
KRRI 연구 99-01 - 건설기술정보시스템
525
-
Upload
khangminh22 -
Category
Documents
-
view
17 -
download
0
Transcript of KRRI 연구 99-01 - 건설기술정보시스템

제 출 문
한국철도기술연구원 원장 귀하
이 보고서를 “수요응답형 순환교통시스템(PRT) 핵심기술 개발에 관한 연구”
과제의 보고서로 제출합니다.
2015. 12. 31
주관연구기관명 : 한국철도기술연구원
주관연구책임자 : 정 락 교 책임연구원
연구원 : 서 승 일 수석연구원 목 진 용 수석연구원
목 재 균 수석연구원 윤 성 철 책임연구원
김 동 현 책임연구원 김 대 상 책임연구원
김 상 암 책임연구원 변 윤 섭 책임연구원
엄 주 환 책임연구원 최 일 윤 책임연구원
김 백 현 선임연구원 이 강 원 선임연구원
이 철 규 선임연구원 강 석 원 선임연구원
조 일 선 위촉연구원 양 다 영 위촉연구원
김 현 중 인턴연구원 박 현 아 인턴연구원
위탁연구기관 : 서울과학기술대학교, 부산대학교
- ii -
보고서 요약서
과제코드 PK1502B 총연구기간
2012.06.01.
∼2016.12.31.
(60개월)
당해연도
연구기간
2015.01.01.
∼2015.12.31.
(12개월)
연 구 사 업 명 미래형 신교통시스템 기술 개발
연구과제명대과제명 수요응답형 순환교통시스템(PRT) 핵심기술 개발
세부과제명 수요응답형 순환교통시스템(PRT) 핵심기술 개발
연 구 책 임 자 정락교
해당단계
참 여
연구원수
총 : 19 명
내부: 15 명
외부: 4 명
해당단계
연 구 비
정부:1,800,000
천원
기업:477,000
천원
계:2,277,000
천원
연구기관명 및
소속부서명
한국철도기술연구원
광역도시교통연구본부
도시교통실용화연구팀
참여기업명
우진산전,
토탈솔루션뱅크,
서영엔지니어링,
현대엘리베이터
국제공동연구 상대국명 : 해당없음 상대국연구기관명 : 해당없음
위 탁 연 구연구기관명 : 서울과학기술대
연구기관명 : 부산대학교
연구책임자 : 구정서
연구책임자 : 홍순도
요약(연구결과를 중심으로 개조식 500자 이내) 보고서면수 491 페이지
당해 연구를 통해 아래와 같은 성과를 달성함.
연구개발과제의 목적 및 필요성 검토
연구개발 범위 및 내용 확정
국내외 PRT 기술개발 현황 조사 및 비교
한국형 PRT시스템의 분야별 핵심기술 개발
- 시작차량 보완 / 시제차량 조립완성
- 운행제어시스템 보완제작 및 시작/시제차량 적용
- 한국형 PRT 적용가능 대상지 조사 및 검토
- 연속수직이송시스템 핵심장치 제작 및 기능구현
- 시제차량용 전력공급시스템 제작(기 시스템 개선)
색 인 어
(각 5개 이상)
한 글수요응답, 개인교통수단, 네트워크 운행, 최적경로검색,
무정차 운행
영 어On-demand, PRT(Personal Rapid Transit), Network
Operation, Optimum Path Search, Non-stop

- iii -
요 약 문
Ⅰ. 연구명 : 수요응답형 순환교통시스템(PRT) 핵심기술 개발
Ⅱ. 연구개발의 목적 및 필요성
현대 도시의 대표적인 대중교통수단으로는 지하철과 버스, 택시를 들 수 있다. 지하철
은 정시성과 수송량에 있어 많은 장점이 있음에도 불구하고 과다한 건설비와 운용비 문
제 때문에 국가 및 지자체의 시스템 도입에 경제적으로 많은 부담이 되고 있는 실정이
다. 버스나 택시와 같은 자동차 운송시스템의 경우는 편리한 접근성 및 시스템 구축에
경제적으로 장점이 있지만, 배출가스로 인한 환경오염 문제와 교통 체증으로 인한 정시
성에 있어서 철도 시스템에 비해 단점이 되고 있다. 이와 같은 배경으로 철도 시스템과
타 대중교통수단과의 연계 및 교통약자를 위한 소규모 맞춤형 교통수단의 요구도 최근
증대 되고 있다.
PRT 시스템은 Personal Rapid Transit의 약자로 미니트램으로 불리는 무인자동 소형
궤도차량 시스템으로 정의 할 수 있으며, 기존의 Mass-transit 개념에서 벗어나 다수의
루프를 포함하는 네트워크형 주행로를 달리는 Para-transit 개념에 가까운 4~6명의 승
객이 차량에 탑승하여 원하는 목적지까지 정차 없이 이동할 수 있는 신 교통시스템이다.
PRT 시스템은 기존교통수단의 단점을 보완하면서 도시권역의 교통 혼잡과 사고, 환경오
염에 따른 문제를 완화해 줄 것으로 기대를 모으고 있다. 이에 더불어 PRT 시스템은 특
별히 지정된 타임 테이블이 없어 언제든지 승객이 원할 때 목적지로 이동할 수 있다.
현재 PRT 시스템은 영국 히드로 공항과 아랍에미리트연합의 마스다르시(Masdar
City)에 도입되어 영업 운행 중에 있으며 국내에서도 민간 기업(예: 벡터스)이 시스템 개
념은 다르지만 운영되고 있다. 따라서 활용성을 높이고 핵심 원천기술의 확보를 위해
PRT 개념초기의 궤도방식에 머무르는 수준으로 보다 실용적이고 혁신적인 신교통시스
템의 개발을 위해 본 연구를 추진할 필요가 있다. 또한 이를 통해서 환경 친화적인 미래
형 대중교통 시스템을 구축하여 국가 경쟁력을 확보 할 수 있을 것으로 기대된다.
Ⅲ. 연구개발의 내용 및 범위
당해 연도에는 3차 년도에 수행된 시작차량, 운행시스템, 선로구조물 및 수직이송장치,
급전시스템 등의 분야별 설계 자료를 바탕으로 후속의 시제차량 주요부품 제작과 차량
성능시험기준 및 운영시나리오를 수립하였고, 운행제어시스템을 최적화 및 보완하였다.
또한 PRT 선로시스템 개발에는 실용화 노선 검토와 연속 수직 이송장치 제작 및 시험
평가하였다. 마지막으로 전력공급 시스템 개발 및 설계 기준에서 제 기준 수립하였고,
시작차량을 발전시켜 시제차량에 적용하였다.
- iv -
특히 차량(시제차량)의 중량절감을 위해 보완설계 및 제작을 진행하였으며, 당해연도에
제작된 시제차량 시운전을 통하여 시험 절차서를 보완하였다. 또한, 시작차량의 최고속
도시험 및 가/감속 시험을 진행하여 성능사양을 만족시킴을 확인하였다. 이를 바탕으로
차량 종합 성능시험기준을 작성하고 차량 운영시나리오를 작성하였다.
운행제어 시스템으로는 자동주행제어장치 시제품 보완 및 제작을 하였고, 시제차량에
설치하였다. 운행제어시스템 보완을 위해 최적경로탐색모듈을 기존중앙관제서버 내부 운
영방식에서 별도의 서버를 통한 구조를 변경하고, 연구원내 테스트를 진행하여 도출된
결과를 운행제어 최적화 및 시스템에 반영하고, 모두 정상적으로 작동함을 확인하였다.
다음으로 PRT 선로시스템 기술개발에 있어서 실용화 노선 검토하였고, 연구원내 시험
노선에 수직이송장치 시험제작 및 기능시험을 하였다. 또한, 자체 시연을 통해 정상 작
동함을 검증하였다.
마지막으로 PRT 전력공급시스템은 시작차량의 설계부분을 보완하여 시제차량에 변경
된 전력변환장치, 에너지 저장장치 및 급전시스템 시제품 제작 및 설치하였으며, 이를
통해 설계/운영 지침 및 제반 안전기준(안) 작성하였다.
Ⅳ. 연구개발결과
한국형 PRT(미니트램) 차량시스템 기술개발
4차 년도 연구에서는 3차 년도에 수행한 기본 설계 및 구조해석 결과를 바탕으로 구조
적인 보완사항에 대한 검토 및 제작을 하였다. 3차 년도에는 차체의 중량 절감을 위해
프레임을 삭제하였다. 하지만 이로 인하여 내외장재 취부 및 측창 취부 등에 어려움이
발생하여 4차 년도에는 이 부분에 대하여 보완 설계를 진행하였다. 시제차량의 전체적인
구조는 시작차량을 기본으로 하여 상세설계 및 보완제작을 하였다. 차체 프레임의 경우
3차 년도 시제차량에 적용한 알루미늄 소재인 A6063-T로 선정하였다.
자동조향제어 시스템 보완 및 개발을 위해 자동주행 소프트웨어 시스템을 구성하고,
인터페이스를 설계하였다. 주행 및 차량제어의 안전성을 위하여 연구원내 구축 된 시험
노선에서 주행성능을 테스트하였다. 또한 자동차안전연구원내 주행시험장에서 차량의 최
고속도시험 및 가/감속 시험을 통하여 성능사양이 만족함을 확인하였다. 이러한 한국형
미니트램의 안정성 확보를 위해 철도차량의 성능시험 및 철도 안전법등을 검토하였다.
시험방법 및 절차의 구체화를 통해 상용화 할 수 있도록 차량 종합성능시험기준을 수립
하였고, 시험절차서를 보완하였다.
한국형 PRT(미니트램) 운행제어시스템 기술개발
현재 시제차량에 탑재되어있는 라이다센서를 활용하여 전방 장애물 검지를 수행한다.
또한 전방 장애물 검지 시스템의 경우 차량과 관제간의 통신을 통하여 장애물과의 거리
- v -
데이터를 기반으로 해당상태를 식별하여 차량의 이동 유무에 관한 제어를 하는 프로세
스를 탑재하였다.
중앙제어장치 및 운영시스템에 있어서 시제품 제작을 통하여 액티비티 다이어그램을
바탕으로 승/하차 프로세스 알고리즘을 구현하였다. 이를 통해 차량 운영 시나리오를 작
성하였고, 원활한 차량 배차 및 순환의 최적화를 위해 승강장 관리 프로세스를 개발 및
보완하였다.
운행제어 시스템의 보완을 위하여 최적경로탐색기능을 기존 중앙관제서버 내부 운영방
식(COS)에서 별도의 RPC 서버 운영방식으로 개선하였다.
실제 운영환경에서 중앙관제시스템의 정상동작 확인을 위해 한국철도기술연구원 내에
구축되어 있는 시험노선에서 시작차량 및 시제차량을 대상으로 중앙관제시스템과의 연
동 테스트를 통하여 정상적으로 수행하는 것을 확인하였다.
한국형 PRT(미니트램) 선로시스템 기술개발
한국형 미니트램 시범적용을 위해 다양한 대상지들을 조사하여 향후 활용성을 고려한
상세검토를 통해 최적의 시범노선 대상지를 선정하기 위한 기본방향을 설정하였다. 검토
의 기본방향은 국내 지자체들의 기존 도시철도 계획 및 도시재생을 위한 계획 등을 조
사하고 이에 맞는 PRT 노선 계획을 검토하였으며, 또한 기존 대중교통과의 연계를 통한
시너지를 이룰 수 있는 지역, 관광수요가 지속적으로 발생하는 주요 관광지 등 국내
PRT 적용 가능지역을 다각적으로 조사 검토하여 최적 대상지를 선정하기 위한 방안을
제안하였다. 최적의 시범노선 대상지는 다음과 같은 이점을 바탕으로 시범노선지역을 조
사를 하였다. 첫째, 정부에서 추진하고 있는 도시재생 선도지역 사업과 연관하여 도시재
생사업에 미니트램을 접목시켜 시너지효과를 얻을 수 있을 것이다. 둘째, 관광노선에 적
용함으로써 이용객들의 편의성확보를 통하여, 많은 관광객을 유치할 수 있을 것이다. 셋
째, 기존 대중교통의 단점을 보완하여 Door to Door, 개인의 프라이버시 보장, 사람 수
나 화물의 용량이 적은 수송에 적합하다. 또한 기동성이 좋아 경제적이며, 승객의 편리
한 교통수단을 제공하는 친환경적인 미래 신교통수단이 될 것이다.
그리고 한국형 PRT의 가장 큰 특징으로서 승객의 편의성 향상을 위한 입체수송을 위
해 개발 중인 연속수직이송시스템의 핵심장치를 제작하고 기능구현 시험을 수행하였다.
연속수직이송장치의 핵심부분인 출입구, 컨베이어 및 시프팅 장치, 파렛트 Up-Down 장
치, 리프트 컨베이어 장치를 실물 제작 하였으며, 실차테스트를 통해 각 기능들의 정상
작동여부를 확인하고 검증하였다.
프로그램을 입력 후, 수동 및 자동테스트를 실시하여 미니트램을 이용한 로드테스트도
실시하였다. 파렛트 동시치환 방식을 통하여 차량은 출입구에서 리프트로 원활히 이동됨
을 확인하였으며, 철도기술연구원 자체 시연을 통하여 검증하였다.
- vi -
한국형 PRT(미니트램) 전력공급시스템 기술개발
4차 년도에는 시제차량에 적용할 수 있는 적합한 집전/전력변환 시스템을 제작하였다.
특히 시스템 성능 및 효율 향상을 위해 기존의 3직 2병 구조(135V)에서 2직 4병으로 변
경하여 90V에서 동작이 가능하도록 하였다. 이는 3차 년도에 구현된 회생제동시 부스터
컨버터를 이용하는 시스템을 당해 년도에는 모터에서 생성된 전력을 부스터 컨버터 없
이 배터리에 충전이 가능하도록 성능을 개선하였다.
또한 픽업/정류기 장치는 성능 테스트를 통해 정상적인 작동함을 확인하였다. 또한 해
당 컨버터는 에너지저장장치로부터 전력을 받아 안정되게 공급할 수 있음을 확인하였으
며, 이를 바탕으로 설계 및 운영 지침, 제반 안전기준(안)을 작성하였다.
Ⅴ. 연구개발결과의 활용계획
4차년도에는 시작차량의 시스템의 각 분야별 설계 및 제작, 보완하였으며 시제차량을
완성시켜 테스트를 수행하였다. 5차년도에는 차량의 부품 및 시스템 성능을 보완하여 고
장진단과 유지보수에 대한 지침 등을 수립 할 것이며, 차량과 운행제어시스템 시운전을
통한 성능시험 및 소프트웨어 품질 검증을 통한 안정성 보완 및 차량의 다중운영, 서버
및 DB의 이중화를 구현할 예정이다. 또한, 미니트램의 무선충전 방식을 배터리 및 유선
플러그 방식으로 변경을 검토하고 있으며 최근 구축되고 있는 전기자동차 충전 인프라
와의 연계 또한 구상 중에 있다. 기 확보된 기술들을 바탕으로 미니트램의 노선계획과
운영계획을 수립하고 국내 환경에 맞는 인프라 맞춤형 교통수단을 제공할 수 있는 기반
마련에 활용하도록 할 계획이다.
- vii -
SUMMARY
The study on an engineering design and real implementation of an
autonomous and on-demand vehicle system known as PRT (Personal Rapid
Transit) was performed by KRRI (Korea Railroad Research Institute) since
2012. In particular, the detailed design and manufacture of the individual
components (i.e., vehicle, operation control, infrastructure, and power transfer)
consisting of a PRT system and the operability-based system integration was
achieved. The three PRT vehicles (i.e., the test-vehicle, the first and second
prototypes) were manufactured through the whole period of this project. In
this year, the first prototype was optimized to reduce the weight of a vehicle
and the second one was (re-)designed to enhance the performance and to
reflect the test results conducted on application/system level so far. The
operational test was performed on a pilot road network designed for evaluation
purpose. The algorithm for the real-time recognition of absolute positions and
orientations was modified to enhance the performance of the magnetic sensing
ruler (MSR). Also, the navigation control system was improved for its
interlocked operation with the operation control center (OCC). In addition, the
vertical lift of continuous type was manufactured and installed on the ground
of the KRRI to check its technological feasibility. Finally, the energy supply
system (i.e., Regulator and DC-DC converter) for the PRT system were
modified and tested on a product as well as application level. It is expected
that this study can contribute to widespread perception of the PRT system as
a highly accessible, user-responsive, environmentally friendly transport system,
which offers a sustainable and economic solution.
- viii -
Contents
Chapter 1. Introduction ··································································································1
Section 1. Introduction to PRT R&D ········································································1
Section 2. Importance of PRT R&D ·········································································5
Section 3. Research Contents and Scope ·································································6
Chapter 2. Current Situations of Technology Development ··························8
Section 1. Trends of Domestic Technology Development ··································8
Section 2. Trends of Foreign Technology Development ···································12
Chapter 3. Contents of this Study and the Results ·······································51
Section 1. Development of ‘Korean Personal Rapid Transit’ Vehicle ············51
Section 2. Development of Network Operation Control System for PRT ·· 278
Section 3. Development of Infrastructures and Vertical Transfer Device for PRT ···322
Section 4. Development of Power Supply System for PRT ··························421
Chapter 4. Achievements and Contributions ····················································472
Section 1. Achievement of Research Goals ·························································472
Section 2. Contribution to Related Fields ····························································487
Chapter 5. Application Plan ·····················································································488
Section 1. Strategy for Utilization ·········································································488
Section 2. Future Prospects ·····················································································488
Chapter 6. Reference ··································································································489

- ix -
목 차
제1장 연구개발과제의 개요 ···························································································1
제1절 연구개발의 필요성 ·······························································································1
제2절 연구개발의 중요성 ·······························································································5
제3절 연구내용 및 범위 ·································································································6
제2장 국내외 기술개발 현황 ···························································································8
제1절 국내기술 동향 ·······································································································8
제2절 국외기술 동향 ·····································································································12
제3장 연구개발수행 내용 및 결과 ··············································································51
제1절 시작차량 완성 및 시제차량 상세 설계 및 제작 ·········································51
제2절 한국형 미니트램 운행제어시스템 기술개발 ···············································278
제3절 미니트램 선로시스템 기술개발 및 수직이송장치 연구개발 ···················322
제4절 미니트램 전력공급 시스템 ·············································································421
제4장 목표달성도 및 관련분야에의 기여도 ···························································472
제1절 연구개발 목표의 달성도 ·················································································472
제2절 기술개발에 따른 관련분야 기여도 ·······························································487
제5장 연구개발 결과의 활용계획 ··············································································488
제1절 활용방안 ·············································································································488
제2절 앞으로의 전망 ···································································································488
제6장 참고문헌 ················································································································489
- x -
표 목 차
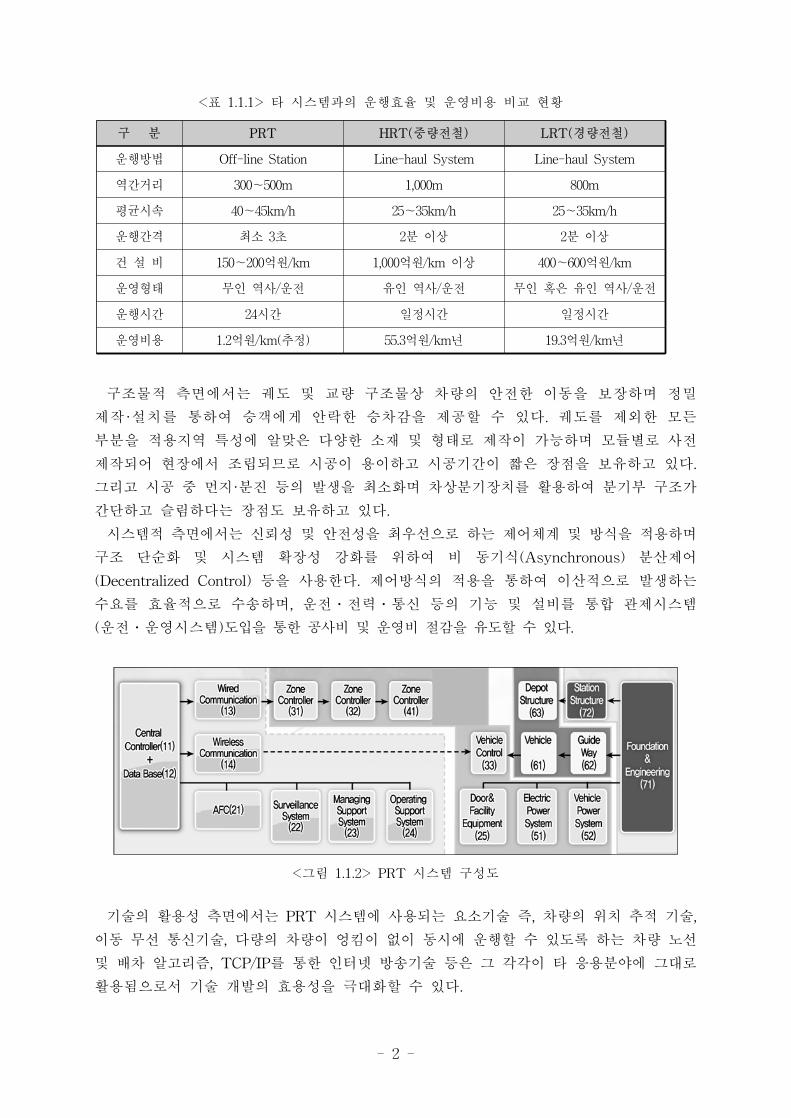
<표 1.1.1> 타 시스템과의 운행효율 및 운영비용 비교 현황 2
<표 1.3.1> 한국형 PRT 차량개발 최종목표 6
<표 1.3.2> PRT 운행제어시스템 기술개발 최종목표 6
<표 1.3.3> PRT 선로시스템 기술개발 최종목표 7
<표 1.3.4> PRT 전력공급시스템 최종목표 7
<표 2.1.1> SKYCAR 개발 목표 사양 9
<표 2.1.2> VECTUS PRT 세부 사양 10
<표 2.1.3> 순천만 소형경전철 사업 개요 11
<표 2.2.1> CabinTaxi 특징 16
<표 2.2.2> Skyweb Express 운영현황 18
<표 2.2.3> ULTra PRT 차량 치수 35
<표 2.2.4> ULTra PRT 차량 성능 35
<표 2.2.5> 2getthere PRT 차량 치수 41
<표 2.2.6> 2getthere PRT 차량 성능 41
<표 2.2.7> E-Zone 사양 45
<표 2.2.8> Change 사양 47
<표 2.2.9> i-MiEV 사양 49
<표 3.1.1> 한국형 미니트램 기본성능 사양 57
<표 3.1.2> A6063-T6과A5052-O의 기계적/물리적 성질 64
<표 3.1.3> A6063-T6과 A5052-O의 화학 성분 65
<표 3.1.4> 의장 주요 구성품 89
<표 3.1.5> 도어 시스템 사양 91
<표 3.1.6> 시작차 vs 시제차 도어 시스템 사양 비교 92
<표 3.1.7> 시작차 vs 시제차 도어 시스템 동작성 비교 93
<표 3.1.8> 시작차 vs 시제차 도어 시스템 부하 비교 93
<표 3.1.9> 시작차 vs 시제차 도어 시스템 비상핸들 구조 비교 94
<표 3.1.10> 전장품 구성품 102
<표 3.1.11> 모터 컨트롤러 사양 102
<표 3.1.12> Reduction Gear Specification 103
<표 3.1.13> Wheel & Tire Specification 104
<표 3.1.14> 전조등 Specification 105
<표 3.1.15> 후미등 Specification 105
<표 3.1.16> CCTV카메라 Specification 106
<표 3.1.17> 정현파 인버터 Specification 107
<표 3.1.18> VCU Specification 108
<표 3.1.19> 시스템 설계 약어 109
<표 3.1.20> NCU&VCU 개발 사양 111
<표 3.1.21> VCU 기능 정리 112
<표 3.1.22> MSR 사양 114
<표 3.1.23> MSR 기능 115
<표 3.1.24> VCU HW 인터페이스 설계 128
- xi -
<표 3.1.25> 메인 기능 함수 130
<표 3.1.26> CAN 모듈 함수 132
<표 3.1.27> VCU 2D 도면 주석 134
<표 3.1.28> 조향/현가 주요 구성품 139
<표 3.1.29> Motor Specification 139
<표 3.1.30> Reduction Gear Specification 140
<표 3.1.31> Wheel & Tire Specification 140
<표 3.1.32> Speed Sensor Specification 142
<표 3.1.33> EPS Specification 143
<표 3.1.34> Steering Rack Specification 144
<표 3.1.35> APM Module Specification 144
<표 3.1.36> NCU H/W Interface 151
<표 3.1.37> 자동가속 동작조건 157
<표 3.1.38> Lidar HW 인터페이스 구성 161
<표 3.1.39> VI별 기능 요약 162
<표 3.1.40> 측정항목 164
<표 3.1.41> 계 측 기 165
<표 3.1.42> 내/외장재 구성품 시험항목 175
<표 3.1.43> 도어시스템 시험항목 176
<표 3.1.44> NCU 시험항목 182
<표 3.1.45> VCU 시험항목 183
<표 3.1.46> MSR 시험항목 183
<표 3.1.47> MCU 시험항목 183
<표 3.1.48> 보호회로 동작시험 항목 184
<표 3.1.49> 제동 단수에 따른 감속도 값 203
<표 3.1.50> 미니트램의 제원 213
<표 3.1.51> Adams/Car Default 차량의 제원 214
<표 3.1.52> ISO 2631-1 승차감 평가기준 218
<표 3.1.53> 일반국도공사 전문시방서 평탄성 규격 218
<표 3.1.54> 미니트램의 Spring과 Anti-roll bar 강성 231
<표 3.1.55> 현가장치 및 Anti-roll bar의 강성 최적화를 위한 실험계획 설계 232
<표 3.1.56> 현가장치 및 Anti-roll bar 강성에 따른 Side slip angle 비교 234
<표 3.1.57> 현가장치 및 Anti-roll bar 강성에 따른 Roll angle 비교 236
<표 3.1.58> 현가장치 및 Anti-roll bar 강성에 따른 Yaw rate 비교 238
<표 3.1.59> 현가장치 및 Anti-roll bar 강성에 따른 Ride comfort 비교 240
<표 3.1.60> 현가장치 및 Anti-roll bar의 강성 최적화를 위한 실험계획 결과 241
<표 3.1.61> Side slip angle에 대한 회기계수 244
<표 3.1.62> Side slip angle에 대한 분산분석 244
<표 3.1.63> Roll angle에 대한 추정된 회기계수 244
<표 3.1.64> Roll angle에 대한 분산분석 245
<표 3.1.65> Yaw rate에 대한 추정된 회기계수 245
<표 3.1.66> Yaw rate에 대한 분산분석 245
<표 3.1.67> Ride comfort에 대한 분산분석 245
<표 3.1.68> Ride comfort에 대한 분산분석 246
- xii -
<표 3.1.69> 최적화된 현가장치 특성 247
<표 3.1.70> 초기모델과 최적화 모델 비교 247
<표 3.1.71> 초기모델과 최적화 모델 동특성 및 승차감 비교 249
<표 3.1.72> 미니트램 시제차량 모델 변경 250
<표 3.1.73> 미니트램 시제차량 유한요소모델 제원 251
<표 3.1.74> A6N01S-T5의 기계적 물성치 251
<표 3.1.75> 알루미늄 허니콤의 기계적 물성치 252
<표 3.1.76> ASCE-APM Standards에 의한 하중종류 252
<표 3.1.77> ASCE-APM Standards의 최대운영하중조건 253
<표 3.1.78> ASCE-APM Standards 최대하중조건의 구조강도평가 결과 257
<표 3.1.79> 취약 부위 두께 변경에 따른 재해석 결과 정리 260
<표 3.1.80> CFRP의 물성치 263
<표 3.1.81> 자동차 충돌규정의 분류 264
<표 3.1.82> 최저속 충돌시험 규정[16~21] 265
<표 3.1.83> 최저속 충돌시험 규정 265
<표 3.1.84> 최저속 충돌시험 규정 266
<표 3.1.85> 최저속 충돌시험 규정 266
<표 3.1.86> ECE R42에 의한 PRT 차량 하중조건 268
<표 3.1.87> PTD 정면충돌 시뮬레이션 유한요소해석 결과 272
<표 3.1.88> 고정벽 정면충돌 시뮬레이션 유한요소해석 결과 277
<표 3.2.1> OD matrix 예시 314
<표 3.3.1> 도시재생 선도지역 지정현황 328
<표 3.3.2> 부산광역시 동구 사업방향 329
<표 3.3.3> 서울특별시 종로구 사업방향 330
<표 3.3.4> 광주광역시 동구 사업방향 331
<표 3.3.5> 전라북도 군산시 사업방향 332
<표 3.3.6> 전라남도 목포시 사업방향 333
<표 3.3.7> 경상북도 영주시 사업방향 334
<표 3.3.8> 경상남도 창원시 사업방향 335
<표 3.3.9> 대구광역시 남구 사업방향 336
<표 3.3.10> 강원도 태백시 사업방향 337
<표 3.3.11> 충청남도 천안시 사업방향 338
<표 3.3.12> 충청남도 공주시 사업방향 339
<표 3.3.13>전라남도 순천시 사업방향 340
<표 3.3.14> 2013년도 주요관광지 관광객수 342
<표 3.3.15> 정부종합청사 노선 개요 345
<표 3.3.16> 옥상정원의 규모 346
<표 3.3.17> 인천공항 제2여객터미널 노선개요 347
<표 3.3.18> 제주공항 노선 개요 349
<표 3.3.19> 판교 IT 밸리 노선 개요 351
<표 3.3.20> 천안아산역~펜타포트 노선개요 353
<표 3.3.21> 광교신도시 노선개요 355
<표 3.3.22> 제주 중문관광단지 노선개요 356
<표 3.3.23> 경주 보문관광단지 노선개요 358
- xiii -
<표 3.3.24> 파주 캠프하우즈 노선개요 360
<표 3.3.25> 포항~KTX 포항역 연결노선 노선개요 361
<표 3.3.26> 군산시 도시재생사업 구간 노선개요 363
<표 3.3.27> 고양시 킨텍스 노선개요 365
<표 3.3.28> 파주시 헤이리마을 노선개요 367
<표 3.3.29> 홍대 문화의 거리 노선개요 369
<표 3.3.30> 인천 송도 센트럴파크 노선개요 371
<표 3.3.31> 노선 특성별 검토노선 374
<표 3.3.32> 노면구간 개략 공사비(포장 필요구간) 377
<표 3.3.33> 노면구간 개략 공사비(기포장 구간) 377
<표 3.3.34> 교량 상부 개략공사비 378
<표 3.3.35> 교량 하부 개략공사비 378
<표 3.3.36> 지하구간 개략공사비 379
<표 3.3.37> 대상노선별 개략공사비(1) 380
<표 3.3.38> 대상노선별 개략공사비(2) 380
<표 3.3.39> 대상노선별 개략공사비(3) 381
<표 3.3.40> 대상노선별 개략공사비(4) 381
<표 3.3.41> 시범노선 성정을 위한 평가항목 382
<표 3.3.42> Lift Cage Conveyor Motor Shaft & Bearing 강도계산 399
<표 3.3.43> Lift Cage Conveyor Idle Shaft & Bearing 강도계산 400
<표 3.3.44> 파렛트 종단면 계수 산출표 408
<표 3.4.1> PBC 사양 423
<표 3.4.2> PBC 주요 소자 Ⅰ 424
<표 3.4.3> PBC 주요 소자 Ⅱ 425
<표 3.4.4> SBC 사양 425
<표 3.4.5> FBC 사양 426
<표 3.4.6> FBC 주요소자 Ⅰ 427
<표 3.4.7> FBC 주요소자 Ⅱ 428
<표 3.4.8> 1kW급 유선충전기 구성소자 Ⅰ 429
<표 3.4.9> 1kW급 유선충전기 구성소자 Ⅱ 430
<표 3.4.10> 1kW급 유선충전기 구성소자 Ⅲ 431
<표 3.4.11> 픽업장치 전기 사양 432
<표 3.4.12> 픽업장치 기구 및 환경 사양 432
<표 3.4.13> 제어기 사양 432
<표 3.4.14> CAN 통신 사양 433
<표 3.4.15> PBC 모듈의 동작 및 비동작 조건 단계적 구분 436
<표 3.4.16> SBC 단계적 동작 시퀀스 436
<표 3.4.17> FBC 단계적 동작 시퀀스 437
<표 3.4.18> 외부 Cut-off 단계적 동작 시퀀스 437
<표 3.4.19> 유선충전기 연결시 단계적 동작 시퀀스 438
<표 3.4.20> PBC 파라미터 포맷 455
<표 3.4.21> "상태 정보" data format 455
<표 3.4.22> "에러 정보" data format 456
<표 3.4.23> SBC 파라미터 포맷 456
- xiv -
<표 3.4.24> "상태 정보" data format 457
<표 3.4.25> "에러 정보" data format 457
<표 3.4.26> "LIC command" data format 457
<표 3.4.27> FBC 파라미터 포멧 457
<표 3.4.28> FBC 상태정보 458
<표 3.4.29> FBC 에러정보 458
<표 3.4.30> LIC 파라미터 포맷 Ⅰ 459
<표 3.4.31> "결함 정보" data format 459
<표 3.4.32> "상태 정보" data format 459
<표 3.4.33> LIC 파라미터 포맷 Ⅱ 460
<표 3.4.34> "결함 정보" data format 460
<표 3.4.35> "상태 정보" data format 460
<표 3.4.36> MCU 주요 파라미터 포멧 461
<표 3.4.37> ‘MCU 고장 데이터1’ data format 461
<표 3.4.38> ‘MCU 상태 데이터1’ data format 462
<표 3.4.39> ‘MCU 상태 데이터2’ data format 462
<표 3.4.40> ‘MCU 상태 데이터3’ data format 462
<표 3.4.41> 제어기 동작 테스트 465
<표 3.4.42> 게이트 드라이버 Function Test 465
<표 3.4.43> Protection Test 465
<표 3.4.44> Earth Continuity Test 465
<표 3.4.45> 고장감시기능 Test 466
<표 3.4.46> Withstanding Voltage Test 466
<표 3.4.47> Protection Test _ Primary Buck 467
<표 3.4.48> 풀브리지 컨버터 H/W 레벨 점검 468
<표 3.4.49> 픽업장치 출력 테스트 469
<표 3.4.50> 10kW급 집전장치 시제품 성능 평가 471
<표 4.1.1> 시작차량을 보완한 시제차량 473
<표 4.1.2> 시작차 vs 시제차 도어 시스템 사양 비교 473
<표 4.1.3> 취약 부위 두께 변경에 따른 구조강도 재해석 결과 정리 478
<표 4.1.4> PTD(Pendulum Test Device) 정면충돌 시뮬레이션 유한요소해석 결과 479
<표 4.1.5> 고정벽 정면충돌 시뮬레이션 유한요소해석 결과 479
<표 4.1.6> 전장품 구성품 481
<표 4.1.7> NCU H/W Interface 482
<표 4.1.8> 노선 특성별 검토노선 485
<표 4.1.9> 시범노선 성정을 위한 평가항목 485

- xv -
그 림 목 차<그림 1.1.1> PRT(Personal Rapid Transit) 시스템의 특징 및 개념도 1
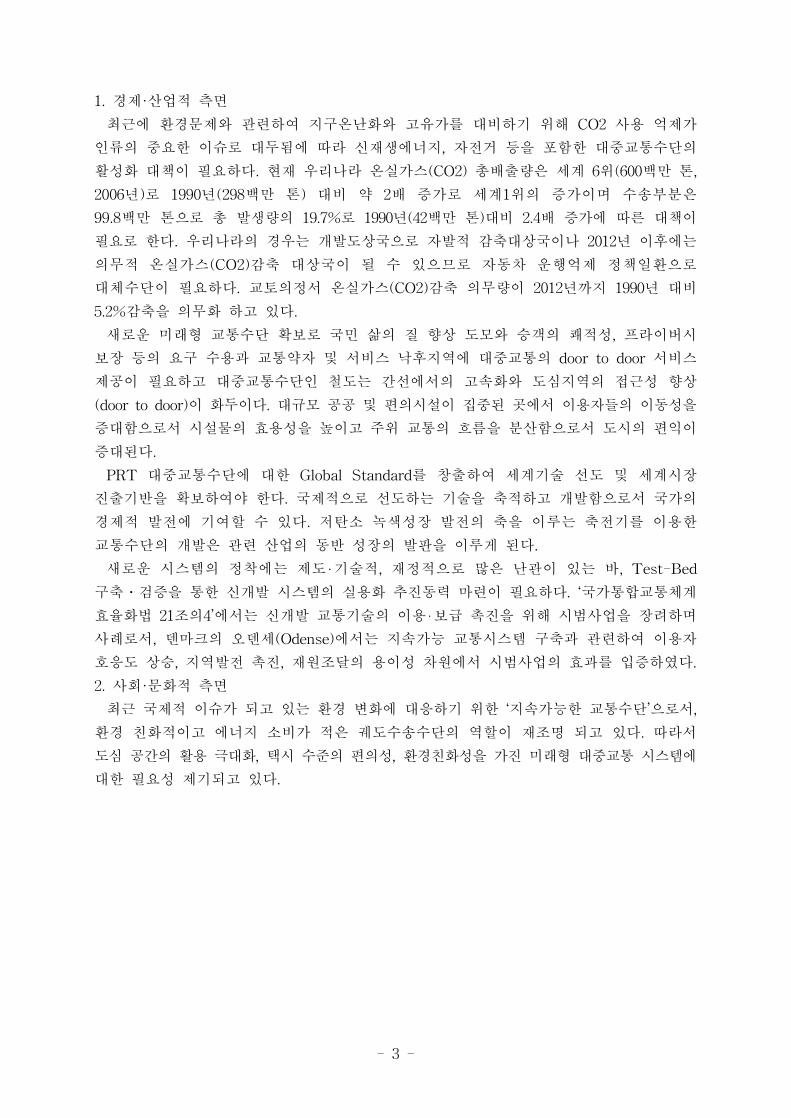
<그림 1.1.2> PRT 시스템 구성도 2
<그림 1.1.3> 환경변화에 따른 대중교통수단의 발전방향 4
<그림 1.3.1> PRT 시스템 구성도 6
<그림 2.1.1> SKYCAR의 차량과 테스트 트랙 8
<그림 2.1.2> VECTUS의 차량과 테스트 트랙 9
<그림 2.1.3> 순천만 소형경전철 노선 및 정거장 10
<그림 2.1.4> 순천만 소형경전철 시스템 운영 11
<그림 2.2.1> Dashaveyor 시스템 12
<그림 2.2.2> ROMAG 시스템 13
<그림 2.2.3> Alden staRRcar 차량 13
<그림 2.2.4> Morgantown의 GRT 시스템 14
<그림 2.2.5> Critical MOVE의 시스템 15
<그림 2.2.6> CabinTaxi 구조물 15
<그림 2.2.7> CVS 시스템 17
<그림 2.2.8> PRT2000 시스템 18
<그림 2.2.9> MISTER 시스템 19
<그림 2.2.10> JPods 시스템 20
<그림 2.2.11> 히드로 PRT 21
<그림 2.2.12> 히드로 PRT 노선 21
<그림 2.2.13> 히드로 PRT - 터미널5 플랫폼 21
<그림 2.2.14> 히드로 PRT - 역사 B 플랫폼 22
<그림 2.2.15> ULTra PRT 샤시 및 프레임 (1) 22
<그림 2.2.16> ULTra PRT 샤시 및 프레임 (2) 23
<그림 2.2.17> ULTra PRT 외관 23
<그림 2.2.18> ULTra PRT 신호 안테나 24
<그림 2.2.19> 차량 내부 도어 24
<그림 2.2.20> 비상인터폰 및 도어 스위치 25
<그림 2.2.21> 비상 탈출문(수동 조작 가능) 25
<그림 2.2.22> 화재감지기 26
<그림 2.2.23> 표시기 (차량상부) 26
<그림 2.2.24> 표시기 (차량측부) 27
<그림 2.2.25> CCTV 및 에어컨 송풍구 27
<그림 2.2.26> 에어컨 송풍구 28
<그림 2.2.27> 충전 시스템 (역사 B) 28
<그림 2.2.28> 충전장치 29
<그림 2.2.29> 충전 상태 표시 29
<그림 2.2.30> 차량 하단부 (역사내 자동 충전) 30
<그림 2.2.31> 주행로 (터미널5 역사) 30
<그림 2.2.32> 주행로 및 연단 (역사 B) 31
<그림 2.2.33> ULTra PRT 차량 바디, 도어와 유리 31
<그림 2.2.34> 고가 구조물 32
- xvi -
<그림 2.2.35> 주행 노면 32
<그림 2.2.36> ULTra PRT 차량의 치수 36
<그림 2.2.37> ULTra PRT 기본도 37
<그림 2.2.38> PRT 적용 개념도 - 마스다르 시티 38
<그림 2.2.39> 2getthere PRT (마스다르시티) 39
<그림 2.2.40> 2getthere PRT - 메인 플랫폼 39
<그림 2.2.41> 2getthere PRT - 주행로 40
<그림 2.2.42> 메인 조작대 41
<그림 2.2.43> 화재감지기 42
<그림 2.2.44> 충전장치 42
<그림 2.2.45> 도어시스템 (슬라이딩 도어) 43
<그림 2.2.46> 장애물 검지 시연 43
<그림 2.2.47> E-zone 외형 44
<그림 2.2.48> E-zone 차체 프레임 46
<그림 2.2.49> Change 외형 46
<그림 2.2.50> Change 차체 프레임 46
<그림 2.2.51> Change 차량 시스템 구성 47
<그림 2.2.52> i-MiEV 차량 외형 48
<그림 2.2.53> i-MiEV 차량 Lay-out 48
<그림 2.2.54> i-MiEV 추진장치 (후륜구동) 49
<그림 2.2.55> i-MiEV 배터리팩 50
<그림 2.2.56> i-MiEV 차량 시스템 구성 50
<그림 3.1.1> 3차년도 미니트램 차체 형상 52
<그림 3.1.2> 4차년도 미니트램 차체 형상 52
<그림 3.1.3> 측창 프레임 53
<그림 3.1.4> 하부스커트 설계 (1) 54
<그림 3.1.5> 하부스커트 설계(2) 54
<그림 3.1.6> 캐패시터 취부 프레임 설계 (1) 55
<그림 3.1.7> 캐패시터 취부 프레임 설계 (2) 55
<그림 3.1.8> 시작차 보완 CAB MASK (GFRP 4T->GFRP 2T) 56
<그림 3.1.9> 시작차량 56
<그림 3.1.10> 자동차안전연구원내 직선 주행 시험로 57
<그림 3.1.11> 연구원내 직선주행로(소음시험장) 58
<그림 3.1.12> 최고속도시험 준비 58
<그림 3.1.13> 최고속도 시험 58
<그림 3.1.14> TEST CASE 1 59
<그림 3.1.15> TEST CASE 2 59
<그림 3.1.16> TEST CASE 3 60
<그림 3.1.17> TEST CASE 4 60
<그림 3.1.18> TEST CASE 5 61
<그림 3.1.19> TEST CASE 6 61
<그림 3.1.20> TEST CASE 7 62
<그림 3.1.21> TEST CASE 8 62
<그림 3.1.22> TEST CASE 9 63
- xvii -
<그림 3.1.23> TEST CASE 10 63
<그림 3.1.24> 3차년도 미니트램 차체 형상 66
<그림 3.1.25> 4차년도 미니트램 차체 형상 66
<그림 3.1.26> 3차년도 UNDER FRAME 구조 67
<그림 3.1.27> 3차년도 UNDER FRAME 구조 67
<그림 3.1.28> 3차년도 ROOF FRAME 구조 68
<그림 3.1.29> 4차년도 ROOF FRAME 구조 68
<그림 3.1.30> 소재 입고 69
<그림 3.1.31> 소재 가공(절단) 69
<그림 3.1.32> UNDER FRAME 하구조 ASS'Y(1) 70
<그림 3.1.33> UNDER FRAME 하구조 ASS'Y(2) 70
<그림 3.1.34> UNDER FRAME 상구조 ASS'Y(1) 71
<그림 3.1.35> UNDER FRAME 상구조 ASS'Y(2) 71
<그림 3.1.36> UNDER FRAME 소조립(1) 72
<그림 3.1.37> UNDER FRAME 소조립(2) 72
<그림 3.1.38> ROOF ASS'Y(1) 73
<그림 3.1.39> ROOF ASS'Y(2) 73
<그림 3.1.40> CAB FRAME ASS'Y(1) 74
<그림 3.1.41> CAB FRAME ASS'Y(2) 74
<그림 3.1.42> 차체 대조립(1) 75
<그림 3.1.43> 차체 대조립(2) 75
<그림 3.1.44> 로드셀을 이용한 중량검사 76
<그림 3.1.45> 차량 중량 측정결과 76
<그림 3.1.46> 미니트램 시제차량 외부 디자인 77
<그림 3.1.47> Cab Mask 설계 78
<그림 3.1.48> 프론트 휠 커버 설계 78
<그림 3.1.49> 외장램프 설계 79
<그림 3.1.50> 외장램프 커버 79
<그림 3.1.51> 사이드 스커트 설계 80
<그림 3.1.52> 도어 파팅라인 변경 설계 80
<그림 3.1.53> 비상도어 파팅라인 변경 설계 81
<그림 3.1.54> 사이드 글라스 형상 변경 81
<그림 3.1.55> 사이드 글라스 형상 변경 안 82
<그림 3.1.56> 사이드 휠 커버 파팅 라인 수정 83
<그림 3.1.57> 도어판넬 형상 수정 83
<그림 3.1.58> 도어 엔진 및 점검커버 83
<그림 3.1.59> 내장트림 형상변경 및 스킨면 페어링 설계 84
<그림 3.1.60> 실내 램프 형상 수정 설계 84
<그림 3.1.61> 사이드 글래스 내장 트림 형상 변경 85
<그림 3.1.62> 휀더 구배각 수정 설계 85
<그림 3.1.63> 루프 상단 면 설계 86
<그림 3.1.64> 사이드 글래스 및 사이드 도어 설계 86
<그림 3.1.65> 필러 밑 윈드실드 수정 86
<그림 3.1.66> 전면부 수정 87
- xviii -
<그림 3.1.67> 사이드 설계 부분 수정 87
<그림 3.1.68> 외장램프 87
<그림 3.1.69> 전면부 점검창 88
<그림 3.1.70> Vacuum Infusion Process 88
<그림 3.1.71> 일체형 외장재(CAB MASK) 89
<그림 3.1.72> CAM MASK 조립 89
<그림 3.1.73> 외장재 도장 공정 90
<그림 3.1.74> 유리 취부 공정 90
<그림 3.1.75> 내장재 취부 공정 90
<그림 3.1.76> 외장 부품 취부 공정 91
<그림 3.1.77> 도어시스템 진단 프로그램 92
<그림 3.1.78> DOOR LOCK(OVER CENTER) 구조 94
<그림 3.1.79> 차량 선두(FRONT)측 기기 취부 95
<그림 3.1.80> 차량 후미(REAR)측 기기 취부 96
<그림 3.1.81> 차량 선두 상하측 기기 취부 96
<그림 3.1.82> 차량 후미 상하측 기기 취부 96
<그림 3.1.83> 픽업장치 97
<그림 3.1.84> 배전반 취부 97
<그림 3.1.85> LIC 97
<그림 3.1.86> LIC CONTROLLER 97
<그림 3.1.87> 하부배선작업 97
<그림 3.1.88> 기기 장치간 커넥터 연결 97
<그림 3.1.89> 하부 배관 작업 98
<그림 3.1.90> 유압호스 체결 98
<그림 3.1.91> BCU 구성 98
<그림 3.1.92> 외부형상 99
<그림 3.1.93> 내부 형상 99
<그림 3.1.94> 외부형상 99
<그림 3.1.95> 내부형상 99
<그림 3.1.96> 밸브 및 배관 100
<그림 3.1.97> 유압 호스 100
<그림 3.1.98> 제동디스크 100
<그림 3.1.99> 캘리퍼 및 패드 100
<그림 3.1.100> 플렉시블 101
<그림 3.1.101> 커넥터류 101
<그림 3.1.102> 시제차량의 변경된 전장품 101
<그림 3.1.103> 모터컨트롤러 형상 103
<그림 3.1.104> 자석검지센서 형상 103
<그림 3.1.105> 슈퍼캐패시터 형상 104
<그림 3.1.106> 전조등 형상 및 설치 105
<그림 3.1.107> 후미등 형상 및 설치 106
<그림 3.1.108> CCTV 카메라 형상 및 설치 106
<그림 3.1.109> 정현파 인버터 형상 및 설치 107
<그림 3.1.110> VCU 형상 및 설치 108
- xix -
<그림 3.1.111> 시스템 설계 블럭다이어그램 109
<그림 3.1.112> 장치간 구성 블록 다이어그램 110
<그림 3.1.113> MSR 구성 블록 다이어그램 113
<그림 3.1.114> QA6 커넥터 116
<그림 3.1.115> SDVO to RGB 117
<그림 3.1.116> MCU 117
<그림 3.1.117> 전원 공급 및 제어 118
<그림 3.1.118> NCU PCB 구성 118
<그림 3.1.119> 절연 CAN 119
<그림 3.1.120> 절연 SPI to CAN 119
<그림 3.1.121> Wheel Encoder 입력 120
<그림 3.1.122> Digital 입출력 120
<그림 3.1.123> VCU PCB 구성 120
<그림 3.1.124> Power Board 121
<그림 3.1.125> POWER PCB 구성 121
<그림 3.1.126> BPB Board 122
<그림 3.1.127> BPB PCB 구성 122
<그림 3.1.128> 12V to 5V 123
<그림 3.1.129> 전원 SSD 고정 123
<그림 3.1.130> SSD PCB 구성 123
<그림 3.1.131> 5port Ethernet Switch 124
<그림 3.1.132> Ethernet 124
<그림 3.1.133> Link / 124
<그림 3.1.134> Hub PCB 구성 124
<그림 3.1.135> STM32F407 MCU 125
<그림 3.1.136> 마그네틱 센서 및 LPF 125
<그림 3.1.137> UART 드라이버 125
<그림 3.1.138> 통신 연결 커넥터 125
<그림 3.1.139> MSR SUB PCB 구성 126
<그림 3.1.140> STM32F407 MCU 126
<그림 3.1.141> UART 드라이버 127
<그림 3.1.142> 디버깅 통신 127
<그림 3.1.143> PHY & Transformer 127
<그림 3.1.144> MSR TOP PCB 구성 127
<그림 3.1.145> VCU 시스템 구성도 128
<그림 3.1.146> VCU FW 구성도 129
<그림 3.1.147> CAN 모듈 알고리즘 131
<그림 3.1.148> UDP 모듈 함수 알고리즘 133
<그림 3.1.149> 통신상태 감시모듈 알고리즘 133
<그림 3.1.150> VCU 2D 도면 134
<그림 3.1.151> VCU & NCU 3D 도면 135
<그림 3.1.152> VCU & NCU Pin ASSIGNMENT 135
<그림 3.1.153> MSR 2D 도면 136
<그림 3.1.154> MSR 3D 도면 136
- xx -
<그림 3.1.155> MSR PIN ARRANGEMENT 136
<그림 3.1.156> 조향/현가장치 구성 (Isometric view) 137
<그림 3.1.157> 조향/현가장치 구성 (Top view) 138
<그림 3.1.158> 조향/현가장치 구성 (Side view) 138
<그림 3.1.159> 조향/현가장치 구성 (Front view) 138
<그림 3.1.160> 감속기 형상 140
<그림 3.1.161> 휠 & 타이어 형상 141
<그림 3.1.162> 액슬 조립 형상 141
<그림 3.1.163> 속도 센서 (Speed Sensor) 형상 142
<그림 3.1.164> EPS 형상 143
<그림 3.1.165> EPS 및 각도센서, 브라켓 조립 형상 143
<그림 3.1.166> 스티어링 랙(Steering rack) 형상 144
<그림 3.1.167> EPS와 APM, VCU 인터페이스 145
<그림 3.1.168> 스트럿(Strut ass’y) 형상 145
<그림 3.1.169> 모터 및 감속기 조립 형상 146
<그림 3.1.170> EPS 조립 형상 147
<그림 3.1.171> EPS & 스티어링 랙 조립 형상 148
<그림 3.1.172> 컨트롤 암 및 스트럿 조립 형상 148
<그림 3.1.173> 속도센서 취부 형상 149
<그림 3.1.174> 등속조인트 연결 형상 (감속기측) 149
<그림 3.1.175> 휠&타이어 조립 형상 150
<그림 3.1.176> NCU 시스템 구성도 150
<그림 3.1.177> 자동주행 SW 구성도 152
<그림 3.1.178> 자동주행 알고리즘 153
<그림 3.1.179> 수동주행 알고리즘 154
<그림 3.1.180> MSR 수신 알고리즘 154
<그림 3.1.181> VCU 수신 알고리즘 155
<그림 3.1.182> 관제 수신 알고리즘 155
<그림 3.1.183> 자석검지 및 위치 추정 알고리즘 156
<그림 3.1.184> 자동조향 알고리즘 157
<그림 3.1.185> 자동가속 알고리즘 159
<그림 3.1.186> 제어모듈 알고리즘 160
<그림 3.1.187> 관제 연결 모듈 알고리즘 160
<그림 3.1.188> 장애물 충돌감지 시스템 구성도 161
<그림 3.1.189> 장애물 충돌감지 SW 구성도 162
<그림 3.1.190> 구조체 지지방법 166
<그림 3.1.191> 시험하중 부하방법 166
<그림 3.1.192> 구조체 지지방법 및 시험하중 부하방법 167
<그림 3.1.193> 구조체 지지방법 168
<그림 3.1.194> 시험하중 부하방법 168
<그림 3.1.195> 시험하중 부하방법 169
<그림 3.1.196> ECU & APM 배선 작업 185
<그림 3.1.197> SAS & APM & 노트북 연결 작업 186
<그림 3.1.198> EPS 전원 연결 186
- xxi -
<그림 3.1.199> VCU 프로그램(좌) 및 조향각 센서 영점 셋팅 완료(우) 187
<그림 3.1.200> 수동운전 시험 원리 187
<그림 3.1.201> 수동운전 시험장비 설치 188
<그림 3.1.202> 수동운전 추진/가속시험 테스트 188
<그림 3.1.203> 수동운전 조향 테스트 189
<그림 3.1.204> VCU 조향 프로그램의 구성 189
<그림 3.1.205> 얼라인먼트 지그 설치 (전) 190
<그림 3.1.206> 얼라인먼트 지그 설치 (후) 191
<그림 3.1.207> 전/후 레이저 포인터 위치 측정 191
<그림 3.1.208> 회전 반경측정기 및 제원 191
<그림 3.1.209> 차량 리프팅 및 반경측정기 설치 192
<그림 3.1.210> 회전 반경 측정기 192
<그림 3.1.211> VMS 메뉴화면 197
<그림 3.1.212> 장치 별 입출력 상태 화면 197
<그림 3.1.213> 입출력 상태 선택 버튼 197
<그림 3.1.214> 입출력 상태 현시 바 198
<그림 3.1.215> 초기동작 메인메뉴 화면 199
<그림 3.1.216> 통신 고장 현시 화면 199
<그림 3.1.217> 고장 복귀 화면 199
<그림 3.1.218> 입출력 상태 화면 선택 버튼 200
<그림 3.1.219> 장치 선택 화면 200
<그림 3.1.220> 입출력 상태 화면 장치 전환 버튼 200
<그림 3.1.221> 입출력 상태 확인 화면 201
<그림 3.1.222> 입출력 상태 바 화면 201
<그림 3.1.223> 견인 요구값에 따른 가속도 지령값 202
<그림 3.1.224> Adams/Car를 이용한 미니트램 모델링 213
<그림 3.1.225> Adams/Car Default 차량 동역학 모델 214
<그림 3.1.226> Adams/Car를 이용한 ISO 8608 2D 도로 모델링 214
<그림 3.1.227> ISO 8608의 A 등급도로에서의 가속도 비교 215
<그림 3.1.228> ISO 8608의 D 등급도로에서의 가속도 비교 215
<그림 3.1.229> ISO 8608의 H 등급도로에서의 가속도 비교 216
<그림 3.1.230> ISO 8608의 A 등급도로에서의 승차감 비교 217
<그림 3.1.231> ISO 8608의 D 등급도로에서의 승차감 비교 217
<그림 3.1.232> Pri 도로 7.6m CP 측정장비 219
<그림 3.1.233> Pri 계산 방법 219
<그림 3.1.234> LabView를 이용한 도로모델링 220
<그림 3.1.235> Random 함수로 만들어진 시방서 기준 도로모델 220
<그림 3.1.236> 미니트램의 가속도 221
<그림 3.1.237> Adams/Car Default 차량의 가속도 221
<그림 3.1.238> 일반국도공사 전문시방서에 의한 도로조건에서의 승차감지수 222
<그림 3.1.239> 일반차량의 Anti-roll bar 장착 전/후 223
<그림 3.1.240> Anti-roll bar를 장착한 미니트램의 동역학 모델 223
<그림 3.1.241> 2차원 반응표면 분석법 224
<그림 3.1.242> 3차원 반응표면 분석법 225
- xxii -
<그림 3.1.243> 2요인 중심합성계획 227
<그림 3.1.244> 2요인 면중심 중심합성계획 228
<그림 3.1.245> 3요인 면중심 중심합성계획 228
<그림 3.1.246> Double Lane Change course 229
<그림 3.1.247> ISO 8608에 기술되어있는 각 공간 주파수 별 도로 등급 230
<그림 3.1.248> 미니트램의 댐핑 계수 231
<그림 3.1.249> D1에 대한 Spring과 Anti-roll bar 강성에 따른 Side slip angle 233
<그림 3.1.250> D2.5에 대한 Spring과 Anti-roll bar 강성에 따른 Side slip angle 233
<그림 3.1.251> D4에 대한 Spring과 Anti-roll bar 강성에 따른 Side slip angle 234
<그림 3.1.252> D1에 대한 Spring과 Anti-roll bar 강성에 따른 Roll angle 235
<그림 3.1.253> D2.5에 대한 Spring과 Anti-roll bar 강성에 따른 Roll angle 235
<그림 3.1.254> D4에 대한 Spring과 Anti-roll bar 강성에 따른 Roll angle 236
<그림 3.1.255> D1에 대한 Spring과 Anti-roll bar 강성에 따른 Yaw rate 237
<그림 3.1.256> D2.5에 대한 Spring과 Anti-roll bar 강성에 따른 Yaw rate 237
<그림 3.1.257> D4에 대한 Spring과 Anti-roll bar 강성에 따른 Yaw rate 238
<그림 3.1.258> D1에 대한 Spring과 Anti-roll bar 강성에 따른 Ride comfort 239
<그림 3.1.259> D2.5에 대한 Spring과 Anti-roll bar 강성에 따른 Ride comfort 239
<그림 3.1.260> D4에 대한 Spring과 Anti-roll bar 강성에 따른 Ride comfort 240
<그림 3.1.261> Roll angle에 대한 반응표면 최적화 분석 242
<그림 3.1.262> Yaw rate에 대한 반응표면 최적화 분석 242
<그림 3.1.263> Side slip angle에 대한 반응표면 최적화 분석 243
<그림 3.1.264> Ride comfort에 대한 반응표면 최적화 분석 243
<그림 3.1.265> Spring, Damper, Anti-roll bar 최적화 결과 246
<그림 3.1.266> 기존 미니트램과 최적화된 미니트램의 Side slip angle 비교 247
<그림 3.1.267> 기존 미니트램과 최적화된 미니트램의 Roll angle 비교 248
<그림 3.1.268> 기존 미니트램과 최적화된 미니트램의 Yaw rate 비교 248
<그림 3.1.269> 기존 미니트램과 최적화된 미니트램의 승차감 비교 249
<그림 3.1.270> 미니트램 시제차량 유한요소모델 250
<그림 3.1.271> 미니트램 시제차량 유한요소모델의 하중 및 구속조건 253
<그림 3.1.272> 압축하중조건에서의 미니트램 시제차량의 하중 및 구속조건 254
<그림 3.1.273> 전장품 등을 고려한 하중분포 비율 254
<그림 3.1.274> Vertical load 조건에서의 유한요소해석 결과 255
<그림 3.1.275> Lateral load 조건에서의 유한요소해석 결과 255
<그림 3.1.276> Longitudinal load 조건에서의 유한요소해석 결과 256
<그림 3.1.277> Compressive load 조건에서의 유한요소해석 결과 256
<그림 3.1.278> 취약 부위 확인 및 두께 변경 258
<그림 3.1.279> Vertical load 조건에서의 유한요소해석 결과 (재해석) 258
<그림 3.1.280> Lateral load 조건에서의 유한요소해석 결과 (재해석) 259
<그림 3.1.281> Longitudinal load 조건에서의 유한요소해석 결과 (재해석) 259
<그림 3.1.282> Compressive load 조건에서의 유한요소해석 결과 (재해석) 260
<그림 3.1.283> A6N01S-T5의 Strain-Stress cruve 261
<그림 3.1.284> Steel의 Strain-Stress cruve 261
<그림 3.1.285> 평면에서 직교이방성의 Strain-Stress 관계 262
<그림 3.1.286> Uni-direction 카본시트 262
- xxiii -
<그림 3.1.287> Pendulum 시험장비 [22] 267
<그림 3.1.288> PTD의 충격부 [18] 267
<그림 3.1.289> 코너충돌시험 267
<그림 3.1.290> PTD 정면충돌시험의 충돌시나리오 268
<그림 3.1.291> PTD 정면충돌 시뮬레이션 [0 ms] 269
<그림 3.1.292> PTD 정면충돌 시뮬레이션 [80 ms] 269
<그림 3.1.293> 외판 주요 응력 발생부 (ECE R42) 270
<그림 3.1.294> 메인 프레임 주요 응력 발생부 (ECE R42) 270
<그림 3.1.295> 브라켓 – 주요 Elements (ECE R42) 270
<그림 3.1.296> 브라켓 – von Mises stresses (ECE R42) 271
<그림 3.1.297> 메인 프레임 – von Mises stresses (ECE R42) 271
<그림 3.1.298> 고정벽 정면충돌시험의 충돌시나리오 273
<그림 3.1.299> 고정벽 정면충돌 시뮬레이션 [0 ms] 273
<그림 3.1.300> 고정벽 정면충돌 시뮬레이션 [70 ms] 274
<그림 3.1.301> 외판 주요 응력 발생부 (ASCE-APM) 274
<그림 3.1.302> 메인 프레임 주요 응력 발생부 (ASCE-APM) 275
<그림 3.1.303> 브라켓 – 주요 Elements (ASCE-APM) 275
<그림 3.1.304> 메인 프레임 – 주요 Elements (ASCE-APM) 275
<그림 3.1.305> 브라켓 – von Mises stresses (ASCE-APM) 276
<그림 3.1.306> 메인 프레임 – von Mises stresses (ASCE-APM) 276
<그림 3.2.1> 개발환경 업그레이드 계획 278
<그림 3.2.2> REST+oAuth+Spring 구성도 279
<그림 3.2.3> UI 구성 및 개발관련 표준안 설계 279
<그림 3.2.4> 두 시스템간 기능비교표 280
<그림 3.2.5> 상용화 제품 벤치마킹 281
<그림 3.2.6> 전체 레이아웃 모니터링 281
<그림 3.2.7> 특정 지역 확대 모니터링 281
<그림 3.2.8> 확대 후 시점 이동 282
<그림 3.2.9> Background 적용 전 Top View Monitoring 282
<그림 3.2.10> Background 적용 후 Top View Monitoring 283
<그림 3.2.11> 시스템 정적분석 283
<그림 3.2.12> IEC 62279 항목관련 적용가능 항목 검토표 (일부) 284
<그림 3.2.13> 인식장치 비교분석 285
<그림 3.2.14> 승객 승/하차 전체 프로세스 설계 286
<그림 3.2.15> 스크린도어 설치 승객인식장치 프로세스 287
<그림 3.2.16> 차량내부 설치 승객인식장치 프로세스 288
<그림 3.2.17> 회원가입 프로세스 289
<그림 3.2.18> 회원탈퇴 프로세스 289
<그림 3.2.19> 승객인식 관련 장비 구성안 290
<그림 3.2.20> 배차정보를 기반으로 생성된 QR코드 291
<그림 3.2.21> 회원가입/탈퇴 및 환경설정 291
<그림 3.2.22> 배차요청 292
<그림 3.2.23> 실 구현된 모바일 웹 어플리케이션의 UI 292
<그림 3.2.24> 교차점 충돌회피 관련 엑티비티 다이어그램 293
- xxiv -
<그림 3.2.25> 교차점 충돌 판단 영역 분포도 294
<그림 3.2.26> 충돌대상차량 접근제한구역 정상 정차 테스트 결과 295
<그림 3.2.27> 승강장 선정을 위한 우선순위 조건 296
<그림 3.2.28> 승강장 관리 프로세스 작동 영역 297
<그림 3.2.29> 한 개의 승강장을 가진 정차역의 차량 취급1 297
<그림 3.2.30> 복수개의 승강장을 가진 정차역의 차량 취급2 298
<그림 3.2.31> 복수개의 승강장을 가진 정차역의 차량 취급3 298
<그림 3.2.32> 승강장 관리 프로세스 엑티비티 다이어그램 299
<그림 3.2.33> 배차알고리즘 운영방식 변경 300
<그림 3.2.34> 전체 메시지 구조 변경 300
<그림 3.2.35> 주행경로 메시지 구조 변경 300
<그림 3.2.36> 설정화일을 통한 데이터 기록저장소 관리 301
<그림 3.2.37> Path Editor UI설계안 및 기능목록 301
<그림 3.2.38> 중앙관제시스템 현장테스트 302
<그림 3.2.39> 차량 간격제어 테스트 303
<그림 3.2.40> LiDAR에 의한 차량 정차 테스트 모습 304
<그림 3.2.41> 승객인식장비(티켓프린터 및 스캐너) 운용 테스트 305
<그림 3.2.42> 시제차량 모델 도면(윗면)과 실제 제작된 시제차량(윗면)의 비교 306
<그림 3.2.43> 시제차량 모델 도면(옆면)과 실제 제작된 시제차량(옆면)의 비교 306
<그림 3.2.44> 시제차량의 모델 도면 파일 (전면 및 측면) 307
<그림 3.2.45> 신규 제작된 시제차량 3D 모델링 307
<그림 3.2.46> 시작차량과 시제차량 모델 비교 308
<그림 3.2.47> 정류장에 대기 중인 시작차량 및 시제차량 308
<그림 3.2.48> 3D 모니터링 시스템에서 운영되는 시제차량 308
<그림 3.2.49> 시뮬레이션을 위한 가상 시험구간 전체 레이아웃 309
<그림 3.2.50> 신규 추가된 우측하단의 미니뷰어 309
<그림 3.2.51> OLAP 툴을 이용한 다차원 분석 310
<그림 3.2.52> 통합 리포트 구성화면 311
<그림 3.2.53> 리포트 편집 화면 311
<그림 3.2.54> 수요 발생의 불균등 312
<그림 3.2.55> 네트워크 예시 312
<그림 3.2.56> 정류장 레이아웃 313
<그림 3.2.57> SV 알고리즘의 프레임워크 313
<그림 3.2.58> 배차 범위 및 경로 계획에 따른 승객 대기시간 316
<그림 3.2.59> 메타 휴리스틱 해 탐색 예시 317
<그림 3.2.60> Covering problem 예시 317
<그림 3.2.61> 네트워크 설계 모듈 실행화면 318
<그림 3.2.62> Schedule mode 노선 설계 319
<그림 3.2.63> Demand mode와 Schedule mode의 전환 320
<그림 3.2.64> 운행 mode 입력 320
<그림 3.2.65> RPC 모듈에 대한 함수 및 입력과 출력 321
<그림 3.3.1> PRT 적용 대상지 선정 방식 322
<그림 3.3.2> 자문회의 진행 326
<그림 3.3.3> 도시재생 선도지역 현황 327

- xxv -
<그림 3.3.4> 부산광역시 동구 위치도 329
<그림 3.3.5> 부산광역시 동구 구상도 329
<그림 3.3.6> 서울시 종로구 위치도 330
<그림 3.3.7> 서울시 종로구 구상도 330
<그림 3.3.8> 광주광역시 동구 위치도 331
<그림 3.3.9> 광주광역시 동구 구상도 331
<그림 3.3.10> 전라북도 군산시 위치도 332
<그림 3.3.11> 전라북도 군산시 구상도 332
<그림 3.3.12> 전라남도 목포시 위치도 333
<그림 3.3.13> 전라남도 목포시 구상도 333
<그림 3.3.14> 경상북도 영주시 위치도 334
<그림 3.3.15> 경상북도 영주시 구상도 334
<그림 3.3.16> 경상남도 창원시 위치도 335
<그림 3.3.17> 경상남도 창원시 구상도 335
<그림 3.3.18> 대구광역시 남구 위치도 336
<그림 3.3.19> 대구광역시 남구 구상도 336
<그림 3.3.20> 강원도 태백시 위치도 337
<그림 3.3.21> 강원도 태백시 구상도 337
<그림 3.3.22> 충청남도 천안시 위치도 338
<그림 3.3.23> 충청남도 천안시 구상도 338
<그림 3.3.23> 충청남도 공주시 위치도 339
<그림 3.3.24> 충청남도 공주시 구상도 339
<그림 3.3.26>전라남도 순천시 위치도 340
<그림 3.3.27> 전라남도 순천시 구상도 340
<그림 3.3.28> 경주 “동궁과 월지” 341
<그림 3.3.29> 부여 “궁남지” 341
<그림 3.3.30> 에버랜드 341
<그림 3.3.31> 강원랜드 341
<그림 3.3.32> 용인 “에버라인” 343
<그림 3.3.33> 순천만 “스카이큐브” 343
<그림 3.3.34> 진주 촉석루 343
<그림 3.3.35> 불국사 343
<그림 3.3.36> 서울대공원 344
<그림 3.3.37> 서울랜드 344
<그림 3.3.38> 성산일출봉 344
<그림 3.3.39> 중문대포해안주상절리대 344
<그림 3.3.40> 정부종합청사 노선도 345
<그림 3.3.41> 정부종합청사 현장사진 346
<그림 3.3.42> 인천공항 제2여객터미널 노선도 347
<그림 3.3.43> 인천공항 현장사진 348
<그림 3.3.44> 제주공항 노선도 349
<그림 3.3.45> 제주공항 현장사진 350
<그림 3.3.46> 판교 IT 밸리 노선도 351
<그림 3.3.47> 판교 IT 밸리 현장사진 352

- xxvi -
<그림 3.3.48> 천안아산역~펜타포트 노선도 353
<그림 3.3.49> 천안아산역~펜타포트 현장사진 354
<그림 3.3.50> 광교신도시 노선도 355
<그림 3.3.51> 제주 중문관광단지 노선도 356
<그림 3.3.52> 제주 중문관광단지 현장사진 357
<그림 3.3.53> 경주 보문관광단지 노선도 358
<그림 3.3.54> 경주 보문관광단지 현장사진 359
<그림 3.3.55> 파주 캠프하우즈 노선도 360
<그림 3.3.56> 포항~KTX 포항역 연결노선도 361
<그림 3.3.57> 포항~KTX 포항역 현장사진 362
<그림 3.3.58> 군산시 도시재생사업 구간 노선도 363
<그림 3.3.59> 군산시 도시재생사업 구간 현장사진 364
<그림 3.3.60> 고양시 킨텍스 노선도 365
<그림 3.3.61> 고양시 도시재생사업 구간 현장사진 366
<그림 3.3.62> 파주시 헤이리마을 노선도 367
<그림 3.3.63> 파주시 헤이리마을 현장사진 368
<그림 3.3.64> 홍대 문화의 거리 노선도 369
<그림 3.3.65> 홍대 문화의 거리 구간 현장사진 370
<그림 3.3.66> 인천 송도 센트럴파크 노선도 371
<그림 3.3.67> 인천 송도 센트럴파크 현장사진 372
<그림 3.3.68> 서울대공원 및 서울랜드 연결 노선도 373
<그림 3.3.69> 토공부 표준폭원(단선) 376
<그림 3.3.70> 교량부 표준폭원(단선) 378
<그림 3.3.71> 저심도 구조물 표준폭원(단선) 379
<그림 3.3.72> 리프트 Governor Sheave 및 Safety Device 383
<그림 3.3.73> Governor Sheave 설치위치 383
<그림 3.3.74> Safety Device 설치위치 383
<그림 3.3.75> Safety Device 작동원리 384
<그림 3.3.76> Safety Device 도면 384
<그림 3.3.77> 주요부분 샘플 구성 385
<그림 3.3.78> Lay-Out 385
<그림 3.3.79> 경사로 및 PIT 적용 설치방안 386
<그림 3.3.80> 테스트 샘플 설치위치 386
<그림 3.3.81> 샘플제작설치 베이스 철골 Lay-out 387
<그림 3.3.82> 컬럼 강도검토 388
<그림 3.3.83> 거더 강도검토-1 389
<그림 3.3.84> 거더 강도검토-2 390
<그림 3.3.85> 리프트(LIFT) 391
<그림 3.3.86> 횡행구동부 모터사양 394
<그림 3.3.87> 횡행구동 Chain 사양 396
<그림 3.3.88> Lift Cage Base Frame 397
<그림 3.3.89> Lift Cage Front & Rear Beam 398
<그림 3.3.90> 컨베어 구조 401
<그림 3.3.91> 컨베어 Shifting 402
- xxvii -
<그림 3.3.92> 파렛트 Up-Down 장치 구조 403
<그림 3.2.93> Up-Down 장치 구동모터 사양 406
<그림 3.3.94> 파렛트(Pallet) 407
<그림 3.3.95> 파렛트(Pallet) 종단면 개략도 407
<그림 3.3.96> 파렛트(Pallet) Frame 개략도 409
<그림 3.3.97> Lay-Out 410
<그림 3.3.98> LIFT ASS’Y 410
<그림 3.3.99> 진출입구 기기 배치도 410
<그림 3.3.100> Up-Down 장치 ASS’Y 410
<그림 3.3.101> 컨베어 ASS’Y 410
<그림 3.3.102> Pallet ASS’Y 410
<그림 3.3.103> 횡행 모터 411
<그림 3.3.104> 컨베어 Shifting 및 Up-Down 모터 411
<그림 3.3.105> 횡행구동체인 411
<그림 3.3.106> 횡행롤러 및 횡행 Side 롤러 411
<그림 3.3.107> 리프트 제작 412
<그림 3.3.108> 출입구 컨베어 장치 제작 412
<그림 3.3.109> 출입구 컨베어 시프팅 장치 제작 413
<그림 3.3.110> 파렛트 Up-Down 장치 제작 413
<그림 3.3.111> 파렛트 제작 설치 414
<그림 3.3.112> Auto Door 제작 설치 414
<그림 3.3.113> 제어반 제작 설치 415
<그림 3.3.114> 센서 설치 위치 415
<그림 3.3.115> 공장 시운전 416
<그림 3.3.116> 앵커위치 마킹 417
<그림 3.3.117> 케미컬앵커 시공 417
<그림 3.3.118> 기둥철골 설치 417
<그림 3.3.119> 지붕층거더 설치 418
<그림 3.3.120> 리프트 설치 419
<그림 3.3.121> 리프트 횡행장치 419
<그림 3.3.122> 출입구 컨베어 장치 및 Up-Down 장치 설치 419
<그림 3.3.123> Auto Door 설치 419
<그림 3.3.124> 전기작업 420
<그림 3.3.125> 프로그램 입력 420
<그림 3.3.126> 센서배치 및 적용센서 420
<그림 3.3.127> 설치완료 421
<그림 3.4.1> 컨버터 구성 레이아웃 422
<그림 3.4.2> PBC 제어 루프 433
<그림 3.4.3> 컨버터 제어 scheme., 434
<그림 3.4.4> SBC PI 제어 루프 434
<그림 3.4.5> FBC PI 제어 루프 435
<그림 3.4.6> 컨버터 동작 시퀀스 435
<그림 3.4.7> 리액터 사양값 계산 438
<그림 3.4.8> 트랜스포머 사양값 계산 439
- xxviii -
<그림 3.4.9> PBC 시뮬레이션 동작(결과) 파형 441
<그림 3.4.10> SBC 소자값 선정 및 동작성 검토 시뮬레이션 441
<그림 3.4.11> SBC 시뮬레이션 동작(결과) 파형 442
<그림 3.4.12> FBC 소자값 선정 및 동작성 검토 시뮬레이션 443
<그림 3.4.13> FBC 시뮬레이션 동작(결과) 파형 443
<그림 3.4.14> WLC 회로도 444
<그림 3.4.15> PBC 상세 설계 레이아웃 444
<그림 3.4.16> SBC 상세 설계 레이아웃 445
<그림 3.4.17> FBC 상세 설계 레이아웃 446
<그림 3.4.18> 유선충전 장치 전력 회로도 447
<그림 3.4.19> 컨버터 제어보드 회로도 (제어 칩) 448
<그림 3.4.20> 컨버터 제어보드 회로도 (제어보드 커넥터) 448
<그림 3.4.21> 컨버터 제어보드 회로도 (전원 회로) 449
<그림 3.4.22> 컨버터 제어보드 회로도 (전압센싱 회로) 450
<그림 3.4.23> 컨버터 제어보드 회로도 (전류센싱 회로) 450
<그림 3.4.24> 컨버터 제어보드 회로도 (외부 장치 인터페이싱 회로) 451
<그림 3.4.25> 충/방전 릴레이 기동용 인터페이싱 451
<그림 3.4.26> 외부 장치 전원/통신 인터페이싱 단자대 레이아웃 452
<그림 3.4.27> 게이트 드라이버 회로도 452
<그림 3.4.28> 픽업 장치 전기 회로도 453
<그림 3.4.29> PI loop, 벅 & 풀브리지 컨버터 제어 Loop 각각 454
<그림 3.4.30> 컨버터 실사 463
<그림 3.4.31> 유선충전기 내구성면 464
<그림 3.4.32> 집전장치 464
<그림 3.4.33> LIC 충전 테스트 466
<그림 3.4.34> LIC 충전 테스트 467
<그림 3.4.35> 28V 전원공급용 1차측 선간전압 468
<그림 3.4.36> 출력전류, 선간전압, 스위칭게이트 파형 469
<그림 3.4.37> 집전장치 테스트 환경 셋팅 (평면도) 470
<그림 3.4.38> 집전장치 테스트 환경 세팅 (측면도) 470
<그림 4.1.1> 시작차 UNDER FRAME 구조 보완 472
<그림 4.1.2> 시작차량 디자인 보완 472
<그림 4.1.3> 비상도어 파팅라인 변경 설계 474
<그림 4.1.4> 도어 파팅라인 변경 설계 474
<그림 4.1.5> 외장램프 474
<그림 4.1.6> 휀더 구배각 수정 설계 474
<그림 4.1.7> 미니트램 시제차량 외부 디자인 475
<그림 4.1.8> 최고속도시험 및 가/감속 시험속도 시험 475
<그림 4.1.9> TEST CASE 1 476
<그림 4.1.10> TEST CASE 2 476
<그림 4.1.11> Spring, Damper, Anti-roll bar 최적화 결과 477
<그림 4.1.12> 압축하중조건에서의 미니트램 시제차량의 하중 및 구속조건 477
<그림 4.1.13> 개발환경 업그레이드 계획 480
<그림 4.1.14> 자동 주행 차량 간격 테스트 480
- xxix -
<그림 4.1.15> 자동주행 알고리즘 482
<그림 4.1.16> LiDAR에 의한 차량 정차 테스트 모습 483
<그림 4.1.17> 배차정보를 기반으로 생성된 QR코드 483
<그림 4.1.18> 배차요청 484
<그림 4.1.19> 중앙관제시스템 현장테스트 484
<그림 4.1.20> 설치완료 486
<그림 4.1.21> 집전장치 테스트 환경 세팅 (측면도) 486

- 1 -
제1장 연구개발과제의 개요
제1절 연구개발의 필요성
1. 기술적 측면
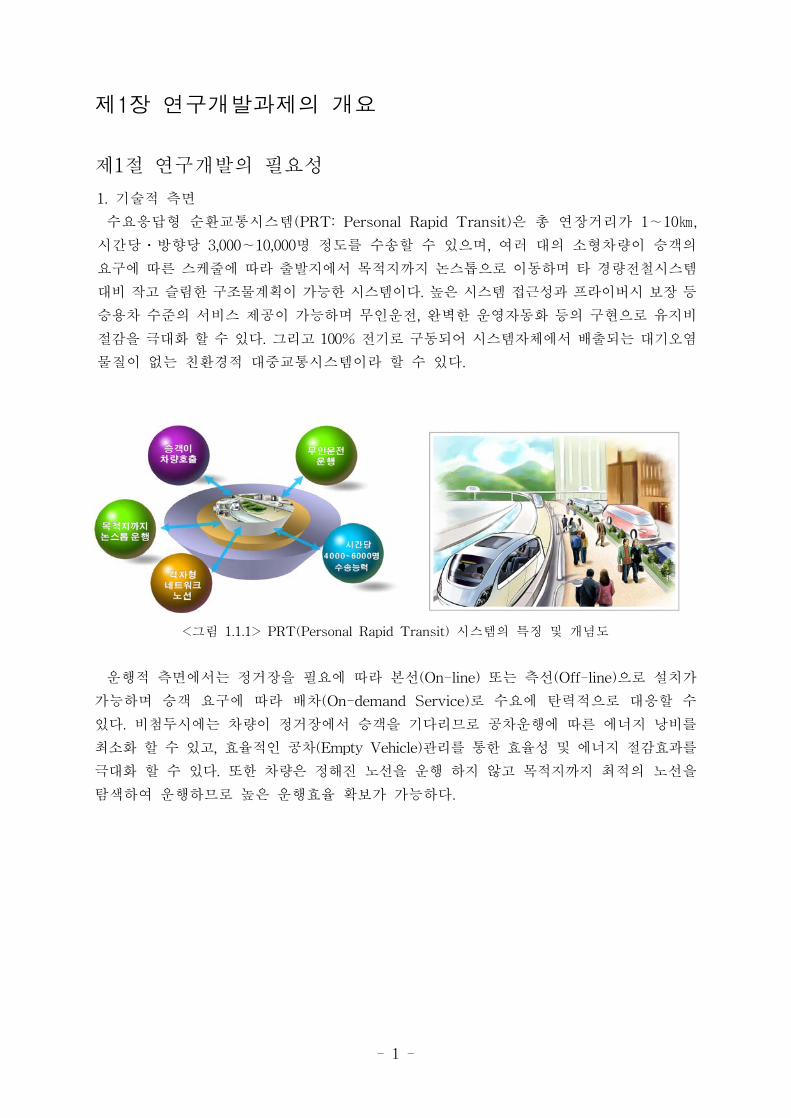
수요응답형 순환교통시스템(PRT: Personal Rapid Transit)은 총 연장거리가 1∼10,
시간당ㆍ방향당 3,000∼10,000명 정도를 수송할 수 있으며, 여러 대의 소형차량이 승객의
요구에 따른 스케줄에 따라 출발지에서 목적지까지 논스톱으로 이동하며 타 경량전철시스템
대비 작고 슬림한 구조물계획이 가능한 시스템이다. 높은 시스템 접근성과 프라이버시 보장 등
승용차 수준의 서비스 제공이 가능하며 무인운전, 완벽한 운영자동화 등의 구현으로 유지비
절감을 극대화 할 수 있다. 그리고 100% 전기로 구동되어 시스템자체에서 배출되는 대기오염
물질이 없는 친환경적 대중교통시스템이라 할 수 있다.
<그림 1.1.1> PRT(Personal Rapid Transit) 시스템의 특징 및 개념도
운행적 측면에서는 정거장을 필요에 따라 본선(On-line) 또는 측선(Off-line)으로 설치가
가능하며 승객 요구에 따라 배차(On-demand Service)로 수요에 탄력적으로 대응할 수
있다. 비첨두시에는 차량이 정거장에서 승객을 기다리므로 공차운행에 따른 에너지 낭비를
최소화 할 수 있고, 효율적인 공차(Empty Vehicle)관리를 통한 효율성 및 에너지 절감효과를
극대화 할 수 있다. 또한 차량은 정해진 노선을 운행 하지 않고 목적지까지 최적의 노선을
탐색하여 운행하므로 높은 운행효율 확보가 가능하다.
- 2 -
구 분 PRT HRT(중량전철) LRT(경량전철)
운행방법 Off-line Station Line-haul System Line-haul System
역간거리 300~500m 1,000m 800m
평균시속 40~45km/h 25~35km/h 25~35km/h
운행간격 최소 3초 2분 이상 2분 이상
건 설 비 150~200억원/km 1,000억원/km 이상 400~600억원/km
운영형태 무인 역사/운전 유인 역사/운전 무인 혹은 유인 역사/운전
운행시간 24시간 일정시간 일정시간
운영비용 1.2억원/km(추정) 55.3억원/km년 19.3억원/km년
<표 1.1.1> 타 시스템과의 운행효율 및 운영비용 비교 현황
구조물적 측면에서는 궤도 및 교량 구조물상 차량의 안전한 이동을 보장하며 정밀
제작·설치를 통하여 승객에게 안락한 승차감을 제공할 수 있다. 궤도를 제외한 모든
부분을 적용지역 특성에 알맞은 다양한 소재 및 형태로 제작이 가능하며 모듈별로 사전
제작되어 현장에서 조립되므로 시공이 용이하고 시공기간이 짧은 장점을 보유하고 있다.
그리고 시공 중 먼지·분진 등의 발생을 최소화며 차상분기장치를 활용하여 분기부 구조가
간단하고 슬림하다는 장점도 보유하고 있다.
시스템적 측면에서는 신뢰성 및 안전성을 최우선으로 하는 제어체계 및 방식을 적용하며
구조 단순화 및 시스템 확장성 강화를 위하여 비 동기식(Asynchronous) 분산제어
(Decentralized Control) 등을 사용한다. 제어방식의 적용을 통하여 이산적으로 발생하는
수요를 효율적으로 수송하며, 운전․전력․통신 등의 기능 및 설비를 통합 관제시스템
(운전․운영시스템)도입을 통한 공사비 및 운영비 절감을 유도할 수 있다.
<그림 1.1.2> PRT 시스템 구성도
기술의 활용성 측면에서는 PRT 시스템에 사용되는 요소기술 즉, 차량의 위치 추적 기술,
이동 무선 통신기술, 다량의 차량이 엉킴이 없이 동시에 운행할 수 있도록 하는 차량 노선
및 배차 알고리즘, TCP/IP를 통한 인터넷 방송기술 등은 그 각각이 타 응용분야에 그대로
활용됨으로서 기술 개발의 효용성을 극대화할 수 있다.
- 3 -
1. 경제·산업적 측면
최근에 환경문제와 관련하여 지구온난화와 고유가를 대비하기 위해 CO2 사용 억제가
인류의 중요한 이슈로 대두됨에 따라 신재생에너지, 자전거 등을 포함한 대중교통수단의
활성화 대책이 필요하다. 현재 우리나라 온실가스(CO2) 총배출량은 세계 6위(600백만 톤,
2006년)로 1990년(298백만 톤) 대비 약 2배 증가로 세계1위의 증가이며 수송부분은
99.8백만 톤으로 총 발생량의 19.7%로 1990년(42백만 톤)대비 2.4배 증가에 따른 대책이
필요로 한다. 우리나라의 경우는 개발도상국으로 자발적 감축대상국이나 2012년 이후에는
의무적 온실가스(CO2)감축 대상국이 될 수 있으므로 자동차 운행억제 정책일환으로
대체수단이 필요하다. 교토의정서 온실가스(CO2)감축 의무량이 2012년까지 1990년 대비
5.2%감축을 의무화 하고 있다.
새로운 미래형 교통수단 확보로 국민 삶의 질 향상 도모와 승객의 쾌적성, 프라이버시
보장 등의 요구 수용과 교통약자 및 서비스 낙후지역에 대중교통의 door to door 서비스
제공이 필요하고 대중교통수단인 철도는 간선에서의 고속화와 도심지역의 접근성 향상
(door to door)이 화두이다. 대규모 공공 및 편의시설이 집중된 곳에서 이용자들의 이동성을
증대함으로서 시설물의 효용성을 높이고 주위 교통의 흐름을 분산함으로서 도시의 편익이
증대된다.
PRT 대중교통수단에 대한 Global Standard를 창출하여 세계기술 선도 및 세계시장
진출기반을 확보하여야 한다. 국제적으로 선도하는 기술을 축적하고 개발함으로서 국가의
경제적 발전에 기여할 수 있다. 저탄소 녹색성장 발전의 축을 이루는 축전기를 이용한
교통수단의 개발은 관련 산업의 동반 성장의 발판을 이루게 된다.
새로운 시스템의 정착에는 제도 기술적, 재정적으로 많은 난관이 있는 바, Test-Bed
구축․검증을 통한 신개발 시스템의 실용화 추진동력 마련이 필요하다. ‘국가통합교통체계
효율화법 21조의4’에서는 신개발 교통기술의 이용 보급 촉진을 위해 시범사업을 장려하며
사례로서, 덴마크의 오덴세(Odense)에서는 지속가능 교통시스템 구축과 관련하여 이용자
호응도 상승, 지역발전 촉진, 재원조달의 용이성 차원에서 시범사업의 효과를 입증하였다.
2. 사회·문화적 측면
최근 국제적 이슈가 되고 있는 환경 변화에 대응하기 위한 ‘지속가능한 교통수단’으로서,
환경 친화적이고 에너지 소비가 적은 궤도수송수단의 역할이 재조명 되고 있다. 따라서
도심 공간의 활용 극대화, 택시 수준의 편의성, 환경친화성을 가진 미래형 대중교통 시스템에
대한 필요성 제기되고 있다.
- 4 -
<그림 1.1.3> 환경변화에 따른 대중교통수단의 발전방향
기존의 철도교통수단은 개인교통수단으로서 입지가 확고한 자동차에 비해 대중교통은
접근성이 떨어지고 주로 대량수송수단인 점에서 야기되는 불편함으로 인해 활성화에 한계가
있고, 다양해진 수송수요의 처리와 친환경성, 경제성 등의 요구조건을 만족하기 위해서는
미래지향적이고 첨단화된 대중교통체계로의 전환이 필요하다. 출발지에서 도착지를 지정하면
해당 목적지까지의 최적 경로로 차량의 운행을 제어함으로서, 이동이 자유롭지 못한
지체부자유자 및 노약자 등에게 환승 등이 없는 이동의 편의성을 제공함으로서 복지향상을
도모할 수 있게 된다. 대규모 다중 복합시설 내의 근거리 이동에 있어 소음과 매연이 거의
없는 교통수단을 이용함으로서 시설물의 효용도를 높이면서도 쾌적한 공간을 유지할 수
있도록 한다.
현재 선진국들은 21세기 성장전략산업으로 철도분야를 설정하고 차세대 기술을 선점하기
위해 국가적인 지원과 개발이 진행되고 있으며, 녹색 신성장동력 창출을 위한 핵심기술
기반을 세우고 일자리 창출이 필요한 시점이다. UAE의 두바이와 아부다비, 스웨덴
스톡홀름과 알란다공항, 영국의 다벤트리 등 유럽․중동을 중심으로 PRT시장이 널리
확산될 전망이다.
- 5 -
제2절 연구개발의 중요성
전 세계적으로 쿄토의정서 체결 등으로 인한 지속 가능한 친환경 교통수단에 대한 필요성이
증가되고 있고 현재 운영 중인 도시철도의 높은 건설 및 운영비, 도로의 만성 교통체증 및
주차난 등의 교통문제가 심화되고 있다. 다양한 도시통행 행태 중에서 단위지역 내 많지 않은
수요가 지속적이면서 분산적인 형태를 보이는 경우, 대규모 수송수단인 기존의 도시철도나
버스로 이를 수용하기에는 비효율적이며, 5km 내외의 비교적 단거리통행에는 승용차가 많이
이용되며, 이는 교통네트워크상 결절점(Node)에서의 교통체증으로 인한 Gridlock 현상이 발생,
네트워크 전체의 교통 혼잡으로 이어진다. 이러한 교통 시스템의 문제점을 극복하기 위한 궤도
대중교통 시스템에 대한 요구가 증가되고 있다. 특히, 도시 구조의 다축․분산화로 인한 간선
교통과 연계 가능한 Network형 궤도 교통수단인 PRT(Personal Rapid Transit)는 교통소비자
들에게 다양한 수단 선택의 기회를 제공함으로서 승용차 교통수요 억제효과를 기대할 수 있으며,
전기에너지를 기반으로 하기 때문에 환경 문제에 유연한 친환경 교통시스템으로 주목받고 있다.
PRT 시스템은 기존 교통수단의 단점을 보완하면서 도시권역의 교통 혼잡과 사고, 환경오염에
따른 문제 완화가 가능한, 기존의 Mass-transit 개념에서 벗어나 Para-transit 개념에 가까운
새로운 개념의 대중교통수단이다. 산업계에서는 신교통수단인 PRT 시스템의 기술개발을 위한
투자 의지와 사업 환경이 조성되어 있는 반면, 기술개발의 구체적인 방향 지표 제시가 미흡한
상태이므로 정부차원의 체계적이고 신속한 기술개발 방향 제시가 절실한 실정이다. 특히, 환경
및 적용기술들이 복잡해짐에 따라 단순한 제작 및 유지보수를 위한 차량위주의 기술보다는
시스템 측면에서 운행과 관련한 기술(차량제어/신호통신 등) 및 소프트웨어/하드웨어 통합기술
등의 핵심기술을 확보하고 운행의 신뢰성을 갖출 수 있도록 체계적인 기술 확보가 필요한
시점이다.
세계적으로 PRT 시스템에 대한 지속적인 요구증대에 대비하여, 기술적으로도 무인운전에 대한
여러 가지 보완책 등이 제공되어 안전성이 강화됨으로서 수요자 요구에 따른 운행, 최적경로
운행 등으로 인한 에너지 최저 소모 및 친 환경적인 장점이 크게 부각되리라 예상된다. UAE의
두바이와 아부다비, 스웨덴 스톡홀름과 알란다공항, 영국의 다벤트리 등 유럽, 중동을 중심으로
PRT시장이 널리 확산될 전망이며, 영국의 ULTra PRT社(舊 ATS)는 PRT 개발의 선두주자로서
세계최초 상용노선 개통을 앞두고 있는 상황에서 전 세계의 잠재적 PRT시장을 석권할 것으로
예상 된다. 이에, 우리도 국가차원의 지원 및 제도를 정비하여 향후 PRT 국제 표준제정에
주도적 지위 확립을 이루고 PRT 사업 경쟁력 강화를 통한 신 성장동력에 기여할 수 있을
것으로 기대된다.
- 6 -
제3절 연구내용 및 범위
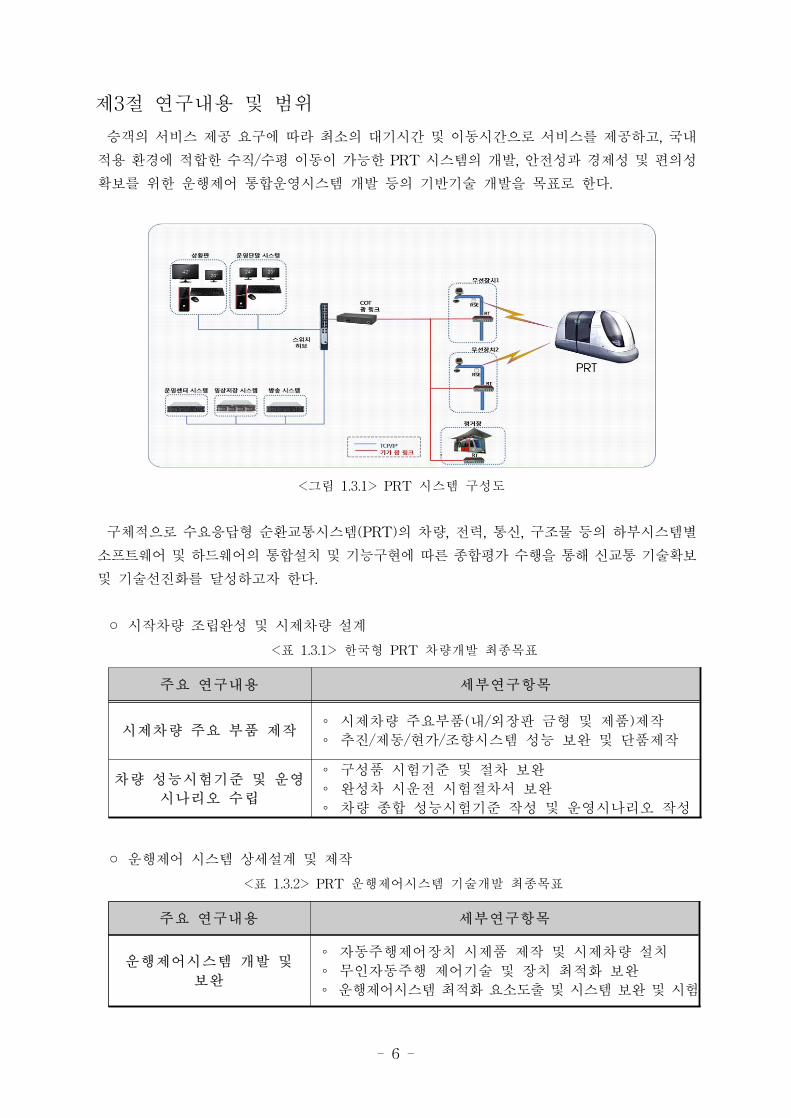
승객의 서비스 제공 요구에 따라 최소의 대기시간 및 이동시간으로 서비스를 제공하고, 국내
적용 환경에 적합한 수직/수평 이동이 가능한 PRT 시스템의 개발, 안전성과 경제성 및 편의성
확보를 위한 운행제어 통합운영시스템 개발 등의 기반기술 개발을 목표로 한다.
<그림 1.3.1> PRT 시스템 구성도
구체적으로 수요응답형 순환교통시스템(PRT)의 차량, 전력, 통신, 구조물 등의 하부시스템별
소프트웨어 및 하드웨어의 통합설치 및 기능구현에 따른 종합평가 수행을 통해 신교통 기술확보
및 기술선진화를 달성하고자 한다.
시작차량 조립완성 및 시제차량 설계
주요 연구내용 세부연구항목
시제차량 주요 부품 제작∘ 시제차량 주요부품(내/외장판 금형 및 제품)제작
∘ 추진/제동/현가/조향시스템 성능 보완 및 단품제작
차량 성능시험기준 및 운영
시나리오 수립
∘ 구성품 시험기준 및 절차 보완
∘ 완성차 시운전 시험절차서 보완
∘ 차량 종합 성능시험기준 작성 및 운영시나리오 작성
<표 1.3.1> 한국형 PRT 차량개발 최종목표
운행제어 시스템 상세설계 및 제작
주요 연구내용 세부연구항목
운행제어시스템 개발 및
보완
∘ 자동주행제어장치 시제품 제작 및 시제차량 설치
∘ 무인자동주행 제어기술 및 장치 최적화 보완
∘ 운행제어시스템 최적화 요소도출 및 시스템 보완 및 시험
<표 1.3.2> PRT 운행제어시스템 기술개발 최종목표
- 7 -
선로구조물 설계기준(안) 보완 및 수직이송장치 상세설계
주요 연구내용 세부연구항목
실용화 노선 검토 및
연속수직이송장치 시험 제작
∘ 연속수직이송장치 시험제작 및 기능시험
∘ PRT시스템 적용대상 노선 검토
<표 1.3.3> PRT 선로시스템 기술개발 최종목표
전력공급시스템 시험 및 설계 보완
주요 연구내용 세부연구항목
전력공급시스템 개발 및
설계기준/제 기준 수립
∘ 에너지 제어시스템, 저장장치 및 급전시스템 시제품
제작, 시제차량 설치 및 시험
∘ 설계/운영 지침 및 제반 안전기준(안) 작성
<표 1.3.4> PRT 전력공급시스템 최종목표
- 8 -
제2장 국내외 기술개발 현황
제1절 국내기술 동향
1. 국내 시스템
가. SKYCAR
1992년 우보엔지니어링은 교통도시개발연구원을 설립하면서 PRT에 관한 연구를 시작하였다.
해당 연구원은 1997년 PRT코리아라는 회사로 분사하게 되었고 미국의 Raytheon社와
기술제휴를 시작하였다. Raytheon社는 1993년 TAXI2000社로부터 TAXI 2000 시스템을
사들여 PRT2000 시스템으로 개선하였다. 하지만 1999년 Raytheon社가 시장에서 철수하면서
TAXI2000社는 자신의 시스템을 재 구입하게 하였다. 따라서 PRT 코리아가 개발한
SKYCAR 시스템은 TAXI 2000과 주행궤도와 가이드라인을 제외하면 매우 유사하다.
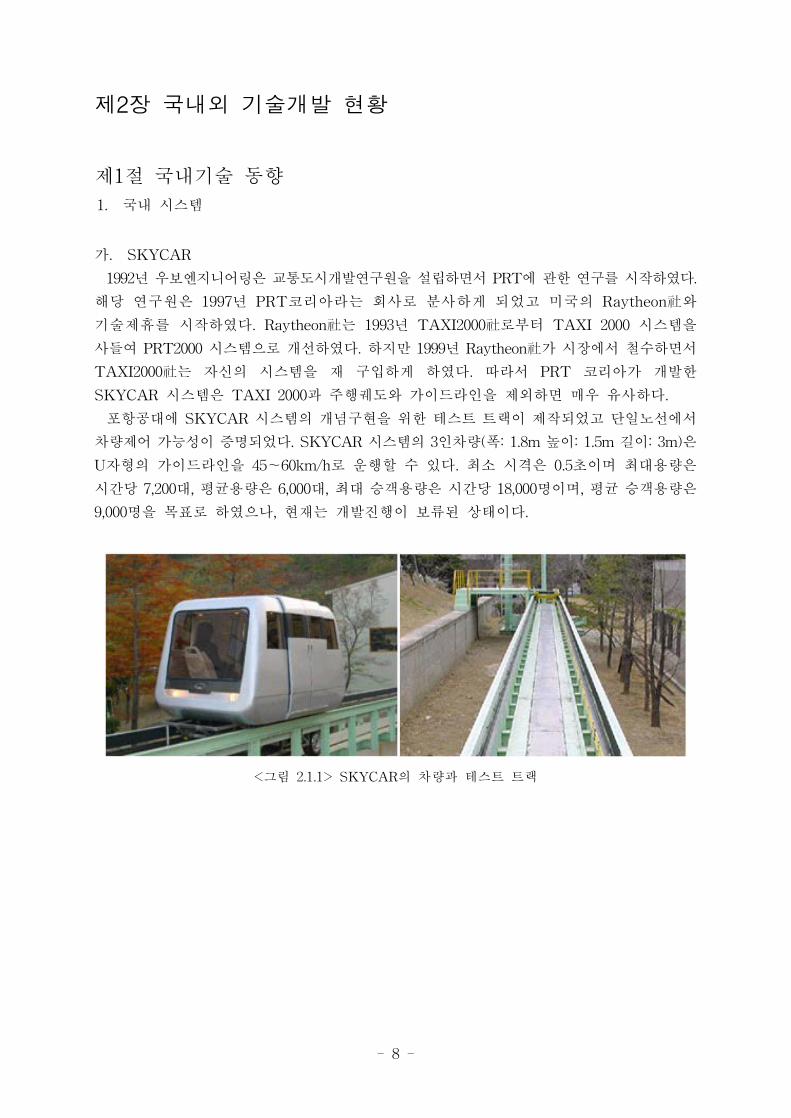
포항공대에 SKYCAR 시스템의 개념구현을 위한 테스트 트랙이 제작되었고 단일노선에서
차량제어 가능성이 증명되었다. SKYCAR 시스템의 3인차량(폭: 1.8m 높이: 1.5m 길이: 3m)은
U자형의 가이드라인을 45~60km/h로 운행할 수 있다. 최소 시격은 0.5초이며 최대용량은
시간당 7,200대, 평균용량은 6,000대, 최대 승객용량은 시간당 18,000명이며, 평균 승객용량은
9,000명을 목표로 하였으나, 현재는 개발진행이 보류된 상태이다.
<그림 2.1.1> SKYCAR의 차량과 테스트 트랙
- 9 -
차량규격 차량성능 운전조건
길이 2.32m 가속도 0.3g 운행시격 0.5초
폭 1.57m 감속도 0.3g노선상
평균 운행량6,000대/시간
높이 1.62m 비상감속도 10 평균승차인원 1.5명/대
중량(빈차) 1,100 운행속도 45~60/h 수송용량 10,000명/시간
중량(만차) 1,400 최소회전반경 16m
좌석 4개 최대구배 15%
<표 2.1.1> SKYCAR 개발 목표 사양
나. VECTUS
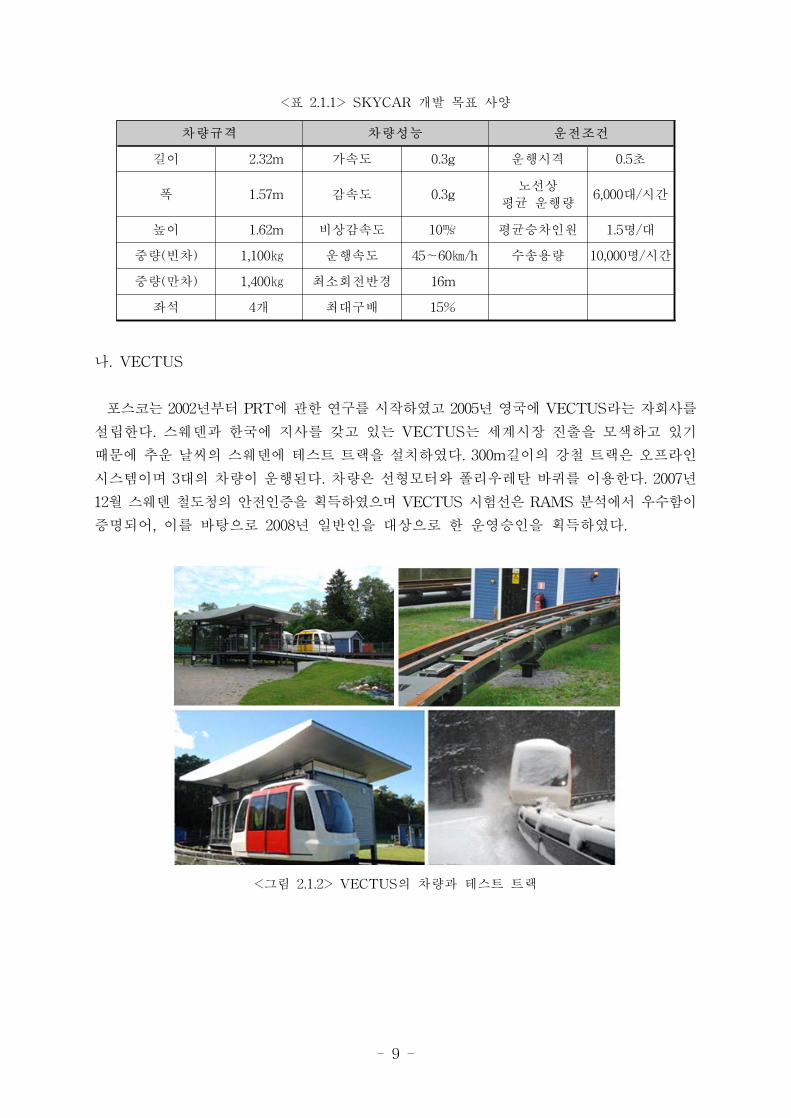
포스코는 2002년부터 PRT에 관한 연구를 시작하였고 2005년 영국에 VECTUS라는 자회사를
설립한다. 스웨덴과 한국에 지사를 갖고 있는 VECTUS는 세계시장 진출을 모색하고 있기
때문에 추운 날씨의 스웨덴에 테스트 트랙을 설치하였다. 300m길이의 강철 트랙은 오프라인
시스템이며 3대의 차량이 운행된다. 차량은 선형모터와 폴리우레탄 바퀴를 이용한다. 2007년
12월 스웨덴 철도청의 안전인증을 획득하였으며 VECTUS 시험선은 RAMS 분석에서 우수함이
증명되어, 이를 바탕으로 2008년 일반인을 대상으로 한 운영승인을 획득하였다.
<그림 2.1.2> VECTUS의 차량과 테스트 트랙
- 10 -
차량규격 차량성능 운전조건
길이 3.5m 최대가속도 2.5m/s2
운행시격 2.5sec
폭 1.5m 비상시 감속 0.5g노선상
평균 운행량4,800~5760대/시간
높이 2.0m 최대 저크 2.5m/s3 최대구배 10%
중량(만차) 1,200 운행속도 60/hr 최소회전반경 5m
<표 2.1.2> VECTUS PRT 세부 사양
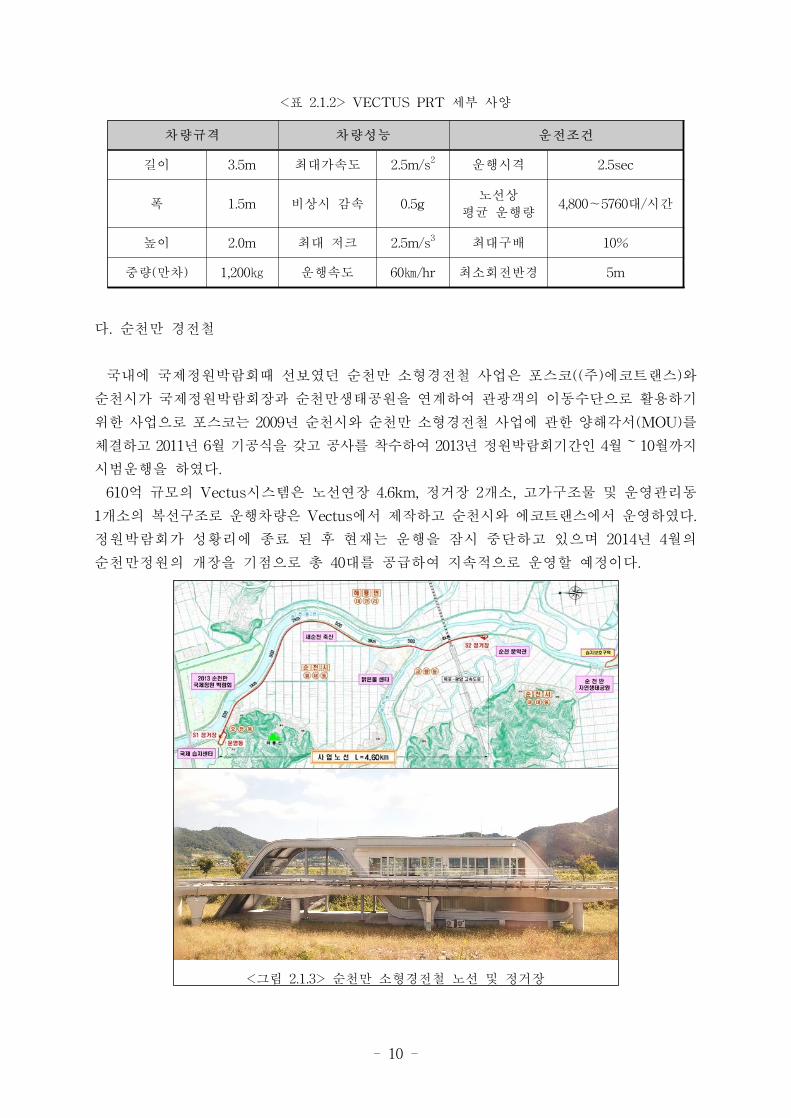
다. 순천만 경전철
국내에 국제정원박람회때 선보였던 순천만 소형경전철 사업은 포스코((주)에코트랜스)와
순천시가 국제정원박람회장과 순천만생태공원을 연계하여 관광객의 이동수단으로 활용하기
위한 사업으로 포스코는 2009년 순천시와 순천만 소형경전철 사업에 관한 양해각서(MOU)를
체결하고 2011년 6월 기공식을 갖고 공사를 착수하여 2013년 정원박람회기간인 4월 ~ 10월까지
시범운행을 하였다.
610억 규모의 Vectus시스템은 노선연장 4.6km, 정거장 2개소, 고가구조물 및 운영관리동
1개소의 복선구조로 운행차량은 Vectus에서 제작하고 순천시와 에코트랜스에서 운영하였다.
정원박람회가 성황리에 종료 된 후 현재는 운행을 잠시 중단하고 있으며 2014년 4월의
순천만정원의 개장을 기점으로 총 40대를 공급하여 지속적으로 운영할 예정이다.
<그림 2.1.3> 순천만 소형경전철 노선 및 정거장
- 11 -
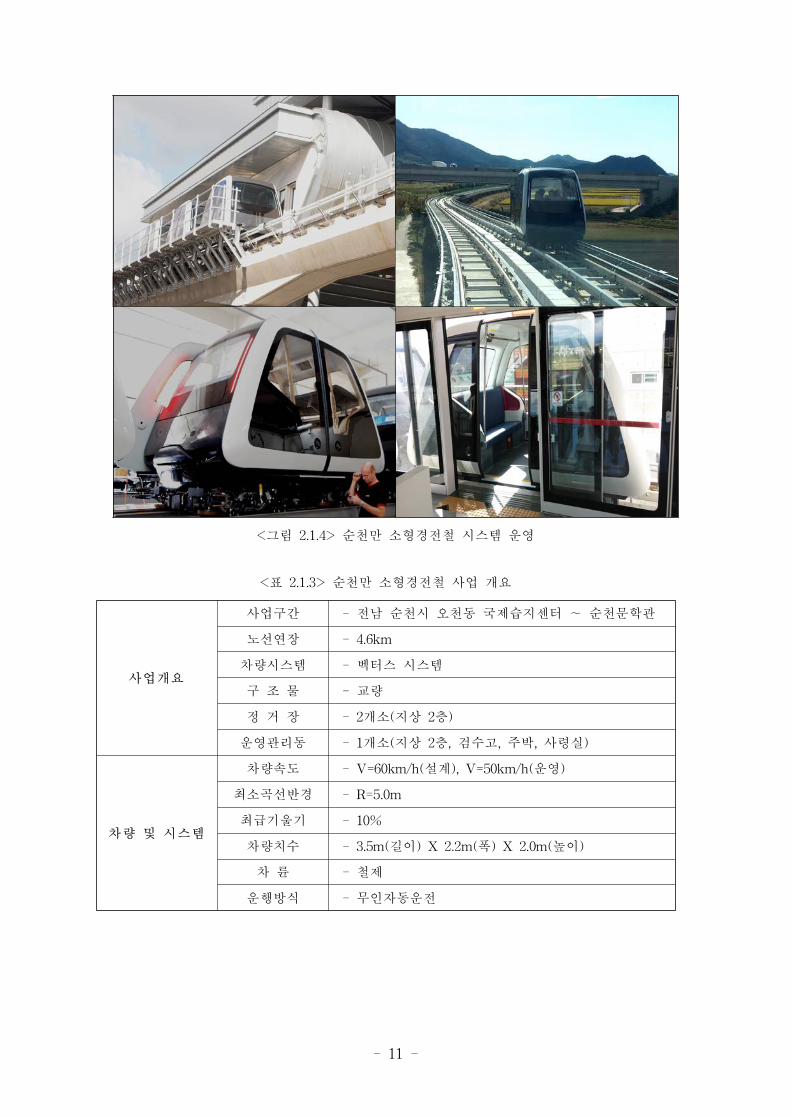
<그림 2.1.4> 순천만 소형경전철 시스템 운영
사업개요
사업구간 - 전남 순천시 오천동 국제습지센터 ∼ 순천문학관
노선연장 - 4.6km
차량시스템 - 벡터스 시스템
구 조 물 - 교량
정 거 장 - 2개소(지상 2층)
운영관리동 - 1개소(지상 2층, 검수고, 주박, 사령실)
차량 및 시스템
차량속도 - V=60km/h(설계), V=50km/h(운영)
최소곡선반경 - R=5.0m
최급기울기 - 10%
차량치수 - 3.5m(길이) X 2.2m(폭) X 2.0m(높이)
차 륜 - 철제
운행방식 - 무인자동운전
<표 2.1.3> 순천만 소형경전철 사업 개요
- 12 -
제2절 국외기술 동향
1. 국외 시스템
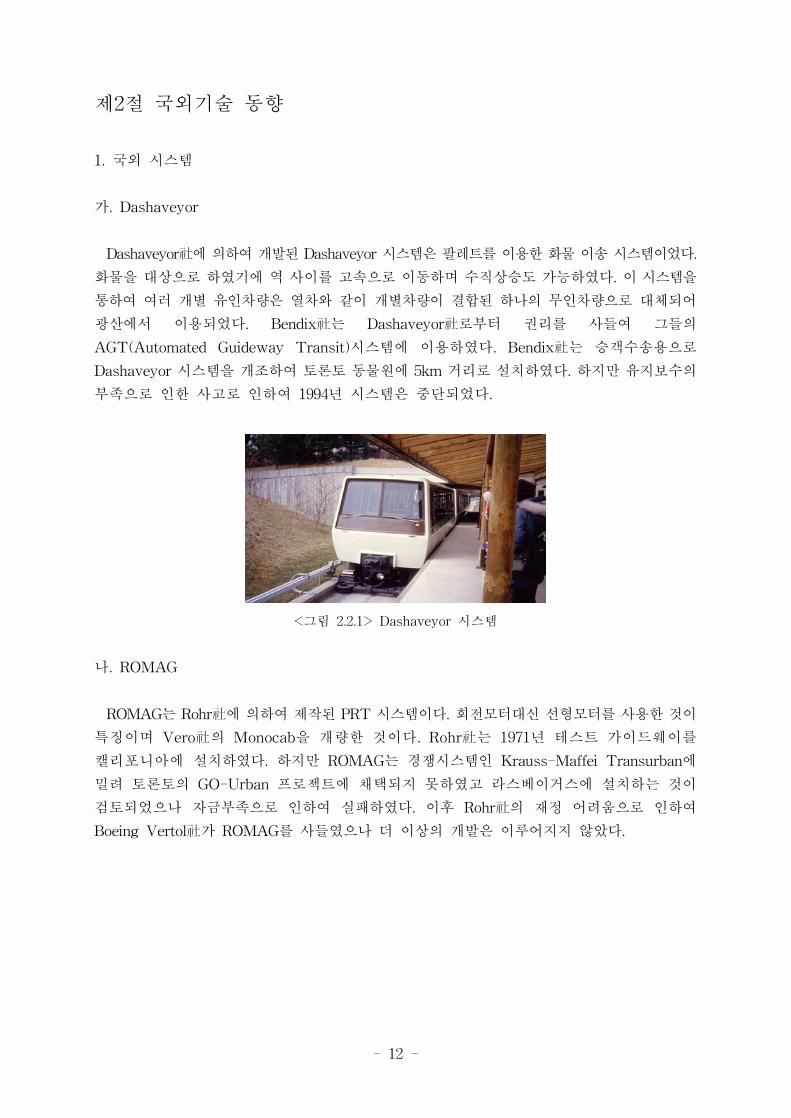
가. Dashaveyor
Dashaveyor社에 의하여 개발된 Dashaveyor 시스템은 팔레트를 이용한 화물 이송 시스템이었다.
화물을 대상으로 하였기에 역 사이를 고속으로 이동하며 수직상승도 가능하였다. 이 시스템을
통하여 여러 개별 유인차량은 열차와 같이 개별차량이 결합된 하나의 무인차량으로 대체되어
광산에서 이용되었다. Bendix社는 Dashaveyor社로부터 권리를 사들여 그들의
AGT(Automated Guideway Transit)시스템에 이용하였다. Bendix社는 승객수송용으로
Dashaveyor 시스템을 개조하여 토론토 동물원에 5km 거리로 설치하였다. 하지만 유지보수의
부족으로 인한 사고로 인하여 1994년 시스템은 중단되었다.
<그림 2.2.1> Dashaveyor 시스템
나. ROMAG
ROMAG는 Rohr社에 의하여 제작된 PRT 시스템이다. 회전모터대신 선형모터를 사용한 것이
특징이며 Vero社의 Monocab을 개량한 것이다. Rohr社는 1971년 테스트 가이드웨이를
캘리포니아에 설치하였다. 하지만 ROMAG는 경쟁시스템인 Krauss-Maffei Transurban에
밀려 토론토의 GO-Urban 프로젝트에 채택되지 못하였고 라스베이거스에 설치하는 것이
검토되었으나 자금부족으로 인하여 실패하였다. 이후 Rohr社의 재정 어려움으로 인하여
Boeing Vertol社가 ROMAG를 사들였으나 더 이상의 개발은 이루어지지 않았다.
- 13 -
<그림 2.2.2> ROMAG 시스템
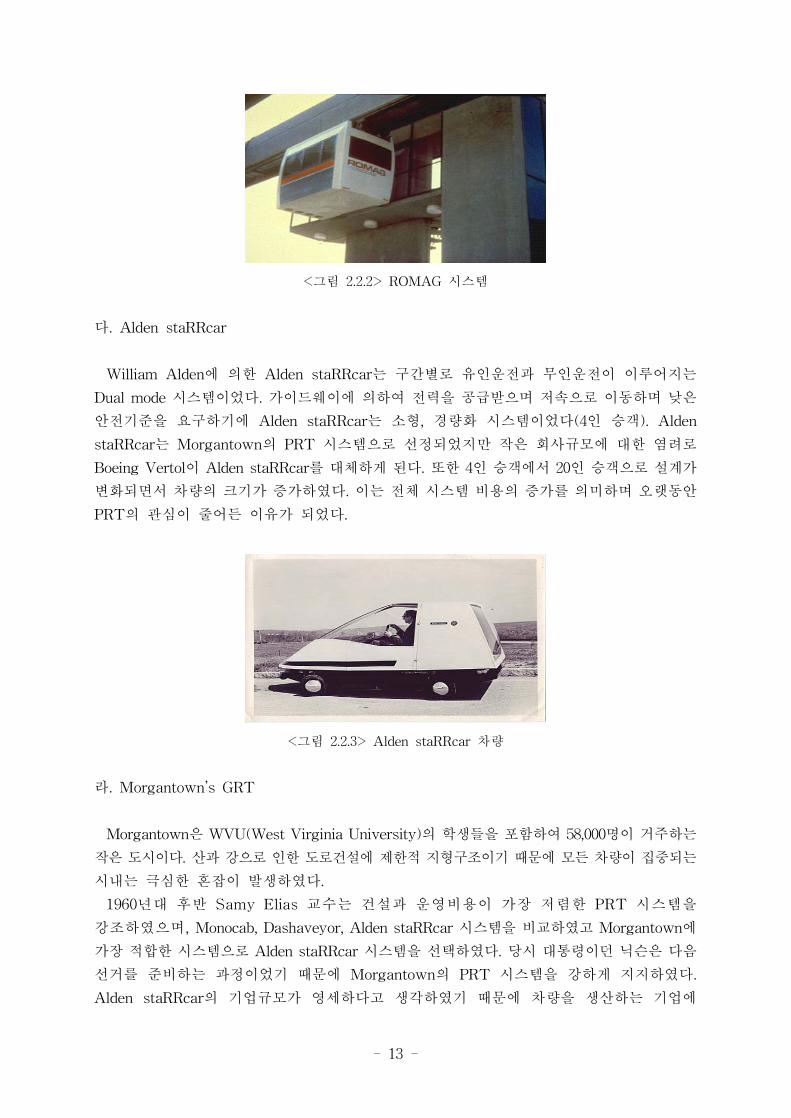
다. Alden staRRcar
William Alden에 의한 Alden staRRcar는 구간별로 유인운전과 무인운전이 이루어지는
Dual mode 시스템이었다. 가이드웨이에 의하여 전력을 공급받으며 저속으로 이동하며 낮은
안전기준을 요구하기에 Alden staRRcar는 소형, 경량화 시스템이었다(4인 승객). Alden
staRRcar는 Morgantown의 PRT 시스템으로 선정되었지만 작은 회사규모에 대한 염려로
Boeing Vertol이 Alden staRRcar를 대체하게 된다. 또한 4인 승객에서 20인 승객으로 설계가
변화되면서 차량의 크기가 증가하였다. 이는 전체 시스템 비용의 증가를 의미하며 오랫동안
PRT의 관심이 줄어든 이유가 되었다.
<그림 2.2.3> Alden staRRcar 차량
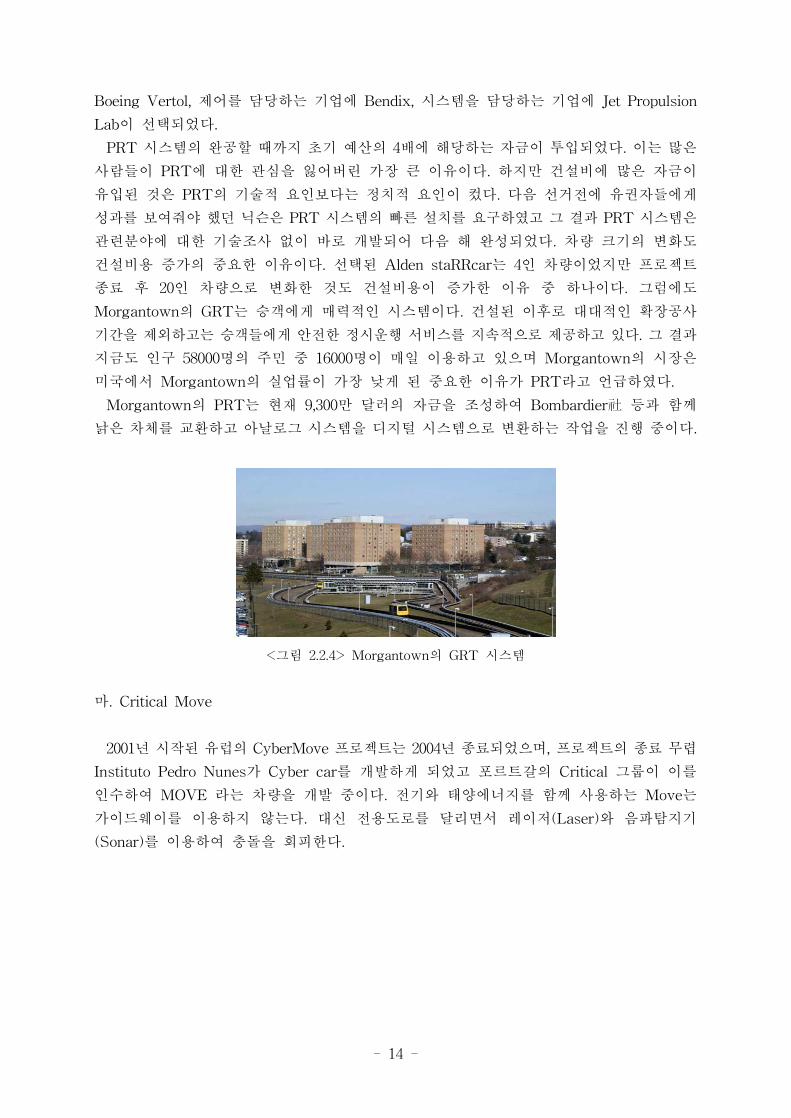
라. Morgantown’s GRT
Morgantown은 WVU(West Virginia University)의 학생들을 포함하여 58,000명이 거주하는
작은 도시이다. 산과 강으로 인한 도로건설에 제한적 지형구조이기 때문에 모든 차량이 집중되는
시내는 극심한 혼잡이 발생하였다.
1960년대 후반 Samy Elias 교수는 건설과 운영비용이 가장 저렴한 PRT 시스템을
강조하였으며, Monocab, Dashaveyor, Alden staRRcar 시스템을 비교하였고 Morgantown에
가장 적합한 시스템으로 Alden staRRcar 시스템을 선택하였다. 당시 대통령이던 닉슨은 다음
선거를 준비하는 과정이었기 때문에 Morgantown의 PRT 시스템을 강하게 지지하였다.
Alden staRRcar의 기업규모가 영세하다고 생각하였기 때문에 차량을 생산하는 기업에
- 14 -
Boeing Vertol, 제어를 담당하는 기업에 Bendix, 시스템을 담당하는 기업에 Jet Propulsion
Lab이 선택되었다.
PRT 시스템의 완공할 때까지 초기 예산의 4배에 해당하는 자금이 투입되었다. 이는 많은
사람들이 PRT에 대한 관심을 잃어버린 가장 큰 이유이다. 하지만 건설비에 많은 자금이
유입된 것은 PRT의 기술적 요인보다는 정치적 요인이 컸다. 다음 선거전에 유권자들에게
성과를 보여줘야 했던 닉슨은 PRT 시스템의 빠른 설치를 요구하였고 그 결과 PRT 시스템은
관련분야에 대한 기술조사 없이 바로 개발되어 다음 해 완성되었다. 차량 크기의 변화도
건설비용 증가의 중요한 이유이다. 선택된 Alden staRRcar는 4인 차량이었지만 프로젝트
종료 후 20인 차량으로 변화한 것도 건설비용이 증가한 이유 중 하나이다. 그럼에도
Morgantown의 GRT는 승객에게 매력적인 시스템이다. 건설된 이후로 대대적인 확장공사
기간을 제외하고는 승객들에게 안전한 정시운행 서비스를 지속적으로 제공하고 있다. 그 결과
지금도 인구 58000명의 주민 중 16000명이 매일 이용하고 있으며 Morgantown의 시장은
미국에서 Morgantown의 실업률이 가장 낮게 된 중요한 이유가 PRT라고 언급하였다.
Morgantown의 PRT는 현재 9,300만 달러의 자금을 조성하여 Bombardier社 등과 함께
낡은 차체를 교환하고 아날로그 시스템을 디지털 시스템으로 변환하는 작업을 진행 중이다.
<그림 2.2.4> Morgantown의 GRT 시스템
마. Critical Move
2001년 시작된 유럽의 CyberMove 프로젝트는 2004년 종료되었으며, 프로젝트의 종료 무렵
Instituto Pedro Nunes가 Cyber car를 개발하게 되었고 포르트갈의 Critical 그룹이 이를
인수하여 MOVE 라는 차량을 개발 중이다. 전기와 태양에너지를 함께 사용하는 Move는
가이드웨이를 이용하지 않는다. 대신 전용도로를 달리면서 레이저(Laser)와 음파탐지기
(Sonar)를 이용하여 충돌을 회피한다.
- 15 -
<그림 2.2.5> Critical MOVE의 시스템
바. CabinTaxi
MBB(Messerschmitt-Bolkow-Blohm)과 Demag의 합병벤처회사인 Cabintaxi는 독일
Hagen에 시험선을 건설하여 1973년∼1979년까지 40만 mile 이상의 시험선을 운행하였다.
1969년에 Demag와 MBB는 독립적으로 8년 동안 Cabintaxi/Cabinlift를 이끌었던 설계를
시작하였으며, 독일정부는 양쪽회사들을 합병펀드프로그램의 활동에 참여시켜 수출경쟁력을
가진 대중교통기술을 개발하는데 목적을 두었다. 각 구성요소에 관한 시스템 정의와 연구실
시험은 1969년에 시작되었고, 1973년 8월 Hagen 부근에 완성된 설비는 150m 복선궤도
(현수식, 과좌식), 합류점으로 구성되었다. 1974년 9월까지 트랙은 두 개의 폐쇄 루프로
1,136m까지 확장되어 5대는 상부에서 2대는 하부에서 주행하였다. 1975년에 시험설비는
3개의 역과 완전 자동화된 9대의 차량을 보유하였으며, 1975년 9월에 12인용 차량이 시험운행을
위해 도입되었고, 1976년 시험설비는 1.9km의 궤도로 구축되어 6개 역과 24개의 운영차량을
1979년까지 운행하였다. 독일 정부는 PRT 시스템 개발을 성공적으로 종료하고 도시 내에
설치 예정이었으나, 1979년에 Hamburg에 적용하려던 사업이 예산상의 이유로 무산되었다.
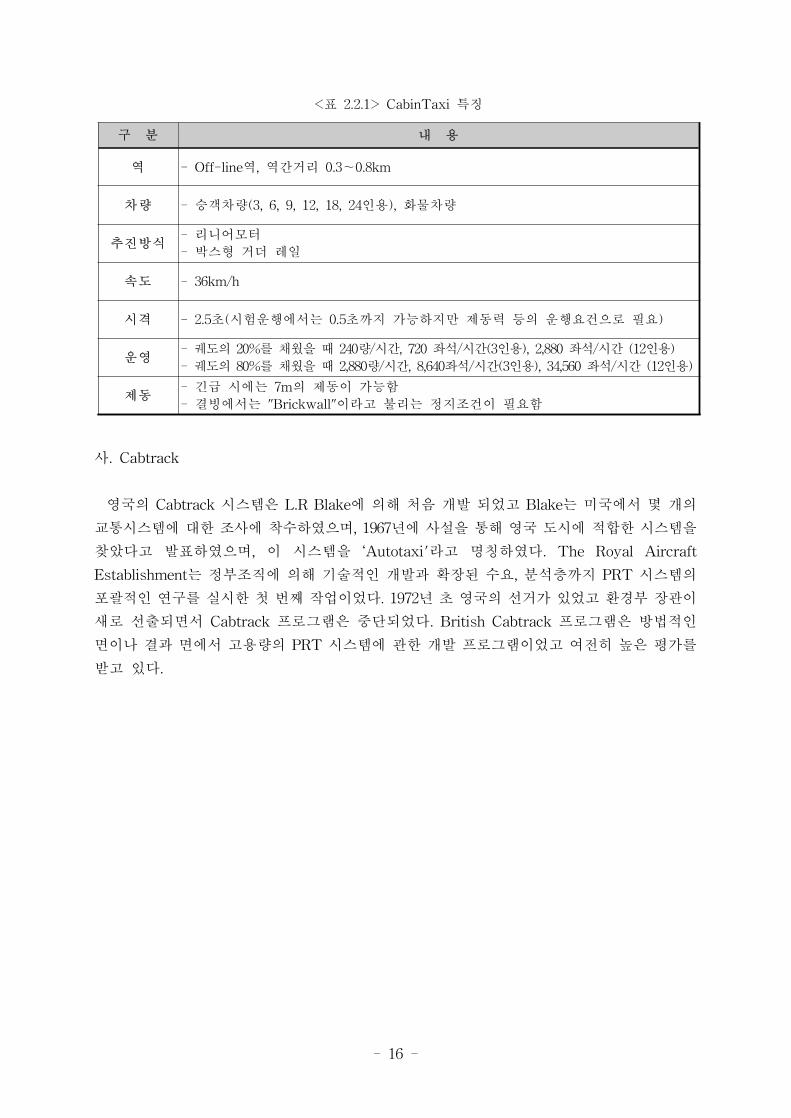
비동기식의 CabinTaxi는 수요가 있을 때 마다 이용할 수 있는 작고 편안한 차량, 환승과
중간역 정차 없이 출발지에서 목적지까지 운행, 30km/h 이상의 속력, 고가 궤도 사용으로
타 수단과의 통행 분리, 시스템의 완전 자동화, 10초 이하의 시격 및 차량이탈을 제어 할 수
있는 선형유도추진방식, 낮은 소음과 공기 오염이 전혀 없다는 특징이 있다. 또한,
Cabintaxi는 궤도 하부에 매달려 주행하는 것 뿐 아니라, 궤도 상부에서 승차한다는 점에서
매우 독특하다. 박스형 거더(Girder)는 현수식과 과좌식 차량을 유도 및 지지한다.
<그림 2.2.6> CabinTaxi 구조물
- 16 -
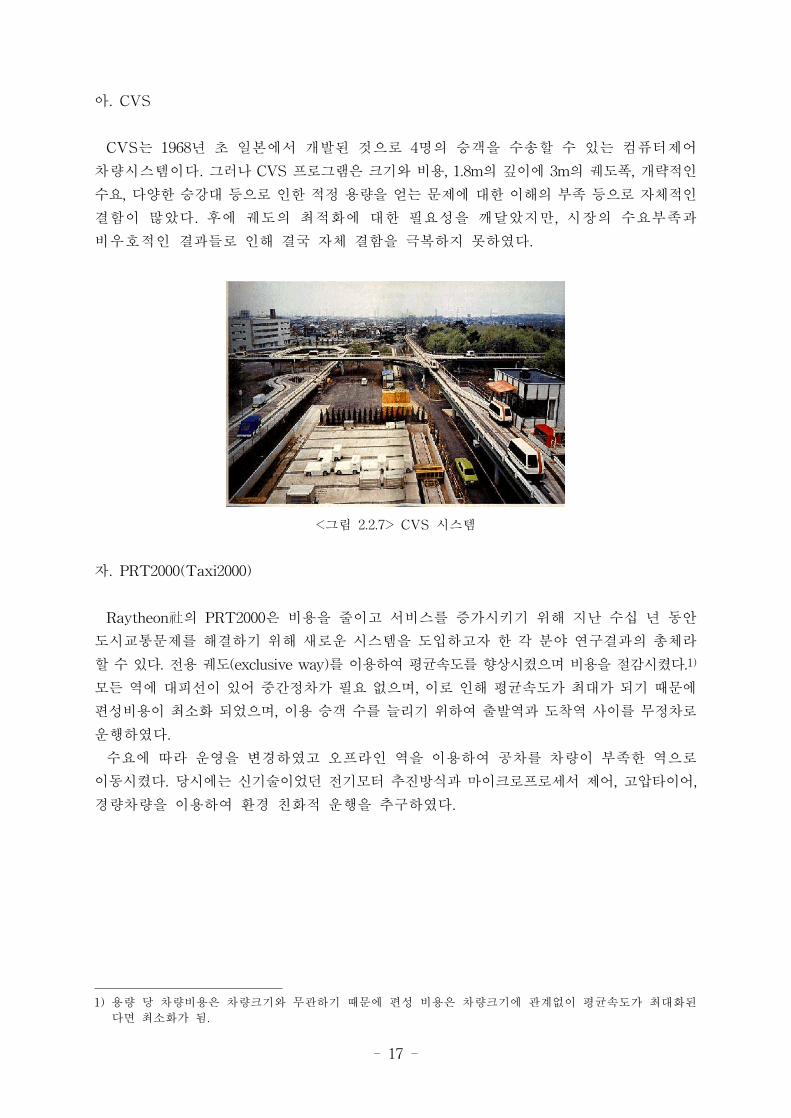
구 분 내 용
역 - Off-line역, 역간거리 0.3~0.8km
차량 - 승객차량(3, 6, 9, 12, 18, 24인용), 화물차량
추진방식- 리니어모터
- 박스형 거더 레일
속도 - 36km/h
시격 - 2.5초(시험운행에서는 0.5초까지 가능하지만 제동력 등의 운행요건으로 필요)
운영- 궤도의 20%를 채웠을 때 240량/시간, 720 좌석/시간(3인용), 2,880 좌석/시간 (12인용)
- 궤도의 80%를 채웠을 때 2,880량/시간, 8,640좌석/시간(3인용), 34,560 좌석/시간 (12인용)
제동- 긴급 시에는 7m의 제동이 가능함
- 결빙에서는 "Brickwall"이라고 불리는 정지조건이 필요함
<표 2.2.1> CabinTaxi 특징
사. Cabtrack
영국의 Cabtrack 시스템은 L.R Blake에 의해 처음 개발 되었고 Blake는 미국에서 몇 개의
교통시스템에 대한 조사에 착수하였으며, 1967년에 사설을 통해 영국 도시에 적합한 시스템을
찾았다고 발표하였으며, 이 시스템을 ‘Autotaxi'라고 명칭하였다. The Royal Aircraft
Establishment는 정부조직에 의해 기술적인 개발과 확장된 수요, 분석층까지 PRT 시스템의
포괄적인 연구를 실시한 첫 번째 작업이었다. 1972년 초 영국의 선거가 있었고 환경부 장관이
새로 선출되면서 Cabtrack 프로그램은 중단되었다. British Cabtrack 프로그램은 방법적인
면이나 결과 면에서 고용량의 PRT 시스템에 관한 개발 프로그램이었고 여전히 높은 평가를
받고 있다.
- 17 -
아. CVS
CVS는 1968년 초 일본에서 개발된 것으로 4명의 승객을 수송할 수 있는 컴퓨터제어
차량시스템이다. 그러나 CVS 프로그램은 크기와 비용, 1.8m의 깊이에 3m의 궤도폭, 개략적인
수요, 다양한 승강대 등으로 인한 적정 용량을 얻는 문제에 대한 이해의 부족 등으로 자체적인
결함이 많았다. 후에 궤도의 최적화에 대한 필요성을 깨달았지만, 시장의 수요부족과
비우호적인 결과들로 인해 결국 자체 결함을 극복하지 못하였다.
<그림 2.2.7> CVS 시스템
자. PRT2000(Taxi2000)
Raytheon社의 PRT2000은 비용을 줄이고 서비스를 증가시키기 위해 지난 수십 년 동안
도시교통문제를 해결하기 위해 새로운 시스템을 도입하고자 한 각 분야 연구결과의 총체라
할 수 있다. 전용 궤도(exclusive way)를 이용하여 평균속도를 향상시켰으며 비용을 절감시켰다.1)
모든 역에 대피선이 있어 중간정차가 필요 없으며, 이로 인해 평균속도가 최대가 되기 때문에
편성비용이 최소화 되었으며, 이용 승객 수를 늘리기 위하여 출발역과 도착역 사이를 무정차로
운행하였다.
수요에 따라 운영을 변경하였고 오프라인 역을 이용하여 공차를 차량이 부족한 역으로
이동시켰다. 당시에는 신기술이었던 전기모터 추진방식과 마이크로프로세서 제어, 고압타이어,
경량차량을 이용하여 환경 친화적 운행을 추구하였다.
1) 용량 당 차량비용은 차량크기와 무관하기 때문에 편성 비용은 차량크기에 관계없이 평균속도가 최대화된
다면 최소화가 됨.
- 18 -
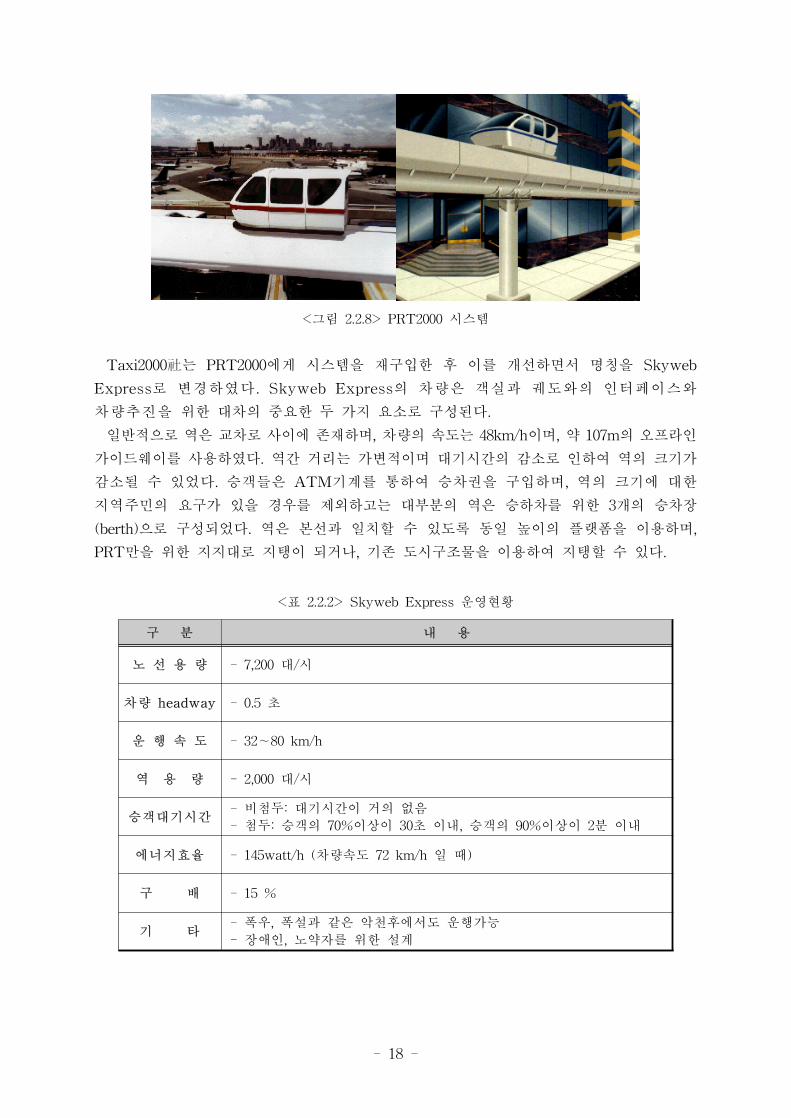
<그림 2.2.8> PRT2000 시스템
Taxi2000社는 PRT2000에게 시스템을 재구입한 후 이를 개선하면서 명칭을 Skyweb
Express로 변경하였다. Skyweb Express의 차량은 객실과 궤도와의 인터페이스와
차량추진을 위한 대차의 중요한 두 가지 요소로 구성된다.
일반적으로 역은 교차로 사이에 존재하며, 차량의 속도는 48km/h이며, 약 107m의 오프라인
가이드웨이를 사용하였다. 역간 거리는 가변적이며 대기시간의 감소로 인하여 역의 크기가
감소될 수 있었다. 승객들은 ATM기계를 통하여 승차권을 구입하며, 역의 크기에 대한
지역주민의 요구가 있을 경우를 제외하고는 대부분의 역은 승하차를 위한 3개의 승차장
(berth)으로 구성되었다. 역은 본선과 일치할 수 있도록 동일 높이의 플랫폼을 이용하며,
PRT만을 위한 지지대로 지탱이 되거나, 기존 도시구조물을 이용하여 지탱할 수 있다.
구 분 내 용
노 선 용 량 - 7,200 대/시
차량 headway - 0.5 초
운 행 속 도 - 32∼80 km/h
역 용 량 - 2,000 대/시
승객대기시간- 비첨두: 대기시간이 거의 없음
- 첨두: 승객의 70%이상이 30초 이내, 승객의 90%이상이 2분 이내
에너지효율 - 145watt/h (차량속도 72 km/h 일 때)
구 배 - 15 %
기 타- 폭우, 폭설과 같은 악천후에서도 운행가능
- 장애인, 노약자를 위한 설계
<표 2.2.2> Skyweb Express 운영현황
- 19 -
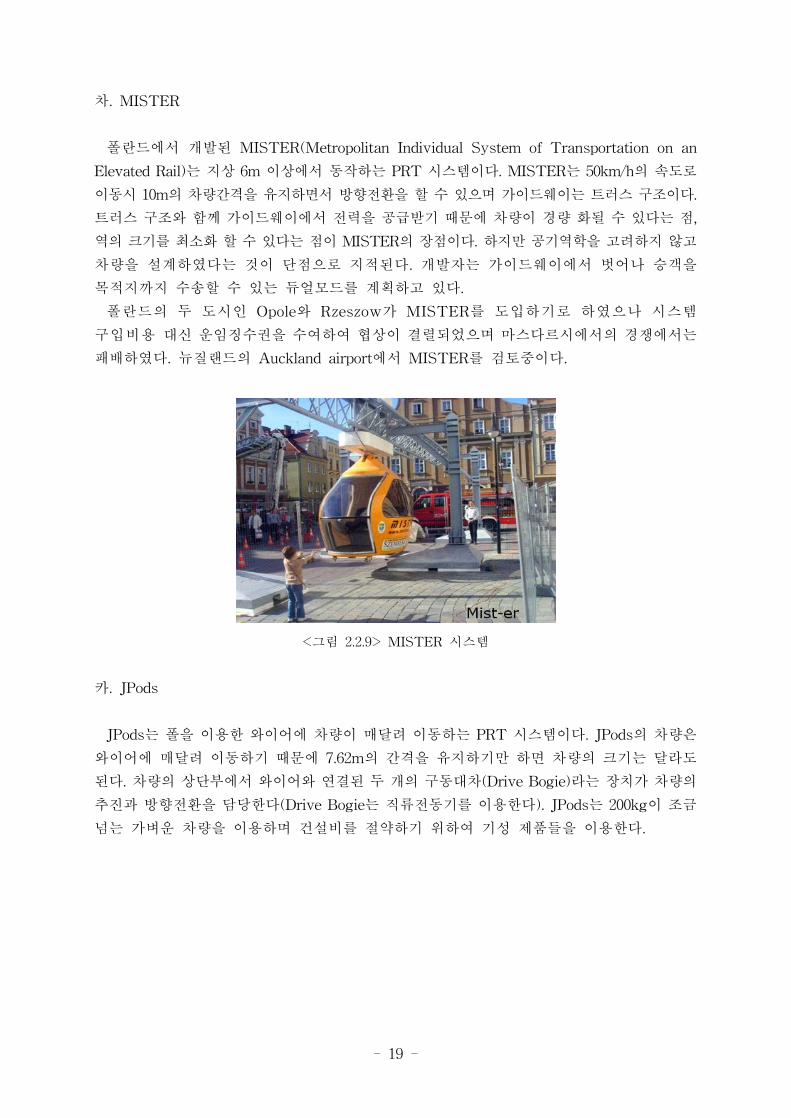
차. MISTER
폴란드에서 개발된 MISTER(Metropolitan Individual System of Transportation on an
Elevated Rail)는 지상 6m 이상에서 동작하는 PRT 시스템이다. MISTER는 50km/h의 속도로
이동시 10m의 차량간격을 유지하면서 방향전환을 할 수 있으며 가이드웨이는 트러스 구조이다.
트러스 구조와 함께 가이드웨이에서 전력을 공급받기 때문에 차량이 경량 화될 수 있다는 점,
역의 크기를 최소화 할 수 있다는 점이 MISTER의 장점이다. 하지만 공기역학을 고려하지 않고
차량을 설계하였다는 것이 단점으로 지적된다. 개발자는 가이드웨이에서 벗어나 승객을
목적지까지 수송할 수 있는 듀얼모드를 계획하고 있다.
폴란드의 두 도시인 Opole와 Rzeszow가 MISTER를 도입하기로 하였으나 시스템
구입비용 대신 운임징수권을 수여하여 협상이 결렬되었으며 마스다르시에서의 경쟁에서는
패배하였다. 뉴질랜드의 Auckland airport에서 MISTER를 검토중이다.
<그림 2.2.9> MISTER 시스템
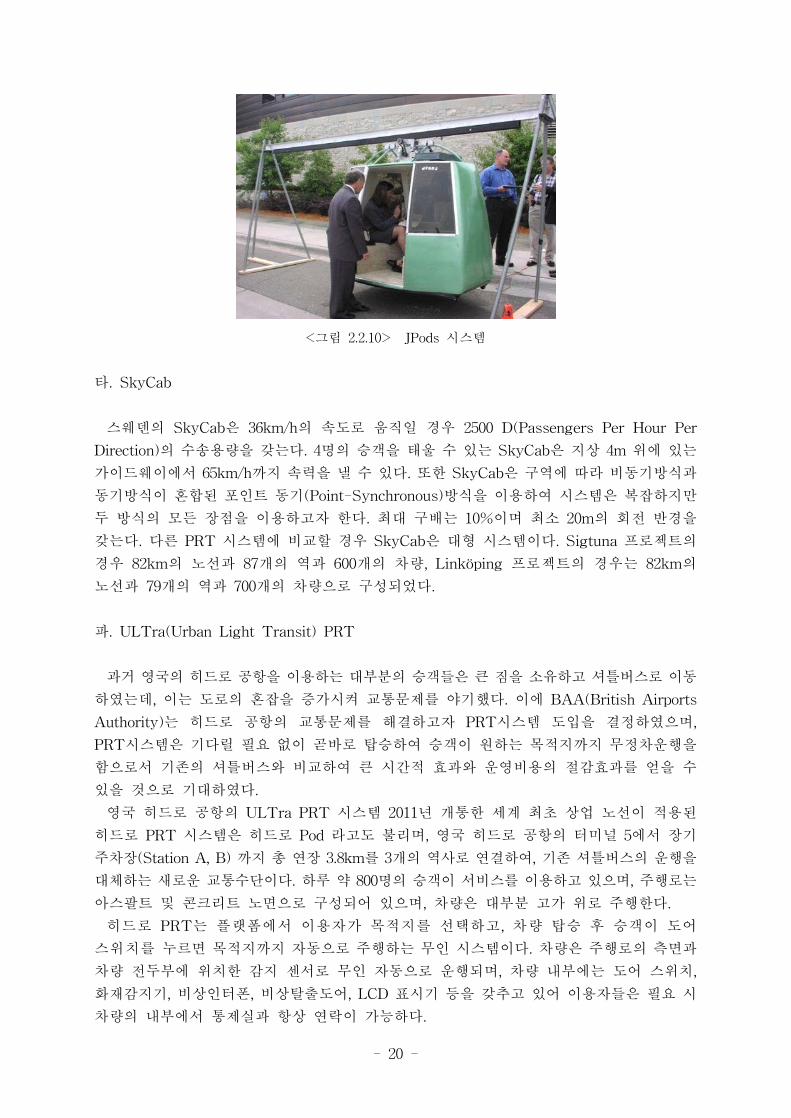
카. JPods
JPods는 폴을 이용한 와이어에 차량이 매달려 이동하는 PRT 시스템이다. JPods의 차량은
와이어에 매달려 이동하기 때문에 7.62m의 간격을 유지하기만 하면 차량의 크기는 달라도
된다. 차량의 상단부에서 와이어와 연결된 두 개의 구동대차(Drive Bogie)라는 장치가 차량의
추진과 방향전환을 담당한다(Drive Bogie는 직류전동기를 이용한다). JPods는 200kg이 조금
넘는 가벼운 차량을 이용하며 건설비를 절약하기 위하여 기성 제품들을 이용한다.
- 20 -
<그림 2.2.10> JPods 시스템
타. SkyCab
스웨덴의 SkyCab은 36km/h의 속도로 움직일 경우 2500 D(Passengers Per Hour Per
Direction)의 수송용량을 갖는다. 4명의 승객을 태울 수 있는 SkyCab은 지상 4m 위에 있는
가이드웨이에서 65km/h까지 속력을 낼 수 있다. 또한 SkyCab은 구역에 따라 비동기방식과
동기방식이 혼합된 포인트 동기(Point-Synchronous)방식을 이용하여 시스템은 복잡하지만
두 방식의 모든 장점을 이용하고자 한다. 최대 구배는 10%이며 최소 20m의 회전 반경을
갖는다. 다른 PRT 시스템에 비교할 경우 SkyCab은 대형 시스템이다. Sigtuna 프로젝트의
경우 82km의 노선과 87개의 역과 600개의 차량, Linköping 프로젝트의 경우는 82km의
노선과 79개의 역과 700개의 차량으로 구성되었다.
파. ULTra(Urban Light Transit) PRT
과거 영국의 히드로 공항을 이용하는 대부분의 승객들은 큰 짐을 소유하고 셔틀버스로 이동
하였는데, 이는 도로의 혼잡을 증가시켜 교통문제를 야기했다. 이에 BAA(British Airports
Authority)는 히드로 공항의 교통문제를 해결하고자 PRT시스템 도입을 결정하였으며,
PRT시스템은 기다릴 필요 없이 곧바로 탑승하여 승객이 원하는 목적지까지 무정차운행을
함으로서 기존의 셔틀버스와 비교하여 큰 시간적 효과와 운영비용의 절감효과를 얻을 수
있을 것으로 기대하였다.
영국 히드로 공항의 ULTra PRT 시스템 2011년 개통한 세계 최초 상업 노선이 적용된
히드로 PRT 시스템은 히드로 Pod 라고도 불리며, 영국 히드로 공항의 터미널 5에서 장기
주차장(Station A, B) 까지 총 연장 3.8km를 3개의 역사로 연결하여, 기존 셔틀버스의 운행을
대체하는 새로운 교통수단이다. 하루 약 800명의 승객이 서비스를 이용하고 있으며, 주행로는
아스팔트 및 콘크리트 노면으로 구성되어 있으며, 차량은 대부분 고가 위로 주행한다.
히드로 PRT는 플랫폼에서 이용자가 목적지를 선택하고, 차량 탑승 후 승객이 도어
스위치를 누르면 목적지까지 자동으로 주행하는 무인 시스템이다. 차량은 주행로의 측면과
차량 전두부에 위치한 감지 센서로 무인 자동으로 운행되며, 차량 내부에는 도어 스위치,
화재감지기, 비상인터폰, 비상탈출도어, LCD 표시기 등을 갖추고 있어 이용자들은 필요 시
차량의 내부에서 통제실과 항상 연락이 가능하다.

- 21 -
히드로 공항은 PRT 시스템을 도입함에 따라 제5터미널과 장기 주차장 간 3.9km를 5분에
이동할 수 있게 되었으며, 기존 셔틀버스 시스템보다 시간 절감과 운영비용 절감효과를
가져오고 있다.
<그림 2.2.11> 히드로 PRT
<그림 2.2.12> 히드로 PRT 노선
정거장은 두단식 승강장으로 승강장에서 목적지를 선택할 수 있는 DSP(Destination
Selection Panels) 시스템이 구축되어 있고, 승강장 끝단과 차량과의 이격거리는 5cm 미만이다.
아래는 히드로 공항내 PRT 역사 사진을 나타낸다.
<그림 2.2.13> 히드로 PRT - 터미널5 플랫폼
- 22 -
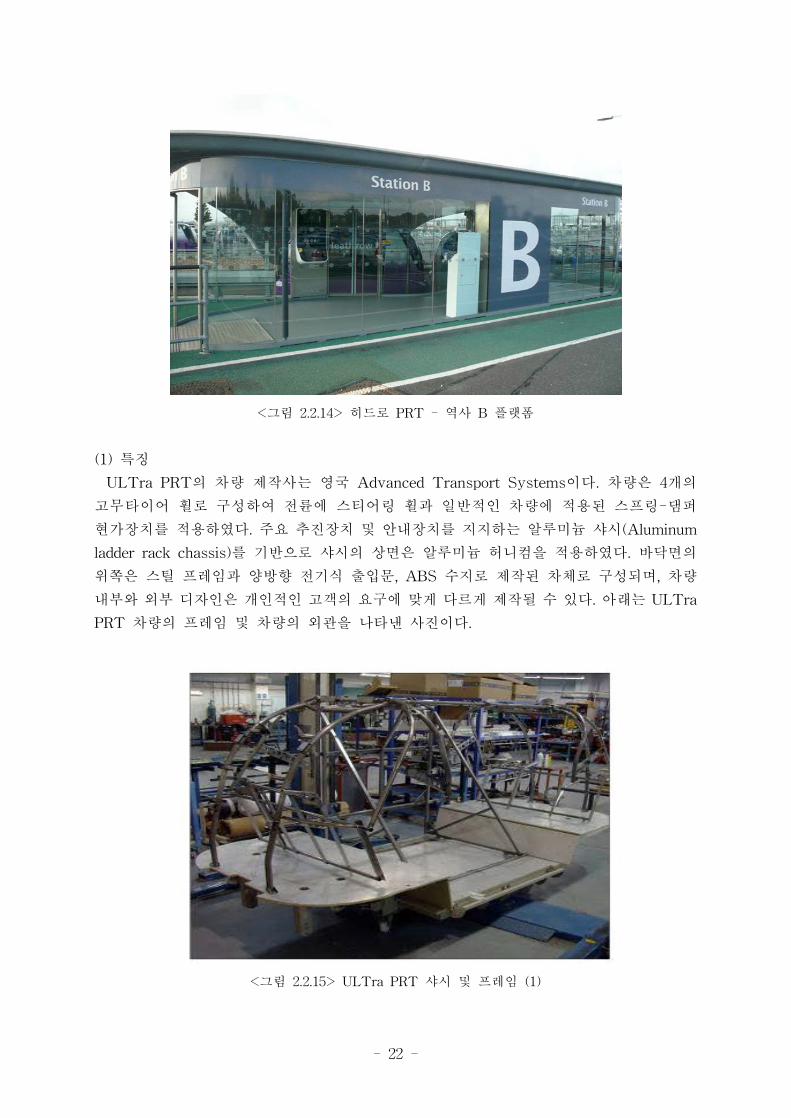
<그림 2.2.14> 히드로 PRT - 역사 B 플랫폼
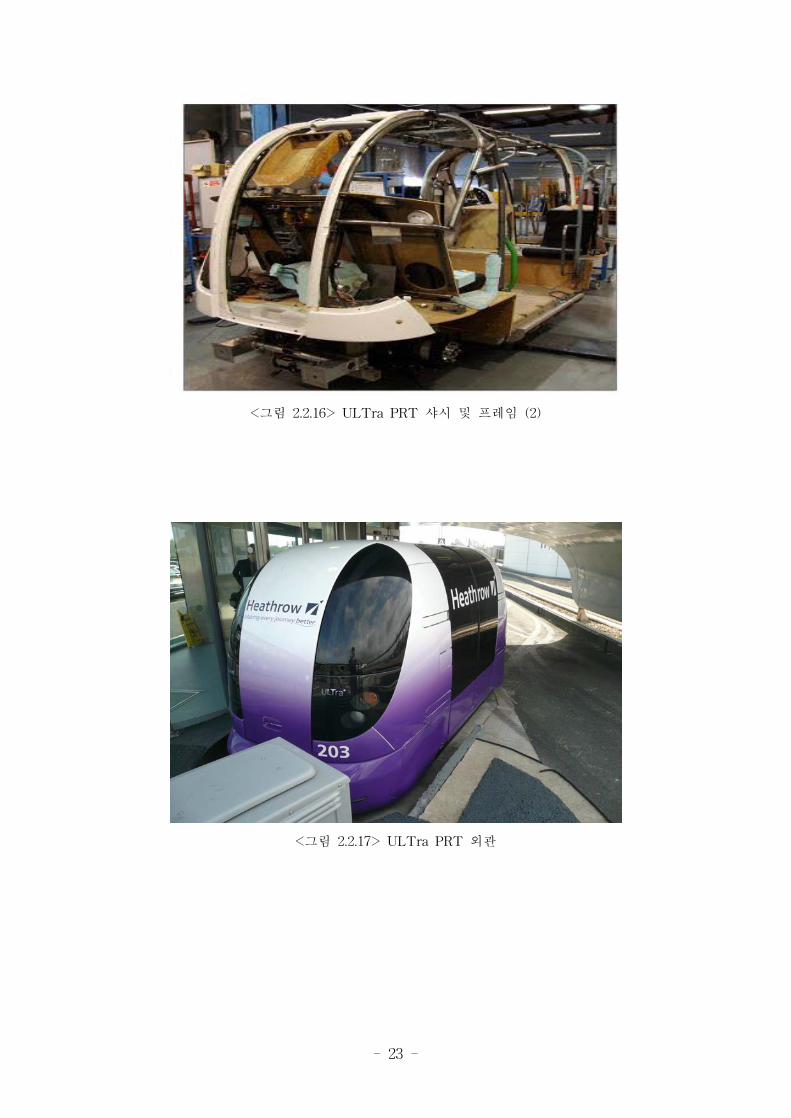
(1) 특징
ULTra PRT의 차량 제작사는 영국 Advanced Transport Systems이다. 차량은 4개의
고무타이어 휠로 구성하여 전륜에 스티어링 휠과 일반적인 차량에 적용된 스프링-댐퍼
현가장치를 적용하였다. 주요 추진장치 및 안내장치를 지지하는 알루미늄 샤시(Aluminum
ladder rack chassis)를 기반으로 샤시의 상면은 알루미늄 허니컴을 적용하였다. 바닥면의
위쪽은 스틸 프레임과 양방향 전기식 출입문, ABS 수지로 제작된 차체로 구성되며, 차량
내부와 외부 디자인은 개인적인 고객의 요구에 맞게 다르게 제작될 수 있다. 아래는 ULTra
PRT 차량의 프레임 및 차량의 외관을 나타낸 사진이다.
<그림 2.2.15> ULTra PRT 샤시 및 프레임 (1)
- 23 -
<그림 2.2.16> ULTra PRT 샤시 및 프레임 (2)
<그림 2.2.17> ULTra PRT 외관
- 24 -
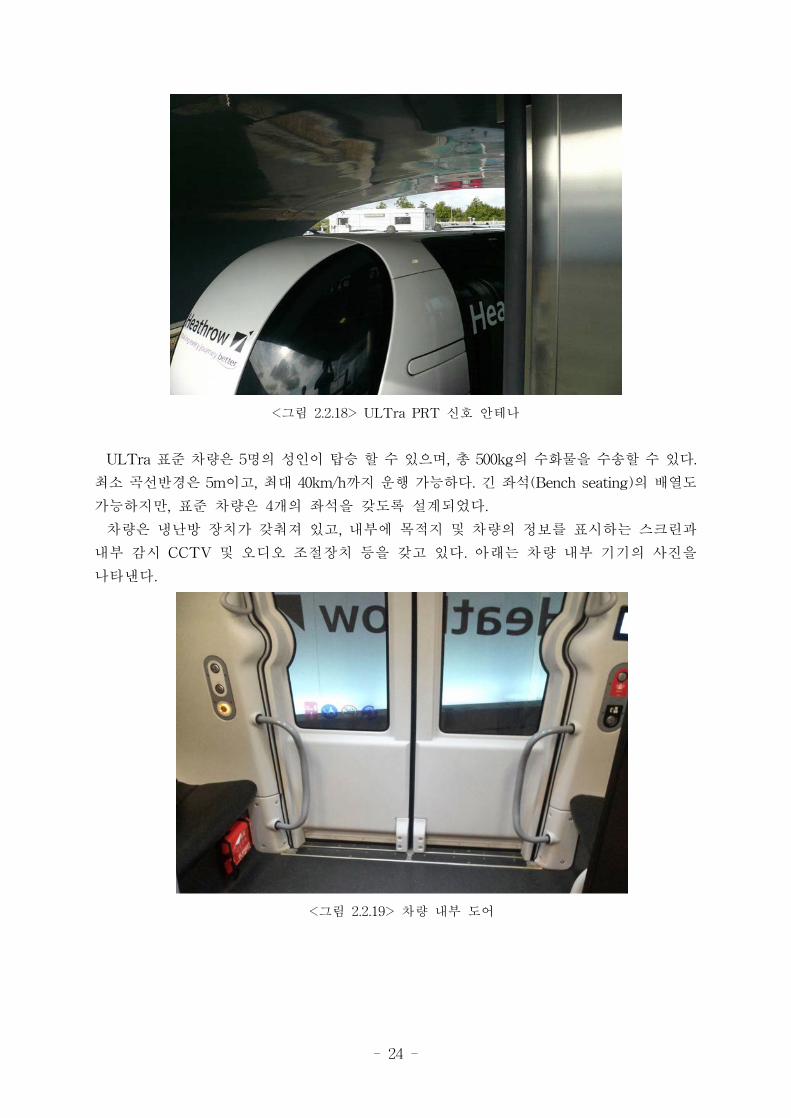
<그림 2.2.18> ULTra PRT 신호 안테나
ULTra 표준 차량은 5명의 성인이 탑승 할 수 있으며, 총 500kg의 수화물을 수송할 수 있다.
최소 곡선반경은 5m이고, 최대 40km/h까지 운행 가능하다. 긴 좌석(Bench seating)의 배열도
가능하지만, 표준 차량은 4개의 좌석을 갖도록 설계되었다.
차량은 냉난방 장치가 갖춰져 있고, 내부에 목적지 및 차량의 정보를 표시하는 스크린과
내부 감시 CCTV 및 오디오 조절장치 등을 갖고 있다. 아래는 차량 내부 기기의 사진을
나타낸다.
<그림 2.2.19> 차량 내부 도어
- 25 -
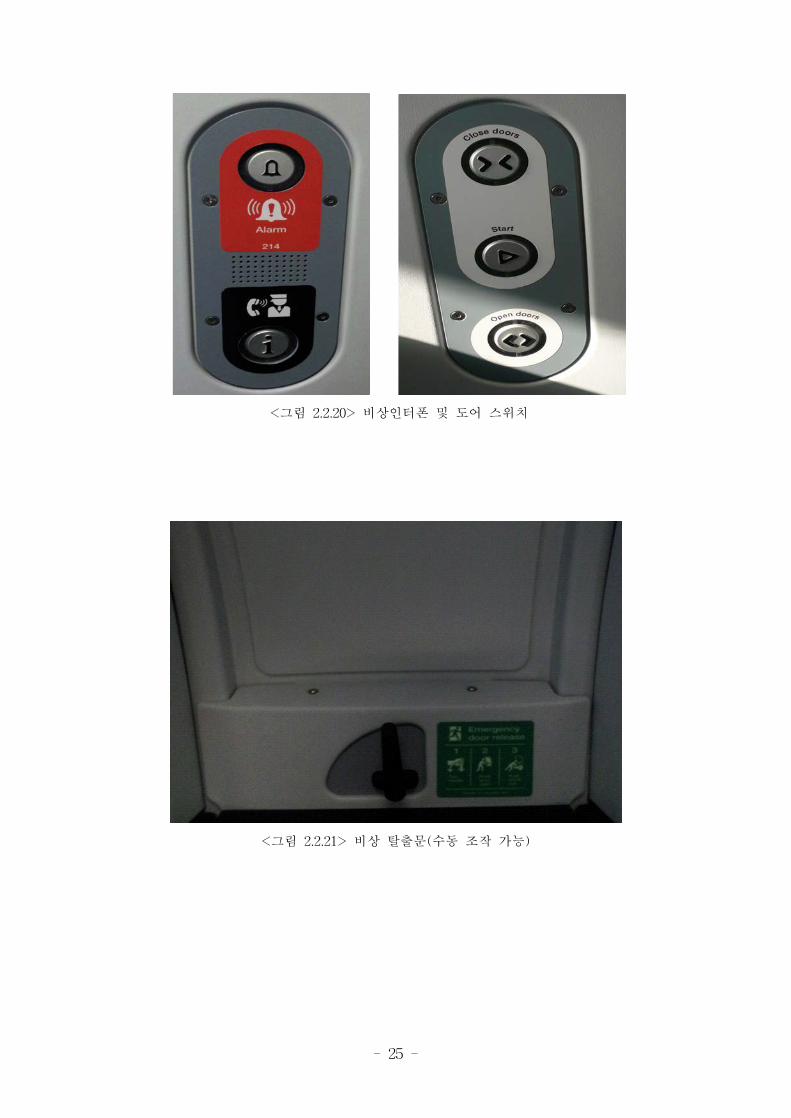
<그림 2.2.20> 비상인터폰 및 도어 스위치
<그림 2.2.21> 비상 탈출문(수동 조작 가능)

- 26 -
<그림 2.2.22> 화재감지기
<그림 2.2.23> 표시기 (차량상부)
- 27 -
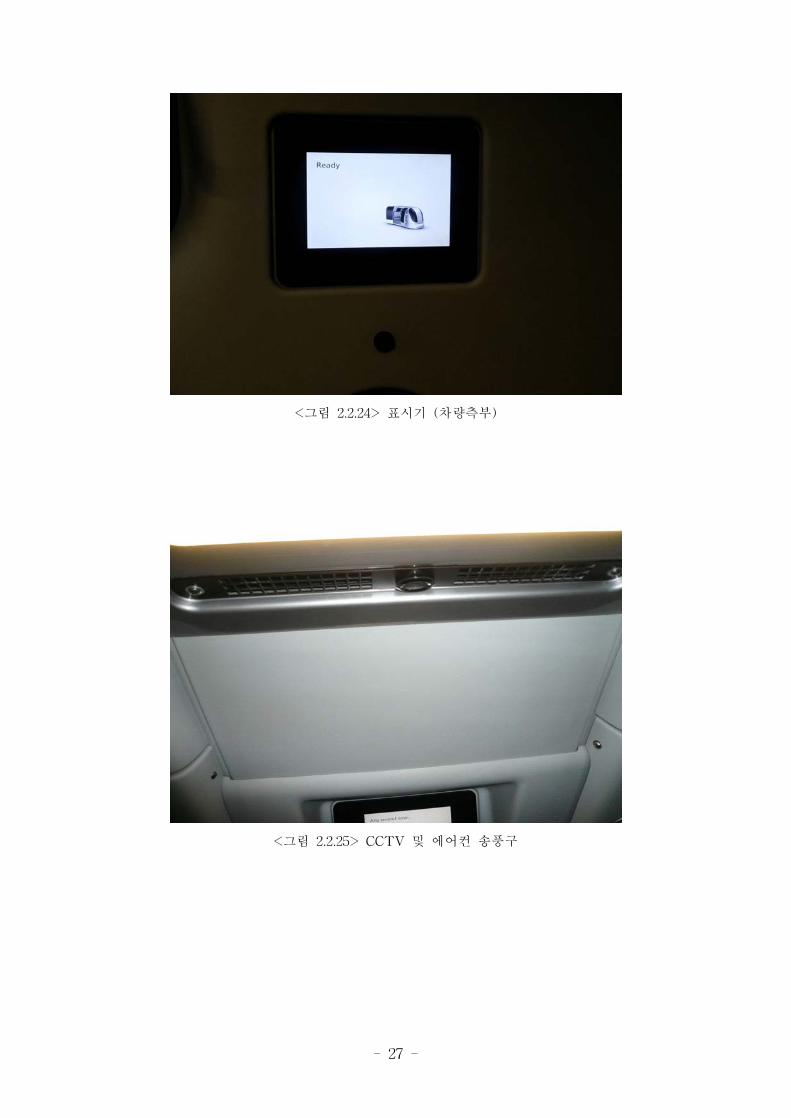
<그림 2.2.24> 표시기 (차량측부)
<그림 2.2.25> CCTV 및 에어컨 송풍구
- 28 -
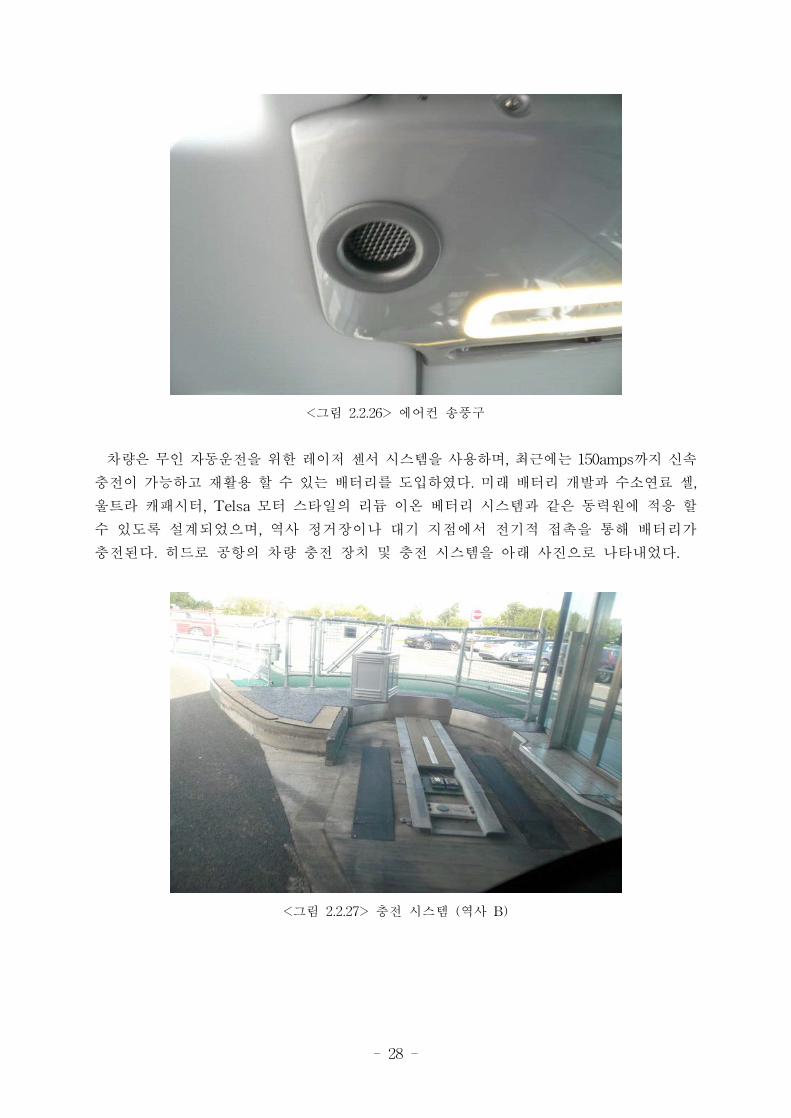
<그림 2.2.26> 에어컨 송풍구
차량은 무인 자동운전을 위한 레이저 센서 시스템을 사용하며, 최근에는 150amps까지 신속
충전이 가능하고 재활용 할 수 있는 배터리를 도입하였다. 미래 배터리 개발과 수소연료 셀,
울트라 캐패시터, Telsa 모터 스타일의 리듐 이온 베터리 시스템과 같은 동력원에 적응 할
수 있도록 설계되었으며, 역사 정거장이나 대기 지점에서 전기적 접촉을 통해 배터리가
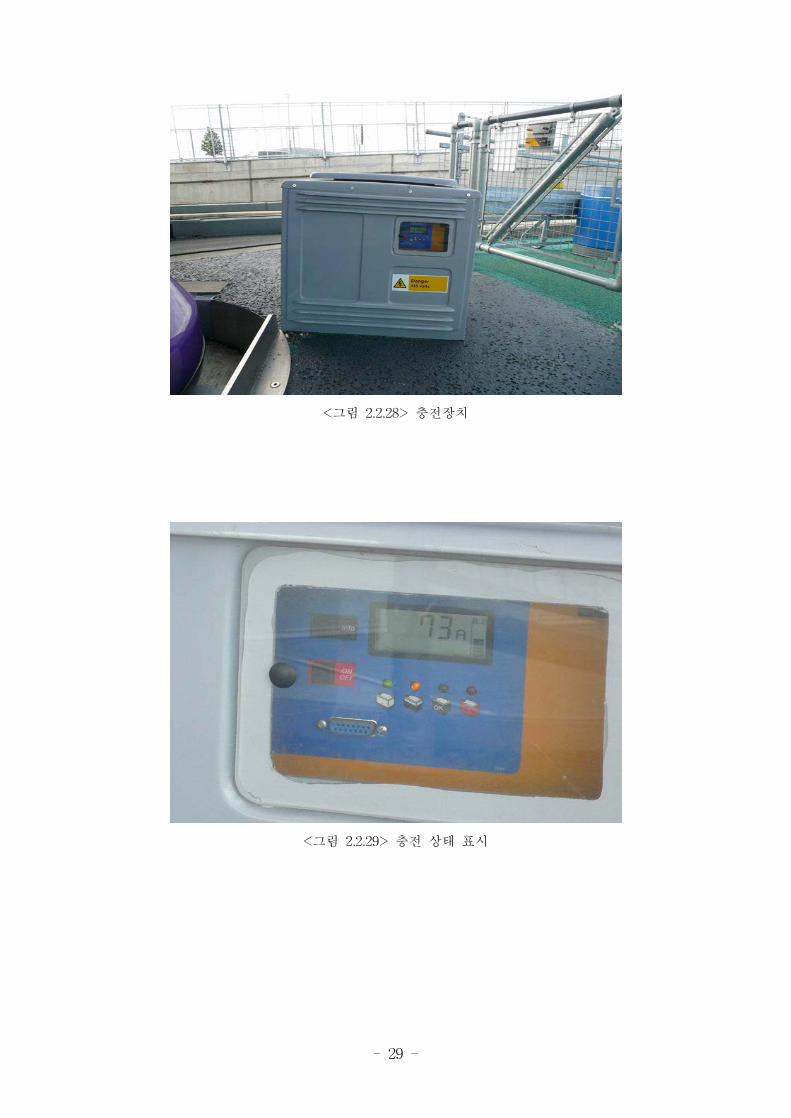
충전된다. 히드로 공항의 차량 충전 장치 및 충전 시스템을 아래 사진으로 나타내었다.
<그림 2.2.27> 충전 시스템 (역사 B)
- 29 -
<그림 2.2.28> 충전장치
<그림 2.2.29> 충전 상태 표시
- 30 -
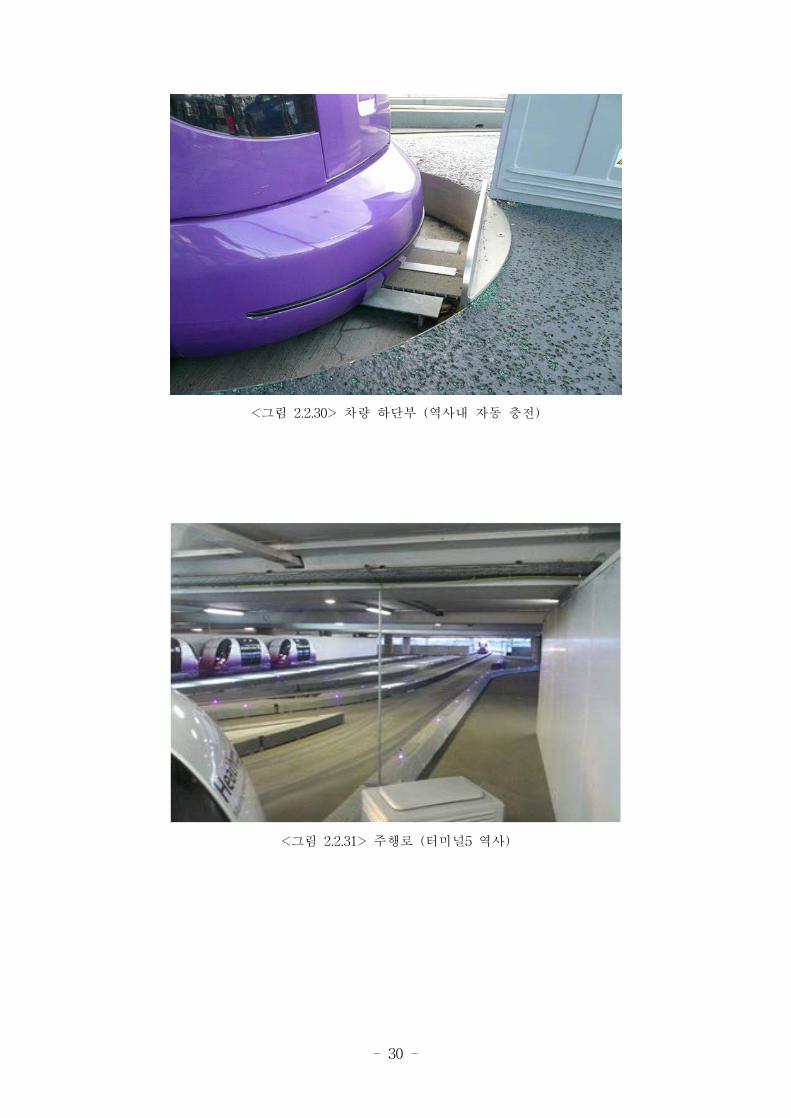
<그림 2.2.30> 차량 하단부 (역사내 자동 충전)
<그림 2.2.31> 주행로 (터미널5 역사)
- 31 -
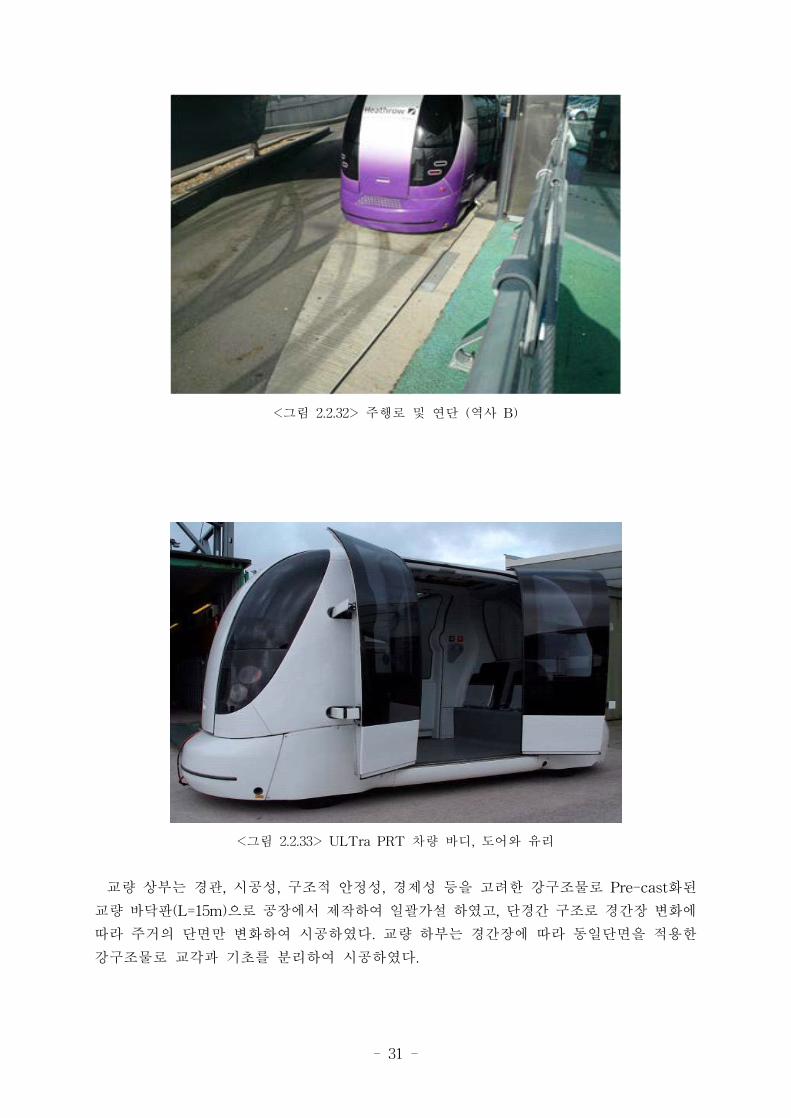
<그림 2.2.32> 주행로 및 연단 (역사 B)
<그림 2.2.33> ULTra PRT 차량 바디, 도어와 유리
교량 상부는 경관, 시공성, 구조적 안정성, 경제성 등을 고려한 강구조물로 Pre-cast화된
교량 바닥판(L=15m)으로 공장에서 제작하여 일괄가설 하였고, 단경간 구조로 경간장 변화에
따라 주거의 단면만 변화하여 시공하였다. 교량 하부는 경간장에 따라 동일단면을 적용한
강구조물로 교각과 기초를 분리하여 시공하였다.

- 32 -
<그림 2.2.34> 고가 구조물
노면은 별도의 레일이 없는 콘크리트 궤도 구조로 포장은 아스팔트이며, 단경간의 교량과
같이 매 경간마다 신축이음이 설치되어 있고, 노면의 평탄성이 주행 성능에 큰 영향을 주며
철제레일에 비해 승차감은 불리하다. 전용 주행로 확보를 위해 경계석(연석)을 설치하였고
차량 충돌을 방지하기 위해 차량한계에서 양측으로 10cm 여유폭을 확보하여 시공하였다.
<그림 2.2.35> 주행 노면
- 33 -
(2) 주요 장치의 구성
(가) 파워트레인과 에너지 시스템
- '7kW' 동기 AC 드라이브 모터 (Synchronous AC Drive Motor)
(일반적으로 평균 동기력 사용은 2kW 이하)
- Solid State Drive Controller / Inverter
- 4×45Ah Starved Electrilyte Lead Acid Traction Batteries (후방 취부) 48V
- 자동 충전 연결 시스템
- 고정비 트랜스액슬 조립
- 전륜 주행
(나) 브레이크 시스템 (Braking Systems)
- 회생제동 모터
- Fail Safe 전자기의 'hold off' 모터 브레이크 (1)
- Fail Safe 전자기의 'hold off' 후방 휠 브레이크 (2)
- 브레이크, 모터와 도어 사이의 안전 인터록
(다) 샤시, 현가장치와 조향 시스템
- 알루미늄 ‘Ladder Frame': 알루미늄 허니컴 바닥과 칸막이 벽 판낼 구조의 하부 샤시
- 전방과 후방 알루미늄 보조 프레임은 서스펜션, 조향, 모터/트랜스미션과 배터리를 지지
- 충격 에너지를 계속해서 흡수하고 승객의 감속도를 제한하기 위한 범퍼 구조 설계
- 외부와 내부의 차체, 사이드 도어와 전방/후방 해치(hatches)를 지지하기 위한 튜브모양의
용접된 상부 프레임
- 전방과 후방 이중 wishbone 서스펜션은 대부분 알루미늄 구조로 된 wishbones, 코일 댐퍼
장치, 일반 차동차의 조인트, 베어링, 부쉬를 사용
- 자동 전자 파워 스티어링 유닛의 작동에 의한 렉 앤 피니언 스티어링 기어
- 튜브가 없는 13인치 레디얼(135×70R13) 자동차 타이어
(라) 차체 외부, 도어와 유리
- 바디 패널은 단색의 광택나는 아크릴 ABS로 구성
- 차량 구조로 접착된 진공으로 형성된 외부 패널
- 플러그인 슬라이딩 도어
- DC 모터를 통한 리덕션 기어박스와 잠금 링크 시스템의해 작동되는 도어
- 도어 작동을 제어하는 마이크로프로세서
- ABS 패널, 강화 스틸과 접합유리로 구성된 도어
- 비막음 장치(Flashing)
- 진공으로 형성된 색조 아크릴 ‘quater window' 유리
- 차량 외부의 조명 (전방 백색과 황색, 후방 적생과 황색)
- 34 -
(마) 내장 및 승객 제어
- 진공으로 형성된 회색 결의 ABS 내부 판낼
- 유동적인 수용능력을 제공하는 성인 4명을 위한 앞뒤로 마주하는 의자
- 도어/컨트롤 발광 스위치
- 차량 양쪽 끝의 통신/알람 발광 스위치
- 스피커 (각 통신 패널에 하나), 승객 통신을 위한 마이크와 전기선은 천장에 설치
- 내부와 외부에 탈출 가능한 비상문 (차량 운행시 잠김)
- 승객정보 LCD 스크린
- 밝은 내부 조명
- 미끄러지지 않는 청소하기 쉬운 바닥 커버
- 난방, 환기 및 에어컨
- 화재감지기, 비상 소화기와 모든 차량의 천장에 설치되는 2개의 차량 내부 CCTV 모니터
카메라
- 과적 시 운행을 금지하고, 차량의 중량을 모니터 하기 위한 무게 센서
- 양방향 데이터 무선 통신 시스템, 차량내 승객과 중앙 관제 사이 통신 가능.
- 35 -
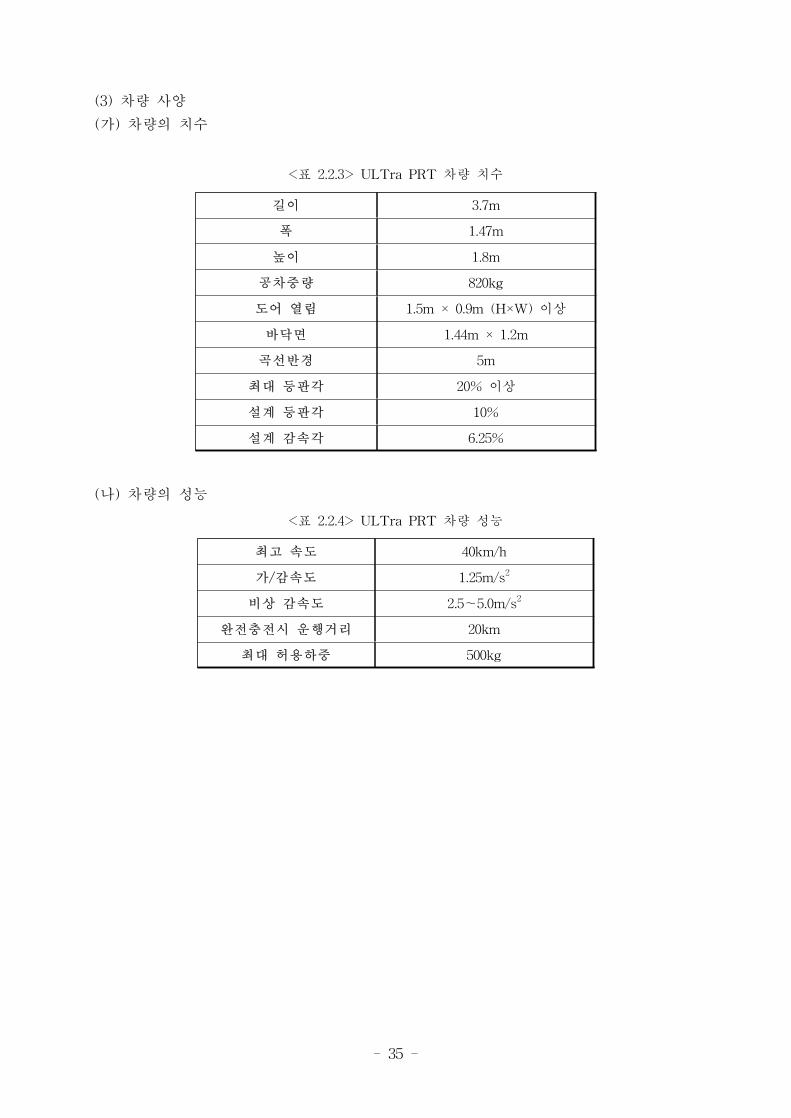
(3) 차량 사양
(가) 차량의 치수
길이 3.7m
폭 1.47m
높이 1.8m
공차중량 820kg
도어 열림 1.5m × 0.9m (H×W) 이상
바닥면 1.44m × 1.2m
곡선반경 5m
최대 등판각 20% 이상
설계 등판각 10%
설계 감속각 6.25%
<표 2.2.3> ULTra PRT 차량 치수
(나) 차량의 성능
최고 속도 40km/h
가/감속도 1.25m/s2
비상 감속도 2.5~5.0m/s2
완전충전시 운행거리 20km
최대 허용하중 500kg
<표 2.2.4> ULTra PRT 차량 성능
- 36 -
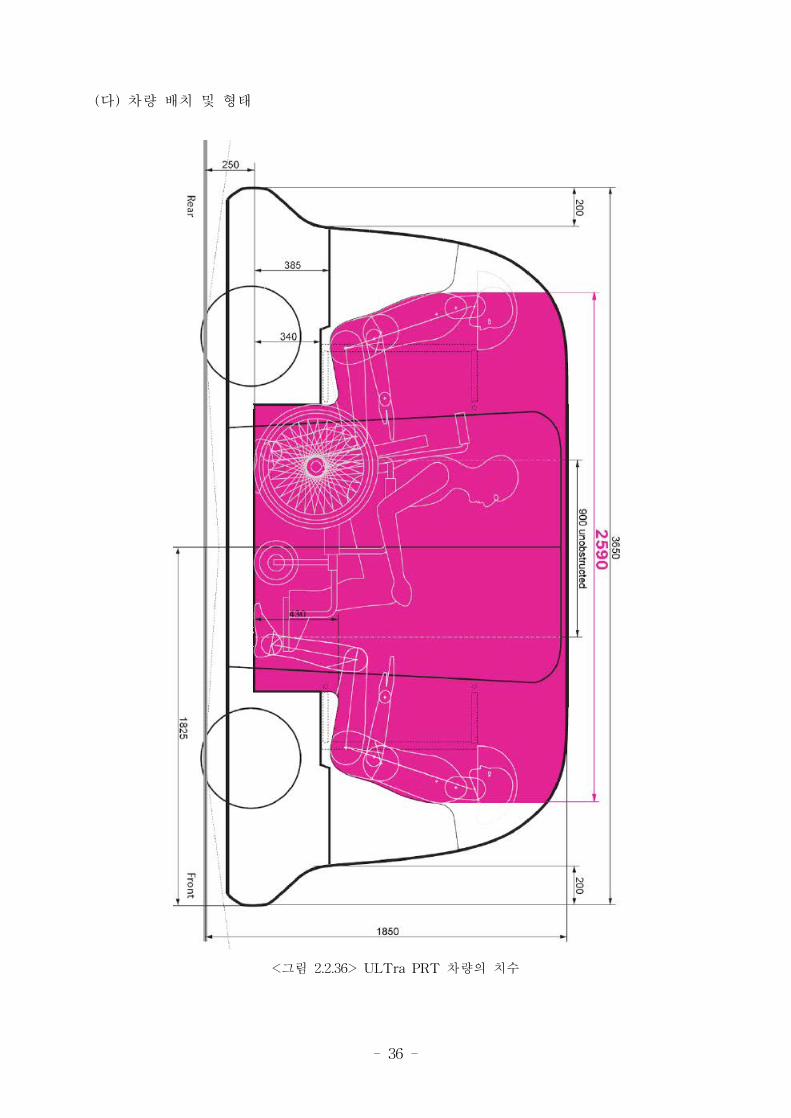
(다) 차량 배치 및 형태
<그림 2.2.36> ULTra PRT 차량의 치수

- 37 -
<그림 2.2.37> ULTra PRT 기본도
- 38 -
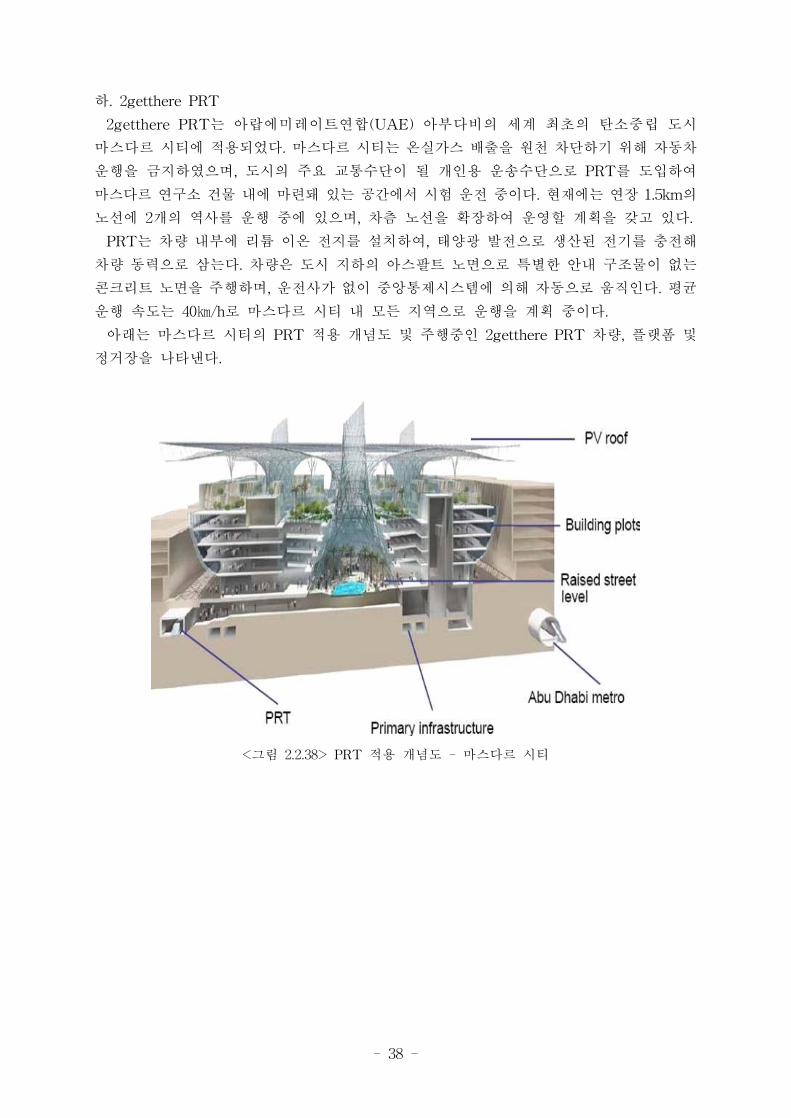
하. 2getthere PRT
2getthere PRT는 아랍에미레이트연합(UAE) 아부다비의 세계 최초의 탄소중립 도시
마스다르 시티에 적용되었다. 마스다르 시티는 온실가스 배출을 원천 차단하기 위해 자동차
운행을 금지하였으며, 도시의 주요 교통수단이 될 개인용 운송수단으로 PRT를 도입하여
마스다르 연구소 건물 내에 마련돼 있는 공간에서 시험 운전 중이다. 현재에는 연장 1.5km의
노선에 2개의 역사를 운행 중에 있으며, 차츰 노선을 확장하여 운영할 계획을 갖고 있다.
PRT는 차량 내부에 리튬 이온 전지를 설치하여, 태양광 발전으로 생산된 전기를 충전해
차량 동력으로 삼는다. 차량은 도시 지하의 아스팔트 노면으로 특별한 안내 구조물이 없는
콘크리트 노면을 주행하며, 운전사가 없이 중앙통제시스템에 의해 자동으로 움직인다. 평균
운행 속도는 40/h로 마스다르 시티 내 모든 지역으로 운행을 계획 중이다.
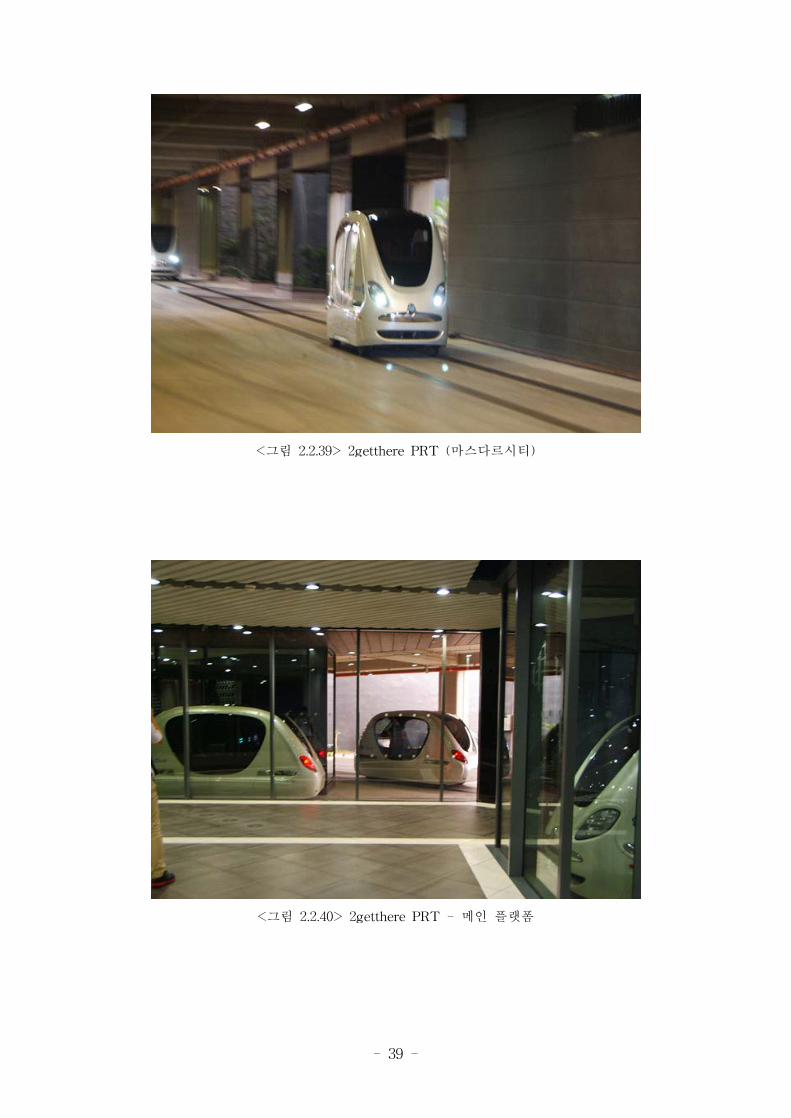
아래는 마스다르 시티의 PRT 적용 개념도 및 주행중인 2getthere PRT 차량, 플랫폼 및
정거장을 나타낸다.
<그림 2.2.38> PRT 적용 개념도 - 마스다르 시티
- 39 -
<그림 2.2.39> 2getthere PRT (마스다르시티)
<그림 2.2.40> 2getthere PRT - 메인 플랫폼
- 40 -
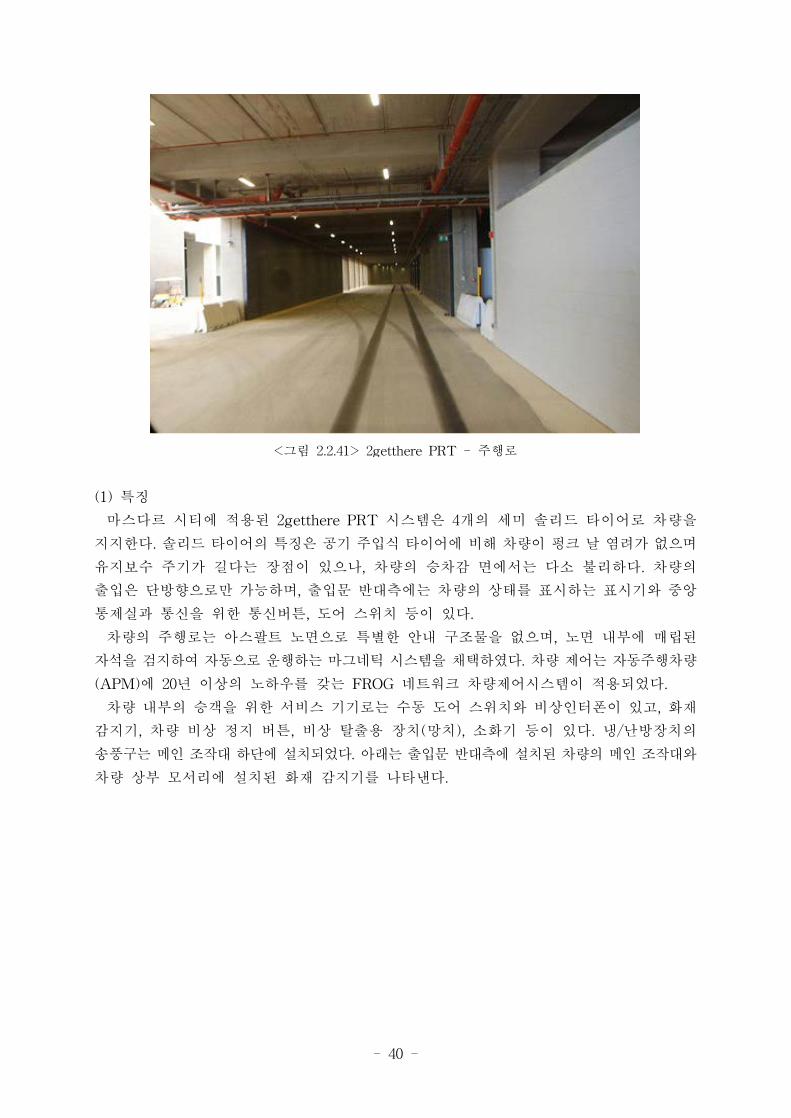
<그림 2.2.41> 2getthere PRT - 주행로
(1) 특징
마스다르 시티에 적용된 2getthere PRT 시스템은 4개의 세미 솔리드 타이어로 차량을
지지한다. 솔리드 타이어의 특징은 공기 주입식 타이어에 비해 차량이 펑크 날 염려가 없으며
유지보수 주기가 길다는 장점이 있으나, 차량의 승차감 면에서는 다소 불리하다. 차량의
출입은 단방향으로만 가능하며, 출입문 반대측에는 차량의 상태를 표시하는 표시기와 중앙
통제실과 통신을 위한 통신버튼, 도어 스위치 등이 있다.
차량의 주행로는 아스팔트 노면으로 특별한 안내 구조물을 없으며, 노면 내부에 매립된
자석을 검지하여 자동으로 운행하는 마그네틱 시스템을 채택하였다. 차량 제어는 자동주행차량
(APM)에 20년 이상의 노하우를 갖는 FROG 네트워크 차량제어시스템이 적용되었다.
차량 내부의 승객을 위한 서비스 기기로는 수동 도어 스위치와 비상인터폰이 있고, 화재
감지기, 차량 비상 정지 버튼, 비상 탈출용 장치(망치), 소화기 등이 있다. 냉/난방장치의
송풍구는 메인 조작대 하단에 설치되었다. 아래는 출입문 반대측에 설치된 차량의 메인 조작대와
차량 상부 모서리에 설치된 화재 감지기를 나타낸다.
- 41 -
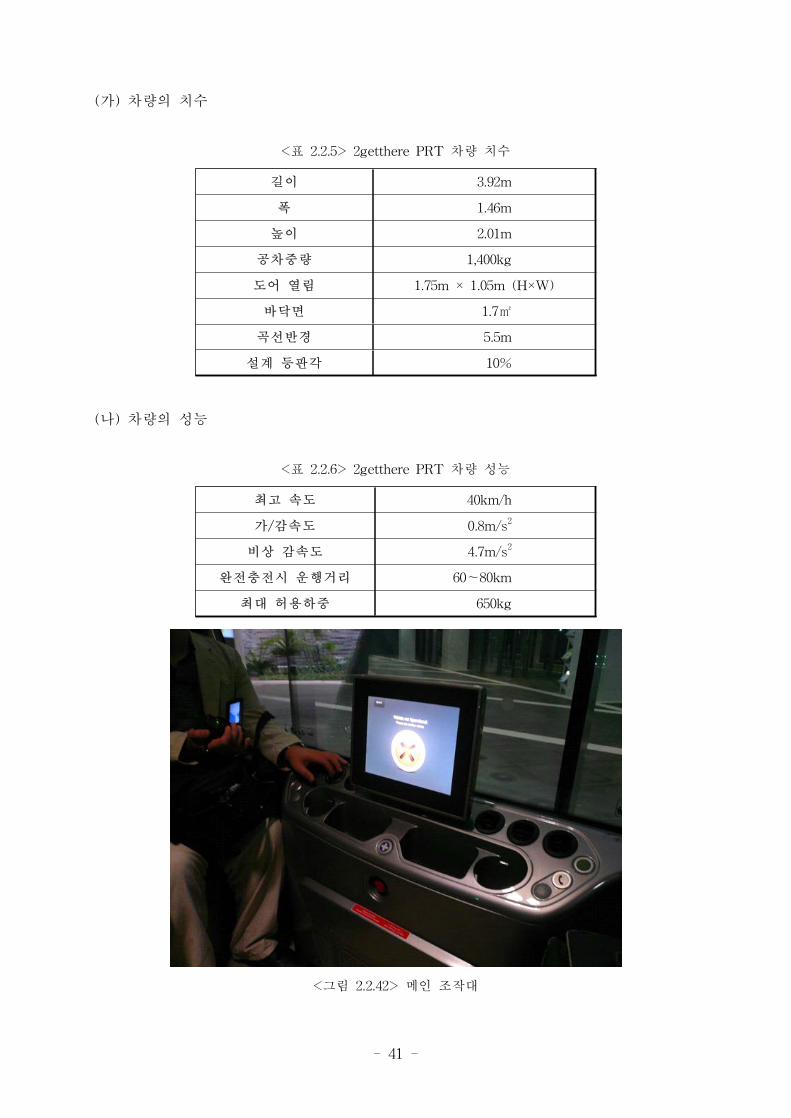
(가) 차량의 치수
길이 3.92m
폭 1.46m
높이 2.01m
공차중량 1,400kg
도어 열림 1.75m × 1.05m (H×W)
바닥면 1.7
곡선반경 5.5m
설계 등판각 10%
<표 2.2.5> 2getthere PRT 차량 치수
(나) 차량의 성능
최고 속도 40km/h
가/감속도 0.8m/s2
비상 감속도 4.7m/s2
완전충전시 운행거리 60~80km
최대 허용하중 650kg
<표 2.2.6> 2getthere PRT 차량 성능
<그림 2.2.42> 메인 조작대

- 42 -
실제 차량의 운행 계획은 자동운전으로 주행되나, 마스다르 견학시 차량은 보수중이었기
때문에 중앙 사령의 지령에 의해 반자동으로 주행하였다. 메인 조작대에서는 차량의 출입문을
제어할 수 있으며, 비상 통화장치를 통해 사령실과 대화가 가능하다. 의자의 하부에는 소화기,
구급상자 등 응급상황을 대비한 도구를 비치하고 있었다.
<그림 2.2.43> 화재감지기
차량의 충전은 차량 하부의 집전장치를 통하여 자동으로 배터리가 충전되는 시스템을
갖으며, 배터리가 10% 남아있는 상태에서 완전 충전까지는 2시간 30분에서 3시간 정도가
소요된다. 완전 충전된 차량은 약 60~80km운행이 가능하다.
<그림 2.2.44> 충전장치
- 43 -
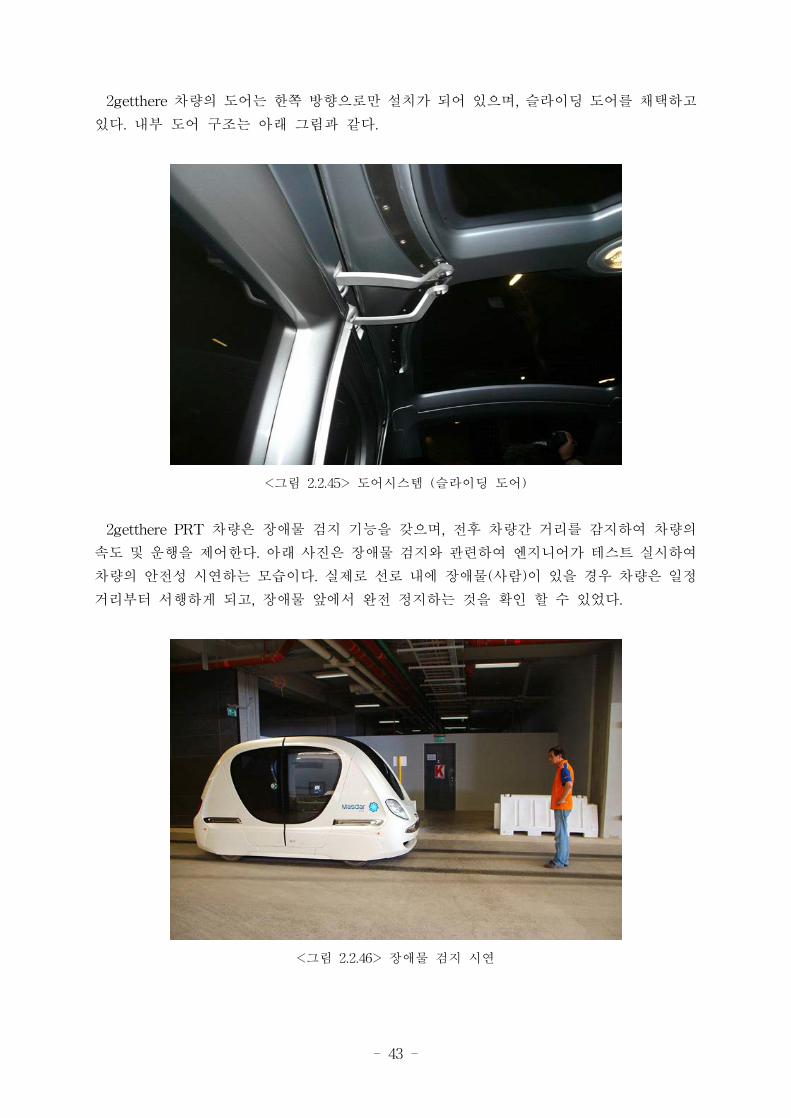
2getthere 차량의 도어는 한쪽 방향으로만 설치가 되어 있으며, 슬라이딩 도어를 채택하고
있다. 내부 도어 구조는 아래 그림과 같다.
<그림 2.2.45> 도어시스템 (슬라이딩 도어)
2getthere PRT 차량은 장애물 검지 기능을 갖으며, 전후 차량간 거리를 감지하여 차량의
속도 및 운행을 제어한다. 아래 사진은 장애물 검지와 관련하여 엔지니어가 테스트 실시하여
차량의 안전성 시연하는 모습이다. 실제로 선로 내에 장애물(사람)이 있을 경우 차량은 일정
거리부터 서행하게 되고, 장애물 앞에서 완전 정지하는 것을 확인 할 수 있었다.
<그림 2.2.46> 장애물 검지 시연
- 44 -
가. 소형 전기자동차
전기자동차(Electric Vehicle)는 석유 연료와 엔진을 사용하지 않고, 전기 배터리와 전기
모터를 사용하는 그린카의 한 종류이다. 현재, 대한민국에서는 전기자동차를 자동차로 분류하고
있지 않아 상용화를 할 수 없는 상태이다. 이는 다른 나라도 크게 다르지 않다. 이미 다양한
법제를 마련하고 합법적인 운행이 이루어지고 있는 나라는 얼마 되지 않는다. 일본과 미국,
호주, 캐나다, 이스라엘, 영국 등 일부 국가에 국한되어 있으며, 이 문제의 해결이 선행되어야
이미 실험 중인 자동차들이 도로 위를 다닐 수 있게 된다. 우리나라도 전기차의 도로 운행을
위한 법적 토대를 시급히 마련해야 한다는 의견이 그래서 대두되고 있다.
전기를 주 동력원으로 구동하는 전기자동차는 구동장치, 제동장치, 조향장치, 배터리 시스템
등으로 구성되며, PRT 차량과 유사한 시스템을 갖는다. 일반적으로 PRT 차량의 최고 속도는
50km/h 이내로(참고: ULTra, 2getthere PRT 최고속도 40km/h) 저속으로 운행하기 때문에
저속 전기 자동차의 개념으로 볼 수 있다. 하지만, PRT 시스템은 정해진 궤도를 무인자동으로
운행하며, 자동조향 및 자동주행 시스템을 갖춘 최첨단 시스템으로 자동차와는 차이점을
갖는다.
본 항에서는 PRT 차량 시스템 구성에 참고가 되는 저속 전기자동차의 구성 및 기본 사양에
대하여 조사하여, 향후 PRT 차량개발에 참고 자료로 활용하고자 한다.
(1) 국내의 저속 전기자동차 시스템
국내의 전기자동차 시장은 인프라 구성 및 관련 법규 미흡 등으로 인하여 아직 널리 상용화
되어있지 않은 실정이다. 상용화 공급된 저속 전기 자동차로는 전기 골프카를 주요 생산품으로
제작하는 CT&T의 e-ZONE이 있으며, AD-Motors의 Change 모델 등이 있다.
(가) CT&T e-ZONE
CT&T는 e-ZONE은 시속 60km 이하로 달리는 NEV(Neighborhood Electric Vehicle)
근거리 저속 전기차로 개발되었다. 하얀색 강화플라스틱 바디를 알루미늄 섀시 위에 씌운
e-ZONE은 경차 쉐보레 스파크와 기아 모닝보다도 짧은 차체를 가졌다. 차량의 외관은
다음 그림과 같다.
<그림 2.2.47> E-zone 외형
- 45 -
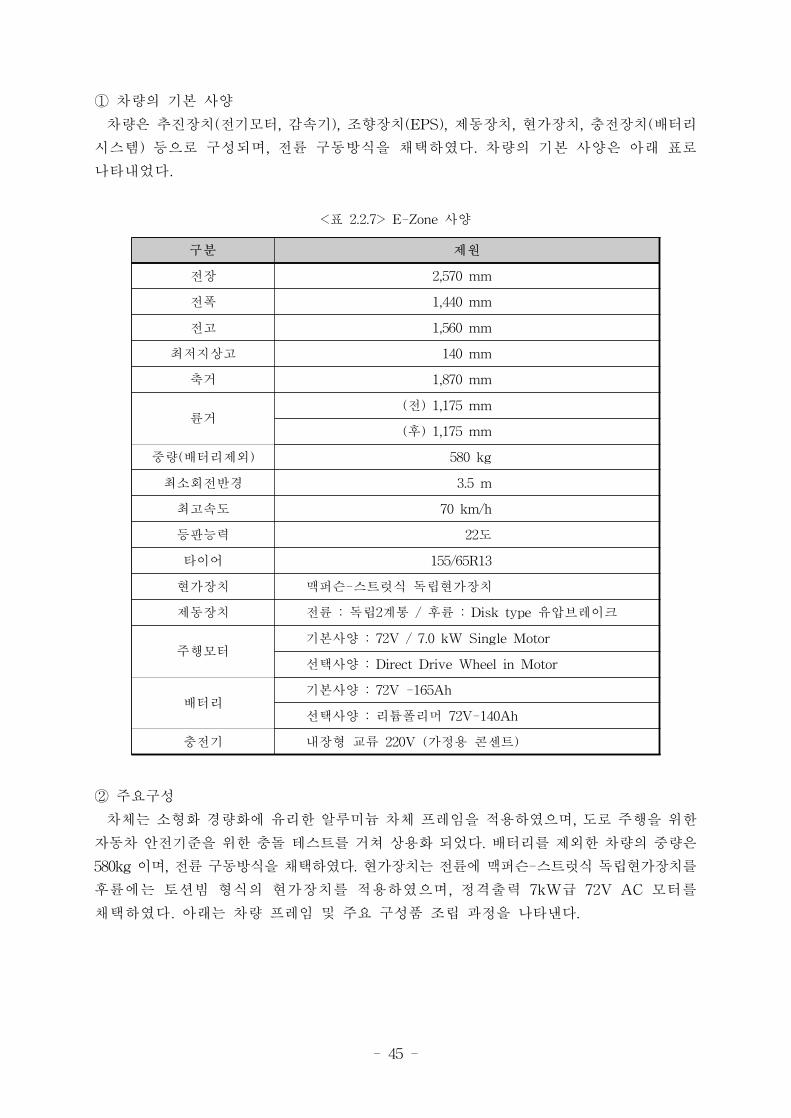
① 차량의 기본 사양
차량은 추진장치(전기모터, 감속기), 조향장치(EPS), 제동장치, 현가장치, 충전장치(배터리
시스템) 등으로 구성되며, 전륜 구동방식을 채택하였다. 차량의 기본 사양은 아래 표로
나타내었다.
구분 제원
전장 2,570 mm
전폭 1,440 mm
전고 1,560 mm
최저지상고 140 mm
축거 1,870 mm
륜거(전) 1,175 mm
(후) 1,175 mm
중량(배터리제외) 580 kg
최소회전반경 3.5 m
최고속도 70 km/h
등판능력 22도
타이어 155/65R13
현가장치 맥퍼슨-스트럿식 독립현가장치
제동장치 전륜 : 독립2계통 / 후륜 : Disk type 유압브레이크
주행모터기본사양 : 72V / 7.0 kW Single Motor
선택사양 : Direct Drive Wheel in Motor
배터리기본사양 : 72V -165Ah
선택사양 : 리튬폴리머 72V-140Ah
충전기 내장형 교류 220V (가정용 콘센트)
<표 2.2.7> E-Zone 사양
② 주요구성
차체는 소형화 경량화에 유리한 알루미늄 차체 프레임을 적용하였으며, 도로 주행을 위한
자동차 안전기준을 위한 충돌 테스트를 거쳐 상용화 되었다. 배터리를 제외한 차량의 중량은
580kg 이며, 전륜 구동방식을 채택하였다. 현가장치는 전륜에 맥퍼슨-스트럿식 독립현가장치를
후륜에는 토션빔 형식의 현가장치를 적용하였으며, 정격출력 7kW급 72V AC 모터를
채택하였다. 아래는 차량 프레임 및 주요 구성품 조립 과정을 나타낸다.
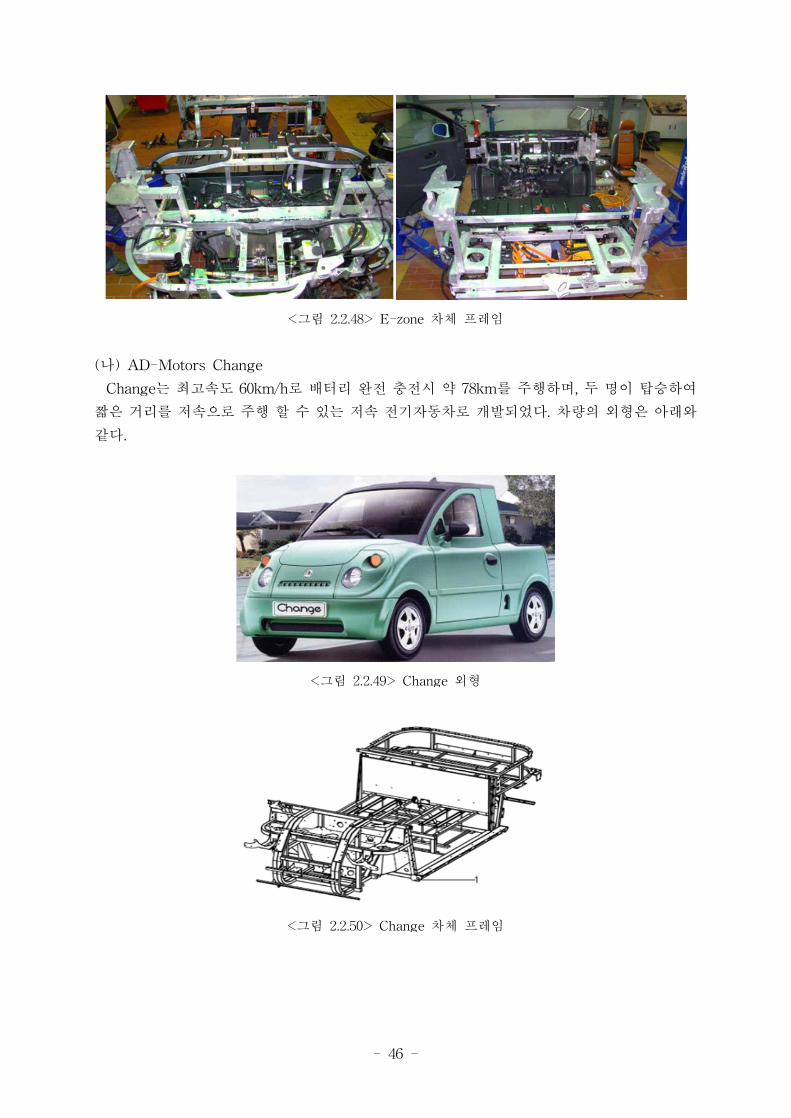
- 46 -
<그림 2.2.48> E-zone 차체 프레임
(나) AD-Motors Change
Change는 최고속도 60km/h로 배터리 완전 충전시 약 78km를 주행하며, 두 명이 탑승하여
짧은 거리를 저속으로 주행 할 수 있는 저속 전기자동차로 개발되었다. 차량의 외형은 아래와
같다.
<그림 2.2.49> Change 외형
<그림 2.2.50> Change 차체 프레임
- 47 -
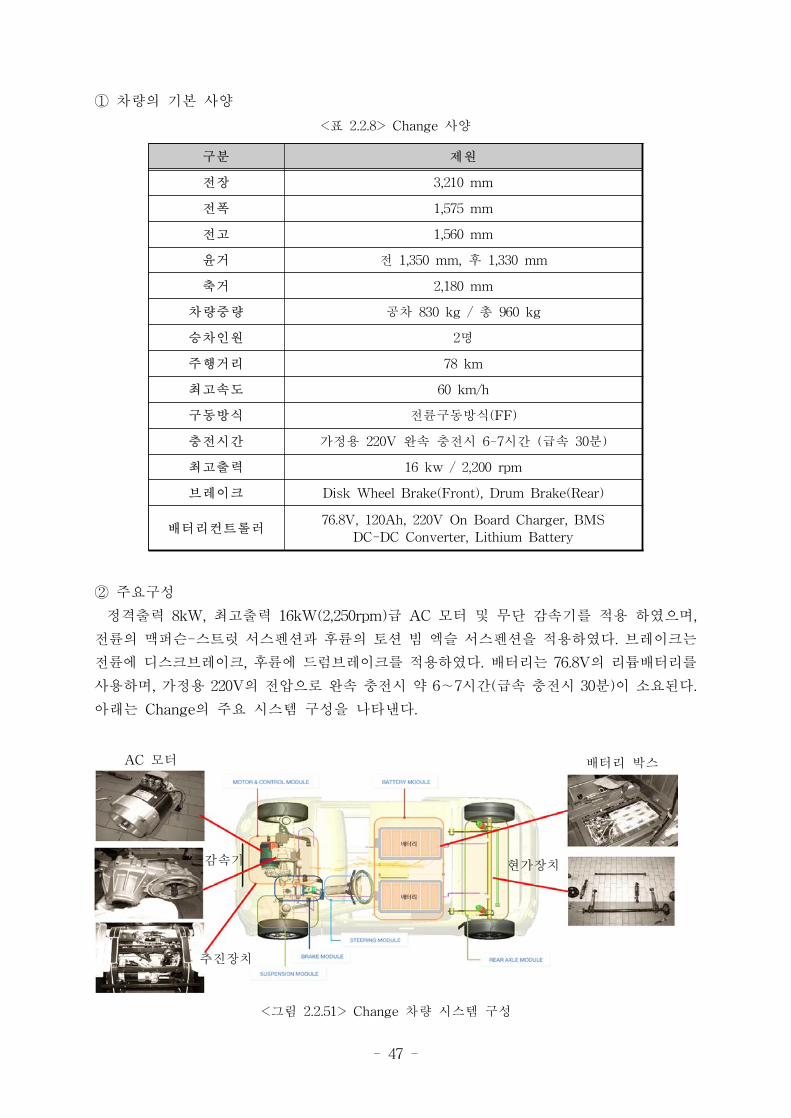
① 차량의 기본 사양
구분 제원
전장 3,210 mm
전폭 1,575 mm
전고 1,560 mm
윤거 전 1,350 mm, 후 1,330 mm
축거 2,180 mm
차량중량 공차 830 kg / 총 960 kg
승차인원 2명
주행거리 78 km
최고속도 60 km/h
구동방식 전륜구동방식(FF)
충전시간 가정용 220V 완속 충전시 6-7시간 (급속 30분)
최고출력 16 kw / 2,200 rpm
브레이크 Disk Wheel Brake(Front), Drum Brake(Rear)
배터리컨트롤러76.8V, 120Ah, 220V On Board Charger, BMS
DC-DC Converter, Lithium Battery
<표 2.2.8> Change 사양
② 주요구성
정격출력 8kW, 최고출력 16kW(2,250rpm)급 AC 모터 및 무단 감속기를 적용 하였으며,
전륜의 맥퍼슨-스트럿 서스펜션과 후륜의 토션 빔 엑슬 서스펜션을 적용하였다. 브레이크는
전륜에 디스크브레이크, 후륜에 드럼브레이크를 적용하였다. 배터리는 76.8V의 리튬배터리를
사용하며, 가정용 220V의 전압으로 완속 충전시 약 6∼7시간(급속 충전시 30분)이 소요된다.
아래는 Change의 주요 시스템 구성을 나타낸다.
AC 모터
감속기
추진장치
배터리 박스
현가장치
<그림 2.2.51> Change 차량 시스템 구성
- 48 -
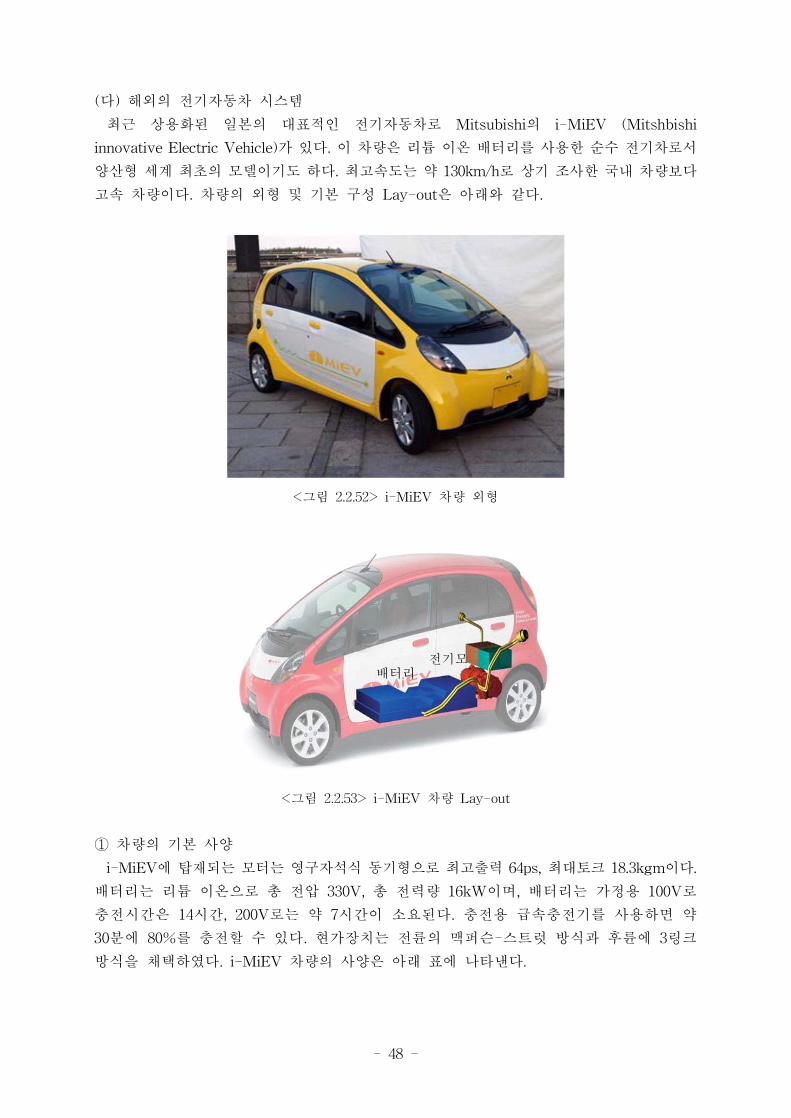
(다) 해외의 전기자동차 시스템
최근 상용화된 일본의 대표적인 전기자동차로 Mitsubishi의 i-MiEV (Mitshbishi
innovative Electric Vehicle)가 있다. 이 차량은 리튬 이온 배터리를 사용한 순수 전기차로서
양산형 세계 최초의 모델이기도 하다. 최고속도는 약 130km/h로 상기 조사한 국내 차량보다
고속 차량이다. 차량의 외형 및 기본 구성 Lay-out은 아래와 같다.
<그림 2.2.52> i-MiEV 차량 외형
배터리
팩
전기모
터
<그림 2.2.53> i-MiEV 차량 Lay-out
① 차량의 기본 사양
i-MiEV에 탑재되는 모터는 영구자석식 동기형으로 최고출력 64ps, 최대토크 18.3kgm이다.
배터리는 리튬 이온으로 총 전압 330V, 총 전력량 16kW이며, 배터리는 가정용 100V로
충전시간은 14시간, 200V로는 약 7시간이 소요된다. 충전용 급속충전기를 사용하면 약
30분에 80%를 충전할 수 있다. 현가장치는 전륜의 맥퍼슨-스트럿 방식과 후륜에 3링크
방식을 채택하였다. i-MiEV 차량의 사양은 아래 표에 나타낸다.

- 49 -
구분 제원
크기
전장×전폭×전고 3,395×1,475×1,610mm
휠 베이스 2,555mm
트레드 1,310/1270mm
차량 중량 1,100kg
모터
형식 D영구자석식 동기형
최고출력 64ps
최대토크 18.3kgm
배터리 리튬 이온총 전압 330V
총 전력량 16kW
트랜스미션1단 고정 감속기구 i-MiEV 전용
구동방식 RR
섀시 앞/뒤 맥퍼슨 스트럿/3링크
브레이크 앞/뒤 V.디스크/리딩 트레일링
타이어 145/65R15 (175/55R15)
<표 2.2.9> i-MiEV 사양
<그림 2.2.54> i-MiEV 추진장치 (후륜구동)

- 50 -
<그림 2.2.55> i-MiEV 배터리팩
② 주요구성
차량은 추진장치(전기모터, 감속기), 조향장치(EPS), 제동장치, 현가장치, 충전장치(배터리
시스템), 인버터, DC/DC 컨버터 등으로 구성되며, 후륜 구동방식을 채택하였다. 아래 그림은
i-MiEV의 차량 시스템 구성을 나타낸다.
<그림 2.2.56> i-MiEV 차량 시스템 구성
- 51 -
제3장 연구개발수행 내용 및 결과
제1절 시작차량 완성 및 시제차량 상세 설계 및 제작
1. 시작차량 보완 설계(중량보완)
가. 구체
(1) 개요
4차년도 연구에서는 3차년도에 수행한 기본 설계 및 구조해석 결과를 바탕으로 제작 및
구조적인 보완사항에 대한 검토하였다. 3차년도 차체는 132kg 으로 중량 절감을 진행하였지만
중량절감을 통하여 삭제한 프레임들로 인하여 내외장재 취부 및 측창 취부 등에 어려움이
발생하여 이 부분에 대하여 보완 설계를 진행하였다.
(2) 차체 재질
(가) 차체 부재 형상
1) 부재 단면 설계
시제 차량의 하부 프레임은 A6063-T6 재질의 사각관을 적용하였다. 하부 프레임은 알루미늄
허니콤 판넬을 A6063-T6 재질의 사각관을 적용한 프레임 위를 덮어 승객 탑승에 따른
하중을 지지하도록 설계하였다. 상부 프레임은 A6063-T6 재질의 사각관을 적용하여 상ž하
프레임을 용접하여 차체를 구성하였다. 그리고 내외장재 및 기계장치, 조향장치, 전자장치
등을 취부할 브라켓은 용접성이 좋은 A5052-O 재질을 적용하여 설계하였다.
(나) 시제차량 부재 형상
3차년도에 검토한 유한요소 해석을 바탕으로 부재의 단면 형상을 설계하였으나 실제 제작 시
작업성 및 처짐 형상등의 문제가 발생하여 차체의 단면부재는 사각관을 적용하여 다시 설계
검토하였으며 측창 및 외장재 고정을 위한 프레임을 신규 적용하였다.
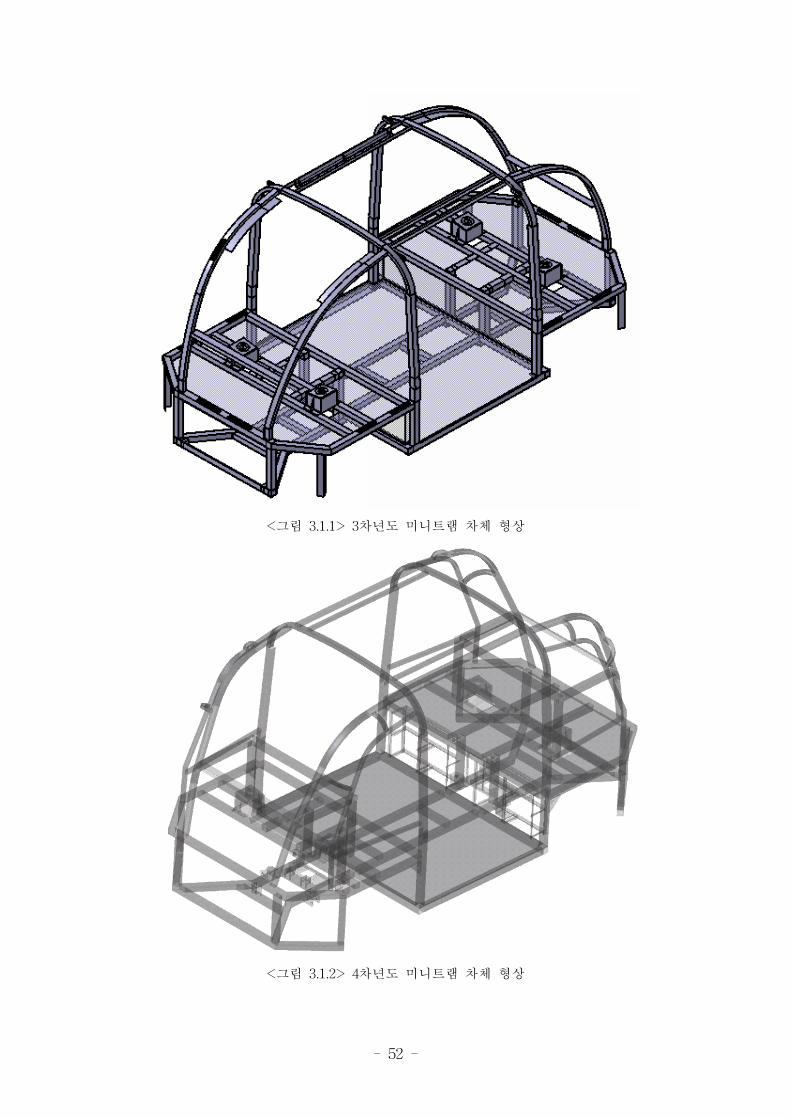
(3) 시제차량 기본형상
차체의 기본형상은 다음과 같으며, 기본 형상을 설계 후 설계된 구조에 맞는 강도와 경량화를
구현 할 수 있도록 단면 설계를 하였다. 주응력 방향 및 차체에 취부되는 기기들을 고려하여
알루미늄 부재를 배치하였다. 전체적으로 소재 형상을 제작의 용이성을 가질 수 있도록
복잡한 형상에서 단순한 형상으로 변경하여 차량을 설계하였다. 3차년도 차량의 경우 차체
경량화를 위하여 측창부 및 외장재 고정 프레임 삭제 및 비상문 취부 프레임 등을 삭제
하였으나 실제 제작 후 기기 및 외장 작업시 작업에 어려움이 발생하여 이 부분을 보완
설계를 진행하였다. 또한 알루미늄 허니콤 판넬 두께를 증가하여 실제 운행 시 발생 할 수
있는 집중하중에 대처 할 수 있도록 설계 하였다.
- 52 -
<그림 3.1.1> 3차년도 미니트램 차체 형상
<그림 3.1.2> 4차년도 미니트램 차체 형상
- 53 -
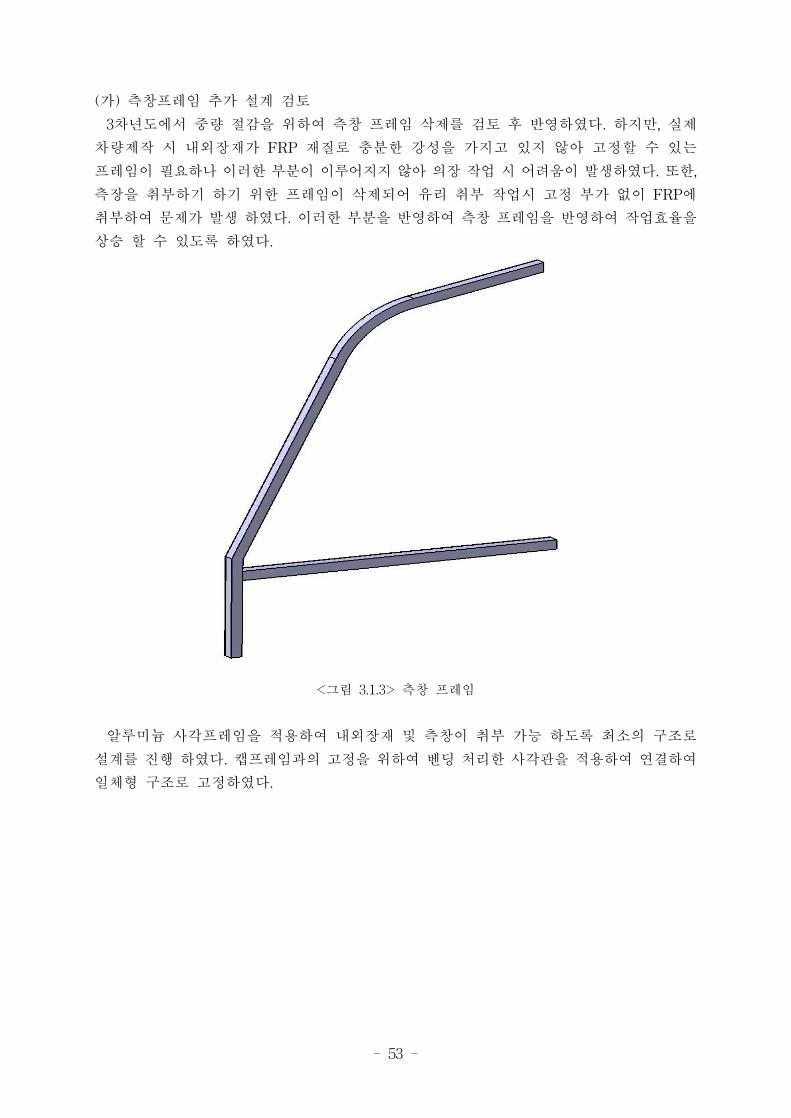
(가) 측창프레임 추가 설계 검토
3차년도에서 중량 절감을 위하여 측창 프레임 삭제를 검토 후 반영하였다. 하지만, 실제
차량제작 시 내외장재가 FRP 재질로 충분한 강성을 가지고 있지 않아 고정할 수 있는
프레임이 필요하나 이러한 부분이 이루어지지 않아 의장 작업 시 어려움이 발생하였다. 또한,
측장을 취부하기 하기 위한 프레임이 삭제되어 유리 취부 작업시 고정 부가 없이 FRP에
취부하여 문제가 발생 하였다. 이러한 부분을 반영하여 측창 프레임을 반영하여 작업효율을
상승 할 수 있도록 하였다.
<그림 3.1.3> 측창 프레임
알루미늄 사각프레임을 적용하여 내외장재 및 측창이 취부 가능 하도록 최소의 구조로
설계를 진행 하였다. 캡프레임과의 고정을 위하여 벤딩 처리한 사각관을 적용하여 연결하여
일체형 구조로 고정하였다.
- 54 -
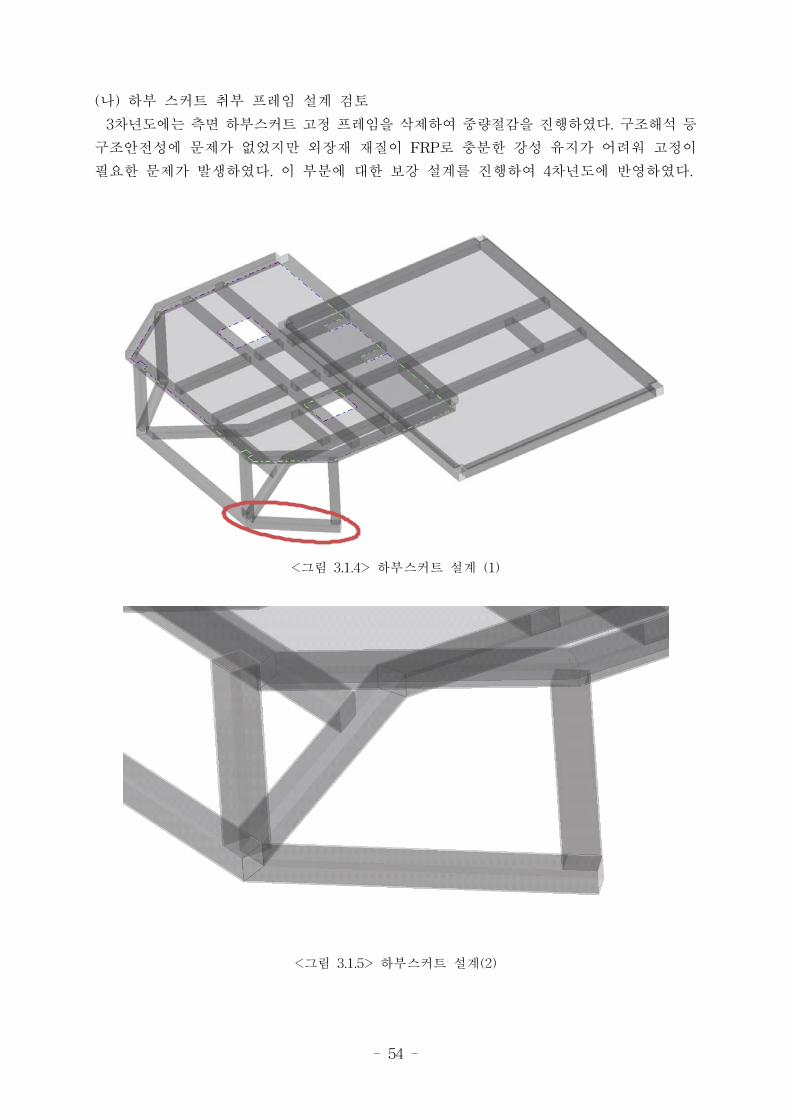
(나) 하부 스커트 취부 프레임 설계 검토
3차년도에는 측면 하부스커트 고정 프레임을 삭제하여 중량절감을 진행하였다. 구조해석 등
구조안전성에 문제가 없었지만 외장재 재질이 FRP로 충분한 강성 유지가 어려워 고정이
필요한 문제가 발생하였다. 이 부분에 대한 보강 설계를 진행하여 4차년도에 반영하였다.
<그림 3.1.4> 하부스커트 설계 (1)
<그림 3.1.5> 하부스커트 설계(2)

- 55 -
(다) 캐패시터 용량 증가에 따른 캐패시터 취부 프레임 설계 검토
4차년도에서는 캐패시터 용량증가를 진행하였으며 3차년도에 캐패시터를 취부한 공간에
추가설치 제약이 발생하여 승객 탑승부 하부에 캐패시터 설치를 검토 하였다. 기존에 소음
및 방수를 위하여 탑승부 한쪽을 활용하여 캐패시터 추가 설치를 고려하였다. 판재를
절곡가공하는 구조로 설계를 진행하였으며 차체와의 인터페이스 및 취부등에 관한
간섭을 최소화하기 위하여 별도 제작 후 취부하지 않고 대조립 시 조립을 같이 진행하였다.
추후 양산차량의 경우 캐패시터 프레임을 별도 제작 후 대조립 시 조립 하는 구조를 검토하여
반영하겠다.
<그림 3.1.6> 캐패시터 취부 프레임 설계 (1)
<그림 3.1.7> 캐패시터 취부 프레임 설계 (2)
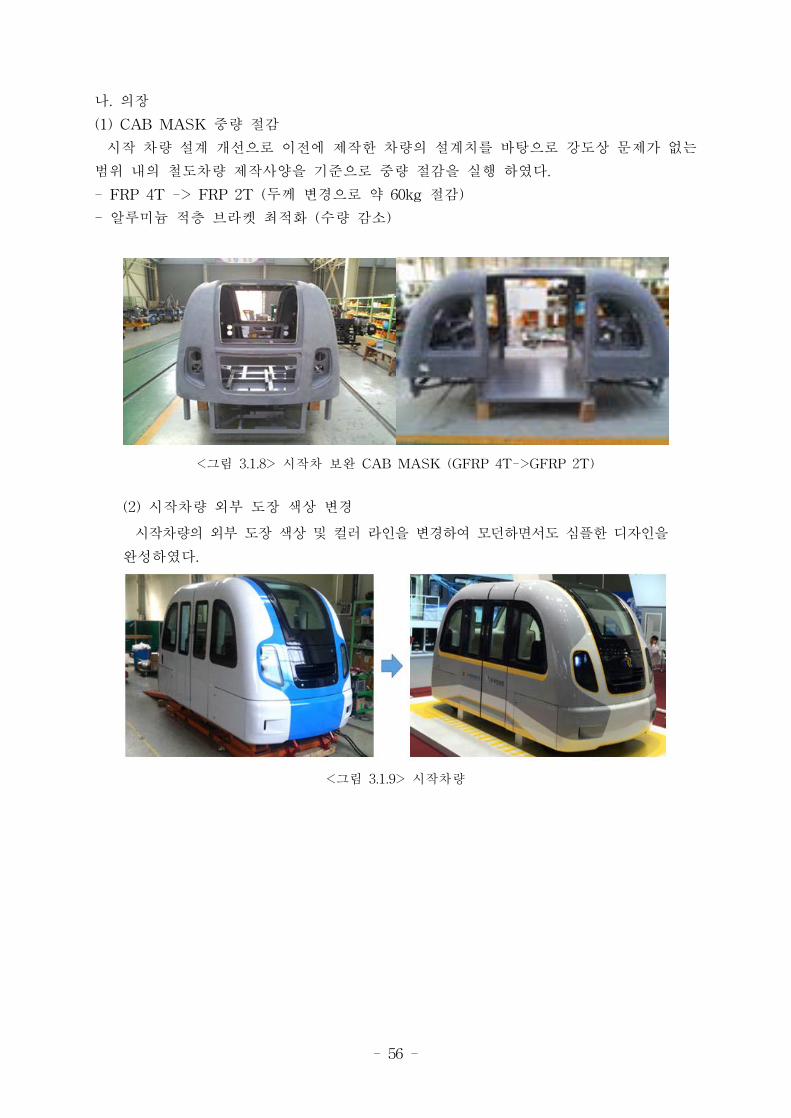
- 56 -
나. 의장
(1) CAB MASK 중량 절감
시작 차량 설계 개선으로 이전에 제작한 차량의 설계치를 바탕으로 강도상 문제가 없는
범위 내의 철도차량 제작사양을 기준으로 중량 절감을 실행 하였다.
- FRP 4T -> FRP 2T (두께 변경으로 약 60kg 절감)
- 알루미늄 적층 브라켓 최적화 (수량 감소)
<그림 3.1.8> 시작차 보완 CAB MASK (GFRP 4T->GFRP 2T)
(2) 시작차량 외부 도장 색상 변경
시작차량의 외부 도장 색상 및 컬러 라인을 변경하여 모던하면서도 심플한 디자인을
완성하였다.
<그림 3.1.9> 시작차량

- 57 -
2. 최고속도 시험
가. 개요
한국형 미니트램의 최고속도 시험은 차량의 성능사양 만족을 시험하기 위하여 실시하였다.
공장 내 시험이나 시험선내 구간에는 차량의 최고속도를 주행할 만큼의 직선주로가 확보되어
있지 않기 때문에 교통안전공단의 자동차안전연구원내 주행시험장을 이용하여 실시하였다.
차량의 최고속도 시험을 위한 직선 주행로는 다음과 같다.
<그림 3.1.10> 자동차안전연구원내 직선 주행 시험로
나. 시험 조건
미니트램 차량의 시험조건은 완충 상태에서 운전자 1인과 안전요원 1인등 총 2인 탑승과
노트북, 카메라 등 운행 및 시험장비를 적재한다. 주행을 시작한 차량은 최대 가속도로
가속하여 설계 최고속도인 50 km/h를 도달 할 때까지 주행한다. 한국형 미니트램의 성능
사양은 다음과 같다.
항목 사양 비고
속도설계최고속도 (km/h) 50
운영최고속도 (km/h) 40
가속도 (km/h/s) 3.5
감속도비상 (km/h/s) 11.88
상용 (km/h/s) 5.08
<표 3.1.1> 한국형 미니트램 기본성능 사양
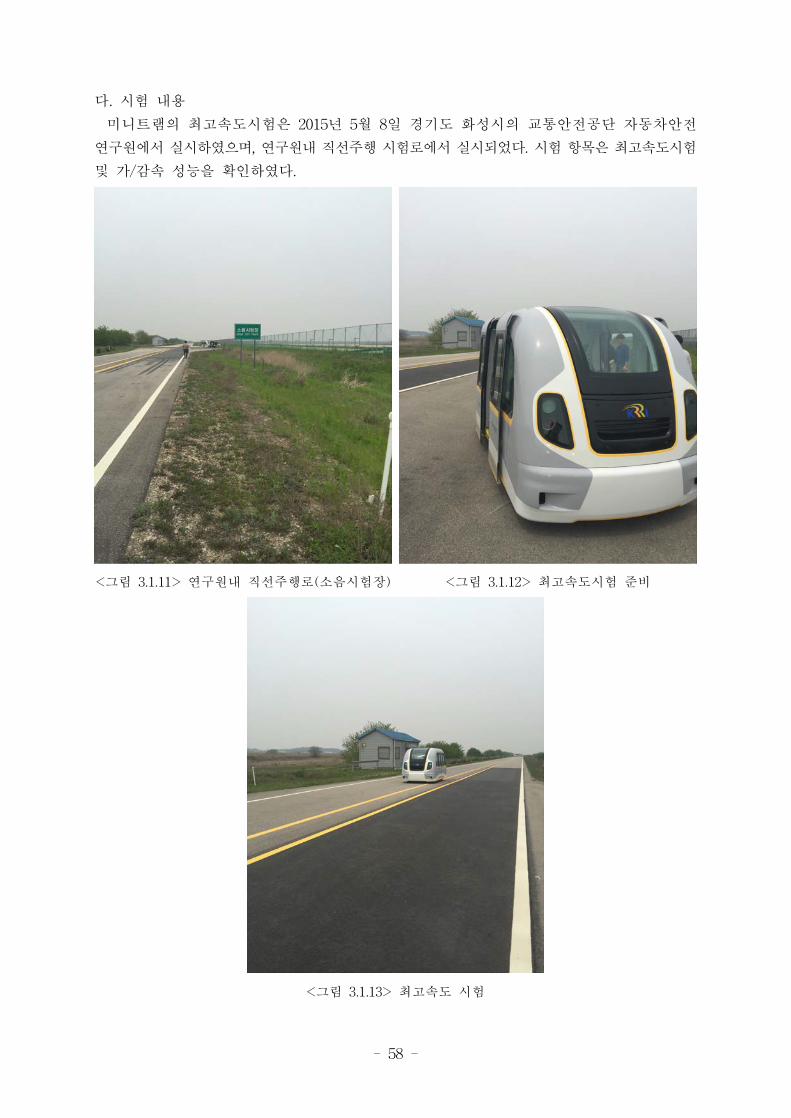
- 58 -
다. 시험 내용
미니트램의 최고속도시험은 2015년 5월 8일 경기도 화성시의 교통안전공단 자동차안전
연구원에서 실시하였으며, 연구원내 직선주행 시험로에서 실시되었다. 시험 항목은 최고속도시험
및 가/감속 성능을 확인하였다.
<그림 3.1.11> 연구원내 직선주행로(소음시험장) <그림 3.1.12> 최고속도시험 준비
<그림 3.1.13> 최고속도 시험
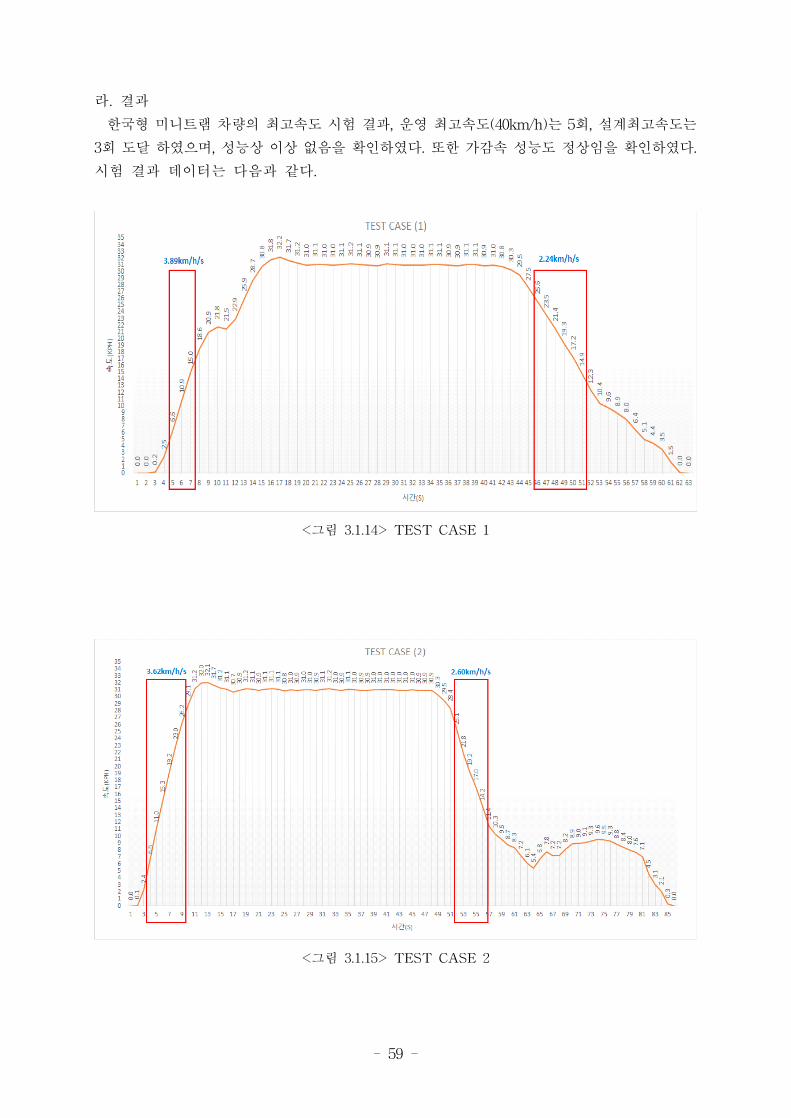
- 59 -
라. 결과
한국형 미니트램 차량의 최고속도 시험 결과, 운영 최고속도(40km/h)는 5회, 설계최고속도는
3회 도달 하였으며, 성능상 이상 없음을 확인하였다. 또한 가감속 성능도 정상임을 확인하였다.
시험 결과 데이터는 다음과 같다.
<그림 3.1.14> TEST CASE 1
<그림 3.1.15> TEST CASE 2
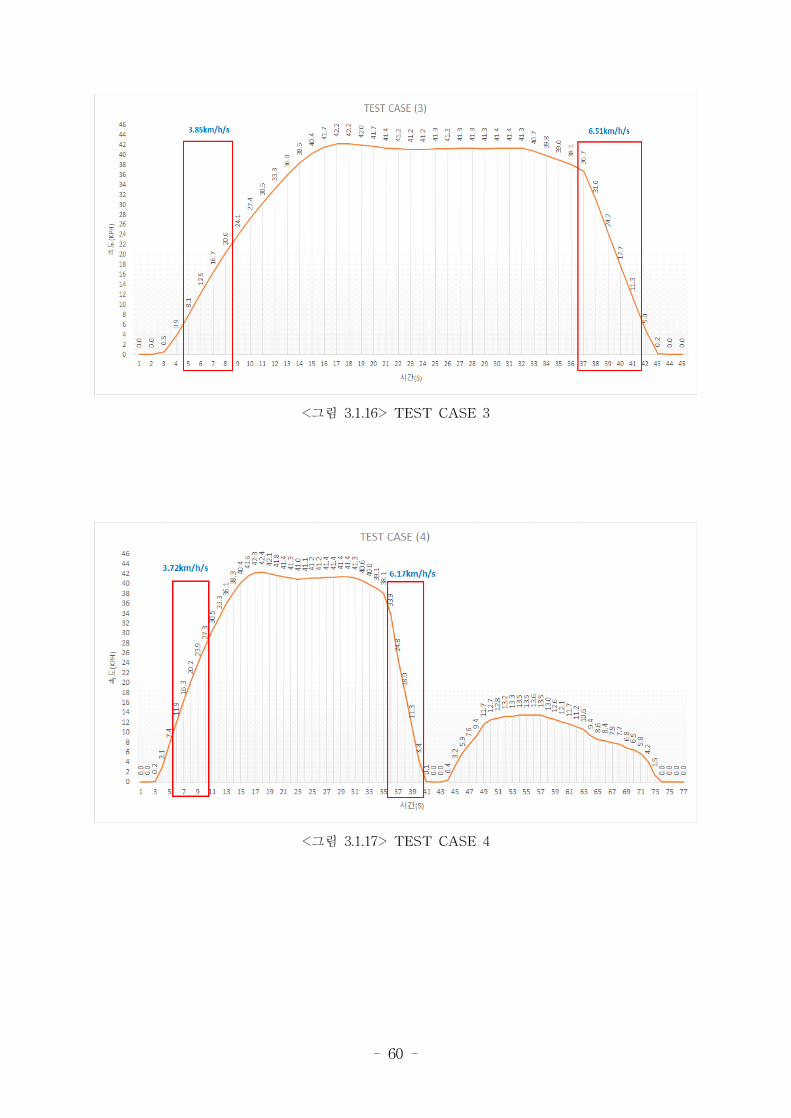
- 60 -
<그림 3.1.16> TEST CASE 3
<그림 3.1.17> TEST CASE 4
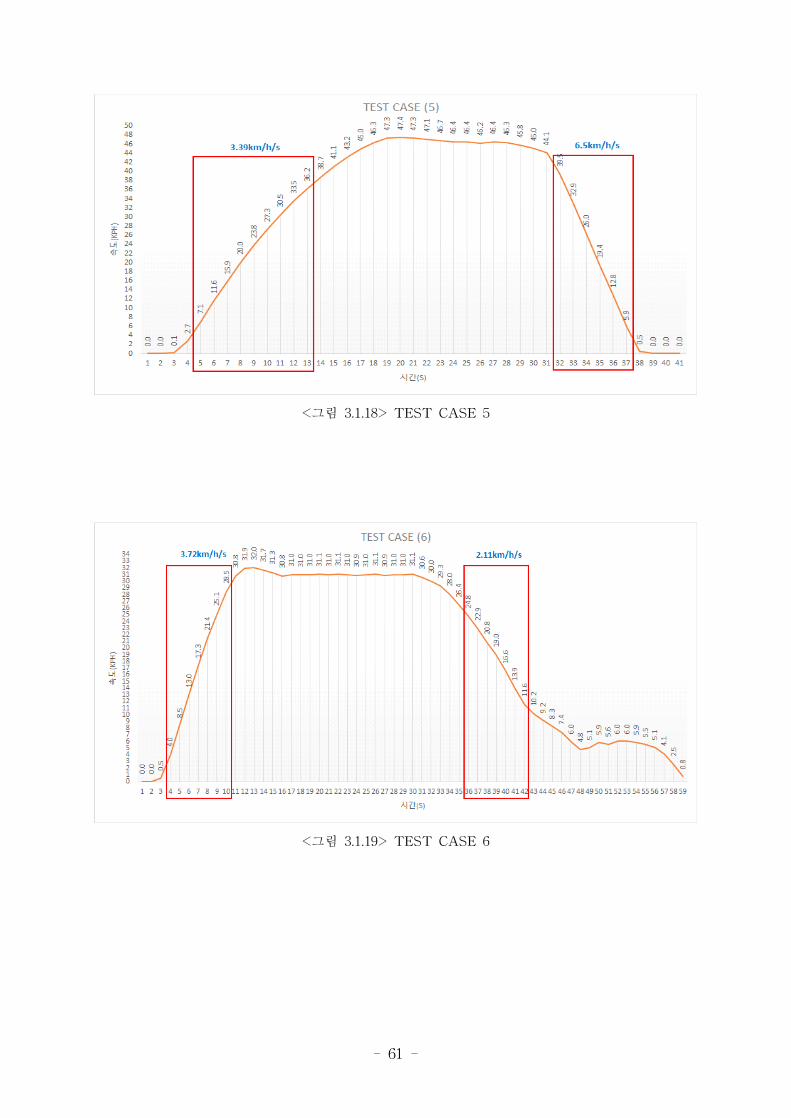
- 61 -
<그림 3.1.18> TEST CASE 5
<그림 3.1.19> TEST CASE 6
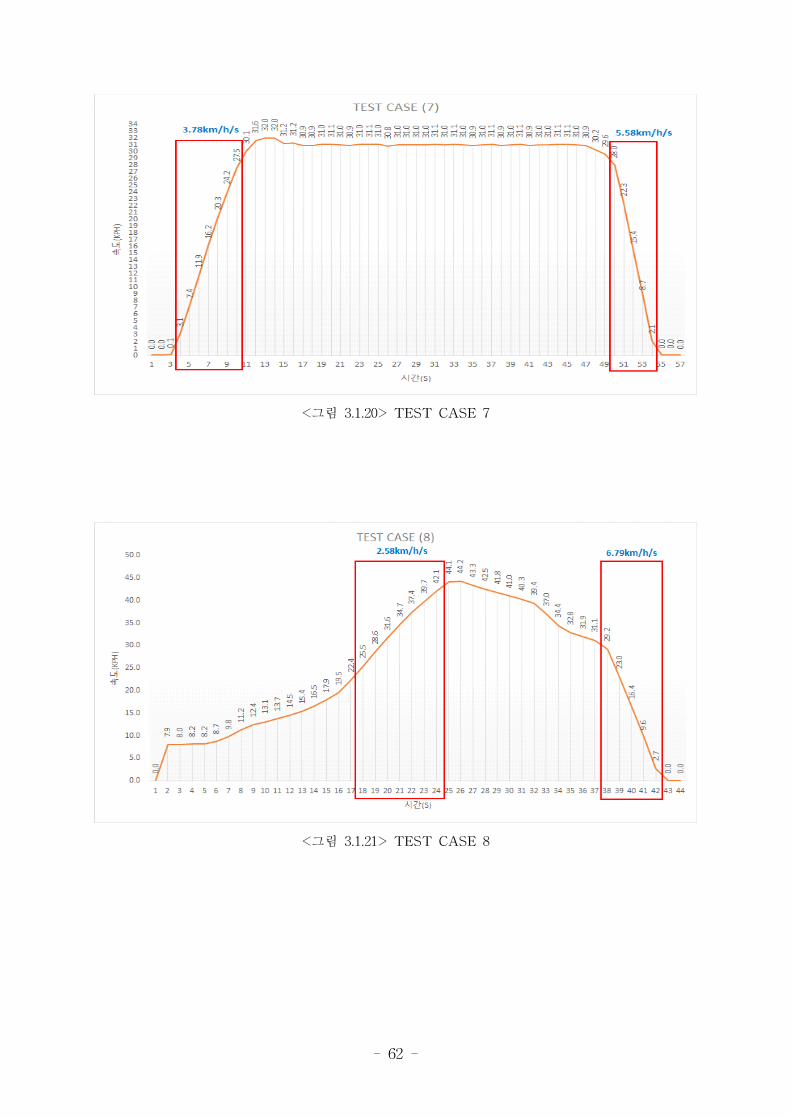
- 62 -
<그림 3.1.20> TEST CASE 7
<그림 3.1.21> TEST CASE 8
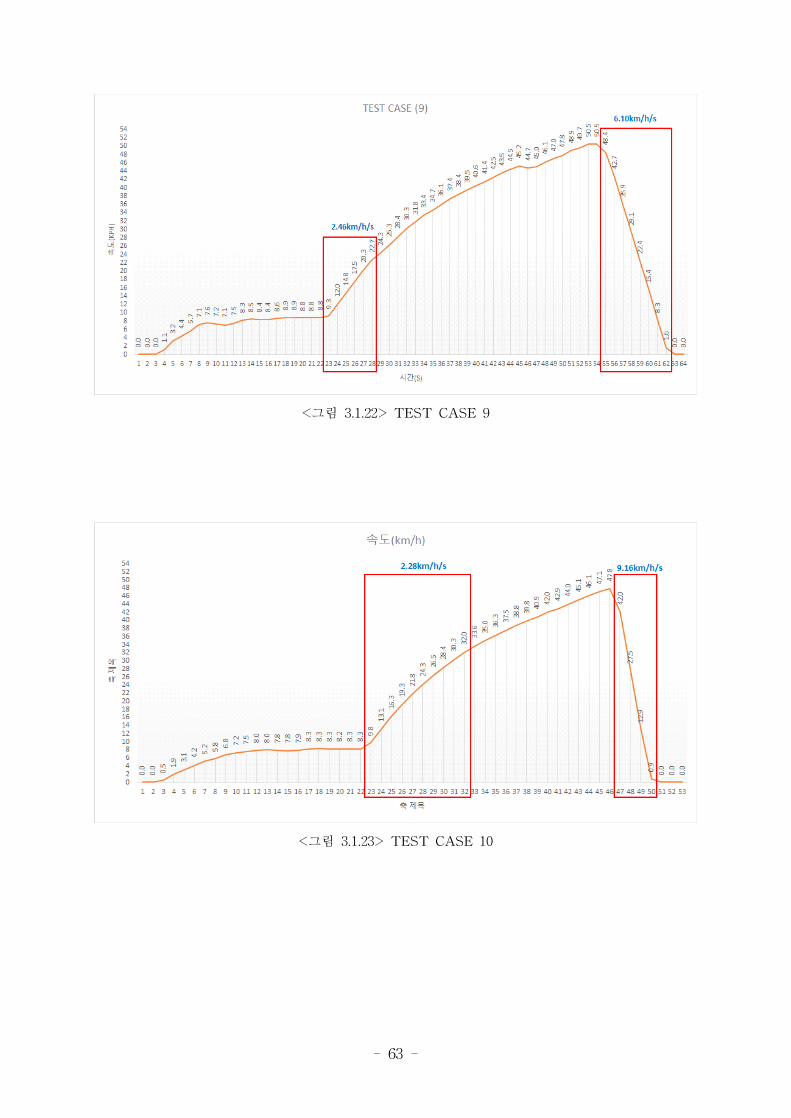
- 63 -
<그림 3.1.22> TEST CASE 9
<그림 3.1.23> TEST CASE 10
- 64 -
3. 시제차량 상세 설계 및 제작
가. 구체
(1) 개요
4차년도 연구에서는 3차년도에 수행한 기본 설계 및 구조해석 결과를 바탕으로 제작 및
구조적인 보완사항을 확인하고, 구조해석을 통한 구조 안정성 검증 확보 후 상세 설계를
수행하여 제작도를 작성하였다. 또한 차체 재질의 경우 3차년도 시제차량에 적용한
A6063-T6 재질을 동일하게 적용하였다.
(2) 차체 재질
(가) 미니트램 차체의 재질 선정
미니트램의 경우 소형에 경량화된 차량으로 충분한 강성을 가지며, 승객의 안전과
내구성능을 가지도록 재질을 선정하였다. 알루미늄의 경우, 경량으로 에너지 사용량이 적고
차체 가공비가 스테인리스보다 상대적으로 적어 원가절감에 도움이 된다. 알루미늄을
사용하면 원하는 형상을 자유자재로 구현 가능한 특징이 있다. 또한, 충격 내흡수성이 좋아
충격 시 승객의 안정성이 우수하여 승객의 만족도를 높일 수 있다. 따라서 미니트램의 차체
주골조 재질은 A6063-T6로 선정하였으며, 의장 및 기계장치, 조향장치용 취부 브라켓은
용접성이 양호한 A5052-O으로 선정하여 상세설계 및 프레임 제작을 진행하였다.
미니트램 시작차량 차체의 특징은,
- 내식성이 우수하며, 외관이 미려하다.
- 자기에 영향이 없고. 저온취성이 좋다.
(3) 적용 재질의 기계적/물리적 성질
(가) 재질의 기계적/물리적 성질
A6063-T6은 Al-Si-Mg계 열처리 합금으로서, 강도 및 내식성 모두 양호해 대표적인
구조재로 알려져 있다. 이 종류의 합금은 강한 가공에 견고하고 절삭성이 좋으며 뛰어난
압출성을 보유하고 있다. 또한, A5052-O은 강도가 높은 비열처리 합금으로서, 용접성이
양호하고 내식성이 좋다. A6063-T6 과 A5052-O의 기계적/물리적 성질은 아래 표와 같다.
ALLOY 열처리인장강도
kg/
기계적성질
용용운동(°c)항복강도
kg/연신율(%)
A6063 T6 24.5 22 12 615-651
A5052 O 19.5 9 25 615-651
<표 3.1.2> A6063-T6과A5052-O의 기계적/물리적 성질
- 65 -
A6063-T6 과 A5052-O의 화학 성분은 아래 표와 같다.
명칭화학 성분 (%)
Si Fe Cu Mn Mg Zn Cr Ti Al
A6063-T60.2~
0.60.35 0.1 0.1
0.45~
0.90.1 0.0 0.0 Ramainder
A5052-O 0.25 0.4 0.1 0.12.2~
2.80.1
0.15~
0.35- Ramainder
<표 3.1.3> A6063-T6과 A5052-O의 화학 성분
나. 차체 부재 형상
(1) 부재 단면 설계
시제 차량의 하부 프레임은 A6063-T6 재질의 사각관을 적용하였다. 하부 프레임은 알루미늄
허니콤 판넬을 A6063-T6 재질의 사각관을 적용한 프레임 위를 덮어 승객 탑승에 따른
하중을 지지하도록 설계하였다, 상부 프레임은 A6063-T6 재질의 사각관을 적용하여 상ž하
프레임을 용접하여 차체를 구성하였다. 그리고 내외장재 및 기계장치, 조향장치, 전자장치
등을 취부 할 브라켓은 용접성이 좋은 A5052-O 재질을 적용하여 설계하였다.
다. 시제차량 부재 형상
3차년도에 검토한 유한요소 해석을 바탕으로 부재의 단면 형상을 설계하였으나 실제 제작 시
작업성 및 처짐 형상등의 문제가 발생하여 차체의 단면부재는 사각관을 적용하여 다시 설계
검토하였으며 측창 및 외장재 고정을 위한 프레임을 신규 적용하였다.
(1) 시제차량 기본형상
차체의 기본형상은 다음과 같으며, 기본 형상을 설계 후 설계된 구조에 맞는 강도와 경량화를
구현 할 수 있도록 단면 설계를 하였다. 주응력 방향 및 차체에 취부되는 기기들을 고려하여
알루미늄 부재를 배치하였다. 전체적으로 소재 형상을 제작의 용이성을 가질 수 있도록
복잡한 형상에서 단순한 형상으로 변경하여 차량을 설계하였다. 3차년도 차량의 경우 차체
경량화를 위하여 측창부 및 외장재 고정 프레임 삭제 및 비상문 취부 프레임 등을 삭제
하였으나 실제 제작 후 기기 및 외장작업시 어려움이 발생하여 이 부분을 보완 설계를 진행
하였다. 또한 알루미늄 허니콤 판넬 두께를 증가하여 실제 운행 시 발생 할 수 있는 집중하중에
대처 할 수 있도록 설계 하였다.
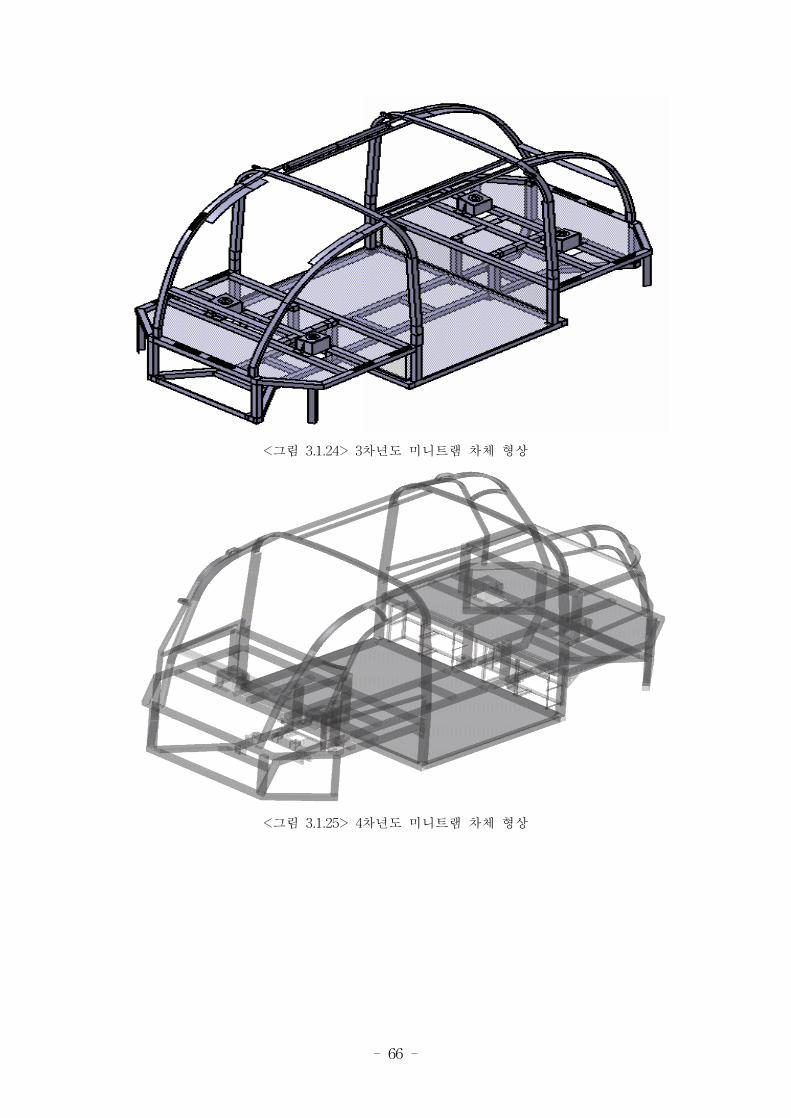
- 66 -
<그림 3.1.24> 3차년도 미니트램 차체 형상
<그림 3.1.25> 4차년도 미니트램 차체 형상
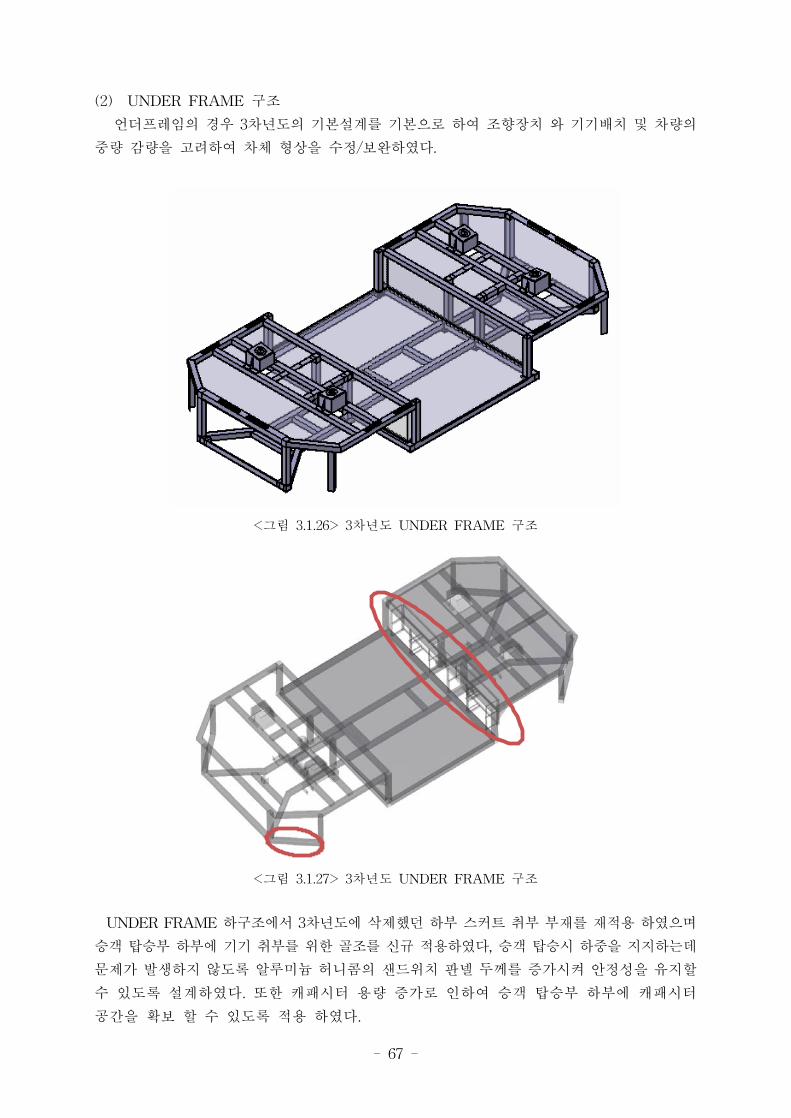
- 67 -
(2) UNDER FRAME 구조
언더프레임의 경우 3차년도의 기본설계를 기본으로 하여 조향장치 와 기기배치 및 차량의
중량 감량을 고려하여 차체 형상을 수정/보완하였다.
<그림 3.1.26> 3차년도 UNDER FRAME 구조
<그림 3.1.27> 3차년도 UNDER FRAME 구조
UNDER FRAME 하구조에서 3차년도에 삭제했던 하부 스커트 취부 부재를 재적용 하였으며
승객 탑승부 하부에 기기 취부를 위한 골조를 신규 적용하였다, 승객 탑승시 하중을 지지하는데
문제가 발생하지 않도록 알루미늄 허니콤의 샌드위치 판넬 두께를 증가시켜 안정성을 유지할
수 있도록 설계하였다. 또한 캐패시터 용량 증가로 인하여 승객 탑승부 하부에 캐패시터
공간을 확보 할 수 있도록 적용 하였다.
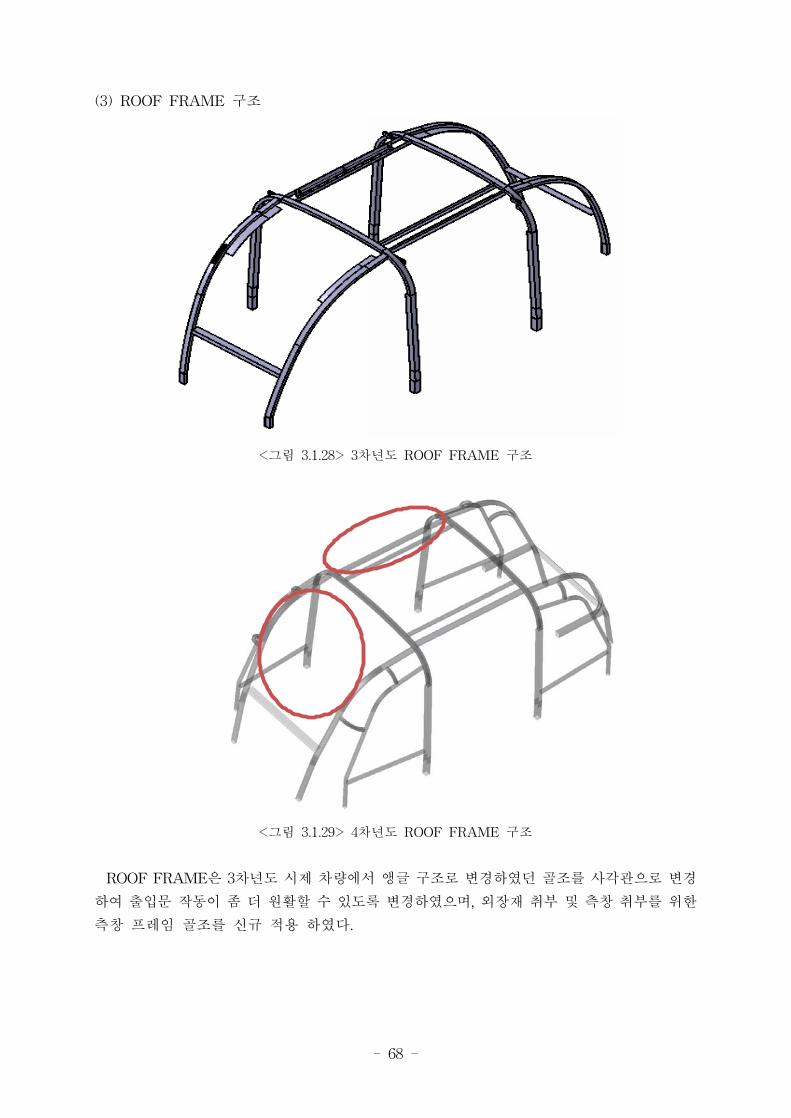
- 68 -
(3) ROOF FRAME 구조
<그림 3.1.28> 3차년도 ROOF FRAME 구조
<그림 3.1.29> 4차년도 ROOF FRAME 구조
ROOF FRAME은 3차년도 시제 차량에서 앵글 구조로 변경하였던 골조를 사각관으로 변경
하여 출입문 작동이 좀 더 원활할 수 있도록 변경하였으며, 외장재 취부 및 측창 취부를 위한
측창 프레임 골조를 신규 적용 하였다.
- 69 -
라. 미니트램 시제차량 차체 제작
(1) 개요
4차년도 연구에서는 2, 3차 년도에서 축척된 용접 수축 데이터 및 WPS를 기반으로 하여
양산 차량 제작 시 작업성 및 원가 절감을 위한 방안을 검토하였으며, 이 부분에 대한 검토는
차년도까지 진행하여 양산제작에 반영할 수 있도록 진행할 계획이다.
(2) 소재 입고
<그림 3.1.30> 소재 입고
(3) 소재 가공 (절단)
<그림 3.1.31> 소재 가공(절단)
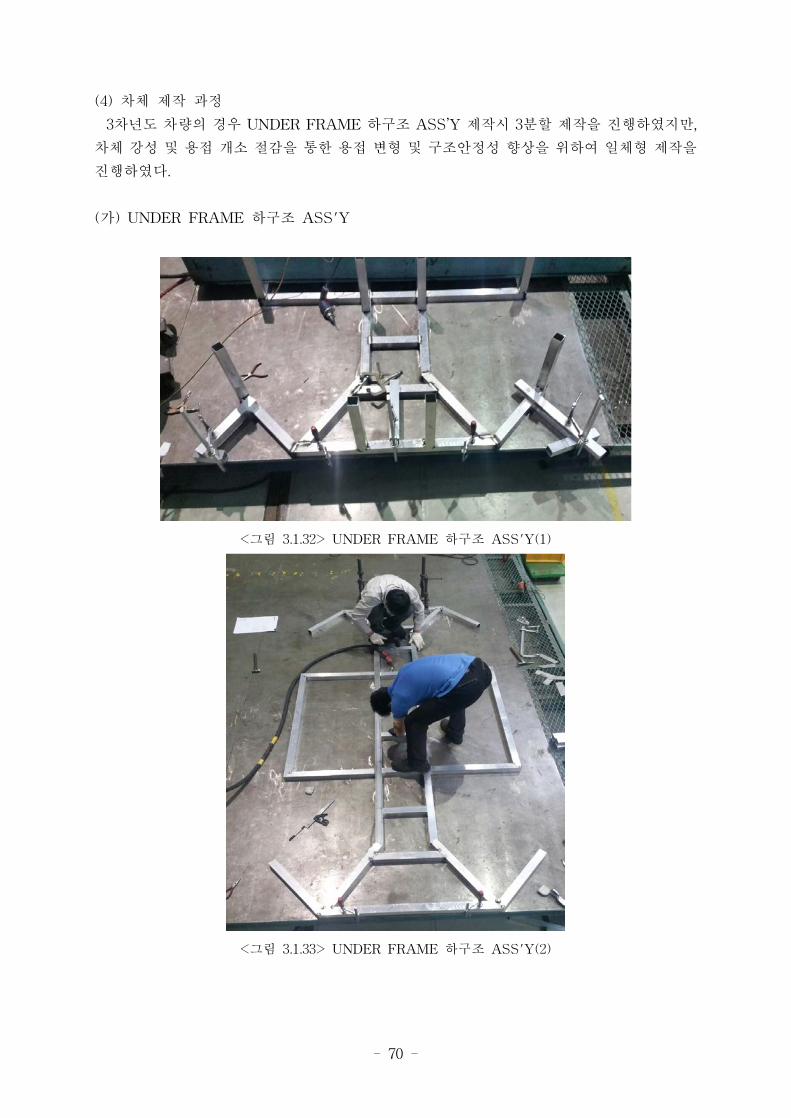
- 70 -
(4) 차체 제작 과정
3차년도 차량의 경우 UNDER FRAME 하구조 ASS’Y 제작시 3분할 제작을 진행하였지만,
차체 강성 및 용접 개소 절감을 통한 용접 변형 및 구조안정성 향상을 위하여 일체형 제작을
진행하였다.
(가) UNDER FRAME 하구조 ASS'Y
<그림 3.1.32> UNDER FRAME 하구조 ASS'Y(1)
<그림 3.1.33> UNDER FRAME 하구조 ASS'Y(2)

- 71 -
(나) UNDER FRAME 상구조 ASS'Y
<그림 3.1.34> UNDER FRAME 상구조 ASS'Y(1)
<그림 3.1.35> UNDER FRAME 상구조 ASS'Y(2)

- 72 -
(다) UNDER FRAME ASS’Y
<그림 3.1.36> UNDER FRAME 소조립(1)
<그림 3.1.37> UNDER FRAME 소조립(2)

- 73 -
(라) ROOF ASS'Y
<그림 3.1.38> ROOF ASS'Y(1)
<그림 3.1.39> ROOF ASS'Y(2)
- 74 -
(마) CAB FRAME ASS'Y
<그림 3.1.40> CAB FRAME ASS'Y(1)
<그림 3.1.41> CAB FRAME ASS'Y(2)
- 75 -
(바) 차체 대조립
<그림 3.1.42> 차체 대조립(1)
<그림 3.1.43> 차체 대조립(2)

- 76 -
(사) 차체 중량 검사
<그림 3.1.44> 로드셀을 이용한 중량검사
제작이 완료된 시제차량의 구체를 로드셀을 이용하여 중량을 측정하였다. 시제차량을
로프로 묶어 고정시킨 다음 영점 조정 후 중량을 확인하였다.
<그림 3.1.45> 차량 중량 측정결과
시제차량의 중량이 150kg이 나온 것을 확인할 수 있었다.

- 77 -
4. 의 장
가. 개요
한국형 미니트램 시제차량으로 선정된 조감도를 기반으로 차량 사이즈를 폭 1,800mm,
길이 3,800mm, 높이 2,000mm로 박스형 외형에 유선형 곡면의 포인트를 주어 단조로움과
세련미를 동시에 구현 하였다. 정면부의 유리창 및 출입문 유리를 시작차보다 넓혀 개방감을
높였고, 출입문 개방 폭을 증대하여 활용성을 높였다.
실내 내장재는 의자, 스위치 판넬부, 도어엔진부, 실내등으로 연결되는 라인을 최대한
미려화 시켜, 승객으로 하여금 실내에서 안락함과, 편리함을 극대화 하였고. 중앙부는
주변의 실내조명을 기준으로 내부 상부를 더 높게 제작하여 승하차시에 편리하도록 구성하고,
LCD 모니터와냉난방토출구, CCTV등을구성하여쾌적성및미려도를높였다. 또한내/외장재의
재질을 GFRP에서 CFRP로 적용하여 미려도와 강도를 증대시킨 것은 물론 비중이 GFRP의
2/3 수준인 CFRP적용으로 중량 절감을 실현하였다.
나. 미니트램 시제차량 외장 디자인
<그림 3.1.46> 미니트램 시제차량 외부 디자인
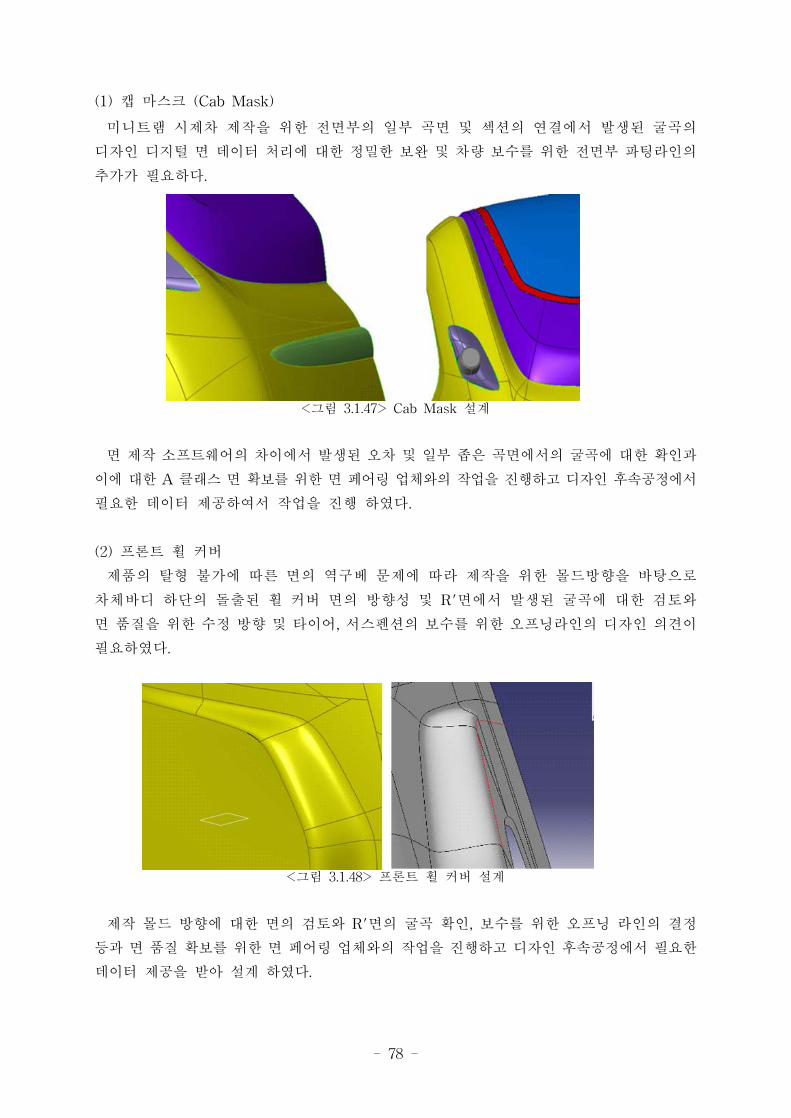
- 78 -
(1) 캡 마스크 (Cab Mask)
미니트램 시제차 제작을 위한 전면부의 일부 곡면 및 섹션의 연결에서 발생된 굴곡의
디자인 디지털 면 데이터 처리에 대한 정밀한 보완 및 차량 보수를 위한 전면부 파팅라인의
추가가 필요하다.
<그림 3.1.47> Cab Mask 설계
면 제작 소프트웨어의 차이에서 발생된 오차 및 일부 좁은 곡면에서의 굴곡에 대한 확인과
이에 대한 A 클래스 면 확보를 위한 면 페어링 업체와의 작업을 진행하고 디자인 후속공정에서
필요한 데이터 제공하여서 작업을 진행 하였다.
(2) 프론트 휠 커버
제품의 탈형 불가에 따른 면의 역구베 문제에 따라 제작을 위한 몰드방향을 바탕으로
차체바디 하단의 돌출된 휠 커버 면의 방향성 및 R'면에서 발생된 굴곡에 대한 검토와
면 품질을 위한 수정 방향 및 타이어, 서스펜션의 보수를 위한 오프닝라인의 디자인 의견이
필요하였다.
<그림 3.1.48> 프론트 휠 커버 설계
제작 몰드 방향에 대한 면의 검토와 R'면의 굴곡 확인, 보수를 위한 오프닝 라인의 결정
등과 면 품질 확보를 위한 면 페어링 업체와의 작업을 진행하고 디자인 후속공정에서 필요한
데이터 제공을 받아 설계 하였다.
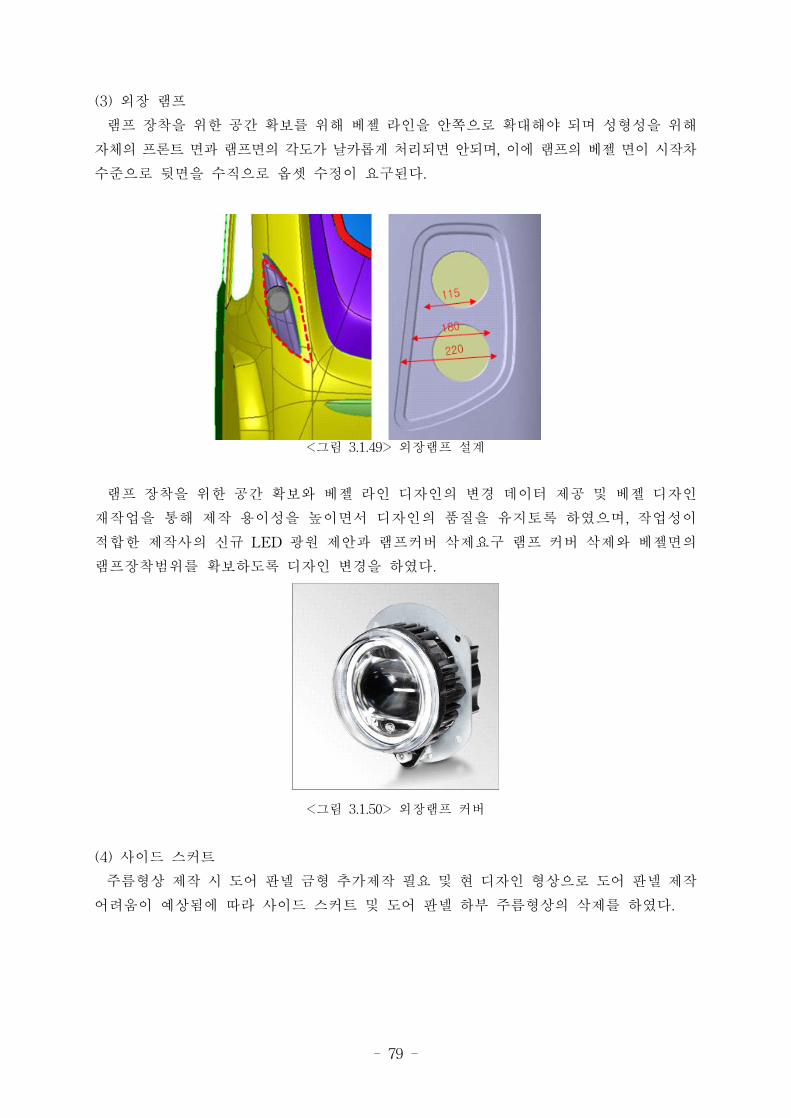
- 79 -
(3) 외장 램프
램프 장착을 위한 공간 확보를 위해 베젤 라인을 안쪽으로 확대해야 되며 성형성을 위해
자체의 프론트 면과 램프면의 각도가 날카롭게 처리되면 안되며, 이에 램프의 베젤 면이 시작차
수준으로 뒷면을 수직으로 옵셋 수정이 요구된다.
<그림 3.1.49> 외장램프 설계
램프 장착을 위한 공간 확보와 베젤 라인 디자인의 변경 데이터 제공 및 베젤 디자인
재작업을 통해 제작 용이성을 높이면서 디자인의 품질을 유지토록 하였으며, 작업성이
적합한 제작사의 신규 LED 광원 제안과 램프커버 삭제요구 램프 커버 삭제와 베젤면의
램프장착범위를 확보하도록 디자인 변경을 하였다.
<그림 3.1.50> 외장램프 커버
(4) 사이드 스커트
주름형상 제작 시 도어 판넬 금형 추가제작 필요 및 현 디자인 형상으로 도어 판넬 제작
어려움이 예상됨에 따라 사이드 스커트 및 도어 판넬 하부 주름형상의 삭제를 하였다.
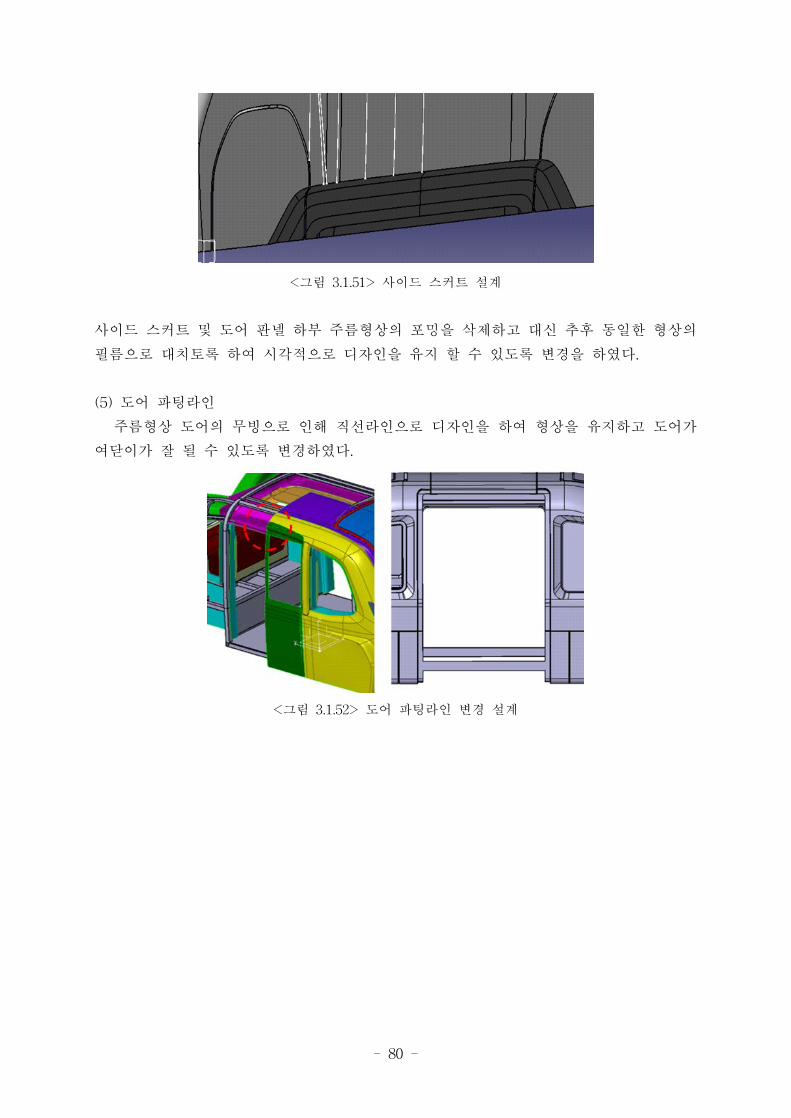
- 80 -
<그림 3.1.51> 사이드 스커트 설계
사이드 스커트 및 도어 판넬 하부 주름형상의 포밍을 삭제하고 대신 추후 동일한 형상의
필름으로 대치토록 하여 시각적으로 디자인을 유지 할 수 있도록 변경을 하였다.
(5) 도어 파팅라인
주름형상 도어의 무빙으로 인해 직선라인으로 디자인을 하여 형상을 유지하고 도어가
여닫이가 잘 될 수 있도록 변경하였다.
<그림 3.1.52> 도어 파팅라인 변경 설계
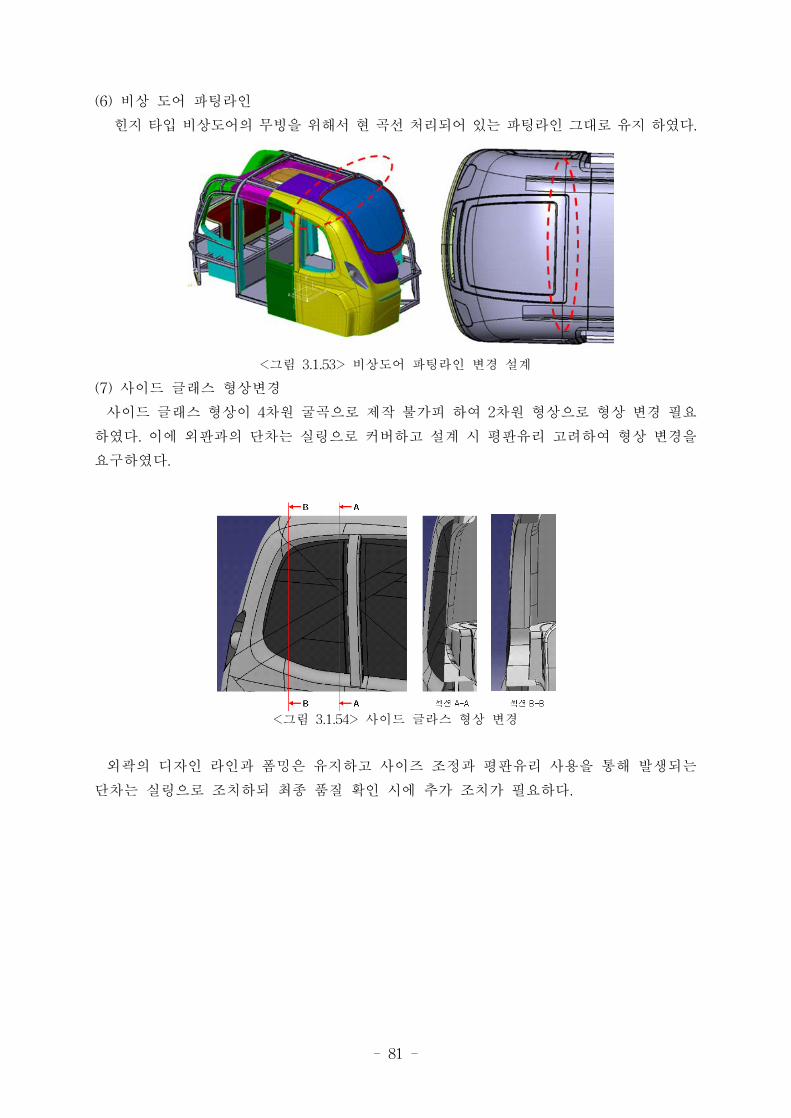
- 81 -
(6) 비상 도어 파팅라인
힌지 타입 비상도어의 무빙을 위해서 현 곡선 처리되어 있는 파팅라인 그대로 유지 하였다.
<그림 3.1.53> 비상도어 파팅라인 변경 설계
(7) 사이드 글래스 형상변경
사이드 글래스 형상이 4차원 굴곡으로 제작 불가피 하여 2차원 형상으로 형상 변경 필요
하였다. 이에 외판과의 단차는 실링으로 커버하고 설계 시 평판유리 고려하여 형상 변경을
요구하였다.
<그림 3.1.54> 사이드 글라스 형상 변경
외곽의 디자인 라인과 폼밍은 유지하고 사이즈 조정과 평판유리 사용을 통해 발생되는
단차는 실링으로 조치하되 최종 품질 확인 시에 추가 조치가 필요하다.
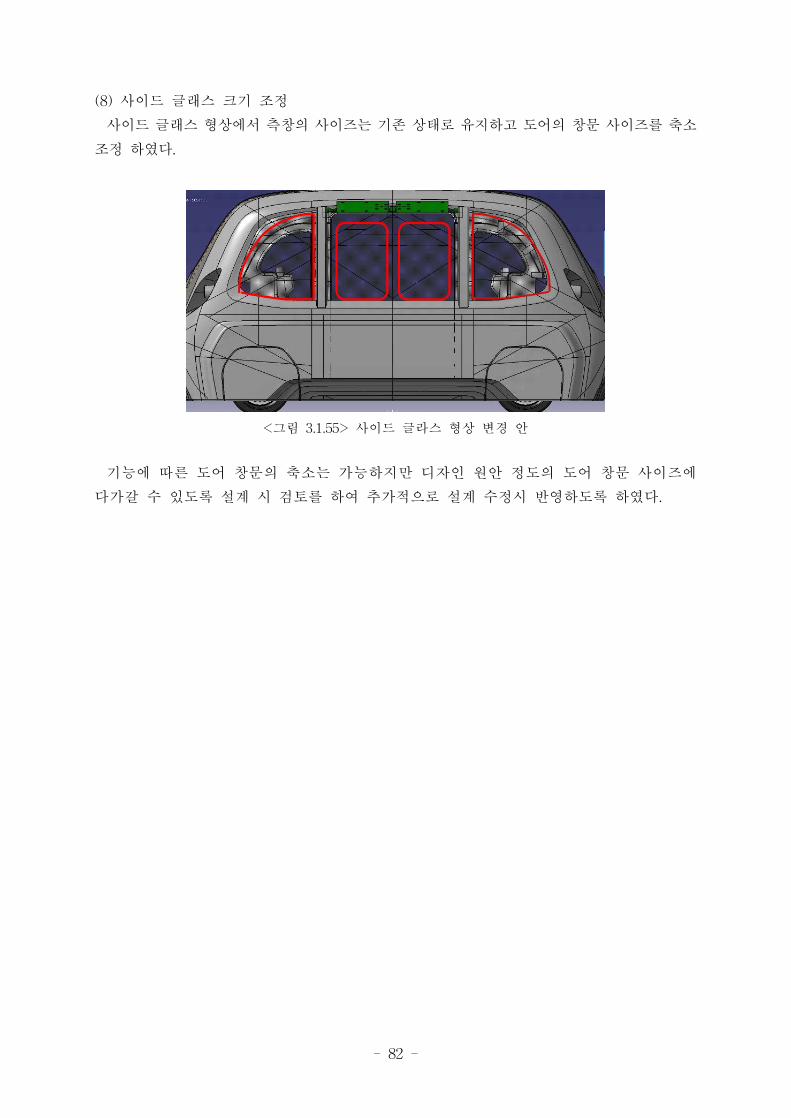
- 82 -
(8) 사이드 글래스 크기 조정
사이드 글래스 형상에서 측창의 사이즈는 기존 상태로 유지하고 도어의 창문 사이즈를 축소
조정 하였다.
<그림 3.1.55> 사이드 글라스 형상 변경 안
기능에 따른 도어 창문의 축소는 가능하지만 디자인 원안 정도의 도어 창문 사이즈에
다가갈 수 있도록 설계 시 검토를 하여 추가적으로 설계 수정시 반영하도록 하였다.
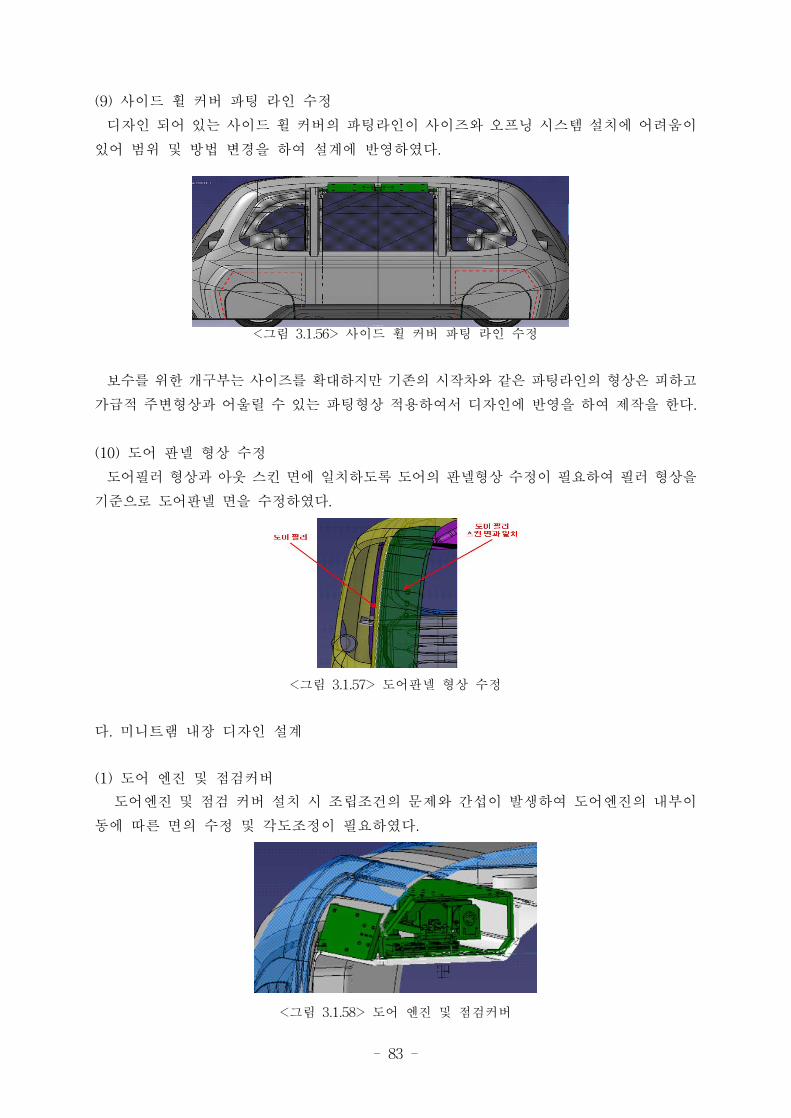
- 83 -
(9) 사이드 휠 커버 파팅 라인 수정
디자인 되어 있는 사이드 휠 커버의 파팅라인이 사이즈와 오프닝 시스템 설치에 어려움이
있어 범위 및 방법 변경을 하여 설계에 반영하였다.
<그림 3.1.56> 사이드 휠 커버 파팅 라인 수정
보수를 위한 개구부는 사이즈를 확대하지만 기존의 시작차와 같은 파팅라인의 형상은 피하고
가급적 주변형상과 어울릴 수 있는 파팅형상 적용하여서 디자인에 반영을 하여 제작을 한다.
(10) 도어 판넬 형상 수정
도어필러 형상과 아웃 스킨 면에 일치하도록 도어의 판넬형상 수정이 필요하여 필러 형상을
기준으로 도어판넬 면을 수정하였다.
<그림 3.1.57> 도어판넬 형상 수정
다. 미니트램 내장 디자인 설계
(1) 도어 엔진 및 점검커버
도어엔진 및 점검 커버 설치 시 조립조건의 문제와 간섭이 발생하여 도어엔진의 내부이
동에 따른 면의 수정 및 각도조정이 필요하였다.
<그림 3.1.58> 도어 엔진 및 점검커버
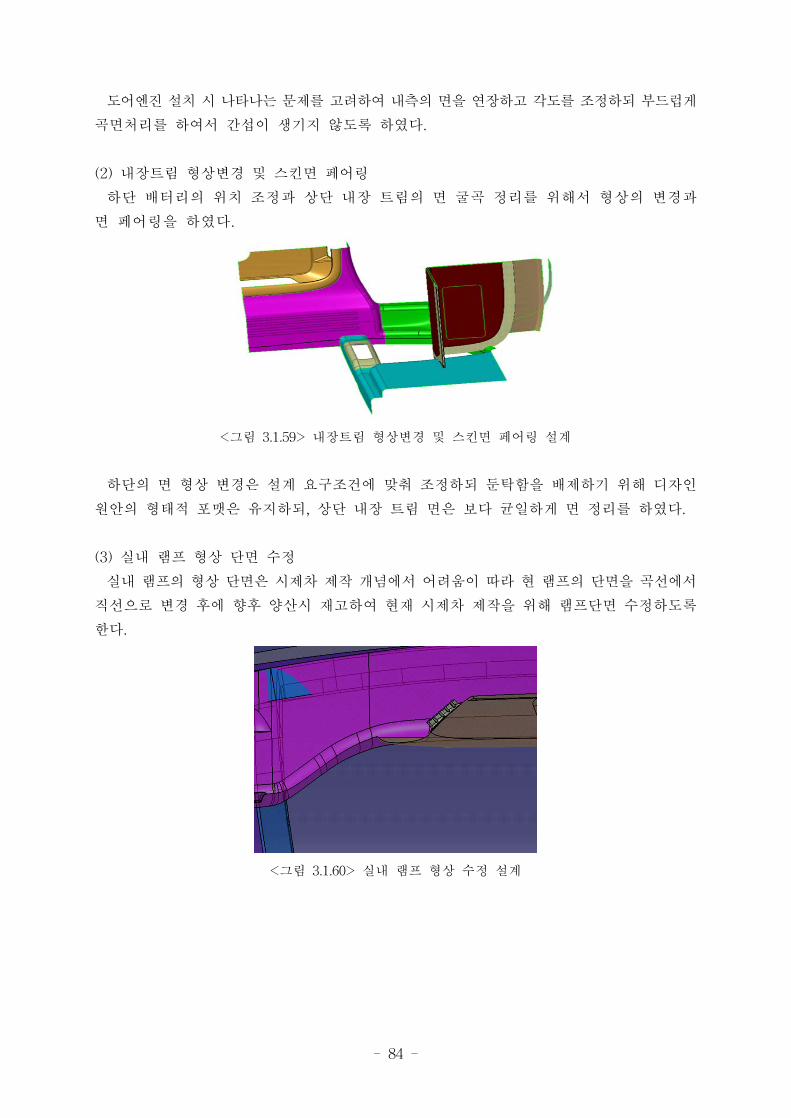
- 84 -
도어엔진 설치 시 나타나는 문제를 고려하여 내측의 면을 연장하고 각도를 조정하되 부드럽게
곡면처리를 하여서 간섭이 생기지 않도록 하였다.
(2) 내장트림 형상변경 및 스킨면 페어링
하단 배터리의 위치 조정과 상단 내장 트림의 면 굴곡 정리를 위해서 형상의 변경과
면 페어링을 하였다.
<그림 3.1.59> 내장트림 형상변경 및 스킨면 페어링 설계
하단의 면 형상 변경은 설계 요구조건에 맞춰 조정하되 둔탁함을 배제하기 위해 디자인
원안의 형태적 포맷은 유지하되, 상단 내장 트림 면은 보다 균일하게 면 정리를 하였다.
(3) 실내 램프 형상 단면 수정
실내 램프의 형상 단면은 시제차 제작 개념에서 어려움이 따라 현 램프의 단면을 곡선에서
직선으로 변경 후에 향후 양산시 재고하여 현재 시제차 제작을 위해 램프단면 수정하도록
한다.
<그림 3.1.60> 실내 램프 형상 수정 설계
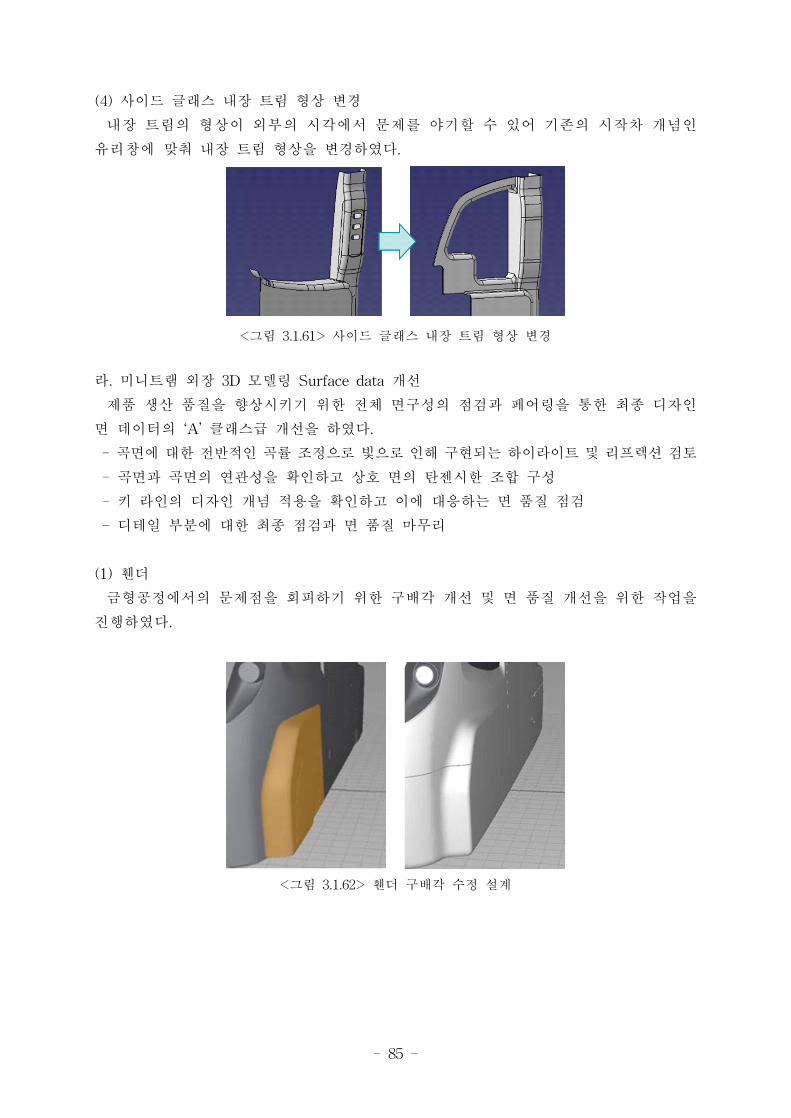
- 85 -
(4) 사이드 글래스 내장 트림 형상 변경
내장 트림의 형상이 외부의 시각에서 문제를 야기할 수 있어 기존의 시작차 개념인
유리창에 맞춰 내장 트림 형상을 변경하였다.
<그림 3.1.61> 사이드 글래스 내장 트림 형상 변경
라. 미니트램 외장 3D 모델링 Surface data 개선
제품 생산 품질을 향상시키기 위한 전체 면구성의 점검과 페어링을 통한 최종 디자인
면 데이터의 ‘A’ 클래스급 개선을 하였다.
- 곡면에 대한 전반적인 곡률 조정으로 빛으로 인해 구현되는 하이라이트 및 리프렉션 검토
- 곡면과 곡면의 연관성을 확인하고 상호 면의 탄젠시한 조합 구성
- 키 라인의 디자인 개념 적용을 확인하고 이에 대응하는 면 품질 점검
- 디테일 부분에 대한 최종 점검과 면 품질 마무리
(1) 휀더
금형공정에서의 문제점을 회피하기 위한 구배각 개선 및 면 품질 개선을 위한 작업을
진행하였다.
<그림 3.1.62> 휀더 구배각 수정 설계
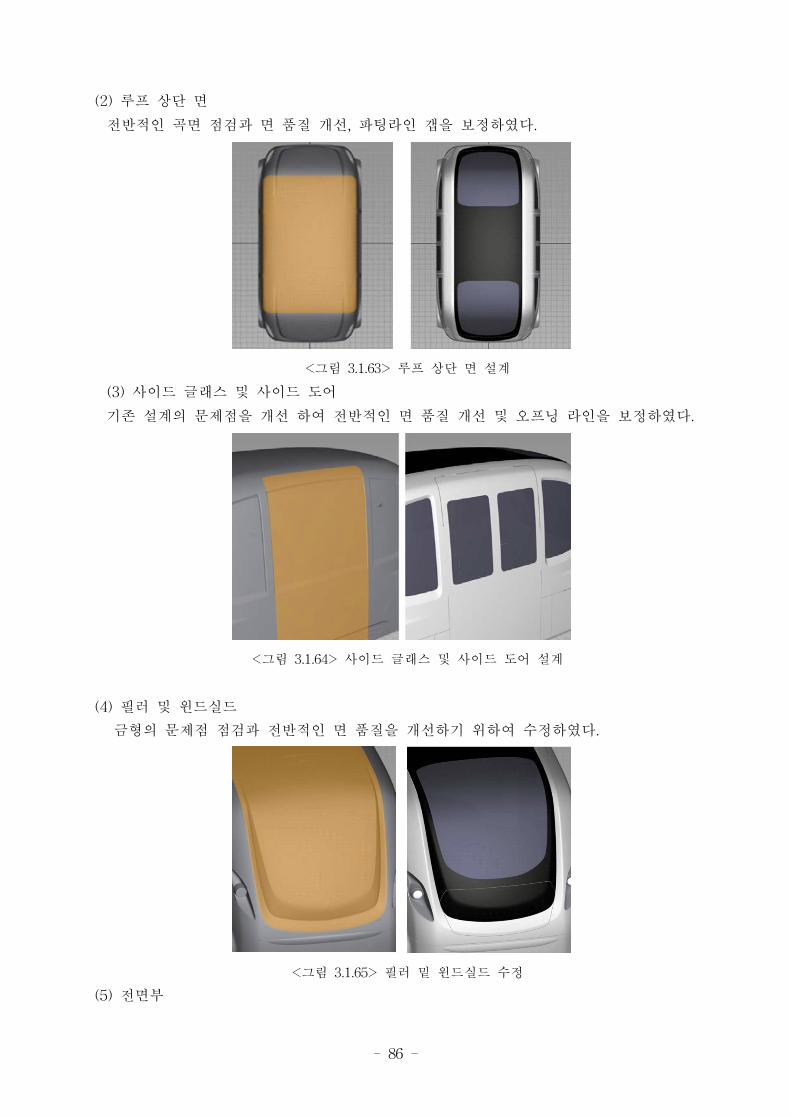
- 86 -
(2) 루프 상단 면
전반적인 곡면 점검과 면 품질 개선, 파팅라인 갭을 보정하였다.
<그림 3.1.63> 루프 상단 면 설계
(3) 사이드 글래스 및 사이드 도어
기존 설계의 문제점을 개선 하여 전반적인 면 품질 개선 및 오프닝 라인을 보정하였다.
<그림 3.1.64> 사이드 글래스 및 사이드 도어 설계
(4) 필러 및 윈드실드
금형의 문제점 점검과 전반적인 면 품질을 개선하기 위하여 수정하였다.
<그림 3.1.65> 필러 밑 윈드실드 수정
(5) 전면부
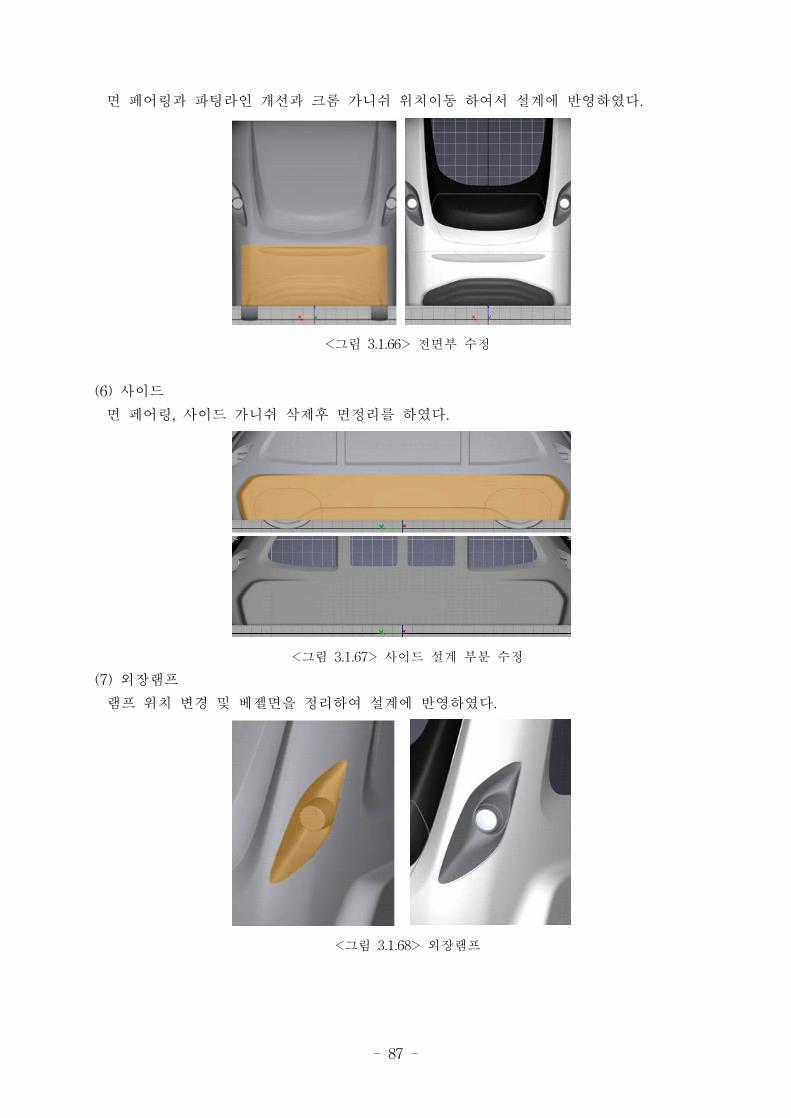
- 87 -
면 페어링과 파팅라인 개선과 크롬 가니쉬 위치이동 하여서 설계에 반영하였다.
<그림 3.1.66> 전면부 수정
(6) 사이드
면 페어링, 사이드 가니쉬 삭제후 면정리를 하였다.
<그림 3.1.67> 사이드 설계 부분 수정
(7) 외장램프
램프 위치 변경 및 베젤면을 정리하여 설계에 반영하였다.
<그림 3.1.68> 외장램프
- 88 -
(8) 전면부 점검창
위치 조정 및 면 정리, 파팅라인 보정 설계
<그림 3.1.69> 전면부 점검창
마. 시제차량 내/외장재 CFRP 적용 공법
시제차량의 내/외장재의 제작 공법은 V.I.P (Vacuum Infusion Process) 공법으로 제작되며
V.I.P는 Resin Contact를 40~60% 정도로 조절 할 수 있어서 중량 관리 및 일정한 기계적
성질은 요하는 제품과 생산량이 소~중 규모정도의 제품을 제작 할 때 적합한 공법이다.
Vacuum Infusion 공법은 진공 펌프와 Vacuum 백을 사용하여 진공의 힘으로 수지를
함침시켜 고품질의 복합 재료 구조물을 제조할 수 있는 공법으로 기존 Vacuum bagging
공법의 수지의 과잉에 따른 강도 저하 및 변형 등의 문제를 보완하고 크기의 대/소에 관계
없이 정해진 룰에 따라 수지가 주입됨으로서 수지의 낭비를 최소화할 수 있으며, 제품별
수지함량을 일정하게 해줌으로서 품질을 균일하게 생산할 수 있다.
<그림 3.1.70> Vacuum Infusion Process
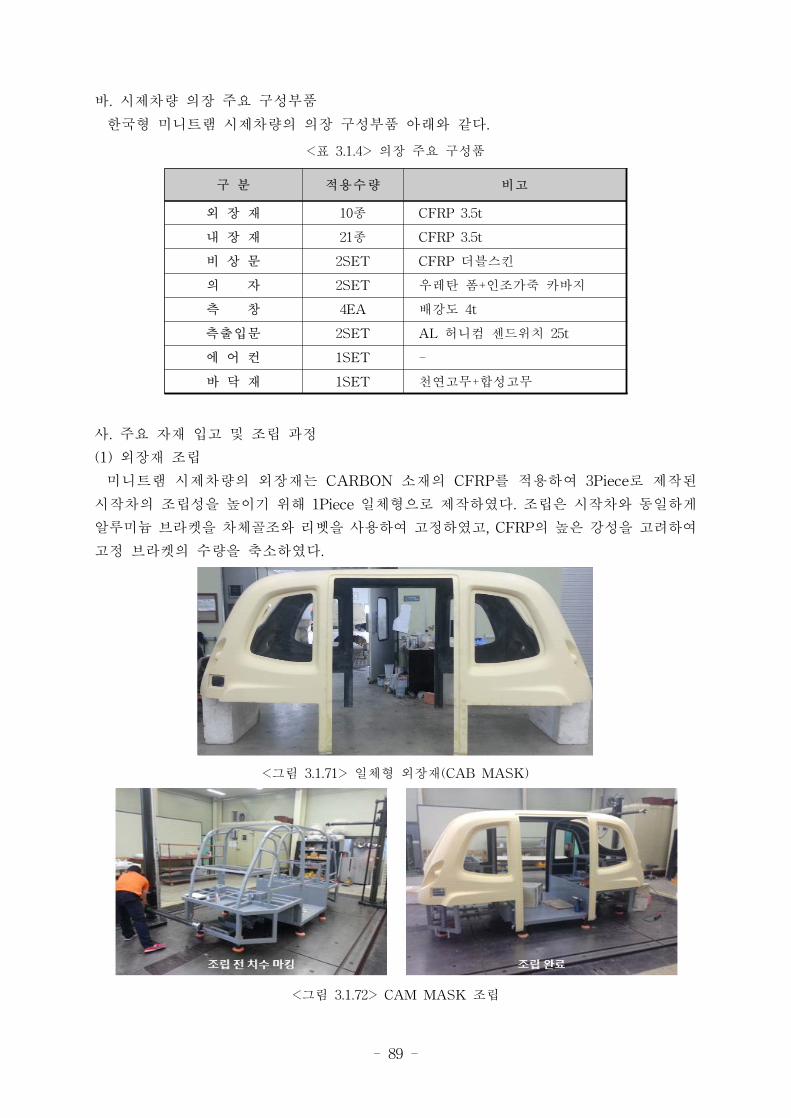
- 89 -
바. 시제차량 의장 주요 구성부품
한국형 미니트램 시제차량의 의장 구성부품 아래와 같다.
구 분 적용수량 비고
외 장 재 10종 CFRP 3.5t
내 장 재 21종 CFRP 3.5t
비 상 문 2SET CFRP 더블스킨
의 자 2SET 우레탄 폼+인조가죽 카바지
측 창 4EA 배강도 4t
측출입문 2SET AL 허니컴 센드위치 25t
에 어 컨 1SET -
바 닥 재 1SET 천연고무+합성고무
<표 3.1.4> 의장 주요 구성품
사. 주요 자재 입고 및 조립 과정
(1) 외장재 조립
미니트램 시제차량의 외장재는 CARBON 소재의 CFRP를 적용하여 3Piece로 제작된
시작차의 조립성을 높이기 위해 1Piece 일체형으로 제작하였다. 조립은 시작차와 동일하게
알루미늄 브라켓을 차체골조와 리벳을 사용하여 고정하였고, CFRP의 높은 강성을 고려하여
고정 브라켓의 수량을 축소하였다.
<그림 3.1.71> 일체형 외장재(CAB MASK)
<그림 3.1.72> CAM MASK 조립
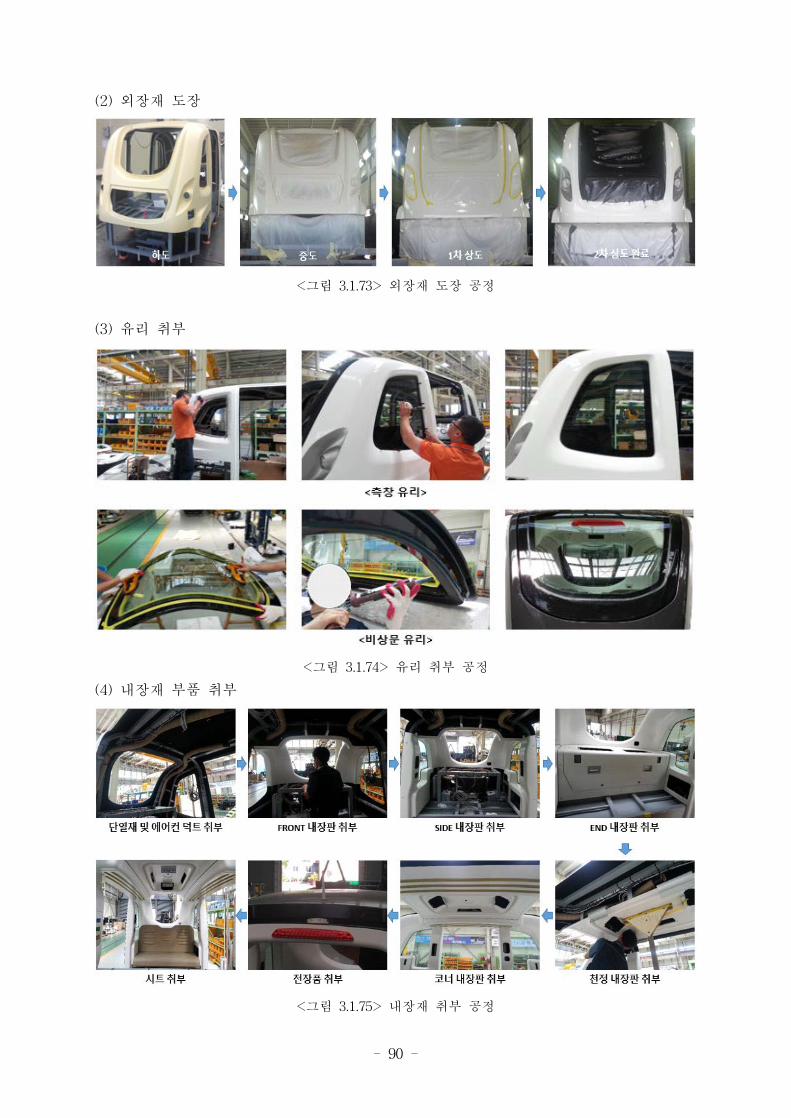
- 90 -
(2) 외장재 도장
<그림 3.1.73> 외장재 도장 공정
(3) 유리 취부
<그림 3.1.74> 유리 취부 공정
(4) 내장재 부품 취부
<그림 3.1.75> 내장재 취부 공정
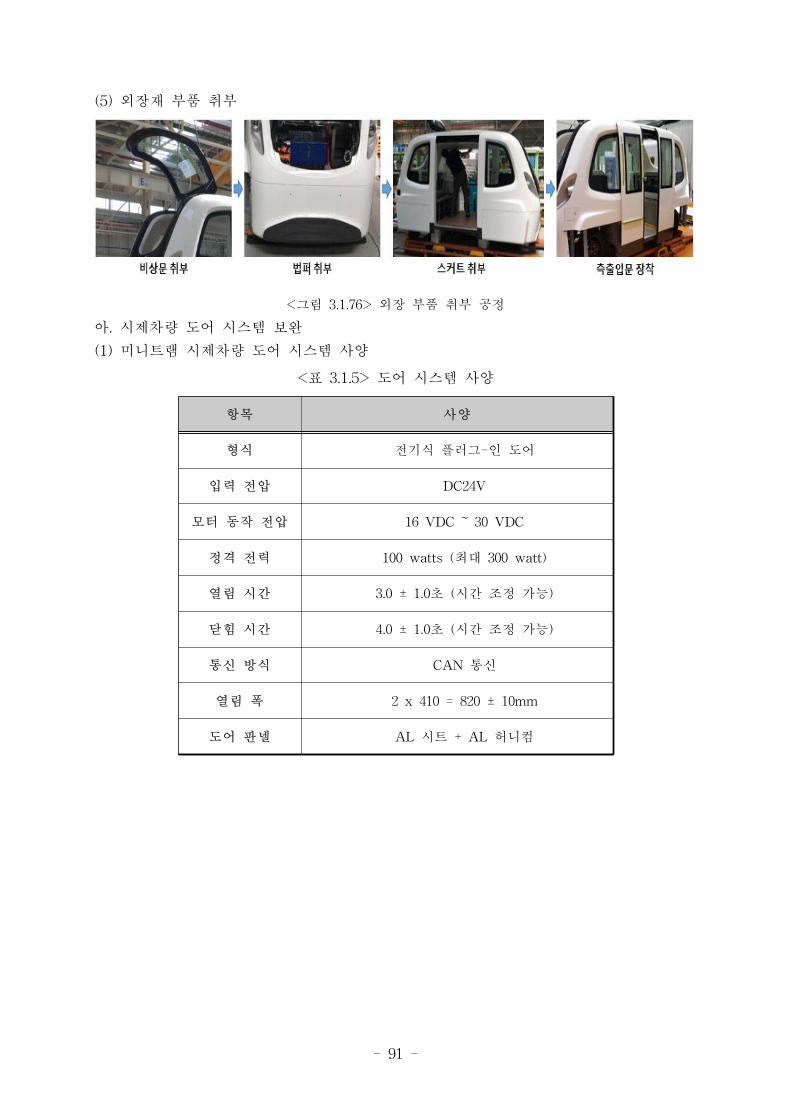
- 91 -
(5) 외장재 부품 취부
<그림 3.1.76> 외장 부품 취부 공정
아. 시제차량 도어 시스템 보완
(1) 미니트램 시제차량 도어 시스템 사양
항목 사양
형식 전기식 플러그-인 도어
입력 전압 DC24V
모터 동작 전압 16 VDC ~ 30 VDC
정격 전력 100 watts (최대 300 watt)
열림 시간 3.0 ± 1.0초 (시간 조정 가능)
닫힘 시간 4.0 ± 1.0초 (시간 조정 가능)
통신 방식 CAN 통신
열림 폭 2 x 410 = 820 ± 10mm
도어 판넬 AL 시트 + AL 허니컴
<표 3.1.5> 도어 시스템 사양
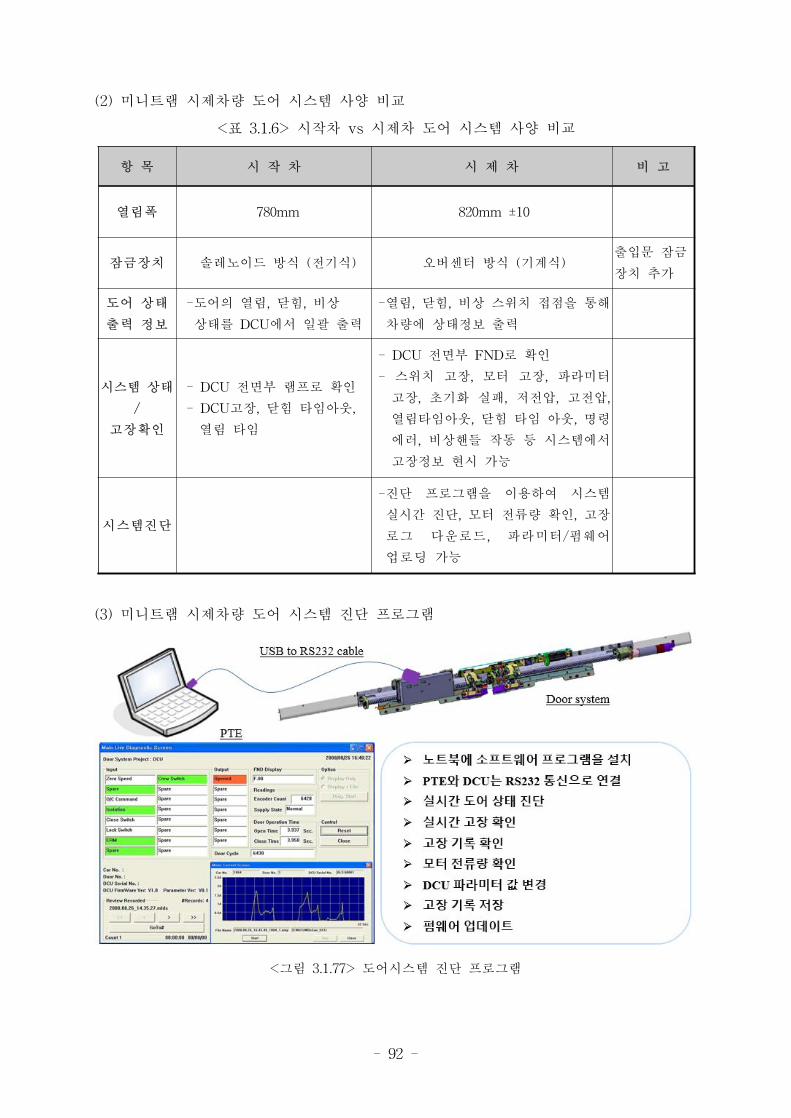
- 92 -
(2) 미니트램 시제차량 도어 시스템 사양 비교
항 목 시 작 차 시 제 차 비 고
열림폭 780mm 820mm ±10
잠금장치 솔레노이드 방식 (전기식) 오버센터 방식 (기계식)출입문 잠금
장치 추가
도어 상태
출력 정보
-도어의 열림, 닫힘, 비상
상태를 DCU에서 일괄 출력
-열림, 닫힘, 비상 스위치 접점을 통해
차량에 상태정보 출력
시스템 상태
/
고장확인
- DCU 전면부 램프로 확인
- DCU고장, 닫힘 타임아웃,
열림 타임
- DCU 전면부 FND로 확인
- 스위치 고장, 모터 고장, 파라미터
고장, 초기화 실패, 저전압, 고전압,
열림타임아웃, 닫힘 타임 아웃, 명령
에러, 비상핸들 작동 등 시스템에서
고장정보 현시 가능
시스템진단
-진단 프로그램을 이용하여 시스템
실시간 진단, 모터 전류량 확인, 고장
로그 다운로드, 파라미터/펌웨어
업로딩 가능
<표 3.1.6> 시작차 vs 시제차 도어 시스템 사양 비교
(3) 미니트램 시제차량 도어 시스템 진단 프로그램
<그림 3.1.77> 도어시스템 진단 프로그램
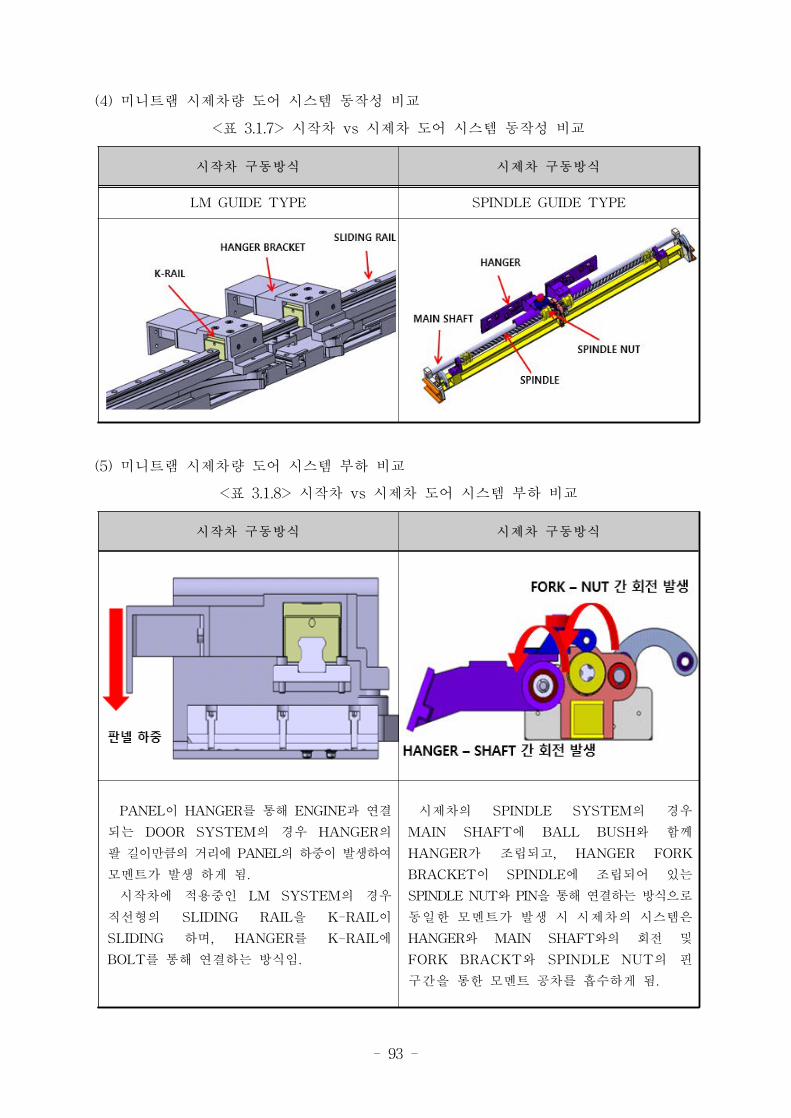
- 93 -
(4) 미니트램 시제차량 도어 시스템 동작성 비교
시작차 구동방식 시제차 구동방식
LM GUIDE TYPE SPINDLE GUIDE TYPE
<표 3.1.7> 시작차 vs 시제차 도어 시스템 동작성 비교
(5) 미니트램 시제차량 도어 시스템 부하 비교
시작차 구동방식 시제차 구동방식
PANEL이 HANGER를 통해 ENGINE과 연결
되는 DOOR SYSTEM의 경우 HANGER의
팔 길이만큼의 거리에 PANEL의 하중이 발생하여
모멘트가 발생 하게 됨.
시작차에 적용중인 LM SYSTEM의 경우
직선형의 SLIDING RAIL을 K-RAIL이
SLIDING 하며, HANGER를 K-RAIL에
BOLT를 통해 연결하는 방식임.
시제차의 SPINDLE SYSTEM의 경우
MAIN SHAFT에 BALL BUSH와 함께
HANGER가 조립되고, HANGER FORK
BRACKET이 SPINDLE에 조립되어 있는
SPINDLE NUT와 PIN을 통해 연결하는 방식으로
동일한 모멘트가 발생 시 시제차의 시스템은
HANGER와 MAIN SHAFT와의 회전 및
FORK BRACKT와 SPINDLE NUT의 핀
구간을 통한 모멘트 공차를 흡수하게 됨.
<표 3.1.8> 시작차 vs 시제차 도어 시스템 부하 비교
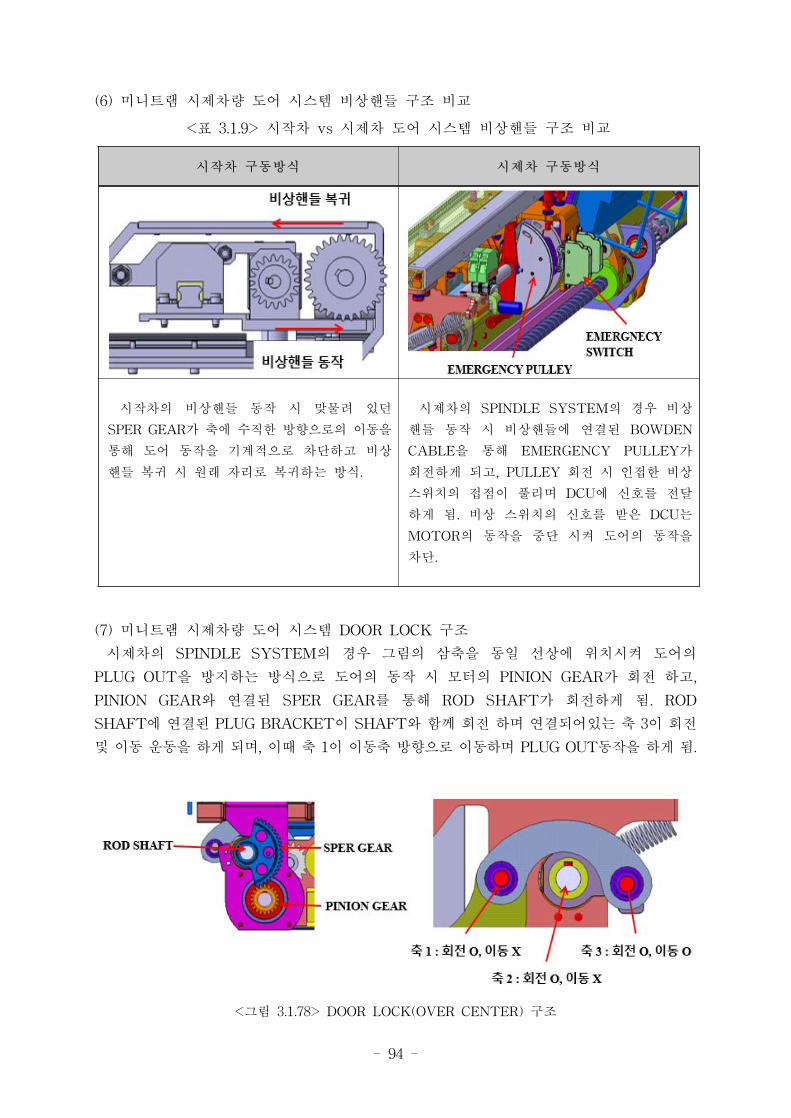
- 94 -
(6) 미니트램 시제차량 도어 시스템 비상핸들 구조 비교
시작차 구동방식 시제차 구동방식
시작차의 비상핸들 동작 시 맞물려 있던
SPER GEAR가 축에 수직한 방향으로의 이동을
통해 도어 동작을 기계적으로 차단하고 비상
핸들 복귀 시 원래 자리로 복귀하는 방식.
시제차의 SPINDLE SYSTEM의 경우 비상
핸들 동작 시 비상핸들에 연결된 BOWDEN
CABLE을 통해 EMERGENCY PULLEY가
회전하게 되고, PULLEY 회전 시 인접한 비상
스위치의 접점이 풀리며 DCU에 신호를 전달
하게 됨. 비상 스위치의 신호를 받은 DCU는
MOTOR의 동작을 중단 시켜 도어의 동작을
차단.
<표 3.1.9> 시작차 vs 시제차 도어 시스템 비상핸들 구조 비교
(7) 미니트램 시제차량 도어 시스템 DOOR LOCK 구조
시제차의 SPINDLE SYSTEM의 경우 그림의 삼축을 동일 선상에 위치시켜 도어의
PLUG OUT을 방지하는 방식으로 도어의 동작 시 모터의 PINION GEAR가 회전 하고,
PINION GEAR와 연결된 SPER GEAR를 통해 ROD SHAFT가 회전하게 됨. ROD
SHAFT에 연결된 PLUG BRACKET이 SHAFT와 함께 회전 하며 연결되어있는 축 3이 회전
및 이동 운동을 하게 되며, 이때 축 1이 이동축 방향으로 이동하며 PLUG OUT동작을 하게 됨.
<그림 3.1.78> DOOR LOCK(OVER CENTER) 구조
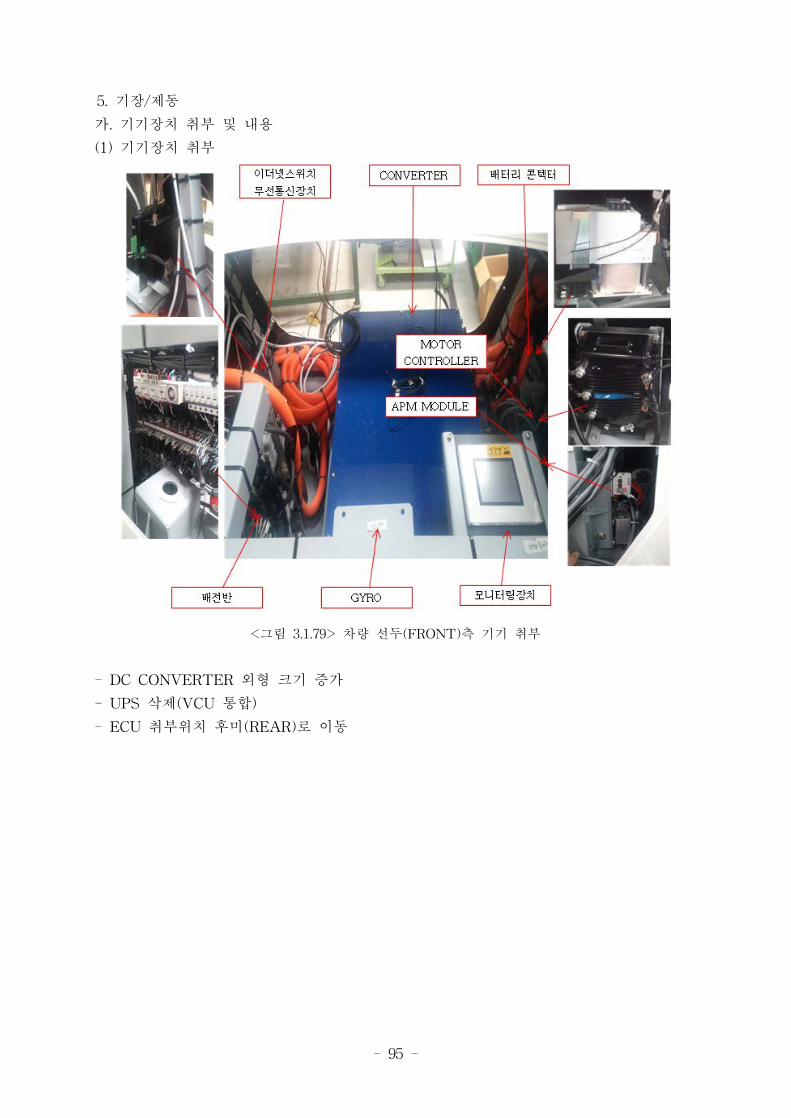
- 95 -
5. 기장/제동
가. 기기장치 취부 및 내용
(1) 기기장치 취부
<그림 3.1.79> 차량 선두(FRONT)측 기기 취부
- DC CONVERTER 외형 크기 증가
- UPS 삭제(VCU 통합)
- ECU 취부위치 후미(REAR)로 이동

- 96 -
<그림 3.1.80> 차량 후미(REAR)측 기기 취부
- VCU 신규적용
- AIRCON 배관 최적화로 측면 여유공간 확보로 ECU취부 공간 확보
<그림 3.1.81> 차량 선두 상하측 기기 취부 <그림 3.1.82> 차량 후미 상하측 기기 취부
- ECU 취부위치 이동(전두 → 후미)으로 BCU 위치 이동
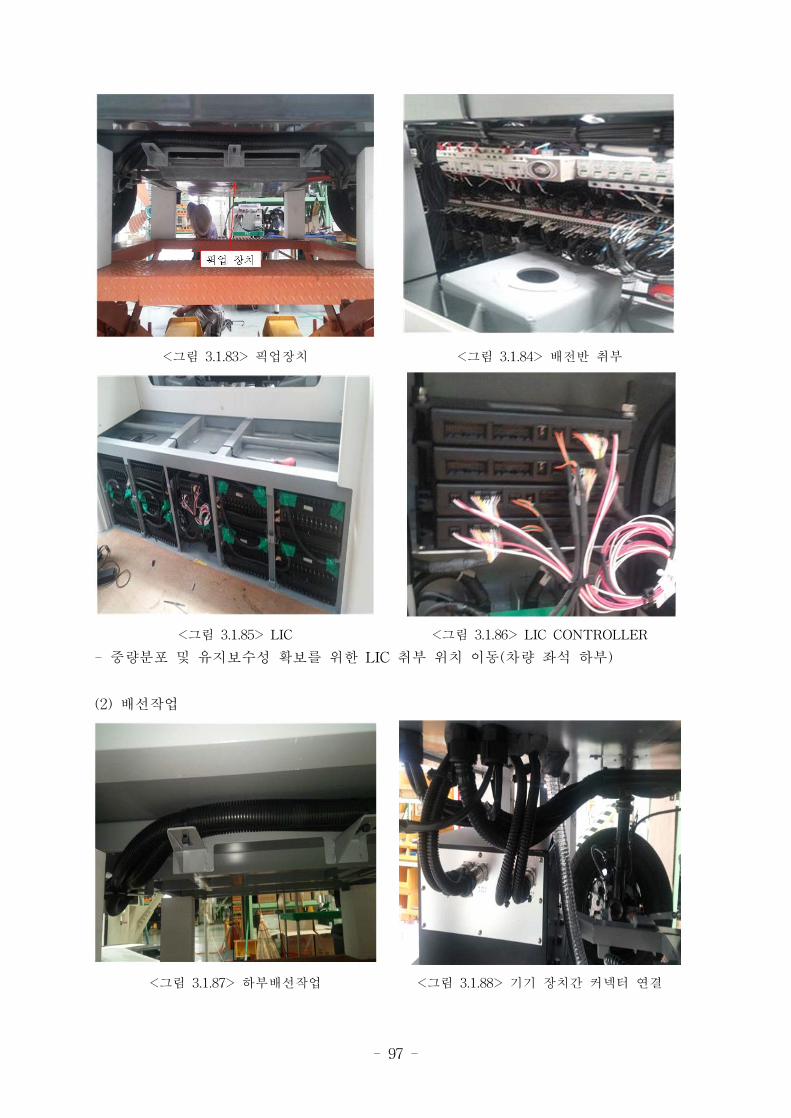
- 97 -
<그림 3.1.83> 픽업장치 <그림 3.1.84> 배전반 취부
<그림 3.1.85> LIC <그림 3.1.86> LIC CONTROLLER
- 중량분포 및 유지보수성 확보를 위한 LIC 취부 위치 이동(차량 좌석 하부)
(2) 배선작업
<그림 3.1.87> 하부배선작업 <그림 3.1.88> 기기 장치간 커넥터 연결
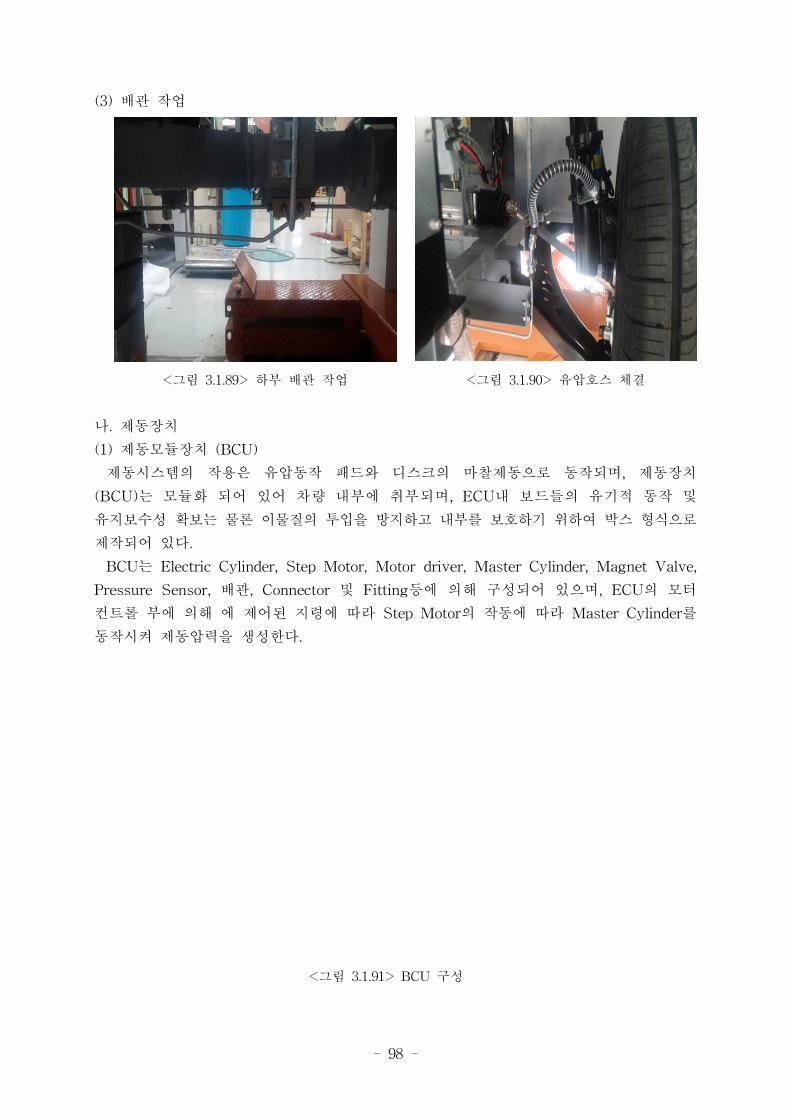
- 98 -
(3) 배관 작업
<그림 3.1.89> 하부 배관 작업 <그림 3.1.90> 유압호스 체결
나. 제동장치
(1) 제동모듈장치 (BCU)
제동시스템의 작용은 유압동작 패드와 디스크의 마찰제동으로 동작되며, 제동장치
(BCU)는 모듈화 되어 있어 차량 내부에 취부되며, ECU내 보드들의 유기적 동작 및
유지보수성 확보는 물론 이물질의 투입을 방지하고 내부를 보호하기 위하여 박스 형식으로
제작되어 있다.
BCU는 Electric Cylinder, Step Motor, Motor driver, Master Cylinder, Magnet Valve,
Pressure Sensor, 배관, Connector 및 Fitting등에 의해 구성되어 있으며, ECU의 모터
컨트롤 부에 의해 에 제어된 지령에 따라 Step Motor의 작동에 따라 Master Cylinder를
동작시켜 제동압력을 생성한다.
6 4
2
1
ECUMotor Driver 1
Motor Driver 2
Electric Cylinder 1
Electric Cylinder 2 Motor 2
8
Master Cylinder
Front Axle Rear Axle
7
10
`
3
9
5
11
BOU(Brake Operating Unit)
Motor 1
Pressure Sensor
<그림 3.1.91> BCU 구성

- 99 -
Brake System의 내부 구조품은 안전성 및 신뢰성을 위하여 Master와 Slave part로
제어된다. 마스터 Part와 Slave Part는 동일한 제품으로 구성이 되어 있으며, 마스터Part가
고장일 때 슬레이브 Part가 구동되어 비상제동을 체결한다.
전자밸브 블록모듈과 전자변, 압력센서등은 BCU의 하단변에 부착되어 있으며, 마스터
실린더에서 생성된 압력은 전자밸브에서 대기하여, ECU의 전자변 조정에 의해 제동압력이
출력되게 된다.
<그림 3.1.92> 외부형상 <그림 3.1.93> 내부 형상
(2) 제동제어장치 (ECU)
ECU는 CAN통신을 통해 감속도를 입력받으면, ECU는 제동감속도의 값과 조건을 판단하여,
제동력으로 환산하여 목표 압력값을 계산한다.
ECU는 제동 압력을 생성시키기 위해 모터 드라이버에 모터 구동 신호를 전송하면, 모터
드라이버는 모터를 구동한다. 모터가 구동하게 되면, Electric Cylinder의 피스톤이 움직여서
Master Cylinder(이하 Cylinder라 칭함)의 피스톤을 구동하게 되며, 이에 의해 제동압력이
생성된다. 제어된 압력은 압력센서의 의해 ECU로 피드백 되며, ECU는 이에 의해 압력을
조정하는 Feedback제어를 한다.
<그림 3.1.94> 외부형상 <그림 3.1.95> 내부형상

- 100 -
(3) 제동부품
<그림 3.1.96> 밸브 및 배관 <그림 3.1.97> 유압 호스
(4) 기초제동장치
- 디스크 브레이크는 실린더에서 발생한 유압을 캘리퍼로 보내어 바퀴와 함께 회전하는
디스크를 양쪽에서 패드로 압착시켜 제동을 시킨다. 디스크 브레이크는 디스크가
대기중으로 노출되어 회전하므로 페이드 현상이 적으며, 자동 조정 브레이크 형식이다.
디스크 브레이크의 제품은 크게 디스크와 캘리퍼로 나뉘며, 캘리퍼 내부에는 디스크
Pad가 장착되어 있다.
- 브레이크 디스크, 캘리퍼, 패드
<그림 3.1.98> 제동디스크 <그림 3.1.99> 캘리퍼 및 패드
(5) 전선관
상하 및 실내기기배치를 기준으로 공간성에 따라 분리배선을 고려하여 플렉시블 케이블
및 커넥터를 사용하여 각종 기기로 연결된다.
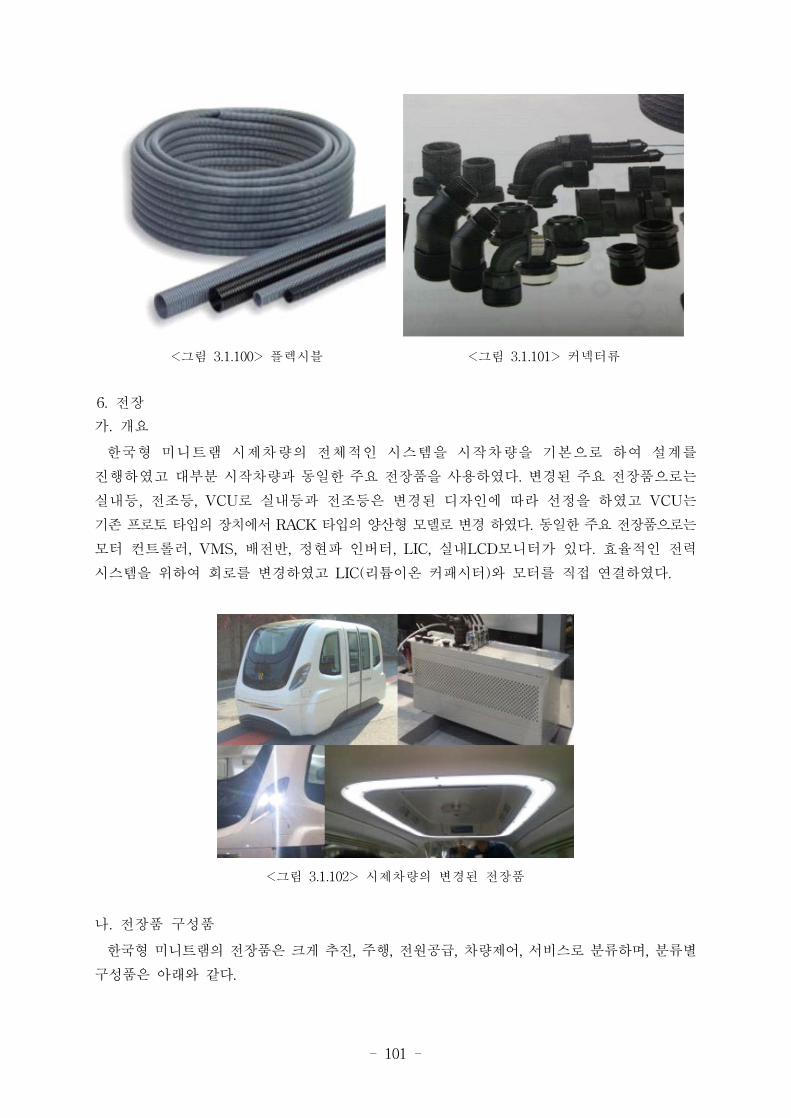
- 101 -
<그림 3.1.100> 플렉시블 <그림 3.1.101> 커넥터류
6. 전장
가. 개요
한국형 미니트램 시제차량의 전체적인 시스템을 시작차량을 기본으로 하여 설계를
진행하였고 대부분 시작차량과 동일한 주요 전장품을 사용하였다. 변경된 주요 전장품으로는
실내등, 전조등, VCU로 실내등과 전조등은 변경된 디자인에 따라 선정을 하였고 VCU는
기존프로토타입의장치에서 RACK 타입의양산형모델로변경하였다. 동일한주요전장품으로는
모터 컨트롤러, VMS, 배전반, 정현파 인버터, LIC, 실내LCD모니터가 있다. 효율적인 전력
시스템을 위하여 회로를 변경하였고 LIC(리튬이온 커패시터)와 모터를 직접 연결하였다.
<그림 3.1.102> 시제차량의 변경된 전장품
나. 전장품 구성품
한국형 미니트램의 전장품은 크게 추진, 주행, 전원공급, 차량제어, 서비스로 분류하며, 분류별
구성품은 아래와 같다.
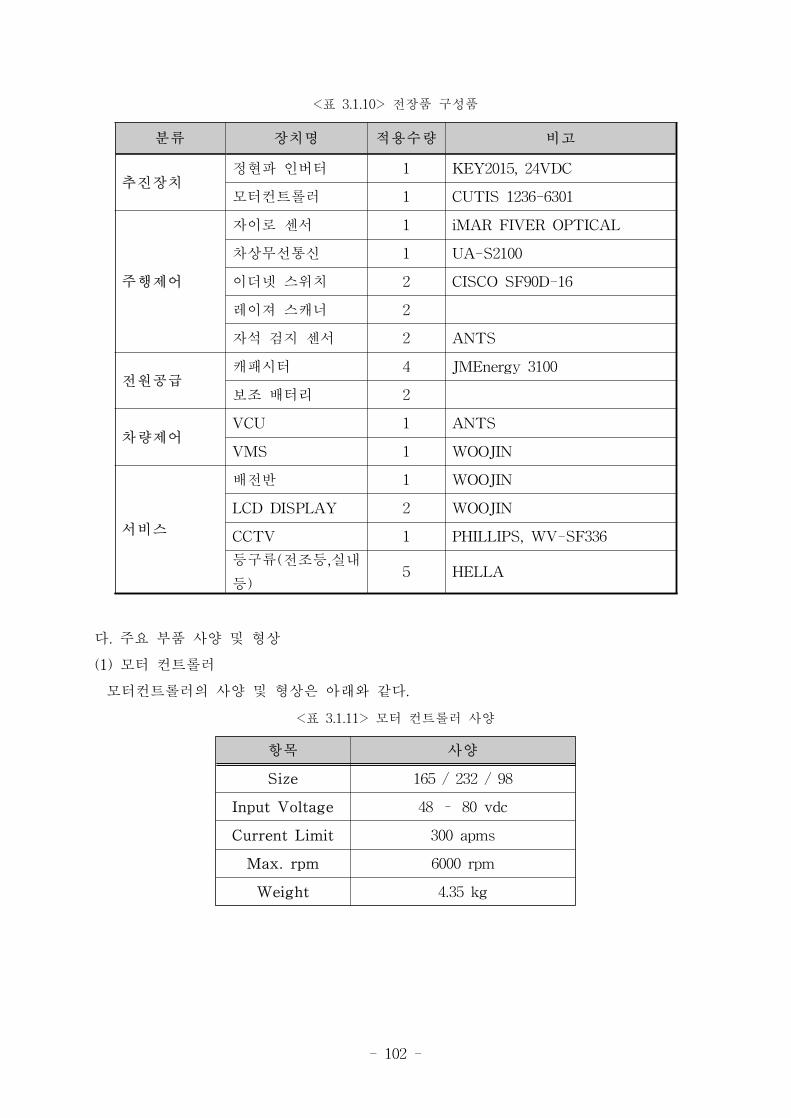
- 102 -
분류 장치명 적용수량 비고
추진장치정현파 인버터 1 KEY2015, 24VDC
모터컨트롤러 1 CUTIS 1236-6301
주행제어
자이로 센서 1 iMAR FIVER OPTICAL
차상무선통신 1 UA-S2100
이더넷 스위치 2 CISCO SF90D-16
레이져 스캐너 2
자석 검지 센서 2 ANTS
전원공급캐패시터 4 JMEnergy 3100
보조 배터리 2
차량제어VCU 1 ANTS
VMS 1 WOOJIN
서비스
배전반 1 WOOJIN
LCD DISPLAY 2 WOOJIN
CCTV 1 PHILLIPS, WV-SF336
등구류(전조등,실내
등)5 HELLA
<표 3.1.10> 전장품 구성품
다. 주요 부품 사양 및 형상
(1) 모터 컨트롤러
모터컨트롤러의 사양 및 형상은 아래와 같다.
항목 사양
Size 165 / 232 / 98
Input Voltage 48 – 80 vdc
Current Limit 300 apms
Max. rpm 6000 rpm
Weight 4.35 kg
<표 3.1.11> 모터 컨트롤러 사양
- 103 -
<그림 3.1.103> 모터컨트롤러 형상
(2) 자석검지센서 (MSR)
자석검지센서는 보완 재제작한 제품으로 사양 및 형상은 아래와 같다.
항목 사양
Size 1270 / 40 / 60
Input Voltage DC12V
부품 구성Top board 1ea / MSR
Sub board 4ea / MSR
Sensor 수량 60ea
<표 3.1.12> Reduction Gear Specification
<그림 3.1.104> 자석검지센서 형상
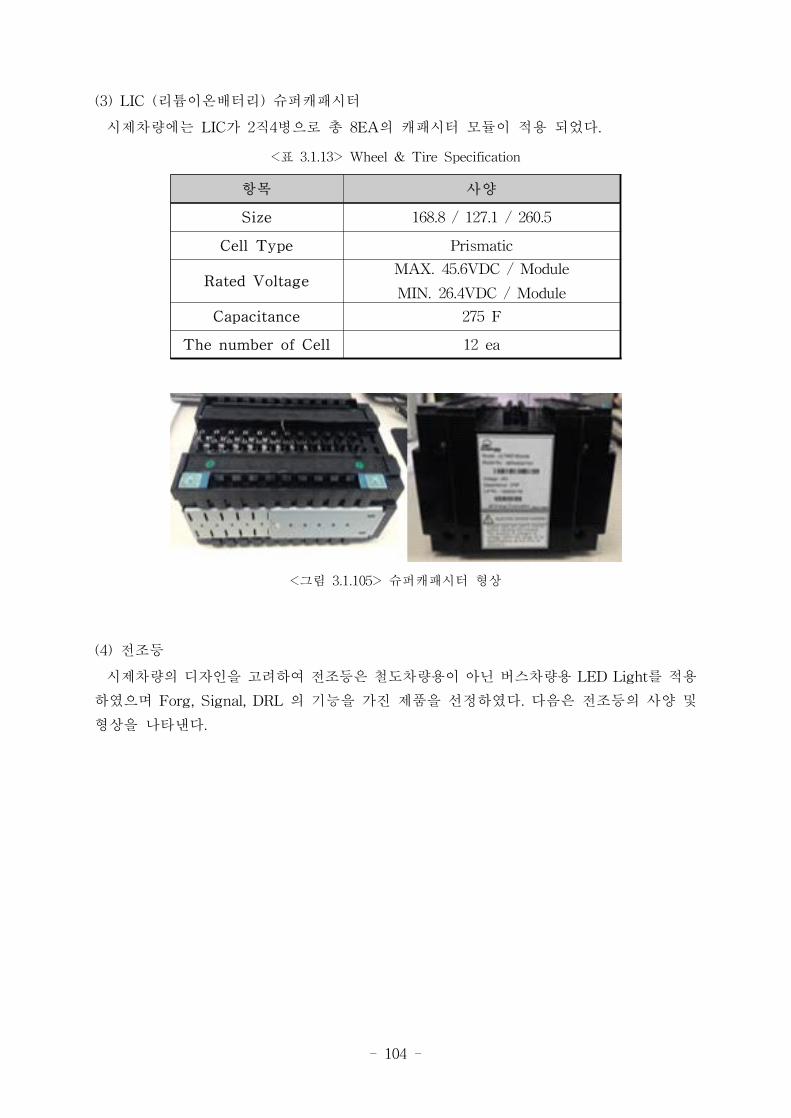
- 104 -
(3) LIC (리튬이온배터리) 슈퍼캐패시터
시제차량에는 LIC가 2직4병으로 총 8EA의 캐패시터 모듈이 적용 되었다.
항목 사양
Size 168.8 / 127.1 / 260.5
Cell Type Prismatic
Rated VoltageMAX. 45.6VDC / Module
MIN. 26.4VDC / Module
Capacitance 275 F
The number of Cell 12 ea
<표 3.1.13> Wheel & Tire Specification
<그림 3.1.105> 슈퍼캐패시터 형상
(4) 전조등
시제차량의 디자인을 고려하여 전조등은 철도차량용이 아닌 버스차량용 LED Light를 적용
하였으며 Forg, Signal, DRL 의 기능을 가진 제품을 선정하였다. 다음은 전조등의 사양 및
형상을 나타낸다.
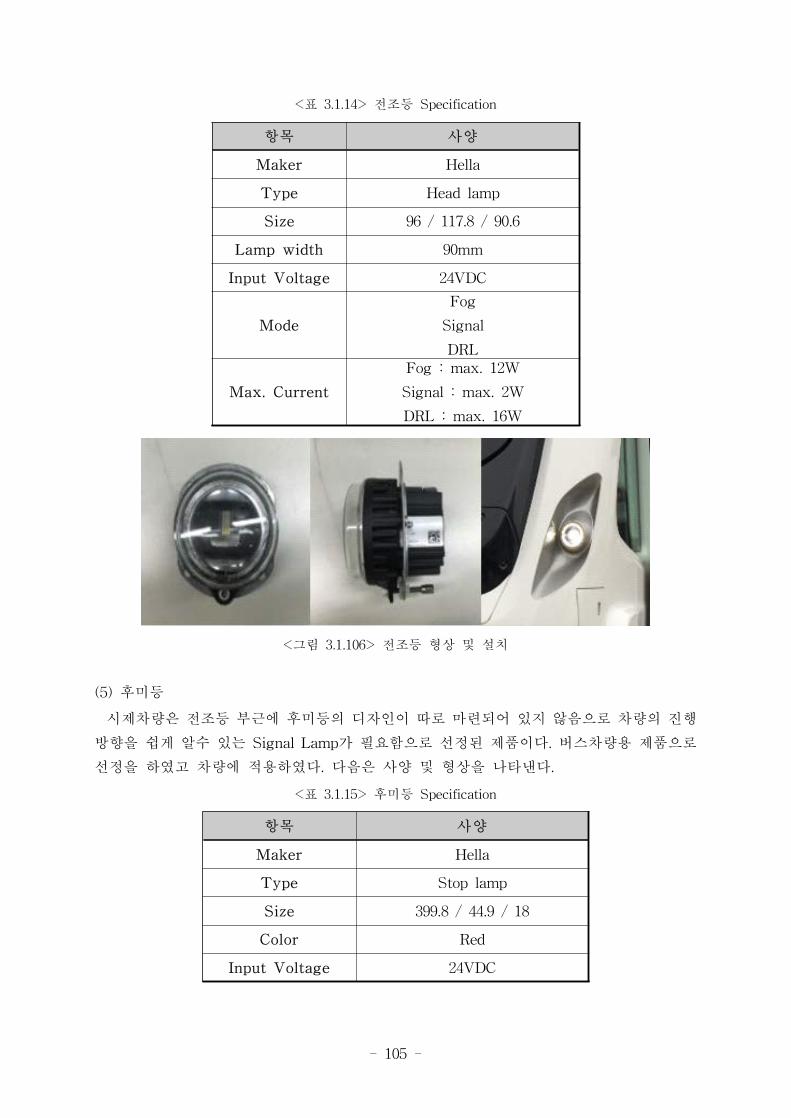
- 105 -
항목 사양
Maker Hella
Type Head lamp
Size 96 / 117.8 / 90.6
Lamp width 90mm
Input Voltage 24VDC
Mode
Fog
Signal
DRL
Max. Current
Fog : max. 12W
Signal : max. 2W
DRL : max. 16W
<표 3.1.14> 전조등 Specification
<그림 3.1.106> 전조등 형상 및 설치
(5) 후미등
시제차량은 전조등 부근에 후미등의 디자인이 따로 마련되어 있지 않음으로 차량의 진행
방향을 쉽게 알수 있는 Signal Lamp가 필요함으로 선정된 제품이다. 버스차량용 제품으로
선정을 하였고 차량에 적용하였다. 다음은 사양 및 형상을 나타낸다.
항목 사양
Maker Hella
Type Stop lamp
Size 399.8 / 44.9 / 18
Color Red
Input Voltage 24VDC
<표 3.1.15> 후미등 Specification

- 106 -
<그림 3.1.107> 후미등 형상 및 설치
(6) CCTV 카메라
CCTV 카메라는 네트워크 통신으로 이루어지며 360도 뷰로 차량 내부 중심에 위치하여
차량내부 상황 및 긴급상황 대처에 이용된다. 다음은 CCTV 카메라의 사양 및 형상을 나타낸다.
항목 사양
Maker Phillips
Type Network Camera
Size 150∅ / 44mm
Lens Length 0.837 mm
Input Voltage 12VDC
<표 3.1.16> CCTV카메라 Specification
<그림 3.1.108> CCTV 카메라 형상 및 설치
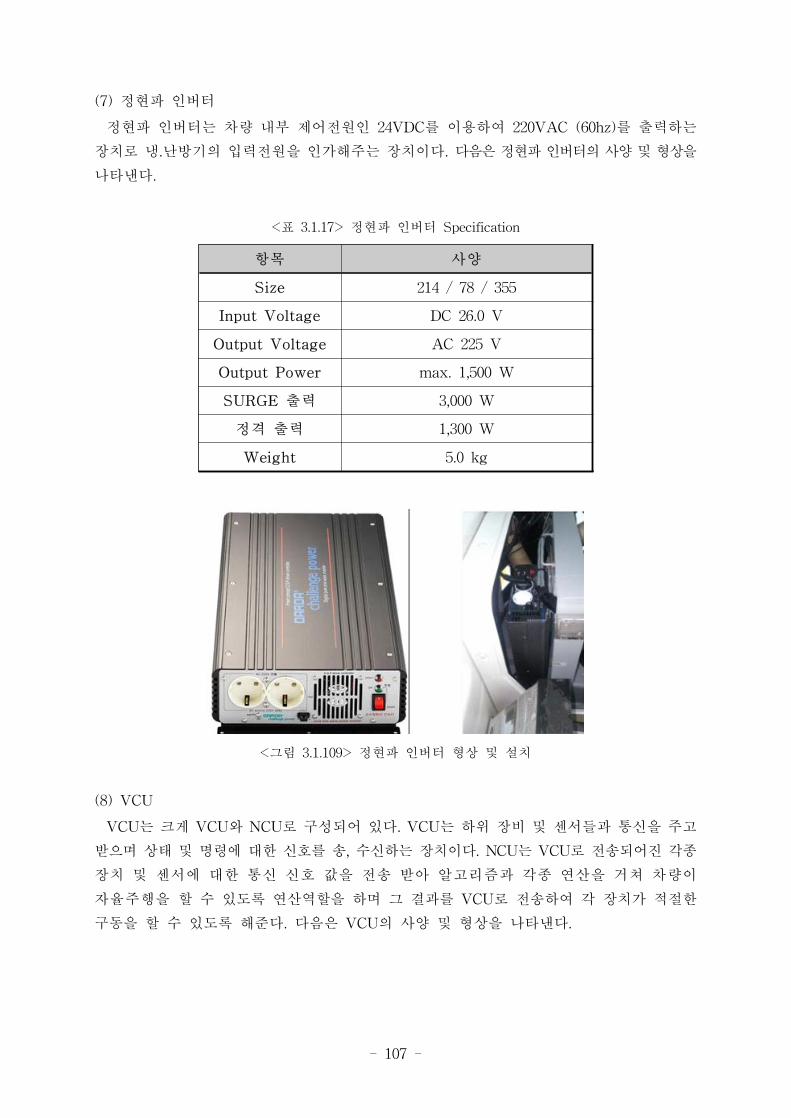
- 107 -
(7) 정현파 인버터
정현파 인버터는 차량 내부 제어전원인 24VDC를 이용하여 220VAC (60hz)를 출력하는
장치로 냉.난방기의 입력전원을 인가해주는 장치이다. 다음은 정현파인버터의사양및형상을
나타낸다.
항목 사양
Size 214 / 78 / 355
Input Voltage DC 26.0 V
Output Voltage AC 225 V
Output Power max. 1,500 W
SURGE 출력 3,000 W
정격 출력 1,300 W
Weight 5.0 kg
<표 3.1.17> 정현파 인버터 Specification
<그림 3.1.109> 정현파 인버터 형상 및 설치
(8) VCU
VCU는 크게 VCU와 NCU로 구성되어 있다. VCU는 하위 장비 및 센서들과 통신을 주고
받으며 상태 및 명령에 대한 신호를 송, 수신하는 장치이다. NCU는 VCU로 전송되어진 각종
장치 및 센서에 대한 통신 신호 값을 전송 받아 알고리즘과 각종 연산을 거쳐 차량이
자율주행을 할 수 있도록 연산역할을 하며 그 결과를 VCU로 전송하여 각 장치가 적절한
구동을 할 수 있도록 해준다. 다음은 VCU의 사양 및 형상을 나타낸다.
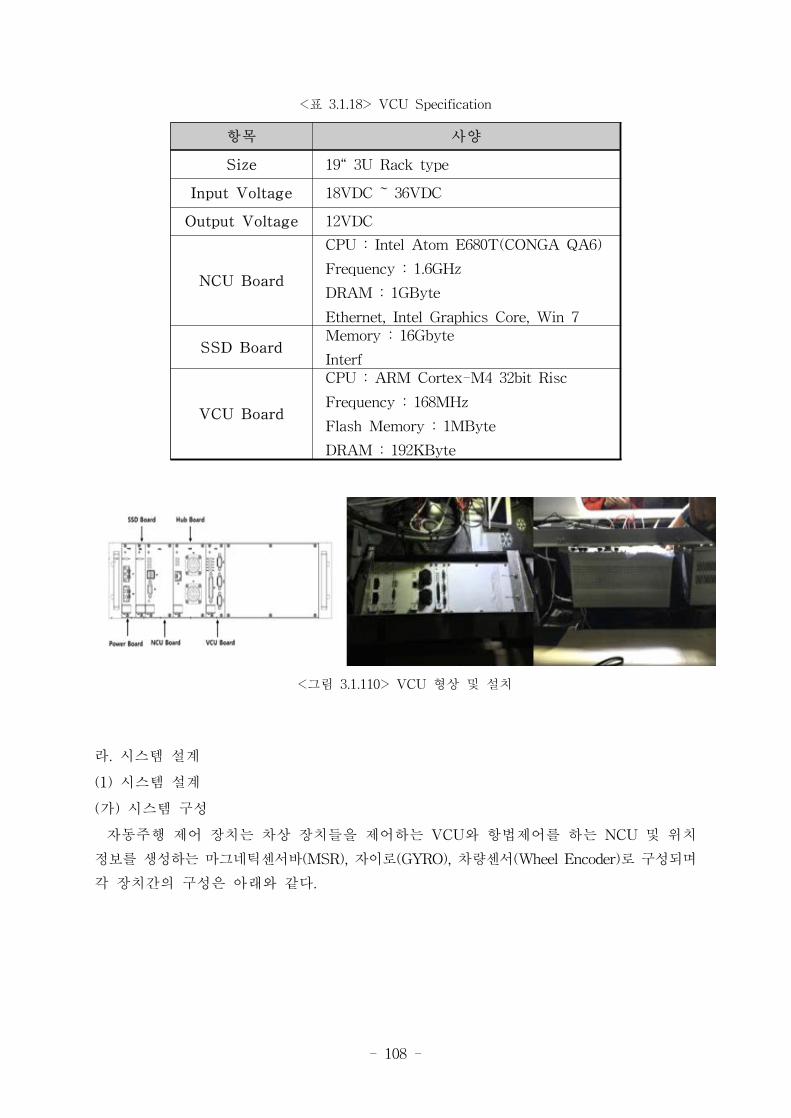
- 108 -
항목 사양
Size 19“ 3U Rack type
Input Voltage 18VDC ~ 36VDC
Output Voltage 12VDC
NCU Board
CPU : Intel Atom E680T(CONGA QA6)
Frequency : 1.6GHz
DRAM : 1GByte
Ethernet, Intel Graphics Core, Win 7
SSD BoardMemory : 16Gbyte
Interf
VCU Board
CPU : ARM Cortex-M4 32bit Risc
Frequency : 168MHz
Flash Memory : 1MByte
DRAM : 192KByte
<표 3.1.18> VCU Specification
<그림 3.1.110> VCU 형상 및 설치
라. 시스템 설계
(1) 시스템 설계
(가) 시스템 구성
자동주행 제어 장치는 차상 장치들을 제어하는 VCU와 항법제어를 하는 NCU 및 위치
정보를 생성하는 마그네틱센서바(MSR), 자이로(GYRO), 차량센서(Wheel Encoder)로 구성되며
각 장치간의 구성은 아래와 같다.
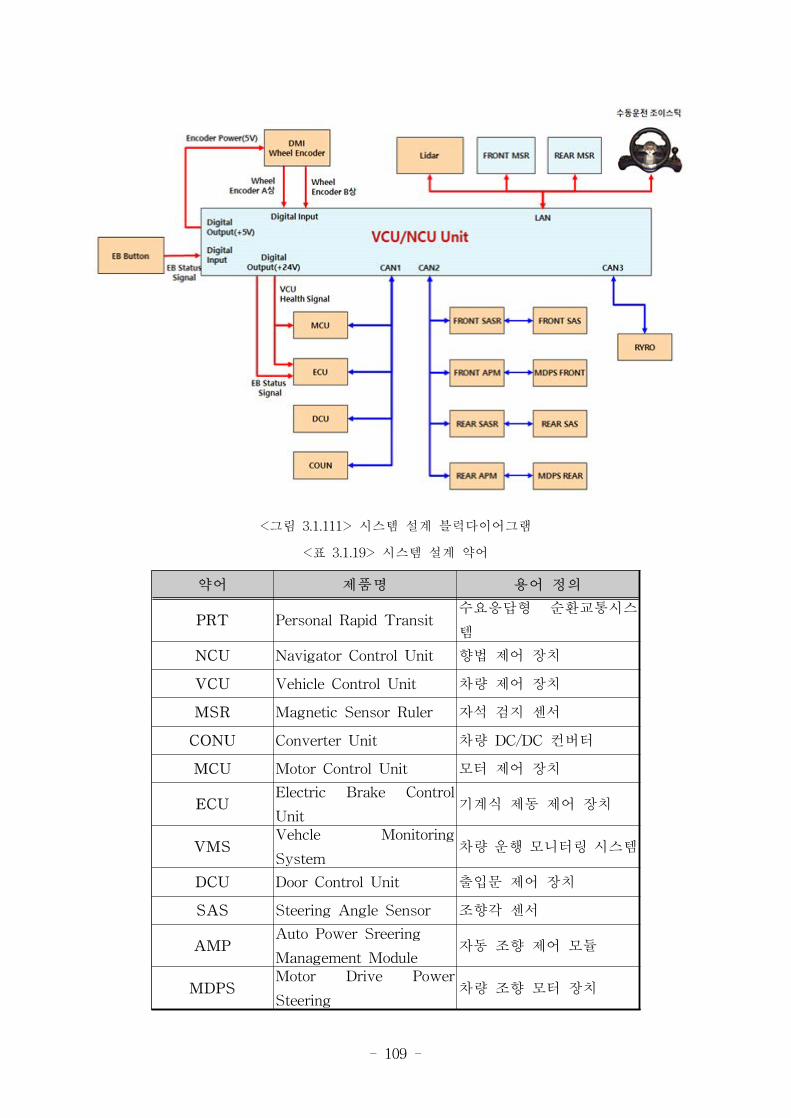
- 109 -
<그림 3.1.111> 시스템 설계 블럭다이어그램
약어 제품명 용어 정의
PRT Personal Rapid Transit수요응답형 순환교통시스
템
NCU Navigator Control Unit 향법 제어 장치
VCU Vehicle Control Unit 차량 제어 장치
MSR Magnetic Sensor Ruler 자석 검지 센서
CONU Converter Unit 차량 DC/DC 컨버터
MCU Motor Control Unit 모터 제어 장치
ECUElectric Brake Control
Unit기계식 제동 제어 장치
VMSVehcle Monitoring
System차량 운행 모니터링 시스템
DCU Door Control Unit 출입문 제어 장치
SAS Steering Angle Sensor 조향각 센서
AMPAuto Power Sreering
Management Module자동 조향 제어 모듈
MDPSMotor Drive Power
Steering차량 조향 모터 장치
<표 3.1.19> 시스템 설계 약어
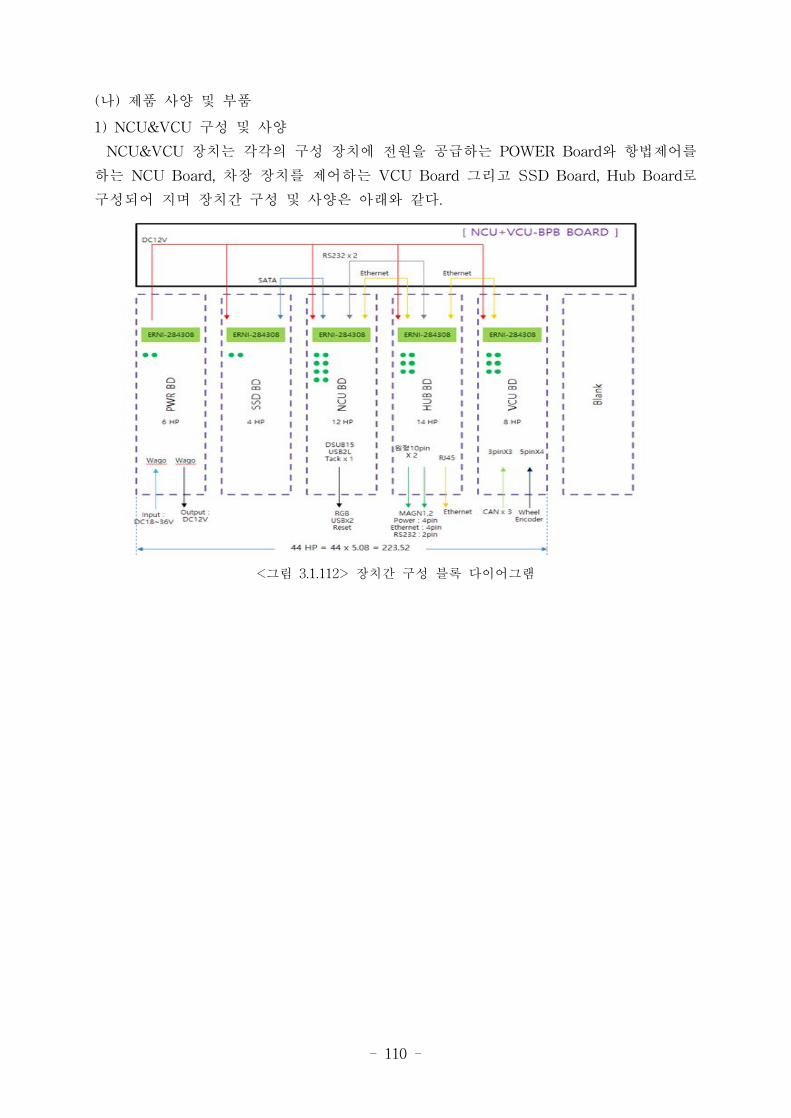
- 110 -
(나) 제품 사양 및 부품
1) NCU&VCU 구성 및 사양
NCU&VCU 장치는 각각의 구성 장치에 전원을 공급하는 POWER Board와 항법제어를
하는 NCU Board, 차장 장치를 제어하는 VCU Board 그리고 SSD Board, Hub Board로
구성되어 지며 장치간 구성 및 사양은 아래와 같다.
<그림 3.1.112> 장치간 구성 블록 다이어그램
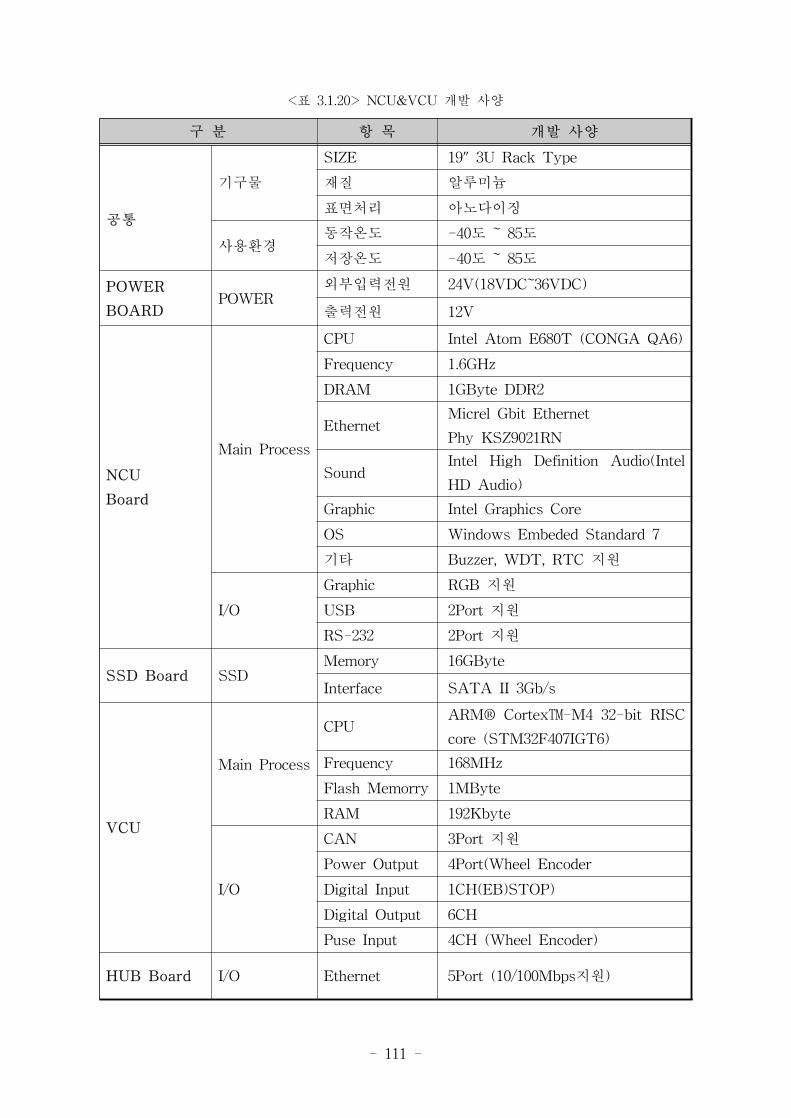
- 111 -
구 분 항 목 개발 사양
공통
기구물
SIZE 19" 3U Rack Type
재질 알루미늄
표면처리 아노다이징
사용환경동작온도 -40도 ~ 85도
저장온도 -40도 ~ 85도
POWER
BOARDPOWER
외부입력전원 24V(18VDC~36VDC)
출력전원 12V
NCU
Board
Main Process
CPU Intel Atom E680T (CONGA QA6)
Frequency 1.6GHz
DRAM 1GByte DDR2
EthernetMicrel Gbit Ethernet
Phy KSZ9021RN
SoundIntel High Definition Audio(Intel
HD Audio)
Graphic Intel Graphics Core
OS Windows Embeded Standard 7
기타 Buzzer, WDT, RTC 지원
I/O
Graphic RGB 지원
USB 2Port 지원
RS-232 2Port 지원
SSD Board SSDMemory 16GByte
Interface SATA II 3Gb/s
VCU
Main Process
CPUARM® Cortex™-M4 32-bit RISC
core (STM32F407IGT6)
Frequency 168MHz
Flash Memorry 1MByte
RAM 192Kbyte
I/O
CAN 3Port 지원
Power Output 4Port(Wheel Encoder
Digital Input 1CH(EB)STOP)
Digital Output 6CH
Puse Input 4CH (Wheel Encoder)
HUB Board I/O Ethernet 5Port (10/100Mbps지원)
<표 3.1.20> NCU&VCU 개발 사양
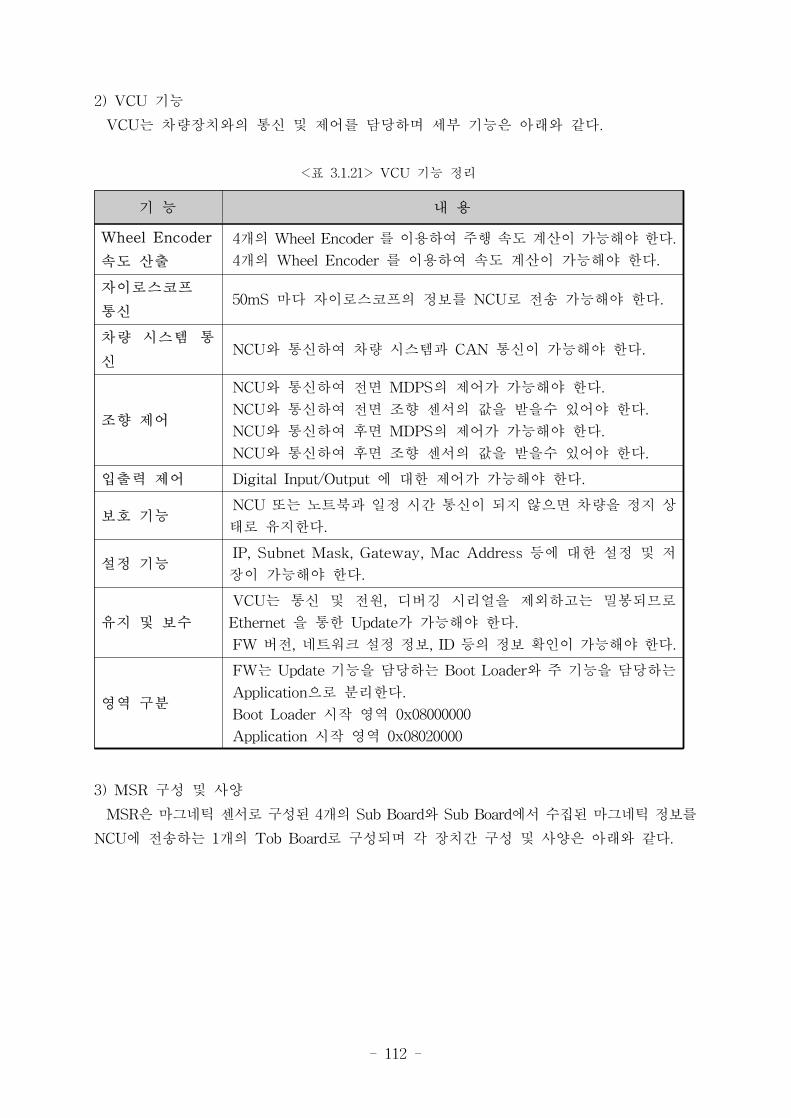
- 112 -
2) VCU 기능
VCU는 차량장치와의 통신 및 제어를 담당하며 세부 기능은 아래와 같다.
기 능 내 용
Wheel Encoder
속도 산출
4개의 Wheel Encoder 를 이용하여 주행 속도 계산이 가능해야 한다.
4개의 Wheel Encoder 를 이용하여 속도 계산이 가능해야 한다.
자이로스코프
통신50mS 마다 자이로스코프의 정보를 NCU로 전송 가능해야 한다.
차량 시스템 통
신NCU와 통신하여 차량 시스템과 CAN 통신이 가능해야 한다.
조향 제어
NCU와 통신하여 전면 MDPS의 제어가 가능해야 한다.
NCU와 통신하여 전면 조향 센서의 값을 받을수 있어야 한다.
NCU와 통신하여 후면 MDPS의 제어가 가능해야 한다.
NCU와 통신하여 후면 조향 센서의 값을 받을수 있어야 한다.
입출력 제어 Digital Input/Output 에 대한 제어가 가능해야 한다.
보호 기능NCU 또는 노트북과 일정 시간 통신이 되지 않으면 차량을 정지 상
태로 유지한다.
설정 기능IP, Subnet Mask, Gateway, Mac Address 등에 대한 설정 및 저
장이 가능해야 한다.
유지 및 보수
VCU는 통신 및 전원, 디버깅 시리얼을 제외하고는 밀봉되므로
Ethernet 을 통한 Update가 가능해야 한다.
FW 버전, 네트워크 설정 정보, ID 등의 정보 확인이 가능해야 한다.
영역 구분
FW는 Update 기능을 담당하는 Boot Loader와 주 기능을 담당하는
Application으로 분리한다.
Boot Loader 시작 영역 0x08000000
Application 시작 영역 0x08020000
<표 3.1.21> VCU 기능 정리
3) MSR 구성 및 사양
MSR은 마그네틱 센서로 구성된 4개의 Sub Board와 Sub Board에서 수집된 마그네틱 정보를
NCU에 전송하는 1개의 Tob Board로 구성되며 각 장치간 구성 및 사양은 아래와 같다.
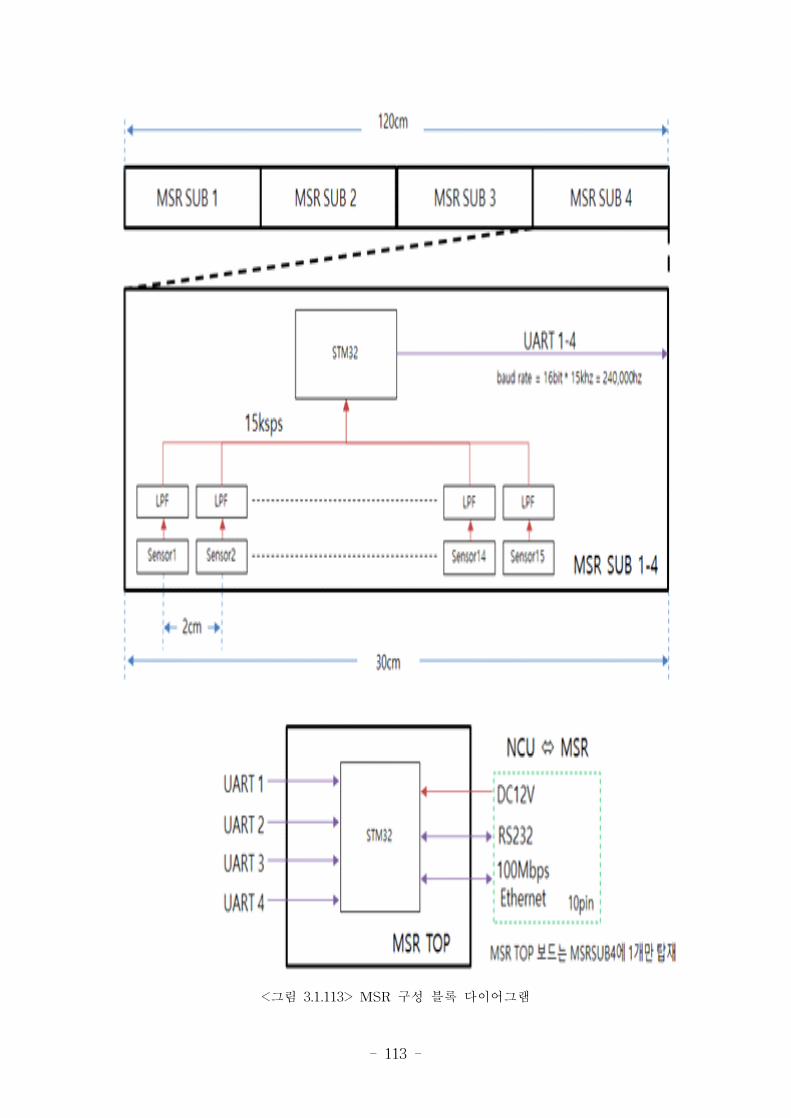
- 113 -
<그림 3.1.113> MSR 구성 블록 다이어그램
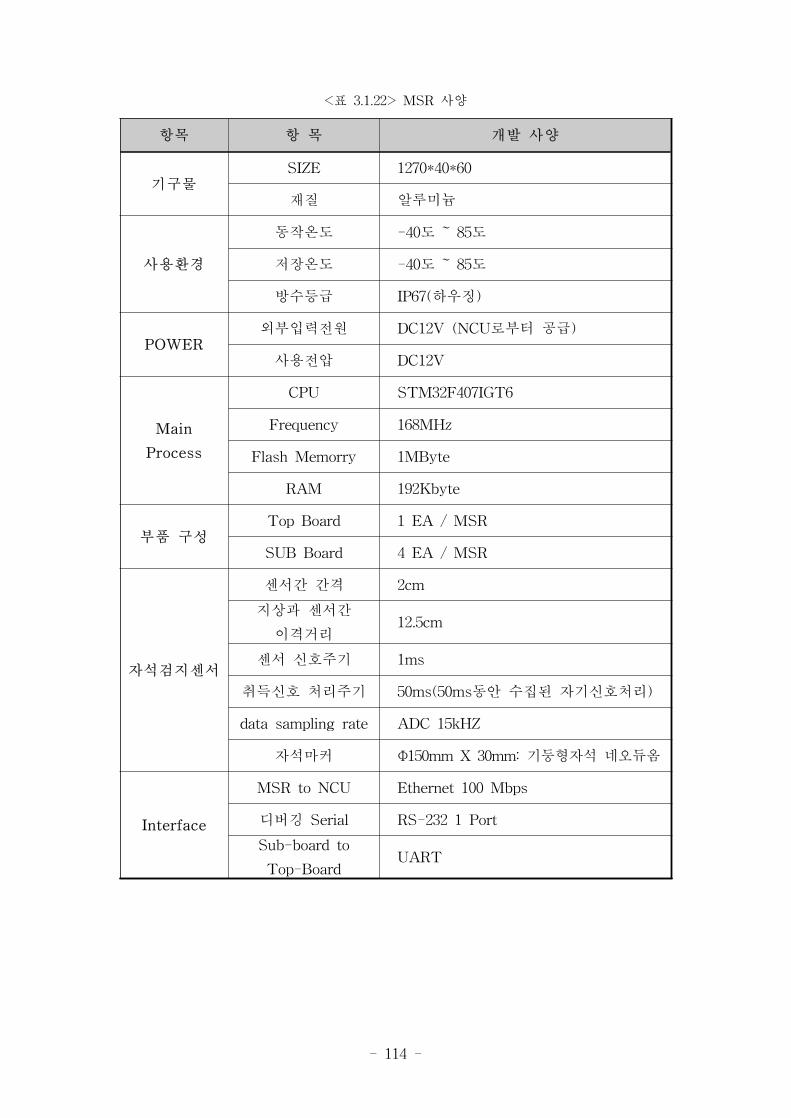
- 114 -
항목 항 목 개발 사양
기구물SIZE 1270*40*60
재질 알루미늄
사용환경
동작온도 -40도 ~ 85도
저장온도 -40도 ~ 85도
방수등급 IP67(하우징)
POWER외부입력전원 DC12V (NCU로부터 공급)
사용전압 DC12V
Main
Process
CPU STM32F407IGT6
Frequency 168MHz
Flash Memorry 1MByte
RAM 192Kbyte
부품 구성Top Board 1 EA / MSR
SUB Board 4 EA / MSR
자석검지센서
센서간 간격 2cm
지상과 센서간
이격거리12.5cm
센서 신호주기 1ms
취득신호 처리주기 50ms(50ms동안 수집된 자기신호처리)
data sampling rate ADC 15kHZ
자석마커 Φ150mm X 30mm: 기둥형자석 네오듀옴
Interface
MSR to NCU Ethernet 100 Mbps
디버깅 Serial RS-232 1 Port
Sub-board to
Top-BoardUART
<표 3.1.22> MSR 사양
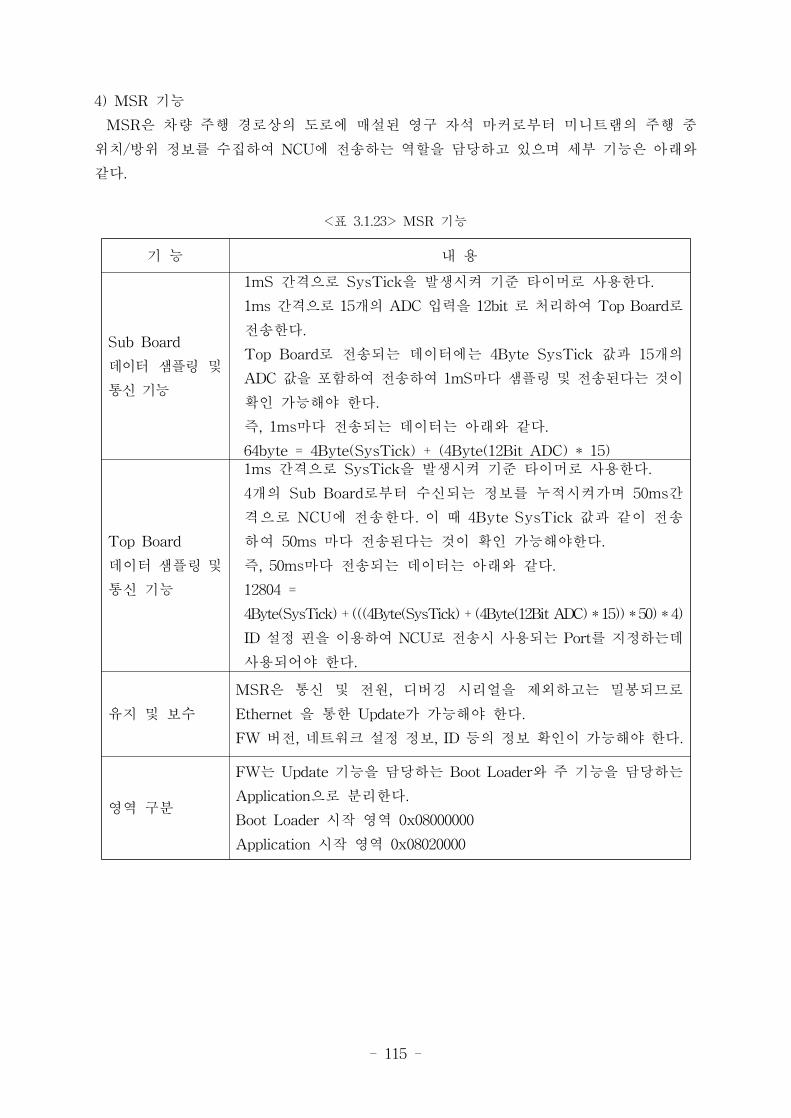
- 115 -
4) MSR 기능
MSR은 차량 주행 경로상의 도로에 매설된 영구 자석 마커로부터 미니트램의 주행 중
위치/방위 정보를 수집하여 NCU에 전송하는 역할을 담당하고 있으며 세부 기능은 아래와
같다.
기 능 내 용
Sub Board
데이터 샘플링 및
통신 기능
1mS 간격으로 SysTick을 발생시켜 기준 타이머로 사용한다.
1ms 간격으로 15개의 ADC 입력을 12bit 로 처리하여 Top Board로
전송한다.
Top Board로 전송되는 데이터에는 4Byte SysTick 값과 15개의
ADC 값을 포함하여 전송하여 1mS마다 샘플링 및 전송된다는 것이
확인 가능해야 한다.
즉, 1ms마다 전송되는 데이터는 아래와 같다.
64byte = 4Byte(SysTick) + (4Byte(12Bit ADC) * 15)
Top Board
데이터 샘플링 및
통신 기능
1ms 간격으로 SysTick을 발생시켜 기준 타이머로 사용한다.
4개의 Sub Board로부터 수신되는 정보를 누적시켜가며 50ms간
격으로 NCU에 전송한다. 이 때 4Byte SysTick 값과 같이 전송
하여 50ms 마다 전송된다는 것이 확인 가능해야한다.
즉, 50ms마다 전송되는 데이터는 아래와 같다.
12804 =
4Byte(SysTick) + (((4Byte(SysTick) + (4Byte(12Bit ADC) * 15)) * 50) * 4)
ID 설정 핀을 이용하여 NCU로 전송시 사용되는 Port를 지정하는데
사용되어야 한다.
유지 및 보수
MSR은 통신 및 전원, 디버깅 시리얼을 제외하고는 밀봉되므로
Ethernet 을 통한 Update가 가능해야 한다.
FW 버전, 네트워크 설정 정보, ID 등의 정보 확인이 가능해야 한다.
영역 구분
FW는 Update 기능을 담당하는 Boot Loader와 주 기능을 담당하는
Application으로 분리한다.
Boot Loader 시작 영역 0x08000000
Application 시작 영역 0x08020000
<표 3.1.23> MSR 기능
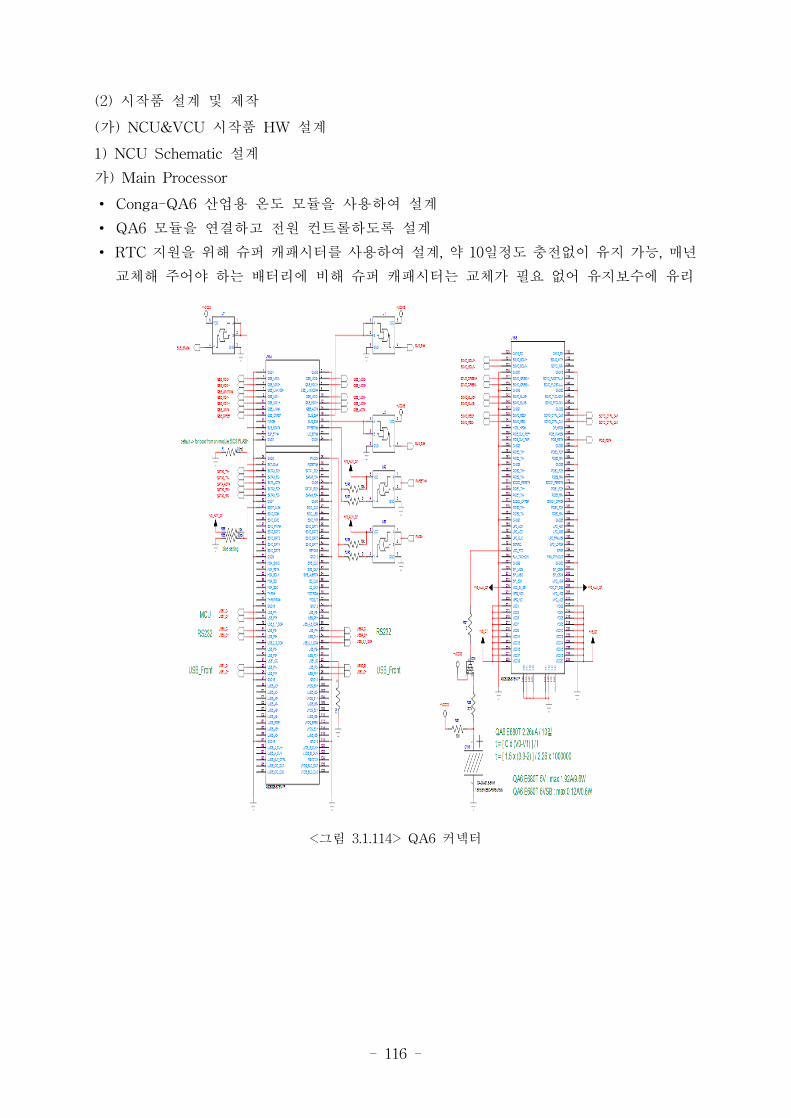
- 116 -
(2) 시작품 설계 및 제작
(가) NCU&VCU 시작품 HW 설계
1) NCU Schematic 설계
가) Main Processor
∙ Conga-QA6 산업용 온도 모듈을 사용하여 설계
∙ QA6 모듈을 연결하고 전원 컨트롤하도록 설계
∙ RTC 지원을 위해 슈퍼 캐패시터를 사용하여 설계, 약 10일정도 충전없이 유지 가능, 매년
교체해 주어야 하는 배터리에 비해 슈퍼 캐패시터는 교체가 필요 없어 유지보수에 유리
<그림 3.1.114> QA6 커넥터
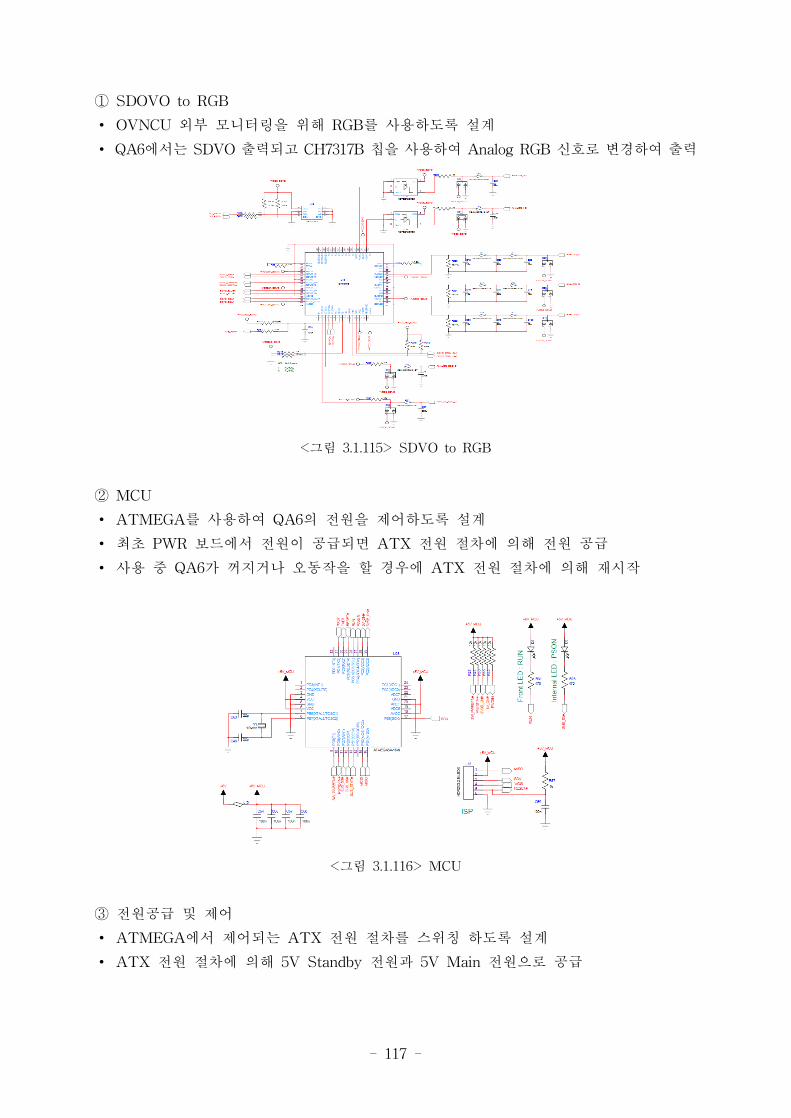
- 117 -
① SDOVO to RGB
∙ OVNCU 외부 모니터링을 위해 RGB를 사용하도록 설계
∙ QA6에서는 SDVO 출력되고 CH7317B 칩을 사용하여 Analog RGB 신호로 변경하여 출력
<그림 3.1.115> SDVO to RGB
② MCU
∙ ATMEGA를 사용하여 QA6의 전원을 제어하도록 설계
∙ 최초 PWR 보드에서 전원이 공급되면 ATX 전원 절차에 의해 전원 공급
∙ 사용 중 QA6가 꺼지거나 오동작을 할 경우에 ATX 전원 절차에 의해 재시작
<그림 3.1.116> MCU
③ 전원공급 및 제어
∙ ATMEGA에서 제어되는 ATX 전원 절차를 스위칭 하도록 설계
∙ ATX 전원 절차에 의해 5V Standby 전원과 5V Main 전원으로 공급
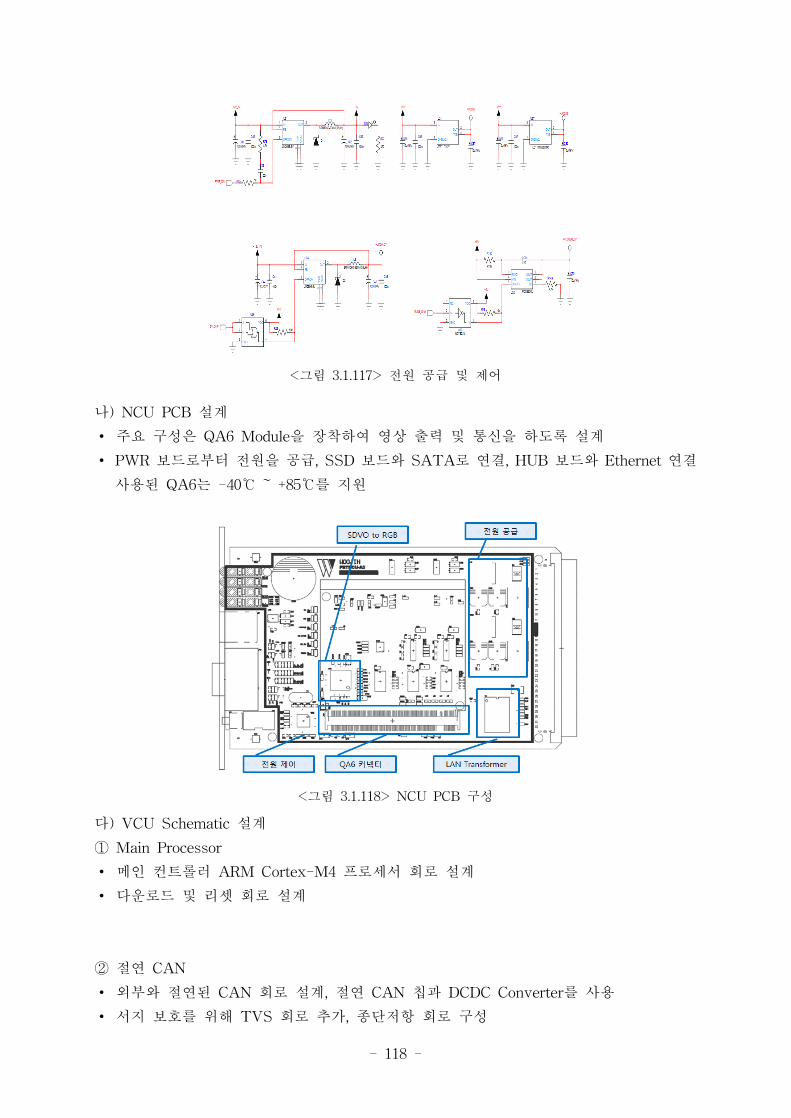
- 118 -
<그림 3.1.117> 전원 공급 및 제어
나) NCU PCB 설계
∙ 주요 구성은 QA6 Module을 장착하여 영상 출력 및 통신을 하도록 설계
∙ PWR 보드로부터 전원을 공급, SSD 보드와 SATA로 연결, HUB 보드와 Ethernet 연결
사용된 QA6는 -40 ~ +85를 지원
<그림 3.1.118> NCU PCB 구성
다) VCU Schematic 설계
① Main Processor
∙ 메인 컨트롤러 ARM Cortex-M4 프로세서 회로 설계
∙ 다운로드 및 리셋 회로 설계
② 절연 CAN
∙ 외부와 절연된 CAN 회로 설계, 절연 CAN 칩과 DCDC Converter를 사용
∙ 서지 보호를 위해 TVS 회로 추가, 종단저항 회로 구성
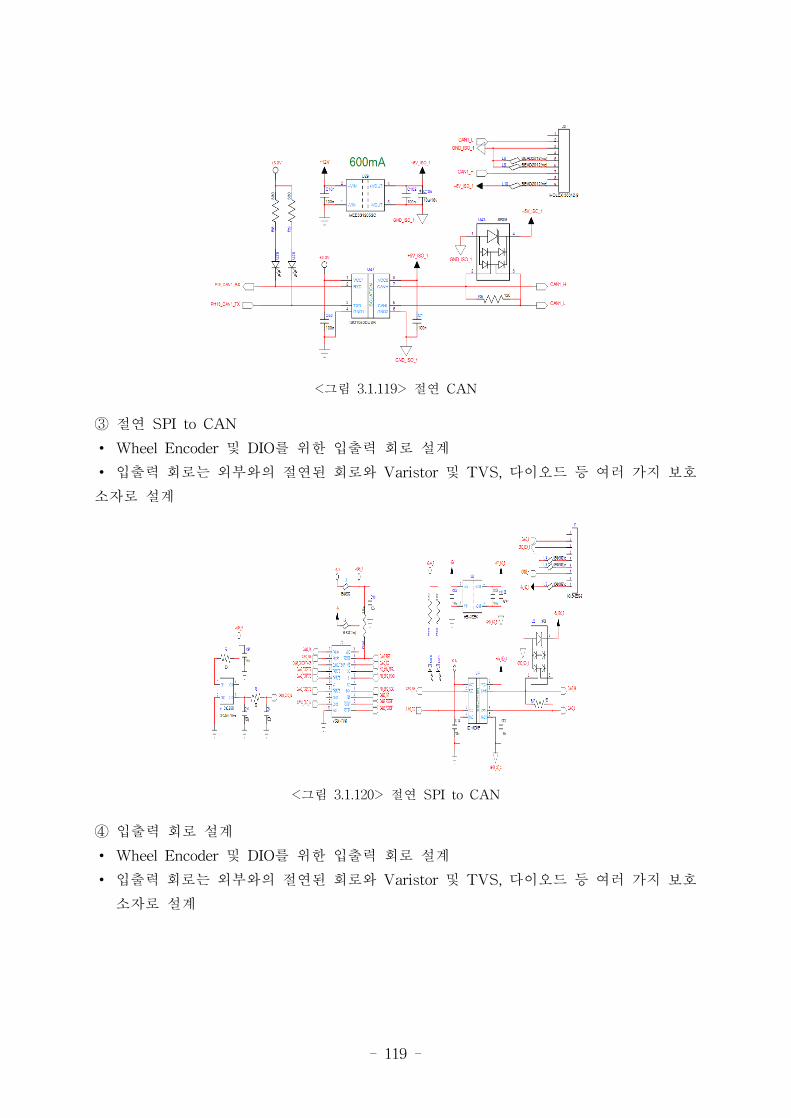
- 119 -
<그림 3.1.119> 절연 CAN
③ 절연 SPI to CAN
∙ Wheel Encoder 및 DIO를 위한 입출력 회로 설계
∙ 입출력 회로는 외부와의 절연된 회로와 Varistor 및 TVS, 다이오드 등 여러 가지 보호
소자로 설계
<그림 3.1.120> 절연 SPI to CAN
④ 입출력 회로 설계
∙ Wheel Encoder 및 DIO를 위한 입출력 회로 설계
∙ 입출력 회로는 외부와의 절연된 회로와 Varistor 및 TVS, 다이오드 등 여러 가지 보호
소자로 설계
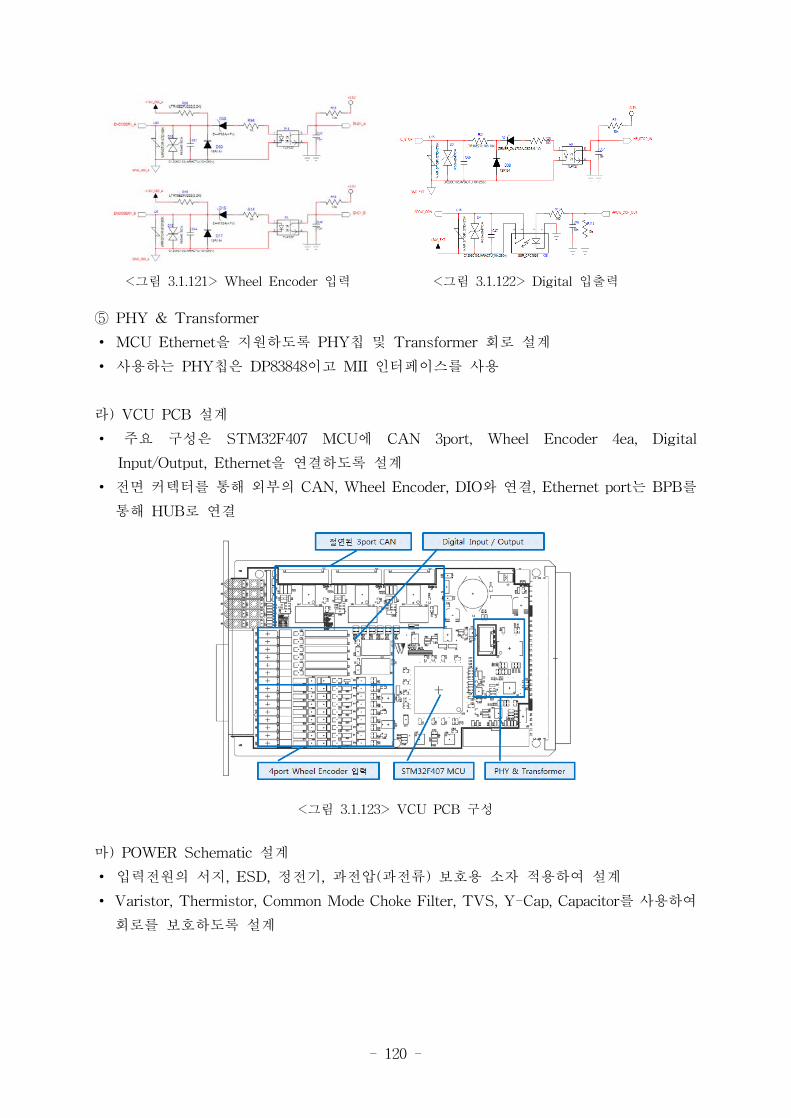
- 120 -
<그림 3.1.121> Wheel Encoder 입력 <그림 3.1.122> Digital 입출력
⑤ PHY & Transformer
∙ MCU Ethernet을 지원하도록 PHY칩 및 Transformer 회로 설계
∙ 사용하는 PHY칩은 DP83848이고 MII 인터페이스를 사용
라) VCU PCB 설계
∙ 주요 구성은 STM32F407 MCU에 CAN 3port, Wheel Encoder 4ea, Digital
Input/Output, Ethernet을 연결하도록 설계
∙ 전면 커텍터를 통해 외부의 CAN, Wheel Encoder, DIO와 연결, Ethernet port는 BPB를
통해 HUB로 연결
<그림 3.1.123> VCU PCB 구성
마) POWER Schematic 설계
∙ 입력전원의 서지, ESD, 정전기, 과전압(과전류) 보호용 소자 적용하여 설계
∙ Varistor, Thermistor, Common Mode Choke Filter, TVS, Y-Cap, Capacitor를 사용하여
회로를 보호하도록 설계
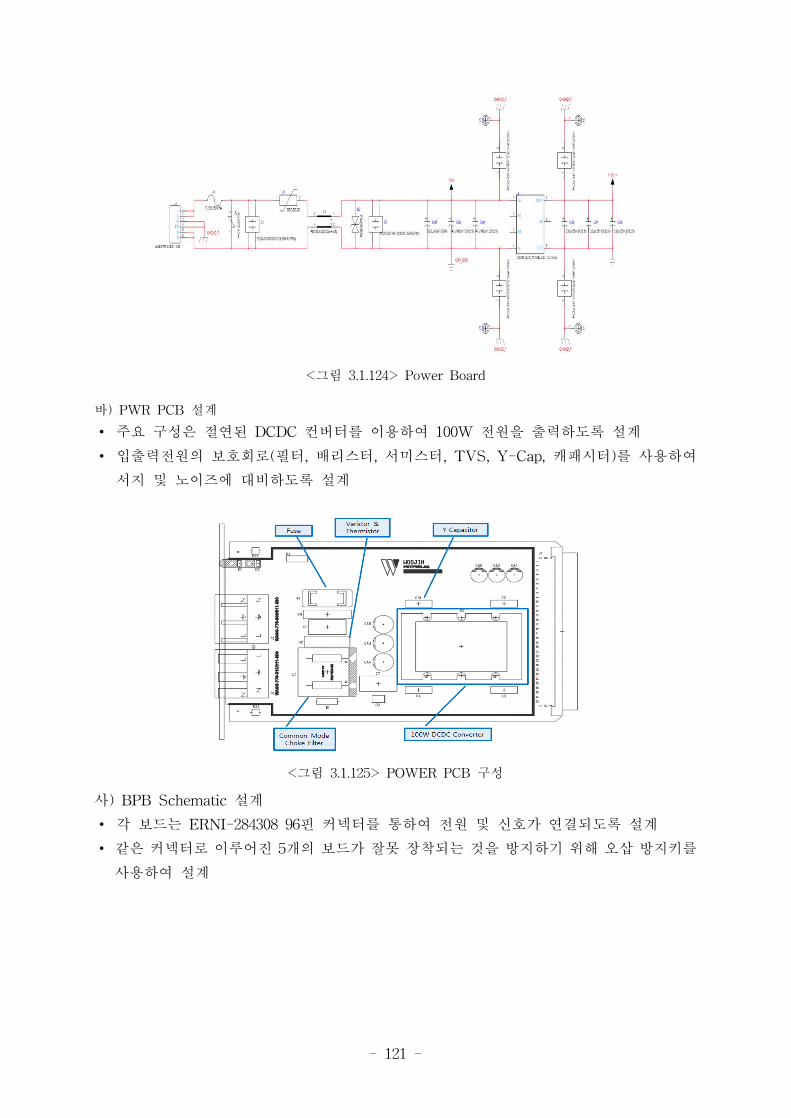
- 121 -
<그림 3.1.124> Power Board
바) PWR PCB 설계
∙ 주요 구성은 절연된 DCDC 컨버터를 이용하여 100W 전원을 출력하도록 설계
∙ 입출력전원의 보호회로(필터, 배리스터, 서미스터, TVS, Y-Cap, 캐패시터)를 사용하여
서지 및 노이즈에 대비하도록 설계
<그림 3.1.125> POWER PCB 구성
사) BPB Schematic 설계
∙ 각 보드는 ERNI-284308 96핀 커넥터를 통하여 전원 및 신호가 연결되도록 설계
∙ 같은 커넥터로 이루어진 5개의 보드가 잘못 장착되는 것을 방지하기 위해 오삽 방지키를
사용하여 설계
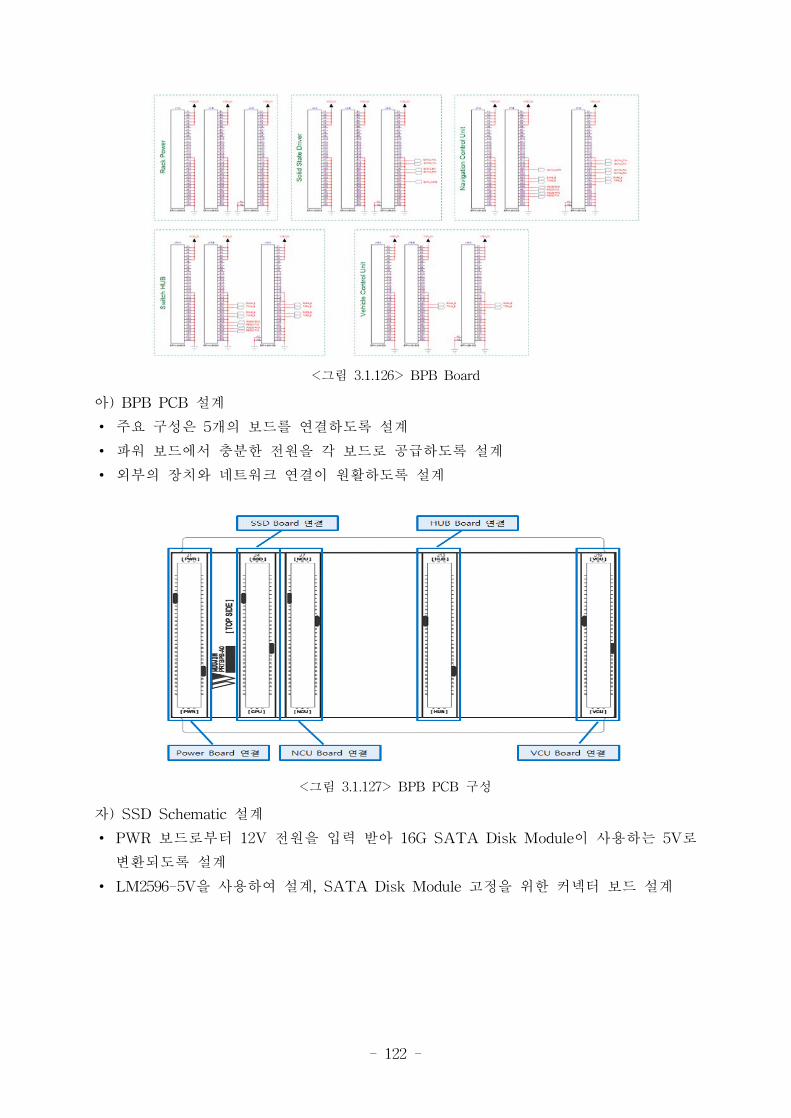
- 122 -
<그림 3.1.126> BPB Board
아) BPB PCB 설계
∙ 주요 구성은 5개의 보드를 연결하도록 설계
∙ 파워 보드에서 충분한 전원을 각 보드로 공급하도록 설계
∙ 외부의 장치와 네트워크 연결이 원활하도록 설계
<그림 3.1.127> BPB PCB 구성
자) SSD Schematic 설계
∙ PWR 보드로부터 12V 전원을 입력 받아 16G SATA Disk Module이 사용하는 5V로
변환되도록 설계
∙ LM2596-5V을 사용하여 설계, SATA Disk Module 고정을 위한 커넥터 보드 설계
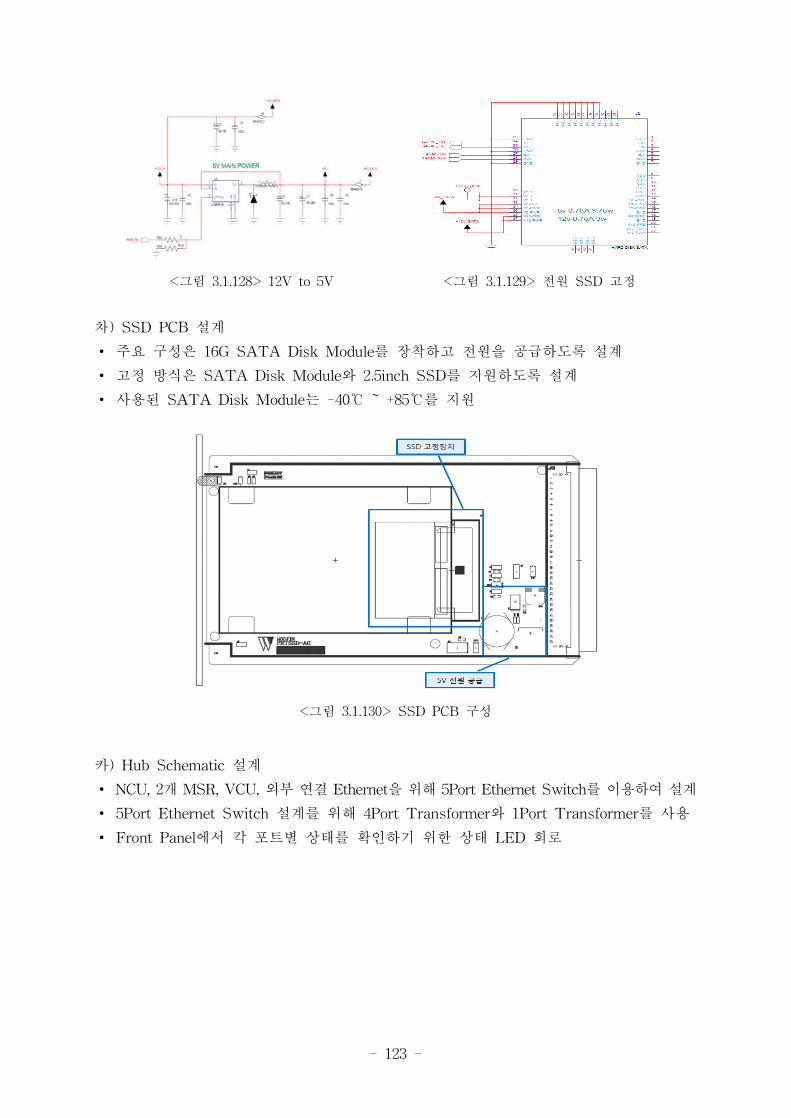
- 123 -
<그림 3.1.128> 12V to 5V <그림 3.1.129> 전원 SSD 고정
차) SSD PCB 설계
∙ 주요 구성은 16G SATA Disk Module를 장착하고 전원을 공급하도록 설계
∙ 고정 방식은 SATA Disk Module와 2.5inch SSD를 지원하도록 설계
∙ 사용된 SATA Disk Module는 -40 ~ +85를 지원
<그림 3.1.130> SSD PCB 구성
카) Hub Schematic 설계
∙ NCU, 2개 MSR, VCU, 외부 연결 Ethernet을 위해 5Port Ethernet Switch를 이용하여 설계
∙ 5Port Ethernet Switch 설계를 위해 4Port Transformer와 1Port Transformer를 사용
∙ Front Panel에서 각 포트별 상태를 확인하기 위한 상태 LED 회로
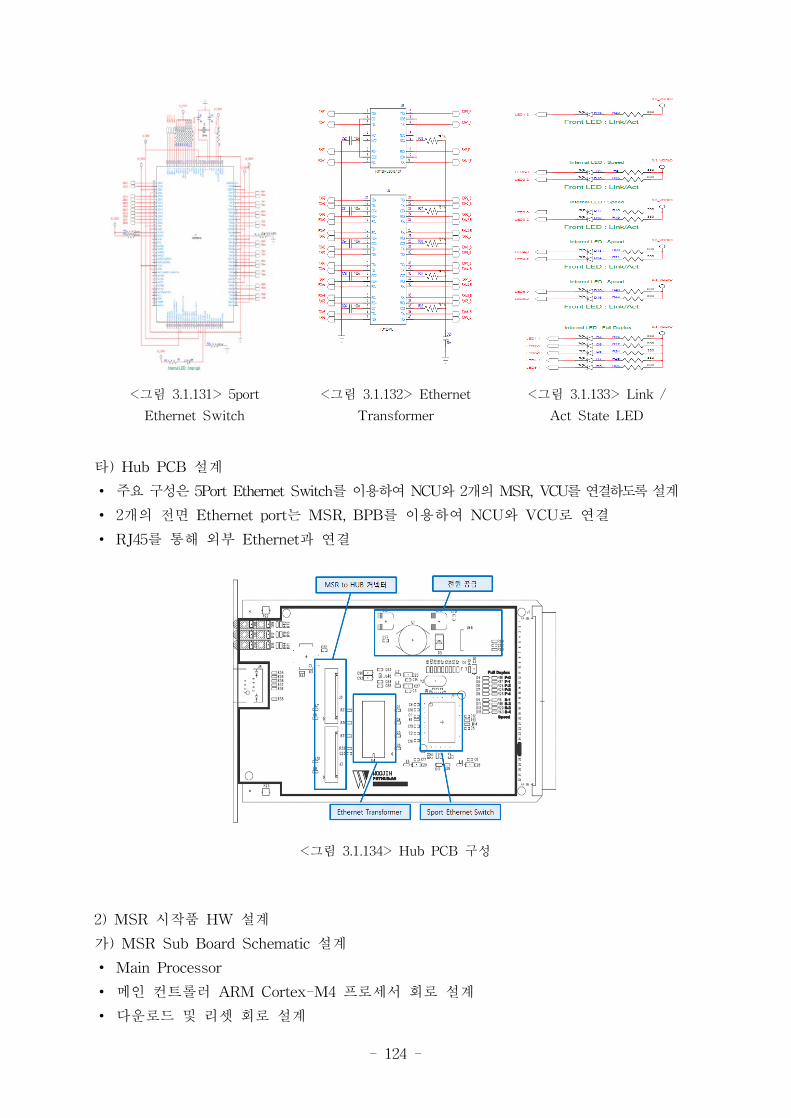
- 124 -
<그림 3.1.131> 5port
Ethernet Switch
<그림 3.1.132> Ethernet
Transformer
<그림 3.1.133> Link /
Act State LED
타) Hub PCB 설계
∙ 주요 구성은 5Port Ethernet Switch를 이용하여 NCU와 2개의 MSR, VCU를연결하도록설계
∙ 2개의 전면 Ethernet port는 MSR, BPB를 이용하여 NCU와 VCU로 연결
∙ RJ45를 통해 외부 Ethernet과 연결
<그림 3.1.134> Hub PCB 구성
2) MSR 시작품 HW 설계
가) MSR Sub Board Schematic 설계
∙ Main Processor
∙ 메인 컨트롤러 ARM Cortex-M4 프로세서 회로 설계
∙ 다운로드 및 리셋 회로 설계
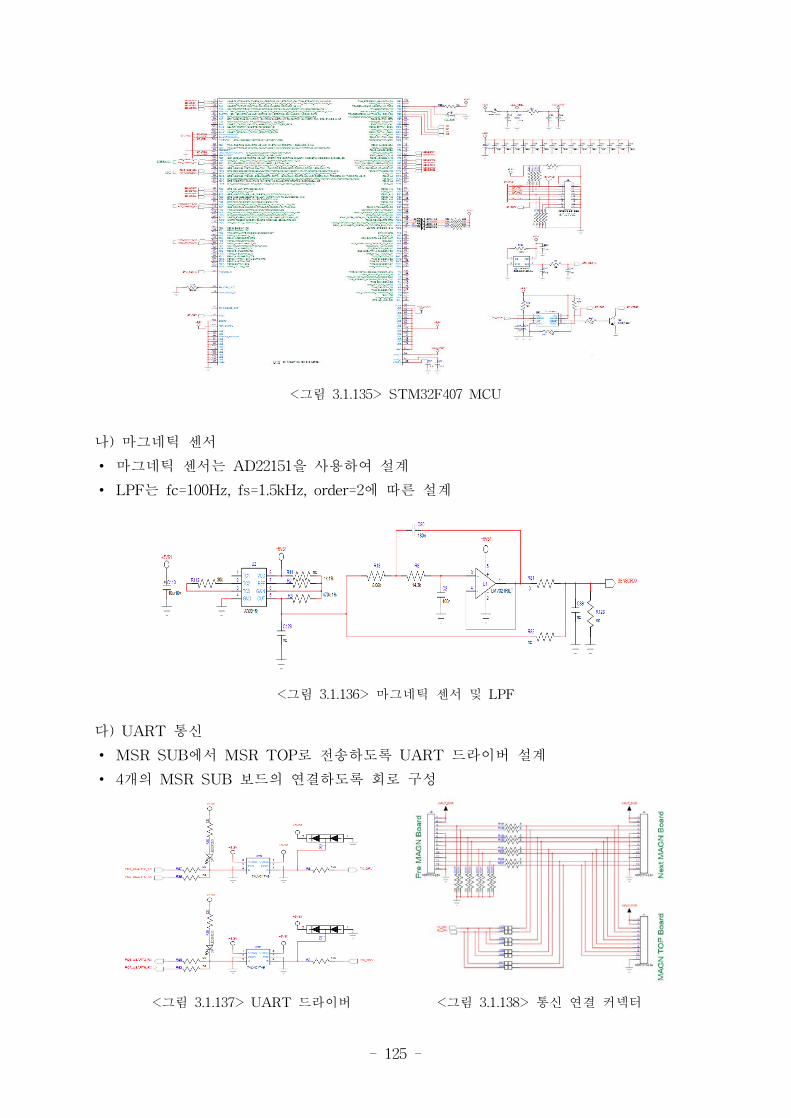
- 125 -
<그림 3.1.135> STM32F407 MCU
나) 마그네틱 센서
∙ 마그네틱 센서는 AD22151을 사용하여 설계
∙ LPF는 fc=100Hz, fs=1.5kHz, order=2에 따른 설계
<그림 3.1.136> 마그네틱 센서 및 LPF
다) UART 통신
∙ MSR SUB에서 MSR TOP로 전송하도록 UART 드라이버 설계
∙ 4개의 MSR SUB 보드의 연결하도록 회로 구성
<그림 3.1.137> UART 드라이버 <그림 3.1.138> 통신 연결 커넥터
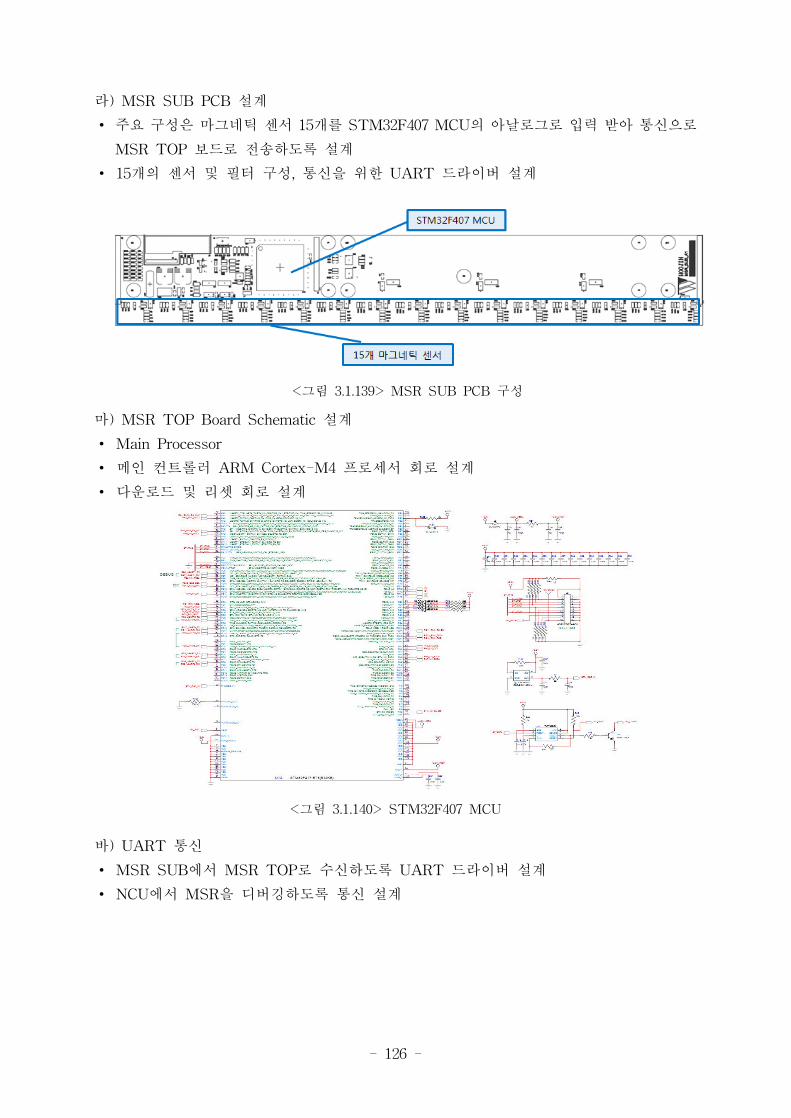
- 126 -
라) MSR SUB PCB 설계
∙ 주요 구성은 마그네틱 센서 15개를 STM32F407 MCU의 아날로그로 입력 받아 통신으로
MSR TOP 보드로 전송하도록 설계
∙ 15개의 센서 및 필터 구성, 통신을 위한 UART 드라이버 설계
<그림 3.1.139> MSR SUB PCB 구성
마) MSR TOP Board Schematic 설계
∙ Main Processor
∙ 메인 컨트롤러 ARM Cortex-M4 프로세서 회로 설계
∙ 다운로드 및 리셋 회로 설계
<그림 3.1.140> STM32F407 MCU
바) UART 통신
∙ MSR SUB에서 MSR TOP로 수신하도록 UART 드라이버 설계
∙ NCU에서 MSR을 디버깅하도록 통신 설계
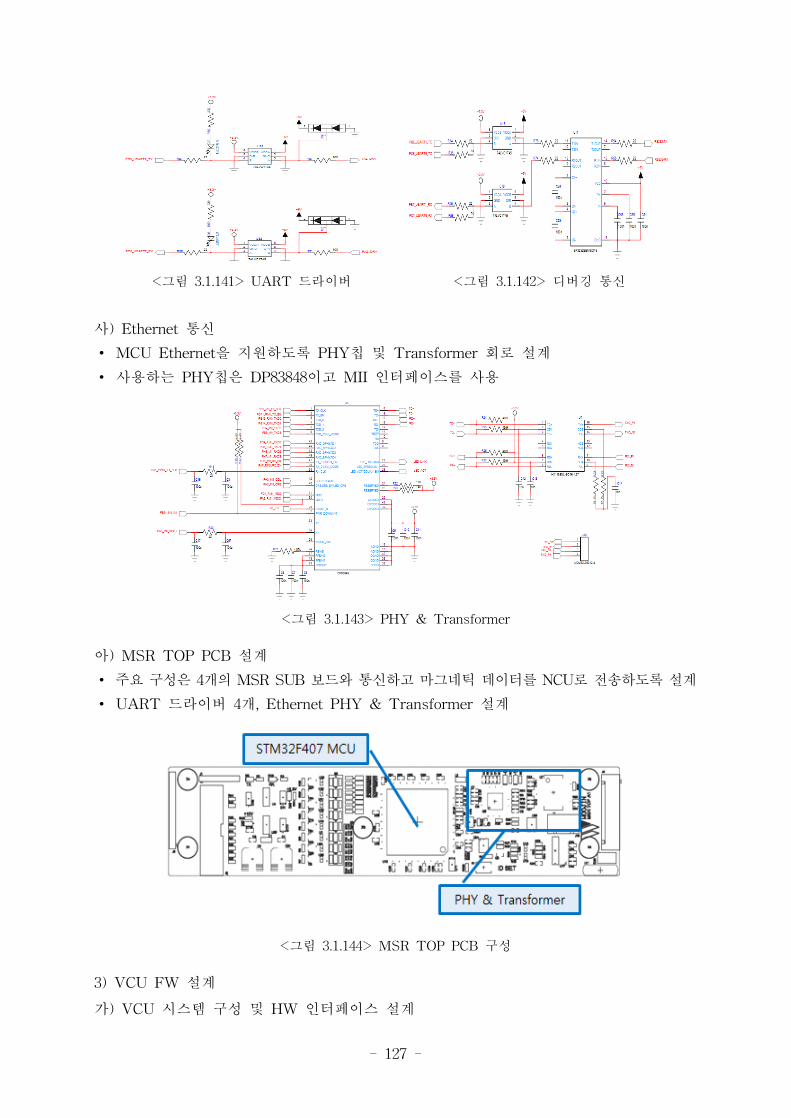
- 127 -
<그림 3.1.141> UART 드라이버 <그림 3.1.142> 디버깅 통신
사) Ethernet 통신
∙ MCU Ethernet을 지원하도록 PHY칩 및 Transformer 회로 설계
∙ 사용하는 PHY칩은 DP83848이고 MII 인터페이스를 사용
<그림 3.1.143> PHY & Transformer
아) MSR TOP PCB 설계
∙ 주요 구성은 4개의 MSR SUB 보드와 통신하고 마그네틱 데이터를 NCU로 전송하도록 설계
∙ UART 드라이버 4개, Ethernet PHY & Transformer 설계
<그림 3.1.144> MSR TOP PCB 구성
3) VCU FW 설계
가) VCU 시스템 구성 및 HW 인터페이스 설계
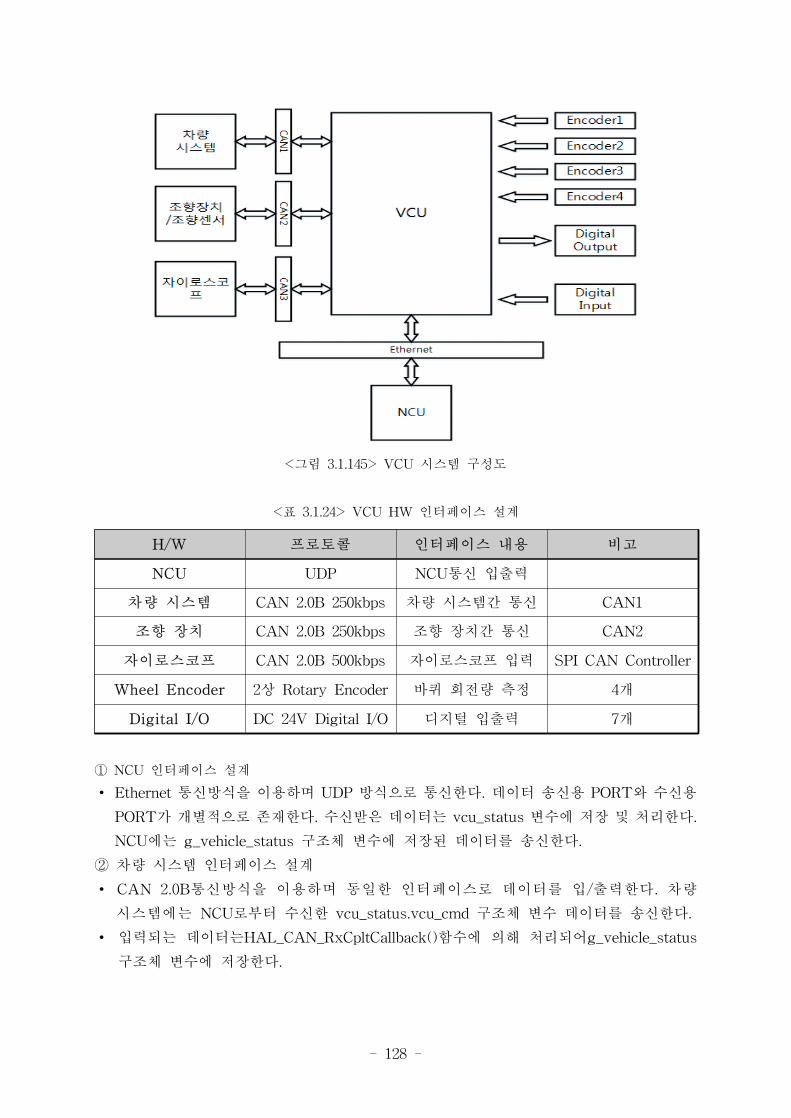
- 128 -
<그림 3.1.145> VCU 시스템 구성도
H/W 프로토콜 인터페이스 내용 비고
NCU UDP NCU통신 입출력
차량 시스템 CAN 2.0B 250kbps 차량 시스템간 통신 CAN1
조향 장치 CAN 2.0B 250kbps 조향 장치간 통신 CAN2
자이로스코프 CAN 2.0B 500kbps 자이로스코프 입력 SPI CAN Controller
Wheel Encoder 2상 Rotary Encoder 바퀴 회전량 측정 4개
Digital I/O DC 24V Digital I/O 디지털 입출력 7개
<표 3.1.24> VCU HW 인터페이스 설계
① NCU 인터페이스 설계
∙ Ethernet 통신방식을 이용하며 UDP 방식으로 통신한다. 데이터 송신용 PORT와 수신용
PORT가 개별적으로 존재한다. 수신받은 데이터는 vcu_status 변수에 저장 및 처리한다.
NCU에는 g_vehicle_status 구조체 변수에 저장된 데이터를 송신한다.
② 차량 시스템 인터페이스 설계
∙ CAN 2.0B통신방식을 이용하며 동일한 인터페이스로 데이터를 입/출력한다. 차량
시스템에는 NCU로부터 수신한 vcu_status.vcu_cmd 구조체 변수 데이터를 송신한다.
∙ 입력되는 데이터는HAL_CAN_RxCpltCallback()함수에 의해 처리되어g_vehicle_status
구조체 변수에 저장한다.

- 129 -
③ 조향장치 인터페이스 설계
∙ CAN 2.0B통신방식을 이용하며 동일한 인터페이스로 데이터를 입/출력한다. 차량 시스템에는
NCU로부터 수신한 vcu_status.front_steer_cmd와 vcu_status.rear_steer_cmd구조체 변수
데이터를 송신한다.
∙ 입력되는 데이터는HAL_CAN_RxCpltCallback()함수에 의해 처리되어g_vehicle_status
구조체 변수에 저장한다.
④ 자이로스코프 인터페이스 설계
∙ SPI CAN Controller인 MCP2515로 부터 SPI 통신을 이용해 자이로스코프로부터 CAN
데이터를 수신한다. 수신한 데이터는CAN3_RxCallBack()함수에서 gyro_data 구조체 변수에
저장한다.
⑤ Wheel Encoder 인터페이스 설계
∙ Quadrature Encoder 기능을 이용하여 2상 Rotary Encoder 입력을 받는다.
∙ CSB_ENC_Get()함수에서 4개의 Encoder값을 입력받아 EncData[4] 데이터 변수에 저장한다.
⑥ Digital I/O
∙ Digital Input은 해당 GPIO의 레지스터 데이터를 읽어서 처리한다.
∙ Digital Output은 해당 GPIO의 레지스터에 데이터를 써서 출력한다.
나) VCU FW 상세 설계
∙ VCU의 SW는 Real-Time OS인 FreeRTOS를 사용하여 설계되었다. CANTxTask(),
udprecv_task(), CommStatusTask() 의 3개의 user task가 동작하며, CAN 통신 수신부는
interrupt 방식으로 설계되었다.
<그림 3.1.146> VCU FW 구성도
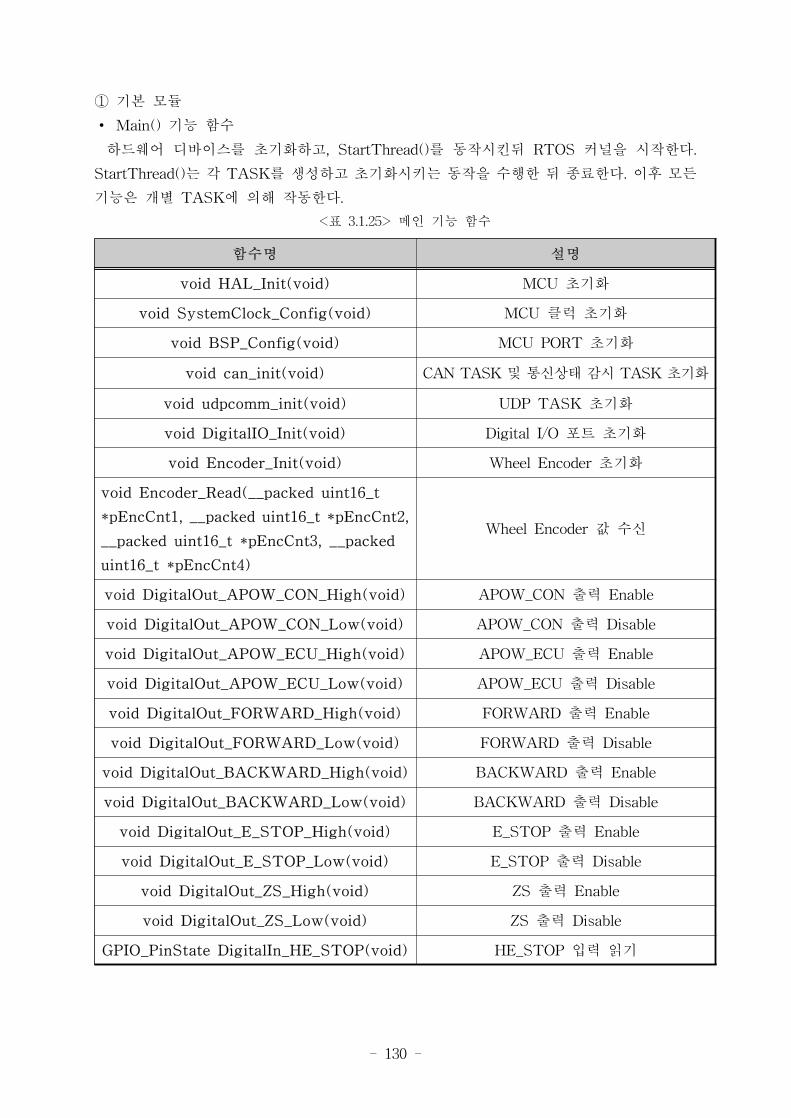
- 130 -
함수명 설명
void HAL_Init(void) MCU 초기화
void SystemClock_Config(void) MCU 클럭 초기화
void BSP_Config(void) MCU PORT 초기화
void can_init(void) CAN TASK 및 통신상태 감시 TASK 초기화
void udpcomm_init(void) UDP TASK 초기화
void DigitalIO_Init(void) Digital I/O 포트 초기화
void Encoder_Init(void) Wheel Encoder 초기화
void Encoder_Read(__packed uint16_t
*pEncCnt1, __packed uint16_t *pEncCnt2,
__packed uint16_t *pEncCnt3, __packed
uint16_t *pEncCnt4)
Wheel Encoder 값 수신
void DigitalOut_APOW_CON_High(void) APOW_CON 출력 Enable
void DigitalOut_APOW_CON_Low(void) APOW_CON 출력 Disable
void DigitalOut_APOW_ECU_High(void) APOW_ECU 출력 Enable
void DigitalOut_APOW_ECU_Low(void) APOW_ECU 출력 Disable
void DigitalOut_FORWARD_High(void) FORWARD 출력 Enable
void DigitalOut_FORWARD_Low(void) FORWARD 출력 Disable
void DigitalOut_BACKWARD_High(void) BACKWARD 출력 Enable
void DigitalOut_BACKWARD_Low(void) BACKWARD 출력 Disable
void DigitalOut_E_STOP_High(void) E_STOP 출력 Enable
void DigitalOut_E_STOP_Low(void) E_STOP 출력 Disable
void DigitalOut_ZS_High(void) ZS 출력 Enable
void DigitalOut_ZS_Low(void) ZS 출력 Disable
GPIO_PinState DigitalIn_HE_STOP(void) HE_STOP 입력 읽기
<표 3.1.25> 메인 기능 함수
① 기본 모듈
∙ Main() 기능 함수
하드웨어 디바이스를 초기화하고, StartThread()를 동작시킨뒤 RTOS 커널을 시작한다.
StartThread()는 각 TASK를 생성하고 초기화시키는 동작을 수행한 뒤 종료한다. 이후 모든
기능은 개별 TASK에 의해 작동한다.
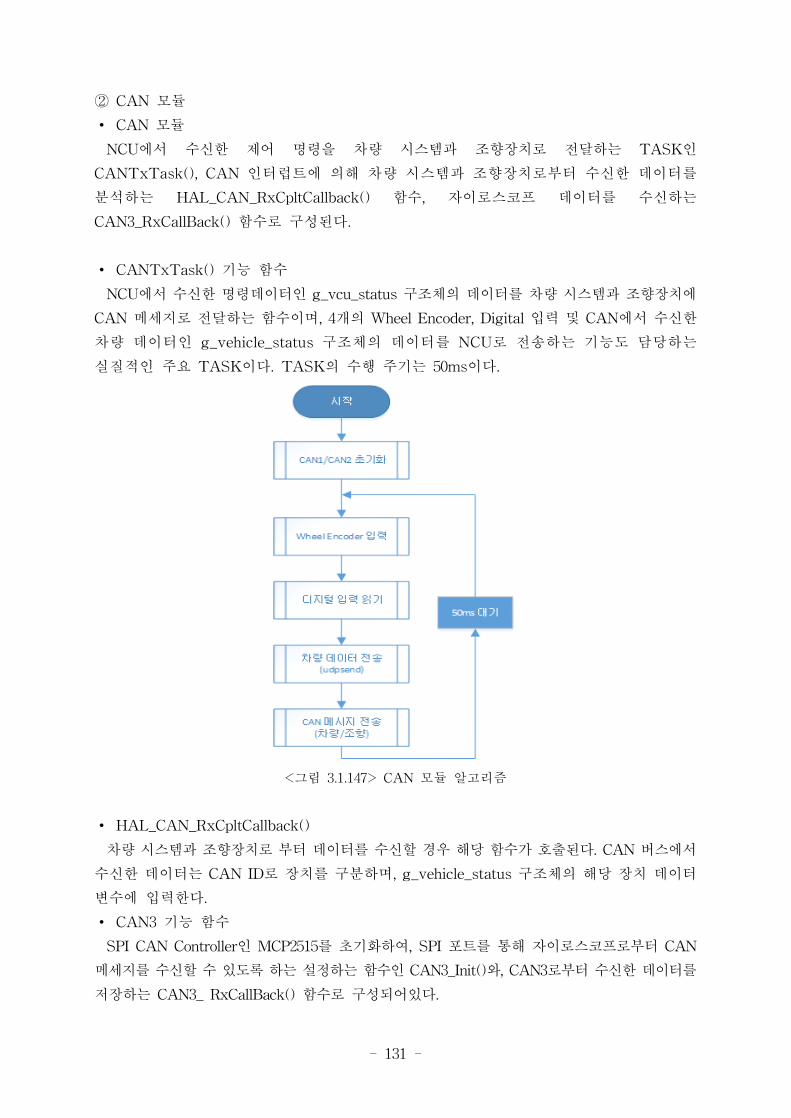
- 131 -
② CAN 모듈
∙ CAN 모듈
NCU에서 수신한 제어 명령을 차량 시스템과 조향장치로 전달하는 TASK인
CANTxTask(), CAN 인터럽트에 의해 차량 시스템과 조향장치로부터 수신한 데이터를
분석하는 HAL_CAN_RxCpltCallback() 함수, 자이로스코프 데이터를 수신하는
CAN3_RxCallBack() 함수로 구성된다.
∙ CANTxTask() 기능 함수
NCU에서 수신한 명령데이터인 g_vcu_status 구조체의 데이터를 차량 시스템과 조향장치에
CAN 메세지로 전달하는 함수이며, 4개의 Wheel Encoder, Digital 입력 및 CAN에서 수신한
차량 데이터인 g_vehicle_status 구조체의 데이터를 NCU로 전송하는 기능도 담당하는
실질적인 주요 TASK이다. TASK의 수행 주기는 50ms이다.
<그림 3.1.147> CAN 모듈 알고리즘
∙ HAL_CAN_RxCpltCallback()
차량 시스템과 조향장치로 부터 데이터를 수신할 경우 해당 함수가 호출된다. CAN 버스에서
수신한 데이터는 CAN ID로 장치를 구분하며, g_vehicle_status 구조체의 해당 장치 데이터
변수에 입력한다.
∙ CAN3 기능 함수
SPI CAN Controller인 MCP2515를 초기화하여, SPI 포트를 통해 자이로스코프로부터 CAN
메세지를 수신할 수 있도록 하는 설정하는 함수인 CAN3_Init()와, CAN3로부터 수신한 데이터를
저장하는 CAN3_ RxCallBack() 함수로 구성되어있다.

- 132 -
함수명 설명
void can_init(void) CAN 관련 TASK 초기화
void CAN1_Config(void) CAN1 기능 초기화
void
HAL_CAN1_MspInit(CAN_Handle
TypeDef*hcan)
CAN1 포트 설정
void
HAL_CAN1_MspDeInit(CAN_Handle
TypeDef*hcan)
CAN1 포트 설정 끄기
void CAN2_Config(void) CAN2 기능 초기화
void
HAL_CAN2_MspInit(CAN_Handle
TypeDef*hcan)
CAN2 포트 설정
void
HAL_CAN2_MspDeInit(CAN_Handle
TypeDef*hcan)
CAN2 포트 설징 끄기
void CAN1_Message_Init(void) 차량 시스템용 CAN 메세지 초기화
void CAN2_Message_Init(void) 조향 장치용 CAN 메세지 초기화
void
HAL_CAN_RxCpltCallback(CAN_Handle
TypeDef*hcan)
CAN 수신 인터럽트 Callback 함수
void
HAL_CAN_ErrorCallback(CAN_Handle
TypeDef*hcan)
CAN 에러 인터럽트 Callback 함수
void CAN3_Init(void) CAN3(SPI CAN Controller) 초기화
void
CAN3_SetRxCallBack(void(*func)
(struct tCan3Msg *pMsg))
CAN3 수신 인터럽트 Callback 함수 설정
vo id CAN3_RxCa llBack (struct
tC an3 M sg*pM sg)CAN3 수신 인터럽트 Callback 함수
<표 3.1.26> CAN 모듈 함수
∙ CAN 모듈 함수
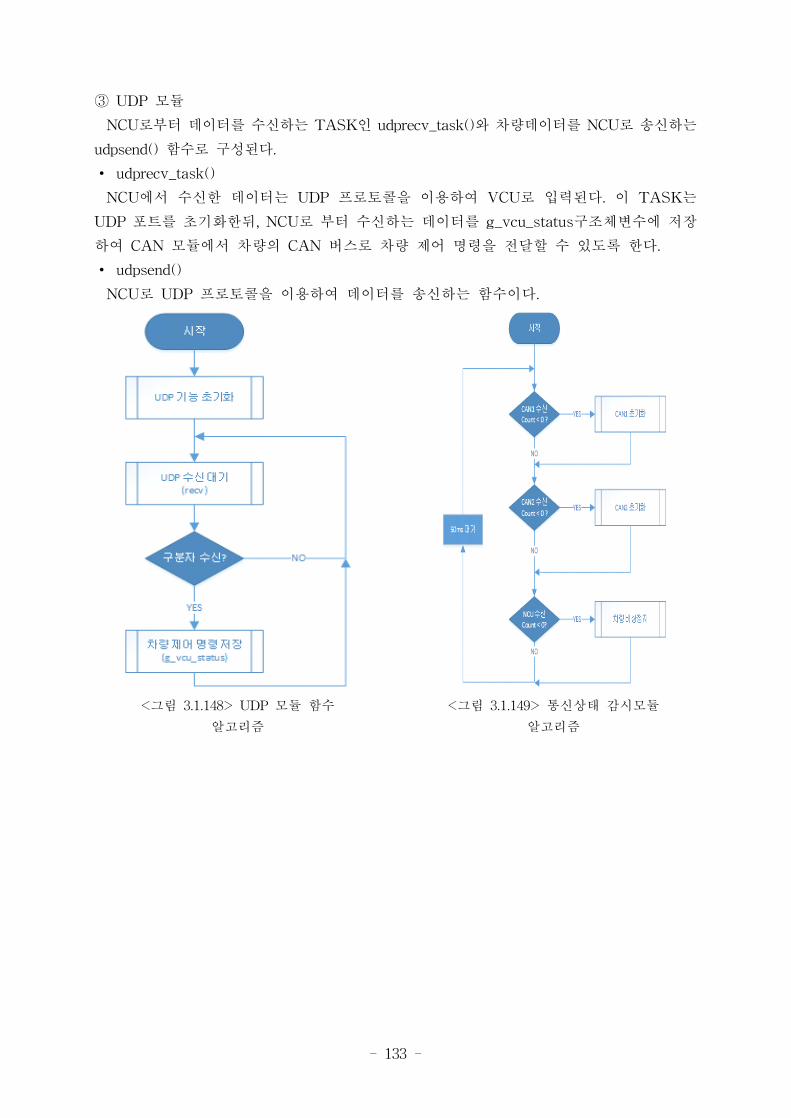
- 133 -
③ UDP 모듈
NCU로부터 데이터를 수신하는 TASK인 udprecv_task()와 차량데이터를 NCU로 송신하는
udpsend() 함수로 구성된다.
∙ udprecv_task()
NCU에서 수신한 데이터는 UDP 프로토콜을 이용하여 VCU로 입력된다. 이 TASK는
UDP 포트를 초기화한뒤, NCU로 부터 수신하는 데이터를 g_vcu_status구조체변수에 저장
하여 CAN 모듈에서 차량의 CAN 버스로 차량 제어 명령을 전달할 수 있도록 한다.
∙ udpsend()
NCU로 UDP 프로토콜을 이용하여 데이터를 송신하는 함수이다.
<그림 3.1.148> UDP 모듈 함수
알고리즘
<그림 3.1.149> 통신상태 감시모듈
알고리즘
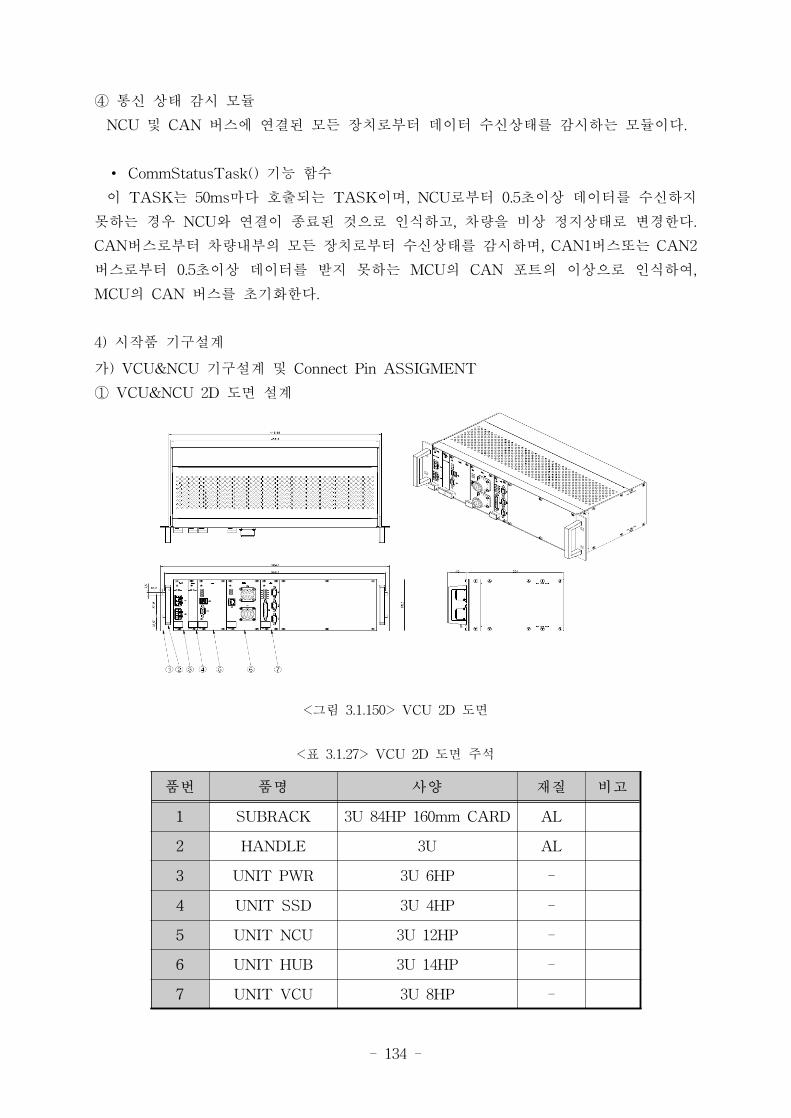
- 134 -
④ 통신 상태 감시 모듈
NCU 및 CAN 버스에 연결된 모든 장치로부터 데이터 수신상태를 감시하는 모듈이다.
∙ CommStatusTask() 기능 함수
이 TASK는 50ms마다 호출되는 TASK이며, NCU로부터 0.5초이상 데이터를 수신하지
못하는 경우 NCU와 연결이 종료된 것으로 인식하고, 차량을 비상 정지상태로 변경한다.
CAN버스로부터 차량내부의 모든 장치로부터 수신상태를 감시하며, CAN1버스또는 CAN2
버스로부터 0.5초이상 데이터를 받지 못하는 MCU의 CAN 포트의 이상으로 인식하여,
MCU의 CAN 버스를 초기화한다.
4) 시작품 기구설계
가) VCU&NCU 기구설계 및 Connect Pin ASSIGMENT
① VCU&NCU 2D 도면 설계
<그림 3.1.150> VCU 2D 도면
품번 품명 사양 재질 비고
1 SUBRACK 3U 84HP 160mm CARD AL
2 HANDLE 3U AL
3 UNIT PWR 3U 6HP -
4 UNIT SSD 3U 4HP -
5 UNIT NCU 3U 12HP -
6 UNIT HUB 3U 14HP -
7 UNIT VCU 3U 8HP -
<표 3.1.27> VCU 2D 도면 주석
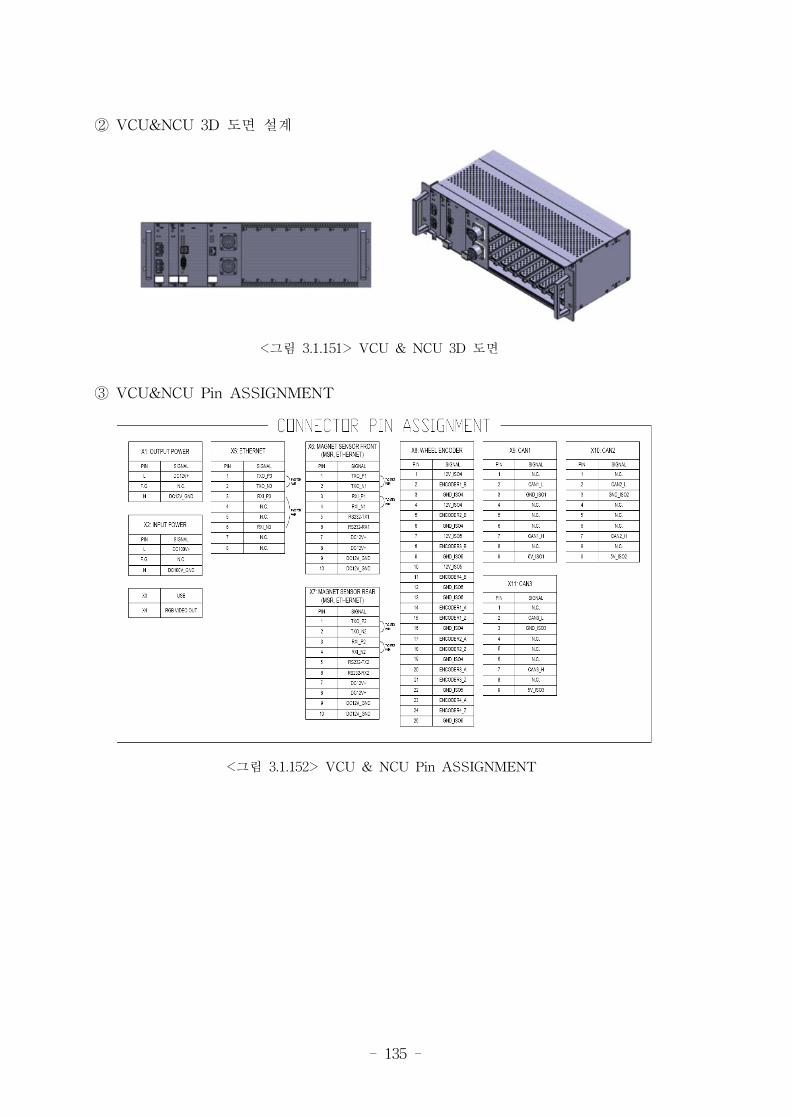
- 135 -
② VCU&NCU 3D 도면 설계
<그림 3.1.151> VCU & NCU 3D 도면
③ VCU&NCU Pin ASSIGNMENT
<그림 3.1.152> VCU & NCU Pin ASSIGNMENT
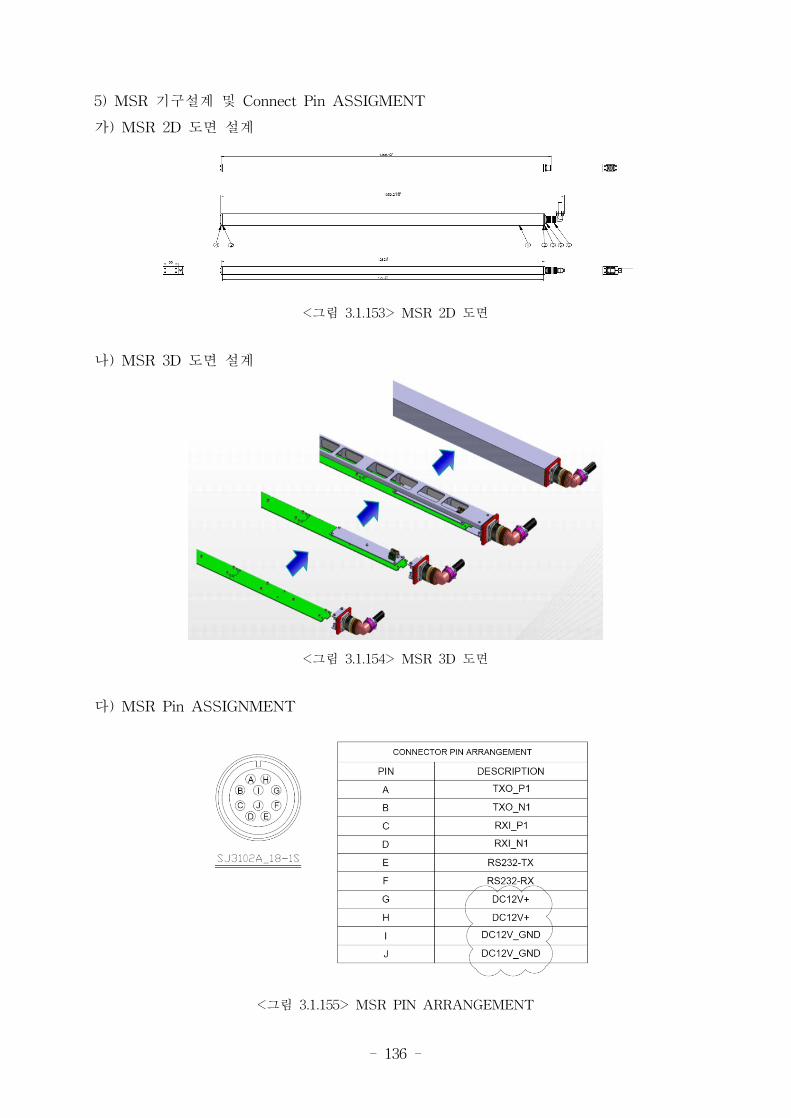
- 136 -
5) MSR 기구설계 및 Connect Pin ASSIGMENT
가) MSR 2D 도면 설계
<그림 3.1.153> MSR 2D 도면
나) MSR 3D 도면 설계
<그림 3.1.154> MSR 3D 도면
다) MSR Pin ASSIGNMENT
<그림 3.1.155> MSR PIN ARRANGEMENT
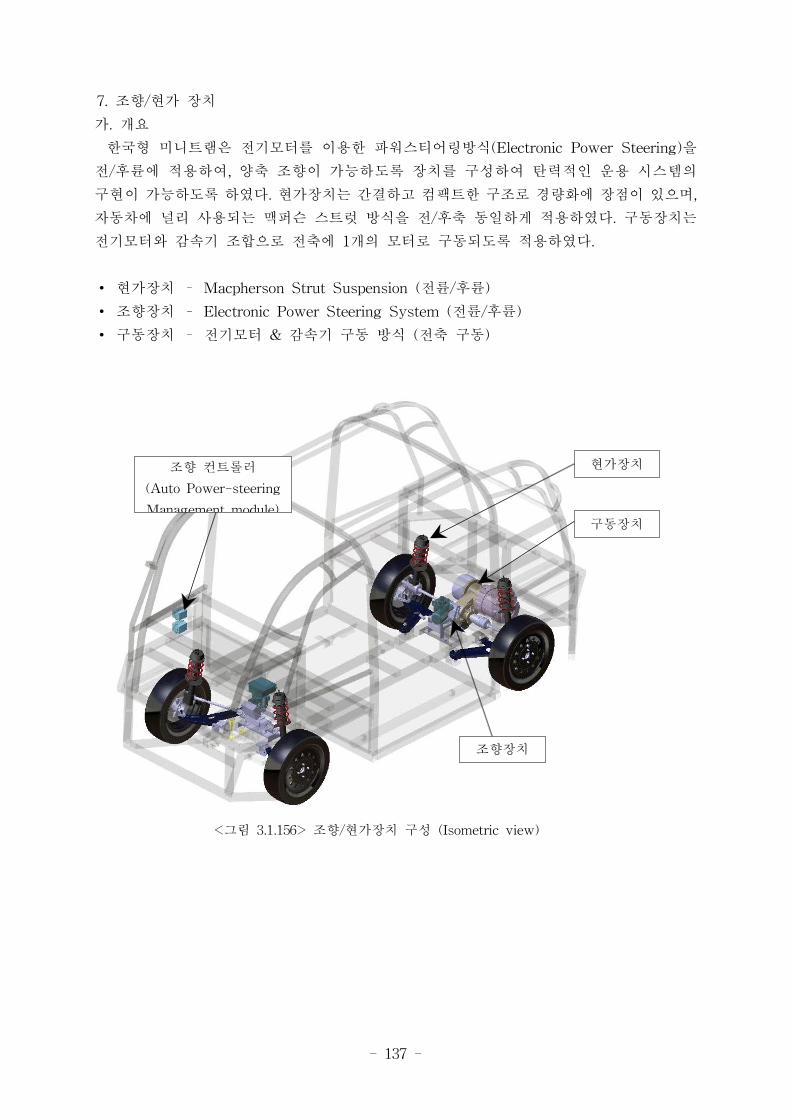
- 137 -
7. 조향/현가 장치
가. 개요
한국형 미니트램은 전기모터를 이용한 파워스티어링방식(Electronic Power Steering)을
전/후륜에 적용하여, 양축 조향이 가능하도록 장치를 구성하여 탄력적인 운용 시스템의
구현이 가능하도록 하였다. 현가장치는 간결하고 컴팩트한 구조로 경량화에 장점이 있으며,
자동차에 널리 사용되는 맥퍼슨 스트럿 방식을 전/후축 동일하게 적용하였다. 구동장치는
전기모터와 감속기 조합으로 전축에 1개의 모터로 구동되도록 적용하였다.
∙ 현가장치 – Macpherson Strut Suspension (전륜/후륜)
∙ 조향장치 – Electronic Power Steering System (전륜/후륜)
∙ 구동장치 – 전기모터 & 감속기 구동 방식 (전축 구동)
현가장치
조향장치
구동장치
조향 컨트롤러
(Auto Power-steering
Management module)
<그림 3.1.156> 조향/현가장치 구성 (Isometric view)
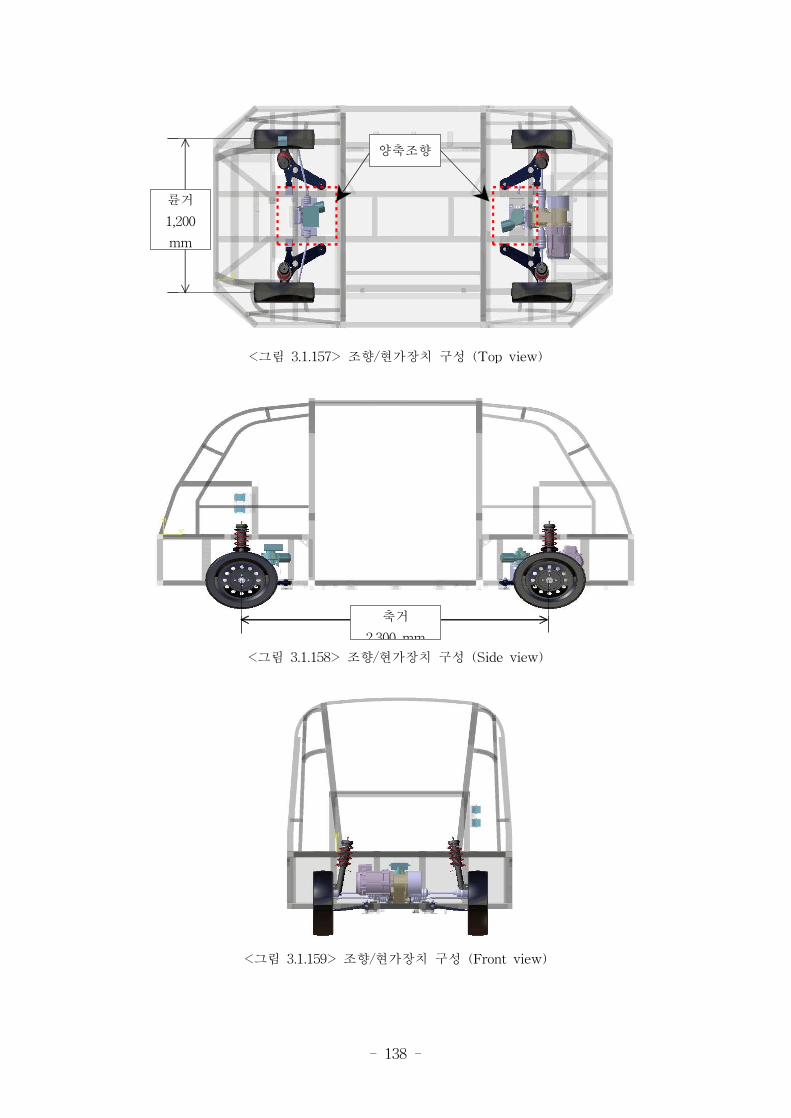
- 138 -
양축조향
륜거
1,200
mm
<그림 3.1.157> 조향/현가장치 구성 (Top view)
축거
2,300 mm
<그림 3.1.158> 조향/현가장치 구성 (Side view)
<그림 3.1.159> 조향/현가장치 구성 (Front view)
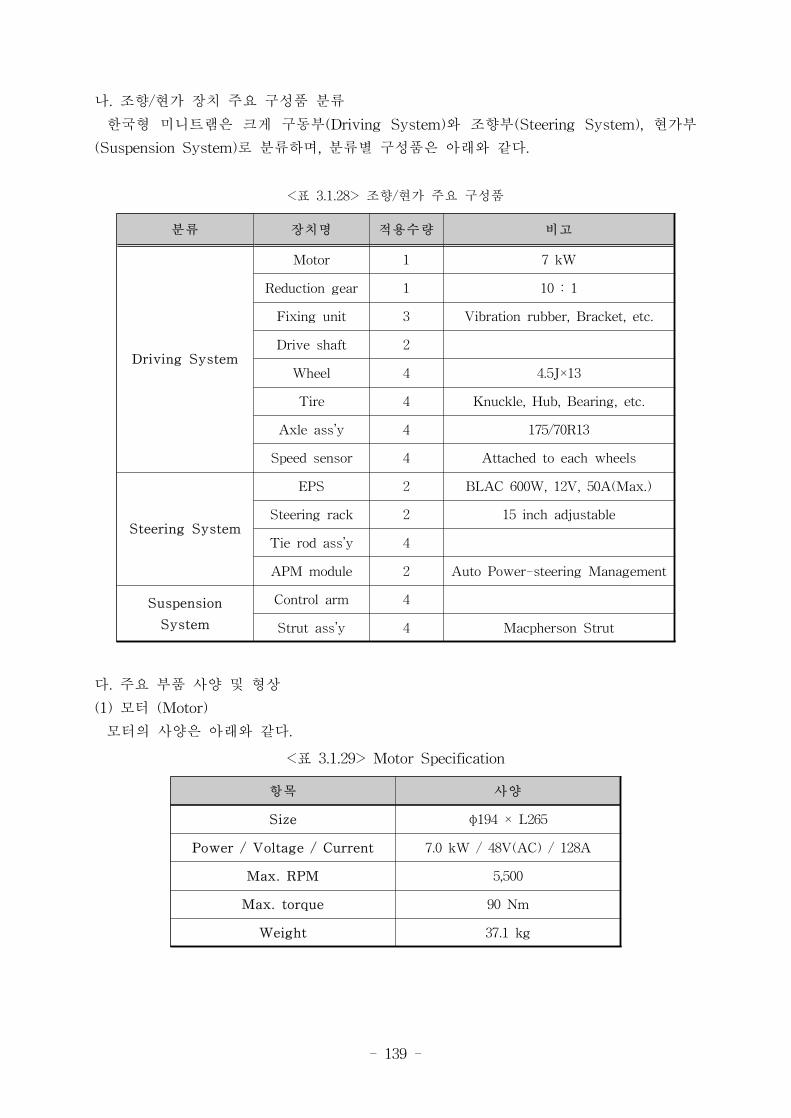
- 139 -
나. 조향/현가 장치 주요 구성품 분류
한국형 미니트램은 크게 구동부(Driving System)와 조향부(Steering System), 현가부
(Suspension System)로 분류하며, 분류별 구성품은 아래와 같다.
분류 장치명 적용수량 비고
Driving System
Motor 1 7 kW
Reduction gear 1 10 : 1
Fixing unit 3 Vibration rubber, Bracket, etc.
Drive shaft 2
Wheel 4 4.5J×13
Tire 4 Knuckle, Hub, Bearing, etc.
Axle ass’y 4 175/70R13
Speed sensor 4 Attached to each wheels
Steering System
EPS 2 BLAC 600W, 12V, 50A(Max.)
Steering rack 2 15 inch adjustable
Tie rod ass’y 4
APM module 2 Auto Power-steering Management
Suspension
System
Control arm 4
Strut ass’y 4 Macpherson Strut
<표 3.1.28> 조향/현가 주요 구성품
다. 주요 부품 사양 및 형상
(1) 모터 (Motor)
모터의 사양은 아래와 같다.
항목 사양
Size φ194 × L265
Power / Voltage / Current 7.0 kW / 48V(AC) / 128A
Max. RPM 5,500
Max. torque 90 Nm
Weight 37.1 kg
<표 3.1.29> Motor Specification
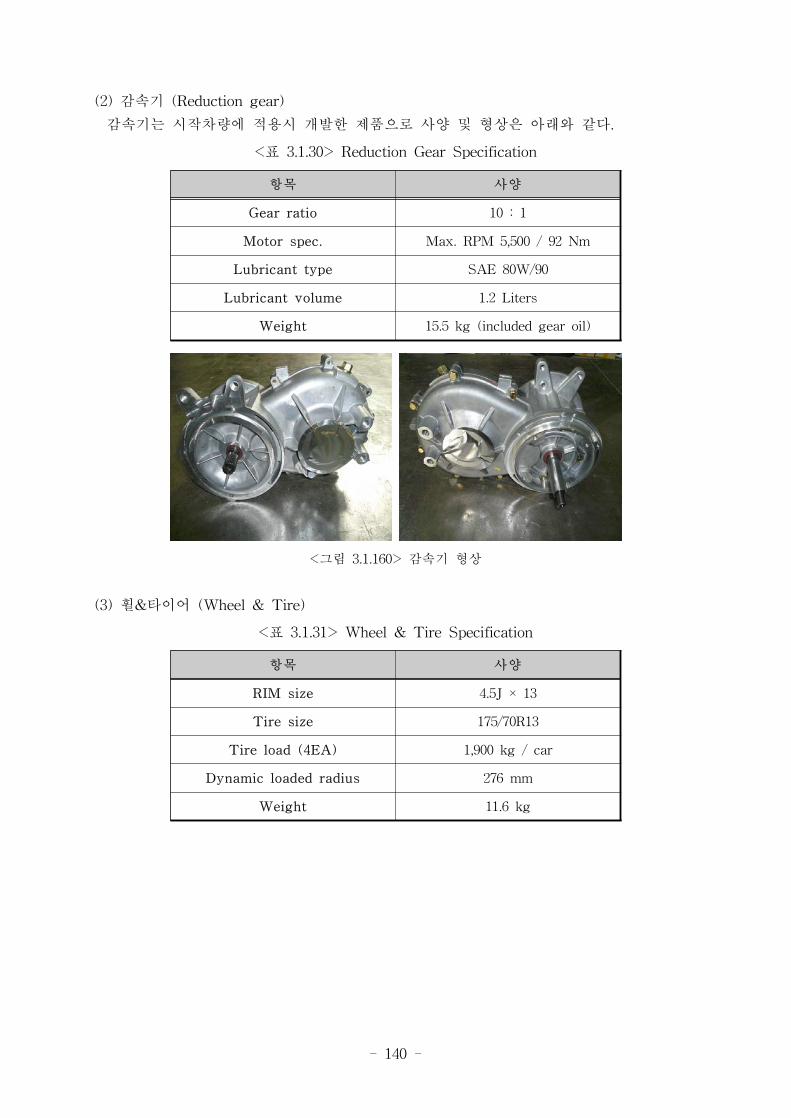
- 140 -
(2) 감속기 (Reduction gear)
감속기는 시작차량에 적용시 개발한 제품으로 사양 및 형상은 아래와 같다.
항목 사양
Gear ratio 10 : 1
Motor spec. Max. RPM 5,500 / 92 Nm
Lubricant type SAE 80W/90
Lubricant volume 1.2 Liters
Weight 15.5 kg (included gear oil)
<표 3.1.30> Reduction Gear Specification
<그림 3.1.160> 감속기 형상
(3) 휠&타이어 (Wheel & Tire)
항목 사양
RIM size 4.5J × 13
Tire size 175/70R13
Tire load (4EA) 1,900 kg / car
Dynamic loaded radius 276 mm
Weight 11.6 kg
<표 3.1.31> Wheel & Tire Specification
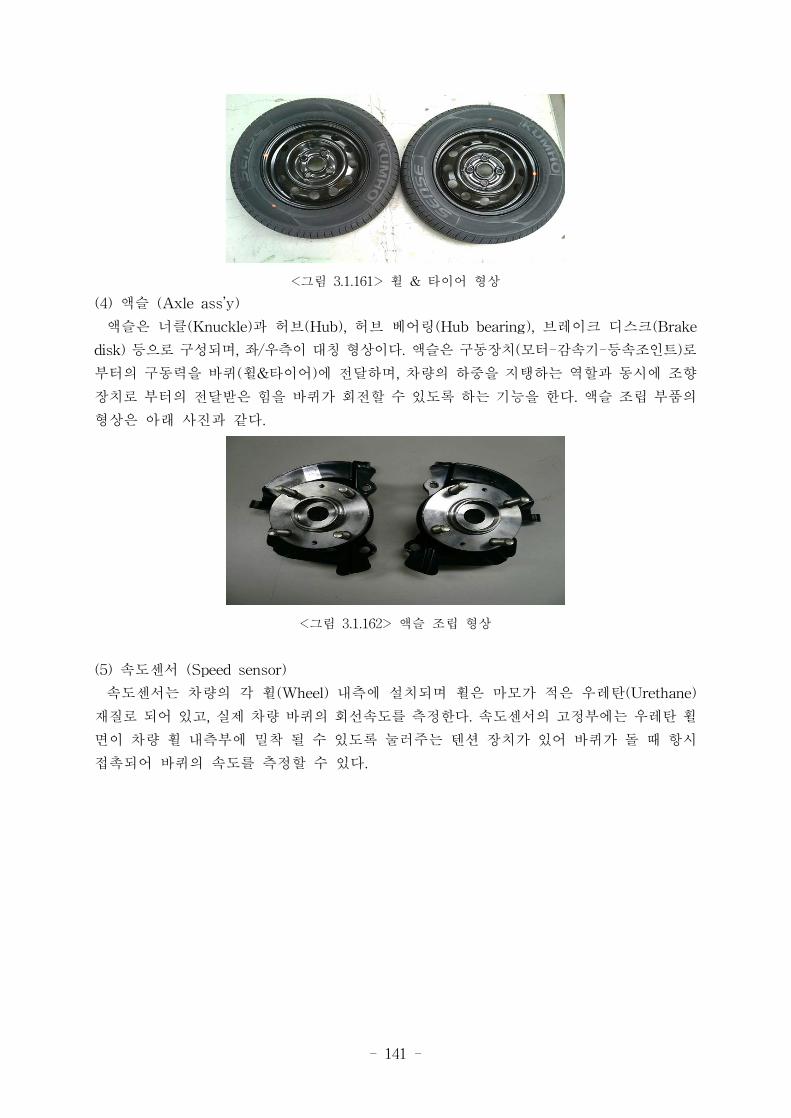
- 141 -
<그림 3.1.161> 휠 & 타이어 형상
(4) 액슬 (Axle ass’y)
액슬은 너클(Knuckle)과 허브(Hub), 허브 베어링(Hub bearing), 브레이크 디스크(Brake
disk) 등으로 구성되며, 좌/우측이 대칭 형상이다. 액슬은 구동장치(모터-감속기-등속조인트)로
부터의 구동력을 바퀴(휠&타이어)에 전달하며, 차량의 하중을 지탱하는 역할과 동시에 조향
장치로 부터의 전달받은 힘을 바퀴가 회전할 수 있도록 하는 기능을 한다. 액슬 조립 부품의
형상은 아래 사진과 같다.
<그림 3.1.162> 액슬 조립 형상
(5) 속도센서 (Speed sensor)
속도센서는 차량의 각 휠(Wheel) 내측에 설치되며 휠은 마모가 적은 우레탄(Urethane)
재질로 되어 있고, 실제 차량 바퀴의 회선속도를 측정한다. 속도센서의 고정부에는 우레탄 휠
면이 차량 휠 내측부에 밀착 될 수 있도록 눌러주는 텐션 장치가 있어 바퀴가 돌 때 항시
접촉되어 바퀴의 속도를 측정할 수 있다.

- 142 -
항목 사양
Type Pre-tension & In-wheel type
Size 48 × 103.6 × 37.9 mm
Wheel width 10mm
Wheel material Urethane
Cycles per revolution 400
Max. Frequency 200 kHz
Voltage 5 V
IP grade IP 65
Allowable speed 0 – 100km/h
<표 3.1.32> Speed Sensor Specification
특징
∙ 우레탄 휠, 소형화 적용
∙ 방수구조
∙ 400 pulse
<그림 3.1.163> 속도 센서 (Speed Sensor) 형상
(6) EPS (Electronic Power Steering)
조향 장치는 전기모터식 동력조향장치로서 전자적으로 제어되는 전기모터의 토크를
조향배력으로 이용한다. 전기모터에 의해 생성된 조향배력 토크는 웜기어에서 스티어링 랙의
조향기어에 전달된다. 미니트램의 EPS에는 조향각 센서 1개를 추가 설치하여, 센서 Fail시를
대비하였다. 아래에 EPS 사양과 형상을 나타낸다.
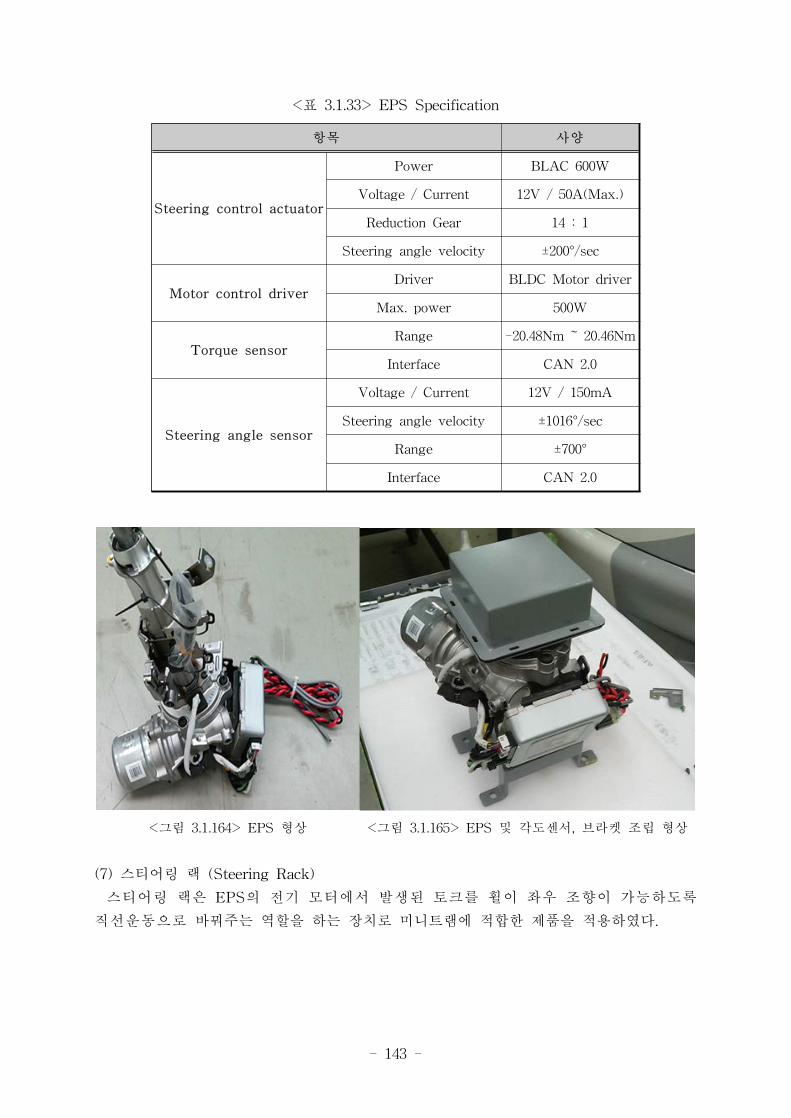
- 143 -
항목 사양
Steering control actuator
Power BLAC 600W
Voltage / Current 12V / 50A(Max.)
Reduction Gear 14 : 1
Steering angle velocity ±200°/sec
Motor control driverDriver BLDC Motor driver
Max. power 500W
Torque sensorRange -20.48Nm ~ 20.46Nm
Interface CAN 2.0
Steering angle sensor
Voltage / Current 12V / 150mA
Steering angle velocity ±1016°/sec
Range ±700°
Interface CAN 2.0
<표 3.1.33> EPS Specification
<그림 3.1.164> EPS 형상 <그림 3.1.165> EPS 및 각도센서, 브라켓 조립 형상
(7) 스티어링 랙 (Steering Rack)
스티어링 랙은 EPS의 전기 모터에서 발생된 토크를 휠이 좌우 조향이 가능하도록
직선운동으로 바꿔주는 역할을 하는 장치로 미니트램에 적합한 제품을 적용하였다.
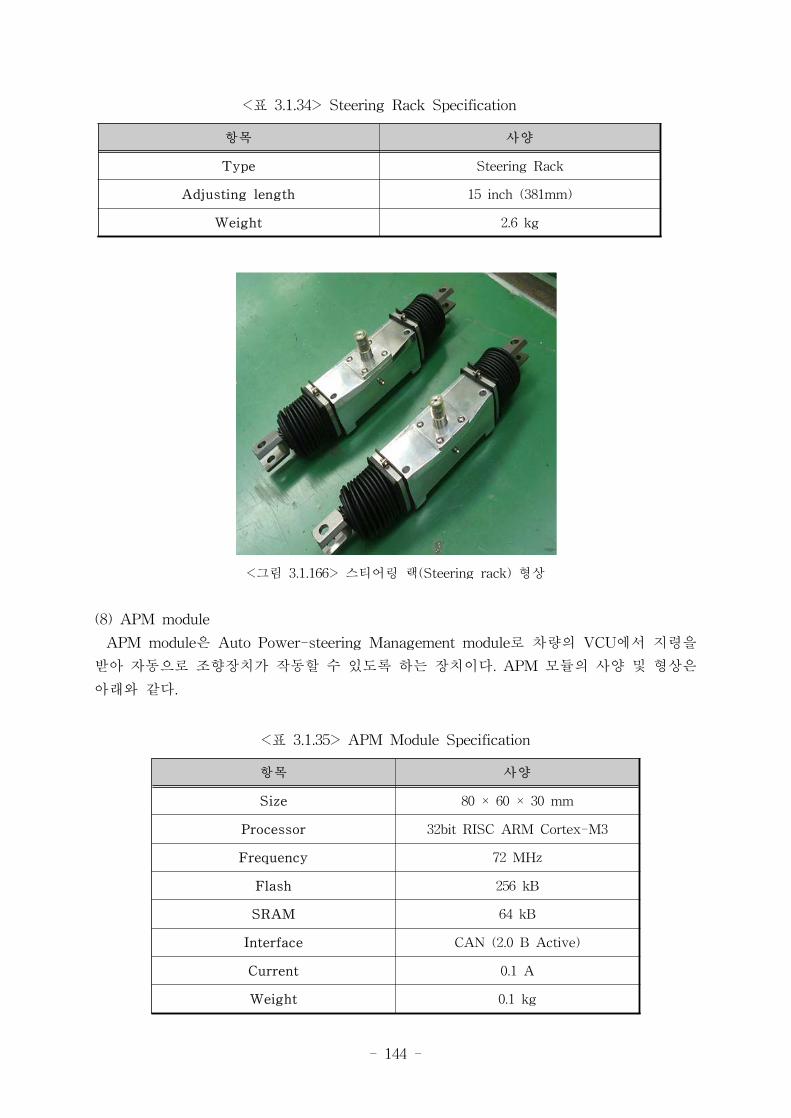
- 144 -
항목 사양
Type Steering Rack
Adjusting length 15 inch (381mm)
Weight 2.6 kg
<표 3.1.34> Steering Rack Specification
<그림 3.1.166> 스티어링 랙(Steering rack) 형상
(8) APM module
APM module은 Auto Power-steering Management module로 차량의 VCU에서 지령을
받아 자동으로 조향장치가 작동할 수 있도록 하는 장치이다. APM 모듈의 사양 및 형상은
아래와 같다.
항목 사양
Size 80 × 60 × 30 mm
Processor 32bit RISC ARM Cortex-M3
Frequency 72 MHz
Flash 256 kB
SRAM 64 kB
Interface CAN (2.0 B Active)
Current 0.1 A
Weight 0.1 kg
<표 3.1.35> APM Module Specification

- 145 -
EPS
APM VCU
<그림 3.1.167> EPS와 APM, VCU 인터페이스
(9) 서스펜션 (Strut ass’y)
미니트램 시제차량의 현가장치는 간단한 구조로 경량화에 유리한 맥퍼슨(Macpherson
type) 형식의 서스펜션을 적용하였다. 시작차량에 보완 사항으로 차량의 좌우 중량차이에
의한 높이차를 줄이고 차량의 전체적인 안전성을 향상시키기 위하여 높이 조절이 가능한
서스펜션을 적용하였으며, 기존 차량과의 호환이 가능하다. 서스펜션 조립품의 형상은 아래
사진과 같다.
<그림 3.1.168> 스트럿(Strut ass’y) 형상

- 146 -
라. 제작 및 조립
(1). 조향/현가 장치 조립
(가) 모터&감속기 조립
∙ 모터-감속기 조립체를 차체의 감속기 브라켓에 조립한다.
∙ 모터와 감속기 단품을 서로 Sub-조립한 상태에서, 감속기 고정 브라켓을 감속기 몸체와
조립한다.
∙ 감속기와 모터는 무게가 무거운 중량물이므로 반드시 Lifting 장치를 사용하고, 감속 기어의
오일(Lubricant)은 차량 조립 완료 후 주입한다.
감속기모터
차체 마운트 브라켓
<그림 3.1.169> 모터 및 감속기 조립 형상

- 147 -
(나) EPS 조립
∙ EPS sub-조립
EPS와 조향각 센서(추가품), EPS 브라켓을 조립한다. 미니트램은 무인 자동으로 주행하기
때문에 EPS 본체의 조향각 센서(Steering Angle Sensor)가 고장 났을 경우, 차량의 회전 각을
측정하지 못하여 제어가 불가능 한 상황을 대비하고자 EPS 본체에 추가로 조향각 센서를
설치하였다.
조향각 센서
커버 브라켓
ECU
EPS 몸체
ECU Sub-조립체
고정 조인트
EPS 브라켓
<그림 3.1.170> EPS 조립 형상
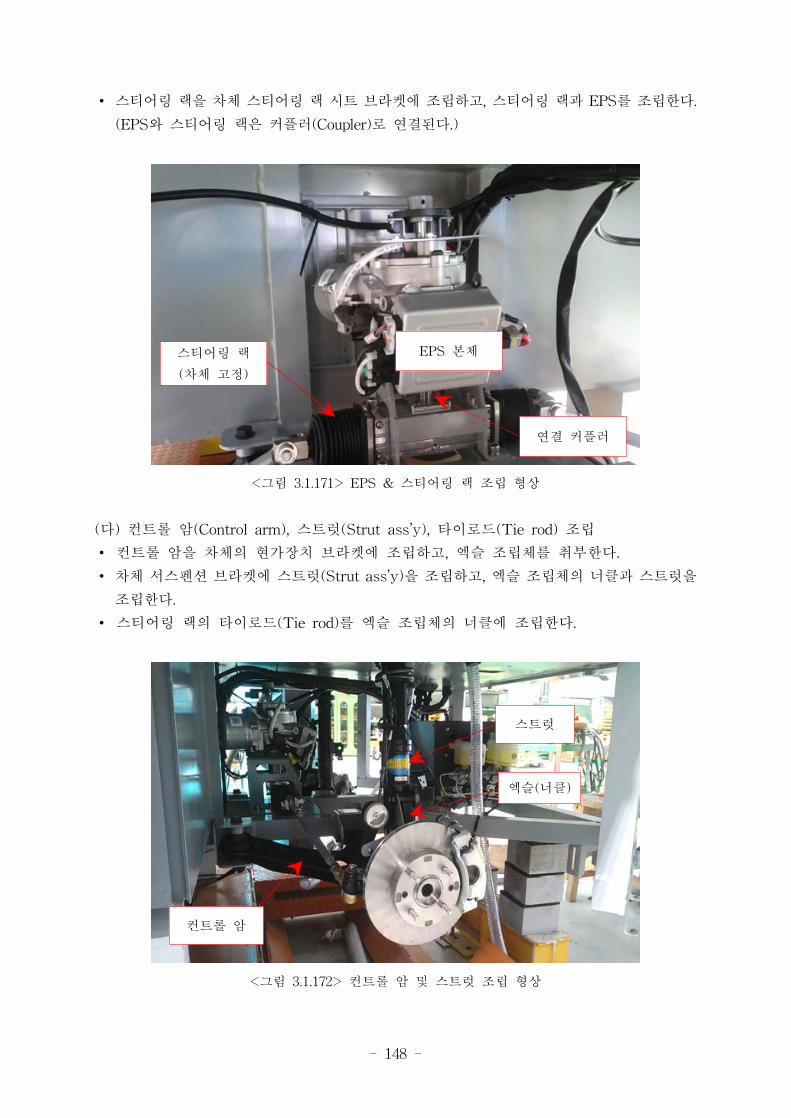
- 148 -
∙ 스티어링 랙을 차체 스티어링 랙 시트 브라켓에 조립하고, 스티어링 랙과 EPS를 조립한다.
(EPS와 스티어링 랙은 커플러(Coupler)로 연결된다.)
스티어링 랙
(차체 고정)
EPS 본체
연결 커플러
<그림 3.1.171> EPS & 스티어링 랙 조립 형상
(다) 컨트롤 암(Control arm), 스트럿(Strut ass’y), 타이로드(Tie rod) 조립
∙ 컨트롤 암을 차체의 현가장치 브라켓에 조립하고, 엑슬 조립체를 취부한다.
∙ 차체 서스펜션 브라켓에 스트럿(Strut ass’y)을 조립하고, 엑슬 조립체의 너클과 스트럿을
조립한다.
∙ 스티어링 랙의 타이로드(Tie rod)를 엑슬 조립체의 너클에 조립한다.
컨트롤 암
스트럿
엑슬(너클)
<그림 3.1.172> 컨트롤 암 및 스트럿 조립 형상
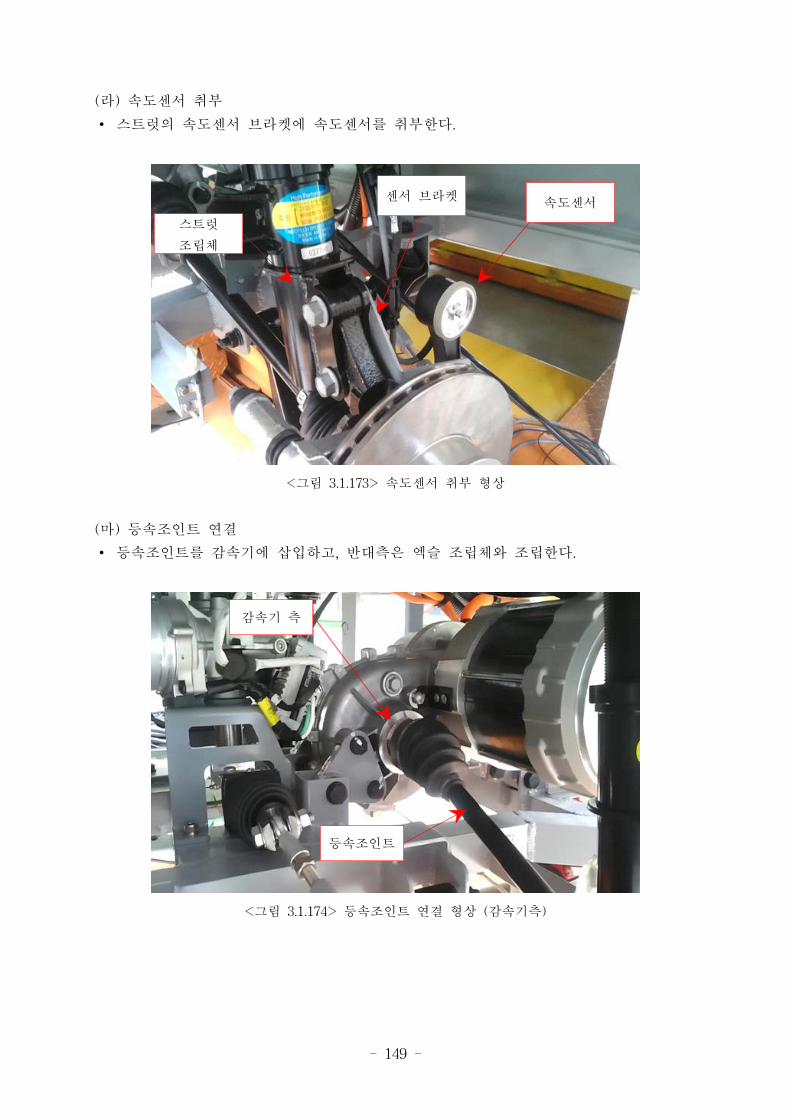
- 149 -
(라) 속도센서 취부
∙ 스트럿의 속도센서 브라켓에 속도센서를 취부한다.
속도센서센서 브라켓
스트럿
조립체
<그림 3.1.173> 속도센서 취부 형상
(마) 등속조인트 연결
∙ 등속조인트를 감속기에 삽입하고, 반대측은 엑슬 조립체와 조립한다.
감속기 측
등속조인트
<그림 3.1.174> 등속조인트 연결 형상 (감속기측)

- 150 -
(바) 휠&타이어 조립
∙ 속도센서가 휠 내측면에 밀착 될 수 있도록 주의하여 휠을 엑슬에 조립한다.
∙ 휠의 허브너트를 채결하고 등속조인트 채결용 너트를 채운다.
휠&타이어
허브너트
(4개소)
등속조인트
채결 너트
<그림 3.1.175> 휠&타이어 조립 형상
8. 자동조향제어 시스템 보완 및 개발
가. 자동 주행 소프트웨어 개발
(1) 시스템 구성 및 H/W 인터페이스 설계
USB로 연결된 조이스틱을 제외한 외부 장치와의 모든 통신은 Ethernet을 이용한다.
관제와의 통신 프로토콜은 TCP/IP이며, 그외 장치는 UDP프로토콜이다.
<그림 3.1.176> NCU 시스템 구성도
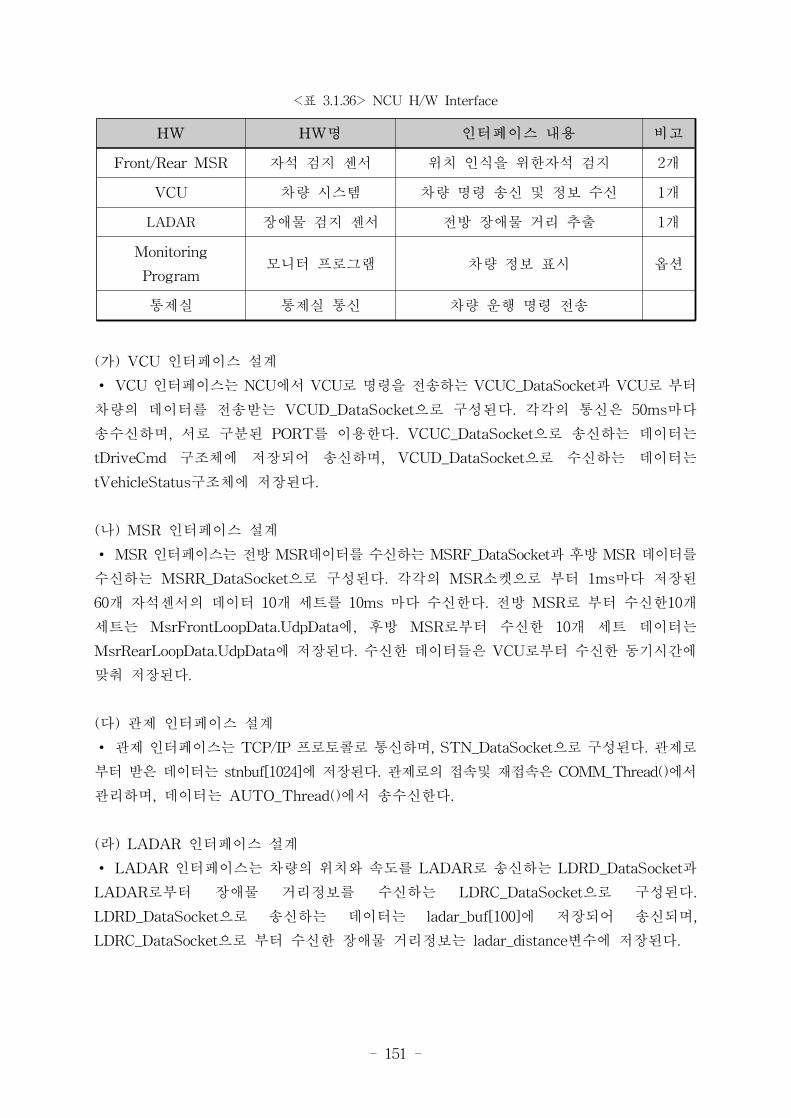
- 151 -
HW HW명 인터페이스 내용 비고
Front/Rear MSR 자석 검지 센서 위치 인식을 위한자석 검지 2개
VCU 차량 시스템 차량 명령 송신 및 정보 수신 1개
LADAR 장애물 검지 센서 전방 장애물 거리 추출 1개
Monitoring
Program모니터 프로그램 차량 정보 표시 옵션
통제실 통제실 통신 차량 운행 명령 전송
<표 3.1.36> NCU H/W Interface
(가) VCU 인터페이스 설계
∙ VCU 인터페이스는 NCU에서 VCU로 명령을 전송하는 VCUC_DataSocket과 VCU로 부터
차량의 데이터를 전송받는 VCUD_DataSocket으로 구성된다. 각각의 통신은 50ms마다
송수신하며, 서로 구분된 PORT를 이용한다. VCUC_DataSocket으로 송신하는 데이터는
tDriveCmd 구조체에 저장되어 송신하며, VCUD_DataSocket으로 수신하는 데이터는
tVehicleStatus구조체에 저장된다.
(나) MSR 인터페이스 설계
∙ MSR 인터페이스는 전방 MSR데이터를 수신하는 MSRF_DataSocket과 후방 MSR 데이터를
수신하는 MSRR_DataSocket으로 구성된다. 각각의 MSR소켓으로 부터 1ms마다 저장된
60개 자석센서의 데이터 10개 세트를 10ms 마다 수신한다. 전방 MSR로 부터 수신한10개
세트는 MsrFrontLoopData.UdpData에, 후방 MSR로부터 수신한 10개 세트 데이터는
MsrRearLoopData.UdpData에 저장된다. 수신한 데이터들은 VCU로부터 수신한 동기시간에
맞춰 저장된다.
(다) 관제 인터페이스 설계
∙ 관제 인터페이스는 TCP/IP 프로토콜로 통신하며, STN_DataSocket으로 구성된다. 관제로
부터 받은 데이터는 stnbuf[1024]에 저장된다. 관제로의 접속및 재접속은 COMM_Thread()에서
관리하며, 데이터는 AUTO_Thread()에서 송수신한다.
(라) LADAR 인터페이스 설계
∙ LADAR 인터페이스는 차량의 위치와 속도를 LADAR로 송신하는 LDRD_DataSocket과
LADAR로부터 장애물 거리정보를 수신하는 LDRC_DataSocket으로 구성된다.
LDRD_DataSocket으로 송신하는 데이터는 ladar_buf[100]에 저장되어 송신되며,
LDRC_DataSocket으로 부터 수신한 장애물 거리정보는 ladar_distance변수에 저장된다.
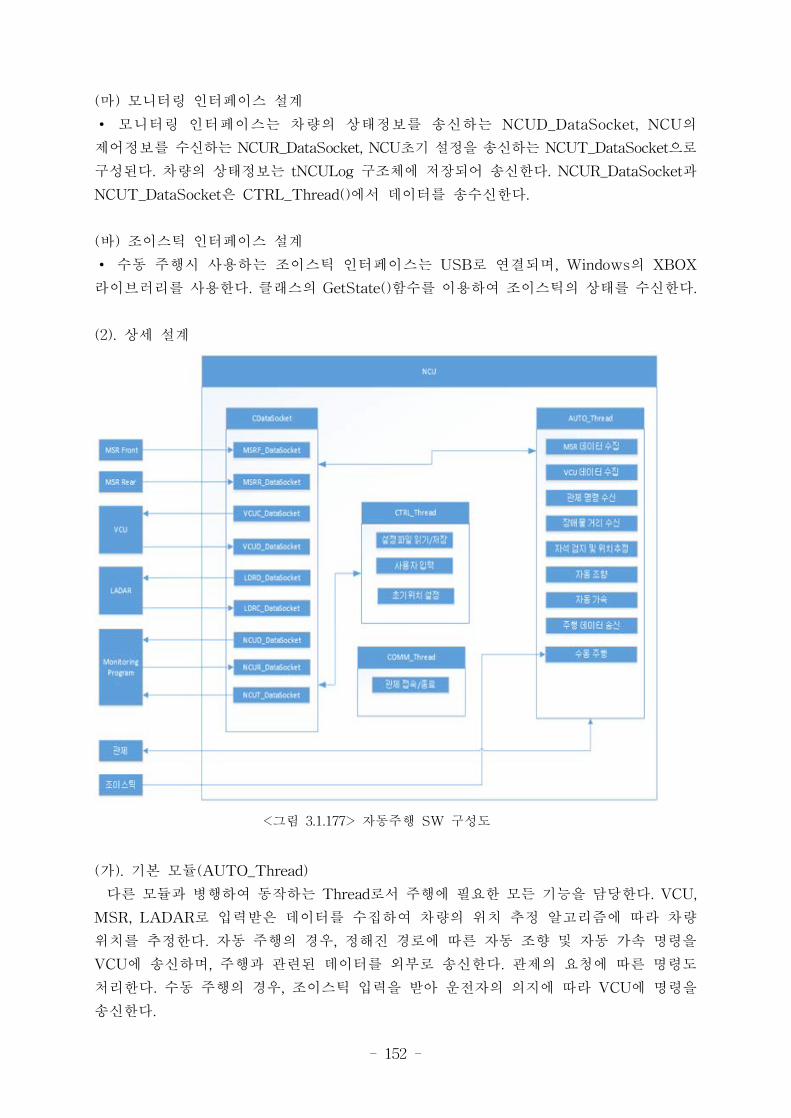
- 152 -
(마) 모니터링 인터페이스 설계
∙ 모니터링 인터페이스는 차량의 상태정보를 송신하는 NCUD_DataSocket, NCU의
제어정보를 수신하는 NCUR_DataSocket, NCU초기 설정을 송신하는 NCUT_DataSocket으로
구성된다. 차량의 상태정보는 tNCULog 구조체에 저장되어 송신한다. NCUR_DataSocket과
NCUT_DataSocket은 CTRL_Thread()에서 데이터를 송수신한다.
(바) 조이스틱 인터페이스 설계
∙ 수동 주행시 사용하는 조이스틱 인터페이스는 USB로 연결되며, Windows의 XBOX
라이브러리를 사용한다. 클래스의 GetState()함수를 이용하여 조이스틱의 상태를 수신한다.
(2). 상세 설계
<그림 3.1.177> 자동주행 SW 구성도
(가). 기본 모듈(AUTO_Thread)
다른 모듈과 병행하여 동작하는 Thread로서 주행에 필요한 모든 기능을 담당한다. VCU,
MSR, LADAR로 입력받은 데이터를 수집하여 차량의 위치 추정 알고리즘에 따라 차량
위치를 추정한다. 자동 주행의 경우, 정해진 경로에 따른 자동 조향 및 자동 가속 명령을
VCU에 송신하며, 주행과 관련된 데이터를 외부로 송신한다. 관제의 요청에 따른 명령도
처리한다. 수동 주행의 경우, 조이스틱 입력을 받아 운전자의 의지에 따라 VCU에 명령을
송신한다.
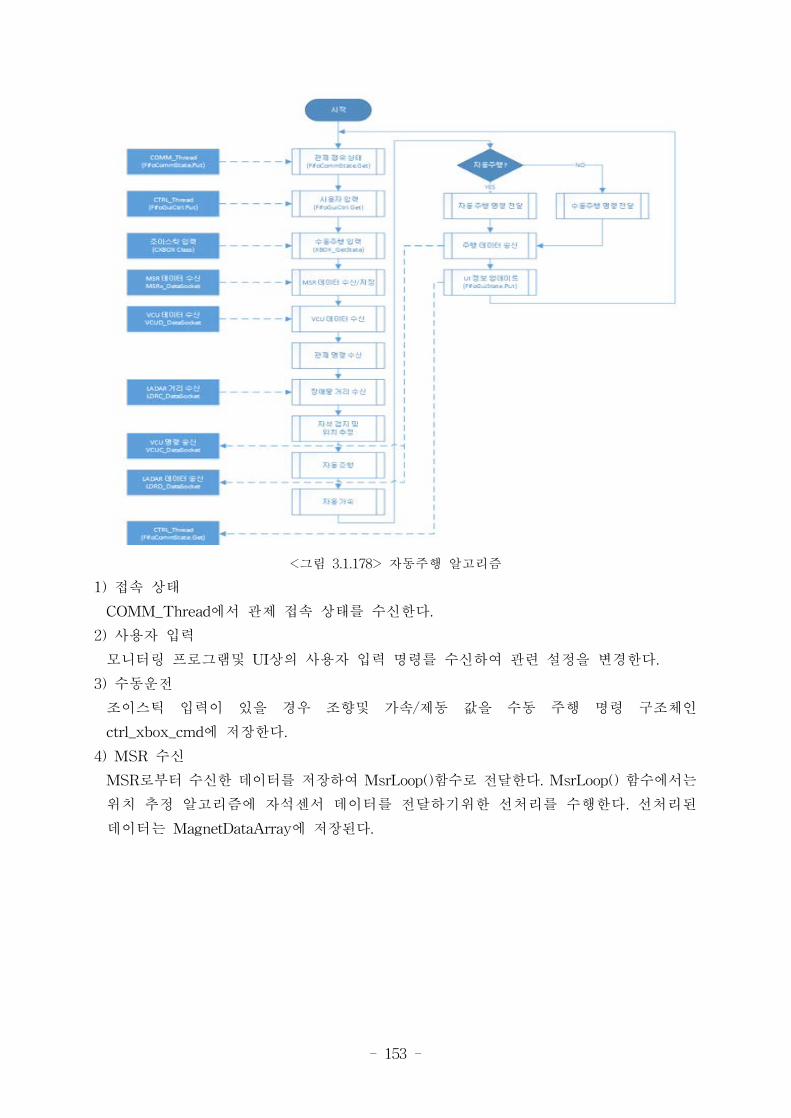
- 153 -
<그림 3.1.178> 자동주행 알고리즘
1) 접속 상태
COMM_Thread에서 관제 접속 상태를 수신한다.
2) 사용자 입력
모니터링 프로그램및 UI상의 사용자 입력 명령를 수신하여 관련 설정을 변경한다.
3) 수동운전
조이스틱 입력이 있을 경우 조향및 가속/제동 값을 수동 주행 명령 구조체인
ctrl_xbox_cmd에 저장한다.
4) MSR 수신
MSR로부터 수신한 데이터를 저장하여 MsrLoop()함수로 전달한다. MsrLoop() 함수에서는
위치 추정 알고리즘에 자석센서 데이터를 전달하기위한 선처리를 수행한다. 선처리된
데이터는 MagnetDataArray에 저장된다.
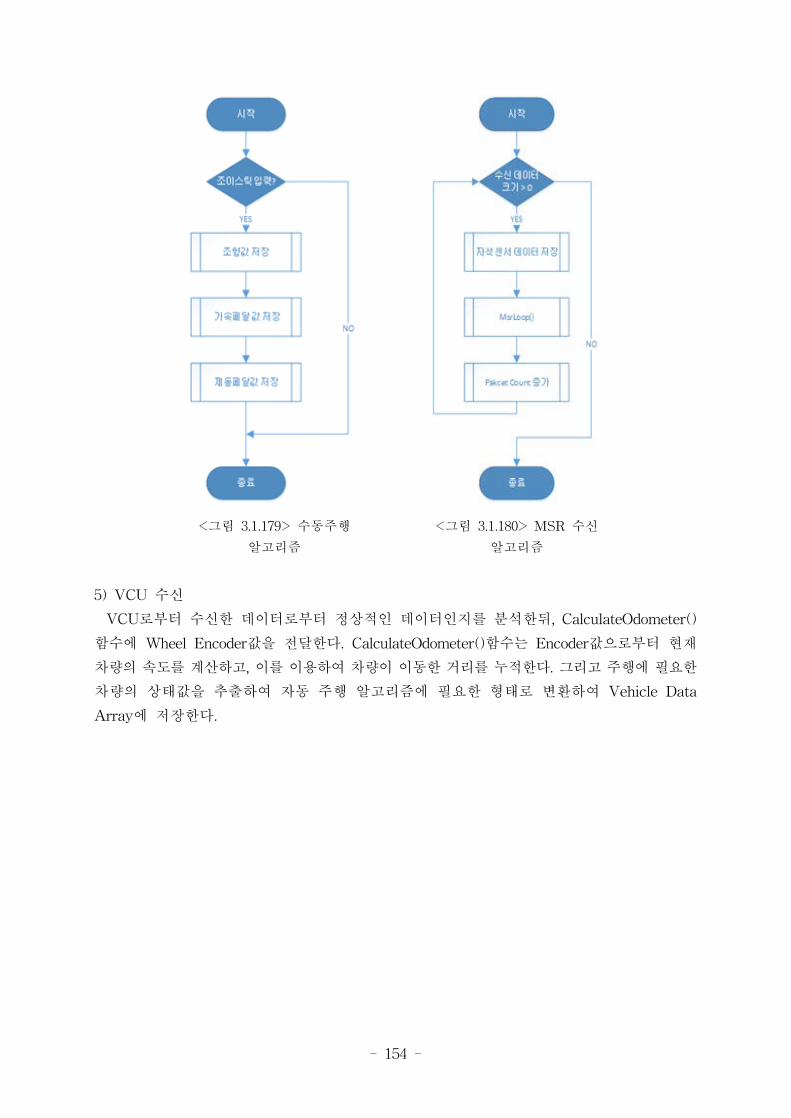
- 154 -
<그림 3.1.179> 수동주행
알고리즘
<그림 3.1.180> MSR 수신
알고리즘
5) VCU 수신
VCU로부터 수신한 데이터로부터 정상적인 데이터인지를 분석한뒤, CalculateOdometer()
함수에 Wheel Encoder값을 전달한다. CalculateOdometer()함수는 Encoder값으로부터 현재
차량의 속도를 계산하고, 이를 이용하여 차량이 이동한 거리를 누적한다. 그리고 주행에 필요한
차량의 상태값을 추출하여 자동 주행 알고리즘에 필요한 형태로 변환하여 Vehicle Data
Array에 저장한다.
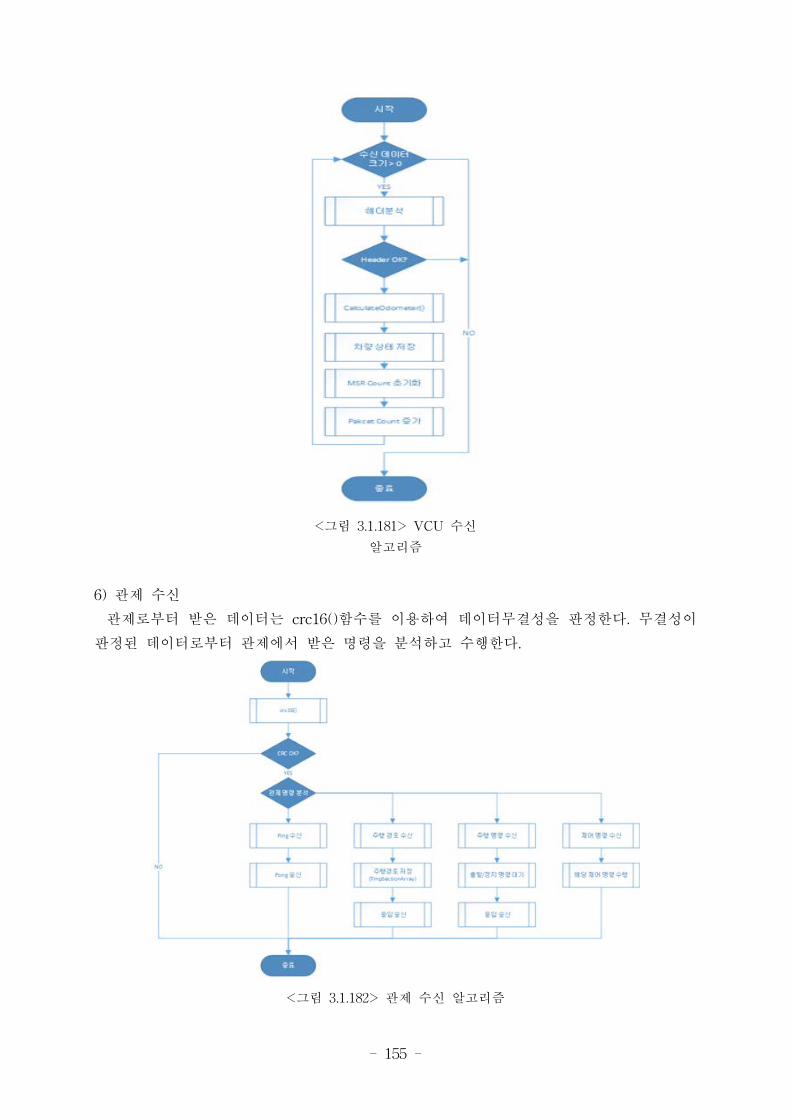
- 155 -
<그림 3.1.181> VCU 수신
알고리즘
6) 관제 수신
관제로부터 받은 데이터는 crc16()함수를 이용하여 데이터무결성을 판정한다. 무결성이
판정된 데이터로부터 관제에서 받은 명령을 분석하고 수행한다.
<그림 3.1.182> 관제 수신 알고리즘
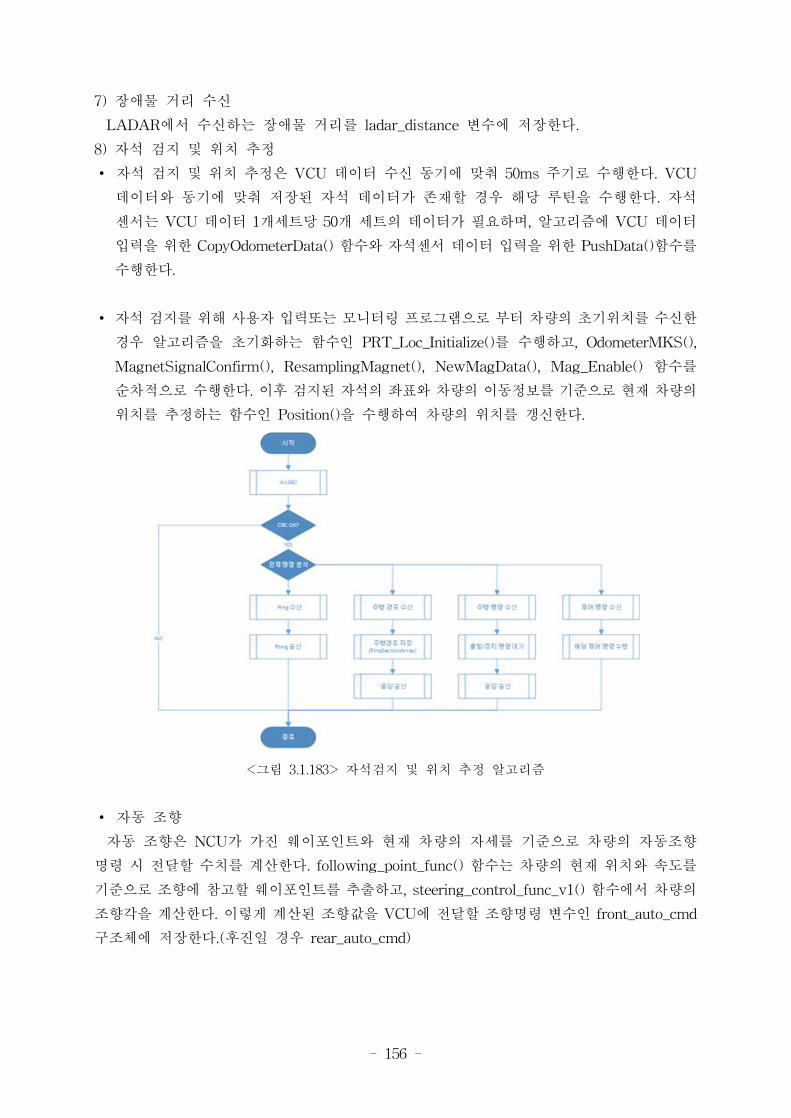
- 156 -
7) 장애물 거리 수신
LADAR에서 수신하는 장애물 거리를 ladar_distance 변수에 저장한다.
8) 자석 검지 및 위치 추정
∙ 자석 검지 및 위치 추정은 VCU 데이터 수신 동기에 맞춰 50ms 주기로 수행한다. VCU
데이터와 동기에 맞춰 저장된 자석 데이터가 존재할 경우 해당 루틴을 수행한다. 자석
센서는 VCU 데이터 1개세트당 50개 세트의 데이터가 필요하며, 알고리즘에 VCU 데이터
입력을 위한 CopyOdometerData() 함수와 자석센서 데이터 입력을 위한 PushData()함수를
수행한다.
∙ 자석 검지를 위해 사용자 입력또는 모니터링 프로그램으로 부터 차량의 초기위치를 수신한
경우 알고리즘을 초기화하는 함수인 PRT_Loc_Initialize()를 수행하고, OdometerMKS(),
MagnetSignalConfirm(), ResamplingMagnet(), NewMagData(), Mag_Enable() 함수를
순차적으로 수행한다. 이후 검지된 자석의 좌표와 차량의 이동정보를 기준으로 현재 차량의
위치를 추정하는 함수인 Position()을 수행하여 차량의 위치를 갱신한다.
<그림 3.1.183> 자석검지 및 위치 추정 알고리즘
∙ 자동 조향
자동 조향은 NCU가 가진 웨이포인트와 현재 차량의 자세를 기준으로 차량의 자동조향
명령 시 전달할 수치를 계산한다. following_point_func() 함수는 차량의 현재 위치와 속도를
기준으로 조향에 참고할 웨이포인트를 추출하고, steering_control_func_v1() 함수에서 차량의
조향각을 계산한다. 이렇게 계산된 조향값을 VCU에 전달할 조향명령 변수인 front_auto_cmd
구조체에 저장한다.(후진일 경우 rear_auto_cmd)
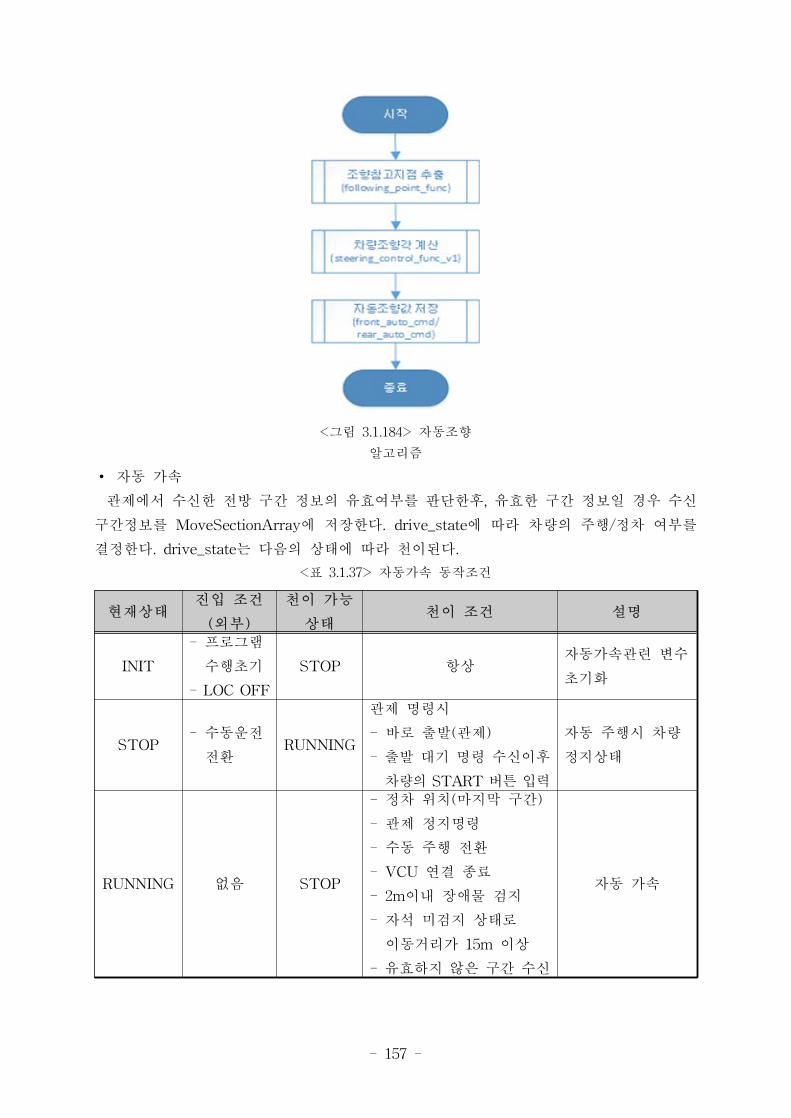
- 157 -
<그림 3.1.184> 자동조향
알고리즘
∙ 자동 가속
관제에서 수신한 전방 구간 정보의 유효여부를 판단한후, 유효한 구간 정보일 경우 수신
구간정보를 MoveSectionArray에 저장한다. drive_state에 따라 차량의 주행/정차 여부를
결정한다. drive_state는 다음의 상태에 따라 천이된다.
현재상태진입 조건
(외부)
천이 가능
상태천이 조건 설명
INIT
- 프로그램
수행초기
- LOC OFF
STOP 항상자동가속관련 변수
초기화
STOP- 수동운전
전환RUNNING
관제 명령시
- 바로 출발(관제)
- 출발 대기 명령 수신이후
차량의 START 버튼 입력
자동 주행시 차량
정지상태
RUNNING 없음 STOP
- 정차 위치(마지막 구간)
- 관제 정지명령
- 수동 주행 전환
- VCU 연결 종료
- 2m이내 장애물 검지
- 자석 미검지 상태로
이동거리가 15m 이상
- 유효하지 않은 구간 수신
자동 가속
<표 3.1.37> 자동가속 동작조건
- 158 -
∙ DRIVE_STATE_INIT
자동 가속과 관련된 변수들을 초기화 한다. 이상태는 프로그램 초기 수행시 항상 이 상태로
진입하며, 이후 사용자 입력(또는 모니터링 프로그램 통신)에 의해 LOC OFF설정으로 변경될
경우 해당 상태로 천이된다.
∙ DRIVE_STATE_STOP
차량이 완전 정지한 상태로 VCU에 제동 명령을 전달한다. 관제로부터 출발 명령을 받을
경우 DRIVE_STATE_RUNNING으로 상태가 천이된다. 이때 다음의 조건을 만족해야 상태
천이가 발생한다.
가) 관제에서 수신받은 구간정보가 유효한 경우(MoveSectionArray)
나) 관제에서 출발 대기 명령을 받은 경우
나-1) 차량의 START 버튼 입력을 받은 경우
나-2) 차량의 도어가 완전 닫힌 경우
자동 가속 설정에서 수동가속 설정으로 변경될 경우 해당 상태로 항상 천이된다.
∙ DRIVE_STATE_RUNNING
자동 주행시 차량의 속도를 가감속을 담당하는 상태이다. 차량의 속도를 결정하는 방법은
다음의 2가지 경우로 분류된다.
가) 일반 가감속
MoveSectionArray에서 차량이 존재하는 구간을 탐색하고, 이로부터 차량의 목표속도
(target_vel)를 설정한다. 차량의 현재 속도에 따라 차량의 다음 목표 속도(next_target_vel)를
설정하고, target_vel과 next_target_vel을 참고하여 velocity_control_func() 함수에서 차량의
속도 명령을 계산한다.
나) 정차 감속
관제에서 수신한 구간 종료까지 남은 거리와 LADAR에서 수신한 장애물거리중 최소값을
remain_dist에 저장하고 remain_dist와 현재 차량의 속도에 비례하여 차량의 제동 시점을
결정한다. 정차지점부터 제동시작 구간까지의 거리는 차량 속도에 비례해서 증가한다. 차량이
제동구간에 진입하게 되면 정차지점부터 2m 전방까지 차량의 속도를 2km/h까지 남은 거리에
비례하여 선형적으로 감소시키고, 정차지점부터 2m 구간은 2km/h~0km/h까지 선형적으로
감소시킨다.
∙ 차량의 제동은 다음의 조건에서 발생한다.
가) 자석을 마지막으로 검지한 이후 15m이상 차량이 이동한경우(자석 검지 불능)
나) LADAR에서 수신한 장애물 거리가 2m이내인 경우
다) 정차 위치인 경우
다-1) 관제에서 받은 구간의 마지막 위치
다-2) 관제와의 연결이 종료되어 더이상 구간정보를 받지 못한경우, 마지막으로 수신한 구간의
마지막 위치
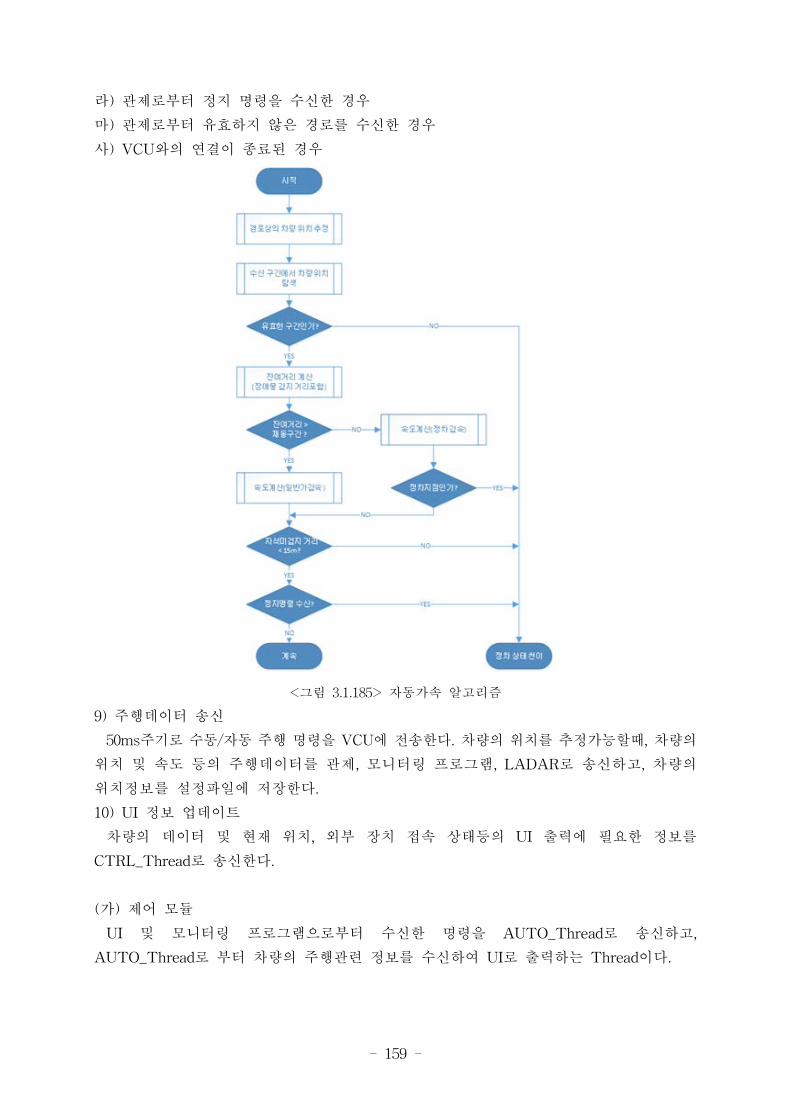
- 159 -
라) 관제로부터 정지 명령을 수신한 경우
마) 관제로부터 유효하지 않은 경로를 수신한 경우
사) VCU와의 연결이 종료된 경우
<그림 3.1.185> 자동가속 알고리즘
9) 주행데이터 송신
50ms주기로 수동/자동 주행 명령을 VCU에 전송한다. 차량의 위치를 추정가능할때, 차량의
위치 및 속도 등의 주행데이터를 관제, 모니터링 프로그램, LADAR로 송신하고, 차량의
위치정보를 설정파일에 저장한다.
10) UI 정보 업데이트
차량의 데이터 및 현재 위치, 외부 장치 접속 상태등의 UI 출력에 필요한 정보를
CTRL_Thread로 송신한다.
(가) 제어 모듈
UI 및 모니터링 프로그램으로부터 수신한 명령을 AUTO_Thread로 송신하고,
AUTO_Thread로 부터 차량의 주행관련 정보를 수신하여 UI로 출력하는 Thread이다.
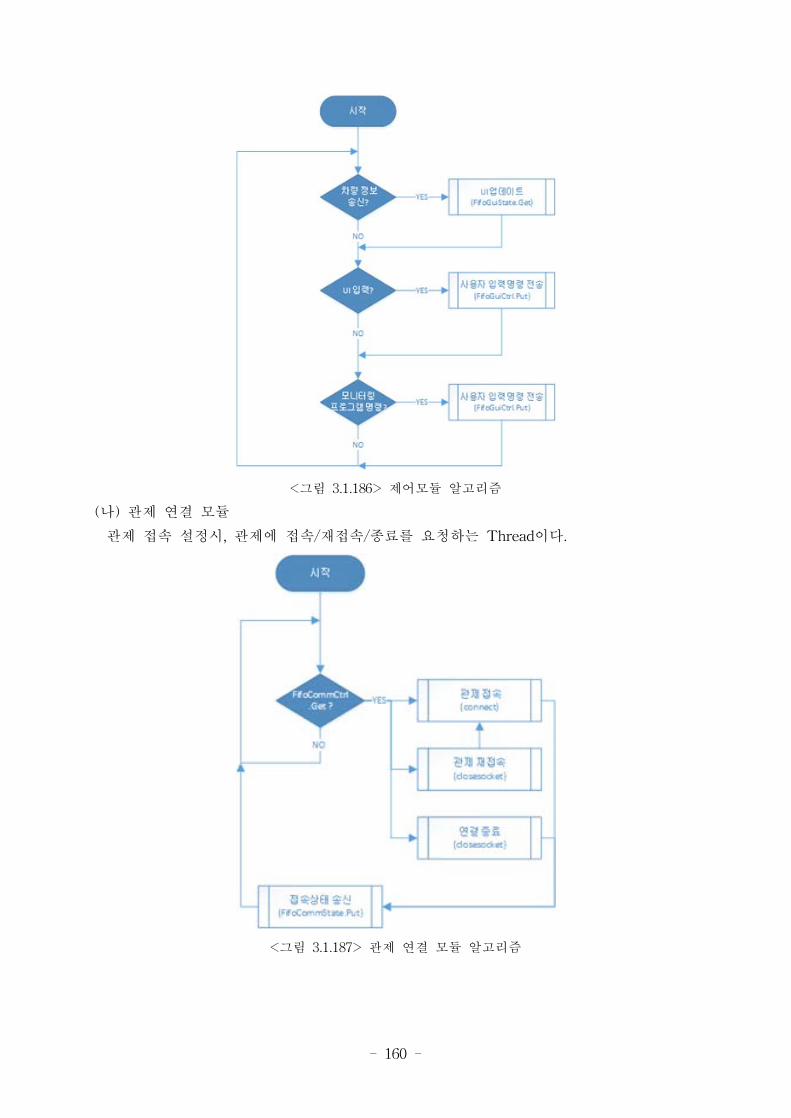
- 160 -
<그림 3.1.186> 제어모듈 알고리즘
(나) 관제 연결 모듈
관제 접속 설정시, 관제에 접속/재접속/종료를 요청하는 Thread이다.
<그림 3.1.187> 관제 연결 모듈 알고리즘
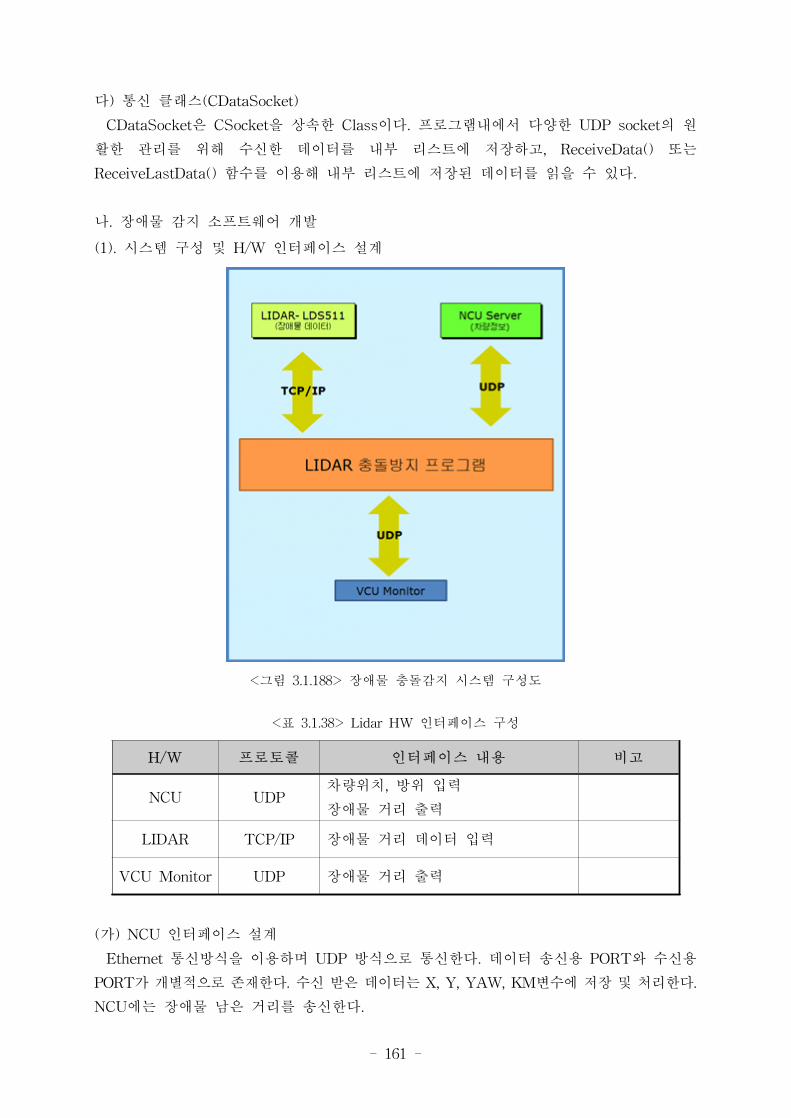
- 161 -
다) 통신 클래스(CDataSocket)
CDataSocket은 CSocket을 상속한 Class이다. 프로그램내에서 다양한 UDP socket의 원
활한 관리를 위해 수신한 데이터를 내부 리스트에 저장하고, ReceiveData() 또는
ReceiveLastData() 함수를 이용해 내부 리스트에 저장된 데이터를 읽을 수 있다.
나. 장애물 감지 소프트웨어 개발
(1). 시스템 구성 및 H/W 인터페이스 설계
<그림 3.1.188> 장애물 충돌감지 시스템 구성도
H/W 프로토콜 인터페이스 내용 비고
NCU UDP차량위치, 방위 입력
장애물 거리 출력
LIDAR TCP/IP 장애물 거리 데이터 입력
VCU Monitor UDP 장애물 거리 출력
<표 3.1.38> Lidar HW 인터페이스 구성
(가) NCU 인터페이스 설계
Ethernet 통신방식을 이용하며 UDP 방식으로 통신한다. 데이터 송신용 PORT와 수신용
PORT가 개별적으로 존재한다. 수신 받은 데이터는 X, Y, YAW, KM변수에 저장 및 처리한다.
NCU에는 장애물 남은 거리를 송신한다.
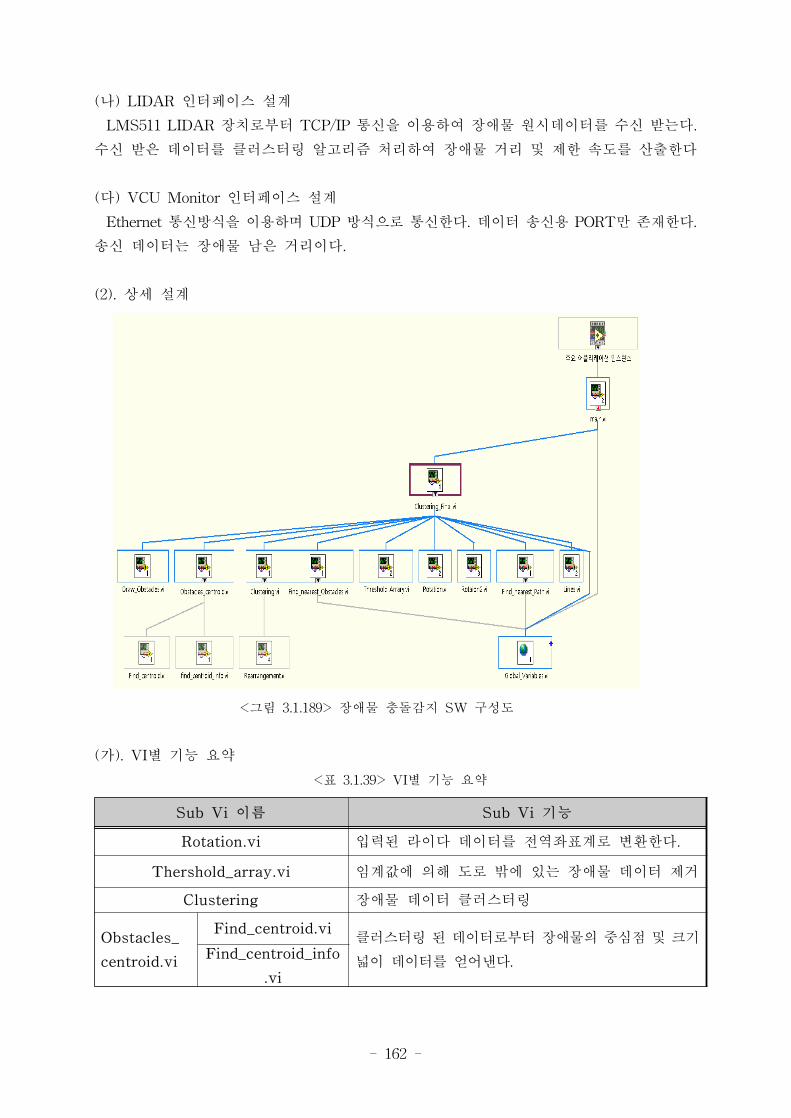
- 162 -
Sub Vi 이름 Sub Vi 기능
Rotation.vi 입력된 라이다 데이터를 전역좌표계로 변환한다.
Thershold_array.vi 임계값에 의해 도로 밖에 있는 장애물 데이터 제거
Clustering 장애물 데이터 클러스터링
Obstacles_
centroid.vi
Find_centroid.vi클러스터링 된 데이터로부터 장애물의 중심점 및 크기
넓이 데이터를 얻어낸다.Find_centroid_info
.vi
<표 3.1.39> VI별 기능 요약
(나) LIDAR 인터페이스 설계
LMS511 LIDAR 장치로부터 TCP/IP 통신을 이용하여 장애물 원시데이터를 수신 받는다.
수신 받은 데이터를 클러스터링 알고리즘 처리하여 장애물 거리 및 제한 속도를 산출한다
(다) VCU Monitor 인터페이스 설계
Ethernet 통신방식을 이용하며 UDP 방식으로 통신한다. 데이터 송신용 PORT만 존재한다.
송신 데이터는 장애물 남은 거리이다.
(2). 상세 설계
<그림 3.1.189> 장애물 충돌감지 SW 구성도
(가). VI별 기능 요약
- 163 -
Find_nearest_path.vi자동차에서 가장 가까이 있는 기준경로를 찾고, 전방
50m에 해당되는 기준경로를 분리한다.
Find_nearest_obstacles.vi현재 진행경로상에 있는 장애물 중 가장 가까이 있는
장애물에 대한 정보를 찾는다.
Rotation.vi & Rotation2.vi절대좌표계상에서 데이터를 원하는 각도만큼 회전
시킨다.
(나). Rotation.vi
라이다 데이터를 차량 중심좌표계로부터 전역 좌표계로 변환 시키기 위해 데이터를
회전시키는 역할을 수행한다. 그래서 Rotation Matrix를 Sub vi 형태로 구현하였다.
(다). Thershold_array.vi
전역 좌표계에서 얻어진 라이다 데이터에서 1차적으로 도로 밖에 있는 데이터를 제거하는
역할을 수행한다. 입력으로는 회전 변환된 라이다 데이터와 현재 차량의 위치 그리고
기준경로 등의 정보이고 출력으로는 필터링 된 라이다 데이터 이다. 차폭을 기준으로 하여
데이터를 필터링 하였으며 이 한계값(threhold)는 조정이 가능하도록 하였다.
(라). Clustering.vi
장애물 인지 알고리즘의 핵심이다. 이 vi는 도로 밖의 장애물이 제거된 데이터를 입력으로
하며 일정한 한계값(threhold)에 의해 데이터를 군집화 하는 역할을 한다. 데이터 군집화는
유클리디안 거리를 기반으로 하며 군집화 된 데이터들에 대해서 일정한 라벨을 부여하는
기능을 수행한다.
(마). Obstacles_centroid.vi
Labeling된 라이다 데이터로부터 장애물의 크기와 위치 그리고 자동차로부터 상대적으로
떨어진 거리 정보를 계산한다.
(바).Find_nearest_path.vi
검출된 장애물의 위치를 모든 기준경로와 비교한다면 그 계산시간이 상당히 오래 걸리게
된다. 따라서 현재 자동차 위치로부터 전방 50m의 경로를 분리해낸다.
(사). Find_nearest_obstacles.vi
최종 검출된 장애물들은 1개 이상이 검출될 경우가 있다. 이러한 경우 차량의 가장 가까이
있는 장애물을 최우선적으로 고려해야 한다. 하지만 장애물과 자동차의 상대적인 거리를
단순한 유클리디안 거리에 기반 한다면 실제 S곡선 혹은 커브와 같은 복잡한 도로환경에서
가장 가까이 있는 장애물을 식별하기란 어려운 일이다. 이러한 어려움을 해결하기 위해 현재
자동차가 가고 있는 경로 정보를 활용 하였으며 앞에서 클러스터링 된 장애물 데이터들을
기준경로와 비교하여 차량에 가고 있는 경로상에 가장 가까이 있는 장애물 데이터를 식별한다.
(아). Rotation.vi & Rotation2.vi
절대좌표계상에서 차량 방위에 따른 장애물 데이터를 원하는 각도만큼 회전 시킨다.
(자). TCP/IP 통신 모듈
∙ LIDAR 장치에 스타트 메시지를 송신한다.
∙ 장애물 데이터를 수신한다.
(차). UDP 통신 모듈
NCU에서 수신 받은 데이터는 X, Y, YAW, KM 변수에 저장 및 처리한다. NCU에 장애물
남은 거리를 송신한다.
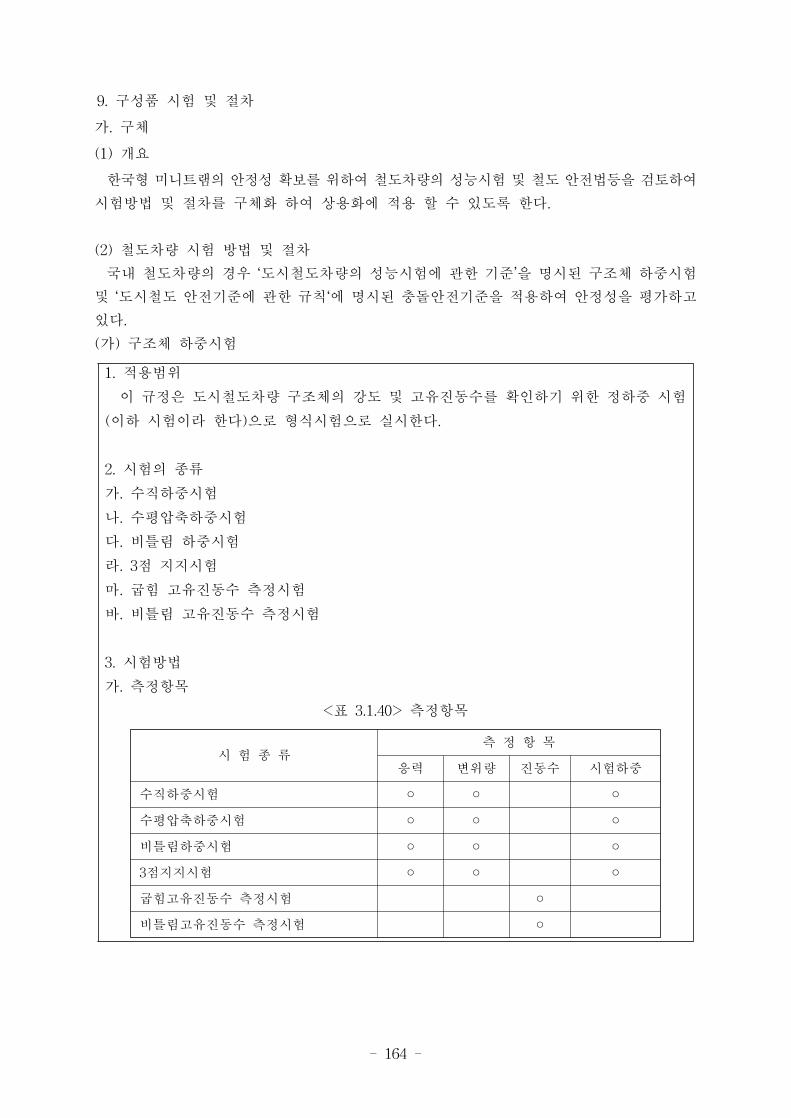
- 164 -
9. 구성품 시험 및 절차
가. 구체
(1) 개요
한국형 미니트램의 안정성 확보를 위하여 철도차량의 성능시험 및 철도 안전법등을 검토하여
시험방법 및 절차를 구체화 하여 상용화에 적용 할 수 있도록 한다.
(2) 철도차량 시험 방법 및 절차
국내 철도차량의 경우 ‘도시철도차량의 성능시험에 관한 기준’을 명시된 구조체 하중시험
및 ‘도시철도 안전기준에 관한 규칙‘에 명시된 충돌안전기준을 적용하여 안정성을 평가하고
있다.
(가) 구조체 하중시험
1. 적용범위
이 규정은 도시철도차량 구조체의 강도 및 고유진동수를 확인하기 위한 정하중 시험
(이하 시험이라 한다)으로 형식시험으로 실시한다.
2. 시험의 종류
가. 수직하중시험
나. 수평압축하중시험
다. 비틀림 하중시험
라. 3점 지지시험
마. 굽힘 고유진동수 측정시험
바. 비틀림 고유진동수 측정시험
3. 시험방법
가. 측정항목
<표 3.1.40> 측정항목
시 험 종 류측 정 항 목
응력 변위량 진동수 시험하중
수직하중시험
수평압축하중시험
비틀림하중시험
3점지지시험
굽힘고유진동수 측정시험
비틀림고유진동수 측정시험
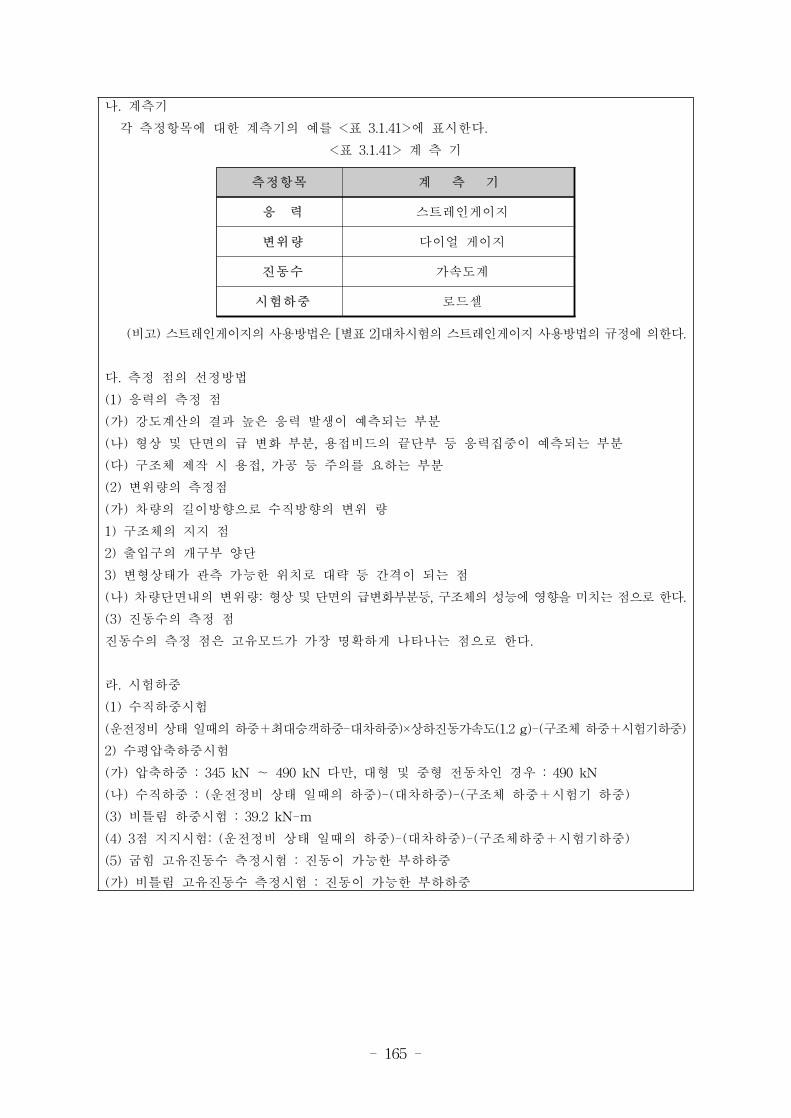
- 165 -
나. 계측기
각 측정항목에 대한 계측기의 예를 <표 3.1.41>에 표시한다.
<표 3.1.41> 계 측 기
측정항목 계 측 기
응 력 스트레인게이지
변위량 다이얼 게이지
진동수 가속도계
시험하중 로드셀
(비고) 스트레인게이지의 사용방법은 [별표 2]대차시험의 스트레인게이지 사용방법의규정에 의한다.
다. 측정 점의 선정방법
(1) 응력의 측정 점
(가) 강도계산의 결과 높은 응력 발생이 예측되는 부분
(나) 형상 및 단면의 급 변화 부분, 용접비드의 끝단부 등 응력집중이 예측되는 부분
(다) 구조체 제작 시 용접, 가공 등 주의를 요하는 부분
(2) 변위량의 측정점
(가) 차량의 길이방향으로 수직방향의 변위 량
1) 구조체의 지지 점
2) 출입구의 개구부 양단
3) 변형상태가 관측 가능한 위치로 대략 등 간격이 되는 점
(나) 차량단면내의 변위량: 형상 및 단면의 급변화부분등, 구조체의 성능에 영향을 미치는 점으로 한다.
(3) 진동수의 측정 점
진동수의 측정 점은 고유모드가 가장 명확하게 나타나는 점으로 한다.
라. 시험하중
(1) 수직하중시험
(운전정비 상태 일때의 하중+최대승객하중-대차하중)×상하진동가속도(1.2 g)-(구조체 하중+시험기하중)
2) 수평압축하중시험
(가) 압축하중 : 345 kN ~ 490 kN 다만, 대형 및 중형 전동차인 경우 : 490 kN
(나) 수직하중 : (운전정비 상태 일때의 하중)-(대차하중)-(구조체 하중+시험기 하중)
(3) 비틀림 하중시험 : 39.2 kN-m
(4) 3점 지지시험: (운전정비 상태 일때의 하중)-(대차하중)-(구조체하중+시험기하중)
(5) 굽힘 고유진동수 측정시험 : 진동이 가능한 부하하중
(가) 비틀림 고유진동수 측정시험 : 진동이 가능한 부하하중
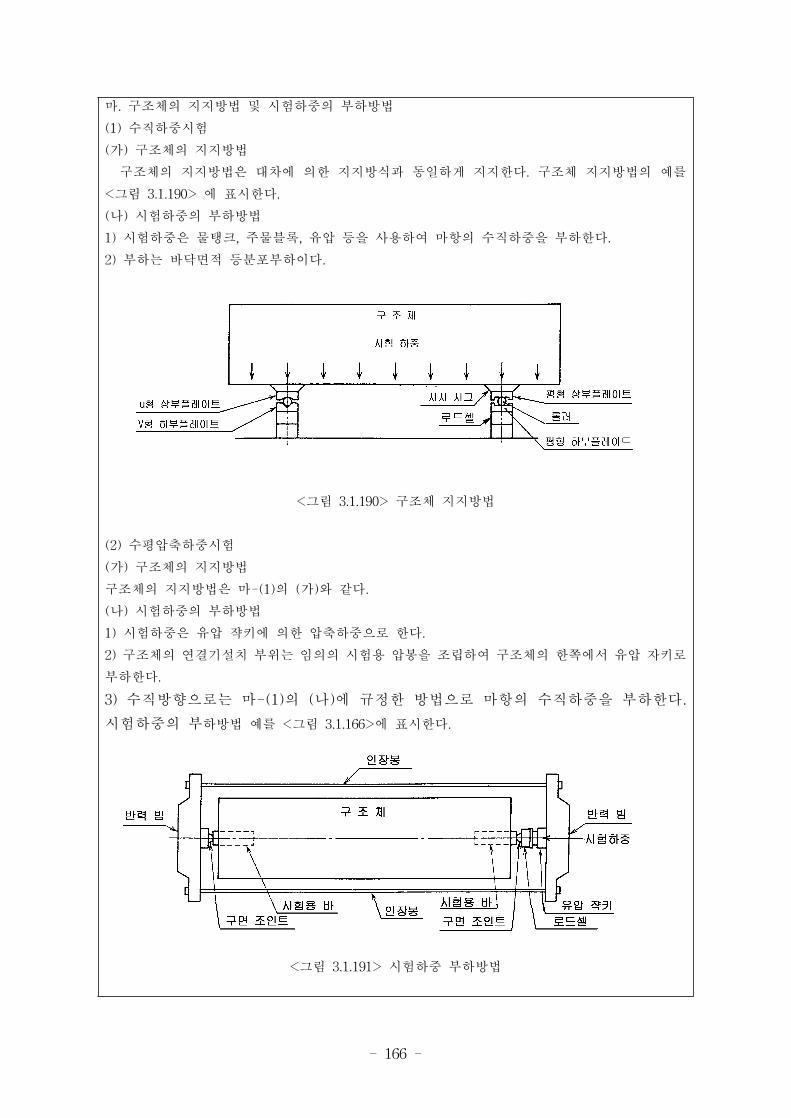
- 166 -
마. 구조체의 지지방법 및 시험하중의 부하방법
(1) 수직하중시험
(가) 구조체의 지지방법
구조체의 지지방법은 대차에 의한 지지방식과 동일하게 지지한다. 구조체 지지방법의 예를
<그림 3.1.190> 에 표시한다.
(나) 시험하중의 부하방법
1) 시험하중은 물탱크, 주물블록, 유압 등을 사용하여 마항의 수직하중을 부하한다.
2) 부하는 바닥면적 등분포부하이다.
<그림 3.1.190> 구조체 지지방법
(2) 수평압축하중시험
(가) 구조체의 지지방법
구조체의 지지방법은 마-(1)의 (가)와 같다.
(나) 시험하중의 부하방법
1) 시험하중은 유압 쟉키에 의한 압축하중으로 한다.
2) 구조체의 연결기설치 부위는 임의의 시험용 압봉을 조립하여 구조체의 한쪽에서 유압 자키로
부하한다.
3) 수직방향으로는 마-(1)의 (나)에 규정한 방법으로 마항의 수직하중을 부하한다.
시험하중의 부하방법 예를 <그림 3.1.166>에 표시한다.
<그림 3.1.191> 시험하중 부하방법
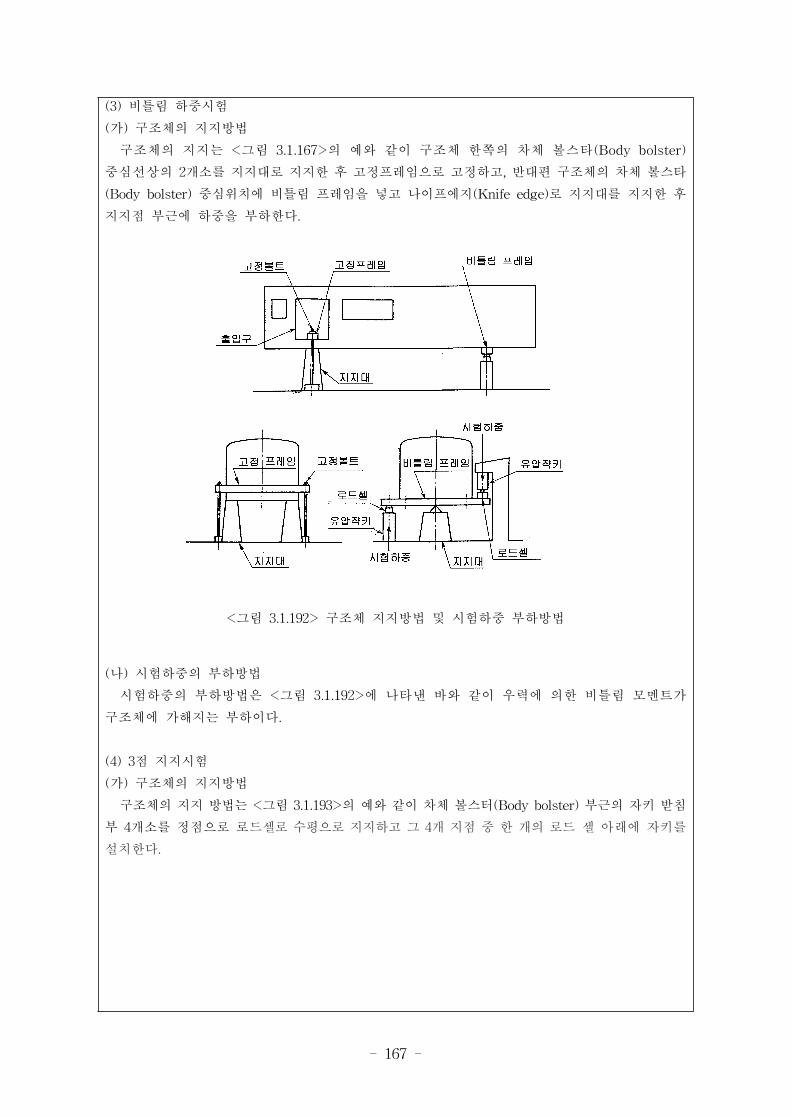
- 167 -
(3) 비틀림 하중시험
(가) 구조체의 지지방법
구조체의 지지는 <그림 3.1.167>의 예와 같이 구조체 한쪽의 차체 볼스타(Body bolster)
중심선상의 2개소를 지지대로 지지한 후 고정프레임으로 고정하고, 반대편 구조체의 차체 볼스타
(Body bolster) 중심위치에 비틀림 프레임을 넣고 나이프에지(Knife edge)로 지지대를 지지한 후
지지점 부근에 하중을 부하한다.
<그림 3.1.192> 구조체 지지방법 및 시험하중 부하방법
(나) 시험하중의 부하방법
시험하중의 부하방법은 <그림 3.1.192>에 나타낸 바와 같이 우력에 의한 비틀림 모멘트가
구조체에 가해지는 부하이다.
(4) 3점 지지시험
(가) 구조체의 지지방법
구조체의 지지 방법는 <그림 3.1.193>의 예와 같이 차체 볼스터(Body bolster) 부근의 자키 받침
부 4개소를 정점으로 로드셀로 수평으로 지지하고 그 4개 지점 중 한 개의 로드 셀 아래에 자키를
설치한다.
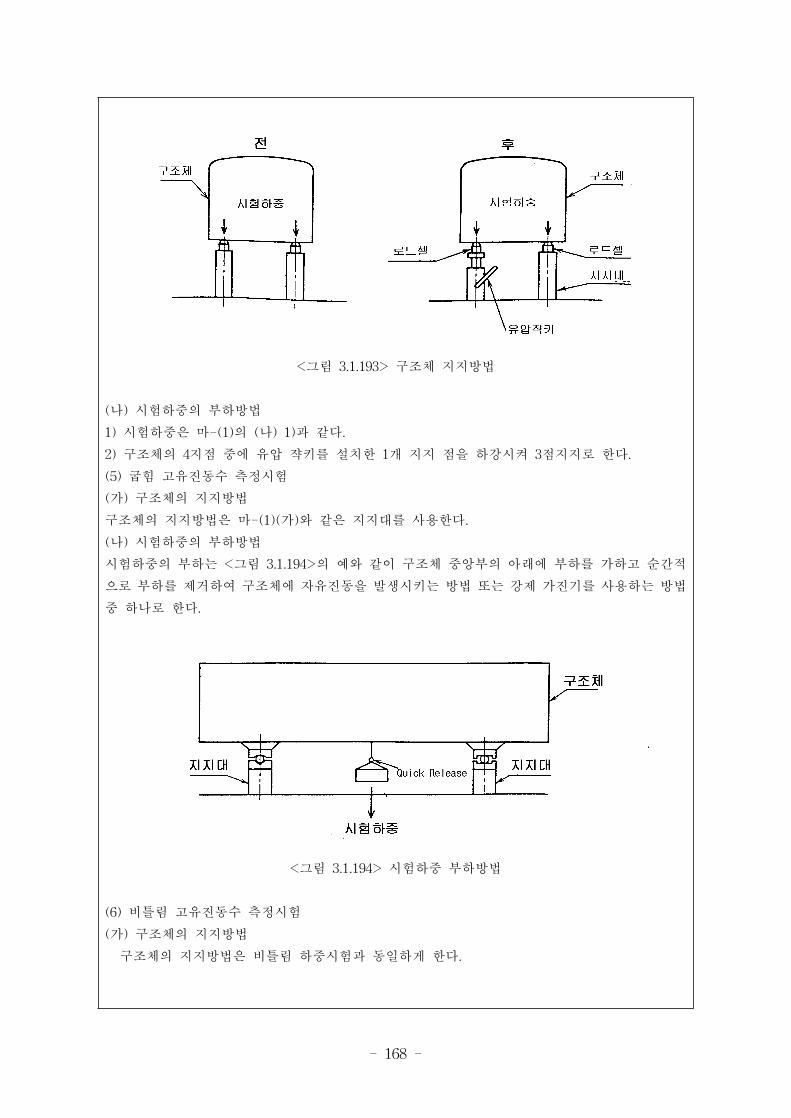
- 168 -
<그림 3.1.193> 구조체 지지방법
(나) 시험하중의 부하방법
1) 시험하중은 마-(1)의 (나) 1)과 같다.
2) 구조체의 4지점 중에 유압 쟉키를 설치한 1개 지지 점을 하강시켜 3점지지로 한다.
(5) 굽힘 고유진동수 측정시험
(가) 구조체의 지지방법
구조체의 지지방법은 마-(1)(가)와 같은 지지대를 사용한다.
(나) 시험하중의 부하방법
시험하중의 부하는 <그림 3.1.194>의 예와 같이 구조체 중앙부의 아래에 부하를 가하고 순간적
으로 부하를 제거하여 구조체에 자유진동을 발생시키는 방법 또는 강제 가진기를 사용하는 방법
중 하나로 한다.
<그림 3.1.194> 시험하중 부하방법
(6) 비틀림 고유진동수 측정시험
(가) 구조체의 지지방법
구조체의 지지방법은 비틀림 하중시험과 동일하게 한다.
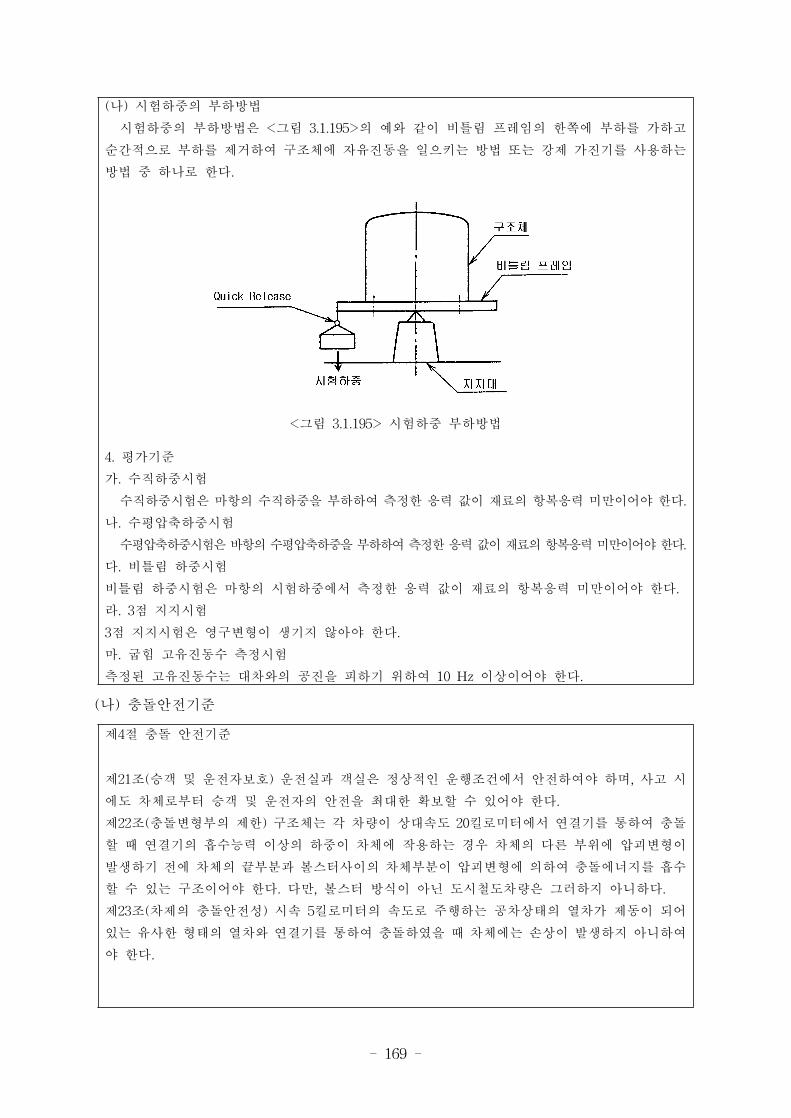
- 169 -
(나) 시험하중의 부하방법
시험하중의 부하방법은 <그림 3.1.195>의 예와 같이 비틀림 프레임의 한쪽에 부하를 가하고
순간적으로 부하를 제거하여 구조체에 자유진동을 일으키는 방법 또는 강제 가진기를 사용하는
방법 중 하나로 한다.
<그림 3.1.195> 시험하중 부하방법
4. 평가기준
가. 수직하중시험
수직하중시험은 마항의 수직하중을 부하하여 측정한 응력 값이 재료의 항복응력 미만이어야 한다.
나. 수평압축하중시험
수평압축하중시험은바항의수평압축하중을부하하여측정한응력값이재료의항복응력미만이어야한다.
다. 비틀림 하중시험
비틀림 하중시험은 마항의 시험하중에서 측정한 응력 값이 재료의 항복응력 미만이어야 한다.
라. 3점 지지시험
3점 지지시험은 영구변형이 생기지 않아야 한다.
마. 굽힘 고유진동수 측정시험
측정된 고유진동수는 대차와의 공진을 피하기 위하여 10 Hz 이상이어야 한다.
(나) 충돌안전기준
제4절 충돌 안전기준
제21조(승객 및 운전자보호) 운전실과 객실은 정상적인 운행조건에서 안전하여야 하며, 사고 시
에도 차체로부터 승객 및 운전자의 안전을 최대한 확보할 수 있어야 한다.
제22조(충돌변형부의 제한) 구조체는 각 차량이 상대속도 20킬로미터에서 연결기를 통하여 충돌
할 때 연결기의 흡수능력 이상의 하중이 차체에 작용하는 경우 차체의 다른 부위에 압괴변형이
발생하기 전에 차체의 끝부분과 볼스터사이의 차체부분이 압괴변형에 의하여 충돌에너지를 흡수
할 수 있는 구조이어야 한다. 다만, 볼스터 방식이 아닌 도시철도차량은 그러하지 아니하다.
제23조(차제의 충돌안전성) 시속 5킬로미터의 속도로 주행하는 공차상태의 열차가 제동이 되어
있는 유사한 형태의 열차와 연결기를 통하여 충돌하였을 때 차체에는 손상이 발생하지 아니하여
야 한다.
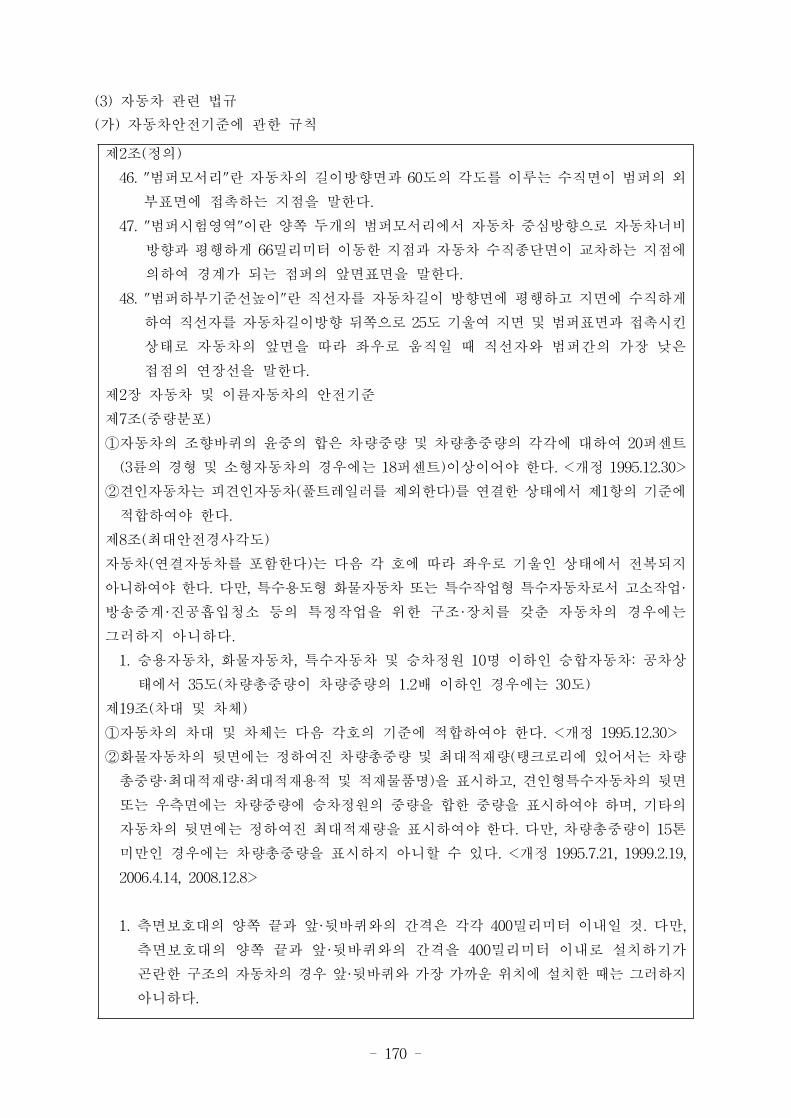
- 170 -
제2조(정의)
46. "범퍼모서리"란 자동차의 길이방향면과 60도의 각도를 이루는 수직면이 범퍼의 외
부표면에 접촉하는 지점을 말한다.
47. "범퍼시험영역"이란 양쪽 두개의 범퍼모서리에서 자동차 중심방향으로 자동차너비
방향과 평행하게 66밀리미터 이동한 지점과 자동차 수직종단면이 교차하는 지점에
의하여 경계가 되는 점퍼의 앞면표면을 말한다.
48. "범퍼하부기준선높이"란 직선자를 자동차길이 방향면에 평행하고 지면에 수직하게
하여 직선자를 자동차길이방향 뒤쪽으로 25도 기울여 지면 및 범퍼표면과 접촉시킨
상태로 자동차의 앞면을 따라 좌우로 움직일 때 직선자와 범퍼간의 가장 낮은
접점의 연장선을 말한다.
제2장 자동차 및 이륜자동차의 안전기준
제7조(중량분포)
①자동차의 조향바퀴의 윤중의 합은 차량중량 및 차량총중량의 각각에 대하여 20퍼센트
(3륜의 경형 및 소형자동차의 경우에는 18퍼센트)이상이어야 한다. <개정 1995.12.30>
②견인자동차는 피견인자동차(풀트레일러를 제외한다)를 연결한 상태에서 제1항의 기준에
적합하여야 한다.
제8조(최대안전경사각도)
자동차(연결자동차를 포함한다)는 다음 각 호에 따라 좌우로 기울인 상태에서 전복되지
아니하여야 한다. 다만, 특수용도형 화물자동차 또는 특수작업형 특수자동차로서 고소작업·
방송중계·진공흡입청소 등의 특정작업을 위한 구조·장치를 갖춘 자동차의 경우에는
그러하지 아니하다.
1. 승용자동차, 화물자동차, 특수자동차 및 승차정원 10명 이하인 승합자동차: 공차상
태에서 35도(차량총중량이 차량중량의 1.2배 이하인 경우에는 30도)
제19조(차대 및 차체)
①자동차의 차대 및 차체는 다음 각호의 기준에 적합하여야 한다. <개정 1995.12.30>
②화물자동차의 뒷면에는 정하여진 차량총중량 및 최대적재량(탱크로리에 있어서는 차량
총중량·최대적재량·최대적재용적 및 적재물품명)을 표시하고, 견인형특수자동차의 뒷면
또는 우측면에는 차량중량에 승차정원의 중량을 합한 중량을 표시하여야 하며, 기타의
자동차의 뒷면에는 정하여진 최대적재량을 표시하여야 한다. 다만, 차량총중량이 15톤
미만인 경우에는 차량총중량을 표시하지 아니할 수 있다. <개정 1995.7.21, 1999.2.19,
2006.4.14, 2008.12.8>
1. 측면보호대의 양쪽 끝과 앞·뒷바퀴와의 간격은 각각 400밀리미터 이내일 것. 다만,
측면보호대의 양쪽 끝과 앞·뒷바퀴와의 간격을 400밀리미터 이내로 설치하기가
곤란한 구조의 자동차의 경우 앞·뒷바퀴와 가장 가까운 위치에 설치한 때는 그러하지
아니하다.
(3) 자동차 관련 법규
(가) 자동차안전기준에 관한 규칙
- 171 -
2. 측면보호대의 가장 아랫 부분과 지상과의 간격은 500밀리미터 이하일 것
3. 측면보호대의 가장 윗부분과 지상과의 간격은 700밀리미터 이상일 것. 다만, 그
간격을 700밀리미터 이상으로 설치하기가 곤란한 구조의 자동차의 경우에는
그러하지 아니하다.
4. 측면보호대 가장 바깥쪽 면은 차체의 가장 바깥쪽 면보다 안쪽에 위치하여야 하며,
그 간격은 120밀리미터 이하일 것. 다만, 자동차의 길이방향으로 측면보호대의
뒷부분부터 최소한 250밀리미터에 해당하는 부분은 측면보호대의 가장 바깥쪽 면이
차체의 가장 바깥쪽 면부터 타이어의 가장 바깥쪽 면의 안쪽으로 30밀리미터까지에
해당하는 구간에 위치하도록 설치하여야 한다.
④차량총중량이 3.5톤 이상인 화물자동차·특수자동차 및 연결자동차는 포장노면위에서
공차상태로 측정하였을 때에 다음 각호의 기준에 적합한 후부안전판을 설치하여야 한다.
다만, 다른 자동차가 추돌할 경우 그 자동차의 차체 앞부분이 들어올 우려가 없는
구조의 자동차, 굴절차량용 견인장치 설치자동차, 목재·철재·기둥 등과 같이 길고
분리할 수 없는 화물운송용 특수트레일러 및 후부안전판이 차량용도에 전혀 적합하지
아니한 자동차의 경우에는 그러하지 아니하다. <신설 2001.4.28, 2003.2.25>
1. 너비는 자동차너비의 100퍼센트 미만일 것
2. 가장 아랫 부분과 지상과의 간격은 550밀리미터 이내일 것
3. 차량 수직방향의 단면 최소높이는 100밀리미터 이상일 것
4. 모서리부의 곡률반경은 2.5밀리미터 이상일 것
5. 후부안전판의 양끝부분과 가장 넓은 뒷축의 좌우 외측타이어 바깥면간의 간격은
각각 100밀리미터 이내일 것
6. 지상으로부터 3미터 이하의 높이에 있는 차체 후단으로부터 차량길이 방향의 안쪽
으로 400밀리미터 이내에 설치할 것. 다만, 자동차의 구조상 400밀리미터 이내에
설치가 곤란한 자동차의 경우에는 그러하지 아니하다.
⑤ 「고압가스 안전관리법 시행령」 제2조의 규정에 의한 고압가스를 운반하는 자동차의
고압가스운송용기는 그 용기의 뒤쪽 끝(가스충전구에 안전장치를 한 경우에는 그
장치의 뒤쪽 끝을 말한다)이 차체의 뒷범퍼 안쪽으로 300밀리미터 이상의 간격이
되어야 하며, 차대에 견고하게 고정시켜야 한다. <개정 2001.4.28, 2005.8.10>
⑥ 차체의 외형은 예리하게 각이 지거나 돌출되어 안전운행에 위험을 줄 우려가 있어서는
아니된다. 다만, 특수자동차로서 기능상 부득이 할 때에는 그러하지 아니하다.
제27조(좌석안전띠장치등)
① 자동차의 좌석에는 안전띠를 설치하여야 한다. 다만, 다음 각 호의 어느 하나에 해당하는
좌석에는 이를 설치하지 아니할 수 있다. <개정 2005.8.10, 2008.3.14, 2011.12.23>
1. 환자수송용 좌석 또는 특수구조자동차의 좌석 등 국토해양부장관이 안전띠의 설치가
필요하지 아니하다고 인정하는 좌석
② 승용자동차의 모든 좌석과 그 외의 자동차의 운전자좌석 및 운전자좌석 옆으로 나란히
되어있는 좌석에는 3점식 이상의 안전띠를 설치하여야 한다. 다만, 승용자동차 외의
자동차의 중간좌석과 좌석의 구조상 3점식 이상의 안전띠 설치가 곤란한 좌석의
경우에는 2점식 안전띠를 설치할 수 있다. <개정 1995.7.21, 2010.3.29, 2011.12.23>
- 172 -
③ 제1항에 따른 안전띠는 제112조의3에 따른 기준에 적합하여야 한다.
<개정 2011.12.23>
④ 제1항의 기준에 의하여 안전띠를 설치한 자동차에는 운전자가 안전띠를 착용하지
아니하고 시동할 경우 운전석에서 그 사실을 알 수 있도록 경고등 또는 경고음을
발하는 장치를 설치하여야 한다.
⑤ 어린이운송용 승합자동차의 승객석에 설치된 좌석안전띠의 구조는 어린이의 신체
구조에 적합하게 조절될 수 있어야 한다. <신설 1997.8.25>
[제목개정 1997.1.17]
제29조(승강구)
① 자동차의 차실에는 다음 각 호의 기준에 적합한 승강구를 설치하여야 한다.
<개정 1995.12.30, 1997.8.25, 2008.12.8, 2009.6.18, 2011.8.31>
1. 승강구의 유효너비는 60센티미터 이상, 유효높이는 160센티미터(대형승합자동차의
경우에는 180센티미터) 이상일 것. 다만, 차실안의 유효높이가 120센티미터 미만의
자동차, 승차정원 15인 이하의 자동차 및 어린이운송용자동차의 경우에는 그러하지
아니하다.
④ 중형승합자동차 및 대형승합자동차를 제외한 자동차의 승강구에는 다음 각 호의 기준에
적합하게 잠금장치를 설치하여야 한다. <신설 2009.6.18>
1. 모든 승강구의 잠금장치는 그 조작장치를 차실 내에 설치할 것
2. 모든 승강구의 잠금장치는 잠김상태에서 바깥쪽 문걸쇠풀림장치에 의하여 승강구가
열리지 아니하도록 할 것
3. 옆면 뒤쪽 승강구의 잠금장치는 다음 각 목의 기준에 적합할 것. 다만, 옆면 뒤쪽
승강구에 승강구의 잠금장치와 연동되지 아니하고 별도로 작동하는 어린이보호
잠금장치를 갖춘 경우에는 그러하지 아니하다.
가. 잠김상태에서 안쪽 문걸쇠풀림장치에 의하여 승강구가 열리지 아니할 것
나. 잠금장치의 조작장치와 안쪽 문걸쇠풀림장치는 구별될 것
4. 뒷면 승강구에 안쪽 문걸쇠풀림장치를 설치한 경우 잠금장치의 조작장치는 안쪽
문걸쇠풀림장치와 구별될 것
제32조(물품적재장치)
① 자동차의 적재함 기타의 물품적재장치는 견고하고 안전하게 물품을 적재·운반할 수
있는 구조로서 다음 각 호의 기준에 적합하여야 한다. <개정 1995.7.21, 2001.4.28,
2003.2.25, 2005.8.10, 2008.3.14, 2008.12.8>
1. 일반형 및 덤프형 화물자동차의 적재함은 위쪽이 개방된 구조일 것
2. 밴형 화물자동차는 다음 각 목의 기준에 적합할 것
가. 물품적하구는 뒷쪽 또는 옆쪽으로 하되, 문은 좌우·상하로 열리는 구조이거나
미닫이식으로 할 것
나. 승차장치와 물품적재장치 사이는 차체와 동일한 재질의 철판 또는 최대적재량의
50퍼센트의 하중을 가할 때 300밀리미터 이상 변형되지 아니하는 재질의
격벽으로 폐쇄할 것. 다만, 통기구 등 제작공정상 불가피한 부분 및 화물의 탈락
등을 방지하기 위한 보호봉을 설치한 창유리 부분(격벽면적의 20퍼센트 이내에 한
한다)은 그러하지 아니하다.
- 173 -
다. 물품적재장치의 옆면벽과 뒷면벽 또는 뒷문은 차체와 동일한 재질로 하고 창유리
등을 설치하지 아니할 것. 다만, 화물의 탈락 등을 방지할 수 있도록 유리창을
지탱하는 창문틀 또는 차체에 2개 이상의 보호봉을 용접한 옆면벽과 보호봉을
설치한 뒷면벽 또는 뒷문의 경우에는 창유리를 설치할 수 있다.
라. 물품적재장치의 바닥면적이 승차장치의 바닥면적보다 넓을 것
3. 덤프형 화물자동차 및 특수목적에 필요한 구조 또는 장치를 한 자동차로서 다른
목적에 사용이 곤란한 탱크로리·살수자동차등의 물품적재장치는 국토해양부장관이
정하는 운송물품별 비중에 의하여 산출되는 중량에 적합한 구조이어야 하며, 유류·
가스등 다른 법령에 의하여 적재용량이 산출되는 경우에는 당해 법령의 기준에
적합한 구조일 것
② 사체·독극물·고압가스·화약류 기타 위험물을 적재하는 장치는 차실과 완전히 격리되어야
하며, 차체외부에서 적재물품을 적하할 수 있는 구조이어야 한다.
③ 운행중 적재물의 탈락의 우려가 있는 청소용 자동차등의 물품적재장치는 덮개등을
설치한 구조이어야 한다.
- 174 -
(4) 한국형 미니트램 시험 및 절차 검토
각 법규를 검토 한 결과 자동차안전기준에 관한 규칙 검토는 자동차의 형상 및 도로교통법에
맞는 상용차에 대한 기준으로 안전벨트와 에어백 및 승강구 크기 등 전반적인 차량의 형상에
대하여 법제화 되어있다. 자동차안전도평가시험 등에 관한 규정은 자동차의 충돌시험에
대한 규정으로 철도차량의 충돌시험 규정과 특이사항이 발견되었다. 철도 차량의 경우 충돌안전
기준은 철도차량 구조체에 대한 시험 규정 및 평가 방법에 대하여 명시되었지만 자동차 안
전도 평가의 경우 승객의 안전도에 대한 평가 기준이 명시되어 있었다.
도시철도차량의 성능시험에 관한 기준은 앞서 기술한바와 같이 철도차량 구조체 시험에
대하여 명기되어 있어 실제 승객 안전도 평가는 없다. 전용 주행로와 일반 도로를 병행하여
주행하는 미니트램의 경우 법규 적용 범위를 논의해봐야 한다.
철도차량의 국내 기준을 검토한 결과 전용선에 운영하여 충돌 시 전방충돌에 대한 안정성
검토를 진행하고 있다. 하지만, 한국형 미니트램의 경우 전용노선과 일반차량과 혼합 운행
할 수 있어 전용노선과 일반 혼합 운행하는 구간에 대하여 기준을 세분화 필요성이 있다고
판단된다. 일반차량과 혼합 운행 시 도로교통법을 적용하여야 하는지에 대한 부분에 대하여
면밀한 검토가 필요하며, 도로교통법을 적용 할 경우 충돌 시험 기준이 철도 차량과 상이하여
차년도 과제를 수행하면서 검토를 진행할 예정이다.
나. 의장
(1) 내/외장재 구성품 시험
미니트램 시제차량의 내/외장재를 구성하고 있는 CFRP의 성능시험을 통해 차량의 기후적
조건(눈, 비등 외부 환경), 기계적 조건(터널통과 등 외부 압력파 조건) 등에 이상이 없음을
확인한다.
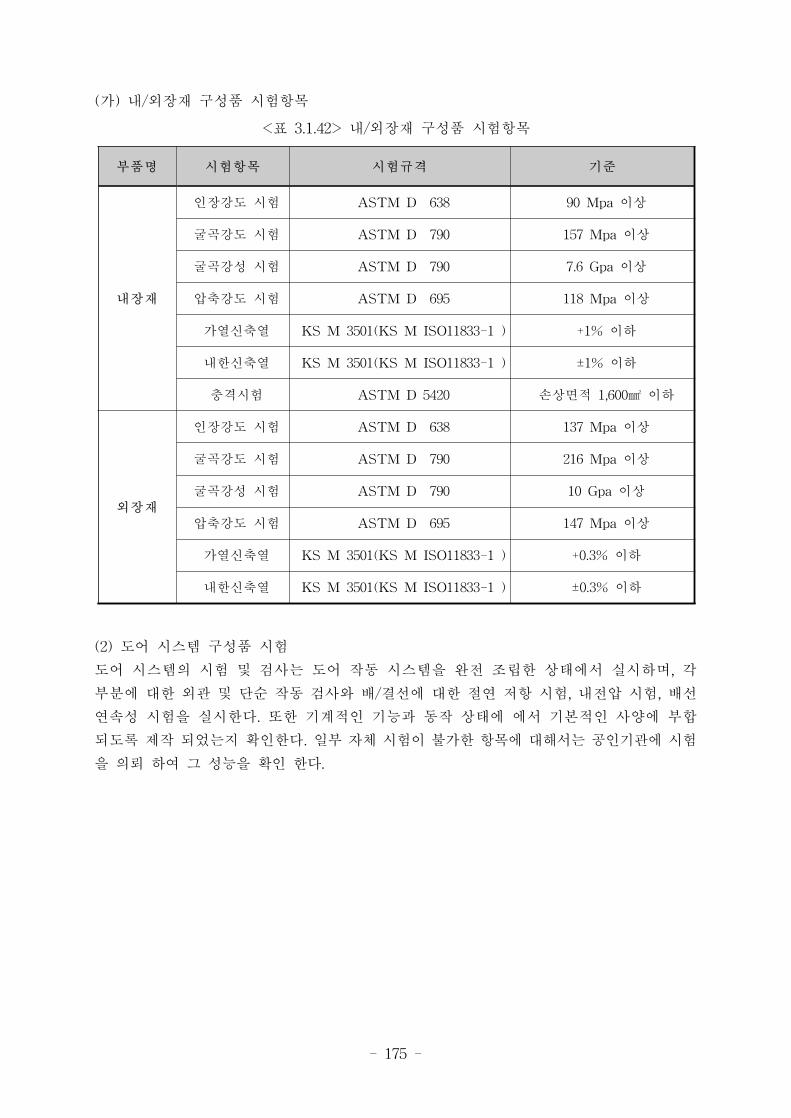
- 175 -
(가) 내/외장재 구성품 시험항목
부품명 시험항목 시험규격 기준
내장재
인장강도 시험 ASTM D 638 90 Mpa 이상
굴곡강도 시험 ASTM D 790 157 Mpa 이상
굴곡강성 시험 ASTM D 790 7.6 Gpa 이상
압축강도 시험 ASTM D 695 118 Mpa 이상
가열신축열 KS M 3501(KS M ISO11833-1 ) +1% 이하
내한신축열 KS M 3501(KS M ISO11833-1 ) ±1% 이하
충격시험 ASTM D 5420 손상면적 1,600 이하
외장재
인장강도 시험 ASTM D 638 137 Mpa 이상
굴곡강도 시험 ASTM D 790 216 Mpa 이상
굴곡강성 시험 ASTM D 790 10 Gpa 이상
압축강도 시험 ASTM D 695 147 Mpa 이상
가열신축열 KS M 3501(KS M ISO11833-1 ) +0.3% 이하
내한신축열 KS M 3501(KS M ISO11833-1 ) ±0.3% 이하
<표 3.1.42> 내/외장재 구성품 시험항목
(2) 도어 시스템 구성품 시험
도어 시스템의 시험 및 검사는 도어 작동 시스템을 완전 조립한 상태에서 실시하며, 각
부분에 대한 외관 및 단순 작동 검사와 배/결선에 대한 절연 저항 시험, 내전압 시험, 배선
연속성 시험을 실시한다. 또한 기계적인 기능과 동작 상태에 에서 기본적인 사양에 부합
되도록 제작 되었는지 확인한다. 일부 자체 시험이 불가한 항목에 대해서는 공인기관에 시험
을 의뢰 하여 그 성능을 확인 한다.
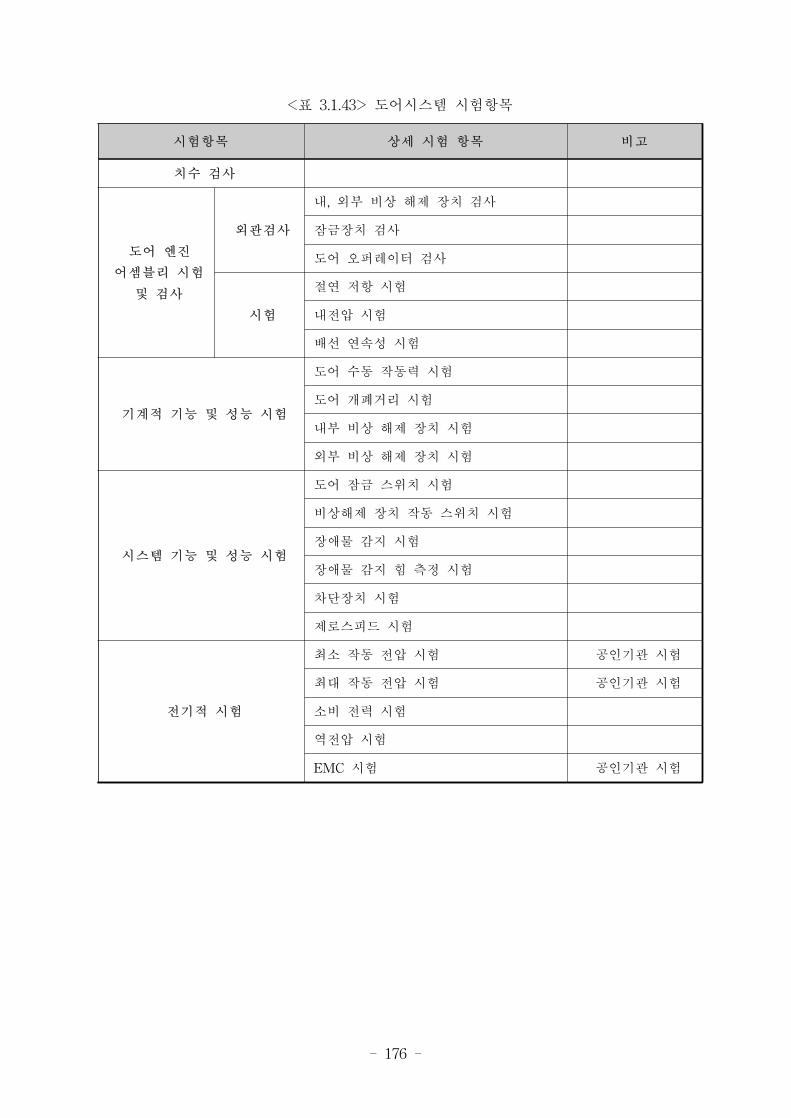
- 176 -
시험항목 상세 시험 항목 비고
치수 검사
도어 엔진
어셈블리 시험
및 검사
외관검사
내, 외부 비상 해제 장치 검사
잠금장치 검사
도어 오퍼레이터 검사
시험
절연 저항 시험
내전압 시험
배선 연속성 시험
기계적 기능 및 성능 시험
도어 수동 작동력 시험
도어 개폐거리 시험
내부 비상 해제 장치 시험
외부 비상 해제 장치 시험
시스템 기능 및 성능 시험
도어 잠금 스위치 시험
비상해제 장치 작동 스위치 시험
장애물 감지 시험
장애물 감지 힘 측정 시험
차단장치 시험
제로스피드 시험
전기적 시험
최소 작동 전압 시험 공인기관 시험
최대 작동 전압 시험 공인기관 시험
소비 전력 시험
역전압 시험
EMC 시험 공인기관 시험
<표 3.1.43> 도어시스템 시험항목
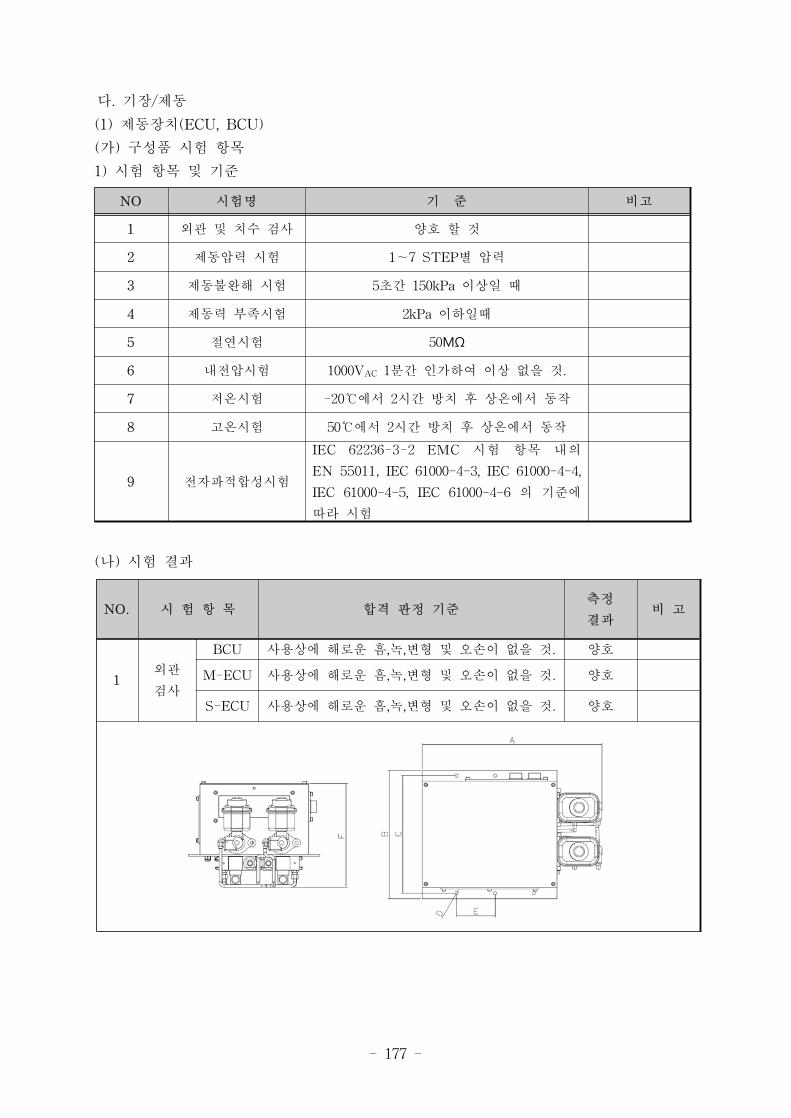
- 177 -
다. 기장/제동
(1) 제동장치(ECU, BCU)
(가) 구성품 시험 항목
1) 시험 항목 및 기준
NO 시험명 기 준 비고
1 외관 및 치수 검사 양호 할 것
2 제동압력 시험 1∼7 STEP별 압력
3 제동불완해 시험 5초간 150kPa 이상일 때
4 제동력 부족시험 2kPa 이하일때
5 절연시험 50MΩ
6 내전압시험 1000VAC 1분간 인가하여 이상 없을 것.
7 저온시험 -20에서 2시간 방치 후 상온에서 동작
8 고온시험 50에서 2시간 방치 후 상온에서 동작
9 전자파적합성시험
IEC 62236-3-2 EMC 시험 항목 내의
EN 55011, IEC 61000-4-3, IEC 61000-4-4,
IEC 61000-4-5, IEC 61000-4-6 의 기준에
따라 시험
(나) 시험 결과
NO. 시 험 항 목 합격 판정 기준측정
결과비 고
1외관
검사
BCU 사용상에 해로운 흠,녹,변형 및 오손이 없을 것. 양호
M-ECU 사용상에 해로운 흠,녹,변형 및 오손이 없을 것. 양호
S-ECU 사용상에 해로운 흠,녹,변형 및 오손이 없을 것. 양호
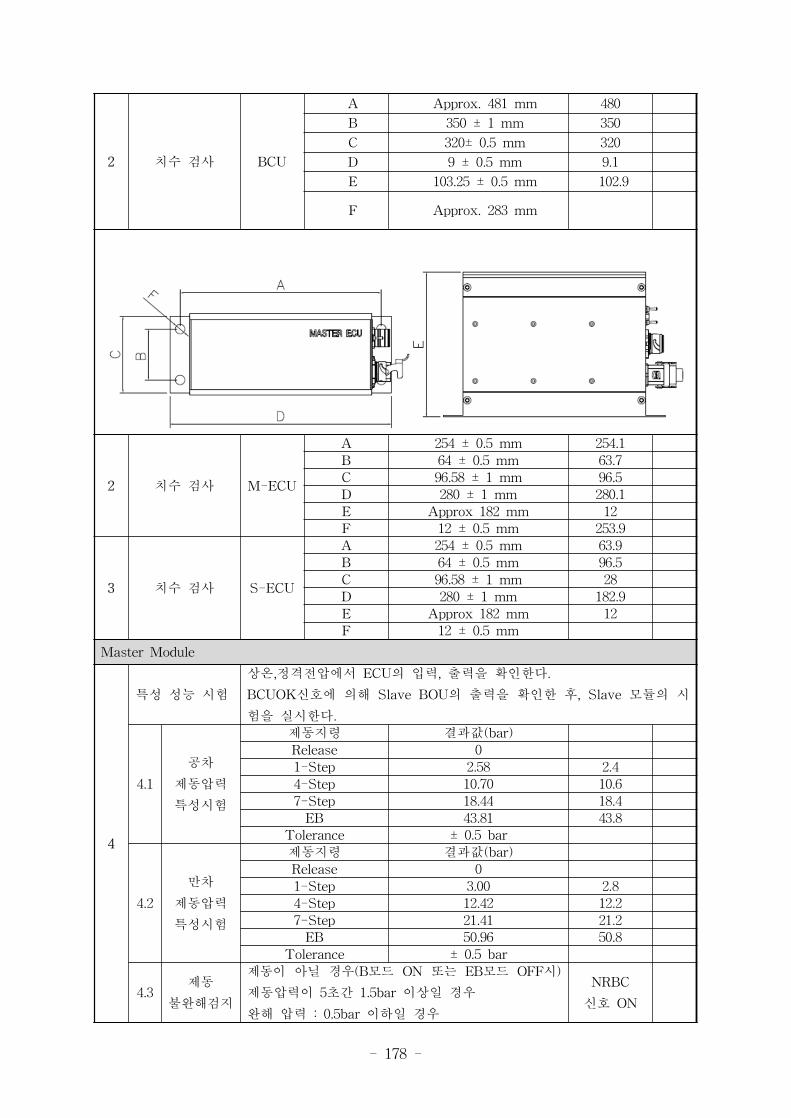
- 178 -
2 치수 검사 BCU
A Approx. 481 mm 480
B 350 ± 1 mm 350
C 320± 0.5 mm 320
D 9 ± 0.5 mm 9.1
E 103.25 ± 0.5 mm 102.9
F Approx. 283 mm
2 치수 검사 M-ECU
A 254 ± 0.5 mm 254.1
B 64 ± 0.5 mm 63.7
C 96.58 ± 1 mm 96.5
D 280 ± 1 mm 280.1
E Approx 182 mm 12
F 12 ± 0.5 mm 253.9
3 치수 검사 S-ECU
A 254 ± 0.5 mm 63.9
B 64 ± 0.5 mm 96.5
C 96.58 ± 1 mm 28
D 280 ± 1 mm 182.9
E Approx 182 mm 12
F 12 ± 0.5 mm
Master Module
4
특성 성능 시험
상온,정격전압에서 ECU의 입력, 출력을 확인한다.
BCUOK신호에 의해 Slave BOU의 출력을 확인한 후, Slave 모듈의 시
험을 실시한다.
4.1
공차
제동압력
특성시험
제동지령 결과값(bar)
Release 0
1-Step 2.58 2.4
4-Step 10.70 10.6
7-Step 18.44 18.4
EB 43.81 43.8
Tolerance ± 0.5 bar
4.2
만차
제동압력
특성시험
제동지령 결과값(bar)
Release 0
1-Step 3.00 2.8
4-Step 12.42 12.2
7-Step 21.41 21.2
EB 50.96 50.8
Tolerance ± 0.5 bar
4.3제동
불완해검지
제동이 아닐 경우(B모드 ON 또는 EB모드 OFF시)
제동압력이 5초간 1.5bar 이상일 경우
완해 압력 : 0.5bar 이하일 경우
NRBC
신호 ON
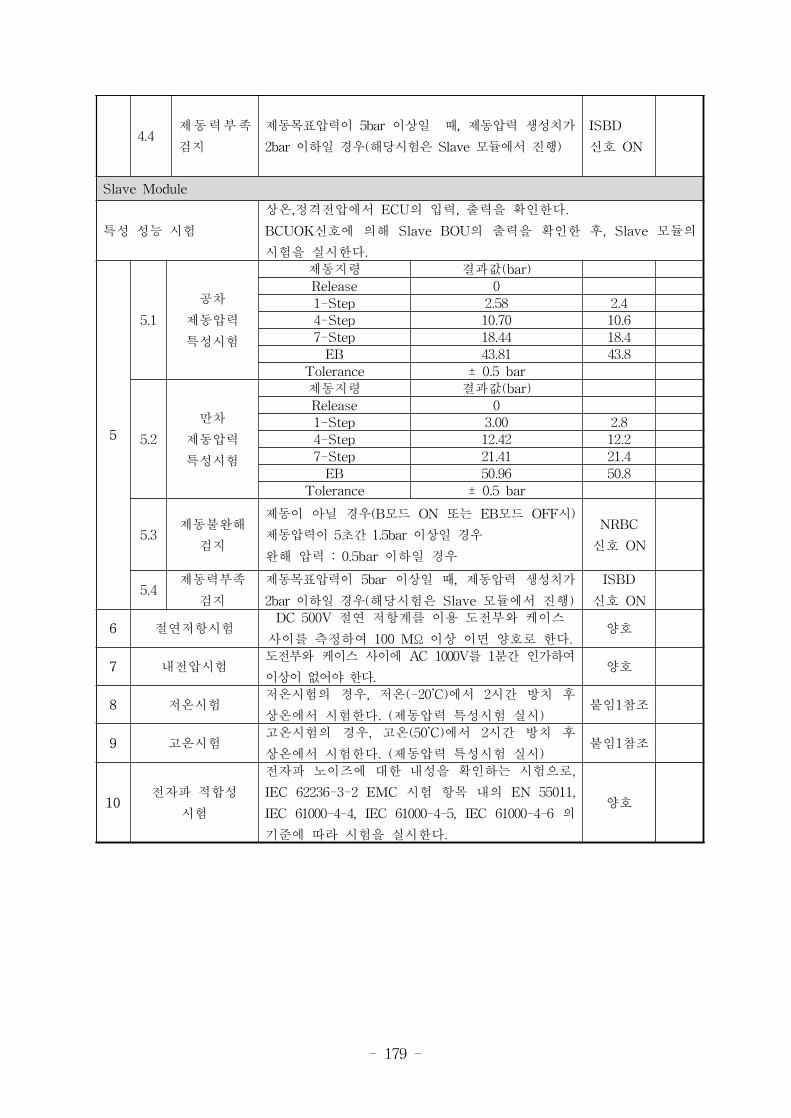
- 179 -
4.4제동력부족
검지
제동목표압력이 5bar 이상일 때, 제동압력 생성치가
2bar 이하일 경우(해당시험은 Slave 모듈에서 진행)
ISBD
신호 ON
Slave Module
특성 성능 시험
상온,정격전압에서 ECU의 입력, 출력을 확인한다.
BCUOK신호에 의해 Slave BOU의 출력을 확인한 후, Slave 모듈의
시험을 실시한다.
5
5.1
공차
제동압력
특성시험
제동지령 결과값(bar)
Release 0
1-Step 2.58 2.4
4-Step 10.70 10.6
7-Step 18.44 18.4
EB 43.81 43.8
Tolerance ± 0.5 bar
5.2
만차
제동압력
특성시험
제동지령 결과값(bar)
Release 0
1-Step 3.00 2.8
4-Step 12.42 12.2
7-Step 21.41 21.4
EB 50.96 50.8
Tolerance ± 0.5 bar
5.3제동불완해
검지
제동이 아닐 경우(B모드 ON 또는 EB모드 OFF시)
제동압력이 5초간 1.5bar 이상일 경우
완해 압력 : 0.5bar 이하일 경우
NRBC
신호 ON
5.4제동력부족
검지
제동목표압력이 5bar 이상일 때, 제동압력 생성치가
2bar 이하일 경우(해당시험은 Slave 모듈에서 진행)
ISBD
신호 ON
6 절연저항시험DC 500V 절연 저항계를 이용 도전부와 케이스
사이를 측정하여 100 MΩ 이상 이면 양호로 한다.양호
7 내전압시험도전부와 케이스 사이에 AC 1000V를 1분간 인가하여
이상이 없어야 한다.양호
8 저온시험저온시험의 경우, 저온(-20’C)에서 2시간 방치 후
상온에서 시험한다. (제동압력 특성시험 실시)붙임1참조
9 고온시험고온시험의 경우, 고온(50’C)에서 2시간 방치 후
상온에서 시험한다. (제동압력 특성시험 실시)붙임1참조
10전자파 적합성
시험
전자파 노이즈에 대한 내성을 확인하는 시험으로,
IEC 62236-3-2 EMC 시험 항목 내의 EN 55011,
IEC 61000-4-4, IEC 61000-4-5, IEC 61000-4-6 의
기준에 따라 시험을 실시한다.
양호
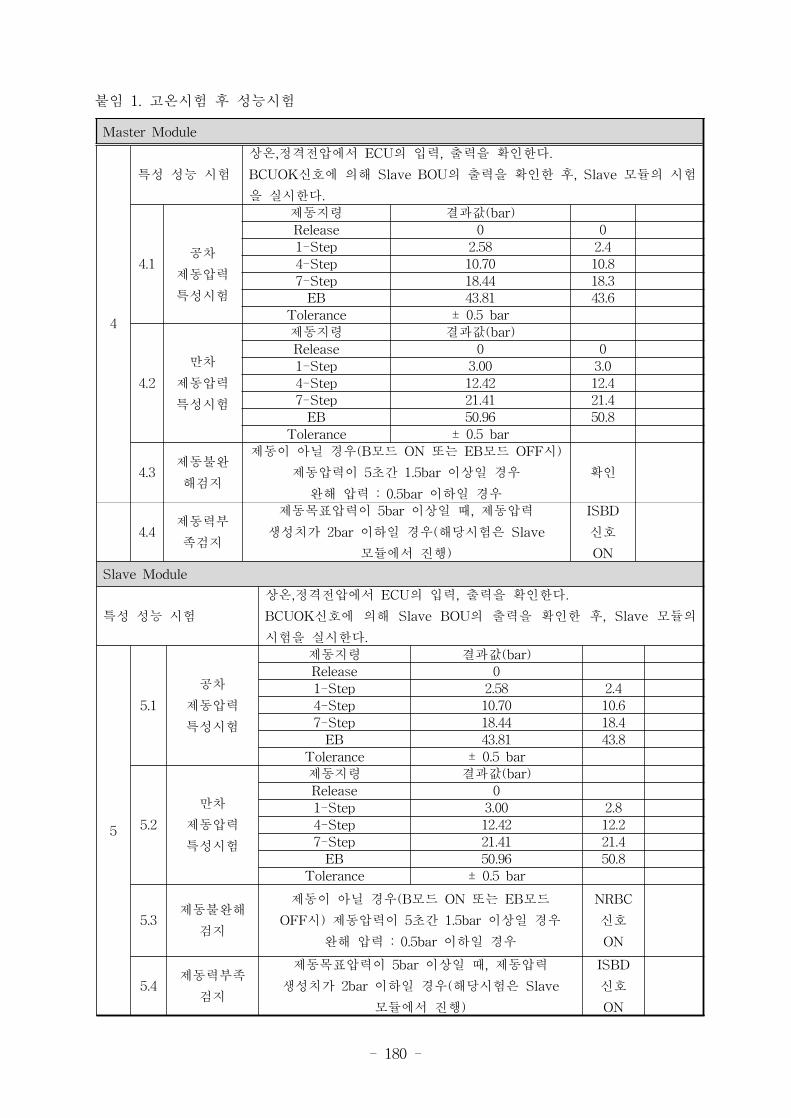
- 180 -
붙임 1. 고온시험 후 성능시험
Master Module
4
특성 성능 시험
상온,정격전압에서 ECU의 입력, 출력을 확인한다.
BCUOK신호에 의해 Slave BOU의 출력을 확인한 후, Slave 모듈의 시험
을 실시한다.
4.1공차
제동압력
특성시험
제동지령 결과값(bar)
Release 0 0
1-Step 2.58 2.4
4-Step 10.70 10.8
7-Step 18.44 18.3
EB 43.81 43.6
Tolerance ± 0.5 bar
4.2
만차
제동압력
특성시험
제동지령 결과값(bar)
Release 0 0
1-Step 3.00 3.0
4-Step 12.42 12.4
7-Step 21.41 21.4
EB 50.96 50.8
Tolerance ± 0.5 bar
4.3제동불완
해검지
제동이 아닐 경우(B모드 ON 또는 EB모드 OFF시)
제동압력이 5초간 1.5bar 이상일 경우
완해 압력 : 0.5bar 이하일 경우
확인
4.4제동력부
족검지
제동목표압력이 5bar 이상일 때, 제동압력
생성치가 2bar 이하일 경우(해당시험은 Slave
모듈에서 진행)
ISBD
신호
ON
Slave Module
특성 성능 시험
상온,정격전압에서 ECU의 입력, 출력을 확인한다.
BCUOK신호에 의해 Slave BOU의 출력을 확인한 후, Slave 모듈의
시험을 실시한다.
5
5.1
공차
제동압력
특성시험
제동지령 결과값(bar)
Release 0
1-Step 2.58 2.4
4-Step 10.70 10.6
7-Step 18.44 18.4
EB 43.81 43.8
Tolerance ± 0.5 bar
5.2
만차
제동압력
특성시험
제동지령 결과값(bar)
Release 0
1-Step 3.00 2.8
4-Step 12.42 12.2
7-Step 21.41 21.4
EB 50.96 50.8
Tolerance ± 0.5 bar
5.3제동불완해
검지
제동이 아닐 경우(B모드 ON 또는 EB모드
OFF시) 제동압력이 5초간 1.5bar 이상일 경우
완해 압력 : 0.5bar 이하일 경우
NRBC
신호
ON
5.4제동력부족
검지
제동목표압력이 5bar 이상일 때, 제동압력
생성치가 2bar 이하일 경우(해당시험은 Slave
모듈에서 진행)
ISBD
신호
ON
- 181 -
라. 전장
(1).전장품 구성품 시험
(가). 검사
1) 외관검사
외관은 육안으로 검사하고 흠, 녹, 기포, 변형이 없어야 하고 사용상 유해한 결점이 없어야 한다.
2) 치수검사
도면에 준하여 치수를 검사하였을 때, 기준치에 적합하여야 한다.
(나). 시험
1) 절연저항시험
가) 시험조건
① 절연저항시험은 내전압시험 전후에 각각 시험한다.
② DCDC컨버터 장치 내부의 전기적인 회로는 전압별로 고압회로, 저압(제어회로)회로로
구분하여 시험전압이 인가되도록 서로 연결하여 시험한다.
③ 시험회로에 연결되지 않은 구성품이나 세부부품(예로 제어회로, 견인전동기 및 팬)은
절연저항시험 동안 접지시켜 시험전압으로부터 보호되도록 한다.
나) 측정항목
① 고압회로 - 접지
② 저압(제어)회로 - 접지
다) 시험방법
① 고압회로에는 직류 1000 V 절연저항계를 저압 및 제어회로에는 직류 500 V 절연저항계를
사용한다.
② 결과는 다음을 만족해야 하며 내전압시험 전후에 측정한 값에 현저한 변화가 없어야 한다.
∙ DC 80V회로 - 접지(30 이상)
2) 내전압시험
가) 시험조건
① 내전압시험은 실시하기 전후에 절연저항시험을 반드시 실시하여 절연저항에 이상이 없음을
확인하여야 한다.
② DCDC컨버터 장치 내부의 전기적인 회로는 전압별로 고압회로, 저압(제어회로)회로로
구분하여 시험전압이 인가되도록 서로 연결하여 시험한다.
③ 시험회로에 연결되지 않은 구성품이나 세부부품(예로 제어회로, 견인전동기 및 팬)은
절연저항시험동안 접지시켜 시험전압으로부터 보호되도록 한다.
나) 측정항목
① 전기적으로 절연된 통전부
② 접지와 통전부
③ 기타 성능확인을 위한 필요부위를 시험하되 과의 시험 외에 대하여는 시험전압을
장치에 무리가 없는 범위에서 설정하도록 한다.
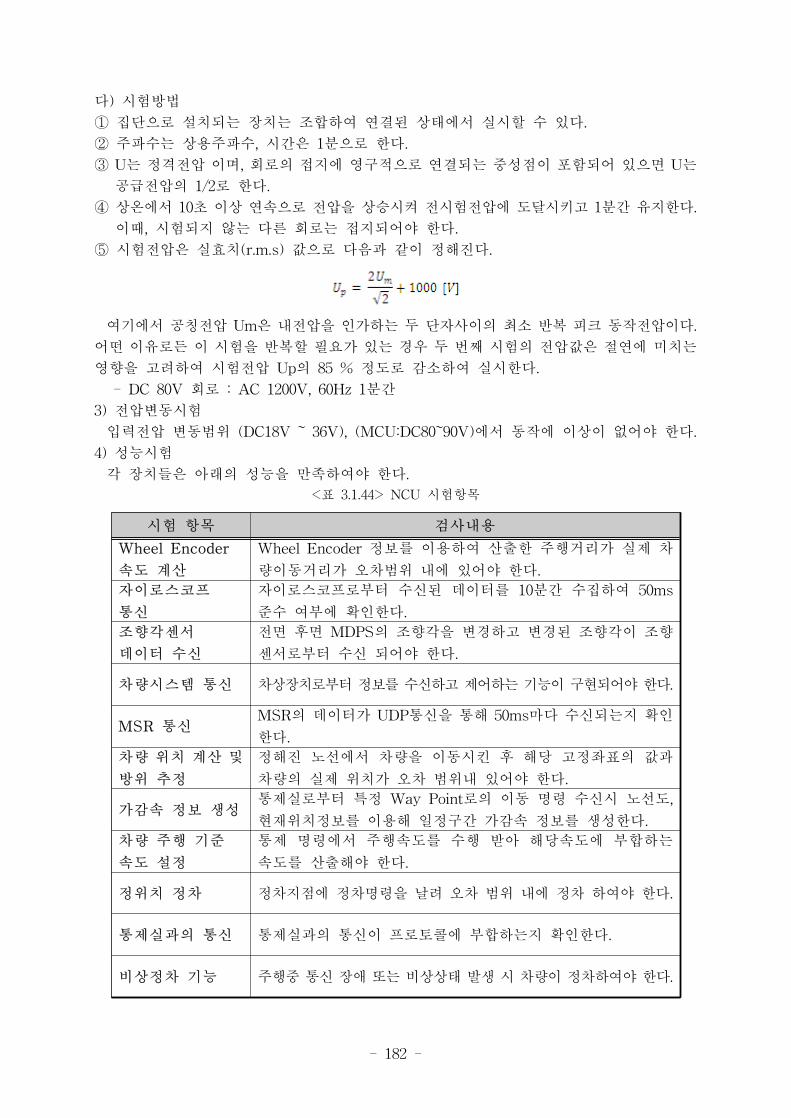
- 182 -
시험 항목 검사내용
Wheel Encoder
속도 계산
Wheel Encoder 정보를 이용하여 산출한 주행거리가 실제 차
량이동거리가 오차범위 내에 있어야 한다.
자이로스코프
통신
자이로스코프로부터 수신된 데이터를 10분간 수집하여 50ms
준수 여부에 확인한다.
조향각센서
데이터 수신
전면 후면 MDPS의 조향각을 변경하고 변경된 조향각이 조향
센서로부터 수신 되어야 한다.
차량시스템 통신 차상장치로부터 정보를 수신하고 제어하는 기능이 구현되어야 한다.
MSR 통신MSR의 데이터가 UDP통신을 통해 50ms마다 수신되는지 확인
한다.
차량 위치 계산 및
방위 추정
정해진 노선에서 차량을 이동시킨 후 해당 고정좌표의 값과
차량의 실제 위치가 오차 범위내 있어야 한다.
가감속 정보 생성통제실로부터 특정 Way Point로의 이동 명령 수신시 노선도,
현재위치정보를 이용해 일정구간 가감속 정보를 생성한다.
차량 주행 기준
속도 설정
통제 명령에서 주행속도를 수행 받아 해당속도에 부합하는
속도를 산출해야 한다.
정위치 정차 정차지점에 정차명령을 날려 오차 범위 내에 정차 하여야 한다.
통제실과의 통신 통제실과의 통신이 프로토콜에 부합하는지 확인한다.
비상정차 기능 주행중 통신 장애 또는 비상상태 발생 시 차량이 정차하여야 한다.
<표 3.1.44> NCU 시험항목
다) 시험방법
① 집단으로 설치되는 장치는 조합하여 연결된 상태에서 실시할 수 있다.
② 주파수는 상용주파수, 시간은 1분으로 한다.
③ U는 정격전압 이며, 회로의 접지에 영구적으로 연결되는 중성점이 포함되어 있으면 U는
공급전압의 1/2로 한다.
④ 상온에서 10초 이상 연속으로 전압을 상승시켜 전시험전압에 도달시키고 1분간 유지한다.
이때, 시험되지 않는 다른 회로는 접지되어야 한다.
⑤ 시험전압은 실효치(r.m.s) 값으로 다음과 같이 정해진다.
여기에서 공칭전압 Um은 내전압을 인가하는 두 단자사이의 최소 반복 피크 동작전압이다.
어떤 이유로든 이 시험을 반복할 필요가 있는 경우 두 번째 시험의 전압값은 절연에 미치는
영향을 고려하여 시험전압 Up의 85 % 정도로 감소하여 실시한다.
- DC 80V 회로 : AC 1200V, 60Hz 1분간
3) 전압변동시험
입력전압 변동범위 (DC18V ~ 36V), (MCU:DC80~90V)에서 동작에 이상이 없어야 한다.
4) 성능시험
각 장치들은 아래의 성능을 만족하여야 한다.
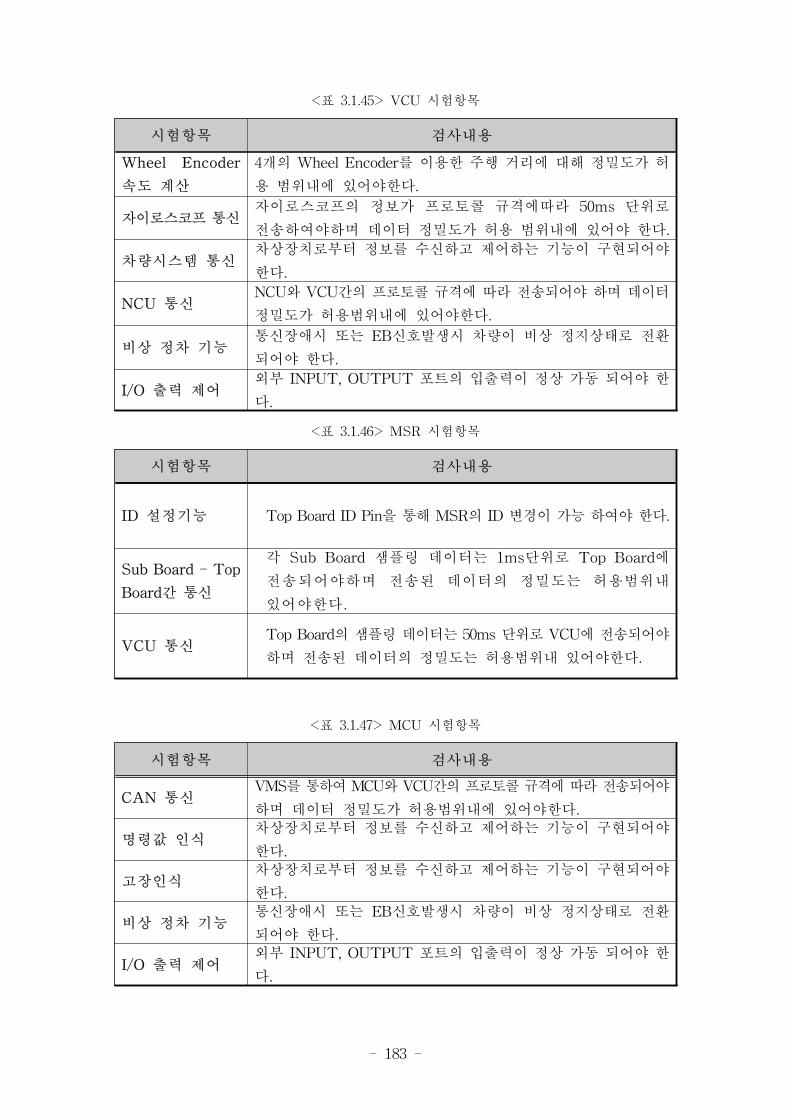
- 183 -
시험항목 검사내용
Wheel Encoder
속도 계산
4개의 Wheel Encoder를 이용한 주행 거리에 대해 정밀도가 허
용 범위내에 있어야한다.
자이로스코프 통신자이로스코프의 정보가 프로토콜 규격에따라 50ms 단위로
전송하여야하며 데이터 정밀도가 허용 범위내에 있어야 한다.
차량시스템 통신차상장치로부터 정보를 수신하고 제어하는 기능이 구현되어야
한다.
NCU 통신NCU와 VCU간의 프로토콜 규격에 따라 전송되어야 하며 데이터
정밀도가 허용범위내에 있어야한다.
비상 정차 기능통신장애시 또는 EB신호발생시 차량이 비상 정지상태로 전환
되어야 한다.
I/O 출력 제어외부 INPUT, OUTPUT 포트의 입출력이 정상 가동 되어야 한
다.
<표 3.1.45> VCU 시험항목
시험항목 검사내용
ID 설정기능 Top Board ID Pin을 통해 MSR의 ID 변경이 가능 하여야 한다.
Sub Board - Top
Board간 통신
각 Sub Board 샘플링 데이터는 1ms단위로 Top Board에
전송되어야하며 전송된 데이터의 정밀도는 허용범위내
있어야한다.
VCU 통신Top Board의 샘플링 데이터는 50ms 단위로 VCU에 전송되어야
하며 전송된 데이터의 정밀도는 허용범위내 있어야한다.
<표 3.1.46> MSR 시험항목
시험항목 검사내용
CAN 통신VMS를 통하여 MCU와 VCU간의 프로토콜규격에 따라 전송되어야
하며 데이터 정밀도가 허용범위내에 있어야한다.
명령값 인식차상장치로부터 정보를 수신하고 제어하는 기능이 구현되어야
한다.
고장인식차상장치로부터 정보를 수신하고 제어하는 기능이 구현되어야
한다.
비상 정차 기능통신장애시 또는 EB신호발생시 차량이 비상 정지상태로 전환
되어야 한다.
I/O 출력 제어외부 INPUT, OUTPUT 포트의 입출력이 정상 가동 되어야 한
다.
<표 3.1.47> MCU 시험항목
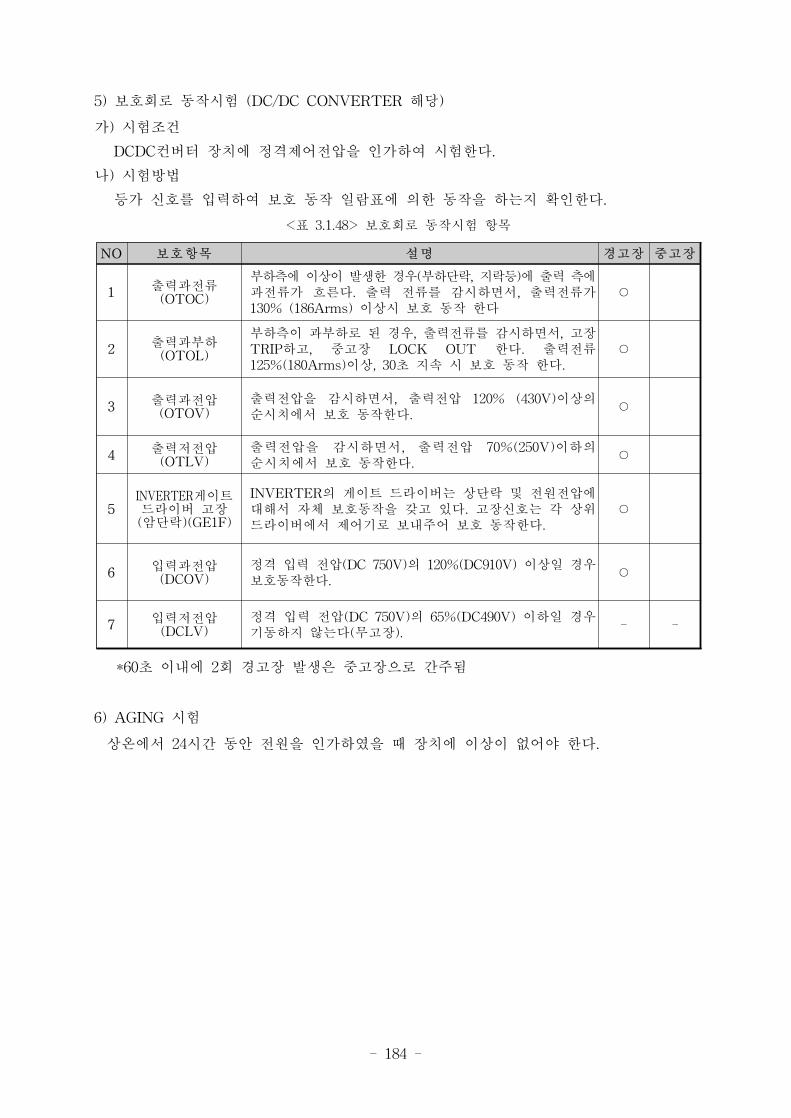
- 184 -
5) 보호회로 동작시험 (DC/DC CONVERTER 해당)
가) 시험조건
DCDC컨버터 장치에 정격제어전압을 인가하여 시험한다.
나) 시험방법
등가 신호를 입력하여 보호 동작 일람표에 의한 동작을 하는지 확인한다.
NO 보호항목 설명 경고장 중고장
1 출력과전류(OTOC)
부하측에 이상이 발생한 경우(부하단락, 지락등)에 출력 측에과전류가 흐른다. 출력 전류를 감시하면서, 출력전류가130% (186Arms) 이상시 보호 동작 한다
2출력과부하(OTOL)
부하측이 과부하로 된 경우, 출력전류를 감시하면서, 고장TRIP하고, 중고장 LOCK OUT 한다. 출력전류125%(180Arms)이상, 30초 지속 시 보호 동작 한다.
3 출력과전압(OTOV)
출력전압을 감시하면서, 출력전압 120% (430V)이상의순시치에서 보호 동작한다.
4출력저전압(OTLV)
출력전압을 감시하면서, 출력전압 70%(250V)이하의순시치에서 보호 동작한다.
5INVERTER게이트드라이버 고장(암단락)(GE1F)
INVERTER의 게이트 드라이버는 상단락 및 전원전압에대해서 자체 보호동작을 갖고 있다. 고장신호는 각 상위드라이버에서 제어기로 보내주어 보호 동작한다.
6입력과전압(DCOV)
정격 입력 전압(DC 750V)의 120%(DC910V) 이상일 경우보호동작한다.
7입력저전압(DCLV)
정격 입력 전압(DC 750V)의 65%(DC490V) 이하일 경우기동하지 않는다(무고장).
- -
<표 3.1.48> 보호회로 동작시험 항목
*60초 이내에 2회 경고장 발생은 중고장으로 간주됨
6) AGING 시험
상온에서 24시간 동안 전원을 인가하였을 때 장치에 이상이 없어야 한다.
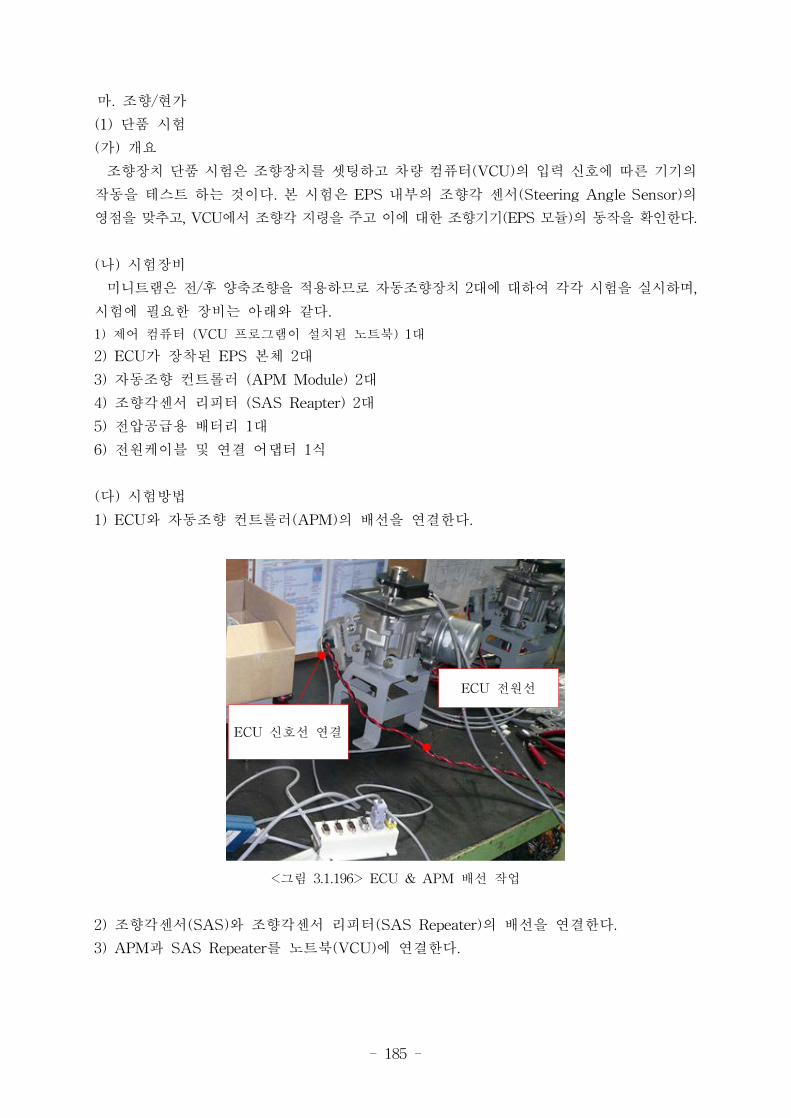
- 185 -
마. 조향/현가
(1) 단품 시험
(가) 개요
조향장치 단품 시험은 조향장치를 셋팅하고 차량 컴퓨터(VCU)의 입력 신호에 따른 기기의
작동을 테스트 하는 것이다. 본 시험은 EPS 내부의 조향각 센서(Steering Angle Sensor)의
영점을 맞추고, VCU에서 조향각 지령을 주고 이에 대한 조향기기(EPS 모듈)의 동작을 확인한다.
(나) 시험장비
미니트램은 전/후 양축조향을 적용하므로 자동조향장치 2대에 대하여 각각 시험을 실시하며,
시험에 필요한 장비는 아래와 같다.
1) 제어 컴퓨터 (VCU 프로그램이 설치된 노트북) 1대
2) ECU가 장착된 EPS 본체 2대
3) 자동조향 컨트롤러 (APM Module) 2대
4) 조향각센서 리피터 (SAS Reapter) 2대
5) 전압공급용 배터리 1대
6) 전원케이블 및 연결 어댑터 1식
(다) 시험방법
1) ECU와 자동조향 컨트롤러(APM)의 배선을 연결한다.
ECU 신호선 연결
ECU 전원선
<그림 3.1.196> ECU & APM 배선 작업
2) 조향각센서(SAS)와 조향각센서 리피터(SAS Repeater)의 배선을 연결한다.
3) APM과 SAS Repeater를 노트북(VCU)에 연결한다.
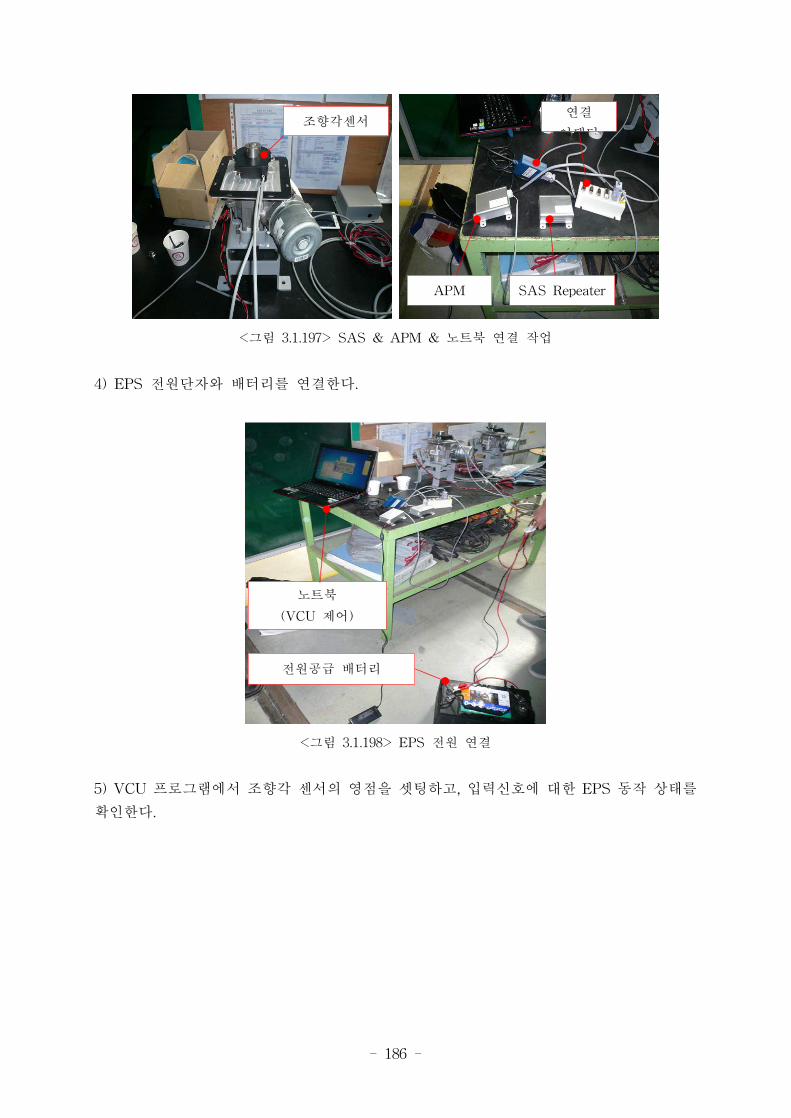
- 186 -
APM SAS Repeater
조향각센서연결
어댑터
<그림 3.1.197> SAS & APM & 노트북 연결 작업
4) EPS 전원단자와 배터리를 연결한다.
전원공급 배터리
노트북
(VCU 제어)
<그림 3.1.198> EPS 전원 연결
5) VCU 프로그램에서 조향각 센서의 영점을 셋팅하고, 입력신호에 대한 EPS 동작 상태를
확인한다.

- 187 -
영점 셋팅
<그림 3.1.199> VCU 프로그램(좌) 및 조향각 센서 영점 셋팅 완료(우)
바. 수동운전 시험
(1) 개요
미니트램은 비상 상황에서 수동으로 운행이 가능하도록 수동운전 모드를 시스템에
적용하였다. (수동운전에 사용하는 핸들은 조이스틱 컨트롤러를 사용하였다.) 본 시험에서는
차량이 배드(bed)상태에서 운전자가 수동으로 핸들을 동작 시켜 정상적으로 추진, 가속,
조향이 되는지를 테스트함에 목적이 있다.
<그림 3.1.200> 수동운전 시험 원리
(2) 시험장비
시험에 필요한 장비는 아래와 같다..
(가) 제어 컴퓨터 (VCU 프로그램이 설치된 노트북) 1대
(나) 조이스틱 (핸들 및 패달) 1대
(3) 시험방법
차량의 기동 상태 및 구동장치, 조향장치의 조립상태를 확인한다.
(가) 제어용 컴퓨터와 차량의 VCU 배선의 커넥터를 결속한다.
(나) 조이스틱 핸들 및 패달의 배선을 제어용 컴퓨터의 USB 포트에 연결한다.
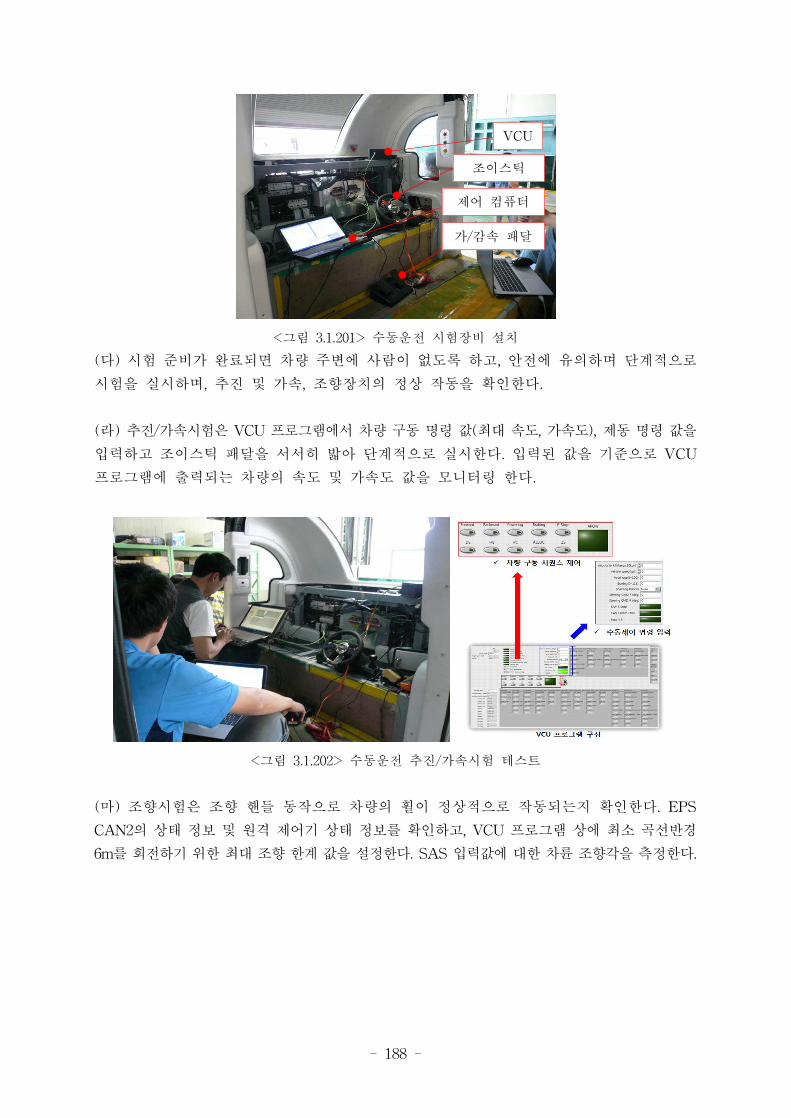
- 188 -
VCU
조이스틱
제어 컴퓨터
가/감속 패달
<그림 3.1.201> 수동운전 시험장비 설치
(다) 시험 준비가 완료되면 차량 주변에 사람이 없도록 하고, 안전에 유의하며 단계적으로
시험을 실시하며, 추진 및 가속, 조향장치의 정상 작동을 확인한다.
(라) 추진/가속시험은 VCU 프로그램에서 차량 구동 명령 값(최대 속도, 가속도), 제동 명령 값을
입력하고 조이스틱 패달을 서서히 밟아 단계적으로 실시한다. 입력된 값을 기준으로 VCU
프로그램에 출력되는 차량의 속도 및 가속도 값을 모니터링 한다.
<그림 3.1.202> 수동운전 추진/가속시험 테스트
(마) 조향시험은 조향 핸들 동작으로 차량의 휠이 정상적으로 작동되는지 확인한다. EPS
CAN2의 상태 정보 및 원격 제어기 상태 정보를 확인하고, VCU 프로그램 상에 최소 곡선반경
6m를 회전하기위한 최대 조향 한계 값을 설정한다. SAS 입력값에대한 차륜 조향각을 측정한다.
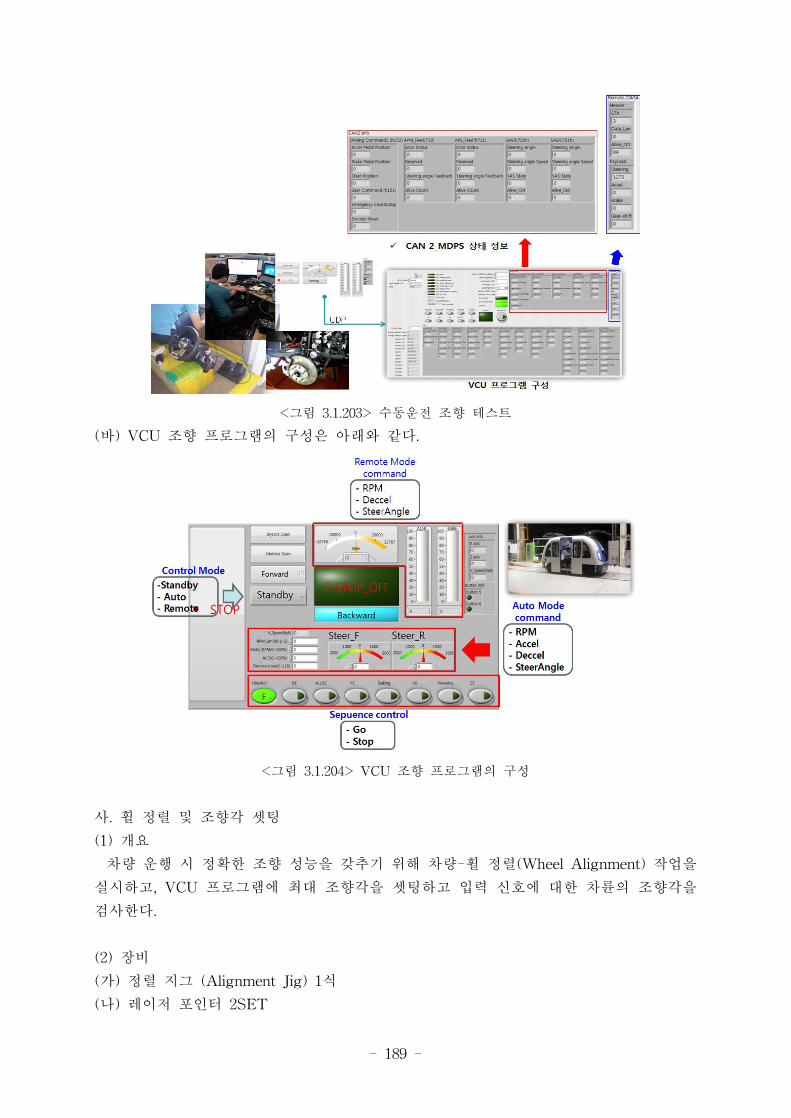
- 189 -
<그림 3.1.203> 수동운전 조향 테스트
(바) VCU 조향 프로그램의 구성은 아래와 같다.
<그림 3.1.204> VCU 조향 프로그램의 구성
사. 휠 정렬 및 조향각 셋팅
(1) 개요
차량 운행 시 정확한 조향 성능을 갖추기 위해 차량-휠 정렬(Wheel Alignment) 작업을
실시하고, VCU 프로그램에 최대 조향각을 셋팅하고 입력 신호에 대한 차륜의 조향각을
검사한다.
(2) 장비
(가) 정렬 지그 (Alignment Jig) 1식
(나) 레이저 포인터 2SET
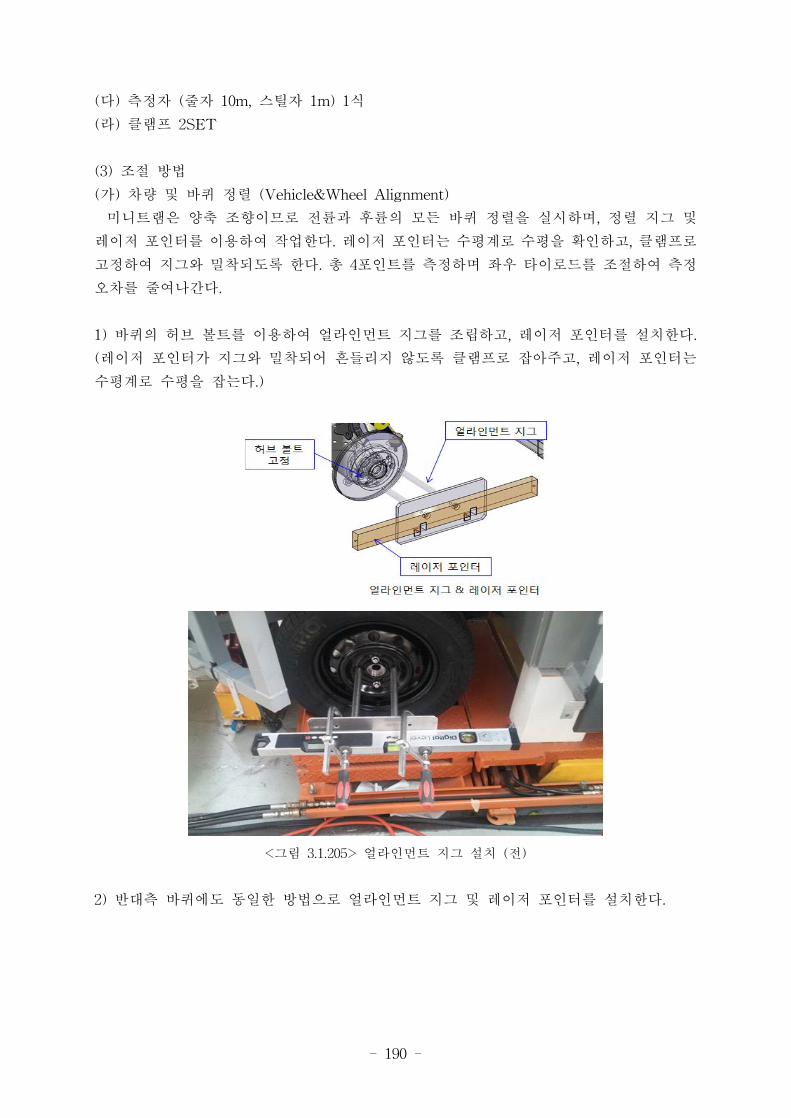
- 190 -
(다) 측정자 (줄자 10m, 스틸자 1m) 1식
(라) 클램프 2SET
(3) 조절 방법
(가) 차량 및 바퀴 정렬 (Vehicle&Wheel Alignment)
미니트램은 양축 조향이므로 전륜과 후륜의 모든 바퀴 정렬을 실시하며, 정렬 지그 및
레이저 포인터를 이용하여 작업한다. 레이저 포인터는 수평계로 수평을 확인하고, 클램프로
고정하여 지그와 밀착되도록 한다. 총 4포인트를 측정하며 좌우 타이로드를 조절하여 측정
오차를 줄여나간다.
1) 바퀴의 허브 볼트를 이용하여 얼라인먼트 지그를 조립하고, 레이저 포인터를 설치한다.
(레이저 포인터가 지그와 밀착되어 흔들리지 않도록 클램프로 잡아주고, 레이저 포인터는
수평계로 수평을 잡는다.)
<그림 3.1.205> 얼라인먼트 지그 설치 (전)
2) 반대측 바퀴에도 동일한 방법으로 얼라인먼트 지그 및 레이저 포인터를 설치한다.
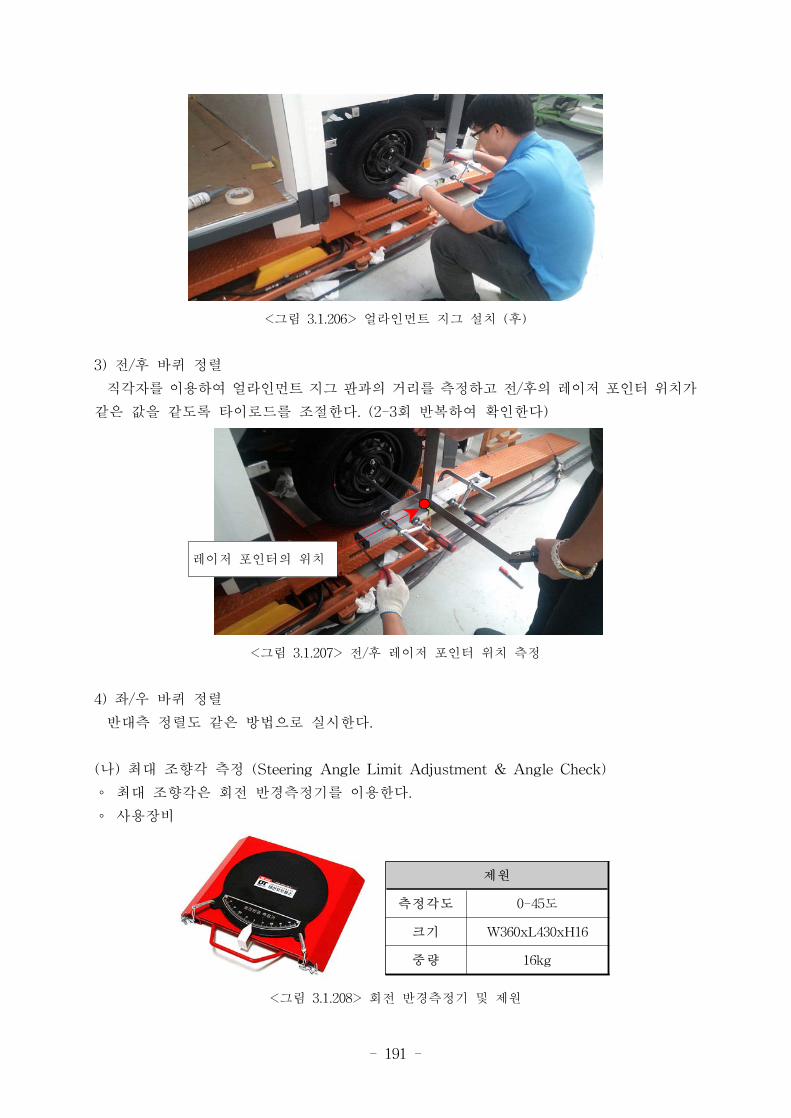
- 191 -
<그림 3.1.206> 얼라인먼트 지그 설치 (후)
3) 전/후 바퀴 정렬
직각자를 이용하여 얼라인먼트 지그 판과의 거리를 측정하고 전/후의 레이저 포인터 위치가
같은 값을 같도록 타이로드를 조절한다. (2-3회 반복하여 확인한다)
레이저 포인터의 위치
<그림 3.1.207> 전/후 레이저 포인터 위치 측정
4) 좌/우 바퀴 정렬
반대측 정렬도 같은 방법으로 실시한다.
(나) 최대 조향각 측정 (Steering Angle Limit Adjustment & Angle Check)
∘ 최대 조향각은 회전 반경측정기를 이용한다.
∘ 사용장비
제원
측정각도 0-45도
크기 W360xL430xH16
중량 16kg
<그림 3.1.208> 회전 반경측정기 및 제원
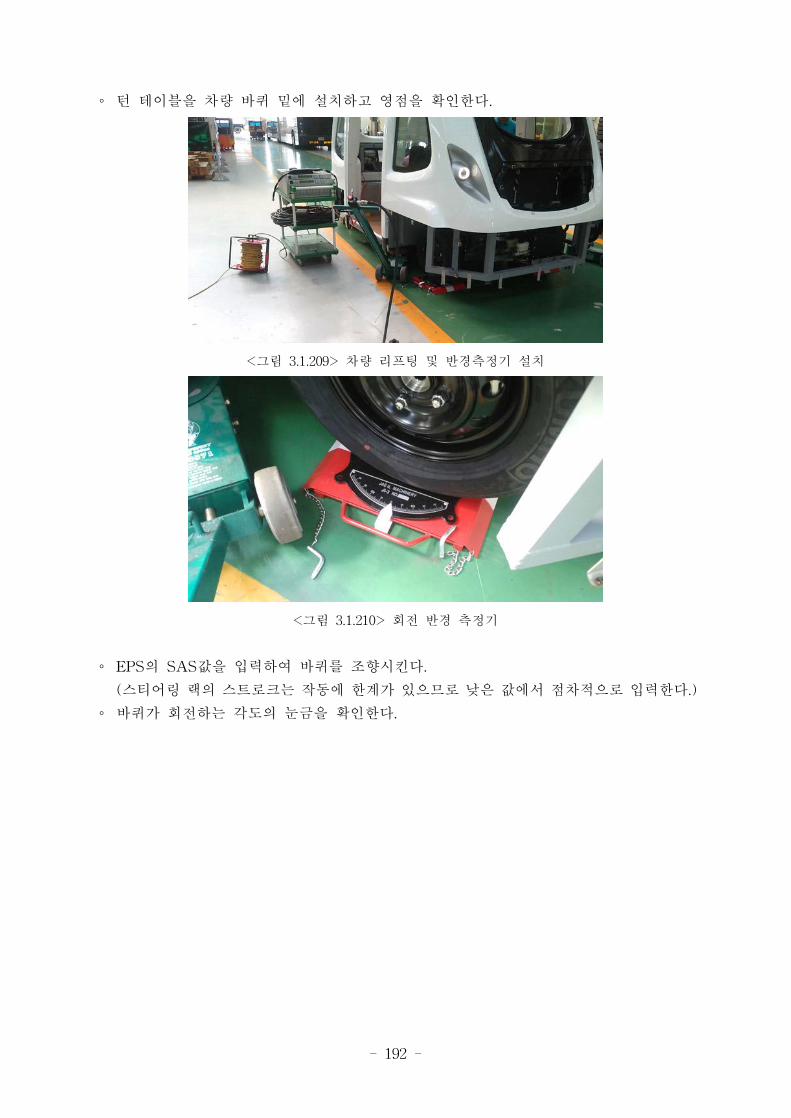
- 192 -
∘ 턴 테이블을 차량 바퀴 밑에 설치하고 영점을 확인한다.
<그림 3.1.209> 차량 리프팅 및 반경측정기 설치
<그림 3.1.210> 회전 반경 측정기
∘ EPS의 SAS값을 입력하여 바퀴를 조향시킨다.
(스티어링 랙의 스트로크는 작동에 한계가 있으므로 낮은 값에서 점차적으로 입력한다.)
∘ 바퀴가 회전하는 각도의 눈금을 확인한다.
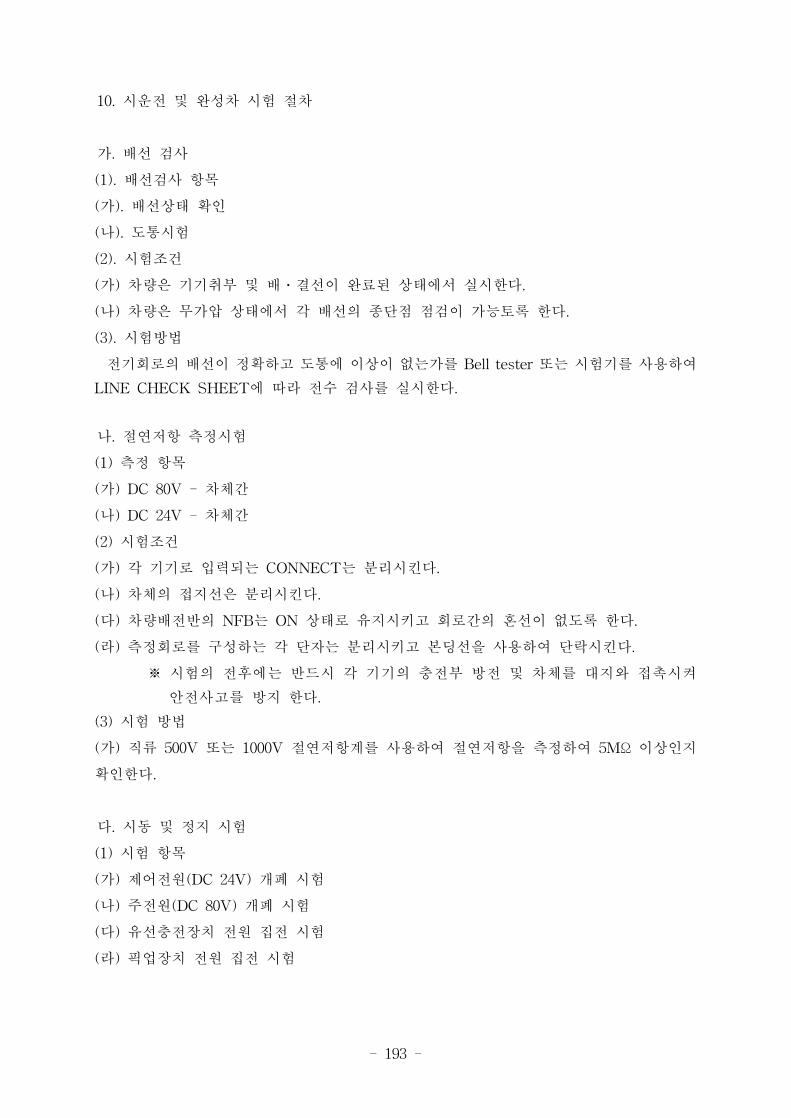
- 193 -
10. 시운전 및 완성차 시험 절차
가. 배선 검사
(1). 배선검사 항목
(가). 배선상태 확인
(나). 도통시험
(2). 시험조건
(가) 차량은 기기취부 및 배․결선이 완료된 상태에서 실시한다.
(나) 차량은 무가압 상태에서 각 배선의 종단점 점검이 가능토록 한다.
(3). 시험방법
전기회로의 배선이 정확하고 도통에 이상이 없는가를 Bell tester 또는 시험기를 사용하여
LINE CHECK SHEET에 따라 전수 검사를 실시한다.
나. 절연저항 측정시험
(1) 측정 항목
(가) DC 80V - 차체간
(나) DC 24V - 차체간
(2) 시험조건
(가) 각 기기로 입력되는 CONNECT는 분리시킨다.
(나) 차체의 접지선은 분리시킨다.
(다) 차량배전반의 NFB는 ON 상태로 유지시키고 회로간의 혼선이 없도록 한다.
(라) 측정회로를 구성하는 각 단자는 분리시키고 본딩선을 사용하여 단락시킨다.
※ 시험의 전후에는 반드시 각 기기의 충전부 방전 및 차체를 대지와 접촉시켜
안전사고를 방지 한다.
(3) 시험 방법
(가) 직류 500V 또는 1000V 절연저항계를 사용하여 절연저항을 측정하여 5MΩ 이상인지
확인한다.
다. 시동 및 정지 시험
(1) 시험 항목
(가) 제어전원(DC 24V) 개폐 시험
(나) 주전원(DC 80V) 개폐 시험
(다) 유선충전장치 전원 집전 시험
(라) 픽업장치 전원 집전 시험
- 194 -
(2) 시험 조건
(가) 제어전원 개폐 시험
1) 차량은 동작 가능한 최소 전원으로 구성한다.
2) LIC에 전원을 공급(시작차량 135VDC, 시제차량 90VDC) 하여 DC/DC Converter
(이하 CONU)를 기동할 수 있는 조건으로 한다.
3) CONU의 DC 80V 출력라인은 분리한다.
4) CONU의 DC 24V 출력라인을 결선한다.
(나) 주전원 개폐 시험
1) 차량은 동작 가능한 최소 전원으로 구성한다.
2) LIC에 전원을 공급하여 CONU를 기동할 수 있는 조건으로 한다.
3) CONU의 DC 24V와 DC 80V 출력라인을 결선한다.
(다) 유선충전장치 전원 집전 시험
1) 차량은 동작 가능한 최소 전원으로 구성한다.(모든 NFB는 OFF 상태)
2) 유선충전장치를 CONU에 연결한다.
(라) 픽업장치 전원 집전 시험
1) 차량은 동작 가능한 최소 전원으로 구성한다.(모든 NFB는 OFF 상태)
2) 차량을 유도급전할 수 있는 무선급전장치에 위치시킨다.
(3) 시험방법
(가) 제어전원 개폐시험
1) 차량의 제어전원용 NFB는 차단한다.
2) SSKS(차량기동 스위치)를 ON 시킨다. (ECUN, LICN, VMSN를 차례로 투입하여 ECU,
LIC, VMS(CU)의 전원공급에 이상이 없을 것)
3) CSTRS(CONU 기동 스위치)를 누른다. (CONU 정상기동할 것)
4) 차량의 나머지 제어전원용 NFB를 차례로 투입한다. (각 장치별 전원공급에 이상이 없을 것)
5) DC 24V 출력전압과 전류를 모니터링한다.(DC 24V 출력전압은 허용 오차범위에 있어야 한다.)
6) CSTOS(CONU 정지 스위치)를 누른다. (CONU가 10초~15초 후 정지할 것)
7) CONU Cutoff 신호가 출력되는지 확인한다.
8) SSKS를 차단한다. (차량의 제어전원이 OFF 될 것)
(나) 주전원 개폐시험
1) MCUN, LITN를 제외한 모든 NFB를 ON 시킨다.
2) SSKS(차량기동 스위치)를 ON 시킨다.
3) CSTRS(CONU 기동 스위치)를 누른다. (CONU 정상기동할 것)
4) LITN를 ON 시킨다. (차량 전등이 정상적으로 켜질 것)
5) MCUN를 ON 시킨다.(MCU의 제어전원 공급에 이상 없을 것)
6) DC 80V 출력전압과 전류를 모니터링한다.(DC 80V 출력전압은 허용 오차범위에 있어야 한다.)
- 195 -
7) CSTOS(CONU 정지 스위치)를 누른다. (CONU가 10초~15초후 후 정지할 것)
8) SSKS를 차단한다. (차량의 제어전원이 OFF 될 것)
(다) 유선충전장치 전원 집전 시험
1) 차량의 정상 동작조건(모든 NFB ON)하에서 SSKS를 ON 시킨다.
2) CSTRS(CONU 기동 스위치)를 누른다. (CONU 정상기동할 것.)
3) 차량의 제어전원(DC24V) 및 주전원(DC80V)이 정상 출력되는지 확인한다.
4) 유선충전기 220Vac 인가 후, 유선충전기의 전원 스위치를 켠다.
5) 유선충전기 동작 상태를 확인한다.
6) DigitalMultiMeter를 이용하여 CONU의 LIC측 단자대에 양단전압과 충전전류값이 정상치
여부를 확인한다.
7) 충전 종지전압 135Vdc 충전완료 확인 후, 유선충전기 전원 스위치를 차단한다.
8) 유선충전기 Off를 확인한다.
9) LIC로 유입전류가 발생하는지 DigitalMultiMeter를 이용하여 확인한다.
10) 220Vac플러그를 뽑고 충전을 종료한다.
11) CSTRS(CONU 기동 스위치)를 누른다. (CONU 정상기동할 것
12) 차량의 제어전원(DC24V) 및 주전원(DC80V)이 정상 출력되는지 확인한다.
13) CSTOS(CONU 정지 스위치)를 누른다. (CONU가 10초 후 정지할 것)
14) SSKS를 차단한다. (차량의 제어전원이 OFF 될 것)
(라) 픽업장치 전원 집전 시험
1) 차량의 정상 동작조건(모든 NFB 투입)하에서 SSKS를 ON 시킨다.
2) CSTRS(CONU 기동 스위치)를 누른다. (CONU 정상기동할 것)
3) 차량의 제어전원(DC24V) 및 주전원(DC80V)이 정상 출력되는지 확인한다.
4) 차량은 동작 가능한 최소 전원으로 구성한다. (24Vdc, 80Vdc 출력 상태)
5) 수동모드 급전인버터를 켠다. (On)
6) 차량을 유도급전할 수 있는 무선충전장치에 위치시킨다. (급전라인 기준으로 차량 좌우
편차 없도록 할 것.)
7) CONU의 PBC(primary buck conv) 수동 모드 동작. → 충전 상태 확인.
8) 수동모드 급전인버터를 끈다. (Off)
9) CONU의 PBC(primary buck conv) 자동 모드 동작. → 충전 상태 확인.
10) (충전시, 충전 전압 레벨에 맞추어 CC → CV 모드 절체 여부 확인, 필요시 게인 튜닝)
11) 차량 급전라인에서 이탈 후, 급전인버터 자동 모드 변환 후, 차량 급전라인에 재 진입.
12) CONU의 PBC(primary buck conv) 수동 모드 동작. → 충전 상태 확인.
13) 차량 급전라인에서 이탈 후, CONU 자동 모드 변환 후, 차량 급전라인에 재 진입.
14) 반복 시험.
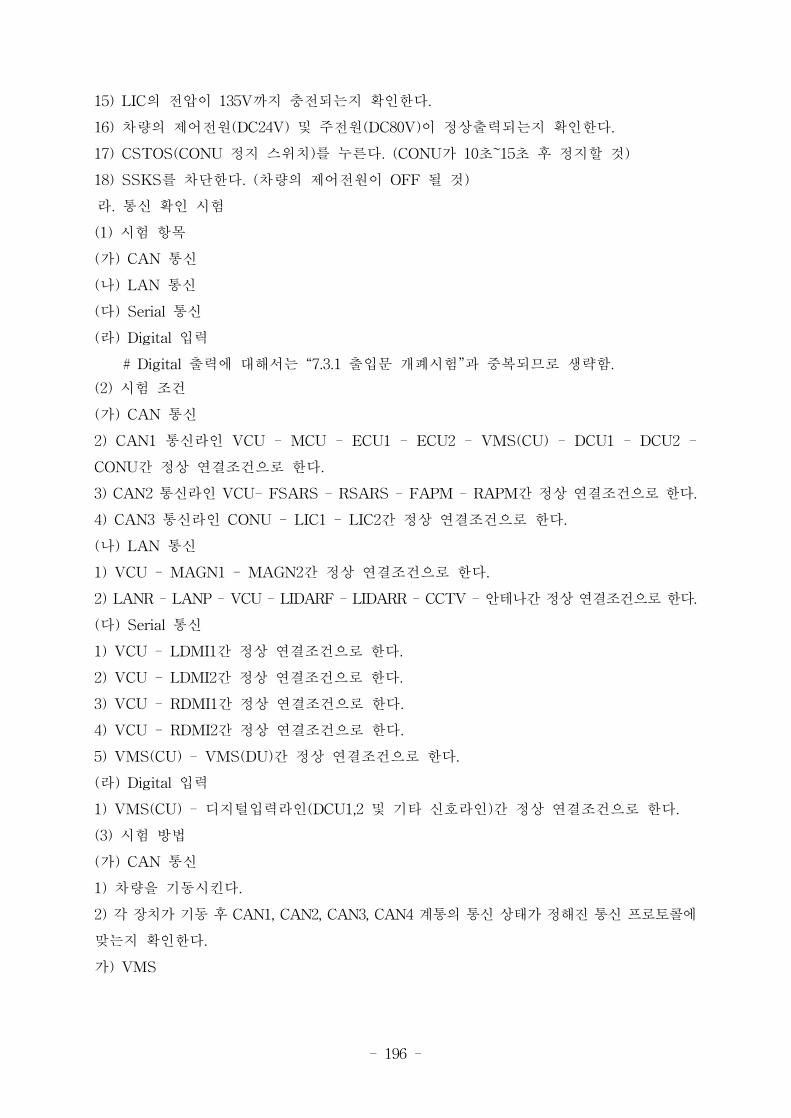
- 196 -
15) LIC의 전압이 135V까지 충전되는지 확인한다.
16) 차량의 제어전원(DC24V) 및 주전원(DC80V)이 정상출력되는지 확인한다.
17) CSTOS(CONU 정지 스위치)를 누른다. (CONU가 10초~15초 후 정지할 것)
18) SSKS를 차단한다. (차량의 제어전원이 OFF 될 것)
라. 통신 확인 시험
(1) 시험 항목
(가) CAN 통신
(나) LAN 통신
(다) Serial 통신
(라) Digital 입력
# Digital 출력에 대해서는 “7.3.1 출입문 개폐시험”과 중복되므로 생략함.
(2) 시험 조건
(가) CAN 통신
2) CAN1 통신라인 VCU - MCU - ECU1 - ECU2 - VMS(CU) - DCU1 - DCU2 -
CONU간 정상 연결조건으로 한다.
3) CAN2 통신라인 VCU- FSARS - RSARS - FAPM - RAPM간 정상 연결조건으로 한다.
4) CAN3 통신라인 CONU - LIC1 - LIC2간 정상 연결조건으로 한다.
(나) LAN 통신
1) VCU - MAGN1 - MAGN2간 정상 연결조건으로 한다.
2) LANR - LANP - VCU - LIDARF - LIDARR - CCTV - 안테나간 정상 연결조건으로 한다.
(다) Serial 통신
1) VCU - LDMI1간 정상 연결조건으로 한다.
2) VCU - LDMI2간 정상 연결조건으로 한다.
3) VCU - RDMI1간 정상 연결조건으로 한다.
4) VCU - RDMI2간 정상 연결조건으로 한다.
5) VMS(CU) - VMS(DU)간 정상 연결조건으로 한다.
(라) Digital 입력
1) VMS(CU) - 디지털입력라인(DCU1,2 및 기타 신호라인)간 정상 연결조건으로 한다.
(3) 시험 방법
(가) CAN 통신
1) 차량을 기동시킨다.
2) 각 장치가 기동 후 CAN1, CAN2, CAN3, CAN4 계통의 통신 상태가 정해진 통신 프로토콜에
맞는지 확인한다.
가) VMS
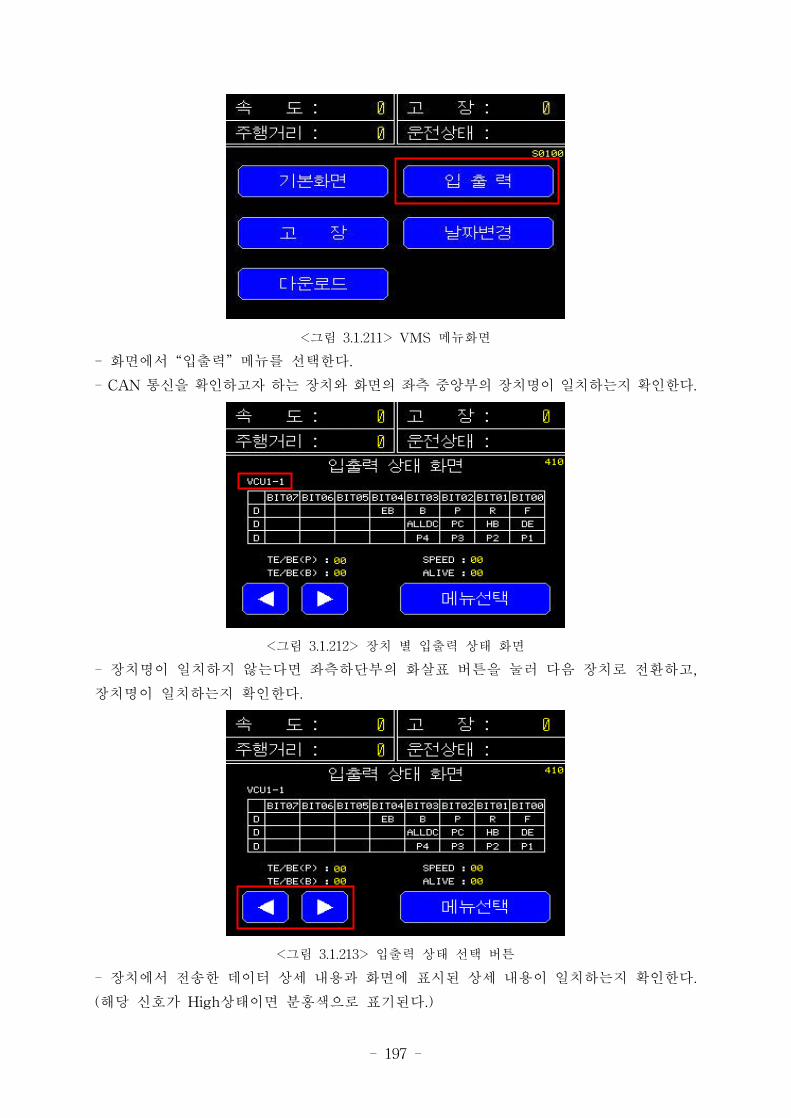
- 197 -
<그림 3.1.211> VMS 메뉴화면
- 화면에서 “입출력” 메뉴를 선택한다.
- CAN 통신을 확인하고자 하는 장치와 화면의 좌측 중앙부의 장치명이 일치하는지 확인한다.
<그림 3.1.212> 장치 별 입출력 상태 화면
- 장치명이 일치하지 않는다면 좌측하단부의 화살표 버튼을 눌러 다음 장치로 전환하고,
장치명이 일치하는지 확인한다.
<그림 3.1.213> 입출력 상태 선택 버튼
- 장치에서 전송한 데이터 상세 내용과 화면에 표시된 상세 내용이 일치하는지 확인한다.
(해당 신호가 High상태이면 분홍색으로 표기된다.)
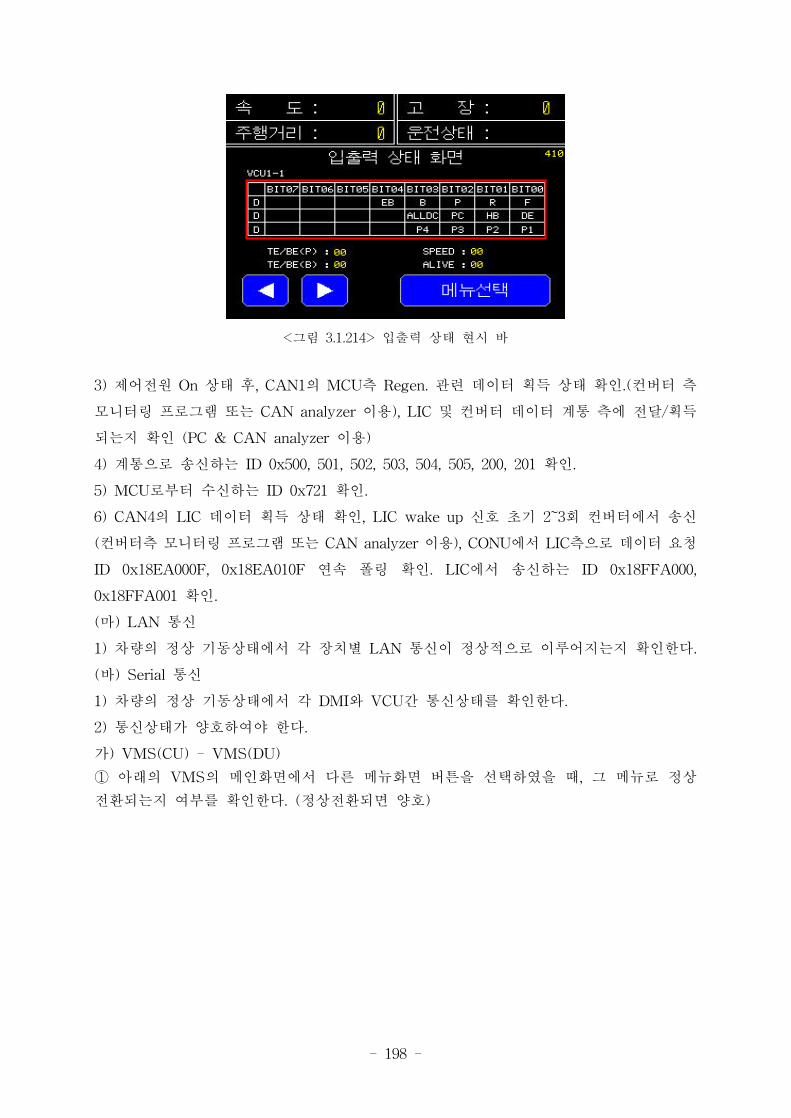
- 198 -
<그림 3.1.214> 입출력 상태 현시 바
3) 제어전원 On 상태 후, CAN1의 MCU측 Regen. 관련 데이터 획득 상태 확인.(컨버터 측
모니터링 프로그램 또는 CAN analyzer 이용), LIC 및 컨버터 데이터 계통 측에 전달/획득
되는지 확인 (PC & CAN analyzer 이용)
4) 계통으로 송신하는 ID 0x500, 501, 502, 503, 504, 505, 200, 201 확인.
5) MCU로부터 수신하는 ID 0x721 확인.
6) CAN4의 LIC 데이터 획득 상태 확인, LIC wake up 신호 초기 2~3회 컨버터에서 송신
(컨버터측 모니터링 프로그램 또는 CAN analyzer 이용), CONU에서 LIC측으로 데이터 요청
ID 0x18EA000F, 0x18EA010F 연속 폴링 확인. LIC에서 송신하는 ID 0x18FFA000,
0x18FFA001 확인.
(마) LAN 통신
1) 차량의 정상 기동상태에서 각 장치별 LAN 통신이 정상적으로 이루어지는지 확인한다.
(바) Serial 통신
1) 차량의 정상 기동상태에서 각 DMI와 VCU간 통신상태를 확인한다.
2) 통신상태가 양호하여야 한다.
가) VMS(CU) - VMS(DU)
① 아래의 VMS의 메인화면에서 다른 메뉴화면 버튼을 선택하였을 때, 그 메뉴로 정상
전환되는지 여부를 확인한다. (정상전환되면 양호)

- 199 -
<그림 3.1.215> 초기동작 메인메뉴 화면
② 또는 다음의 방법으로 체크할 수 있다.
- VMS(CU) 의 4CN에 연결된 케이블을 제거한다.
- VMS(DU) 화면이 “MIM4와의 통신 ERROR !!!”의 메시지가 띄워진 화면으로 전환되는지
여부를 확인한다.
<그림 3.1.216> 통신 고장 현시 화면
- 제거한 케이블을 CU의 4CN에 재연결한다.
- 메인화면으로 정상전환되는지 여부를 확인한다.(정상전환되면 양호)
<그림 3.1.217> 고장 복귀 화면
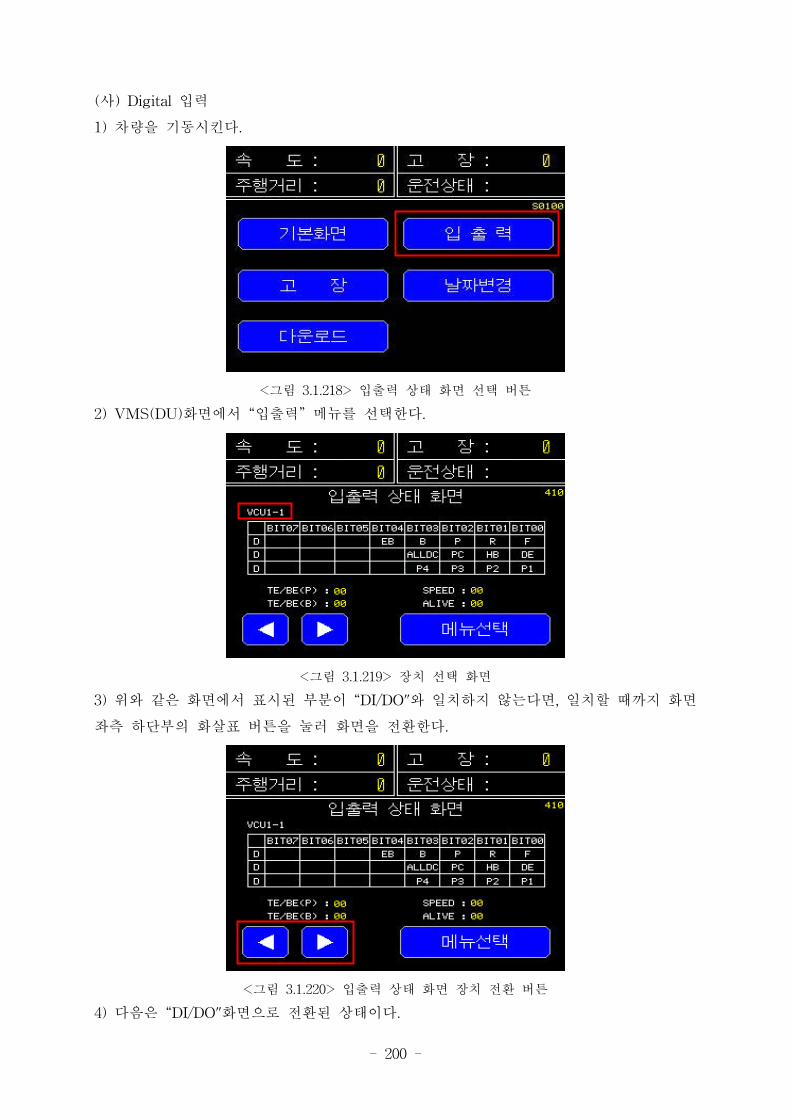
- 200 -
(사) Digital 입력
1) 차량을 기동시킨다.
<그림 3.1.218> 입출력 상태 화면 선택 버튼
2) VMS(DU)화면에서 “입출력” 메뉴를 선택한다.
<그림 3.1.219> 장치 선택 화면
3) 위와 같은 화면에서 표시된 부분이 “DI/DO"와 일치하지 않는다면, 일치할 때까지 화면
좌측 하단부의 화살표 버튼을 눌러 화면을 전환한다.
<그림 3.1.220> 입출력 상태 화면 장치 전환 버튼
4) 다음은 “DI/DO"화면으로 전환된 상태이다.
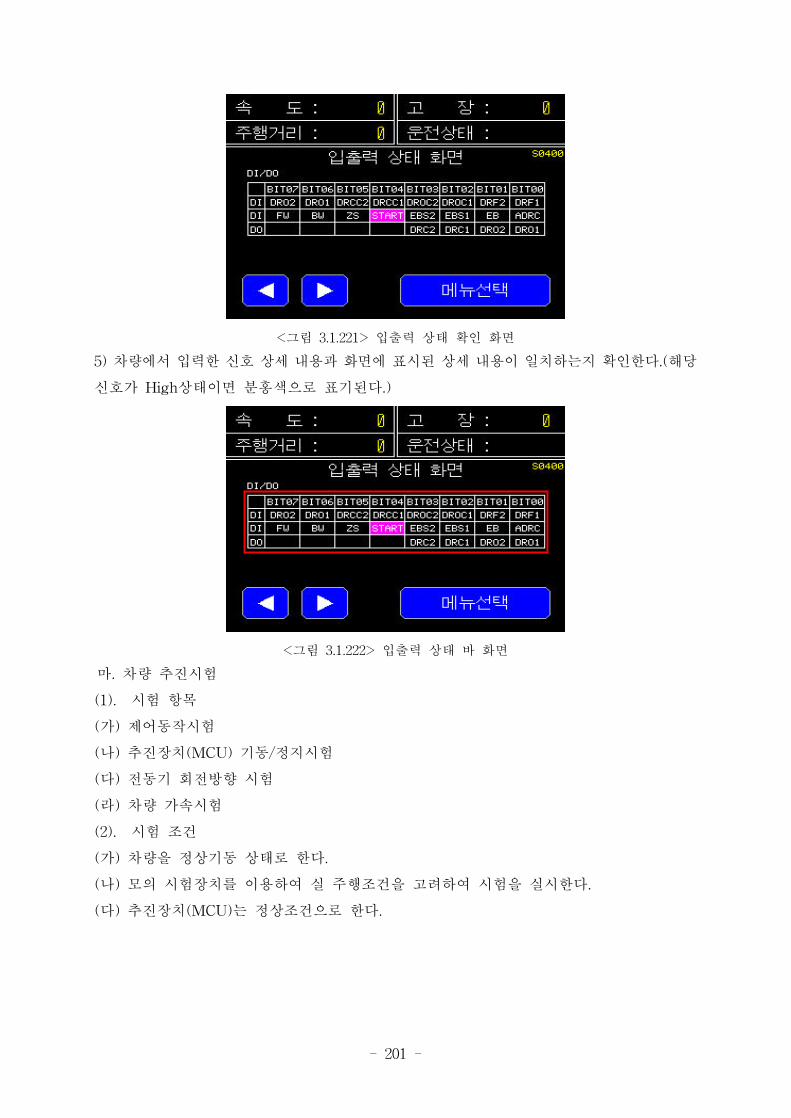
- 201 -
<그림 3.1.221> 입출력 상태 확인 화면
5) 차량에서 입력한 신호 상세 내용과 화면에 표시된 상세 내용이 일치하는지 확인한다.(해당
신호가 High상태이면 분홍색으로 표기된다.)
<그림 3.1.222> 입출력 상태 바 화면
마. 차량 추진시험
(1). 시험 항목
(가) 제어동작시험
(나) 추진장치(MCU) 기동/정지시험
(다) 전동기 회전방향 시험
(라) 차량 가속시험
(2). 시험 조건
(가) 차량을 정상기동 상태로 한다.
(나) 모의 시험장치를 이용하여 실 주행조건을 고려하여 시험을 실시한다.
(다) 추진장치(MCU)는 정상조건으로 한다.
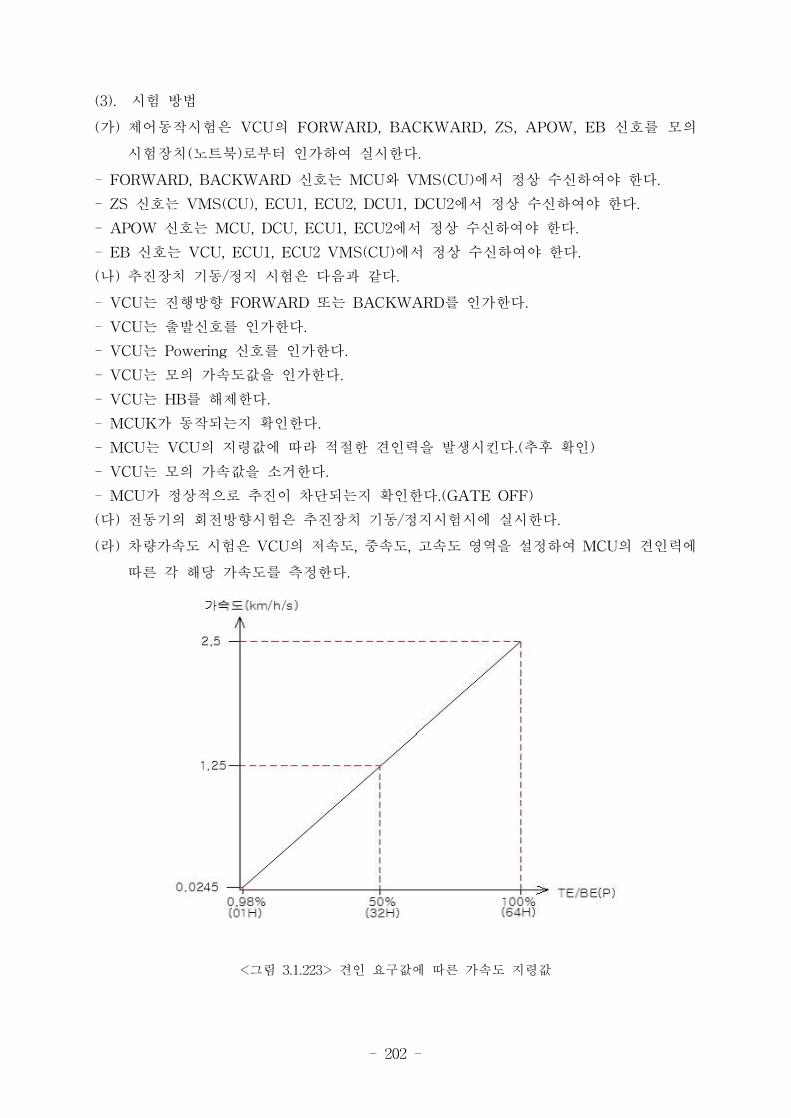
- 202 -
(3). 시험 방법
(가) 제어동작시험은 VCU의 FORWARD, BACKWARD, ZS, APOW, EB 신호를 모의
시험장치(노트북)로부터 인가하여 실시한다.
- FORWARD, BACKWARD 신호는 MCU와 VMS(CU)에서 정상 수신하여야 한다.
- ZS 신호는 VMS(CU), ECU1, ECU2, DCU1, DCU2에서 정상 수신하여야 한다.
- APOW 신호는 MCU, DCU, ECU1, ECU2에서 정상 수신하여야 한다.
- EB 신호는 VCU, ECU1, ECU2 VMS(CU)에서 정상 수신하여야 한다.
(나) 추진장치 기동/정지 시험은 다음과 같다.
- VCU는 진행방향 FORWARD 또는 BACKWARD를 인가한다.
- VCU는 출발신호를 인가한다.
- VCU는 Powering 신호를 인가한다.
- VCU는 모의 가속도값을 인가한다.
- VCU는 HB를 해제한다.
- MCUK가 동작되는지 확인한다.
- MCU는 VCU의 지령값에 따라 적절한 견인력을 발생시킨다.(추후 확인)
- VCU는 모의 가속값을 소거한다.
- MCU가 정상적으로 추진이 차단되는지 확인한다.(GATE OFF)
(다) 전동기의 회전방향시험은 추진장치 기동/정지시험시에 실시한다.
(라) 차량가속도 시험은 VCU의 저속도, 중속도, 고속도 영역을 설정하여 MCU의 견인력에
따른 각 해당 가속도를 측정한다.
<그림 3.1.223> 견인 요구값에 따른 가속도 지령값

- 203 -
바. 차량 제동시험
(1). 시험 항목
(가) 유압제동 시험
(나) 비상제동 시험
(다) 혼합제동 시험
(2). 시험 조건
(가) 차량을 정상기동 상태로 한다.
(나) 모의 시험장치를 이용하여 실 주행조건을 고려하여 시험을 실시한다.
(다) 제동장치(ECU와 BCU)는 정상조건으로 한다.
(라) VCU는 차량의 승차 정원을 임의값(2인 기준)으로 설정한다.
(3). 시험 방법
(가) 유압제동 시험
1) VCU는 진행방향 FORWARD 또는 BACKWARD를 인가한다.
2) VCU는 Holding Brake 신호 해제한다.
3) VCU는 Braking 신호를 인가한다.
4) VCU는 모의 감속도값을 인가한다.
5) 지령 감속값도 값에 따라 제동압이 발생하는지 측정한다.
6) 저감속지령, 중감속지령, 고감속지령값을 설정하여 VCU의 지령값에 따라 제동압이
정상적으로 동작하는지 확인한다.
제동단수 제동 감속도
1 0.72 km/h/s2 1.44 km/h/s3 2.16 km/h/s4 2.88 km/h/s5 3.60 km/h/s6 4.32 km/h/s7 5.04 km/h/s
<표 3.1.49> 제동 단수에 따른 감속도 값
TE/BE(BRAKING) 0 ~ 11.8 km/h/s (0 ~ 118 / 0F ~ 76 h)
118 수신일 경우, 11.8km/h/s로 수신 인식
(나) 비상제동 시험
1) VCU는 진행방향 FORWARD 또는 BACKWARD를 인가한다.
2) VCU는 Holding Brake 신호 해제한다.
3) VCU는 모의로 비상제동(EB) 신호를 인가한다.
4) 비상제동이 체결되는지 확인한다.
5) 차량의 비상제동 스위치1(PEB1)를 눌러 비상제동이 체결되는지 확인한다.
6) 차량의 비상제동 스위치2(PEB2)를 눌러 비상제동이 체결되는지 확인한다.
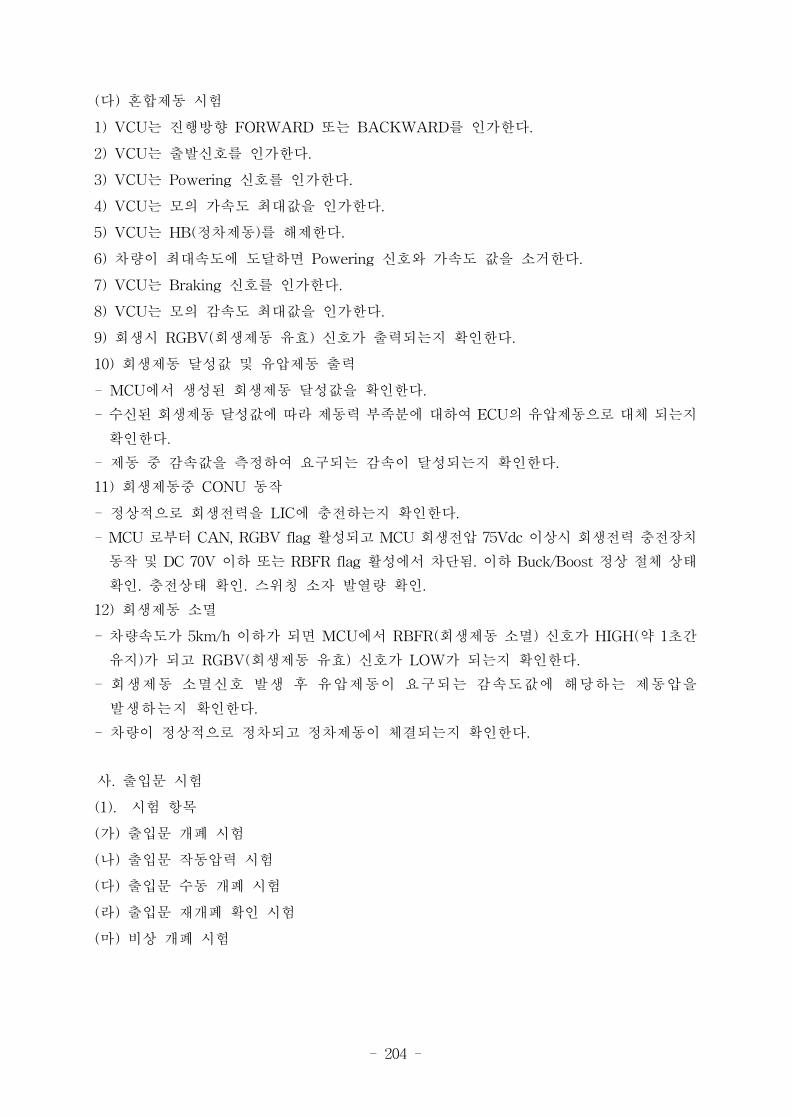
- 204 -
(다) 혼합제동 시험
1) VCU는 진행방향 FORWARD 또는 BACKWARD를 인가한다.
2) VCU는 출발신호를 인가한다.
3) VCU는 Powering 신호를 인가한다.
4) VCU는 모의 가속도 최대값을 인가한다.
5) VCU는 HB(정차제동)를 해제한다.
6) 차량이 최대속도에 도달하면 Powering 신호와 가속도 값을 소거한다.
7) VCU는 Braking 신호를 인가한다.
8) VCU는 모의 감속도 최대값을 인가한다.
9) 회생시 RGBV(회생제동 유효) 신호가 출력되는지 확인한다.
10) 회생제동 달성값 및 유압제동 출력
- MCU에서 생성된 회생제동 달성값을 확인한다.
- 수신된 회생제동 달성값에 따라 제동력 부족분에 대하여 ECU의 유압제동으로 대체 되는지
확인한다.
- 제동 중 감속값을 측정하여 요구되는 감속이 달성되는지 확인한다.
11) 회생제동중 CONU 동작
- 정상적으로 회생전력을 LIC에 충전하는지 확인한다.
- MCU 로부터 CAN, RGBV flag 활성되고 MCU 회생전압 75Vdc 이상시 회생전력 충전장치
동작 및 DC 70V 이하 또는 RBFR flag 활성에서 차단됨. 이하 Buck/Boost 정상 절체 상태
확인. 충전상태 확인. 스위칭 소자 발열량 확인.
12) 회생제동 소멸
- 차량속도가 5km/h 이하가 되면 MCU에서 RBFR(회생제동 소멸) 신호가 HIGH(약 1초간
유지)가 되고 RGBV(회생제동 유효) 신호가 LOW가 되는지 확인한다.
- 회생제동 소멸신호 발생 후 유압제동이 요구되는 감속도값에 해당하는 제동압을
발생하는지 확인한다.
- 차량이 정상적으로 정차되고 정차제동이 체결되는지 확인한다.
사. 출입문 시험
(1). 시험 항목
(가) 출입문 개폐 시험
(나) 출입문 작동압력 시험
(다) 출입문 수동 개폐 시험
(라) 출입문 재개폐 확인 시험
(마) 비상 개폐 시험
- 205 -
(2). 시험 조건
(가) 차량을 정상기동 상태로 한다.
(나) 모의 시험장치를 이용하여 실 동작조건을 고려하여 시험을 실시한다.
(다) 차량 수동 출입문 조작 번튼을 취급하여 시험을 실시한다.
(3). 시험 방법
(가) 출입문 개폐시험
1) 차량 정차상태에서 사령실 출입문1 열림신호를 모의하여 VCU에서 CAN 통신을 통해
출력한다.
2) VMS(CU)에서 사령실 출입문1 열림 지령을 출력한다.(VCU 신호수신시 자동 출력)
3) DCU1의 출입문 열림을 확인한다.
4) 사령실 출입문1 닫힘신호를 모의하여 VCU에서 CAN 통신을 통해 출력한다.
5) VMS(CU)에서 사령실 출입문 닫힘 지령을 출력한다.(VCU 신호수신시 자동 출력)
6) DCU1의 출입문 닫힘을 확인한다.(동시에 출입문 작동압력을 측정한다.)
7) 사령실 출입문2 열림/닫힘 지령에 따라 위 절차를 수행한다.
(나) 출입문 수동개폐 시험
1) 차량 정차상태에서 출입문 스위치 판넬의 PDOS1(출입문1 열림 스위치)을 동작시켜
DCU1의 출입문이 열림을 확인한다.
2) 출입문 스위치 판넬의 PDCS1(출입문1 닫힘 스위치)을 동작시켜 DCU1의 출입문이 닫힘을
확인한다.(동시에 출입문 작동압력을 측정한다.)
3) 출입문 스위치 판넬의 PDOS2(출입문2 열림 스위치)을 동작시켜 DCU2의 출입문이 열림을
확인한다.
4) 출입문 스위치 판넬의 PDCS2(출입문2 닫힘 스위치)을 동작시켜 DCU2의 출입문이 닫힘을
확인한다.(동시에 출입문 작동압력을 측정한다.)
(다) 출입문 재개폐 시험
1) 출입문 정상동작 상태에서에서 장애물 감지시 2회 동작 동안 이상이 없어야 한다.
(라) 비상 개폐 시험
1) 차량 정차상태에서 IEDOS1(차량 내부 출입문 비상 열림 스위치1)을 동작시켜 출입문을
승객이 열수 있는지 확인한다.
2) 출입문 개방이 용이하여야 한다.
3) OEDOS1(차량 외부 출입문 비상 열림 스위치1), IEDOS2, OEDOS2에 대하여 동일한
시험을 실시하여 출입문 개방이 용이한지 확인한다.
- 206 -
아. 보호장치 동작시험
(1). 시험 항목
(가) CONU 입/출력 과전압 보호 동작 시험.
(나) 입/출력 과전류 보호 동작 시험.
(다) CONU 內 각 컨버터 Over Temp. 차단 보호 동작 시험.
(2). 시험 조건
(가) Primary buck converter (집전/LIC 충전)
1) 입력 과전압 보호 동작 레벨 : 730Vdc 이상에서 트립/ PBC 동작 안함.
2) 출력 과전압 보호 동작 레벨 : 142Vdc 이상에서 트립/ PBC 동작 안함.
3) 입력 과전류 보호 동작 레벨 : 40A 이상에서 트립/ PBC 동작 안함.
4) 출력 과전류 보호 동작 레벨 : 130A이상에서 트립/ PBC 동작 안함.
5) 과온도 보호 동작 레벨 : 85 이상에서 트립/ PBC 동작 안함.
(나) Secondary buck converter (80Vdc 출력)
1) 입력 과전압 보호 동작 레벨 : 142Vdc이상에서 트립/ SBC 동작 안함.
2) 출력 과전압 보호 동작 레벨 : 100Vdc 이상에서 트립/ SBC 동작 안함.
3) 입력 과전류 보호 동작 레벨 : 120A 이상에서 트립/ SBC 동작 안함.
4) 출력 과전류 보호 동작 레벨 : 150A 이상에서 트립/ SBC 동작 안함.
5) 과온도 보호 동작 레벨 : 85 이상에서 트립/ SBC 동작 안함.
(다) Regen. boost converter (LIC 충전)
1) 입력 과전압 보호 동작 레벨 : 100Vdc이상에서 트립/ boost 동작 안함.
2) 출력 과전압 보호 동작 레벨 : 145Vdc 이상에서 트립/ boost 동작 안함.
3) 입력 과전류 보호 동작 레벨 : 40A 이상에서 트립/ boost 동작 안함.
4) 출력 과전류 보호 동작 레벨 : 30A 이상에서 트립/ boost 동작 안함.
5) 과온도 보호 동작 레벨 : 85 이상에서 트립/ boost 동작 안함.
(라) Full bridge converter (24Vdc 출력)
1) 입력 과전압 보호 동작 레벨 : 142VdcVdc에서 트립/ FBC 동작 안함.
2) 출력 과전압 보호 동작 레벨 : 30Vdc에서 트립/ FBC 동작 안함.
3) 입력 과전류 보호 동작 레벨 : 80A에서 트립/ FBC 동작 안함.
4) 출력 과전류 보호 동작 레벨 : 200A에서 트립/ FBC 동작 안함.
5) 과온도 보호 동작 레벨 : 85 이상에서 트립/ FBC 동작 안함.
(3). 시험 방법
(가) 컨버터 입력/출력 전압 시험
1) 컨버터 비동작에서 파워서플라이 이용. 전압을 수동으로 인가하여 해당 전압 레벨에서
트립 상태 확인.

- 207 -
2) 출력 과전압 시험 조건 : 컨버터 동작 상태에서 Protection 전압 레벨을 인위적으로 하향치
조정 후, 해당 값 이상에서 트립 상태 확인.
3) 과온도 시험 조건
① 열풍기를 이용한 직접 가열 후, 설정된 온도에서 트립 확인.
② 각 컨버터 동작 상태에서 소팅하여 설정온도에서 트립 확인.
11. 성능시험 및 분석 기준
가. 추진
(1). 성능시험 항목
(가) 가속도 성능시험
(나) 속도유지 성능시험
(다) 회생 감속도 성능시험
(2). 성능시험 조건
(가) 차량이 성능을 낼 수 있는 충분한 직선 주행로가 마련되어야 한다. (200m 이상 확보
할 것.)
(나) 충분한 성능을 낼 수 있도록 LIC가 SOC 80% 이상이어야 한다.
(다) 수동운전을 위한 장치의 연결이 시험 중 끊어지지 않아야 한다.
(라) 차량 기동 후 정지상태에서 제어전압과 주전압, LIC전압을 확인 한다.
(마) 차량의 통신 상태를 확인한다. (VCU, MCU, VMS, ECU1, ECU2)
(바) 수동운전을 위한 조이스틱을 연결 하고 NCU 프로그램에서 수동운전 모드로 전환한다.
(사) NCU 프로그램의 차량 목표 속도를 20km/h로 설정한다.
(아) 안전을 위해 운전자와 동승자가 탑승을 하며, 동승자는 불시의 사고를 예방하기 위한
비상제동 체결을 준비 해야 한다.
(자) 시험 전 동승자는 모니터링 프로그램의 로깅 프로그램을 시작한다.
(차) 운전자는 차량이 경로에서 벗어나지 않도록 조향을 하고, 조이스틱의 ACCEL을 100%
취급하여 시험을 시작한다.
(카) 동승자는 차량이 주행되는 상황과 모니터링 프로그램을 주시하며 차량의 상황을 운전자와
커뮤니케이션 한다.
(타) 동승자는 불시의 사고를 예방하기위한 비상제동 체결을 준비한다.
(3). 성능시험 방법
(가) 가속도 성능시험
1) 모니터링 프로그램의 로깅기능을 이용하여 로깅된 데이터값으로 가속도 성능확인을 한다.
2) 로깅 데이터는 500ms 간격으로 수집이 되며 속도와 진행 거리값, 브레이크 압력값 등이
로깅된다.
3) 데이터 분석은 차량이 속력을 내는 순간부터 시작하여 목표속도인 20km/h가 되는 순간
까지가 분석 데이터로 사용된다.
4) 기록 된 데이터의 시간과 속도, 진행 거리값을 분석하여 가속도 값을 도출한다.
- 208 -
(나) 속도유지 성능시험
1) 모니터링 프로그램의 로깅기능을 이용하여 로깅된 데이터값으로 속도유지 성능확인을
한다.
2) 로깅 데이터는 500ms 간격으로 수집이 되며 속도와 진행 거리값, 브레이크 압력값 등이
로깅된다.
3) 시험은 시험환경을 고려하여 목표속도를 5km/h, 10km/h로 설정하며, 목표 속도가 유지된
상태로 속도 변화량이 5% 이내여야 한다.
4) 데이터 분석은 차량이 속력을 내어 목표속도에 도달하는 순간부터 시작하여 감속하기전
까지가 분석 데이터로 사용된다.
5) 기록 된 데이터의 목표속도 유지 데이터를 분석하여 변화량을 측정한다.
(다) 회생 감속도 성능시험
1) 모니터링 프로그램의 로깅기능을 이용하여 로깅된 데이터값으로 회생 감속도 성능확인을
한다.
2) 로깅 데이터는 500ms 간격으로 수집이 되며 속도와 진행 거리값, 브레이크 압력값 등이
로깅된다.
3) 차량이 속력을 내어 목표속도인 20km/h를 달성 후 ACCEL를 0% 취급하여 회생브레이
크가 작동 되도록 한다.
4) 데이터 분석은 목표속도에서 회생브레이크가 작동되는 순간부터 차량속도 0km/h가 되는
순간까지가 분석 데이터로 사용된다.
5) 기록 된 데이터의 시간과 속도, 진행 거리값을 분석하여 회생 감속도 값을 도출한다.
나. 제동
(1) 성능시험
(가) 시험 항목 및 절차
1) 시험 항목
- 상용제동 시험
- 비상제동 시험
- 혼합제동 시험
2) 시험조건
- 차량을 정상기동 상태로 한다.
- 평탄하고 직선구간에서 실시한다.
- 모의 시험장치를 이용하여 실 주행조건을 고려하여 시험을 실시한다.
- 제동장치(ECU와 BCU)는 정상조건으로 한다.
- VCU는 차량의 승차 정원을 임의값(시험인원 2인 기준)으로 설정한다.
- 209 -
3) 시험방법
가) 유압제동 시험
① VCU는 진행방향 FORWARD 또는 BACKWARD를 인가한다.
② VCU는 Holding Brake 신호 해제한다.
③ VCU는 Braking 신호를 인가한다.
④ VCU는 모의 감속도 값을 인가한다.
⑤ 지령 감속값도 값에 따라 제동압이 발생하는지 측정한다.
⑥ VCU의 감속도 지령값에 따라 제동압이 정상적으로 동작하는지 확인한다.
나) 비상제동 시험
① VCU는 진행방향 FORWARD 또는 BACKWARD를 인가한다.
② VCU는 Holding Brake 신호 해제한다.
③ VCU는 모의 비상제동(EB) 신호를 인가한다.
④ 차량의 비상제동 스위치1(PEB1)를 눌러 비상제동이 체결되는지 확인한다.
⑤ 차량의 비상제동 스위치2(PEB2)를 눌러 비상제동이 체결되는지 확인한다.
다) 혼합제동 시험
① VCU는 진행방향 FORWARD 또는 BACKWARD를 인가한다.
② VCU는 출발신호를 인가한다.
③ VCU는 Powering 신호를 인가한다.
④ VCU는 모의 가속도 최대값을 인가한다.
⑤ VCU는 HB(정차제동)를 해제한다.
⑥ 차량이 최대속도에 도달하면 Powering 신호와 가속도 값을 소거한다.
⑦ 5초간 타행상태를 유지한다.
⑧ VCU는 Braking 신호를 인가한다.
⑨ VCU는 모의 감속도 최대값을 인가한다.
⑩ 회생시 RGBV(회생제동 유효) 신호가 출력되는지 확인한다.
⑪ 회생제동 달성값 및 유압제동 출력
- MCU에서 생성된 회생제동 달성값을 확인한다.
- 수신된 회생제동 달성값에 따라 제동력 부족분에 대하여 ECU의 유압제동으로 대체
되는지 확인한다.
- 제동 중 감속값을 측정하여 요구되는 감속이 달성되는지 확인한다.
⑫ 회생제동중 CONU 동작
- 정상적으로 회생전력을 LIC에 충전하는지 확인한다.
- RGBV 입력시 DC 80V 전원 계통이 DC 80V 이상시 회생전력 충전장치 동작 및
DC 75V 이하에서 차단됨
⑬ 회생제동 소멸
- 차량속도가 5km/h 이하가 되면 MCU에서 RBFR(회생제동 소멸) 신호가 HIGH(약
1초간 유지)가 되고 RGBV(회생제동 유효) 신호가 LOW가 되는지 확인한다.
- 회생제동 소멸신호 발생 후 유압제동이 요구되는 감속도값(3.5km/h/s)에 해당하는
제동압을 발생하는지 확인한다.
- 차량이 정상적으로 정차되고 정차제동이 체결되는지 확인한다.
- 210 -
다. 자동운전
(1). 성능시험 항목
(가) 지자석검지 성능시험
(나) 경로추종 성능시험
(다) 속도추종 성능시험
(라) 통신 성능시험
(2). 성능시험 조건
(가) 차량이 성능을 낼 수 있는 지자석 코스 주행로가 마련되어야 한다.
(나) 코스 주행로의 WAYPOINT가 마련되어야 한다.
(다) WAYPOIN를 INDEX화 하며 속도프로파일을 마련하여야 한다.
(라) 관제 서버와의 통신을 할 수 있는 환경이 마련되어야 한다.
(마) 코스를 완주 할 수 있는 충분한 SOC가 충족되어야 한다.
(바) 수동운전을 위한 장치의 연결이 시험 중 끊어지지 않아야 한다.
(사) 차량 기동 후 정지상태에서 제어전압과 주전압, LIC전압을 확인 한다.
(아) 차량의 통신 상태를 확인한다.
(자) 수동운전을 위한 조이스틱을 준비한다.
(차) NCU 프로그램의 차량 목표 속도를 5km/h로 설정한다.
(카) 안전을 위해 운전자와 동승자가 탑승을 하며, 동승자는 불시의 사고를 예방하기 위한
비상제동 체결을 준비 해야 한다.
(타) 시험 전 동승자는 모니터링 프로그램의 로깅 프로그램을 시작한다.
(파) 동승자는 차량이 주행되는 상황과 모니터링 프로그램을 주시하며 차량의 상황을 운전자와
커뮤니케이션 한다.
(하) 동승자는 불시의 사고를 예방하기위한 비상제동 체결을 준비한다.
(3). 성능시험 방법
(가) 지자석검지 성능시험
1) 운전자는 NCU 프로그램을 이용하여 수동운전 모드로 전환한다.
2) 차량을 수동운전으로 구동하여 START 위치로 이동한다.
3) 첫 검지 지자석과 차량의 위치상태는 차량 전방의 MSR의 중앙 부분이 기점이고 첫 검지
자석을 전면으로 바라보는 형상으로 20~30cm 전에 차량을 정차시킨다.
4) 동승자는 모니터링 프로그램의 로깅 프로그램을 시작한다.
5) 운전자는 지자석을 따라 수동으로 조향 하여 운전을 하며 설정된 목표 속도인 5km/h로
주행을 한다.
6) 동승자는 차량이 주행되는 상황과 모니터링 프로그램을 주시하고 지자석검지 상황을
확인하며 차량의 상황을 운전자와 커뮤니케이션 한다.
7) 주행 코스를 완주한 후 모니터링 프로그램의 로깅기능을 이용하여 로깅된 데이터값으로
지자석검지 성능확인을 한다.
- 211 -
8) 로깅데이터는 50ms 간격으로수집이되며 속도와 진행거리값, 브레이크압력값자석센서센싱
값 등이 로깅된다.
9) 데이터는 차량이 구동되는 순간부터 시작하여 코스가 완주 되는 순간까지가 분석 데이터로
사용되고 자석센싱 부분만 데이터로 사용한다.
10) 데이터 분석은 한국철도기술연구원의 시뮬레이션 프로그램에 적용하여 분석을 하며 자석
검지에 대한 성능를 확인한다.
(나) 경로추종 성능시험
1) 운전자는 NCU 프로그램을 이용하여 수동운전 모드로 전환한다.
2) 차량을 수동운전으로 구동하여 START 위치로 이동한다.
3) 첫 검지 지자석과 차량의 위치상태는 차량 전방의 MSR의 중앙 부분이 기점이고 첫 검지
지자석을 전면으로 바라보는 형상으로 20~30cm 전에 차량을 정차시킨다.
4) 운전자는 NCU 프로그램의 조향 부분만 자동모드로 전환한다.
5) 동승자는 모니터링 프로그램의 로깅 프로그램을 시작한다.
6) 운전자는 가속부분만 수동으로 운전하고 설정된 목표 속도인 5km/h로 주행을 한다.
7) 동승자는 차량이 자동조향으로 주행되는 상황과 모니터링 프로그램을 주시하고 지자석검지
상황을 확인하며 차량의 상황을 운전자와 커뮤니케이션 한다.
8) 주행 코스를 완주한 후 모니터링 프로그램의 로깅기능을 이용하여 로깅된 데이터값으로
경로추종 성능확인을 한다.
9) 로깅 데이터는 50ms 간격으로 수집이 되며 속도와 진행 거리값, 브레이크 압력값 자석센서
센싱 값 등이 로깅된다.
10) 데이터는 차량이 구동되는 순간부터 시작하여 코스가 완주 되는 순간까지가 분석 데이터로
사용되고 자석센싱 부분만 데이터로 사용한다.
11) 데이터 분석은 한국철도기술연구원의 시뮬레이션 프로그램에 적용하여 분석을 하며 경로
추종에 대한 성능을 확인한다.
(다) 속도추종 성능시험
1) 운전자는 NCU 프로그램을 이용하여 수동운전 모드로 전환한다.
2) 차량을 수동운전으로 구동하여 START 위치로 이동한다.
3) 첫 검지 지자석과 차량의 위치상태는 차량 전방의 MSR의 중앙 부분이 기점이고 첫 검지
지자석을 전면으로 바라보는 형상으로 20~30cm 전에 차량을 정차시킨다.
4) 운전자는 NCU 프로그램을 자율주행모드로 전환한다.
5) 동승자는 모니터링 프로그램의 로깅 프로그램을 시작한다.
6) 운전자는 차량실내의 출발 버튼을 취급하여 차량을 주행시키고 차량은 미리 설정된 속도
프로파일로 주행을 한다.
7) 운전자와 동승자는 차량이 자율주행으로 주행되는 상황과 모니터링 프로그램을 주시하고
지자석검지 상황을 확인하며 차량의 상황을 서로 커뮤니케이션 한다.
- 212 -
8) 주행 코스를 완주한 후 모니터링 프로그램의 로깅기능을 이용하여 로깅된 데이터값으로
속도추종 성능확인을 한다.
9) 로깅 데이터는 50ms 간격으로 수집이 되며 속도와 진행 거리값, 브레이크 압력값 자석센서
센싱 값 등이 로깅된다.
10) 데이터는 차량이 구동되는 순간부터 시작하여 코스가 완주 되는 순간까지가 분석 데이터로
사용되고 모든 데이터가 사용된다.
11) 데이터 분석은 한국철도기술연구원의 시뮬레이션 프로그램에 적용하여 분석을 하며 속도
추종에 대한 성능을 확인한다.
(라) 통신 성능시험
1) 운전자는 NCU 프로그램을 이용하여 수동운전 모드로 전환한다.
2) 차량을 수동운전으로 구동하여 START 위치로 이동한다.
3) 첫 검지 지자석과 차량의 위치상태는 차량 전방의 MSR의 중앙 부분이 기점이고 첫 검지
지자석을 전면으로 바라보는 형상으로 20~30cm 전에 차량을 정차시킨다.
4) 운전자는 NCU 프로그램을 자율주행모드로 전환한다.
5) 동승자는 모니터링 노트북과 관제 서버간의 PING TEST를 한다.
6) 차량은 관제의 출발 신호를 통신으로 확인하여 차량을 주행시키고 미리 설정된 경로와
속도 프로파일로 자율주행을 한다.
7) 운전자와 동승자는 차량이 자율주행으로 주행되는 상황과 모니터링 프로그램을 주시하고
지자석검지 상황을 확인하며 차량의 상황을 서로 커뮤니케이션 한다.
8) 주행 코스를 완주한 후 관제에서 로깅된 통신 연결 상태 데이터값으로 통신성능확인을
한다.
9) 데이터 분석은 한국철도기술연구원에서 분석을 하며 차량과 관제 서버간의 통신에 대한
성능을 확인한다.
12. 도로조건에 대한 주행성능 분석
가. ISO 8608 기준 도로등급 별 동역학 시뮬레이션
다물체 동역학 소프트웨어인 Adams/car [4]를 통하여 ISO 8608 [5] Road class 별
미니트램의 만차상태(1300 [kg])일 때, Adams/Car 프로그램의 Default 차량 모델과 승차감지수를
분석/비교하였다.
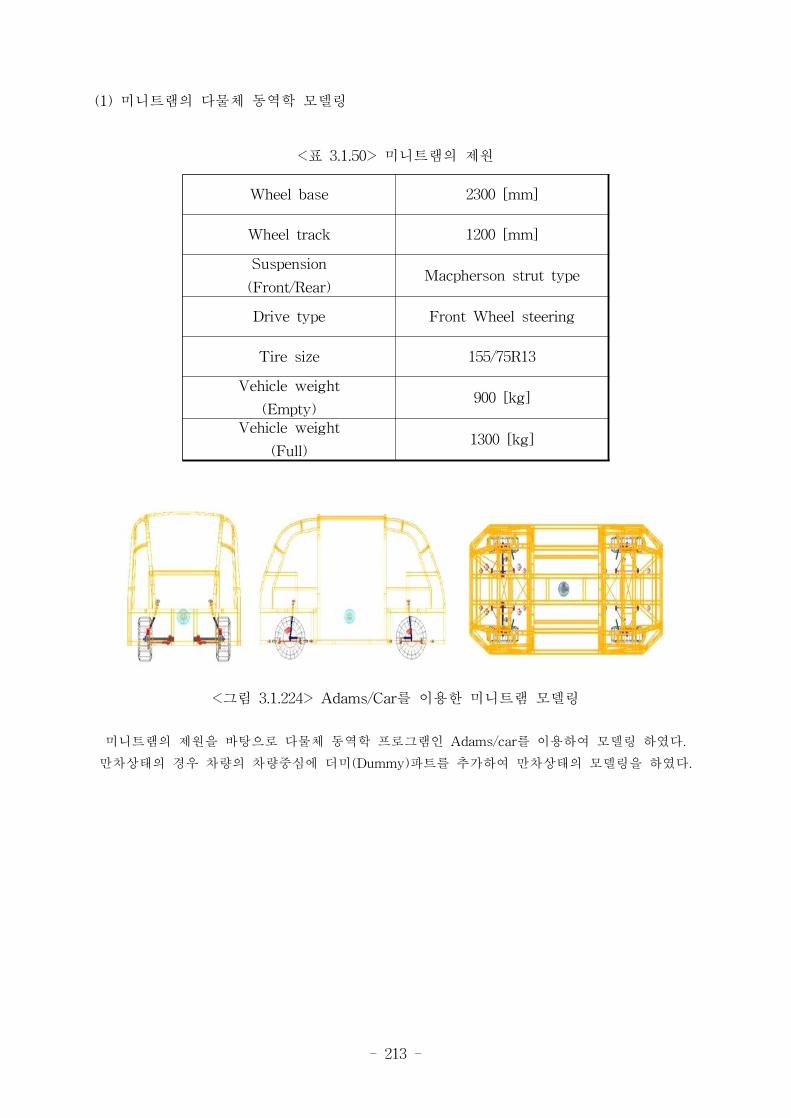
- 213 -
(1) 미니트램의 다물체 동역학 모델링
Wheel base 2300 [mm]
Wheel track 1200 [mm]
Suspension
(Front/Rear)Macpherson strut type
Drive type Front Wheel steering
Tire size 155/75R13
Vehicle weight
(Empty)900 [kg]
Vehicle weight
(Full)1300 [kg]
<표 3.1.50> 미니트램의 제원
<그림 3.1.224> Adams/Car를 이용한 미니트램 모델링
미니트램의 제원을 바탕으로 다물체 동역학 프로그램인 Adams/car를 이용하여 모델링 하였다.
만차상태의 경우 차량의 차량중심에 더미(Dummy)파트를 추가하여 만차상태의 모델링을 하였다.
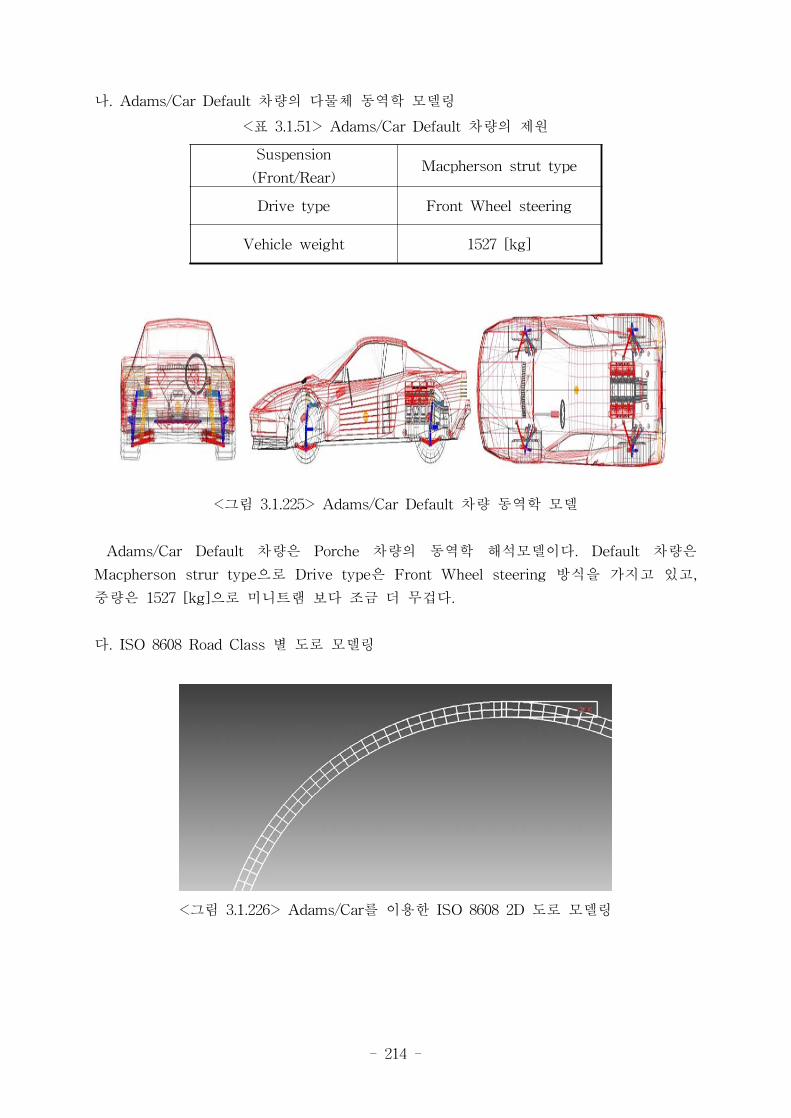
- 214 -
나. Adams/Car Default 차량의 다물체 동역학 모델링
Suspension
(Front/Rear)Macpherson strut type
Drive type Front Wheel steering
Vehicle weight 1527 [kg]
<표 3.1.51> Adams/Car Default 차량의 제원
<그림 3.1.225> Adams/Car Default 차량 동역학 모델
Adams/Car Default 차량은 Porche 차량의 동역학 해석모델이다. Default 차량은
Macpherson strur type으로 Drive type은 Front Wheel steering 방식을 가지고 있고,
중량은 1527 [kg]으로 미니트램 보다 조금 더 무겁다.
다. ISO 8608 Road Class 별 도로 모델링
<그림 3.1.226> Adams/Car를 이용한 ISO 8608 2D 도로 모델링
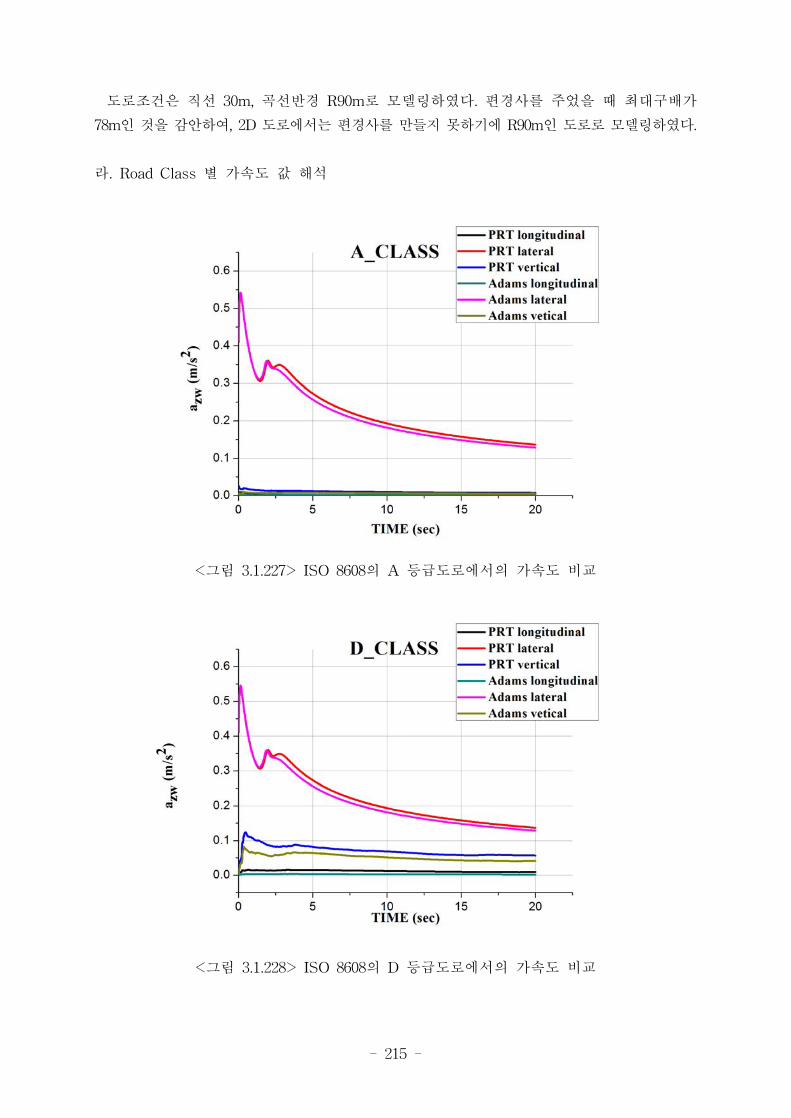
- 215 -
도로조건은 직선 30m, 곡선반경 R90m로 모델링하였다. 편경사를 주었을 때 최대구배가
78m인 것을 감안하여, 2D 도로에서는 편경사를 만들지 못하기에 R90m인 도로로 모델링하였다.
라. Road Class 별 가속도 값 해석
<그림 3.1.227> ISO 8608의 A 등급도로에서의 가속도 비교
<그림 3.1.228> ISO 8608의 D 등급도로에서의 가속도 비교
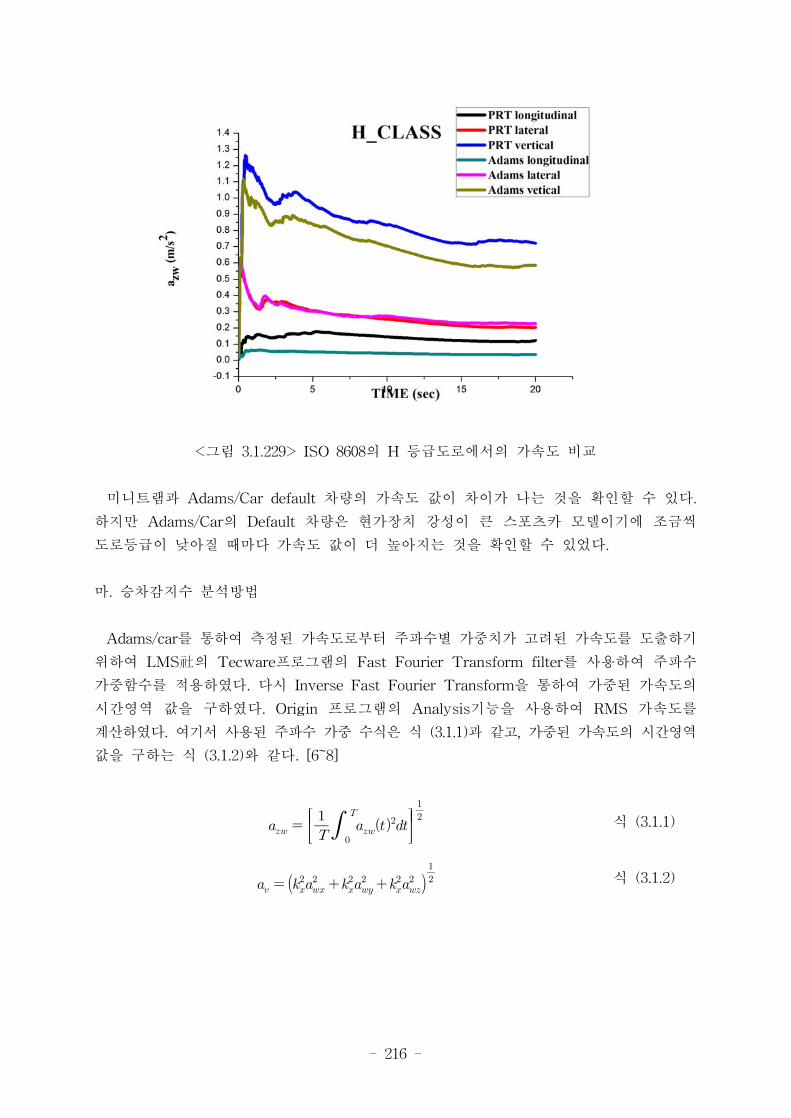
- 216 -
<그림 3.1.229> ISO 8608의 H 등급도로에서의 가속도 비교
미니트램과 Adams/Car default 차량의 가속도 값이 차이가 나는 것을 확인할 수 있다.
하지만 Adams/Car의 Default 차량은 현가장치 강성이 큰 스포츠카 모델이기에 조금씩
도로등급이 낮아질 때마다 가속도 값이 더 높아지는 것을 확인할 수 있었다.
마. 승차감지수 분석방법
Adams/car를 통하여 측정된 가속도로부터 주파수별 가중치가 고려된 가속도를 도출하기
위하여 LMS社의 Tecware프로그램의 Fast Fourier Transform filter를 사용하여 주파수
가중함수를 적용하였다. 다시 Inverse Fast Fourier Transform을 통하여 가중된 가속도의
시간영역 값을 구하였다. Origin 프로그램의 Analysis기능을 사용하여 RMS 가속도를
계산하였다. 여기서 사용된 주파수 가중 수식은 식 (3.1.1)과 같고, 가중된 가속도의 시간영역
값을 구하는 식 (3.1.2)와 같다. [6~8]
식 (3.1.1)
식 (3.1.2)
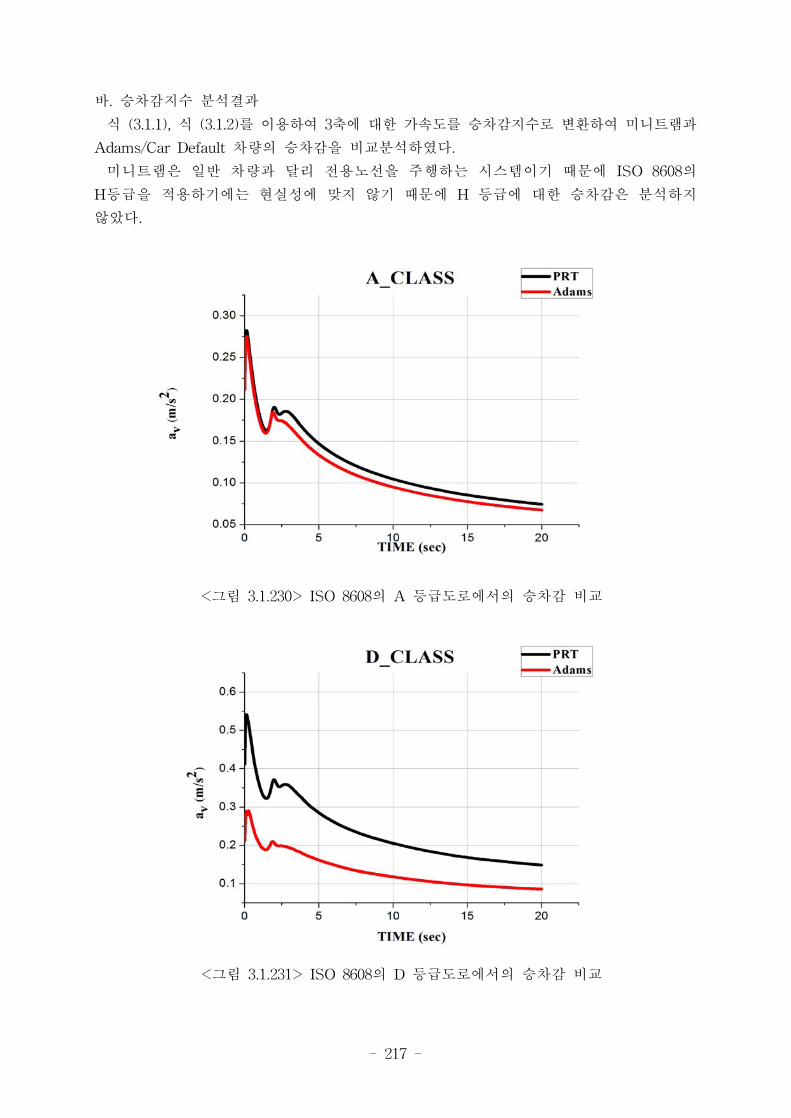
- 217 -
바. 승차감지수 분석결과
식 (3.1.1), 식 (3.1.2)를 이용하여 3축에 대한 가속도를 승차감지수로 변환하여 미니트램과
Adams/Car Default 차량의 승차감을 비교분석하였다.
미니트램은 일반 차량과 달리 전용노선을 주행하는 시스템이기 때문에 ISO 8608의
H등급을 적용하기에는 현실성에 맞지 않기 때문에 H 등급에 대한 승차감은 분석하지
않았다.
<그림 3.1.230> ISO 8608의 A 등급도로에서의 승차감 비교
<그림 3.1.231> ISO 8608의 D 등급도로에서의 승차감 비교
- 218 -
<그림 3.1.230>, <그림 3.1.231>의 결과와 같이 미니트램과 Adams/Car Default 모델의
승차감지수는 A등급의 도로에서 미니트램은 0.1199, Adams/Car Default 모델은
0.1105, D등급의 도로에서는 미니트램이 0.15318, Adams/Car Default 모델이
0.1324으로 미니트램이 약간 승차감이 떨어지지만 ISO 2631-1의 기준에 따라 둘 다
‘불편하지 않음‘ 등급을 받을 수 있었다.
진동 평가
0.315 이하 불편하지않음
0.315 ~ 0.63 조금 불편함
0.5 ~ 1 적당히 불편함
0.8 ~ 1.6 불편함
1.25 ~ 2.5 매우 불편함
2 이상 아주 불편함
<표 3.1.52> ISO 2631-1 승차감 평가기준
사. 일반국도공사 전문시방서 기준 승차감 분석
국내 기준의 도로유지보수 시방서 [9]에 따라 도로조건에 따른 주행안전성 분석과 승차감
분석을 진행하였다.
평탄성 Pri [mm/km]
일반도로토공부 : 80 이하
교량접속부 : 160 이하
확장 및
시가지 도로
토공부 : 160 이하
교량접속부 : 160 이하
<표 3.1.53> 일반국도공사 전문시방서 평탄성
규격
현재 일반국도공사전문시방서에 나와있는 평탄성 Pri 기준은 토공부 80 [mm/km]이하이고,
교량접촉부는 160 [mm/km]이하이다. 현재 조금은 가혹한 시뮬레이션을 위해 토공부 평탄성
최고 기준 80 [mm/km]의 도로로 모델링하였다.
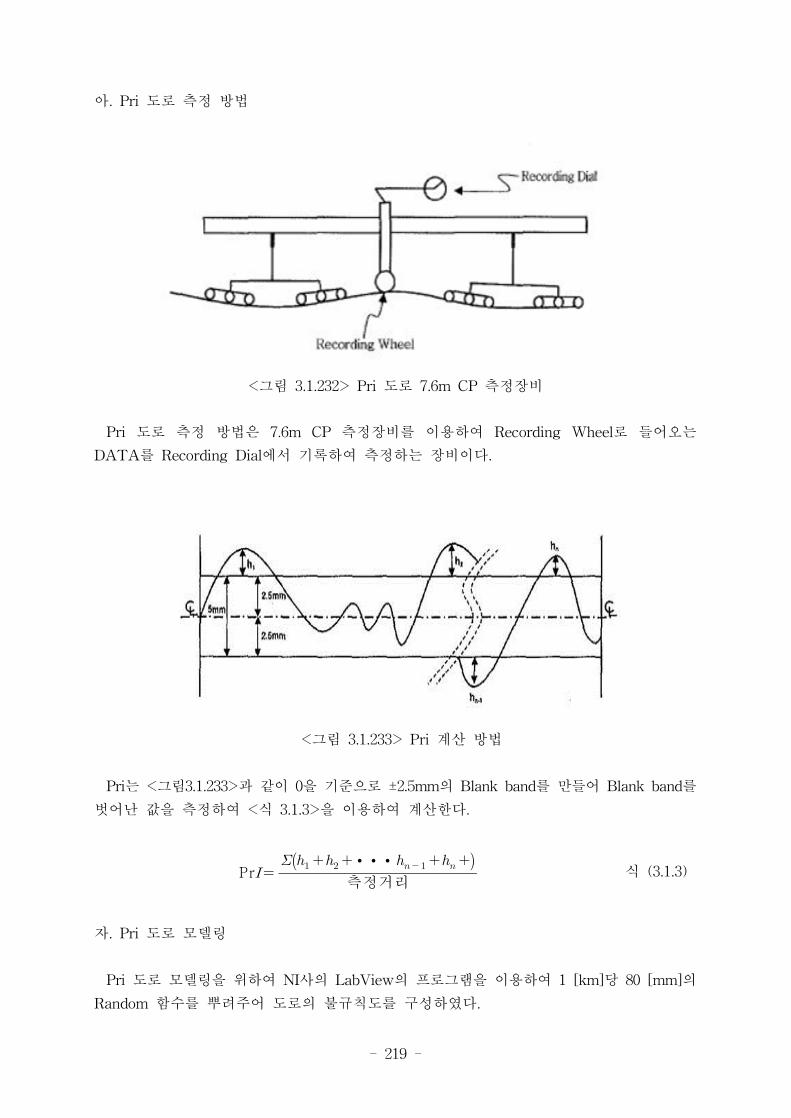
- 219 -
아. Pri 도로 측정 방법
<그림 3.1.232> Pri 도로 7.6m CP 측정장비
Pri 도로 측정 방법은 7.6m CP 측정장비를 이용하여 Recording Wheel로 들어오는
DATA를 Recording Dial에서 기록하여 측정하는 장비이다.
<그림 3.1.233> Pri 계산 방법
Pri는 <그림3.1.233>과 같이 0을 기준으로 ±2.5mm의 Blank band를 만들어 Blank band를
벗어난 값을 측정하여 <식 3.1.3>을 이용하여 계산한다.
Pr 측정거리···
식 (3.1.3)
자. Pri 도로 모델링
Pri 도로 모델링을 위하여 NI사의 LabView의 프로그램을 이용하여 1 [km]당 80 [mm]의
Random 함수를 뿌려주어 도로의 불규칙도를 구성하였다.
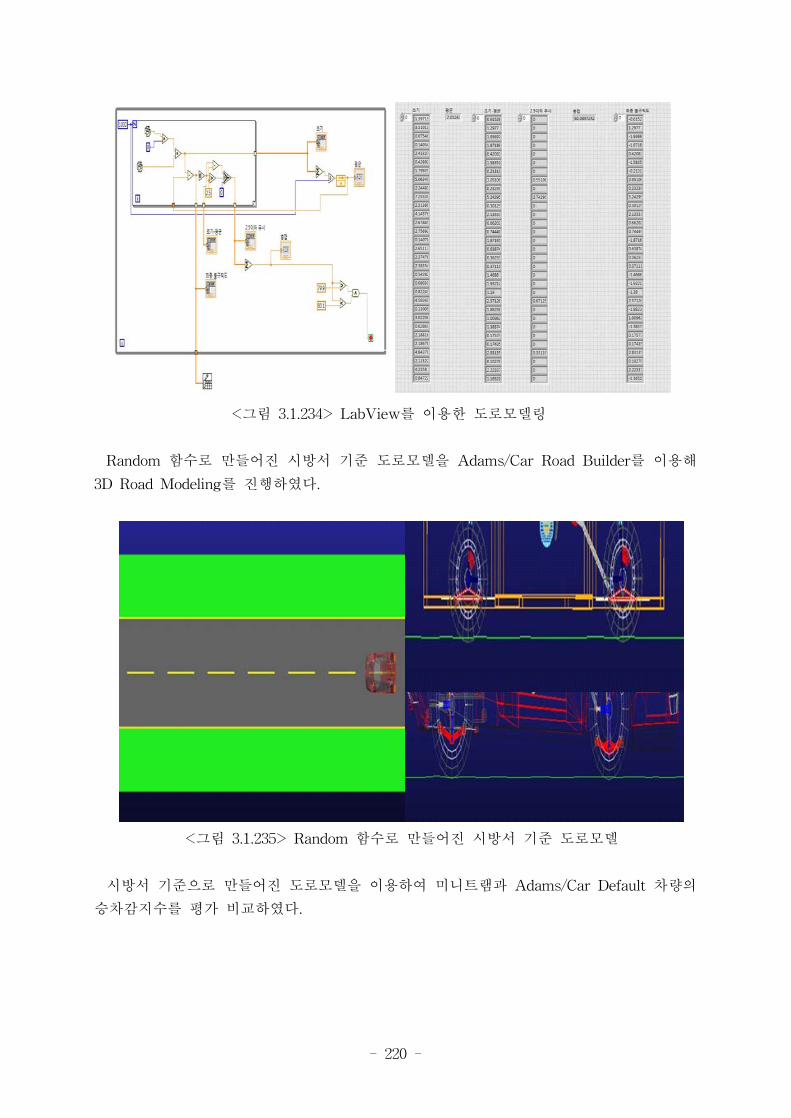
- 220 -
<그림 3.1.234> LabView를 이용한 도로모델링
Random 함수로 만들어진 시방서 기준 도로모델을 Adams/Car Road Builder를 이용해
3D Road Modeling를 진행하였다.
<그림 3.1.235> Random 함수로 만들어진 시방서 기준 도로모델
시방서 기준으로 만들어진 도로모델을 이용하여 미니트램과 Adams/Car Default 차량의
승차감지수를 평가 비교하였다.
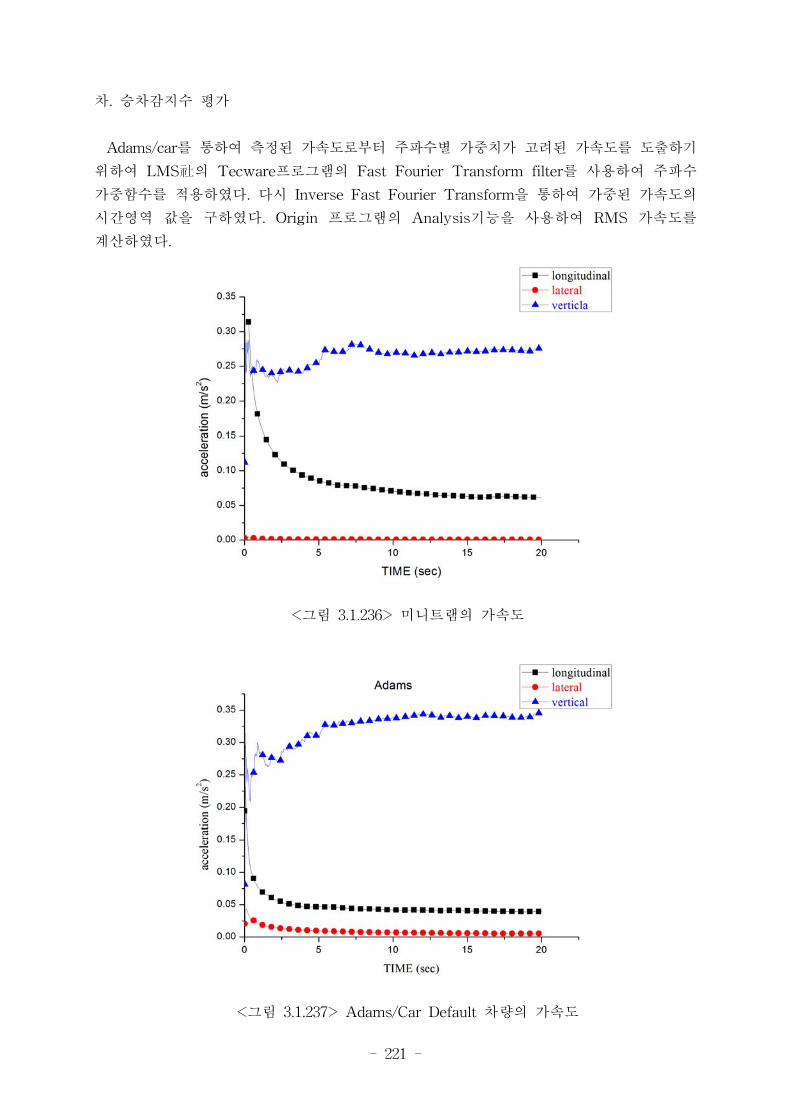
- 221 -
차. 승차감지수 평가
Adams/car를 통하여 측정된 가속도로부터 주파수별 가중치가 고려된 가속도를 도출하기
위하여 LMS社의 Tecware프로그램의 Fast Fourier Transform filter를 사용하여 주파수
가중함수를 적용하였다. 다시 Inverse Fast Fourier Transform을 통하여 가중된 가속도의
시간영역 값을 구하였다. Origin 프로그램의 Analysis기능을 사용하여 RMS 가속도를
계산하였다.
<그림 3.1.236> 미니트램의 가속도
<그림 3.1.237> Adams/Car Default 차량의 가속도
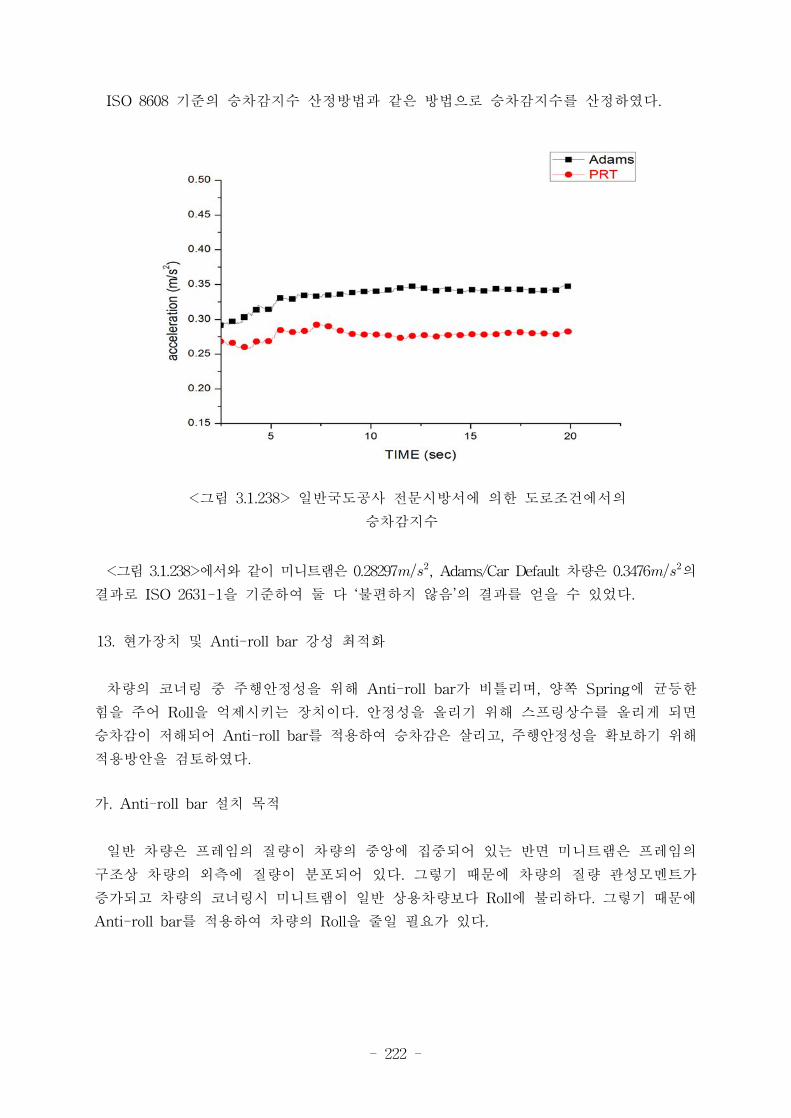
- 222 -
ISO 8608 기준의 승차감지수 산정방법과 같은 방법으로 승차감지수를 산정하였다.
<그림 3.1.238> 일반국도공사 전문시방서에 의한 도로조건에서의
승차감지수
<그림 3.1.238>에서와 같이 미니트램은 0.28297, Adams/Car Default 차량은 0.3476의
결과로 ISO 2631-1을 기준하여 둘 다 ‘불편하지 않음’의 결과를 얻을 수 있었다.
13. 현가장치 및 Anti-roll bar 강성 최적화
차량의 코너링 중 주행안정성을 위해 Anti-roll bar가 비틀리며, 양쪽 Spring에 균등한
힘을 주어 Roll을 억제시키는 장치이다. 안정성을 올리기 위해 스프링상수를 올리게 되면
승차감이 저해되어 Anti-roll bar를 적용하여 승차감은 살리고, 주행안정성을 확보하기 위해
적용방안을 검토하였다.
가. Anti-roll bar 설치 목적
일반 차량은 프레임의 질량이 차량의 중앙에 집중되어 있는 반면 미니트램은 프레임의
구조상 차량의 외측에 질량이 분포되어 있다. 그렇기 때문에 차량의 질량 관성모멘트가
증가되고 차량의 코너링시 미니트램이 일반 상용차량보다 Roll에 불리하다. 그렇기 때문에
Anti-roll bar를 적용하여 차량의 Roll을 줄일 필요가 있다.
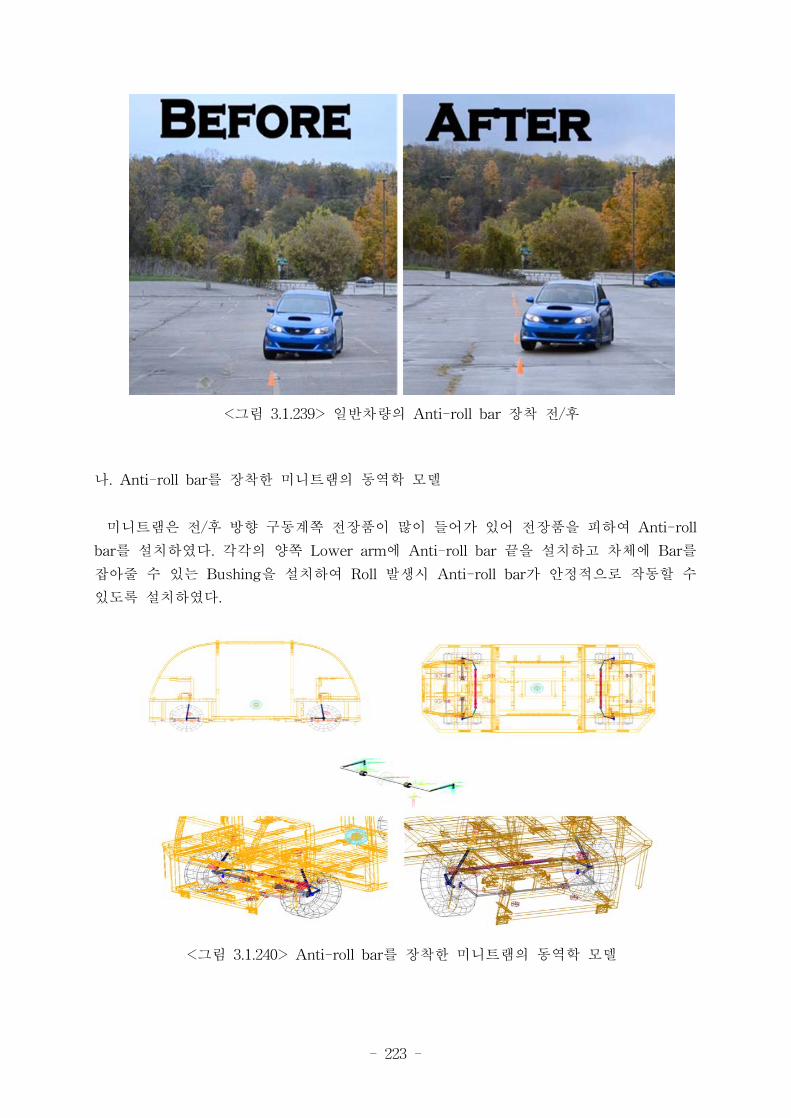
- 223 -
<그림 3.1.239> 일반차량의 Anti-roll bar 장착 전/후
나. Anti-roll bar를 장착한 미니트램의 동역학 모델
미니트램은 전/후 방향 구동계쪽 전장품이 많이 들어가 있어 전장품을 피하여 Anti-roll
bar를 설치하였다. 각각의 양쪽 Lower arm에 Anti-roll bar 끝을 설치하고 차체에 Bar를
잡아줄 수 있는 Bushing을 설치하여 Roll 발생시 Anti-roll bar가 안정적으로 작동할 수
있도록 설치하였다.
<그림 3.1.240> Anti-roll bar를 장착한 미니트램의 동역학 모델
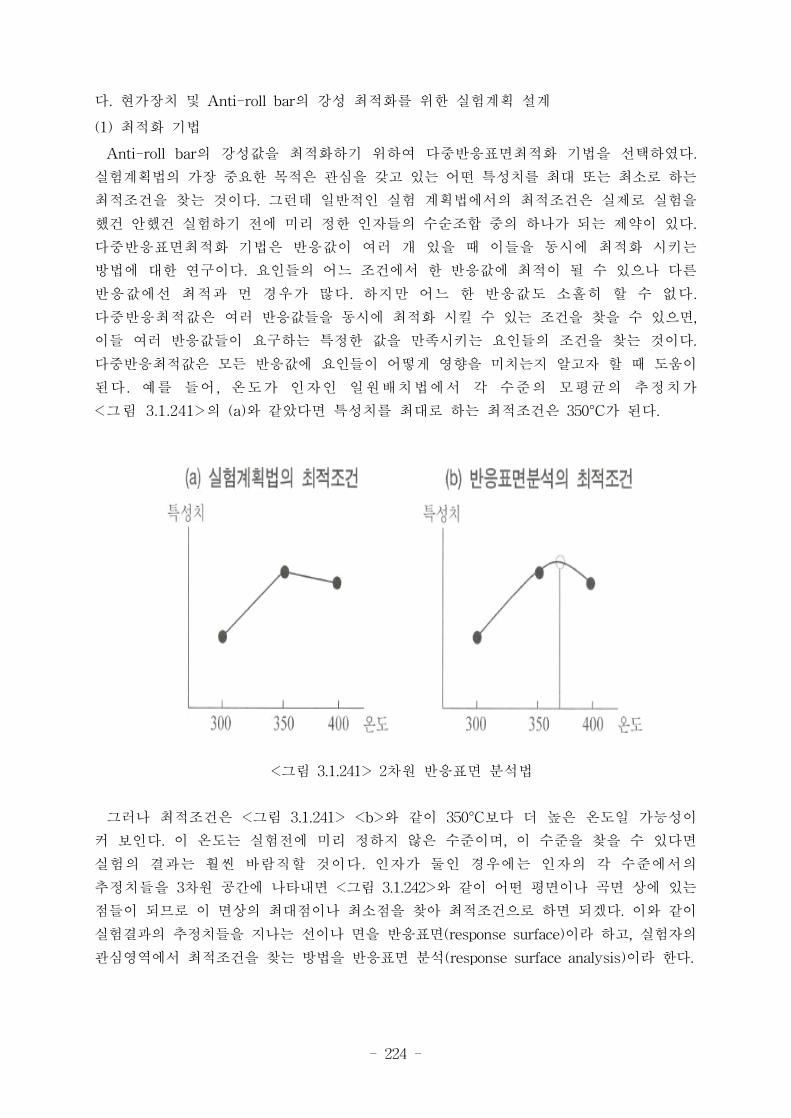
- 224 -
다. 현가장치 및 Anti-roll bar의 강성 최적화를 위한 실험계획 설계
(1) 최적화 기법
Anti-roll bar의 강성값을 최적화하기 위하여 다중반응표면최적화 기법을 선택하였다.
실험계획법의 가장 중요한 목적은 관심을 갖고 있는 어떤 특성치를 최대 또는 최소로 하는
최적조건을 찾는 것이다. 그런데 일반적인 실험 계획법에서의 최적조건은 실제로 실험을
했건 안했건 실험하기 전에 미리 정한 인자들의 수순조합 중의 하나가 되는 제약이 있다.
다중반응표면최적화 기법은 반응값이 여러 개 있을 때 이들을 동시에 최적화 시키는
방법에 대한 연구이다. 요인들의 어느 조건에서 한 반응값에 최적이 될 수 있으나 다른
반응값에선 최적과 먼 경우가 많다. 하지만 어느 한 반응값도 소홀히 할 수 없다.
다중반응최적값은 여러 반응값들을 동시에 최적화 시킬 수 있는 조건을 찾을 수 있으면,
이들 여러 반응값들이 요구하는 특정한 값을 만족시키는 요인들의 조건을 찾는 것이다.
다중반응최적값은 모든 반응값에 요인들이 어떻게 영향을 미치는지 알고자 할 때 도움이
된다. 예를 들어, 온도가 인자인 일원배치법에서 각 수준의 모평균의 추정치가
<그림 3.1.241>의 (a)와 같았다면 특성치를 최대로 하는 최적조건은 350°C가 된다.
<그림 3.1.241> 2차원 반응표면 분석법
그러나 최적조건은 <그림 3.1.241> <b>와 같이 350°C보다 더 높은 온도일 가능성이
커 보인다. 이 온도는 실험전에 미리 정하지 않은 수준이며, 이 수준을 찾을 수 있다면
실험의 결과는 훨씬 바람직할 것이다. 인자가 둘인 경우에는 인자의 각 수준에서의
추정치들을 3차원 공간에 나타내면 <그림 3.1.242>와 같이 어떤 평면이나 곡면 상에 있는
점들이 되므로 이 면상의 최대점이나 최소점을 찾아 최적조건으로 하면 되겠다. 이와 같이
실험결과의 추정치들을 지나는 선이나 면을 반응표면(response surface)이라 하고, 실험자의
관심영역에서 최적조건을 찾는 방법을 반응표면 분석(response surface analysis)이라 한다.
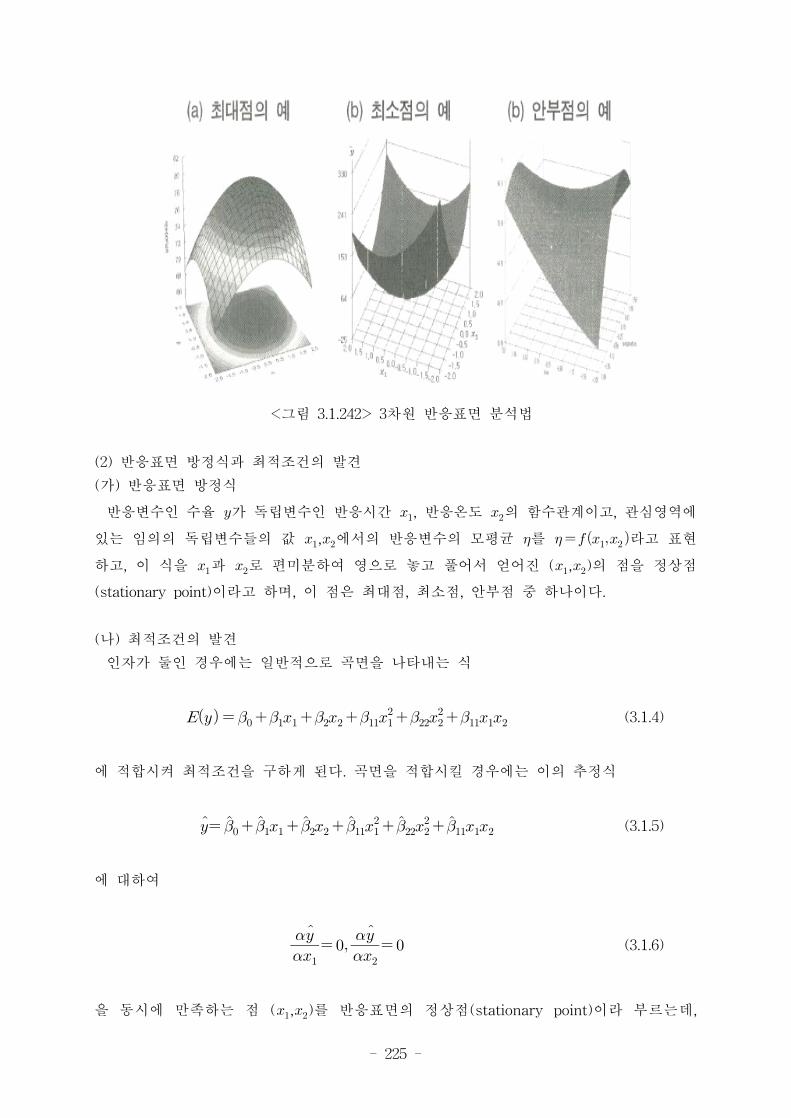
- 225 -
<그림 3.1.242> 3차원 반응표면 분석법
(2) 반응표면 방정식과 최적조건의 발견
(가) 반응표면 방정식
반응변수인 수율 가 독립변수인 반응시간 , 반응온도 의 함수관계이고, 관심영역에
있는 임의의 독립변수들의 값 ,에서의 반응변수의 모평균 를 라고 표현
하고, 이 식을 과 로 편미분하여 영으로 놓고 풀어서 얻어진 (,)의 점을 정상점
(stationary point)이라고 하며, 이 점은 최대점, 최소점, 안부점 중 하나이다.
(나) 최적조건의 발견
인자가 둘인 경우에는 일반적으로 곡면을 나타내는 식
(3.1.4)
에 적합시켜 최적조건을 구하게 된다. 곡면을 적합시킬 경우에는 이의 추정식
(3.1.5)
에 대하여
(3.1.6)
을 동시에 만족하는 점 (,)를 반응표면의 정상점(stationary point)이라 부르는데,
- 226 -
이 정상점은 다음 세 가지 중 하나가 된다.
√ 가 최대가 되는 점(최대점)
√ 가 최소가 되는 점(최소점)
√ 가 최대도 최소도 아닌 점(안부점)
가 최대도 최소도 아닌 경우의 반응표면은 말안장 모양이므로 이 점을 안장점(saddle
point) 또는 안부점이라 부른다. 곡면을 나타내는 2차 반응 표면식을 행렬을 이용하여
표현하면
′′
(3.1.7)
와 같고, 이때 정상점을 구하면
(3.1.8)
가 된다. 여기서 는 의 역행렬이다.
(3). 중심합성법 기본 개념
중심합성법은 반응표면설계에서 가장 일반적으로 사용되는 방법이다. 중심합성법은
효율적으로 1차, 2차항을 추정하고자 할 때와 요인 배치 실험 후에 추가 실험하여 곡률
반응변수를 모델화 할 때 많이 사용된다.
중심합성법은 다음과 같은 상황에서 이용된다.
√ 설정된 요인들이 관심 반응값에 어떤 영향을 미치는지 알고자 할 경우
√ 공정조건을 만족시키는 요인들을 찾고자 할 경우
√ 반응값을 최적화시키기 위하여 요인들을 설정할 경우
독립변수의 수가 k인 2차 회귀모형은 <식 3.1.9>에 나타내었다.
≤
∼ (3.1.9)
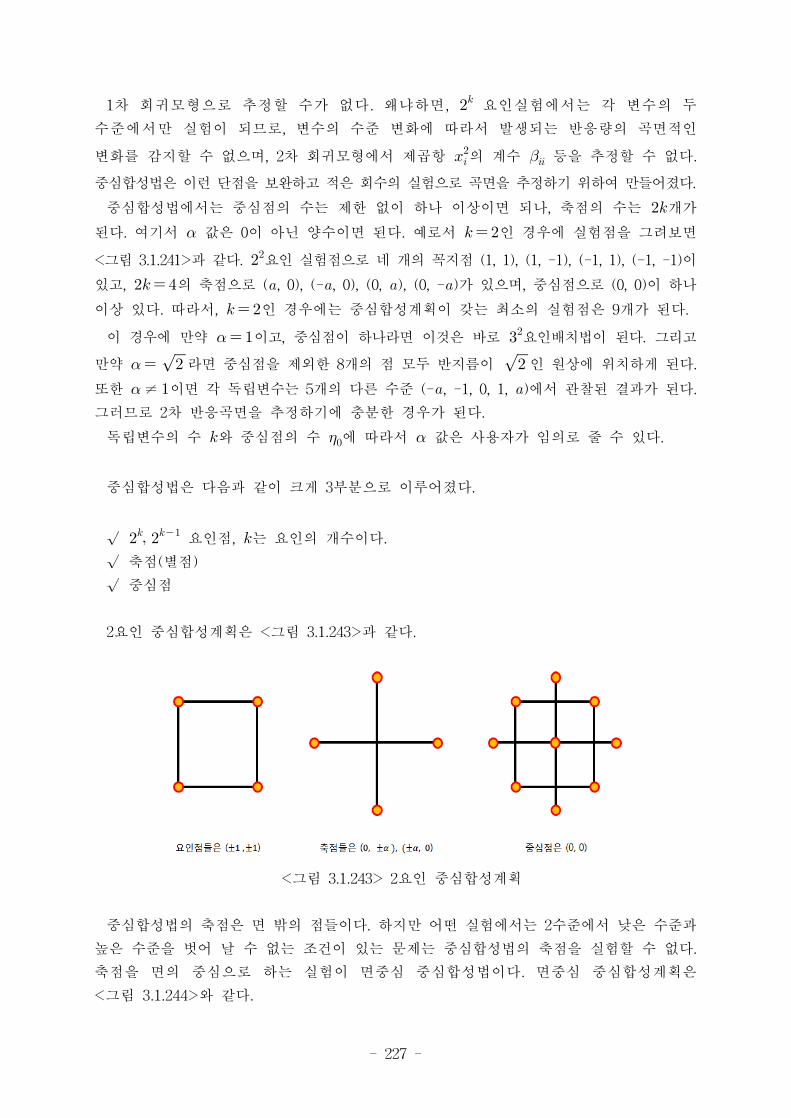
- 227 -
1차 회귀모형으로 추정할 수가 없다. 왜냐하면, 요인실험에서는 각 변수의 두
수준에서만 실험이 되므로, 변수의 수준 변화에 따라서 발생되는 반응량의 곡면적인
변화를 감지할 수 없으며, 2차 회귀모형에서 제곱항 의 계수 등을 추정할 수 없다.
중심합성법은 이런 단점을 보완하고 적은 회수의 실험으로 곡면을 추정하기 위하여 만들어졌다.
중심합성법에서는 중심점의 수는 제한 없이 하나 이상이면 되나, 축점의 수는 개가
된다. 여기서 값은 0이 아닌 양수이면 된다. 예로서 인 경우에 실험점을 그려보면
<그림 3.1.241>과 같다. 요인 실험점으로 네 개의 꼭지점 (1, 1), (1, -1), (-1, 1), (-1, -1)이
있고, 의 축점으로 (, 0), (-, 0), (0, ), (0, -)가 있으며, 중심점으로 (0, 0)이 하나
이상 있다. 따라서, 인 경우에는 중심합성계획이 갖는 최소의 실험점은 9개가 된다.
이 경우에 만약 이고, 중심점이 하나라면 이것은 바로 요인배치법이 된다. 그리고
만약 라면 중심점을 제외한 8개의 점 모두 반지름이 인 원상에 위치하게 된다.
또한 ≠이면 각 독립변수는 5개의 다른 수준 (-, -1, 0, 1, )에서 관찰된 결과가 된다.
그러므로 2차 반응곡면을 추정하기에 충분한 경우가 된다.
독립변수의 수 와 중심점의 수 에 따라서 값은 사용자가 임의로 줄 수 있다.
중심합성법은 다음과 같이 크게 3부분으로 이루어졌다.
√ 요인점, 는 요인의 개수이다.
√ 축점(별점)
√ 중심점
2요인 중심합성계획은 <그림 3.1.243>과 같다.
<그림 3.1.243> 2요인 중심합성계획
중심합성법의 축점은 면 밖의 점들이다. 하지만 어떤 실험에서는 2수준에서 낮은 수준과
높은 수준을 벗어 날 수 없는 조건이 있는 문제는 중심합성법의 축점을 실험할 수 없다.
축점을 면의 중심으로 하는 실험이 면중심 중심합성법이다. 면중심 중심합성계획은
<그림 3.1.244>와 같다.
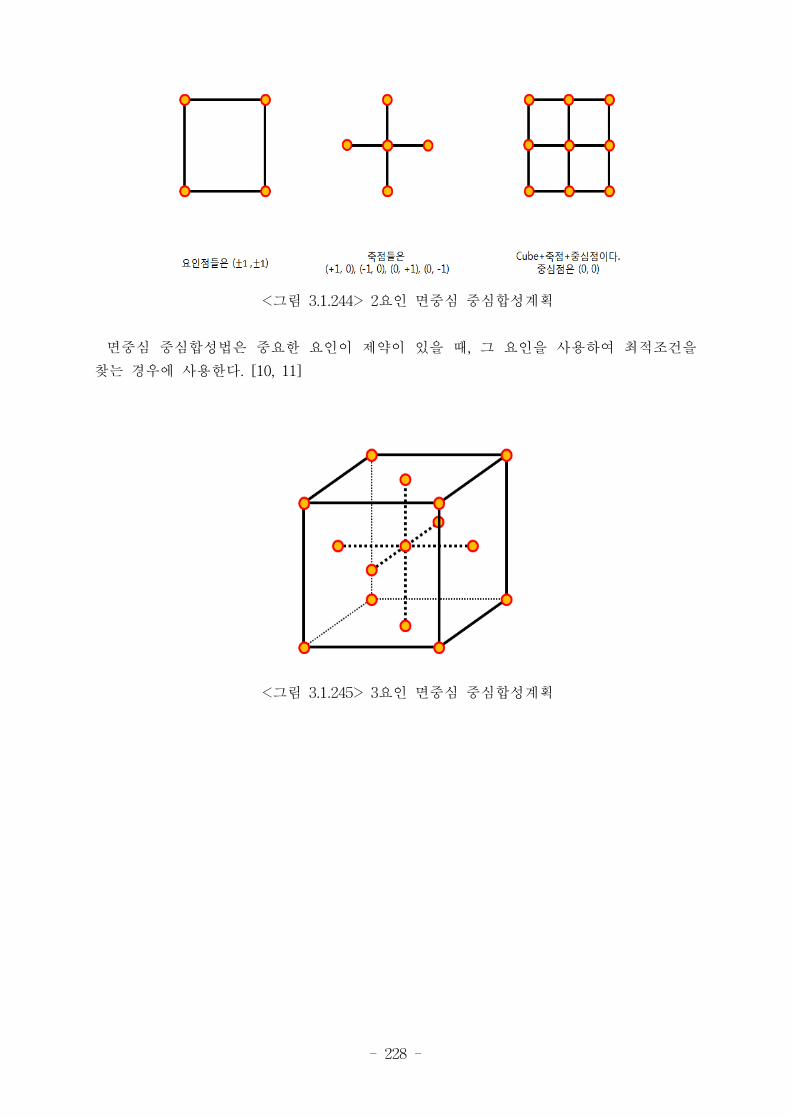
- 228 -
<그림 3.1.244> 2요인 면중심 중심합성계획
면중심 중심합성법은 중요한 요인이 제약이 있을 때, 그 요인을 사용하여 최적조건을
찾는 경우에 사용한다. [10, 11]
<그림 3.1.245> 3요인 면중심 중심합성계획
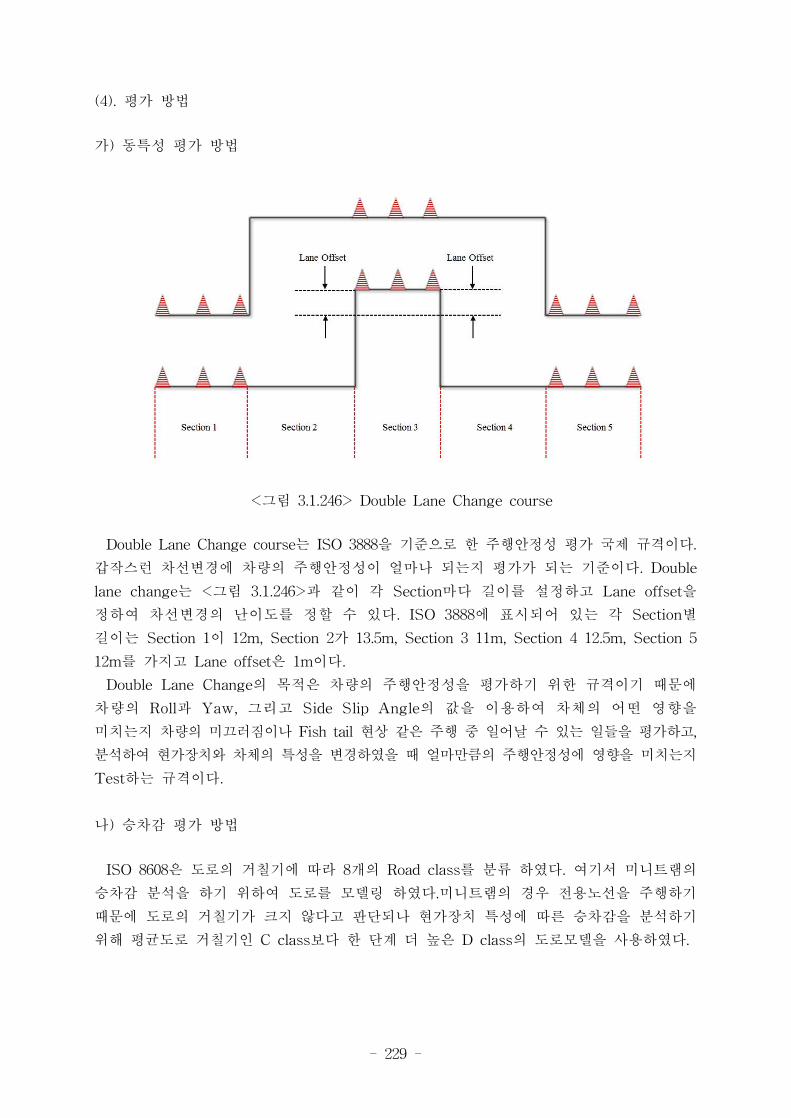
- 229 -
(4). 평가 방법
가) 동특성 평가 방법
<그림 3.1.246> Double Lane Change course
Double Lane Change course는 ISO 3888을 기준으로 한 주행안정성 평가 국제 규격이다.
갑작스런 차선변경에 차량의 주행안정성이 얼마나 되는지 평가가 되는 기준이다. Double
lane change는 <그림 3.1.246>과 같이 각 Section마다 길이를 설정하고 Lane offset을
정하여 차선변경의 난이도를 정할 수 있다. ISO 3888에 표시되어 있는 각 Section별
길이는 Section 1이 12m, Section 2가 13.5m, Section 3 11m, Section 4 12.5m, Section 5
12m를 가지고 Lane offset은 1m이다.
Double Lane Change의 목적은 차량의 주행안정성을 평가하기 위한 규격이기 때문에
차량의 Roll과 Yaw, 그리고 Side Slip Angle의 값을 이용하여 차체의 어떤 영향을
미치는지 차량의 미끄러짐이나 Fish tail 현상 같은 주행 중 일어날 수 있는 일들을 평가하고,
분석하여 현가장치와 차체의 특성을 변경하였을 때 얼마만큼의 주행안정성에 영향을 미치는지
Test하는 규격이다.
나) 승차감 평가 방법
ISO 8608은 도로의 거칠기에 따라 8개의 Road class를 분류 하였다. 여기서 미니트램의
승차감 분석을 하기 위하여 도로를 모델링 하였다.미니트램의 경우 전용노선을 주행하기
때문에 도로의 거칠기가 크지 않다고 판단되나 현가장치 특성에 따른 승차감을 분석하기
위해 평균도로 거칠기인 C class보다 한 단계 더 높은 D class의 도로모델을 사용하였다.
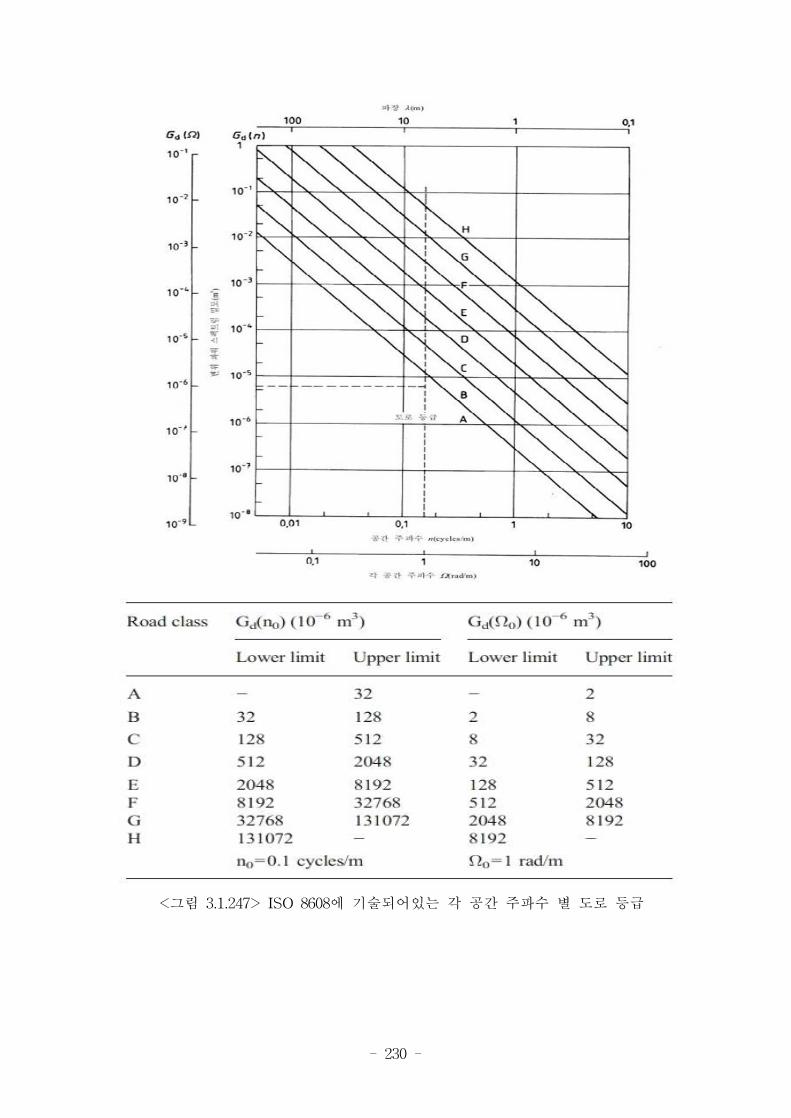
- 230 -
<그림 3.1.247> ISO 8608에 기술되어있는 각 공간 주파수 별 도로 등급
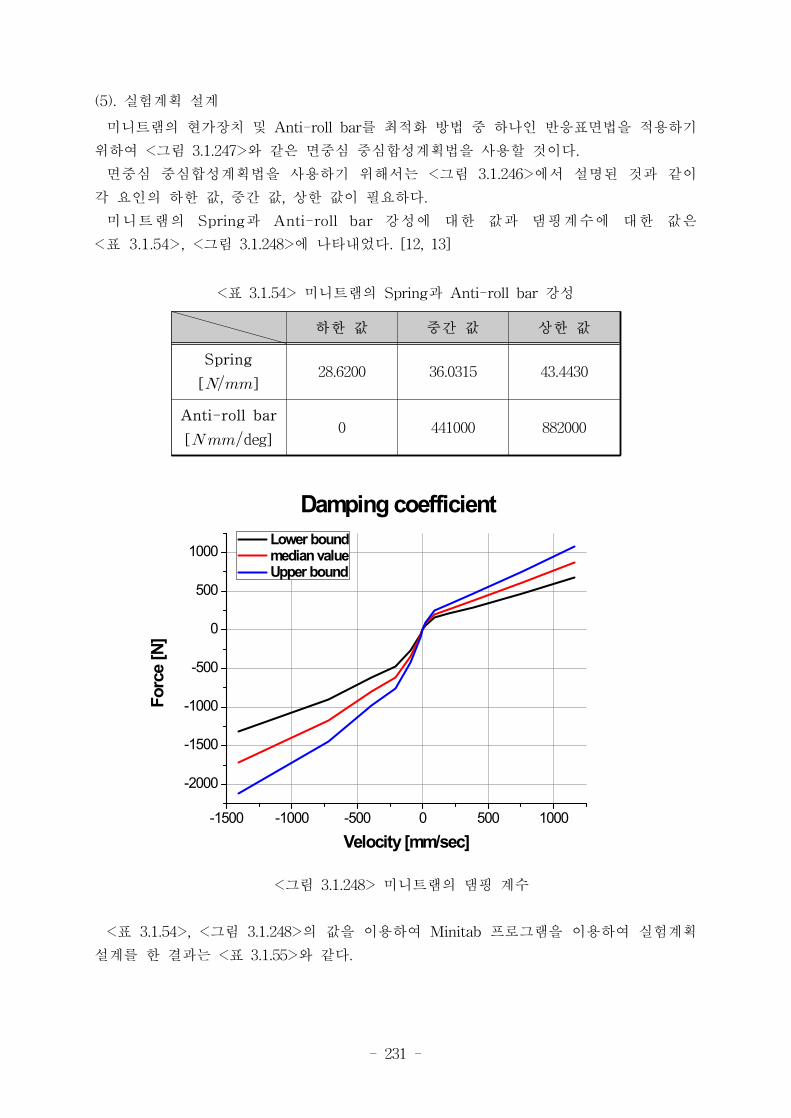
- 231 -
(5). 실험계획 설계
미니트램의 현가장치 및 Anti-roll bar를 최적화 방법 중 하나인 반응표면법을 적용하기
위하여 <그림 3.1.247>와 같은 면중심 중심합성계획법을 사용할 것이다.
면중심 중심합성계획법을 사용하기 위해서는 <그림 3.1.246>에서 설명된 것과 같이
각 요인의 하한 값, 중간 값, 상한 값이 필요하다.
미니트램의 Spring과 Anti-roll bar 강성에 대한 값과 댐핑계수에 대한 값은
<표 3.1.54>, <그림 3.1.248>에 나타내었다. [12, 13]
하한 값 중간 값 상한 값
Spring
[]28.6200 36.0315 43.4430
Anti-roll bar
[ deg] 0 441000 882000
<표 3.1.54> 미니트램의 Spring과 Anti-roll bar 강성
-1500 -1000 -500 0 500 1000
-2000
-1500
-1000
-500
0
500
1000
Forc
e [N
]
Velocity [mm/sec]
Lower bound median value Upper bound
Damping coefficient
<그림 3.1.248> 미니트램의 댐핑 계수
<표 3.1.54>, <그림 3.1.248>의 값을 이용하여 Minitab 프로그램을 이용하여 실험계획
설계를 한 결과는 <표 3.1.55>와 같다.
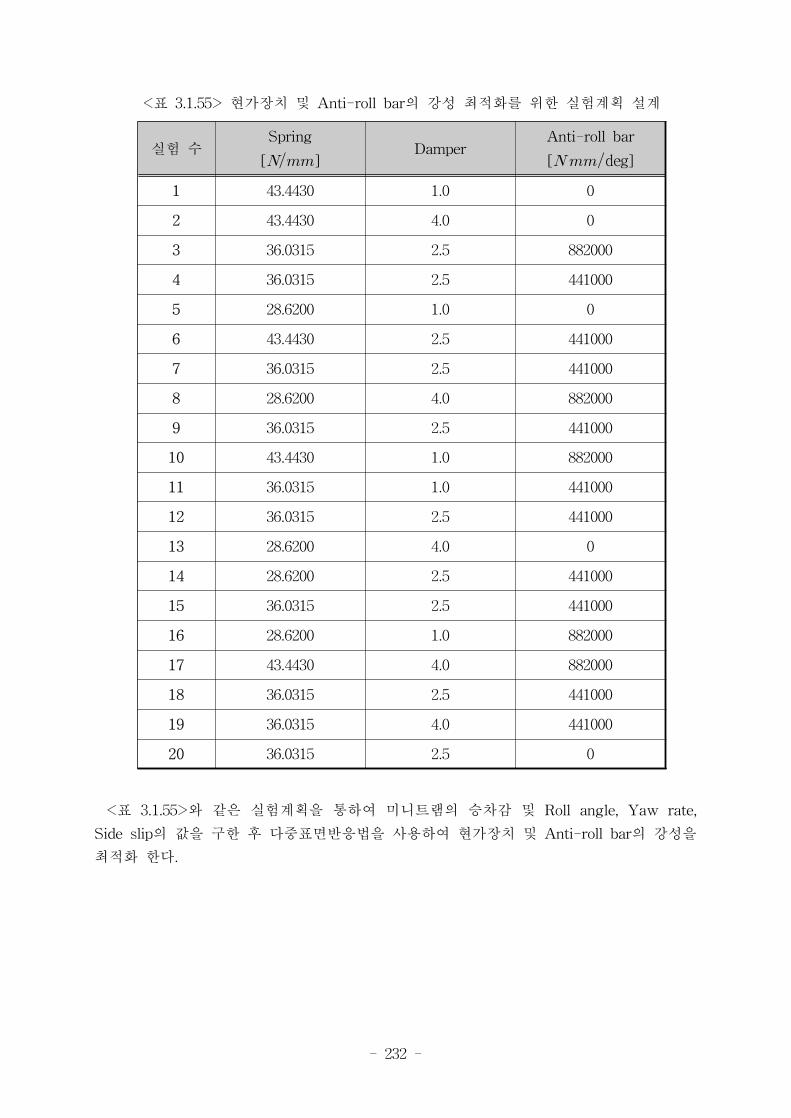
- 232 -
실험 수Spring
[]Damper
Anti-roll bar
[ deg]1 43.4430 1.0 0
2 43.4430 4.0 0
3 36.0315 2.5 882000
4 36.0315 2.5 441000
5 28.6200 1.0 0
6 43.4430 2.5 441000
7 36.0315 2.5 441000
8 28.6200 4.0 882000
9 36.0315 2.5 441000
10 43.4430 1.0 882000
11 36.0315 1.0 441000
12 36.0315 2.5 441000
13 28.6200 4.0 0
14 28.6200 2.5 441000
15 36.0315 2.5 441000
16 28.6200 1.0 882000
17 43.4430 4.0 882000
18 36.0315 2.5 441000
19 36.0315 4.0 441000
20 36.0315 2.5 0
<표 3.1.55> 현가장치 및 Anti-roll bar의 강성 최적화를 위한 실험계획 설계
<표 3.1.55>와 같은 실험계획을 통하여 미니트램의 승차감 및 Roll angle, Yaw rate,
Side slip의 값을 구한 후 다중표면반응법을 사용하여 현가장치 및 Anti-roll bar의 강성을
최적화 한다.
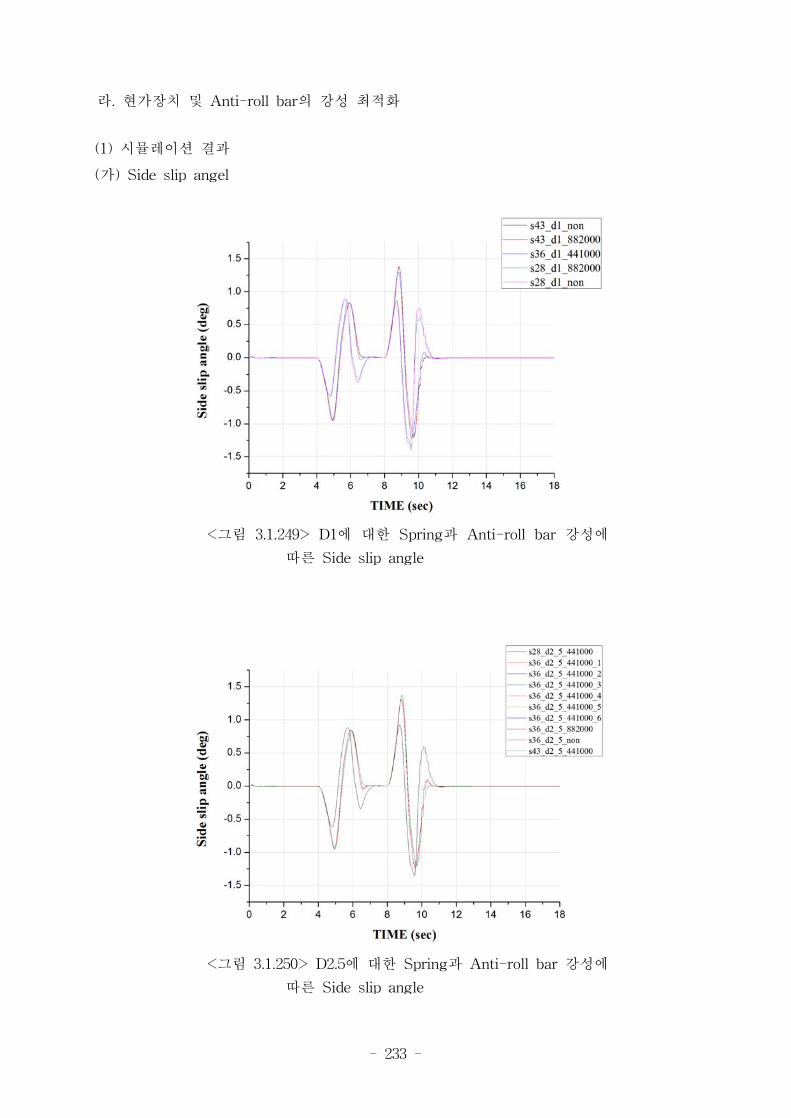
- 233 -
라. 현가장치 및 Anti-roll bar의 강성 최적화
(1) 시뮬레이션 결과
(가) Side slip angel
<그림 3.1.249> D1에 대한 Spring과 Anti-roll bar 강성에
따른 Side slip angle
<그림 3.1.250> D2.5에 대한 Spring과 Anti-roll bar 강성에
따른 Side slip angle
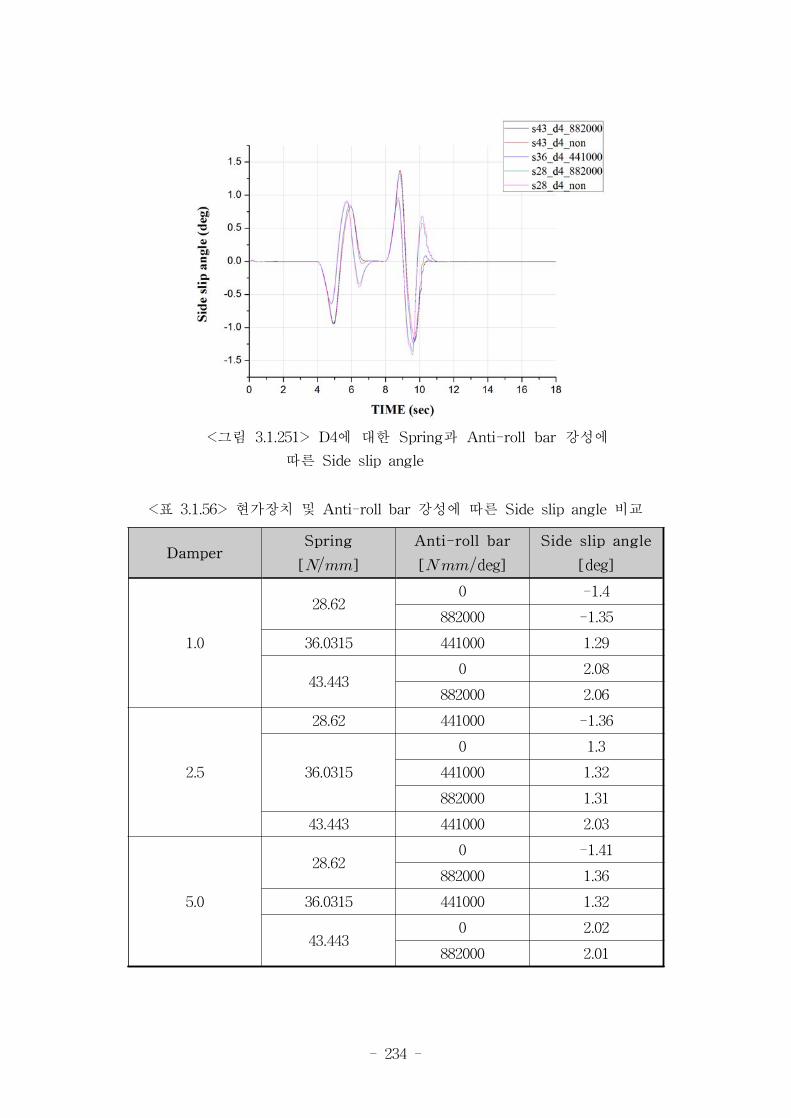
- 234 -
<그림 3.1.251> D4에 대한 Spring과 Anti-roll bar 강성에
따른 Side slip angle
DamperSpring
[]
Anti-roll bar
[ deg]Side slip angle
[deg]
1.0
28.620 -1.4
882000 -1.35
36.0315 441000 1.29
43.4430 2.08
882000 2.06
2.5
28.62 441000 -1.36
36.0315
0 1.3
441000 1.32
882000 1.31
43.443 441000 2.03
5.0
28.620 -1.41
882000 1.36
36.0315 441000 1.32
43.4430 2.02
882000 2.01
<표 3.1.56> 현가장치 및 Anti-roll bar 강성에 따른 Side slip angle 비교
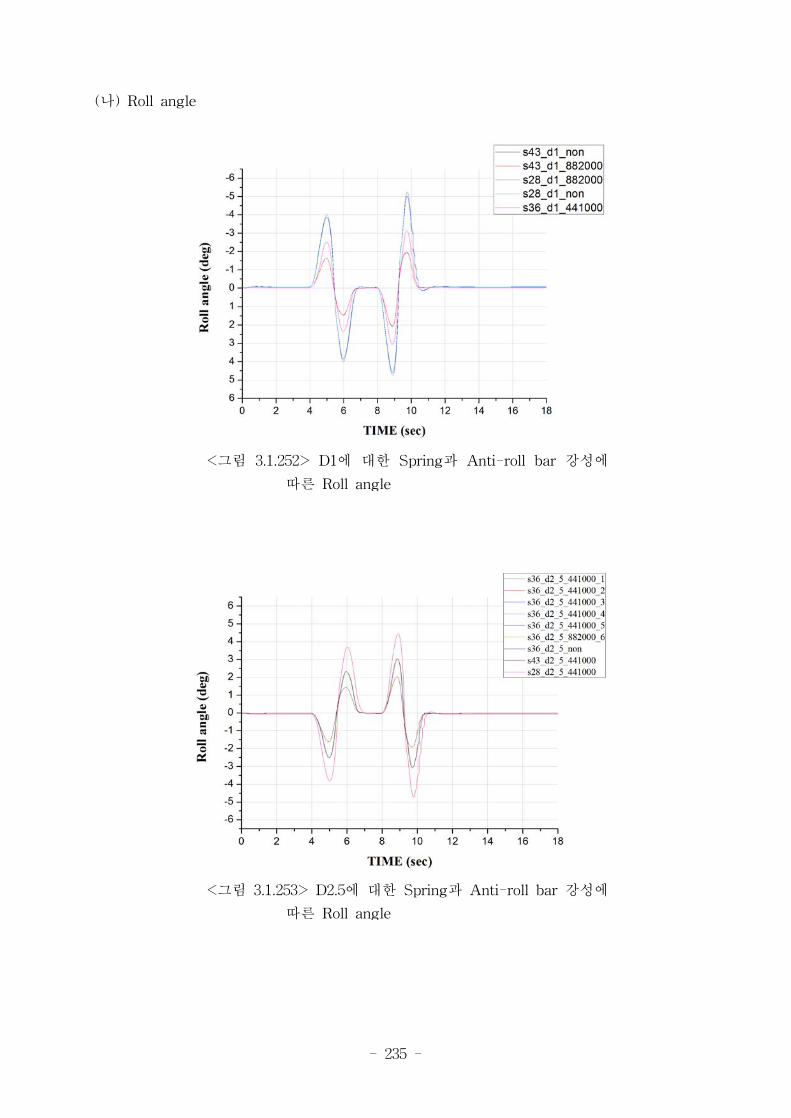
- 235 -
(나) Roll angle
<그림 3.1.252> D1에 대한 Spring과 Anti-roll bar 강성에
따른 Roll angle
<그림 3.1.253> D2.5에 대한 Spring과 Anti-roll bar 강성에
따른 Roll angle

- 236 -
<그림 3.1.254> D4에 대한 Spring과 Anti-roll bar 강성에
따른 Roll angle
DamperSpring
[]
Anti-roll bar
[ deg]Roll angle
[deg]
1.0
28.620 -5.25
882000 -5.03
36.0315 441000 -3.14
43.4430 2.08
882000 2.06
2.5
28.62 441000 -4.7
36.0315
0 -3.09
441000 -3.03
882000 -3.03
43.443 441000 2.03
5.0
28.620 -4.7
882000 -4.51
36.0315 441000 -2.93
43.4430 2.02
882000 2.01
<표 3.1.57> 현가장치 및 Anti-roll bar 강성에 따른 Roll angle 비교
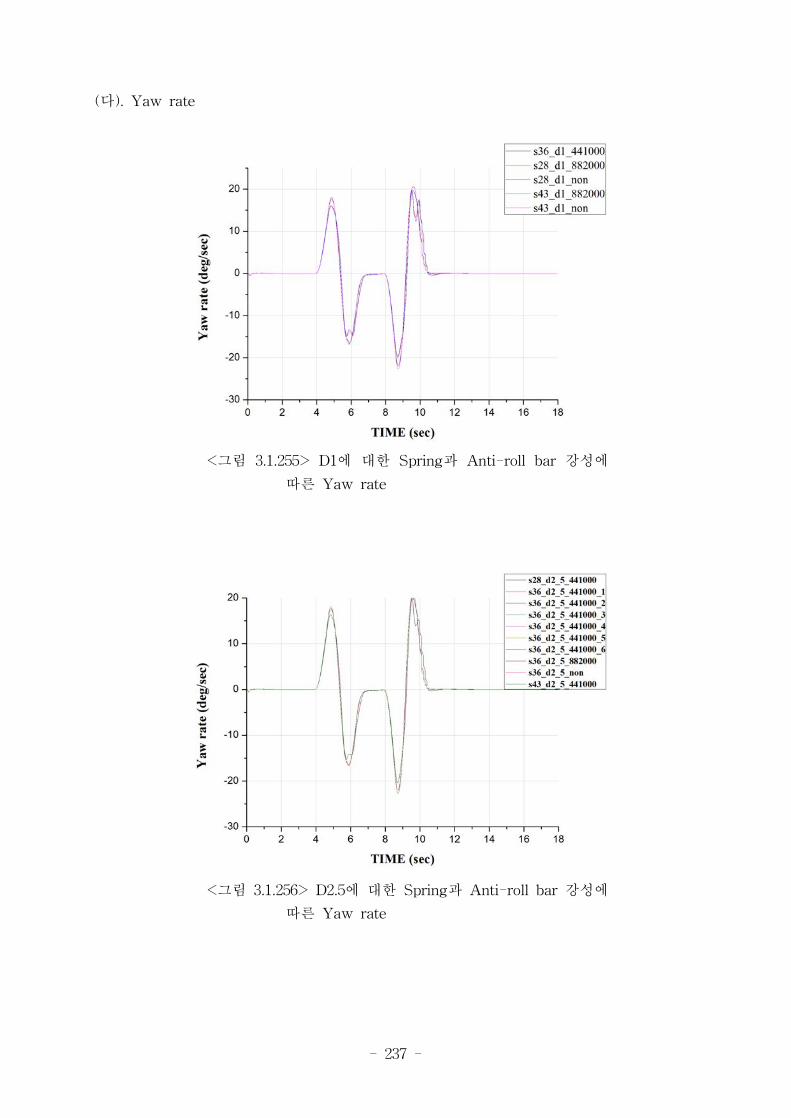
- 237 -
(다). Yaw rate
<그림 3.1.255> D1에 대한 Spring과 Anti-roll bar 강성에
따른 Yaw rate
<그림 3.1.256> D2.5에 대한 Spring과 Anti-roll bar 강성에
따른 Yaw rate
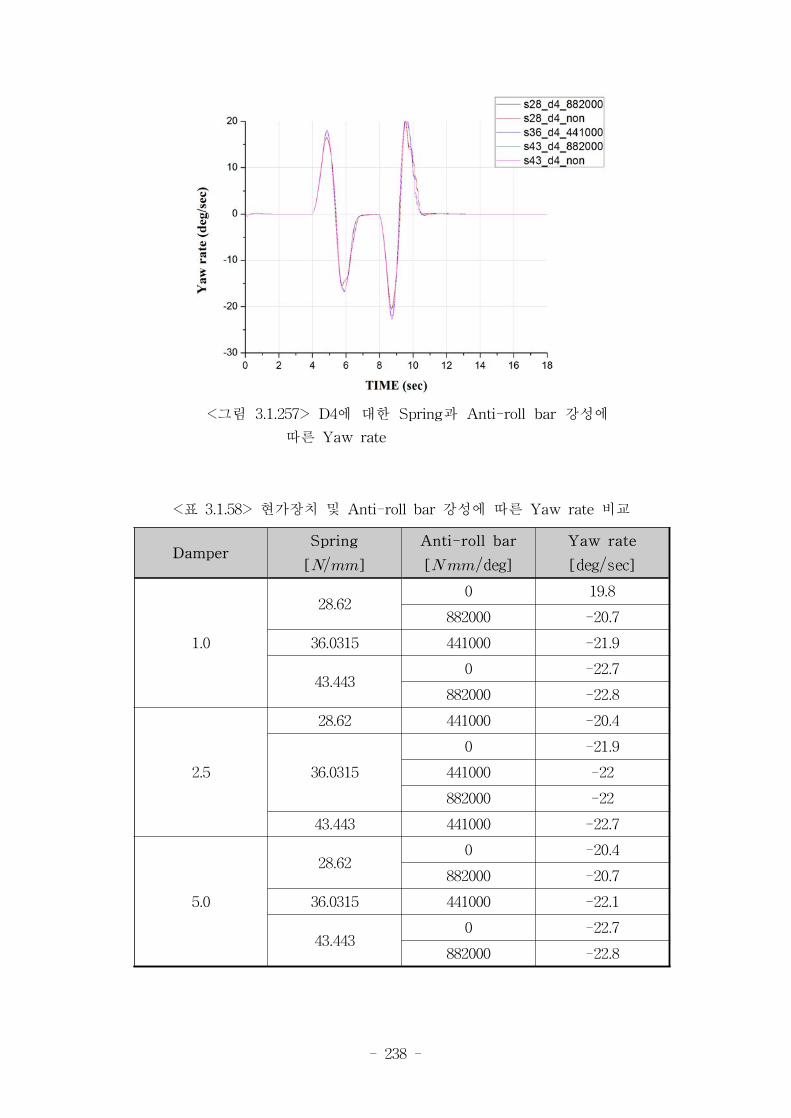
- 238 -
<그림 3.1.257> D4에 대한 Spring과 Anti-roll bar 강성에
따른 Yaw rate
DamperSpring
[]
Anti-roll bar
[ deg]Yaw rate
[degsec]
1.0
28.620 19.8
882000 -20.7
36.0315 441000 -21.9
43.4430 -22.7
882000 -22.8
2.5
28.62 441000 -20.4
36.0315
0 -21.9
441000 -22
882000 -22
43.443 441000 -22.7
5.0
28.620 -20.4
882000 -20.7
36.0315 441000 -22.1
43.4430 -22.7
882000 -22.8
<표 3.1.58> 현가장치 및 Anti-roll bar 강성에 따른 Yaw rate 비교
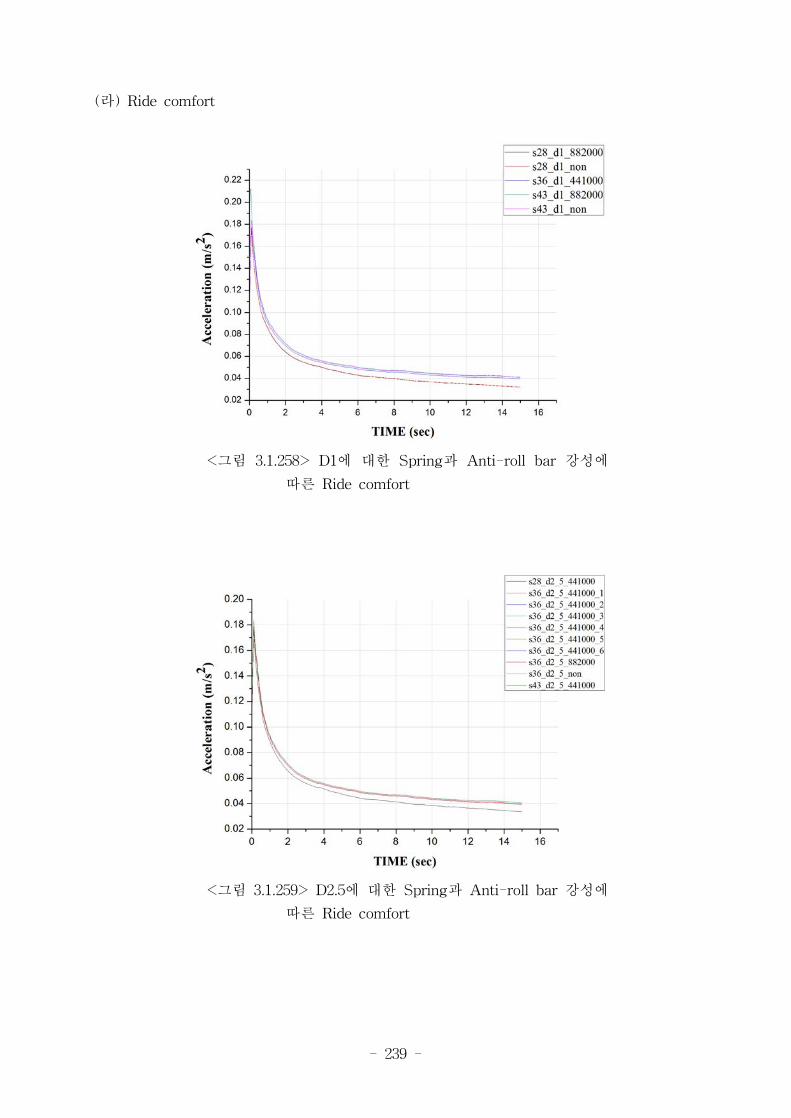
- 239 -
(라) Ride comfort
<그림 3.1.258> D1에 대한 Spring과 Anti-roll bar 강성에
따른 Ride comfort
<그림 3.1.259> D2.5에 대한 Spring과 Anti-roll bar 강성에
따른 Ride comfort
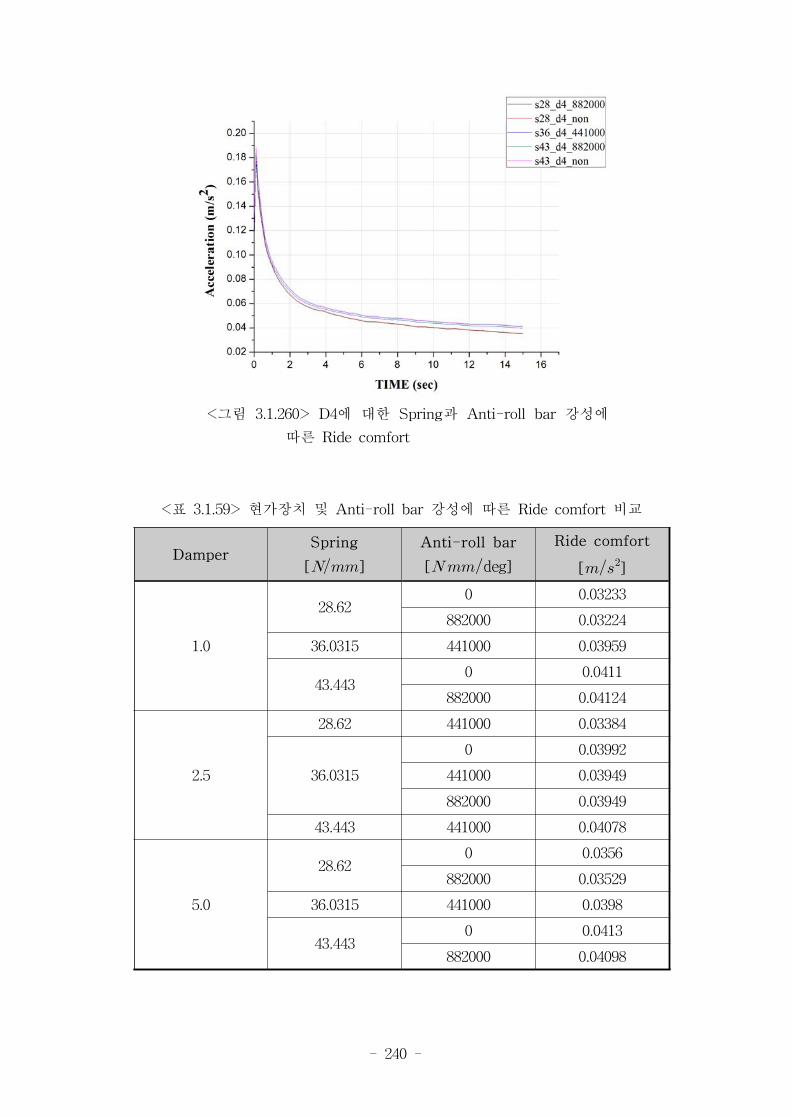
- 240 -
<그림 3.1.260> D4에 대한 Spring과 Anti-roll bar 강성에
따른 Ride comfort
DamperSpring
[]
Anti-roll bar
[ deg]Ride comfort
[]
1.0
28.620 0.03233
882000 0.03224
36.0315 441000 0.03959
43.4430 0.0411
882000 0.04124
2.5
28.62 441000 0.03384
36.0315
0 0.03992
441000 0.03949
882000 0.03949
43.443 441000 0.04078
5.0
28.620 0.0356
882000 0.03529
36.0315 441000 0.0398
43.4430 0.0413
882000 0.04098
<표 3.1.59> 현가장치 및 Anti-roll bar 강성에 따른 Ride comfort 비교
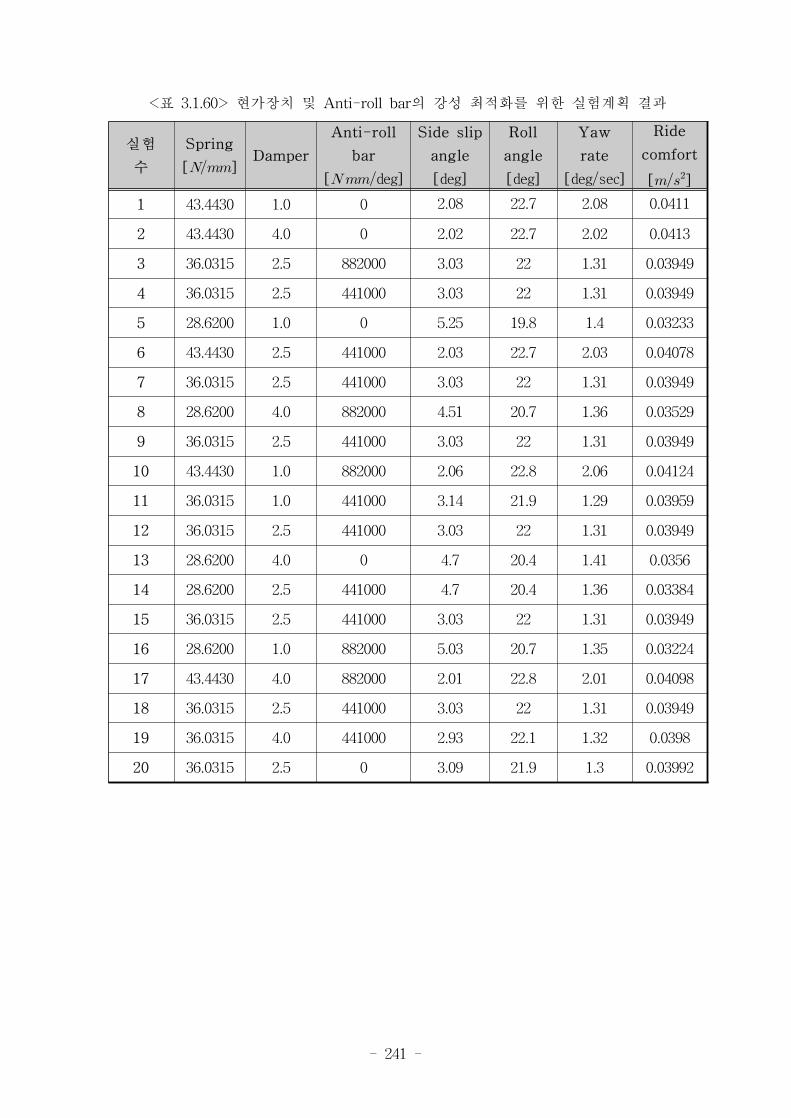
- 241 -
실험
수
Spring
[]Damper
Anti-roll
bar
[ deg]
Side slip
angle
[deg]
Roll
angle
[deg]
Yaw
rate
[degsec]
Ride
comfort
[]
1 43.4430 1.0 0 2.08 22.7 2.08 0.0411
2 43.4430 4.0 0 2.02 22.7 2.02 0.0413
3 36.0315 2.5 882000 3.03 22 1.31 0.03949
4 36.0315 2.5 441000 3.03 22 1.31 0.03949
5 28.6200 1.0 0 5.25 19.8 1.4 0.03233
6 43.4430 2.5 441000 2.03 22.7 2.03 0.04078
7 36.0315 2.5 441000 3.03 22 1.31 0.03949
8 28.6200 4.0 882000 4.51 20.7 1.36 0.03529
9 36.0315 2.5 441000 3.03 22 1.31 0.03949
10 43.4430 1.0 882000 2.06 22.8 2.06 0.04124
11 36.0315 1.0 441000 3.14 21.9 1.29 0.03959
12 36.0315 2.5 441000 3.03 22 1.31 0.03949
13 28.6200 4.0 0 4.7 20.4 1.41 0.0356
14 28.6200 2.5 441000 4.7 20.4 1.36 0.03384
15 36.0315 2.5 441000 3.03 22 1.31 0.03949
16 28.6200 1.0 882000 5.03 20.7 1.35 0.03224
17 43.4430 4.0 882000 2.01 22.8 2.01 0.04098
18 36.0315 2.5 441000 3.03 22 1.31 0.03949
19 36.0315 4.0 441000 2.93 22.1 1.32 0.0398
20 36.0315 2.5 0 3.09 21.9 1.3 0.03992
<표 3.1.60> 현가장치 및 Anti-roll bar의 강성 최적화를 위한 실험계획 결과
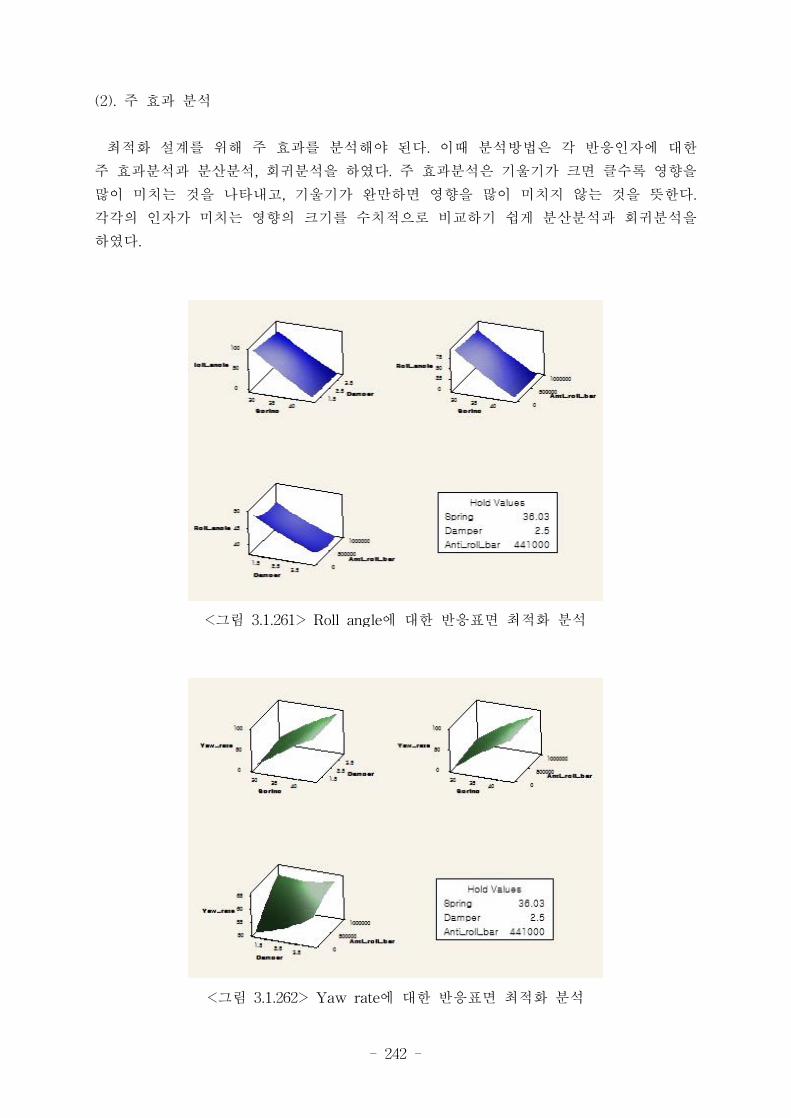
- 242 -
(2). 주 효과 분석
최적화 설계를 위해 주 효과를 분석해야 된다. 이때 분석방법은 각 반응인자에 대한
주 효과분석과 분산분석, 회귀분석을 하였다. 주 효과분석은 기울기가 크면 클수록 영향을
많이 미치는 것을 나타내고, 기울기가 완만하면 영향을 많이 미치지 않는 것을 뜻한다.
각각의 인자가 미치는 영향의 크기를 수치적으로 비교하기 쉽게 분산분석과 회귀분석을
하였다.
<그림 3.1.261> Roll angle에 대한 반응표면 최적화 분석
<그림 3.1.262> Yaw rate에 대한 반응표면 최적화 분석

- 243 -
<그림 3.1.263> Side slip angle에 대한 반응표면 최적화
분석
<그림 3.1.264> Ride comfort에 대한 반응표면 최적화 분석
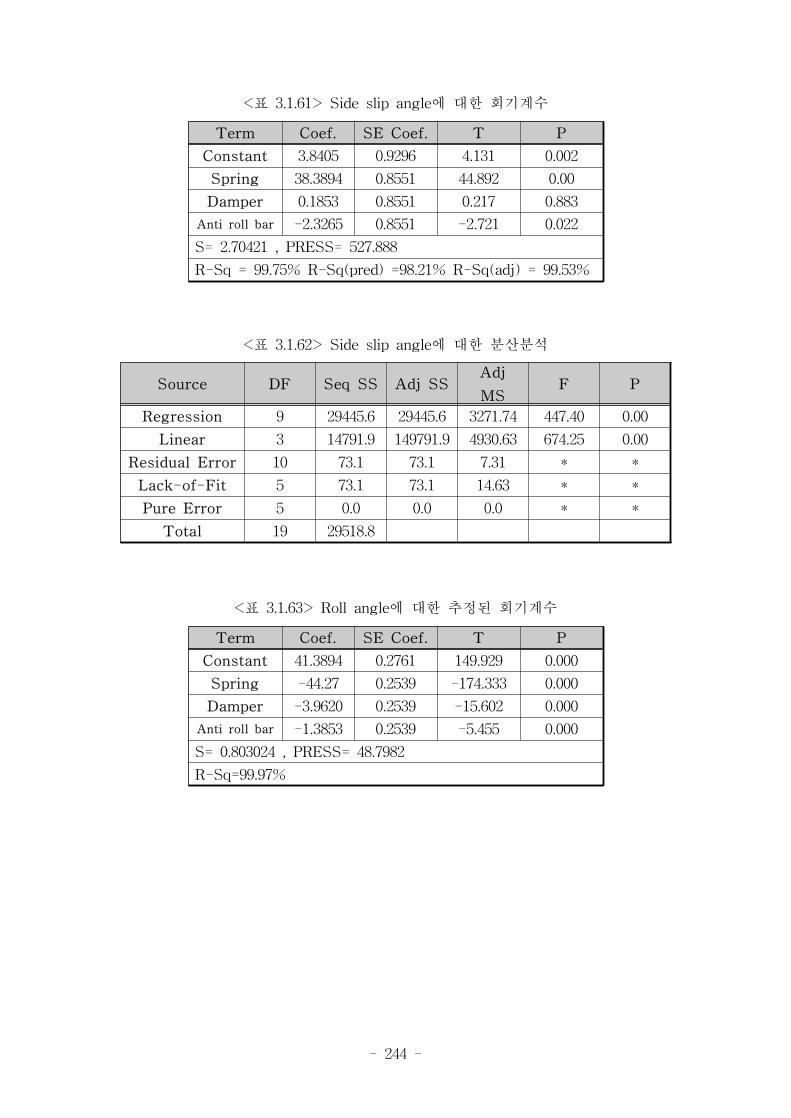
- 244 -
Term Coef. SE Coef. T P
Constant 3.8405 0.9296 4.131 0.002
Spring 38.3894 0.8551 44.892 0.00
Damper 0.1853 0.8551 0.217 0.883
Anti roll bar -2.3265 0.8551 -2.721 0.022
S= 2.70421 , PRESS= 527.888
R-Sq = 99.75% R-Sq(pred) =98.21% R-Sq(adj) = 99.53%
<표 3.1.61> Side slip angle에 대한 회기계수
Source DF Seq SS Adj SSAdj
MSF P
Regression 9 29445.6 29445.6 3271.74 447.40 0.00
Linear 3 14791.9 149791.9 4930.63 674.25 0.00
Residual Error 10 73.1 73.1 7.31 * *
Lack-of-Fit 5 73.1 73.1 14.63 * *
Pure Error 5 0.0 0.0 0.0 * *
Total 19 29518.8
<표 3.1.62> Side slip angle에 대한 분산분석
Term Coef. SE Coef. T P
Constant 41.3894 0.2761 149.929 0.000
Spring -44.27 0.2539 -174.333 0.000
Damper -3.9620 0.2539 -15.602 0.000
Anti roll bar -1.3853 0.2539 -5.455 0.000
S= 0.803024 , PRESS= 48.7982
R-Sq=99.97%
<표 3.1.63> Roll angle에 대한 추정된 회기계수
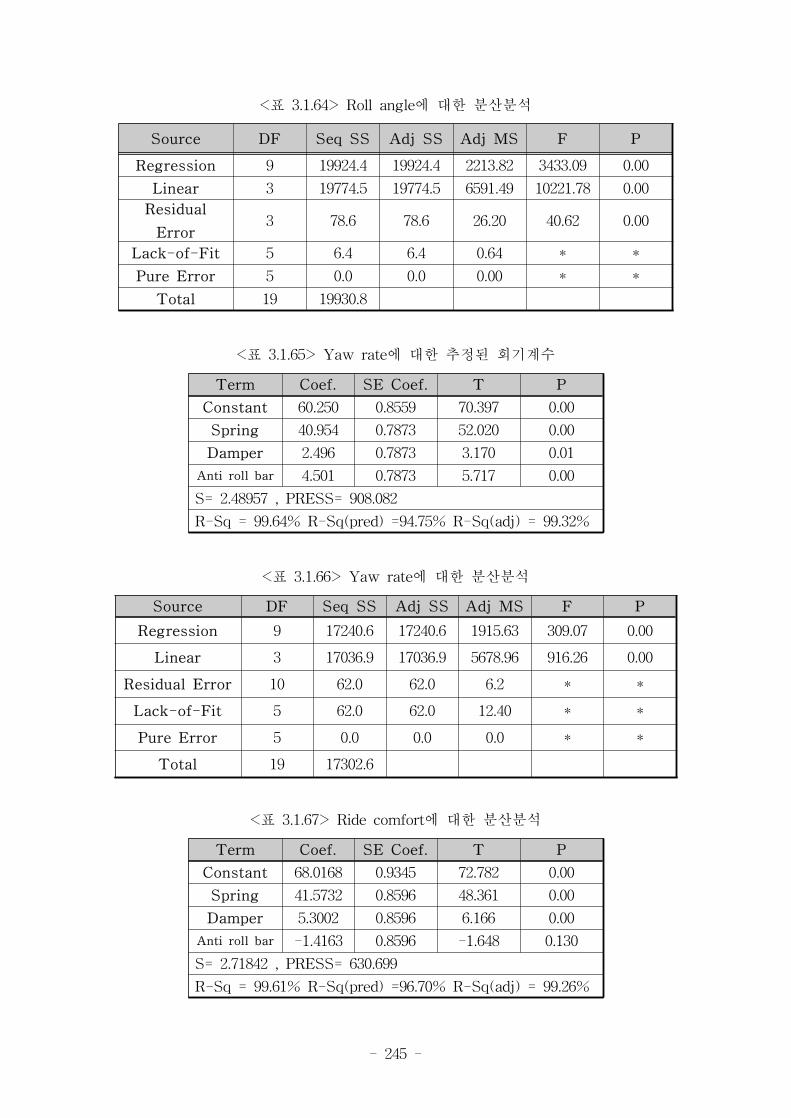
- 245 -
Source DF Seq SS Adj SS Adj MS F P
Regression 9 19924.4 19924.4 2213.82 3433.09 0.00
Linear 3 19774.5 19774.5 6591.49 10221.78 0.00
Residual
Error3 78.6 78.6 26.20 40.62 0.00
Lack-of-Fit 5 6.4 6.4 0.64 * *
Pure Error 5 0.0 0.0 0.00 * *
Total 19 19930.8
<표 3.1.64> Roll angle에 대한 분산분석
Term Coef. SE Coef. T P
Constant 60.250 0.8559 70.397 0.00
Spring 40.954 0.7873 52.020 0.00
Damper 2.496 0.7873 3.170 0.01
Anti roll bar 4.501 0.7873 5.717 0.00
S= 2.48957 , PRESS= 908.082
R-Sq = 99.64% R-Sq(pred) =94.75% R-Sq(adj) = 99.32%
<표 3.1.65> Yaw rate에 대한 추정된 회기계수
Source DF Seq SS Adj SS Adj MS F P
Regression 9 17240.6 17240.6 1915.63 309.07 0.00
Linear 3 17036.9 17036.9 5678.96 916.26 0.00
Residual Error 10 62.0 62.0 6.2 * *
Lack-of-Fit 5 62.0 62.0 12.40 * *
Pure Error 5 0.0 0.0 0.0 * *
Total 19 17302.6
<표 3.1.66> Yaw rate에 대한 분산분석
Term Coef. SE Coef. T P
Constant 68.0168 0.9345 72.782 0.00
Spring 41.5732 0.8596 48.361 0.00
Damper 5.3002 0.8596 6.166 0.00
Anti roll bar -1.4163 0.8596 -1.648 0.130
S= 2.71842 , PRESS= 630.699
R-Sq = 99.61% R-Sq(pred) =96.70% R-Sq(adj) = 99.26%
<표 3.1.67> Ride comfort에 대한 분산분석
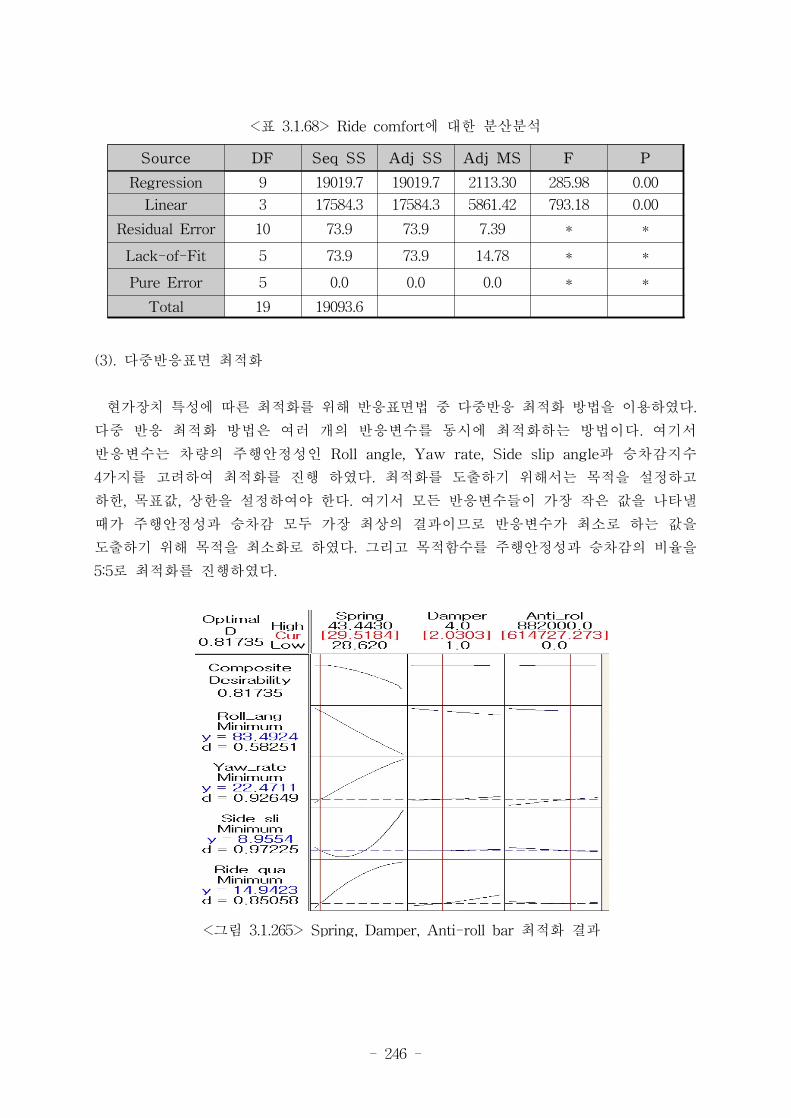
- 246 -
Source DF Seq SS Adj SS Adj MS F P
Regression 9 19019.7 19019.7 2113.30 285.98 0.00
Linear 3 17584.3 17584.3 5861.42 793.18 0.00
Residual Error 10 73.9 73.9 7.39 * *
Lack-of-Fit 5 73.9 73.9 14.78 * *
Pure Error 5 0.0 0.0 0.0 * *
Total 19 19093.6
<표 3.1.68> Ride comfort에 대한 분산분석
(3). 다중반응표면 최적화
현가장치 특성에 따른 최적화를 위해 반응표면법 중 다중반응 최적화 방법을 이용하였다.
다중 반응 최적화 방법은 여러 개의 반응변수를 동시에 최적화하는 방법이다. 여기서
반응변수는 차량의 주행안정성인 Roll angle, Yaw rate, Side slip angle과 승차감지수
4가지를 고려하여 최적화를 진행 하였다. 최적화를 도출하기 위해서는 목적을 설정하고
하한, 목표값, 상한을 설정하여야 한다. 여기서 모든 반응변수들이 가장 작은 값을 나타낼
때가 주행안정성과 승차감 모두 가장 최상의 결과이므로 반응변수가 최소로 하는 값을
도출하기 위해 목적을 최소화로 하였다. 그리고 목적함수를 주행안정성과 승차감의 비율을
5:5로 최적화를 진행하였다.
<그림 3.1.265> Spring, Damper, Anti-roll bar 최적화 결과
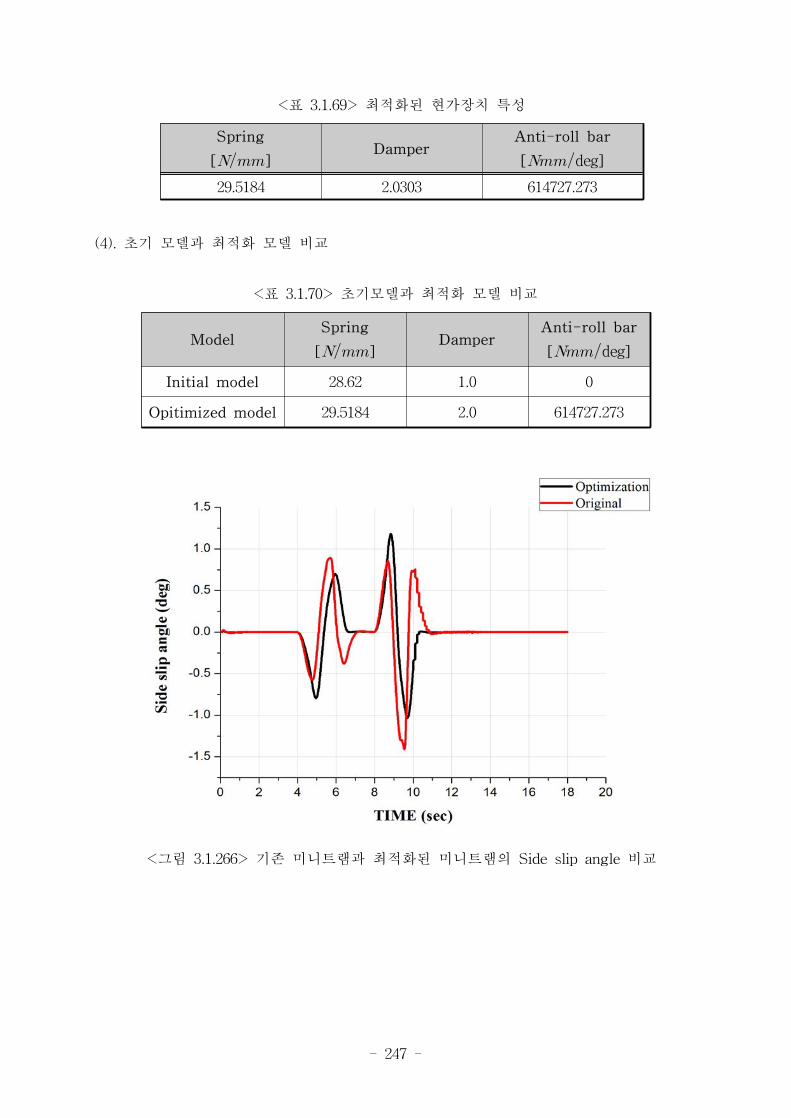
- 247 -
Spring
[]Damper
Anti-roll bar
[deg]29.5184 2.0303 614727.273
<표 3.1.69> 최적화된 현가장치 특성
(4). 초기 모델과 최적화 모델 비교
ModelSpring
[]Damper
Anti-roll bar
[deg]Initial model 28.62 1.0 0
Opitimized model 29.5184 2.0 614727.273
<표 3.1.70> 초기모델과 최적화 모델 비교
<그림 3.1.266> 기존 미니트램과 최적화된 미니트램의 Side slip angle 비교
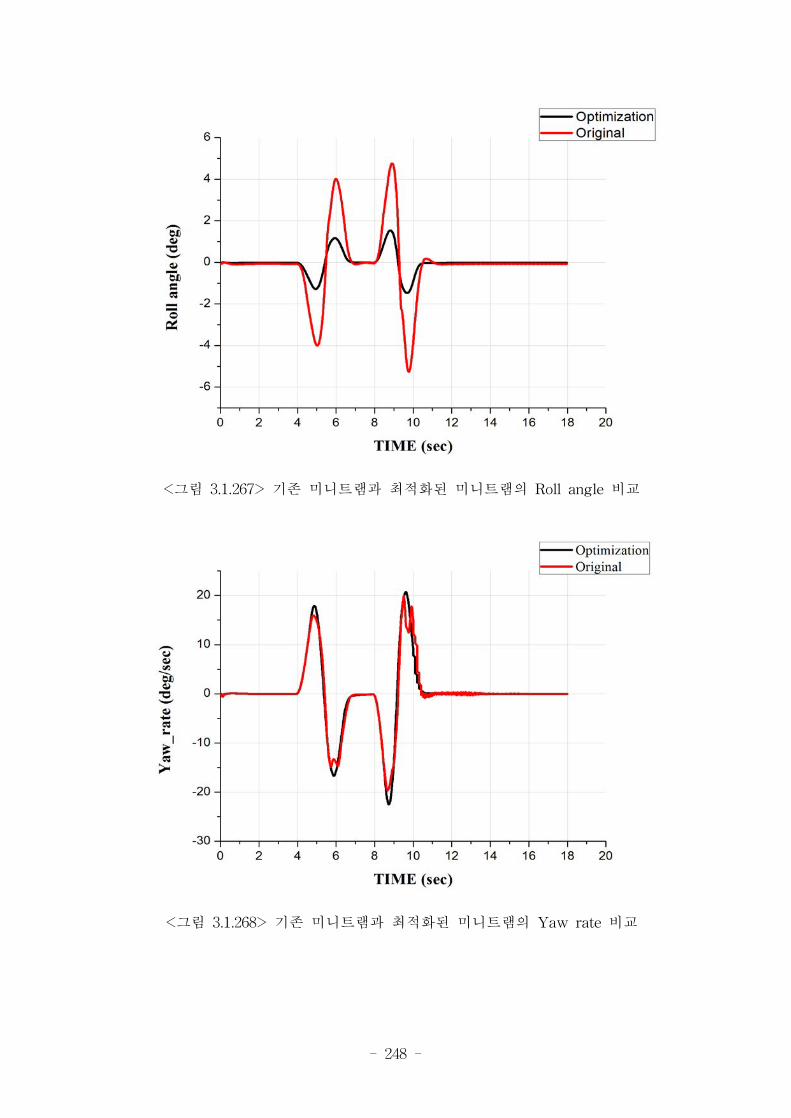
- 248 -
<그림 3.1.267> 기존 미니트램과 최적화된 미니트램의 Roll angle 비교
<그림 3.1.268> 기존 미니트램과 최적화된 미니트램의 Yaw rate 비교
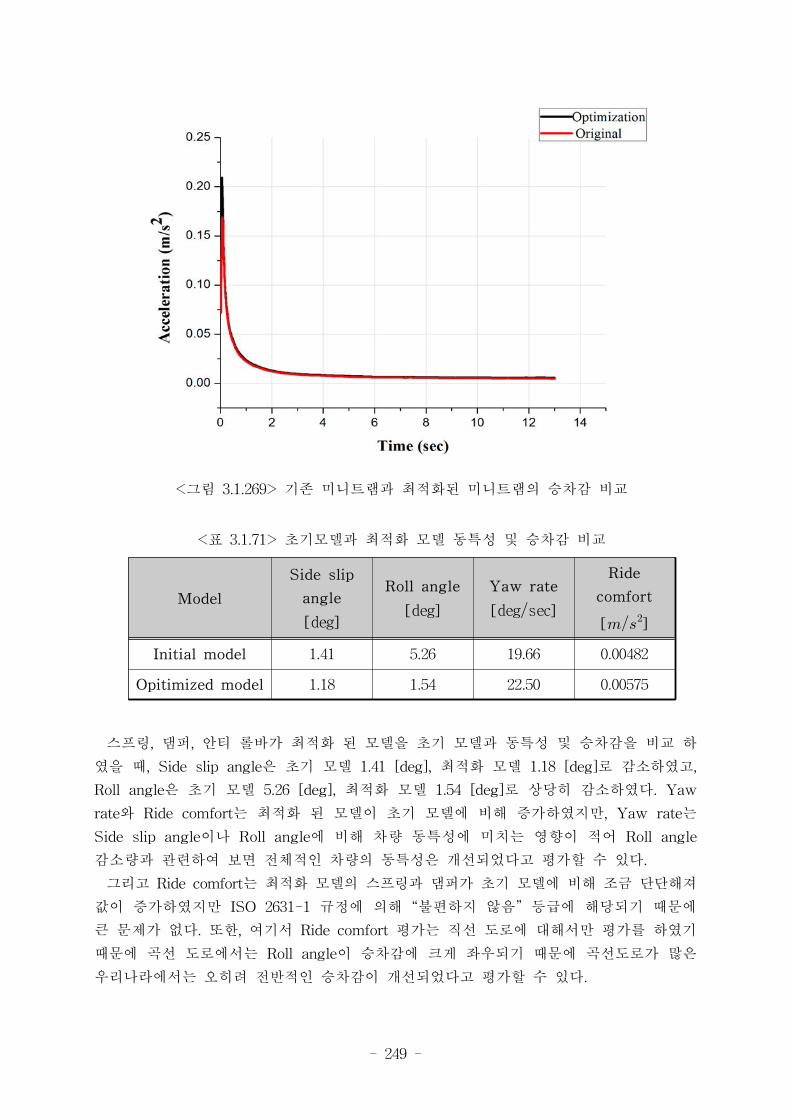
- 249 -
<그림 3.1.269> 기존 미니트램과 최적화된 미니트램의 승차감 비교
Model
Side slip
angle
[deg]Roll angle
[deg]Yaw rate
[degsec]Ride
comfort
[]
Initial model 1.41 5.26 19.66 0.00482
Opitimized model 1.18 1.54 22.50 0.00575
<표 3.1.71> 초기모델과 최적화 모델 동특성 및 승차감 비교
스프링, 댐퍼, 안티 롤바가 최적화 된 모델을 초기 모델과 동특성 및 승차감을 비교 하
였을 때, Side slip angle은 초기 모델 1.41 [deg], 최적화 모델 1.18 [deg]로 감소하였고,
Roll angle은 초기 모델 5.26 [deg], 최적화 모델 1.54 [deg]로 상당히 감소하였다. Yaw
rate와 Ride comfort는 최적화 된 모델이 초기 모델에 비해 증가하였지만, Yaw rate는
Side slip angle이나 Roll angle에 비해 차량 동특성에 미치는 영향이 적어 Roll angle
감소량과 관련하여 보면 전체적인 차량의 동특성은 개선되었다고 평가할 수 있다.
그리고 Ride comfort는 최적화 모델의 스프링과 댐퍼가 초기 모델에 비해 조금 단단해져
값이 증가하였지만 ISO 2631-1 규정에 의해 “불편하지 않음” 등급에 해당되기 때문에
큰 문제가 없다. 또한, 여기서 Ride comfort 평가는 직선 도로에 대해서만 평가를 하였기
때문에 곡선 도로에서는 Roll angle이 승차감에 크게 좌우되기 때문에 곡선도로가 많은
우리나라에서는 오히려 전반적인 승차감이 개선되었다고 평가할 수 있다.
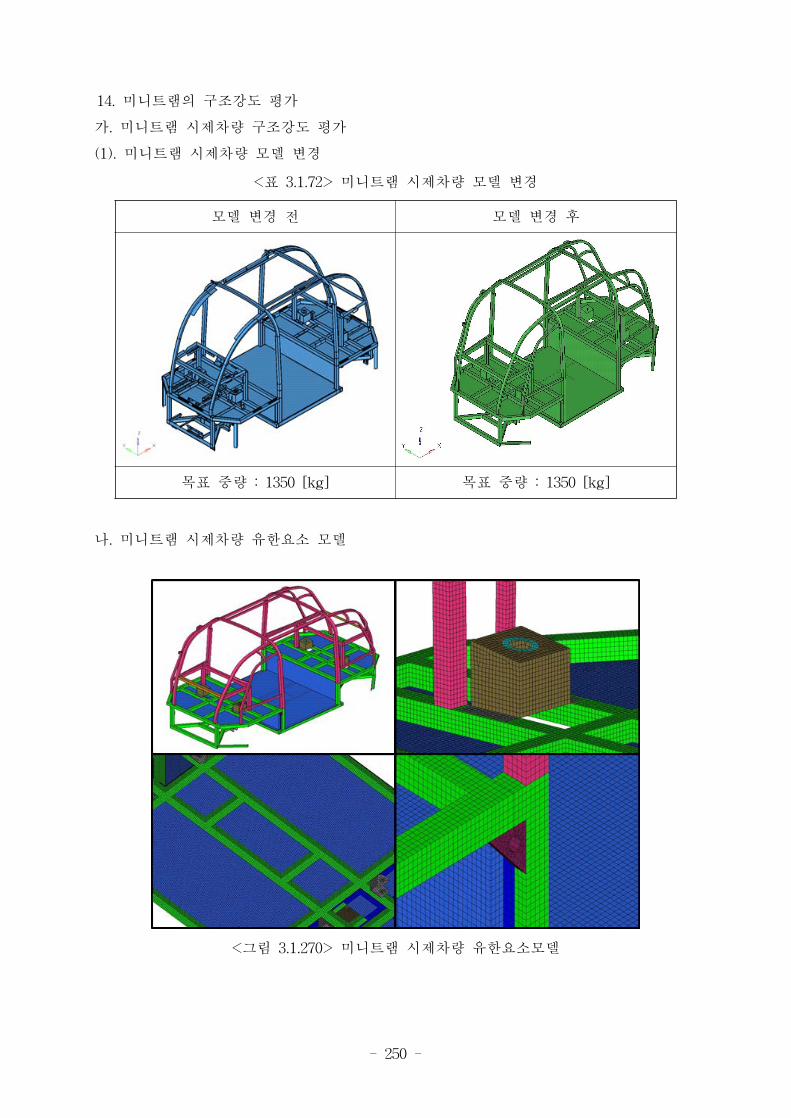
- 250 -
14. 미니트램의 구조강도 평가
가. 미니트램 시제차량 구조강도 평가
(1). 미니트램 시제차량 모델 변경
모델 변경 전 모델 변경 후
목표 중량 : 1350 [kg] 목표 중량 : 1350 [kg]
<표 3.1.72> 미니트램 시제차량 모델 변경
나. 미니트램 시제차량 유한요소 모델
<그림 3.1.270> 미니트램 시제차량 유한요소모델
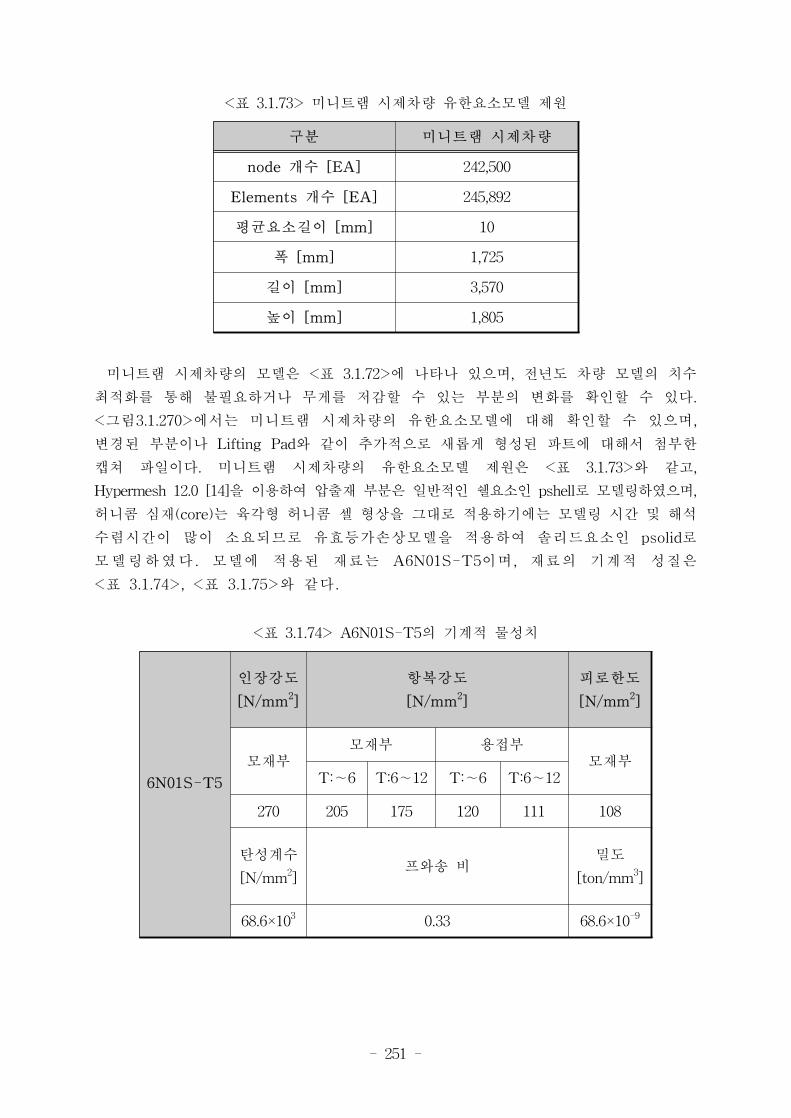
- 251 -
구분 미니트램 시제차량
node 개수 [EA] 242,500
Elements 개수 [EA] 245,892
평균요소길이 [mm] 10
폭 [mm] 1,725
길이 [mm] 3,570
높이 [mm] 1,805
<표 3.1.73> 미니트램 시제차량 유한요소모델 제원
미니트램 시제차량의 모델은 <표 3.1.72>에 나타나 있으며, 전년도 차량 모델의 치수
최적화를 통해 불필요하거나 무게를 저감할 수 있는 부분의 변화를 확인할 수 있다.
<그림3.1.270>에서는 미니트램 시제차량의 유한요소모델에 대해 확인할 수 있으며,
변경된 부분이나 Lifting Pad와 같이 추가적으로 새롭게 형성된 파트에 대해서 첨부한
캡쳐 파일이다. 미니트램 시제차량의 유한요소모델 제원은 <표 3.1.73>와 같고,
Hypermesh 12.0 [14]을 이용하여 압출재 부분은 일반적인 쉘요소인 pshell로 모델링하였으며,
허니콤 심재(core)는 육각형 허니콤 셀 형상을 그대로 적용하기에는 모델링 시간 및 해석
수렴시간이 많이 소요되므로 유효등가손상모델을 적용하여 솔리드요소인 psolid로
모델링하였다. 모델에 적용된 재료는 A6N01S-T5이며 , 재료의 기계적 성질은
<표 3.1.74>, <표 3.1.75>와 같다.
6N01S-T5
인장강도
[N/mm2]
항복강도
[N/mm2]
피로한도
[N/mm2]
모재부모재부 용접부
모재부T:∼6 T:6∼12 T:∼6 T:6∼12
270 205 175 120 111 108
탄성계수
[N/mm2]
프와송 비밀도
[ton/mm3]
68.6×103 0.33 68.6×10-9
<표 3.1.74> A6N01S-T5의 기계적 물성치
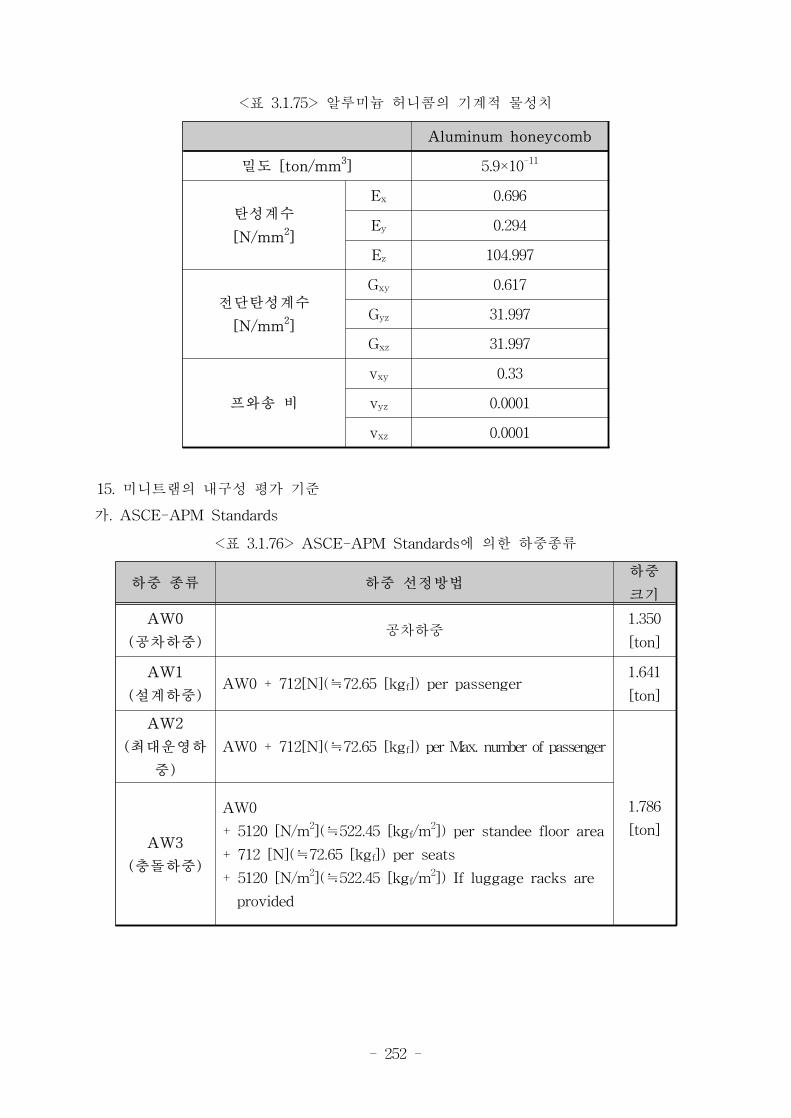
- 252 -
Aluminum honeycomb
밀도 [ton/mm3] 5.9×10-11
탄성계수
[N/mm2]
Ex 0.696
Ey 0.294
Ez 104.997
전단탄성계수
[N/mm2]
Gxy 0.617
Gyz 31.997
Gxz 31.997
프와송 비
vxy 0.33
vyz 0.0001
vxz 0.0001
<표 3.1.75> 알루미늄 허니콤의 기계적 물성치
15. 미니트램의 내구성 평가 기준
가. ASCE-APM Standards
하중 종류 하중 선정방법하중
크기
AW0
(공차하중)공차하중
1.350
[ton]
AW1
(설계하중)AW0 + 712[N](≒72.65 [kgf]) per passenger
1.641
[ton]
AW2
(최대운영하
중)
AW0 + 712[N](≒72.65 [kgf]) per Max. number of passenger
1.786
[ton]AW3
(충돌하중)
AW0
+ 5120 [N/m2](≒522.45 [kgf/m
2]) per standee floor area
+ 712 [N](≒72.65 [kgf]) per seats
+ 5120 [N/m2](≒522.45 [kgf/m
2]) If luggage racks are
provided
<표 3.1.76> ASCE-APM Standards에 의한 하중종류
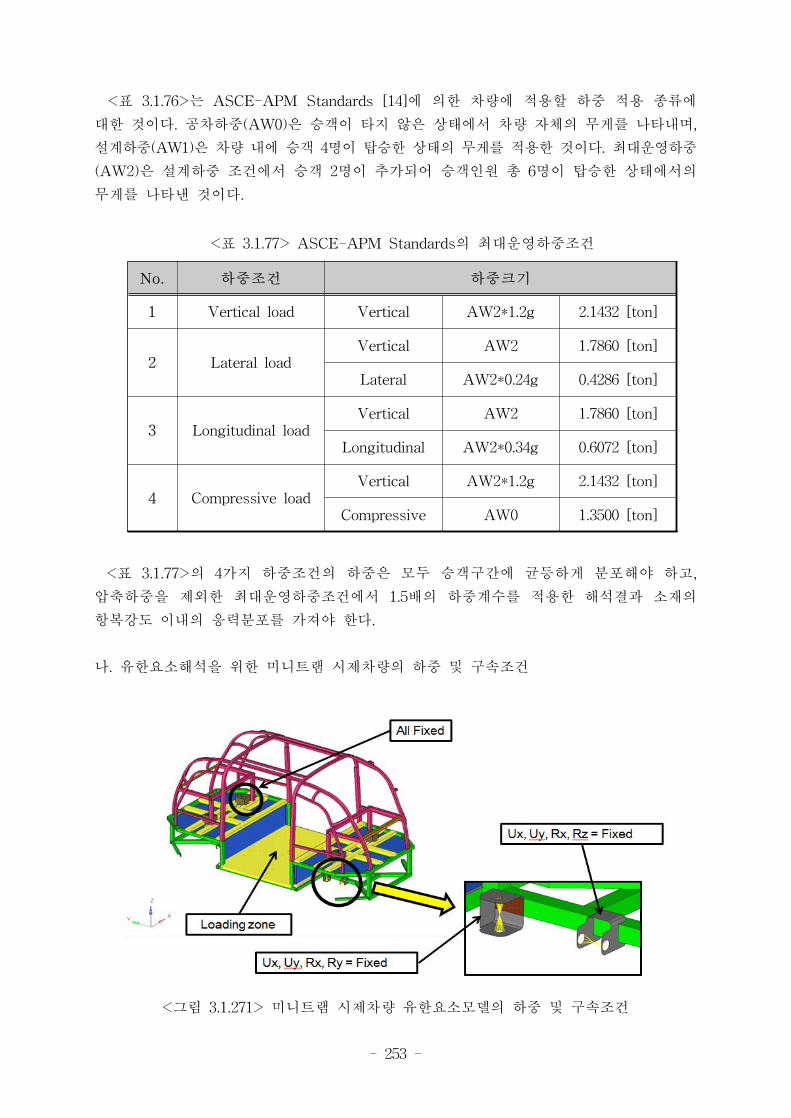
- 253 -
<표 3.1.76>는 ASCE-APM Standards [14]에 의한 차량에 적용할 하중 적용 종류에
대한 것이다. 공차하중(AW0)은 승객이 타지 않은 상태에서 차량 자체의 무게를 나타내며,
설계하중(AW1)은 차량 내에 승객 4명이 탑승한 상태의 무게를 적용한 것이다. 최대운영하중
(AW2)은 설계하중 조건에서 승객 2명이 추가되어 승객인원 총 6명이 탑승한 상태에서의
무게를 나타낸 것이다.
No. 하중조건 하중크기
1 Vertical load Vertical AW2*1.2g 2.1432 [ton]
2 Lateral loadVertical AW2 1.7860 [ton]
Lateral AW2*0.24g 0.4286 [ton]
3 Longitudinal loadVertical AW2 1.7860 [ton]
Longitudinal AW2*0.34g 0.6072 [ton]
4 Compressive loadVertical AW2*1.2g 2.1432 [ton]
Compressive AW0 1.3500 [ton]
<표 3.1.77> ASCE-APM Standards의 최대운영하중조건
<표 3.1.77>의 4가지 하중조건의 하중은 모두 승객구간에 균등하게 분포해야 하고,
압축하중을 제외한 최대운영하중조건에서 1.5배의 하중계수를 적용한 해석결과 소재의
항복강도 이내의 응력분포를 가져야 한다.
나. 유한요소해석을 위한 미니트램 시제차량의 하중 및 구속조건
<그림 3.1.271> 미니트램 시제차량 유한요소모델의 하중 및 구속조건
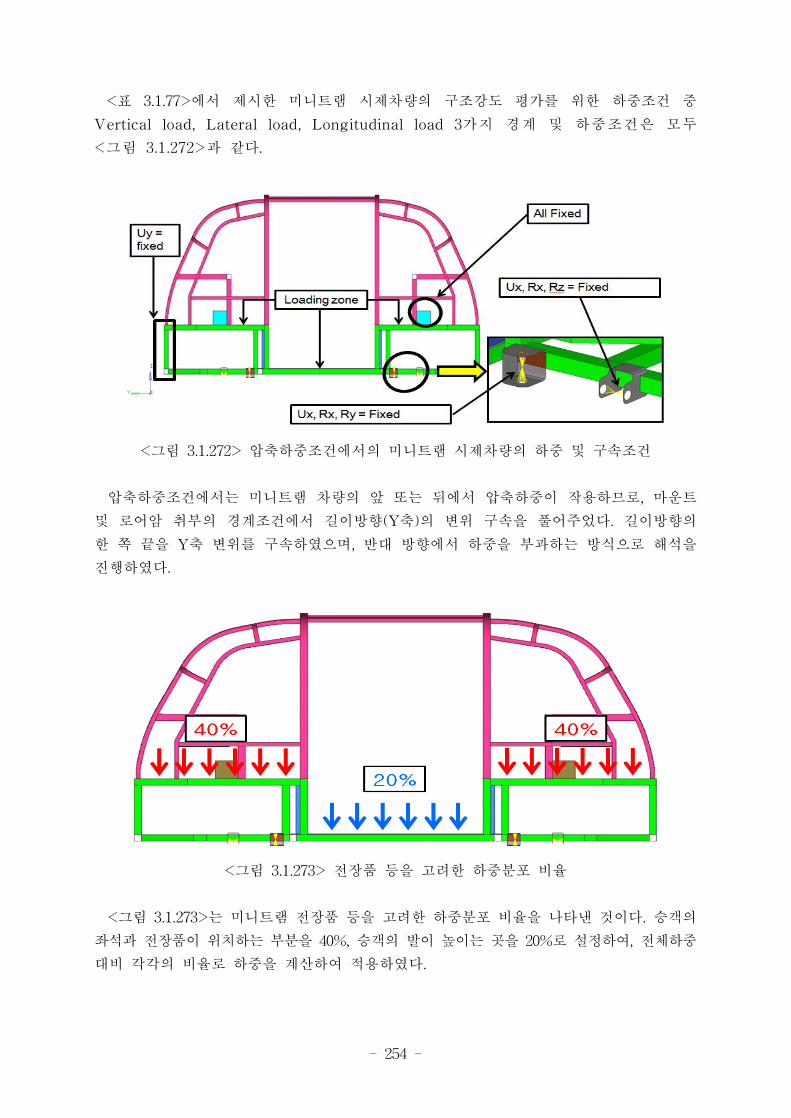
- 254 -
<표 3.1.77>에서 제시한 미니트램 시제차량의 구조강도 평가를 위한 하중조건 중
Vertical load, Lateral load, Longitudinal load 3가지 경계 및 하중조건은 모두
<그림 3.1.272>과 같다.
<그림 3.1.272> 압축하중조건에서의 미니트램 시제차량의 하중 및 구속조건
압축하중조건에서는 미니트램 차량의 앞 또는 뒤에서 압축하중이 작용하므로, 마운트
및 로어암 취부의 경계조건에서 길이방향(Y축)의 변위 구속을 풀어주었다. 길이방향의
한 쪽 끝을 Y축 변위를 구속하였으며, 반대 방향에서 하중을 부과하는 방식으로 해석을
진행하였다.
<그림 3.1.273> 전장품 등을 고려한 하중분포 비율
<그림 3.1.273>는 미니트램 전장품 등을 고려한 하중분포 비율을 나타낸 것이다. 승객의
좌석과 전장품이 위치하는 부분을 40%, 승객의 발이 높이는 곳을 20%로 설정하여, 전체하중
대비 각각의 비율로 하중을 계산하여 적용하였다.
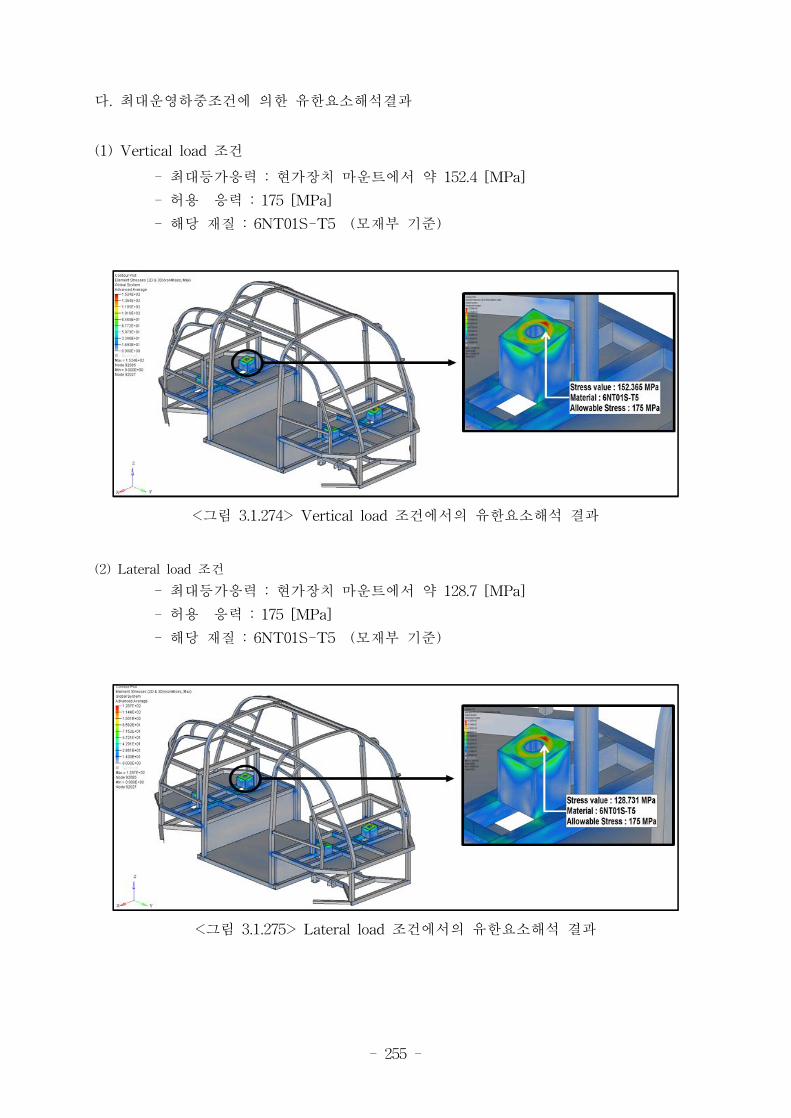
- 255 -
다. 최대운영하중조건에 의한 유한요소해석결과
(1) Vertical load 조건
- 최대등가응력 : 현가장치 마운트에서 약 152.4 [MPa]
- 허용 응력 : 175 [MPa]
- 해당 재질 : 6NT01S-T5 (모재부 기준)
<그림 3.1.274> Vertical load 조건에서의 유한요소해석 결과
(2) Lateral load 조건
- 최대등가응력 : 현가장치 마운트에서 약 128.7 [MPa]
- 허용 응력 : 175 [MPa]
- 해당 재질 : 6NT01S-T5 (모재부 기준)
<그림 3.1.275> Lateral load 조건에서의 유한요소해석 결과
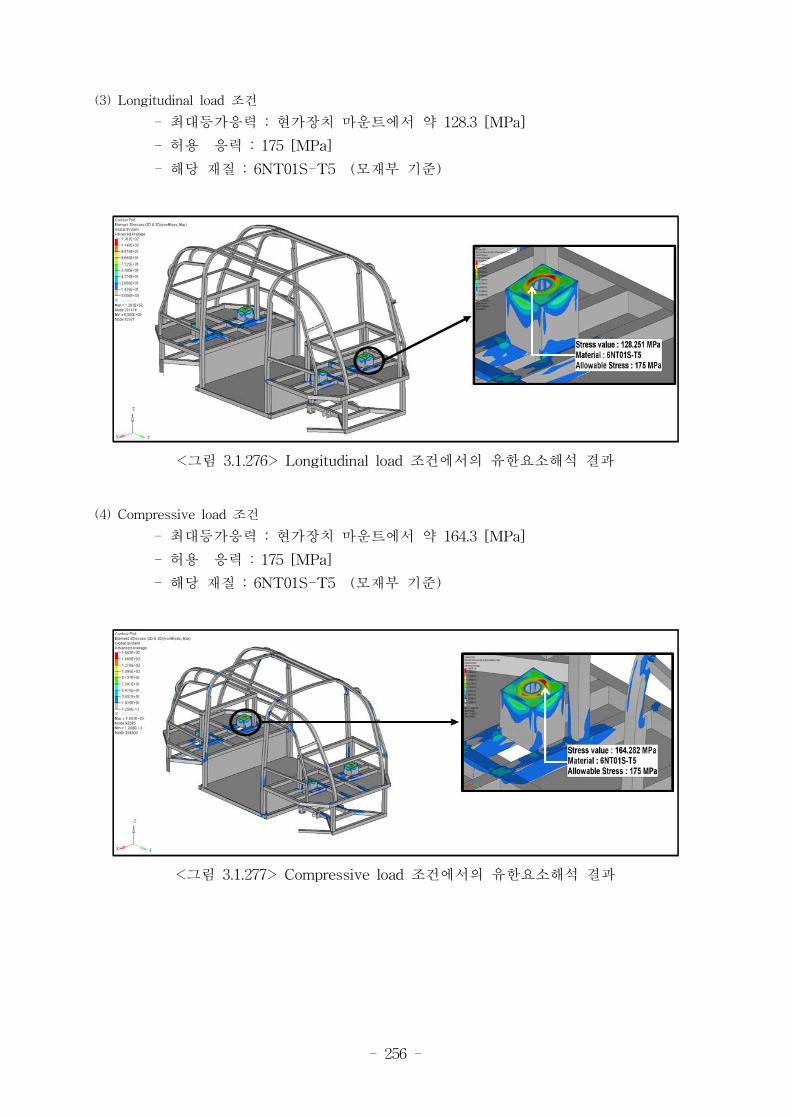
- 256 -
(3) Longitudinal load 조건
- 최대등가응력 : 현가장치 마운트에서 약 128.3 [MPa]
- 허용 응력 : 175 [MPa]
- 해당 재질 : 6NT01S-T5 (모재부 기준)
<그림 3.1.276> Longitudinal load 조건에서의 유한요소해석 결과
(4) Compressive load 조건
- 최대등가응력 : 현가장치 마운트에서 약 164.3 [MPa]
- 허용 응력 : 175 [MPa]
- 해당 재질 : 6NT01S-T5 (모재부 기준)
<그림 3.1.277> Compressive load 조건에서의 유한요소해석 결과
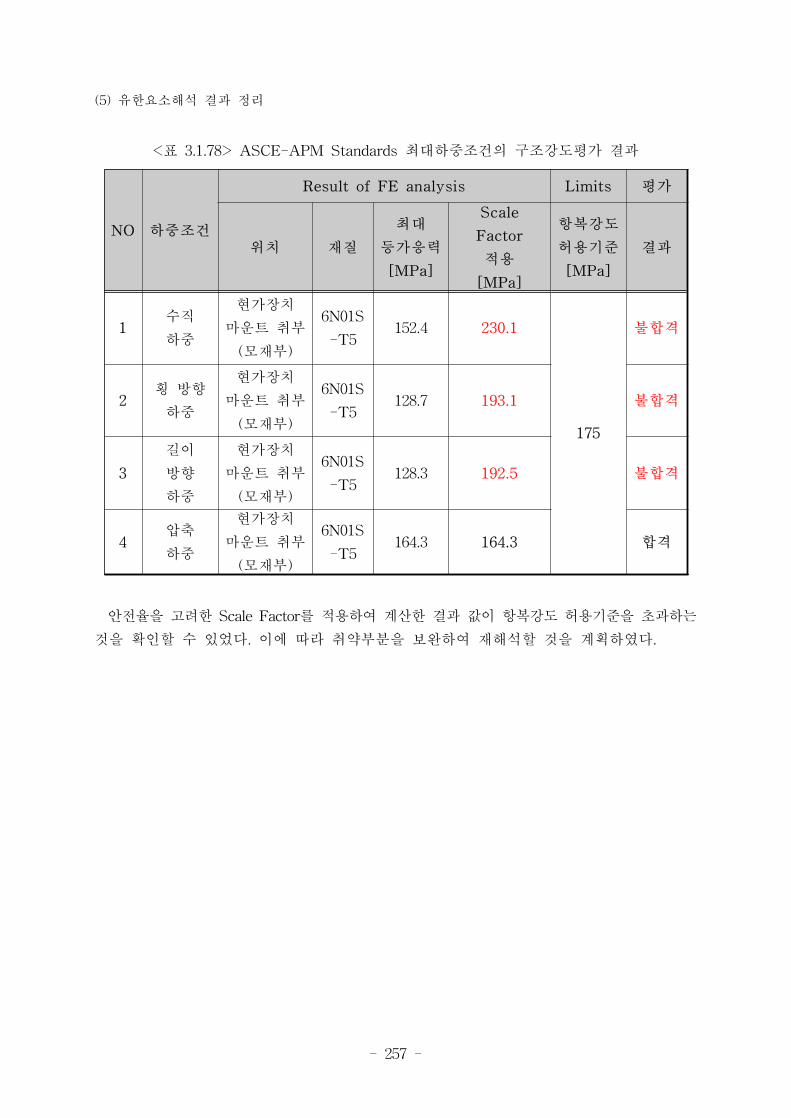
- 257 -
(5) 유한요소해석 결과 정리
NO 하중조건
Result of FE analysis Limits 평가
위치 재질
최대
등가응력
[MPa]
Scale
Factor
적용
[MPa]
항복강도
허용기준
[MPa]
결과
1수직
하중
현가장치
마운트 취부
(모재부)
6N01S
-T5152.4 230.1
175
불합격
2횡 방향
하중
현가장치
마운트 취부
(모재부)
6N01S
-T5128.7 193.1 불합격
3
길이
방향
하중
현가장치
마운트 취부
(모재부)
6N01S
-T5128.3 192.5 불합격
4압축
하중
현가장치
마운트 취부
(모재부)
6N01S
-T5164.3 164.3 합격
<표 3.1.78> ASCE-APM Standards 최대하중조건의 구조강도평가 결과
안전율을 고려한 Scale Factor를 적용하여 계산한 결과 값이 항복강도 허용기준을 초과하는
것을 확인할 수 있었다. 이에 따라 취약부분을 보완하여 재해석할 것을 계획하였다.

- 258 -
라. 취약부위 확인 및 두께 변경
<그림 3.1.278> 취약 부위 확인 및 두께 변경
상단의 <그림3.1.253>에서 본 바와 같이, 취약하다고 판단되는 모든 현가장치 마운트
부분의 두께를 각각 3T → 6T, 6T → 9T로 수정 보완 후 재해석을 실시하였다.
마. Vertical load 조건에서의 유한요소해석 결과 (재해석)
- 최대등가응력 : 현가장치 마운트 취부에서 약 53.6 [MPa]
- 허용 응력 : 120 [MPa]
- 해당 재질 : 6NT01S-T5 (용접부 기준)
<그림 3.1.279> Vertical load 조건에서의 유한요소해석 결과 (재해석)
바. Lateral load 조건에서의 유한요소해석 결과 (재해석)
- 최대등가응력 : 현가장치 마운트 취부에서 약 50.2 [MPa]
- 허용 응력 : 120 [MPa]
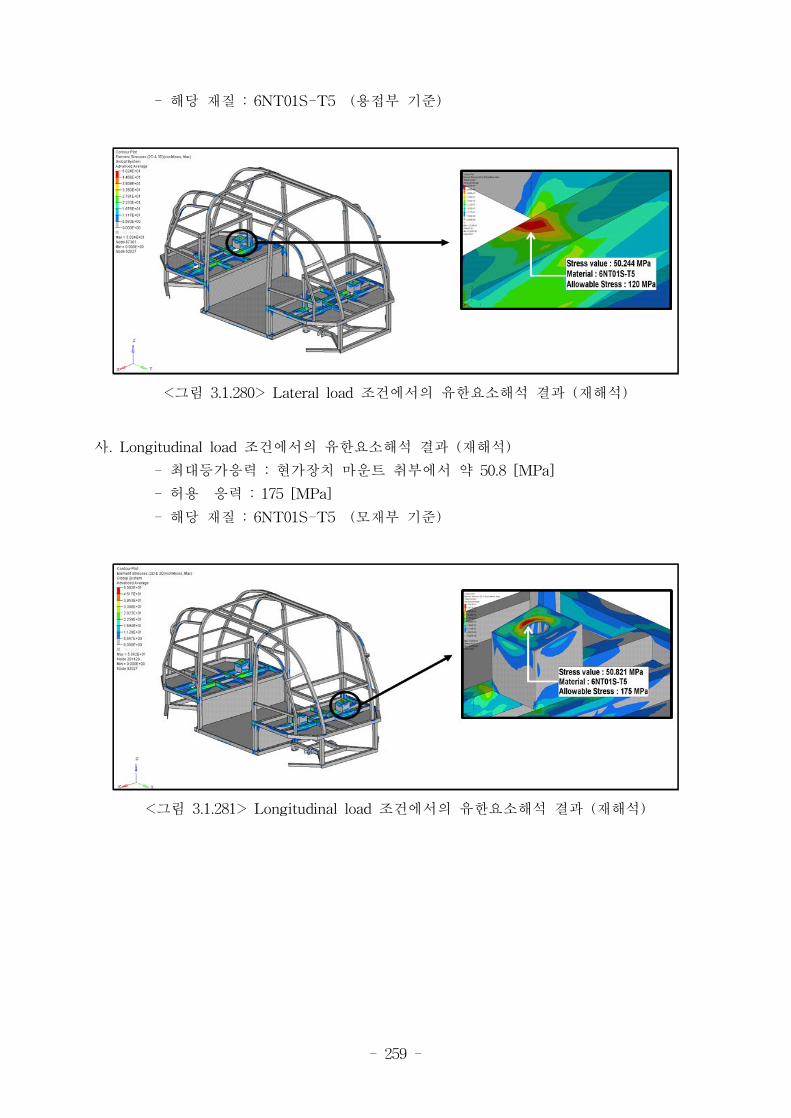
- 259 -
- 해당 재질 : 6NT01S-T5 (용접부 기준)
<그림 3.1.280> Lateral load 조건에서의 유한요소해석 결과 (재해석)
사. Longitudinal load 조건에서의 유한요소해석 결과 (재해석)
- 최대등가응력 : 현가장치 마운트 취부에서 약 50.8 [MPa]
- 허용 응력 : 175 [MPa]
- 해당 재질 : 6NT01S-T5 (모재부 기준)
<그림 3.1.281> Longitudinal load 조건에서의 유한요소해석 결과 (재해석)
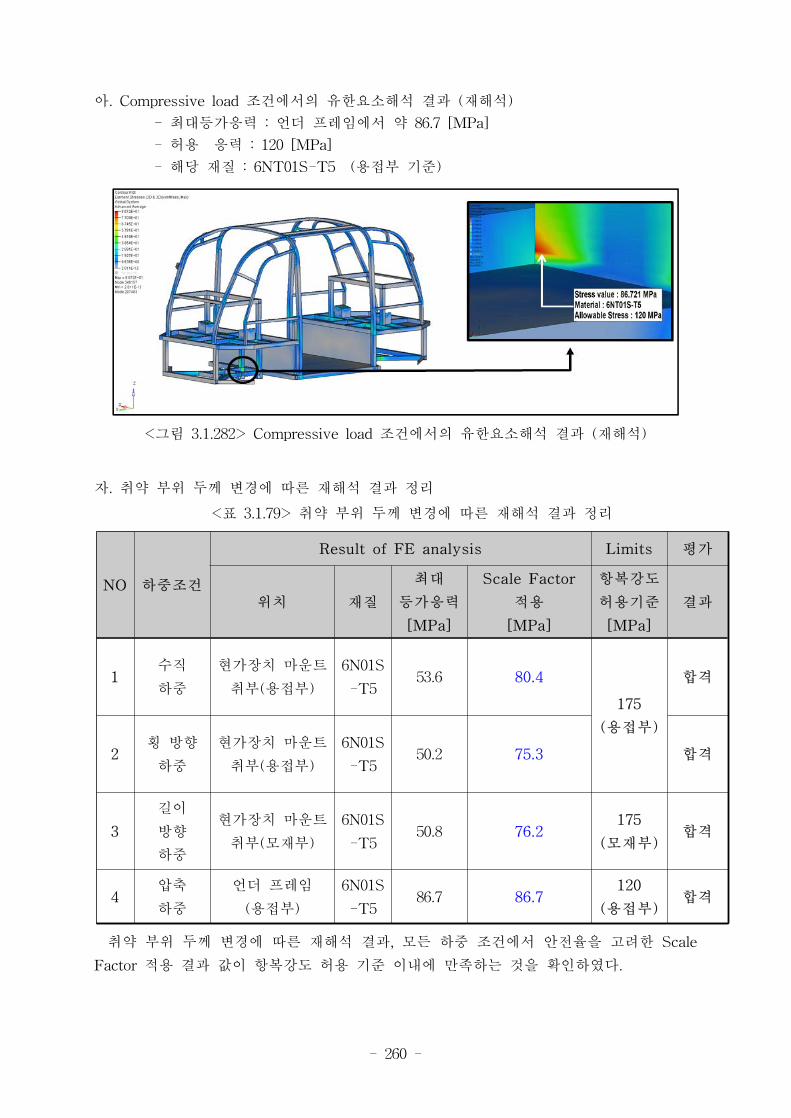
- 260 -
아. Compressive load 조건에서의 유한요소해석 결과 (재해석)
- 최대등가응력 : 언더 프레임에서 약 86.7 [MPa]
- 허용 응력 : 120 [MPa]
- 해당 재질 : 6NT01S-T5 (용접부 기준)
<그림 3.1.282> Compressive load 조건에서의 유한요소해석 결과 (재해석)
자. 취약 부위 두께 변경에 따른 재해석 결과 정리
NO 하중조건
Result of FE analysis Limits 평가
위치 재질
최대
등가응력
[MPa]
Scale Factor
적용
[MPa]
항복강도
허용기준
[MPa]
결과
1수직
하중
현가장치 마운트
취부(용접부)
6N01S
-T553.6 80.4
175
(용접부)
합격
2횡 방향
하중
현가장치 마운트
취부(용접부)
6N01S
-T550.2 75.3 합격
3
길이
방향
하중
현가장치 마운트
취부(모재부)
6N01S
-T550.8 76.2
175
(모재부)합격
4압축
하중
언더 프레임
(용접부)
6N01S
-T586.7 86.7
120
(용접부)합격
<표 3.1.79> 취약 부위 두께 변경에 따른 재해석 결과 정리
취약 부위 두께 변경에 따른 재해석 결과, 모든 하중 조건에서 안전율을 고려한 Scale
Factor 적용 결과 값이 항복강도 허용 기준 이내에 만족하는 것을 확인하였다.
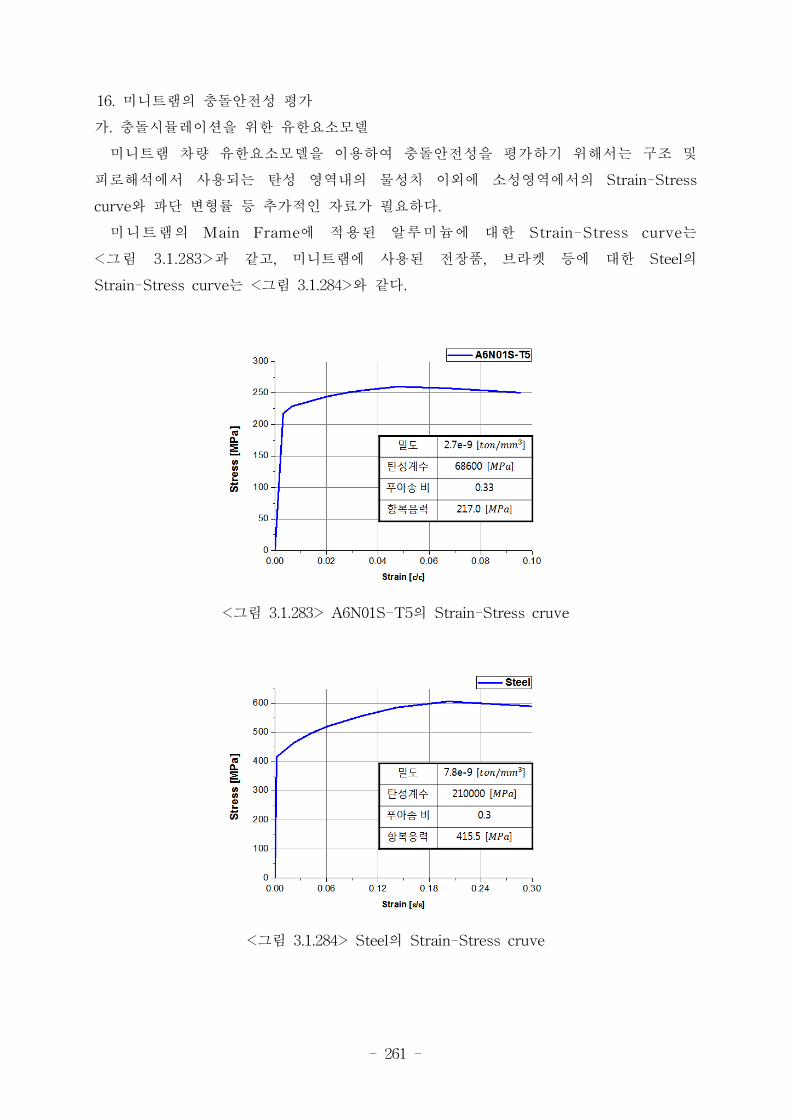
- 261 -
16. 미니트램의 충돌안전성 평가
가. 충돌시뮬레이션을 위한 유한요소모델
미니트램 차량 유한요소모델을 이용하여 충돌안전성을 평가하기 위해서는 구조 및
피로해석에서 사용되는 탄성 영역내의 물성치 이외에 소성영역에서의 Strain-Stress
curve와 파단 변형률 등 추가적인 자료가 필요하다.
미니트램의 Main Frame에 적용된 알루미늄에 대한 Strain-Stress curve는
<그림 3.1.283>과 같고, 미니트램에 사용된 전장품, 브라켓 등에 대한 Steel의
Strain-Stress curve는 <그림 3.1.284>와 같다.
<그림 3.1.283> A6N01S-T5의 Strain-Stress cruve
<그림 3.1.284> Steel의 Strain-Stress cruve
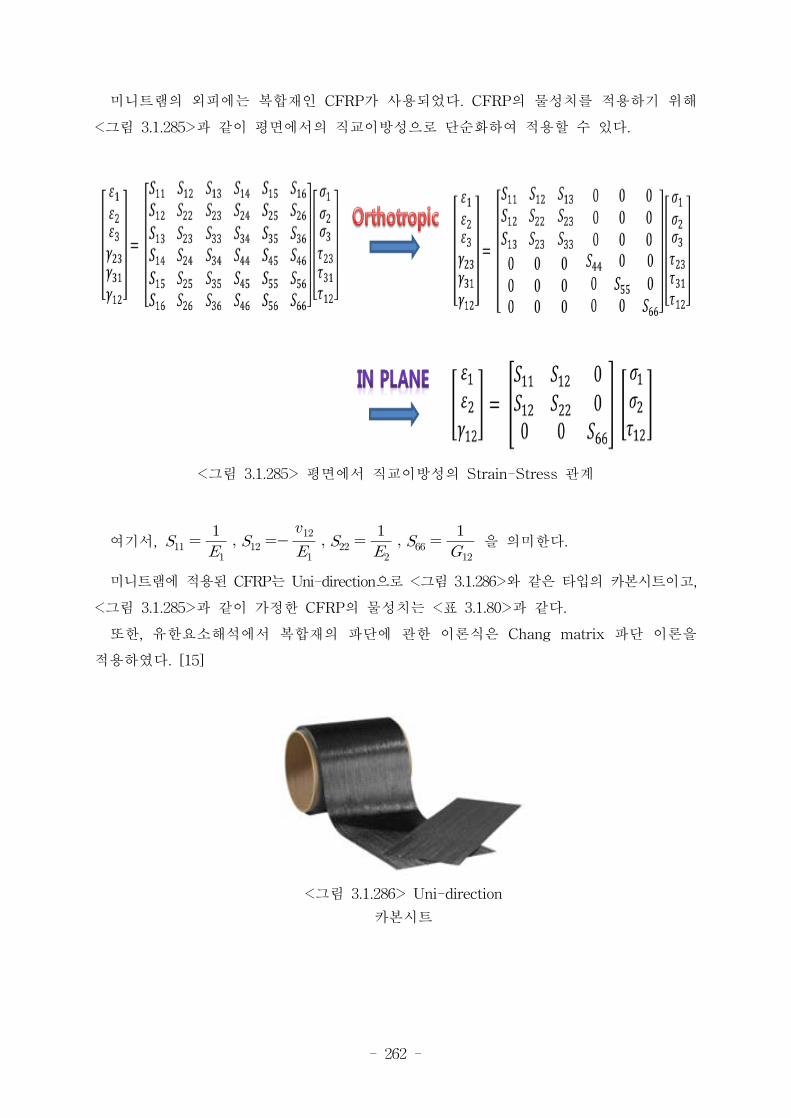
- 262 -
미니트램의 외피에는 복합재인 CFRP가 사용되었다. CFRP의 물성치를 적용하기 위해
<그림 3.1.285>과 같이 평면에서의 직교이방성으로 단순화하여 적용할 수 있다.
<그림 3.1.285> 평면에서 직교이방성의 Strain-Stress 관계
여기서,
을 의미한다.
미니트램에 적용된 CFRP는 Uni-direction으로 <그림 3.1.286>와 같은 타입의 카본시트이고,
<그림 3.1.285>과 같이 가정한 CFRP의 물성치는 <표 3.1.80>과 같다.
또한, 유한요소해석에서 복합재의 파단에 관한 이론식은 Chang matrix 파단 이론을
적용하였다. [15]
<그림 3.1.286> Uni-direction
카본시트
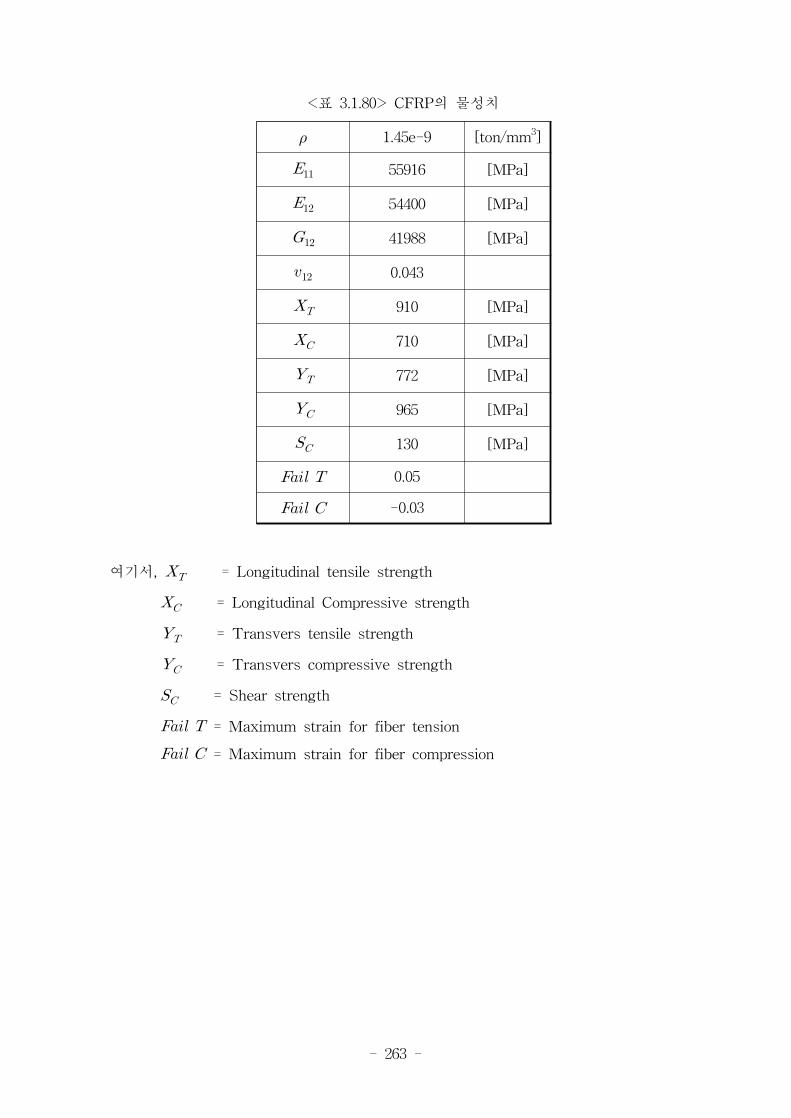
- 263 -
1.45e-9 [ton/mm3]
55916 [MPa]
54400 [MPa]
41988 [MPa]
0.043
910 [MPa]
710 [MPa]
772 [MPa]
965 [MPa]
130 [MPa]
0.05
-0.03
<표 3.1.80> CFRP의 물성치
여기서, = Longitudinal tensile strength
= Longitudinal Compressive strength
= Transvers tensile strength
= Transvers compressive strength
= Shear strength
= Maximum strain for fiber tension
= Maximum strain for fiber compression
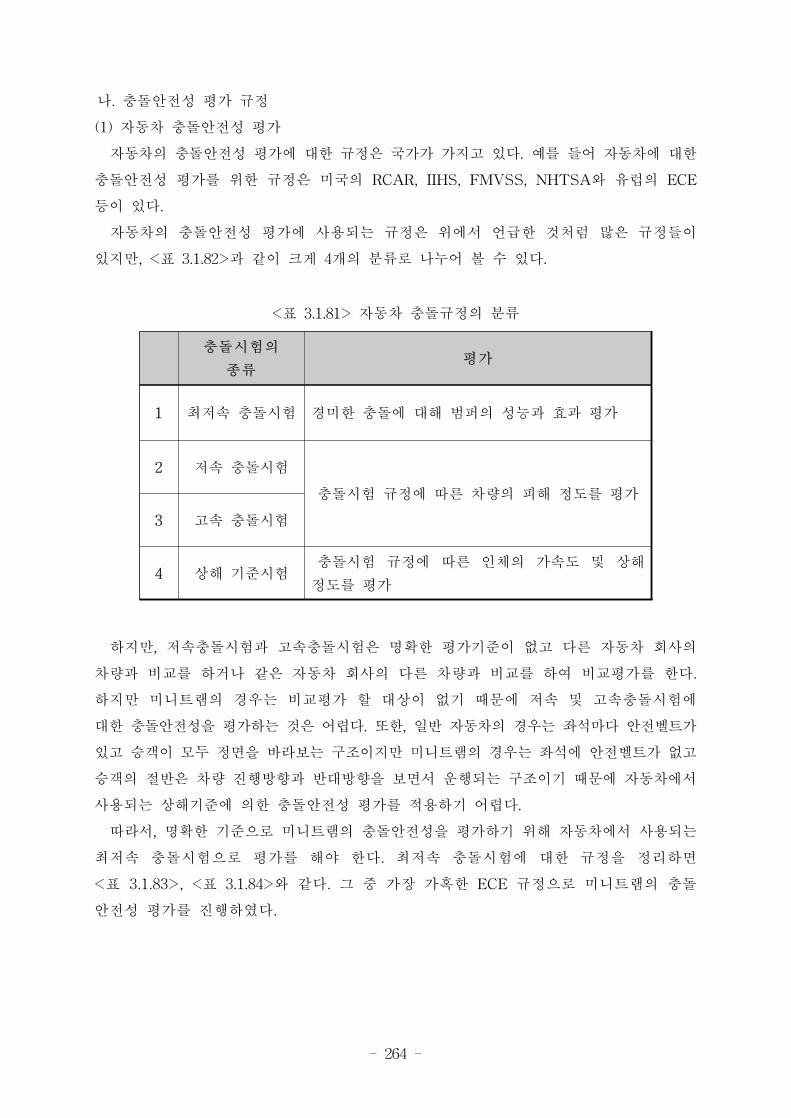
- 264 -
나. 충돌안전성 평가 규정
(1) 자동차 충돌안전성 평가
자동차의 충돌안전성 평가에 대한 규정은 국가가 가지고 있다. 예를 들어 자동차에 대한
충돌안전성 평가를 위한 규정은 미국의 RCAR, IIHS, FMVSS, NHTSA와 유럽의 ECE
등이 있다.
자동차의 충돌안전성 평가에 사용되는 규정은 위에서 언급한 것처럼 많은 규정들이
있지만, <표 3.1.82>과 같이 크게 4개의 분류로 나누어 볼 수 있다.
충돌시험의
종류평가
1 최저속 충돌시험 경미한 충돌에 대해 범퍼의 성능과 효과 평가
2 저속 충돌시험
충돌시험 규정에 따른 차량의 피해 정도를 평가
3 고속 충돌시험
4 상해 기준시험충돌시험 규정에 따른 인체의 가속도 및 상해
정도를 평가
<표 3.1.81> 자동차 충돌규정의 분류
하지만, 저속충돌시험과 고속충돌시험은 명확한 평가기준이 없고 다른 자동차 회사의
차량과 비교를 하거나 같은 자동차 회사의 다른 차량과 비교를 하여 비교평가를 한다.
하지만 미니트램의 경우는 비교평가 할 대상이 없기 때문에 저속 및 고속충돌시험에
대한 충돌안전성을 평가하는 것은 어렵다. 또한, 일반 자동차의 경우는 좌석마다 안전벨트가
있고 승객이 모두 정면을 바라보는 구조이지만 미니트램의 경우는 좌석에 안전벨트가 없고
승객의 절반은 차량 진행방향과 반대방향을 보면서 운행되는 구조이기 때문에 자동차에서
사용되는 상해기준에 의한 충돌안전성 평가를 적용하기 어렵다.
따라서, 명확한 기준으로 미니트램의 충돌안전성을 평가하기 위해 자동차에서 사용되는
최저속 충돌시험으로 평가를 해야 한다. 최저속 충돌시험에 대한 규정을 정리하면
<표 3.1.83>, <표 3.1.84>와 같다. 그 중 가장 가혹한 ECE 규정으로 미니트램의 충돌
안전성 평가를 진행하였다.
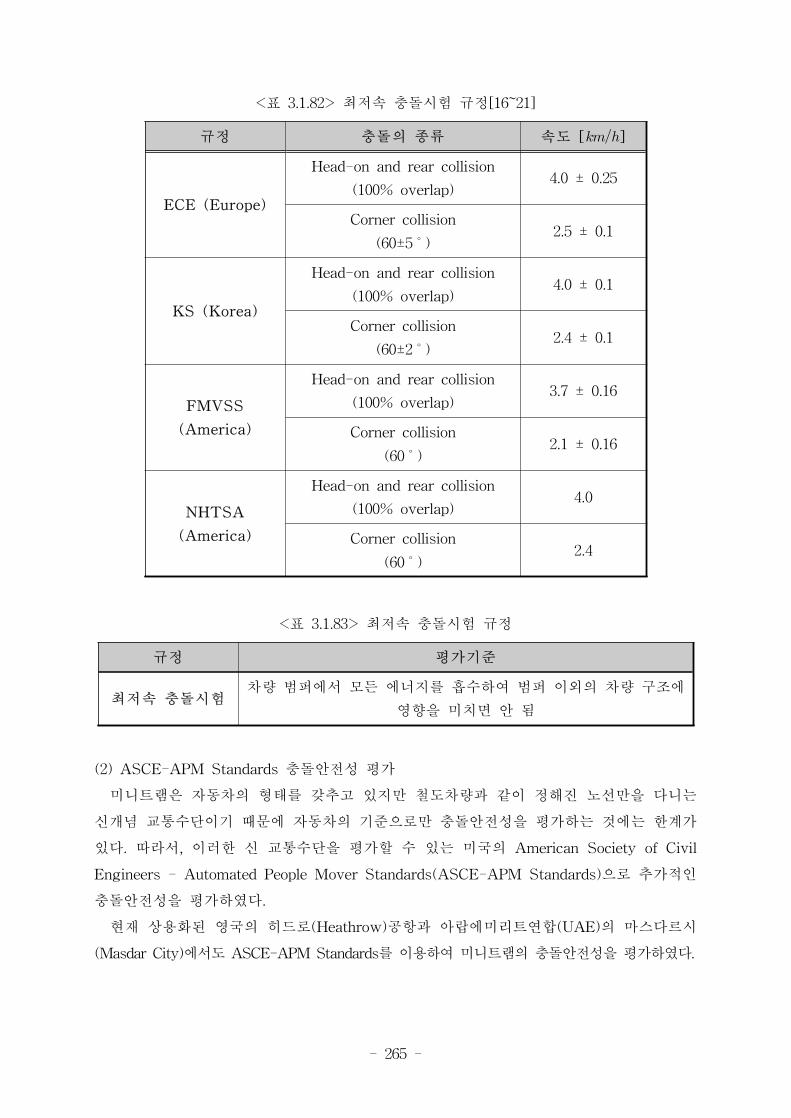
- 265 -
규정 충돌의 종류 속도 []
ECE (Europe)
Head-on and rear collision
(100% overlap)4.0 ± 0.25
Corner collision
(60±5)2.5 ± 0.1
KS (Korea)
Head-on and rear collision
(100% overlap)4.0 ± 0.1
Corner collision
(60±2)2.4 ± 0.1
FMVSS
(America)
Head-on and rear collision
(100% overlap)3.7 ± 0.16
Corner collision
(60)2.1 ± 0.16
NHTSA
(America)
Head-on and rear collision
(100% overlap)4.0
Corner collision
(60)2.4
<표 3.1.82> 최저속 충돌시험 규정[16~21]
규정 평가기준
최저속 충돌시험차량 범퍼에서 모든 에너지를 흡수하여 범퍼 이외의 차량 구조에
영향을 미치면 안 됨
<표 3.1.83> 최저속 충돌시험 규정
(2) ASCE-APM Standards 충돌안전성 평가
미니트램은 자동차의 형태를 갖추고 있지만 철도차량과 같이 정해진 노선만을 다니는
신개념 교통수단이기 때문에 자동차의 기준으로만 충돌안전성을 평가하는 것에는 한계가
있다. 따라서, 이러한 신 교통수단을 평가할 수 있는 미국의 American Society of Civil
Engineers - Automated People Mover Standards(ASCE-APM Standards)으로 추가적인
충돌안전성을 평가하였다.
현재 상용화된 영국의 히드로(Heathrow)공항과 아랍에미리트연합(UAE)의 마스다르시
(Masdar City)에서도 ASCE-APM Standards를 이용하여 미니트램의 충돌안전성을 평가하였다.
- 266 -
ASCE-APM Standards에서 규정하는 충돌시험 및 평가는 <표 3.1.85>, <표 3.1.86>와 같다.
규정 충돌의 종류 속도 []
ASCE-APM
(America)차대차 충돌 5.0
<표 3.1.84> 최저속 충돌시험 규정
규정 평가기준
ASCE-APM
(America)
√ 차량 범퍼에서 모든 에너지를 흡수하여 범퍼 이외의 차량 구
조에 영향을 미치면 안 됨
√ 최대 감가속도 1.2g 이하
<표 3.1.85> 최저속 충돌시험 규정
다. ECE R42 Standards
(1) 시험장비 및 시험조건
미니트램의 충돌 안전성 평가를 위해 Economic Commision for Europe – Uniform
provisions concerning the approval of vehicles with regard to their front and rear
protective devies (ECE R42)의 충돌시험을 적용하였다. ECE R42의 충돌시험에서는
고정벽이 아닌 <그림 3.1.287>과 같은 Pendulum Test Device(PTD)를 사용한다. PTD의
충격부의 단면형상은 <그림 3.1.288>와 같다.
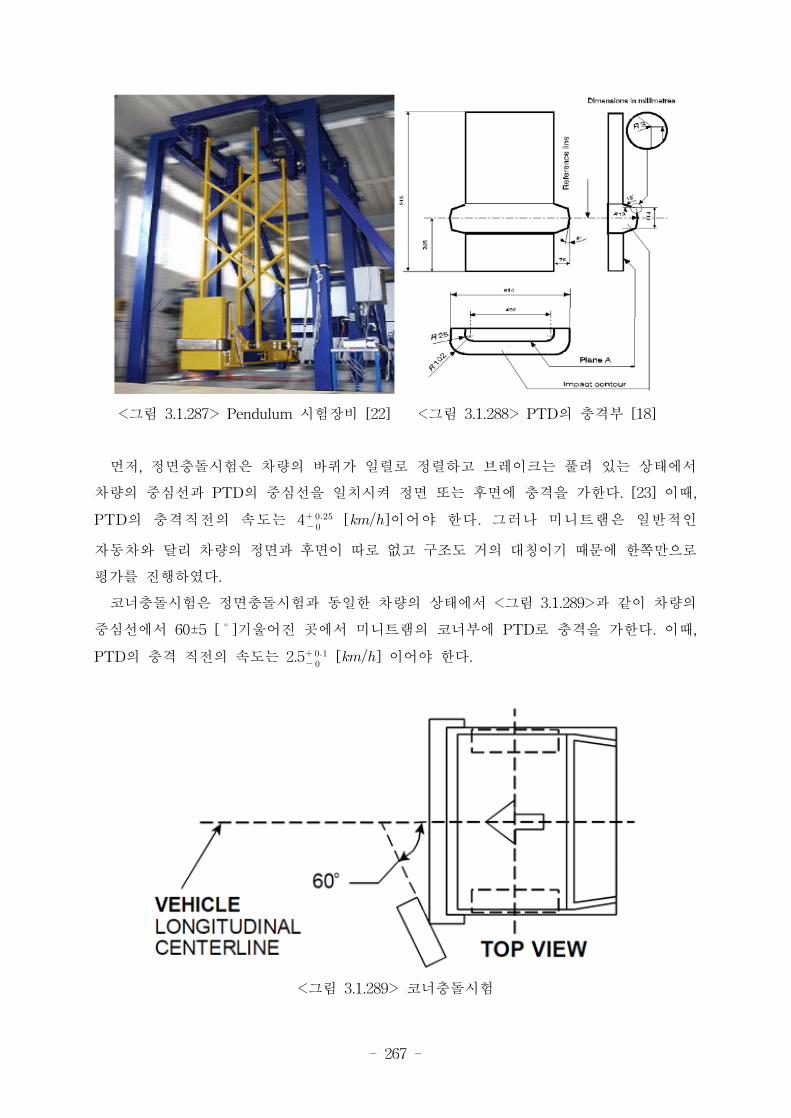
- 267 -
<그림 3.1.287> Pendulum 시험장비 [22] <그림 3.1.288> PTD의 충격부 [18]
먼저, 정면충돌시험은 차량의 바퀴가 일렬로 정렬하고 브레이크는 풀려 있는 상태에서
차량의 중심선과 PTD의 중심선을 일치시켜 정면 또는 후면에 충격을 가한다. [23] 이때,
PTD의 충격직전의 속도는 4
[]이어야 한다. 그러나 미니트램은 일반적인
자동차와 달리 차량의 정면과 후면이 따로 없고 구조도 거의 대칭이기 때문에 한쪽만으로
평가를 진행하였다.
코너충돌시험은 정면충돌시험과 동일한 차량의 상태에서 <그림 3.1.289>과 같이 차량의
중심선에서 60±5 []기울어진 곳에서 미니트램의 코너부에 PTD로 충격을 가한다. 이때,
PTD의 충격 직전의 속도는 2.5 [] 이어야 한다.
<그림 3.1.289> 코너충돌시험
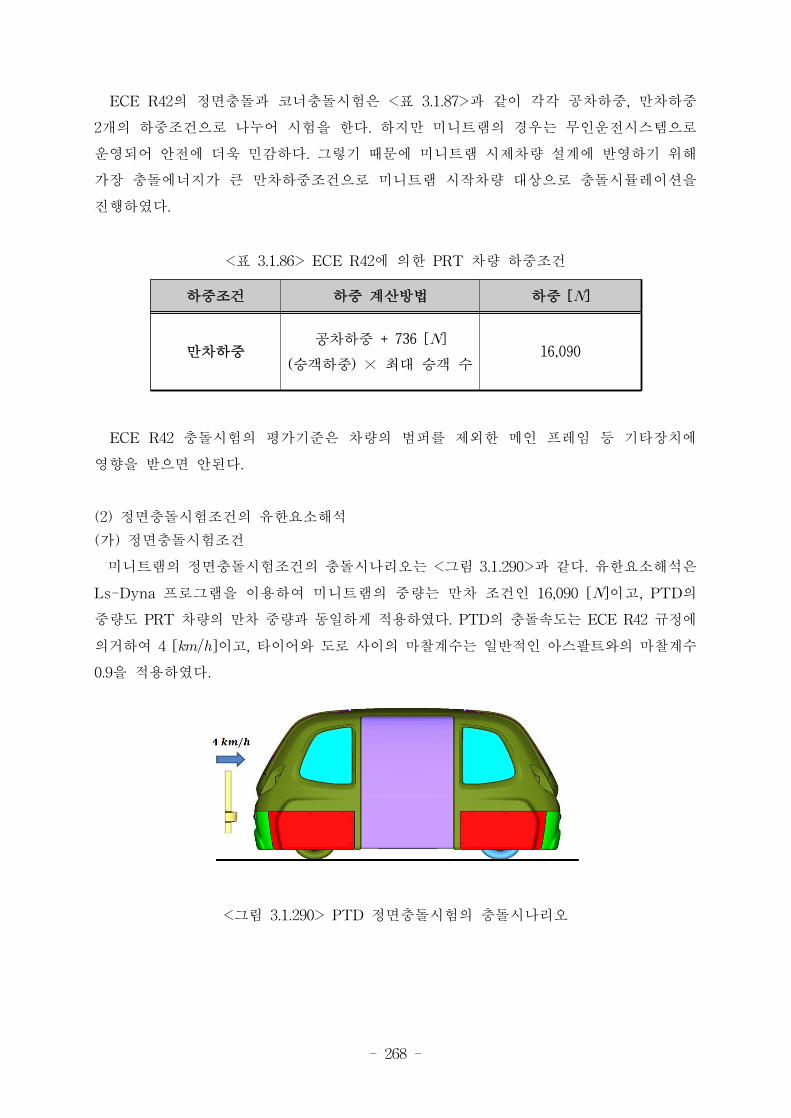
- 268 -
ECE R42의 정면충돌과 코너충돌시험은 <표 3.1.87>과 같이 각각 공차하중, 만차하중
2개의 하중조건으로 나누어 시험을 한다. 하지만 미니트램의 경우는 무인운전시스템으로
운영되어 안전에 더욱 민감하다. 그렇기 때문에 미니트램 시제차량 설계에 반영하기 위해
가장 충돌에너지가 큰 만차하중조건으로 미니트램 시작차량 대상으로 충돌시뮬레이션을
진행하였다.
하중조건 하중 계산방법 하중 []
만차하중공차하중 + 736 []
(승객하중) × 최대 승객 수16,090
<표 3.1.86> ECE R42에 의한 PRT 차량 하중조건
ECE R42 충돌시험의 평가기준은 차량의 범퍼를 제외한 메인 프레임 등 기타장치에
영향을 받으면 안된다.
(2) 정면충돌시험조건의 유한요소해석
(가) 정면충돌시험조건
미니트램의 정면충돌시험조건의 충돌시나리오는 <그림 3.1.290>과 같다. 유한요소해석은
Ls-Dyna 프로그램을 이용하여 미니트램의 중량는 만차 조건인 16,090 []이고, PTD의
중량도 PRT 차량의 만차 중량과 동일하게 적용하였다. PTD의 충돌속도는 ECE R42 규정에
의거하여 4 []이고, 타이어와 도로 사이의 마찰계수는 일반적인 아스팔트와의 마찰계수
0.9을 적용하였다.
<그림 3.1.290> PTD 정면충돌시험의 충돌시나리오
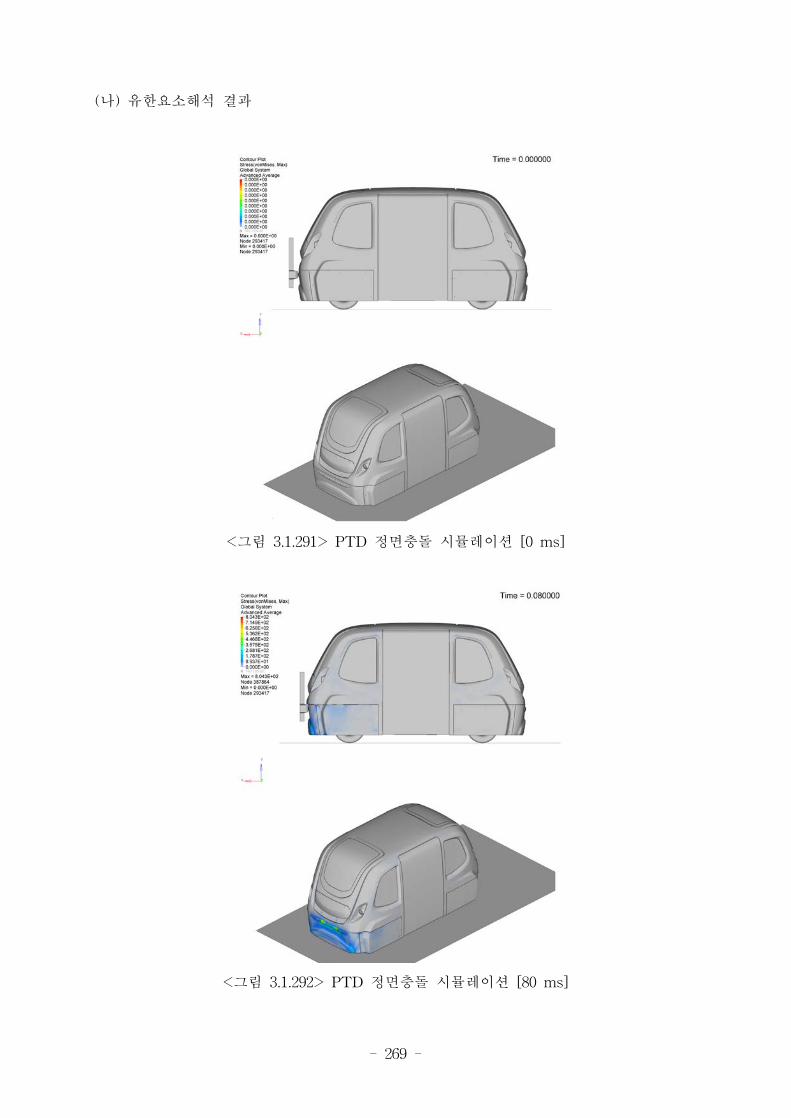
- 269 -
(나) 유한요소해석 결과
<그림 3.1.291> PTD 정면충돌 시뮬레이션 [0 ms]
<그림 3.1.292> PTD 정면충돌 시뮬레이션 [80 ms]
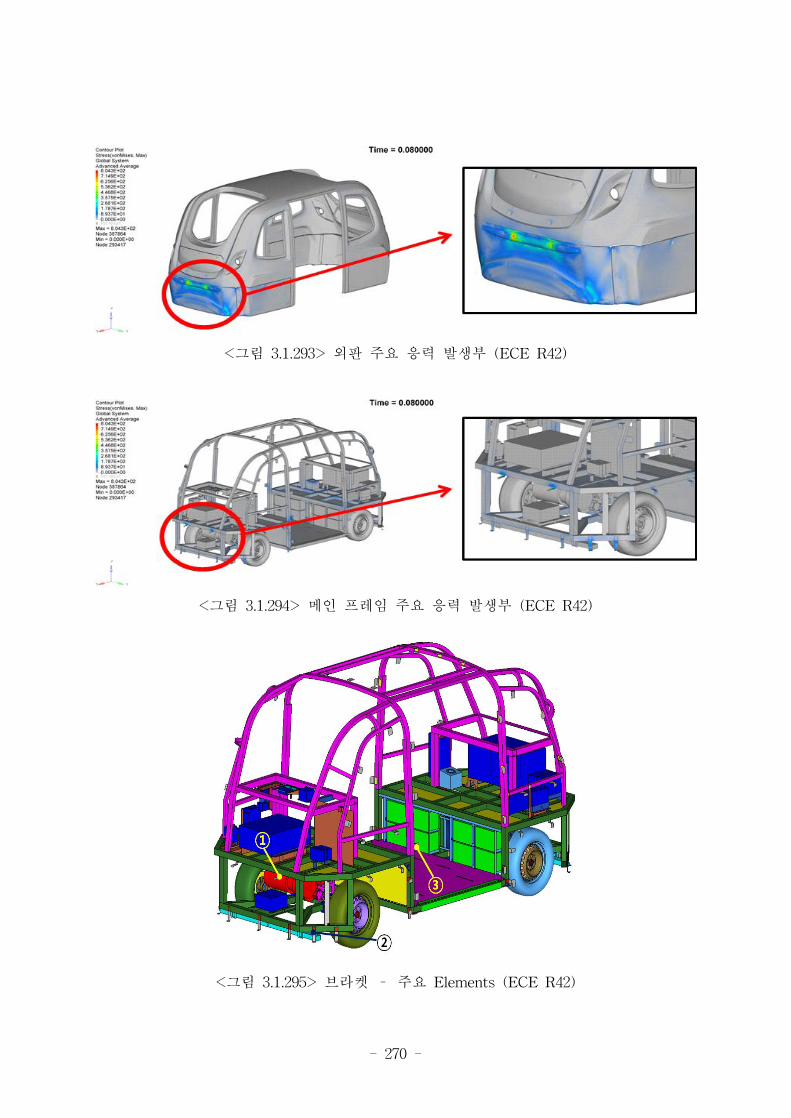
- 270 -
<그림 3.1.293> 외판 주요 응력 발생부 (ECE R42)
<그림 3.1.294> 메인 프레임 주요 응력 발생부 (ECE R42)
<그림 3.1.295> 브라켓 – 주요 Elements (ECE R42)
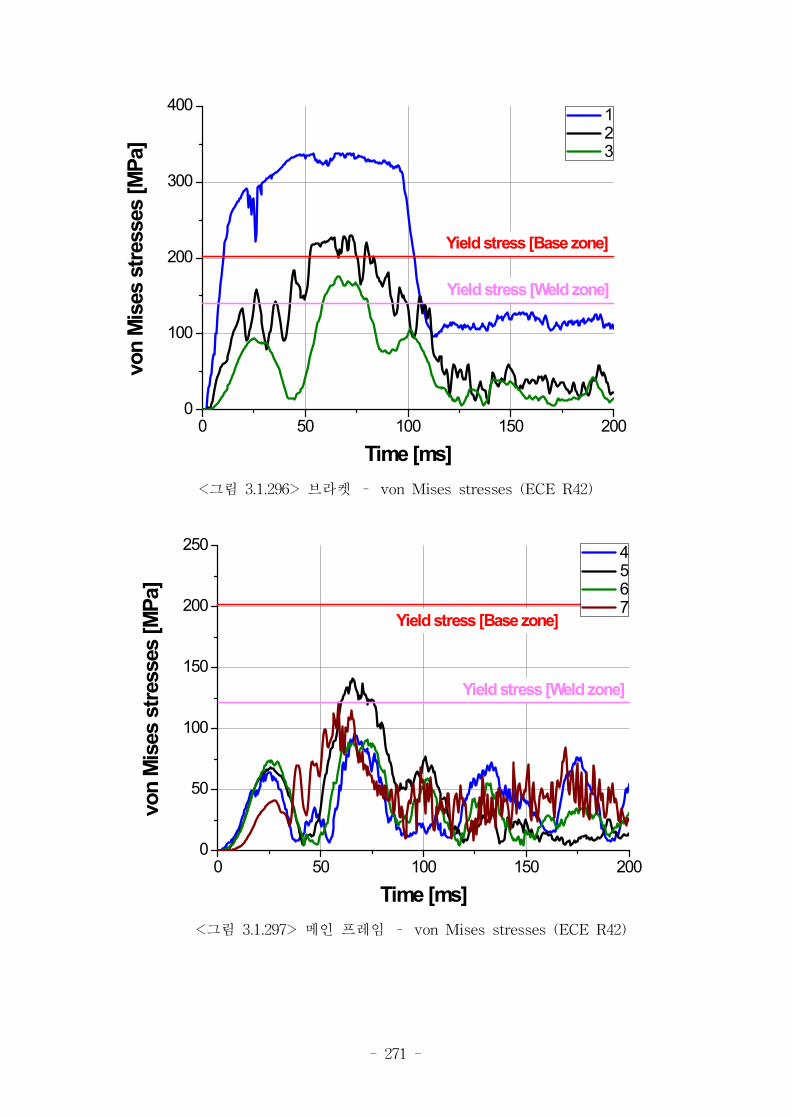
- 271 -
0 50 100 150 2000
100
200
300
400
Yield stress [Weld zone]
von
Mis
es s
tress
es [M
Pa]
Time [ms]
1 2 3
Yield stress [Base zone]
<그림 3.1.296> 브라켓 – von Mises stresses (ECE R42)
0 50 100 150 2000
50
100
150
200
250
Yield stress [Weld zone]
von
Mis
es s
tress
es [M
Pa]
Time [ms]
Yield stress [Base zone]
4 5 6 7
<그림 3.1.297> 메인 프레임 – von Mises stresses (ECE R42)
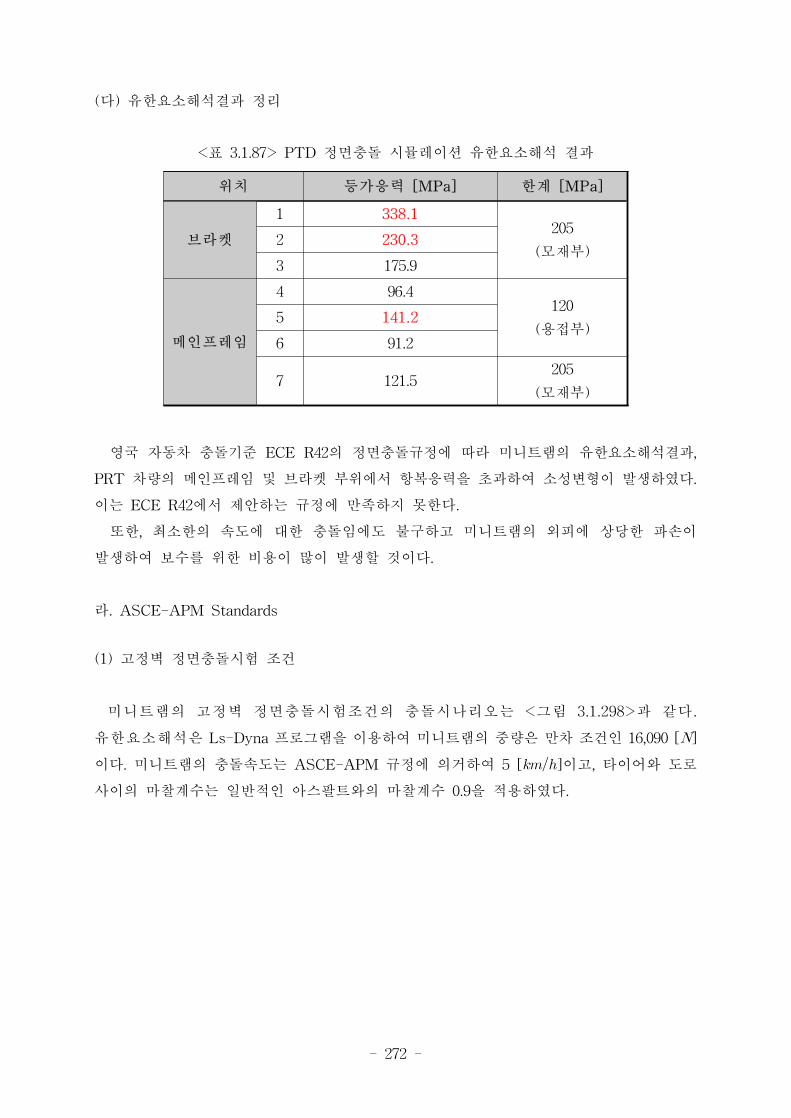
- 272 -
(다) 유한요소해석결과 정리
위치 등가응력 [MPa] 한계 [MPa]
브라켓
1 338.1205
(모재부)2 230.3
3 175.9
메인프레임
4 96.4120
(용접부)5 141.2
6 91.2
7 121.5205
(모재부)
<표 3.1.87> PTD 정면충돌 시뮬레이션 유한요소해석 결과
영국 자동차 충돌기준 ECE R42의 정면충돌규정에 따라 미니트램의 유한요소해석결과,
PRT 차량의 메인프레임 및 브라켓 부위에서 항복응력을 초과하여 소성변형이 발생하였다.
이는 ECE R42에서 제안하는 규정에 만족하지 못한다.
또한, 최소한의 속도에 대한 충돌임에도 불구하고 미니트램의 외피에 상당한 파손이
발생하여 보수를 위한 비용이 많이 발생할 것이다.
라. ASCE-APM Standards
(1) 고정벽 정면충돌시험 조건
미니트램의 고정벽 정면충돌시험조건의 충돌시나리오는 <그림 3.1.298>과 같다.
유한요소해석은 Ls-Dyna 프로그램을 이용하여 미니트램의 중량은 만차 조건인 16,090 []
이다. 미니트램의 충돌속도는 ASCE-APM 규정에 의거하여 5 []이고, 타이어와 도로
사이의 마찰계수는 일반적인 아스팔트와의 마찰계수 0.9을 적용하였다.

- 273 -
<그림 3.1.298> 고정벽 정면충돌시험의 충돌시나리오
나. 유한요소해석 결과
<그림 3.1.299> 고정벽 정면충돌 시뮬레이션 [0 ms]
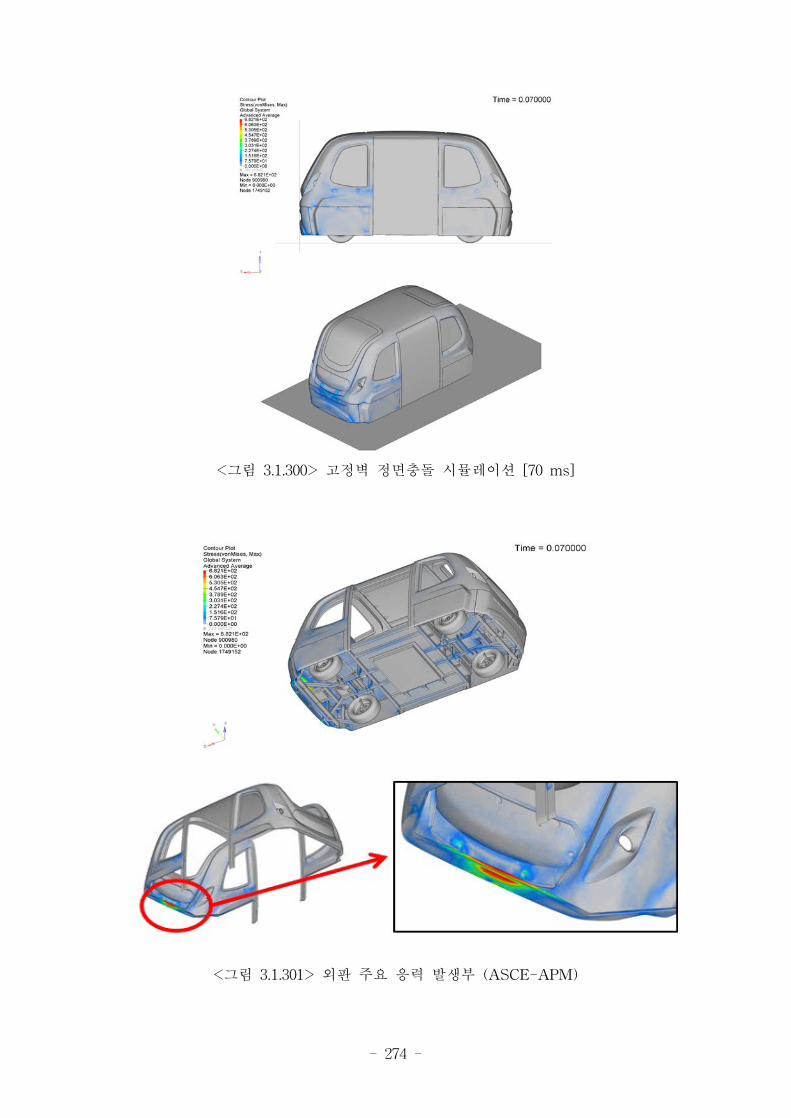
- 274 -
<그림 3.1.300> 고정벽 정면충돌 시뮬레이션 [70 ms]
<그림 3.1.301> 외판 주요 응력 발생부 (ASCE-APM)
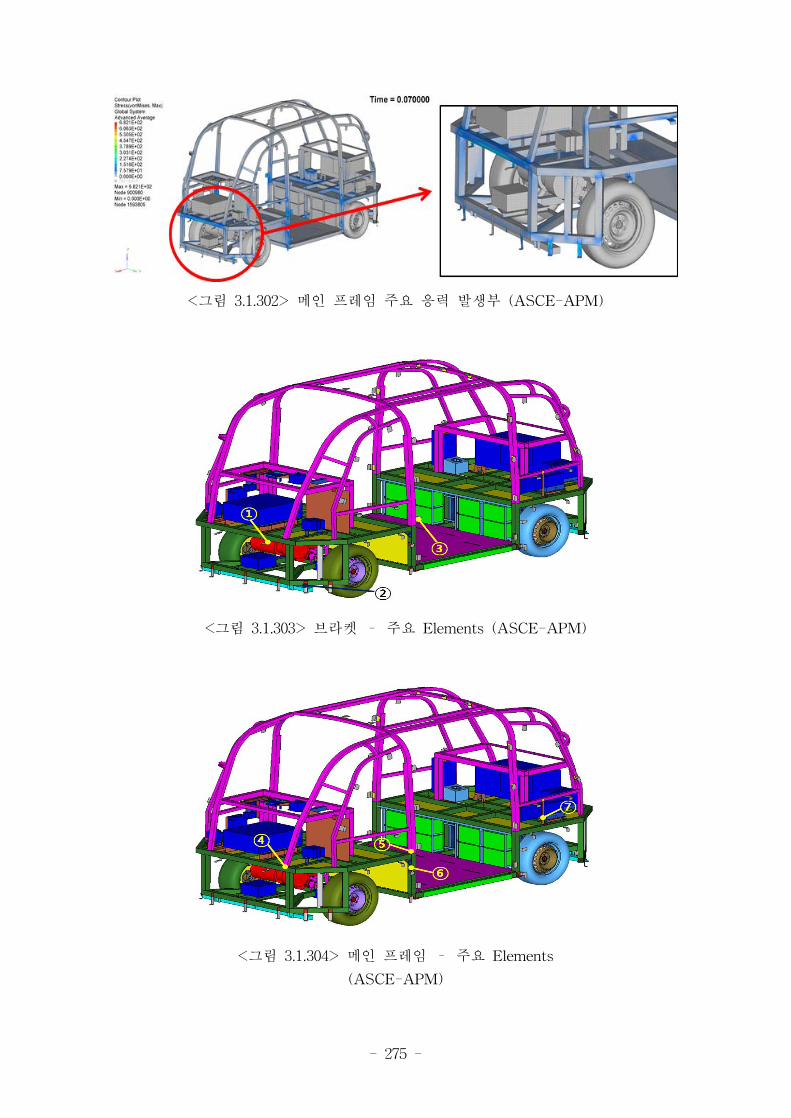
- 275 -
<그림 3.1.302> 메인 프레임 주요 응력 발생부 (ASCE-APM)
<그림 3.1.303> 브라켓 – 주요 Elements (ASCE-APM)
<그림 3.1.304> 메인 프레임 – 주요 Elements
(ASCE-APM)
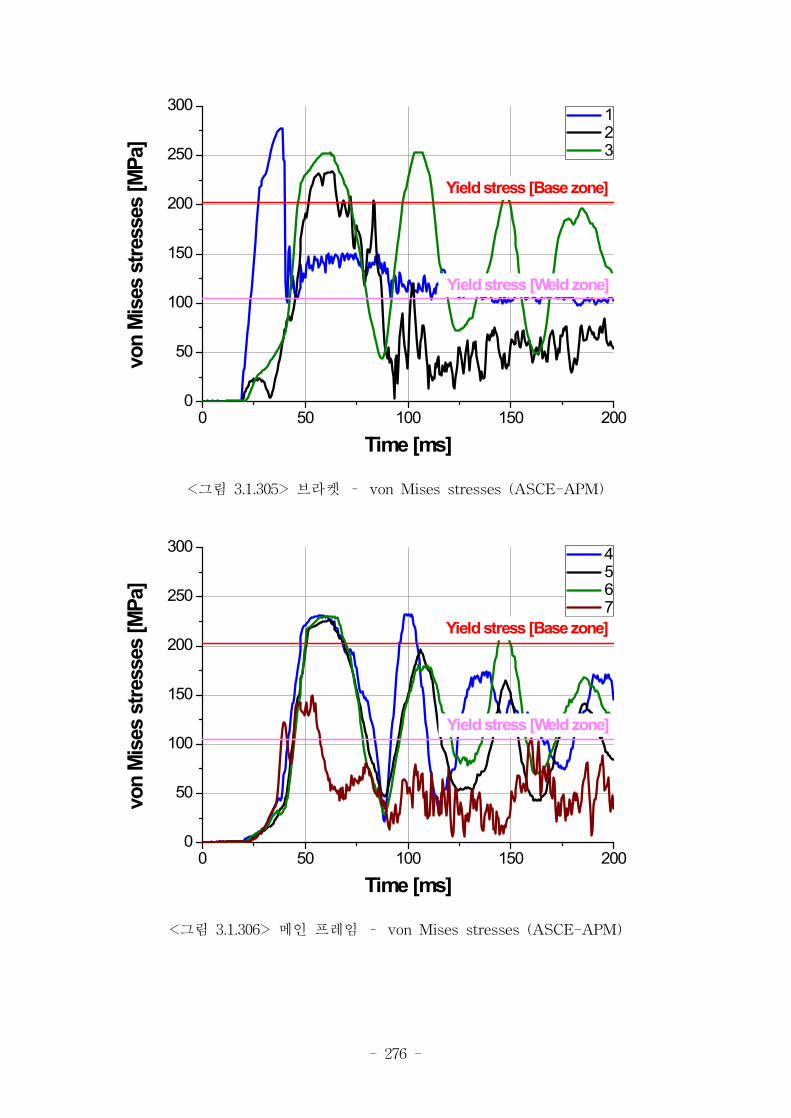
- 276 -
0 50 100 150 2000
50
100
150
200
250
300
Yield stress [Weld zone]
von
Mis
es s
tress
es [M
Pa]
Time [ms]
1 2 3
Yield stress [Base zone]
<그림 3.1.305> 브라켓 – von Mises stresses (ASCE-APM)
0 50 100 150 2000
50
100
150
200
250
300
Yield stress [Weld zone]
von
Mis
es s
tress
es [M
Pa]
Time [ms]
4 5 6 7
Yield stress [Base zone]
<그림 3.1.306> 메인 프레임 – von Mises stresses (ASCE-APM)
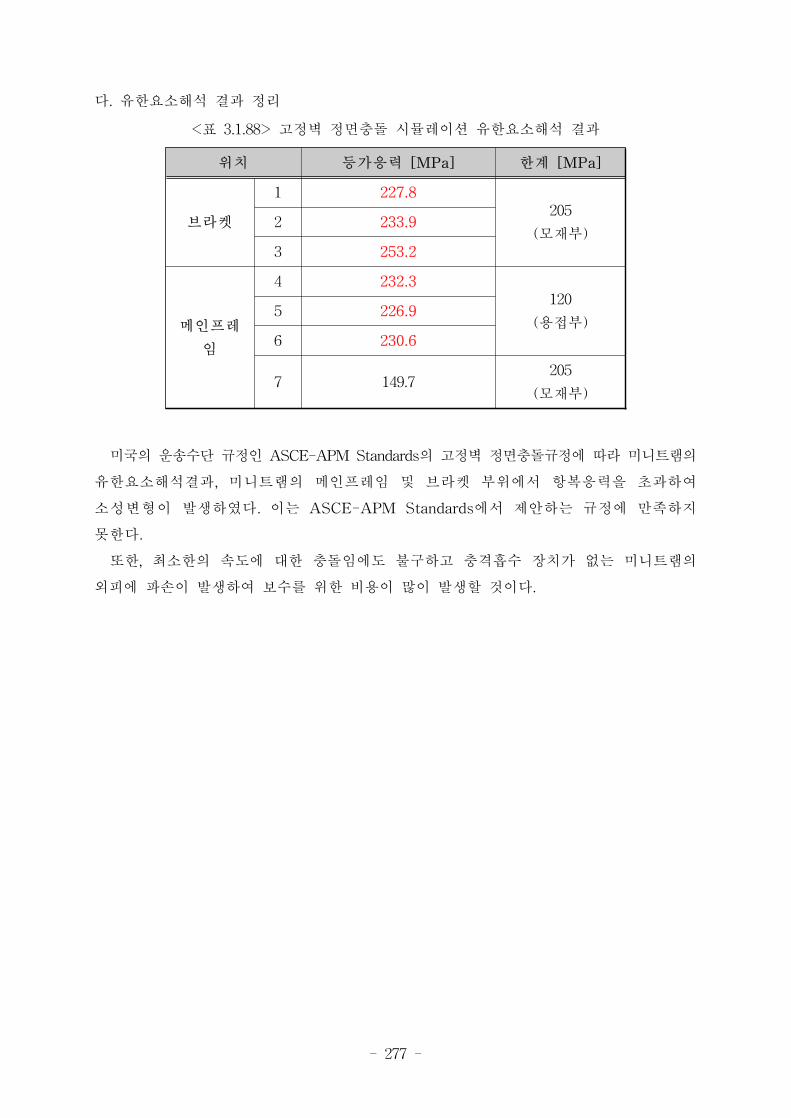
- 277 -
다. 유한요소해석 결과 정리
위치 등가응력 [MPa] 한계 [MPa]
브라켓
1 227.8205
(모재부)2 233.9
3 253.2
메인프레
임
4 232.3120
(용접부)5 226.9
6 230.6
7 149.7205
(모재부)
<표 3.1.88> 고정벽 정면충돌 시뮬레이션 유한요소해석 결과
미국의 운송수단 규정인 ASCE-APM Standards의 고정벽 정면충돌규정에 따라 미니트램의
유한요소해석결과, 미니트램의 메인프레임 및 브라켓 부위에서 항복응력을 초과하여
소성변형이 발생하였다. 이는 ASCE-APM Standards에서 제안하는 규정에 만족하지
못한다.
또한, 최소한의 속도에 대한 충돌임에도 불구하고 충격흡수 장치가 없는 미니트램의
외피에 파손이 발생하여 보수를 위한 비용이 많이 발생할 것이다.
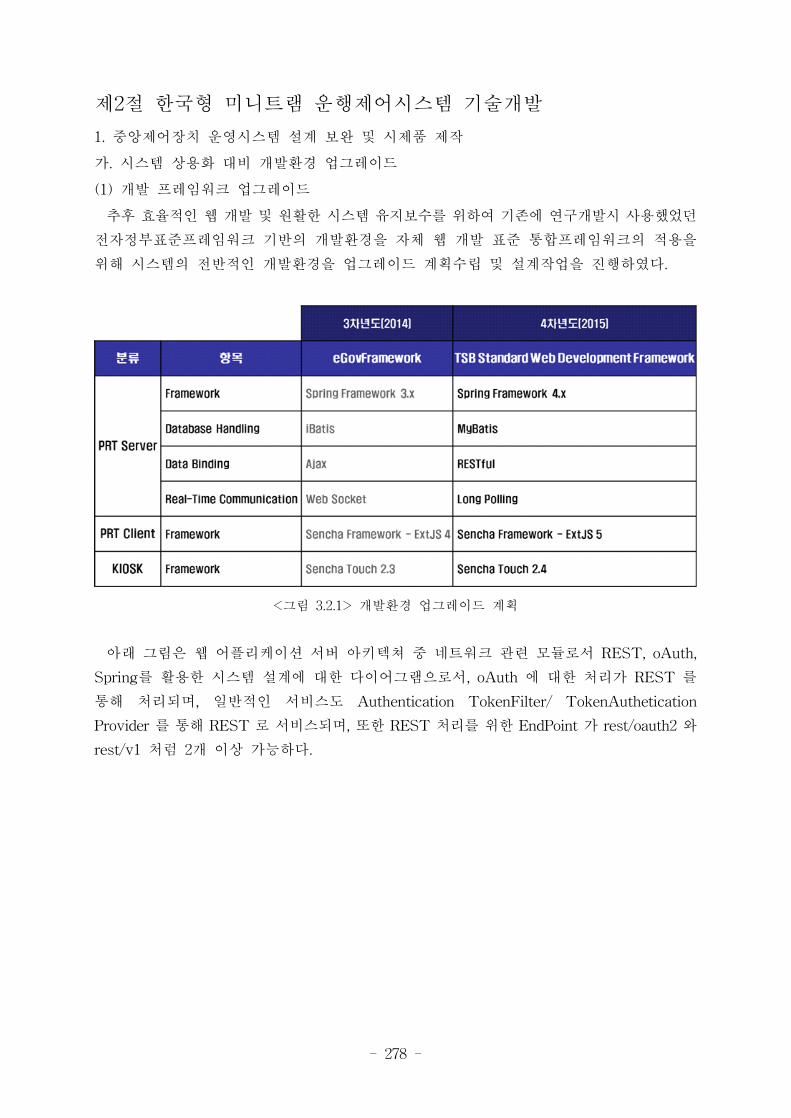
- 278 -
제2절 한국형 미니트램 운행제어시스템 기술개발
1. 중앙제어장치 운영시스템 설계 보완 및 시제품 제작
가. 시스템 상용화 대비 개발환경 업그레이드
(1) 개발 프레임워크 업그레이드
추후 효율적인 웹 개발 및 원활한 시스템 유지보수를 위하여 기존에 연구개발시 사용했었던
전자정부표준프레임워크 기반의 개발환경을 자체 웹 개발 표준 통합프레임워크의 적용을
위해 시스템의 전반적인 개발환경을 업그레이드 계획수립 및 설계작업을 진행하였다.
<그림 3.2.1> 개발환경 업그레이드 계획
아래 그림은 웹 어플리케이션 서버 아키텍쳐 중 네트워크 관련 모듈로서 REST, oAuth,
Spring를 활용한 시스템 설계에 대한 다이어그램으로서, oAuth 에 대한 처리가 REST 를
통해 처리되며, 일반적인 서비스도 Authentication TokenFilter/ TokenAuthetication
Provider 를 통해 REST 로 서비스되며, 또한 REST 처리를 위한 EndPoint 가 rest/oauth2 와
rest/v1 처럼 2개 이상 가능하다.
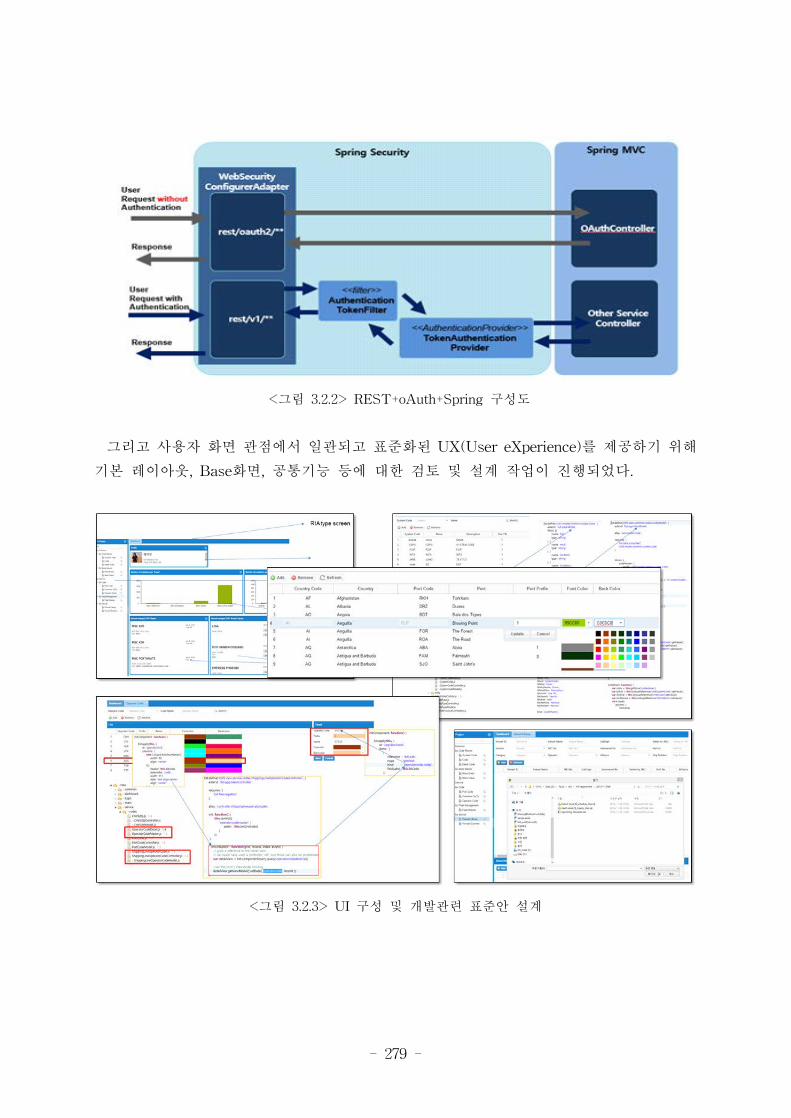
- 279 -
<그림 3.2.2> REST+oAuth+Spring 구성도
그리고 사용자 화면 관점에서 일관되고 표준화된 UX(User eXperience)를 제공하기 위해
기본 레이아웃, Base화면, 공통기능 등에 대한 검토 및 설계 작업이 진행되었다.
<그림 3.2.3> UI 구성 및 개발관련 표준안 설계
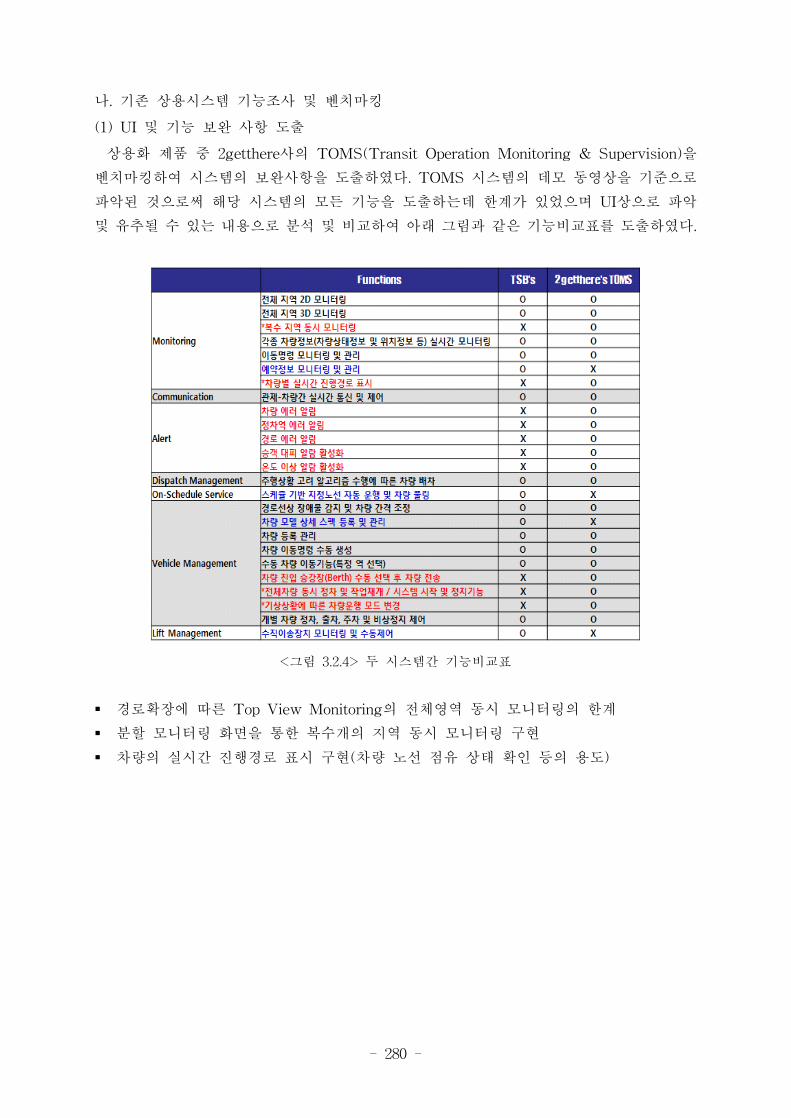
- 280 -
나. 기존 상용시스템 기능조사 및 벤치마킹
(1) UI 및 기능 보완 사항 도출
상용화 제품 중 2getthere사의 TOMS(Transit Operation Monitoring & Supervision)을
벤치마킹하여 시스템의 보완사항을 도출하였다. TOMS 시스템의 데모 동영상을 기준으로
파악된 것으로써 해당 시스템의 모든 기능을 도출하는데 한계가 있었으며 UI상으로 파악
및 유추될 수 있는 내용으로 분석 및 비교하여 아래 그림과 같은 기능비교표를 도출하였다.
<그림 3.2.4> 두 시스템간 기능비교표
§ 경로확장에 따른 Top View Monitoring의 전체영역 동시 모니터링의 한계
§ 분할 모니터링 화면을 통한 복수개의 지역 동시 모니터링 구현
§ 차량의 실시간 진행경로 표시 구현(차량 노선 점유 상태 확인 등의 용도)
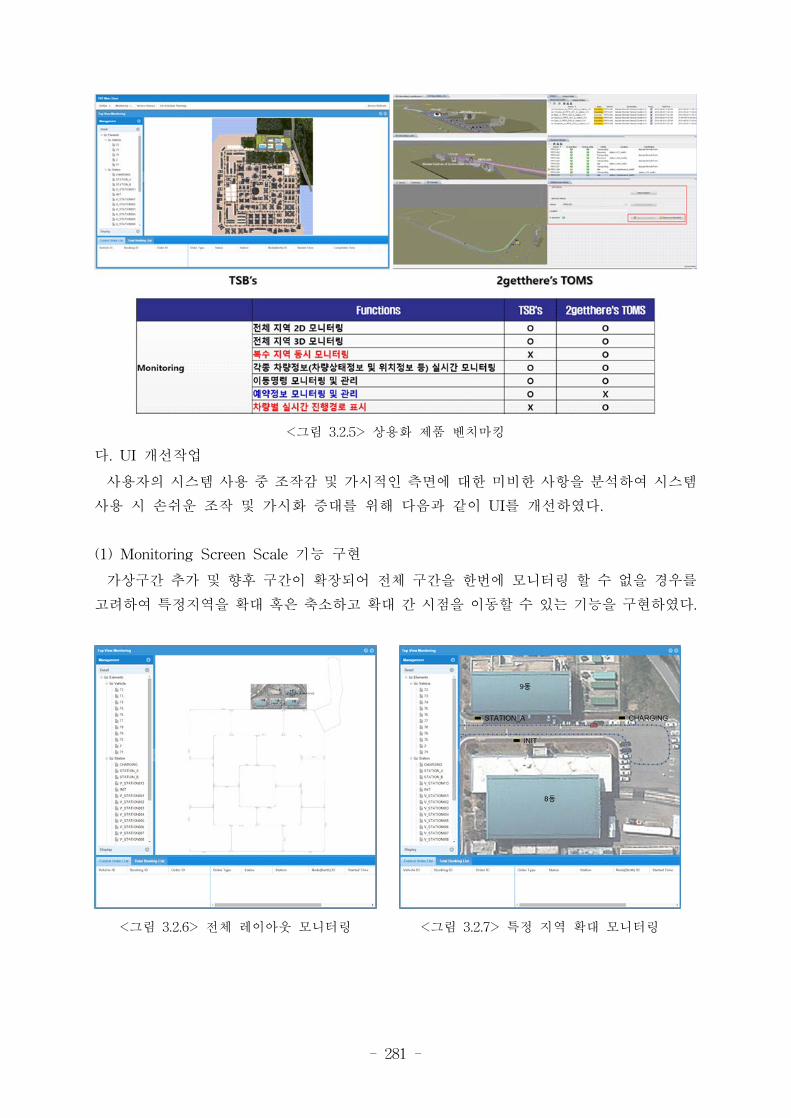
- 281 -
<그림 3.2.5> 상용화 제품 벤치마킹
다. UI 개선작업
사용자의 시스템 사용 중 조작감 및 가시적인 측면에 대한 미비한 사항을 분석하여 시스템
사용 시 손쉬운 조작 및 가시화 증대를 위해 다음과 같이 UI를 개선하였다.
(1) Monitoring Screen Scale 기능 구현
가상구간 추가 및 향후 구간이 확장되어 전체 구간을 한번에 모니터링 할 수 없을 경우를
고려하여 특정지역을 확대 혹은 축소하고 확대 간 시점을 이동할 수 있는 기능을 구현하였다.
<그림 3.2.6> 전체 레이아웃 모니터링 <그림 3.2.7> 특정 지역 확대 모니터링
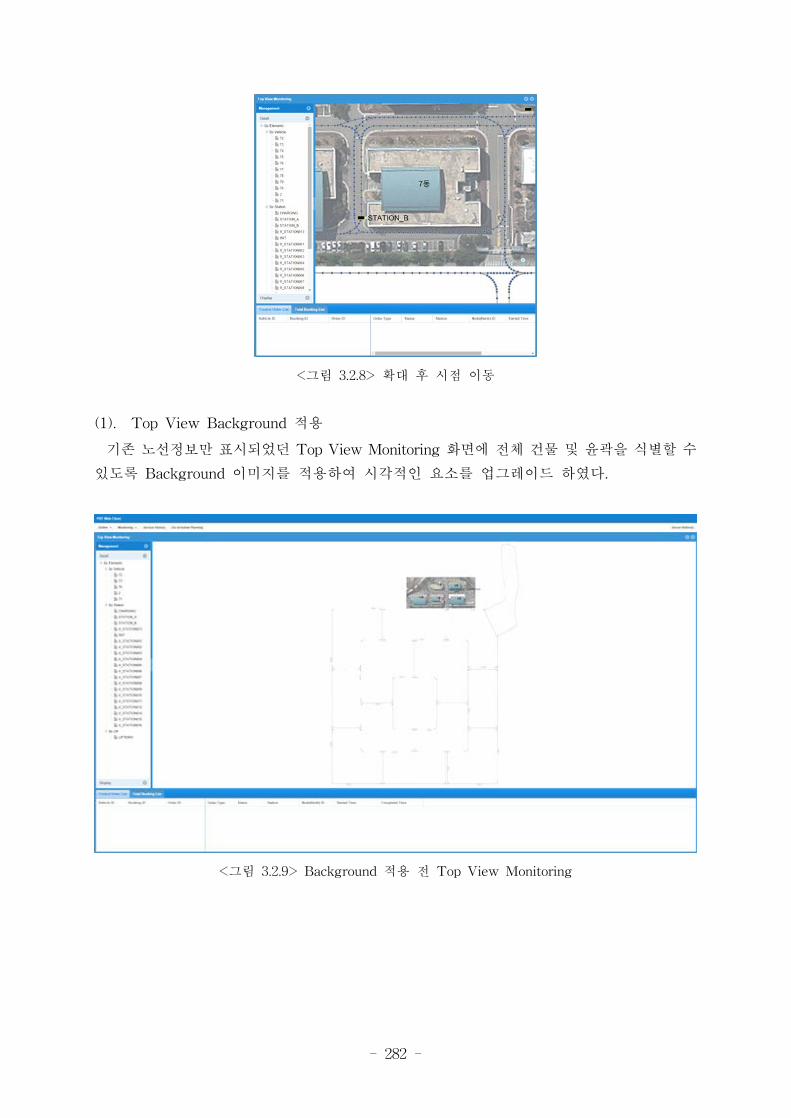
- 282 -
<그림 3.2.8> 확대 후 시점 이동
(1). Top View Background 적용
기존 노선정보만 표시되었던 Top View Monitoring 화면에 전체 건물 및 윤곽을 식별할 수
있도록 Background 이미지를 적용하여 시각적인 요소를 업그레이드 하였다.
<그림 3.2.9> Background 적용 전 Top View Monitoring
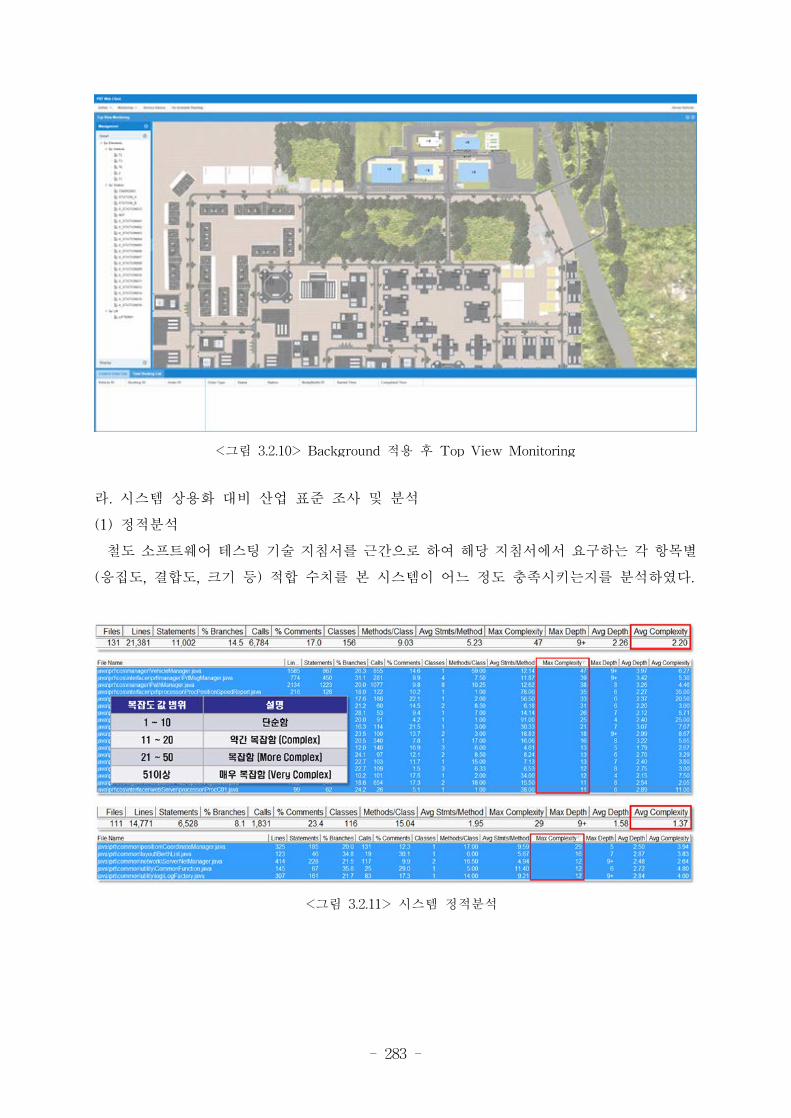
- 283 -
<그림 3.2.10> Background 적용 후 Top View Monitoring
라. 시스템 상용화 대비 산업 표준 조사 및 분석
(1) 정적분석
철도 소프트웨어 테스팅 기술 지침서를 근간으로 하여 해당 지침서에서 요구하는 각 항목별
(응집도, 결합도, 크기 등) 적합 수치를 본 시스템이 어느 정도 충족시키는지를 분석하였다.
<그림 3.2.11> 시스템 정적분석
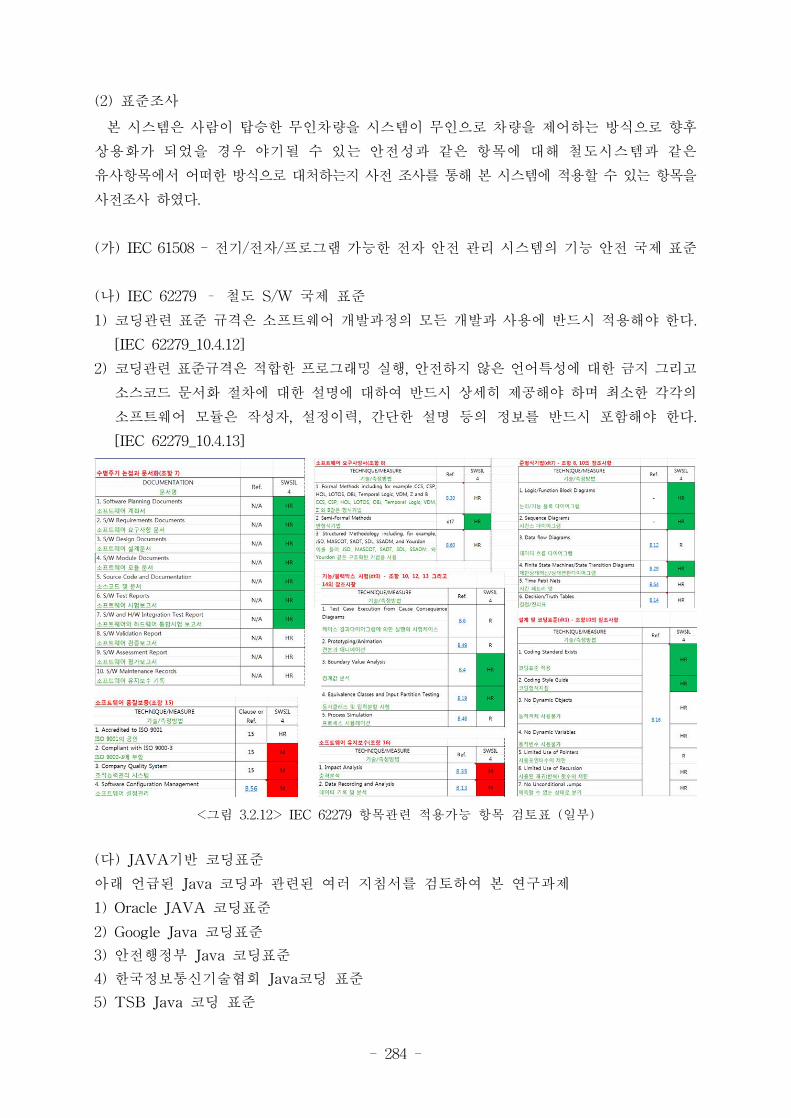
- 284 -
(2) 표준조사
본 시스템은 사람이 탑승한 무인차량을 시스템이 무인으로 차량을 제어하는 방식으로 향후
상용화가 되었을 경우 야기될 수 있는 안전성과 같은 항목에 대해 철도시스템과 같은
유사항목에서 어떠한 방식으로 대처하는지 사전 조사를 통해 본 시스템에 적용할 수 있는 항목을
사전조사 하였다.
(가) IEC 61508 - 전기/전자/프로그램 가능한 전자 안전 관리 시스템의 기능 안전 국제 표준
(나) IEC 62279 – 철도 S/W 국제 표준
1) 코딩관련 표준 규격은 소프트웨어 개발과정의 모든 개발과 사용에 반드시 적용해야 한다.
[IEC 62279_10.4.12]
2) 코딩관련 표준규격은 적합한 프로그래밍 실행, 안전하지 않은 언어특성에 대한 금지 그리고
소스코드 문서화 절차에 대한 설명에 대하여 반드시 상세히 제공해야 하며 최소한 각각의
소프트웨어 모듈은 작성자, 설정이력, 간단한 설명 등의 정보를 반드시 포함해야 한다.
[IEC 62279_10.4.13]
<그림 3.2.12> IEC 62279 항목관련 적용가능 항목 검토표 (일부)
(다) JAVA기반 코딩표준
아래 언급된 Java 코딩과 관련된 여러 지침서를 검토하여 본 연구과제
1) Oracle JAVA 코딩표준
2) Google Java 코딩표준
3) 안전행정부 Java 코딩표준
4) 한국정보통신기술협회 Java코딩 표준
5) TSB Java 코딩 표준
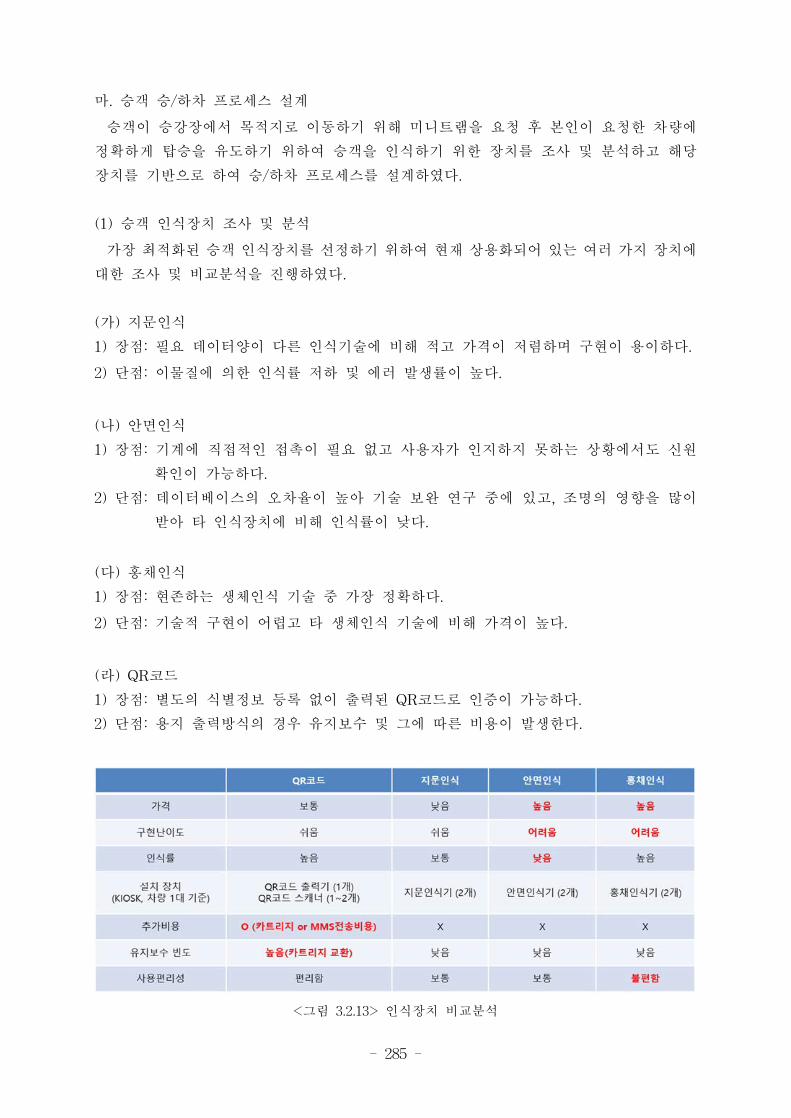
- 285 -
마. 승객 승/하차 프로세스 설계
승객이 승강장에서 목적지로 이동하기 위해 미니트램을 요청 후 본인이 요청한 차량에
정확하게 탑승을 유도하기 위하여 승객을 인식하기 위한 장치를 조사 및 분석하고 해당
장치를 기반으로 하여 승/하차 프로세스를 설계하였다.
(1) 승객 인식장치 조사 및 분석
가장 최적화된 승객 인식장치를 선정하기 위하여 현재 상용화되어 있는 여러 가지 장치에
대한 조사 및 비교분석을 진행하였다.
(가) 지문인식
1) 장점: 필요 데이터양이 다른 인식기술에 비해 적고 가격이 저렴하며 구현이 용이하다.
2) 단점: 이물질에 의한 인식률 저하 및 에러 발생률이 높다.
(나) 안면인식
1) 장점: 기계에 직접적인 접촉이 필요 없고 사용자가 인지하지 못하는 상황에서도 신원
확인이 가능하다.
2) 단점: 데이터베이스의 오차율이 높아 기술 보완 연구 중에 있고, 조명의 영향을 많이
받아 타 인식장치에 비해 인식률이 낮다.
(다) 홍채인식
1) 장점: 현존하는 생체인식 기술 중 가장 정확하다.
2) 단점: 기술적 구현이 어렵고 타 생체인식 기술에 비해 가격이 높다.
(라) QR코드
1) 장점: 별도의 식별정보 등록 없이 출력된 QR코드로 인증이 가능하다.
2) 단점: 용지 출력방식의 경우 유지보수 및 그에 따른 비용이 발생한다.
<그림 3.2.13> 인식장치 비교분석
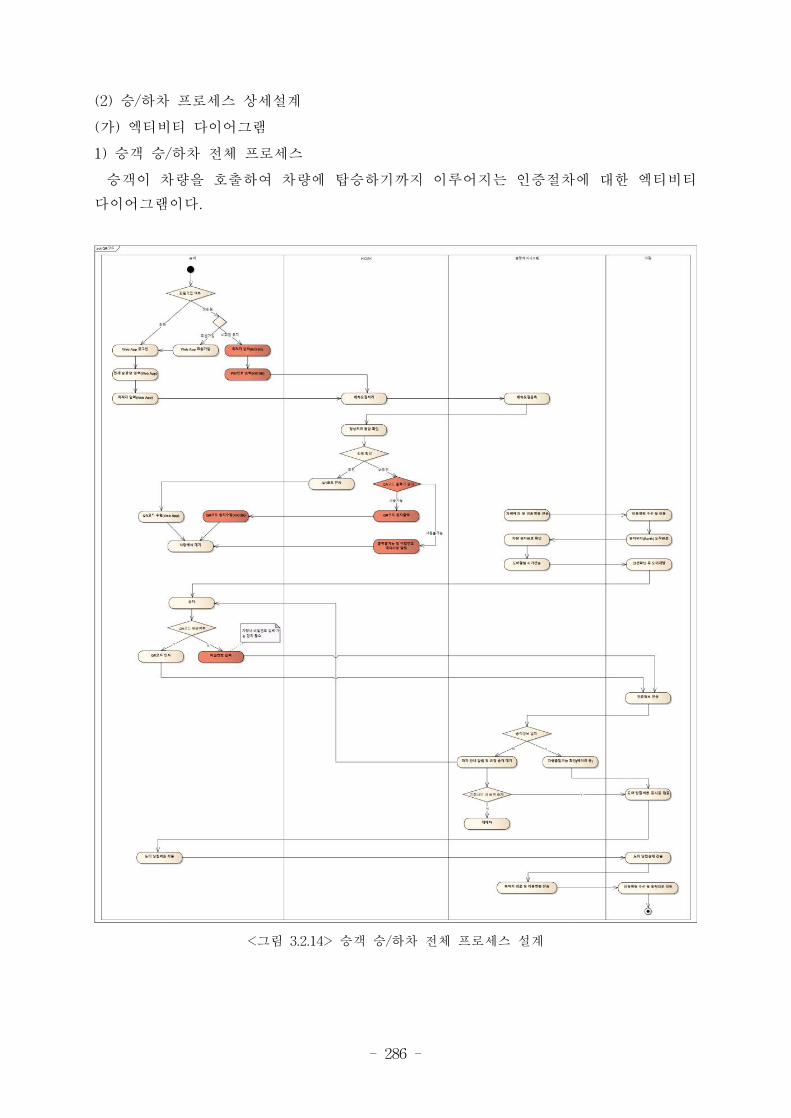
- 286 -
(2) 승/하차 프로세스 상세설계
(가) 엑티비티 다이어그램
1) 승객 승/하차 전체 프로세스
승객이 차량을 호출하여 차량에 탑승하기까지 이루어지는 인증절차에 대한 엑티비티
다이어그램이다.
<그림 3.2.14> 승객 승/하차 전체 프로세스 설계
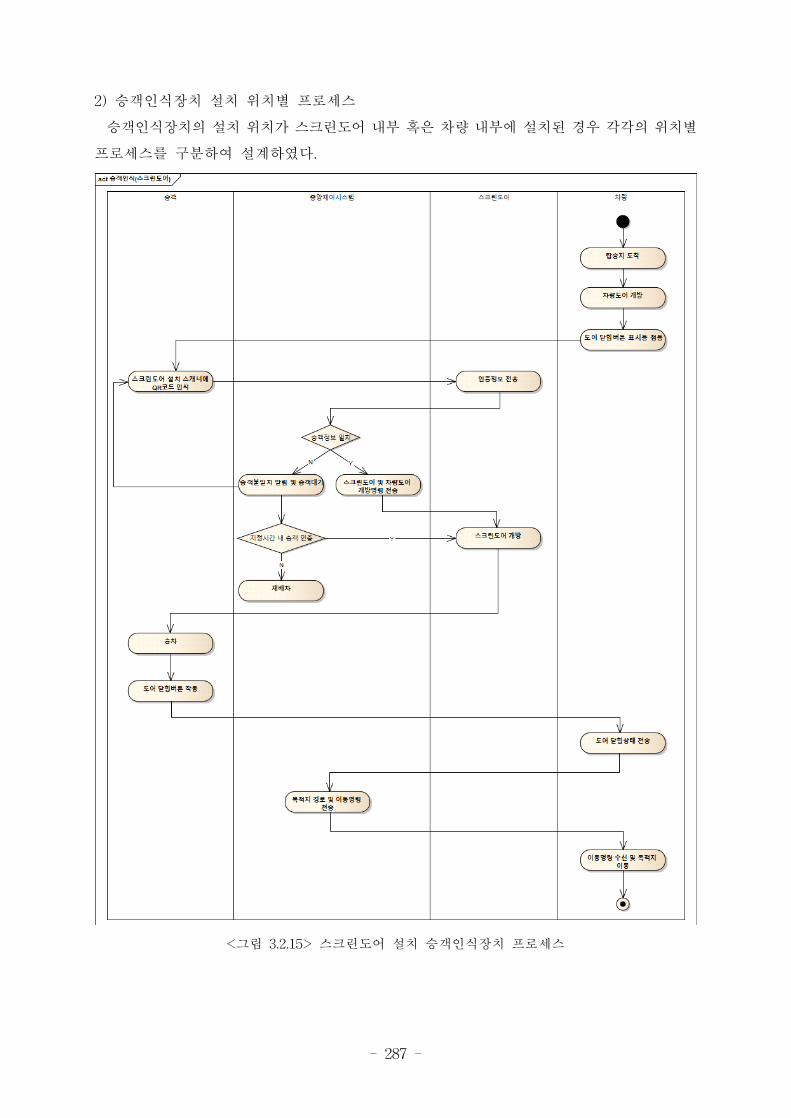
- 287 -
2) 승객인식장치 설치 위치별 프로세스
승객인식장치의 설치 위치가 스크린도어 내부 혹은 차량 내부에 설치된 경우 각각의 위치별
프로세스를 구분하여 설계하였다.
<그림 3.2.15> 스크린도어 설치 승객인식장치 프로세스
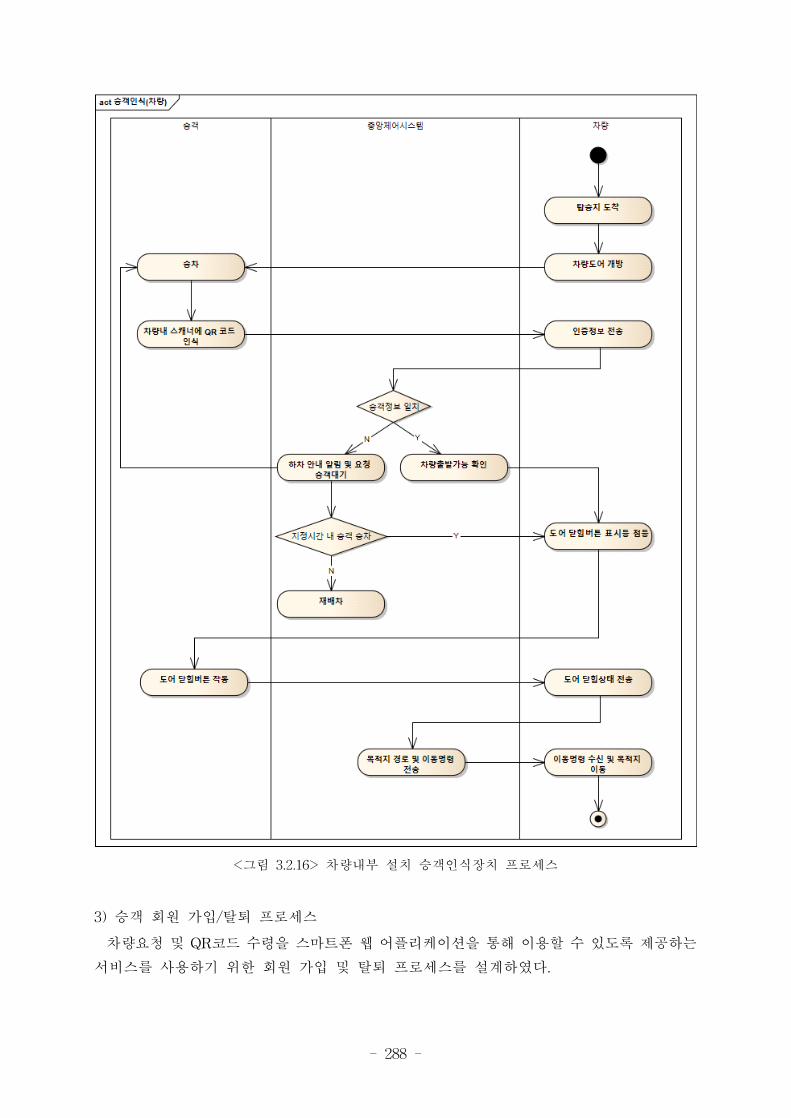
- 288 -
<그림 3.2.16> 차량내부 설치 승객인식장치 프로세스
3) 승객 회원 가입/탈퇴 프로세스
차량요청 및 QR코드 수령을 스마트폰 웹 어플리케이션을 통해 이용할 수 있도록 제공하는
서비스를 사용하기 위한 회원 가입 및 탈퇴 프로세스를 설계하였다.

- 289 -
<그림 3.2.18> 회원탈퇴 프로세스
<그림 3.2.17> 회원가입 프로세스
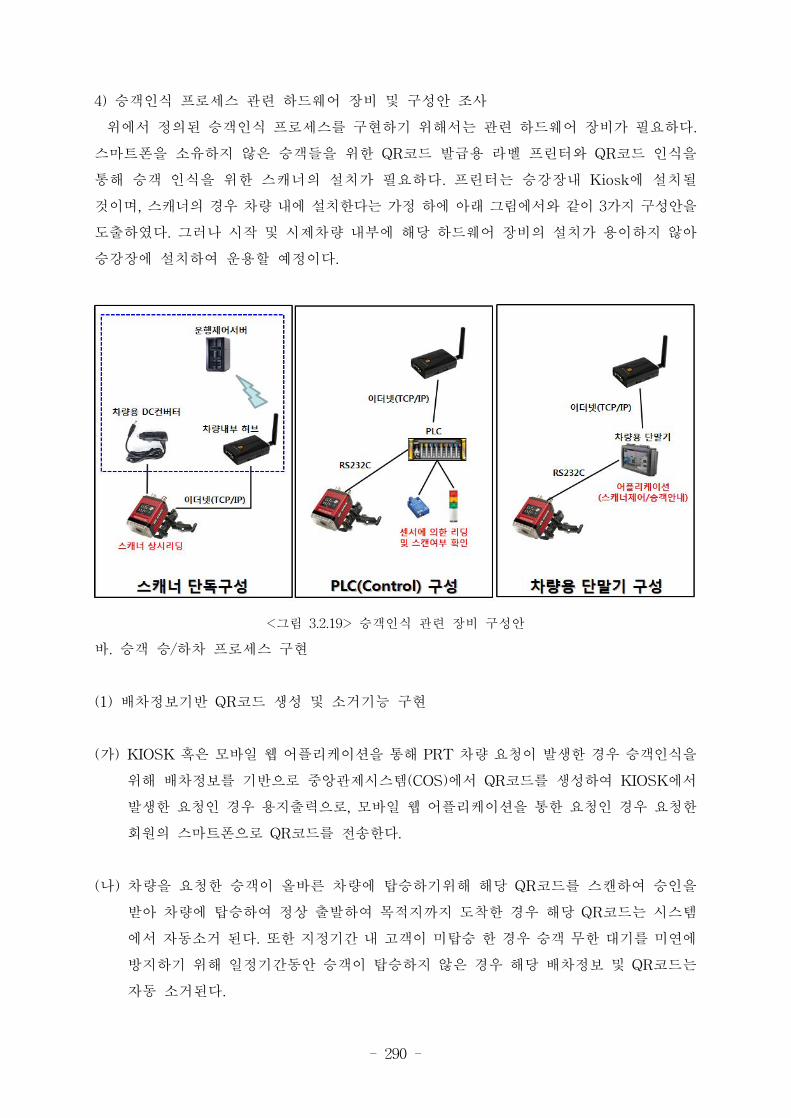
- 290 -
4) 승객인식 프로세스 관련 하드웨어 장비 및 구성안 조사
위에서 정의된 승객인식 프로세스를 구현하기 위해서는 관련 하드웨어 장비가 필요하다.
스마트폰을 소유하지 않은 승객들을 위한 QR코드 발급용 라벨 프린터와 QR코드 인식을
통해 승객 인식을 위한 스캐너의 설치가 필요하다. 프린터는 승강장내 Kiosk에 설치될
것이며, 스캐너의 경우 차량 내에 설치한다는 가정 하에 아래 그림에서와 같이 3가지 구성안을
도출하였다. 그러나 시작 및 시제차량 내부에 해당 하드웨어 장비의 설치가 용이하지 않아
승강장에 설치하여 운용할 예정이다.
<그림 3.2.19> 승객인식 관련 장비 구성안
바. 승객 승/하차 프로세스 구현
(1) 배차정보기반 QR코드 생성 및 소거기능 구현
(가) KIOSK 혹은 모바일 웹 어플리케이션을 통해 PRT 차량 요청이 발생한 경우 승객인식을
위해 배차정보를 기반으로 중앙관제시스템(COS)에서 QR코드를 생성하여 KIOSK에서
발생한 요청인 경우 용지출력으로, 모바일 웹 어플리케이션을 통한 요청인 경우 요청한
회원의 스마트폰으로 QR코드를 전송한다.
(나) 차량을 요청한 승객이 올바른 차량에 탑승하기위해 해당 QR코드를 스캔하여 승인을
받아 차량에 탑승하여 정상 출발하여 목적지까지 도착한 경우 해당 QR코드는 시스템
에서 자동소거 된다. 또한 지정기간 내 고객이 미탑승 한 경우 승객 무한 대기를 미연에
방지하기 위해 일정기간동안 승객이 탑승하지 않은 경우 해당 배차정보 및 QR코드는
자동 소거된다.
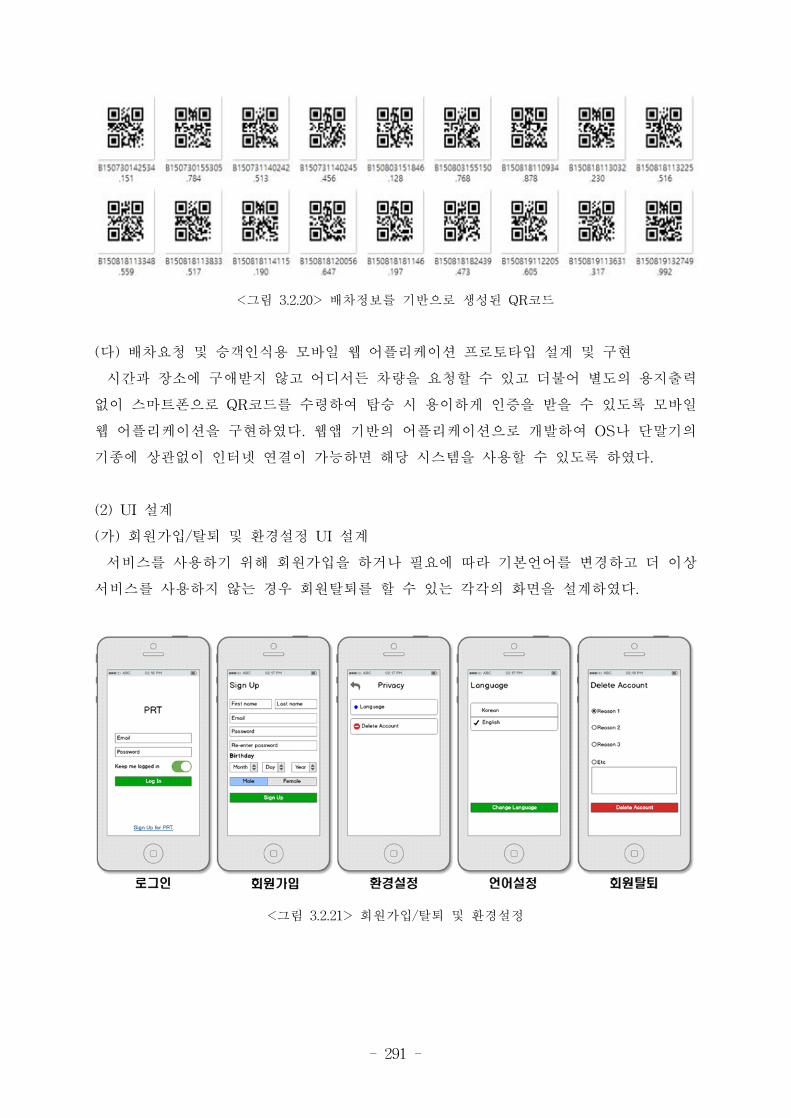
- 291 -
<그림 3.2.20> 배차정보를 기반으로 생성된 QR코드
(다) 배차요청 및 승객인식용 모바일 웹 어플리케이션 프로토타입 설계 및 구현
시간과 장소에 구애받지 않고 어디서든 차량을 요청할 수 있고 더불어 별도의 용지출력
없이 스마트폰으로 QR코드를 수령하여 탑승 시 용이하게 인증을 받을 수 있도록 모바일
웹 어플리케이션을 구현하였다. 웹앱 기반의 어플리케이션으로 개발하여 OS나 단말기의
기종에 상관없이 인터넷 연결이 가능하면 해당 시스템을 사용할 수 있도록 하였다.
(2) UI 설계
(가) 회원가입/탈퇴 및 환경설정 UI 설계
서비스를 사용하기 위해 회원가입을 하거나 필요에 따라 기본언어를 변경하고 더 이상
서비스를 사용하지 않는 경우 회원탈퇴를 할 수 있는 각각의 화면을 설계하였다.
<그림 3.2.21> 회원가입/탈퇴 및 환경설정

- 292 -
(나) 배차요청관련 UI 설계
어느 장소에서든 모바일 웹 어플리케이션을 통해 탑승할 역을 선택 후 목적지 및 승차인원을
기입하여 차량을 요청하게 되면 탑승역으로 자동 차량이 배차됨과 동시에 승객인식을 위한
QR코드를 수령하는 화면을 설계하였다.
<그림 3.2.22> 배차요청
(3) 모바일 웹 어플리케이션 구현
설계된 프로세스 및 UI를 기반으로 실제 모바일 웹 어플리케이션 프로토타입을 구현하였다.
<그림 3.2.23> 실 구현된 모바일 웹 어플리케이션의 UI

- 293 -
(가) 시스템 구현환경
1) 개발언어: Java 1.7
2) 개발도구: Eclipse
3) 개발프레임워크: 전자정부표준프레임워크 3.5.1 / Sencha Touch 2.4.1
4) DBMS: Oracle 11g Release 2
사. 교차점 충돌회피 관련 설계 및 개발
병합 구간에서의 차량 간 간섭이나 충돌을 방지하기 위해 차량의 위치 및 상태를 실시간
으로 모니터링 하여 차량을 제어하는 모듈을 설계 및 구현하였다.
(1) 프로세스 설계
(가) 엑티비티 다이어그램
<그림 3.2.24> 교차점 충돌회피 관련 엑티비티 다이어그램
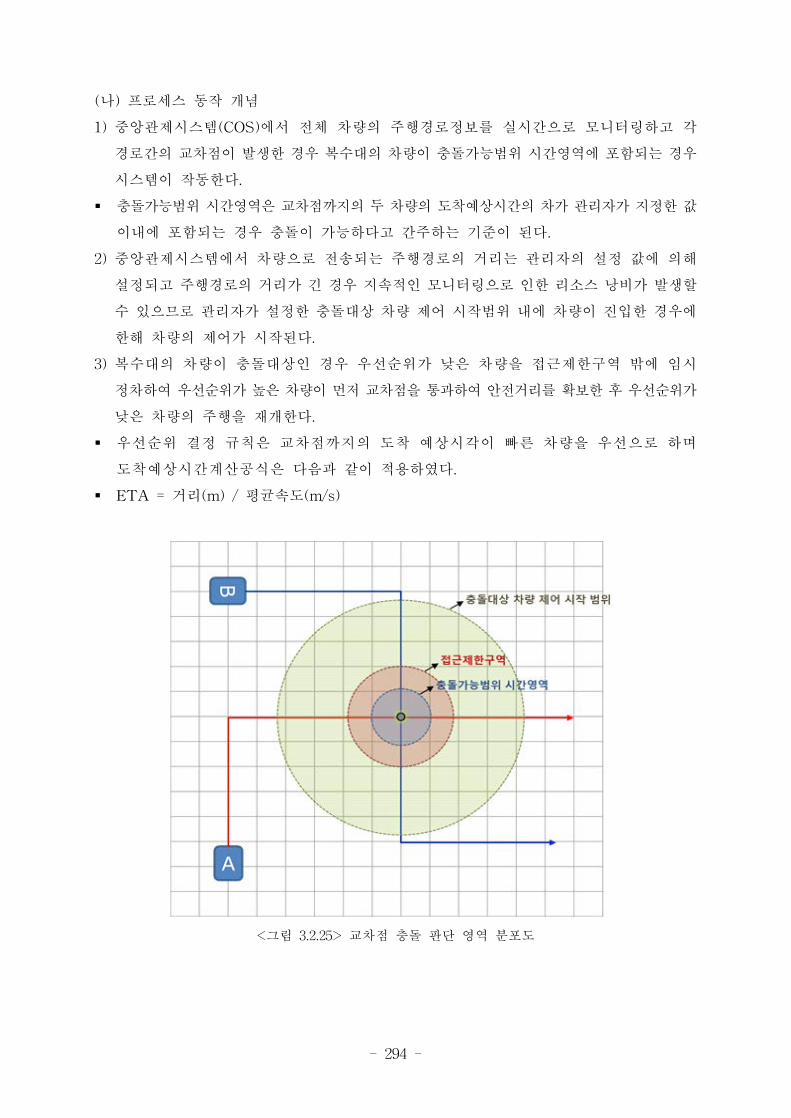
- 294 -
(나) 프로세스 동작 개념
1) 중앙관제시스템(COS)에서 전체 차량의 주행경로정보를 실시간으로 모니터링하고 각
경로간의 교차점이 발생한 경우 복수대의 차량이 충돌가능범위 시간영역에 포함되는 경우
시스템이 작동한다.
§ 충돌가능범위 시간영역은 교차점까지의 두 차량의 도착예상시간의 차가 관리자가 지정한 값
이내에 포함되는 경우 충돌이 가능하다고 간주하는 기준이 된다.
2) 중앙관제시스템에서 차량으로 전송되는 주행경로의 거리는 관리자의 설정 값에 의해
설정되고 주행경로의 거리가 긴 경우 지속적인 모니터링으로 인한 리소스 낭비가 발생할
수 있으므로 관리자가 설정한 충돌대상 차량 제어 시작범위 내에 차량이 진입한 경우에
한해 차량의 제어가 시작된다.
3) 복수대의 차량이 충돌대상인 경우 우선순위가 낮은 차량을 접근제한구역 밖에 임시
정차하여 우선순위가 높은 차량이 먼저 교차점을 통과하여 안전거리를 확보한 후 우선순위가
낮은 차량의 주행을 재개한다.
§ 우선순위 결정 규칙은 교차점까지의 도착 예상시각이 빠른 차량을 우선으로 하며
도착예상시간계산공식은 다음과 같이 적용하였다.
§ ETA = 거리(m) / 평균속도(m/s)
<그림 3.2.25> 교차점 충돌 판단 영역 분포도
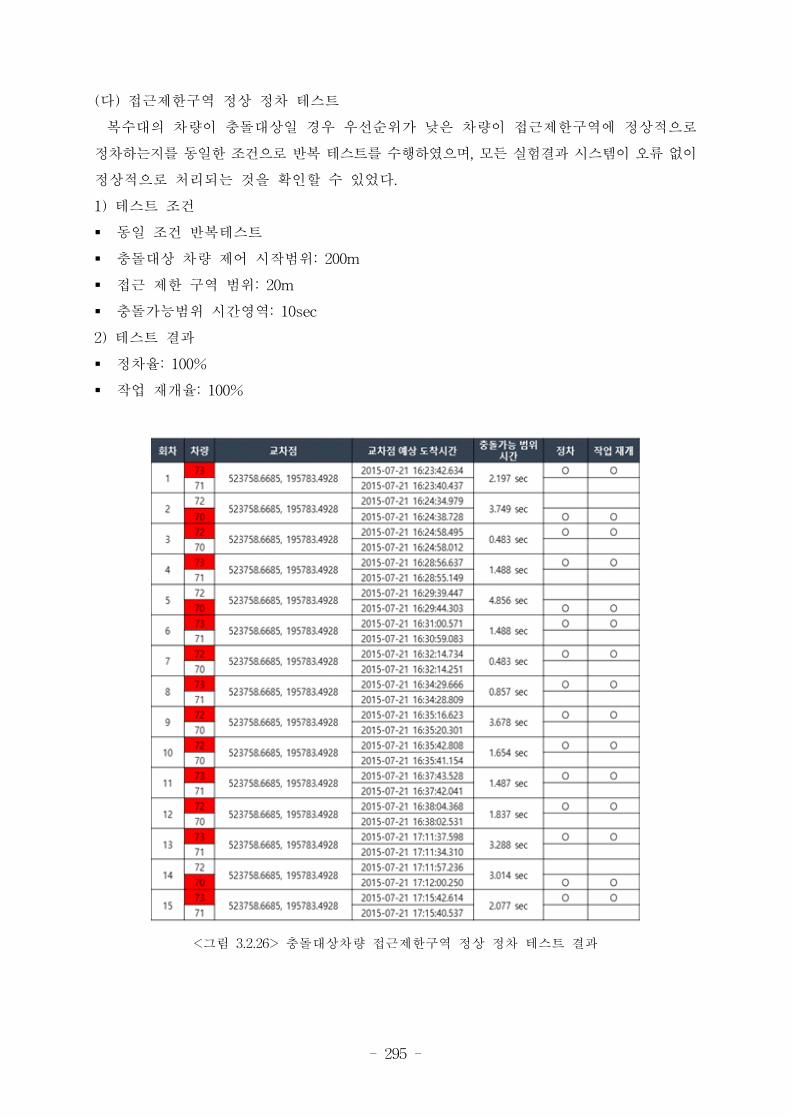
- 295 -
(다) 접근제한구역 정상 정차 테스트
복수대의 차량이 충돌대상일 경우 우선순위가 낮은 차량이 접근제한구역에 정상적으로
정차하는지를 동일한 조건으로 반복 테스트를 수행하였으며, 모든 실험결과 시스템이 오류 없이
정상적으로 처리되는 것을 확인할 수 있었다.
1) 테스트 조건
§ 동일 조건 반복테스트
§ 충돌대상 차량 제어 시작범위: 200m
§ 접근 제한 구역 범위: 20m
§ 충돌가능범위 시간영역: 10sec
2) 테스트 결과
§ 정차율: 100%
§ 작업 재개율: 100%
<그림 3.2.26> 충돌대상차량 접근제한구역 정상 정차 테스트 결과
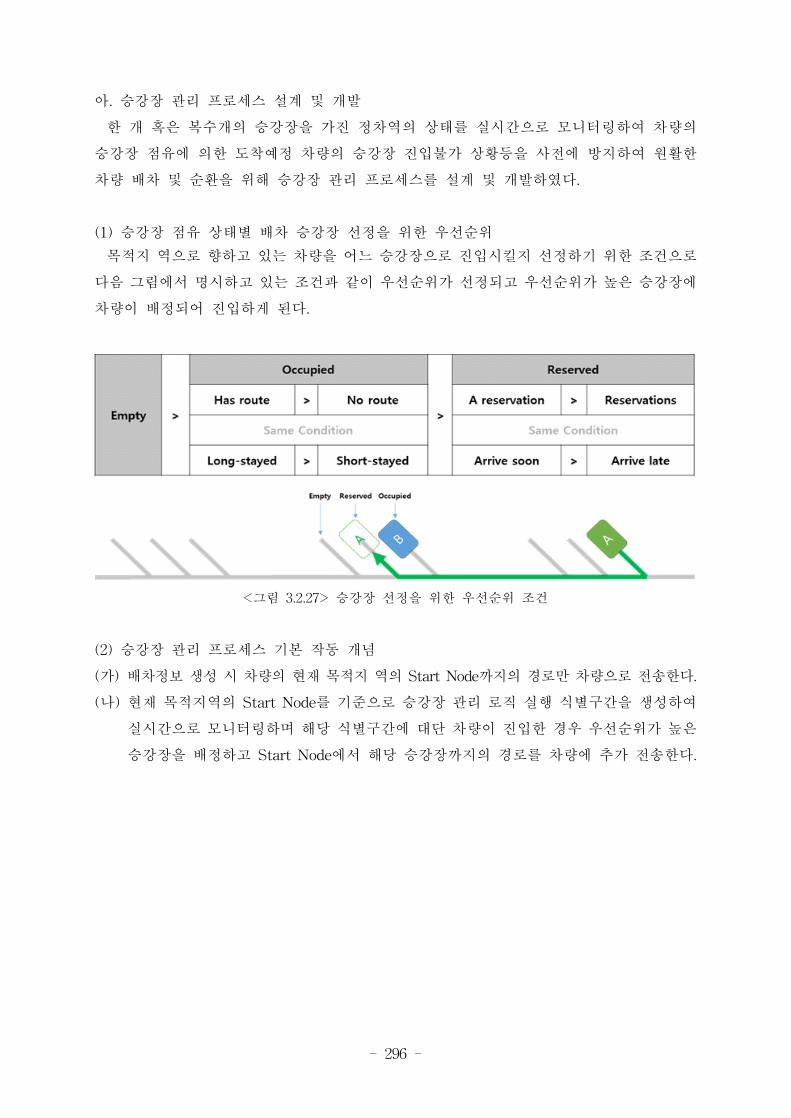
- 296 -
아. 승강장 관리 프로세스 설계 및 개발
한 개 혹은 복수개의 승강장을 가진 정차역의 상태를 실시간으로 모니터링하여 차량의
승강장 점유에 의한 도착예정 차량의 승강장 진입불가 상황등을 사전에 방지하여 원활한
차량 배차 및 순환을 위해 승강장 관리 프로세스를 설계 및 개발하였다.
(1) 승강장 점유 상태별 배차 승강장 선정을 위한 우선순위
목적지 역으로 향하고 있는 차량을 어느 승강장으로 진입시킬지 선정하기 위한 조건으로
다음 그림에서 명시하고 있는 조건과 같이 우선순위가 선정되고 우선순위가 높은 승강장에
차량이 배정되어 진입하게 된다.
<그림 3.2.27> 승강장 선정을 위한 우선순위 조건
(2) 승강장 관리 프로세스 기본 작동 개념
(가) 배차정보 생성 시 차량의 현재 목적지 역의 Start Node까지의 경로만 차량으로 전송한다.
(나) 현재 목적지역의 Start Node를 기준으로 승강장 관리 로직 실행 식별구간을 생성하여
실시간으로 모니터링하며 해당 식별구간에 대단 차량이 진입한 경우 우선순위가 높은
승강장을 배정하고 Start Node에서 해당 승강장까지의 경로를 차량에 추가 전송한다.
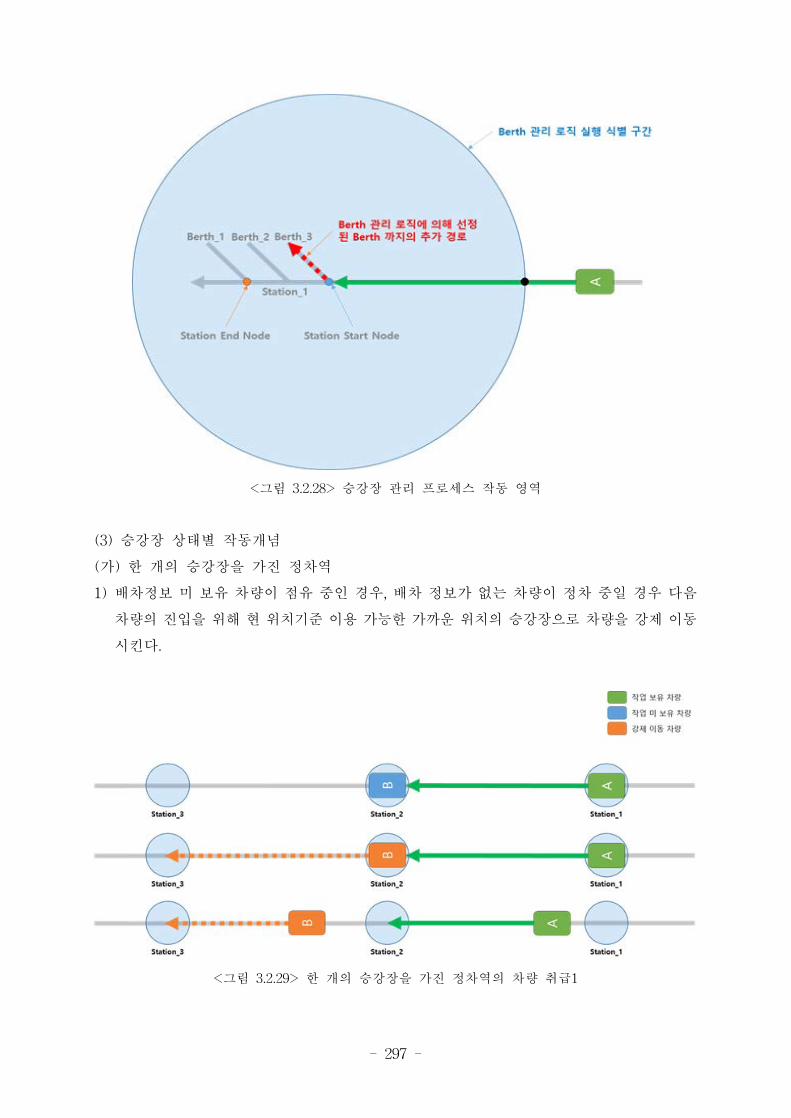
- 297 -
<그림 3.2.28> 승강장 관리 프로세스 작동 영역
(3) 승강장 상태별 작동개념
(가) 한 개의 승강장을 가진 정차역
1) 배차정보 미 보유 차량이 점유 중인 경우, 배차 정보가 없는 차량이 정차 중일 경우 다음
차량의 진입을 위해 현 위치기준 이용 가능한 가까운 위치의 승강장으로 차량을 강제 이동
시킨다.
<그림 3.2.29> 한 개의 승강장을 가진 정차역의 차량 취급1
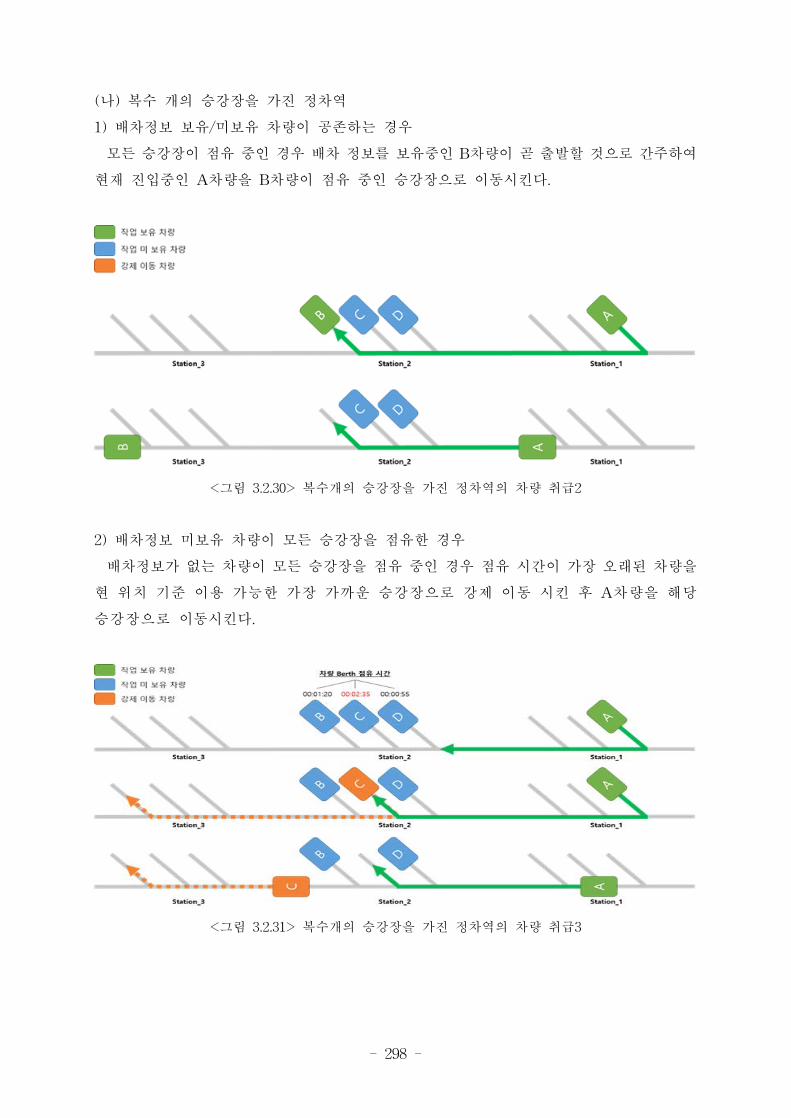
- 298 -
(나) 복수 개의 승강장을 가진 정차역
1) 배차정보 보유/미보유 차량이 공존하는 경우
모든 승강장이 점유 중인 경우 배차 정보를 보유중인 B차량이 곧 출발할 것으로 간주하여
현재 진입중인 A차량을 B차량이 점유 중인 승강장으로 이동시킨다.
<그림 3.2.30> 복수개의 승강장을 가진 정차역의 차량 취급2
2) 배차정보 미보유 차량이 모든 승강장을 점유한 경우
배차정보가 없는 차량이 모든 승강장을 점유 중인 경우 점유 시간이 가장 오래된 차량을
현 위치 기준 이용 가능한 가장 가까운 승강장으로 강제 이동 시킨 후 A차량을 해당
승강장으로 이동시킨다.
<그림 3.2.31> 복수개의 승강장을 가진 정차역의 차량 취급3
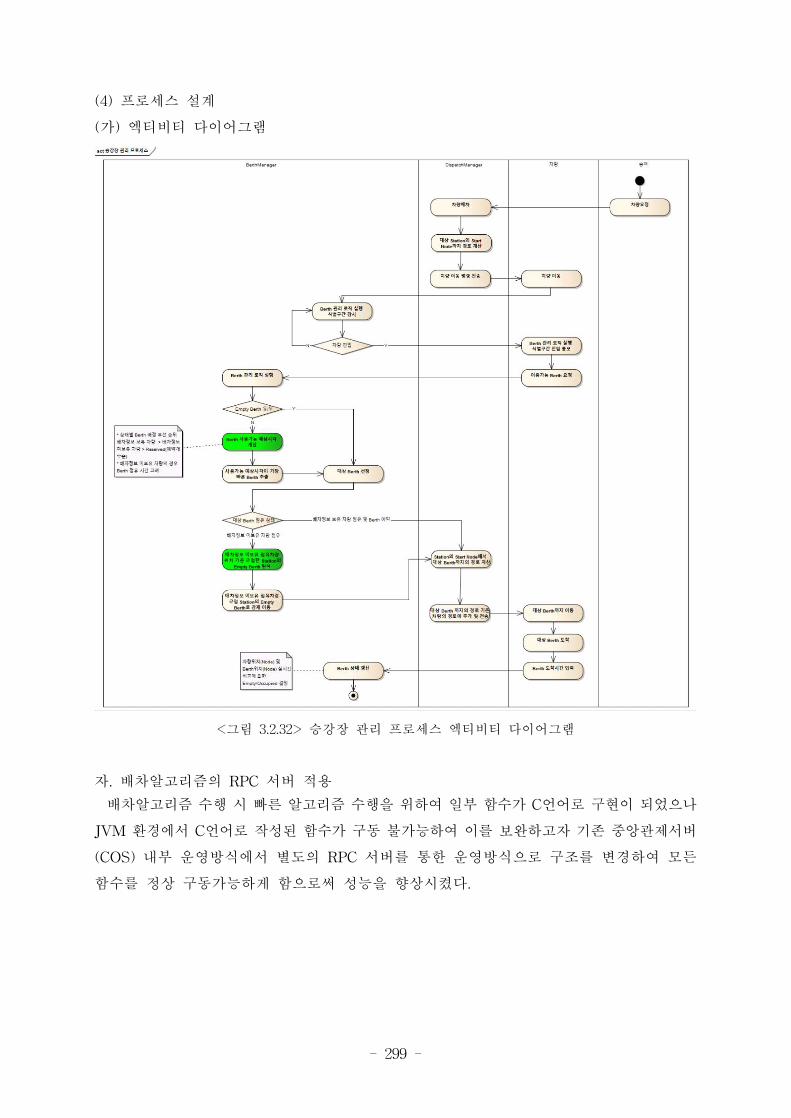
- 299 -
(4) 프로세스 설계
(가) 엑티비티 다이어그램
<그림 3.2.32> 승강장 관리 프로세스 엑티비티 다이어그램
자. 배차알고리즘의 RPC 서버 적용
배차알고리즘 수행 시 빠른 알고리즘 수행을 위하여 일부 함수가 C언어로 구현이 되었으나
JVM 환경에서 C언어로 작성된 함수가 구동 불가능하여 이를 보완하고자 기존 중앙관제서버
(COS) 내부 운영방식에서 별도의 RPC 서버를 통한 운영방식으로 구조를 변경하여 모든
함수를 정상 구동가능하게 함으로써 성능을 향상시켰다.
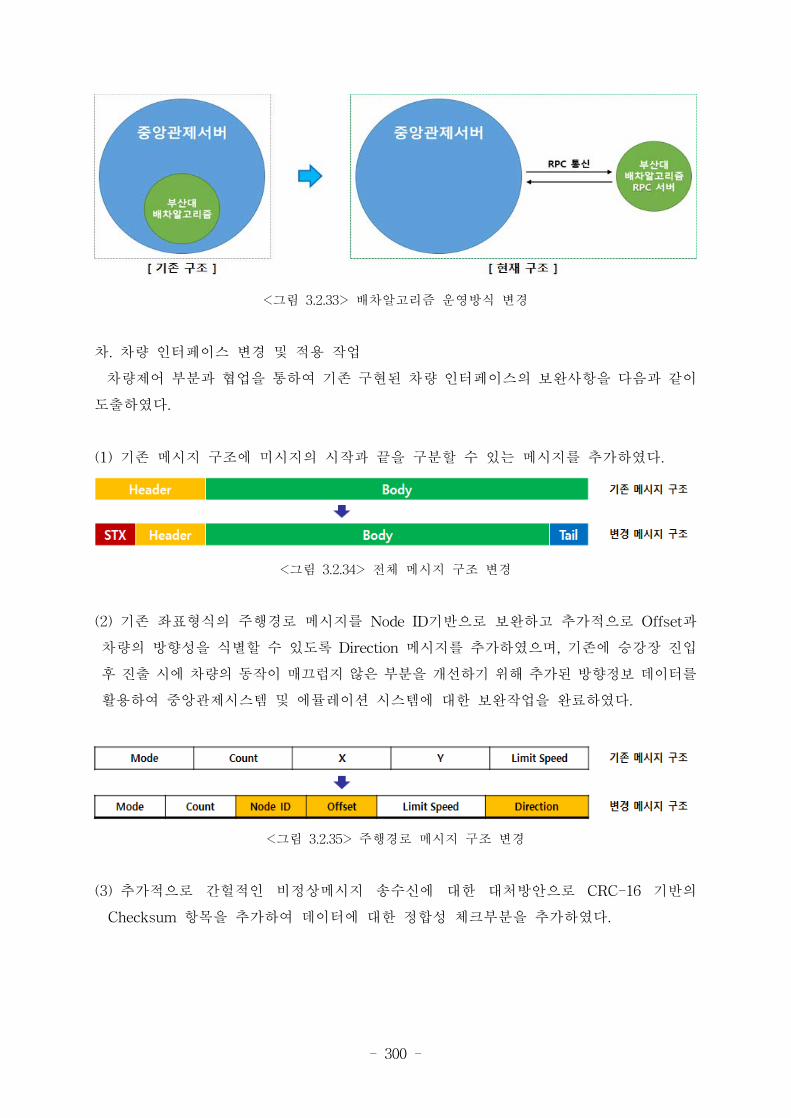
- 300 -
<그림 3.2.33> 배차알고리즘 운영방식 변경
차. 차량 인터페이스 변경 및 적용 작업
차량제어 부분과 협업을 통하여 기존 구현된 차량 인터페이스의 보완사항을 다음과 같이
도출하였다.
(1) 기존 메시지 구조에 미시지의 시작과 끝을 구분할 수 있는 메시지를 추가하였다.
<그림 3.2.34> 전체 메시지 구조 변경
(2) 기존 좌표형식의 주행경로 메시지를 Node ID기반으로 보완하고 추가적으로 Offset과
차량의 방향성을 식별할 수 있도록 Direction 메시지를 추가하였으며, 기존에 승강장 진입
후 진출 시에 차량의 동작이 매끄럽지 않은 부분을 개선하기 위해 추가된 방향정보 데이터를
활용하여 중앙관제시스템 및 에뮬레이션 시스템에 대한 보완작업을 완료하였다.
<그림 3.2.35> 주행경로 메시지 구조 변경
(3) 추가적으로 간헐적인 비정상메시지 송수신에 대한 대처방안으로 CRC-16 기반의
Checksum 항목을 추가하여 데이터에 대한 정합성 체크부분을 추가하였다.
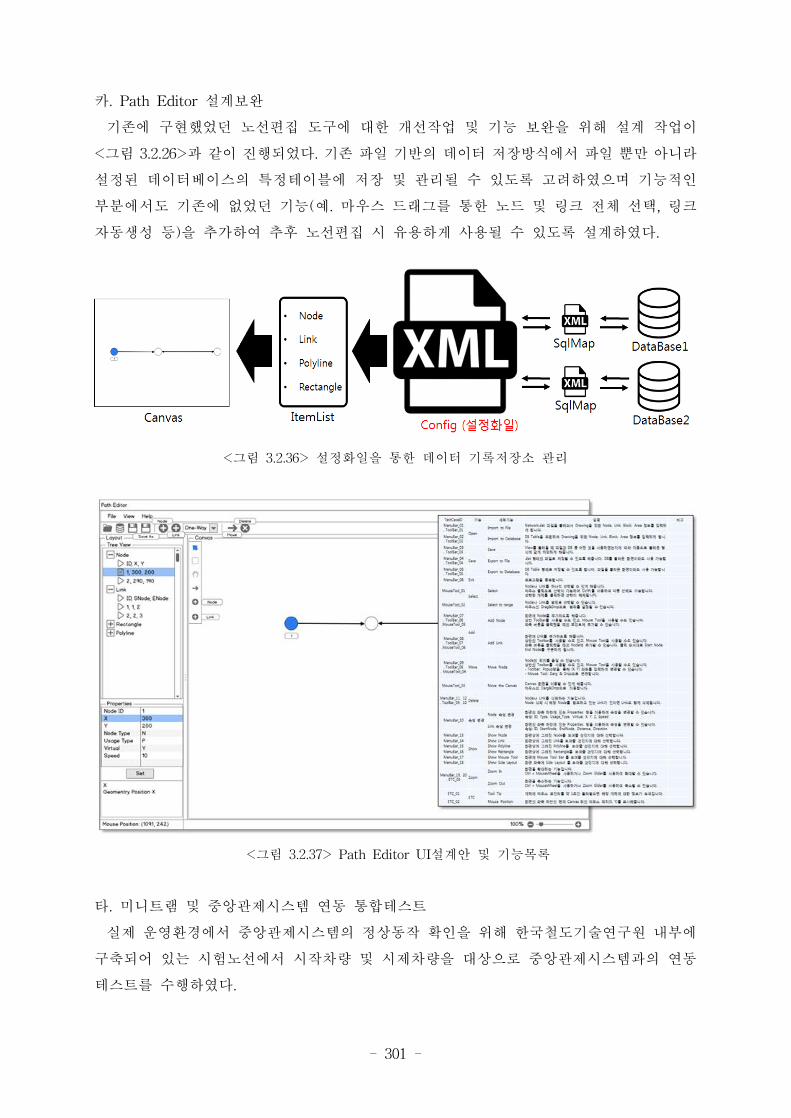
- 301 -
카. Path Editor 설계보완
기존에 구현했었던 노선편집 도구에 대한 개선작업 및 기능 보완을 위해 설계 작업이
<그림 3.2.26>과 같이 진행되었다. 기존 파일 기반의 데이터 저장방식에서 파일 뿐만 아니라
설정된 데이터베이스의 특정테이블에 저장 및 관리될 수 있도록 고려하였으며 기능적인
부분에서도 기존에 없었던 기능(예. 마우스 드래그를 통한 노드 및 링크 전체 선택, 링크
자동생성 등)을 추가하여 추후 노선편집 시 유용하게 사용될 수 있도록 설계하였다.
<그림 3.2.36> 설정화일을 통한 데이터 기록저장소 관리
<그림 3.2.37> Path Editor UI설계안 및 기능목록
타. 미니트램 및 중앙관제시스템 연동 통합테스트
실제 운영환경에서 중앙관제시스템의 정상동작 확인을 위해 한국철도기술연구원 내부에
구축되어 있는 시험노선에서 시작차량 및 시제차량을 대상으로 중앙관제시스템과의 연동
테스트를 수행하였다.
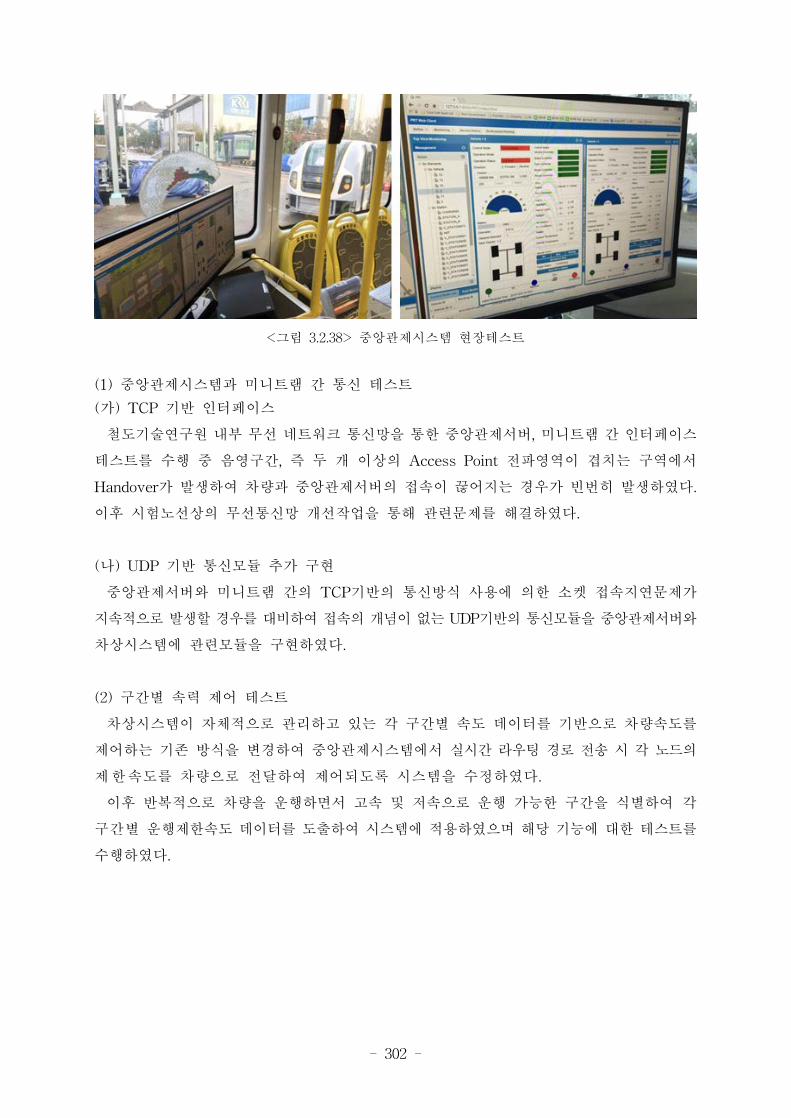
- 302 -
<그림 3.2.38> 중앙관제시스템 현장테스트
(1) 중앙관제시스템과 미니트램 간 통신 테스트
(가) TCP 기반 인터페이스
철도기술연구원 내부 무선 네트워크 통신망을 통한 중앙관제서버, 미니트램 간 인터페이스
테스트를 수행 중 음영구간, 즉 두 개 이상의 Access Point 전파영역이 겹치는 구역에서
Handover가 발생하여 차량과 중앙관제서버의 접속이 끊어지는 경우가 빈번히 발생하였다.
이후 시험노선상의 무선통신망 개선작업을 통해 관련문제를 해결하였다.
(나) UDP 기반 통신모듈 추가 구현
중앙관제서버와 미니트램 간의 TCP기반의 통신방식 사용에 의한 소켓 접속지연문제가
지속적으로 발생할 경우를 대비하여 접속의 개념이 없는 UDP기반의 통신모듈을 중앙관제서버와
차상시스템에 관련모듈을 구현하였다.
(2) 구간별 속력 제어 테스트
차상시스템이 자체적으로 관리하고 있는 각 구간별 속도 데이터를 기반으로 차량속도를
제어하는 기존 방식을 변경하여 중앙관제시스템에서 실시간 라우팅 경로 전송 시 각 노드의
제한속도를 차량으로 전달하여 제어되도록 시스템을 수정하였다.
이후 반복적으로 차량을 운행하면서 고속 및 저속으로 운행 가능한 구간을 식별하여 각
구간별 운행제한속도 데이터를 도출하여 시스템에 적용하였으며 해당 기능에 대한 테스트를
수행하였다.
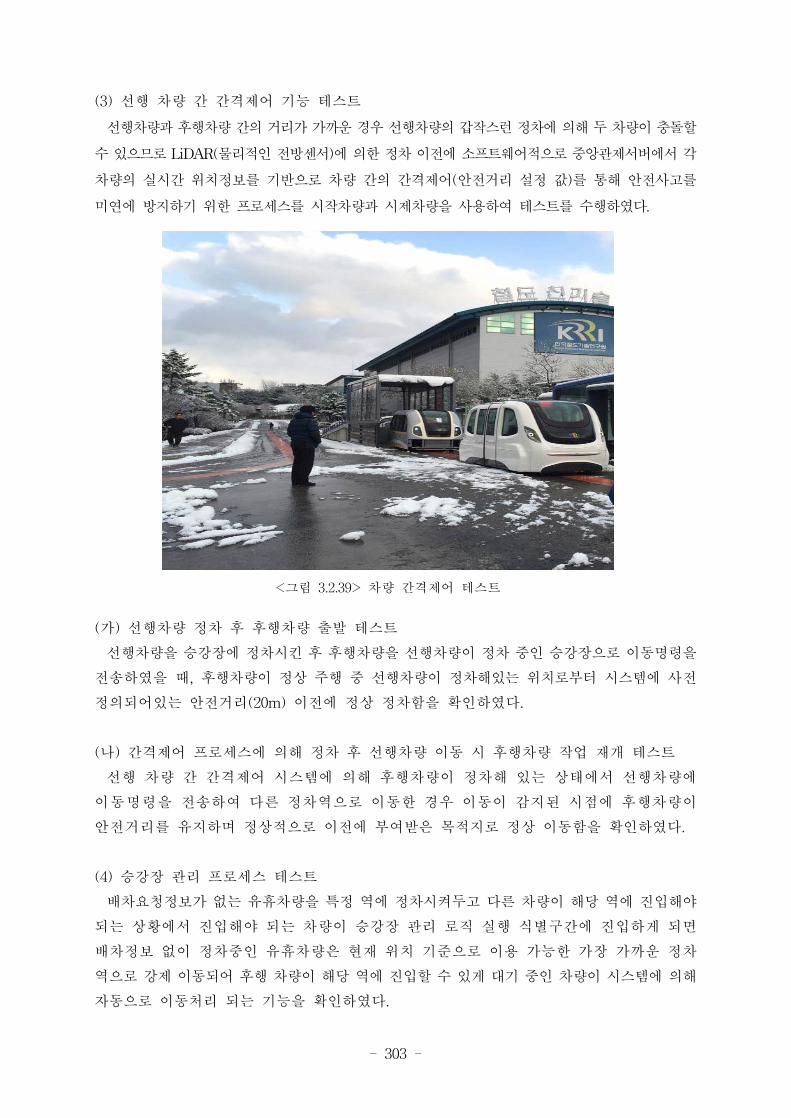
- 303 -
<그림 3.2.39> 차량 간격제어 테스트
(3) 선행 차량 간 간격제어 기능 테스트
선행차량과후행차량간의거리가가까운경우선행차량의갑작스런정차에의해두차량이충돌할
수있으므로 LiDAR(물리적인전방센서)에 의한정차이전에소프트웨어적으로중앙관제서버에서각
차량의 실시간 위치정보를 기반으로 차량 간의 간격제어(안전거리 설정 값)를 통해 안전사고를
미연에 방지하기 위한 프로세스를 시작차량과 시제차량을 사용하여 테스트를 수행하였다.
(가) 선행차량 정차 후 후행차량 출발 테스트
선행차량을 승강장에 정차시킨 후 후행차량을 선행차량이 정차 중인 승강장으로 이동명령을
전송하였을 때, 후행차량이 정상 주행 중 선행차량이 정차해있는 위치로부터 시스템에 사전
정의되어있는 안전거리(20m) 이전에 정상 정차함을 확인하였다.
(나) 간격제어 프로세스에 의해 정차 후 선행차량 이동 시 후행차량 작업 재개 테스트
선행 차량 간 간격제어 시스템에 의해 후행차량이 정차해 있는 상태에서 선행차량에
이동명령을 전송하여 다른 정차역으로 이동한 경우 이동이 감지된 시점에 후행차량이
안전거리를 유지하며 정상적으로 이전에 부여받은 목적지로 정상 이동함을 확인하였다.
(4) 승강장 관리 프로세스 테스트
배차요청정보가 없는 유휴차량을 특정 역에 정차시켜두고 다른 차량이 해당 역에 진입해야
되는 상황에서 진입해야 되는 차량이 승강장 관리 로직 실행 식별구간에 진입하게 되면
배차정보 없이 정차중인 유휴차량은 현재 위치 기준으로 이용 가능한 가장 가까운 정차
역으로 강제 이동되어 후행 차량이 해당 역에 진입할 수 있게 대기 중인 차량이 시스템에 의해
자동으로 이동처리 되는 기능을 확인하였다.
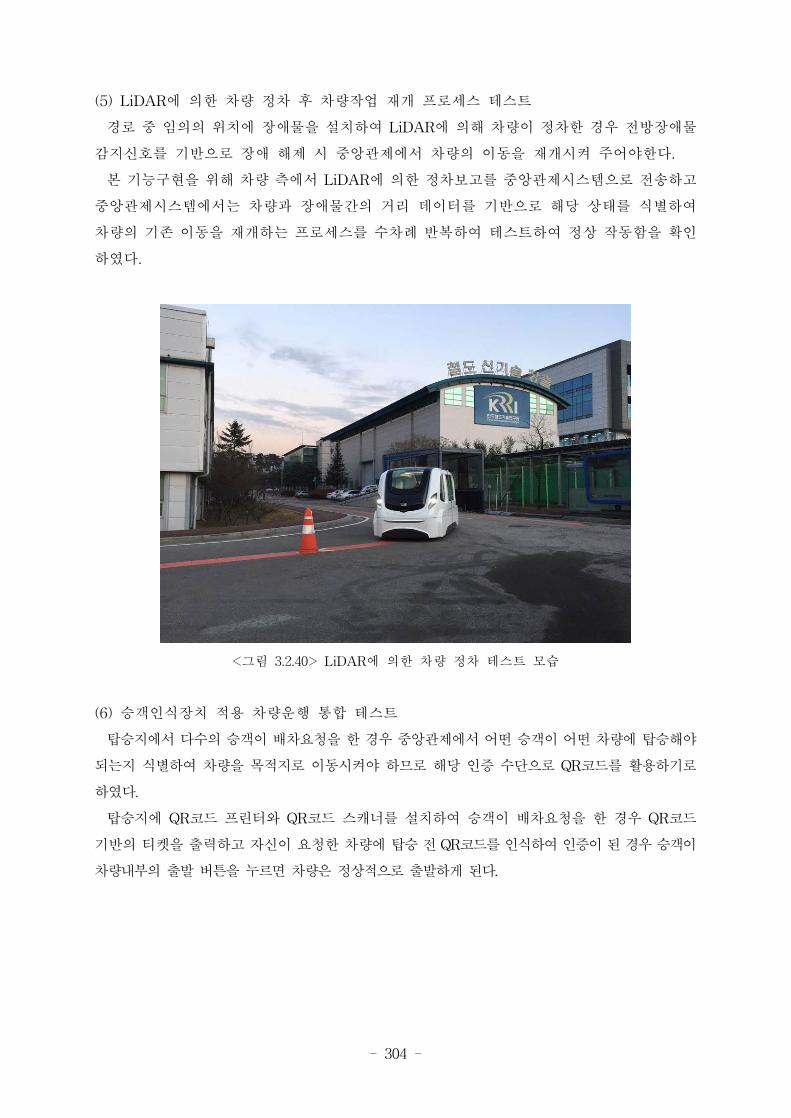
- 304 -
(5) LiDAR에 의한 차량 정차 후 차량작업 재개 프로세스 테스트
경로 중 임의의 위치에 장애물을 설치하여 LiDAR에 의해 차량이 정차한 경우 전방장애물
감지신호를 기반으로 장애 해제 시 중앙관제에서 차량의 이동을 재개시켜 주어야한다.
본 기능구현을 위해 차량 측에서 LiDAR에 의한 정차보고를 중앙관제시스템으로 전송하고
중앙관제시스템에서는 차량과 장애물간의 거리 데이터를 기반으로 해당 상태를 식별하여
차량의 기존 이동을 재개하는 프로세스를 수차례 반복하여 테스트하여 정상 작동함을 확인
하였다.
<그림 3.2.40> LiDAR에 의한 차량 정차 테스트 모습
(6) 승객인식장치 적용 차량운행 통합 테스트
탑승지에서다수의승객이배차요청을한경우중앙관제에서어떤승객이어떤차량에탑승해야
되는지 식별하여 차량을 목적지로 이동시켜야 하므로 해당 인증 수단으로 QR코드를 활용하기로
하였다.
탑승지에 QR코드 프린터와 QR코드 스캐너를 설치하여 승객이 배차요청을 한 경우 QR코드
기반의 티켓을 출력하고 자신이 요청한 차량에탑승전 QR코드를인식하여인증이된경우승객이
차량내부의 출발 버튼을 누르면 차량은 정상적으로 출발하게 된다.
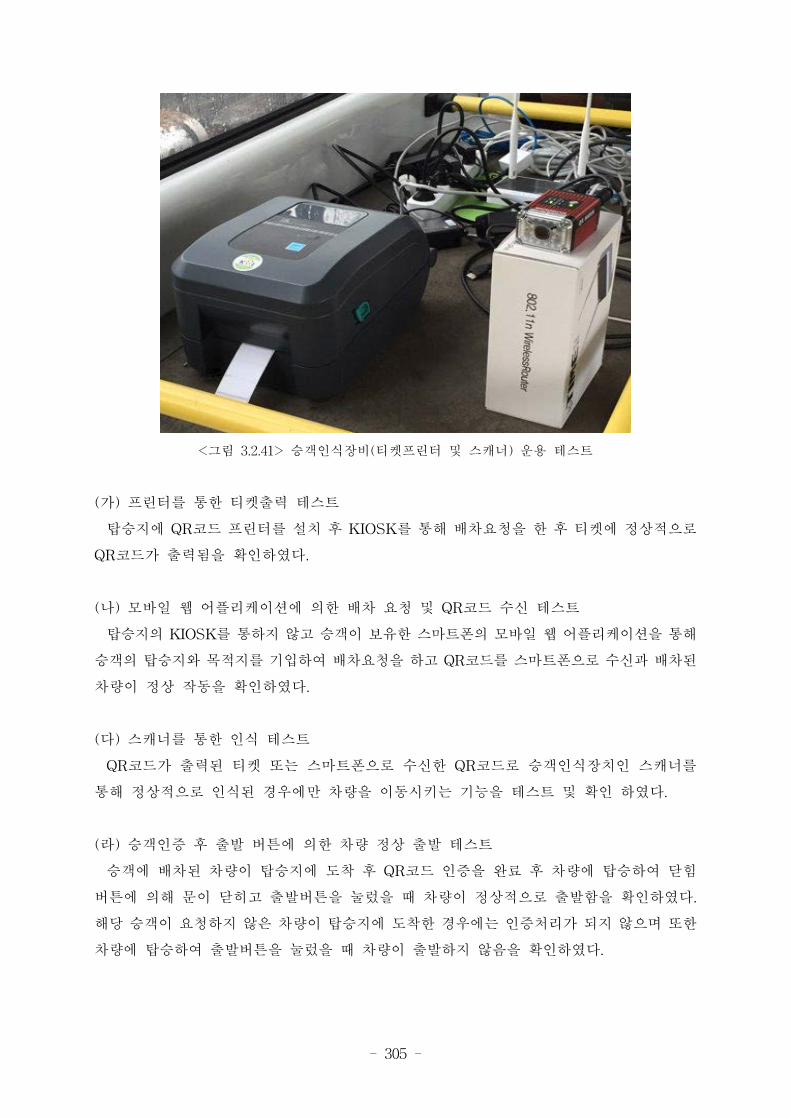
- 305 -
<그림 3.2.41> 승객인식장비(티켓프린터 및 스캐너) 운용 테스트
(가) 프린터를 통한 티켓출력 테스트
탑승지에 QR코드 프린터를 설치 후 KIOSK를 통해 배차요청을 한 후 티켓에 정상적으로
QR코드가 출력됨을 확인하였다.
(나) 모바일 웹 어플리케이션에 의한 배차 요청 및 QR코드 수신 테스트
탑승지의 KIOSK를 통하지 않고 승객이 보유한 스마트폰의 모바일 웹 어플리케이션을 통해
승객의 탑승지와 목적지를 기입하여 배차요청을 하고 QR코드를 스마트폰으로 수신과 배차된
차량이 정상 작동을 확인하였다.
(다) 스캐너를 통한 인식 테스트
QR코드가 출력된 티켓 또는 스마트폰으로 수신한 QR코드로 승객인식장치인 스캐너를
통해 정상적으로 인식된 경우에만 차량을 이동시키는 기능을 테스트 및 확인 하였다.
(라) 승객인증 후 출발 버튼에 의한 차량 정상 출발 테스트
승객에 배차된 차량이 탑승지에 도착 후 QR코드 인증을 완료 후 차량에 탑승하여 닫힘
버튼에 의해 문이 닫히고 출발버튼을 눌렀을 때 차량이 정상적으로 출발함을 확인하였다.
해당 승객이 요청하지 않은 차량이 탑승지에 도착한 경우에는 인증처리가 되지 않으며 또한
차량에 탑승하여 출발버튼을 눌렀을 때 차량이 출발하지 않음을 확인하였다.
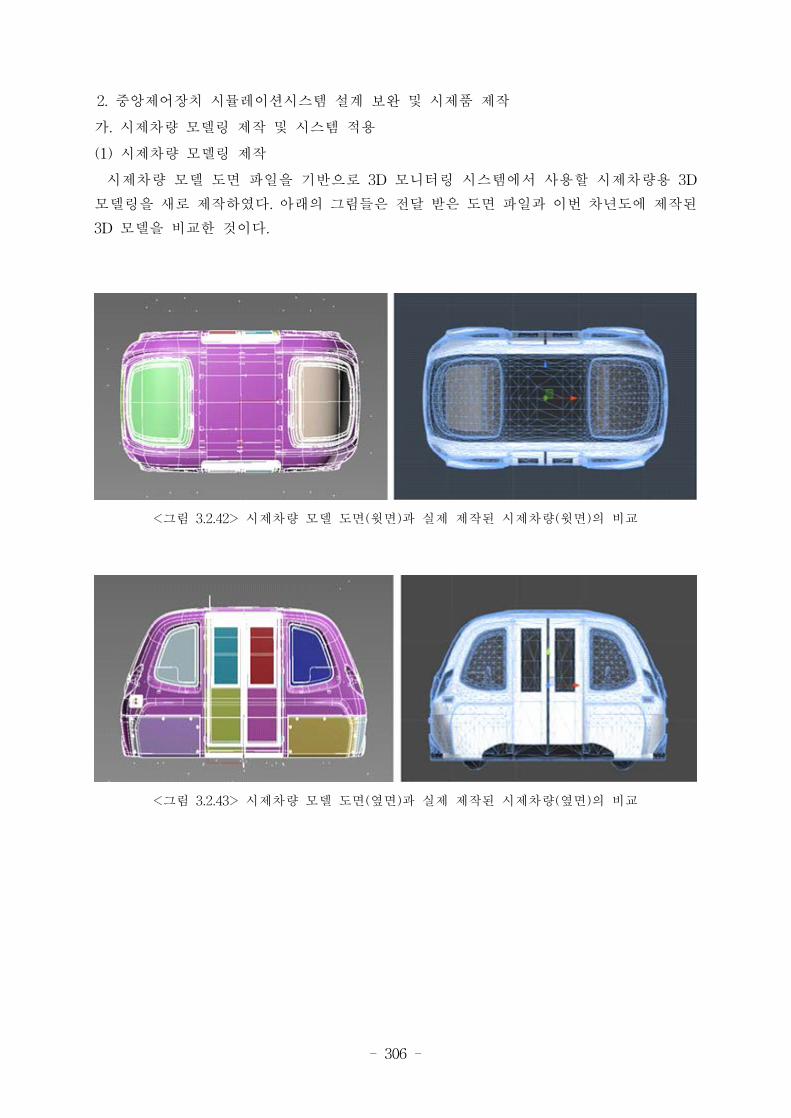
- 306 -
2. 중앙제어장치 시뮬레이션시스템 설계 보완 및 시제품 제작
가. 시제차량 모델링 제작 및 시스템 적용
(1) 시제차량 모델링 제작
시제차량 모델 도면 파일을 기반으로 3D 모니터링 시스템에서 사용할 시제차량용 3D
모델링을 새로 제작하였다. 아래의 그림들은 전달 받은 도면 파일과 이번 차년도에 제작된
3D 모델을 비교한 것이다.
<그림 3.2.42> 시제차량 모델 도면(윗면)과 실제 제작된 시제차량(윗면)의 비교
<그림 3.2.43> 시제차량 모델 도면(옆면)과 실제 제작된 시제차량(옆면)의 비교
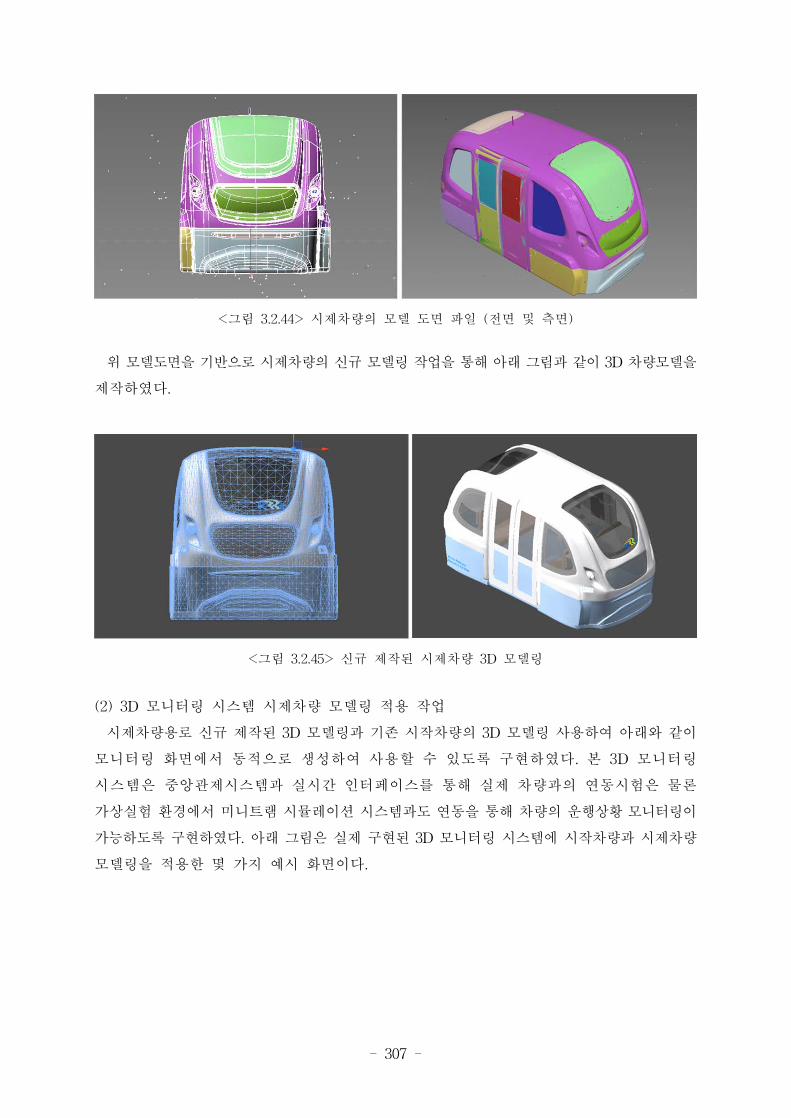
- 307 -
<그림 3.2.44> 시제차량의 모델 도면 파일 (전면 및 측면)
위 모델도면을 기반으로 시제차량의 신규 모델링 작업을 통해 아래 그림과 같이 3D 차량모델을
제작하였다.
<그림 3.2.45> 신규 제작된 시제차량 3D 모델링
(2) 3D 모니터링 시스템 시제차량 모델링 적용 작업
시제차량용로 신규 제작된 3D 모델링과 기존 시작차량의 3D 모델링 사용하여 아래와 같이
모니터링 화면에서 동적으로 생성하여 사용할 수 있도록 구현하였다. 본 3D 모니터링
시스템은 중앙관제시스템과 실시간 인터페이스를 통해 실제 차량과의 연동시험은 물론
가상실험 환경에서 미니트램 시뮬레이션 시스템과도 연동을 통해 차량의 운행상황 모니터링이
가능하도록 구현하였다. 아래 그림은 실제 구현된 3D 모니터링 시스템에 시작차량과 시제차량
모델링을 적용한 몇 가지 예시 화면이다.
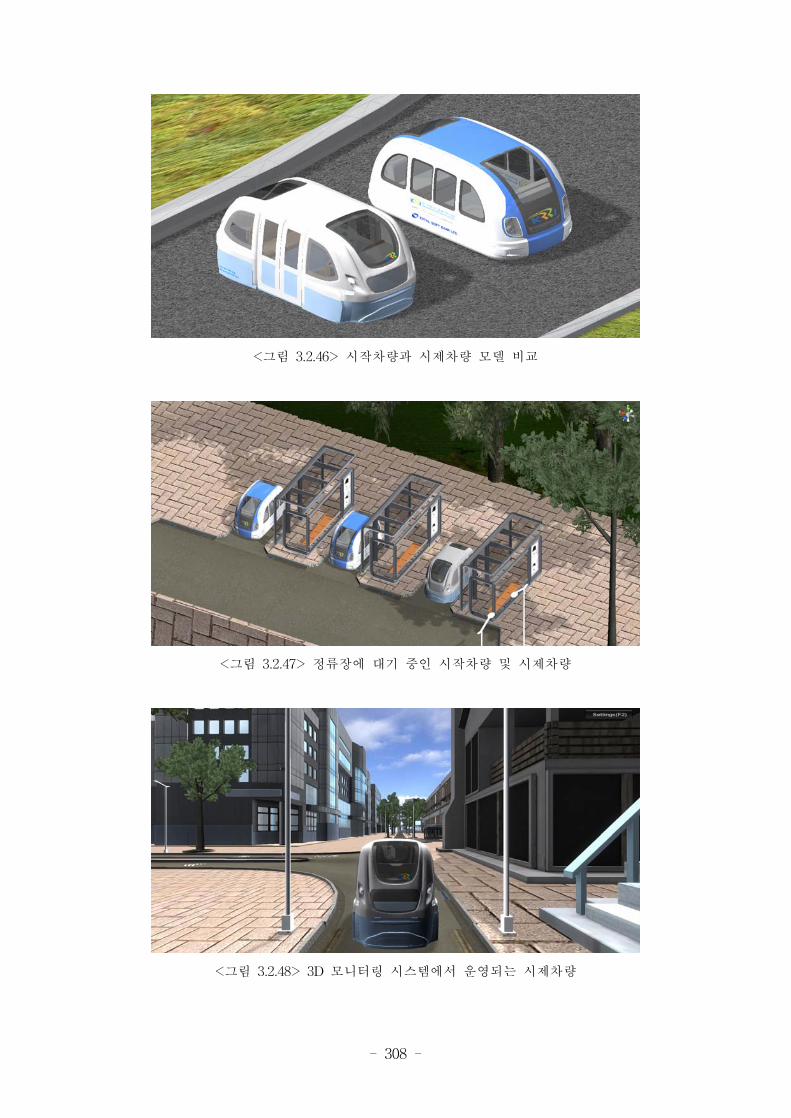
- 308 -
<그림 3.2.46> 시작차량과 시제차량 모델 비교
<그림 3.2.47> 정류장에 대기 중인 시작차량 및 시제차량
<그림 3.2.48> 3D 모니터링 시스템에서 운영되는 시제차량

- 309 -
나. 기타 3D 모니터링 시스템 보완작업
아래 <그림 3.2.49>에서와 같이 철도기술연구원의 실제 시험구간과 가상 구간이 하나로
연결된 전체 시뮬레이션 공간에 대한 전체 모습으로서 중앙관제시스템과 시뮬레이션
시스템간의 연동을 통한 기능 및 성능 시험 시 사용되었으며, 추가적으로 모니터링 시스템의
우측 하단에 미니뷰어을 통해 다른 시점으로 동시에 볼 수 있는 기능을 구현하였다.
<그림 3.2.49> 시뮬레이션을 위한 가상 시험구간 전체 레이아웃
<그림 3.2.50> 신규 추가된 우측하단의 미니뷰어
추가적으로, 기존 3D Viewer의 경우 단순히 차량 및 기타 시설물들의 움직임이나 동작
상태에 대한 실시간 모니터링만이 가능하여 이를 개선해보고자 일반적인 어플리케이션을
통해서 습득될 수 있는 상세정보들도 같이 통합적으로 모니터링이 가능하도록 관련 설계

- 310 -
검토 및 프로토타입을 일부 진행하였다. 또한 복수 카메라, 사용자 뷰 정의기능 등을 통해
여러 차량 및 시설물의 상태를 한 화면에서 동시에 모니터링 가능하도록 개선작업을
진행 중이며, 차년도 연구개발 시 지속적으로 진행할 예정이다.
다. KPI Report 시스템 설계 및 구축(일부)
시뮬레이션을 통한 성능시험으로부터 기록되는 차량배차이력, 운행이력, 차량상태정보 등의
정보를 기반으로 각종 리포트를 추출하기 위한 시스템을 설계 및 일부 구현하였다. 기존
고정된 방식의 리포트가 아니라 보고 싶은 데이터와 차원에 따라 자유롭게 원하는 결과를
볼 수 있도록 아래 그림과 같은 개념으로 OLAP 툴을 이용한 구조로 시스템을 설계 및
구현하였다. 리포트 구성요소로서 크게 분석하고자 하는 대상 측정값을 나타내는 Measure와
그 Measure를 분석하기 위한 기준인 Dimension의 조합으로 이루어진다.
<그림 3.2.51> OLAP 툴을 이용한 다차원 분석
아래 <그림 3.2.53>,<그림 3.2.54>는 이번 차년도에 구현된 KPI Report 시스템의 일부
화면으로서 통합리포트에 들어갈 각 리포트들을 생성 및 구성하기 위한 화면과 각 리포트별로
Measure와 Dimension을 선택하여 보고 싶은 리포트를 편집하는 화면으로서 새로운 템플릿
생성하거나 기존 템플릿 수정(다차원 분석)하고 다양한 차트종류(Bar, Line, Area)를 선택하는
구성하는 기능을 가지고 있다.
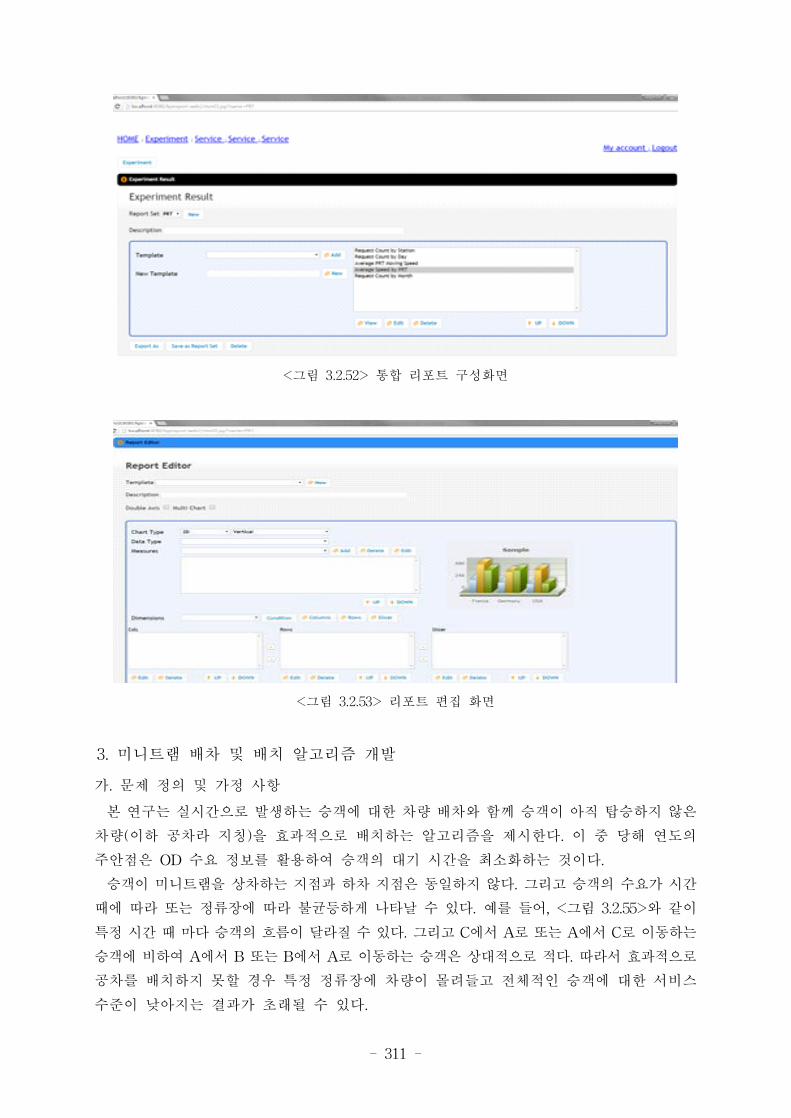
- 311 -
<그림 3.2.52> 통합 리포트 구성화면
<그림 3.2.53> 리포트 편집 화면
3. 미니트램 배차 및 배치 알고리즘 개발
가. 문제 정의 및 가정 사항
본 연구는 실시간으로 발생하는 승객에 대한 차량 배차와 함께 승객이 아직 탑승하지 않은
차량(이하 공차라 지칭)을 효과적으로 배치하는 알고리즘을 제시한다. 이 중 당해 연도의
주안점은 OD 수요 정보를 활용하여 승객의 대기 시간을 최소화하는 것이다.
승객이 미니트램을 상차하는 지점과 하차 지점은 동일하지 않다. 그리고 승객의 수요가 시간
때에 따라 또는 정류장에 따라 불균등하게 나타날 수 있다. 예를 들어, <그림 3.2.55>와 같이
특정 시간 때 마다 승객의 흐름이 달라질 수 있다. 그리고 C에서 A로 또는 A에서 C로 이동하는
승객에 비하여 A에서 B 또는 B에서 A로 이동하는 승객은 상대적으로 적다. 따라서 효과적으로
공차를 배치하지 못할 경우 특정 정류장에 차량이 몰려들고 전체적인 승객에 대한 서비스
수준이 낮아지는 결과가 초래될 수 있다.

- 312 -
<그림 3.2.55> 네트워크 예시
<그림 3.2.54> 수요 발생의 불균등
미니트램 시스템의 네트워크는 정류장(station), 분기 및 합류점(junction), 단방향 차로로
구성된다. <그림 3.2.56>. 정류장의 진·출입 구간 및 곡선 구간에는 안전상 이유로 최고 주행
속도를 제한한다.
정류장 내부는 <그림 3.2.57>와 같이 주 선로(main line)와 승차장(berth)으로 구성된다.
주 선로는 해당 정류장이 최종 목적지가 아닌 차량이 지나가는 차로이다. 승객은 승차장에서
차량을 탑승하거나 하차한다. 정류장에는 한정된 수의 승차장이 존재한다. 따라서 모든
승차장에 차량이 들어와 있는 경우, 나중에 도착한 차량은 승차장에 진입하지 못한다.
본 연구에서는 정류장과 분기 및 합류점을 노드(node)로, 차로는 아크(arc)로 정의하여 미니트램
네트워크를 표현한다. 각 노드와 아크에는 허용량이 존재한다. 정류장 노드에는 승차장의
수만큼 차량이 동시에 진입할 수 있으며 분기 및 합류점의 허용량은 차량 한 대이다.
마지막으로 아크의 허용량은 차로의 길이를 차량의 길이와 안전거리의 합으로 나눈 값보다
작은 가장 큰 정수로 한다. 예를 들어 차로가 10m, PRT 차량의 길이가 2.5m, 안전거리가
1m라면, 10/3.5≒2.85로 해당 차로의 허용량은 2가 된다.
- 313 -
<그림 3.2.56> 정류장 레이아웃
본 연구에서 OD 수요는 이미 알고 있는 것으로 가정한다. 추가적인 가정 사항은 아래와 같다.
- PRT 차량의 수는 일정하고 차량의 종류는 같음.
- 차량은 선로에 미리 정해진 평균 속도의 ± 10% 안의 범위에서 주행함.
- 승객이 차량을 승하차할 때 일정 정도 시간이 소요됨.
- 승객은 PRT 차량이 도착할 때까지 정류장을 떠나지 않음.
- 합승 및 환승에 대한 서비스는 없음.
- 승객의 예약 서비스는 없음.
(1) 알고리즘 설명
본 연구에서 제시하는 알고리즘은 Lees-Miller (2011)의 SV 알고리즘의 프레임워크를
활용한다. <그림 3.2.57>은 SV 알고리즘의 프레임워크를 보여준다. SV의 의사결정 시점은
배차 요청이 PRT 운영 시스템에 접수되는 때이다. 이때 배차 알고리즘을 이용하여 정류장에
대기 중인 고객에 대하여 차량을 배차한다. 그리고 OD 수요를 기반으로 미래의 승객 발생
패턴을 예측한다. <그림 3.2.58>에서는 미래에 나타날 5명의 승객에 대하여 도착시간,
출발역과 도착역을 보여준다. 그리고 해당 입력에 대하여 공차 배치 알고리즘을 적용하여
해를 구한다. 또 이를 반복하여 (<그림 3.2.58>에서는 4번 반복) 각 입력에 대한 해를 도출한다.
마지막으로 각각의 해를 바탕으로 어떤 차량을 어떤 정류장으로 보낼지를 투표를 통하여
결정한다.
<그림 3.2.57> SV 알고리즘의 프레임워크
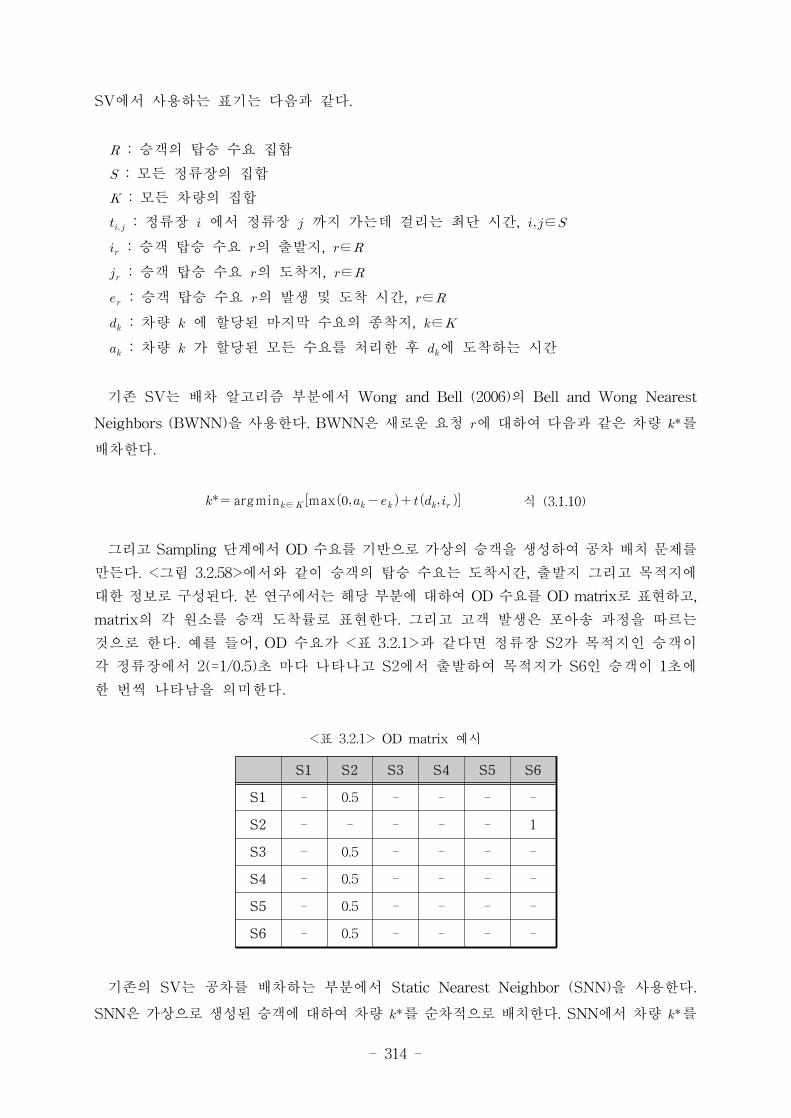
- 314 -
SV에서 사용하는 표기는 다음과 같다.
: 승객의 탑승 수요 집합
: 모든 정류장의 집합
: 모든 차량의 집합
: 정류장 에서 정류장 까지 가는데 걸리는 최단 시간, ∈
: 승객 탑승 수요 의 출발지, ∈ : 승객 탑승 수요 의 도착지, ∈ : 승객 탑승 수요 의 발생 및 도착 시간, ∈ : 차량 에 할당된 마지막 수요의 종착지, ∈
: 차량 가 할당된 모든 수요를 처리한 후 에 도착하는 시간
기존 SV는 배차 알고리즘 부분에서 Wong and Bell (2006)의 Bell and Wong Nearest
Neighbors (BWNN)을 사용한다. BWNN은 새로운 요청 에 대하여 다음과 같은 차량 를
배차한다.
argmin∈ max 식 (3.1.10)
그리고 Sampling 단계에서 OD 수요를 기반으로 가상의 승객을 생성하여 공차 배치 문제를
만든다. <그림 3.2.58>에서와 같이 승객의 탑승 수요는 도착시간, 출발지 그리고 목적지에
대한 정보로 구성된다. 본 연구에서는 해당 부분에 대하여 OD 수요를 OD matrix로 표현하고,
matrix의 각 원소를 승객 도착률로 표현한다. 그리고 고객 발생은 포아송 과정을 따르는
것으로 한다. 예를 들어, OD 수요가 <표 3.2.1>과 같다면 정류장 S2가 목적지인 승객이
각 정류장에서 2(=1/0.5)초 마다 나타나고 S2에서 출발하여 목적지가 S6인 승객이 1초에
한 번씩 나타남을 의미한다.
S1 S2 S3 S4 S5 S6
S1 - 0.5 - - - -
S2 - - - - - 1
S3 - 0.5 - - - -
S4 - 0.5 - - - -
S5 - 0.5 - - - -
S6 - 0.5 - - - -
<표 3.2.1> OD matrix 예시
기존의 SV는 공차를 배차하는 부분에서 Static Nearest Neighbor (SNN)을 사용한다.
SNN은 가상으로 생성된 승객에 대하여 차량 를 순차적으로 배치한다. SNN에서 차량 를
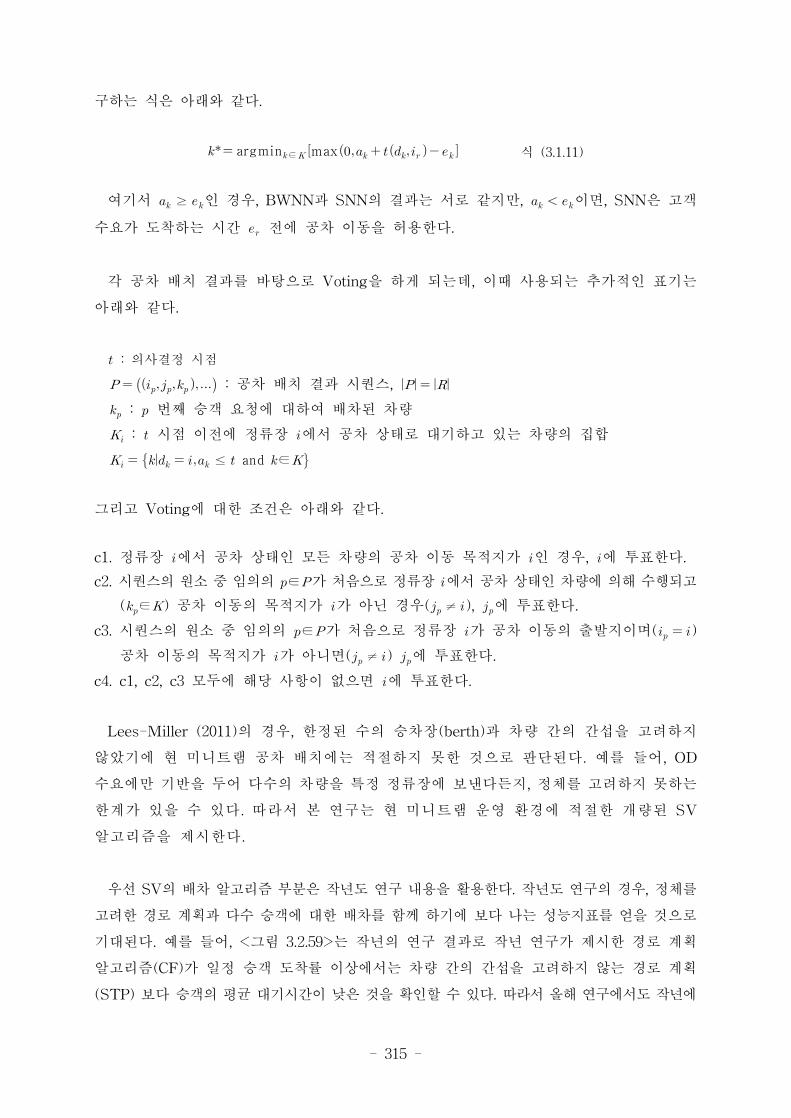
- 315 -
구하는 식은 아래와 같다.
argmin∈ max 식 (3.1.11)
여기서 ≥ 인 경우, BWNN과 SNN의 결과는 서로 같지만, 이면, SNN은 고객
수요가 도착하는 시간 전에 공차 이동을 허용한다.
각 공차 배치 결과를 바탕으로 Voting을 하게 되는데, 이때 사용되는 추가적인 표기는
아래와 같다.
: 의사결정 시점
: 공차 배치 결과 시퀀스,
: 번째 승객 요청에 대하여 배차된 차량
: 시점 이전에 정류장 에서 공차 상태로 대기하고 있는 차량의 집합
≤ and ∈
그리고 Voting에 대한 조건은 아래와 같다.
c1. 정류장 에서 공차 상태인 모든 차량의 공차 이동 목적지가 인 경우, 에 투표한다.
c2. 시퀀스의 원소 중 임의의 ∈가 처음으로 정류장 에서 공차 상태인 차량에 의해 수행되고
(∈) 공차 이동의 목적지가 가 아닌 경우(≠), 에 투표한다.
c3. 시퀀스의 원소 중 임의의 ∈가 처음으로 정류장 가 공차 이동의 출발지이며( )
공차 이동의 목적지가 가 아니면(≠) 에 투표한다.
c4. c1, c2, c3 모두에 해당 사항이 없으면 에 투표한다.
Lees-Miller (2011)의 경우, 한정된 수의 승차장(berth)과 차량 간의 간섭을 고려하지
않았기에 현 미니트램 공차 배치에는 적절하지 못한 것으로 판단된다. 예를 들어, OD
수요에만 기반을 두어 다수의 차량을 특정 정류장에 보낸다든지, 정체를 고려하지 못하는
한계가 있을 수 있다. 따라서 본 연구는 현 미니트램 운영 환경에 적절한 개량된 SV
알고리즘을 제시한다.
우선 SV의 배차 알고리즘 부분은 작년도 연구 내용을 활용한다. 작년도 연구의 경우, 정체를
고려한 경로 계획과 다수 승객에 대한 배차를 함께 하기에 보다 나는 성능지표를 얻을 것으로
기대된다. 예를 들어, <그림 3.2.59>는 작년의 연구 결과로 작년 연구가 제시한 경로 계획
알고리즘(CF)가 일정 승객 도착률 이상에서는 차량 간의 간섭을 고려하지 않는 경로 계획
(STP) 보다 승객의 평균 대기시간이 낮은 것을 확인할 수 있다. 따라서 올해 연구에서도 작년에

- 316 -
사용하였던 경로 계획 알고리즘과배차알고리즘을사용한경우, BWNN보다좋은성능지표를보여줄
것으로예상된다.
<그림 3.2.58> 배차 범위 및 경로 계획에 따른 승객 대기시간
그리고 공차 배치 알고리즘에서 또한 기존의 greedy heuristic 보다 나은 해를 구하기
위하여 다수의 차량과 미래에 발생한 다수의 승객을 고려하여 global optimal을 제시하고자
한다. 승객의 도착 시간, 출발지 그리고 목적지에 대한 정보를 모두 알고 있을 경우 이는
특수한 경우의 vehicle routing problem (VRP)으로 볼 수 있으며, 현재 VRP와 관련된 연구를
참고하여 새로운 공차 배치 알고리즘을 연구 중이다. 예상되는 적절한 방법론은 메타
휴리스틱(meta-heuristic)이다.
메타 휴리스틱은 휴리스틱의 한 종류로, 초기 해를 바탕으로 지속적으로 새로운 해를
생성해 보고 이를 통하여 얻어지는 해의 값이 개선되는 경우 해당 해를 저장해 두는 방식
으로 진행된다. 공차 배치 문제에 대한 해를 <그림 3.2.60>과 같이 나타낼 수 있다. 예를 들어,
1-3-0-2;36의 의미는 차량 1은 정류장 1로, 차량 2은 정류장 3으로, 차량 3은 정류장 0으로,
차량 4는 정류장 2로 보내면 고객의 총 대기시간은 26이 된다는 표현이다. 선의 의미는
하나의 해에서 연결된 또 다른 해를 생성할 수 있음을 의미한다. 예를 들어, 방금 전의
해에서 3과 0의 위치를 서로 바꾸면 1-0-3-2라는 해를 생성할 수 있고 해당 해의 값이 41이
됨을 뜻한다. 따라서 본 연구는 공차 배치 문제에 대하여 메타 휴리스틱 방법을 이용하여
SNN 보다 뛰어난 결과 값을 얻고자 한다.
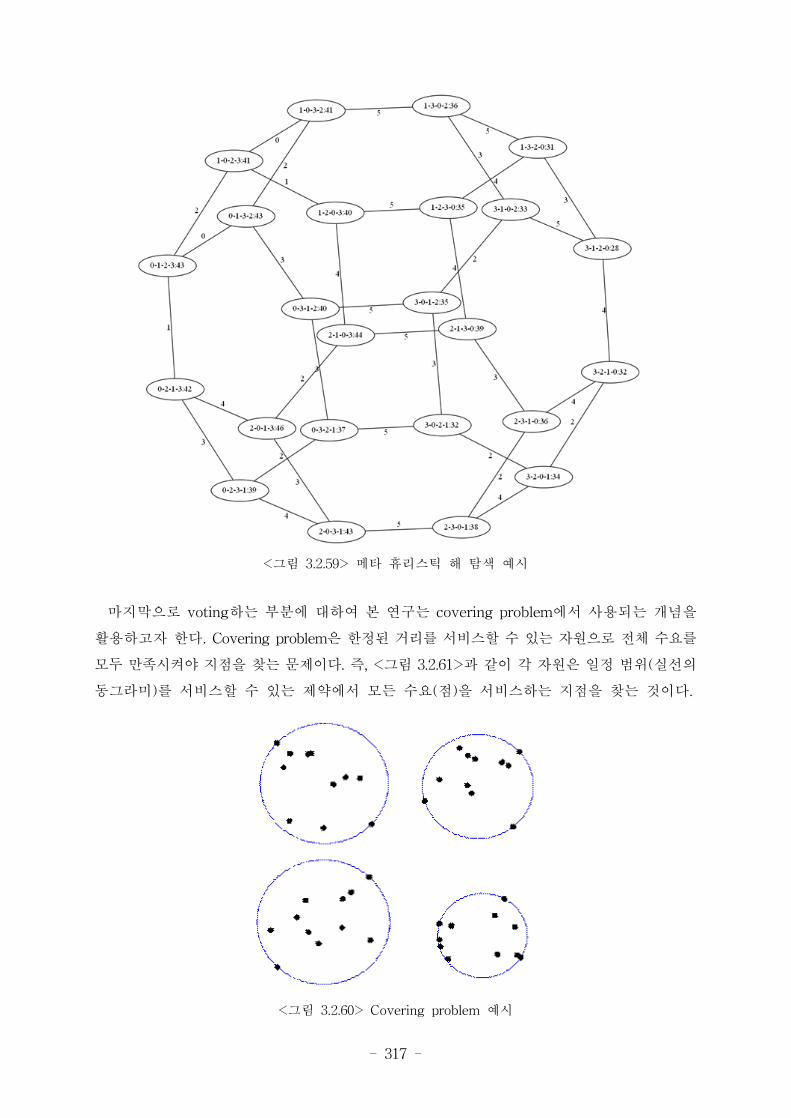
- 317 -
<그림 3.2.59> 메타 휴리스틱 해 탐색 예시
마지막으로 voting하는 부분에 대하여 본 연구는 covering problem에서 사용되는 개념을
활용하고자 한다. Covering problem은 한정된 거리를 서비스할 수 있는 자원으로 전체 수요를
모두 만족시켜야 지점을 찾는 문제이다. 즉, <그림 3.2.61>과 같이 각 자원은 일정 범위(실선의
동그라미)를 서비스할 수 있는 제약에서 모든 수요(점)을 서비스하는 지점을 찾는 것이다.
<그림 3.2.60> Covering problem 예시
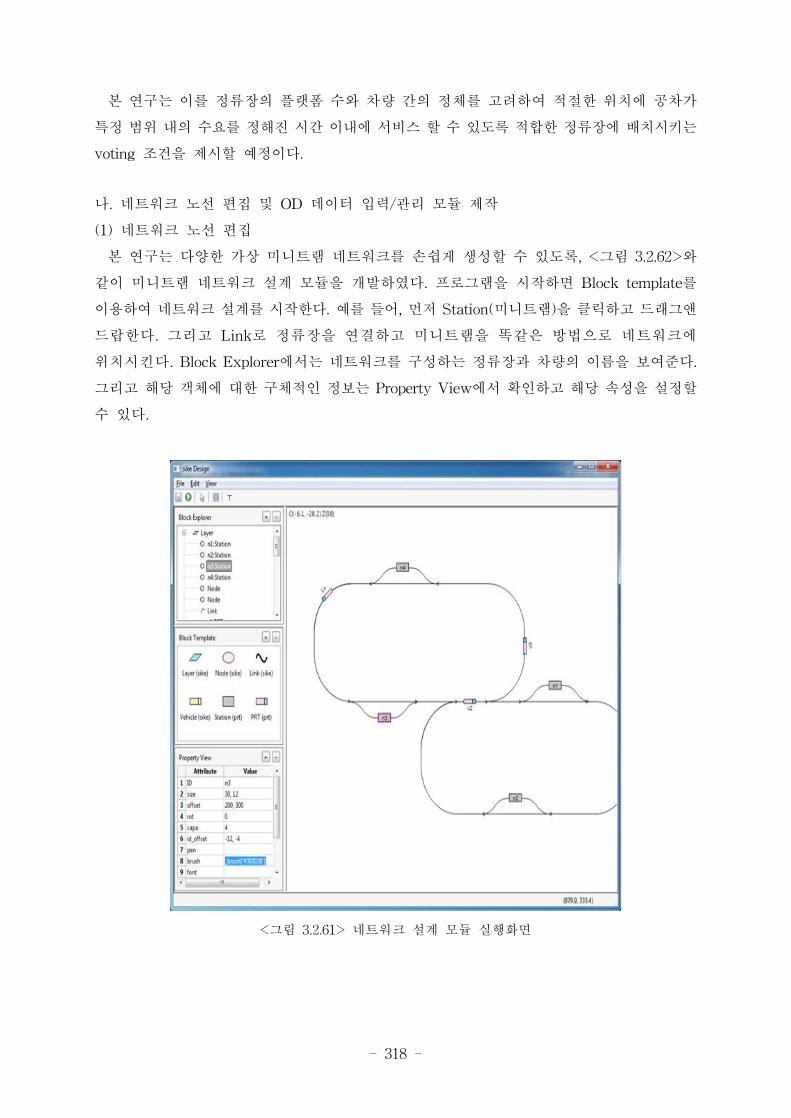
- 318 -
본 연구는 이를 정류장의 플랫폼 수와 차량 간의 정체를 고려하여 적절한 위치에 공차가
특정 범위 내의 수요를 정해진 시간 이내에 서비스 할 수 있도록 적합한 정류장에 배치시키는
voting 조건을 제시할 예정이다.
나. 네트워크 노선 편집 및 OD 데이터 입력/관리 모듈 제작
(1) 네트워크 노선 편집
본 연구는 다양한 가상 미니트램 네트워크를 손쉽게 생성할 수 있도록, <그림 3.2.62>와
같이 미니트램 네트워크 설계 모듈을 개발하였다. 프로그램을 시작하면 Block template를
이용하여 네트워크 설계를 시작한다. 예를 들어, 먼저 Station(미니트램)을 클릭하고 드래그앤
드랍한다. 그리고 Link로 정류장을 연결하고 미니트램을 똑같은 방법으로 네트워크에
위치시킨다. Block Explorer에서는 네트워크를 구성하는 정류장과 차량의 이름을 보여준다.
그리고 해당 객체에 대한 구체적인 정보는 Property View에서 확인하고 해당 속성을 설정할
수 있다.
<그림 3.2.61> 네트워크 설계 모듈 실행화면

- 319 -
다. 기 개발된 PRT 운행 시뮬레이터 보완 모듈 개발
(1) Schedule mode 모형 추가
미니트램이 버스와 같이 정해진 구간을 순환하며 정류장에 승객을 서비스 하는 것을
schedule mode라 정의한다. 그리고 이를 기존의 시뮬레이터에 반영하였다. 우선, 시뮬레이터를
실행시키기 전에 <그림 3.2.63>과 같이 schedule mode로 운행할 차량의 노선을 설계한다.
첫 번째 행은 노선 명을 나타내고 두 번째 행 이후부터는 차량이 정차하는 정류장의 순서를
의미한다. 예를 들어 Line 3을 순환하는 차량의 경우 정류장 s12, s14, s15, s17를 방문하며
고객을 서비스한 후 다시 s12 정류장으로 돌아와 똑같은 경로를 계속 순환한다.
<그림 3.2.62> Schedule mode 노선 설계
차량을 schedule mode로 전환하기 위해서는 실행 메뉴 바에서 버튼을 선택하고
<그림 3.2.64>와 같은 화면에서 mode를 전환에 대한 설정을 입력한다.
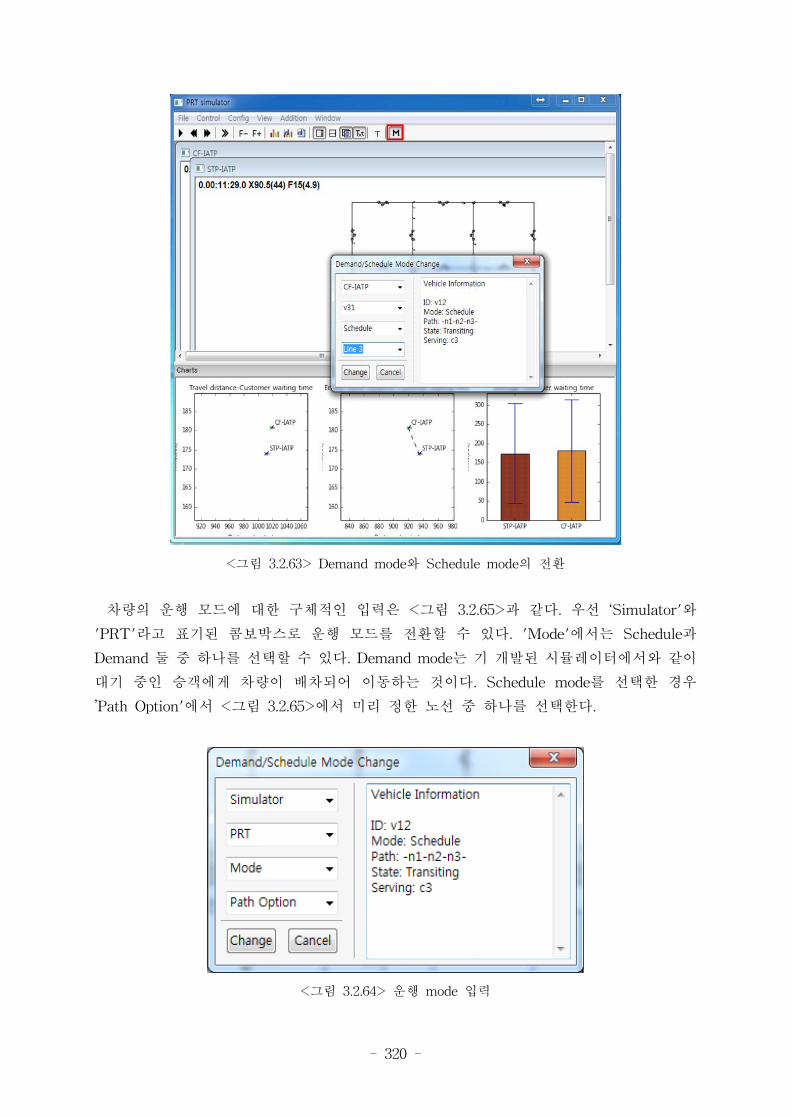
- 320 -
<그림 3.2.63> Demand mode와 Schedule mode의 전환
차량의 운행 모드에 대한 구체적인 입력은 <그림 3.2.65>과 같다. 우선 ‘Simulator'와
'PRT'라고 표기된 콤보박스로 운행 모드를 전환할 수 있다. 'Mode'에서는 Schedule과
Demand 둘 중 하나를 선택할 수 있다. Demand mode는 기 개발된 시뮬레이터에서와 같이
대기 중인 승객에게 차량이 배차되어 이동하는 것이다. Schedule mode를 선택한 경우
’Path Option'에서 <그림 3.2.65>에서 미리 정한 노선 중 하나를 선택한다.
<그림 3.2.64> 운행 mode 입력
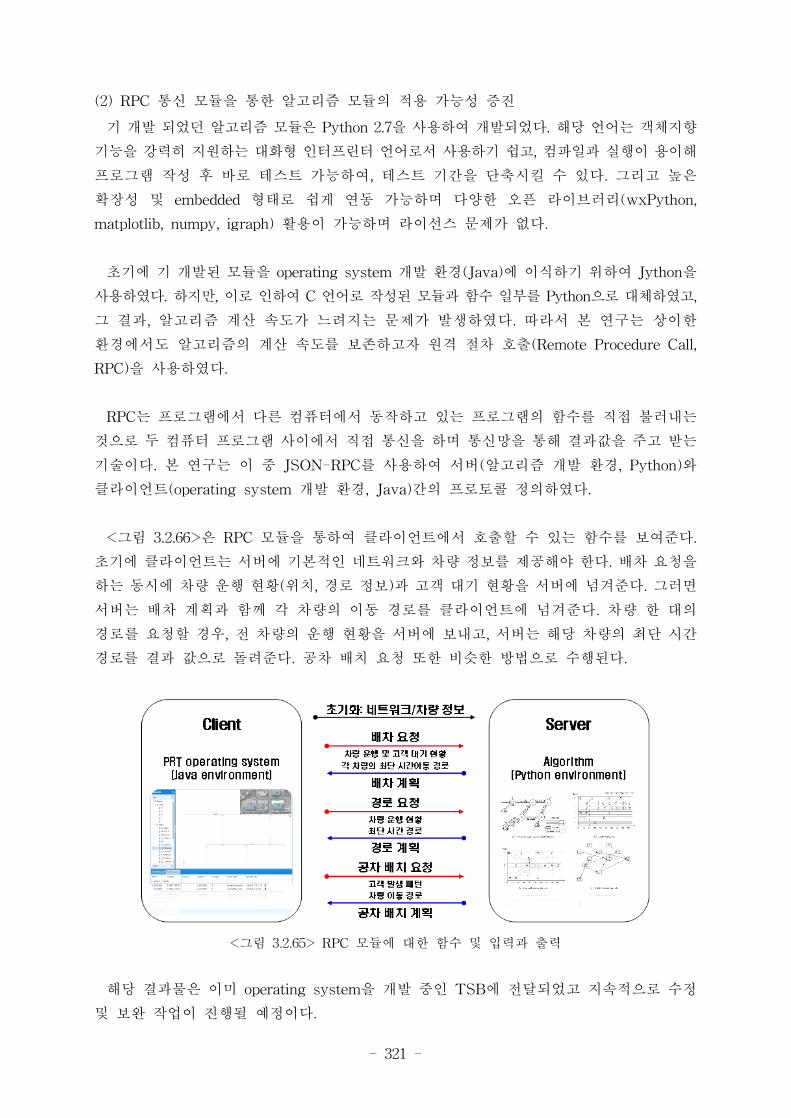
- 321 -
(2) RPC 통신 모듈을 통한 알고리즘 모듈의 적용 가능성 증진
기 개발 되었던 알고리즘 모듈은 Python 2.7을 사용하여 개발되었다. 해당 언어는 객체지향
기능을 강력히 지원하는 대화형 인터프린터 언어로서 사용하기 쉽고, 컴파일과 실행이 용이해
프로그램 작성 후 바로 테스트 가능하여, 테스트 기간을 단축시킬 수 있다. 그리고 높은
확장성 및 embedded 형태로 쉽게 연동 가능하며 다양한 오픈 라이브러리(wxPython,
matplotlib, numpy, igraph) 활용이 가능하며 라이선스 문제가 없다.
초기에 기 개발된 모듈을 operating system 개발 환경(Java)에 이식하기 위하여 Jython을
사용하였다. 하지만, 이로 인하여 C 언어로 작성된 모듈과 함수 일부를 Python으로 대체하였고,
그 결과, 알고리즘 계산 속도가 느려지는 문제가 발생하였다. 따라서 본 연구는 상이한
환경에서도 알고리즘의 계산 속도를 보존하고자 원격 절차 호출(Remote Procedure Call,
RPC)을 사용하였다.
RPC는 프로그램에서 다른 컴퓨터에서 동작하고 있는 프로그램의 함수를 직접 불러내는
것으로 두 컴퓨터 프로그램 사이에서 직접 통신을 하며 통신망을 통해 결과값을 주고 받는
기술이다. 본 연구는 이 중 JSON-RPC를 사용하여 서버(알고리즘 개발 환경, Python)와
클라이언트(operating system 개발 환경, Java)간의 프로토콜 정의하였다.
<그림 3.2.66>은 RPC 모듈을 통하여 클라이언트에서 호출할 수 있는 함수를 보여준다.
초기에 클라이언트는 서버에 기본적인 네트워크와 차량 정보를 제공해야 한다. 배차 요청을
하는 동시에 차량 운행 현황(위치, 경로 정보)과 고객 대기 현황을 서버에 넘겨준다. 그러면
서버는 배차 계획과 함께 각 차량의 이동 경로를 클라이언트에 넘겨준다. 차량 한 대의
경로를 요청할 경우, 전 차량의 운행 현황을 서버에 보내고, 서버는 해당 차량의 최단 시간
경로를 결과 값으로 돌려준다. 공차 배치 요청 또한 비슷한 방법으로 수행된다.
<그림 3.2.65> RPC 모듈에 대한 함수 및 입력과 출력
해당 결과물은 이미 operating system을 개발 중인 TSB에 전달되었고 지속적으로 수정
및 보완 작업이 진행될 예정이다.
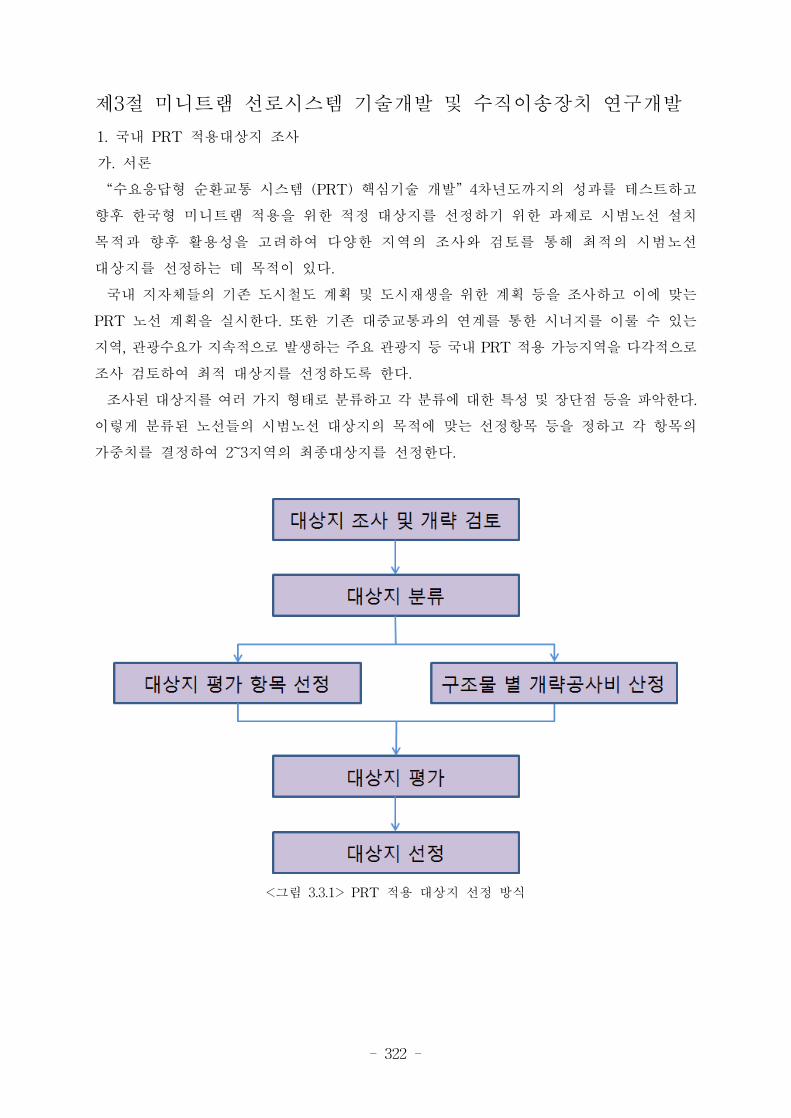
- 322 -
제3절 미니트램 선로시스템 기술개발 및 수직이송장치 연구개발
1. 국내 PRT 적용대상지 조사
가. 서론
“수요응답형 순환교통 시스템 (PRT) 핵심기술 개발” 4차년도까지의 성과를 테스트하고
향후 한국형 미니트램 적용을 위한 적정 대상지를 선정하기 위한 과제로 시범노선 설치
목적과 향후 활용성을 고려하여 다양한 지역의 조사와 검토를 통해 최적의 시범노선
대상지를 선정하는 데 목적이 있다.
국내 지자체들의 기존 도시철도 계획 및 도시재생을 위한 계획 등을 조사하고 이에 맞는
PRT 노선 계획을 실시한다. 또한 기존 대중교통과의 연계를 통한 시너지를 이룰 수 있는
지역, 관광수요가 지속적으로 발생하는 주요 관광지 등 국내 PRT 적용 가능지역을 다각적으로
조사 검토하여 최적 대상지를 선정하도록 한다.
조사된 대상지를 여러 가지 형태로 분류하고 각 분류에 대한 특성 및 장단점 등을 파악한다.
이렇게 분류된 노선들의 시범노선 대상지의 목적에 맞는 선정항목 등을 정하고 각 항목의
가중치를 결정하여 2~3지역의 최종대상지를 선정한다.
<그림 3.3.1> PRT 적용 대상지 선정 방식

- 323 -
나. 대상지 조사 및 개략검토
한국형 미니트램 시범노선 설치를 위한 대상지 선정을 위한 국내 각 지자체의 개발개획이
나 현재 설치 가능 지역 등을 다양한 시각으로 조사 및 검토하여야 한다.
그러한 방법으로 첫째, 정부에서 추진하고 있는 “도시재생 선도지역 사업”과 연관하여 현재
예전의 원도심으로 신도심 개발에 따라 구도심으로 밀려나 도시재생이 필요한 지역에 정부의
지원으로 재생사업을 시행하는 내용이다. 이에 미니트램 차량의 접목을 통하여 시너지 효과를
있을 수 있는 지역을 해당 지자체와의 협의를 통해 검토해보기로 한다.
`둘째, 관광노선이다. 국내에는 우수한 문화유적 및 자연경관을 소재로 관광을 테마로 한
지역이나 도시들이 많다. 이러한 관광지의 특징은 크게 범위에 따라 두 가지로 분류할 수
있다. 일정한 공간 또는 지역을 구획으로 하여 이용객들이 많은 이동 없이 관광을 할 수 있는
지역과 한 지자체나 여러 곳에 관광자원들이 산재해 있어서 별도의 이동수단이 필요한 경
우라 할 수 있다.
셋째, 기존 대중교통, 그 중 도시철도 등 철도시스템과의 연계노선이다. 철도는 많은 장점에도
불구하고 도로교통보다 취약점이 Door to Door 서비스라 말할 수 있다. 최근에는 많은
도시철도 및 경전철 등이 계획, 건설, 준공되어 예전보다 보다 많은 사람들이 철도시스템을
이용할 수 있게 되었다. 하지만 역세권 주거민을 제외한 나머지 이용객들은 별도의
대중교통이나 자가용 등을 이용하여 접근할 수 밖에 없는 구조이다. 또한 새로이 개발되는
지역의 경우 기존 철도시스템의 거리도 문제지만 개발 완료시 집중되는 수요에 의해 도로
혼잡 등 여러 가지 교통문제를 내포하고 있다. 이러한 문제점의 해결책 중 미니트램의 주요
수요발생지와 인근 도시철도와의 연계는 검토가 필요할 것으로 판단된다.
나머지 방법들은 공항, Complex 등 대규모 수요 밀집지역 내부 교통으로서의 미니트램
도입부분으로 검토해보도록 한다.
다. 시범노선 선정을 위한 자문회의
(1). 목적
한국형 미니트램 시범노선 선정을 위한 주요 검토 항목 및 고려사항에 대한 자문 및 미니트램
적용 가능 지역 추천을 목적으로 교통 및 수요 전문가의 의견을 취합.
(2). 자문회의 개요
- 일시 : 2015년 3월 25일 오후 3시
- 장소 : 서영엔지니어링 12층 회의실
- 참석인원
자문위원 : 김시곤 교수(과학기술대학교), 이성모 교수(서울대학교),
차동득 박사(교통환승센터)
한국철도기술연구원 : 정락교 책임연구원, 엄주환 책임연구원, 김백현 선임연구원
서영엔지니어링 : 김유봉 전무, 정상훈 부장
- 324 -
(3). 자문내용
(가) 김시곤 교수
¡ 기본원칙을 수립할 필요가 있음
‒ 가능한 지상(NOT 고가, 지하)으로 운행함으로써 입체화 구간을 최소화‒ 도로 또는 보행로와 공용으로 추진 (환경 친화적)‒ 건물 속까지 진입이 되도록 추진‒ 수요확보가 가능 지역 (관광지역, etc.)
¡ 주요 철도역 주변 대규모 고정 수요유발 지역 간 연결(연계)선으로 활용.
‒ 천안 아산역 ↔ Penta Port‒ 광교역 ↔ 주변 밀집지역‒ 동탄역 ↔ 주변 밀집지역‒ 인천국제공항 제2터미널 ↔ 장기주차장 등.
¡ 연계형과 자립 Network형으로 구분하여 접근할 필요가 있음.
‒ 연계형 : 주요 철도역, 공항, 터미널 등.‒ 자립 Network형 : 관광단지내, 방문지가 다양한 곳.
- 325 -
(나) 이성모 교수
¡ 본 시스템 개발에 따른 문제는 장기간 테스트를 하여 공무원들에게 설득하는 방안이 관권
‒ 현행 운행하는 사람‒ Bi-modal 등 고려해야할 것 (R/D 과제라 하더라도)
¡ 관련 법 체계 및 제도적인 체계 정비 등 법체계 구축할 필요가 있음
¡ 제주도의 경우 제주공항은 신공항 계획이 검토되고 있음을 감안할 필요가 있음
¡ 중문관광단지내 도입의 경우 국토연구원에서 현재 “제주미래 Vision”을 수립하고 있음을 감안할 필요가 있음
¡ 인천공항의 경우 현제 제2터미널과 KTX역사와 연계 방안 강구
¡ 판교IT밸리는 성남시에서 구상하고 있는 노면전차와 관계 정립
¡ 파주 캠프하우즈는 인구규모 등을 감안하여 수요발생을 근간으로 노선대 구축방안 강구
¡ 의왕역 – 철도박물관 노선을 TEST bed 차원에서 검토하되 다양한 노선 특성을 감안할 수 있는 체계를 구축할 것
¡ 경주보문관광단지 PRT노선을 기존 경북관광개발 공사에서 수립할 노면 Tram과의 역할 관계를 정립해야함
¡ 특히 PRT는 복잡한 Network 구축시 많은 노선을 접속하는 Node에서 방향별 운행으로 지정체 해소문제
¡ 안전문제도 노면교통과 보행안전 등 고려해야 하지만 차량내 승객 안전문제 방안강구
¡ 노선 설정시 수요예측으로 인해 통과인원(재차인원) 등을 고려하여 System을 구축할 것
¡ 오스트리아 등 동구유럽에 노면 Tram의 운행행태를 보면 2차선도로에서도 door-to-door로 운행하고 있는 점을 감안하여 PRT System을 검토할 필요가 있음
¡ 기존 PRT Korea회사에서 보유하고 있는 System적 차원에서 차별화와 특화 필요
¡ 친환경 교통수단 운행관점에서 온실가스 저감 방안을 기존 노면교통과 공신력있는 자료구축 요망
¡ 시범노선을 선정하여 우선 운행하되 신뢰성 등 확보
- 326 -
(다) 차동득 교수
¡ 노선선정에서 가급적 고가 건설을 피할 수 있는 곳부터가 바람직
¡ PRT는 보행 친화적 교통수단으로 고려가 필요10~15kph를 넘지 않는다고 보고, 보행자와 상충 우려는 최소가 가능
¡ 가급적 구조물화는 피하는 게 좋겠음
¡ 시범지로서 최적지는 판교 - 테크노밸리가 우선적으로 고려필요. 노선정비방향이 확정되어 있고, 보행자와 기존 개발상항과 조화에 유리
¡ 위례 신도시내 복정역-마천역 간 보행축에 대한 교통수단으로 필요
¡ 수요 규모, 특성 등에 따라 차량크기, 운영방식(PRT/GRT)등에 따라 노선 특성을 반영하여 추진 필요
(4). 자문회의 사진
<그림 3.3.2> 자문회의 진행
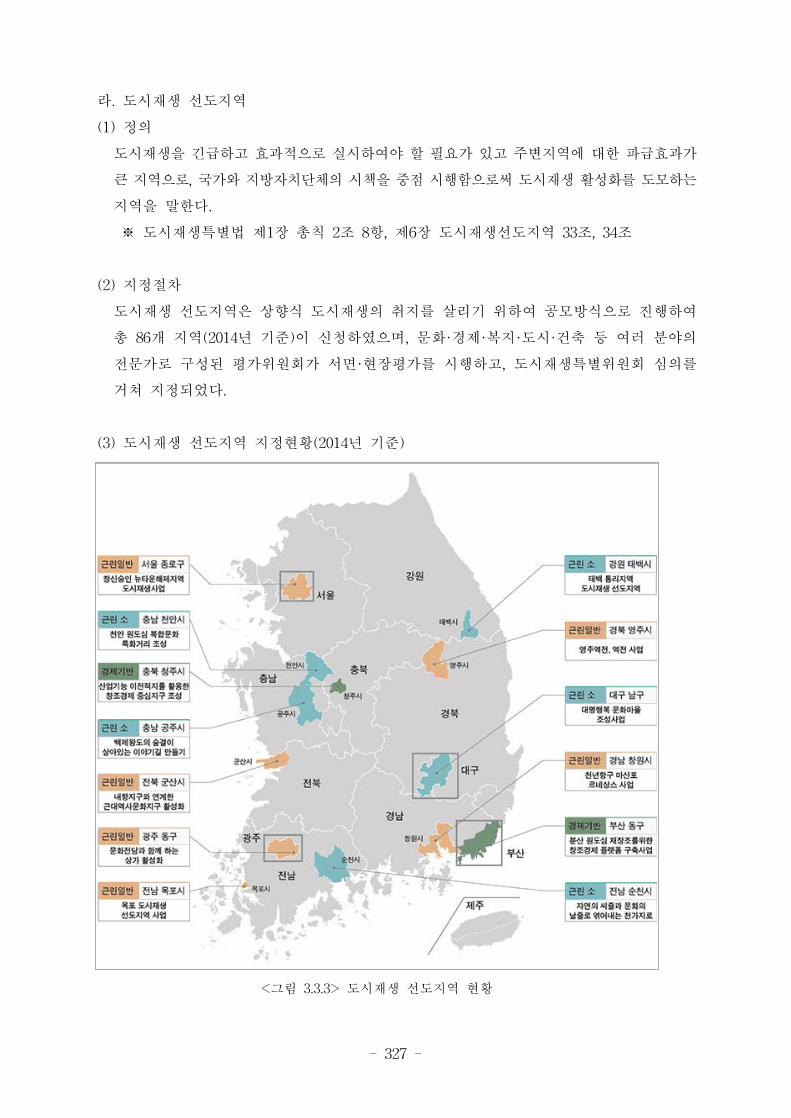
- 327 -
라. 도시재생 선도지역
(1) 정의
도시재생을 긴급하고 효과적으로 실시하여야 할 필요가 있고 주변지역에 대한 파급효과가
큰 지역으로, 국가와 지방자치단체의 시책을 중점 시행함으로써 도시재생 활성화를 도모하는
지역을 말한다.
※ 도시재생특별법 제1장 총칙 2조 8항, 제6장 도시재생선도지역 33조, 34조
(2) 지정절차
도시재생 선도지역은 상향식 도시재생의 취지를 살리기 위하여 공모방식으로 진행하여
총 86개 지역(2014년 기준)이 신청하였으며, 문화·경제·복지·도시·건축 등 여러 분야의
전문가로 구성된 평가위원회가 서면·현장평가를 시행하고, 도시재생특별위원회 심의를
거쳐 지정되었다.
(3) 도시재생 선도지역 지정현황(2014년 기준)
<그림 3.3.3> 도시재생 선도지역 현황
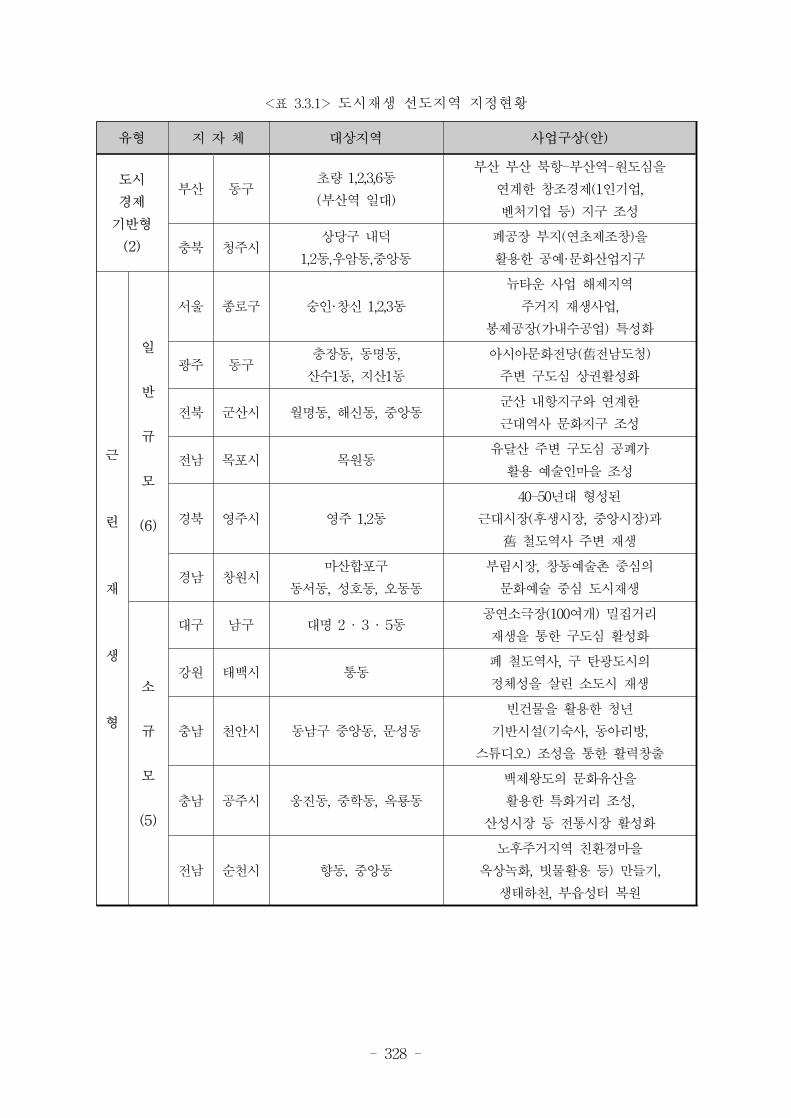
- 328 -
유형 지 자 체 대상지역 사업구상(안)
도시
경제
기반형
(2)
부산 동구초량 1,2,3,6동
(부산역 일대)
부산 부산 북항-부산역-원도심을
연계한 창조경제(1인기업,
벤처기업 등) 지구 조성
충북 청주시상당구 내덕
1,2동,우암동,중앙동
폐공장 부지(연초제조창)을
활용한 공예·문화산업지구
근
린
재
생
형
일
반
규
모
(6)
서울 종로구 숭인·창신 1,2,3동
뉴타운 사업 해제지역
주거지 재생사업,
봉제공장(가내수공업) 특성화
광주 동구충장동, 동명동,
산수1동, 지산1동
아시아문화전당(舊전남도청)
주변 구도심 상권활성화
전북 군산시 월명동, 해신동, 중앙동군산 내항지구와 연계한
근대역사 문화지구 조성
전남 목포시 목원동유달산 주변 구도심 공폐가
활용 예술인마을 조성
경북 영주시 영주 1,2동
40-50년대 형성된
근대시장(후생시장, 중앙시장)과
舊 철도역사 주변 재생
경남 창원시마산합포구
동서동, 성호동, 오동동
부림시장, 창동예술촌 중심의
문화예술 중심 도시재생
소
규
모
(5)
대구 남구 대명 2 · 3 · 5동공연소극장(100여개) 밀집거리
재생을 통한 구도심 활성화
강원 태백시 통동폐 철도역사, 구 탄광도시의
정체성을 살린 소도시 재생
충남 천안시 동남구 중앙동, 문성동
빈건물을 활용한 청년
기반시설(기숙사, 동아리방,
스튜디오) 조성을 통한 활력창출
충남 공주시 웅진동, 중학동, 옥룡동
백제왕도의 문화유산을
활용한 특화거리 조성,
산성시장 등 전통시장 활성화
전남 순천시 향동, 중앙동
노후주거지역 친환경마을
옥상녹화, 빗물활용 등) 만들기,
생태하천, 부읍성터 복원
<표 3.3.1> 도시재생 선도지역 지정현황
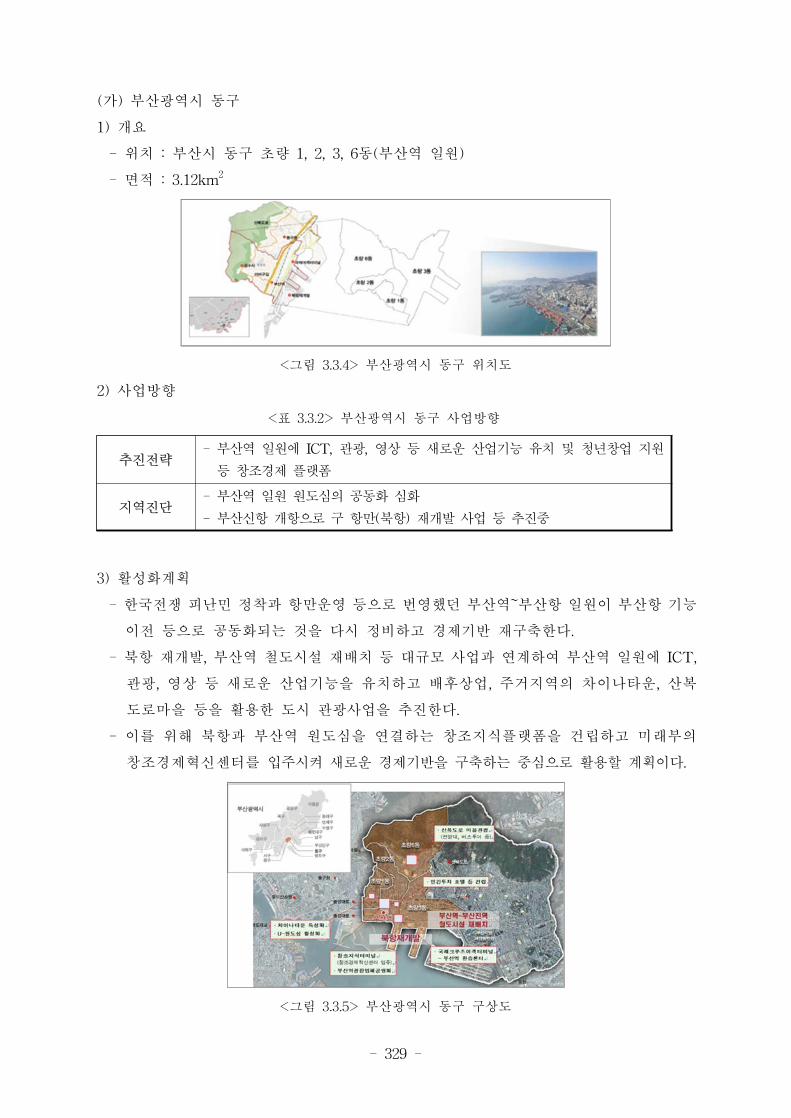
- 329 -
(가) 부산광역시 동구
1) 개요
- 위치 : 부산시 동구 초량 1, 2, 3, 6동(부산역 일원)
- 면적 : 3.12km2
<그림 3.3.4> 부산광역시 동구 위치도
2) 사업방향
추진전략- 부산역 일원에 ICT, 관광, 영상 등 새로운 산업기능 유치 및 청년창업 지원
등 창조경제 플랫폼
지역진단- 부산역 일원 원도심의 공동화 심화
- 부산신항 개항으로 구 항만(북항) 재개발 사업 등 추진중
<표 3.3.2> 부산광역시 동구 사업방향
3) 활성화계획
- 한국전쟁 피난민 정착과 항만운영 등으로 번영했던 부산역~부산항 일원이 부산항 기능
이전 등으로 공동화되는 것을 다시 정비하고 경제기반 재구축한다.
- 북항 재개발, 부산역 철도시설 재배치 등 대규모 사업과 연계하여 부산역 일원에 ICT,
관광, 영상 등 새로운 산업기능을 유치하고 배후상업, 주거지역의 차이나타운, 산복
도로마을 등을 활용한 도시 관광사업을 추진한다.
- 이를 위해 북항과 부산역 원도심을 연결하는 창조지식플랫폼을 건립하고 미래부의
창조경제혁신센터를 입주시켜 새로운 경제기반을 구축하는 중심으로 활용할 계획이다.
<그림 3.3.5> 부산광역시 동구 구상도
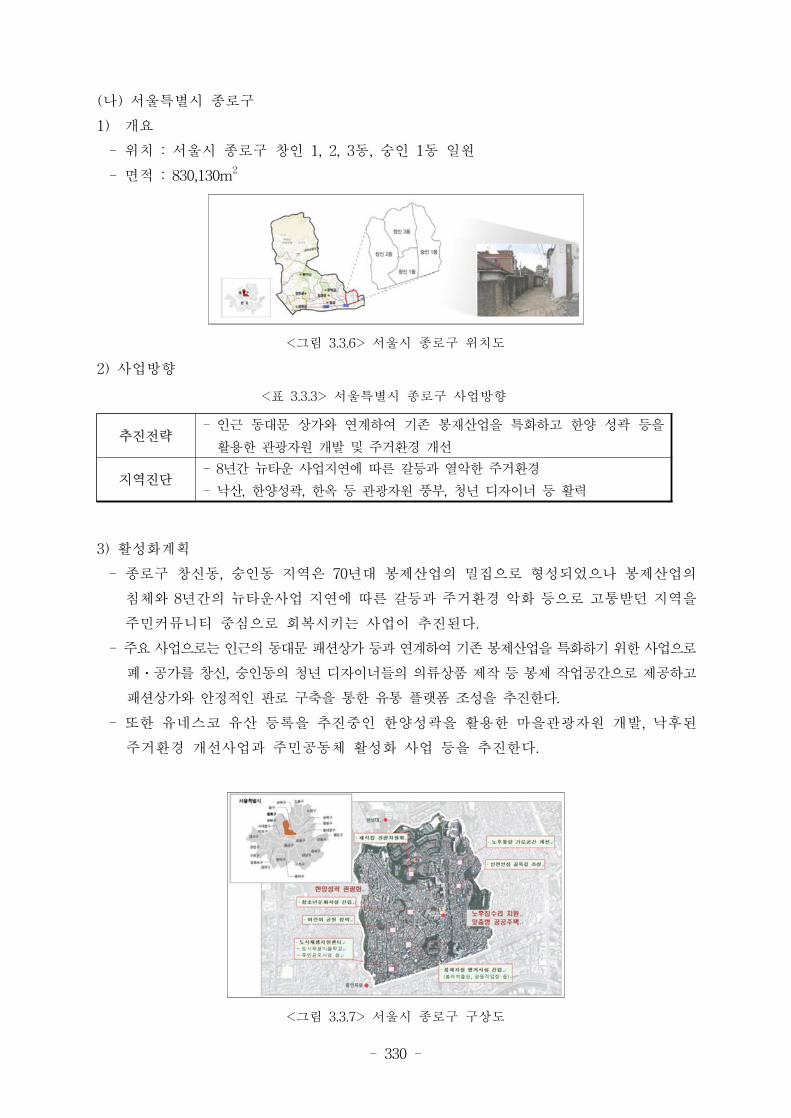
- 330 -
(나) 서울특별시 종로구
1) 개요
- 위치 : 서울시 종로구 창인 1, 2, 3동, 숭인 1동 일원
- 면적 : 830,130m2
<그림 3.3.6> 서울시 종로구 위치도
2) 사업방향
추진전략- 인근 동대문 상가와 연계하여 기존 봉재산업을 특화하고 한양 성곽 등을
활용한 관광자원 개발 및 주거환경 개선
지역진단- 8년간 뉴타운 사업지연에 따른 갈등과 열악한 주거환경
- 낙산, 한양성곽, 한옥 등 관광자원 풍부, 청년 디자이너 등 활력
<표 3.3.3> 서울특별시 종로구 사업방향
3) 활성화계획
- 종로구 창신동, 숭인동 지역은 70년대 봉제산업의 밀집으로 형성되었으나 봉제산업의
침체와 8년간의 뉴타운사업 지연에 따른 갈등과 주거환경 악화 등으로 고통받던 지역을
주민커뮤니티 중심으로 회복시키는 사업이 추진된다.
- 주요사업으로는인근의동대문패션상가등과연계하여기존봉제산업을특화하기위한사업으로
폐․공가를창신, 숭인동의청년디자이너들의의류상품제작등봉제작업공간으로제공하고
패션상가와 안정적인 판로 구축을 통한 유통 플랫폼 조성을 추진한다.
- 또한 유네스코 유산 등록을 추진중인 한양성곽을 활용한 마을관광자원 개발, 낙후된
주거환경 개선사업과 주민공동체 활성화 사업 등을 추진한다.
<그림 3.3.7> 서울시 종로구 구상도
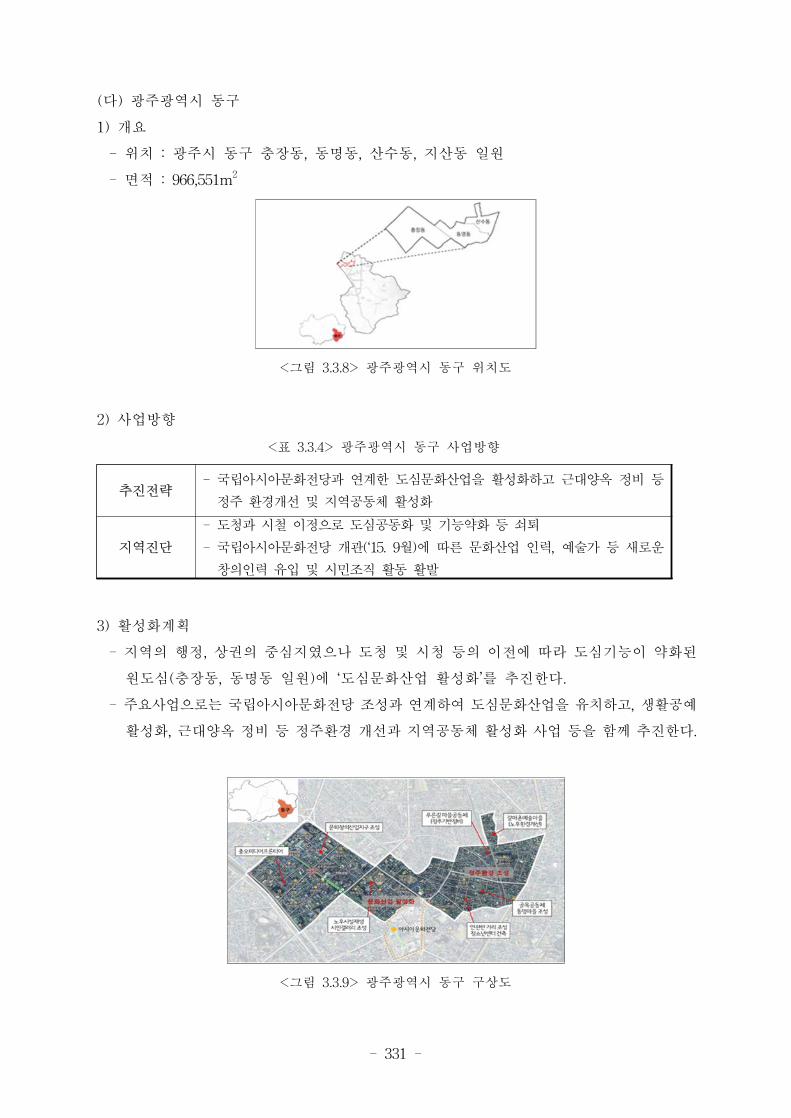
- 331 -
(다) 광주광역시 동구
1) 개요
- 위치 : 광주시 동구 충장동, 동명동, 산수동, 지산동 일원
- 면적 : 966,551m2
<그림 3.3.8> 광주광역시 동구 위치도
2) 사업방향
추진전략- 국립아시아문화전당과 연계한 도심문화산업을 활성화하고 근대양옥 정비 등
정주 환경개선 및 지역공동체 활성화
지역진단
- 도청과 시철 이정으로 도심공동화 및 기능약화 등 쇠퇴
- 국립아시아문화전당 개관(‘15. 9월)에 따른 문화산업 인력, 예술가 등 새로운
창의인력 유입 및 시민조직 활동 활발
<표 3.3.4> 광주광역시 동구 사업방향
3) 활성화계획
- 지역의 행정, 상권의 중심지였으나 도청 및 시청 등의 이전에 따라 도심기능이 약화된
원도심(충장동, 동명동 일원)에 ‘도심문화산업 활성화’를 추진한다.
- 주요사업으로는 국립아시아문화전당 조성과 연계하여 도심문화산업을 유치하고, 생활공예
활성화, 근대양옥 정비 등 정주환경 개선과 지역공동체 활성화 사업 등을 함께 추진한다.
<그림 3.3.9> 광주광역시 동구 구상도
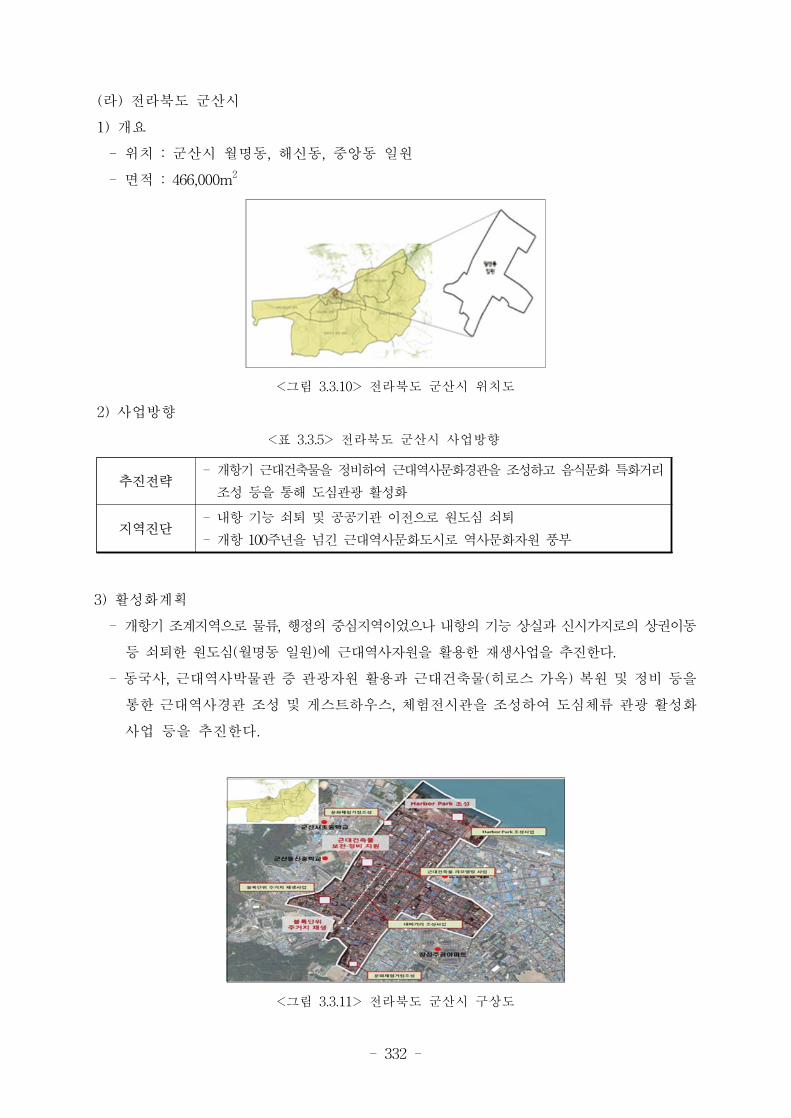
- 332 -
(라) 전라북도 군산시
1) 개요
- 위치 : 군산시 월명동, 해신동, 중앙동 일원
- 면적 : 466,000m2
<그림 3.3.10> 전라북도 군산시 위치도
2) 사업방향
추진전략- 개항기 근대건축물을 정비하여 근대역사문화경관을 조성하고 음식문화 특화거리
조성 등을 통해 도심관광 활성화
지역진단- 내항 기능 쇠퇴 및 공공기관 이전으로 원도심 쇠퇴
- 개항 100주년을 넘긴 근대역사문화도시로 역사문화자원 풍부
<표 3.3.5> 전라북도 군산시 사업방향
3) 활성화계획
- 개항기조계지역으로물류, 행정의중심지역이었으나내항의기능상실과신시가지로의상권이동
등 쇠퇴한 원도심(월명동 일원)에 근대역사자원을 활용한 재생사업을 추진한다.
- 동국사, 근대역사박물관 증 관광자원 활용과 근대건축물(히로스 가옥) 복원 및 정비 등을
통한 근대역사경관 조성 및 게스트하우스, 체험전시관을 조성하여 도심체류 관광 활성화
사업 등을 추진한다.
<그림 3.3.11> 전라북도 군산시 구상도
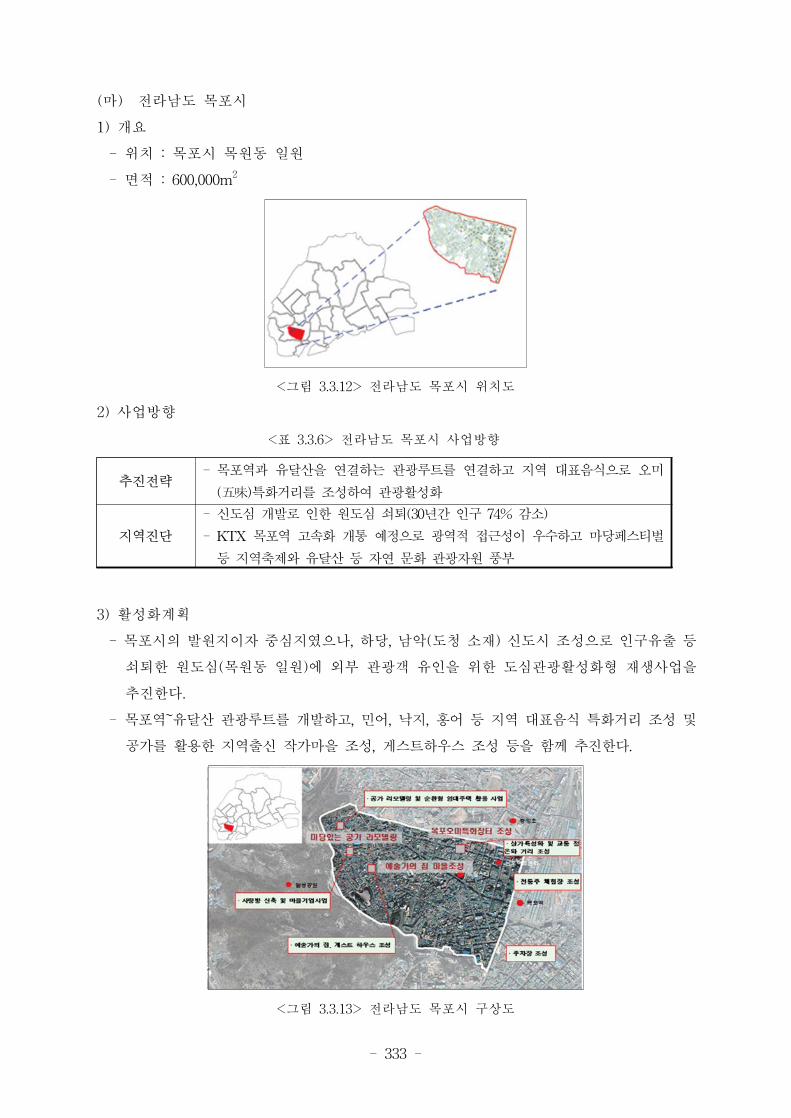
- 333 -
(마) 전라남도 목포시
1) 개요
- 위치 : 목포시 목원동 일원
- 면적 : 600,000m2
<그림 3.3.12> 전라남도 목포시 위치도
2) 사업방향
추진전략- 목포역과 유달산을 연결하는 관광루트를 연결하고 지역 대표음식으로 오미
(五味)특화거리를 조성하여 관광활성화
지역진단
- 신도심 개발로 인한 원도심 쇠퇴(30년간 인구 74% 감소)
- KTX 목포역 고속화 개통 예정으로 광역적 접근성이 우수하고 마당페스티벌
등 지역축제와 유달산 등 자연 문화 관광자원 풍부
<표 3.3.6> 전라남도 목포시 사업방향
3) 활성화계획
- 목포시의 발원지이자 중심지였으나, 하당, 남악(도청 소재) 신도시 조성으로 인구유출 등
쇠퇴한 원도심(목원동 일원)에 외부 관광객 유인을 위한 도심관광활성화형 재생사업을
추진한다.
- 목포역~유달산 관광루트를 개발하고, 민어, 낙지, 홍어 등 지역 대표음식 특화거리 조성 및
공가를 활용한 지역출신 작가마을 조성, 게스트하우스 조성 등을 함께 추진한다.
<그림 3.3.13> 전라남도 목포시 구상도
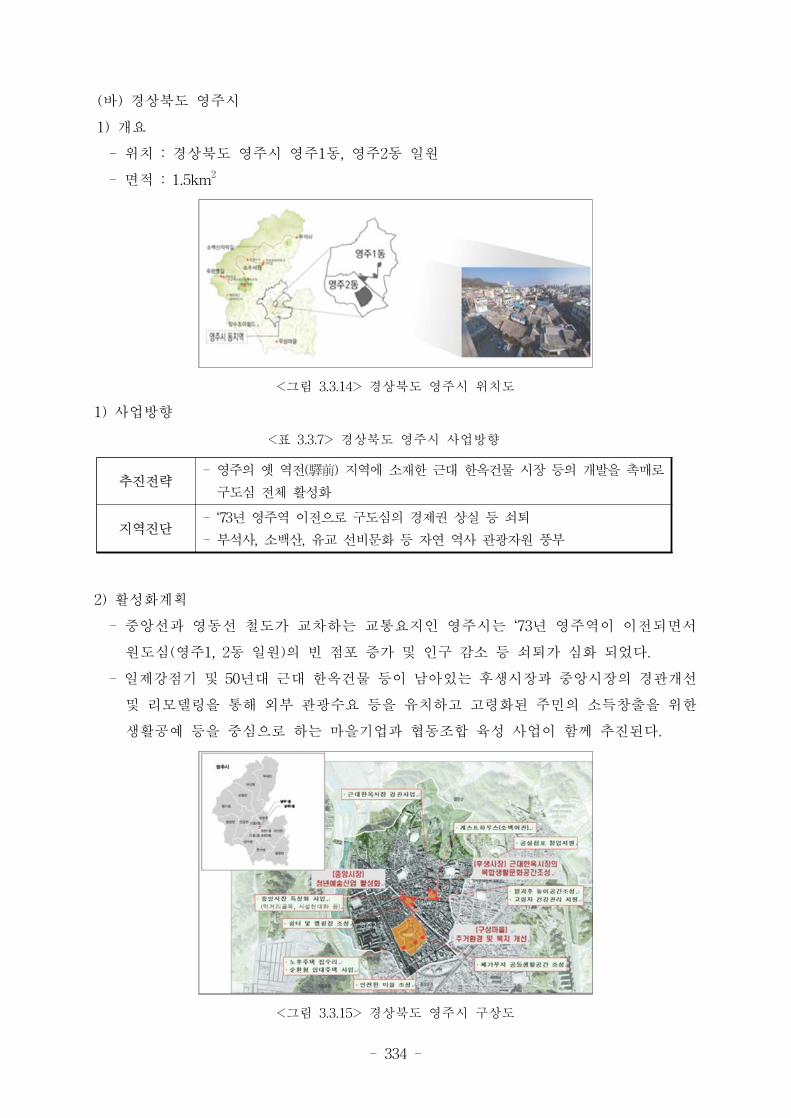
- 334 -
(바) 경상북도 영주시
1) 개요
- 위치 : 경상북도 영주시 영주1동, 영주2동 일원
- 면적 : 1.5km2
<그림 3.3.14> 경상북도 영주시 위치도
1) 사업방향
추진전략- 영주의 옛 역전(驛前) 지역에 소재한 근대 한옥건물 시장 등의 개발을 촉매로
구도심 전체 활성화
지역진단- ‘73년 영주역 이전으로 구도심의 경제권 상실 등 쇠퇴
- 부석사, 소백산, 유교 선비문화 등 자연 역사 관광자원 풍부
<표 3.3.7> 경상북도 영주시 사업방향
2) 활성화계획
- 중앙선과 영동선 철도가 교차하는 교통요지인 영주시는 ‘73년 영주역이 이전되면서
원도심(영주1, 2동 일원)의 빈 점포 증가 및 인구 감소 등 쇠퇴가 심화 되었다.
- 일제강점기 및 50년대 근대 한옥건물 등이 남아있는 후생시장과 중앙시장의 경관개선
및 리모델링을 통해 외부 관광수요 등을 유치하고 고령화된 주민의 소득창출을 위한
생활공예 등을 중심으로 하는 마을기업과 협동조합 육성 사업이 함께 추진된다.
<그림 3.3.15> 경상북도 영주시 구상도
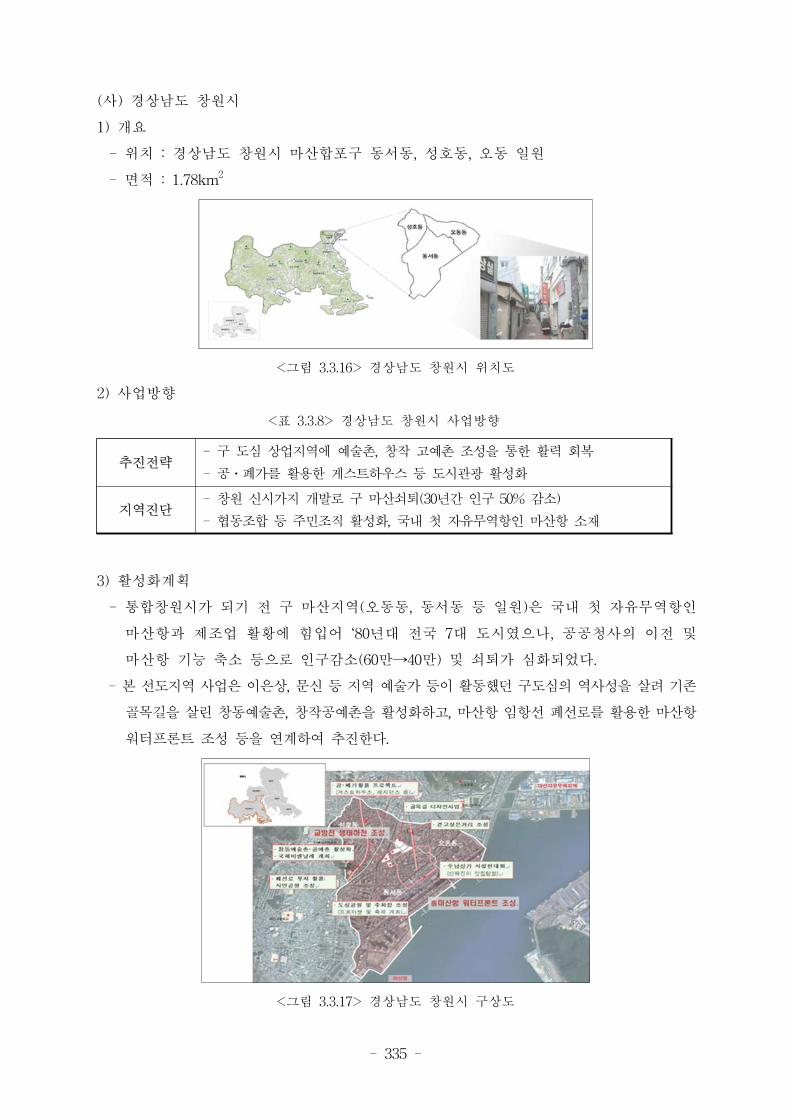
- 335 -
(사) 경상남도 창원시
1) 개요
- 위치 : 경상남도 창원시 마산합포구 동서동, 성호동, 오동 일원
- 면적 : 1.78km2
<그림 3.3.16> 경상남도 창원시 위치도
2) 사업방향
추진전략- 구 도심 상업지역에 예술촌, 창작 고예촌 조성을 통한 활력 회복
- 공․폐가를 활용한 게스트하우스 등 도시관광 활성화
지역진단- 창원 신시가지 개발로 구 마산쇠퇴(30년간 인구 50% 감소)
- 협동조합 등 주민조직 활성화, 국내 첫 자유무역항인 마산항 소재
<표 3.3.8> 경상남도 창원시 사업방향
3) 활성화계획
- 통합창원시가 되기 전 구 마산지역(오동동, 동서동 등 일원)은 국내 첫 자유무역항인
마산항과 제조업 활황에 힘입어 ‘80년대 전국 7대 도시였으나, 공공청사의 이전 및
마산항 기능 축소 등으로 인구감소(60만→40만) 및 쇠퇴가 심화되었다.
- 본 선도지역 사업은 이은상, 문신 등 지역 예술가 등이활동했던 구도심의 역사성을 살려 기존
골목길을 살린 창동예술촌, 창작공예촌을 활성화하고, 마산항 임항선 폐선로를 활용한 마산항
워터프론트 조성 등을 연계하여 추진한다.
<그림 3.3.17> 경상남도 창원시 구상도
- 336 -
(아) 대구광역시 남구
1) 개요
- 위치 : 대구광역시 남구 대명 2, 3, 5동
- 면적 : 2.0km2
<그림 3.3.18> 대구광역시 남구 위치도
2) 사업방향
추진전략- 예술학교 등과 연계한 공연문화거리 특화 및 사회적 약자를 위한 복지시설
및 서비스 확충 등 복지문화형 재생
지역진단
- 지역 대학 이전에 따른 도심 쇠퇴 및 취약계층 밀집
- 대명공연문화거리를 중심으로 공연 예술관련 인적자원과 영남대, 대구교대 등
복지관련 인프라 및 인적자원 풍부
<표 3.3.9> 대구광역시 남구 사업방향
3) 활성화계획
- 대학 캠퍼스 외곽 이전에 따른 상권 침체와 취약계층이 밀집한 주거지 노후화 등
주거환경이 악화된 지역(대명동 일원)에 ‘복지문화형’재생사업을 추진한다.
- 선도지역 사업은 사회적 약자를 위한 안전한 생활환경 조성 및 보건 의료관련 대학과 연계한
건강, 복지 프로그램을 운영하고 예술고, 대학, 공연예술인 등과 연계하여 생활문화 및
공연문화 활성화사업 등이 함께 추진된다.
<그림 3.3.19> 대구광역시 남구 구상도
- 337 -
(자) 강원도 태백시
1) 개요
- 위치 : 강원도 태백시 통동 일원
- 면적 : 110,000m2
<그림 3.3.20> 강원도 태백시 위치도
2) 사업방향
추진전략- 공가를 활용한 보건, 보육시설 등 주민편의시설을 확충하고 자연자원을 활용한
마을기업 등 주민소득 창출 및 공동체 활성화
지역진단
- 탄광산업 사양화로 인구감소, 상권 침체 등 쇠퇴 심화
- 통리 10일장, 구 통리역 등의 지역자원 및 청정한 자연환경 보유, 인근 철도
테마 리조트 개장(‘14년 10월)에 따른 방문객 증가 기대
<표 3.3.10> 강원도 태백시 사업방향
3) 활성화계획
- 80년대까지 석탄산업의 절정기에 지역상권의 중심지였으나, 석탄산업 사양화에 따른
쇠퇴지역(통동 일원)에 주민 복지 중심의 재생사업을 추진한다.
- 공․폐가를 활용하여 보건, 보육시설 등 주민 편의․복지시설을 확충하고, 지역의 자연자원을
활용한 마을기업 육성 및 탄광촌의 유휴시설을 활용한 관광자원화 등 주민 일자리 창출
사업이 함께 추진된다.
<그림 3.3.21> 강원도 태백시 구상도

- 338 -
(차) 충청남도 천안시
1) 개요
- 위치 : 충청남도 천안시 동남구 중앙동, 문성동 일원
- 면적 : 196,000m2
<그림 3.3.22> 충청남도 천안시 위치도
2) 사업방향
추진전략- 빈건물을 활용한 대학생 기숙사 창업공간을 조성하고 다문화 특화거리와
지원센터를 조성하여 천안역 역세권 활성화
지역진단
- 주요 공공기관의 신시가지 이전에 따른 원도심 쇠퇴
- 천안역 인근 지역대학(11개)과 산업단지(9개) 등 청년층의 문화수요와 외국인
학생, 근로자 등 다문화관련 서비스 수요 증대
<표 3.3.11> 충청남도 천안시 사업방향
3) 활성화계획
- 천안시의 행정, 문화, 상권의 중심이었으나 시청, 경찰서 등의 신시가지 이전으로 쇠퇴한
천안역 일원에 ‘청년문화, 다문화’중심의 역세권 활성화를 추진한다.
- 인근 지역대학, 산업단지 등 증가하는 청년층 및 외국인 학생근로자 등 다문화계층을 위해
빈건물을활용한대학생커뮤니티기숙사및창업, 창작공간을조성하고, 다문화 특화거리와
다문화 지원센터 조성 등을 함께 추진한다.
<그림 3.3.23> 충청남도 천안시 구상도
- 339 -
(카) 충청남도 공주시
1) 개요
- 위치 : 충청남도 공주시 웅진동, 중학동, 옥룡동 일원
- 면적 : 10.3km2
<그림 3.3.23> 충청남도 공주시 위치도
2) 사업방향
추진전략- 역사관광거점을 연결하는 이야기길과 문화예술촌 등을 조성하고 편의시설을
확충하여 도심관광객 유치 등 원도심 활성화
지역진단
- 도청 이전 및 신도심 개발에 따른 원도심 쇠퇴
- 무령왕릉, 공산성 등 고도(高度)의 역사문화자원이 풍부하고, 주민조직 및
문화공동체 기반의 역사문화관광 활성화 모색 활발
<표 3.3.12> 충청남도 공주시 사업방향
3) 활성화계획
- 외곽개발로 인한 인구유출 및 문화재 보존에 치중한 환경 정비 소홀로 쇠퇴한 원도심
(웅진동, 중학동 일원)에 고도(高度)의 풍부한 역사문화자원을 활용한 재생사업을 추진한다.
- 주요 사업으로는무령왕릉, 공산성등관광자원과연계하여원도심곳곳에테마가있는이야기
길을조성하고, 관광객편의를위한보행및가로환경정비등을통한도심관광활성화를추진한다.
<그림 3.3.24> 충청남도 공주시 구상도
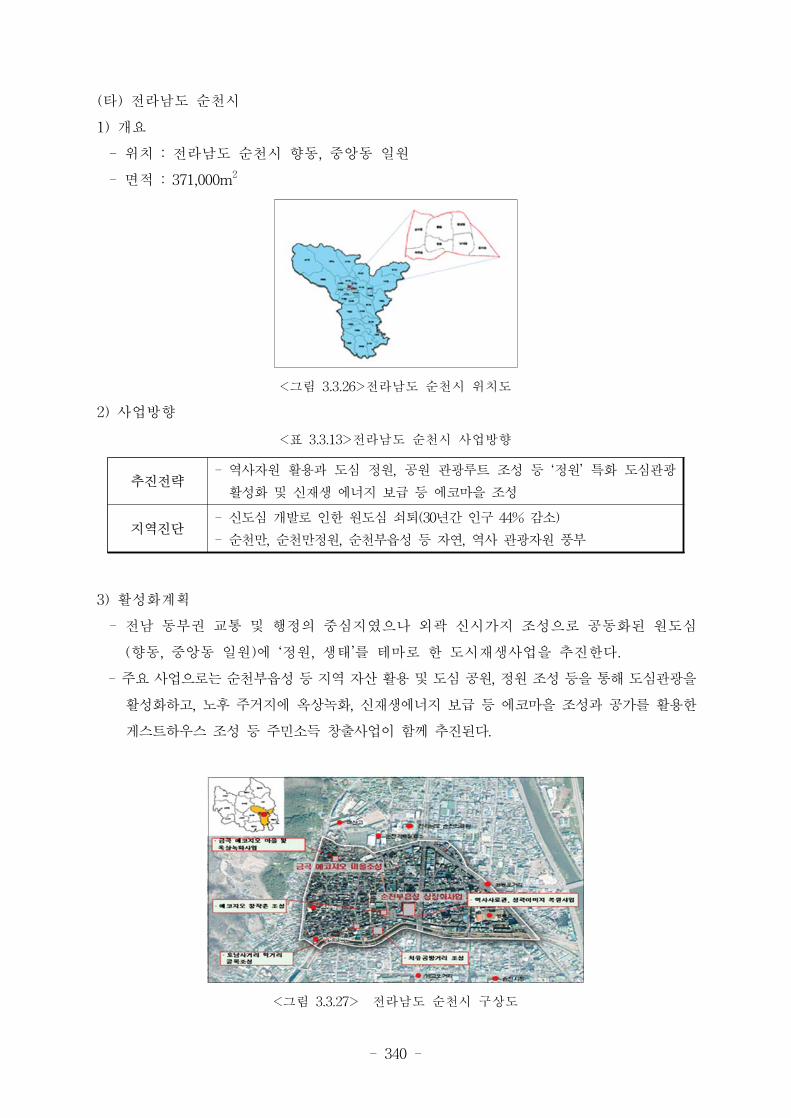
- 340 -
(타) 전라남도 순천시
1) 개요
- 위치 : 전라남도 순천시 향동, 중앙동 일원
- 면적 : 371,000m2
<그림 3.3.26>전라남도 순천시 위치도
2) 사업방향
추진전략- 역사자원 활용과 도심 정원, 공원 관광루트 조성 등 ‘정원’ 특화 도심관광
활성화 및 신재생 에너지 보급 등 에코마을 조성
지역진단- 신도심 개발로 인한 원도심 쇠퇴(30년간 인구 44% 감소)
- 순천만, 순천만정원, 순천부읍성 등 자연, 역사 관광자원 풍부
<표 3.3.13>전라남도 순천시 사업방향
3) 활성화계획
- 전남 동부권 교통 및 행정의 중심지였으나 외곽 신시가지 조성으로 공동화된 원도심
(향동, 중앙동 일원)에 ‘정원, 생태’를 테마로 한 도시재생사업을 추진한다.
- 주요사업으로는순천부읍성등지역자산활용및도심공원, 정원조성등을통해도심관광을
활성화하고, 노후 주거지에 옥상녹화, 신재생에너지 보급 등 에코마을 조성과 공가를 활용한
게스트하우스 조성 등 주민소득 창출사업이 함께 추진된다.
<그림 3.3.27> 전라남도 순천시 구상도
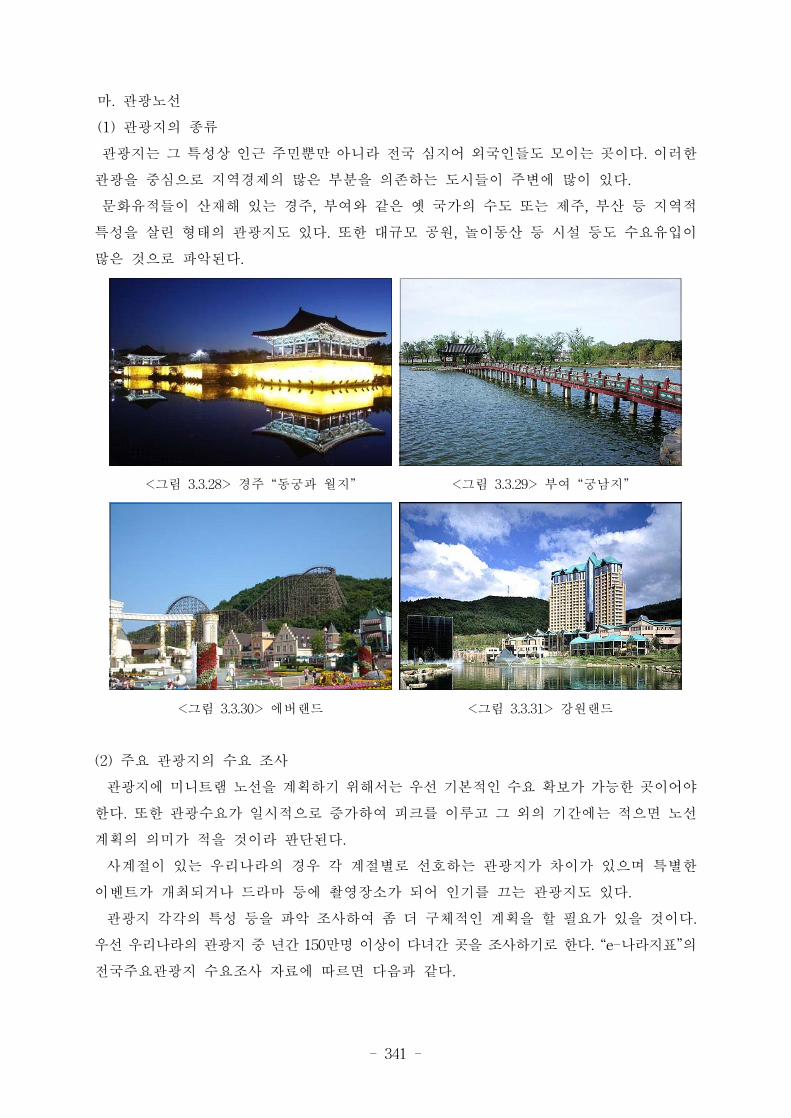
- 341 -
마. 관광노선
(1) 관광지의 종류
관광지는 그 특성상 인근 주민뿐만 아니라 전국 심지어 외국인들도 모이는 곳이다. 이러한
관광을 중심으로 지역경제의 많은 부분을 의존하는 도시들이 주변에 많이 있다.
문화유적들이 산재해 있는 경주, 부여와 같은 옛 국가의 수도 또는 제주, 부산 등 지역적
특성을 살린 형태의 관광지도 있다. 또한 대규모 공원, 놀이동산 등 시설 등도 수요유입이
많은 것으로 파악된다.
<그림 3.3.28> 경주 “동궁과 월지” <그림 3.3.29> 부여 “궁남지”
<그림 3.3.30> 에버랜드 <그림 3.3.31> 강원랜드
(2) 주요 관광지의 수요 조사
관광지에 미니트램 노선을 계획하기 위해서는 우선 기본적인 수요 확보가 가능한 곳이어야
한다. 또한 관광수요가 일시적으로 증가하여 피크를 이루고 그 외의 기간에는 적으면 노선
계획의 의미가 적을 것이라 판단된다.
사계절이 있는 우리나라의 경우 각 계절별로 선호하는 관광지가 차이가 있으며 특별한
이벤트가 개최되거나 드라마 등에 촬영장소가 되어 인기를 끄는 관광지도 있다.
관광지 각각의 특성 등을 파악 조사하여 좀 더 구체적인 계획을 할 필요가 있을 것이다.
우선 우리나라의 관광지 중 년간 150만명 이상이 다녀간 곳을 조사하기로 한다. “e-나라지표”의
전국주요관광지 수요조사 자료에 따르면 다음과 같다.
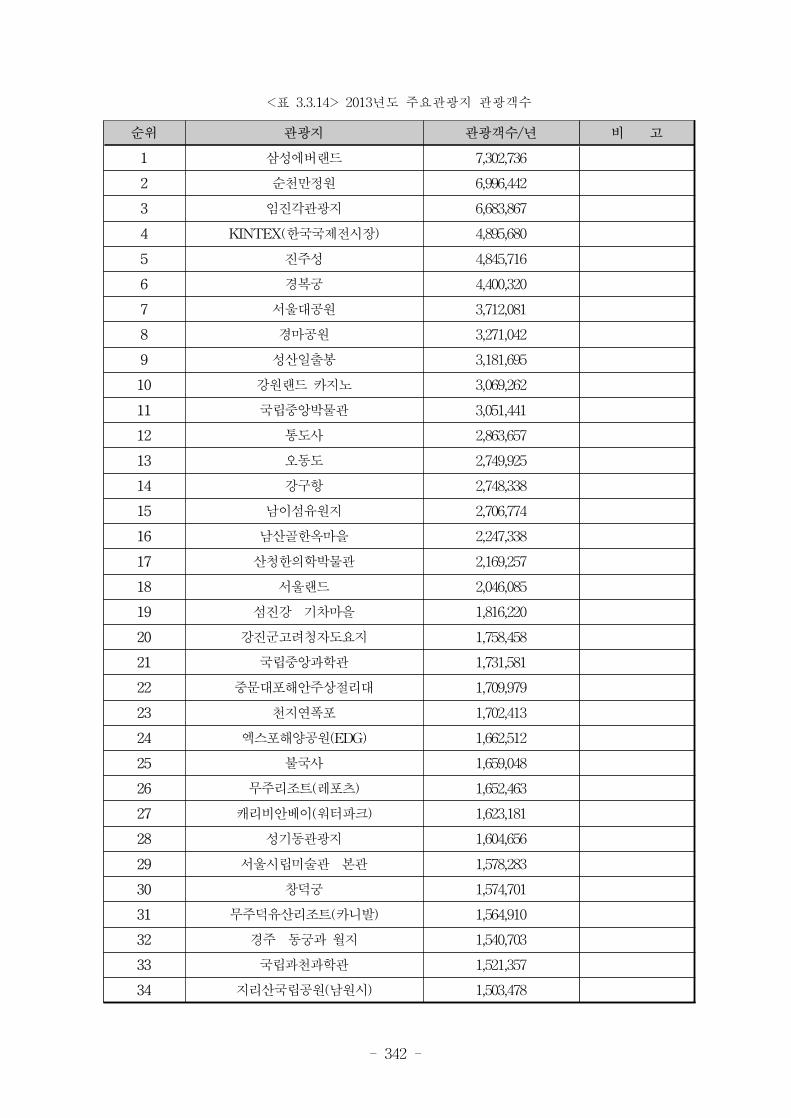
- 342 -
순위 관광지 관광객수/년 비 고
1 삼성에버랜드 7,302,736
2 순천만정원 6,996,442
3 임진각관광지 6,683,867
4 KINTEX(한국국제전시장) 4,895,680
5 진주성 4,845,716
6 경복궁 4,400,320
7 서울대공원 3,712,081
8 경마공원 3,271,042
9 성산일출봉 3,181,695
10 강원랜드 카지노 3,069,262
11 국립중앙박물관 3,051,441
12 통도사 2,863,657
13 오동도 2,749,925
14 강구항 2,748,338
15 남이섬유원지 2,706,774
16 남산골한옥마을 2,247,338
17 산청한의학박물관 2,169,257
18 서울랜드 2,046,085
19 섬진강 기차마을 1,816,220
20 강진군고려청자도요지 1,758,458
21 국립중앙과학관 1,731,581
22 중문대포해안주상절리대 1,709,979
23 천지연폭포 1,702,413
24 엑스포해양공원(EDG) 1,662,512
25 불국사 1,659,048
26 무주리조트(레포츠) 1,652,463
27 캐리비안베이(워터파크) 1,623,181
28 성기동관광지 1,604,656
29 서울시립미술관 본관 1,578,283
30 창덕궁 1,574,701
31 무주덕유산리조트(카니발) 1,564,910
32 경주 동궁과 월지 1,540,703
33 국립과천과학관 1,521,357
34 지리산국립공원(남원시) 1,503,478
<표 3.3.14> 2013년도 주요관광지 관광객수
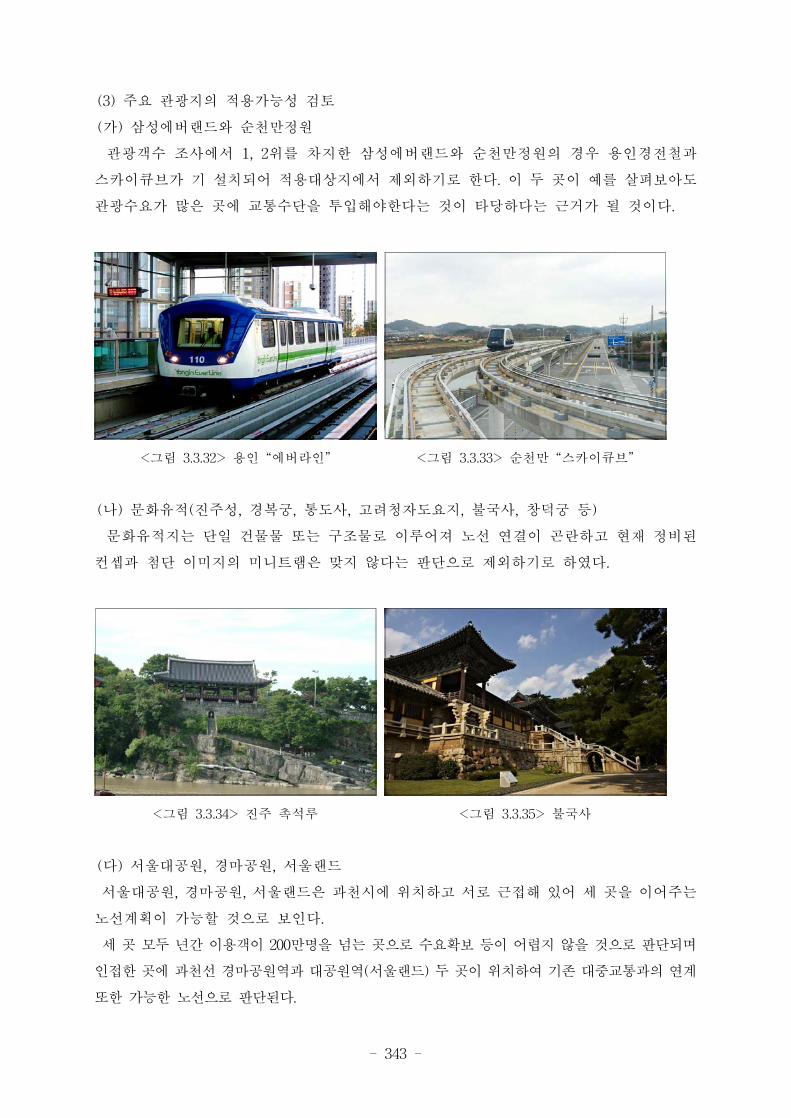
- 343 -
(3) 주요 관광지의 적용가능성 검토
(가) 삼성에버랜드와 순천만정원
관광객수 조사에서 1, 2위를 차지한 삼성에버랜드와 순천만정원의 경우 용인경전철과
스카이큐브가 기 설치되어 적용대상지에서 제외하기로 한다. 이 두 곳이 예를 살펴보아도
관광수요가 많은 곳에 교통수단을 투입해야한다는 것이 타당하다는 근거가 될 것이다.
<그림 3.3.32> 용인 “에버라인” <그림 3.3.33> 순천만 “스카이큐브”
(나) 문화유적(진주성, 경복궁, 통도사, 고려청자도요지, 불국사, 창덕궁 등)
문화유적지는 단일 건물물 또는 구조물로 이루어져 노선 연결이 곤란하고 현재 정비된
컨셉과 첨단 이미지의 미니트램은 맞지 않다는 판단으로 제외하기로 하였다.
<그림 3.3.34> 진주 촉석루 <그림 3.3.35> 불국사
(다) 서울대공원, 경마공원, 서울랜드
서울대공원, 경마공원, 서울랜드은 과천시에 위치하고 서로 근접해 있어 세 곳을 이어주는
노선계획이 가능할 것으로 보인다.
세 곳 모두 년간 이용객이 200만명을 넘는 곳으로 수요확보 등이 어렵지 않을 것으로 판단되며
인접한 곳에 과천선 경마공원역과 대공원역(서울랜드) 두 곳이 위치하여 기존 대중교통과의 연계
또한 가능한 노선으로 판단된다.
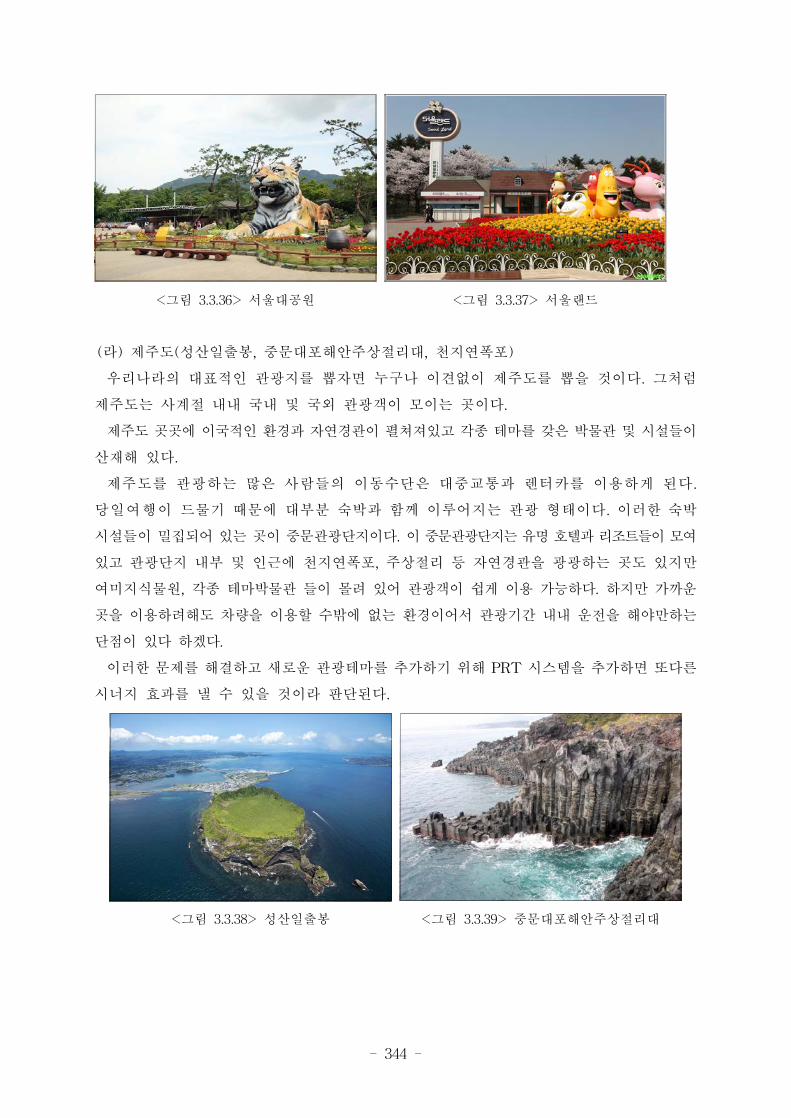
- 344 -
<그림 3.3.36> 서울대공원 <그림 3.3.37> 서울랜드
(라) 제주도(성산일출봉, 중문대포해안주상절리대, 천지연폭포)
우리나라의 대표적인 관광지를 뽑자면 누구나 이견없이 제주도를 뽑을 것이다. 그처럼
제주도는 사계절 내내 국내 및 국외 관광객이 모이는 곳이다.
제주도 곳곳에 이국적인 환경과 자연경관이 펼쳐져있고 각종 테마를 갖은 박물관 및 시설들이
산재해 있다.
제주도를 관광하는 많은 사람들의 이동수단은 대중교통과 렌터카를 이용하게 된다.
당일여행이 드물기 때문에 대부분 숙박과 함께 이루어지는 관광 형태이다. 이러한 숙박
시설들이 밀집되어 있는 곳이 중문관광단지이다. 이중문관광단지는유명호텔과리조트들이모여
있고 관광단지 내부 및 인근에 천지연폭포, 주상절리 등 자연경관을 광광하는 곳도 있지만
여미지식물원, 각종 테마박물관 들이 몰려 있어 관광객이 쉽게 이용 가능하다. 하지만 가까운
곳을 이용하려해도 차량을 이용할 수밖에 없는 환경이어서 관광기간 내내 운전을 해야만하는
단점이 있다 하겠다.
이러한 문제를 해결하고 새로운 관광테마를 추가하기 위해 PRT 시스템을 추가하면 또다른
시너지 효과를 낼 수 있을 것이라 판단된다.
<그림 3.3.38> 성산일출봉 <그림 3.3.39> 중문대포해안주상절리대
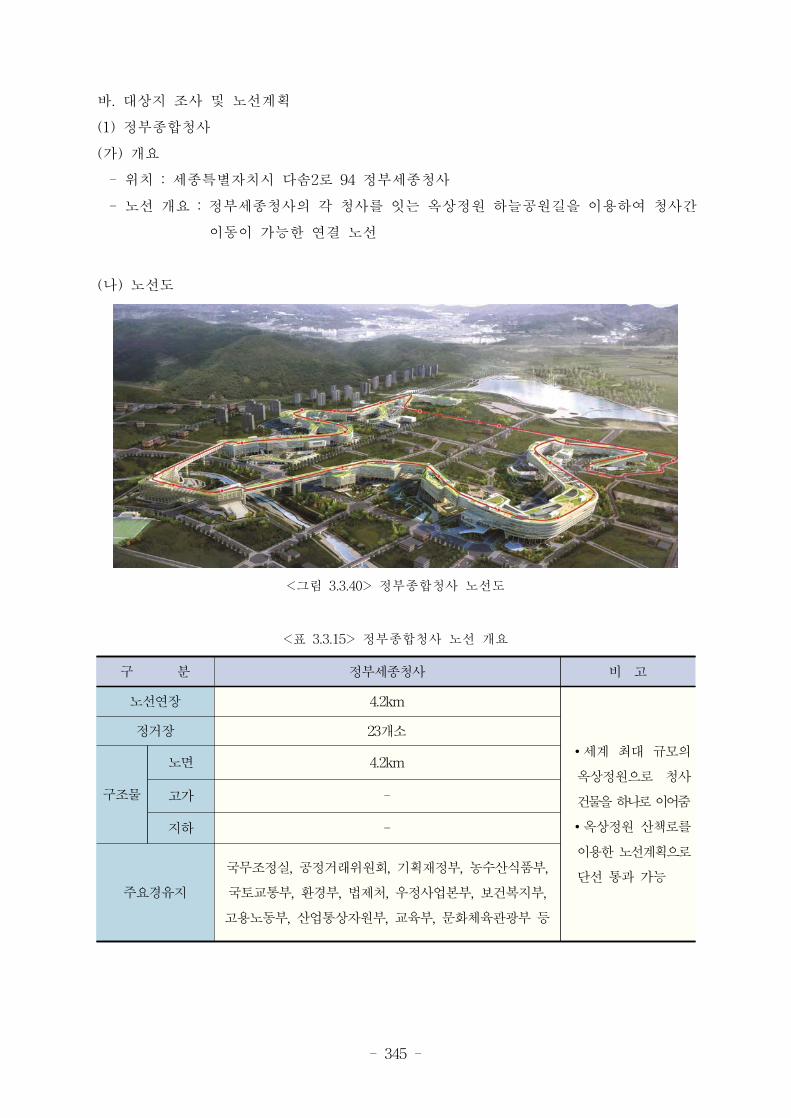
- 345 -
바. 대상지 조사 및 노선계획
(1) 정부종합청사
(가) 개요
- 위치 : 세종특별자치시 다솜2로 94 정부세종청사
- 노선 개요 : 정부세종청사의 각 청사를 잇는 옥상정원 하늘공원길을 이용하여 청사간
이동이 가능한 연결 노선
(나) 노선도
<그림 3.3.40> 정부종합청사 노선도
구 분 정부세종청사 비 고
노선연장 4.2km
∙세계 최대 규모의
옥상정원으로 청사
건물을하나로이어줌
∙옥상정원 산책로를
이용한노선계획으로
단선 통과 가능
정거장 23개소
구조물
노면 4.2km
고가 -
지하 -
주요경유지
국무조정실, 공정거래위원회, 기획재정부, 농수산식품부,
국토교통부, 환경부, 법제처, 우정사업본부, 보건복지부,
고용노동부, 산업통상자원부, 교육부, 문화체육관광부 등
<표 3.3.15> 정부종합청사 노선 개요
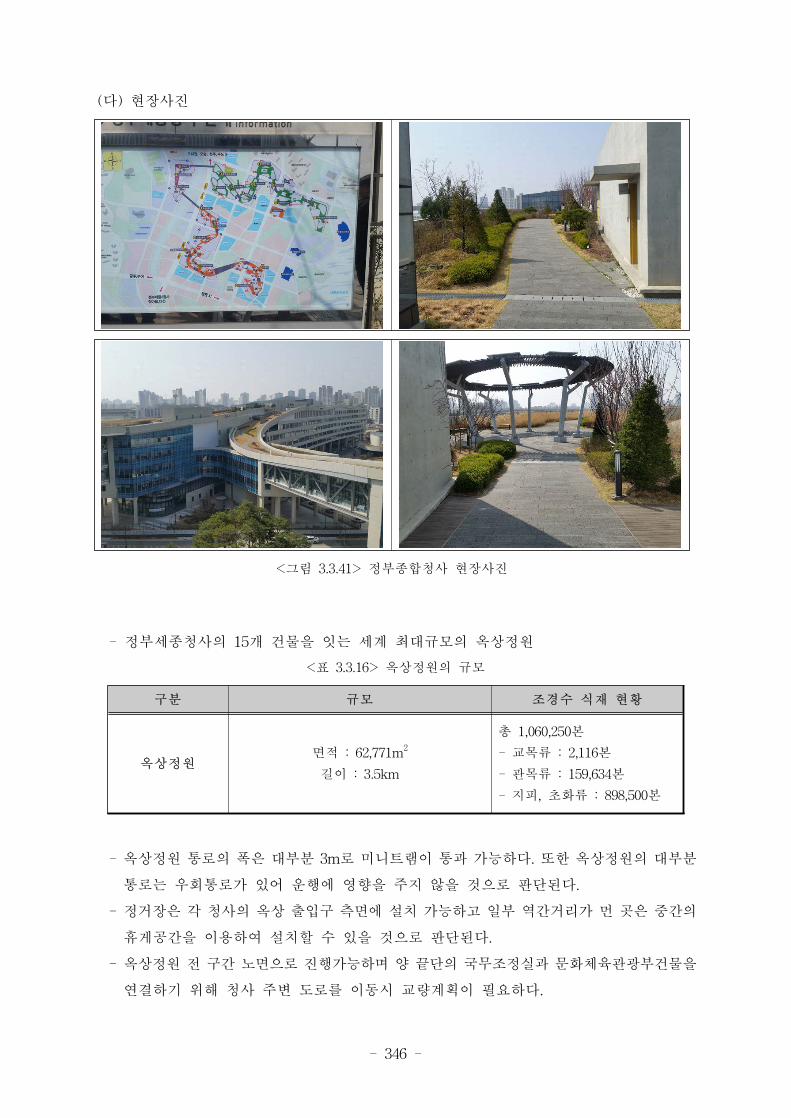
- 346 -
(다) 현장사진
<그림 3.3.41> 정부종합청사 현장사진
- 정부세종청사의 15개 건물을 잇는 세계 최대규모의 옥상정원
구분 규모 조경수 식재 현황
옥상정원면적 : 62,771m2
길이 : 3.5km
총 1,060,250본
- 교목류 : 2,116본
- 관목류 : 159,634본
- 지피, 초화류 : 898,500본
<표 3.3.16> 옥상정원의 규모
- 옥상정원 통로의 폭은 대부분 3m로 미니트램이 통과 가능하다. 또한 옥상정원의 대부분
통로는 우회통로가 있어 운행에 영향을 주지 않을 것으로 판단된다.
- 정거장은 각 청사의 옥상 출입구 측면에 설치 가능하고 일부 역간거리가 먼 곳은 중간의
휴게공간을 이용하여 설치할 수 있을 것으로 판단된다.
- 옥상정원 전 구간 노면으로 진행가능하며 양 끝단의 국무조정실과 문화체육관광부건물을
연결하기 위해 청사 주변 도로를 이동시 교량계획이 필요하다.
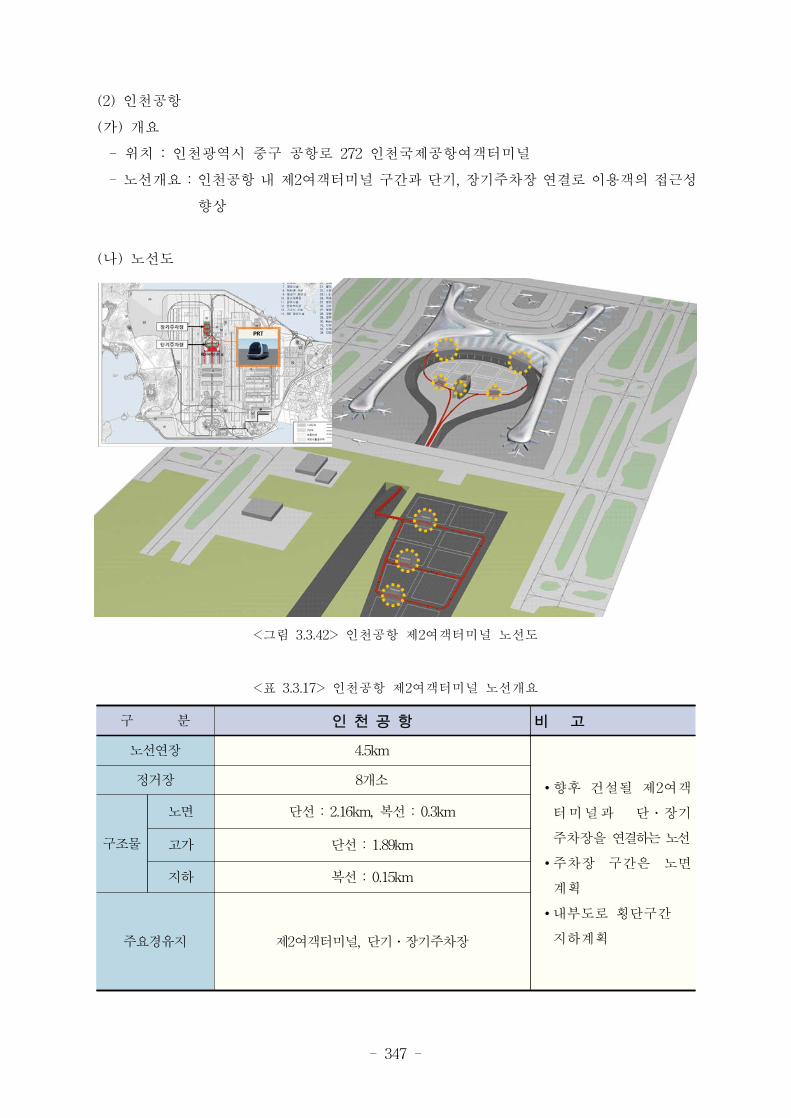
- 347 -
(2) 인천공항
(가) 개요
- 위치 : 인천광역시 중구 공항로 272 인천국제공항여객터미널
- 노선개요 : 인천공항 내 제2여객터미널 구간과 단기, 장기주차장 연결로 이용객의 접근성
향상
(나) 노선도
<그림 3.3.42> 인천공항 제2여객터미널 노선도
구 분 인 천 공 항 비 고
노선연장 4.5km
∙향후 건설될 제2여객
터미널과 단․장기
주차장을 연결하는노선
∙주차장 구간은 노면
계획
∙내부도로 횡단구간
지하계획
정거장 8개소
구조물
노면 단선 : 2.16km, 복선 : 0.3km
고가 단선 : 1.89km
지하 복선 : 0.15km
주요경유지 제2여객터미널, 단기․장기주차장
<표 3.3.17> 인천공항 제2여객터미널 노선개요
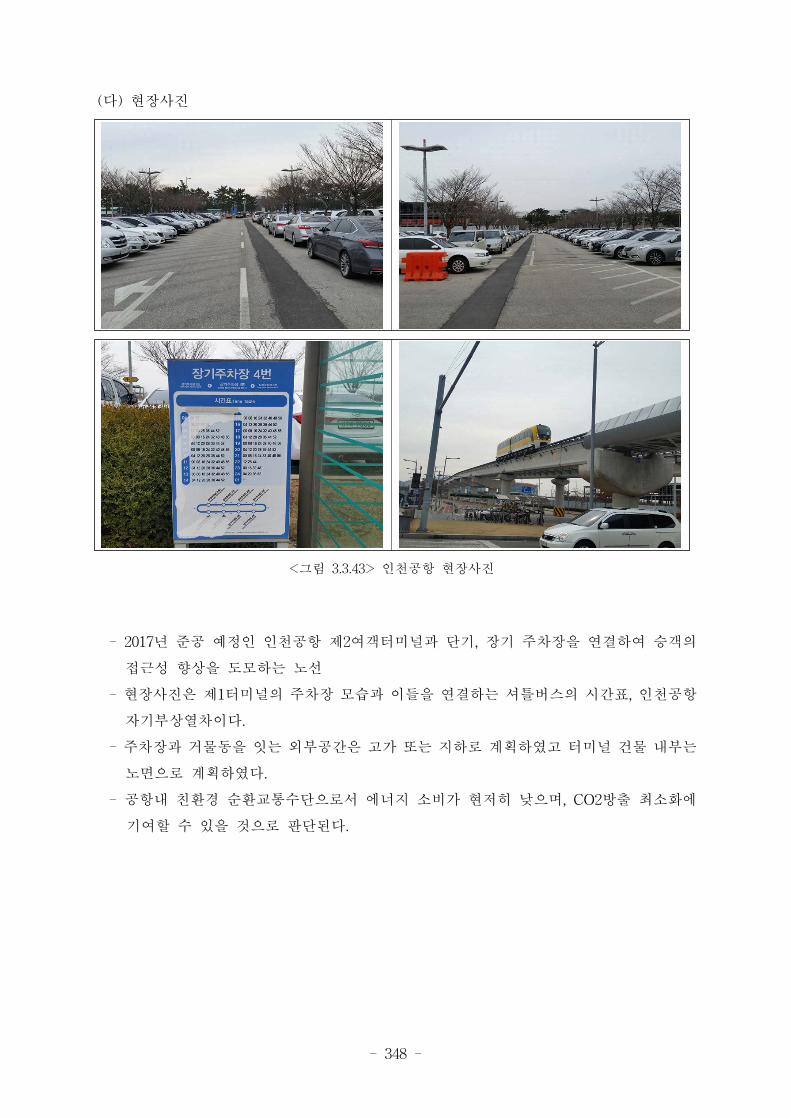
- 348 -
(다) 현장사진
<그림 3.3.43> 인천공항 현장사진
- 2017년 준공 예정인 인천공항 제2여객터미널과 단기, 장기 주차장을 연결하여 승객의
접근성 향상을 도모하는 노선
- 현장사진은 제1터미널의 주차장 모습과 이들을 연결하는 셔틀버스의 시간표, 인천공항
자기부상열차이다.
- 주차장과 거물동을 잇는 외부공간은 고가 또는 지하로 계획하였고 터미널 건물 내부는
노면으로 계획하였다.
- 공항내 친환경 순환교통수단으로서 에너지 소비가 현저히 낮으며, CO2방출 최소화에
기여할 수 있을 것으로 판단된다.
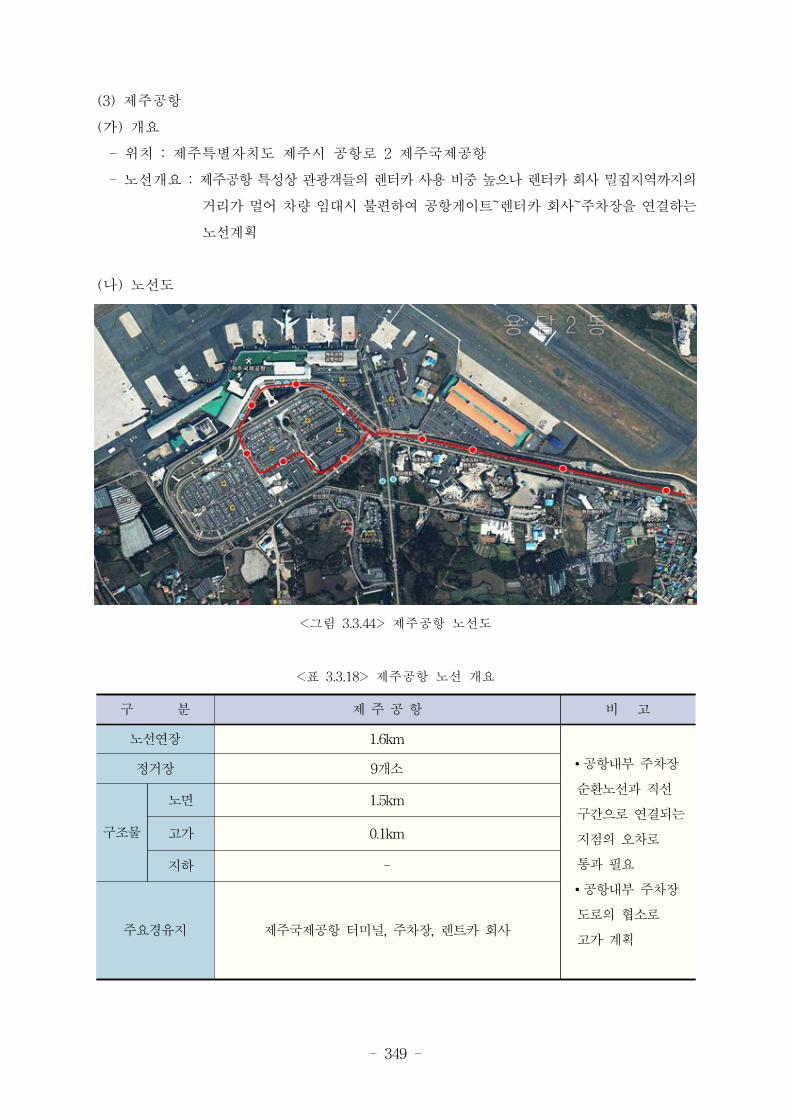
- 349 -
(3) 제주공항
(가) 개요
- 위치 : 제주특별자치도 제주시 공항로 2 제주국제공항
- 노선개요 : 제주공항특성상관광객들의렌터카사용비중높으나렌터카회사밀집지역까지의
거리가 멀어 차량 임대시 불편하여 공항게이트~렌터카 회사~주차장을 연결하는
노선계획
(나) 노선도
<그림 3.3.44> 제주공항 노선도
구 분 제 주 공 항 비 고
노선연장 1.6km
∙공항내부 주차장
순환노선과 직선
구간으로 연결되는
지점의 오차로
통과 필요
∙공항내부 주차장
도로의 협소로
고가 계획
정거장 9개소
구조물
노면 1.5km
고가 0.1km
지하 -
주요경유지 제주국제공항 터미널, 주차장, 렌트카 회사
<표 3.3.18> 제주공항 노선 개요
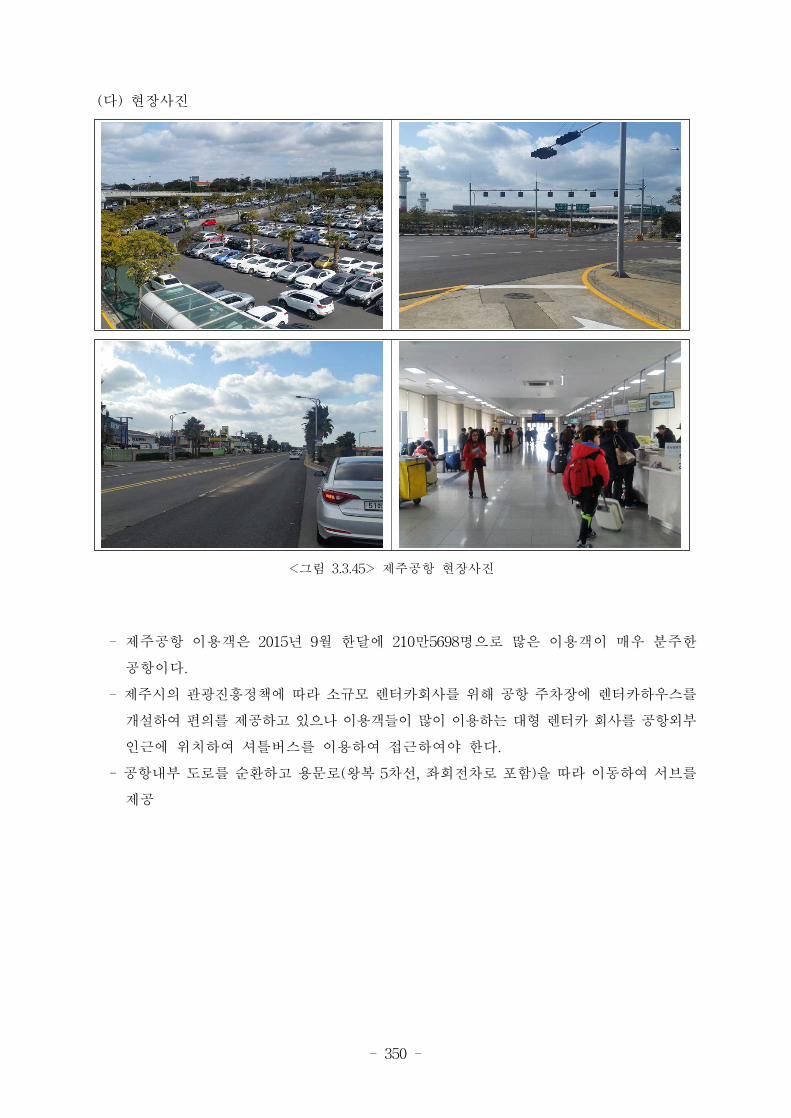
- 350 -
(다) 현장사진
<그림 3.3.45> 제주공항 현장사진
- 제주공항 이용객은 2015년 9월 한달에 210만5698명으로 많은 이용객이 매우 분주한
공항이다.
- 제주시의 관광진흥정책에 따라 소규모 렌터카회사를 위해 공항 주차장에 렌터카하우스를
개설하여 편의를 제공하고 있으나 이용객들이 많이 이용하는 대형 렌터카 회사를 공항외부
인근에 위치하여 셔틀버스를 이용하여 접근하여야 한다.
- 공항내부 도로를 순환하고 용문로(왕복 5차선, 좌회전차로 포함)을 따라 이동하여 서브를
제공
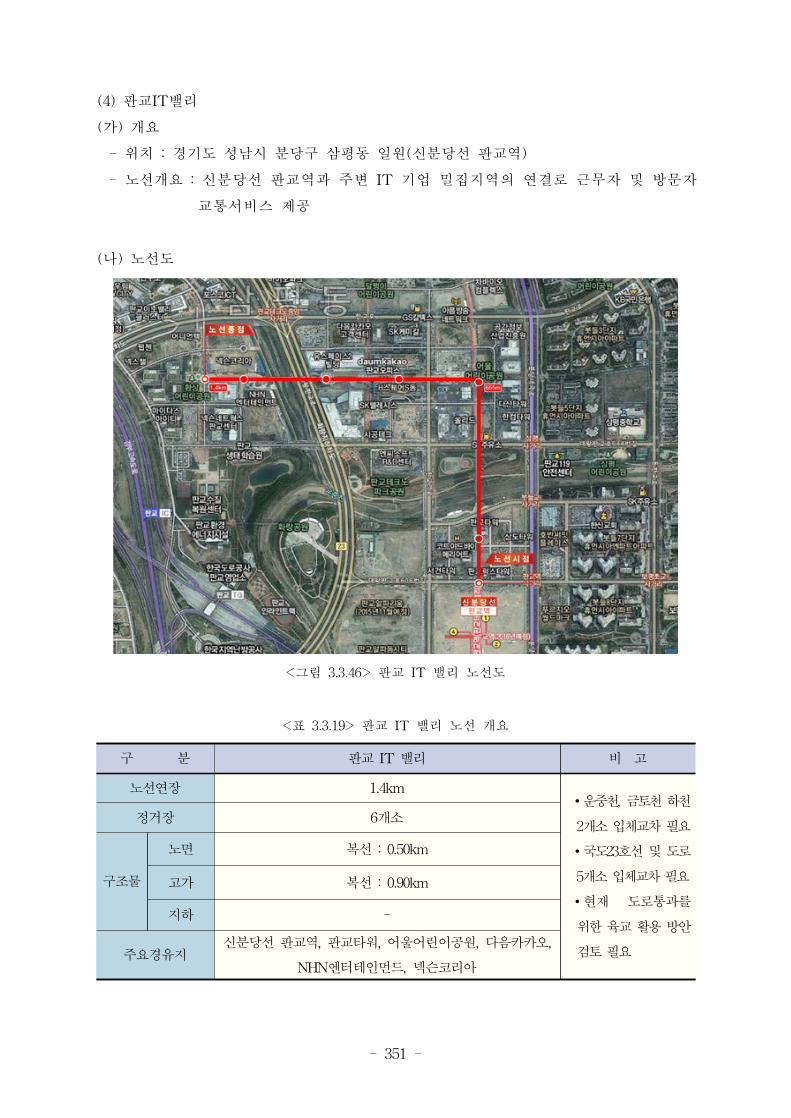
- 351 -
(4) 판교IT밸리
(가) 개요
- 위치 : 경기도 성남시 분당구 삼평동 일원(신분당선 판교역)
- 노선개요 : 신분당선 판교역과 주변 IT 기업 밀집지역의 연결로 근무자 및 방문자
교통서비스 제공
(나) 노선도
<그림 3.3.46> 판교 IT 밸리 노선도
구 분 판교 IT 밸리 비 고
노선연장 1.4km∙운중천, 금토천하천
2개소입체교차필요
∙국도23호선및도로
5개소입체교차필요
∙현재 도로통과를
위한육교활용방안
검토필요
정거장 6개소
구조물
노면 복선 : 0.50km
고가 복선 : 0.90km
지하 -
주요경유지신분당선 판교역, 판교타워, 어울어린이공원, 다음카카오,
NHN엔터테인먼드, 넥슨코리아
<표 3.3.19> 판교 IT 밸리 노선 개요
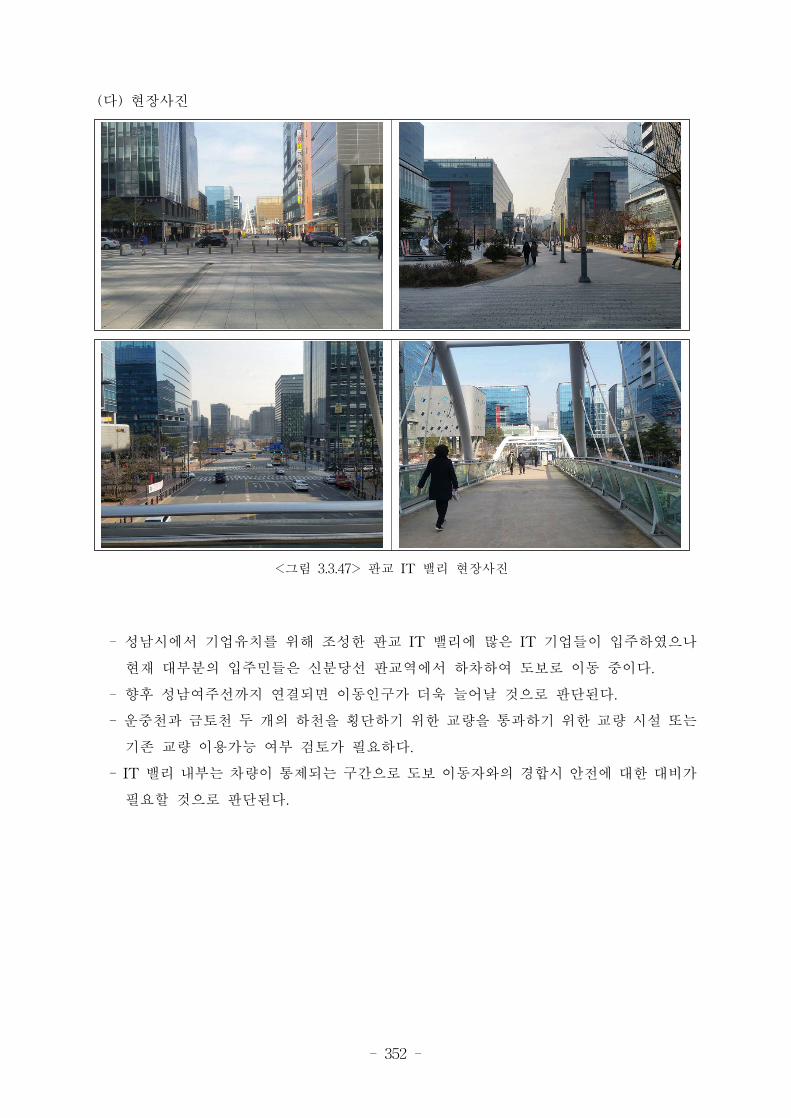
- 352 -
(다) 현장사진
<그림 3.3.47> 판교 IT 밸리 현장사진
- 성남시에서 기업유치를 위해 조성한 판교 IT 밸리에 많은 IT 기업들이 입주하였으나
현재 대부분의 입주민들은 신분당선 판교역에서 하차하여 도보로 이동 중이다.
- 향후 성남여주선까지 연결되면 이동인구가 더욱 늘어날 것으로 판단된다.
- 운중천과 금토천 두 개의 하천을 횡단하기 위한 교량을 통과하기 위한 교량 시설 또는
기존 교량 이용가능 여부 검토가 필요하다.
- IT 밸리 내부는 차량이 통제되는 구간으로 도보 이동자와의 경합시 안전에 대한 대비가
필요할 것으로 판단된다.
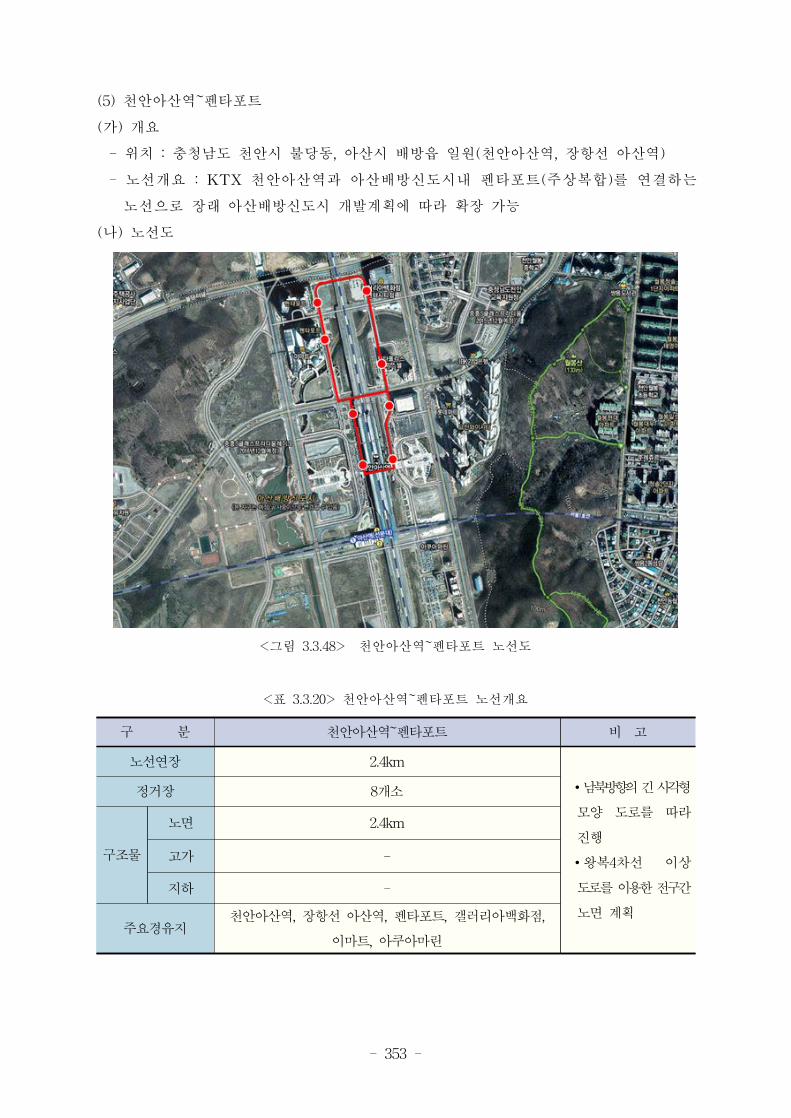
- 353 -
(5) 천안아산역~펜타포트
(가) 개요
- 위치 : 충청남도 천안시 불당동, 아산시 배방읍 일원(천안아산역, 장항선 아산역)
- 노선개요 : KTX 천안아산역과 아산배방신도시내 펜타포트(주상복합)를 연결하는
노선으로 장래 아산배방신도시 개발계획에 따라 확장 가능
(나) 노선도
<그림 3.3.48> 천안아산역~펜타포트 노선도
구 분 천안아산역~펜타포트 비 고
노선연장 2.4km
∙남북방향의긴사각형
모양 도로를 따라
진행
∙왕복4차선 이상
도로를이용한전구간
노면 계획
정거장 8개소
구조물
노면 2.4km
고가 -
지하 -
주요경유지천안아산역, 장항선 아산역, 펜타포트, 갤러리아백화점,
이마트, 아쿠아마린
<표 3.3.20> 천안아산역~펜타포트 노선개요
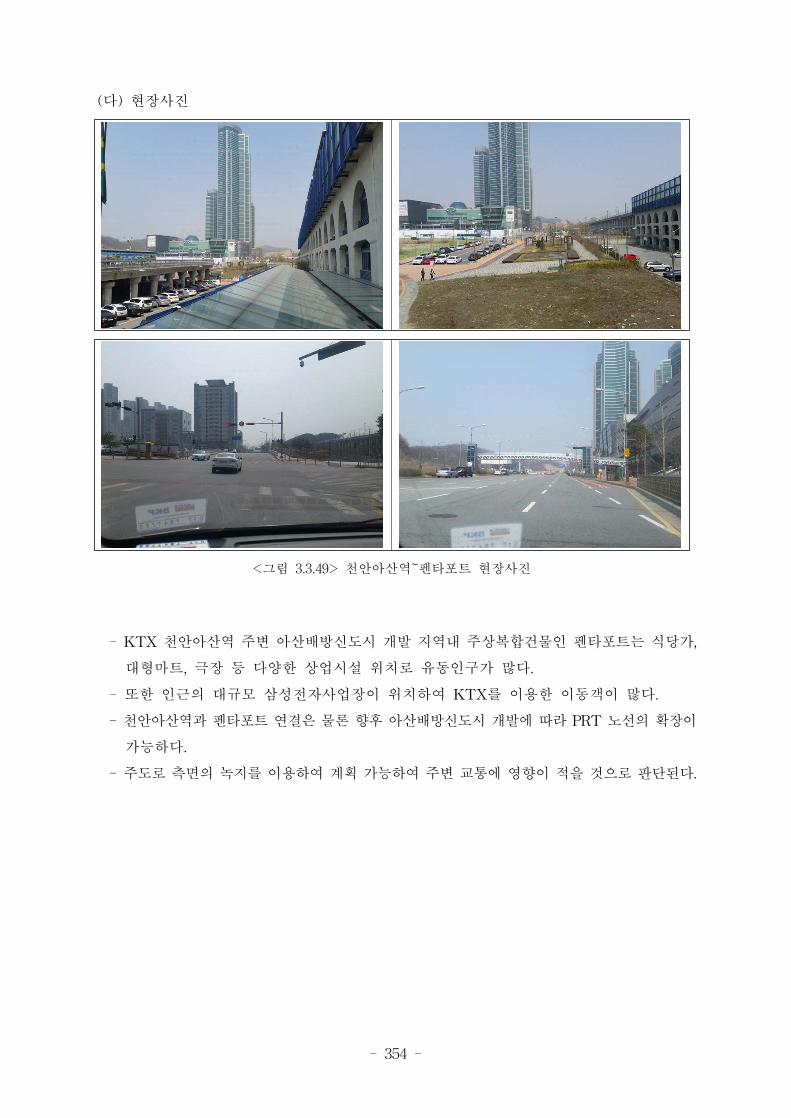
- 354 -
(다) 현장사진
<그림 3.3.49> 천안아산역~펜타포트 현장사진
- KTX 천안아산역 주변 아산배방신도시 개발 지역내 주상복합건물인 펜타포트는 식당가,
대형마트, 극장 등 다양한 상업시설 위치로 유동인구가 많다.
- 또한 인근의 대규모 삼성전자사업장이 위치하여 KTX를 이용한 이동객이 많다.
- 천안아산역과 펜타포트 연결은 물론 향후 아산배방신도시 개발에 따라 PRT 노선의 확장이
가능하다.
- 주도로 측면의 녹지를 이용하여 계획 가능하여 주변 교통에 영향이 적을 것으로 판단된다.
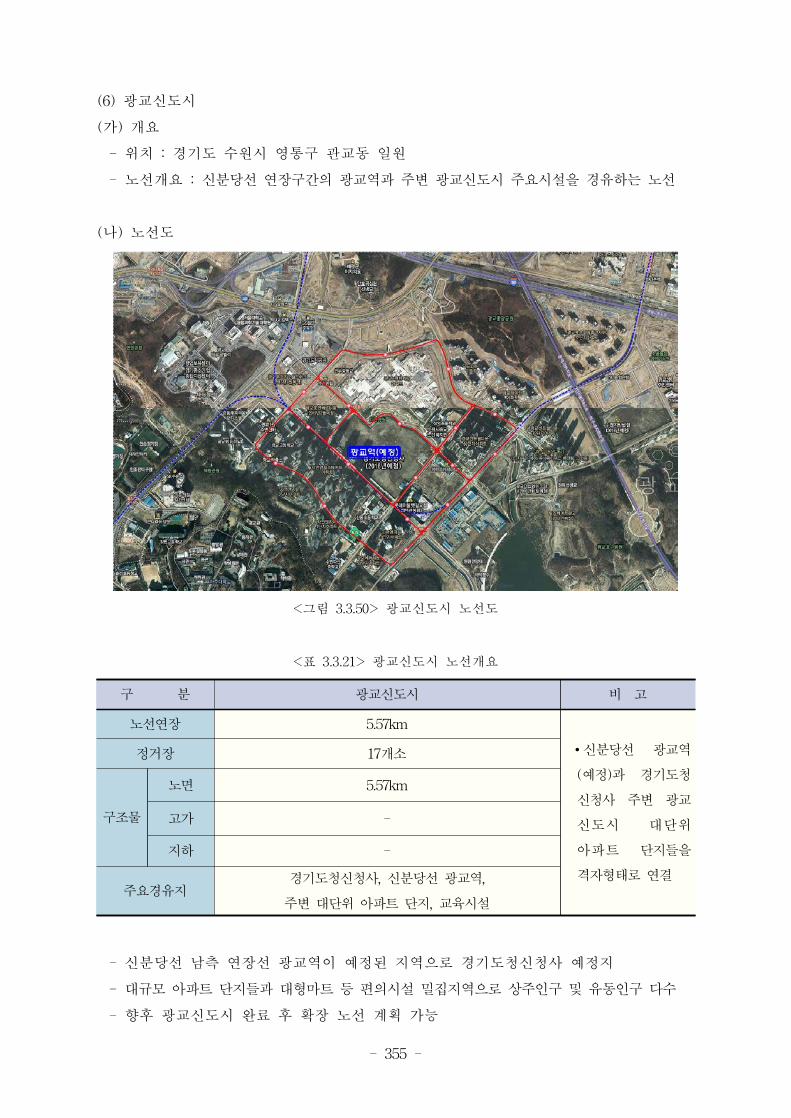
- 355 -
(6) 광교신도시
(가) 개요
- 위치 : 경기도 수원시 영통구 관교동 일원
- 노선개요 : 신분당선 연장구간의 광교역과 주변 광교신도시 주요시설을 경유하는 노선
(나) 노선도
<그림 3.3.50> 광교신도시 노선도
구 분 광교신도시 비 고
노선연장 5.57km
∙신분당선 광교역
(예정)과 경기도청
신청사 주변 광교
신도시 대단위
아파트 단지들을
격자형태로 연결
정거장 17개소
구조물
노면 5.57km
고가 -
지하 -
주요경유지경기도청신청사, 신분당선 광교역,
주변 대단위 아파트 단지, 교육시설
<표 3.3.21> 광교신도시 노선개요
- 신분당선 남측 연장선 광교역이 예정된 지역으로 경기도청신청사 예정지
- 대규모 아파트 단지들과 대형마트 등 편의시설 밀집지역으로 상주인구 및 유동인구 다수
- 향후 광교신도시 완료 후 확장 노선 계획 가능
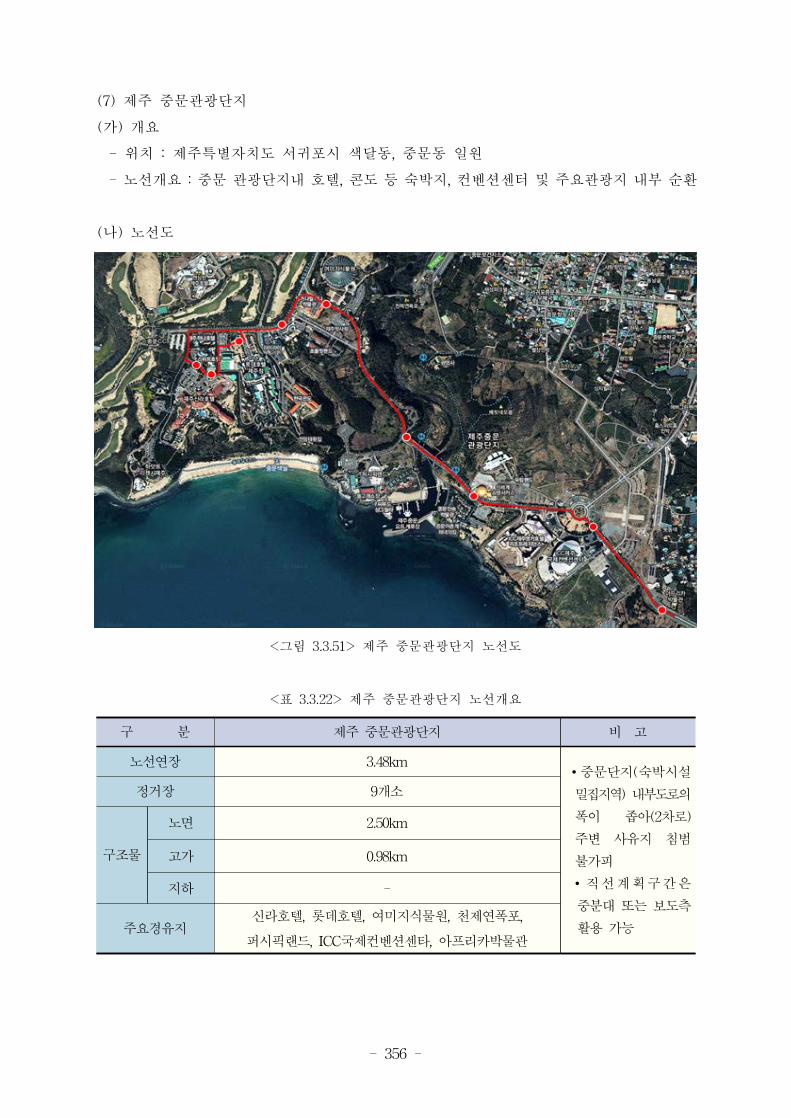
- 356 -
(7) 제주 중문관광단지
(가) 개요
- 위치 : 제주특별자치도 서귀포시 색달동, 중문동 일원
- 노선개요 : 중문 관광단지내 호텔, 콘도 등 숙박지, 컨벤션센터 및 주요관광지 내부 순환
(나) 노선도
<그림 3.3.51> 제주 중문관광단지 노선도
구 분 제주 중문관광단지 비 고
노선연장 3.48km∙중문단지(숙박시설
밀집지역) 내부도로의
폭이 좁아(2차로)
주변 사유지 침범
불가피
∙직선계획구간은
중분대 또는 보도측
활용 가능
정거장 9개소
구조물
노면 2.50km
고가 0.98km
지하 -
주요경유지신라호텔, 롯데호텔, 여미지식물원, 천제연폭포,
퍼시픽랜드, ICC국제컨벤션센타, 아프리카박물관
<표 3.3.22> 제주 중문관광단지 노선개요
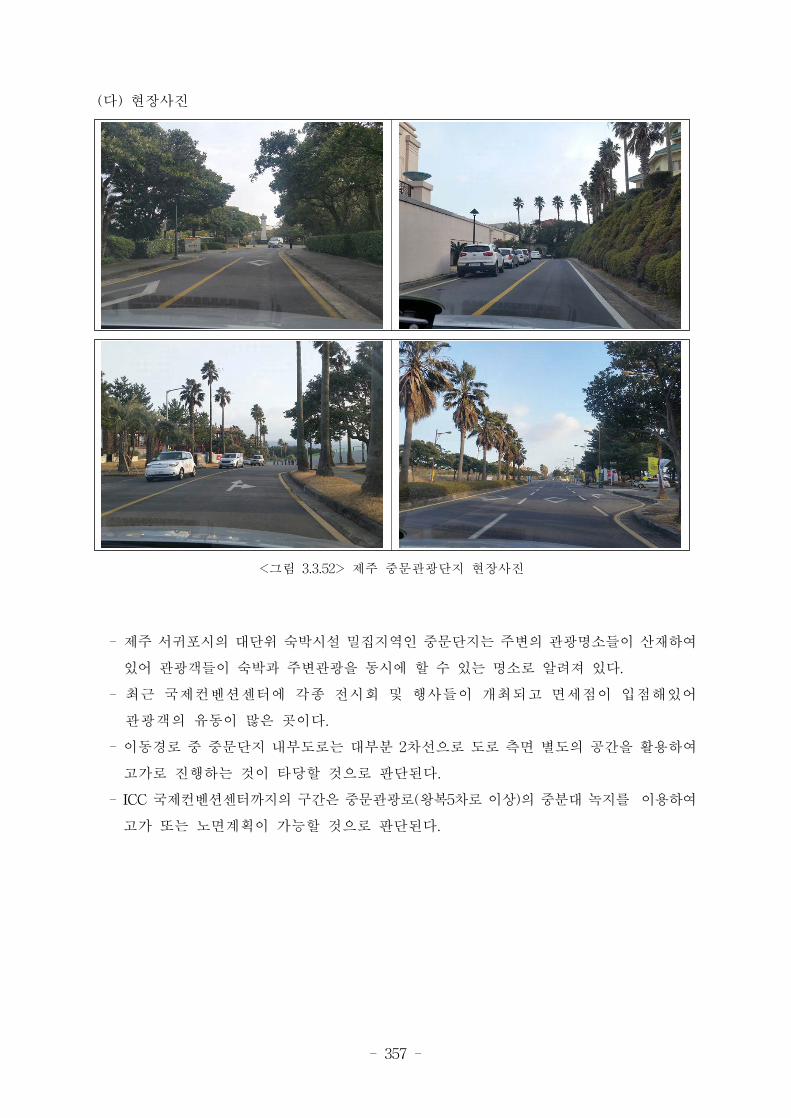
- 357 -
(다) 현장사진
<그림 3.3.52> 제주 중문관광단지 현장사진
- 제주 서귀포시의 대단위 숙박시설 밀집지역인 중문단지는 주변의 관광명소들이 산재하여
있어 관광객들이 숙박과 주변관광을 동시에 할 수 있는 명소로 알려져 있다.
- 최근 국제컨벤션센터에 각종 전시회 및 행사들이 개최되고 면세점이 입점해있어
관광객의 유동이 많은 곳이다.
- 이동경로 중 중문단지 내부도로는 대부분 2차선으로 도로 측면 별도의 공간을 활용하여
고가로 진행하는 것이 타당할 것으로 판단된다.
- ICC 국제컨벤션센터까지의 구간은 중문관광로(왕복5차로 이상)의 중분대 녹지를 이용하여
고가 또는 노면계획이 가능할 것으로 판단된다.
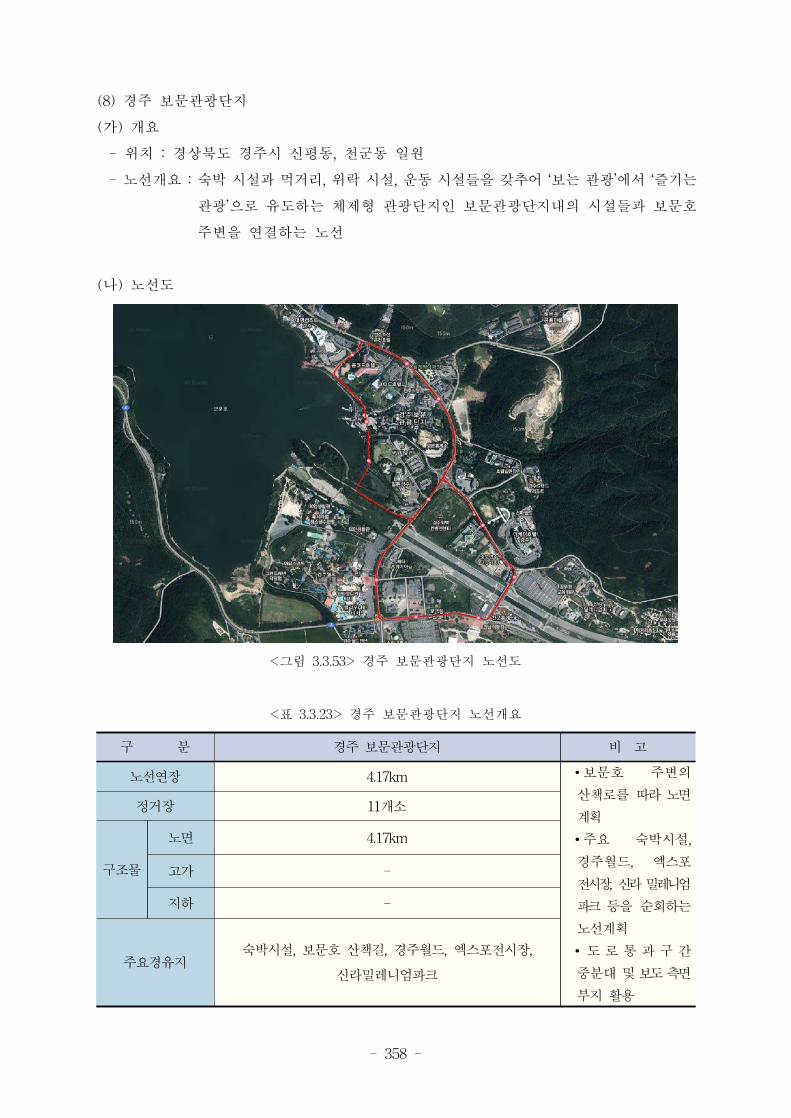
- 358 -
(8) 경주 보문관광단지
(가) 개요
- 위치 : 경상북도 경주시 신평동, 천군동 일원
- 노선개요 : 숙박 시설과 먹거리, 위락 시설, 운동 시설들을 갖추어 ‘보는 관광’에서 ‘즐기는
관광’으로 유도하는 체제형 관광단지인 보문관광단지내의 시설들과 보문호
주변을 연결하는 노선
(나) 노선도
<그림 3.3.53> 경주 보문관광단지 노선도
구 분 경주 보문관광단지 비 고
노선연장 4.17km ∙보문호 주변의
산책로를 따라 노면
계획
∙주요 숙박시설,
경주월드, 엑스포
전시장, 신라밀레니엄
파크 등을 순회하는
노선계획
∙도로 통과구 간
중분대 및보도측면
부지 활용
정거장 11개소
구조물
노면 4.17km
고가 -
지하 -
주요경유지숙박시설, 보문호 산책길, 경주월드, 엑스포전시장,
신라밀레니엄파크
<표 3.3.23> 경주 보문관광단지 노선개요
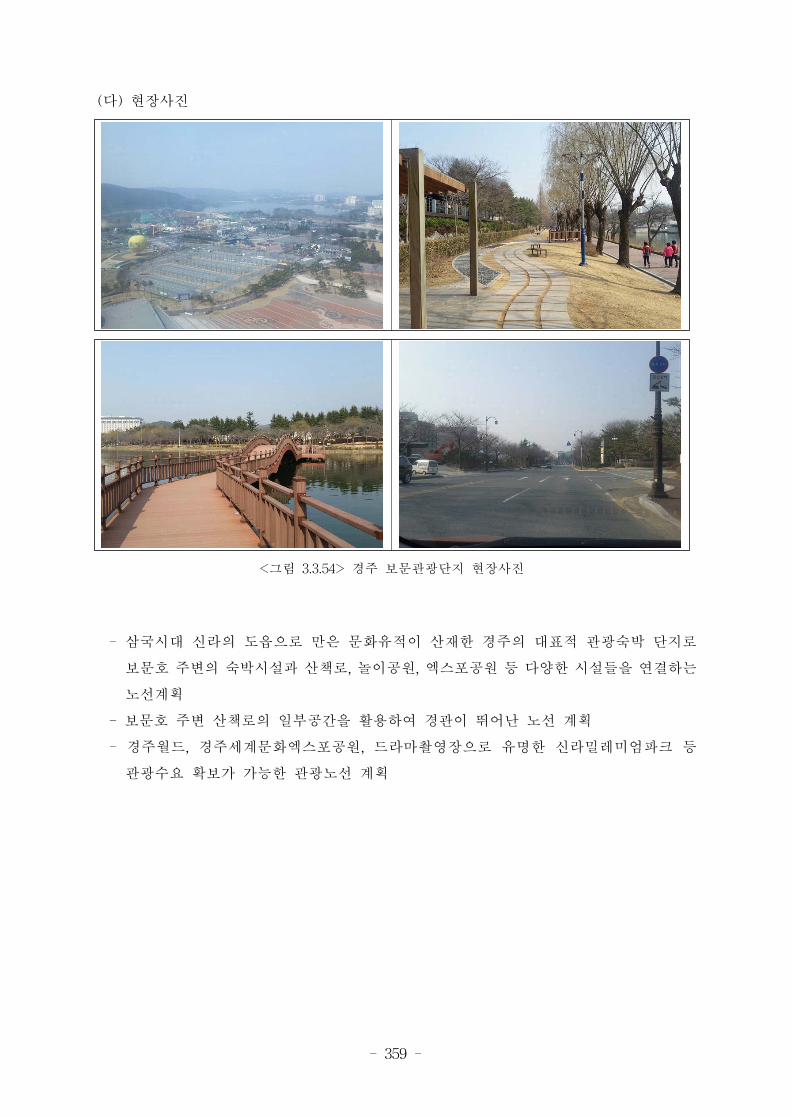
- 359 -
(다) 현장사진
<그림 3.3.54> 경주 보문관광단지 현장사진
- 삼국시대 신라의 도읍으로 만은 문화유적이 산재한 경주의 대표적 관광숙박 단지로
보문호 주변의 숙박시설과 산책로, 놀이공원, 엑스포공원 등 다양한 시설들을 연결하는
노선계획
- 보문호 주변 산책로의 일부공간을 활용하여 경관이 뛰어난 노선 계획
- 경주월드, 경주세계문화엑스포공원, 드라마촬영장으로 유명한 신라밀레미엄파크 등
관광수요 확보가 가능한 관광노선 계획
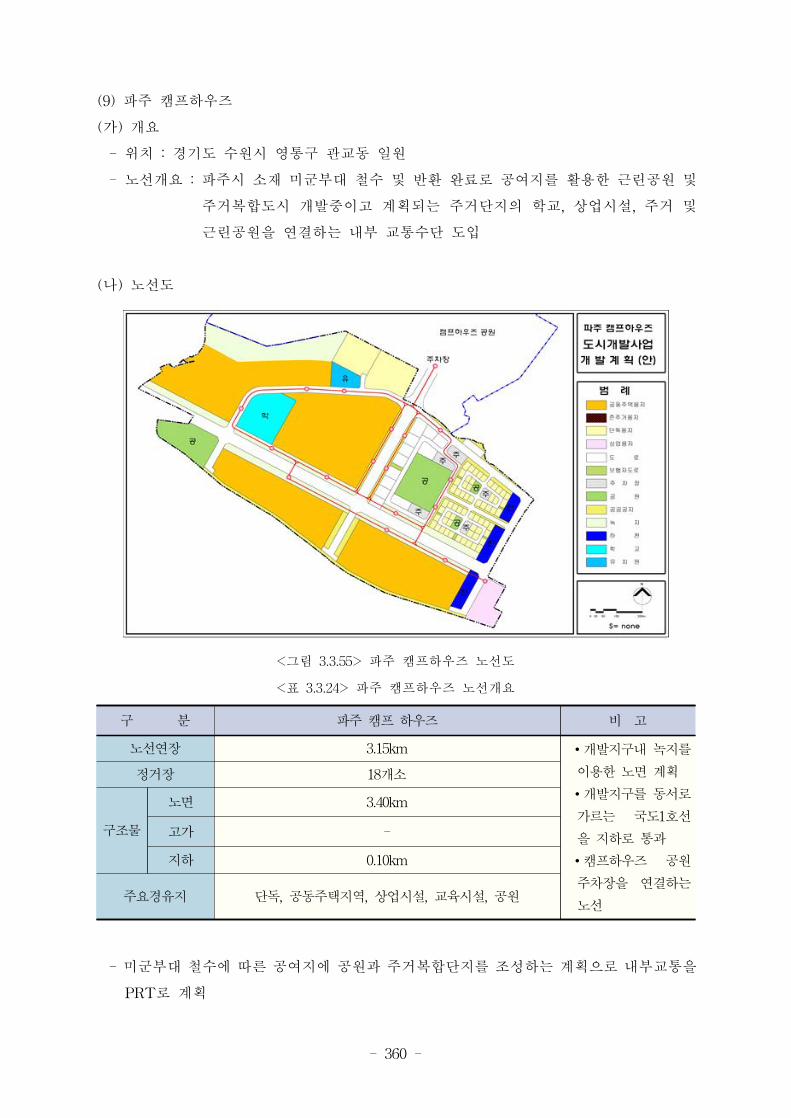
- 360 -
(9) 파주 캠프하우즈
(가) 개요
- 위치 : 경기도 수원시 영통구 관교동 일원
- 노선개요 : 파주시 소재 미군부대 철수 및 반환 완료로 공여지를 활용한 근린공원 및
주거복합도시 개발중이고 계획되는 주거단지의 학교, 상업시설, 주거 및
근린공원을 연결하는 내부 교통수단 도입
(나) 노선도
<그림 3.3.55> 파주 캠프하우즈 노선도
구 분 파주 캠프 하우즈 비 고
노선연장 3.15km ∙개발지구내 녹지를
이용한 노면 계획
∙개발지구를 동서로
가르는 국도1호선
을 지하로 통과
∙캠프하우즈 공원
주차장을 연결하는
노선
정거장 18개소
구조물
노면 3.40km
고가 -
지하 0.10km
주요경유지 단독, 공동주택지역, 상업시설, 교육시설, 공원
<표 3.3.24> 파주 캠프하우즈 노선개요
- 미군부대 철수에 따른 공여지에 공원과 주거복합단지를 조성하는 계획으로 내부교통을
PRT로 계획
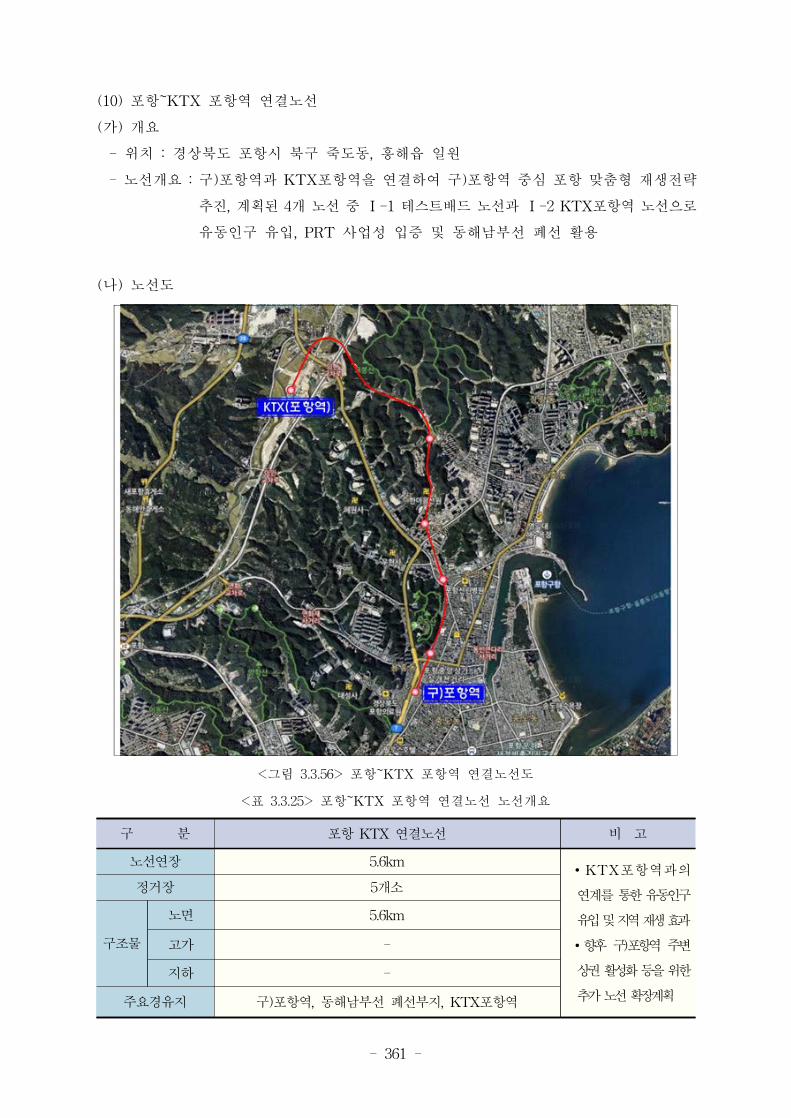
- 361 -
(10) 포항~KTX 포항역 연결노선
(가) 개요
- 위치 : 경상북도 포항시 북구 죽도동, 흥해읍 일원
- 노선개요 : 구)포항역과 KTX포항역을 연결하여 구)포항역 중심 포항 맞춤형 재생전략
추진, 계획된 4개 노선 중 Ⅰ-1 테스트배드 노선과 Ⅰ-2 KTX포항역 노선으로
유동인구 유입, PRT 사업성 입증 및 동해남부선 폐선 활용
(나) 노선도
<그림 3.3.56> 포항~KTX 포항역 연결노선도
구 분 포항 KTX 연결노선 비 고
노선연장 5.6km∙KTX포항역과의
연계를통한유동인구
유입및지역재생효과
∙향후 구)포항역 주변
상권활성화등을위한
추가노선확장계획
정거장 5개소
구조물
노면 5.6km
고가 -
지하 -
주요경유지 구)포항역, 동해남부선 폐선부지, KTX포항역
<표 3.3.25> 포항~KTX 포항역 연결노선 노선개요
- 362 -
(다) 현장사진
<그림 3.3.57> 포항~KTX 포항역 현장사진
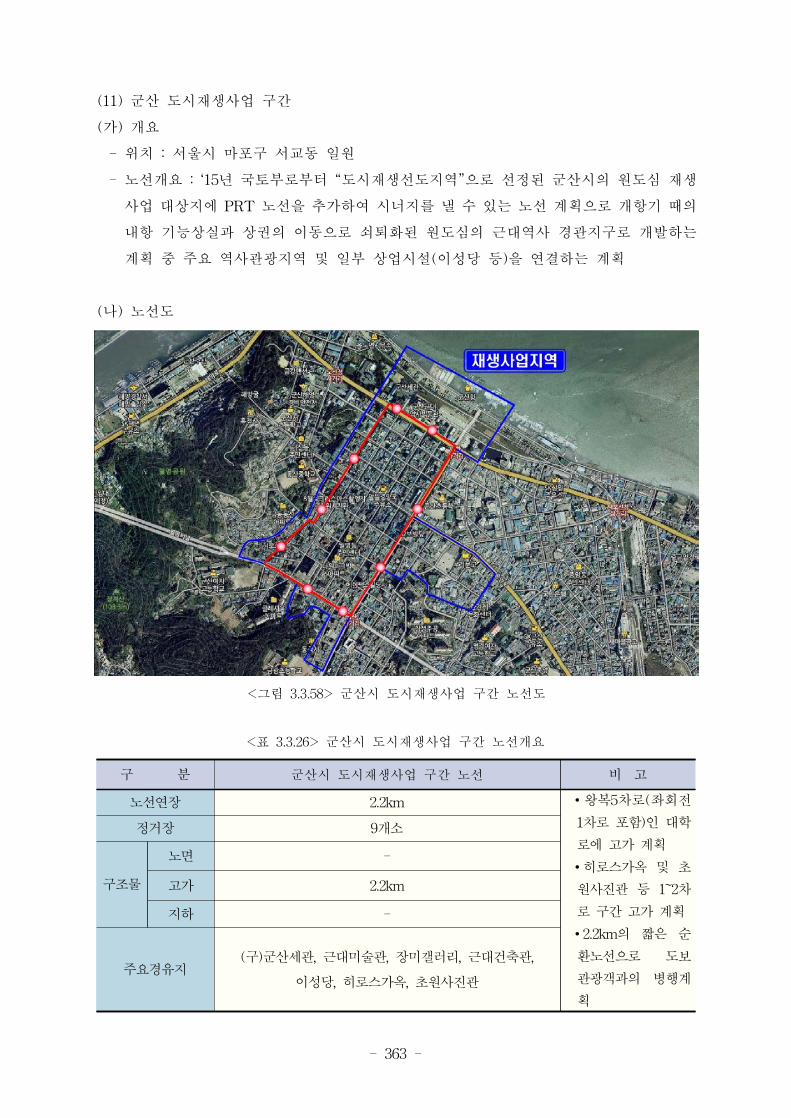
- 363 -
(11) 군산 도시재생사업 구간
(가) 개요
- 위치 : 서울시 마포구 서교동 일원
- 노선개요 : ‘15년 국토부로부터 “도시재생선도지역”으로 선정된 군산시의 원도심 재생
사업 대상지에 PRT 노선을 추가하여 시너지를 낼 수 있는 노선 계획으로 개항기 때의
내항 기능상실과 상권의 이동으로 쇠퇴화된 원도심의 근대역사 경관지구로 개발하는
계획 중 주요 역사관광지역 및 일부 상업시설(이성당 등)을 연결하는 계획
(나) 노선도
<그림 3.3.58> 군산시 도시재생사업 구간 노선도
구 분 군산시 도시재생사업 구간 노선 비 고
노선연장 2.2km ∙왕복5차로(좌회전
1차로 포함)인 대학
로에 고가 계획
∙히로스가옥 및 초
원사진관 등 1~2차
로 구간 고가 계획
∙2.2km의 짧은 순
환노선으로 도보
관광객과의 병행계
획
정거장 9개소
구조물
노면 -
고가 2.2km
지하 -
주요경유지(구)군산세관, 근대미술관, 장미갤러리, 근대건축관,
이성당, 히로스가옥, 초원사진관
<표 3.3.26> 군산시 도시재생사업 구간 노선개요
- 364 -
(다) 현장사진
<그림 3.3.59> 군산시 도시재생사업 구간 현장사진
- 정부가 추진하는 “도시재생사업 선도지역” 중 한 곳으로 신도시의 발달에 따라
쇠퇴해져가는 원심도을 재생하려는 계획
- 군산시는 일제강점기 군산항을 통해 쌀 등 곡물을 수탈해가던 지역으로 일제강점기
시절의 건물(히로스 가옥 등)들이 잘 보전되어 있다.
- 또한, 군산의 명물인 ‘이성당’ 제과점이 노선대에 자리잡고 있다.
- 노면 또는 고가를 이용하여 계획할 수 있으나 노면교통과의 경합 배제를 위해 고가로
계획하기로 한다.
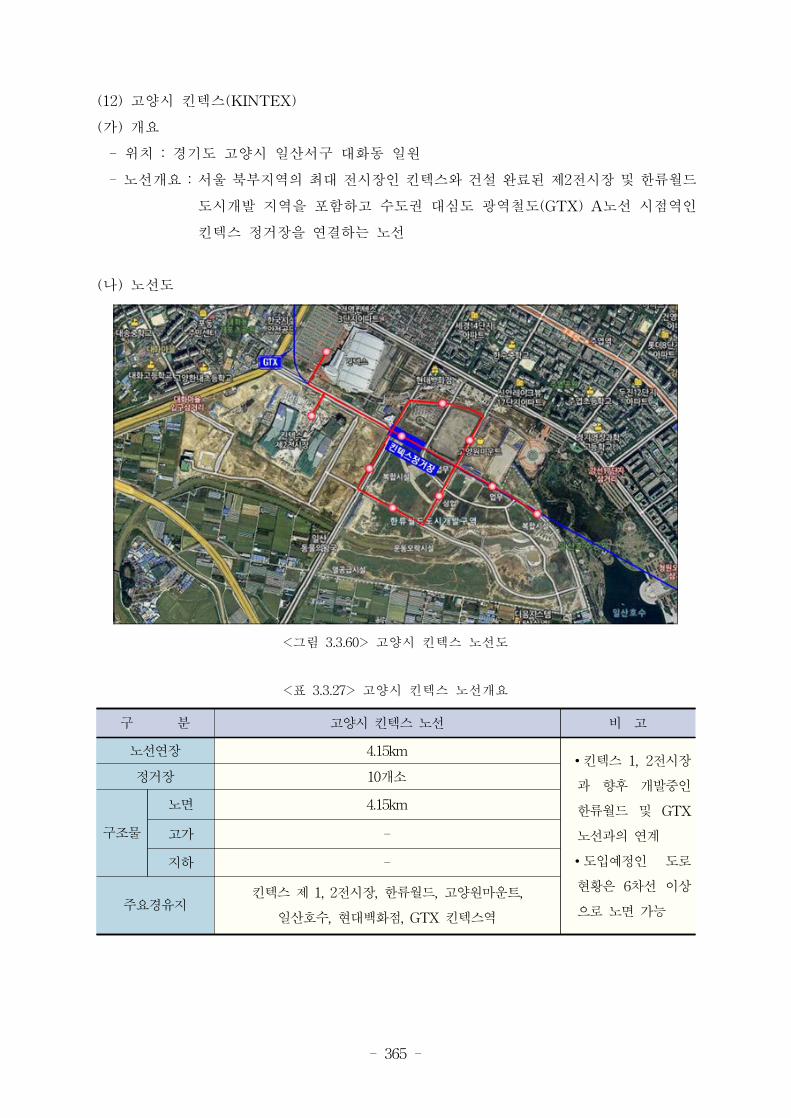
- 365 -
(12) 고양시 킨텍스(KINTEX)
(가) 개요
- 위치 : 경기도 고양시 일산서구 대화동 일원
- 노선개요 : 서울 북부지역의 최대 전시장인 킨텍스와 건설 완료된 제2전시장 및 한류월드
도시개발 지역을 포함하고 수도권 대심도 광역철도(GTX) A노선 시점역인
킨텍스 정거장을 연결하는 노선
(나) 노선도
<그림 3.3.60> 고양시 킨텍스 노선도
구 분 고양시 킨텍스 노선 비 고
노선연장 4.15km∙킨텍스 1, 2전시장
과 향후 개발중인
한류월드 및 GTX
노선과의 연계
∙도입예정인 도로
현황은 6차선 이상
으로 노면 가능
정거장 10개소
구조물
노면 4.15km
고가 -
지하 -
주요경유지킨텍스 제 1, 2전시장, 한류월드, 고양원마운트,
일산호수, 현대백화점, GTX 킨텍스역
<표 3.3.27> 고양시 킨텍스 노선개요
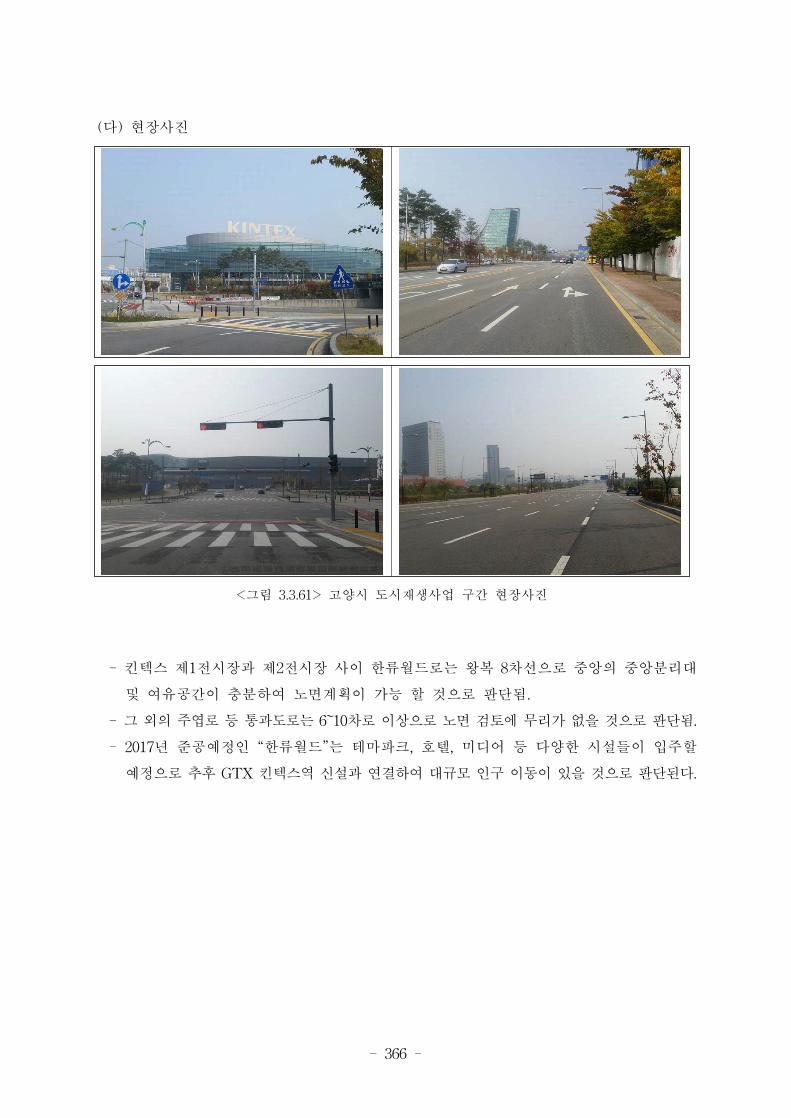
- 366 -
(다) 현장사진
<그림 3.3.61> 고양시 도시재생사업 구간 현장사진
- 킨텍스 제1전시장과 제2전시장 사이 한류월드로는 왕복 8차선으로 중앙의 중앙분리대
및 여유공간이 충분하여 노면계획이 가능 할 것으로 판단됨.
- 그 외의 주엽로 등 통과도로는 6~10차로 이상으로 노면 검토에 무리가 없을 것으로 판단됨.
- 2017년 준공예정인 “한류월드”는 테마파크, 호텔, 미디어 등 다양한 시설들이 입주할
예정으로 추후 GTX 킨텍스역 신설과 연결하여 대규모 인구 이동이 있을 것으로 판단된다.

- 367 -
(13) 파주시 헤이리마을
(가) 개요
- 위치 : 경기도 파주시 탄현면 법흥리 일원
- 노선개요 : 1998년 파주시 법흥리 약 15만평에 미술인, 음악가, 작가, 건축자 등 380여명의
예술인들이 회원제로 작업실, 공연장, 박물관, 미술관 등으로 문화예술공간을
만들었다. 주말 또는 공휴일이 몰려드는 이용객들로 외부 주차장에 주차를 하고
내부이동을 PRT 차량을 이용하여 주요지점을 경유하는 것으로 계획하는
노선계획
(나) 노선도
<그림 3.3.62> 파주시 헤이리마을 노선도
구 분 파주시 헤이리마을 노선 비 고
노선연장 2.2km ∙마을 내부 도로는
차선이 표시되어
있지 않고 일반
보도블럭 또는
콘크리트 포장으
로 이루어져 있다.
∙어린이토이박물관~
네버랜드박물관
구간은 고가로
이동가능
정거장 14개소
구조물
노면 1.8km
고가 0.4km
지하 -
주요경유지제1외부주차장, 게임박물관, 한스갤러리, 갤러리 모아,
어린이 토이박물관, 네버랜드 박물관 등
<표 3.3.28> 파주시 헤이리마을 노선개요
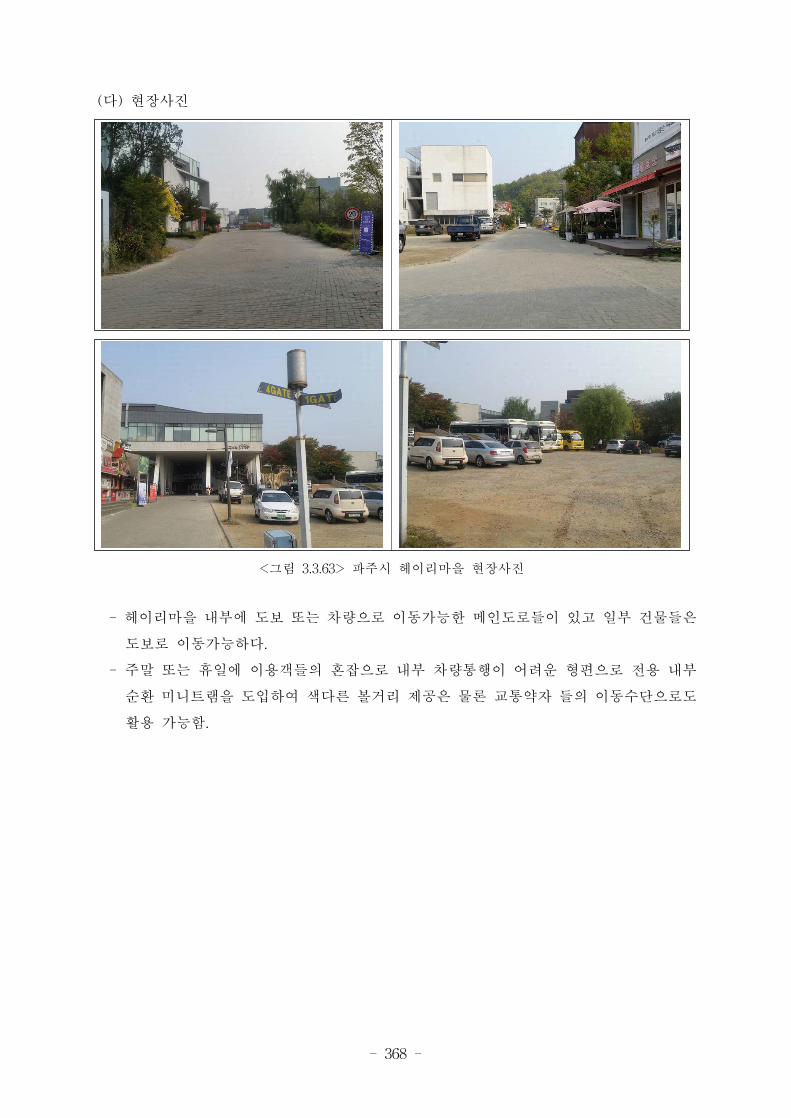
- 368 -
(다) 현장사진
<그림 3.3.63> 파주시 헤이리마을 현장사진
- 헤이리마을 내부에 도보 또는 차량으로 이동가능한 메인도로들이 있고 일부 건물들은
도보로 이동가능하다.
- 주말 또는 휴일에 이용객들의 혼잡으로 내부 차량통행이 어려운 형편으로 전용 내부
순환 미니트램을 도입하여 색다른 볼거리 제공은 물론 교통약자 들의 이동수단으로도
활용 가능함.
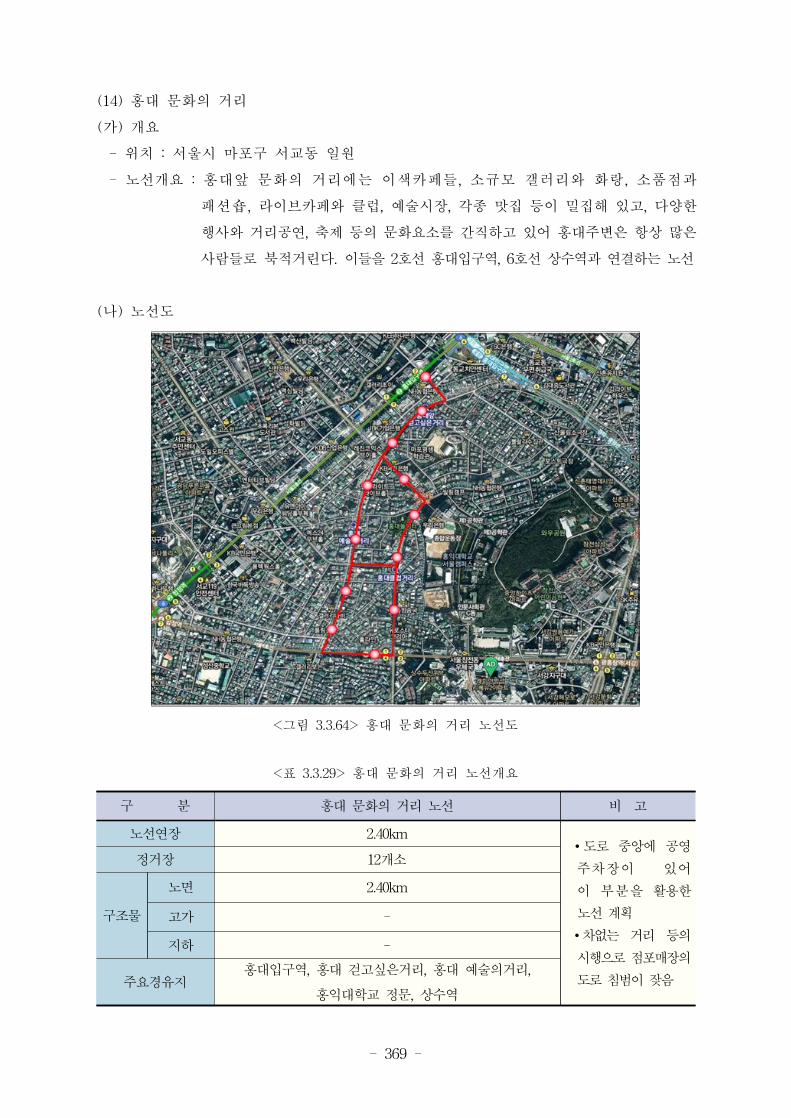
- 369 -
(14) 홍대 문화의 거리
(가) 개요
- 위치 : 서울시 마포구 서교동 일원
- 노선개요 : 홍대앞 문화의 거리에는 이색카페들, 소규모 갤러리와 화랑, 소품점과
패션숍, 라이브카페와 클럽, 예술시장, 각종 맛집 등이 밀집해 있고, 다양한
행사와 거리공연, 축제 등의 문화요소를 간직하고 있어 홍대주변은 항상 많은
사람들로 북적거린다. 이들을 2호선 홍대입구역, 6호선 상수역과 연결하는 노선
(나) 노선도
<그림 3.3.64> 홍대 문화의 거리 노선도
구 분 홍대 문화의 거리 노선 비 고
노선연장 2.40km∙도로 중앙에 공영
주차장이 있어
이 부분을 활용한
노선계획
∙차없는 거리 등의
시행으로점포매장의
도로침범이잦음
정거장 12개소
구조물
노면 2.40km
고가 -
지하 -
주요경유지홍대입구역, 홍대 걷고싶은거리, 홍대 예술의거리,
홍익대학교 정문, 상수역
<표 3.3.29> 홍대 문화의 거리 노선개요
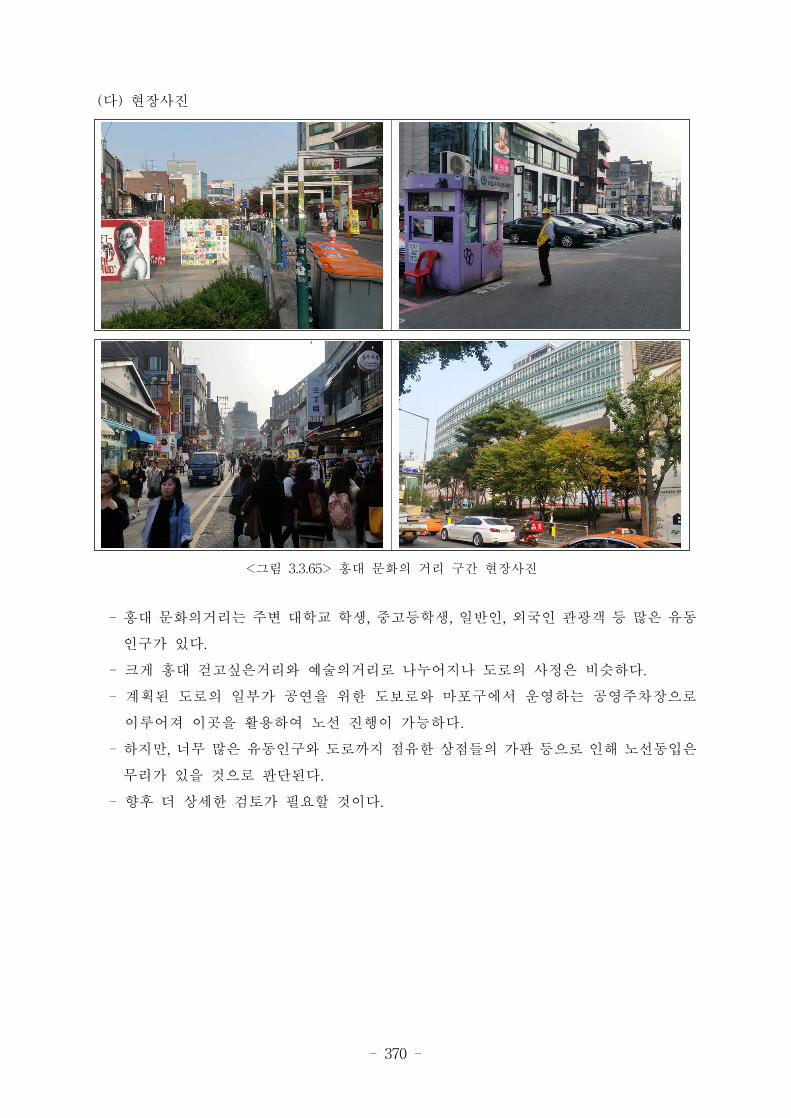
- 370 -
(다) 현장사진
<그림 3.3.65> 홍대 문화의 거리 구간 현장사진
- 홍대 문화의거리는 주변 대학교 학생, 중고등학생, 일반인, 외국인 관광객 등 많은 유동
인구가 있다.
- 크게 홍대 걷고싶은거리와 예술의거리로 나누어지나 도로의 사정은 비슷하다.
- 계획된 도로의 일부가 공연을 위한 도보로와 마포구에서 운영하는 공영주차장으로
이루어져 이곳을 활용하여 노선 진행이 가능하다.
- 하지만, 너무 많은 유동인구와 도로까지 점유한 상점들의 가판 등으로 인해 노선동입은
무리가 있을 것으로 판단된다.
- 향후 더 상세한 검토가 필요할 것이다.

- 371 -
(15). 인천 송도 센트럴파크
(가) 개요
- 위치 : 인천광역시 연수구 송도동 일원
- 노선개요 : 인천지하철 1호선 센트럴파크역과 송도 센트럴파크를 연결하는 노선
(나) 노선도
<그림 3.3.66> 인천 송도 센트럴파크 노선도
구 분 인천 송도 센트럴파크 비 고
노선연장 5.40km
∙인천지하철 1호선
연장 센트럴파크역과
주변 공원등을연결
하는노선
∙대부분의 도로가
6차선 이상으로
노면으로 도입가능
정거장 14개소
구조물
노면 5.40km
고가 -
지하 -
주요경유지송도센트럴파크, 송도컨벤시아, 쉐라톤 인천호텔,
해돋이공원, 인천아트센터 등
<표 3.3.30> 인천 송도 센트럴파크 노선개요
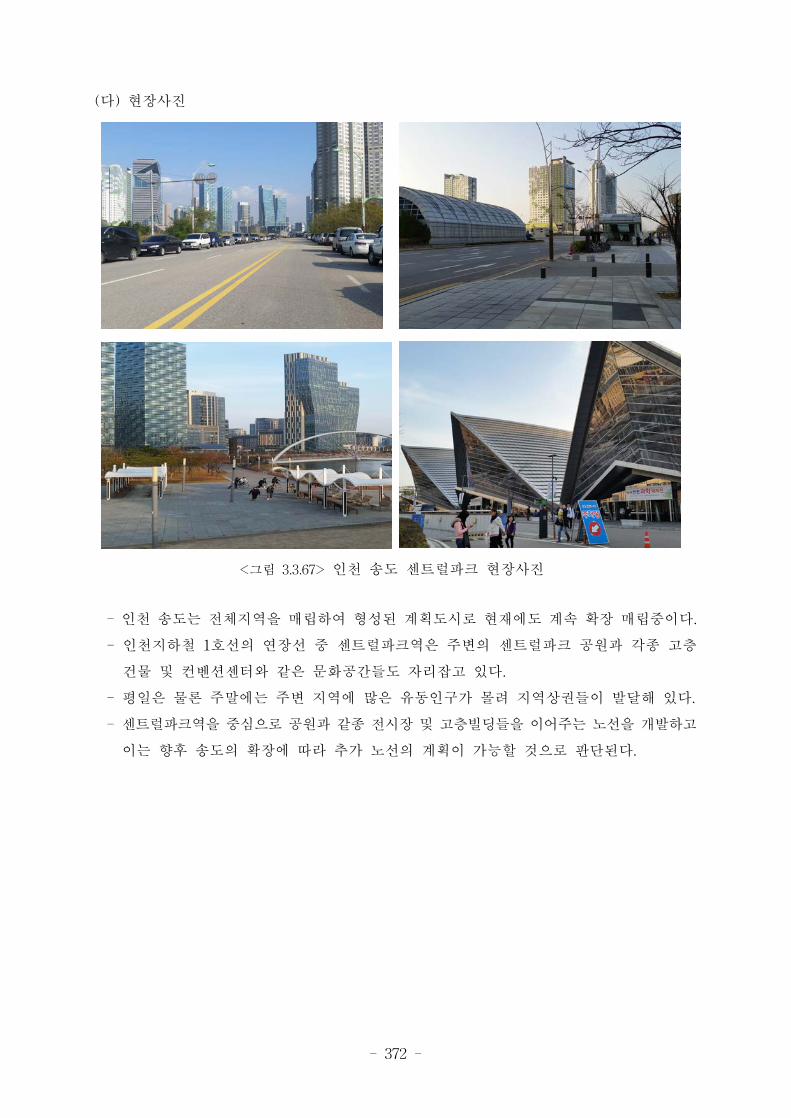
- 372 -
(다) 현장사진
<그림 3.3.67> 인천 송도 센트럴파크 현장사진
- 인천 송도는 전체지역을 매립하여 형성된 계획도시로 현재에도 계속 확장 매립중이다.
- 인천지하철 1호선의 연장선 중 센트럴파크역은 주변의 센트럴파크 공원과 각종 고층
건물 및 컨벤션센터와 같은 문화공간들도 자리잡고 있다.
- 평일은 물론 주말에는 주변 지역에 많은 유동인구가 몰려 지역상권들이 발달해 있다.
- 센트럴파크역을 중심으로 공원과 같종 전시장 및 고층빌딩들을 이어주는 노선을 개발하고
이는 향후 송도의 확장에 따라 추가 노선의 계획이 가능할 것으로 판단된다.
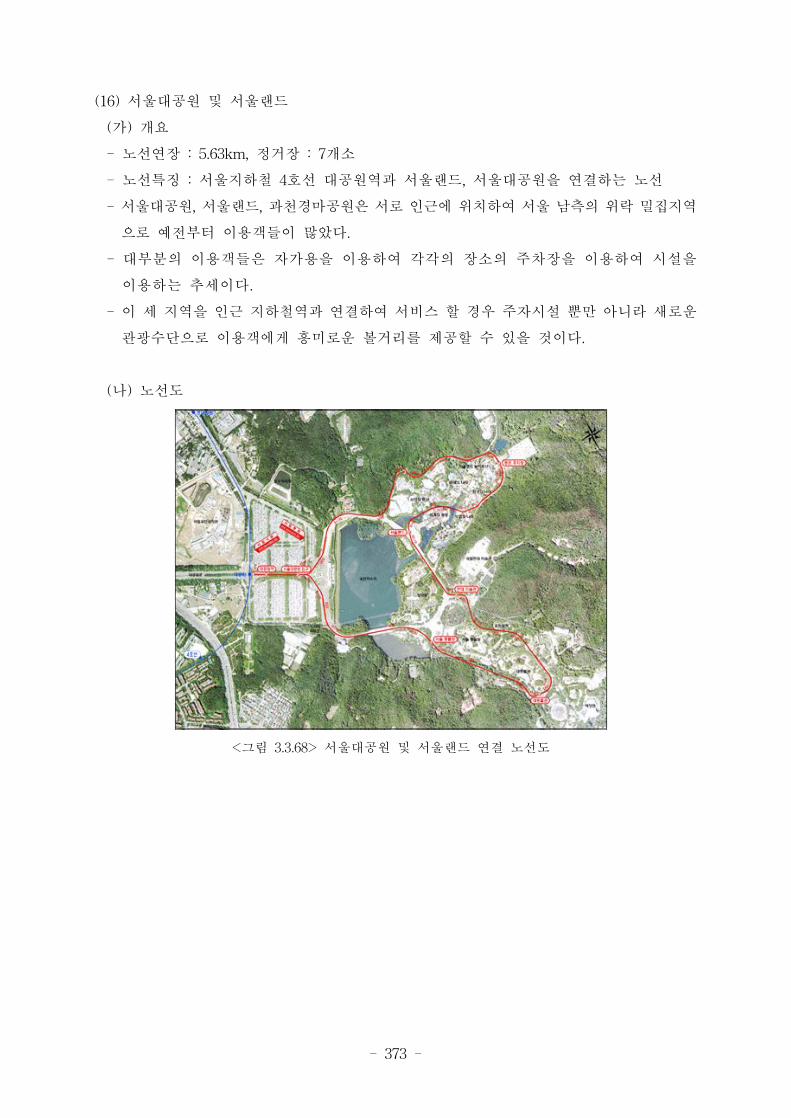
- 373 -
<그림 3.3.68> 서울대공원 및 서울랜드 연결 노선도
(16) 서울대공원 및 서울랜드
(가) 개요
- 노선연장 : 5.63km, 정거장 : 7개소
- 노선특징 : 서울지하철 4호선 대공원역과 서울랜드, 서울대공원을 연결하는 노선
- 서울대공원, 서울랜드, 과천경마공원은 서로 인근에 위치하여 서울 남측의 위락 밀집지역
으로 예전부터 이용객들이 많았다.
- 대부분의 이용객들은 자가용을 이용하여 각각의 장소의 주차장을 이용하여 시설을
이용하는 추세이다.
- 이 세 지역을 인근 지하철역과 연결하여 서비스 할 경우 주자시설 뿐만 아니라 새로운
관광수단으로 이용객에게 흥미로운 볼거리를 제공할 수 있을 것이다.
(나) 노선도
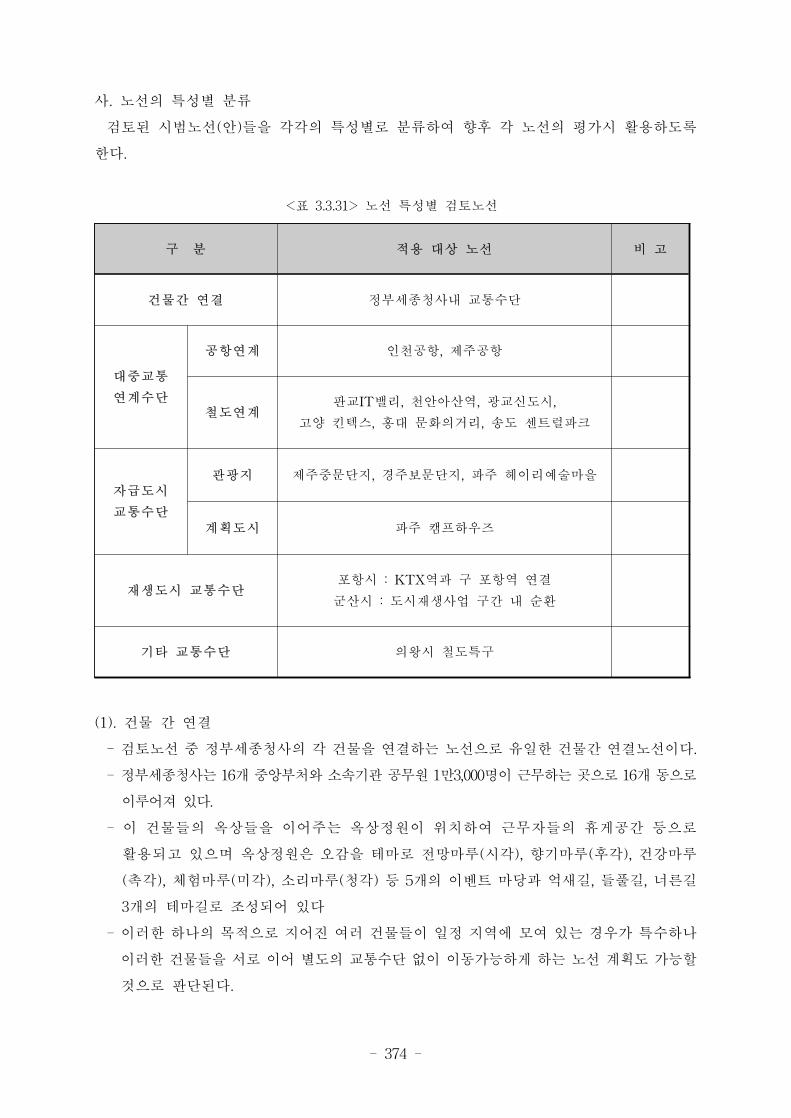
- 374 -
사. 노선의 특성별 분류
검토된 시범노선(안)들을 각각의 특성별로 분류하여 향후 각 노선의 평가시 활용하도록
한다.
구 분 적용 대상 노선 비 고
건물간 연결 정부세종청사내 교통수단
대중교통
연계수단
공항연계 인천공항, 제주공항
철도연계판교IT밸리, 천안아산역, 광교신도시,
고양 킨텍스, 홍대 문화의거리, 송도 센트럴파크
자급도시
교통수단
관광지 제주중문단지, 경주보문단지, 파주 헤이리예술마을
계획도시 파주 캠프하우즈
재생도시 교통수단포항시 : KTX역과 구 포항역 연결
군산시 : 도시재생사업 구간 내 순환
기타 교통수단 의왕시 철도특구
<표 3.3.31> 노선 특성별 검토노선
(1). 건물 간 연결
- 검토노선 중 정부세종청사의 각 건물을 연결하는 노선으로 유일한 건물간 연결노선이다.
- 정부세종청사는 16개 중앙부처와소속기관공무원 1만3,000명이 근무하는곳으로 16개 동으로
이루어져 있다.
- 이 건물들의 옥상들을 이어주는 옥상정원이 위치하여 근무자들의 휴게공간 등으로
활용되고 있으며 옥상정원은 오감을 테마로 전망마루(시각), 향기마루(후각), 건강마루
(촉각), 체험마루(미각), 소리마루(청각) 등 5개의 이벤트 마당과 억새길, 들풀길, 너른길
3개의 테마길로 조성되어 있다
- 이러한 하나의 목적으로 지어진 여러 건물들이 일정 지역에 모여 있는 경우가 특수하나
이러한 건물들을 서로 이어 별도의 교통수단 없이 이동가능하게 하는 노선 계획도 가능할
것으로 판단된다.
- 375 -
(2). 대중교통 연계수단
- 인천공항과 제주공항은 실제 활용도가 매우 높으며 시범노선 목적에 부합하나, 다만
공항공사 등과의 협의, 공항내 제한된 공간에서의 운행 등 해결사항이 많을 것으로 판단됨.
- 신분당선 판교역 연결 노선의 경우 고가 건설 등 건설비용이 다소 많이 필요하며,
Network 연결이 쉽지 않는 등 단점이 있으나 해당 지자체인 성남의 의지가 타 지자체보다
강하여 실제 추진시 많은 도움이 될 것으로 판단됨.
- 천안아산역과 펜타포트 연결노선은 건설비용이 저렴하고 시범노선의 목적 달성에 유리하나
지역개발 완료시 노면교통과의 경합 등을 고려하여야 할 것으로 판단됨.
- 광교신도시의 경우 시험목적과 활용도 면에서 가장 우수한 편이지만 노선연장이 길고
노면교통과의 간섭 등 해결해야 할 문제가 있으므로 해당 지자체인 수원시와 협의하여
추진해야 할 것으로 판단됨.
- 고양시 킨텍스 노선은 복잡한 도심지 내에서 시험노선으로 활용하기에는 다소 어려울
것으로 판단되나 향후 한류월드 및 GTX 노선 완료 후 활용도가 높을 것으로 판단됨.
- 파주헤이리예술마을노선의경우내부도로여건이좁고블럭포장이며내외부에주차시설이
완비되어 있고 도보이용으로 대부분 지역 접근이 용이하여 노선 활용도 측면에서 다소
미흡하다 판단됨.
- 홍대 문화예술의 거리는 많은 유동인구와 좁은 도로 등으로 실제 공사여건이 좋지 않아
건설가능 여부를 고민하여 판단하여야 함.
- 송도 센트럴파크 노선의 경우 신도시내 노선으로 활용성은 다소 높을 것으로 예상되지만
인천시와의 협의 등 행정처리에 어려움이 예상됨
(3). 자급도시 교통수단
- 제주 중문단지 노선은 관광지에 색다른 관광상품으로도 가치가 있겠지만 도로가 좁고
위치 등 시험목적에는 부합하지 않을 것으로 판단됨
- 경주 보문단지 노선은 대부분 승용차 이용객으로 활용도가 생각보다 높지 않을 것으로
판단됨
- 파주 캠프하우즈 노선은 공여지로 시험목적에 적합하지만 민자사업 실현의 불투명성
및 국도 1호선의 지하통과 등 공사의 어려움이 예상됨
(4). 재생도시 교통수단
- 포항 KTX 연결노선은 단순한 셔틀 개념의 노선으로 향후 2~3단계 노선안이 추진되지
않으면 큰 의미가 없다 판단되나 폐선부지 활용 및 해당 지자체의 적극적인 도입 의지는
사업 실현에 많은 강점이 있을 것으로 판단됨
- 군산 재생도시 노선은 전구간이 고가로 건설되어 정거장 설치 공간의 어려움 및 시험
목적에도 부합하기 어렵다고 판단됨
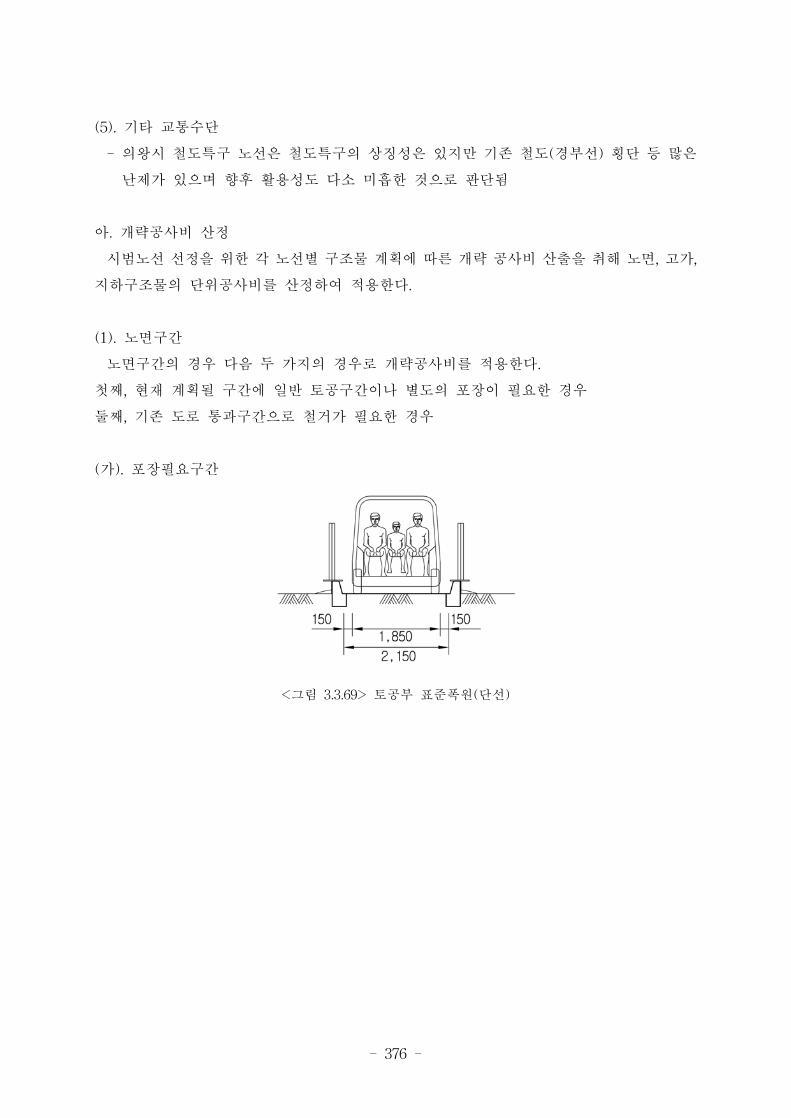
- 376 -
(5). 기타 교통수단
- 의왕시 철도특구 노선은 철도특구의 상징성은 있지만 기존 철도(경부선) 횡단 등 많은
난제가 있으며 향후 활용성도 다소 미흡한 것으로 판단됨
아. 개략공사비 산정
시범노선 선정을 위한 각 노선별 구조물 계획에 따른 개략 공사비 산출을 취해 노면, 고가,
지하구조물의 단위공사비를 산정하여 적용한다.
(1). 노면구간
노면구간의 경우 다음 두 가지의 경우로 개략공사비를 적용한다.
첫째, 현재 계획될 구간에 일반 토공구간이나 별도의 포장이 필요한 경우
둘째, 기존 도로 통과구간으로 철거가 필요한 경우
(가). 포장필요구간
<그림 3.3.69> 토공부 표준폭원(단선)
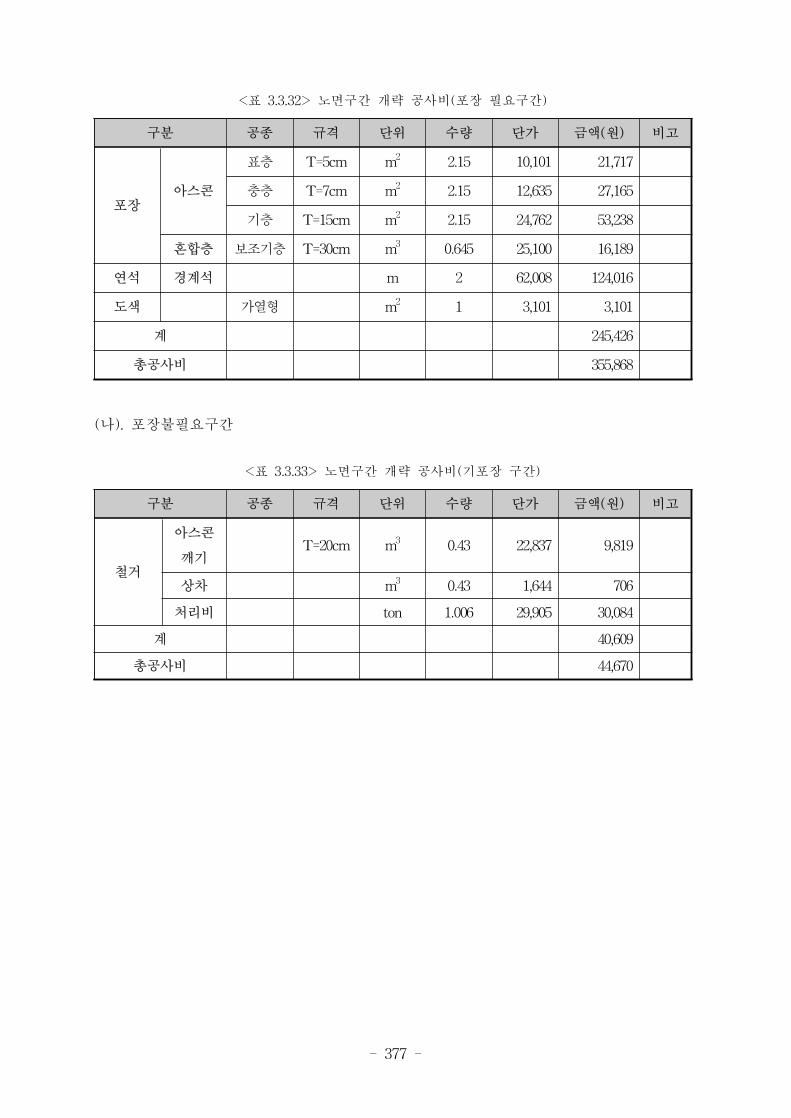
- 377 -
구분 공종 규격 단위 수량 단가 금액(원) 비고
포장아스콘
표층 T=5cm m2 2.15 10,101 21,717
충층 T=7cm m2 2.15 12,635 27,165
기층 T=15cm m2 2.15 24,762 53,238
혼합층 보조기층 T=30cm m3 0.645 25,100 16,189
연석 경계석 m 2 62,008 124,016
도색 가열형 m2 1 3,101 3,101
계 245,426
총공사비 355,868
<표 3.3.32> 노면구간 개략 공사비(포장 필요구간)
(나). 포장불필요구간
구분 공종 규격 단위 수량 단가 금액(원) 비고
철거
아스콘
깨기 T=20cm m3 0.43 22,837 9,819
상차 m3 0.43 1,644 706
처리비 ton 1.006 29,905 30,084
계 40,609
총공사비 44,670
<표 3.3.33> 노면구간 개략 공사비(기포장 구간)
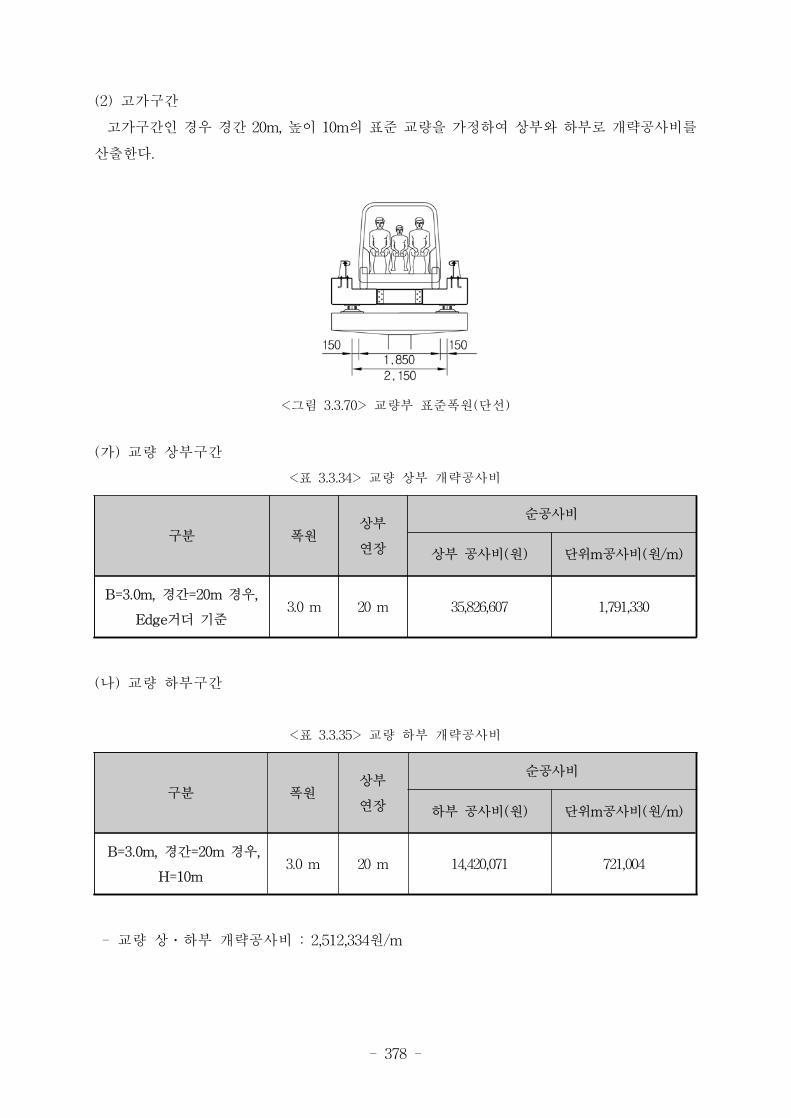
- 378 -
(2) 고가구간
고가구간인 경우 경간 20m, 높이 10m의 표준 교량을 가정하여 상부와 하부로 개략공사비를
산출한다.
<그림 3.3.70> 교량부 표준폭원(단선)
(가) 교량 상부구간
구분 폭원상부
연장
순공사비
상부 공사비(원) 단위m공사비(원/m)
B=3.0m, 경간=20m 경우,
Edge거더 기준3.0 m 20 m 35,826,607 1,791,330
<표 3.3.34> 교량 상부 개략공사비
(나) 교량 하부구간
구분 폭원상부
연장
순공사비
하부 공사비(원) 단위m공사비(원/m)
B=3.0m, 경간=20m 경우,
H=10m3.0 m 20 m 14,420,071 721,004
<표 3.3.35> 교량 하부 개략공사비
- 교량 상․하부 개략공사비 : 2,512,334원/m
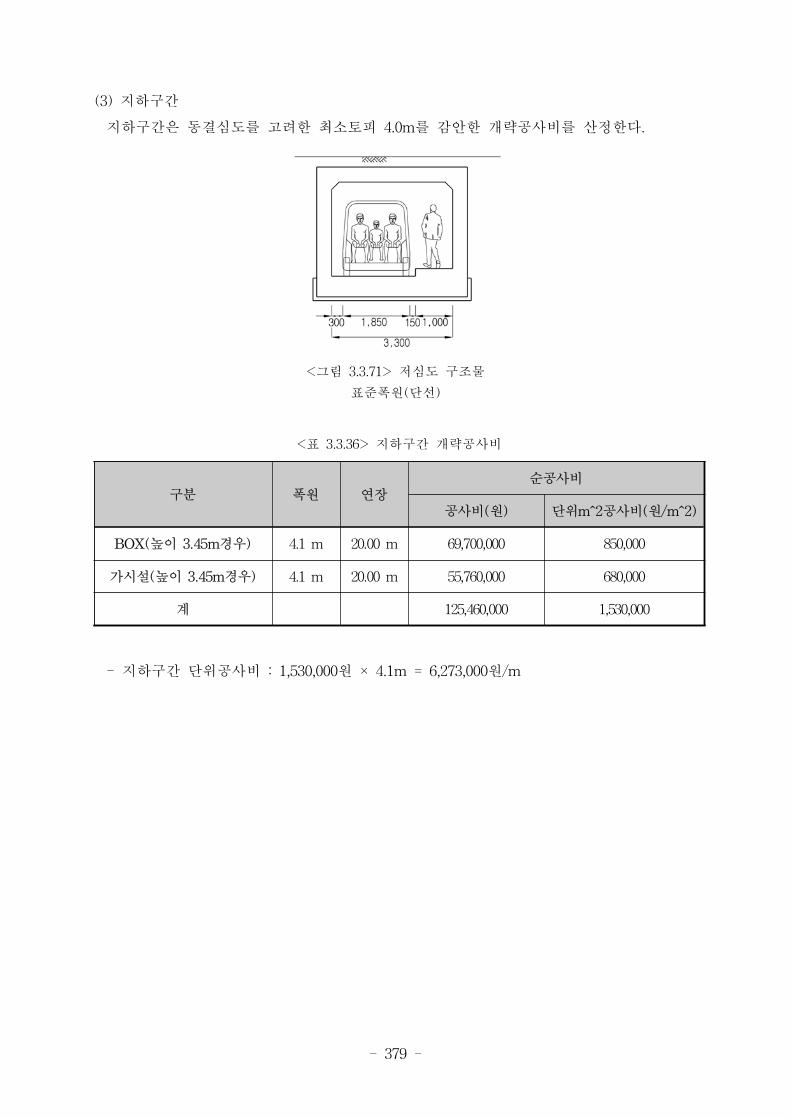
- 379 -
(3) 지하구간
지하구간은 동결심도를 고려한 최소토피 4.0m를 감안한 개략공사비를 산정한다.
<그림 3.3.71> 저심도 구조물
표준폭원(단선)
구분 폭원 연장순공사비
공사비(원) 단위m^2공사비(원/m^2)
BOX(높이 3.45m경우) 4.1 m 20.00 m 69,700,000 850,000
가시설(높이 3.45m경우) 4.1 m 20.00 m 55,760,000 680,000
계 125,460,000 1,530,000
<표 3.3.36> 지하구간 개략공사비
- 지하구간 단위공사비 : 1,530,000원 × 4.1m = 6,273,000원/m
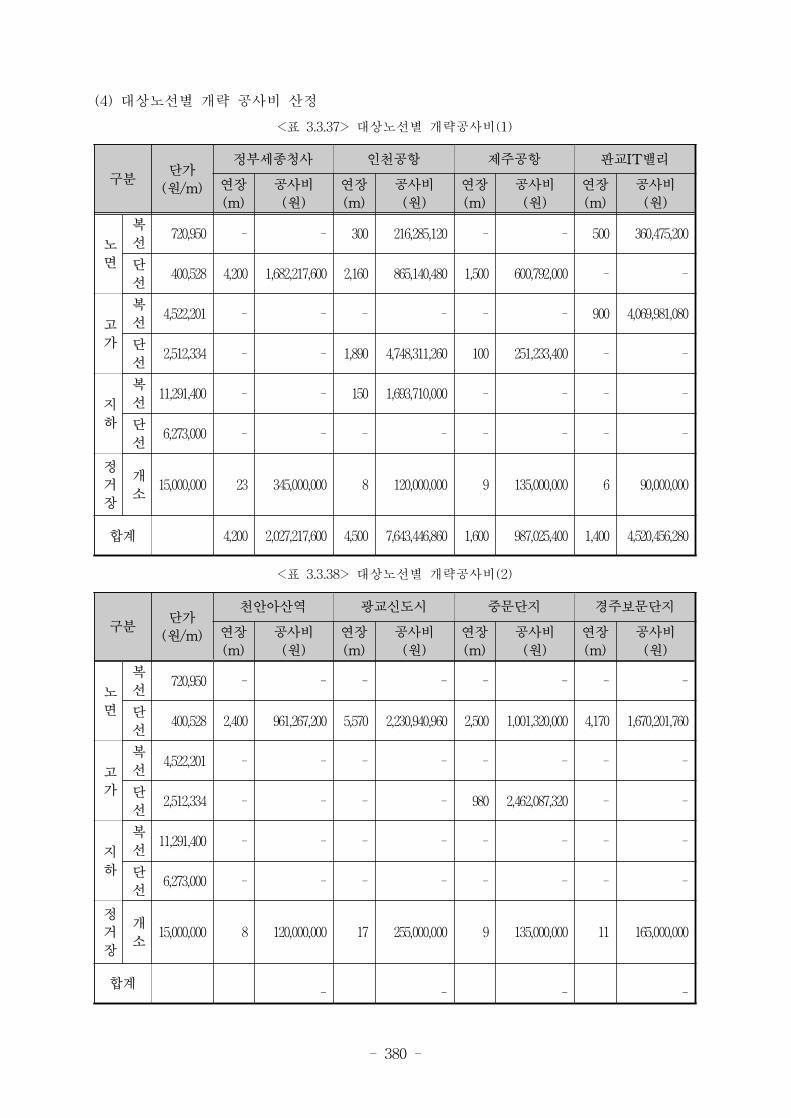
- 380 -
(4) 대상노선별 개략 공사비 산정
구분단가
(원/m)
정부세종청사 인천공항 제주공항 판교IT밸리
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
노
면
복
선720,950 - - 300 216,285,120 - - 500 360,475,200
단
선400,528 4,200 1,682,217,600 2,160 865,140,480 1,500 600,792,000 - -
고
가
복
선4,522,201 - - - - - - 900 4,069,981,080
단
선2,512,334 - - 1,890 4,748,311,260 100 251,233,400 - -
지
하
복
선11,291,400 - - 150 1,693,710,000 - - - -
단
선6,273,000 - - - - - - - -
정
거
장
개
소15,000,000 23 345,000,000 8 120,000,000 9 135,000,000 6 90,000,000
합계 4,200 2,027,217,600 4,500 7,643,446,860 1,600 987,025,400 1,400 4,520,456,280
<표 3.3.37> 대상노선별 개략공사비(1)
구분단가
(원/m)
천안아산역 광교신도시 중문단지 경주보문단지
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
노
면
복
선720,950 - - - - - - - -
단
선400,528 2,400 961,267,200 5,570 2,230,940,960 2,500 1,001,320,000 4,170 1,670,201,760
고
가
복
선4,522,201 - - - - - - - -
단
선2,512,334 - - - - 980 2,462,087,320 - -
지
하
복
선11,291,400 - - - - - - - -
단
선6,273,000 - - - - - - - -
정
거
장
개
소15,000,000 8 120,000,000 17 255,000,000 9 135,000,000 11 165,000,000
합계 -
-
-
-
<표 3.3.38> 대상노선별 개략공사비(2)
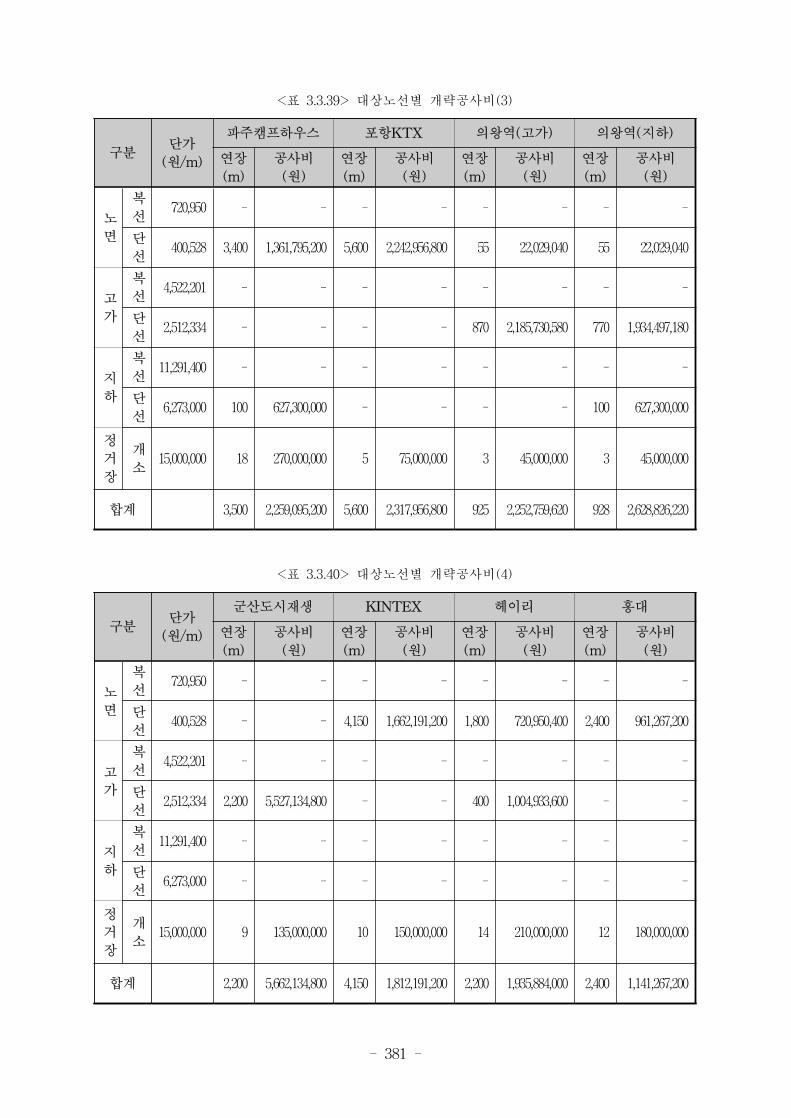
- 381 -
구분단가
(원/m)
파주캠프하우스 포항KTX 의왕역(고가) 의왕역(지하)
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
노
면
복
선720,950 - - - - - - - -
단
선400,528 3,400 1,361,795,200 5,600 2,242,956,800 55 22,029,040 55 22,029,040
고
가
복
선4,522,201 - - - - - - - -
단
선2,512,334 - - - - 870 2,185,730,580 770 1,934,497,180
지
하
복
선11,291,400 - - - - - - - -
단
선6,273,000 100 627,300,000 - - - - 100 627,300,000
정
거
장
개
소15,000,000 18 270,000,000 5 75,000,000 3 45,000,000 3 45,000,000
합계 3,500 2,259,095,200 5,600 2,317,956,800 925 2,252,759,620 928 2,628,826,220
<표 3.3.39> 대상노선별 개략공사비(3)
구분단가
(원/m)
군산도시재생 KINTEX 헤이리 홍대
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
연장
(m)
공사비
(원)
노
면
복
선720,950 - - - - - - - -
단
선400,528 - - 4,150 1,662,191,200 1,800 720,950,400 2,400 961,267,200
고
가
복
선4,522,201 - - - - - - - -
단
선2,512,334 2,200 5,527,134,800 - - 400 1,004,933,600 - -
지
하
복
선11,291,400 - - - - - - - -
단
선6,273,000 - - - - - - - -
정
거
장
개
소15,000,000 9 135,000,000 10 150,000,000 14 210,000,000 12 180,000,000
합계 2,200 5,662,134,800 4,150 1,812,191,200 2,200 1,935,884,000 2,400 1,141,267,200
<표 3.3.40> 대상노선별 개략공사비(4)
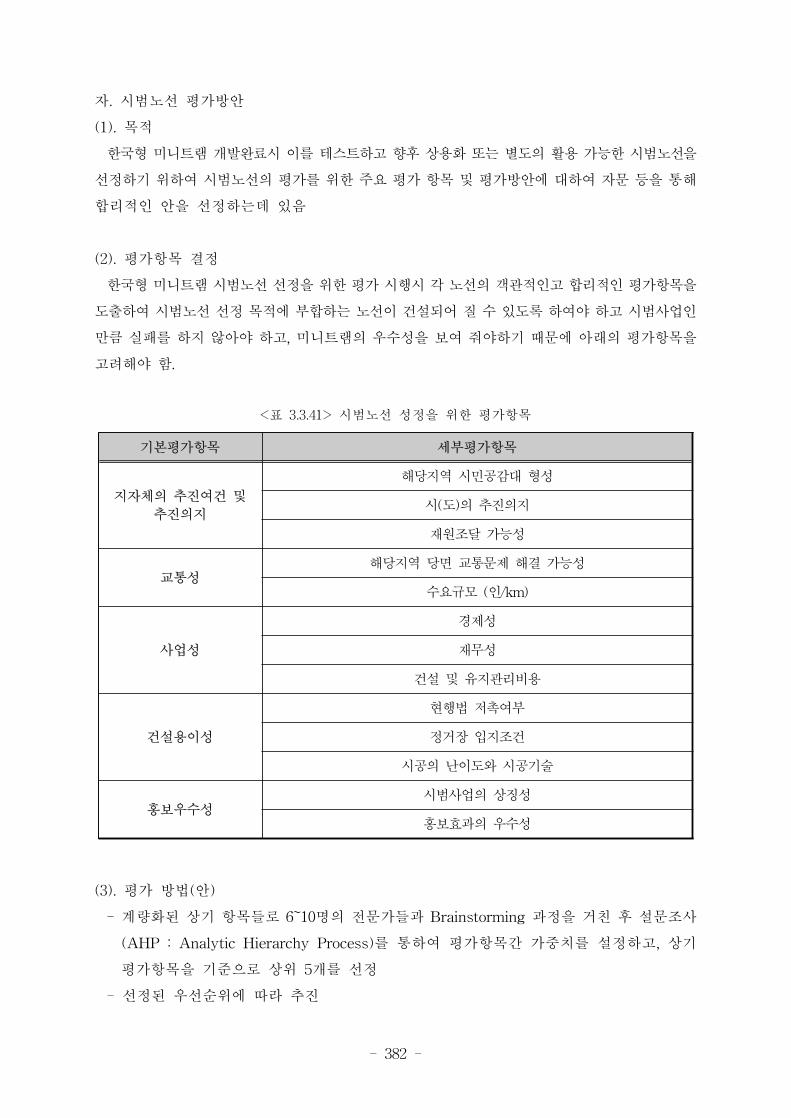
- 382 -
자. 시범노선 평가방안
(1). 목적
한국형 미니트램 개발완료시 이를 테스트하고 향후 상용화 또는 별도의 활용 가능한 시범노선을
선정하기 위하여 시범노선의 평가를 위한 주요 평가 항목 및 평가방안에 대하여 자문 등을 통해
합리적인 안을 선정하는데 있음
(2). 평가항목 결정
한국형미니트램시범노선선정을위한평가시행시각노선의객관적인고합리적인평가항목을
도출하여 시범노선 선정 목적에 부합하는 노선이 건설되어 질 수 있도록 하여야 하고 시범사업인
만큼 실패를 하지 않아야 하고, 미니트램의 우수성을 보여 줘야하기 때문에 아래의 평가항목을
고려해야 함.
기본평가항목 세부평가항목
지자체의 추진여건 및
추진의지
해당지역 시민공감대 형성
시(도)의 추진의지
재원조달 가능성
교통성해당지역 당면 교통문제 해결 가능성
수요규모 (인/km)
사업성
경제성
재무성
건설 및 유지관리비용
건설용이성
현행법 저촉여부
정거장 입지조건
시공의 난이도와 시공기술
홍보우수성시범사업의 상징성
홍보효과의 우수성
<표 3.3.41> 시범노선 성정을 위한 평가항목
(3). 평가 방법(안)
- 계량화된 상기 항목들로 6~10명의 전문가들과 Brainstorming 과정을 거친 후 설문조사
(AHP : Analytic Hierarchy Process)를 통하여 평가항목간 가중치를 설정하고, 상기
평가항목을 기준으로 상위 5개를 선정
- 선정된 우선순위에 따라 추진
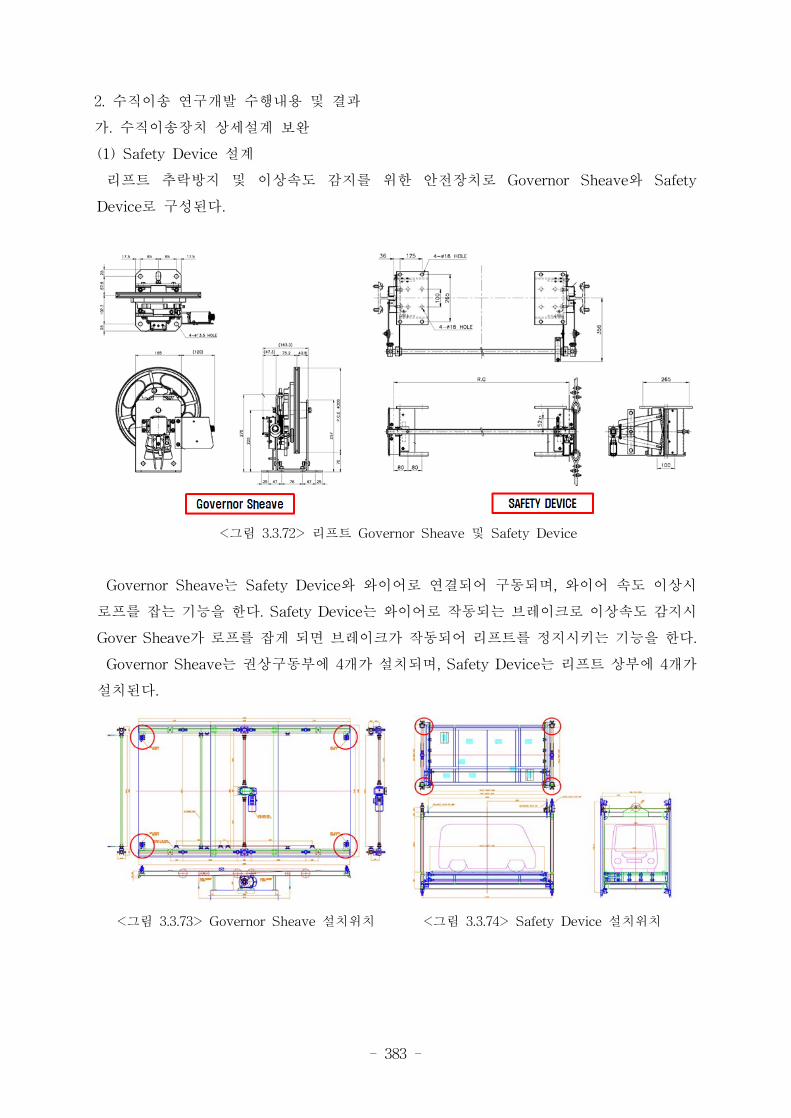
- 383 -
<그림 3.3.73> Governor Sheave 설치위치 <그림 3.3.74> Safety Device 설치위치
2. 수직이송 연구개발 수행내용 및 결과
가. 수직이송장치 상세설계 보완
(1) Safety Device 설계
리프트 추락방지 및 이상속도 감지를 위한 안전장치로 Governor Sheave와 Safety
Device로 구성된다.
<그림 3.3.72> 리프트 Governor Sheave 및 Safety Device
Governor Sheave는 Safety Device와 와이어로 연결되어 구동되며, 와이어 속도 이상시
로프를 잡는 기능을 한다. Safety Device는 와이어로 작동되는 브레이크로 이상속도 감지시
Gover Sheave가 로프를 잡게 되면 브레이크가 작동되어 리프트를 정지시키는 기능을 한다.
Governor Sheave는 권상구동부에 4개가 설치되며, Safety Device는 리프트 상부에 4개가
설치된다.
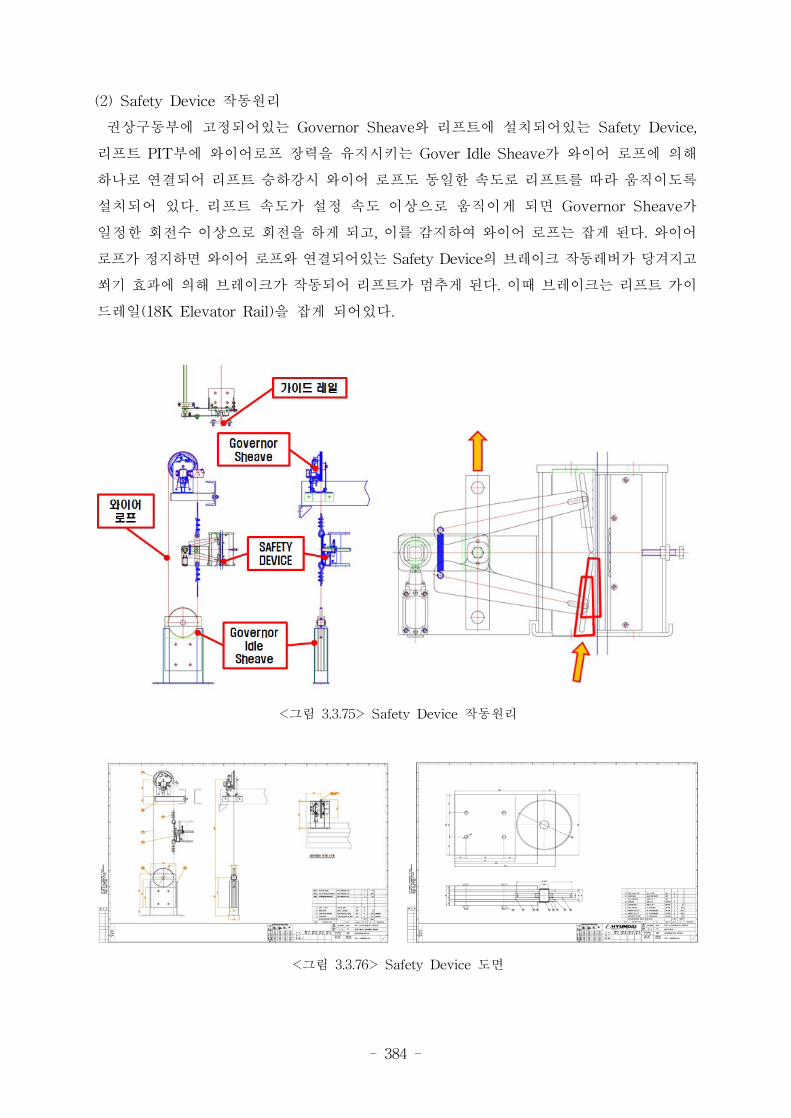
- 384 -
(2) Safety Device 작동원리
권상구동부에 고정되어있는 Governor Sheave와 리프트에 설치되어있는 Safety Device,
리프트 PIT부에 와이어로프 장력을 유지시키는 Gover Idle Sheave가 와이어 로프에 의해
하나로 연결되어 리프트 승하강시 와이어 로프도 동일한 속도로 리프트를 따라 움직이도록
설치되어 있다. 리프트 속도가 설정 속도 이상으로 움직이게 되면 Governor Sheave가
일정한 회전수 이상으로 회전을 하게 되고, 이를 감지하여 와이어 로프는 잡게 된다. 와이어
로프가 정지하면 와이어 로프와 연결되어있는 Safety Device의 브레이크 작동레버가 당겨지고
쐬기 효과에 의해 브레이크가 작동되어 리프트가 멈추게 된다. 이때 브레이크는 리프트 가이
드레일(18K Elevator Rail)을 잡게 되어있다.
<그림 3.3.75> Safety Device 작동원리
<그림 3.3.76> Safety Device 도면
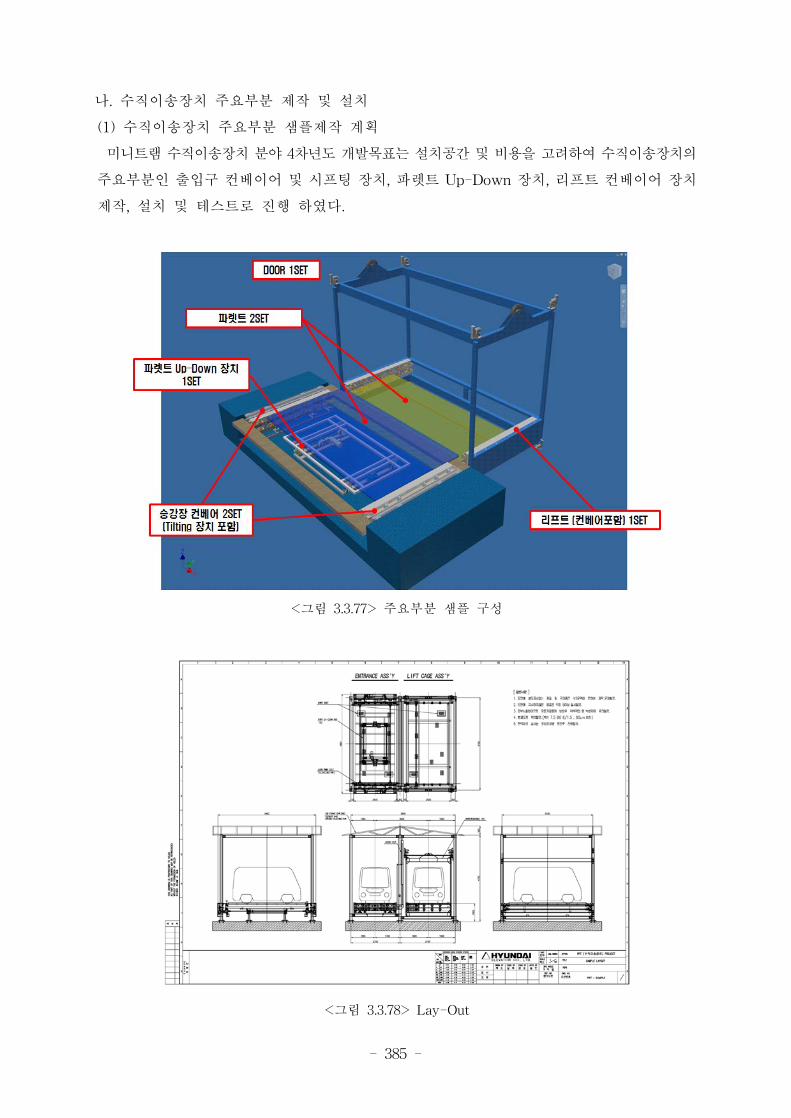
- 385 -
나. 수직이송장치 주요부분 제작 및 설치
(1) 수직이송장치 주요부분 샘플제작 계획
미니트램 수직이송장치 분야 4차년도 개발목표는 설치공간 및 비용을 고려하여 수직이송장치의
주요부분인 출입구 컨베이어 및 시프팅 장치, 파렛트 Up-Down 장치, 리프트 컨베이어 장치
제작, 설치 및 테스트로 진행 하였다.
<그림 3.3.77> 주요부분 샘플 구성
<그림 3.3.78> Lay-Out
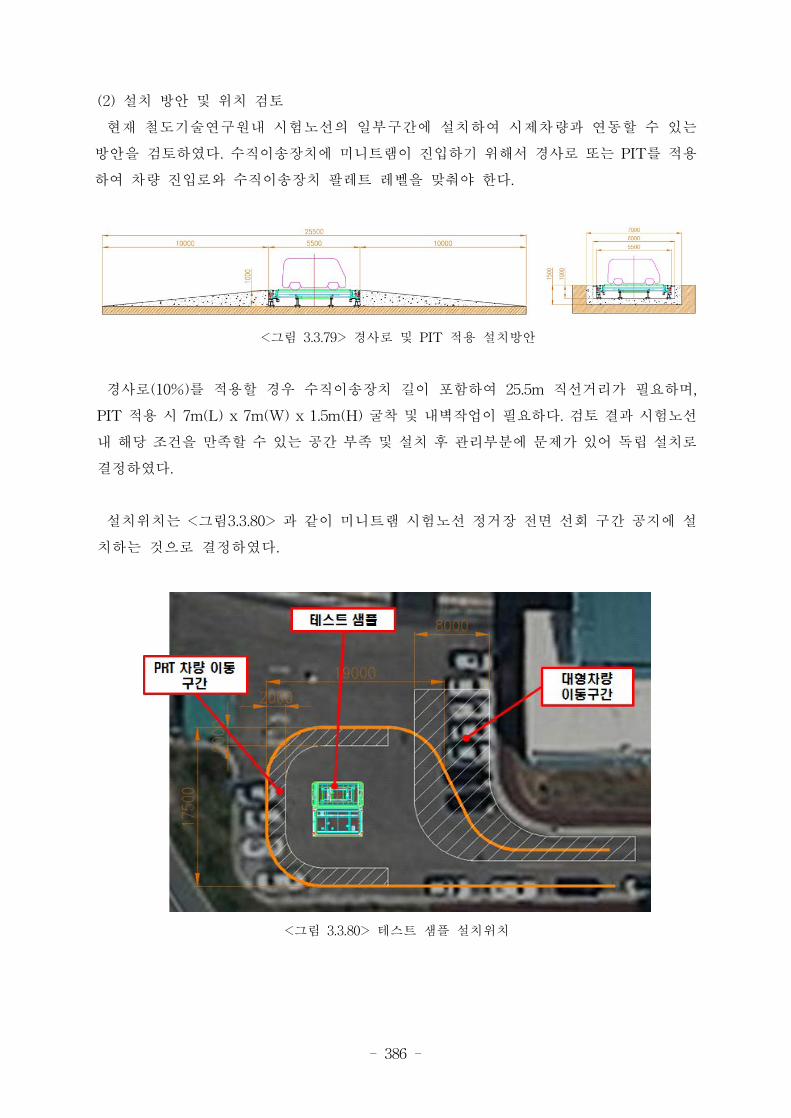
- 386 -
(2) 설치 방안 및 위치 검토
현재 철도기술연구원내 시험노선의 일부구간에 설치하여 시제차량과 연동할 수 있는
방안을 검토하였다. 수직이송장치에 미니트램이 진입하기 위해서 경사로 또는 PIT를 적용
하여 차량 진입로와 수직이송장치 팔레트 레벨을 맞춰야 한다.
<그림 3.3.79> 경사로 및 PIT 적용 설치방안
경사로(10%)를 적용할 경우 수직이송장치 길이 포함하여 25.5m 직선거리가 필요하며,
PIT 적용 시 7m(L) x 7m(W) x 1.5m(H) 굴착 및 내벽작업이 필요하다. 검토 결과 시험노선
내 해당 조건을 만족할 수 있는 공간 부족 및 설치 후 관리부분에 문제가 있어 독립 설치로
결정하였다.
설치위치는 <그림3.3.80> 과 같이 미니트램 시험노선 정거장 전면 선회 구간 공지에 설
치하는 것으로 결정하였다.
<그림 3.3.80> 테스트 샘플 설치위치
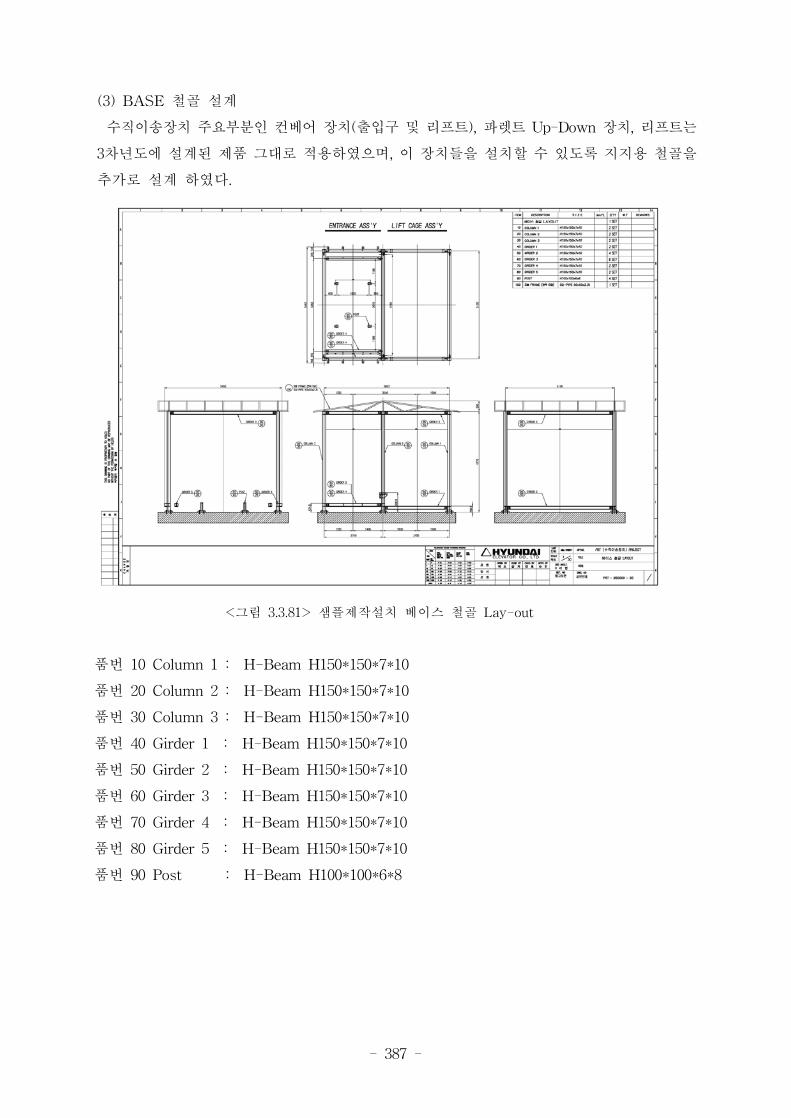
- 387 -
(3) BASE 철골 설계
수직이송장치 주요부분인 컨베어 장치(출입구 및 리프트), 파렛트 Up-Down 장치, 리프트는
3차년도에 설계된 제품 그대로 적용하였으며, 이 장치들을 설치할 수 있도록 지지용 철골을
추가로 설계 하였다.
<그림 3.3.81> 샘플제작설치 베이스 철골 Lay-out
품번 10 Column 1 : H-Beam H150*150*7*10
품번 20 Column 2 : H-Beam H150*150*7*10
품번 30 Column 3 : H-Beam H150*150*7*10
품번 40 Girder 1 : H-Beam H150*150*7*10
품번 50 Girder 2 : H-Beam H150*150*7*10
품번 60 Girder 3 : H-Beam H150*150*7*10
품번 70 Girder 4 : H-Beam H150*150*7*10
품번 80 Girder 5 : H-Beam H150*150*7*10
품번 90 Post : H-Beam H100*100*6*8
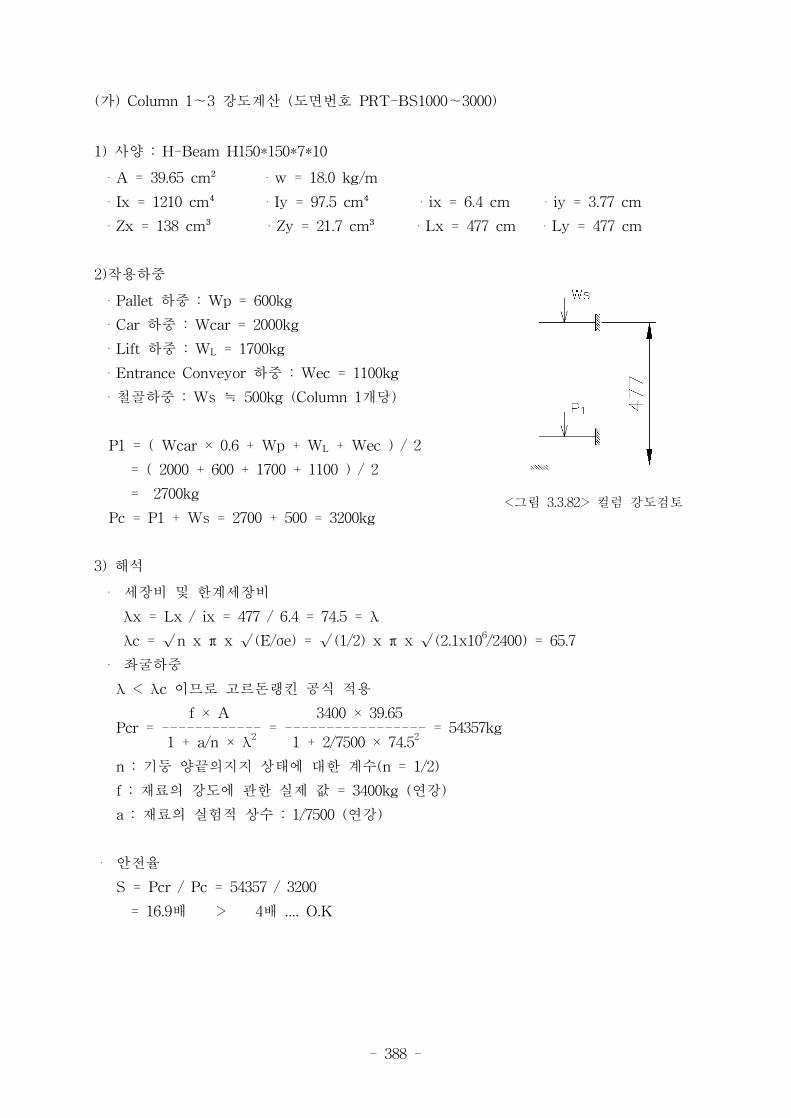
<그림 3.3.82> 컬럼 강도검토
- 388 -
(가) Column 1~3 강도계산 (도면번호 PRT-BS1000~3000)
1) 사양 : H-Beam H150*150*7*10
・A = 39.65 cm² ・w = 18.0 kg/m・Ix = 1210 cm⁴ ・Iy = 97.5 cm⁴ ・ix = 6.4 cm ・iy = 3.77 cm・Zx = 138 cm³ ・Zy = 21.7 cm³ ・Lx = 477 cm ・Ly = 477 cm
2)작용하중
・Pallet 하중 : Wp = 600kg・Car 하중 : Wcar = 2000kg・Lift 하중 : WL = 1700kg・Entrance Conveyor 하중 : Wec = 1100kg
・철골하중 : Ws ≒ 500kg (Column 1개당)
P1 = ( Wcar × 0.6 + Wp + WL + Wec ) / 2
= ( 2000 + 600 + 1700 + 1100 ) / 2
= 2700kg
Pc = P1 + Ws = 2700 + 500 = 3200kg
3) 해석
・ 세장비 및 한계세장비
λx = Lx / ix = 477 / 6.4 = 74.5 = λ
λc = √n x π x √(E/σe) = √(1/2) x π x √(2.1x106/2400) = 65.7
・ 좌굴하중λ < λc 이므로 고르돈랭킨 공식 적용
f × A 3400 × 39.65Pcr = ------------ = ----------------- = 54357kg
1 + a/n × λ2 1 + 2/7500 × 74.52
n : 기둥 양끝의지지 상태에 대한 계수(n = 1/2)
f : 재료의 강도에 관한 실제 값 = 3400kg (연강)
a : 재료의 실험적 상수 : 1/7500 (연강)
・ 안전율S = Pcr / Pc = 54357 / 3200
= 16.9배 > 4배 .... O.K
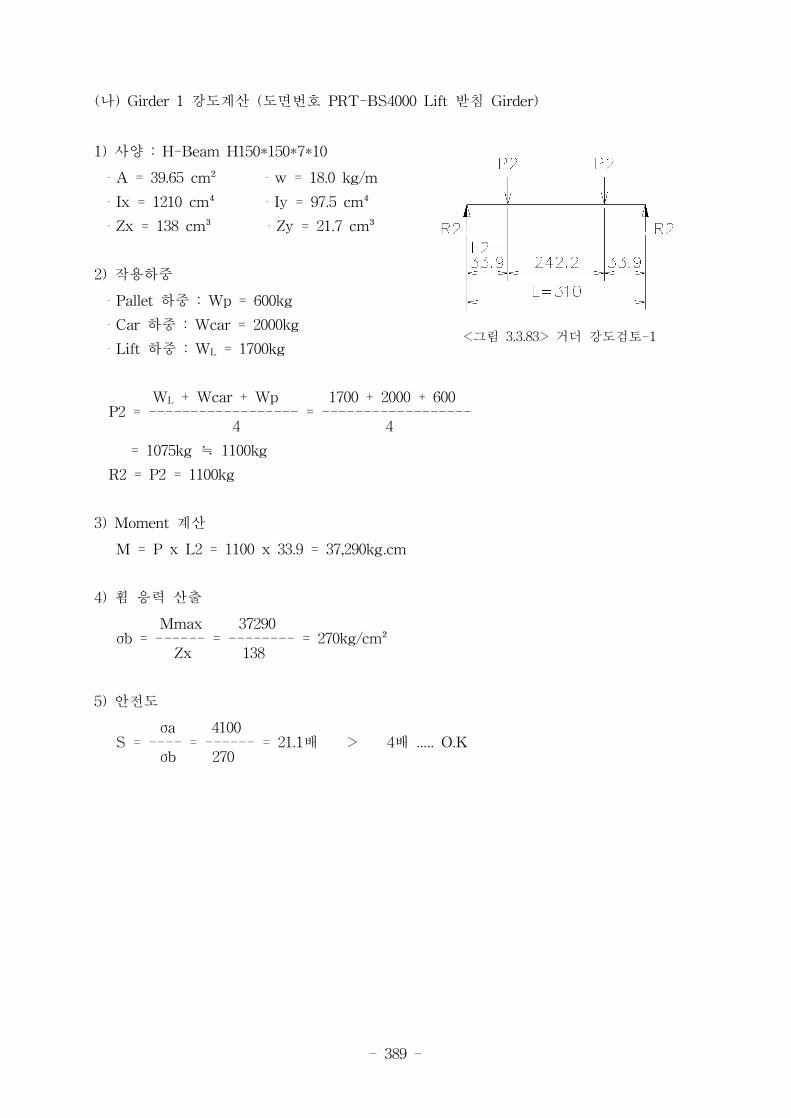
<그림 3.3.83> 거더 강도검토-1
- 389 -
(나) Girder 1 강도계산 (도면번호 PRT-BS4000 Lift 받침 Girder)
1) 사양 : H-Beam H150*150*7*10
・A = 39.65 cm² ・w = 18.0 kg/m・Ix = 1210 cm⁴ ・Iy = 97.5 cm⁴・Zx = 138 cm³ ・Zy = 21.7 cm³
2) 작용하중
・Pallet 하중 : Wp = 600kg・Car 하중 : Wcar = 2000kg・Lift 하중 : WL = 1700kg
WL + Wcar + Wp 1700 + 2000 + 600P2 = ------------------ = ------------------
4 4
= 1075kg ≒ 1100kg
R2 = P2 = 1100kg
3) Moment 계산
M = P x L2 = 1100 x 33.9 = 37,290kg.cm
4) 휨 응력 산출
Mmax 37290σb = ------ = -------- = 270kg/cm²
Zx 138
5) 안전도
σa 4100S = ---- = ------ = 21.1배 > 4배 ..... O.K
σb 270
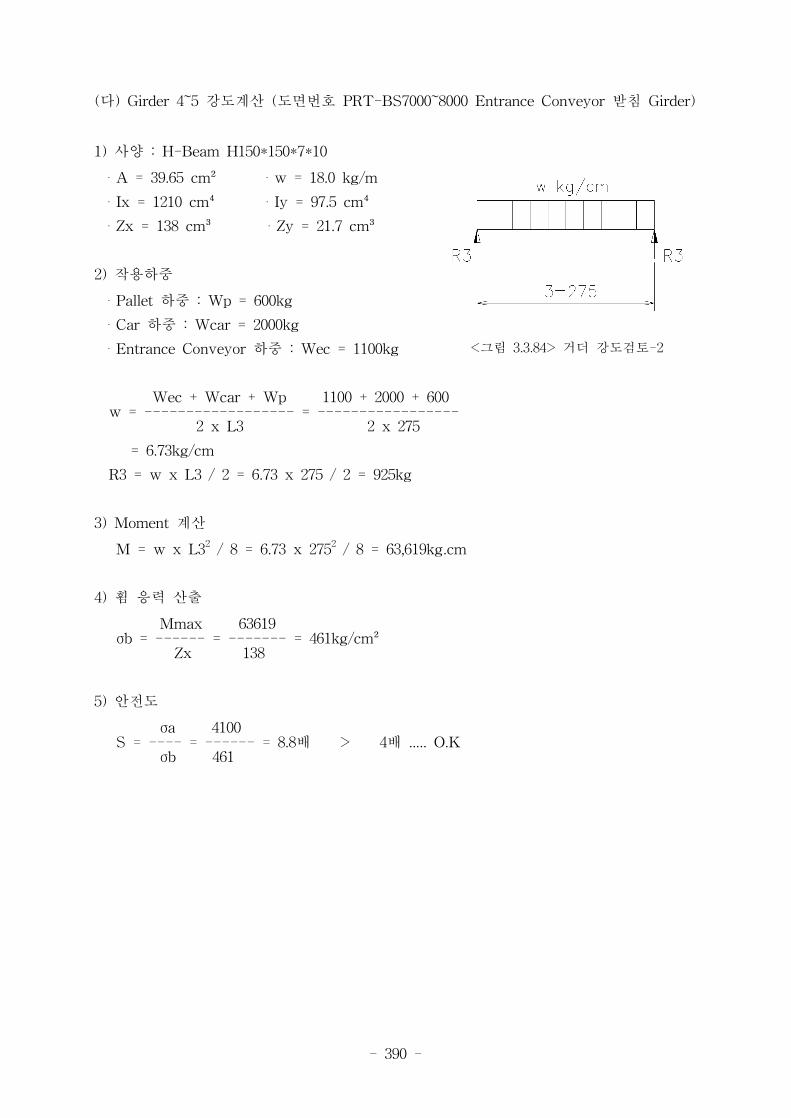
<그림 3.3.84> 거더 강도검토-2
- 390 -
(다) Girder 4~5 강도계산 (도면번호 PRT-BS7000~8000 Entrance Conveyor 받침 Girder)
1) 사양 : H-Beam H150*150*7*10
・A = 39.65 cm² ・w = 18.0 kg/m・Ix = 1210 cm⁴ ・Iy = 97.5 cm⁴・Zx = 138 cm³ ・Zy = 21.7 cm³
2) 작용하중
・Pallet 하중 : Wp = 600kg・Car 하중 : Wcar = 2000kg・Entrance Conveyor 하중 : Wec = 1100kg
Wec + Wcar + Wp 1100 + 2000 + 600w = ------------------ = -----------------
2 x L3 2 x 275
= 6.73kg/cm
R3 = w x L3 / 2 = 6.73 x 275 / 2 = 925kg
3) Moment 계산
M = w x L32 / 8 = 6.73 x 2752 / 8 = 63,619kg.cm
4) 휨 응력 산출
Mmax 63619σb = ------ = ------- = 461kg/cm²
Zx 138
5) 안전도
σa 4100S = ---- = ------ = 8.8배 > 4배 ..... O.K
σb 461
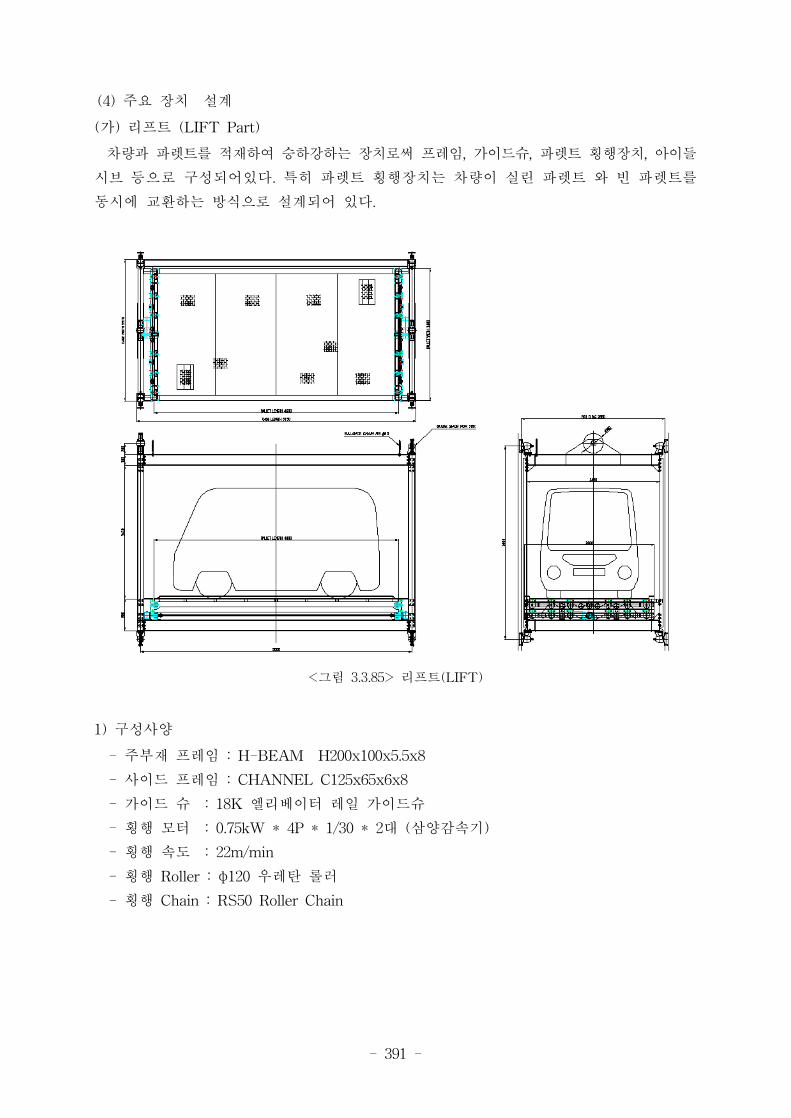
- 391 -
(4) 주요 장치 설계
(가) 리프트 (LIFT Part)
차량과 파렛트를 적재하여 승하강하는 장치로써 프레임, 가이드슈, 파렛트 횡행장치, 아이들
시브 등으로 구성되어있다. 특히 파렛트 횡행장치는 차량이 실린 파렛트 와 빈 파렛트를
동시에 교환하는 방식으로 설계되어 있다.
<그림 3.3.85> 리프트(LIFT)
1) 구성사양
- 주부재 프레임 : H-BEAM H200x100x5.5x8
- 사이드 프레임 : CHANNEL C125x65x6x8
- 가이드 슈 : 18K 엘리베이터 레일 가이드슈
- 횡행 모터 : 0.75kW * 4P * 1/30 * 2대 (삼양감속기)
- 횡행 속도 : 22m/min
- 횡행 Roller : φ120 우레탄 롤러
- 횡행 Chain : RS50 Roller Chain
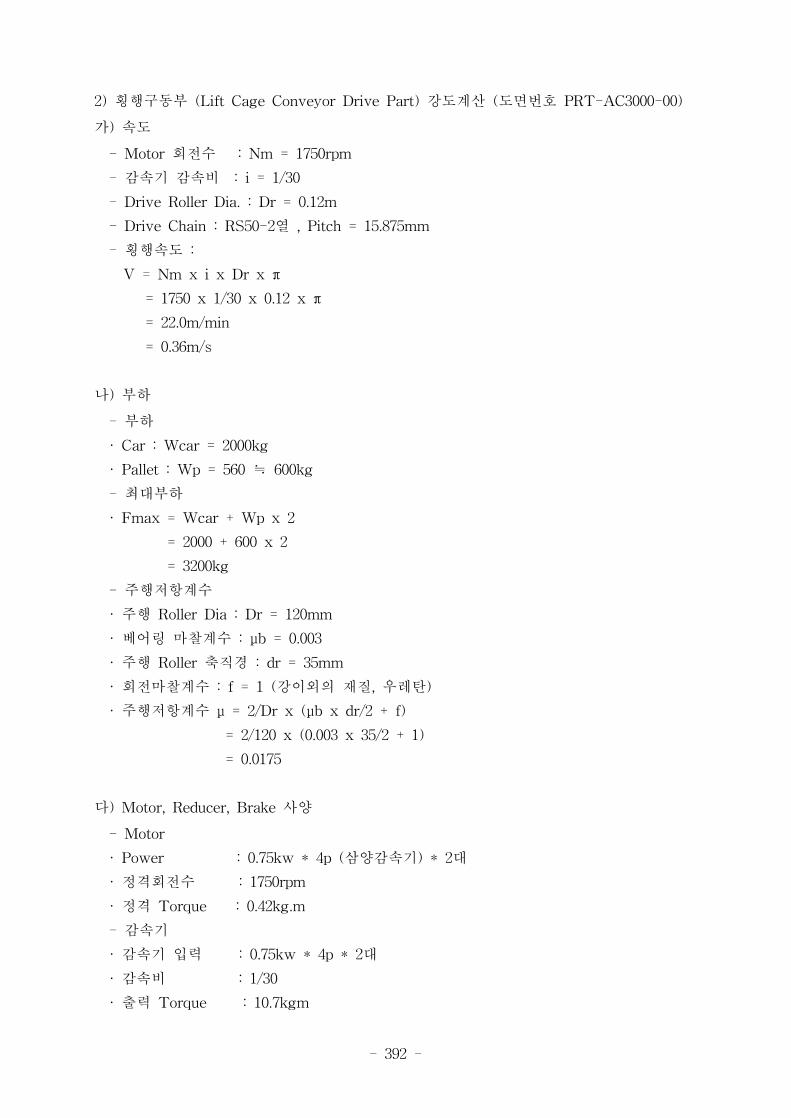
- 392 -
2) 횡행구동부 (Lift Cage Conveyor Drive Part) 강도계산 (도면번호 PRT-AC3000-00)
가) 속도
- Motor 회전수 : Nm = 1750rpm
- 감속기 감속비 : i = 1/30
- Drive Roller Dia. : Dr = 0.12m
- Drive Chain : RS50-2열 , Pitch = 15.875mm
- 횡행속도 :
V = Nm x i x Dr x π
= 1750 x 1/30 x 0.12 x π
= 22.0m/min
= 0.36m/s
나) 부하
- 부하
· Car : Wcar = 2000kg
· Pallet : Wp = 560 ≒ 600kg
- 최대부하
· Fmax = Wcar + Wp x 2
= 2000 + 600 x 2
= 3200kg
- 주행저항계수
· 주행 Roller Dia : Dr = 120mm
· 베어링 마찰계수 : μb = 0.003
· 주행 Roller 축직경 : dr = 35mm
· 회전마찰계수 : f = 1 (강이외의 재질, 우레탄)
· 주행저항계수 μ = 2/Dr x (μb x dr/2 + f)
= 2/120 x (0.003 x 35/2 + 1)
= 0.0175
다) Motor, Reducer, Brake 사양
- Motor
· Power : 0.75kw * 4p (삼양감속기) * 2대
· 정격회전수 : 1750rpm
· 정격 Torque : 0.42kg.m
- 감속기
· 감속기 입력 : 0.75kw * 4p * 2대
· 감속비 : 1/30
· 출력 Torque : 10.7kgm
- 393 -
· Service Factor : 1.3
· 최대출력 Torque : 10.7 x 1.3 = 13.91kg.m
· 효율 : 0.9
- Brake
· 규격 : 0.75kw * 4p * 2대
· 정격 TORQUE : 2.0kg.m
라) 효율
- 감속기 효율 : ηr = 0.9
- Chain 전동 효율 : ηs = 0.96
- Total 효율 η : ηr x ηs = 0.864
마) 소요동력 및 Torque
- 소요동력
1.25 x μ x Fmax x g x V 1.25 x 0.0175 x 3200 x 9.81 x 0.36P = ------------------------- = -------------------------------
1000 x η 1000 x 0.864
= 0.29kw < 0.75kw x 2 = 1.5kw .... O.K
(1.25 = 사행부가계수)
- 정격 Torque
Ta = 974 x P/Nm = 974 x 0.29 / 1750
= 0.16kg.m < 0.42 x 2 = 0.84kg.m .... O.K
- 감속기 용량 계산
Tar = Ta x 1/i x ηr = 0.16 x 30 x 0.864 x 1.2 (관성모멘트적용)
= 4.98kg.m < 13.91 x 2 = 27.82kg.m .... O.K
- Brake 용량 계산
Tab = Ta x 1.5 = 0.16 x 1.5 x 1.2
= 0.29kg.m < 2.0 x 2 = 4.0kg.m .... O.K
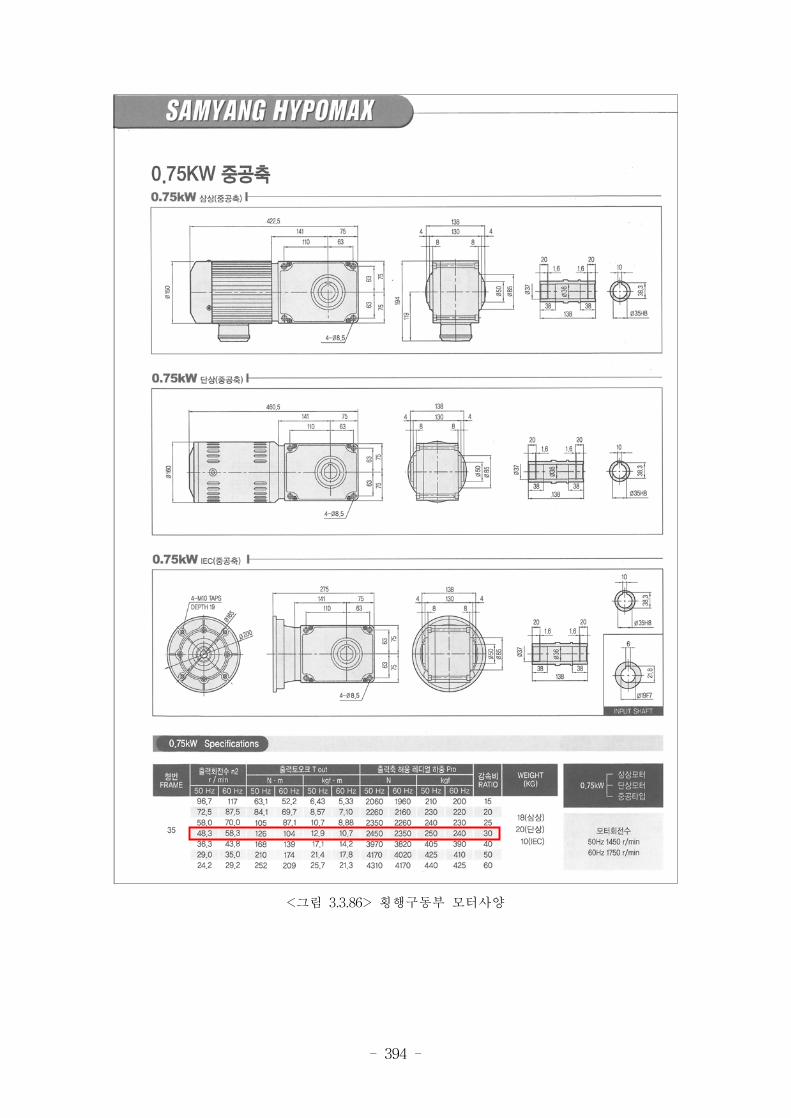
- 394 -
<그림 3.3.86> 횡행구동부 모터사양
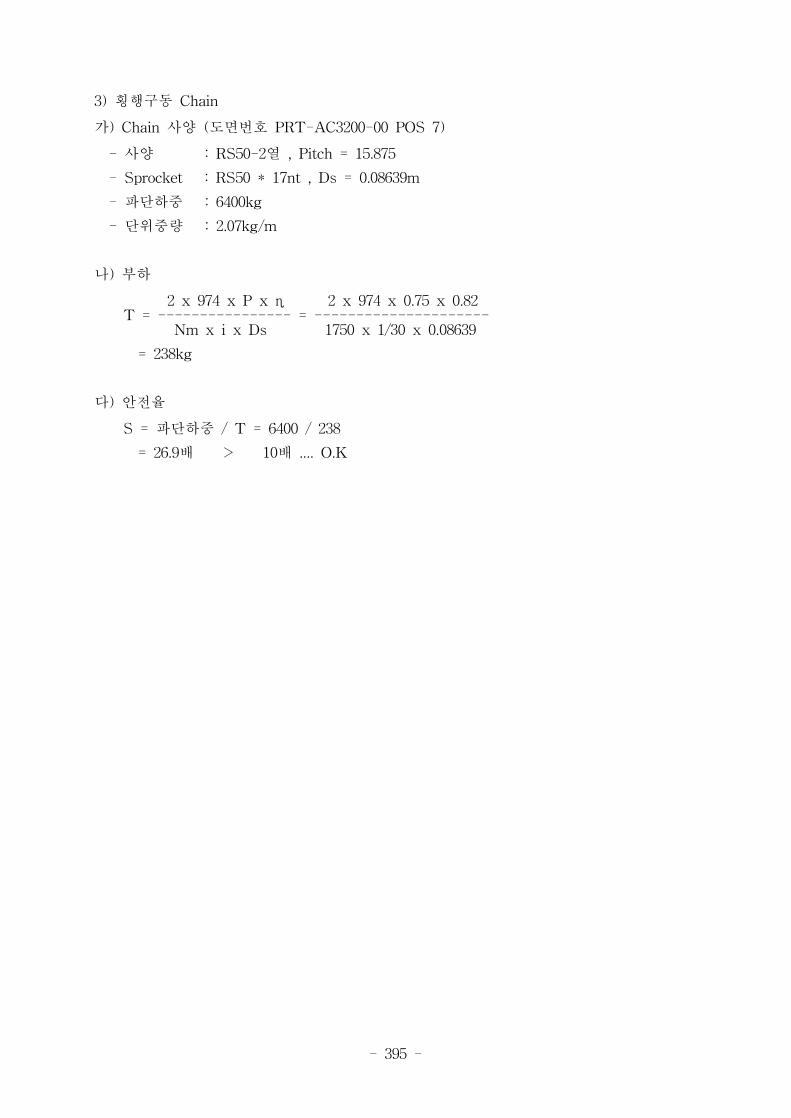
- 395 -
3) 횡행구동 Chain
가) Chain 사양 (도면번호 PRT-AC3200-00 POS 7)
- 사양 : RS50-2열 , Pitch = 15.875
- Sprocket : RS50 * 17nt , Ds = 0.08639m
- 파단하중 : 6400kg
- 단위중량 : 2.07kg/m
나) 부하
2 x 974 x P x η 2 x 974 x 0.75 x 0.82T = ---------------- = ---------------------
Nm x i x Ds 1750 x 1/30 x 0.08639
= 238kg
다) 안전율
S = 파단하중 / T = 6400 / 238
= 26.9배 > 10배 .... O.K
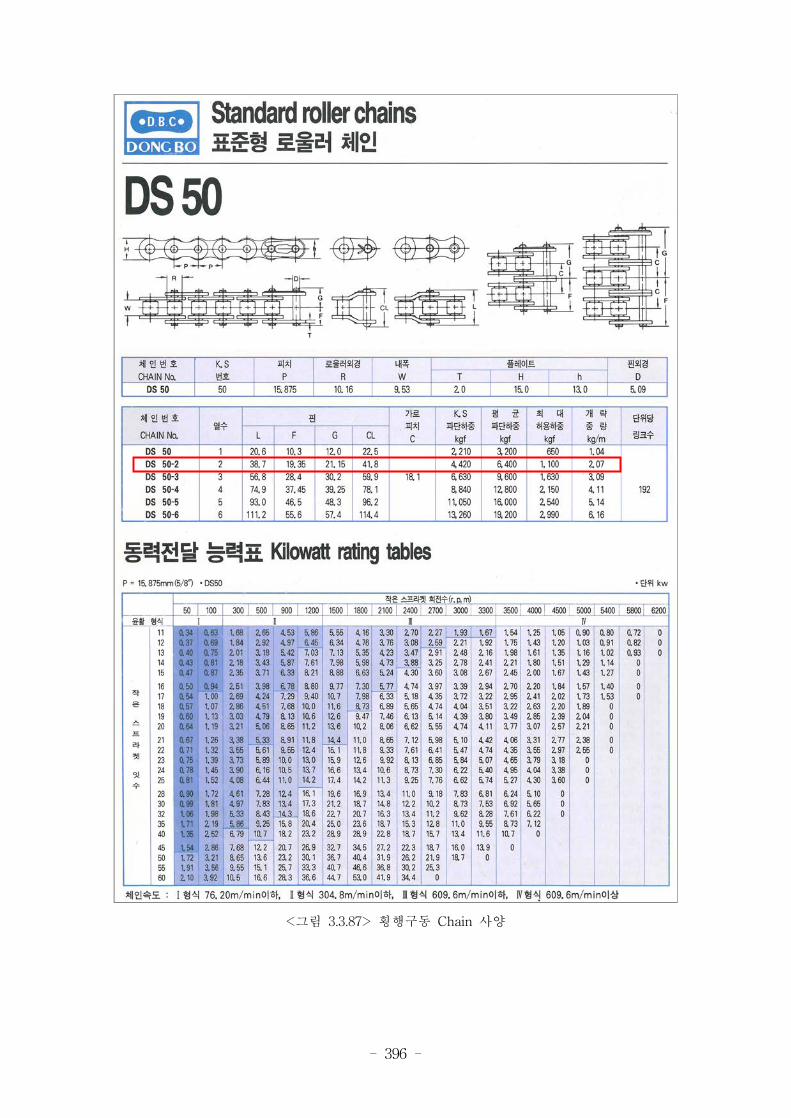
- 396 -
<그림 3.3.87> 횡행구동 Chain 사양
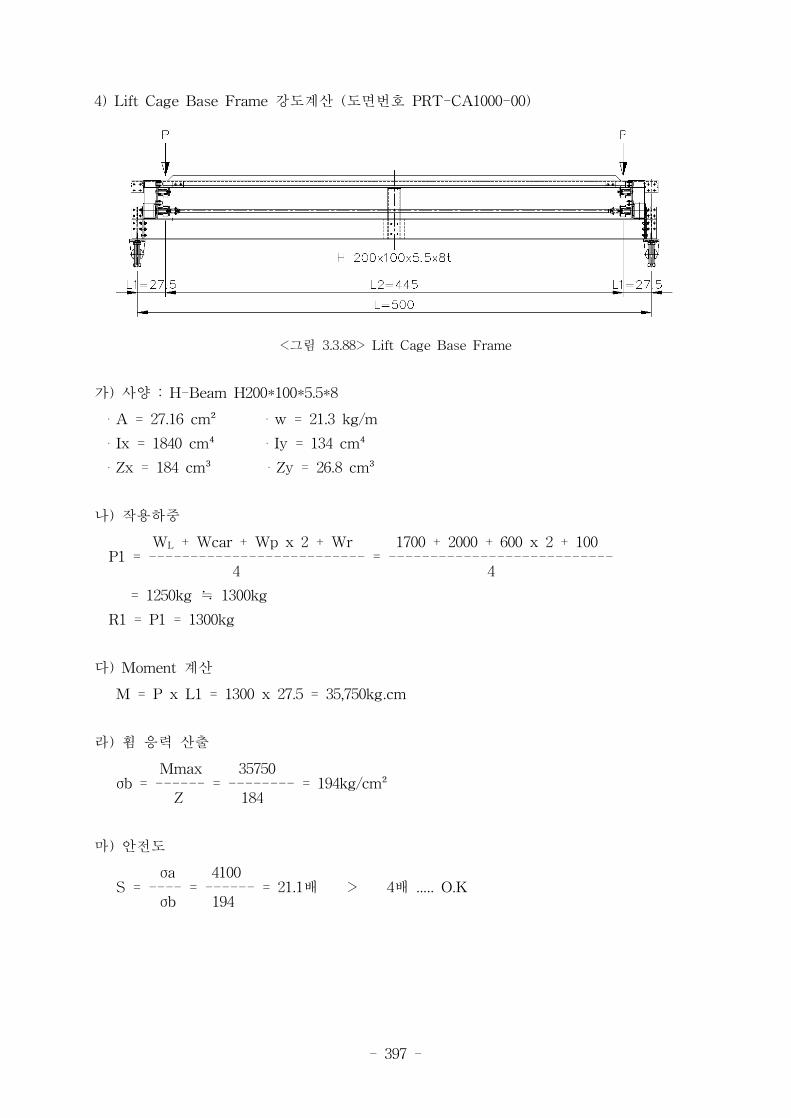
- 397 -
4) Lift Cage Base Frame 강도계산 (도면번호 PRT-CA1000-00)
<그림 3.3.88> Lift Cage Base Frame
가) 사양 : H-Beam H200*100*5.5*8
・A = 27.16 cm² ・w = 21.3 kg/m・Ix = 1840 cm⁴ ・Iy = 134 cm⁴・Zx = 184 cm³ ・Zy = 26.8 cm³
나) 작용하중
WL + Wcar + Wp x 2 + Wr 1700 + 2000 + 600 x 2 + 100P1 = -------------------------- = ---------------------------
4 4
= 1250kg ≒ 1300kg
R1 = P1 = 1300kg
다) Moment 계산
M = P x L1 = 1300 x 27.5 = 35,750kg.cm
라) 휨 응력 산출
Mmax 35750σb = ------ = -------- = 194kg/cm²
Z 184
마) 안전도
σa 4100S = ---- = ------ = 21.1배 > 4배 ..... O.K
σb 194

- 398 -
5) Lift Cage Cage Front & Rear Beam 강도계산 (도면번호 PRT-CA2200-00)
<그림 3.3.89> Lift Cage Front & Rear Beam
가) 사양 : H-Beam H200*100*5.5*8
・A = 27.16 cm² ・w = 21.3 kg/m・Ix = 1840 cm⁴ ・Iy = 134 cm⁴・Zx = 184 cm³ ・Zy = 26.8 cm³
나) 작용하중
P2 = 8 x Tmax = 8 x 275 = 2200kg
R2 = P2 / 2 = 2200 / 2 = 1100kg
다) Moment 계산
P2 x L 2200 x 245M = -------- = ------------
4 4
= 134,750kg.cm
라) 휨 응력 산출
Mmax 134750σb = ------ = -------- = 732kg/cm²
Z 184
마) 안전도
σa 4100S = ---- = ------ = 5.6배 > 4배 ..... O.K
σb 732
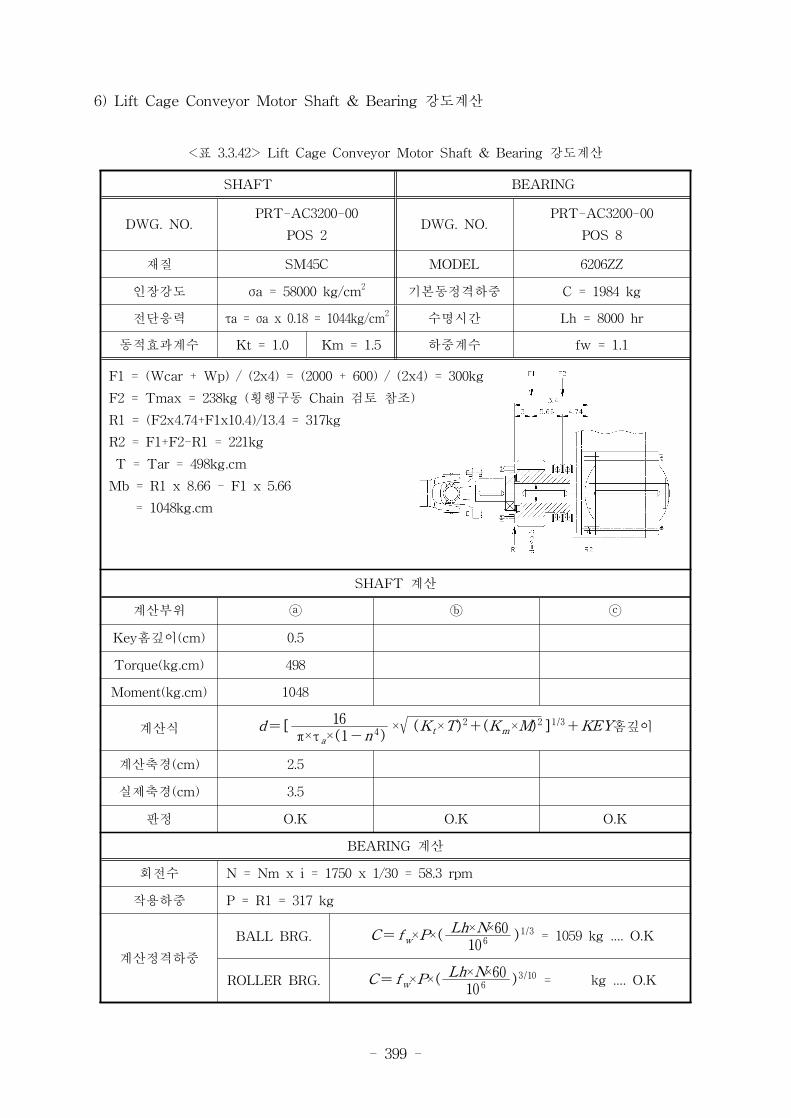
- 399 -
6) Lift Cage Conveyor Motor Shaft & Bearing 강도계산
SHAFT BEARING
DWG. NO.PRT-AC3200-00
POS 2DWG. NO.
PRT-AC3200-00
POS 8
재질 SM45C MODEL 6206ZZ
인장강도 σa = 58000 kg/cm2 기본동정격하중 C = 1984 kg
전단응력 τa = σa x 0.18 = 1044kg/cm2 수명시간 Lh = 8000 hr
동적효과계수 Kt = 1.0 Km = 1.5 하중계수 fw = 1.1
F1 = (Wcar + Wp) / (2x4) = (2000 + 600) / (2x4) = 300kg
F2 = Tmax = 238kg (횡행구동 Chain 검토 참조)
R1 = (F2x4.74+F1x10.4)/13.4 = 317kg
R2 = F1+F2-R1 = 221kg
T = Tar = 498kg.cm
Mb = R1 x 8.66 - F1 x 5.66
= 1048kg.cm
SHAFT 계산
계산부위
Key홈깊이(cm) 0.5
Torque(kg.cm) 498
Moment(kg.cm) 1048
계산식 d= [16
π×τ a×(1-n 4 )× (Kt×T)
2+(Km×M)2 ] 1/3+KEY홈깊이
계산축경(cm) 2.5
실제축경(cm) 3.5
판정 O.K O.K O.K
BEARING 계산
회전수 N = Nm x i = 1750 x 1/30 = 58.3 rpm
작용하중 P = R1 = 317 kg
계산정격하중
BALL BRG. C= fw×P×(Lh×N×60
10 6) 1/3 = 1059 kg .... O.K
ROLLER BRG. C= fw×P×(Lh×N×60
10 6) 3/10 = kg .... O.K
<표 3.3.42> Lift Cage Conveyor Motor Shaft & Bearing 강도계산
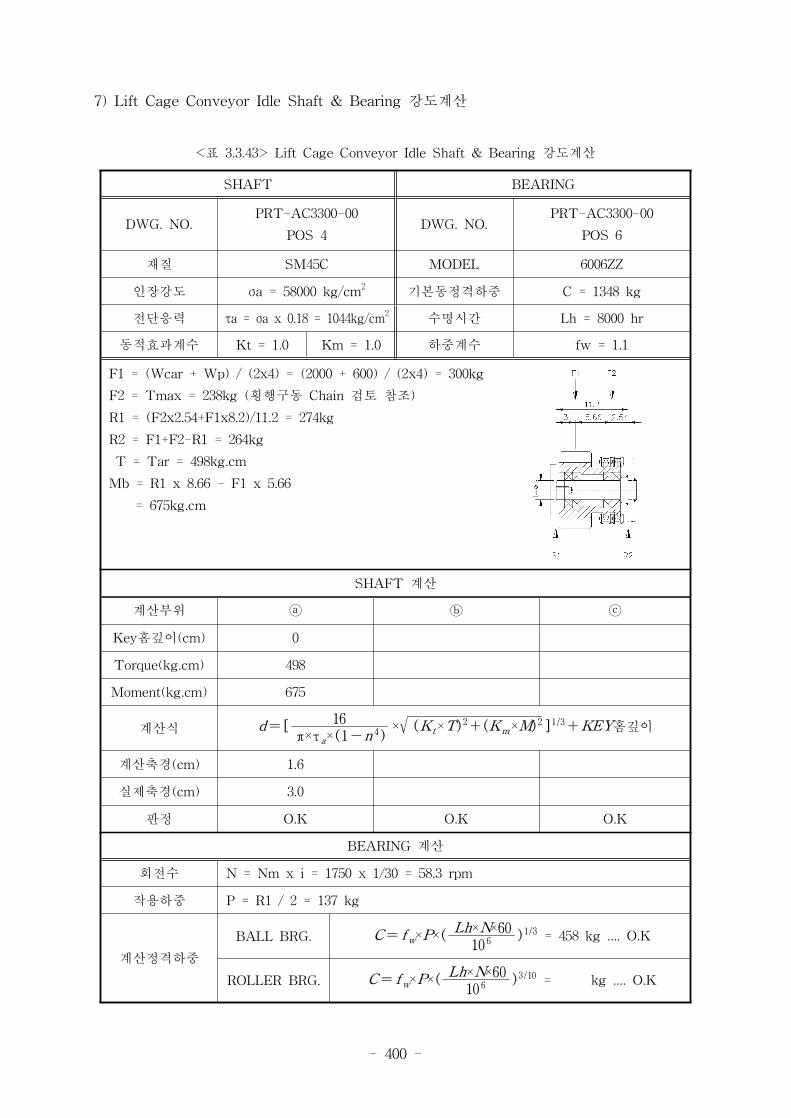
- 400 -
7) Lift Cage Conveyor Idle Shaft & Bearing 강도계산
SHAFT BEARING
DWG. NO.PRT-AC3300-00
POS 4DWG. NO.
PRT-AC3300-00
POS 6
재질 SM45C MODEL 6006ZZ
인장강도 σa = 58000 kg/cm2 기본동정격하중 C = 1348 kg
전단응력 τa = σa x 0.18 = 1044kg/cm2 수명시간 Lh = 8000 hr
동적효과계수 Kt = 1.0 Km = 1.0 하중계수 fw = 1.1
F1 = (Wcar + Wp) / (2x4) = (2000 + 600) / (2x4) = 300kg
F2 = Tmax = 238kg (횡행구동 Chain 검토 참조)
R1 = (F2x2.54+F1x8.2)/11.2 = 274kg
R2 = F1+F2-R1 = 264kg
T = Tar = 498kg.cm
Mb = R1 x 8.66 - F1 x 5.66
= 675kg.cm
SHAFT 계산
계산부위
Key홈깊이(cm) 0
Torque(kg.cm) 498
Moment(kg.cm) 675
계산식 d= [16
π×τ a×(1-n 4 )× (Kt×T)
2+(Km×M)2 ] 1/3+KEY홈깊이
계산축경(cm) 1.6
실제축경(cm) 3.0
판정 O.K O.K O.K
BEARING 계산
회전수 N = Nm x i = 1750 x 1/30 = 58.3 rpm
작용하중 P = R1 / 2 = 137 kg
계산정격하중
BALL BRG. C= fw×P×(Lh×N×60
10 6) 1/3 = 458 kg .... O.K
ROLLER BRG. C= fw×P×(Lh×N×60
10 6) 3/10 = kg .... O.K
<표 3.3.43> Lift Cage Conveyor Idle Shaft & Bearing 강도계산
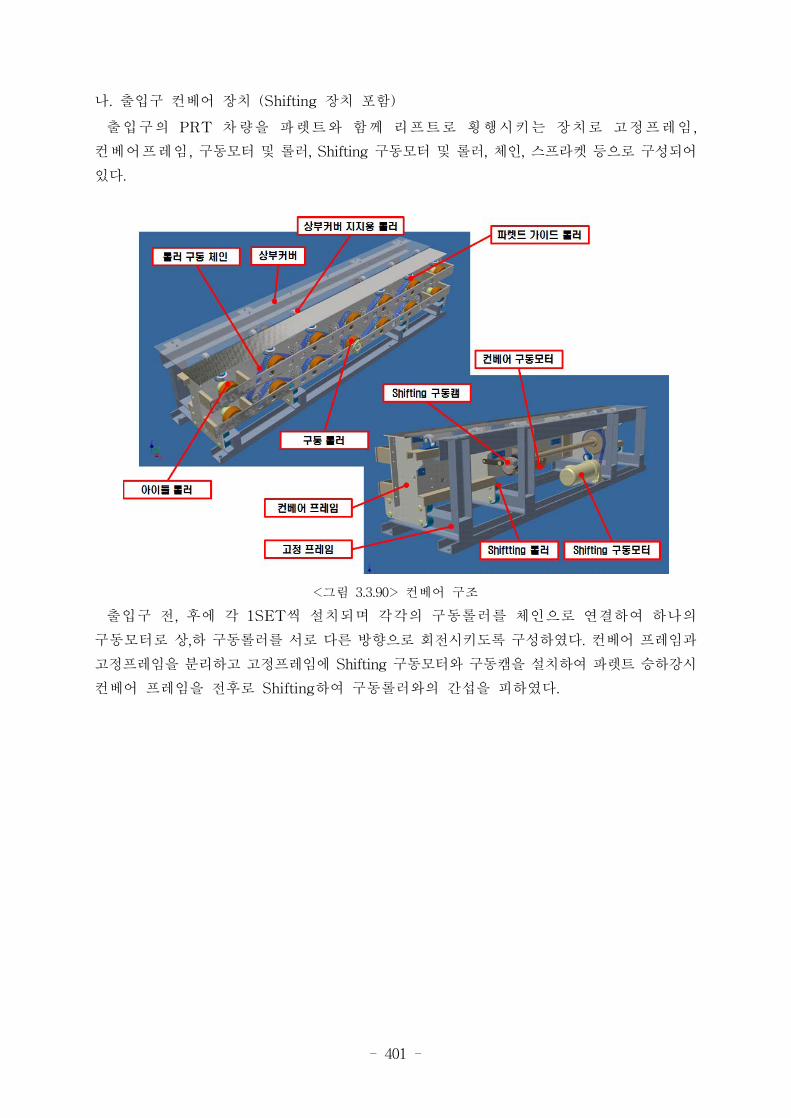
- 401 -
나. 출입구 컨베어 장치 (Shifting 장치 포함)
출입구의 PRT 차량을 파렛트와 함께 리프트로 횡행시키는 장치로 고정프레임,
컨베어프레임, 구동모터 및 롤러, Shifting 구동모터 및 롤러, 체인, 스프라켓 등으로 구성되어
있다.
<그림 3.3.90> 컨베어 구조
출입구 전, 후에 각 1SET씩 설치되며 각각의 구동롤러를 체인으로 연결하여 하나의
구동모터로 상,하 구동롤러를 서로 다른 방향으로 회전시키도록 구성하였다. 컨베어 프레임과
고정프레임을 분리하고 고정프레임에 Shifting 구동모터와 구동캠을 설치하여 파렛트 승하강시
컨베어 프레임을 전후로 Shifting하여 구동롤러와의 간섭을 피하였다.

- 402 -
<그림 3.3.91> 컨베어 Shifting
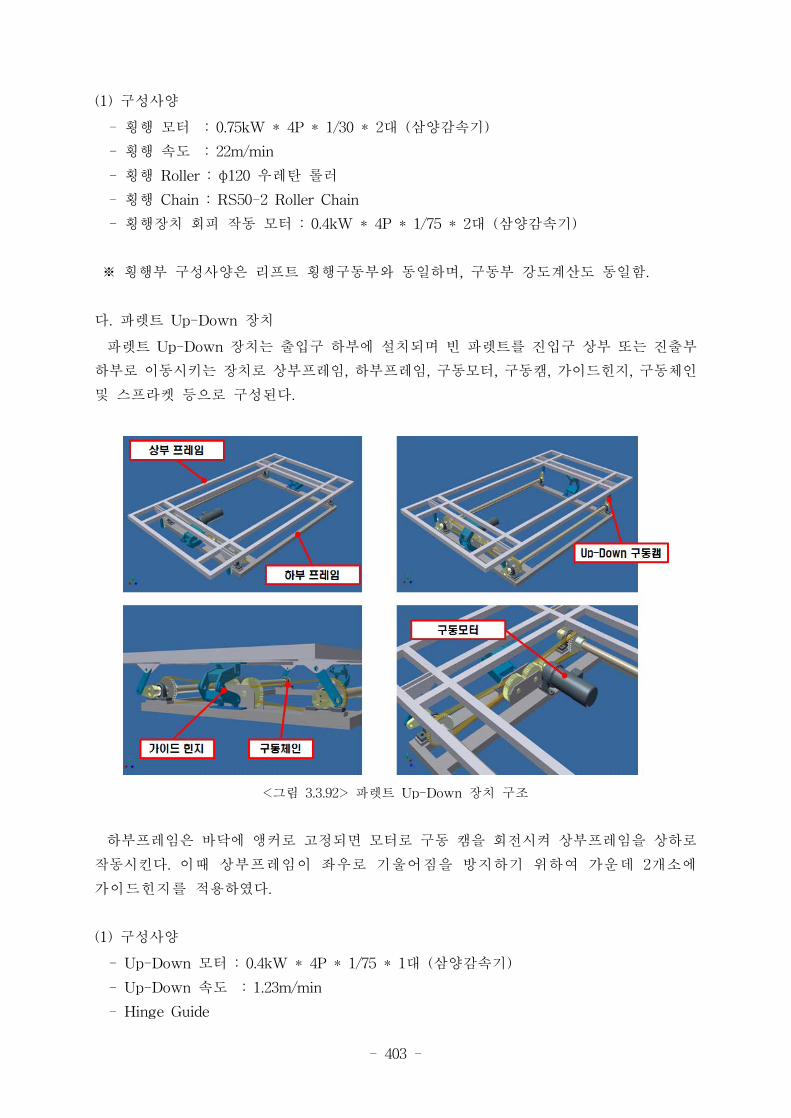
- 403 -
(1) 구성사양
- 횡행 모터 : 0.75kW * 4P * 1/30 * 2대 (삼양감속기)
- 횡행 속도 : 22m/min
- 횡행 Roller : φ120 우레탄 롤러
- 횡행 Chain : RS50-2 Roller Chain
- 횡행장치 회피 작동 모터 : 0.4kW * 4P * 1/75 * 2대 (삼양감속기)
※ 횡행부 구성사양은 리프트 횡행구동부와 동일하며, 구동부 강도계산도 동일함.
다. 파렛트 Up-Down 장치
파렛트 Up-Down 장치는 출입구 하부에 설치되며 빈 파렛트를 진입구 상부 또는 진출부
하부로 이동시키는 장치로 상부프레임, 하부프레임, 구동모터, 구동캠, 가이드힌지, 구동체인
및 스프라켓 등으로 구성된다.
<그림 3.3.92> 파렛트 Up-Down 장치 구조
하부프레임은 바닥에 앵커로 고정되면 모터로 구동 캠을 회전시켜 상부프레임을 상하로
작동시킨다. 이때 상부프레임이 좌우로 기울어짐을 방지하기 위하여 가운데 2개소에
가이드힌지를 적용하였다.
(1) 구성사양
- Up-Down 모터 : 0.4kW * 4P * 1/75 * 1대 (삼양감속기)
- Up-Down 속도 : 1.23m/min
- Hinge Guide
- 404 -
(2) Up-Down 구동부 (Up-Down Drive Part) 강도계산 (도면 PRT-UD3000-00)
(가) 속도
- Motor 회전수 : Nm = 1750rpm
- 감속기 감속비 : i = 1/75
- Gear 잇수 : Zg1 = 18nt , Zg2 = 56nt (m=3)
- Sprocket 잇수 : Zs1 = 11nt , Zs2 = 28nt
- Drive Chain : RS60-2열 , Pitch = 19.05mm
- Stroke : 0.22m
- Up-Down속도 :
V = Nm x i x Zg1/Zg2 x Zs1/Zs2 x 2 x 0.22
= 1750 x 1/75 x 18/59 x 11/28 x 2 x 0.22
= 1.23m/min
= 0.02m/s
(나) 부하
- 부하
· Upper Deck Frame : Wf = 103kg
· Pallet : Wp = 560 ≒ 600kg
- 최대부하
· Fmax = Wf + Wp = 103 + 600 = 703
≒ 1000kg
(다) Motor, 감속기, Brake 사양
- Motor
· Power : 0.4kw * 4p (삼양감속기)
· 정격회전수 : 1750rpm
· 정격 Torque : 0.22kg.m
- 감속기
· 감속기 입력 : 0.4kw * 4p
· 감속비 : 1/75
· 출력 Torque : 15.3kgm
· Service Factor : 1.3
· 최대출력 Torque : 15.3 x 1.3 = 19.89kg.m
· 효율 : 0.9
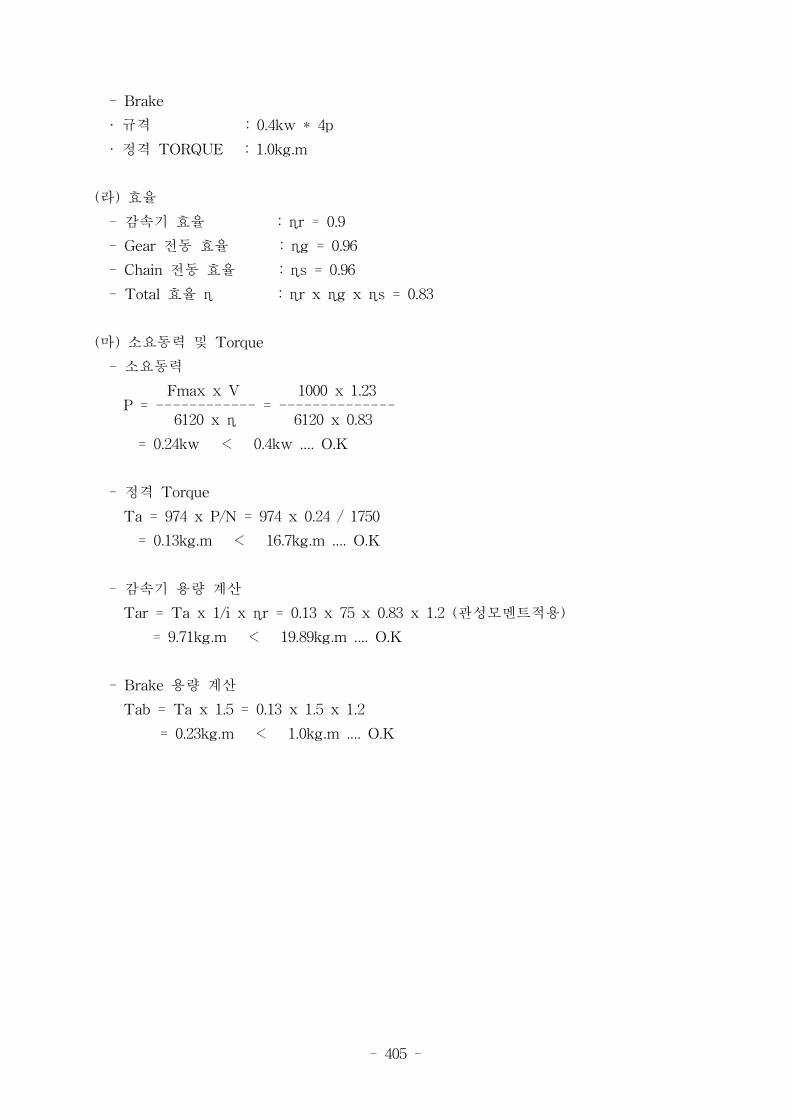
- 405 -
- Brake
· 규격 : 0.4kw * 4p
· 정격 TORQUE : 1.0kg.m
(라) 효율
- 감속기 효율 : ηr = 0.9
- Gear 전동 효율 : ηg = 0.96
- Chain 전동 효율 : ηs = 0.96
- Total 효율 η : ηr x ηg x ηs = 0.83
(마) 소요동력 및 Torque
- 소요동력
Fmax x V 1000 x 1.23P = ------------ = --------------
6120 x η 6120 x 0.83
= 0.24kw < 0.4kw .... O.K
- 정격 Torque
Ta = 974 x P/N = 974 x 0.24 / 1750
= 0.13kg.m < 16.7kg.m .... O.K
- 감속기 용량 계산
Tar = Ta x 1/i x ηr = 0.13 x 75 x 0.83 x 1.2 (관성모멘트적용)
= 9.71kg.m < 19.89kg.m .... O.K
- Brake 용량 계산
Tab = Ta x 1.5 = 0.13 x 1.5 x 1.2
= 0.23kg.m < 1.0kg.m .... O.K
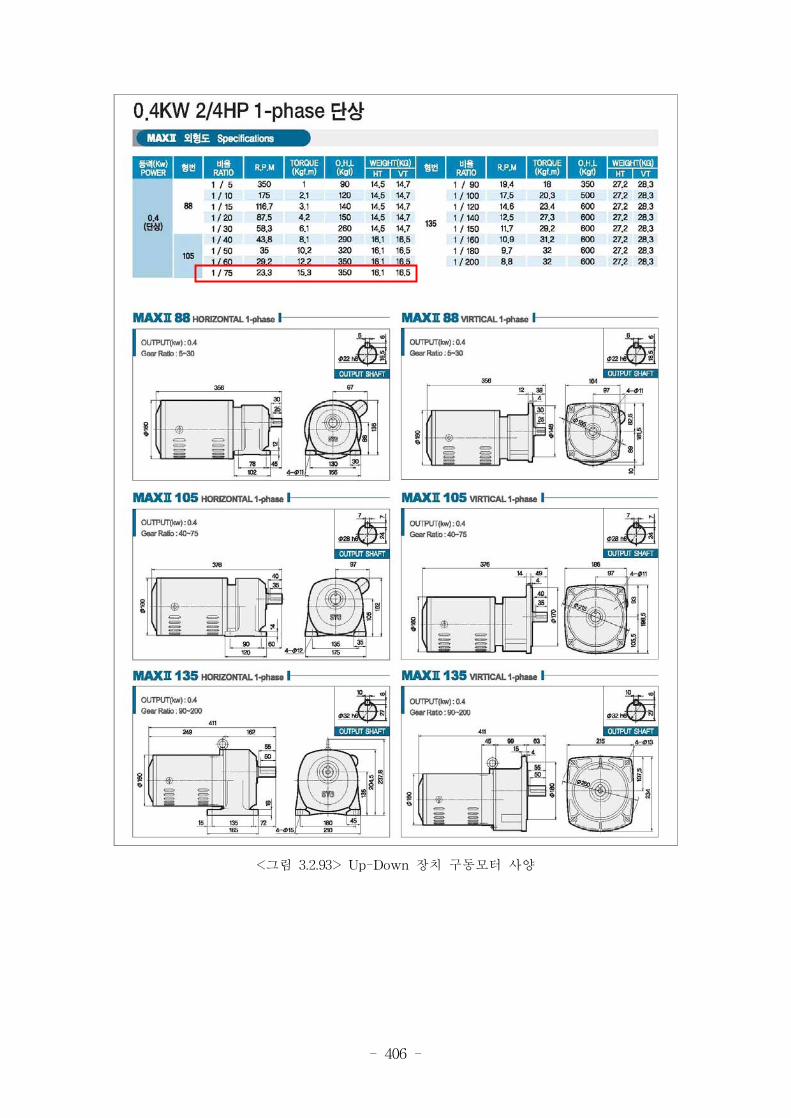
- 406 -
<그림 3.2.93> Up-Down 장치 구동모터 사양
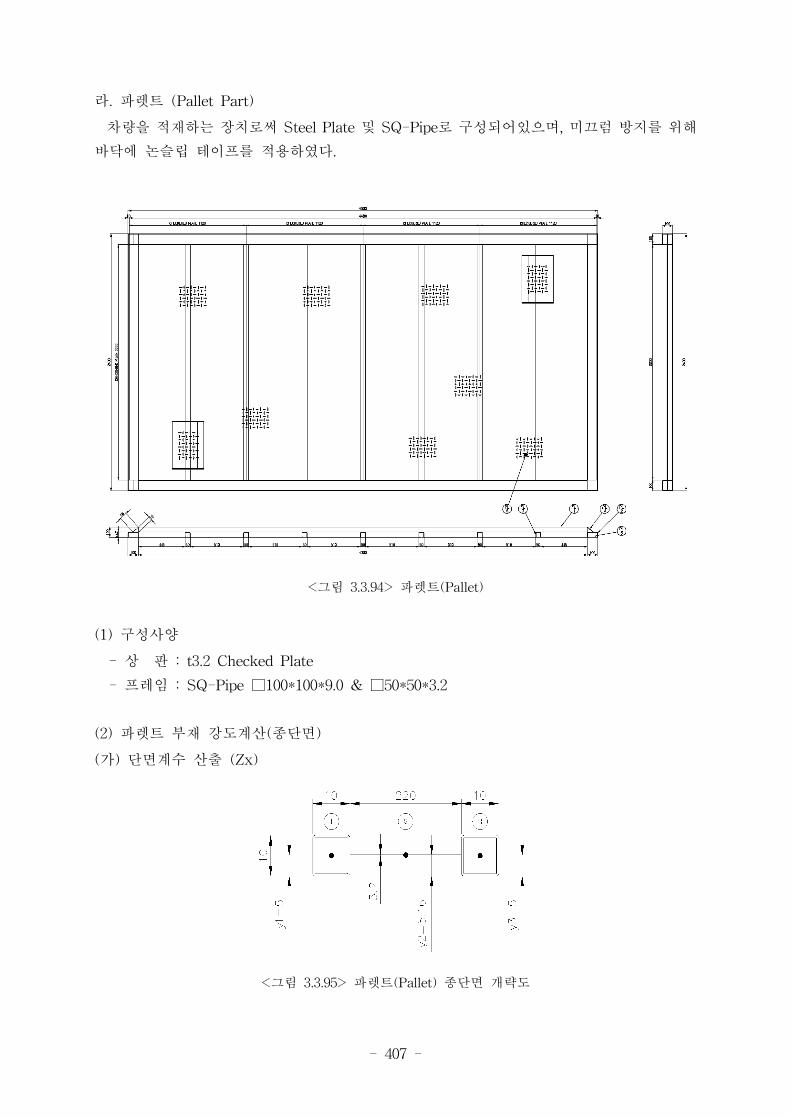
- 407 -
라. 파렛트 (Pallet Part)
차량을 적재하는 장치로써 Steel Plate 및 SQ-Pipe로 구성되어있으며, 미끄럼 방지를 위해
바닥에 논슬립 테이프를 적용하였다.
<그림 3.3.94> 파렛트(Pallet)
(1) 구성사양
- 상 판 : t3.2 Checked Plate
- 프레임 : SQ-Pipe 100*100*9.0 & 50*50*3.2
(2) 파렛트 부재 강도계산(종단면)
(가) 단면계수 산출 (Zx)
<그림 3.3.95> 파렛트(Pallet) 종단면 개략도
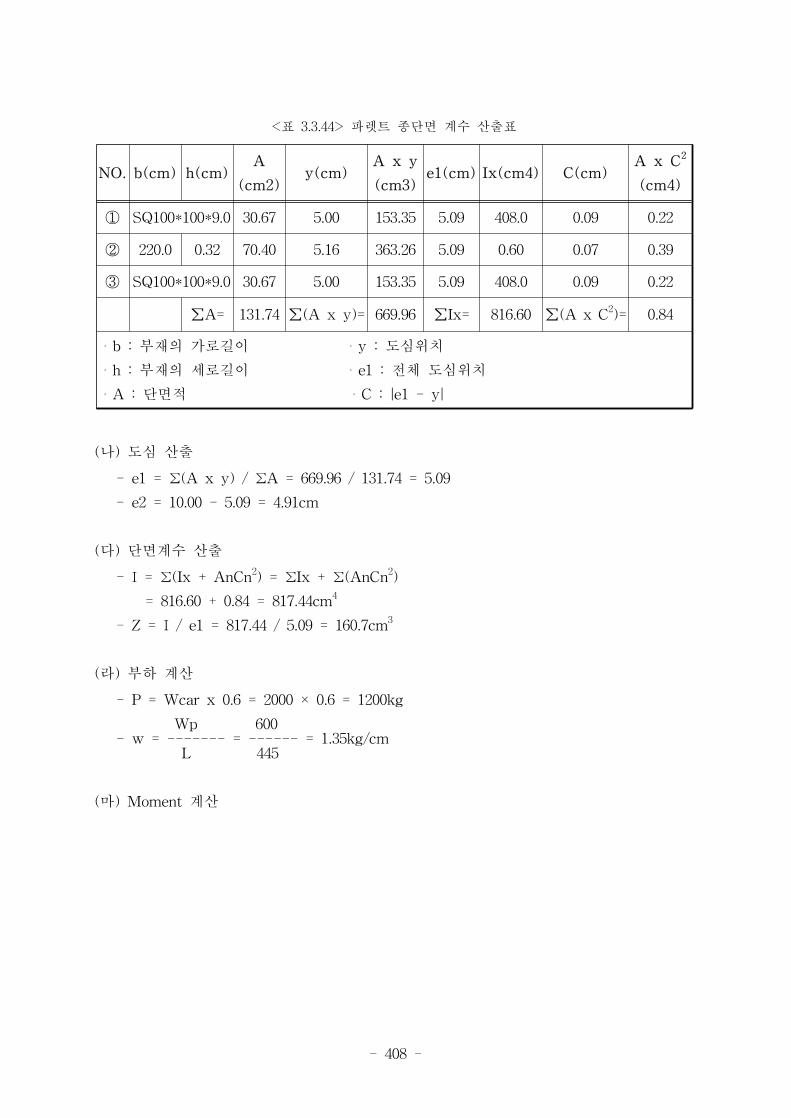
- 408 -
NO. b(cm) h(cm)A
(cm2)y(cm)
A x y
(cm3)e1(cm) Ix(cm4) C(cm)
A x C2
(cm4)
① SQ100*100*9.0 30.67 5.00 153.35 5.09 408.0 0.09 0.22
② 220.0 0.32 70.40 5.16 363.26 5.09 0.60 0.07 0.39
③ SQ100*100*9.0 30.67 5.00 153.35 5.09 408.0 0.09 0.22
∑A= 131.74 ∑(A x y)= 669.96 ∑Ix= 816.60 ∑(A x C2)= 0.84
・b : 부재의 가로길이 ・y : 도심위치・h : 부재의 세로길이 ・e1 : 전체 도심위치
・A : 단면적 ・C : |e1 - y|
<표 3.3.44> 파렛트 종단면 계수 산출표
(나) 도심 산출
- e1 = Σ(A x y) / ΣA = 669.96 / 131.74 = 5.09
- e2 = 10.00 - 5.09 = 4.91cm
(다) 단면계수 산출
- Ι = Σ(Ix + AnCn2) = ΣIx + Σ(AnCn2)
= 816.60 + 0.84 = 817.44cm4
- Z = Ι / e1 = 817.44 / 5.09 = 160.7cm3
(라) 부하 계산
- P = Wcar x 0.6 = 2000 × 0.6 = 1200kg
Wp 600- w = ------- = ------ = 1.35kg/cm
L 445
(마) Moment 계산
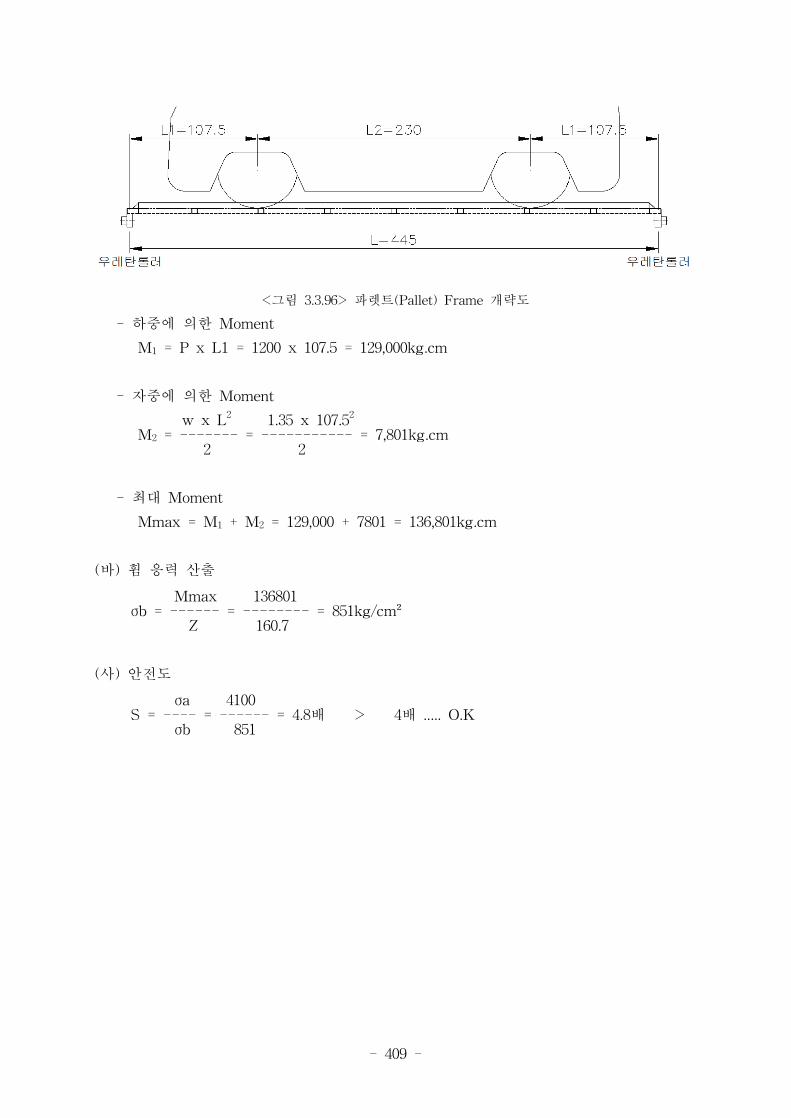
- 409 -
<그림 3.3.96> 파렛트(Pallet) Frame 개략도
- 하중에 의한 Moment
M1 = P x L1 = 1200 x 107.5 = 129,000kg.cm
- 자중에 의한 Moment
w x L2 1.35 x 107.52
M2 = ------- = ----------- = 7,801kg.cm2 2
- 최대 Moment
Mmax = M1 + M2 = 129,000 + 7801 = 136,801kg.cm
(바) 휨 응력 산출
Mmax 136801σb = ------ = -------- = 851kg/cm²
Z 160.7
(사) 안전도
σa 4100S = ---- = ------ = 4.8배 > 4배 ..... O.K
σb 851
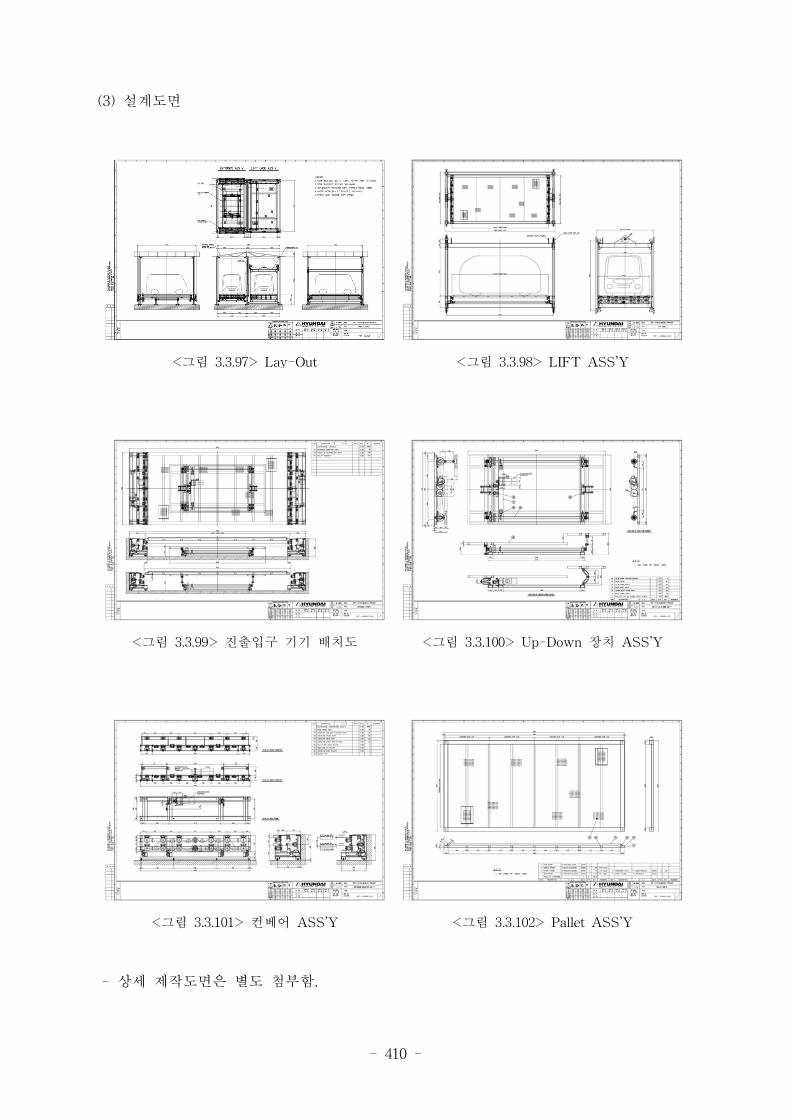
- 410 -
(3) 설계도면
<그림 3.3.97> Lay-Out <그림 3.3.98> LIFT ASS’Y
<그림 3.3.99> 진출입구 기기 배치도 <그림 3.3.100> Up-Down 장치 ASS’Y
<그림 3.3.101> 컨베어 ASS’Y <그림 3.3.102> Pallet ASS’Y
- 상세 제작도면은 별도 첨부함.
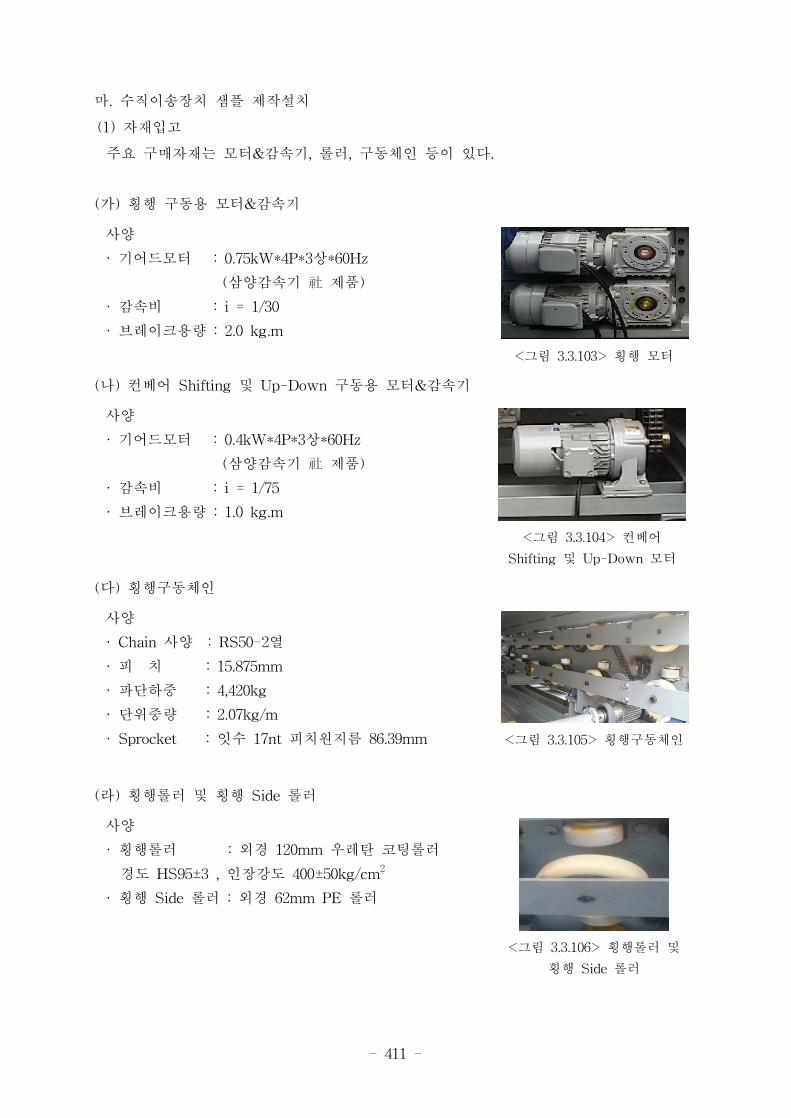
- 411 -
마. 수직이송장치 샘플 제작설치
(1) 자재입고
주요 구매자재는 모터&감속기, 롤러, 구동체인 등이 있다.
(가) 횡행 구동용 모터&감속기
사양
· 기어드모터 : 0.75kW*4P*3상*60Hz
(삼양감속기 社 제품)
· 감속비 : i = 1/30
· 브레이크용량 : 2.0 kg.m
<그림 3.3.103> 횡행 모터
(나) 컨베어 Shifting 및 Up-Down 구동용 모터&감속기
사양
· 기어드모터 : 0.4kW*4P*3상*60Hz
(삼양감속기 社 제품)
· 감속비 : i = 1/75
· 브레이크용량 : 1.0 kg.m
<그림 3.3.104> 컨베어
Shifting 및 Up-Down 모터
(다) 횡행구동체인
사양
· Chain 사양 : RS50-2열
· 피 치 : 15.875mm
· 파단하중 : 4,420kg
· 단위중량 : 2.07kg/m
· Sprocket : 잇수 17nt 피치원지름 86.39mm <그림 3.3.105> 횡행구동체인
(라) 횡행롤러 및 횡행 Side 롤러
사양
· 횡행롤러 : 외경 120mm 우레탄 코팅롤러
경도 HS95±3 , 인장강도 400±50kg/cm2
· 횡행 Side 롤러 : 외경 62mm PE 롤러
<그림 3.3.106> 횡행롤러 및
횡행 Side 롤러

- 412 -
(2) 제작 및 공장 시운전
(가) 리프트 제작
리프트는 H-Beam H200*100*5.5*8 및 Channel 125*65*6*8 , Plate 등을 이용하여 용접
및 볼팅 조립으로 제작하였다.
<그림 3.3.107> 리프트 제작
(나) 출입구 컨베어 및 시프팅 장치 제작
출입구 컨베어 장치는 H-Beam H100*100*6*8 및 Channel 100*50*5*7.5 , Plate 등을
이용하여 용접, 볼팅 조립으로 제작하였다.
<그림 3.3.108> 출입구 컨베어 장치 제작
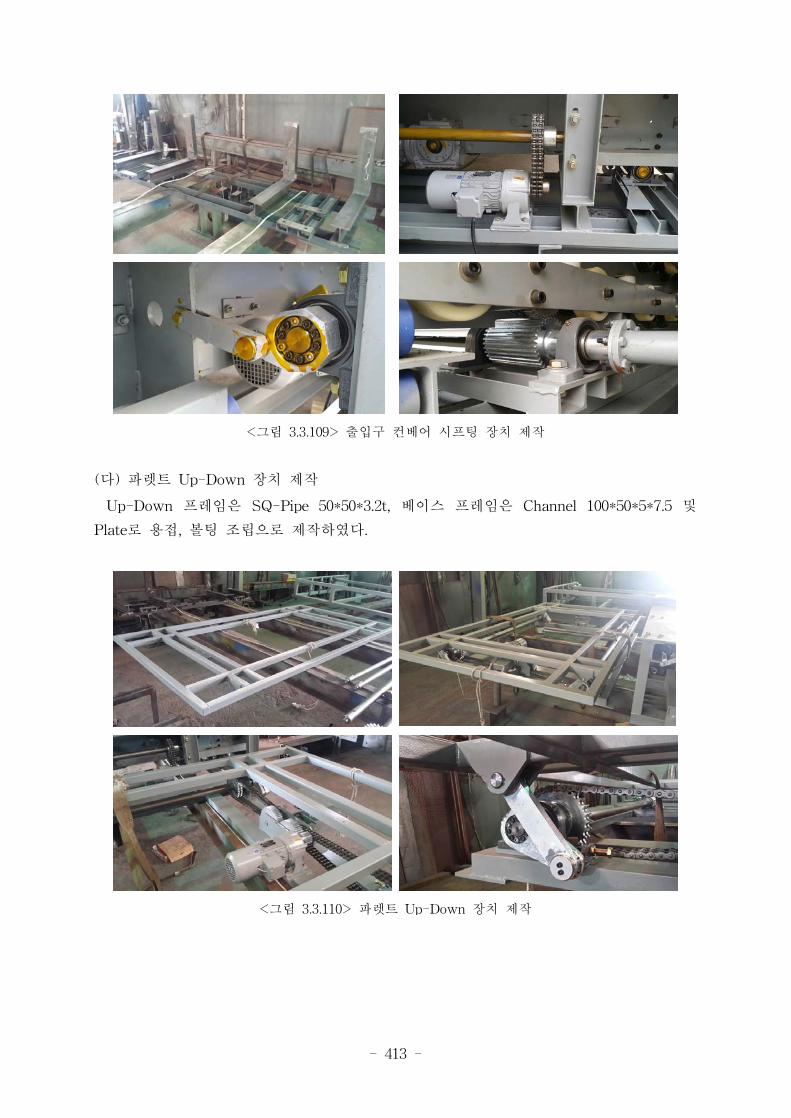
- 413 -
<그림 3.3.109> 출입구 컨베어 시프팅 장치 제작
(다) 파렛트 Up-Down 장치 제작
Up-Down 프레임은 SQ-Pipe 50*50*3.2t, 베이스 프레임은 Channel 100*50*5*7.5 및
Plate로 용접, 볼팅 조립으로 제작하였다.
<그림 3.3.110> 파렛트 Up-Down 장치 제작
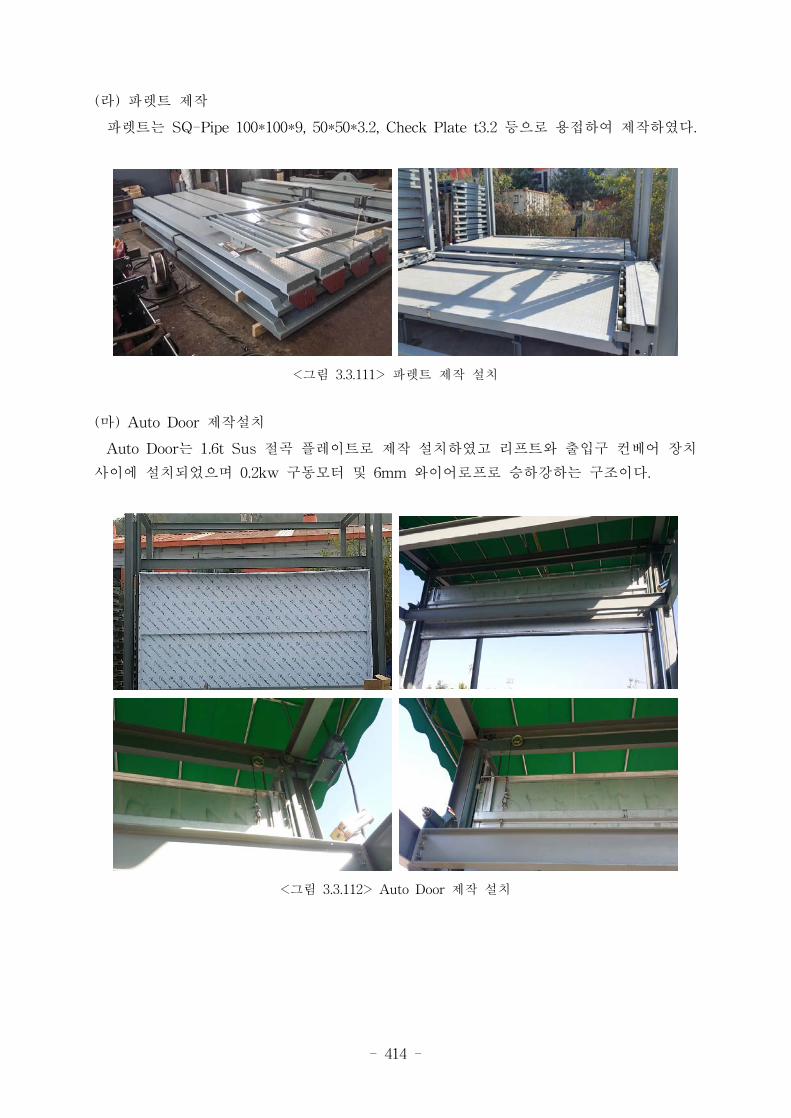
- 414 -
(라) 파렛트 제작
파렛트는 SQ-Pipe 100*100*9, 50*50*3.2, Check Plate t3.2 등으로 용접하여 제작하였다.
<그림 3.3.111> 파렛트 제작 설치
(마) Auto Door 제작설치
Auto Door는 1.6t Sus 절곡 플레이트로 제작 설치하였고 리프트와 출입구 컨베어 장치
사이에 설치되었으며 0.2kw 구동모터 및 6mm 와이어로프로 승하강하는 구조이다.
<그림 3.3.112> Auto Door 제작 설치

- 415 -
(바) 제어반 제작설치
제어반은 모터 속도조절용 인버터, 동작프로그램용 PLC(Programmable Logic
Controller), 전원부, 단자함 등으로 구성되었으며, 판넬 전면에 조작 버튼을 배치하여 수동
또는 자동조작을 할 수 있도록 제작하였다.
<그림 3.3.113> 제어반 제작 설치
(사) 센서 설치
PRT 차량을 적재한 파렛트 정지 및 업다운 제어를 위한 각종 센서가 설치되며 위치는
<그림 3.3.114>과 같다.
<그림 3.3.114> 센서 설치 위치

- 416 -
(아) 공장 시운전
테스트 샘플 공장제작 완료 후 현장 설치전 작동상태 확인을 위해 공장 시운전을 실시하였다.
각 부분 조립 확인 및 수동테스트를 통해 정상 작동여부를 확인하였다.
<그림 3.3.115> 공장 시운전
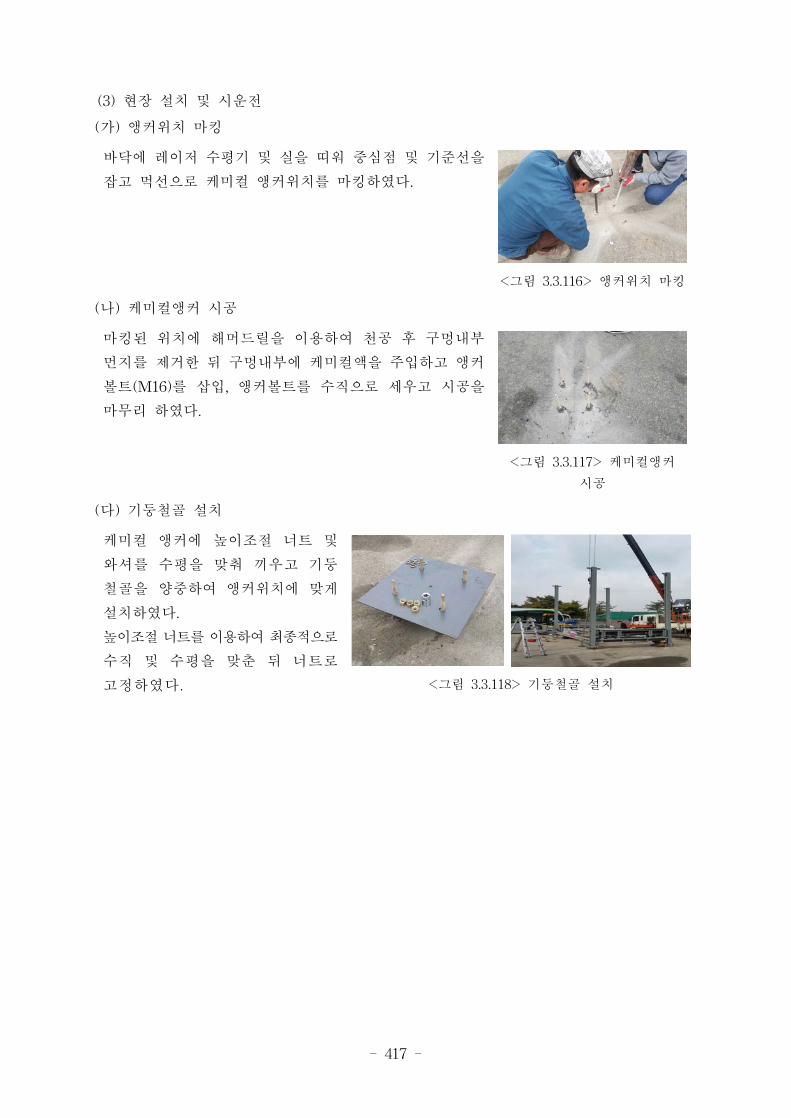
- 417 -
(3) 현장 설치 및 시운전
(가) 앵커위치 마킹
바닥에 레이저 수평기 및 실을 띠워 중심점 및 기준선을
잡고 먹선으로 케미컬 앵커위치를 마킹하였다.
<그림 3.3.116> 앵커위치 마킹
(나) 케미컬앵커 시공
마킹된 위치에 해머드릴을 이용하여 천공 후 구멍내부
먼지를 제거한 뒤 구멍내부에 케미컬액을 주입하고 앵커
볼트(M16)를 삽입, 앵커볼트를 수직으로 세우고 시공을
마무리 하였다.
<그림 3.3.117> 케미컬앵커
시공
(다) 기둥철골 설치
케미컬 앵커에 높이조절 너트 및
와셔를 수평을 맞춰 끼우고 기둥
철골을 양중하여 앵커위치에 맞게
설치하였다.
높이조절 너트를이용하여 최종적으로
수직 및 수평을 맞춘 뒤 너트로
고정하였다. <그림 3.3.118> 기둥철골 설치
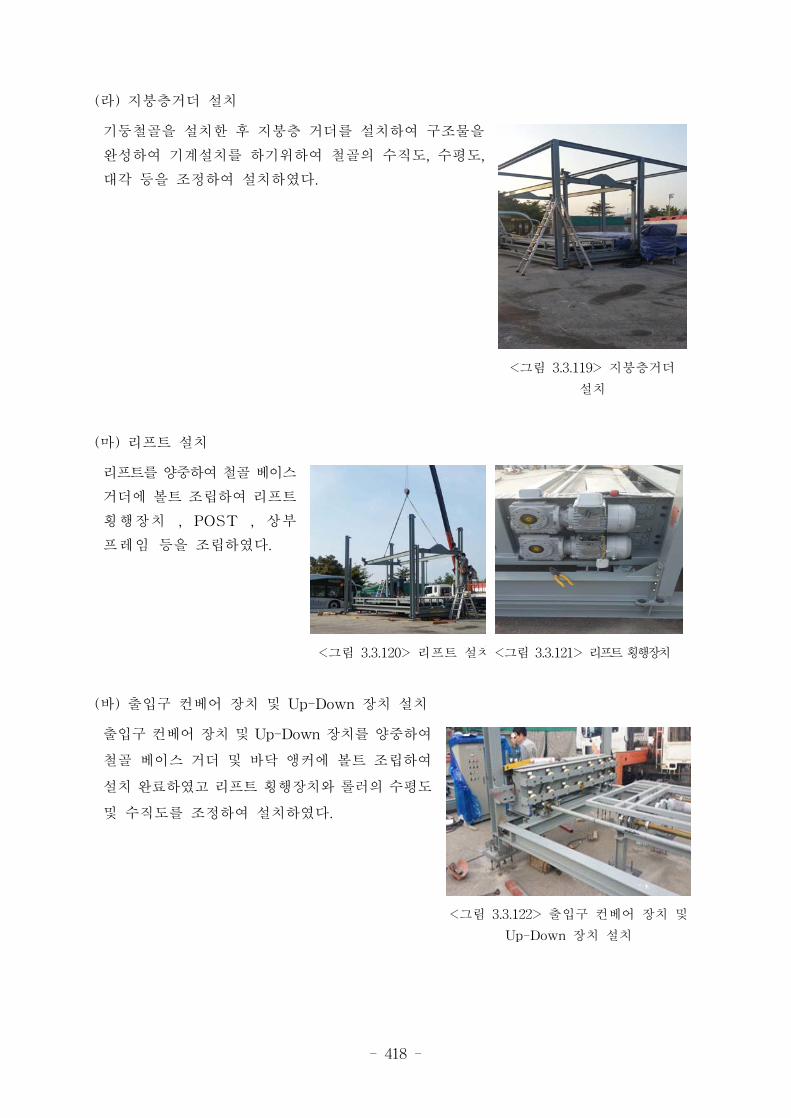
- 418 -
(라) 지붕층거더 설치
기둥철골을 설치한 후 지붕층 거더를 설치하여 구조물을
완성하여 기계설치를 하기위하여 철골의 수직도, 수평도,
대각 등을 조정하여 설치하였다.
<그림 3.3.119> 지붕층거더
설치
(마) 리프트 설치
리프트를 양중하여 철골 베이스
거더에 볼트 조립하여 리프트
횡행장치 , POST , 상부
프레임 등을 조립하였다.
<그림 3.3.120> 리프트 설치 <그림 3.3.121> 리프트횡행장치
(바) 출입구 컨베어 장치 및 Up-Down 장치 설치
출입구 컨베어 장치 및 Up-Down 장치를 양중하여
철골 베이스 거더 및 바닥 앵커에 볼트 조립하여
설치 완료하였고 리프트 횡행장치와 롤러의 수평도
및 수직도를 조정하여 설치하였다.
<그림 3.3.122> 출입구 컨베어 장치 및
Up-Down 장치 설치
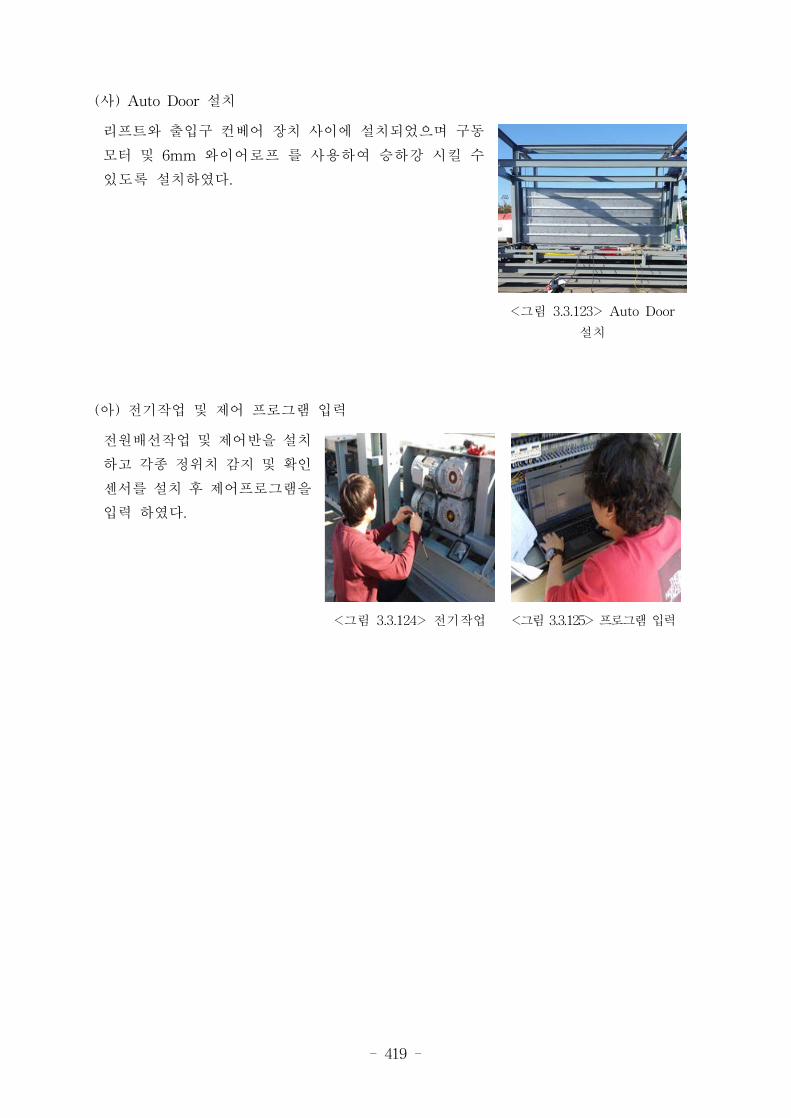
- 419 -
(사) Auto Door 설치
리프트와 출입구 컨베어 장치 사이에 설치되었으며 구동
모터 및 6mm 와이어로프 를 사용하여 승하강 시킬 수
있도록 설치하였다.
<그림 3.3.123> Auto Door
설치
(아) 전기작업 및 제어 프로그램 입력
전원배선작업 및 제어반을 설치
하고 각종 정위치 감지 및 확인
센서를 설치 후 제어프로그램을
입력 하였다.
<그림 3.3.124> 전기작업 <그림 3.3.125> 프로그램 입력
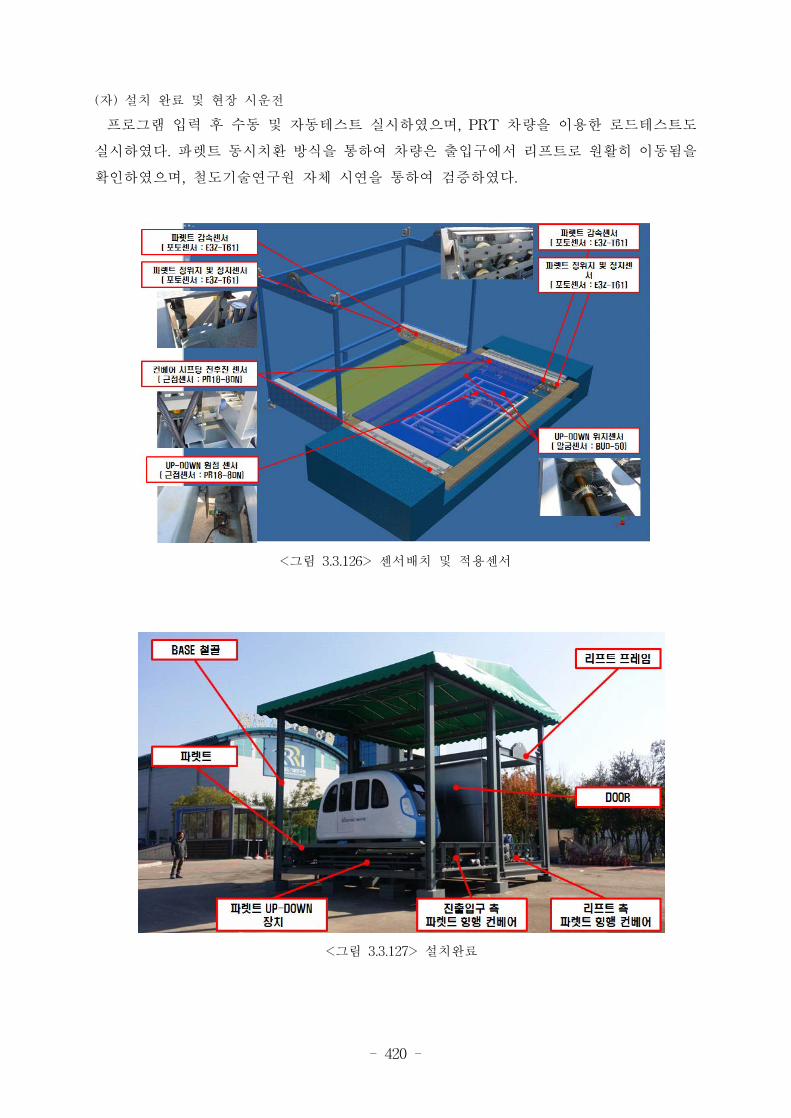
- 420 -
(자) 설치 완료 및 현장 시운전
프로그램 입력 후 수동 및 자동테스트 실시하였으며, PRT 차량을 이용한 로드테스트도
실시하였다. 파렛트 동시치환 방식을 통하여 차량은 출입구에서 리프트로 원활히 이동됨을
확인하였으며, 철도기술연구원 자체 시연을 통하여 검증하였다.
<그림 3.3.126> 센서배치 및 적용센서
<그림 3.3.127> 설치완료
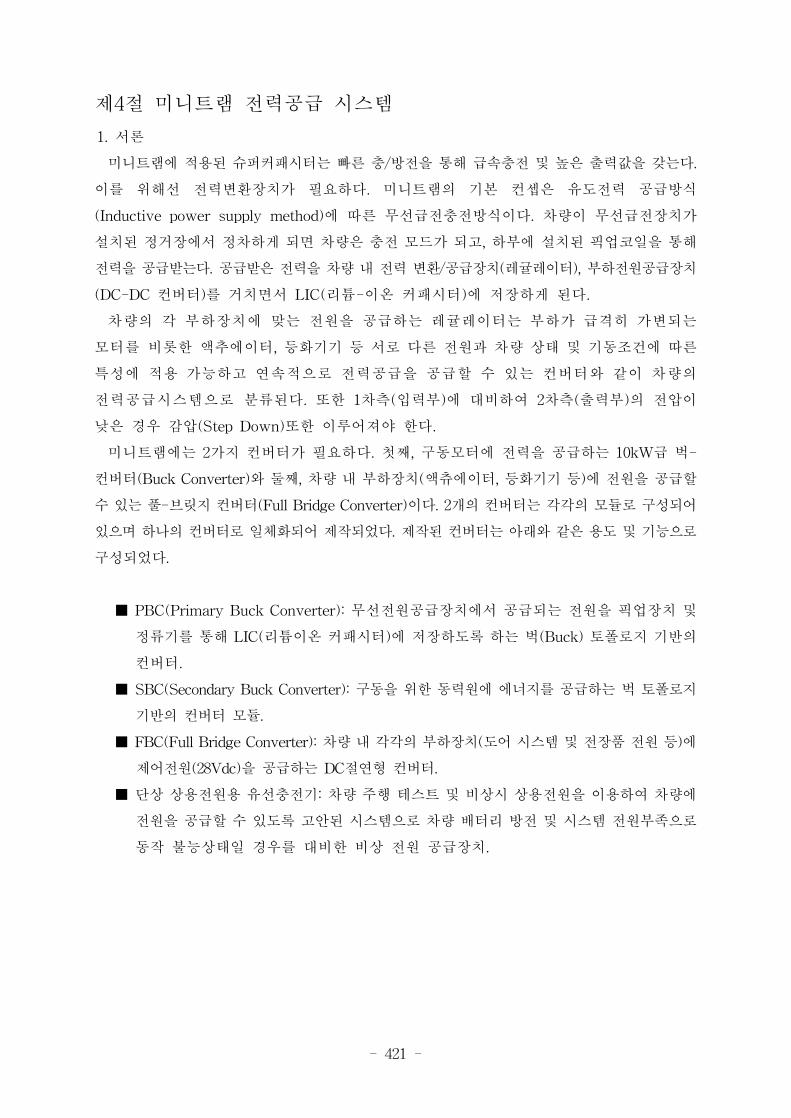
- 421 -
제4절 미니트램 전력공급 시스템
1. 서론
미니트램에 적용된 슈퍼커패시터는 빠른 충/방전을 통해 급속충전 및 높은 출력값을 갖는다.
이를 위해선 전력변환장치가 필요하다. 미니트램의 기본 컨셉은 유도전력 공급방식
(Inductive power supply method)에 따른 무선급전충전방식이다. 차량이 무선급전장치가
설치된 정거장에서 정차하게 되면 차량은 충전 모드가 되고, 하부에 설치된 픽업코일을 통해
전력을 공급받는다. 공급받은 전력을 차량 내 전력 변환/공급장치(레귤레이터), 부하전원공급장치
(DC-DC 컨버터)를 거치면서 LIC(리튬-이온 커패시터)에 저장하게 된다.
차량의 각 부하장치에 맞는 전원을 공급하는 레귤레이터는 부하가 급격히 가변되는
모터를 비롯한 액추에이터, 등화기기 등 서로 다른 전원과 차량 상태 및 기동조건에 따른
특성에 적용 가능하고 연속적으로 전력공급을 공급할 수 있는 컨버터와 같이 차량의
전력공급시스템으로 분류된다. 또한 1차측(입력부)에 대비하여 2차측(출력부)의 전압이
낮은 경우 감압(Step Down)또한 이루어져야 한다.
미니트램에는 2가지 컨버터가 필요하다. 첫째, 구동모터에 전력을 공급하는 10kW급 벅-
컨버터(Buck Converter)와 둘째, 차량 내 부하장치(액츄에이터, 등화기기 등)에 전원을 공급할
수 있는 풀-브릿지 컨버터(Full Bridge Converter)이다. 2개의 컨버터는 각각의 모듈로 구성되어
있으며 하나의 컨버터로 일체화되어 제작되었다. 제작된 컨버터는 아래와 같은 용도 및 기능으로
구성되었다.
∎ PBC(Primary Buck Converter): 무선전원공급장치에서 공급되는 전원을 픽업장치 및
정류기를 통해 LIC(리튬이온 커패시터)에 저장하도록 하는 벅(Buck) 토폴로지 기반의
컨버터.
∎ SBC(Secondary Buck Converter): 구동을 위한 동력원에 에너지를 공급하는 벅 토폴로지
기반의 컨버터 모듈.
∎ FBC(Full Bridge Converter): 차량 내 각각의 부하장치(도어 시스템 및 전장품 전원 등)에
제어전원(28Vdc)을 공급하는 DC절연형 컨버터.
∎ 단상 상용전원용 유선충전기: 차량 주행 테스트 및 비상시 상용전원을 이용하여 차량에
전원을 공급할 수 있도록 고안된 시스템으로 차량 배터리 방전 및 시스템 전원부족으로
동작 불능상태일 경우를 대비한 비상 전원 공급장치.
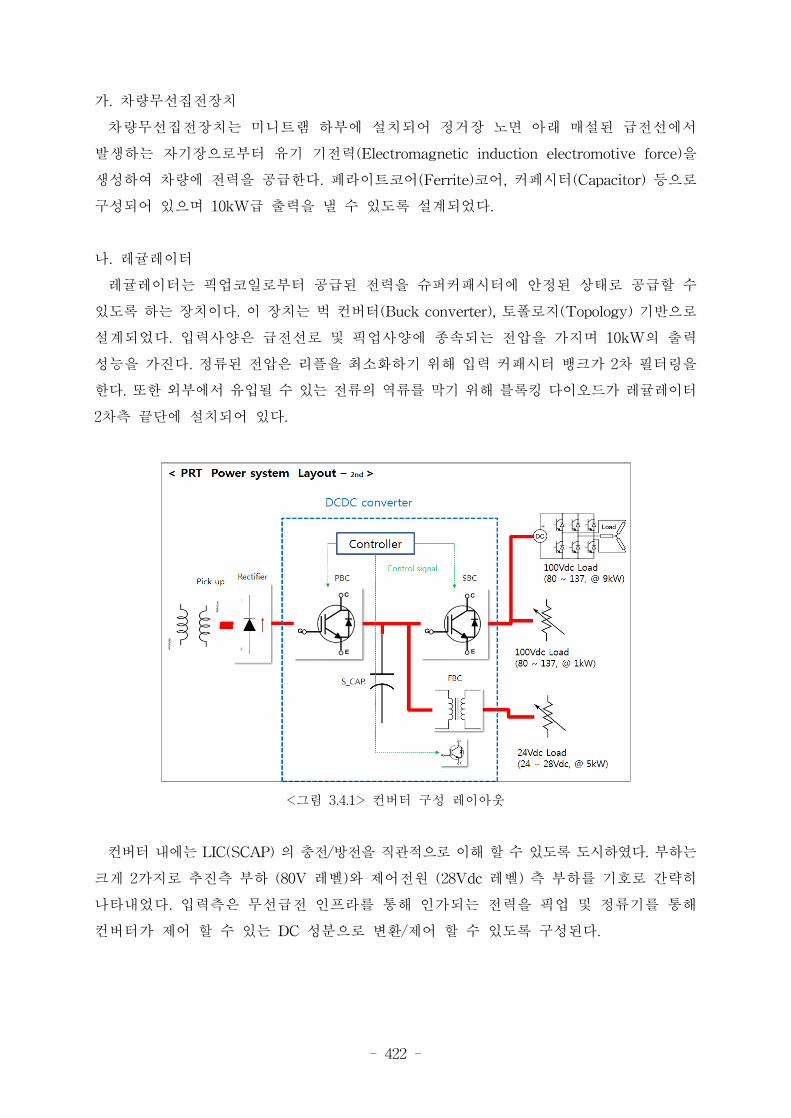
- 422 -
가. 차량무선집전장치
차량무선집전장치는 미니트램 하부에 설치되어 정거장 노면 아래 매설된 급전선에서
발생하는 자기장으로부터 유기 기전력(Electromagnetic induction electromotive force)을
생성하여 차량에 전력을 공급한다. 페라이트코어(Ferrite)코어, 커페시터(Capacitor) 등으로
구성되어 있으며 10kW급 출력을 낼 수 있도록 설계되었다.
나. 레귤레이터
레귤레이터는 픽업코일로부터 공급된 전력을 슈퍼커패시터에 안정된 상태로 공급할 수
있도록 하는 장치이다. 이 장치는 벅 컨버터(Buck converter), 토폴로지(Topology) 기반으로
설계되었다. 입력사양은 급전선로 및 픽업사양에 종속되는 전압을 가지며 10kW의 출력
성능을 가진다. 정류된 전압은 리플을 최소화하기 위해 입력 커패시터 뱅크가 2차 필터링을
한다. 또한 외부에서 유입될 수 있는 전류의 역류를 막기 위해 블록킹 다이오드가 레귤레이터
2차측 끝단에 설치되어 있다.
<그림 3.4.1> 컨버터 구성 레이아웃
컨버터 내에는 LIC(SCAP) 의 충전/방전을 직관적으로 이해 할 수 있도록 도시하였다. 부하는
크게 2가지로 추진측 부하 (80V 레벨)와 제어전원 (28Vdc 레벨) 측 부하를 기호로 간략히
나타내었다. 입력측은 무선급전 인프라를 통해 인가되는 전력을 픽업 및 정류기를 통해
컨버터가 제어 할 수 있는 DC 성분으로 변환/제어 할 수 있도록 구성된다.
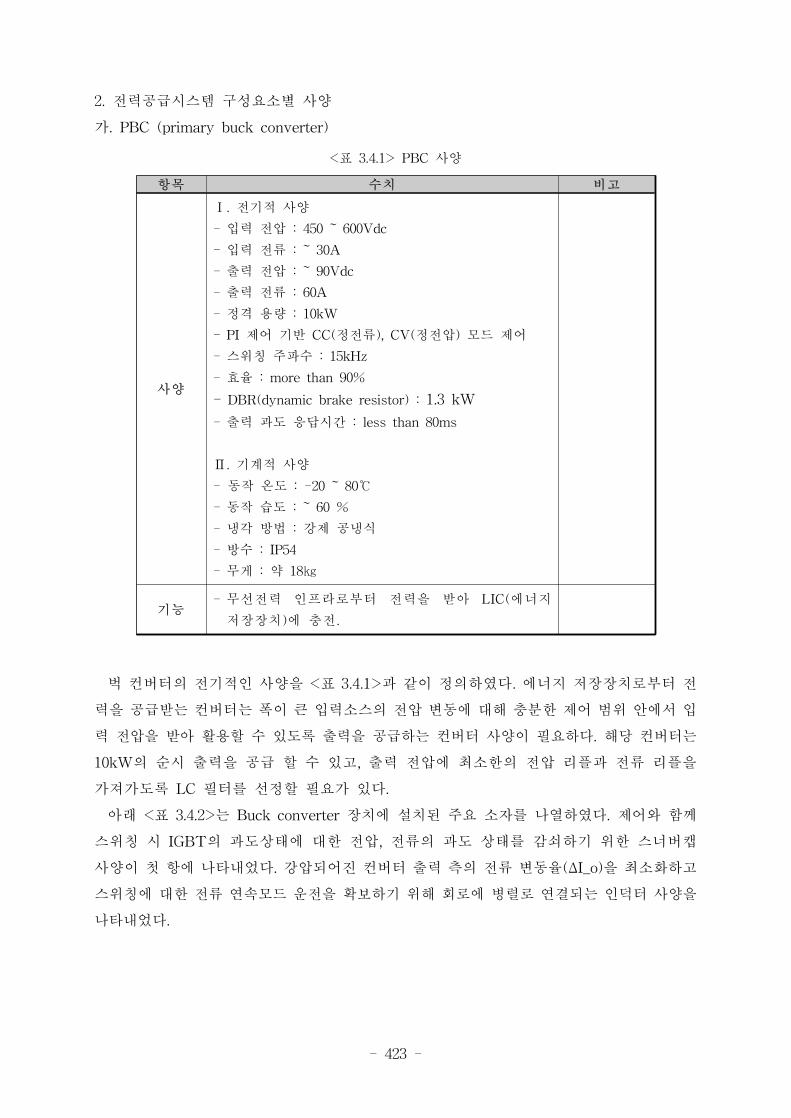
- 423 -
2. 전력공급시스템 구성요소별 사양
가. PBC (primary buck converter)
항목 수치 비고
사양
Ⅰ. 전기적 사양
- 입력 전압 : 450 ~ 600Vdc
- 입력 전류 : ~ 30A
- 출력 전압 : ~ 90Vdc
- 출력 전류 : 60A
- 정격 용량 : 10kW
- PI 제어 기반 CC(정전류), CV(정전압) 모드 제어
- 스위칭 주파수 : 15kHz
- 효율 : more than 90%
- DBR(dynamic brake resistor) : 1.3 kW
- 출력 과도 응답시간 : less than 80ms
Ⅱ. 기계적 사양
- 동작 온도 : -20 ~ 80
- 동작 습도 : ~ 60 %
- 냉각 방법 : 강제 공냉식
- 방수 : IP54
- 무게 : 약 18
기능- 무선전력 인프라로부터 전력을 받아 LIC(에너지
저장장치)에 충전.
<표 3.4.1> PBC 사양
벅 컨버터의 전기적인 사양을 <표 3.4.1>과 같이 정의하였다. 에너지 저장장치로부터 전
력을 공급받는 컨버터는 폭이 큰 입력소스의 전압 변동에 대해 충분한 제어 범위 안에서 입
력 전압을 받아 활용할 수 있도록 출력을 공급하는 컨버터 사양이 필요하다. 해당 컨버터는
10kW의 순시 출력을 공급 할 수 있고, 출력 전압에 최소한의 전압 리플과 전류 리플을
가져가도록 LC 필터를 선정할 필요가 있다.
아래 <표 3.4.2>는 Buck converter 장치에 설치된 주요 소자를 나열하였다. 제어와 함께
스위칭 시 IGBT의 과도상태에 대한 전압, 전류의 과도 상태를 감쇠하기 위한 스너버캡
사양이 첫 항에 나타내었다. 강압되어진 컨버터 출력 측의 전류 변동율(ΔI_o)을 최소화하고
스위칭에 대한 전류 연속모드 운전을 확보하기 위해 회로에 병렬로 연결되는 인덕터 사양을
나타내었다.
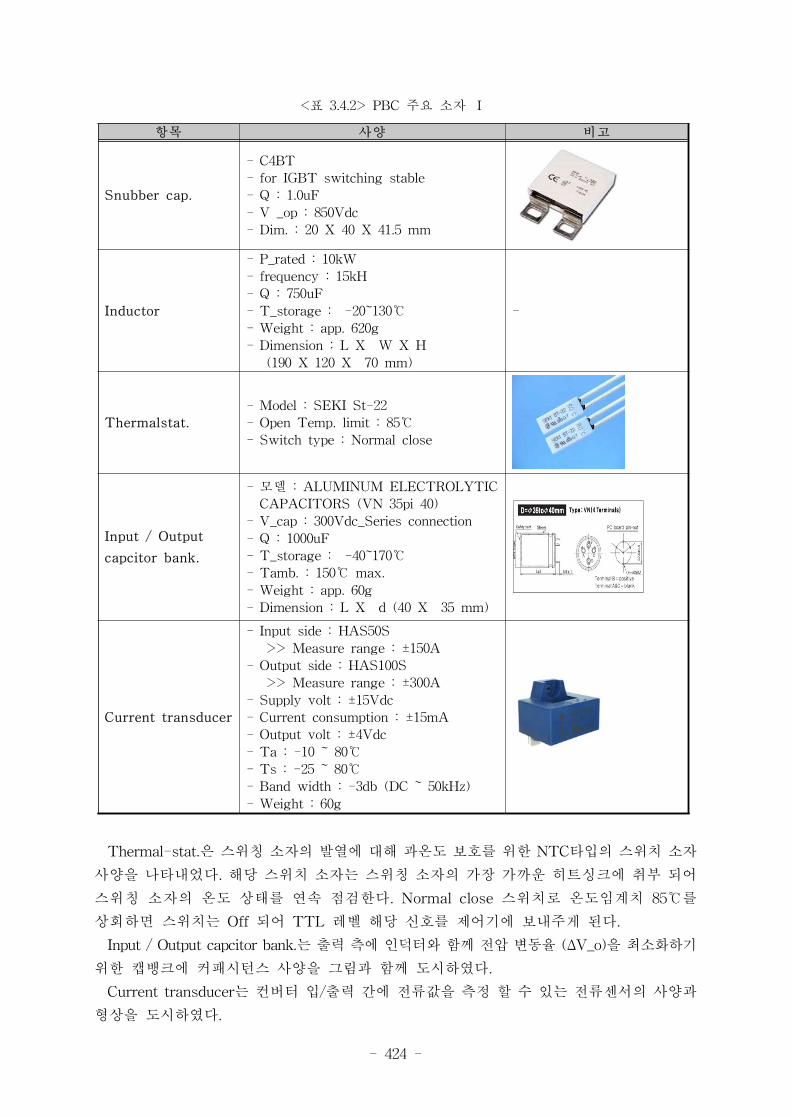
- 424 -
항목 사양 비고
Snubber cap.
- C4BT
- for IGBT switching stable
- Q : 1.0uF
- V _op : 850Vdc
- Dim. : 20 X 40 X 41.5 mm
Inductor
- P_rated : 10kW
- frequency : 15kH
- Q : 750uF
- T_storage : -20~130
- Weight : app. 620g
- Dimension : L X W X H
(190 X 120 X 70 mm)
-
Thermalstat.
- Model : SEKI St-22
- Open Temp. limit : 85
- Switch type : Normal close
Input / Output
capcitor bank.
- 모델 : ALUMINUM ELECTROLYTIC
CAPACITORS (VN 35pi 40)
- V_cap : 300Vdc_Series connection
- Q : 1000uF
- T_storage : -40~170
- Tamb. : 150 max.
- Weight : app. 60g
- Dimension : L X d (40 X 35 mm)
Current transducer
- Input side : HAS50S
>> Measure range : ±150A
- Output side : HAS100S
>> Measure range : ±300A
- Supply volt : ±15Vdc
- Current consumption : ±15mA
- Output volt : ±4Vdc
- Ta : -10 ~ 80
- Ts : -25 ~ 80
- Band width : -3db (DC ~ 50kHz)
- Weight : 60g
<표 3.4.2> PBC 주요 소자 Ⅰ
Thermal-stat.은 스위칭 소자의 발열에 대해 과온도 보호를 위한 NTC타입의 스위치 소자
사양을 나타내었다. 해당 스위치 소자는 스위칭 소자의 가장 가까운 히트싱크에 취부 되어
스위칭 소자의 온도 상태를 연속 점검한다. Normal close 스위치로 온도임계치 85를
상회하면 스위치는 Off 되어 TTL 레벨 해당 신호를 제어기에 보내주게 된다.
Input / Output capcitor bank.는 출력 측에 인덕터와 함께 전압 변동율 (ΔV_o)을 최소화하기
위한 캡뱅크에 커패시턴스 사양을 그림과 함께 도시하였다.
Current transducer는 컨버터 입/출력 간에 전류값을 측정 할 수 있는 전류센서의 사양과
형상을 도시하였다.
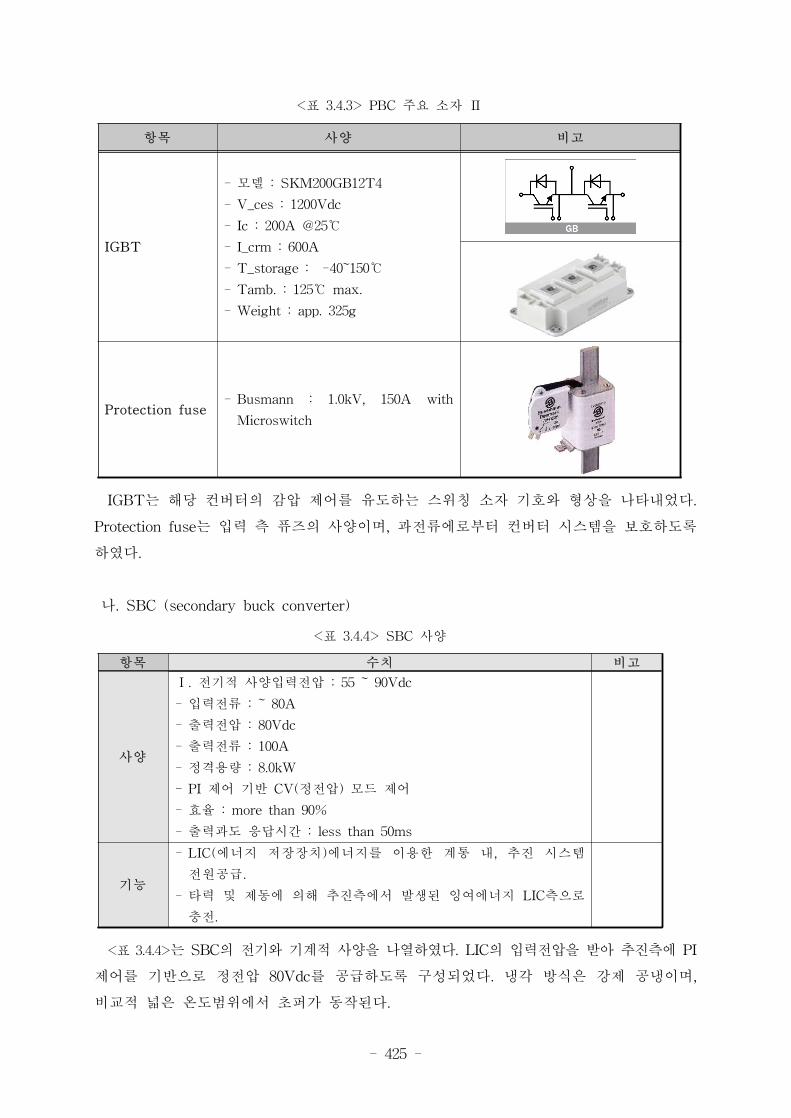
- 425 -
항목 사양 비고
IGBT
- 모델 : SKM200GB12T4
- V_ces : 1200Vdc
- Ic : 200A @25
- I_crm : 600A
- T_storage : -40~150
- Tamb. : 125 max.
- Weight : app. 325g
Protection fuse- Busmann : 1.0kV, 150A with
Microswitch
<표 3.4.3> PBC 주요 소자 Ⅱ
IGBT는 해당 컨버터의 감압 제어를 유도하는 스위칭 소자 기호와 형상을 나타내었다.
Protection fuse는 입력 측 퓨즈의 사양이며, 과전류에로부터 컨버터 시스템을 보호하도록
하였다.
나. SBC (secondary buck converter)
항목 수치 비고
사양
Ⅰ. 전기적 사양입력전압 : 55 ~ 90Vdc
- 입력전류 : ~ 80A
- 출력전압 : 80Vdc
- 출력전류 : 100A
- 정격용량 : 8.0kW
- PI 제어 기반 CV(정전압) 모드 제어
- 효율 : more than 90%
- 출력과도 응답시간 : less than 50ms
기능
- LIC(에너지 저장장치)에너지를 이용한 계통 내, 추진 시스템
전원공급.
- 타력 및 제동에 의해 추진측에서 발생된 잉여에너지 LIC측으로
충전.
<표 3.4.4> SBC 사양
<표 3.4.4>는 SBC의 전기와 기계적 사양을 나열하였다. LIC의 입력전압을 받아 추진측에 PI
제어를 기반으로 정전압 80Vdc를 공급하도록 구성되었다. 냉각 방식은 강제 공냉이며,
비교적 넓은 온도범위에서 초퍼가 동작된다.
- 426 -
다. FBC (full bridge converter)
항목 수치 비고
사양
Ⅰ. 전기적 사양
- 입력전압 : 55 ~ 90Vdc
- 입력전류 : ~ 50A
- 출력전압 : 23 ~ 28Vdc
- 출력전류 : 150A
- 정격용량 : 3.5kW
- PI 제어 기반 CV(정전압) 모드 제어
- 효율 : more than 85%
- 출력과도 응답시간 : less than 100ms
Ⅱ. 기계적 사양
- 동작 온도 : -20 ~ 85
- 기동 습도 : ~ 60 %
- 냉각 방법 : 강제 공냉
- IGBT 치수 : 94(L) X 34(W) X 30.1(H) mm
- 게이트 드라이버 치수 : 106.5(L) X 58(W) X 18 (H) mm
- 무게 : 약 15
기능 - LIC(에너지 저장장치)에너지를 이용한 계통 내, 제어전원 공급
<표 3.4.5> FBC 사양
출력 27Vdc 정전압 전압으로 전력을 공급하는 풀브리지 컨버터에 대한 사양을 정의하고
기술하였다. 차량 샤시와 접지되는 시스템 특성에 대해 정격 사양이 높고 절연형 컨버터를
선정하고 설계와 제작을 진행하였다.
<표 3.4.5>는 풀브리지 컨버터 사양을 표로 나타내었다. 입력 전압범위는 상기의 벅 컨버터와
같은 레벨의 범위를 갖는다. 이는 동일한 입력 전원을 사용하기 때문이다. 출력전압은 1V
이내의 리플을 포함한 27Vdc 의 목표전압으로 설정하였다. MOSFET 스위칭 소자를 고속으로
제어하고 스위칭 손실을 줄이기 위해 50kHz의 캐리어 주파수로 설정하였다.
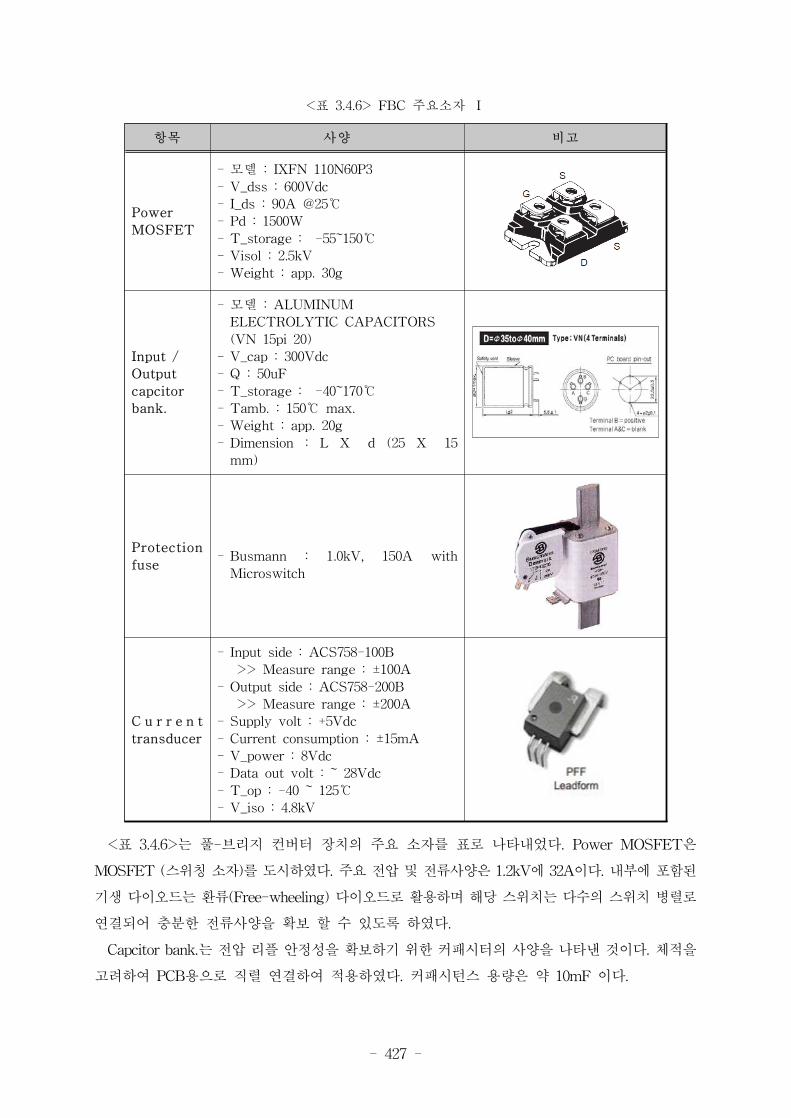
- 427 -
항목 사양 비고
Power
MOSFET
- 모델 : IXFN 110N60P3
- V_dss : 600Vdc
- I_ds : 90A @25
- Pd : 1500W
- T_storage : -55~150
- Visol : 2.5kV
- Weight : app. 30g
Input /
Output
capcitor
bank.
- 모델 : ALUMINUM
ELECTROLYTIC CAPACITORS
(VN 15pi 20)
- V_cap : 300Vdc
- Q : 50uF
- T_storage : -40~170
- Tamb. : 150 max.
- Weight : app. 20g
- Dimension : L X d (25 X 15
mm)
Protection
fuse- Busmann : 1.0kV, 150A with
Microswitch
C u r r e n t
transducer
- Input side : ACS758-100B
>> Measure range : ±100A
- Output side : ACS758-200B
>> Measure range : ±200A
- Supply volt : +5Vdc
- Current consumption : ±15mA
- V_power : 8Vdc
- Data out volt : ~ 28Vdc
- T_op : -40 ~ 125
- V_iso : 4.8kV
<표 3.4.6> FBC 주요소자 Ⅰ
<표 3.4.6>는 풀-브리지 컨버터 장치의 주요 소자를 표로 나타내었다. Power MOSFET은
MOSFET (스위칭 소자)를 도시하였다. 주요 전압 및 전류사양은 1.2kV에 32A이다. 내부에 포함된
기생 다이오드는 환류(Free-wheeling) 다이오드로 활용하며 해당 스위치는 다수의 스위치 병렬로
연결되어 충분한 전류사양을 확보 할 수 있도록 하였다.
Capcitor bank.는 전압 리플 안정성을 확보하기 위한 커패시터의 사양을 나타낸 것이다. 체적을
고려하여 PCB용으로 직렬 연결하여 적용하였다. 커패시턴스 용량은 약 10mF 이다.
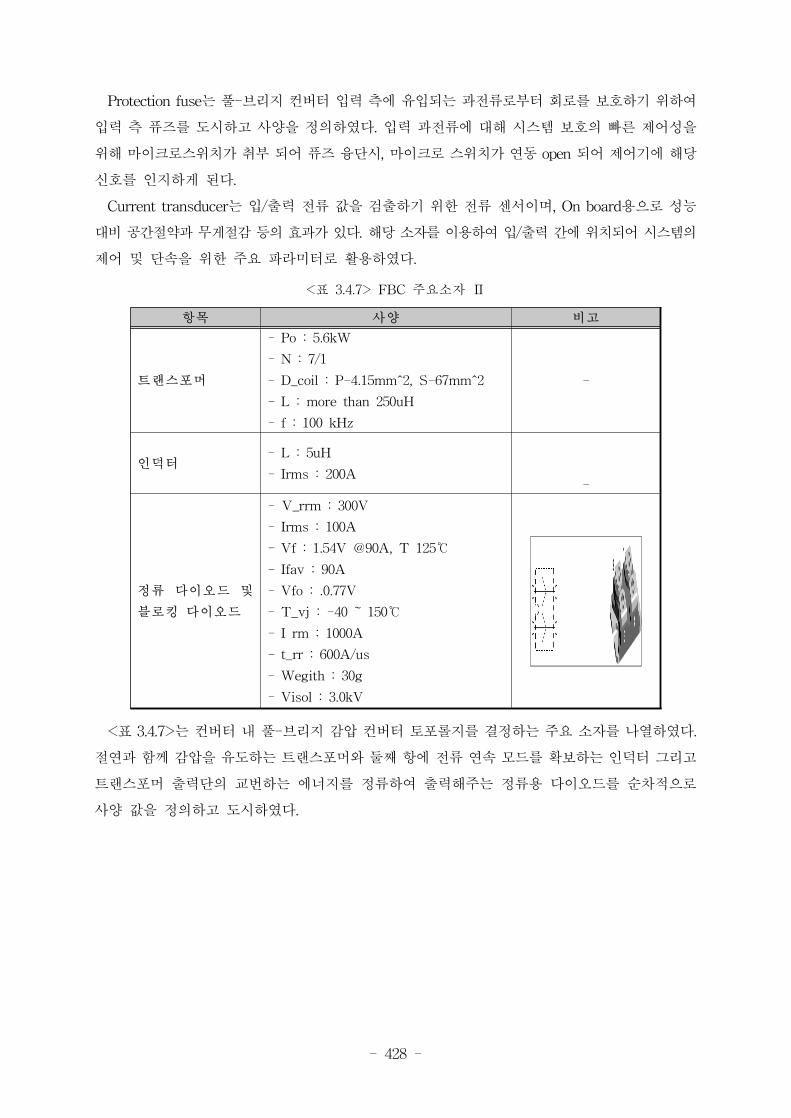
- 428 -
Protection fuse는 풀-브리지 컨버터 입력 측에 유입되는 과전류로부터 회로를 보호하기 위하여
입력 측 퓨즈를 도시하고 사양을 정의하였다. 입력 과전류에 대해 시스템 보호의 빠른 제어성을
위해 마이크로스위치가 취부 되어 퓨즈 융단시, 마이크로 스위치가 연동 open 되어 제어기에 해당
신호를 인지하게 된다.
Current transducer는 입/출력 전류 값을 검출하기 위한 전류 센서이며, On board용으로 성능
대비공간절약과무게절감등의효과가있다. 해당소자를이용하여입/출력간에위치되어시스템의
제어 및 단속을 위한 주요 파라미터로 활용하였다.
항목 사양 비고
트랜스포머
- Po : 5.6kW
- N : 7/1
- D_coil : P-4.15mm^2, S-67mm^2
- L : more than 250uH
- f : 100 kHz
-
인덕터- L : 5uH
- Irms : 200A-
정류 다이오드 및
블로킹 다이오드
- V_rrm : 300V
- Irms : 100A
- Vf : 1.54V @90A, T 125
- Ifav : 90A
- Vfo : .0.77V
- T_vj : -40 ~ 150
- I rm : 1000A
- t_rr : 600A/us
- Wegith : 30g
- Visol : 3.0kV
<표 3.4.7> FBC 주요소자 Ⅱ
<표 3.4.7>는 컨버터 내 풀-브리지 감압 컨버터 토포롤지를 결정하는 주요 소자를 나열하였다.
절연과 함께 감압을 유도하는 트랜스포머와 둘째 항에 전류 연속 모드를 확보하는 인덕터 그리고
트랜스포머 출력단의 교번하는 에너지를 정류하여 출력해주는 정류용 다이오드를 순차적으로
사양 값을 정의하고 도시하였다.
- 429 -
라. 유선충전기
항목 수치 비고
사양
Ⅰ. 전기적 사양
- 입력전압 : 220 Vac
- 출력전압 : 90Vdc
- 용량 : 1kW
- 효율 : more than 90%
- 출력 과도 응답시간: 1000 ms 이내
- 트랜스포머 turn ratio를 이용한 자동 정전압 충전.
Ⅱ. 기계적 사양
- 동작 온도 : -20 ~ 80
- 동작 습도 : ~ 80%
- 방수 능력 : IP66
기능- 상용 단상 전원을 이용한 LIC(에너지 저장장치) 비상
충전용
<표 3.4.8> 1kW급 유선충전기 구성소자 Ⅰ
상기 제안한 충전기를 설계하는데 외부의 상용전원을 이용하여 차량 내, 에너지 저장장치를
충전하는 시스템으로, 전기 및 기구 사양을 결정하고 상세적인 소자 사양 및 설계 내용을
진행하였다.
위 <표 3.4.8>은 유선충전장치에 설치된 주요 소자를 나열하였다. 별도의 능동소자 없이
반 제어 반도체소자(다이오드), L, C, 트랜스포머 등의 수동 소자 등으로 전기 회로도를
구성하였다.
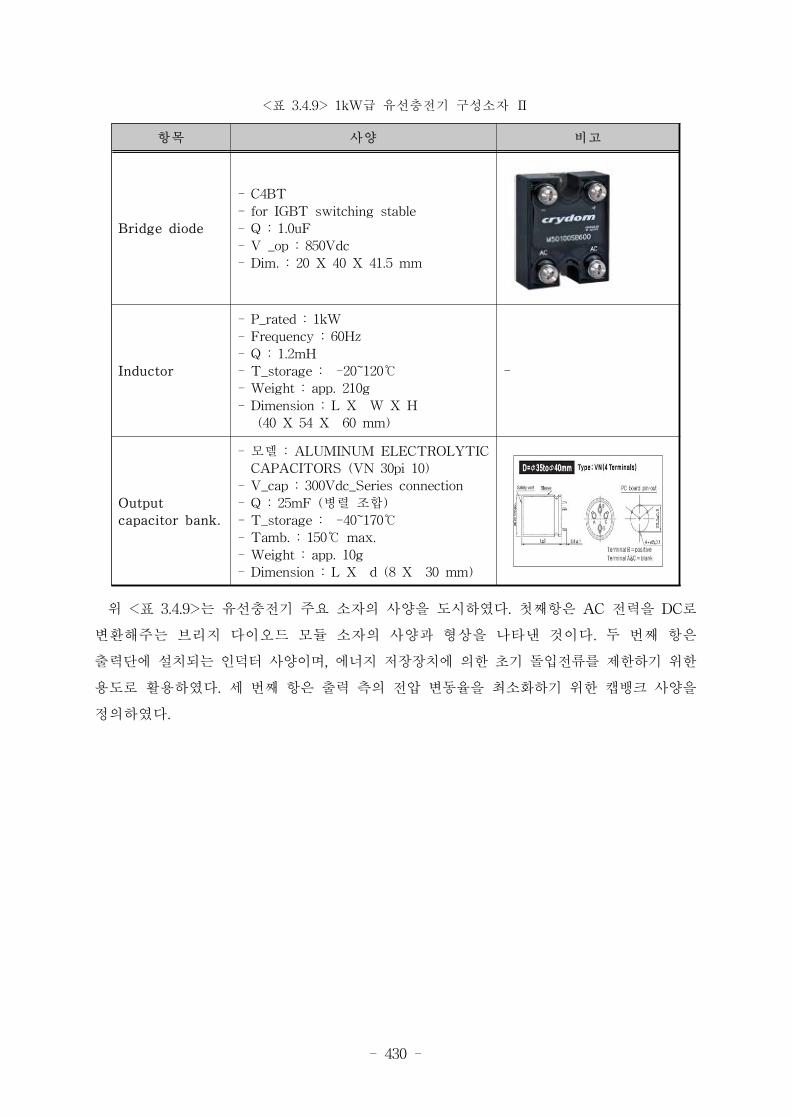
- 430 -
항목 사양 비고
Bridge diode
- C4BT
- for IGBT switching stable
- Q : 1.0uF
- V _op : 850Vdc
- Dim. : 20 X 40 X 41.5 mm
Inductor
- P_rated : 1kW
- Frequency : 60Hz
- Q : 1.2mH
- T_storage : -20~120
- Weight : app. 210g
- Dimension : L X W X H
(40 X 54 X 60 mm)
-
Output
capacitor bank.
- 모델 : ALUMINUM ELECTROLYTIC
CAPACITORS (VN 30pi 10)
- V_cap : 300Vdc_Series connection
- Q : 25mF (병렬 조합)
- T_storage : -40~170
- Tamb. : 150 max.
- Weight : app. 10g
- Dimension : L X d (8 X 30 mm)
<표 3.4.9> 1kW급 유선충전기 구성소자 Ⅱ
위 <표 3.4.9>는 유선충전기 주요 소자의 사양을 도시하였다. 첫째항은 AC 전력을 DC로
변환해주는 브리지 다이오드 모듈 소자의 사양과 형상을 나타낸 것이다. 두 번째 항은
출력단에 설치되는 인덕터 사양이며, 에너지 저장장치에 의한 초기 돌입전류를 제한하기 위한
용도로 활용하였다. 세 번째 항은 출력 측의 전압 변동율을 최소화하기 위한 캡뱅크 사양을
정의하였다.
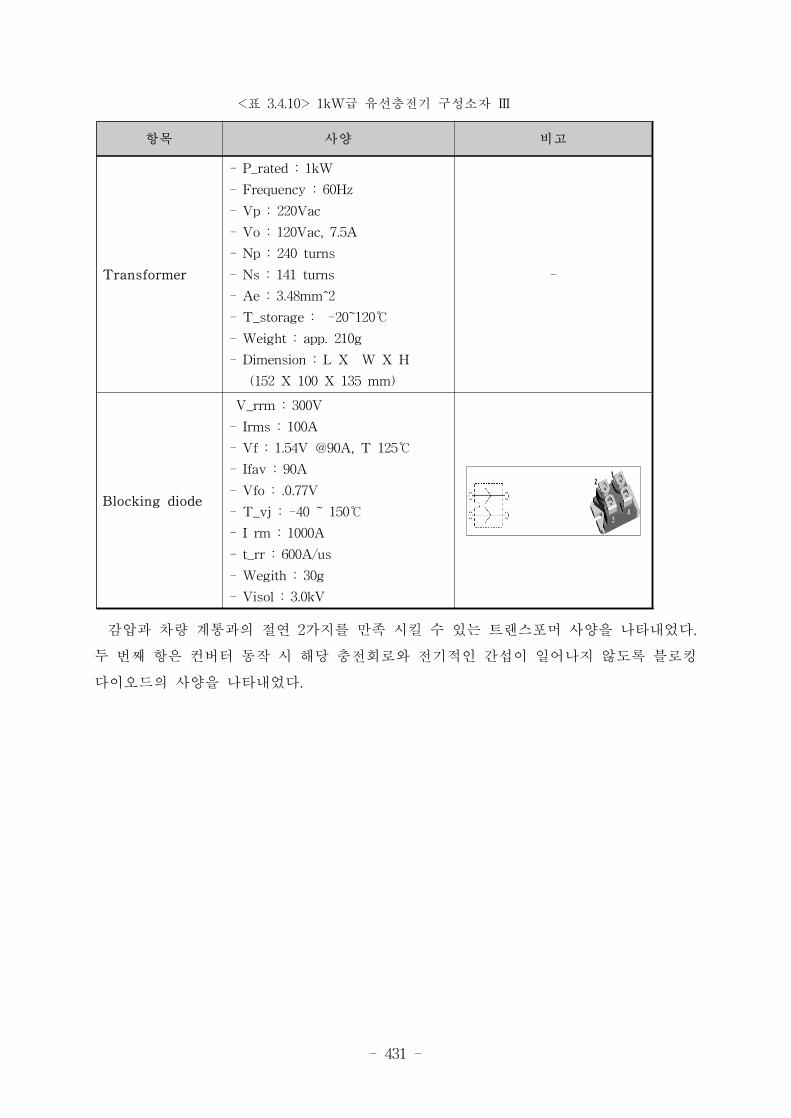
- 431 -
항목 사양 비고
Transformer
- P_rated : 1kW
- Frequency : 60Hz
- Vp : 220Vac
- Vo : 120Vac, 7.5A
- Np : 240 turns
- Ns : 141 turns
- Ae : 3.48mm^2
- T_storage : -20~120
- Weight : app. 210g
- Dimension : L X W X H
(152 X 100 X 135 mm)
-
Blocking diode
V_rrm : 300V
- Irms : 100A
- Vf : 1.54V @90A, T 125
- Ifav : 90A
- Vfo : .0.77V
- T_vj : -40 ~ 150
- I rm : 1000A
- t_rr : 600A/us
- Wegith : 30g
- Visol : 3.0kV
<표 3.4.10> 1kW급 유선충전기 구성소자 Ⅲ
감압과 차량 계통과의 절연 2가지를 만족 시킬 수 있는 트랜스포머 사양을 나타내었다.
두 번째 항은 컨버터 동작 시 해당 충전회로와 전기적인 간섭이 일어나지 않도록 블로킹
다이오드의 사양을 나타내었다.
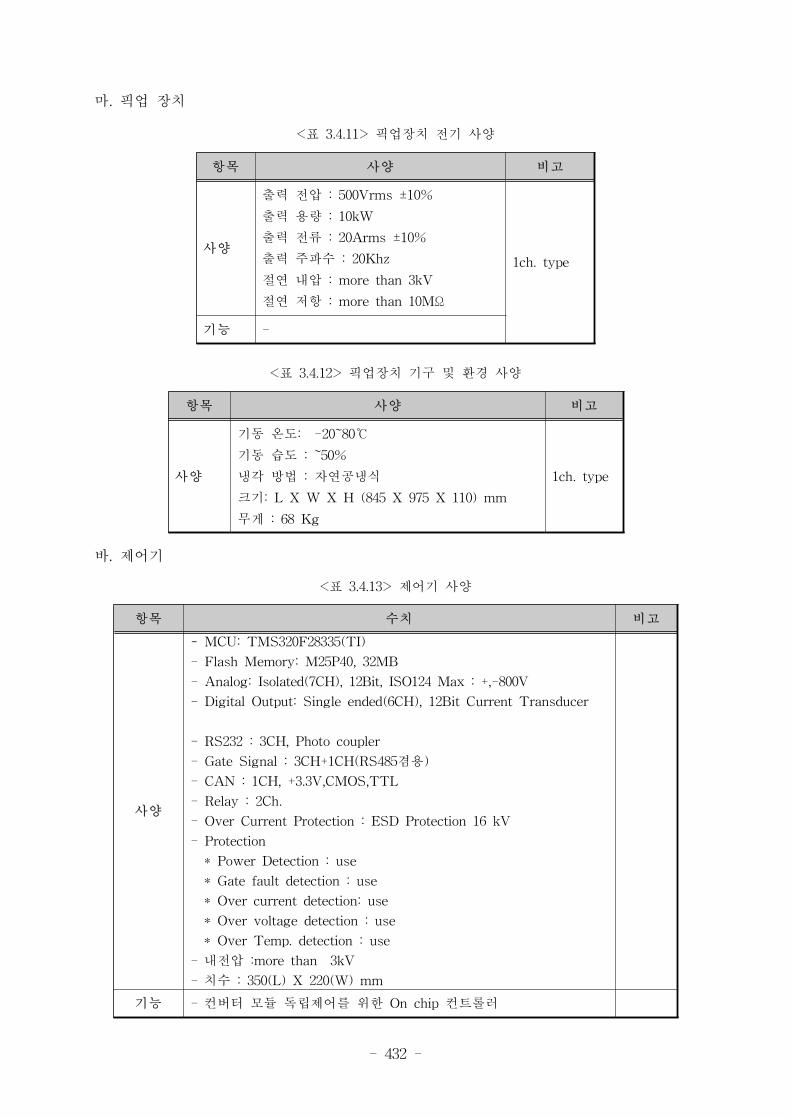
- 432 -
마. 픽업 장치
항목 사양 비고
사양
출력 전압 : 500Vrms ±10%
출력 용량 : 10kW
출력 전류 : 20Arms ±10%
출력 주파수 : 20Khz
절연 내압 : more than 3kV
절연 저항 : more than 10MΩ
1ch. type
기능 -
<표 3.4.11> 픽업장치 전기 사양
항목 사양 비고
사양
기동 온도: -20~80
기동 습도 : ~50%
냉각 방법 : 자연공냉식
크기: L X W X H (845 X 975 X 110) mm
무게 : 68 Kg
1ch. type
<표 3.4.12> 픽업장치 기구 및 환경 사양
바. 제어기
항목 수치 비고
사양
- MCU: TMS320F28335(TI)- Flash Memory: M25P40, 32MB
- Analog: Isolated(7CH), 12Bit, ISO124 Max : +,-800V
- Digital Output: Single ended(6CH), 12Bit Current Transducer
- RS232 : 3CH, Photo coupler
- Gate Signal : 3CH+1CH(RS485겸용)
- CAN : 1CH, +3.3V,CMOS,TTL
- Relay : 2Ch.
- Over Current Protection : ESD Protection 16 kV
- Protection
* Power Detection : use
* Gate fault detection : use
* Over current detection: use
* Over voltage detection : use
* Over Temp. detection : use
- 내전압 :more than 3kV
- 치수 : 350(L) X 220(W) mm
기능 - 컨버터 모듈 독립제어를 위한 On chip 컨트롤러
<표 3.4.13> 제어기 사양
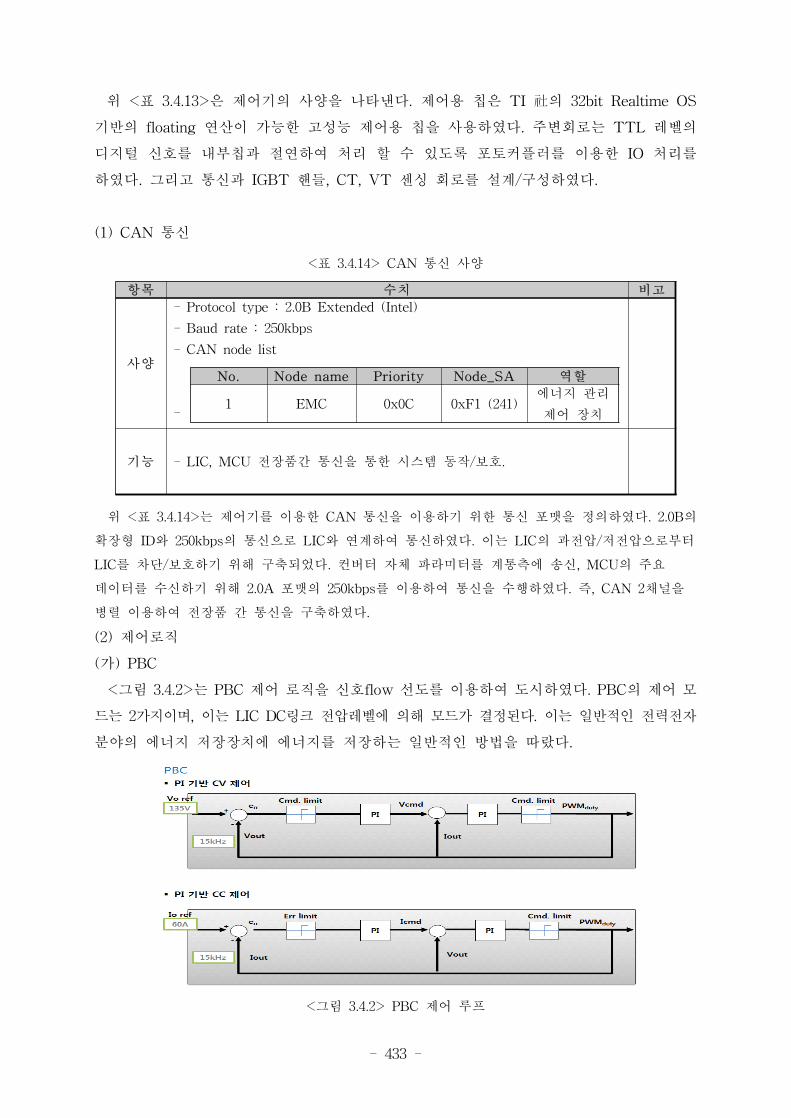
- 433 -
위 <표 3.4.13>은 제어기의 사양을 나타낸다. 제어용 칩은 TI 社의 32bit Realtime OS
기반의 floating 연산이 가능한 고성능 제어용 칩을 사용하였다. 주변회로는 TTL 레벨의
디지털 신호를 내부칩과 절연하여 처리 할 수 있도록 포토커플러를 이용한 IO 처리를
하였다. 그리고 통신과 IGBT 핸들, CT, VT 센싱 회로를 설계/구성하였다.
(1) CAN 통신
항목 수치 비고
사양
- Protocol type : 2.0B Extended (Intel)
- Baud rate : 250kbps
- CAN node list
-
No. Node name Priority Node_SA 역할
1 EMC 0x0C 0xF1 (241)에너지 관리
제어 장치
기능 - LIC, MCU 전장품간 통신을 통한 시스템 동작/보호.
<표 3.4.14> CAN 통신 사양
위 <표 3.4.14>는 제어기를 이용한 CAN 통신을 이용하기 위한 통신 포맷을 정의하였다. 2.0B의
확장형 ID와 250kbps의 통신으로 LIC와 연계하여 통신하였다. 이는 LIC의 과전압/저전압으로부터
LIC를 차단/보호하기 위해 구축되었다. 컨버터 자체 파라미터를 계통측에 송신, MCU의 주요
데이터를 수신하기 위해 2.0A 포맷의 250kbps를 이용하여 통신을 수행하였다. 즉, CAN 2채널을
병렬 이용하여 전장품 간 통신을 구축하였다.
(2) 제어로직
(가) PBC
<그림 3.4.2>는 PBC 제어 로직을 신호flow 선도를 이용하여 도시하였다. PBC의 제어 모
드는 2가지이며, 이는 LIC DC링크 전압레벨에 의해 모드가 결정된다. 이는 일반적인 전력전자
분야의 에너지 저장장치에 에너지를 저장하는 일반적인 방법을 따랐다.
<그림 3.4.2> PBC 제어 루프
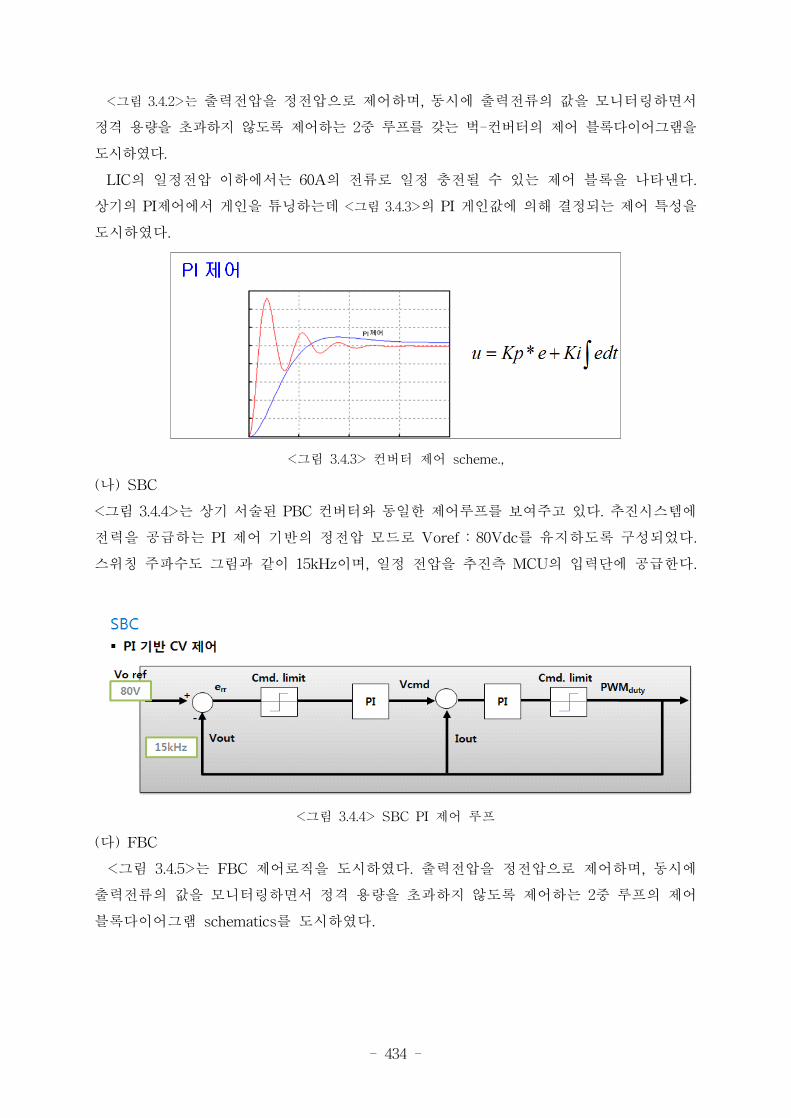
- 434 -
<그림 3.4.2>는 출력전압을 정전압으로 제어하며, 동시에 출력전류의 값을 모니터링하면서
정격 용량을 초과하지 않도록 제어하는 2중 루프를 갖는 벅-컨버터의 제어 블록다이어그램을
도시하였다.
LIC의 일정전압 이하에서는 60A의 전류로 일정 충전될 수 있는 제어 블록을 나타낸다.
상기의 PI제어에서 게인을 튜닝하는데 <그림 3.4.3>의 PI 게인값에 의해 결정되는 제어 특성을
도시하였다.
<그림 3.4.3> 컨버터 제어 scheme.,
(나) SBC
<그림 3.4.4>는 상기 서술된 PBC 컨버터와 동일한 제어루프를 보여주고 있다. 추진시스템에
전력을 공급하는 PI 제어 기반의 정전압 모드로 Voref : 80Vdc를 유지하도록 구성되었다.
스위칭 주파수도 그림과 같이 15kHz이며, 일정 전압을 추진측 MCU의 입력단에 공급한다.
<그림 3.4.4> SBC PI 제어 루프
(다) FBC
<그림 3.4.5>는 FBC 제어로직을 도시하였다. 출력전압을 정전압으로 제어하며, 동시에
출력전류의 값을 모니터링하면서 정격 용량을 초과하지 않도록 제어하는 2중 루프의 제어
블록다이어그램 schematics를 도시하였다.
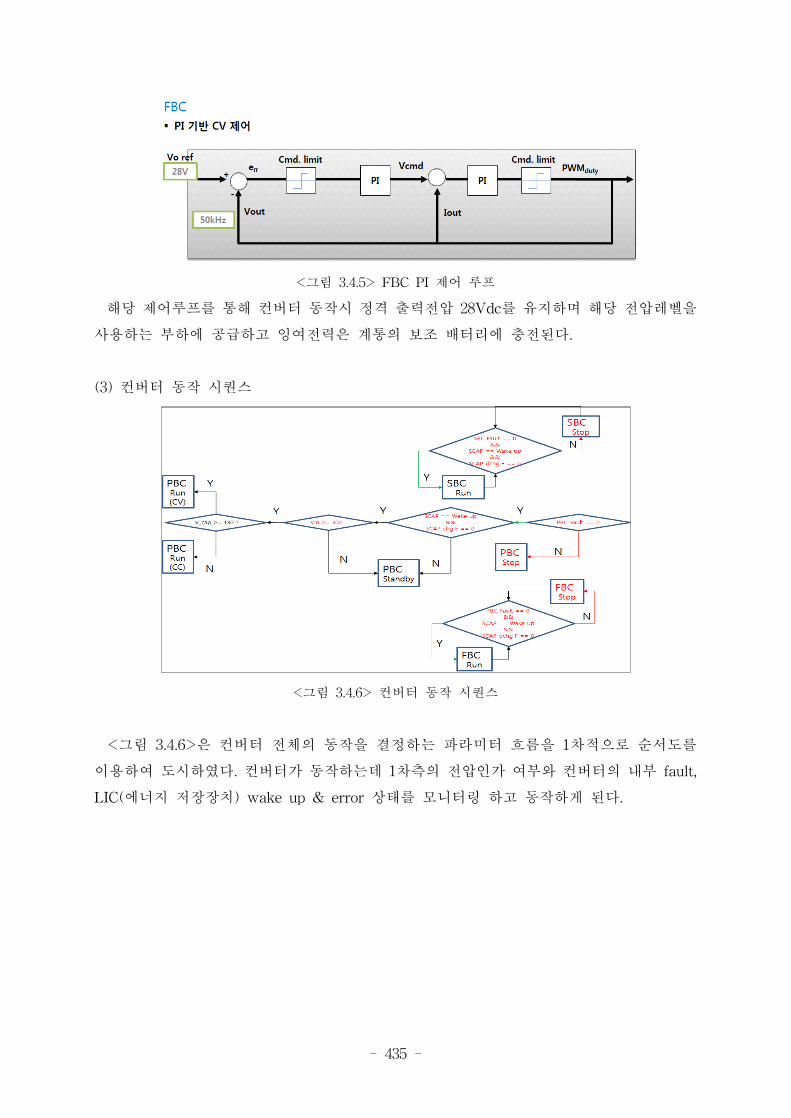
- 435 -
<그림 3.4.5> FBC PI 제어 루프
해당 제어루프를 통해 컨버터 동작시 정격 출력전압 28Vdc를 유지하며 해당 전압레벨을
사용하는 부하에 공급하고 잉여전력은 계통의 보조 배터리에 충전된다.
(3) 컨버터 동작 시퀀스
<그림 3.4.6> 컨버터 동작 시퀀스
<그림 3.4.6>은 컨버터 전체의 동작을 결정하는 파라미터 흐름을 1차적으로 순서도를
이용하여 도시하였다. 컨버터가 동작하는데 1차측의 전압인가 여부와 컨버터의 내부 fault,
LIC(에너지 저장장치) wake up & error 상태를 모니터링 하고 동작하게 된다.
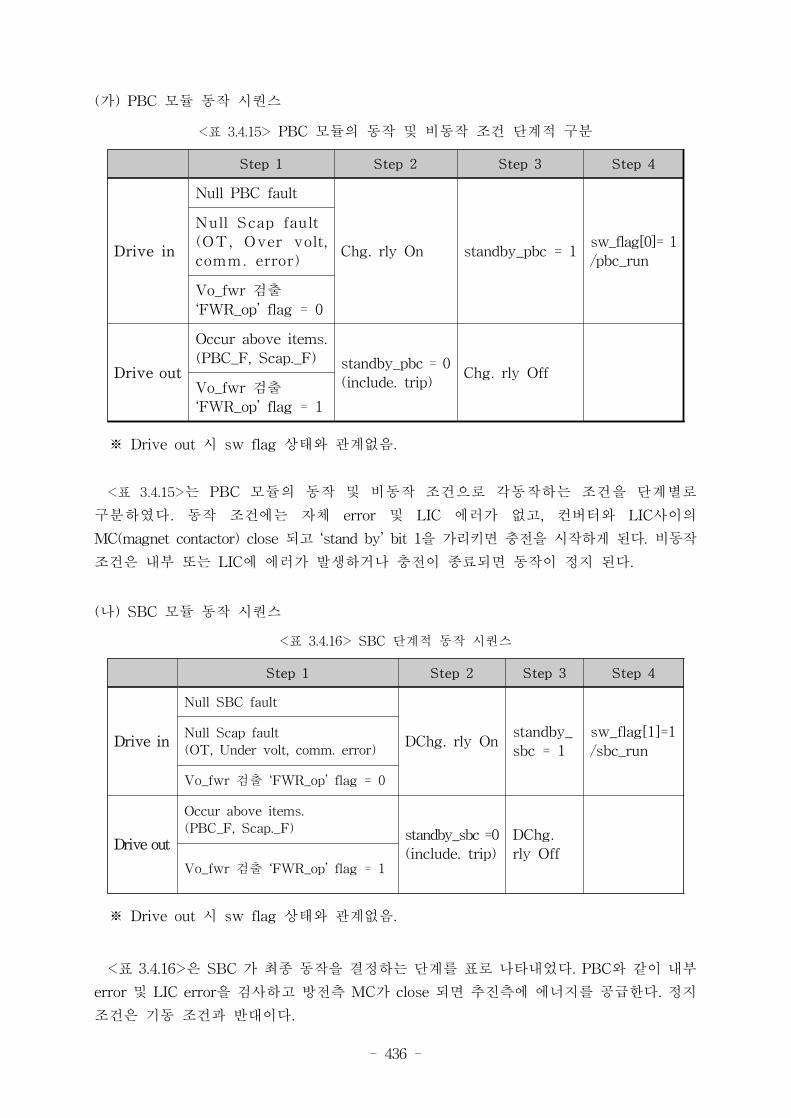
- 436 -
(가) PBC 모듈 동작 시퀀스
Step 1 Step 2 Step 3 Step 4
Drive in
Null PBC fault
Chg. rly On standby_pbc = 1sw_flag[0]= 1
/pbc_run
Null Scap fault
(OT , Over volt,
comm . error)
Vo_fwr 검출
‘FWR_op’ flag = 0
Drive out
Occur above items.
(PBC_F, Scap._F) standby_pbc = 0
(include. trip)Chg. rly Off
Vo_fwr 검출
‘FWR_op’ flag = 1
<표 3.4.15> PBC 모듈의 동작 및 비동작 조건 단계적 구분
※ Drive out 시 sw flag 상태와 관계없음.
<표 3.4.15>는 PBC 모듈의 동작 및 비동작 조건으로 각동작하는 조건을 단계별로
구분하였다. 동작 조건에는 자체 error 및 LIC 에러가 없고, 컨버터와 LIC사이의
MC(magnet contactor) close 되고 ‘stand by’ bit 1을 가리키면 충전을 시작하게 된다. 비동작
조건은 내부 또는 LIC에 에러가 발생하거나 충전이 종료되면 동작이 정지 된다.
(나) SBC 모듈 동작 시퀀스
Step 1 Step 2 Step 3 Step 4
Drive in
Null SBC fault
DChg. rly Onstandby_
sbc = 1
sw_flag[1]=1
/sbc_run
Null Scap fault
(OT, Under volt, comm. error)
Vo_fwr 검출 ‘FWR_op’ flag = 0
Drive out
Occur above items.
(PBC_F, Scap._F) standby_sbc =0
(include. trip)
DChg.
rly OffVo_fwr 검출 ‘FWR_op’ flag = 1
<표 3.4.16> SBC 단계적 동작 시퀀스
※ Drive out 시 sw flag 상태와 관계없음.
<표 3.4.16>은 SBC 가 최종 동작을 결정하는 단계를 표로 나타내었다. PBC와 같이 내부
error 및 LIC error을 검사하고 방전측 MC가 close 되면 추진측에 에너지를 공급한다. 정지
조건은 기동 조건과 반대이다.
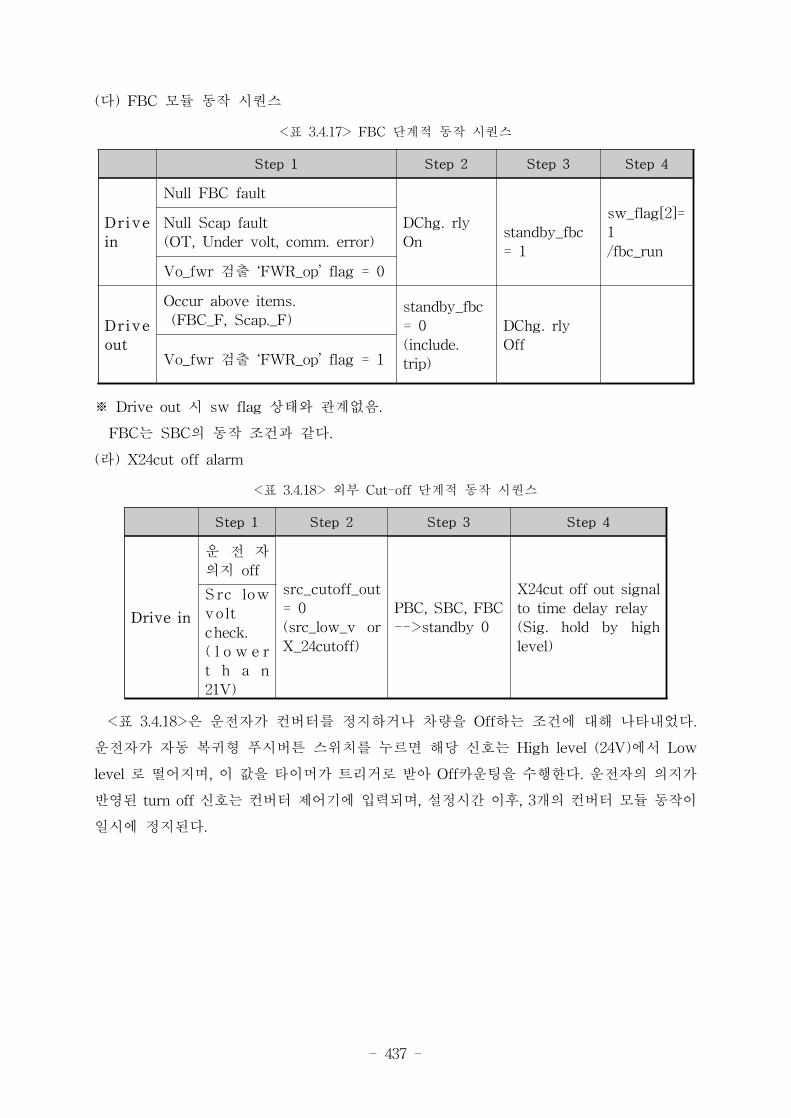
- 437 -
(다) FBC 모듈 동작 시퀀스
Step 1 Step 2 Step 3 Step 4
Dr ive
in
Null FBC fault
DChg. rly
Onstandby_fbc
= 1
sw_flag[2]=
1
/fbc_run
Null Scap fault
(OT, Under volt, comm. error)
Vo_fwr 검출 ‘FWR_op’ flag = 0
Dr ive
out
Occur above items.
(FBC_F, Scap._F)standby_fbc
= 0
(include.
trip)
DChg. rly
OffVo_fwr 검출 ‘FWR_op’ flag = 1
<표 3.4.17> FBC 단계적 동작 시퀀스
※ Drive out 시 sw flag 상태와 관계없음.
FBC는 SBC의 동작 조건과 같다.
(라) X24cut off alarm
Step 1 Step 2 Step 3 Step 4
Drive in
운 전 자
의지 off
src_cutoff_out
= 0
(src_low_v or
X_24cutoff)
PBC, SBC, FBC
-->standby 0
X24cut off out signal
to time delay relay
(Sig. hold by high
level)
S rc low
vo lt
check.
( l o w e r
t h a n
21V)
<표 3.4.18> 외부 Cut-off 단계적 동작 시퀀스
<표 3.4.18>은 운전자가 컨버터를 정지하거나 차량을 Off하는 조건에 대해 나타내었다.
운전자가 자동 복귀형 푸시버튼 스위치를 누르면 해당 신호는 High level (24V)에서 Low
level 로 떨어지며, 이 값을 타이머가 트리거로 받아 Off카운팅을 수행한다. 운전자의 의지가
반영된 turn off 신호는 컨버터 제어기에 입력되며, 설정시간 이후, 3개의 컨버터 모듈 동작이
일시에 정지된다.
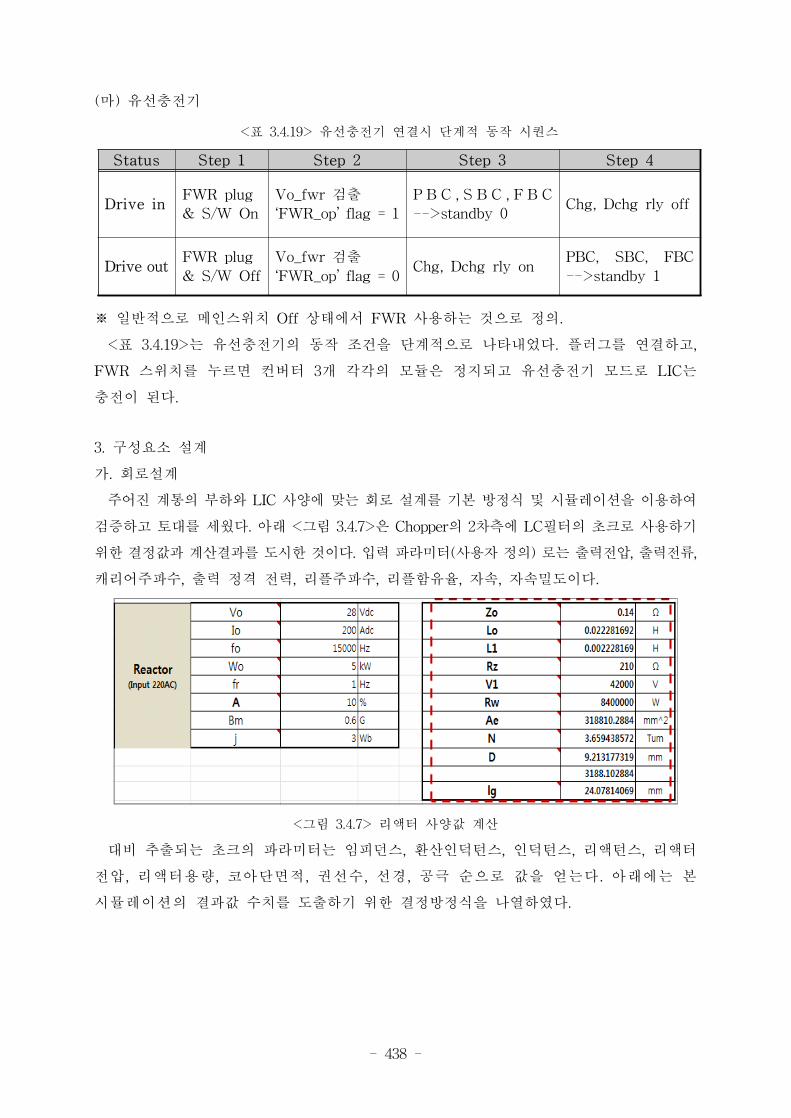
- 438 -
(마) 유선충전기
Status Step 1 Step 2 Step 3 Step 4
Drive inFWR plug
& S/W On
Vo_fwr 검출
‘FWR_op’ flag = 1
P B C , S B C , F B C
-->standby 0Chg, Dchg rly off
Drive outFWR plug
& S/W Off
Vo_fwr 검출
‘FWR_op’ flag = 0Chg, Dchg rly on
PBC, SBC, FBC
-->standby 1
<표 3.4.19> 유선충전기 연결시 단계적 동작 시퀀스
※ 일반적으로 메인스위치 Off 상태에서 FWR 사용하는 것으로 정의.
<표 3.4.19>는 유선충전기의 동작 조건을 단계적으로 나타내었다. 플러그를 연결하고,
FWR 스위치를 누르면 컨버터 3개 각각의 모듈은 정지되고 유선충전기 모드로 LIC는
충전이 된다.
3. 구성요소 설계
가. 회로설계
주어진 계통의 부하와 LIC 사양에 맞는 회로 설계를 기본 방정식 및 시뮬레이션을 이용하여
검증하고 토대를 세웠다. 아래 <그림 3.4.7>은 Chopper의 2차측에 LC필터의 초크로 사용하기
위한 결정값과 계산결과를 도시한 것이다. 입력 파라미터(사용자 정의) 로는 출력전압, 출력전류,
캐리어주파수, 출력 정격 전력, 리플주파수, 리플함유율, 자속, 자속밀도이다.
<그림 3.4.7> 리액터 사양값 계산
대비 추출되는 초크의 파라미터는 임피던스, 환산인덕턴스, 인덕턴스, 리액턴스, 리액터
전압, 리액터용량, 코아단면적, 권선수, 선경, 공극 순으로 값을 얻는다. 아래에는 본
시뮬레이션의 결과값 수치를 도출하기 위한 결정방정식을 나열하였다.

- 439 -
(식 3.5.1)
<그림 3.4.8>는 DCDC 컨버터에서 적용된 트랜스포머 사양 선정을 위한 계산기를
개발하고 사양값을 추출한 결과를 도시한 것이다.
<그림 3.4.8> 트랜스포머 사양값 계산
좌측에는 파라미터값을 추출하기 위하여 입력되는 최소 입력 파라미터를 나타낸다. 우측에는
(붉은점선) 입력값에 대해 얻어진 트랜스포머 결정값이 도시되었다. 상기 계산 방정식은
아래에 식에 기초하여 만들어졌다.

- 440 -
max
max
≥ max
≥
min
s
(식 3.5.2)
※ 설계 레벨 시뮬레이션 유틸을 이용한 회로설계 적합성 검증 과정.
나. 시뮬레이션 검증
(1) PBC
목적은 무선집전장치로부터 전력을 받아 슈퍼캡 충전 및 계통 부하장치에 잉여 전력을
공급 하는 컨버터의 각 소자 사양을 검토/결정하는데 사용한다. 벅 컨버터 chopper 토폴로지이며,
무선 전력을 받아 600Vdc 레벨의 DC 전압으로 정류하여 입력측에 공급된다. <그림 3.4.9>의
상단부분은 파워회로이며, 하단은 출력 전압을 feedback 으로 받아 PI 제어루프를 이용하여
슈퍼캡 충전 종지 전압인 90Vdc 로 정전압제어가 이루어지는 로직을 도시하였다.
구현된 컨버터에는 슈퍼캡의 매우 작은 내부 임피던스 특성을 고려하여 정전류/정전압
제어가 순차적으로 동작 구현된다. 부하는 저항으로1.8Ω 으로 정격 10kW 출력을 고려하였다.
아래 그래프는 Inductor 전류와 출력 전류를 plot 하였고, 두 번째는 입력전압 대비 출력
전압 파형을 도시하였다. Inductor 전류는 기 계산된 m ax 와 m in 사이에서 전류
연속모드가 정상동작으로 이루어지는 것을 확인하였다. 출력 리플량은 부하값에 ± 1.5A
이내에서 수렴함을 확인하였다. 두 번째는 입력 전압 대비 출력 전압을 나타낸다. 목표
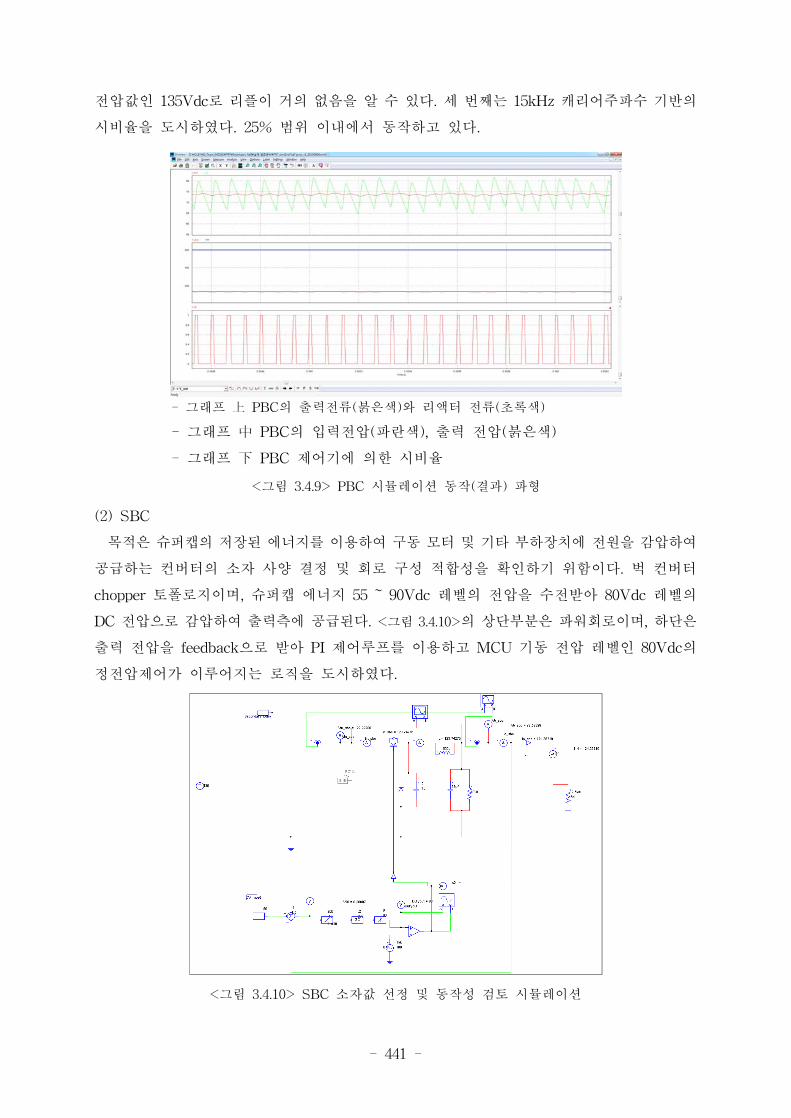
- 441 -
전압값인 135Vdc로 리플이 거의 없음을 알 수 있다. 세 번째는 15kHz 캐리어주파수 기반의
시비율을 도시하였다. 25% 범위 이내에서 동작하고 있다.
- 그래프 上 PBC의 출력전류(붉은색)와 리액터 전류(초록색)
- 그래프 中 PBC의 입력전압(파란색), 출력 전압(붉은색)
- 그래프 下 PBC 제어기에 의한 시비율
<그림 3.4.9> PBC 시뮬레이션 동작(결과) 파형
(2) SBC
목적은 슈퍼캡의 저장된 에너지를 이용하여 구동 모터 및 기타 부하장치에 전원을 감압하여
공급하는 컨버터의 소자 사양 결정 및 회로 구성 적합성을 확인하기 위함이다. 벅 컨버터
chopper 토폴로지이며, 슈퍼캡 에너지 55 ~ 90Vdc 레벨의 전압을 수전받아 80Vdc 레벨의
DC 전압으로 감압하여 출력측에 공급된다. <그림 3.4.10>의 상단부분은 파워회로이며, 하단은
출력 전압을 feedback으로 받아 PI 제어루프를 이용하고 MCU 기동 전압 레벨인 80Vdc의
정전압제어가 이루어지는 로직을 도시하였다.
<그림 3.4.10> SBC 소자값 선정 및 동작성 검토 시뮬레이션
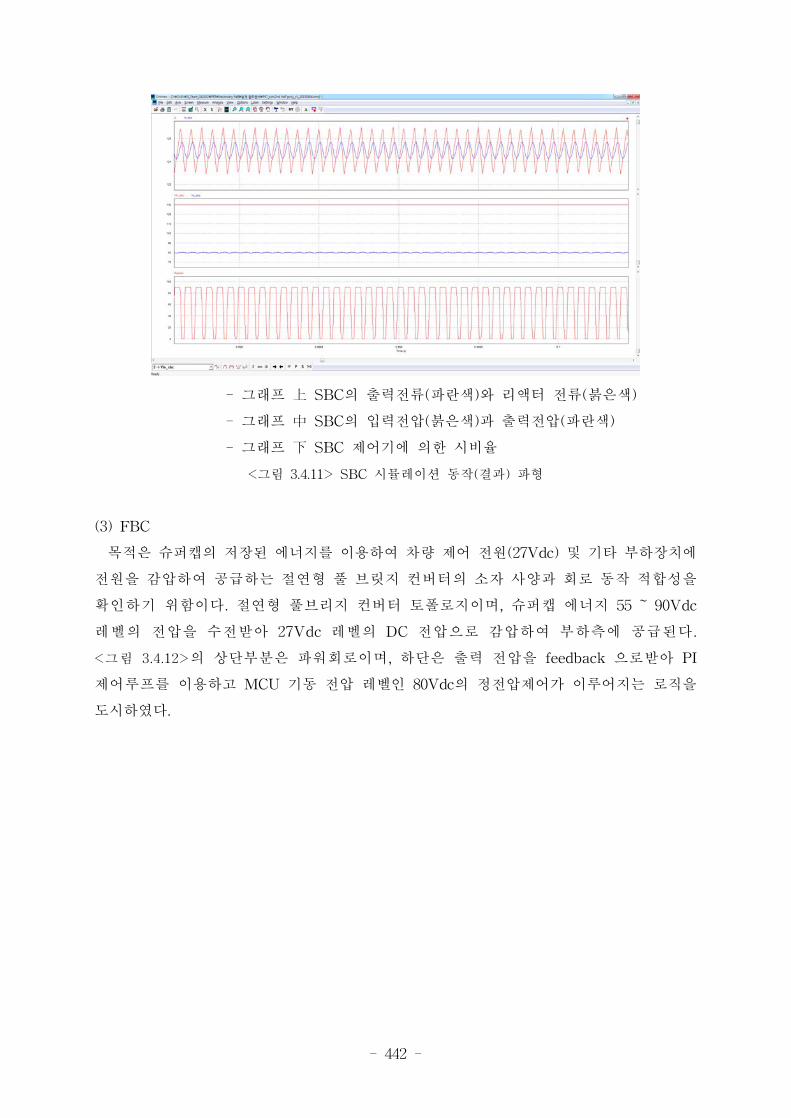
- 442 -
- 그래프 上 SBC의 출력전류(파란색)와 리액터 전류(붉은색)
- 그래프 中 SBC의 입력전압(붉은색)과 출력전압(파란색)
- 그래프 下 SBC 제어기에 의한 시비율
<그림 3.4.11> SBC 시뮬레이션 동작(결과) 파형
(3) FBC
목적은 슈퍼캡의 저장된 에너지를 이용하여 차량 제어 전원(27Vdc) 및 기타 부하장치에
전원을 감압하여 공급하는 절연형 풀 브릿지 컨버터의 소자 사양과 회로 동작 적합성을
확인하기 위함이다. 절연형 풀브리지 컨버터 토폴로지이며, 슈퍼캡 에너지 55 ~ 90Vdc
레벨의 전압을 수전받아 27Vdc 레벨의 DC 전압으로 감압하여 부하측에 공급된다.
<그림 3.4.12>의 상단부분은 파워회로이며, 하단은 출력 전압을 feedback 으로받아 PI
제어루프를 이용하고 MCU 기동 전압 레벨인 80Vdc의 정전압제어가 이루어지는 로직을
도시하였다.
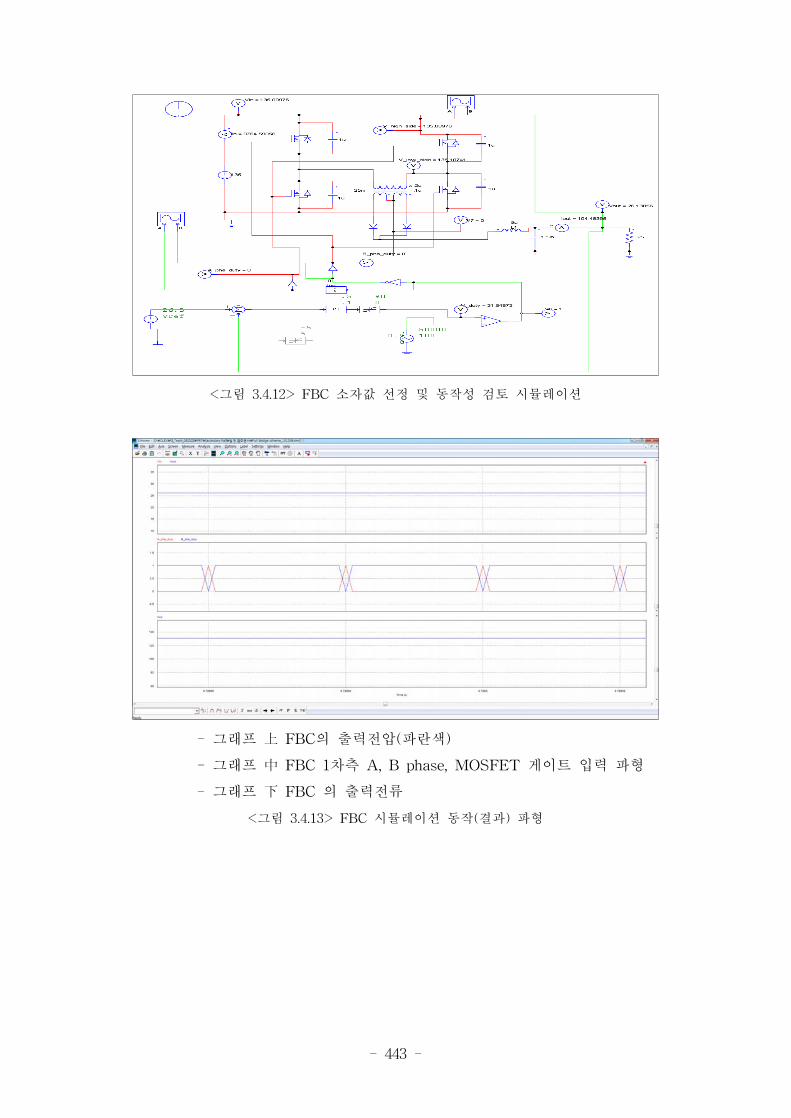
- 443 -
<그림 3.4.12> FBC 소자값 선정 및 동작성 검토 시뮬레이션
- 그래프 上 FBC의 출력전압(파란색)
- 그래프 中 FBC 1차측 A, B phase, MOSFET 게이트 입력 파형
- 그래프 下 FBC 의 출력전류
<그림 3.4.13> FBC 시뮬레이션 동작(결과) 파형
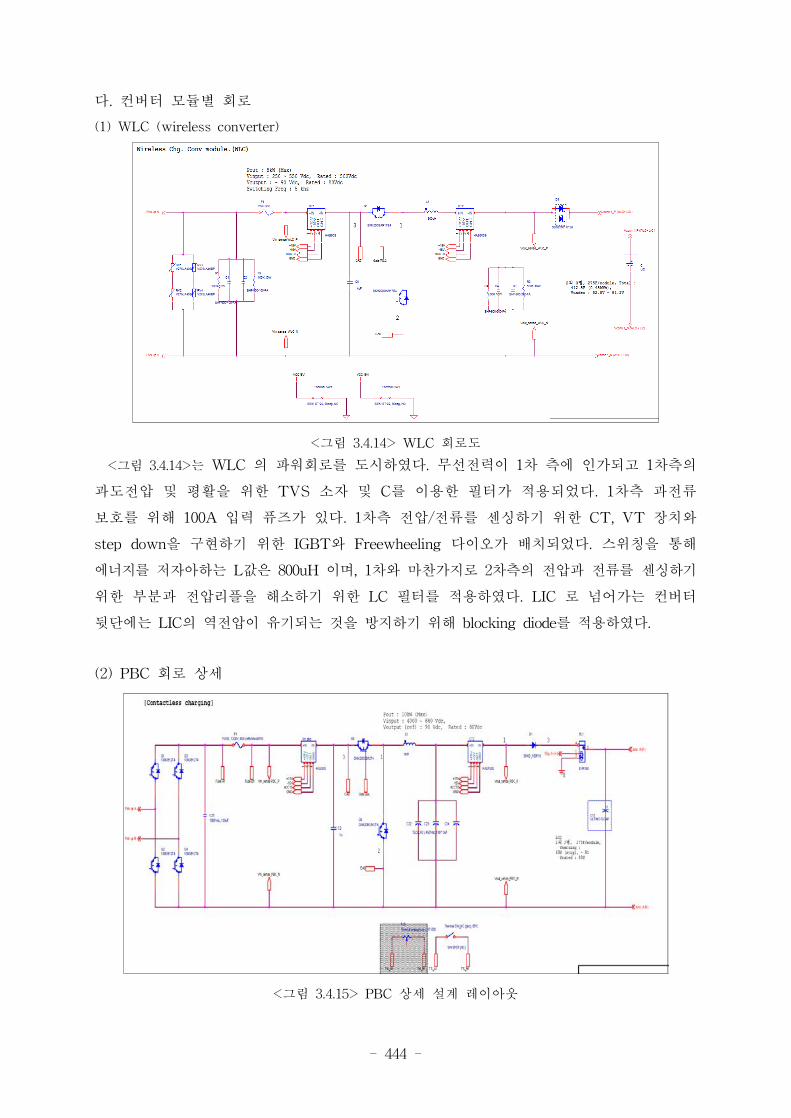
- 444 -
다. 컨버터 모듈별 회로
(1) WLC (wireless converter)
<그림 3.4.14> WLC 회로도
<그림 3.4.14>는 WLC 의 파워회로를 도시하였다. 무선전력이 1차 측에 인가되고 1차측의
과도전압 및 평활을 위한 TVS 소자 및 C를 이용한 필터가 적용되었다. 1차측 과전류
보호를 위해 100A 입력 퓨즈가 있다. 1차측 전압/전류를 센싱하기 위한 CT, VT 장치와
step down을 구현하기 위한 IGBT와 Freewheeling 다이오가 배치되었다. 스위칭을 통해
에너지를 저자아하는 L값은 800uH 이며, 1차와 마찬가지로 2차측의 전압과 전류를 센싱하기
위한 부분과 전압리플을 해소하기 위한 LC 필터를 적용하였다. LIC 로 넘어가는 컨버터
뒷단에는 LIC의 역전압이 유기되는 것을 방지하기 위해 blocking diode를 적용하였다.
(2) PBC 회로 상세
<그림 3.4.15> PBC 상세 설계 레이아웃
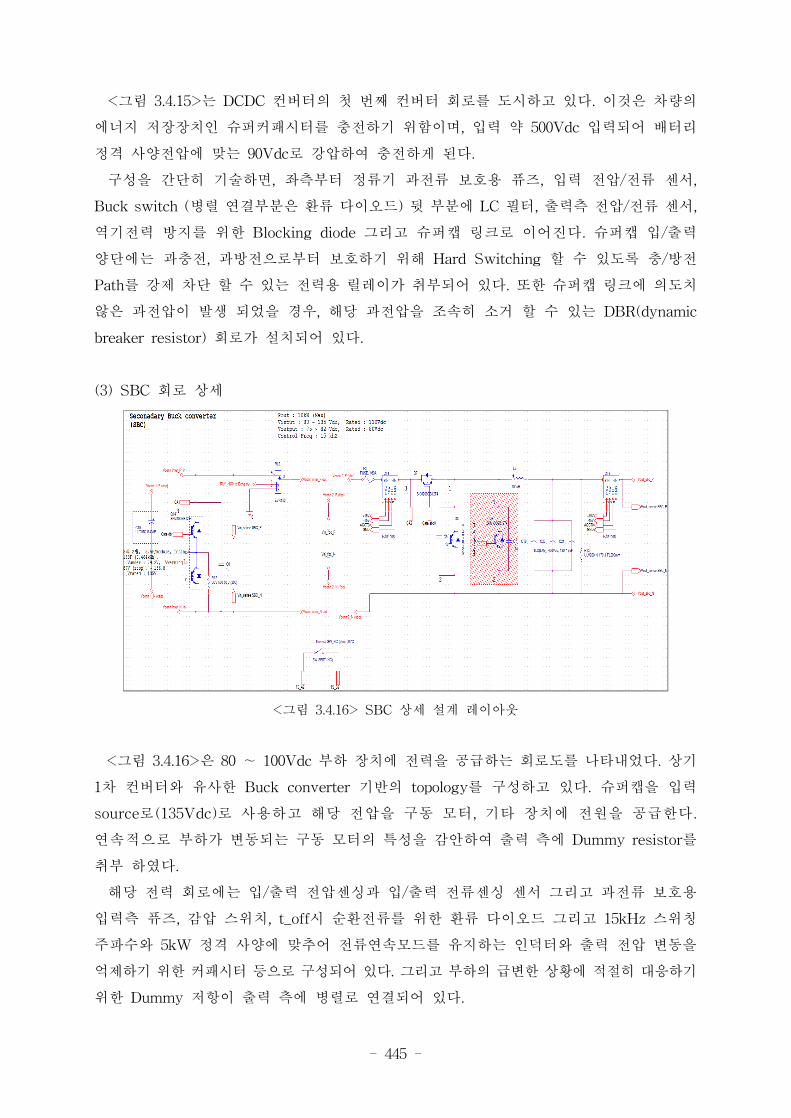
- 445 -
<그림 3.4.15>는 DCDC 컨버터의 첫 번째 컨버터 회로를 도시하고 있다. 이것은 차량의
에너지 저장장치인 슈퍼커패시터를 충전하기 위함이며, 입력 약 500Vdc 입력되어 배터리
정격 사양전압에 맞는 90Vdc로 강압하여 충전하게 된다.
구성을 간단히 기술하면, 좌측부터 정류기 과전류 보호용 퓨즈, 입력 전압/전류 센서,
Buck switch (병렬 연결부분은 환류 다이오드) 뒷 부분에 LC 필터, 출력측 전압/전류 센서,
역기전력 방지를 위한 Blocking diode 그리고 슈퍼캡 링크로 이어진다. 슈퍼캡 입/출력
양단에는 과충전, 과방전으로부터 보호하기 위해 Hard Switching 할 수 있도록 충/방전
Path를 강제 차단 할 수 있는 전력용 릴레이가 취부되어 있다. 또한 슈퍼캡 링크에 의도치
않은 과전압이 발생 되었을 경우, 해당 과전압을 조속히 소거 할 수 있는 DBR(dynamic
breaker resistor) 회로가 설치되어 있다.
(3) SBC 회로 상세
<그림 3.4.16> SBC 상세 설계 레이아웃
<그림 3.4.16>은 80 ∼ 100Vdc 부하 장치에 전력을 공급하는 회로도를 나타내었다. 상기
1차 컨버터와 유사한 Buck converter 기반의 topology를 구성하고 있다. 슈퍼캡을 입력
source로(135Vdc)로 사용하고 해당 전압을 구동 모터, 기타 장치에 전원을 공급한다.
연속적으로 부하가 변동되는 구동 모터의 특성을 감안하여 출력 측에 Dummy resistor를
취부 하였다.
해당 전력 회로에는 입/출력 전압센싱과 입/출력 전류센싱 센서 그리고 과전류 보호용
입력측 퓨즈, 감압 스위치, t_off시 순환전류를 위한 환류 다이오드 그리고 15kHz 스위칭
주파수와 5kW 정격 사양에 맞추어 전류연속모드를 유지하는 인덕터와 출력 전압 변동을
억제하기 위한 커패시터 등으로 구성되어 있다. 그리고 부하의 급변한 상황에 적절히 대응하기
위한 Dummy 저항이 출력 측에 병렬로 연결되어 있다.
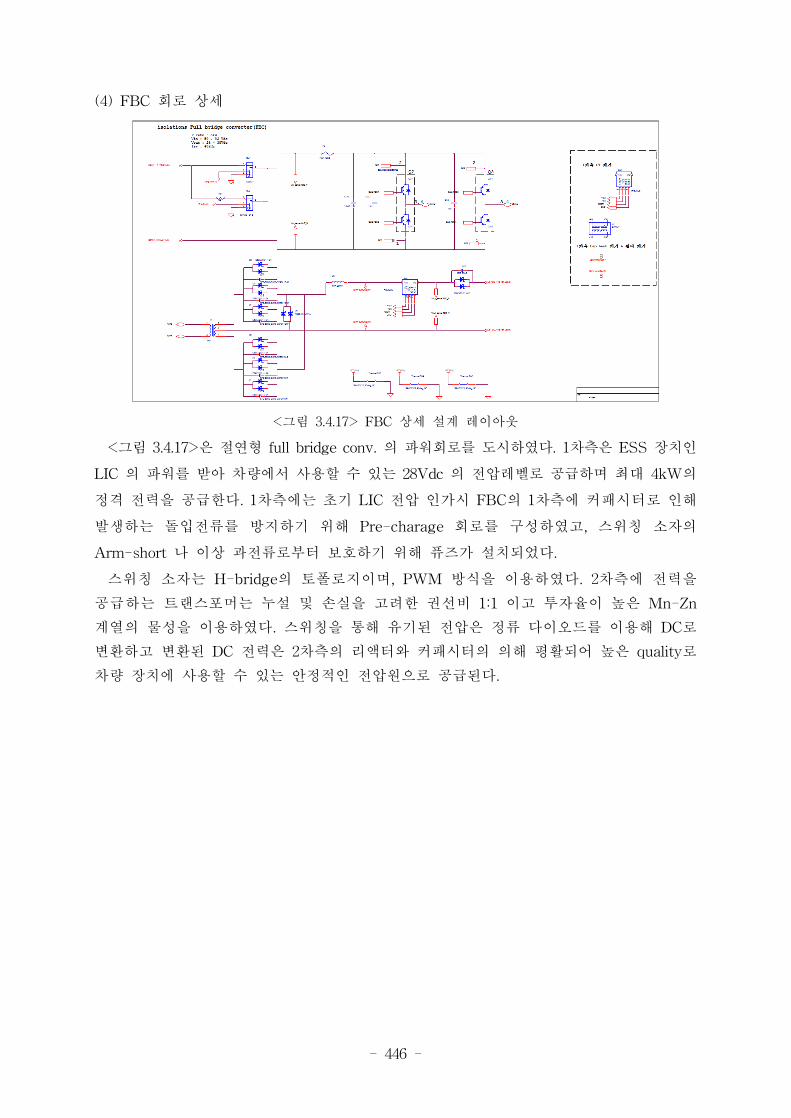
- 446 -
(4) FBC 회로 상세
<그림 3.4.17> FBC 상세 설계 레이아웃
<그림 3.4.17>은 절연형 full bridge conv. 의 파워회로를 도시하였다. 1차측은 ESS 장치인
LIC 의 파워를 받아 차량에서 사용할 수 있는 28Vdc 의 전압레벨로 공급하며 최대 4kW의
정격 전력을 공급한다. 1차측에는 초기 LIC 전압 인가시 FBC의 1차측에 커패시터로 인해
발생하는 돌입전류를 방지하기 위해 Pre-charage 회로를 구성하였고, 스위칭 소자의
Arm-short 나 이상 과전류로부터 보호하기 위해 퓨즈가 설치되었다.
스위칭 소자는 H-bridge의 토폴로지이며, PWM 방식을 이용하였다. 2차측에 전력을
공급하는 트랜스포머는 누설 및 손실을 고려한 권선비 1:1 이고 투자율이 높은 Mn-Zn
계열의 물성을 이용하였다. 스위칭을 통해 유기된 전압은 정류 다이오드를 이용해 DC로
변환하고 변환된 DC 전력은 2차측의 리액터와 커패시터의 의해 평활되어 높은 quality로
차량 장치에 사용할 수 있는 안정적인 전압원으로 공급된다.
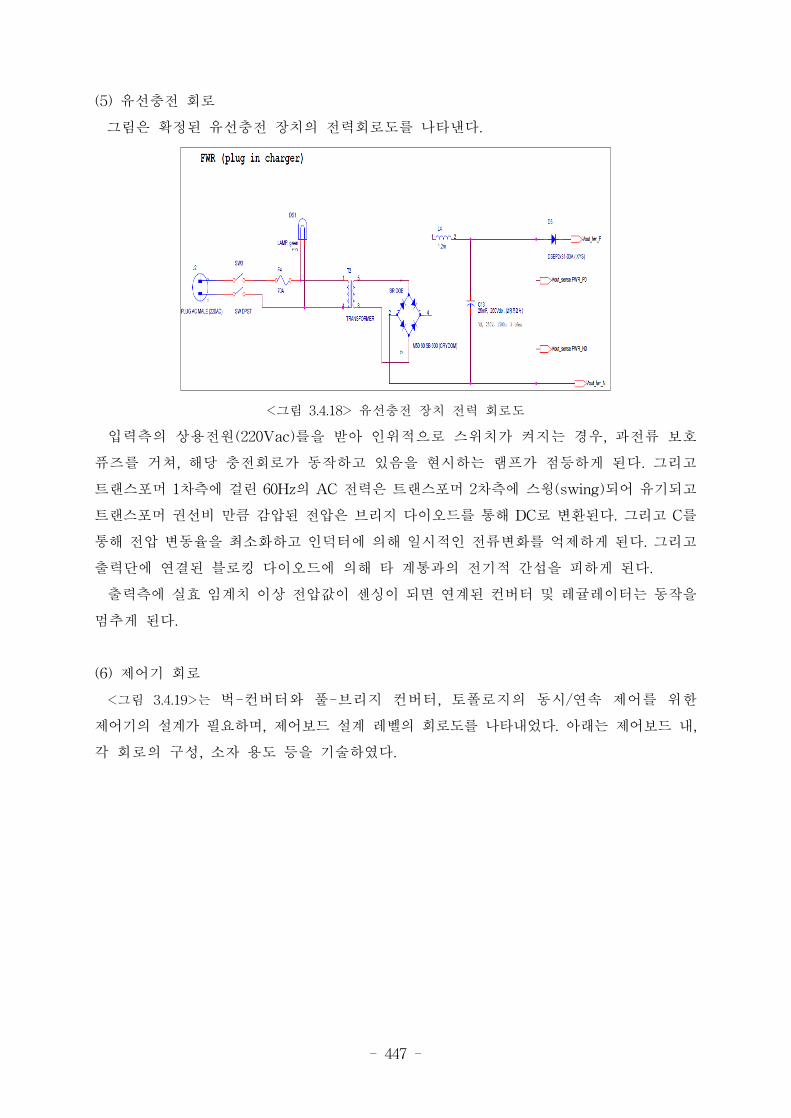
- 447 -
(5) 유선충전 회로
그림은 확정된 유선충전 장치의 전력회로도를 나타낸다.
<그림 3.4.18> 유선충전 장치 전력 회로도
입력측의 상용전원(220Vac)를을 받아 인위적으로 스위치가 켜지는 경우, 과전류 보호
퓨즈를 거쳐, 해당 충전회로가 동작하고 있음을 현시하는 램프가 점등하게 된다. 그리고
트랜스포머 1차측에 걸린 60Hz의 AC 전력은 트랜스포머 2차측에 스윙(swing)되어 유기되고
트랜스포머 권선비 만큼 감압된 전압은 브리지 다이오드를 통해 DC로 변환된다. 그리고 C를
통해 전압 변동율을 최소화하고 인덕터에 의해 일시적인 전류변화를 억제하게 된다. 그리고
출력단에 연결된 블로킹 다이오드에 의해 타 계통과의 전기적 간섭을 피하게 된다.
출력측에 실효 임계치 이상 전압값이 센싱이 되면 연계된 컨버터 및 레귤레이터는 동작을
멈추게 된다.
(6) 제어기 회로
<그림 3.4.19>는 벅-컨버터와 풀-브리지 컨버터, 토폴로지의 동시/연속 제어를 위한
제어기의 설계가 필요하며, 제어보드 설계 레벨의 회로도를 나타내었다. 아래는 제어보드 내,
각 회로의 구성, 소자 용도 등을 기술하였다.
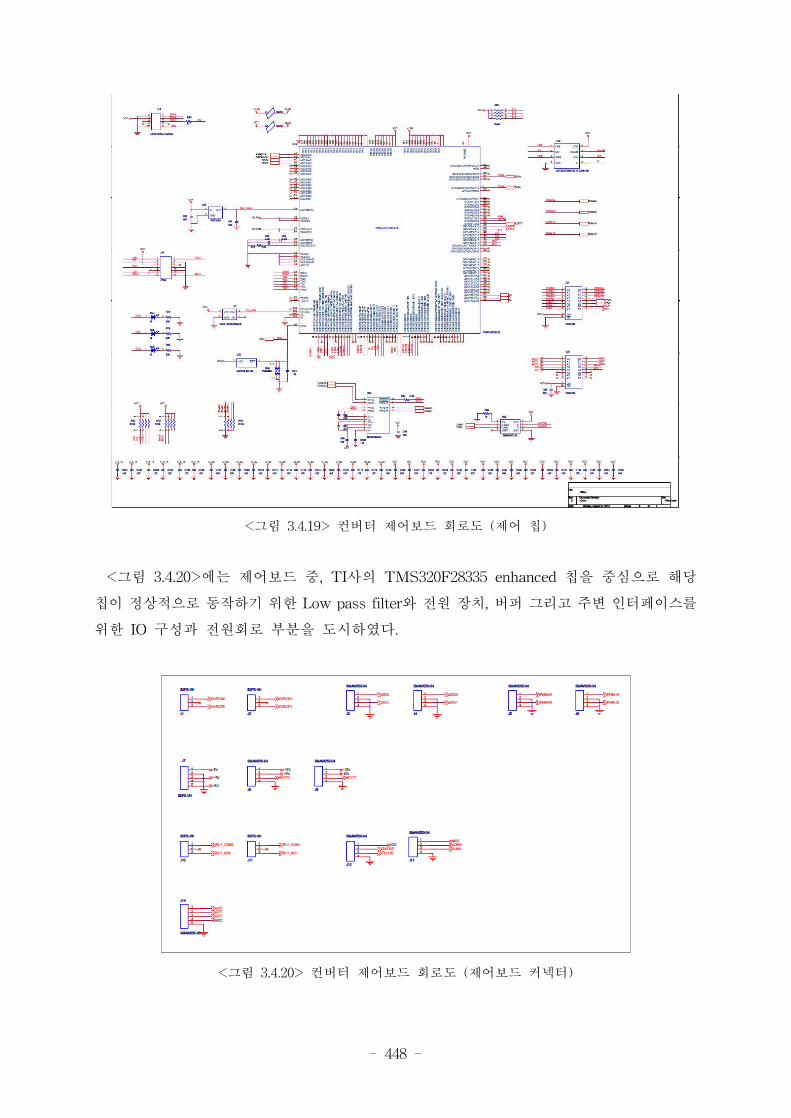
- 448 -
<그림 3.4.19> 컨버터 제어보드 회로도 (제어 칩)
<그림 3.4.20>에는 제어보드 중, TI사의 TMS320F28335 enhanced 칩을 중심으로 해당
칩이 정상적으로 동작하기 위한 Low pass filter와 전원 장치, 버퍼 그리고 주변 인터페이스를
위한 IO 구성과 전원회로 부분을 도시하였다.
<그림 3.4.20> 컨버터 제어보드 회로도 (제어보드 커넥터)
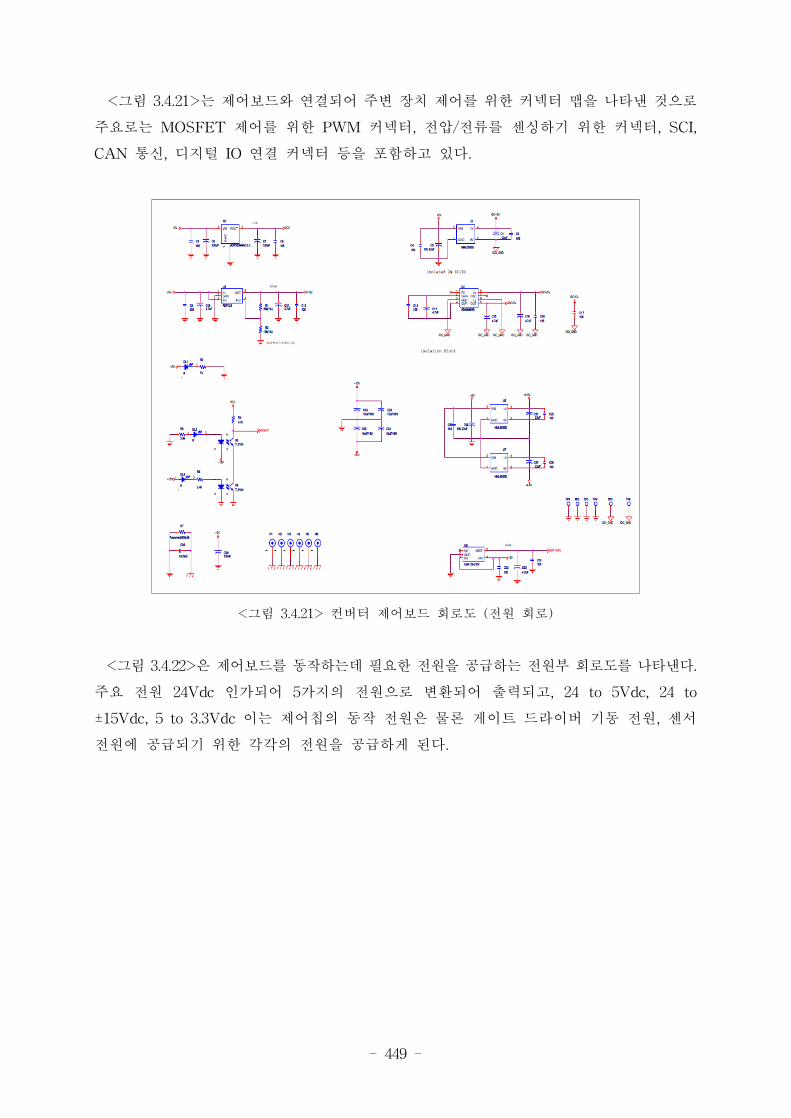
- 449 -
<그림 3.4.21>는 제어보드와 연결되어 주변 장치 제어를 위한 커넥터 맵을 나타낸 것으로
주요로는 MOSFET 제어를 위한 PWM 커넥터, 전압/전류를 센싱하기 위한 커넥터, SCI,
CAN 통신, 디지털 IO 연결 커넥터 등을 포함하고 있다.
<그림 3.4.21> 컨버터 제어보드 회로도 (전원 회로)
<그림 3.4.22>은 제어보드를 동작하는데 필요한 전원을 공급하는 전원부 회로도를 나타낸다.
주요 전원 24Vdc 인가되어 5가지의 전원으로 변환되어 출력되고, 24 to 5Vdc, 24 to
±15Vdc, 5 to 3.3Vdc 이는 제어칩의 동작 전원은 물론 게이트 드라이버 기동 전원, 센서
전원에 공급되기 위한 각각의 전원을 공급하게 된다.
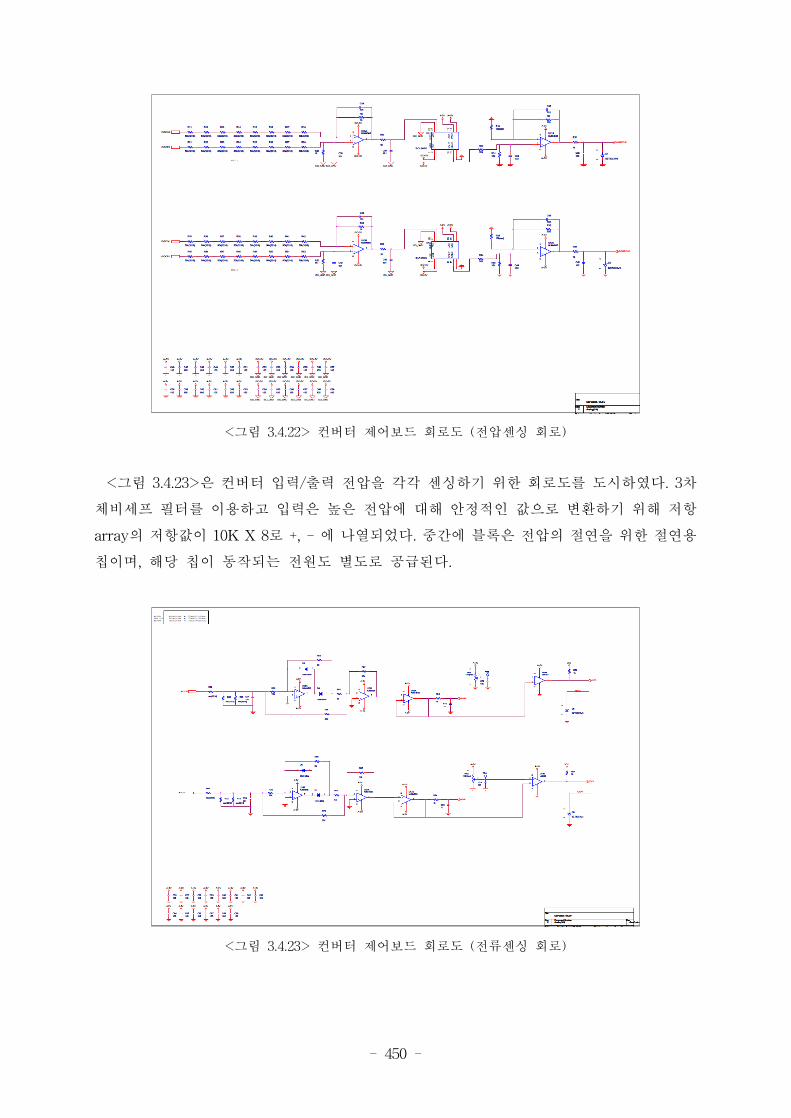
- 450 -
<그림 3.4.22> 컨버터 제어보드 회로도 (전압센싱 회로)
<그림 3.4.23>은 컨버터 입력/출력 전압을 각각 센싱하기 위한 회로도를 도시하였다. 3차
체비세프 필터를 이용하고 입력은 높은 전압에 대해 안정적인 값으로 변환하기 위해 저항
array의 저항값이 10K X 8로 +, - 에 나열되었다. 중간에 블록은 전압의 절연을 위한 절연용
칩이며, 해당 칩이 동작되는 전원도 별도로 공급된다.
<그림 3.4.23> 컨버터 제어보드 회로도 (전류센싱 회로)
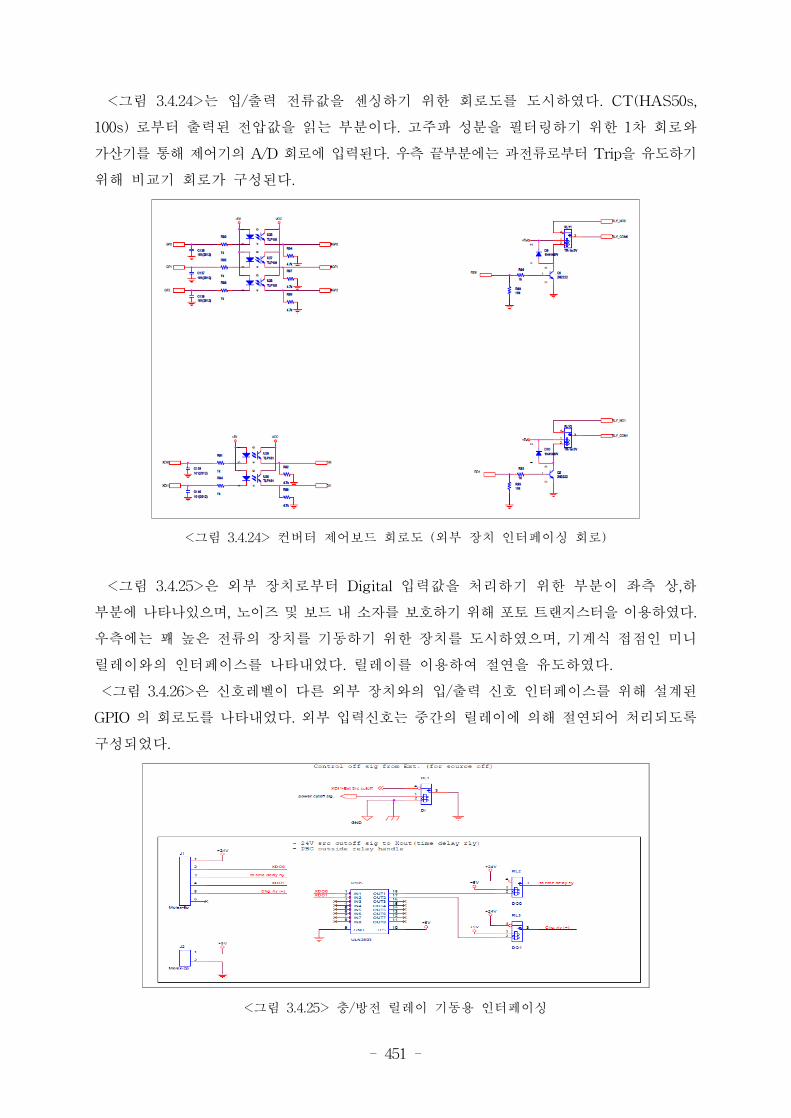
- 451 -
<그림 3.4.24>는 입/출력 전류값을 센싱하기 위한 회로도를 도시하였다. CT(HAS50s,
100s) 로부터 출력된 전압값을 읽는 부분이다. 고주파 성분을 필터링하기 위한 1차 회로와
가산기를 통해 제어기의 A/D 회로에 입력된다. 우측 끝부분에는 과전류로부터 Trip을 유도하기
위해 비교기 회로가 구성된다.
<그림 3.4.24> 컨버터 제어보드 회로도 (외부 장치 인터페이싱 회로)
<그림 3.4.25>은 외부 장치로부터 Digital 입력값을 처리하기 위한 부분이 좌측 상,하
부분에 나타나있으며, 노이즈 및 보드 내 소자를 보호하기 위해 포토 트랜지스터을 이용하였다.
우측에는 꽤 높은 전류의 장치를 기동하기 위한 장치를 도시하였으며, 기계식 접점인 미니
릴레이와의 인터페이스를 나타내었다. 릴레이를 이용하여 절연을 유도하였다.
<그림 3.4.26>은 신호레벨이 다른 외부 장치와의 입/출력 신호 인터페이스를 위해 설계된
GPIO 의 회로도를 나타내었다. 외부 입력신호는 중간의 릴레이에 의해 절연되어 처리되도록
구성되었다.
<그림 3.4.25> 충/방전 릴레이 기동용 인터페이싱
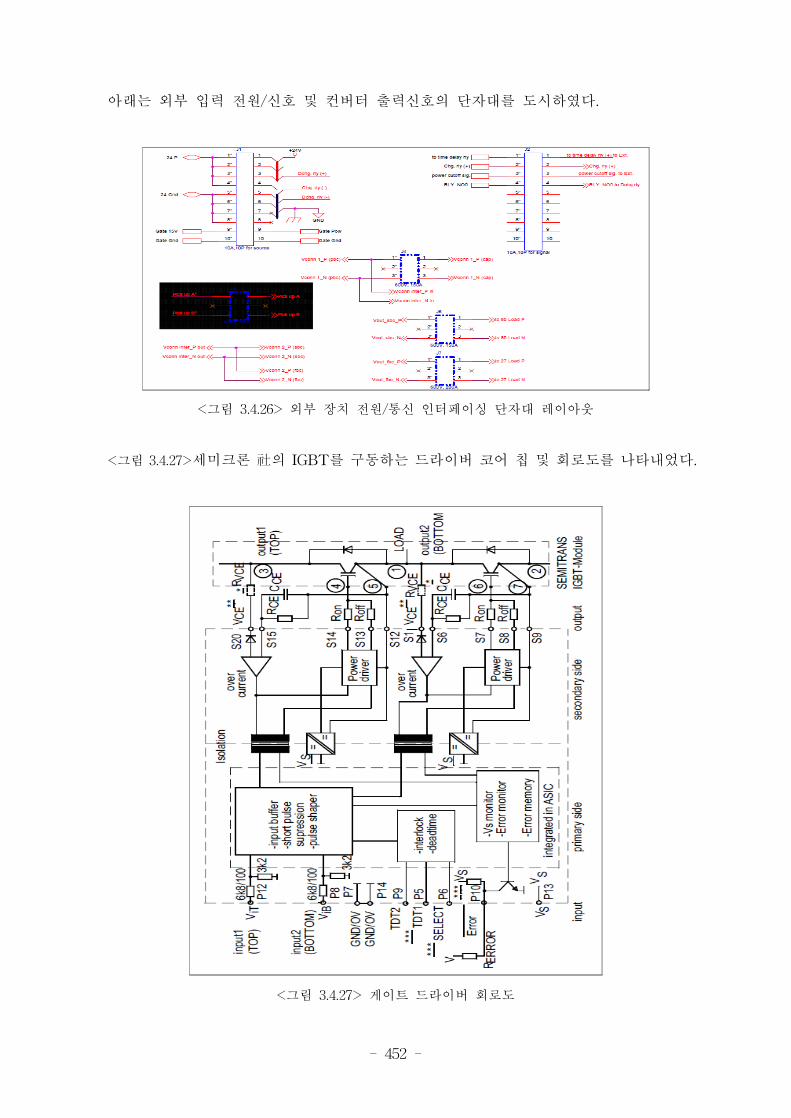
- 452 -
아래는 외부 입력 전원/신호 및 컨버터 출력신호의 단자대를 도시하였다.
<그림 3.4.26> 외부 장치 전원/통신 인터페이싱 단자대 레이아웃
<그림 3.4.27>세미크론 社의 IGBT를 구동하는 드라이버 코어 칩 및 회로도를 나타내었다.
<그림 3.4.27> 게이트 드라이버 회로도
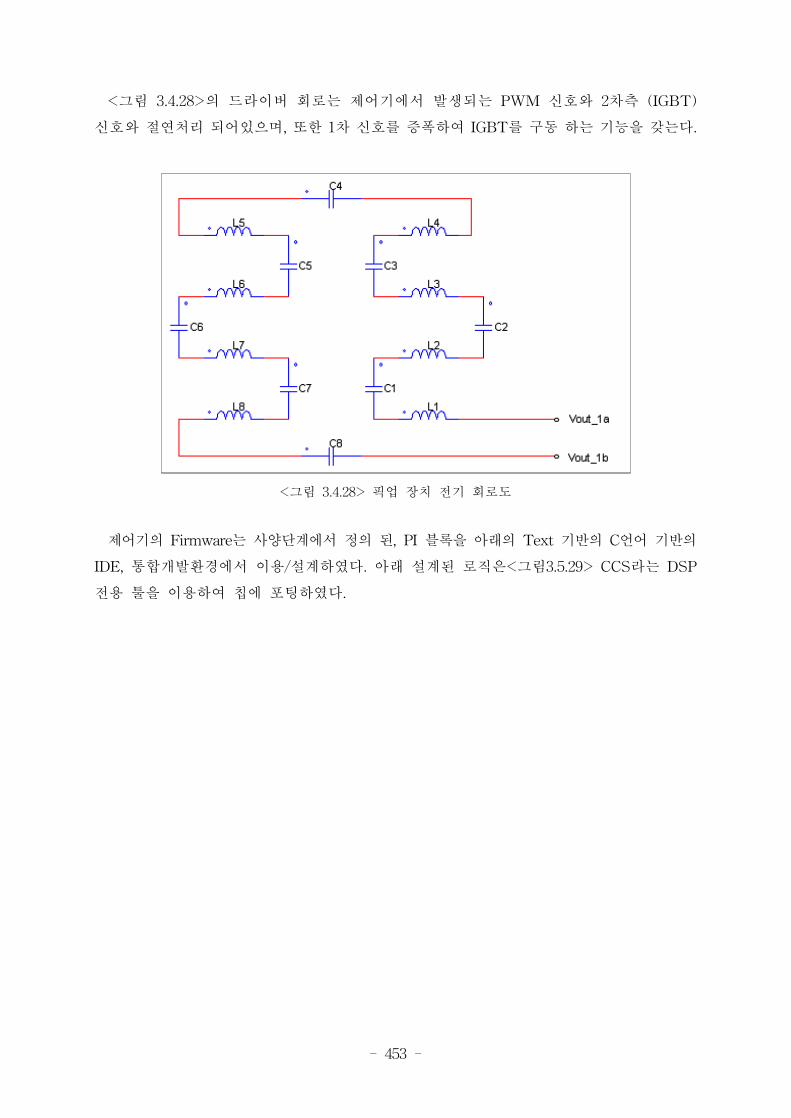
- 453 -
<그림 3.4.28>의 드라이버 회로는 제어기에서 발생되는 PWM 신호와 2차측 (IGBT)
신호와 절연처리 되어있으며, 또한 1차 신호를 증폭하여 IGBT를 구동 하는 기능을 갖는다.
<그림 3.4.28> 픽업 장치 전기 회로도
제어기의 Firmware는 사양단계에서 정의 된, PI 블록을 아래의 Text 기반의 C언어 기반의
IDE, 통합개발환경에서 이용/설계하였다. 아래 설계된 로직은<그림3.5.29> CCS라는 DSP
전용 툴을 이용하여 칩에 포팅하였다.
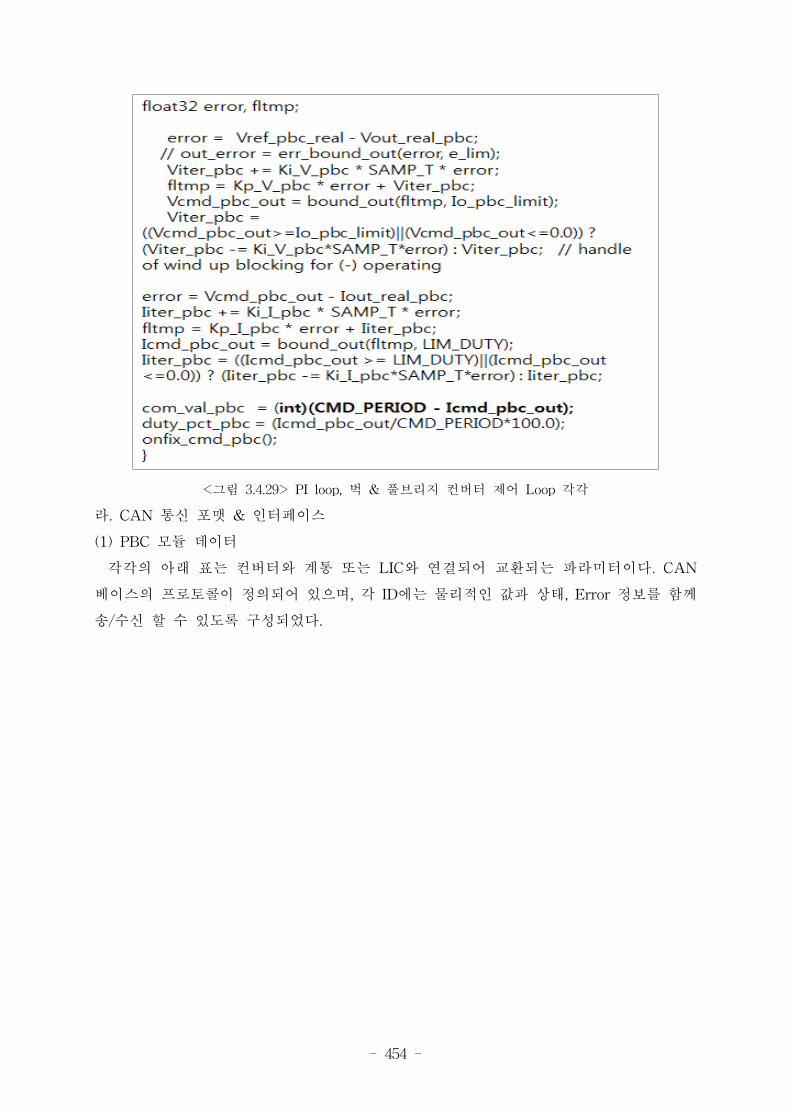
- 454 -
<그림 3.4.29> PI loop, 벅 & 풀브리지 컨버터 제어 Loop 각각
라. CAN 통신 포맷 & 인터페이스
(1) PBC 모듈 데이터
각각의 아래 표는 컨버터와 계통 또는 LIC와 연결되어 교환되는 파라미터이다. CAN
베이스의 프로토콜이 정의되어 있으며, 각 ID에는 물리적인 값과 상태, Error 정보를 함께
송/수신 할 수 있도록 구성되었다.
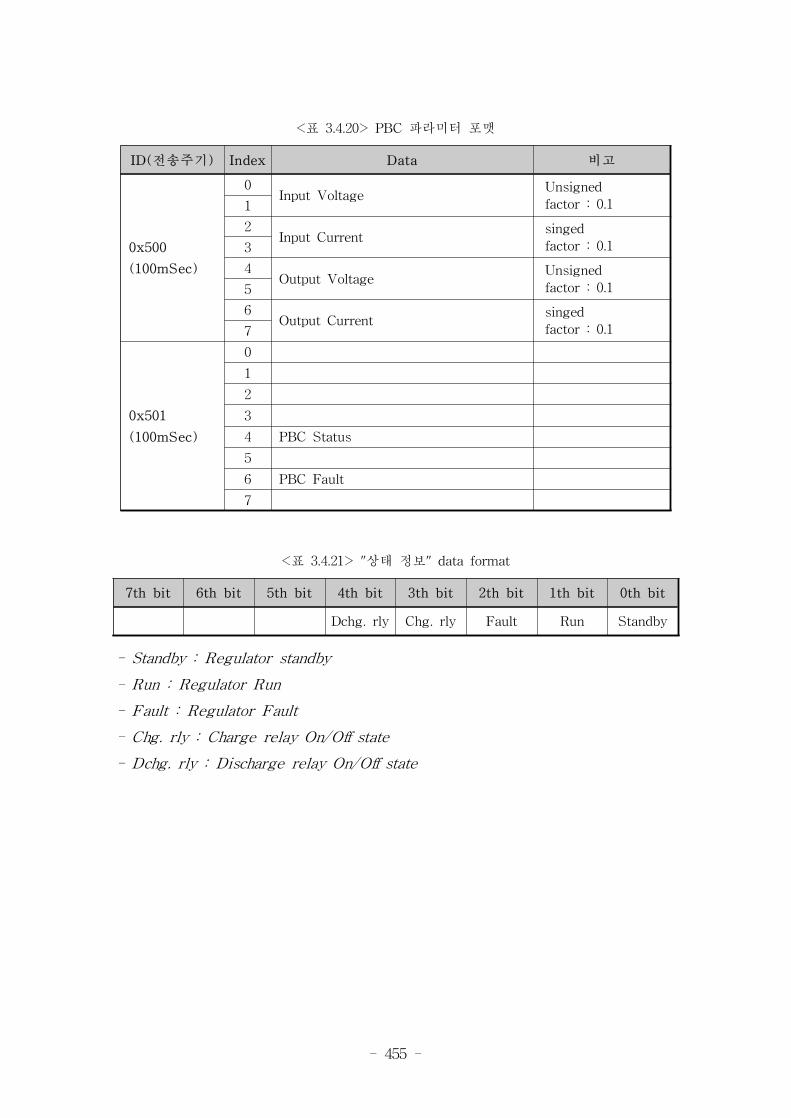
- 455 -
ID(전송주기) Index Data 비고
0x500
(100mSec)
0Input Voltage
Unsigned
factor : 0.11
2Input Current
singed
factor : 0.13
4Output Voltage
Unsigned
factor : 0.15
6Output Current
singed
factor : 0.17
0x501
(100mSec)
0
1
2
3
4 PBC Status
5
6 PBC Fault
7
<표 3.4.20> PBC 파라미터 포맷
7th bit 6th bit 5th bit 4th bit 3th bit 2th bit 1th bit 0th bit
Dchg. rly Chg. rly Fault Run Standby
<표 3.4.21> "상태 정보" data format
- Standby : Regulator standby
- Run : Regulator Run
- Fault : Regulator Fault
- Chg. rly : Charge relay On/Off state
- Dchg. rly : Discharge relay On/Off state
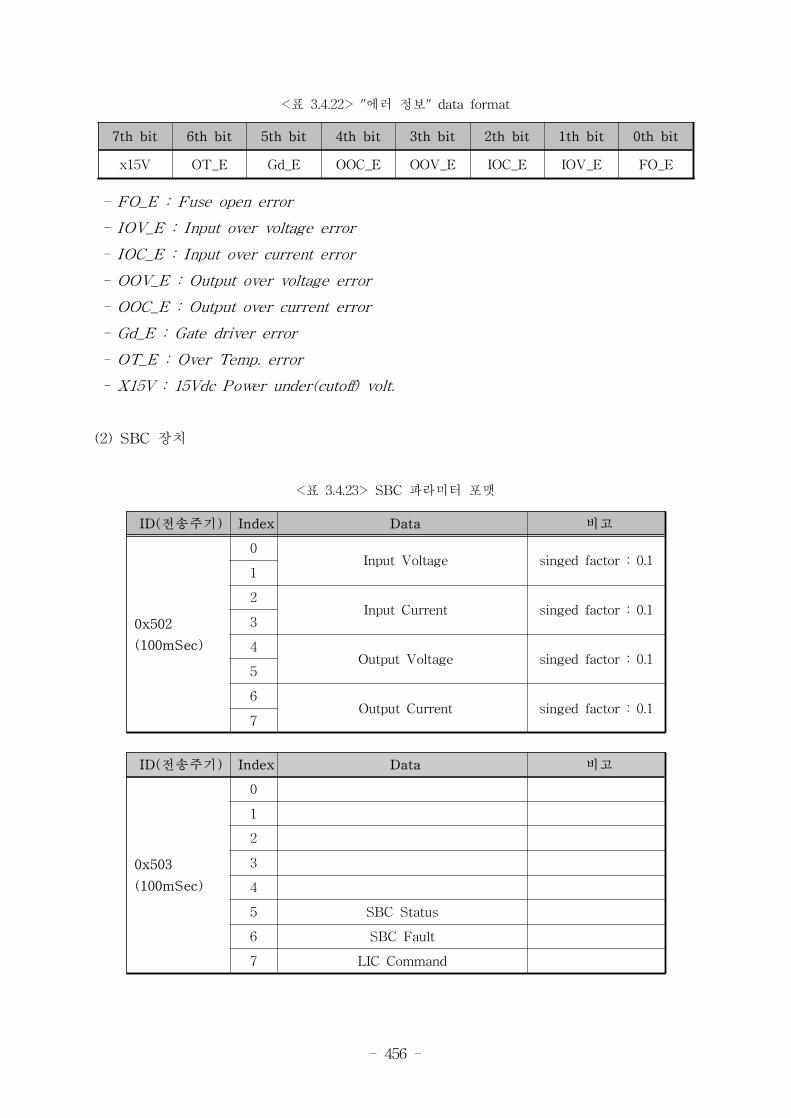
- 456 -
7th bit 6th bit 5th bit 4th bit 3th bit 2th bit 1th bit 0th bit
x15V OT_E Gd_E OOC_E OOV_E IOC_E IOV_E FO_E
<표 3.4.22> "에러 정보" data format
- FO_E : Fuse open error
- IOV_E : Input over voltage error
- IOC_E : Input over current error
- OOV_E : Output over voltage error
- OOC_E : Output over current error
- Gd_E : Gate driver error
- OT_E : Over Temp. error
- X15V : 15Vdc Power under(cutoff) volt.
(2) SBC 장치
<표 3.4.23> SBC 파라미터 포맷
ID(전송주기) Index Data 비고
0x502
(100mSec)
0Input Voltage singed factor : 0.1
1
2Input Current singed factor : 0.1
3
4Output Voltage singed factor : 0.1
5
6Output Current singed factor : 0.1
7
ID(전송주기) Index Data 비고
0x503
(100mSec)
0
1
2
3
4
5 SBC Status
6 SBC Fault
7 LIC Command
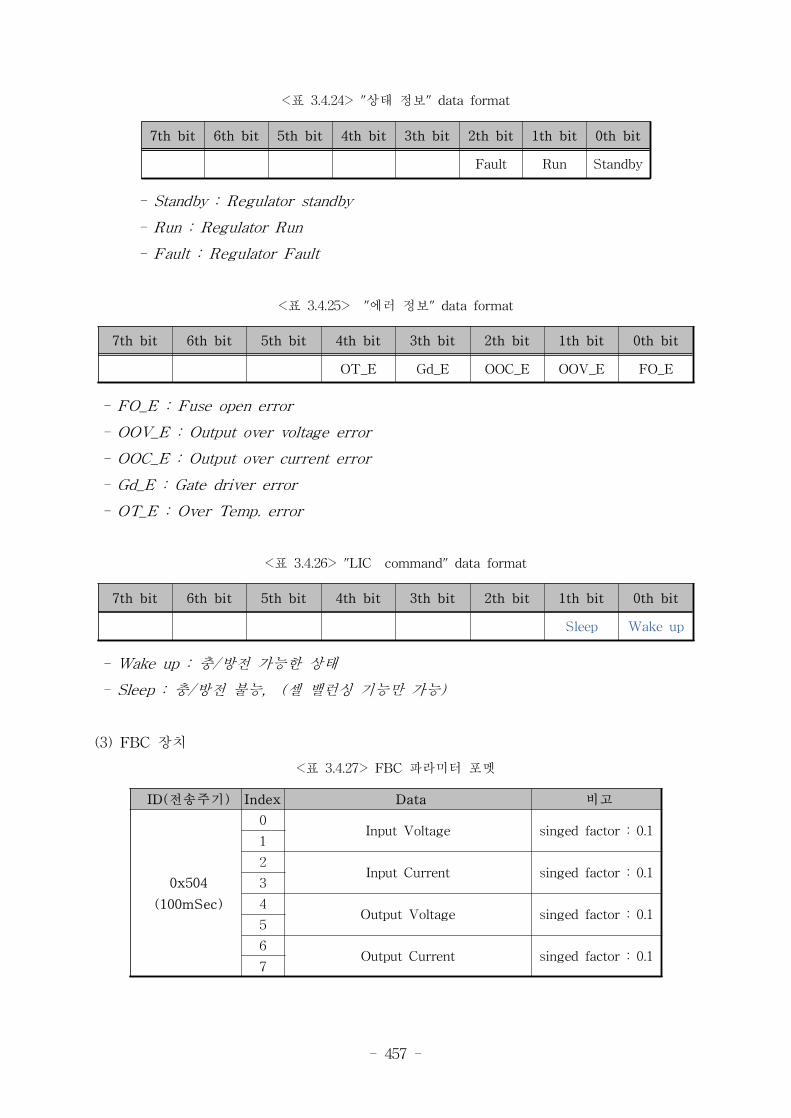
- 457 -
<표 3.4.24> "상태 정보" data format
7th bit 6th bit 5th bit 4th bit 3th bit 2th bit 1th bit 0th bit
Fault Run Standby
- Standby : Regulator standby
- Run : Regulator Run
- Fault : Regulator Fault
<표 3.4.25> "에러 정보" data format
7th bit 6th bit 5th bit 4th bit 3th bit 2th bit 1th bit 0th bit
OT_E Gd_E OOC_E OOV_E FO_E
- FO_E : Fuse open error
- OOV_E : Output over voltage error
- OOC_E : Output over current error
- Gd_E : Gate driver error
- OT_E : Over Temp. error
<표 3.4.26> "LIC command" data format
7th bit 6th bit 5th bit 4th bit 3th bit 2th bit 1th bit 0th bit
Sleep Wake up
- Wake up : 충/방전 가능한 상태
- Sleep : 충/방전 불능, (셀 밸런싱 기능만 가능)
(3) FBC 장치
<표 3.4.27> FBC 파라미터 포멧
ID(전송주기) Index Data 비고
0x504
(100mSec)
0Input Voltage singed factor : 0.1
1
2Input Current singed factor : 0.1
3
4Output Voltage singed factor : 0.1
5
6Output Current singed factor : 0.1
7
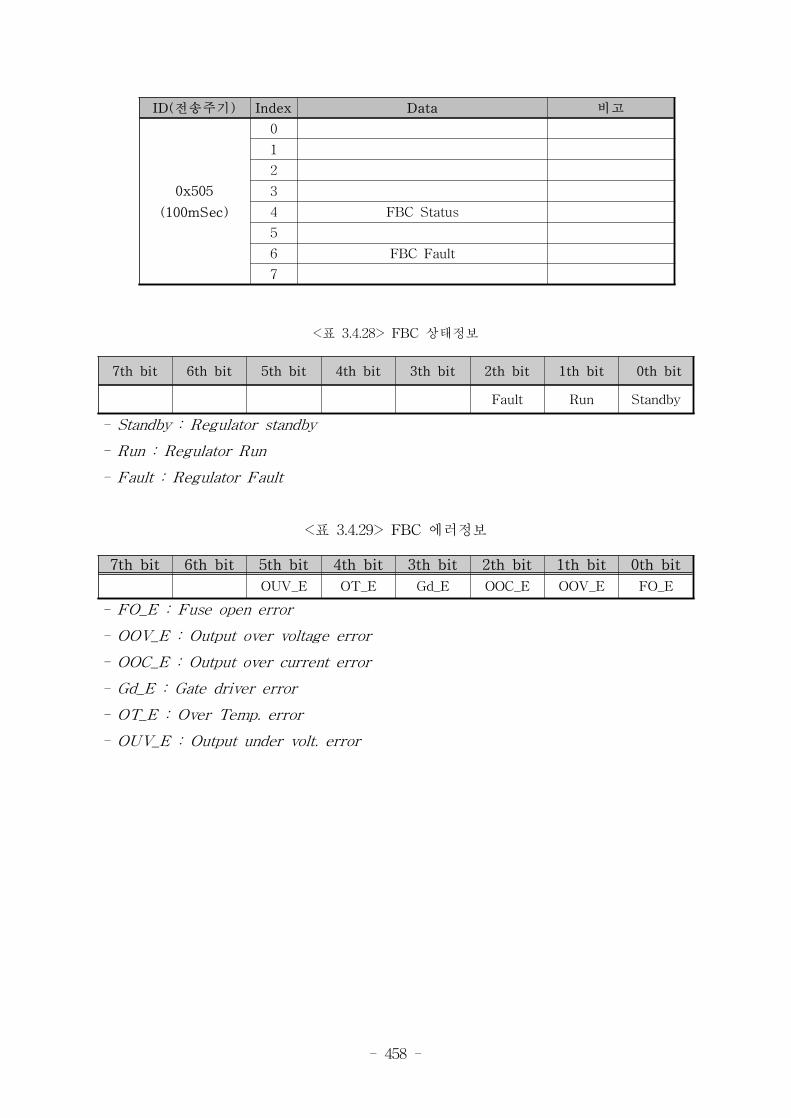
- 458 -
7th bit 6th bit 5th bit 4th bit 3th bit 2th bit 1th bit 0th bit
Fault Run Standby
7th bit 6th bit 5th bit 4th bit 3th bit 2th bit 1th bit 0th bit
OUV_E OT_E Gd_E OOC_E OOV_E FO_E
ID(전송주기) Index Data 비고
0x505
(100mSec)
0
1
2
3
4 FBC Status
5
6 FBC Fault
7
<표 3.4.28> FBC 상태정보
- Standby : Regulator standby
- Run : Regulator Run
- Fault : Regulator Fault
<표 3.4.29> FBC 에러정보
- FO_E : Fuse open error
- OOV_E : Output over voltage error
- OOC_E : Output over current error
- Gd_E : Gate driver error
- OT_E : Over Temp. error
- OUV_E : Output under volt. error
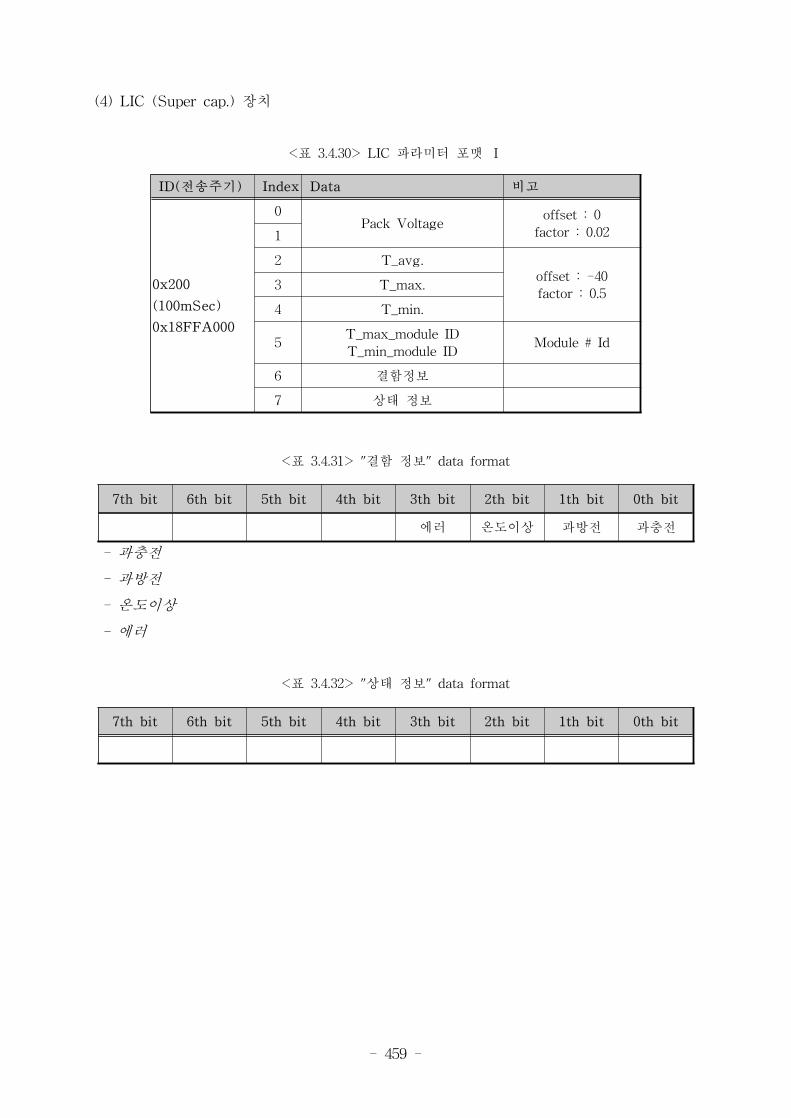
- 459 -
7th bit 6th bit 5th bit 4th bit 3th bit 2th bit 1th bit 0th bit
에러 온도이상 과방전 과충전
7th bit 6th bit 5th bit 4th bit 3th bit 2th bit 1th bit 0th bit
(4) LIC (Super cap.) 장치
<표 3.4.30> LIC 파라미터 포맷 Ⅰ
ID(전송주기) Index Data 비고
0x200
(100mSec)
0x18FFA000
0Pack Voltage
offset : 0
factor : 0.021
2 T_avg.offset : -40
factor : 0.53 T_max.
4 T_min.
5T_max_module ID
T_min_module IDModule # Id
6 결함정보
7 상태 정보
<표 3.4.31> "결함 정보" data format
- 과충전
- 과방전
- 온도이상
- 에러
<표 3.4.32> "상태 정보" data format
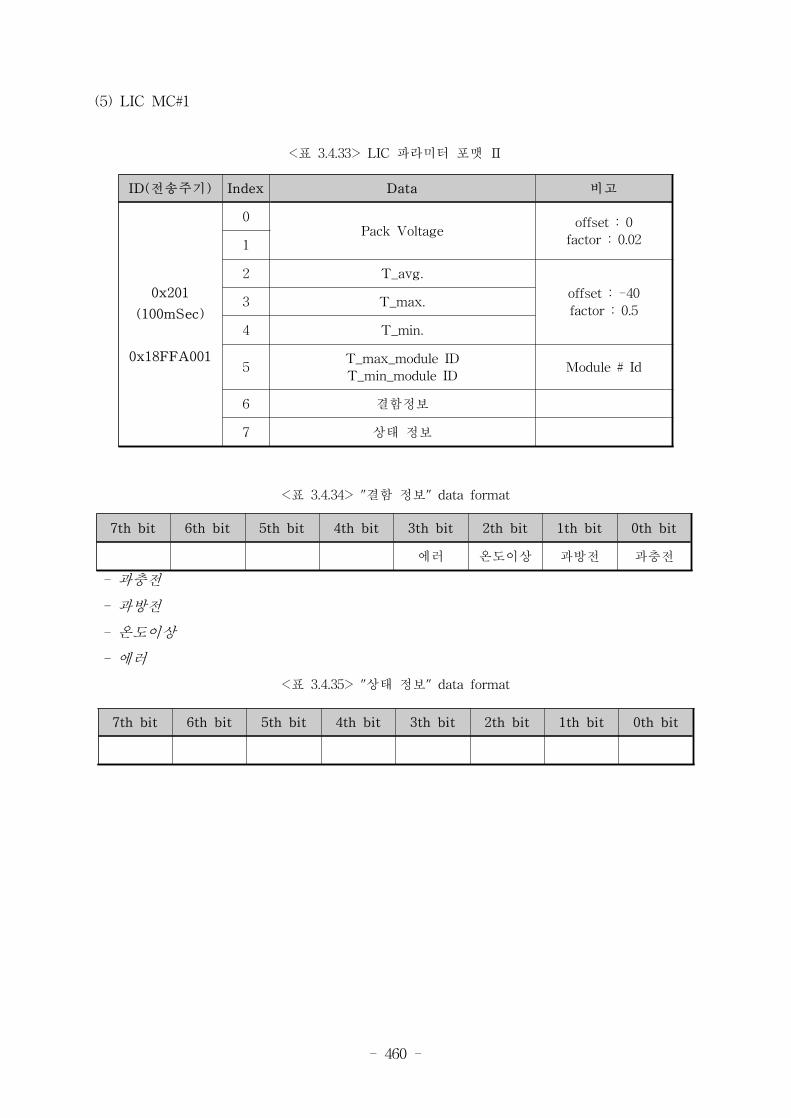
- 460 -
7th bit 6th bit 5th bit 4th bit 3th bit 2th bit 1th bit 0th bit
에러 온도이상 과방전 과충전
7th bit 6th bit 5th bit 4th bit 3th bit 2th bit 1th bit 0th bit
(5) LIC MC#1
<표 3.4.33> LIC 파라미터 포맷 Ⅱ
ID(전송주기) Index Data 비고
0x201
(100mSec)
0x18FFA001
0Pack Voltage
offset : 0
factor : 0.021
2 T_avg.
offset : -40
factor : 0.53 T_max.
4 T_min.
5T_max_module ID
T_min_module IDModule # Id
6 결함정보
7 상태 정보
<표 3.4.34> "결함 정보" data format
- 과충전
- 과방전
- 온도이상
- 에러
<표 3.4.35> "상태 정보" data format
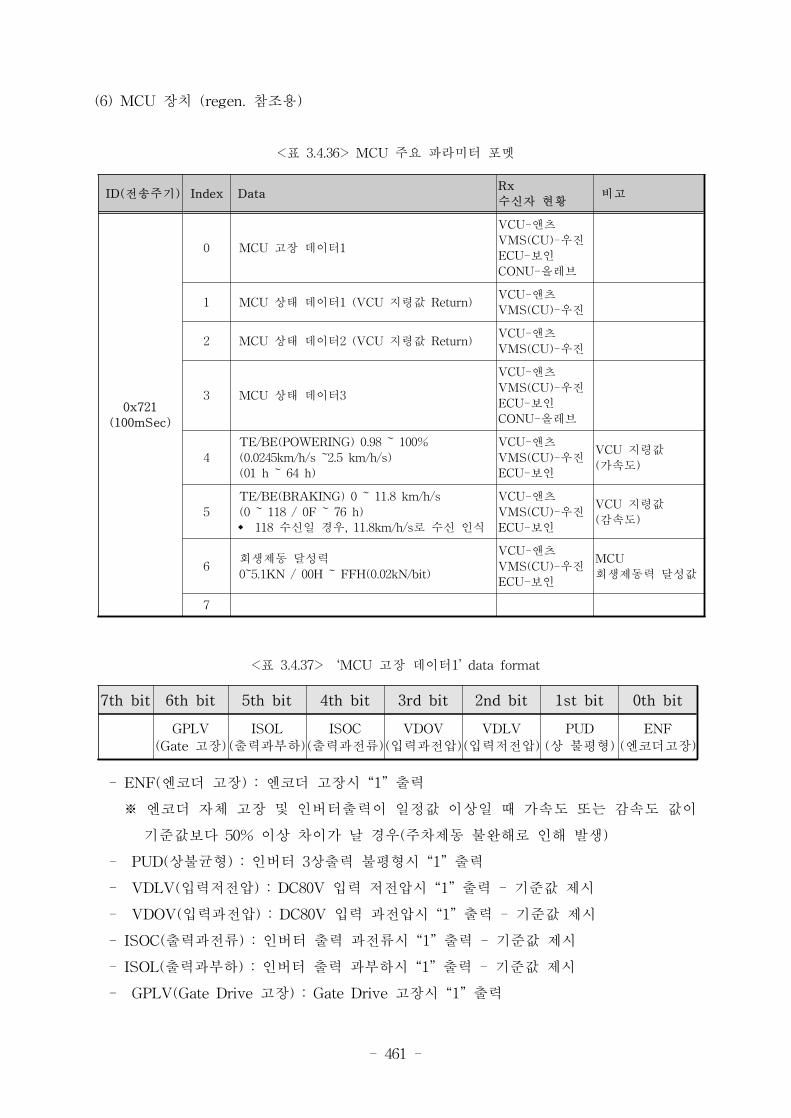
- 461 -
(6) MCU 장치 (regen. 참조용)
<표 3.4.36> MCU 주요 파라미터 포멧
ID(전송주기) Index DataRx
수신자 현황비고
0x721
(100mSec)
0 MCU 고장 데이터1
VCU-앤츠
VMS(CU)-우진
ECU-보인
CONU-올레브
1 MCU 상태 데이터1 (VCU 지령값 Return)VCU-앤츠
VMS(CU)-우진
2 MCU 상태 데이터2 (VCU 지령값 Return)VCU-앤츠
VMS(CU)-우진
3 MCU 상태 데이터3
VCU-앤츠
VMS(CU)-우진
ECU-보인
CONU-올레브
4
TE/BE(POWERING) 0.98 ~ 100%
(0.0245km/h/s ~2.5 km/h/s)
(01 h ~ 64 h)
VCU-앤츠
VMS(CU)-우진
ECU-보인
VCU 지령값
(가속도)
5
TE/BE(BRAKING) 0 ~ 11.8 km/h/s
(0 ~ 118 / 0F ~ 76 h)
w 118 수신일 경우, 11.8km/h/s로 수신 인식
VCU-앤츠
VMS(CU)-우진
ECU-보인
VCU 지령값
(감속도)
6회생제동 달성력
0~5.1KN / 00H ~ FFH(0.02kN/bit)
VCU-앤츠
VMS(CU)-우진
ECU-보인
MCU
회생제동력 달성값
7
<표 3.4.37> ‘MCU 고장 데이터1’ data format
7th bit 6th bit 5th bit 4th bit 3rd bit 2nd bit 1st bit 0th bit
GPLV
(Gate 고장)
ISOL
(출력과부하)
ISOC
(출력과전류)
VDOV
(입력과전압)
VDLV
(입력저전압)
PUD
(상 불평형)
ENF
(엔코더고장)
- ENF(엔코더 고장) : 엔코더 고장시 “1” 출력
※ 엔코더 자체 고장 및 인버터출력이 일정값 이상일 때 가속도 또는 감속도 값이
기준값보다 50% 이상 차이가 날 경우(주차제동 불완해로 인해 발생)
- PUD(상불균형) : 인버터 3상출력 불평형시 “1” 출력
- VDLV(입력저전압) : DC80V 입력 저전압시 “1” 출력 - 기준값 제시
- VDOV(입력과전압) : DC80V 입력 과전압시 “1” 출력 - 기준값 제시
- ISOC(출력과전류) : 인버터 출력 과전류시 “1” 출력 - 기준값 제시
- ISOL(출력과부하) : 인버터 출력 과부하시 “1” 출력 - 기준값 제시
- GPLV(Gate Drive 고장) : Gate Drive 고장시 “1” 출력

- 462 -
<표 3.4.38> ‘MCU 상태 데이터1’ data format
7th bit 6th bit 5th bit 4th bit 3rd bit 2nd bit 1st bit 0th bit
EB
(비상제동)
Emergenc
y Brake
B
(제동)
Braking
P
(추진)
Powering
R
(진행방향)
Reverse
F
(진행방향)
Forward
- F(진행방향 전진) : VCU 전진 입력 확인시 “1” 출력
- R(진행방향 후진) : VCU 후진 입력 확인시 “1” 출력
- P(추진신호) : VCU 추진신호 입력 확인시 “1” 출력
- B(제동신호) : VCU 제동신호 입력 확인시 “1” 출력
- EB(비상제동) : VCU 비상제동신호 입력 확인시 “1”출력
<표 3.4.39> ‘MCU 상태 데이터2’ data format
7th bit 6th bit 5th bit 4th bit 3rd bit 2nd bit 1st bit 0th bit
PC
(추진차단)
Powering
Cut
HB
(정차제동)
Holding
Brake
DE
(출발신호)
Departure
Demand
- DE(출발신호) : VCU 출발신호 요구 확인시 “1” 출력
- HB(정차제동) : VCU 정차제동 요구 확인시 “1” 출력
- PC(추진차단) : VCU 추진차단 요구 확인시 “1” 출력
<표 3.4.40> ‘MCU 상태 데이터3’ data format
7th bit 6th bit 5th bit 4th bit 3rd bit 2nd bit 1st bit 0th bit
RGBVF
(회생제동
불능신호)
RBFR
(회생제동
소멸)
RGBV
(회생제동
유효)
CDR
(추진상태)
- CDR(추진상태신호) : MCU의 인버터 3상 출력시 “1” 출력
- RGBV(회생제동 유효신호) : 회생제동 시 “1” 출력
- RBFR(회생제동 소멸신호) : 회생제동 소멸 시점에서 “1” 출력
- RGBVF(회생제동 불능신호)
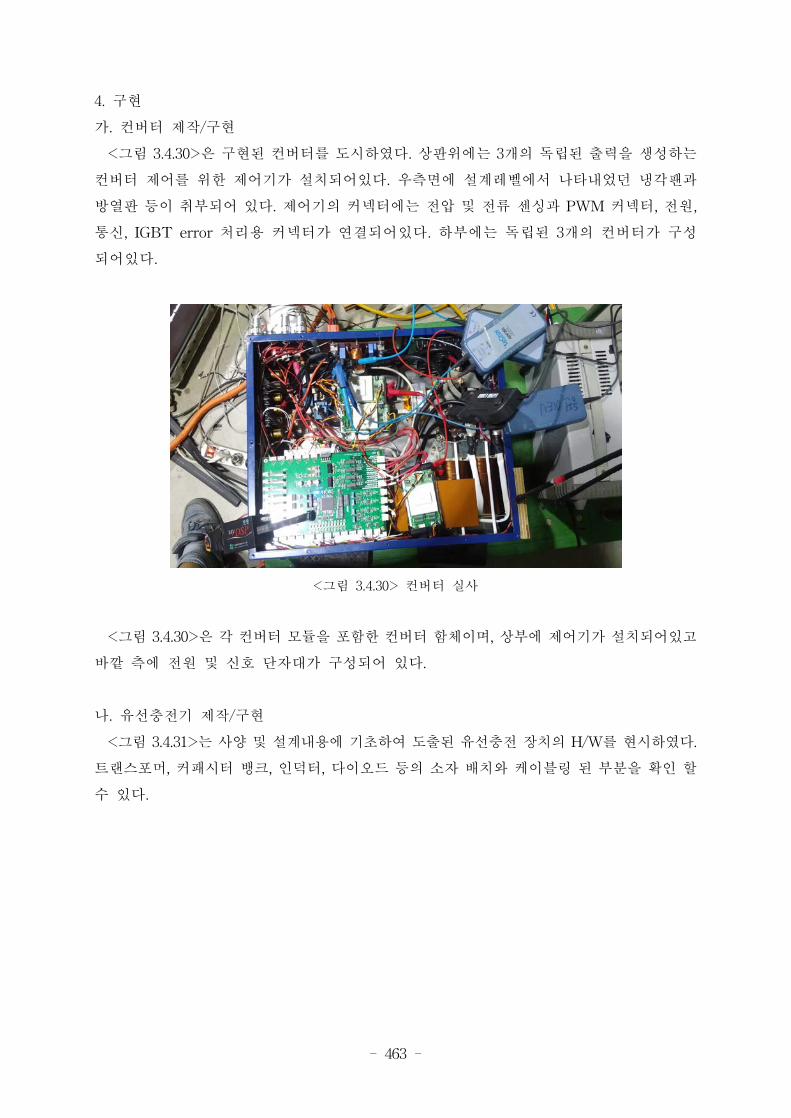
- 463 -
4. 구현
가. 컨버터 제작/구현
<그림 3.4.30>은 구현된 컨버터를 도시하였다. 상판위에는 3개의 독립된 출력을 생성하는
컨버터 제어를 위한 제어기가 설치되어있다. 우측면에 설계레벨에서 나타내었던 냉각팬과
방열판 등이 취부되어 있다. 제어기의 커넥터에는 전압 및 전류 센싱과 PWM 커넥터, 전원,
통신, IGBT error 처리용 커넥터가 연결되어있다. 하부에는 독립된 3개의 컨버터가 구성
되어있다.
<그림 3.4.30> 컨버터 실사
<그림 3.4.30>은 각 컨버터 모듈을 포함한 컨버터 함체이며, 상부에 제어기가 설치되어있고
바깥 측에 전원 및 신호 단자대가 구성되어 있다.
나. 유선충전기 제작/구현
<그림 3.4.31>는 사양 및 설계내용에 기초하여 도출된 유선충전 장치의 H/W를 현시하였다.
트랜스포머, 커패시터 뱅크, 인덕터, 다이오드 등의 소자 배치와 케이블링 된 부분을 확인 할
수 있다.

- 464 -
<그림 3.4.31> 유선충전기 내구성면
다. 픽업 장치
<그림 3.4.32> 집전장치
중심 부분에는 타원형 픽업코일에 페라이트코어가 배치되고 좌/우에 공진 캡(resonant cap.)이
공진튜닝을 위해 배치되었다.
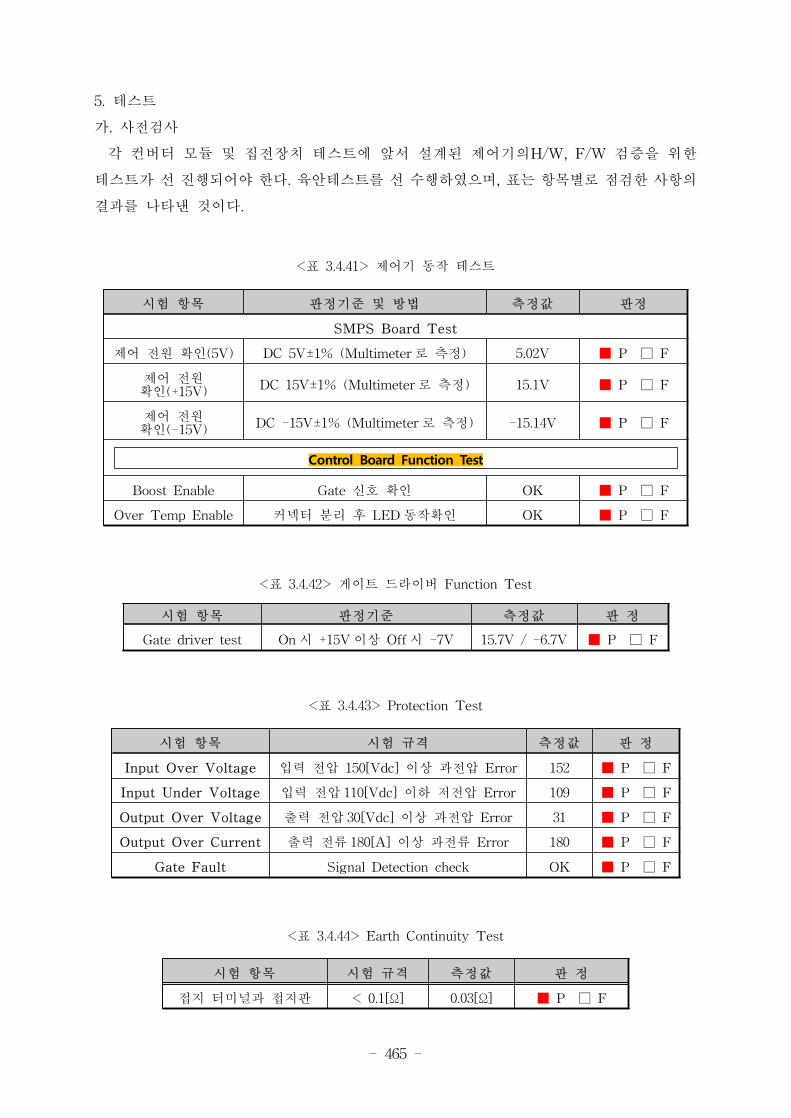
- 465 -
5. 테스트
가. 사전검사
각 컨버터 모듈 및 집전장치 테스트에 앞서 설계된 제어기의H/W, F/W 검증을 위한
테스트가 선 진행되어야 한다. 육안테스트를 선 수행하였으며, 표는 항목별로 점검한 사항의
결과를 나타낸 것이다.
<표 3.4.41> 제어기 동작 테스트
시험 항목 판정기준 및 방법 측정값 판정
SMPS Board Test
제어 전원 확인(5V) DC 5V±1% (Multimeter 로 측정) 5.02V P F
제어 전원확인(+15V)
DC 15V±1% (Multimeter 로 측정) 15.1V P F
제어 전원확인(-15V)
DC -15V±1% (Multimeter 로 측정) -15.14V P F
Control Board Function Test
Boost Enable Gate 신호 확인 OK P F
Over Temp Enable 커넥터 분리 후 LED동작확인 OK P F
<표 3.4.42> 게이트 드라이버 Function Test
시험 항목 판정기준 측정값 판 정
Gate driver test On 시 +15V이상 Off시 -7V 15.7V / -6.7V P F
<표 3.4.43> Protection Test
시험 항목 시험 규격 측정값 판 정
Input Over Voltage 입력 전압 150[Vdc] 이상 과전압 Error 152 P F
Input Under Voltage 입력 전압 110[Vdc] 이하 저전압 Error 109 P F
Output Over Voltage 출력 전압 30[Vdc] 이상 과전압 Error 31 P F
Output Over Current 출력 전류 180[A] 이상 과전류 Error 180 P F
Gate Fault Signal Detection check OK P F
<표 3.4.44> Earth Continuity Test
시험 항목 시험 규격 측정값 판 정
접지 터미널과 접지판 < 0.1[Ω] 0.03[Ω] P F
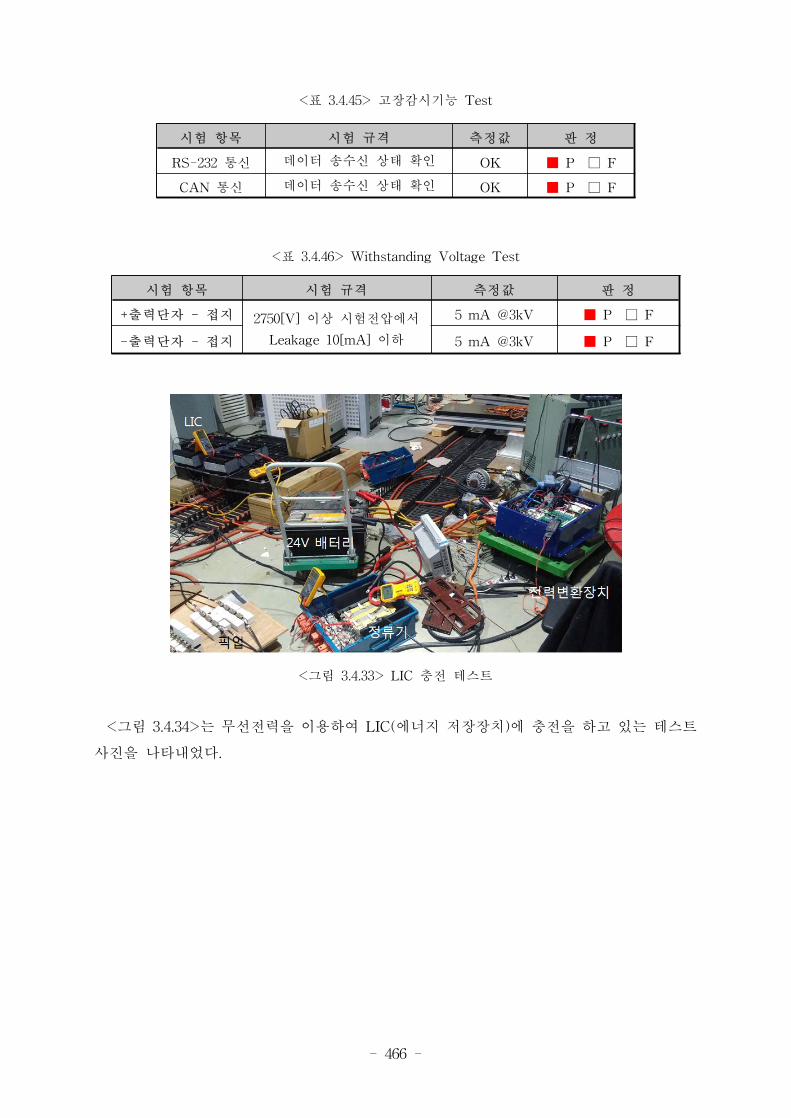
- 466 -
<표 3.4.45> 고장감시기능 Test
시험 항목 시험 규격 측정값 판 정
RS-232 통신 데이터 송수신 상태 확인 OK P F
CAN 통신 데이터 송수신 상태 확인 OK P F
<표 3.4.46> Withstanding Voltage Test
시험 항목 시험 규격 측정값 판 정
+출력단자 - 접지 2750[V] 이상 시험전압에서
Leakage 10[mA] 이하
5 mA @3kV P F
-출력단자 - 접지 5 mA @3kV P F
<그림 3.4.33> LIC 충전 테스트
<그림 3.4.34>는 무선전력을 이용하여 LIC(에너지 저장장치)에 충전을 하고 있는 테스트
사진을 나타내었다.
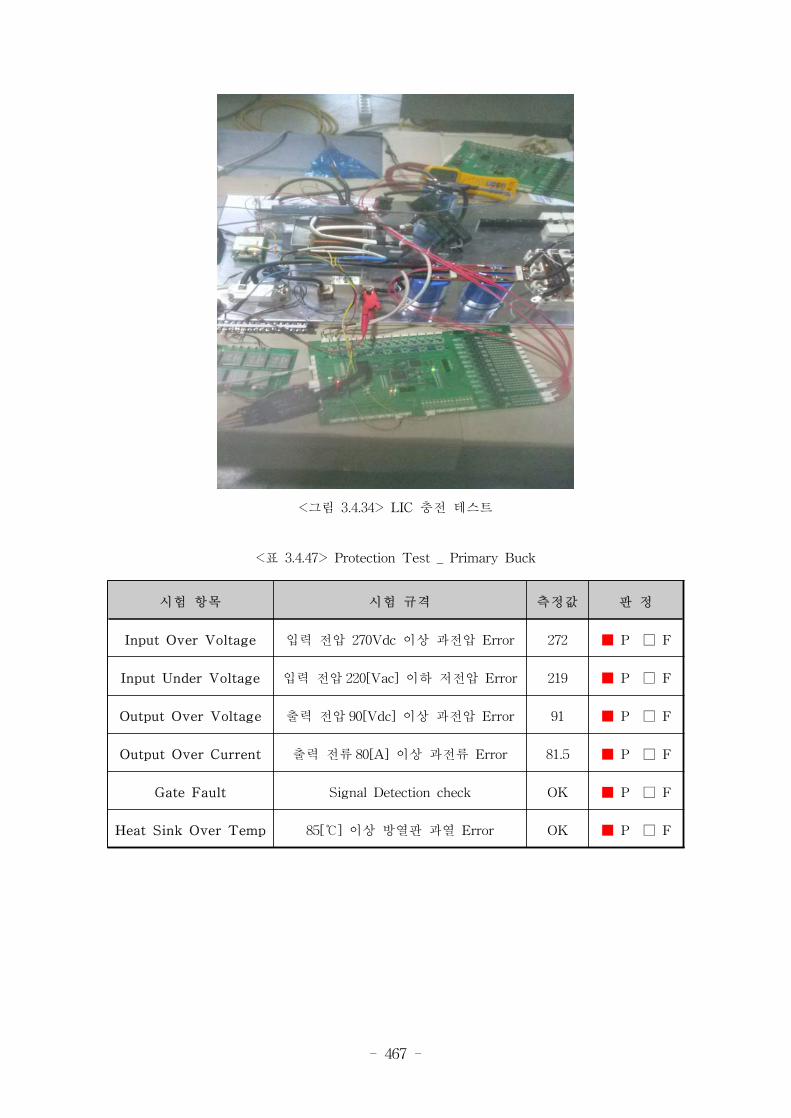
- 467 -
<그림 3.4.34> LIC 충전 테스트
<표 3.4.47> Protection Test _ Primary Buck
시험 항목 시험 규격 측정값 판 정
Input Over Voltage 입력 전압 270Vdc 이상 과전압 Error 272 P F
Input Under Voltage 입력 전압 220[Vac] 이하 저전압 Error 219 P F
Output Over Voltage 출력 전압 90[Vdc] 이상 과전압 Error 91 P F
Output Over Current 출력 전류 80[A] 이상 과전류 Error 81.5 P F
Gate Fault Signal Detection check OK P F
Heat Sink Over Temp 85[] 이상 방열판 과열 Error OK P F
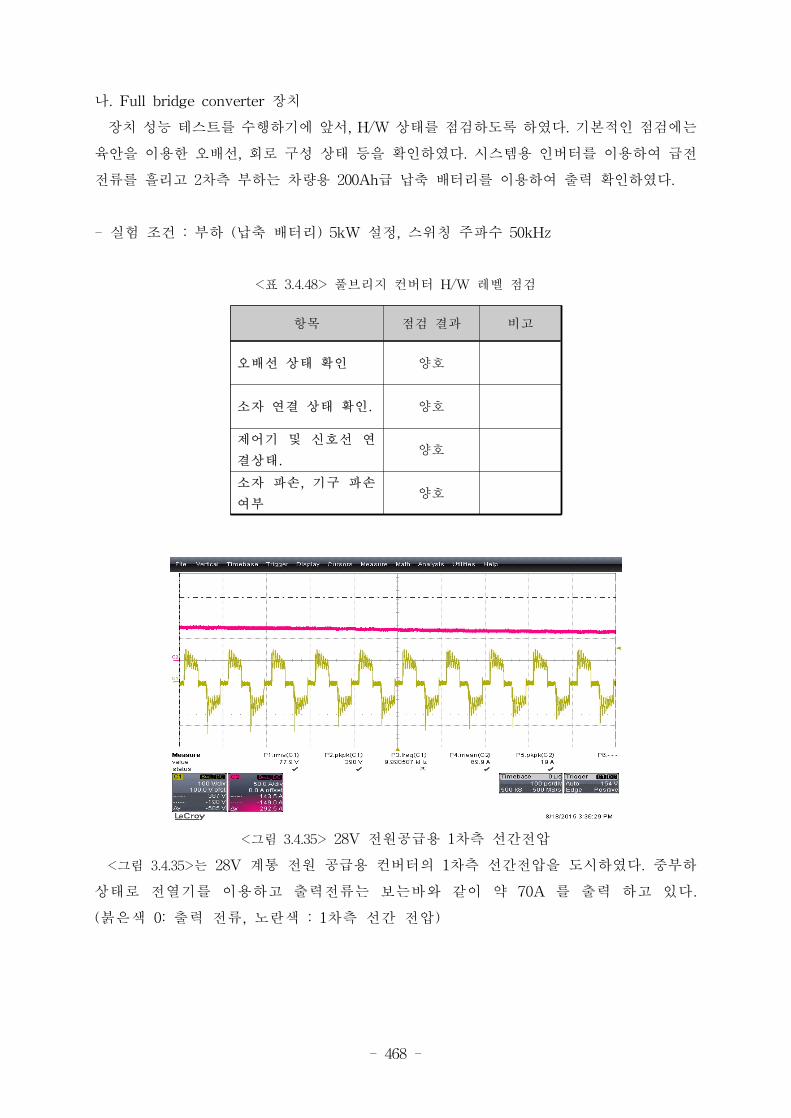
- 468 -
나. Full bridge converter 장치
장치 성능 테스트를 수행하기에 앞서, H/W 상태를 점검하도록 하였다. 기본적인 점검에는
육안을 이용한 오배선, 회로 구성 상태 등을 확인하였다. 시스템용 인버터를 이용하여 급전
전류를 흘리고 2차측 부하는 차량용 200Ah급 납축 배터리를 이용하여 출력 확인하였다.
- 실험 조건 : 부하 (납축 배터리) 5kW 설정, 스위칭 주파수 50kHz
<표 3.4.48> 풀브리지 컨버터 H/W 레벨 점검
항목 점검 결과 비고
오배선 상태 확인 양호
소자 연결 상태 확인. 양호
제어기 및 신호선 연
결상태.양호
소자 파손, 기구 파손
여부양호
<그림 3.4.35> 28V 전원공급용 1차측 선간전압
<그림 3.4.35>는 28V 계통 전원 공급용 컨버터의 1차측 선간전압을 도시하였다. 중부하
상태로 전열기를 이용하고 출력전류는 보는바와 같이 약 70A 를 출력 하고 있다.
(붉은색 0: 출력 전류, 노란색 : 1차측 선간 전압)

- 469 -
<그림 3.4.36> 출력전류, 선간전압, 스위칭게이트 파형
<그림 3.4.36>은 28V 계통 전원 공급용 컨버터의 경부하 상태의 출력 전류 파형과, 1차측
선간전압, 그리고 스위칭 게이트 파형을 나타내었다.
다. 집전 장치 (픽업 & 정류기)
인버터를이용하여급전전류를흘리고 2차측부하는 ACTIVE Load를이용하여출력확인하였다.
- 실험 조건 : 공극 15.5cm, 주파수 20kHz
급전 전류, Aac 집전 전류, Adc 집전 전압, Vdc 출력, kW
270 5 511 2.5
10 500 5
15 490 7.3
20 477 9.6
275 20 490 9.7
295 20 524 10.4
<표 3.4.49> 픽업장치 출력 테스트
상기결과표는 인버터를 이용하여 출력을 확인하였다. 순차적으로 급전 전류를 올려 최종적으로
10.4kW 정격 출력을 확인하였다.

- 470 -
<그림 3.4.37> 집전장치 테스트 환경 셋팅 (평면도)
<그림 3.4.37>은 집전장치 중 픽업 테스트를 위해 구축한 테스트 환경을 나타낸 것이다.
A, B 두 채널이 붉은 라인으로 픽업에서 인출된 부분을 확인 할 수 있으며, 픽업과 급전선로간
공극 15.5cm에서 테스트를 수행하였고, 급전 인버터 출력 전류 약 280AC로 셋팅하였다.
<그림 3.4.38> 집전장치 테스트 환경 세팅 (측면도)
<그림 3.4.38>은 픽업과 급전장치 간 셋팅 된 구조와 공극을 명확히 도시하기 위한 측면도를
나타낸다. 공극을 만들기 위해 픽업 양면에 절연체인 합판을 이용하여 세팅하였다
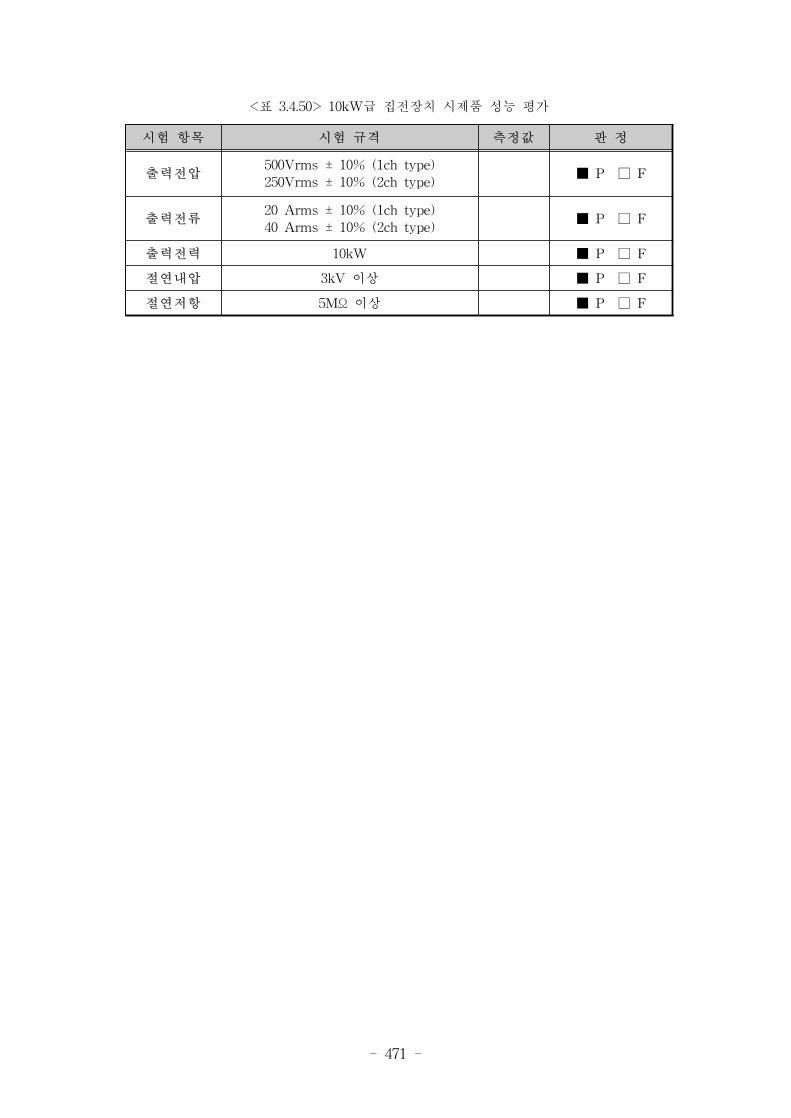
- 471 -
시험 항목 시험 규격 측정값 판 정
출력전압500Vrms ± 10% (1ch type)
250Vrms ± 10% (2ch type) P F
출력전류20 Arms ± 10% (1ch type)
40 Arms ± 10% (2ch type) P F
출력전력 10kW P F
절연내압 3kV 이상 P F
절연저항 5MΩ 이상 P F
<표 3.4.50> 10kW급 집전장치 시제품 성능 평가
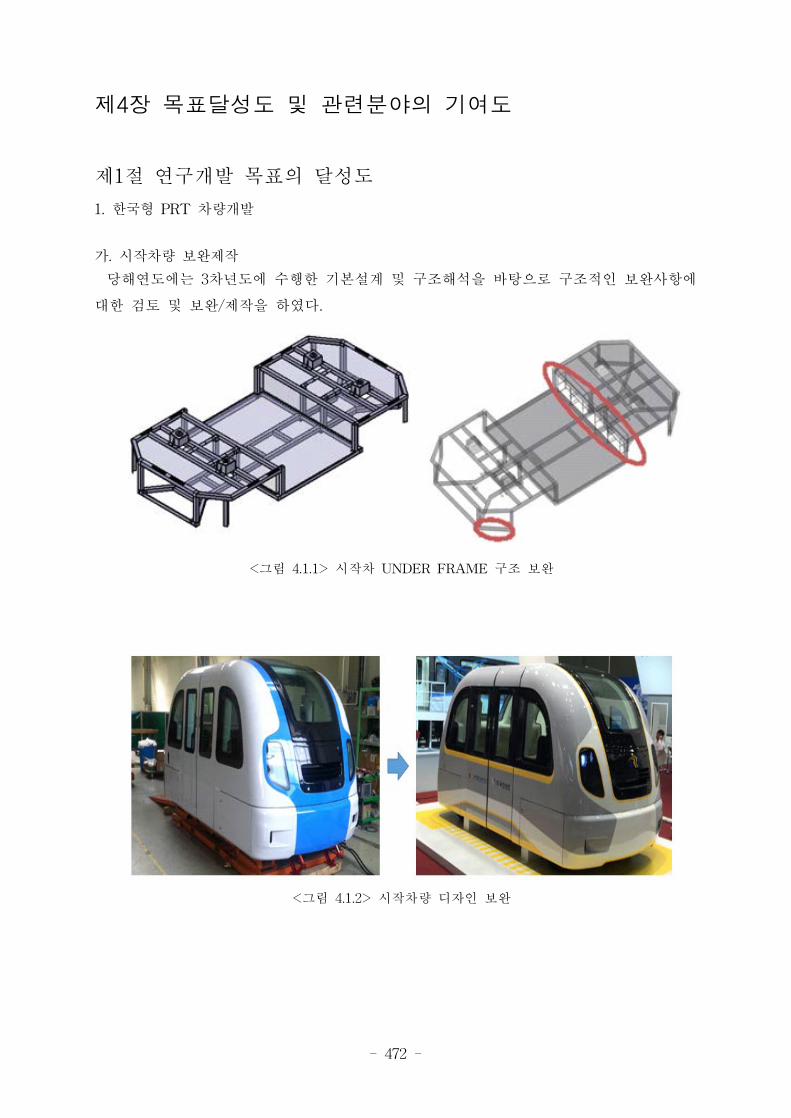
- 472 -
제4장 목표달성도 및 관련분야의 기여도
제1절 연구개발 목표의 달성도
1. 한국형 PRT 차량개발
가. 시작차량 보완제작
당해연도에는 3차년도에 수행한 기본설계 및 구조해석을 바탕으로 구조적인 보완사항에
대한 검토 및 보완/제작을 하였다.
<그림 4.1.1> 시작차 UNDER FRAME 구조 보완
<그림 4.1.2> 시작차량 디자인 보완
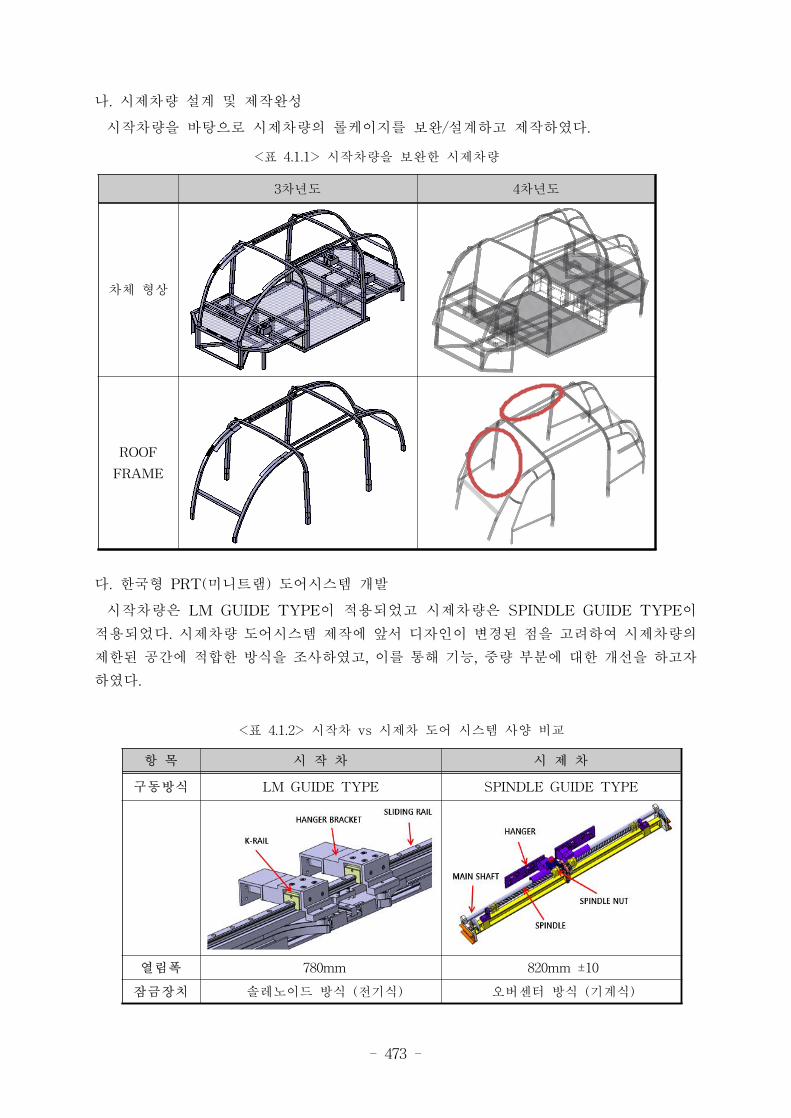
- 473 -
3차년도 4차년도
차체 형상
ROOF
FRAME
<표 4.1.1> 시작차량을 보완한 시제차량
나. 시제차량 설계 및 제작완성
시작차량을 바탕으로 시제차량의 롤케이지를 보완/설계하고 제작하였다.
다. 한국형 PRT(미니트램) 도어시스템 개발
시작차량은 LM GUIDE TYPE이 적용되었고 시제차량은 SPINDLE GUIDE TYPE이
적용되었다. 시제차량 도어시스템 제작에 앞서 디자인이 변경된 점을 고려하여 시제차량의
제한된 공간에 적합한 방식을 조사하였고, 이를 통해 기능, 중량 부분에 대한 개선을 하고자
하였다.
항 목 시 작 차 시 제 차
구동방식 LM GUIDE TYPE SPINDLE GUIDE TYPE
열림폭 780mm 820mm ±10
잠금장치 솔레노이드 방식 (전기식) 오버센터 방식 (기계식)
<표 4.1.2> 시작차 vs 시제차 도어 시스템 사양 비교
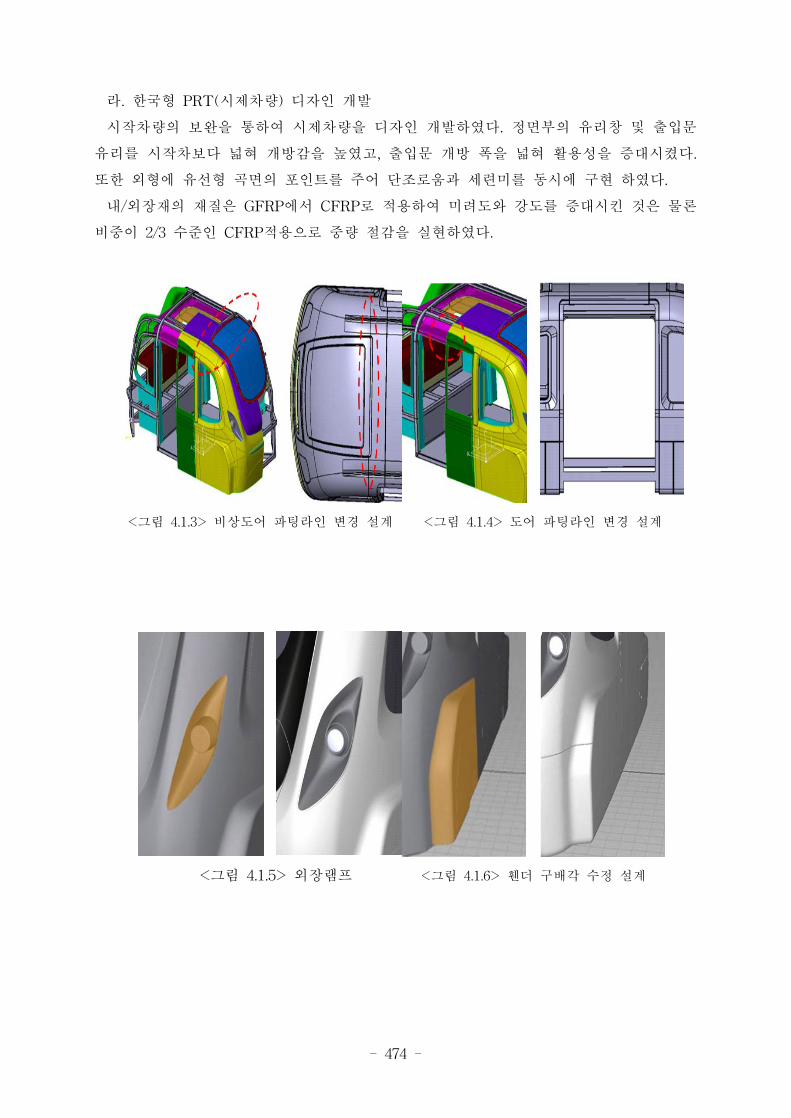
- 474 -
라. 한국형 PRT(시제차량) 디자인 개발
시작차량의 보완을 통하여 시제차량을 디자인 개발하였다. 정면부의 유리창 및 출입문
유리를 시작차보다 넓혀 개방감을 높였고, 출입문 개방 폭을 넓혀 활용성을 증대시켰다.
또한 외형에 유선형 곡면의 포인트를 주어 단조로움과 세련미를 동시에 구현 하였다.
내/외장재의 재질은 GFRP에서 CFRP로 적용하여 미려도와 강도를 증대시킨 것은 물론
비중이 2/3 수준인 CFRP적용으로 중량 절감을 실현하였다.
<그림 4.1.3> 비상도어 파팅라인 변경 설계 <그림 4.1.4> 도어 파팅라인 변경 설계
<그림 4.1.5> 외장램프 <그림 4.1.6> 휀더 구배각 수정 설계

- 475 -
<그림 4.1.7> 미니트램 시제차량 외부 디자인
마. 시제차량 연구원 내 시험 및 시험선에서의 기능시험
자동차 안전연구원내 주행시험장에서 차량의 최고속도시험 및 가/감속 시험을 통하여
성능사양이 만족함을 확인하였다.
<그림 4.1.8> 최고속도시험 및 가/감속 시험속도 시험
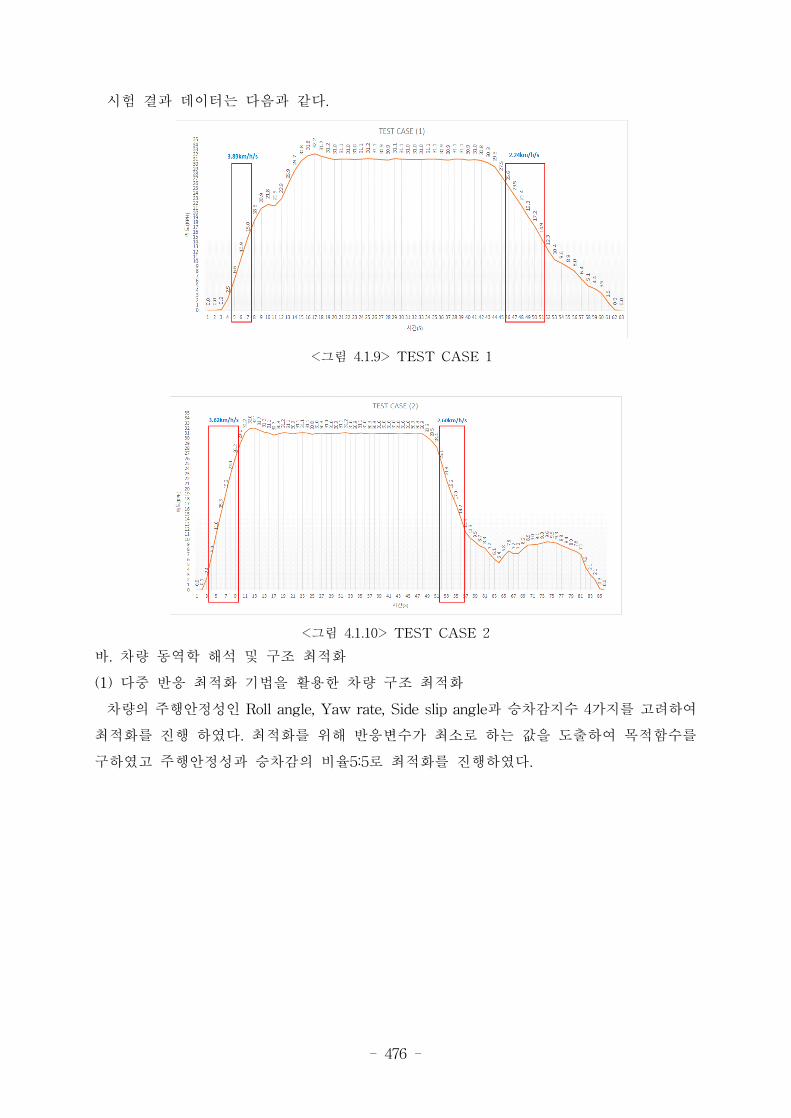
- 476 -
시험 결과 데이터는 다음과 같다.
<그림 4.1.9> TEST CASE 1
<그림 4.1.10> TEST CASE 2
바. 차량 동역학 해석 및 구조 최적화
(1) 다중 반응 최적화 기법을 활용한 차량 구조 최적화
차량의 주행안정성인 Roll angle, Yaw rate, Side slip angle과 승차감지수 4가지를 고려하여
최적화를 진행 하였다. 최적화를 위해 반응변수가 최소로 하는 값을 도출하여 목적함수를
구하였고 주행안정성과 승차감의 비율5:5로 최적화를 진행하였다.
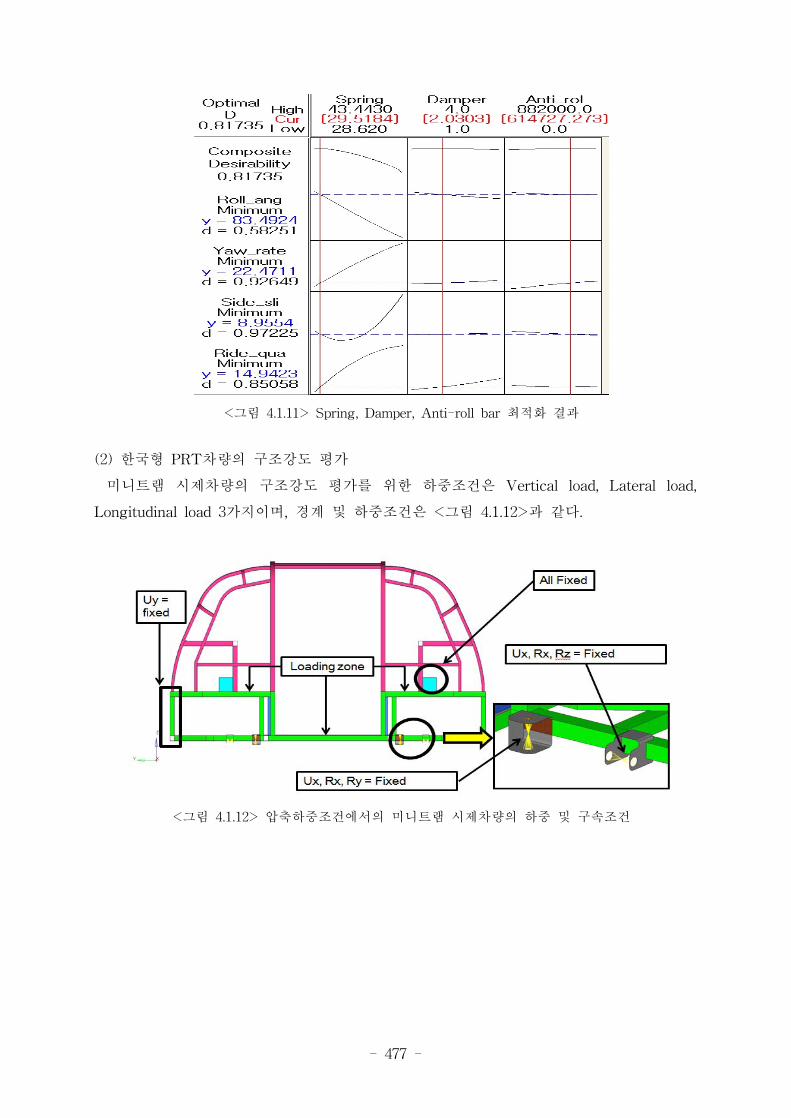
- 477 -
<그림 4.1.11> Spring, Damper, Anti-roll bar 최적화 결과
(2) 한국형 PRT차량의 구조강도 평가
미니트램 시제차량의 구조강도 평가를 위한 하중조건은 Vertical load, Lateral load,
Longitudinal load 3가지이며, 경계 및 하중조건은 <그림 4.1.12>과 같다.
<그림 4.1.12> 압축하중조건에서의 미니트램 시제차량의 하중 및 구속조건

- 478 -
NO 하중조건
Result of FE analysis Limits 평가
위치 재질
최대
등가응력
[MPa]
Scale Factor
적용
[MPa]
항복강도
허용기준
[MPa]
결과
1수직
하중
현가장치 마운트
취부(용접부)
6N01S
-T553.6 80.4
175
(용접부)
합격
2횡 방향
하중
현가장치 마운트
취부(용접부)
6N01S
-T550.2 75.3 합격
3
길이
방향
하중
현가장치 마운트
취부(모재부)
6N01S
-T550.8 76.2
175
(모재부)합격
4압축
하중
언더 프레임
(용접부)
6N01S
-T586.7 86.7
120
(용접부)합격
<표 4.1.3> 취약 부위 두께 변경에 따른 구조강도 재해석 결과 정리
취약 부위 두께 변경에 따른 재해석 결과, 모든 하중 조건에서 안전율을 고려한 Scale
Factor 적용 결과 값이 항복강도 허용 기준 이내에 만족하는 것을 확인하였다.
(3) 충돌 안전성 평가 및 충돌안전 기준(안)제시
미니트램은 신개념 교통수단이기 때문에 자동차의 기준으로만 충돌안전성을 평가하는
것에는 한계가 있다. 따라서, 신교통수단을 평가할 수 있는 미국의 American Society of
Civil Engineers - Automated People Mover Standards(ASCE-APM Standards)으로 추가적인
충돌안전성을 평가하였다.
현재 상용화된 영국의 히드로(Heathrow)공항과 아랍에미리트연합(UAE)의 마스다르시
(Masdar City)에서도 ASCE-APM Standards를 이용하여 미니트램의 충돌안전성을 평가하였다.
그 결과는 아래와 같다.
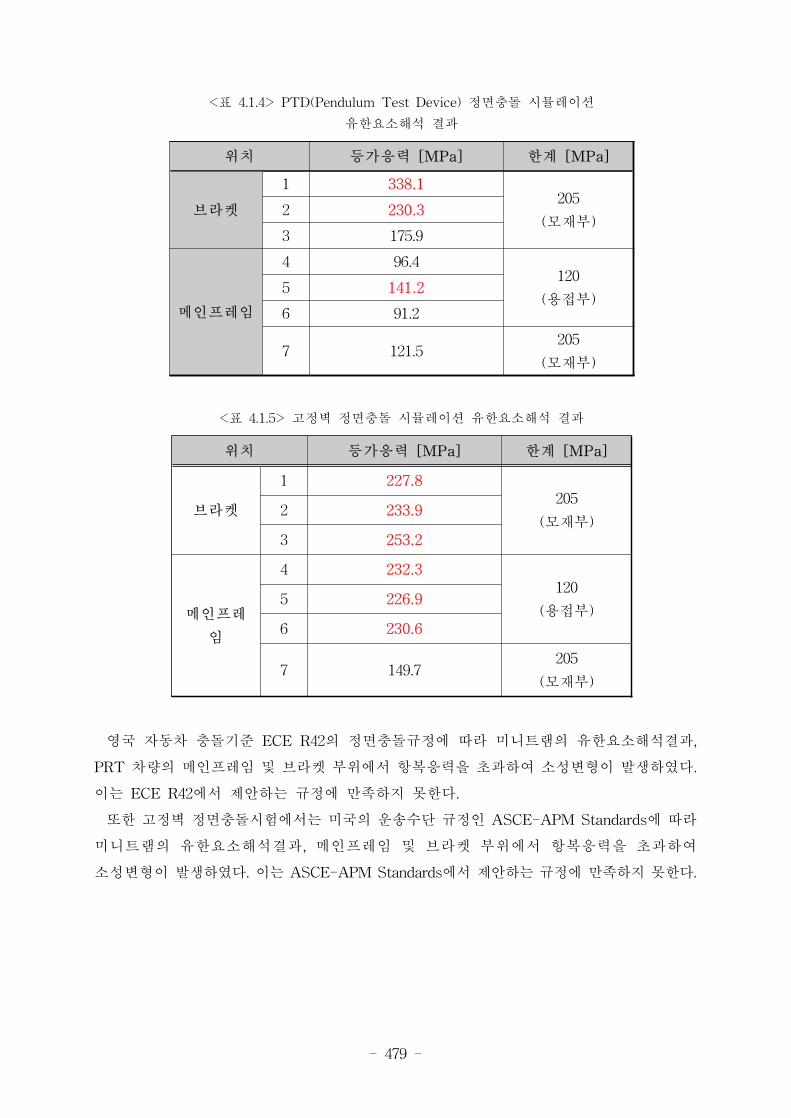
- 479 -
위치 등가응력 [MPa] 한계 [MPa]
브라켓
1 338.1205
(모재부)2 230.3
3 175.9
메인프레임
4 96.4120
(용접부)5 141.2
6 91.2
7 121.5205
(모재부)
<표 4.1.4> PTD(Pendulum Test Device) 정면충돌 시뮬레이션
유한요소해석 결과
위치 등가응력 [MPa] 한계 [MPa]
브라켓
1 227.8205
(모재부)2 233.9
3 253.2
메인프레
임
4 232.3120
(용접부)5 226.9
6 230.6
7 149.7205
(모재부)
<표 4.1.5> 고정벽 정면충돌 시뮬레이션 유한요소해석 결과
영국 자동차 충돌기준 ECE R42의 정면충돌규정에 따라 미니트램의 유한요소해석결과,
PRT 차량의 메인프레임 및 브라켓 부위에서 항복응력을 초과하여 소성변형이 발생하였다.
이는 ECE R42에서 제안하는 규정에 만족하지 못한다.
또한 고정벽 정면충돌시험에서는 미국의 운송수단 규정인 ASCE-APM Standards에 따라
미니트램의 유한요소해석결과, 메인프레임 및 브라켓 부위에서 항복응력을 초과하여
소성변형이 발생하였다. 이는 ASCE-APM Standards에서 제안하는 규정에 만족하지 못한다.
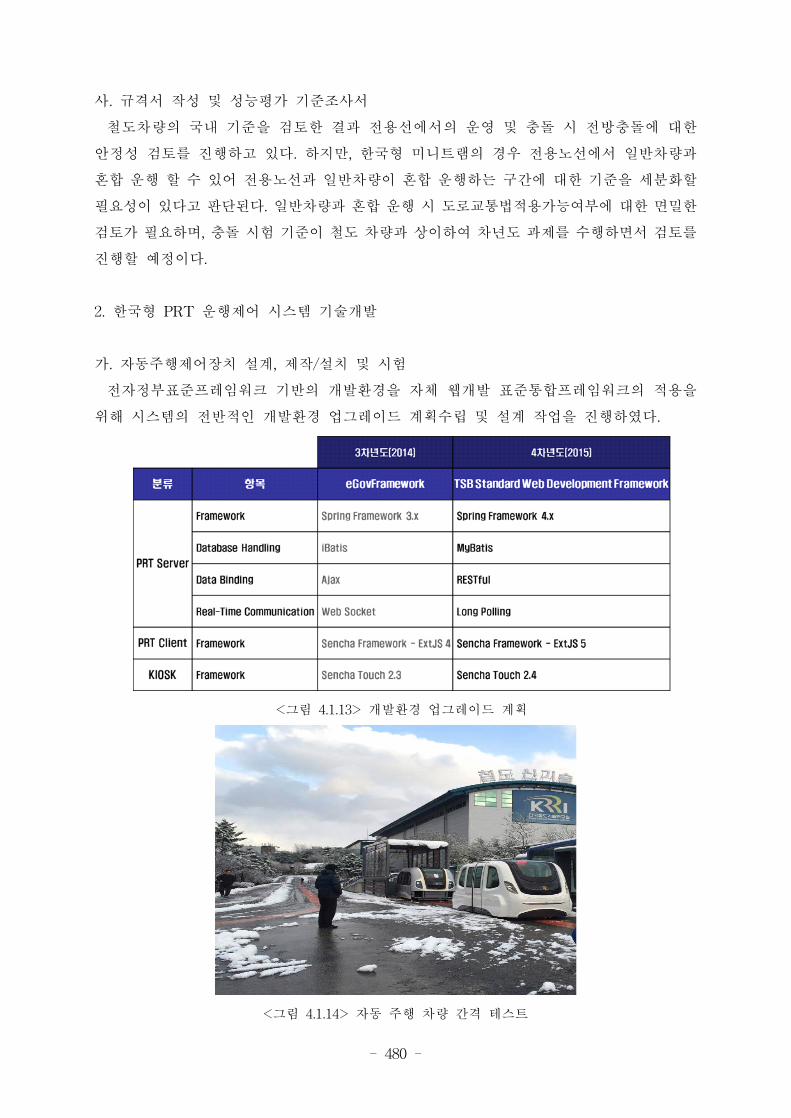
- 480 -
사. 규격서 작성 및 성능평가 기준조사서
철도차량의 국내 기준을 검토한 결과 전용선에서의 운영 및 충돌 시 전방충돌에 대한
안정성 검토를 진행하고 있다. 하지만, 한국형 미니트램의 경우 전용노선에서 일반차량과
혼합 운행 할 수 있어 전용노선과 일반차량이 혼합 운행하는 구간에 대한 기준을 세분화할
필요성이 있다고 판단된다. 일반차량과 혼합 운행 시 도로교통법적용가능여부에 대한 면밀한
검토가 필요하며, 충돌 시험 기준이 철도 차량과 상이하여 차년도 과제를 수행하면서 검토를
진행할 예정이다.
2. 한국형 PRT 운행제어 시스템 기술개발
가. 자동주행제어장치 설계, 제작/설치 및 시험
전자정부표준프레임워크 기반의 개발환경을 자체 웹개발 표준통합프레임워크의 적용을
위해 시스템의 전반적인 개발환경 업그레이드 계획수립 및 설계 작업을 진행하였다.
<그림 4.1.13> 개발환경 업그레이드 계획
<그림 4.1.14> 자동 주행 차량 간격 테스트
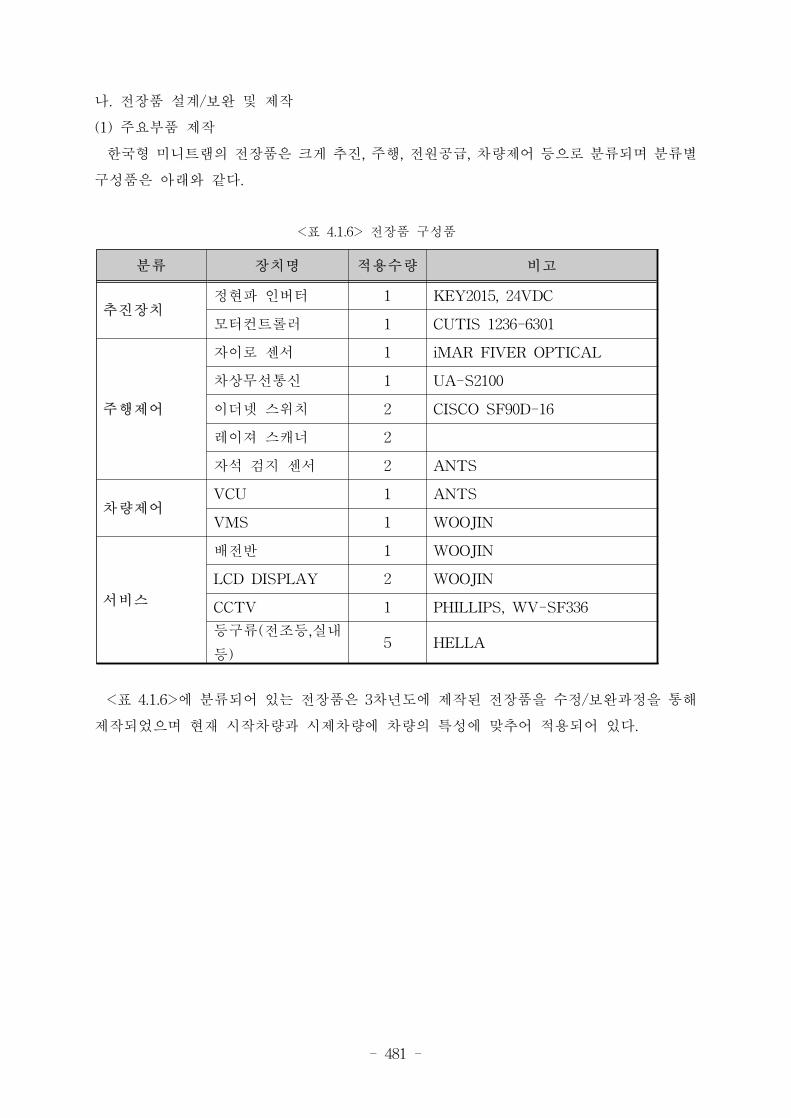
- 481 -
분류 장치명 적용수량 비고
추진장치정현파 인버터 1 KEY2015, 24VDC
모터컨트롤러 1 CUTIS 1236-6301
주행제어
자이로 센서 1 iMAR FIVER OPTICAL
차상무선통신 1 UA-S2100
이더넷 스위치 2 CISCO SF90D-16
레이져 스캐너 2
자석 검지 센서 2 ANTS
차량제어VCU 1 ANTS
VMS 1 WOOJIN
서비스
배전반 1 WOOJIN
LCD DISPLAY 2 WOOJIN
CCTV 1 PHILLIPS, WV-SF336
등구류(전조등,실내
등)5 HELLA
<표 4.1.6> 전장품 구성품
나. 전장품 설계/보완 및 제작
(1) 주요부품 제작
한국형 미니트램의 전장품은 크게 추진, 주행, 전원공급, 차량제어 등으로 분류되며 분류별
구성품은 아래와 같다.
<표 4.1.6>에 분류되어 있는 전장품은 3차년도에 제작된 전장품을 수정/보완과정을 통해
제작되었으며 현재 시작차량과 시제차량에 차량의 특성에 맞추어 적용되어 있다.
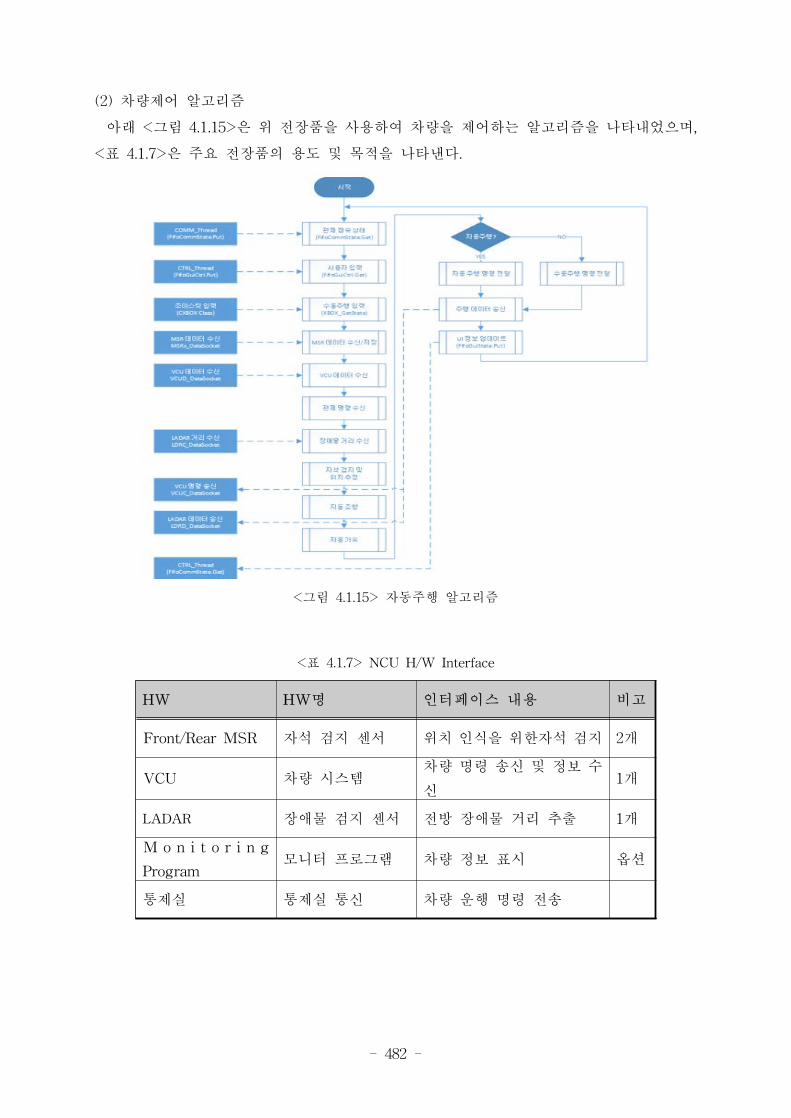
- 482 -
(2) 차량제어 알고리즘
아래 <그림 4.1.15>은 위 전장품을 사용하여 차량을 제어하는 알고리즘을 나타내었으며,
<표 4.1.7>은 주요 전장품의 용도 및 목적을 나타낸다.
<그림 4.1.15> 자동주행 알고리즘
HW HW명 인터페이스 내용 비고
Front/Rear MSR 자석 검지 센서 위치 인식을 위한자석 검지 2개
VCU 차량 시스템차량 명령 송신 및 정보 수
신1개
LADAR 장애물 검지 센서 전방 장애물 거리 추출 1개
M o n i t o r i n g
Program모니터 프로그램 차량 정보 표시 옵션
통제실 통제실 통신 차량 운행 명령 전송
<표 4.1.7> NCU H/W Interface
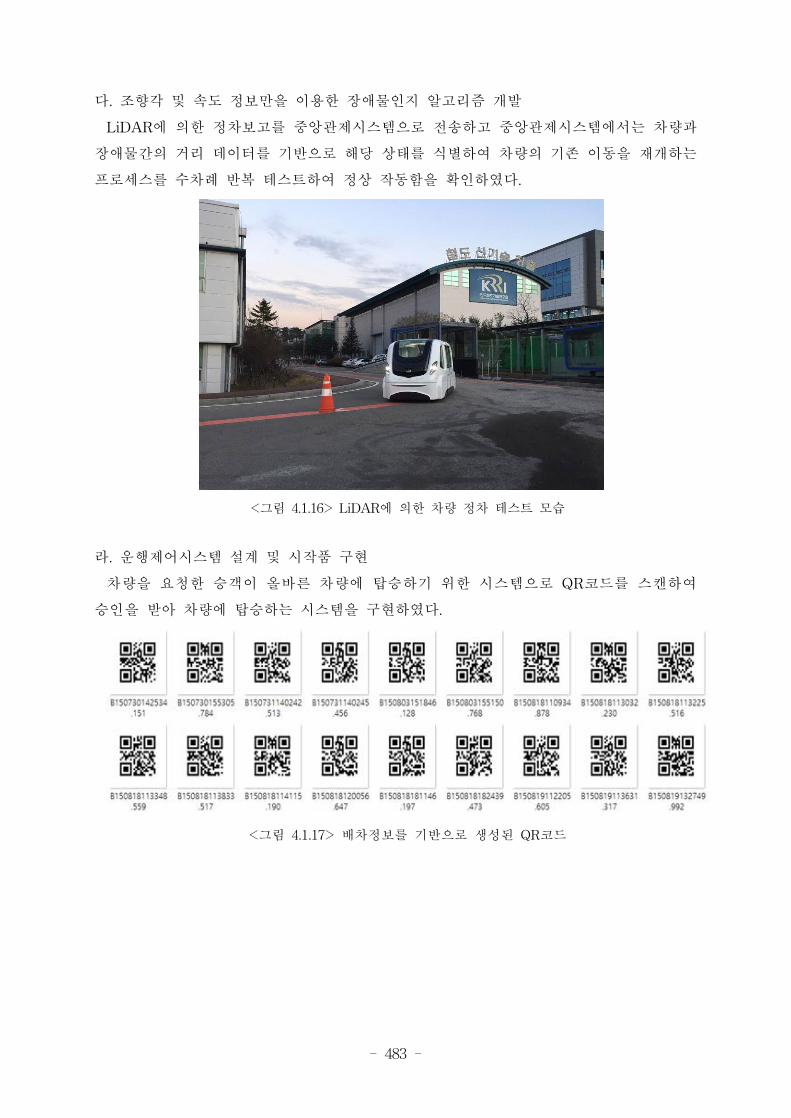
- 483 -
다. 조향각 및 속도 정보만을 이용한 장애물인지 알고리즘 개발
LiDAR에 의한 정차보고를 중앙관제시스템으로 전송하고 중앙관제시스템에서는 차량과
장애물간의 거리 데이터를 기반으로 해당 상태를 식별하여 차량의 기존 이동을 재개하는
프로세스를 수차례 반복 테스트하여 정상 작동함을 확인하였다.
<그림 4.1.16> LiDAR에 의한 차량 정차 테스트 모습
라. 운행제어시스템 설계 및 시작품 구현
차량을 요청한 승객이 올바른 차량에 탑승하기 위한 시스템으로 QR코드를 스캔하여
승인을 받아 차량에 탑승하는 시스템을 구현하였다.
<그림 4.1.17> 배차정보를 기반으로 생성된 QR코드
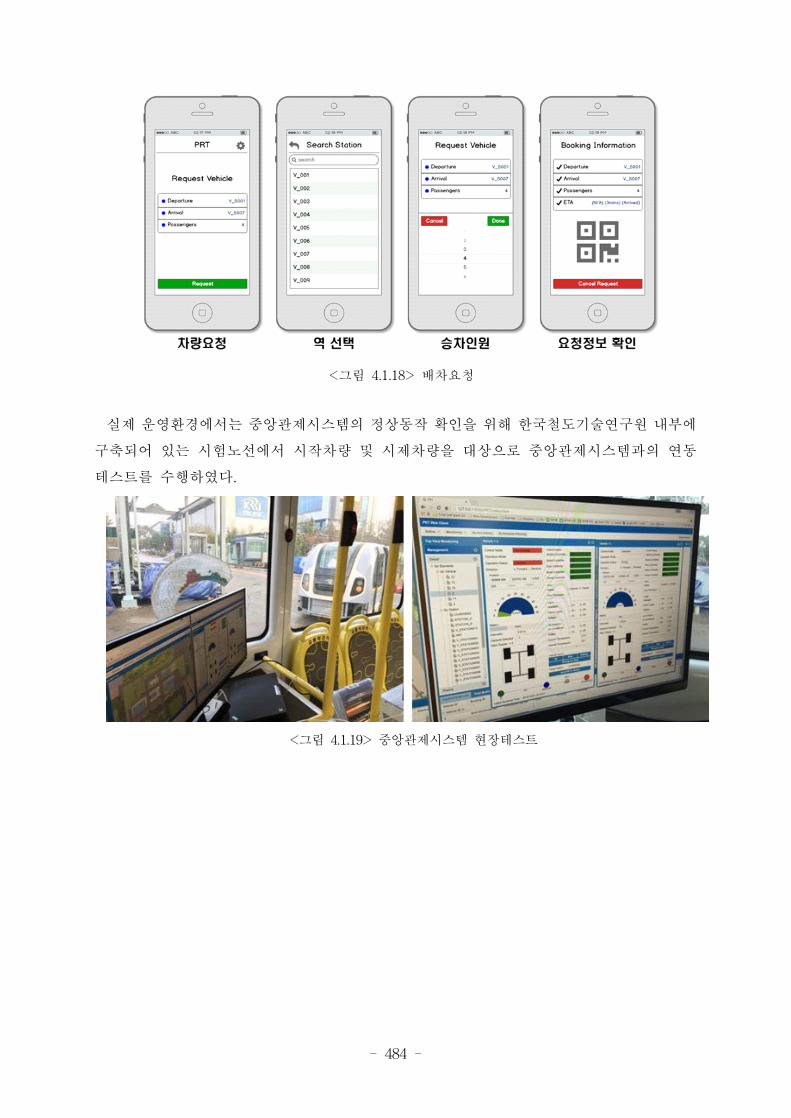
- 484 -
<그림 4.1.18> 배차요청
실제 운영환경에서는 중앙관제시스템의 정상동작 확인을 위해 한국철도기술연구원 내부에
구축되어 있는 시험노선에서 시작차량 및 시제차량을 대상으로 중앙관제시스템과의 연동
테스트를 수행하였다.
<그림 4.1.19> 중앙관제시스템 현장테스트
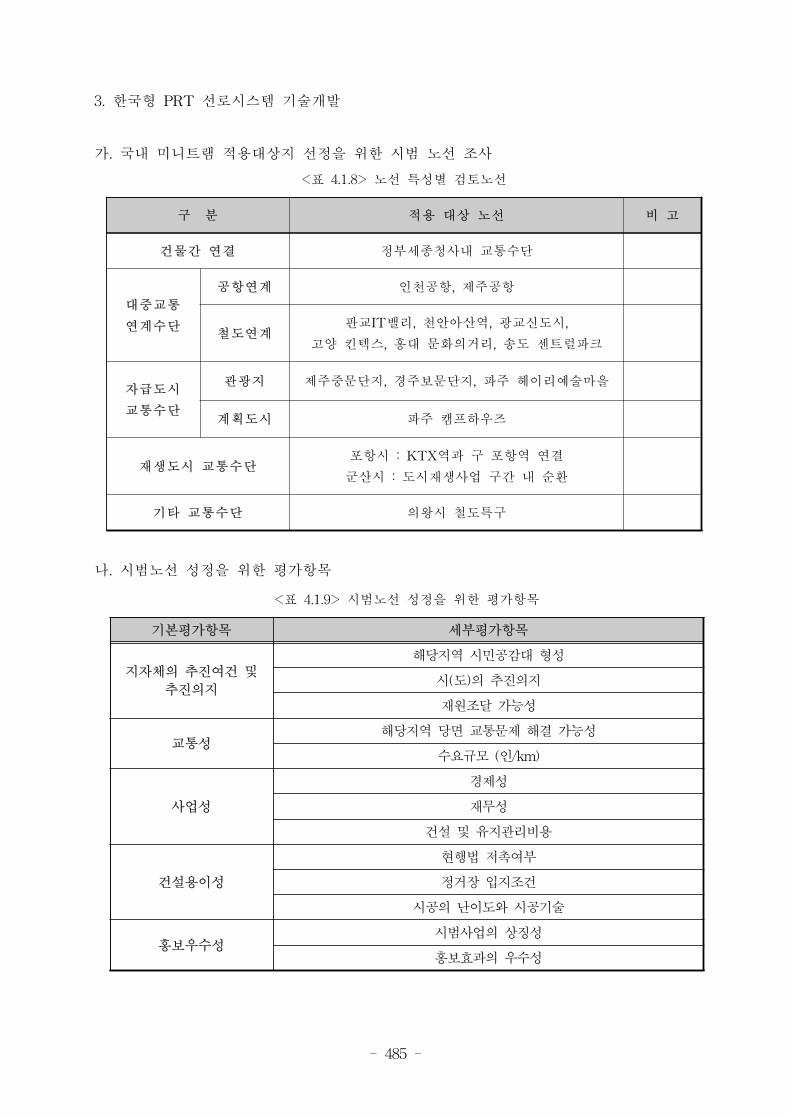
- 485 -
3. 한국형 PRT 선로시스템 기술개발
가. 국내 미니트램 적용대상지 선정을 위한 시범 노선 조사
구 분 적용 대상 노선 비 고
건물간 연결 정부세종청사내 교통수단
대중교통
연계수단
공항연계 인천공항, 제주공항
철도연계판교IT밸리, 천안아산역, 광교신도시,
고양 킨텍스, 홍대 문화의거리, 송도 센트럴파크
자급도시
교통수단
관광지 제주중문단지, 경주보문단지, 파주 헤이리예술마을
계획도시 파주 캠프하우즈
재생도시 교통수단포항시 : KTX역과 구 포항역 연결
군산시 : 도시재생사업 구간 내 순환
기타 교통수단 의왕시 철도특구
<표 4.1.8> 노선 특성별 검토노선
나. 시범노선 성정을 위한 평가항목
기본평가항목 세부평가항목
지자체의 추진여건 및
추진의지
해당지역 시민공감대 형성
시(도)의 추진의지
재원조달 가능성
교통성해당지역 당면 교통문제 해결 가능성
수요규모 (인/km)
사업성
경제성
재무성
건설 및 유지관리비용
건설용이성
현행법 저촉여부
정거장 입지조건
시공의 난이도와 시공기술
홍보우수성시범사업의 상징성
홍보효과의 우수성
<표 4.1.9> 시범노선 성정을 위한 평가항목

- 486 -
다. 수직이송장치 설치 및 테스트
미니트램 수직이송장치 분야 4차년도 개발목표는 설치공간 및 비용을 고려하여 철도기술
연구원내 수직이송장치의 주요부분인 출입구 컨베이어 및 시프팅 장치, 파렛트 Up-Down
장치, 리프트 컨베이어 장치 제작, 설치 및 테스트를 진행하여 정상작동 여부를 확인하였다.
<그림 4.1.20> 설치완료
4, PRT전력공급시스템
가. 전력변환장치 제작 및 시작 및 시제차량 적용/시험
4차년도에는 시작차량의 하드웨어 부분을 보완하여 시작 및 시제차량에 집전/전력변환
시스템을 적용하였다. 3차년도에 제작한 3직 2병 구조(135V)는 주행거리가 짧아 배터리를
추가하고, 설계를 보완하여 2직 4병으로 변경하여 이동거리를 늘릴 수 있었다. 또한 부스터
컨버터 없이 충전이 가능하도록 성능을 개선하였다. 그리고 미니트램의 전원공급 방식은 무
선으로 전력을 공급함으로 공급하기 위한 집전장치 중 PICK UP장치 테스트를 위한 환경
을 구축하였다.
<그림 4.1.21> 집전장치 테스트 환경 세팅 (측면도)
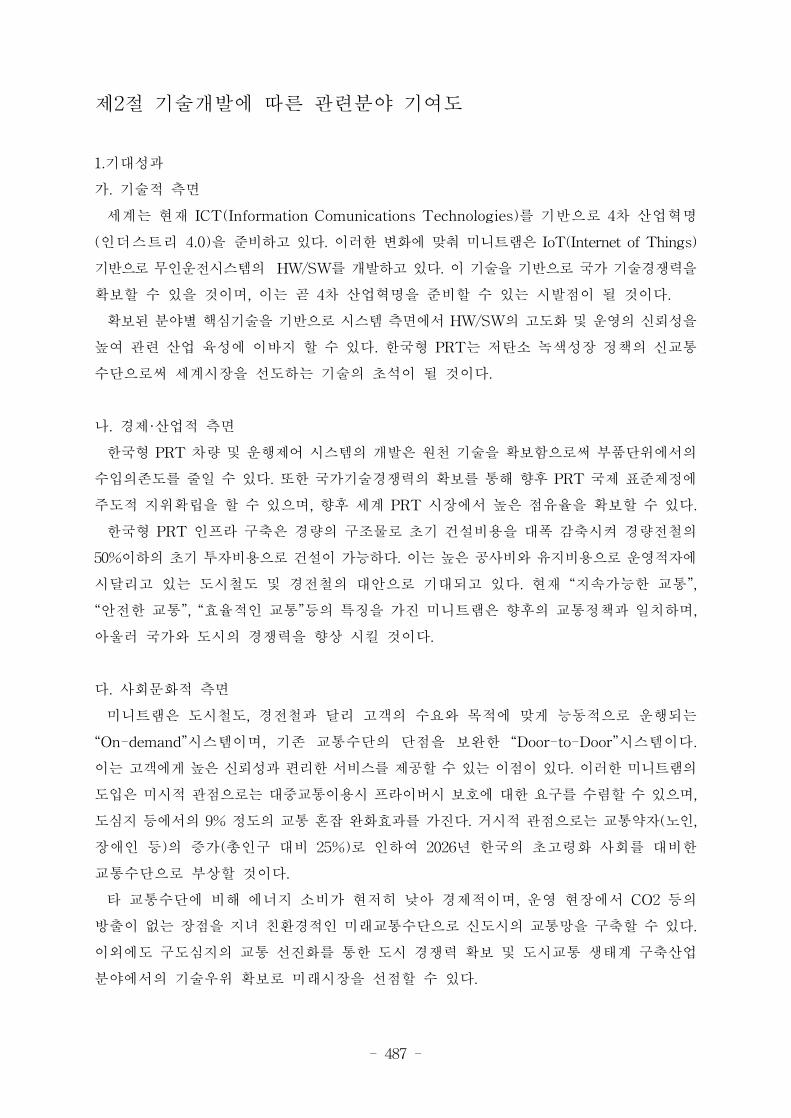
- 487 -
제2절 기술개발에 따른 관련분야 기여도
1.기대성과
가. 기술적 측면
세계는 현재 ICT(Information Comunications Technologies)를 기반으로 4차 산업혁명
(인더스트리 4.0)을 준비하고 있다. 이러한 변화에 맞춰 미니트램은 IoT(Internet of Things)
기반으로 무인운전시스템의 HW/SW를 개발하고 있다. 이 기술을 기반으로 국가 기술경쟁력을
확보할 수 있을 것이며, 이는 곧 4차 산업혁명을 준비할 수 있는 시발점이 될 것이다.
확보된 분야별 핵심기술을 기반으로 시스템 측면에서 HW/SW의 고도화 및 운영의 신뢰성을
높여 관련 산업 육성에 이바지 할 수 있다. 한국형 PRT는 저탄소 녹색성장 정책의 신교통
수단으로써 세계시장을 선도하는 기술의 초석이 될 것이다.
나. 경제·산업적 측면
한국형 PRT 차량 및 운행제어 시스템의 개발은 원천 기술을 확보함으로써 부품단위에서의
수입의존도를 줄일 수 있다. 또한 국가기술경쟁력의 확보를 통해 향후 PRT 국제 표준제정에
주도적 지위확립을 할 수 있으며, 향후 세계 PRT 시장에서 높은 점유율을 확보할 수 있다.
한국형 PRT 인프라 구축은 경량의 구조물로 초기 건설비용을 대폭 감축시켜 경량전철의
50%이하의 초기 투자비용으로 건설이 가능하다. 이는 높은 공사비와 유지비용으로 운영적자에
시달리고 있는 도시철도 및 경전철의 대안으로 기대되고 있다. 현재 “지속가능한 교통”,
“안전한 교통”, “효율적인 교통”등의 특징을 가진 미니트램은 향후의 교통정책과 일치하며,
아울러 국가와 도시의 경쟁력을 향상 시킬 것이다.
다. 사회문화적 측면
미니트램은 도시철도, 경전철과 달리 고객의 수요와 목적에 맞게 능동적으로 운행되는
“On-demand”시스템이며, 기존 교통수단의 단점을 보완한 “Door-to-Door”시스템이다.
이는 고객에게 높은 신뢰성과 편리한 서비스를 제공할 수 있는 이점이 있다. 이러한 미니트램의
도입은 미시적 관점으로는 대중교통이용시 프라이버시 보호에 대한 요구를 수렴할 수 있으며,
도심지 등에서의 9% 정도의 교통 혼잡 완화효과를 가진다. 거시적 관점으로는 교통약자(노인,
장애인 등)의 증가(총인구 대비 25%)로 인하여 2026년 한국의 초고령화 사회를 대비한
교통수단으로 부상할 것이다.
타 교통수단에 비해 에너지 소비가 현저히 낮아 경제적이며, 운영 현장에서 CO2 등의
방출이 없는 장점을 지녀 친환경적인 미래교통수단으로 신도시의 교통망을 구축할 수 있다.
이외에도 구도심지의 교통 선진화를 통한 도시 경쟁력 확보 및 도시교통 생태계 구축산업
분야에서의 기술우위 확보로 미래시장을 선점할 수 있다.
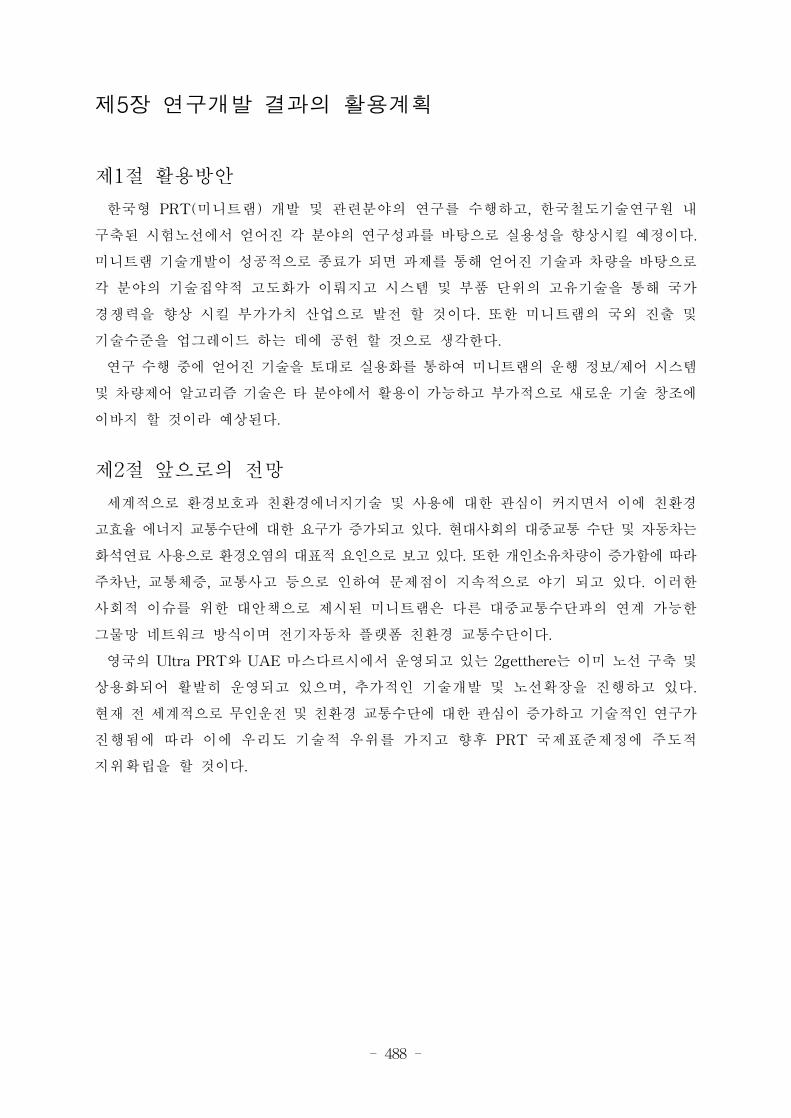
- 488 -
제5장 연구개발 결과의 활용계획
제1절 활용방안
한국형 PRT(미니트램) 개발 및 관련분야의 연구를 수행하고, 한국철도기술연구원 내
구축된 시험노선에서 얻어진 각 분야의 연구성과를 바탕으로 실용성을 향상시킬 예정이다.
미니트램 기술개발이 성공적으로 종료가 되면 과제를 통해 얻어진 기술과 차량을 바탕으로
각 분야의 기술집약적 고도화가 이뤄지고 시스템 및 부품 단위의 고유기술을 통해 국가
경쟁력을 향상 시킬 부가가치 산업으로 발전 할 것이다. 또한 미니트램의 국외 진출 및
기술수준을 업그레이드 하는 데에 공헌 할 것으로 생각한다.
연구 수행 중에 얻어진 기술을 토대로 실용화를 통하여 미니트램의 운행 정보/제어 시스템
및 차량제어 알고리즘 기술은 타 분야에서 활용이 가능하고 부가적으로 새로운 기술 창조에
이바지 할 것이라 예상된다.
제2절 앞으로의 전망
세계적으로 환경보호과 친환경에너지기술 및 사용에 대한 관심이 커지면서 이에 친환경
고효율 에너지 교통수단에 대한 요구가 증가되고 있다. 현대사회의 대중교통 수단 및 자동차는
화석연료 사용으로 환경오염의 대표적 요인으로 보고 있다. 또한 개인소유차량이 증가함에 따라
주차난, 교통체증, 교통사고 등으로 인하여 문제점이 지속적으로 야기 되고 있다. 이러한
사회적 이슈를 위한 대안책으로 제시된 미니트램은 다른 대중교통수단과의 연계 가능한
그물망 네트워크 방식이며 전기자동차 플랫폼 친환경 교통수단이다.
영국의 Ultra PRT와 UAE 마스다르시에서 운영되고 있는 2getthere는 이미 노선 구축 및
상용화되어 활발히 운영되고 있으며, 추가적인 기술개발 및 노선확장을 진행하고 있다.
현재 전 세계적으로 무인운전 및 친환경 교통수단에 대한 관심이 증가하고 기술적인 연구가
진행됨에 따라 이에 우리도 기술적 우위를 가지고 향후 PRT 국제표준제정에 주도적
지위확립을 할 것이다.
- 489 -
제6장 참고문헌
[국내문헌]
1. 조정길, 구정서, 강석원, 정락교, “소형궤도차량(PRT) 차체의 설계사양 도출 및 구조강
도 평가 연구”, 한국자동차공학회논문집, 제21권 제4호, 2013년 7월, pp. 144-152
2. 강석원, 조정길, 정락교, 김준우, 구정서, “한국형 수요응답형 순환교통시스템(PRT) 개
발을 위한 시작차량 설계”, 한국자동차공학회 부문종합 학술대회, 2013년 5월, pp.
2119-2123
3. 권순박, 송지한, 강석원, 정락교, 김학범, 이창현, 서동관, “PRT 차량하부 열부하 저감
방안 도출연구”, 한국전산유체공학회지, 제18권 제1호, 2013년 3월, pp. 58-62
4. 일반국도공사 전문시방서, 국토교통부, 2015
5. 이상복, “미니탭 15버전을 활용한 예제중심의 실험계획법”, 이레테크, 2008
6. 박성현, 김종욱, “Minitab을 활용한 현대실험계획법”, 민영사, 2011
7. 김현태, “한국형 PRT 차량의 주행안전성 및 승차감 향상을 위한 현가장치 최적화 연
구”, 서울과학기술대학교 철도전문대학원, 2015
8. 철도차량 안전기준에 관한 규칙, “표준충돌사고각본 세부기준”, 2013.
[국외문헌]
1. Adams/car user manual, 2013
2. ISO 8608 : Mechanical vibration – Road surface profiles, 1995
3. LMS, Tecware
4. Origin lab corporation, Origin Pro 9.1.
5. ISO 2631-1 : Mechanical vibration and shock-Evaluation of human exposure to
whole-body vibration, 1997
6. Bylund, N., Fredricson, H., “Field Method for Torsion Stiffness Measurement of
Complete Vehicles”, Society of Automotive Engineers International, SAE
2003-01-2754, 2003
7. Automated People Mover Standards, American Society of Civil Engineers, 2006
8. Paolo Feraboli, Bonnie Wade, Francesco Deleo, Mostafa Rassaian, Mark Higgins,
Ala Byar, “LS-DYNA MAT54 modeling of the axial crushing of a composite tape
sinusoidal specimen”, Elesevier Composites : Part A 42, pp. 1809-1825, 2011
9. Economic Commision for Europe Regulation 42, “Uniform provisions concerning
the approval of vehicles with regard to their front and rear protectiv devices
(Bumpers, ETC.), 1980.
10. Korea Standard Regulation 0074, “Frontal and rear vehicle collision test
procedure”, 2003.
11. Federal Motor Vehicle Safety Standard 215, “National Highway Traffic Safety
Administration, Bumper Standard”, 1990.
12. National Highway Traffic Safety Administration, “An Evaluation of the Bumper

- 490 -
Standard”, 1982.
13. Lees-Miller, J. D., "Empty vehicle redistribution for personal rapid transit".
University of Bristol, 2011
14. Lees-Miller, J. D. and Wilson, R. E., "Proactive empty vehicle redistribution for
personal rapid transit and taxis", Transportation Planning and Technology, V.35
No.1, 2012
15. Lin, J.-R., and Yang, T.-H., "Strategic design of public bicycle sharing systems
with service level constraints", Transportation Research Part E, V.47 No.2, 2011
16. Maxwell, M. S., Restrepo, M., Henderson, S. G. and Topaloglu, H., "Approximate
Dynamic Programming for Ambulance Redeployment", INFORMS Journal on
Computing, V.22 No.2, 2010
17. Raviv, T., Tzur, M., and Forma, I. A., "Static repositioning in a bike-sharing
system: models and solution approaches", EURO Journal on Transportation and
Logistics, V.2 No.3, 2013
18. Schmid, V., "Solving the dynamic ambulance relocation and dispatching problem
using approximate dynamic programming", European Journal of Operational
Research, V.219 No.3, 2012
19. Fatnassi, E., Chebbi, O. and Siala, J. C., "Two strategies for real time empty
vehicle redistribution for the Personal Rapid Transit system", Intelligent
Transportation Systems - (ITSC) 16th International IEEE Conference, 2013
20. Wang, I.-L. and Wang, C.-W., "Analyzing Bike Repositioning Strategies Based on
Simulations for Public Bike Sharing Systems: Simulating Bike Repositioning
Strategies for Bike Sharing Systems", IIAI International Conference on Advanced
Applied Informatics (IIAIAAI), IEEE, 2013
21. Wong, K.I. and Bell, Michael G.H., "The Optimal Dispatching of Taxis under
Congestion: a Rolling Horizon Approach. Journal of AdvancedTransportation", V.40
No.2, 2006
[사이트]
1. http://www.concept-tech.com/
2. https://www.car.go.kr/index.jsp
KRRI 연구 2015-109
수요응답형 순환교통시스템(PRT)
핵심기술 개발
발 행 인 김기환
발 행 일 2015년 12월 31일
발 행 처 한국철도기술연구원
16105 경기도 의왕시 철도박물관로 176
전화 : (031)460-5000 팩스 : (031)450-5029
홈페이지 : http://www.krri.re.kr
ISBN : 979-11-87144-41-0
본 보고서의 내용은 無斷轉載․譯載․複寫를 금함.




















