
Localizacion de un robot movil en rejillas de informacion con RFID usando los filtros EKF y EFIR
98
UNIVERSIDAD DE GUANAJUATO CAMPUS IRAPUATO - SALAMANCA DIVISI ´ ON DE INGENIER ´ IAS Localizaci´ on de un robot m´ ovil en rejillas de informaci´ on con RFID usando los filtros EKF y EFIR TESIS PROFESIONAL QUE PARA OBTENER EL GRADO DE: MAESTRO EN INGENIER ´ IA EL ´ ECTRICA (Opci´ on: Instrumentaci´ on y Sistemas Digitales) PRESENTA: Ing. Juan Jos´ ePom´aricoFranquiz ASESORES: Dr.Yuriy Semenovich Shmaliy Salamanca Guanajuato Enero 2015
Transcript of Localizacion de un robot movil en rejillas de informacion con RFID usando los filtros EKF y EFIR

UNIVERSIDAD DE GUANAJUATO
CAMPUS IRAPUATO - SALAMANCADIVISION DE INGENIERIAS
Localizacion de un robot movilen rejillas de informacion con RFID
usando los filtros EKF y EFIR
TESIS PROFESIONAL
QUE PARA OBTENER EL GRADO DE:
MAESTRO EN INGENIERIA ELECTRICA
(Opcion: Instrumentacion y Sistemas Digitales)
PRESENTA:
Ing. Juan Jose Pomarico Franquiz
ASESORES:
Dr.Yuriy Semenovich Shmaliy
Salamanca Guanajuato Enero 2015

Resumen
Espacios cerrados de navegacion con rejillas de informacion utilizando etique-tas RFID vislumbran un futuro prometedor para aplicaciones industriales y otrasnecesidades de ingenierıa; la razon es simple: cada etiqueta puede proporcionar in-formacion acerca del entorno local en 2D o 3D. Sin embargo para obtener su maximorendimiento se requiere una alta precision del vehıculo movil que se desplaza por larejilla; ya que los errores que se produzcan durante el trayecto pueden generar fallasno deseadas o inclusive colisiones fatales. Por ello se propone un nuevo tipo de filtrodenominado Filtro Extendido de Respuesta Finita al Impulso sin Desplazamiento(EFIR) que se caracteriza por ser insesgado y su condicion de extendido se derivade que es aplicado a un proceso no lineal; este tipo de filtro es recursivo presentandola forma del filtro de Kalman que ha sido ampliamente utilizado en ingenierıa. Estetrabajo de investigacion presenta a traves de una basta gama de simulaciones el com-portamiento del filtro EFIR y se compara con el filtro extendido de Kalman (EKF)el cual se ha empleado en la ultima decada en aplicaciones con etiquetas RFID yautolocalizacion de robots moviles; se demuestra como los errores en las matrices decovarianza de ruido pueden provocar divergencia en el filtro EKF; mientras que elfiltro EFIR permanece estable convirtiendolo en un filtro con mayor robustez y unfuerte candidato en distintas aplicaciones de filtrado digital.
Palabras claves:etiquetas RFID; Filtro extendido de Kalman; Filtro UFIR ex-tendido;Robot movil; localizacion; EKF; EFIR.
I
Agradecimientos
A mis padres:Juan Jose y Yelitza por ser los pilares de fortaleza y motivacion en mi vida, graciaspor todo el carino y amor que me han dado, este logro tambien es de ustedes.
A mis hermanas y hermano:Yoanett,Daniela,Mariangel e Israel por creer en mı, robusteciendo mi voluntad yconfianza, esta vida no serıa la misma sin su presencia, que el esfuerzo realizado enalcanzar esta meta sirva de ejemplo y motivacion para la proxima generacion familiar.
A mis companeros y amigos de maestrıa:Por hacer esta experiencia mas agradable y llevadera, gracias por su apoyo incon-dicional,por los consejos otorgados, los buenos momentos compartidos,y en especialpor su amistad la cual espero que se pueda perpetuar con el paso del tiempo.
A mi asesor:Dr. Yuriy Semenovich Shmaliy ha sido un honor poder trabajar bajo su tutela, gra-cias por su invaluable conocimiento e incondicional orientacion en cada paso dadopara la realizacion de esta tesis.
Por ultimo yo, Ing. Juan Jose Pomarico Franquiz con numero de CVU 510777,agradezco al CONACYT,a la Universidad de Guanajuato y DAIP por darme unainvaluable oportunidad de superacion otorgandome el apoyo economico y moral pararealizar esta tesis.
II

Indice general
1. Generalidades 11.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1. Historia del Filtrado digital . . . . . . . . . . . . . . . . . . . 21.2.2. Historia de la Robotica movil . . . . . . . . . . . . . . . . . . 31.2.3. Origenes de los RFID. . . . . . . . . . . . . . . . . . . . . . . 5
1.3. Hipotesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.4. Objetivos del proyecto . . . . . . . . . . . . . . . . . . . . . . . . . . 71.5. Justificacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.6. Organizacion del documento . . . . . . . . . . . . . . . . . . . . . . . 8
2. Induccion al filtrado optimo 92.1. Ruido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1. Ruido intrınseco . . . . . . . . . . . . . . . . . . . . . . . . . . 92.1.2. Ruido extrınseco . . . . . . . . . . . . . . . . . . . . . . . . . 102.1.3. Ruido blanco Guassiano . . . . . . . . . . . . . . . . . . . . . 10
2.2. Procesos estocasticos . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2.1. Variable aleatoria . . . . . . . . . . . . . . . . . . . . . . . . . 112.2.2. Distribucion de probabilidad . . . . . . . . . . . . . . . . . . . 122.2.3. Momentos: media, varianza y desviacion estandar . . . . . . . 122.2.4. Matriz de covarianza . . . . . . . . . . . . . . . . . . . . . . . 132.2.5. Divergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3. Filtrado optimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.3.1. Filtrado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.3.2. Suavizado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.3.3. Prediccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.4. Criterios de optimizacion . . . . . . . . . . . . . . . . . . . . . . . . . 162.4.1. Error cuadratico medio (MSE) . . . . . . . . . . . . . . . . . . 172.4.2. Raız error cuadratico medio (RMSE) . . . . . . . . . . . . . . 172.4.3. Sesgo o desplazamiento (BIAS) . . . . . . . . . . . . . . . . . 18
2.5. Modelado en espacio de estados . . . . . . . . . . . . . . . . . . . . . 182.5.1. Estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.5.2. Variable de estado . . . . . . . . . . . . . . . . . . . . . . . . 192.5.3. Vector de estados . . . . . . . . . . . . . . . . . . . . . . . . . 192.5.4. Espacio de estados . . . . . . . . . . . . . . . . . . . . . . . . 19
III

INDICE GENERAL
2.5.5. Ecuaciones en espacio de estados . . . . . . . . . . . . . . . . 192.6. Sistemas dinamicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6.1. Clasificacion de los sistemas dinamicos . . . . . . . . . . . . . 212.6.2. Linealizacion de sistemas dinamicos no lineales . . . . . . . . 212.6.3. Interpretacion grafica . . . . . . . . . . . . . . . . . . . . . . . 222.6.4. Representacion aproximada de una funcion no lineal . . . . . . 222.6.5. Punto de equilibrio y punto de operacion . . . . . . . . . . . . 232.6.6. Linealizacion aproximada de un sistema no lineal . . . . . . . 23
3. Robot movil y tecnologıa RFID 263.1. Tecnologıa RFID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.2. Radiofrecuencia empleada . . . . . . . . . . . . . . . . . . . . . . . . 273.3. Tipos de etiquetas RFID . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3.1. Etiquetas RFID pasivas . . . . . . . . . . . . . . . . . . . . . 273.3.2. Etiquetas RFID semi-pasivas . . . . . . . . . . . . . . . . . . 283.3.3. Etiquetas RFID activas . . . . . . . . . . . . . . . . . . . . . . 28
3.4. Lector y etiqueta RFID . . . . . . . . . . . . . . . . . . . . . . . . . . 283.5. Robot movil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.6. Grados de libertad, centro instantaneo de rotacion y tipos de ruedas 313.7. Clasificacion de los robots moviles por su locomocion . . . . . . . . . 32
3.7.1. Robot movil con patas . . . . . . . . . . . . . . . . . . . . . . 323.7.2. Robot movil tipo oruga . . . . . . . . . . . . . . . . . . . . . . 333.7.3. Robot movil con ruedas . . . . . . . . . . . . . . . . . . . . . 33
3.8. Consideraciones generales del proyecto . . . . . . . . . . . . . . . . . 353.8.1. Modelo cinematico del robot movil . . . . . . . . . . . . . . . 363.8.2. Modelo en espacio de estados del robot movil . . . . . . . . . 39
4. Filtros 414.1. Filtro de Kalman . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.1.1. Argumentos computacionales del filtro . . . . . . . . . . . . . 434.1.2. Argumentos probabilısticos del filtro . . . . . . . . . . . . . . 444.1.3. Algoritmo discreto del filtro de Kalman . . . . . . . . . . . . . 444.1.4. Consideraciones del filtro . . . . . . . . . . . . . . . . . . . . . 464.1.5. Filtro de Kalman Extendido: aplicado al modelo del robot . . 47
4.2. Filtro UFIR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.2.1. Consideraciones generales . . . . . . . . . . . . . . . . . . . . 504.2.2. Filtro Batch UFIR de tipo Kalman . . . . . . . . . . . . . . . 504.2.3. Filtro tipo Kalman UFIR iterativo . . . . . . . . . . . . . . . 524.2.4. Filtro UFIR Extendido: aplicado al modelo del robot . . . . . 54
5. Simulaciones y resultados 595.1. Trayectoria circular . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.1.1. Analisis de errores: Trayectoria circular EKF p=1 ; EFIR N=30y N=500 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
IV
INDICE GENERAL
5.1.2. Analisis de errores: Trayectoria circular EKF p=0.6 y p=4;EFIR N=124 . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.2. Trayectoria lineal: el robot viaja a traves de una rejilla RFID con unaruta planeada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 695.2.1. Analisis de errores: Trayectoria lineal EKF p=1; EFIR N=10
y N=150 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 715.2.2. Analisis de errores:Trayectoria lineal EKF p=0.3 y p=9; EFIR
N=40; . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 725.3. Trayectoria libre bajo condiciones tıpicas . . . . . . . . . . . . . . . . 74
5.3.1. Analisis de errores: Trayectoria tıpica EKF p=1 ; EFIR N=5y N=150 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.3.2. Analisis de errores: Trayectoria tıpica EFIR N=36 , EKF p=0.2y p=9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.4. Verificacion de resultados . . . . . . . . . . . . . . . . . . . . . . . . . 80
6. Conclusiones 82
Bibliografıa 84
V

Indice de figuras
2.1. Efectos del ruido sobre una senal . . . . . . . . . . . . . . . . . . . . 92.2. Representacion de un proceso estocastico de una variable aleatoria Y 112.3. CDF y PDF de una variable aleatoria . . . . . . . . . . . . . . . . . . 122.4. Diagrama a bloques del proceso del filtrado optimo . . . . . . . . . . 142.5. Aplicacion del filtrado optimo al determinar la altura de un avion . . 152.6. Ejemplo de la estimacion producida por un filtro optimo . . . . . . . 152.7. Ejemplo de filtrado de un valor en una senal . . . . . . . . . . . . . . 162.8. Ejemplo de suavizado de un valor en una senal . . . . . . . . . . . . . 162.9. Ejemplo de prediccion de un valor en una senal . . . . . . . . . . . . 162.10. Diagrama a bloques de un sistema en espacio de estados . . . . . . . 202.11. Grafica de linealizacion de un sistema dinamico no lineal. . . . . . . . 22
3.1. Esquema general de los elementos que conforman la tecnologıa RFID 263.2. Modelo de una etiqueta RFID y su lector de etiquetas. . . . . . . . . 293.3. Esquema de las estructuras de un robot movil . . . . . . . . . . . . . 313.4. Tipos de ruedas en un robot movil . . . . . . . . . . . . . . . . . . . 323.5. Clasificacion de robots moviles segun su tipo de locomocion . . . . . 323.6. Tipos de configuraciones cinematicas de un robot movil . . . . . . . . 343.7. Rejillas RFID e interaccion del robot movil . . . . . . . . . . . . . . . 363.8. Centro instantaneo de rotacion en la trayectoria de un robot movil . . 38
4.1. Algoritmo Filtro de Kalman . . . . . . . . . . . . . . . . . . . . . . . 454.2. Estimacion Filtro de Kalman . . . . . . . . . . . . . . . . . . . . . . 464.3. Modo de estimacion de los filtros Kalman y Batch UFIR . . . . . . . 524.4. Estrategia de estimacion del filtro UFIR iterativo . . . . . . . . . . . 544.5. Diagrama a bloques del algoritmo del filtro UFIR iterativo . . . . . . 554.6. Diagrama a bloques del algoritmo del filtro EFIR . . . . . . . . . . . 56
5.1. Rejilla RFID para la trayectoria circular con el punto de partida delrobot movil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.2. Trayectoria deseada y mediciones realizadas . . . . . . . . . . . . . . 615.3. Respuesta de la trayectoria obtenida al aplicar los filtros de estudio . 625.4. Comparacion de las estimaciones de los filtros vs la trayectoria y las
mediciones del robot movil . . . . . . . . . . . . . . . . . . . . . . . . 625.5. Errores MSE por coordenadas en las estimaciones producidas por los
filtros EKF y EFIR con valores optimos . . . . . . . . . . . . . . . . 63
VI

INDICE DE FIGURAS
5.6. Trazo del error en las estimaciones producidas por los filtros EKF yEFIR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.7. Estimaciones producidas por los filtros de estudio con valores de p=1y N=30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.8. Errores MSE por coordenadas; producidas por los filtros de estudiocon valores de p=1 y N=30 . . . . . . . . . . . . . . . . . . . . . . . 65
5.9. Errores MSE por coordenadas; producidas por los filtros de estudiocon valores de p=1 y N=500 . . . . . . . . . . . . . . . . . . . . . . . 65
5.10. Estimaciones producidas con valores de p=0.6 y N=124 . . . . . . . . 665.11. Errores MSE por coordenadas obtenidos; con valores de p=0.6 y N=124 675.12. Errores MSE por coordenadas obtenidos en las estimaciones con va-
lores de p=4 y N=124 . . . . . . . . . . . . . . . . . . . . . . . . . . 685.13. Modelo de rejilla RFID utilizado y trayectoria deseada . . . . . . . . 695.14. Estimaciones producidas por los filtros EKF y EFIR con valores de
p=1 y N=40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 705.15. Trazo del error en los filtros EKF y EFIR . . . . . . . . . . . . . . . . 705.16. Error MSE por coordenadas en los filtros EKF y EFIR con p=1 y N=10 715.17. Error MSE por coordenadas en los filtros EKF y EFIR con valores de
p=1 y N=150 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 725.18. Error MSE por coordenadas en los filtros EKF y EFIR con valores de
p=0.3 y N=40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 735.19. Error MSE por coordenadas en los filtros EKF y EFIR con valores de
p=9 y N=40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 735.20. Trayectoria libre del robot y estimaciones de los filtros de Kalman
extendido y UFIR extendido con p=1 y N=36 . . . . . . . . . . . . . 745.21. Analisis de errores en estimaciones por coordenadas de los filtros EKF
y EFIR con valores de p=1 y N=36 . . . . . . . . . . . . . . . . . . . 755.22. Analisis de errores en estimaciones por coordenadas de los filtros EKF
y EFIR con valores de p=1 y N=5 . . . . . . . . . . . . . . . . . . . 765.23. Analisis de errores en estimaciones por coordenadas de los filtros EKF
y EFIR con valores de p=1 y N=150 . . . . . . . . . . . . . . . . . . 775.24. Analisis de errores en estimaciones por coordenadas de los filtros EKF
y EFIR con valores de p=0.2 y N=36 . . . . . . . . . . . . . . . . . . 785.25. Efecto de divergencia en las estimaciones de las coordenadas x ; y de
los filtros EKF y EFIR con valores de p=0.2 y N=36 . . . . . . . . . 785.26. Efecto de divergencia en las estimaciones de las coordenadas x;y de
los filtros EKF y EFIR con valores de p=9 y N=36 . . . . . . . . . . 79
VII

Indice de tablas
3.1. Comparativo de frecuencias de trabajo de los RFID . . . . . . . . . . 273.2. Comparativo de etiquetas RFID activas vs pasivas . . . . . . . . . . 28
4.1. Pasos de estimacion del filtro EKF . . . . . . . . . . . . . . . . . . . 494.2. Pasos de estimacion del filtro EFIR . . . . . . . . . . . . . . . . . . . 57
5.1. Valores de desviacion estandar(σ) y sesgo(β) producidos por coorde-nadas en la trayectoria circular p=1 y N=30; 124; 500. . . . . . . . . 66
5.2. Valores de desviacion estandar(σ) y sesgo(β) producidos por coorde-nadas en la trayectoria circular N=124 y p=0.6; 1; 4. . . . . . . . . . 68
5.3. Valores de desviacion estandar(σ) y sesgo(β) producidos por coorde-nadas en la trayectoria lineal p=1 y N=10; 40; 150. . . . . . . . . . . 72
5.4. Valores de desviacion estandar(σ) y sesgo(beta) producidos por coor-denadas en la trayectoria lineal N=40 y p=0.3; 1; 9. . . . . . . . . . . 74
5.5. Valores de desviacion estandar(σ) y sesgo(β) producidos por coorde-nadas en la trayectoria lineal p=1 y N=5; 36; 150. . . . . . . . . . . . 77
5.6. Valores de desviacion estandar(σ) y sesgo(β) producidos por coorde-nadas en la trayectoria lineal N=36 y p=0.2; 1; 9. . . . . . . . . . . . 79
5.7. Comparativo de valores RMSE del filtro EFIR con respecto a diferen-tes trabajos de localizacion de vehıculos moviles con filtros de Kalman 80
5.8. Tiempo computacional de proceso y estimacion requerido en las dife-rentes trayectorias simuladas . . . . . . . . . . . . . . . . . . . . . . . 81
VIII
Siglas y sımbolos
BIAS:SesgoBIBO:Bounded Input Bounded OutputCDF:Funcion de Densidad AcumuladaCIR:Centros Instantaneos de RotacionEAN:European Article NumberingEAS:Electronic Article SurveillanceEFIR:Unbiased Finite Impulse Response ExtendedEKF:Extended Kalman FilterEPC:Electronic Product CodeFFT:Fast Fourier TransformNASA:National Administration Spacial AereonauticFIR:Finite Impulse ResponseFOG:Fiber Optic GyroscopeGDL:Grados De LibertadGNPG:Gain Noise Power GainIFF:Identification Friend or FoeMSE:Mean Square ErrorPDF:Funcion de Densidad de ProbabilidadRFID:Radio Frecuency IDRMR:Ride Movil RobotRMSE:Root Meas Square ErrorRSSI:Received Signal Strengh InformationUCC:Uniform Code ConucilE(x):Mediaσ2:Varianzaσ:Desviacion Estandarβ:Sesgo o BiasJ :Criterio de optimizacionQ:Matriz de covarianza
IX

Capıtulo 1
Generalidades
1.1. Introduccion
En la actualidad la electronica se encuentra presente en diversas areas del diariovivir desde el hogar o la escuela hasta el sector industrial, muchas de las ramas dela electronica como: microelectronica, control, electronica marina y aeronautica, oinstrumentacion digital se valen del uso de equipos y sensores capaces de realizar me-diciones precisas y proporcionar dicha informacion para el uso o control de un procesoy con ello garantizar el buen funcionamiento del mismo; sin embargo el ruido existede manera inherente en todo sistema electronico y en muchas ocasiones es imposibleeliminar completamente el efecto causado por este, por lo que se desarrollo el filtradodigital para tratar dicha situacion y poder dejar las senales de interes libres de ruidoen la mayor medida posible.
En robotica movil el grado de precision requerido es elevado principalmente por quea nivel industrial los procesos deben garantizar un buen funcionamiento y un bajocosto, sin embargo en muchas ocasiones las lecturas de mediciones son poco fiablesy muy ruidosas lo que en la practica genera que el robot tome decisiones erroneasque pueden desembocar en multiples fallas, algunas de ellas fatales, el procesamientode datos y eliminacion de ruido que se necesitan emplear deben ser optimos. Antela necesidad inminente que presentaba dicha area, en los anos sesenta se desarrolloel filtro de Kalman, un algoritmo capaz de eliminar el ruido de manera optima, pe-ro con ciertos requisitos: el ruido debıa ser blanco Gaussiano, el sistema lineal,y sedebıan conocer las condiciones iniciales y las matrices de covarianza. El algoritmofue de gran utilidad ya que al poco tiempo de su desarrollo, fue usado por la NASAen el programa Apolo XI. Sin embargo, son sus mismas condiciones las que limitansu aplicacion en ingenierıa dado que al no conocerse las condiciones de ruido ni lasiniciales, las estimaciones producidas presentan un error bastante elevado. Esta si-tuacion motivo la creacion de nuevos algoritmos con mejores caracterısticas, desdeentonces el desarrollo de filtros ha evolucionado de diversas formas siempre con elobjetivo de obtener algoritmos mas rapidos, con un menor uso de memoria, con ma-yor flexibilidad y robustez.
1

CAPITULO 1. GENERALIDADES
En este trabajo de tesis se investiga un nuevo algoritmo de tipo Kalman denominadofiltro EFIR (Extended Unbiased Finite Impulse Response Filter). El algoritmo pre-senta varias ventajas sobre el filtro de Kalman tradicional, por un lado este filtro nonecesita condiciones iniciales y tampoco de las matrices de covarianza. Tiene la ven-taja de ser un estimador generalizado, dependiendo de un valor N el cual representala longitud del filtro o numero de muestras necesarias para obtener una estimacionaceptable.
1.2. Antecedentes
Con la finalidad de facilitar al lector la lectura de este apartado se dividira en tresfragmentos que permitiran un mayor entendimiento del origen del presente trabajode investigacion y la importancia de realizacion del mismo: se comenzara con lacronologıa del filtrado digital, posteriormente una breve resena de los orıgenes y losavances de la robotica movil, y en tercera instancia el desarrollo de los RFID y suevolucion, finalizando con la presentacion de los trabajos realizados recientementeen el tema de estudio.
1.2.1. Historia del Filtrado digital
El procesamiento digital surge de la necesidad de manipular la informacionque contienen las senales para realizar calculos a partir de ciertos datos obtenidos,ya que en ocasiones estos calculos se pueden realizar de forma manual se puedeconsiderar que el procesamiento digital se llevo a cabo durante siglos antes de laaparicion de las computadoras para la prediccion y analisis de cuerpos celestes yde las mareas [1]. Sin embargo no se da un avance formal en el area hasta el anode 1928 cuando Harry Nyquist con su trabajo [2] presento el efecto producido enel espectro de frecuencia de una senal analoga al ser discretizada en el tiempo, y seplanteo que, para preservar la informacion original, la tasa de muestreo debıa sermayor que el doble de la maxima componente de frecuencia contenida en la senalanaloga.Posteriormente, en 1949 Claude Shannon con su trabajo[3] demostro que esposible reconstruir perfectamente una senal analoga a partir de sus muestras, si sedispone de un filtro pasabajos analogo ideal (Si bien no es posible fabricar un filtrode este tipo, es posible aproximarse bastante a el en muchas situaciones practicas).Dado que el procesamiento digital requiere en muchas ocasiones de un gran numerode calculos; no fue hasta los anos 60 y 70 con la aparicion de las computadoras dondese dieron grandes avances y se dividio el area en topicos de estudios.
Diseno e implementacion de filtros digitales.
Invencion y optimizacion del algoritmo de la FFT.
Compresion de voz.
Procesamiento de imagenes (fotos tomadas por satelites y naves espaciales).
2

CAPITULO 1. GENERALIDADES
Sismologıa (busqueda de minerales y de petroleo).
Siendo el primer topico el interes de estudio de este trabajo, a continuacion se desa-rrolla una cronologıa de los hechos mas relevantes que contribuyeron al avance delfiltrado digital.
1. Los primeros filtros desarrollados para la eliminacion del ruido fueron estudia-dos por Wiener y Kolmorov en [4] y [5] respectivamente. Sus trabajos tenıancomo condicion que el ruido debıa ser estacionario, sin embargo, su aportaciontuvo un gran impacto al utilizar conceptos estadısticos para filtrado.
2. El filtro de Kalman aparece por primera vez en [6] en 1960, al poco tiempode haberse publicado el artıculo del filtro Kalman, el estudio de nuevos filtrosse empezo a desarrollar con el objetivo de obtener mejores estimadores conresultados adecuados para los casos en donde el filtro tradicional no generabauna buena estimacion.
3. En 1964 se publica por Cox et al. en [7] una de las primeras modificaciones, elfiltro de Kalman extendido (EKF), el cual se usa para la estimacion en modelosno lineales. En 1968 el filtro de Kalman-Bucy [8] es desarrollado para el filtradooptimo en sistemas lineales continuos.
4. En [9] Kwon et al., desarrollan un filtro de tipo Kalman FIR, usando la teorıade control por horizonte deslizante que se explica con mayor detalle en [10]-[12], En [13] Kim et al., sugieren un algoritmo FIR para sistemas de controldeterminıstico de tiempo invariante.
5. En [14] Shmaliy deriva un algoritmo iterativo con desplazamiento p de tiempoinvariante de tipo FIR insesgado. Cuando se usa un valor optimo Nopt dentro delos parametros de este filtro FIR se obtiene una estimacion similar o mejor quela obtenida por un filtro Kalman. En [15] Shmaliy describe un algoritmo paraestimar la matriz de ganancia de potencia de ruido la cual describe el lımite delerror para filtros de tipo FIR. En [16] Shmaliy desarrolla un nuevo filtro que norequiere conocer las condiciones iniciales y matrices de covarianza, este nuevofiltro se denomina filtro UFIR iterativo. En [17] Shmaliy et al., demuestran uncriterio para optimizar la respuesta del filtro UFIR iterativo, En [18] Shmaliyet al., desarrollaron dos filtros UFIR iterativos extendidos para aplicaciones ensistemas no lineales.
1.2.2. Historia de la Robotica movil
Un robot movil es una maquina automatica que es capaz de moverse en un medioambiente determinado; estos son un foco importante de la investigacion actual y encasi todas las grandes universidades tienen uno o mas laboratorios dedicados a lainvestigacion de la robotica movil ya que se considera actualmente un area con granavance tecnologico donde su desarrollo supone la integracion de numerosas discipli-nas entre las que se encuentran la automatica, la electronica, la ingenierıa mecanica,
3
CAPITULO 1. GENERALIDADES
la informatica, la inteligencia artificial, la estadıstica etc.Esta area es capaz de ma-nejar problemas de alta complejidad y sus productos sirven de base para el avanceen diversos campos de la industria, aportando soluciones tecnologicas innovadorasorientadas al desarrollo de mejores robots y a la ampliacion del abanico de aplica-ciones disponibles.Por ello en [39] se enlista una serie de eventos del siglo anteriorque enmarcaron el progreso y desarrollo de la robotica movil actual:
1. Durante la segunda guerra mundial, entre 1939-1945, con la aparicion de nuevoscampos y avances novedosos dentro de la cibernetica e informatica se crearonlas bombas volantes que tenıan un sistema automatico de detonacion y son lospredecesores de los misiles modernos.
2. W. Grey Walter a finales de los anos 40’s construye Elmer y Elsie, dos robotsautonomos llamados Speculatrix Machina, porque a estos robots les gustabaexplorar su entorno. Elmer y Elsie fueron cada uno equipados con un sensorde luz. Si encontraban una fuente de luz se movıan hacia ella, evitando losobstaculos en su camino. Estos robots demostraron que el comportamientocomplejo podrıa surgir de un diseno simple.
3. A inicio de los anos 60’s varias universidades incursionan en este campo, launiversidad Hopkins con su robot llamado “Bestia”que utilizaba un sonar paramoverse y era capaz de encontrar un enchufe donde conectarse si su baterıa sedescargaba; mientras que la universidad de Stanford disena un carrito seguidorde lınea blanca utilizando una camara.
4. Pero es a finales de los anos 60’s con el proyecto Shakey en el SRI (StanfordResearch Institute)donde se genera un avance de impacto. El documento [19]menciona la percepcion del entorno,la planificacion del movimiento y la arqui-tectura de control que debıan poseer lo equipos roboticos, generando que estosaspectos se convirtieran en el nucleo de investigacion en las siguientes decadas.
5. En la decada de los 70’s la NASA utiliza la robotica movil enviando dos navesespaciales no tripuladas a Marte, eventos pertenecientes al programa Viking.
6. En los 80’s se da un ‘boom’ en el area y las personas comienzan a sentir masinteres en los robots moviles sobre todo en aquellos que les permiten suplir lastareas domesticas o con fines educativos, y continuan los trabajos de investi-gacion en universidades ahora con un mayor auge en Europa, especialmente enla velocidad que pueden alcanzar los vehıculos y su autonomıa.
7. La decada de los 90’s viene repleta de un gran arsenal de inventos e innovacionespopularizandose los mismos en el mercado, se pueden destacar: los trabajosde Joseph Engelberger (el padre del brazo robotico industrial) y sus colegasquienes disenan los primeros brazos roboticos para los hospitales disponiblesen el mercado; los robots Dante I y Dante II desarrollados por la UniversidadCarnegie Mellon. Ambos utilizados para explorar volcanes activos; aparecenautomatas programables como el Pioneer movil a un precio asequible en el
4

CAPITULO 1. GENERALIDADES
mercado, permitiendo un aumento generalizado en el estudio y la investigacionde la robotica en las universidades durante la proxima decada, la roboticamovil se convierte en una parte estandar del currıculo universitario; entre otroseventos mas.
8. Desde el ano 2000 hasta los presentes dıas los avances en la robotica movil soncada vez mas impresionantes, ya que en estos ultimos anos se han perfeccionadolas tecnicas existentes y buscado alternativas que permitan reducir el tiempoen el proceso y la precision en el funcionamiento, se involucran los terrenosy superficies de trabajo del robot permitiendo explorar e investigar espaciosnunca antes vistos como es el caso de Curiosity en Marte.
1.2.3. Origenes de los RFID.
Los orıgenes de la tecnologıa RFID se remontan a la segunda guerra mundial enlos anos 1939 y 1940 cuando alemanes, japoneses, britanicos y americanos utilizabanradares para detectar el acercamiento de los aviones. El problema existıa al no sabersi estos aviones pertenecıan a su bando o eran del bando contrario, por lo que losbritanicos idearon un metodo IFF (Identification Friend or Foe ) con el que si lospilotos balanceaban el avion al volver a la base cambiarıa la senal de radio reflejaday podrıan distinguir los aviones aliados de los alemanes, convirtiendose ası en elprimer dispositivo de RFID pasivo. A partir de este hecho acontece una serie deeventos determinantes en el desarrollo y evolucion de estos dispositivos:
1. A mediados de los anos 40’s la industria inglesa desarrolla los primeros equiposelectronicos para la identificacion de objetos, los cuales funcionaban con unjuego de transmision de frecuencias pero eran equipos bastantes limitados por lafalta de desarrollo de la electronica en cuanto a transistores, microprocesadoresy redes de comunicacion.
2. En la decada de los 50’s se impulsaron los sistema de deteccion de largo alcanceIFF, pero fue Donald B.H en su trabajo [20] quien realiza una investigacioncapaz de permitir que los RFID dejen de ser una idea para convertirse en unaaplicacion.
3. En la decada de los 60’s se comercializa esta tecnologıa en los grandes alma-cenes para detectar el robo de productos. El primer sistema se llamo EASElectronic Article Surveillance, era un sistema sencillo conformado por un bitde informacion para detectar la etiqueta dentro de un rango de operacion y ac-tivar la alarma si la etiqueta no estaba desactivada; este sistema es el utilizadohoy en dıa en tiendas de ropa; pese a que es limitado es economico y efectivo.
4. En la decada de los 70’s se produce un gran auge en la aplicacion y el desarrollode la tecnica de esta tecnologıa. Se enfocaron a los campos de la ganaderıa, eltransporte y la industria. Se fundan nuevas empresas dedicadas al desarrollode RFID debido al potencial que presentaba; de aquı surgen las dos primeras
5

CAPITULO 1. GENERALIDADES
patentes en 1973: la primera de la mano de Mario W. Cardillo cuando pre-sento una etiqueta RFID activa con memoria re-escribible y la segunda porparte de Charles Walton al crear un RFID pasivo para abrir las puertas sinnecesidad de llaves.
5. Con los grandes avances logrados en la decada anterior, los 80’s se caracterizanpor aplicar esta tecnologıa en el transporte publico y en menor grado en aspec-tos de control de animales; en Europa se enfocan a las aplicaciones industrialesy sistemas de corto alcance para el control pecuario, principalmente en paıseseuropeos como Francia, Espana, Portugal e Italia.
6. En la decada de los 90’s se incorpora en EEUU la tecnologıa RFID en el controlde peaje en las autopistas, siendo las primeras las de Houston y Oklahoma,posteriormente el exito de esta aplicacion se propago a Europa, Asia, Africa,Sudamerica y Australia, permitiendo ası el crecimiento y la aplicacion en otrossegmentos economicos.
7. Desde el ano 2000 hasta nuestros dıas el desarrollo y el progreso de esta tecno-logıa va de la mano de AUTOID Labs conformado por 6 laboratorios ubicadosen universidades de prestigio como MIT(Massachussets Institute Technology)de EEUU, University of Cambridge en el Reino Unido,University of Adelaideen Australia,Keio University en Japon, Fundan University en China, y Univer-sity of St.Gallen en Suiza. Tambien hace un par de anos este centro en apoyocon el EAN international(European Article Numbering) y el UCC (UniformCode Council) y las empresas de consumo masivo de ambito mundial desa-rrollaron lo que hoy conocemos como la Red EPC (Electronic Product Code)y sus componentes; este codigo unico se graba en el chip en una etiqueta deRFID y se coloca en el producto permitiendo ası hacer un seguimiento de cadaunidad, el codigo EPC contendra la informacion de la empresa y caracterısticasdel producto permitiendo una identificacion unica en el ambito mundial.
Recientemente en [21] se desarrolla una prometedora aplicacion industrial para queun robot pueda describir su entorno en 2D y 3D utilizando la informacion progra-mada en cada una de las etiquetas RFID. Las investigaciones realizadas en [22]-[24]muestran que utilizando RSSI (Received Signal Strengh Information) y midiendola distancia a dos o tres etiquetas de RFID con coordenadas conocidas podemosdeterminar la posicion del vehıculo. Esta tecnica denominada trilateracion requieresolo tres etiquetas y tres ecuaciones matematicas para determinar las coordenadas yası su posicion. Tambien se han empleado algoritmos hıbridos en donde la informa-cion recibida de las RFID se combina con la de otras fuentes para tomar decisionestal como la presentada en [25] donde se utiliza una camara y a traves de vision arti-ficial tomar las decisiones correctas para el movimiento del robot. O las presentadasen [26] donde se emplean las etiquetas de RFID en el diseno de una silla de ruedasinteligente; algunos otros eventos relevantes se pueden encontrar en [27]-[30]
6

CAPITULO 1. GENERALIDADES
1.3. Hipotesis
¿Puede el algoritmo de EFIR producir estimaciones con un alto grado de precisiony un error mınimo en la determinacion de la posicion de un robot movil que viajaen rejillas de informacion con RFID?.
1.4. Objetivos del proyecto
Objetivo general:implementar y comparar los algoritmos del Filtro de KalmanExtendido (EKF) y el Filtro Extendido de Respuesta Finita al Impulso sin Despla-zamiento (EFIR) en un robot movil que se desplaza en rejillas de informacion conRFID (Radio Frecuency ID) para obtener su posicion con el error mınimo posible yuna alta precision.
Objetivos especıficos:
Analisis de los algoritmos de Kalman y UFIR para comprender el comporta-miento de los filtros extendidos de los mismos.
Modelado en espacio de estados del robot.
Realizacion de filtros de estudio en software Matlab.
Simulacion y pruebas del comportamiento de los filtros realizados.
Estudio y comparacion de estimacion y errores entre los filtros.
1.5. Justificacion
El crecimiento progresivo de la industria y la demanda constante de realizar pro-cesos de fabricacion cada vez mas rapidos y eficientes ha llevado consigo el desarrollotecnologico y la invencion de tecnicas capaces de solucionar su problematica. En lasultimas decadas la incorporacion de robots que desempenan tareas en aplicacionesindustriales en espacios cerrados ha cobrado relevancia, pero lleva consigo la nece-sidad de que los robots sean de bajo costo, precisos y de rapida localizacion, Sinembargo un bajo costo de equipo genera en muchas ocasiones lecturas de medicionespoco fiables y muy ruidosas que en la practica generan que el robot tome decisio-nes erroneas que pueden desembocar en multiples fallas, algunas de ellas fatales. Elprocesamiento de datos y la eliminacion de ruido que se necesitan emplear deben seroptimos; por lo que el filtro de Kalman se ha convertido en una poderosa herramien-ta en esta area por las ventajas que proporciona. Pese a que la implementacion delfiltro de Kalman y el filtro de Kalman extendido goza de gran aceptacion, tambiense han buscado soluciones alternas con diferentes tipos de filtros especialmente losde tipo FIR que ofrecen las ventajas de tener estabilidad BIBO, ser robustos anteincertidumbres temporales y ruido no Gaussiano. Por lo tanto filtros como: UFIR y
7

CAPITULO 1. GENERALIDADES
UFIR extendido, que son relativamente nuevos, permiten establecer una nueva pro-puesta de solucion a la problematica descrita. Se podra observar como en el topicode estudio se comportan los filtros y con ello poder establecer comparaciones, deter-minar fortalezas y debilidades y con ello fundamentar bases solidas para una posibleimplementacion fısica.
1.6. Organizacion del documento
El presente trabajo se divide en seis capıtulos. El contenido de cada capıtulo sedescribe a continuacion.
Capıtulo 2: Induccion al filtrado optimo. Se presentan de manera concisa lasbases de la teorıa de estimacion.
Capıtulo 3: Robot movil y tecnologıa RFID. Se proporciona una explicacionde las caracterısticas y consideraciones del robot ası como su modelado ma-tematico; ademas se proporciona informacion relevante en cuanto al principiode funcionamiento, tipos y modos de trabajo de los sensores RFID
Capıtulo 4: Filtro de Kalman y Filtro UFIR. Se presenta una explicacion dela teorıa de los mismos y sus caracterısticas relevantes para dar paso al estudiode sus extensiones.
Capıtulo 5: Simulaciones. Se presentan los diferentes casos de estudios y lassimulaciones realizadas con enfasis en el analisis del error producido por cadauno de los filtros.
Capıtulo 6: Conclusiones. Se presenta un analisis de resultados y observacio-nes obtenidas.
8

Capıtulo 2
Induccion al filtrado optimo
2.1. Ruido
Federico Miyara en [31] define al ruido como: “Toda senal no deseada superpuestaen una senal util o de estudio que corrompe o modifica su contenido”, el ruido sepuede dividir de manera general en dos tipo: ruido intrınseco y ruido extrınseco. Lafigura 2.1 es un ejemplo de lo mencionado.
Figura 2.1: Efectos del ruido sobre una senal
2.1.1. Ruido intrınseco
Es aquel en el cual la fuente de ruido se encuentra dentro del sistema, en electroni-ca generado por los distintos componentes del sistema que ocasionan el movimientocaotico de los electrones, el cual causa fluctuaciones en la corriente y el voltaje Algu-nos ejemplos de ruido intrınseco son el ruido termico, el ruido de disparo, el ruido deparpadeo o ruido de 1/f, etcetera. Cabe destacar que en estos casos no podemos de-terminar de manera absoluta la amplitud, solo podemos describir la senal por mediode sus caracterısticas probabilısticas.
9

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
2.1.2. Ruido extrınseco
Es aquel que es generado por fuentes que son externas a nuestro sistema. Porejemplo se pueden mencionar el ruido atmosferico causado por tormentas electricas,el ruido generado por motores electricos, radio, celulares, acoplamientos indeseadoso interferencias. A diferencia del ruido intrınseco, el extrınseco es por lo general unfenomeno determinıstico.
2.1.3. Ruido blanco Guassiano
Este tipo de ruido tiende a confundirse con conceptos similares sin embargo secomprende mejor cuando estudiamos los siguientes terminos:
Blancura
Implica que el valor del ruido no esta correlacionado en el tiempo, es decir no sesabe que valor va a tener, este desconocimiento hace que no sea bueno en la predic-cion del valor en cualquier tiempo. La blancura tambien implica que el ruido tengaigual potencia en todas las frecuencias.Dado que esto resulta en una potencia infinitade ruido, el ruido blanco obviamente no puede existir.Este concepto se debe considerar de una manera singular. Primero, cualquier siste-ma de interes tiene una banda de paso, un rango de frecuencias en el cual puederesponder, y encima de estas frecuencias, las entradas no tienen efecto en las salidas,o el sistema las atenua severamente.Por lo tanto, la blancura se refiere al tiempo o la frecuencia de un ruido, la guasia-nidad tiene que ver con su amplitud. Ademas, en cualquier punto en el tiempo, ladensidad de probabilidad de una amplitud del ruido gaussiano tiene una forma decampana. Esto puede justificarse fısicamente por el hecho de que el sistema o ruidomedido es tıpicamente causado por un numero de pequenas fuentes.
Densidad Guassiana
La densidad gaussiana, similar a la blancura, hace que las matematicas sean mastratables, pero mas alla de este hecho, tıpicamente un ingeniero va a saber en mayorgrado, las estadısticas de primer y segundo orden (media y la varianza o desviacionestandar) del ruido del proceso. En la ausencia de cualquiera de las estadısticas demayor orden, es mejor asumir la densidad gaussiana. Las estadısticas del primer ysegundo orden determinan completamente la densidad gaussiana. Las presuncionesparticulares, son hechas por los objetivos que se quieren alcanzar, y por ese motivoesencial, los modelos son desarrollados.
2.2. Procesos estocasticos
Los procesos estocasticos son basicamente fenomenos cuyo comportamiento sedesarrolla en el tiempo y se rige por las leyes de la probabilidad, ejemplos de tales
10

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
fenomenos son: el crecimiento de una poblacion tal como una colonia bacterial, eltamano de una cola en un estacion cliente/servidor, la recepcion de una senal enpresencia de ruido o perturbaciones, etc. Para efectos matematicos, un proceso es-tocastico es una sucesion de variables aleatorias, cada una de las cuales describe elestado del sistema en un instante de tiempo. Por lo tanto se puede decir:
1. El estado del sistema en un tiempo determinado es variable, y su variabilidadse debe a mecanismos aleatorios.
2. La variable aleatoria del estado del sistema es una funcion que depende deltiempo y en consecuencia, su distribucion esta determinada por el instante detiempo que se considere.
3. Si se consideran los estados de un sistema en distintos instantes de tiempoconjuntamente, se puede conceptuar un proceso estocastico como un vectoraleatorio n-dimensional.
Figura 2.2: Representacion de un proceso estocastico de una variable aleatoria Y
La figura 2.2 representa el proceso descrito; ahora bien tambien se puede descri-bir un fenomeno aleatorio conociendo ciertos valores numericos que determinan elcomportamiento del proceso, facilitando ası el entendimiento del mismo, por ello esimportante conocer la siguiente terminologıa.
2.2.1. Variable aleatoria
Supongase que a cada punto de un espacio muestral se asigna un numero. Ası sedefine una funcion en el espacio muestral. Dicha funcion se llama variable aleatoria(o variable estocastica) o mas precisamente funcion aleatoria (funcion estocastica).Comunmente se denota por una letra mayuscula como X o Y. En general una variablealeatoria tiene algun significado fısico, geometrico u otro.
11

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
2.2.2. Distribucion de probabilidad
Las senales estocasticas tambien pueden ser descritas por su funcion de densidadacumulada (CDF) y su funcion de densidad de probabilidad (PDF). La funcionde densidad acumulada F(x) es la funcion que nos expresa la probabilidad de queuna variable aleatoria sea menor a un valor. Por otro lado la funcion de densidadde probabilidad f(x) se define como la derivada de F(x), nos da una nocion de lafrecuencia en la que se repite un cierto valor x.[32]. En la figura 2.3 se muestrauna representacion de estas funciones. Para CDF se considera que nuestra variablealeatoria es x(t). PDF es la derivada de CDF,la cual muestra el valor que se repitecon mayor frecuencia.
Figura 2.3: CDF y PDF de una variable aleatoria
2.2.3. Momentos: media, varianza y desviacion estandar
Los momentos son la manera mas simple de describir los procesos estocasticos,se dividen en dos: momentos iniciales y momentos centrales [33]. El promedio es elmomento inicial de orden uno, y se define como:
“Dado un conjunto de n cantidades denotadas por x1,x2,.....,xn, donde el prome-dio denotado frecuentemente como x representa la suma de las cantidades divididasentre el numero de ellas n”.
m1 = E(x) = x =x1 + x2 + .....+ xn
n=
1
n
n∑i=1
xi (2.1)
La ecuacion (2.1) indica la tendencia central de una coleccion de datos, es decirrepresenta un centro de gravedad alrededor del cual se distribuyen los datos, Una delas limitaciones de este parametro radica en la sensibilidad a los valores extremos;valores muy grandes tienden a aumentarlo mientras que valores muy pequenos tien-den a reducirlo, lo que implica que puede dejar de ser representativo del conjunto dedatos.
12

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
La varianza y la desviacion estandar son medidas de dispersion y momentoscentrales, que permiten conocer que tanto se separan los datos del punto central, esdecir, indican cuanto se desvıan las observaciones alrededor de su promedio aritmeti-co (Media) permitiendo ası sacar conclusiones mas especificas sobre un conjunto dedatos.
En el caso de la varianza esta medida de dispersion permite identificar la dife-rencia promedio que hay entre cada uno de los valores respecto a su punto central;su ecuacion viene determinada en (2.2):
µ = σ2x =
1
n
n∑i=1
(xi − x)2 (2.2)
Esta medida permite determinar el promedio aritmetico de fluctuacion de losdatos respecto a su punto central o media. La desviacion estandar da como resultadoun valor numerico que representa el promedio de diferencia que hay entre los datosy la media. Para calcular la desviacion estandar basta con hallar la raız cuadrada dela varianza, por lo tanto su ecuacion queda representada en (2.3):
σx =
√√√√ 1
n
n∑i=1
(xi − x)2 (2.3)
Elevar los valores al cuadrado en el caso de la varianza hace que la respuesta seamuy grande, ası que aplicarle la raız cuadrada permite que la desviacion estandarsea mucho mas util, dado que se obtiene un valor en el mismo rango del promedio.
2.2.4. Matriz de covarianza
En probabilidad, la matriz de covarianza se usa para expandir el concepto de va-rianza para dos o mas variables aleatorias [33]. Considerese un vector x = [x1, x2, · · · , xn]T
en el cual cada uno de sus elementos x1, x2, · · · , xn son variables aleatorias y cadauna de ellas tiene un promedio m1,m2, · · · ,mn, las cuales se agrupan en un vectorx = [m1,m2, · · · ,mn]T , la matriz de covarianza se define como se presenta en laecuacion (2.4):
Qx =
E{(x1 −m1)(x1 −m1)} · · · E{(x1 −m1)(xn −mn)}E{(x2 −m2)(x1 −m1)} · · · E{(x2 −m2)(xn −mn)}
.... . .
...E{(xn −mn)(x1 −m1)} · · · E{(xn −mn)(xn −mn)}
(2.4)
Por lo que se puede expresar dicha matriz de covarianza de forma mas compactacomo la que se presenta en (2.5):
Qx = E{(x− x)(x− x)T} (2.5)
Para las senales estocasticas es posible usar este concepto, ya que se puede ex-presar la senal de interes x(t) en forma de vector como x = [x(t1), x(t2), · · · , x(tn)]y de esta forma aplicar la definicion de covarianza para hallar sus caracterısticas.
13

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
2.2.5. Divergencia
Se posee un conjunto de valores pertenecientes a la observacion de un fenomeno,dentro de los cuales existen ciertos valores anomalos que parecieran no perteneceral grupo de observaciones obtenidas (generalmente dados por mediciones erroneas opor la alteracion de un parametro durante el proceso de observacion), por la tanto[34] expresa: “la divergencia es el valor absoluto de la diferencia del valor anomalo yel valor que se encuentra inmediatamente mas cercano a el”.
Divergencia = |valoranomalo − valorcercano| (2.6)
2.3. Filtrado optimo
El filtrado optimo se obtiene a partir del estudio de ciertos parametros (la tasa deconvergencia, la precision, robustez, la carga computacional entre otros), la senal deinteres y el ruido que la corrompe. En el caso del filtrado optimo lo que se busca esminimizar el efecto del ruido sobre la salida. En la figura 2.4 se presenta un pequenodiagrama a bloques del proceso del filtrado optimo y una representacion grafica delos elementos de interes del mismo; la complejidad de esta area de estudio radica enel desarrollo de un filtro acorde a nuestras necesidades y capaz de eliminar el ruido.
Figura 2.4: Diagrama a bloques del proceso del filtrado optimo
Para ilustrar un poco mas lo mencionado previamente imagine que se quiere co-nocer la altura h a la que se encuentra un avion como se presenta en la figura 2.5.Suponga que se conoce que existe una ecuacion tal que describa esta variable h encualquier instante de tiempo t inclusive valores futuros. En un problema practicoesta ecuacion es desconocida ya que para la gran mayorıa de procesos no se puededeterminar su valor futuro, lo unico que se conoce de esta ecuacion es un modelo ma-tematico, una aproximacion que representa el comportamiento de nuestra senal, conbase en el conocimiento del fenomeno a analizar y realizando ciertas consideraciones.A su vez se debe contemplar que el sistema es afectado por un ruido extrınseco cuyanaturaleza no se puede controlar del todo, el cual se denomina ruido del sistema w;por otro lado es posible usar un sensor para obtener la altura h; el sensor es afectado
14

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
por el ruido intrınseco que existe en todo sistema electronico, este ruido se denominaruido del observador y se simboliza con v.
Figura 2.5: Aplicacion del filtrado optimo al determinar la altura de un avion
La senal filtrada es una estimacion con base en la medicion y el modelo matemati-co, si el filtro es optimo, el efecto causado por los ruidos w y v se reduce en el mayorgrado posible. En otras palabras un filtro optimo proporciona un valor cercano alvalor real tal como se presentan en la figura 2.6.
Figura 2.6: Ejemplo de la estimacion producida por un filtro optimo
El filtrado optimo tambien abarca la posibilidad de crear suavizadores y predic-tores para operar el modelo matematico desde otro angulo; cabe resaltar que a lossistemas capaces de filtrar, predecir o suavizar se denominan estimadores. A conti-nuacion se presenta una pequena explicacion de los mismos.
2.3.1. Filtrado
Filtrado es un proceso que consiste en utilizar n numero de puntos conocidos apriori para estimar el valor actual de la senal de estudio. Se ilustra en la figura 2.7
15

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
Figura 2.7: Ejemplo de filtrado de un valor en una senal
2.3.2. Suavizado
Suavizado es un proceso que consiste en utilizar n numero de puntos conocidos apriori para estimar un dato pasado de la senal de estudio. Se ejemplifica en la figura2.8
Figura 2.8: Ejemplo de suavizado de un valor en una senal
2.3.3. Prediccion
Predecir es un proceso que consiste en utilizar n numero de puntos conocidos apriori para estimar un dato a futuro o a posteriori de la senal de estudio; como seobserva en la figura 2.9
Figura 2.9: Ejemplo de prediccion de un valor en una senal
2.4. Criterios de optimizacion
Un criterio de optimizacion es la funcion que indica como se debe reducir el ruido.De esta manera es posible disminuir el numero de posibles filtros y obtener solo el
16

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
que tiene la mejor respuesta para nuestro criterio. El criterio de optimizacion es unafuncion del error producido entre el modelo de estudio y su estimacion (ε=x-x)[43].Estos criterios permiten medir el grado de precision de la simulacion. Es decir elgrado de correspondencia entre pares individuales de valores pronosticados y valoresobservados. de tal forma que:
J = E{|x− x|p} (2.7)
En la ecuacion (2.7) J representa el criterio de optimizacion, x los valores delparametro u observaciones, x las estimaciones realizadas y p es la potencia que de-termina el criterio del estudio del error. Durante este trabajo se estudiaran 3 criteriosque aportan informacion sobre el comportamiento del estimador y su eficacia, estoscriterios son: Error cuadratico medio (MSE), la raız del error cuadratico medio (RM-SE), y el sesgo (BIAS).
2.4.1. Error cuadratico medio (MSE)
Cuando se habla de estimadores[43] es importante tener en cuenta que se procuraque cometan, en promedio, el menor error posible en la estimacion; es decir evitarlos errores que se cometan por defecto o exceso de estimacion, para ello se pretendeminimizar la diferencia entre el valor estimado (x) y el valor del parametro (x).
MSE = E{(x− x)2} (2.8)
la ventaja de este criterio es que la ecuacion (2.8) se puede descomponer enterminos de la varianza y el sesgo (2.11), esto permite que si se comparan diversosestimadores con un parametro en especifico, el MSE coincidira con sus varianzas; sinembargo, si la varianza disminuye, el sesgo crece y viceversa, por lo que al trabajarcon este criterio se considera un valor optimo para MSE cuando la varianza y elBIAS son lo menor posible como se presenta en la ecuacion (2.9).
MSE = σ2 + (β)2 (2.9)
2.4.2. Raız error cuadratico medio (RMSE)
Este parametro es frecuentemente utilizado en la medicion de la diferencia entrelos valores de prediccion de un modelo y los valores observados en el modeladodel mismo [43]. La raız del error cuadratico medio (RMSE) es el promedio especialde las diferencias al cuadrado entre la prediccion y el analisis del modelo o de lasobservaciones de verificacion, validas para el mismo instante.
Es una medida de cuan bueno es un modelo, capturando tanto la estructura comola intensidad de los sistemas. Tambien incluye los efectos de cualquier bias o sesgo.Cuanto menor sea el RMSE, tanto mejor para el modelo. El error en las prediccionesdel modelo se cuantificara en terminos de las unidades de la variable calculada. Unvalor de RMSE=0 indica un ajuste perfecto tal como se presenta en la ecuacion(2.10).
17

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
RMSE =
√E{(x− x)2} (2.10)
2.4.3. Sesgo o desplazamiento (BIAS)
Otra propiedad razonable que se puede pedir a un estimador para determinarcuan optimo puede llegar a ser, es que en promedio sus valores estimados coincidancon el valor real del parametro estimado [43]. Este valor proporciona informacionsobre la tendencia del modelo a sobrestimar o subestimar una variable cuantificandoel error sistematico del sistema. Se puede calcular con la ecuacion (2.11):
β = E{x} − x (2.11)
2.5. Modelado en espacio de estados
Una representacion de espacios de estados es un modelo matematico de un sis-tema fısico descrito mediante un conjunto de entradas, salidas y variables de estadorelacionadas a traves de un conjunto de n ecuaciones diferenciales de primer orden.Un sistema complejo posee muchas entradas y muchas salidas que se relacionan entresı de una forma complicada. Para analizar un sistema de este tipo es esencial reducirla complejidad de las expresiones matematicas, y desde este punto de vista el enfoqueen ecuaciones de estados es el mas conveniente para el analisis de estos sistemas; yde allı se derivan las siguientes ventajas:
Modelo de analisis y diseno mas general.
Permite tratar de manera analoga sistemas lineales y no lineales.
Introduccion de conceptos de algebra lineal en el analisis de ecuaciones endiferencias.
Utilizacion de conceptos geometricos, generalizacion del plano de fase: (posi-cion,velocidad) a n dimensiones.
Relacion entre descripciones internas y externas.
Adecuado para sistemas con multiples entradas o salidas.
Calculos matriciales sencillos.
Afortunadamente, la clase de modelos que lleva a matematicas tratables tam-bien provee representacion adecuada para muchas aplicaciones de interes. Despues,la estructura del modelo se va extender a algun lugar para alargar el rango de laaplicabilidad, pero el requerimiento de la utilidad del modelo para el diseno de unestimador o de un controlador va a ser una influencia dominante en la manera en lacual las extensiones son hechas.
18

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
2.5.1. Estado
El estado de un sistema dinamico es el conjunto mas pequeno de variables (lla-madas variables de estado) tales que el conocimiento de dichas variables en t = t0,junto con el conocimiento de la entrada para t ≥ t0 determinan por completo el com-portamiento del sistema para cualquier t ≥ t0. El concepto de estado no se limita asistemas fısicos, tambien se aplica a sistemas biologicos, economicos, sociales, entreotro [44].
2.5.2. Variable de estado
Las variables de estado de un sistema dinamico son las que conforman el conjuntomas pequeno de variables que determinan el estado del sistema dinamico. Si paradescribir en su totalidad el sistema dinamico, se requieren por lo menos n variablesde tal forma que una vez que la entrada es producida para t ≥ t0 y el estado inicialt = t0, el estado futuro quedara completamente determinado; entonces las n variablesse consideran un conjunto de n variables de estado. Las variables de estado poseenvarias propiedades[44].
2.5.3. Vector de estados
Si se necesitan n variables de estado para describir completamente el comporta-miento de un sistema dado, entonces estas se pueden considerar como las n compo-nentes de un vector x, dicho vector se conoce como vector de estados. Un vector deestados es por tanto un vector que determina en forma unica el estado de x(t) delsistema para cualquier tiempo t ≥ t0 una vez dado el estado t = t0 y especificada laentrada u(t) para t ≥ t0 [44].
2.5.4. Espacio de estados
El espacio de estados cuyos ejes coordenados estan formados por los ejes x1, x2, · · ·xnse conoce como espacio de estados. Cualquier estado puede representarse por un pun-to dentro del espacio de estado [44].
2.5.5. Ecuaciones en espacio de estados
En el analisis de estados se trata con tres tipos de variables que estan involucradasen el modelo del sistema; estas variables son: las variables de entrada, las variablesde salida, y las variables de estado. La representacion en el espacio de estados paraun sistema no es unica, con excepcion de que el numero de variables de estado esel mismo para cualquiera de las distintas representaciones en el espacio de estadosdel mismo sistema.Una de las ventajas de utilizar dicha representacion radica enque su modelo puede representar sistemas tanto continuos como discretos, linealeso no lineales, variables o invariables en el tiempo, y generalmente utilizados en unanotacion matricial [44].
19

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
Por ejemplo, para los sistemas lineales de tiempo discreto invariantes en el tiempo,la ecuacion de estado y la ecuacion de salida se pueden simplificar como:
xn+1 = Axn +Bwn (2.12)
yn = Cxn +Dvn (2.13)
Donde:
xn=vector n (Vector de estados) A= matriz n x n(Matriz de estados)yn=vector m (Vector de salida) B= matriz n x r (Matriz de entrada)wn=vector r (Vector de entrada) C= matriz m x n (Matriz de salida)vn=vector s (Vector de observacion) D= matriz m x s (Matriz de transicion)
En la figura 2.10 se presentan un diagrama a bloques de un sistema de control linealinvariante en el tiempo representado en espacio de estados.
Figura 2.10: Diagrama a bloques de un sistema en espacio de estados
2.6. Sistemas dinamicos
Los sistemas dinamicos cuyos parametros internos (variables de estado) siguenuna serie de reglas temporales. Se llaman sistemas por que estan descritos por unconjunto de ecuaciones y dinamicos por que sus parametros varıan con respecto a unavariable generalmente el tiempo. El estudio de sistemas dinamicos puede dividirseen tres areas de estudio:
Dinamica aplicada: modelado de procesos por medio de ecuaciones de estadoque relacionan estados pasados con estados futuros.
Dinamica experimental: experimentos de laboratorio, simulaciones de compu-tadora de modelos dinamicos.
Matematica de la dinamica: se enfoca en el analisis cualitativo del modelodinamico.
20

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
2.6.1. Clasificacion de los sistemas dinamicos
Los sistemas dinamicos se pueden clasificar de diferentes maneras [45] como en:continuos y discretos; autonomos y no autonomos , invariantes o variantes en eltiempo,etc sin embargo la clasificacion de interes en este trabajo de investigacion esla de los sistemas lineales o no lineales por lo que se dara una breve explicacion deestos para enmarcar ası las caracterısticas del problema de estudio.
Sistemas lineales y no lineales
Se puede decir que un sistema es lineal si se cumple la expresion:
x = F (ax+ by) = aF (x) + bF (y) (2.14)
Es decir es lineal si la funcion F que relaciona la tasa de incremento de las varia-bles de estado con sus valores actuales cumple con el principio de superposicion.Lossistemas lineales son sencillos de analizar y trabajar, ya que la solucion del sistemaesta sujeta a la suma de condiciones del sistema mas sencillas eliminando ası sucomplejidad; sin embargo la ecuacion (2.14) no se cumple si se esta en presencia deun sistema no lineal, lo que genera que el sistema se torne complejo y en muchasocasiones no se encuentren soluciones analıticas exactas a los problemas no lineales;ası la representacion dinamica del sistema se auxilia de tecnicas geometricas, analıti-cas y de visualizacion, por lo tanto lo ideal serıa trabajar con sistemas lineales. Porello en las siguientes secciones se presenta la alternativa de aproximar una funcionno lineal a una lineal y poder abordar el problema de estudio desde una perspectivamas sencilla.
2.6.2. Linealizacion de sistemas dinamicos no lineales
Se considera que un sistema dinamico no lineal se puede representar por un con-junto de ecuaciones diferenciales [45] de la forma general en donde f y h son funcionesque representan la dinamica del sistema y la salida de este, dada en terminos de lavariable de estado x y la entrada u.
x(t) = f(x(t), u(t)) , x(t0) = x0 (2.15)
y(t) = h(x(t)) (2.16)
donde f es una funcion vectorial de n × 1 elementos, expresada en terminos deun vector de estado el cual es una variable de estado de dimension x ∈ Rn × 1. Elnumero de estados n es conocido como el orden del sistema. La solucion x(t) de laecuacion (2.15) corresponde a una curva en el espacio de estado donde t varıa decero hasta infinito. Esta curva es conocida como la trayectoria de estado.
21

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
2.6.3. Interpretacion grafica
Imagine una funcion no lineal de cierta curvatura cuya representacion lineal esla lınea recta que pasa tangente en uno de sus puntos y las ecuaciones que descri-ben un sistema dinamico no lineal cuya representacion lineal se obtiene a partir delas derivadas parciales de la misma funcion con respecto a sus variables. Considereentonces, por analogıa, que una determinada funcion f(t) es no lineal. Por lo tanto,esta se representa como una grafica con ciertas curvaturas dependiendo de los termi-nos que contenga. El comportamiento no lineal de esta curva obedece a cada uno delos terminos que contiene. Suponiendo que se desea analizar la forma lineal en quese comporta esta curva, entonces se debera realizar un analisis en un solo punto delespacio. Esto se puede describir graficamente por medio de una lınea tangente a esepunto, la cual describira linealmente a la funcion. La lınea representa la derivada dela funcion analizada en cierto punto especıfico, lo cual es la representacion lineal dela curva en un punto especıfico. El analisis en un sistema dinamico no lineal se reali-za de manera similar. Las ecuaciones de los sistemas no lineales se pueden entenderde la misma forma que se describe este comportamiento grafico de una curva. Lainterpretacion grafica de una linealizacion es encontrar la forma de la lınea tangenteen un punto de la funcion de una curva [45]. Este punto se tomara en cuenta como elpunto de operacion o el punto de equilibrio. La curva x(t) entonces es tangente en elpunto de linealizacion t = t1 es x(t1), y la lınea que describe el comportamiento delsistema en dicho punto es la tangente a dicho punto. En una vecindad alrededor deeste punto se dice que la tangente no cambia, de igual manera sucedera alrededor delpunto de operacion para el cual se encuentra la linealizacion del sistema dinamico.
Figura 2.11: Grafica de linealizacion de un sistema dinamico no lineal.
2.6.4. Representacion aproximada de una funcion no lineal
Sea f(x1, x2, · · · , xn) una funcion no lineal escalar de n variables de estado x.En forma general, esta funcion no lineal se puede expresar como una representacionaproximada lineal alrededor de un punto establecido mediante una expansion en
22

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
series de Taylor de la siguiente manera. Suponiendo que la funcion se quiere linealizaralrededor del punto x0, su expansion en series de Taylor es como la que se presentaen la ecuacion (2.17):
f(x0 + δx) = f(x0) +df
dx
∣∣∣0δx+
1
2!
d2f
dx2
∣∣∣0δx2 + · · · (2.17)
Algunas funciones no lineales tıpicas son por ejemplo:
1. Cuando una ecuacion contiene un termino bilineal, el cual se define como aquelen donde aparecen multiplicandose el vector de la variable de estado y el controlU.
2. Cuando aparece un termino cuadratico, expresado como xTAx el cual describeuna representacion de elevar al cuadrado una variable de estado vectorial, x ∈Rn y donde la ganancia esta dada por la matriz A.
De igual modo, otras funciones no lineales pueden ser terminos donde aparez-can funciones trigonometricas, exponenciales, productos de mas de una variable deestado, entre otras muchas.
2.6.5. Punto de equilibrio y punto de operacion
Un punto de equilibrio del sistema dinamico representa las condiciones de lasvariables del sistema, en donde este se encuentra estatico [45]. Por ejemplo, en el casode una partıcula, si se encuentra en reposo sin alguna fuerza externa que representauna entrada, entonces se dice que se encuentra en un punto de equilibrio. Entonces,un punto de equilibro esta dado como: x = f(x0, u0) = 0.
2.6.6. Linealizacion aproximada de un sistema no lineal
Suponga que el termino f(x, u) es una funcion no lineal, a partir de este mode-lo no lineal normalmente no es posible obtener una representacion de las matrices(A,B,C,D). A pesar de esto, es posible obtener una representacion equivalente a par-tir de este sistema no lineal, el cual sera linealizado en el punto nominal o en algunpunto de equilibrio establecido para el sistema. Tambien se hace esta linealizacionpara por ejemplo, poder representar el modelo como una funcion de transferencia.Un punto de equilibrio del sistema dinamico representa las condiciones de las varia-bles del sistema, en donde este se encuentra estatico [45]. Por ejemplo, en el caso deuna partıcula, si se encuentra en reposo sin alguna fuerza externa que representa unaentrada, entonces se dice que se encuentra en un punto de equilibrio. Entonces, unpunto de equilibro esta dado en x = f(x0, u0) = 0. Si se quiere linealizar el sistemaen algun punto nominal dado como (un, xn). Se supone que se tiene el sistema ex-presado como xi = fi(x, u, t), y que inicialmente el sistema esta en el punto nominaldonde ante ciertas perturbaciones pequenas estas variables se expresan como:
x(t) = x0(t) + δx(t) (2.18)
u(t) = u0(t) + δu(t) (2.19)
23

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
Entonces para realizar la linealizacion analıticamente en este sistema, expresadode forma general, se debe realizar una expansion en series de Taylor de f(n, n) paraexpresar los terminos que tienen las perturbaciones de manera separada. La serie deTaylor se representa como la serie infinita expresada a continuacion:
f(x) =∞∑k=0
fk(a)
k!(x− a) (2.20)
Una expansion en series de Taylor representa este mismo concepto, aunque parael caso que se hace la expansion los terminos de orden superior se consideran despre-ciables por ser muy pequenos. Entonces, la expansion en serie de Taylor de f(n, n)en el punto de operacion o nominal x0(t), u0(t)
xi =d
dt(x0i + δxi) ≈ fi(x0 + δx) +
∂f
∂x
∣∣∣0δx+
∂f
∂u
∣∣∣0δu+ ϑ(n > 2) + · · · (2.21)
En donde los terminos de las derivadas parciales deben ser evaluados en el puntonominal (u0, x0). Por lo tanto, realizando esto se obtiene:
∂fi∂x
=[ ∂fi∂x1
· · · ∂fi∂xn
](2.22)
Como se conoce que:
d
dt(x0i) = fi(x0, u0) (2.23)
Por la tanto se obtiene que:
d
dt(δxi) ≈
∂fi∂x
∣∣∣0
+∂f
∂u
∣∣∣0δu (2.24)
Entonces para expresar el sistema linealizado se puede escribir lo siguiente:
d
dt(δx) =
∂f1
∂x
∣∣∣0
∂f2
∂x
∣∣∣0
...∂fn∂x
∣∣∣0
δx+
∂f1
∂u
∣∣∣0
∂f2
∂u
∣∣∣0
...∂fn∂u
∣∣∣0
δu = A(t)δx+B(t)δu (2.25)
Las matrices A y B seran por lo tanto matrices de dimension A ∈ Rn×n, yB ∈ Rn×m. Expandiendo los terminos de las ecuaciones anteriores se tiene que:
A(t) =
∂f1
∂x1
∣∣∣0
∂f1
∂x2
∣∣∣0· · · ∂fn
∂x1
∣∣∣0
∂f2
∂x1
∣∣∣0
∂f2
∂x2
∣∣∣0· · · ∂fn
∂x2
∣∣∣0
......
. . ....
∂fn∂x1
∣∣∣0
∂fn∂x2
∣∣∣0· · · ∂fn
∂xn
∣∣∣0
;B(t) =
∂f1
∂u1
∣∣∣0
∂f1
∂u2
∣∣∣0· · · ∂fn
∂u1
∣∣∣0
∂f2
∂u1
∣∣∣0
∂f2
∂u2
∣∣∣0· · · ∂fn
∂u2
∣∣∣0
......
. . ....
∂fn∂u1
∣∣∣0
∂fn∂u2
∣∣∣0· · · ∂fn
∂un
∣∣∣0
(2.26)
24

CAPITULO 2. INDUCCION AL FILTRADO OPTIMO
Si la ecuacion de salida y = g(x, u) es no lineal y tambien y(t) = y0+δy , entonces:
d
dt(δx) =
∂g1
∂x
∣∣∣0
∂g2
∂x
∣∣∣0
...∂gn∂x
∣∣∣0
δx+
∂g1
∂u
∣∣∣0
∂g2
∂u
∣∣∣0
...∂gn∂u
∣∣∣0
δu = C(t)δx+D(t)δu (2.27)
Por lo tanto, el sistema no lineal se puede expresar como un modelo linealizadode la forma:
z = Az +Bv (2.28)
donde A ∈ Rn×n, y B ∈ Rn×m se representa como:
A =(∂f∂x
)τ ∣∣∣xn,un
;B =(∂f∂u
)τ ∣∣∣xn,un
(2.29)
Si el punto de operacion o nominal es un punto de equilibrio del sistema x0(t), u0(t)son cero, entonces las matrices de las ecuaciones diferenciales para obtener el grupode matrices (A,B,C,D) seran constantes (sistema lineal e invariante en el tiempo).
25

Capıtulo 3
Robot movil y tecnologıa RFID
3.1. Tecnologıa RFID
Un identificador de radio frecuencia RFID de sus siglas en ingles “Radio Fre-quency ID”; es un metodo de almacenamiento y recuperacion de datos remotos, conbase en el empleo de etiquetas “tags”donde reside la informacion. El sistema RFIDemplea el uso de radio frecuencia en distintas bandas para su funcionamiento. Lossistemas RFID se conforman de los siguientes elementos basicos:
Una etiqueta RFID llamada tag (puede ser receptor o emisor) esta se adhierea un objeto, animal, o persona portando informacion del mismo.
Un lector encargado de transmitir la suficiente energıa a la etiqueta para acti-varla y leer los datos que esta envıe, consta de un modulo de radiofrecuencia(transmisor y receptor), una unidad de control y una antena.
Dependiendo de la aplicacion se agrega un tercer elemento que puede ser unordenador, un microprocesador, o algun otro dispositivo encargado de manejar yutilizar la informacion que le otorga el lector para alguna funcion o actividad enparticular, en la figura 3.1 se presenta un esquema general de las partes mencionadas.
Figura 3.1: Esquema general de los elementos que conforman la tecnologıa RFID
26

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
3.2. Radiofrecuencia empleada
Una de las consideraciones mas importantes en la utilizacion e implementacionde RFID es la frecuencia a la cual trabajaran ya que esta delimitara en gran medidala capacidad de lectura y transferencia de datos; ası como la cobertura y zona dealcance de los mismos. En la tabla 3.1 se presenta un conjunto de indicadores aconsiderar cuando se hable de la frecuencia de trabajo de los RFID:
Frecuencias de trabajo RFIDParametros LF HF UHF Microondas
Frecuencia 135 KHz 13.56 MHz 928MHz 2.45-5.8GHz
Cobertura Baja Media Media Alta
Tamano de etiqueta Grande Medio Medio Pequeno
Velocidad de lectura Lenta Media Media Rapida
Lectura en metales y liqui-dos
Buena Media Media Baja.
Lectura con interferencias Mala Media Media Buena
Tabla 3.1: Comparativo de frecuencias de trabajo de los RFID
3.3. Tipos de etiquetas RFID
La tecnologıa RFID se puede catalogar en diferentes clases: desde el rango de fre-cuencia, su capacidad de programacion, protocolo de comunicacion , etc. Sin embargola clasificacion mas comun es la que depende del lugar que provenga la energıa deactivacion, se pueden dividir en tres tipos, en la tabla 3.2 se presenta un comparativode los mismos.
3.3.1. Etiquetas RFID pasivas
Las etiquetas RFID pasivas no llevan fuente de alimentacion propia y utilizan pararesponder la energıa inducida en la antena por la senal de escaneo de radiofrecuencia.Debido a esto, la senal de respuesta tiene un tiempo de vida bastante corto y suradio de transmision puede llegar a como mucho 6 metros, pero tienen la ventajade poder ser mucho mas pequenas que las etiquetas activas. La forma de la etiquetadependera del uso que se vaya a hacer de la misma, aunque lo normal es que vayamontada sobre una calca o una tarjeta.
27

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
3.3.2. Etiquetas RFID semi-pasivas
Este tipo de etiquetas es muy similar al anterior, pero con la diferencia de queincluyen una pequena baterıa que permite que el circuito integrado de la etiquetaeste siempre alimentado. Esto da lugar a que las antenas no requieran capturar lapotencia de la senal entrante para devolver la senal saliente, sino que las antenas sonmejoradas para la emision de la respuesta.
3.3.3. Etiquetas RFID activas
Este tipo de etiquetas lleva su propia fuente de alimentacion y tiene rangos ma-yores de uso, tanto a nivel de frecuencias, como las distancias a las que pueden serdetectadas y leıdas, 100 metros. Su tamano es logicamente mayor que los otros dostipos de etiquetas, aunque no apenas supera el tamano de una moneda. Ademas,portan una pequena memoria, debido a lo cual pueden almacenar un mayor numerode datos.
Caracterısticas RFIDActivos Pasivos
Baterıa Si No
Fuente de alimentacion Interna a la etiqueta Energıa transferida porel lector
Disponibilidad deenergıa
Continua Solo en campo del lector
Intensidad de senal re-querida
Muy baja Muy alta
Cobertura Hasta 100 m Entre 3 y 6 m
Lecturas multiples Hasta 1000 lecturas en100 m
Cerca de 100 lecturas en3-6 m
Busqueda de datos 128 Kbytes de R/W 128 bytes de R/W
Tabla 3.2: Comparativo de etiquetas RFID activas vs pasivas
3.4. Lector y etiqueta RFID
Etiqueta RFID
La etiqueta RFID contiene la informacion asociada al objeto que la posee; es-ta compuesta por un microchip y una antena y puede o no tener una baterıa dealimentacion. El microchip se encarga del control y envıo de datos ası como de laalimentacion del mismo mientras que la antena permite la recepcion y envıo de losdatos.
28

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
Lector RFID
Es el dispositivo que proporciona la energıa a las etiquetas, lee los datos quellegan y los envıa al dispositivo encargado de procesar la informacion; el lector estaequipado de un modulo de radiofrecuencia (receptor y emisor) una unidad de controly una antena. Cada elemento que conforma el lector posee un conjunto de carac-terısticas que por si solas requieren de particular estudio, uno de los elementos demayor sensibilidad y de peso a la hora de detectar una etiqueta RFID es la antena,dado que es necesaria una buena orientacion del lector con la etiqueta para obtenerun buen acoplamiento entre los mismos.
La figura 3.2 muestra un ejemplo claro de un lector RFID, de igual modo, sepresenta como se visualizan las etiquetas y los circuitos que las conforman.
(a) Etiqueta RFID (b) Circuito RFID (c) Lector RFID
Figura 3.2: Modelo de una etiqueta RFID y su lector de etiquetas.
3.5. Robot movil
Hoy en dıa las palabras robot o robotica son parte de nuestro vocabulario y seutilizan de manera tan natural y frecuente que no reparamos en la magnitud de lasmismas y en los cambios que han generado en pro de la transformacion de la sociedady, con ello, el avance tecnologico acarreado; para abordar el tema de estudio que noscompete se introducira un pequeno concepto sobre que es un robot movil. En [35] seplantea que:
“Un robot movil es un vehıculo de propulsion autonoma y movimiento programadopara realizar una tarea especıfica”.
El principal problema a resolver en un robot movil es generar trayectorias y guiarsu movimiento segun estas, con base en la informacion proveniente del sistema de sen-sores externos (ultrasonidos, laser, vision), permitiendo al vehıculo desplazarse entredos puntos cualesquiera del ambiente de trabajo de manera segura, sin colisiones.Esto exige disenar sistemas de control de trayectorias (posicion, direccion, velocidad)en diversos niveles jerarquicos, de manera que el procesamiento de la informacion
29
CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
proveniente de los sensores externos asegure la mayor autonomıa posible. El robotmovil autonomo se caracteriza por una conexion inteligente entre las operacionesde percepcion y accion, que define su comportamiento y le permite llegar a la cul-minacion de los objetivos programados sobre entornos con cierta incertidumbre. Elgrado de autonomıa depende en gran medida de la facultad del robot para abstraerel entorno y convertir la informacion obtenida en ordenes, de tal modo que, aplicadassobre los actuadores del sistema de locomocion, garantice la realizacion eficaz de sutarea. De este modo, las dos grandes caracterısticas que lo alejan de cualquier otrotipo de vehıculo se relacionan a continuacion:
Percepcion: El robot movil debe ser capaz de determinar la relacion con su entornode trabajo, mediante el sistema sensorial a bordo. La capacidad de percepcion delrobot movil se traduce en la sıntesis de toda la informacion provista por los senso-res, con el objeto de generar mapas globales y locales del entorno de acuerdo a losdiversos niveles de control.
Razonamiento: El robot movil debe ser capaz de decidir que acciones son reque-ridas en cada momento, segun el estado del robot y el de su entorno, para alcanzarsu(s) objetivo(s)
A su vez el estudio y el desarrollo de un robot movil abarca cuatro grandes es-tructuras:
Estructura mecanica: como las que conforman la locomocion (ruedas, bandas,patas) y la estructura fısica del robot como tal.
Actuadores: cualquier elemento que permita al robot interactuar con el medioambiente (motores, luces, brazos).
Sensores: cualquier elemento que nos proporcione informacion del medio am-biente (sonar, laseres, camaras).
Inteligencia: a partir de la interaccion con los sensores permitira al robot tomardecisiones e interactuar con el ambiente (algoritmos, metodos, etc).
Con lo mencionado anteriormente se puede decir que los robots moviles brin-dan la posibilidad de navegar en distintos terrenos y tienen aplicaciones multiplescomo: exploracion minera, exploracion planetaria, misiones de busqueda y rescatede personas, limpieza de desechos peligrosos, automatizacion de procesos, vigilancia,reconocimiento de terreno. Ante dicha capacidad y una inminente area de aplicaciony desarrollo existen diferentes tipos de clasificaciones como por ejemplo: por su inte-ligencia, por el medio en que se desplazan, por su generacion etc; en la seccion 3.7 sepresentara un breve resumen de la clasificacion de robots moviles por su sistema delocomocion ya que el tipo de robot propuesto en este tema de investigacion pertenecea esa categorıa y es el que compete analizar con mayor detalle.
30

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
Figura 3.3: Esquema de las estructuras de un robot movil
3.6. Grados de libertad, centro instantaneo de ro-
tacion y tipos de ruedas
Grados de libertad (GDL)
Se refiere al numero de movimientos de desplazamiento y de rotacion que puederealizar un robot movil, si un cuerpo se mueve en 2D tiene 3 grados de libertad (2de traslacion y 1 de rotacion) mientras que si se mueve en 3D tiene 6 grados delibertad(3 de rotacion y 3 de traslacion).
Al hablar de grados de libertad suele preguntarse si el sistema que los poseees holonomico o no holonomico; el sistema es holonomico si se puede controlar lacantidad de grados de libertad disponibles; en su defecto el sistema se cataloga comono holonomico. En un sistema no holonomico las ecuaciones diferenciales no sonintegrables en la posicion final del robot; lo que quiere decir que no basta con conocerla distancia recorrida por cada rueda sino que hay que conocer como fue ejecutadoel movimiento en cada instante del tiempo.
Centro instantaneo de rotacion (CIR)
Es el punto por el cual el robot gira en un instante determinado y se cruzanlos ejes de las ruedas, aunque en un plano real no se sabe a ciencia cierta el CIR,si se sepone que las ruedas llevan una velocidad tal que comiencen a describir unacircunferencia; lo haran con referencia a un punto el cual se catalogara como CIR.
Tipos de ruedas
Ruedas motrices: proporcionan la fuerza de traccion al robot.
Ruedas directrices: son ruedas que permiten el direccionamiento del robot conla capacidad de ser controlables.
Ruedas fijas: solo giran sobre su propio eje sin proporcionar traccion motriz.
31

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
Ruedas locas o de castor: son ruedas de orientacion pero sin capacidad de control
Figura 3.4: Tipos de ruedas en un robot movil
3.7. Clasificacion de los robots moviles por su lo-
comocion
Los robots moviles pueden ser clasificados por el tipo de locomocion, en tresgrandes grupos que condicionan su movimiento, estos son: por ruedas, por patas yorugas. En la figura 3.5 se presenta una ejemplo de estos:
(a) Patas (b) Oruga (c) Ruedas
Figura 3.5: Clasificacion de robots moviles segun su tipo de locomocion
3.7.1. Robot movil con patas
En [36] se dice que este tipo de robots imitan formas de desplazamiento similaresa las de los animales y al hombre; es un tipo de robot que se puede desplazar endiversas superficies; sin embargo el diseno de este tipo de robots presenta ciertasdificultades debido a su gran numero de grados de libertad y su algoritmo de con-trol presenta cierta complejidad debido al gran numero de movimientos a coordinar.
32

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
Ademas, se deben tener en cuenta algunos aspectos, tales como: posicion, veloci-dad, equilibrio,etc. De acuerdo al numero de patas, este tipo de robots adquiere sudenominacion (bıpedos, cuadrupedos, hexapodos, etc).
3.7.2. Robot movil tipo oruga
En [37] plantea que los robots tipo oruga son aquello que poseen un sistemarodante en el que se substituyen las ruedas por un conjunto de bandas que permitenque giren mediante un sistema de traccion; en este tipo de vehıculos la direccion seconsigue parando una de las bandas o haciendolas girar en sentido contrario.
3.7.3. Robot movil con ruedas
Los robots moviles con ruedas (RMR)[38] son el area con mayor interes y apli-cacion, se destacan por su eficiencia en cuanto a energıa consumida en superficieslisas y firmes, a la vez que no causan desgaste en la superficie donde se mueven yrequieren un numero menor de partes y con menor complejidad, en comparacioncon los robots de patas y de orugas, lo que permite que su construccion sea massencilla. Uno de los atributos que debe poseer un robot movil es la autonomıa, lacual se entiende como el dominio que tiene el robot para determinar su curso deaccion, mediante un proceso propio de razonamiento con base en sensores, en lugarde seguir una secuencia fija de instrucciones. Un RMR tiene un arreglo cinematicoy un arreglo de actuadores que son de interes de estudio a este trabajo.
Configuracion cinematica de los RMR
Existen diferentes configuraciones cinematicas para los RMR[38], estas dependenprincipalmente de la aplicacion hacia donde van enfocados, no obstante, de manerageneral se tienen las siguientes configuraciones:
Ackerman
Esta configuracion es ampliamente utilizada, posee dos ruedas de traccion traserasy dos ruedas de direccion delantera, esta configuracion esta creada para evitar elderrape en las ruedas, lo que se consigue al momento de girar el angulo de la ruedainterior y que este sea menor al angulo de la rueda exterior.
Triciclo
Dicha configuracion posee tres ruedas; la rueda delantera se utiliza tanto para eldireccionamiento como para la traccion. El eje posterior con las dos ruedas lateralesse desplaza libremente. La movilidad resulta mas eficiente en este sistema comparadocon el anterior, pero puede presentar inestabilidad en terrenos irregulares. El centrode gravedad tiende a desplazarse cuando el vehıculo se desplaza por una pendiente,causando la perdida de traccion.
33

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
Sıncrona
Este tipo de configuracion se conforma de tres o mas ruedas, todas ellas acopladasmecanicamente y dotadas de traccion por lo que todas rotan en la misma direcciony en la misma velocidad; y la direccion de los ejes de rotacion es controlada.
Omnidireccional
Esta clase de configuracion se caracteriza por utilizar ruedas omnidireccionales,es decir, el robot podra moverse en cualquier direccion sin embargo se complicanconsiderablemente los calculos matematicos para el diseno de su modelo y el controldel mismo.
Skeed steer
Esta configuracion se caracteriza por poseer multiples motores para la propulsiony direccion del vehıculo, sin embargo, su controlabilidad presenta altos grado decomplejidad; presenta problemas de deslizamiento en las ruedas por lo que se reducesu exactitud en la posicion.
Diferencial
Es la configuracion mas sencilla de todas; consta de dos ruedas colocadas en uneje perpendicular a la direccion del robot.Cada rueda es controlada por un motorde tal forma que el giro del robot queda determinado por la diferencia de velocidadde las ruedas.Ası para girar a la izquierda hay que darle una mayor velocidad a laderecha y viceversa; con tal de mantener el equilibrio del robot se le agrega unatercera rueda libre de giro y sin impacto en el modelo matematico, sin embargoaunque mantiene el equilibrio pierde traccion , presenta ciertas restricciones ya quesolo se puede desplazar en superficies planas. Generalmente se utiliza la tecnica deodometrıa para calcular la posicion. La figura 3.6 muestra un dibujo de los modelosmencionados.
Figura 3.6: Tipos de configuraciones cinematicas de un robot movil
34

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
3.8. Consideraciones generales del proyecto
En las secciones previas se explico el comportamiento del robot movil tipo di-ferencial, ası como algunas de sus caracterısticas importantes. Ahora se aplica esteconcepto como modelo a utilizar en el desarrollo de este proyecto; por lo tanto seasume que el vehıculo viaja en direccion d y que la trayectoria es controlada por lasruedas izquierda y derecha respectivamente; los incrementos producidos por la mis-mas se denotan como dL para la rueda izquierda y dR para la derecha, la distanciaentre las ruedas se denota como b y la rueda de equilibrio no presenta impacto enel modelado del robot. El vehıculo se mueve en un espacio cartesiano con coorde-nadas (x, y) con respecto a su centro denotado como M(x, y), este centro siempreesta paralelo al eje x del plano por el que se desplaza, y con la finalidad de evitarerrores extras al momento de determinar su localizacion se considera que el anguloθ es medido con un giroscopio de fibra optica (FOG).Una rejilla de informacion RFID es un espacio cerrado en el cual se encuentran dis-puestos un conjunto de etiquetas RFID separadas por una distancia en metros; estasetiquetas son de caracter pasivo con la finalidad de que el proyecto resulte economicoy realizable, el lector de las etiquetas se encontrara instalado en el robot movil y seconsidera que el robot debe ser capaz de pasar por al menos dos de estas etiquetascon coordenadas conocidas A(x1, y1) y B(x2, y2), el lector podra entonces medir ladistancia existente entre el robot y las mismas; las cuales se denotaran como d1 y d2
respectivamente; la altitud de instalacion de las etiquetas quedara denotada como c1
y c2 respectivamente, cabe mencionar que esta altura suele cambiar dependiendo delpunto de instalacion de la etiqueta y se puede calcular su proyeccion a1 y a2 de serrequeridas empleando trigonometrıa; sin embargo en este trabajo se considera queestan instaladas a un 1m de altura.En el caso de las etiquetas RFID se menciono que son de caracter pasivo; por lo cualdependen del lector para activarse. Este proceso depende de la potencia de la onda,a lo cual [40] explica ampliamente en su trabajo, siendo la ecuacion 3.1 de interes; seconsidera una frecuencia de trabajo de LF o HF lo que limita su cobertura y aumentalas posibles interferencias en la medicion:
Pr = PtGtGrλ
2
16πLd2(3.1)
Donde:Pr:Potencia recibida.Pt:Potencia transmitidaGt:Ganancia del transmisor.Gr:Ganancia del receptor.L:Perdidas presentes entre el transmisor y el receptor.d:Distancia entre el transmisor y el receptor.λ:Longitud de onda.
Como se menciono anteriormente; el robot debe ser capaz de detectar al menosdos de las etiquetas y es a traves de la potencia recibida que determinara cuales deben
35

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
de ser estas; las dos etiquetas que presenten la mayor potencia seran las seleccionadas.
(a) Robot Movil (b) Rejilla RFID
Figura 3.7: Rejillas RFID e interaccion del robot movil
La figura 3.7a presenta el proceso de desplazamiento y de interaccion del robotmovil con las etiquetas de RFID mientras que en 3.7b se presenta una rejilla deRFID por medio de la cual se desplaza el vehıculo. En este caso las etiquetas se handispuesto a una distancia de 4 metros abarcando ası un area de 384m2 y utilizandoun total de 35 etiquetas.
3.8.1. Modelo cinematico del robot movil
En el desarrollo de este trabajo de investigacion se propone un modelo de robotmovil de tipo diferencial, las razones se deben a la vasta bibliografıa existente parael desarrollo y entendimiento matematico del mismo, ası como por su sencillez endiseno y funcionamiento; los problemas que presenta se pueden solucionar de manerarelativamente facil y se debe tener en cuenta la aplicacion a la cual va destinada.Calcular la posicion del robot es el objetivo principal de este trabajo. Para realizarlopor medio de este modelo se necesita conocer la posicion momentanea del mismo en(x, y) relativo a un punto de comienzo y mediante odometrıa y la utilizacion de susecuaciones cinematicas poder determinar dicha posicion.Para poder deducir las ecuaciones cinematicas empleando la odometrıa primero esnecesario conocer cuantas revoluciones ha dado la rueda; para ello se emplea el uso deencoders incrementales; estos van colocados sobre el motor de traccion de las ruedas,entonces los pulsos que registra el encoder se convierten en una descomposicion linealpara determinar la velocidad a la que gira cada rueda, para ello se emplea un factorde conversion determinado en la ecuacion (3.2):
Cm =2πR
noCe(3.2)
36

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
Donde:Cm: factor de conversion que convierte los impulsos del encoder en descomposicionlineal de la rueda.R: radio de la ruedaCe: resolucion del encoder en pulsos por revolucion.no: relacion de engranajes. Engranajes de reduccion entre el motor y la rueda.
Normalmente, todos los sistemas rueda/motor suelen tener una reduccion. Lareduccion no es mas que el factor que mide cuantas vueltas da la rueda por vueltadada por el eje del motor. Un buen ejemplo de esto son los cambios de una bicicleta.Cambiando de pinones y platos, se puede cambiar la relacion de vueltas dadas porlos pedales (eje del motor) y vueltas dadas por las ruedas. Lo mismo pasa con loscambios de un coche. Para no entrar en detalles y siendo el fin el modelado ma-tematico se puede considerar que no = 1 y ası se evita caer en la problematica de lareduccion.
Conociendo Cm determinar el desplazamiento lineal de cada rueda se torna facil.Si se considera que los encoders leen los pulsos en intervalos regulares de tiempo,el tiempo que discurre entre una lectura de pulso y la proxima lectura de pulso esconstante. Si se llama NL,n a la cantidad de pulsos leıdos por el encoder de la ruedaizquierda para el tiempo de muestreo n. Lo mismo se hace con la rueda derecha y sele llama NR,n. Entonces la distancia lineal avanzada por cada rueda en el intervalo(n− 1, n) viene dada por las ecuaciones (3.3) y (3.4):
dRn = 4sR,n = cmNR,n (3.3)
dLn = 4sL,n = cmNL,n (3.4)
Sin embargo, es de interes averiguar cuanto ha avanzado el centro del robot enese intervalo de tiempo y calcular el incremento angular que ha tenido debido a esedesplazamiento lineal. Para deducir la procedencia de estas ecuaciones, suponga quecada una de las ruedas tiene una velocidad angular constante durante el tiempo. Sila velocidad de la rueda derecha fuera mayor a la de la rueda izquierda, el robotse moverıa en una trayectoria curva hacia su izquierda y viceversa. Siendo las dosvelocidades constantes, esa trayectoria corresponderıa a la trayectoria de una circun-ferencia con un radio concreto. Es decir, de mantener este patron de movimiento,el robot describirıa una circunferencia en torno a un punto del entorno al que sellamara Centro Instantaneo de Rotacion o CIR. Por ahora no se sabe que punto delespacio de trabajo es el CIR, pero se sabe que debe estar en la lınea que une a ambasruedas, para ilustrar lo mencionado se presenta la figura 3.8.
Por lo tanto, volviendo a los intervalos temporales de antes, la rueda izquierdaha descrito un arco de longitud dLn en el intervalo (n− 1, n). El radio de curvaturaha sido r (la distancia al CIR). Mientras tanto, la rueda derecha ha descrito un arcode longitud dRn con un radio de r + b. Con esto, al aplicar un poco de geometrıa a
37

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
Figura 3.8: Centro instantaneo de rotacion en la trayectoria de un robot movil
traves de la formula del arco se obtiene:
Θn =dLnr
(3.5)
Θn =dRnr + b
(3.6)
De este modo en las ecuaciones (3.5) y (3.6) se tienen dos ecuaciones con dosincognitas (r y Θn) al resolver ambas se llega a:
Θn =dRn − dLn
b(3.7)
r =b dLn
dRn − dLn(3.8)
Por lo tanto el incremento de orientacion Θn ya se ha deducido. Ahora, parasaber el desplazamiento lineal del centro del robot solo se tiene que pensar que elcentro ha descrito un arco de longitud dn con radio r+ b
2. Aplicando la misma logica
de antes, se sabe que al sustituir Θn = dnr+ b
2
por el lado derecho de la ecuacion (3.7)
y al resolver unos pasos extras se obtiene la ecuacion (3.9):
dn =dRn + dLn
2(3.9)
Solo faltarıa calcular la posicion en las coordenadas x, y, θ del centro del roboten el instante n. Para ello, se supone que se conocen las coordenadas del robot enel instante n − 1, es decir, se conocen (xn−1, yn−1, θn−1). Es logico, puesto que seestan calculando los desplazamientos lineales y de orientacion para cada intervalo detiempo. Siendo esto ası, al aplicar un poco de trigonometrica se obtiene que:
f1n = xn = xn−1 + dn cos (θn−1 +1
2Θn) (3.10)
f2n = yn = yn−1 + dn sin (θn−1 +1
2Θn) (3.11)
f3n = θn = θn−1 + Θn (3.12)
38

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
Repitiendo de forma iterativa dicho procedimiento se obtienen los valores deposicion del robot en cada instante de tiempo n. Ası la ecuacion (3.10) definira lacoordenada x, la ecuacion (3.11) la coordenada y, y la ecuacion (3.12) el angulo derotacion θ; cabe resaltar que la posicion del robot dentro del plano queda ubicadapor el centro del robot, que para fines de este trabajo se define como M(x, y).
3.8.2. Modelo en espacio de estados del robot movil
Se considera un vector de estados Xn, el cual determinara la posicion del vehıculoen cada instante de tiempo n. Este vector esta conformado por Xn = [xn yn θn]T yaque estas son las coordenadas de interes y que en conjunto determinan la posiciondentro del plano; existe un vector de entrada el cual se denomina Un = [dLn dRn]T
este vector se conforma de los incrementos lineales presentados en las ruedas de-recha e izquierda del vehıculo respectivamente. Dichos vectores son afectados porcomponentes aleatorias las cuales se consideran como aditivas, blancas gaussianas,con promedio cero y no correlacionadas; de acuerdo con esto se pueden establecer losvectores de ruido que afectan al vector de estado Xn como: Wn = [wxn wyn wθn]T ;de lo cual se puede sugerir de (3.10)–(3.12) que la ecuacion de estado no lineal delvehıculo quedara determinada por:
Xn = fn(Xn−1, Un,Wn, en) (3.13)
Donde fn es un vector conformado por fn = [f1 f2 f3]T en el cual se encuentranlas componentes de ruido como se indica en la ecuacion (3.13). Las componentes deruido Wn y en tienen promedio cero E{Wn} = 0 y E{en} = 0 y con ello se podrandefinir sus matrices de covarianzas como lo indican las ecuaciones (3.14) y (3.15)respectivamente:
Q = E{Wn WTn } (3.14)
L = E{en eTn} (3.15)
Al estar no correlacionadas se considera entonces que E{wi ej} = 0 para cual-quier valor de i y j.Como se observa en la figura 3.7a la distancia existente entre el robot movil y lasetiquetas debe ser conocida dado que es determinante en la toma de decisiones delrobot, ası conociendo la posicion del robot en el instante de tiempo n, se puede cal-cular la distancia a las etiquetas ya que poseen coordenadas conocidas de la maneraindicada en las ecuaciones (3.16)– (3.18):
α1n = d1n =√
(y1 − yn)2 + (x1 − xn)2 + c21 (3.16)
α2n = d2n =√
(y2 − yn)2 + (x2 − xn)2 + c22 (3.17)
α3n = θn = θn (3.18)
El modelo en espacio de estado requiere un vector de observacion, el cual sedenotara como zn = [z1n z2n z3n]T , donde se puede definir una funcion no lineal del
39

CAPITULO 3. ROBOT MOVIL Y TECNOLOGIA RFID
vector de estado como hn(xn) = [α1n α2n α3n]T y al considerar que existe ruido enlas mediciones se define el mismo como un vector vn = [v1n v2n v3n]T ; por lo tanto elvector de observacion quedarıa definido por la ecuacion (3.19):
zn = hn(xn) + vn (3.19)
Como en los casos anteriores se considera el vector vn como un ruido blancogaussiano con promedio cero E{vn} = 0, de este modo su matriz de covarianzaqueda delimitada por la ecuacion (3.20):
R = E{vn vTn } (3.20)
Donde E{vi wTj } = 0 y E{vi eTj } = 0 para cualquier valor de i y j. De dichomodo el modelo en espacio de estado quedarıa definido por las ecuaciones (3.13) y(3.19) respectivamente.
40
Capıtulo 4
Filtros
En este capıtulo se estudiaran los filtros de interes del presente trabajo de investi-gacion, para poder entender los algoritmos desarrollados es fundamental, en primerainstancia, analizar los mismos en su modo de aplicacion en sistemas lineales paraluego abordarlos con los sistemas no lineales en donde a traves de la serie de Taylorse pueden expandir los mismos y lograr una aproximacion bastante real del fenomenoestudiado; de modo que se presenta el filtro de Kalman y su extension para el modelosugerido en la seccion 3 y, posteriormente, se abordan los filtros UFIR y de modosimilar que en el de Kalman su extension en el modelo propuesto.
4.1. Filtro de Kalman
El filtro de kalman es un algoritmo de procesamiento de datos recursivo optimo.Para entender esto, se define optimo, dependiendo sobre el criterio escogido paraevaluar el funcionamiento del algoritmo.Un aspecto de ser optimo es que el filtro de Kalman incorpora toda la informa-cion que se le pueda proveer. Procesa todas las medidas disponibles, para estimarel valor actual de las variables de interes, con el uso del conocimiento del sistema ylas dinamicas de los sensores, la descripcion estadıstica de los ruidos del sistema, losmodelos dinamicos inciertos, y cualquier informacion disponible acerca de las con-diciones de las variables de interes con la finalidad de minimizar el error en algunaspecto.La palabra recursivo significa, a diferencia de ciertos conceptos de procesamiento dedatos, que el filtro de Kalman no requiere que todos los datos previos requeridos semantengan almacenados y reprocesados cada vez que una nueva medida es tomada.Este concepto es de vital importancia para la practicidad de la implementacion delfiltro.El filtro es actualmente un algoritmo de procesamiento de datos, a pesar de latıpica connotacion del filtro como caja negra conteniendo redes electricas, el hechoes que en muchas aplicaciones, el filtro es solo un programa de computadora en unprocesador central. Esto inherentemente incorpora medidas discretas en el tiempo.A menudo las variables de interes de alguna cantidad finita describen el estado del
41

CAPITULO 4. FILTROS
sistema, algunas no pueden ser medidas directamente, y otras se pueden inferir de losdatos disponibles. Mas aun, cualquier medida va a ser corrompida de alguna manerapor el ruido, como las inexactitudes del componente, por lo que la extraccion de lainformacion valuable de una senal ruidosa es muy necesaria.Hay muchos sensores, que tienen sus propias dinamicas particulares y errores ca-racterısticos, que proveen alguna informacion acerca de una variable particular, ypodrıa ser deseable combinar esas salidas en una manera optima y sistematica. Elfiltro de Kalman combina todas las medidas de los datos, ademas con un previo co-nocimiento acerca de los componentes del sistema, para producir un estimado de lasvariables deseables en una manera en la cual el error es minimizado estadısticamente.
El filtro de Kalman tiene como prioridad estimar el estado xn de un proceso entiempo discreto, el cual es dominado por una ecuacion de diferencias lineal estocasticade la siguiente forma:
xn = Axn−1 +Bun−1 + wn−1 + · · · (4.1)
Y una medida z representada como:
zn = Hxn + vn + · · · (4.2)
Donde las dimensiones de los vectores se encuentran definidas por el numero deestados k del sistema y por el numero de variables a medir m; en donde: x ∈ Rn;z ∈ Rm; w ∈ Rn; v ∈ Rm; Las matrices representan las relaciones del sistemaA ∈ Rn×n; B ∈ Rn×m; C ∈ Rm×n; D ∈ Rm×m. La matriz A tiene una dimensionn×n y relaciona el estado previo n−1 con el estado actual n. La matriz B, se relacionacon la entrada de control y la matriz H de dimension m×n relaciona el estado con lamedicion zk. Estas matrices pueden cambiar en el tiempo, pero en general se asumencomo constantes. Mientras que las variables wk y vk representan las perturbacioneso ruido del sistema y de la observacion respectivamente. Se asume que son blancosgaussianos, que no estan correlacionadas con el tiempo y son independientes entreellos, que tienen una distribucion de probabilidad normal:
p(w) u N(0, σQ) · · · (4.3)
p(v) u N(0, σR) · · · (4.4)
Esto quiere decir que tienen una distribucion normal, con media 0 y con una des-viacion estandar de Q y R, respectivamente. En la practica las matrices de covarianzade la perturbacion del proceso, Q, y de la perturbacion de la medida, R, podrıancambiar en el tiempo, por simplicidad en general se asumen que son constantes.
Q(i, j) = E{wi wτj } (4.5)
R(i, j) = E{vi vτj } (4.6)
E{viwj} = 0 para toda j e i (4.7)
42

CAPITULO 4. FILTROS
4.1.1. Argumentos computacionales del filtro
Se define el estado estimado, a priori en n, como xn−1, el conocimiento del procesoantes de n, y se define el estado a posteriori en n dada la medicion. Entonces sepueden definir los errores de estimacion a priori y a posteriori como se presenta enlas ecuaciones (4.8) y (4.9):
en|n−1 = xn − xn−1 (4.8)
en|n = xn − xn (4.9)
La covarianza del error del estado estimado a priori, se define con la ecuacion(4.10):
Pn−1 = E{en|n−1 eTn|n−1} (4.10)
La covarianza del error del estado estimado a posteriori, quedara definida por laecuacion (4.11):
Pn = E{en|n eTn|n} (4.11)
Por medio de las ecuaciones del filtro de Kalman se pretende encontrar unaecuacion que calcule el estado estimado a posteriori como una combinacion linealde una estimacion a priori y de manera ponderada de diferencias entre la medicionactual y la prediccion de la medicion.
xn = xn−1 +K(zn −Hxn−1) (4.12)
La diferencia en la ecuacion (4.12) es llamada innovacion en la medicion, o elresiduo, que refleja la discrepancia entre la medicion y la medicion actual. Un resi-duo de cero significa que los dos estan completamente cercanos. La matriz K en laecuacion (4.12) es elegida para ser la ganancia o la mezcla que minimiza el error aposteriori de la covarianza (4.11). Esta minimizacion se puede lograr incorporandoen la ecuacion (4.12), la ecuacion (4.10) y despues lo que se incorporo en la definicionanterior, se incluye en la ecuacion (4.10), entonces resolviendo para K, se tiene lasiguiente expresion:
K = Pn−1HT (HPn−1H
T +R)−1 (4.13)
De la ecuacion (4.13) se puede apreciar que a medida que la covarianza del errorde medicion R se aproxima a cero, la ganancia K tiende a la inversa de H. Es decir
lımRn−1→0
Kn = H−1. Por otra parte, cuando la estimacion de la covarianza del error
a priori, Pn−1, se aproxima a cero, la ganancia K tiende a cero: lımPn−1→0
Kn = 0. Un
significado de K, es entender que la covarianza del error de medicion se aproxima acero, entonces la medicion real zn es de mayor “confianza”, mientras que la medidapredecida Hxn−1 es menos confiable. Por otra parte, cuando la estimacion de lacovarianza del error a priori, Pn−1, se aproxima a cero la medicion real zn es cadavez menos confiable, mientras que la medicion predecida Hxn−1 es mas confiable.
43

CAPITULO 4. FILTROS
4.1.2. Argumentos probabilısticos del filtro
La justificacion de la ecuacion (4.12) se basa en la probabilidad de la estimaciona priori condicionada en todas las mediciones anteriores.
E{xn} = xn (4.14)
Pn = E{(xn − xn)(xn − xn)T} (4.15)
El estado estimado a posteriori en la ecuacion (4.12) corresponde a la media (elprimer momento) y es distribuido normalmente si las condiciones en las ecuaciones(4.3) y (4.4) se cumplen. La estimacion de la covarianza del error a posteriori (4.11)refleja la varianza del estado de distribucion (el segundo momento central). En otraspalabras:
P (xn∣∣zn) ≈ N(E{xn}, E{(xn − xn)(xn − xn)T})
= N(xn, Pn)(4.16)
Vemos que al final se convierte en una distribucion normal con media xn y desviacionestandar Pn.
4.1.3. Algoritmo discreto del filtro de Kalman
El filtro de Kalman estima un proceso utilizando una forma de control de retro-alimentacion, en otras palabras, estima el estado del proceso en algun momento enel tiempo y entonces obtiene la retroalimentacion por medio de los datos observados.Las ecuaciones que se utilizan para derivar el filtro de Kalman se pueden dividir endos grupos:
Las ecuaciones de actualizacion de tiempo son responsables de la estimaciondel estado actual y del error de covarianza para obtener la estimacion para elproximo estado.
Las ecuaciones de actualizacion de medida son responsables de la retroalimen-tacion, es decir, incorporan nueva medida dentro de la estimacion a priori paraobtener una estimacion mejorada del estado.
Efectivamente, el algoritmo de estimacion final puede definirse como un algoritmode prediccion-correccion para resolver numerosos problemas. El estimador optimo ofiltro de Kalman trabaja como proyector y corrector al pronosticar el nuevo estado ysu incertidumbre ademas de corregir la proyeccion con la nueva medida. El filtro deKalman usa la actualizacion del tiempo como predictor, la cual genera una predic-cion del estado para el siguiente dato en el tiempo tomando en cuenta la informaciondisponible hasta ese momento, tambien usa la actualizacion de medida como correc-tor, la cual mejora la prediccion del estado, de tal forma que el error es minimizado.Las ecuaciones que competen a la parte de prediccion del estado se presentan en(4.17) y (4.18), por medio de estas ecuaciones se puede proyectar el estado haciadelante de n− 1 a n:
xn = Axn−1 +Bun−1 + wn−1 (4.17)
Pn = APn−1AT +Q (4.18)
44

CAPITULO 4. FILTROS
La primera tarea que se realiza durante la actualizacion de la medicion es calcularla ganancia de Kalman, K. El siguiente paso es medir el proceso para obtener ydespues generar una estimacion del estado a posteriori mediante la incorporacion dela medicion en la ecuacion (4.19). El paso final es obtener la estimacion del error de lacovarianza a posteriori mediante la ecuacion (4.20). Despues de cada actualizacionen la medicion y el tiempo, el proceso se repite con las estimaciones anteriores aposteriori utilizadas para proyectar o predecir las nuevas estimaciones a priori.
Kn = Pn−1HT (HPn−1H
T +R)−1 (4.19)
xn = xn−1 +Kn(zn −Hxn−1) (4.20)
Pn = (I −KnH)Pn−1 (4.21)
Este caracter recursivo es una de las caracterısticas mas significativas del filtroKalman que lo hace practico en las implementaciones; el filtro de Kalman usa surecursividad para la estimacion actual con base en todas las mediciones anteriores.La figura 4.1 presenta el algoritmo de trabajo del filtro de Kalman y las etapasdescritas previamente.
Figura 4.1: Algoritmo Filtro de Kalman
De manera grafica la figura 4.2 representa el proceso de estimacion del filtrode Kalman. Se produce del modo como se explico previamente; se proporcionanlas condiciones iniciales x0, con la matriz A y por medio de la relacion Anxn−1 seestablece una primera aproximacion hacia xn. El termino Kn es la ganancia del filtroque genera una correccion del primer termino basada en la medicion y, donde la
45

CAPITULO 4. FILTROS
matriz de ganancia de Kalman establece el peso de la correccion. Debido a que Kn
se establece por medio del criterio MSE se asegura que el error es mınimo por lo quela aproximacion xn debe ser un valor muy cercano a xn. El proceso descrito se repitepara los siguientes puntos, de un punto n hasta llegar a un punto n + 1, luego sehace que n+ 1 = n y se calcula el nuevo punto n+ 1.
Figura 4.2: Estimacion Filtro de Kalman
4.1.4. Consideraciones del filtro
En la aplicacion real del filtro, la covarianza del error de medicion R, suele medirseantes de la operacion del filtro. La medicion de la covarianza del error de medicion R,es en general practica, porque es posible medir el proceso de todos modos (mientrasque el filtro entra en funcionamiento). La determinacion de la covarianza del ruidodel proceso Q, es generalmente mas difıcil de medir ya que normalmente no se tiene lacapacidad de observar directamente el proceso que estamos estimando. A veces, conmodelos simples del proceso, se pueden producir resultados aceptables si se inyectabastante incertidumbre en el proceso a traves de la seleccion de Q. En cualquier caso,si se tiene o no una base racional para la eleccion de estos parametros,en muchasocasiones se consideran valores superiores al rendimiento del filtro (estadısticamentehablando) para despues obtener por medio de la afinacion de los parametros del filtroel Q y R. Bajo condiciones en donde Q y R son constantes, ambas estimaciones de lacovarianza del error de Pn y la ganancia de Kalman Kn se estabilizaran rapidamentey luego se mantendran relativamente constantes.
Las ventajas del filtro es que es compacto, no necesita de mucha memoria porquesolo usa el paso anterior para estimar su punto actual, el algoritmo es rapido. Susdesventajas son que el filtro solo es optimo cuando se conoce que el ruido es ruidoblanco Gaussiano y tiene una estimacion inicial ası como las matrices de covarianza.Se debe resaltar que al momento de aplicar un filtro de Kalman es necesario tener unconocimiento estadıstico del ruido del sistema, queda claro que en el caso del ruidode medicion vn estas caracterısticas son relativamente faciles de obtener, sin embargopara el ruido del sistema wn suele ser mas complicado. En la implementacion del filtro
46

CAPITULO 4. FILTROS
de Kalman en problemas reales, solo se puede obtener una estimacion de las matri-ces de covarianza y las condiciones iniciales. Debido a estas caracterısticas el filtrose encuentra limitado en aplicaciones reales, el desconocimiento de las propiedadesestadısticas del ruido implica una estimacion con mayor error. Es posible modificar elalgoritmo para ampliar su rango de aplicaciones, a estos algoritmos se les denominafiltros de tipo Kalman. Una de las modificaciones mas importantes es el uso de lasseries de Taylor para aplicar el filtro en sistemas no lineales, como es el presente casode investigacion y se conoce como el filtro extendido de Kalman. Por otro lado esigualmente posible expandir el algoritmo como un estimador o suavizador de senales.
4.1.5. Filtro de Kalman Extendido: aplicado al modelo delrobot
Con el afan de estimar el vector de estado Xn a traves de los metodos del filtradolineal como es el caso del filtro de Kalman, se necesita aplicar una serie de Taylor deprimer orden para extender el modelo; de este modo aplicando la serie de Taylor alvector de estado Xn = fn(Xn−1, un,Wn, en) se aproxima un modelo no lineal a unolineal como se explico en la seccion 2.6.6 para obtener ası:
fn u fn(xn−1, un, 0, 0) + Fn(xn−1 − xn−1 +Wnwn + Enen) (4.22)
Donde xn = [x yn θn] es la estimacion de xn. Una expansion de la ecuacion(3.13)en series de Taylor permite obtener la ecuacion (4.22), la cual indica que un−un−1 esinsignificante en el sistema dado que los incrementos en las ruedas son muy pequenosen cada paso de tiempo; ası como las componentes iniciales del ruido en el punton − 1 se consideran cero wn−1 = 0 y en−1 = 0 y si se ordenan los terminos de laecuacion (4.24) para obtener una ecuacion de la forma de espacio de estados (2.17)se obtiene que un = fn(xn−1, un, 0, 0) − Fnxn−1. Esta representa las entradas delmodelo, mismas que son bien conocidas, ası las matrices Fn,Wn, En son las matricesen espacio de estados que no son otra cosa mas que Jacobianos y que se denotaronen la teorıa general como A,B y H respectivametne. Cabe resaltar que al expandirlas ecuaciones (3.13) y (3.19) en series de Taylor el termino de segundo orden norepresenta ninguna ventaja adicional, por lo que para fines practicos de este trabajoes omitido, obteniendo ası la ecuacion (4.23):
fn = Fnxn−1 + un +Wnwn + Enen (4.23)
Por lo tanto los Jacobianos quedarıan determinados por la ecuacion (4.24):
Fn =∂fn∂x
∣∣∣xn−1
=
1 0 −dn sin(θn−1 + 12Θn)
0 1 dn sin(θn−1 + 12Θn
0 0 1
(4.24)
Como al considerar el ruido aditivo con respecto a las componentes de xn yespecificar que wn−1 = 0 se obtiene que:
Wn =∂fn∂w
∣∣∣xn−1
= Fn (4.25)
47

CAPITULO 4. FILTROS
Finalmente el Jacobiano con respecto a las componentes de ruido en las entradasse plantea como lo presenta la ecuacion (4.26):
En =∂fn∂u
∣∣∣xn−1
=1
2b
becn + dnesn becn − dnesnbesn − dnecn besn + dnecn−2 2
(4.26)
Donde ecn = cos(θn−1 + Θn
2) y esn = sin(θn−1 + Θn
2). De modo similar que se
analizo la ecuacion (3.13) se analiza la ecuacion (3.19) y de igual forma la ecuacionno lineal hn(xn) se pude expandir en n terminos (cabe mencionar que se utiliza lanotacion para los terminos xn , xn|n y xn , xn|n−1) respectivamente obteniendoası la ecuacion (4.27):
hn(xn) u hn(xn) +∂hn∂x
∣∣∣xn
(xn − xn) (4.27)
Donde al dar continuidad a la forma en espacio de estados de la ecuacion (3.13)se considera que zn = hn(xn)−Hnxn dando como resultado la ecuacion (4.28):
hn(xn) = Hnxn + zn (4.28)
De este modo Hn se denotarıa con el Jacobiano presentado en la ecuacion (4.29):
Hn =∂fn∂u
∣∣∣xn−1
=
xn−x1
u1n
yn−y1
u1n0
xn−x2
u2n
yn−y2
u2n0
0 0 1
(4.29)
Donde u1n =√
(y1 − yn)2 + (x1 − xn)2 + c21 mientras el termino de u2n se define
como u2n =√
(y2 − yn)2 + (x2 − xn)2 + c22 de tal modo que la ecuacion del mode-
lado en espacios de estados extendidos de primer orden quedarıa definida por lasecuaciones (4.30) y (4.31) respectivamente:
xn = FnXn−1 + un + wn + en (4.30)
zn = HnXn−1 + zn + vn (4.31)
Donde wn = Wnwn y en = Enen respectivamente, y sus matrices de covarianzasposeen la forma de:
Qn = FnQFTn (4.32)
Ln = EnLETn (4.33)
Donde Q y L fueron especificadas en las ecuaciones (3.14) y (3.15) respectiva-mente. Una vez obtenidas las ecuaciones anteriores se puede considerar que el errora priori de la estimacion quedara definido como:
Pn = E{(xn − xn)(xn − xn)T} (4.34)
= FnPn−1FTn + Qn + Ln (4.35)
48

CAPITULO 4. FILTROS
Y la estimacion del error quedara definida como:
Pn = E{(xn − xn)(xn − xn)T} (4.36)
= (I −KnHn)Pn (4.37)
Cabe resaltar que la estimacion inicial x0 debera ser proporcionada. En la tabla4.1 se presentan los pasos realizados por el filtro extendido de Kalman obedeciendoa la forma del algoritmo presentada en la figura 4.1
Algoritmo EKFEntradas: zn; x0;P0;M ;R;Q;L
Procesofor n=1:M do
1.- xn = fn(xn−1;un; 0; 0)2.- Pn = Fn(Pn−1 +Q)F T
n + EnLETn
3.- Kn = PnHTn (HnPnH
Tn +Rn)−1
4.- xn = xn +Kn[zn − hn(xn)]5.- Pn = (I −KnHn)Pn
end forSalida: xn
Tabla 4.1: Pasos de estimacion del filtro EKF
Donde zn representa el conjunto de observaciones o mediciones realizadas; x0 lascondiciones iniciales de donde parte el robot; P0 los valores iniciales de la matrizde error, M el numero total de muestras que conforman la trayectoria del robot; yR,Q,L las matrices de covarianzas de los ruidos que afectan al sistema respectiva-mente.
4.2. Filtro UFIR
Para poder definir y explicar de manera mas eficiente y clara lo que es un fil-tro UFIR extendido se debe comenzar por analizar sus siglas;FIR (Finite ImpulseResponse) se deriva de los conocidos filtros digitales de este tipo en donde si en suentrada se encuentra un impulso (una delta kronecker) su salida sera un numerolimitado de terminos no nulos, una de las ventajas que poseen los filtros FIR es laestabilidad BIBO,el sesjo existente entre las estimaciones y la media de las mismasen este tipo de filtro se disminuye considerablemente, de ahı la caracterıstica de serinsesgado o Unbiased. La caracterıstica de extendido es comparable a la de Kalman,un conjunto de modificaciones necesarias aplicables cuando se esta en presencia desistemas no lineales. Sin embargo es importante recalcar que es necesario estudiar losfiltros UFIR desarrollados previamente; el por que de hacer esto radica en que parapoder capturar la esencia del funcionamiento del filtro EFIR, el cual es desarrolladoen este trabajo de investigacion y de interes de estudio, se requiere analizar su origen
49

CAPITULO 4. FILTROS
y la evolucion del mismo, de esta manera el proceso de comprension se agilizara ypermitira un mayor entendimiento del filtro propuesto. A continuacion se presentaun conjunto de secciones dedicadas a los filtros UFIR mas relevantes,algunos diagra-mas a bloques que presentan sus algoritmos de trabajo y el conjunto de ecuacionesque los caracteriza.
4.2.1. Consideraciones generales
Considere un sistema no lineal el cual es afectado por ruido blanco gaussiano,como se muestra en las ecuaciones (4.38) y (4.39):
xn = Anxn−1 +Bnwn (4.38)
zn = Cnxn +Dnvn (4.39)
las dimensiones de los vectores se encuentran definidas por el numero de estadosk del sistema y por el numero de variables a medir m en donde: xn ∈ Rk; zn ∈ Rm;son el vector de estado y el vector de observacion; w ∈ Rk; v ∈ Rm son los vectoresde ruido respectivamente; A ∈ Rk×k; B ∈ Rk×m; C ∈ Rm×k; D ∈ Rm×m representanlas matrices que relacionan el sistema. El promedio de cada ruido es cero, E{wn} =0 y E{vn} = 0. Los ruidos son mutuamente no correlacionados, E{wivTj } = 0,con distribuciones arbitrarias, no necesariamente Gaussianos. Las covarianzas de losruidos son conocidas y estan definidas por ecuaciones (4.40) y (4.41), donde Q ∈ Rk×k
y R ∈ Rm×m.
Q(i, j) = E{wiwTj }; para toda j e i (4.40)
R(i, j) = E{vivTj }; para toda j e i (4.41)
Bajo estas condiciones se desea desarrollar un filtro FIR que sea insesgado y quefiltre de manera optima el ruido y aplicable a las condiciones de no linealidad delsistema. Bajo estos requisitos se asume que fn(xn−1) y hn(xn) son lo suficientementeaproximables en un modelo extendido a traves de la serie de Taylor. Como se mencio-na en futuras secciones, en este caso en particular se expande hasta el primer ordende la serie fn(xn−1) alrededor de la estimacion xn (Para fines practicos se adoptanlas notaciones xn , xn|n mientras que xn , xn|n−1).
4.2.2. Filtro Batch UFIR de tipo Kalman
Debido a que se desea que el filtro sea de tipo FIR, se extienden las ecuaciones(4.38) y (4.39) a un horizonte N , que va desde m = n−N + 1 hasta n.
Xn,m = An,mxm +Bn,mWn,m (4.42)
Zn,m = Cn,mxm +Gn,mWn,m +Dn.mVn,m (4.43)
50

CAPITULO 4. FILTROS
Cada uno de estos terminos es un vector cuya estructura se muestra en las ecua-ciones que se presentan a continuacion en (4.44)–(4.47):
Xn,m = [xTn xTn−1 · · ·xTm]T (4.44)
Wn,m = [wTn wTn−1 · · ·wTm]T (4.45)
Zn,m = [zTn zTn−1 · · · zTm]T (4.46)
Vn,m = [vTn vTn−1 · · · vTm]T (4.47)
De igual modo las matrices son modificadas, y se pude notar que aparece un nue-vo termino G. Las nuevas dimensiones de las matrices quedarıan denotadas en lasecuaciones (4.48)–(4.51):
An,m = [Am+1Tn,0 Am+1T
n,1 · · ·ATm+1 I]T (4.48)
Cn,m = Cn,mAn,m (4.49)
Gn,m = Cn,mBn,m (4.50)
Dn,m = diag(DnDn−1 · · · Dm︸ ︷︷ ︸N
) (4.51)
Con respecto a las ecuaciones anteriores es importante aclarar que los terminosAr−gr,h y Cn,m se definen por las ecuaciones (4.52) y (4.53) respectivamente:
Ar−gr,h =
g∑i=h
Ar−i (4.52)
Cn,m = diag(CnCn−1 · · · Cm︸ ︷︷ ︸N
) (4.53)
De igual modo la matriz B quedara definida como se presenta en (4.54):
Bn,m =
Bn AnBn−1 · · · Am+2
n,0 Bm+1 Am+1n,0 Bm
0 Bn−1 · · · Am+2n,1 Bm+2 Am+2
n,1 Bm+1...
.... . .
......
0 0 · · · Bm+1 Am+1Bm
0 0 · · · 0 Bm
(4.54)
Es posible obtener un estimador usando la medicion Zn,m. En la ecuacion (4.55)se establece esta relacion, ahora el problema radica en hallar la Hn,m(p) capaz degenerar una estimacion optima.
xn+p
∣∣n = Hn,m(p)Zn,m (4.55)
Dentro de la solucion tambien se debe establecer la condicion de no bias o in-sesgado de la ecuacion (4.56). Bajo las condiciones establecidas del ruido y con laconsideracion que el estimador propuesto sea insesgado es posible hallar Hn,m(p) cu-ya solucion se muestra en (4.57). Sustituyendo (4.58) en (4.55) se halla el estimador
51

CAPITULO 4. FILTROS
insesgado de la ecuacion (4.58) donde la barra denota que el estimador es insesgado,igualmente se debe observar que se tiene un termino p que habilita al estimadoractuar como un filtro, predictor o suavizador dependiendo de su valor.
E{xn+p
∣∣n} = E{xn+p
∣∣n} (4.56)
Hn,m(p) = Am+1n+p,0(CT
n,m, Cn,m)−1CTn,m (4.57)
xn+p
∣∣n = Hn,m(p)Zn,m (4.58)
= Am+1n+p,0(CT
n,m, Cn,m)−1CTn,mZn,m
La ecuacion (4.57) establece la formula concreta del estimador. Cuando p = 0 elestimador de la ecuacion (4.57) es un filtro Batch UFIR, Batch debido a que usa unconjunto de datos, UFIR por que es unbiased (sin sesjo) y de tipo FIR.
Figura 4.3: Modo de estimacion de los filtros Kalman y Batch UFIR
En la figura 4.3 se muestra la comparacion entre la estrategia Kalman y la es-trategia del filtro Batch UFIR, los dos filtros comienzan en un punto m y buscanestimar el valor n. En la estrategia del filtro Kalman se pasa de un punto m a unpunto m+ 1 y por medio de la ganancia de Kalman se obtiene la estimacion x hastallegar al punto n de manera recursiva, cada uno de los puntos azules de la lineapunteada representa una estimacion. En el filtro Batch UFIR se tiene un conjuntode datos Yn,m de la medicion representados por los puntos verde oscuro dentro dela region sombreada. Estos puntos van desde m hasta n, operando con las matricessiguiendo la ecuacion (4.42) se obtiene una estimacion x.
4.2.3. Filtro tipo Kalman UFIR iterativo
A pesar de que se conoce la ecuacion del estimador insesgado (4.56) que propor-ciona una solucion al filtrado FIR, se debe observar que el tamano de las matricesdepende de N en gran medida. Para N � 1 el costo computacional crece considera-blemente por cada una de las operaciones, sobre todo la matriz inversa. La solucion
52

CAPITULO 4. FILTROS
es recurrir a una estrategia iterativa, de esta manera se reduce el costo computacio-nal de las operaciones matriciales. La forma iterativa de x se muestra en la ecuacion(4.59).
xl+p
∣∣l = Al+pxl−1+p
∣∣l−1+Kl[zl − FlΓl(p)x
l−1+p
∣∣l−1] (4.59)
Se puede observar que la forma es similar a la de un filtro Kalman. El terminoAl+px
l−1+p
∣∣l−1representa la proyeccion basado en un modelo, el termino en los cor-
chetes representa una correccion basada en la medicion zl y por ultimo Kl representala ganancia de Kalman encargada de darle el peso correcto a cada correccion. Se debeobservar que existen dos nuevas matrices F y Γ las cuales se encuentran definidasen las ecuaciones (4.60) y (4.61) respectivamente. La ganancia de Kalman quedadefinida por la ecuacion (4.62).
F = [CTl Cl + (AlFl−1A
Tl )−1]−1 (4.60)
Γl(p) =
Al−|p|l,0 si p < 0
Al si p = 0I si p = 1∏p−1
i=1 A−1l−i si p > 1
(4.61)
Kl = Al+pΓ−1l (p)FlC
Tl (4.62)
Igualmente se debe observar que en la ecuacion hay dos condiciones inicialesxl−1+p|l−1 y Fl−1 que no se han definido. Para obtener estas condiciones iniciales serecurre al conjunto de ecuaciones que se presentan en (4.63)–(4.65):
Fs = Am+1s,0 PAm+1T
s,0 (4.63)
xs+p|s = Am+1s+p,0PC
Ts,mZs,m (4.64)
P = (CTs,mCs,m)−1 (4.65)
Donde s = l − 1 y se observa que las ecuaciones no requieren de una condicioninicial o de las matrices de covarianza. La iteracion de l comienza en un valor inicialmax(m + K,m + 2,m + 2 − p) y llega hasta n. La limitante del valor inicial de lse establece para permitir que la matriz inversa de P y las matrices Am+1
l−1+p,0 Am+1l−1,0
existan. Cuando l = n el valor de xl representa la estimacion de xn.Debido a que l debe ser menor o igual a n, el valor de N esta limitado por el
valor inicial seleccionado max(m+K,m+ 2,m+ 2− p).
Caso 1: max(m+K,m+ 2,m+ 2− p) = m+K.
l = m+K = (n−N + 1) +K
n ≥ l→ n ≥ n−N + 1 +K
N ≥ K + 1
53

CAPITULO 4. FILTROS
Caso 2: max(m+K,m+ 2,m+ 2− p) = m+ 2.
l = m+ 2 = (n−N + 1) + 2
n ≥ l→ n ≥ n−N + 3
N ≥ 3
Caso 3: max(m+K,m+ 2,m+ 2− p) = m+ 2− p.
l = m+ 2− p = (n−N + 1) + 2− pn ≥ l→ n ≥ n−N + 3− pN ≥ 3− p
Si se sigue una estrategia UFIR iterativa se comienza en un punto m y se deter-mina un punto l y s, las matrices iniciales Fs y xs establecen el punto de partida delalgoritmo y se obtienen sin la necesidad de conocer una x inicial o las matrices decovarianza. Luego por medio de la ecuacion de xl+p|l se realiza un paso de prediccioncon base en la matriz A y una correccion con base en la matriz K en forma iterativahasta que l = n. Se observa que el algoritmo es similar a un filtro Kalman por estoel filtro se denomina UFIR iterativo de tipo Kalman.
Figura 4.4: Estrategia de estimacion del filtro UFIR iterativo
Una vez que se elige un valor de N se obtiene una respuesta del filtro, en la figura4.4 se muestra una comparacion del proceso que sigue el estimador UFIR iterativo yun filtro Kalman mientras que en la figura 4.5 un diagrama a bloques del algoritmodel mismo.
4.2.4. Filtro UFIR Extendido: aplicado al modelo del robot
Una vez dado a conocer el funcionamiento general del filtro UFIR, se abordael estudio de la extension del mismo en donde al igual que el Kalman se aplica asistemas no lineales en este caso al modelo descrito en las ecuaciones (4.30) y (4.31);
54

CAPITULO 4. FILTROS
Figura 4.5: Diagrama a bloques del algoritmo del filtro UFIR iterativo
a pesar de que el filtro de la seccion 4.1.5 es ampliamente utilizado en ingenierıadebido a los buenos resultados que arroja, presenta problemas cuando no se conocenlas matrices de covarianza debido a que produce grandes errores en su estimacion; eneste caso una mala interaccion con las etiquetas RFID generara una mala determi-nacion de la posicion del robot; contrario al filtro de Kalman optimo que minimiza elerror cuadratico medio (MSE), el filtro FIR satisface las condiciones de ser insesgadoE{xn} = E{xn}, esta caracterıstica ha sido estudiada y explicada ampliamente en[41]. Una de las ventajas de aplicar un filtro EFIR es que este ignora las estadısticasdel ruido pero requiere de un intervalo optimo de muestras para poder realizar unaadecuada estimacion. El filtro EFIR se organiza de manera similar al filtro de Kal-man, la estimacion se realiza de manera iterativa como se presenta en la ecuacion(4.66):
xl = xl +Kl[zl − hl(xl)] (4.66)
Se incorpora una nueva variable l la cual abarca desde el rango de m+K hastan pero m queda denotada como m = n − N − 1, aquı K representa el numero deestados de modelo en este caso son 3 los de interes; mientras que N es el horizonte detrabajo del filtro FIR determinando ası su orden y su rango de operacion.La salidafinal del filtro se toma cuando l = n en cada ciclo realizado. La ganancia que definela correccion en el sesgo de la estimacion queda definida por la ecuacion (4.67)
Kl = GlHTl (4.67)
55

CAPITULO 4. FILTROS
Figura 4.6: Diagrama a bloques del algoritmo del filtro EFIR
Tambien se presenta una generalizacion de la ganancia de ruido de sus siglas eningles (GNPG), Gl definida en la ecuacion (4.68):
Gl = [HTl Hl + (FlGl−1F
Tl )−1]−1 (4.68)
En la cual los terminos de inversa que presenta son aplicables cuando el sistemaes estable generalmente en l ≥ m + K. Es este caso en particular donde se tienentres estados asociados al vehıculo (K = 3), los valores de la estimacion inicial ens = m + K − 1 pueden ser encontrados calculandolos como en el filtro de Batch dela seccion 4.2.2 y de esto se obtiene que:
xs = FsFs−1(HTs,mHs,m)−1HT
s,mYs,m (4.69)
Gs = FsFs−1(HTs,mHs,m)−1Fs−1Fs (4.70)
Ys,m = [yTm+2yTm+1y
Tm]T (4.71)
Hs,m =
Hm+2Fm+2Fm+1
Hm+1Fm+1
Hm
(4.72)
Para el algoritmo de EFIR se considera que yn es un vector lineal de la medicionde xn, el cual muchas veces no se encuentra disponible debido a la naturaleza delsistema; pero si se llegase a encontrar disponible este puede ser sustituido por laecuacion (4.69) en vez de xs; una de las caracterısticas del algoritmo de EFIR quese presenta en este modelo es una simplificacion de la (GNPG) considerando a Gs
56

CAPITULO 4. FILTROS
como una matriz identidad en cada ciclo de trabajo Gs = I permitiendo ası reducirel numero de ecuaciones presentes en (4.69)-(4.72). Esto se lograr hacer dado quesus efectos en la precision de la localizacion del robot no son significativos, efectosque son demostrados ampliamente en el siguiente capıtulo a traves de simulaciones.De este modo se puede decir que el algoritmo EFIR presentado en el diagramaa bloques de la figura 4.6 solo necesitarıa conocer el rango de muestras a utilizarrepresentado por N para lograr una buena estimacion; el numero de estados quepresenta el sistema analizado se denota con K; las medidas u observaciones realizadaspor medio de zn y el vector lineal de medicion si se dispone como Yn, es decir nose necesitan las caracterısticas del ruido que afectan al sistema. Cabe resaltar queaunque el algoritmo permite utilizar Gs = I esta puede ser sustituida por la ecuacion(4.70) sin embargo aunque cumplirıa las condicion de ser insesgado no garantizaque el MSE sea mınimo y por lo tanto no serıa optimo y se tendrıa que recurrira la optimizacion del algoritmo calculando el valor de Nopt. Con lo mencionadoanteriormente,se puede entonces plantear el algoritmo del filtro EFIR y visualizarası el modo de trabajo. La tabla 4.2 representan de una manera abreviada los pasosde estimacion el filtro propuesto, y parte de sus caracteristicas computacionales.
Algoritmo EFIREntradas: zn;Yn;K;N
Procesofor n=N-1:M do
1.- m = n−N + 1 s = m+K − 1
2.- xs =
ys si s < N − 1
xs si s ≥ N − 13.- Gs = I4.- for l = m+K : n do5.- xl = fl(xl;ul; 0; 0)6.- Gl = [HT
l Hl + (FlGl−1FTl )−1]−1
7.- Kl = GlHTl
8.- xl = xl +Kl[zl − hl(xl)]9.- end for10.- xn = xn
end forSalida:xn
Tabla 4.2: Pasos de estimacion del filtro EFIR
Obtencion del valor optimo de N
Los trabajos realizados en [42] presentan la forma de como obtener un filtroFIR optimo cuando se involucran espacios de estados; y se trabaja con el valor delMSE para obtener ası el valor optimo de N (Nopt) al emplear la ecuacion (4.36) se
57

CAPITULO 4. FILTROS
puede determinar el error producido por el valor de N utilizado para cada procesode estimacion; de forma que:
Nopt = argmınN{trP (N)} (4.73)
Es decir se puede realizar el trazo producido por el error en cada valor de Nempleado y determinar el rango en el cual el MSE sea mınimo de forma que se puedadefinir dicho rango como el valor optimo de trabajo del filtro garantizando ası sucalidad al producir estimaciones con un alto grado de precision.
58

Capıtulo 5
Simulaciones y resultados
En este capıtulo se presentara el conjunto de simulaciones y pruebas realizadasdurante el presente trabajo de investigacion, se comienza indicando que en las su-cesivas imagenes que se presentaran se considera que el robot movil viaja a travesde un espacio cerrado al cual se le ha colocado un conjunto de etiquetas RFID don-de sus coordenadas de localizacion se encuentran almacenadas en la memoria delvehıculo; como se especifico en el capıtulo 3 en las secciones 3.2 y 3.3, las etiquetasposeen un rango de operacion y se asume que el lector de etiquetas instalado en elrobot es capaz de medir las distancias del mismo a las etiquetas a traves del RSSI(Received Signal Strenght Indicator ), es decir, midiendo la potencia presente en lasenal recibida por medio de la ecuacion (3.1); se recuerda que el FOG (Fibre OpticGyroscope) que se considera estara tambien instalado en el vehıculo movil, es capazde medir directamente el angulo θn.Tambien se recuerda que todas las fuentes de ruido se consideran aditivas, estacio-narias, con promedio cero, no correlacionadas y de tipo blanco Gaussiano, ademas,se proporcionan los valores de varianza del ruido en la estimacion denotados como:σ2x;σ
2y;σ
2θ respectivamente, por lo tanto la matriz de covarianza especificada en la
ecuacion (3.14) se denota como una matriz con su diagonal principal con dichos va-lores y sus demas componentes cero de la forma diagQ = [σ2
x σ2y σ
2θ ]. De igual forma
se considera la varianza del ruido que afecta las entradas denotada como σ2L;σ2
R res-pectivamente y su matriz de covarianza especificada en la ecuacion (3.15) se denotacon su diagonal principal como diagL = [σ2
L σ2R] y todas sus demas componentes cero
respectivamente. Por ultimo se considera a las fuentes de ruido para las medicionescon varianza σ2
v1;σ2v2;σ2
v3 definiendo ası su matriz de covarianza en la ecuacion (3.20)como diagR = [σ2
v1 σ2v2 σ
2v3] y el resto de sus componentes cero.
Abordando el tema de interes de las simulaciones y resultados se dividira este capıtu-lo en tres grandes secciones: la primera representa el modo de trabajo del vehıculoen una trayectoria circular y se toman como referencia solo dos etiquetas RFID; lasegunda, el robot viaja a traves de una rejilla RFID recreando una ruta planeadapreviamente; y por ultimo en la tercera seccion el robot viaja nuevamente por unarejilla RFID pero bajos condiciones tıpicas de trabajo.
59

CAPITULO 5. SIMULACIONES Y RESULTADOS
5.1. Trayectoria circular
Se comenzara simulando una trayectoria circular realizada por el vehıculo to-mando como referencia dos etiquetas RFID, esto con el afan de observar los posibleserrores en la localizacion y algun posible efecto negativo derivado de los mismos. Sedefinen los valores de la desviacion estandar como: σx = σy = σL = σR = 1mm yσθ = 0,5◦ respectivamente. De igual modo se proporcionan los valores de la desvia-cion estandar para las mediciones de las distancias como σv1 = σv2 = 5cm y σv3 = 2◦;el numero de muestras consideradas para este ejemplo es de 5000 muestras. Debidoa que se consideran etiquetas pasivas, el rango de lectura del lector se supone deaproximadamente r = 6m, para lo cual se posiciona cada una de las etiquetas RFIDconsideradas en los puntos A(0,0) y B(0,6) metros respectivamente. Para probar elbuen funcionamiento de los filtros EKF y EFIR, de la tabla 4.1 y 4.2 respectivamente,se considera que la trayectoria deseada xn, que se supone deberıa seguir el vehıculomovil, es medida simultaneamente usando un equipo de precision y que parte en elpunto x0 = [3 2 0] con respecto al origen y serıan estas las condiciones iniciales quese requieren para el filtro EKF.
Figura 5.1: Rejilla RFID para la trayectoria circular con el punto de partida delrobot movil
La figura 5.1 presenta lo mencionado en el parrafo anterior sobre la ubicacion delas etiquetas y el punto inicial de partida; Sin embargo, segun el esquema de trabajopresentado en la figura 3.7, las mediciones directas de xn y yn no son posibles, porlo que se procede a atacar el problema de manera inversa de las ecuaciones (3.16) y(3.17). Al conocer las posiciones de las etiquetas x1 = x2 = y2 = 0 y y1 = 6 se puede
60

CAPITULO 5. SIMULACIONES Y RESULTADOS
realzar una medicion lineal de xn y yn.
xn =
√A1n −
1
4y21
(y21 − A2n + A1n) (5.1)
yn =1
2y1
(A2n − A1n + y21) (5.2)
Donde A1n = d21n − c2
1; A2n = d22n − c2
1. Ası c1 = c2 = 1m representan la alturaa la cual se encuentran las etiquetas RFID; al unir las mediciones de xn y yn en unvector de la forma Yn = [xn yn]τ ; ademas se considera que se conoce con precision elvector xn que representa el vector de la medicion actual de la trayectoria del robot.
(a) trayectoria (b) Medicion
Figura 5.2: Trayectoria deseada y mediciones realizadas
La figura 5.2a representa la trayectoria realizada por el robot movil y que ha sidomedida con un equipo de precision. Sin embargo, como se especifico en el capıtulo3, el equipo de medicion instalado en el vehıculo movil es de bajo costo y se veafectado por las diferentes fuentes de ruido, lo que lleva a realizar un conjunto demediciones como las presentada en la figura 5.2b, mismas que poseen un alto gradode perturbacion y un error elevado en cuanto a la posicion del vehıculo y es ante estacircunstancia donde se aplican los filtros propuestos en las tablas 4.1 y 4.2, para conello obtener los resultados de las figuras 5.3a y 5.3b.
Como se puede observar, las estimaciones realizadas por cada filtro son aceptablesmuy cercanas a la ruta deseada; si se comparan las figuras 5.2 y 5.3 en un solo planose aprecia de manera grafica como la diferencia existente entre las estimaciones y laruta transitada por el vehıculo se asemejan considerablemente; cabe mencionar queposteriormente en dicho capıtulo se presentaran resultados cuantitativos de los mis-mos. Ası la figura 5.4 presenta una superposicion de las estimaciones y la diferenciamencionadas previamente.
61

CAPITULO 5. SIMULACIONES Y RESULTADOS
(a) Filtro de Kalman Extendido p=1 (b) Filtro UFIR Extendido N=124
Figura 5.3: Respuesta de la trayectoria obtenida al aplicar los filtros de estudio
Cabe resaltar que la figura 5.4 muestra las estimaciones realizadas cuando losfiltros operan ante condiciones ideales, es decir, se conocen las matrices de covarianzaQ,L,R y las condiciones para el filtro de Kalman y el valor de Nopt para el filtroEFIR calculado a traves de la ecuacion (4.73) midiendo el MSE entre la trayectoriay la estimacion.
Figura 5.4: Comparacion de las estimaciones de los filtros vs la trayectoria y lasmediciones del robot movil
En la figura 5.5 se presentan de manera mas detallada las estimaciones producidaspara cada coordenada de interes en la posicion del vehıculo, como se puede apreciarambas estimaciones presentan un error bajo y muy cercano a la trayectoria realizada
62

CAPITULO 5. SIMULACIONES Y RESULTADOS
Figura 5.5: Errores MSE por coordenadas en las estimaciones producidas por losfiltros EKF y EFIR con valores optimos
por el robot movil y que fue medida con equipo de precision. La figura 5.6 representael trazo del error MSE para cada filtro propuesto, de este modo se considera el rangoen el cual el MSE presenta el menor valor. En este caso para el filtro EFIR el
Figura 5.6: Trazo del error en las estimaciones producidas por los filtros EKF y EFIR
rango de valores permitidos se encuentra entre 92 − 140 muestras, siendo el valorde Nopt = 124. En el caso del filtro EKF se conoce por la teorıa presentada en loscapıtulos 4 y 5 respectivamente; que el buen funcionamiento en la estimacion depende
63

CAPITULO 5. SIMULACIONES Y RESULTADOS
del conocimiento previo de las matrices de covarianza y de los valores iniciales; con elafan de poder observar los efectos producidos ante el desconocimiento de los mismosse introduce un coeficiente p que modifique los valores de la desviacion estandar delos ruidos de la forma: p2R;Q/p2;L/p2. El trazo del error demuestra que ante uncaso ideal donde p = 1 el filtro de Kalman produce una estimacion con un alto gradode precision; mientras que en el rango de 0,7 < p < 2 la estimacion producida seconsidera aceptable o buena, fuera de este rango los errores alcanzados son elevadosy la estimacion carece de precision para la localizacion del vehıculo.Reforzando la idea presentada en el parrafo anterior se modificaran los valores dep y de N en cada filtro contrastando las estimaciones producidas por cada uno;recalcando de este modo las fortalezas y debilidades que puede presentar a la horade ejecutarlos.
5.1.1. Analisis de errores: Trayectoria circular EKF p=1 ;EFIR N=30 y N=500
En el presente apartado se presentara el efecto producido en las estimacionesdel filtro EFIR cuando no se proporciona un valor de N optimo; en contraparte seconsidera que el filtro de EKF trabaja con condiciones ideales de sus matrices decovarianza, es decir, se conoce la desviacion estandar del ruido, por lo tanto p = 1.Como se aprecia en la figura 5.7 la estimacion producida por el filtro EFIR cuando
(a) Trayectoria recorrida (b) Estimaciones realizadas
Figura 5.7: Estimaciones producidas por los filtros de estudio con valores de p=1 yN=30
se aplica un valor de N fuera del rango adecuado de trabajo bien sea por encimao por debajo de este, como es el caso presentado, los errores MSE presentan unaumento considerable y la estimacion pierda calidad. Para sustentar lo mencionadopreviamente se muestran los errores MSE producidos en cada coordenada en la figura5.8, tal como se hizo en el caso de los valores optimos; en este caso se aprecia que
64

CAPITULO 5. SIMULACIONES Y RESULTADOS
la estimacion del EFIR presenta un mayor grado de error en las coordenadas de x,ydebido al valor de N utilizado.
Figura 5.8: Errores MSE por coordenadas; producidas por los filtros de estudio convalores de p=1 y N=30
De igual modo se puede emplear un valor de N por encima del rango adecuadode trabajo. En este ejemplo se utilizara un valor de N=500 y se pueden apreciar losefectos producidos por dicha circunstancia. La figura 5.9 ejemplifica lo planteado yse observa como nuevamente la estimacion que arroja el filtro EFIR posee un mayorgrado de error en las coordenadas x,y, θ.
Figura 5.9: Errores MSE por coordenadas; producidas por los filtros de estudio convalores de p=1 y N=500
65

CAPITULO 5. SIMULACIONES Y RESULTADOS
Realizando una comparacion de manera cuantitativa se aprecia como, al compararlos valores del sesgo (bias) y la desviacion estandar de los valores optimos de lasestimaciones, con los otros valores de N utilizados en las simulaciones presentadas,los valores del sesgo y la desviacion estandar cambian de manera considerable; latabla 5.1 presenta los datos de desviacion estandar y sesgo(bias) en cada coordenada.
Trayectoria CircularFiltro x cm y cm θ rad 10−4
EKF p=1 β=-0.0022 β=0.0052 β=-18.00σ=1.1107 σ=1.0524 σ=99.05
EFIR N=30 β=-0.1000 β=-0.1387 β=39.82σ=1.6000 σ=1.7300 σ=184.00
EFIR N=124 β=-0.0017 β=-0.0046 β=11.00σ=1.1622 σ=1.1200 σ=110.10
EFIR N=500 β=0.8848 β=0.2200 β=49.61σ=2.0300 σ=1.6200 σ=301.00
Tabla 5.1: Valores de desviacion estandar(σ) y sesgo(β) producidos por coordenadasen la trayectoria circular p=1 y N=30; 124; 500.
5.1.2. Analisis de errores: Trayectoria circular EKF p=0.6 yp=4; EFIR N=124
Dando continuidad al conjunto de simulaciones realizadas, se presenta el casocontrario, en donde el filtro EFIR trabaja con un valor de N optimo, y el filtro EKFcon matrices de covarianza no conocidas:
(a) Trayectoria recorrida (b) Estimaciones realizadas
Figura 5.10: Estimaciones producidas con valores de p=0.6 y N=124
66

CAPITULO 5. SIMULACIONES Y RESULTADOS
Para ello se hace uso del coeficiente p que se introdujo previamente y que seexplico que modifica los valores de las matrices de covarianza; se sabe por el casoanterior estudiado que el valor de p = 1 representa el modo de trabajo ideal delfiltro EKF, sin embargo, es importante analizar el comportamiento del filtro cuandose utiliza un valor de p por debajo de 1 y por encima de este. En la figura 5.10 seobservan las estimaciones producidas por los filtros cuando se trabaja con los valoresde N y p indicados con anterioridad; sin embargo, al igual que en la seccion anterior,es importante analizar el error MSE que se obtiene en cada coordenada; evento quese presenta en figuras sucesivas.
Figura 5.11: Errores MSE por coordenadas obtenidos; con valores de p=0.6 y N=124
En la figura 5.11, ası como en la figura 5.8, se puede deducir que cuando setrabaja con valores menores al valor optimo se obtienen estimaciones con presenciade ruido “rapido”, este caso valores menores de p; de manera inversa cuando seemplean valores de p por encima del valor de trabajo optimo para cada uno, seobserva la presencia de ruido “lento”, en las estimaciones producidas tal como sepresenta en las figuras 5.12 y 5.9 respectivamente. Es importante profundizar unpoco mas sobre el funcionamiento del valor de N expresado en la ecuacion (4.73) ylos efectos que este genera; como se explico previamente, se busca que el filtro seainsegado y que los valores de la varianza producidos en las estimaciones sean mınimos,garantizando ası su precisicion; sin embargo, el numero de muestras utilzado tieneuna intima relacion con el tiempo empleado en generar la estimacion, de modo quecon un numero menor de muestras al valor optimo, el filtro requiere menos tiempode estimacion y la estimacion se ve plagada de ruido “rapido”, es decir, se subestimael sistema; en caso contrario cuando se posee un numero de muestras mayor al valoroptimo, el tiempo de estimacion requerido es mayor y la estimacion contiene ruido
67
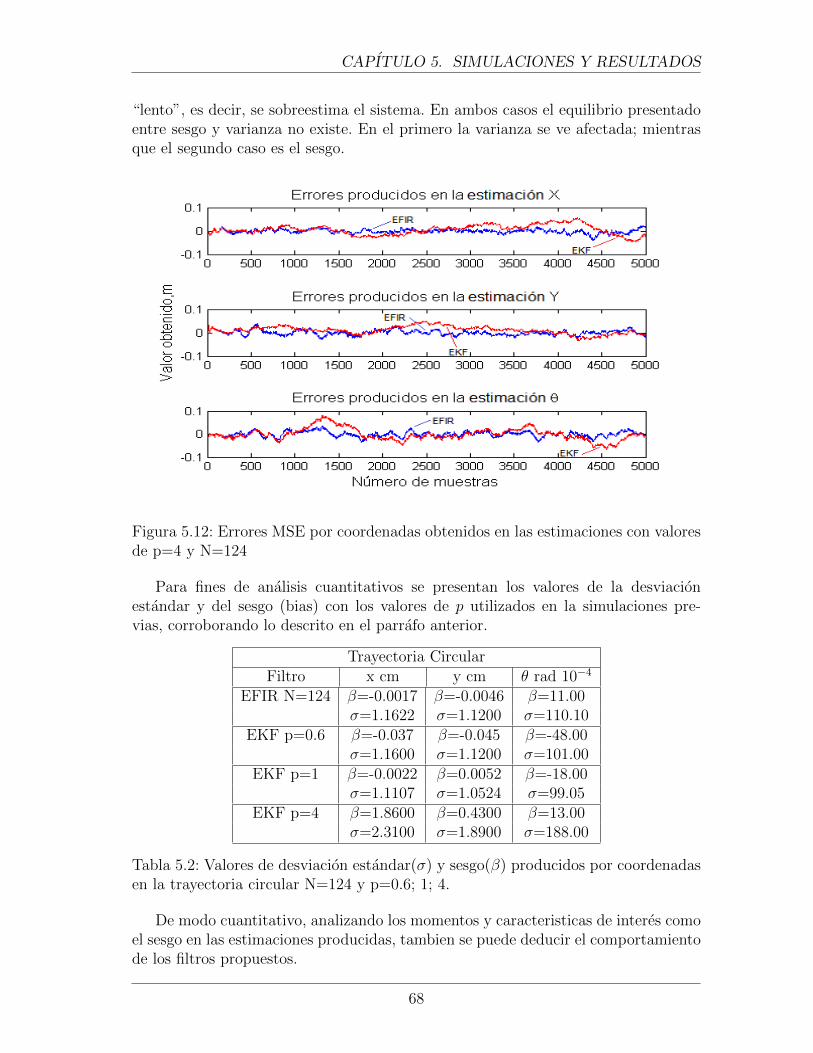
CAPITULO 5. SIMULACIONES Y RESULTADOS
“lento”, es decir, se sobreestima el sistema. En ambos casos el equilibrio presentadoentre sesgo y varianza no existe. En el primero la varianza se ve afectada; mientrasque el segundo caso es el sesgo.
Figura 5.12: Errores MSE por coordenadas obtenidos en las estimaciones con valoresde p=4 y N=124
Para fines de analisis cuantitativos se presentan los valores de la desviacionestandar y del sesgo (bias) con los valores de p utilizados en la simulaciones pre-vias, corroborando lo descrito en el parrafo anterior.
Trayectoria CircularFiltro x cm y cm θ rad 10−4
EFIR N=124 β=-0.0017 β=-0.0046 β=11.00σ=1.1622 σ=1.1200 σ=110.10
EKF p=0.6 β=-0.037 β=-0.045 β=-48.00σ=1.1600 σ=1.1200 σ=101.00
EKF p=1 β=-0.0022 β=0.0052 β=-18.00σ=1.1107 σ=1.0524 σ=99.05
EKF p=4 β=1.8600 β=0.4300 β=13.00σ=2.3100 σ=1.8900 σ=188.00
Tabla 5.2: Valores de desviacion estandar(σ) y sesgo(β) producidos por coordenadasen la trayectoria circular N=124 y p=0.6; 1; 4.
De modo cuantitativo, analizando los momentos y caracteristicas de interes comoel sesgo en las estimaciones producidas, tambien se puede deducir el comportamientode los filtros propuestos.
68

CAPITULO 5. SIMULACIONES Y RESULTADOS
5.2. Trayectoria lineal: el robot viaja a traves de
una rejilla RFID con una ruta planeada
En este nuevo apartado se considera una rejilla de RFID como la presentadaen la figura 3.7b, en la cual se tienen 20 etiquetas RFID separadas entre ellas unadistancia de 4m; las mismas se han colocado en el piso o las paredes y las coordenadasse pueden predecir empleando geometrıa. Como se ha mencionado a lo largo delescrito, el lector de etiquetas instalado en el robot movil debe ser capaz de leer almenos dos etiquetas. En este caso se consideran 3500 muestras y se supone que lasfuentes de ruido que afectan al vector de estado y a las entradas son muy pequenas,por lo tanto su desviacion estandar tomarıa el valor de: σL = σR = σx = σy = 1mmy σθ = 0,05◦ respectivamente; pero por el contrario se considera que la fuente deruido que afecta a la medicion es considerablemente grande y genera una desviacionestandar σv1 = σv2 = 1,5cm y σv3 = 2◦. Sin embargo, determinar las coordenadasde las etiquetas de manera inversa como se realizo en la seccion anterior, empleandolas ecuaciones (3.16) y (3.17) respectivamente, no es posible en este caso; dado queel algoritmo del filtro EFIR requiere como una de sus entradas el vector lineal Ynse toma entonces la salida del filtro EKF y se determina el valor de Nopt en el cualla estimacion producida es satisfactoria. Con el afan de determinar el efecto de estevalor p y la longotud requerida del vector Yn sobre el filtro EFIR, se modificaransus valores y se analizaran los resultados obtenidos en las estimaciones. La figura5.13a representa la rejilla de RFID descrita mientras que la figura 5.13b la ruta quedebiera transitar el robot movil.
(a) Rejilla RFID (b) Trayectoria
Figura 5.13: Modelo de rejilla RFID utilizado y trayectoria deseada
De igual modo que en la seccion anterior, se comparan las estimaciones producidaspor cada filtro; en la figura 5.14 se presentan las estimaciones producidas por losfiltros analizados cuando trabajan con valores optimos p = 1 y N = 40. Ante estas
69

CAPITULO 5. SIMULACIONES Y RESULTADOS
Figura 5.14: Estimaciones producidas por los filtros EKF y EFIR con valores de p=1y N=40
condiciones las estimaciones producidas presentan un alto grado de precision y seobserva que en este caso la diferencia entre ellas es imperceptible.
Se procede a analizar el error MSE en las estimaciones producidas por coordena-das y calcular el valor optimo de N a traves de la ecuacion (4.73), obteniendo comoresultado que el valor MSE mınimo se presenta cuando N = 40, siendo este el valoroptimo para el filtro EFIR. La figura 5.15 representa el trazo del error mencionadoy el valor optimo indicado para cada filtro.
Figura 5.15: Trazo del error en los filtros EKF y EFIR
70

CAPITULO 5. SIMULACIONES Y RESULTADOS
5.2.1. Analisis de errores: Trayectoria lineal EKF p=1; EFIRN=10 y N=150
Se realizan las siguientes pruebas para comprobar los efectos del valor de Nen el filtro EFIR, ahora en una rejilla donde se interactua con un numero mayor deetiquetas RFID. Se considera que el filtro de Kalman extendido utiliza las condicionesideales p = 1; por lo que se emplean diferentes valores de N con la finalidad deobservar el comportamiento del filtro EFIR.
Figura 5.16: Error MSE por coordenadas en los filtros EKF y EFIR con p=1 y N=10
Como se puede apreciar en la figura 5.16, los valores de N por debajo de su valoroptimo, en este caso Nopt = 40, presentan ruido “rapido”, en la estimacion, mientrasen la figura 5.17 se observa el caso contrario, donde el valor de N se encuentrapor encima del valor optimo, en este caso se utilizo N = 150 para ejemplificar;observando ası la presencia de ruido “lento”, en las estimaciones producidas tal comose presento en el caso de la trayectoria circular.
Si se analizan de manera cuantitativa las figuras presentadas previamente, seaprecia el cambio en los valores de la desviacion estandar y el sesgo (bias) producidoen las estimaciones.
La tabla 5.3 incluye los cambios en el sesgo(Bias) y en la desviacion estandar, loscuales dependen del numero de N empleado para producir la estimacion. De ahı elpor que emplear el valor de N optimo.
71
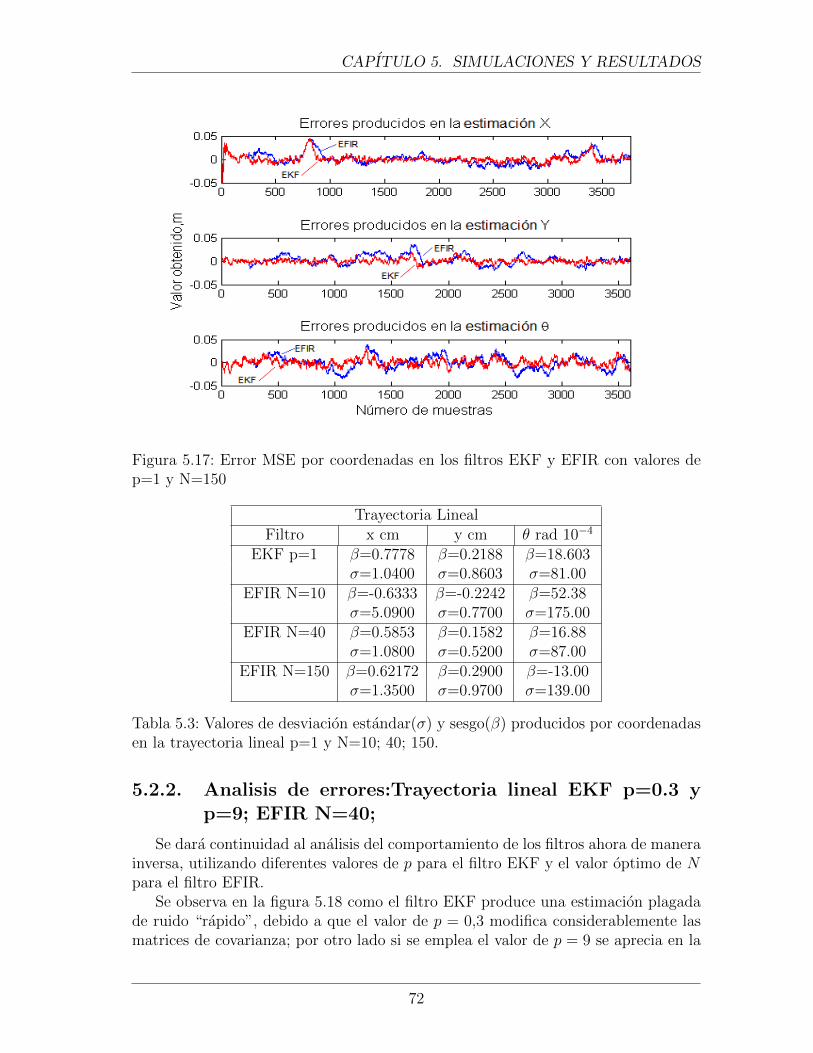
CAPITULO 5. SIMULACIONES Y RESULTADOS
Figura 5.17: Error MSE por coordenadas en los filtros EKF y EFIR con valores dep=1 y N=150
Trayectoria LinealFiltro x cm y cm θ rad 10−4
EKF p=1 β=0.7778 β=0.2188 β=18.603σ=1.0400 σ=0.8603 σ=81.00
EFIR N=10 β=-0.6333 β=-0.2242 β=52.38σ=5.0900 σ=0.7700 σ=175.00
EFIR N=40 β=0.5853 β=0.1582 β=16.88σ=1.0800 σ=0.5200 σ=87.00
EFIR N=150 β=0.62172 β=0.2900 β=-13.00σ=1.3500 σ=0.9700 σ=139.00
Tabla 5.3: Valores de desviacion estandar(σ) y sesgo(β) producidos por coordenadasen la trayectoria lineal p=1 y N=10; 40; 150.
5.2.2. Analisis de errores:Trayectoria lineal EKF p=0.3 yp=9; EFIR N=40;
Se dara continuidad al analisis del comportamiento de los filtros ahora de manerainversa, utilizando diferentes valores de p para el filtro EKF y el valor optimo de Npara el filtro EFIR.
Se observa en la figura 5.18 como el filtro EKF produce una estimacion plagadade ruido “rapido”, debido a que el valor de p = 0,3 modifica considerablemente lasmatrices de covarianza; por otro lado si se emplea el valor de p = 9 se aprecia en la
72

CAPITULO 5. SIMULACIONES Y RESULTADOS
Figura 5.18: Error MSE por coordenadas en los filtros EKF y EFIR con valores dep=0.3 y N=40
figura 5.19 la presencia de ruido “lento”, y pequenas divergencias en la estimacionproducida. Ambos casos demuestran el efecto de trabajar con valores de las matricesde covarianza no conocidos o ideales.
Figura 5.19: Error MSE por coordenadas en los filtros EKF y EFIR con valores dep=9 y N=40
73
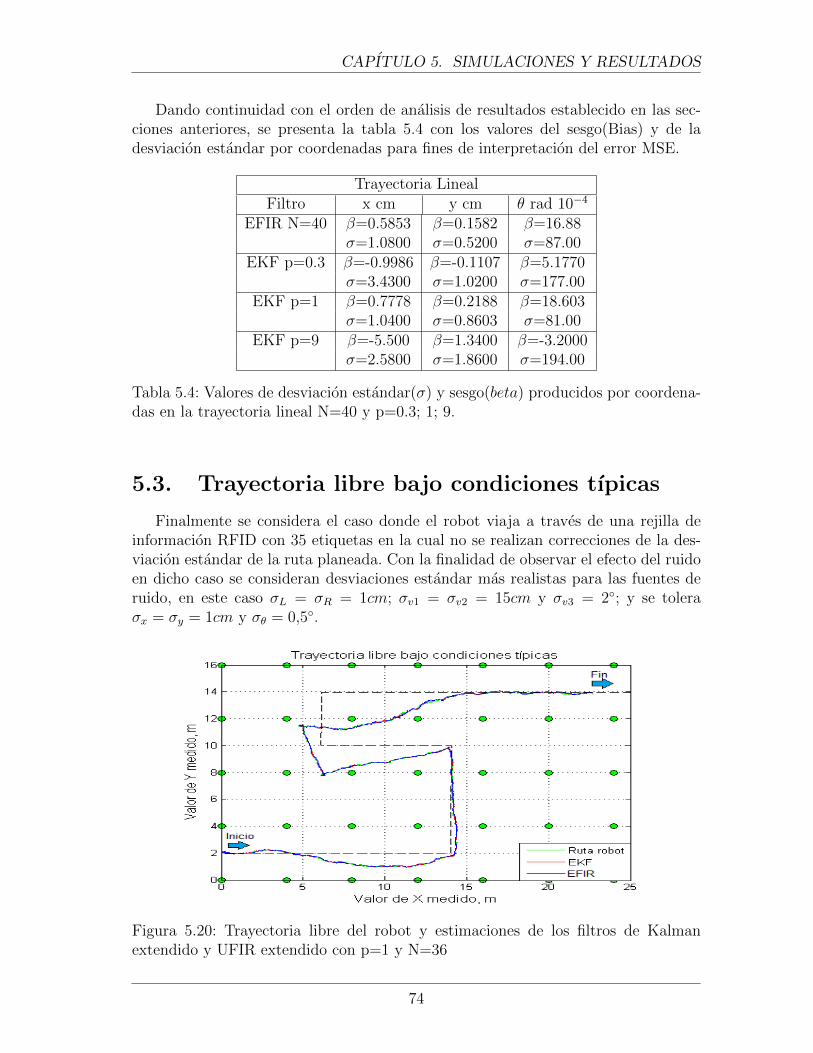
CAPITULO 5. SIMULACIONES Y RESULTADOS
Dando continuidad con el orden de analisis de resultados establecido en las sec-ciones anteriores, se presenta la tabla 5.4 con los valores del sesgo(Bias) y de ladesviacion estandar por coordenadas para fines de interpretacion del error MSE.
Trayectoria LinealFiltro x cm y cm θ rad 10−4
EFIR N=40 β=0.5853 β=0.1582 β=16.88σ=1.0800 σ=0.5200 σ=87.00
EKF p=0.3 β=-0.9986 β=-0.1107 β=5.1770σ=3.4300 σ=1.0200 σ=177.00
EKF p=1 β=0.7778 β=0.2188 β=18.603σ=1.0400 σ=0.8603 σ=81.00
EKF p=9 β=-5.500 β=1.3400 β=-3.2000σ=2.5800 σ=1.8600 σ=194.00
Tabla 5.4: Valores de desviacion estandar(σ) y sesgo(beta) producidos por coordena-das en la trayectoria lineal N=40 y p=0.3; 1; 9.
5.3. Trayectoria libre bajo condiciones tıpicas
Finalmente se considera el caso donde el robot viaja a traves de una rejilla deinformacion RFID con 35 etiquetas en la cual no se realizan correcciones de la des-viacion estandar de la ruta planeada. Con la finalidad de observar el efecto del ruidoen dicho caso se consideran desviaciones estandar mas realistas para las fuentes deruido, en este caso σL = σR = 1cm; σv1 = σv2 = 15cm y σv3 = 2◦; y se toleraσx = σy = 1cm y σθ = 0,5◦.
Figura 5.20: Trayectoria libre del robot y estimaciones de los filtros de Kalmanextendido y UFIR extendido con p=1 y N=36
74

CAPITULO 5. SIMULACIONES Y RESULTADOS
En la figura 5.20 la lınea punteada representa la ruta planeada, la cual de maneraideal deberıa seguir el robot movil. Se contempla un total de 5600 muestras y seconsidera que el error inicial P0 = 0; el cual se modifica en cada ciclo de estimacion;sin embargo, debido a las condiciones de ruido, la trayectoria que realiza el mismoes la producida por la lınea en color verde; poco observable en la figura dado quelas estimaciones coinciden de tal manera con la misma que dificultan su apreciacion.Cabe mencionar que, siguiendo los pasos para obtener el valor optimo de N en elfiltro EFIR empleando la ecuacion (4.73), se obtiene que Nopt = 36 y se mantieneel caso ideal para el EKF como p = 1. Analizando las estimaciones producidas por
Figura 5.21: Analisis de errores en estimaciones por coordenadas de los filtros EKFy EFIR con valores de p=1 y N=36
coordenadas a traves del MSE existente en las mismas, es distinguible a simple vistacomo las estimaciones de ambos filtros producen un MSE bajo. Ambas estimacionespresentan un alto grado de precision y ademas se asemejan bastante entre sı, por loque se demuestra que el filtro EFIR puede ser un fuerte rival para el filtro EKF enlos diferentes escenarios planteados. La figura 5.21 es una muestra de ello, donde apesar de las condiciones descritas los resultados satisfacen las necesidades requeridasy las exigencias planteadas.
5.3.1. Analisis de errores: Trayectoria tıpica EKF p=1 ; EFIRN=5 y N=150
Se prosigue a realizar los casos pertinentes de estudio. En esta ocasion analizandofenomenos de interes presentados en las diferentes simulaciones, iniciando con el caso
75

CAPITULO 5. SIMULACIONES Y RESULTADOS
del filtro EFIR, en donde de manera similar que en las secciones anteriores se obser-van los efectos y la presencia de los ruidos “rapido”, y “lento”, en las estimacionesproducidas debido a valores de N fuera del rango de trabajo. Se emplean valores deN = 5 y N = 150, sustentando ası lo mencionado previamente.
Figura 5.22: Analisis de errores en estimaciones por coordenadas de los filtros EKFy EFIR con valores de p=1 y N=5
La figura 5.22 muestra la presencia del ruido “rapido”, en las estimaciones pro-ducidas por el efecto del valor de N = 5. Mientras que en el caso de la figura 5.23se observa en las estimaciones producidas la presencia de ruido “lento”por los efec-tos del valor de N = 150. Si se comparan los datos de las desviaciones estandar ydel sesgo(Bias) obtenidos en cada estimacion, se puede construir la tabla 5.5 que sepresenta a continuacion.
Se proseguira con el analisis de las simulaciones, ahora para el caso del filtro EKFcambiando los valores de p, observando ası su comportamiento y efectos; a su vez seestudia el filtro EFIR ante dichas variantes.
5.3.2. Analisis de errores: Trayectoria tıpica EFIR N=36 ,EKF p=0.2 y p=9
En dicha seccion se comenzara con el analisis del filtro EKF cuando empleamos elvalor de p = 0,2. Como se ha mencionado de manera repetitiva durante este capıtulo,el valor de p modifica los valores de las matrices de covarianza pero al trabajar concondiciones tıpicas surgen efectos de interes de estudio.
La figura 5.24 representa el error MSE presentando en cada coordenada de estu-dio, apareciendo divergencia en las estimaciones de las coordenadas (x, y) respecti-vamente, concepto que fue explicado con antelacion en el apartado 2.2.5.
76

CAPITULO 5. SIMULACIONES Y RESULTADOS
Figura 5.23: Analisis de errores en estimaciones por coordenadas de los filtros EKFy EFIR con valores de p=1 y N=150
Trayectoria TıpicaFiltro x cm y cm θ rad 10−4
EKF p=1 β=0.2700 β=0.2300 β=-0.5788σ=4.9300 σ=4.5900 σ=214.00
EFIR N=5 β=0.2600 β=-0.2264 β=-0.7528σ=8.2800 σ=8.2000 σ=219.00
EFIR N=36 β=0.2400 β=0.1500 β=-0.5721σ=5.4000 σ=5.1900 σ=513.00
EFIR N=150 β=0.4700 β=0.3000 β=0.7700σ=9.7100 σ=8.7400 σ=1277.00
Tabla 5.5: Valores de desviacion estandar(σ) y sesgo(β) producidos por coordenadasen la trayectoria lineal p=1 y N=5; 36; 150.
En este caso se puede inferir que la divergencia ocurre debido a que el lectorde etiquetas no sabe con precision cual etiqueta es la adecuada para utilizar en surecorrido, incrementando ası el error en la estimacion; una vez localizada la etiquetacorrecta el error disminuye vertiginosamente, y el proceso de estimacion trascurrede manera normal dentro del rango de trabajo utilizado con la presencia del ruido“rapido”, generando ası ruidos extras no deseados; para fines practicos es importanteobservar mas de cerca dicho fenomeno. La figura 5.25 es un acercamiento de lafigura 5.24. En esta se puede apreciar con claridad como el filtro EKF, durante todoel conjunto de muestras analizados, presenta en diferentes instantes de tiempo elefecto descrito; sin embargo, en el filtro EFIR solo ocurre en la primera etapa en
77

CAPITULO 5. SIMULACIONES Y RESULTADOS
Figura 5.24: Analisis de errores en estimaciones por coordenadas de los filtros EKFy EFIR con valores de p=0.2 y N=36
Figura 5.25: Efecto de divergencia en las estimaciones de las coordenadas x ; y delos filtros EKF y EFIR con valores de p=0.2 y N=36
la estimacion para la coordenada x dado que en la coordenada y no presenta dichoefecto, esto es debido al hecho de utilizar el vector Yn producto de la salida del filtro
78

CAPITULO 5. SIMULACIONES Y RESULTADOS
EKF.
Figura 5.26: Efecto de divergencia en las estimaciones de las coordenadas x;y de losfiltros EKF y EFIR con valores de p=9 y N=36
Ahora bien, al utilizar un valor mucho mayor para p como p = 9, se observanuevamente como el filtro EKF produce una estimacion poco fiable y plagada deruido “lento”, pero en contraparte, observamos como el filtro EFIR conserva unaadecuada estimacion careciendo de los efectos mencionados anteriormente. La figura5.26 muestra las estimaciones por coordenadas y el resultado obtenido en el procesopreviamente.
Trayectoria tıpicaFiltro x cm y cm θ rad 10−4
EFIR N=36 β=0.2400 β=0.1500 β=-0.5721σ=5.4000 σ=5.1900 σ=513.00
EKF p=0.2 β=4.1600 β=1.6600 β=-3.5058σ=30.9000 σ=5.2400 σ=513.00
EKF p=1 β=0.2700 β=0.2300 β=-0.5788σ=4.9300 σ=4.5900 σ=214.00
EKF p=9 β=4.8500 β=1.7700 β=0.6770σ=20.5100 σ=16.2000 σ=1236.00
Tabla 5.6: Valores de desviacion estandar(σ) y sesgo(β) producidos por coordenadasen la trayectoria lineal N=36 y p=0.2; 1; 9.
Se finaliza esta etapa con la habitual tabla descriptiva de sesgo (Bias) y desviacion
79

CAPITULO 5. SIMULACIONES Y RESULTADOS
estandar producidos en cada estimacion; acotando que ante las condiciones conside-radas y los efectos generados, se observa un incremento considerable en los valoresde los mismos, especialmente en la desviacion estandar con hincapie en el angulo θ.Es importante recalcar una vez mas la eficiencia de los filtros al trabajar con condi-ciones optimas, dado que los valores de sesgo(Bias) y desviacion estandar alcanzanniveles relativamente bajos en comparacion con los otros rangos empleados. la tabla5.6 contiene el conjunto de valores que representan las caracterısticas descritas en elpresente parrafo, proporcionando ası informacion relevante en la comparativa de losfiltros.
5.4. Verificacion de resultados
Como se aclaro en el primer capıtulo del presente trabajo, esta investigacion cons-ta de un conjunto de simulaciones numericas, por lo que las pruebas experimentalesde los mismos se consideran como un trabajo a futuro; por lo tanto para verificarlos resultados presentados se puede utilizar el valor de MSE empleado durante es-te capıtulo pero ahora aplicandole la raız cuadrada (RMSE) como una metrica quepermita comprender el efecto del trazo del error Pn; se define el mismo como J de-limitado por la ecuacion 5.3, donde se excluye el angulo θ por presentar diferentesunidades; es comun en la navegacion 2D encontrar dicha excepcion:
J =
√√√√ 1
T
T+N−2∑i=N−1
[(xi − xi)2 + (yi − yi)2] (5.3)
T representa el numero de puntos, mientras que N − 1 representa el numerode puntos en donde se obtiene la primera salida de estimacion del filtro EFIR. Deeste modo se compara el error promedio producido en la localizacion del filtro EFIRcontra el filtro de Kalman (implementado en diferentes trabajos mencionados en labibliografıa relacionados a la localizacion de un robot movil) de lo cual se obtiene latabla 5.7:
Tabla comparativa (cm)
Tipo de prueba EFIREKF
[48] [46] [49] [47] [50] [51]Simulacion 3.34· · · 8.56 ≈ 30 - 12.94 2.82 - 9
Implementacion - - 12.8 - 13.5 ≈ 27 13
Tabla 5.7: Comparativo de valores RMSE del filtro EFIR con respecto a diferentestrabajos de localizacion de vehıculos moviles con filtros de Kalman
Por lo tanto los valores correspondientes al filtro EFIR representan el RMSE apli-cando la ecuacion (5.3) en los casos de trayectoria lineal (el valor de la izquierda) y dela trayectoria lineal bajo condiciones tıpicas (el valor de la derecha) respectivamen-te; los valores para el filtro EKF empleado en este trabajo, bajo condiciones ideales
80

CAPITULO 5. SIMULACIONES Y RESULTADOS
JEKF (ideal : p = 1) = 3,30 · · · 8,44 indican que ante condiciones ideales el filtro deKalman supera los modelos de filtro de Kalman utilizados en la bibliografia [46]-[51]respectivamente, mientras que en el caso del filtro EFIR su desempeno supera en laprecision a la mayorıa de los casos mencionados.
Ademas se incluye una de las caracterısticas que suele ser de interes a la hora depresentar un algoritmo; esta se denomina el tiempo computacional, es decir, cuantotarda en ejecutarse el algoritmo de inicio a fin; esta caracterıstica repercute en lafuncionalidad del mismo y en la aplicacion a la que va destinado por lo tanto sepresenta en la tabla 5.8 el tiempo empleado por cada algoritmo en realizar unaestimacion.
Tiempo computacionalTrayectoria circular Trayectoria lineal Trayectoria libre
EKF EKF EKFProceso Estimacion Proceso Estimacion Proceso Estimacion53.0104s 1.6870 ms 12.1099s 1.6918ms 13.0194s 1.6217ms
EFIR EFIR EFIRProceso Estimacion Proceso Estimacion Proceso Estimacion114.75s 8.570ms 31.7007s 6.4000ms 40.4860s 7.6000ms
Tabla 5.8: Tiempo computacional de proceso y estimacion requerido en las diferentestrayectorias simuladas
Como se puede apreciar en la tabla 5.8 el filtro de EFIR requiere un mayor tiempode estimacion y por ende un mayor tiempo en el proceso de trabajo. Esto debido ala presencia de los ciclos for que utiliza para realizar su estimacion, como se presentoen la tabla 4.2; dicha situacion se pude catalogar como una de las debilidades delfiltro al compararla con el EKF que, aunque es un filtro de caracter recursivo, realizasu estimacion en un tiempo menor; sin embargo la fortaleza del EFIR radica enque las condiciones del ruido que afectan al sistema no son necesarias para que esteproduzca una estimacion con un alto grado de precision. Cabe resaltar que productode este trabajo de investigacion se deriva el artıculo presentado en la referencia [52];ası como tambien ha servido de base para otros trabajos [53] y [54] realizados por elgrupo de investigacion encabezado por el Dr. Yuriy Shmaliy.
81
Capıtulo 6
Conclusiones
En la actualidad la presencia de la robotica en las industrias se torna cada vezmas frecuente, especialmetne los robots moviles con ruedas y, aunque su diseno ymodelado matematico han sido ampliamente estudiados, siempre representan un retoadaptarlos para satisfacer las necesidades requeridas, no solo desde el desarrollo me-canico y los diferentes elementos que engloba; sino las diferentes consideraciones quese deben de tener presentes a la hora de modelarlo. Esto por que en la mayorıa de lostrabajos previos realizados y en diferentes investigaciones en curso se recomiendanmodelos sencillos o comunes como los diferenciales o ackerman.
Se demostro como las rejillas de informacion con RFID son una herramienta po-derosa para aplicaciones industriales; las cuales aun conservan mucho potencial paraexplotar sobre todo dentro de la robotica movil; ademas, dicha tecnologıa puedellegar a cubrir otras necesidades industriales que se presenten a futuro. Una de lasprincipales ventajas que posee es el bajo costo y el amplio espacio que puede cubrir,ademas, la versatilidad de trabajo en diferentes rangos de frecuencia, ası como losdiferentes tipos y modelos de etiquetas existentes, los convierten en un instrumentoflexible de facil adaptacion para el desarrollo de proyectos ingenieriles.
Se ha hecho hincapie en que el estudio del procesamiento digital de senales po-see un amplio campo de aplicacion y de constante desarrollo, permitiendo solucionary satisfacer necesidades tecnologicas que requieren una amplia precision o exactitud.Por lo que este trabajo presento el desarrollo y la simulacion de algoritmos de fil-tros digitales aplicados a problematicas industriales a traves de la comparacion delos filtros EKF y EFIR respectivamente. Por dicha razon se realizo un conjunto depruebas exhautivas cuyos resultados se presentaron en el capıtulo anterior
De modo que el presente trabajo de investigacion propone un filtro EFIR que poseeuna mayor robustez y precision que el filtro EKF bajo condiciones industriales detrabajo, es decir, condiciones tıpicas donde la presencia de ruido sea elevada y dondeel costo del equipo de medicion utilizado por el robot movil son determinantes a lahora de realizar las mediciones. En el algoritmo del filtro EFIR, aunque presenta demanera general un esquema de trabajo similar a la forma del filtro de Kalman, la
82

CAPITULO 6. CONCLUSIONES
estimacion producida depende directamente del valor de N utilizado. Por esto, du-rante el conjunto de simulaciones realizadas bajo diferentes condiciones de trabajose puede inferir que cuando el filtro EFIR trabaja con el valor de N adecuado, esdecir optimo, posee mayor robustez y es menos propenso a sufrir divergencia u otrosefectos indeseados; de modo general se considera que:
La divergencia se produce en ambos filtros cuando se consideran fuentes de rui-do con valores de varianza elevados, tal como los presentados en la trayectorialineal tıpica; sin embargo la robustez del filtro EFIR genera que la divergenciasolo ocurra en el primer tramo de muetras, esto debido a que depende de losdatos almacenados en el vector Yn; mientras que en el filtro de Kalman la di-vergencia se presenta a lo largo del trayecto tanto para la coordenada x comopara la coordenada y.
Los efectos de utilizar valores por debajo o por encima del valor de N optimoen cada filtro derivan en estimaciones con presencia de ruido “rapido”, o ruido“lento”, esto por la relacion existente del valor deN con cada iteracion realizadaen el tiempo; ası como tambien el desconocimiento de los valores de las matricesde covarianza en el filtro EKF perjudica el buen desempeno del mismo.
Se finaliza este trabajo aclarando que algun otro problema o efecto que pudierasurgir en la vida real dependera del ambiente de trabajo; por lo que llevar a laimplementacion fısica este proyecto se considera como trabajo a futuro, ası como eldesarrollo de nuevos filtros o algoritmos hıbridos que puedan derivarse de la presenteinvestigacion.
83
Bibliografıa
[1] J. Vignolo, “Introduccion al procesamiento de senales”, Introduccion alprocesamiento digital de senales. universitarias de Valparaiso, Ed.Chile,2008, pp.15-25.
[2] H. Nyquist, “Certain Topics in Telegraph Trasmission”. Amaerican Te-lephone and Telegraph Co., vol.47, no.2, pp.617-644, 1928.
[3] C. E. Shannon,“Proceedings of the IRE”, Bell Telephone Laboratories.,vol.37, no.1, pp.10-21, 1949.
[4] N. Wiener, “Extrapolation, interpolation and smoothing of stationarytime series”, The M.I.T. Press, Cambridge, Mass, 1949.
[5] A. N. Kolmogorov, “Interpolation and extrapolation”, Bull. del acade-mie des sciences de U.S.S.R., vol.Ser.Math, no.5, pp.3-14, 1941.
[6] R. E. Kalman, “A new approach to linear filtering and predictionproblems”, Transactions of the ASME Journal of Basic Engineering.,vol:82, no.Series D, pp.35-45, 1960.
[7] H.Cox, “On the estimation of state variables and parameters for noisydynamic systems”, IEEE Transactions on Automatic Control., vol.9,no.1, pp.5-12, 1964.
[8] R. S. Bucy, P. D. Joseph, “Filtering for stochastic processes with ap-plications to guidance”.American Mathematical Soc.,vol.326, 1987.
[9] W. H. Kwon, P. S. Kim, and P. Park, “A receding horizon kalmanFIR filter for discrete time-invariant systems”, IEEE Trans. Autom.Control., vol.44, no.9, pp.1787-1791, Sep. 1999.
[10] W. H. Kwon, and H. H. Soo, “Receding horizon control: model predic-tive control for state models”. Springer,2006.
[11] P. S. Kim and M. E. Lee, “A new FIR filter for state estimation and itsapplications”, J. Comput. Sci. Technol., vol.22, no.5, pp.779-784, Sep.2007.
[12] P. S. Kim, “An alternative FIR filter for state estimation in discretetimesystems”, Digit. Signal Process., vol.20, no.3, pp.935-943, May. 2010.
84

BIBLIOGRAFIA
[13] W. H. Kwon, P. S. Kim, and S. H. Han, “A receding horizon unbiasedFIR filter for discrete-time state space models”, Automatica., vol.38,no.3, pp.545-551, Mar. 2002.
[14] Y. S. Shmaliy, “Linear optimal FIR estimation of discrete time inva-riant state-space models”, IEEE Trans. Signal Process., vol.58, no.6,pp.3086-3096, Jun. 2010.
[15] Y. S. Shmaliy, “Noise power gain for discrete-time FIR estimators”,IEEE Signal Processing Letters., vol.18, no.4, pp.207-210, Apr. 2011.
[16] Y. S. Shmaliy, “An iterative kalman-like algorithm ignoring noise andinitial conditions”, IEEE Trans. Signal Process., vol.59, no.6, pp.2465-2472, Jun. 2011.
[17] F. Ramirez Echeverria, A. Sarr, O. Ibarra Manzano, and Y. S. Shma-liy, “Studies of optimal memory for discrete time FIR filters in state-space”, in 2012 IEEE Statistical Signal Processing Workshop (SSP),august 5-8, 2012, Ann Arbor,MI,USA, pp.349-352.
[18] O. Ibarra Manzano, F. Ramirez Echeverria, and Y. S. Shmaliy, “Ex-tended UFIR filtering of nonlinear models corrupted by white gaussiannoise”,in 2012 IEEE Statistical Signal Processing Workshop (SSP), au-gust 5-8, 2012, Ann Arbor,MI,USA, pp.345-348.
[19] N. J. Nillson,“A mobile automaton: an application of artificial intelli-gence techniques”,SRI INTERNATIONAL MENLO PARK CA ARTI-FICIAL INTELLIGENCE CENTER, Juanary 1969.
[20] B. H. Donald,“Radio transmission systems with modulatable passiveresponder”,United State pantent office, no.2,927,31, 1 Mar.1960.
[21] S. Willis and S. Helal, “RFID information grid for blind navigation andway finding”, in Proc. IEEE Int. Symp. on Wearable Computers, 2005,pp.3437.
[22] Y. C. Chen and J. H. Chou, “Mobil robot localization by RFIDmethod”,in Proc. 7th Int. Conf. Digital Commun.(ICDT-2012), 2012,pp.33-38.
[23] R. Krigslund, P. Popovski, G. F. Pedersen, and K. Olesen, “Interferencehelps to equalize the read range and reduce false positives of passiveRFID tags”, IEEE Trans. on Industr. Electron., vol.59, no.12, pp.4821-4830, Dec.2012.
[24] S. Park and H. Lee, “Self-recognition of vehicle position using UHFpassive RFID tags”, IEEE Trans. on Industr. Electron., vol.60, no.1,pp.226-234, Jan.2013.
85

BIBLIOGRAFIA
[25] T. Tsukiyama, “Navigation system for mobile robots using RFID tags”,in Proc. Int. Conf. on Advanced Robotics (ICAR), Coimbra, Portugal,2003, pp.1130-1135.
[26] H. Chae and K. Han, “Combination of RFID and vision for mobilerobot localization”, in Proc. IEEE Int. Conf. Intell. Sensors, SensorNetw. Inf. Process., 2005, pp.75-80.
[27] F. Viani, P. Rocca, G. Oliveri, D. Trinchero, and A. Massa, “Localiza-tion,tracking, and imaging of targets in wireless sensor networks”, Aninvited review,Radio Science., vol.46, no.RS5002, pp.1-12, 2011.
[28] S. P. Subramanian, J. Sommer, S. Schmitt, and W. Rosenstiel, “Relia-ble RFID based indoor localization for pedestrians”, in Proc. 16th Int.Conf. SoftCOM, Sep.2008, pp.218-222.
[29] B.S. Choi, J. W. Lee, J. J. Lee, and K.T. Park, “A Hierarchical Al-gorithm for Indoor Mobile Robot Localization Using RFID Sensor Fu-sion”, IEEE Trans. on Industr. Electron., vol.58, no.6, pp.2226-2235,Jun.2011.
[30] W. Gueaieb and M. S. Miah, “An intelligent mobile robot naviga-tion technique using RFID technology”, IEEE Trans. Instrum. Meas.,vol.57, no.9, pp.1908-1917, Sep.2008.
[31] F. Miyara,“Introduccion al estudio del ruido”, Introduccion al analisisfrecuencial y al ruido Electrico, Riobamba 245 bis, 3era Ed. Argentina,2003, pp.32-35.
[32] H. Stark and J. W. Woods,“Noise and Signals”,Probability,RandomProcesses, and Estimation Theory for Engineers.Prentice-Hall, Ed.Mexico, 2001, pp.30-38.
[33] M. R. Spiegel, “Conceptos basicos de probabilidad: momentos”, Pro-babilidad y estadıstica, McGraw-Hill, Ed.Mexico, 1997, pp.21-26.
[34] R. Delgado, “Variable aleatoria”, Probabilidad y estadıstica para cien-cias e ingenierıas, Delta publicaciones, Ed.Espana, 2008, pp.42-54.
[35] A. Lazea, “Aspects on path planning for mobile robots”, Reporte in-terno de la Technical University of Cluj-Napoca, 2001, pp.125-132.
[36] P. F. Muir and C. P. Neuman, “Kinematic modeling of wheeled mo-bile robots”, Robotics Institute, Carnegie Mellon University, Pitts-burgh,PA, Tech.Rep.CMU-RI-TR-86-12, 1992.
[37] D. Todd, “Kinds of robots”, Walking machines: An introduction tolegged robotics, Kogan Page , Ed.London, pp.101-107, 1985.
86

BIBLIOGRAFIA
[38] G. Grasnoik and J. Borenstein, “Integrated joint actuator for ser-pentine robots”. IEEE/ASME Transactions on Mechatoronics., vol.10,pp.473-481, 2005.
[39] M. C. Gordon, “kinematic of a diferencial robot”, The Robot Builder’sBonanza, McGraw-Hill, Ed.USA, pp.174-186, 2001.
[40] J. Zhou and J. Shi, “RFID localization algorithms and applicationsareview”, Intell. Manuf., vol.20, no.6, pp.695-707, Dec.2009.
[41] Y.S Shmaliy. “Suboptimal FIR filtering of nonlinear models in additi-ve white Gaussian noise”, IEEE Trans. Signal Process., vol.57, no.10,pp.5519-5527, Oct.2012.
[42] F. Ramirez Echeverria, A.Sarr, and Y.S Shmaliy, “Optimal memory fordiscrete time FIR filters in space state”, IEEE trans. Signal Process.,vol.62, no.3, pp.557-561, Mar.2014.
[43] I. Garcıa Garrido, “Estimacion en sistemas con observaciones incier-tas con correlacion en la incertidumbre”, M.S Tesis, Departamento deestadıstica e investigacion operativa, Universidad de Granada, Grana-da,Espana, 2010.
[44] O. Katsuhiko, “Sistemas dinamicos”, Sistemas de control en tiempodiscreto, Prentice Hall, 2da ed Mexico, 1996, pp.50-57.
[45] K. K. Hassan, “Sistemas lineales”, Nonlinear Systems, Prentice Hall,3ra ed Mexico, 2002, pp.42-46.
[46] S. S. Saab and Z. S. Nakad, “A standlone RFID indoor positionningsystem using passive tags”, IEEE Trans on Industr Electron., vol.58,no.5, pp.1961-1970. May.2011.
[47] E. DiGiampaolo and F. Martinelli, “A passive UHF-RFID system forthe localization of an indoor autonomous vehicle”, IEEE Trans. onIndustr. Electron., vol.59, no.10, pp.3961-3970, Oct.2012.
[48] F. Martinelli, “Robot localization: comparable performance of EKFand UKF in some interesting indoor settings”, in Proc. 16th Mediterra-nean Conf. on Contr. Autom., Ajaccio,France, June.2008, pp.499-504.
[49] T. Nick, J. Gotze, W. John, and G. Stonner, “Localization of pas-sive UHF RFID labels using an unscented Kalman filter with relativeposition information”, in Proc. ITD-Fachbericht -RFID SysTech, Dres-den,Germany, May.2011, pp.1-7.
[50] V. Savic, A. Athalye, M. Bolic, and P. M. Djuric, “Particle filtering forindoor RFID tag tracking”, In Statistical Signal Processing Workshop(SSP), 2011 IEEE, IEEE 2011, pp.193-196.
87

BIBLIOGRAFIA
[51] M. Boccadoro, F. Martinelli, and S. Pagnotelli, “Constrained and quan-tized Kalman fltering for an RFID robot localization problem”, Auton.Robots., vol.29, no.3-4, pp.235-251, Nov.2010.
[52] J. Pomarico Franquiz, Y. S Shmaliy, S. Zhao, “Self-localizationin RFID tag information networks using extended UFIR filteri-ng”, 18th Int.Conf.on Circuits (part of 18th Int.Conf.on Circuits,Systems,Comunications and Computers-CSCC 2014), Santorini Is-land,Greece, Jul.2014, pp.286-289.
[53] S. Zhao, J. Pomarico Franquiz, Y. S. Shmaliy, “An approach to nonli-near state estimation using extended FIR filtering”, in Proc.22nd Euro-pean Signal Processing Conference, Lisbon,Portugal, Sep.2014, pp.1-5.
[54] M. Granados Cruz, J. Pomarico Franquiz, Y. S. Shmaliy, L. J. Mo-rales Mendoza, “Triangulation based indoor robot localization usingextended FIR/Kalman filtering”, in Proc.2014 11th International Con-ference on Electrical Engineering,Computing Science and AutomaticControl (CCE), Campeche,Mexico, Oct.2014, pp.17-21.
88




















