Maintaining Optimal Communication Chains in Robotic Sensor Networks using Mobility Control
11
Mobile Netw Appl (2009) 14:281–291 DOI 10.1007/s11036-008-0102-0 Maintaining Optimal Communication Chains in Robotic Sensor Networks using Mobility Control Cory Dixon · Eric W. Frew Published online: 30 September 2008 © Springer Science + Business Media, LLC 2008 Abstract This paper presents a decentralized mobility control algorithm for the formation and maintenance of an optimal cascaded communication chain between a lead sensor-equipped robot and a control station, using a team of robotic vehicles acting as communication relays in an unknown and dynamic RF environment. The gradient-based controller presented uses measurements of the signal-to- noise ratio (SNR) field of neighbor communication links, as opposed to relative position between nodes, as input into a localized performance function. By using the SNR field as input into the control system, the controller is reactive to unexpected and unpredictable changes in the RF envi- ronment that is not possible with range-based controllers. Since the operating environment is not known a priori to deployment of a robotic sensor network, an adaptive model- free extremum seeking (ES) algorithm, that uses the motion of the relays to estimate the performance function gradient, is presented to control the motion of 2D nonholonomic vehicles acting as communication relays using the gradient- based controller. Even without specific knowledge of the SNR field, simulations show that the ES decentralized chaining controller using measurements of the SNR field, will drive a team of robotic vehicles to locations that achieve the global objective of maximizing capacity of a cascaded communication chain, even in the presence of an active jamming source. C. Dixon (B ) · E. W. Frew Aerospace Engineering Sciences Department, University of Colorado at Boulder, Boulder, CO, USA e-mail: [email protected] Keywords relays · robotics · communication chains · ad hoc networks · unmanned aircraft 1 Introduction This paper presents a decentralized mobility control algo- rithm for the formation and maintenance of an optimal cascaded communication chain between a lead sensor- equipped robot and a control station using a team of robotic vehicles acting as communication relays. The mobility con- troller presented in this paper is based on maximizing the capacity of a local 3-node network to maximize the end-to- end capacity of the entire communication chain, and there- fore provide an optimal high-bandwidth communication link between the lead node and the control station, by using measurements of the local signal-to-noise ratio (SNR) field. Because the mobility controller is based on the gradient of the local 3-node network capacity performance function, and not on geographic position or range, the controller can form and maintain an optimal, and connected, communica- tion chain in unknown dynamic RF environments that may also contain active jamming noise sources. Since it is not possible to predict the gradient of the SNR field in a physical environment, extremum seeking (ES) methods are applied to the decentralized gradient controller to provide a real- time estimate of the SNR gradient using motion of the relay. In wireless sensor networks consisting of mobile robotic nodes, a common mode of operation is to form a commu- nication relay chain between a lead (exploring) node and a control station [10, 17]. In this type of operation the lead node is typically deployed to explore a remote region of interest that is beyond direct RF communication range, or out of line-of-sight, to the control station. To provide non- line-of-sight service and extend the communication range
Transcript of Maintaining Optimal Communication Chains in Robotic Sensor Networks using Mobility Control

Mobile Netw Appl (2009) 14:281–291
DOI 10.1007/s11036-008-0102-0
Maintaining Optimal Communication Chains
in Robotic Sensor Networks using Mobility Control
Cory Dixon · Eric W. Frew
Published online: 30 September 2008
© Springer Science + Business Media, LLC 2008
Abstract This paper presents a decentralized mobility
control algorithm for the formation and maintenance of
an optimal cascaded communication chain between a lead
sensor-equipped robot and a control station, using a team
of robotic vehicles acting as communication relays in an
unknown and dynamic RF environment. The gradient-based
controller presented uses measurements of the signal-to-
noise ratio (SNR) field of neighbor communication links,
as opposed to relative position between nodes, as input into
a localized performance function. By using the SNR field
as input into the control system, the controller is reactive
to unexpected and unpredictable changes in the RF envi-
ronment that is not possible with range-based controllers.
Since the operating environment is not known a priori to
deployment of a robotic sensor network, an adaptive model-
free extremum seeking (ES) algorithm, that uses the motion
of the relays to estimate the performance function gradient,
is presented to control the motion of 2D nonholonomic
vehicles acting as communication relays using the gradient-
based controller. Even without specific knowledge of the
SNR field, simulations show that the ES decentralized
chaining controller using measurements of the SNR field,
will drive a team of robotic vehicles to locations that achieve
the global objective of maximizing capacity of a cascaded
communication chain, even in the presence of an active
jamming source.
C. Dixon (B) · E. W. Frew
Aerospace Engineering Sciences Department,
University of Colorado at Boulder, Boulder, CO, USA
e-mail: [email protected]
Keywords relays · robotics · communication chains ·ad hoc networks · unmanned aircraft
1 Introduction
This paper presents a decentralized mobility control algo-
rithm for the formation and maintenance of an optimal
cascaded communication chain between a lead sensor-
equipped robot and a control station using a team of robotic
vehicles acting as communication relays. The mobility con-
troller presented in this paper is based on maximizing the
capacity of a local 3-node network to maximize the end-to-
end capacity of the entire communication chain, and there-
fore provide an optimal high-bandwidth communication
link between the lead node and the control station, by using
measurements of the local signal-to-noise ratio (SNR) field.
Because the mobility controller is based on the gradient of
the local 3-node network capacity performance function,
and not on geographic position or range, the controller can
form and maintain an optimal, and connected, communica-
tion chain in unknown dynamic RF environments that may
also contain active jamming noise sources. Since it is not
possible to predict the gradient of the SNR field in a physical
environment, extremum seeking (ES) methods are applied
to the decentralized gradient controller to provide a real-
time estimate of the SNR gradient using motion of the relay.
In wireless sensor networks consisting of mobile robotic
nodes, a common mode of operation is to form a commu-
nication relay chain between a lead (exploring) node and a
control station [10, 17]. In this type of operation the lead
node is typically deployed to explore a remote region of
interest that is beyond direct RF communication range, or
out of line-of-sight, to the control station. To provide non-
line-of-sight service and extend the communication range

282 Mobile Netw Appl (2009) 14:281–291
of the lead node (and thus its operational range), additional
robotic nodes are deployed in a convoy fashion behind the
lead sensor-equipped vehicle to act as communication relays
in a cascaded communication chain, relaying high priority
data back to a control station. For this work, the relaying
nodes are tasked to act solely as communication relays
and their only objective is to find and maintain a maximal
capacity of the communication chain while the lead node
explores the environment.
Typically, the mobility control algorithms presented in
literature for these types of robotic team deployments as-
sume a “disc communication model,” where nodes can
communicate at some fixed data rate if they are within a
range of r of each other. Therefore, in these mobility control
algorithms the objective of an individual relay is to maintain
a minimum separation distance between the two network
nodes it is relaying data between. In essence the goal of
these controllers is to maintain network connectivity. Since
these controllers do not take into account the radio trans-
mission properties in the operational RF environment, they
are not reactive to changes in the environment. Furthermore,
these controllers do not lead to optimal communication
chains when localized noise sources are present in the
environment. In fact, depending upon the capacity model
used it can be shown for certain locations of a noise source
that a relaying node that positions itself based on a range
based controller can lead to worse performance than using
the direct communication. Therefore, changes in the RF
environment, such as the introduction of a jamming node,
will lead to a reduction of network quality-of-service that
the nodes cannot react to.
The work in this paper seeks to improve the communi-
cation capacity of a cascaded communication chain, over
that of a range-based controller, in a complex and time
varying RF environment containing localized noise sources
using a reactive and adaptive controller. Instead of using
range-based measurements as inputs for the decentralized
controller, the controller presented in this paper uses mea-
surements of the SNR with its two communication neigh-
bors. The measurement of the individual link SNRs, and
their gradients with respect to the position of the relay,
are used as inputs into a local performance function to
generate a gradient that the relay node follows to improve
the local 3-node capacity. By improving the local 3-node
chain capacity, it will be shown the relays maximize the
capacity of the entire chain and maintains connectivity of
the chain. For small low power sensor networks that have
limited transmit and computation powers, mobility may be
the only means to overcome significant changes in the RF
environment once they are deployed.
Due to the complexity of the RF environment in the phys-
ical world, and the difficulty in predicting RF propagation
properties with terrain, weather, and antenna affects, it is not
practical to assume that the nodes can predict the gradient of
the SNR field based solely on their geographic position. Just
like it is unpractical to assume a communication capacity
given only node separation distances. In addition, even if the
RF propagation environment has been previously measured,
the presence of a jamming node at an unknown location will
mean that an accurate prediction of the gradient is impossi-
ble. However, there are methods available for estimating the
positional gradient of a measurable field using the motion
of a vehicle within a sampled environment. Thus, after it
is shown that the decentralized gradient-based controller
will drive the team of relays to optimal locations when the
gradients are fully known, the problem will be reformed into
an ES framework [2] where the positional gradient of the
performance function is estimated from the motion of the
nodes.
Fundamental to the ES chaining algorithm is that to esti-
mate the gradient of the communication performance field,
cyclic motion of the vehicle is required. For generality in
application of this work to different vehicle types, a bicycle-
like kinematic vehicle model [12], exhibiting Dubins’ vehi-
cle constraints [8], is assumed and a Lyapunov Guidance
Vector Field (LGVF) controller [9] is used to provide the
cyclic motion of the vehicle by driving the vehicle to a
globally stable limit cycle (i.e. a circular orbit) about a
virtual center point. The ES controller uses the estimate of
the gradient from the cyclic motion of the vehicle to move
the virtual center point (or orbit point) to a location for
optimal relaying.
Finally, since this work is motivated by our Ad Hoc
Unmanned Aircraft (UA) and Ground Network (AUGNet)
[5] research into networks that combine ad hoc networks
with UA acting as airborne communication relays, this
paper presents simulations of the ES chaining controller
running on UA. In the simulations, there is a team of UA
acting as communication relays between a ground based
leader node and a control station. The ground based leader
node is representative of a mobile sensor, or a human
explorer such as a firefighter [22], that is allowed to freely
wander the environment but has relatively slow dynamics
compared to the aircraft. The performance of the aircraft and
the radios are modeled off of values taken from AUGNet
experiments.
1.1 Contributions
It is common in literature to use the mobility of the net-
worked nodes to maintain connectivity using range-based
metrics. This paper expands this idea further and shows that
the mobility of the nodes can be used to specifically control,
and thus improve, the quality-of-service of the network.
Beyond using mobility control to optimize a network QoS,
this paper shows that the mobility of networked vehicles can

Mobile Netw Appl (2009) 14:281–291 283
be used to overcome the effects of being actively jammed
from RF noise sources by measuring the SNR field.
The focus of this paper is on forming an optimal cascaded
communication chain using decentralized mobility control
of the relays, where optimal is defined as maximizing the
capacity of the chain from the leader node to the control
station, i.e. then end-to-end capacity of the communication
chain. Thus, this paper introduces a decentralized gradient-
based mobility controller that maximizes the local 3-node
network capacity, using only local SNR information, and
proves that the controller will result in achieving the global
objective.
Finally, since it is not practical to predict the gradient of
the SNR field in physical environments, or even possible
when localized noise sources are located in the environment
at unknown locations, this paper presents the gradient-
based chaining controller in an ES framework that has
been designed for use on planar nonholonomic vehicles. By
using the ES framework, the gradient of the performance
function used can be estimated on-line in real-time. Thus,
this paper presents a solution that can be deployed on robots
in physical environments and not just in simulation.
2 Background & related work
While there has been significant work in robotic team
control requiring network communications (e.g. [4, 16, 21]),
only a small body of work [3, 7, 11, 19] exists that ex-
plicitly incorporates communication objectives into larger
multi-objective control framework. Although the goal is to
optimize network parameters in these works, the perfor-
mance metrics are typically transformed into position based
constraints and cost functions using the disc communication
model.
For example, in [11] the authors make the claim that
the set of optimal positions of the relay nodes lies entirely
on the line between the source and destination nodes, and
that the relay nodes must be evenly spaced along this line.
However, as will be shown in this paper, in a physical
environment the assumptions required for position based
control are typically invalid since localized noise sources,
terrain affects, power differences, and antenna patterns will
cause the optimal location to move off of the center line
between the two end nodes and possibly away from the
geometric center point of the line. This work overcomes
this by defining the optimal communication chain in a more
generalized sense using the SNR instead of position. The
communication chain that is formed is more robust and is
reactive to changes in the RF environment.
ES algorithms have been presented in [23] to drive a
nonholonomic vehicle in a sampled environment, however
driving the vehicle directly using the ES framework limits
the application to limited vehicle types. Specifically the ES
algorithm in [23] can only be used on vehicles that can
go forward and backwards as the controller modulates the
forward velocity of the vehicle, while holding a constant
turn rate. The use of the LGVF controller in this work to
generate a circular motion, with forward vehicle velocity
and bounded turn rate capabilities, can be applied to a much
wider class of robotic vehicles; from simple point mass
models to UA. In addition, the circular motion of the vehicle
due to the LGVF is more natural for certain vehicles such
as UA.
The authors of [23] have proposed a second part to
their work (but is still unpublished) where the velocity of
the vehicle is held constant and the turning rate of the
vehicle is modulated by the ES algorithm. This resulting
motion of this controller is a forward motion of the vehicle
with a “wiggle”. The idea being that if one can mount a
sensor on a long boom to the vehicle, a small wiggle of the
vehicle will result in a large displacement of the sensor in
the sampled environment. However, on some vehicles it is
not practical to mount a long boom sticking out the nose
of the vehicle. In addition, there are some environments
where the displacement of the sensor on a boom will still
not provide a large enough displacement for the sensor to
measure the change in the sampled environment, either due
to the field structure or the sensor resolution. Thus, driving
the vehicle in a circular motion, about a virtual center point,
provides a more generic ES framework for mobility control
of vehicles.
3 Problem statement
Let a planar cascaded relay network of nodes ni, at posi-
tions pi ∈ R2, be designated N = {n1, n2, · · · , nN}, where
nodes n1 and nN are the source (S) and destination (D)
nodes, respectively. The source node is the leader node and
the destination node is the control station for the scenario
used in this work. Let R = {n2, n3, · · · , nN−1} ⊂ N be the
set of relay nodes in N , with R = N − 2 being the number
of relays in the network.
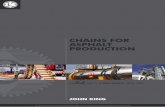
A cascaded network indicates that the topology of the
network links are taken to be fixed and ordered from source
to destination, e.g. a communication chain as shown in
Fig. 1. For this paper, the routing order of the nodes is
determined by a higher level algorithm that chooses when
to deploy a relay node to assist the leader. The focus of
this paper is given a robotic team of R relays and network
topology decided by a higher-level algorithm, form an opti-
mal communication chain. This paper does not specifically
address the question of when to deploy an additional relay
to improve the capacity of the communication chain, e.g.
we do not seek to answer the question of how many relays

284 Mobile Netw Appl (2009) 14:281–291
1
2
3
4
5
C21
C32
C43
C54
2 Mbps 1 Mbps
Figure 1 A planar cascaded network showing a directed communica-
tion chain with a fixed communication ordering of the nodes. For this
chain, the throughput from node 1 to node 6 is only 1 Mbps
provides the optimal end-to-end capacity given the current
RF environment.
Define the capacity of the network N to be C(N ). Then
the problem considered in this paper is to solve the global
optimization problem
p∗i = arg max
ni∈R,pi∈R2
C(N ) (1)
by moving the set of relay nodes, subject to vehicle
dynamics
pi = f(P, ui
)(2)
using a decentralized controller based only on local infor-
mation of the SNR field. The next section will present the
radio propagation and capacity models that are assumed for
the problem and simulations presented in this paper. These
are presented to help motivate the use of the SNR as input
into the control system.
3.1 RF propagation and capacity models
The SNR of an RF communication link is defined as
Sij(pi, pj
) = Pij(pi, pj
)
N(pi
) (3)
where Pij(pi, pj) is the power received by node i at position
pi ∈ R2
from the transmission of node j, located at pj ∈R
2. N(pi) is the environmental noise seen by node i at
location pi, and includes thermal and interference noise. For
simplification of notation let Sij = Sij(pi, pj).
The Shannon-Hartley Theorem states that the channel
capacity c, which is the theoretical maximum rate of clean
(or arbitrarily low bit error rate) data that can be sent with a
given average SNR is [20]
cij(pi, pj) = B log2
(1 + Sij(pi, pj)
), (4)
where B is the bandwidth of the channel, and cij(pi, pj) is
the channel capacity for node j at position pj transmitting
to node i at position pi. The Shannon-Hartley Theorem
provides a useful relation in that the maximum achievable
rate is related to the SNR of the channel. By increasing
the SNR of a wireless channel, the ability of the channel
to send more data is increased, providing a higher capacity
capability.
For this paper it is assumed that the RF environment
can contain localized noise sources such that N(pi) �= N(pj),
giving Sij �= Sji ⇒ cij �= c ji. That is to say, even though node
i can receive a transmission from node j, node j may not
be able to decode a transmission from node i. This is a
fundamental assumption for any geographic, range-based
controller, and for the definition of an optimal chain given
in [11].
3.2 Optimal communication chain
For a cascaded network communication chain, the achiev-
able chain capacity can be directly related to the individ-
ual link capacities along the chain. The relation of the
local link capacity to the full chain capacity is defined
by the type of network being considered. In this paper
a cascaded relay network [13] is considered where the
relays can transmit and receive at the same time. This is
possible if the relay has two antennas and frequencies, one
for receiving and one transmitting. While this is typically
not the case for cheap wireless network nodes that use a
single omnidirectional antenna, this network model is valid
for modelling repeater based networks used by emergency
personnel [22].
Because of the assumption of simultaneous transmission
and reception of signals by a relay, the throughput capacity
of a cascaded network chain is limited by the link with
smallest throughput capacity. Figure 1 provides a graphical
example of the problem where the link between nodes 4 and
5 is limited to 1 megabit per second (Mbps), either due to
distance or environmental noise, and the rest of the chain
has a 2 Mbps link capacity. It is clear from the figure that
even if node 1, the source node, tries to transmit at 2 Mbps
to node 5, the destination node, that the link between nodes
4 and 5 will limit the resulting throughput through the chain
to be 1 Mbps.
In a cascaded communication chain with simultaneous
transmission and reception the capacity of the communica-
tion chain is given as
C(N ) = mini∈[2,N]j=i−1
{cij(pi, pj)
}(5)
for the directed communication flow from the source to the
destination.
Optimal chain capacity is found by maximizing the min-
imum individual link capacity by moving the relays nodes
in the environment so that
C∗ = maxpi∈R2
mini∈[2,N]j=i−1
{cij(pi, pj)
}, (6)
where C∗is the globally optimal communication capacity
for the cascaded chain.

Mobile Netw Appl (2009) 14:281–291 285
Since link capacity is a monotonically increasing func-
tion of SNR,1
maximizing the minimum link capacity can
be achieved by maximizing the minimum link SNR along
the chain. Thus, the performance of the chain defined by
Eq. 6 can be restated in terms of the SNR instead of link
capacity.
S∗ = maxpi∈R2
mini∈[2,N]j=i−1
{Sij(pi, pj)
}(7)
It is desirable to use this objective function over that in
Eq. 6 because unlike link capacity, the SNR of a link is
directly measurable by a node. Furthermore, if a goodput
link capacity model is assumed, such as the piece-wise
linear model given in [18] then there may be regions in
the environment where the radios have reached throughput
saturation. That is, even with an increase in SNR there is
no increase in the link capacity. Thus, in this case if the
controller used the link capacity it would stop as soon as
throughput saturation was reached even though there may
be a direction to move that increases the link’s SNR even
further. So by maximizing the minimum link SNR, the relay
nodes will find the most robust position for all link capacity
models, not just Shannon’s channel capacity.
4 Decentralized gradient-based chaining controller
It is well known (e.g. see [7, 15]) that gradient-based con-
trollers are well suited for decentralized control in robotic
teams where the vehicles are required to maximize, and
adapt to, a changing objective function. Typically, smooth
artificial potential functions are developed to model inter-
robot constraints and achieve team objectives based on
the positions of neighboring vehicles. For this work, the
artificial potential function (referred to as the local objective
function) is specifically designed to achieve the global team
objective of maximizing end-to-end chain capacity using
the SNR of neighbor communication links as the input.
Define the local performance function Ji : R × R → R+
to be
Ji = min{
Si,i−1, Si+1,i}
(8)
which is only a function of the SNR of the links with node
i’s neighbors, and follows the form of the global objective
stated in Eq. 7. The affect of this performance function is to
move the relay towards the direction of improving the link
with the weakest SNR.
The use of the min() function means that Ji is non-
smooth when Si,i−1 = Si+1,i, and therefore the gradient
of Ji is not defined. Therefore, when Si,i−1 = Si+1,i the
1 ∂c∂S > 0.
gradient of Ji needs to be understood in terms of the
least-norm element of the generalized gradient [6]. The
reader is referred to [6] for detailed discussion on using
the least-norm element of the generalized gradient and using
non-smooth feedback in dynamic systems. For this paper
the least-norm element of the gradient of Ji will be denoted
∇ i Ji and is defined as
∇ i Ji =
⎧⎪⎪⎨
⎪⎪⎩
∇i Si,i−1, if Si,i−1 < Si+1,i
∇i Si+1,i, if Si,i−1 > Si+1,i
Ln{co{∇i Si,i−1, ∇i Si+1,i, }}, if Si,i−1 = Si+1,i
(9)
where ∇i is the gradient with respect to node i’s location,
co{} is the convex closure, and Ln{} is the least-norm
element of a set. A key subtlety of the generalized gradient
and this objective function is that even if the SNR of the
two links are equal (and therefore their capacities), it does
not mean that the throughput is maximized. There might be
a direction for the relay node to move that will improve the
SNR of both links even more, as determined by the convex
closure of the two neighbor link gradients.
Let xi ∈ R2
be the state vector for node i subject to
xi = ui (10)
where ui : R2 × R
2 → R2
is the control input to node i.First order dynamics are presented in this section for ease of
discussion. Extension to higher order dynamics is possible
with a correct choice of controller or performance function.
Finally, define the local decentralized controller for node ias
ui = −k∇ i Ji. (11)
where k ∈ R+
is the controller gain.
Due to the fact that localized noise sources may be
present in the environment, it is possible for Ji to have
multiple critical points, i.e. local and global extremum
points. Because of this, a gradient-based controller cannot
guarantee convergence to the global optimum when local-
ized noise sources are present in the environment. However,
this is not considered a downfall for this application. The
reason is that even though it may be impractical to find
the globally optimum relay location in very complex RF
environments, the gradient based controller will always seek
improve the communication capacity of the chain from its
initial conditions. Thus, if the system is initialized using
a position-based solution the chaining controller can only
improve the chains capacity. If the environment does not
contain localized noise sources, then the local performance
function given will only have a single stable critical point.
It will now be shown that this decentralized gradient-
based controller achieves the objective of the global op-

286 Mobile Netw Appl (2009) 14:281–291
timization problem by showing the set of critical points
of Ji correspond to the locations that maximize Eq. 7. Let
X = [x1, x2, · · · , xn]T, and U = [u1, u2, · · · , un]T
such that
X = U. (12)
Since ∇i Si,i−1, ∇i Si+1,i �= 0, from Eq. 9 the critical points
of Ji are located at positions where Si,i−1 = Si+1,i. That is
∇ i Ji = 0 ⇒ Si,i−1 = Si+1,i (13)
and thus
X = 0 ⇒ S2,1 = S3,2 = · · · = SN,N−1. (14)
When all of the SNR of the individual links are equal, then
the generalized gradient of the global objective function
is equivalent to the localized gradient. That is, when
S2,1 = S3,2 = · · · = SN,N−1, and only when, then
∇S =
⎡
⎢⎢⎢⎢⎣
∇1J1
∇2J2
...
∇ n Jn
⎤
⎥⎥⎥⎥⎦
(15)
Since ∇ i Ji = 0 at this condition,
X = 0 ⇒ ∇S = 0 (16)
and therefore the set points of the decentralized controller
achieves locations of optimal relaying.
A simulation of a network consisting of two point-mass
robotic relays is presented in Fig. 2 to show the response of
the system following the chaining controller. In the simula-
tion, the two relay nodes are initialized close to the location
of the destination node, modeling the initial deployment
of the relay nodes from a base station the desires higher
bandwidth communications from the source node. Without
the presence of the localized noise source, the controller
deploys the relays to the nominal range based positions,
indicated by the circles, as these are the optimal locations
when there is no localized noise sources. When then noise
source is introduced at t = 250 s, the robots sense the
change in the SNR field and bend around the source to
maximize the chain throughput. The final location of the
relay nodes is indicated by the diamonds. The time plots
on the right of the figure show that the chaining controller
is able to improve the capacity of the communication chain
significantly above that of the range-based solution, indi-
cated by the dashed line.
5 Electronic chaining ES controller
It was shown in the previous section that if the local gradi-
ents are known by the nodes, then a decentralized controller
(based on the localized gradients) can be used to drive
individual nodes to their globally optimal relaying locations.
However, in a physical environment with unknown local-
ized noise sources, either due to faulty nodes or active jam-
ming, the structure of the SNR field is impossible to predict,
and therefor the gradient can not be directly determined. A
way to estimate the gradient of the performance objective in
real-time, and by each mobile node, is required so that the
system may be driven to optimal operating positions (set
points).
ES [2] controllers are adaptive, model-free controllers
designed to drive the set point of a dynamic system to
an optimal, but unpredictable location defined by a perfor-
500 1000 1500 2000 2500 3000 3500 4000 4500 5000
500
1000
1500
2000
2500
3000
3500
Source Dest
R 1R 2
Noise
X – Position [m]
Y –
Po
siti
on
[m
]
0
10
20
30
40
Lin
k S
NR
[d
Bm
]
0 100 200 300 400 500
Link 1Link 2Link 3
0
50
100
150
200
Ch
ain
Cap
acit
y [M
bp
s]
0 100 200 300 400 500
Time [s]
GradientRange–BasedDirect
Figure 2 Simulation of a planar cascaded relay network using two
point-mass robotic relay nodes. At time t = 250 s a jamming noise
source is introduced showing the ability of the gradient controller to
react to changes in the RF environment and improve the capacity
above that of a range-based solution

Mobile Netw Appl (2009) 14:281–291 287
mance function that is only known to have an extremum
point. That is, given a sufficiently smooth cost function
J: R × Rm → R, ES controllers seek to solve in real time
the optimization problem
θ∗(t) = arg maxθ∈Rm
J(t, θ) (17)
where J is an unknown, possibly time varying, cost function
of the input parameter θ such that Dθ J (t, θ∗) = 0 and
D2
θ J(t, θ∗) < 0.2
The standard ES algorithm works by generating a mea-
sure of the local gradient of the mapping J(θ) by injecting a
perturbation signal, α cos(ωt), directly into the plant. The
output of the plant will also be sinusoidal, with a DC
(or constant) offset that the HPF removes. This signal is
then demodulated by β sin(ωt − γ ) and low-pass filtered to
obtain the gradient estimate. The gradient estimate is then
used to update the estimate of the optimal location, θ . See
[1, 2] for formal discussions, including stability proofs and
design guidelines, on single and multivariable ES.
In two dimensions, the input into the performance func-
tion has the appearance of a circular perturbation about
a moving (i.e. time varying) orbit center point. It is this
specific structure that the ES algorithm presented in this
paper takes advantage of in that some vehicles, like UA,
also exhibit a cyclic (circular) motion about an orbit center
point when they are station keeping since they must always
maintain a forward speed.
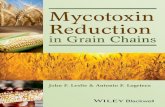
A block diagram of the decentralized ES chaining algo-
rithm is shown in Fig. 3 and consists of a LGVF Controller
steering a 2D kinematic vehicle operating within an ad hoc
network. The basic ES framework within the controller is
used to estimate the gradient of the communication perfor-
mance field that is used to drive the motion of the orbit
center point for the LGVF controller using virtual point
mass dynamics with a bounded center point velocity.
The most significant difference in the design of this ES
algorithm is that it is a self-exciting system. That is, there
is a natural limit cycle that persists in the system (the
orbital motion of the vehicle) and this limit cycle provides
the required dither signal into a measurable performance
function. Because the limit cycle that exists due to the
plant dynamics generates the sinusoidal dither signal, the
performance and stability of the controller are dependent
upon the performance capabilities of the vehicle. Thus to
maintain stability of the ES chaining algorithm, appropriate
values for the ES filters, the ES feedback gain kES, and the
maximum center point velocity must be designed for each
different vehicle type with different performance abilities.
2 Diθ (·) denotes the ith directional derivative of J w.r.t. θ .
Figure 3 Decentralized ES algorithm for a 2D kinematic vehicle
using a LGVF controller to provide the orbital motion of the vehicle
about a virtual center point driven by the gradient estimate of the
performance of a communication chain
5.1 Kinematic vehicle model
It is assumed that the robotic nodes in the network are
equipped with a low-level control system that presents a 2-
D kinematic model for use by the higher-level ES algorithm.
Let pj ∈ R2, denoted as pj = [xj, yj]T
, be the position of vehi-
cle jwith inertial speed [xj, yj]T ∈ R2
that evolves according
to the standard (Cartesian) bicycle-like kinematic model
xj = vjcos ψj
yj = vjsin ψj (18)
ψj = vj cj
where [xj, yj]T ∈ R2
is the two-dimensional inertial position
of node j, ψj ∈ [0, 2π) is the track angle (compass heading),
vj is the commanded speed (held constant), and cj is the
bounded path curvature. The bicycle kinematic model is
chosen over a unicycle model because this model covers a
wider class of 2D nonholonomic vehicles, moving in only
a forward direction and that cannot turn on the spot, such
as bicycles, cars, and autonomous underwater and aerial
vehicles [12].
It should be noted that the major difference of the
bicycle-like model from the unicycle model is that the head-
ing rate is a function of the vehicle speed and the curvature
constraints of the vehicle. For bicycles, the curvature is
related directly to the steering angle of the front wheel.
For an aircraft in a steady-state coordinated turn, the path
curvature is
c(v) = g tan φ
v2, (19)
where φ is the aircraft bank angle and g is the gravitational
constant.
Due to vehicle performance constraints, the path curva-
ture for a vehicle is bounded by upper and lower limits. For
an aircraft at a speed v,
ωmax(v) = g tan φmax
v(20)

288 Mobile Netw Appl (2009) 14:281–291
where φmax is the maximum bank angle of the vehicle at
speed v. Thus the steering input into vehicle j is bounded
such that
∣∣uj
∣∣ ≤ ωmax and gives a minimum orbital radius of
rmin(v) = v
ωmax(v). (21)
For bicycles and car-like vehicles, the path curvature bound
is directly related to the physical limitations in the motion
of the steering wheels.
This minimum radius, as will be seen later, is the effec-
tively the lower bound on the final error (or distance) of
the vehicle from the optimal communication location, which
will be the location of orbit center point for the loiter circle.
While the orbit center point can be driven to the location of
optimal communication, the robotic relay will always be at
best no closer than rmin.
Because of the wide range of dynamics and physi-
cal constraints of different types of robotic nodes, it is
not practical to drive the vehicle speed or heading di-
rectly by the ES dither signal as done in [23]. Instead a
Lyapunov guidance vector field (LGVF) controller is used
to drive the vehicle to an orbital (limit cycle) motion about
a center point. The center point is then driven with virtual
point mass dynamics by the ES framework in the chaining
algorithm.
5.2 Lyapunov guidance vector field controller
To provide the sinusoidal perturbation signal required by
the ES framework. A LGVF controller [9] is used to drive
the vehicle to a circular limit cycle about a virtual center
point, pcp ∈ R2. Since the vehicle is orbiting pcp, the ES
framework does not drive the vehicle directly to the optimal
communication location, but instead pushes pcp to the op-
timal communication location that the vehicle orbits about
using the LGVF controller.
The LGVF controller is split into two components, a
guidance vector field generator and a heading tracker (HT)
controller. The HT drives the robotic relay to the desired
loiter circle at a radial distance of rd from the orbit center
point pcp = [xcp, ycp]Tas given by the generated vector field
f (pr) =[
xd
yd
]
= β
[−(
r2 − r2
d) −2rrd
−2rrd −(r2 − r2
d)
][x − xcp
y − ycp
]
(22)
+[
xcp
ycp
]
where r2 = pr · pr = (x − xcp
)2 + (y − ycp
)2
is the squared
radial distance of the UA from the loiter center point, pcp, β
is a non-negative scalar that guarantees convergence to the
desired loiter circle when the center point is moving [9], and
vcp = [xcp, ycp]Tis the center point velocity.
The guidance vector field gives the desired velocity,
which is used to generate a turn rate command to the vehicle
through the HT. Let eψ = ψ − ψd where ψd is the desired
compass heading given as
ψd = arctan
(yd
xd
). (23)
The heading angle error is driven to zero by the turn rate
command
ω = ψd − λ · (ψ − ψd) (24)
where
ψd = v
rd. (25)
This controller is globally stable limit cycle about pcp and is
stable for any value of vcp. However, since it is assumed that
the vehicles have bounded turn rate capabilities, rd should
be chosen such that rd > rmin.
5.3 Center point dynamics
For the ES framework to be stable, and to generate the
appropriate gradient estimate, the system needs to exhibit
three different time scales [14]:
1. Fast – tracking of the center point
2. Medium – the orbital motion
3. Slow – the LPF filter in the ES
Since the amplitude and excitation frequency of the pertur-
bation signal are set by v and rd, the fast and slow dynamics
must also be functions of the vehicle performance. Due to
the speed constraints placed on the dynamics of the center
point, the convergence rate of the center point to the optimal
location is bounded by the maximum speed of the center
point.
For the error dynamics of the center point to be fast,
and to maintain the cyclic orbit about the center point, the
motion of the center point must be slow as compared to
the speed of the vehicle, i.e. vcp << vj . In the ES chaining
algorithm the center point velocity is bounded by Vcp so that
vcp ≤ Vcp and Vcp << vj.
It should be pointed out that center point velocity satu-
ration is required in the loop because even though we can
choose k small enough that the speed of the orbit center
point remains slow, as compared to the UA for a given
environment and performance function, the output of the
ES framework depends upon the magnitude and shape of
the performance function, which is not necessarily known
a priori. Thus, there could be unexpected environments in

Mobile Netw Appl (2009) 14:281–291 289
which if the center point speed was not bounded, it could
reach the maximum flight speed of the aircraft. At this point,
the motion of the UA about the center point is no longer
cyclic and is not generating the periodic perturbation signal
of the performance function required for the ES framework
to generate the gradient estimate.
6 Electronic chaining simulations
Since this work is motivated by our AUGNet [5] research
into networks that combine ad hoc networks with UA acting
as airborne communication relays, this section presents sim-
ulations of the decentralized ES chaining controller running
on UA. The performance of the aircraft and the radios are
modeled off of values taken from AUGNet experiments. For
the simulations, the aircraft are limited to a maximum 30
degree bank angle, flying at 25 m/s, and their ordering is
preset and maintained depending upon the starting location
of the UA. The maximum center point velocity is set to
5 m/s.
Though it is not know by the ES controller, the radios in
the simulation are assumed to follow the standard exponen-
tial decay model
Pij = Pji = Krd−αij (26)
where Kr is the link gain, dij is the separation distance of
the receiver from the transmitter, α is the exponential decay
rate, and Pij is the received power. The radio values are
set to Kr = 3822 and α = 3.5. For the simulation with a
noise source, the noise source is taken to be a faulty radio
transmitting with Kr = 382. Note, the choice of using the
exponential decay model was for ease of programming in
the simulation. However, by assuming that the noise source
is a faulty radio that is acting as a jamming node, even in the
simulation the SNR models are no longer concentric circles
about the radio nodes. Instead, depending upon the power
and location of the noise source, the SNR contour lines are
extremely skewed and non-symmetric.
Figure 4 shows results from a simulation with a single
UA, two end nodes and no localized no source. In Fig. 4a,
the position of the orbit center point is shown as a dashed
line within the cyclic orbital flight path of the UA. From this
figure one can see that when the UA was far away, it headed
directly in the direction of improving the minimum SNR
(which is the SNR from the far right node) at the maximum
speed of the center point. Figure 4b shows just the X-Y
position of the orbit center point is shown to highlight the
bounded convergence rate of the ES algorithm. For t ∈(50, 500) s the positional errors (especially on the Y-axis)
show the bounded convergence rate due to the bounded
center point speed.
Figure 5 shows a simulation run with three UA and two
static end nodes. At the beginning of the simulation, the
UA relays are aligned along the chain as would be a result
of running a position based controller. At time t = 0 s a
noise source located at [2500,1000] m is introduced. Since
position based controllers would not sense the change in
the RF environment, the nodes would maintain their current
position. However, using the electronic chaining algorithm
the figure shows that the UA react appropriately to the
jamming signal source and form a bowed communication
chain. Figure 5b shows that at t = 0 s the minimum SNR at
the orbit center points along the communication chain was
less then 19 dBm and that the electronic chaining controller
was able to improve the minimum value to above 24 dBm
by moving the location of the vehicles orbit center point.
Again, it is worth pointing out that in the simulation the
gradient of the SNR field is estimated on-line using the
500 1000 1500 2000 2500 3000 3500 4000 4500
0
500
1000
1500
2000
2500
3000
35
40
45
50
55
60
35
40
45
50
60Node 1
UAV 1
UA Locations over Time
X–Position [m]
Y–P
osi
tio
n [
m]
0 500 1000 15001000
1500
2000
2500
3000UA Orbit Point Locations over Time
XP
osi
tio
n [
m]
0 500 1000 15002000
2200
2400
2600
2800
3000
Time [s]
Y
Po
siti
on
[m
]
Node 2
a b
Figure 4 Simulation of a single UA airborne relay between two static nodes without any localized noise source. The motion of the center point
is the dashed line with the orbital motion of the UA required for the ES framework

290 Mobile Netw Appl (2009) 14:281–291
500 1000 1500 2000 2500 3000 3500 4000 4500 5000
500
1000
1500
2000
2500
3000
3500
Noise Source
10
1520
2530
35
40
10
15
20
25
30
3540
4Node 1 Node 2UAV 1 UAV 2 UAV 3
UA Locations over Time
X–Position [m]
Y–P
osi
tio
n [
m]
0 200 400 600 800 1000 1200 1400 1600 1800 200018
19
20
21
22
23
24
25Minimum SNR at Orbit Center
Time [s]
Min
SN
R [
dB
m]
a b
Figure 5 Simulation of three UA relay nodes reacting to a localized noise source. Motion of UA within the environment is also shown with the
noise source location and the SNR contours of the two end nodes
motion of the vehicle and the change in the measured SNR
values.
7 Limitations & future work
The decentralized controller based on the gradient of the
SNR field is shown to maximize the capacity of a cascaded
relay network with simultaneous transmission and reception
of RF signals. However, this is not a common network used
on cheap and inexpensive robots. While it is an appropriate
model for use on a single airborne relay using a repeater
network, as in the case of wildland firefighters, to be more
general a different performance function is required for
packetized networks such as 802.11b. In these networks,
each hop along the chain adds to the total delay of the
system and maximizing the link with the minimum SNR
does not necessarily maximize the end-to-end chain capac-
ity. Current work by the authors is in finding a local per-
formance function that has a spatially distributed gradient
mapping to be used for different types of packet based
networks.
A limitation of the ES frameworks is that cyclic motion
of the vehicle must be maintained to sustain an estimate of
the positional gradients required. For the application of this
work on using UA as communication relays, this is not a
problem since aircraft must maintain forward flight speed
and the most natural motion is to maintain an orbital flight
pattern for acting as a communication relay. In fact, this nat-
ural cyclic motion of a UA flying orbits to station keep is a
unique benefit to aircraft and was the original motivation for
using ES methods. However, in the application of this work
to cheap robots with limited battery power this continual
motion to estimate the gradient will simply require too much
power to sustain. A more general solution will need to take
into account the benefit of updating the gradient estimate to
the cost of the motion.
8 Conclusion
In this paper a definition of an optimal communication
chain of relay nodes in an ad hoc network was presented
based on the SNR instead of relative position. By using the
SNR instead of position, a communication chain of robotic
relays can respond to changes and unexpected features in
the RF environment that is not possible with position based
chaining solutions. Since the operating environment is gen-
erally not known a priori to deployment of a network, an
adaptive model-free ES chaining algorithm was presented
to control the motion of 2D nonholonomic vehicles acting
as communication relays. Even without specific knowledge
of the SNR field, the ES algorithm is able to drive the
team of vehicles to an optimal locations with only local
measures of the SNR. The mobility of the vehicle was
modeled as a bicycle-like kinematic model and is chosen
because the model covers a wider class of 2D nonholonomic
vehicles, including UA. An orbital motion of the vehicle
due to a LGVF controller was applied to ES in a unique
way in that the orbital motion of the vehicle about an orbit
center point generated the dither and demodulation signals
required by the ES algorithm. A specific application using
UA was simulated to highlight the focus of this work in
using UA as airborne communication relays. Even though it
is realized that this work may have limitations, the gradient-
based controller presented in the ES framework provides a

Mobile Netw Appl (2009) 14:281–291 291
means for a robotic team to find and maintain an optimal
cascaded communication chain.
References
1. Ariyur K, Krstic M (2002) Multivariable extremum seeking feed-
back: analysis and design. In: Fifteenth international symposium
on mathematical theory of networks and systems, Notre Dame,
12–16 August 2002
2. Ariyur KB, Krstic M (2003) Real-time optimization by extremum-
seeking control. Wiley, New York
3. Basu P, Redi J (2004) Movement control algorithms for realization
of fault-tolerant ad hoc robot networks. IEEE Netw 18(4):36
4. Beard RW, Stepanyan V (2003) Synchronization of information in
distributed multiple vehicle coordinated control. In: IEEE confer-
ence on decision and control, IEEE, Maui, December 2003
5. Brown TX, Argrow B, Dixon C, Doshi S, Thekkekunnel
R-G, Henkel D (2004) Ad hoc uav ground network (augnet). In:
AIAA 3rd “Unmanned unlimited” technical conference, AIAA,
Chicago, 20–23 September 2004
6. Clarke FH (1975) Generalized gradients and applications. Trans
Am Math Soc 205:247–262, April
7. Cortes J, Martinez S, Karatas T, Bullo F (2004) Coverage
control for mobile sensing networks. In: IEEE transactions
on robotics and automation. IEEE, Piscataway, May 2002,
pp 1327–1332
8. Dubins LE (1957) On curves of minimal length with a constraint
on average curvature, and with prescribed initial and terminal
positions and tangents. Am J Math 79(3):497–516, July
9. Frew EW, Lawrence D (2005) Cooperative stand-off track-
ing of moving targets by a team of autonomous air-
craft. In: AIAA guidance, navigation, and control conference,
San Francisco, August 2005
10. Gerkey BP, Mailler R, Morisset B (2006) Commbots: distributed
control of mobile communication relays. In: Proc. of the AAAI
workshop on auction mechanisms for robot coordination (Auc-
tionBots). Boston, July 2006, p 5157
11. Goldenberg D, Lin J, Morse AS, Rosen BE, Yang YR (2004)
Towards mobility as a network control primitive. In: Mobihoc ’04.
ACM, Tokyo, 24–26 May 2004
12. Indiveri G (1999) Kinematic time-invariant control of a 2d non-
holonomic vehicle. In: 38th Conference on decision and control
(CDC’99), Phoenix, December 1999
13. Kramer G, Gastpar M, Gupta P (2005) Cooperative strategies
and capacity theorems for relay networks. IEEE Trans Inf Theory
51(9):3037–3063, September
14. Krstic M, Wang HH (2000) Stability of extremum seeking feed-
back for general nonlinear dynamic systems. Automatica 36:595–
601
15. Martinez S, Cortes J, Bullo F (2007) Motion coordination with
distributed information. IEEE Control Syst Mag 27(4):75–88, Au-
gust
16. Olfati-Saber R, Murray RM (2003) Flocking with obstacle avoid-
ance: cooperation with limited information in mobile networks. In:
Conference on decision and control (CDC), Maui, December 2003
17. Pezeshkian N, Nguyen HG, Burmeister A (2007) Unmanned
ground vehicle radio relay deployment system for non-line-of-
sight operations. In: IASTED robotics and applications (RA 2007),
Würzburg, 29–31 August 2007
18. Rappaport TS, Na C, Chen J (2004) Application through-
put measurements and predictions using site-specific infor-
mation. In: IEEE 802.11 plenary session, IEEE doc. 802.
110-04-1473-00-000t, 17 November. IEEE, Piscataway
19. Sweeney J, Brunette T, Grupen YYR (2002) Coordinated teams of
reactive mobile platforms. In: International conference on robotics
and automation, IEEE, Washington, DC, 11–15 May 2002
20. Taub B, Schilling DL (1986) Principles of communication sys-
tems. McGraw-Hill, New York
21. Yang L, Passino KM, Polycarpou M (2003) Stability analysis
of m-dimensional asynchronous swarms with a fixed com-
munication topology. IEEE Trans Automat Contr 48(1; ana-
lyzed. Such stability analysis is of fundamental importance):
76–95, December
22. Zajkowski T, Dunagan S, Eilers J (2006) Small uas com-
munications mission. In: Eleventh biennial USDA forest ser-
vice remote sensing applications conference, Salt Lake City,
24–28 April 2006
23. Zhang C, Arnold D, Ghods N, Siranosian A, Krstic M
(2006) Source seeking with nonholonomic unicycle without
position measurement—part i: tuning of forward velocity. In:
45th IEEE conference on decision and control, San Diego,
13–15 December 2006