Joël Merker, editor/translator Theory of Transformation Groups ...
661
Joël Merker, editor/translator Theory of Transformation Groups of Lie and Engel Modern Presentation and English Translation (Vol. I, 1888) August 20, 2014
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Joël Merker, editor/translator Theory of Transformation Groups ...

Joël Merker, editor/translator
Theory of Transformation Groupsof Lie and Engel
Modern Presentation and English Translation(Vol. I, 1888)
August 20, 2014

2
Address of the editor/translator:
Prof. Joël MerkerFaculté des SciencesUniversité Paris-SudFrance
E-mail:
Internet:
www.math.u-psud.fr/∼merker/
MSC codes and keywords in order of importance:
22E05, 22E10, 22E60, 22-03, 01A05, 01A55, 17B30, 17B40, 17B45, 17B56,17B66, 17B70, 22F30, 12H05, 14P05, 14P15
continuous transformation groups, infinitesimal transformations, general projectivegroup, complete systems of PDE’s, classification of Lie algebras, local holomorphicvector fields

v
THEORIE
DER
TRANSFORMATIONSGRUPPEN
—————-
ERSTER ABSCHNITT
—————-
UNTER MITWIRKUNG VON Prof. Dr. FRIEDRICH ENGEL
BEARBEITET VON
SOPHUS LIE,WEIL. PROFESSOR DER GEOMETRIE AND DER UNIVERSITÄT LEIPZIG
UND PROFESSOR I TRANSFORMASJONSGRUPPENES TEORI AN DERKÖNIGLICHEN FREDERIKS UNIVERSITÄT ZU OSLO
UNVERÄNDERTER NEUDRUCKMIT UNTERSTÜTZUNG DER KÖNIGLICHEN
FREDERIKS UNIVERSITÄT ZU OSLO
1930VERLAG UND DRUCK VON B.G. TEUBNER IN LEIPZIG
UND BERLIN

vi
Widmung.
—————-
Die neuen Theorien, die in diesem Werke dargestelltsind, habe ich in den Jahren von 1869 bis 1884 en-twickelt, wo mir die Liberalität meines
Geburtslandes Norwegengestattete, ungestört meine volle Arbeitskraft derWissenschaft zu widmen, die durch ABELS Werkein Norwegens wissenschaftlicher Literatur den erstenPlatz erhalten hat.
Bei der Durchführung meiner Ideen im Einzelnenund bei ihrer systematischen Darstellung genossich seit 1884 in der Grössten Ausdehnung die uner-müdliche Unterstützung des PROFESSORS
Friedrich Engelmeines ausgezeichneten Kollegen and der UniversitätLeipzig.
Das in dieser Weise entstandene Werk widme ichFrankreichs
École Normale Supérieurederen unsterblicher Schüler GALOIS zuerst die Be-deutung des Begriffs discontinuirliche Gruppe erkannte.Den hervorragenden Lehrern dieses Instituts, beson-ders den Herren G. DARBOUX, E. PICARD und J.TANNERY verdanke ich es, dass die tüchtigsten jungenMathematiker Frankreichs wetteifernd mit einer Reihejunger deutscher Mathematiker meine Untersuchungenüber continuirliche Gruppen, über Geometrie und überDifferentialgleichungen studiren und mit glänzendemErfolge verwerthen.
Sophus Lie.

Foreword
This modernized English translation grew out of my old simultaneous interest in themathematics themselves and in the metaphysical thoughts governing their continueddevelopment. I owe to the books of Robert Hermann, of Peter Olver, of ThomasHawkins, and of Olle Stormark to have been introduced in Lie’s original vast field.
Up to the end of the 18th Century, the universal language of Science was Latin,until its centre of gravity shifted to German during the 19th Century while nowa-days — and needless to say — English is widespread. Being intuitively convincedthat Lie’s original works contain much more than what is modernized up to now, Istarted three years ago to learn German from scratch just in order to read Lie, andwith two main goals in mind:
complete and modernize the Lie-Amaldi classification of finite-dimensionallocal Lie group holomorphic actions on spaces of complex dimensions 1, 2 and 3for various applications in complex and Cauchy-Riemann geometry;
better understand the roots of Élie Cartan’s achievements.Then it gradually appeared to me that the mathematical thought of Lie is univer-
sal and transhistorical, hence deserves per se to be translated. The present adaptedEnglish translation follows a first monograph1 written in French and specially de-voted to the treatment by Engel and Lie of the so-called Riemann-Helmholtz prob-lem in the Volume III of the Theorie der Transformationsgruppen.
A few observations are in order concerning the chosen format. For several rea-sons, it was essentially impossible to translate directly the first few chapters in whichLie’s intention was to set up the beginnings of the theory in the highest possible gen-erality, especially in order to come up with the elimination of the axiom of inverse,an aspect never dealt with in modern treatises. As a result, I decided in the first fourchapters to reorganize the material and to reprove the concerned statements, with-out nevertheless removing anything from the mathematical contents embraced. Butstarting with Chap. 5, the exposition of Engel and Lie is so smooth, so rigorous, so
1 Merker, J.: Sophus Lie, Friedrich Engel et le problème de Riemann-Helmholtz, Hermann Éditeurdes Sciences et des Arts, Paris, xxiii+325 pp, 2010.
vii

viii Foreword
understandable, so systematic, so astonishingly well organized — in one word: sobeautiful for thought — that a pure translation is essential.
Lastly, the author is grateful to Gautam Bharali, to Philip Boalch, to EgmontPorten, to Masoud Sabzevari for a few fine suggestions concerning the language andfor misprint chasing, but is of course the sole responsible for the lack of idiomaticEnglish.
Paris, École Normale Supérieure, Joël Merker16 March 2010

Contents
Part I Modern Presentation
1 Three Principles of ThoughtGoverning the Theory of Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Local Transformation Equationsand Essential Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.1 Generic Rank of the Infinite Coefficient Mapping . . . . . . . . . . . . . . . . 132.2 Quantitative Criterion
for the Number of Superfluous Parameters . . . . . . . . . . . . . . . . . . . . . . 152.3 Axiom of Inverse and Engel’s Counter-Example . . . . . . . . . . . . . . . . . 19References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3 Fundamental Differential Equationsfor Finite Continuous Transformation Groups . . . . . . . . . . . . . . . . . . . . . 233.1 Concept of Local Transformation Group . . . . . . . . . . . . . . . . . . . . . . . 24
3.1.1 Transformation Group Axioms . . . . . . . . . . . . . . . . . . . . . . . . . 243.1.2 Some Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2 Changes of Coordinates and of Parameters . . . . . . . . . . . . . . . . . . . . . 273.3 Geometric Introduction of Infinitesimal Transformations . . . . . . . . . . 313.4 Derivation of Fundamental Partial Differential Equations . . . . . . . . . 33
3.4.1 Restricting Considerations to a Single System of Parameters 343.4.2 Comparing Different Frames
of Infinitesimal Transformations . . . . . . . . . . . . . . . . . . . . . . . . 353.5 Essentializing the Group Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.6 First Fundamental Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.7 Fundamental Differential Equations
for the Inverse Transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.8 Transfer of Individual Infinitesimal Transformations
by the Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
ix

x Contents
3.8.1 Synthetic, Geometric Counterpart of the Computations . . . . . 463.8.2 Transfer of General Infinitesimal Transformations . . . . . . . . . 473.8.3 Towards the Adjoint Action . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.9 Substituting the Axiom of Inversefor a Differential Equations Assumption . . . . . . . . . . . . . . . . . . . . . . . 503.9.1 Specifying Domains of Existence . . . . . . . . . . . . . . . . . . . . . . . 513.9.2 Group Composition Axiom And Fundamental Differential
Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543.9.3 The Differential Equations Assumption
And Its Consequences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.9.4 Towards the Theorem 26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583.9.5 Metaphysical Links With Substitution Theory . . . . . . . . . . . . 59
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4 One-Term Groupsand Ordinary Differential Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.1 Mechanical and Mental Images . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.2 Straightening of Flows and the Exponential Formula . . . . . . . . . . . . . 64
4.2.1 The Exponential Analytic Flow Formula . . . . . . . . . . . . . . . . . 664.2.2 Action on Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.3 Exponential Change of Coordinates and Lie Bracket . . . . . . . . . . . . . 704.3.1 Flows as Changes of Coordinates . . . . . . . . . . . . . . . . . . . . . . . 72
4.4 Essentiality of Multiple Flow Parameters . . . . . . . . . . . . . . . . . . . . . . . 734.5 Generation of an r-Term Group by its One-Term Subgroups . . . . . . . 804.6 Applications to the Economy of Axioms . . . . . . . . . . . . . . . . . . . . . . . 82References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Part II English Translation
5 Complete Systems of Partial Differential Equations . . . . . . . . . . . . . . . . 95§ 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97§ 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98§ 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102§ 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104§ 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106§ 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6 New Interpretation of the Solutions of a Complete System . . . . . . . . . . 111§ 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111§ 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114§ 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
7 Determination of All Systems of EquationsWhich Admit Given Infinitesimal Transformations . . . . . . . . . . . . . . . . 123
§ 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123§ 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130

Contents xi
§ 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133§ 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136§ 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138§ 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143§ 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
8 Complete Systems Which AdmitAll Transformationsof a One-term Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
§ 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152§ 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
9 Characteristic RelationshipsBetween the Infinitesimal Transformations of a Group . . . . . . . . . . . . . 161
§ 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161§ 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166§ 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170§ 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173§ 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174§ 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178§ 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180§ 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
10 Systems of Partial Differential Equationsthe General Solution of WhichDepends Only Upon a Finite Numberof Arbitrary Constants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
§ 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188§ 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
11 The Defining Equationsfor the Infinitesimal Transformations of a Group . . . . . . . . . . . . . . . . . . 199
§ 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199§ 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201§ 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203§ 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208§ 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
12 Determination of All Subgroups of an r-term Group . . . . . . . . . . . . . . . 217§ 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217§ 55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219§ 56. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221§ 57. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222

xii Contents
13 Transitivity, Invariants, Primitivity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225§ 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225§ 59. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231§ 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
14 Determination of All Systems of EquationsWhich Admit a Given r-term Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
§ 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236§ 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238§ 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241§ 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242§ 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248§ 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249§ 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251§ 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
15 Invariant Families of Infinitesimal Transformations . . . . . . . . . . . . . . . . 257§ 69. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260§ 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267§ 71. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 268§ 72. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270§ 73. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271§ 74. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272§ 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
16 The Adjoint Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283§ 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285§ 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288§ 78. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290§ 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292
17 Composition and Isomorphism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301§ 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301§ 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308§ 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311§ 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321
18 Finite Groups, the Transformations of WhichForm Discrete Continuous Families . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323
§ 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324§ 85. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 330§ 86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332§ 87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339

Contents xiii
19 Theory of the Similarity [AEHNLICHKEIT] of r-term Groups . . . . . . . . 341§ 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341§ 89. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343§ 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348§ 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354§ 92. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367§ 93. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373§ 94. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374
20 Groups, the Transformations of WhichAre Interchangeable With All Transformationsof a Given Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 379
§ 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 379§ 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 389§ 97. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393§ 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400§ 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404
21 The Group of Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 411§ 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412§ 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414§ 102. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 417§ 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422§ 104. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434§ 105. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 438
22 The Determination of All r-term Groups . . . . . . . . . . . . . . . . . . . . . . . . . . 441§ 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442§ 107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445§ 108. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 457§ 109. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464
23 Invariant Families of Manifolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 469§ 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 470§ 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473§ 112. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483§ 113. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 488§ 114. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 490§ 115. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492§ 116. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495§ 117. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 498§ 118. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 498§ 119. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 499§ 120. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 501

xiv Contents
24 Systatic and Asystatic Transformation Groups . . . . . . . . . . . . . . . . . . . . 505§ 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 506§ 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 509§ 123. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511§ 124. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516§ 125. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 521§ 126. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524
25 Differential Invariants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 529§ 127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 530§ 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534§ 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 538§ 130. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 547§ 131. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554§ 132. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555§ 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555
26 The General Projective Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 561§ 134. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 561§ 135. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564§ 136. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 566§ 137. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 568§ 138. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 569§ 139. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 570§ 140. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575§ 141. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 576§ 142. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 579§ 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 580
27 Linear Homogeneous Groups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583§ 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583§ 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 585§ 146. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 589§ 147. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593§ 148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 598
28 Approach [ANSATZ] towards the Determinationof All Finite Continuous Groupsof the n-times Extended Space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 601
§ 149. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 602§ 105. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 607§ 151. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 616

Contents xv
29 Characteristic Properties of the GroupsWhich are Equivalent to Certain Projective Groups . . . . . . . . . . . . . . . . 621
§ 152. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 622§ 153. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 630§ 154. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 632
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 637
Glossary of significantly used words . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 639
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 645


Part IModern Presentation


Chapter 1Three Principles of ThoughtGoverning the Theory of Lie
Let x = (x1, . . . ,xn) be coordinates on an n-dimensional real or complex euclideanspace Cn or Rn, considered as a source domain. The archetypal objects of Lie’sTheory of Continuous Transformation Groups are point transformation equations:
x′i = fi(x1, . . . xn; a1, . . . ,ar) (i=1 ···n),
parameterized by a finite number r of real or complex parameters (a1, . . . ,ar),namely each map x′ = f (x; a) =: fa(x) is assumed to constitute a diffeomorphismfrom some domain1 in the source space into some domain in a target space ofthe same dimension equipped with coordinates (x′1, . . . ,x
′n). Thus, the functional
determinant:
detJac( f ) =
∣∣∣∣∣∣∣∣∂ f1∂x1
· · · · · · ∂ f1∂xn
.... . .
...∂ fn∂x1
· · · · · · ∂ fn∂xn
∣∣∣∣∣∣∣∣= ∑σ∈Permn
sign(σ)∂ f1
∂xσ(1)
∂ f2
∂xσ(2)· · · ∂ fn
∂xσ(n)
vanishes at no point of the source domain.
§ 15. ([1], pp. 25–26)[The concepts of transformation x′ = f (x) and of transformation equations
x′ = f (x; a) are of purely analytic nature.] However, these concepts can receivea graphic interpretation [ANSCHAULICH AUFFASUNG], when the concept of ann-times extended space [RAUM] is introduced.
If we interpret x1, . . . ,xn as the coordinates for points [PUNKTCOORDI-NATEN] of such a space, then a transformation x′i = fi(x1, . . . ,xn) appears asa point transformation [PUNKTTRANSFORMATION]; consequently, this trans-formation can be interpreted as an operation which consists in that, every pointxi is transferred at the same time in the new position x′i. One expresses this as
1 By domain, it will always been meant a connected, nonempty open set.
3

4 1 Three Principles of Thought Governing the Theory of Lie
follows: the transformation in question is an operation through which the pointsof the space x1, . . . ,xn are permuted with each other.
Before introducing the continuous group axioms in Chap. 3 below, the very firstquestion to be settled is: how many different transformations x′i = fi(x; a) do cor-respond to the ∞r different systems of values (a1, . . . ,ar)? Some parameters mightindeed be superfluous, hence they should be removed from the beginning, as will beachieved in Chap. 2. For this purpose, it is crucial to formulate explicitly and oncefor all three principles of thought concerning the admission of hypotheses that dohold throughout the theory of continuous groups developed by Lie.
General Assumption of Analyticity
Curves, surfaces, manifolds, groups, subgroups, coefficients of infinitesimal trans-formations, etc., all mathematical objects of the theory will be assumed to be ana-lytic, i.e. their representing functions will be assumed to be locally expandable inconvergent, univalent power series defined in a certain domain of an appropriate Rm.
Principle of Free Generic Relocalization
Consider a local mathematical object which is represented by functions that are an-alytic in some domain U1, and suppose that a certain “generic” nice behaviour holdson U1\D1 outside a certain proper closed analytic subset D1 ⊂ U1; for instance:the invertibility of a square matrix composed of analytic functions holds outside thezero-locus of its determinant. Then relocalize the considerations in some subdomainU2 ⊂U1\D1.
D1
D2 U3
U2
U3
U1 U2
Fig. 1.1 Relocalizing finitely many times in neighbourhoods of generic points
Afterwards, in U2, further reasonings may demand to avoid another proper closedanalytic subset D2, hence to relocalize the considerations into some subdomain U3 ⊂U2\D2, and so on. Most proofs of the Theorie der Transformationsgruppen, andespecially the classification theorems, do allow a great number of times such relo-calizations, often without any mention, such an act of thought being considered as

1 Three Principles of Thought Governing the Theory of Lie 5
implicitly clear, and free relocalization being justified by the necessity of studyingat first generic objects.
Giving no Name to Domains or Neighbourhoods
Without providing systematic notation, Lie and Engel commonly wrote the neigh-bourhood [der UMGEBUNG] (of a point), similarly as one speaks of the neighbour-hood of a house, or of the surroundings of a town, whereas contemporary topologyconceptualizes a (say, sufficiently small) given neighbourhood amongst an infinity.Contrary to what the formalistic, twentieth-century mythology tells sometimes, Lieand Engel did emphasize the local nature of the concept of transformation group interms of narrowing down neighbourhoods; we shall illustrate this especially whenpresenting Lie’s attempt to economize the axiom of inverse. Certainly, it is true thatmost of Lie’s results are stated without specifying domains of existence, but in factalso, it is moreover quite plausible that Lie soon realized that giving no name toneighbourhoods, and avoiding superfluous denotation is efficient and expeditious inorder to perform far-reaching classification theorems.
Therefore, adopting the economical style of thought in Engel-Lie’s treatise, our“modernization-translation” of the theory will, without nevertheless providing fre-quent reminders, presuppose that:
• mathematical objects are analytic;• relocalization is freely allowed;• open sets are often small, usually unnamed, and always connected.
Introduction ([1], pp. 1–8)
—————–
If the variables x′1, . . . ,x′n are determined as functions of x1, . . . ,xn by n equa-
tions solvable with respect to x1, . . . ,xn:
x′i = fi(x1, . . . ,xn) (i=1 ···n),
then one says that these equations represent a transformation [TRANSFORMA-TION] between the variables x and x′. In the sequel, we will have to deal withsuch transformations; unless the contrary is expressly mentioned, we will re-strict ourselves to the case where the fi are analytic [ANALYTISCH] functionsof their arguments. But because a not negligible portion of our results is inde-pendent of this assumption, we will occasionally indicate how various develop-ments take shape by taking into considerations functions of this sort.
When the functions fi(x1, . . . ,xn) are analytic and are defined inside a com-mon region [BEREICH], then according to the known studies of CAUCHY,

6 1 Three Principles of Thought Governing the Theory of Lie
WEIERSTRASS, BRIOT and BOUQUET, one can always delimit, in the mani-fold of all real and complex systems of values x1, . . . ,xn, a region (x) such thatall functions fi are univalent in the complete extension [AUSDEHNUNG] of thisregion, and so that as well, in the neighbourhood [UMGEBUNG] of every systemof values x0
1, . . . ,x0n belonging to the region (x), the functions behave regularly
[REGULÄR VERHALTEN], that is to say, they can be expanded in ordinary powerseries with respect to x1 − x0
1, . . . , xn − x0n with only entire positive powers.
For the solvability of the equations x′i = fi(x), a unique condition is necessaryand sufficient, namely the condition that the functional determinant:
∑ ± ∂ f1
∂x1· · · ∂ fn
∂xn
should not vanish identically. If this condition is satisfied, then the region (x)defined above can specially be defined so that the functional determinant doesnot take the value zero for any system of values in the (x). Under this assump-tion, if one lets the x take gradually all systems of values in the region (x), thenthe equations x′i = fi(x) determine, in the domain [GEBIETE] of the x′, a regionof such a nature that x1, . . . ,xn, in the neighbourhood of every system of valuesx′1
0, . . . ,x′n0 in this new region behave regularly as functions of x′1, . . . ,x
′n, and
hence can be expanded as ordinary power series of x′1 − x′10, . . . , x′n − x′n
0. It iswell known that from this, it does not follow that the xi are univalent functionsof x′1, . . . ,x
′n in the complete extension of the new region; but when necessary,
it is possible to narrow down the region (x) defined above so that two differentsystems of values x1, . . . ,xn of the region (x) always produce two, also differentsystems of values x′1 = f1(x), . . . , x′n = fn(x).
Thus, the equations x′i = fi(x) establish a univalent invertible relationship[BEZIEHUNG] between regions in the domain of the x and regions in the domainof the x′; to every system of values in one region, they associate one and onlyone system of values in the other region, and conversely.
If the equations x′i = fi(x) are solved with respect to the x, then in turn, theresulting equations:
xk = Fk(x′1, . . . ,x′n) (k=1 ···n)
again represent a transformation. The relationship between this transformationand the initial one is evidently a reciprocal relationship; accordingly, one says:the two transformations are inverse one to another. From this definition, it visi-bly follows:
If one executes at first the transformation:
x′i = fi(x1, . . . ,xn) (i=1 ···n)
and afterwards the transformation inverse to it:

1 Three Principles of Thought Governing the Theory of Lie 7
x′′i = Fi(x′1, . . . ,x′n) (i=1 ···n),
then one obtains the identity transformation:
x′′i = xi (i=1 ···n).
Here lies the real definition of the concept [BEGRIFF] of two transformationsinverse to each other.
In general, if one executes two arbitrary transformations:
x′i = fi(x1, . . . ,xn), x′′i = gi(x′1, . . . ,x′n) (i=1 ···n)
one after the other, then one obtains a new transformation, namely the followingone:
x′′i = gi(
f1(x), . . . , fn(x))
(i=1 ···n).
In general, this new transformation naturally changes when one changes theorder [REIHENFOLGE] of the two transformations; however, it can also happenthat the order of the two transformations is indifferent. This case occurs whenone has identically:
gi(
f1(x), . . . , fn(x))≡ fi
(g1(x), . . . ,gn(x)
)(i=1 ···n) ;
we then say, as in the process of the Theory of Substitutions [VORGANG DERSUBSTITUTIONENTHEORIE]: the two transformations:
x′i = fi(x1, . . . ,xn) (i=1 ···n)
and:x′i = gi(x1, . . . ,xn) (i=1 ···n)
are interchangeable [VERTAUSCHBAR] one with the other. —A finite or infinite family [SCHAAR] of transformations between the x and the
x′ is called a group of transformations or a transformation group when any twotransformations of the family executed one after the other give a transformationwhich again belongs to the family.†
A transformation group is called discontinuous when it consists of a discretenumber of transformations, and this number can be finite or infinite. Two trans-formations of such a group are finitely different from each other. The discon-tinuous groups belong to the domain of the Theory of Substitutions, so in thesequel, they will remain out of consideration.
† Sophus LIE, Gesellschaft der Wissenschaften zu Christiania 1871, p. 243. KLEIN, Vergle-ichende Betrachtungen über neuere geometrische Forschungen, Erlangen 1872. LIE, GöttingerNachrichten 1873, 3. Decemb.

8 1 Three Principles of Thought Governing the Theory of Lie
The discontinuous groups stand in opposition to the continuous transforma-tion groups, which always contain infinitely many transformations. A transfor-mation group is called continuous when it is possible, for every transformationbelonging to the group, to indicate certain other transformations which are onlyinfinitely little different from the transformation in question, and when by con-trast, it is not possible to reduce the complete totality [INBEGRIFF] of transfor-mations contained in the group to a single discrete family.
Now, amongst the continuous transformation groups, we consider againtwo separate categories [KATEGORIEN] which, in the nomenclature [BENEN-NUNG], are distinguished as finite continuous groups and as infinite continuousgroups. To begin with, we can only give provisional definitions of the two cate-gories, and these definitions will be apprehended precisely later.
A finite continuous transformation group will be represented by one systemof n equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n),
where the fi denote analytic functions of the variables x1, . . . ,xn and of the arbi-trary parameters a1, . . . ,ar. Since we have to deal with a group, two transforma-tions:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar)
x′′i = fi(x′1, . . . ,x′n, a1, . . . ,ar),
when executed one after the other, must produce a transformation which belongsto the group, hence which has the form:
x′′i = fi(
f1(x,a), . . . , fn(x,a), b1, . . . ,br)= fi(x1, . . . ,xn, c1, . . . ,cr).
Here, the ck are naturally independent of the x and so, are functions of only thea and the b.
Example. A known group of this sort is the following:
x′ =x+a1
a2 x+a3,
which contains the three parameters a1, a2, a3. If one executes the two transfor-mations:
x′ =x+a1
a2 x+a3, x′′ =
x′+b1
b2 x′+b3
one after the other, then one receives:
x′′ =x+ c1
c2 x+ c3,
where c1, c2, c3 are defined as functions of the a and the b by the relations:

1 Three Principles of Thought Governing the Theory of Lie 9
c1 =a1 +b1 a3
1+b1 a2, c2 =
b2 +a2 b3
1+b1 a2, c3 =
b2 a1 +b3 a3
1+b1 a2.
The following group with the n2 parameters aik is not less known:
x′i =n
∑k=1
aik xk (i=1 ···n).
If one sets here:
x′′ν =n
∑i=1
bν i x′i (i=1 ···n),
then it comes:
x′′ν =1···n
∑i, k
bν i aik xk =n
∑k=1
cνk xk,
where the cνk are determined by the equations:
cνk =n
∑i=1
bν i aik (ν , k=1 ···n).−
In order to arrive at a usable definition of a finite continuous group, we wantat first to somehow reshape the definition of finite continuous groups. On theoccasion, we use a proposition from the theory of differential equations aboutwhich, besides, we will come back later in a more comprehensive way (cf.Chap. 10).
Let the equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
represent an arbitrary continuous group. According to the proposition in ques-tion, it is then possible to define the functions fi through a system of differentialequations, insofar as they depend upon the x. To this end, one only has to differ-entiate the equations x′i = fi(x,a) with respect to x1, . . . ,xn sufficiently often andthen to set up all equations that may be obtained by elimination of a1, . . . ,ar.If one is gone sufficiently far by differentiation, then by elimination of the a,one obtains a system of differential equations for x′1, . . . ,x
′n, whose most gen-
eral system of solutions is represented by the initial equations x′i = fi(x,a) withthe r arbitrary parameters. Now, since by assumption the equations x′i = fi(x,a)define a group, it follows that the concerned system of differential equationspossesses the following remarkable property: if x′i = fi(x1, . . . ,xn, b1, . . . ,br) isa system of solutions of it, and if x′i = fi(x,a) is a second system of solutions,then:
x′i = fi(
f1(x,a), . . . , fn(x,a), b1, . . . ,br)
(i=1 ···n)
is also a system of solutions.

10 1 Three Principles of Thought Governing the Theory of Lie
From this, we see that the equations of an arbitrary finite continuous trans-formation group can be defined by a system of differential equations whichpossesses certain specific properties. Firstly, from two systems of solutions ofthe concerned differential equations one can always derive, in the way indicatedabove, a third system of solutions: it is precisely in this that we have to dealwith a group. Secondly, the most general system of solutions of the concerneddifferential equations depends only upon a finite number of arbitrary constants:this circumstance expresses that our group is finite.
Now, we assume that there is a family of transformations x′i = fi(x1, . . . ,xn)which is defined by a system of differential equations of the form:
Wk
(x′1, . . . ,x
′n,
∂x′1∂x1
, . . . ,∂ 2x′1∂x2
1, . . .
)= 0 (k=1, 2 ···).
Moreover, we assume that this system of differential equations possesses thefirst one of the two mentioned properties, but not the second one; therefore, withx′i = fi(x1, . . . ,xn) and x′i = gi(x1, . . . ,xn), then always, x′i = gi
(f1(x), . . . , fn(x)
)is also a system of solutions of these differential equations, and the most gen-eral system of solutions of them does not only depend upon a finite number ofarbitrary constants, but also upon higher sorts of elements, as for example, uponarbitrary functions. Then the totality of all transformations which satisfy theconcerned differential equations evidently forms again a group, and in general,a continuous group, though no more a finite one, but one which we call infinitecontinuous.
Straightaway, we give a few simple examples of infinite continuous transfor-mation groups.
When the differential equations which define the concerned infinite groupreduce to the identity equation 0 = 0, then the transformations of the groupread:
x′i = Πi(x1, . . . ,xn) (i=1 ···n)
where the Πi denote arbitrary analytic functions of their arguments.Also the equations:
∂x′i∂xk
= 0 (i 6=k ; i, k=1 ···n)
define an infinite group, namely the following one:
x′i = Πi(xi) (i=1 ···n),
where again the Πi are absolutely arbitrary.
Besides, it is to be observed that the concept of an infinite continuous groupcan yet be understood more generally than what takes place here. Actually, one

1 Three Principles of Thought Governing the Theory of Lie 11
could call infinite continuous any continuous group which is not finite. However,this definition does not coincide with the one given above.
For instance, the equations:
x′ = F(x), y′ = F(y)
in which F , for the two cases, denotes the same function of its arguments, rep-resent a group. This group is continuous, since all its transformations are rep-resented by a single system of equations; in addition, it is obviously not finite.Consequently, it would be an infinite continuous group if we would interpretthis concept in the more general sense indicated above. But on the other hand,it is not possible to define the family of the transformations:
x′ = F(x), y′ = F(y)
by differential equations that are free of arbitrary elements. Consequently, thedefinition stated first for an infinite continuous group does not fit to this case.Nevertheless, we find suitable to consider only the infinite continuous groupswhich can be defined by differential equations and hence, we always set as fun-damental our first, tight definition.
We do not want to omit emphasizing that the concept of “transformationgroup” is still not at all exhausted by the difference between discontinuous andcontinuous groups. Rather, there are transformation groups which are subordi-nate to none of these two classes but which have something in common witheach one of the two classes. In the sequel, we must at least occasionally alsotreat this sort of groups. Provisionally, two examples will suffice.
The totality of all coordinate transformations of a plane by which one trans-fers an ordinary right-angled system of coordinates to another one forms a groupwhich is neither continuous, nor discontinuous. Indeed, the group in questioncontains two separate categories of transformations between which a continu-ous transition is not possible: firstly, the transformations by which the old andthe new systems of coordinates are congruent, and secondly, the transformationsby which these two systems are not congruent.
The first ones have the form:
x′−a = x cosα − y sinα , y′−b = x sinα + y cosα,
while the analytic expression of the second ones reads:
x′−a = x cosα + y sinα , y′−b = x sinα − y cosα.
Each one of these systems of equations represents a continuous family of trans-formations, hence the group is not discontinuous; but it is also not continuous,because both systems of equations taken together provide all transformations

12 1 Three Principles of Thought Governing the Theory of Lie
of the group; thus, the transformations of the group decompose in two discretefamilies. If one imagines the plane x,y in ordinary space and if one adds z asa third right-angled coordinate, then one can imagine the totality of coordinatetransformations of the plane z = 0 is a totality of certain movements [BEWE-GUNGEN] of the space, namely the movements during which the plane z = 0keeps its position. Correspondingly, these movements separate in two classes,namely in the class which only shifts the plane in itself and in the class whichturns the plane.
As a second example of such a group, one can yet mention the totality of allprojective and dualistic transformations of the plane.
—————–
According to these general remarks about the concept of transformationgroup, we actually turn ourselves to the consideration of the finite continu-ous transformation groups which constitute the object of the studies follow-ing. These studies are divided in three volumes [ABSCHNITTE]. The first vol-ume treats finite continuous groups in general. The second volume treats the fi-nite continuous groups whose transformations are so-called contact transforma-tions [BERÜHRUNGSTRANSFORMATIONEN]. Lastly, in the third volume, cer-tain general problems of group theory will be carried out in great details for asmall number of variables.
References
1. Engel, F., Lie, S.: Theorie der Transformationsgruppen. Erster Abschnitt. Unter Mitwirkungvon Prof. Dr. Friedrich Engel, bearbeitet von Sophus Lie, Verlag und Druck von B.G. Teubner,Leipzig und Berlin, xii+638 pp. (1888). Reprinted by Chelsea Publishing Co., New York, N.Y.(1970)
—————–

Chapter 2Local Transformation Equationsand Essential Parameters
Abstract Let K=R or C, throughout. As said in Chap. 1, transformation equationsx′i = fi(x; a1, . . . ,ar), i = 1, . . . ,n, which are local, analytic diffeomorphisms of Kn
parametrized by a finite number r of real or complex numbers a1, . . . ,ar, constitutethe archetypal objects of Lie’s theory. The preliminary question is to decidewhether the fi really depend upon all parameters, and also, to get rid of superfluousparameters, if there are any.
Locally in a neighborhood of a fixed x0, one expands fi(x; a)=∑α∈Nn U iα(a)(x−
x0)α in power series and one looks at the infinite coefficient mapping U∞ : a 7−→(
U iα(a)
)16i6nα∈Nn from Kr to K∞, expected to tell faithfully the dependence with
respect to a in question. If ρ∞ denotes the maximal, generic and locally constantrank of this map, with of course 0 6 ρ∞ 6 r, then the answer says that locallyin a neighborhood of a generic a0, there exist both a local change of parametersa 7→
(u1(a), . . . ,uρ∞(a)
)=: u decreasing the number of parameters from r down to
ρ∞, and new transformation equations:
x′i = gi(x; u1, . . . ,uρ∞
)(i=1 ···n)
depending only upon ρ∞ parameters which give again the old ones:
gi(x; u(a)
)≡ fi(x; a) (i=1 ···n).
At the end of this brief chapter, before introducing precisely the local Lie groupaxioms, we present an example due to Engel which shows that the axiom of inversecannot be deduced from the axiom of composition, contrary to one of Lie’s Idéesfixes.
2.1 Generic Rank of the Infinite Coefficient Mapping
Thus, we consider local transformation equations:
13

14 2 Local Transformation Equations and Essential Parameters
x′i = fi(x1, . . . ,xn;a1, . . . ,ar) (i=1 ···n).
We want to illustrate how the principle of free generic relocalization exposed justabove on p. 4 helps to get rid of superfluous parameters ak. We assume that the fiare defined and analytic for x belonging to a certain (unnamed, connected) domainof Kn and for a belonging as well to some domain of Kr.
Expanding the fi of x′i = fi(x;a) in power series with respect to x− x0 in someneighborhood of a point x0:
fi(x;a) = ∑α∈Nn
U iα(a)(x− x0)
α ,
we get an infinite number of analytic functions U iα = U i
α(a) of the parameters thatare defined in some uniform domain of Kr. Intuitively, this infinite collection ofcoefficient functions U i
α(a) should show how f (x;a) does depend on a.To make this claim precise, we thus consider the map:
U∞ : Kr 3 a 7−→(U i
α(a))16i6n
α∈Nn ∈K∞.
For the convenience of applying standard differential calculus in finite dimension,we simultaneously consider also all its κ-th truncations:
Uκ : Kr 3 a 7−→(U i
α(a))16i6n|α |6κ ∈Kn (n+κ)!
n! κ! ,
where (n+κ)!n! κ! is the number of multiindices α ∈Nn whose length |α| :=α1+ · · ·+αn
satisfies the upper bound |α | 6 κ . We call Uκ , U∞ the (in)finite coefficient map-ping(s) of x′i = fi(x; a).
The Jacobian matrix of Uκ is the r×(n (n+κ)!
n! κ!
)matrix:(
∂U iα
∂a j(a))|α |6κ,16i6n
16 j6r,
its r rows being indexed by the partial derivatives. The generic rank of Uκ is thelargest integer ρκ 6 r such that there is a ρκ ×ρκ minor of JacUκ which does notvanish identically, but all (ρκ + 1)× (ρκ + 1) minors do vanish identically. Theuniqueness principle for analytic functions then insures that the common zero-set ofall ρκ ×ρκ minors is a proper closed analytic subset Dκ (of the unnamed domainwhere the U i
α are defined), so it is stratified by a finite number of submanifoldsof codimension > 1 ([8, 2, 3, 5]), and in particular, it is of empty interior, henceintuitively “thin”.
So the set of parameters a at which there is a least one ρκ ×ρκ minor of JacUκwhich does not vanish is open and dense. Consequently, “for a generic point a”, themap Uκ is of rank > ρκ at every point a′ sufficiently close to a (since the corre-sponding ρκ ×ρκ minor does not vanish in a neighborhood of a), and because all(ρκ + 1)× (ρκ + 1) minors of JacUκ were assumed to vanish identically, the map

2.2 Quantitative Criterion for the Number of Superfluous Parameters 15
Uκ happens to be in fact of constant rank Uκ in a (small) neighborhood of everysuch a generic a.
Insuring constancy of a rank is one important instance of why free relocaliza-tion is useful: a majority of theorems of the differential calculus and of the classicaltheory of (partial) differential equations do hold under specific local constancy as-sumptions.
As κ increases, the number of columns of JacUκ increases, hence ρκ1 6 ρκ2for κ1 6 κ2. Since ρκ 6 r is anyway bounded, the generic rank of Uκ becomesconstant for all κ > κ0 bigger than some large enough κ0. Thus, let ρ∞ 6 r denotethis maximal possible generic rank.
Definition 2.1. The parameters (a1, . . . ,ar) of given point transformation equationsx′i = fi(x;a) are called essential if, after expanding fi(x;a) =∑α∈Nn U i
α(a)(x−x0)α
in power series at some x0, the generic rank ρ∞ of the coefficient mapping a 7−→(U i
α(a))16i6n
α∈Nn is maximal, equal to the number r of parameters: ρ∞ = r.
Without entering technical details, we make a remark. It is a consequence of theprinciple of analytic continuation and of some reasonings with power series that thesame maximal rank ρ∞ is enjoyed by the coefficient mapping a 7→
(U ′i
α(a))16i6n
α∈Nn
for the expansion of fi(x;a) = ∑α∈Nn U ′iα(a)(x− x′0)
α at another, arbitrary pointx′0. Also, one can prove that ρ∞ is independent of the choice of coordinates xi andof parameters ak. These two facts will not be needed, and the interested reader isreferred to [9] for proofs of quite similar statements holding true in the context ofCauchy-Riemann geometry.
2.2 Quantitative Criterionfor the Number of Superfluous Parameters
It is rather not practical to compute the generic rank of the infinite Jacobian matrixJacU∞. To check essentiality of parameters in concrete situations, a helpful criteriondue to Lie is (iii) below.
Theorem 2.1. The following three conditions are equivalent:
(i) In the transformation equations
x′i = fi(x1, . . . ,xn; a1, . . . ,ar) = ∑α∈Nn
U iα(a)(x− x0)
α(i=1 ···n),
the parameters a1, . . . ,ar are not essential.(ii) (By definition) The generic rank ρ∞ of the infinite Jacobian matrix:
JacU∞(a) =(∂U i
α∂a j
(a))α∈Nn,16i6n
16 j6r

16 2 Local Transformation Equations and Essential Parameters
is strictly less than r.
(iii) Locally in a neighborhood of every (x0,a0), there exists a not identically zeroanalytic vector field on the parameter space:
T =n
∑k=1
τk(a)∂
∂ak
which annihilates all the fi(x;a):
0 ≡ T fi =n
∑k=1
τk∂ fi
∂ak= ∑
α∈Nn
r
∑k=1
τk(a)∂U i
α∂ak
(a)(x− x0)α
(i=1 ···n).
More generally, if ρ∞ denotes the generic rank of the infinite coefficient mapping:
U∞ : a 7−→(U i
α(a))16i6n
α∈Nn ,
then locally in a neighborhood of every (x0,a0), there exist exactly r−ρ∞, and nomore, analytic vector fields:
Tµ =n
∑k=1
τµk(a)∂
∂ak(µ =1 ···r−ρ∞),
with the property that the dimension of Span(T1∣∣a, . . . , Tr−ρ∞
∣∣a
)is equal to r−ρ∞
at every parameter a at which the rank of U∞ is maximal equal to ρ∞, such that thederivations Tµ all annihilate the fi(x;a):
0 ≡ Tµ fi =r
∑k=1
τµk(a)∂ fi
∂ak(x;a) (i=1 ···n; µ =1 ···r−ρ∞).
Proof. Just by the chosen definition, we have (i) ⇐⇒ (ii). Next, suppose that condi-tion (iii) holds, in which the coefficients τk(a) of the concerned nonzero derivationT are locally defined. Reminding that the Jacobian matrix JacU∞ has r rows and aninfinite number of columns, we then see that the n annihilation equations 0 ≡ T fi,when rewritten in matrix form as:
0 ≡(τ1(a), . . . ,τr(a)
)(∂U iα
∂a j(a))α∈Nn,16i6n
16 j6r
just say that the transpose of JacU∞(a) has nonzero kernel at each a where thevector T
∣∣a =
(τ1(a), . . . ,τr(a)
)is nonzero. Consequently, JacU∞ has rank strictly
less than r locally in a neighborhood of every a0, hence in the whole a-domain. So(iii) ⇒ (ii).
Conversely, assume that the generic rank ρ∞ of JacU∞ is < r. Then there existρ∞ < r “basic” coefficient functions U
i(1)α(1), . . . ,U
i(ρ∞)α(ρ∞)
(there can be several choices)
such that the generic rank of the extracted map a 7→(U
i(l)α(l)
)16l6ρ∞
equals ρ∞ al-

2.2 Quantitative Criterion for the Number of Superfluous Parameters 17
ready. We abbreviate:
ul(a) := Ui(l)
α(l)(a) (l=1 ···ρ∞).
The goal is to find vectorial local analytic solutions(τ1(a), . . . ,τr(a)
)to the infinite
number of linear equations:
0 ≡ τ1(a)∂U i
α(a)∂a1
(a)+ · · ·+ τr(a)∂U i
α(a)∂ar
(a) (i=1 ···n ; α ∈Nn).
To begin with, we look for solutions of the finite, extracted linear system of ρ∞equations with the r unknowns τk(a):
0 ≡ τ1(a)∂u1
∂a1(a)+ · · ·+ τρ∞(a)
∂u1
∂aρ∞(a)+ · · ·+ τr(a)
∂u1
∂ar(a)
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·
0 ≡ τ1(a)∂uρ∞
∂a1(a)+ · · ·+ τρ∞(a)
∂uρ∞
∂aρ∞(a)+ · · ·+ τr(a)
∂uρ∞
∂ar(a).
After possibly renumbering the variables (a1, . . . ,ar), we can assume that the leftρ∞ ×ρ∞ minor of this system:
∆(a) := det( ∂ul
∂am(a))16l6ρ∞
16m6ρ∞
does not vanish identically. However, it can vanish at some points, and while en-deavoring to solve the above linear system by an application of the classical ruleof Cramer, the necessary division by the determinant ∆(a) introduces poles that areundesirable, for we want the τk(a) to be analytic. So, for any µ with 1 6 µ 6 r−ρ∞,we look for a solution (rewritten as a derivation) under the specific form:
Tµ :=−∆(a)∂
∂aρ∞+µ+ ∑
16k6ρ∞
τµk(a)∂
∂ak(µ =1 ···r−ρ∞),
in which we introduce in advance a factor ∆(a) designed to compensate the un-avoidable division by ∆(a). Indeed, such a Tµ will annihilate the ul :
0 ≡ Tµu1 ≡ ·· · ≡ Tµuρ∞
if and only its coefficients are solutions of the linear system:

18 2 Local Transformation Equations and Essential Parameters∆(a)
∂u1
∂aρ∞+µ(a)≡ τµ1(a)
∂u1
∂a1(a)+ · · ·+ τµρ∞(a)
∂u1
∂aρ∞(a)
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·
∆(a)∂uρ∞
∂aρ∞+µ(a)≡ τµ1(a)
∂uρ∞
∂a1(a)+ · · ·+ τµρ∞(a)
∂uρ∞
∂aρ∞(a).
Cramer’s rule then yields the unique solution:
τµk(a) =1
∆(a)
∣∣∣∣∣∣∣∂u1∂a1
(a) · · · ∆(a) ∂u1∂aρ∞+µ
(a) · · · ∂u1∂aρ∞
(a)· · · · · · · · · · · · · · · · · · · · · · · · · · ·
∂uρ∞∂a1
(a) · · · ∆(a) ∂uρ∞∂aρ∞+µ
(a) · · · ∂uρ∞∂aρ∞
(a)
∣∣∣∣∣∣∣ (k=1 ···r),
where, as predicted, the overall factor ∆(a) of the k-th column compensates thedivision by the determinant ∆(a) of this system, so that the Tµ all have analyticcoefficients indeed.
Clearly, T1, . . . ,Tr−ρ∞ are linearly independent at all (generic) points a where∆(a) 6= 0. It remains to show that the Tµ also annihilate all other coefficient func-tions U i
α .Thus, let (i,α) 6= (i(1),α(1)), . . . ,(i(ρ∞),α(ρ∞)). By the very definition of ρ∞,
the generic rank of any r× (1+ρ∞) extracted subJacobian matrix:∂U i
α∂a1
(a) ∂u1∂a1
(a) · · · ∂uρ∞∂a1
(a)· · · · · · · · · · · ·
∂U iα
∂ar(a) ∂u1
∂ar(a) · · · ∂uρ∞
∂ar(a)
must always be equal to ρ∞, the generic rank of its last ρ∞ columns. Consequently,in a neighborhood of every point a at which its top right ρ∞ ×ρ∞ minor ∆(a) doesnot vanish, the first column is a certain linear combination:
∂U αi
∂ak(a) = λ1(a)
∂u1
∂ak(a)+ · · ·+λρ∞(a)
∂uρ∞
∂ak(a) (i=1 ···n ; α ∈Nn ; k=1 ···r)
of the last ρ∞ columns in question, where, again thanks to an appropriate applica-tion of Cramer’s rule, the coefficients λl(a) are analytic in the concerned genericneighborhood, for their denominator ∆(a) is 6= 0 there. It then follows immediatelyby appropriate scalar multiplication and summation that:
r
∑k=1
τµk(a)∂U i
α∂ak
(a)≡ λ1(a)r
∑k=1
τµk(a)∂u1
∂ak(a)+ · · ·+λρ∞(a)
r
∑k=1
τµk(a)∂uρ∞
∂ak(a)
≡ λ1(a)Tµ u1 + · · ·+λρ∞(a)Tµ uρ∞
≡ 0 (i=1 ···n ; α ∈Nn).
But since these analytic equations hold on the dense open set where ∆(a) 6= 0, wededuce by continuity that the equations:

2.3 Axiom of Inverse and Engel’s Counter-Example 19
0 ≡ T1 U iα ≡ ·· · ≡ Tr−ρ∞ U i
α (i=1 ···n ; α ∈Nn)
do hold everywhere, as desired. In conclusion, we have shown the implication (ii)⇒ (iii), and simultaneously, we have established the last part of the theorem. ut
Corollary 2.1. Locally in a neighborhood of every generic point a0 at whichthe infinite coefficient mapping a 7→ U∞(a) has maximal, locally constant rankequal to its generic rank ρ∞, there exist both a local change of parametersa 7→
(u1(a), . . . ,uρ∞(a)
)=: u decreasing the number of parameters from r down to
ρ∞, and new transformation equations:
x′i = gi(x; u1, . . . ,uρ∞
)(i=1 ···n)
depending only upon ρ∞ parameters which give again the old ones:
gi(x; u(a)
)≡ fi(x; a) (i=1 ···n).
Proof. Choose ρ∞ coefficients Ui(l)
α(l)(a) =: ul(a), 1 6 l 6 ρ∞, with ∆(a) :=
det( ∂ul(a)
∂am(a))16l6ρ∞
16m6ρ∞6≡ 0 as in the proof of the theorem. Locally in some small
neighborhood of any a0 with ∆(a0) 6= 0, the infinite coefficient map U∞ hasconstant rank ρ∞, hence the constant rank theorem provides, for every (i,α), acertain function V i
α of ρ∞ variables such that:
U iα(a)≡ V i
α(u1(a), . . . ,uρ∞(a)
).
Thus, we can work out the power series expansion:
fi(x;a) = ∑α∈Nn U iα(a)(x− x0)
α
= ∑α∈Nn V iα(u1(a), . . . ,uρ∞(a))(x− x0)
α
=: gi(x,u1(a), . . . ,uρ∞(a)).
which yields the natural candidate for gi(x; u). Lastly, one may verify that anyCauchy estimate for the growth decrease of U i
α(a) as |α| → ∞ insures a similarCauchy estimate for the growth decrease of b 7→ V i
α(u), whence each gi is analytic,and in fact, termwise substitution was legitimate. ut
Definition 2.2. Transformation equations x′i = fi(x1, . . . ,xn;a1, . . . ,ar), i = 1, . . . ,n,are called r-term when all its parameters (a1, . . . ,ar) are essential.
2.3 Axiom of Inverse and Engel’s Counter-Example
Every analytic diffeomorphism of an n-times extended space permutes all the pointsin a certain differentiable, invertible way. Although they act on a set of infinite car-dinality, diffeomorphisms can thus be thought to be sorts of analogs of the substi-

20 2 Local Transformation Equations and Essential Parameters
tutions on a finite set. In fact, in the years 1873–80, Lie’s Idée fixe was to build, inthe geometric realm of n-dimensional continua, a counterpart of the Galois theoryof substitutions of roots of algebraic equations ([6]).
As above, let x′ = f (x; a1, . . . ,ar) =: fa(x) be a family of (local) analytic diffeo-morphisms parameterized by a finite number r of parameters. For Lie, the basic,single group axiom should just require that such a family be closed under composi-tion, namely that one always has fa
(fb(x)
)≡ fc(x) for some c depending on a and
on b. More precisions on this definition will given in the next chapter, but at present,we ask whether one can really economize the other two group axioms: existence ofan identity element and existence of inverses.
Lemma 2.1. If H is any subset of some abstract group G with CardH < ∞ which isclosed under group multiplication:
h1h2 ∈ H whenever h1, h2 ∈ H,
then H contains the identity element e of G and every h ∈ H has an inverse in H, sothat H itself is a true subgroup of G.
Proof. Indeed, picking h ∈ H arbitrary, the infinite sequence h,h2,h3, . . . ,hk, . . . ofelements of the finite set H must become eventually periodic: ha = ha+n for somea > 1 and for some n > 1, whence e = hn, so e ∈ H and hn−1 is the inverse of h. ut
For more than thirteen years, Lie was convinced that a purely similar propertyshould also hold with G = Diffn being the (infinite continuous pseudo)group ofanalytic diffeomorphisms and with H ⊂ Diffn being any continuous family closedunder composition. We quote a characteristic excerpt of [7], pp. 444–445.
As is known, one shows in the theory of substitutions that the permutations of agroup can be ordered into pairwise inverse couples of permutations. Now, sincethe distinction between a permutation group and a transformation group onlylies in the fact that the former contains a finite and the latter an infinite numberof operations, it is natural to presume that the transformations of a transforma-tion group can also be ordered into pairs of inverse transformations. In previousworks, I came to the conclusion that this should actually be the case. But be-cause in the course of my investigations in question, certain implicit hypotheseshave been made about the nature of the appearing functions, then I think that it isnecessary to expressly add the requirement that the transformations of the groupcan be ordered into pairs of inverse transformations. In any case, I conjecturethat this is a necessary consequence of my original definition of the concept[BEGRIFF] of transformation group. However, it has been impossible for me toprove this in general.
As a proposal of counterexample that Engel devised in the first year he workedwith Lie (1884), consider the family of transformation equations:

2.3 Axiom of Inverse and Engel’s Counter-Example 21
x′ = ζ x,
where x, x′ ∈C and the parameter ζ ∈C is restricted to |ζ |< 1. Of course, this fam-ily is closed under any composition, say: x′ = ζ1 x and x′′ = ζ2 x′ = ζ1ζ2x, with in-deed |ζ2 ζ1|< 1 when |ζ1|, |ζ2|< 1, but neither the identity element nor any inversetransformation does belong to the family. However, the requirement |ζ |< 1 is heretoo artificial: the family extends in fact trivially as the complete group
(x′ = ζ x
)ζ∈C
of dilations of the line. Engel’s idea was to appeal to a Riemann map ω having|ζ | = 1 as a frontier of nonextendability. The map used by Engel is the follow-ing1. Let odk denote the number of odd divisors (including 1) of any integer k > 1.The theory of holomorphic functions in one complex variables yields the following.
Lemma 2.2. The infinite series:
ω(a) := ∑ν>1
aν
1−a2ν = ∑ν>1
(aν +a3ν +a5ν +a7ν + · · ·
)= ∑
k>1odk ak
converges absolutely in every open disc ∆ρ = z ∈C : |z|< ρ of radius ρ < 1 anddefines a univalent holomorphic function ∆ →C from the unit disc ∆ := |z|< 1 toC which does not extend holomorphically across any point of the unit circle ∂∆ :=|z|= 1.
In fact, any other similar Riemann biholomorphic map ζ 7−→ω(ζ ) =: λ from theunit disc ∆ onto some simply connected domain Λ :=ω(∆) having fractal boundarynot being a Jordan curve, as e.g. the Von Koch Snowflake Island, would do the job2.Denote then by λ 7−→ χ(λ ) =: ζ the inverse of such a map and consider the familyof transformation equations: (
x′ = χ(λ )x)
λ∈Λ .
By construction, |χ(λ )|< 1 for every λ ∈ Λ . Any composition of x′ = χ(λ1)x andof x′′ = χ(λ2)x′ is of the form x′′ = χ(λ )x, with the uniquely defined parameterλ := ω
(χ(λ1)χ(λ2)
), hence the group composition axiom is satisfied. However
there is again no identity element, and again, none transformation has an inverse.And furthermore crucially (and lastly), there does not exist any prolongation of thefamily to a larger domain Λ ⊃ Λ together with a holomorphic prolongation χ of χto Λ so that χ
(Λ)
contains a neighborhood of 1 (in order to catch the identity)or a fortiori a neighborhood of ∆ (in order to catch inverses of transformationsx′ = χ(λ )x with λ ∈ Λ close to ∂Λ ).
1 In the treatise [4], this example is presented at the end of Chap. 9, see below p. 179.2 A concise presentation of Carathéodory’s theory may be found in Chap. 17 of [10].

22 2 Local Transformation Equations and Essential Parameters
Observation
In Vol. I of the Theorie der Transformationsgruppen, this example appears only inChap. 9, on pp. 163–165, and it is written in small characters. In fact, Lie still be-lieved that a deep analogy with substitution groups should come out as a theorem.Hence the structure of the first nine chapters insist on setting aside, whenever pos-sible, the two axioms of existence of identity element and of existence of inverses.To do justice to this great treatise, we shall translate in Chap. 9 how Master Liemanaged to produce the Theorem 26 on p. 178, which he considered to provide thesought analogy with finite group theory, after taking Engel’s counterexample intoaccount.
References
1. Ackerman, M., Hermann, R.: Sophus Lie’s 1880 Transformation Group paper. Math. Sci. Press,Brookline, Mass. (1975)
2. Bochnak, J., Coste, M., Roy, M.-F.: Géométrie algébrique réelle. Ergenisse der Mathematikund ihrer Grenzgebiete (3), 12. Springer-Verlag, Berlin, x+373 pp. (1987)
3. Chirka, E.M.: Complex analytic sets. Mathematics and its applications (Soviet Series), 46.Kluwer Academic Publishers Group, Dordrecht, xx+372 pp. (1989)
4. Engel, F., Lie, S.: Theorie der Transformationsgruppen. Erster Abschnitt. Unter Mitwirkungvon Prof. Dr. Friedrich Engel, bearbeitet von Sophus Lie, Verlag und Druck von B.G. Teubner,Leipzig und Berlin, xii+638 pp. (1888). Reprinted by Chelsea Publishing Co., New York, N.Y.(1970)
5. Gunning, R.: Introduction to Holomorphic Functions of Several Variables, 3 vols. Wadsworth& Brooks/Cole. I: Function theory, xx+203 pp. II: Local theory, +218 pp. III: Homologicaltheory, +194 pp. (1990)
6. Hawkins, T.: Emergence of the theory of Lie groups. An essay in the history of mathematics1869–1926. Sources and studies in the history of mathematics and physical sciences, Springer-Verlag, Berlin, xiii+564 pp. (2001)
7. Lie, S.: Theorie der Transformationsgruppen. Math. Ann. 16, 441–528 (1880). Translated inEnglish and commented in: [1].
8. Malgrange, B.: Ideals of Differentiable Functions. Tata Institute of Fundamental ResearchStudies in Mathematics, No. 3, Bombay. Oxford University Press, London, vii+106 pp. (1967)
9. Merker, J.: On the local geometry of generic submanifolds of Cn and the analytic reflectionprinciple. Journal of Mathematical Sciences (N. Y.) 125, 751–824 (2005)
10. Milnor, J.: Dynamics in one complex variable. Annals of Mathematics Studies, 160. PrincetonUniversity Press, Princeton, Third Edition, viii+304 pp. (2006)
—————–

Chapter 3Fundamental Differential Equationsfor Finite Continuous Transformation Groups
Abstract A finite continuous local transformation group in the sense of Lie is afamily of local analytic diffeomorphisms x′i = fi(x; a), i = 1 . . . ,n, parametrized bya finite number r of parameters a1, . . . ,ar that is closed under composition and undertaking inverses:
fi(
f (x; a); b))= fi
(x; m(a,b)
)and xi = fi
(x′; i(a)
),
for some group multiplication map m and for some group inverse map i, both localand analytic. Also, it is assumed that there exists e = (e1, . . . ,er) yielding the iden-tity transformation fi(x; e)≡ xi.
Crucially, these requirements imply the existence of fundamental partial differ-ential equations:
∂ fi
∂ak(x; a) =−
r
∑j=1
ψk j(a)∂ fi
∂a j(x; e) (i=1 ···n, k=1 ···r)
which, technically speaking, are cornerstones of the basic theory. What matters hereis that the group axioms guarantee that the r × r matrix (ψk j) depends only on aand it is locally invertible near the identity. Geometrically speaking, these equationsmean that the r infinitesimal transformations:
Xak
∣∣x =
∂ f1
∂ak(x; a)
∂∂x1
+ · · ·+ ∂ fn
∂ak(x; a)
∂∂xn
(k=1 ···r)
corresponding to an infinitesimal increment of the k-th parameter computed at a:
f (x;a1, . . . ,ak + ε, . . . ,ar)− f (x; a1, . . . ,ak, . . . ,ar)≈ εXak
∣∣x
are linear combinations, with certain coefficients −ψk j(a) depending only on theparameters, of the same infinitesimal transformations computed at the identity:
23

24 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
Xek
∣∣x =
∂ f1
∂ak(x; e)
∂∂x1
+ · · ·+ ∂ fn
∂ak(x; e)
∂∂xn
(k=1 ···r).
Remarkably, the process of removing superfluous parameters introduced in the pre-vious chapter applies to local Lie groups without the necessity of relocalizing arounda generic a0, so that everything can be achieved around the identity e itself, withoutlosing it.
3.1 Concept of Local Transformation Group
Let K=R or C, let n> 1 be an integer and let x = (x1, . . . ,xn)∈Kn denote variablesof an n-times extended space. We shall constantly employ the sup-norm:
|x| := max16i6n
|xi|,
where | · | denotes the absolute value on R, or the modulus on C. For various “radii”ρ > 0, we shall consider the precise open sets centered at the origin that are definedby:
∆ nρ :=
x ∈Kn : |x|< ρ
;
in case K = C, these are of course standard open polydiscs, while in case K = R,these are open cubes.
On the other hand, again1 with K = R or C, let r > 1 be another integer andintroduce parameters a = (a1, . . . ,ar) in Kr, again equipped with the sup-norm:
|a| := max16k6r
|ak|.
For various σ > 0 similarly, we introduce the precise open sets:
rσ :=
a ∈Kr : |a|< σ
.
3.1.1 Transformation Group Axioms
Letx′i = fi(x1, . . . ,xn;a1, . . . ,ar) (i=1 ···n)
be local transformation equations, as presented in Chapter 1. To fix the local char-acter, the fi(x;a) will be assumed to be defined when |x| < ρ1 and when |a| < σ1,for some ρ1 > 0 and for some σ1 > 0. We shall assume that for the parameter a := e
1 When x ∈Rn is real, while studying local analytic Lie group actions x′i = fi(x;a) below, we willnaturally require that a ∈ Rr also be real (unless we complexify both x and a). When x ∈ Cn, wecan suppose a to be either real or complex.

3.1 Concept of Local Transformation Group 25
equal to the origin 0 ∈Kr, the transformation corresponds to the identity, so that:
fi(x1, . . . ,xn : 0, . . . ,0)≡ xi (i=1 ···n).
Consequently, for the composition of two successive such transformationsx′ = f (x;a) and x′′ = f (x′;b) to be well defined, it suffices to shrink ρ1 to ρ2 with0 < ρ2 < ρ1 and σ1 to σ2 with 0 < σ2 < σ1 in order to insure that:
| f (x;a)|< ρ1 for all |x|< ρ2 and all |a|< σ2.
This is clearly possible thanks to f (x;0) = x. Now, we can present the local trans-formation group axioms, somehow with a rigorous control of existence domains.
∆ nρ2 r
σ2
× x′ = f (x;a)
KnKr ∆ nρ1r
σ1Kn ∆ n
ρ1
00 0a
Fig. 3.1 Local transformation group in terms of cubes
Group composition axiom. For every x ∈ ∆ nρ2
, and a,b ∈ rσ2
, an arbitrary com-position:
(1) x′′ = f(
f (x;a);b)= f (x;c) = f (x;m(a,b))
always identifies to an element f (x;c) of the same family, for a unique parameterc = m(a,b) given by an auxiliary group-multiplication local analytic map:
m : nσ1×n
σ1−→Kr
which satisfies m(r
σ2×r
σ2
)⊂r
σ1and m(a,e)≡ m(e,a)≡ a.
For a,b,c ∈ nσ3
with 0 < σ3 < σ2 < σ1 small enough so that three successivecompositions are well defined, the associativity of diffeomorphism compositionyields:
f(x;m(m(a,b),c)
)= f(
f ( f (x;a);b);c)= f(x;m(a,m(b,c))
),
whence, thanks to the supposed uniqueness of c = m(a,b), it comes the group asso-ciativity: m
(m(a,b),c
)= m
(a,m(b,c)
)for such restricted values of a,b,c.
Contrary to what his opponents sometimes claimed, e.g. Study, Slocum and oth-ers, Lie was conscious of the necessity of emphasizing the local character of trans-formation groups that is often required in applications. Amongst the first 50 pages ofthe Theorie der Transformationsgruppen, at least 15 pages (written in small charac-ters) are devoted to rigorously discuss when and why domains of definition should

26 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
be shrunk. We translate for instance a relevant excerpt ([1], pp. 15–16) in which thesymbol (x), due to Weierstrass and introduced by Engel and Lie just before, denotesa region of the coordinate space and (a) a region of the parameter space, with the fianalytic there.
Here one has to observe that we have met the fixing about the behaviour ofthe functions fi(x;a) only inside the regions (x) and (a).
Consequently, we have the permission to substitute the expression x′ν =fν(x,a) in the equations x′′i = fi(x′,b) only when the system of values x′1, . . . ,x
′n
lies in the region (x). That is why we are compelled to add, to the fixings met upto now about the regions (x) and (a), yet the following assumption: it shall bepossible to indicate, inside the regions (x) and (a), respective subregions ((x))and ((a)) of such a nature that the x′i always remain in the region (x) when thexi run arbitrarily in ((x)) and when the ak run arbitrarily in ((a)); we express thisbriefly as: the region x′ = f
(((x))((a))
)shall entirely fall into the region (x).
According to these fixings, if we choose x1, . . . ,xn in the region ((x)) anda1, . . . ,ar in the region ((a)), we then can really execute the substitution x′k =fk(x,a) in the expression fi(x′1, . . . ,x
′n, b1, . . . ,bn); that is to say, when x0
1, . . . ,x0n
means an arbitrary system of values in the region ((x)), the expression:
fi(
f1(x,a), . . . , fn(x,a), b1, . . . ,bn)
can be expanded, in the neighborhood of the system of values x0k , as an ordi-
nary power series in x1 −x01, . . . ,xn −x0
n; the coefficients of this power series arefunctions of a1, . . . ,ar, b1, . . . ,br and behave regularly, when the ak are arbitraryin ((a)) and the bk are arbitrary in (a).
Existence of an inverse-element map. There exists a local analytic map:
i : rσ1
−→Kr
with i(e) = e (namely i(0) = 0) such that for every a ∈rσ2
:
e = m(a, i(a))= m
(i(a),a
)whence in addition: x = f
(f (x;a); i(a)
)= f(
f (x; i(a));a),
for every x ∈ ∆ nρ2
.
3.1.2 Some Conventions
In the sequel, the diffeomorphism x 7→ f (x;a) will occasionally be written x 7→fa(x). Also, we shall sometimes abbreviate m(a,b) by a ·b and i(a) by a−1. Also, a

3.2 Changes of Coordinates and of Parameters 27
finite number of times, it will be necessary to shrink again ρ2 and σ2. This will bedone automatically, without emphasizing it.
3.2 Changes of Coordinates and of Parameters
In the variables x1, . . . ,xn, let the equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
of an r-term group be presented. Then there are various means to derive fromthese equations other equations which represent again an r-term group.
On the first hand, in place of the a, we can introduce r arbitrary independentfunctions of them:
ak = βk(a1, . . . ,ar) (k=1 ···r)
as new parameters. By resolution with respect to a1, . . . ,ar, one can obtain:
ak = γk(a1, . . . ,ar) (k=1 ···r)
and by substitution of these values, one may set:
fi(x1, . . . ,xn, a1, . . . ,ar) = fi(x1, . . . ,xn, a1, . . . ,ar).
Then if we yet set:
βk(b1, . . . ,br) = bk, βk(c1, . . . ,cr) = ck (k=1 ···r),
the composition equations:
fi(
f1(x,a), . . . , fn(x,a), b1, . . . ,br)= fi(x1, . . . ,xn, c1, . . . ,cr)
take, without effort, the form:
fi(f1(x,a), . . . , fn(x,a), b1, . . . ,br
)= fi(x1, . . . ,xn, c1, . . . ,cr),
from which it results that the equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
with the r essential parameters a1, . . . ,ar represent in the same way an r-termgroup.
Certainly, the equations of this new group are different from the ones ofthe original group, but these equations obviously represent exactly the same

28 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
transformations as the original equations x′i = fi(x,a). Consequently, the newgroup is fundamentally identical to the old one.
On the other hand, we can also introduce new independent variablesy1, . . . ,yn in place of the x:
yi = ωi(x1, . . . ,xn) (i=1 ···n),
or, if resolved:xi = wi(y1, . . . ,yn) (i=1 ···n).
Afterwards, we have to set:
x′i = wi(y′1, . . . ,y′n) = w′
i, x′′i = wi(y′′1 , . . . ,y′′n) = w′′
i ,
and we hence obtain, in place of the transformation equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar),
the following ones:
wi(y′1, . . . ,y′n) = fi(w1, . . . ,wn, a1, . . . ,ar),
or, by resolution:
y′i = ωi(
f1(w,a), . . . , fn(w,a))= Fi(y1, . . . ,yn, a1, . . . ,ar).
It is easy to prove that the equations:
y′i = Fi(y1, . . . ,yn, a1, . . . ,ar) (i=1 ···n)
with the r essential parameters a1, . . . ,ar again represent an r-term group. Infact, the known equations:
fi(
f1(x,a), . . . , fn(x,a), b1, . . . ,br)= fi(x1, . . . ,xn, c1, . . . ,cr)
are transferred, after the introduction of the new variables, to:
fi(
f (w,a), b)= fi(w1, . . . ,wn, c1, . . . ,cr),
which can also be written:
fi(w′1, . . . ,w
′n, b1, . . . ,br) = fi(w1, . . . ,wn, c1, . . . ,cr) = w′′
i ;
but from this, it comes by resolution with respect to y′′1 , . . . ,y′′n :
y′′ν = ων(
f1(w′,b), . . . , fn(w′,b))= ων
(f1(w,c), . . . , fn(w,c)
),

3.2 Changes of Coordinates and of Parameters 29
or, what is the same:
y′′ν = Fν(y′1, . . . ,y′n, b1, . . . ,br) = Fν(y1, . . . ,yn, c1, . . . ,cr),
that is to say: there exist the equations:
Fν(F1(y,a), . . . , Fn(y,a), b1, . . . ,br
)= Fν(y1, . . . ,yn, c1, . . . ,cr),
whence it is indeed proved that the equations y′i = Fi(y,a) represent a group.Lastly, we can naturally introduce at the same time new parameters and new
variables in a given group; it is clear that in this way, we likewise obtain a newgroup from the original group.
At present, we set up the following definition:
Definition. Two r-term groups:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
y′i = fi(y1, . . . ,yn, b1, . . . ,br) (i=1 ···n)
in the same number of variables are similar [ÄHNLICH] to each other as soon asthe one converts into the other by the introduction of appropriate new variablesand of appropriate new parameters.
Obviously, there is an unbounded number of groups which are similar to agiven one; but all these unboundedly numerous groups are known simultane-ously with the given one. For this reason, as it shall also happen in the sequel,we can consider that two mutually similar groups are not essentially distinctfrom each other.
Above, we spoke about the introduction of new parameters and of new vari-ables without dealing with the assumptions by which we can ascertain that allgroup-theoretic properties essential for us are preserved here. Yet a few wordsabout this point.
For it to be permitted to introduce, in the group x′i = fi(x1, . . . ,xn, a1, . . . ,ar),the new parameters ak = βk(a1, . . . ,ar) in place of the a, the ak must beunivalent functions of the a in the complete region (a) defined earlier on,and they must behave regularly everwhere in it; the functional determinant∑ ±∂β1/∂a1 · · · ∂βr/∂ar should vanish nowhere in the region (a), and lastly,to two distinct systems of values a1, . . . ,ar of this region, there must always beassociated two distinct systems of values a1, . . . ,ar. In other words: in the re-gion of the ak, one must be able to delimit a region (a) on which the systemsof values of the region (a) are represented in a univalent way by the equationsak = βk(a1, . . . ,ar).
On the other hand, for the introduction of the new variables yi =ωi(x1, . . . ,xn) to be allowed, the y must be univalent and regular func-tions of the x for all sytems of values x1, . . . ,xn which come into con-sideration after establishing the group-theoretic properties of the equations

30 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
x′i = fi(x1, . . . ,xn, a1, . . . ,ar); inside this region, the functional determinant∑ ±∂ω1/∂x1 · · · ∂ωn/∂xn should vanish nowhere, and lastly, to two distinctsystems of values x1, . . . ,xn of this region, there must always be associated twodistinct systems of values y1, . . . ,yn. The concerned system of values of the xmust therefore be represented univalently onto a certain region of systems ofvalues of the y.
If one would introduce, in the group x′i = fi(x,a), new parameters or newvariables without the requirements just explained being satisfied, then it wouldbe thinkable in any case that important properties of the group, for instancethe group composition property itself, would be lost; a group with the identitytransformation could convert into a group which does not contain the identitytransformation, and conversely.
But it certain circumstances, the matter is only to study the family of trans-formations x′i = fi(x,a) in the neighbourhood of a single point a1, . . . ,ar orx1, . . . ,xn. This study will often be facilitated by introducing new variables ornew parameters which satisfy the requirements mentioned above in the neigh-bourhood of the concerned points.
In such a case, one does not need at all to deal with the question whether theconcerned requirements are satisfied in the whole extension of the regions (x)and (a).
Now, if we have a family of ∞r transformations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar)
which forms an r-term group, then there corresponds to this family a familyof ∞r operations by which the points of the space x1, . . . ,xn are permuted. Evi-dently, any two of these ∞r operations, when executed one after the other, alwaysproduce an operation which again belongs to the family.
Thus, if we actually call a family of operations of this sort a group operation[OPERATIONSGRUPPE], or shortly, a group, then we can say: every given r-term transformation group can be interpreted as the analytic representation ofa certain group of ∞r permutations of the points x1, . . . ,xn.
Conversely, if a group of ∞r permutations of the points x1, . . . ,xn is given,and if it is possible to represent these permutations by analytic transformationequations, then the corresponding ∞r transformations naturally form a transfor-mation group.
Now, if one imagines that a determined group-operation is given, and in ad-dition, that an analytic representation of it is given — hence if one has a trans-formation group —, then this representation has in itself two obvious incidentalcharacters [ZUFÄLLIGKEIT].
The first incidental character is the choice of the parameters a1, . . . ,ar. Itstands to reason that this choice has in itself absolutely no influence on thegroup-operation, when we introduce in place of the a the new parameters

3.3 Geometric Introduction of Infinitesimal Transformations 31
ak = βk(a1, . . . ,ar). Only the analytic expression for the group-operation willbe a different one on the occasion; therefore, this expression represents a trans-formation group as before.
The second incidental character in the analytic representation of our group-operation is the choice of the coordinates in the space x1, . . . ,xn. Every permu-tation of the points x1, . . . ,xn is fully independent of the choice of the systemof coordinates to which one refers the points x1, . . . ,xn; only the analytic repre-sentation of the permutation changes with the concerned system of coordinates.Naturally, the same holds for any group of permutations. From this, it resultsthat by introducing new variables, that is to say, by a change of the system ofcoordinates, one obtains, from a transformation group, again a transformationgroup, for the transformation equations that one receives after the introductionof the new variables represent exactly the same group-operation as the one of theinitial transformation group, so that they form in turn a transformation group.
Thus, the analytic considerations of the previous paragraphs are now ex-plained in a conceptual way. Above all, it is at present clear why two similartransformation groups are to be considered as not essentially distinct from eachother; namely, for the reason that they both represent analytically one and thesame group-operation.
3.3 Geometric Introduction of Infinitesimal Transformations
Now, for reasons of understandability, we shall present in advance the basic geo-metric way in which infinitesimal transformations can be introduced, a way whichis knowingly passed over silence in the great treatise [1].
Letting ε denote either an infinitesimal quantity in the sense of Leibniz, or asmall quantity subjected to Weierstrass’ rigorous epsilon-delta formalism, for fixedk ∈ 1,2, . . . ,r, we consider all the points:
x′i = fi(x; e1, . . . ,ek + ε , . . . ,en
)= xi +
∂ fi
∂ak(x;e)ε + · · · (i=1 ···n)
that are infinitesimally pushed from the starting points x = f (x;e) by adding the tinyincrement ε to only the k-th identity parameter ek. One may reinterpret this commonspatial move by introducing the vector field (and a new notation for its coefficients):
Xek :=
n
∑i=1
∂ fi
∂ak(x;e)
∂∂xi
:=n
∑i=1
ξki(x)∂
∂xi,
which is either written as a derivation in modern style, or considered as a columnvector:
τ ( ∂ f1∂ak
, · · · , ∂ fn∂ak
)∣∣∣x= τ(ξk1, . . . ,ξkn
)∣∣∣x

32 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
based at x, where τ(·) denotes a transposition, yielding column vectors. Then x′ =x+ ε Xe
k + · · · , or equivalently:
x′i = xi + ε ξki + · · · (i=1 ···n),
where the left out terms “+ · · ·” are of course an O(ε2), so that from the geometricalviewpoint, x′ is infinitesimally pushed along the vector Xe
k
∣∣x up to a length ε .
Xee a1
a2
a3
e
a3
a2
a1
λ
p
p11 x+ ε Xe
1
Xe1
x+ ε Xe
Fig. 3.2 Infinitesimal displacement x′ = x+ ε Xe of all points
More generally, still starting from the identity parameter e, when we add to e anarbitrary infinitesimal increment:(
e1 + ε λ1, . . . ,ek + ε λk, . . . ,er + ε λr),
where τ(λ1, . . . ,λr)∣∣e is a fixed, constant vector based at e in the parameter space, it
follows by linearity of the tangential map, or else just by the chain rule in coordi-nates, that:
fi(x; e+ ε λ ) = xi +n
∑k=1
ε λk∂ fi
∂ak(x;e)+ · · ·
= xi + εn
∑k=1
λk ξki(x)+ · · · ,
so that all points x′ = x+ ε X + · · · are infinitesimally and simultaneously pushedalong the vector field:
X := λ1 Xe1 + · · ·+λr Xe
r
which is the general linear combination of the r previous basic vector fields Xek ,
k = 1, . . . ,r.Occasionally, Lie wrote that such a vector field X belongs to the group, x′ =
f (x;a), to mean that X comes itself with the infinitesimal move x′ = x+ ε X it issupposed to perform (dots should now be suppressed in intuition), and hence accord-ingly, Lie systematically called such an X an infinitesimal transformation, viewingindeed x′ = x+ ε X as just a case of x′ = f (x,a). Another, fundamental and verydeep reason why Lie said that X belongs to the group x′ = f (x,a) is that he showedthat local transformation group actions are in one-to-one correspondence with thepurely linear vector spaces:
VectK(X1,X2, . . . ,Xr
),

3.4 Derivation of Fundamental Partial Differential Equations 33
of infinitesimal transformations, which in fact also inherit a crucial additional al-gebraic structure directly from the group multiplication law. Without anticipatingtoo much, let us come to the purely analytic way how Engel and Lie introduce theinfinitesimal transformations.
3.4 Derivation of Fundamental Partial Differential Equations
So we have defined the concept of a purely local Lie transformation group, insistingon the fact that composition and inversion are both represented by some preciselocal analytic maps defined around the identity. The royal road towards the famoustheorems of Lie is to differentiate these finite data, namely to infinitesimalize.
We start with the group composition law (1) which we rewrite as follows:
x′′ = f(
f (x;a);b)= f (x;a ·b) =: f (x;c).
Here, c := a ·b depends on a and b, but instead of a and b, following [1], we want toconsider a and c to be the independent parameters, namely we rewrite b = a−1 ·c =:b(a,c) so that the equations:
fi(
f (x;a); b(a,c))≡ fi(x;c) (i=1 ···n)
hold identically for all x, all a and all c. Next, we differentiate these identities withrespect to ak, denoting f ′i ≡ fi(x′;b) and x′j ≡ f j(x;a):
∂ f ′i∂x′1
∂x′1∂ak
+ · · ·+ ∂ f ′i∂x′n
∂x′n∂ak
+∂ f ′i∂b1
∂b1
∂ak+ · · ·+ ∂ f ′i
∂br
∂br
∂ak≡ 0 (i=1 ···n).
Here of course again, the argument of f ′ is(
f (x,a);b(a,c)), the argument of
x′ is (x;a) and the argument of b is (a,c). Thanks to x′′(x′;e) ≡ x′, the matrix∂ f ′i∂x′k
(f (x;e);b(e,e)
)is the identity In×n. So using Cramer’s rule2, for each fixed
k, we can solve the preceding n linear equations with respect to the n unknowns∂x′1∂ak
, . . . , ∂x′n∂ak
, getting expressions of the form:
(2)∂x′ν∂ak
(x; a) = Ξ1ν(x′,b)∂b1
∂ak(a,c)+ · · ·+Ξrν(x′,b)
∂br
∂ak(a,c)
(ν =1 ···n ;k=1 ···r),
with some analytic functions Ξ jν(x′,b) that are independent of k.
On the other hand, in order to substitute the ∂b j∂ak
, we differentiate with respect toak the identically satisfied identities:
2 — and possibly also, shrinking ρ2 and σ2 if necessary, and also below, without further mention.

34 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
cµ ≡ mµ(a,b(a,c)
)(µ =1 ···r).
We therefore get:
0 ≡∂mµ
∂ak+
r
∑π=1
∂mµ
∂bπ
∂bπ∂ak
(µ =1 ···r)
But since the matrix ∂mµ∂bπ
is the identity Ir×r for(a,b(a,c)
)∣∣(a,c)=(e,e) = (e,e), just
because m(e,b) ≡ b, Cramer’s rule again enables one to solve this system withrespect to the r unknowns ∂bπ
∂ak, getting expressions of the form:
∂bπ∂ak
(a,c) =Ψkπ(a,c),
for certain functions Ψkπ , defined on a possibly smaller parameter product spacer
σ2×r
σ2. Putting again (a,c) = (e,e) in the same system before solving it, we get
in fact (notice the minus sign):(∂bπ∂ak
(e,e))16π6r
16k6r=−Ir×r,
so that Ψkπ(e,e) =−δ πk .
We can therefore now insert in (2) the gained value Ψkπ of ∂bπ∂ak
, obtaining (andquoting [1], p. 29) the following crucial partial differential equations:
(2’)∂x′ν∂ak
(x;a) =r
∑π=1
Ψkπ(a,b)Ξπν(x′,b) (ν =1 ···n, k=1 ···r)
These equations are of utmost importance [ÄUSSERST WICHTIG], as we willsee later.
Here, we have replaced c by c = c(a,b) = a ·b, whence b(a,c(a,b)
)≡ b, and we
have reconsidered (a,b) as the independent variables.
3.4.1 Restricting Considerations to a Single System of Parameters
Setting b := e in (2’) above, the partial derivatives of the group transformation equa-tions x′i = x′i(x;a) with respect to the parameters ak at (x;a):

3.4 Derivation of Fundamental Partial Differential Equations 35
(2”)∂x′i∂ak
(x;a) =r
∑j=1
ψk j(a)ξ ji(x′(x;a)
)(i=1 ···n, k=1 ···r),
appear to be linear combinations, with certain coefficients ψk j(a) :=Ψk j(a,e) de-pending only upon a, of the quantities ξ ji(x′) :=Ξ ji(x′,b)
∣∣b=e. But we in fact already
know these quantities.
3.4.2 Comparing Different Framesof Infinitesimal Transformations
Indeed, setting a = e above, thanks to ψk j(e) =−δ jk , we get immediately:
ξki(x) = ξki(x′(x;e)
)=− ∂x′i
∂ak(x;e),
whence the ξki(x) just coincide with the coefficients of the r infinitesimal transfor-mations already introduced on p. 31 (with an overall opposite sign) and written asderivations:
(3)Xe
k
∣∣x =
∂ f1
∂ak(x;e)
∂∂x1
+ · · ·+ ∂ fn
∂ak(x;e)
∂∂xn
=: −ξk1(x)∂
∂x1−·· ·−ξkn(x)
∂∂xn
(k=1 ···r).
Now at last, after having reproduced some rather blind computations by which Lieexpresses his brilliant synthetic thoughts, the crucial geometric interpretation of thetwice-boxed partial differential equations can be unveiled.
Kn Kn
Xak := ∂ f
∂ak
∣∣a
Xek := ∂ f
∂ak
∣∣e
∂ f∂ak
∣∣a = ∑ −ψk j(a)
∂ f∂a j
∣∣e
fa(·)
xx
Xek∣∣x
Xek
∣∣fa(x) Xe
k
∣∣fa(x)
Xak
∣∣fa(x)
fa(x)fa(x)
Fig. 3.3 Geometric signification of the fundamental differential equations
Instead of differentiating with respect to ak only at (x;e), we must in principle, forreasons of generality, do the same at any (x;a), which yields the vector fields:

36 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
Xak
∣∣fa(x)
:=∂ f1
∂ak(x;a)
∂∂x1
+ · · ·+ ∂ fn
∂ak(x;a)
∂∂xn
(k=1 ···r),
and then the fundamental partial differential equations say that such new r infinites-imal transformations:
Xak
∣∣fa(x)
=−ψk1(a)Xe1∣∣
fa(x)−·· ·−ψkr(a)Xe
r∣∣
fa(x)
are just linear combinations, with coefficients depending only upon the group pa-rameters, of the r infinitesimal transformations Xe
1 , . . . ,Xer computed at the special
parameter e, and considered at the a-pushed points fa(x).Finally, since the matrix ψk j(a) has an inverse that we will denote, as in [1], by
α jk(a) which is analytic in a neighborhood of e, we can also write the fundamentaldifferential equations under the reciprocal form, useful in the sequel:
(4) ξ ji(x′(x;a)
)=
r
∑k=1
α jk(a)∂x′i∂ak
(x;a). (i=1 ···n ; j=1 ···r).
3.5 Essentializing the Group Parameters
As we have seen in the previous chapter, the (needed) suppression of illusoryparameters in the transformation group equations x′i = fi(x;a) = ∑α∈Nn U i
α(a)xα
might require to relocalize considerations to some neighborhood of some generica0, which might possibly not include the identity e. Fortunately, this does notoccur: the group property ensures that the rank of the infinite coefficient mapU∞ : a 7−→
(U i
α(a))16i6n
α∈Nn is constant around e.
Proposition 3.1. For a finite continuous local Lie transformation group x′i =fi(x;a) = ∑α∈Nn U i
α(a)xα expanded in power series with respect to x, thefollowing four conditions are equivalent:
(i) The parameters (a1, . . . ,ar) are not essential, namely the generic rank of a 7−→(U i
α(a))16i6n
α∈Nn is strictly less than r.
(ii) The rank at all a near the identity e = 0 (and not only the generic rank) of a 7−→(U i
α(a))16i6n
α∈Nn is strictly less than r.
(iii) There exists a vector field T = ∑rk=1 τk(a) ∂
∂akhaving analytic coefficients τk(a)
which vanishes nowhere near e and annihilates all coefficient functions: 0 ≡T U i
α for all i and all α .
(iv) There exist constants e1, . . . ,er ∈K not all zero such that, if
Xk =∂ f1
∂ak(x;e)
∂∂x1
+ · · ·+ ∂ fn
∂ak(x;e)
∂∂xn
(k=1 ···n)

3.5 Essentializing the Group Parameters 37
denote the r infinitesimal transformations associated to the group, then:
0 ≡ e1 X1 + · · ·+ er Xr.
Proof. Suppose that (iv) holds, namely via the expressions (3):
0 ≡−e1 ξ1i(x)−·· ·− er ξri(x) (i=1 ···n).
By applying the linear combination ∑rj=1 e j(·) to the partial differential equa-
tions (4), the left member thus becomes zero, and we get n equations:
0 ≡r
∑j=1
r
∑k=1
e j θ jk(a)∂x′i∂ak
(x;a) (i=1 ···n)
which just say that the not identically zero vector field:
T :=r
∑k=1
( r
∑j=1
e j θ jk(a))
∂∂ak
satisfies 0 ≡ T f1 ≡ ·· · ≡ T fn, or equivalently 0 ≡ T U iα for all i and all α . Since
the matrix θ(a) equals −Ir×r at the identity e, the vectors T∣∣a are nonzero for all a
in a neighborhood of a. In conclusion, (iv) implies (iii), and then straightforwardly(iii) ⇒ (ii) ⇒ (i).
It remains to establish the reverse implications: (i) ⇒ (ii) ⇒ (iii) ⇒ (iv). As akey fact, the generic rank in (i) happens to be constant.
Lemma 3.1. There exist two ∞×∞ matrices(Coeff
βα(a)
)β∈Nn
α∈Nn and(Coeff
βα(a)
)β∈Nn
α∈Nn
of analytic functions of the parameters a1, . . . ,ar which enjoy appropriate Cauchyconvergence estimates3, the second matrix being the inverse of the first, such that:
U iα(m(a,b)
)≡ ∑
β∈NnCoeff
βα(a)U i
β (b) (i=1 ···n; α ∈Nn),
and inversely:
U iα(b)≡ ∑
β∈NnCoeff
βα(a)U i
β(m(a,b)
)(i=1 ···n; α ∈Nn).
As a consequence, the rank of the infinite coefficient mapping a 7−→(U i
α(a))16i6n
α∈Nn
is constant in a neighborhood of e.
Proof. By definition, the composition of x′ = ∑α∈Nn Uα(a)xα and of x′′i =
∑β∈Nn U iβ (b)(x
′)β yields x′′i = fi(x; m(a,b)
)and we must therefore compute the
composed Taylor series expansion in question, which we place in the right-handside:
3 — that are automatically satisfied and hence can be passed over in silence —

38 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
∑α∈Nn
U iα(m(a,b)
)xα ≡ ∑
β∈NnU i
β (b)(
∑α∈Nn
Uα(a)xα)β
.
To this aim, we use the general formula for the expansion of a k-th power:(∑
α∈Nncα xα
)k
= ∑α∈Nn
xα
∑α1+···+αk =α
cα1 · · ·cαk
of a scalar power series. Thus splitting x′β = (x′1)
β1 · · ·(x′n)βn in scalar powers, wemay start to compute the wanted expansion:
Composition = ∑(β1,...,βn)
U iβ (b)
(∑
α1∈Nn
U 1α1(a)xα1
)β1
· · ·(
∑αn∈Nn
U nαn(a)xαn
)βn
= ∑(β1,...,βn)
U iβ (b)
[∑
α1∈Nn
xα1
∑α1
1+···+α1β1=α1
U 1α1
1(a) · · ·U 1
α1β1
(a)]
· · ·
· · ·[
∑αn∈Nn
xαn
∑αn
1+···+αnβn=αn
U nαn
1(a) · · ·U n
αnβn(a)]
.
To finish off, if we apply the expansion of a product of n power series:(∑α1 c1
α1 xα1)· · ·(
∑αn cnαn xαn
)= ∑xα
∑α1+···+αn =α c1
α1 · · ·cnαn
,
we then obtain straightforwardly:
∑α∈Nn
U iα(m(a,b)
)xα = ∑
α∈Nnxα
∑(β1,...,βn)
U iβ (b) ∑
α1+···+αn =α(∑
α11+···+α1
β1=α1
U 1α1
1(a) · · ·U 1
α1β1
(a))· · ·(
∑αn
1+···+αnβn
=αnU n
αn1(a) · · ·U n
αnβn(a))
.
By identifying the coefficients of xα in both sides and by abbreviating just asCoeff
βα(a) the ∑α1+···+αn =α of the products of the n long sums appearing in the
second line, we have thus gained the first family of equations. The second one isobtained quite similarly by just expanding the identities:
fi(x; b)≡ fi(
f (x; i(a)); m(a,b))
(i=1 ···n).
The two gained families of equations must clearly be inverses of each other.To show that the rank at e of a 7→ U∞(a) is the same as it is at any a near e, we
apply ∂∂bk
∣∣b=e to the first, and also to the second, family of equations, which gives:

3.5 Essentializing the Group Parameters 39
r
∑l=1
∂U iα
∂al(a)
∂ml
∂bk(a,e)≡ ∑
β∈NnCoeffβ
α(a)∂U i
β
∂bk(e)
∂U iα
∂bk(e)≡ ∑
β∈NnCoeff
βα(a)
( r
∑l=1
∂U iβ (a)
∂al
∂ml
∂bk(a,e)
)(k=1 ···r; i=1 ···n; α ∈Nn).
Of course, the appearing r× r matrix:
M(a) :=(∂ml
∂bk(a,e)
)16l6r
16k6r
has nonzero determinant at every a, because left translations b 7→ m(a,b) of thegroup are diffeomorphisms. Thus, if for each fixed i we denote by JacUi
∞(a) the
r×∞ Jacobian matrix( ∂U i
α∂ak
(a))α∈Nn
16k6r, the previous two families of identities whenwritten in matrix form:
M(a)JacUi∞(a)≡ Coeff(a)JacUi
∞(a)
JacUi∞(e)≡ Coeff(a)M(a)JacUi
∞(a)
show well that the rank of Jaci∞(a) must be equal to the rank of Jaci
∞(e). This com-pletes the proof of the auxiliary lemma. ut
Thus, (i) of the proposition implies (ii) and moreover, the last part of the theoremon p. 15 yields annihilating analytic vector fields T1, . . . ,Tr−ρ∞ on the parameterspace with dimVect
(T1∣∣a, . . . ,Tρ∞
∣∣a
)= r−ρ∞ constant for all a near e. So (i) ⇒
(ii) ⇒ (iii). Finally, assuming (iii), namely:
0 ≡ T fi(x;a) =r
∑k=1
τk(a)∂x′i∂ak
(x;a) (i=1 ···n)
with T∣∣e 6= 0, and replacing ∂x′i
∂akby its value (2”) given by the fundamental differ-
ential equations, we get:
0 ≡r
∑j=1
r
∑k=1
τk(a)ψk j(a)ξ ji(x′(x;a)
)(i=1 ···n).
Setting a to be the identity element in these equations and introducing the r constants(remind here that ψk j(e) =−δ j
k ):
c j := ∑rk=1 τk(e)ψk j(e) =−τ j(e) ( j=1 ···r)
that are not all zero, since T∣∣e 6= 0, we get equations:
0 ≡ c1 ξ1i(x)+ · · ·+ cr ξri(x) (i=1 ···n)

40 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
which, according to (3), are the coordinatewise expression of (iv). This completesthe proof of the proposition. ut
3.6 First Fundamental Theorem
Thanks to this proposition and to the corollary on p. 15, no relocalization is neces-sary to get rid of superfluous parameters in finite continuous transformation groupsx′ = f (x;a1, . . . ,ar). Thus, without loss of generality parameters can (and surelywill) always be assumed to be essential. We can now translate Theorem 3 on pp. 33–34 of [1] which summarizes all the preceding considerations, and we add some tech-nical precisions if this theorem is to be interpreted as a local statement (though Liehas something different in mind, cf. the next section). As above, we assume im-plicitly for simplicity that the group x′ = f (x; a) is local and contains the identitytransformation x′ = f (x; e) = x, but the theorem is in fact valid with less restrictiveassumptions, see Sect. 3.9 and especially Proposition 3.4.
Theorem 3. If the n equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
represent a finite continuous group, whose parameters a1, . . . ,ar are all essen-tial, then x′1, . . . ,x
′n, considered as functions of a1, . . . ,ar, x1, . . . ,xn satisfy cer-
tain differential equations of the form:
(5)∂x′i∂ak
=r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(x′1, . . . ,x′n) (i=1 ···n; k=1 ···r),
which can also be written as:
(6) ξ ji(x′1, . . . ,x′n) =
r
∑k=1
α jk(a1, . . . ,ar)∂x′i∂ak
(i=1 ···n; j=1 ···r).
Here, neither the determinant of the ψk j(a), nor the one of the α jk(a) vanishesidentically4; in addition, it is impossible to indicate r quantities e1, . . . ,er inde-pendent of x′1, . . . ,x
′n [constants] and not all vanishing such that the n expres-
sions:e1 ξ1i(x′)+ · · ·+ er ξri(x′) (i=1 ···n)
vanish simultaneously.
4 The functions ξ ji(x) are, up to an overall minus sign, just the coefficients of the r infinitesimaltransformations obtained by differentiation with respect to the parameters at the identity: ξ ji(x) =

3.6 First Fundamental Theorem 41
Furthermore, the latter property is clearly equivalent to the nonexistence of con-stants e1, . . . ,er not all zero such that:
0 ≡ e1 X1 + · · ·+ er Xr,
that is to say: the r infinitesimal transformations X1, . . . ,Xr are linearly independent.This property was shown to derive from essentiality of parameters, and Theorem 8p. 75 below will establish a satisfactory converse.
Thus in the above formulation, Engel and Lie do implicitly introduce the r in-finitesimal transformations:
Xk :=n
∑i=1
ξki(x1, . . . ,xn)∂
∂xi(k=1 ···r)
of an r-term continuous group not as partial derivatives at the identity element withrespect to the parameters (which would be the intuitively clearest way):
Xek :=
n
∑i=1
∂ fi
∂ak(x; e)
∂∂xi
≡−Xk,
but rather indirectly as having coefficients ξki(x) stemming from the fundamentaldifferential equations (5); in fact, we already saw in (3) that both definitions agreemodulo sign. Slightly Later in the treatise, the introduction is done explicitly.
Proposition. ([1], p. 67) Associated to every r-term group x′i = fi(x1, . . . ,xn,a1, . . . ,ar), there are r infinitesimal transformations:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
which stand in such a relationship that equations of the form:
∂x′i∂ak
=r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(x′1, . . . ,x′n)
hold true, that can be resolved with respect to the ξ ji:
ξ ji(x′1, . . . ,x′n) =
r
∑k=1
α jk(a1, . . . ,ar)∂x′i∂ak
.
The gist of Lie’s theory is to show that the datum of an r-term continuous (lo-cal) transformation group is equivalent the datum of r infinitesimal transformations
− ∂ fi∂a j
(x; e), i = 1, . . . ,n, j = 1, . . . ,n. Furthermore, with the purely local assumptions we made
above, we in fact have ψk j(e) = −δ jk , so the mentioned determinants do not vanish for all a in a
neighborhood of e.

42 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
X1, . . . ,Xr associated this way. The next chapters are devoted to expose this (wellknown) one-to-one correspondence between local Lie groups and Lie algebras oflocal analytic vector fields (Chap. 9), by following, by summarizing and by adaptingthe original presentation, but without succumbing to the temptation of overformal-izing some alternative coordinate-free reasonings with the help of some availablecontemporary views, because this would certainly impoverish the depth of Lie’soriginal thought.
3.7 Fundamental Differential Equationsfor the Inverse Transformations
According to the fundamental Theorem 3 just above p. 40, a general r-term continu-ous transformation group x′i = fi(x;a1, . . . ,ar) satisfies partial differential equations:∂ fi/∂ak = ∑r
j=1 ψk j(a)ξ ji( f1, . . . , fn) that are used everywhere in the basic Lie the-ory. For the study of the adjoint group in Chap. 16 below, we must also know how towrite precisely the fundamental differential equations that are satisfied by the groupof inverse transformations:
xi = fi(x′; i(a)
)(i=1 ···n),
and this is easy. Following an already known path, we must indeed begin by differ-entiating these equations with respect to the parameters ak:
∂xi
∂ak=
r
∑l=1
∂ fi
∂al
(x′; i(a)
) ∂ il∂ak
(a) (i=1 ···n ; k=1 ···r).
Naturally, we replace here the ∂ fi/∂al by their values ∑rj=1 ψl j ξ ji given by the
fundamental differential equations of Theorem 3, and we obtain a double sum:
∂xi
∂ak=
r
∑l=1
r
∑j=1
ψl j(i(a))
ξ ji(
f (x′; i(a)) ∂ il
∂ak(a)
=:r
∑j=1
ϑk j(a)ξ ji(x) (i=1 ···n; k=1 ···r),
which we contract to a single sum by simply introducing the following new r × rauxiliary matrix of parameter functions:
ϑk j(a) :=r
∑l=1
ψl j(i(a)) ∂ il
∂ak(a) (k, j=1 ···r),
whose precise expression in terms of i(a) will not matter anymore. It now remainsto check that this matrix
(ϑk j(a)
)16 j6r16k6r is invertible for all a in a neighborhood of
the identity element e = (e1, . . . ,er). In fact, we claim that:

3.7 Fundamental Differential Equations for the Inverse Transformations 43
ϑk j(e) = δ jk ,
which will clearly assure the invertibility in question. Firstly, we remember fromTheorem 3 on p. 40 that ψl j(e) =−δ j
l . Thus secondly, it remains now only to checkthat ∂ il
∂ak(e) =−δ l
k .To check this, we differentiate with respect to ak the identities: e j ≡ m j
(a, i(a)
),
j = 1, . . . ,r, which hold by definition, and we get:
0 ≡∂m j
∂ak(e,e)+
r
∑l=1
∂m j
∂bl(e,e)
∂ il∂ak
(e) ( j=1 ···r).
From another side, by differentiating the two families of r identities a j ≡ m j(a,e)and b j ≡ m j(e,b) with respect to ak and with respect to bl , we immediately get twoexpressions:
∂m j
∂ak(e,e) = δ j
k and∂m j
∂bl(e,e) = δ j
l
which, when inserted just above, yield the announced ∂ il∂ak
(e) = −δ lk . Sometimes,
we will write g(x; a) instead of f(x; i(a)
). As a result:
Lemma 3.2. The finite continuous transformation group x′i = fi(x;a) and its inversetransformations xi = gi(x′;a) := fi
(x′; i(a)
)both satisfy fundamental partial differ-
ential equations of the form:∂x′i∂ak
(x; a) =r
∑j=1
ψk j(a)ξ ji(x′(x;a)
)(i=1 ···n ; k=1 ···r),
∂xi
∂ak(x′; a) =
r
∑j=1
ϑk j(a)ξ ji(x(x′;a)
)(i=1 ···n ; k=1 ···r),
where ψ and ϑ are some two r× r matrices of analytic functions with −ψk j(e) =ϑk j(e) = δ j
k , and where the functions ξ ji appearing in both systems of equations:
ξ ji(x) :=− ∂ fi
∂x j(x;e) (i=1 ···n; j=1 ···r)
are, up to an overall minus sign, just the coefficients of the r infinitesimal transfor-mations
Xe1 =
∂ f∂a1
(x; e), . . . . . . ,Xer =
∂ f∂ar
(x; e)
obtained by differentiating the finite equations with respect to the parameters at theidentity element.

44 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
Theorem 4. If, in the equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
of a group with the r essential parameters a1, . . . ,ar, one considers the xi asfunctions of a1, . . . ,ar and of x′1, . . . ,x
′n, then there exist differential equations of
the form:
∂xi
∂ak=
r
∑j=1
ϑk j(a1, . . . ,ar)ξ ji(x1, . . . ,xn) (i=1 ···n ; k=1 ···r).
3.8 Transfer of Individual Infinitesimal Transformationsby the Group
With x = g(x′; a) denoting the inverse of x′ = f (x; a), we now differentiate withrespect to ak the identically satisfied equations:
x′i ≡ fi(g(x′; a); a) (i=1 ···n),
which just say that an arbitrary transformation of the group followed by its inversegives again the identity transformation, and we immediately get:
0 ≡n
∑ν=1
∂ fi
∂xν
∂gν∂ak
+∂ fi
∂ak(i=1 ···n; k=1 ···r).
Thanks to the above two systems of partial differential equations, we may then re-place ∂gν/∂ak by its value from the second equation of the lemma above, and also∂ fi/∂ak by its value from the first equation in the same lemma:
(7)0 ≡
n
∑ν=1
r
∑j=1
ϑk j(a)ξ jν(g) ∂ fi
∂xν+
r
∑j=1
ψk j(a)ξ ji( f )
(i=1 ···n; k=1 ···r).
In order to bring these equations to a more symmetric form, following [1] pp. 44–45, we fix k and we multiply, for i = 1 to n, the i-th equation by ∂
∂x′i, we apply the
summation ∑ni=1, we use the fact that, through the diffeomorphism x 7→ fa(x) = x′,
the coordinate vector fields transform as:
∂∂xν
=n
∑i=1
∂ fi
∂xν
∂∂x′i
,

3.8 Transfer of Infinitesimal Transformations by the Group 45
which just means in contemporary notation that:
( fa)∗( ∂
∂xν
)= ∑n
i=1∂ fi∂xν
∂∂x′i
(ν =1 ···n),
and we obtain, thanks to this observation, completely symmetric equations:
0 ≡n
∑j=1
ϑk j(a)n
∑ν=1
ξ jν(x)∂
∂xν+
r
∑j=1
ψk j(a)r
∑ν=1
ξ jν(x′)∂
∂x′ν(k=1 ···r),
in which the push-forwards ( fa)∗(∂/∂xν
)are now implicitly understood. It is
easy to see that exactly the same equations, but with the opposite push-forwards(ga)∗
(∂/∂x′ν
), can be obtained by subjecting to similar calculations the reverse,
identically satisfied equations: xi ≡ gi(
f (x; a); a). Consequently, we have obtained
two families of equations:
(8)
0 ≡n
∑j=1
ϑk j(a)n
∑ν=1
ξ jν(x)∂
∂xν
∣∣∣∣x 7→ga(x′)
+r
∑j=1
ψk j(a)r
∑ν=1
ξ jν(x′)∂
∂x′ν,
0 ≡n
∑ν=1
ϑk j(a)n
∑ν=1
ξ jν(x)∂
∂xν+
r
∑j=1
ψk j(a)r
∑ν=1
ξ jν(x′)∂
∂x′ν
∣∣∣∣x′ 7→ fa(x)
(k=1 ···r),
in which we represent push-forwards of vector fields by the symbol of variablereplacement x 7→ ga(x′) in the first line, and similarly in the second line, by x′ 7→fa(x).
Theorem 5. If the equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
with the r essential parameters a1, . . . ,ar represent an r-term transformationgroup, if, moreover, F(x′1, . . . ,x
′n) denotes an arbitrary function of x′1, . . . ,x
′n and
lastly, if the ξ jν(x), ψk j(a), ϑk j(a) denote the same functions of their argumentsas in the two Theorems 3 and 4, then the relations:
r
∑j=1
ϑk j(a)n
∑ν=1
ξ jν(x)∂F∂xν
+r
∑j=1
ψk j(a)n
∑ν=1
ξ jν(x′)∂F∂x′ν
= 0
(k=1 ···r)
hold true after the substitution x′1 = f1(x,a), . . . , x′n = fn(x,a).

46 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
3.8.1 Synthetic, Geometric Counterpart of the Computations
To formulate the adequate interpretation of the above considerations, we must intro-duce the two systems of r infinitesimal transformations (1 6 k 6 r):
Xk :=n
∑i=1
ξki(x)∂
∂xiand X ′
k :=n
∑i=1
ξki(x′)∂
∂x′i,
where the second ones are defined to be exactly the same vector fields as the firstones, though considered on the x′-space. This target, auxiliary space x′ has in factto be considered to be the same space as the x-space, because the considered trans-formation group acts on a single individual space. So we can also consider thatX ′
k coincides with the value of Xk at x′ and we shall sometimes switch to anothernotation:
X ′k ≡ Xk
∣∣x′ .
Letting now α and ϑ be the inverse matrices of ψ and of ϑ , namely:
r
∑k=1
αlk(a)ψk j(a) = δ jl ,
r
∑k=1
ϑlk(a)ϑk j(a) = δ jl ,
we can multiply the first (resp. the second) line of (8) by αlk(a) (resp. by ϑlk(a))and then make summation over k = 1, . . . ,r in order to get resolved equations:
0 ≡r
∑k=1
r
∑j=1
αlk(a)ϑk j(a)X j +X ′l (k=1 ···r),
0 ≡ Xl +r
∑k=1
r
∑j=1
ϑlk(a)ψk j(a)X ′j (k=1 ···r),
in which we have suppressed the push-forward symbols. We can readily rewritesuch equations under the contracted form:
Xk =r
∑j=1
ρ jk(a)X ′j and X ′
k =r
∑j=1
ρ jk(a)X j
(k=1 ···r),
by introducing some two appropriate auxiliary r×r matrices ρ jk(a) :=−∑rl=1 ϑkl(a)ψl j(a)
and ρ jk(a) :=−∑rl=1 αkl(a)ϑl j(a) of analytic functions (whose precise expression
does not matter here) which depend only upon a and which, naturally, are inversesof each other. A diagram illustrating what we have gained at that point is welcomeand intuitively helpful.
Proposition 3.2. If, in each one of the r basic infinitesimal transformations of thefinite continuous transformation group x′ = f (x; a)= fa(x) having the inverse trans-

3.8 Transfer of Infinitesimal Transformations by the Group 47
(x′1, . . . ,x′n)Kn (x1, . . . ,xn) Kn
X ′1
X ′r
...X1
Xr
...
fa(·) fa(x)
x′xf ∗a(X ′
k) = ∑ ρ jk(a)X j
ga(·) g∗a(Xk) = ∑ ρ jk(a)X ′j
ga(x′)
Fig. 3.4 Transfer of infinitesimal transformations by the group
formations x = ga(x′), namely if in the vector fields:
Xk =n
∑i=1
ξki(x)∂
∂xi(k=1 ···r), ξki(x) :=− ∂ fi
∂ak(x; e),
one introduces the new variables x′ = fa(x), that is to say: replaces x by ga(x′)and ∂
∂xiby ∑n
ν=1∂ fν∂xi
(x; a) ∂∂x′ν
, then one necessarily obtains a linear combination
of the same infinitesimal transformations X ′l = ∑n
i=1 ξki(x′) ∂∂x′i
at the point x′ withcoefficients depending only upon the parameters a1, . . . ,ar:
( fa)∗(Xk∣∣x
)= (ga)
∗(Xk∣∣ga(x′)
)=
r
∑l=1
ρlk(a1, . . . ,ar)Xl∣∣x′ (k=1 ···r).
Of course, through the inverse change of variable x′ 7→ fa(x), the infinitesimal trans-formations X ′
k are subjected to similar linear substitutions:
(ga)∗(X ′
k
∣∣x′)= ( fa)
∗(X ′k
∣∣fa(x)
)=
r
∑l=1
ρlk(a)Xl∣∣x (k=1 ···r).
3.8.2 Transfer of General Infinitesimal Transformations
Afterwards, thanks to the linearity of the tangent map, we deduce that the generalinfinitesimal transformation of our group:
X := e1 X1 + · · ·+ er Xr,
coordinatized in the basis(Xk)
16k6r by means of some r arbitrary constantse1, . . . ,er ∈K, then transforms as:
(ga)∗(
e1 X1 + · · ·+ er Xr∣∣ga(x′)
)=
r
∑k=1
ek
r
∑l=1
ρlk(a)Xl∣∣x′
=: e′1(e; a)X1∣∣x′ + · · ·+ e′r(e; a)Xr
∣∣x′

48 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
and hence we obtain that the change of variables x′ = fa(x) caused by a generaltransformation of the group acts linearly on the space 'Kr of its infinitesimal trans-formations:
e′k(e; a) :=r
∑l=1
ρkl(a)el (k=1 ···r),
by just multiplying the coordinates el by the matrix ρkl(a). Inversely, we have:
ek(e′; a) =r
∑l=1
ρkl(a)e′l (k=1 ···r),
where ρ(a) is the inverse matrix of ρ(a).
Proposition 4. ([1], p. 81) If the equations x′i = fi(x1, . . . ,xn, a1, . . . ,ar) repre-sent an r-term group and if this group contains the r independent infinitesimaltransformations:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r),
then after the introduction of the new variables x′i = fi(x,a), the general in-finitesimal transformation:
e1 X1( f )+ · · ·+ er Xr f
keeps its form in so far as, for every system of values e1, . . . ,er, there is a relationof the form:
r
∑k=1
ek Xk( f ) =r
∑k=1
e′k X ′k( f ),
where e′1, . . . ,e′r are independent linear homogeneous functions of e1, . . . ,er with
coefficients which are functions of a1, . . . ,ar.
3.8.3 Towards the Adjoint Action
Afterwards, thanks to the linearity of the tangent map, we deduce that the generaltransformation of our group:
X := e1 X1 + · · ·+ er Xr,
coordinatized in the basis(Xk)
16k6r by means of some r arbitrary constantse1, . . . ,er ∈K, then transforms as:

3.8 Transfer of Infinitesimal Transformations by the Group 49
(ga)∗(
e1 X1 + · · ·+ er Xr∣∣ga(x′)
)=
r
∑k=1
ek
r
∑l=1
ρlk(a)Xl∣∣x′
=: e′1(e; a)X1∣∣x′ + · · ·+ e′r(e; a)Xr
∣∣x′
and hence we obtain that the change of variables x′ = fa(x) performed by a generaltransformation of the group then acts linearly on the space 'Kr of its infinitesimaltransformations:
e′k(e; a) :=r
∑l=1
ρkl(a) · el (k=1 ···r),
by just multiplying the coordinates el by the matrix ρkl(a).Nowadays, the adjoint action is defined as an action of an abstract Lie group on
its Lie algebra. But in Chap. 16 below, Lie defines it in the more general context ofa transformation group, as follows. Employing the present way of expressing, oneconsiders the general infinitesimal transformation X
∣∣x′ = e1 X1 + · · ·+ erXr
∣∣x′ of the
group as being based at the point x′, and one computes the adjoint action Ad fa(X∣∣x′)
of fa on X∣∣x′ by differentiating at t = 0 the composition5:
fa exp(tX) f−1a
which represents the action of the interior automorphism associated to fa on theone-parameter subgroup (t,w) 7−→ exp(tX)(x) generated by X :
Ad fa(X∣∣x′)
:=dd t
(fa exp(tX)(·) f−1
a (x′))∣∣∣
t=0
= ( fa)∗dd t
(exp(tX)
(f−1a (x′)
))∣∣∣t=0
= ( fa)∗(X∣∣
f−1a (x′)
)= (ga)
∗(X∣∣ga(x′)
)= (ga)
∗(
e1 X1 + · · ·+ er Xr∣∣ga(x′)
)= e′1(e; a)X1
∣∣x′ + · · ·+ e′r(e; a)Xr
∣∣x′ .
We thus recover exactly the linear action e′k = e′k(e; a1, . . . ,ar) boxed above. A dia-gram is welcome: from the left, the point x is sent by fa to x′ = fa(x)— or inverselyx = ga(x′)—, the vector X |x = ∑ ek Xk
∣∣ga(x′)
is sent to (ga)∗(X∣∣ga(x′)
)by means of
the differential ( fa)∗ = (ga)∗ and Lie’s theorem says that this transferred vector is
a linear combination of the existing vectors Xk|x′ based at x′, with coefficients de-pending on the e j and on the a j.
5 One terms groups (t,x) 7−→ exp(tX)(x) are introduced in Chap. 4.
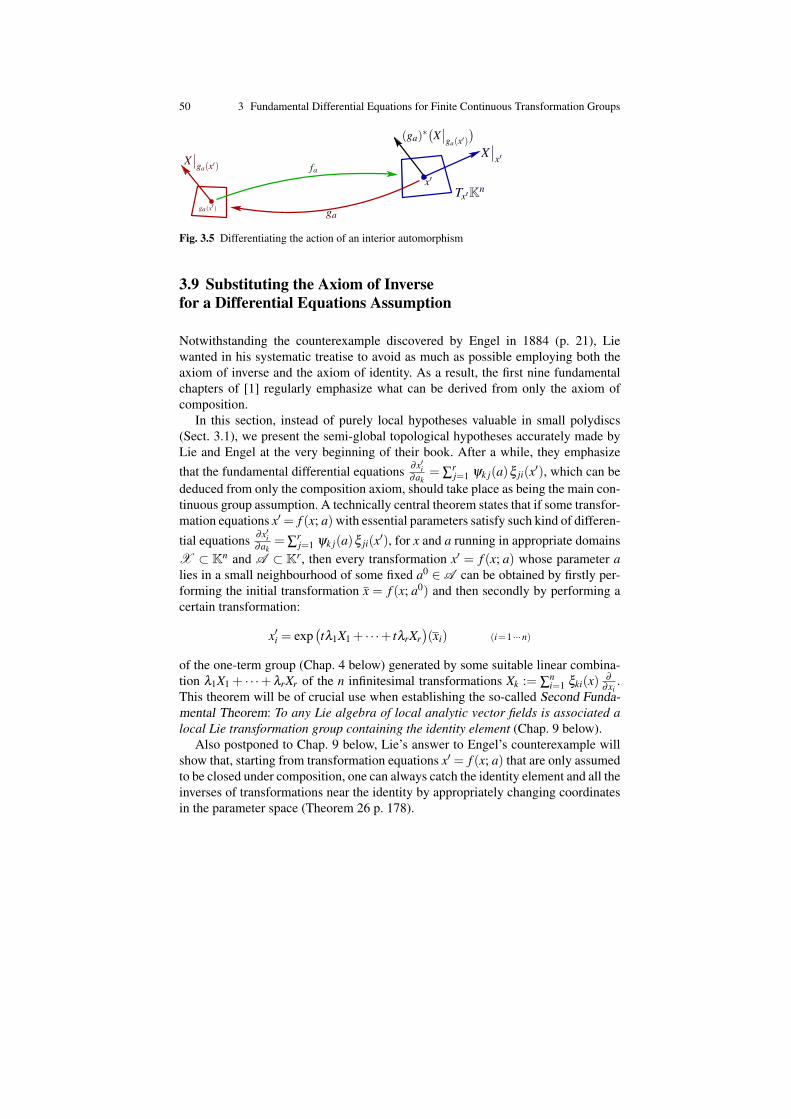
50 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
(ga)∗(X∣∣ga(x′)
)X∣∣x′
Tx′Kn
X∣∣ga(x′)
gaga(x′)
x′fa
Fig. 3.5 Differentiating the action of an interior automorphism
3.9 Substituting the Axiom of Inversefor a Differential Equations Assumption
Notwithstanding the counterexample discovered by Engel in 1884 (p. 21), Liewanted in his systematic treatise to avoid as much as possible employing both theaxiom of inverse and the axiom of identity. As a result, the first nine fundamentalchapters of [1] regularly emphasize what can be derived from only the axiom ofcomposition.
In this section, instead of purely local hypotheses valuable in small polydiscs(Sect. 3.1), we present the semi-global topological hypotheses accurately made byLie and Engel at the very beginning of their book. After a while, they emphasizethat the fundamental differential equations ∂x′i
∂ak= ∑r
j=1 ψk j(a)ξ ji(x′), which can bededuced from only the composition axiom, should take place as being the main con-tinuous group assumption. A technically central theorem states that if some transfor-mation equations x′ = f (x; a) with essential parameters satisfy such kind of differen-tial equations ∂x′i
∂ak= ∑r
j=1 ψk j(a)ξ ji(x′), for x and a running in appropriate domainsX ⊂ Kn and A ⊂ Kr, then every transformation x′ = f (x; a) whose parameter alies in a small neighbourhood of some fixed a0 ∈ A can be obtained by firstly per-forming the initial transformation x = f (x; a0) and then secondly by performing acertain transformation:
x′i = exp(tλ1X1 + · · ·+ tλrXr
)(xi) (i=1 ···n)
of the one-term group (Chap. 4 below) generated by some suitable linear combina-tion λ1X1 + · · ·+λrXr of the n infinitesimal transformations Xk := ∑n
i=1 ξki(x) ∂∂xi
.This theorem will be of crucial use when establishing the so-called Second Funda-mental Theorem: To any Lie algebra of local analytic vector fields is associated alocal Lie transformation group containing the identity element (Chap. 9 below).
Also postponed to Chap. 9 below, Lie’s answer to Engel’s counterexample willshow that, starting from transformation equations x′ = f (x; a) that are only assumedto be closed under composition, one can always catch the identity element and all theinverses of transformations near the identity by appropriately changing coordinatesin the parameter space (Theorem 26 p. 178).

3.9 Substituting the Axiom of Inverse for a Differential Equations Assumption 51
3.9.1 Specifying Domains of Existence
Thus, we consider K-analytic transformation equations x′i = fi(x; a) defined on amore general domain than a product ∆ n
ρ ×rσ of two small polydiscs centered at the
origin. Here is how Lie and Engel specify their domains of existence on p. 14 of [1],and these domains might be global.
§ 2.In the transformation equations:
(1) x′i = fi(x1, . . . ,xn; a1, . . . ,ar) (i=1 ···n),
let now all the parameters a1, . . . ,ar be essential.
Since the fi are analytic functions of their arguments, in the domain [GE-BIETE] of all systems of values x1, . . . ,xn and in the domain of all systems ofvalues a1, . . . ,ar, we can choose a region [BEREICH] (x) and, respectively, aregion (a) such that the following holds:
Firstly. The fi(x, a) are single-valued [EINDEUTIG] functions of the n+ rvariables x1, . . . ,xn, a1, . . . ,ar in the complete extension [AUSDEHNUNG] of thetwo regions (x) and (a).
Secondly. The fi(x, a) behave regularly in the neighbourhood of every sys-tem of values x0
1, . . . ,x0n, a0
1, . . . ,a0r , hence are expandable in ordinary power se-
ries with respect to x1 − x01, . . . , xn − x0
n, as soon as x01, . . . ,x
0n lies arbitrarily in
the domain (x), and a01, . . . ,a
0r lies arbitrarily in the domain (a).
Thirdly. The functional determinant:
∑ ± ∂ f1
∂x1· · · ∂ fn
∂xn
vanishes for no combination of systems of values of xi and of ak in the twodomains (x) and (a), respectively.
Fourthly. If one gives to the parameters ak in the equations x′i = fi(x, a) anyof the values a0
k in domain (a), then the equations:
x′i = fi(x1, . . . ,xn; a01, . . . ,a
0r ) (i=1 ···n)
always produce two different systems of values x′1, . . . ,x′n for two different sys-
tems of values x1, . . . ,xn of the domain (x).We assume that the two regions (x) and (a) are chosen in such a way that
these four conditions are satisfied. If we give to the variables xi in the equationsx′i = fi(x, a) all possible values in (x) and to the parameters ak all possible valuesin (a), then in their domain, the x′i run throughout a certain region, which we candenote symbolically by the equation x′ = f
((x)(a)
). This new domain has the
following properties:

52 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
Firstly. If a01, . . . ,a
0r is an arbitrary system of values of (a) and x′1
0, . . . ,x′n0 an
arbitrary system of values of the subregion x′ = f((x)(a0)
), then in the neigh-
bourhood of the system of values x′i0, a0
k , the x1, . . . ,xn can be expanded in ordi-nary power series with respect to x′1 − x′1
0, . . . ,x′n − x′n0, a1 −a0
1, . . . ,an −a0n.
Secondly. If one gives to the ak fixed values a0k in domain (a), then in the
equations:x′i = fi(x1, . . . ,xn; a0
1, . . . ,a0r ) (i=1 ···n),
the quantities x1, . . . ,xn will be single-valued functions of x′1, . . . ,x′n, which be-
have regularly in the complete extension of the region x′ = f((x)(a0)
).
Referring also to the excerpt p. 26, we may rephrase these basic assumptions asfollows. The fi(x; a) are defined for (x,a) belonging to the product:
X ×A ⊂ Kn ×Kr
of two domains X ⊂Kn and A ⊂Kr. These functions are K-analytic in both vari-ables, hence expandable in Taylor series at every point (x0,a0). Furthermore, forevery fixed a0, the map x 7→ f (x; a0) is assumed to constitute a K-analytic diffeo-morphism of X ×a0 onto its image. Of course, the inverse map is also locallyexpandable in power series, by virtue of the K-analytic inverse function theorem.
To insure that the composition of two transformations exists, one requires thatthere exist nonempty subdomains:
X 1 ⊂ X and A 1 ⊂ A ,
with the property that for every fixed a1 ∈ A 1:
f(X 1 ×a1
)⊂ X ,
so that for every such an a1 ∈ A 1 and for every fixed b ∈ A , the composed map:
x 7−→ f(
f (x; a1); b)
is well defined for all x ∈ X 1 and moreover, is a K-analytic diffeomorphism ontoits image. In fact, it is even K-analytic with respect to all the variables (x,a1,b) inX 1 ×A 1 ×A . Lie’s fundamental and unique group composition axiom may thenbe expressed as follows.
(A1) There exists a Kr-valued K-analytic map ϕ = ϕ(a,b) defined in A 1×A 1 withϕ(A 1 ×A 1
)⊂ A such that:
f(
f (x; a); b)≡ f(x; ϕ(a,b)
)for all x ∈ X 1, a ∈ A 1, b ∈ A 1.

3.9 Substituting the Axiom of Inverse for a Differential Equations Assumption 53
Here are two further specific unmentioned assumptions that Lie presupposes, stillwith the goal of admitting neither the identity element, nor the existence of inverses.
(A2) There is a Kr-valued K-analytic map (a,c) 7−→ b= b(a,c) defined for a runningin a certain (nonempty) subdomain A 2 ⊂ A 1 and for c running in a certain(nonempty) subdomain C 2 ⊂ A 1 with b
(A 2 ×C 2
)⊂ A 1 which solves b in
terms of (a,c) in the equations ck = ϕk(a,b), namely which satisfies identically:
c ≡ ϕ(a, b(a,c)
)for all a ∈ A 2, c ∈ C 2.
Inversely, ϕ(a,b) solves c in terms of (a,b) in the equations bk = bk(a,c), namelymore precisely: there exists a certain (nonempty) subdomain A 3 ⊂ A 2 (⊂ A 1)and a certain (nonempty) subdomain B3 ⊂ A 1 with ϕ
(A 3 ×B3
)⊂ C 2 such
that one has identically:
b ≡ b(a, ϕ(a,b)
)for all a ∈ A 3, b ∈ B3.
Example. In Engel’s counterexample of the group x′ = χ(λ )x with a Riemannuniformizing map ω : ∆ → Λ as on p. 21 having inverse χ : Λ → ∆ , these threerequirements are satisfied, and in addition, we claim that one may even take X =K and A 1 = A = Λ , with no shrinking, for composition happens to hold in factwithout restriction in this case. Indeed, starting from the general composition:
x′′ = χ(λ2)x′ = χ(λ2)χ(λ1)x,
that is to say, from x′′ = χ(λ2)χ(λ1)x, in order to represent it under the specific formx′′ = χ(λ3)x, it is necessary and sufficient to solve χ(λ3) = χ(λ1)χ(λ2), hence wemay take for ϕ:
λ3 = ω(χ(λ1)χ(λ2)
)=: ϕ(λ1,λ2),
without shrinking the domains, for the two inequalities |χ(λ1)|< 1 and |χ(λ2)|< 1readily imply that |χ(λ1)χ(λ2)| < 1 too so that ω
(χ(λ1)χ(λ2)
)is defined. On the
other hand, for solving λ2 in terms of (λ1,λ3) in the above equation, we are naturallyled to define:
b(λ1,λ3) := ω(χ(λ3)
/χ(λ1)
),
and then b = b(λ1,λ3) is defined under the specific restriction that |χ(λ3)| <|χ(λ1)|.
However, the axiom (A2) happens to be still incomplete for later use, and oneshould add the following axiom in order to be able to also solve a in c = ϕ(a,b).
(A3) There is a Km-valued K-analytic map (b,c) 7−→ a= a(b,c) defined in B4 ×C 4
with B4 ⊂ A 1 and C 4 ⊂ A 1, and with a(B4 ×C 4
)⊂ A 1, such that one has
identically:c ≡ ϕ
(a(b,c), b
)for all b ∈ B4, c ∈ C 4.
Inversely, ϕ(a,b) solves c in the equations ak = ak(b,c), namely more precisely:there exist B5 ⊂ B4 and A 5 ⊂ A 1 with ϕ
(A 5 ×B5
)⊂ C 4 such that one has

54 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
identically:
a ≡ a(b, ϕ(a,b)
)for all a ∈ A 5, b ∈ B5,
and furthermore in addition, with a(B5 ×C 4
)⊂ A 2 and with b
(A 5 ×C 4
)⊂
B4 such that one also has identically:
b ≡ b(a(b,c), c
)for all b ∈ B5, c ∈ C 4
a ≡ a(b(a,c), a
)for all a ∈ A 5, c ∈ C 4.
The introduction of the numerous (nonempty) domains A 2, C 2, A 3, B3, B4,C 4, A 5, B5 which appears slightly unnatural and seems to depend upon the orderin which the solving maps a and b are considered can be avoided by requiring fromthe beginning only that there exist two subdomains A 3 ⊂ A 2 ⊂ A 1 such that onehas uniformly:
c ≡ ϕ(a, b(a,c)
)for all a ∈ A 3, c ∈ A 3
c ≡ ϕ(a(b,c), b
)for all b ∈ A 3, c ∈ A 3
b ≡ b(a(b,c), c
)for all b ∈ A 3, c ∈ A 3
b ≡ b(a, ϕ(a,b)
)for all a ∈ A 3, b ∈ A 3
a ≡ a(b(a,c), c
)for all a ∈ A 3, c ∈ A 3
a ≡ a(b, ϕ(a,b)
)for all a ∈ A 3, b ∈ A 3.
We will adopt these axioms in the next subsection. Importantly, we wouldlike to point out that, although b(a,c) seems to represent the group producta−1 · c = m
(i(a), c
), the assumption (A2) neither reintroduces inverses, nor the
identity element, it just means that one may solve b by means of the implicit functiontheorem in the parameter composition equations ck = ϕk(a1, . . . ,ar, b1, . . . ,br).
3.9.2 Group Composition Axiom And Fundamental DifferentialEquations
As was said earlier on, the fundamental Theorem 3, p. 40 about differential equa-tions satisfied by a transformation group was in fact stated and proved in [1] undersemi-global assumptions essentially equivalent to the ones we just formulated abovewith A 3 ⊂ A 2 ⊂ A 1, and now, we can restitute it really.
Proposition 3.4. Under these assumptions, there is an r × r matrix of functions(ψk j(a))
16 j6r16k6r which is K-analytic and invertible in A 3, and there are certain
functions ξ ji(x), K-analytic in X such that the following differential equations:

3.9 Substituting the Axiom of Inverse for a Differential Equations Assumption 55
(2)∂x′i∂ak
(x; a) =r
∑j=1
ψk j(a)ξ ji(x′) (i=1 ···n ; k=1 ···r)
are identically satisfied for all x ∈ X 1 and all a ∈ A 3 after replacing x′ by f (x; a).Here, the functions ξ ji(x′) are defined by choosing arbitrarily some fixed b0 ∈ A 3
and by setting:
ξ ji(x′1, . . . ,x′n) =
[∂x′i∂b j
]b=b0
=
[ r
∑k=1
∂x′i∂ak
∂ak
∂b j
]b=b0
,
and moreover, in the equations inverse to (2):
ξ ji(x′) =r
∑k=1
α jk(a)∂x′i∂ak
(x; a),
the (inverse) coefficients α jk(a) are defined by:
α jk(a) =[
∂ak
∂b j
]b=b0
.
Proof. The computations which we have already conducted on p. 33 for a purelylocal transformation group can here be performed in a similar way. In brief, usingb = b(a,c) from (A2), we consider the identities:
fi(
f (x; a); b(a,c))≡ fi(x; c) (i=1 ···n)
and we differentiate them with respect to ak; if we shortly denote f ′i ≡ fi(x′;b(a,c)
)and x′j ≡ f j(x;a), this gives:
n
∑ν=1
∂ f ′i∂x′ν
∂x′ν∂ak
+r
∑j=1
∂ f ′i∂b j
∂b j
∂ak≡ 0 (i=1 ···n).
By the diffeomorphism assumptions, the matrix( ∂ f ′i
∂x′ν(x′; b)
)16ν6n16i6n has a K-analytic
inverse for all (x′,b)∈X ×A , so an application of Cramer’s rule yields a resolutionof the form:
∂x′ν∂ak
(x; a) = Ξ1ν(x′,b(a,c)
) ∂b1
∂ak(a,c)+ · · ·+Ξrν
(x′,b(a,c)
) ∂br
∂ak(a,c)
(ν =1 ···n ; k=1 ···r).
Here of course, a, c ∈A 3. Then we replace c by ϕ(a,b), with a, b ∈A 3, we conferto b any fixed value, say b0 (remind that the identity e is not available), and weget the desired differential equations with ξ ji(x′) := Ξ ji(x′,b0) and with ψk j(a) :=∂b j∂ak
(a,b0). Naturally, the invertibility of the matrix ψk j(a) comes from (A2).Next, we multiply each equation just obtained (changing indices):

56 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
(2’)∂x′i∂ak
(x; a)≡r
∑ν=1
∂bν∂ak
(a,c)Ξν i(x′, b(a,c)
)by ∂ak
∂bl(b,c), where l ∈ 1, . . . ,r is fixed, we consider (b,c), instead of (a,c), as
the 2r independent variables while a = a(b,c), and we sum with respect to k fork = 1, . . . ,r:
r
∑k=1
∂x′i∂ak
∂ak
∂bl=
r
∑ν=1
r
∑k=1
∂ak
∂bl
∂bν∂ak
Ξν i.
Now, the chain rule and the fact that ∂ak/∂bl is the inverse matrix of ∂bν/∂akenables us to simplify both sides (interchanging members):
(3)r
∑k=1
∂x′i∂ak
∂ak
∂bl=
∂x′i∂bl
= Ξli
Specializing b := b0 ∈ A 3, we get the announced representation:
ξ ji(x′) = Ξ ji(x′, b0) = ∂x′i/∂b j∣∣b=b0
,
and by identification, we also obtain at the same time the representation α jk(a) =∂ak/∂b j
∣∣b=b0
. ut
We end up by observing that, similarly as we did on p. 33, one could proceed tosome further computations, although it would not really be needed for the proposi-tion. We may indeed differentiate the equations:
cµ ≡ ϕµ(a(b,c), b) (µ =1 ···r)
with respect to bl , and for this, we translate a short passage of [1], p. 20.
Hence one has:
r
∑k=1
∂ϕµ
∂ak
∂ak
∂bl+
∂ϕµ
∂bl= 0 (µ, l=1 ···r),
whence it comes:
∂ak
∂bl=−
∑ ± ∂ϕ1∂a1
· · · ∂ϕk−1∂ak−1
∂ϕk∂bl
∂ϕk+1∂ak+1
· · · ∂ϕr∂ar
∑ ± ∂ϕ1∂a1
· · · ∂ϕr∂ar
= Alk(a1, . . . ,ar, b1, . . . ,br).
When we insert these values in (3), we obtain the equations:
(3’) Ξli(x′,b) =r
∑k=1
Alk(a, b)∂x′i∂ak
(i=1 ···n ; l=1 ···r).

3.9 Substituting the Axiom of Inverse for a Differential Equations Assumption 57
Of course by identification with (3), we must then have Alk(a, b) = ∂ak/∂bl here.In conclusion, we have presented the complete thought of Lie and Engel, who didnot necessarily consider the axioms of groups to be strictly local.
3.9.3 The Differential Equations AssumptionAnd Its Consequences
Now, we would like to emphasize that instead of axioms (A1-2-3), in his answer toEngel’s counterexample and in several other places as well, Lie says that he wantsto set as a fundamental hypothesis the existence of a system of differential equationsas the one above, with an invertible matrix ψk j(a).
§ 17. ([1], pp. 67–68)For the time being, we want to retain from assuming that the equations
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) should represent an r-term group. Rather, about theequations (1), we want only to assume: firstly, that they represent a family of ∞r
different transformations, hence that the r parameters a1, . . . ,ar are all essential,and secondly, that they satisfy differential equations of the specific form (2).
So renaming the domain A 3 considered above simply as A 1, we will funda-mentally assume in Sect. 4.6 of Chap. 4 that differential equations of the specificform (2) hold for all x ∈ X 1 and all a ∈ A 1, forgetting completely about compo-sition, and most importantly, without assuming neither the existence of the identityelement, nor assuming existence of inverse transformations. At first, as explained byEngel and Lie, one can easily deduce from such new economical assumptions twobasic nondegeneracy conditions.
Lemma 3.3. Consider transformation equations x′i = fi(x; a) defined for x∈X anda ∈ A having essential parameters a1, . . . ,ar which satisfy differential equations ofthe form:
(2)∂x′i∂ak
(x; a) =r
∑j=1
ψk j(a)ξ ji(x′) (i=1 ···n ; k=1 ···r),
for all x ∈ X 1 and all a ∈ A 1. Then the determinant of the ψk j(a) does not vanishidentically and furthermore, the r infinitesimal transformations:
X ′k =
n
∑i=1
ξki(x′)∂
∂x′i(k=1 ···r)
are independent of each other.

58 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
Proof. If the determinant of the ψk j(a) would vanish identically, there would ex-ist a locally defined (for a running in the locus where ψk j(a) is of maximal, lo-cally constant rank) nonzero K-analytic vector
(τ1(a), . . . ,τr(a)
)in the kernel of
ψk j(a). Consequently, after multiplying (2) by τk(a), we would derive the equations:
∑rk=1 τk(a)
∂x′i∂ak
(x; a)≡ 0 which would then contradict essentiality of parameters, ac-cording to the theorem on p. 15.
As a result, for any a belonging to open set where detψk j(a) 6= 0, we can locallyinvert the differential equations (2) and write them down under the form:
ξ ji(x′) =r
∑k=1
α jk(a)∂x′i∂ak
(x; a) (i=1 ···n; j=1 ···r).
If there would exist constants e′1, . . . ,e′r not all zero with e′1X ′
1 + · · ·+ e′rX′r = 0, we
would then deduce the relation:
0 ≡r
∑k=1
r
∑j=1
e′j α jk(a)∂x′i∂ak
(x; a)
which would again contradict essentiality of parameters. ut
3.9.4 Towards the Theorem 26
At the end of the next chapter in Sect. 4.6, we shall be in a position to pursue therestoration of further refined propositions towards Lie’s Theorem 26 (translated inChap. 9, p. 178) which will answer fully Engel’s counterexample. In brief, and byanticipation, this theorem states what follows.
Let x′i = fi(x; a1, . . . ,ar) be a family of transformation equations which is onlyassumed to be closed under composition, a finite continuous transformation group,in the sense of Lie. According to Proposition 3.4 above, there exists a system offundamental differential equations of the form:
∂x′i∂ak
=r
∑j=1
ψk j(a) ·ξ ji(x′) (i=1 ···n ;k=1 ···r)
which is identically satisfied by the functions fi(x,a), where the ψk j are certainanalytic functions of the parameters (a1, . . . ,ar). If one introduces the r infinitesimaltransformations:
n
∑i=1
ξki(x)∂ f∂xi
=: Xk( f ) (k=1 ···r),
and if one forms the so-called canonical finite equations:
x′i = exp(λ1X1 + · · ·+λkXk
)(x)
=: gi(x; λ1, . . . ,λr) (i=1 ···n)

3.9 Substituting the Axiom of Inverse for a Differential Equations Assumption 59
of the r-term group which is generated by these r infinitesimal transformations —see the next Chap. 4 for expX(x)— then this group contains the identity element,namely g(x; 0), and its transformations are ordered as inverses by pairs, namely:g(x; −λ ) = g(x; λ )−1. Lastly, the Theorem 26 in questions states that in these finiteequations x′i = gi(x; λ ), it is possible to introduce new local parameters a1, . . . ,ar inplace of λ1, . . . ,λr so that the resulting transformation equations:
x′i = gi(x; λ1(a), . . . ,λr(a)
)=: f i(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
represent a family of ∞r transformations which embraces, possibly after analyticprolongation, all the ∞r initial transformations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar).
In this way, Lie not only answers Engel’s counterexample x′ = χ(λ )x by sayingthat one has to restitute the plain transformations x′ = ζ x by changing appropriatelycoordinates in the parameter space, but also, Lie really establishes the conjecturehe suspected (quotation p. 20), modulo the fact that the conjecture was not truewithout a suitable change of coordinates in the parameter space. To our knowledge,no modern treatise restitutes this theorem of Lie, although a great deal of the first170 pages of the Theorie der Transformationsgruppen is devoted to economize theaxiom of inverse. We end up this chapter by a quotation ([1], pp. 81–82) motivatingthe introduction of one-term groups exp(tX)(x) in the next chapter.
3.9.5 Metaphysical Links With Substitution Theory
We conclude this chapter with a brief quotation motivating what will follow.
The concepts and the propositions of the theory of the continuous transfor-mation groups often have their analogues in the theory of substitutions†, that isto say, in the theory of the discontinuous groups. In the course of our studies, wewill not emphasize this analogy every time, but we will more often rememberit by translating the terminology of the theory of substitutions into the theory oftransformation groups, and this shall take place as far as possible.
Here, we want to point out that the one-term groups in the theory of transfor-mation groups play the same rôle as the groups generated by a single substitu-tion in the theory of substitutions.
In a way, we shall consider the one-term groups, or their infinitesimal trans-formations, as the elements of the r-term group. In the studies about r-termgroups, it is, almost in all circumstances, advantageous to direct at first the at-

60 3 Fundamental Differential Equations for Finite Continuous Transformation Groups
tention towards the infinitesimal transformations of the concerned group and tochoose them as the object of study.
References
1. Engel, F., Lie, S.: Theorie der Transformationsgruppen. Erster Abschnitt. Unter Mitwirkungvon Prof. Dr. Friedrich Engel, bearbeitet von Sophus Lie, Verlag und Druck von B.G. Teubner,Leipzig und Berlin, xii+638 pp. (1888). Reprinted by Chelsea Publishing Co., New York, N.Y.(1970)
—————–
† C. JORDAN, Traité des substitutions, Paris 1870.

Chapter 4One-Term Groupsand Ordinary Differential Equations
Abstract The flow x′ = exp(tX)(x) of a single, arbitrary vector field X =
∑ni=1 ξi(x) ∂
∂xiwith analytic coefficients ξi(x) always generates a one-term (local)
continuous transformation group satisfying:
exp(t1X)(
exp(t2X)(x))= exp
((t1 + t2)X
)(x),
and:[exp(tX)(·)]−1 = exp(−tX)(·).
In a neighbourhood of any point at which X does not vanish, an appropriate localdiffeomorphism x 7→ y may straighten X to just ∂
∂y1, hence its flow becomes y′1 =
y1 + t, y′2 = y2, . . . ,y′n = yn.In fact, in the analytic category (only), computing a general flow exp(tX)(x)
amounts to adding the differentiated terms appearing in the formal expansion ofLie’s exponential series:
exp(tX)(xi) = ∑k>0
(tX)k
k!(xi) = xi + t X(xi)+ · · ·+ tk
k!X(· · ·(X(X︸ ︷︷ ︸
k times
(xi)))
· · ·)+ · · · ,
that have been studied extensively by Gröbner in [3].The famous Lie bracket is introduced by looking at the way how a vector field
X = ∑ni=1 ξi(x) ∂
∂xiis perturbed, to first order, while introducing the new coordinates
x′ = exp(tY )(x) =: ϕ(x) provided by the flow of another vector field Y :
ϕ∗(X) = X ′+ t[X ′, Y ′]+ · · · ,
with X ′ = ∑ni=1 ξi(x′) ∂
∂ x′iand Y ′ = ∑n
i=1 ηi(x′) ∂∂x′i
denoting the two vector fields in
the target space x′ having the same coefficients as X and Y . Here, the analyticalexpression of the Lie bracket is:
61

62 4 One-Term Groups and Ordinary Differential Equations
[X ′, Y ′]= n
∑i=1
( n
∑l=1
ξl(x′)∂ηi
∂x′l(x′)−ηl(x′)
∂ξi
∂x′l(x′))
∂∂x′i
.
An r-term group x′ = f (x; a) satisfying his fundamental differential equations∂x′i∂ak
= ∑rj=1 ψk j(a)ξ ji(x′) can, alternatively, be viewed as being generated by its
infinitesimal transformations Xk = ∑ni=1 ξki(x) ∂
∂xiin the sense that the totality of the
transformations x′ = f (x; a) is identical with the totality of all transformations:
x′i = exp(λ1 X1 + · · ·+λr Xr
)(xi)
= xi +r
∑k=1
λk ξki(x)+1...r
∑k, j
λk λ j
1 ·2Xk(ξ ji)+ · · · (i=1 ···n)
obtained as the time-one map of the one-term group exp(t ∑ λiXi
)(x) generated by
the general linear combination of the infinitesimal transformations.A beautiful idea of analyzing the (diagonal) action x(µ)
′= f
(x(µ); a
)induced
on r-tuples of points(x(1), . . . ,x(r)
)in general position enables Lie to show that
for every collection of r linearly independent vector fields Xk = ∑ni=1 ξki(x) ∂
∂xi, the
parameters λ1, . . . ,λr in the finite transformation equations x′ = exp(λ1 X1 + · · ·+
λr Xr)(x) are all essential.
4.1 Mechanical and Mental Images
§ 15. ([2])The concept of infinitesimal transformation and likewise the one of one-termgroup gain a certain graphic nature when one makes use of geometric andmechanical images.
In the infinitesimal transformation:
x′i = xi +ξi(x1, . . . ,xn)δ t (i=1 ···n),
or in:
X( f ) =n
∑i=1
ξi∂ f∂xi
,
we interpret the variables x as Cartesian coordinates of an n-times extendedspace. Then the transformation can obviously be interpreted in such a waythat each point of coordinates x1, . . . ,xn is transferred to an infinitesimallyneighbouring point of coordinates x′1, . . . ,x
′n. So the transformation attaches
to every point at which not all the ξi vanish a certain direction of progress[FORTSCHREITUNGSRICHTUNG], and along this direction of progress, a cer-

4.1 Mechanical and Mental Images 63
tain infinitely small line [STRECKE]; the direction of progress is determined bythe proportion: ξ1(x) : ξ2(x) : · · · : ξn(x); the infinitely small line has the length:√
ξ 21 + · · ·+ξ 2
n δ t. If at a point x1, . . . ,xn all the ξ are zero, then no direction ofprogress is attached to the point by the infinitesimal transformation.
If we imagine that the whole space is filled with a compressible fluid, then wecan interpret the infinitesimal transformation X( f ) simply as an infinitely smallmovement [BEWEGUNG] of this fluid, and δ t as the infinitely small time inter-val [ZEITABSCHNITT] during which this movement proceeds. Then evidently,the quantities ξ1(x) : · · · : ξn(x) are the components of the velocity of the fluidparticle [FLÜSSIGKEITSTHEILCHENS] which is located precisely in the pointx1, . . . ,xn.
The finite transformations of the one-term group X( f ) come into being[ENTSTEHEN] by repeating infinitely many times [DURCH UNENDLICHMA-LIGE WIEDERHOLUNG] the infinitesimal transformation x′i = xi + ξi δ t. In or-der to arrive at a finite transformation, we must hence imagine that the infinitelysmall movement represented by the infinitesimal transformation is repeated dur-ing infinitely many time intervals δ t; in other words, we must follow the move-ment of the fluid particle during a finite time interval. To this end, it is necessaryto integrate the differential equations of this movement, that is to say the simul-taneous system:
dx′1dξ1(x′)
= · · ·= dx′nξn(x′)
= d t.
A fluid particle which, for the time t = 0, is located in the point x1, . . . ,xn will,after a lapse of time t, reach the point x′1, . . . ,x
′n; so the integration must be
executed in such a way that for t = 0, one has: x′i = xi. In reality, we foundearlier the general form of a finite transformation of our group exactly in thismanner.
The movement of our fluid is one which is a so-called stationary movement,because the velocity components dx′i/d t are free of t. From this, it follows thatin one and the same point, the movement is the same at each time, and con-sequently that the whole process of movement always takes the same course,whatever the time at which one starts to consider it. The proof that the finitetransformations produced by the infinitesimal transformation X( f ) constitute agroup already lies fundamentally in this observation.
If we consider a determined fluid particle, say the one which, for the timet = 0 is located in the point x0
1, . . . ,x0n, then we see that it moves on a curve
which passes through the point x01, . . . ,x
0n. So the entire space is decomposed
only in curves of a constitution such that each particle remains on the curveon which it is located once. We want to call these curves the integral curves[BAHNCURVEN] of the infinitesimal transformation X( f ). Obviously, there are∞n−1 such integral curves.
For a given point x01, . . . ,x
0n, it is easy to display the equations of the integral
curve passing through it. The integral curve is nothing but the locus of all points

64 4 One-Term Groups and Ordinary Differential Equations
in which the point x01, . . . ,x
0n is transferred, when the ∞1 transformations:
x′i = xi +t1
ξi(x)+ · · · (i=1 ···n)
of the one-term group are executed on it. Consequently, the equations:
x′i = x0i +
t1
ξi(x0)+t2
1 ·2(X(ξi)
)x=x0
+ · · · (i=1 ···n)
represent the integral curve in question, when one considers t as an independentvariable.
4.2 Straightening of Flows and the Exponential Formula
Let x′i = fi(x; a) be a one-term local transformation group, with a ∈ K (= R orC) a scalar and with the identity e corresponding to the origin 0 ∈ K as usual. Itsfundamental differential equations (p. 35):
dx′ida
= ψ(a)ξi(x′1, . . . ,x′n) (i=1 ···n)
then consist of a complete first order PDE system. But by introducing the new pa-rameter:
t = t(a) :=∫ a
0ψ(a1)da1,
we immediately transfer these fundamental differential equations to the time-independent system of n ordinary differential equations:
(1)dx′id t
= ξi(x′1, . . . ,x′n) (i=1 ···n),
the integration of which amounts to computing the so-called flow of the vector fieldX := ∑n
i=1 ξi(x) ∂∂xi
.With the same letters fi, we will write fi(x; t) instead of fi(x; a(t)). Of course,
the (unique) solution of the system (1) with the initial condition x′i(x; 0) = xi isnothing but x′i = fi(x; t): the flow was in fact known from the beginning. Further-more, uniqueness of the flow and the fact that the ξi are independent of t both implythat the group composition property corresponds just to addition of time parameters([1, 4]):
fi(
f (x; t1); t2)≡ fi(x; t1 + t2) (i=1 ···n).
It is classical that one may (locally) straighten X to ∂∂yn
.
Theorem 4.1. Every one-term continuous transformation group:
x′i = fi(x1, . . . ,xn; t) (i=1 ···n)

4.2 Straightening of Flows and the Exponential Formula 65
satisfying differential equations of the form:
d fi
d t= ξi( f1, . . . , fn) (i=1 ···n)
is locally equivalent, through a suitable change of variables yi = yi(x), to a groupof translations:
y′1 = y1 + t, . . . . . . , y′2 = y2, y′n = yn.
y1
0
x
x1y10
y
Φ(y)y
=: Φ(y)
y = Φ−1(x)
x = f (0, y; y1)
Fig. 4.1 Straightening a flow by means of a diffeomorphism
Proof. We may suppose from the beginning that the coordinates x1, . . . ,xn had beenchosen so that ξ1(0) = 1 and ξ2(0) = · · ·= ξn(0) = 0. In an auxiliary space y1, . . . ,yndrawn on the left of the figure, we consider all points
(0, y)
:=(0,y2, . . . ,yn) near theorigin lying on the coordinate hyperplane which is complementary to the y1-axis,and we introduce the diffeomorphism:
y 7−→ x = x(y) := f(0, y; y1
)=: Φ(y),
defined by following the flow up to time y1 from(0, y); this is indeed a diffeo-
morphism fixing the origin thanks to ∂Φ1∂y1
(0) = ∂ f1∂ t (0) = ξ1(0) = 1, to ∂Φk
∂y1(0) =
∂ fk∂ t (0) = ξk(0) = 0 and to Φk(0, y)≡ yk for k = 2, . . . ,n. Consequently, we get that
the (wavy) flow represented on the right figure side has been straightened on the leftside to be just a uniform translation directed by the y1-axis, because by substituting:
x′ = f(0, y′; y′1
)= f(0, y; y1 + t
)= f(
f(0, y; y1
); t)= f (x; t),
we recover the uniquely defined flow x′ = f (x; t) when assuming that y′ = y andy′1 = y1 + t. ut
Theorem 6. If a one-term group:
x′i = fi(x1, . . . ,xn, a) (i=1 ···n)
contains the identity transformation, then its transformations are interchange-able [VERTAUSCHBAR] one with another and they can be ordered as inversesby pairs. Every group of this sort is equivalent to a group of translations:

66 4 One-Term Groups and Ordinary Differential Equations
y′1 = y1, . . . , y′n−1 = yn−1, y′n = yn + t.
4.2.1 The Exponential Analytic Flow Formula
In fact, because we have universally assumed analyticity of all data, the solutionx′ = x′(x; t) to the PDE system (1) can be sought by expanding the unknown x′ inpower series with respect to t:
x′i(x; t) = ∑k>0
Ξik(x) tk = xi + t ξi(x)+ · · · (i=1 ···n).
So, what are the coefficient functions Ξik(x)? Differentiating once more and twicemore (1), we get for instance:
d2x′id t2 =
n
∑k=1
∂ξi
∂xk
dx′kd t
=n
∑k=1
∂ξi
∂xkξk = X(ξi) (i=1 ···n)
d3x′id t3 =
n
∑k=1
∂X(ξi)
∂xk
dx′kd t
=n
∑k=1
∂X(ξi)
∂xkξk = X
(X(ξi)
),
etc., and hence generally by a straightforward induction:
dkx′id tk = X
(· · ·(X︸ ︷︷ ︸
k−1 times
(ξi))· · ·)= X
(· · ·(X(X︸ ︷︷ ︸
k times
(x′i)))
· · ·),
for every nonnegative integer k, with the convention X0xi = xi. Setting t = 0, wetherefore get:
k! Ξik(x)≡ X(· · ·(X(X︸ ︷︷ ︸
k times
(xi)))
· · ·).
Thus rather strikingly, computing a flow boils down in the analytic category to sum-ming up differentiated terms.
Proposition 4.1. The unique solution x′(x; t) to a local analytic system of ordinary
differential equations dx′id t = ξi(x′1, . . . ,x
′n) with initial condition x′i(x; 0) = xi is pro-
vided by the power series expansion:
(2) x′i(x; t) = xi + t X(xi)+ · · ·+ tk
k!X(· · ·(X(X︸ ︷︷ ︸
k times
(xi)))
· · ·)+ · · · (i=1 ···n),
which can also be written, quite adequately, by means of an exponential denotation:

4.2 Straightening of Flows and the Exponential Formula 67
(2’) x′i = exp(t X)(xi) = ∑
k>0
(t X)k
k!(xi) (i=1 ···n).
4.2.2 Action on Functions
Letting f = f (x1, . . . ,xn) be an arbitrary analytic function, we might compose fwith the above flow:
f ′ := f (x′1, . . . ,x′n) = f
(x′1(x; t), . . . ,x′n(x; t)
),
and we should then expand the result in power series with respect to t:
f ′ =(
f ′)
t=0 +t1!
( d f ′d t
)t=0 +
t2
2!
( d2 f ′
d t2
)t=0 + · · · .
Consequently, we need to compute the differential quotients d f ′d t , d2 f ′
d t2 , . . . , and if weset ξ ′
i := ξi(x′1, . . . ,x′n) and X ′ := ∑n
i=1 ξ ′i
∂∂x′i
,
d f ′
d t=
n
∑i=1
ξ ′i
∂ f ′
∂x′i= X ′( f ′),
d2 f ′
d t2 = X ′( n
∑i=1
ξ ′i
∂ f ′
∂x′i
)= X ′(X ′( f ′)
),
and so on. After setting t = 0, the x′i become xi, the f ′ becomes f , the X ′( f ′) becomesX( f ), and so on, whence we obtain the expansion1:
(3) f (x′1, . . . ,x′n) = f (x1, . . . ,xn)+
t1!
X( f )+ · · ·+ tk
k!X(· · ·(X︸ ︷︷ ︸
k times
( f ))· · ·)+ · · · .
§ 13. ([2])Amongst the ∞1 transformations of the one-term group (2), those whose pa-
rameter t has an infinitely small value, say the value δ t, play an outstandingrole. We now want to consider more precisely these “infinitely small” or “in-finitesimal” transformations of the group.
1 Changing t to −t exchanges the rôles of x′ = exp(tX)(x) and of x = exp(−tX)(x′), hence wealso have:
(3a) f (x1, . . . ,xn) = f (x′1, . . . ,x′n)−
t1!
X( f )+ · · ·+(−1)k tk
k!X(· · ·(X( f )
)· · ·)+ · · · .

68 4 One-Term Groups and Ordinary Differential Equations
If we take into account only the first power of δ t, whereas we ignore thesecond and all the higher ones, then we obtain from (2) the desired infinitesimaltransformation under the form:
(4) x′i = xi +ξi(x1, . . . ,xn)δ t (i=1 ···n);
on the other hand, if we use the equation (3), we get the last n equations con-densed in the single one:
f ′ = f +X( f )δ t,
or written in greater length:
f (x′1, . . . ,x′n) = f (x1, . . . ,xn)+δ t
n
∑i=1
ξi∂ f∂xi
.
It is convenient to introduce a specific naming for the difference x′i − xi, that isto say, for the expression ξi δ t. Occasionally, we want to call ξiδ t the “increase”[ZUWACHS], or the “increment” [INCREMENT], or also the “variation” [VARI-ATION] of xi, and write for that: δxi. Then we can also represent the infinitesimaltransformation under the form:
δx1 = ξ1 δ t, . . . , δxn = ξn δ t.
Correspondingly, we will call the difference f ′− f , or the expression X( f )δ tthe increase, or the variation of the function f (x1, . . . ,xn) and we shall write:
f ′− f = X( f )δ t = δ f .
It stands to reason that the expression, completely alone:
X( f ) =n
∑i=1
ξi∂ f∂xi
already fully determines the infinitesimal transformation δxi = ξi δ t, when oneunderstands by f (x1, . . . ,xn) some undetermined function of its arguments. In-deed, all the n functions ξ1, . . . ,ξn are individually given at the same time withX( f ).
This is why we shall introduce the expression X( f ) = δ fδ t as being the symbol
of the infinitesimal transformation (4), so we will really speak of the “infinites-imal transformation X( f )”. However, we want to point out just now that thesymbol of the infinitesimal transformation (4) is basically determined only upto an arbitrary remaining constant factor. In fact, when we multiply the expres-sion X( f ) by any finite constant c, then the resulting expression cX( f ) is alsoto be considered as the symbol of the infinitesimal transformation (4). Indeed,

4.2 Straightening of Flows and the Exponential Formula 69
according to the concept of an infinitely small quantity, it makes no difference,when we substitute in (4) the infinitely small quantity δ t by cδ t.
The introduction of the symbol X( f ) for the infinitesimal transformation (4)presents many advantages. Firstly, it is very convenient that the n equationsx′i = xi +ξi δ t of the transformation are replaced by the single expression X( f ).Secondly, it is convenient that in the symbol X( f ), we have to deal with onlyone series of variables, not with the two series: x1, . . . ,xn and x′1, . . . ,x
′n. Lastly
and thirdly, the symbol X( f ) establishes the connection between infinitesimaltransformations and linear partial differential equations; because in the lattertheory, expressions such as X( f ) do indeed play an important role. We shall gointo more details later about this connection (cf. Chap. 6).
The preceding developments show that a one-term group with the identitytransformation always comprises a well determined infinitesimal transformationx′i = xi +ξi δ t, or briefly X( f ). But it is also clear that conversely, the one-termgroup in question is perfectly determined, as soon as one knows its infinitesimaltransformation. Indeed, the infinitesimal transformation x′i = xi + ξi δ t is, so tospeak, only another way of writing the simultaneous system (1) from which arederived the equations (2) of the one-term group.
Thus, since every one-term group with the identity transformation is com-pletely determined by its infinitesimal transformation, we shall, for the sake ofconvenience, introduce the following way of expressing.
Every transformation of the one-term group:
x′i = xi +t1
ξi +t2
1 ·2X(ξi)+ · · · (i=1 ···n)
is obtained by repeating infinitely many times the infinitesimal transformation:
x′i = xi +ξi δ t or X( f ) = ξ1∂ f∂x1
+ · · ·+ξn∂ f∂xn
.
Or yet more briefly:The one-term group in question is generated by its infinitesimal transforma-
tions.
In contrast to the infinitesimal transformation X( f ), we call the equations:
x′i = xi +t1
ξi +t2
1 ·2X(ξi)+ · · ·
the finite equations of the one-term group in question.Now, we may enunciate briefly as follows the connection found earlier be-
tween the simultaneous system (1) and the one-term group (2’):
Proposition 1. Every one-term group which contains the identity transforma-tion is generated by a well determined infinitesimal transformation.

70 4 One-Term Groups and Ordinary Differential Equations
And conversely:
Proposition 2. Every infinitesimal transformation generates a completely de-termined one-term group.
4.3 Exponential Change of Coordinates and Lie Bracket
Let X = ∑ni=1 ξi(x) ∂
∂xibe an infinitesimal transformation which generates the one-
term group x′ = exp(tX)(x). What happens if the variables x1, . . . ,xn are subjectedto an analytic diffeomorphism yν = ϕν(x) which transfers naturally X to the vectorfield:
Y := ϕ∗(X) =n
∑ν=1
X(yν)∂
∂yν=:
n
∑ν=1
ην(y1, . . . ,yn)∂
∂yν
in the new variables y1, . . . ,yn?
Proposition 4.4. The new one-term group y′ = exp(tY )(y) associated to Y = ϕ∗(X)can be recovered from the old one x′ = exp(tX)(x) thanks to the formula:
exp(tY )(y) = ϕ(
exp(tX)(x))∣∣
x=ϕ−1(y).
Proof. Since we work in the analytic category, we are allowed to deal with powerseries expansions. Through the introduction of the new variables yν = ϕν(x), anarbitrary function f (x1, . . . ,xn) is transformed to the function F = F(y) defined bythe identity:
f (x)≡ F(ϕ(x)
).
With x′ = exp(tX)(x) by assumption, we may also define y′ν := ϕν(x′) so that:
F(y′)∣∣y′=ϕ(x′) = f (x′).
On the other hand, the Jacobian matrix of ϕ induces a transformation between vec-tor fields; equivalently, this transformation X 7→ ϕ∗(X) =: Y can be defined by therequirement that for any function f :
Y (F)∣∣y=ϕ(x) = X( f ).
By a straightforward induction, it follows for any integer k > 1 that we have:
Y(Y (F)
)∣∣y=ϕ(x) = X
(X( f )
), . . . . . . , Y k(F)
∣∣y=ϕ(x) = Xk( f ).
Consequently, in the expansion (3) of f (x′) = f(
exp(tX)(x))
with respect to thepowers of t, we may perform replacements:

4.3 Exponential Change of Coordinates and Lie Bracket 71
F(y′)∣∣y′=ϕ(x′) = f (x′) = ∑
k>0
tk
k!Xk( f ) = ∑
k>0
tk
k!Y k(F)
∣∣y=ϕ(x).
Removing the two replacements |y′=ϕ(x′) and |y=ϕ(x), we get an identity in terms ofthe variables y and y′:
F(y′) = ∑k>0
tk
k!Y k(F),
which, because the function f — and hence F too — was arbitrary, shows that y′
must coincide with exp(tY )(y), namely:
y′i = ∑k>0
tk
k!Y k(yi) (i=1 ···n).
Consequently, after replacing here y′ by ϕ(x′) and y by ϕ(x), we obtain:
ϕ(
exp(tX)(x))= ϕ(x′) = y′ = ∑
k>0
tk
k!Y k(y)
∣∣y=ϕ(x) = exp(tY )(y)
∣∣y=ϕ(x),
and this is the same relation between flows as the one stated in the proposition, butviewed in the x-space. ut
Proposition 3. If, after the introduction of the new independent variables:
yi = ϕi(x1, . . . ,xn) (i=1 ···n),
the symbol:
X( f ) =n
∑i=1
ξi∂ f∂xi
of the infinitesimal transformation:
x′i = xi +ξi δ t (i=1 ···n)
receives the form:
X( f ) =n
∑ν=1
X(yν)∂ f∂yν
=n
∑ν=1
ην(y1, . . . ,yn) = Y ( f ),
then the finite transformations generated by X( f ):
x′i = xi +t1
ξi +t2
1 ·2X(ξi)+ · · · (i=1 ···n)
are given, in the new variables, the shape:

72 4 One-Term Groups and Ordinary Differential Equations
y′i = yi +t1
ηi +t2
1 ·2Y (ηi)+ · · · (i=1 ···n),
where the parameter t possesses the same value in both cases.
4.3.1 Flows as Changes of Coordinates
Suppose we are given an arbitrary infinitesimal transformations:
X =n
∑i=1
ξi(x)∂
∂xi.
For later use, we want to know how X transforms through the change of coordinatesrepresented by the flow diffeomorphism:
x′i = exp(tY )(xi) = xi +t1
ηi +t2
1 ·2Y (ηi)+ · · · (i=1 ···n)
of another infinitesimal transformation:
Y =n
∑i=1
ηi(x1, . . . ,xn)∂
∂xi.
At least, we would like to control how X transforms modulo second order terms int. By definition, X is transformed to the vector field:
ϕ∗(X) =n
∑i=1
X(x′i)∂
∂x′i,
where the expressions X(x′i) should still be expressed in terms of the target coordi-nates x′1, . . . ,x
′n. Replacing x′i by its above expansion and neglecting the second and
the higher powers of t, we thus get:
X(x′i) = X(xi)+ t X(ηi)+ · · · (i=1 ···n).
To express the first term of the right-hand side in terms of the target coordinates,we begin by inverting x′ = exp(tY )(x), getting x = exp(−tY ′)(x′), with of courseY ′ := ∑n
i=1 ηi(x′) ∂∂y′i
denoting the same field as Y but written in the x′-space, and wecompute X(xi) as follows:

4.4 Essentiality of Multiple Flow Parameters 73
X(xi) = ξi(x) = ξi(
exp(−tY ′)(x′))
= ξi(x′1 − t η1(x′), . . . . . . ,x′n − t ηn(x′)
)= ξi(x′)− t
n
∑l=1
∂ξi
∂x′l(x′)ηl(x′)+ · · ·
= ξi(x′)− t Y ′(ξi(x′))+ · · · (i=1 ···n).
If we now abbreviate ξ ′i := ξi(x′) and η ′
i := ηi(x′), because O(t2) is neglected, nocomputation is needed to express the second term in terms of x′:
t X(ηi) = t X ′(η ′i )−·· · (i=1 ···n),
and consequently by adding we get:
X(x′i) = ξ ′i + t
(X ′(η ′
i )−Y ′(ξ ′i ))+ · · · (i=1 ···n).
As the n coefficients X ′(η ′i )−Y ′(ξ ′
i ), either one recognizes the coefficients of theLie bracket:[
X ′, Y ′]= [ n
∑i=1
ξi(x′)∂
∂x′i,
n
∑i=1
ηi(x′)∂
∂x′i
]:=
n
∑i=1
(X ′(η ′
i )−Y ′(ξ ′i )) ∂
∂x′i,
between X ′ := ∑ni=1 ξi(x′) ∂
∂x′iand Y ′ := ∑n
i=1 ηi(x′) ∂∂x′i
, or one chooses to defineonce for all the Lie bracket in such a way. In fact, Engel and Lie will mainly intro-duce brackets in the context of the Clebsch-Frobenius theorem, Chap. 5 below. Atpresent, let us state the gained result in a self-contained manner.
Lemma 4.1. ([2], p. 141) If, in the infinitesimal transformation X = ∑ni=1 ξi(x) ∂
∂xiof the space x1, . . . ,xn, one introduces as new variables:
x′i = exp(tY )(xi) = xi + t Y (xi)+ · · · (i=1 ···n),
those induced by the one-term group generated by another infinitesimal transforma-tion Y = ∑n
i=1 ηi(x) ∂∂xi
, then setting X ′ := ∑ni=1 ξi(x′) ∂
∂x′iand Y ′ := ∑n
i=1 ηi(x′) ∂∂x′i
,one obtains a transformed vector field:
ϕ∗(X) = X ′+ t[X ′, Y ′]+ · · · ,
with a first order perturbation which is the Lie bracket[X ′, Y ′].
4.4 Essentiality of Multiple Flow Parameters
At present, we again consider r arbitrary vector fields with analytic coefficientsdefined on a certain, unnamed domain of Kn which contains the origin:

74 4 One-Term Groups and Ordinary Differential Equations
Xk =n
∑i=1
ξki(x1, . . . ,xn)∂
∂xi(k=1 ···r).
Though the collection X1, . . . ,Xk does not necessarily stem from an r-term group,each individual Xk nonetheless generates the one-term continuous transformationgroup x′ = exp(tXk)(x) with corresponding infinitesimal transformations x′i = xi +ε ξki(x); this is the reason why we shall hence sometimes alternatively refer to suchgeneral vector fields Xk as being infinitesimal transformations.
Definition 4.1. The r infinitesimal transformations X1, . . . ,Xr will be called inde-pendent (of each other) if they are linearly independent, namely if the n equations:
0 ≡ e1 ξ1i(x)+ · · ·+ er ξri(x) (i=1 ···n)
in which e1, . . . ,er are constants, do imply e1 = · · ·= er = 0.
For instance, Theorem 3 on p. 40 states that an r-term continuous local trans-formation group x′i = fi(x; a1, . . . ,ar) whose parameters ak are all essential alwaysgives rise to the r infinitesimal transformations Xk :=− ∂ f
∂ak(x; e), k = 1, . . . ,r, which
are independent of each other.Introducing r arbitrary auxiliary constants λ1, . . . ,λr, one may consider the one-
term group generated by the general linear combination:
C := λ1 X1 + · · ·+λr Xr,
of X1, . . . ,Xr, namely the flow:
x′i = exp(tC)(xi) = xi +t1
C(xi)+t2
1 ·2C(C(xi)
)+ · · ·
= xi + tr
∑k=1
λk ξki + t21...r
∑k, j
λk λ j
1 ·2Xk(ξ ji)+ · · ·
=: hi(x; t,λ1, . . . ,λr) (i=1 ···n).
If the Xk ≡− ∂ f∂ak
(x; e) do stem from an r-term continuous group x′i = fi(x; a1, . . . ,ar),a natural question is then to compare the above integrated finite equationshi(x; t,λ1, . . . ,λr) to the original transformation equations fi(x; a1, . . . ,ar). Beforestudying this question together with Lie and Engel, we focus our attention on asubquestion whose proof shows a beautiful, synthetical, geometrical idea: that ofprolongating the action jointly to finite sets of points.
At first, without assuming that the Xk stem from an r-term continuous group, it isto be asked (subquestion) whether the parameters λ1, . . . ,λr in the above integratedtransformation equations x′i = hi(x; λ1, . . . ,λr) are all essential. In the formula justabove, we notice that the r + 1 parameters only appear in the form t λ1, . . . , t λr,hence because the λk are arbitrary, there is no restriction to set t = 1. We shall thensimply write hi(x; λ1, . . . ,λr) instead of hi(x; 1,λ1, . . . ,λr).

4.4 Essentiality of Multiple Flow Parameters 75
Theorem 8. If the r independent infinitesimal transformations:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
are independent of each other, and if furthermore λ1, . . . ,λr are arbitrary pa-rameters, then the totality of all one-term groups λ1 X1( f )+ · · ·+λr Xr( f ) formsa family of transformations:
(5) x′i = xi +r
∑k=1
λk ξki +1...r
∑k, j
λk λk
1 ·2Xk(ξ ji)+ · · · (i=1 ···n),
in which the r parameters λ1, . . . ,λr are all essential, hence a family of ∞r dif-ferent transformations.
Proof. Here exceptionally, we observed a harmless technical incorrection in Engel-Lie’s proof ([2], pp. 62–65) about the link between the generic rank of X1
∣∣x, . . . ,Xr
∣∣x
and a lower bound for the number of essential parameters2.However, Lie’s main idea is clever and pertinent: it consists in the introduction
of exactly r (the number of λk’s) copies of the same space x1, . . . ,xn whose coor-dinates are labelled as x(µ)1 , . . . ,x(µ)n for µ = 1, . . . ,r and to consider the family oftransformation equations induced by the same transformation equations:
x(µ)i′= exp(C)
(x(µ)i
)= hi
(x(µ); λ1, . . . ,λr
)(i=1 ···n; µ =1 ···r)
on each copy of space, again with t = 1. Geometrically, one thus views how theinitial transformation equations x′i = hi(x; λ1, . . . ,λr) act simultaneously on r-tuplesof points. Written in greater length, these transformations read:
(5’)x(µ)i
′= x(µ)i +
r
∑k=1
λk ξ (µ)ki +
1...r
∑k, j
λk λ j
1 ·2X (µ)
k
(ξ (µ)
ji
)+ · · ·
(i=1 ···n; µ =1 ···r),
where we have of course set: ξ (µ)ki := ξki(x(µ)) and X (µ)
k :=∑ni=1 ξki(x(µ)) ∂
∂x(µ)i
. Such
an idea also reveals to be fruitful in other contexts.According to the theorem stated on p. 15, in order to check that the parameters
λ1, . . . ,λr are essential, one only has to expand x′ in power series with respect to the
2 On page 63, it is said that if the number r of the independent infinitesimal transformations Xk is6 n, then the r×n matrix
(ξki(x)
)16i6n16k6r of their coefficients is of generic rank equal to r, although
this claim is contradicted with n = r = 2 by the two vector fields x ∂∂x + y ∂
∂y and xx ∂∂x + xy ∂
∂y .Nonetheless, the ideas and the arguments of the written proof (which does not really needs such afact) are perfectly correct.

76 4 One-Term Groups and Ordinary Differential Equations
powers of x at the origin:
x′i = ∑α∈Nn
U iα(λ )xα
(i=1 ...n),
and to show that the generic rank of the infinite coefficient mapping λ 7−→(U i
α(λ ))16i6n
α∈Nn is maximal possible equal to r. Correspondingly and immediately,we get the expansion of the r-times copied transformation equations:
(5”) x(µ)i′= ∑
α∈NnU
i,(µ)α (λ )(x(µ))α
(i=1 ...n; µ =1 ...r),
with, for each µ = 1, . . . ,r, the same coefficient functions:
Ui,(µ)
α (λ )≡ U iα(λ ) (i=1 ...n; α ∈Nn; µ =1 ...r).
So the generic rank of the corresponding infinite coefficient matrix, which is just anr-times copy of the same mapping λ 7−→
(U i
α(λ ))16i6n
α∈Nn , does neither increase nordecrease.
Thus, the parameters λ1, . . . ,λr for the transformation equations x′ = h(x; λ ) areessential if and only if they are essential for the diagonal transformation equationsx(µ)
′= h(x(µ); λ
), µ = 1, . . . ,r, induced on the r-fold copy of the space x1, . . . ,xn.
Therefore, we are left with the purpose of showing that the generic rank of the rtimes copy of the infinite coefficient matrix λ 7−→
(U
i,(µ)α (λ )
)16i6n, 16µ6rα∈Nn is equal
to r. We shall in fact establish more, namely that the rank at λ = 0 of this mapalready equals r, or equivalently, that the infinite constant matrix:(
∂Ui,(µ)
α∂λk
(0))16i6n,α∈Nn,16µ6r
16k6r,
whose r lines are labelled with respect to partial derivatives, has rank equal to r.To prepare this infinite matrix, if we differentiate the expansions (5’) which iden-
tify to (5”) with respect to λk at λ = 0, and if we expand the coefficients of ourinfinitesimal transformations:
ξki(x(µ)) = ∑α∈Nn
ξkiα (x(µ))α(i=1 ...n; k=1 ...r; µ =1 ...r)
with respect to the powers of x1, . . . ,xn, we obtain a more suitable expression of it:(∂U
i,(µ)α
∂λk(0))16i6n,α∈Nn,16µ6r
16k6r≡((
ξkiα)16i6n,α∈Nn
16k6r · · ·(ξkiα
)16i6n,α∈Nn
16k6r
)=:(J∞Ξ(0) · · · J∞Ξ(0)
).

4.4 Essentiality of Multiple Flow Parameters 77
As argued up to now, it thus suffices to show that this matrix has rank r. Also,we observe that this matrix identifies with the infinite jet matrix J∞Ξ(0) of Taylorcoefficients of the r-fold copy of the same r×n matrix of coefficients of the vectorfields Xk:
Ξ(x) :=
ξ11(x) · · · ξ1n(x)· · · · · · · · ·
ξr1(x) · · · ξrn(x)
.
This justifies the symbol J∞ introduced just above. At present, we can formulate anauxiliary lemma which will enable us to conclude.
Lemma 4.2. Let n > 1, q > 1, m > 1 be integers, let x ∈Kn and let:
A(x) =
a11(x) · · · a1m(x)· · · · · · · · ·
aq1(x) · · · aqm(x)
be an arbitrary q×m matrix of analytic functions:
ai j(x) = ∑α∈Nn
ai jα xα(i=1 ...q; j=1 ...m)
that are all defined in a fixed neighborhood of the origin in Kn, and introduce theq×∞ constant matrix of Taylor coefficients:
J∞A(0) :=(ai jα
)16 j6m,α∈Nn
16i6q
whose q lines are labelled by the index i. Then the following inequality between(generic) ranks holds true:
rkJ∞A(0)> genrkA(x).
Proof. Here, our infinite matrix J∞A(0) will be considered as acting by left multi-plication on horizontal vectors u = (u1, . . . ,uq), so that uJ∞A(0) is an ∞×1 matrix,namely an infinite horizontal vector. Similarly, A(x) will act on horizontal vectorsof analytic functions (u1(x), . . . ,ur(x)).
Supposing that u = (u1, . . . ,uq) ∈ Kq is any nonzero vector in the kernel ofJ∞A(0), namely: 0 = uJ∞A(0), or else in greater length:
0 = u1 a1 jα + · · ·+uq aq jα ( j=1 ...m; α ∈Nn),
we then immediately deduce, after multiplying each such equation by xα and bysumming up over all α ∈ Nn:
0 ≡ u1 a1 j(x)+ · · ·+uq aq j(x) ( j=1 ...m),
so that the same constant vector u = (u1, . . . ,uq) also satisfies 0 ≡ uA(x). It followsthat the dimension of the kernel of J∞A(0) is smaller than or equal to the dimension

78 4 One-Term Groups and Ordinary Differential Equations
of the kernel of A(x) (at a generic x): this is just equivalent to the above inequalitybetween (generic) ranks. ut
Now, for each q = 1,2, . . . ,r, we want to apply the lemma with the matrix A(x)being the q-fold copy of matrices
(Ξ(x(1)) · · · Ξ(x(q))
), or equivalently in greater
length:
Ξq(xq)
:=
ξ (1)11 · · · ξ (1)
1n ξ (2)11 · · · ξ (2)
1n · · · · · · ξ (q)11 · · · ξ (q)
1n· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·ξ (1)
r1 · · · ξ (1)rn ξ (2)
r1 · · · ξ (2)rn · · · · · · ξ (q)
r1 · · · ξ (q)rn
,
where we have abbreviated:
xq :=(x(1), . . . ,x(q)
).
Lemma 4.3. It is a consequence of the fact that X1,X2, . . . ,Xr are linearly indepen-dent of each other that for every q = 1,2, . . . ,r, one has:
genrk(
Ξ(x(1))
Ξ(x(2))
· · · Ξ(x(q)))
> q.
Proof. Indeed, for q = 1, it is at first clear that genrk(Θ(x(1))
)> 1, just because not
all the ξki(x) vanish identically.We next establish by induction that, as long as they remain < r, generic ranks do
increase of at least one unity at each step:
genrk(
Ξq+1(xq+1
))> 1+genrk
(Ξq(xq))
,
a fact which will immediately yield the lemma.Indeed, if on the contrary, the generic ranks would stabilize, and still be < r,
then locally in a neighborhood of a generic, fixed x0q+1, both matrices Ξq+1
and Ξq would have the same, locally constant rank. Consequently, the solutions(ϑ1(xq) · · · ϑr(xq)
)to the (kernel-like) system of linear equations written in matrix
form:0 ≡
(ϑ1(xq) · · · ϑr(xq)
)Ξq(xq),
which are analytic near x0q thanks to an application of Cramer’s rule and thanks to
constancy of rank, would be automatically also solutions of the extended system:
0 ≡(ϑ1(xq) · · · ϑr(xq)
)(Ξq(xq) Ξ(x(q+1))
),
whence there would exist nonzero solutions (ϑ1, . . . ,ϑr) to the linear dependenceequations:
0 =(ϑ1 · · · ϑr
)Ξ(x(q+1))

4.4 Essentiality of Multiple Flow Parameters 79
which are constant with respect to the variable x(q+1), since they only depend uponxq. This exactly contradicts the assumption that X (q+1)
1 , . . . ,X (q+1)r are independent
of each other. ut
Lastly, we may chain up a series of (in)equalities that are now obvious conse-quences of the lemma and of the assertion:
rank(J∞Ξ(0) · · · J∞Ξ(0)
)= rankJ∞Ξr(0)> genrkΞr
(xr)= r,
and since all ranks are anyway 6 r, we get the promised rank estimation:
r = rank(J∞Ξ(0) · · · J∞Ξ(0)
),
which finally completes the proof of the theorem. ut
In order to keep a memory track of the trick of extending the group action to anr-fold product of the base space, we also translate a summarizing proposition whichis formulated on p. 66 of [2].
Proposition 5. If the r infinitesimal transformations:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ...r)
are independent of each other, if furthermore:
x(µ)1 , . . . ,x(µ)n (µ =1 ...r)
are r different systems of n variables, and if lastly one sets for abbreviation:
X (µ)k ( f ) =
n
∑i=1
ξki(x(µ)1 , . . . ,x(µ)n
) ∂ f
∂x(µ)i
(k,µ =1 ...r),
then the r infinitesimal transformations:
Wk( f ) =r
∑µ=1
X (µ)k ( f ) (k=1 ...r)
in the nr variables x(µ)i satisfy no relation of the form:
n
∑k=1
χk(x(1)1 , . . . ,x(1)n , . . . . . . ,x(r)1 , . . . ,x(r)n
)Wk( f )≡ 0.
Also, we remark for later use as in [2], p. 65, that during the proof of the the-orem 8 above, it did not really matter that the equations (5) represented the finite

80 4 One-Term Groups and Ordinary Differential Equations
equations of a family of one-term groups. In fact, we only considered the termsof first order with respect to λ1, . . . ,λr in the finite equations (5), and the crucialLemma 4.3 emphasized during the proof was true under the only assumption that theinfinitesimal transformations X1, . . . ,Xr were mutually independent. Consequently,Theorem 8 can be somewhat generalized as follows.
Proposition 4. If a family of transformations contains the r arbitrary parame-ters e1, . . . ,er and if its equations, when they are expanded with respect to pow-ers of e1, . . . ,er, possess the form:
x′i = xi +r
∑k=1
ek ξki(x1, . . . ,xn)+ · · · (i=1 ···n),
where the neglected terms in e1, . . . ,er are of second and of higher order, andlastly, if the functions ξki(x) have the property that the r infinitesimal transfor-mations made up with them:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
are independent of each other, then those transformation equations represent ∞r
different transformations, or what is the same: the r parameters e1, . . . ,er areessential.
4.5 Generation of an r-Term Group by its One-Term Subgroups
After these preparations, we may now come back to our question formulated onp. 74: how to compare the equations x′i = fi(x; a) of a given finite continuous trans-formation group to the equations:
x′i = exp(t λ1 X1 + · · ·+ t λr Xr
)(xi)
=: hi(x; t,λ1, . . . ,λr
)(i=1 ...n)
obtained by integrating the general linear combination of its r infinitesimal trans-formations Xk =− ∂ fi
∂ak(x; e)? Sometimes, such equations will be called as in [2] the
canonical finite equations of the group.Abbreviating λ1 X1 + · · · + λr Xr as the infinitesimal transformation C :=
∑ni=1 ξi(x) ∂
∂xi, whose coefficients are given by:
ξi(x) :=n
∑j=1
λ j ξ ji(x) (i=1 ...n),

4.5 Generation of an r-Term Group by its One-Term Subgroups 81
then by definition of the flow x′i = exp(tC)(x), the functions hi satisfy the first ordersystem of ordinary differential equations dhi
d t = ξi(h1, . . . ,hn), or equivalently:
(6)dhi
d t=
r
∑j=1
λ j ξ ji(h1, . . . ,hn) (i=1 ...n),
with of course the initial condition h(x;0,λ ) = x at t = 0. On the other hand, ac-cording to Theorem 3 on p. 40, we remember that the fi satisfy the fundamentaldifferential equations:
(7) ξ ji( f1, . . . , fn) =r
∑k=1
α jk(a)∂ fi
∂ak(i=1 ...n; j=1 ...r).
Proposition 4.8. If the parameters a1, . . . ,ar are the unique solutions ak(t,λ ) to thesystem of first order ordinary differential equations:
dak
d t=
r
∑j=1
λ j α jk(a) (k=1 ...r)
with initial condition a(0,λ ) = e being the identity element, then the following iden-tities hold:
fi(x; a(t,λ )
)≡ exp
(t λ1 X1 + · · ·+ t λr Xr
)(xi) = hi
(x; t,λ1, . . . ,λr
)(i=1 ...n)
and they show how the hi are recovered from the fi.
Proof. Indeed, multiplying the equation (7) by λ j and summing over j for j equals1 up to r, we get:
r
∑k=1
∂ fi
∂ak
r
∑j=1
λ j α jk(a) =r
∑j=1
λ j ξ ji( f1, . . . , fn) (i=1 ...n).
Thanks to the assumption about the ak, we can replace the second sum of the left-hand side by dak
d t , which yields identities:
r
∑k=1
∂ fi
∂ak
dak
d t≡
r
∑j=1
λ j ξ ji( f1, . . . , fn) (i=1 ...n)
in the left hand side of which we recognize just a plain derivation with respect to t:
d fi
d t=
dd t
[fi(x; a(t,λ )
)]≡
r
∑j=1
λ j ξ ji( f1, . . . , fn) (i=1 ...n).
But since f(x; a(0,λ )
)= f (x; e) = x has the same initial condition x at t = 0
as the solution h(x; t,λ
)to (6), the uniqueness of solutions to systems of first

82 4 One-Term Groups and Ordinary Differential Equations
order ordinary differential equations immediately gives the asserted coincidencef(x; a(t,λ )
)≡ h(x; t,λ
). ut
4.6 Applications to the Economy of Axioms
We now come back to the end of Chap. 3, Sect. 3.9, where the three standard groupaxioms (composition; identity element; existence of inverses) were superseded bythe hypothesis of existence of differential equations. We remind that in the proof ofLemma 3.3, a relocalization was needed to assure that detψk j(a) 6= 0. For the sakeof clarity and of rigor, we will, in the hypotheses, explicitly mention the subdomainA 1 ⊂ A where the determinant of the ψk j(a) does not vanish.
The following (apparently technical) theorem which is a mild modification ofthe Theorem 9 on p. 72 of [2], will be used in an essential way by Lie to derive hisfamous three fundamental theorems in Chap. 9 below.
Theorem 9. If, in the transformation equations defined for (x,a) ∈ X ×A :
(1) x′i = fi(x1, . . . ,xn; a1, . . . ,ar) (i=1 ···n),
the r parameters a1, . . . ,ar are all essential and if in addition, certain differentialequations of the form:
(2)∂x′i∂ak
=r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(x′1, . . . ,x′n) (i=1 ···n ; k=1 ···r)
are identically satisfied by x′1 = f1(x; a), . . . ,x′n = fn(x; a), where the matrixψk j(a) is holomorphic and invertible in some nonempty subdomain A 1 ⊂ A ,and where the functions ξ ji(x′) are holomorphic in X , then by introducing ther infinitesimal transformations:
Xk :=n
∑i=1
ξki(x)∂
∂xi,
it holds true that every transformation x′i = fi(x; a) whose parameters a1, . . . ,arlie in a small neighborhood of some fixed a0 ∈ A 1 can be obtained by firstlyperforming the transformation:
xi = fi(x1, . . . ,xn; a01, . . . ,a
0r ) (i=1 ···n),
and then secondly, by performing a certain transformation:
x′i = exp(tλ1X1 + · · ·+ tλrXr
)(xi) (i=1 ···n)

4.6 Applications to the Economy of Axioms 83
of the one-term group generated by some suitable linear combination of the Xk,where t and λ1, . . . ,λr are small complex numbers.
Especially, this technical statement will be useful later to show that whenever rinfinitesimal transformations X1, . . . ,Xr form a Lie algebra, the composition of twotransformations of the form x′ = exp
(tλ1X1+ · · ·+tλrXr
)is again of the same form,
hence the totality of these transformations truly constitutes a group.
Proof. The arguments are essentially the same as the ones developed at the end ofthe previous section (p. 81) for a genuinely local continuous transformation group,except that the identity parameter e (which does not necessarily exist here) shouldbe replaced by a0.
For the sake of completeness, let us perform the proof. On the first hand, wefix a0 ∈ A 1 and we introduce the solutions ak = ak(t,λ1, . . . ,λr) of the followingsystem of ordinary differential equations:
dak
d t=
r
∑j=1
λ j α jk(a) (k=1 ···r),
with initial condition ak(0,λ1, . . . ,λr) = a0k , where λ1, . . . ,λr are small complex pa-
rameters and where, as before, α jk(a) denotes the inverse matrix of ψ jk(a), whichis holomorphic in the whole of A1.
On the second hand, we introduce the local flow:
exp(tλ1X1 + · · ·+ tλrXr
)(x) =: h
(x; t,λ
)of the general linear combination λ1X1 + · · ·+λrXr of the r infinitesimal transfor-mations Xk = ∑n
i=1 ξki(x) ∂∂xi
, where x is assumed to run in A 1. Thus by its verydefinition, this flow integrates the ordinary differential equations:
dhi
d t=
r
∑j=1
λ j ξ ji(h1, . . . ,hn) (i=1 ···n)
with the initial condition h(x; 0,λ
)= x.
On the third hand, we solve first the ξ ji in the fundamental differential equa-tions (2) using the inverse matrix α:
ξ ji( f1, . . . , fn) =r
∑k=1
α jk(a)∂ fi
∂ak(i=1 ···n ; j=1 ···r).
Then we multiply by λ j, we sum and we recognize dakd t , which we then substitute:

84 4 One-Term Groups and Ordinary Differential Equations
r
∑j=1
λ j ξ ji( f1, . . . , fn) =r
∑k=1
∂ fi
∂ak
r
∑j=1
λ j α jk(a)
=r
∑k=1
∂ fi
∂ak
dak
d t
=dd t
[fi(x; a(t,λ )
)](i=1 ···n).
So the fi(x; a(t,λ )
)satisfy the same differential equations as the hi
(x; t,λ
), and in
addition, if we set x equal to f (x; a0), both collections of solutions will have thesame initial value for t = 0, namely f (x; a0). In conclusion, by observing that the fiand the hi satisfy the same equations, the uniqueness property enjoyed by first orderordinary differential equations yields the identity:
f(x; a(t,λ )
)≡ exp
(t1λ1X1 + · · ·+ tλrXr
)(f (x; a0)
)expressing that every transformation x′ = f (x; a) for a in a neighbourhood of a0
appears to be the composition of the fixed transformation x = f (x; a0) followed bya certain transformation of the one-term group exp
(tλ1X1 + · · ·+ tλrXr
)(x). ut
§ 18.We now apply the preceding general developments to the peculiar case where
the ∞r transformations x′i = fi(x1, . . . ,xn, a1, . . . ,ar) consitute an r-term group.If the equations (1) represent an r-term group, then according to Theorem 3
p. 40, there always are differential equations of the form (2); so we do not needto specially enunciate this requirement.
Moreover, we observe that all infinitesimal transformations of the form∑n
i=1
∑r
j=1 λ jξ ji(x)
∂ f∂xi
can be linearly expressed by means of the followingr infinitesimal transformations:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r),
since all the infinitesimal transformations (9) are contained in the expression:
r
∑k=1
λk Xk( f ).
Here, as we have underscored already in the introduction of this chapter, theinfinitesimal transformations X1( f ), . . . ,Xr( f ) are independent of each other.
Consequently, we can state the following theorem about arbitrary r-termgroups:
Theorem 10. To every r-term group:

4.6 Applications to the Economy of Axioms 85
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
are associated r independent infinitesimal transformations:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(i=1 ···n),
which stand in the following relationship to the finite transformations of thegroup: if x′i = fi(x1, . . . ,xn; a0
1, . . . ,a0r ) is any transformation of the group, then
every transformation x′i = fi(x,a) whose parameter lies in a certain neigh-bourhood of a0
1, . . . ,a0r can be obtained by firstly executing the transforma-
tion xi = fi(x1, . . . ,xn, a01, . . . ,a
0r ) and secondly a certain transformation x′i =
ωi(x1, . . . ,xn) of a one-term group, the infinitesimal transformation of whichhas the form λ1X1( f )+ · · ·+λrXr( f ), where λ1, . . . ,λr denote certain suitablychosen constants.
If we not only know that the equations x′i = fi(x,a) represent an r-term group,but also that this group contains the identity transformation, and lastly also thatthe parameters a0
k represent a system of values of the identity transformationin the domain ((ak)), then we can still say more. Indeed, if we in particularchoose for the transformation xi = fi(x,a0) the identity transformation, we thenrealize immediately that the transformations of our group are nothing but thetransformations of those one-term groups that are generated by the infinitesimaltransformations:
λ1 X1( f )+ · · ·+λr Xr( f ).
Thus, if for abbreviation we set:
r
∑k=1
λk Xk( f ) =Ck( f ),
then the equations:
x′i = xi +t1
C(xi)+t2
1 ·2C(C(xi)
)+ · · · (i=1 ···n)
represent the ∞r transformations of the group. The fact that the r+1 parameters:λ1, . . . ,λr, t appear is just fictitious here, for they are indeed only found in the rcombinations λ1t, . . . ,λrt. We can therefore quietly set t equal to 1. In addition,if we remember the representation of a one-term group by a single equationgiven in eq. (3) on p. 67, then we realize that the equations of our r-term groupmay be condensed in the single equation:
f (x′1, . . . ,x′n) = f (x1, . . . ,xn)+C( f )+
11 ·2
C(C( f )
)+ · · · .

86 4 One-Term Groups and Ordinary Differential Equations
That it is possible to order the transformations of the group as inverses in pairsthus requires hardly any mention.
We can briefly state as follows the above result about the r-term groups withidentity transformation.
Theorem 11. If an r-term group:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
contains the identity transformation, then its ∞r transformations can be orga-nized in ∞r−1 families of ∞1 transformations in such a way that each familyamongst these ∞r−1 families consists of all the transformations of a certainone-term group with the identity transformation. In order to find these one-termgroups, one forms the known equations:
∂x′i∂ak
=r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(x′1, . . . ,x′n) (i=1 ···n ;k=1 ···r),
which are identically satisfied after substituting x′i = fi(x,a), one further sets:
n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
= Xk( f ) (k=1 ···r),
hence the expression:r
∑k=1
λk Xk( f )
with the r arbitrary parameters λ1, . . . ,λr represents the infinitesimal transfor-mations of these ∞r−1 one-term groups, and their finite equations have the form:
x′i = xi +r
∑k=1
λk ξki(x)+1...r
∑k, j
λk λ j
1 ·2Xk(ξ ji)+ · · · (i=1 ···n).
The totality of all these finite transformations is identical with the totality of alltransformations of the group x′i = fi(x,a). Besides, the transformations of thisgroup can be ordered as inverses in pairs.
§ 19.
In general, if an r-term group contains all transformations of some one-termgroup and if, in the sense discussed earlier, this one-term group is generated bythe infinitesimal transformation X( f ), then we say that the r-term group con-tains the infinitesimal transformationX( f ). Now, we have just seen that everyr-term group with the identity transformation can be brought to the form:

4.6 Applications to the Economy of Axioms 87
f (x′1, . . . ,x′n) = f (x1, . . . ,xn)+
r
∑k=1
λk Xk( f )
+1
1 ·2
1···r
∑k, j
λk λ j Xk(X j( f )
)+ · · · ,
where λ1, . . . ,λr denote arbitrary constants, while X1( f ), . . . ,Xr( f ) stand formutually independent infinitesimal transformations. So we can say that everysuch r-term group contains r independent infinitesimal transformations.
One is very close to presume that an r-term group cannot contain more thanr independent infinitesimal transformations.
In order to clarify this point, we want to consider directly the question ofwhen the infinitesimal transformation:
Y ( f ) =n
∑i=1
ηi(x1, . . . ,xn)∂ f∂xi
is contained in the r-term group with the r independent infinitesimal transfor-mations X1( f ), . . . ,Xr( f ).
If Y ( f ) belongs to the r-term group in question, then the same is also true ofthe transformations:
x′i = xi +τ1
ηi(x)+τ2
1 ·2Y (ηi)+ · · · (i=1 ···n)
of the one-term group generated by Y ( f ). Hence if we execute first an arbitrarytransformation of this one-term group and after an arbitrary transformation:
x′′i = x′i +r
∑k=1
λk ξ ′ki +
1···r
∑k, j
λk λ j
1 ·2X ′
j(ξ ′
ki)+ · · ·
of the r-term group, we then must obtain a transformation which also belongsto the r-term group. By a calculation, we find that this new transformation hasthe form:
x′′i = xi + τ ηi(x)+r
∑k=1
λk ξki(x)+ · · · (i=1 ···n),
where all the left out terms are of second and of higher order with re-spect to λ1, . . . ,λr,τ . For arbitrary λ1, . . . ,λr,τ , this transformation must be-long to the r-term group. Now, if the r + 1 infinitesimal transformationsX1( f ), . . . ,Xr( f ),Y ( f ) were independent of each other, then according to theProposition 4 p. 80, the last written equations would represent ∞r+1 transfor-mations; but this is impossible, for the r-term group contains in general only∞r transformations. Consequently, X1( f ), . . . ,Xr( f ),Y ( f ) are not independent

88 4 One-Term Groups and Ordinary Differential Equations
of each other, but since X1( f ), . . . ,Xr( f ) are so, then Y ( f ) must be linearly de-duced from X1( f ), . . . ,Xr( f ), hence have the form:
Y ( f ) =r
∑k=1
lk Xk( f ),
where l1, . . . , lr denote appropriate constants. That is to say, the following holds:
Proposition 2. If an r-term group contains the identity transformation, then itcontains r independent infinitesimal transformations X1( f ), . . . ,Xr( f ) and everyinfinitesimal transformation contained in it possesses the form λ1X1( f )+ · · ·+λr Xr( f ), where λ1, . . . ,λr denote constants.
We even saw above that every infinitesimal transformation of the formλ1X1( f ) + · · ·+ λrXr( f ) belongs to the group; hence in future, we shall callthe expression λ1X1( f )+ · · ·+λrXr( f ) with the r arbitrary constants λ1, . . . ,λrthe general infinitesimal transformation of the r-term group in question.
From the preceding considerations, it also comes the following certainly spe-cial, but nevertheless important:
Proposition 2. If an r-term group contains the m 6 r mutually independentinfinitesimal transformations X1( f ), . . . ,Xr( f ), then it also contains every in-finitesimal transformation of the following form: λ1 X1( f ) + · · ·+ λmXm( f ),where λ1, . . . ,λm denote completely arbitrary constants.
Of course, the researches done so far give the means to determine the in-finitesimal transformations of an r-term group x′i = fi(x, a) with the identitytransformation. But it is possible to reach the objective more rapidly.
Let the identity transformation of our group go with the parameters:a0
1, . . . ,a0r , and let a0
1, . . . ,a0r lie in the domain ((a)), so that the determinant
∑ ±ψ11(a0) · · ·ψrr(a0) is hence certainly different from zero. Now, we have:
r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(
f1(x,a), . . . , fn(x,a))≡ ∂
∂akfi(x, a),
hence when one sets ak = a0k :
r
∑j=1
ψk j(a0)ξ ji(x1, . . . ,xn)≡[
∂∂ak fi(x, a)
]a=a0
.
We multiply this equation by ∂ f∂xi
and we sum for i from 1 to n, which then gives:
r
∑j=1
ψk j(a0)X j( f ) =n
∑i=1
[∂
∂akfi(x, a)
]a=a0
∂ f∂xi
(k=1 ···r)

4.6 Applications to the Economy of Axioms 89
Now, since X1( f ), . . . ,Xr( f ) are independent infinitesimal transformations andsince in addition the determinant of the ψk j(a0) is different from zero, the right-hand sides of the latter equations represent r independent infinitesimal transfor-mations of our group.
The following method is even somewhat simpler.
One sets ak = a0k +δ tk, where it is understood that δ t1, . . . ,δ tr are infinitely
small quantities. Then it comes:
x′i = fi(x1, . . . ,xn, a0
1 +δ t1, . . . ,a0r +δ tr
)= xi +
r
∑k=1
[∂
∂akfi(x, a)
]a=a0
δ tk + · · · ,
where the left out terms are of second and of higher order with respect to the δ tk.Here, it is now immediately apparent that our group contains the r infinitesimaltransformations:
x′i = xi+
[∂
∂akfi(x,a)
]a=a0
δ tk (i=1 ···n)
(k=1 ···r)
However, the question whether these r infinitesimal transformations are inde-pendent of each other requires in each individual case yet a specific examina-tion, if one does not know from the beginning that the determinant of the ψ doesnot vanish for ak = a0
k .
Example. We consider the general projective group:
x′ =x+a1
a2x+a3
of the once-extended manifold.
The infinitesimal transformations of this group are obtained very easily bymeans of the method shown right now. Indeed, one has a0
1 = 0, a02 = 0, a0
3 = 1,hence we have:
x′ =x+δ t1
xδ t2 +1+δ t3= x+δ t1 − xδ t3 − x2 δ t2 + · · · ,
that is to say, our group contains the three mutually independent infinitesimaltransformations:
X1( f ) =d fdx
, X2( f ) = xd fdx
, X3( f ) = x2 d fdx
.
The general infinitesimal transformation of our group has the form:

90 4 One-Term Groups and Ordinary Differential Equations
(λ1 +λ2x+λ3x2) d f
dx,
hence we obtain its finite transformations by integrating the ordinary differentialequation:
dx′
λ1 +λ2x′+λ3x′2= d t,
adding the initial condition: x′ = x for t = 0.In order to carry out this integration, we bring the differential equation to the
form:dx′
x′−α− dx′
x′−β= γ d t,
by setting:
λ1 =αβγ
α −β, λ2 =−α +β
α −βγ, λ3 =
γα −β
,
whence:
2α =−λ2
λ3+
√λ 2
2 −4λ1λ3
λ3, 2β =−λ2
λ3−
√λ 2
2 −4λ1λ3
λ3,
γ =√
λ 22 −4λ1λ3.
By integration, we find:
l(x′−α)− l(x′−β ) = γ t + l(x−α)− l(x−β ),
or:x′−αx′−β
= eγt x−αx−β
,
and now there is absolutely no difficulty to express α ,β ,γ in terms of λ1,λ2,λ3,in order to receive in this way the ∞3 transformations of our three-term grouparranged in ∞2 one-term groups, exactly as is enunciated in Theorem 11.
Besides, a simple known form of our group is obtained if one keeps the twoparameters α and β , while one introduces the new parameter γ instead of eγt ;then our group appears under the form:
x′−αx′−β
= γx−αx−β
.

References 91
References
1. Arnol’d, V.I.: Ordinary differential equations. Translated from the Russian and edited byR.A. Silverman, MIT Press, Cambridge, Mass.-London (1978)
2. Engel, F., Lie, S.: Theorie der Transformationsgruppen. Erster Abschnitt. Unter Mitwirkungvon Prof. Dr. Friedrich Engel, bearbeitet von Sophus Lie, Verlag und Druck von B.G. Teubner,Leipzig und Berlin, xii+638 pp. (1888). Reprinted by Chelsea Publishing Co., New York, N.Y.(1970)
3. Gröbner, W.: Die Lie-Reihen und ihre Anwendungen. Math. Monog. Veb Deutschen Verlagder Wissenschaften (1960)
4. Rao, M.R.M.: Ordinary differential equations, theory and applications. Edward Arnold, Lon-don (1981)
—————–


Part IIEnglish Translation


Chapter 5Complete Systems of Partial DifferentialEquations
Abstract Any infinitesimal transformation X = ∑ni=1 ξi(x) ∂
∂xican be consid-
ered as the first order analytic partial differential equation Xω = 0 with the un-known ω . After a relocalization, a renumbering and a rescaling, one may supp-pose ξn(x)≡ 1. Then the general solution ω happens to be any (local, analytic)function Ω
(ω1, . . . ,ωn−1
)of the (n−1) functionally independent solutions de-
fined by the formula:
ωk(x) := exp(− xnX
)(xk) (k=1 ···n−1).
What about first order systems X1ω = · · ·= Xqω = 0 of such differential equa-tions? Any solution ω trivially satisfies also Xi
(Xk(ω)
)−Xk
(Xi(ω)
)= 0. But
it appears that the subtraction in the Jacobi commutator Xi(Xk(·)
)−Xk
(Xi(·)
)kills all the second-order differentiation terms, so that one may freely add suchsupplementary first-order differential equations to the original system, contin-uing again and again, until the system, still denoted by X1ω = · · · = Xqω = 0,becomes complete in the sense of Clebsch, namely satisfies, locally in a neigh-borhood of a generic point x0:
(i) for all indices i,k = 1, . . . ,q, there are appropriate functions χikµ(x) so thatXi(Xk( f )
)−Xk
(Xi( f )
)= χik1(x)X1( f )+ · · ·+χikq(x)Xq( f );
(ii) the rank of the vector space generated by the q vectors X1∣∣x, . . . ,Xq
∣∣x is
constant equal to q for all x near the central point x0.Under these assumptions, it is shown in this chapter that there are n− q func-tionally independent solutions x(q)1 , . . . ,x(q)n−q of the system that are analytic nearx0 such that any other solution is a suitable function of these n−q fundamentalsolutions.
95

96 5 Complete Systems of Partial Differential Equations
First Order Scalar Partial Differential Equation
As a prologue, we ask what are the general solutions ω of a first order partialdifferential equation Xω = 0 naturally associated to a local analytic vector fieldX = ∑n
i=1 ξi(x) ∂∂xi
. Free relocalization being always allowed in the theory ofLie, we may assume, after possibly renumbering the variables, that ξn does notvanish in a small neighborhood of some point at which we center the origin ofthe coordinates. Dividing then by ξn(x), it is equivalent to seek functions ω thatare annihilated by the differential operator:
X =n−1
∑i=1
ξi(x)ξn(x)
∂∂xi
+∂
∂xn,
still denoted by X and which now satisfies X(xn) ≡ 1. We recall that the corre-sponding system of ordinary differential equations which defines curves that areeverywhere tangent to X , namely the system:
dx1
d t=
ξ1(x(t))
ξn(x(t)) , . . . . . . ,
dxn−1
d t=
ξn−1(x(t))
ξn(x(t)) ,
dxn(t)d t
= 1,
with initial condition for t = 0 being an arbitrary point of the hyperplane xn =0:
x1(0) = x1, . . . . . . ,xn−1(0) = xn−1, xn(0) = 0
is solvable and has a unique vectorial solution (x1, . . . ,xn−1,xn) which is ana-lytic in a neighborhood of the origin. In fact, xn(t) = t by an obvious integration,and the (n− 1) other xk(t) are given by the marvelous exponential formula al-ready shown on p. 67:
xk(t) = exp(tX)(xk) = ∑l>0
t l
l!X l(xk) (k=1 ···n−1).
We then set t :=−xn in this formula (minus sign will be crucial) and we definethe (n−1) functions that are relevant to us:
ωk(x1, . . . ,xn) := xk(−xn) = exp(− xnX
)(xk)
= ∑l>0
(−1)l (xn)l
l!X l(xk).
Proposition 5.1. The (n−1) so defined functions ω1, . . . ,ωn−1 are functionallyindependent solutions of the partial differential equation Xω = 0 with the rankof their Jacobian matrix
( ∂ωk∂xi
)16k6n−116i6n being equal to n−1 at the origin. Fur-
thermore, for every other solution ω of Xω = 0, there exists a local analyticfunction Ω = Ω
(ω1, . . . ,ωn−1
)defined in a neighborhood of the origin in Kn−1

§ 21. 97
such that:ω(x)≡ Ω
(ω1(x), . . . ,ωn−1(x)
).
Proof. Indeed, when applying X to the above series defining the ωk, we see thatall terms do cancel out, just thanks to an application Leibniz’ formula developedin the form:
X[(xn)
l X l(xk)]= l (xn)
l−1 X l(xk)+(xn)l X l+1(xk).
Next, the assertion that the map x 7−→(ω1(x), . . . ,ωn−1(x)
)has rank n− 1 is
clear, for ωk(x1, . . . ,xn−1,0)≡ xk by construction. Finally, after straightening Xto X ′ := ∂
∂x′nin some new coordinates (x′1, . . . ,x
′n) thanks to the theorem on p. 64,
the general solution ω ′(x′) to X ′ω ′ = 0 happens trivially to just be any functionΩ ′(x′1, . . . ,x
′n−1) of x′1 ≡ ω ′
1, . . . ,x′n−1 ≡ ω ′
n−1. ut
C h a p t e r 5.
The Complete Systems.
We assume that the theory of the integration of an individual first order linearpartial differential equation:
X( f ) =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
= 0,
or of the equivalent simultaneous system of ordinary differential equations:
dx1
ξ1= · · ·= dxn
ξn,
is known; nonetheless, as an introduction, we compile without demonstration a fewrelated propositions. Based on these propositions, we shall very briefly derive thetheory of the integration of simultaneous linear partial differential equations of thefirst order. In the next chapter, we shall place in a new light [IN EIN NEUES LICHTSETZEN] this theory due in the main whole to JACOBI and to CLEBSCH, by ex-plaining more closely the connection between the concepts [BEGRIFFEN] of “linearpartial differential equation” and of “infinitesimal transformation”, a connection thatwe have already mentioned earlier (Chap. 4, p. 69).
§ 21.
One can suppose that ξ1, . . . ,ξn behave regularly in the neighborhood of a deter-minate system of values x0
1, . . . ,x0n, and as well that ξn(x0
1, . . . ,x0n) is different from
zero. Under these assumptions, one can determine x1, . . . ,xn−1 as analytic functionsof xn in such a way that by sustitution of these functions, the simultaneous system:

98 5 Complete Systems of Partial Differential Equations
dx1
dxn=
ξ1
ξn, . . . ,
dxn−1
dxn=
ξn−1
ξn
is identically satisfied, and that in addition x1, . . . ,xn−1 for xn = x0n take certain pre-
scribed initial values [ANFANGSWERTHE] x′1, . . . ,x′n−1. These initial values have to
be interpreted as the integration constants.The equations which, in the concerned way, represent x1, . . . ,xn−1 as functions of
xn are called the complete integral equations of the simultaneous system; they canreceive the form:
xk = x′k +(x0n − xn)Pk
(x′1 − x0
1, . . . ,x′n−1 − x0
n−1,x0n − xn
)(k=1 ···n−1),
where the Pk denote ordinary power series in their arguments. By inversing therelation between x1, . . . ,xn−1,xn and x′1, . . . ,x
′n−1,x
0n, one again obtains the integral
equations, resolved with respect to only the initial values x′1, . . . ,x′n−1:
x′k = xk +(xn − x0n)Pk
(x1 − x0
1, . . . ,xn − x0n)= ωk(x1, . . . ,xn)
(k=1 ···n−1).
Here, the functions ωk are the so-called integral functions of the simultaneous sys-tem, since the differentials of these functions:
dωk =n
∑i=1
∂ωk
∂xidxi (k=1 ···n−1)
all vanish identically by virtue of the simultaneous system, and every function ofthis sort is called an integral function of the simultaneous system. But every suchintegral function is at the same time a solution of the linear partial differential equa-tion X( f ) = 0, whence ω1, . . . ,ωn−1 are solutions of X( f ) = 0, and in fact, theyare obviously independent. In a certain neighborhood of x0
1, . . . ,x0n these solutions
behave regularly; in addition, they reduce for xn = x0n to x1, . . . ,xn−1 respectively;
that is why they are called the general solutions of the equation X( f ) = 0 relative toxn = x0
n.If one knows altogether n−1 independent solutions:
ψ1(x1, . . . ,xn), . . . . . . ,ψn−1(x1, . . . ,xn)
of the equation X( f ) = 0, then the most general solution of it has the formΩ(ψ1, . . . ,ψn−1), where Ω denotes an arbitrary analytic function of its arguments.
§ 22.
If a function ψ(x1, . . . ,xn) satisfies the two equations:
X1( f ) = 0, X2( f ) = 0,

§ 22. 99
then it naturally also satisfies the two differential equations of second order:
X1(X2( f )
)= 0, X2
(X1( f )
)= 0,
and in consequence of that, also the equation:
X1(X2( f )
)−X2
(X1( f )
)= 0,
which is obtained by subtraction from the last two written ones.If now one lets:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1,2),
then it comes:
X1(X2( f )
)−X2
(X1( f )
)=
n
∑i=1
X1(ξ2i)−X2(ξ1i)
∂ f∂xi
,
because all terms which contain second order differential quotients are cancelled.Thus, the following holds:
Proposition 1. If a function ψ(x1, . . . ,xn) satisfies the two differential equations offirst order:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
= 0 (k=1,2),
then it also satisfies the equation:
X1(X2( f )
)−X2
(X1( f )
)=
n
∑i=1
X1(ξ2i)−X2(ξ1i)
∂ f∂xi
= 0,
which, likewise, is of first order.
It is of great importance to know how the expression X1(X2( f )
)−X2
(X1( f )
)behaves when, in place of x1, . . . ,xn, new independent variables y1, . . . ,yn are intro-duced.
We agree that by introduction of the y, it arises:
Xk( f ) =n
∑i=1
Xk(yi)∂ f∂yi
=n
∑i=1
ηki(y1, . . . ,yn)∂ f∂yi
= Yk( f )
(k=1,2).
Since f denotes here a completely arbitrary function of x1, . . . ,xn, we can substituteX1( f ) or X2( f ) in place of f , so we have:
X1(X2( f )
)= Y1
(X2( f )
)= Y1
(Y2( f )
)X2(X1( f )
)= Y2
(X1( f )
)= Y2
(Y1( f )
),

100 5 Complete Systems of Partial Differential Equations
and consequently:
X1(X2( f )
)−X2
(X1( f )
)= Y1
(Y2( f )
)−Y2
(Y1( f )
).
Thus we have the
Proposition 2. If, by the introduction of a new independent variable, the expres-sions X1( f ) and X2( f ) are transferred to Y1( f ) and respectively to Y2( f ), then theexpression X1
(X2( f )
)−X2
(X1( f )
)is transferred to Y1
(Y2( f )
)−Y2
(Y1( f )
).
This property of the expression X1(X2( f )
)−X2
(X1( f )
)will be frequently used
in the course of our study. The same proposition can be stated more briefly: theexpression X1
(X2( f )
)−X2
(X1( f )
)behaves invariantly through the introduction of
a new variable.We now consider the q equations:
(1) X1( f ) = 0, . . . . . . ,Xq( f ) = 0,
and we ask about its possible joint solutions.It is thinkable that between the expressions Xk( f ), there are relations of the form:
(2)q
∑k=1
χk(x1, . . . ,xn)Xk( f )≡ 0.
If this would be the case, then certain amongst our equations would be a conse-quence of the remaining ones, and they could easily be left out while taking forgranted the solution of the stated problem. Therefore it is completely legitimate tomake the assumption that there are no relations of the form (2), hence that the equa-tions (1) are solvable with respect to the q of the differential quotients ∂ f
∂xi. It is to be
understood in this sense, when we refer to the equations (1) as independent of eachother 1.
According to what has been said above about the two equations X1( f ) = 0 andX2( f ) = 0, it is clear that the possible joint solutions of our q equations do alsosatisfy all equations of the form:
Xi(Xk( f )
)−Xk
(Xi( f )
)= 0.
And now, two cases can occur.Firstly, the equations obtained this way can be a consequence of the former, when
for every i and k 6 q, a relation of the following form:
Xi(Xk( f )
)−Xk
(Xi( f )
)=
= χik1(x1, . . . ,xn)X1( f )+ · · ·+χikq(x1, . . . ,xn)Xq( f ).
1 This is a typical place where a relocalization is in general required in order to insure that thevectors X1
∣∣x, . . . ,Xq
∣∣x are locally linearly independent, and the authors, as usual, understand it
mentally.

§ 22. 101
holds. With CLEBSCH, we then say that the q independent equations X1( f ) = 0, . . . ,Xq( f ) = 0 form a q-term complete system [q-GLIEDRIG VOLLSTÄNDIG SYSTEM].
However, in general the second possible case will occur; amongst the new formedequations:
Xi(Xk( f )
)−Xk
(Xi( f )
)= 0,
will be found a certain number which are independent of each other, and from the qpresented ones. We add them, say:
Xq+1( f ) = 0, . . . . . . ,Xq+s( f ) = 0
to the q initial ones and we now treat the obtained q+ s equations exactly as theq ones given earlier. So we continue; but since we cannot come to more than nequations Xi( f ) = 0 that are independent of each other, we must finally reach acomplete system which consists of n or less independent equations. Therefore wehave the proposition:
Proposition 3. The determination of the joint solutions of q given linear partialdifferential equations of first order X1( f ) = 0, . . . ,Xq( f ) = 0 can always be reduced,by differentiation and elimination, to the integration of a complete system.
We now assume that X1( f ) = 0, . . . , Xq( f ) = 0 form a q-term complete system.Obviously, these equations may be replaced by q other ones:
Yk( f ) =q
∑j=1
ψk j(x1, . . . ,xn)X j( f ) = 0 (k=1 ···q).
In the process, it is only required that the determinant of the ψk j does not vanishidentically, whence the X j( f ) can also be expressed linearly in terms of the Yk( f ).Visibly, relations of the form:
(3) Yi(Yk( f )
)−Yk
(Yi( f )
)=
q
∑j=1
ωik j(x1, . . . ,xn)Yj( f )
then hold true; so the equations Yk( f ) = 0 too do form a q-term complete systemand hence are totally equivalent to the equations Xk( f ) = 0.
As it has been pointed out for the first time by CLEBSCH, some ψk j are alwaysavailable for which all the ωik j vanish. In order to attain this in the simplest way,we select with A. MAYER the ψk j so that the Yk( f ) = 0 appear to be resolved withrespect to q of the differential quotients, for instance with respect to ∂ f
∂xn, . . . , ∂ f
∂xn−q+1:
(4) Yk( f ) =∂ f
∂xn−q+k+
n−q
∑i=1
ηki∂ f∂xi
(k=1 ···q).
Then the expressions Yi(Yk( f )
)−Yk
(Yi( f )
)will all be free of ∂ f
∂xn−q+1, . . . , ∂ f
∂xn, and
consequently they can have the form ∑ j ωik j Yj( f ) only if all the ωik j vanish. Thus:

102 5 Complete Systems of Partial Differential Equations
Proposition 4. If one solves a q-term complete system:
X1( f ) = 0, . . . . . . ,Xq( f ) = 0
with respect to q of the differential quotients, then the resulting equations:
(4) Yk( f ) =∂ f
∂xn−q+k+
n−q
∑i=1
ηki∂ f∂xi
= 0 (k=1 ···q)
stand pairwise in the relationships:
(5) Yi(Yk( f )
)−Yk
(Yi( f )
)= 0 (i,k=1 ···q).
§ 23.
We now imagine that a given q-term complete system is brought to the above-mentioned form:
(4) Yk( f ) =∂ f
∂xn−q+k+
n−q
∑i=1
ηki∂ f∂xi
= 0 (k=1 ···q).
It will be shown that this system possesses n − q independent solutions, for thedetermination of which it suffices to integrate q individual linear partial differentialequations one after the other.
At first, we integrate the differential equation:
Yq( f ) =∂ f∂xn
+n−q
∑i=1
ηqi∂ f∂xi
= 0;
amongst its n−1 independent solutions x′1, . . . ,x′n, the following q−1, namely:
x′n−q+1 = xn−q+1, . . . . . . ,x′n−1 = xn−1
are known at once. If the n−1 expressions x′1, . . . ,x′n−1 together with the quantity xn
which is independent of them, are introduced as new variables, then our completesystem receives the form:
Yq( f ) =∂ f∂xn
= 0, Yk( f ) =∂ f
∂x′n−q+1+
n−q
∑i=1
η ′ki
∂ f∂x′i
= 0
(k=1 ···q−1).
Now, since the expressions Yi(Yk( f )
)−Yk
(Yi( f )
)behave invariantly through the
introduction of new variables (cf. Proposition 2 of this chapter), they must now againalso vanish, from which it follows that all η ′
ki must be functions of only x′1, . . . ,x′n−1,
and be free of xn. The initial problem of integration is therefore reduced to findingout the joint solutions of the q−1 equations:

§ 23. 103
Y ′k( f ) =
∂ f∂x′n−q+k
+n−q
∑i=1
η ′ki(x
′1, . . . ,x
′n−1)
∂ f∂x′i
= 0
(k=1 ···q−1),
and in fact these equations, which depend upon only n− 1 independent variables,namely x′1, . . . ,x
′n−1, do stand again pairwise in the relationships: Y ′
i(Y ′
k( f ))−
Y ′k
(Y ′
i ( f ))= 0.
We formulate this result in the following way.
Proposition 5. The joint solutions of the equations of a q-term complete system in nvariables can also be defined as the joint solutions of the equations of a (q−1)-termcomplete system in n−1 variables. In order to be able to set up this new completesystem, one only has to integrate a single linear partial differential equation of firstorder in (n−q+1) variables.
The new complete system again appears in resolved form; we can hence at oncecontinue our above-mentioned process and by applying it (q− 1) times, we obtainthe following:
Proposition 6. The joint solutions of the equations of a q-term complete system inn variables can also be defined as the solutions of a single linear partial differentialequation of first order in n − q + 1 variables. In order to be able to set up thisequation, it suffices to integrate q−1 individual equations of this sort one after theother.
From this it follows easily:
Proposition 7. A q-term complete system in n independent variables always pos-sesses n−q independent solutions.
But conversely, the following also holds:
Proposition 8. If q independent linear partial differential equations of first order inn independent variables:
X1( f ) = 0, . . . . . . ,Xq( f ) = 0
have exactly n−q independent solutions in common, then they form a q-term com-plete system.
For the proof, we remark that according to what precedes, the equations:
X1( f ) = 0, . . . . . . ,Xq( f ) = 0
determine a complete system with q or more terms; now, if this complete systemwould contain more than q independent equations, then it would possess not n−q,but only a smaller number of independent solutions; under the assumptions of the

104 5 Complete Systems of Partial Differential Equations
proposition, it is therefore q-term, that is to say, it is constituted by the equationsX1( f ) = 0, . . . , Xq( f ) = 0 themselves.
If n−q independent functions ω1, . . . ,ωn−q of x1, . . . ,xn are presented, then onealways can set up q independent linear partial differential equations which are iden-tically satisfied by all ω . Indeed, if we take for granted that the determinant:
∑ ± ∂ω1
∂x1. . .
∂ωn−q
∂xn−q
does not vanish identically, which we can achieve without restriction, then the qequations: ∣∣∣∣∣∣∣∣∣∣
∂ f∂x1
· · · ∂ f∂xn−q
∂ f∂xn−q+k
∂ω1∂x1
· · · ∂ω1∂xn−q
∂ω1∂xn−q+k
· · · · · ·∂ωn−q
∂x1· · · ∂ωn−q
∂xn−q
∂ωn−q∂xn−q+k
∣∣∣∣∣∣∣∣∣∣= 0 (k=1 ···q)
are differential equations of that kind; because after the substitution f = ω j, they goto an identity, and because they are independent of each other, as shows their form.According to the last proposition, these equations form a q-term complete system.Thus:
Proposition 9. If n−q independent functions of n variables x1, . . . ,xn are presented,then there always exists a determinate q-term complete system in x1, . . . ,xn of whichthese functions constitute a system of solutions.
§ 24.
However, for our goal, it does not suffice to have proved the existence of the solu-tions to a complete system, it is on the contrary rather necessary to deal more closelywith the analytic properties of these solutions.
On this purpose, we shall assume that in the presented q-term complete system:
Yk( f ) =∂ f
∂xn−q+k+
n−q
∑i=1
ηki∂ f∂xi
= 0 (k=1 ···q),
the analytic functions ηki behave regularly in the neighborhood of:
x1 = · · ·= xn = 0.
As quantities x′1, . . . ,x′n−1, we now choose amongst the solutions of the equation:
∂ f∂xn
+n−q
∑i=1
ηqi∂ f∂xi
= 0
the formerly defined general solutions of this equation, relative to xn = 0.

§ 24. 105
We know that these general solutions x′1, . . . ,x′n−1 are ordinary power series with
respect to x1, . . . ,xn in a certain neighborhood of x1 = · · · = xn = 0, and that forxn = 0, they reduce to x1, . . . ,xn−1 respectively. The solutions already mentionedabove:
x′n−q+1 = xn−q+1, . . . . . . ,x′n−1 = xn−1
are therefore general solutions.Conversely, according to the observations in § 21, x1, . . . ,xn−1 are also analytic
functions of x′1, . . . ,x′n−1,xn and they behave regularly in the neighborhood of the
system of values x′1 = · · ·= x′n−1 = xn = 0. Now, since in the new complete systemY ′
k( f ) = 0, the coefficients η ′ki behave regularly as functions of x1, . . . ,xn, they will
also be ordinary power series with respect to x′1, . . . ,x′n−1,xn in a certain neighbor-
hood of x′1 = 0, . . . ,x′n−1 = 0, xn = 0, and in fact they will be, as we know, free ofxn.
Next, we determine the general solutions of the equation:
∂ f∂x′n−1
+n−q
∑i=1
η ′q−1,i
∂ f∂x′i
= 0
relative to x′n−1 = 0. These solutions, that we may call x′′1 , . . . ,x′′n−2, behave regularly
as functions of x′1, . . . ,x′n−1 in the neighborhood of x′1 = · · ·= x′n−1 = 0 and are hence
also regular in the neighborhood of x1 = · · ·= xn = 0, as functions of x1, . . . ,xn. Afterthe substitution x′n−1 = 0, the functions x′′1 , . . . ,x
′′n−2 reduce to x′1, . . . ,x
′n−2, whence
they reduce to x1, . . . ,xn−2 after the substitution xn−1 = xn = 0. The coefficientsof the next (q − 2)-term complete system are naturally ordinary power series inx′′1 , . . . ,x
′′n−2.
After iterating q times these considerations, we obtain at the end n−q indepen-dent solutions: x(q)1 , . . . ,x(q)n−q of our complete system. These are ordinary power se-
ries with respect to the x(q−1)i in a certain neighborhood of x(q−1)
1 = · · ·= x(q)n−q+1 = 0,and just in the same way also, series with respect to the xi in a certain neighbor-hood of x1 = · · ·= xn = 0. For x(q−1)
n−q+1 = 0, the x(q)1 , . . . ,x(q)n−q reduce respectively to
x(q−1)1 , . . . ,x(q−1)
n−q and hence to x1, . . . ,xn−q for xn−q+1 = · · ·= xn = 0. Therefore onehas:
x(q)i = xi +Pi(x1, . . . ,xn) (i=1 ···n−q),
where the Pi all vanish for xn−q+1 = · · ·= xn = 0.We call the solutions x(q)1 , . . . ,x(q)n−q of our complete system its general solutions
relative to xn−q+1 = 0, . . . , xn = 0.We may state the gained result in a somewhat more general form by introducing
a general system of values: x01, . . . ,x
0n in place of the special one:
x1 = x2 = · · ·= xn = 0.
Then we can say:
Theorem 12. Every q-term complete system:

106 5 Complete Systems of Partial Differential Equations
∂ f∂xn−q+k
+n−q
∑i=1
ηki(x1, . . . ,xn)∂ f∂xi
= 0 (k=1 ···q)
whose coefficients ηki behave regularly in the neighborhood of x1 = x01, . . . , xn =
x0n possesses n− q independent solutions x(q)1 , . . . ,x(q)n−q which behave regularly in
a certain neighborhood of x1 = x01, . . . , xn = x0
n and which in addition reduce tox1, . . . ,xn−q respectively after the substitution xn−q+1 = x0
n−q+1, . . . , xn = x0n.
The main theorem of the theory of complete systems has not been stated in thisprecise version, neither by JACOBI, nor by CLEBSCH. Nevertheless, this theorem isimplicitly contained in the known studies due to CAUCHY, WEIERSTRASS, BRIOTand BOUQUET, KOWALEVSKY and DARBOUX and which treat the question of ex-istence of solutions to given differential equations.
§ 25.
The theory of a single linear partial differential equation:
X( f ) =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
= 0
stands, as already said, in the closest connection with the theory of the simultaneoussystem:
dx1
ξ1= · · ·= dxn
ξn.
Moreover, something completely analogous takes place also for systems of linearpartial differential equations†.
Consider q independent linear partial differential equations of first order which,though, need not constitute a complete system. For the sake of simplicity, we imag-ine that the equations are solved with respect to q of the differential quotients:
(4’) Yk( f ) =∂ f
∂xn−q+k+
n−q
∑i=1
ηki(x1, . . . ,xn)∂ f∂xi
= 0 (k=1 ···q).
If ω(x1, . . . ,xn) is a general solution of these equations, then it holds:
∂ω∂xn−q+k
≡−n−q
∑i=1
ηki∂ω∂xi
(k=1 ···q),
whence:
dω =n−q
∑i=1
∂ω∂xi
dxi −
q
∑k=1
ηki dxn−q+k
.
† This connection has been explained in detail for the first time by BOOLE. Cf. also A. MAY-ERMAYER about unrestricted integrable differential equations, Math. Ann. Vol. V.

§ 25. 107
Consequently, the differential dω vanishes identically by virtue of the n− q totaldifferential equations:
(6) dxi −q
∑k=1
ηki dxn−q+k = 0 (i=1 ···n−q).
But one calls every function of this nature an integral function of this system of totaldifferential equations. Thus we can say:
Every joint solution of the q linear partial differential equations (4’) is an integralfunction of the system of n−q total differential equations (6).
But conversely also, every integral function of the system (6) is a joint solution ofthe equations (4’).
Indeed, if w(x1, . . . ,xn) is an integral function of (6), then the expression:
dw =n
∑i=1
∂w∂xi
dxi
vanishes identically by virtue of (6), that it is to say, one has:
q
∑k=1
∂w
∂xn−q+k+
n−q
∑i=1
ηki∂w∂xi
dxn−q+k ≡ 0,
and from this it is evident that w satisfies the equations (4) identically.But now, the integration of the system (6) is synonymous to the finding
[AUFFINDUNG] of all its integral functions; for, what does it mean to integratethe system (6)? Nothing else, as is known, but to determine all possible functionsρ1, . . . ,ρn−q of x1, . . . ,xn which make the expression:
n−q
∑i=1
ρi(x1, . . . ,xn)
dxi −
q
∑k=1
ηki dxn−q+k
to become a complete differential, hence to be the differential of an integral function.
In other words:The integration of the system (4’) of q linear partial differential equations is
accomplished if one integrates the system of the n−q total differential equations (6),and conversely.
This connection between the two systems (4’) and (6) naturally presupposes thatthey (respectively) possess integral functions; however, there still exists a certainconnection also when there are no joint solutions to (4’), and hence too, no integralfunctions for (6). That will be considered on another occasion (Chap. 6, p. 120).
Since the equations (4’) have at most n − q independent solution in com-mon, the system (6) has at most n − q integral functions. If it possess preciselyn − q such independent solutions, the system (6) is called unrestrictedly inte-

108 5 Complete Systems of Partial Differential Equations
grable [UNBESCHRÄNKT INTEGRABEL]; so this case occurs only when the qequations (4’) form a q-term complete system.
We suppose that the system (6) is unrestrictedly integrable, or what is the same,that all the expressions Yk
(Yj( f )
)−Yj
(Yk( f )
)vanish identically. Furthermore, we
imagine that the n−q general solutions:
ω1(x1, . . . ,xn), . . . , ωn−q(x1, . . . ,xn)
of the complete system (4’) relative to:
xn−q+1 = x0n−q+1, . . . ,xn = x0
n
are determined. Then the equations:
ω1(x1, . . . ,xn) = a1, . . . , ωn−q(x1, . . . ,xn) = an−q
with the n−q arbitrary constants a1, . . . ,an−q are called the complete integral equa-tions of the system (6). These integral equations are obviously solvable with respectto x1, . . . ,xn−q, for ω1, . . . ,ωn−q reduce to x1, . . . ,xn−q (respectively) for:
xn−q+1 = x0n−q+1, . . . , xn = x0
n.
Hence we obtain:
xi = ψi(xn−q+1, . . . ,xn, a1, . . . ,an−q
)(i=1 ···n−q).
One can easily see that the equations (6) become identities after the substitutionx1 = ψ1, . . . , xn−q = ψn−q. Indeed, we at first have:
xi −ψi(xn−q+1, . . . ,xn, ω1, . . . ,ωn−q
)≡ 0 (i=1 ···n−q);
so if we introduce xi −ψi in place of f in Yk( f ), we naturally again obtain an iden-tically vanishing expression, and since all Yk(ω1), . . . ,Yk(ωn−q) are identically zero,it comes:
ηki(x1, . . . ,xn)−∂
∂xn−q+kψi(xn−q+1, . . . ,xn, ω1, . . . ,ωn−q
)≡ 0
(k=1 ···q; i=1 ···n−q).
If we here make the substitution x1 = ψ1, . . . , xn−q = ψn−q, it comes:
ηki(ψ1, . . . ,ψn−q, xn−q+1, . . . ,xn
)− ∂
∂xn−q+kψi(xn−q+1, . . . ,xn,
a1, . . . ,an−q)≡ 0.
We multiply this by dxn−q+k, we sum with respect to k from 1 to q and we thenrealize that the expression:

§ 26. 109
dxi −q
∑k=1
ηki(x1, . . . ,xn)dxn−q+k
does effectively vanish identically after the substitution x1 = ψ1, . . . , xn−q = ψn−q.If we yet add that, from the equations ωi = ai, we can always determine the ai sothat the variables x1, . . . ,xn−q take prescribed initial values x1, . . . ,xn−q for xn−q+1 =x0
n−q+1, . . . , xn = x0n, then we can say:
If the system of total differential equations (6) is unrestrictedly integrable, thenit is always possible to determine analytic functions x1, . . . ,xn−q of xn−q+1, . . . ,xnin such a way that the system (6) is identically satisfied and that x1, . . . ,xn−q takeprescribed initial values for xn−q+1 = x0
n−q+1, . . . , xn = x0n.
§ 26.
For reasons of convenience, we introduce a few abbreviations useful in the future.Firstly, the parentheses around the f in X( f ) shall from now on be frequently left
out.Further, since expressions of the form X
(Y ( f )
)−Y(X( f )
)shall occur always
more frequently [IMMER HAÜFIGER], we want to write:
X(Y ( f )
)−Y(X( f )
)= XY f −Y X f =
[X , Y
];
also, we shall not rarely employ the following language [REDEWEISE BEDIENEN]:the expression, or the infinitesimal transformation
[X , Y
]arises as the “composi-
tion” [ZUSAMMENSETZUNG], or the “combination” [COMBINATION], of X f andY f .
Yet the following observation may also find its position at this place:Between any three expressions X f ,Y f ,Z f there always exists the following iden-
tity:
(7)[[
X , Y], Z]+[[
Y, Z], X]+[[
Z, X], Y]≡ 0.
This identity is a special case of the so-called Jacobi identity, which we shall get toknow later. Here, we want to content ourselves with verifying the correctness of thespecial identity (7); later at the concerned place (cf. Volume 2), we shall enter intothe sense of the Jacobi identity.
One has obviously:[[X , Y
], Z]= XY Z f −Y XZ f −ZXY f +ZY X f ;
if one permutes here circulary X f ,Y f ,Z f and then sums the three obtained relations,one gets rid of all the terms in the right-hand side, and one receives the identitypointed out above.
This special Jacobi identity turns out to be extremely important in all the re-searches on transformation groups.

110 5 Complete Systems of Partial Differential Equations
The above simple verification of the special Jacobi identity could be given forthe first time by ENGEL.
—————–

Chapter 6New Interpretation of the Solutions of aComplete System
If, in the developments of the preceding chapter, we interpret the expression X( f )as the symbol of an infinitesimal transformation, or what is the same, as the symbolof a one-term group, then all what has been said receives a new sense. If on theother hand, we interpret the variables x1, . . . ,xn as point coordinates [PUNKTCOOR-DINATEN] in a space of n dimensions, the results obtained at that time also receivea certain graphic nature [ANSCHAULICHKEIT].
The goal of the present chapter is to present these two aspects in details and thento put them in association; but for that, the introduction of various new conceptsturns out to be necessary†.
§ 27.
Let x′i = fi(x1, . . . ,xn) be a transformation in the variables x1, . . . ,xn and letΦ(x1, . . . ,xn) be an arbitrary function; now, if by chance this function is constitutedin such a way that the relation:
Φ(
f1(x), . . . , fn(x))= Φ(x1, . . . ,xn)
holds identically, then we say: the function Φ(x1, . . . ,xn) admits [GESTATTET] thetransformation x′i = fi(x1, . . . ,xn), or: it allows [ZULÄSST] this transformation;we also express ourselves as follows: the function Φ(x1, . . . ,xn) remains invariantthrough the mentioned transformation, it behaves as an invariant with respect tothis transformation.
If a function Φ(x1, . . . ,xn) admits all the ∞r transformations x′i = fi(x1, . . . ,xn, a1, . . . ,ar)of an r-term group, we say that it remains invariant by this group, and that it admitsthis group; at the same time, we call Φ an absolute invariant, or briefly an invariantof the group.
Here, we restrict ourselves to one-term groups. So consider a on-term group:
† The formations of concepts [BEGRIFFSBILDUNGEN] presented in this chapter have been de-veloped by Lie in the Memoirs of the Scientific Society of Christiania 1872, 1873, 1874 and 19february 1875. Cf. also Math. Ann. Vols. VIII, IX and XI.
111

112 6 New Interpretation of the Solutions of a Complete System
X( f ) =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
,
the finite transformations of which have the form:
x′i = xi +t1
ξi +t2
1 ·2X(ξi)+ · · · (i=1 ···n).
We ask for all invariants of this group.If Φ(x1, . . . ,xn) is such an invariant, then for every t, the equation:
Φ(x1 + tξ1 + · · · , . . . . . . , xn + tξn + · · ·
)= Φ(x1, . . . ,xn)
must hold identically. If we expand here the left-hand side in a series of powers of taccording to the general formula (7) in Chap. 4, p. 67, then we obtain the condition:
Φ(x1, . . . ,xn)+t1
X(Φ)+t2
1 ·2X(X(Φ)
)+ · · · ≡ Φ(x1, . . . ,xn)
for every t. From this, it immediately follows that the expression X(Φ) must vanishidentically, if Φ admits our one-term group; as a result, we thus have a necessarycriterion for the invariance of the function Φ by the one-term group X( f ).
As we have seen earlier (cf. p. 68), the expression X(Φ) determines the increase[ZUWACHS] that the function Φ undergoes by the infinitesimal transformationX( f ). Now, since this increase δΦ = X(Φ)δ t vanishes together with X(Φ), it isnatural to introduce the following language: when the expression X(Φ) vanishesidentically, we say that the function Φ admits the infinitesimal transformationX( f ).
Thus, our result above can also be enunciated as follows:For a function Φ of x1, . . . ,xn to admit all transformations of the one-term group
X( f ), it is a necessary condition that it admits the infinitesimal transformation X( f )of the concerned group.
But it is easy to see that this necessary condition is at the same time sufficient.Indeed, together with X(Φ), all the expressions X
(X(Φ)
), X(X(X(Φ)
)), etc. also
vanish identically, and consequently, the equation:
Φ(x′1, . . . ,x′n) = Φ(x1, . . . ,xn)+
t1
X(Φ)+ · · ·
reduces to Φ(x′) = Φ(x) for every value of t, hence with that, it is proved that thefunction Φ(x) admits all transformations of the one-term group X( f ). Now, sincethe functions Φ(x1, . . . ,xn) for which the expression X(Φ) vanishes identically arenothing but the solutions of the linear partial differential equation X( f ) = 0, wetherefore can state the following theorem.
Theorem 13. The solutions of the linear partial differential equation:

§ 27. 113
X( f ) =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
= 0
are invariant by the one-term group X( f ), and in fact, they are the only invariantsby X( f ).
Of course, it should not be forgotten that the invariants of the one-term groupX( f ) are also at the same time the invariants of any one-term group of the form:
ρ(x1, . . . ,xn)n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
= ρ X( f ),
whichever ρ can be as a function of its arguments.This simply follows from the fact that one can multiply by any arbitrary func-
tion ρ of x1, . . . ,xn the equation X( f ) = 0 which defines the invariants in question.We can also express this fact as follows: if a function of x1, . . . ,xn admits the in-finitesimal transformation X( f ), then at the same time, it admits every infinitesimaltransformation ρ(x1, . . . ,xn)X( f ).
One sees that the two concepts of one-term group X( f ) and of infinitesimal trans-formation X( f ) are more special [SPECIELLER] than the concept of linear partialdifferential equation X( f ) = 0.
On the basis of our developments mentioned above, we can now expressin the following way our former observation that the joint solutions of twoequations Xi( f ) = 0 and Xk( f ) = 0 simultaneously satisfy the third equationXi(Xk( f )
)−Xk
(Xi( f )
)= 0.
Proposition 1. If a function of x1, . . . ,xn admits the two infinitesimal transforma-tions Xi( f ) and Xk( f ) in these variables, then it also admits the infinitesimal trans-formation Xi
(Xk( f )
)−Xk
(Xi( f )
).
Expressed differently:
Proposition 2. If a function of x1, . . . ,xn admits the two one-term groups Xi( f ) andXk( f ), then it also admits the one-term group Xi
(Xk( f )
)−Xk
(Xi( f )
).
If ψ1, . . . ,ψn−q is a system of independent solutions of the q-term complete sys-tem X1( f )= 0, . . . ,Xq( f )= 0, then Ω(ψ1, . . . ,ψn−q) is the general form of a solutionof this complete system, whence Ω(ψ1, . . . ,ψn−q) generally admits every infinites-imal transformation of the shape:
(1) χ1(x1, . . . ,xn)X1( f )+ · · ·+χq(x1, . . . ,xn)Xq( f ),
whatever functions χ1, . . . ,χq one can choose. It is even clear that aside fromthe ones written just now, there are no infinitesimal transformations by which allfunctions of the form Ω(ψ1, . . . ,ψn−q) remain invariant; for we know that theq-term complete system X1( f ) = 0, . . . , Xq( f ) = 0 is characterized by its solutionsψ1, . . . ,ψn−q.

114 6 New Interpretation of the Solutions of a Complete System
Naturally, the functions Ω also admit all finite transformations of the one-termgroup (1). Besides, one can indicate all finite transformations through which allfunctions Ω(ψ1, . . . ,ψn−q) remain simultaneously invariant. The form of thesetransformations obviously is:
ψk(x′1, . . . ,x′n) = ψk(x1, . . . ,xn) (k=1 ···n−q)
U j(x′1, . . . ,x′n, x1, . . . ,xn) = 0 ( j=1 ···q),
where the U j are subjected to the condition that really a transformation arises. More-over, the x′k and the xk as well must stay inside a certain region.
We want to say that the system of equations:
π1(x1, . . . ,xn) = 0, . . . , πm(x1, . . . ,xn) = 0
admits the transformation x′i = fi(x1, . . . ,xn) when the system of equations:
π1(x′1, . . . ,x′n) = 0, . . . , πm(x′1, . . . ,x
′n) = 0
is equivalent to π1(x) = 0, . . . , πm(x) = 0 after the substitution x′i = fi(x1, . . . ,xn),hence when every system of values x1, . . . ,xn which satisfies the m equationsπµ(x) = 0 also satisfies the m equations:
π1(
f1(x), . . . , fn(x))= 0, . . . , πm
(f1(x), . . . , fm(x)
)= 0.
With the introduction of this definition, it is not even necessary to assume that them equations π1 = 0, . . . ,πm = 0 are independent of each other, though this assump-tion will always be done in the sequel, unless the contrary is expressly admitted.
From what precedes, it now comes immediately the
Proposition 3. If W1,W2, . . . ,Wm (m 6 n− q) are arbitrary solutions of the q-termcomplete system X1( f ) = 0, . . . ,Xq( f ) = 0 in the n independent variables x1, . . . ,xnand if furthermore a1, . . . ,am are arbitrarily chosen constants, then the system ofequation:
W1 = a1, . . . , Wm = am
admits any one-term group of the form:
q
∑k=1
χk(x1, . . . ,xn)Xk( f ),
where it is understood that χ1, . . . ,χq are arbitrary functions of their arguments.
§ 28.
In the previous paragraph, we have shown in a new light the theory of the integrationof linear partial differential equations, in such a way that we brought to connectionthe infinitesimal transformations and the one-term groups. At present, we want to

§ 28. 115
take another route, we want to attempt to make accessible the clear, illustrated con-ception of this theory of integration (and of what is linked with it), by means ofmanifold considerations [MANNIGFALTIGKEITSBETRACHTUNGEN].
If we interpret x1, . . . ,xn as coordinates in an n-times extended space Rn, then thesimultaneous system:
dx1
ξ1= · · ·= dxn
ξn
receives a certain illustrative sense; namely it attaches to each point x1, . . . ,xn of theRn a certain direction [RICHTUNG].
The integral equations of the simultaneous system determine n− 1 of the vari-ables x1, . . . ,xn, hence for instance x1, . . . ,xn−1, as functions of the n-th: xn and ofthe initial values x1, . . . ,xn; consequently, after a definite choice of initial values,these integral equations represent a determinate once-extended manifold which wecall an integral curve of the simultaneous system. Every such integral curve comesinto contact [BERÜHRT], in each one of its points, with the direction attached to thepoint.
There is in total ∞n−1 different integral curves of the simultaneous system, andin fact, through every point of the Rn, there passes in general one integral curve.
If ψ1, . . . ,ψn−1 are independent integral functions of the simultaneous system,then all the integral curves are also represented by means of the n−1 equations:
ψk(x1, . . . ,xn) =Ck (k=1 ···n−1),
with the n−1 arbitrary constants C1, . . . ,Cn−1. If one sets an arbitrary integral func-tion Ω(ψ1, . . . ,ψn−1) to be equal to an arbitrary constant:
Ω(ψ1, . . . ,ψn−1) = A,
then one gets the equation of ∞1 (n− 1)-times extended manifolds, which are en-tirely constituted of integral curves and in fact, every such manifold is constitutedof ∞n−2 different integral manifolds. Lastly, if one sets in general m 6 n− 1 inde-pendent integral functions Ω1, . . . ,Ωm to be equal to arbitrary constants:
Ωµ(ψ1, . . . ,ψn−1) = Aµ (µ =1 ···m),
then one obtains the analytic expression of a family of ∞m (n−m)-times extendedmanifolds, each one of which consists of ∞n−m−1 integral curves.
The integral functions of our simultaneous system are at the same time the solu-tions of the linear partial differential equations:
n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
= X( f ) = 0.
Occasionally, we also call the integral curves of the simultaneous system thecharacteristics of the linear partial differential equation X( f ) = 0, if we take upagain a terminology introduced by MONGE for n = 3. Using this way of expressing,

116 6 New Interpretation of the Solutions of a Complete System
we can also say: every solution of the linear partial differential equation X( f ) = 0represents, when it is set equal to a constant, a family of ∞1 manifolds which consistsof ∞n−2 characteristics of X( f ) = 0.
Now, we imagine that we are given two linear partial differential equations, sayX1( f ) = 0 and X2( f ) = 0.
It is possible that the two equations have characteristics in common. This casehappens when there is an identity of the form:
χ1(x1, . . . ,xn)X1( f )+χ2(x1, . . . ,xn)X2( f )≡ 0,
without χ1 and χ2 both vanishing. Then obviously every solution of X1( f ) = 0 sat-isfies also X2( f ) = 0 and conversely.
If the two equations X1( f ) = 0 and X2( f ) = 0 have distinct characteristics, thenthey do not have all their solutions in common; then the question is whether theyin general possess solutions in common, or, as we can now express: whether thecharacteristics of X1( f ) = 0 can be gathered as manifolds which consist of charac-teristics of X2( f ) = 0.
This question can be answered directly when one knows the characteristics ofthe two equations X1( f ) = 0 and X2( f ) = 0; however, we do not want to halt here.In the sequel, we shall restrict ourselves to expressing in the language of the theoryof manifolds [MANNIGFALTIGKEITSLEHRE] the former results which have beendeduced by means of the analytic method [DURCH ANALYTISCHE METHODEN].
Let the q mutually independent equations:
X1( f ) = 0, . . . , Xq( f ) = 0
form a q-term complete system; let ψ1, . . . ,ψn−q be independent solution of it. Thenthe equations:
ψ1(x1, . . . ,xn) =C1, . . . , ψn−q(x1, . . . ,xn) =Cn−q
with the n− q arbitrary constants Ck represent a family of ∞n−q q-times extendedmanifolds, each one of which consists of ∞q−1 characteristics of each individualequation amongst the q equations X1( f ) = 0, . . . ,Xq( f ) = 0. We call these ∞n−q
manifolds the characteristic manifolds of the complete system.If one sets any n−q−m independent functions of ψ1, . . . ,ψn−q equal to arbitrary
constants:
Ω1(ψ1, . . . ,ψn−q) = A1, . . . , Ωn−q−m(ψ1, . . . ,ψn−q) = An−q−m,
then one gets the analytic expression of a family of ∞n−q−m (q+m)-times extendedmanifolds, amongst which each individual one consists of ∞m characteristic mani-folds.
The equations of the ∞n−q characteristic manifolds show that every point of theRn belongs to one and to only one characteristic manifold. Consequently, we cansay that the whole Rn is decomposed [ZERLEGT] in ∞n−q q-times extended man-

§ 28. 117
ifolds, hence that our complete system defines a decomposition [ZERLEGUNG] ofthe space.
Conversely, every decomposition of the Rn in ∞n−q q-times extended manifolds:
ϕ1(x1, . . . ,xn) = A1, . . . , ϕn−q(x1, . . . ,xn) = An−q
can be defined by means of a q-term complete system; for ϕ1, . . . ,ϕn−q necessarilyare independent functions, whence according to Proposition 9, p. 104, there is a q-term complete system the most general solutions of which is an arbitrary functionof ϕ1, . . . ,ϕn−q; this complete system then defines the decomposition in question.
An individual linear partial differential equation X( f ) = 0 attaches to every pointof the Rn a certain direction. If one has several such equations, for instance thefollowing ones, which can be chosen in a completely arbitrary way:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
= 0 (k=1 ···q),
then each one of these equations associates to every point of the space a directionof progress [FORTSCHREITUNGSRICHTUNG]. For instance, the q directions associ-ated to the point x0
1, . . . ,x0n are determined by:
δx01 : δx0
2 : · · · : δx0n = ξk1(x0) : ξk2(x0) : · · · : ξkn(x0)
(k=1 ···q).
We call these q directions in the chosen point independent of each other if none of itcan be linearly deduced from the remaining ones, that is to say: if it is not possibleto indicate q numbers λ1, . . . ,λq which do not all vanish although the n equations:
λ1ξ 01i + · · ·+λqξ 0
qi = 0 (i=1 ···n)
are satisfied.From this, it follows that the q equations X1( f ) = 0, . . . ,Xq( f ) = 0 associate to
every point in general position q independent directions when they are themselvesmutually independent, thus when the equation:
q
∑k=1
χk(x1, . . . ,xn)Xk( f ) = 0
can be identically satisfied only for χ1 = 0, . . . , χq = 0.If one wants to visualize geometrically what should be understood by “indepen-
dent directions”, one should best start in ordinary, thrice-extended space R3; for itis then really obvious. In a point of the R3 one calls two directions independent ofeach other when they are generally distinct; three directions are independent whenthey do not fall in a same plane passing through the point; there is in general nomore than three mutually independent directions in a point of the R3.

118 6 New Interpretation of the Solutions of a Complete System
Accordingly, q directions in a point of the Rn are independent of each other ifand only if, when collected together, they are not contained in any smooth manifoldthrough this point which has less than q dimensions.
Every possible common solution of the q equations:
X1( f ) = 0, . . . , Xq( f ) = 0
also satisfies all equations of the form:
(2)q
∑k=1
χk(x1, . . . ,xn)Xk( f ) = 0.
The totality of all these equations associates a whole family of directionsto any point of the Rn. If we assume from the beginning that the equationsX1( f ) = 0, . . . , Xq( f ) = 0 are mutually independent, we do not restrict the gener-ality of the investigation; thus through the equations (2), we are given a family of∞q−1 different directions which are attached to each point x1, . . . ,xn. One easilyrealizes that these ∞q−1 directions in every point form a smooth bundle, and hencedetermine a smooth q-times extended manifold passing through this point, namelythe smallest smooth manifold through the point which contains the q independentdirections of the q equations X1( f ) = 0, . . . ,Xq( f ) = 0.
Every possible joint solution of the equations:
X1( f ) = 0, . . . , Xq( f ) = 0
satisfies also all equations of the form:
Xk(X j( f )
)−X j
(Xk( f )
)= 0.
These equations also do attach to any point x1, . . . ,xn certain directions, but ingeneral, the directions in question shall only exceptionally belong to the above-mentioned bundle of ∞q−1 directions at the point x1, . . . ,xn. It is only in one casethat at each point of the space, the directions attached to all equations:
Xk(X j( f )
)−X j
(Xk( f )
)= 0
belong to the bundle in question, namely only if for every k and j there exists arelation of the form:
Xk(X j( f )
)−X j
(Xk( f )
)=
q
∑s=1
ωk js(x1, . . . ,xn)Xs( f ),
that is to say, when the equations X1( f ) = 0, . . . , Xq( f ) = 0 do coincidentally forma q-term complete system. —
We can also define by the equations:

§ 28. 119
δx1 : · · · : δxn =q
∑k=1
χk(x)ξk1(x) : · · · :q
∑k=1
χk(x)ξkn(x)
(k=1 ···q)
the bundle of directions which is determined at every point x1, . . . ,xn by theequations X1 f = 0, . . . , Xq f = 0. By eliminating from this the arbitrary functionsχ1, . . . ,χq, or, what is the same, by setting equal to zero all the determinants in q+1columns of the matrix: ∣∣∣∣∣∣∣∣
dx1 dx2 · · dxnξ11 ξ12 · · ξ1n· · · · ·
ξq1 ξq2 · · ξqn
∣∣∣∣∣∣∣∣we obtain a system of n− q independent total differential equations. This systemattaches to every point x1, . . . ,xn exactly the same smooth bundle of ∞q−1 directionsas did the equations (2). It follows conversely that the totality of the linear partialdifferential equations (2) is also completely determined by the system of total dif-ferential equations just introduced.
The formulas become particularly convenient when one replaces the q equationsX1( f ) = 0, . . . , Xq( f ) = 0 by q other equations which are resolved with respect to qof the differential quotients ∂ f
∂xi, for instance by the following q equations:
Yk( f ) =∂ f
∂xn−q+k+
n−q
∑i=1
ηki(x1, . . . ,xn)∂ f∂xi
= 0 (k=1 ···q).
The totality of all the equations (2) is equivalent to the totality of all the equations:
q
∑k=1
χk(x1, . . . ,xn)Yk( f ) = 0;
hence the directions which are attached to the point x1, . . . ,xn are also representedby the equations:
dx1 : · · · : dxn−q : dxn−q+1 : · · · : dxn =
=q
∑k=1
χk ηk1 : · · · :q
∑k=1
χk ηk,n−q : χ1 : · · · : χq.
If we therefore eliminate χ1, . . . ,χq, we obtain the following system of total differ-ential equations:
(3) dxi −q
∑k=1
ηki(x)dxn−q+k = 0 (i=1 ···n−q).
We have already seen in the preceding chapter, from p. 106 up to p. 107, thatthere is a connection between the system of the linear partial differential equations

120 6 New Interpretation of the Solutions of a Complete System
Y1( f ) = 0, . . . , Yq( f ) = 0 and the above system of total differential equations. Butat that time, we limited ourselves to the special case where the q equations:
Y1( f ) = 0, . . . , Yq( f ) = 0
possess solutions in common, and we showed that the determination of these jointsolutions amounts to the integration of the above total differential equations.
However, in the developments carried out just now, the integrability of theconcerned system of differential equations is out of the question. With that,the connection between the system of the linear partial differential equationsY1( f ) = 0, . . . , Yq( f ) = 0 and the system of the total differential equations (3) iscompletely independent of the integrability of these two systems; this connectionis just based on the fact that the two systems attach a single and the same smoothbundle of ∞q−1 directions.
To conclude, we still make the following remark which seems most certainlyobvious, but nevertheless has to be done: if the q equations X1 f = 0, . . . , Xq f = 0constitute a q-term complete system, then at each point x1, . . . ,xn, the characteristicmanifold of the complete system comes into contact with the ∞q−1 directions thatall equations of the form (2) attach to this point.
§ 29.
Lastly, it is advisable to combine the manifold-type considerations [MANNIG-FALTIGKEITSBETRACHTUNGEN] of the previous paragraph with the developmentsof § 27. But before, we still pursue a bit the manifold considerations.
Every transformation x′i = fi(x1, . . . ,xn) can be interpreted as an operation whichexchanges [VERTAUSCHT] the points of the Rn, as it transfers each point x1, . . . ,xnin the new position x′1 = f1(x), . . . , x′n = fn(x) (Chap. 1, p. 3).
A system of m independent equations:
Ω1(x1, . . . ,xn) = 0, . . . , Ωm(x1, . . . ,xn) = 0
represents a (n − m)-times extended manifold of the Rn. We say that this mani-fold admits the transformation x′i = fi(x1, . . . ,xn) if the system of equations Ω1 =0, . . . , Ωm = 0 admits this transformation. According to § 27 it is the case when ev-ery system of values x1, . . . ,xn which satisfies the equations Ω1(x)= 0, . . . , Ωm(x)=0 satisfies at the same time the equations:
Ω1(
f1(x), . . . , fn(x))= 0, . . . , Ωm
(f1(x), . . . , fn(x)
)= 0.
Hence we can also express ourselves as follows:The manifold:
Ω1(x1, . . . ,xn) = 0, . . . , Ωm(x1, . . . ,xn) = 0
admits the transformation:

§ 29. 121
x′1 = f1(x1, . . . ,xn), . . . , x′n = fn(x1, . . . ,xn)
if every point x1, . . . ,xn of the manifold is transferred by this transformation to apoint x′1, . . . ,x
′n which likewise belongs to the manifold.
In Chapter 3, p. 62 sq., we have seen that through every point x1, . . . ,xn in generalposition of Rn there passes an integral curve [BAHNCURVE] of the infinitesimaltransformation:
X( f ) =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
.
There, we defined this integral curve as the totality of all the positions that the pointx1, . . . ,xn can take by means of all the ∞1 transformations of the one-term groupX( f ); besides, the point x1, . . . ,xn on the integral curve in question could be chosencompletely arbitrarily. From this, it results that, through every transformation ofthe one-term group X( f ), every point x1, . . . ,xn stays on the integral curve passingthrough it, whence every integral curve of the infinitesimal transformation X( f )remains invariant by the ∞1 transformations of the one-term group X( f ). The samenaturally holds true for every manifold which consists of integral curves.
But the integral curves of the infinitesimal transformation X( f ) are nothing elsethan the integral curves of the simultaneous system:
dx1
ξ1= · · ·= dxn
ξn
hence from this it again follows that the above-mentioned characteristics of the lin-ear partial differential equation X( f ) = 0 coincide with the integral curves of theinfinitesimal transformation X( f ).
Earlier on (Chap. 4, p. 62), we have emphasized that an infinitesimal transforma-tion X f attaches to every point x1, . . . ,xn in general position a certain direction ofprogress, namely the one with which comes into contact the integral curve passingthrough. Obviously this direction of progress coincides with the direction that theequation X f associates to the point in question.
Several, say q, infinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···q)
determine q different directions of progress at each point x1, . . . ,xn in general posi-tion; in accordance with what precedes, we call these directions of progress indepen-dent of each other if the equations X1 f = 0, . . . , Xq f = 0 are mutually independent.
From this, it follows immediately that the q infinitesimal transformationsX1 f , . . . ,Xq f attach precisely h 6 q independent directions of progress when all the(h+1)× (h+1) determinants of the matrix:

122 6 New Interpretation of the Solutions of a Complete System∣∣∣∣∣∣ξ11 · · ξ1n· · · ·
ξq1 · · ξqn
∣∣∣∣∣∣vanish identically, without all its h×h determinants doing so. —
What we have in addition to say here can be summarized as a statement.
Proposition 4. If q infinitesimal transformations X1 f , . . . ,Xq f of the n-timesextended space x1, . . . ,xn are constituted in such a way that the q equationsX1 f = 0, . . . , Xq f = 0 are independent of each other, then X1 f , . . . ,Xq f attach toevery point x1, . . . ,xn in general position q independent directions of progress;moreover, if the equations X1 f = 0, . . . , Xq f = 0 form a q-term complete system,then X1 f , . . . ,Xq f determine a decomposition of the space in ∞n−q q-times extendedmanifolds, the characteristic manifolds of the complete system. Each one ofthese manifolds comes into contact in each of its points with the directions thatX1 f , . . . ,Xq f associate to the point; each such manifold can be engendered by the∞q−1 integral curves of an arbitrary infinitesimal transformation of the form:
χ1(x1, . . . ,xn)X1 f + · · ·+χq(x1, . . . ,xn)Xq f ,
where it is understood that χ1, . . . ,χq are arbitrary functions of their arguments;lastly, each one of the discussed manifolds admits all the transformations of anyone-term group:
χ1 X1 f + · · ·+χq Xq f .
—————–

Chapter 7Determination of All Systems of EquationsWhich Admit Given InfinitesimalTransformations
At first, we shall define what should mean the phrase that the system of equations:
Ω1(x1, . . . ,xn) = 0, . . . , Ωn−m(x1, . . . ,xn) = 0
admits the infinitesimal transformation X( f ). Afterwards, we shall settle the ex-tremely important problem of determining all systems of equations which admitgiven infinitesimal transformations†.
But beforehand, we still want to observe the following:We naturally consider only such system of equations:
Ω1 = 0, . . . , Ωn−m = 0
that are really satisfied by certain systems of values x1, . . . ,xn; at the same time,we always restrict ourselves to systems of values x1, . . . ,xn in the neighbourhood ofwhich the functions Ω1, . . . ,Ωn−m behave regularly. In addition, we want once forall agree on the following: unless the contrary is expressly allowed, every system ofequations Ω1 = 0, . . . , Ωn−m = 0 which we consider should be constituted in such away that not all (n−m)× (n−m) determinants of the matrix:
(1)
∣∣∣∣∣∣∣∂Ω1∂x1
· · ∂Ω1∂xn
· · · ·∂Ωn−m
∂x1· · ∂Ωn−m
∂xn
∣∣∣∣∣∣∣vanish by means of Ω1 = 0, . . . , Ωn−m = 0. It is permitted to make this assumption,since a system of equations which does not possess the demanded property canalways be brought to a form in which it satisfies the stated requirement.
§ 30.
In the variables x1, . . . ,xn, let an infinitesimal transformation:
† Cf. LIE, Scientific Society of Christiania 1872–74, as also Math. Ann. Vol. XI, Vol. XXIV,pp. 542–544.
123

1247 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
X f =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
be given. In the studies which relate to such an infinitesimal transformation, we shallalways restrict ourselves to systems of values for which the ξi behave regularly.
If a system of equations Ω1 = 0, . . . , Ωn−m = 0 admits all finite transformations:
x′i = xi + eXxi + · · · (i=1 ···n)
of the one-term group X f , then the system of equations:
Ωk(x1 + eXx1 + · · · , . . . , xn + eXxn + · · ·
)= 0
(k=1 ···n−m),
or, what is the same, the system:
Ωk + eXΩk + · · ·= 0 (k=1 ···n−m)
must be equivalent to the system of equations:
Ω1 = 0, . . . , Ωn−m = 0
for all values of e. To this end it is obviously necessary that all XΩk vanish for thesystem of values of Ω1 = 0, . . . , Ωn−m = 0, hence that the increment XΩkδ t that Ωkundergoes by the infinitesimal transformation x′i = xi + ξiδ t, vanishes by means ofΩ1 = 0, . . . , Ωn−m = 0.
These considerations conduct us to set up the following definition:A system of equations:
Ω1(x1, . . . ,xn) = 0, . . . , Ωn−m(x1, . . . ,xn) = 0
admits the infinitesimal transformation X f as soon as all the n−m expressions XΩkvanish by means1 of the system of equations.
Then on the basis of this definition, the following obviously holds:
Proposition 1. If a system of equations admits all transformations of the one-termgroup X f , then in any case, it must admit the infinitesimal transformation X f .
In addition, we immediately realize that a system of equations which admits theinfinitesimal transformation X f allows at the same time every infinitesimal transfor-mation of the form χ(x1, . . . ,xn)X f , provided of course that the function χ behavesregularly for the system of values which comes into consideration in the concernedsystem of equations.
Without difficulty, one can see that the above definition is independent of thechoice of coordinates, so that every system of equations Ω1 = 0, . . . , Ωn−m = 0
1 An example appearing p. 128 below illustrates this condition.

§ 30. 125
which admits the infinitesimal transformation X f in the sense indicated above, mustalso admit it, when new independent variables y1, . . . ,yn are introduced in place ofthe x. The fact that this really holds true follows immediately from the behaviour ofthe symbol X f after the introduction of new variables. Here as always, it is assumedthat the y are ordinary power series in the x, and that the x are ordinary powerseries in the y, for all the systems of values x1, . . . ,xn and y1, . . . ,yn coming intoconsideration.
It yet remains to show that the definition set up above is also independent of theform of the system of equations Ω1 = 0, . . . , Ωn−m = 0. Only when we will haveproved this fact shall the legitimacy of the definition be really established.
Now, in order to be able to perform this proof, we provide at first a few generaldevelopments which are actually already important and which will later find severalapplications.
Suppose that the system of equations Ω1 = 0, . . . , Ωn−m = 0 admits the infinites-imal transformation X f . Since not all m×m determinants of the matrix (1) vanishby means of Ω1 = 0, . . . , Ωn−m = 0, we can assume that the determinant:
∑ ± ∂Ω1
∂x1. . .
∂Ωn−m
∂xn−m
belongs to the nonvanishing ones. Then it is possible to resolve the equations Ωk = 0with respect to x1, . . . ,xm, and this naturally delivers a system of equations:
x1 = ϕ1(xn−m+1, . . . ,xn), . . . , xn−m = ϕn−m(xn−m+1, . . . ,xn)
which is analytically equivalent to the system Ω1 = 0, . . . , Ωn−m = 0. Therefore, ifby the sign [ ] we denote the substitution x1 = ϕ1, . . . , xn−m = ϕn−m, we have:[
Ω1]≡ 0, . . . ,
[Ωn−m
]≡ 0;
and moreover, the fact that the system of equations Ω1 = 0, . . . , Ωn−m = 0 admitsthe infinitesimal transformation X f is expressed by the identities:[
XΩ1]≡ 0, . . . ,
[XΩn−m
]≡ 0.
Now, let Φ(x1, . . . ,xn) be an arbitrary function which behaves regularly for thesystem of values x1, . . . ,xn coming into consideration. Then one has:
[XΦ]=
n
∑i=1
[Xxi][∂Φ
∂xi
],
and on the other hand:
[X [Φ ]
]=
n−m
∑k=1
[Xϕk
][∂Φ∂xk
]+
m
∑µ=1
[Xxn−m+µ
][ ∂Φ∂xn−m+µ
],
whence:

1267 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
(2)[XΦ]=[X [Φ ]
]+
n−m
∑k=1
[X(xk −ϕk)
][∂Φ∂xk
].
If in place of Φ we insert one after the other the functions Ω1, . . . ,Ωn−m, and if wetake into account that
[Ω j]
and also X[Ω j]
plus[X [Ω j]
]vanish identically, then we
find: [XΩ j
]=
n−m
∑k=1
[X(xk −ϕk)
][∂Ω j
∂xk
]( j=1 ···n−m).
Now, because[XΩ j
]vanishes identically in any case, while the determinant:
∑ ±[
∂Ω1
∂x1
]. . .
[∂Ωn−m
∂xn−m
]does not vanish identically, it follows:[
X(xk −ϕk)]≡ 0 (k=1 ···n−m),
whence the equation (2) takes the form:
(3)[XΦ]≡[X [Φ ]
].
This formula which is valid for any function Φ(x1, . . . ,xn) will later be very useful.Here, we need it only in the special case where Φ vanishes by means of Ω1 =0, . . . , Ωn−m = 0; then
[Φ]
is identically zero and likewise[X [Φ ]
]; our formula
hence shows that also[XΦ]
vanishes identically. In words, we can express thisresult as follows:
Proposition 2. If a system of equations:
Ω1(x1, . . . ,xn) = 0, . . . , Ωn−m(x1, . . . ,xn) = 0
admits the infinitesimal transformation:
X f =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
and if V (x1, . . . ,xn) is a function which vanishes by means of this system of equation,then the function XV also vanishes by means of Ω1 = 0, . . . , Ωn−m = 0.
Now, if V1 = 0, . . . ,Vn−m = 0 is an arbitrary system analytically equivalent to:
Ω1 = 0, . . . , Ωn−m = 0,
then according to the proposition just stated, all the n−m expressions XVk vanishby means of Ω1 = 0, . . . , Ωn−m = 0 and hence they also vanish by means of V1 =

§ 30. 127
0, . . . ,Vn−m = 0; in other words: the system of equations V1 = 0, . . . ,Vn−m = 0 tooadmits the infinitesimal transformation X f .
Finally, as a result, it is established that our above definition for the invarianceof a system of equations by an infinitesimal transformation is also independent ofthe form of this system of equations. Therefore, the introduction of this definition iscompletely natural [NATURGEMÄSS].
We know that a system of equations can admit all transformations of the one-term group X f only when it admits the infinitesimal transformation X f . But thisnecessary condition is at the same time sufficient; indeed, it can be established thatevery system of equations which admits the infinitesimal transformation X f gener-ally allows all the transformations of the one-term group X f .
In fact, let the system of equation Ω1 = 0, . . . , Ωn−m = 0 admit the infinitesimaltransformation X f ; moreover, let x1 = ϕ1, . . . , xn−m = ϕn−m be a resolved form forthe system of equations Ω1 = 0, . . . , Ωn−m = 0; lastly, let the substitution xµ = ϕµbe again denoted by the sign
[ ].
Under these assumptions, we have at first[Ωk]≡ 0, then
[XΩk
]≡ 0 and from
the Proposition 2 stated just now we obtain furthermore:[XXΩk
]≡ 0,
[XXXΩk
]≡ 0, · · · .
Consequently, the infinite series:
Ωk +e1
XΩk +e2
1 ·2XXΩk + · · ·
vanishes identically after the substitution xµ = ϕµ , whichever value the parameter ecan have. So for any e, the system of equations:
Ωk + eXΩk + · · ·= 0 (k=1 ···n−m)
will be satisfied by the systems of values of the system of equations Ω1 =0, . . . , Ωn−m = 0, and according to what has been said earlier, this does meannothing but: the system of equations:
Ω1 = 0, . . . , Ωn−m = 0
admits all transformations:
x′i = xi + eXxi + · · · (i=1 ···n)
of the one-term group X f . With that, the assertion made above is proved; as a result,we have the
Theorem 14. The system of equations:
Ω1(x1, . . . ,xn) = 0, . . . , Ωn−m(x1, . . . ,xn) = 0

1287 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
admits all transformations of the one-term group X f if and only if it admits theinfinitesimal transformation X f , that is to say, when all the n−m expressions XΩkvanish by means of Ω1 = 0, . . . , Ωn−m = 0.
This theorem is proved under the assumption, which we always make unlesssomething else is expressly notified, under the assumption namely that not all (n−m)×(n−m) determinants of the matrix (1) vanish by means of Ω1 = 0, . . . , Ωn−m =0. In addition, as already said, both the Ωk and the ξi must behave regularly for thesystems of values x1, . . . ,xn coming into consideration.
It can be seen that Theorem 14 does not hold true anymore when this assumptionabout the determinant of the matrix (1) is not fulfilled. Indeed, we consider forinstance the system of equations:
Ω1 = x21 = 0, . . . , Ωn−m = x2
n−m = 0,
by means of which all the (n−m)× (n−m) determinants of the matrix (1) vanish.We find for these equations: XΩk = 2xk Xxk, hence all the XΩk vanish by meansof Ω1 = 0, . . . , Ωn−m = 0, whatever form X f can have. Consequently, if the Theo-rem 14 would be also true here, then the system of equations:
x21 = 0, . . . , x2
n−m = 0
would admit any arbitrary one-term group X f , which obviously is not the case.From this we conclude the following: when the system of equations Ω1 =
0, . . . , Ωn−m = 0 brings to zero all the (n − m)× (n − m) determinants of thematrix (1), the vanishing of all the XΩk by means of Ω1 = 0, . . . , Ωn−m = 0 is ofcourse necessary in order that this system of equations admits the one-term groupX f , but however, it is not sufficient.
Nevertheless, some general researches frequently conduct one to systems ofequations for which one has no means to decide whether the repeatedly mentionedrequirement is met. Then how should one recognize that the system of equations inquestion admits, or does not admit, a given one-term group?
In such circumstances, there is a criterion which is frequently of great help andwhich we now want to develop.
Let:∆1(x1, . . . ,xn) = 0, . . . , ∆s(x1, . . . ,xn) = 0
be a system of equations. We assume that the functions ∆1, . . . ,∆s behave regularlyinside a certain region B, in the neighbourhood of those systems of values x1, . . . ,xnwhich satisfy the system of equations. However, we assume nothing about the be-haviour of the functional determinants of the ∆ ’s; we do not demand anymore thatour s equations are independent of each other, so the number s can even be largerthan n in certain circumstances.
Moreover, let:
X f =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi

§ 30. 129
be an infinitesimal transformation and suppose that amongst the system of valuesx1, . . . ,xn for which ξ1, . . . ,ξn behave regularly, there exist some which satisfy theequations ∆1 = 0, . . . , ∆s = 0 and which in addition belong to the domain B.
Now, if under these assumptions the s expressions X∆σ can be represented as:
X∆σ ≡s
∑τ=1
ρστ(x1, . . . ,xn)∆τ(x1, . . . ,xn) (σ =1 ···s),
and if at the same time all the ρστ behave regularly for the concerned system ofvalues of:
∆1 = 0, . . . , ∆s = 0,
then our system of equations admits every transformation:
x′i = xi +e1
Xxi + · · · (i=1 ···n)
of the one-term group X f .The proof of that is very simple. We have:
∆σ (x′1, . . . ,x′n) = ∆σ (x1, . . . ,xn)+
e1
X∆σ + · · · ;
but it comes:
XX∆σ ≡s
∑τ=1
Xρστ +
s
∑π=1
ρσπ ρπτ
∆τ ,
where in the right-hand side the coefficients of the ∆ again behave regularly forthe system of values of ∆1 = 0, . . . , ∆s = 0. In the same way, the XXX∆σ expresslinearly in terms of ∆1, . . . ,∆s, and so on. In brief, we find:
∆σ (x′1, . . . ,x′n) =
s
∑τ=1
ψστ(x1, . . . ,xn, e)∆τ(x) (σ =1 ···s),
where the ψστ are ordinary power series in e and behave regularly for the systemof values of ∆1 = 0, . . . , ∆s = 0. From this, it results that every system of valuesx1, . . . ,xn which satisfies the equations ∆1(x) = 0, . . . , ∆s(x) = 0 also satisfies theequations:
∆σ
(x1 +
e1
Xx1 + · · · , . . . , xn +e1
Xxn + · · ·)
(σ =1 ···s)
so that the system of equations ∆1 = 0, . . . , ∆s = 0 really admits the one-term groupX f .
As a result, we have the
Proposition 3. If, in the variables x1, . . . ,xn, a system of equations:
∆1(x1, . . . ,xn) = 0, . . . , ∆s(x1, . . . ,xn) = 0

1307 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
is given, about which it is not assumed that its equations are mutually independent,and even less that the s× s determinants of the matrix:∣∣∣∣∣∣∣
∂∆1∂x1
· · ∂∆1∂xi1
· · · ·∂∆s∂x1
· · ∂∆s∂xn
∣∣∣∣∣∣∣vanish or do not vanish by means of ∆1 = 0, . . . , ∆s = 0, then this system of equa-tions surely admits all the transformations of the one-term group X f when the sexpressions X∆σ can be represented under the form:
X∆σ ≡s
∑τ=1
ρστ(x1, . . . ,xn)∆τ (σ =1 ···s),
and when at the same time the ρστ behave regularly for those systems of valuesx1, . . . ,xn which satisfy the system of equations ∆1 = 0, . . . , ∆s = 0.
§ 31.
In the preceding paragraph, we have shown that the determination of all systems ofequations which admit the one-term group X f amounts to determining all systemsof equations which admit the infinitesimal transformation X f . Hence the questionarises to ask for [ES ENTSTEHT DAHER DIE FRAGE NACH] all systems of equationsΩ1 = 0, . . . , Ωn−m = 0 (m 6 n) which admit the infinitesimal transformation2:
X f =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
.
This question shall find its answer in the present paragraph.Two cases must be distinguished, namely either not all functions ξ1, . . . ,ξn vanish
by means of:Ω1 = 0, . . . , Ωn−m = 0
or the equations ξ1 = 0, . . . , ξn = 0 are a consequence of:
Ω1 = 0, . . . , Ωn−m = 0.
To begin with, we treat the first case.Suppose to fix ideas that ξn does not vanish by means of Ω1 = 0, . . . ,Ωn−m = 0.
Then the concerned system of equations also admits the infinitesimal transforma-tion:
Y f =1ξn
X f =ξ1
ξn
∂ f∂x1
+ · · ·+ ξn−1
ξn
∂ f∂xn−1
+∂ f∂xn
.
If now x01, . . . ,x
0n is a system of values which satisfies the equations Ωk = 0 and for
which ξn does not vanish, then we may think that the general solutions of X f = 0 rel-
2 (in the sense of the definition p. 124)

§ 31. 131
ative to xn = x0n, or, what is the same, of Y f , are determined; these general solutions,
that we may call y1, . . . ,yn−1, behave regularly in the neighbourhood of x01, . . . ,x
0n
and are independent of xn. Hence if we introduce the new independent variablesy1, . . . ,yn−1, yn = xn in place of the x, this will be an allowed transformation. Doingso, Y f receives the form ∂ f
∂yn, and the system of equations Ω1 = 0, . . . , Ωn−m = 0 is
transferred to a new one:
Ω 1(y1, . . . ,yn) = 0, . . . , Ω n−m(y1, . . . ,yn) = 0
which admits the infinitesimal transformation ∂ f∂yn
.From this, it follows that the system of equations Ω k = 0 is not solvable with
respect to yn. Indeed, if it would be solvable with respect to yn, and hence wouldyield yn −ϕ(y1, . . . ,yn−1) = 0, then the expression:
Y (yn −ψ) =∂
∂yn(yn −ψ) = 1
would vanish by means of Ω 1 = 0, . . . , Ω n−m = 0, which is nonsensical. Conse-quently, yn can at most appear purely formally in the equations Ω k = 0, that is tosay, these equations can in all circumstances be brought to a form such as theyrepresent relations between y1, . . . ,yn−1 alone3. Here, the form of these relations issubjected to no further restriction.
If we now return to the initial variables, we immediately realize that the systemof equations Ωk = 0 can be expressed by means of relations between the n− 1 in-dependent solutions y1, . . . ,yn−1 of the equation X f = 0. This outcome is obviouslyindependent of the assumption that ξn itself should not vanish by means of Ωk = 0;we therefore see that every system of equations which admits the infinitesimal trans-formation X f and which does not annihilate ξ1, . . . ,ξn is represented by relationsbetween the solutions of X f = 0. On the other hand, we know that completely arbi-trary relations between the solutions of X f = 0 do represent a system of equationswhich admits not only the infinitesimal transformation, but also all transformationsof the one-term group X f (Chap. 6, Proposition 3, p. 114). Consequently, this con-firms the previously established result that our system of equations Ωk = 0 admitsthe one-term group X f .
We now come to the second of the above two distinguished cases; naturally, thiscase can occur only when there are in general systems of values x1, . . . ,xn for whichall the n functions ξi vanish.
If x01, . . . ,x
0n is an arbitrary system of values for which all ξi vanish, then the
transformation of our one-term group:
x′i = xi +e1
ξi +e2
1 ·2Xξi + · · · (i=1 ···n)
3 For instance, the system of two equations y1yn = 0 and y1 = 0 invariant by ∂∂yn
amounts to justy1 = 0.

1327 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
reduces after the substitution xi = x0i to:
x′1 = x01, . . . , xn = x0
n,
and we express this as: the system of values x01, . . . ,x
0n remains invariant by all trans-
formations of the one-term group X f . For this reason, it comes that every system ofequations of the form:
ξ1 = 0, . . . , ξn = 0, ψ1(x1, . . . ,xn) = 0, ψ2(x1, . . . ,xn) = 0, . . . ,
admits the one-term group X f , whatever systems of values x1, . . . ,xn are involvedin it. But such a form embraces4 [UMFASST] all systems of equations which bringξ1, . . . ,ξn to zero; so as a result, the second one of the two previously distinguishedcases is settled.
We summarize the gained result in the
Theorem 15. There are two sorts of systems of equations which admit the infinites-imal transformation:
X f =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
,
and hence in general admit all transformations of the one-term group X f . The sys-tems of equations of the first sort are represented by completely arbitrary relationsbetween the solutions of the linear partial differential equation X f = 0. The systemsof equations of the second sort have the form:
ξ1 = 0, . . . , ξn = 0, ψ1(x1, . . . ,xn) = 0, ψ2(x1, . . . ,xn) = 0, . . . ,
in which the ψ are absolutely arbitrary, provided of course that there are systems ofvalues x1, . . . ,xn which satisfy the equations in question.
We yet make a brief remark on this.Let C1, . . . ,Cn−m be arbitrary constants, and let Ω1, . . . ,Ωn−m be functions of x,
which however are free of the C; lastly, suppose that each system of equations of theform:
Ω1(x1, . . . ,xn) =C1 . . . , Ωn−m(x1, . . . ,xn) =Cn−m
admits the infinitesimal transformation X f , which is free of C. Under these assump-tions, the n−m expression XΩk must vanish by means of:
Ω1 =C1, . . . , Ωn−m =Cn−m,
4 In Lie’s thought, a first system of equations embraces (verb: UMFASSEN) a second system ofequations when the first zero-set is larger than the second one so that the first system implies thesecond one, at least locally and generically, and perhaps after some allowed algebraic manipu-lations. Nothing really more precise about this notion will come up later, and certainly nothingapproaching either the Nullstellensatz or some of the concepts of the so-called theory of complexspaces.

§ 32. 133
and certainly, for all values of the C. But since the XΩk are all free of the C, thisis only possible when the XΩk vanish identically, that is to say, when the Ωk aresolutions of the equation X f = 0. Thus, the following holds.
Proposition 4. If the equations:
Ω1(x1, . . . ,xn) =C1, . . . , Ωn−m(x1, . . . ,xn) =Cn−m
with the arbitrary constants C1, . . . ,Cn−m represent a system of equations whichadmits the infinitesimal transformation X f , then Ω1, . . . ,Ωn−m are solutions of thedifferential equation X f , which is free of the C.
§ 32.
At present, consider q arbitrary infinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···q)
and ask for the systems of equations Ω1 = 0, Ω2 = 0, . . . which admit all theseinfinitesimal transformations.
As always, we restrict ourselves here to systems of values x1, . . . ,xn for which allthe ξki behave regularly.
At first, it is clear that every sought system of equations also admits all infinites-imal transformations of the form:
q
∑k=1
χk(x1, . . . ,xn)Xk f ,
provided that χ1, . . . ,χq behave regularly for the systems of values x1, . . . ,xn whichsatisfy the system of equations. From the previous paragraph, we moreover see thateach such system of equations also admits all finite transformations of the one-termgroups that arise from the discussed infinitesimal transformations5.
Furthermore, we remember Chap. 6, Proposition 1, p. 113. At that time, we sawthat every function of x1, . . . ,xn which admits the two infinitesimal transformationsX1 f and X2 f also allows the transformation X1X2 f −X2X1 f . Exactly the same prop-erty also holds true for every system of equations which allows the two infinitesimaltransformations X1 f and X2 f .
In fact, assume that the system of equations:
Ωk(x1, . . . ,xn) = 0 (k=1 ···n−m)
admits the two infinitesimal transformations X1 f and X2 f , so that all the expres-sions X1Ω j and X2Ω j vanish by means of the system Ω1 = 0, . . . , Ωn−m = 0. Then
5 In fact, Proposition 3 p. 129 gives a more precise statement.

1347 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
according to Proposition 2 p. 126, the same holds true for all expressions X1X2Ω jand X2X1Ω j, so that each X1X2Ω j −X2X1Ω j vanishes by means of the system ofequations Ω1 = 0, . . . , Ωn−m = 0. As a result, we have the
Proposition 5. If a system of equations:
Ω1(x1, . . . ,xn) = 0, . . . , Ωn−m(x1, . . . ,xn) = 0
admits the two infinitesimal transformations X1 f and X2 f , then it also admits theinfinitesimal transformation X1X2 f −X2X1 f .
We now apply this proposition similarly as we did at a previous time in the Propo-sition 1 on p. 99, where the question was to determine the joint solutions of q givenequations X1 f = 0, . . . , Xq f = 0. At that time, we reduced the stated problem to thedetermination of the solutions of a complete system. Now, we proceed as follows.
We form all infinitesimal transformations:
XkX j f −X jXk f =[Xk, X j]
and we ask whether the linear partial differential equations [Xk, X j] = 0 are a conse-quence of X1 f = 0, . . . , Xq f = 0. If this is not the case, then we add all transforma-tions [Xk, X j] to the infinitesimal transformations X1 f , . . . ,Xq f †, which is permitted,since every system of equations which admits X1 f , . . . ,Xq f also allows [Xk, X j]. Atpresent, we treat the infinitesimal transformations taken together:
X1 f , . . . , Xq f , [Xk, X j] (k, j=1 ···q)
exactly as we did at first with X1 f , . . . ,Xq f , that is to say, we form all infinitesimaltransformations:
[[Xk, X j], Xl ], [[Xk, X j], [Xh, Xl ]],
and we ask whether the equations obtained by setting these expressions equal to zeroare a consequence of Xk f = 0, [Xk, X j] = 0 (k, j = 1, . . . ,q). If this is not the case,we add all the found infinitesimal transformations to Xk f , [Xk, X j] (k, j = 1, . . . ,q).
We continue in this way, and so at the end we must obtain a series of infinitesimaltransformations:
X1 f , . . . , Xq f , Xq+1 f , . . . , Xq′ f (q′>q)
which is constituted in such a way that every equation:
[Xk, X j] = 0 (k, j=1 ···q′)
is a consequence of X1 f = 0, . . . , Xq′ f = 0. The equations:
X1 f = 0, . . . , Xq′ f = 0
† In practice, one will in general not add all infinitesimal transformations [Xk, X j], but only acertain number amongst them.

§ 32. 135
then define a complete system with q′ or less terms. Hence we have the
Theorem 16. The problem of determining all systems of equations which admit qgiven infinitesimal transformations X1 f , . . . ,Xq f can always be led back to the de-termination of all systems of equations which, aside from X1 f , . . . ,Xq f , admit yetcertain further infinitesimal transformations:
Xq+1 f , . . . , Xq′ f (q′>q),
where now the equations:
X1 f = 0, . . . , Xq f = 0, Xq+1 f = 0, . . . , Xq′ f = 0
define a complete system which has as many terms as there are independent equa-tions in it.
Thus we can from now on limit ourselves to the following more special problem:Consider q infinitesimal transformations in the variables x1, . . . ,xn:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···q)
with the property that amongst the q equations:
X1 f = 0, . . . , Xq f = 0,
there are exactly p 6 q equations which are mutually independent, and with theproperty that any p independent ones amongst these q equations form a p-term com-plete system which belongs to X1 f = 0, . . . ,Xq f = 0. To seek all systems of equationsin x1, . . . ,xn which admit the infinitesimal transformations X1 f , . . . ,Xq f .
It is clear that we can suppose without loss of generality that X1 f , . . . ,Xq f areindependent of each other as infinitesimal transformations. Furthermore, we noticethat under the assumptions of the problem, the (p+1)× (p+1) determinants of thematrix:
(4)
∣∣∣∣∣∣ξ11 · · ξ1n· · · ·
ξq1 · · ξqn
∣∣∣∣∣∣vanish all identically, whereas not all p× p determinants do.
The first step towards the solution of our problem is to distribute the systemsof equations which admit the q infinitesimal transformations X1 f , . . . ,Xq f in twoseparate classes [IN ZWEI GETRENNTE CLASSEN]; as a principle of classification,we here take the behaviour of the p× p determinants of (4).
In the first class, we reckon all systems of equations by means of which not allp× p determinants of the matrix (4) vanish.

1367 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
In the second class, we reckon all systems of equations by means of which thep× p determinants in question all vanish.
We now examine the two classes one after the other.
§ 33.
Amongst the q equations X1 f = 0, . . . , Xq f = 0, we choose any p equations whichare independent of each other; to fix ideas, let X1 f = 0, . . . , Xp f = 0 be such equa-tions, so that not all p× p determinants of the matrix:
(5)
∣∣∣∣∣∣ξ11 · · ξ1n· · · ·
ξp1 · · ξpn
∣∣∣∣∣∣vanish identically. We now seek, amongst the systems of equations Ω1 =0, . . . , Ωn−m = 0 of the first species, those which do not cancel the independenceof the equations X1 f = 0, . . . , Xp f = 0, hence those which do not annihilate allp× p determinants of the matrix (5). Here, we want at first to make the specialassumption that a definite p× p determinant of the matrix (5), say the followingone:
D =
∣∣∣∣∣∣ξ1,n−p+1 · · ξ1n
· · · ·ξp,n−p+1 · · ξpn
∣∣∣∣∣∣neither vanishes identically, nor vanishes by means of Ω1 = 0, . . . , Ωn−m = 0.
Under the assumptions made, there are identities of the form:
Xp+ j f ≡p
∑π=1
χ jπ(x1, . . . ,xn)Xπ f ( j=1 ···q− p).
For the determination of the functions χ jπ , we have here the equations:
p
∑π=1
ξπν χ jπ = ξp+ j,ν (ν =1 ···n; j=1 ···q− p);
now since the determinant D does not vanish by means of Ω1 = 0, . . . , Ωn−m = 0,we realize that the χ jπ behave regularly for the system of values of Ω1 =0, . . . , Ωn−m = 0, so that we can, under the assumptions made, leave out theinfinitesimal transformations Xp+1 f , . . . ,Xq f ; because, if the system of equa-tions Ω1 = 0, . . . , Ωn−m = 0 admits the transformations X1 f , . . . ,Xp f , then itautomatically admits also Xp+1 f , . . . ,Xq f .
We replace the infinitesimal transformations X1 f , . . . ,Xp f by p other infinitesi-mal transformations of the specific form:
Yπ f =∂ f
∂xn−p+π+
n−p
∑i=1
ηπi(x1, . . . ,xn)∂ f∂xi
(π =1 ··· p).

§ 33. 137
We are allowed to do that, because for the determination of Y1 f , . . . ,Yp f we obtainthe equations:
p
∑π=1
ξ j,n−p+π Yπ f = X j f ( j=1 ··· p),
which are solvable, and which provide for the Yπ expressions of the form:
Yπ f =p
∑j=1
ρπ j(x1, . . . ,xn)X j f (π =1 ··· p),
where the coefficients ρπ j behave regularly for the systems of values of:
Ω1 = 0, . . . , Ωn−m = 0.
Hence if the system of equations Ωk = 0 admits the infinitesimal transformationsX1 f , . . . ,Xp f , it also admits Y1 f , . . . ,Yp f , and conversely.
Let x01, . . . ,x
0n be any system of values which satisfies the equations Ω1 =
0, . . . , Ωn−m = 0 and for which the determinant D is nonzero. Then the ηπi behaveregularly in the neighbourhood of x0
1, . . . ,x0n. Now, the equations Y1 f = 0, . . . , Yp f =
0 constitute a p-term complete system just as the equations X1 f = 0, . . . , Xp f = 0,hence according to Theorem 12 p. 105, they possess n − p general solutionsy1, . . . ,yn−p which behave regularly in the neighbourhood of x0
1, . . . ,x0n and which
reduce to x1, . . . ,xn−p (respectively) for xn−p+1 = x0n−p+1, . . . , xn = x0
n.Thus, if we still set yn−p+1 = xn−p+1, . . . , yn = xn, we can introduce y1, . . . ,yn as
new variables in place of the x. At the same time, the infinitesimal transformationsYπ f receive the form:
Y1 f =∂ f
∂yn−p+1, . . . , Yp f =
∂ f∂yn
;
but the system of equations Ωk = 0 is transferred to:
Ω 1(y1, . . . ,yn) = 0, . . . , Ω n−m(y1, . . . ,yn) = 0,
and now these new equations must admit the infinitesimal transformations∂ f
∂yn−p+1, . . . , ∂ f
∂yn. From this, it follows that the equations Ω k = 0 are solvable with
respect to none of the variables yn−p+1, . . . ,yn, that they contain these variablesat most fictitiously and that they can be reshaped so as to represent only relationsbetween y1, . . . ,yn−p alone.
If we now return to the original variables x1, . . . ,xn, we then see that the equa-tions Ω1 = 0, . . . , Ωn−m = 0 are nothing but relations between the solutions of thecomplete system Y1 f = 0, . . . , Yp f = 0, or, what is the same, of the complete systemX1 f = 0, . . . , Xp f = 0. Moreover, this result is independent of the assumption thatprecisely the determinant D should not vanish by means of Ω1 = 0, . . . , Ωn−m = 0;thus it holds always true when not all p× p determinants of the matrix (5) vanish bymeans of Ω1 = 0, . . . , Ωn−m = 0.

1387 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
Consequently, we can state the following theorem:
Theorem 17. If q infinitesimal transformations X1 f , . . . ,Xq f in the variablesx1, . . . ,xn provide exactly p 6 q independent equations when equated to zero, sayX1 f = 0, . . . , Xp f = 0, and if the latter equations form a p-term complete system,then every system of equations:
Ω1(x1, . . . ,xn) = 0, . . . , Ωn−m(x1, . . . ,xn) = 0
which admits the q infinitesimal transformations X1 f , . . . ,Xq f without cancellingthe independence of the equations:
X1 f = 0, . . . , Xp f = 0,
is represented by relations between the solutions of the p-term complete systemX1 f = 0, . . . , Xp f = 0.
Thanks to this theorem, the determination of all systems of equations which be-long to our first class is accomplished. In place of X1 f = 0, . . . , Xp f = 0, we onlyhave to insert in the theorem one after the other all the systems of p independentequations amongst the q equations X1 f = 0, . . . , Xq f = 0.
§ 34.
We now come to the second class of systems of equations which admit the infinites-imal transformations X1 f , . . . ,Xq f , namely to the systems of equations which bringto zero all p× p determinants of the matrix (4).
Here, a series of subcases must immediately be distinguished. Namely it is possi-ble that aside from the p× p determinants of the matrix (4), the system of equations:
Ω1 = 0, . . . , Ωn−m = 0
also brings to zero yet all (p − 1)× (p − 1) determinants, all (p − 2)× (p − 2)determinants, and so on.
We hence see that to every sought system of equations is associated a determinatenumber h < p with the property that the concerned system of equations brings tozero all p× p, all (p− 1)× (p− 1), . . . , all (h+ 1) . . .(h+ 1) determinants of thematrix (4), but not all h×h determinants. Thus, we must go in details through all thevarious possible values 1,2, . . . , p−1 of h and for each one of these values, we mustset up the corresponding systems of equations that are admitted by X1 f , . . . ,Xq f .
Let h be any of the numbers 1,2, . . . , p−1. A system of equations which bringsto zero all (h+ 1)× (h+ 1) determinants of the matrix (4), but not all the h× hones, contains in any case all equations which are obtained by equating to zeroall (h + 1)× (h + 1) determinants ∆1, . . . ,∆s of (4). Now, if the equations ∆1 =0, . . . , ∆s = 0 would absolutely not be satisfied by the systems of values x1, . . . ,xnfor which the ξki(x) behave regularly, or else, if the equations ∆1 = 0, . . . , ∆s = 0would also bring to zero all h× h determinants of (4), then this would be a sign

§ 34. 139
that there is absolutely no system of the demanded nature to which is associated thechosen number h. So we assume that none of these two cases occurs.
At first, it is to be examined whether the system of equations ∆1 = 0, . . . , ∆s = 0is reducible. When this is the case, one should consider every irreducible6 [IRRE-DUCIBEL] system of equations which comes from ∆1 = 0, . . . , ∆s = 0, and whichdoes not bring to zero all h×h determinants of (4).
Let W1 = 0, . . . ,Wl = 0 be one of the found irreducible systems of equations, andsuppose that it is already brought to a form such that not all l× l determinants of thematrix: ∣∣∣∣∣∣∣
∂W1∂x1
· · ∂W1∂xn
· · · ·∂Wl∂x1
· · ∂Wl∂xn
∣∣∣∣∣∣∣vanish by means of W1 = 0, . . . ,Wl = 0. Thus we must determine all systems ofequations which are admitted by X1 f , . . . ,Xq f , which contain the equations W1 =0, . . . ,Wl = 0 and which at the same time do not bring to zero all h×h determinantsof (4). When we execute this for each individual irreducible system obtained from∆1 = 0, . . . , ∆s = 0, we find all systems of equations which admit X1 f , . . . ,Xq f andto which is associated the number h.
In general, the system of equations W1 = 0, . . . ,Wl = 0 will in fact not admit theinfinitesimal transformations X1 f , . . . ,Xq f . To a system of equations which containsW1 = 0, . . . ,Wl = 0 and which in addition admits X1 f , . . . ,Xq f there must belong inany case yet the equations:
XkWλ = 0, X jXkWλ = 0 (k, j=1 ···q; λ =1 ··· l),
and so on. We form these equations and we examine whether they become con-tradictory with each other, or with W1 = 0, . . . ,Wl = 0, and whether they possiblybring to zero all h× h determinants of (4). If one of these two cases occurs, thenthere is no system of equations of the demanded constitution; if none occurs, thenthe independent equations amongst the equations:
Wλ = 0, XkWλ = 0, X jXkWλ = 0, . . . (λ =1 ··· l; j,k=1 ···q)
represent a system of equations which is admitted by X1 f , . . . ,Xq f . Into this systemof equations which can naturally be reducible, we stick all systems of equationswhich admit X1 f , . . . ,Xq f , which contain the equations W1 = 0, . . . ,Wl = 0, butwhich embrace no smaller system of equations of the same nature.
The corresponding systems of equations are obviously the smallest systems ofequations which are admitted by X1 f , . . . ,Xq f and which bring to zero all (h+1)×(h+1) determinants of (4), though not all the h×h ones.
Let now:
(6) W1 = 0, . . . , Wn−m = 0 (n−m> l)
6 This means smooth after stratification and not decomposable further in an invariant way.

1407 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
be one of the found irreducible systems of equations; then the question is to add,in the most general way, new equations to this system so that one obtains a systemof equations which is admitted by X1 f , . . . ,Xq f but which does not bring to zero allh×h determinants of (4).
Since not all h×h determinants of (4) vanish by means of:
(6) W1 = 0, . . . , Wn−m = 0,
we can assume that for instance the determinant:
∆ =
∣∣∣∣∣∣ξ1,n−h+1 · · ξ1n
· · · ·ξh,n−h+1 · · ξhn
∣∣∣∣∣∣belongs to the nonvanishing ones and we can set ourselves the problem of deter-mining all systems of equations which are admitted by X1 f , . . . ,Xq f and which atthe same time do not make ∆ equal to zero. When we carry out this problem forevery individual h× h determinant of (4) which does not vanish already by meansof (6), we then evidently obtain all the sought systems of equations which embraceW1 = 0, . . . ,Wn−m = 0.
The independence of the equations X1 f = 0, . . . , Xh f = 0 is, under the assump-tions made, not cancelled by W1 = 0, . . . ,Wn−m = 0, and in fact, for the systems ofvalues of (6), there are certain relations of the form:
Xh+ j f =h
∑k=1
ψ jk(x1, . . . ,xn)Xk f ( j=1 ···q−h)
where the ψ jk are to be determined out from the equations:
ξh+ j,ν =h
∑k=1
ψ jk ξkν ( j=1 ···q−h; ν =1 ···n).
Since all (h + 1)× (h + 1) determinants of (4) vanish by means of (6) while ∆does not, the functions ψ jk are perfectly determined and they behave regularly forthe systems of values of (6). Without loss of generality, we are hence allowed toleave out the infinitesimal transformations Xh+1 f , . . . ,Xq f ; because every system ofequations which contains the equations (6), which at the same time does not bringto zero the determinant ∆ , and lastly, which is admitted by X1 f , . . . ,Xh f , is alsoautomatically admitted by Xh+1 f , . . . ,Xq f .
One can easily see that no relation between xn−h+1, . . . ,xn alone can be derivedfrom the equations (6). Indeed, if one obtained such a relation, say:
xn −ω(xn−h+1, . . . ,xn−1) = 0,
then the h expressions:

§ 34. 141
Xk(xn −ω) = ξkn −h−1
∑j=1
∂ω∂xn−h+ j
ξk,n−h+ j (k=1 ···h)
would vanish by means of (6). From this, we draw the conclusion that the numbern−m is in any case not larger than n−h and that the equations (6) can be resolvedwith respect to n−m of the variables x1, . . . ,xn−h, say with respect to x1, . . . ,xn−m:
(7) xk = ϕk(xn−m+1, . . . ,xn) (k=1 ···n−m) (n−m6n−h).
We can therefore replace the system (6) by these equations.Every system of equations which contains the equations (6) or equivalently the
equations (7) can obviously be brought to a form such that, aside from the equa-tions (7), it yet contains a certain number of relations:
Vj(xn−m+1, . . . ,xn) = 0 ( j=1,2, ···)
between xn−m+1, . . . ,xn alone. Now, if the system of equations in question is sup-posed to admit the infinitesimal transformations X1 f , . . . ,Xh f , then all the expres-sions XkVj must vanish by means of (7) and of V1 = 0, . . . ; or, if we again denote bythe sign
[ ]the substitution x1 = ϕ1, . . . , xn−m = ϕn−m: the expressions:
[XkVj
]=
m
∑µ=1
[ξk,n−m+µ
] ∂Vj
∂xn−m+µ(k=1 ···h; j=1,2, ···)
vanish by means of V1 = 0, . . . . But we can also express this as follows: the systemof equations V1 = 0, . . . in the variables xn−m+1, . . . ,xn must admit the h reducedinfinitesimal transformations:
Xk f =m
∑µ=1
[ξk,n−m+µ
] ∂ f∂xn−m+µ
(k=1 ···h)
in these variables. In addition, the system of equations V1 = 0, . . . should naturallynot bring to zero the determinant
[∆].
Conversely, every system of equations V1 = 0, . . . which possesses the propertydiscussed just now provides, together with (7), a system of equations which does notmake ∆ be zero and which in addition admits X1 f , . . . ,Xh f and also Xh+1 f , . . . ,Xq fas well.
As a result, our initial problem is reduced to the simpler problem of determiningall systems of equations in m < n variables which admit the h 6 m infinitesimaltransformations X1 f , . . . ,Xh f and for which the determinant:
∑ ±[ξ1,n−h+1
]· · ·[ξh,n−h+h
]is not made zero.
We summarize what was done up to now in the
Theorem 18. If q infinitesimal transformations:

1427 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···q)
are constituted in such a way that all (p+ 1)× (p+ 1) determinants, but not allp× p determinants of the matrix: ∣∣∣∣∣∣
ξ11 · · ξ1n· · · ·
ξq1 · · ξqn
∣∣∣∣∣∣vanish identically, and that any p independent equations amongst the equations
X1 f = 0, . . . , Xq f = 0 form a p-term complete system, then one finds in the followingmanner all systems of equations in x1, . . . ,xn which admit X1 f , . . . ,Xq f and which atthe same time bring to zero all (h+1)×(h+1) determinants of the above matrix, butnot all h×h ones: by forming determinants [DURCH DETERMINANTENBILDUNG],one seeks at first the smallest system of equations for which all (h+ 1)× (h+ 1)determinants of the matrix vanish, but not all h× h ones. If there exists a systemof this sort, and if W1 = 0, . . . ,Wl = 0 is one such, then one forms the equationsXkWi = 0, X jXkWi = 0, . . . , and one determines in this way the possibly existingsmallest system of equations which embraces W1 = 0, . . . ,Wl = 0, which is admittedby X1 f , . . . ,Xq f and which does not make equal to zero all h×h determinants of thematrix; if W1 = 0, . . . ,Wn−m = 0 (n−m > l) is such a system of equations, whichdoes not bring to zero for instance the determinant:
∆ = ∑ ±ξ1,n−h+1 · · ·ξh,n−h+h,
then h is 6 m and the equations W1 = 0, . . . ,Wn−m = 0 can be resolved with respectto n−m of the variables x1, . . . ,xn−h, say as follows:
xk = ϕk(xn−m+1, . . . ,xn) (k=1 ···n−m).
Lastly, one determines all systems of equations in the m variables xn−m+1, . . . ,xnwhich admit the h reduced infinitesimal transformations:
Xk f =m
∑µ=1
ξk,n−m+µ(ϕ1, . . . ,ϕn−m, xn−m+1, . . . ,xn)∂ f
∂xn−m+µ
=m
∑µ=1
[ξk,n−m+µ
] ∂ f∂xn−m+µ
(k=1 ···h)
and which do not bring to zero the determinant:[∆]= ∑±
[ξ1,n−h+1
]· · ·[ξh,nh+h
].
Each one of these systems of equations represents, after adding the equations x1 =ϕ1, . . . , xn−m = ϕn−m, a system of equations of the demanded constitution. By car-

§ 35. 143
rying out the indicated developments in all possible cases, one obtains all systemsof equations of the demanded constitution.
It frequently happens that one already knows a system of equations U1 = 0,U2 =0, . . . ,Un−s = 0 which admits the infinitesimal transformations X1 f , . . . ,Xq f andwhich brings to zero all (h+1)× (h+1) determinants of the matrix (4), and whichnevertheless does not bring to zero the h× h determinant ∆ . Then one can ask forall systems of equations which comprise the equations U1 = 0, . . . ,Un−s = 0 andwhich likewise do not bring ∆ to zero.
The determination of all these systems of equations can be carried outexactly as in the special case above, where the smallest system of equationsW1 = 0, . . . ,Wn−m = 0 of the relevant nature was known, and where one waslooking for all systems of equations which were admitted by X1 f , . . . ,Xq f , whichcomprised the system W1 = 0, . . . ,Wn−m = 0 and which did not bring ∆ to zero.
Indeed, in exactly the same way as above, one shows at first that h6 s and that theequations U1 = 0, . . . ,Un−s = 0 can be resolved with respect to n−s of the variablesx1, . . . ,xn−h, say as follows:
xk = ψk(xn−s+1, . . . ,xn) (k=1 ···n−s).
Now, in order to find the sought systems of equations, one forms the h reducedinfinitesimal transformations:
Xk f =s
∑σ=1
ξk,n−s+σ(ψ1, . . . ,ψn−s, xn−s+1, . . . ,xn)
∂ f∂xn−s+σ
=s
∑σ=1
ξk,n−s+σ∂ f
∂xn−s+σ(k=1 ···h)
and next, one determines all systems of equations in the s variables xn−s+1, . . . ,xnwhich admit X1 f , . . . , Xh f and which do not bring to zero the determinant:
∆ = ∑ ± ξ1,n−h+1 · · · ξh,n−h+h.
By adding these equations one after the other to the equations x1 − ψ1 =0, . . . , xn−s − ψn−s = 0, one obtains all systems of equations of the demandedconstitution.
It is not necessary to explain more precisely what has been just said.
§ 35.
The problem which has been set up at the beginning of § 32 is now basically settled.Indeed, thanks to the latter theorem, this problem is reduced to the determinationof all systems of equations in the m variables xn−m+1, . . . ,xn which admit the hinfinitesimal transformations X1 f , . . . ,Xh f . But this is a problem of the same type asthe original one, which is simplified only inasmuch as the number m of the variablesis smaller than n.

1447 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
Now, about the reduced problem, the same considerations as those about the ini-tial problem can be made use of. That is to say: if the equations X1 f = 0, . . . , Xh f =0 do not actually form an h-term complete system, then one has to set up for k, j =1, . . . ,h the infinitesimal transformations [Xk, X j] and to ask whether the indepen-dent equations amongst the equations Xk f = 0, [Xk, X j] = 0 for a complete system,and so on, in brief, one proceeds just as for the original problem. The only differ-ence in comparison to the former situation is that from the beginning one looks forsystems of equations which do not cancel the independence of the equations:
X1 f = 0, . . . , Xh f = 0,
and especially, which do not bring the determinant[∆]
to zero.Exactly as above for the original problem, the reduced problem can be dealt with
in parts, and be partially reduced to a problem in yet less variables, and so forth.Briefly, one sees that the complete resolution of the original problem can be attainedafter a finite number of steps.
We therefore need not to address this issue further, but we want to consider some-how into more details a special particularly important case.
Let as above the system of equations:
(7’) x1 −ϕ1(xn−m+1, . . . ,xn) = 0, . . . , xn−m −ϕn−m(x1, . . . ,xn) = 0
be constituted in such a way that it admits the infinitesimal transformationsX1 f , . . . ,Xq f and assume that it brings to zero all (h+1)× (h+1) determinants ofthe matrix (4), while it does not bring to zero the determinant ∆ . In comparison, bythe system of equations (7’), we want to understand not just the smallest one, but acompletely arbitrary one of the demanded constitution.
Amongst the equations X1 f = 0, . . . , Xq f = 0, assume that any p independentamongst them, say for instance X1 f = 0, . . . , Xp f = 0, form a p-complete system;thus in any case, there are relations of the form:
[Xk, X j] =q
∑σ=1
ωk jσ (x1, . . . ,xn)Xσ f (k, j=1 ···q).
For the systems of values of (7’) there remain only h equations:
X1 f = 0, . . . , Xh f = 0
that are independent of each other, whereas Xh+1 f , . . . ,Xq f can be represented underthe form:
Xh+ j f =h
∑τ=1
ψ jτ(x1, . . . ,xn)Xτ f ( j=1 ···q−h),
where the ψ jk behave regularly for the concerned system of values.Now, we want to make the specific assumption that also all the coefficients ωk js
behave regularly for the system of values of (7); then evidently for the concernedsystem of values, equations of the form:

§ 35. 145
[Xk, X j] =h
∑σ=1
ωk jσ +
q−h
∑τ=1
ωk jh+τ ψτσ
Xσ f
hold true. In this special case one can indicate in one stroke all systems of equationswhich embrace the equations (7’), which admit X1 f , . . . ,Xq f and which do not bring∆ to zero. This should now be shown.
For all systems of values x1, . . . ,xn which satisfy the equations (7’), there arerelations of the form:
[Xk, X j] =h
∑σ=1
wk jσ (x1, . . . ,xn)Xσ f (k, j=1 ···h).
Here, the wk jσ behave regularly and likewise the functions [wk js], if by the sign [ ]we denote as before the substitution:
x1 = ϕ1, . . . , xn−m = ϕn−m.
We decompose the above relations in the following ones:
Xkξ jν −X jξkν =h
∑s=1
wk js(x1, . . . ,xn)ξsν
(k, j=1 ···h; ν =1 ···n),
and they naturally hold identically after the substitution [ ], so that we have:
(8)[Xkξ jν
]−[X jξkν
]≡
h
∑s=1
[wk js] [ξsν ].
But now the system of equations xk−ϕk = 0 admits the infinitesimal transformationsX1 f , . . . ,Xh f , so the relation (3) derived on p. 126:[
XkΦ]≡[Xk[Φ ]
]holds true, in which Φ(x1, . . . ,xn) is a completely arbitrary function of its arguments.We can write this relation somewhat differently, if we remember the infinitesimaltransformations:
Xk f =m
∑µ=1
[ξk,n−m+µ ]∂ f
∂xn−m+µ(k=1 ···h);
indeed, one evidently has: [Xk[Φ ]
]≡ Xk[Φ ],
whence: [XkΦ
]≡ Xk[Φ ].
From this, it follows that the identities (8) can be replaced by the following ones:
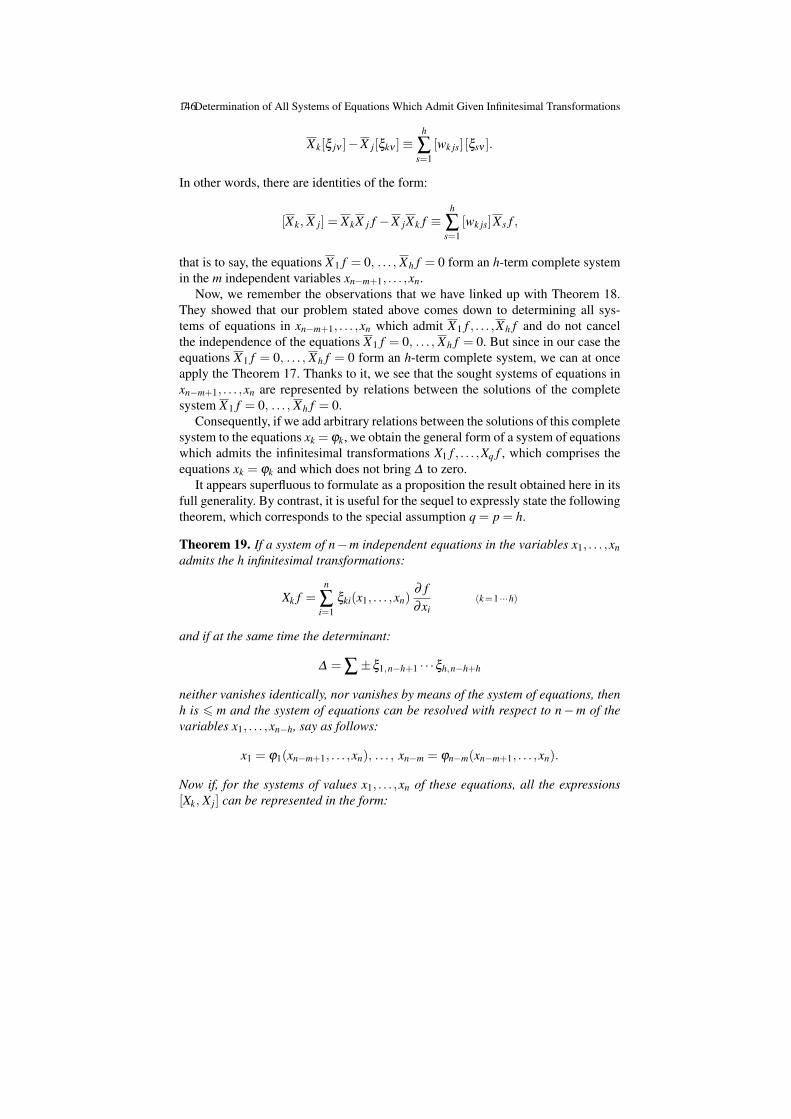
1467 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
Xk[ξ jν ]−X j[ξkν ]≡h
∑s=1
[wk js] [ξsν ].
In other words, there are identities of the form:
[Xk, X j] = XkX j f −X jXk f ≡h
∑s=1
[wk js]X s f ,
that is to say, the equations X1 f = 0, . . . , Xh f = 0 form an h-term complete systemin the m independent variables xn−m+1, . . . ,xn.
Now, we remember the observations that we have linked up with Theorem 18.They showed that our problem stated above comes down to determining all sys-tems of equations in xn−m+1, . . . ,xn which admit X1 f , . . . ,Xh f and do not cancelthe independence of the equations X1 f = 0, . . . , Xh f = 0. But since in our case theequations X1 f = 0, . . . , Xh f = 0 form an h-term complete system, we can at onceapply the Theorem 17. Thanks to it, we see that the sought systems of equations inxn−m+1, . . . ,xn are represented by relations between the solutions of the completesystem X1 f = 0, . . . , Xh f = 0.
Consequently, if we add arbitrary relations between the solutions of this completesystem to the equations xk = ϕk, we obtain the general form of a system of equationswhich admits the infinitesimal transformations X1 f , . . . ,Xq f , which comprises theequations xk = ϕk and which does not bring ∆ to zero.
It appears superfluous to formulate as a proposition the result obtained here in itsfull generality. By contrast, it is useful for the sequel to expressly state the followingtheorem, which corresponds to the special assumption q = p = h.
Theorem 19. If a system of n−m independent equations in the variables x1, . . . ,xnadmits the h infinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···h)
and if at the same time the determinant:
∆ = ∑ ±ξ1,n−h+1 · · ·ξh,n−h+h
neither vanishes identically, nor vanishes by means of the system of equations, thenh is 6 m and the system of equations can be resolved with respect to n−m of thevariables x1, . . . ,xn−h, say as follows:
x1 = ϕ1(xn−m+1, . . . ,xn), . . . , xn−m = ϕn−m(xn−m+1, . . . ,xn).
Now if, for the systems of values x1, . . . ,xn of these equations, all the expressions[Xk, X j] can be represented in the form:

§ 36. 147
[Xk, X j] =h
∑s=1
wk js(x1, . . . ,xn)Xs f (k, j=1 ···h),
where the wk js behave regularly for the concerned systems of values, then one findsas follows all systems of equations which comprise the equations:
x1 −ϕ1 = 0, . . . , xn−m −ϕn−m = 0,
which admit the infinitesimal transformations X1 f , . . . ,Xh f and which do not bringto zero the determinant ∆ : one sets up the h reduced infinitesimal transformations:
Xk f =m
∑µ=1
ξk,n−m+µ(ϕ1, . . . ,ϕn−m, xn−m+1, . . . ,xn
) ∂ f∂xn−m+µ
(k=1 ···h);
then the h mutually independent equations X1 f = 0, . . . , Xh f = 0 form an h-termcomplete system in the independent variables xn−m+1, . . . ,xn; if:
u1(xn−m+1, . . . ,xn), . . . , um−h(xn−m+1, . . . ,xn)
are independent solutions of this complete system, then:
x1 −ϕ1 = 0, . . . , xn−m −ϕn−m = 0, Φi(u1, . . . ,um−h) = 0(i=1,2, ···)
is the general form of the sought system of equations; by the Φi here are to beunderstood arbitrary function of their arguments.
§ 36.
The analytical developments of the present chapter receive a certain clarity and espe-cially a better transparency when one applies the ideas and the forming of conceptsof the theory of manifolds [DIE VORSTELLUNGEN UND BEGRIFFSBILDUNGENDER MANNIGFALTIGKEITSLEHRE]. We now want to do that. The sequel stands incomparison to the §§ 30 to 35 in exactly the same relationship as Chap. 6 stands incomparison to Chap. 5.
Every system of equations in the variables x1, . . . ,xn represents a manifold of then-times extended manifold Rn. If the system of equations admits the one-term groupX f , then according to the previously introduced way of expressing, the correspond-ing manifold also admits X f ; so if a point x1, . . . ,xn belongs to the manifold, then allpoints into which x1, . . . ,xn is transferred by all the transformations of the one-termgroup X f also lie in the same manifold.
If now x01, . . . ,x
0n is any point of the space, two cases can occur: either ξ1, . . . ,ξn
do not all vanish for xi = x0i , or the quantities ξ1(x0), . . . ,ξn(x0) are all equal to
zero. In the first case, the point x01, . . . ,x
0n takes infinitely many positions by the
∞1 transformations of the one-term group X f , and as we know, the totality of these

1487 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
positions is invariant by the one-term group X f and it constitutes an integral curve ofthe infinitesimal transformation X f . In the second case, x0
1, . . . ,x0n keeps its position
through all transformations of the one-term group X f ; the integral curve passing byx0
1, . . . ,x0n shrinks to the point itself.
So if a manifold admits the one-term group X f and if it consists in general ofpoints for which ξ1, . . . ,ξn do not all vanish, then it is constituted of integral curvesof the infinitesimal transformation X f . By contrast, if the manifold in question con-sists only of points for which ξ1, . . . ,ξn all vanish, then each point of the manifoldkeeps its position through all transformations of the one-term group X f . Evidently,every smaller manifold contained in this manifold then admits also the one-termgroup X f .
With these words, the conceptual content [DER BEGRIFFLICHE INHALT] of theTheorem 15 is clearly stated, and in fact fundamentally, the preceding considerationscan be virtually regarded as a providing a new demonstration of the Theorem 15.
We still have to explain what does it means conceptually for a system of equationsΩ1 = 0, . . . , Ωn−m = 0 to admit the infinitesimal transformation X f .
To this end, we remember that the infinitesimal transformation X f attaches toeach point x1, . . . ,xn at which not all ξ vanish the completely determined directionof progress:
δx1 : · · · : δxn = ξ1 : · · · : ξn,
while it attaches no direction of progress to a point for which ξ1 = · · ·= ξn = 0. Wecan therefore say:
The system of equations Ω1 = 0, . . . , Ωn−m = 0 admits the infinitesimaltransformation X f when the latter attaches to each point of the manifoldΩ1 = 0, . . . , Ωn−m = 0 either absolutely no direction of progress, or a direction ofprogress which satisfies the n−m equations:
∂Ωk
∂x1δx1 + · · ·+ ∂Ωk
∂xnδxn (k=1 ···n−m),
hence which comes into contact with the manifold.
This definition is visibly independent both of the choice of the variables and ofthe form of the system of equations:
Ω1 = 0, . . . , Ωn−m = 0.
The Theorem 14 can now receive the following visual version:If the infinitesimal transformation X f attaches to each point of a manifold either
absolutely no direction of progress, or a direction of progress which comes intocontact with the manifold, then the manifold admits all transformations of the one-term group X f .
In conclusion, if we yet introduce the language: “the manifold Ω1 = 0, . . . , Ωn−m =0 admits the infinitesimal transformation X f , we can express as follows the Theo-rem 14.

§ 36. 149
A manifold admits all transformations of the one-term group X f if and only if itadmits the infinitesimal transformation X f .
In the §§ 32 and 34, we gave a classification of all systems of equations whichadmit the q infinitesimal transformations X1 f , . . . ,Xq f . There, we took as a startingpoint the behaviour of the determinants of the matrix (4):∣∣∣∣∣∣
ξ11 · · ξ1n· · · ·
ξq1 · · ξqn
∣∣∣∣∣∣ .We assumed that all (p+ 1)× (p+ 1) determinants of this matrix vanished identi-cally, whereas the p× p determinants did not. We then reckoned as belonging to thesame class all systems of equations by means of which all (h+1)×(h+1) determi-nants of the matrix vanish, but not all h×h determinants; in the process, the integerh could have the p+1 different values: p, p−1, . . . ,2,1,0.
Already in Chap. 6 we observed that, under the assumptions made just now, theq infinitesimal transformations:
X1 f , . . . ,Xq f
attach exactly p independent directions of progress to any point x1, . . . ,xn in generalposition. It stands to reason in the corresponding way that X1 f , . . . ,Xq f attach ex-actly h independent directions of progress to a point x1, . . . ,xn, when the h×h deter-minants of the above matrix do not all vanish at the point in question, while by con-trast all (h+1)× (h+1) determinants take the zero value. Now, since every systemof equations which admits the infinitesimal transformations X1 f , . . . ,Xq f representsa manifold having the same property, our previous classification of the systems ofequations immediately provides a classification of the manifolds. Indeed, amongstthe manifolds which admit X1 f , . . . ,Xq f we always reckon as belonging to one classthose systems, to the points of which are associated the same number h 6 p of in-dependent directions of progress by the infinitesimal transformations X1 f , . . . ,Xq f .
If a manifold admits the infinitesimal transformations X1 f , . . . ,Xq f , then at eachone of its points, it comes into contact with the directions of progress that are at-tached to the point by X1 f , . . . ,Xq f . Now, if X1 f , . . . ,Xq f determine precisely hindependent directions at each point of the manifold, then the manifold must obvi-ously have at least h dimensions. Hence we can state the proposition:
Proposition 6. If q infinitesimal transformations X1 f , . . . ,Xq f attach precisely h in-dependent directions of progress to a special point x0
1, . . . ,x0n, then there is in any
case no manifold of smaller dimension than h which contains the point x01, . . . ,x
0n
and which admits the q infinitesimal transformations X1 f , . . . ,Xq f .
Basically, this proposition is only another formulation of a former result. In § 34indeed, we considered the systems of equations which admit X1 f , . . . ,Xq f and whichat the same time leave only h mutually independent equations amongst the q equa-tions X1 f = 0, . . . , Xq f = 0. On the occasion, we saw that such a system of equations

1507 Determination of All Systems of Equations Which Admit Given Infinitesimal Transformations
consists of at most n−h independent equations, so that it represents a manifold hav-ing at least h dimensions.
—————–

Chapter 8Complete Systems Which AdmitAll Transformationsof a One-term Group
If, in a q-term complete system:
Xk f =r
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···q)
one introduces new independent variables x′1 =F1(x1, . . . ,xn), . . . ,x′n =Fn(x1, . . . ,xn),then as was already observed earlier (cf. Chap. 5, p. 102), one again obtains aq-term complete system in x′1, . . . ,x
′n. Naturally, this new complete system has in
general a form different from the initial one; nonetheless, it can also happen thatthe two complete systems do essentially not differ in their form, when relationshipsof the shape:
Xk f =q
∑j=1
ψk j(x′1, . . . ,x′n)
n
∑i=1
ξ ji(x′1, . . . ,x′n)
∂ f∂x′i
(k=1 ···q)
hold, in which of course the determinant of the ψk j does not vanish identically. Inthis case, we say: the complete system:
X1 f = 0, . . . , Xq f = 0
admits the transformation x′i = Fi(x1, . . . ,xn), or: it remains invariant through thistransformation.
By making use of the abbreviated notations:
ξki(x′1, . . . ,x′n) = ξ ′
ki,n
∑i=1
ξ ′ki
∂ f∂x′i
= X ′k f ,
we can set up the following definition:The q-term complete system:
151

152 8 Complete Systems Which Admit All Transformations of a One-term Group
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
= 0 (k=1 ···q)
admits the infinitesimal transformation x′i = Fi(x1, . . . ,xn) if and only if, for every k,there is a relation of the form:†
(1) Xk f =q
∑j=1
ψk j(x′1, . . . ,x′n)X ′
j f .
The sense of this important definition will best be elucidated [VERDEUTLICHEN]by means of a simple example.
The two equations:
X1 f =∂ f∂x1
= 0, X2 f =∂ f∂x2
= 0
in the three variables x1,x2,x3 form a two-term complete system. By introducing thenew variables:
x′1 = x1 + x2, x′2 = x1 − x2, x′3 = x3
in place of the x, we obtain the new complete system:
∂ f∂x1
=∂ f∂x′1
+∂ f∂x′2
= 0,∂ f∂x2
=∂ f∂x′1
− ∂ f∂x′2
= 0
which is equivalent to the system ∂ f∂x′1
= 0, ∂ f∂x′2
= 0. So there are relations of theform:
X1 f = X ′1 f +X ′
2 f , X2 f = X ′1 f −X ′
2 f ,
whence the complete system ∂ f∂x1
= 0, ∂ f∂x2
= 0 admits the transformation: x′1 = x1 +
x2, x′2 = x1 − x2.
§ 37.
Let the q-term complete system X1 f = 0, . . . , Xq f = 0 admit the transformationx′i = Fi(x1, . . . ,xn), so that for every f there are relations of the form (1). Now, ifϕ(x1, . . . ,xn) is a solution of the complete system, the right-hand side of (1) vanishesidentically after the substitution f = ϕ(x′1, . . . ,x′n), whence the left-hand side alsovanishes identically after the substitution f = ϕ
(F1(x), . . . ,Fn(x)
); consequently, as
ϕ(x) itself, ϕ(F1(x), . . . ,Fn(x)
)constitutes at the same time a solution, or, as one
can express this fact: the transformation x′i = Fi(x) transfers every solution of thecomplete system X1 f = 0, . . . , Xq f = 0 to a solution of the same complete system.
But conversely the following also holds true: if every solution of the q-term com-plete system X1 f = 0, . . . , Xq f = 0 is transferred, by means of a transformation
† Lie, Scientific Society of Christiania, February 1875.

§ 37. 153
x′i = Fi(x1, . . . ,xn), to a solution, then the complete system admits the transforma-tion in question. Indeed, by the introduction of the variables xi in place of the vari-ables x′i, the equations X ′
1 f = 0, . . . , X ′q f = 0 convert into a q-term complete system
which has all its solutions in common with the q-term system X1 f = 0, . . . , Xq f = 0;but from this it follows that relations of the form (1) hold, hence that the completesystem X1 f = 0, . . . , Xq f = 0 really admits the transformation x′i = Fi(x).
From all that, it results that a q-term complete system admits the transformationx′i = Fi(x1, . . . ,xn) if and only if this transformation transfers every solution of thecomplete system into a solution. Naturally, for this to hold, it is only necessarythat the transformation transfers to solutions any n−q independent solutions of thesystem.
Next, the present line of thought will completely correspond to the one followedin Chaps. 6 and 7 if we now ask the question: how can one realize that a q-termcomplete system X1 f = 0, . . . , Xq f = 0 admits all transformations of the one-termgroup Y f ? Indeed, this question actually belongs to the general researches aboutdifferential equations which admit one-term groups, and that is why this questionwill also be took up again in a subsequent chapter of this Division, in the Chapteron differential invariants, and on the basis of the general theory developed there, itwill be settled. But before, we need criteria by means of which we can recognizewhether a given complete system admits or not all transformations of a given one-term group. That is why we want to derive such criteria already now, with somewhatsimpler expedients.
Let us denote any n− q independent solutions of the q-term complete systemX1 f = 0, . . . , Xq f = 0 by ϕ1, . . . ,ϕn−q. If now the complete system admits all trans-formations:
x′i = xi +t1
Y xi +t2
1 ·2YY xi + · · · (i=1 ···n)
of the one-term group Y f , then the n−q independent functions:
ϕk(x+ t Y x+ · · ·
)= ϕk(x)+
t1
Y ϕk +t2
1 ·2YY ϕk + · · ·
(k=1 ···n−q)
must also be solutions of the system, and for every value of t. From this, we deducethat the n− q expressions Y ϕk are in any case solutions of the system, hence thatrelations of the form:
(2) Y ϕk = ωk(ϕ1, . . . ,ϕn−q) (k=1 ···n−q)
must hold. This condition is necessary; but at the same time it is also sufficient, sinceif it is satisfied, then all YY ϕk, YYY ϕk, . . . , will be functions of ϕ1, . . . ,ϕn−q only,whence the expressions ϕk(x+ t Y x+ · · ·) will be solutions of the complete system,and from this it follows that this system effectively admits all transformations of theone-term group Y f .
Consequently, the following holds.

154 8 Complete Systems Which Admit All Transformations of a One-term Group
Proposition 1. A q-term complete system X1 f = 0, . . . , Xq f = 0 with the n−q inde-pendent solutions ϕ1, . . . ,ϕn−q admits all the transformations of the one-term group:
Y f =n
∑i=1
ηi(x1, . . . ,xn)∂ f∂xi
,
if and only if n−q relations of the form:
Y ϕk = ωk(ϕ1, . . . ,ϕn−q) (k=1 ···n−q)
hold.
Saying this, the gained criterion naturally is practically applicable only whenthe complete system is already integrated. But it is very easy to deduce from thiscriterion another one which does not presupposes that one knows the solutions ofthe complete system.
If in the identity:
Xk(Y ( f )
)−Y(Xk( f )
)≡
n
∑i=1
(Xkηi −Y ξki
) ∂ f∂xi
one sets in place of f any solution ϕ of the complete system, then one obtains:
Xk(Y (ϕ)
)≡
n
∑i=1
(Xkηi −Y ξki
)∂ϕ∂xi
.
Now, if the complete system allows all transformations of the one-term group Y f ,then by the above, Y (ϕ) also a solution of the system, hence the left-hand side ofthe last equation vanishes identically; naturally, the right-hand side does the same,so every solution of the complete system also satisfies the q equations:
n
∑i=1
(Xkηi −Y ξki
) ∂ f∂xi
= 0;
but from this it follows that q identities of the form:
n
∑i=1
(Xkηi −Y ξki
) ∂ f∂xi
≡q
∑j=1
χk j(x1, . . . ,xn)X j f (k=1 ···q)
hold.On the other hand, we assume that identities of this form exist and we again
understand by ϕ , any solution of the complete system. Then it follows immediatelythat the q expressions Xk
(Y ( f )
)−Y(Xk( f )
)vanish identically after the substitution
f = ϕ; but from that, it comes: Xk(Y (ϕ)
)≡ 0, that is to say Y ϕ is a solution of the
system, so there exist n−q relations of the form:
(2) Y ϕk = ωk(ϕ1, . . . ,ϕn−q) (k=1 ···n−q),

§ 37. 155
and they show that the complete system admits all transformations of the one-termgroup Y f .
As a result, we have the
Theorem 20. † A q-term complete system:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
= 0 (k=1 ···q)
in the variables x1, . . . ,xn admits all transformations of the one-term group:
Y f =n
∑i=1
ηi(x1, . . . ,xn)∂ f∂xi
if and only if all Xk(Y ( f )
)− Y
(Xk( f )
)can be expressed linearly in terms of
X1 f , . . . ,Xq f :
(3)[Xk, Y ] = Xk
(Y ( f )
)−Y(Xk( f )
)=
q
∑j=1
χk j(x1, . . . ,xn)X j f
(k=1 ···q).
The existence of relations of the form (3) is therefore necessary and sufficient inorder that the system X1 f = 0, . . . , Xq f = 0 admits all transformations of the one-term group Y f . For various fundamental reasons, it appears to be desirable to stillprove the necessity of the relation (3) also by means of a direct method.
The transformations of the one-term group Y f have the form:
x′i = xi +t1
ηi +t2
1 ·2Y ηi + · · · (i=1 ···n).
If we now introduce the new variables x′1, . . . ,x′n in the expressions Xk f by means of
this formula in place of x1, . . . ,xn, we receive:
Xk f =n
∑i=1
Xkx′i∂ f∂x′i
.
Here, the Xkx′i have still to be expressed in terms of x′1, . . . ,x′n. By leaving out the
second and the higher powers of t, it comes immediately:
(4) Xkx′i = Xkxi + t Xkηi + · · · .
Furthermore, one has (cf. Chap. 4, Eq. (3a), p. 67):
† Lie, Gesellschaft d. W. zu Christiania, 1874.

156 8 Complete Systems Which Admit All Transformations of a One-term Group
Xkxi = ξki(x) = ξ ′ki −
t1
Y ′ξ ′ki + · · ·
t Xkηi = t X ′kη ′
i −·· · .
Hence it comes:Xkx′i = ξ ′
ki + t(X ′
kη ′i −Y ′ξ ′
ki)+ · · · ,
and lastly:
(5) Xk f = X ′k f +
t1(X ′
kY′ f −Y ′X ′
k f)+ · · · ,
where the left out terms are of second or of higher order in t.Now, if the complete system X1 f = 0, . . . , Xq f = 0 admits all transformations of
the one-term group Y f , then the system of the q equations:
Xk f +t1[Xk, Y ]+ · · ·= 0 (k=1 ···q)
must be equivalent to X1 f = 0, . . . , Xq f = 0 and this, for all values of t. Con-sequently, the coefficients of t must in any case be expressible by means ofX1 f , . . . ,Xq f , that is to say, relations of the form (3):
Xk(Y ( f )
)−Y(Xk( f )
)= [Xk, Y ] =
q
∑j=1
χk j(x1, . . . ,xn)X j f
(k=1 ···q)
must exist.As a result, we have shown directly that the existence of these relations is neces-
sary; but we do not want to show once more its sufficiency, and we want to contentourselves with what has been said.
We want to speak of complete systems which admit an infinitesimal transforma-tion Y f in the same way as we spoke of the systems of equations:
Ω1(x1, . . . ,xn) = 0, . . . , Ωn−m(x1, . . . ,xn) = 0
which do the same. We shall say: the q-term complete system X1 f = 0, . . . , Xq f = 0admits the infinitesimal transformation Y f when relations of the form (3) hold.
With the use of this language, we can also express the Theorem 20 as follows:The q-term complete system X1 f = 0, . . . , Xq f = 0 admits all transformations of
the one-term group Y f if and only if it admits the infinitesimal transformation Y f .
When a complete system admits all transformations of a one-term group, we saybriefly that it admits this one-term group.
The conditions of the Theorem 20 are in particular satisfied when Y f has theform:
Y f =q
∑j=1
ρ j(x1, . . . ,xn)X j f ,

§ 38. 157
where it is understood that the ρ j are arbitrary functions of the x. Indeed, there al-ways exist relations of the form (3) and in addition, it holds that Y ϕ ≡ 0. This is inaccordance with the developments of Chap. 6, p. 113 which showed that every solu-tion Ω(ϕ1, . . . ,ϕn−q) of the complete system X1 f = 0, . . . ,Xq f = 0 remains invariantby the transformations of all one-term groups of the form ∑ρ jX j f .
On the other hand, if an infinitesimal transformation Y f which does not havethe form ∑ρ j(x)X j f satisfies the conditions of Theorem 20, then the finite trans-formations of the one-term group Y f do not at all leave invariant each individualsolution of the complete system, but instead, they leave invariant the totality of allthese solutions.
Amongst the infinitesimal transformations that are admitted by a given completesystem X1 f = 0, . . . , Xq f = 0, there are those of the form ∑ ρ j(x)X j f which aregiven simultaneously with the complete system, and which, for this reason, haveto considered as trivial. By contrast, one cannot in general indicate the remaininginfinitesimal transformations that the system admits before one has integrated thesystem.
As we have seen above, when the complete system X1 f = 0, . . . , Xq f = 0 admitsthe infinitesimal transformation Y f , every solution Ω(ϕ1, . . . ,ϕn−q) of the completesystem is transferred to a solution by every transformation:
x′i = xi +t1
Y xi + · · · (i=1 ···n)
of the one-term group Y f . Hence if we interpret the x and the x′ as coordinates forthe points of an n-times extended space and the transformation just written as anoperation by which the point x1, . . . ,xn takes the new position x′1, . . . ,x
′n, and if we
remember in addition that, with the constants a1, . . . ,an−q, the equations ϕ1 = a1,. . . , ϕn−q = an−q represent a characteristic manifold of the complete system X1 f = 0,. . . , Xq f = 0 (cf. Chap. 6, p. 116), then we realize immediately that the transforma-tions of the one-term group Y f send every characteristic manifold of the completesystem to a characteristic manifold. The characteristic manifolds of our completesystem are therefore permuted with each other by the transformations of the one-term group Y f , hence they form, as we want to express this, a family [SCHAAR]which is invariant by the one-term group Y f . Since the mentioned characteristicmanifolds determine, according to Chap. 6, p. 117, a decomposition of the space,we can also say that this decomposition remains invariant by the one-term groupY f .
§ 38.
Still a few simple statements about complete systems which admit one-term groups:
Proposition 2. If a q-term complete system admits every transformation of the twoone-term groups Y f and Z f , then it also admits every transformation of the one-term group Y
(Z( f )
)−Z(Y ( f )
)= [Y, Z].
Let Xk f = 0 be the equations of the complete system. One then forms the Jacobiidentity:

158 8 Complete Systems Which Admit All Transformations of a One-term Group[[Y, Z], Xk
]+[[Z, Xk], Y
]+[[Xk, Y ], Z
]= 0,
and one takes into consideration that [Y, Xk] and [Z, Xk] can, according to the as-sumption, be expressed linearly in terms of X1 f , . . . ,Xq f , hence one realizes that thesame property is enjoyed by
[[Y, Z], Xk]. But as a result, our proposition is proved.
Proposition 3. If the equations A1 f = 0, . . . , Aq f = 0 and likewise the equationsB1 f = 0, . . . , Bs f = 0 form a complete system, then a complete system is also formedby the totality of all possible equations C f = 0 which the two complete systemsshare, in the sense that relations of the form:
C f =q
∑j=1
α j(x1, . . . ,xn)A j f =s
∑k=1
βk(x1, . . . ,xn)Bk f
hold. If the two complete systems Ak f = 0 and Bk f = 0 admit a certain one-termgroup X f , then the complete system of equations C f = 0 also admits this group.
Proof. Amongst the equations C f = 0, one can select exactly, say m but not more,equations:
C1 f = 0, . . . , Cm f = 0
which are independent of each other. Next, there exist for every µ = 1, . . . ,m rela-tions of the form:
Cµ f =q
∑j=1
αµ j(x)A j f =s
∑k=1
βµk(x)Bk f ;
consequently, every Cµ(Cν( f )
)−Cν
(Cµ( f )
)= [Cµ ,Cν ] can be expressed both in
terms of the A f and in terms of the B f , that is to say, every [Cµ ,Cν ] expresseslinearly in terms of C1 f , . . . ,Cm f . As a result, the first part of our proposition isproved. Further, every [X ,Cµ ] expresses both in terms of the A f and in terms of theB f , hence there there exist relations of the form:
[X ,Cµ ] =m
∑ν=1
γµν(x1, . . . ,xn)Cν f (µ =1 ···m).
This is the second part of the proposition.If two complete systems A1 f = 0, . . . , Aq f = 0 and B1 f = 0, . . . , Bs f = 0 are
given, then all possible solutions that are common to the to systems can be definedby means of a complete system which, under the guidance of Chap. 5, p. 101, onecan derive from the equations:
A1 f = 0, . . . , Aq f = 0, B1 f = 0, . . . , Bs f = 0.
What is more, the following holds.
Proposition 3. If the two complete systems A1 f = 0, . . . , Aq f = 0 and B1 f = 0, . . . ,Bs f = 0 admit the one-term group X f , then the complete system which defines the

§ 38. 159
common solution of all the equations Ak f = 0 and Bk f = 0 also admits the one-termgroup X f .
Proof. The identity:[[A j, Bk], X
]+[[Bk, X ], A j
]+[[X , A j], Bk
]= 0
shows that all[[A j, Bk], X
]can be expressed linearly in terms of the A f , of the B f
and of the [A, B]. Hence, when the equations [A j, Bk] = 0, together with the A f = 0and the B f = 0, already produce a complete system, the assertion of our propositionis proved. Otherwise, one treats the system of the equations A f = 0, B f = 0, [A, B] =0 exactly in the same way as the system A f = 0, B f = 0 just considered, that is tosay: one forms the Jacobi identity with X f for any two expressions amongst the A f ,B f , [A, B], and so on.
The propositions 3 and 4 can be given a simple conceptual sense when x1, . . . ,xnare interpreted as coordinates for the points of a space Rn.
At first, we remember that the ∞n−q q-times extended characteristic manifolds Mqof the complete system A1 f = 0, . . . , Aq f = 0 form a family that remains invariantby the one-term group X f . Next, we remark that also the ∞n−s s-times extendedcharacteristic manifolds Ms of the complete system B1 f = 0, . . . , Bs f = 0 formsuch an invariant family.
Let us agree that the number s is at least equal to q. Then every Ms of generalposition will be decomposed in a family of ∞s−q+h (q − h)-extended manifolds,those in which it is cut by the Mq, where one understands that h is a determinednumber amongst 0,1, . . . ,q. Therefore in this way, the whole Rn is decomposedin a family of ∞n−q+h (q− h)-extended manifolds. Naturally, the totality of thesemanifolds remain invariant by the one-term group X f , for it is the cutting of thetotality of all Mq with the totality of all Ms, and these two totalities are, as alreadysaid, invariant by the group X f .
The considered (q−h)-times extended manifolds are nothing but the character-istic manifolds of the complete system C f = 0 which appears in Proposition 3, andunder the assumptions made, this complete system is (q−h)-term.
On the other hand, one can ask for the smallest manifolds which consist both ofMq and of Ms. When there are manifolds of this kind, the totality of them naturallyremains invariant by the one-term group X f ; they are the characteristic manifoldsof the complete system which is defined in Proposition 4.
—————–


Chapter 9Characteristic RelationshipsBetween the Infinitesimal Transformations of aGroup
In Chap. 3 and in Chap. 4 (Proposition 1, p. 41) it has been shown that to every r-term group, there belong r independent infinitesimal transformations which stand ina characteristic relationship to the group in question. Now, we want at first to derivecertain important relations which exist between these infinitesimal transformations.Afterwards, we shall prove the equally important proposition that r independentinfinitesimal transformations which satisfy the concerned relations do always deter-mine an r-term group with the identity transformation.
§ 39.
Instead of considering an r-term group, we at the moment want to take the somewhatmore general point of view of considering a family of ∞r different transformations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
which satisfy differential equations of the form:
∂x′i∂ak
=r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(x′1, . . . ,x′n)
(i=1 ···n; k=1 ···r).
We then know (cf. Chap. 3, p. 57) that the r infinitesimal transformations:
X ′k( f ) =
n
∑i=1
ξki(x′)∂ f∂x′i
(k=1 ···r)
are independent of each other, and that the determinant of the ψk j(a) do not vanishidentically; consequently, as we have already done earlier, we can also write downthe above differential equations as:
161

162 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
(1)ξ ji(x′1, . . . ,x
′n) =
r
∑k=1
α jk(a1, . . . ,ar)∂x′i∂ak
(i=1 ···n; j=1 ···r).
Here naturally, the determinant of the α jk(a) does not vanish identically.If on the other hand, we imagine that the equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
are solved with respect to x1, . . . ,xn:
xi = Fi(x′1, . . . ,x′n, a1, . . . ,ar) (i=1 ···n),
then we can very easily derive certain differential equations that are satisfied byF1, . . . ,Fn. We simply differentiate the identity:
Fi(
f1(x, a), . . . , fn(x, a), a1, . . . ,ar)≡ xi
with respect to ak; then we have:
n
∑ν=1
∂Fi(x′,a)∂x′ν
∂ fν(x,a)∂ak
+∂Fi(x′,a)
∂ak≡ 0,
provided that one sets x′ν = fν(x, a) everywhere. We multiply this identity by α jk(a)and we sum it for k equals 1 to r; then on account of:
r
∑k=1
α jk(a)∂ fν(x,a)
∂ak≡ ξ jν( f1, . . . , fn),
we obtain the following equations:
n
∑ν=1
ξ jν(x′1, . . . ,x′n)
∂Fi
∂x′ν+
r
∑k=1
α jk(a1, . . . ,ar)∂Fi
∂ak= 0
(i=1 ···n; j=1 ···r).
According to their derivation, these equations hold identically when one makesthe substitution x′ν = fν(x, a) in them; but since they do not at all contain x1, . . . ,xn,they must actually hold identically, that is to say: F1, . . . ,Fn are all solutions of thefollowing linear partial differential equations:
(2)Ω j(F) =
n
∑ν=1
ξ jν(x′)∂F∂x′ν
+r
∑µ=1
α jµ(a)∂F∂aµ
= 0
( j=1 ···r).
These r equations contain n+ r variables, namely x′1, . . . ,x′n and a1, . . . ,ar; in addi-
tion, they are independent of each other, for the determinant of the α jµ(a) does not

§ 39. 163
vanish identically, and hence a resolution with respect to the r differential quotients∂F∂a1
, . . . , ∂F∂ar
is possible. But on the other hand, the equations (2) have n indepen-dent solutions in common, namely just the functions F1(x′, a), . . . ,Fn(x′, a) whosefunctional determinant with respect to the x′:
∑ ± ∂F1
∂x′1. . .
∂Fn
∂x′n=
1
∑ ± ∂ f1∂x1
. . . ∂ fn∂xn
does not vanish identically, because the equations x′i = fi(x, a) represent transfor-mations by assumption. Therefore, the hypotheses of the Proposition 8 in Chap. 5,p. 103 are met by the equations (2), that is to say, these equations constitute anr-term complete system.
If we set:r
∑k=1
α jk(a)∂F∂ak
= A j(F)
and furthermore:n
∑ν=1
ξ jν(x′)∂F∂x′ν
= X ′j(F),
in accordance with a designation employed earlier, then the equations (2) receivethe form:
Ω j(F) = X ′j(F)+A j(F) = 0 ( j=1 ···r).
As we know, the fact that they constitute a complete system is found in theirexpressions: certain equations of the form:
Ωk(Ω j(F)
)−Ω j
(Ωk(F)
)=
r
∑s=1
ϑk js(x′1, . . . ,x′n,a1, . . . ,ar)Ωs(F)
(k, j=1 ···r)
must hold identically1, whichever F can be as a function of x′1, . . . ,x′n, a1, . . . ,ar. But
since these identities can also be written as:
X ′k(X ′
j(F))−X ′
j(X ′
k(F))+Ak
(A j(F)
)−A j
(Ak(F)
)=
=r
∑s=1
ϑk js X ′s(F)+
r
∑s=1
ϑk js As(F),
we can immediately split them in two identities:
(3)
X ′
k(X ′
j(F))−X ′
j(X ′
k(F))=
r
∑s=1
ϑk js X ′s(F)
Ak(A j(F)
)−A j
(Ak(F)
)=
r
∑s=1
ϑk js As(F),
1 These are identities between vector fields.

164 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
and here, the second series of equations can yet again be decomposed in:
Ak(α jµ)−A j
(αkµ)=
r
∑s=1
ϑk js αsµ (k, j,µ =1 ···r).
Now, because the determinant of the αsµ does not vanish identically, then the ϑk jsin these last conditions are completely determined, and it comes out that the ϑk js canonly depend upon a1, . . . ,ar, whereas they are in any case free of x′1, . . . ,x
′n. But it
can be established that the ϑk js are also free of a1, . . . ,ar. For, if in the first seriesof the identities (3), we consider F as an arbitrary function of only x′1, . . . ,x
′n, then
we obtain by differentiating with respect to aµ the following identically satisfiedequations:
0 ≡r
∑s=1
∂ϑk js
∂aµX ′
s(F) (k, j,µ =1 ···r).
But since X ′1(F), . . . ,X ′
r(F) are independent infinitesimal transformations, and since
in addition the ∂ϑk js∂aµ
do not depend upon x′1, . . . ,x′n, then all the ∂ϑk js
∂aµvanish identi-
cally; that is to say, the ϑk js are also free of a1, . . . ,ar, they are numerical constants.Thus, we have the
Theorem 21. If a family of ∞r transformations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
satisfies certain differential equations of the specific form:
∂x′i∂ak
=r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(x′1, . . . ,x′n) (i=1 ···n; k=1 ···r)
and if one writes, what is always possible, these differential equations in the form:
ξ ji(x′1, . . . ,x′n) =
r
∑k=1
α jk(a1, . . . ,ar)∂x′i∂ak
(i=1 ···n; j=1 ···r),
then there exist between the 2r independent infinitesimal transformations:
X ′j(F) =
n
∑i=1
ξ ji(x′1, . . . ,x′n)
∂F∂xi
( j=1 ···r)
A j(F) =r
∑µ=1
α jµ(a1, . . . ,ar)∂F∂aµ
( j=1 ···r)
relationships of the form:

§ 39. 165
(4)
X ′
k(X ′
j(F))−X ′
j(X ′
k(F))=
r
∑s=1
ck js X ′s(F) (k, j=1 ···r),
Ak(A j(F)
)−A j
(Ak(F)
)=
r
∑s=1
ck js As(F) (k, j=1 ···r),
where the ck js denote numerical constants. In consequence of that, the r equations:
X ′j(F)+A j(F) = 0 (k=1 ···r),
which are solvable with respect to ∂F∂a1
, . . . , ∂F∂ar
, constitute an r-term complete sys-tem in the n+ r variables x′1, . . . ,x
′n, a1, . . . ,ar; if one solves the n equations x′i =
fi(x, a) with respect to x1, . . . ,xn:
xi = Fi(x′1, . . . ,x′n, a1, . . . ,ar) (i=1 ···n),
then F1(x′, a), . . . , Fn(x′, a) are independent solutions of this complete system.
This theorem can now be immediately applied to all r-term groups, whether ornot they contain the identity transformation.
When applied to the case of an r-term group with the identity transformation, thetheorem gives us certain relationships which exist between the infinitesimal trans-formations of this group. We therefore obtain the important
Theorem 22. If an r-term group in the variables x1, . . . ,xn contains the r indepen-dent infinitesimal transformations:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r),
then there exist between these infinitesimal transformations pairwise relationshipsof the form :
Xk(X j( f )
)−X j
(Xk( f )
)=
r
∑s=1
ck js Xs( f ),
where the ck js denote numerical constants†.
From this, it follows in particular the following important
Proposition 1. If a finite continuous group contains the two infinitesimal transfor-mations:
X( f ) =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
, Y ( f ) =n
∑i=1
ηi(x1, . . . ,xn)∂ f∂xi
,
then it also contains the infinitesimal transformation:
X(Y ( f )
)−Y(X( f )
).
† Lie, Math. Ann. Vol. 8, p. 303; Göttinger Nachr. 1874.

166 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
§ 40.
Conversely, we imagine that r independent infinitesimal transformations inx′1, . . . ,x
′n:
X ′j(F) =
n
∑i=1
ξ ji(x′1, . . . ,x′n)
∂F∂x′i
( j=1 ···r)
are presented, which stand pairwise in relationships of the form:
X ′k(X ′
j(F))−X ′
j(X ′
k(F))=
r
∑s=1
ck js X ′s(F),
where the ck js are numerical constants. In addition, we imagine that r infinitesimaltransformations in a1, . . . ,ar:
A j(F) =r
∑µ=1
α jµ(a1, . . . ,ar)∂F∂aµ
( j=1 ···r)
are given, which satisfy analogous relations in pairs of the form:
Ak(A j(F)
)−A j
(Ak(F)
)=
r
∑s=1
ck js As(F),
with the same ck js and whose determinant ∑ ±α11(a) · · ·αrr(a) does not vanishidentically. We will show that under these assumptions, the infinitesimal transfor-mations X ′
1(F), . . . ,X ′r(F) generate a completely determined r-term group with the
identity transformation.To this aim, we form the equations:
Ω j(F) = X ′j(F)+A j(F) = 0 ( j=1 ···r),
which, according to the assumptions made, constitute an r-term complete system;indeed, there exist relations of the form:
Ωk(Ω j(F)
)−Ω j
(Ωk(F)
)=
r
∑s=1
ck js Ωs(F)
and in addition, the equations Ω1(F) = 0, . . . , Ωr(F) = 0 are solvable with respectto ∂F
∂a1, . . . , ∂F
∂ar.
Now, let a01, . . . ,a
0r be a system of values of the a, in a neighbourhood of which
the α jk(a) behave regularly and for which the determinant ∑ ±α11(a0) · · ·αrr(a0)is different from zero. Then according to Theorem 12, Chap. 5, p. 105, the com-plete system Ω j(F) = 0 possesses n solutions F1(x′, a), . . . ,Fn(x′, a) which reduceto x′1, . . . ,x
′n respectively for ak = a0
k ; they are the so-called general solutions of thecomplete system relative to ak = a0
k . We imagine that these general solutions aregiven, we form the n equations:

§ 40. 167
xi = Fi(x′1, . . . ,x′n, a1, . . . ,ar) (i=1 ···n),
and we resolve them with respect to x′1, . . . ,x′n, which is always possible, for
F1, . . . ,Fn are obviously independent of each other, as far as x′1, . . . ,x′n are
concerned. The equations obtained in this way:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
represent, as we shall now show, an r-term group and in fact naturally, a group withthe identity transformation; because for ak = a0
k , one gets x′i = xi.At first, we have identically:
(5)
n
∑ν=1
ξ jν(x′)∂Fi
∂x′ν+
r
∑µ=1
α jµ(a)∂Fi
∂aµ= 0
(i=1 ···n; j=1 ···r).
On the other hand, by differentiating xi = Fi(x′, a) with respect to aµ , one obtainsthe equation:
0 =n
∑ν=1
∂Fi
∂x′ν
∂x′ν∂aµ
+∂Fi
∂aµ(i=1 ···n; µ =1 ···r),
which holds identically after the substitution x′ν = fν(x, a). We multiply this equa-tion by α jµ(a) and we sum for µ equals 1 to r, hence we obtain an equation which,after using (5), goes to:
n
∑ν=1
∂Fi
∂x′ν
( r
∑µ=1
α jµ(a)∂x′ν∂aµ
−ξ jν(x′))= 0
(i=1 ···n; µ =1 ···r).
But since the determinant ∑ ± ∂F1∂x′1
. . . ∂Fn∂x′n
does not vanish identically, we thereforeobtain:
r
∑µ=1
α jµ(a)∂x′ν∂aµ
= ξ jν(x′),
a system that we can again resolve with respect to the ∂x′ν∂aµ
, for the determinant of theα jµ(a) does not vanish, indeed. Thus, we obtain finally that equations of the form:
(6)
∂x′ν∂aµ
=r
∑j=1
ψµ j(a1, . . . ,ar)ξ jν(x′1, . . . ,x′n)
(ν =1 ···n; µ =1 ···r)
do hold true, which naturally reduce to identities after the substitution x′ν = fν(x, a).

168 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
At this point, the demonstration that the equations x′i = fi(x, a) represent an r-term group is not at all difficult.
Indeed, it is at first easy to see that the equations x′i = fi(x, a) represent ∞r distincttransformations, hence that the parameters a1, . . . ,ar are all essential. Otherwiseindeed, all functions f1(x, a), . . . , fn(x, a) should satisfy a linear partial differentialequation of the form (cf. p. 15):
r
∑k=1
χk(a1, . . . ,ar)∂ f∂ak
= 0,
where the χk would be free of x1, . . . ,xn. On account of (6), we would then have:
1...r
∑k, j
χk(a)ψk j(a)ξ jν( f1, . . . , fn)≡ 0 (ν =1 ···n),
whence, since X ′1(F), . . . ,X ′
r(F) are independent infinitesimal transformations:
r
∑k=1
χk(a)ψk j(a) = 0 ( j=1 ···r) ;
but from this, it follows immediately: χ1(a) = 0, . . . , χr(a) = 0, because the deter-minant of the ψk j(a) does not vanish identically.
Thus, the equations x′i = fi(x, a) effectively represent a family of ∞r differenttransformations. But now this family satisfies certain differential equations of thespecific form (6); we hence can immediately apply the Theorem 9 of Chap. 4 onp. 82. According to it, the following holds true: if a1, . . . ,ar is a system of values ofthe a for which the the determinant ∑ ±ψ11(a) · · ·ψrr(a) does not vanish, and theψk j(a) behave regularly, then every transformation x′i = fi(x, a) whose parametersa1, . . . ,ar lie in a certain neighbourhood of a1, . . . ,ar, can be obtained by firstlyexecuting the transformation:
xi = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
and then a transformation:
x′i = xi +r
∑k=1
λk ξki(x)+ · · · (i=1 ···n)
of a one-term group λ1 X1( f )+ · · ·+λr Xr( f ), where it is understood that λ1, . . . ,λrare appropriate constants. If we set in particular ak = a0
k , we then get xi = xi, hencewe see at first that the family of the ∞r transformations x′i = fi(x, a) coincides, in acertain neighbourhood of a0
1, . . . ,a0r , with the family of the transformations:
(7)x′i = xi +
r
∑k=1
λk ξki(x)+ · · ·
(i=1 ···n).

§ 40. 169
If, on the other hand, we choose a1, . . . ,ar arbitrary in a certain neighbourhoodof a0
1, . . . ,a0r , then the transformation xi = fi(x, a) always belongs to the family (7).
But if we first execute the transformation xi = fi(x, a) and then an appropriate trans-formation:
x′i = xi +r
∑k=1
λk ξki(x)+ · · ·
of the family (7), then by what has been said above, we obtain a transformation x′i =fi(x, a), where a1, . . . ,ar can take all values in a certain neighbourhood of a1, . . . ,ar.In particular, if we choose a1, . . . ,ar in the neighbourhood of a0
1, . . . ,a0r mentioned
earlier on, which is always possible, then again the transformation x′i = fi(x, a) alsobelongs to the family (7); Consequently2, we see that two transformations of thefamily (7), when executed one after the other, do once again yield a transformationof this family. As a result, this family, and naturally also the family x′i = fi(x, a)which identifies with it, forms an r-term group, a group which contains the identitytransformation and whose transformations can be ordered as inverses in pairs. Wecan state the gained result as follows:
Theorem 23. If r independent infinitesimal transformations:
X ′k( f ) =
n
∑i=1
ξki(x′1, . . . ,x′n)
∂ f∂x′i
(k=1 ···r)
in the variables x′1, . . . ,x′n satisfy conditions in pairs of the form:
X ′k(X ′
j( f ))−X ′
j(X ′
k( f ))=
r
∑s=1
ck js X ′s( f ),
2 The present goal is mainly to establish that if r infinitesimal transformations X1, . . . ,Xr standpairwise in the relationships
[Xk, X j
]= ∑r
j=1 ck js Xs, where the ck js are constants, then the total-ity of transformations x′ = exp
(λ1X1 + · · ·+λrXr
)(x) constitutes an r-term continuous local Lie
group; Theorem 24 below will conclude such a fundamental statement. Especially, the exponentialfamily x′ = exp
(λ1X1 + · · ·+λrXr
)(x) will be shown to be (after appropriate shrinkings) closed
under composition, a property that we may abbreviate informally by expexp ≡ exp.However the Theorem 9 on p. 82 only said that f exp ≡ f , or in greater details:
(∗)
(x = f
(x; a)
a near a0
)
(x′ = exp
(λ X)(x)
λ near 0
)≡
(x′ = f (x; a)
a near a
).
But if we now apply this statement with a = a0 being the system of values introduced while solv-ing the complete system Ω1(F) = · · · = Ωr( f ) = 0, then by construction, a0 yields the identitytransformation x = f (x; a0) = x and we hence get in particular:(
x′ = exp(λ X)(x)
λ near 0
)≡
(x′ = f (x; a)
a near a0
).
We can therefore replace by exponentials the two occurrences of the family f (x; a) in (∗) to seethat the exponential family is indeed closed under composition, as was shortly claimed in the text.

170 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
if furthermore r independent infinitesimal transformations:
Ak( f ) =r
∑µ=1
αkµ(a1, . . . ,ar)∂ f∂aµ
(k=1 ···r)
in the variables a1, . . . ,ar satisfy the analogous conditions:
Ak(A j( f )
)−A j
(Ak( f )
)=
r
∑s=1
ck js As( f )
with the same ck js, and if, in addition, the determinant ∑ ±α11(a) · · ·αrr(a) doesnot vanish identically, then one obtains in the following way the equations of anr-term group: one forms the r-term complete system:
X ′k( f )+Ak( f ) = 0 (k=1 ···r)
and one determines its general solutions relative to a suitable system of values ak =a0
k . If xi = Fi(x′1, . . . ,x′n, a1, . . . ,ar) are these general solutions, then the equations
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) which arise from resolution represent an r-term con-tinuous transformation group. This group contains the identity transformation andfor each one of its transformations, yet the inverse transformation; it is generatedby the ∞r−1 infinitesimal transformations:
λ1 X ′1( f )+ · · ·+λr X ′
r( f ),
where λ1, . . . ,λr denote arbitrary constants. By introducing new parameters in placeof the ak, the equations of the group can therefore be brought to the form:
x′i = xi +r
∑k=1
λk ξki(x)+1...r
∑k, j
λk λ j
12X j(ξki)+ · · · (i=1 ···n).
Obviously, even the equations xi = Fi(x′, a) appearing in this theorem do repre-sent a group, and in fact, just the group x′i = fi(x, a).
§ 41.
The hypotheses which are made in the important Theorem 23 can be simplified inan essential way.
The theorem expresses that the 2r infinitesimal transformations Xk( f ) and Ak( f )determine a certain r-term group in the x-space; but at the same time, there is arepresentation of this group which is absolutely independent of the Ak( f ); indeed,according to the cited theorem, the group in question identifies with the family ofthe ∞r−1 one-term groups λ1 X1( f )+ · · ·+λr Xr( f ), and this family is already com-pletely determined by the Xk( f ) alone. This circumstance conducts us to the con-jecture that the family of the ∞r−1 one-term groups λ1 X1( f )+ · · ·+λr Xr( f ) alwaysforms an r-term group if and only if the independent infinitesimal transformations

§ 41. 171
X1( f ), . . . ,Xr( f ) stand pairwise in relations of the form:
(8) Xk(X j( f )
)−X j
(Xk( f )
)= [Xk, X j] =
r
∑s=1
ck js Xs( f ).
According to the Theorem 22, this condition is necessary for the ∞r−1 one-termgroups ∑ λk Xk( f ) to form an r-term group. Thus our conjecture amounts to the factthat this necessary condition is also sufficient.
This presumption would be brought to certainty if we would succeed in produc-ing, for every system of the discussed nature, r independent infinitesimal transfor-mations in (a1, . . . ,ar):
Ak( f ) =r
∑µ=1
αkµ(a1, . . . ,ar)∂ f∂aµ
(k=1 ···r)
which satisfy the corresponding relations:
Ak(A j( f )
)−A j
(Ak( f )
)=
r
∑s=1
ck js As( f ),
while, however, the determinant ∑ ±α11 · · ·αrr does not vanish identically, or ex-pressed differently, while no relation of the form:
r
∑k=1
χk(a1, . . . ,ar)Ak( f ) = 0
holds identically.With the help of the Proposition 5 in Chap. 4, p. 79, we can now in fact always
manage to produce such a system of infinitesimal transformations Ak( f ). Similarlyas at that previous time, we set:
X (µ)k ( f ) =
n
∑i=1
ξki(x(µ)1 , . . . ,x(µ)n
) ∂ f
∂x(µ)i
,
and we make up the r infinitesimal transformations:
Wk( f ) =r
∑µ=1
X (µ)k ( f ).
According to the stated proposition, these infinitesimal transformations have theproperty that no relation of the form:
r
∑k=1
ψk(x′1, . . . ,x
′n,x
′′1 , . . . ,x
′′n , · · · · · · ,x
(r)1 , . . . ,x(r)n
)Wk( f ) = 0
holds. Now, since in addition we have:

172 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
Wk(Wj( f )
)−Wj
(Wk( f )
)=
r
∑s=1
ck js Ws( f ),
the r equations, independent of each other:
W1( f ) = 0, · · · · · · ,Wr( f ) = 0
form an r-term complete system in the rn variables x′1, . . . ,x′n, · · · ,x
(r)1 , . . . ,x(r)n .
This complete system possesses r(n − 1) independent solutions, which can becalled u1,u2, . . . ,urn−r. Hence, if we select r functions y1, . . . ,yr of the rn quantitiesx(µ)i that are independent of each other and independent of u1, . . . ,urn−r, we canintroduce the y and the u as new independent variables in place of the x(µ)i . By this,we obtain:
Wk( f ) =r
∑π=1
Wk(yπ)∂ f∂yπ
+rn−r
∑τ=1
Wk(uτ)∂ f∂uτ
,
or, since all Wk(uτ) vanish identically:
Wk( f ) =r
∑π=1
ωkπ(y1, . . . ,yr,u1, . . . ,urn−r)∂ f∂yπ
,
where W1( f ), . . . ,Wr( f ) are linked by no relation of the form:
r
∑k=1
ϕk(y1, . . . ,yr, u1, . . . ,urn−r)Wk( f ) = 0.
This property of the Wk( f ) remains naturally also true when we confer to the uτappropriate fixed values u0
τ . If we then set ωkπ(y,u0) = ω0kπ(y), the r independent
infinitesimal transformations in the independent variables y1, . . . ,yr:
Vk( f ) =r
∑π=1
ω0kπ(y1, . . . ,yr)
∂ f∂yπ
stand pairwise in the relationships:
Vk(Vj( f )
)−Vj
(Vk( f )
)=
r
∑s=1
ck js Vs( f )
and in addition, are linked by no relation of the form:
r
∑k=1
ϕk(y1, . . . ,yr)Vk( f ) = 0.
Consequently, the Vk( f ) are infinitesimal transformations of the required constitu-tion. So we can immediately apply the Theorem 23 p. 169 to the 2r infinitesimaltransformations X1( f ), . . . ,Xr( f ), V1( f ), . . . ,Vr( f ) and as a result, we have proved

§ 42. 173
that the ∞r−1 one-term groups ∑ λk Xk( f ) constitute an r-term group. Therefore thefollowing holds true:
Theorem 24. If r independent infinitesimal transformations:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
stand pairwise in the relationships:
(8) Xk(X j( f )
)−X j
(Xk( f )
)= [Xk, X j] =
r
∑s=1
ck js Xs( f ),
where the ck js are constants, then the totality of the ∞r−1 one-term groups:
λ1 X1( f )+ · · ·+λr Xr( f )
forms an r-term continuous group, which contains the identity transformation andwhose transformations are ordered as inverses in pairs†.
When we have r independent infinitesimal transformations:
X1( f ), . . . ,Xr( f )
which match the hypotheses of the above theorem, we shall henceforth say thatX1( f ), . . . ,Xr( f ) generate an r-term group, and we shall also virtually speak of ther-term group X1( f ), . . . ,Xr( f ).
§ 42.
Let X1( f ), . . . ,Xr( f ) be an r-term group in the variables x1, . . . ,xn and Y1, . . .Ym( f )be an m-term group in the same variables. The relations between the Xk( f ) and theYµ( f ) respectively may have the form:
Xk(X j( f )
)−X j
(Xk( f )
)=
r
∑s=1
ck js Xs( f ) = [Xk, X j]
Yµ(Yν( f )
)−Yν
(Yµ( f )
)=
m
∑s=1
c′µνs Ys( f ) =[Yµ , Yν
](k, j=1 ···r; µ,ν =1 ···m).
Now, it can happen that these two groups have certain infinitesimal transformationsin common. We suppose that they have exactly l independent such transformationsin common, say:
† Lie, Math. Annalen Vol. 8, p. 303, 1874; Göttinger Nachrichten, 1874, p. 533 and 540; Archivfor Math. og Naturv. Christiania 1878.

174 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
Zλ ( f ) =r
∑k=1
gλk Xk( f ) =m
∑µ=1
hλ µ Yµ( f ) (λ =1 ··· l),
where the gλk and the hλ µ denote constants. Then every other infinitesimal transfor-mation contained in the two groups can be linearly deduced from Z1( f ), . . . ,Zl( f ).But if we form the expressions:
Zλ(Zν( f )
)−Zν
(Zλ ( f )
)= [Zλ , Zν ] ,
we realize that they can be deduced linearly from X1( f ), . . . ,Xr( f ) and also fromY1( f ), . . . ,Ym( f ) as well, hence that they are common to the two groups. Conse-quently, relations of the form:
Zλ(Zν( f )
)−Zν
(Zλ ( f )
)= [Zλ , Zν ] =
l
∑s=1
dλνs Zs( f )
hold true, that is to say Z1( f ), . . . ,Zl( f ) generate an l-term group.As a result, we have the
Proposition 2. If the two continuous groups: X1( f ), . . . ,Xr( f ) and Y1( f ), . . . ,Ym( f )in the same variables have exactly l and not more independent infinitesimal trans-formations in common, then these transformations generate, as far as they are con-cerned, an l-term continuous group.
§ 43.
If the equations x′i = fi(x1, . . . ,xn, a1, . . . ,ar) represent a family of ∞r transforma-tions and if in addition they satisfy differential equations of the specific form:
∂x′i∂ak
=r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(x′1, . . . ,x′n) (i=1 ···n; k=1 ···r),
then as we know, the r infinitesimal transformations:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
are independent of each other, and in addition, according to Theorem 21 on p. 164,they are linked together through relations of the form:
Xk(X j( f )
)−X j
(Xk( f )
)= [Xk, X j] =
r
∑s=1
ck js Xs( f ).
Hence the family of the ∞r−1 one-term groups:
λ1 X1( f )+ · · ·+λr Xr( f )

§ 43. 175
forms an r-term group with the identity transformation. Consequently, we can statethe Theorem 9 on p. 82 as follows:
Theorem 25. If a family of ∞r transformations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
satisfies certain differential equations of the form:
∂x′i∂ak
=r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(x′1, . . . ,x′n) (i=1 ···n ; k=1 ···r),
and if a01, . . . ,a
0r is a system of values of the a for which the ψk j(a) behave regularly
and for which in addition, the determinant:
∑ ±ψ11(a) · · ·ψrr(a)
is different from zero, then every transformation x′i = fi(x, a) whose parametersa1, . . . ,ar lie in a certain neighbourhood of a0
1, . . . ,a0r can be thought to be produced
by performing firstly the transformation xi = fi(x, a0) and secondly, a completelydetermined transformation:
x′i = xi +r
∑k=1
λk ξki(x)+ · · · (i=1 ···n)
of the r-term group which, under the assumptions made, is generated by the r inde-pendent infinitesimal transformations:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r).
The above theorem is then of special interest when the equations x′i = fi(x,a)represent an r-term group which does not contain the identity transformation at leastin the domain ((a)). In this case, we will yet derive a few important conclusions.
Thus, let x′i = fi(x1, . . . ,xn, a1, . . . ,ar) be an r-term group without identity trans-formation, and assume that the two transformations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar)
x′′i = fi(x′1, . . . ,x′n, b1, . . . ,br)
executed one after the other produce the transformation:
x′′i = fi(x1, . . . ,xn, c1, . . . ,cr) = fi(x1, . . . ,xn, ϕ1(a,b), . . . ,ϕr(a,b)
).
Here, if we employ the previous notation, x1, . . . ,xn lie arbitrarily in the domain((x)), a1, . . . ,ar and b1, . . . ,br in the domain ((a)), while the positions of the x′i, x′′iand of the ck are determined by the indicated equations. In addition, there are still

176 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
differential equations of the specific form:
∂x′i∂ak
=r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(x′1, . . . ,x′n)
(i=1 ···n ;k=1 ···r).
In what follows, a01, . . . ,a
0r and likewise b0
1, . . . ,b0r should now denote a deter-
mined point [STELLE] of the domain ((a)) and ϕk(a0,b0) should be equal to c0k . By
contrast, by a1, . . . ,ar we want to understand an arbitrary point in the domain (a),so that the equations:
xi = fi(x1, . . . ,xn, a1, . . . ,ar)
should represent any transformation of the given group.Every transformation of the form xi = fi(x,a) can be obtained by performing at
first the transformation x′i = fi(x,a0) and afterwards a certain second transformation.In order to find the latter transformation, we solve the equations x′i = fi(x,a0) withrespect to x1, . . . ,xn:
xi = Fi(x′1, . . . ,x′n, a0
1, . . . ,a0r )
and we introduce these values of the xi in xi = fi(x,a). In this way, we obtain for thesought transformation an expression of the form:
(9) xi = Φi(x′1, . . . ,x
′n, a1, . . . ,ar) (i=1 ···n) ;
we here do not write down the a0k , because we want to consider them as numerical
constants.The transformation (9) is well defined for all systems of values ak in the domain
(a) and its expression can be analytically continued to the whole domain of suchsystems of values; this follows from the hypotheses that we have made previouslyabout the nature of the functions fi and Fi.
We now claim that for certain values of the parameters ak, the transformationsof the family xi = Φi(x′, a) belong to the initially given group x′i = fi(x,a), whereasby contrast, for certain other values of the ak, they belong to the group X1 f , . . . ,Xr fwith identity transformation.
We establish as follows the first part of the claim stated just now. We know thatthe two transformations:
x′i = fi(x1, . . . ,xn, a01, . . . ,a
0r ), xi = fi(x′1, . . . ,x
′n, b1, . . . ,br)
executed one after the other produce the transformation xi = fi(x,c), where ck =ϕk(a0,b); here, we may set for b1, . . . ,br any system of values of the domain ((a)),while the system of values c1, . . . ,cr then lies in the domain (a), in a certain neigh-bourhood of c0
1, . . . ,c0r . But according to what has been said earlier, the transforma-
tion xi = fi(x,c) is also obtained when the two transformations:
x′i = fi(x1, . . . ,xn, a01, . . . ,a
0r ), xi = Φi(x′1, . . . ,x
′n, a1, . . . ,ar)

§ 43. 177
are executed one after the other and when one chooses ak = ck. Consequently, thetransformation xi = Φi(x′,a) is identical, after the substitution ak = ϕk(a0,b), tothe transformation xi = fi(x′,b), that is to say: all transformations xi = Φi(x′,a)whose parameters ak lie in a certain neighbourhood of c0
1, . . . ,c0r defined through
the equation ak = ϕk(a0,b), belong to the presented group x′i = fi(x,a).In order to establish the second part of our claim stated above, we remember the
Theorem 25. If a1, . . . ,ar lie in a certain neighbourhood of a01, . . . ,a
0r , then according
to this theorem, the transformation xi = fi(x,a) can be obtained by performing atfirst the transformation:
x′i = fi(x1, . . . ,xn, a01, . . . ,a
0r )
and afterwards a completely determined transformation:
(10) xi = x′i +r
∑k=1
λk ξki(x′)+ · · ·
of the r-term group that is generated by the r independent infinitesimal transforma-tions:
Xk( f ) =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r).
From earlier considerations (cf. Chap. 4, proof of Theorem 9, p. 82), we knowin addition that one finds the transformation (10) in question when one choosesin an appropriate way a1, . . . ,ar as independent functions of λ1, . . . ,λr and whenone then determines by resolution λ1, . . . ,λr as functions of a1, . . . ,ar. But on theother hand, we also obtain the transformation xi = fi(x,a) when we at first executethe transformation x′i = fi(x,a0) and afterwards the transformation xi = Φi(x′,a).Consequently, the transformation xi = Φi(x′,a) belongs to the group generated byX1 f , . . . ,Xr f as soon as the system of values a1, . . . ,ar lies in a certain neighbour-hood of a0
1, . . . ,a0r . Expressed differently: the equations xi = Φi(x′,a) are transferred
to the equations (10) when a1, . . . ,ar are replaced by the functions of λ1, . . . ,λrdiscussed above.
With these words, our claim stated above is completely proved.Thus the transformation equations xi = Φi(x′,a) possess the following impor-
tant property: if in place of the ak, the new parameters b1, . . . ,br are introduced bymeans of the equations ak = ϕk(a0,b), then for a certain domain of the variables,the equations xi = Φi(x′,a) take the form xi = fi(x′,b); on the other hand, if in placeof the ak, the new parameters λ1, . . . ,λr are introduced, then for a certain domain,the equations xi = Φi(x′,a) convert into:
xi = x′i +r
∑k=1
λk ξki(x′)+ · · · (i=1 ···n)
Here lies an important feature of the initially given group x′i = fi(x,a). Namely,when we introduce in the equations x′i = fi(x,a) the new parameters a1, . . . ,ar in

178 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
place of the ak by means of ak =ϕk(a0,a), then we obtain a system of transformationequations x′i = Φi(x,a) which, by performing in addition its analytic continuation,represents a family of transformations to which belong all transformations of somer-term group with identity transformation.
We can also express this as follows.
Theorem 26. Every r-term group x′i = fi(x1, . . . ,xn, a1, . . . ,ar) which is not gener-ated by r independent infinitesimal transformations can be derived from an r-termgroup with r independent infinitesimal transformations in the following way: onesets up at first the differential equations:
∂x′i∂ak
=r
∑j=1
ψk j(a)ξ ji(x′) (i=1 ···n ;k=1 ···r),
which are satisfied by the equations x′i = fi(x,a), then one sets:
n
∑i=1
ξki(x)∂ f∂xi
= Xk( f ) (k=1 ···r)
and one forms the finite equations:
x′i = xi +r
∑k=1
λk ξki(x)+ · · · (i=1 ···n)
of the r-term group with identity transformation which is generated by the r inde-pendent infinitesimal transformations X1 f , . . . ,Xr f . Then it is possible, in these fi-nite equations, to introduce new parameters a1, . . . ,ar in place of λ1, . . . ,λr in sucha way that the resulting transformation equations:
x′i = Φi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
represent a family of ∞r transformations which embrace, after analytic continuation,all the ∞r transformations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar)
of the group.
§ 44.
Without difficulty, it can be shown that there really exist groups which do not con-tain the identity transformation and also whose transformations are not ordered asinverses by pairs.
The equation:x′ = ax
with the arbitrary parameter a represents a one-term group. If one executes twotransformations:

§ 44. 179
x′ = ax, x′′ = bx′
of this group one after the other, then one gets the transformation:
x′′ = abx,
which belongs to the group as well. From this, it results that the family of all trans-formations of the form x′ = ax, in which the absolute value of a is smaller than 1,constitutes a group too3. Obviously, neither this family contains the identity trans-formation, nor its transformations order as inverses by pairs.
Hence, if there would exist an analytic expression which would represent onlythose transformations of the form x′ = ax in which the absolute value of a is smallerthan 1, then with it, we would have a finite continuous group without the identitytransformation and without inverse transformations.
Now, an analytic expression of the required constitution can effectively be indi-cated.
It is known that the function4:
∞
∑ν=1
aν
1−a2ν
can be expanded, in the neighbourhood of a = 0, as an ordinary power series withrespect to a which converges as long as the absolute value |a| of a is smaller than 1.The power series in question has the form:
∞
∑µ=1
kµ aµ = ω(a),
where the kµ denote entire numbers depending on the index µ . Hence if we inter-pret the complex values of a as points in a plane, then ω(a), as an analytic func-tion of a, is defined in the interior of the circle of radius 1 which can be described[BESCHREIBEN] around the point a = 0.
Furthermore, it is known that the function ω(a) has no more sense for the awhose absolute value equals 1, so that the circle in question around the point a =0 constitutes the natural frontier for ω(a), across which this function cannot byanalytically continued.
We not set ω(a) = λ , and moreover, let |a0| < 1 and ω(a0) = λ 0; then we cansolve the equation ω(a) = λ with respect to a, that is to say, we can representa as an ordinary power series in λ − λ 0 in such a way that it gives: a = a0 forλ = λ 0 and that the equation ω(a) = λ is identically satisfied after substitution ofthis expression for a.
Let a = χ(λ ); then χ(λ ) is an analytic function which takes only values whoseabsolute value are smaller than 1; this holds true not only for the found function
3 In the sought economy of axioms, what matters is only closure under composition.4 A presentation of this passage has been anticipated in Sect. 2.3.

180 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
element which is represented in the neighbourhood of λ = λ 0 by an ordinary powerseries in λ −λ 0, but also for every analytic continuation of this function element.
Hence if we set:x′ = χ(λ )x,
we obtain the desired analytic expression for all transformations x′ = ax in which|a| is smaller than 1. If now we have:
x′ = χ(λ1)x, x′′ = χ(λ2)x′,
then it comes:x′′ = χ(λ1)χ(λ2)x ;
but this equation can always be brought to the form:
x′′ = χ(λ3)x ;
indeed, we have |χ(λ1)χ(λ2)|< 1; so if we set χ(λ1)χ(λ2)=α , we simply receive:λ3 = ω(α).
With this, it is shown that the equation x′ = χ(λ )x with the arbitrary parameter λrepresents a group. This group is continuous and finite, but lastly, neither it containsthe identity transformation, nor its transformations can be ordered as inverses bypairs. Our purpose: the proof that there are groups of this kind, is attained with it.Besides, it is easy to see that in a similar manner, one can form arbitrarily manygroups having this constitution.
Remarks. In his first researches about finite continuous transformation groups,LIE has attempted to show that every r-term group contains the identity transfor-mation plus infinitesimal transformations, and is generated by the latter (cf. notablythe two articles in Archiv for Math. og Naturvid., Bd. 1, Christiania 1876). How-ever he soon realized that in his proof were made certain implicit assumptions aboutthe constitution of the occurring functions; as a consequence, he restricted himselfexpressly to groups whose transformations can be ordered as inverses by pairs andhe showed that in any case, the mentioned statement was correct for such groups(Math. Ann. Vol. 16, p. 441 sq.).
Later, in the year 1884, ENGEL succeeded to make up a finite continuous groupwhich does not contain the identity transformation and whose transformations donot order as inverses by pairs; this was the group set up in the preceding paragraph.
Finally, LIE found that the equations of an arbitrary finite continuous group withr parameters can in any case be derived, after introduction of new parameters andanalytic continuation, from the equations of an r-term group which contains theidentity transformation and r independent infinitesimal transformations, while itsfinite transformations can be ordered as inverses by pairs (Theorem 26).
§ 45.
In Chap. 4, p. 86, we found that every r-term group which contains r independentinfinitesimal transformations has the property that its finite transformations can be

§ 45. 181
ordered as inverses by pairs. On the other hand, it was mentioned at the end ofthe previous paragraph that this statement can be reversed, hence that every r-termgroup whose transformations order as inverses by pairs, contains the identity trans-formation and is produced by r infinitesimal transformations. We will indicate howthe correctness of this assertion can be seen.
Let the equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,an) (i=1 ···n)
with r essential parameters a1, . . . ,ar represent an r-term group with inverse trans-formations by pairs. By resolution with respect to x1, . . . ,xn, one can obtain:
xi = Fi(x′1, . . . ,x′n, a1, . . . ,ar) (i=1 ···n)
When the system of values ε1, . . . ,εr lies in a certain neighbourhood of ε1 = 0,. . . , εr = 0, then we can execute the two transformations:
xi = Fi(x′1, . . . ,x′n, a1, . . . ,ar)
x′′i = fi(x1, . . . ,xn, a1 + ε1, . . . , ar + εr)
one after the other and we thus obtain a transformation:
x′′i = fi(F1(x′,a), . . . ,Fn(x′,a), a1 + ε1, . . . , ar + εr
)which likewise belongs to our group and which can be expanded in power serieswith respect to ε1, . . . ,εr:
(11) x′′i = x′i +r
∑k=1
εk
[∂ fi(x,a)
∂ak
]x=F(x′,a)
+ · · · .
If we set here all εk equal to zero, then we get the identity transformation, whichhence appears to our group. If on the other hand we choose all the εk infinitely small,we obtain transformations of our group which are infinitely little different from theidentity transformation.
For brevity, we set:
(12)[
∂ fi(x,a)∂ak
]x=F(x′,a)
= ηki(x′,a),
so that the transformation (11) hence receives the form:
x′′i = x′i +r
∑k=1
εk ηki(x′,a)+ · · · (i=1 ···n).
Then, in the variables x′1, . . . ,x′n, we form the r infinitesimal transformations:

182 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
Y ′k f =
n
∑i=1
ηki(x′,a)∂ f∂x′k
(k=1 ···r),
which are certainly independent from each other for undetermined values of the ak.Indeed, on the contrary case, the would be r not all vanishing quantities ρ1, . . . ,ρrwhich would not depend upon x′1, . . . ,x
′n such that the equation:
r
∑k=1
ρk Y ′k f = 0
would be identically satisfied; then the n relations:
r
∑k=1
ρk ηki(x′,a) = 0 (i=1 ···n)
would follow and in turn, these relations would, after the substitution x′i = fi(x,a),be transferred to:
r
∑k=1
ρk∂ fi(x,a)
∂ak= 0 (i=1 ···n) ;
but such relations cannot exist, since according to the assumption, the parametersare essential in the equations x′i = fi(x,a) (cf. Chap. 2, p. 16).
From this, we then conclude that Y ′1 f , . . . ,Y ′
r f also remain independent from eachother, when one inserts for a1, . . . ,ar some determined system of values in generalposition. If a1, . . . ,ar is such a system of values, we want to write:
ηki(x′,a) = ξki(x′) ;
then the r infinitesimal transformations:
X ′k f =
n
∑i=1
ξki(x′)∂ f∂x′i
(k=1 ···r)
are also independent of each other. It remains to show that our group is generatedby the r infinitesimal transformations X ′
k f .We execute two transformations of our group one after the other, namely firstly
the transformation:
x′′i = x′i +r
∑k=1
εk ηki(x′,a)+ · · · ,
and secondly the transformation:
x′′′i = x′′i +r
∑k=1
ϑk ηki(x′′,a)+ · · ·
= x′′i +r
∑k=1
ϑk ξki(x′′)+ · · · .

§ 45. 183
If, as up to now, we only take into consideration the first-order terms, we then obtainin the indicated way the transformation:
x′′′i = x′i +r
∑k=1
εk ηki(x′,a)+r
∑k=1
ϑk ξki(x′)+ · · · ,
which belongs naturally to our group, and this, inside a certain region for all valuesof the parameters a, ε , ϑ .
If there would be, amongst the infinitesimal transformations Y ′1 f , . . . ,Y ′
r f , also acertain number which would be independent of X ′
1 f , . . . ,X ′r f , then the last written
equations would, according to Chap. 4, Proposition 4, p. 80, represent at least ∞r+1
different transformations, whereas our group nevertheless contain only ∞r differenttransformations. Consequently, each transformation Y ′
k f must be linearly express-ible in terms of X ′
1 f , . . . ,X ′r f , whichever values the a can have. By considerations
similar to those of Chap. 2, p. 39, one now realizes that r identities of the form:
Y ′k f ≡
r
∑j=1
ψk j(a1, . . . ,ar)X ′j f (k=1 ···r)
hold true, where the ψk j behave regularly in a certain neighbourhood of ak = ak;in addition, the determinant of the ψk j does not vanish identically, since otherwiseY ′
1 f , . . . ,Y ′r f would not anymore be independent infinitesimal transformations.
At present, it is clear that the ηki(x′,a) can be expressed as follows in terms ofthe ξ ji(x′):
ηki(x′,a)≡r
∑j=1
ψk j(a)ξ ji(x′).
Finally, if we remember the equations (12) which define the functions ηki(x′,a),we realize that the differential equations:
(13)
∂x′i∂ak
=r
∑j=1
ψk j(a)ξ ji(x′)
(i=1 ···n ; k=1 ···r)
are identically satisfied after the substitution x′i = fi(x,a).As a result, it has been directly shown that every group with inverse transforma-
tions by pairs satisfies certain differential equations of the characteristic form (13);insofar, we have reached the starting point for the developments of Chap. 3,Sect. 3.9.
Now, if it would be possible to prove that, for the parameter values a01, . . . ,a
0r of
the identity transformation, the determinant of the ψk j(a) has a value distinct fromzero, then it would follow from the stated developments that the group x′i = fi(x,a)is generated by the r infinitesimal transformations X1 f , . . . ,Xr f . But now, it is not in

184 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
the nature of things that one can prove that the determinant ∑±ψ11(a0) · · ·ψrr(a0)is distinct from zero. One can avoid this trouble as follows5.
One knows that the equations:
(14)x′i = xi +
r
∑k=1
εk ξki(x)+ · · ·
(i=1 ···n)
represent transformations of our group x′i = fi(x,a) as soon as the εk lie in a certainneighbourhood of ε1 = 0, . . . , εr = 0; besides, one can show that one obtains inthis way all transformations x′i = fi(x,a) the parameters of which lie in a certainneighbourhood of a0
1, . . . ,a0r . Now, if one puts the equations (14) at the foundation,
one easily realizes that the x′, interpreted as functions of the ε and of the x, satisfydifferential equations of the form:
∂x′i∂εk
=r
∑j=1
χk j(ε1, . . . ,εr)ξ ji(x′1, . . . ,x′n)
(i=1 ···n ; k=1 ···r),
where now the determinant of the χk j(ε) for ε1 = 0, . . . , εr = 0 does not vanish. Inthis way, one comes finally to the following result:
Every r-term group with transformations inverse by pairs contains the identitytransformation, and in addition r independent infinitesimal transformations bywhich it is generated.
§ 46.
Consider r independent infinitesimal transformations:
Xk f =n
∑ν=1
ξkν(x1, . . . ,xn)∂ f∂xν
(k=1 ···r)
which satisfy relations in pairs of the form:
(8)Xi(Xk( f )
)−Xk
(Xi( f )
)=[Xi, Xk
]=
r
∑s=1
ciks Xs( f )
(i,k=1 ···r),
with certain constants ciks, so that according to Theorem 24 p. 173, the totality of allone-term groups of the form:
λ1X1( f )+ · · ·+λrXr( f )
5 For (local) continuous finite transformation groups containing the identity transformation, thisproperty has already been seen in Sect. 3.4.

§ 46. 185
constitutes an r-term group. We will show that, as far as they are concerned, theconstants ciks in the above relations are then tied up together with certain equations.
To begin with, we have[Xi, Xk
]=−
[Xk, Xi
], from which it comes immediately:
ciks = −ckis. When the number r is greater than 2, we find still other relations.Indeed, in this case, there is the Jacobi identity (Chap. 5, § 26, p. 7) which holdsbetween any three Xi f , Xk f , X j f amongst the r infinitesimal transformationsX1 f , . . . ,Xr f : [[
Xi, Xk], X j]+[[
Xk, X j], Xi]+[[
X j, Xi], Xk]= 0
(i,k, j=1 ···n).
By making use of the above relation (8), we obtain firstly from this:
r
∑s=1
ciks[Xs, X j
]+ ck js
[Xs, Xi
]+ c jis
[Xs, Xk
]= 0,
and then by renewed applications of this relation:
1···r
∑s,τ
ciks cs jτ + ck js csiτ + c jis cskτ
Xτ f = 0.
But since the infinitesimal transformations Xτ f are independent of each other, thisequation decomposes in the following r equations:
(15)
r
∑s=1
ciks cs jτ + ck js csiτ + c jis cskτ
= 0
(τ =1 ···r).
Thus the following holds.
Theorem 27. † If r independent infinitesimal transformations X1 f , . . . ,Xr f are con-stituted in such a way that they satisfy relations in pairs of the form:
(8)Xi(Xk( f )
)−Xk
(Xi( f )
)=[Xi, Xk
]=
r
∑s=1
ciks Xs( f )
(i,k=1 ···r),
with certain constants ciks, so that the totality of all ∞r−1 one-term groups of theform:
λ1 X1( f )+ · · ·+λr Xr( f )
forms an r-term group, then between the constants ciks, there exist the followingrelations:
† Lie, Archiv for Math. og Naturv. Bd. 1, p. 192, Christiania 1876.

186 9 Characteristic Relationships Between the Infinitesimal Transformations of a Group
(16)
cikτ + ckiτ = 0
r
∑s=1
ciks cs jτ + ck js csiτ + c jis cskτ
= 0
(i,k, j,τ =1 ···r).
The equations (16) are completely independent of the number of the variablesx1, . . . ,xn in the infinitesimal transformations X1( f ), . . . ,Xr( f ). Hence from the thepreceding statement, we can still conclude what follows:
Even if the number n of the independent variables x1, . . . ,xn can be chosen inan completely arbitrary way, one nevertheless cannot associate to every system ofconstants ciks (i,k,s=1 ···r) r independent infinitesimal transformations:
Xk( f ) =n
∑ν=1
ξkν(x1, . . . ,xn)∂ f∂xν
(k=1 ···r)
which pairwise satisfy the relations:
[Xi, Xk
]=
r
∑s=1
ciks Xs( f ) (i,k=1 ···r).
Rather, for the existence of such infinitesimal transformations, the existence of theequations (16) is necessary; but it also is sufficient, as we will see later.
—————–
Unless the contrary is specially notified, in all the subsequent studies, we shallrestrict ourselves to the r-term groups which contain r independent infinitesimaltransformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
,
and so, which are generated by the same transformations. Here, we shall alwaysconsider only systems of values x1, . . . ,xn for which all the ξki behave regularly.
Further, we stress once more that in the future, we shall often call shortly an r-term group with the independent infinitesimal transformations X1 f , . . . ,Xr f by “thegroup X1 f , . . . ,Xr f ”. Amongst the various forms the finite equations of the r-termgroup X1 f , . . . ,Xr f can be given, we shall call the following:
x′i = xi +r
∑k=1
ek ξki(x)+ · · · (i=1 ···n)
by “a canonical form” of the group.
—————–

Chapter 10Systems of Partial Differential Equationsthe General Solution of WhichDepends Only Upon a Finite Numberof Arbitrary Constants
In the variables x1, . . . ,xn, z1, . . . ,zm let us imagine that a system of partial differ-ential equations of arbitrary order is given. Aside from x1, . . . ,xn, z1, . . . ,zm, such asystem can only contain differential quotients of z1, . . . ,zm with respect to x1, . . . ,xn,so that we have hence to consider x1, . . . ,xn as independent of each other, whilez1, . . . ,zm are to be determined as functions of x1, . . . ,xn in such a way that the sys-tem be identically satisfied.
Our system of differential equations shall not at all be completely arbitrary, but itwill possess certain special properties. We want to assume that, in the form in whichit is presented, it satisfies the following conditions.
Firstly. If s is the order of the highest differential quotient occurring in the system,then by resolution of the equations of the system, all s-th order differential quotientsof z1, . . . ,zm with respect to x1, . . . ,xn are supposed to be expressible in terms of thedifferential quotients of the first order up to the (s−1)-th, and in terms of z1, . . . ,zm,x1, . . . ,xn. By contrast, it shall not be possible in this way to express all differentialquotients of order (s−1) in terms of those of lower order and in terms of z1, . . . ,zm,x1, . . . ,xn.
Secondly. By differentiating once the given system with respect to the individualvariables x1, . . . ,xn and by combining the obtained equations, it shall result onlyrelations between x1, . . . ,xn, z1, . . . ,zm and the differential quotients of order (s−1)which already follow from the given system.
We make these special assumptions about the form of the given system for rea-sons of convenience. Naturally, all subsequent considerations can be applied on thewhole to every system of partial differential equations which can, trough differenti-ations and elimination, be given the form just described.
According to the known theory of differential equations, it results without dif-ficulty that every system of differential equations which possesses the propertiesdiscussed just now is integrable and that the most general functions z1, . . . ,zm ofx1, . . . ,xn which satisfy the system depend only on a finite number of constants.
We want now to give somewhat different reasons to this proposition, by reducingthe discussed problem of integration to the problem of finding systems of equations
187

188 10 On Certain Higher-Order Systems of Partial Differential Equations
which admit a certain number of given infinitesimal transformations; on the basis ofthe developments of Chap. 7, we can indeed solve the latter problem straightaway.
On the other hand, we will also show that the mentioned proposition can beinverted: we will show that every system of equations:
zµ = Zµ(x1, . . . ,xn, a1, . . . ,ar) (µ =1 ···m)
which contains a finite number r of arbitrary parameters ak represents the mostgeneral system of solutions for a certain system of partial differential equations.
For us, this second proposition is the more important; we shall use it again in thenext chapter.
Therefore, it appears to be desirable to derive the two propositions in an indepen-dent way, without marching into the theory of total differential equations.
§ 47.
Let the number of differential quotients of order k of z1, . . . ,zm with respect tox1, . . . ,xn be denoted εk. For the differential quotients of order k themselves, weintroduce the notation p(k)i , where i has to run through the values 1,2, . . . ,εk; but wereserve us the right to write simply z1, . . . ,zm instead of p(0)1 , . . . , p(0)ε0 . Lastly, wealso set:
∂ p(k)i∂x j
= p(k)i j ,
so that p(k)i j hence denotes one of the εk+1 differential quotients of order (k+1).According to these settlements, we can write as follows:
(1)
W1(x, z, p(1), . . . , p(s−1)) = 0, . . . , Wq(x, z, p(1), . . . , p(s−1)) = 0
p(s−1)i j = Pi j(x, z, p(1), . . . , p(s−1)) (i=1 ···εs−1 ; j=1 ···n)
the system of differential equations to be studied.We assume here that the equations W1 = 0, . . . , Wq = 0 are independent of each
other. The nεs−1 equations p(s−1)i j = Pi j are independent of the W = 0, but they are
not of each other, because indeed the nεs−1 expressions p(s−1)i j do not represent only
distinct differential quotients of order s. However for what follows the above way ofwriting is more convenient than if we had written the system of equations (1) underthe form:
W1 = 0, . . . , Wq = 0, p(s)i = Pi(x, z, p(1), . . . , p(s−1)) (i=1 ···εs).
Now, by hypothesis, our system of equations (1) has the property that by differ-entiating it once with respect to the x, no new relation between the x, z, p(1), . . . ,p(s−1) is produced. All relations between the x, z, p(1), . . . , p(s−1) which come outby differentiating once (1) must hence be a consequence of W1 = 0, . . . , Wq = 0.

§ 47. 189
Obviously, we find the relations in question by differentiating (1) with respectto the n variables x1, . . . ,xn and afterwards, by taking away all differential quotientsof order (s+ 1), and by substituting all differential quotients of order s by meansof (1).
By differentiation of Wk = 0 and then by elimination of the differential quotientsof order s, we receive the equations:
∂Wk
∂xν+
m
∑i=1
p(0)iν∂Wk
∂ zi+
ε1
∑i=1
p(1)iν∂Wk
∂ p(1)i
+ · · ·+
+εs−2
∑i=1
p(s−2)iν
∂Wk
∂ p(s−2)i
+εs−1
∑i=1
Piν∂Wk
∂ p(s−1)i
= 0
(k=1 ···q ; ν =1 ···n).
By the above, these equations are a consequence of W1 = 0, . . . , Wq = 0. In otherwords: the system of equations W1 = 0, . . . , Wq = 0 in the variables x, z, p(1), . . . ,p(s−1) admits the n infinitesimal transformations:
(2)
Ων f =∂ f∂xν
+m
∑i=1
p(0)iν∂ f∂ zi
+ · · ·+
+εs−2
∑i=1
p(s−2)iν
∂ f
∂ p(s−2)i
+εs−1
∑i=1
Piν∂ f
∂ p(s−1)i
(ν =1 ···n).
in these variables (cf. Chap. 7, p. 124).If on the other hand, one differentiates the equations p(s−1)
i j = Pi j with respect toxν and then eliminates all differential quotients of order s, then one obtains:
∂∂xν
p(s−1)i j =
∂ 2
∂xν ∂x jp(s−1)
i = Ων(Pi j).
One has still to take away all the differential quotients of order (s+ 1) from theseequations. One easily realizes that only the following equations come out:
(3)Ων(Pi j)−Ω j(Piν) = 0(ν , j=1 ···n ; i=1 ···εs−1),
which likewise must hence be a consequence of W1 = 0, . . . , Wq = 0.With this, the properties of the system (1) demanded in the introduction are for-
mulated analytically.Now, we imagine that an arbitrary system of solutions:
z1 = ϕ1(x1, . . . ,xn), . . . , zm = ϕm(x1, . . . ,xn)

190 10 On Certain Higher-Order Systems of Partial Differential Equations
of the differential equations (1) is presented. By differentiating this system we obtainthat the p(1), . . . , p(s−1), p(s) are represented as functions of x1, . . . ,xn:
p(1)i1= ϕ(1)
i1(x1, . . . ,xn), . . . , p(s−1)
is−1= ϕ(s−1)
is−1(x1, . . . ,xn), p(s−1)
is−1,ν =∂ϕ(s−1)
is−1
∂xν
(ik =1,2 ···εk ; ν =1 ···n),
and when we insert these expressions, and the expressions for z1, . . . ,zm as well,inside the equations (1), we naturally receive nothing but identities. From this, itresults that the equations W1 = 0, . . . , Wq = 0 in their turn convert into identitiesafter the substitution:
(4)zµ = ϕµ(x1, . . . ,xn), p(1)i1
= ϕ(1)i1
(x1, . . . ,xn), . . . , p(s−1)is−1
= ϕ(s−1)is−1
(x1, . . . ,xn)
(µ =1 ···m ; ik =1 ···εk) ;
clearly, we can also express this as follows: the system of equations (4) embraces[UMFASST] the equations W1 = 0, . . . , Wq = 0.
Furthermore, we claim that the system of equations (4) admits the infinitesimaltransformations Ω1 f , . . . ,Ωn f discussed above.
Indeed at first, all the expressions:
Ων(zµ −ϕµ) = p(0)µν −∂ϕµ
∂xν,
Ων(p(1)i1−ϕ(1)
i1) = p(1)i,ν −
∂ϕ(1)i1
∂xν,
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·
Ων(
p(s−2)is−2
−ϕ(s−2)is−2
)= p(s−2)
is−2ν −∂ϕ(s−2)
is−2
∂xν
vanish by means of (4), since the equations (4) come from zµ −ϕµ = 0 by differen-tiation with respect to x1, . . . ,xn. But also the expressions:
Ων(
p(s−1)is−1
−ϕ(s−1)is−1
)= Pis−1ν −
∂ϕ(s−1)is−1
∂xν
vanish by means of (4), since the equations:
p(s−1)is−1ν = Pis−1ν
are, as already said above, identically satisfied after the substitution:
zµ = ϕµ , p(1)i1= ϕ(1)
i1, . . . , p(s−1)
is−1= ϕ(s−1)
is−1, p(s−1)
is−1ν =∂ϕ(s−1)
is−1
∂xν.

§ 47. 191
As a result, our claim stated above is proved.Conversely, imagine now that we are given a system of equations of the form (4)
about which moreover we do know neither whether it admits the infinitesimal trans-formations Ω1 f , . . . ,Ωn f , nor whether it embraces the equations W1 = 0, . . . , Wq =0.
Clearly, the equations (4) in question are all created by differentiating the equa-tions zµ = ϕµ with respect to x1, . . . ,xn. In addition, since under the made assump-tions, the equations:
Ων(
p(s−1)is−1
−ϕ(s−1)is−1
)= Pis−1ν −
∂ϕ(s−1)is−1
∂xν= 0
are a consequence of (4) and likewise, of the equations W1 = 0, . . . , Wq = 0, thenthe system of equations (1) will be identically satisfied when one executes the sub-
stitution (4) in it, and then sets also p(s−1)iν =
∂ϕ(s−1)i
∂xν. Consequently, the equations
zµ = ϕµ represent a system of solutions for the differential equations (1).From this, we see: every solution zµ = ϕµ of the differential equations (1) pro-
vides a completely determined system of equations of the form (4) which admitsthe infinitesimal transformations Ω1 f , . . . ,Ωn f and which embraces the equationsW1 = 0, . . . , Wq = 0; conversely, every system of equations of the form (4) whichpossesses the properties just indicated provides a completely determined systemof solutions for the differential equations (1). Consequently, the problem of deter-mining all systems of solutions of the differential equations (1) is equivalent to theproblem of determining all systems of equations of the form (4) which admit the in-finitesimal transformations Ω1 f , . . . ,Ωn f and which in addition embrace the equa-tions W1 = 0, . . . , Wq = 0. If one knows the most general solution for one of thesetwo problems, then at the same time, the most general solution of the other systemis given.
But we can solve this new problem on the basis of the developments of Chap. 7,p. 133 sq.
According to Chap. 7, Proposition 5, p. 5, every sought system of equations ad-mits, simultaneously with Ω1 f , . . . ,Ωn f , also all infinitesimal transformations ofthe form Ων
(Ω j( f )
)−Ω j
(Ων( f )
). By computation, one verifies that:
Ων(Ω j( f )
)−Ω j
(Ων( f )
)=
εs−1
∑i=1
Ων(Pi j)−Ω j(Piν)
∂ f
∂ p(s−1)i
(ν , j=1 ···n),
since the expressions:Ων(p(k)i j )−Ω j(p(k)iν )
all vanish identically, as long as k is smaller than s−1. But now, we have seen abovethat the equations (3):
Ων(Pi j)−Ω j(Piν) = 0

192 10 On Certain Higher-Order Systems of Partial Differential Equations
are a consequence of W1 = 0, . . . , Wq = 0. Consequently, for the systems of valuesx, z, p(1), . . . , p(s−1) of the system of equations W1 = 0, . . . , Wq = 0, there existrelations of the form:
Ων(Ω j( f )
)−Ω j
(Ων( f )
)=
n
∑τ=1
ων jτ(x, z, p(1), . . . , p(s−1)) ·Ωτ f (ν , j=1 ···n),
where the functions ων jτ are all equal to zero and behave regularly for the systemsof values of W1 = 0, . . . , Wq = 0.
In addition, it is still to be underlined that amongst the n×n determinants of thematrix: ∣∣∣∣∣∣∣
1 0 · · · 0 p(0)11 · · · p(s−2)εs−2,1
P11 · · · Pεs−1,1
· · · · · · · · · · · · · · · ·0 0 · · · 1 p(0)1n · · · p(s−2)
εs−2,n P1n · · · Pεs−1,n
∣∣∣∣∣∣∣ ,one has the value 1, and thus cannot be brought to zero for any of the sought systemsof equations.
From this, we see that we have in front of us the special case whose handlingwas given by Theorem 19 in Chap. 7, p. 146. With the help of this theorem, wecan actually set up all systems of equations which admit Ω1 f , . . . ,Ωn f and whichembrace the equations W1 = 0, . . . , Wq = 0. There is no difficulty to identify suchsystems of equations which can be given the form (4).
From one system of equations which admits the infinitesimal transformationsΩ1 f , . . . ,Ωn f , one can never derive a relation between the variables x1, . . . ,xn. Thisfollows from the mentioned theorem and also can easily be seen directly. As a result,it is possible to solve the equations W1 = 0, . . . , Wq = 0 with respect to q, amongstε0 + ε1 + · · ·+ εs−1, of the quantities z, p(1), . . . , p(s−1). When we do that, we re-ceive q of the ∑εk variables z, p(1), . . . , p(s−1) expressed by means of the ∑εk − qremaining ones and by means of x1, . . . ,xn.
Thanks to these preparations, we can form the reduced infinitesimal transforma-tions about which it is question in the mentioned theorem. We obtain them whenwe leave out all differential quotients of f with respect to the q considered variablesamongst z, p(1), . . . , p(s−1) and afterwards, by substituting, in the remaining terms,each one of the q variables with its expression by means of the ∑εk − q left onesand the x.
The so obtained n reduced infinitesimal transformations, which we can denoteby Ω 1 f , . . . ,Ω n f , contain n−q+∑ εk independent variables and stand in additionpairwise in the relationships:
Ω ν(Ω j( f )
)−Ω j
(Ω ν( f )
)≡ 0 (ν , j=1 ···n),
according to the mentioned theorem.Consequently, the n mutually independent equations Ω 1 f = 0, . . . , Ω n f = 0
form an n-term complete system with the ∑ εk − q independent solutions: u1, u2,. . . , u∑εk−q. If these solutions are determined, then one can indicate all systems ofequations which admit the infinitesimal transformations Ω1 f , . . . ,Ωn f and which

§ 47. 193
embrace the equations W1 = 0, . . . ,Wq = 0. The general form of a system of thiskind is: W1 = 0, . . . , Wq = 0 together with arbitrary relations between the ∑ εk − qsolutions u.
However now, the matter is not about all systems of equations of this kind, butonly about those which can be brought to the form (4). Every system of equationsof this constitution contains exactly ∑ εk equations, hence can be given the form:
(5) W1 = 0, . . . , Wq = 0, u1 = a1, . . . , u∑εk−q = a∑εk−q,
where the a denotes constants. But every system of the form just indicated can besolved with respect to the ∑ εk variables z, p(1), . . . , p(s−1), since it admits the in-finitesimal transformations Ω1 f , . . . , Ωn f . If we perform the resolution in question,we then obtain a system of equations:
(5’)
zµ = Zµ(x1, . . . ,xn, a1,a2, . . .), p(1)i1= Π (1)
i1(x1, . . . ,xn, a1,a2, . . .),
· · · p(s−1)is−1
= Πis−1(x1, . . . ,xn, a1,a2, . . .)
(µ =1 ···m ; ik =1 ···εk)
which satisfies all the stated requirements: it admits the infinitesimal transforma-tions Ω1 f , . . . ,Ωn f , it embraces the equations W1 = 0, . . . , Wq = 0, and it possessesthe form (4). At present, when we consider the ∑ εk − q constants a as arbitraryconstants, we therefore obviously have the most general system of equations of thedemanded constitution.
From this, it follows that according to what has been said, the equations:
(6) zµ = Zµ(x1, . . . ,xn, a1,a2, . . .) (µ =1 ···m)
represent a system of solutions for the differential equations (1) and in fact, themost general system of solutions. We now claim that in this system of solutions, the∑ εk −q arbitrary constants a are all essential.
To prove our claim, we remember that the equations (5’) can be obtained fromthe equations zµ = Zµ by differentiation with respect to x1, . . . ,xn, provided that thep(1), p(2), . . . are again interpreted as differential quotients of the z with respect tothe x. Now, if the ∑ εk −q parameters a in the equations (6) were not essential, thenthe number of parameters could be lowered by introducing appropriate functions ofthem. But with this, according to what precedes, the number of parameters in theequations (5’) would at the same time be lowered, and this is impossible, since theequations (5’) can be brought to the form (5), from which it follows immediately thatthe parameters a in (5’) are all essential. This is a contradiction, so the assumptionmade a short while ago is false and the parameters a in the equations (6) are allessential.
We can hence state the following proposition.
Proposition 1. If a system of partial differential equations of order s of the form:

194 10 On Certain Higher-Order Systems of Partial Differential Equations
Fσ
(x1, . . . ,xn, z1, . . . ,zm,
∂ z1
∂x1, . . . ,
∂ 2z1
∂x21, . . . ,
∂ szm
∂xsn
)= 0 (σ =1,2, ···)
possesses the property that all differential quotients of order s of the z with respectto the x can be expressed by means of the differential quotients of lower order, bymeans of z1, . . . ,zm and by means of x1, . . . ,xn, while the corresponding propertydoes not hold in any case for the differential quotients of order (s− 1), and if inaddition, by differentiating it once with respect to the x, the system produces onlyrelations between x1, . . . ,xn, z1, . . . ,zn and the differential quotients of the first orderup to the (s−1)-th which follow from the system itself, then the most general systemof solutions:
zµ = ϕµ(x1, . . . ,xn) (µ =1 ···m)
of the concerned system of differential equations contains only a finite number of ar-bitrary constants. The number of these arbitrary constants is equal to ε0+ε1+ · · ·+εs−1−q, where εk denotes the number of differential quotients of order k of z1, . . . ,zmwith respect to x1, . . . ,xn and where q is the number of independent relations whichthe system in question yields between x1, . . . ,xn, z1, . . . ,zn and the differential quo-tients up to order (s− 1). One finds the most general system of solutions zµ = ϕµitself by integrating an n-term complete system in n−q+ε0+ · · ·+εs−1 independentvariables.
For the proof of the above proposition, we imagined the equations W1 = 0, . . . ,Wq = 0 solved with respect to q of the quantities z, p(1), . . . , p(s−1). In principle, itis completely indifferent with respect to which amongst these quantities the equa-tions are solved; but now, since the equations W1 = 0, . . . , Wq = 0 are differentialequations and since the p(1), p(2), . . . denote differential quotients, it is advisable toundertake the concerned resolution in a specific way, which we want to now explain.
At first, we eliminate all differential quotients p(1), p(2), . . . , p(s−1) from theequations W1 = 0, . . . , Wq = 0; then we obtain, say, ν0 independent equations be-tween the x and z alone, and so we can represent ν0 of the z as functions of theε0 −ν0 = m−ν0 remaining ones, and of the x.
We insert the expressions for these ν0 quantities z in the equations W1 = 0, . . . ,Wq = 0, which now reduce to q− ν0 mutually independent equations. Afterwards,from these q−ν0 equations, we remove all the differential quotients p(2), . . . , p(s−1)
and we obtain, say ν1 mutually independent equations by means of which we canexpress ν1 of the quantities p(1) in terms of the ε1 −ν1 remaining ones, in terms ofthe ε0 −ν0 of the z and in terms of x1, . . . ,xn.
If we continue in the described way, then at the end, the system of equationsW1 = 0, . . . , Wq = 0 will be resolved, and to be precise, it will be resolved withrespect to νk amongst the εk differential quotients p(k), where it is understood that kis any of the numbers 0, 1, 2, . . . , s−1. Here, the concerned νk amongst the p(k) areeach time expressed in terms of the εk − νk remaining ones, in terms of certain ofthe differential quotients: p(k−1), . . . , p(1), p(0), and in terms of the x. Naturally, thesum ν0 +ν1 + · · ·+νs−1 has the value q. Lastly, it can be shown that νk is alwayssmaller than εk. Indeed at first, νs−1 is certainly smaller than εs−1, because we have

§ 48. 195
assumed that in our system of differential equations, not all differential quotients oforder (s−1) can be expressed in terms of those of lower order, and in terms of thex. But if any other numbers νk would be equal to εk, we would have:
p(k)i = Fi(x, z, p(1), . . . , p(k−1)) (i=1,2 ···εk) ;
now, since the system of equations W1 = 0, . . . , Wq = 0 admits the infinitesimaltransformations Ω1 f , . . . ,Ωn f , then all systems of equations:
p(k)iν = Ων(Fi) (i=1 ···εk ; ν =1 ···n)
would be consequences of W1 = 0, . . . , Wq = 0, so one would also have νk+1 = εk+1and in the same way νk+2 = εk+2, . . . , νs−1 = εs−1, and this is impossible accordingto what has been said.
Once we have resolved the equations W1 = 0, . . . , Wq = 0, then with this at thesame time, the system of differential equations (1) is resolved in a completely de-termined way, namely with respect to νk of the εk differential quotients of order k,where it is understood that k is any of the numbers 0, 1, 2, . . . , s. At each time, theνk differential quotients of order k are expressed in terms of the εk −νk remainingones of order k, in terms of those of lower order, and in terms of the x.
If one knows all the numbers εk and νk, then one can immediately indicate thenumber of arbitrary constants in the most general system of solutions of the dif-ferential equations (1). Indeed, according to the above proposition, this number isequal to:
ε0 + ε1 + · · ·+ εs−1 −q = (ε0 −ν0)+(ε1 −ν1)+ · · ·+(εs−1 −νs−1).
§ 48.
Conversely, consider a system of equations of the form:
(7)zµ = Zµ(x1, . . . ,xn, a1, . . . ,ar)
(µ =1 ···m),
in which x1, . . . ,xn are interpreted as independent variables, and a1, . . . ,ar as arbi-trary parameters. The r parameters a1, . . . ,ar whose number is finite can be assumedto be all essential.
We will prove that there is a system of partial differential equations which is freeof a1, . . . ,ar whose most general solution is represented by the equations (7).
By differentiating the equations (7) with respect to x1, . . . ,xn, we obtain the onesafter the others equations of the form:
(71) p(1)i = Z(1)i (x1, . . . ,xn, a1, . . . ,ar) (i=1 ···ε1)
(72) p(2)i = Z(2)i (x1, . . . ,xn, a1, . . . ,ar) (i=1 ···ε2),

196 10 On Certain Higher-Order Systems of Partial Differential Equations
and so on.Now, by means of the equations (7), a certain number, say ν0, of the a can be
expressed in terms of the r − µ0 remaining ones, and in terms of the x and the z.By taking together the equations (7) and (71), we can express µ0 + µ1 of the a interms of the r − µ0 − µ1 remaining ones, in terms of the p(1), the z and the x. Ingeneral, if we take the equations (7), (71), . . . , (7k) together, we can then expressµ0 + µ1 + · · ·+ µk of the quantities a in terms of the r − µ0 − ·· · − µk remainingones and in terms of the p(k), p(k−1), . . . , p(1), z, x. Here, µ0, µ1, . . . are entirelydetermined positive entire numbers.
Naturally, the sum µ0+µ1+ · · ·+µk is at most equal to r; furthermore, the num-ber µ0 is in any case different from zero, because we can assume that r is bigger thanzero. Consequently, there must exist a finite entire number s > 1 having the propertythat µ0, µ1, . . . , µs−1 are all different from zero, but the number µs vanishes. Thenif the said quantities amongst a1, . . . ,ar are determined from the equations (7), (71),. . . , (7s−1) and if their values are inserted in the equations (7s), then one obtainsonly equations which are free of a1, . . . ,ar; because on the contrary case, one coulddetermine more than µ0 + · · ·+µs−1 of the quantities a from the equations (7), (71),. . . , (7s), so one would have µs > 0, which is not the case according to the above.
As a result, by eliminating a1, . . . ,ar from the equations (7), (71), . . . , (7s), weobtain the following equations:
Firstly, εs equations which express all the εs differential quotients p(s) in termsof the p(s−1), . . . , p(1), z, x, and:
Secondly: yet ε0 −µ0 +ε1 −µ1 + · · ·+εs−1 −µs−1 mutually independent equa-tions between the x, z, p(1), . . . , p(s−1).
It is easy to see that the so obtained system of differential equations of order spossesses all properties which were ascribed in Proposition 1, p. 193 to the differ-ential equations Fσ
(x, z, ∂ z
∂x , . . .).
Indeed, all εs differential quotients of order s are functions of the differentialquotients of lower order, and of the x; however, the corresponding property does nothold true for the differential quotients of order (s− 1), because the number µs−1discussed above is indeed different from zero. Lastly, by differentiation with respectto the x and by combination of the obtained equations, it results only relations be-tween the x, z, p(1), . . . , p(s−1) which follow from the above-mentioned relations.Indeed, the equations (7), (71), . . . , (7s−1) and the ones which follow from themare the only finite relations through which the quantities a1, . . . ,ar, x, z, p(1), . . . ,p(s−1) are linked; hence when we eliminate the a, we obtain the only finite relationswhich exist between the x, z, p(1), . . . , p(s−1), namely the ε0−µ0+ · · ·+εs−1−µs−1relations mentioned above.
The Proposition 1 p. 193 can therefore easily be applied to our system of differ-ential equations of order s. The numbers νk defined at that time are equal to εk −µk,and the number q has hence in the present case the value:
ε0 −µ0 + · · ·+ εs−1 −µs−1,

§ 48. 197
and therefore the most general system of solutions of our differential equations con-tains precisely µ0+µ1+ · · ·+µs−1 arbitrary constants. Now, since on the other handthe equations (7) also represent a system of solutions for our differential equations,and a system with the r essential parameters a1, . . . ,ar as arbitrary constants, it fol-lows that the number µ0 + · · ·+µs−1, which is at most equal to r, must precisely beequal to r. In other words: the equations (7) represent the most general system ofsolutions of our differential equations.
As a result, we have the
Proposition 2. If z1, . . . ,zm are given functions of the variables x1, . . . ,xn and of afinite number of parameters a1, . . . ,ar:
zµ = Zµ(x1, . . . ,xn, a1, . . . ,ar) (µ =1 ···m),
then there always exists an integrable system of partial differential equations whichdetermines the z as functions of the x, and whose most general solutions are repre-sented by the equations zµ = Zµ(x, a).
If we relate this proposition with the Proposition 1 p. 193, we immediately obtainthe
Proposition 3. If an integrable system of partial differential equations:
Fσ
(x1, . . . ,xn, z1, . . . ,zm,
∂ z1
∂x1, . . . ,
∂ 2z1
∂x21, . . .
)= 0 (σ =1,2 ···)
is constituted in such a way that its most general solutions depend only on a finitenumber of arbitrary constants, then by means of differentiation and of elimination,it can always be brought to a form which possesses the following two properties:firstly, all differential quotients of a certain order, say s, can be expressed in terms ofthose of lower order, and in terms of z1, . . . ,zm, x1, . . . ,xn, whereas the correspondingproperty does not, in any case, hold true for all differential quotients of order (s−1). Secondly, by differentiating once with respect to the x, it only comes relationsbetween the x, z and the differential quotients of orders 1 up to (s−1) which followfrom the already extant equations.
Besides, the developments of the present § provide a simple method to answerthe question of how many parameters a1, . . . ,ar are essential amongst the ones of agiven system of equations:
zµ = Zµ(x1, . . . ,xn, a1, . . . ,ar) (µ =1 ···m).
Indeed, in order to be able to answer this question, we only need to compute theentire numbers µ0, µ1, . . . , µs−1 defined above; the sum µ0 + µ1 + · · ·+ µs−1 thenidentifies the number of essential parameters amongst a1, . . . ,ar, because the equa-tions zµ = Zµ(x,a) represent the most general solutions of a system of differential

198 10 On Certain Higher-Order Systems of Partial Differential Equations
equations the most general solutions of which, according to the above developments,contain precisely µ0 + · · ·+µs−1 essential parameters.
—————–

Chapter 11The Defining Equationsfor the Infinitesimal Transformations of a Group
In Chap. 9, we have reduced the finding of all r-term groups to the determinationof all systems of r independent infinitesimal transformations X1 f , . . . ,Xr f whichsatisfy relations of the form:
XiXk f −XkXi f = [Xi, Xk] =r
∑s=1
ciks Xs f ,
with certain constants ciks. Only later will we find means of treating this reducedproblem; temporarily, we must restrict ourselves to admitting systems X1 f , . . . ,Xr fof the concerned nature and to study their properties.
In the present chapter we begin with an application of the developments of thepreceding chapter; from this chapter, we conclude that the general infinitesimaltransformation:
e1 X1 f + · · ·+ er Xr f
of a given r-term group X1 f , . . . ,Xr f can be defined by means of certain linear partialdifferential equations, which we call the defining equations of the group. From that,further conclusions will then be drawn†.
§ 49.
Consider r infinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
which generate an r-term group. Then the general infinitesimal transformation ofthis group has the form:
† LIE, Archiv for Mathematik og Naturvidenskab Vol. 3, Christiania 1878 and Vol. 8, 1883;Gesellschaft der Wissenschaften zu Christiania 1883, No. 12.
199

200 11 The Defining Equations of a Group
n
∑i=1
ξi∂ f∂xi
=n
∑i=1
r
∑k=1
ek ξki∂ f∂xi
,
where the ek denote arbitrary constants. For the ξi, it comes from this the expres-sions:
(1) ξi =r
∑k=1
ek ξki(x) (i=1 ···n),
in which the ξki(x) are given functions of x1, . . . ,xn.Now, according to Proposition 2 of the preceding chapter, the expressions
ξ1, . . . ,ξn just written are the most general system of solutions of a certain systemof partial differential equations which is free of the arbitrary constants e1, . . . ,er.In order to set up this system, we proceed as in the introduction to § 48; wedifferentiate the equations (1) with respect to every variable x1, . . . ,xn, next wedifferentiate in the same way the obtained equations with respect to x1, . . . ,xn, andso on. Then when we have computed all differential quotients of the ξ up to acertain order (considered in more details in § 48), we take away from the foundequations the arbitrary constants e1, . . . ,er and we receive in this way the desiredsystem of differential equations, the most general solutions of which are just theexpressions ξ1, . . . ,ξn.
We can always arrange that all equations of the discussed system in the ξi and intheir differential quotients are linear homogeneous; indeed, from any two systemsof solutions:
ξkν , ξ jν (ν =1 ···n),
one can always derive another system of solutions ekξkν + e jξ jν of the concerneddifferential equations with two arbitrary constants ek and e j.
The system of the differential equations which define ξ1, . . . ,ξn therefore has theform:
n
∑ν=1
Aµν(x1, . . . ,xn)ξν +1···n
∑ν , π
Bµνπ(x1, . . . ,xn)∂ξν∂xπ
+ · · ·= 0,
where the A, B, . . . , are free of the arbitrary constants e1, . . . ,er.We briefly [KURTZWEG] call these differential equations the defining equations
of the group, since they completely define the totality of all infinitesimal transforma-tions of this group and therefore, they define the group itself.
What has been said can be illustrated precisely at this place by means of a coupleof examples.
In the general infinitesimal transformation:
ξ1∂ f∂x1
+ξ2∂ f∂x2
of the six-term linear group:

§ 50. 201
x′1 = a1 x1 +a2 x2 +a3
x′2 = a4 x1 +a5 x2 +a6,
ξ1 and ξ2 have the form:
ξ1 = e1 + e2 x1 + e3 x2, ξ2 = e4 + e5 x1 + e6 x2.
From this, it comes that the defining equations of the group are the following:
∂ 2ξ1
∂x21= 0,
∂ 2ξ1
∂x1∂x2= 0,
∂ 2ξ1
∂x22= 0,
∂ 2ξ2
∂x21= 0,
∂ 2ξ2
∂x1∂x2= 0,
∂ 2ξ2
∂x22= 0.
The known eight-term group:
x′1 =a1 x1 +a2 x2 +a3
a7 x1 +a8 x2 +1, x′2 =
a4 x1 +a5 x2 +a6
a7 x1 +a8 x2 +1
of all projective transformations of the plane serves as a second example. Its generalinfinitesimal transformation:
ξ1 = e1 + e2 x1 + e3 x2 + e7 x21 + e8 x1x2
ξ2 = e4 + e5 x1 + e6 x1 + e7 x1x2 + e8 x22
will be defined by means of relations between the differential quotients of secondorder of the ξ , namely by means of:
∂ 2ξ1
∂x21−2
∂ 2ξ2
∂x1∂x2= 0,
∂ 2ξ2
∂x22−2
∂ 2ξ1
∂x1∂x2= 0,
∂ 2ξ1
∂x22= 0,
∂ 2ξ2
∂x21= 0.
By renewed differentiation, one finds that all third-order differential quotients of ξ1and of ξ2 vanish.
§ 50.
Conversely, when does a system of linear homogeneous differential equations:
n
∑ν=1
Aµν(x)ξν +1···n
∑ν , π
Bµνπ(x)∂ξν∂xπ
+ · · ·= 0 (µ =1,2 ···)
define the general infinitesimal transformation of a finite continuous group?Naturally, the first condition is that the most general solutions ξ1, . . . ,ξn of the
system depend only on a finite number of arbitrary constants. Let this conditionbe fulfilled. Then according to Proposition 3, p. 197 of the preceding chapter, it isalways possible, by differentiation and elimination, to bring the system to a cer-tain specific form in which all differential quotients of the highest, say the s-th,

202 11 The Defining Equations of a Group
order can be expressed in terms of those of lower order, and in terms of x1, . . . ,xn,whereas the corresponding property does not, in any case, hold true for all differ-ential quotients of order (s− 1); in addition, differentiating yet once with respectto the x produces no new relation between x1, . . . ,xn, ξ1, . . . ,ξn and the differentialquotients of first order up to the (s−1)-th. We assume that the system has receivedthis form and we imagine that it has been solved in the way indicated on p. 194;then for k = 0,1, . . . ,s, we obtain at each time that a certain number of differentialquotients, say νk, amongst the εk of the k-th order differential quotients of the ξ , arerepresented as linear homogeneous functions of the remaining differential quotientsof k-th order, and of certain differential quotients of (k−1)-th, . . . , first, zeroth or-der, with coefficients which depend only upon x1, . . . ,xn, where νs = εs, but else, νkis always smaller than εk.
As was shown in the preceding chapter, p. 195, under the assumptions made, themost general system of solutions ξ1, . . . ,ξn of our differential equations comprisesprecisely:
(ε0 −ν0)+(ε1 −ν1)+ · · ·+(εs−1 −νs−1) = r
arbitrary constants; this most general system of solutions can be deduced from rparticular systems of solutions ξ1i, . . . ,ξri with the help of r constants of integrationas follows:
ξi =r
∑k=1
ek ξki (i=1 ···n),
and here, the particular systems of solutions in question must only be such that ther expressions:
n
∑i=1
ξ1i∂ f∂xi
, . . . ,n
∑i=1
ξri∂ f∂xi
represent as many independent infinitesimal transformations.Now according to Theorem 24 p. 173, for ξ1
∂ f∂x1
+ · · ·+ξn∂ f∂xn
to be the generalinfinitesimal transformation of an r-term group, a certain condition is necessary andsufficient, namely: when ξk1, . . . ,ξkn and ξ j1, . . . ,ξ jn are two particular systems ofsolutions, then the expression:
n
∑ν=1
(ξkν
∂ξ ji
∂xν−ξ jν
∂ξki
∂xν
)(i=1 ···n)
must always represent a system of solutions. As a result, we have the
Theorem 28. If ξ1, . . . ,ξn, as functions of x1, . . . ,xn, are determined by certain lin-ear and homogeneous partial differential equations:
n
∑ν=1
Aµν(x)ξν +1···n
∑ν , π
Bµνπ(x)∂ξν∂xπ
+ · · ·= 0 (µ =1,2 ···),
then the expression ξ1∂ f∂x1
+ · · ·+ξn∂ f∂xn
represents the general infinitesimal transfor-mation of a finite continuous group if and only if: firstly the most general system of

§ 51. 203
solutions of these differential equations depends only on a finite number of arbitraryconstants, and secondly from any two particular systems of solutions ξk1, . . . ,ξknand ξ j1, . . . ,ξ jn, by the formation of the expression:
n
∑ν=1
(ξkν
∂ξ ji
∂xν−ξ jν
∂ξki
∂xν
)(i=1 ···n),
one always obtains a new system of solutions.
If ξ1∂ f∂x1
+ · · ·+ξn∂ f∂xn
really is the general infinitesimal transformation of a finitegroup, then naturally, the above differential equations are the defining equations ofthis group.
If the defining equations of a finite group are given, the numbers ν0, ν1, . . . , νs−1discussed earlier on can be determined by differentiation and by elimination; thenumber:
r = (ε0 −ν0)+(ε1 −ν1)+ · · ·+(εs−1 −νs−1)
indicates how many parameters the group contains.In the first one of the two former examples, one has:
s = 2, ν0 = 0, ν1 = 0, ε0 = 2, ε1 = 4,
and therefore r = 6. In the second example, one has:
s = 3, ν0 = 0, ν1 = 0, ν2 = 4, ε0 = 2, ε1 = 4, ε2 = 6,
whence r = 8.
§ 51.
Now, let again:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
be independent infinitesimal transformations of an r-term group. We imagine thatthe defining equations of this group are set up and are brought to the form discussedabove, hence resolved with respect to νk of the εk differential quotients of order k ofthe ξ (k = 0,1, . . . ,s); here, as said earlier on, νk is always < εk, except in the casek = s, in which νs = εs.
The coefficients in the resolved defining equations are visibly rational functionsof the ξ together with their differential quotients of first order, up to th s-th. Now,since as a matter of principle (cf. p. 187), we restrict ourselves to systems of val-ues x1, . . . ,xn for which all ξki behave regularly, then the meant coefficients will ingeneral behave regularly too for the systems of values x1, . . . ,xn coming into con-sideration, but obviously only in general: there can well exist points x1, . . . ,xn inwhich all ξki indeed behave regularly, but in which not all coefficients of the solved

204 11 The Defining Equations of a Group
defining equations do so. In what follows, one must everywhere pay heed to thisdistinction between the different points x1, . . . ,xn.
Let x01, . . . ,x
0n be a point for which all coefficients in the solved defining equa-
tions behave regularly; then ξ1, . . . ,ξn are, in a certain neighbourhood of x01, . . . ,x
0n,
ordinary power series with respect to the xk − x0k :
ξi = g0i +
n
∑ν=1
g′iν (xν − x0ν)+
1···n
∑ν , π
g′′iνπ (xν − x0ν)(xπ − x0
π)+ · · · ,
where, always, the terms of the same order are thought to be combined together.Here, the coefficients g0, g′, . . . must be determined in such a way that the givendifferential equations are identically satisfied after insertion of the power series ex-pansions for ξ1, . . . ,ξn.
If we now remember that our group is r-term, then we immediately realize that onthe whole, r of the coefficients g0, g′, . . . remain undetermined, hence that certainamongst the initial values which the ξ and its differential quotients take for x1 = x0
1,. . . , xn = x0
n, can be chosen arbitrarily. Now, since our differential equations showthat all differential quotients of order s and of higher order can be expressed in termsof the differential quotients of orders zero up to (s−1), and in terms of x1, . . . ,xn, itfollows that exactly r amongst the initial values g0, g′, g′′, . . . , g(s−1) can be chosearbitrarily, or, what amounts to the same: the ε0 + ε1 + · · ·+ εs−1 mentioned initialvalues must be linked together by certain ∑ εk −r independent relations. At present,we want to set up these relations.
Our system of differential equations produces all relations which exist, at anarbitrary x, between the ξ and their differential quotients of first order up to the (s−1)-th. Hence, when we make the substitution xi = x0
i in our differential equations,we obtain certain relationships by which the initial values g0, g′, . . . , g(s−1) arelinked together. In this manner, it results ν0 linear homogeneous relations betweenthe g0 alone, furthermore ν1 relations between the g′ and certain g0, and in generalνk relations between the g(k) and certain g(k−1), . . . , g′, g0. The relations in questionare resolved, and to be precise, they are resolved with respect to ν0 of the g0, withrespect to ν1 of the g′, and so on, and in total, there are ∑ νk = ∑ εk − r independentrelations. Now, since according to what has been said, there do not exist more than∑ εk − r independent relations between g0, g′, . . . , g(s−1), we therefore have foundall relations by means of which these ∑ εk initial values are linked together; at thesame time, we obtain ν0 + · · ·+ νs−1 of the quantities g0, . . . ,gs−1 represented aslinear homogeneous functions of the ∑(εk − νk) = r remaining ones, which stayentirely arbitrary.
We use the preceding observations in order to draw conclusions from them aboutthe constitution of the particular system of solutions to our differential equations.
At first, it can be shown that there does not exist a particular system of solutionsξ1, . . . ,ξn whose power series expansion with respect to the xi−x0
i begins with termsof order s or yet higher order. Indeed, in the power series expansion of such a systemof solutions, the coefficients g0, g′, . . . , g(s−1) would all be equal to zero, so all g(s),

§ 51. 205
g(s+1), . . . would also vanish and the system of solutions would therefore reduce to:ξ1 = 0, . . . , ξn = 0. This system of solutions certainly satisfies the given differentialequations, but alone it does not deliver us any infinitesimal transformation of ourgroup, and is therefore useless.
But for that, there is a certain number of particular systems of solutions ξ1, . . . ,ξnwhose power series expansions begin with terms of order lower than the s-th, letus say with terms of k-th order. The coefficients g0, g′, . . . , g(k−1) can then all bechosen equal to zero; so the existing relations between these are all satisfied, and ityet remains only νk relations between the g(k), νk+1 relations between the g(k+1) andcertain g(k), . . . , and lastly, νs−1 relations between the g(s−1) and certain g(s−2), . . . ,g(k). As a result, there are in sum still (εk −νk)+ · · ·+(εs−1−νs−1) of the constantsg(k), . . . , g(s−1) which can be chosen arbitrarily, and when one disposes of theseconstants in such a way that not all the εk quantities g(k) vanish, then one alwaysobtains a particular system of solutions ξ1, . . . ,ξn whose power series expansionswith respect to the xi − x0
i contain terms of the k-th order, but no terms of lowerorder.
If ξ1, . . . ,ξn is a particular system of solutions of our differential equations, thenthe infinitesimal transformation:
ξ1∂ f∂x1
+ · · ·+ξn∂ f∂xn
belongs to our group. From what has been said above, it results that this groupalways contains infinitesimal transformations whose power series expansion withrespect to the xi − x0
i begins with terms of order k, only as soon as k is one of thenumbers 0, 1, 2, . . . , s−1. By contrast, there are no infinitesimal transformations inthe group whose power series expansions begin with terms of order s or of higherorder. Naturally, all of this is proved only under the assumption that the coefficientsof the resolved differential equations behave regularly in the point x0
1, . . . ,x0n.
In order to meet, at least up to some extent, the requirements for conciseness ofthe expression, we want henceforth to say: an infinitesimal transformation is of thek-th order in the xi − x0
i when its power series expansion with respect to the xi − x0i
begins with terms of order k. Then we can enunciate the preceding result as follows:If x0
1, . . . ,x0n is a point for which the coefficients in the resolved defining equations
of the group X1 f , . . . ,Xr f behave regularly, then the group contains certain infinites-imal transformations of zeroth order in the xi − x0
i , certain of the first order, and ingeneral, certain of the k-th order, where k means one arbitrary number amongst 0,1, . . . , s−1; by contrast, the group contains no infinitesimal transformation of orders or of higher order in the xi − x0
i .It is clear that two infinitesimal transformations of different orders in the xi − x0
iare always independent of each other. Actually, for the examination whether severalgiven infinitesimal transformations are independent of each other or not, the consid-eration of the terms of lowest order in their power series expansions already settlesthe question many times; indeed, if the terms of lowest order, taken for themselves,determine independent infinitesimal transformations, then the given infinitesimaltransformations are also independent of each other.

206 11 The Defining Equations of a Group
The general expression of an infinitesimal transformation which belongs to ourgroup and which is of order k with respect to the xi −x0
i contains, as we know, (εk −νk)+ · · ·+(εs−1 −νs−1) = ρk arbitrary and essential constants, namely the εk −νkwhich can be chosen arbitrarily amongst the g(k), the εk+1 −νk+1 arbitrary amongstthe g(k+1), and so on; however here, the arbitrariness of these εk −νk quantities g(k)
is restricted inasmuch as not all g(k) are allowed to vanish simultaneously. Fromthis, it follows that ρk independent infinitesimal transformations of our group canbe exhibited which are of order k in the xi − x0
i ; but it is easy to see that fromthese ρk infinitesimal transformations, one can derive in total ρk+1 independent oneswhich are of the (k + 1)-th order, or yet of higher order. The general expressionof an infinitesimal transformation which is linearly deduced from these ρk onesindeed contains exactly the same arbitrary constants as the general expression of aninfinitesimal transformation of order k in the xi − x0
i , with the only difference thatin the first expression, all the εk −νk available g(k) can be set equal to zero, whichgives always an infinitesimal transformation of order (k + 1) or of higher order.Consequently, amongst these ρk infinitesimal transformations of order k, there areonly ρk+1 −ρk = εk −νk which are independent of each other and out of which noinfinitesimal transformation of (k+1)-th order or of higher order in the xi − x0
i canbe linearly deduced.
We recapitulate the present result in the
Theorem 29. To every r-term group X1 f , . . . ,Xr f in n variables x1, . . . ,xn is asso-ciated a completely determined entire number s > 1 of such a nature that, in theneighbourhood of a point x0
i for which the coefficients of the resolved defining equa-tions behave regularly, the group contains certain infinitesimal transformations ofzeroth, of first, . . . , of (s−1)-th order in the xi −x0
i , but none of s-th or of higher or-der. In particular, one can always select r independent infinitesimal transformationsof the group such that, for each one of the s values 0, 1, . . . , s− 1 of the numberk, exactly εk − νk mutually independent infinitesimal transformations of order k inthe xi − x0
i are extant out of which no infinitesimal transformation of order (k+ 1)or of higher order can be linearly deduced. At the same time, the number νk can bedetermined from the defining equations for the general infinitesimal transformationξ1
∂ f∂x1
+ · · ·+ξn∂ f∂xn
of the group, and from εk, which denotes the number of all dif-ferential quotients of order k of the ξ1, . . . ,ξn with respect to x1, . . . ,xn and is alwayslarger than νk.
Example. Earlier on, we have already mentioned the equations:
∂ 2ξ1
∂x21=
∂ 2ξ1
∂x1∂x2=
∂ 2ξ1
∂x22=
∂ 2ξ2
∂x21=
∂ 2ξ2
∂x1∂x2=
∂ 2ξ2
∂x22= 0
as the defining equations of the six-term linear group:
x′1 = a1 x1 +a2 x2 +a3, x′2 = a4 x1 +a5 x2 +a6.
These defining equations are already presented under the resolved form; all theappearing coefficients are equal to zero, hence they behave regularly. Amongst the

§ 51. 207
infinitesimal transformations of the group, we can select the following six mutuallyindependent ones:
∂ f∂x1
,∂ f∂x2
, (x1 − x01)
∂ f∂x1
, (x2 − x02)
∂ f∂x1
, (x1 − x01)
∂ f∂x2
, (x2 − x02)
∂ f∂x2
;
the first two of them are of zeroth order, and the last four are of first order in thexi − x0
i .
For the calculations with infinitesimal transformations, the expressions of theform:
X(Y ( f )
)−Y(X( f )
)= [X , Y ]
play an important rôle. So if X f and Y f are expanded in the neighbourhood of thepoint x0
i with respect to the power of the xi−x0i , the related question is how does the
transformation [X , Y ] behave in this point.Let the power series expansion of X f begin with terms of order µ , let that of Y f
begin with terms of order ν , that is to say, let:
X f =n
∑k=1
(ξ (µ)k + · · ·) ∂ f
∂xk, Y f =
n
∑j=1
(η(ν)j + · · ·) ∂ f
∂x j,
where the ξ (µ) and the η(ν) denote homogeneous functions of order µ and of orderν , respectively, in the xi − x0
i , while the terms of higher order in the xi − x0i are left
out. Under these assumptions, the power series expansion for [X , Y ] is, if one onlyconsiders terms of the lowest order, the following:
[X , Y ] =n
∑j=1
n
∑k=1
(ξ (µ)
k
∂η(ν)j
∂xk−η(ν)
k
∂ξ (µ)j
∂xk
)+ · · ·
∂ f∂x j
.
So the terms of lowest order in [X , Y ] are of order µ +ν −1 and they stem solelyand only from the terms of orders µ and ν in X f and in Y f , respectively.
Theorem 30. If X f and Y f are two infinitesimal transformations whose power se-ries expansions with respect to the powers of x1 − x0
1, . . . , xn − x0n begin with terms
of orders µ and ν , respectively, then the power series expansion of the infinitesimaltransformation XY f −Y X f = [X , Y ] begins with terms of order (µ +ν −1) whichare entirely determined by the terms of orders µ and ν in X f and in Y f , respectively.If these terms of order (µ + ν − 1) vanish, then about the power series expansionof [X , Y ], it can only be said that it starts with terms of order (µ +ν), or of higherorder.
If the two numbers µ and ν are larger than one, then the number µ + ν − 1 islarger than both of them. This remark is often of great utility for the calculationswith infinitesimal transformations of various orders.
For the derivation of the Theorem 30, it is not at all assumed that the two in-finitesimal transformations X f and Y f belong to a group; the only assumption isthat both X f and Y f can be expanded in powers of xk − x0
k .

208 11 The Defining Equations of a Group
§ 52.
Let the defining equations of an r-term group be given in the form discussed ear-lier on, hence resolved with respect to νk of the εk differential quotients of order kof ξ1, . . . ,ξn. Moreover, let x0
i be a point in which the coefficients of the resolveddefining equations behave regularly.
Under these assumptions, we can expand the infinitesimal transformations ofour group in ordinary power series of the xi − x0
i . We even know that our groupcontains a completely determined number of independent infinitesimal transforma-tions, namely ε0 −ν0, which are of zeroth order in the xi − x0
i and out of which noinfinitesimal transformation of first order or of higher order can be linearly deduced;moreover, the group contains a completely determined number of independent in-finitesimal transformations, namely ε1 −ν1, of first order in the xi −x0
i out of whichnone of second order or of higher order can be linearly deduced, and so on.
Shortly, our group associates to every point of the indicated nature a series of sentire numbers ε0 − ν0, ε1 − ν1, . . . , εs−1 − νs−1 and these entire numbers are thesame for all points of this kind.
Now, there can also be points xi in special position, hence points in the neigh-bourhood of which the coefficients of the resolved defining equations do not behaveregularly anymore, while by contrast, all infinitesimal transformations of the groupcan be expanded in ordinary power series in the xi − xi. If x1, . . . ,xn is a determinedpoint of this sort, then naturally, there is in our group a completely determined num-ber of infinitesimal transformations of zeroth order in the xi − xi out of which noinfinitesimal transformation of higher order can be linearly deduced, and so on.
Consequently, our group also associates to every point in special position a deter-mined, obviously finite series of entire numbers; frequently, to two different pointsin special position there will be associated two also different series of entire num-bers.
An example will best make clear the matter.The defining equations of the two-term group ∂ f
∂x1, x2
2∂ f∂x1
read in the resolvedform:
ξ2 = 0,∂ξ1
∂x1=− ∂ξ2
∂x1=
∂ξ2
∂x2,= 0
∂ 2ξ1
∂x21=
∂ 2ξ1
∂x1∂x2= 0,
∂ 2ξ1
∂x22=
1x2
∂ξ1
∂x2,
∂ 2ξ2
∂x21=
∂ 2ξ2
∂x1∂x2=
∂ 2ξ2
∂x22= 0.
The coefficients appearing here behave regularly for all points x1,x2 located inthe finite, except only for the points of the line x2 = 0.
At first, let us consider a point x01, x0
2 with nonvanishing x02. We have s = 2, and
moreover ε0 = 2, ε1 = 4, ν0 = 1, ν1 = 3, hence to the point x01,x
02 are associated
the two numbers 1,1. All infinitesimal transformations of the group can be linearlydeduced from the two:

§ 52. 209
∂ f∂x1
,(
x2 − x02 +
12x0
(x2 − x02)
2) ∂ f
∂x1
amongst which the first is of zeroth order in the xi−x0i , and the second of first order.
Next, let us consider a point x1,x2 = 0.To such a point, the group associates the three numbers 1,0,1, since amongst its
infinitesimal transformations there are none of first order in the xi − xi, but one ofsecond order, hence of s-th order, namely: x2
2∂ f∂x1
. —If x0
1, . . . ,x0n is a point for which the coefficients of the resolved defining equa-
tions behave regularly, then according to Theorem 29, the group certainly containsinfinitesimal transformations of zeroth, of first, . . . , of (s−1)-th orders in the xi−x0
i ,but none of s-th or of higher order. Now, our example discussed just now shows thatfor a point xi in which not all the coefficients in question behave regularly, no generalstatement of this kind holds anymore: the group can very well contain infinitesimaltransformations of s-th order in the xi − xi, and perhaps also some of higher order;on the other hand, it can occur that for one number k < s, the group actually containsno infinitesimal transformation of k-th order in the xi − xi.
If x01, . . . ,x
0n denotes an arbitrary point in which all the ξ behave regularly, then
as already said, the infinitesimal transformations of our group can be classified ac-cording to their orders in the xi − x0
i . It is of great importance that this classificationstays obtained when in place of the x, new variables y1, . . . ,yn are introduced. Ofcourse, the concerned change of variables must, in the neighbourhood of the placex0
1, . . . ,x0n, possess the following properties: y1, . . . ,yn must firstly be ordinary power
series in the xi − x0i :
(2) yk = y0k +
n
∑i=1
aki (xi − x0i )+ · · · (k=1 ···n) ;
and secondly, x1, . . . ,xn must also be representable as ordinary power series in theyk − y0
k and in fact, so that every xi for y1 = y01, . . . , yn = y0
n must take the value x0i .
If the first one of these two requirements is satisfied, it is known that the second oneis then always satisfied, when the determinant ∑ ±a11 · · ·ann is different from zero.
Now, in order to prove that the discussed classification stays obtained after thetransition to the variables y1, . . . ,yn, we need only to show that every infinitesimaltransformation of µ-th order in the xi − x0
i converts, by the introduction of the newvariables yk − y0
k , into an infinitesimal transformation of µ-th order in the yk − y0k .
But this is not difficult.The general form of an infinitesimal transformation of the µ-th order in the xi−x0
iis:
X f =n
∑j=1
(ξ (µ)j + · · ·) ∂ f
∂x j;

210 11 The Defining Equations of a Group
here, ξ (µ)1 , . . . ,ξ (µ)
n denote entire rational functions1 which are homogeneous of or-der µ and do not all vanish; the terms of orders (µ +1) and higher are left out.
By the introduction of y1, . . . ,yn it comes:
X f =n
∑k=1
Xyk∂ f∂yk
;
here at first, the Xyk are ordinary power series in the xi − x0i :
Xyk =n
∑j=1
ak j ξ (µ)j + · · ·
and they begin with terms of order µ . These terms of order µ do not all vanish, sinceotherwise one would have:
n
∑j=1
ak j ξ (µ)j = 0 (k=1 ···n),
which is impossible, because the determinant ∑ ±a11 · · ·ann is different from zero,and because ξ (µ)
1 , . . . ,ξ (µ)n do not all vanish. Now, if in Xy1, . . . ,Xyn we express the
xi in terms of the yi, we obtains n ordinary power series in the yi − y0i . These power
series likewise begin with terms of order µ which do not all vanish. Indeed, oneobtains the terms of order µ in question by substituting, in the n expressions:
n
∑j=1
ak j ξ (µ)j (k=1 ···n),
the x for the y by means of the equations:
yk = y0k +
n
∑i=1
aki (xi − x0i ) (k=1 ···n) ;
but since the n shown expressions do not all vanish, then they also do not all vanishafter introduction of the y.
Consequently, the infinitesimal transformation X f is transferred, by the introduc-tion of the y, to an infinitesimal transformation which is of order µ in the yi − y0
i .But this was to be shown.
As a result, we have the
Proposition 1. If, in an infinitesimal transformation X f which is of order µ in x1 −x0
1, . . . , xn − x0n, one introduces new variables:
1 GANZE RATIONALE FUNCTIONEN, that is to say, polynomials.

§ 53. 211
yk = y0k +
n
∑i=1
aki(xi − x0i )+
1···n
∑i, j
aki j (xi − x0i )(x j − x0
j)+ · · ·
(k=1 ···n),
where the determinant ∑ ±a11 · · ·ann is different from zero, then X f converts intoan infinitesimal transformation of order µ in y1 − y0
1, . . . , yn − y0n.
From this, it immediately follows the somewhat more specific
Proposition 2. If, in the neighbourhood of the point x01, . . . ,x
0n, an r-term group con-
tains exactly τµ independent infinitesimal transformations of order µ in the xi − x0i
out of which none of higher order can be linearly deduced, and if new variables:
yk = y0k +
n
∑i=1
aki(xi − x0i )+ · · · (k=1 ···n),
are introduced in this group, where the determinant ∑ ±a11 · · ·ann is different fromzero, then in turn in the neighbourhood of the point y0
k , the new group which onefinds in this way contains exactly τµ independent infinitesimal transformations oforder µ in the yk − y0
k out of which none of higher order can be linearly deduced.
One therefore sees: the series of entire numbers which the initial group associatesto the point x0
1, . . . ,x0n is identical to the series of entire numbers which the new
groups associates to the point y01, . . . ,y
0n.
§ 53.
If one knows the defining equations of an r-term group and if one has resolved themin the way discussed earlier on, then as we have seen, one can immediately identifythe numbers εk − νk defined above. For every point x0
1, . . . ,x0n in which the coeffi-
cients of the resolved defining equations behave regularly, one therefore knows thenumber of all independent infinitesimal transformations of the group which are oforder k in the xi − x0
i and which possess the property that out of them, no infinitesi-mal transformation of order (k+1) or of higher order can be linearly deduced.
Naturally, one can compute the numbers in question also for the points x01, . . . ,x
0n
in which the coefficients of the resolved defining equations do not behave regularly.For that, the knowledge of the defining equations already suffices, however it isincomparably more convenient when r arbitrary independent infinitesimal transfor-mations are already given, which is what we will assume in the sequel. Then oneproceeds as follows.
At first, one determines how many independent infinitesimal transformations oforder k or higher in the xi − x0
i the group contains. To this aim, one expands thegeneral infinitesimal transformation:
e1 X1 f + · · ·+ er Xr f
with respect to the powers of the xi − x0i and then in the n expressions:

212 11 The Defining Equations of a Group
e1 ξ1i + · · ·+ er ξri (i=1 ···n),
one sets equal to zero all coefficients of zeroth, of first, . . . , of (k− 1)-th order. Inthis way, one obtains a certain number of linear homogeneous equations betweene1, . . . ,er; one then easily determines how many independent infinitesimal transfor-mations are extant amongst these equations by calculating certain determinants; ifr−ωk is the number of independent equations, then it follows that the group con-tains exactly ωk independent infinitesimal transformations of order k or higher in thexi − x0
i . So obviously, ωk −ωk+1 is the number of independent infinitesimal trans-formations of order k out of which no infinitesimal transformation of higher ordercan be linearly deduced.
It is hardly not necessary to make the observation that the operations just indi-cated remain applicable also to every point x0
1, . . . ,x0n for which the coefficients of
the resolved defining equations behave regularly.Somewhat more precisely, we want to occupy ourselves with the infinitesimal
transformations ∑ e j X j f of the group X1 f , . . . ,Xr f whose power series expansionin the xi−x0
i contain only terms of the first and higher orders, but none of the zeroth.At first, we shall examine how many independent infinitesimal transformations ofthis nature there are and we shall show how one can set up them in a simple manner.Here, by x0
1, . . . ,x0n, we understand a completely arbitrary, though determined, point.
Evidently, such infinitesimal transformations are characterized by the fact thatthemselves, and as well the one-term groups generated by them, do leave at rest thepoint xi = x0
i (cf. Chap. 7, p. 148), or, what amounts to the same, by the fact thatthey are the only ones amongst the infinitesimal transformations ∑ e j X j f which donot attach any direction to the point xi = x0
i .Analytically, the most general transformation ∑ e j X j f of the concerned consti-
tution will be determined by the equations:
e1 ξ1i(x01, . . . ,x
0n)+ · · ·+ er ξri(x0
1, . . . ,x0n) = 0 (i=1 ···n).
Now, if in the matrix:
(3)
∣∣∣∣∣∣ξ11(x0) · · ξ1n(x0)
· · · ·ξr1(x0) · · ξrn(x0)
∣∣∣∣∣∣ ,all (r+1)× (r+1) determinants vanish, but not all h×h ones, then h of the quan-tities e1, . . . ,er can be represented as linear homogeneous functions of the r−h leftones, which remain completely arbitrary. As a result, we obtain the following simplebut important result:
Proposition 3. If all (h+1)× (h+1) determinants of the matrix:∣∣∣∣∣∣ξ11(x) · · ξ1n(x)
· · · ·ξr1(x) · · ξrn(x)
∣∣∣∣∣∣ ,

§ 53. 213
vanish for x1 = x01, . . . , xn = x0
n, but not all h×h ones vanish, then the r-term group:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
contains exactly r − h independent infinitesimal transformations which, when ex-panded in power series in x1 − x0
1, . . . , xn − x0n, contain no term of zeroth order —
which, in other words, leave at rest the point x01, . . . ,x
0n.
At the same time, it yet comes from what has been said the following
Proposition 4. When all (h+1)× (h+1) determinants of the matrix:∣∣∣∣∣∣ξ11(x) · · ξ1n(x)
· · · ·ξr1(x) · · ξrn(x)
∣∣∣∣∣∣ ,are set to zero, then the resulting equations determine the locus of all pointsx1, . . . ,xn which admit2 at least r − h independent infinitesimal transformations ofthe group X1 f , . . . ,Xr f ; amongst the found points, those which do not bring to zeroall h× h determinants of the matrix admit exactly r − h independent infinitesimaltransformations of the group.
Earlier on (p. 149), we have underlined that the infinitesimal transformationsX1 f , . . . ,Xr f associate to a determined point x1, . . . ,xn precisely h independent di-rections when all (h+1)× (h+ 1) determinants of the matrix (3) vanish, while bycontrast not all h× h determinants do. From this, we see that the found result canalso be expressed as follows.
Proposition 5. If an r-term group X1 f , . . . ,Xr f of the space x1, . . . ,xn contains ex-actly r − h independent infinitesimal transformations which leave at rest a deter-mined point x0
1, . . . ,x0n, then the infinitesimal transformations of the group associate
to this point exactly h independent directions.
At present, we continue one step further to really set up all infinitesimal transfor-mations ∑ e j X j f which leave at rest a determined point x0
1, . . . ,x0n.
We want to suppose that in the matrix (3), all (h+ 1)× (h+ 1) determinantsvanish, but not all h×h ones, and specifically, that in the smaller matrix:∣∣∣∣∣∣
ξ11(x0) · · ξ1n(x0)· · · ·
ξh1(x0) · · ξhn(x0)
∣∣∣∣∣∣ ,not all h×h determinants are equal to zero.
Under these assumptions, there are obviously no infinitesimal transformations ofthe form e1 X1 f + · · ·+ eh Xh f which leave at rest the point x0
1, . . . ,x0n; by contrast,
the r−h infinitesimal transformations:2 — in the sense that the manifold constituted of such a point is left invariant, i.e. at rest —

214 11 The Defining Equations of a Group
Xh+k f +λk1 X1 f + · · ·+λkh Xh f (k=1 ···r−h)
do leave it at rest, as soon as one chooses the constants λ in an appropriate way,which visibly is possible only in one single way. Saying this, r − h independentinfinitesimal transformations are found whose power series expansions contain noterm of order zero; naturally, out of these r − h transformation, every other of thesame constitution can be linearly deduced. From this, it follows that amongst theinfinitesimal transformations of our group which are of zeroth order in the xi − x0
i ,there are only h independent ones out of which no transformation of first order orof higher order can be linearly deduced; of course, X1 f , . . . ,Xr f are transformationsof zeroth order of this nature; hence they attach to the point x0
1, . . . ,x0n exactly h
independent directions.With these words, we have the
Proposition 6. If the r infinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
of an r-term group of the space x1, . . . ,xn are constituted in such a way that for x1 =x0
1, . . . , xn = x0n, all (h+1)× (h+1) determinants, but not all h×h determinants, of
the matrix: ∣∣∣∣∣∣ξ11(x) · · ξ1n(x)
· · · ·ξr1(x) · · ξrn(x)
∣∣∣∣∣∣vanish, and especially, if not all h×h determinants of the matrix:∣∣∣∣∣∣
ξ11(x) · · ξ1n(x)· · · ·
ξh1(x) · · ξhn(x)
∣∣∣∣∣∣are zero for xi = x0
i , then firstly: all infinitesimal transformations:
e1 X1 f + · · ·+ eh Xh f
are of zeroth order in the xi − x0i and they attach to the point x0
1, . . . ,x0n exactly h in-
dependent directions, and secondly: one can always choose h(r−h) constants λk j,but only in one single way, so that in the r−h independent infinitesimal transforma-tions:
Xh+k f +λk1 X1 f + · · ·+λkh Xh f (k=1 ···r−h)
all terms of zeroth order in the xi − x0i are missing; then out of these r−h infinites-
imal transformations, one can linearly deduce all infinitesimal transformations ofthe group X1 f , . . . ,Xr f which are of the first order in the xi − x0
i , or of higher order.
For the sequel, it is useful to state this proposition in a somewhat more specificway.

§ 53. 215
We want to assume that all (q+1)× (q+1) determinants of the matrix:
(4)
∣∣∣∣∣∣ξ11(x) · · ξ1n(x)
· · · ·ξr1(x) · · ξrn(x)
∣∣∣∣∣∣vanish identically, but that this is not the case for all q×q determinants and specially,that not all q×q determinants of the matrix:
(5)
∣∣∣∣∣∣ξ11(x) · · ξ1n(x)
· · · ·ξq1(x) · · ξqn(x)
∣∣∣∣∣∣are identically zero.
Under these assumptions, it is impossible to exhibit q not all vanishing functionsχ1(x), . . . ,χq(x) which make identically equal to zero the expression χ1(x)X1 f +· · ·+χq(x)Xq f . By contrast, one can determine q(r−q) functions ϕ jk(x) so that ther−q equations:
Xq+ j f = ϕ j1(x1, . . . ,xn)X1 f + · · ·+ϕ jq(x1, . . . ,xn)Xq f
( j=1 ···r−q)
are identically satisfied; indeed, every ϕ jk will be equal to a quotient whose nu-merator is a certain q× q determinant of the matrix (4) and whose denominator isa not identically vanishing q× q determinant of the matrix (5) (cf. the analogousdevelopments in Chap. 7, p. 136).
Now, let x01, . . . ,x
0n be a point in general position, or if said more precisely, a point
for which not all q×q determinants of (5) vanish. Then the expressions ϕ jk(x0) aredetermined, finite constants, and at the same time, the r− q infinitesimal transfor-mations:
Xq+ j f −ϕ j1(x0)X1 f −·· ·−ϕ jq(x0)Xq f ( j=1 ···r−q)
belong to our group. These infinitesimal transformations are clearly independent ofeach other and in addition, they possess the property that their power series expan-sions with respect to the xi − x0
i lack of all zeroth order terms. Hence according toProposition 3, p. 212, every infinitesimal transformation of our group whose powerseries expansion with respect to the xi − x0
i only contains terms of first order or ofhigher order must be linearly expressible by means of the r−q infinitesimal trans-formations just found.
Thus, the following holds true.
Proposition 7. If the first q of the infinitesimal transformations X1 f , . . . ,Xr f of anr-term group are not linked by linear relations of the form:
χ1(x1, . . . ,xn)X1 f + · · ·+χq(x1, . . . ,xn)Xq f = 0,

216 11 The Defining Equations of a Group
while Xq+1 f , . . . ,Xr f can be linearly expressed in terms of X1 f , . . . ,Xq f :
Xq+ j f ≡q
∑k=1
ϕ jk(x1, . . . ,xn)Xk f ( j=1 ···r−q),
then in the neighbourhood of every point x01, . . . ,x
0n in general position, the
group contains exactly q independent infinitesimal transformations, for exampleX1 f , . . . ,Xq f , which are of zeroth order and out of which no infinitesimal transfor-mation of first order or of higher order in the xi − x0
i can be linearly deduced. Bycontrast, in the neighbourhood of x0
i , the group contains exactly r− q independentinfinitesimal transformations, for instance:
Xq+ j f −q
∑k=1
ϕ jk(x01, . . . ,x
0n)Xk f ( j=1 ···r−q),
which contain no terms of zeroth order in the xi − x0i , hence which leave at rest the
point x01, . . . ,x
0n.
We have pointed out above more precisely what is to be understood, in this propo-sition, for a point in general position.
—————–

Chapter 12Determination of All Subgroups of an r-termGroup
If all the transformations of a ρ-term group are contained in a group with more thanρ parameters, say with r parameters, then the ρ-term group is called a subgroup ofthe r-term group.
The developments of Chap. 4 already gave us an example of subgroups of anr-term group; indeed, these developments showed that every r-term group contains∞r−1 one-term subgroups. In the present chapter, we will at first develop a fewspecific methods which enable one to find all subgroups of a given group. Thenwe submit us to the question of how one should proceed in order to determine allsubgroups of a given group. About it, we obtain the important result that the deter-mination of all continuous subgroups of an r-term group can always be achieved byresolution of algebraic equations.
§ 54.
In the preceding chapter, we imagined the infinitesimal transformations of a given r-term group expanded with respect to the powers of the xi−x0
i , where it is understoodthat x0
i is a system of values for which all these transformations behave regularly.For the infinitesimal transformations of the group, there resulted in this way a
classification which will now conduct us towards the existence of certain subgroups.However, the considerations of this paragraph find an application only to groupswhich in any case for certain points x0
i , contain not only infinitesimal transforma-tions of zeroth order, but also some of higher order in the xi − x0
i . In the neigh-bourhood of the point x0
1, . . . ,x0n, let an r-term group of the space x1, . . . ,xn contain
exactly ωk independent infinitesimal transformations:
Y1 f , . . . ,Yωk f ,
whose power series expansions with respect to the xi − x0i start with terms of order
k or of higher order.We want to suppose that k is > 1. Then if we combine one, with the other, two
infinitesimal transformations Yi f and Yj f , we obtain (Theorem 30, p. 207) an in-finitesimal transformation [Yi, Yj] of order (2k−1) or higher, hence at least of order
217

218 12 Determination of All Subgroups of a Group
k. Consequently, [Yi, Yj] must be linearly expressible in terms of the Y f :
[Yi, Yj] =ωk
∑ν=1
di jν Yν f ,
or, what is the same: the Y1 f , . . . ,Yωk f generate an ωk-term subgroup of the givengroup. Hence the following holds true.
Proposition 1. If an r-term group of the space x1, . . . ,xn contains, in the neighbour-hood of x0
1, . . . ,x0n, exactly ωk independent infinitesimal transformations of order k
or of higher order and if k is > 1 here, then these ωk infinitesimal transformationsgenerate an ωk-term subgroup of the group in question.
If the point x01, . . . ,x
0n is procured so that, for it the coefficients of the resolved
defining equations of the group X1 f , . . . ,Xr f behave regularly, then ωk has the value:
(εk −νk)+ · · ·+(εs−1 −νs−1)
(cf. Chap. 11, p. 206).The case k = 1 is particularly important, hence we want to yet dwell on it.If:
X j f =n
∑i=1
ξ ji(x1, . . . ,xn)∂ f∂xi
( j=1 ···r)
are independent infinitesimal transformations of the r-term group, then according toChap. 11, p. 212 sq., one finds the number ω1 by examining the determinants of thematrix: ∣∣∣∣∣∣
ξ11(x0) · · ξ1n(x0)· · · ·
ξr1(x0) · · ξrn(x0)
∣∣∣∣∣∣ .Moreover, we remember (cf. p. 212 sq.) that all infinitesimal transformations of
the group which contain only terms of first order or of higher order in the xi −x0i are
characterized by the fact that they leave at rest the point x01, . . . ,x
0n. Hence if k = 1,
we can also enunciate the above proposition as follows.
Proposition 2. If, in a group of the space x1, . . . ,xn, there are precisely ω1independent infinitesimal transformations which leave invariant a determinedpoint x0
1, . . . ,x0n, then these transformations generate an ω1-term subgroup of the
concerned group.
It is clear that in the variables x1, . . . ,xn, there are no more than n infinitesimaltransformations which are of zeroth order in the xi−x0
i and out of which no infinites-imal transformation of first order or of higher order can be linearly deduced. Fromthis, we conclude that every r-term group in n < r variables contains at least r− nindependent infinitesimal transformations which are of the first order or of higherorder in the xi − x0
i . We therefore have the

§ 55. 219
Proposition 3. Every r-term group in n < r variables contains subgroups with atleast r−n parameters.
From the Proposition 7 of the preceding chapter (p. 215), we finally obtain forthe points x0
1, . . . ,x0n in general position yet the
Proposition 4. If the infinitesimal transformations X1 f , . . . ,Xq f , . . . ,Xr f of an r-term group in the space x1, . . . ,xn are constituted in such a manner that X1 f , . . . ,Xq fare linked by no linear relation of the form:
χ1(x1, . . . ,xn)X1 f + · · ·+χq(x1, . . . ,xn)Xq f ≡ 0,
while by contrast Xq+1 f , . . . ,Xr f can be expressed linearly in terms of X1 f , . . . ,Xq f :
Xq+ j f ≡ ϕ j1(x1, . . . ,xn)X1 f + · · ·+ϕ jq(x1, . . . ,xn)Xq f
( j=1 ···r−q),
and if in addition x01, . . . ,x
0n is a point in general position, then the r−q infinitesimal
transformations:
Xq+ j f −q
∑µ=1
ϕ jµ(x01, . . . ,x
0n)Xµ f ( j=1 ···r−q)
are all of the first order, or of higher order, in the xi − x0i and they generate an
(r−q)-term subgroup whose transformations are characterized by the fact that theyleave invariant the point x0
1, . . . ,x0n.
By a point in general position, as on p. 215, we understand here, a point whichdoes not bring to zero all q×q determinants of the matrix:∣∣∣∣∣∣
ξ11(x) · · ξ1n(x)· · · ·
ξq1(x) · · ξqn(x)
∣∣∣∣∣∣ .§ 55.
Here equally, we yet want to draw attention on a somewhat more general methodwhich often conducts, in a very simple way, to the determination of certain sub-groups of a given group. This method is founded on the following
Theorem 31. If the r-term group X1 f , . . . ,Xr f contains some infinitesimal transfor-mations for which a given system of equations:
Ωi(x1, . . . ,xn) = 0 (i=1,2 ···)
remains invariant, and if every infinitesimal transformation of this nature can belinearly deduced from the m infinitesimal transformations:

220 12 Determination of All Subgroups of a Group
Yk f =r
∑ν=1
hkν Xν f (k=1 ···m),
then Y1 f , . . . ,Ym f generate an m-term subgroup of the group X1 f , . . . ,Xr f .
The correctness of this theorem follows almost immediately from the Proposi-tion 5 in Chap. 7, p. 134. Indeed, according to this proposition the system Ωi = 0admits all infinitesimal transformations of the form [Yk, Yj]. Since the [Yk, Yj] alsobelong to the group X1 f , . . . ,Xr f , then under the assumptions made, none of theseinfinitesimal transformations can be independent of Y1 f , . . . ,Ym f , hence on the con-trary, there must exist relations of the form:
[Yk, Yj] =m
∑µ=1
hk jµ Yµ f ,
that is to say, the Yk f really generate a group.Clearly, we can also state the above theorem as follows.
Proposition 5. If, amongst the infinitesimal transformations of an r-term group inthe variables x1, . . . ,xn, there are precisely m independent transformations by whicha certain manifold of the space x1, . . . ,xn remains invariant, then these m infinitesi-mal transformations generate an m-term subgroup of the r-term group.
The simplest case is the case where the invariant system of equations representsan invariant point, so that it has the form:
x1 = x01, . . . , xn = x0
n.
The subgroup which corresponds to this system of equations is of course gener-ated by all infinitesimal transformations whose power series expansions with respectto the xi − x0
i start with terms of first order, or of higher order. Thus, we arrive hereat one of the subgroups that we have already found in the preceding §.
As a second example, we consider a subgroup of the eight-term general projectivegroup of the plane. The equation of a nondegenerate conic section admits exactlythree independent infinitesimal projective transformations of the plane; hence thesethree infinitesimal transformations generate a three-term subgroup of the generalprojective group.
Lastly, yet another example, got from the ten-term group of all conformal pointtransformations of the R3. In this group, there are exactly six independent infinitesi-mal transformations which leave invariant an arbitrarily chosen sphere. These trans-formations generate a six-term subgroup of the ten-term group.
The Theorem 31 is only a special case of the following more general
Theorem 32. If, in the variables x1, . . . ,xn, an arbitrary group is given, finite or infi-nite, continuous or not continuous, then the totality of all transformations containedin it which leave invariant an arbitrary system of equations in x1, . . . ,xn, also formsa group.

§ 56. 221
The proof of this theorem is very simple. Any two infinitesimal transformationsof the group which, when executed one after the other, leave invariant the systemof equations give a transformation which belongs again to the group and which atthe same time leaves invariant the system of equations. As a result, the proof thatthe totality of transformations defined in the theorem effectively forms a group isproduced.
Instead of a system of equations, one can naturally consider also a system ofdifferential equations, and then the theorem would still remain also valid.
Besides, if the given group is continuous, then the subgroup which is definedthrough the invariant system of equations can very well be discontinuous.
§ 56.
After we have so far got to know a few methods in order to discover individualsubgroups of a given group, we now turn to the more general problem of determiningall continuous subgroups of a given r-term group X1 f , . . . ,Xr f .
Some m arbitrary independent infinitesimal transformations:
Yµ f =r
∑ρ=1
hµρ Xρ f (µ =1 ···m)
of our group generate an m-term subgroup if and only if all:
[Yµ , Yν ] =1···r
∑ρ, σ
hµρ hνσ [Xρ , Xσ ]
express by means only of Y1 f , . . . ,Ym f . If we insert here the values:
[Xρ , Xσ ] =r
∑τ=1
cρστ Xτ f ,
then it comes:
[Yµ , Yν ] =1···r
∑ρστ
hµρ hνσ cρστ Xτ f ,
and it is demanded that these equations take the form:
[Yµ , Yν ] =m
∑π=1
lµνπ Yπ f =r
∑τ=1
m
∑π=1
lµνπ hπτ Xτ f .
For this to hold, it is necessary and sufficient that the equations:
(1)
1···r
∑ρ, σ
hµρ hνσ cρστ =m
∑π=1
lµνπ hπτ
(µ,ν =1 ···m ; τ =1 ···r)

222 12 Determination of All Subgroups of a Group
can be satisfied; for this to be possible, all the (m+1)× (m+1) determinants of thematrix:
(2)
∣∣∣∣∣∣∑1···r
ρ, σ hµρ hνσ cρσ1 h11 · hm1· · · ·
∑1···rρ, σ hµρ hνσ cρσr h1r · hmr
∣∣∣∣∣∣must vanish.
As a result, we have a series of algebraic equations for the determination of themr unknowns hπρ . But because Y1 f , . . . ,Ym f should be independent infinitesimaltransformations, one should from the beginning exclude every system of values hπρwhich brings to zero all m×m determinants of the matrix:∣∣∣∣∣∣
h11 · · hm1· · · ·
h1r · · hmr
∣∣∣∣∣∣ .If the hπρ are determined so that all these conditions are satisfied, then for every
pair of numbers µ , ν , the equations (1) reduce to exactly m equations that determinecompletely the unknown constants lµν1, . . . , lµνm. Therefore, every system of solu-tions hπρ provides an m-term subgroup, and it is clear that in this way, one finds allm-term subgroups.
With this, we have a general method for the determination of all subgroups of agiven r-term group; however in general, this method is practically applicable onlywhen the number r is not too large; nonetheless it shows that the problem of deter-mining all these subgroups necessitates only algebraic operations, which actually isalready a very important result.
Theorem 33. The determination of all continuous subgroups of a given r-termgroup X1 f , . . . ,Xr f necessitates only algebraic operations; the concerned opera-tions are completely determined in terms of the constants ciks in the relationships†:
[Xi, Xk] =r
∑s=1
ciks Xs f (i,k=1 ···r).
In specific cases, the determination of all subgroups of a given group will of-ten be facilitated by the fact that one knows from the beginning certain subgroupsand actually also certain properties of the concerned group; naturally, there is also asimplification when one has already settled the corresponding problem for one sub-group of the given group. In addition, we shall see later that the matter is actuallynot of really setting up all subgroups, but rather, that it suffices to identify certain ofthese subgroups (cf. the studies on types of subgroups, Chap. 23).
§ 57.
Let the m independent infinitesimal transformations:
† LIE, Archiv for Mathematik of Naturv., Vol. 1, Christiania 1876.

§ 57. 223
Yµ f =r
∑k=1
hµk Xk f (µ =1 ···m)
generate an m-term subgroup of the r-term group X1 f , . . . ,Xr f . Then the generalinfinitesimal transformation of this subgroup is:
m
∑µ=1
αµ Yµ f =m
∑µ=1
r
∑k=1
αµ hµk Xk f ,
where the αµ denote arbitrary parameters.As a consequence of this, all infinitesimal transformations e1 X1 f + · · ·+ er Xr f
of the r-term group which belong to the m-term subgroup Y1 f , . . . ,Ym f are definedby the equations:
ek =m
∑µ=1
αµ hµk (k=1 ···r).
Hence if we imagine here that the m arbitrary parameters αµ are eliminated, weobtain exactly r−m independent linear homogeneous equations between e1, . . . ,er,so that we can say:
Proposition 6. If e1 X1 f + · · ·+ er Xr f is the general infinitesimal transformationof an r-term group, then the infinitesimal transformations of an arbitrary m-termsubgroup of this group can be defined by means of r−m independent linear homo-geneous relations between e1, . . . ,er.
The infinitesimal transformations which are common to two distinct subgroupsof an r-term group X1 f , . . . ,Xr f generate in turn a subgroup; indeed, according toChap. 9, Proposition 2, p. 174, the infinitesimal transformations common to thetwo groups generate a group, which, naturally, is contained in X1 f , . . . ,Xr f as asubgroup.
Now, if we assume that one of the two groups is m-term, and the other µ-term,then their common infinitesimal transformations will be defined by means of r −m+r−µ linear homogeneous equations between the e, some equations which neednot, however, be mutually independent.
From this, we conclude that amongst the common infinitesimal transformations,there are at least r− (2r−m− µ) = m+ µ − r which are independent. Therefore,we have the statement:
Proposition 7. If an r-term group contains two subgroups with m and µ param-eters, respectively, then these two subgroups have at least m+ µ − r independentinfinitesimal transformations in common. The infinitesimal transformations of ther-term group which are actually common to the two subgroups generate in turn asubgroup.
This proposition can evidently be generalized:Actually, if amongst the infinitesimal transformations e1 X1 f + · · ·+ er Xr f of an
r-term group, two families are sorted, the one by means of r−m linear homogeneous

224 12 Determination of All Subgroups of a Group
equations, the other by means of r−µ such equations, then there are at least m+µ−r independent infinitesimal transformations which are common to the two families.
—————–

Chapter 13Transitivity, Invariants, Primitivity
The concepts of transitivity and of primitivity which play a so broad rôle in thetheory of substitutions, shall be extended [AUSGEDEHNT] here to finite continuoustransformation groups. In passing, let us mention that these concepts can actuallybe extended to all groups, namely to finite groups and to infinite groups as well, tocontinuous groups and to not continuous groups as well†.
§ 58.
A finite continuous group in the variables x1, . . . ,xn is called transitive when, inthe space (x1, . . . ,xn), there is an n-times extended domain inside which each pointcan be transferred to any other point by means of at least one transformation of thegroup. One calls intransitive every group which is not transitive.
According to this definition, an r-term group:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
is transitive when in general1, to every system of values x1, . . . ,xn, x′1, . . . ,x′n at least
one system of values a1, . . . ,ar can be determined so that the equations x′i = fi(x, a)are satisfied by the concerned values of x, a, x′. In other words: The equations x′i =fi(x, a) of a transitive group can be resolved with respect to n of the r parameters
† After that LIE had integrated in 1869 a few differential equations with known continuousgroups, in 1871 and in 1872, he stated in conjunction with KLEINKLEIN the problem of trans-lating the concepts of the theory of substitutions as far as possible into the theory of the continuoustransformation groups. LIE gave the settlement of this problem in details; on the basis of thepresentation and of the concepts exhibited through here, as early as in 1874, he developed thefundamentals of a general theory of integration of the complete systems which admit known in-finitesimal transformations (Verh. d. G. d. W. zu Christiania, 1874). He reduced this problem tothe case where the known infinitesimal transformations generate a finite continuous group which isimprimitive, since its transformations permute the characteristic manifolds of the complete system.Amongst other things, he determined all cases where the integration of the complete system canbe performed by means of quadratures.1 As usual (cf. Chap. 1), one reasons generically, hence the concept of transitivity is essentiallyconsidered for (sub)domains and for generic values of the x and of the x′.
225

226 13 Transitivity, Invariants, Primitivity
a1, . . . ,ar. If by contrast such a resolution if impossible, and if rather, from from theequations x′i = fi(x, a) of the group, one can derive equations which are free of theparameters a and which contain only the variables x1, . . . ,xn, x′1, . . . ,x
′n, then the
group is not transitive, it is intransitive.From this, we see that every transitive group of the space x1, . . . ,xn contains at
least n essential parameters.If a transitive group in n variables has exactly n essential parameters, then in
general, it contains one, but only one, transformation which transfers an arbitrarypoint of the space to another arbitrary point; hence in particular, aside from theidentity transformation, it contains no transformation which leaves invariant a pointin general position. We call simply transitive [EINFACH TRANSITIV] every group ofthis nature.
The general criterion for transitivity and, respectively, for intransitivity of a groupgiven above is practically applicable only when one knows the finite equations ofthe group. But should not there be a criterion the application of which would requireonly the knowledge of the infinitesimal transformations of the group? We will showthat such a criterion can indeed be exhibited. At the same time, we will find meansin order to recognize how many and which relations there are between the x and thex′ only for an intransitive group with known infinitesimal transformations.
Let us be given r independent infinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
which generate an r-term group. This group, the finite equations of which we canimagine written down in the form:
Φi =−x′i + xi +r
∑k=1
ek ξki(x)+ · · · (i=1 ···n),
is, according to what precedes, transitive if and only if the n equations Φ1 = 0, . . . ,Φn = 0 are solvable with respect to n of the r parameters e1, . . . ,er. Consequently,for the transitivity of our group, it is necessary and sufficient that not all n×n deter-minants of the matrix:
(1)
∣∣∣∣∣∣∣∂Φ1∂e1
· · ∂Φn∂e1
· · · ·∂Φ1∂er
· · ∂Φn∂er
∣∣∣∣∣∣∣vanish identically. From this, it follows that the group is certainly transitive whenthe corresponding determinants do not all vanish for e1 = 0, . . . ,er = 0, hence whennot all n×n determinants of the matrix:
(2)
∣∣∣∣∣∣ξ11 · · · ξ1n· · · · ·
ξr1 · · · ξrn
∣∣∣∣∣∣

§ 58. 227
are identically zero.As a result, we have found a sufficient condition for the transitivity of our group.
We now want to study what happens when this condition is not satisfied.So, let all n×n determinants of the above-written matrix (2) be identically zero;
in order to embrace all possibilities in one case, we in addition want to assume thatall determinants of sizes (n−1), (n−2), . . . , (q+1) vanish identically, whereas notall q×q determinants do this.
Under these circumstances, it is certain that not all q× q determinants of thematrix (1) vanish, hence we can conclude that from the n equations Φ1 = 0, . . . ,Φn = 0, at most n−q equations between the x and x′ only that are free of e1, . . . ,erand are mutually independent can be deduced.
But now, under the assumptions made, the r equations X1 f = 0, . . . , Xr f = 0 re-duce to q < n independent ones, say to: X1 f = 0, . . . , Xq f = 0, while Xq+1 f , . . . ,Xr fcan be expressed as follows:
Xq+ν f ≡ ϕν1(x)X1 f + · · ·+ϕνq(x)Xq f (ν =1 ···r−q).
Consequently, for all values of i and k, one will have:
[Xi, Xk] =q
∑j=1
(cik j +
r−q
∑ν=1
cik,q+ν ϕν j
)X j f ,
that is to say: the q equations X1 f = 0, . . . , Xq f = 0 form a q-term complete sys-tem with n−q independent solutions, which can be denoted by Ω1(x), . . . ,Ωn−q(x).These solutions admit every infinitesimal transformation of the form e1 X1 f + · · ·+er Xr f , hence every infinitesimal transformation, and in consequence of that, alsoevery finite transformation of our r-term group X1 f , . . . ,Xr f (cf. Chap. 6, p. 114).Analytically, this expresses by saying that between the variables x and x′, whichappear in the transformation equations of our group, the following n− q equationsfree of the e are extant:
Ω1(x′1, . . . ,x′n) = Ω1(x1, . . . ,xn), . . . . . . , Ωn−q(x′1, . . . ,x
′n) = Ωn−q(x1, . . . ,xn).
Above, we said that between the x and the x′ alone, there could exist at most n−qindependent relations, and therefore we have found all the relations in question.
In particular, we realize that the group X1 f , . . . ,Xr f is intransitive as soon as alln× n determinants of the matrix (2) vanish identically. With this, it is shown thatthe sufficient condition found a short while ago for the transitivity of the groupX1 f , . . . ,Xr f is not only sufficient, and that it is also necessary.
We formulate the gained results as propositions. At the head, we state the
Theorem 34. The r-term group X1 f , . . . ,Xr f of the space x1, . . . ,xn is transitivewhen amongst the r equations X1 f = 0, . . . ,Xr f = 0, exactly n mutually independentones are found, and it is intransitive in the opposite case.
Then a proposition can follow:

228 13 Transitivity, Invariants, Primitivity
Proposition 1. From the finite equations:
x′i = fi(x1, . . . ,xn; a1, . . . ,ar) (i=1 ···n)
of an r-term group with the infinitesimal transformations X1 f , . . . ,Xr f , one can elim-inate the r parameters a1, . . . ,ar only when the group is intransitive; in this case, oneobtains between the x and the x′ a certain number of relations that can be broughtto the form:
Ωk(x′1, . . . ,x′n) = Ωk(x1, . . . ,xn) (k=1,2 ···) ;
here, Ω1(x), Ω2(x), . . . are a system of independent solutions of the complete systemwhich is determined by the r equations X1 f = 0, . . . , Xr f = 0.
In Chap. 6, p. 112, we saw that the solutions of the linear partial differentialequations X f = 0 are the only invariants of the one-term group X f ; accordingly, thecommon solutions of the equations X1 f = 0, . . . , Xr f = 0 are the only invariants ofthe group X1 f , . . . ,Xr f . We can hence state the proposition:
Proposition 2. If the r-term group X1 f , . . . ,Xr f of the space x1, . . . ,xn is transitive,then it has no invariant; if it is intransitive, then the common solutions of the equa-tions X1 f = 0, . . . , Xr f = 0 are its only invariants.
In order to get straight [KLARSTELLEN] the conceptual sense [BEGRIFFLICHENSINN] of the gained analytic results, we now want to interpret x1, . . . ,xn as pointcoordinates of a space of n dimensions.
Let the complete system mentioned in the theorem be q-term and let the numberq be smaller than n, so that the group X1 f , . . . ,Xr f is intransitive. Let the functionsΩ1(x1, . . . ,xn), . . . , Ωn−q(x1, . . . ,xn) be independent solutions of the complete sys-tem in question, and let C1, . . . ,Cn−q denote arbitrary constants. Then the equations:
Ω1 =C1, . . . , Ωn−q =Cn−q
decompose the whole space in ∞n−q different q-times extended subsidiary domains[THEILGEBIETE] which all remain invariant by the group X1 f , . . . ,Xr f . Every pointof the space belongs to a completely determined subsidiary domain and can be trans-ferred only to points of the same subsidiary domain by transformations of the group.Still, the points of a subsidiary domain are transformed transitively, that is to say, ev-ery point in general position in the concerned subsidiary domain can be transferredto any other such point by means of at least one transformation of the group.
If x1, . . . ,xn is a point in general position, then we also call the functionsΩ1(x), . . . ,Ωn−q(x) the invariants of the point x1, . . . ,xn with respect to the groupX1 f , . . . ,Xr f . The number of these invariants indicates the degree of intransitivity ofour group, since the larger the number of invariants is, the smaller is the dimensionnumber of the subsidiary domains, inside which the point x1, . . . ,xn stays throughthe transformations of the group.
Relatively to a transitive group, a point in general position clearly has no invari-ant.

§ 58. 229
The theorem stated above enables to determine whether a given groupX1 f , . . . ,Xr f is transitive or not. At present, one can give various other versions ofthe criterion contained there for the transitivity or the intransitivity of a group.
At first, with a light change of the way of expressing, we can say:An r-term group X1 f , . . . ,Xr f in x1, . . . ,xn is transitive if and only if amongst its
infinitesimal transformations, there are exactly n — say X1 f , . . . ,Xn f — which arelinked by no relation of the form:
χ1(x1, . . . ,xn)X1 f + · · ·+χn(x1, . . . ,xn)Xn f = 0,
whereas Xn+1 f , . . . ,Xr f express as follows in terms of X1 f , . . . ,Xn f :
Xn+ j f = ϕ j1(x)X1 f + · · ·+ϕ jn(x)Xn f
( j=1 ···r−n).
If there are no infinitesimal transformations of this constitution, then the group isintransitive.
Now, if we remember that every infinitesimal transformation Xk f attaches a di-rection to each point of the space x1, . . . ,xn, and if we yet add what has been said inChap. 6, p. 117 about the independence of such directions which pass through thesame point, then we can state also as follows the criterion for the transitivity of agroup:
Proposition 4. A group X1 f , . . . ,Xr f in the variables x1, . . . ,xn is transitive when itcontains n infinitesimal transformations which attach to every point in general posi-tion n independent directions; if the group contains no infinitesimal transformationof this constitution, then it is intransitive.
On the other hand, let us remember the discussions in Chap. 11, p. 215, where weimagined the infinitesimal transformations of the group expanded with respect to thepowers of the xi − x0
i in the neighbourhood of a point x0i in general position. Since
a transitive group X1 f , . . . ,Xr f in the variables x1, . . . ,xn contains n infinitesimaltransformations, say: X1 f , . . . ,Xn f which are linked by no relation χ1(x)X1 f + · · ·+χn(x)Xn f = 0, we obtain the following proposition:
Proposition 5. An r-term group X1 f , . . . ,Xr f in the n variables x1, . . . ,xn is transi-tive if, in the neighbourhood of a point x0
i in general position, it contains exactly nindependent infinitesimal transformations of zeroth order in the xi −x0
i out of whichno infinitesimal transformation of first order or of higher order can be linearly de-duced. If the number of such infinitesimal transformations of zeroth order is smallerthan n, then the group is intransitive.
From this, one sees that one needs only know the defining equations of the groupX1 f , . . . ,Xr f in order to settle its transitivity or its intransitivity.
Finally, we can also state as follows the first part of the Proposition 5:The group X1 f , . . . ,Xr f is transitive when in the neighbourhood of a point x0
i ingeneral position, it contains exactly r−n independent infinitesimal transformations

230 13 Transitivity, Invariants, Primitivity
whose power series expansions with respect to the xi − x0i start with terms of of
first or of higher order, hence when the group contains exactly r−n, and not more,independent infinitesimal transformations which leave invariant a point in generalposition. —
If one only knows the infinitesimal transformations X1 f , . . . ,Xr f of an intransi-tive group, then as we have seen, one finds the invariants of the group by integratingthe complete system X1 f = 0, . . . ,Xr f = 0. Now, it is of great importance that thisintegration is not necessary when the finite equations of the group are known, sothat in this case, the invariants of the group are rather found by plain elimination.
In order to prove this, we imagine that the finite equations of an intransitive groupare given:
x′i = fi(x1, . . . ,xn a1, . . . ,ar) (i=1 ···n),
and then we eliminate the parameters a1, . . . ,ar from them. According to what pre-cedes, it must be possible to bring the n−q independent equations obtained in thisway:
(3) Wµ(x1, . . . ,xn, x′1, . . . ,x′n) = 0 (µ =1 ···n−q),
to the form:
(4) Ωµ(x′1, . . . ,x′n) = Ωµ(x1, . . . ,xn) (µ =1 ···n−q),
where the Ωµ(x) are the sought invariants. Hence, when we solve the equations (3)with respect to n−q of the variables x′1, . . . ,x
′n:
x′µ = Πµ(x1, . . . ,xn, x′n−q+1, . . . ,x′n) (µ =1 ···n−q),
which is always possible, then we obtain n−q functions Π1, . . . ,Πn−q in which thevariables x1, . . . ,xn occur only the combinations Ω1(x), . . . ,Ωn−q(x). Consequently,the n−q expressions:
Πµ(x1, . . . ,xn, αn−q+1, . . . ,αn) (µ =1 ···n−q)
in which αn−q+1, . . . ,αn denote constants, represent invariants of our group, and infact clearly, n−q independent invariants. —
The following therefore holds true.
Theorem 35. If one knows the finite transformations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
of an intransitive group, then one can find the invariants of this group by means ofelimination.

§ 59. 231
§ 59.
When we studied how a point in general position behaves relatively to the trans-formations of an r-term group, we were conducted with necessity to the conceptsof transitivity and of intransitivity [WURDEN WIR MIT NOTHWENDIGKEIT AUFDIE BEGRIFFE TRANSITIVITÄT UND INTRANSITIVITÄT GEFÜHRT]. We obtainedin this way a division [EINTHEILUNG] of all r-term groups of a space of n dimen-sions in two different classes, exactly the same way as in the theory of substitu-tions; but at the same time, we yet obtained a division of the intransitive groups too,namely according to the number of the invariants that a point in general positionpossesses with respect to the concerned group.
Correspondingly to the process of the theory of substitutions, we now can also gofurther and study the behaviour of two or more points in general position relativelyto an r-term group. This gives us a new classification of the groups of the Rn.
Let:yi = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
be an r-term group and let X1 f , . . . ,Xr f be r independent infinitesimal transforma-tions of it.
At first, we want to consider two points x′1, . . . ,x′n and x′′1 , . . . ,x
′′n and to seek their
invariants relatively to our group, that is to say: we seek all functions of x′1, . . . ,x′n,
x′′1 , . . . ,x′′n which remain invariant by the transformations of our group.
To this end, we write the infinitesimal transformations Xk f once in the x′ un-der the form X ′
k f and once in the x′′ under the form X ′′k f ; then simply, the sought
invariants are the invariants of the r-term group:
(5) X ′k f +X ′′
k f (k=1 ···r)
in the variables x′1, . . . ,x′n, x′′1 , . . . ,x
′′n .
If J1(x), . . . ,Jρ1(x) are the invariants of the group X1 f , . . . ,Xr f , then without ef-fort, the 2ρ1 functions:
J1(x′), . . . ,Jρ1(x′), J1(x′′), . . . ,Jρ1(x
′′)
are invariants, and in fact, independent invariants of the group (5); but in addition,there can yet be a certain number, say ρ2, of invariants:
J′1(x′1, . . . ,x
′n, x′′1 , . . . ,x
′′n), . . . , J′ρ2
(x′1, . . . ,x′n, x′′1 , . . . ,x
′′n)
which are mutually independent and are independent of the 2ρ1 above invariants.So in this case, two points in general position have 2ρ1 +ρ2 independent invariantsrelatively to the group X1 f , . . . ,Xr f , amongst which however, only ρ2 have to beconsidered as essential, because each one of the two points already has ρ1 invariantsfor itself. Under these assumptions, from the equations:
y′i = fi(x′1, . . . ,x′n, a1, . . . ,ar), y′′i = fi(x′′1 , . . . ,x
′′n , a1, . . . ,ar)
(i=1 ···n)

232 13 Transitivity, Invariants, Primitivity
there result the following relations free of the a:
Jk(y′) = Jk(x′), Jk(y′′) = Jk(x′′) (k=1 ···ρ1)
J′j(y′, y′′) = J′j(x
′, x′′) ( j=1 ···ρ2).
Therefore, if we imagine that the quantities x′1, . . . ,x′n and y′1, . . . ,y
′n are chosen
fixed, then the totality of all positions y′′1 , . . . ,y′′n which the point x′′1 , . . . ,x
′′n can take
are determined by the equations:
Jk(y′′) =Jk(x′′), J′j(y′,y′′) = J′j(x
′,x′′)
(k=1 ···ρ1 ; j=1 ···ρ2) ;
so there are ∞n−ρ1−ρ2 distinct positions of this sort.In a similar way, one can determine the invariants that three, four and more points
have relatively to the group. So one finds a series of entire number ρ1, ρ2, ρ3, . . .which are characteristic of the group and which are independent of the choice ofvariables. If one computes these numbers one after the other, one always comes toa number ρm which vanishes, while at the same time all numbers ρm+1, ρm+2, . . .are equal to zero.
We do not want to address further the issue about these behaviours, but it mustbe observed that analogous considerations can be endeavoured for every family of∞r transformations, shall this family constitute a group or not.
§ 60.
Above, we have seen that an intransitive group X1 f , . . . ,Xr f decomposes the entirespace (x1, . . . ,xn) in a continuous family of q-times extended manifolds of points:
Ω1(x1, . . . ,xn) =C1, . . . , Ωn−q(x1, . . . ,xn) =Cn−q
which remain all invariant by the transformations of the group. Here, the Ω denoteindependent solutions of the q-term complete system which is determined by theequations X1 f = 0, . . . ,Xr f = 0.
Each point of the space belongs to one and to only one of the ∞n−q manifoldsΩ1 = a1, . . . , Ωn−q = an−q, so in the sense provided by Chap. 6, 117, we are dealingwith a decomposition of the space. This decomposition remains invariant by alltransformations of the group X1 f , . . . ,Xr f ; and at the same time, each one of theindividual subsidiary domains in which the space is decomposed stays invariant.
It can also happen for transitive groups that there exists a decomposition of thespace in ∞n−q q-times extended manifolds Ω1 = a1, . . . , Ωn−q = an−q which remaininvariant by the group. But naturally, each individual manifold amongst the ∞n−q
manifolds need not remain invariant, since otherwise the group would be intransi-tive; these ∞n−q manifolds must rather be permuted by the group, while the totalityof them remains invariant.
Now, a group of the Rn is called imprimitive [IMPRIMITIV] when it determines atleast one invariant decomposition of the space by ∞n−q q-times extended manifolds;

§ 60. 233
a group for which there appears absolutely no invariant decomposition is calledprimitive [PRIMITIV]. That the values q = 0 and q = n are excluded requires hardlyany mention here.
The intransitivity is obviously a special case of imprimitivity: every intransitivegroup is at the same time also imprimitive. On the other hand, every primitive groupis necessarily transitive.
Now, in order to obtain an analytic definition for the imprimitivity of an r-termgroup X1 f , . . . ,Xr f , we need only to remember that every decomposition of thespace in ∞n−q q-times extended manifolds y1 = const., . . . , yn−q = const. is analyt-ically defined by the q-term complete system Y1 f = 0, . . . , Yq f = 0, the solutionsof which are the yk. The fact that the concerned decomposition remains invariant bythe group X1 f , . . . ,Xr f amounts to the fact that the corresponding q-term completesystem admits all transformations of the group.
The q-term complete system Yk f = 0 admits our group as soon it admits thegeneral one-term group λ1 X1 f + · · ·+λr Xr f . According to Theorem 20, Chap. 8,p. 155, this is the case when, between the Xi f and the Yk f , there exist relationshipsof the following form:
[Xi, Yk] =q
∑ν=1
ψikν(x)Yν f .
Consequently, it is a necessary and sufficient condition for the imprimitivity ofthe group X1 f , . . . ,Xr f that there exists a q-term complete system:
Y1 f = 0, . . . , Yq f = 0 (q<n)
which stands in such relationships with the Xk f .Besides, the group X1 f , . . . ,Xr f can also be imprimitive in several manners, that
is to say, there can exist many, and even infinitely many systems that the groupadmits.
Later, we will develop a method for the setting up of all complete systems whichremain invariant by a given group. Hence in particular, we will also be able to deter-mine whether the group in question is primitive or not. Naturally, the latter questionrequires a special examination only for transitive groups.
Now, yet a brief remark.Let the equations:
y1 =C1, . . . , yn−q =Cn−q
represent a decomposition of the space x1, . . . ,xn which is invariant by the groupX1 f , . . . ,Xr f . Then if we introduce y1, . . . ,yn−q together with q other appropriatefunctions z1, . . . ,zq of x1, . . . ,xn as new independent variables, the infinitesimaltransformations Xk f receive the specific form:
Xk f =n−q
∑µ=1
ωkµ(y1, . . . ,yn−q)∂ f∂yµ
+q
∑j=1
ζk j(y1, . . . ,yn−q, z1, . . . ,zq)∂ f∂ z j
(k=1 ···r).

234 13 Transitivity, Invariants, Primitivity
Now, according to Chap. 12, p. 220, all infinitesimal transformations e1 X1 f +· · ·+ er Xr f which leave invariant a determined manifold y1 = y0
1, . . . , yn−q = y0n−q
generate a subgroup. If we want to find the infinitesimal transformations in question,then we only have to seek all systems of values e1, . . . ,er which satisfy the n− qequations:
r
∑k=1
ek ωkµ(y01, . . . ,y
0n−q) = 0 (µ =1 ···n−q).
If r > n− q, then there always are systems of values e1, . . . ,er of this constitution,and consequently in this case, the group X1 f , . . . ,Xr f certainly contains subgroupswith a least r−n+q parameters.
Besides, it is clear that the r reduced [VERKÜRZTEN] infinitesimal transforma-tions:
Xk f =n−q
∑µ=1
ωkµ(y1, . . . ,yn−q)∂ f∂yµ
(k=1 ···r)
in the n− q variables y1, . . . ,yn−q generate a group; however, this group possiblycontains not r, but only a smaller number of essential parameters. Clearly, the cal-culations indicated just now amount to the determination of all infinitesimal trans-formations e1 X1 f + · · ·+ er X r f which leave invariant the point y0
1, . . . ,y0n−q of the
(n−q)-times extended space y1, . . . ,yn−q.
—————–

Chapter 14Determination of All Systems of EquationsWhich Admit a Given r-term Group
If a system of equations remains invariant by all transformations of an r-term groupX1 f , . . . ,Xr f , we say that it admits the group in question. Every system of equa-tions of this constitution admits all transformations of the general one-term group∑ ek Xk f , and therefore specially, all ∞r−1 infinitesimal transformations ∑ ek Xk f ofthe r-term group.
Now on the other hand, we have shown earlier on that every system of equationswhich admits the r infinitesimal transformations X1 f , . . . ,Xr f and therefore also,all ∞r−1 infinitesimal transformations ∑ ek Xk f , allows at the same time all finitetransformations of the one-term group ∑ ek Xk f , that is to say, all transformations ofthe group X1 f , . . . ,Xr f (cf. Theorem 14, p. 127). Hence if all systems of equationswhich admit the r-term group X1 f , . . . ,Xr f are to be determined, this shall be aproblem which is completely settled by the developments of the Chap. 7. Indeed,the problem of setting up all systems of equations which admit r given infinitesimaltransformations is solved in complete generality there.
However, the circumstance where the X1 f , . . . ,Xr f which are considered heregenerate an r-term group means a really major simplification in comparison to thegeneral case. Hence it appears to be completely legitimate that we settle indepen-dently the special case where the Xk f generate a group.
The treatment of the addressed problem turns out to be not inessentially different,whether or not one also knows the finite equations of the concerned group. In thefirst case, no integration is required. But in the second case, one does not make itin general without integration; however, some operations which were necessary forthe general problem of the chapter 7 drop.
We shall treat these two cases one after the other, above all because of the ap-plications, but also in order to afford a deeper insight into the matter; in fact, theconcerned developments complement one another mutually†.
Lastly, let us yet mention that from now on, we shall frequently translate the com-mon symbolism of the theory of substitutions into the theory of the transformation
† LIE, Math. Ann. Vol. XI, pp. 510–512, Vol. XVI, p. 476. Archiv for Math. og Nat., Christiania1878, 1882, 1883. Math. Ann. Vol. XXIV.
235

236 14 Determination of Invariant Systems of Equations
groups. So for example, we denote by S, T , . . . individual transformations, and byS−1, T−1, . . . the corresponding inverse transformations. By ST , we understand thetransformation which is obtained when the transformation S is executed first, andthen the transformation T . From this, it follows that expressions of the form SS−1,T T−1 mean the identity transformation.
§ 61.
We consider an arbitrary point P of the space. The totality of all positions that thispoint takes by the ∞r transformations of the group forms a certain manifold M; weshall show that this manifold admits the group, or in other words, that every pointof M is transferred to a point again of M by every transformation of the group.
Indeed, let P′ be any point of M, and let P′ come from P by the transformation Sof our group, what we want to express by means of the symbolic equation:
(P)S = (P′).
Next, if T is a completely arbitrary transformation of the group, then by the execu-tion of T , P′ is transferred to:
(P′)T = (P)ST ;
but since the transformation ST belongs to the group as well, (P)ST is also a pointof M, and our claim is therefore proved.
Obviously, every manifold invariant by the group which contains the point Pmust at the same time contain the manifold M. That is why we can also say: M isthe smallest manifold invariant by the group to which the point P belongs.
But still, there is something more. It can be shown that with the help of transfor-mations of the group, every point of M can be transferred to any other point of thismanifold. Indeed, if P′ and P′′ are any two points of M and if they are obtained fromP by means of the transformations S and U , respectively, one has the relations:
(P)S = (P′), (P)U = (P′′) ;
from the first one, it follows:
(P′)S−1 = (P)SS−1 = (P) ;
hence with the help of the second one, it comes:
(P′)S−1 U = (P′′),
that is to say, by the transformation S−1U which likewise belongs to the group,the point P′ is transferred to the point P′′. As a result, the assertion stated above isproved.

§ 61. 237
From this, we realize that the manifold M can also be defined as the totality ofall positions which any of its other points, not just P, take by the ∞r transformationsof the group.
Consequently, the following holds true.
Theorem 36. If, on a point P of the space (x1, . . . ,xn), one executes all ∞r trans-formations of an r-term group of this space, then the totality of all positions thatthe point takes in this manner forms a manifold invariant by the group; this man-ifold contains no smaller subsidiary domain invariant by the group, and it is itselfcontained in all invariant manifolds in which the point P lies.
If one assumes that the finite equations x′i = fi(x1, . . . ,xn, a1, . . . ,ar) of ther-term group are known, then without difficulty, one can indicate for every pointx0
1, . . . ,x0n the smallest invariant manifold to which it belongs. Indeed by the above,
the manifold in question consists of the totality of all positions x1, . . . ,xn that thepoint x0
1, . . . ,x0n take by the transformations of the group; but evidently, the totality
of these positions is represented by the n equations:
xi = fi(x01, . . . ,x
0n, a1, . . . ,ar) (i=1 ···n)
in which the parameters a are to be interpreted as independent variables. If oneeliminates the a, one obtains the sought manifold represented by equations betweenthe x alone.
Here, it is to be recalled that in the equations xi = fi(x0,a), the a are not com-pletely arbitrary; indeed, all systems of values a1, . . . ,ar for which the determinant:
∑ ±[
∂ f1(x,a)∂x1
]x=x0
· · ·[
∂ fn(x,a)∂xn
]x=x0
vanish are excluded from the beginning, because we always use only transforma-tions which are solvable. From this, it follows that in certain circumstances, oneobtains, by elimination of the a, a manifold which contains, aside from the points towhich x0
1, . . . ,x0n is transferred by the solvable transformations of the group, yet other
points; then as one easily sees, the latter points form in turn an invariant manifold.
Furthermore, it is to be remarked that the discussed elimination can take differ-ent shapes for different systems of values x0
k ; indeed, the elimination of the a neednot conduct always to the same number of relations between the x, which againmeans that the smallest invariant manifolds in question need not have all the samedimension number.
If, amongst all smallest invariant manifolds of the same dimension number, onetakes infinitely many such invariant manifolds according to an arbitrary analyticrule, then their totality also forms an invariant manifold. In this way, all invariantmanifolds can obviously be obtained.
So we have the
Theorem 37. If one knows the finite equations of an r-term group X1 f , . . . ,Xr f inthe variables x1, . . . ,xn, then without integration, one can find all invariant systems

238 14 Determination of Invariant Systems of Equations
of equations invariant by the group, or, what is the same, all manifolds invariant byit.
§ 62.
In Chap. 12, p. 219, we have seen that an r-term group Gr in x1, . . . ,xn associatesto every point of the space a completely determined subgroup, namely the subgroupwhich consists of all transformations of the Gr which leave the point invariant.
Let the point P be invariant by an m-term subgroup of the Gr, but by no subgroupwith more terms; let S be the general symbol of a transformation of this m-termsubgroup, so that one hence has: (P)S = (P). Moreover, let T be a transformationwhich transfers the point P to the new position P′:
(P)T = P′.
Now, if T is an arbitrary transformation of the Gr which transfers P to P′ as well,we have:
(P)T= (P′) = (P)T,
hence it comes:(P)TT−1 = (P).
From this, it is evident that TT−1 belongs to the transformations S, hence that:
T= ST
is the general form of a transformation of the same constitution as T. Now, sincethere are precisely ∞m transformations S, we see that:
The Gr contains exactly ∞m transformations which transfer P to P′.
On the other hand, if we ask for all transformations S′ of the Gr which leaveinvariant the point P′, then we have to fulfill the condition (P′)S′ = (P′). From it,we see that:
(P)T S′ = (P)T and (P)T S′ T−1 = (P),
and consequently T S′ T−1 is a transformation S, that is to say S′ has the form:
S′ = T−1 ST.
One sees with easiness here that S can be a completely arbitrary transformationof the subgroup associated to the point P; as a result, our group contains exactly∞m different transformations S′, and in turn now, they obviously form an m-termsubgroup of the Gr.
The results of this paragraph obtained up to now can be summarized as follows.
Proposition 1. If an r-term group Gr of the Rn contains exactly ∞m and not moretransformations S which leave the point P invariant, and if in addition it containsat least one transformation T which transfers the point P to the point P′, then it

§ 62. 239
contains on the whole ∞m different transformations which transfer P to P′; the gen-eral form of these transformations is: ST . In addition, the Gr contains exactly ∞m
transformations which leave invariant the point P′; their general form is: T−1 ST .
From the second part of this proposition, it follows that the points which admitexactly ∞m transformations of our group are permuted by the transformations of thegroup, while their totality remains invariant.
Hence the following hold true.
Theorem 38. The totality of all points which admit the same number, say ∞m, andnot more transformations of an r-term group, remains invariant by all transforma-tions of the group.
We have proved this theorem by applying considerations which are borrowedfrom the theory of substitutions. But at the same time, we want to show how onecan conduct the proof in case one abstains from such considerations, or from a moreexact language.
A point x01, . . . ,x
0n which allows ∞m transformations of the r-term group:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
admits precisely m independent infinitesimal transformations of this group. Hencethe group contains, in the neighbourhood of x0
1, . . . ,x0n, exactly m independent in-
finitesimal transformations whose power series expansions with respect to the xi−x0i
begin with terms of first order or of higher order. Now, if we imagine that new vari-ables:
xi = x0i +
n
∑k=1
αki (xk − x0k)+ · · · (i=1 ···n)
∑ ± α11 · · · αnn 6= 0,
are introduced in the group, then according to Chap. 11, p. 210, we obtain a newgroup in the xi which, in the neighbourhood of x0
i , contains in the same way exactlym independent infinitesimal transformations of first order or of higher order. In par-ticular, if we imagine that the transition from the xi to the xi is a transformation ofthe group X1 f , . . . ,Xr f , then the group in the xi is simply identical to the group:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
(cf. Chap. 3, p. 46). In other words, if, by a transformation of our group, the pointx0
i is transferred to the point x0i , then this point also admits precisely m independent
infinitesimal transformations of the group. But with this, the Theorem 38 is visiblyproved.
From the Theorem 38 it comes immediately that the following proposition alsoholds true:

240 14 Determination of Invariant Systems of Equations
Proposition 2. The totality of all points x1, . . . ,xn which admit m or more indepen-dent infinitesimal transformations of the r-term group X1 f , . . . ,Xr f remains invari-ant by this group.
If we associate this proposition with the developments in Chap. 11, Proposi-tion 4, p. 213, we obtain a new important result. At that time, we indeed saw thatthe points x1, . . . ,xn which admit m or more independent infinitesimal transforma-tions e1 X1 f + · · ·+ er Xr f of the r-term group X1 f , . . . ,Xr f are characterized by thefact that all (r−m+ 1)× (r−m+ 1) determinants of a certain matrix are broughtto vanishing. At present, we recognize that the system of equations which is ob-tained by equating to zero these (r−m+ 1)× (r−m+ 1) determinants admits alltransformations of the group X1 f , . . . ,Xr f . As a result, we have the
Theorem 39. If r independent infinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
generate an r-term group, then by equating to zero all (r −m+ 1)× (r −m+ 1)determinants of the matrix:
(1)
∣∣∣∣∣∣ξ11(x) · · ξ1n
· · · ·ξr1(x) · · ξrn
∣∣∣∣∣∣ ,one always obtains a system of equations which admits all transformations of thegroup X1 f , . . . ,Xr f ; this holds true for every number m 6 r, provided only that thereactually exist systems of values x1, . . . ,xn which bring to zero all the (r−m+ 1)×(r−m+1) determinants in question.
Later in the course of this chapter (§§ 66 and 67, p. 249 and 251 resp.), wewill give yet two different purely analytic proofs of the above important theorem.Temporarily, we observe only the following:
The Theorem 39 shows that there is an essential difference between the problemof the Chap. 7 p. 138 up to 147 and the one of the present chapter.
If X1 f , . . . ,Xr f generate an r-term group, then by equating to zero all (r−m+1)× (r−m+1) determinants of the matrix (1), one always obtains an invariant sys-tem of equations, only as soon as all these determinants really can vanish at the sametime. But this is not anymore true when it is only assumed about the Xk f that, whenset to zero, they constitute a complete system consisting of r, or less equations. Inthis case, it is certainly possible that there are invariant systems of equations whichembrace the equations obtained by equating to zero the determinants in question,but it is not at all always the case that one obtains an invariant system of equationsby equating to zero these determinants, just like that. To get this, further operationsare rather necessary in general, as it is explained in Chap. 7, p. 139 sq.
In the last paragraph of this chapter, p. 253, we will study this point in moredetails.

§ 63. 241
§ 63.
In the preceding paragraph, we have seen that, from the infinitesimal transformationsof an r-term group, one can derive without integration certain systems of equationswhich remain invariant by the concerned group. Now, we will show how one findsall systems of equations which admit an r-term group with given infinitesimal trans-formations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r).
We want to suppose that amongst the r equations X1 f = 0, . . . , Xr f = 0, exactlyq mutually independent are extant, hence that in the matrix (1), all (q+1)× (q+1)determinants vanish identically, but not all q×q ones.
Exactly as in Chap. 7, p. 135 and 138 we can then distribute in q+ 1 differentclasses the systems of equations which admit the r infinitesimal transformationsX1 f , . . . ,Xr f . In one and the same class, we reckon here the systems of equations byvirtue of which all (p+1)×(p+1) determinants of the matrix (1) vanish, but not allp× p determinants, where it is understood that p is one of the q+1 numbers q, q−1,. . . , 1, 0. If we prefer to apply the way of expressing of the theory of manifolds, wemust say: to one and the same class belong the invariant manifolds whose pointsadmit the same number, say exactly r− p, of infinitesimal transformations e1 X1 f +· · ·+ er Xr f . To every point of such a manifold, the infinitesimal transformationsX1 f , . . . ,Xr f attach exactly p independent directions, which in turn are in contactwith the manifold (cf. Chap. 123, p. 149).
The usefulness of this classification is that it makes it possible to consider everyindividual class for itself and to determine the systems of equations which belongto it, or, respectively, the manifolds.
If the number p equals q, then the determination of all invariant systems of equa-tions which belong to the concerned class is achieved by the Theorem 17 in Chap. 7,p. 138. Every such system of equations can be represented by relations between thecommon solutions of the equations X1 f = 0, . . . , Xr f = 0. Since these r equationsdetermine a q-term complete system, they will of course possess common solutionsonly when q is smaller than n.
At present, we can disregard the case p = q. Hence we assume from now on thatp is one of the numbers 0, 1, . . . , q−1 and we state the problem of determining allmanifolds invariant by the group X1 f , . . . ,Xr f which belong to the class defined bythe number p.
The first step for solving this problem is the determination of the locus of allpoints for which all (p+1)×(p+1) determinants of the matrix (1) vanish, whereasnot all p× p determinants do. Indeed, the corresponding locus clearly contains allmanifolds invariant by the group which belong to our class; besides, according toTheorem 38 p. 239, this locus itself constitutes an invariant manifold.
In order to find the sought locus, we at first study the totality of all points forwhich all (p+1)× (p+1) determinants of the matrix (1) vanish, that is to say, wecalculate all the (p+ 1)× (p+ 1) determinants of the matrix in question — theycan be denoted ∆1, ∆2, . . . , ∆ρ — and we set them equal to zero:

242 14 Determination of Invariant Systems of Equations
∆1 = 0, . . . , ∆ρ = 0.
The so obtained equation then represent a manifold which, according to Theo-rem 39, p. 240, is invariant by the group and which contains the sought locus.
If there is in fact no system of values x1, . . . ,xn which brings to zero all the ∆ , orif the (p+ 1)× (p+ 1) determinants can vanish only in such a way that all p× pdeterminants also vanish at the same time, then it is clear that actually no mani-fold invariant by the group X1 f , . . . ,Xr f belongs to the class which is defined byp. Consequently, we see that not exactly each one of our q+ 1 classes need to berepresented by manifolds which belong to it.
We assume that for the p chosen by us, none of the two exceptional cases dis-cussed just now occurs, so that there really are systems of values x1, . . . ,xn for whichall (p+1)× (p+1) determinants of the matrix (1), but not all p× p ones vanish.
As we have already observed, the manifold ∆1 = 0, . . . , ∆ρ = 0 remains invariantby the group X1 f , . . . ,Xr f . Now, if this manifold is reducible, it therefore consistsof a discrete number of finitely many different manifolds, so it decomposes with-out difficulty in as many different individual invariant manifolds. Indeed, the groupX1 f , . . . ,Xr f is generated by infinitesimal transformations; hence when it leaves in-variant the totality of finitely many manifolds, then each individual manifold muststay at rest1.
Let M1, M2, . . . be the individual irreducible, and so invariant by the group, mani-folds in which the manifold ∆1 = 0, . . . , ∆ρ = 0 decomposes. Then possibly amongstthese manifolds, there are some, for the points of which all p× p determinants ofthe matrix (1) also vanish. When we exclude all manifolds of this special constitu-tion, we still keep certain manifolds M1, M2, . . . , the totality of which clearly formsthe locus of all points for which all (p+1)× (p+1) determinants of the matrix (1)vanish, but not all p× p ones.
With this, we have found the sought locus; at the same time, we see that thislocus can consist of a discrete number of individual invariant manifolds M1, M2, . . .which, naturally, belong all to the class defined by p.
Clearly, each manifold invariant by our group which belongs to the class definedby p is contained in one of the manifolds M1, M2, . . . So in order to find all suchmanifolds, we need only to examine each individual manifold M1, M2, . . . andto determine the invariant manifolds contained in them which belong to the saidclass. According to a remark made earlier on (Chap. 7, Proposition 6, p. 150), eachinvariant manifold belonging to the class p is at least p-times extended.
§ 64.
The problem, to which we have been conducted at the end of the preceding para-graph is a special case of the following general problem:
Suppose the equations of an irreducible manifold M which remain invariant bythe transformations of the r-term group X1 f , . . . ,Xr f are given. In general, the in-
1 In fact, the argument is that each stratum is kept invariant because the group acts close to theidentity.

§ 64. 243
finitesimal transformations X1 f , . . . ,Xr f attach exactly p independent directions tothe points of the manifold with which they are naturally in contact, and the manifoldis at least p-times extended. To seek all invariant subsidiary domains contained inM, to the points of which the transformations X1 f , . . . ,Xr f attach exactly p inde-pendent directions.
We now want to solve this problem.We imagine the equations of M presented under the resolved form:
xs+i = ϕs+i(x1, . . . ,xs) (i=1 ···n−s),
but here it should not be forgotten that by the choice of a determined resolution,we exclude all systems of values x1, . . . ,xn for which precisely this resolution is notpossible. It is thinkable that we exclude in this manner certain invariant subsidiarydomains of M which are caught by another resolution.
The case p = 0 requires no special treatment, because obviously, the manifold Mthen consists only of invariant points.
In order to be able to solve the problem for the remaining values of p, we mustbegin by mentioning a few remarks that stand in tight connection to the analyticdevelopments in Chap. 7, P. 140 and 142, and which already possess in principle agreat importance.
Since the manifold M remains invariant by the transformations of our group, itspoints are permuted by the transformations of the group. Hence, if we disregard allpoints lying outside of M, then our group X1 f , . . . ,Xr f determines a certain groupof transformations of the points of M. However, this new group need not contain ressential parameters, since it can happen that a subgroup of the group X1 f , . . . ,Xr fleaves all points of M individually fixed.
We want to summarize at first what has been said:
Theorem 40. The points of a manifold that remains invariant by an r-term group ofthe space (x1, . . . ,xn) are in their turn transformed by a continuous group with r orless parameters.
Since we have assumed that the invariant manifold M is irreducible, we can con-sider it as being a space for itself. The analytic expression of the transformationgroup by which the points of this space are transformed must therefore be obtainedby covering the points of M by means of a related coordinate system and by estab-lishing how these coordinates are transformed by the group X1 f , . . . ,Xr f .
Under the assumptions made, the group which transforms the points of M can beimmediately indicated. Indeed, we need only to interpret x1, . . . ,xs as coordinates ofthe points of M, and in the finite equations x′i = fi(x,a) of the group X1 f , . . . ,Xr f , toreplace the xs+1, . . . ,xn by ϕs+1, . . . ,ϕn and to leave out x′s+1, . . . ,x
′n; then we obtain
the equations of the concerned group, they are the following:
x′i = fi(x1, . . . ,xs, ϕs+1, . . . ,ϕn; a1, . . . ,ar) (i=1 ···n).
One could convince oneself directly that one really has to face with a group in thevariables x1, . . . ,xn. For that, one would only need to execute two transformations

244 14 Determination of Invariant Systems of Equations
one after another2 under the form just written, and then to take account of twofacts: firstly, that the transformations x′i = fi(x1, . . . ,xn, a1, . . . ,ar) form a group, andsecondly that the system of equations xs+i = ϕs+i admits this group.
If on the other hand one would want to know the infinitesimal transformationsof the group in x1, . . . ,xs, then one would only need to leave out the terms with∂ f/∂xs+1, . . . , ∂ f/∂xn in the Xk f and to replace xs+1, . . . ,xn by the ϕ in the re-maining terms. One finds the r infinitesimal transformations:
Xk f =s
∑ν=1
ξkν(x1, . . . ,xs, ϕs+1, . . . ,ϕn)∂ f∂xν
(k=1 ···r),
which, however, need not be independent of each other.We will verify directly that the reduced infinitesimal transformations Xk f gen-
erate a group. The concerned computation is mostly similar to the one executed inChap. 7, p. 145.
At that time, we indicated the execution of the substitution xs+i = ϕs+i by meansof the symbol [ ]. So we have at first:
Xk f =s
∑ν=1
[ξkν ]∂ f∂xν
.
Furthermore as before, we see through the Eq. (3) of the Chap. 7, p. 126, that:
Xk[Ω ]≡ [XkΩ ],
where it is understood that Ω is a completely arbitrary function of x1, . . . ,xn. Fromthis, it therefore comes:
[Xk, X j] =s
∑ν=1
[Xkξ jν ]− [X jξkν ]
∂ f∂xν
;
and since relations of the form:
[Xk, X j] =r
∑π=1
ck jπ Xπ f ,
or, what is the same, of the form:
Xkξ jν −X jξkν =r
∑π=1
ck jπ ξπν
hold true, then we obtain simply:
2 Remind from Chaps. 4 and 9 that only closure under composition counts for Lie.

§ 64. 245
[Xk, X j] =r
∑π=1
ck jπ Xπ f .
As a result, it is proved in a purely analytic way that X1 f , . . . ,X r f really generatea group.
The infinitesimal transformations X1 f , . . . ,Xr f of the space x1, . . . ,xn attach ex-actly p independent directions dx1 : · · · : dxn to every point in general position onthe manifold M, and these directions, as is known, are in contact with the manifold.It can be foreseen that the infinitesimal transformations X1 f , . . . ,X r f of the spacex1, . . . ,xs, or what is the same, of the manifold M, also attach to every point x1, . . . ,xsin general position exactly p independent directions dx1 : · · · : dxs. We shall verifythat this is really so.
Under the assumptions made, after the substitution xs+i = ϕs+i, all (p + 1)×(p+ 1) determinants of the matrix (1) vanish, but not all p× p determinants, andtherefore, amongst the r equations:
(2) [ξk1]∂ f∂x1
+ · · ·+[ξkn]∂ f∂xn
(k=1 ···r),
exactly p independent ones are extant. From this, it follows that amongst the r equa-tions Xk f = 0, there are at most p independent ones; our problem is to prove thatthere are exactly p. This is not difficult.
Since the system of equations xs+i −ϕs+i = 0 admits the infinitesimal transfor-mations Xk f , we have identically:
[Xk(xs+i −ϕs+i)]≡ 0,
or if written in greater length:
[ξk,s+i]≡s
∑ν=1
[ξkν ]∂ϕs+i
∂xν.
Hence, if by χ1, . . . ,χr we denote arbitrary functions of x1, . . . ,xs, we then have:
r
∑k=1
χk [ξk,s+i]≡r
∑k=1
χk Xkϕs+i.
Now, if there are r functions ψ1, . . . ,ψr of x1, . . . ,xn not all vanishing such thatthe equation:
r
∑k=1
ψk(x1, . . . ,xs)Xk f ≡ 0
is identically satisfied, then we have:
r
∑k=1
ψk [ξk,s+i]≡r
∑k=1
ψk Xk ϕs+i ≡ 0,

246 14 Determination of Invariant Systems of Equations
and consequently also:
r
∑k=1
ψk(x1, . . . ,xs)n
∑ν=1
[ξkν ]∂ f∂xν
≡ 0.
As a result, it is proved that amongst the equations:
X1 f = 0, . . . , X r f = 0,
there are exactly as many independent equations as there are amongst the equa-tions (2), that is to say, exactly p independent ones.
At present, we are at last in a position to settle the problem posed in the beginningof the paragraph, on p. 242.
The thing is the determination of certain subsidiary domains invariant by thegroup X1 f , . . . ,Xr f in the invariant manifold M, namely the subsidiary domains tothe points of which the infinitesimal transformations X1 f , . . . ,Xr f attach exactly pindependent directions. According to what precedes, these subsidiary domains canbe defined as certain manifolds of the space x1, . . . ,xs; as such, they are character-ized by the fact that they admit the group X1 f , . . . ,X r f and that, to their points,are attached exactly p independent directions by the infinitesimal transformationsX1 f , . . . ,X r f . Consequently, our problem amounts to the following:
In a space M of s dimensions, let the group X1 f , . . . ,X r f be given, whose in-finitesimal transformations attach, to the points of this space in general position,exactly p 6 s independent directions. To seek all invariant manifolds contained inM having the same constitution.
But we already have solved this problem above (p. 241); only at that time wehad the group X1 f , . . . ,Xr f in place of the group X1 f , . . . ,X r f , the number n inplace of the number s, the number q in place of the number p. Thus, the wantedmanifolds are represented by means of relations between the solutions of the p-termcomplete system that the equations X1 f = 0, . . . , X r f = 0 determine. If one addsthese relations to the equations of M, then one obtains the equations of the invariantsubsidiary domains of M in terms of the initial variables x1, . . . ,xn.
Naturally, there are invariant subsidiary domains in M of the demanded sort onlywhen s is larger than p, and there are none, when the numbers s and p are equal oneto another.
With this, we therefore have at first the following important result:
Theorem 41. If an s-times extended manifold of the space x1, . . . ,xn admits the r-term group X1 f , . . . ,Xr f and if, to the points of this manifold, the infinitesimal trans-formations attach exactly p independent directions which then surely fall into themanifold3, then s is > p; in case s > p, the manifold decomposes in ∞s−p p-timesextended subsidiary domains, each of which admits the group X1 f , . . . ,Xr f .
3 Act of “intrinsiqueness”: directions attached to M inside the ambient space happen to in fact beintrinsically attached to M.

§ 64. 247
At the same time, the problem to which we were conducted at the end of thepreceding paragraph (p. 242) is also completely solved, and with this, the determi-nation of all systems of equations that the group X1 f , . . . ,Xr f admits, is achieved. Inview of applications, we put together yet once more the guidelines [MASSREGELN]required for that.
Theorem 42. If the r independent infinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
generate an r-term group and if at the same time, all (q+1)× (q+1) determinantsof the matrix: ∣∣∣∣∣∣
ξ11 · · · ξ1n· · · · ·
ξr1 · · · ξrn
∣∣∣∣∣∣vanish identically, whereas not all q×q determinants do, then one finds as followsall systems of equations, or, what is the same, all manifolds that the group admits.
One distributes the systems of equations or the manifolds in question in q+ 1different classes by reckoning to be always in the same class the systems of equationsby virtue of which4 all (p+ 1)× (p+ 1) determinants of the above matrix, but notall p× p ones, vanish, where it is understood that p is one of the numbers q, q−1,. . . , 1, 0.
Then in order to find all invariant systems of equations which belongs to a de-termined class, one forms all (p+1)× (p+1) determinants ∆1, ∆2, . . . , ∆ρ of thematrix and one sets them equal to zero. If there is no system of values x1, . . . ,xnwhich brings to zero all the ρ determinants ∆i at the same time, then actually, theclass which is defined by the number p contains absolutely no invariant manifold;and the same evidently holds also for the classes with the numbers p−1, p−2, . . . ,1, 0. On the other hand, if all systems of values x1, . . . ,xn which make ∆1, . . . ,∆ρequal to zero would at the same time bring to zero all p× p determinants of thematrix, then also in this case, the class with the number p would absolutely not bepresent as manifolds. If none of these two cases occurs, then the system of equations:
∆1 = 0, . . . , ∆ρ = 0
represents the manifold M invariant by the group inside which all invariant mani-folds with the class number p are contained. If M decomposes in a discrete numberof manifolds M1, M2, . . . , then these manifolds remain individually invariant, but ineach one of them, infinitely many invariant subsidiary domains can yet be containedwhich belong to the same class as M. In order to find these subsidiary domains, onesets the equations of, say M1, in resolved form:
xs+i = ϕs+i(x1, . . . ,xs) (i=1 ···n−s),
4 This just means systems of equations including the equations of (p+1)× (p+1) minors.

248 14 Determination of Invariant Systems of Equations
where the entire number s is at least equal to p. Lastly, one forms the r equations:
Xk f =s
∑ν=1
ξkν(x1, . . . ,xs, ϕs+1, . . . ,ϕn)∂ f∂xν
= 0,
and one computes any s− p independent solutions:
ω1(x1, . . . ,xs), . . . , ωs−p(x1, . . . ,xs)
of the p-term complete system determined by these equations. The general analyticexpression for the sought invariant subsidiary domains of M1 is then:
xs+i −ϕs+i(x1, . . . ,xn) = 0, ψ j(ω1, . . . ,ωs−p) = 0(i=1 ···n−s ; j=1 ···m),
where the m 6 s− p relations ψ j = 0 are completely arbitrary. —Naturally, also M2, . . . must be treated in the same manner as M1. In addition,
for p, one has to insert one after the other all the q+1 numbers q, q−1, . . . , 1, 0.
§ 65.
In order to apply the preceding researches to an example, we consider the three-termgroup:
X1 f =∂ f∂y
+ x∂ f∂ z
, X2 f = y∂ f∂y
+ z∂ f∂ z
,
X3 f = (−z+ xy)∂ f∂x
+ y2 ∂ f∂y
+ yz∂ f∂ z
of the ordinary space. The group is transitive, because the determinant:
∆ =
∣∣∣∣∣∣0 1 x0 y z
−z+xy y2 yz
∣∣∣∣∣∣=−(z− xy)2
does not vanish identically. From this, we conclude that the surface of second de-gree: z− xy = 0 remains invariant by the group, and else that no further surfacedoes.
For the points of the surface z− xy = 0, but also only for these points, all the2 × 2 subdeterminants of ∆ even vanish, while its 1× 1 subdeterminants cannotvanish simultaneously. From this, it follows that the invariant surface decomposesin ∞1 invariant curves, but that apart from these, no other invariant curves exist,while there are actually no invariant points.
In order to find the ∞1 curves on the surface z− xy = 0, we choose x and y ascoordinates for the points of the surface and we form, according to the instructionsgiven above, the reduced infinitesimal transformations in x,y:

§ 66. 249
X1 f =∂ f∂y
, X2 f = y∂ f∂y
, X3 f = y2 ∂ f∂y
.
The three equations Xk f = 0 reduce to a single one whose solutions is x. There-fore, the sought curves are represented by the equations:
z− xy = 0, x = const.,
that is to say, all individuals of a family of generatrices on the surface of seconddegree remain invariant.
§ 66.
Here, we give one of the two new proofs promised on p. 240 for the importantTheorem 39.
As before, we denote by ∆1(x), . . . ,∆ρ(x) all the (p+1)× (p+1) determinantsof the matrix:
(3)
∣∣∣∣∣∣ξ11(x) · · ξ1n(x)
· · · ·ξr1(x) · · ξrn(x)
∣∣∣∣∣∣ .In addition, we assume that there are systems of values x1, . . . ,xn which bring to
zero all the ρ determinants ∆ . Then it is to be proved that the system of equations:
∆1(x) = 0, . . . , ∆ρ(x) = 0
admits all transformations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
of the r-term group X1 f , . . . ,Xr f .According to Chap. 6, p. 114, this only amounts to prove that the system of
equations:∆1(x′) = 0, . . . , ∆ρ(x′) = 0
is equivalent, after the substitution x′i = fi(x, a), to the system of equations:
∆1(x) = 0, . . . , ∆ρ(x) = 0;
here, it is completely indifferent whether or not the equations ∆1 = 0, . . . , ∆ρ = 0are mutually independent.
In order to prove that our system of equations really possesses the property inquestion, we proceed as follows:
In Chap. 3, p. 485, we have seen that by virtue of the equations x′i = fi(x,a), arelation of the form:
5 The matrix denoted ρ(a) is denoted here ω(a)

250 14 Determination of Invariant Systems of Equations
(4)r
∑k=1
e′k X ′k f =
r
∑k=1
ek Xk f
holds, in which the e′k are related to the ek by the r equations:
e j =−1···r
∑π, k
ϑk j(a)απk(a)e′π =r
∑π=1
ω jπ(a)e′π .
If we insert the just written expression of the ek in (4) and if we compare the coeffi-cients of the two sides, we obtain r relations:
X ′k f =
r
∑j=1
ω jk(a)X j f (k=1 ···r)
which clearly reduce to identities as soon as one expresses the x′ in terms of the xby means of the equations x′i = fi(x,a).
By inserting the function x′i in place of f in the equations just found, we obtainthe equations:
X ′kx′i = ξki(x′) =
r
∑j=1
ω jk(a)X jx′i
=r
∑j=1
ω jk(a)n
∑ν=1
ξ jν(x)∂ fi(x,a)
∂xν
which express directly the ξki(x′) as functions of the x and a. Thanks to this, we arein a position to study the behaviour of the equations ∆(x′) = 0 after the substitutionx′i = fi(x,a).
The determinants ∆1(x′), . . . ,∆ρ(x′) are made up from the matrix:∣∣∣∣∣∣ξ11(x′) · · ξ1n(x′)
· · · ·ξr1(x′) · · ξrn(x′)
∣∣∣∣∣∣in the same way as the determinants ∆1(x), . . . ,∆ρ(x) are made up from the ma-trix (3). Now, if we imagine that the values found a while ago:
ξki(x′) =r
∑j=1
ω jk X jx′i
are inserted in the matrix just written and then that the determinants ∆(x′) are com-puted, we realize at first what follows: the determinants ∆σ (x′) have the form:
∆σ (x′) =ρ
∑τ=1
χστ(a)Dτ (σ =1 ···ρ),

§ 67. 251
where the χστ are certain determinants formed with the ω jk(a), while D1, . . . ,Dρdenote all the (p+1)× (p+1) determinants of the matrix:∣∣∣∣∣∣
X1x′1 · · X1x′n· · · ·
Xrx′1 · · Xrx′n
∣∣∣∣∣∣ .Lastly, if the replace each Xkx′i by its value:
Xkx′i =n
∑ν=1
ξkν(x)∂ fi(x,a)
∂xν,
we obtain for the determinants Dτ expressions of the form:
Dτ =ρ
∑µ=1
ψτµ(x,a)∆µ(x),
where the ψτµ are certain determinants formed with the ∂ fi(x,a)∂xν
.
With this, it is proved that, after the substitution x′i = fi(x,a), the ∆σ (x′) take theform:
∆σ (x′) =1···ρ
∑τ, µ
χστ(a)ψτµ(x,a)∆µ(x) (σ =1 ···ρ).
Now, since the functions χστ(a), ψτµ(x,a) behave regularly for all systemsof values x,a coming into consideration, it is clear that the system of equations∆σ (x′) = 0 is equivalent, after the substitution x′i = fi(x,a), to the system of equa-tions ∆σ (x) = 0, hence that the latter system of equations admits all transformationsx′i = fi(x,a). But this is what was to be proved.
§ 67.
The Theorem 39 is so important that it appears not to be superfluous to produce yeta third proof of it.
According to the Proposition 3 of the Chap. 7 (p. 129), the system of equations∆1 = 0, . . . , ∆ρ = 0 certainly admits all transformations of the r-term groupX1 f , . . . ,Xr f when there exist relations of the form:
Xk∆σ =ρ
∑τ=1
ωστ(x1, . . . ,xn)∆τ (k=1 ···r ; σ =1 ···ρ)
and when in addition the functions ωστ behave regularly for the systems of valueswhich satisfy the equations ∆1 = 0, . . . , ∆ρ = 0. Now, it is in our case not moredifficult to prove that the system of equations ∆σ = 0 satisfies this property. But inorder not to be too much extensive, we want to execute this proof only in a specialcase. In such a way, one will see well how to treat the most general case.

252 14 Determination of Invariant Systems of Equations
We will firstly assume that our group is simply transitive. So it contains n inde-pendent infinitesimal transformations and in addition, the determinant:
∆ =
∣∣∣∣∣∣ξ11(x) · · · ξ1n(x)
· · · · ·ξn1(x) · · · ξnn(x)
∣∣∣∣∣∣does not vanish identically.
Furthermore, we will restrict ourselves to establish that there are n relations ofthe form:
Xi∆ = ωi(x1, . . . ,xn)∆ (i=1 ···n),
so that the equation ∆ = 0 admits all transformations of the group. By contrast, wewill not consider the invariant systems of equations which are obtained by equatingto zero all subdeterminants of the determinant ∆ .
If we express the (n− 1)× (n− 1) subdeterminants of ∆ as partial differentialquotients of ∆ with respect to the ξµν , it comes for Xi∆ the expression:
Xi∆ =1···n
∑µ, ν
Xi ξµν∂∆
∂ξµν.
Now, X1 f , . . . ,Xn f generate an n-term group, so there are relations of the form:
[Xi, Xµ ] =n
∑s=1
ciµs Xs f ,
or else, if written with more details:
Xi ξµν −Xµ ξiν =n
∑s=1
ciµs ξsν .
Consequently, for Xi ξµν , it results the following expression:
Xi ξµν =n
∑s=1
(ξµs
∂ξiν∂xs
+ ciµs ξsν
).
If, in this expression, we insert the equation above for Xi∆ , then it comes:
Xi ∆ =1···n
∑µ, ν , s
(ξµs
∂ξiν∂xs
+ ciµs ξsν
)∂∆
∂ξµν.
Here according to a known proposition about determinants, the coefficients of∂ξiν/∂xs and of ciµs can be expressed in terms of ∆ . Namely, one has:

§ 68. 253
n
∑µ=1
ξµs∂∆
∂ξµν= εsν ∆ ,
n
∑ν=1
ξsν∂∆
∂ξµν= εsµ ∆ ,
where the quantities επρ vanish as soon as π and ρ are different from each other,while εππ always has the value 1. Using these formulas, we obtain:
Xi∆ = ∆ 1···n
∑ν , s
εsν∂ξiν∂xs
+1···n
∑µ, s
εsµ ciµs
,
and from this, it follows lastly that:
(5) Xi∆ = ∆n
∑s=1
(∂ξis
∂xs+ ciss
)(i=1 ···n).
Since, as always, only systems of values x1, . . . ,xn for which all ξki(x) behaveregularly are taken into consideration, then clearly, the factor of ∆ in the right-handside behaves regularly for the considered systems of values x1, . . . ,xn. Hence, if theequation ∆ = 0 can be satisfied by such systems of values x1, . . . ,xn, then accordingto the Proposition 3, p. 129, it admits all transformations of the group X1 f , . . . ,Xn f .
§ 68.
As was already underlined on p. 235, the developments of the present chapter havegreat similarities with those of the Chap. 7, p. 135 sq. Therefore, it is important tobe conscious of the differences between the two theories.
We have already mentioned the first difference on page 240. It consists in whatfollows:
When the r independent infinitesimal transformations X1 f , . . . ,Xr f generate an r-term group, then each system of equations ∆1 = 0, . . . , ∆ρ = 0 obtained by formingdeterminants as mentioned more than enough admits all infinitesimal transforma-tions X1 f , . . . ,Xr f . By contrast, when the r infinitesimal transformations are onlysubjected to the restriction that the independent equations amongst the equationsX1 f = 0, . . . , Xr f = 0 form a complete system, then in general, none of the systemsof equations ∆1 = 0, . . . , ∆ρ = 0 needs to admit the infinitesimal transformationsX1 f , . . . ,Xr f .
Amongst certain conditions, one can in fact also be sure from the beginning, inthe second one of the two cases just mentioned, that a system of equations ∆1 = 0,. . . , ∆ρ = 0 obtained by forming determinants admits the infinitesimal transforma-tions X1 f , . . . ,Xr f .
Let the r independent infinitesimal transformations X1 f , . . . ,Xr f be constitutedin such a way that the independent equations amongst the r equations X1 f = 0, . . . ,Xr f = 0 form a complete system, so that there are relations of the form:

254 14 Determination of Invariant Systems of Equations
(6)[Xi, Xk] = γik1(x1, . . . ,xn)X1 f + · · ·+ γikr(x1, . . . ,xn)Xr f
(i, k=1 ···r).
Let the (p+1)× (p+1) determinants of the matrix:
(7)
∣∣∣∣∣∣ξ11(x) · · ξ1n(x)
· · · ·ξr1(x) · · ξrn(x)
∣∣∣∣∣∣be denoted by ∆1, . . . ,∆ρ . If there are systems of values x1, . . . ,xn for which alldeterminants ∆1, . . . ,∆ρ vanish and if all functions γik j(x1, . . . ,xn) behave regularlyfor these systems of values, then it can be shown that the system of equations ∆1 = 0,. . . , ∆ρ = 0 admits the infinitesimal transformations X1 f , . . . ,Xr f .
In what follows, this proposition plays no rôle; it will therefore suffice that weprove it only in a special simple case; the proof for the general proposition can beexecuted in an entirely similar way.
We want to assume that r = n and that the n equations X1 f = 0, . . . , Xn f = 0 aremutually independent; in addition, let p = n−1. The mentioned matrix then reducesto the not identically vanishing determinant:
∆ = ∑ ±ξ11 · · ·ξnn,
and it contains only a single (p+ 1)× (p+ 1) determinant, namely itself. We willshow that the equation ∆ = 0 then certainly admits the infinitesimal transformationsX1 f , . . . ,Xr f when the functions γik j in the equations:
[Xi, Xk] =n
∑j=1
γik j X j f (i, k=1 ···n)
behave regularly for the systems of values x1, . . . ,xn which bring ∆ to zero.According to Chap. 7, Proposition 3, p. 129, we need only to show that each Xk∆
can be represented under the form ωk(x1, . . . ,xn)∆ and that the ωk behave regularlyfor the systems of values of ∆ = 0. This proof succeeds in the same way as in thepreceding paragraph. We simply compute the expressions Xk∆ and we find in thesame way as before:
Xk ∆ = ∆n
∑ν=1
∂ξkν∂xν
+ γkνν(x1, . . . ,xn)
(k=1 ···n).
The computation necessary for that is exactly the previous one, although theconstants cik j are replaced by the functions γik j(x); but still, that there occurs nodifference has its reason in the fact that in the preceding paragraphs, it was made nouse of the constancy property of the cik j.

§ 68. 255
Clearly, the factors of ∆ in the right-hand side of the above equations behaveregularly for the systems of values of ∆ = 0, hence we see that the equation ∆ = 0really admits the infinitesimal transformations X1 f , . . . ,Xn f .
A second important difference between the case of an r-term group X1 f , . . . ,Xr fand the more general case of the Chap. 7 comes out as soon as one already knows amanifold M which admits all infinitesimal transformations X1 f , . . . ,Xr f .
We want to assume that X1 f , . . . ,Xr f attach exactly p independent directions tothe points of M and especially, that X1 f , . . . ,Xp f determine p independent direc-tions. Under these assumptions, for the points of M, there are relations of the form:
Xp+k f = ϕk1(x1, . . . ,xn)X1 f + · · ·+ϕkp(x1, . . . ,xn)Xp f
(k=1 ···r− p),
where the ϕk j behave regularly; on the other hand, there is no relation of the form:
χ1(x1, . . . ,xn)X1 f + · · ·+χp(x1, . . . ,xn)Xp f = 0.
Now, if X1 f , . . . ,Xr f generate an r-term group, then for the points of M, all[Xi, Xk] can be represented under the form:
[Xi, Xk] =p
∑j=1
ψik j(x1, . . . ,xn)X j f (i, k=1 ···r),
and here, the ψik j behave regularly. By contrast, if X1 f , . . . ,Xr f only possess theproperty that the independent equations amongst the equations X1 f = 0, . . . , Xr f = 0form a complete system, then such a representation of the [Xi, Xk] for the points ofM is not possible in all cases; but it is always possible when the functions γik j in theequations (6) behave regularly for the systems of values x1, . . . ,xn on M. We havealready succeeded to make use of this condition in Chap. 7, p. 144 sq.
—————–


Chapter 15Invariant Families of InfinitesimalTransformations
One studies in this chapter the general linear combination:
e1 X1 + · · ·+ eq Xq
of q > 1 given arbitrary local infinitesimal transformations:
Xk =n
∑i=1
ξki(x)∂
∂xi(k=1 ···q)
having analytic coefficients ξki(x) and which are assumed to be independent ofeach other. When one introduces new variables x′i = ϕi(x1, . . . ,xn) in place of thexl , every transformation Xk of this general combination receives another form,but it may sometimes happen under certain circumstances that the completefamily in its wholeness remains unchanged, namely that there are functions e′k =e′k(e1, . . . ,eq) such that:
ϕ∗(e1 X1 + · · ·+ eq Xq
)= e′1(e)X ′
1 + · · ·+ e′q(e)X ′q,
where, as in previous circumstances, the X ′k = ∑n
i=1 ξki(x′) ∂∂x′i
denote the same
vector fields, but viewed in the target space x′1, . . . ,x′n.
Definition 15.1. The family e1 X1 + · · ·+ eq Xq of infinitesimal transformationsis said to remain invariant after the introduction of the new variables x′ = ϕ(x)if there are functions e′k = e′k(e1, . . . ,eq) depending on ϕ such that:
(1) ϕ∗(e1 X1 + · · ·+ eq Xq
)= e′1(e)X ′
1 + · · ·+ e′q(e)X ′q;
alternatively, one says that the family admits the transformation which is repre-sented by the concerned change of variables.
Proposition 2. Then the functions e′k(e) in question are necessarily linear:
257

258 15 Invariant Families of Infinitesimal Transformations
e′k =q
∑j=1
ρk j e j (k=1 ···q),
with the constant matrix(ρk j)16 j6q
16k6q being invertible: ek = ∑qj=1 ρk j e′j.
Proof. Indeed, through the change of coordinates x′ = ϕ(x), if we write that thevector fields Xk are transferred to:
ϕ∗(Xk) =n
∑i=1
Xk(x′i)∂
∂x′i=:
n
∑i=1
ηki(x′1, . . . ,x′n)
∂∂x′i
(k=1 ···q),
with their coefficients ηki =ηki(x′) being expressed in terms of the target coordi-nates, and if we substitute the resulting expression into (1), we get the followinglinear relations:
(1’)q
∑k=1
e′k ξki(x′) =q
∑k=1
ek ηki(x′) (i=1 ···n).
The idea is to substitute here for x′ exactly the same number q of different sys-tems of fixed values:
x(1)1 , . . . ,x(1)n ,x(2)1 , . . . ,x(2)n , . . . . . . ,x(q)1 , . . . ,x(q)n
that are mutually in general position and considered as constant. In fact, ac-cording to the proposition on p. 79, or equivalently, according to the assertionformulated just below the long matrix located on p. 78, the linear independenceof X1, . . . ,Xq insures that for most such q points, the long q×qn matrix in ques-tion: ξ (1)
11 · · · ξ (1)1n ξ (2)
11 · · · ξ (2)1n · · · · · · ξ (q)
11 · · · ξ (q)1n
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·ξ (1)
q1 · · · ξ (1)qn ξ (2)
q1 · · · ξ (2)qn · · · · · · ξ (q)
q1 · · · ξ (q)qn
has rank equal to q, where we have set ξ (ν)
ki := ξxi(x(ν)). Consequently, while
considering the values of ξki(x(ν))
and of ηki(x(ν))
as constant, the linear sys-tem above is solvable with respect to the unknowns e′k and we obtain:
e′k =q
∑j=1
ρk j e j (k=1 ···q),
for some constants ρk j. In addition, we claim that the determinant of the matrix(ρk j)16 j6q
16k6q is in fact nonzero. Indeed, the linear independence of X1, . . . ,Xq be-ing obviously equivalent to the linear independence of ϕ∗(X1), . . . ,ϕ∗(Xq), theother corresponding long matrix:

15 Invariant Families of Infinitesimal Transformations 259
η(1)11 · · · η(1)
1n η(2)11 · · · η(2)
1n · · · · · · η(q)11 · · · η(q)
1n· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·
η(1)q1 · · · η(1)
qn η(2)q1 · · · η(2)
qn · · · · · · η(q)q1 · · · η(q)
qn
then also has rank equal to q and we therefore can also solve symmetrically:
ek =q
∑j=1
ρk j e′j (k=1 ···q),
with coefficients ρk j which necessarily coincide with the elements of the inversematrix. ut
As usual, we understand by:
Xk f =n
∑i=1
ξki∂ f∂xi
(k=1 ···q)
independent infinitesimal transformations; temporarily, this shall be the only as-sumption which we make about the Xk f .
We consider the family of ∞q−1 infinitesimal transformations which is repre-sented by the expression:
e1 X1 f + · · ·+ eq Xq f
with the q arbitrary parameters e1, . . . ,eq. When we introduce, in this expression,new independent variables x′ in place of the x, then each infinitesimal transforma-tions in our family takes another form; evidently, we then obtain in general a com-pletely new family of ∞q−1 infinitesimal transformations. However, in certain cir-cumstances, it can happen that the new family does not essentially differ in its formfrom the original family, when for arbitrary values of the e, there is a relation of theshape:
(1)q
∑k=1
ek
n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
=q
∑k=1
e′kn
∑i=1
ξki(x′1, . . . ,x′n)
∂ f∂x′i
,
in which the e′k do not depend upon the x, but only upon e1, . . . ,eq.If there is such a relation, which we can also write shortly as:
(2)q
∑k=1
ek Xk f =q
∑k=1
e′k X ′k f ,
then we say: the family of the infinitesimal transformations ∑ ek Xk f remains invari-ant after the introduction of the new variables x′, or: it admits the transformationwhich is represented by the concerned change of variables.

260 15 Invariant Families of Infinitesimal Transformations
§ 69.
Let the family of the ∞q−1 infinitesimal transformations ∑ ek Xk f remain invariantthrough the transition to the variables x′, so that there is a relation of the form:
(2)q
∑k=1
ek Xk f =q
∑k=1
e′k X ′k f ,
in which the e′ are certain functions of only the e. To begin with, we study this rela-tionship of dependence between the e and the e′; in this way, we reach the startingpoint for the more precise study of such families of infinitesimal transformations.
The expressions Xk f can be written as:
Xk f =n
∑i=1
Xk x′i∂ f∂x′i
,
or, when one expresses the Xk x′i in terms of the x′, as:
Xk f =n
∑i=1
ηki(x′1, . . . ,x′n)
∂ f∂x′i
.
If we insert these values in the equation (2), we can equate the coefficients of the∂ f/∂x′i in the two sides, and so we obtain the following linear relations between thee and the e′:
(2’)q
∑k=1
e′k ξki(x′) =q
∑k=1
ek ηki(x′) (i=1 ···n)
According to our assumption, it is possible to enter for the e′ functions of the ealone so that the equations (2’) are satisfied for all values of the x′. It can be shownthat the concerned functions of the e are completely determined.
Since the equations (2’) are supposed to hold true for all values of the x′, thenthey must also be satisfied yet when we replace x′1, . . . ,x
′n by any other system of
variables. We want to do this, and to write down the equations (2’) in exactly qdifferent systems of variables x′1, . . . ,x
′n, x′′1 , . . . ,x
′′n , · · · , x(q)1 , . . . ,x(q)n :
q
∑k=1
e′k ξki(x(ν)) =q
∑k=1
ek ηki(x(ν)) (i=1 ···n)
(ν =1 ···q).
The so obtained equations are solvable with respect to e′1, . . . ,e′q, because under
the assumptions made, according to the developments of the Chap. 4, p. 78, not allq×q determinants of the matrix:

§ 69. 261∣∣∣∣∣∣∣ξ ′
11 · · ξ ′1n ξ ′′
11 · · ξ ′′1n · · · ξ (q)
1n· · · · · · · · · · · ·
ξ ′q1 · · ξ ′
qn ξ ′′q1 · · ξ ′′
qn · · · ξ (q)qn
∣∣∣∣∣∣∣vanish.
In addition, since the mentioned equations are certainly compatible with eachother1, we obtain the e′ represented as linear homogeneous functions of the e:
e′k =q
∑j=1
ρk j e j (k=1 ···q).
Here naturally, the ρk j are independent of the x′, x′′, . . . , x(q) and hence are abso-lute constants; the determinant of the ρk j is different from zero, because visibly theek can, in exactly the same way, be represented as linear homogeneous functions ofthe e′.
Although, under the assumptions made, the family of the infinitesimal transfor-mations ∑ ek Xk f remains invariant after the introduction of the x′, in general, itsindividual transformations are permuted. However, there always exists at least oneinfinitesimal transformation ∑ e0
k Xk f which remains itself invariant, since the con-dition which the coefficients e0
k of such an infinitesimal transformation:
q
∑k=1
e0k Xk f = ω
q
∑k=1
e0k X ′
k f
must satisfy can be replaced by the q equations:
ω e0k =
q
∑j=1
ρk j e0j (k=1 ···q)
and these last equations can always be satisfied without all the e0k being zero.
For closer illustration of what has been said, an example is more suitable.In the family of the ∞3 transformations:
e1∂ f∂x1
+ e2∂ f∂x2
+ e3
(x2
1∂ f∂x1
+ x1x2∂ f∂x2
)+ e4
(x1x2
∂ f∂x1
+ x22
∂ f∂x2
),
we introduce new variables by setting:
x′1 = a1 x1 +a2x2, x′2 = a3 x1 +a4 x2.
At the same time, the family receives the new form:
1 — and since, furthermore, the Lemma on p. 78 insures that, with a suitable choice of genericfixed points x′1, . . . ,x
′n, x′′1 , . . . ,x
′′n , · · · , x(q)1 , . . . ,x(q)n , the rank of the considered matrix of ξ ’s is
maximal equal to q —

262 15 Invariant Families of Infinitesimal Transformations
e′1∂ f∂x′1
+ e′2∂ f∂x′2
+ e′3
(x′1
2 ∂ f∂x′1
+ x′1x′2∂ f∂x′2
)+ e′4
(x′1x′2
∂ f∂x′1
+ x′22 ∂ f
∂x′2
),
where e′1, . . . ,e′4 express as follows:
e′1 = a1 e1 +a2 e2, e′2 = a3 e1 +a4 e2, e′3 =a4 e3 −a3 e4
a1a4 −a2a3, e′4 =
a1 e4 −a2 e3
a1a4 −a2a3.
Consequently, the family remains invariant in the above sense. If one would wantto know which individual infinitesimal transformations of the family remain invari-ant, one would only have to determine ω from the equation:∣∣∣∣a1 −ω a2
a3 a4 −ω
∣∣∣∣ · ∣∣∣∣ a1ω −1 a2a3 a4ω −1
∣∣∣∣= 0,
and to choose e1, . . . ,e4 so that e′k = ω ek; the concerned systems of values of the ekprovide the invariant infinitesimal transformations.
At present, by coming back to the general case, we want yet to specialize in acertain direction the assumptions made above. Namely, we want to suppose that thetransition from the x to the x′ is a completely arbitrary transformation of a deter-mined group. Correspondingly, we state from now on the following question:
Under which conditions does the family ∑ ek Xk f remain invariant through everytransformation x′i = fi(x1, . . . ,xn, t) of the one-term group Y f , that is to say, underwhich conditions does a relation:
q
∑k=1
ek Xk f =q
∑k=1
e′k X ′k f ,
hold for all systems of values e1, . . .eq, t, in which the e′k, aside from upon the e j, yetonly depend upon t?
When, in order to introduce new variables in Xk f , we apply the general transfor-mation:
x′i = xi + t Y xi + · · · (i=1 ···n)
of the one-term group Y f , we obtain according to Chap. 4, p. 73:
Xk f = X ′k f + t
(X ′
kY′ f −Y ′X ′
k f)+ · · · ;
hence also inversely:
(3) X ′k f = Xk f + t[Y, Xk]+ · · · ,
which is more convenient for what follows.Now, if every infinitesimal transformation Xk f + t[Y, Xk]+ · · · should belong to
the family e1X1 f + · · ·+ eqXq f , and in fact so for every value of t, then obviouslyevery infinitesimal transformation [Y, Xk] would also be contained in this family.As a result, certain necessary conditions for the invariance of our family would be

§ 69. 263
found, some conditions which amount to the fact that q relations of the form:
(4) [Y, Xk] =q
∑j=1
gk j X j f (k=1 ···q)
should hold, in which the gk j denote absolute constants.If the family of the infinitesimal transformations:
e1 X1 f + · · ·+ eq Xq f
is constituted so that for every k, a relation of the form (4) holds true, then we wantto say that the family admits the infinitesimal transformation Y f . By this settlementof terminology, we can state as follows the result just obtained:
If the family of the infinitesimal transformations:
e1 X1 f + · · ·+ eq Xq f
admits all transformations of the one-term group Y f , then it also admits the in-finitesimal transformation Y f .
But the converse too holds true, as we will now show.We want to suppose that the family of the transformations ∑ ek Xk f admits the
infinitesimal transformation Y f , hence that relations of the form (4) hold true. If nowthe family ∑ ek Xk f is supposed to simultaneously admit all finite transformations ofthe one-term group Y f , then it must be possible to determine e′1, . . . ,e
′q as functions
of e1, . . . ,eq in such a way that the equation:
q
∑k=1
e′k X ′k f =
q
∑k=1
ek Xk f
is identically satisfied, as soon as one introduces the variable x in place of x′ in theX ′
k f . Consequently, if X ′k f takes the form:
X ′k f =
n
∑i=1
ζki(x1, . . . ,xn, t)∂
∂xi
after the introduction of the x, then one must be able to determine the e′k so that theexpression:
q
∑k=1
e′k X ′k f =
q
∑k=1
n
∑i=1
e′k ζki(x1, . . . ,xn, t)∂ f∂xi
is free of t, hence so that the differential quotient:
∂∂ t
q
∑k=1
e′k X ′k f =
n
∑i=1
∂ f∂xi
∂∂ t
q
∑k=1
e′k ζki(x1, . . . ,xn, t)

264 15 Invariant Families of Infinitesimal Transformations
vanishes2; but at the same time, the e must still also satisfy the initial condition:e′k = ek for t = 0.
In order to be able to show that under the assumptions made there really arefunctions e′ of the required constitution, we must at first calculate the differentialquotient:
∂∂ t
X ′k f =
n
∑i=1
∂ζki(x1, . . . ,xn, t)∂ t
∂ f∂xi
;
for this, we shall take an indirect route.Above, we saw that X ′
k f can be expressed in the following way in terms ofx1, . . . ,xn and t:
X ′k f = Xk f + t[Y, Xk]+ · · · ,
when the independent variables x′ entering the X ′k are determined by the equations
x′i = fi(x1, . . . ,xn, t) of the one-term group Y f . So the desired differential quotientcan be obtained by differentiation of the infinite power series in t lying in the right-hand side, or differently enunciated: it is the coefficient of τ1 in the expansion of theexpression:
Xk f +(t + τ)[Y, Xk]+ · · ·=n
∑i=1
ξki(x′′1 , . . . ,x′′n)
∂ f∂x′′i
= X ′′k f
with respect to powers of τ . Here, the x′′ mean the quantities:
x′′i = fi(x1, . . . ,xn, t + τ).
However, the expansion coefficient [ENTWICKELUNGSCOEFFICIENT] discussedjust above appears at first as an infinite series of powers of t; nevertheless, there isno difficulty to find a finite closed expression for it.
As we know, the transition from the variables x to the variables x′i = fi(x1, . . . ,xn, t)occurs through a transformation of the one-term group Y f , and to be precise,through a transformation with the parameter t. One comes from the x to thex′′i = fi(x1, . . . ,xn, t + τ) through a transformation of the same group, namelythrough the transformation with the parameter t + τ . But this transformation canbe substituted for the succession of two transformations, of which the first onepossesses the parameter t, and the second one the parameter τ; consequently, thetransition from the x′ to the x′′ is likewise got through a transformation of theone-term group Y f , namely through the transformation whose parameter is τ:
x′′i = fi(x′1, . . . ,x′n,τ).
From this, we conclude that the series expansion of X ′′k f with respect to powers
of τ reads:X ′′
k f = X ′k f + τ[Y ′, X ′
k]+ · · · .
2 Indeed, differentiation with respect to t of e1 X1 + · · ·+ er Xr yields: 0 ≡ ∂∂ t ∑q
k=1 ek Xk.

§ 69. 265
As a result, we have then found a finite closed expression for the expansion coeffi-cient mentioned a short while ago; the sought differential quotient ∂ (X ′
k f )∂ t is hence:
(5)∂∂ t
X ′k f = [Y ′, X ′
k] = Y ′ X ′k f −X ′
k Y ′ f .
Naturally, this formula holds generally, whatever also one can choose as thetwo infinitesimal transformations Xk f and Y f . However, in our specific case,X1 f , . . . ,Xq f ,Y f are not absolutely arbitrary, but they are linked together throughthe relations (4). So under the assumptions made above, we receive:
(6)∂ (X ′
k f )∂ t
=q
∑ν=1
gkν X ′ν f (k=1 ···q).
Now, if we form the differential quotient of ∑ e′k X ′k f with respect to t, we obtain:
∂∂ t
q
∑k=1
e′k X ′k f =
q
∑k=1
de′kd t
X ′k f +
q
∑k=1
e′kq
∑ν=1
gkν X ′ν f
=q
∑k=1
de′kd t
+q
∑ν=1
gνk e′ν
X ′k f .
Obviously, this expression vanishes only when the e′k satisfy the differential equa-tions:
(7)de′kd t
+q
∑ν=1
gνk e′ν = 0 (k=1 ···q).
But from this the e′k can be determined as functions of t in such a way that for t = 0,each e′k converts into the corresponding ek; in addition, the e′ are linear homoge-neous functions of the e.
If one puts the values of the e′ in question in the expression ∑ e′k X ′k f and returns
afterwards from the x′ to the initial variables x1, . . . ,xn, then ∑ e′k X ′k will be indepen-
dent of t, that is to say, it will be equal to ∑ ek Xk f . Consequently, the family of theinfinitesimal transformations ∑ ek Xk f effectively remains invariant by the changeof variables in question.
As a result, we can state the following theorem:
Theorem 43. A family of ∞q−1 infinitesimal transformations e1 X1 f + · · ·+ eq Xq fremains invariant, through the introduction of new variables x′ which are defined bythe equations of a one-term group:
x′i = xi + t Y xi + · · · (i=1 ···n),
if and only if, between Y f and the Xk f there are q relations of the form:

266 15 Invariant Families of Infinitesimal Transformations
(4) [Y, Xk] =q
∑ν=1
gkν Xν f (k=1 ···q),
in which the gkν denote constants. If these conditions are satisfied, then by the con-cerned change of variables, ∑ ek Xk f receives the form ∑ e′k X ′
k f , where e′1, . . . ,e′q
determine themselves through the differential equations:
de′kd t
+q
∑ν=1
gνk e′ν = 0 (k=1 ···q),
by taking account of the initial conditions: e′k = ek for t = 0†.
If one performs the integration of which the preceding theorem speaks, hencedetermines e′1, . . . ,e
′r from the differential equations:
de′kd t
=−q
∑ν=1
gνk e′ν (k=1 ···q)
taking as a basis the initial conditions: e′k = ek for t = 0, then one obtains equationsof the form:
e′k =q
∑j=1
dk j(t)e j (k=1 ···q).
It is clear that these equations represent the finite transformations of a certain one-term group, namely the one which is generated by the infinitesimal transformation:
q
∑k=1
q
∑ν=1
gνk eν
∂ f∂ek
(cf. Chap. 4).
From the theorem just stated, we want to derive an important proposition whichis certainly closely suggested.
If the family of ∞q−1 infinitesimal transformations e1 X1 f + · · ·+eq Xq admits thetwo infinitesimal transformations y1 f and Y2 f , then it also admits at the same timeeach transformation c1 Y1 f + c2 Y2 f which is linearly deduced from Y1 f and Y2 f ;this follows immediately from the fact that the infinitesimal transformation:[
c1 Y1 f + c2 Y2 f , Xk f]= c1 [Y1, Xk]+ c2 [Y2, Xk]
can, in our case, be linearly expressed in terms of the Xi f . But our family e1 X1 f +· · ·+ eq Xq f also admits the infinitesimal transformation [Y1, Y2]. Indeed, one formsthe Jacobi identity:[
[Y1, Y2], Xk]+[[Y2, Xk], Y1
]+[[Xk, Y1], Y2
]= 0,
† LIE, Archiv for Mathematik og Naturvidenskab Vol. 3, Christiania 1878.

§ 70. 267
and one takes into account that [Y1, Xk] and [Y2, Xk] can be linearly expressed interms of the Xi f , so one realizes that this is also the case for
[[Y1, Y2], Xk
].
By combining these two observations, one obtains the announced
Proposition 1. If the most general infinitesimal transformation which leaves invari-ant a family of ∞q−1 infinitesimal transformations:
e1 X1 f + · · ·+ eq Xq f
can be linearly deduced from a bounded number of infinitesimal transformations,say from Y1 f , . . . ,Ym f , then the Yk f generate an m-term group.
This proposition can yet be generalized; indeed, it is evident that that the totalityof all finite transformations which leave invariant the family ∑ ek Xk f always formsa group.
§ 70.
Let the conditions of the latter theorem be satisfied, namely let the family of the∞q−1 infinitesimal transformations ∑ ek Xk f be invariant by all transformations ofthe one-term group Yf .
Now, according to Chap. 4, p. 70, the following holds true: if, after the introduc-tion of new variables, the infinitesimal transformation X f is transferred to Z f , thenat the same time, the transformations of the one-term group X f are transferred to thetransformations of the one-term group Z f . So we deduce that under the assumptionsof the Theorem 43, not only the family of the ∞q−1 infinitesimal transformationse1 X1 f + · · ·+ er Xr f remains invariant, but also the family of the ∞q−1 one-termgroups generated by these infinitesimal transformations, and naturally also, the to-tality of the ∞q finite transformations which belong to these one-term groups.
But we yet want to go a step further: we want to study how the analytic expressionof the individual finite transformations of the one-term groups e1X1 f + · · ·+ eq Xq fbehave, when the new variables:
x′i = xi + t Y xi + · · ·
are introduced in place of the x.The answer to this question is given by the Proposition 3 in Chap. 4, p. 71. Indeed,
from this proposition, it easily results that, after the introduction of the new variablesx′, every finite transformation:
(8)xi = xi +
1···q
∑k
ek Xk xi +1···q
∑k, j
ek e j
1 ·2Xk X j xi + · · ·
(i=1 ···n)
receives the shape:

268 15 Invariant Families of Infinitesimal Transformations
(9) x′i = x′i +1···q
∑k
e′k X ′k x′i +
1···q
∑k, j
e′k e′j1 ·2
X ′k X ′
j x′i + · · · ,
where the connection between the ek and the e′k is prescribed through the relation:
(10)q
∑k=1
ek Xk f +q
∑k=1
e′k X ′k f .
Consequently, we see directly that the concerned family of ∞q finite transformationsin the new variables x′ possesses exactly the same form as in the initial variables x.But in addition, we remark that a finite transformation which has the parameterse1, . . . ,eq in the x possesses, after the introduction of the new variables x′, the pa-rameters e′1, . . . ,e
′q.
Now, as said just now, the connection between the e and the e′ through the iden-tity (10) is completely prescribed; hence this identity is absolutely sufficient whenthe question is to determine the new form which an arbitrary finite transformation (8)takes after the transition to the x′.
In order to be as distinct as possible, we bring this circumstance to expressionwhen we interpret ∑ ek Xk f virtually as the symbol of the finite transformation:
x′i = xi +q
∑k=1
ek Xk xi + · · · (i=1 ···n),
where the absolute3 values of the ek then come into consideration, not only theirratio. Then we can simply say:
After the introduction of the new variables x′, the finite transformation ∑ ek Xk fis transferred to the finite transformation ∑ e′k X ′
k f .
In the next studies of this chapter, the symbol ∑ ek Xk f will be employed some-times as the symbol of a finite transformation, sometimes as the symbol of an in-finitesimal transformation. Hence in each individual case, we shall underline whichone of the two interpretations of the symbol is meant.
§ 71.
Let the family of the ∞q transformations e1 X1 f + · · ·+ eq Xq f remain invariant byall transformations of the one-term group Y f . It can happen that Y f itself is aninfinitesimal transformation of the family ∑ ek Xk f ; indeed, the case where Y f is onearbitrary of the ∞q−1 infinitesimal transformations ∑ ek Xk f is of special interest.This will occur if, but also, only if between the Xk f , there are relations of the form:
[Xi, Xk] =q
∑s=1
giks Xs f .
3 — namely the values themselves, but not the ‘absolute values’ |ek| in the modern sense —

§ 71. 269
Hence from the theorem of the preceding paragraph, we obtain the following morespecial theorem in which we permit ourselves to write r instead q and ciks instead ofgiks.
Theorem 44. For a family of ∞r finite transformations:
e1 X1 f + · · ·+ er Xr f or: xi =Pi(x1, . . . ,xn, e1, . . . ,er)
to remain invariant by every transformation which belongs to it — so that, after theintroduction of the new variables:
x′i =Pi(x1, . . . ,xn, h1, . . . ,hr), x′i =Pi(x1, . . . ,xn, h1, . . . ,hr)
in place of the x and the x, it takes the form:
x′i =Pi(x′1, . . . ,x′n, l1, . . . , lr)
where the l only depend upon e1, . . . ,er and h1, . . . ,hr — it is necessary and sufficientthat the X f stand pairwise in the relationships:
[Xi, Xk] =r
∑s=1
ciks Xs f ,
where the ciks are absolute constants.
This theorem states an important property that the family of the ∞r finite trans-formations ∑ ek Xk f possesses as soon as relations of the form [Xi, Xk] exist. It isnoteworthy that, for the proof of this theorem, we have used the studies of the pre-ceding chapter only for the smallest part; moreover, we have used no more than afew developments of the Chaps. 2, 3, 4 and 8. Namely, one should observe that wehave made no use of the Theorem 24, Chap. 9, p. 173.
If one assumes that the latter theorem is known, then one can shorten the proofof the Theorem 44 as follows: one shows at first, as above, that the relations[Xi, Xk] = ∑ ciks Xs f are necessary; then from Theorem 24, p. 173 it comes thatthe ∞r−1 infinitesimal transformations ∑ ek Xk f generate an r-term group. Ifx′i = Pi(x1, . . . ,xn, h1, . . . ,hr) are the finite equations of this group, then accordingto Theorem 5, p. 45, there is an identity of the form:
r
∑k=1
ek Xk f =r
∑k=1
e′k X ′k f ;
with this, the proof of the Theorem 44 is produced.One does not even need to refer to Theorem 5 p. 45, but one can conclude in the
following way:The equations x′i = Pi(x,h) of our group, when resolved, give a transformation
of the shape:xi =Pi
(x′1, . . . ,x
′n, χ1(h), . . . ,χr(h)
),

270 15 Invariant Families of Infinitesimal Transformations
that is to say, the transformation which is inverse to the transformation with theparameters h1, . . . ,hr. Now, if one imagines that these values of the xi are insertedin the equations xi =Pi(x,e) and if one takes into consideration that one has to dealwith a group, then one realizes that there exist certain equations of the form:
xi =Pi(x′1, . . . ,x
′n, ψ1(h,e), . . . ,ψr(h,e)
).
Lastly, if one inserts these expressions for the xi in the equations x′i = Pi(x,h),then one obtains:
x′i =Pi(x′1, . . . ,x′n, l1, . . . , lr).
This is the new form that the transformations xi =Pi(x,e) take after the introductionof the new variables x′. Here evidently, the l are functions of only the e and the h,exactly as it is claimed by the Theorem 44, p. 269.
As a result, the connection which exists between the Theorem 24, p. 173 and theTheorem 44 of the present chapter is clarified.
§ 72.
In order to be able to state the gained results more briefly, or, if one wants, moreclearly, we will, as earlier on, translate the symbolism of the theory of substitutionsinto the theory of transformation groups.
We shall denote all finite transformations e1 X1 f + · · ·+ erXr f by the commonsymbol T , and the individual transformations by marking an appended index, sothat for instance the symbol T(a) denotes the finite transformation:
a1 X1 f + · · ·+ar Xr f .
Using this way of expressing, we can at first state the Theorem 24, p. 173 asfollows:
Proposition 2. If r independent infinitesimal transformations X1 f , . . . ,Xr f standpairwise in relationships of the form:
[Xi, Xk] =r
∑s=1
ciks Xs f ,
then the family of all finite transformations ∑ ek Xk f , or T(e), contains, simultane-ously with the two transformations T(a) and T(b), also the transformation T(a) T(b);hence there is a symbolic equation of the form:
T(a) T(b) = T(c),
in which the parameters c are functions of the a and of the b.
Correspondingly, from the Theorem 44 of the present chapter, we obtain the fol-lowing proposition, which, however, does not exhaust the complete content of thetheorem:

§ 73. 271
Proposition 3. If r independent infinitesimal transformations X1 f , . . . ,Xr f standpairwise in the relationships [Xi, Xk], then the family of the ∞r finite transformations∑ ek Xk f , or T(e), contains, simultaneously with the transformations T(a) and T(b),also the transformation T−1
(a) T(b) T(a), whence there exists an equation of the form:
T−1(a) T(b) T(a) = T(c′)
in which the parameters c′ are functions of the a and of the b.
Obviously, the existence of the symbolic relation: T−1(a) T(b) T(a) = T(c′) is a con-
sequence of the former relation: T(a) T(b) = T(c), hence the latter proposition is alsoa consequence of the preceding one, as we already have seen in the previous para-graphs.
Finally, by combining the two Theorems 44 and 24, p. 173, we yet obtain thefollowing the following curious result.
Theorem 45. If a family of ∞r finite transformations: a1 X1 f + · · ·+ ar Xr f , orshortly T(a), possesses the property that the transformation T−1
(a) T(b) T(a) alwaysbelongs to the family, whatever values the parameters a1, . . . ,ar, b1, . . . ,br canhave, then the family of ∞r transformations in question forms an r-term group, thatis to say: T(a) T(b) is always a transformation which also belongs to the family.
§ 73.
If the transformation T−1(a) T(b) T(a) coincides with the transformation T(b), a fact that
we express by means of the symbolic equation:
T−1(a) T(b) T(a) = T(b),
then we say: the transformation T(b) remains invariant by the transformation T(a).But in this case, we also have:
T−1(b) T(a) T(b) = T(a),
that is to say, the transformation T(a) remains invariant by the transformation T(b);on the other hand:
T(a) T(b) = T(b) T(a)
is an equation which expresses that the two transformations T(a) and T(b) are inter-changeable one with another.
We already remarked in Theorem 6, p. 65 that the transformations of an arbitraryone-term group are interchangeable by pairs. At present, we can also settle the moregeneral question of when the transformations of two different one-term groups X fand Y f are interchangeable one with another.
In the general finite transformation eX f of the one-term group X f , we introducethe new variables x′i which are defined by the finite equations x′i = xi + t Y xi + · · · of

272 15 Invariant Families of Infinitesimal Transformations
the one-term group Y f . The transformations of our two one-term groups will thenbe interchangeable if and only if every transformation of the form eX f remainsinvariant after the introduction of the x′, whence eX f is equal to eX ′ f .
According to the Theorem 43, p. 265, for the existence of an equation of theform:
eX f = e′ X f ,
it is necessary and sufficient that the infinitesimal transformations X f and Y f satisfya relation:
[Y, X ] = gX f ;
at the same time, the e′ determines itself through the differential equation:
de′
d t+ge′ = 0.
But in our case, e′ is supposed, for every value of t, to be equal to e, hence e′
depends absolutely not on t, that is to say, the differential quotient de′/d t vanishes,and with it, the quantity g too. At the same time, this condition is evidently necessaryand sufficient. Consequently, the following holds true:
Proposition 4. The finite transformations of two one-term groups X f and Y f areinterchangeable one with another if and only if the expression [X , Y ] vanishes iden-tically.
It stands to reason to call interchangeable two infinitesimal transformations X fand Y f which stand in the relationship [X , Y ]≡ 0.
If we introduce this way of expressing, we can say that the finite transformationsof two one-term groups are interchangeable by pairs if and only if the infinitesimaltransformations of the two groups are so.
Moreover, from the latter proposition, it yet comes the
Theorem 46. The finite transformations of an r-term group X1 f , . . . ,Xr f are pair-wise interchangeable if and only if all expressions [Xi, Xk] vanish identically, orstated differently, if and only if the infinitesimal transformations X1 f , . . . ,Xr f areinterchangeable by pairs†.
§ 74.
From the general developments of the §§ 69 and 70, we will now yet draw a fewfurther consequences that are of importance.
We again assume that the r independent infinitesimal transformations X1 f , . . . ,Xr fstand pairwise in the relationships:
[Xi, Xk] =r
∑s=1
ciks Xs f ,
† LIE, Gesellschaft der Wissenschaften zu Christiania 1872; Archiv for Mathematik og Naturvi-denskab Vol. 8, p. 180, 1882; Math. Annalen Vol. 24, p. 557, 1884.

§ 74. 273
whence according to the Theorem 24 of the Chap. 9, p. 173, the ∞r finite transfor-mations ∑ ek Xk f form an r-term group. Now, if the family of the transformations∑ ek Xk f remains invariant by all transformations of a one-term group Y f , then ac-cording to Theorem 43, p. 265, there exist r equations of the form:
(4) [Y, Xk] =r
∑s=1
gks Xs f .
These equations show that the r+ 1 infinitesimal transformations X1 f , . . . ,Xr f ,Y f generate an (r+1)-term group to which X1 f , . . . ,Xr f belongs as an r-term sub-group.
In addition, it is clear that the relations (4) do not essentially change their formwhen one inserts in place of Y f a completely arbitrary infinitesimal transformationof the (r+1)-term group.
Hence, if x′i = ψi(x1, . . . ,xn, a1, . . . ,ar+1) are the finite equations of the (r+ 1)-term group, then the family of the finite transformations ∑ ek Xk f remains invariantwhen one introduces in the same way the new variables x′ in place of the x, that isto say, only the parameters vary in the analytic expression of the r-term group.
A similar property would hold true if, instead of the single transformation Y f ,one would have several, say m, such transformations all of which would satisfyrelations of the form (4); in addition, we yet want to add the assumption that these minfinitesimal transformations Y1 f , . . . ,Ym f , together with X1 f , . . . ,Xr f , generate an(r+m)-term group. Then if we introduce new variables in the group X1 f , . . . ,Xr f bymeans of an arbitrary transformation of the (r+m)-term group, the family of finitetransformations of our r-term group remains invariant, although the parameters arechanged in their analytic representation.
We want to express this relationship between the two groups by saying shortly:if the r-term group X1 f , . . . ,Xr f remains invariant by all transformations of the (r+m)-term group, it is an invariant subgroup of it.
If we translate the way of expressing used commonly in the theory of substitu-tions, we can also interpret as follows the definition of the invariants subgroups:
If T is the symbol of an arbitrary transformation of the (r +m)-term group G,and if S is an arbitrary transformation of a subgroup of G, then this subgroup isinvariant in G when the transformation T−1 ST always belongs also to the subgroupin question.
In what has been said above, the analytic conditions for the invariance of a sub-group are completely exhibited; so we need only to summarize them once again:
Theorem 47. If the r-term group X1 f , . . . ,Xr f is contained in an (r+m)-term groupX1 f , . . . ,Xr f , Y1 f , . . . ,Ym f , then it is an invariant subgroup of it when every [Yi, Xk]expresses in terms of X1 f , . . . ,Xr f linearly with constant coefficients.
On can give the Theorem 47 in the following more general — though only in aformal sense — version:

274 15 Invariant Families of Infinitesimal Transformations
Proposition 5. If the totality of all infinitesimal transformations e1 X1 f + · · ·+em Xm f forms an invariant family in the r-term group X1 f , . . . ,Xm f , . . . ,Xr f , thenX1 f , . . . ,Xm f generate an m-term invariant subgroup of the r-term group.
Indeed, since all [Xi, Xk], in which i is 6 m, can be linearly deduced fromX1 f , . . . ,Xm f , then in particular the same holds true of all [Xi, Xk] in which both iand k are 6 m. As a result, X1 f , . . . ,Xm f generate an m-term subgroup to which theTheorem 47 can immediately be applied.
At first, a few examples of invariant subgroups.
Proposition 6. † If the r independent infinitesimal transformations X1 f , . . . ,Xr fgenerate an r-term group, then the totality of all infinitesimal transformations[Xi, Xk] also generates a group; if the latter group contains r parameters, then it isidentical to the group X1 f , . . . ,Xr f ; if it contains less than r parameters, then it is aninvariant subgroup of the group X1 f , . . . ,Xr f ; if one adds to the [Xi, Xk] arbitrarilymany mutually independent infinitesimal transformations e1 X1 f + · · ·+ er Xr f thatare also independent of the [Xi, Xk], then one always obtains again an invariantsubgroup of the group X1 f , . . . ,Xr f .
It is clear that the [Xi, Xk] can at most generate an r-term group, since they allbelong to the group X1 f , . . . ,Xr f ; the fact that they effectively generate a groupcomes immediately from the relations:
[Xi, Xk] =r
∑s=1
ciks Xs f ,
for one indeed has:
[[Xi, Xk], [X j, Xl ]
]=
1···r
∑s,σ
ciks c jlσ [Xs, Xσ ].
The claim that the group generated by the [Xi, Xk] in the group X1 f , . . . ,Xr f isinvariant becomes evident from the equations:
[X j, [Xi, Xk]
]=
r
∑s=1
ciks [X j, Xs].
The last part of the proposition does not require any closer explanation.The following generalization of the proposition just proved is noteworthy:
Proposition 7. If m infinitesimal transformations Z1 f , . . . ,Zm f of the r-term groupX1 f , . . . ,Xr f generate an m-term subgroup of this group, and if the subgroup inquestion is invariant in the r-term group, then the subgroup which is generated byall the infinitesimal transformations [Zµ , Zν ] is also invariant in the r-term group.
† In the Archiv for Mathematik og Naturvidenskab Vol. 8, p. 390, Christiania 1883, LIE observedthat the [Xi, Xk] form an invariant subgroup. KILLING has realized this independently in the year1886.

§ 74. 275
The proof of that is very simple. Under the assumptions of the proposition, thereare relations of the shape:
[Xk, Zµ ] =m
∑λ=1
hkµλ Zλ f (k=1 ···r ; µ =1 ···m),
where the hkµλ are constants. Next, if we form the Jacobi identity (cf. Chap. 5,p. 109): [
Xk, [Zµ , Zν ]]+[Zµ , [Zν , Xk]
]+[Zν , [Xk, Zµ ]
]= 0,
and if we insert in it the expressions written above for [Zµ , Xk] and [Zν , Xk], weobtain the equations:
[Xk, [Zµ , Zν ]
]=
m
∑λ=1
hkνλ [Zµ , Zλ ]−hkµλ [Zν , Zλ ]
,
from which it comes that the subgroup of the group X1 f , . . . ,Xr f generated by the[Zµ , Zν ] is invariant in the former group. But this is what was to be proved. —
Let the r-term group X1 f , . . . ,Xr f , or shortly Gr, contain an (r−1)-term invariantsubgroup and let Y1 f , . . . ,Yr f be r independent infinitesimal transformations of theGr selected in a such a way that Y1 f , . . . ,Yr−1 f is this invariant subgroup. Then thereexist relations of the form4:
[Yi, Yk] = cik1 Y1 f + · · ·+ cik,r−1Yr−1 f (i, k=1 ···r),
whence all [Yi, Yk] and also all [Xi, Xk] can be linearly deduced from onlyY1 f , . . . ,Yr−1 f . From this, we conclude that every (r− 1)-term invariant subgroupof the Gr contains all the infinitesimal transformations [Xi, Xk] and so, we realizethat the following proposition holds true:
Proposition 8. In the r-term group X1 f , . . . ,Xr f , there is an (r− 1)-term invariantsubgroup if and only if the infinitesimal transformations [Xi, Xk] generate a groupwith less than r parameters; if there are, amongst the [Xi, Xk] exactly r1 < r mu-tually independent infinitesimal transformations, then one obtains all (r− 1)-terminvariant subgroups of the group X1 f , . . . ,Xr f by adding to the [Xi, Xk] in the mostgeneral way r− r1 −1 infinitesimal transformations e1 X1 f + · · ·+ er Xr f which aremutually independent and are independent of the [Xi, Xk].
The Proposition 1 in Chap. 12, p. 218 provides us with another example of in-variant subgroup.
Namely, if, in the neighbourhood of a point x01, . . . ,x
0n, a group contains infinites-
imal transformations of first or of higher order in the xi − x0i , then each time, all
infinitesimal transformations of order k (k > 0) and higher generate a subgroup.
4 Indeed, the invariance yields such relations for all i = 1, . . . ,r−1 and all k = 1, . . . ,r, and alsoby skew-symmetry for all i = 1, . . . ,r and all k = 1, . . . ,r− 1; it yet remains only [Yn, Yn] which,anyway, is zero.

276 15 Invariant Families of Infinitesimal Transformations
Now, by bracketing [KLAMMEROPERATION], two infinitesimal transformations ofrespective orders k and k+ν produce a transformation [X , Y ] of the order 2k+ν−1.Because k is > 0, one has 2k+ν −1 > k+ν , hence [X , Y ] must be linearly express-ible in terms of the infinitesimal transformations of orders k+ν and higher. In otherwords: all the infinitesimal transformations of orders k + ν and higher generate agroup which is invariant in the group generated by the infinitesimal transformationsof orders k and higher. And as said, all of that holds true under the only assumptionthat the number k is larger than zero.
In particular, if the numbers k and k+ ν can be chosen in such a way that thegroup contains no infinitesimal transformation of orders (2k+ν −1) and higher inthe neighbourhood of x0
1, . . . ,x0n, then the expression [X , Y ] must vanish identically.
Hence the following holds true:
Proposition 9. If, in the neighbourhood of a point x01, . . . ,x
0n, a group contains no in-
finitesimal transformation of (s+1)-th order, or of higher order, and if, by contrast,it contains transformations of k-th order, where k satisfies the condition 2k−1 > s,then all infinitesimal transformations of the group which are of the k-th order andof higher order generate a group with pairwise interchangeable transformations.
Here, the point x01, . . . ,x
0n needs absolutely not be such that the coefficients of
the resolved defining equations of the group (cf. Chap. 11, p. 204 sq.) behave regu-larly. —
Consequently [CONSEQUENTERWEISE] one must say that each finite continu-ous group contains two invariant subgroups, namely firstly itself and secondly theidentity transformation. One realizes this by setting m, in the Theorem 47, firstlyequal to r, and secondly equal to zero; in the two cases the condition for the invari-ance of the subgroup X1 f , . . . ,Xr f is satisfied by itself, only as soon as X1 f , . . . ,Xr f ,Y1 f , . . . ,Ym f is an (r+m)-term group.
The groups which contain absolutely no invariant subgroup, disregarding the twowhich are always present, are of special importance. That is why these groups arealso supposed to have a special name, and they should be called simple [EINFACH].In contrast to this, a group is called compound [ZUSAMMENGESETZT] when, asidefrom the two invariant subgroups indicated above, it yet contains other invariantsubgroups.
In conclusion, here are still two propositions about invariant subgroups:
Proposition 10. The transformations which are common to two invariant subgroupsof a group G form in the same way a subgroup which is invariant in G.
The transformations in question certainly form a subgroup of G (cf. Chap. 9,Proposition 2, p. 174); this subgroup must be invariant in G, since by all transforma-tions of G, it is transferred to a group which belongs to the two invariant subgroups,that is to say, to itself.
Proposition 11. If two invariant subgroups Y1 f , . . . ,Ym f and Z1 f , . . . ,Zp f of agroup G have no infinitesimal transformations in common, then all expressions[Yi, Zk] vanish identically, that is to say, every transformation of one subgroup isinterchangeable with every other transformation of the other subgroup.

§ 75. 277
Indeed, under the assumptions made, every expression [Yi, Zk] must be ex-pressible with constant coefficients both in terms of Y1 f , . . . ,Ym f and in terms ofZ1 f , . . . ,Zp f ; but since the two subgroups have no infinitesimal transformationsin common, then the thing is nothing else but that all expressions [Yi, Zk] vanishidentically. The rest follows from the Proposition 4, p. 263.
§ 75.
There are r-term groups for which one can select r independent infinitesimaltransformations: Y1 f , . . . ,Yr f so that for every i < r, the i independent infinitesimaltransformations Y1 f , . . . ,Yi f generate an i-term group which is invariant in the(i+1)-term group Y1 f , . . . ,Yi+1 f . Then between Y1 f , . . . ,Yr f , there are relations ofthe form:
(11)[Yi, Yi+k] = ci,i+k,1 Y1 f + · · ·+ ci,i+k,i+k−1 Yi+k−1 f
(i=1 ···r−1; k=1 ···r− i).
In the integration theory of those systems of differential equations which admit finitegroups, it comes out that the groups of the just defined specific constitution occupya certain outstanding position in comparison to all other groups†.
Later, in the chapter about linear homogeneous groups, we will occupy ourselvesmore accurately with this special category of groups; at present, we want only toshow in which way one can determine whether a given r-term group X1 f , . . . ,Xr fbelongs, or does not belong, to the category in question.
In order that it be possible to choose, amongst the infinitesimal transformationse1 X1 f + · · ·+ er Xr f , r mutually independent ones: Y1 f , . . . ,Yr f which stand in re-lationships of the form (11), there must above all exist an (r − 1)-term invariantsubgroup in the Gr: X1 f , . . . ,Xr f . Thanks to Proposition 8, p. 275, we are in a posi-tion to determine whether this is the case: according to this proposition, the groupX1 f , . . . ,Xr f contains an (r−1)-term invariant subgroup only when the group gen-erated by all [Xi, Xk] contains less than r parameters, say r1; if this condition is sat-isfied, then one obtains all (r−1)-term invariant subgroups of the Gr by adding tothe [Xi, Xk] in the most general way r−r1−1 infinitesimal transformations e1 X1 f +· · ·+ er Xr f that are mutually independent and are independent of the [Xi, Xk].
However, not every r-term group which contains an (r− 1)-term invariant sub-group does belong to the specific category defined above; for it to belong to thiscategory, it must contain an (r − 1)-term invariant subgroup, which in turn mustcontain an (r−2)-term invariant subgroup, and again the latter subgroup must con-tain an (r−3)-term invariant subgroup, and so on.
From this, it follows how we have to proceed with the group X1 f , . . . ,Xr f :amongst all (r−1)-term invariant subgroups of the Gr, we must select those whichcontain at least an (r−2)-term invariant subgroup and we must determine all their(r − 2)-term invariant subgroups; according to what precedes, this presents no
† LIE, Ges. der Wiss. zu Christiania, 1874, p. 273. Math. Ann. Vol. XI, p. 517 and 518. Archivfor Math. og Nat. Vol. 3, 1878, p. 105 sq., Vol. 8, 1883.

278 15 Invariant Families of Infinitesimal Transformations
difficulty. Afterwards, amongst the found (r − 2)-term subgroups, we must selectthose which contain (r−3)-term invariant subgroups, and so forth.
It is clear that in this manner, we arrive at the answer to the question whichwe have asked about the group X1 f , . . . ,Xr f . Either we realize that this group doesnot belong to the discussed specific category, or we find r independent infinitesi-mal transformations Y1 f , . . . ,Yr f of our group which are linked by relations of theform (11).
In certain circumstances, the computations just indicated will be made more dif-ficult by the fact that the subgroups to be studied contain arbitrary parameters whichspecialize themselves in the course of the computations. So we will indicate yet an-other process which conducts as well to answering our question, but which avoidsall computations with arbitrary parameters.
We want to suppose that amongst the [Xi, Xk], one finds exactly r1 6 r whichare independent and that all [Xi, Xk] can be linearly deduced from X ′
1 f , . . . ,X ′r1
f ,and furthermore correspondingly, that all [X ′
i , X ′k] can be linearly deduced from the
r2 6 r1 independent transformations X ′′1 f , . . . ,X ′′
r2f , all [X ′′
i , X ′′k ] from the r3 6 r2
independent X ′′′1 f , . . . ,X ′′′
r3f , and so on. Then according to Proposition 6, p. 274,
X ′1 f , . . . ,X ′
r1f generate an r1-term invariant subgroup Gr1 of the Gr: X1 f , . . . ,Xr f ,
and furthermore X ′′1 f , . . . ,X ′′
r2f generate an r2-term invariant subgroup Gr2 of the
Gr1 , and so forth; briefly, we obtain a series of subgroups Gr1 , Gr2 , Gr3 , . . . , of theGr in which each subgroup is contained in all the preceding ones and is invariantin the immediately preceding one, in all cases. But now, according to the Proposi-tion 7, p. 274, the Gr2 is at first invariant not only in the Gr1 , but also in the Gr, andfurthermore, according to the same proposition, the Gr3 is not only invariant in theGr2 , but also in the Gr1 and even in the Gr itself, and so forth. One sees that in theseries of the groups: Gr, Gr1 , Gr2 , . . . , each individual group is contained in all thegroups preceding, and is invariant in all the groups preceding.
In the series of the entire numbers r, r1, r2, . . . , there is none which is largerthan the preceding one, and on the other hand, none which is smaller than zero.Consequently, there must exist a positive number q of such a nature that rq+1 isequal to rq, while for j < q, it always holds true that: r j+1 < r j. Evidently, one thenhas:
rq = rq+1 = rq+2 = · · · ,
so actually:rq+k = rq (k=1,2 ···).
Now, there are two cases to be distinguished, according to whether the numberrq has the value zero, or is larger than zero5.
In the case rq = 0, it is always possible, as we will show, to select r independentinfinitesimal transformations Y1 f , . . . ,Yr f of the Gr which stand in relationships ofthe form (11).
Indeed, we choose as Yr f , Yr−1 f , . . . , Yr1+1 f any r− r1 infinitesimal transforma-tions e1 X1 f + · · ·+ er Xr f of the Gr that are mutually independent and are indepen-
5 In this case, rq > 2 in fact, for a one-term group is always solvable.

§ 75. 279
dent of X ′1 f , . . . ,X ′
r1f ; as Yr1 f , Yr1−1 f , . . . , Yr2+1 f , we choose any r1 − r2 infinitesi-
mal transformations e′1X ′1 f + · · ·+ e′r1
X ′r1
f of the Gr1 that are mutually independentand are independent of X ′′
1 f , . . . ,X ′′r2
f , etc.; lastly, as Yrq−1 f , Yrq−1−1 f , . . . , Y1 f , we
choose any rq−1 independent infinitesimal transformations e(q−1)1 X (q−1)
1 f + · · ·+e(q−1)
rq−1 X (q−1)rq−1 f of the Grq−1 . In this way, we obviously obtain r mutually indepen-
dent infinitesimal transformations Y1 f , . . . ,Yr f of our Gr; about them, we claim thatfor every i < r, the i transformations Y1 f , . . . ,Yi f generate an i-term group which isinvariant in the (i+1)-term group: Y1 f , . . . ,Yi+1 f . If we succeed to prove this claim,then we have proved also that Y1 f , . . . ,Yr f stand in the relationships (11).
Let j be any of the numbers 1,2, . . . ,q. Then it is clear that the r j mutuallyindependent infinitesimal transformations Y1 f , . . . ,Yr j f generate an r j-term group,namely the group Gr j defined above; certainly, it must be remarked that in the casej = q, the Gr j reduces to the identity transformation.
As we already have remarked earlier on, according to Proposition 6, p. 274, theGr j is invariant in the group Gr j−1 ; but from this proposition, one can conclude evenmore, namely one can conclude that we always obtain an invariant subgroup of theGr j−1 when, to the infinitesimal transformations Y1 f , . . . ,Yr j f of the Gr j , we addany infinitesimal transformations of the group Gr j−1 that are mutually independentand are independent of Y1 f , . . . ,Yr j f . Now, since Yr j+1 f , . . . ,Yr j−1 f belong to theGr j−1 , and furthermore, since they are mutually independent and independent ofY1 f , . . . ,Yr j f , then it comes that each one of the following systems of infinitesimaltransformations:
Y1 f , . . . ,Yr j f , Yr j+1 f , . . . ,Yr j−1−2 f ,Yr j−1−1 f
Y1 f , . . . ,Yr j f , Yr j+1 f , . . . ,Yr j−1−2 f
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·Y1 f , . . . ,Yr j f , Yr j+1 f , Yr j+2 f
Y1 f , . . . ,Yr j f , Yr j+1 f
generates an invariant subgroup of the Gr j−1 .In this way, between the two groups Gr j−1 and Gr j , there are certain groups — let
us call them Γr j−1−1, Γr j−1−2, . . . , Γr j+1 — which interpolate them and which possessthe following properties: each one of them has a number of terms exactly one lessthan that of the group just preceding in the series, each one of them is containedin the Gr j−1 and in all the groups preceding in the series, and each one of them isinvariant in the Gr j−1 , hence also invariant in all the groups preceding in the series,and in particular, invariant in the group immediately preceding. About that, it yetcomes that the Gr j is contained in the Γr j+1 as an invariant subgroup.
What has been said holds for all values: 1,2, . . . ,q of the number j, and conse-quently, we have effectively proved that Y1 f , . . . ,Yr f are independent infinitesimaltransformations of the group X1 f , . . . ,Xr f such that, for any i < r, Y1 f , . . . ,Yi falways generate an i-term group which is invariant in the (i + 1)-term groupY1 f , . . . ,Yi+1 f . But this is what we wanted to prove.

280 15 Invariant Families of Infinitesimal Transformations
The case where the entire number rq defined above vanishes is now settled, so itstill remains the case where rq is larger than zero. We shall show that it is impos-sible in this case to select r infinitesimal transformations Y1 f , . . . ,Yr f in the groupX1 f , . . . ,Xr f which stand in relationships of the form (11).
If rq > 0, then the rq-term group Grq which is generated by the rq independent
infinitesimal transformations X (q)1 f , . . . ,X (q)
rq f certainly contains no (rq − 1)-terminvariant subgroup. Indeed, since rq+1 = rq, then amongst the infinitesimal transfor-mations [X (q)
i , X (q)k ], one finds exactly rq that are mutually independent, whence by
taking account of the Proposition 8, p. 275, the property of the group Grq just statedfollows.
At present, we assume6 that in the group X1 f , . . . ,Xr f , there are r independentinfinitesimal transformations Y1 f , . . . ,Yr f which are linked by relations of theform (11), and we denote by Gi the i-term group which, under this assumption, isgenerated by Y1 f , . . . ,Yi f .
According to p. 279, the group Grq is invariant in the group X1 f , . . . ,Xr f , but aswe saw just now, it contains no (rq−1)-term invariant subgroup. Now, since each Gicontains an (i−1)-term invariant subgroup, namely the group Gi−1, it then followsimmediately that the Grq cannot coincide with the group Grq , and at the same time,it also comes that there exists an integer number m which is at least equal to rq andis smaller than r, such that the Grq is contained in none of the groups Grq , Grq+1 ,. . . , Gm, while by contrast, it is contained in all groups: Gm+1, Gm+2, . . . , Gr.
As a result, we have an m-term group Gm and an rq-term group Grq which areboth contained in the (m+ 1)-term group Gm+1 as subgroups, and to be precise,which are both evidently contained in it as invariant7 subgroups. According toChap. 12, Proposition 7, p. 223, the transformations common to the Gm and to theGrq form a group Γ which has at least rq − 1 parameters, and which, according toChap. 15, Proposition 10, p. 276, is invariant in the Gm+1. Now, since under theassumptions made, the Grq is not contained in the Gm, it comes that Γ is exactly(rq −1)-term and is at the same time invariant in the Grq .
This is a contradiction, since according to what precedes, the Grq containsabsolutely no invariant (rq − 1)-term subgroup. Consequently, the assumptionwhich we took as a starting point is false, namely the assumption that in thegroup X1 f , . . . ,Xr f , one can indicate r independent infinitesimal transformationsY1 f , . . . ,Yr f which stand mutually in relationships of the form (11). From this, wesee that in the case rq > 0, there are no infinitesimal transformations Y1 f , . . . ,Yr f ofthis constitution.
In the preceding developments, a simple process has been provided by means ofwhich one can realize whether a given r-term group X1 f , . . . ,Xr f belongs, or doesnot belong, to the specific category defined on page 277.
6 (reasoning by contradiction)7 Since, as we saw, Grq is invariant in Gr =Gr , it is then trivially invariant in Gm+1 ⊂Gr .

§ 75. 281
Proposition 12. † If X1 f , . . . ,Xr f are independent infinitesimal transformations ofan r-term group, if X ′
1 f , . . . ,X ′r1
f (r1 6 r) are independent infinitesimal transforma-tions from which all [Xi, Xk] can be linearly deduced, if furthermore X ′′
1 f , . . . ,X ′′r2
f(r2 6 r1) are independent infinitesimal transformations from which all [X ′
i , X ′k] can
be linearly deduced, and if one defines in a corresponding way r3 6 r2 mutuallyindependent infinitesimal transformations X ′′′
1 f , . . . ,X ′′′r3
f , and so on, then the X ′ fgenerate an r1-term group, the X ′′ f an r2-term group, the X ′′′ f an r3-term group,and so on, and to be precise, each one of these groups is invariant in all the preced-ing groups, and also in the group X1 f , . . . ,Xr f . — In the series of the numbers r, r1,r2, . . . there is a number, say rq, which is equal to all the numbers following: rq+1,rq+2, . . . , while by contrast the numbers r, r1, . . . , rq are all distinct one from an-other. Now, if rq = 0, then it is always possible to indicate, in the group X1 f , . . . ,Xr f ,r mutually independent infinitesimal transformations Y1 f , . . . ,Yr f such that for everyi < r, the transformations Y1 f , . . . ,Yi f generate an i-term group which is invariantin the (i+1)-term group: Y1 f , . . . ,Yi+1 f , so that there exist relations of the specificform:
[Yi, Yi+k] = ci,i+k,1 Y1 f + · · ·+ ci,i+k,i+k−1 Yi+k−1 f
(i=1 ···r−1; k=1 ···r− i).
However, if rq > 0, it is not possible to determine r independent infinitesimal trans-formations Y1 f , . . . ,Yr f in the group X1 f , . . . ,Xr f having the constitution definedabove.
—————–
† In this proposition, r1 naturally has the same meaning as on p. 278, and likewise r2, r3, etc.


Chapter 16The Adjoint Group
Let x′i = fi(x1, . . . ,xn, a1, . . . ,ar) be an r-term group with the r infinitesimal trans-formations:
Xk f =n
∑i=1
ξki(x)∂ f∂xi
(k=1 ···r).
If one introduces the x′i as new variables in the expression ∑ ek Xk f , then as it hasbeen already shown in Chap. 3, Proposition 4, p. 48, one gets for all values of the ekan equation of the form:
r
∑k=1
ek Xk f =r
∑k=1
e′k X ′k f .
Here, the e′k are certain linear, homogeneous functions of the ek with coefficientsthat depend upon a1, . . . ,ar:
(1) e′k =r
∑j=1
ρk j(a1, . . . ,ar)e j.
If one again introduces in ∑ e′k X ′k f the new variables x′′i = fi(x, b), then one
receives:r
∑k=1
e′k X ′k f =
r
∑k=1
e′′k X ′′k f ,
where:
(1’) e′′k =r
∑j=1
ρk j(b1, . . . ,br)e′j.
But now, because the equations x′i = fi(x, a) represent a group, the x′′ are conse-quently linked with the x through relations of the form x′′i = fi(x, c) in which the cdepend only upon a and b:
ck = ϕk(a1, . . . ,ar, b1, . . . ,br).
283

284 16 The Adjoint Group
Hence if one passes directly from the x to the x′′, one finds:
r
∑k=1
ek Xk f =r
∑k=1
e′′k X ′′k f ,
and to be precise, one has:
(1”) e′′k =r
∑j=1
ρk j(c1, . . . ,cr)e j =r
∑j=1
ρk j(ϕ1(a,b), . . . ,ϕr(a,b)
)e j.
From this, it can be deduced that the totality of all transformations e′k = ∑ ρk j(a)e jforms a group. Indeed, by combination of the equations (1) and (1’) it comes:
e′′k =1···r
∑j, ν
ρk j(b1, . . . ,br)ρ jν(a1, . . . ,ar)eν ,
what must naturally coincide with the equations (1”) and in fact, for all values ofthe e, of the a and of the b. Consequently, there are the r2 identities:
ρkν(ϕ1(a,b), . . . ,ϕr(a,b)
)≡
r
∑j=1
ρ jν(a1, . . . ,ar)ρk j(b1, . . . ,br),
from which it results that the family of the transformations e′k = ∑ ρk j(a)e j effec-tively forms a group.
To every r-term group x′i = fi(x, a) therefore belongs a fully determined linearhomogeneous group:
(1) e′k =r
∑j=1
ρk j(a1, . . . ,ar)e j (k=1 ···r),
which we want to call the adjoint group† [ADJUNGIRTE GRUPPE] of the groupx′i = fi(x, a).
We consider for example the two-term group x′ = ax+b with the two independentinfinitesimal transformations: d f
dx , x d fdx . We find:
e1d fdx
+ e2 xd fdx
= e1 ad fdx′
+ e2 (x′−b)d fdx′
= e′1d fdx′
+ e′2 x′d fdx′
,
whence we obtain for the adjoint group of the group x′ = ax+b the following equa-tions:
e′1 = ae1 −be2, e′2 = e2,
which visibly really represent a group.The adjoint group of the group x′i = fi(x, a) contains, under the form in which
it has been found above, precisely r arbitrary parameters: a1, . . . ,ar. But for every
† LIE, Archiv for Math., Vol. 1, Christiania 1876.

§ 76. 285
individual group x′i = fi(x, a), a special research is required to investigate whetherthe parameters a1, . . . ,ar are all essential in the adjoint group. Actually, we shallshortly see that there are r-term groups whose adjoint group does not contain ressential parameters.
Besides, in all circumstances, one special transformation appears in the adjointgroup of the group x′i = fi(x, a), namely the identity transformation; for if one setsfor a1, . . . ,ar in the equations (1) the system of values which produces the identitytransformation x′i = xi in the group x′i = fi(x, a), then one obtains the transformation:e′1 = e1, . . . ,e′r = er, which hence is always present in the adjoint group. However,as we shall see, it can happen that the adjoint group consists only of the identitytransformation: e′1 = e1, . . . ,e′r = er.
§ 76.
In order to make accessible the study of the adjoint group, we must above all deter-mine its infinitesimal transformations. We easily reach this end by an application ofthe Theorem 43, Chap. 15, p. 265; yet we must in the process replace the equationsx′i = fi(x, a) of our group by the equivalent canonical equations:
(2) x′i = xi +t1
r
∑k=1
λk Xk xi + · · · (i=1 ···n),
which represent the ∞r−1 one-term subgroups of the group x′i = fi(x, a). Accordingto Chap. 4, p. 81, the ak are defined here as functions of t and λ1, . . . ,λr by thesimultaneous system:
(3)dak
d t=
r
∑j=1
λ j α jk(a1, . . . ,ar) (k=1 ···r).
By means of the equations (2), we therefore have to introduce the new variablesx′i in ∑ ek Xk f and we must then obtain a relation of the form:
r
∑k=1
ek Xk f =r
∑k=1
e′k X ′k f .
The infinitesimal transformation denoted by Y f in Theorem 43 on p. 265 nowwrites: λ1 X1 f + · · ·+λr Xr f ; we therefore receive in our case:
Y(Xk( f )
)−Xk
(Y ( f )
)=
r
∑ν=1
λν [Xν , Xk]
=r
∑s=1
r
∑ν=1
λν cνks
Xs f .
Consequently, we obtain the following differential equations for e′1, . . . ,e′r:

286 16 The Adjoint Group
(4)de′sd t
+r
∑ν=1
λνr
∑k=1
cνks e′k = 0 (s=1 ···r).
We consider the integration of these differential equations as an executable op-eration, for it is known that it requires only the resolution of an algebraic equationof r-th degree. So if we perform the integration on the basis of the initial condition:e′k = ek for t = 0, we obtain r equations of the form:
(5) e′k =r
∑j=1
ψk j(λ1t, . . . ,λrt)e j (k=1 ···r),
which are equivalent to the equations (1), as soon as the ak are expressed as functionsof λ1t, . . . ,λrt in the latter.
From this, it follows that the equations (5) represent the adjoint group too. Butnow we have derived the equations (5) in exactly the same way as if we would havewanted to determine all finite transformations which are generated by the infinitesi-mal transformations:
r
∑ν=1
λν1···r
∑k, s
ckνs ek∂ f∂es
=r
∑ν=1
λν Eν f
(cf. p. 51 above). Consequently, we conclude that the adjoint group (1) consists ofthe totality of all one-term groups of the form λ1 E1 f + · · ·+λr Er f .
If amongst the family of all infinitesimal transformations λ1 E1 f + · · ·+ λr Er fthere are exactly ρ transformations and no more which are independent,say E1 f , . . . ,Eρ f , then all the finite transformations of the one-term groupsλ1 E1 f + · · ·+ λr Er f are already contained in the totality of all finite transforma-tions of the ∞ρ−1 groups λ1 E1 f + · · ·+ λρ Eρ f . The totality of these ∞ρ finitetransformations forms the adjoint group: e′k = ∑ ρk j(a)e j, which therefore containsonly ρ essential parameters (Chap. 4, Theorem 8, p. 75).
According to what precedes, it is to be supposed that E1 f , . . . ,Eρ f are linkedtogether by relations of the form:
[Eµ , Eν ] =ρ
∑s=1
gµνs Es f ;
we can also confirm this by a computation. By a direct calculation, it comes:
Eµ(Eν( f )
)−Eν
(Eµ( f )
)=
1···r
∑σ , k, π
(cπµk ckνσ − cπνk ckµσ
)eπ
∂ f∂eσ
.
But between the ciks, there exist the relations:
r
∑k=1
(cπµk ckνσ + cµνk ckπσ + cνπk ckµσ
)= 0,

§ 76. 287
which we have deduced from the Jacobi identity some time ago (cf. Chap. 9, Theo-rem 27, p. 185). If we yet use for this that cνπk =−cπνk and ckπσ =−cπkσ , we canbring the right hand-side of our equation for [Eµ , Eν ] to the form:
r
∑k=1
cµνk
1···r
∑σ , π
cπkσ eπ∂ f∂eσ
,
whence it comes:
[Eµ , Eν ] =r
∑k=1
cµνk Ek f .
Lastly, under the assumptions made above, the right hand side can be expressed bymeans of E1 f , . . . ,Eρ f alone, so that relations of the form:
[Eµ , Eν ] =ρ
∑s=1
gµνs Es f
really hold, in which the gµνs denote constants.Before we continue, we want yet to recapitulate in cohesion [IM ZUSAMMEN-
HANGE WIEDERHOLEN] the results of the chapter obtained until now.
Theorem 48. If, in the general infinitesimal transformation e1 X1 f + · · ·+ er Xr f ofthe r-term group x′i = fi(x, a), one introduces the new variables x′ in place of the x,then one obtains an expression of the form:
e′1 X ′1 f + · · ·+ e′r X ′
r f ;
in the process, the e′ are linked to the e by equations of the shape:
e′k =r
∑j=1
ρk j(a1, . . . ,ar)e j (k=1 ···r),
which represent a group in the variables e, the so-called adjoint group of the groupx′i = fi(x, a). This adjoint group contains the identity transformation and is gener-ated by certain infinitesimal transformations; if, between X1 f , . . . ,Xr f , there existthe Relations:
[Xi, Xk] =r
∑s=1
ciks Xs f (i,k=1 ···r),
and if one sets:
Eµ f =1···r
∑k, j
c jµk e j∂ f∂ek
(µ =1 ···r),
then λ1 E1 f + · · ·+λr Er f is the general infinitesimal transformation of the adjointgroup and between E1 f , . . . ,Er f , there are at the same time the relations:

288 16 The Adjoint Group
[Ei, Ek] =r
∑s=1
ciks Es f (i,k=1 ···r).
If two r-term groups X1 f , . . . ,Xr f and Y1 f , . . . ,Yr f are constituted in such a waythat one simultaneously has:
[Xi, Xk] =r
∑s=1
ciks Xs, [Yi, Yk] =r
∑s=1
ciks Ys f ,
with the same constants ciks in the two cases, then both groups obviously have thesame adjoint group. Later, we will see that in certain circumstances, also certaingroups which do not possess an equal number of terms can nonetheless have thesame adjoint group.
§ 77.
Now, by what can one recognize how many independent infinitesimal transforma-tion there are amongst E1 f , . . . ,Er f ?
If E1 f , . . . ,Er f are not all independent of each other, then there is at least oneinfinitesimal transformation ∑ gµ Eµ f which vanishes identically. From the identity:
r
∑µ=1
gµ1···r
∑k, j
c jµk e j∂ f∂ek
≡ 0,
it comes:r
∑µ=1
gµ c jµk = 0
for all values of j and k, and consequently the expression:[X j,
r
∑µ=1
gµ Xµ f]=
r
∑k=1
r
∑µ=1
gµ c jµk
Xk f
vanishes, that is to say: the infinitesimal transformation ∑ gµ Xµ f is interchange-able with all the r infinitesimal transformations X j f . Conversely, if the groupX1 f , . . . ,Xr f contains an infinitesimal transformation ∑ gµ Xµ f which is inter-changeable with all the Xk f , then if follows in the same way that the infinitesimaltransformation ∑ gµ Eµ f vanishes identically.
In order to express this relationship in a manner which is as brief as possible, weintroduce the following terminology:
An infinitesimal transformation ∑ gµ Xµ f of the r-term group X1 f , . . . ,Xr f iscalled an excellent infinitesimal transformation of this group if it is interchangeablewith all the Xk f .
Incidentally, the excellent infinitesimal transformations of the group X1 f , . . . ,Xr fare also characterized by the fact that they keep their form through the introductionof the new variables x′i = fi(x, a), whichever values the parameters a1, . . . ,ar can

§ 77. 289
have. Indeed, if the infinitesimal transformation ∑ gµ Xµ f is excellent, then accord-ing to Chap. 15, p. 259, there is a relation of the form:
∑ gµ Xµ f = ∑ gµ X ′µ f .
In addition, the cited developments show that each finite transformation of theone-term group ∑ gµ Xµ f is interchangeable with every finite transformation of thegroup X1 f , . . . ,Xr f .
According to what has been said above, to every excellent infinitesimal trans-formation of the group X1 f , . . . ,Xr f , it corresponds a linear relation betweenE1 f , . . . ,Er f . If ∑ gµ Xµ f is an excellent infinitesimal transformation, then thereexists between the E f simply the relation: ∑ gµ Eµ f = 0. Consequently, betweenE1 f , . . . ,Er f there are exactly as many independent relations of this sort as thereare independent excellent infinitesimal transformations in the group X1 f , . . . ,Xr f . Ifthere are exactly m and not more such independent transformations, then amongstthe infinitesimal transformations E1 f , . . . ,Er f there are exactly r−m and not morewhich are independent, and likewise, the adjoint group contains the same numberof essential parameters.
We therefore have the
Theorem 49. The adjoint group e′k = ∑ ρk j(a)e j of an r-term group X1 f , . . . ,Xr fcontains r essential parameters if and only if none of the ∞r−1 infinitesimal trans-formations ∑ gµ Xµ f is excellent inside the group X1 f , . . . ,Xr f ; by contrast, theadjoint group has less than r essential parameters, namely r−m, when the groupX1 f , . . . ,Xr f contains exactly m and not more independent excellent infinitesimaltransformations.†
Let us take for example the group:
∂ f∂x1
, . . . ,∂ f∂xr
(r 6n).
Its infinitesimal transformations are all excellent, since all ciks are zero. So all rexpressions E1 f , . . . ,Er f vanish identically, and the adjoint group reduces to theidentity transformation.
On the other hand, let us take the four-term group:
x∂ f∂x
, y∂ f∂x
, x∂ f∂y
, y∂ f∂y
.
This group contains a single excellent infinitesimal transformation, namely:
x∂ f∂x
+ y∂ f∂y
;
its adjoint group is hence only three-term.
† LIE, Math. Ann. Vol. XXV, p. 94.

290 16 The Adjoint Group
If the group X1 f , . . . ,Xr f contains the excellent infinitesimal transformation∑ gµ Xµ f , then ∑ gµ Xµ f is a linear partial differential equation which remainsinvariant by the group; in consequence of that, the group is imprimitive (cf. p. 233).From this, we conclude that the following proposition holds:
Proposition 1. If the group X1 f , . . . ,Xr f in the variables x1, . . . ,xn is primitive, thenit contains no excellent infinitesimal transformation.
If we combine this proposition with the latter theorem, we yet obtain the
Proposition 2. The adjoint group of an r-term primitive group contains r essentialparameters.
In a later place, we shall give a somewhat more general version of the last twopropositions (cf. the Chapter 24 about systatic groups).
According to what precedes, the infinitesimal transformations of an r-term groupX1 f , . . . ,Xr f and those of the adjoint group E1 f , . . . ,Er f can be mutually orderedin such a way that, to every infinitesimal transformation ∑ ek Xk which is not excel-lent there corresponds a nonvanishing infinitesimal transformation ∑ ek Ek f , whileto every excellent infinitesimal transformation ∑ ek Xk f is associated the identitytransformation in the adjoint group. In addition, if one takes account of the fact thatthe two systems of equations:
[Xi, Xk] =r
∑s=1
ciks Xs f , [Ei, Ek] =r
∑s=1
ciks Es f
have exactly the same form, then one could be led to the presumption that the adjointgroup cannot contain excellent infinitesimal transformations. Nevertheless, this pre-sumption would be false; that is shown by the group ∂ f/∂x2, x1 ∂ f/∂x2, ∂ f/∂x1whose adjoint group consists of two interchangeable infinitesimal transformationsand therefore contains two independent excellent infinitesimal transformations.
§ 78.
The starting point of our study was the remark that the expression ∑ ek Xk f takesthe similar form ∑ e′k X ′
k f after the introduction of the new variables x′i = fi(x,a).But now, according to Chap. 15, p. 268, the expression ∑ ek Xk f can be interpretedas the symbol of the general finite transformation of the group X1 f , . . . ,Xr f ; here,the quantities e1, . . . ,er are to be considered as the parameters of the finite transfor-mations of the group X1 f , . . . ,Xr f . Consequently, we can also say: after the tran-sition to the variables x′, the finite transformations of the group X1 f , . . . ,Xr f arepermuted with each other, while their totality remains invariant. Thanks to the de-velopments of the preceding paragraph, we can add that the concerned permutation[VERTAUSCHUNG] is achieved by a transformation of the adjoint group.
But when it is spoken of a “permutation of the finite transformations ∑ ek Xk f ”,the interpretation fundamentally lies in the fact that one imagines these transfor-mations as individuals [INDIVIDUEN]; we now want to pursue this interpretationsomewhat in details.

§ 78. 291
Every individual in the family ∑ ek Xk f is determined by the associated values ofe1, . . . ,er; for the sake of graphic clarity, we hence imagine the ek as right-angledpoint coordinates of an r-times extended manifold. The points of this manifold thenrepresent all finite transformations ∑ ek Xk f ; hence, they are transformed by ourknown linear homogeneous group:
e′k =r
∑j=1
ρk j(a)e j.
At the same time, the origin of coordinates e1 = 0, . . . , er = 0, i.e. the image-point[BILDPUNKT] of the identity transformation x′i = xi, obviously remains invariant.
Every finite transformation e0k belongs to a completely determined one-term
group, whose transformations are defined by the equations:
e1
e01= · · ·= er
e0r
;
but according to our interpretation, these equations represent a straight line throughek = 0, that is to say:
Every one-term subgroup of the group X1 f , . . . ,Xr f is represented, in the spacee1, . . . ,er, by a straight line which passes through the origin of coordinates ek = 0;conversely, every straight line through the origin of coordinates represents such aone-term group.
Every other subgroup of the r-term group X1 f , . . . ,Xr f consists of one-termsubgroups and these one-term groups are determined by the infinitesimal trans-formations that the subgroup in question contains. But according to Chap. 11,Proposition 6, p. 223, the infinitesimal transformations of a subgroup of the groupX1 f , . . . ,Xr f can be defined by means of linear homogeneous equations betweene1, . . . ,er; these equations naturally define also the one-term groups which belong tothe subgroup, hence they actually define the finite transformations of the subgroupin question. Expressed differently:
Every m-term subgroup of the group X1 f , . . . ,Xr f is represented, in the spacee1, . . . ,er, by a straight2 [EBEN] m-times extended manifold which passes throughthe origin of coordinates: e1 = 0, . . . , er = 0.
Of course, the converse does not hold true in general; it occurs only very excep-tionally that every straight manifold through the origin of coordinates represents asubgroup.
The adjoint group e′k = ∑ ρk j(a)e j now transforms linearly the points ek. If anarbitrary point ek remains invariant by all transformations of the group, and in con-sequence of that, also every point mek = Const.ek, then according to what precedes,this means that the transformations of the one-term group ∑ ek Xk f are interchange-able with all transformations of the group X1 f , . . . ,Xr f .
2 The “straight” character just means that the manifold in question is a linear subspace of thespace e1, . . . ,er .

292 16 The Adjoint Group
Every invariant subgroup of the group X1 f , . . . ,Xr f is represented by a straightmanifold containing the origin of coordinates which keeps its position through alltransformations e′k = ∑ ρk j(a)e j. On the other hand, every manifold through theorigin of coordinates which remains invariant by the adjoint group represents aninvariant subgroup of X1 f , . . . ,Xr f (cf. Chap. 15, Proposition 5, p. 273).
Now, let M be any straight manifold through the origin of coordinates whichrepresents a subgroup of the Gr: X1 f , . . . ,Xr f . If an arbitrary transformation of theadjoint group is executed on M, this gives a new straight manifold which, like-wise, represents a subgroup of the Gr. Obviously, this new subgroup is equivalent[ÄHNLICH], through a transformation of the Gr, to the initial one, and if we followthe process of the theory of substitutions, we can express this as follows: the twosubgroups just discussed are conjugate [GLEICHBERECHTIGT]3 inside the groupX1 f , . . . ,Xr f .
The totality of all subgroups which, inside the group Gr, are conjugate to the sub-group which is represented by M is represented by a family of straight manifolds,namely by the family that one receives as soon as one executes on M all transforma-tions of the adjoint group. Two different manifolds of this family naturally representconjugate subgroups.
From this we conclude that every invariant subgroup of the Gr is conjugate onlyto itself inside the Gr.
Since the family of all subgroups g which are conjugate to a given one resultsfrom the latter by the execution of all transformations e′k = ∑ ρk j(a)e j, then thisfamily itself must be reproduced by all transformations e′′k = ∑ ρk j(b)e′j. Because ifone executes the transformations e′k = ∑ ρk j(a)e j and e′′k = ∑ ρk j(a)e′j one after theother, then one obtains the same result as if one would have applied all transforma-tions:
e′′k = ∑ ρk j(c)e j (ck =ϕk (a, b))
to the initially given subgroup; in the two cases, one obtains the said family.Now, if all conjugate subgroups g have a continuous number of mutually com-
mon transformations, then the totality of all these transformations are representedby a straight manifold in the space e1, . . . ,er. Naturally, this straight manifold re-mains invariant by all transformations of the adjoint group and hence, according towhat was said above, it represents an invariant subgroup of the Gr. Consequently,the following holds true.
Theorem 50. If the subgroups of a group Gr which are conjugate inside the Gr to adetermined subgroup have a family of transformations in common, then the totalityof these transformations forms a subgroup invariant in the Gr.
§ 79.
We distribute [EINTHEILEN] the subgroups of an arbitrary r-term group Gr in dif-ferent classes which we call types [TYPEN] of subgroups of the Gr. We reckon
3 Literally in German: they are equal, they are considered on the same basis, or they have thesame rights.
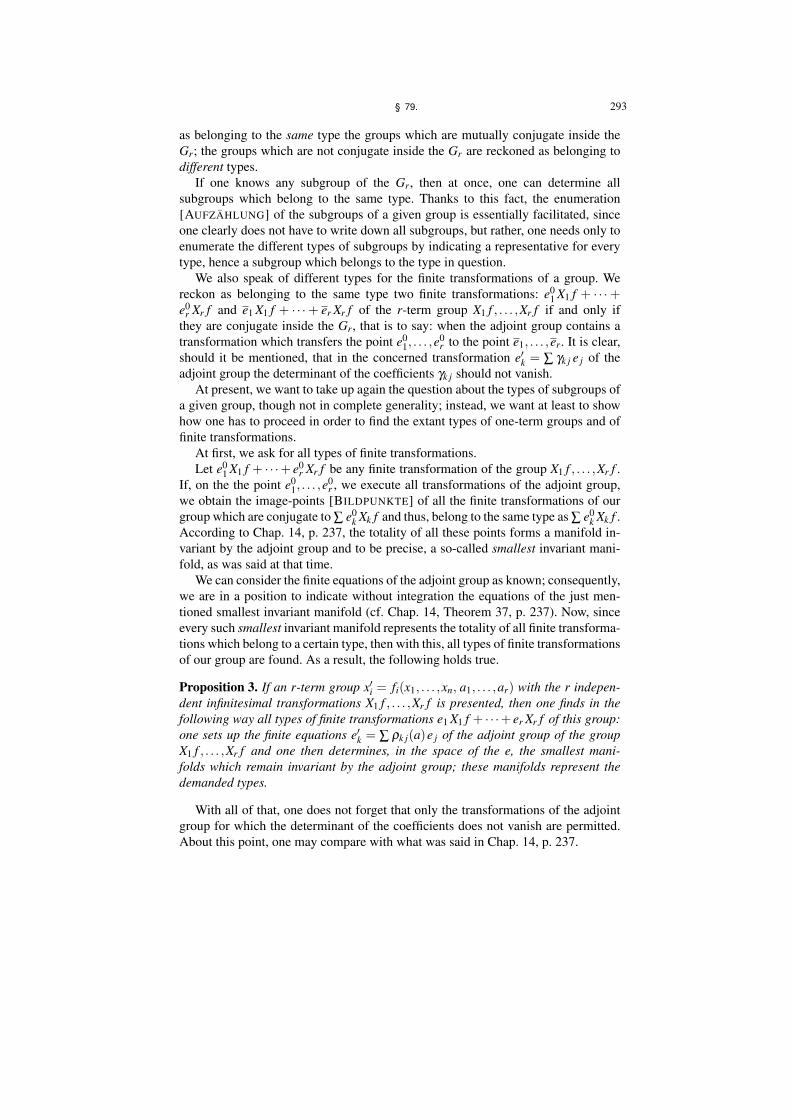
§ 79. 293
as belonging to the same type the groups which are mutually conjugate inside theGr; the groups which are not conjugate inside the Gr are reckoned as belonging todifferent types.
If one knows any subgroup of the Gr, then at once, one can determine allsubgroups which belong to the same type. Thanks to this fact, the enumeration[AUFZÄHLUNG] of the subgroups of a given group is essentially facilitated, sinceone clearly does not have to write down all subgroups, but rather, one needs only toenumerate the different types of subgroups by indicating a representative for everytype, hence a subgroup which belongs to the type in question.
We also speak of different types for the finite transformations of a group. Wereckon as belonging to the same type two finite transformations: e0
1 X1 f + · · ·+e0
r Xr f and e1 X1 f + · · ·+ er Xr f of the r-term group X1 f , . . . ,Xr f if and only ifthey are conjugate inside the Gr, that is to say: when the adjoint group contains atransformation which transfers the point e0
1, . . . ,e0r to the point e1, . . . ,er. It is clear,
should it be mentioned, that in the concerned transformation e′k = ∑ γk j e j of theadjoint group the determinant of the coefficients γk j should not vanish.
At present, we want to take up again the question about the types of subgroups ofa given group, though not in complete generality; instead, we want at least to showhow one has to proceed in order to find the extant types of one-term groups and offinite transformations.
At first, we ask for all types of finite transformations.Let e0
1 X1 f + · · ·+ e0r Xr f be any finite transformation of the group X1 f , . . . ,Xr f .
If, on the the point e01, . . . ,e
0r , we execute all transformations of the adjoint group,
we obtain the image-points [BILDPUNKTE] of all the finite transformations of ourgroup which are conjugate to ∑ e0
k Xk f and thus, belong to the same type as ∑ e0k Xk f .
According to Chap. 14, p. 237, the totality of all these points forms a manifold in-variant by the adjoint group and to be precise, a so-called smallest invariant mani-fold, as was said at that time.
We can consider the finite equations of the adjoint group as known; consequently,we are in a position to indicate without integration the equations of the just men-tioned smallest invariant manifold (cf. Chap. 14, Theorem 37, p. 237). Now, sinceevery such smallest invariant manifold represents the totality of all finite transforma-tions which belong to a certain type, then with this, all types of finite transformationsof our group are found. As a result, the following holds true.
Proposition 3. If an r-term group x′i = fi(x1, . . . ,xn, a1, . . . ,ar) with the r indepen-dent infinitesimal transformations X1 f , . . . ,Xr f is presented, then one finds in thefollowing way all types of finite transformations e1 X1 f + · · ·+ er Xr f of this group:one sets up the finite equations e′k = ∑ ρk j(a)e j of the adjoint group of the groupX1 f , . . . ,Xr f and one then determines, in the space of the e, the smallest mani-folds which remain invariant by the adjoint group; these manifolds represent thedemanded types.
With all of that, one does not forget that only the transformations of the adjointgroup for which the determinant of the coefficients does not vanish are permitted.About this point, one may compare with what was said in Chap. 14, p. 237.

294 16 The Adjoint Group
Next, we seek all types of one-term subgroups, or, what is the same: all types ofinfinitesimal transformations of our group.
Two one-term groups ∑ e0k Xk f and ∑ ek Xk f are conjugate inside the Gr when
there is, in the adjoint group, a transformation which transfers the straight line:
e1
e01= · · ·= er
e0r
to the straight line:e1
e1= · · ·= er
er;
these two straight lines passing through the origin of coordinates are indeed the im-ages of the one-term subgroups in question. Hence if we imagine that all transfor-mations of the adjoint group are executed on the first one of these two straight lines,we obtain all straight lines passing through the origin of coordinates that representone-term subgroups which are conjugate to the group ∑ e0
k Xk f . Naturally, the total-ity of all these straight lines forms a manifold invariant by the adjoint group, namelythe smallest invariant manifold to which the straight line: e1/e0
1 = · · · = er/e0r be-
longs. It is clear that this manifold is represented by a system of equations which ishomogeneous in the variables e1, . . . ,er.
Conversely, it stands to reason that every system of equations homogeneous in thee which admits the adjoint group represents an invariant family of one-term groups.Now, since every system of equations homogeneous in the e is characterized to behomogeneous by the fact that it admits all transformations of the form:
(6) e′1 = λ e1, . . . , e′r = λ er,
it follows that we obtain all invariant families of one-term groups by looking up atall manifolds of the space e1, . . . ,er which, aside from the transformations of theadjoint group, yet also admit all transformations of the form (6). In particular, ifwe seek all smallest invariant manifolds of this constitution, we clearly obtain allexisting types of one-term subgroups.
The transformations (6) form a one-term group whose infinitesimal transforma-tions read:
E f =r
∑k=1
ek∂ f∂ek
.
If we add E f to the infinitesimal transformations E1 f , . . . ,Er f of the adjoint group,we again obtain the infinitesimal transformations of a group; indeed, the expres-sions [Ek, E] all vanish identically, as their computation shows. Visibly, everythingamounts to the determination of the smallest manifolds which remain invariant bythe group E1 f , . . . ,Er f ,E f . But according to the instructions in Chap 14, p. 237,this determination can be accomplished, since together with the finite equations ofthe adjoint group, the finite equations of the group just mentioned are also knownwithout effort. Hence we have the

§ 79. 295
Proposition 4. If an r-term group x′i = fi(x1, . . . ,xn, a1, . . . ,ar) with the r indepen-dent infinitesimal transformations X1 f , . . . ,Xr f is presented, then one finds as fol-lows all types of one-term subgroups of this group, or what is the same, all typesof infinitesimal transformations E1 f , . . . ,Er f : one sets up the infinitesimal transfor-mations of the adjoint group of the group X1 f , . . . ,Xr f , then one computes the finiteequations of the group which is generated by the r+1 infinitesimal transformationsE1 f , . . . ,Er f and:
E f =r
∑k=1
ek∂ f∂ek
and lastly, one determines, in the space e1, . . . ,er, the smallest manifolds invariantby the just defined group; these manifolds represent the demanded types.
In what precedes, it is shown how one can determine all types of finite trans-formations and all types of one-term subgroups of a given r-term group. Now ina couple of words, we will yet consider somewhat more precisely the connectionwhich exists between these two problems; we will see that the settlement of one ofthese two problems facilitates each time the settlement of the other.
On the first hand, we assume that we already know all types of finite trans-formations of the group X1 f , . . . ,Xr f , so that all smallest manifolds of the spacee1, . . . ,er which admit the adjoint group E1 f , . . . ,Er f are known to us. Then howone must proceed in order to find the smallest manifolds invariant by the group E f ,E1 f , . . . ,Er f ?
It is clear that every manifold invariant by the group E f , E1 f , . . . ,Er f admitsalso the adjoint group; consequently, every sought manifold either must be one ofthe already known manifolds, or it must contain at least one of the known man-ifolds. Hence in order to find all the sought manifolds, we only need to take theknown manifolds one after the other and for each of them, to look up at the smallestmanifold invariant by the group E f , E1 f , . . . ,Er f in which it is contained.
Let:
(7) W1(e1, . . . ,er) = 0, . . . , Wm(e1, . . . ,er) = 0,
or shortly M, be one of the known manifolds which admits the adjoint groupE1 f , . . . ,Er f . Now, how one finds the smallest manifold which admits the groupE f , E1 f , . . . ,Er f and which in addition comprises the manifold M?
The sought manifold necessarily contains the origin of coordinates e1 = 0, . . . ,er = 0 and moreover, it consists in nothing but straight lines passing through it,hence it certainly contains the manifold M′ which is formed of the straight linesbetween the points of M and the origin of coordinates. Now, if we can prove that M′
admits the infinitesimal transformations E f , E1 f , . . . ,Er f , then at the same time, wehave proved that M′ is the sought manifold.
Visibly, the equations of M′ are obtained by eliminating the parameter τ from theequations:
(8) W1(e1 τ, . . . ,er τ) = 0, . . . , Wm(e1 τ, . . . , er τ) = 0.

296 16 The Adjoint Group
Consequently, M′ can be interpreted as the totality of all the ∞1 manifolds that arerepresented by the equations (8) with the arbitrary parameter τ . But the totality ofthe manifolds (8) obviously admits the infinitesimal transformation E f , since the ∞1
systems of equations (8) are permuted with each other by the finite transformations:
e′1 = λ e1, . . . , e′r = λ er
of the one-term group E f . Furthermore, it is easy to see that each one of the individ-ual systems of equations (8) allows the infinitesimal transformations E1 f , . . . ,Er f .Indeed, because the system of equations (7) allows the infinitesimal transformations:
Eµ f =1···r
∑k, j
c jµk e j∂ f∂ek
(µ =1 ···r)
then the system (8) with the parameter τ admits the transformations:
1···r
∑k, j
c jµk e j τ∂ f
∂ (ekτ)= Eµ f ,
that is to say, it admits E1 f , . . . ,Er f themselves, whichever value τ can have.From this, we conclude that the totality of the ∞1 manifolds (8) admits the in-
finitesimal transformations E f , E1 f , . . . ,Er f , hence that the manifold M′ which co-incides with this totality really is the sought manifold; as said, this manifold is an-alytically represented by the equations which are obtained by elimination of theparameter τ .
If we imagine that for every manifold M, the accompanying manifold M′ isformed, then according to the above, we obtain all types of one-term subgroups ofthe group X1 f , . . . ,Xr f . —
On the other hand, we assume that we know all types of one-term subgroups ofthe group X1 f , . . . ,Xr f , and we then seek to determine from them all types of finitetransformations of these groups.
All smallest manifolds invariant by the group E f , E1 f , . . . ,Er f are known to usand we must seek all smallest manifolds invariant by the group E1 f , . . . ,Er f . Butnow, since every sought manifold is contained in one of the known manifolds, weonly have to consider for itself each individual known manifold and to look up atmanifolds of the demanded constitution that are located in each such manifold.
Let the q-times extended manifold M be one of the smallest manifolds invariantby the group E f , E1 f , . . . ,Er f . Then for the points of M (cf. Chap. 14, p. 247), allthe (q+1)× (q+1) determinants, but not all q×q ones, of the matrix:
(9)
∣∣∣∣∣∣∣∣e1 · · · er
∑rk=1 ck11 ek · · · ∑r
k=1 ck1r ek· · · · ·
∑rk=1 ckr1 ek · · · ∑r
k=1 ckrr ek
∣∣∣∣∣∣∣∣vanish.

§ 79. 297
Now, the question whether M decomposes in subsidiary domains which remaininvariant by the group E1 f , . . . ,Er f is settled by the behaviour of the q× q subde-terminants of the determinant:
∆ =
∣∣∣∣∣∣∑r
k=1 ck11 ek · · · ∑rk=1 ck1r ek
· · · · ·∑r
k=1 ckr1 ek · · · ∑rk=1 ckrr ek
∣∣∣∣∣∣ .If, for the points of M, not all the subdeterminants in question vanish, then no
decomposition of M in smaller manifolds invariant by the adjoint group takes place.By contrast, if the concerned subdeterminant all vanish for the points of M, then
M decomposes in ∞1 (q− 1)-times extended subsidiary domains invariant by thegroup E1 f , . . . ,Er f ; that there are exactly ∞1 such subsidiary domains follows fromthe fact that surely for the points of M, not all (q− 1)× (q− 1) subdeterminantsof ∆ vanish, for on the contrary case, all the q× q determinants of the matrix (9)would vanish simultaneously. Naturally, one can sets up without integration theequations of the discussed subsidiary domains, since the finite equations of thegroup E1 f , . . . ,Er f are known.
—————–
In the present chapter, we always have up to now considered the finite transfor-mations of the group X1 f , . . . ,Xr f only as individuals and we have interpreted themas points of an r-times extended space.
There is another standpoint which is equally legitimate. We can also consider asindividuals the one-term subgroups, or, what amounts to the same, the infinitesimaltransformations of our group, and interpret them as points of a now (r − 1)-timesextended space. Then clearly, we must understand the quantities e1, . . . ,er as homo-geneous coordinates in this space.
Our intention is not to follow further these views; above all, by considering whatwas said earlier on, it appears for instance evident that every m-term subgroup of thegroup X1 f , . . . ,Xr f is represented, in the (r−1)-times extended space, by a smooth4
[EBEN] manifold of m−1 dimensions. We only want to derive a simple propositionwhich follows by taking as a basis the new interpretation and which can often beuseful for the conceptual researches about transformation groups.
We imagine that the general finite transformation:
x′i = xi +t1
r
∑k=1
λ 0k Xk xi + · · · (i=1 ···n)
of the one-term group λ 01 X1 f + · · ·+λ 0
r Xr f is executed on the infinitesimal trans-formation: e0
1 X1 f + · · ·+ e0r Xr f of our r-term group, that is to say, we imagine that,
in place of x1, . . . ,xn, the new variables x′1, . . . ,x′n are introduced in the expression
e01 X1 f + · · ·+e0
r Xr f . According to p. 286, the infinitesimal transformation: e01 X1 f +
4 Namely, the projectivization of a linear subspace (Lie subalgebra) or “straight” [EBEN] manifold(cf. 291).

298 16 The Adjoint Group
· · ·+ e0r Xr f is transferred at the same time to the ∞1 infinitesimal transformations:
e1 X1 f + · · ·+er Xr f of our group, where e1, . . . ,er are certain functions of e01, . . . ,e
0r
and t that determine themselves through the differential equations:
(4’)des
d t=−
r
∑ν=1
λ 0ν
r
∑k=1
cνks ek (s=1 ···r),
with the initial conditions: e1 = e01, . . . , er = e0
r for t = 0.Since every infinitesimal transformation of our group is represented by a point of
the (r−1)-times extended space mentioned a short while ago, we can also obviouslysay: If all ∞1 transformations of the one-term group: λ 0
1 X1 f + · · ·+λ 0r Xr f are exe-
cuted on the infinitesimal transformation: e01 X1 f + · · ·+e0
r Xr f , then the image-pointof this infinitesimal transformation moves on a certain curve of the space e1, . . . ,er.
Now, there is a very simple definition for the tangent to this curve at the pointe0
1 : · · · : e0r . Namely, the equations of the tangent in question have the form:
es
1···r
∑ν , k
cνkτ λ 0ν e0
k − eτ1···r
∑ν , k
cνks λ 0ν e0
k = 0
(s, τ =1 ···r),
whence the point whose homogeneous coordinates possess the values:
es =1···r
∑ν , k
cνks λ 0ν e0
k (s=1 ···r)
obviously lie on the tangent. But this point visibly is the image-point of the infinites-imal transformation:[ r
∑ν=1
λ 0ν Xν f ,
r
∑k=1
e0k Xk f
]=
r
∑s=1
1···r
∑ν , k
cνks λ 0ν e0
k
Xs f
which is obtained by combination of the two infinitesimal transformations ∑ λ 0ν Xν f
and ∑ e0k Xk f . Consequently, we have the
Proposition 5. If one interprets the ∞r−1 infinitesimal transformations e1 X1 f +· · ·+ er Xr f of an r-term group X1 f , . . . ,Xr f as points of an (r − 1)-times ex-tended space by considering e1, . . . ,er as homogeneous coordinates in thisspace, then the following happens: If all transformations of a determined oneterm group: λ 0
1 X1 f + · · ·+ λ 0r Xr f are executed on a determined infinitesimal
transformation e01 X1 f + · · ·+ e0
r Xr f , then the image-point of the transformatione0
1 X1 f + · · ·+e0r Xr f describes a curve, the tangent of which at the point e0
1 : · · · : e0r
may be obtained by connecting, through a straight line, this point to the image-pointof the infinitesimal transformation [∑ λ 0
ν Xν f , ∑ e0k Xk f ]; on the other hand, if all
transformations of the one-term group ∑ e0k Xk f are executed on the infinitesimal
transformation ∑ λ 0ν Xν f , then the image-point of the transformation ∑ λ 0
ν Xν f

§ 79. 299
describes a curve, the tangent of which one obtains by connecting, through astraight line, this point to the image-point of the infinitesimal transformation[∑ e0
k Xk f , ∑ λ 0ν Xν f ].
—————–


Chapter 17Composition and Isomorphism
Several problems that one can raise about an r-term group X1 f , . . . ,Xr f require, fortheir solution, only the knowledge of the constants ciks in the relations:
[Xi, Xk] =r
∑s=1
ciks Xs f .
For instance, we have seen that the determination of all subgroups of the groupX1 f , . . . ,Xr f depends only on the constants ciks and that exactly the same also holdstrue for the determination of all types of subgroups (cf. Theorem 33, p. 222 andChap. 16, p. 291 and 292).
It is evident that the constants ciks actually play the rôle of certain properties ofthe group X1 f , . . . ,Xr f . For the totality of these properties, we introduce a specificterminology, we call them the composition [ZUSAMMENSETZUNG] of the group,and we thus say that the constants ciks in the relations:
(1) [Xi, Xk] =r
∑s=1
ciks Xs f
determine the composition of the r-term group X1 f , . . . ,Xr f .
§ 80.
The system of the ciks which determines the composition of the r-term groupX1 f , . . . ,Xr f is in turn not completely determined. Indeed, the individual ciks re-ceive in general other numerical values when one chooses, in place of X1 f , . . . ,Xr f ,any other r independent infinitesimal transformations e1 X1 f + · · ·+ er Xr f .
From this, it follows that two different systems of ciks can represent, in certaincircumstances, the composition of one and the same group. But how can one recog-nize that this is the case?
We start from the relations:
301

302 17 Composition and Isomorphism
(1) [Xi, Xk] =r
∑s=1
ciks Xs f (i, k=1 ···r)
which exist between r determined independent infinitesimal transformationsX1 f , . . . ,Xr f of our group. We seek the general form of the relations by whichr arbitrary independent infinitesimal transformations X1 f , . . . ,Xr f of the groupX1 f , . . . ,Xr f are linked.
If the concerned relations have the form:
(2) [Xi, Xk] =r
∑s=1
c′iks Xs f ,
then the system of the constants c′iks is the most general one which represents thecomposition of the group X1 f , . . . ,Xr f . Hence the thing is only about the computa-tion of the c′iks.
Since X1 f , . . . ,Xr f are supposed to be arbitrary independent infinitesimal trans-formations of the group X1 f , . . . ,Xr f , we have:
Xk f =r
∑j=1
hk j X j f (k=1 ···r),
where the constants hk j can take all the possible values which do not bring to zerothe determinant:
D = ∑ ± h11 · · ·hrr.
By a calculation, it comes:
[Xi, Xk] =1···r
∑j, π
hi j hkπ [X j, Xπ ] =1···r
∑j, π, s
hi j hkπ c jπs Xs f ;
on the other hand, it follows from (2):
[Xi, Xk] =1···r
∑π, s
hπs c′ikπ Xs f .
If we compare with each other these two expressions for [Xi, Xk] and if we takeaccount of the fact that X1 f , . . . ,Xr f are independent infinitesimal transformations,we obtain the relations:
(3)r
∑π=1
hπs c′ikπ =1···r
∑j, π
hi j hkπ c jπs (s=1 ···r).
Under the assumptions made, these equations can be solved with respect to thec′ikπ , hence one has1:
1 Implicitly here, one sees a standard way to represent the matrix which is the inverse of (hk j).

§ 80. 303
(4)c′ikρ =
1D
r
∑s=1
∂D
∂hρs
1···r
∑j, π
hi j hkπ
c jπs
(i, k, ρ =1 ···r)
With these words and according to the above, we have found the general form ofall systems of constants which determine the composition of the group X1 f , . . . ,Xr f .At the same time, we have at least theoretical means to decide whether a given sys-tem of constants ciks determines the composition of the group X1 f , . . . ,Xr f ; namely,such a system obviously possesses this property if and only if one can choose theparameters hk j in such a way that c′iks = ciks. —
If two r-term groups are given, we can compare their compositions. Clearly,thanks to the above developments, we are in a position to decide whether the twogroups have one and the same composition, or have different compositions. Here,we do not need to pay heed to the number of variables.
We say that two r-term groups which have one and the same composition areequally composed [GLEICHZUSAMMENGESETZT].
If:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
are independent infinitesimal transformations of an r-term group and if:
Yk f =m
∑µ=1
ηkµ(y1, . . . ,ym)∂ f∂yµ
(k=1 ···r)
are independent infinitesimal transformations of a second r-term group, and in ad-dition, if there are relations:
[Xi, Xk] =r
∑s=1
ciks Xs f ,
then obviously, these two groups are equally composed when, and only when,amongst the infinitesimal transformations e1 Y1 f + · · ·+ er Yr f of the second group,one can indicate r mutually independent transformations Y1 f , . . . ,Yr f such thatthe relations:
[Yi, Yk] =r
∑s=1
ciks Ys f
hold identically.If the relations holding between Y1 f , . . . ,Yr f have the form:
[Yi, Yk] =r
∑s=1
ciks Ys f ,

304 17 Composition and Isomorphism
then we can say: the two groups are equally composed when and only when it ispossible to choose the parameters hk j in the equations (4) in such a way that everyc′iks is equal to the corresponding ciks.
One can also compare the compositions of two groups which do not have thesame number of parameters. This is made possible by the introduction of the generalconcept: isomorphism [ISOMORPHISMUS].
The r-term group X1 f , . . . ,Xr f :
[Xi, Xk] =r
∑s=1
ciks Xs f
is said to be isomorphic [ISOMORPH] to the (r−q)-term group: Y1 f , . . . ,Yr−q f whenit is possible to choose r infinitesimal infinitesimal transformations:
Yk f = hk1 Y1 f + · · ·+hk,r−q Yr−q f
(k=1 ···r)
in the (r−q) so that not all (r−q)× (r−q) determinants of the matrix:∣∣∣∣∣∣∣∣h11 · · h1,r−q· · · ·· · · ·
hr1 · · hr,r−q
∣∣∣∣∣∣∣∣and so that at the same time, the relations:
[Yi, Yk] =r
∑s=1
ciks Ys f
hold identically.†
Let there be an isomorphism in this sense and let Y1 f , . . . ,Yr f be already cho-sen in the indicated way. Then if we associate to the infinitesimal transformatione1 X1 f + · · ·+ er Xr f of the r-term group always the infinitesimal transformation:
e1 Y1 f + · · ·+ er Yr f
of the (r−q)-term group, whichever values the constants e1, . . . ,er may have, thenthe following clearly holds true: when Y1 f is the transformation of the (r−q)-termgroup which is associated to the transformation Ξ1 f of the other group, and when,correspondingly, Y2 f is associated to the transformation Ξ2 f , then the transforma-tion [Ξ1, Ξ2] always corresponds to the transformation [Y1, Y2]. We express thismore briefly as follows: through the indicated correspondence of the infinitesimaltransformations of the two groups, the groups are isomorphically related one to an-
† Cf. Volume III, [1], p. 701, remarks.

§ 80. 305
other. Visibly, this isomorphic condition is completely determined when one knowsthat, to X1 f , . . . ,Xr f , are associated the transformations Y1 f , . . . ,Yr f , respectively.
One makes a distinction between holoedric and meroedric isomorphisms. Theholoedric case occurs when the number q, which appears in the definition of theisomorphism, has the value zero; the meroedric case when q is larger than zero.Correspondingly, one says that the two groups are holoedrically, or meroedrically,isomorphic one to another.
Visibly, the property of being equally composed [DIE EIGENSCHAFT DES GLE-ICHZUSAMMENGESETZTSEINS] of two groups is a special case of isomorphism;namely, two equally composed groups are always holoedrically isomorphic, andconversely.
Two meroedrically isomorphic groups are for example the two:
∂ f∂x1
, x1∂ f∂x1
, x21
∂ f∂x1
,∂ f∂x2
and:∂ f∂y1
, y1∂ f∂y1
, y21
∂ f∂y1
,
with, respectively, four and three parameters. We obtain that these two groups aremeroedrically isomorphic when, to the four infinitesimal transformations:
X1 f =∂ f∂x1
, X2 f = x1∂ f∂x1
, X3 f = x21
∂ f∂x1
, X4 f =∂ f∂x1
+∂ f∂x2
of the first, the following four, say, are associated:
Y1 f =∂ f∂y1
, Y2 f = y1∂ f∂y1
, Y3 f = y21
∂ f∂y1
, Y4 f =∂ f∂y1
.
In the theory of substitutions, one also speaks of isomorphic groups, althoughthe notion of isomorphism happens to be apparently different from the one here†.Later (cf. Chap. 21: The Group of Parameters) we will convince ourselves that nev-ertheless, the concept of isomorphism following from our definition correspondsperfectly to the concept which one obtains as soon as one translates the definition ofthe theory of substitution directly into the theory of finite continuous groups.
At present, we shall at first derive a few simple consequences from our definitionof isomorphism.
In the preceding chapter, we have seen that to every r-term group X1 f , . . . ,Xr fis associated a certain linear homogeneous group, the adjoint group, as we havenamed it. From the relations which exist between the infinitesimal transformationsof the adjoint group (cf. Chap. 16, p. 287), it becomes immediately evident that thegroup X1 f , . . . ,Xr f is isomorphic to its adjoint group; however, the two groups areholoedrically isomorphic only when the group X1 f , . . . ,Xr f contains no excellent
† Camille JORDAN, Traité des substitutions, Paris 1870.

306 17 Composition and Isomorphism
infinitesimal transformation, because the adjoint group is r-term only in this case,whereas it always contains less than r parameters in the contrary case. Thus:
Theorem 55. To every r-term group X1 f , . . . ,Xr f is associated an isomorphic linearhomogeneous group, namely the adjoint group; this group is holoedrically isomor-phic to the group X1 f , . . . ,Xr f only when the latter contains no excellent infinitesi-mal transformation.
We do not consider here the question of whether to every r-term group whichcontains excellent infinitesimal transformations one can also associate an holoedri-cally isomorphic linear homogeneous group. Yet by an example, we want to showthat this is in any case possible in many circumstances, also when the given r-termgroup contains excellent infinitesimal transformations.
Let the r-term group X1 f , . . . ,Xr f contains precisely r − m independent ex-cellent infinitesimal transformations, and let X1 f , . . . ,Xr f be chosen in such away that Xm+1 f , . . . ,Xr f are excellent infinitesimal transformations; then betweenX1 f , . . . ,Xr f , there exist relations of the form:
[Xµ , Xν ] = cµν1 X1 f + · · ·+ cµνr Xr f
[Xµ , Xm+k] = [Xm+k, Xm+ j] = 0(µ, ν =1 ···m ; k, j=1 ···r−m).
In the associated adjoint group E1 f , . . . ,Er f , there are only m independent in-finitesimal transformations: E1 f , . . . ,Em f , while Em+1 f , . . . ,Er f vanish identically,and hence E1 f , . . . ,Em f are linked together by the relations:
[Eµ , Eν ] = cµν1 E1 f + · · ·+ cµνm Em f .
In particular, if all cµ,ν ,m+1, . . . ,cµνr vanish, one can always indicate an r-term linear homogeneous group which is holoedrically isomorphic to the groupX1 f , . . . ,Xr f . In this case namely, X1 f , . . . ,Xm f actually generate an m-term groupto which the group E1 f , . . . ,Em f is holoedrically isomorphic. Hence if we set:
Em+1 f = er+1∂ f
∂er+1, . . . , Er f = e2r−m
∂ f∂e2r−m
,
then the r independent infinitesimal transformations:
E1 f , . . . , Em f , Em+1 f , . . . , Er f
obviously generate a linear homogeneous group which is holoedrically isomorphicto the group X1 f , . . . ,Xr f .
But also in the cases where not all cµ,ν ,m+1, . . . ,cµνr vanish, one can often easilyindicate an holoedrically isomorphic linear homogeneous group. As an example, weuse the three-term group X1 f , X2 f , X3 f :
[X1, X2] = X3 f , [X1, X3] = [X2, X3] = 0,

§ 80. 307
which contains an excellent infinitesimal transformation, namely X3 f ; it is holoedri-cally isomorphic to the linear homogeneous group:
E1 f = α3∂ f∂α1
, E2 f = α1∂ f∂α2
, E3 f = α3∂ f∂α2
.
As we have seen in Chap. 9, p. 186, the constants ciks in the equations:
(1) [Xi, Xk] =r
∑s=1
ciks Xs f
satisfy the relations:
(5)
ciks + ckis = 0
r
∑ν=1
cikν cν js + ck jν cν is + c jiν cνks
= 0
(i, k, j, s=1 ···r).
With the help of these relations, we succeeded, in Chap. 16, p. 287, to prove thatthe r infinitesimal transformations:
(6) Eµ f =1···r
∑k, j
c jµk e j∂ f∂ek
(µ =1 ···r)
of the group adjoint to the group X1 f , . . . ,Xr f stand pairwise in the relationships:
(7) [Eµ , Eν ] =r
∑s=1
cµνs Es f .
But for this proof of the relations (7), we have used no more than the fact thatthe ciks satisfied the equations (5), namely we have made no use of the fact that weknew r infinitesimal transformations X1 f , . . . ,Xr f which were linked together bythe relations (1). Thanks to the cited developments, it is hence established that the rinfinitesimal transformations (6) always stand in the relationships (7) when the cikssatisfy the equations (5).
Consequently, if we know a system of ciks which satisfies the relations (5),we can immediately indicate r linear homogeneous infinitesimal transforma-tions E1 f , . . . ,Er f , namely the transformations (6), which stand pairwise in therelationships:
[Ei, Ek] =r
∑s=1
ciks Es f .
It is evident that the so obtained infinitesimal transformations E1 f , . . . ,Er f gen-erate a group, and to be precise, a group with r or less parameters; clearly, theygenerate a group with exactly r parameters only when they are mutually indepen-dent, hence when it is impossible that the equations:

308 17 Composition and Isomorphism
g1 E1 f + · · ·+gr Er f = 0,
or the r2 equivalent equations:
g1 c j1k +g2 c j2k + · · ·+gr c jrk ( j, k=1 ···r)
are satisfied by not all vanishing quantities g1, . . . ,gr.As a result, we have the
Theorem 52. † When the constants ciks (i, k, s=1 ···r) possess values such that all re-lations of the form:
(5)
ciks + ckis = 0
r
∑ν=1
cikν cν js + ck jν cν is + c jiν cνks
= 0
(i, k, j, s=1 ···r)
are satisfied, then the r linear homogeneous infinitesimal transformations:
Eµ f =1···r
∑k, j
c jµk e j∂ f∂ek
(µ =1 ···r)
stand pairwise in the relationships:
[Ei, Ek] =r
∑s=1
ciks Es f (i, k=1 ···r),
and hence, they generate a linear homogeneous group. In particular, if the ciks areconstituted so that not all r×r determinants, the horizontal series of which have theform: ∣∣c j1k c j2k · · · c jrk
∣∣ ( j, k=1 ···r),
vanish, then E1 f , . . . ,Er f are independent infinitesimal transformations and theygenerate an r-term group whose composition is determined by the system of the ciks,and which contains no excellent infinitesimal transformation. In all other cases, thegroup generated by E1 f , . . . ,Er f has less than r parameters.
§ 81.
The results of the preceding paragraph suggest the presumption that actually, everysystem of ciks which satisfies the relations (5) represents the composition of a certainr-term group. This presumption, corresponds to the truth [DIESE VERMUTHUNGENTSPRICHT DER WAHRHEIT], for the following really holds2.
† LIE, Archiv for Math. og Nat. Vol. 1, p. 192, Christiania 1876.2 This is the so-called Third Fundamental Theorem of Lie’s theory, cf. Vol. III.

§ 81. 309
Proposition 1. If the constants ciks (i, k, s=1 ···r) possess values such that the rela-tions:
(5)
ciks + ckis = 0
r
∑ν=1
cikν cν js + ck jν cν is + c jiν cνks
= 0
(i, k, j, s=1 ···r)
are satisfied, then there are always, in a space of the appropriate number of dimen-sions, r independent infinitesimal transformations X1 f , . . . ,Xr f which stand pair-wise in the relationships:
[Xi, Xk] =r
∑s=1
ciks Xs f
and hence generate an r-term group of the composition ciks.
For the time being, we suppress the proof of this important proposition, in ordernot to be forced to digress for a long while, and we will perform this proof only inthe next volume. Of course, until then, we will make the least possible use of thisproposition.
From the Proposition 1, it results that the totality of all possible compositions ofr-term groups is represented by the totality of all systems of ciks which satisfy theequations (5). If one knows all such systems of ciks, then with this, one knows at thesame time all compositions of r-term groups.
But now, as we have seen on p. 303, there are in general infinitely many systemsof ciks which represent one and the same composition; if a system of ciks is givenwhich represents a composition, then one finds all systems of c′iks which representthe same composition by means of the equations (4), in which it is understood thatthe hk j are arbitrary parameters. Hence, when one knows all systems of ciks whichsatisfy the equations (5), a specific research is yet required in order to find out whichof these systems represent different compositions. In order to be able to execute thisresearch, we must at first consider somehow more closely the equations (4).
For the moment, we disregard the fact that the ciks are linked together by somerelations; rather, we consider the ciks, and likewise the c′iks, as variables independentof each other. On the basis of this conception, it will be shown that the equations (4)represent a continuous transformation group in the variables ciks.
In order to prove the claimed property of the equations (4), we will directly exe-cute one after the other two transformations (4), or, what is the same, two transfor-mations:
(3)
r
∑π=1
hπs c′ikπ =1···r
∑j, π
hi j hkπ c jπs
(i, k, s=1 ···r).

310 17 Composition and Isomorphism
To begin with, we therefore transfer the ciks to the c′iks by means of the transfor-mation (3) and then the c′iks to the c′′iks by means of the transformation:
(3’)r
∑π=1
h′πs c′′ikπ =1···r
∑j, π
h′i j h′kπ c′jπs.
In this way, we obtain a new transformation, the equations of which are obtainedwhen the c′iks are took away from (3) and (3’). It is to be proved that this new trans-formation has the form:
(3”)r
∑π=1
h′′πs c′′ikπ =1···r
∑j, π
h′′i j h′′kπ c′jπs,
where the h′′ are functions of only the h and the h′.We multiply (3’) by hsσ and we sum with respect to s; then we receive:
1···r
∑π, s
h′πs hsσ c′′ikπ =1···r
∑j, π, s
h′i j h′kπ hsσ c′jπs,
or, because of (3):
1···r
∑π, s
h′πs hsσ c′′ikπ =1···r
∑j, π, τ, ρ
h′i j h′kπ h jτ hπρ cτρσ .
This is the discussed new transformation; it converts into (3”) when one sets:
h′′πσ =r
∑s=1
h′πs hsσ .
As a result, it is proved that the transformations (4) effectively form a group.Now, we claim that the transformations of this group leave invariant the equa-
tions (5).Let ciks be a system of constants which satisfies the relations (5), hence according
to Proposition 1, which represents the composition of a certain r-term group. Thenas we know, the system of the c′iks which is determined by the relations (4) representsin the same way a composition, namely the same composition as the one of thesystem of the ciks; consequently, the c′iks also satisfy relations of the form (5). Thus,the transformations (4) transfers every system ciks which satisfies (5) to a systemc′iks having the same constitution, that is to say, they leave invariant the system ofequations (5), and this was just our claim.
At present, we interpret the r3 variables ciks as point coordinates in a space of r3
dimensions.In this space, a certain manifold M which is invariant by the transformations of
the group (4) is sorted by the equations (5). Every point of M — as we can say —represents a composition of r-term group, and conversely, every possible compo-

§ 82. 311
sition of r-term group is represented by certain points of M. Two different pointsof M represent one and the same composition when there is, in the group (4), atransformation which transfers the first point to the other.
Hence, if P is an arbitrary point of M, then the totality of all positions that thepoint P takes by the transformations of the group (4) coincides with the totality of allpoints which represent the same composition as P. We know from before (Chap. 14,p. 237) that that this totality of points forms a manifold invariant by the group (4),and to be precise, a so-called smallest invariant manifold.
From this, it follows that one has to proceed as follows in order to find all differ-ent types of r-term groups:
One determines all smallest manifolds located in M that remain invariant by thegroup (4); on each such manifold, one chooses an arbitrary point ciks: the systemsof values ciks which belong to the chosen points then represent all types of differentcompositions of r-term groups.
Since the finite equations of the group (4) are here, the determination of the small-est invariant manifolds has to be considered as an executable operation; it requiresonly the resolution of algebraic equations.
We therefore have the
Theorem 53. The determination of all essentially different compositions of r-termgroups requires only algebraic operations.
§ 82.
Now, let X1 f , . . . ,Xr f be an r-term group Gr of the composition:
[Xi, Xk] =r
∑s=1
ciks Xs f .
Furthermore, let Y1 f , . . . ,Yr−q f be an (r−q)-term group isomorphic to the Gr, andto be precise, meroedrically isomorphic, so that q is therefore larger than zero. Wewant to denote this second group shortly by Gr−q.
Let the two groups be, in the way indicated on p. 304 and 305, isomorphi-cally related one to the other; so in the Gr−q, let r infinitesimal transformationsY1 f , . . . ,Yr f be chosen which stand in the relationships:
[Yi, Yk] =r
∑s=1
ciks Ys f ,
where Y1 f , . . . ,Yr−q f are mutually independent, whereas Yr−q+1 f , . . . ,Yr f are de-fined by the identities:
(8)Yr−q+k f ≡ dk1 Y1 f + · · ·+dk,r−q Yr−q f
(k=1 ···q).
Under the assumptions made, one obviously has:

312 17 Composition and Isomorphism[Yi f , Yr−q+k f −
r−q
∑µ=1
dkµ Yµ f]≡ 0
( j=1 ···r ; k=1 ···q),
or:r
∑s=1
c j,r−q+k,s −
r−q
∑µ=1
dkµ c jµs
Ys f ≡ 0.
If we replace here Yr−q+1 f , . . . ,Yr f by their values (8), we obtain linear relationsbetween Y1 f , . . . ,Yr−q f ; but obviously, such linear relations can hold only when thecoefficients of every individual Y1 f , . . . ,Yr−q f possess the value zero.
From the vanishing of these coefficients, it follows that the rq expressions:[X j f , Xr−q+k f −
r−q
∑µ=1
dkµ Xµ f]=
r
∑s=1
c j,r−q+k,s −
r−q
∑µ=1
dkµ c jµs
Xs f
can be linearly deduced from the q infinitesimal transformations:
(9) Xr−q+k f −r−q
∑µ=1
dkµ Xµ f (k=1 ···q).
Expressed differently: the q independent infinitesimal transformations (9) generatea q-term invariant subgroup of the group X1 f , . . . ,Xr f .
Theorem 54. If the (r − q)-term group Y1 f , . . . ,Yr−q f is isomorphic to the r-termgroup: X1 f , . . . ,Xr f , and if Y1 f , . . . ,Yr f are infinitesimal transformations of the(r−q)-term group such that firstly Y1 f , . . . ,Yr−q f are mutually independent whileby contrast, Yr−q+1, . . . ,Yr f can be linearly deduced from Y1 f , . . . ,Yr−q f :
Yr−q+k f ≡ dk1 Y1 f + · · ·+dk,r−q Yr−q f (k=1 ···q),
and secondly such that, simultaneously with the relations:
[Xi, Xk] =r
∑s=1
ciks Xs f ,
the analogous relations:
[Yi, Yk] =r
∑s=1
ciks Ys f
hold, then the q infinitesimal transformations:
Xr−q+k f −dk1 X1 f −·· ·−dk,r−q Xr−q f (k=1 ···q)
generate a q-term invariant subgroup of the group X1 f , . . . ,Xr f .
The Gr: X1 f , . . . ,Xr f and the Gr−q: Y1 f , . . . ,Yr−q f are, as we know, isomorphi-cally related when, to every infinitesimal transformation of the form: e1 X1 f + · · ·+

§ 82. 313
er Xr f , we associate the infinitesimal transformation:
r
∑k=1
ek Yk f =r−q
∑k=1
ek +
q
∑j=1
er−q+ j d jk
Yk f .
Through this correspondence, the transformations of the Gr which belong to theq-term group (9) are the only ones which correspond to the identically vanishing in-finitesimal transformation of the Gr−q. Consequently, in general, to every one-termsubgroup of the Gr, there corresponds a completely determined one-term subgroupof the Gr−q, and it is only to the one-term subgroups of the group (9) that therecorrespond no one-term subgroups of the Gr−q, for the associated one-term groupsindeed reduce to the identity transformation. Conversely, to one and the same one-term subgroup h1 Y1 f + · · ·+ hr−q Yr−q f of the Gr−q, there correspond in total ∞q
different one-term subgroups of the Gr, namely all the groups of the form:
r−q
∑k=1
hk Xk f +q
∑j=1
λ j
Xr−q+ j f −
r−q
∑µ=1
d jµ Xµ f,
where λ1, . . . ,λq denote arbitrary constants.Now, a certain correspondence between the subgroups of the Gr and the sub-
groups of the Gr−q actually takes place.If m arbitrary mutually independent infinitesimal transformations:
lµ1 X1 f + · · ·+ lµr Xr f (µ =1 ···m)
generate an m-term subgroup of the Gr, then the m infinitesimal transformations:
r
∑k=1
lµk Yk f =r−q
∑k=1
lµk +
q
∑j=1
lµ,r−q+ j d jk
Yk f
(µ =1 ···m)
obviously generate a subgroup of the Gr−q. This subgroup is at most m-term, and inparticular, it is 0-term, that is to say, it consists of only the identity transformationwhen the m-term subgroup of the Gr is contained in the q-term group (9), and in factclearly, only in this case.
Conversely, if m′ arbitrary infinitesimal transformations:
lµ1 Y1 f + · · ·+ lµ,r−q Yr−q f (µ =1 ···m′)
generate an m′-term subgroup of the Gr−q: Y1 f , . . . ,Yr−q f , then the m′ infinitesimaltransformations:
lµ1X1 f + · · ·+ lµ,r−q Xr−q f (µ =1 ···m′),
together with the q transformations:

314 17 Composition and Isomorphism
Xr−q+k f −dk1 X1 f −·· ·−dk,r−q Xr−q f (k=1 ···q)
always generate an (m′+q)-term subgroup of the Gr.From this, we see that to every subgroup of the Gr corresponds a completely
determined subgroup of the Gr−q which, in certain circumstances, consists of onlythe identity transformation; and moreover, we see that to every subgroup of the Gr−qcorresponds at least one subgroup of the Gr. If we know all subgroups of the Gr andif we determine all the subgroups of the Gr−q corresponding to them, we then obtainall subgroups of the Gr−q. Thus, the following holds.
Proposition 2. If one has isomorphically related an r-term group of whichone knows all subgroups to an (r − q)-term group, then one can also indicatestraightaway all subgroups of the (r−q)-term group.
Let X1 f , . . . ,Xr f , or shortly Gr, be an r-term group of the composition:
[Xi, Xk] =r
∑s=1
ciks Xs f .
We want to study what are the different compositions that a group meroedricallyisomorphic to the Gr can have.
Up to now, we know only the following: If the Gr can be isomorphically related toan (r−q)-term group, then there is in the Gr a completely determined q-term invari-ant subgroup which corresponds to the identity transformation in the (r− q)-termgroup. Now, we claim that this proposition can be reversed in the following way:If the Gr contains a q-term invariant subgroup, then there always is an (r−q)-termgroup Gr−q which is isomorphic to the Gr and which can be isomorphically relatedto the Gr in such a way that the q-term invariant group inside the Gr corresponds tothe identity transformation3 in the Gr−q.
For reasons of convenience, we imagine that the r independent infinitesimaltransformations X1 f , . . . ,Xr f are chosen so that Xr−q+1 f , . . . ,Xr f generate the saidinvariant subgroup. Then our claim clearly amounts to the fact that, in arbitraryvariables y1,y2, . . . , there are r infinitesimal transformations Y1 f , . . . ,Yr f whichsatisfy the following two conditions: firstly, Yr−q+1 f , . . . ,Yr f vanish identically,while Y1 f , . . . ,Yr−q f are mutually independent, and secondly, the relations:
(10) [Yi, Yk] = cik1 Y1 f + · · ·+ cikr Yr f (i, k=1 ···r)
must hold identically.Since Xr−q+1 f , . . . ,Xr f generate a subgroup invariant in the Gr, all cik1, cik2, . . . ,
cik,r−q in which at least one of the two indices i and k is larger than r − q, areequal to zero. Thus, if in the relations (10), we set equal to zero all the infinitesimaltransformations Yr−q+1 f , . . . ,Yr f , then all relations for which not both i and k are
3 The notion of quotient group will in fact not come up here; instead, Lie uses Proposition 1above.

§ 82. 315
smaller than r− q+ 1 will be identically satisfied, and we keep only the followingrelations between Y1 f , . . . ,Yr−q f :
(11) [Yi, Yk] = cik1 Y1 f + · · ·+ cik,r−q Yr−q f (i, k=1 ···r−q).
So, we need only to prove that there are r − q independent infinitesimal trans-formations Y1 f , . . . ,Yr−q f which are linked together by the relations (11), or, whatis the same: that there is an (r−q)-term group, the composition of which is repre-sented by the system of the constants ciks (i, k, s=1 ···r−q).
In order to prove this, we start from the fact that, for i,k, j = 1, . . . ,r − q, theJacobi identity: [
[Xi, Xk], X j]+[[Xk, X j], Xi
]+[[X j, Xi], Xk
]= 0,
holds, and it can also be written as:
r−q
∑µ=1
cikµ [Xµ , X j]+ ck jµ [Xµ , Xi]+ c jiµ [Xµ , Xk]
+
q
∑π=1
[Xr−q+π f , cik,r−q+π X j f + ck j,r−q+π Xi f + c ji,r−q+π Xk f
]= 0.
If we develop here the left-hand side and if we take into consideration that thecoefficients of X1 f , . . . ,Xr−q f must vanish, we obtain, between the constants cikswhich appear in (11), the following relations:
r−q
∑µ=1
cikµ cµ jν + ck jµ cµiν + c jiµ cµkν
= 0
(i, k, j, ν =1 ···r−q).
These relations show that the ciks (i, k, s=1 ···r−q) determine a composition in the sensedefined earlier on. As was observed on p. 309, there surely are (r−q)-term groupsthe composition of which is determined by the ciks (i, k, s=1 ···r−q).
As a result, the claim stated above is proved. If we yet add what we already knewfor a while, we obtain the†
Proposition 3. If one knows all invariant subgroups of the r-term group X1 f , . . . ,Xr f :
[Xi, Xk] =r
∑s=1
ciks Xs f ,
then one can indicate all compositions which a group isomorphic to the groupX1 f , . . . ,Xr f can have.
† We will show later that the cited Proposition 1, p. 309 is not at all indispensable for the devel-opments of the text. Cf. LIE, Archiv for Math. og Nat. Vol. 10, p. 357, Christiania 1885.

316 17 Composition and Isomorphism
In order to really set up the concerned compositions, one must proceed as fol-lows:
If the q > 0 independent infinitesimal transformations:
gµ1 X1 f + · · ·+gµr Xr f (µ =1 ···q)
generate a q-term invariant subgroup of the group: X1 f , . . . ,Xr f , or shortly Gr, thenone sets:
gµ1 Y1 f + · · ·+gµr Yr f = 0 (µ =1 ···q),
one solves with respect to q of the r expressions Y1 f , . . . ,Yr f , and one eliminatesthem from the relations:
[Yi, Yk] =r
∑s=1
ciks Ys f .
Between the r − q expressions remaining amongst the expressions Y1 f , . . . ,Yr f ,one then obtains relations which define the composition of an (r − q)-term groupisomorphic to the Gr. If one proceeds in this way for every individual subgroup ofthe Gr, one obtains all the desired compositions.
Since every group is one’s own invariant subgroup, it follows that to every r-termgroup Gr is associated a meroedrically isomorphic group, namely the group whichis formed by the identity transformation. If the Gr is simple (cf. Chap. 15, p. 276),then the identity transformation is evidently the only group which is meroedricallyisomorphic to it.
§ 83.
In this paragraph, we consider an important case in which groups occur that areisomorphic to a given group.
Let the r-term group:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
of the space x1, . . . ,xn be imprimitive, and let:
u1(x1, . . . ,xn) = const., . . . , un−q(x1, . . . ,xn) = const.
be a decomposition of the space into ∞n−q q-times extended manifolds invariant bythe group.
According to Chap. 7 and to Chap. 13, p. 233, the n− q mutually independentfunctions u1, . . . ,un−q satisfy relations of the form:
Xk uν = ωkν(u1, . . . ,un−q) (k=1 ···r ; ν =1 ···n−q),
hence the r expressions:

§ 83. 317
n−q
∑ν=1
Xk uν∂ f∂uν
=n−q
∑ν=1
ωkν(u1, . . . ,un−q)∂ f∂uν
= Xk f
(k=1 ···r)
represent as many infinitesimal transformations in the variables u1, . . . ,un−q. Weclaim that X1 f , . . . ,X r f generate a group isomorphic4 to the group X1 f , . . . ,Xr f .
For the proof, we form:
X i(Xk( f )
)−Xk
(X i( f )
)=
n−q
∑ν=1
(X i ωkν −Xk ωiν
) ∂ f∂uν
=n−q
∑ν=1
(Xi ωkν −Xk ωiν
) ∂ f∂uν
;
now, we have:
Xi(Xk( f )
)−Xk
(Xi( f )
)=
r
∑s=1
ciks Xs f ,
or, when we insert uν in place of f :
Xi ωkν −Xk ωiν =r
∑s=1
ciks Xs uν =r
∑s=1
ciks ωsν ,
hence, after inserting the found values of Xi ωkν −Xk ωiν , it comes:
X i(Xk( f )
)−Xk
(X i( f )
)=
r
∑s=1
n−q
∑ν=1
ciks ωsν∂ f∂uν
,
or, what amounts to the same:
[X i, Xk] =r
∑s=1
ciks X s f .
But this is what was to be proved.The group X1 f , . . . ,X r f has a very simple conceptual meaning.From the definition of imprimitivity, it follows that the totality of the ∞n−q man-
ifolds u1 = const., . . . , un−q = const. remains invariant by the group X1 f , . . . ,Xr f ,hence that the ∞n−q manifolds are permuted by every transformation of this group.Consequently, to every transformation of the group X1 f , . . . ,Xr f , there correspondsa certain permutation of our ∞n−q manifolds, or, what is the same, a transformationin the n− q variables u1, . . . ,un−q. It is clear that the totality of all the so obtained
4 This notion of reduced group X1 f , . . . ,X r f appearing just now is central in the general algo-rithm, devised by LIE and developed later in Vol. III, towards the classification of all imprimitivetransformation groups, and it also unveils appropriately the true mathematical causality of thenowadays seemingly unusual notion of isomorphism which was introduced earlier on, p. 304.

318 17 Composition and Isomorphism
transformations in the variables u form a group, namely just the group which isgenerated by X1 f , . . . ,X r f .
Naturally, the group X1 f , . . . ,X r f needs not be holoedrically isomorphic to theinitial group, but evidently, it is only meroedrically isomorphic to it when, amongstthe infinitesimal transformations e1 X1 f + · · ·+ er X r f , there is at least one whichvanishes identically without e1, . . . ,er being all zero, hence when at least oneamongst the infinitesimal transformations e1 X1 f + · · ·+ er Xr f leaves individuallyinvariant each one of our ∞n−q manifolds.
Thus, we have the
Proposition 4. If the r-term group X1 f , . . . ,Xr f of the space x1, . . . ,xn is imprimitiveand if the equations:
u1(x1, . . . ,xn) = const., . . . , un−q(x1, . . . ,xn) = const.
represent a decomposition of the space in ∞n−q q-times extended manifolds, thenthe infinitesimal transformations:
n−q
∑ν=1
Xk uν∂ f∂uν
=n−q
∑ν=1
ωkν(u1, . . . ,un−q)∂ f∂uν
= Xk f
(k=1 ···r)
in the variables u1, . . . ,un−q, generate a group isomorphic to the group X1 f , . . . ,Xr fwhich indicates in which way the ∞n−q manifolds are permuted by the transfor-mations of the group X1 f , . . . ,Xr f . If, amongst the infinitesimal transformationse1 X1 f + · · ·+ er Xr f , there are exactly r−ρ independent ones which leave individ-ually invariant each one of the ∞n−q manifolds, then the group X1 f , . . . ,X r f is justρ-term.
Using the Theorem 54, p. 312, we yet obtain the
Proposition 5. If the group X1 f , . . . ,Xr f of the space x1, . . . ,xn is imprimitive andif:
u1(x1, . . . ,xn) = const., . . . , un−q(x1, . . . ,xn) = const.
is a decomposition of the space in ∞n−q q-times extended manifolds, then the totalityof all infinitesimal transformations e1 X1 f + · · ·+ er Xr f which leave individuallyinvariant each one of these manifolds generates an invariant subgroup of the groupX1 f , . . . ,Xr f .
At present, we consider an arbitrary r-term group X1 f , . . . ,Xr f which leaves in-variant a manifold of the space x1, . . . ,xn.
According to Chap. 14, p. 243, the points of this manifold are in turn transformedby a group, the infinitesimal transformations of which can be immediately indicatedwhen the equations of the manifold are in resolved form. Indeed, if the equations ofthe manifold read in the following way:
x1 = ϕ1(xn−m+1, . . . ,xn), . . . , xn−m = ϕn−m(xn−m+1, . . . ,xn),

§ 83. 319
and if xn−m+1, . . . ,xn are chosen as coordinates for the points of the manifold, thenthe infinitesimal transformations of the group in question possess the form (cf.Chap. 14, p. 244):
Xk f =m
∑µ=1
ξk,n−m+µ(ϕ1, . . . ,ϕn−m, xn−m+1, . . . ,xn)∂ f
∂xn−m+µ
(k=1 ···r).
What is more, as we have already proved at that time, the following relationshold:
[X i, Xk] =r
∑s=1
ciks X s f .
From this, we see that the group X1 f , . . . ,X r f is isomorphic to the groupX1 f , . . . ,Xr f ; in particular, it is meroedrically isomorphic to it when, amongst theinfinitesimal transformations:
e1 X1 f + · · ·+ er X r f ,
there is at least one transformation which vanishes identically, so that at least oneamongst the infinitesimal transformations e1 X1 f + · · ·+ er Xr f leaves fixed everyindividual point of the manifold.
We can therefore complement the Theorem 40 in Chap. 14, p. 243 as follows:
Proposition 6. If the r-term group X1 f , . . . ,Xr f in the variables x1, . . . ,xn leavesinvariant the manifold:
x1 = ϕ1(xn−m+1, . . . ,xn), . . . , xn−m = ϕn−m(xn−m+1, . . . ,xn),
then the reduced infinitesimal transformations:
Xk f =m
∑µ=1
ξk,n−m+µ(ϕ1, . . . ,ϕn−m, xn−m+1, . . . ,xn)∂ f
∂xn−m+µ
(k=1 ···r)
in the variables xn−m+1, . . . ,xn generate a group isomorphic to the r-term groupwhich indicates in which way the points of the manifold are permuted by the trans-formations of the group X1 f , . . . ,Xr f . If, amongst the infinitesimal transformationse1 X1 f + · · ·+er Xr f , there are exactly r−ρ independent ones which leave invariantevery individual point of the manifold, then the group X1 f , . . . ,X r f is just ρ-term.
In addition, the following also holds true.
Proposition 7. If the r-term group X1 f , . . . ,Xr f of the space x1, . . . ,xn leaves invari-ant a manifold, then the totality of all infinitesimal transformations e1 X1 f + · · ·+er Xr f which leave fixed every individual point of this manifold generate an invariantsubgroup of the r-term group.

320 17 Composition and Isomorphism
—————–
Let:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
be an r-term intransitive group of the Rn, and one which contains only a discretenumber of invariant subgroups.
The complete system which is determined by the equations:
X1 f = 0, . . . , Xr f = 0
is q-term under these assumptions, where q < n, and it possesses n−q independentsolutions. Hence we can imagine that the variables x1, . . . ,xn are chosen from thebeginning in such a way that xq+1, . . . ,xn are solutions of the complete system; if wedo this, then because ξk,q+ j = Xk xq+ j, all ξk,q+1, . . . ,ξkr vanish.
Evidently, each one of the ∞n−q q-times extended manifolds:
xq+1 = aq+1, . . . , xn = an
remains now invariant by the group X1 f , . . . ,Xr f ; but their points are permuted andaccording to Chap. 14, p. 243, by a group. If we choose x1, . . . ,xq as coordinatesfor the points of the manifold, then the infinitesimal transformations of the group inquestion will be:
Xk f =q
∑i=1
ξki(x1, . . . ,xq, aq+1, . . . ,an)∂ f∂xi
(k=1 ···r)
Whether this group is r-term or not remains temporarily uncertain, and in anycase, it is isomorphic to the group X1 f , . . . ,Xr f .
If the group X1 f , . . . ,X r f if ρ-term (ρ 6 r), then the group X1 f , . . . ,Xr f containsan (r − ρ)-term invariant subgroup which leaves fixed every individual point ofthe manifold xq+1 = aq+1, . . . ,xn = an (cf. Propositions 6 and 7). This invariant sub-group cannot change with the values of aq+1, . . . ,an, since otherwise, there would bein the group X1 f , . . . ,Xr f a continuous series of invariant subgroups, and this wouldcontradict our assumption. Consequently, there exists in the group X1 f , . . . ,Xr f an(r−ρ)-term invariant subgroup which leaves fixed all points of an arbitrary mani-fold amongst the ∞n−q manifolds:
xq+1 = aq+1, . . . , xn = an,
hence which actually leaves fixed all points of the space x1, . . . ,xn. But now, theidentity transformation is the only one which leaves at rest all points of the spacex1, . . . ,xn, so one has r−ρ = 0 and ρ = r, that is to say: the group X1 f , . . . ,X r f isholoedrically isomorphic to the group X1 f , . . . ,Xr f .
As a result, the following holds true.

References 321
Proposition 8. If X1 f , . . . ,Xr f are independent infinitesimal transformations of anr-term group with the absolute invariants Ω1(x1, . . . ,xn), . . . , Ωn−q(x1, . . . ,xn), andif there is only, in this group, a discrete number of invariant subgroups, then thepoints of an arbitrary invariant domain: Ω1 = a1, . . . , Ωn−q = an−q are transformedby a group holoedrically isomorphic to the group X1 f , . . . ,Xr f .
References
1. Engel, F.; Lie, S.: Theorie der transformationsgruppen. Dritter und letzter Abschnitt. UnterMitwirkung von Dr. Friedrich Engel, bearbeitet von Sophus Lie, Verlag und Druck von B.G.Teubner, Leipzig und Berlin, xxix+836 pp. (1890). Reprinted by Chelsea Publishing Co., NewYork, N.Y. (1970)
—————–


Chapter 18Finite Groups, the Transformations of WhichForm Discrete Continuous Families
So far, we have only occupied ourselves with continuous transformation groups,hence with groups which are represented by one system of equations of the form:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n).
In this chapter, we shall also treat briefly the finite groups which cannot be repre-sented by a single system of equations, but which can only represented by severalsuch systems; these are the groups about which we already made a mention in theIntroduction, p. 11†
Thus, we imagine that a series of systems of equations of the form:
(1)x′i = f (k)i
(x1, . . . ,xn, a(k)1 , . . . ,a(k)rk
)(i=1 ···n)
(k=1,2 ···)
is presented, in which each system contains a finite number rk of arbitrary param-eters a(k)1 , . . . ,a(k)rk , and we assume that the totality of all transformations which arerepresented by these systems of equations forms a group.
Since each one of the systems of equations (1) represents a continuous family oftransformations, our group consists of a discrete number of continuous transforma-tions. It is clear that every continuous family of transformations of our group eithercoincides with one of the families (1), or must be contained in one of these fami-lies. Of course, we assume that none of the families (1) is contained in one of theremaining families.
It is our intention to develop the foundations of a general theory of the sorts ofgroups just defined, but for reasons of simplicity we will introduce a few restrictions,which, incidentally, are not to be considered as essential.
Firstly, we make the assumption that the transformations of the group (1) areordered as inverses by pairs. Hence, although the transformations of the family:
† LIE, Verhandlungen der Gesellschaft der Wissenchaften zu Christiania, Nr. 12, p. 1, 1883.
323

324 18 Groups with Discrete Families of Transformations
x′i = f (k)i
(x1, . . . ,xn, a(k)1 , . . . ,a(k)rk
)(i=1 ···n)
are not already ordered as inverses by pairs, the totality of the associated inversetransformations is supposed to form a family which belongs to the group, hencewhich is contained amongst the families (1).
Secondly, we assume that the number of the families (1) is finite, say equal tom. However, when the propositions we derive are also true for infinitely many fam-ilies (1), we will occasionally point out that this is the case.
§ 84.
To the two assumptions about the group (1) which we have made in the introductionof the chapter, we yet want to temporarily add the third assumption that all familiesof the group should contain the same number, say r, of essential parameters. In thenext paragraph, we show that this third assumption follows from the first two, andhence is superfluous.
Let:x′i = f (k)i (x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
be one of the m families of ∞r transformations of which our group consists, so k isany of the numbers 1, . . . ,m.
By resolution of the equations written above, we obtain a family of transforma-tions:
xi = F(k)i (x′1, . . . ,x
′n, a1, . . . ,ar) (i=1 ···n)
which, under the assumptions made, equally belongs to the group.Therefore, when the two transformations:
xi = F(k)i (x′1, . . . ,x
′n, a1, . . . ,ar)
x′′i = f (k)i (x1, . . . ,xn, a1 +h1, . . . ,ar +hr)(i=1 ···n)
are executed one after the other, it again comes a transformation of our group,namely the following one:
(2) x′′i = f (k)i
(F(k)
1 (x′,a), . . . ,F(k)n (x′,a), a1 +h1, . . . ,ar +hr
)(i=1 ···n).
Here, we expand the right-hand side with respect to powers of h1, . . . ,hr and wefind:
x′′i = f (k)i
(F(k)(x′,a), a
)+
r
∑j=1
h j
[∂ f (k)i (x,a)
∂a j
]x=F(k)(x′,a)
+ · · · ,
where all the left out terms in h1, . . . ,hr are of second order and of higher order. Butif we take into account that the two transformations:
xi = F(k)i (x′,a), x′i = f (k)i (x,a) (i=1 ···n)
are inverse to each other, and if in addition, we yet set for abbreviation:

§ 84. 325
(3)[
∂ f (k)i∂a j x=F(k)(x′,a)
]= η(k)
ji (x′1, . . . ,x′n, a1, . . . ,ar),
then we see that the transformation just found has the shape:
(4) x′′i = x′i +r
∑j=1
h j η(k)ji (x′,a)+ · · · (i=1 ···n).
It is easy to see that there are no functions χ1(a), . . . ,χr(a) independent ofx′1, . . . ,x
′n which satisfy the n equations:
r
∑j=1
χ j(a1, . . . ,ar)η(k)ji (x′,a) = 0 (i=1 ···n)
identically, without vanishing all. Indeed, if one makes the substitution x′ν =
f (k)ν (x,a) in these equations, one obtains the equations:
r
∑j=1
χ j(a)∂ f (k)i (x,a)
∂a j= 0 (i=1 ···n),
which must as well be satisfied identically; but according to Chap. 2, Theorem 2.2,p. 15, this is impossible, because the parameters a1, . . . ,ar in the transformationequations x′i = f (k)i (x,a) are essential.
From this, we conclude that the r infinitesimal transformations:
(5)n
∑i=1
η(k)ji (x′1, . . . ,x
′n, a1, . . . ,ar)
∂ f∂x′i
( j=1 ···r)
are always mutually independent when a1, . . . ,ar is a system of values in generalposition.
By a01, . . . ,a
0r , we want to understand a system of values in general position and
we want to set:η(1)
ji (x′, a0) = ξ ji(x′1, . . . ,x′n),
by conferring the special value 1 to the number k. We will show that all infinites-imal transformations (5) can be linearly deduced from the r mutually independentinfinitesimal transformations:
X ′j f =
n
∑i=1
ξ ji(x′1, . . . ,x′n)
∂ f∂x′i
( j=1 ···r),
whichever value k can have as one of the integers 1, 2, . . . , m and whichever valuea1, . . . ,ar can have.
The proof here has great similarities with the developments in Chap. 4, p. 87 sq.

326 18 Groups with Discrete Families of Transformations
We execute two transformations of our group one after the other, namely at firstthe transformation:
(6) x′′i = x′i +r
∑j=1
h j ξ ji(x′)+ · · · (i=1 ···n)
which results from the transformation (4) when one sets k = 1 and a1 = a01, . . . ,
ar = a0r , and afterwards, the transformation:
x′′′i = x′′i +r
∑j=1
ρ j η(k)i j (x′′,a)+ · · · (i=1 ···n)
which, likewise, possesses the form (4). In this way, we obtain the following trans-formation belonging to our group:
x′′′i = x′i +r
∑j=1
h j ξ ji(x′)+r
∑j=1
ρ j η(k)ji (x′,a)+ · · ·
(i=1 ···n),
where the left out terms are of second order and of higher order in the 2r quantitiesh1, . . . ,hr, ρ1, . . . ,ρr.
Disregarding the a, the 2r arbitrary parameters h1, . . . ,hr, ρ1, . . . ,ρr appear in thelatter transformation, whereas our group can contain only transformations with r es-sential parameters. From the Proposition 4 of the Chap. 4, p. 80, it therefore resultsthat, amongst the 2r infinitesimal transformations: (5) and X ′
1 f , . . . ,X ′r f , only r can
be in existence that are mutually independent. But because X ′1 f , . . . ,X ′
r f are mutu-ally independent, the infinitesimal transformations (5) must be linearly expressiblein terms of X ′
1 f , . . . ,X ′r f , for all values 1, 2, . . . , m of k and for all values of the a.
At present, thanks to considerations analogous to those in Chap. 3, we realizethat identities of the form:
n
∑i=1
η(k)ji (x′,a)
∂ f∂x′i
≡r
∑π=1
ψ(k)jπ (a1, . . . ,ar)X ′
π f
(k=1 ···m ; j=1 ···r)
hold, where the ψ(k)jπ are completely determined analytic functions of a1, . . . ,ar.
Lastly, if we remember the equations (3) which can evidently also be written as:
η(k)ji
(f (k)1 (x,a), . . . , f (k)n (x,a), a1, . . . ,ar
)≡
∂ f (k)i (x,a)∂a j
,
and if we compare these equations to the identities:
η(k)ji (x′,a)≡
r
∑π=1
ψ(k)jπ (a)ξπi(x′),

§ 84. 327
we then obtain the identities:
(7)∂ f (k)i (x,a)
∂a j≡
r
∑π=1
ψ(k)jπ (a1, . . . ,ar)ξπi
(f (k)1 (x,a), . . . , f (k)n (x,a)
)
The functions ξπi here are independent of the index k, but by contrast, the ψ(k)jπ
are not.Thus, we have the
Theorem 55. If the m systems of equations:
x′i = f (k)i (x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
(k=1 ···m),
in each of which the r parameters a1, . . . ,ar are essential, represent all transforma-tions of a group (and if at the same time, all these transformations can be orderedas inverses by pairs)†, then there are r independent infinitesimal transformations:
X j f =n
∑i=1
ξ ji(x1, . . . ,xn)∂ f∂xi
( j=1 ···r)
which stand in such a relationship to the group that each family:
x′i = f (k)i (x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
satisfies differential equations of the form:
(7’)∂ f (k)i∂a j
=r
∑π=1
ψ(k)jπ (a1, . . . ,ar)ξπi(x′1, . . . ,x
′n)
(i=1 ···n ; j=1 ···r).
From this, it follows at first that, according to the Theorems 21, p. 164 and 24,p. 173, the r infinitesimal transformations X1 f , . . . ,Xr f generate an r-term group.
Furthermore, it is clear that the Theorem 25 in Chap. 9, p. 175 finds an applica-tion to each one of the families x′i = f (k)i (x,a): every transformation x′i = f (k)i (x,a)whose parameters a1, . . . ,ar lie in a certain neighbourhood of a1, . . . ,ar can be ob-tained by executing firstly the transformation xi = f (k)i (x, a) and afterwards, a certaintransformation of the r-term group X1 f , . . . ,Xr f .
Now, since our group contains all transformations of the form (6):
† As one easily realizes, the Theorem 55 still remains correct when the words in brackets arecrossed out. (Compare to the developments of the Chaps. 3, 4 and 9.)

328 18 Groups with Discrete Families of Transformations
x′′i = x′i +r
∑j=1
h j ξ ji(x′)+ · · · (i=1 ···n)
and since one of these transformations is the identity transformation, namely the onewith the parameters h1 = 0, . . . , hr = 0, then the identity transformation must occurin one of the families x′i = f (k)i (x,a). Consequently, one amongst these families isjust the r-term group X1 f , . . . ,Xr f . Of course, this is the only r-term group generatedby infinitesimal transformations which is contained in the group x′i = f (k)i (x,a).
As a result, we have gained the following theorem:
Theorem 56. Every group:
x′i = f (k)i (x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
(k=1 ···m)
having the constitution indicated in the preceding theorem contains one, and onlyone, r-term group with transformations inverse by pairs. This r-term group is gen-erated by the infinitesimal transformations X1 f , . . . ,Xr f defined in the previous the-orem, its ∞r transformations form one of the m families x′i = f (k)i (x,a) and in ad-dition, they stand in the following relationship with respect to each one of the re-maining m−1 families: If xi = f (k)i (x,a) is an arbitrary transformation of the fam-ily x′i = f (k)i (x,a), then every other transformation of this family whose parametersa1, . . . ,ar lie in a certain neighbourhood of a1, . . . ,ar can be obtained by executingfirstly the transformation xi = f (k)i (x, a), and afterwards, a certain transformationx′i = ωi(x1, . . . ,xn) of the r-term group X1 f , . . . ,Xr f .
For example, we consider the group consisting of the two families of ∞1 trans-formations that are represented by the two systems of equations:
x′ = x cosa− y sina, y′ = x sina+ y cosa
x′ = x cosa+ y sina, y′ = x sina− y cosa.
For the two families, one obtains by differentiation with respect to a:
dx′
da=−y′,
dy′
da= x′,
so that in the present case, the functions ψ(k)jπ mentioned in the Theorem 55 are
independent of the index k.The first one of the above two families is a one-term group which is generated
by the infinitesimal transformation y∂ f/∂x− x∂ f/∂y. The general transformationof the second family will be obtained when one executes firstly the transformation:
x = x, y =−y,
and afterwards the transformation:

§ 84. 329
x′ = x cosa− y sina, y′ = x sina+ y cosa
of the one-term group y∂ f/∂x− x∂ f/∂y, hence the general transformation of thefirst family. —
It should not remain unmentioned that the two Theorems 55 and 56 also remainyet valid when the concerned group consists of an infinite number of discrete con-tinuous families which all contain the same number of essential parameters. —
Before we go further, yet a few not unimportant remarks.Let:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
be an r-term continuous group which does not contain the identity transforma-tion. Then according to Theorem 25, Chap. 9, p. 175, there is an r-term groupX1 f , . . . ,Xr f with the identity transformation and with pairwise inverse transfor-mations which stands in the following relationship to the group x′i = fi(x,a), orshortly G: If one executes at first a transformation xi = fi(x, a) of G and afterwardsa transformation:
x′i = xi +r
∑k=1
ek Xk xi + · · · (i=1 ···n)
of the group X1 f , . . . ,Xr f , then one always obtains a transformation of G.At present, one can easily prove that one then also always obtains a transforma-
tion of G when one firstly executes a transformation of the group X1 f , . . . ,Xr f andafterwards a transformation of the group G. We do not want to spend time in order toproduce this proof in details, and we only want to remark that for this proof, one mayemploy considerations completely similar to those of Chap. 4 (Cf. Theorem 58).
Now, if we take together these two relationships between G and the groupX1 f , . . . ,Xr f and in addition, if we take into account that we have to deal with twogroups, then we realize immediately that the transformations of the group G and ofthe group X1 f , . . . ,Xr f , when combined, again form a group, but to be precise, agroup the transformations of which cannot be ordered as inverses by pairs.
At present, we also attract in the circle of our considerations yet the family of thetransformations:
x′i = Fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
which are inverses of the transformations x′i = fi(x,a). According to Theorem 21
([1], p. 19), this family of transformations also forms a group, that may be calledG′. We shall show that the transformations of the three groups G, G′, X1 f , . . . ,Xr f ,when taken together, form again a group, and naturally, a group with pairwise in-verse transformations.
1 This theorem simply states that if transformation equations x′i = f (x,a) are stable by compo-sition, the same holds for the inverse transformations xi = Fi(x′,a) modulo possible shrinkings ofdomains.

330 18 Groups with Discrete Families of Transformations
Let T be the general symbol of a transformation of G, whence T−1 is the generalsymbol of a transformation of G′; by S, it will always be understood a transformationof the group X1 f , . . . ,Xr f .
We already know that all transformations T and S taken together form a groupand that the transformations T−1 taken for themselves do the same. From this, werealize the existence of relations which have the following form:
Tα Tβ = Tγ , Sλ Sµ = Sν , T−1β T−1
α = T−1γ
Tα Sλ = Tπ , Sλ Tα = Tρ .
We can also write as follows the second series of these relations:
S−1λ T−1
α = T−1π , T−1
α S−1λ = T−1
ρ .
Now, since the group of the S consists of pairwise inverse transformations, it isimmediately clear that the T−1 together with the S form a group. Moreover, wehave:
T−1α Tπ = T−1
α Tα Sλ = Sλ ,
Tα T−1ρ = Tα T−1
α S−1λ = S−1
λ ,
and therefore, the totality of all S, T , T−1 also forms a group.With these words, the promised proof is brought: the transformations of the three
groups G, G′, X1 f , . . . ,Xr f form a group together, and naturally, a group with pair-wise inverse transformations.
§ 85.
At present, we take up a standpoint more general than in the previous paragraph. Wedrop the special assumption2 made there and we only maintain the two settlementswhich were done in the Introduction.
Thus, we consider a group G which consists of m discrete families with, respec-tively, r1, r2, . . . , rm essential parameters and which, for each one of its transfor-mations, also contains the inverse transformation. We will prove that the numbersr1, r2, . . . , rm are all mutually equal. Then from this, it follows that the assumption:r1 = r2 = · · ·= rm made in the previous paragraph was not a restriction.
We execute two transformations of the group one after the other, firstly a trans-formation:
x′i = f (k)i (x1, . . . ,xn, a1, . . . ,ark) (i=1 ···n)
of a family with rk parameters, and secondly a transformation:
x′′i = f ( j)i (x′1, . . . ,x
′n, b1, . . . ,br j) (i=1 ···n)
of a family with r j parameters.In this way, we find a transformation:
2 (i.e. the third one)

§ 85. 331
x′′i = f ( j)i
(f (k)1 (x,a), . . . , f (k)n (x,a), b1, . . . ,br j
)which belongs to our group and which formally contains rk + r j arbitrary parame-ters. Now, if the largest number amongst the numbers r1, r2, . . . , rm has the value r,then amongst these rk + r j arbitrary parameters, there are no more than r which areessential, but also no less essential ones than what indicates the largest of the twonumbers rk and r j. So in particular, if both numbers rk and r j are equal to r, then thelast written transformation contains exactly r essential parameters. Consequently,all families of our group which contain exactly r essential parameters already forma group Γ when taken together.
Now, we can immediately apply the Theorem 56 of the previous paragraph to thegroup Γ . From this, we see that Γ and hence also G contains an r-term group:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
which is generated by r independent infinitesimal transformations. Thus, if we atfirst execute the transformation x′i = fi(x,a) and then the transformation:
(8) x′′i = f ( j)i (x′1, . . . ,x
′n, b1, . . . ,br j),
we obtain again a transformation of the group G, namely the following one:
(9) x′′i = f ( j)i
(f1(x,a), . . . , fn(x,a), b1, . . . ,br j
)(i=1 ···n).
Of the r + r j parameters of this transformation, exactly r are essential, so theequations just written represent a continuous family of ∞r transformations of thegroup G. But since the group x′i = fi(x,a) contains the identity transformation, thereare special values of the parameters a1, . . . ,ar for which the functions f1(x,a), . . . ,fn(x,a) reduce to x1, . . . ,xn, respectively. Consequently, the family of the ∞r j trans-formations (8) is contained in the family of the ∞r transformations (9). Accordingto the remarks made in the introduction of the chapter, this is possible only whenthe two families coincide, hence when r j is equal to r.
As a result, it is proved that the numbers r1, r2, . . . , rm are all really equal one toanother. Consequently, we have the
Theorem 57. If a group whose transformations are pairwise inverse one to anotherconsists of m continuous families of transformations and if each one of these familiescontains only a finite number of arbitrary parameters, then the families all have thesame number of essential parameters.
Besides, this theorem still remains valid also when the number of the families ofwhich the group consists is infinitely large, when each one of these infinitely manyfamilies contains just a finite number ρk of arbitrary parameters and when at thesame time, amongst all the numbers ρk, a largest one is extant.

332 18 Groups with Discrete Families of Transformations
§ 86.
As up to now, let G consist of m discrete, continuous families of ∞r transformations;in addition, we assume that the transformations of G are mutually inverse by pairs.
According to the Theorem 57 in the preceding paragraph, there is in the groupG one and only one r-term group generated by r independent infinitesimal transfor-mations. Now, if S is the symbol of the general transformation of this r-term groupand T is the symbol of an arbitrary transformation of G, then in the same way:
T−1 ST
is the symbol of the general infinitesimal transformation of an r-term group gen-erated by infinitesimal transformations. Since this new group is contained in G, itmust coincide with the group of all S; according to the terminology [TERMINOLO-GIE] introduced in the Chap. 15, p. 273, we can also express this as: the discussedr-term group remains invariant by every transformation T . Thus the following holdstrue.
Theorem 58. If a group G with pairwise inverse transformations consists of severalfamilies of transformations, then the largest group generated by infinitesimal trans-formations which is contained in G remains invariant by every transformation ofG.
From this theorem, it comes how one can construct groups which consist of sev-eral continuous families of ∞r transformations.
Let X1 f , . . . ,Xr f be an r-term group in the variables x1, . . . ,xn and let again S bethe symbol of the general transformation of this group.
Now, when a group with pairwise inverse transformations contains all transfor-mations of the r-term group X1 f , . . . ,Xr f , and in addition yet contains a finite num-ber, say m− 1, of discrete families of ∞r transformations, then in consequence ofTheorem 56, p. 328, it possesses the form:
(10) T0 S, T1 S, . . . , Tm−1S.
Here, T0 means the identity transformation and T1, . . . ,Tm−1 are, according tothe last theorem, constituted in such a way that their totality leaves invariant alltransformations S. This property of the Tν expresses analytically by the fact that forevery transformation Sk of the group X1 f , . . . ,Xr f , a relation of the form:
T−1ν Sk Tν = S j
exists, where the transformation S j again belongs to the group X1 f , . . . ,Xr f . Inci-dentally, such a relation also holds true when ν is equal to zero, for indeed one thenhas Sk = S j.
Since T1, . . . ,Tm−1 themselves belong to the transformations (10), the totality ofall transformations (10) can then be a group only when all transformations Tµ Tνalso belong to this totality. Hence, aside from the above relations, the Ti must alsosatisfy yet relations of the form:

§ 86. 333
Tµ Tν = Tπ Sτ ,
where µ and ν denote arbitrary numbers amongst the numbers 1, 2, . . . , m−1, whileπ runs through the values 0, 1, . . . , m−1. If one the numbers µ , ν , say µ , is equalto zero, then actually, there is already relation of the form indicated, since indeedTπ = Tν and Sτ is, just as T0, the identity transformation.
On the other hand, if the transformations Tµ possess the properties indicated,then for all values 0, 1, . . . , m−1 of the two numbers µ and ν , there exist relationsof the form:
Tµ Sk Tν Sl = Tµ Tν S j Sl = Tπ Sτ S j Sl = Tπ Sρ ,
and therefore, the totality of all transformations (10) forms a group. It is easy to seethat in any case and in general, the transformations of such a group order as inversesby pairs.
At present, it is yet to be asked how the transformations Tµ must be constitutedin order that the m families (10) are all distinct from each other.
Obviously, all the families (10) are distinct from each other when no transforma-tion of the group belongs simultaneously to two of these families. On the other hand,if any two of these families, say: Tµ S and Tν S, have a transformation in common,then they are identical, because from the existence of a relation of the form:
Tµ Sk = Tν Sl ,
it immediately follows:Tν = Tµ Sk S−1
l ,
hence the family of the transformations Tν S has the form:
Tµ Sk S−1l S,
that is to say, it is identical to the family: Tµ S.Thus, for the m families (10) to be distinct from each other, it is necessary and
sufficient that no two of the transformations T0, T1, . . . , Tm−1 be linked by a relationof the form:
Tν = Tµ S j (ν 6=µ).
We summarize the gained result in the
Theorem 59. If S is the symbol of the general transformation of the r-term groupX1 f , . . . ,Xr f , and if moreover, T1, . . . ,Tm−1 are transformations which leave invari-ant the group X1 f , . . . ,Xr f and which, in addition, are linked together and jointlywith the identity transformation T0 by relations of the form:
Tµ Tν = Tπ S,
but not by relations of the form:
Tν = Tµ S j (ν 6=µ),

334 18 Groups with Discrete Families of Transformations
then the totality of all transformations:
T0 S, T1 S, . . . , Tm−1 S
form a group with pairwise inverse transformations which consists of m discretecontinuous families of ∞r transformations and which, at the same time, containsall transformations of the group X1 f , . . . ,Xr f . If one chooses the transformationsT1, . . . ,Tm−1 in all possible ways, then one obtains all groups having the constitutionindicated.
In the next chapter, we give a general method for the determination of all trans-formations which leave invariant a given group X1 f , . . . ,Xr f .
If one has two different systems of transformations T1, . . . ,Tm−1, say T1, . . . ,Tm−1and T ′
1 , . . . ,T′
m−1, then obviously, the two groups:
T0 S, T1 S, . . . , Tm−1 S
T0 S, T ′1 , . . . , T ′
m−1 S
are always distinct when and only when it is not possible to represent each one ofthe transformations T ′
1 , . . . ,T′
m−1 in the form:
T ′µ = Tiµ Skµ .
Needless to say, one can frequently arrange that the m transformations T0, T1, . . . ,Tm−1 already form a discontinuous group for themselves.
Example. The n infinitesimal transformations:
∂ f∂x1
, . . . ,∂ f∂xn
generate an r-term group. The totality of all transformations that leave this groupinvariant forms a finite continuous group which is generated by the n+n2 infinites-imal transformations:
∂ f∂xi
, xi∂ f∂xk
(i, k=1 ···n)
Now, if amongst the ∞nn transformations:
x′i = ai1 x1 + · · ·+ain xn (i=1 ···n)
of the group:
xi∂ f∂xk
(i, k=1 ···n),
one chooses m arbitrary transformations that form a discontinuous group as trans-formations T0, T1, . . . , Tm−1, and if one sets for S the general transformation:

§ 87. 335
x′1 = x1 +a1, . . . , x′n = xn +an
of the group ∂ f/∂x1, . . . , ∂ f/∂xn, then one always obtains a group which consistsof m discrete families and which comprises all ∞n transformations of the group∂ f/∂x1, . . . , ∂ f/∂xn.
Naturally, the Theorem 58, p. 332 also holds true when the group G consists ofinfinitely many families of ∞r transformations. Hence if one wants to construct sucha group, one only has to seek infinitely many discrete transformations:
T1, T2, . . .
which leave invariant the group X1 f , . . . ,Xr f and which, in addition, satisfy pairwiserelations of the form:
Tµ Tν = Tπ Sτ ,
but by contrast, which are neither mutually, nor together with the identity transfor-mation, linked by relations of the form:
Tµ = Tν S j.
The totality of all transformations:
T0 S, T1 S, T2 S, . . .
then forms a group G which comprises the group X1 f , . . . ,Xr f and which consistsof infinitely many different families of ∞r transformations.
But the transformations of the group G found in this way are in general notordered as inverses by pairs; in order that they enjoy this property, each one ofthe transformations T1, T2, . . . , must also satisfy, aside from the relations indicatedabove, yet relations of the form:
T−1µ = Tkµ S jµ .
§ 87.
At present, we still make a few observations about the invariant subgroups as wehave considered them in the previous three paragraphs.
Let G be a group which consists of the m discrete families:
x(k)i = f (k)i
(x1, . . . ,xn,a
(k)1 , . . . ,a(k)r
)(i=1 ···n)
(k=1 ···m)
of ∞r transformations and which, for each one of its transformations, also containsthe inverse transformation. In particular, let:
x′i = f (1)i (x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)

336 18 Groups with Discrete Families of Transformations
be the r-term group generated by r infinitesimal transformations: X1 f , . . . ,Xr fwhich is contained in G.
In accordance with Chap. 6, p. 111, we say that every function which admits alltransformations of G, hence which satisfies the m equations:
U(x(k)1 , . . . ,x(k)n
)= U(x1, . . . ,xn) (k=1 ···m),
is an invariant of G. We want to show how one can find the invariants of G.
Evidently, every invariant of G is at the same time an invariant of the r-termgroup X1 f , . . . ,Xr f and therefore, it is a solution of the complete system which isdetermined by the equations:
X1 f = 0, . . . , Xr f = 0.
If this complete system is n-term, then the group X1 f , . . . ,Xr f and therefore alsothe group G possess in fact no invariant. So, we assume that the said completesystem is (n− q)-term and we denote by u1, . . . ,uq any q of its solutions that areindependent.
According to Theorem 58, the group X1 f , . . . ,Xr f remains invariant by all trans-formations of G; consequently, the (n−q)-term complete system determined by theequations:
X1 f = 0, . . . , Xr f = 0
also admits all transformations of G. Consequently (cf. Chap. 8, p. 153), the solu-tions u1, . . . ,uq of this complete system satisfy relations of the shape:
(11)u j(x(k)1 , . . . ,x(k)n
)= ω(k)
j
(u1(x), . . . ,uq(x), a(k)1 , . . . ,a(k)r
)( j=1 ···q ; k=1 ···m).
It can be shown here that the functions ω(k)j are all free of the parameters
a(k)1 , . . . ,a(k)r .By a(k)1 , . . . ,a(k)r , we want to denote an arbitrary fixed system of values. If the
system of values a(k)1 , . . . ,a(k)r lies in a certain neighbourhood of a(k)1 , . . . ,a(k)r , thenaccording to Theorem 56, p. 328, the transformation:
x(k)i = f (k)i
(x1, . . . ,xn, a(k)1 , . . . ,a(k)r
)can be obtained by executing firstly the transformation:
x(k)i = f (k)i
(x1, . . . ,xn, a(k)1 , . . . ,a(k)r
)and afterwards, a certain transformation:
x(k)i = f (1)i
(x(k)1 , . . . ,x(k)n , α1, . . . ,αr
)

§ 87. 337
of the group X1 f , . . . ,Xr f . So we have:
x(k)i = f (1)i
(f (k)1 (x, a(k)), . . . , f (k)n (x, a(k)), α1, . . . ,αr
).
Now, u1, . . . ,uq are invariants of the group X1 f , . . . ,Xr f and therefore, they sat-isfy relations of the shape:
u j(x(k)1 , . . . ,x(k)n
)= u j
(x(k)1 , . . . ,x(k)n
).
On the other hand, we have:
u j(x(k)1 , . . . ,x(k)n
)= ω(k)
j
(u1(x), . . . ,uq(x)
),
where the ω(k)j depend only upon u1, . . . ,uq and contain no arbitrary parameters,
since a(k)1 , . . . ,a(k)r are numerical constants, indeed. Thus we obtain:
(11’) u j(x(k)1 , . . . ,x(k)n
)= ω(k)
j
(u1(x), . . . ,uq(x)
),
and with this, it is proved that the functions ω(k)j in the equations (11) are effectively
free of the parameters a(k)1 , . . . ,a(k)r .According to what has bee said above, every invariant U(x1, . . . ,xn) of the group
G satisfies m equations of the shape:
U(x(k)1 , . . . ,x(k)n
)= U(x1, . . . ,xn) (k=1 ···m) ;
but since it is in addition a function of only u1, . . . ,uq, say:
U(x1, . . . ,xn) = J(u1, . . . ,uq),
then at the same time, it satisfies the m relations:
(12)J(ω(k)
1 (u1, . . . ,uq), . . . , ω(k)q (u1, . . . ,uq)
)= J(u1, . . . ,uq)
(k=1 ···m).
Conversely, every function J(u1, . . . ,uq) that satisfies the m functional equationsjust written obviously is an invariant of the group G. Consequently, in order to findall invariants of G, we only need to fulfill these functional equations in the mostgeneral way.
The problem of determining all solutions of the functional equations (12) is vis-ibly identical to the problem of determining all functions of u1, . . . ,uq which admitthe m transformations:
(13)u′j = ω(k)
j (u1, . . . ,uq) ( j=1 ···q)
(k=1 ···m).

338 18 Groups with Discrete Families of Transformations
But these m transformations form a discontinuous group, as one realizes withoutdifficulty from the group property [GRUPPENEIGENSCHAFT] of G. Thus, our prob-lem stated at the outset of the paragraph is lead back to a problem of the theory ofthe discontinuous groups.
We summarize the gained result in the
Theorem 60. If a group G (whose transformations are pairwise inverse) consists ofseveral discrete families of ∞r transformations:
x(k)i = f (k)i
(x1, . . . ,xn, a(k)1 , . . . , a(k)r
)(i=1 ···n)
(k=1, 2 ···),
then all invariants of G are at the same time also invariants of the r-term continuousgroup: X1 f , . . . ,Xr f determined by G. If one knows the invariants of the latter group,hence if one knows any q arbitrary independent solutions u1, . . . ,uq of the (n−q)-term complete system which is determined by the equations:
X1 f = 0, . . . , Xr f = 0,
the one finds the invariants of G in the following way: one forms at first the relations:
u j(x(k)1 , . . . ,x(k)n
)= ω(k)
j
(u1(x), . . . ,uq(x)
)( j=1 ···q)
(k=1, 2 ···),
which, under the assumptions made, exist, and in which the ω(k)j depend only upon
the two indices j and k; afterwards, one determines all functions of u1, . . . ,uq whichadmit the discontinuous group formed by the transformations:
u′j = ω(k)j (u1, . . . ,uq) ( j=1 ···q)
(k=1, 2 ···).
The concerned functions are the invariants of the group G.
A similar theorem clearly holds true when the group G consists of infinitely manycontinuous families of transformations.
One can propose to oneself the problem of finding all invariants that a givenfamily of transformations:
x′i = ϕi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
possesses, or all invariants that are common to several such families.† The family,respectively the families, can here be completely arbitrary and they need not belongto a finite group.
† Cf. LIE, Berichte der K. Sächs. Ges. d. W., 1. August 1887.

References 339
We do not intend to treat exhaustively this problem; let it only be remarked thatthe concerned invariants are solutions, though not arbitrary solutions, of a certaincomplete system that can be easily be indicated. Indeed, since the sought invariants,aside from the given transformations, also obviously admit yet the associated inversetransformations, then one can very easily set up certain infinitesimal transformationsby which they remain invariant as well. In general, these infinitesimal transforma-tions contain arbitrary elements, an in particular, certain parameters; when set equalto zero, these infinitesimal transformations provide linear partial differential equa-tions which must be satisfied by the sought invariants. Now, it is always possible toset up the smallest complete system which embraces all these differential equations.If one knows a system of solutions u1, u2, . . . of this complete system, then oneforms an arbitrary function Ω(u1,u2, . . .) of them, one executes on it the generaltransformation of the given family and one determines Ω in the most general wayin order that Ω behaves invariantly.
References
1. Engel, F.; Lie, S.: Theorie der transformationsgruppen. Erster Abschnitt. Unter Mitwirkungvon Dr. Friedrich Engel, bearbeitet von Sophus Lie, Verlag und Druck von B.G. Teubner,Leipzig und Berlin, xii+638 pp. (1888). Reprinted by Chelsea Publishing Co., New York, N.Y.(1970)
—————–


Chapter 19Theory of the Similarity [AEHNLICHKEIT] ofr-term Groups
It is often of the utmost importance to answer the question whether a given r-termgroup x′i = fi(x1, . . . ,xs, a1, . . . ,ar) of the s-times extended space is similar [ÄHN-LICH] to another given r-term group y′i = Fi(y1, . . . ,ys, b1, . . . ,br) of the same space,hence whether one can introduce, in place of the x and of the a, new variables:y1, . . . ,ys and new parameters: b1, . . . ,br so that the first group converts into the sec-ond group (Chap. 3, p. 29). If one knows, in a given case, that such a transfer of oneof the groups to the other is possible, then a second question raises itself: how oneaccomplishes the concerned transfer in the most general way?
In the present chapter, we provide means for answering the two questions.To begin with, we show that the first one of the two questions can be replaced
by the following more simple question: under which conditions does there exist atransformation:
yi = Φ(x1, . . . ,xs) (i=1 ···s)
of such a nature that r arbitrary independent infinitesimal transformations of thegroup x′i = fi(x,a) are transferred to infinitesimal transformations of the group y′i =Fi(y,b) by the introduction of the variables y1, . . . ,ys? We settle this simpler questionby setting up certain conditions which are necessary for the existence of a transfor-mation yi = Φi(x) of the demanded constitution, and which prove to also be suf-ficient. At the same time, we shall see that all possibly existing transformationsyi = Φi(x) of the demanded constitution can be determined by integrating completesystems. With that, the second one of the two questions stated above will then alsobe answered.
§ 88.
Let the two r-term groups: x′i = fi(x,a) and y′i = Fi(y,b) be similar to each otherand to be precise, let the first one be transferred to the second one when the newvariables yi = Φi(x1, . . . ,xs) are introduced in place of x1, . . . ,xs, and when the newparameters bk = βk(a1, . . . ,ar) are introduced in place of a1, . . . ,ar. Furthermore,let:
341

342 19 Theory of the Similarity of r-term Groups
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r)
be r arbitrary independent infinitesimal transformations of the group x′i = fi(x,a);by the introduction of the new variables y1, . . . ,ys, let them take the form:
Xk f =s
∑i=1
Xk yi∂ f∂yi
=s
∑i=1
yki(y1, . . . ,ys)∂ f∂yi
=Yk f
(k=1 ···r).
We decompose the transition from the group x′i = fi(x,a) to the group y′i =Fi(y,b)in a series of steps.
At first, we bring the group x′i = fi(x,a) to the canonical form:
(1) x′i = xi +r
∑k=1
ek ξki(x1, . . . ,xs)+ · · · (i=1 ···s)
by introducing for a1, . . . ,ar certain (needless to say) perfectly determined functionsof e1, . . . ,er. Then evidently, we must obtain from (1) the equations y′i = Fi(y,b)when we introduce the new variables y1, . . . ,ys in place of the x, and when in addi-tion, we insert for e1, . . . ,er some completely determined functions of b1, . . . ,br.
But now, according to Chap. 4, p. 71, after the introduction of the variablesy1, . . . ,ys, the equations (1) take the shape:
(1’) y′i = yi +r
∑k=1
ek yki(y1, . . . ,ys)+ · · · (i=1 ···s),
hence the equations (1’) must become identical to the equations y′i = Fi(y,b) whenone expresses e1, . . . ,er in terms of b1, . . . ,br in the indicated way. Consequently, theequations (1’) are a form of the group y′i = Fi(y,b), and to be precise, a canonicalform, as an examination teaches [WIE DER AUGENSCHEIN LEHRT]. In other words:Y1 f , . . . ,Yr f are independent infinitesimal transformations of this group.
Thus, if after the introduction of the new variables y1, . . . ,ys and of the new pa-rameters b1, . . . ,br, the r-term group x′i = fi(x1, . . . ,xs, a1, . . . ,ar) converts into thegroup y′i = Fi(y1, . . . ,ys, b1, . . . ,br), then the infinitesimal transformations of the firstgroup convert into the infinitesimal transformations of the second group, also afterthe introduction of the variables y1, . . . ,ys.
Obviously, the converse also holds true: if the two groups x′i = fi(x,a) and y′i =Fi(y,b) stand in the mutual relationship that the infinitesimal transformations of thefirst one are transferred to the infinitesimal transformations of the second one afterthe introduction of the new variables y1, . . . ,ys, then one can always transfer thegroup x′i = fi(x,a) to the group y′i = Fi(y,b) by means of appropriate choices of thevariables and of the parameters. Indeed, by the introduction of the y, the canonicalform (1) of the group x′i = fi(x,a) is transferred to the canonical form (1’) of thegroup y′i = Fi(y,b).

§ 89. 343
As a result, we have the
Theorem 61. Two r-term groups in the same number of variables are similar toeach other if and only if it is possible to transfer any r arbitrary independent in-finitesimal transformations of the first one to infinitesimal transformations of thesecond one by the introduction of new variables.
When the question is to examine whether the two r-term groups x′i = fi(x,a) andyi = Fi(y,b) are similar to each other, then one needs only to consider [INS AUGEFASSEN] the infinitesimal transformations of the two groups and to ask whether theycan be transferred to each other.
From the above developments, one can yet immediately draw another more im-portant conclusion.
We know that between the infinitesimal transformations X1 f , . . . ,Xr f of thegroup x′i = fi(x,a), there exist relations of the form:
Xi(Xk( f )
)−Xk
(Xi( f )
)= [Xi, Xk] =
r
∑σ=1
cikσ Xσ f .
According to Chap. 5, Proposition 2, p. 100, after the introduction of the new vari-ables y1, . . . ,ys, these relations receive the form:
Yi(Yk( f )
)−Yk
(Yi( f )
)= [Yi,Yk] =
r
∑σ=1
cikσ Yσ f ,
so the r independent infinitesimal relations Y1 f , . . . ,Yr f of the group y′i = Fi(y,b)are linked together by exactly the same relations as the infinitesimal transformationsX1 f , . . . ,Xr f of the group x′i = fi(x,a).
According to the way of expressing introduced in Chap. 17, p. 303 and 305, wecan therefore say:
Theorem 62. If two r-term groups in the same number of variables are similar toeach other, then they are also equally composed, or, what is the same, holoedricallyisomorphic.
At the same time, it is clear that the transformation yi = Φi(x1, . . . ,xs) establishesa holoedrically isomorphic relationship between the two groups: x′i = fi(x,a) andy′i = Fi(y,b) since it associates to the r independent infinitesimal transformationsX1 f , . . . ,Xr f of the first group the r independent transformations Y1 f , . . . ,Yr f ofthe other, and since through this correspondence, the two groups are obviously re-lated to each other in a holoedrically isomorphic way.
§ 89.
At present, we imagine that two arbitrary r-term group in the same number of vari-ables are presented; let their infinitesimal transformations be:

344 19 Theory of the Similarity of r-term Groups
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r)
and:
Zk f =s
∑i=1
ζki(x1, . . . ,xs)∂ f∂yi
(k=1 ···r).
We ask: are these two groups similar to each other, or not?Our answer to this question must obviously fall in the negative sense as soon as
the two groups are not equally composed; indeed, according to Theorem 62, onlythe equally composed groups can be similar to each other. Consequently, we needonly to occupy ourselves with the case when the two groups are equally composed;the question whether this case really happens may always be settled thanks to analgebraic discussion [ALGEBRAISCHE DISCUSSION].
According to that, we assume from now on that the two presented groups areequally composed.
According to Theorem 61, the two equally composed groups X1 f , . . . ,Xr fand Z1 f , . . . ,Zr f are similar to each other if and only if there is a transformationyi = Φi(x1, . . . ,xs) of such a constitution that X1 f , . . . ,Xr f convert into infinitesimaltransformations of the group Z1 f , . . . ,Zr f after the introduction of the new variablesy1, . . . ,ys. If we combine this with the remark at the end of the previous paragraph,we realize that the two groups are similar to each other if and only if a holoedricallyisomorphic relation can be established between them so that it is possible, bythe introduction of appropriate new variables: yi = Φi(x1, . . . ,xs) to transfer the rinfinitesimal transformations X1 f , . . . ,Xr f precisely to the infinitesimal transfor-mations Y1 f , . . . ,Yr f of the group Z1 f , . . . ,Zr f that are associated through theisomorphic relation.
The next step that we must climb towards the answer to the question we stated istherefore to relate the two groups in the most general holoedrically isomorphic way.
In the group Z1 f , . . . ,Zr f , we choose in the most general way r independentinfinitesimal transformations:
Yk f =r
∑j=1
gk j Z j f (k=1 ···r)
such that together with the relations:
(2) [Xi, Xk] =r
∑σ=1
cikσ Xσ f ,
there are at the same time the relations:
(2’) [Yi, Yk] =r
∑σ=1
cikσ Yσ f .
If this is occurs — only algebraic operations are required for that —, then we asso-ciate the infinitesimal transformations Y1 f , . . . ,Yr f to X1 f , . . . ,Xr f , respectively, and

§ 89. 345
we obtain that the two groups are holoedrically isomorphically related to each otherin the most general way.
In the present chapter, by the gk j, we understand everywhere the most generalsystem of constants which satisfies the requirement stated just now.
Here, it is to be remarked that in general, the gk j depend upon arbitrary elements,once upon arbitrary parameters and then upon certain arbitrarinesses [WILLKÜR-LICHKEITEN] which are caused by the algebraic operations that are necessary forthe determination of the gk j; indeed, it is thinkable that there are several discretefamilies of systems of values gk j which possess the demanded constitution.
At present, the question is whether, amongst the reciprocal isomorphic relation-ships between the two groups found in this way, there is one which has the propertyindicated above. In other words: is it possible to specialize the arbitrary elementswhich occur in the coefficients gk j in such a way that X1 f , . . . ,Xr f can be trans-ferred to Y1 f , . . . ,Yr f , respectively, by means of the introduction of appropriate newvariables: yi = Φi(x1, . . . ,xs)?
When, but only when, this question must have been answered, one may concludethat the two groups X1 f , . . . ,Xr f and Z1 f , . . . ,Zr f are similar to each other.
Let X1 f , . . . ,Xn f (n 6 r) be linked together by no linear relation of the form:
χ1(x1, . . . ,xs)X1 f + · · ·+χn(x1, . . . ,xs)Xn f = 0,
while by contrast, Xn+1 f , . . . ,Xr f can be linearly expressed in terms of X1 f , . . . ,Xn f :
(3)Xn+k f ≡ ϕk1(x1, . . . ,xs)X1 f + · · ·+ϕkn(x1, . . . ,xs)Xn f
(k=1 ···r−n).
Now, if the transformation yi = Φi(x1, . . . ,xs) is constituted in such a way that,after introduction of the y, X1 f , . . . ,Xr f are transferred to certain infinitesimal trans-formations Y1 f , . . . ,Yr f which belong to the group Z1 f , . . . ,Zr f , then naturally,Y1 f , . . . ,Yn f are not linked together by a linear relation of the form:
ψ1(y1, . . . ,ys)Y1 f + · · ·+ψn(y1, . . . ,ys)Yn f = 0;
by contrast, we visibly obtain for Yn+1 f , . . . ,Yr f expressions of the shape:
Yn+k f ≡n
∑ν=1
ϕkν(y1, . . . ,ys)Yν f (k=1 ···r−n),
in which the ϕkν(y) come into existence after the introduction of the variables y inplace of the x, so that the n(r−n) equations:
ϕkν(y1, . . . ,ys) = ϕkν(x1, . . . ,xs)
are hence identities after the substitution: yi = Φi(x1, . . . ,xs).From this, we conclude that:

346 19 Theory of the Similarity of r-term Groups
If there is no linear relation between X1 f , . . . ,Xn f , while Xn+1 f , . . . ,Xr f expresslinearly in terms of X1 f , . . . ,Xn f by virtue of the relations (3), then the two equallycomposed groups X1 f , . . . ,Xr f and Z1 f , . . . ,Zr f can be similar only when the arbi-trary elements in the coefficients gk j defined above can be chosen in such a way thatthe infinitesimal transformations:
Yk f =r
∑j=1
gk j Z j f (k=1 ···r)
possess the following properties: firstly, Y1 f , . . . ,Yn f are linked by no linear relation,while by contrast, Yn+1 f , . . . ,Yr f express linearly in terms of Y1 f , . . . ,Yn f :
(3’) Yn+k f ≡n
∑ν=1
ψkν(y1, . . . ,ys)Yν f (k=1 ···r−n),
and secondly, the n(r−n) equations:
(4) ϕkν(x1, . . . ,xs)−ψkν(y1, . . . ,ys) = 0 (k=1 ···r−n ; ν =1 ···n),
are compatible with each other and they give relations neither between the x alonenor between the y alone.
These conditions are necessary for the similarity between the two equally com-posed groups X1 f , . . . ,Xr f and Z1 f , . . . ,Zr f . We claim that the same conditions aresufficient. Said more precisely, we claim: when the said conditions are satisfied, thenthere always is a transformation yi = Φi(x1, . . . ,xs) which transfers the infinitesi-mal transformations X1 f , . . . ,Xr f to, respectively, Y1 f , . . . ,Yr f , so the two groupsX1 f , . . . ,Xr f and Z1 f , . . . ,Zr f are similar to each other.
The proof of this claim will be produced while we develop a method which con-ducts to the determination of a transformation having the indicated constitution.
Our more present standpoint is therefore the following:In the s variables x1, . . . ,xs, let an r-term group:
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r)
be presented, the composition of which is determined by the relations:
[Xi, Xk] =r
∑σ=1
cikσ Xσ f .
Between X1 f , . . . ,Xn f , there is at the same time no linear relation of the form:
χ1(x1, . . . ,xs)X1 f + · · ·+χn(x1, . . . ,xs)Xn f = 0,
while by contrast Xn+1 f , . . . ,Xr f express themselves in terms of X1 f , . . . ,Xn f :

§ 89. 347
(3) Xn+k f ≡n
∑ν=1
ϕkν(x1, . . . ,xs)Xν f (k=1 ···n−r).
Furthermore, let us be given an r-term group:
Zk f =s
∑i=1
ζki(y1, . . . ,ys)∂ f∂yi
(k=1 ···r)
which is equally composed with the group X1 f , . . . ,Xr f , and let r independent in-finitesimal transformations:
Yk f =r
∑j=1
gk j Z j f =s
∑i=1
ηki(y1, . . . ,ys)∂ f∂yi
(k=1 ···r)
in this group be chosen in such a way that firstly, the relations:
[Yi, Yk] =r
∑σ=1
cikσ Yσ f
are identically satisfied, and such that secondly, Y1 f , . . . ,Yn f are linked together byno relation of the form:
ψ1(y1, . . . ,ys)Y1 f + · · ·+ψn(y1, . . . ,ys)Yn f = 0,
while by contrast Yn+1 f , . . . ,Yr f express themselves in the following way:
(3’) Yn+k f ≡n
∑ν=1
ψkν(y1, . . . ,ys)Yν f (k=1 ···n−r),
and such that, lastly, the n(r−n) equations:
(4) ϕkν(x1, . . . ,xs)−ψkν(y1, . . . ,ys) = 0 (k=1 ···r−n ; ν =1 ···n)
are compatible with each other and give relations neither between the x alone, norbetween the y alone.
To seek a transformation:
(5) yi = Φi(x1, . . . ,xs) (i=1 ···s)
which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively.
We can add:The sought transformation is constituted in such a way that the equations (4) are
identities after the substitution: y1 = Φ1(x), . . . , ys = Φs(x).
With these words, the problem which is to be settled is enunciated.

348 19 Theory of the Similarity of r-term Groups
§ 90.
Before we attack in its complete generality the problem stated at the end of thepreceding paragraph, we want to consider a special case, the settlement of whichturns out to be substantially simpler; we mean the case n = r which, obviously, canoccur only when s is at least equal to r.
Thus, let the entire number n defined above be equal to r.It is clear that in this case, neither between X1 f , . . . ,Xr f , nor between
Z1 f , . . . ,Zr f there exists a linear relation. From this, it follows that the r infinitesi-mal transformations:
Yk f =r
∑j=1
gk j Z j f (k=1 ···r)
satisfy by themselves the conditions indicated on p. 346, without it begin necessaryto specialize further the arbitrary elements contained in the gk j. Indeed, firstly thereis no linear relation between Y1 f , . . . ,Yr f , and secondly, the equations (4) reduceto the identity 0 = 0, hence they are certainly compatible to each other and theyproduce relations neither between the x alone, nor between the y alone.
Thus, if the claim stated on p. 346 is correct, our two r-term groups must besimilar, and to be precise, there must exist a transformation yi =Φi(x1, . . . ,xs) whichtransfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively. We seek to determine such atransformation.
When we introduce the variables y1, . . . ,ys in Xk f by means of the transforma-tion:
(5) yi = Φi(x1, . . . ,xs) (i=1 ···s),
we obtain:
Xk f =s
∑i=1
Xk yi∂ f∂yi
=s
∑i=1
Xk Φi∂ f∂yi
;
so by comparing to:
Yk f =s
∑i=1
ηki(y1, . . . ,ys)∂ f∂yi
=s
∑i=1
Yk yi∂ f∂yi
,
we realize that the transformation (5) transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respec-tively, if and only if the r s equations:
(6) Yk yi −Xk Φi = 0 (k=1 ···r ; i=1 ···s)
become identities after the substitution: y1 = Φ1(x), . . . , ys = Φs(x).Now, if we set:
Xk f +Yk f = Ωk f (k=1 ···r),
we have:Ωk(yi −Φi) = Yk yi −Xk Φi ;

§ 90. 349
thus, when the equations (5) represent a transformation having the constitution de-manded, the r s expressions Ωk(yi−Φi) all vanish by means of (5), or, what amountsto the same: the system of equations (5) admits the r infinitesimal transformationsΩ1 f , . . . ,Ωr f (cf. Chap. 7, p. 124 sq.).
On the other hand, the following obviously holds true: every system of equationssolvable with respect to x1, . . . ,xs of the form (5) which admits the r infinites-imal transformations Ω1 f , . . . ,Ωr f represents a transformation which transfersX1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively.
At present, if we take into account that the r infinitesimal transformationsΩ1 f , . . . ,Ωr f stand pairwise in the relationships:
[Ωi, Ωk] = [Xi, Xk]+ [Yi, Yk] =r
∑σ=1
cikσ Ωσ f ,
and therefore generate an r-term group in the 2s variables x1, . . . ,xs, y1, . . . ,ys, wecan thus say:
The totality of all transformations (5) which transfer X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f ,respectively, is identical to the totality of all systems of equations solvable withrespect to x1, . . . ,xn of the form (5) which admit the r-term group Ω1 f , . . . ,Ωr f .
The determination of a transformation of the discussed constitution is thereforelead back to the determination of a certain system of equations in the 2s variablesx1, . . . ,xs, y1, . . . ,ys; this system of equations must possess the following properties:it must consist of s independent equations, it must be solvable both with respect tox1, . . . ,xs and with respect to y1, . . . ,ys, and lastly, it must admit the r-term groupΩ1 f , . . . ,Ωr f .
For the resolution of this new problem, we can base ourselves on the develop-ments of the Chap. 14.
Under the assumptions made, the r× r determinants of the matrix:∣∣∣∣∣∣ξ11(x) · · ξ1s(x)
· · · ·ξr1(x) · · ξrs(x)
∣∣∣∣∣∣do not all vanish identically and even less all r× r determinants of the matrix:
(7)
∣∣∣∣∣∣ξ11(x) · · ξ1s(x) η11(y) · · η1s(y)
· · · · · · · ·ξr1(x) · · ξrs(x) ηr1(y) · · ηrs(y)
∣∣∣∣∣∣ .Hence when a system of equations brings to zero all r× r determinants of the ma-trix (7), it must necessarily contain relations between the x alone.
Our problem is the determination of a system of equations of the form:
(8) y1 −Φ1(x1, . . . ,xs) = 0, . . . , ys −Φs(x1, . . . ,xs) = 0

350 19 Theory of the Similarity of r-term Groups
which admits the group Xk f +Yk f , and which is at the same time solvable withrespect to x1, . . . ,xs.
A system of equations of this nature certainly contains no relation betweenx1, . . . ,xs only, so it does not bring to zero all r× r determinants of the matrix (7)and according to Theorem 17 in Chap. 7, p. 138, it can be brought to a such a formthat it contains only relations between the solutions of the complete system:
(9) Ωk f = Xk f +Yk f = 0 (k=1 ···r).
Consequently, our problem will be solved when we will succeed to determine s in-dependent relations between the solutions of this complete system that are solvablewith respect to x1, . . . ,xs and with respect to y1, . . . ,ys as well.
The complete system (9) possesses 2s− r independent solutions which we canevidently choose in such a way that s− r of them, say:
u1(x1, . . . ,xs), . . . , us−r(x1, . . . ,xs)
depend only upon the x, so that s− r other:
v1(y1, . . . ,ys), . . . , vs−r(y1, . . . ,ys)
depend only upon the y, while by contrast, the r remaining ones:
w1(x1, . . . ,xs, y1, . . . ,ys), . . . , wr(x1, . . . ,xs, y1, . . . ,ys)
must contain certain x and certain y as well. Here, the s functions u1, . . . ,us−r,w1, . . . ,wr are mutually independent as far as x1, . . . ,xs are concerned, and the sfunctions v1, . . . ,vs−r, w1, . . . ,wr are so too, as far as y1, . . . ,ys are concerned; fromthis, it follows that the r equations of the complete system are solvable with respectto r of the differential quotients ∂ f/∂y1, . . . , ∂ f/∂ys, and with respect to r ofthe differential quotients ∂ f/∂x1, . . . , ∂ f/∂xs as well (cf. Chap. 5, Theorem 12,p. 105).
Now, when s mutually independent relations between the u, v, w are solvable bothwith respect to x1, . . . ,xs and with respect to y1, . . . ,ys? Clearly, when and only whenthey can be solved both with respect to u1, . . . ,us−r, w1, . . . ,wr and with respect tov1, . . . ,vs−r, w1, . . . ,wr, hence when they can be brought to the form:
(10)v1 = F1(u1, . . . ,us−r), . . . , vs−r = Fs−r(u1, . . . ,us−r),
w1 =G1(u1, . . . ,us−r), . . . , wr =Gr(u1, . . . ,us−r),
where F1, . . . ,Fs−r denote arbitrary mutually independent functions of their argu-ments, while the functions G1, . . . ,Gr are submitted to absolutely no restriction.
The equations (10) represent the most general system of equations which consistsof s independent equations, which admits the group Ω1 f , . . . ,Ωr f and which canbe solved both with respect to x1, . . . ,xs and with respect to y1, . . . ,ys; at the sametime, they represent the most general transformation between x1, . . . ,xs and y1, . . . ,ys

§ 90. 351
which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively. It is therefore proved thatthere exist transformations which achieve this transfer, hence that our two groupsare effectively similar to each other.
But even more: the equations (10) actually represent the most general transfor-mation which transfers the group X1 f , . . . ,Xr f to the group Z1 f , . . . ,Zr f .
In fact, if yi =Ψi(x1, . . . ,xs) is an arbitrary transformation which transfers the onegroup to the other, then it converts X1 f , . . . ,Xr f into certain infinitesimal transfor-mations Y1 f , . . . ,Yr f of the group Z1 f , . . . ,Zr f which stand pairwise in the rela-tionships:
[Yi,Yk] =r
∑σ=1
cikσ Yσ f ,
and which can hence be obtained from the r infinitesimal transformations:
Yk f =r
∑j=1
gk j Z j f (k=1 ···r)
when one specializes in an appropriate way the arbitrary elements appearing in thegk j. But now, all transformations which convert X1 f , . . . ,Xr f into Y1 f , . . . ,Yr f , re-spectively, are contained in the form (10), so in particular, the transformation yi =Ψi(x1, . . . ,xn) is also contained in this form.
Now, by summarizing the gained result, we can say:
Theorem 63. If the two r-term groups:
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r)
and:
Zk f =s
∑i=1
ζki(y1, . . . ,ys)∂ f∂yi
(k=1 ···r)
are equally composed and if neither X1 f , . . . ,Xr f , nor Z1 f , . . . ,Zr f are linked to-gether by linear relations, then the two groups are also similar to each other. Oneobtains the most general transformation which transfers the one group to the otherin the following way: One chooses the r2 constants gk j in the most general way sothat the r infinitesimal transformations:
Yk f =r
∑j=1
gk j Z j f (k=1 ···r)
are mutually independent and so that, together with the relations:
[Xi, Xk] =r
∑σ=1
cikσ Xσ f ,
there are at the same time the relations:

352 19 Theory of the Similarity of r-term Groups
[Yi, Yk] =r
∑σ=1
cikσ Yσ f ;
afterwards, one forms the r-term complete system:
Xk f +Yk f = 0 (k=1 ···r)
in the 2s variables x1, . . . ,xs, y1, . . . ,ys and one determines 2s− r independent solu-tions of it, namely s− r independent solutions:
u1(x1, . . . ,xs), . . . , us−r(x1, . . . ,xs)
which contain only the x, plus s− r independent solutions:
v1(y1, . . . ,ys), . . . , vs−r(y1, . . . ,ys)
which contain only the y, and r solutions:
w1(x1, . . . ,xs, y1, . . . ,ys), . . . , wr(x1, . . . ,xs, y1, . . . ,ys)
which are mutually independent and which are independent of u1, . . . ,us−r,v1, . . . ,vs−r; if this takes place, then the system of equations:
v1 = F1(u1, . . . ,us−r), . . . , vs−r = Fs−r(u1, . . . ,us−r),
w1 =G1(u1, . . . ,us−r), . . . , wr =Gr(u1, . . . ,us−r),
represents the demanded transformation; here, G1, . . . ,Gr are perfectly arbitraryfunctions of their arguments; by contrast, F1, . . . ,Fs−r are subjected to the restric-tion that they must be mutually independent.
From this, it results in particular the
Proposition 1. If the r 6 s independent infinitesimal transformations:
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r)
stand pairwise in the relationships:
[Xi, Xk] = 0 (i, k=1 ···r),
without being, however, linked together by a linear relation of the form:
r
∑k=1
χk(x1, . . . ,xs)Xk f = 0,
then they generate an r-term group which is similar to the group of transformations:

§ 90. 353
Y1 f =∂ f∂y1
, . . . , Yr f =∂ f∂yr
.
A case of the utmost importance is when the two numbers s and r are equal toeach other, so that the two groups X1 f , . . . ,Xr f and Z1 f , . . . ,Zr f are transitive, ormore precisely: simply transitive (cf. Chap. 13, p. 226). We want to enunciate theTheorem 63 for this special case:
Theorem 64. Two simply transitive equally composed groups in the same numberof variables are always also similar to each other. If:
Xk f =r
∑i=1
ξki(x1, . . . ,xr)∂ f∂xi
(k=1 ···r)
and:
Zk f =r
∑i=1
ζki(y1, . . . ,yr)∂ f∂yi
(k=1 ···r)
are the infinitesimal transformations of the two groups, then one finds in the follow-ing way the most general transformation which transfers the one group to the other:One chooses the r2 constants gk j in the most general way so that the r infinitesimaltransformations:
Yk f =r
∑j=1
gk j Z j f (k=1 ···r)
are mutually independent and so that, together with the relations:
[Xi, Xk] =r
∑σ=1
cikσ Xσ f ,
there are at the same time the relations:
[Yi, Yk] =r
∑σ=1
cikσ Yσ f ;
moreover, one forms the r-term complete system:
Xk f +Yk f = 0 (k=1 ···r)
in the 2r variables x1, . . . ,xr, y1, . . . ,yr and one determines r arbitrary independentsolutions:
w1(x1, . . . ,xr, y1, . . . ,yr), . . . , wr(x1, . . . ,xr, y1, . . . ,yr)
of it; then the r equations:
w1 = a1, . . . , wr = ar

354 19 Theory of the Similarity of r-term Groups
with the r arbitrary constants a1, . . . ,ar represent the most general transformationhaving the constitution demanded.
§ 91.
At present, we turn to the treatment of the general problem that we have stated atthe end of § 89 (p. 347).
At first, we can prove exactly as in the previous paragraph that every transforma-tion: yi = Φi(x1, . . . ,xs) which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively,represents a system of equations which admits the r-term group Ωk f = Xk f +Yk fand that, on the other hand, every system of equations solvable with respect tox1, . . . ,xs:
yi = Φi(x1, . . . ,xs)
which admits the group Ω1 f , . . . ,Ωr f represents a transformation which transfersX1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively.
Now, according to p. 346, every transformation yi = Φi(x1, . . . ,xs) which trans-fers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively, is constituted in such a way that theequations (4) become identities after the substitution: y1 = Φ1(x), . . . , ys = Φs(x).Consequently, we can also enunciate as follows the problem formulated on p. 347:
To seek, in the 2s variables x1, . . . ,xs, y1, . . . ,ys, a system of equations which ad-mits the r-term group Ω1 f , . . . ,Ωr f , which consists of exactly s independent equa-tions that are solvable both with respect to x1, . . . ,xs and to y1, . . . ,ys, and lastly,which embraces1 the n(r−n) equations:
(4) ϕkν(x1, . . . ,xs)−ψkν(x1, . . . ,xs) = 0 (k=1 ···r−n ; ν =1 ···n).
For the solution of this problem, it is if great importance that the system of equa-tions (4) admits in turn the r-term group Ω1 f , . . . ,Ωr f .
In order to prove this, we imagine that the matrix which is associated to theinfinitesimal transformations Ω1 f , . . . ,Ωr f :
(11)
∣∣∣∣∣∣ξ11(x) · · ξ1s(x) η11(y) · · η1s(y)
· · · · · · · ·ξr1(x) · · ξrs(x) ηr1(y) · · ηrs(y)
∣∣∣∣∣∣is written down. We will show that the equations (4) are a system of equationswhich is obtained by setting equal to zero all (n+1)× (n+ 1) determinants of thematrix (11). With this, according to Theorem 39, Chap. 14, p. 240, it will be provedthat the system of equations (4) admits the group Ω1 f , . . . ,Ωr f .
Amongst the (n+1)× (n+1) determinants of the matrix (11), there are in par-ticular those of the form:
1 See the footnote on p. 132.

§ 91. 355
∆ =
∣∣∣∣∣∣∣∣ξ1k1(x) · · ξ1kn(x) η1σ (y)
· · · · ·ξnk1(x) · · ξnkn(x) ηnσ (y)
ξn+ j,k1(x) · · ξn+ j,kn(x) ηn+ j,σ (y)
∣∣∣∣∣∣∣∣ .If we replace in ∆ the members of the last horizontal row by their values from (3)and (3’), namely by the following values:
ξn+ j,kµ (x)≡n
∑ν=1
ϕ jν(x)ξν,kµ (x), ηn+ j,σ (y)≡n
∑ν=1
ψ jν(y)ηνσ (y),
and if we subtract from the last horizontal row the first n rows, after we have multi-plied them before by ϕ j1(x), . . . ,ϕ jn(x), respectively, then we receive:
∆ = ∑ ±ξ1k1(x) · · · ξnkn(x)n
∑ν=1
ηνσ (y)
ψ jν(y)−ϕ jν(x).
Here, under the assumptions made earlier on, the determinants of the form:
D = ∑ ±ξ1k1(x) · · · ξnkn(x)
do not all vanish identically, and likewise not all determinants:
D= ∑ ±η1k1(y) · · · ηnkn(y)
vanish identically.Obviously, a system of equations that brings to zero all determinants ∆ must
either contain all equations of the form D = 0, or it must contain the s(r−n) equa-tions:
n
∑ν=1
ηνσ (y)
ψ jν(y)−ϕ jν(x)= 0 (σ =1 ···s ; j=1 ···r−n) ;
in the latter case, it embraces either all equations of the form D= 0, or the n(r−n)equations:
(4) ϕ jν(x)−ψ jν(y) = 0 ( j=1 ···r−n ; ν =1 ···n).
In the latter one of these three cases, we now observe what follows:The system of equation (4) brings to zero not only all determinants ∆ , but ac-
tually also all (n+ 1)× (n+ 1) determinants of the matrix (11). One realizes thisimmediately when one writes the matrix under the form:

356 19 Theory of the Similarity of r-term Groups∣∣∣∣∣∣∣∣∣∣ξ11(x) · · ξ1s(x) η11(y) · · η1s(y)
· · · · · · · ·∑1···n
ν ϕ1ν ξν1 · · ∑1···nν ϕ1ν ξνs ∑1···n
ν ψ1ν ην1 · · ∑1···nν ψ1ν ηνs
· · · · · · · ·∑1···n
ν ϕr−n,ν ξν1 · · ∑1···nν ϕr−n,ν ξνs ∑1···n
ν ψr−n,ν ην1 · · ∑1···nν ψr−n,ν ηνs
∣∣∣∣∣∣∣∣∣∣,
and when one makes afterwards the substitution: ψkν(y)=ϕkν(x); the (n+1)×(n+1) determinants of the so obtained matrix are all identically zero. Consequently, (4)belongs to the systems of equations that one obtains by setting equal to zero all(n+ 1)× (n+ 1) determinants of the matrix (11), and therefore, according to thetheorem cited above, it admits the r-term group Ω1 f , . . . ,Ωr f .
The important property of the system of equations (4) just proved can also yet berealized in another, somehow more direct way.
According to p. 124 and to p. 235, the system of equations (4) admits in any casethe r-term group Ω1 f , . . . ,Ωr f only when all equations of the form:
Ω j(ϕkν(x)−ψkν(y)
)= X j ϕkν(x)−Yj ψkν(y) = 0
are a consequence of (4). That this condition is satisfied in the present case can beeasily verified.
For j = 1, . . . ,r and k = 1, . . . ,r−n, we have:
[X j, Xn+k] =
[X j f ,
n
∑ν=1
ϕkν Xν f]
=n
∑ν=1
X j ϕkν Xν f +n
∑ν=1
ϕkν [X j, Xν ].
Moreover, we have in general:
[X j, Xµ ] =r
∑π=1
c jµπ Xπ f =n
∑ν=1
c jµν +
r−n
∑τ=1
c jµ,n+τ ϕτν
Xν f .
If we insert these values in the preceding equation and if in addition, we take intoaccount that X1 f , . . . ,Xn f are not linked together by a linear relation, we then find:
(12)
X j ϕkν = c j,n+k,ν +
r−n
∑τ=1
c j,n+k,n+τ ϕτν
−n
∑µ=1
ϕkµ
c jµν +
r−n
∑τ=1
c j,µ,n+τ ϕτν
.
Consequently, we have:
X j ϕkν = Π jkν(ϕ11, ϕ12, . . .) ( j=1 ···r ; k=1 ···r−n ; ν =1 ···r),
and a completely similar computation gives:

§ 91. 357
Yj ψkν = Π jkν(ψ11, ψ12, . . .),
where in the two cases Π jkν denote the same functions of their arguments.At present, we obtain:
Ω j(ϕkν −ψkν) = Π jkν(ϕ11, ϕ12, . . .)−Π jkν(ψ11, ψ12, . . .),
from which it is to be seen that the expressions Ω j(ϕkν −ψkν) effectively vanish byvirtue of (4).
In general, the n(r−n) equations ϕkν(x) = ψkν(x) are not be mutually indepen-dent, but rather, they can be replaced by a smaller number of mutually independentequations, say by the following s−ρ 6 s following ones:
(13) ϕk(x1, . . . ,xs) = ψk(y1, . . . ,ys) (k=1 ···s−ρ).
Naturally, each X j ϕk will then be a function of ϕ1, . . . ,ϕs−ρ alone:
(14) X j ϕk = π jk(ϕ1, . . . ,ϕs−ρ) ( j=1 ···r ; k=1 ···s−ρ),
and every Yj ψk will be the same function of ψ1, . . . ,ψs−ρ :
(14’) Yj ψk = π jk(ψ1, . . . ,ψs−ρ) ( j=1 ···r ; k=1 ···s−ρ),
hence all Ω j(ϕk −ψk) vanish by virtue of the system of equations: ϕ1 = ψ1, . . . ,ϕs−ρ = ψs−ρ . But since this system of equations is presented under a form whichsatisfies the requirement set on p. 123 sq., then according to p. 127 and to p. 235,we conclude that it admits the r-term group Ω1 f , . . . ,Ωr f .
Now, if s−ρ = s, so ρ = 0, then the s equations ϕ1 = ψ1, . . . , ϕs = ψs actuallyrepresent already a transformation in the variables x1, . . . ,xs, y1, . . . ,ys. This trans-formation obviously transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively, and at thesame time, it is the most general transformation that does this.
Thus, the case s−ρ = s is settled from the beginning, but by contrast, the cases−ρ < s requires a closer study.
In order to simplify the additional considerations, we want at first to introduceappropriate new variables in place of the variables x and y.
The n mutually independent equations: X1 f = 0, . . . , Xn f = 0 form an n-termcomplete system in the s variables x1, . . . ,xs, hence they have s − n independentsolutions in common, and likewise, the n equations: Y1 f = 0, . . . , Yn f = 0 in thevariables y1, . . . ,ys have exactly s−n independent solutions in common.
It stands to reason to simplify the infinitesimal transformations X1 f , . . . ,Xr f andY1 f , . . . ,Yr f by introducing, in place of the x, new independent variables of whichs − n are independent solutions of the complete system: X1 f = 0, . . . , Xn f = 0,and by introducing, in place of the y, new independent variables of which s−n areindependent solutions of the complete system: Y1 f = 0, . . . , Yn f = 0.
On the other hand, it stands to reason to simplify the equations (13) by introduc-ing the functions ϕ1(x), . . . ,ϕs−ρ(x) and ψ1(y), . . . ,ψs−ρ(y) as new variables.
358 19 Theory of the Similarity of r-term Groups
We want to attempt to combine the two simplifications as far as possible.At first, we start by introducing appropriate new variables in place of the x.Amongst the solutions of the complete system X1 f = 0, . . . , Xn f = 0, there can be
some which can be expressed in terms of the functions ϕ1(x), . . . , ϕs−ρ(x) alone; allsolutions F(ϕ1, . . . ,ϕs−ρ) of this nature determine themselves from the n differentialequations:
(15)s−ρ
∑ν=1
Xk ϕν∂F∂ϕν
=s−ρ
∑ν=1
πkν(ϕ1, . . . ,ϕs−ρ)∂F∂ϕν
= 0 (k=1 ···n)
in the s−ρ variables ϕ1, . . . ,ϕs−ρ . We want to suppose that these equations possessexactly s−q 6 s−ρ independent solutions, say the following ones:
U1(ϕ1, . . . ,ϕs−ρ), . . . , Us−q(ϕ1, . . . ,ϕs−ρ).
Under these assumptions:
U1(ϕ1(x), . . . ,ϕs−ρ(x)
)= u1(x), . . . , Us−q
(ϕ1(x), . . . ,ϕs−ρ(x)
)= us−q(x)
are obviously independent solutions of the complete system: X1 f = 0, . . . , Xn f = 0which can be expressed in terms of ϕ1(x), . . . ,ϕs−ρ(x) alone, and such that everyother solution of the same constitution is a function of u1(x), . . . ,us−q(x) only. Nat-urally, we also have at the same time the inequation: s− q 6 s− n, hence none ofthe two numbers ρ and n is larger than q.
Now, let:us−q+1 = us−q+1(x), . . . , us−n = us−n(x)
be q−n arbitrary mutually independent solutions of the complete system X1 f = 0,. . . , Xn f = 0 that are also independent of u1(x), . . . ,us−q(x). We will show that thes − ρ + q − n functions: us−q+1(x), . . . , us−n(x), ϕ1(x), . . . ,ϕs−ρ(x) are mutuallyindependent.
Since ϕ1(x), . . . ,ϕs−ρ(x) are mutually independent, there are, amongst the func-tions ϕ1(x), . . . , ϕs−ρ(x), us−q+1(x), . . . , us−n(x) at least s−ρ , say exactly s−ρ +q− n− h that are mutually independent, where 0 6 h 6 q− n. We want to sup-pose that precisely ϕ1(x), . . . , ϕs−ρ(x), us−q+h+1(x), . . . , us−n(x) are mutually in-dependent, while us−q+1(x), . . . , us−q+h(x) can be expressed in terms of ϕ1(x), . . . ,ϕs−ρ(x), us−q+h+1(x), . . . , us−n only. Thus, there must exist, between the quantitiesus−q+1, . . . ,us−n, ϕ1, . . . ,ϕs−ρ relations of the form:
(16) us−q+ j = χ j(us−q+h+1, . . . , us−n, ϕ1, . . . , ϕs−ρ
)( j=1 ···h)
which reduce to identities after the substitution:
(17)
us−q+1 = us−q+1(x), . . . , us−n = us−n(x)
ϕ1 = ϕ1(x), . . . , ϕs−ρ = ϕs−ρ(x).
If we interpret the substitution (17) by the sign [ ], we then have:

§ 91. 359
[us−q+ j −χ j ]≡ 0 ( j=1 ···h),
whence it comes:
Xk [us−q+ j −χ j ] =−s−ρ
∑ν=1
[πkν(ϕ1, . . . ,ϕs−ρ) ]
[∂ χ j
∂ϕν
]≡ 0 (k=1 ···n ; j=1 ···h),
that is to say: all the expressions:
(18)s−ρ
∑ν=1
πkν(ϕ1, . . . ,ϕs−ρ)∂ χ j
∂ϕν(k=1 ···n ; j=1 ···h)
vanish identically after the substitution (17). But now, these expressions are all freeof us−q+1, . . . ,us−q+h, so if they were not identically zero and they would vanishidentically after the substitution (17), then the functions us−q+h+1(x), . . . , us−n(x),ϕ1(x), . . . , ϕs−ρ(x) would not be mutually independent, but this is in contradic-tion to the assumption. Consequently, the expressions (18) are in fact identicallyzero, or, what amounts to the same, the functions χ1, . . . ,χh are solutions of the ndifferential equations (15) in the s−ρ variables ϕ1, . . . ,ϕs−ρ . From this, it resultsthat ϕ1, . . . ,ϕs−ρ appear in the χ j only in the combination: U1(ϕ1, . . . ,ϕs−ρ), . . . ,Us−q(ϕ1, . . . ,ϕs−ρ), so that the h equations (16) can be replaced by h relations ofthe form:
(19) us−q+ j = χ j(us−q+h+1, . . . , us−n, u1, . . . ,us−q
)( j=1 ···h),
which in turn reduce to identities after the substitution:
u1 = u1(x), . . . , us−n = us−n(x).
Obviously, relations of the form (19) cannot exist, for u1, . . . ,us−n are indepen-dent solutions of the complete system X1 f = 0, . . . , Xn f = 0; consequently, h is equalto zero. As a result, it is proved that the s−ρ +q−n functions ϕ1(x), . . . ,ϕs−ρ(x),us−q+1(x), . . . , us−n(x) really are independent of each other.
We therefore see that, between the s − n + s − ρ quantities u1, . . . ,us−n,ϕ1, . . . ,ϕs−ρ , no other relations exist that are independent from the s−q relations:
(20) u1 = U1(ϕ1, . . . ,ϕs−ρ), . . . , us−q = Us−q(ϕ1, . . . ,ϕs−ρ)
which reduce to identities after the substitution:
u1 = u1(x), . . . , us−q = us−q(x), ϕ1 = ϕ1(x), . . . , ϕs−ρ = ϕs−ρ(x).
From what has been just said, it results that, amongst the s−n+ s−ρ functionsu1(x), . . . , us−n(x), ϕ1(x), . . . , ϕs−ρ(x), there exist exactly s−n+ s−ρ − (s−q) =s−n+q−ρ that are mutually independent, namely for instance the s−n functions:u1(x), . . . ,us−n(x) to which q− ρ > 0 of the functions ϕ1(x), . . . ,ϕs−ρ(x) are yetadded. If we agree that the equations (20) can be resolved precisely with respect to

360 19 Theory of the Similarity of r-term Groups
ϕq−ρ+1, . . . ,ϕs−ρ , we can conclude that precisely the s−n+q−ρ functions: u1(x),. . . , us−n(x), ϕ1(x), . . . , ϕq−ρ(x) are mutually independent. Here, the number q−ρ ,or shortly m, is certainly not larger than n, since the sum s−n+q−ρ can naturallynot exceed the number s of the variables x.
At present, we have gone so far that we can introduce new independent variablesx′1, . . . ,x
′s in place of x1, . . . ,xs; we choose them in the following way:
We set simply:
x′q+1 = u1(x1, . . . ,xs), . . . , x′s = us−q(x1, . . . ,xs),
furthermore:
x′n+1 = us−q+1(x1, . . . ,xs), . . . , x′q = us−n(x1, . . . ,xs),
and:x′1 = ϕ1(x1, . . . ,xs), . . . , x′m = ϕm(x1, . . . ,xs),
where m = q−ρ is not larger than n; in addition, we yet set:
x′m+1 = λ1(x1, . . . ,xs), . . . , x′n = λn−m(x1, . . . ,xs),
where λ1(x), . . . ,λn−m(x) denote arbitrary mutually independent functions that arealso independent of u1(x), . . . , us−n(x), ϕ1(x), . . . , ϕm(x).
In a completely similar way, we introduce new independent variables in place ofy1, . . . ,ys.
We form the s−q functions:
U1(ψ1(y), . . . , ψs−ρ(y)
)= v1(y), . . . , Us−q
(ψ1(y), . . . , ψs−ρ(y)
)= vs−q(y)
that are evidently independent solutions of the n-term complete system: Y1 f = 0,. . . , Yn f = 0; moreover, we determine any q−n arbitrary mutually independent solu-tions: vs−q+1(y), . . . , vs−n(y) of the same complete system that are also independentof v1(y), . . . , vs−q(y). Then it is clear that the s−n+q−ρ functions:
v1(y), . . . , vs−n(y), ψ1(y), . . . , ψq−ρ(y)
are mutually independent.We now choose the new variables y′1, . . . ,y
′s in exactly the same way as the vari-
ables x′ a short while ago.We set simply:
y′q+1 = v1(y1, . . . ,ys), . . . , y′s = vs−q(y1, . . . ,ys),
furthermore:
y′n+1 = vs−q+1(y1, . . . ,ys), . . . , y′q = vs−n(y1, . . . ,ys),
and:

§ 91. 361
y′1 = ψ1(y1, . . . ,ys), . . . , y′m = ψm(y1, . . . ,ys) ;
in addition, we yet set:
y′m+1 = Λ1(y1, . . . ,ys), . . . , y′n = Λn−m(y1, . . . ,ys),
where Λ1, . . . ,Λn−m are arbitrary mutually independent functions that are also inde-pendent of: v1(y), . . . , vs−n(y), ψ1(y), . . . , ψm(y).
At present, we introduce the new variables x′ and y′ in the infinitesimal transfor-mations Xk f , Yk f and in the equations (13).
Since all Xk x′n+1, . . . , Xk x′s vanish identically and since all Xk ϕ1, . . . , Xk ϕm de-pend only on ϕ1, . . . ,ϕs−ρ , that is to say, only on x′1, . . . ,x
′m, x′q+1, . . . ,x
′s, the Xk f
receive the following form in the variables x′1, . . . ,x′s:
Xk f =m
∑µ=1
xkµ(x′1, . . . ,x
′m, x′q+1, . . . ,x
′s) ∂ f
∂x′µ+
+n−m
∑j=1
xk,m+ j(x′1, . . . ,x
′m, . . . ,x
′n, . . . ,x
′q, . . . ,x
′s) ∂ f
∂x′m+ j= Ξk f .
In the same way, we have:
Yk f =m
∑µ=1
xkµ(y′1, . . . ,y
′m, y′q+1, . . . ,y
′s) ∂ f
∂y′µ+
+n−m
∑j=1
yk,m+ j(y′1, . . . ,y
′m, . . . ,y
′n, . . . ,y
′q, . . . ,y
′s) ∂ f
∂y′m+ j= Hk f .
Here, the xkµ(y′1, . . . ,y′m, y′q+1, . . . ,y
′s) denote the same functions of their arguments
as the xkµ(x′1, . . . ,x′m, x′q+1, . . . ,x
′s). Indeed, it results from the equations (14)
and (14’) that Yk y′µ is the same function of y′1, . . . ,y′m, y′q+1, . . . ,y
′s as Xk x′µ is of
x′1, . . . ,x′m, x′q+1, . . . ,x
′s, where it is understood that µ is an arbitrary number amongst
1,2, . . . ,m.
On the other hand, we must determine which form the system of equations (13)receives in the new variables.
The system of equations can evidently be replaced by the following one:
ϕ1 −ψ1 = 0, . . . , ϕm −ψm = 0,U1(ϕ1, . . . ,ϕs−ρ)−U1(ψ1, . . . ,ψs−ρ) = 0, . . . ,
Us−q(ϕ1, . . . ,ϕs−ρ)−Us−q(ψ1, . . . ,ψs−ρ) = 0.
If we introduce our new variables in this system, we obviously obtain the simplesystem:

362 19 Theory of the Similarity of r-term Groups
(21)
x′1 − y′1 = 0, . . . , x′m − y′m = 0,
x′q+1 − y′q+1 = 0, . . . , x′s − y′s = 0;
so the system of equations (13), or, what is the same, the system of equations (4),can be brought to this form after the introduction of the new variables.
Finally, if we remember that neither X1 f , . . . ,Xn f , nor Y1 f , . . . ,Yn f are linked bylinear relations and that all (n+1)× (n+1) determinants of the matrix (11) vanishby means of (4) while not all n×n determinants do, we then realize that in the sameway, neither Ξ1 f , . . . ,Ξn f , nor H1 f , . . . ,Hn f are linked by linear relations, and thatall (n+1)× (n+1) determinants, but no all n×n ones, of the matrix which can beformed with the coefficients of the differential quotients of f in the r infinitesimaltransformations Ωk f = Ξk f +Hk f vanish by means of (21).
Thanks to the preceding developments, the problem stated in the outset of theparagraph, p. 354, is lead back to the following simpler problem:
To seek, in the 2s variables x′1, . . . ,x′s, y′1, . . . ,y
′s, a system of equations which
admits the r-term group:
Ωk f = Ξk f +Hk f (k=1 ···r)
and in addition which consists of s independent equations that are solvable withrespect to x′1, . . . ,x
′s and to y′1, . . . ,y
′s as well, and lastly, which comprises the s−q+
m equations (21).
In order to solve this new problem, we remember Chap. 14, p. 243 sq.; from whatwas said at that time, we deduce that every system of equations which admits thegroup Ξk f +Hk f = Ωk f and which comprises at the same time the equations (21)can be obtained by adding to the equations (21) a system of equations in the s+q−mvariables x′1, . . . , x′m, . . . , x′n, . . . , x′q, . . . , x′s, . . . , y′m+1, . . . ,y
′q that admits the r-term
group:
Ω k f =m
∑µ=1
xkµ(x′1, . . . ,x
′m, x′q+1, . . . ,x
′s) ∂ f
∂x′µ+
+n−m
∑j=1
xk,m+ j(x′1, . . . ,x
′m, . . . ,x
′n, . . . ,x
′q, . . . ,x
′s) ∂ f
∂x′m+ j+
+n−m
∑j=1
yk,m+ j(x′1, . . . ,x
′m, y′m+1, . . . ,y
′n, . . . ,y
′q, x′q+1, . . . ,x
′s) ∂ f
∂y′m+ j.
Here, Ω k f is obtained by leaving out all terms with ∂ f/∂y′1, . . . , ∂ f/∂y′m inΩk f = Ξk f +Hk f and by making everywhere the substitution:
y′1 = x′1, . . . , y′m = x′m, y′q+1 = x′q+1, . . . , y′s = x′s
by means of (21) in the remaining terms. This formation of Ω k f shows that in thematrix formed with Ω 1 f , . . . ,Ω r f :

§ 91. 363
(22)
∣∣∣∣∣∣x11(x′) · · x1n(x′) y1,m+1(x′,y′) · · y1n(x′,y′)
· · · · · · · ·xr1(x′) · · xrn(x′) yr,m+1(x′,y′) · · yrn(x′,y′)
∣∣∣∣∣∣ ,all (n+1)× (n+1) determinants vanish identically, but not all n×n ones. If we yetadd that neither Ξ1 f , . . . ,Ξn f nor H1 f , . . . ,Hn f are linked by linear relations, werealize immediately that in particular the two n×n determinants:
(23) ∑ ±x11(x′) · · · xnn(x′)
and:
(24)
∣∣∣∣∣∣x11(x′) · · x1m(x′) y1,m+1(x′,y′) · · y1n(x′,y′)
· · · · · · · ·xn1(x′) · · xnm(x′) yn,m+1(x′,y′) · · ynn(x′,y′)
∣∣∣∣∣∣are not identically zero.
But now, the matter for us is not to find all systems of equations which com-prise (21) and which admit the group Ω1 f , . . . ,Ωr f , and the matter is only to deter-mine systems of equations of this sort which consist of exactly s independent equa-tions that are solvable both with respect to x′1, . . . ,x
′s and to y′1, . . . ,y
′s. Consequently,
we do not have to set up all systems of equations in x′1, . . . ,x′s, y′m+1, . . . ,y
′q which
admit Ω 1 f , . . . ,Ω r f , but only the systems which consist of exactly s−(m+s−q) =q−m independent equations and which in addition are solvable both with respectto x′m+1, . . . ,x
′n, . . . ,x
′q and with respect to y′m+1, . . . ,y
′n, . . . ,y
′q.
If a system of equation in x′1, . . . ,x′s, y′m+1, . . . ,y
′q satisfies the requirement just
stated, then it can be brought to the form:
(25) y′m+ j = Φm+ j(x′1, . . . ,x′m, . . . ,x
′n, . . . ,x
′q, . . . ,x
′s) ( j=1 ···q−m),
where the functions Φm+1, . . . ,Φq are in turn independent relatively to x′m+1, . . . ,x′q.
Now, it is clear that a system of equations of the form (25) cannot bring to zeroall n× n determinants of the matrix (22), since in any case, the determinant (23)cannot be equal to zero by virtue of (25). On the other hand, since all (n+ 1)×(n+1) determinants of (22) vanish identically, then according to Chap. 14, p. 241,it comes that every system of equations of the form (25) which admits the groupΩ 1 f , . . . ,Ω r f is represented by relations between the solutions of the equations:Ω 1 f = 0, . . . , Ω r f = 0, or, what is the same, by relations between the solutions ofthe n-term complete system: Ω 1 f = 0, . . . , Ω n f = 0.
The n-term complete system Ω 1 f = 0, . . . , Ω n f = 0 contains s+q−m indepen-dent variables and possesses therefore s−n+q−m independent solutions; one canimmediately indicate s−n+q−n independent solutions, namely: x′n+1, . . . , x′q, . . . ,x′s, y′n+1, . . . , y′q, while the n−m lacking ones must be determined by integration andcan obviously be brought to the form:
ω1(x′1, . . . ,x′m, . . . ,x
′s, y′m+1, . . . ,y
′q), . . . , ωn−m(x′1, . . . ,x
′m, . . . ,x
′s, y′m+1, . . . ,y
′q).

364 19 Theory of the Similarity of r-term Groups
Since the two determinants (23) and (24) do not vanish identically, the equationsof our complete system are solvable both with respect to ∂ f/∂x′1, . . . , ∂ f/∂x′m,. . . , ∂ f/∂x′n and with respect to ∂ f/∂x′1, . . . , ∂ f/∂x′m, ∂ f/∂y′m+1, . . . , ∂ f/∂y′nand therefore, its s − n + q − m independent solutions x′n+1, . . . ,x
′s, y′n+1, . . . ,y
′q,
ω1, . . . ,ωn−m are mutually independent both relatively to x′n+1, . . . , x′q, . . . , x′s,y′m+1, . . . ,y
′q and relatively to x′m+1, . . . , x′n, . . . , x′q, . . . , x′s, y′n+1, . . . ,y
′q (cf. Theo-
rem 12, p. 105). Consequently, the functions ω1, . . . ,ωn−m are mutually independentboth relatively to y′m+1, . . . ,y
′n and relatively to x′m+1, . . . ,x
′n.
Every system of equations (25) which satisfies the stated requirements is repre-sented by relations between the solutions x′n+1, . . . ,x
′s, y′n+1, . . . ,y
′q, ω1, . . . ,ωn−m and
to be precise, by q−m relations that are solvable both with respect to y′m+1, . . . ,y′q
and with respect to x′m+1, . . . ,x′q. Visibly, these relations must be solvable both with
respect to ω1, . . . ,ωn−m, x′n+1, . . . ,x′q and with respect to ω1, . . . ,ωn−m, y′n+1, . . . ,y
′q,
so they must have the form:
(26)
ωµ(x′1, . . . ,x
′m, x′m+1, . . . ,x
′s, y′m+1, . . . ,y
′q) = χµ(x′n+1, . . . ,x
′q, . . . ,x
′s)
(µ =1 ···n−m)
y′n+1 = Π1(x′n+1, . . . ,x′q, . . . ,x
′s), . . . , y′q = Πq−n(x′n+1, . . . ,x
′q, . . . ,x
′s),
where Π1, . . . ,Πq−n are mutually independent relatively to x′n+1, . . . ,x′q.
Conversely, every system of equations of the form (26) in which Π1, . . . ,Πq−nare mutually independent relatively to x′n+1, . . . ,x
′q is solvable both with respect to
y′m+1, . . . ,y′q and with respect to x′m+1, . . . ,x
′q and since in addition, it admits the
group Ω 1 f , . . . ,Ω r f , then it possesses all properties which the sought system ofequations in the variables x′1, . . . ,x
′s, y′m+1, . . . ,y
′q should have.
From this, we conclude that the equations (26) represent the most general systemof equations which admits the group Ω 1 f , . . . ,Ω r f , which consists of exactly q−mindependent equations, and which is solvable both with respect to y′m+1, . . . ,y
′q and
with respect to x′m+1, . . . ,x′q; about it, χ1, . . . ,χn−m are absolutely arbitrary functions
of their arguments and Π1, . . . ,Πq−n as well, though with the restriction for the latterthat they must be mutually independent relatively to x′n+1, . . . ,x
′q.
Thus, if we add the system of equation (26) to the equations (21), we obtain themost general system of equations in x′1, . . . ,x
′s, y′1, . . . ,y
′s which admits the group
Ωk = Ξk f +Hk f , which comprises the equations (21), which consists of s indepen-dent equations and which is solvable both with respect to x′1, . . . ,x
′s and with respect
to y′1, . . . ,y′s. Finally, if, in this system of equations, we express the variables x′ and y′
in terms of the initial variables x and y, we obtain the most general system of equa-tions which admits the group Ωk f = Xk f +Yk f , which comprises the equations (4),which consists of s independent equations and which is solvable both with respectto x1, . . . ,xs and with respect to y1, . . . ,ys. In other words: we obtain the most gen-eral transformation yi = Φi(x1, . . . ,xs) which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f ,respectively.
As a result, the problem stated on p. 347 is settled, and it has been achieved evenmore than what was actually required there, because we not only know a transforma-

§ 91. 365
tion of the demanded constitution, we know all these transformations. At the sametime, the claim stated on p. 346 is proved, namely it is proved that the two groupsX1 f , . . . ,Xr f and Z1 f , . . . ,Zr f are really similar to each other, under the assumptionsmade there.
Lastly, on the basis of the developments preceding, we can yet determine themost general transformation which transfers the group X1 f , . . . ,Xr f to the groupZ1 f , . . . ,Zr f ; indeed, if we remember the considerations of p. 344 sq., and if wecombine them with the result gained just now, we then see immediately that thetransformation in question can be found in the following way: In the infinitesimaltransformations:
Yk f =r
∑j=1
gk j Z j f (k=1 ···r)
defined on p. 347, one chooses the constants gk j in the most general way and af-terwards, following the method given by us, one determines the most general trans-formation which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively; this then is atthe same time the most general transformation which actually transfers the groupX1 f , . . . ,Xr f to the group Z1 f , . . . ,Zr f .
As the equations (26) show, the transformation found in this way contains n−m+ q− n = q−m arbitrary functions of s− n arguments, and in addition, certainarbitrary elements which come from the gk j; these are firstly certain arbitrary pa-rameters, and secondly, certain arbitrarinesses which come from the fact that the gk jare determined by algebraic operations. From this, it follows that the said transfor-mation cannot in all cases be represented by a single system of equations. —
At present, we summarize our results.At first, we have the
Theorem 65. Two r-term groups:
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r)
and:
Zk f =s
∑i=1
ζki(y1, . . . ,ys)∂ f∂yi
(k=1 ···r)
in the same number of variables are similar to each other if and only if the followingconditions are satisfied:
Firstly: the two groups must be equally composed; so, if the relations:
[Xi, Xk] =r
∑σ=1
cikσ Xσ f
hold, it must be possible to determine r2 constants gk j such that the r infinitesimaltransformations:
Yk f =r
∑j=1
gk j Z j f (k=1 ···r)

366 19 Theory of the Similarity of r-term Groups
are mutually independent and such that the relations:
[Yi,Yk] =r
∑σ=1
cikσ Yσ f
are identically satisfied.Secondly: if X1 f , . . . ,Xr f are constituted in such a way that, X1 f , . . . ,Xn f (say)
are linked together by no relation of the form:
χ1(x1, . . . ,xs)X1 f + · · ·+χn(x1, . . . ,xs)Xn f = 0,
while by contrast Xn+1 f , . . . ,Xr f express themselves linearly in terms of X1 f , . . . ,Xn f :
Xn+k f ≡n
∑ν=1
ϕkν(x1, . . . ,xs)Xν f (k=1 ···r−n),
them amongst the systems of gk j which satisfy the above requirements, there mustexist at least one, say the system: gk j = gk j, which is constituted in such a way that,of the r infinitesimal transformations:
Yk f =r
∑j=1
gk j Z j f (k=1 ···r),
the first n ones are linked together by no linear relation of the form:
ψ1(y1, . . . ,ys)Y1 f + · · ·+ψn(y1, . . . ,ys)Yn f = 0,
while Yn+1 f , . . . ,Yr f express themselves in terms of Y1 f , . . . ,Yn f :
Yn+k f ≡n
∑ν=1
ψkν(y1, . . . ,ys)Yν f (k=1 ···r−n),
and such that in addition, the n(r−n) equations:
ϕkν(x1, . . . ,xs)−ψkν(y1, . . . ,ys) = 0 (k=1 ···r−n ; ν =1 ···n)
neither contradict themselves mutually, nor produce relations between the x aloneor between the y alone.†
Moreover, we yet have the
Proposition 2. If the two r-term groups X1 f , . . . ,Xr f and Z1 f , . . . ,Zr f are similarto each other and if the r infinitesimal transformations:
Yk f =r
∑j=1
gk j Z j f (k=1 ···r)
† LIE, Archiv for Math. og Naturv. Vols. 3 and 4, Christiania 1878 and 1879; Math. Ann. Vol.XXV, pp. 96–107.

§ 92. 367
are chosen as is indicated by Theorem 65, then there always exists at least onetransformation:
y1 = Φ1(x1, . . . ,xs), . . . , ys = Φs(x1, . . . ,xs)
which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively. One can set up each trans-formation of this nature as soon as one has integrated certain complete systems.One obtains the most general transformation which actually transfers the groupX1 f , . . . ,Xr f to the group Z1 f , . . . ,Zr f by choosing the constants gk j in the Yk f inthe most general way, and afterwards, by seeking the most general transformationwhich transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively.
The complete systems which are spoken of in this proposition do not at all appearin one case, namely in the case where the number ρ defined earlier on is equal tozero, hence when amongst the n(r−n) functions ϕkν(x1, . . . ,xs), there are exactly swhich are mutually independent. Indeed, we have already remarked on p. 357 thatin this case, the equations:
ϕkν(x1, . . . ,xs)−ψkν(y1, . . . ,ys) = 0 (k=1 ···r−n ; ν =1 ···n)
are solvable both with respect to y1, . . . ,ys and with respect to x1, . . . ,xs, and thatthey represent the most general transformation which transfers X1 f , . . . ,Xr f toY1 f , . . . ,Yr f , respectively.
On the other hand, there are cases in which the integration of the mentioned com-plete systems is executable, for instance, this is always so when the finite equationsof both groups X1 f , . . . ,Xr f and Y1 f , . . . ,Yr f are known; however, we cannot getinvolved in this sort of questions.
§ 92.
Let the two r-term groups X1 f , . . . ,Xr f and Z1 f , . . . ,Zr f be similar to each other, sothat the transformations X1 f , . . . ,Xr f convert into the infinitesimal transformationsof the other group.
If we now choose r independent infinitesimal transformations:
Yk f =r
∑j=1
gk j Z j f (k=1 ···r)
in the group Z1 f , . . . ,Zr f , then according to what precedes, there exists a trans-formation which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively, if and only ifY1 f , . . . ,Yr f possess the properties indicated in Theorem 65.
We assume that Y1 f , . . . ,Yr f satisfy this requirement and that yi = Φi(x1, . . . ,xs)is a transformation which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively.Then by the transformation yi = Φi(x), the general infinitesimal transformation:e1 X1 f + · · ·+ er Xr f receives the form: e1 Y1 f + · · ·+ er Yr f , hence our transforma-tion associates to every infinitesimal transformation of the group X1 f , . . . ,Xr f acompletely determined infinitesimal transformation of the group Z1 f , . . . ,Zr f , and

368 19 Theory of the Similarity of r-term Groups
conversely. The univalent and invertible relationships which is established in thisway between the infinitesimal transformations of the two groups is, according top. 343, a holoedrically isomorphic one.
Now, let x01, . . . ,x
0s be a point in general position, i.e. a point for which the trans-
formations X1 f , . . . ,Xn f produce n independent directions, so that the functionsϕkν(x) in the identities:
(3) Xn+k f ≡n
∑ν=1
ϕkν(x1, . . . ,xn)Xν f (k=1 ···r−n)
behave regularly. According to Chap. 11, p. 216, the infinitesimal transformationse1 X1 f + · · ·+ er Xr f that leave invariant the point x0
1, . . . ,x0s have the form:
(27)r−n
∑k=1
εk
Xq+k f −
n
∑ν=1
ϕkν(x01, . . . ,x
0s )Xν f
,
where it is understood that ε1, . . . ,εr−n are arbitrary parameters, and all theseinfinitesimal transformations generate an (r − n)-term subgroup of the groupX1 f , . . . ,Xr f .
If, in the identities (3), we introduce the new variables y1, . . . ,ys by means of thetransformation: yi = Φi(x1, . . . ,xs), then we obtain between Y1 f , . . . ,Yr f the identi-ties:
(3’) Yn+k f ≡n
∑ν=1
ψkν(y1, . . . ,ys)Yν f (k=1 ···r−n).
Hence with y0i =Φi(x0
1, . . . ,x0s ), after the introduction of the variables y, the infinites-
imal transformation (27) is transferred to:
(27’)r−n
∑k=1
εk
Yq+k −
n
∑ν=1
ψkν(y01, . . .y
0s )Yν f
,
that is to say, to the most general infinitesimal transformation e1 Y1 f + · · ·+ er Yr fwhich leaves fixed the point: y0
1, . . . ,y0s in general position. At the same time, all
infinitesimal transformations of the form (27’) naturally generate an (r − n)-termsubgroup of the group Z1 f , . . . ,Zr f .
In that, we have an important property of the holoedrically isomorphic re-lationship which is established between the two groups by the transformation:yi = Φi(x1, . . . ,xs). Indeed, to the most general subgroup of X1 f , . . . ,Xr f whichleaves fixed an arbitrarily chosen point: x0
1, . . . ,x0s in general position, this holoedri-
cally isomorphic relationship always associates the most general subgroup ofY1 f , . . . ,Yr f which leaves fixed a point: y0
1, . . . ,y0s in general position. Exactly the
same association is found in the reverse direction; in other words: when the point:x0
1, . . . ,x0s runs through all possible positions, then the point: y0
1, . . . ,y0s also runs
through all possible positions.

§ 92. 369
Now conversely, for two r-term groups in the same number of variables to besimilar to each other, then obviously, one must be able to produce between them aholoedrically isomorphic relationship of the constitution just described. We claimthat this necessary condition is at the same time also sufficient; we will show thatthe two groups are really similar, when such a holoedrically isomorphic relationshipcan be produced between them.
In fact, let Z1 f , . . . ,Zr f be any r-term group which can be related in a holoedri-cally isomorphic way to the group X1 f , . . . ,Xr f in the said manner; let e1 Y1 f + · · ·+er Yr f be the infinitesimal transformation of the group Z1 f , . . . ,Zr f which is asso-ciated to the general infinitesimal transformation e1 X1 f + · · ·+ er Xr f of the groupX1 f , . . . ,Xr f through the concerned holoedrically isomorphic relationship.
If X1 f , . . . ,Xn f are linked together by no linear relations, while Xn+1 f , . . . ,Xr fcan be expressed by means of X1 f , . . . ,Xn f in the known way, then the most gen-eral infinitesimal transformation contained in the group X1 f , . . . ,Xr f which leavesinvariant the point: x0
1, . . . ,x0s in general position reads as follows:
(27)r−n
∑k=1
εk
Xn+k f −
n
∑ν=1
ϕkν(x01, . . . ,x
0s )Xν f
.
Under the assumptions made, to it corresponds, in the group Z1 f , . . . ,Zr f , the in-finitesimal transformation:
(28)r−n
∑k=1
εk
Yn+k f −
n
∑ν=1
ϕkν(x01, . . . ,x
0s )Yν f
,
which now is in turn the most general transformation of the group Z1 f , . . . ,Zr fwhich leaves at rest a certain point: y0
1, . . . ,y0s in general position. Here, if the point
x01, . . . ,x
0s runs through all possible positions, then the point y0
1, . . . ,y0s does the same.
Since (28) is the most general infinitesimal transformation e1 Y1 f + · · ·+ er Yr fwhich leaves invariant the point: y0
1, . . . ,y0s in general position, Y1 f , . . . ,Yn f can be
linked together by no linear relation, and by contrast, Yn+1 f , . . . ,Yr f must be ex-pressible by means of Y1 f , . . . ,Yn f in the known way. From this, we deduce that themost general infinitesimal transformation e1 Y1 f + · · ·+er Yr f which leaves fixed thepoint: y0
1, . . . ,y0s can also be represented by the following expression:
(28’)r−n
∑k=1
ε ′k
Yn+k f −
n
∑ν=1
ψkν(y01, . . . ,y
0s )Yν f
.
Evidently, every infinitesimal transformation contained in the expression (28) isidentical to one of the infinitesimal transformations (28’), so for arbitrarily chosenε1, . . . ,εr−n, it must always be possible to determine ε ′1, . . . ,ε ′r−n so that the equation:
r−n
∑k=1
(εk − ε ′k)Yn+k f −n
∑ν=1
r−n
∑k=1
(εk ϕkν(x0)− ε ′k ψkν(y0)
)Yν f = 0

370 19 Theory of the Similarity of r-term Groups
is identically satisfied.Because Y1 f , . . . ,Yr f are independent infinitesimal transformations, the equation
just written decomposes in the following ones:
(29)εk − ε ′k = 0,
r−n
∑j=1
(ε j ϕ jν(x0)− ε ′j ψ jν(y0)
)= 0
(k=1 ···r−n ; ν =1 ···n).
From this, it comes immediately:
ε ′1 = ε1, . . . , ε ′r−n = εr−n,
and in addition, we obtain thanks to the arbitrariness of the ε , yet the equations:
ϕkν(x01, . . . ,x
0s )−ψkν(y0
1, . . . ,y0s ) = 0 (k=1 ···r−n ; ν =1 ···n),
which must therefore, under the assumptions made, hold for the two points x01, . . . ,x
0s
and y01, . . . ,y
0s . At present, if we still remember that the point y0
1, . . . ,y0s runs through
all possible positions, as soon as x01, . . . ,x
0s does this, then we realize immediately
that, under the assumptions made, the n(r−n) equations:
(4) ϕkν(x1, . . . ,xs)−ψkν(y1, . . . ,ys) = 0 (k=1 ···r−n ; ν =1 ···n)
are compatible with each other and produce relations neither between the x alone,not between the y alone.
According to Theorem 65, p. 365, it is thus proved that the two groupsX1 f , . . . ,Xr f and Z1 f , . . . ,Zr f are similar to each other, and this is just what wewanted to prove.
We therefore have the
Proposition 3. Two r-term groups G and Γ in the same number of variables aresimilar to each other if and only if it is possible to relate them in a holoedricallyisomorphic way so that the most general subgroup of G which leaves invariant a de-termined point in general position always corresponds, in whichever way the pointmay be chosen, to the most general subgroup of Γ which leaves invariant a certainpoint in general position, and so that the same correspondence also holds in thereverse direction.
But at the same time, it is also proved that, under the assumption made rightnow, there exists a transformation: yi = Φi(x1, . . . ,xs) which transfers X1 f , . . . ,Xr fto Y1 f , . . . ,Yr f , respectively. We can therefore also state the following somewhatmore specific proposition:
Proposition 4. If the r independent infinitesimal transformations:
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r)
§ 92. 371
generate an r-term group G, and if the r independent infinitesimal transformations:
Yk f =s
∑i=1
ηki(y1, . . . ,ys)∂ f∂yi
(k=1 ···r)
generate an r-term group Γ , then there is a transformation: yi =Φi(x1, . . . ,xs) whichtransfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively, if and only if the following con-ditions are satisfied:
Firstly: if G contains exactly r − n independent infinitesimal transformationswhich leave invariant an arbitrarily chosen point in general position, then Γ mustalso contain exactly r − n independent infinitesimal transformations having thisconstitution.
Secondly: if one associates to every infinitesimal transformation e1 X1 f + · · ·+er Xr f of G the infinitesimal transformation e1 Y1 f + · · ·+ er Yr f of Γ , then the twogroups must be related to each other in a holoedrically isomorphic way, in the man-ner indicated by the previous proposition.
Because the most general subgroup of G which leaves invariant a determinedpoint in general position is completely defined by this point, and moreover, becausethe holoedrically isomorphic relationship between G and Γ mentioned several timesassociates to every subgroup of G of this kind a subgroup of Γ constituted in thesame way, it follows that this relationship between G and Γ also establishes a cor-respondence between the points x1, . . . ,xs and the points y1, . . . ,ys; however, thiscorrespondence is in general infinitely multivalent, for to every point x1, . . . ,xs thereobviously correspond all points y1, . . . ,ys which satisfy the equations (4), and in-versely. As a result, this agrees with the fact that there are in general infinitely manytransformations which transfer X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively.
For transitive groups, the criterion of similarity enunciated in Proposition 3 turnsout to be particularly simple. We shall see later (Chap. 21) that two r-term transitivegroups G and Γ in the same number, say s, of variables are already similar to eachother when it is possible to relate them in a holoedrically isomorphic way so that, toa single (r− s)-term subgroup of G which leaves fixed one point in general positionthere corresponds an (r− s)-term subgroup of Γ having the same constitution.
If an r-term group:
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r)
having the composition:
[Xi, Xk] =r
∑σ=1
cikσ Xσ f
is presented, then one can ask for all transformations:
x′i = Φi(x1, . . . ,xs) (i=1 ···s)

372 19 Theory of the Similarity of r-term Groups
that leave it invariant, namely one can ask for all transformations through which thegroup is similar to itself.
Thanks to the developments of the previous paragraphs, we are in a position todetermine all the transformations in question.
To begin with, we relate in the most general holoedrically isomorphic way thegroup X1 f , . . . ,Xr f to itself, hence we choose in the most general way r independentinfinitesimal transformations:
Ξk f =r
∑j=1
gk j X j f (k=1 ···r)
that stand pairwise in the relationships:
[Ξi, Ξk] =r
∑σ=1
cikσ Ξσ f .
Afterwards, we specialize the arbitrary elements contained in the gk j in such a waythat the following conditions are satisfied: when there are no relations betweenX1 f , . . . ,Xn f , while Xn+1 f , . . . ,Xr f express themselves by means of X1 f , . . . ,Xn f :
Xn+k f ≡n
∑ν=1
ϕkν(x1, . . . ,xs)Xν f (k=1 ···r−n),
then firstly, also Ξ1 f , . . . ,Ξn f should be linked together by no linear relation, whileby contrast Ξn+1 f , . . . ,Ξr f also express themselves by means of Ξ1 f , . . . ,Ξn f :
Ξn+k f ≡n
∑ν=1
ψkν(x1, . . . ,xs)Ξν f (k=1 ···r−n),
and secondly, the n(r−n) equations:
ϕkν(x′1, . . . ,x′s) = ψkν(x1, . . . ,xs) (k=1 ···r−n ; ν =1 ···n)
should be mutually compatible, and they should produce relations neither betweenthe x alone, nor between the x′ alone.
If all of this is realized, then following the introduction of § 91, we determinethe most general transformation x′i = Φi(x1, . . . ,xs) which transfers Ξ1 f , . . . ,Ξr f toX ′
1 f , . . . ,X ′r f , respectively, where:
X ′k f =
r
∑i=1
ξki(x′1, . . . ,x′s)
∂ f∂x′i
.
The transformation in question is then the most general one by which the groupX1 f , . . . ,Xr f is transferred to itself.
It is clear that the totality of all transformations which leave invariant the groupX1 f , . . . ,Xr f forms a group by itself, namely the largest group in which X1 f , . . . ,Xr f

§ 93. 373
is contained as an invariant subgroup. This group can be finite or infinite, contin-uous or not continuous, but in all circumstances its transformations order as in-verses by pairs, because when a transformation x′i = Φi(x1, . . . ,xs) leaves the groupX1 f , . . . ,Xr f invariant, then the associated inverse transformation also does this.
If by chance the just defined group consists of a finite number of different fam-ilies of transformations and if at the same time each one of these families containsonly a finite number of arbitrary parameters, then according to Chap. 18, p. 327sq., there is in the concerned group a family of transformations which constitutesa finite continuous group; then this family is the largest continuous group in whichX1 f , . . . ,Xr f is contained as an invariant subgroup.
Up to now, we have spoken of similarity only for groups which contain the samenumber of variables. But about that, it was not excluded that certain of the variableswere absolutely not transformed by the concerned groups, so that they actually didnot appear in the infinitesimal transformations.
Now, for the groups which do not contain the same number of variables, one canalso speak of similarity; indeed, one can always complete the number of variablesin one of the groups so that one adds a necessary number of variables that are ab-solutely not transformed by the concerned group. Then one has two groups in thesame number of variables and one can examine whether they are similar to eachother, or not.
In the sequel, unless the contrary is expressly stressed, we shall actually interpretthe concept of similarity in the original, narrower sense.
§ 93.
In order to illustrate the general theory of similarity by an example, we will examinewhether the two three-term groups in two independent variables:
X1 f =∂ f∂x1
, X2 f = x1∂ f∂x1
+ x2∂ f∂x2
,
X3 f = x21
∂ f∂x1
+(2x1x2 +C x22)
∂ f∂x2
and:
Y1 f =∂ f∂y1
+∂ f∂y2
, Y2 f = y1∂ f∂y1
+ y2∂ f∂y2
,
Y3 f = y21
∂ f∂y1
+ y22
∂ f∂y2
are similar to each other.As one has remarked, the Yk f here are already chosen in such a way that one has
at the same time:
[X1, X2] = X1 f , [X1, X3] = 2X2 f , [X2, X3] = X3 f
and:[Y1, Y2] = Y1 f , [Y1, Y3] = 2Y2 f , [Y2, Y3] = Y3 f

374 19 Theory of the Similarity of r-term Groups
Although the Yk f are not chosen in the most general way so that the shown relationshold, it is nevertheless not necessary to do this, because the result would not bemodified by this.
We find:X3 f ≡−(x2
1 +C x1x2)X1 f +(2x1 +C x2)X2 f
and:Y3 f ≡−y1y2 Y1 f +(y1 + y2)Y2 f ,
whence one must have:
y1y2 = x21 +C x1x2, y1 + y2 = 2x1 +C x2.
As long as the constant C does not vanish, these equations determine a transforma-tion, and consequently, according to our general theory, the two groups are similarto each other in the case C 6= 0. But if C = 0, it comes a relation between y1 and y2alone, hence in any case, there exists no transformation which transfers X1 f , X2 f ,X3 f to Y1 f , Y2 f , Y3 f , respectively; one can easily convince oneself that in this case,the two groups are actually not similar to each other.
§ 94.
Subsequently to the theory of the similarity of r-term groups, we yet want to brieflytreat a somewhat more general question and to indicate its solution.
We imagine, in the variables x1, . . . ,xs, that any p infinitesimal transformations:X1 f , . . . ,Xp f are presented, hence not exactly some which generate a finite group,and likewise, we imagine in y1, . . . ,ys that any p infinitesimal transformationsY1 f , . . . ,Yp f are presented. We ask under which conditions there is a transformationyi = Φi(x1, . . . ,xs) which transfers X1 f , . . . ,Xp f to Y1 f , . . . ,Yp f , respectively. Here,we do not demand that X1 f , . . . ,Xp f should be independent infinitesimal transfor-mations, since this assumption would in fact not interfere with the generality ofthe considerations following, but it would complicate the presentation, because itwould always have to be taken into account.
At first, we can lead back the above general problem to the special case casewhere the independent equations amongst the equations: X1 f = 0, . . . , Xp f = 0form a complete system.
Indeed, if there is a transformation which transfers X1 f , . . . ,Xp f to Y1 f , . . . ,Yp f ,respectively, then according to Chap. 4, p. 100, every expression:
Xk(X j( f )
)−X j
(Xk( f )
)= [Xk, X j]
also converts into the corresponding expression:
Yk(Yj( f )
)−Yj
(Yk( f )
)= [Yk, Yj].
Hence, if the independent equations amongst the equations X1 f = 0, . . . , Xp f = 0 doactually not form already a complete system, then to X1 f , . . . ,Xp f , we can yet addall the expressions [Xk, X j], and also, we must only add to Y1 f , . . . ,Yp f all the expres-

§ 94. 375
sions [Yk, Yj]. The question whether there exists a transformation of the demandedconstitution then amounts to the question whether there exists a transformation withtransfers X1 f , . . . ,Xp f , [Xk, X j] to Y1 f , . . . ,Yp f , [Yk, Yj], respectively, where one hasto set for k and j the numbers 1,2, . . . , p one after the other.
Now, if the independent equations amongst the equations: X1 f = 0, . . . , Xp f = 0,[Xk, X j] = 0 also do not form a complete system, then we yet add the expressions[Xi, [Xk, X j]
]and the
[[Xi, Xk], [X j, Xl ]
], and the corresponding expressions in the
Y f as well. If we continue in this way, we obtain at the end that our initial problemis lead back to the following one:
In the variables x1, . . . ,xs, let r infinitesimal transformations: X1 f , . . . ,Xr f bepresented, of which n6 r, say X1 f , . . . ,Xn f , are linked together by no linear relation,while Xn+1 f , . . . ,Xr f can be linearly expressed in terms of X1 f , . . . ,Xn f :
Xn+k f ≡n
∑ν=1
ϕkν(x1, . . . ,xs)Xν f (k=1 ···n−r) ;
in addition, let relations of the form:
[Xk, X j] =n
∑ν=1
ϕk jν(x1, . . . ,xs)Xν f (k, j=1 ···r)
yet hold, so that the independent equations amongst the equations X1 f = 0, . . . ,Xr f = 0 form an n-term complete system. Moreover, in the variables y1, . . . ,ys, let rinfinitesimal transformations Y1 f , . . . ,Yr f be presented. To determine whether thereis a transformation yi = Φi(x1, . . . ,xs) which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f ,respectively.
For a transformation of the constitution demanded here to exist, Y1 f , . . . ,Yr fshould naturally not be linked together by a linear relation, while Yn+1 f , . . . ,Yr fshould be linearly expressible in terms of Y1 f , . . . ,Yn f :
Yn+k f ≡n
∑ν=1
ψkν(y1, . . . ,ys)Yν f (k=1 ···r−n),
and there should be relations of the form:
[Yk, Yj] =n
∑ν=1
ψk jν(y1, . . . ,ys)Yν f (k, j=1 ···r).
In addition, the equations:
(30)
ϕkν(x1, . . . ,xs)−ψkν(y1, . . . ,ys) = 0 (k=1 ···r−n ; ν =1 ···n)
ϕk jν(x1, . . . ,xs)−ψk jν(y1, . . . ,ys) = 0 (k, j=1 ···r ; ν =1 ···n)
should yet neither contradict mutually, nor conduct to relations between the xalone or the y alone, since these equations will obviously reduce to identities after

376 19 Theory of the Similarity of r-term Groups
the substitution: yi = Φi(x1, . . . ,xs), when the transformation: yi = Φi(x) convertsX1 f , . . . ,Xr f into Y1 f , . . . ,Yr f , respectively.
We want to assume that all these conditions are satisfied and that all the equa-tions (30) reduce to the ρ mutually independent equations:
(31) ϕ1(x)−ψ1(x) = 0, . . . , ϕρ(x)−ψρ(x) = 0.
Thanks to considerations completely similar to those of p. 348 sq., we realize thatthe determination of a transformation which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f ,respectively, amounts to determining a system of equations in the 2s variablesx1, . . . ,xs, y1, . . . ,ys, and to be precise, a system of equations having the followingconstitution: it must admit the r infinitesimal transformations: Ωk f = Xk f +Yk f ,it must consist of exactly s independent equations, it must be solvable both withrespect to x1, . . . ,xs and with respect to y1, . . . ,ys, and lastly, it must comprise the ρequations (31).
A system of equations which comprises the ρ equations (31) and which admitsthe r infinitesimal transformations Ωk f embraces at the same time all the r ρ equa-tions:
Ωk(ϕ j(x)−ψ j(x)
)= Xk ϕ j(x)−Yk ψ j(y) = 0
(k=1 ···r ; j=1 ···ρ).
If these equations are not a consequence of (31), we can again deduce from themnew equations which must be contained in the sought system of equations, and soon. If we proceed in this way, then at the end, we must come either to relationswhich contradict each other, or to relations between the x alone, or to to relationsbetween the y alone, or lastly, to a system of σ 6 s independent equations:
(32) ϕ1(x)−ψ1(y) = 0, . . . , ϕσ (x)−ψσ (y) = 0 (σ >ρ)
which possesses the following two properties: it produces no relation between thex or the y alone, and it admits the r infinitesimal transformations Ωk f , so that eachone of the r σ equations:
Ωk(ϕ j(x)−ψ j(y)
)= 0 (k=1 ···r ; j=1 ···σ).
is a consequence of (32).Evidently, there can be a transformation which transfers X1 f , . . . ,Xr f to
Y1 f , . . . ,Yr f , respectively, only when we are conducted to a system of equa-tions (32) having the constitution defined just now by means of the indicatedoperations. So we need to consider only this case.
If the entire number σ is precisely equal to s, then the system of equations (32)taken for itself represents a transformation which achieves the demanded transferand to be precise, it is obviously the only transformation which does this. Wewill show that also in the case σ < s, a transformation exists which transfersX1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively; here, we produce the proof of that by

§ 94. 377
indicating a method which conducts to the determination of a transformation havingthe demanded constitution.
It is clear that the equations (32) neither cancel the independence of the equa-tions: X1 f = 0, . . . , Xn f = 0, nor they cancel the independence of the equations:Y1 f = 0, . . . , Yn f = 0, for they produce relations neither between the x alone, norbetween the y alone.
Besides, it is to be observed that relations of the form:
[Ωk, Ω j] =n
∑ν=1
ϕk jν(x)Ων f =n
∑ν=1
ψk jν(y)Ων f
(k, j=1, 2 ···n)
hold, in which the coefficients ϕk jν(x) = ψk jν(y) behave regularly in general for thesystems of values of the system of equations: ϕ1 −ψ1 = 0, . . . , ϕσ −ψσ = 0. Thus,the case settled in Theorem 19, p. 146 is present here.
As in p. 357 sq., we introduce the solutions of the n-term complete system X1 f =0, . . . , Xn f = 0 as new x and those of the complete system Y1 f = 0, . . . , Yn f = 0 asnew y, and on the occasion, exactly as we did at that time, we have to make a dis-tinction between the solutions which can be expressed in terms of ϕ1(x), . . . ,ϕσ (x)or, respectively, in terms of ψ1(y), . . . ,ψσ (y), and the solutions which are indepen-dent of the ϕ , or respectively, of the ψ . In this way, we simplify the shape of theequations (32), and then, exactly as on p. 361 sq., we can determine a system ofequations which admits Ω1 f , . . . ,Ωr f , which contains exactly s independent equa-tions, which is solvable both with respect to x1, . . . ,xs and with respect to y1, . . . ,ys,and lastly, which embraces the equations (32). Obviously, the obtained system ofequations represents a transformation which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f ,respectively.
Thus, we have the following Theorem.
Theorem 66. If, in the variables x1, . . . ,xs, p infinitesimal transformationsX1 f , . . . ,Xp f are presented and if, in the variables y1, . . . ,ys, p infinitesimaltransformations Y1 f , . . . ,Yp f are also presented, then one can always decide, bymeans of differentiations and of eliminations, whether there is a transformationyi =Φi(x1, . . . ,xs) which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively; if thereis such a transformation, then one can determine the most general transformationwhich accomplishes the concerned transfer, as soon as one has integrated certaincomplete systems.†
—————–
† LIE, Archiv for Math. og Naturv., Vol. 3, p. 125, Christiania 1878.


Chapter 20Groups, the Transformations of WhichAre Interchangeable With All Transformationsof a Given Group
Thanks to the developments of the §§ 89, 90, 91, pp. 343 up to 367, we are in theposition to determine all transformations which leave invariant a given r-term group:
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r).
Amongst all transformations of this nature, we now want yet to pick out those whichin addition possess the property of leaving invariant every individual transformationof the group X1 f , . . . ,Xr f , and we want to occupy ourselves somehow more closelywith these transformations.
When a transformation T leaves invariant every individual transformation S ofthe group X1 f , . . . ,Xr f , then according to p. 271, it stands with respect to S in therelationship:
T−1 ST = S,
or, what is the same, in the relationship:
ST = T S,
hence it is interchangeable with T . Thus, we can also characterize the transforma-tions just defined in the following way: they are the transformations which are in-terchangeable with all transformations of the group X1 f , . . . ,Xr f .
§ 95.
According to Chap. 15, p. 268, the expression e1 X1 f + · · ·+ er Xr f can be regardedas the general symbol of a transformation of the group X1 f , . . . ,Xr f . Consequently,a transformation x′i = Φi(x1, . . . ,xs) will leave invariant every individual transforma-tion of the group X1 f , . . . ,Xr f when, for arbitrary choice of the e, it leaves invariantthe expression e1 X1 f + · · ·+er Xr f , hence when the expression e1 X1 f + · · ·+er Xr ftakes the form: e1 X ′
1 f + · · ·+ er X ′r f after the introduction of the new variables x′i =
Φi(x), where:
379

380 20 Transformations Which Are Interchangeable With All Transformations of a Group
X ′k f =
s
∑i=1
ξki(x′1, . . . ,x′s)
∂ f∂x′i
.
Here, for this to hold, it is necessary and sufficient that the r infinitesimal trans-formations: X1 f , . . . ,Xr f receive the form X ′
1 f , . . . ,X ′r f , respectively, after the intro-
duction of the new variables x′i.It is clear that there are transformations x′i = Φi(x) having the constitution de-
manded; indeed, the identity transformation x′i = xi is such a transformation; be-sides, this results from the Proposition 2 of the preceding chapter (p. 366), becausethis proposition shows that there are transformations which transfer X1 f , . . . ,Xr f toX ′
1 f , . . . ,X ′r f , respectively. In addition, it follows from the developments achieved
at that time that the most general transformation of the demanded constitution isrepresented by the most general system of equations:
x′1 = Φ1(x1, . . . ,xs), . . . , x′s = Φs(x1, . . . ,xs)
which admits the r-term group: X1 f + X ′1 f , . . . , Xr f + X ′
r f in the 2s variablesx1, . . . ,xs, x′1, . . . ,x
′s.
If one executes, one after the other, two transformations which leave invariant ev-ery individual transformation of the group: X1 f , . . . ,Xr f , then obviously, one alwaysobtains a transformation which does the same; consequently, the totality of all trans-formations of this constitution forms a group G. This group can be discontinuous,and it can even reduce to the identity transformation; it can consist of several discretefamilies of which each one contains only a finite number of arbitrary parameters, itcan be infinite; but its transformations are always ordered as inverses by pairs, sinceif a transformation leaves invariant all transformations of the group: X1 f , . . . ,Xr f ,then the associated inverse transformation naturally possesses the same property.
If the just defined group G contains only a finite number of arbitrary parameters,then it belongs to the category of groups which was discussed in Chap. 18, and ac-cording to Theorem 56, p. 328, it certainly comprises a finite continuous subgroupsgenerated by infinitesimal transformations. On the other hand, if the group G is in-finite, then thanks to considerations similar to those of Chap. 18, it can be provedthat it comprises one-term groups, and in fact, infinitely many such groups that aregenerated by infinitely many independent infinitesimal transformations.
At present, we take up directly the problem of determining all one-term groupswhich are contained in the group G.
According to Chap. 15, p. 271 and , the r expressions X1 f , . . . ,Xr f remain invari-ant by all transformations of the one-term group Z f when the r relations:
[Xk, Z] = Xk(Z( f )
)−Z(Xk( f )
)= 0 (k=1 ···r)
are identically satisfied, hence when the infinitesimal transformation Z f is inter-changeable with all transformations of the group X1 f , . . . ,Xr f . Thus, the determina-tion of all one-term groups having the constitution defined a short while ago amountsto the determination of the most general infinitesimal transformation Z f which is in-terchangeable with all Xk f .

§ 95. 381
If one has two infinitesimal transformations Z1 f and Z2 f which are interchange-able with all Xk f , then all expressions [Z1, Xk] and [Z2, Xk] vanish identically,whence the Jacobi identity:[
[Z1, Z2], Xk]+[[Z2, Xk], Z1
]+[[Xk, Z1], Z2
]≡ 0
reduces to: [[Z1, Z2], Xk
]≡ 0.
Thus, the following holds:
Proposition 1. If the two infinitesimal transformations Z1 f and Z2 f are inter-changeable with all infinitesimal transformations of the r-term group X1 f , . . . ,Xr f ,then the transformation [Z1, Z2] also is so.
On the other hand, every infinitesimal transformation aZ1 f + bZ2 f is at thesame time interchangeable with X1 f , . . . ,Xr f , whichever values the constantsa and b may have. Hence if by chance there is only a finite number, say q, ofindependent infinitesimal transformations Z1 f , . . . ,Zq f which are interchangeablewith X1 f , . . . ,Xr f , then the most general infinitesimal transformation having thesame constitution has the form: λ1 Z1 f + · · ·+ λq Zq f , where it is understood thatλ1, . . . ,λq are arbitrary parameters. Then because of Proposition 1, there must existrelations of the form:
[Zi, Zk] =q
∑σ=1
c′ikσ Zσ f ,
so that Z1 f , . . . ,Zq f generate a q-term group.
At present, we seek to determine directly the most general infinitesimal transfor-mation:
Z f =s
∑i=1
ζi(x1, . . . ,xs)∂ f∂xi
which is interchangeable with all infinitesimal transformations of the groupX1 f , . . . ,Xr f .
The r condition-equations [BEDINGUNGSGLEICHUNGEN]:
[X1, Z] = 0, . . . , [Xr, Z] = 0
decompose immediately in the following r s equations:
Xk ζi = Z ξki (k=1 ···r ; i=1 ···s),
or, if written in more length:
(1)s
∑ν=1
ξkν(x)∂ζi
∂xν=
s
∑ν=1
∂ξki
∂xνζν (k=1 ···r ; i=1 ···s).
The question is to determine the most general solutions ζ1, . . . ,ζs to these differen-tial equations.

382 20 Transformations Which Are Interchangeable With All Transformations of a Group
Let:
(2) ζi = ωi(x1, . . . ,xs) (i=1 ···n)
be any system of solutions of (1), whence all the expressions:
Xk ωi −s
∑ν=1
∂ξki
∂xνζν
vanish identically after the substitution: ζ1 = ω1(x), . . . , ζs = ωs(x); in other words:the system of equations (2) in the 2s variables x1, . . . ,xs, ζ1, . . . ,ζs admits the rinfinitesimal transformations:
Wk F = Xk f +s
∑i=1
s
∑ν=1
∂ξki
∂xνζν
∂ f∂ζi
(k=1 ···r).
Conversely, if a system of equations of the form (2) admits the infinitesimal trans-formations W1 f , . . . ,Wr f , then ω1(x), . . . ,ωs(x) are obviously solutions of the differ-ential equations (1). Consequently, the integration of the differential equations (1)is equivalent to the determination of the most general system of equations (2) whichadmits the infinitesimal transformations W1 f , . . . ,Wr f .
Every system of equations which admits W1 f , . . . ,Wr f also allows the infinitesi-mal transformation Wk(Wj( f ))−Wj(Wk( f )) = [Wk,Wj]; we compute it.
We have:
[Wk,Wj] = [Xk, X j]+1···s
∑i, µ, ν
ξkν
∂ 2ξ ji
∂xµ ∂xν−ξ jν
∂ 2ξki
∂xµ ∂xν
ζµ
∂ f∂ζi
+1···s
∑i, µ, ν
∂ξkν∂xµ
∂ξ ji
∂xν−
∂ξ jν
∂xµ
∂ξki
∂xν
ζµ
∂ f∂ζi
,
and here, the right-hand side can be written:
[Xk, X j]+1···s
∑i, µ
∂∂xµ
s
∑ν=1
ξkν
∂ξ ji
∂xν−ξ jν
∂ξki
∂xν
ζµ
∂ f∂ζi
.
But now, there are relations of the form:
[Xk, X j] =r
∑σ=1
ck jσ Xσ f ,
from which it follows:
s
∑ν=1
ξkν
∂ξ ji
∂xν−ξ jν
∂ξki
∂xν
=
r
∑σ=1
ck jσ ξσ i,
and therefore, we get simply:

§ 95. 383
[Wk,Wj] =r
∑σ=1
ck jσ Wσ f .
From this, we see that W1 f , . . . ,Wr f generate an r-term group in the 2s variablesx1, . . . ,xs, ζ1, . . . ,ζs; but this was closely presumed.
There can be n, amongst the infinitesimal transformations X1 f , . . . ,Xr f , sayX1 f , . . . ,Xn f that are linked together by no linear relation of the form:
χ1(x1, . . . ,xs)X1 f + · · ·+χn(x1, . . . ,xs)Xn f = 0,
while Xn+1 f , . . . ,Xr f can be expressed in the following way:
(3) Xn+k f ≡n
∑ν=1
ϕkν(x1, . . . ,xs)Xν f (k=1 ···r−n).
Under these assumptions, the differential equations (1) can also be written as:
Xν ζi −Z ξν i = 0 (ν =1 ···n ; i=1 ···s)n
∑ν=1
ϕkν(x)Xν ζi −Z ξn+k, i = 0 (k=1 ···r−n ; i=1 ···s).
Hence if the expressions X1 ζ1, . . . ,Xn ζi are took away, we obtain between ζ1, . . . ,ζsthe finite equations:
(4)
s
∑π=1
∂ξn+k, i
∂xπ−
n
∑ν=1
ϕkν∂ξν i
∂xπ
ζπ = 0
(k=1 ···r−n ; i=1 ···s).
It stands to reason that every system of equations of the form (2) which admitsthe group W1 f , . . . ,Wr f must comprise the equations (4).
The equations (4) are linear and homogeneous in ζ1, . . . ,ζs; so if amongst them,one finds exactly s that are mutually independent, then ζ1 = 0, . . . , ζs = 0 is theonly system of solutions which satisfies the equations. In this case, there is only onesystem of equations of the form (2) which admits the group W1 f , . . . ,Wr f , namelythe system of equations: ζ1 = 0, . . . , ζs = 0, hence there is no infinitesimal transfor-mation Z f which is interchangeable with all Xk f .
Differently, assume that the equations (4) reduce to less than s, say to m < sindependent equations. We will see that in this case, aside from the useless systemζ1 = 0, . . . , ζs = 0, there are yet also other systems of the form (2) which admit thegroup W1 f , . . . ,Wr f .
Above all, we observe that the system of equations (4) admits the groupW1 f , . . . ,Wr f .
In order to prove this, we write down the matrix which is associated to the in-finitesimal transformations W1 f , . . . ,Wr f :

384 20 Transformations Which Are Interchangeable With All Transformations of a Group
(5)
∣∣∣∣∣∣∣ξ11 · · ξ1s ∑s
ν=1∂ξ11∂xν
ζν · · ∑sν=1
∂ξ1s∂xν
ζ ν· · · · · · · ·
ξr1 · · ξrs ∑sν=1
∂ξr1∂xν
ζν · · ∑sν=1
∂ξrs∂xν
ζ ν
∣∣∣∣∣∣∣ .We will show that (4) belongs to the system of equations that one obtains by settingequal to zero all (n+1)× (n+1) determinants of this matrix. As a result, accordingto Chap. 14, Theorem 39, p. 240, it will be proved that (4) admits the the groupW1 f , . . . ,Wr f .
Amongst the (n+1)× (n+1) determinants of the matrix (5), there are those ofthe form:
D =
∣∣∣∣∣∣∣∣∣∣∣
ξ1k1 · · ξ1kn ∑sν=1
∂ξ1σ∂xν
ζν· · · · ·
ξnk1 · · ξnkn ∑sν=1
∂ξnσ∂xν
ζν· · · · ·
ξn+ j,k1 · · ξn+ j,kn ∑sν=1
∂ξn+ j,σ∂xν
ζν
∣∣∣∣∣∣∣∣∣∣∣.
If we use the identities following from (3):
ξn+ j,π ≡n
∑ν=1
ϕ jν(x)ξνπ (π =1 ···s ; j=1 ···r−n),
then we can obviously write D as:
D = ∑ ±ξ1k1 · · · ξnkn
s
∑ν=1
∂ξn+ j,σ
∂xν−
n
∑τ=1
ϕ jτ∂ξτσ∂xν
ζν .
Now, under the assumptions made, not all determinants of the form:
∑ ±ξ1k1 · · · ξnkn
vanish identically; so if we set equal to zero all determinants of the form D, weobtain either relations between the x1, . . . ,xs alone, or we obtain the system ofequations (4). But as it is easy to see, this system of equations actually brings tozero all (n+ 1)× (n+ 1) determinants of the matrix (5), hence it admits the groupW1 f , . . . ,Wr f .
The determination of the most general system of equations (2) which admits thegroup W1 f , . . . ,Wr f and which comprises the equations (4) can now be executed onthe basis of Chap. 14, p. 246 up to p. 248.
The system of equations (4) brings to zero all (n+ 1)× (n+ 1) determinantsof the matrix (5), but not all n× n determinants; likewise, a system of equationsof the form (2) cannot make zero all n× n determinants of the matrix (5). Thus,we proceed in the following way: We solve the equations (4) with respect to m ofthe quantities ζ1, . . . ,ζs, say with respect to ζ1, . . . ,ζm, afterwards, following theintroduction of the cited developments, we form the reduced infinitesimal transfor-mations W 1 f , . . . ,W r f in the 2s−m variables x1, . . . ,xs, ζm+1, . . . ,ζs, and lastly, we

§ 95. 385
determine 2s−m−n arbitrary independent solutions of the n-term complete systemwhich is formed by the n equations: W 1 f = 0, . . . , W n f = 0.
The n equations W 1 f = 0, . . . , W n f = 0 are solvable with respect to n of the dif-ferential quotients ∂ f/∂x1, . . . , ∂ f/∂xs, hence its 2s−m−n independent solutionsare mutually independent relatively to s−n of the x and to the variables ζm+1, . . . ,ζs(cf. Chap. 15, Theorem 12, p. 105). Now, amongst the solutions of the completesystem W k f = 0, there are exactly s−n independent ones which satisfy at the sametime the n-term complete system: X1 f = 0, . . . , Xn f = 0, and hence depend onlyupon the x, and they can be called:
u1(x1, . . . ,xs), . . . , us−n(x1, . . . ,xs).
So, if:
B1(ζm+1, . . . ,ζs, x1, . . . ,xs), . . . , Bs−m(ζm+1, . . . ,ζs, x1, . . . ,xs)
are s−m arbitrary mutually independent, and independent of the u, solutions of thecomplete system W k f = 0, then necessarily, these solutions are mutually indepen-dent relatively to ζm+1, . . . ,ζs.
At present, we obtain the most general system of equations (2) which admitsthe group W1 f , . . . ,Wr f by adding to the equations (4), in the most general way,s−m mutually independent relations between u1, . . . ,us−n, B1, . . . ,Bs−m that aresolvable with respect to ζm+1, . . . ,ζs. It is clear that these relations must be solvablewith respect to B1, . . . ,Bs−m, so that they can be brought to the form:
(6) Bµ(ζm+1, . . . ,ζs, x1, . . . ,xs) = Ωµ(u1(x), . . . , us−n(x)
)(µ =1 ···s−m).
Here, the Ωµ are subject to no restriction at all, and they are absolutely arbitraryfunctions of their arguments.
Thus, if we add the equations (6) to (4) and if we solve, what is always possible,all of them with respect to ζ1, . . . ,ζs, then we obtain the most general system ofequations (2) which admits the group W1 f , . . . ,Wr f and as a result also, the mostgeneral system of solutions to the differential equations (1). Visibly, this most gen-eral system of solutions contains s−m arbitrary functions of u1, . . . ,us−n.
But now, the differential equations (1) are linear and homogeneous in the un-knowns ζ1, . . . ,ζs; thus, it can be concluded that its most general system of solutionsζ1, . . . ,ζs can be deduced from s−m particular systems of solutions:
ζµ1(x), . . . , ζµs(x) (µ =1 ···s−m)
in the following way:
ζi = χ1(u1, . . . , us−n)ζ1i + · · ·+χs−m(u1, . . . , us−n)ζs−m, i
(i=1 ···s),

386 20 Transformations Which Are Interchangeable With All Transformations of a Group
where the χ are completely arbitrary functions of the u; naturally, the particularsystem of solutions in question must be constituted in such a way that there are nos−m functions ψ1(u1, . . . ,us−n), . . . , ψs−m(u1, . . . ,us−n) which satisfy identicallythe s equations:
ψ1(u)ζ1i + · · ·+ψs−m(u)ζs−m, i = 0 (i=1 ···s).
It can even be proved that actually, there are no s−m functions Ψ1(x1, . . . ,xs), . . . ,Ψs−m(x1, . . . ,xs) which satisfy identically the s−m equations:
Ψ1(x)ζ1i + · · ·+Ψs−m ζs−m, i = 0 (i=1 ···s−m).
Indeed, the s−m equations:
ζm+σ =s−m
∑µ=1
χµ(u)ζµ,m+σ (σ =1 ···s−m)
are obviously equivalent to the equations (6), hence they must be solvable withrespect to χ1, . . . ,χs−m and the determinant:
∑ ±ζ1,m+1 · · · ζs−m,m+s−m
should not vanish identically.According to these preparations, we can finally determine the form that the
most general infinitesimal transformation Z f interchangeable with X1 f , . . . ,Xr fpossesses. The concerned transformation reads:
Z f =s−m
∑µ=1
χµ(u1, . . . ,us−m)Zµ f ,
where the s−m infinitesimal transformations:
Zµ f =s
∑i=1
ζµi(x1, . . . ,xs)∂ f∂xi
(µ =1 ···s−m)
are linked together by no linear relation of the form:
Ψ1(x1, . . . ,xs)Z1 f + · · ·+Ψs−m(x1, . . . ,xs)Zs−m f = 0.
In addition, since according to Proposition 1, p. 381, every infinitesimal transfor-mation [Zµ , Zν ] is also interchangeable with X1 f , . . . ,Xr f , there are relations of thespecific form:
[Zµ , Zν ] =s−m
∑π=1
ωµνπ(u1, . . . ,us−m)Zπ f (µ, ν =1 ···s−m).

§ 95. 387
We thus see: There always exists a transformation which is interchangeable withX1 f , . . . ,Xr f when and only when the number m defined on p. 383 is smaller thanthe number s of the variables x. If m < s and if at the same time, n < s, then thegroup X1 f , . . . ,Xr f is intransitive, so the most general infinitesimal transformationZ f interchangeable with X1 f , . . . ,Xr f depends upon arbitrary functions. If by con-trast n = s, then the group X1 f , . . . ,Xr f is transitive, so the most general transfor-mation Z f interchangeable with X1 f , . . . ,Xr f can be linearly deduced from s−mindependent infinitesimal transformations: Z1 f , . . . ,Zs−m f ; according to a remarkmade earlier on (p. 381), the concerned infinitesimal transformations then generatean (s−m)-term group. —
We know that an infinitesimal transformation interchangeable with X1 f , . . . ,Xr fexists only when the equations (4) reduce to less than s independent equations. Wecan give a somewhat more lucid interpretation of this condition by remembering theidentities (3), or the equivalent identities:
ξn+k, i −n
∑ν=1
ϕkν(x)ξν i ≡ 0 (k=1 ···r−n ; i=1 ···s),
that define the functions ϕkν . Indeed, if we differentiate with respect to x j the iden-tities just written, we obtain the following identities:
∂ξn+k, i
∂x j−
n
∑ν=1
ϕkν
∂ξν i
∂x j+ξν i
∂ϕkν∂x j
≡ 0
(k=1 ···r−n ; i=1, j ···s),
by virtue of which the equations (4) can be replaced by the equivalent equations:
n
∑ν=1
ξν i
s
∑j=1
ζ j∂ϕkν∂x j
= 0 (i=1 ···s ; k=1 ···r−n).
But since not all determinants of the form ∑ ±ξk1 · · · ξkn vanish identically, then inturn, the latter equations are equivalent to:
(4’)s
∑j=1
ζ j∂ϕkν∂x j
= 0 (k=1 ···r−n ; ν =1 ···n).
Thus, there is a transformation Z f interchangeable with X1 f , . . . ,Xr f only whenthe linear equations (4’) in the ζ j reduce to less than s independent equations.
The equations (4’) are more clearly arranged than the equations (4), and theyhave in addition a simple meaning, for they express that each one of the n(r − n)functions ϕkν(x1, . . . ,xs) admits all the infinitesimal transformations Z f .
If, amongst the equations (4), there are exactly m that are mutually independent,then naturally, amongst the equations (4’), there are also exactly m that are mutuallyindependent, and therefore, m is nothing but the number of independent functionsamongst the n(r−n) functions ϕkν(x).

388 20 Transformations Which Are Interchangeable With All Transformations of a Group
We recapitulate the gained result:
Theorem 67. If, amongst the r infinitesimal transformations:
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r),
of an r-term group, X1 f , . . . ,Xn f , say, are linked together by no linear relation, whileXn+1 f , . . . ,Xr f can be expressed linearly in terms of X1 f , . . . ,Xn f :
Xn+ j f ≡n
∑ν=1
ϕ jν(x1, . . . ,xs)Xν f ( j=1 ···r−n),
and if amongst the n(r − n) functions ϕkν , there exist exactly s that are mutuallyindependent, then there is no infinitesimal transformation which is interchangeablewith all Xk f ; by contrast, if amongst the functions ϕkν , there exist less than s, sayonly m, that are mutually independent, then there are infinitesimal transformationswhich are interchangeable with X1 f , . . . ,Xr f , and to be precise, the most generalinfinitesimal transformation Z f of this nature possesses the form:
Z f = ψ1(u1, . . . ,us−n)Z1 f + · · ·+ψs−m(u1, . . . ,us−n)Zs−m f ,
where u1, . . . ,us−n denote independent solutions of the n-term complete system:X1 f = 0, . . . , Xn f = 0, where furthermore ψ1, . . . ,ψs−m mean arbitrary functions oftheir arguments, and lastly, where the infinitesimal transformations:
Zµ f =s
∑i=1
ζµi(x1, . . . ,xs)∂ f∂xi
(µ =1 ···s−m)
interchangeable with X1 f , . . . ,Xr f and linked together by no linear relation standpairwise in relationships of the form†:
[Zµ , Zν ] =s−m
∑π=1
ωµνπ(u1, . . . ,us−m)Zπ f .
Besides, a part of the result stated in this proposition follows immediately fromthe developments of the previous chapter. Indeed, if the number of independentfunctions amongst the functions ϕkν(x1, . . . ,xs) is exactly equal to s, then accordingto p. 357, the equations:
ϕkν(x′1, . . . ,x′s) = ϕkν(x1, . . . ,xs) (k=1 ···r−n ; ν =1 ···n)
represent the most general transformation which transfers X1 f , . . . ,Xr f toX ′
1 f , . . . ,X ′r f , respectively. By contrast, if amongst the ϕkν , there are less than s
that are mutually independent, then according to Theorem 65, p. 365, there is a
† LIE suggested this general theorem in the Math. Ann. Vol. XXV.

§ 96. 389
continuous amount [MENGE] of transformations which leaves invariant every Xk f ;we remarked already on p. 380 that the totality of all such transformations forms agroup, about which it can be directly seen that it comprises one-term groups.
It seems to be adequate to yet state expressly the following proposition:
Proposition 2. If there actually exists an infinitesimal transformation which isinterchangeable with all infinitesimal transformations X1 f , . . . ,Xr f of an r-termgroup of the space x1, . . . ,xs, then the most general infinitesimal transformationinterchangeable with X1 f , . . . ,Xr f contains arbitrary functions, as soon as thegroup X1 f , . . . ,Xr f is intransitive, but by contrast, it contains only arbitraryparameters, as soon as the group is transitive.
§ 96.
Of outstanding significance is the case where the group Xk f is simply transitive,thus the case s = r = n.
If one would desire, in this case, to know the most general transformation x′i =Φi(x1, . . . ,xn) by virtue of which every Xk f takes the form X ′
k f , then one would onlyhave to seek n independent solutions Ω1, . . . ,Ωn of the n-term complete system:
Xk f +X ′k f = 0 (k=1 ···n)
and to set these solutions equal to arbitrary constants a1, . . . ,an. The equations:
Ωk(x1, . . . ,xn, x′1, . . . ,x′n) = ak (k=1 ···n)
are then solvable both with respect to the x and with respect to the x′, and theyrepresent the transformation demanded.
From the beginning, we know that the totality of all transformations Ωk = akforms a group. At present, we see that this group is n-term and simply transitive;this results immediately from the form in which the group is presented, resolvedwith respect to its n parameters.
The group:Ω1(x,x′) = a1, . . . , Ωn(x,x′) = an
contains the identity transformation and n independent infinitesimal transforma-tions:
Zk f =n
∑i=1
ζki(x1, . . . ,xn)∂ f∂xi
(k=1 ···n),
and this results from the developments of the preceding paragraph; but this is alsoclear in itself, since the transformations of the group are ordered as inverses bypairs, and hence the Theorem 56 in Chap. 18, p. 328 finds an application. Besides, itfollows from the transitivity of the group Z1 f , . . . ,Zn f that Z1 f , . . . ,Zn f are linkedtogether by no linear relation of the form ∑ χi(x1, . . . ,xs)Zi f = 0.
Between the two simply transitive groups Xk f and Zi f , there is a full relation-ship of reciprocity [RECIPROCITÄTSVERHÄLTNISS]. If the Xk f are given, then the

390 20 Transformations Which Are Interchangeable With All Transformations of a Group
general infinitesimal transformation Z f = ∑ ei Zi f is completely defined by the nequations:
Xk(Z( f )
)−Z(Xk( f )
)= 0 (k=1 ···n) ;
on the other hand, if the Zi f are given then the n equations:
X(Zi( f )
)−Zi
(X( f )
)= 0 (i=1 ···n)
determine in the same way the general infinitesimal transformation:
X f = ∑ ek Xk f .
But with that, the peculiar relationship in which the two groups stand is not yetwritten down exhaustively. Indeed, as we will now show, the two groups are also yetequally composed; since both are simply transitive, it then follows immediately thatthey are similar to each other (cf. Chap. 19, Theorem 64, p. 353).
In the infinitesimal transformations Xk f and Zi f , we imagine that the ξkν and theζiν are expanded in powers of x1, . . . ,xn, and we assume at the same time that x1 = 0,. . . , xn = 0 is a point in general position. According to Chap. 13, p. 229, since thegroup Xk f is simply transitive, it contains exactly n infinitesimal transformations ofzeroth order in x1, . . . ,xn out of which no infinitesimal transformation of first order,or of higher order, can be linearly deduced.
We can therefore imagine that X1 f , . . . ,Xn f are replaced by n other independentinfinitesimal transformations X1 f , . . . ,Xn f which have the form:
Xk f =∂ f∂xk
+1···n
∑µ, ν
hkµν xµ∂ f∂xν
+ · · ·
(k=1 ···n),
after leaving out the terms of second order and of higher order. In the same way,we can replace Z1 f , . . . ,Zn f by n independent infinitesimal transformations of theform:
Zi f =− ∂ f∂xi
+1···n
∑µ,ν
liµν xµ∂ f∂xν
+ · · ·
(i=1 ···n).
After these preparations, we form the equations [Xk, Zi] = 0 ; the same equationtakes the form:
n
∑ν=1
(likν +hkiν)∂ f∂xν
+ · · ·= 0,
from which it follows:likν =−hkiν .
Computations of the same sort yield:

§ 96. 391
[Xk, X j] =n
∑ν=1
(h jkν −hk jν)∂ f∂xν
+ · · ·
and:
[Zk, Z j] =n
∑ν=1
(− l jkν + lk jν)∂ f∂xν
+ · · ·
=n
∑ν=1
(hk jν −h jkν)∂ f∂xν
+ · · · .
On the other hand, we have:
[Xk, X j] =n
∑ν=1
ck jν Xν f , [Zk, Zi] =n
∑ν=1
c′k jν Zν f ;
here, we insert the expressions just found for: Xν f , Zν f , [Xk, X j], [Zk, Z j] and af-terwards, we make the substitution: x1 = 0, . . . , xn = 0; it then comes:
ck jν = h jkν −hk jν = c′k jν .
Thus, our two groups are effectively equally composed, and in consequence ofthat, as already remarked above, they are similar to each other. As a result, thefollowing holds:
Theorem 68. If X1 f , . . . ,Xn f are independent infinitesimal transformations of asimply transitive group in the variables x1, . . . ,xn, then the n equations [Xk, Z] = 0define the general infinitesimal transformation Z f of a second simply transitivegroup Z1 f , . . . ,Zn f which has the same composition as the group X1 f , . . . ,Xn f andwhich is at the same time similar to it. The relationship between these two simplytransitive groups is a reciprocal relationship: each one of the two groups consistsof the totality of all one-term groups whose transformations are interchangeablewith all transformations of the other group.†
It is convenient to call the groups Xk f and Zi f as reciprocal [RECIPROKE] trans-formation groups, or always, the one as the reciprocal group of the other.
If we remember from Chap. 16, p. 288, that the excellent infinitesimal transfor-mations e1 X1 f + · · ·+ er Xr f of the group X1 f , . . . ,Xn f are defined by the n equa-tions [Xk, Y ] = 0, then we can yet state the following proposition:
Proposition 3. The common infinitesimal transformations of two reciprocal simplytransitive groups are at the same time the excellent infinitesimal transformations ofboth groups.
Let the two n-term groups X1 f , . . . ,Xn f and Z1 f , . . . ,Zn f in the n variablesx1, . . . ,xn be simply transitive and reciprocal to each other. Then, if after theintroduction of new variables x′1, . . . ,x
′n, the Xk f are transferred to X ′
k f and the
† LIE communicated the Theorem 68 in the Gesellschaft der Wissenschaften zu Christiania inNov. 1882 and in May 1883; cf. also the Math. Ann. Vol. XXV, p. 107 sq.

392 20 Transformations Which Are Interchangeable With All Transformations of a Group
Zk f to Z′k f , the two simply transitive groups X ′
1 f , . . . ,X ′n f and Z′
1 f , . . . ,Z′n f
are also reciprocal to each other; this follows immediately from the relations:[X ′
k, Z′j] = [Xk, Z j]≡ 0.
From this, it follows in particular the
Proposition 4. If an n-term simply transitive group in n variables remains invariantby a transformation, then at the same time, its reciprocal simply transitive groupremains invariant.
From this proposition it lastly follows the next one:
Proposition 5. The largest group of the space x1, . . . ,xn in which an n-term simplytransitive group of this space is contained as an invariant subgroup coincides withthe largest subgroup in which the reciprocal group of this simply transitive group iscontained as an invariant subgroup.
We want to give a couple of simple examples to the preceding general develop-ments about simply transitive groups.
The group:∂ f∂x
, x∂ f∂x
+ y∂ f∂y
of the place x, y is simply transitive. The finite equations of the reciprocal group areobtained by integration of the complete system:
∂ f∂x
+∂ f∂x′
= 0, x∂ f∂x
+ y∂ f∂y
+ x′∂ f∂x′
+ y′∂ f∂y′
= 0
under the following form:
x′− xy
= a,y′
y= b,
hence solved with respect to x′ and y′:
x′ = x+ay, y′ = by.
The infinitesimal transformations of the reciprocal group are therefore:
y∂ f∂x
, y∂ f∂y
.
An interesting example is provided by the six-term projective group of a nonde-generate surface of second order in ordinary space. Indeed, this group contains twothree-term simply transitive and reciprocal to each other groups, of which the firstgroup leaves fixed all generatrices of the one family, while the other group leavesfixed all generatrices of the other family.
If z− xy = 0 is the equation of the surface, then:

§ 97. 393
X1 f =∂ f∂x
+ y∂ f∂ z
, X2 f = x∂ f∂x
+ z∂ f∂ z
,
X3 f = x2 ∂ f∂x
+(xy− z)∂ f∂y
+ xz∂ f∂ z
is one of the two simply transitive groups and:
Z1 f =∂ f∂y
+ x∂ f∂ z
, Z2 f = y∂ f∂y
+ z∂ f∂ z
Z3 f = (xy− z)∂ f∂x
+ y2 ∂ f∂y
+ yz∂ f∂ z
is the other.The two reciprocal groups are naturally similar to each other; but it is to be ob-
served that they are similar through a projective transformation, namely throughevery projective transformation which interchanges the two families of generatricesof the surface.
§ 97.
We proceed to the general studies about reciprocal simply transitive groups.Let X1 f , . . . ,Xn f and Z1 f , . . . ,Zn f be two simply transitive and reciprocal groups
in the variables x1, . . . ,xn.If n would be equal to 1, then the two groups would be identical to each other,
as one easily convinces oneself; we therefore want to assume that n is larger than 1.Then the group Z1 f , . . . ,Zn f certainly contains subgroups. If Z1 f , . . . ,Zm f (m < n)is such a subgroup, then the m equations:
Z1 f = 0, . . . , Zm f = 0
form an m-term complete system which, as it results from the identities:
[Xi, Z1]≡ 0, . . . , [Xi, Zm]≡ 0 (i=1 ···n),
admits the group X1 f , . . . ,Xn f (cf. Chap. 8, Theorem 20, p. 155). Consequently, thegroup X1 f , . . . ,Xn f is imprimitive.
If u1, . . . ,un−m are independent solutions of the complete system Z1 f = 0, . . . ,Zm f = 0, then according to Chap. 8, Proposition 1, 153, there are relations of theform:
Xi uν = ωiν(u1, . . . ,un−m) (i=1 ···n ; ν =1 ···n−m),
and hence (cf. p. 157) the ∞n−m m-times extended manifolds:
u1 = const., . . . , un−m = const.
are mutually permuted by the group X1 f , . . . ,Xr f .We therefore have the:

394 20 Transformations Which Are Interchangeable With All Transformations of a Group
Proposition 6. Every simply transitive group: X1 f , . . . ,Xn f in n > 1 variables:x1, . . . ,xn is imprimitive; if Z1 f , . . . ,Zn f is the associated reciprocal group and ifZ1 f , . . . ,Zm f is an arbitrary subgroup of it with the invariants u1, . . . ,un−m, thenthe m-term complete system Z1 f = 0, . . . , Zm f = 0 admits the group X1 f , . . . ,Xn fand the ∞n−m m-times extended manifolds: u1 = const., . . . , un−m = const. aremutually permuted by this group.
The preceding proposition shows that every m-term subgroup of the groupZ1 f , . . . ,Zn f provides a completely determined decomposition of the spacex1, . . . ,xn in ∞n−m m-times extended manifolds invariant by the group X1 f , . . . ,Xn f .Hence, if we imagine that all subgroups of the group Z1 f , . . . ,Zn f are determined,and that all the associated invariants are computed, then we obtain infinitelymany decompositions of the space invariant by the group X1 f , . . . ,Xn f . It can beproved that all existing invariant decompositions are found in this way, so that theProposition 6 can be reversed.
Indeed, let Y1 f = 0, . . . , Ym f = 0 be any m-term complete system which admitsthe group X1 f , . . . ,Xn f , and let u1, . . . ,un−m be independent solutions of this com-plete system, so that the family of the ∞n−m m-times extended manifolds:
u1 = const., . . . , un−m = const.
represent a decomposition of the space x1, . . . ,xn invariant by the group X1 f , . . . ,Xn f .We claim that the group Z1 f , . . . ,Zn f contains a completely determined m-termsubgroup which leaves individually invariant each one of these ∞n−m manifolds;this is just the reversion of the Proposition 6.
At first, we introduce the functions u1, . . . ,un−m and m arbitrary mutually inde-pendent functions: v1, . . . ,vm of the x that are also independent of u1, . . . ,un−m asvariables in our reciprocal groups, and we get:
Xk f =n−m
∑ν=1
ωkν(u1, . . . ,un−m)∂ f∂uν
+m
∑µ=1
Xk vµ∂ f∂vµ
(k=1 ···n)
and:
Zk f =n−m
∑ν=1
Zk uν∂ f∂uν
+m
∑µ=1
Zk vµ∂ f∂vµ
(k=1 ···n),
where the Xk vµ , Zk uν and Zk vµ are certain functions of the u and the v. Our claimnow obviously amounts to the fact that m independent infinitesimal transformationsshould be linearly deducible from Z1 f , . . . ,Zn f which should absolutely nottransform u1, . . . ,un−m, hence in which the coefficients of ∂ f/∂u1, . . . , ∂ f/∂un−mshould all be zero.
In order to be able to prove this, we must compute the coefficients of ∂ f/∂u1, . . . ,∂ f/∂un−m in the general infinitesimal transformation Z f = e1 Z1 f + · · ·+en Zn f ofthe group Z1 f , . . . ,Zn f .
The infinitesimal transformation Z f is completely determined by the relations:

§ 97. 395
X1(Z( f )
)−Z(X1( f )
)= 0, . . . , Xn
(Z( f )
)−Z(Xn( f )
)= 0.
If we replace f in these equations by uν , we obtain the relations:
X1(Z uν)−Z ω1ν = 0, . . . , Xn(Z uν)−Z ωnν = 0 (ν =1 ···n−m).
Consequently, the functions Z u1, . . . ,Z un−m are solutions of the differential equa-tions:
(7) Xk ρν −n−m
∑µ=1
∂ωkν∂uµ
ρµ = 0 (k=1 ···n ; ν =1 ···n−m),
in which ρ1, . . . ,ρn−m are to be seen as the unknown functions.If:
(8)ρ1 = ψ1(u1, . . . ,un−m, v1, . . . ,vm), . . . , ρn−m = ψn−m(u1, . . . ,un−m, v1, . . . ,vm)
is an arbitrary system of solutions to the differential equations (7), then all the n(n−m) expressions:
Xk ψν −n−m
∑µ=1
∂ωkν∂uµ
ρµ
vanish identically after the substitution: ρ1 = ψ1, . . . , ρn−m = ψn−m. Hence if weinterpret the equations (8) as a system of equations in the n + n − m variables:u1, . . . ,un−m, v1, . . . ,vm, ρ1, . . . ,ρn−m, we realize immediately that this system ofequations admits the n infinitesimal transformations:
(9) Uk f = Xk f +n−m
∑ν=1
n−m
∑µ=1
∂ωkν∂uµ
ρµ
∂ f∂ρν
(k=1 ···n).
The converse is also clear: if one known an arbitrary system of equations of theform (8) which admits the infinitesimal transformations U1 f , . . . ,Un f , then one alsoknows a system of solutions of the differential equations (7), since the functionsψ1, . . . ,ψn−m are such a system.
From this, it results that the determination of the most general system of solutionsto the differential equations (7) amounts to determining, in the 2n−m variables u,v, ρ , the most general system of equations (8) that admits the infinitesimal transfor-mations U1 f , . . . ,Un f .
Every system of equations which admits U1 f , . . . ,Un f also allows all theinfinitesimal transformations [Ui,Uk]. By a calculation, we find:
[Ui,Uk] = [Xi, Xk]+1···n−m
∑µ, ν , π
(ωiπ
∂ 2ωkν∂uµ ∂uπ
−ωkπ∂ 2ωiν
∂uµ ∂uπ
)ρµ
∂ f∂ρν
+1···n−m
∑µ, ν , π
(∂ωiν∂uµ
∂ωkπ∂uν
− ∂ωkν∂uµ
∂ωiπ∂uν
)ρµ
∂ f∂ρπ
,

396 20 Transformations Which Are Interchangeable With All Transformations of a Group
or else, if written differently:
[Ui,Uk] = [Xi, Xk]+1···n−m
∑µ, ν
∂∂uµ
(Xi ωkν −Xk ωiν
)ρµ
∂ f∂ρν
.
Now, since X1 f , . . . ,Xn f generate a group, there exist relations of the form:
[Xi, Xk] = Xi(Xk( f )
)−Xk
(Xi( f )
)=
n
∑σ=1
cikσ Xσ f ,
hence in particular, we have:
Xi(Xk uν
)−Xk
(Xi uν
)= Xi ωkν −Xk ωiν
=n
∑σ=1
cikσ ωσν ,
and it comes:
[Ui,Uk] =n
∑σ=1
cikσ Uσ f .
Consequently, the infinitesimal transformations U1 f , . . . ,Un f generate an n-termgroup in the 2n−m variables u1, . . . ,un−m, v1, . . . ,vm, ρ1, . . . ,ρn−m.
Thus, the question at present is to determine the most general system of equa-tions of the form (8) that admits the group U1 f , . . . ,Un f . Since X1 f , . . . ,Xn f arelinked together by no linear relation, not all n×n determinants of the matrix whichis associated to U1 f , . . . ,Un f vanish, and likewise also, not all these determinantsvanish by virtue of a system of equations of the form (8). It follows therefore fromChap. 14, Theorem 42, p. 247 that every system of equations of the form (8) whichadmits the group U1 f , . . . ,Un f is represented by relations between the solutions ofthe n-term complete system U1 f = 0, . . . , Un f = 0. Now, this complete system pos-sesses exactly n−m independent solutions, say:
Ψµ(u1, . . . ,un−m, v1, . . . ,vm, ρ1, . . . ,ρn−m) (k=1 ···n−m)
and to be precise, Ψ1, . . . ,Ψn−m are mutually independent relatively to ρ1, . . . ,ρn−m,because the complete system is solvable with respect to the differential quotients∂ f/∂u1, . . . , ∂ f/∂un−m, ∂ f/∂v1, . . . , ∂ f/∂vm (cf. Chap. 5, Theorem 12, p. 105).From this, we conclude that the most general system of equations (8) that admitsthe group U1 f , . . . ,Un f can be given the form:
Ψ1 =C1, . . . , Ψn−m =Cn−m,
where C1, . . . ,Cn−m denote arbitrary constants.If we solve the system of equations just found with respect to ρ1, . . . ,ρn−m, which
is always possible, then we obtain the most general system of solutions to the differ-ential equations (7), hence we see that this most general system of solutions contains

§ 97. 397
exactly n−m arbitrary, essential constants. Now, since the differential equations (7)are linear and homogeneous in the unknowns ρ1, . . . ,ρn−m, the said most generalsystem of solutions must receive the form:
(10)ρµ =C′
1 ψ(1)µ +C′
2 ψ(2)µ + · · ·+C′
n−m ψ(n−m)µ
(µ =1 ···n−m),
where the n−m systems of functions:
ψ(ν)1 , ψ(ν)
2 , . . . , ψ(ν)n−m (ν =1 ···n−m)
represent the same number n−m of linearly independent systems of solutions tothe differential equations (7) that are free of arbitrary constants, and where the C′
are arbitrary constants. Of course, the determinant of the ψ does not vanish, for theequations (10) must be solvable with respect to C′
1, . . . ,C′n−m.
The functions: Z u1, . . . ,Z un−m are, according to p. 395, solutions of the differ-ential equations (7), hence they have the form:
Z uµ =C1 ψ(1)µ + · · ·+Cn−m ψ(n−m)
µ (µ =1 ···n−m).
Here, the Cν are constants about which we temporarily do not know anything moreprecise; it could still be thinkable that they are linked together by linear relations.
From the values of the Z uµ , it follows that the general infinitesimal transforma-tion Z f of the group: Z1 f , . . . ,Zn f can be given the following representation:
Z f =1···n−m
∑µ, ν
Cµ ψ(µ)ν
∂ f∂uν
+m
∑µ=1
Z vµ∂ f∂vµ
.
Now, since the n−m expressions:
n−m
∑ν=1
ψ(µ)ν
∂ f∂uν
(µ =1 ···n−m)
represent independent infinitesimal transformations, then from Z1 f , . . . ,Zn f , onecan obviously deduce linearly at least m, hence say exactly m + ε , independentinfinitesimal transformations in which the coefficients of ∂ f/∂u1, . . . , ∂ f/∂un−mare equal to zero. These m+ ε infinitesimal transformations naturally generate an(m+ ε)-term subgroup of the group: Z1 f , . . . ,Zn f , and in fact, a subgroup whichleaves fixed each one of the ∞n−m m-times extended manifolds u1 = const., . . . ,un−m = const. But this is only possible when the entire number ε is equal to zero,since if ε would be > 0, the group Z1 f , . . . ,Zn f could not be simply transitive.
As a result, the claim made on p. 394 is proved and we can therefore state thefollowing proposition:
Proposition 7. If X1 f , . . . ,Xn f and Z1 f , . . . ,Zn f are two reciprocal simply transitivegroups in the n variables x1, . . . ,xn, and if:

398 20 Transformations Which Are Interchangeable With All Transformations of a Group
u1(x1, . . . ,xn) = const., . . . , un−m(x1, . . . ,xn) = const.
is an arbitrary decomposition of the space x1, . . . ,xn in ∞n−m m-times extended man-ifolds that is invariant by the group X1 f , . . . ,Xn f , then the group Z1 f , . . . ,Zn f al-ways contains an m-term subgroup which leaves individually fixed each one of these∞n−m manifolds.
By combining this proposition with the Proposition 6, p. 393, we obtain the:
Theorem 69. If the n-term group X1 f , . . . ,Xn f in the n variables x1, . . . ,xn is simplytransitive, then one finds all m-term complete systems that this groups admits, or,what is the same, all invariant decompositions of the space x1, . . . ,xn in ∞n−m m-times extended manifolds, in the following way: One determines at first the simplytransitive group: Z1 f , . . . ,Zn f which is reciprocal to X1 f , . . . ,Xn f and one sets upall m-term subgroups of the former; if, say:
Zµ f = gµ1 Z1 f + · · ·+gµn Zn f (µ =1 ···m)
is one of the found subgroups, then the equations Z1 f = 0, . . . , Zm f = 0 repre-sent one of the sought complete systems and they determine a decomposition of thespace x1, . . . ,xn in ∞n−m m-times extended manifolds that is invariant by the groupX1 f , . . . ,Xn f ; if, for each one of the found subgroups, one forms the m-term com-plete system which the subgroup provides, then one obtains all m-term completesystems that the group X1 f , . . . ,Xn f admits. If one undertakes the indicated studyfor each one of the numbers m = 1,2, . . . ,n−1, then one actually obtains all com-plete systems that the group X1 f , . . . ,Xn f admits, and therefore at the same time, alldecompositions of the space x1, . . . ,xn that are invariant by this group.
The above theorem contains a solution to the problem of determining all possibleways in which a given simply transitive group can be imprimitive.
At present, let the equations:
u1 = const., . . . , un−m = const.
again represent an arbitrary decomposition of the space x1, . . . ,xn in ∞n−m m-timesextended manifolds invariant by the group X1 f , . . . ,Xn f , so that hence, whenu1, . . . ,un−m, together with appropriate functions v1, . . . ,vm, are introduced as newvariables, X1 f , . . . ,Xn f receive the form:
Xk f =n−m
∑ν=1
ωkν(u1, . . . ,un−m)∂ f∂uν
+m
∑µ=1
ξ kµ(u1, . . . ,un−m, v1, . . . ,vm)∂ f∂vµ
.
Here, not all (n−m)× (n−m) determinants of the matrix:∣∣∣∣∣∣ω11 · · ω1,n−m· · · ·
ωn1 · · ωn,n−m
∣∣∣∣∣∣

§ 97. 399
can vanish identically, since otherwise, X1 f , . . . ,Xn f would be linked together bya linear relation, which is contrary to the assumption. So, if by u0
1, . . . ,u0n−m, we
understand a general system of values, then according to Chap. 13, p. 234, the groupX1 f , . . . ,Xn f contains exactly ∞m−1 different infinitesimal transformations whichleave invariant the system of equations:
u1 = u01, . . . , un−m = u0
n−m ;
naturally, these infinitesimal transformations then generate an m-term subgroup, themost general subgroup of the group X1 f , . . . ,Xn f which leaves fixed the m-timesextended manifold u1 = u0
1, . . . , un−m = u0n−m, or shortly M.
On the other hand, the said m-times extended manifold M now admits also mindependent infinitesimal transformations of the reciprocal group Z1 f , . . . ,Zn f , foraccording to Proposition 7, p. 397, this group contains an m-term subgroup whichleaves individually fixed each one of the ∞n−m manifolds:
u1 = const., . . . , un−m = const.
In addition, it is clear that M cannot admit a larger subgroup of the groupZ1 f , . . . ,Zn f , for u0
1, . . . ,u0n−m is supposed to be a general system of values.
From this, we see that M allows exactly m infinitesimal transformations bothfrom the two reciprocal groups X1 f , . . . ,Xn f and Z1 f , . . . ,Zn f , hence from eachone, a completely determined m-term subgroup.
We can make these two m-term subgroups visible by choosing an arbitrarysystem of values: v0
1, . . . ,v0m in general position and by expanding the infinites-
imal transformations of our two reciprocal groups in powers of: u1 − u01, . . . ,
un−m − u0n−m, v1 − v0
1, . . . , vm − v0m. Indeed, if we disregard the terms of first order
and of higher order, then similarly as on p. 390, we can replace the infinitesimaltransformations: X1 f , . . . ,Xn f by n transformations of the form:
X1 f =∂ f∂u1
+ · · · , . . . , Xn−m f =∂ f
∂un−m+ · · · ,
Xn−m+1 f =∂ f∂v1
+ · · · , . . . , Xn f =∂ f∂vm
+ · · · ,
and we can also replace Z1 f , . . . ,Zn f by n transformations of the form:
Z1 f =− ∂ f∂u1
+ · · · , . . . , Zn−m f =− ∂ f∂un−m
+ · · · ,
Zn−m+1 f =− ∂ f∂v1
+ · · · , . . . , Zn f =− ∂ f∂vm
+ · · · .
Here, Xn−m+1 f , . . . ,Xn f are obviously independent infinitesimal transforma-tions which leave invariant the manifold: u1 = u0
1, . . . , un−m = u0n−m, and
Zn−m+1 f , . . . ,Zn f are independent infinitesimal transformations which do the

400 20 Transformations Which Are Interchangeable With All Transformations of a Group
same; thus, Xn−m+1 f , . . . ,Xn f and Zn−m+1 f , . . . ,Zn f are the two m-term subgroupsabout which we have spoken just now.
From this representation of the two subgroup, one can yet derive a few noticeableconclusions.
Between X1 f , . . . ,Xn f , there are relations of the form:
[Xi, Xk] =n
∑ν=1
cikν Xν f ,
and according to p. 390 sq., between Z1 f , . . . ,Zn f , there are the same relations:
[Zi, Zk] =n
∑ν=1
cikν Zν f ,
with the same constants cikν . From this, it comes that the two subgroups:Xn−m+1 f , . . . ,Xn f and Zn−m+1 f , . . . ,Zn f are equally composed. But it even comesmore. Indeed, since the two groups: X1 f , . . . ,Xn f and: Z1 f , . . . ,Zn f are relatedto each other in a holoedrically isomorphic way, when to every infinitesimaltransformation: e1X1 f + · · · + er Xr f is associated the infinitesimal transfor-mation: e1Z1 f + · · ·+ er Zr f , and since through this association, the subgroup:Xn−m+1 f , . . . ,Xr f obviously corresponds to the subgroup: Zn−m+1 f , . . . ,Zr f , thenit becomes evident that the two reciprocal groups can be related to each other ina holoedrically isomorphic way so that the two m-term subgroups which leave Minvariant correspond to each other.
If we summarize the results of the pp. 398 sq., we then have the:
Proposition 8. If an m-times extended manifold of the space x1, . . . ,xn admitsexactly m independent infinitesimal transformations, and hence an m-term sub-group, of a simply transitive group X1 f , . . . ,Xn f of this space, then it admits atthe same time exactly m independent infinitesimal transformations, and hence anm-term subgroup, of the simply transitive group: Z1 f , . . . ,Zn f which is reciprocalto X1 f , . . . ,Xn f . The two m-term subgroups defined in this way are equally com-posed and it is possible to relate the two simply transitive reciprocal groups in aholoedrically isomorphic way so that these m-term subgroups correspond to eachother.
§ 98.
The largest portion of the results of the preceding paragraph can be derived by meansof simple conceptual considerations. We shall now undertake this, and at the sametime, we shall yet gain a few further results.
As up to now, let X1 f , . . . ,Xn f and Z1 f , . . . ,Zn f be two reciprocal simply tran-sitive groups in the variables x1, . . . ,xn; moreover, let Z1 f , . . . ,Zm f be again an ar-bitrary m-term subgroup of the group Z1 f , . . . ,Zn f and let u1, . . . ,un−m be its in-variants. Let the letter S be the general symbol of a transformation of the group

§ 98. 401
Z1 f , . . . ,Zm f , and lastly, let T be an arbitrarily chosen transformation of the groupX1 f , . . . ,Xn f .
Now, if P is any point of the space x1, . . . ,xn, then:
(P′) = (P)S
is the general symbol of a point on the manifold:
u1 = const., . . . , un−m = const.
which passes through the point P. Furthermore, since the transformations S and Tare mutually interchangeable, we have:
(P′)T = (P)ST = (P)T S,
hence, if we denote by Π the point (P)T , we have:
(11) (P′)T = (Π)S.
Here, (Π)S is the general symbol of a point on the manifold: uν = const. passingthough Π . Consequently, our symbolic equation (11) says that the transformation T ,hence actually every transformation of the group X1 f , . . . ,Xn f , permutes the ∞n−m
manifolds: u1 = const., . . . , un−m = const., by transferring each one of these mani-folds to a manifold of the same family.
As a result, the Proposition 6, p. 393, is derived.But we can also prove the converse of this proposition by means of such concep-
tual considerations.Let us imagine that an arbitrary decomposition of the space x1, . . . ,xn in ∞n−m
m-times extended manifolds invariant by the group X1 f , . . . ,Xn f is given, and let usassume that M is one of these ∞n−m manifolds. By P and P′, let us understand two ar-bitrary points of M, and by T , an arbitrary transformation of the group X1 f , . . . ,Xn f .
By the execution of T , let the point P be transferred to Π , so we have:
(Π) = (P)T ;
on the other hand, there always is in the reciprocal group Z1 f , . . . ,Zn f one, and alsoonly one, transformation which transfers P to P′:
(P′) = (P)S.
Because of:(P)ST = (P)T S,
we also have:
(12) (P′)T = (Π)S.
We must attempt to interpret this equation.

402 20 Transformations Which Are Interchangeable With All Transformations of a Group
To begin with, we assume that the point Π also belongs to the manifold M. Inthis case, the transformation T has the property of leaving M invariant. Indeed, Tpermutes the mentioned ∞n−m manifolds, but on the other hand, T transfers a pointof M, namely P, to a point of M, namely the point Π ; thus, T must transfer allpoints of M to points of M, hence it must leave M invariant. Now, since P′ lies onM, then the point (P′)T also belongs to the manifold M, and because of (12), thepoint (Π)S too; but by appropriate choice of T , Π can be an arbitrary point of M,hence the transformation S also transfers every point of M to a point of M, so that italso leaves invariant the manifold M.
On the other hand, we can suppose that Π is any point of an arbitrary othermanifold amongst the ∞n−m in question; if we make this assumption, then we im-mediately realize from (12) that S leaves at rest the concerned manifold.
With these words, it is proved that the group Z1 f , . . . ,Zn f contains a transforma-tion, namely the transformation S, which leaves individually fixed each one of our∞n−m manifolds. But there are evidently ∞m different such transformations, since af-ter fixing P, the point P′ can yet be chosen inside M in ∞m different ways. However,there are no more than ∞m transformations of this sort in the group Z1 f , . . . ,Zn f , be-cause this group is simply transitive; consequently, the ∞m existing transformationsgenerate an m-term subgroup of the group Z1 f , . . . ,Zn f .
As a result, the Proposition 7, p. 397, is proved.Obviously, the manifold M admits, aside from the ∞m transformations of the
group Z1 f , . . . ,Zn f , also yet ∞m transformations of the group X1 f , . . . ,Xn f , whichin turn form an m-term subgroup of this group. This is a result which is stated inProposition 8, p. 400.
Something essentially new arises when the number m in the developments justconducted is chosen equal to n. Up to now, this case did not come into consideration,because to it, there corresponds no decomposition of the space x1, . . . ,xn.
If m is equal to n, then the manifold M coincides with the space x1, . . . ,xn itself;hence P and P′ are arbitrary points of the space, and by appropriate choice of P andP′, S can be any transformation of the reciprocal group Z1 f , . . . ,Zn f .
If we choose P and P′ fixed, the transformation S is completely determined; next,if T is an arbitrary transformation of the group X1 f , . . . ,Xn f , we have:
(P)ST = (P)T S,
or, because (P′) = (P)S:
(13) (P′)T = (P)T S.
Here, by an appropriate choice of the transformation T , the point (P)T can bebrought to coincidence with any arbitrary point of the space x1, . . . ,xn; the sameholds for the point (P′)T . Consequently, thanks to the equation (13), we are in aposition to indicate, for every point P of the space, the new position P′ that itgets by the transformation S; we need only to determine the transformation T ofthe group X1 f , . . . ,Xn f which transfers P to P, hence which satisfies the symbolicequation:

§ 98. 403
(P)T= (P).
Then we have:(P′) = (P)S = (P)TS,
whence:(P′) = (P′)T.
Now, if we let the point P take all possible positions, or, what is the same, if weset for T one after the other all transformations of the group X1 f , . . . ,Xn f , then weobtain that, to every point of the space x1, . . . ,xn is associated a completely deter-mined other point, hence we obtain a transformation of the space x1, . . . ,xn, namelythe transformation S. Lastly, if we yet choose the points P and P′ in all possibleways, then we obviously obtain all transformations of the group Z1 f , . . . ,Zn f .
Thus, we can say:If two points P and P′ of the space x1, . . . ,xn are transformed in cogredient way
[IN COGREDIENTER WEISE] by means of each one of the ∞n transformations of asimply transitive group X1 f , . . . ,Xn f , then the transformation which transfers eachone of the ∞n positions taken by P to the corresponding position of the point P′ be-longs to the group Z1 f , . . . ,Zn f reciprocal to the group X1 f , . . . ,Xn f . If one choosesthe points P and P′ in all possible ways, then one obtains all transformations of thegroup Z1 f , . . . ,Zn f .
It goes without saying that here, the points P and P′ are always to be understoodas points in general position, or said more precisely, points which lie on no manifoldinvariant by the group X1 f , . . . ,Xn f .
If one knows the finite equations of the group X1 f , . . . ,Xn f , then one can use theconstruction just found for the transformations of the group Z1 f , . . . ,Zn f in order toset up the finite equations of this group.
Let:x′i = fi(x1, . . . ,xn, a1, . . . ,an) (i=1 ···n)
be the finite equations of the group X1 f , . . . ,Xn f . If one calls the coordinates ofthe point say x0
1, . . . ,x0n, and those of the point P′ say u0
1, . . . ,u0n, then by the ∞n
transformations of the group X1 f , . . . ,Xn f , P receives the ∞n different positions:
yi = fi(x01, . . . ,x
0n, a1, . . . ,an) (i=1 ···n)
and P′ receives the ∞n positions:
y′i = fi(u01, . . . ,u
0n, a1, . . . ,an) (i=1 ···n).
Every system of values of the a provides positions for P and P′ which correspond toeach other; hence if we eliminate from the equations yi = fi(x0,a) and y′i = fi(u0,a)the parameters a, we obtain the equations:
(14) y′i = Fi(y1, . . . ,yn, x01, . . . ,x
0n, u0
1, . . . ,u0n) (i=1 ···n)

404 20 Transformations Which Are Interchangeable With All Transformations of a Group
of a transformation of the group Z1 f , . . . ,Zn f , namely the transformation whichtransfers the point P to P′. Lastly, if we let x0
1, . . . ,x0n and u0
1, . . . ,u0n take all possible
values, we obtain all transformations of the group Z1 f , . . . ,Zn f .In the equations (14) of the group Z1 f , . . . ,Zn f just found, there appear 2n
arbitrary parameters; however, this is only fictitious, only n of these parametersare essential. Indeed, one can obtain every individual transformation of the groupZ1 f , . . . ,Zn f in ∞n different ways, since one can always choose arbitrarily the pointP, whereas the point P′ is determined by the concerned transformation after thefixed choice of P.
From this, it follows that one can also derive in this way all transformations of thegroup Z1 f , . . . ,Zn f , by choosing the point P fixed once for all, and only by lettingthe point P′ take all possible positions; that is to say, one can insert determinednumbers for the quantities x0
1, . . . ,x0n and one only needs to interpret u0
1, . . . ,u0n as
arbitrary parameters.Thus, the following holds:
Proposition 9. If the finite equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,an) (i=1 ···n)
of a simply transitive n-term group of the space x1, . . . ,xn are presented, then onefinds the equations of the reciprocal simply transitive group in the following way:
In the equations:
yi = fi(x01, . . . ,x
0n, a1, . . . ,an) (i=1 ···n),
one confers a fixed value to the x0 and afterwards, one eliminates the n quantitiesa1, . . . ,an from these equations and from the equations:
y′i = fi(u01, . . . ,u
0n, a1, . . . ,an) (i=1 ···n) ;
the resulting equations:
y′i = Fi(y1, . . . ,yn, x01, . . . ,x
0n, u0
1, . . . ,u0n) (i=1 ···n)
with the n arbitrary parameters are the equations of the reciprocal group. The as-sumption is that the x0
k are chosen so that the point x01, . . . ,x
0n lies on no manifold
which remains invariant by the group: x′i = fi(x,a).
§ 99.
The Proposition 7, p. 397 is a special case of a general proposition that also holdstrue for certain groups which are not simply transitive. We now want to derive thisgeneral proposition; on the occasion, we obtain at the same time a new proof for theProposition 7.
Let X1 f , . . . ,Xn f be an n-term group in the variables x1, . . . ,xn and let the numbern be not larger than s. In addition, we make the assumption that X1 f , . . . ,Xn f are

§ 99. 405
linked together by no linear relation of the form:
χ1(x1, . . . ,xs)X1 f + · · ·+χn(x1, . . . ,xs)Xn f = 0.
The proposition to be proved amounts to the following: if one knows an arbitrarym-term complete system: Y1 f = 0, . . . , Ym f = 0 that the group X1 f , . . . ,Xn f ad-mits, then one can always bring the complete system to a form: Y1 f = 0, . . . , Ym f = 0such that the infinitesimal transformations Y1 f , . . . ,Ym f are all interchangeable withX1 f , . . . ,Xn f , and that in the relations:
[Yi, Yk] =m
∑ν=1
τikν(x1, . . . ,xs)Yν f
which hold between Y1 f , . . . ,Ym f , the τikν are all solutions of the n-term completesystem: X1 f = 0, . . . , Xn f = 0.
In the special case s = n, where the group X1 f , . . . ,Xn f is simply transitive, theinfinitesimal transformations Y1 f , . . . ,Ym f obviously belong to the simply transitivegroup Z1 f , . . . ,Zn f reciprocal to X1 f , . . . ,Xn f ; moreover, since the n-term completesystem X1 f = 0, . . . , Xn f = 0 possesses in this case no other solutions than f =const., the functions τikν are then plain constants so that Y1 f , . . . ,Ym f generate anm-term subgroup of the group Z1 f , . . . ,Zn f . We therefore have the Proposition 7,p. 397.
However, we deal at present with the general case.We therefore imagine that an m-term complete system:
Y1 f = 0, . . . , Ym f = 0
is presented which admits the group X1 f , . . . ,Xn f , so that the X f and Y f are linkedtogether by relations of the form:
(15) [Yµ , Xk] =m
∑ν=1
αµkν(x1, . . . ,xs)Yν f (k=1 ···n ; µ =1 ···m)
(cf. Chap. 13, p. 233).To begin with, we now attempt to determine m functions ρ1, . . . ,ρm of the x so
that the infinitesimal transformation:
Y f =m
∑µ=1
ρµ(x1, . . . ,xs)Yµ f
is interchangeable with all the n infinitesimal transformations Xk f . We thereforehave to satisfy the n equations:

406 20 Transformations Which Are Interchangeable With All Transformations of a Group
[Xk, Y ] =m
∑µ=1
Xk ρµ Yµ f +m
∑µ=1
ρµ [Xk,Yµ ]
=m
∑µ=1
Xk ρµ −
m
∑ν=1
ανkµ ρν
Yµ f = 0,
or, because Y1 f , . . . ,Ym f cannot be linked together by linear relations, the follow-ing mn relations:
(16) Xk ρµ −m
∑ν=1
ανkµ ρν = 0 (k=1 ···n ; µ =1 ···m).
These are differential equations by means of which the ρ are to be determined.If:
(17) ρ1 = P1(x1, . . . ,xs), . . . , ρm = Pm(x1, . . . ,xs)
is a system of solutions of the differential equations (16), then the equations:
Xk Pµ −m
∑ν=1
ανkµ ρν = 0
are satisfied identically after the substitution: ρ1 = P1, . . . , ρm = Pm. Expressed dif-ferently: the system of equations (17) in the s+m variables x1, . . . ,xs, ρ1, . . . ,ρmadmits the infinitesimal transformations:
Uk f = Xk f +m
∑µ=1
m
∑ν=1
ανkµ ρν
∂ f
∂ρµ(k=1 ···n).
Conversely, if a system of equations of the form (17) admits the infinitesimal trans-formations U1 f , . . . ,Un f , then the functions P1, . . . ,Pm are obviously solutions of thedifferential equations (16).
From this, we see that the integration of the differential equations (16) amounts todetermining, in the s+m variables x, ρ , the most general system of equations (17),which admits the infinitesimal transformations U1 f , . . . ,Un f .
The system of equations to be determined also admits the infinitesimal transfor-mations: [Ui, Uk].
By calculation, we find:
[Ui, Uk] = [Xi, Xk]+1···m
∑µ, ν
Xi ανkµ −Xk αν iµ
ρν
∂ f∂ρµ
+1···m
∑µ, ν , π
αν iπ απkµ −ανkπ απiµ
ρν
∂ f∂ρµ
.
Here, in order to simplify the right-hand side, we form the Jacobi identity (cf.Chap. 5, p. 109):

§ 99. 407[Yν , [Xi, Xk]
]+[Xi, [Xk,Yν
]+][Xk, [Yν , Xi]
]= 0,
which, using (15), can be written as:
[Yν , [Xi, Xk]
]=
m
∑µ=1
[Xi f , ανkµ Yµ f ]− [Xk f , αν iµ Yµ f ]
,
or: [Yν , [Xi, Xk]
]=
m
∑µ=1
Xi ανkµ −Xk ανiµ
Yµ f
+1···m
∑µ, π
αν iµ αµkπ −ανkµ αµiπ
Yπ f .
But now, X1 f , . . . ,Xn f generate an n-term group, whence:
[Xi, Xk] =n
∑σ=1
cikσ Xσ f ,
from which it follows:[Yν , [Xi, Xk]
]=
m
∑µ=1
n
∑σ=1
cikσ ανσ µ
Yµ f .
If we still take into account that Y1 f , . . . ,Ym f are linked together by no linearrelations, we obtain:
Xi ανkµ −Xk αν iµ +m
∑π=1
ανiπ απkµ −ανkπ απiµ
=
n
∑σ=1
cikσ ανσ µ .
By inserting these values in the expression found above for [Ui, Uk], it comes:
[Ui, Uk] =n
∑σ=1
cikσ Uσ f ,
so U1 f , . . . ,Un f generate an n-term group in the s+m variables x, ρ .At present, the question is to determine the most general system of equations (17)
which admits the n-term group U1 f , . . . ,Un f .Since X1 f , . . . ,Xn f are linked together by no linear relation, not all n× n deter-
minants vanish identically in the matrix associated to U1 f , . . . ,Un f ; but obviously,these n× n determinants cannot all be equal to zero, even by virtue of a system ofequations of the form (17). Consequently, every system of equations of the form (17)which admits the group U1 f , . . . ,Un f is represented by relations between the solu-

408 20 Transformations Which Are Interchangeable With All Transformations of a Group
tions of the n-term complete system: U1 f = 0, . . . , Un f = 0 (cf. Chap. 14, Theo-rem 42, p. 247).
The n-term complete system U1 f = 0, . . . , Un f = 0 possesses s+m−n indepen-dent solutions; s− n of these solutions can be chosen in such a way that they arefree of the ρ and depend only upon the x, they are the independent solutions of then-term complete system: X1 f = 0, . . . , Xn f = 0, and we can call them:
v1(x1, . . . ,xs), . . . , vs−n(x1, . . . ,xs).
Furthermore, let:
Ω1(ρ1, . . . ,ρm, x1, . . . ,xs), . . . , Ωm(ρ1, . . . ,ρm, x1, . . . ,xs)
be m arbitrary mutually independent solutions of the complete system: U1 f = 0, . . . ,Un f = 0 that are also independent of the v.
Since the equations: U1 f = 0, . . . , Un f = 0 are solvable with respect to n of thedifferential quotients ∂ f/∂x1, . . . , ∂ f/∂xs, the s − n + m functions v1, . . . ,vs−n,Ω1, . . . ,Ωm must be mutually independent relatively to s − n of the variablesx1, . . . ,xs, and relatively to ρ1, . . . ,ρm. Consequently, Ω1, . . . ,Ωm are mutuallyindependent relatively to ρ1, . . . ,ρm.
k After these preparations, we can identify the most general system of equationswhich admits the group U1 f , . . . ,Un f and which can be given the form (17).
The concerned system of equations consists of m relations between v1, . . . ,vs−n,Ω1, . . . ,Ωm and is solvable with respect to ρ1, . . . ,ρm; consequently, it is solvablewith respect to Ω1, . . . ,Ωm and has the form:
(18) Ωµ(ρ1, . . . ,ρm, x1, . . . ,xs) =Ψµ(v1(x), . . . , vs−n(x)
)(µ =1 ···m),
where the Ψ are absolutely arbitrary functions of their arguments. If we solve thissystem of equations with respect to ρ1, . . . ,ρm, then for ρ1, . . . ,ρm, we receive ex-pressions that represent the most general system of solutions to the differential equa-tions (16).
Thus, the most general system of solutions (16) contains m arbitrary functions ofv1, . . . ,vs−n. Now, since the equations (16) in the unknowns ρ1, . . . ,ρm are linear andhomogeneous, one can conclude that the most general system of solutions ρ1, . . . ,ρmto it can be deduced from m particular systems of solutions:
P(µ)1 (x1, . . . ,xs), . . . , P(µ)
m (x1, . . . ,xs) (µ =1 ···m)
in the following way:
(19)ρν = χ1(v1, . . . ,vs−n)P(1)
ν + · · ·+χm(v1, . . . ,vs−n)P(m)ν
(µ =1 ···m),
where it is understood that the χ are arbitrary functions of their arguments. Natu-rally, the m particular systems of solutions must be constituted in such a way that it

§ 99. 409
is not possible to determine m functions ψ1, . . . ,ψm of v1, . . . ,vs−n such that the mequations:
m
∑µ=1
ψµ(v1, . . . ,vs−n)P(µ)ν = 0 (ν =1 ···m)
are satisfied simultaneously.Lastly, it is still to be observed that the equations (19) are solvable with respect
to χ1, . . . ,χm, so that the determinant of the P(µ)ν does not vanish identically. In-
deed, according to what precedes, one must be able to bring the equations (19) tothe form (18), and this is obviously impossible when the determinant of the P(µ)
νvanishes.
At present, we can write down the most general transformation:
Y f =m
∑µ=1
ρµ Yµ f
which is interchangeable with X1 f , . . . ,Xn f (cf. above, p. 405). Its form is:
Y f =m
∑ν=1
χν(v1, . . . ,vs−n)m
∑µ=1
P(ν)µ (x1, . . . ,xs)Yµ f ,
or:
Y f =m
∑ν=1
χν(v1, . . . ,vs−n)Yν f ,
if we set:m
∑µ=1
P(ν)µ Yµ f = Yν f (ν =1 ···m).
Here obviously, Y1 f , . . . ,Ym f are all interchangeable with X1 f , . . . ,Xn f ; further-more, the equations: Y1 f = 0, . . . , Ym f = 0 are equivalent to the equations: Y1 f = 0,. . . , Ym f = 0, and hence they in turn form an m-term complete system that admitsthe group X1 f , . . . ,Xn f .
As a consequence of that, between Y1 f , . . . ,Ym f , there are relations of the form:
[Yµ , Yν ] =m
∑π=1
τµνπ(x1, . . . ,xs)Yπ f .
But from the Jacobi identity:[Xk, [Yµ , Yν ]
]+[Yµ , [Yν , Xk]
]+[Yν , [Xk, Yµ ]
]≡ 0 ,
in which the last two terms are identically zero, it results immediately:[Xk, [Yµ , Yν ]
]≡ 0.
We must therefore have:
410 20 Transformations Which Are Interchangeable With All Transformations of a Group
m
∑π=1
Xk τµνπ Yπ f ≡ 0,
or, because Y1 f , . . . ,Ym f are linked together by no linear relation:
Xk τµνπ ≡ 0 (k=1 ···n),
that is to say: the τµνπ are all solutions of the complete system: X1 f = 0, . . . , Xn f =0, they are functions of v1, . . . ,vs−n alone.
The complete system: Y1 f = 0, . . . , Ym f = 0 possesses all the properties indicatedon p 405; we can therefore enunciate the statement:
Theorem 70. If an m-term complete system: Y1 f = 0, . . . , Ym f = 0 in the s vari-ables x1, . . . ,xs admits the n-term group X1 f , . . . ,Xn f and if this group is constitutedin such a way that between X1 f , . . . ,Xn f , there is no linear relation of the form:
χ1(x1, . . . ,xs)X1 f + · · ·+χn(x1, . . . ,xs)Xn f = 0,
then it is possible to determine m2 functions P(ν)µ (x1, . . . ,xs) with not identically
vanishing determinant such that the m infinitesimal transformations:
Yν f =m
∑µ=1
P(ν)µ (x1, . . . ,xs)Yµ f (ν =1 ···m)
are all interchangeable with X1 f , . . . ,Xn f . In turn, the equations: Y1 f = 0, . . . ,Ym f = 0 equivalent to Y1 f = 0, . . . , Ym f = 0 form an m-term complete system thatadmits the group X1 f , . . . ,Xn f . Lastly, between Y1 f , . . . ,Ym f , there are relations ofthe specific form:
[Yµ , Yν ] =m
∑π=1
ϑµνπ(v1, . . . ,vs−n)Yπ f ,
where v1, . . . ,vs−n are independent solutions of the n-term complete system: X1 f =0, . . . , Xn f = 0.†
—————–
† During the summer semester 1887, in a lecture about the general theory of integration of thedifferential equations that admit a finite continuous group, LIE developed the Theorem 70 whichcomprises the Theorem 69 as a special case.

Chapter 21The Group of Parameters
If one executes three transformations of the space x1, . . . ,xn subsequently, say thefollowing ones:
(1)
x′i = fi(x1, . . . ,xn) (i=1 ···n)
x′′i = gi(x′1, . . . ,x′n) (i=1 ···n)
x′′′i = hi(x′′1 , . . . ,x′′n) (i=1 ···n),
the one gets a new transformation:
x′′′i = ωi(x1, . . . ,xn) (i=1 ···n)
of the space x1, . . . ,xn.The equations of the new transformation are obtained when the 2n variables:
x′1, . . . ,x′n, x′′1 , . . . ,x
′′n are eliminated from the 3n equations (1). Clearly, one can ex-
ecute this elimination in two different ways, since one can begin either by takingaway the x′, or by taking away the x′′. In the first case, one obtains firstly betweenthe x and the x′′ the relations:
x′′i = gi(
f1(x), . . . , fn(x))
(i=1 ···n),
and afterwards, one has to insert these values of x′′1 , . . . ,x′′n in the equations:
x′′′i = hi(x′′1 , . . . ,x′′n) (i=1 ···n).
In the second case, one obtains firstly between the x′ and the x′′′ the relations:
x′′′i = hi(g1(x′), . . . , gn(x′)
)(i=1 ···n),
and then one has yet to replace the x′ by their values:
x′i = fi(x1, . . . ,xn) (i=1 ···n).
411

412 21 The Group of Parameters
The obvious observation that in both ways indicated above, one obtains in thetwo cases the same transformation as a final result receives a content [INHALT]when one interprets the transformation as an operation and when one applies thesymbolism of substitution theory.
For the three substitutions (1), we want to introduce the symbols: S, T , U oneafter the other, so that the transformation:
x′′i = gi(
f1(x), . . . , fn(x))
(i=1 ···n)
receives the symbol: ST , the transformation:
x′′′i = hi(g1(x′), . . . , gn(x′)
)(i=1 ···n),
the symbol: T U and lastly, the transformation: x′′′i = ωi(x1, . . . ,xn), the sym-bol: ST U . We can then express the two ways of forming the transformation:x′′′i = ωi(x1, . . . ,xn) discussed above by saying that this transformation is obtainedboth when one executes at first the transformation: ST and next the transformationU , and when one executes at first the transformation S, and next the transformationT U .
Symbolically, these facts can be expressed by the equations:
(2) (ST )U = S (T U) = ST U,
and its known that they say that the operations S, T , U satisfy the so-called associa-tive rule [ASSOCIATIVE GESETZ].
We can therefore say:The transformations of an n-times extended space are operations for which the
law of associativity holds true.
At present, let us consider the specific case where S, T , U are arbitrary transfor-mations of an r-term group:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n).
In this case, the transformations ST , T U and ST U naturally belong also to thegroup in question. We now want to see what can be concluded from the validity ofthe associative law.
§ 100.
Let the transformations S, T , U of our group be:
(3)
S : x′i = fi(x1, . . . ,xn, a1, . . . ,ar)
T : x′′i = fi(x′1, . . . ,x′n, b1, . . . ,br)
U : x′′′i = fi(x′′1 , . . . ,x′′n , c1, . . . ,cr).

§ 100. 413
For the transformation ST , there result from this in the known way equations ofthe form:
x′′i = fi(x1, . . . ,xn, ϕ1(a,b), . . . , ϕr(a,b)
),
where the functions ϕ1(a,b), . . . , ϕr(a,b) are, according to Chap. 3, p. 53, mutuallyindependent both relatively to a1, . . . ,ar and relatively to b1, . . . ,br.
Furthermore, the equations of the transformation (ST )U are:
(4) x′′′i = fi(x1, . . . ,xn, ϕ1
(ϕ(a,b), c
), . . . , ϕr
(ϕ(a,b), c
)).
On the other hand, we have for the transformation T U the equations:
x′′′i = fi(x′1, . . . ,x
′n, ϕ1(b,c), . . . , ϕr(b,c)
),
hence for S (T U) the following ones:
(4’) x′′′i = fi(x1, . . . ,xn, ϕ1
(a, ϕ(b,c)
), . . . , ϕr
(a, ϕ(b,c)
)).
Now, it holds: (ST )U = S (T U), whence the two transformations (4) and (4’)must be identical to each other; by comparison of the two parameters in the twotransformations, we therefore obtain the following relations:
ϕk(ϕ1(a,b), . . . , ϕr(a,b), c1, . . . ,cr
)= ϕk
(a1, . . . ,ar, ϕ1(b,c), . . . , ϕr(b,c)
)(k=1 ···r),
or more shortly:
(5) ϕk(ϕ(a,b), c
)= ϕk
(a, ϕ(b,c)
)(k=1 ···r).
Thus, the functions ϕ1, . . . ,ϕr must identically satisfy these relations for all val-ues of the a, b, c.
The equations (5) express the law of associativity for three arbitrary transfor-mations of the group x′i = fi(x,a). But they can yet be interpreted in another way;namely, they say that the equations:
(6) a′k = ϕk(a1, . . . ,ar, b1, . . . ,br) (k=1 ···r)
in the variables a1, . . . ,ar represent a group, and to be precise, a group with the rparameters b1, . . . ,br.
Indeed, if we execute two transformations (6), say:
a′k = ϕk(a1, . . . ,ar, b1, . . . ,br)
and:a′′k = ϕk(a′1, . . . ,a
′r, c1, . . . ,cr)
one after the other, we obtain the transformation:

414 21 The Group of Parameters
a′′k = ϕk(ϕ1(a,b), . . . , ϕr(a,b), c1, . . . ,cr
)which, by virtue of (5), takes the shape:
a′′k = ϕk(a1, . . . ,ar, ϕ1(b,c), . . . , ϕr(b,c)
),
and hence belongs likewise to the transformations (6). As a result, our assertion isproved.
We want to call the group:
(6) a′k = ϕk(a1, . . . ,ar, b1, . . . ,br) (k=1 ···r)
the parameter group [PARAMETERGRUPPE] of the group x′i = fi(x1, . . . ,xn, a1, . . . ,ar).
According to the already cited page 53, the equations a′k = ϕk(a,b) are solvablewith respect to the r parameters b1, . . . ,br:
bk = ψk(a1, . . . ,ar, a′1, . . . ,a′r) (k=1 ···r).
From this, we conclude that the parameter group is r-term, is transitive, and in fact,simply transitive. In addition, the equations (5) show that the parameter group is itsown parameter group.
We can therefore say in summary:
Theorem 71. If the functions fi(x1, . . . ,xn, a1, . . . ,ar) in the equations x′i = fi(x,a)of an r-term group satisfy the functional equations:
fi(
f1(x,a), . . . , fn(x,a), b1, . . . ,br)= fi
(x1, . . . ,xn, ϕ1(a,b), . . . , ϕr(a,b)
)(i=1 ···n),
then the r relations:
a′i = ϕi(a1, . . . ,ar, b1, . . . ,br) (i=1 ···r)
determine an r-term group between the 2r variables a and a′: the parameter groupof the original group. This parameter group is simply transitive and is its own pa-rameter group.
§ 101.
If the r-term group: x′i = fi(x1, . . . ,xn, a1, . . . ,ar) is generated by the r independentinfinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r),
then according to Chap. 9, p. 173, its transformations are ordered together as in-verses by pairs. Evidently, the transformations of the associated parameter group:

§ 101. 415
a′k = ϕk(a,b) are then also ordered together as inverses by pairs, whence accord-ing to Chap. 9, p. 184 above, the parameter group contains exactly r independentinfinitesimal transformations and is generated by them.
We can also establish this important property of the parameter group in the fol-lowing way, where we find at the same time the infinitesimal transformations of thisgroup.
In the equations: x′i = fi(x1, . . . ,xn, a1, . . . ,ar), if the x′i are considered as func-tions of the x and of the a, then according to Theorem 3, p. 40, there are differentialequations of the form:
(7)∂x′i∂ak
=r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(x′1, . . . ,x′n) (i=1 ···n ; k=1 ···r),
and they can also be written:
(7’) ξ ji(x′1, . . . ,x′n) =
r
∑k=1
α jk(a1, . . . ,ar)∂x′i∂ak
( j=1 ···r ; i=1 ···n).
Here, according to the Chap. 3, Proposition 3.4, p. 54, the ξ ji and the α jk aredetermined by the equations:
ξ ji(x′1, . . . ,x′n) =
[∂x′i∂b j
]b=b0
, α jk(a1, . . . ,ar) =
[∂ak
∂b j
]b=b0
,
whose meaning has been explained in the place indicated.For the group a′k = ϕk(a,b), one naturally obtains analogous differential equa-
tions:∂a′i∂bk
=r
∑j=1
ψk j(b1, . . . ,br)ψ ji(a′1, . . . ,a
′r) (i, k=1 ···r)
in which the ψk j have the same signification as in (7), while the ψ ji(a) are deter-mined by:
ψ ji(a1, . . . ,ar) =
[∂ai
∂b j
]b=b0
.
In consequence of that, the ψ ji are the same functions of their arguments as theα ji; in correspondence to the formulas (7) and (7’), we therefore obtain the twofollowing ones:
(8)∂a′i∂bk
=r
∑j=1
ψk j(b1, . . . ,br)α ji(a′1, . . . ,a′r) (i, k=1 ···r)
and:
(8’) α ji(a′1, . . . ,a′r) =
r
∑k=1
α jk(b1, . . . ,br)∂a′i∂bk
( j, i=1 ···r).

416 21 The Group of Parameters
Now, the group: x′i = fi(x1, . . . ,xn, a1, . . . ,ar) contains the identity transformationand in fact, we can always suppose that the parameters a0
1, . . . ,a0r of the identity
transformation lie in the region ((a)) defined on p. 26. According to p. 411, thedeterminant:
∑ ±ψ11(a0) · · · ψrr(a0)
is then certainly different from zero.On the other hand, it is clear that, also in the family of the transformations: a′k =
ϕk(a,b), the identity transformation: a′1 = a1, . . . , a′r = ar appears, and even, thatthe transformation:
a′k = ϕk(a1, . . . ,ar, a01, . . . ,a
0r ) (k=1 ···r)
is the identity transformation. Thus, if we take into account the existence of the dif-ferential equations (8) and if we apply the Theorem 9, p. 82, we realize immediatelythat the family of the ∞r transformations: a′k = ϕk(a,b) coincides with the family ofthe ∞r−1 one-term groups:
r
∑k=1
λk
r
∑i=1
αki(a1, . . . ,ar)∂ f∂ai
.
Consequently, the group: a′k = ϕk(a,b) is generated by the r infinitesimal trans-formations:
Ak f =r
∑j=1
αk j(a1, . . . ,ar)∂ f∂a j
(k=1 ···r)
Naturally, these infinitesimal transformations are independent of each other,since there exists between them absolutely no relation of the form:
χ1(a1, . . . ,ar)A1 f + · · ·+χr(a1, . . . ,ar)Ar f = 0,
as we have already realized in Chap. 3, Theorem 3, p. 40; on the other hand, it canalso be concluded from this that the parameter group is simply transitive (Theo-rem 71).
In what precedes, we have not only proved that the group: a′k = ϕk(a,b) is gen-erated by infinitesimal transformations, but we have also found these infinitesimaltransformations themselves. From this, we can immediately deduce a new importantproperty of the group: a′k = ϕk(a,b).
The r infinitesimal transformations: X1 f , . . . ,Xr f of the group: x′i = fi(x,a) arelinked together by relations of the form:
[Xi, Xk] =r
∑s=1
ciks Xs f ,
1 According to the footnote, this determinant is equal to (−1)r .

§ 102. 417
and according to Theorem 21, p. 164, there are, between A1 f , . . . ,Ar f , relations ofthe same form:
[Ai, Ak] =r
∑s=1
ciks As f ,
with the same constants ciks. By applying the way of expressing introduced inChap. 17, p. and p. 305, we can hence state the following theorem:
Theorem 72. Every r-term group:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
is equally composed with its parameter group:
a′k = ϕk(a1, . . . ,ar, b1, . . . ,br) (k=1 ···r),
or, what is the same, it is holoedrically isomorphic to it. If the infinitesimal transfor-mations of the group: x′i = fi(x,a) satisfy the relations:
ξ ji(x′1, . . . ,x′n) =
r
∑k=1
α jk(a1, . . . ,ar)∂x′i∂ak
(i=1 ···n ; j=1 ···r),
then the r expressions:
A j f =r
∑k=1
α jk(a1, . . . ,ar)∂ f∂ak
( j=1 ···r)
represent r independent infinitesimal transformations of the parameter group.†
§ 102.
As usual, let:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
be independent infinitesimal transformations of an r-term group in the variablesx1, . . . ,xn.
Under the guidance of Chap. 9, p. 171 and p. 172, one determines r independentinfinitesimal transformations:
Ak f =r
∑j=1
αk j(a1, . . . ,ar)∂ f∂a j
(k=1 ···r)
which are linked together by no linear relation of the form:
χ1(a1, . . . ,ar)A1 f + · · ·+χr(a1, . . . ,ar)Ar f = 0,
† LIE, Gesellschaft d. W. zu Christiania 1884, no. 15.

418 21 The Group of Parameters
but which stand pairwise in the relationships:
[Ai, Ak] =r
∑s=1
ciks As f ;
in other words, one determines r independent infinitesimal transformations ofany simply transitive r-term group which has the same composition as the groupX1 f , . . . ,Xr f .
Afterwards, one selects any system of values: a1, . . . ,ar in the neighbourhoodof which the αki(a1, . . . ,ar) behave regularly and for which the determinant∑ ±α11 · · · αrr does not vanish, and then, relatively to this system of values, onedetermines the general solutions of the r-term complete system:
(9)
n
∑i=1
ξki(x′)∂ f∂x′i
+r
∑j=1
αk j(a)∂ f∂a j
= X ′k f +Ak f = 0
(k=1 ···r)
in the n+ r variables: x′1, . . . ,x′n, a1, . . . ,ar.
Now, if F1(x′1, . . . ,x′n, a1, . . . ,ar), . . . , Fn(x′, a) are the general solutions in ques-
tion, one sets:xi = F i(x′1, . . . ,x
′n, a1, . . . ,ar) (i=1 ···n) ;
by resolution with respect to x′1, . . . ,x′n, one obtains equations of the form:
x′i = f i(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
which, according to Theorem 23, p. 169, represent the finite transformations of anr-term group, namely of the group: X1 f , . . . ,Xr f itself.
In the mentioned theorem, we already observed that the equations: x′i = f i(x,a)can be brought to the form:
x′i = xi +r
∑k=1
ek Xk xi +1···r
∑k, j
ek e j
1 ·2Xk X j xi + · · · (i=1 ···n)
after the introduction of new parameters, so that these equations represent the finiteequations of the r-term group which is generated by the infinitesimal transforma-tions: X1 f , . . . ,Xr f .
It has no influence whether we choose the group A1 f , . . . ,Ar f or any other groupamongst the infinitely many simply transitive groups which have the same compo-sition as the group X1 f , . . . ,Xr f , and it is completely indifferent whether we choosethe system of values a1, . . . ,ar or any other system of values: in the way indicated,we always obtain an analytic representation for the finite transformations of thegroup: X1 f , . . . ,Xr f .
We also made this remark already in Chap. 9, though naturally not with the samewords. But at present, we have reached a point where we can see directly why one

§ 102. 419
always obtains the equations of the same group for various choices of the group:A1 f , . . . ,Ar f and of the systems of values: a1, . . . ,ar.
Indeed, let:
Ak f =r
∑j=1
βk j(a1, . . . ,ar)∂ f∂a j
(k=1 ···r)
be any other simply transitive group equally composed with the group: X1 f , . . . ,Xr ffor which the relations:
[Ai, Ak] =r
∑s=1
ciksAs f
are identically satisfied, and moreover, let: a01, . . . ,a
0r be any system of values in the
neighbourhood of which all βk j(a) behave regularly and for which the determinant∑ ±β11 · · · βrr does not vanish.
Because the two groups: A1 f , . . . ,Ar f and A1 f , . . . ,Ar f are equally composedand are both simply transitive, then (Theorem 64, p. 353) there are ∞r differenttransformations:
ak = λk(a1, . . . ,ar,C1, . . . ,Cr
)(k=1 ···r)
which transfer A1 f , . . . ,Ar f to: A1 f , . . . ,Ar f , respectively. The equations of thesetransformations are solvable with respect to the arbitrary parameters: C1, . . . ,Cr, soin particular, one can choose C1, . . . ,Cr in such a way that the equations:
ak = λk(a01, . . . ,a
0r ,C1, . . . ,Cr) (k=1 ···r)
are satisfied.If: C0
1 , . . . ,C0r are the values of C1, . . . ,Cr obtained in this way, and if one sets:
λk(a1, . . . ,ar,C01 , . . . ,C
0r ) = πk(a1, . . . ,ar) (k=1 ···r),
then the equations:
(10) ak = πk(a1, . . . ,ar) (k=1 ···r)
represent a transformation which transfers A1 f , . . . ,Ar f to: A1 f , . . . ,Ar f , respec-tively, and which in addition transfers the system of values: a0
1, . . . ,a0r to the system
of values: a1, . . . ,ar.From this, it results that we obtain the general solutions of the complete system:
(9’) X ′k f +Ak f = 0 (k=1 ···r)
relatively to: a1 = a01, . . . , ar = a0
r when we make the substitution: a1 = π1(a), . . . ,ar = πr(a) in the general solutions:
F i(x′1, . . . ,x′n, a1, . . . ,ar) (i=1 ···n)

420 21 The Group of Parameters
of the complete system (9). Therefore, if we had used, instead of the simply tran-sitive group: A1 f , . . . ,Ar f , the group: A1 f , . . . ,Ar f , and if we had used, instead ofthe system of values: a1, . . . ,ar, the system of values: a0
1, . . . ,a0r , then instead of the
equations: x′i = f i(x1, . . . ,xn, a1, . . . ,ar), we would have received the equations:
x′i = f i(x1, . . . ,xn, π1(a), . . . , πr(a)
)(i=1 ···n).
But evidently, these equations are transferred to the former ones when thenew parameters a1, . . . ,ar are introduced in place of a1, . . . ,ar by virtue of theequations (10).
As in the paragraphs 100 and 101, p. 412 sq., we want again to start with adetermined form:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
of the group: X1 f , . . . ,Xr f , and as before, we let a01, . . . ,a
0r denote the parameters
attached to the identity transformation: x′i = xi.Then it is easy to identify the complete system, the integration of which conducts
precisely to the equations: x′i = fi(x,a).The complete system in question has simply the form:
X ′k +Ak f = 0 (k=1 ···r),
where, in the infinitesimal transformations:
Ak f =r
∑j=1
αk j(a1, . . . ,ar)∂ f∂a j
(k=1 ···r),
the functions αk j(a) are the same as in the differential equations (7’). If:
Fi(x′1, . . . ,x′n, a1, . . . ,ar) (i=1 ···n)
denote the general solutions to the complete system: X ′k f +Ak f = 0 relatively to:
a1 = a01, . . . , ar = a0
r , then by resolution with respect to x′1, . . . ,x′n, the equations:
xi = Fi(x′1, . . . ,x′n, a1, . . . ,ar) (i=1 ···n)
give the equations: x′i = fi(x,a) exactly. All of this follows from the developmentsof the Chaps. 3 and 9.
We now apply these considerations to the parameter group associated to thegroup: x′i = fi(x,a), whose equations, according to p. 413, have the form:
a′k = ϕk(a1, . . . ,ar, b1, . . . ,br) (k=1 ···r)
and whose identity transformation possesses the parameters: b1 = a01, . . . , br = a0
r .The complete system, through the introduction of which the equations:
a′k = ϕk(a,b) of the parameter group can be found, visibly reads:

§ 102. 421
r
∑j=1
αk j(a′1, . . . ,a′r)
∂ f∂a′j
+r
∑j=1
αk j(b1, . . . ,br)∂ f∂b j
= 0 (k=1 ···r).
If we determine the general solutions:
H j(a′1, . . . ,a′r, b1, . . . ,br) ( j=1 ···r)
of this complete system relatively to: bk = a0k and if we solve afterwards the equa-
tions:a j = H j(a′1, . . . ,a
′r, b1, . . . ,br) ( j=1 ···r)
with respect to a′1, . . . ,a′r, we obtain: a′k = ϕk(a,b).
Thus, the following holds:
Theorem 73. If one knows the infinitesimal transformations:
Ak f =r
∑j=1
αk j(a1, . . . ,ar)∂ f∂a j
(k=1 ···r)
of the parameter group of an r-term group and if one knows that the identity trans-formation of this group possesses the parameters: a0
1, . . . ,a0r , whence the identity
transformation of the parameter group also possesses the parameters: a01, . . . ,a
0r ,
then one finds the finite equations of the parameter group in the following way: Onedetermines the general solutions of the complete system:
r
∑j=1
αk j(a′)∂ f∂a′j
+r
∑j=1
αk j(b)∂ f∂b j
= 0 (k=1 ···r)
relatively to: b1 = a01, . . . , br = a0
r ; if:
H j(a′1, . . . ,a′r, b1, . . . ,br) ( j=1 ···r)
are these general solutions, then one obtains the sought equations of the parametergroup by solving the r equations:
a j = H j(a′1, . . . ,a′r, b1, . . . ,br) ( j=1 ···r)
with respect to a′1, . . . ,a′r.
If, in an r-term group x′i = fi(x,a), one introduces new parameters ak in placeof the a, then group receives a new form to which a new parameter group is alsonaturally associated.
The connection between the new and the old parameter groups is very simple.Indeed, if the new parameters are determined by the equations:
a j = λ j(a1, . . . ,ar) ( j=1 ···r),
then the new form of the group: x′i = fi(x,a) is the following one:

422 21 The Group of Parameters
x′i = fi(x1, . . . ,xn, λ1(a), . . . , λr(a)
)(i=1 ···n),
and the new parameter group reads:
λk(a′1, . . . ,a
′r) = ϕk
(λ1(a), . . . , λr(a), λ1(b), . . . , λr(b)
)(k=1 ···r)
while the old one was a′k = ϕk(a,b). Consequently, the new one comes from the oldone when by executing the substitution a j = λ j(a) both on the a and on the b, thatis to say, by inserting, for the a′, a, b, the following values:
a′j = λ j(a′), a j = λ j(a), b j = λ j(b) ( j=1 ···r)
in the equations: a′k = ϕk(a,b).
§ 103.
According to Theorem 72, p. 417, every r-term group has the same compositionas its parameter group, and consequently, the r-term group which have the sameparameter group are equally composed with each other.
Now, we claim that conversely, two equally composed r-term groups can alwaysbe brought, after the introduction of new parameters, to a form such that they twohave the same parameter group.
In order to prove this claim, we imagine that the infinitesimal transformations ofthe two groups are given; let the ones of the first group be:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r),
and the ones of the other group be:
Yk f =m
∑µ=1
ηkµ(y1, . . . ,ym)∂ f∂yµ
(k=1 ···r).
Since the two groups are equally composed, we can assume that the Xk f and the Yk fare already chosen in such a way that, simultaneously with the relations:
[Xi, Xk] =r
∑s=1
ciks Xs f ,
the relations:
[Yi, Yk] =r
∑s=1
ciks Ys f
hold.Lastly, we yet imagine that r independent infinitesimal transformations:

§ 103. 423
Ak f =r
∑j=1
αk j(a1, . . . ,ar)∂ f∂a j
(k=1 ···r)
are given which generate a simply transitive r-term group equally composed withthese groups and which stand pairwise in the relationships:
[Ai, Ak] =r
∑s=1
ciks As f .
At present, we form the complete system:
X ′k f +Ak f = 0 (k=1 ···r)
and we determine its general solutions:
Fi(x′1, . . . ,x′n, a1, . . . ,ar) (i=1 ···n)
relatively to an arbitrary system of values: a1 = a01, . . . , ar = a0
r ; furthermore, weform the complete system:
Y ′k f +Ak f = 0 (k=1 ···r)
and we determine its general solutions:
Fµ(y′1, . . . ,y′m, a1, . . . ,ar) (i=1 ···n)
relatively to the same system of values: ak = a0k .
In addition, we yet solve the n equations: xi = Fi(x′,a) with respect to x′1, . . . ,x′n:
(11) x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n),
and likewise, the m equations: yµ = Fµ(y′,a) with respect to y′1, . . . ,y′m:
(11’) y′µ = fµ(y1, . . . ,ym, a1, . . . ,ar) (µ =1 ···n).
In whichever form the finite equations of the group: X1 f , . . . ,Xr f are present,then obviously, they can be brought to the form (11) by introducing new parameters,and likewise, in whichever form the finite equations of the group: Y1 f , . . . ,Yr f arepresent, they can always be given the form (11’) by introducing new parameters.
But the Theorem 73 p. 421 can be applied to the two groups (11) and (11’).Indeed, in the two groups, the identity transformation has the parameters: a0
1, . . . ,a0r
and for the two groups, the associated parameter groups contain the r independentinfinitesimal transformations: A1 f , . . . ,Ar f , and consequently, according to thementioned theorem, one can indicate for each one of the two groups the associatedparameter group, and these parameter groups are the same for both of them.
As a result, the claim stated above is proved. —

424 21 The Group of Parameters
Thus, it is at present established that two groups which have the same parametergroup are equally composed, and on the other hand, that two groups that which areequally composed, can be brought, by introducing new parameters, to a form inwhich they two have the same parameter group. Thus, we can say:
Theorem 74. Two r-term groups:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
and:y′µ = gµ(y1, . . . ,ym, a1, . . . ,ar) (µ =1 ···m)
are equally composed if and only if it is possible to represent the parameters:a1, . . . ,ar as independent functions of the a:
ak = χk(a1, . . . ,ar) (k=1 ···r)
in such a way that the parameter group of the group:
y′µ = gµ(y1, . . . ,ym, χ1(a), . . . ,χr(a)
)(µ =1 ···m)
coincides with the parameter group of the group: x′i = fi(x,a).
It is particularly noticeable that our two equally composed groups: X1 f , . . . ,Xr fand: Y1 f , . . . ,Yr f then have the same parameter group when one writes their finiteequations under the canonical form:
(12) x′i = xi +r
∑k=1
ek Xk xi +1···r
∑k, j
ek e j
1 ·2Xk X j xi + · · · (i=1 ···n)
and, respectively:
(12’) y′µ = yµ +r
∑k=1
ek Yk yµ +1···r
∑k, j
ek e j
1 ·2Yk Yj yµ + · · · (µ =1 ···m).
In fact, from the developments in Chap. 4, Sect. 4.5, it follows that the equa-tions (11) receive the form (12) after the substitution:
(13)aν = a0
ν +r
∑k=1
ek[Ak aν
]a=a0 +
1···r
∑k, j
ek e j
1 ·2[Ak A j aν
]a=a0 + · · ·
(ν =1 ···r)
and that the equations (11’) are transferred to (12’) by the same substitution.Now, since the equations (13) represent a transformation between the parameters:a1, . . . ,ar and e1, . . . ,er and since the two groups (11) and (11’) have their parametergroup in common, it follows that one and the same parameter group is associated tothe two groups (12) and (12’).

§ 103. 425
Thus, the following holds:
Proposition 1. If the r independent infinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
stand pairwise in the relationships:
[Xi, Xk] =r
∑s=1
ciks Xs f
and if, on the other hand, the r independent infinitesimal transformations:
Yk f =m
∑µ=1
ηkµ(y1, . . . ,ym)∂ f∂yµ
(k=1 ···r)
stand pairwise in the same relationships:
[Yi, Yk] =r
∑s=1
ciks Ys f ,
then the two equally composed groups:
x′i = xi +r
∑k=1
ek Xk xi +1···r
∑k, j
ek e j
1 ·2Xk X j xi + · · · (i=1 ···n)
and:
y′µ = yµ +r
∑k=1
ek Yk yµ +1···r
∑k, j
ek e j
1 ·2Yk Yj yµ + · · · (µ =1 ···m)
possess one and the same parameter group.
At present, we imagine that two arbitrary equally composed r-term groups:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
and:y′µ = fµ(y1, . . . ,ym, a1, . . . ,ar) (µ =1 ···m)
are presented which already have a form such that the parameter group for both isthe same.
Let the infinitesimal transformations of the parameter group in question be:
Ak f =r
∑j=1
αk j(a1, . . . ,ar)∂ f∂a j
(k=1 ···r)
and let them be linked together by the relations:

426 21 The Group of Parameters
[Ai, Ak] =r
∑s=1
ciks As f .
According to p. 415, x′1, . . . ,x′n, when considered as functions of x1, . . . ,xn,
a1, . . . ,ar, satisfy certain differential equations of the form:
ξ ji(x′1, . . . ,x′n) =
r
∑k=1
α jk(a1, . . . ,ar)∂x′i∂ak
( j=1 ···r ; i=1 ···n).
Here, the ξ ji(x′) are completely determined functions, because by resolution of theequations: x′i = fi(x,a), we get, say: xi = Fi(x′,a), whence it holds identically:
ξ ji(x′1, . . . ,x′n) =
r
∑k=1
α jk(a1, . . . ,ar)
[∂ fi(x,a)
∂ak
]x=F(x′,a)
,
so that we can therefore find the ξ ji(x′) without difficulty, when we want.According to Theorem 21, p. 164, the r expressions:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
are independent infinitesimal transformations and they are linked together by therelations:
[Xi, Xk] =r
∑s=1
ciks Xs f ;
naturally, they generate the group: x′i = fi(x,a).For the group: y′µ = fµ(y,a), there are in a corresponding way differential equa-
tions of the form:
η jµ(y′1, . . . ,y′m) =
r
∑k=1
α jk(a1, . . . ,ar)∂y′µ∂ak
( j=1 ···r ; µ =1 ···m),
where the η jµ(y′) are completely determined functions. The r expressions:
Yk f =m
∑µ=1
ηkµ(y1, . . . ,ym)∂ f∂yµ
(k=1 ···r)
are independent infinitesimal transformations and they are linked together by therelations:
[Yi, Yk] =r
∑s=1
ciks Ys f ;
naturally, they generate the group: y′µ = fµ(y,a).At present, exactly as on p. 424, we recognize that, after the substitution:

§ 103. 427
aν = a0ν +
r
∑k=1
ek[Ak aν
]a=a0 + · · · (ν =1 ···r),
the groups: x′i = fi(x,a) and: y′µ = fµ(y,a) receive the forms:
x′i = xi +r
∑k=1
ek Xk xi + · · · (i=1 ···n)
and, respectively:
y′µ = yµ +r
∑k=1
ek Yk yµ + · · · (µ =1 ···m).
Therefore, we get the
Proposition 2. If the two r-term groups:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
and:y′µ = fµ(y1, . . . ,ym, a1, . . . ,ar) (µ =1 ···m)
have the same parameter group, then it is possible to introduce, in place of the a,new parameters: e1, . . . ,er so that the two groups receive the forms:
x′i = xi +r
∑k=1
ek Xk xi + · · · (i=1 ···n)
and, respectively:
y′µ = yµ +r
∑k=1
ek Yk yµ + · · · (µ =1 ···m) ;
here, X1 f , . . . ,Xr f and Y1 f , . . . ,Yr f are independent infinitesimal transformations ofthe two groups such that, simultaneously with the relations:
[Xi, Xk] =r
∑s=1
ciks Xs f
there hold the relations:
[Yi, Yk] =r
∑s=1
ciks Ys f ,
so that the two groups are related to each other in a holoedrically isomorphic waywhen the infinitesimal transformation e1 Y1 f + · · ·+ er Yr f is associated to everyinfinitesimal transformation: e1 X1 f + · · ·+ er Xr f .

428 21 The Group of Parameters
Now, about the two groups: x′i = fi(x,a) and: y′µ = fµ(y,a), we make the same as-sumptions as in Proposition 2; in addition, we want to assume yet that: a′k = ϕk(a,b)are the finite equations of their common parameter group.
Under this assumption, the following obviously holds true of each one of the twogroups: If two transformations of the group which have the parameters: a1, . . . ,arand: b1, . . . ,br, respectively, are executed one after the other, then the resultingtransformation belongs to the group and it possesses the parameters: ϕ1(a,b), . . . ,ϕr(a,b).
We can express this fact somehow differently if we mutually associate the trans-formations of the two groups in a way so that every transformation of the one groupcorresponds to the transformation of the other group which has the same parame-ters. Indeed, we can then say: if S is a transformation of the one group and if S isthe corresponding transformation of the other group, and moreover, if T is a sec-ond transformation of the one group and if T the corresponding transformation ofthe other group, then the transformation ST of the one group corresponds to thetransformation ST in the other group.
Such a mutual association of the transformations of both groups is then, accord-ing to Theorem 74, p. 424 always possible when and only when the two groups areequally composed. So we have the:
Theorem 75. Two r-term groups are equally composed if and only if it is possible torelate the transformations of the one group to the transformations of the other groupin a univalent invertible way so that the following holds true: If, in the one group,one executes two transformations one after the other and if, in the other group, oneexecutes one after the other and in the same order the corresponding transforma-tions, then the transformation that one obtains in the one group corresponds to thetransformation that one obtains in the other group.†
The above considerations provide a new important result when they are applied tothe Proposition 1, p. 425. In order to be able to state this result under the most simpleform, we remember two different things: firstly, that the two groups: X1 f , . . . ,Xr fand: Y1 f , . . . ,Yr f are related to each other in a holoedrically isomorphic way when toevery infinitesimal transformation: e1 X1 f + · · ·+ er Xr f is associated the infinitesi-mal transformation: e1 Y1 f + · · ·+er Yr f , and secondly, that the expression: e1 X1 f +· · ·+ er Xr f can also be interpreted as the symbol of a finite transformation of thegroup: X1 f , . . . ,Xr f (cf. Chap. 17, p. 305 and Chap. 15, p. 268). By taking this intoaccount, we can say:
Proposition 3. Let the two equally composed r-term groups:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
and:
† Cf. LIE, Archiv for Mathematik og Naturvidenskab 1876; Math. Ann. Vol. XXV, p. 77; G. d.W. zu Christiania, 1884, no. 15.

§ 103. 429
Yk f =m
∑µ=1
ηkµ(y1, . . . ,ym)∂ f∂yµ
(k=1 ···r)
be related to each other in a holoedrically isomorphic way when one associates toevery infinitesimal transformation: e1 X1 f + · · ·+ er Xr f the infinitesimal transfor-mation: e1 Y1 f + · · ·+ er Yr f so that, simultaneously with the relations:
[Xi, Xk] =r
∑s=1
ciks Xs f
there hold the relations:
[Yi, Yk] =r
∑s=1
ciks Ys f ,
Then, if one interprets the expressions: ∑ ek Xk f and ∑ ek Yk f as the general sym-bols of the finite transformations of the two groups: X1 f , . . . ,Xr f and Y1 f , . . . ,Yr f ,the following holds true: If the two transformations: ∑ ek Xk f and ∑ e′k Xk f of thegroup: X1 f , . . . ,Xr f give, when executed one after the other, the transformation:∑ e′′k Xk f , then the two transformations: ∑ ek Yk f and ∑ e′k Yk f give the transforma-tion: ∑ e′′k Yk f when executed one after the other.
Thus, if one has related two equally composed r-term groups in a holoedricallyisomorphic way in the sense of Chap. 17, p. 305, then at the same time thanksto this, one has established a univalent invertible relationship between the finitetransformations of the two groups, as is written down in Theorem 75.
But the converse also holds true: If one has produced a univalent invertible rela-tionship between the transformations of two r-term equally composed groups whichhas property written down in Theorem 75, then at the same time thanks to this, thetwo groups are related to each other in a holoedrically isomorphic way.
In fact, let: x′i = fi(x1, . . . ,xn, a1, . . . ,ar) be the one group and let: y′µ =fµ(y1, . . . ,ym, a1, . . . ,ar) be the transformation of the other group that corre-sponds to the transformation: x′i = fi(x,a). Then the two groups: x′i = fi(x,a)and y′µ = fµ(y,a) obviously have one and the same parameter group and hence,according to Proposition 2, p. 427, by introducing appropriate new parameters:e1, . . . ,er, they can be given the following forms:
x′i = xi +r
∑k=1
ek Xk xi + · · · (i=1 ···n)
and:
y′µ = yµ +r
∑k=1
ek Yk yµ + · · · (µ =1 ···m).
From this, it results that the said univalent invertible relationship between the trans-formations of the two groups amounts to the fact that, to every finite transforma-tion: e1 X1 f + · · ·+ er Xr f of the one group is associated the finite transformation:e1 Y1 f + · · ·+ er Yr f of the other group. Therefore at the same time, to every in-finitesimal transformation: ∑ ek Xk f is associated the infinitesimal transformation:
430 21 The Group of Parameters
∑ ek Yk f , and as a result, according to Proposition 2, a holoedrically isomorphicrelationship between the two groups is effectively established.
In the theory of substitutions, one defines the holoedric isomorphism of twogroups and the holoedrically isomorphic relationship between two groups dif-ferently than what we have done in Chap. 17. There, one says that two groupswith the same number of substitutions are “equally composed” or “holoedricallyisomorphic” when one can produce, between the transformations of the two groups,a univalent invertible relationship which has the property written in the Theorem 75,p. 428; if such a relationship between two holoedrically isomorphic groups is reallyestablished, then one says that the two groups are “related to each other in aholoedrically isomorphic way”.
But already on p. 305, we observed that materially [MATERIELL], our definitionof the concept in question corresponds precisely to the one which is usual in thetheory of substitutions, as far as such a correspondence may in any case be possi-ble between domains so different as the theory of substitutions and the theory oftransformation groups.
Our last developments show that the claim made on p. 305 is correct. From Theo-rem 75, p. 428, it results that two r-term groups which are holoedrically isomorphicin the sense of Chap. 17, p. 305 must also be called holoedrically isomorphic in thesense of the theory of substitutions, and conversely. From Proposition 3, p. 428 andfrom the remarks following, it is evident that two r-term groups which are related toeach other in a holoedrically isomorphic way in the sense of Chap. 17, p. 305, arealso holoedrically isomorphic in the sense of substitution theory.
It still remains to prove that our definition of the meroedric isomorphism (cf.Chap. 17, p. 305) also corresponds to the definition of meroedric isomorphism thatis given by the theory of substitutions.
Let X1 f , . . . ,Xr−q f , . . . ,Xr f and Y1 f , . . . ,Yr−q f be two meroedrically isomorphicgroups and let Xr−q+1 f , . . . ,Xr f be precisely the invariant subgroup of the r-termgroup which corresponds to the identity transformation of the (r− q)-term group.Lastly, let A1 f , . . . ,Ar f be a simply transitive group in the variables a1, . . . ,ar whichhas the same composition as X1 f , . . . ,Xr f . Here, we want to assume that a1, . . . ,ar−qare solutions of the complete system:
Ar−q+1 f = 0, . . . , Ar f = 0.
After this choice of the variables, A1 f , . . . ,Ar−q f possess the form:
Ak f =r−q
∑i=1
αki(a1, . . . ,ar−q)∂ f∂ai
+r
∑j=r−q+1
βk j(a1, . . . ,ar)∂ f∂a j
(k=1 ···r−q),
while Ar−q+1 f , . . . ,Ar f have the form:

§ 103. 431
Ak f =r
∑j=r−q+1
βk j(a1, . . . ,ar)∂ f∂a j
(k=1 ···r−q+1).
At the same time, it is clear that the reduced infinitesimal transformations:
Ak f =r−q
∑i=1
αki(a1, . . . ,ar−q)∂ f∂ai
(k=1 ···r−q)
generate a simply transitive group equally composed with the (r − q)-term groupY1 f , . . . ,Yr−q f .
If one denotes by Bk f , Bk f the infinitesimal transformations Ak f , Ak f writtendown in the variables b instead of the variables a, then according to earlier discus-sions, one finds the parameter group of the (r − q)-term group Y1 f , . . . ,Yr−q f byintegrating the complete system:
Ak f +Bk f = 0 (k=1 ···r−q),
and also the parameter group of the r-term group X1 f , . . . ,Xr f by integrating thecomplete system:
Ak f +Bk f = 0 (k=1 ···r).
If the equations of the parameter group associated with the (r − q)-term groupobtained in this way are, say:
a′k = ϕk(a1, . . . ,ar−q, b1, . . . ,br−q) (k=1 ···r−q),
then it is clear that the parameter group associated with the r-term group is repre-sentable by equations of the form:
a′k = ϕk(a1, . . . ,ar−q, b1, . . . ,br−q) (k=1 ···r−q)
a′i = ψi(a1, . . . ,ar, b1, . . . ,br) (i=r−q+1 ···r).
From this, it follows that the groups X1 f , . . . ,Xr f and Y1 f , . . . ,Yr−q f are meroedri-cally isomorphic in the sense of substitution theory.
At present, we want to derive the result obtained just now yet in another way.However, we do not consider it to be necessary to conduct in details this second,in itself noticeable, method, because it presents great analogies with the precedingdevelopments.
We imagine that the transformation equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
are presented, but we leave undecided whether the a are essential parameters or not.Now, if the fi satisfy differential equations of the form:

432 21 The Group of Parameters
∂ fi
∂ak=
r
∑j=1
ψk j(a1, . . . ,ar)ξ ji( f1, . . . , fn)
which can be resolved with respect to the ξ ji:
ξ ji( f ) =r
∑k=1
α jk(a1, . . . ,ar)∂ fi
∂ak,
then we realize easily (cf. Chap. 4, Sect. 4.6) that every transformation: x′i = fi(x,a)whose parameters a lie in a certain neighbourhood of a1, . . . ,ar can be obtained byexecuting firstly the transformation: xi = fi(x, a), and then a certain transformation:
x′i = wi(x1, . . . ,xn, λ1, . . . ,λr)
of a one-term group:
λ1 X1 f + · · ·+λr Xr f =r
∑k=1
λk
n
∑i=1
ξki(x)∂ f∂xi
.
In addition, we find that the concerned values of the parameters λ only depend uponthe form of the functions α jk(a), and on the two systems of values ak and ak as well.
Under the assumptions made, when one sets:
r
∑k=1
α jk(a)∂ f∂ak
= Ak f ,n
∑i=1
ξki(x′)∂ f∂x′i
= X ′k f ,
one now obtains (compare with the pages 161 sq.) that relations of the form:
[X ′i , X ′
k] =r
∑s=1
ϑiks(x′1, . . . ,x′n, a1, . . . ,ar)X ′
s f
[Ai, Ak] =r
∑s=1
ϑiks(x′1, . . . ,x′n, a1, . . . ,ar)As f
hold, in which the ϑiks are even independent of the x′. However, contrary to theearlier analogous developments, it cannot be proved now that in the two latter equa-tions, the ϑ can be set equal to absolute constants. But when we consider only theequations:
[X ′i , X ′
k] =r
∑s=1
ϑiks(a)X ′s f ,
it is clear that by particularizing the a, they provide relations of the form:
[X ′i , X ′
k] =r
∑s=1
ciks X ′s f

§ 103. 433
in which the ciks denote constants. Hence it is also sure under our present assump-tions that all finite transformations λ1 X1 f + · · ·+λr Xr f form a group which pos-sesses the same number of essential parameters as the family x′i = fi(x,a).
On the other hand, let X ′1 f , . . . ,X ′
r f denote r infinitesimal transformation that arenot necessarily independent and which stand in the relationships:
[X ′i , X ′
k] =r
∑s=1
ciks X ′s f ;
furthermore, let:
Ak f =r
∑i=1
αki(a1, . . . ,ar)∂ f∂ai
(k=1 ···r)
be r independent infinitesimal transformations of a simply transitive group whosecomposition is given by the equations:
[Ai, Ak] =r
∑s=1
ciks As f .
At present, we form the r-term complete system:
X ′k f +Ak f = 0 (k=1 ···r),
we compute its general solutions F1, . . . ,Fn relatively to a suitable system of valuesa1 = a0
1, . . . , ar = a0r and we set: x1 = F1, . . . , xn = Fn. Afterwards, the equations
resulting by resolution:
x′k = fk(x1, . . . ,xn, a1, . . . ,ar)
determine a family of at most ∞r transformations which obviously comprises theidentity transformation x′k = xk.
Now, by proceeding exactly as on p. 167, we obtain at first the system of equa-tions:
r
∑µ=1
α jµ(a)∂x′ν∂aµ
= ξ jν(x′),
and then from it, by resolution:
∂x′ν∂aµ
=r
∑j=1
ψµ j(a)ξ jν(x′).
From this, we conclude: firstly, that the family x′i = fi(x,a) consists of the trans-formations of all one-term groups ∑ λk Xk f , secondly, that all these transformationsform a group with at most r essential parameters, and lastly thirdly that from thetwo transformations:

434 21 The Group of Parameters
x′i = fi(x,a), x′′i = fi(x′,b),
a third transformation x′′i = fi(x,c) comes into existence whose parameters: c1 =ϕ1(a,b), . . . , cr = ϕr(a,b) are determined by these two systems of values ak, bi andby the form of the functions αk j(a).
But with this, the result obtained earlier on is derived in a new manner, withoutthat we need to enter further details.
If a given r-term group X1 f , . . . ,Xr−q f , . . . ,Xr f contains a known invariant sub-group, say Xr−q+1 f , . . . ,Xr f , then at present, we can easily indicate a meroedricallyisomorphic (r − q)-term group, the identity transformation of which correspondsto the said invariant subgroup (cf. p. 315, footnote). In fact, one forms a simplytransitive group A1 f , . . . ,Ar−q f , . . . ,Ar f in the variables a1, . . . ,ar which is equallycomposed with the r-term group X1 f , . . . ,Xr f . At the same time, we can assumeas earlier on that a1, . . . ,ar−q are invariants of the q-term group Ar−q+1 f , . . . ,Ar f .Then if we again set:
Ak f =r−q
∑i=1
αki(a1, . . . ,ar−q)∂ f∂ai
+r
∑j=r−q+1
βk j(a)∂ f∂a j
(k=1 ···r−q),
then the reduced infinitesimal transformations:
Ak f =r−q
∑i=1
αki(a1, . . . ,ar−q)∂ f∂ai
(k=1 ···r−q)
obviously generate an (r−q)-term group having the constitution demanded.In addition, it results from these developments that every proposition about the
composition of (r−q)-term groups produces without effort a proposition about thecomposition of r-term groups with a q-term invariant subgroup. This general prin-ciple which has its analogue in the theory of substitutions will be exploited in thethird volume.†
§ 104.
In Chap. 19, Proposition 3, p. 370, we gave a remarkable form to the criterion forthe similarity of equally composed groups; namely, we showed that two equallycomposed groups in the same number of variables are similar to each other if andonly if they can be related to each other in a holoedrically isomorphic, completelyspecific way.
Already at that time, we announced that the criterion in question could yet besimplified in an essential way as soon as two concerned groups are transitive; weannounced that the following theorem holds:
† Cf. LIE, Math. Ann. Vol. XXV, p. 137.

§ 104. 435
Theorem 76. Two equally composed transitive groups:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
and:
Zk f =n
∑i=1
ζki(y1, . . . ,yn)∂ f∂yi
(k=1 ···r)
in the same number of variables are similar to each other if and only if the fol-lowing condition is satisfied: If one chooses a determined point x0
1, . . . ,x0n which
lies on no manifold invariant by the group: X1 f , . . . ,Xr f , then it must be possibleto relate the two groups one to another in a holoedrically isomorphic way so thatthe largest subgroup contained in the group: X1 f , . . . ,Xr f which leaves invariantthe point: x0
1, . . . ,x0n corresponds to the largest subgroup of the group: Z1 f , . . . ,Zr f
which leaves at rest a certain point: y01, . . . ,y
0n.†
From Proposition 3, p. 370, it is clear that this condition for the similarity of thetwo groups is necessary; hence we need only to prove that it is also sufficient.
So, we imagine that the assumptions of the theorem are satisfied, namely weimagine that in the group: Z1 f , . . . ,Zr f , independent infinitesimal transformations:Y1 f , . . . ,Yr f are chosen so that our two groups are related to each other in theholoedrically isomorphic way described in Theorem 76, when to every infinitesimaltransformation: e1 X1 f + · · ·+ er Xr f is associated the infinitesimal transformation:e1 Y1 f + · · ·+ er Yr f .
According to the developments of the preceding paragraph, by means of the con-cerned holoedrically isomorphic relationship, a univalent invertible relationship be-tween the finite transformations of the two groups is also produced. We can de-scribe the latter relationship simply by interpreting, in the known way, ∑ ek Xk f and∑ ek Yk f as symbols of the finite transformations of our groups and in addition, bydenoting for convenience the finite transformation ∑ ek Xk f shortly by: T(e), and aswell, the transformation: ∑ ek Yk f shortly by: T(e).
Indeed, under these assumptions, the holoedrically isomorphic relationship be-tween our two groups associates the transformation T(e) to the transformation T(e),and conversely, and this association is constituted in such a way that the two trans-formations: T(e) T(e′) and T(e)T(e′) are related to each other, where e1, . . . ,er ande′1, . . . ,e
′r denote completely arbitrary systems of values.
The point: x01, . . . ,x
0n remains invariant by exactly r − n independent infinitesi-
mal transformations of the group X1 f , . . . ,Xr f , and consequently, it admits exactly∞r−n different finite transformations of this group, transformations which form, asis known, an (r−n)-term subgroup. For the most general transformation T(e) whichleaves at rest the point: x0
1, . . . ,x0n, we want to introduce the symbol: S(a1,...,ar−n), or
shortly: S(a); here, by a1, . . . ,ar−n we understand arbitrary parameters.We denote by S(a1,...,ar−n), or shortly by S(a), the transformations T(e) of the
group: Z1 f , . . . ,Zr f which are associated to the transformations S(a) of the group:
† Cf. LIE, Archiv for Math. og Naturv. Christiania 1885, p. 388 and p. 389.

436 21 The Group of Parameters
X1 f , . . . ,Xr f ; under the assumptions made, the ∞r−n transformations S(a) then formthe largest subgroup contained in the group: Z1 f , . . . ,Zr f which leaves invariant thepoint: y0
1, . . . ,y0n. This is the reason why the point: y0
1, . . . ,y0n belongs to no manifold
which remains invariant by the group: Z1 f , . . . ,Zr f .
After these preparations, we conduct the following reflections.By execution of the transformation T(e) the point x0
i is transferred to the point:(x0
i )T(e), whose position naturally depends on the values of the parameters e1, . . . ,er.According to Chap. 14, Proposition 1, p. 238, this new point in turn admits exactly∞r−n transformations of the group: X1 f , . . . ,Xr f , namely all transformations of theform:
T−1(e) S(a) T(e)
with the r−n arbitrary parameters: a1, . . . ,ar−n.On the other hand, the point y0
i is transferred by the transformation T(e) to thepoint: (y0
i )T(e) which, naturally, admits exactly ∞r−n transformations of the group:Z1 f , . . . ,Zr f , namely all transformations of the form:
T−1(e)S(a)T(e).
Now, this is visibly the transformations of the group: Z1 f , . . . ,Zr f which is as-sociated to the transformation: T−1
(e) S(a) T(e) of the group: X1 f , . . . ,Xr f ; so, we seethat, by means of our holoedrically isomorphic relationship, exactly the same holdstrue for the points: (x0
i )T(e) and (y0i )T(e) as for the points: x0
i and y0i ; namely, to
the largest subgroup contained in the group X1 f , . . . ,Xr f which leaves invariant thepoint: (x0
i )T(e) there corresponds the largest subgroup of the group: Z1 f , . . . ,Zr f bywhich the point: (y0
i )T(e) remains fixed.Now, we give to the parameters e1, . . . ,er in the transformations T(e) and
T(e) all possible values, gradually. Then because of the transitivity of the group:X1 f , . . . ,Xr f , the point: (x0
i )T(e) is transferred gradually to all points of the spacex1, . . . ,xn that lie on no invariant manifold, hence to all points in general position.At the same time, the point: (y0
i )T(e) is transferred to all points in general positionin the space y1, . . . ,yn.
With these words, it is proved that the holoedrically isomorphic relationship be-tween our two groups possesses the properties put together in Proposition 3, p. 370;consequently, according to that proposition, the group: X1 f , . . . ,Xr f is similar to thegroup: Z1 f , . . . ,Zr f and the correctness of the Theorem 76, p. 434 is established.
Besides, for the proof of the Theorem 76, one does absolutely not need to gofurther back to the cited proposition. Rather, it can be directly concluded from thedevelopments above that a transformation exists which transfers the infinitesimaltransformations: X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively.
We have seen that through our holoedrically isomorphic relationship, the point:(y0
i )T(e) of the space y1, . . . ,yn is associated to the point: (x0i )T(e) of the space
x1, . . . ,xn, and to be precise, in this way, a univalent invertible relationship isproduced between the points of the two spaces in general position, inside a certain

§ 104. 437
region. Now, if we interpret the xi and the yi as point coordinates of one and thesame n-times extended space: Rn, and both with respect to the same system ofcoordinates, then there is a completely determined transformation T of the spaceRn which always transfers the points with the coordinates: (x0
i )T(e) to the point withthe coordinates: (y0
i )T(e). We will prove that this transformation T transfers theinfinitesimal transformations: X1 f , . . . ,Xr f to: Y1 f , . . . ,Yr f , respectively, so that ourtwo r-term groups are similar to each other precisely thanks to the transformationT.
The transformation T satisfies all the infinitely many symbolic equations:
(14) (x0i )T(e′)T= (y0
i )T(e′),
with the r arbitrary parameters e′1, . . . ,e′r, and it is even defined by these equations.
From this, it results that T satisfies at the same time the symbolic equations:
(x0i )T(e′) T(e)T= (y0
i )T(e′)T(e),
whichever values the parameters e and e′ may have.If we compare these equations with the equations (14) which we can obviously
also write as:(x0
i )T(e′) = (y0i )T(e′)T
−1,
then we obtain:(y0
i )T(e′)T−1 T(e)T= (y0
i )T(e′)T(e),
or, what is the same:
(15) (y0i )T(e′)T
−1 T(e)TT−1(e) = (y0
i )T(e′).
By appropriate choice of e′1, . . . ,e′r, the point: (y0
i )T(e′) can be brought in coin-cidence with every point in general position in the Rm, hence the equations (15)express that every transformation:
(16) T−1 T(e)TT−1(e)
leaves fixed all points in general position in the Rn. But obviously, this is possibleonly when all transformations (16) coincide with the identity transformation.
With these words, it is proved that the following ∞r symbolic equations hold:
(17) T−1 T(e)T= T(e),
hence that the transformation T transfers every transformation T(e) of the group:X1 f , . . . ,Xr f to the corresponding transformation T(e) of the group: Z1 f , . . . ,Zr f .In other words, the expression: e1 X1 f + · · ·+ er Xr f converts into the expression:e1 Y1 f + · · ·+er Yr f after the execution of the transformation T, or, what is the same,the r infinitesimal transformations: X1 f , . . . ,Xr f are transferred, by the execution ofT, to Y1 f , . . . ,Yr f , respectively.

438 21 The Group of Parameters
Consequently, the two groups: X1 f , . . . ,Xr f and Z1 f , . . . ,Zr f are similar to eachother and the Theorem 76, p. 434 is at present proved, independently of the Propo-sition 3, p. 370.
§ 105.
In § 100, we saw that the same equations defined there: a′k = ϕk(a,b) represented agroup, and in fact, we realized that between the r functions ϕk(a,b), the r identities:
(5) ϕk(ϕ1(a,b), . . . , ϕr(a,b), c1, . . . ,cr
)≡ ϕk
(a1, . . . ,ar, ϕ1(b,c), . . . ,ϕr(b,c)
)held true.
Now, one convinces oneself in the same way that the equations:
(18) a′k = ϕk(b1, . . . ,br, a1, . . . ,ar) (k=1 ···r)
in the variables a also represent a group with the parameters b and to be precise, asimply transitive r-term group.
At present, a few remarks about this new group.This group possesses the remarkable property that each one of its transformations
is interchangeable with every transformation of the parameter group: a′k = ϕk(a,b).Indeed, if one executes at first the transformation (18) and then any transformation:
a′′k = ϕk(a′1, . . . ,a′r, c1, . . . ,cr) (k=1 ···r)
of the parameter group: a′k = ϕk(a,b), then one obtains the transformation:
a′′k = ϕk(ϕ1(b,a), . . . ,ϕr(b,a), c1, . . . ,cr
)(k=1 ···r)
which, because of the identities (5), can be brought to the form:
a′′k = ϕk(b1, . . . ,br, ϕ1(a,c), . . . , ϕr(a,c)
)(k=1 ···r).
But this transformation can be obtained by executing at first the transformation:
a′k = ϕk(a1, . . . ,ar, c1, . . . ,cr)
of the parameter group and then the transformation:
a′′k = ϕk(b1, . . . ,br, a′1, . . . ,a′r)
of the group (18).Thus, the group (18) is nothing else than the reciprocal simply transitive group
associated to the parameter group†; according to Theorem 68, p. 391, it is equally
† The observation that the two groups (6) and (18) discussed in the text stand in a relationshipsuch that the transformations of the one are interchangeable with the transformations of the other,is due to ENGEL.

§ 105. 439
composed with the parameter group, and even similar to it; besides, it is naturallyalso equally composed with the group: x′i = fi(x,a) itself.
—————–


Chapter 22The Determination of All r-term Groups
Already in Chap. 17, p. 309, we have emphasized that every system of constants cikswhich satisfies the relations:
(1)
ciks + ckis = 0
r
∑ν=1
(cikν cν js + ck jν cν is + c jiν cνks
)= 0
(i, k, j, s=1 ···r).
represents a possible composition of r-term group and that there always are r-termgroups whose composition is determined just by this system of ciks. As we remarkedat that time, the proof for this will be first provided in full generality in the sec-ond volume; there, we will imagine that an arbitrary system of ciks having the saidconstitution is presented and we will prove that in order to find the infinitesimaltransformations of an r-term group having the composition ciks, only the integrationof simultaneous systems of ordinary differential equations is required in any case.The finite equations of this group can likewise be obtained by integrating ordinarydifferential equations, according to Chaps. 4 and 9.
Now in the present chapter, we show two kinds of things:Firstly, we imagine that the finite equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
of an r-term group are presented and we show that by integrating simultaneoussystems of ordinary differential equations, one can in every case find all r-termtransitive groups which are equally composed with the group: x′i = fi(x,a).
Secondly, we show that one can determine all intransitive r-term groups withoutintegration as soon as one knows all transitive groups with r or less parameters.
If we combine these results with what was said above and if we yet add thataccording to Theorem 53, p. 311, the determination of all possible compositions ofgroups with given number of parameters requires only algebraic operations, then weimmediately realize what follows:
441

442 22 The Determination of All r-term Groups
If the number r is given, then, aside from executable operations, the determina-tion of all r-term groups requires at most the integration of simultaneous systems ofordinary differential equations.
Naturally, the question whether the integration of the appearing differential equa-tions is executable or not is of great importance. However, we can enter this ques-tion neither in this chapter, nor in the concerned place of the second volume, sincethe answer to this question presupposes the theory of integration which cannot bedeveloped wholly in a work about transformation groups, and which would ratherdemand a separate treatment.
§ 106.
In this paragraph, we put together various method for the determination of simplytransitive groups, partly because these method will find applications in the sequel,partly because they are noticeable in themselves.
At first, let the equations:
(2) x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
of an r-term group be presented. We seek the finite equations of a simply transitivegroup which is equally composed with the presented group.
According to Chap. 21, p. 414, the parameter group of the group (2) is simplytransitive and is equally composed with the group (2). Now, the finite equations:
a′k = ϕk(a1, . . . ,ar, b1, . . . ,br) (k=1 ···r)
of this group can be found by means of executable operations, namely by resolvingfinite equations. Thus, we can set up the finite equations of one simply transitivegroup having the constitution demanded, namely just the said parameter group.
We therefore have the:
Theorem 77. If the finite equations of an r-term group are presented, then one canfind the equations of an equally composed simply transitive group by means of exe-cutable operations.
Obviously, together with this one simply transitive group, all other simply transi-tive groups which are equally composed with the group: x′i = fi(x,a) are also given,for as a consequence of Theorem 64, p. 353, all these groups are similar to eachother.
On the other hand, we assume that not the finite equations, but instead only theinfinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
of an r-term group are presented, and we seek to determine the infinitesimal trans-formations of an equally composed simply transitive group.

§ 106. 443
Visibly, we have already solved this problem in Chap. 9, p. 171 and 172, thoughit was interpreted differently there, because at that time, we did not have yet the con-cepts of simply transitive group and of being equally composed [GLEICHZUSAM-MENGESETZTSEINS]. At present, we can state as follows our previous solution tothe problem:
Proposition 1. If the infinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
of an r-term group are presented, then one finds the infinitesimal transformations ofan equally composed simply transitive group in the following way: One sets:
X (µ)k =
n
∑i=1
ξki(x(µ)1 , . . . , x(µ)n
) ∂ f
∂x(µ)i
(k=1 ···r)
(µ =1,2 ···r−1),
one forms the r infinitesimal transformations:
Wk f = Xk f +X (1)k f + · · ·+X (r−1)
k f (k=1 ···r)
and one determines rn− r arbitrary independent solutions: u1, . . . ,unr−r of the r-term complete system:
W1 f = 0, . . . , Wr f = 0;
then one introduces u1, . . . ,unr−r together with r appropriate functions: y1, . . . ,yr ofthe nr variables x(µ)i as new independent variables and in this way, one obtains theinfinitesimal transformations:
Wk f =r
∑j=1
ηk j(y1, . . . ,yr, u1, . . . ,unr−r)∂ f∂y j
(k=1 ···r),
and if in addition one understands numerical constants by u01, . . . ,u
0nr−r, then the r
independent infinitesimal transformations:
Wk f =r
∑j=1
ηk j(y1, . . . ,yr, u01, . . . ,u
0nr−r)
∂ f∂y j
(k=1 ···r)
generate a simply transitive group equally composed with the group: X1 f , . . . ,Xr f .If: X1 f , . . . ,Xr f are linked together by the relations:
[Xi, Xk] =r
∑s=1
ciks Xs f ,
then the same relations hold between W1 f , . . . ,Wr f :

444 22 The Determination of All r-term Groups
[Wi,Wk] =r
∑s=1
ciksWs f .
The process which is described in the above proposition requires the integrationof ordinary differential equations, and naturally, this integration is not always ex-ecutable. Theoretically, this is completely indifferent, since in the present chapter,we do not manage without integration. Nevertheless, in the developments of thenext paragraph where the question is to really set up simply transitive groups, wewill nowhere make use of the described process, and we will apply it only in oneplace, where it holds, in order to prove the existence of one simply transitive groupwith certain properties.
Lastly, we still want to take up the standpoint where we imagine only that acomposition of an r-term group is given, hence a system of ciks which satisfies theequations (1). We will show that it is at least in very many cases possible, by meansof executable operations, to set up the finite equations of a simply transitive groupof the composition ciks.
For this, we use the Theorem 52, p. 308. According to it, the r infinitesimaltransformations:
Eµ f =1···r
∑k, j
c jµk e j∂ f∂ek
(k=1 ···r)
stand pairwise in the relationships:
[Ei, Ek] =r
∑s=1
ciks Es f ,
hence they generate a linear homogeneous group in the variables: e1, . . . ,er. Thisgroup is in particular r-term when not all r×r determinants vanish whose horizontalrows possess the form: ∣∣c j1k c j2k · · · c jrk
∣∣ ( j, k=1 ···r)
and it has then evidently the composition ciks.Now, the finite equations of the group: E1 f , . . . ,Er f can be set up by means of
executable operations (cf. p. 286); hence when these r× r determinants are not allequal to zero, we can indicate the finite equations of an r-term group having thecomposition ciks. But from this, it immediately follows (Theorem 77, p. 442) thatwe can also indicate the finite equations of a simply transitive group having thecomposition ciks.
With these words, we have gained the proposition standing next:
Proposition 2. If a system of constants ciks is presented which satisfies the equa-tions:

§ 107. 445
(1)
ciks + ckis = 0
r
∑ν=1
(cikν cν js + ck jν cν is + c jiν cνks
)= 0
(i, k, j, s=1 ···r)
and which is constituted in such a way that not all r× r determinants vanish whosehorizontal rows have the form:∣∣c j1k c j2k · · · c jrk
∣∣ ( j, k=1 ···r),
then by means of executable operations, one can always find the finite equations ofa simply transitive group having the composition ciks.
Besides, the same can also be proved in a completely analogous way for othersystems of ciks, but we do not want to go further in that direction. Only a few moreobservations.
If r infinitesimal transformations: X1 f , . . . ,Xr f are presented which generate anr-term group, then the system of ciks which is associated to the group in questionis given at the same time. Now, if this system of ciks is constituted in such a waythat not all determinants considered in Proposition 2 vanish, then visibly, the group:X1 f , . . . ,Xr f contains no excellent infinitesimal transformation (cf. p. 288), hencewe realize that the following holds:
If r independent infinitesimal transformations: X1 f , . . . ,Xr f are presented whichgenerate an r-term group, then when this group contains no excellent infinitesimaltransformation, one can set up in every case, by means of executable operations,the finite equations of a simply transitive group which is equally composed with thegroup: X1 f , . . . ,Xr f .
§ 107.
At present, we tackle the first one of the two problems the solution of which we havepromised in the introduction of the chapter.
So, we imagine that the finite equations:
(2) x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
of an r-term group are presented and we take up the problem of determining alltransitive r-term groups which are equally composed with the presented group.
When an r-term group Γ of any arbitrary space is transitive and has the samecomposition as the group: x′i = fi(x,a), the same two properties evidently hold truefor all groups of the same space that are similar to Γ . Hence, we classify the soughtgroups in classes by reckoning as belonging to one and the same class all groups ofthe demanded constitution which contain an equal number of parameter and whichin addition are similar to each other. We call the totality of all groups which belongto such a class a type of transitive group of given composition.

446 22 The Determination of All r-term Groups
This classification of the sought groups has the advantage that it is not necessaryfor us to really write down all the sought groups. Indeed, if one group of the consti-tution demanded is known, then at the same time, all groups similar to it are known,hence all groups which belong to the same type. Consequently, it suffices completelythat we enumerate how many different types there are of the sought groups and thatwe indicate for every individual type a representative, hence a group which belongsto the concerned type.
In order to settle our problem, we take the following route:At first, we indicate a process which provides the transitive groups equally com-
posed with the group: x′i = fi(x,a). Afterwards, we conduct the proof that, by meansof this process, one can obtain every group having the concerned constitution, sothat notably, one finds at least one representative for every type of such groups.Lastly, we give criteria to decide whether two different groups obtained by our pro-cess are similar to each other, or not, hence to decide whether they belong to thesame type, or not. Thanks to this, we then become in a position to have a view of theexisting mutually distinct types and at the same time, for each one of these types, tohave a representative.
This is the program that will be carried out in the sequel.
Let:
Yk f =r
∑j=1
ηk j(y1, . . . ,yr)∂ f∂y j
(k=1 ···r)
be independent infinitesimal transformations of a simply transitive group which isequally composed with the group: x′i = fi(x,a). Moreover, let:
Zk f =r
∑j=1
ζk j(y1, . . . ,yr)∂ f∂y j
(k=1 ···r)
be independent infinitesimal transformations of the associated reciprocal groupwhich, according to Theorem 68, p. 391, is simply transitive as well, and is equallycomposed with the group: x′i = fi(x,a).
Evidently, all these assumptions can be satisfied. For instance, two simply transi-tive groups having the constitution indicated are the parameter group of the group:x′i = fi(x,a) defined in the previous chapter:
a′k = ϕk(a1, . . . ,ar, b1, . . . ,br) (k=1 ···r)
and its reciprocal group:
a′k = ϕk(b1, . . . ,br, a1, . . . ,ar) (k=1 ···r)
and the finite equations of both may even be set up by means of executable opera-tions.

§ 107. 447
After these preparations, we turn to the explanation of the process announcedabove which produces transitive groups that are equally composed with the group:x′i = fi(x,a).
In Chap. 17, p. 316, we showed how every decomposition of the space invariantby a group can be used in order to set up an isomorphic group. We want to applythis to the group: Y1 f , . . . ,Yr f .
On the basis of Theorem 69, p. 398, we seek an arbitrary decomposition of thespace y1, . . . ,yr invariant by the group Y1 f , . . . ,Yr f . By means of algebraic opera-tions, we determine and m-term subgroup of the group: Z1 f , . . . ,Zr f . If:
(3) Zµ f = εµ1 Z1 f + · · ·+ εµr Zr f (µ =1 ···m)
are independent infinitesimal transformations of this subgroup, we form the m-termcomplete system:
Z1 f = 0, . . . , Zm f = 0
and we compute, by integrating it, r−m arbitrary invariants:
u1(y1, . . . ,yr), . . . , ur−m(y1, . . . ,yr)
of the group: Z1 f , . . . ,Zm f . Then the equations:
(4) u1(y1, . . . ,yr) = const., . . . , ur−m(y1, . . . ,yr) = const.
determine a decomposition of the space y1, . . . ,yr in ∞r−m m-times extended mani-folds invariant by the group: Y1 f , . . . ,Yr f .
Now, we introduce u1(y), . . . ,ur−m(y) together with m other appropriate func-tions: v1, . . . ,vm of the y as new variables in Y1 f , . . . ,Yr f and we obtain:
Yk f =r−m
∑ν=1
ωkν(u1, . . . ,ur−m)∂ f∂uν
+m
∑µ=1
wkµ(u1, . . . ,ur−m, v1, . . . ,vm)∂ f∂vµ
(k=1 ···r).
From this, we lastly form the reduced infinitesimal transformations:
Uk f =r−m
∑ν=1
ωkν(u1, . . . ,ur−m)∂ f∂uν
(k=1 ···r).
According to Chap. 17, Proposition 4, p. 318, they generate a group in the variables:u1, . . . ,ur−m which is isomorphic with the group: Y1 f , . . . ,Yr f .
If we had chosen, instead of u1(y), . . . ,ur−m(y), any other independent in-variants: u′1(y), . . . ,u
′r−m(y) of the group: Z1 f , . . . ,Zm f , then in place of the
group: U1 f , . . . ,Ur f , we would have obtained another group in the variablesu′1, . . . ,u
′r−m, but this group would visibly be similar to the group: U1 f , . . . ,Ur f ,
because u′1(y), . . . ,u′r−m(y) are independent functions of: u1(y), . . . ,ur−m(y). If we
would replace u1(y), . . . ,ur−m(y) by the most general system of r−m independent

448 22 The Determination of All r-term Groups
invariants of the group: Z1 f , . . . ,Zm f , then we would obtain the most general groupin r−m variables which is similar to the group: U1 f , . . . ,Ur f .
From the fact that the group: Y1 f , . . . ,Yr f is simply transitive, it follows, as wehave observed already in Chap. 20, p. 398, that not all (r−m)×(r−m) determinantsof the matrix: ∣∣∣∣∣∣∣∣
ω11(u) · · ω1,r−m(u)· · · ·· · · ·
ωr1(u) · · ωr,r−m(u)
∣∣∣∣∣∣∣∣vanish identically; expressed differently: it results that the group: U1 f , . . . ,Ur−m f inthe r−m variables u is transitive.
We therefore have a method for setting up transitive groups which are isomor-phic with the group: Y1 f , . . . ,Yr f . However, this does not suffices, for we demandtransitive groups that are equally composed with the group: Y1 f , . . . ,Yr f , hence areholoedrically isomorphic to it. Thus, the group: U1 f , . . . ,Ur f is useful for us onlywhen it is r-term. Under which conditions is it so?
Since the group: U1 f , . . . ,Ur f is transitive, it contains at least r −m essentialparameters, hence it will in general contain exactly r− l essential parameters, where0 6 l 6 m. Then according to p. 318, in the group: Y1 f , . . . ,Yr f , there are exactly lindependent infinitesimal transformations which leave individually fixed each oneof the ∞r−m manifolds (4), and these infinitesimal transformations generate an l-term invariant subgroup of the group: Y1 f , . . . ,Yr f . For reasons of brevity, we wantto denote the concerned subgroup by g.
If M is an arbitrary manifold amongst the generally located manifolds (4), thenM admits exactly m independent infinitesimal transformations: e1 Y1 f + · · ·+ er Yr fwhich generate an m-term subgroup γ of the group: Y1 f , . . . ,Yr f (cf. page 399). Nat-urally, the invariant subgroup g is contained in this group γ . On the other hand, Madmits exactly m independent infinitesimal transformations of the reciprocal group:Z1 f , . . . ,Zr f , namely: Z1 f , . . . ,Zm f , which also generate an m-term group. There-fore, according to Chap. 20, p. 400, one can relate the two simply transitive groups:Y1 f , . . . ,Yr f and Z1 f , . . . ,Zr f to each other in a holoedrically isomorphic way so thatthe subgroup γ corresponds to the subgroup: Z1 f , . . . ,Zm f . On the occasion, to theinvariant subgroup g, there visibly corresponds an l-term invariant subgroup g′ ofthe group: Z1 f , . . . ,Zr f , and in fact, g′ is contained in the subgroup: Z1 f , . . . ,Zm f .
We therefore see: when the group: U1 f , . . . ,Ur f is exactly (r− l)-term, then thegroup: Z1 f , . . . ,Zm f contains an l-term subgroup g′ which is invariant in the group:Z1 f , . . . ,Zr f .
Conversely: when the group: Z1 f , . . . ,Zm f contains an l-term subgroup:
Z′λ f = hλ1Z1 f + · · ·+hλmZm f (λ =1 ··· l)
which is invariant in the group: Z1 f , . . . ,Zr f , then the group: U1 f , . . . ,Ur f can atmost be (r− l)-term.
Indeed, under the assumptions just made, the l mutually independent equations:

§ 107. 449
(5) Z′1 f = 0, . . . , Z′
l f = 0
form an l-term complete system with r− l independent solutions:
ψ1(y1, . . . ,yr), . . . , ψr−l(y1, . . . ,yr).
Furthermore, there are relations of the form:
[Zk, Z′λ ] = hkλ1Z
′1 f + · · ·+hkλ l Z
′l f
(k=1 ···r ; λ =1 ··· l)
which express that the complete system (5) admits the group: Z1 f , . . . ,Zr f . Conse-quently, the equations:
(6) ψ1(y1, . . . ,yr) = const., . . . , ψr−l(y1, . . . ,yr) = const.
represent a decomposition of the space y1, . . . ,yr invariant by the group Z1 f , . . . ,Zr f ,and to be precise, a decomposition in ∞r−l l-times extended manifolds.
These ∞r−l manifolds stand in a very simple relationship with respect to the ∞r−m
manifolds:
(4) u1(y1, . . . ,yr) = const., . . . , ur−m(y1, . . . ,yr) = const.,
namely each one of the manifolds (4) consists of ∞m−l different manifolds (6). Thisfollows without effort from the fact that u1(y), . . . ,ur−m(y), as solutions of the com-plete system:
Z1 f = 0, . . . , Zm f = 0,
satisfy simultaneously the complete system (5), and can therefore be represented asfunctions of: ψ1(y), . . . ,ψr−l(y).
Now, according to Chap. 20, p. 397, the reciprocal group: Y1 f , . . . ,Yr f containsexactly l independent infinitesimal transformations which leave individually fixedeach one of the ∞r−l manifolds (6), hence it obviously contains at least l indepen-dent infinitesimal transformations which leave individually fixed each one of the∞r−m manifolds (4); but from this, it immediately follows that, under the assump-tion made, the group: U1 f , . . . ,Ur f can be at most (r− l)-term, as we claimed above.
Thanks to the preceding developments, it is proved that the group: U1 f , . . . ,Ur fis (r− l)-term if and only if the group: Z1 f , . . . ,Zm f contains an l-term subgroupinvariant in the group: Z1 f , . . . ,Zr f , but no larger subgroup of the same nature. Inparticular, the group: U1 f , . . . ,Ur f is r-term if and only if the group: Z1 f , . . . ,Zm fcontains, aside from the identity transformation, no subgroup invariant in the groupZ1 f , . . . ,Zr f . Here, the word ‘subgroup’ is to be understood in its widest sense,so that one then also has to consider the group: Z1 f , . . . ,Zm f itself as a subgroupcontained in it.
By summarizing the gained result, we can at present say:
Theorem 78. If the two r-term groups:

450 22 The Determination of All r-term Groups
Yk f =r
∑j=1
ηk j(y1, . . . ,yr)∂ f∂y j
(k=1 ···r)
and:
Zk f =r
∑j=1
ζk j(y1, . . . ,yr)∂ f∂y j
(k=1 ···r)
are simply transitive and reciprocal to each other, if, moreover:
Zµ f = εµ1 Z1 f + · · ·+ εµr Zr f (µ =1 ···m)
is an m-term subgroup of the group: Z1 f , . . . ,Zr f , and if:
u1(y1, . . . ,yr), . . . , ur−m(y1, . . . ,yr)
are independent invariants of this subgroup, then the r infinitesimal transforma-tions:
r−m
∑ν=1
Yk uν∂ f∂uν
=r−m
∑ν=1
ωkν(u1, . . . ,ur−m)∂ f∂uν
=Uk f
(k=1 ···r)
in the r −m variables: u1, . . . ,ur−m generate a transitive group, isomorphic withthe group: Y1 f , . . . ,Yr f . This group is (r − l)-term when there is in the group:Z1 f , . . . ,Zm f an l-term subgroup, but no larger subgroup, which is invariant inthe group: Z1 f , . . . ,Zr f . In particular, it is r-term and equally composed with thegroup: Y1 f , . . . ,Yr f if and only if the group: Z1 f , . . . ,Zm f neither is invariant itselfin the group: Z1 f , . . . ,Zr f , nor contains, aside from the identity transformation,another subgroup invariant in the group: Z1 f , . . . ,Zr f .
If one replaces u1(y), . . . ,ur−m(y) by the most general system: u′1(y), . . . ,u′r−m(y)
of r −m independent invariants of the group: Z1 f , . . . ,Zm f , then in place of thegroup: U1 f , . . . ,Ur f , one obtains the most general group in r−m variables similarto it. In particular, if the group: U1 f , . . . ,Ur f is r-term, then one obtains in this waythe most general transitive group equally composed with the group: Y1 f , . . . ,Yr fthat belongs to the same type as the group: U1 f , . . . ,Ur f .
In addition, from the developments used for the proof of this theorem, it yetresults the following
Proposition 3. If Y1 f , . . . ,Yr f and Z1 f , . . . ,Zr f are two reciprocal simply transitivegroups and if: Z1 f , . . . ,Zl f is an invariant l-term subgroup of the second group,then the invariants of this l-term group can also be defined as the invariants ofa certain l-term group which is contained as an invariant subgroup in the r-termgroup: Y1 f , . . . ,Yr f .
Thanks to the Theorem 78, the first part of the program stated on p. 446 is set-tled, and we are in possession of a process which provides transitive groups equallycomposed with the group: x′i = fi(x,a). We now come to the second part, namely tothe proof that every group of this sort can be found thanks to our process.

§ 107. 451
In r−m variables, let an arbitrary transitive group be presented which is equallycomposed with the group: x′i = fi(x,a); let its infinitesimal transformations be:
Xk f =r−m
∑ν=1
xkν(z1, . . . ,zr−m)∂ f∂ zν
(k=1 ···r)
At first, we prove that amongst the simply transitive groups of the same compo-sition, there is in any case one which can be obtained from the group: X1 f , . . . ,Xr fin a way completely analogous to the way in which the group: U1 f , . . . ,Ur f wasobtained from the simply transitive group: Y1 f , . . . ,Yr f .
To this end, under the guidance of Proposition 1, p. 443, we form, in the r(r−m)variables: z, z(1), . . . , z(r−1), the r infinitesimal transformations:
Wk f = Xk f +X(1)k f + · · ·+X
(r−1)k f (k=1 ···r).
Now, if ϕ1, . . . ,ϕR are (r−m)r−r =R independent solutions of the r-term completesystem:
(7) W1 f = 0, . . . , Wr f = 0,
then we introduce them, together with z1, . . . ,zr−m and yet together with m func-tions z1, . . . ,zm of the z, z(1), . . . , z(r−1), as new variables. This is possible, since theequations (7) are solvable with respect to ∂ f/∂ z1, . . . , ∂ f/∂ zr−m because of thetransitivity of the group: X1 f , . . . ,Xr f , whence z1, . . . ,zr−m are independent of thefunctions: ϕ1, . . . ,ϕR. In the new variables, W1 f , . . . ,Wr f receive the form:
Wk f = Xk f +m
∑µ=1
wkµ(z1, . . . ,zr−m, z1, . . . ,zm, ϕ1, . . . ,ϕR)∂ f∂ zµ
(k=1 ···r),
and here, when we confer to the ϕ suitable fixed values ϕ01 , . . . ,ϕ
0R and when we set:
wk(z1, . . . ,zr−m, z1, . . . ,zm, ϕ01 , . . . ,ϕ
0R) = w0
k(z1, . . . ,zr−m, z1, . . . ,zm),
then:
Wk f = Xk f +m
∑µ=1
w0kµ(z1, . . . ,zr−m, z1, . . . ,zm)
∂ f∂ zµ
(k=1 ···r)
are independent infinitesimal transformations of a simply transitive group which isequally composed with the group: X1 f , . . . ,Xr f and therefore, also equally com-posed with the group: x′i = fi(x,a).
With this, we have found a simply transitive group having the constitution indi-cated earlier on.
Indeed, the equations:

452 22 The Determination of All r-term Groups
z1 = const., . . . , zr−m = const.
obviously determine a decomposition of the space: z1, . . . ,zr−m, z1, . . . ,zm in∞r−m m-times extended manifolds invariant by the group: W1 f , . . . ,Wr f . Thegroup: X1 f , . . . ,Xr f indicates in which way these ∞r−m manifolds are permutedby the group: W1 f , . . . ,Wr f . So, between the two groups: X1 f , . . . ,Xr f andW1 f , . . . ,Wr f , there is a relationship completely analogous to the one abovebetween the two groups: U1 f , . . . ,Ur f and Y1 f , . . . ,Yr f .
At present, there is no difficulty to prove that the group: X1 f , . . . ,Xr f is similarto one of the groups that we obtain when we apply the process described in Theo-rem 78, p. 449 to two determined simply transitive reciprocal groups: Y1 f , . . . ,Yr fand Z1 f , . . . ,Zr f having the concerned composition.
Let: B1 f , . . . ,Br f be the simply transitive group reciprocal to: W1 f , . . . ,Wr f .Naturally, this group is equally composed with the group: Z1 f , . . . ,Zr f and hence,also similar to it (cf. Chap. 19, Theorem 64, p. 353).
We want to assume that the transformation:
(8)
z1 = z1(y1, . . . ,yr), . . . , zr−m = zr−m(y1, . . . ,yr)
z1 = z1(y1, . . . ,yr), . . . , zm = zm(y1, . . . ,yr)
transfers the group: Z1 f , . . . ,Zr f to the group: B1 f , . . . ,Br f . Then according toChap. 20, p. 391, through the same transformation, the group: Y1 f , . . . ,Yr f istransferred at the same time to the group: W1 f , . . . ,Wr f , hence by virtue of (8),there are relations of the form:
Yk f =r
∑j=1
hk j W j f (k=1 ···r),
where the determinant of the constants hk j does not vanish. But from these relations,the following relations immediately follow:
(9)r−m
∑ν=1
Yk zν∂ f∂ zν
=r
∑j=1
hk j X j f (k=1 ···r),
and likewise, they hold identically by virtue of (8).This is the reason why the equations:
z1(y1, . . . ,yr) = const., . . . , zr−m(y1, . . . ,yr) = const.
represent a decomposition of the space y1, . . . ,yr invariant by the group: Y1 f , . . . ,Yr f ,or, what amount to the same, the reason why z1(y), . . . ,zr−m(y) are independentinvariants of a completely determined m-term subgroup g of the group Z1 f , . . . ,Zr f .Consequently, we obtain the group: X1 f , . . . ,Xr f thanks to the process described inTheorem 78, p. 449 when we arrange ourselves as follows: As group: Z1 f , . . . ,Zm f ,we choose the m-term subgroup g of the group: Z1 f , . . . ,Zr f just defined, and asfunctions: u1(y), . . . ,ur−m(y), we choose the just said invariants: z1(y), . . . ,zr−m(y)

§ 107. 453
of the group g. Indeed, under these assumptions, the relations (9) hold true, inwhich the right-hand side expressions are independent infinitesimal transformationsof the group: X1 f , . . . ,Xr f .
As a result, it is proved that, thanks to the process which is described in The-orem 78, p. 449, one can find every transitive group isomorphic with the group:x′i = fi(x,a). We can therefore enunciate the following theorem:
Theorem 79. If the finite equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
of an r-term group are presented, then one finds in the following way all transitivegroups that are equally composed with this group:
To begin with, one determines, which requires only executable operations, twor-term simply transitive groups:
Yk f =r
∑j=1
ηk j(y1, . . . ,yr)∂ f∂y j
(k=1 ···r)
and:
Zk f =r
∑j=1
ζk j(y1, . . . ,yr)∂ f∂y j
(k=1 ···r)
that are reciprocal to each other and are equally composed with the group pre-sented. Afterwards, by means of algebraic operations, one sets up all subgroups ofthe group: Z1 f , . . . ,Zr f which neither are invariant in this group, nor contain, asidefrom the identity transformation, a subgroup invariant in the group: Z1 f , . . . ,Zr f .Under the guidance of Theorem 78, each one of the found subgroups produces alltransitive groups equally composed with the group: x′i = fi(x,a) that belong to acertain type. If one determines these groups for each one of the found subgroups,then one obtains all transitive groups that are equally composed with the group:x′i = fi(x,a).†
The second part of our program is now carried out, and we are in the position toidentify all types of transitive groups equally composed with the group: x′i = fi(x,a).Every subgroup of the group: Z1 f , . . . ,Zr f which has the property mentioned inthe Theorem 79 provides us with such a type. It yet remains to decide when twodifferent subgroups of the group: Z1 f , . . . ,Zr f produce different types, and whenthey produce the same type.
Let the m independent infinitesimal transformations:
Zµ f =r
∑k=1
εµk Zk f (µ =1 ···m)
† LIE, Archiv for Math., Vol. 10, Christiania 1885, and Verh. der Gesellsch. d. W. zu Chr. a.1884; Berichte der Kgl. Sächs. G. d. W., 1888.

454 22 The Determination of All r-term Groups
generate an m-term group which neither is invariant in the group: Z1 f , . . . ,Zr f , norcontains, aside from the identity transformation, another subgroup invariant in thegroup: Z1 f , . . . ,Zr f .
Let the functions:
u1(y1, . . . ,yr), . . . , ur−m(y1, . . . ,yr)
be independent invariants of the group: Z1 f , . . . ,Zm f . Under these assumptions, ac-cording to Theorem 79, the group:
Uk f =r−m
∑ν=1
Yk uν∂ f∂uν
=r−m
∑ν=1
ωkν(u1, . . . ,ur−m)∂ f∂uν
(k=1 ···r)
in the r −m variables: u1, . . . ,ur−m has the same composition as the group: x′i =fi(x,a), and is in addition transitive, hence it is a representative of the type of groupswhich corresponds to the subgroup: Z1 f , . . . ,Zm f .
If another subgroup of the group: Z1 f , . . . ,Zr f is supposed to provide the sametype of group, then this subgroup must evidently be m-term, for it is only in this casethat it can provide transitive groups in r −m variables that are equally composedwith the group: x′i = fi(x,a).
So, we assume that:
Zµ f =r
∑k=1
eµk Zk f (µ =1 ···m)
is another m-term subgroup of the group: Z1 f , . . . ,Zr f , and that this subgroup tooneither is invariant in the group: Z1 f , . . . ,Zr f , nor contains, aside from the identitytransformation, another subgroup invariant in the group: Z1 f , . . . ,Zr f . Let indepen-dent invariants of the group: Z1 f , . . . ,Zm f be:
u1(y1, . . . ,yr), . . . , ur−m(y1, . . . ,yr).
Under these assumptions, the group:
Uk f =r−m
∑ν=1
Yk uν∂ f∂uν
=r−m
∑ν=1
okν(u1, . . . ,ur−m)∂ f∂uν
(k=1 ···r)
in the r−m variables: u1, . . . ,ur−m is transitive and has the same composition as thegroup: x′i = fi(x,a).
The question whether the two subgroups: Z1 f , . . . ,Zm f and Z1 f , . . . ,Zm f of thegroup: Z1 f , . . . ,Zr f provide the same type of group, or not, can now obviously beexpressed also as follows: Are the two groups: U1 f , . . . ,Ur f and: U1 f , . . . ,Ur f sim-ilar to each other, or not?
The two groups about which it is at present question are transitive; the questionwhether they are similar, or not similar, can be decided on the basis of Theorem 76,p. 434.

§ 107. 455
From this theorem, we see that the groups: U1 f , . . . ,Ur f and: U1 f , . . . ,Ur f aresimilar to each other if and only if it is possible to relate them to each other in aholoedrically isomorphic way so that the following condition is satisfied: The mostgeneral subgroup of the group: U1 f , . . . ,Ur f which leaves invariant an arbitrarilychosen, but determined, system of values: u1 = u0
1, . . . , ur−m = u0r−m in general
position must correspond to the most general subgroup of the group: U1 f , . . . ,Ur fwhich leaves invariant a certain system of values: u1 = u0
1, . . . , ur−m = u0r−m in
general position.Now, the groups: U1 f , . . . ,Ur f and: U1 f , . . . ,Ur f are, because of their derivation,
both related to the group: Y1 f , . . . ,Yr f in a holoedrically isomorphic way, hence wecan express the necessary and sufficient criterion for their similarity also obviouslyas follows: Similarity happens to hold when and only when it is possible to relatethe group: Y1 f , . . . ,Yr f to itself in a holoedrically isomorphic way so that its largestsubgroup G which fixes the manifold:
(10) u1(y1, . . . ,yr) = u01, . . . , ur−m(y1, . . . ,yr) = u0
r−m
corresponds to its largest subgroup G which fixes the manifold:
(11) u1(y1, . . . ,yr) = u01, . . . , ur−m(y1, . . . ,yr) = u0
r−m.
The criterion found with these words can be brought to another remarkable form.In fact, we consider the group: Z1 f , . . . ,Zr f reciprocal to the group: Y1 f , . . . ,Yr f . Init, Z1 f , . . . ,Zm f is the largest subgroup which leaves invariant the manifold (10),and Z1 f , . . . ,Zm f is the largest subgroup which leaves invariant the manifold (11).According to Chap. 20, Proposition 8, p. 400, one can then relate the two groups:Y1 f , . . . ,Yr f and: Z1 f , . . . ,Zr f in a holoedrically isomorphic way so that the sub-group G corresponds to the subgroup: Z1 f , . . . ,Zm f ; but one can also related themtogether in a holoedrically isomorphic way so that the subgroup G corresponds tothe subgroup: Z1 f , . . . ,Zm f .
From this, it results that the group: Y1 f , . . . ,Yr f can be related to itself in aholoedrically isomorphic way as described just above if and only if it is possible torelate the group: Z1 f , . . . ,Zr f to itself in a holoedrically isomorphic way so that thesubgroup: Z1 f , . . . ,Zm f corresponds to the subgroup: Z1 f , . . . ,Zm f .
We therefore have the:
Theorem 80. If the two r-term groups:
Yk f =r
∑j=1
ηk j(y1, . . . ,yr)∂ f∂y j
(k=1 ···r)
and:
Zk f =r
∑j=1
ζk j(y1, . . . ,yr)∂ f∂y j
(k=1 ···r)
are simply transitive and reciprocal to each other, if moreover:

456 22 The Determination of All r-term Groups
Zµ f =r
∑k=1
εµk Zk f (µ =1 ···m)
and:
Zµ f =r
∑k=1
eµk Zk f (µ =1 ···m)
are two m-term subgroups of the group: Z1 f , . . . ,Zr f which both neither areinvariant in this group, nor contain, aside from the identity transformation,another subgroup invariant in this group, and lastly, if: u1(y), . . . ,ur−m(y) and:u1(y), . . . ,ur−m(y) are independent invariants of these two m-term subgroups,respectively, then the two transitive, both equally composed with the groupY1 f , . . . ,Yr f , groups:
Uk f =r−m
∑ν=1
Yk uν∂ f∂uν
=r−m
∑ν=1
ωkν(u1, . . . ,ur−m)∂ f∂uν
(k=1 ···r)
and:
Uk f =r−m
∑ν=1
Yk uν∂ f∂uν
=r−m
∑ν=1
okν(u1, . . . ,ur−m)∂ f∂uν
(k=1 ···r)
are similar to each other if and only if it is possible to relate the group: Z1 f , . . . ,Zr fto itself in a holoedrically isomorphic way so that the subgroup: Z1 f , . . . ,Zm f cor-responds to the subgroup: Z1 f , . . . ,Zm f .
Thanks to this theorem, the last part of the program stated on p. 446 is now alsosettled. At present, we can decide whether two different subgroups of the group:Z1 f , . . . ,Zr f provide, or do not provide, different types of transitive groups equallycomposed with the group: x′i = fi(x,a). Clearly, for that, only a research about thesubgroups of the group Z1 f , . . . ,Zr f is required, or, what is the same, about thesubgroups of the group: x′i = fi(x,a).
We recapitulate the necessary operations in a theorem:
Theorem 81. If the finite equations, or the infinitesimal transformations of an r-term group Γ are presented, one can determine in the following way how manydifferent types of transitive groups having the same composition as Γ there are:One determines all m-term subgroups of Γ , but one excludes those which either areinvariant in Γ or do contain a subgroup invariant in Γ different from the identitytransformation. One distributes the found m-term subgroups in classes by reckoningthat two subgroups always belong to the same class when it is possible to relate Γto itself in a holoedrically isomorphic way so that the two subgroups correspondto each other. To each class of m-term subgroups obtained in this way there corre-sponds a completely determined type of transitive groups in r−m variables equallycomposed with Γ ; to different classes there correspond different types. If one un-dertakes this study for each one of the numbers: m = 0,1,2, . . . ,r−1, then one canhave a view [ÜBERSEHEN] of all existing types.

§ 108. 457
We yet observe what follows: The operations required in the Theorem 81 are allexecutable, even when the group Γ is not given, and when only its composition isgiven. Also in this case, only executable operations are then necessary. Since thenumber of the subgroups of Γ only depends upon arbitrary parameters, the numberof existing types depends at most upon arbitrary parameters. In particular, thereis only one single type of simply transitive groups which are equally composedwith the group Γ . But this already results from the developments of the previousparagraph.
By combining the two Theorems 81 and 78, we yet obtain the following:
Theorem 82. If the finite equations:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
of an r-term group are presented, then the determination of all equally composedtransitive groups requires in all cases, while disregarding executable operations,only the integration of simultaneous systems of ordinary differential equations.†
If one wants to list all r-term transitive groups in n variables, then one determinesall compositions of r-term groups and one then seeks, for each composition, theassociated types of transitive groups in n variables. For given r (and n), all thesetypes decompose in a bounded number of kinds [GATTUNG] so that the types of akind have the same analytic representation. However, the analytic expressions forall types of a kind contain certain parameters the number of which we can alwaysimagine to be lowered down to a minimum. That such parameters occur stems fromtwo different facts: firstly, from the fact that, to a given r > 2, an unbounded numberof different compositions is associated; secondly from the fact that in general, agiven r-term group contains an unbounded number of subgroups which producenothing but different types. We do not consider it to be appropriate here to pursuethese considerations further.
§ 108.
Once again, we move back to the standpoint we took on p. 453 sq.We had used two m-term subgroups: Z1 f , . . . ,Zm f and: Z1 f , . . . ,Zm f of the
group: Z1 f , . . . ,Zr f in order to produce transitive groups equally composed withthe group: Y1 f , . . . ,Yr f , and we have found the two groups: U1 f , . . . ,Ur f and:U1 f , . . . ,Ur f . At present, the question arises: under which conditions are these twogroup similar to each other?
We have answered this question at that time, when we based ourselves on theTheorem 76, p. 434, and in this way, we have obtained the Theorem 80, p. 455. Atpresent, we want to take up again the question and to attempt to answer it withoutusing the Theorem 76.
Evidently, we are close to presume that the groups: U1 f , . . . ,Ur f and:U1 f , . . . ,Ur f are in any case similar to each other when there is a transformation:
† Cf. LIE, Math. Annalen Vol. XVI, p. 528.

458 22 The Determination of All r-term Groups
(12) yk = Ωk(y1, . . . ,yr) (k=1 ···r)
which converts the subgroup: Z1 f , . . . ,Zm f into the subgroup: Z1 f , . . . ,Zm f andwhich transfers at the same time the group: Z1 f , . . . ,Zr f into itself. We will showthat this presumption corresponds to the truth.
Thus, let (12) be a transformation which possesses the indicated properties.Through this transformation, the invariants of the group: Z1 f , . . . ,Zm f are obvi-ously transferred to the invariants of the group: Z1 f , . . . ,Zm f , hence we have byvirtue of (12):
uν(y1, . . . ,yr) = χν(u1(y), . . . , ur−m(y)
)(ν =1 ···r−m),
where the functions: χ1, . . . ,χr−m are absolutely determined and are mutually inde-pendent relatively to: u1(y), . . . ,ur−m(y). On the other hand, according to Chap. 20,p. 391, through the transformation (12), not only the group: Z1 f , . . . ,Zr f is trans-ferred into itself, but also its reciprocal group: Y1 f , . . . ,Yr f , so we have:
r
∑j=1
ηk j(y1, . . . ,yr)∂ f∂y j
= Y k f =r
∑j=1
hk j Yj f (k=1 ···r),
where the hk j are constants, the determinant of which does not vanish.Now, if we set for f , in the equations just written, an arbitrary function F of:
u1(y), . . . ,ur−m(y), or, what is the same, a function of: u1(y), . . . , ur−m(y), it thencomes:
Y kF =r−m
∑ν=1
okν(u1, . . . ,ur−m)∂F∂uν
=r
∑j=1
hk j
r−m
∑ν=1
ω jν(u1, . . . ,ur−m)∂F∂uν
.
In other words, the two groups: U1 f , . . . ,Ur f and: U1 f , . . . ,Ur f are similar to eachother: obviously:
(13) uν = χν(u1, . . . ,ur−m) (ν =1 ···r−m)
is a transformation which transfers the one group to the other.As a result, the presumption enunciated above is proved.
But it can be proved that the converse also holds true: When the two groups:U1 f , . . . ,Ur f and: U1 f , . . . ,Ur f are similar to each other, then there always isa transformation which transfers the subgroup: Z1 f , . . . ,Zm f to the subgroup:Z1 f , . . . ,Zm f and which transfers at the same time the group: Z1 f , . . . ,Zr f to itself.
Thus, let the two groups: Uk f and: Uk f be similar to each other and let:
(14) uν = ψν(u1, . . . ,ur−m) (ν =1 ···r−m)
be a transformation which transfers the one group to the other, so that we have:

§ 108. 459
(15) Uk f =r
∑j=1
δk j U j f =U ′k f (k=1 ···r).
Here, by δk j, it is to be understood constants the determinant of which does notvanish. If U1 f , . . . ,Ur f are linked together by relations of the form:
[Ui, Uk] =r
∑s=1
ciksUs f ,
then naturally, U ′1 f , . . . ,U ′
r f are linked together by the relations:
[U ′i ,U ′
k] =r
∑s=1
ciks U ′s f .
Above, we have seen that every transformation (12) which leaves invariant thegroup: Z1 f , . . . ,Zr f and which transfers the subgroup of the Zµ f to the subgroupof the Zµ f provides a completely determined transformation (13) which transfersthe group of the Uk f to the group of the Uk f . Under the present assumptions, wealready know a transformation which accomplishes the latter transfer, namely thetransformation (14). Therefore, we attempt to determine a transformation:
(16) yk = Ok(y1, . . . ,yr) (k=1 ···r)
which leaves invariant the group: Z1 f , . . . ,Zr f , which converts the subgroup:Z1 f , . . . ,Zm f into the subgroup: Z1 f , . . . ,Zm f and lastly, which provides exactlythe transformation (14).
It is clear that every transformation (16) of the kind demanded must be con-stituted in such a way that its equations embrace the r −m mutually independentequations:
(14’) uν(y1, . . . ,yr) = ψν(u1(y), . . . , ur−m(y)
)(ν =1 ···r−m).
If it satisfies this condition, and in addition, if it yet leaves invariant the group:Z1 f , . . . ,Zr f , then it satisfies all our demands. Indeed, on the first hand, it trans-fers the invariants of the group: Z1 f , . . . ,Zm f to the invariants of the group:Z1 f , . . . ,Zm f , whence it converts the first one of these two groups into the secondone, and on the other hand, it visibly produces the transformation (14) by virtue ofwhich the two groups: U1 f , . . . ,Ur f and U1 f , . . . ,Ur f are similar to each other.
But now, whether we require of the transformation (16) that it leaves invariant thegroup: Z1 f , . . . ,Zr f , or whether we require that it transfers the group: Y1 f , . . . ,Yr finto itself, this obviously is completely indifferent. We can therefore interpret ourproblem as follows:
To seek a transformation (16) which leaves invariant the group: Y1 f , . . . ,Yr f andwhich is constituted in such a way that its equations embrace the equations (14’).
For the sake of simplification, we introduce new variables.

460 22 The Determination of All r-term Groups
We choose m arbitrary mutually independent functions: v1(y), . . . ,vm(y) thatare also independent of: u1(y), . . . ,ur−m(y), and moreover, we choose m arbitrarymutually independent functions: v1(y), . . . ,vm(y) that are also independent ofu1(y), . . . ,ur−m(y). We introduce the functions: u1(y), . . . ,ur−m(y), v1(y), . . . ,vm(y)as new variables in place of: y1, . . . ,yr and the functions: u1(y), . . . ,ur−m(y),v1(y), . . . ,vm(y) in place of: y1, . . . ,yr.
In the new variables, the sought transformation (16) necessarily receives theform:
(16’)
uν = ψν(u1, . . . ,ur−m) (ν =1 ···r−m)
vµ =Ψµ(u1, . . . ,ur−m, v1, . . . ,vm) (µ =1 ···m),
where it is already taken account of the fact that the present equations must comprisethe equations (14).
But what do we have in place of the requirement that the transformation (16)should leave invariant the group: Y1 f , . . . ,Yr f ?
Clearly, in the new variables: u1, . . . ,ur−m, v1, . . . ,vm, the group: Y1 f , . . . ,Yr f re-ceives the form:
Uk f +m
∑µ=1
wkµ(u1, . . . ,ur−m, v1, . . . ,vm)∂ f∂vµ
=Uk f +Vk f (k=1 ···r).
On the other hand, after the introduction of u1, . . . ,ur−m, v1, . . . ,vm, the infinitesimaltransformations:
Y k f =r
∑j=1
ηk j(y1, . . . ,yr)∂ f∂y j
(k=1 ···r)
are transferred to:
Uk f +m
∑µ=1
wkµ(u1, . . . ,ur−m, v1, . . . ,vm)∂ f∂vµ
= Uk f +Vk f (k=1 ···r).
Consequently, we must require of the transformation (16’) that it transfers the group:U1 f +V1 f , . . . , Ur f +Vr f to the group: U1 f +V1 f , . . . , Ur f +Vr f ; we must attemptto determine the functions: Ψ1, . . . ,Ψm accordingly.
As the equation (15) show, the r independent infinitesimal transformations:
r
∑j=1
δ1 j U j f , . . . ,r
∑j=1
δr j U j f
are transferred by the transformation:
(14) uν = ψν(u1, . . . ,ur−m) (ν =1 ···r−m)
to the transformations:

§ 108. 461
U1 f , . . . , Ur f ,
respectively. Hence, if a transformation of the form (16’) is supposed to convertthe group of the Uk f +Vk f to the group of the Uk f +Vk f , then through it, the rindependent infinitesimal transformations:
r
∑j=1
δ1 j (U j f +Vj f ), . . . ,r
∑j=1
δr j (U j f +Vj f )
are transferred to:U1 f +V1 f , . . . , Ur f +Vr f .
This condition is necessary, and simultaneously also sufficient.
Thanks to the same considerations as in Chap. 19, p. 348 sq., we now recog-nize that every transformation (16’) having the constitution demanded can also bedefined as a system of equations in the 2r variables u, v, u, v which possesses theform:
(16’)
uν = ψν(u1, . . . ,ur−m) (ν =1 ···r−m)
vµ =Ψµ(u1, . . . ,ur−m, v1, . . . ,vm) (µ =1 ···m),
which admits the r-term group:
Wk f = Uk f +Vk f +r
∑j=1
δk j (U j f +Vj f ) (k=1 ···r)
and which is solvable with respect to u1, . . . ,ur−m, v1, . . . ,vm.According to our assumption, the system of equations:
(14) uν = ψν(u1, . . . ,ur−m) (ν =1 ···r−m)
represents a transformation which transfers the r independent infinitesimal transfor-mations:
r
∑j=1
δk j U j f (k=1 ···r)
to: U1 f , . . . ,Ur f , respectively, whence it admits the r-term group:
Uk f +r
∑j=1
δk j U j f (k=1 ···r),
and consequently, also the group: W1 f , . . . ,Wr f .We can therefore use the developments of Chap. 14, pp. 243–246 in order to find
a system of equations (16’) having the constitution demanded.To begin with, from W1 f , . . . ,Wr f , we form certain reduced infinitesimal trans-
formations: W1 f , . . . ,Wr f by leaving out all terms with the differential quotients:∂ f/∂u1, . . . , ∂ f/∂ur−m and by making the substitution: u1 = ψ1(u), . . . , ur−m =

462 22 The Determination of All r-term Groups
ψr−m(u) in all the terms remaining. If this substitution is indicated by the sign: [ ],then the Wk f read as follows:
Wk f =m
∑µ=1
[wkµ(u1, . . . ,ur−m, v1, . . . ,vm
] ∂ f∂vµ
+r
∑j=1
δk j (U j f +Vj f ),
or, more shortly:
Wk f =[Vk f
]+
r
∑j=1
δk j (U j f +Vj f ) (k=1 ···r).
Naturally, W1 f , . . . ,Wr f generate a group in the r + m variables v1, . . . ,vm,u1, . . . ,ur−m, v1, . . . ,vm and in our case, a group which is evidently r-term.
At present, we determine in the v, u, v a system of equations of the form:
(17) vµ =Ψµ(u1, . . . ,ur−m, v1, . . . ,vm) (µ =1 ···m)
which admits the group: W1 f , . . . ,Wr f and which is solvable with respect tov1, . . . ,vm. Lastly, when we add this system to the equations (14), we then obtaina system of equations of the form (16’) which possesses the properties explainedabove.
Since the r-term group:
r
∑j=1
δk j (U j f +Vj f ) (k=1 ···r)
is simply transitive, then in the matrix which can be formed with the coefficientsof W1 f , . . . ,Wr f , it is certain that not all r× r determinants vanish identically, andthey can even less vanish all by virtue of a system of equations of the form (17).Consequently, every system of equations of the form (17) which admits the group:W1 f , . . . ,Wr f can be represented by m independent relations between m arbitraryindependent solutions of the r-term complete system:
(18) W1 f = 0, . . . , Wr f = 0
in the r+m variables v1, . . . ,vm, u1, . . . ,ur−m, v1, . . . ,vm.The equations (18) are obviously solvable with respect to: ∂ f/∂u1, . . . ,
∂ f/∂ur−m, ∂ f/∂v1, . . . , ∂ f/∂vm; on the other hand, they are also solvable withrespect to: ∂ f/∂u1, . . . , ∂ f/∂ur−m, ∂ f/∂v1, . . . , ∂ f/∂vm, because if we introducethe new variables: u1, . . . ,ur−m, v1, . . . ,vm in place of u1, . . . ,ur−m, v1, . . . ,vm bymeans of the equations:
(14) uµ = ψµ(u1, . . . ,ur−m) (µ =1 ···r−m)
in the r infinitesimal transformations:

§ 108. 463
U1 f +V1 f , . . . , Ur f +Vr f ,
then we obtain the infinitesimal transformations:
r
∑j=1
δk j U j f +[Vk f
](k=1 ···r)
which in turn generate therefore a simply transitive group in the variables:u1, . . . ,ur−m, v1, . . . ,vm.
Consequently, if:
Pµ(v1, . . . ,vm, u1, . . . ,ur−m, v1, . . . ,vm
)(µ =1 ···m)
are m arbitrary independent solutions of the complete system (18), then thesesolutions are mutually independent both relatively to v1, . . . ,vm and relatively tov1, . . . ,vm (cf. Theorem 12, p. 105).
From this, it results that the most general system of equations of the form (17)which can be resolved with respect to v1, . . . ,vm and which admits the group:W1 f , . . . ,Wr f can be obtained by solving the m equations:
(19) Pµ(v1, . . . ,vm, u1, . . . ,ur−m, v1, . . . ,vm) = const. (µ =1 ···m)
with respect to v1, . . . ,vm.
At present, we can immediately indicate a transformation, and in fact the mostgeneral transformation (16’), which transfers the infinitesimal transformations:
r
∑j=1
δ1 j (U j +Vj f ), . . . ,r
∑j=1
δr j (U j f +Vj f )
to the infinitesimal transformations:
U1 f +V1 f , . . . , Ur f +Vr f ,
respectively; this transformation is simply represented by the equations (14)and (19) together. Lastly, if we introduce again the variables: y1, . . . ,yr, y1, . . . ,yrin (14) and in (19), we obtain a transformation which leaves invariant the group:Y1 f , . . . ,Yr f and whose equations embrace the equations (14’); in other words, weobtain a transformation which leaves the group: Z1 f , . . . ,Zr f invariant and whichtransfers the subgroup: Z1 f , . . . ,Zm f to the subgroup: Z1 f , . . . ,Zm f .
With these words, it is proved that there always exists a transformations hav-ing the constitution just described, as soon as the two groups: U1 f , . . . ,Ur f andU1 f , . . . ,Ur f are similar to each other. But since the similarity of the two groupsfollows from the existence of such a transformation, according to p. 457 sq., we cansay:

464 22 The Determination of All r-term Groups
The two groups: U1 f , . . . ,Ur f and U1 f , . . . ,Ur f are similar to each other if andonly if there is a transformation which leaves invariant the group: Z1 f , . . . ,Zr f andwhich transfers the subgroup: Z1 f , . . . ,Zm f to the subgroup: Z1 f , . . . ,Zm f .
Now, the group: Z1 f , . . . ,Zr f is simply transitive, hence it is clear that there al-ways is a transformation of this sort when and only when the group: Z1 f , . . . ,Zr fcan be related to itself in a holoedrically isomorphic way so that the two subgroups:Z1 f , . . . ,Zm f and Z1 f , . . . ,Zm f correspond to each other. Consequently, for the sim-ilarity of the groups: U1 f , . . . ,Ur f and U1 f , . . . ,Ur f , we find exactly the same crite-rion as we had expressed in Theorem 80, p. 455.
Besides, the preceding developments can also be used to derive a new proof ofthe Theorem 76 in Chap. 21, p. 434.
At first, thanks to considerations completely similar to the ones on p. 454, it canbe proved that the transitive groups: U1 f , . . . ,Ur f and U1 f , . . . ,Ur f can be relatedto each other in a the holoedrically isomorphic way described in Theorem 76 if andonly if it is possible to relate the group: Z1 f , . . . ,Zr f to itself in a holoedrically iso-morphic way in such a way that the subgroups: Z1 f , . . . ,Zm f and Z1 f , . . . ,Zm f cor-respond to each other. Afterwards, it follows from the preceding developments thatthe conditions of the Theorem 76 for the similarity of the two groups: U1 f , . . . ,Ur fand U1 f , . . . ,Ur f are necessary and sufficient.
§ 109.
Now, we turn to the second one of the two problems, the settlement of which wasannounced in the introduction of the chapter (on p. 441): to the determination of allr-term intransitive groups; as was already said at that time, we want to undertakethe determination in question under the assumption that all transitive groups withr or less parameters are given. Since all transitive groups with an equal number ofparameters can be ordered in classes according to their composition and moreover,since all transitive groups having one and the same composition decompose in a se-ries of types (cf. p. 445 sq.), we can precise our assumption somehow more exactlyby supposing firstly that all possible compositions of a group with r or less parame-ters are known and secondly by imagining that for each one of these compositions,all possible types of transitive groups having the concerned composition are given.
To begin with, we consider an arbitrary r-term intransitive group.If X1 f , . . . ,Xr f are independent infinitesimal transformations of an r-term group
of the space x1, . . . ,xn, the r equations:
(20) X1 f = 0, . . . , Xr f = 0
have a certain number, say exactly n− l > 0, of independent solutions in common.Hence we can imagine that the variables x1, . . . ,xn are chosen from the beginning insuch a way that xl+1, . . . ,xn are such independent solutions. Then X1 f , . . . ,Xr f willreceive the form:
Xk f =l
∑λ=1
ξkλ (x1, . . . ,xl , xl+1, . . . ,xn)∂ f∂xλ
(k=1 ···r)

§ 109. 465
where now naturally, not all l × l determinants of the matrix:∣∣∣∣∣∣∣∣ξ11(x) · · ξ1l(x)
· · · ·· · · ·
ξr1(x) · · ξrl(x)
∣∣∣∣∣∣∣∣vanish identically, since otherwise, the equations (20) would have more than n− lindependent solutions in common.
If the number r, which is at least equal to l, would be exactly equal to l, thenX1 f , . . . ,Xr f would be linked together by no relation of the form:
χ1(xl+1, . . . ,xn)X1 f + · · ·+χr(xl+1, . . . ,xn)Xr f = 0;
but now, r needs not be equal to l, hence relations of the form just described canalso very well exist without that all the functions χ1, . . . ,χr vanish. So we want toassume that X1 f , . . . ,Xm f , say, are linked together by no such relation, while bycontrast, Xm+1 f , . . . ,Xr f may be expressed as follows in terms of X1 f , . . . ,Xm f :
(21) Xm+ν f ≡m
∑µ=1
ϑνµ(xl+1, . . . ,xn)Xµ f (ν =1 ···r−m).
Here of course, m satisfies the inequations: l 6 m 6 r.By combination of the equation (21) with the relations:
[Xi, Xk] =r
∑s=1
ciks Xs f (i, k=1 ···r)
which hold true in all circumstances, we yet recognize that X1 f , . . . ,Xm f stand pair-wise in the relationships:
[Xλ , Xµ ] =m
∑π=1
cλ µπ +
r−m
∑ν=1
cλ ,µ,m+ν ϑνπ(xl+1, . . . ,xn)
Xπ f
(λ , µ =1 ···m).
Now, if the variables xl+1, . . . ,xn are replaced by arbitrary constants: al+1, . . . ,anand if x1, . . . ,xl only are still considered as variables, then it is clear that the r in-finitesimal transformations:
Xk f =l
∑λ=1
ξkλ (x1, . . . ,xl , al+1, . . . ,an)∂ f∂xλ
(k=1 ···r)
in the l variables x1, . . . ,xl are not anymore independent of each other, but can belinearly deduced from the m independent infinitesimal transformations:

466 22 The Determination of All r-term Groups
X µ f =l
∑λ=1
ξµλ (x1, . . . ,xl , al+1, . . . ,an)∂ f∂xλ
(µ =1 ···m).
The m infinitesimal transformations X1 f , . . . ,Xm f are in turn obviously linked to-gether by the relations:
(22) [Xλ , X µ ] =m
∑π=1
cλ µπ +
r−m
∑ν=1
cλ ,µ,m+ν ϑνπ(al+1, . . . ,an)
Xπ f ,
and consequently, whichever values one may confer to the parameters al+1, . . . ,an,they always generate an m-term group in the variables: x1, . . . ,xl , and of course, atransitive group.
Now, by conferring to the parameters al+1, . . . ,an all possible values gradually,one obtains ∞n−l m-term groups in l variables. On the occasion, it is thinkable,though not necessary, that these ∞n−l groups are similar to each other. If this is notthe case, then these groups order themselves in ∞n−l−σ families, each one consistingin ∞σ groups, and to be precise, in such a way that two groups in the same familyare similar, while by contrast, two groups belonging to two different families are notsimilar.
In all circumstances, our ∞n−l groups belong to the same kind of type [TYPE-NGATTUNG]; in the latter case, this kind depends upon essential parameters (cf.p. 457 sq.).
At present, one may overview how one can find all intransitive r-term groups in nvariables. One chooses two numbers l and m so that l 6m6 r and so that in additionl < n, and one then forms all kinds [GATTUNGEN] of transitive m-term groups in lvariables. If Y1 f , . . . ,Ym f :
Yk f =l
∑i=1
ηki(x1, . . . ,xl , α1,α2, . . .)∂ f∂xi
(k=1 ···m)
is such a kind with the essential parameters α1, α2, . . . , then one interprets theseparameters as unknown functions of xl+1, . . . ,xn, one sets:
Xk f =m
∑i=1
βki(xl+1, . . . ,xn)Yi f (k=1 ···r),
and lastly, one attempts to choose the yet undetermined functions α j, βki ofxl+1, . . . ,xn in the most general way so that X1 f , . . . ,Xr f become independentinfinitesimal transformations of an r-term group. This requirement conducts tocertain finite relations between the α , the β and the ciks of the sought r-termgroup which must be satisfied in the most general way. The expressions of theinfinitesimal transformations determined in this way contain, apart from certainarbitrary constants ciks, yet certain arbitrary functions of the invariants of the group.
We therefore have at first the

§ 109. 467
Theorem 83. The determination of all intransitive r-term groups: X1 f , . . . ,Xr f inn variables requires, as soon as all transitive groups with r or less parameters arefound, no integration, but only executable operations.†
It is to be observed that the computations necessary for the determination ofall intransitive groups depend only upon the numbers r, l and m. By contrast, thenumber n plays no direct rôle. Consequently:
Theorem 84. The determination of all r-term groups in an arbitrary number of vari-ables can be led back to the determination of all r-term groups in r or less variables.
Yet a brief remark about the determination of all intransitive r-term groups ofgiven composition.
If a group of the concerned composition contains only a finite number of invari-ant subgroups, then m must be equal to r (Proposition 8, p. 321), and consequently,the settlement of the problem formulated just now amounts without effort to thedetermination of all transitive groups of the concerned composition. By contrast,if there occur infinitely many invariant subgroups, m can be smaller than r; thenaccording to the developments just mentioned, the m-term group X1 f , . . . ,Xm f dis-cussed above must be meroedrically isomorphic to the sought r-term group. We donot want to undertake to show more closely how the problem can be settled in thiscase.
—————–
† LIE, Archiv for Math. og Naturv. Vol. 10, Christiania 1885; Math. Ann. Vol. XVI, p. 528, 1880.


Chapter 23Invariant Families of Manifolds
If x1, . . . ,xn are point coordinates of an n-times extended space, then a family ofmanifolds of this space is represented by equations of the form:
(1) Ω1(x1, . . . ,xn, l1, . . . , lm) = 0, . . . , Ωn−q(x1, . . . ,xn, l1, . . . , lm) = 0,
in which, aside from the variables x1, . . . ,xn, yet certain parameters: l1, . . . , lm arepresent.
If one executes an arbitrary transformation:
x′i = fi(x1, . . . ,xn) (i=1 ···n)
of the space x1, . . . ,xn, then each one of the manifolds (1) is transferred to a newmanifold, hence the whole family (1) converts into a new family a new familyof manifolds. One obtains the equations of this new family when one takes awayx1, . . . ,xn from (1) with the help of the n equations: x′i = fi(x). Now in particular,if the new family of manifolds coincides with the original family (1), whenceevery manifold of the family (1) is transferred by the transformation: x′i = fi(x)to a manifold of the same family, then we say that the family (1) admits thetransformation in question, or that it remains invariant by it.
If a family of manifolds in the space x1, . . . ,xn admits all transformations of anr-term group, then we say that it admits the group in question.
Examples of invariant families of manifolds in the space x1, . . . ,xn have alreadyappeared to us several times; every intransitive group decomposes the space into aninvariant family of individually invariant manifolds (Chap. 13, pp. 227–228); everyimprimitive group decomposes the space in an invariant family of manifolds that itpermutes (p. 232 sq.); also, every manifold individually invariant by a group may beinterpreted as an invariant family of manifolds, namely as a family parametrized bya point.
In what follows, we now consider a completely arbitrary family of manifolds. Atfirst, we study under which conditions this family admits a single given transfor-mation, or a given r-term group. Afterwards, we imagine that a group is given bywhich the family remains invariant and we determine the law according to which
469

470 23 Invariant Families of Manifolds
the manifolds of the family are permuted with each other by the transformationsof this group. In this way, we obtain a new process to set up the groups which areisomorphic with a given group. Finally, we give a method for finding all families ofmanifolds invariant by a given group.
§ 110.
Let the equations:
(1) Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
with the m arbitrary parameters l1, . . . , lm represent an arbitrary family of manifolds.If l1, . . . , lm are absolutely arbitrary parameters, then naturally, one should not be
able to eliminate all the x from (1); therefore, the equations (1) must be solvablewith respect to n−q of the variables x1, . . . ,xn.
By contrast, it is not excluded that the l can be eliminated from (1), and this saysnothing but, that some relations between the x alone can be derived from (1). Onlythe number of independent equations free of the l which follow from (1) must besmaller than n−q, since otherwise, the parameters l1, . . . , lr would be only apparentand the equations (1) would therefore represent not a family of manifolds, but asingle manifold.
Before we study how the family of manifolds (1) behaves relatively to transfor-mations of the x, we must first make a few remarks about the nature of the equa-tions (1).
The equations (1) contain m parameters l1, . . . , lm; if we let these parameters takeall possible values, then we obtain ∞m different systems of values: l1, . . . , lm, but notnecessarily ∞m different manifolds. It must therefore be determined under whichconditions the given system of equations represents exactly ∞m different manifolds,or in other words: one must give a criterion to determine whether the parameters:l1, . . . , lm in the equations (1) are essential, or not.
In order to find such a criterion, we imagine that the equations: Ωk = 0 are solvedwith respect to n−q of the x, say with respect to xq+1, . . . ,xn:
(2)xq+k = ψq+k(x1, . . . ,xq, l1, . . . , lm)
(k=1 ···n−q)
and we imagine moreover that the functions ψq+k are expanded with respect tothe powers of: x1 − x0
1, . . . , xq − x0q in the neighbourhood of an arbitrary system
of values: x01, . . . ,x
0q. The coefficients of the expansion, whose number is naturally
infinitely large in general, will be analytic functions of l1, . . . , lm and we may callthem:
Λ j(l1, . . . , lm) ( j=1, 2 ···)
The question amounts just to how many independent functions are extant amongstall the functions Λ1, Λ2, . . . .

§ 110. 471
Indeed, if amongst the Λ , there are exactly l that are mutually independent func-tions — there are anyway surely no more than l —, then to the ∞m different systemsof values: l1, . . . , lm, there obviously correspond also ∞m different systems of values:Λ1, Λ2, . . . , and therefore ∞m different manifolds (2), that is to say, the parametersare essential in the equations (2), and hence also in the equations (1).
Otherwise, assume that amongst the functions Λ1, Λ2, . . . , there are not m but lessfunctions, say only m−h, that are mutually independent. In this case, all the Λ j canbe expressed in terms of m−h of them, say in terms of: Λ ′
1, . . . ,Λ ′m−h, which natu-
rally must be mutually independent. To the ∞m different systems of values l1, . . . , lm,there correspond therefore ∞m−h different systems of values Λ ′
1, . . . ,Λ ′m−h, and ∞m−h
different systems of values Λ1, Λ2, . . . , so that the equations (2), and thus also theequations (1), represent only ∞m−h different manifolds. This comes to expressionin the clearest way when one observes that the functions ψq+k(x, l) contain the pa-rameters l1, . . . , lm only in the combinations: Λ ′
1, . . . ,Λ ′m−h, so that the equations (2)
possess the form:
(2’) xq+k = ψq+k(x1, . . . ,xq, Λ ′1, . . . ,Λ ′
m−h) (k=1 ···n−q).
From this, it indeed results that we can introduce precisely Λ ′1, . . . ,Λ ′
m−h as new pa-rameters in place of l1, . . . , ln, a process by which the number of arbitrary parametersappearing in (2) is lowered to m−h.
Thus, we can say:The equations:
Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
represent ∞m different manifolds only when it is not possible to indicate m−h < mfunctions π1, . . . ,πm−h of l1, . . . , lm such that, in the resolved equations:
xq+k = ψq+k(x1, . . . ,xq, l1, . . . , lm) (k=1 ···n−q),
the functions ψq+1, . . . ,ψn can be expressed in terms of x1, . . . ,xn and of π1, . . . ,πm−honly. By contrast, if it is possible to indicate m− h < m functions πµ having thisconstitution, then the equations Ωk = 0 represent at most ∞m−h manifolds and theparameters l1, . . . , lm are hence not essential.
Here, yet a brief remark.If the functions: Λ1, Λ2, . . . discussed above take the values: Λ 0
1 , Λ 02 after the
substitution: l1 = l01 , . . . , lm = l0
m, then the equations:
Λ j(l1, . . . , lm) = Λ 0j ( j=1, 2 ···)
define the totality of all systems of values l1, . . . , lm which, when inserted in (2) orin (1), provide the same manifold as the system of values: l0
1 , . . . , l0m. Now, if amongst
the functions Λ1, Λ2, . . . , there are m functions that are mutually independent, thenthe parameters l1, . . . , lm are all essential, whence the following obviously holds:Around every system of values l0
1 , . . . , l0m in general position, one can delimit a region

472 23 Invariant Families of Manifolds
such that two distinct systems of values l1, . . . , lm of the concerned region alwaysprovide two manifolds that are also distinct.
The definition for essentiality [WESENTLICHKEIT] and for inessentiality[NICHTWESENTLICHKEIT] of the parameters l1, . . . , lm (respectively) given aboveis satisfied only when the equations: Ω1 = 0, . . . , Ωq = 0 are already solved withrespect to n− q of the x. However, it is desirable, in principle and also for whatfollows, to reshape this definition so that it fits also to a not resolved system ofequations Ωk = 0.
There is no difficulty for doing that.Let the parameters l1, . . . , lm in the equations:
(2) xq+k = ψq+k(x1, . . . ,xq, l1, . . . , lm) (k=1 ···n−q)
be not essential, whence one can indicate m− h < m functions: π1(l), . . . ,πm−h(l)so that ψq+1(x, l), . . . , ψn(x, l) can be expressed in terms of x1, . . . ,xq andof π1(l), . . . ,πm−h(l) alone. Evidently, there is then at least one linear partialdifferential equation:
L f =m
∑µ=1
λµ(l1, . . . , lm)∂ f∂ lµ
= 0
with the coefficients: λ1(l), . . . ,λµ(l) free of the x which is satisfied identically by allfunctions: π1(l), . . . ,πm−h(l), and hence also by all the functions: xq+i −ψq+i(x, l).Thus, we can also say (cf. Chap. 7, Theorem 15, p. 132):
When the parameters l1, . . . , lm are not essential in (2), then the system of equa-tions (2), interpreted as a system of equations in the variables: x1, . . . ,xn, l1, . . . , lm,admits an infinitesimal transformation L f in the variables l1, . . . , lm alone.
But the converse also holds true: When the system of equation (2), interpreted asa system of equations in the variables x1, . . . ,xn, l1, . . . , lm, admits an infinitesimaltransformation L f in the l alone, then the parameters l1, . . . , lm are not essential in thesystem of equations; it is indeed immediately clear that, under the assumption made,ψq+1(x, l), . . . , ψn(x, l) are solutions of the partial differential equation: L f = 0,whence it is possible to lower the number of arbitrary parameters appearing in (2).
If we bear in mind that the system of equations (2) is only another form of thesystem of equations (1), then we realize without effort (cf. p. 126) that the followingproposition holds:
Proposition 1. A system of equations:
(1) Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
with the l1, . . . , lm parameters which is solvable with respect to n− q of the vari-ables x1, . . . ,xn represents ∞m different manifolds of the space x1, . . . ,xn if and onlyif, when it is regarded as a system of equations in the n+m variables: x1, . . . ,xn,l1, . . . , lm, it admits no infinitesimal transformation:

§ 111. 473
L f =m
∑µ=1
λµ(l1, . . . , lm)∂ f∂ lµ
in the variables l alone.
§ 111.
In the space x1, . . . ,xn, let at present a family of ∞m different manifolds be deter-mined by the n−q equations: Ωk(x, l)= 0, or by the equally good [GLEICHWERTIG]equations:
(2) xq+k = ψq+k(x1, . . . ,xn, l1, . . . , lm) (k=1 ···n−q).
If this family is supposed to remain invariant by the transformation: x′i =fi(x1, . . . ,xn), then every manifold of the family must be transferred by the con-cerned transformation again into a manifold of the family. Hence, if by l′1, . . . , l
′m we
understand the parameters of the manifold of the family into which the manifoldwith the parameters l1, . . . , lm is transferred by the transformation: x′i = fi(x),then after the introduction of the new variables: x′1 = f1(x), . . . , x′n = fn(x), theequations (2) must receive the form:
x′q+k = ψq+k(x′1, . . . ,x′q, l′1, . . . , l
′m) (k=1 ···n−q),
where the parameters l′1, . . . , l′m depend naturally only upon the l.
But now, after the introduction of the x′, the equation (2) evidently take up theform:
x′q+k =Ψq+k(x′1, . . . ,x′q, l1, . . . , lm) (k=1 ···n−q) ;
thus, if the family (2) is supposed to remain invariant by the transformation: x′i =fi(x), then it must be possible to satisfy the n−q equations:
(3) ψq+k(x′1, . . . ,x′q, l′1, . . . , l
′m) =Ψq+k(x′1, . . . ,x
′q, l1, . . . , lm) (k=1 ···n−q)
independently of the values of the variables x′1, . . . ,x′q.
If one expands the two sides of (3), in the neighbourhood of an arbitrary systemof values x′1
0, . . . ,x′n0, with respect to the powers of: x′1 − x′1
0, . . . , x′n − x′n0, if one
compares the coefficients, and if one takes into account that l′1, . . . , l′m are essential
parameters, then one realizes that l′1, . . . , l′m must be entirely determined functions of
l1, . . . , lm:l′µ = χµ(l1, . . . , lm) (µ =1 ···m)
Conversely, the l must also naturally be representable as functions of the l′, be-cause through the transition from the x′ to the x, the family of our manifolds mustalso remain unchanged.
We therefore see that the equations:
x′i = fi(x1, . . . ,xn) (i=1 ···n), l′µ = χµ(l1, . . . , lm) (µ =1 ···m)

474 23 Invariant Families of Manifolds
taken together represent a transformation in the n+m variables: x1, . . . ,xn, l1, . . . , lmthat leaves invariant the system of equations: xq+k = ψq+k(x, l in these n+m vari-ables. Consequently, we can say:
A family of ∞m manifolds:
Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
in the space x1, . . . ,xn admits the transformation:
x′i = fi(x1, . . . ,xn) (i=1 ···n)
if and only if it is possible to add to this transformation in the x a correspondingtransformation:
l′µ = χµ(l1, . . . , lm) (µ =1 ···m)
in the l in such a way that the system of equations: Ωk(x, l)= 0 in the n+m variablesx1, . . . ,xn, l1, . . . , lm allows the transformation:
x′i = fi(x1, . . . ,xn), l′µ = χµ(l1, . . . , lm).
From the above considerations, it becomes clear that the transformation: l′µ =χµ(l), when it actually exists, is the only one of its kind; indeed, it is completelydetermined when the transformation x′i = fi(x) is known. The transformation: l′µ =χµ(l) therefore contains no arbitrary parameters.
If the family of the ∞m manifolds: Ωk(x, l) = 0 allows two different transforma-tions:
x′i = fi(x1, . . . ,xn) ; x′′i = Fi(x′1, . . . ,x′n),
then obviously, it admits also the transformation:
x′′i = Fi(
f1(x), . . . , fn(x)),
which comes into existence by executing each one of the two transformations oneafter the other. From this, we conclude:
The totality of all transformations x′i = fi(x1, . . . ,xn) which leave invariant a fam-ily of ∞m manifolds of the space x1, . . . ,xn forms a group.
Naturally, this group needs neither be finite, nor continuous; in complete gener-ality, we can only say: its transformations are ordered as inverses by pairs. Hence inparticular, when it contains only a finite number of arbitrary parameters, then it be-longs to the category of groups which was discussed in Chap. 18, and according toTheorem 56, p. 328, it contains a completely determined finite continuous subgroupgenerated by infinitesimal transformations. Evidently, this subgroup is the largestcontinuous subgroup by which the family Ωk(x, l) = 0 remains invariant.
We now turn ourselves to the consideration of finite continuous groups whichleave invariant the family of the ∞m manifolds:

§ 111. 475
(1) Ωk(x1, . . . ,xn, l1, . . . , lm) (k=1 ···n−q) ;
however, we restrict ourselves at first for reasons of simplicity to the case of a one-term group having the concerned constitution.
Let the family of the ∞m manifolds (1) admit all transformations:
(1) x′i = fi(x1, . . . ,xn, ε) (i=1 ···n)
of the one-term group:
X f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
.
The transformation in the l which, according to p. 474, corresponds to the generaltransformation: x′i = fi(x,a), can be read:
(4’) l′µ = χµ(l1, . . . , lm, ε) (µ =1 ···m).
It is easy to see that the totality of all transformations of the form:
(4”)
x′i = fi(x1, . . . ,xn, ε) (i=1 ···n)
l′µ = χµ(l1, . . . , lm, ε) (µ =1 ···m)
forms in turn a one-term group in the n+m variables: x1, . . . ,xn, l1, . . . , lm.In fact, according to p. 474, the transformations (4”) leave invariant the system of
equations (1); hence if one executes at first the transformation (4”) and afterwards atransformation of the same form with the parameter ε1, then one gets a transforma-tion:
x′′i = fi(
f1(x,ε), . . . , fn(x,ε), ε1)
(i=1 ···n)
l′′µ = χµ(χ1(l,ε), . . . , χm(l,ε), ε1
)(µ =1 ···m)
which, likewise, leaves invariant the system of equations (1). Now, the transforma-tion:
(5) x′′i = fi(
f1(x,ε), . . . , fn(x,ε), ε1)
belongs to the one-term group X f and can hence be brought to the form:
x′′i = fi(x1, . . . ,xn, ε2) (i=1 ···n),
where ε2 depends only on ε and on ε1. Consequently, the transformation in the lwhich corresponds to the transformation (5) has the shape:
l′′µ = χµ(l1, . . . , lm, ε2) (µ =1 ···m)
and we therefore deduce:

476 23 Invariant Families of Manifolds
χµ(χ1(l,ε), . . . ,χm(l,ε), ε1) = χµ(l1, . . . , lm, ε2)
(µ =1 ···m).
As a result, it is proved that the equations (4”) effectively represent a group in then+m variables: x1, . . . ,xn, l1, . . . , lm, and to be precise, a group which possesses thesame parameter group as the given group: x′i = fi(x,ε). At the same time, it is clearthat the equations (4’) taken for themselves also represent a group in the variables:l1, . . . , lm, however not necessarily a one-term group, because it is thinkable that theparameter ε in the equations (4’) is completely missing.
The transformations of the group (4) order as inverses by pairs, hence the samevisibly holds true for the transformations of the group (4’). From this, it comes (cf.Chap. 9, p. 184 above) that the group (4”) also contains the identity transformation,and in addition, an infinitesimal transformation:
n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
+m
∑µ=1
λµ(l1, . . . , lm)∂ f
∂λµ= X f +L f ,
by which it is generated.
We recapitulate the gained result in the:
Proposition 2. If the family of the ∞m manifolds:
Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
of the space x1, . . . ,xn admits all transformations:
x′i = fi(x1, . . . ,xn, ε) (i=1 ···n)
of the one-term group:
X f =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
,
then the corresponding transformations:
x′i = fi(x1, . . . ,xn, ε) (i=1 ···n)
l′µ = χµ(l1, . . . , lm, ε) (µ =1 ···m)
which leave invariant the system of equations: Ω1(x, l) = 0, . . . , Ωn−q(x, l) = 0 inthe n+m variables: x1, . . . ,xn, l1, . . . , lm form a one-term group with an infinitesimaltransformation of the shape:
n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
+m
∑µ=1
λµ(l1, . . . , lm)∂ f
∂λµ= X f +L f .
At present, we set up the following definition:Definition. A family of ∞m manifolds:

§ 111. 477
Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
of the space x1, . . . ,xn admits the infinitesimal transformation:
X f =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
when there is, in l1, . . . , lm, an infinitesimal transformation:
L f =m
∑µ=1
λµ(l1, . . . , lm)∂ f∂ lµ
such that the system of equations: Ω1(x, l) = 0, . . . , Ωn−q(x, l) = 0 in the n+mvariables: x1, . . . ,xn, l1, . . . , lm admits the infinitesimal transformation X f +L f .
It yet remains here to consider the question whether the infinitesimal transfor-mation L f is completely determined by the transformation X f . One easily realizesthat this is the case; indeed, if the system of equations: Ωk(x, l) = 0 admits the twoinfinitesimal transformations: Xl+L f and X f +L f , then it admits at the same timethe transformation:
X f +L f − (X f +L f ) = L f −L f ;
but since the parameters of the family: Ωk(x, l) = 0 are essential, the expression:L f −L f must vanish identically, hence the transformation L f cannot be distinctfrom the transformation L f .
By taking as a basis the above definition, we can obviously express the contentof Proposition 2 as follows:
If the family of the ∞m manifolds:
Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
admits the one-term group X f , then at the same time, it admits the infinitesimaltransformation X f .
Conversely: when the family of the ∞m manifolds: Ωk(x, l) = 0 admits the in-finitesimal transformation X f , then it also admits the one-term group X f .
Indeed, under the assumption made, if the system of equations: Ωk(x, l) = 0 inthe n+m variables x, l admits an infinitesimal transformation of the form:
X f +L f =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
+m
∑µ=1
λµ(l1, . . . , lm)∂ f∂ lµ
,
then1 it admits at the same time all transformations of the one-term group: X f +L f ,and therefore, the family of the ∞m manifolds: Ωk(x, l) = 0 in the space x1, . . . ,xnallows all transformations of the one-term group X f .
With these words, we have prove the:
1 See Chap. 6, Theorem 14, p. 127 for this general fact.

478 23 Invariant Families of Manifolds
Proposition 3. The family of the ∞m manifolds:
Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
in the space x1, . . . ,xn admits the one-term group X f if and only if it admits theinfinitesimal transformation X f .
If one wants to know whether the family of the ∞m manifolds: Ωk(x, l)= 0 admitsa given infinitesimal transformation X f , then one will at first solve the equationsΩk(x, l) = 0 with respect to n−q of the x:
(2) xq+k = ψq+k(x1, . . . ,xq, l1, . . . , lm) (k=1 ···n−q),
and afterwards, one will attempt to determine m functions: λ1(l), . . . ,λm(l) of the lso that the system of equations (2) in the n+m variables x, l admits the infinitesimaltransformation:
X f +L f =n
∑i=1
ξi(x1, . . . ,xn)∂ f∂xi
+m
∑µ=1
λµ(l1, . . . , lm)∂ f∂ lµ
.
If one denotes the substitution: xq+1 = ψq+1, . . . , xn = ψn by the sign [ ], thenone obviously obtains for λ1(l), . . . , λm(l) the following equations:
m
∑µ=1
λµ(l)∂ψq+k
∂ lµ=[ξq+k
]−
q
∑j=1
[ξ j] ∂ψq+k
∂x j
(k=1 ···n−q),
which must be satisfied independently of the values of the variables x1, . . . ,xq. The-oretically, there is absolutely no difficulty to decide whether this is possible. Onefinds either that there is no system of functions λµ(l) which has the constitutiondemanded, or one finds a system of this sort, but then also only one such system,for the infinitesimal transformation L f is indeed, when it actually exists, completelydetermined by X f .
At present, we will prove that the following proposition holds:
Proposition 4. If the family of the ∞m manifolds:
Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
in the space x1, . . . ,xn admits the two infinitesimal transformations:
X1 f =n
∑i=1
ξ1i(x)∂ f∂xi
, X2 f =n
∑i=1
ξ2i(x)∂ f∂xi
,
then it admits not only every infinitesimal transformation:
e1 X1 f + e2 X2 f

§ 111. 479
which can be linearly deduced from X1 f and X2 f , but also the transformation:[X1, X2].
Under the assumptions that are made in the proposition, there are two infinites-imal transformations L1 f and L2 f in the l alone that are constituted in such a waythat the system of equations: Ωk(x, l) = 0 in the n+m variables x, l allows the twoinfinitesimal transformations X1 f +L1 f , X2 f +L2 f . According to Chap. 7, Proposi-tion 5, p. 134, the system of equations Ωk(x, l) = 0 then also admits the infinitesimaltransformation: [X1, X2] + [L1, L2] coming into existence by combination; but thisprecisely says that the family of the ∞m manifolds Ωk(x, l) = 0 also admits [X1,X2].As a result, our proposition is proved.
The considerations that we have applied in the proof just conducted also give yetwhat follows:
If the family of the ∞m manifolds Ωk(x, l) = 0 admits the two infinitesimal trans-formations X1 f and X2 f , and if L1 f and L2 f , respectively, are the correspondinginfinitesimal transformations in l1, . . . , lm alone, then the infinitesimal transforma-tion [L1, L2] corresponds to the transformation [X1, X2].
At present, we assume that the family of the ∞m manifolds: Ωk(x, l) = 0 in thespace: x1, . . . ,xn allows all transformations of an arbitrary r-term group:
(6) x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n).
Let the group in question be generated by the r independent infinitesimal transfor-mations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
,
so that between: X1 f , . . . ,Xn f , there are relations of the known form:
[Xi, Xk] =r
∑s=1
ciks Xs f (i, k=1 ···r).
If:
(6’) l′µ = χµ(l1, . . . , lm, a1, . . . ,ar) (µ =1 ···m)
is the transformation in the l which corresponds to the general transformation: x′i =fi(x,a) of the group: X1 f , . . . ,Xr f , then the equations (6) and (6’) taken togetherrepresent an r-term group in the n+m variables: x1, . . . ,xn, l1, . . . , lm.
In fact, if T(a1,...,ar), or shortly T(a), and T(b1,...,br), or shortly T(b), are two trans-formations of the group: x′i = fi(x,a), then when executed one after the other, theyproduce in the known way a transformation: T(a) T(b) = T(c) of the same group, wherethe parameters c1, . . . ,cr depend only on the a and on the b.
On the other hand, if S(a) and S(b) are the transformations (6’) which correspond,respectively, to the transformations T(a) and T(b), then one obviously obtains thetransformation in the l corresponding to the transformation T(a) T(b) when one

480 23 Invariant Families of Manifolds
executes the two transformations S(a) and S(b) one after the other, that is to say:the transformation S(a) S(b) corresponds to the transformation T(a) T(b). But now,we have: T(a) T(b) = T(c) and the transformation S(c) in the l corresponds to thetransformation T(c), whence we must have: S(a) S(b) = S(c).
With these words, it is proved that the equations (6) and (6’) really represent anr-term group in the variables: x1, . . . ,xn, l1, . . . , lm and to be precise, a group whichis holoedrically isomorphic with the group: x′i = fi(x,a); indeed, both groups visiblyhave one and the same parameter group (cf. Chap. 21, p. 412 sq.).
At the same time, it is proved that the equations (6’) in turn also represent agroup in the variables l1, . . . , lm, and in fact, a group isomorphic with the group:x′i = fi(x,a) (cf. Chap. 21, p. 430 sq.), as it results from the symbolic relationsholding simultaneously:
T(a) T(b) = T(c)
and:S(a) S(b) = S(c).
If one associates to every transformation of the group (6) the transformation of thegroup (6’) which is determined by it, then one obtains the two groups (6) and (6’)related to each other in an isomorphic way.
The isomorphism of the two groups (6) and (6’) needs not at all be holoedric, andin certain circumstances, the group (6’) can even reduce to the identity transforma-tion, namely when the group x′ = f (x,a) leaves individually untouched each one ofthe ∞m manifolds: Ωk(x, l) = 0.
We will show that the group which is represented by the joint equations (6)and (6’) is generated by r independent infinitesimal transformations.
Since the family of the ∞m manifolds: Ωk(x, l) allows all transformations ofthe group: x′i = fi(x,a), it admits in particular each one of the r one-term groups:X1 f , . . . ,Xr f , hence according to Proposition 3, p. 477, it also admits each oneof the r infinitesimal transformations: X1 f , . . . ,Xr f . From this, it results that toevery infinitesimal transformation Xk f is associated a completely determinedinfinitesimal transformation:
Lk f =m
∑µ=1
λkµ(l1, . . . , lm)∂ f∂ lµ
of such a constitution that the system of equations: Ωk(x, l) = 0 in the n+m vari-ables: x1, . . . ,xn, l1, . . . , lm admits the infinitesimal transformation: Xk f +Lk f .
Naturally, the system of equations: Ωk(x, l) = 0 admits at the same time everyinfinitesimal transformation: e1 (X1 f + L1 f ) + · · ·+ er (Xr f + Lr f ), and in conse-quence of that, also every one-term group: e1 (X1 f +L1 f )+ · · ·+er (Xr f +Lr f ). Butsince the group: x′i = fi(x,a) consists of the totality of all one-term groups: e1 X1 f +· · ·+er Xr f , then the group represented by the equations (6) and (6’) must obviouslybe identical to the totality of all one-term groups: ∑ ek Xk f +∑ ek Lk f , hence it mustbe generated by the r independent infinitesimal transformations: Xk f + Lk f , waswhat to be shown.

§ 111. 481
Now, from this, it follows that two arbitrary infinitesimal transformationsamongst the Xk +Lk f must satisfy relations of the form:
[Xi +Li f , Xk +Lk f ] =r
∑s=1
c′iks (Xs f +Ls f ).
By verifying this directly, we obtain a new proof of the fact that all finite transfor-mations: x′i = fi(x,a), l′µ = χµ(l,a) form a group. But at the same time, we realizethat c′iks = ciks, which is therefore coherent with the fact that our new group in the xand l possesses the same parameter group as the given group: x′i = fi(x,a).
The system of equations: Ωk(x, l) = 0 admits, simultaneously with the infinitesi-mal transformations: X1 f +L1 f , . . . , Xr f +Lr f , the transformations:
[Xi, Xk]+ [Li, Lk] =r
∑s=1
ciks Xs f +[Li, Lk]
(i, k=1 ···r),
and therefore also the following ones:
[Xi, Xk]+ [Li, Lk]−r
∑s=1
ciks (Xs f +Ls f ) = [Li, Lk]−r
∑s=1
ciks Ls f
in the variables l1, . . . , lm alone. But because of the constitution of the system ofequations: Ωk(x, l) = 0, this is possible only when the infinitesimal transformationsjust written vanish identically, hence when the relations:
[Li, Lk] =r
∑s=1
ciks Ls f
hold true. From this, it results immediately:
[Li, Lk]+ [Xi, Xk] =r
∑s=1
ciks (Xs f +Ls f ),
whence the said property of the joint equations (6) and (6’) is proved.According to the above, it goes without saying that the group (6’) is generated by
the r infinitesimal transformations: L1 f , . . . ,Lr f . At the same time, in what precedes,we have a new proof of the fact that the equations (6’) represent a group in thevariables l1, . . . , lm which is isomorphic with the group: X1 f , . . . ,Xr f .
At present, the isomorphic relationship between the two groups (6) and (6’) men-tioned on p. 480 can also be defined by saying that to every infinitesimal transfor-mation: e1 X1 f + · · ·+er Xr f is associated the infinitesimal transformation: e1 L1 f +· · ·+ er Lr f determined by it in the l.
We therefore have the:
Proposition 5. If the family of the ∞m manifolds:

482 23 Invariant Families of Manifolds
Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
in the space: x1, . . . ,xn admits the r independent infinitesimal transformations:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
of an r-term group having the composition:
[Xi, Xk] =r
∑s=1
ciks Xs f (i, k=1 ···r),
then to every Xk f there corresponds a completely determined infinitesimal transfor-mation:
Lk f =m
∑µ=1
λkµ(l1, . . . , lm)∂ f∂ lµ
of such a constitution that the system of equations: Ωk(x, l) = 0 in the n+m vari-ables: x1, . . . ,xn, l1, . . . , lm admits the r infinitesimal transformations: Xk f +Lk f , sothe r infinitesimal transformations Lk f stand pairwise in the relationships:
[Li, Lk] =r
∑s=1
ciks Ls f (i, k=1 ···r),
that is to say, they generate a group isomorphic with the group: X1 f , . . . ,Xr f .
Here, the following proposition may yet be expressly stated and proved indepen-dently:
Proposition 6. If the r-term group: X1 f , . . . ,Xr f of the space x1, . . . ,xn contains ex-actly p 6 r independent infinitesimal transformations which leave invariant the ∞m
manifolds:Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q),
then these p independent infinitesimal transformations generate a p-term subgroupof the group: X1 f , . . . ,Xr f .
The proof is very simple. Let:
Ξπ f =r
∑j=1
gπ j X j f (π =1 ··· p)
be such independent infinitesimal transformations of the group: X1 f , . . . ,Xr f whichleave invariant the family: Ωk(x, l) = 0, so that every other infinitesimal transfor-mation: e1 X1 f + · · ·+ er Xr f which does the same can be linearly deduced fromΞ1 f , . . . ,Ξp f . Then according to Proposition 4, p. 478, the family: Ωk(x, l) = 0 alsoadmits every infinitesimal transformation: [Ξµ , Ξν ] of the group: X1 f , . . . ,Xr f , andconsequently, there are relations of the form:

§ 112. 483
[Ξµ , Ξν ] =p
∑π=1
gµνπ Ξπ f (µ, ν =1 ··· p)
in which the gµνπ denote constants. From this, it results that Ξ1 f , . . . ,Ξp f effec-tively generate a p-term group. —
If the family of the ∞m manifolds:
Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
is presented, and if in addition an arbitrary r-term group: X1 f , . . . ,Xr f of the spacex1, . . . ,xn is also presented, one can ask how many independent infinitesimal trans-formations of the group: X1 f , . . . ,Xr f does the family presented admit. We nowoverview how this question can be answered.
Indeed, if the family: Ωk(x, l) = 0 is supposed to admit an infinitesimal trans-formation of the form: e1 X1 f + · · ·+ er Xr f , then it must be possible to indicatean infinitesimal transformation: L f in the l alone such that the system of equations:Ωk(x, l)= 0 in the n+m variables: x1, . . . ,xn, l1, . . . , lm admits the infinitesimal trans-formation: ∑ ek Xk f +L f . Hence, if we imagine that the equations: Ωk(x, l) = 0 areresolved with respect to n−q of the x:
xq+k = ψq+k(x1, . . . ,xq, l1, . . . , lm) (k=1 ···n−q),
and if, as on p. 478, we denote the substitution: xq+1 = ψq+1, . . . , xn = ψn by thesign [ ], then we only have to determine the constants e1, . . . ,er and the functions:λ1(l), . . . ,λm(l) in the most general way so that the n−q equations:
m
∑µ=1
λµ(l)∂ψq+k
∂ lµ=
r
∑σ=1
eσ
[ξσ ,q+k
]−
q
∑j=1
[ξσ j] ∂ψq+k
∂x j
(k=1 ···n−q)
are satisfied identically, independently of the values of the variables x1, . . . ,xq. Inthis way, we find the most general infinitesimal transformation: e1 X1 f + · · ·+er Xr fwhich leaves invariant the family: Ωk(x, l) = 0.
§ 112.
When the family of the ∞m manifolds:
(1) Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
admits the transformation: x′i = fi(x1, . . . ,xn), then there is, as we have seen on p. 473sq., a completely determined transformation: l′µ = χµ(l1, . . . , lm) of such a constitu-tion that the system of equations: Ωk(x, l) = 0 in the n+m variables x, l admits thetransformation:
x′i = fi(x1, . . . ,xn) (i=1 ···n)
l′µ = χµ(l1, . . . , lm) (µ =1 ···m).

484 23 Invariant Families of Manifolds
Already on p. 473, we observed that the equations: l′µ = χµ(l) determine the pa-rameters of the manifold of the invariant family (1) into which the manifold with theparameters l1, . . . , lm is transferred by the transformation: x′i = fi(x). Hence, whenwe interpret l1, . . . , lm virtually as coordinates of individual manifolds of the fam-ily (1), the equations: l′µ = χµ(l) indicate the law according to which the mani-folds of our invariant family are permuted with each other by the transformation:x′i = fi(x).
For instance, if a special system of values: l01 , . . . , l
0m admits the transformation:
l′µ = χµ(l1, . . . , lm) (µ =1 ···m),
then at the same time, the manifold:
Ωk(x1, . . . ,xn, l01 , . . . , l
0m) = 0 (k=1 ···n−q)
admits the transformation:
x′i = fi(x1, . . . ,xn) (i=1 ···n).
In fact, the manifold: Ωk(x, l0) = 0 is transferred, by the execution of the trans-formation: x′i = fi(x), to the new manifold:
Ωk(x′1, . . . ,x
′n, χ1(l0), . . . , χm(l0)
)= 0 (k=1 ···n−q) ;
but under the assumption made, we have:
χµ(l01 , . . . , l
0m) = l0
µ (µ =1 ···m),
hence the new manifold coincides with the old one and the manifold: Ωk(x, l0) = 0really remains invariant.
However by contrast, the converse does not always hold true. If an arbitrary spe-cial manifold:
Ωk(x1, . . . ,xn, l01 , . . . , l
0m) = 0 (k=1 ···n−q)
of the family (1) admits the transformation: x′i = fi(x), then it does not follow fromthat with necessity that the system of values: l0
1 , . . . , l0m admits the transformation:
l′µ = χµ(l). Indeed, it is thinkable that, to the system of values: l01 , . . . , l
0m, there is
associated a continuous series of systems of values: l1, . . . , lm which provide thesame manifold as the system of values: l0
1 , . . . , l0m, when inserted in (1); in this case,
from the invariance of the manifold: Ωk(x, l0) = 0, it only follows that the individualsystems of values: l1, . . . , lm of the series just defined are permuted with each otherby the transformation: l′µ = χµ(l), but not that the system of values: l0
1 , . . . , l0m re-
mains invariant by the transformation in question. Nevertheless, if the lk do not havespecial values but general values, then the manifold: Ωk(x, l) = 0 admits the trans-formation: x′i = fi(x,a) only when the system of values lk allows the correspondingtransformation: l′µ = χµ(l), and also, always in this case too.

§ 112. 485
Now, we consider the general case where the family of the ∞m manifolds:
(1) Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
admits the r-term group:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
with the r independent infinitesimal transformations: X1 f , . . . ,Xr f . Let the group inthe l which corresponds to the group: x′i = fi(x,a) have the form:
l′µ = χµ(l1, . . . , lm, a1, . . . ,ar) (µ =1 ···m),
and let it be generated by the r infinitesimal transformations: L1 f , . . . ,Lr f which inturn correspond naturally to the infinitesimal transformations: X1 f , . . . ,Xr f , respec-tively.
At first, the question is how one decides whether the infinitesimal transforma-tion: e0
1 X1 f + · · ·+ e0r Xr f leaves invariant a determined manifold contained in the
family (1):
(7) Ωk(x1, . . . ,xn, l01 , . . . , l
0m) = 0 (k=1 ···n−q).
It is easy to see that the manifold (7) admits in any case the infinitesimal trans-formation: e0
1 X1 f + · · ·+ e0r Xr f when the system of values: l0
1 , . . . , l0m admits the
infinitesimal transformation: e01 L1 f + · · ·+ e0
r Lr f .In fact, the system of equations (1) in the m+ n variables: x1, . . . ,xn, l1, . . . , lm
admits, under the assumptions made, the infinitesimal transformation: ∑ e0j (X j f +
L j f ); the n−q expressions:
r
∑j=1
e0j(X j Ωk +L j Ωk
)=
r
∑j=1
e0j
n
∑i=1
ξ ji(x)∂Ωk
∂xi+
m
∑µ=1
λ jµ(l)∂Ωk
∂ lµ
therefore vanish all by virtue of: Ω1(x, l) = 0, . . . , Ωn−q(x, l) = 0. This also holdstrue when we set: l1 = l0
1 , . . . , lm = l0m; but now, the system of values l0
1 , . . . , l0m admits
the infinitesimal transformation: ∑ e0j L j f and hence, the m expressions:
e01 λ1µ(l0)+ · · ·+ e0
r λrµ(l0) (µ =1 ···m)
vanish all. Consequently, the n−q expressions:
n
∑i=1
r
∑j=1
e0j ξ ji(x)
∂Ωk(x, l0)
∂xi(k=1 ···n−q)
vanish all by virtue of (7), that is to say, the manifold (7) really admits the infinites-imal transformation: ∑ e0
j X j f .

486 23 Invariant Families of Manifolds
Nevertheless, the sufficient criterion found here with these words is not neces-sary.
Indeed, if our family of manifolds Ωk(x, l) = 0 remains invariant by the group:X1 f , . . . ,Xr f , and if at the same time, the special manifold: Ωk(x, l0) = 0 is supposedto admit the infinitesimal transformation: e0
1 X1 f + · · ·+ e0r Xr f , then for that, it is
only necessary that the n−q expressions:
m
∑µ=1
r
∑j=1
e0j λ jµ(l0)
∂Ωk(x, l0)
∂ lµ
be equal to zero by virtue of the system of equations: Ωk(x, l0) = 0; but it is not atall necessary that the r expressions: ∑ e0
j λ jµ(l0) themselves vanish.Thus, if one wants to know whether every manifold: Ωk(x, l) = 0 of the invari-
ant family admits one or several infinitesimal transformations: ∑ ek Xk f , and if inaddition, one wants for every manifold lk to find the concerned infinitesimal trans-formation, then one has to determined the ek in the most general way as functionsof the l so that the equations:
(8)m
∑µ=1
r
∑j=1
e j λ jµ(l)∂Ω(x, l)
∂ lµ= 0
are a consequence of the system of equations: Ωk(x, l) = 0. But since, according toan assumption made earlier on, the l are essential parameters, the system of equa-tions: Ωk(x, l) = 0 in the n+m variables x, l can admit no not identically vanishingtransformation:
m
∑µ=1
r
∑j=1
e j(l)λ jµ(l)∂ f∂ lµ
,
whence it follows with necessity that:
e1 λ1µ(l)+ · · ·+ er λrµ(l) = 0 (µ =1, 2 ···m).
We therefore get the following:If: ∑ e0
k Lk f is the most general infinitesimal transformation contained in thegroup: L1 f , . . . ,Lr f which leaves invariant the system of values: l0
1 , . . . , l0m located
in general position, then: ∑ e0k Xk f is the most general infinitesimal transformation
contained in the group: X1 f , . . . ,Xr f which leaves invariant the manifold (7)located in general position.
We can assume that amongst the r infinitesimal transformations: L1 f , . . . ,Lr f ,exactly m− p, say: L1 f , . . . ,Lm−p f , are linked together by no linear relation of theform:
α1(l1, . . . , lm)L1 f + · · ·+αm−p(l1, . . . , lm)Lm−p f = 0,
while by contrast: Lm−p+1 f , . . . ,Lr f can be expressed linearly in terms ofL1 f , . . . ,Lm−p f :

§ 112. 487
Lm−p+ j f ≡m−p
∑µ=1
α jµ(l1, . . . , lm)Lµ f ( j=1 ···r−m+ p).
We can always insure that this assumption holds, even when the infinitesimal trans-formations: L1 f , . . . ,Lr f are not mutually independent, which can very well occur.
It is now clear that the r−m+ p infinitesimal transformations:
(9) Lm−p+ j f −m−p
∑µ=1
α jµ(l01 , . . . , l
0m)Lµ f ( j=1 ···r−m+ p)
leave invariant the system of values: l01 , . . . , l
0m; moreover, because l0
1 , . . . , l0m is a sys-
tem of values in general position, one realizes immediately that every infinitesi-mal transformation: ∑ ek Lk f by which the system of values remains invariant canbe linearly deduced from the the r−m+ p transformations (9). Consequently, themost general infinitesimal transformation: ∑ ek Xk f which leaves invariant the man-ifold (7) located in general position can be linearly deduced from the r −m+ ptransformations:
(10) Xm−p+ j f −m−p
∑µ=1
α jµ(l01 , . . . , l
0m)Xµ f ( j=1 ···r−m+ p).
Of course, the infinitesimal transformations (10) are mutually independent andthey generate an (r −m+ p)-term group, namely the most general subgroup con-tained in the group: X1 f , . . . ,Xr f by which the manifold (7) remains invariant.
In particular, if the group: L1 f , . . . ,Lr f is transitive, then the entire number p hasthe value zero; so in this case, every manifold of the family (1) located in general po-sition admits exactly r−m independent infinitesimal transformations of the group:X1 f , . . . ,Xr f .
We therefore have the
Proposition 7. If the family of the ∞m manifolds:
Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q)
admits the r-term group: X1 f , . . . ,Xr f , if moreover L1 f , . . . ,Lr f are the infinites-imal transformations in the l alone which correspond to the X j f and if lastlyL1 f , . . . ,Lr f are linked together by exactly r −m+ p independent relations of theform: ∑ β j(l)L j f = 0, then the group: X1 f , . . . ,Xr f contains exactly r−m+ p in-dependent infinitesimal transformations which leave invariant a manifold l0
1 , . . . , l0m
in general position. These transformations generate an (r − m + p)-term group.If the group: L1 f , . . . ,Lr f in the m variables l1, . . . , lm is transitive, then everymanifold of the family Ωk(x, l) = 0 located in general position admits exactly r−mindependent infinitesimal transformations of the group: X1 f , . . . ,Xr f and theseinfinitesimal transformations generate an (r−m)-term subgroup.

488 23 Invariant Families of Manifolds
We yet add here the obvious remark that the group: L1 f , . . . ,Lr f in l1, . . . , lm istransitive if and only if every manifold of the family Ωk(x, l) = 0 located in generalposition can be transferred, by means of at least one transformation of the group:X1 f , . . . ,Xr f , to every other manifold.
§ 113.
In the n-times extended space x1, . . . ,xn, let an r-term group: X1 f , . . . ,Xr f be pre-sented, and in addition, let an arbitrary manifold, which we want to denote by M,be given. We assume that in the equations of M, no arbitrary parameters of any kindappear.
If all ∞r transformations of the group: X1 f , . . . ,Xr f are executed on the manifoldM, then this manifold is transferred to a series of new manifolds. We will prove thatthe totality of all these manifolds remains invariant by the group: X1 f , . . . ,Xr f , andthat it forms a family invariant by the group.
Let M′ be an arbitrary manifold which belongs to the totality just said, and letT1 be a transformation of the group: X1 f , . . . ,Xr f which transfers M to M′, whencethere is the symbolic equation:
(M)T1 = (M′).
Now, if T is an arbitrary transformation of the group, we have:
(M′)T = (M′)T1 T = (M)T2,
where the transformation T2 again belongs to the group; consequently, the mani-fold M′ is transferred by the transformation T to another manifold of the totalityin question. Since this holds for every manifold M′ of the totality, we see that themanifolds belonging to the totality are permuted with each other by T , and henceactually, by all transformations of the group: X1 f , . . . ,Xr f , hence we see that the to-tality of manifolds defined above effectively forms a family invariant by the group:X1 f , . . . ,Xr f .
It is easy to see that every manifold of this invariant family can be transferred,by means of at least one transformation of the group, to every other manifold of thefamily. Indeed, if:
(M′) = (M)T1, (M′′) = (M)T2,
then (M) = (M′)T−11 , whence:
(M′′) = (M′)T−11 T2,
whence the claim is proved. At the same time, it results from this that one alsoobtains the discussed family of manifolds when one executes all ∞r transformationsof the group on an arbitrary manifold of the family.
We therefore have the

§ 113. 489
Proposition 8. If one executes all ∞r transformations of an r-term group:X1 f , . . . ,Xr f of the Rn on a given manifold of this space, then the totality of allpositions that the manifold takes on the occasion forms a family of manifoldsinvariant by the group. Every manifold of this family can be transferred, by meansof at least one transformation of the group, to any other manifold of the family.The family can be derived from each one of its manifolds in the same way as it isdeduced from the initially given manifold.
The manifold M will admit a certain number, that we assume to be exactly equalto r−m, of infinitesimal transformations of the group: X1 f , . . . ,Xr f .† These trans-formations then generate an (r−m)-term subgroup (cf. Theorem 31, p. 219).
Now, let S be the general symbol of a transformation of this subgroup, so:(M)S = (M); moreover, let T1 be an arbitrary transformation of the group:X1 f , . . . ,Xr f and let M be transferred to the new position M′ by T1: (M′) = (M)T1.Then it is easy to indicate all transformations T of the group Xk f which transfer Mto M′.
Indeed, one has:(M)T= (M′) = (M)T1,
whence:(M)TT−1
1 = (M),
hence TT−11 is a transformation S and ST1 is the general symbol of all transforma-
tions of the group Xk f which transfer M to M′. But there are as many transformationsST1 as there are different transformations S, that is to say, ∞r−m.
One finds in a similar way all transformations S of our group which leave M′
invariant. From (M′)S= (M′) and (M)T1 = (M′), one obtains:
(M)T1ST−11 = (M),
whence:T1ST−1
1 = S, S= T−11 ST1.
Likewise, there are ∞r−m such different transformations and their totality forms an(r−m)-term subgroup which is conjugate to the group S inside the group Xk f .
We summarize this result as follows:
Proposition 9. If a manifold M of the Rn admits exactly r−m independent infinites-imal transformations of the r-term group: X1 f , . . . ,Xr f , or briefly Gr, if moreoverS is the general symbol of the ∞r−m finite transformations of the (r−m)-term sub-group which is generated by these r −m infinitesimal transformations, and lastly,if T is an arbitrary transformation of the Gr: X1 f , . . . ,Xr f and if M takes the new
† The totality of all finite transformations of the group: X1 f , . . . ,Xr f which leave invariant amanifold M always forms a subgroup (Theorem 32, p. 220), but of course, this group needs not bea finite continuous group. Nevertheless, in the following developments of the text, when we makethe implicit assumption that this subgroup is generated by infinitesimal transformations, that is notto be interpreted as an essential restriction, because we can indeed suitably narrow down the region((a)) introduced on p. 26.

490 23 Invariant Families of Manifolds
position M′ after the execution of T , then the Gr contains exactly ∞r−m differenttransformations which likewise transfer M to M′ and the general symbol of thesetransformations is: ST ; in addition, the Gr contains exactly ∞r−m transformationswhich leave M′ invariant, these transformations have T−1 ST for a general symboland they form an (r −m)-term subgroup which is conjugate to the group of the Sinside the Gr.
If we imagine that the ∞r transformations of the group: x′i = fi(x,a) are executedon the equations of the manifold M, then we obtain the analytic expression of thediscussed invariant family of manifolds. Formally, this expression contains the rparameters a1, . . . ,ar, but these parameters need not be all essential. We now wantto determine the number m′ of the essential parameters amongst the parametersa1, . . . ,ar.
Our invariant family consists of ∞m′different manifolds and each one of these
manifolds can be transferred to every other manifold by means of a transformationof the group: X1 f , . . . ,Xr f . According to Proposition 7, p. 487, each individual man-ifold amongst the ∞m′
manifolds then admits exactly r−m′ independent infinites-imal transformations of the Gr; but from what precedes, we know that under theassumptions made, each one of these manifolds admits exactly ∞r−m finite transfor-mations of the Gr, and consequently, we have m′ = m and amongst the r parameters:a1, . . . ,ar, there are exactly m that are essential.
We therefore have the
Proposition 10. If a manifold of the n-times extended space Rn admits exactly r−mindependent infinitesimal transformations of an r-term group: X1 f , . . . ,Xr f of thisspace, then this manifold takes exactly ∞m different positions by the ∞r transforma-tions of this group.
§ 114.
In the equations of our invariant family of manifolds, the parameters need not, assaid, be all essential, but we can always imagine that m 6 r functions l1, . . . , lm ofthe a are introduced as new parameters so that the equations of our family are giventhe form:
Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q),
where now l1, . . . , lm are essential parameters.The family Ωk = 0 remains invariant by the group: X1 f , . . . ,Xr f while its in-
dividual manifolds are permuted with each other. The way how the manifolds arepermuted is indicated by the group: L1 f , . . . ,Lr f in the l alone which, as shownearlier on, is completely determined by the group: X1 f , . . . ,Xr f .
The group Lk f in the variables l1, . . . , lm is isomorphic with the group Xk f , henceit has at most r essential parameters; on the other hand it is certainly, under theassumption made, transitive (cf. p. 487 sq.), hence it has at least m essential parame-ters. For us, it only remains to indicate a simple criterion for determining how manyessential parameters the group Lk f really has.

§ 114. 491
Let the group: L1 f , . . . ,Lr f be ρ-term, where 0 6 ρ 6 r. Because it is meroedri-cally isomorphic with the Gr: X1 f , . . . ,Xr f , then there must exist in the Gr an (r−ρ)-term invariant subgroup which corresponds to the identity transformation in thegroup Lk f (cf. Theorem 54, p. 312). This (r−ρ)-term invariant subgroup of the Grthen leaves individually fixed each one of the ∞m manifolds: Ωk(x, l) = 0, hence itis contained in the (r−m)-term subgroup gr−m of the Gr which leaves invariant themanifold M discussed above and at the same time, it is contained in all (r−m)-termsubgroups contained in the Gr which are conjugate, inside the Gr, to the gr−m justmentioned.
Conversely, if this gr−m contains an (r−ρ)-term subgroup which is invariant inthe Gr, then this subgroup is at the same time contained in all subgroups of the Grthat are conjugate to the gr−m, hence it leaves untouched every individual manifold:Ωk(x, l) = 0, and to it, there corresponds the identity transformation in the group:L1 f , . . . ,Lr f .
In order to decide how many parameters the group: L1 f , . . . ,Lr f contains, wetherefore have only to look up at the largest group contained in the gr−m which isinvariant in the Gr. When the group in question is exactly (r − ρ)-term (ρ > m),then the group: L1 f , . . . ,Lr f is exactly ρ-term.
We do not want to state this result as a specific proposition, but instead, we wantto recapitulate all the results of the previous two paragraphs in a theorem.
Theorem 85. If one has an r-term group: X1 f , . . . ,Xr f , or briefly Gr, of the spacex1, . . . ,xn and if one has an arbitrary manifold M which allows exactly r −m in-dependent infinitesimal transformations of the Gr and hence which also admits the(r−m)-term subgroup gr−m generated by these infinitesimal transformations, thenthrough the ∞r transformations of the Gr, M takes in total ∞m different positionsthe totality of which remains invariant relatively to the group Gr. If one marks theindividual positions of M by means of m parameters: l1, . . . , lm, then one obtains acertain group in l1, . . . , lm:
l′µ = χµ(l1, . . . , lm; a1, . . . ,ar) (µ =1 ···m)
which indicates in which way the individual positions of M are permuted with eachother by the group: X1 f , . . . ,Xr f . This group in the l is transitive and isomorphicwith the group: X1 f , . . . ,Xr f . If the largest subgroup contained in the gr−m which isinvariant in the Gr is exactly (r−ρ)-term, then the group: l′µ = χµ(l,a) has exactlyρ essential parameters. In particular, if the Gr is simple, then the group in the lis always r-term and holoedrically isomorphic to the Gr, with the only exceptionof the case m = 0, in which the group: l′µ = χµ(l,a) consists only of the identitytransformation.†
The number r−ρ mentioned in the theorem may have each one of the values: 0,1, . . . , r−m; if r−ρ = 0, then the (r−ρ)-term subgroup of the gr−m consists of theidentity transformation, hence the group: l′µ = χµ(l,a) is holoedrically isomorphic
† LIE, Archiv for Mathematik og Naturv., Vol. 10, Christiania 1885.

492 23 Invariant Families of Manifolds
to the Gr; if r−ρ = r−m, then the gr−m itself is invariant in the Gr and the group:l′µ = χµ(l,a) is only m-term.
§ 115.
In the last but one paragraph we gave a method to find the families of manifoldswhich remain invariant by a given r-term group: X1 f , . . . ,Xr f . The invariant familiesthat we obtained in this way were distinguished by the fact that every manifold of afamily of this sort could be transferred, by means of at least one transformation ofthe group: X1 f , . . . ,Xr f , to every other manifold of the family.
At present, we want to generalize the discussed method so that it produces allfamilies of manifolds invariant by the group X1 f , . . . ,Xr f .
For this, we are conducted to the obvious observation that the considerations ofthe pp. 488–490 also remain valid when the equations of the manifold M contain ar-bitrary parameters, that is to say: when in place of an individual manifold M we usedirectly a complete family of manifolds. Thus, we can also proceed in the followingway in order to find invariant families of manifolds:
We take an arbitrary family:
(11) Vk(x1, . . . ,xn, u1, . . . ,uh) = 0 (k=1 ···n−q)
of ∞h manifolds and we execute on it all ∞r transformations of the group:X1 f , . . . ,Xr f ; the totality of all manifolds that we obtain in this way always forms afamily invariant by the group: X1 f , . . . ,Xr f .
It is clear that we obtain all families invariant by the group: X1 f , . . . ,Xr f whenwe choose the family (11) in all possible ways. Indeed, if an arbitrary family invari-ant by the group is presented, say the family:
(1) Ωk(x1, . . . ,xn, l1, . . . , lm) = 0 (k=1 ···n−q),
then this family can in any case be obtained when we just choose, as the family (11),the family (1). Besides, one can easily indicate infinitely many other families (11)out of which precisely the family (1) is obtained, but we do not want to spend timeon this.
But it yet remains to answer a question.If the family (11) is presented and if all the transformations of the group:
X1 f , . . . ,Xr f are executed on it, then the equations of the invariant family whichcomes into existence in this way obviously have the form:
(12) Wk(x1, . . . ,xn, u1, . . . ,uh, a1, . . . ,ar) = 0 (k=1 ···n−q),
and therefore, they formally contain h+ r arbitrary parameters, namely: u1, . . . ,uh,a1, . . . ,ar. How many parameters amongst these parameters are essential?
Every generally positioned manifold of the family (11) takes by the group:X1 f , . . . ,Xr f a certain number, say ∞p, of different positions; of these ∞p positions,there is a certain number, say ∞o, of different positions, which again belong tothe family (11). In this manner, the complete family (11) is decomposed in ∞h−o

§ 115. 493
different subfamilies of ∞o manifolds, in such a way that every manifold of thefamily (11) can always be transferred to every manifold which belongs to oneand the same subfamily by means of at least one transformation of the group:X1 f , . . . ,Xr f , and such that every manifold of the family (11), as soon as it remainsinside the family (11) by a transformation of the group: X1 f , . . . ,Xr f , remains at thesame time in the subfamily to which it belongs.
Now, if we imagine that all transformations of the group: X1 f , . . . ,Xr f are exe-cuted on two arbitrary manifolds which belong to the same subfamily, we obviouslyobtain in the two cases the same family of ∞p manifolds; on the other hand, if weimagine that all transformations of the group are executed on two manifolds of thefamily (11) which belong to distinct subfamilies, we obtain two distinct families of∞p manifolds which have absolutely no manifold in common.
Hence, when we choose on each one of the ∞h−o subfamilies of the family (11)a manifold and when we execute all transformations of the group: X1 f , . . . ,Xr f onthe so obtained ∞h−o manifolds, we receive ∞h−o distinct families of ∞p manifolds,in total ∞h−o+p different manifolds. At the same time, it is clear that in this way, weobtain exactly the same family as when we execute all transformations of our groupon the manifolds (11) themselves.
As a result, it is proved that the family (12) consists of ∞h−o+p different mani-folds, hence that amongst the h+r parameters of the equations (12), exactly h−o+p are essential.
We yet want to indicate how one has to proceed in order to determine the numbersp and o mentioned above.
The number r− p is evidently the number of the infinitesimal transformations:e1 X1 f + · · ·+ er Xr f which leave invariant a generally positioned manifold of thefamily (11). Now, the most general infinitesimal transformation: ∑ e j X j f whichleaves invariant the manifold:
(13) Vk(x1, . . . ,xn, u1, . . . ,uh) = 0 (k=1 ···n−q)
necessarily has the form:
(14)r
∑j=1
e j(u1, . . . ,uh)X j f ,
where the e j(u1, . . . ,uh) are functions of the u. So we need only to determine thefunctions e j(u) in the most general way so that the system of equations (13) in thevariables: x1, . . . ,xn admits the infinitesimal transformation (14).
If we imagine that the equations (13) are resolved with respect to n−q of the x:
xq+k = ωq+k(x1, . . . ,xq, u1, . . . ,uh) (k=1 ···n−q),
and if we denote the substitution: xq+1 = ωq+1, . . . , xn = ωn by the sign [ ], wevisibly obtain for the functions e j(u) the equations:

494 23 Invariant Families of Manifolds
(15)
r
∑j=1
e j(u1, . . . ,uh)
[ξ j,q+k
]−
q
∑π=1
[ξ jπ] ∂ωq+k
∂xπ
= 0
(k=1 ···n−q)
which must be satisfied independently of the values of x1, . . . ,xn.If we have determined from these equations the e j(u) in the most general way, we
know the most general infinitesimal transformation ∑ e j X j f which leaves invariantthe manifold (13) and from this, we can immediately deduce the number of theindependent infinitesimal transformations ∑ e j X j f of this sort.
For the determination of the number o, we proceed as follows:We seek at first the most general infinitesimal transformation: ∑ ε j(u1, . . . ,uh)X j f
that transfers the manifold (13) to an infinitely neighbouring manifold, or, expresseddifferently: we seek the most general infinitesimal transformation:
r
∑j=1
ε j(u1, . . . ,uh)X j f +h
∑σ=1
Φσ (u1, . . . ,uh)∂ f
∂uσ
which leaves invariant the system of equations (13) in the n+h variables: x1, . . . ,xn,u1, . . . ,uh.
If we keep the notation chosen above, the functions: ε j(u) and Φσ (u) are obvi-ously defined by the equations:
(15’)
r
∑j=1
ε j(u)[
ξ j,q+k]−
q
∑π=1
[ξ jπ] ∂ωq+k
∂xπ
=
h
∑σ=1
Φσ (u)∂ωq+k
∂uσ
(k=1 ···n−q)
which they must satisfy independently of the values of the variables x1, . . . ,xq.We imagine that the ε j(u) and the Φσ (u) are determined in the most general way
from these equations and we form the expression:
h
∑σ=1
Φσ (u1, . . . ,uh)∂ f
∂uσ.
Evidently, this expression can be deduced from a completely determined number,say h′ 6 h, of expressions:
h
∑σ=1
Φτσ (u1, . . . ,uh)∂ f
∂uσ(τ =1 ···h′)
by means of additions and of multiplications by functions of the u. According to thenature of things, the h′ equations:
h
∑σ=1
Φτσ (u1, . . . ,uh)∂ f
∂uσ= 0 (τ =1 ···h′)

§ 116. 495
form an h′-term complete system with h−h′ independent solutions:
w1(u1, . . . ,uh), . . . , wh−h′(u1, . . . ,uh),
and it is clear that the equations:
w1 = const., . . . , wh−h′ = const.
determine the ∞h−o subfamilies in which the family (11) can be decomposed, as wesaw above. Consequently, we have: h−o = h−h′, hence o = h′.
It should not remain unmentioned that the developments of the present chaptercan yet be generalized.
One can for instance, instead of starting from an individual manifold, start froma discrete number of manifolds or even more generally: instead of starting from anindividual family of manifolds, one can start from several such families. We call anumber of manifolds briefly a figure [FIGUR].
§ 116.
The Theorem 85, p. 491 contains a method for the determination of transitivegroups which are isomorphic with a given r-term group; we have already explaineda method for the determination of all groups of this sort in Chap. 22, p. 445 sq. Atpresent, we will show that our new method fundamentally amounts finally to theold one, and we will in this way come to state an important result found earlier on,in a new, much more general form.
Let:
(16) Vk(x1, . . . ,xn) = 0 (k=1 ···n−q)
be an arbitrary manifold and let:
x′i = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n)
be an arbitrary r-term group generated by r independent infinitesimal transforma-tions. By resolution with respect to the x, the equations: x′i = fi(x,a) may give:
xi = Fi(x′1, . . . ,x′n, a1, . . . ,ar) (i=1 ···n).
Lastly, we want yet to assume that the manifold (16) admits exactly r−m indepen-dent infinitesimal transformations of the group: x′i = fi(x,a).
If we execute on the manifold (16) the general transformation: x′i = fi(x,a) of ourgroup, then according to Theorem 85, p. 491, we obtain a family of ∞m manifoldsinvariant by the group. The equations of this family are:
(17)Vk(F1(x′,a), . . . ,Fn(x′,a)
)=Wk(x′1, . . . ,x
′n, a1, . . . ,ar) = 0
(k=1 ···n−q),

496 23 Invariant Families of Manifolds
hence they formally contain r arbitrary parameters. But amongst these r parame-ters, only m are essential, hence it is possible to indicate m independent functions:ω1(a), . . . ,ωm(a) of the a so that the equations (17) take the form:
(17’) Ωk(x′1, . . . ,x
′n, ω1(a), . . . ,ωm(a)
)= 0 (k=1 ···n−q).
Here, we can lastly introduce: l1 = ω1(a), . . . , lm = ωm(a) as new parameters inplace of the a; then in the system of equations:
(18) Ωk(x′1, . . . ,x′n, l1, . . . , lm) = 0 (k=1 ···n−q)
which comes into existence in this way, the parameters l1, . . . , lm are essential.We find a new representation of our invariant family when we execute an arbi-
trary transformation: x′′i = fi(x′,b) of our group on the system of equations (18).According to Theorem 85, p. 491, (18) receives on the occasion the form:
(18’) Ωk(x′′1 , . . . ,x′′n , l′1, . . . , l
′m) = 0 (k=1 ···n−q),
where the l′ are completely determined functions of the l and of the b:
(19) l′µ = χµ(l1, . . . , lm, b1, . . . ,br) (µ =1 ···m).
We must obtain this representation of our family when we execute the transforma-tion:
x′′i = fi(
f1(x,a), . . . , fn(x,a), b1, . . . ,br)= fi(x1, . . . ,xn, a′1, . . . ,a
′r)
directly on the manifold (16), where the a′ are completely determined functions ofthe a and of the b:
(20) a′k = ϕk(a1, . . . ,ar, b1, . . . ,br) (k=1 ···r).
If we do that, we receive the equations of our family at first under the form:
Vk(F1(x′′,a′), . . . ,Fn(x′′,a′)
)=Wk(x′′1 , . . . ,x
′′n , a′1, . . . ,a
′r) = 0
(k=1 ···n−q),
which we can also obviously write under the form:
Ωk(x′′1 , . . . ,x
′′n , ω1(a′), . . . ,ωm(a′)
)= 0 (k=1 ···n−q).
But since these equations must agree with the equations (18’), it results that theparameters l′ are linked to the a′ by the relations:
l′µ = ωµ(a′1, . . . ,a′r) (µ =1 ···m).
Because of the equations (19), we therefore have:

§ 116. 497
ωµ(a′) = χµ(l1, . . . , lm, b1, . . . ,br) (µ =1 ···m),
or:
(21) ωµ(a′) = χµ(ω1(a), . . . ,ωm(a), b1, . . . ,br) (µ =1 ···m).
If we make here the substitution: a′1 = ϕ1(a,b), . . . , a′r = ϕr(a,b), then we mustobtain only identities, because the parameters a1, . . . ,ar, b1, . . . ,br are absolutelyarbitrary, and hence, are linked together by no relation.
At present, if we remember that the equations (20) represent a simply transitivegroup in the variables a1, . . . ,ar equally composed with the group: x′i = fi(x,a),namely the associated parameter group (Chap. 21, p. 413), and that the equa-tions (19) represent a transitive group isomorphic with the group: x′i = fi(x,a), thenwe realize immediately what follows:
The equations:
(22) ω1(a1, . . . ,ar) = const., . . . , ωm(a1, . . . ,ar) = const.
represent a decomposition of the r-times extended space a1, . . . ,ar invariant by thegroup (20), and to be precise, a decomposition in ∞m (r−m)-times extended mani-folds. But the group:
(19) l′µ = χµ(l1, . . . , lm, b1, . . . ,br) (µ =1 ···m)
indicates in which way the ∞m manifolds (22) are permuted with each other by thetransformations of the simply transitive group (20).
We therefore see that the group (19) can be derived from the simply transitivegroup: a′k = ϕk(a,b) according to the rules of the preceding chapter (p. 446 sq.).
We can use this fact in order to decide under which conditions do we obtain twogroups (19) similar to each other when we start from two different manifolds (16).Thanks to similar considerations, we realize that the following statement holds, ofwhich Theorem 80 in Chap. 22, p. 455 is only a special case, fundamentally:
Theorem 86. If, in the space x1, . . . ,xn, an r-term group: X1 f , . . . ,Xr f is presented,if in addition, two manifolds M and M′ are given, and if one executes all ∞r trans-formations of the group: X1 f , . . . ,Xr f on each one of these two manifolds, thenthe individual manifolds of the two invariant families that one obtains in this wayare transformed by two transitive groups isomorphic with the group: X1 f , . . . ,Xr fwhich are similar to each other when and only when the following two conditionsare satisfied:
Firstly, the two manifolds M and M′ must admit the same number of independentinfinitesimal transformations of the form: e1 X1 f + · · ·+ er Xr f , and:
Secondly, it must be possible to relate the group: X1 f , . . . ,Xr f to itself in aholoedrically isomorphic way so that, to every infinitesimal transformation whichfixes the one manifold, there corresponds an infinitesimal transformation whichleaves invariant the other manifold.

498 23 Invariant Families of Manifolds
It goes without saying that this theorem remains also valid yet when one replacesthe two manifolds by two figures.
§ 117.
Specially worthy of note is the case where one has a manifold, or a figure, whichadmits absolutely no infinitesimal transformation of the Gr: X1 f , . . . ,Xr f . Thegroup (19) isomorphic to Gr then has the form:
l′k = χk(l1, . . . , lr, a1, . . . ,ar) (k=1 ···r),
it is simply transitive and hence holoedrically isomorphic with the Gr.†
We therefore have here a general method in order to set up the simply transitivegroups that are equally composed with a given r-term group.
The method applied in the preceding chapter, Proposition 1, page 443, is only aspecial case of the present more general method. Indeed at that time — as we cannow express this — we used as a figure the totality of r different points of the Rn.
When no special assumption is made about the position of these points, thenthe figure consisting of them can allow none of the infinitesimal transformations ofthe group Xk f . Since the group Xk f certainly leaves invariant no point in generalposition, there can be in it at most r− 1 independent infinitesimal transformationswhich fix such a point; from these possible r−1 infinitesimal transformations, onecan linearly deduce again at most r − 2 independent infinitesimal transformationsby which a second point in general position yet remains untouched, and so on; onerealizes at the end that there is no infinitesimal transformation in the group by whichr points in general position remain simultaneously invariant.
Hence if we take a figure which consists of r points of this sort, and if we executeon them the ∞r transformations of the group: X1 f , . . . ,Xr f , then the figure takes ∞r
different positions, the totality of which remains invariant by the group. These ∞r
positions are transformed by a simply transitive group.If we really set up this simply transitive group, we obtain exactly the same group
as the one obtained thanks to the method of the preceding chapter.
§ 118.
It appears to be desirable to illustrate the general developments of the §§ 114 and116 by means of a specific example. However, we restrict ourselves here to givingindications, and we leave to the reader the effective execution of the concernedsimple computations.
The most general projective group of the plane which leaves invariant the non-degenerate conic section: x2 −2y = 0 is three-term and contains the following threeindependent infinitesimal transformations:
† LIE, Gesellsch. d. W. zu Christiania, 1884.

§ 119. 499
X1 f =∂ f∂x
+ x∂ f∂y
, X2 f = x∂ f∂x
+2y∂ f∂y
X3 f = (x2 − y)∂ f∂x
+ xy∂ f∂y
.
One sees immediately that this group — that we want to call G3 for short — istransitive and that its composition is determined through the relations:
[X1, X2] = X1 f , [X1, X3] = X2 f , [X2, X3] = X3 f .
From this, it follows by taking account of Chap. 15, Proposition 8, p. 275 that theG3 contains no two-term invariant subgroup; one convinces oneself that it doesnot contain either any one-term invariant subgroup. Consequently, the G3 is simple(Chap. 15, p. 276).
Every tangent to the fixed conic section x2 −2y = 0 admits exactly two indepen-dent infinitesimal transformations of the group; besides, it can be proved that thetangents are the only curves of the plane which possess this property. In the sameway, the conic sections which enter in contact [BERÜHREN] in two points with thefixed conic section are the only curves which admit one and only one infinitesimaltransformation of the G3; as a conic section which enters twice in contact, one mustalso certainly count every line of the plane which cuts [SCHNEIDET] the conic sec-tion in two separate points. Lastly, it is clear that every point not lying on the conicsection admits one and only one infinitesimal transformation of the group.
Now, if one chooses as manifold M an arbitrary other curve, hence a curve whichadmits absolutely no infinitesimal transformation of the G3, then by the group, thiscurve takes ∞3 different positions and the totality of these positions is obviouslytransformed by means of a three-term group. One therefore finds a simply transitivegroup of the R3 equally composed with the original G3. All groups that one obtainsin this way are similar to each other; one amongst them is for instance the three-termgroup of all projective transformations of the R3 which leaves invariant a windingcurve of third order.
If one introduces as manifold M a conic section (irreducible or decomposable)entering in contact in two separate points [with the fixed conic section], then oneobtains a group holoedrically isomorphic to the G3 in a twice-extended manifold;all groups obtained in this way are similar to each other. By contrast, if one usesas a manifold M a conic section having four points entering in contact [with thefixed conic section], one obtains a completely different type of three-term group ofa twice-extended manifold.
Lastly, if one introduces as manifold M a tangent to the fixed conic section, thenone obtains a three-term group in a once-extended manifold which is similar to thegeneral projective group of the straight line.
§ 119.
Let a linear homogeneous group:

500 23 Invariant Families of Manifolds
Xk f =1···n
∑µ, ν
akµν xµ∂ f∂xν
(k=1 ···r)
of the Rn be presented. This group leaves invariant the family of the ∞n planes Mn−1of the Rn:
u1 x1 + · · ·+un xn +1 = 0.
We want to set up the group corresponding to it in the parameters u1, . . . ,un.According to § 111, the infinitesimal transformations:
Uk f =n
∑ν=1
vkν(u1, . . . ,un)∂ f∂uν
of the sought group are to be determined so that the equation ∑ uν xν +1 = 0 admitsthe infinitesimal transformation Xk f +Uk f . So, the r expressions:
1···n
∑µ, ν
akµν xµ uν +1···n
∑ν
xν vkν
must vanish by means of ∑ uν xν + 1 = 0. This is possible only when they vanishidentically, that is to say when vkν =− ∑µ akνµ uµ .
We therefore find:
Uk f =−1···n
∑µ, ν
akνµ uµ∂ f∂uν
.
Consequently, the group Uk f is linear homogeneous too; we know from the begin-ning that it is isomorphic with the group Xk f .
We call the group: U1 f , . . . ,Ur f the group dualistic [DUALISTISCH] to the group:X1 f , . . . ,Xr f .
In order to give an example, we want to look up at the group dualistic to theadjoint group of an r-term group having the composition:
[Yi, Yk] =r
∑s=1
ciks Ys f .
The adjoint group reads (cf. p. 287):
1···r
∑i, s
ciks ei∂ f∂es
(k=1 ···r),
whence the group dualistic to it reads†:
1···r
∑i, s
ckis εs∂ f∂εi
(k=1 ···r),
† LIE, Math. Ann. Vol. XVI, p. 496, cf. also Archiv for Mathematik, Vol. 1, Christiania 1876.

§ 120. 501
where the relation: ciks =−ckis is used.Similar considerations can actually be made for all projective groups of the Rn,
since they all leave invariant the family of the ∞n straight, (n− 1)-times extendedmanifolds of the Rn. However, we do not want to enter these considerations, andrather, we refer to the next volume in which the concept of duality [DUALITÄT]is considered under a more general point of view, namely as a special case of thegeneral concept of contact transformation [BERÜHRUNGSTRANSFORMATION].
§ 120.
Finally, we yet want to consider an important example of a more general nature.We assume that we know all q-term subgroups of the Gr: X1 f , . . . ,Xr f . Then the
question is still to decide what are the different types of such q-term subgroups.In Chap. 16, p. 292, we already have explained the concept of “types of sub-
groups”; according to that, we reckon two q-term subgroups as belonging to thesame type when they are conjugate to each other inside the Gr; of all subgroupswhich belong to the same type, we therefore need only to indicate a single one, andin addition, all these subgroups are perfectly determined by this only one.
We know that every subgroup of the group: X1 f , . . . ,Xr f is represented by a seriesof linear homogeneous relations between the parameters: e1, . . . ,er of the general in-finitesimal transformation: e1 X1 f + · · ·+er Xr f (cf. Chap. 12, p. 223). Moreover, weknow that two subgroups are conjugate to each other inside the group: X1 f , . . . ,Xr fif and only if the system of equations between the e which represents the one sub-group can be transferred, by means of a transformation of the adjoint group, to thesystem of equations which represents the other subgroup (Chap. 16, p. 292).
Now according to our assumption, we know all q-term subgroups of the Gr,hence we know all systems of r − q independent linear homogeneous equationsbetween the e:
r
∑j=1
hk j e j = 0 (k=1 ···r−q)
which represent q-term subgroups.For reasons of simplicity, amongst all these systems of equations, we want to
take those which can be resolved with respect to eq+1, . . . ,er, hence which can bebrought to the form:
(23)eq+k = gq+k,1 e1 + · · ·+gq+k,q eq
(k=1 ···r−q) ;
we leave the remaining ones which cannot be brought to this form, because theycould naturally be treated in exactly the same way as those of the form (23).
All systems of values gq+k, j which, when inserted in (23), provide q-term sub-groups are defined by means of certain equations between the gq+k, j; however ingeneral, it is not possible to represent all these systems of values by means of a sin-gle system of equations between the g, and rather, a discrete number of such systemsof equations will be necessary if one wants to have all q-term subgroups which are

502 23 Invariant Families of Manifolds
contained in the form (23). Naturally, two different systems of equations of this sortthen provide nothing but different types of q-term subgroups.
We restrict ourselves to an arbitrary system of equations amongst the concernedsystems of equations, say the following one:
(24) Ωµ(gq+1,1, gq+1,2, . . . , gr,q) = 0 (µ =1, 2 ···),
and we now want to see what types of q-term subgroups does this system determine.The equations (23) determine, when the gq+k, j are completely arbitrary, the familyof all straight q-times extended manifolds of the space e1, . . . ,er which pass throughthe point: e1 = 0, . . . , er = 0. Of course, this family of manifolds remains invariantby the adjoint group:
(25) e′k =r
∑j=1
ρk j(a1, . . . ,ar)e j (k=1 ···r)
of the group: X1 f , . . . ,Xr f . Hence, if we execute the transformation (25) on the sys-tem of equations (23), we obtain a system of equations in the e′ of the correspondingform:
e′q+k =q
∑j=1
g′q+k, j e′j (k=1 ···r−q),
where the g′ are linear homogeneous functions of the g with coefficients whichdepend upon the a:
(26)g′q+k, j =
r−q
∑µ=1
q
∑ν=1
αk jµν(a1, . . . ,ar)gq+µ,ν
(k=1 ···r−q ; j=1 ···q).
According to p. 478 sq., the equations (26) determine a group in the variables g.The system of equations (24) remains invariant by this group, because every systemof values gq+k, j which provides a subgroup is naturally transferred to a system ofvalues g′q+k, j which determines a subgroup; but since the group (26) is continuous,it leaves individually invariant all discrete regions of systems of values gq+k, j of thissort, hence in particular also the system of equations:
(24) Ωµ(gq+1,1, . . . ,gr,q) = 0 (µ =1, 2 ···).
Now, the question is how the systems of values (24) are transformed by thegroup (26), and whether every system of values can be transferred to every other, ornot.
This question receives a graphic sense when we imagine that the gq+k, j are pointcoordinates in a space of q(r−q) dimensions. Indeed, the equations (24) then repre-sent a certain manifold in this space which remains invariant by the group (26). Eachpoint of the manifold belongs to a certain smallest invariant subsidiary domain ofthe manifold and the points of such a subsidiary domain represent nothing but con-

§ 120. 503
jugate q-term subgroups of the Gr, and to be precise, all the q-term subgroups of theGr which belong to one and the same type.
Besides, one must draw attention on the fact that only the points gq+k, j of sucha smallest invariant subsidiary domain that belong in turn to no smaller invariantsubsidiary domain are to be counted, because it is only when one delimits the sub-sidiary domain in this way that each one of its points can be transferred to any otherpoint by means of a nondegenerate transformation of the group (26).
Hence, if one wants to determine all types of q-term subgroups which are con-tained in the system of equations (24), then one only has to look up at all smallestinvariant subsidiary domains of the manifold Ωµ = 0. Every such subsidiary domaindetermines all subgroups which belong to the same type, and an arbitrary point ofthe subsidiary domain provides a group which can be chosen as a representative ofthe concerned type.
Besides, in order to be able to determine the discussed invariant subsidiary do-mains, one does not at all need to assume that the finite equations (25) of the adjointgroup are known; it suffices that one has the infinitesimal transformations of thisgroup, because one can then immediately indicate the infinitesimal transformationsof the group (26) and afterwards, following the rules of Chap. 14, one can determinethe desired invariant subsidiary domains; in the case present here, this determinationrequires only executable operations.
One observes that the preceding developments remain also applicable when oneknows not an r-term group, but only a possible composition of such a group, hencea system of ciks which satisfies the known relations:
ciks + ckis = 0r
∑ν=1
cikν cν js + ck jν cν is + c jiν cνks
= 0
(i, k, j, s=1 ···r).
If the Gr: X1 f , . . . ,Xr f is invariant in a larger group G, then the question is oftenwhether two subgroups of the Gr are conjugate in this larger group Gr, or not. Inthis case, one can also define differently the concept of “type of subgroup of theGr”, by reckoning two subgroups of the Gr as being distinct only when they are notconjugate to each other also in the G.
If one wants to determine all types, in this sense, of subgroups of the Gr, thenthis task presents no special difficulty. Indeed, the problem in question is obviouslya part of the more general problem of determining all types of subgroups of the G,when the word “type” is understood in the sense of Chap. 16, p. 292.
This study is particularly important when the group G is actually the largestsubgroup of the Rn in which the Gr: X1 f , . . . ,Xr f is invariant.
—————–


Chapter 24Systatic and Asystatic Transformation Groups
In the s-times extended space x1, . . . ,xs, let an r-term group:
Xk f =s
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r),
or shortly Gr, be presented. Of the r infinitesimal transformations X1 f , . . . ,Xr f , letthere be precisely n, say: X1 f , . . . ,Xn f , which are linked together by no linear rela-tion, while by contrast Xn+1 f , . . . ,Xr f can be expressed as follows:
(1) Xn+ j f ≡n
∑ν=1
ϕ jν(x1, . . . ,xn)Xν f ( j=1 ···r−n).
Now, if x01, . . . ,x
0s is a point for which not all n×n determinants of the matrix:
(2)
∣∣∣∣∣∣ξ11(x) · · ξ1s(x)
· · · ·ξn1(x) · · ξns(x)
∣∣∣∣∣∣vanish, then according to Chap. 11, p. 215, there are in the Gr exactly r−n indepen-dent infinitesimal transformations whose power series expansions with respect tothe xi − x0
i contain no term of zeroth order, but only terms of first order or of higherorder; the point x0
1, . . . ,x0s therefore admits exactly r − n independent infinitesimal
transformations of the Gr which generate an (r−n)-term subgroup Gr−n of the Gr(cf. Chap. 12, p. 218). The infinitesimal transformations of this Gr−n can, accordingto p. 216, be linearly deduced from the r−n independent transformations:
Xn+ j f −n
∑ν=1
ϕ jν(x01, . . . ,x
0s )Xν f ( j=1 ···r−n).
In the sequel, we want to briefly call a point x01, . . . ,x
0s for which not all n× n
determinants of the matrix (2) vanish, a point in general position.
505

506 24 Systatic and Asystatic Transformation Groups
§ 121.
According to the above, to every point x01, . . . ,x
0s in general position is associated a
completely determined (r − n)-term subgroup of the Gr, namely the most generalsubgroup of the Gr by which it remains invariant.
If we let the point x0 change its position, we receive a new (r−n)-term subgroupof the Gr, and since there are ∞s different points, we receive in total ∞s subgroupsof this sort; however, it is not said that we obtain ∞s different subgroups.
If for example r = n, then the discussed ∞s subgroups coincide all, namely theyreduce all to the identity transformation, since the Gr contains absolutely no in-finitesimal transformation which leaves at rest a point x0 in general position.
But disregarding also this special case, it can happen that to the ∞s points ofthe space x1, . . . ,xs, only ∞s−1, or less, different groups of the said constitution areassociated; evidently, this will always occur in any case when there is a continuousfamily of individual points which simultaneously keep their positions by the (r−n)-term subgroup.
At present, we want to look up at the analytic conditions under which such aphenomenon occurs. At first, we take up the question: when do two points in generalposition remain invariant by the same (r−n)-term subgroup of the Gr?
The answer to this question has a great similarity with the considerations inChap. 19, p. 368 sq.
Let the one point be x01, . . . ,x
0s and let us call Gr−n the associated (r − n)-term
subgroup of the Gr; then the general infinitesimal transformation of the Gr−n reads:
r−n
∑j=1
ε j
(Xn+ j f −
n
∑ν=1
ϕ0jν Xν f
),
where it is understood that the ε are arbitrary parameters.Let the other point be: x1, . . . ,xs, and let the general infinitesimal transformation
of the subgroup Gr−n associated to it then be:
r−n
∑j=1
ε j
(Xn+ j f −
n
∑ν=1
ϕ jν Xν f).
Now, if the two points are supposed to remain invariant by the same (r − n)-termsubgroup, then Gr−n and Gr−n do coincide; for this, it is necessary and sufficientthat all infinitesimal transformations of the one belong to those of the other group,and conversely; when expressed analytically, one must be able to satisfy identicallythe equation:
r−n
∑j=1
ε j
Xn+ j f −
n
∑ν=1
ϕ0jν Xν f
=
r−n
∑j=1
ε j
Xn+ j f −
n
∑ν=1
ϕ jν Xν f
for arbitrarily chosen ε thanks to suitable values of the ε , and also for arbitrarilychosen ε thanks to suitable values of the ε .

§ 121. 507
The latter equation can also be written:
r−n
∑j=1
(ε j − ε j)Xn+ j f −n
∑ν=1
r−n
∑j=1
(ε j ϕ0jν − ε j ϕ jν)Xν f = 0,
hence, because of the independence of the infinitesimal transformations X1 f , . . . ,Xr f ,if can hold only if ε j = ε j; in addition, since the ε j are absolutely arbitrary, weobtain:
ϕ jν(x01, . . . ,x
0s ) = ϕ jν(x1, . . . ,xs) ( j=1 ···r−n ; ν =1 ···n).
Consequently, the two (r−n)-term subgroups of the Gr which are associated totwo distinct points in general position are identical with each other if and only ifeach one of the n(r−n) functions ϕ jν takes the same numerical values for the onepoint as for the other point.
Hence, if we want to know all points in general position which, under the groupGr−n, keep their positions simultaneously with the point x0
1, . . . ,x0s , then we only
have to determine all systems of values x which satisfy the equations:
(3) ϕ jν(x1, . . . ,xs) = ϕ0jν ( j=1 ···r−n ; ν =1 ···n) ;
every such system of values provides a point having the constitution demanded.Here, two cases have to be distinguished.Firstly the number of mutually independent functions amongst the n(r−n) func-
tions ϕkν(x) can be equal to s exactly. In this case, the (r−n)-term subgroup Gr−nwhich fixes the point: x0
1, . . . ,x0s leaves untouched yet at most a discrete number of
points in general position.Secondly the number of independent functions amongst the ϕkν(x) can be smaller
than s. In this case, there is a continuous manifold of points in general position whichremain all invariant by the group Gr−n; to every point of the manifold in question isthen associated the same (r−n)-term subgroup of the Gr as to the point x0
1, . . . ,x0s .
At the same time, the point x01, . . . ,x
0s evidently lies inside the manifold, that is to say:
there are, in the manifold, also points that are infinitely close to the point: x01, . . . ,x
0s .
We assume that the second case happens, so that amongst the n(r−n) functionsϕkν(x), there are only s− ρ < s that are mutually independent, and we may callthem ϕ1(x), . . . ,ϕs−ρ(x).
Under this assumption, all ϕkν(x) can be expressed by means of ϕ1(x), . . . ,ϕs−ρ(x)alone, and the equations (3) can be replaced by the s − ρ mutually independentequations:
(3’) ϕ1(x1, . . . ,xs) = ϕ1(x01, . . . ,x
0s ), . . . , ϕs−ρ(x1, . . . ,xs) = ϕs−ρ(x0
1, . . . ,x0s ).
We therefore see that to every generally located point: x01, . . . ,x
0s of the space is
associated a completely determined ρ-times extended manifold (3’) which is formedof the totality of all points to which is associated the same (r−n)-term subgroup ofthe group: X1 f , . . . ,Xr f as to the point: x0
1, . . . ,x0s .

508 24 Systatic and Asystatic Transformation Groups
It is possible that the equations:
ϕ jν(x1, . . . ,xs) = ϕ jν(x01, . . . ,x
0s ) ( j=1 ···r−n ; ν =1 ···n)
represent, for every system of values x01, . . . ,x
0s , a manifold which decomposes in a
discrete number of different manifolds.An example is provided by the three-term group:
X1 f =∂ f∂x1
, X2 f =1
cosx2
∂ f∂x2
, X3 f = tanx2∂ f∂x2
.
Here, we have:X3 f ≡ sinx2 X2 f ,
while X1 f and X2 f are linked by no linear relation. So, if one fixes the point x01, x0
2,all points whose coordinates x1, x2 satisfy the equation:
sinx2 = sinx02
also remain fixed, that is to say: simultaneously with the point x01, x0
2, every pointwhich lies in one of the infinitely many lines:
x2 = x02 +2k π
parallel to the x1-axis keeps its position, where it is understood that k is an arbitrary,positive or negative, entire number.
Since, under the assumption made above, the group: X1 f , . . . ,Xr f associates toevery point: x0
1, . . . ,x0s a ρ-times extended manifold passing through it, then the
whole space x1, . . . ,xs obviously decomposes in a family of ∞s−ρ ρ-times extendedmanifolds:
(4) ϕ1(x1, . . . ,xs) = const., . . . , ϕs−ρ(x1, . . . ,xs) = const.,
and to be precise, in such a way that all transformations of the group which fix anarbitrarily chosen point in general position do leave at rest all points of the mani-fold (4) that passes through this point.
Certainly, it is to be remarked here that one can speak of a real decomposition ofthe space only when the number ρ is smaller than s; if ρ = s, no real decompositionof the space occurs, since every transformation of our group which fixes a point ingeneral position actually leaves invariant all points of the space; in other words: theidentity transformation is the only transformation of the group which leaves at resta point in general position.
The preceding considerations give an occasion for an important division[EINTHEILUNG] of all r-term groups X1 f , . . . ,Xr f of the space x1, . . . ,xs, and to beprecise, for a division in two different classes.
If a group of the space x1, . . . ,xs is constituted in such a way that all its trans-formations which leave invariant a point in general position do simultaneously fix

§ 122. 509
all points of a continuous manifold passing through this point, then we reckon thisgroup as belonging to the one class and we call them systatic [SYSTATISCH]. But wereckon all the remaining groups, hence those which are not systatic, as belonging tothe other class, and we call them asystatic [ASYSTATISCH].†
Using this terminology, we can express the gained result in the following way:
Theorem 87. If the independent infinitesimal transformations X1 f , . . . ,Xr f of an r-term group in s variables x1, . . . ,xs are linked together by r− n linear relations ofthe form:
Xn+k f ≡n
∑ν=1
ϕkν(x1, . . . ,xs)Xν f (k=1 ···r−n),
while between X1 f , . . . ,Xn f alone no relation of this sort holds, then the group issystatic when amongst the n(r − n) functions ϕkν(x1, . . . ,xs), there are less than sthat are mutually independent; by contrast, if amongst the functions ϕkν(x1, . . . ,xs),there are s functions that are mutually independent, then the group is asystatic.
§ 122.
We want to maintain all the assumptions that we have made in the introduction of thechapter about the r-term group: X1 f , . . . ,Xr f of the space x1, . . . ,xs, and at present,we only want to add yet the assumption that the group is supposed to be systatic.Thus, we assume that, amongst the n(r−n) functions ϕkν(x1, . . . ,xs), only 0 6 s−ρ < s are mutually independent, and as above, we may call them ϕ1(x), . . . ,ϕs−ρ(x).
We consider at first the case where the number s−ρ has the value zero.If the number s− ρ vanishes, then n is obviously equal to r, that is to say the
r independent infinitesimal transformations: X1 f , . . . ,Xr f are linked together by nolinear relation of the form:
χ1(x1, . . . ,xs)X1 f + · · ·+χr(x1, . . . ,xs)Xr f = 0.
From this, it results that the number r is in any case not larger than the number s ofthe variables x, hence that the group: X1 f , . . . ,Xr f is either intransitive, or at mostsimply transitive. Hence in the two cases, the group: X1 f , . . . ,Xr f is imprimitive (cf.Chap. 13, p. 233 and Chap. 20, Proposition 6, p. 393.
So we see that the systatic group: X1 f , . . . ,Xr f is always imprimitive when theentire number s−ρ has the value zero.
We now turn ourselves to the case s−ρ > 0.In this case, the equations:
(4) ϕ1(x1, . . . ,xs) = const., . . . , ϕs−ρ(x1, . . . ,xs) = const.
† The concepts of systatic and asystatic groups, and the theory of these groups as well, stem fromLIE (Ges. d. W. zu Christiania 1884, Archiv for Math. Vol. 10, Christiania 1885). The expres-sive terminologies: systatic “with leaving fixed” [MITSTEHENDLASSEND] and asystatic “withoutleaving fixed” [NICHTMITSTEHENDLASSEND] are from ENGEL. As for the rest, the terminologycharacteristic of the present work was introduced by LIE.

510 24 Systatic and Asystatic Transformation Groups
provide a real decomposition of the space x1, . . . ,xs in ∞s−ρ ρ-times extended man-ifolds, and in fact, as we have seen above, a decomposition which is completely de-termined by the group: X1 f , . . . ,Xr f and which stands in a completely characteristicrelationship to this group. We are very close to presume that this decompositionremains invariant by the group: X1 f , . . . ,Xr f ; from this, it would then follow thatthe systatic group: X1 f , . . . ,Xr f is imprimitive also in the case s−ρ > 0 (Chap. 13,p. 232).
On can very easily see that the presumption expressed just now corresponds tothe truth. In fact, according to Chap 19, p. 356 sq., the r(s−ρ) expressions: Xk ϕ1,. . . , Xk ϕs−ρ can be expressed as functions of ϕ1, . . . ,ϕs−ρ alone:
Xk ϕ j = π jk(ϕ1, . . . ,ϕs−ρ) (k=1 ···r ; j=1 ···s−ρ).
In this (cf. Chap. 8, p. 153 and 157) lies the reason why the decomposition (4) admitsthe r infinitesimal transformations Xk f , and therefore actually, the complete group:X1 f , . . . ,Xr f .
The developments just carried out prove that a systatic group of the spacex1, . . . ,xs is always imprimitive. We therefore have the
Theorem 88. Every systatic group is imprimitive.
It is not superfluous to establish, also by means of conceptual considerations, thatin the case s−ρ > 0, the decomposition (4) remains invariant by the systatic group:X1 f , . . . ,Xr f .
Let us denote by M an arbitrary manifold amongst the ∞s−ρ ρ-times extendedmanifolds (4), let P be the general symbol of a point of the manifold M, let S be thegeneral symbol of the ∞r−n transformations of our group which leave untouched allthe points of M, and lastly, let us understand by T an arbitrary transformation of ourgroup.
If we execute the transformation T on M, we obtain a certain ρ-times extendedmanifold M′, the ∞ρ points P′ of which are defined by the equation:
(P′) = (P)T.
Now, since every point P remains invariant by all ∞r−n transformations S of ourgroup, it is clear that every point P′ keeps its position by the ∞r−n transformationsT−1 ST , which belong as well to our group. From this, it results that M′ also belongsto the ∞s−ρ manifolds (4); consequently, it is proved that the ∞s−ρ manifolds (4) arepermuted with each other by every transformation of the group: X1 f , . . . ,Xr f , sothat the decomposition (4) effectively remains invariant by our group.
Since according to Theorem 88, every systatic group is imprimitive, every primi-tive group must be asystatic, inversely. But there are also imprimitive groups whichare asystatic, for instance the four-term group:
∂ f∂x
,∂ f∂y
, x∂ f∂y
, y∂ f∂y

§ 123. 511
of the plane x, y. This group is imprimitive, since it leaves invariant the family ofstraight lines: x = const., but it is at the same time asystatic, because from the twoidentities:
x∂ f∂y
≡ x∂ f∂y
, y∂ f∂y
≡ y∂ f∂y
,
it becomes clear that the functions ϕkν associated to the group are nothing but xand y themselves; but they are obviously independent of each other. The three-termintransitive group:
∂ f∂y
, x∂ f∂y
, y∂ f∂y
shows that there are even intransitive asystatic groups.
§ 123.
If one knows r independent infinitesimal transformations: X1 f , . . . ,Xr f of an r-termgroup of the space x1, . . . ,xs, then according to Theorem 87, p. 509, one can easilydecide whether the concerned group is systatic or not.
For this purpose, one forms the matrix:∣∣∣∣∣∣ξ11(x) · · ξ1s(x)
· · · ·ξr1(x) · · ξrs(x)
∣∣∣∣∣∣and one studies its determinants. If all the (n+ 1)× (n+ 1) determinants vanishidentically, but not all n×n determinants, and in particular, not all n×n determinantsthat can be formed with the topmost n rows of the matrix, then there are identitiesof the form:
(1) Xn+k f ≡n
∑ν=1
ϕkν(x1, . . . ,xs)Xν f (k=1 ···r−n),
while X1 f , . . . ,Xn f are linked together by no linear relation. If one has set up theidentities (1), then one determines the number of independent functions amongstthe n(r−n) functions ϕkν(x1, . . . ,xs).
However, in order to be able to decide whether a determined r-term group issystatic or not, one needs absolutely not to know the finite expressions for the in-finitesimal transformations of the group, and rather, it suffices that one knows thedefining equations of the group. This sufficiency is based on the fact that, as soon asthe defining equations of the group are presented, one can always indicate an unre-stricted integrable system of total differential equations, the only integral functionsof which are just the ϕkν(x) and the functions of them. Indeed, from this it clearlyturns out that one can determine the number of independent functions amongst theϕkν(x) without knowing the ϕkν(x) themselves.
At present, we will derive this important result.The independent equations amongst the equations:

512 24 Systatic and Asystatic Transformation Groups
(5) dϕkν =s
∑i=1
∂ϕkν(x)∂xi
dxi = 0 (k=1 ···r−n ; ν =1 ···n)
form an unrestricted integrable system of total differential equations, the only inte-gral functions of which are the ϕkν(x), and the functions of them (cf. Chap. 5, p. 106sq.). We start from this system of total differential equations.
Because of (1), we have identically:
ξn+ j, i −n
∑ν=1
ϕ jν ξν i ≡ 0 ( j=1 ···r−n ; i=1 ···s),
whence it comes by differentiation:
dξn+ j, i −n
∑ν=1
ϕ jν dξν i ≡n
∑ν=1
ξν i dϕ jν ,
or, since according to the assumption, not all n×n determinants of the matrix:∣∣∣∣∣∣ξ11(x) · · ξ1s(x)
· · · ·ξr1(x) · · ξrs(x)
∣∣∣∣∣∣vanish, it yet comes:
dϕ jπ ≡s
∑i=1
χπi(x1, . . . ,xs)
dξn+ j, i −
n
∑ν=1
ϕ jν dξν i
( j=1 ···r−n ; π =1 ···n).
From this, it follows that the system of the total differential equations (5) can bereplaced by the following one:
(6)s
∑π=1
∂ξn+ j, i
∂xπ−
n
∑ν=1
ϕ jν∂ξν i
∂xπ
dxπ = 0 ( j=1 ···r−n ; i=1 ···s).
Of course, the independent equations amongst the equations (6) form an unrestrictedintegrable system of total differential equations, the integral functions of which arejust the ϕkν(x), and the functions of them.
However, it is not possible now to set up the individual equations (6) when oneonly knows the defining equations of the group: X1 f , . . . ,Xr f ; by contrast, it is pos-sible to replace the system of equations (6) by another system which, aside from thedxπ , contains only the coefficients of the defining equations. We arrive at this in thefollowing way.
By x01, . . . ,x
0s , we understand a point in general position. According to p. 215, the
most general infinitesimal transformation: e1 X1 f + · · ·+ er Xr f whose power seriesexpansion with respect to the xi − x0
i contains only terms of first order or of higherorder has the shape:

§ 123. 513
r−n
∑j=1
e j
(Xn+ j f −
n
∑ν=1
ϕ jν(x01, . . . ,x
0s )Xν f
),
where it is understood that the e j are arbitrary parameters. But when we really ex-ecute the power series expansion with respect to the xi − x0
i and when at the sametime we take into account only the terms of first order, this expression receives theform:
(7)r−n
∑j=1
e j
1···s
∑i, π
[∂ξn+ j, i
∂xπ
]x=x0
−n
∑ν=1
ϕ jν(x0)
[∂ξν i
∂xπ
]x=x0
(xπ − x0
π)∂ f∂xi
+ · · · .
But we can compute the terms of first order in the expression (7) from the defin-ing equations of the group, and to be precise, without integration. Indeed, accordingto Chap. 11, p. 203 sq., the most general infinitesimal transformation whose powerseries expansion with respect to the xi − x0
i contains only terms of first order or ofhigher order has the form:
1···s
∑i, π
g′iπ(xπ − x0π)
∂ f∂xπ
+ · · · ,
where a certain number of the s2 quantities g′πi which we denoted by ε1 −ν1 at thattime were arbitrary, while the s2−ε1+ν1 remaining ones were linear homogeneousfunctions of these ε1 − ν1 quantities with coefficients which could be computedimmediately from the defining equations. We therefore obtain, when we start fromthe defining equations, the following representation for the expression (7):
(7’)ε1−ν1
∑j=1
e′j
1···s
∑i, π
α jπi(x01, . . . ,x
0s )(xπ − x0
π)∂ f∂xi
+ · · · ,
where the e′j denote arbitrary parameters, while the α jπi(x0) are completely deter-mined analytic functions of the x0 which can, as said above, be computed from thedefining equations.
Because (7) and (7’) are only different representations of the same infinitesimaltransformation, the factors of (xπ −x0
π)∂ f/∂xi in the two expressions must be equalto each other, that is to say, there are the following s2 relations:
r−n
∑j=1
e j
[∂ξn+ j, i
∂xπ−
n
∑ν=1
ϕ jν(x)∂ξν i
∂xπ
]x=x0
=ε1−ν1
∑j=1
e′j α jπi(x0) (i, π =1 ···s).
For arbitrarily chosen e j, one must always be able to satisfy these relations thanks tosuitable choices of the values of the e′j, and for arbitrarily chosen e′j, always thanksto suitable choices of the values of the e j.
All of this holds for every point x01, . . . ,x
0s in general position; hence this also
holds true when we consider the x0 as variables and when we substitute them by

514 24 Systatic and Asystatic Transformation Groups
x1, . . . ,xn. Consequently, when we have chosen the e in completely arbitrary way asfunctions of the x, we can always determine the e′ as functions of the x in such away that the equations:
(7”)
r−n
∑j=1
ek
∂ξn+ j, i
∂xπ−
n
∑ν=1
ϕ jν(x)∂ξνi
∂xπ
=
ε1−ν1
∑j=1
e′j α jπi(x)
(i, π =1 ···s)
are identically satisfied, and when we have chosen the e′ in completely arbitraryway as functions of the x, we can always satisfy (7”) identically thanks to suitablefunctions e1, . . . ,er−n of the x.
Now, one can obviously replace the equations (6) by the following s equations:
(6’)r−n
∑j=1
e j
s
∑π=1
∂ξn+ j, i
∂xπ−
n
∑ν=1
ϕ jν∂ξν i
∂xπ
dxπ = 0 (i=1 ···s),
provided only that one regards the e as arbitrary functions of the x in them. Hencefrom what has been said above, it follows that the totality of all equations (6) isequivalent to the totality of all equations of the form:
ε1−ν1
∑j=1
e′j
s
∑π=1
α jπi(x1, . . . ,xs)dxπ = 0 (i=1 ···s),
in which the e′ are to be interpreted as arbitrary functions of the x. Lastly, the latterequations can evidently be replaced by the (ε1 −ν1)s equations:
(8)s
∑π=1
α jπi(x1, . . . ,xs)dxπ = 0 ( j=1 ···ε1 −ν1 ; i=1 ···s).
With these words, it is proved that the two systems of total differential equations:(6) and (8) are equivalent to each other; thus, it results that the independent equationsamongst the equations (8) form an unrestricted integrable system of total differentialequations, and to be precise, a system, the only integral functions of which are theϕkν(x) and the functions of them.
We can therefore say:
Theorem 89. If the defining equations of an r-term group of the space x1, . . . ,xs arepresented, then one decides in the following way whether the concerned group issystatic or not:
One understands by x01, . . . ,x
0s an arbitrary point in the neighbourhood of which
the coefficients of the resolved defining equations behave regularly and one deter-mines the terms of zeroth order and of first order in the power series expansion ofthe general infinitesimal transformation of the group with respect to the powers ofx1 −x0
1, . . . , xs −x0s . Afterwards, one searches for the terms of first order in the most
general infinitesimal transformation of the group which contains no term of zeroth

§ 123. 515
order. These terms will have the form:
ε1−ν1
∑j=1
e′j
1···s
∑i, π
α jπi(x01, . . . ,x
0s )(xπ − x0
π)∂ f∂xi
,
where the e′j denote arbitrary parameters, while the α jπi(x0) are completely deter-mined analytic functions of the x0 and can be computed without integration fromthe coefficients of the defining equations. Now, one forms the system of the totaldifferential equations:
(8)s
∑π=1
α jπi(x1, . . . ,xs)dxπ = 0 ( j=1 ···ε1 −ν1 ; i=1 ···s)
and one determines the number s−ρ of the independent equations amongst theseequations. If s − ρ < s, then the group is systatic, but if s− ρ = s, the group isasystatic.†
We can add:
Proposition 1. The s−ρ mutually independent equations amongst the differentialequations (8) form an unrestricted integrable system with s− ρ independent inte-gral functions: ϕ1(x), . . . ,ϕs−ρ(x). These integral functions stand in the followingrelationship to the group: X1 f , . . . ,Xr f :
If, amongst the r independent infinitesimal transformations: X1 f , . . . ,Xr f thereare exactly n, say X1 f , . . . ,Xn f , that are linked together by no linear relation, whileXn+1 f , . . . ,Xr f can be expressed linearly in terms of X1 f , . . . ,Xn f :
Xn+k f ≡n
∑ν=1
ϕkν(x1, . . . ,xs)Xν f (k=1 ···r−n),
then all n(r− n) functions ϕkν(x) can be expressed in terms of ϕ1(x), . . . ,ϕs−ρ(x)alone.
One even does not need to know the defining equations themselves in order tobe able to decide whether a determined group is systatic or not. For this, one onlyneeds to know the initial terms in the power series expansions of the infinitesimaltransformations of the group in the neighbourhood of an individual point: x0
1, . . . ,x0s
in general position. Indeed, if one knows these initial terms, one can obviouslycompute the numerical values α0
jπi that the functions α jπi(x) take for x1 = x01, . . . ,
xs = x0s . The number s− ρ defined above then is nothing but the number of the
mutually independent equations amongst the linear equations in the dx1, . . . ,dxs:
s
∑π=1
α0jπi dxπ = 0 ( j=1 ···ε1 −ν1 ; i=1 ···s).
† LIE, Archiv for Math., Vol. 10, Christiania 1885.

516 24 Systatic and Asystatic Transformation Groups
The system of the total differential equations has a very simple conceptual mean-ing. Indeed, as one easily realizes directly, it defines all the points: x1 + dx1, . . . ,xs + dxs infinitely close to the point x1, . . . ,xs that remain invariant by all transfor-mations of our group which leave at rest the point x1, . . . ,xs. Here lies the innerreason [INNERE GRUND] why the ϕkν(x) and the functions of them are the onlyintegral functions of the system (6) or (8), because indeed, the equations:
ϕkν(y1, . . . ,ys) = ϕkν(x1, . . . ,xs) (k=1 ···r−n ; ν =1 ···n)
define all points y1, . . . ,ys which remain invariant simultaneously with the pointx1, . . . ,xs.
§ 124.
We have found that the r-term group: X1 f , . . . ,Xr f of the space x1, . . . ,xs is asystaticor is systatic according to whether there are exactly s, or less than s, mutually inde-pendent functions amongst the functions ϕkν(x1, . . . ,xs) defined on p. 345 and 505.Now, according to Chap. 20, Theorem 67, p. 388, there always is an infinitesimaltransformation Z f which is interchangeable with all Xk f when, and only when,the number of independent functions amongst the ϕkν(x) is smaller than s. Conse-quently, we can also say:
Proposition 2. The r-term group: X1 f , . . . ,Xr f of the space x1, . . . ,xs is systatic ifand only if there is an infinitesimal transformation Z f which is interchangeable withall Xk f ; if there is no such infinitesimal transformation, the group: X1 f , . . . ,Xr f isasystatic.†
Since the excellent infinitesimal transformations of a group are interchangeablewith all the other infinitesimal transformations of the group, we have in addition:
Proposition 3. Every group which contains one or several excellent infinitesimaltransformations is systatic.
Thus for such groups, one realizes already from the composition that they aresystatic.
Finally, if we remember that the adjoint group of a group without excellent in-finitesimal transformation contains r essential parameters (cf. Theorem 49, p. 289),we see that the following proposition holds:
Proposition 4. The adjoint group of an asystatic group is always r-term.
Proposition 2 and Proposition 4 are the generalizations of the Propositions 1and 2 of the Chap. 16 (p. 290) announced at that time.
Already from the developments of the Chap. 20 we could have taken as an oppor-tunity a division of all groups in two classes; in the first class, we had reckoned everyr-term group: X1 f , . . . ,Xr f for which there is at least one infinitesimal transforma-tion interchangeable with all Xk f , and in the other class, all the remaining groups.
† LIE, Archiv for Math., Vol. 10, p. 377, Christiania 1885.

§ 124. 517
According to what was said above, it is clear that this division would coincide withour present division of the groups in systatic and asystatic groups; the first classwould consist of all systatic group, and the second class, of all asystatic groups. Inwhat follows, we want to explain this fact by means of conceptual considerationsand at the same time, we want to derive new important results.
Let Θ be a transformation which is interchangeable with all transformations ofa given r-term group: X1 f , . . . ,Xr f of the space x1, . . . ,xs, and moreover, let S bethe general symbol of the transformations of the group: X1 f , . . . ,Xr f which leaveinvariant an arbitrary, generally positioned point P of the space x1, . . . ,xs.
If, P is transferred to the point P1 by the execution of the transformation Θ ,then obviously, Θ−1SΘ is the general symbol of all transformations of the group:X1 f , . . . ,Xr f which leave invariant the point P1. But now, since Θ is interchangeablewith all transformations of the group: X1 f , . . . ,Xr f , then the totality of all transfor-mations Θ−1SΘ is identical to the totality of all transformations S, hence we see thatall transformations of the group: X1 f , . . . ,Xr f which fix the point P do also leave atrest the point P1.
We now apply this to the case where there is a continuous family of trans-formations Θ which are interchangeable with all transformations of the group:X1 f , . . . ,Xr f .
Since P is a point in general position, then by the execution of the transforma-tions Θ , it takes a continuous series of different positions. But as we have seen justnow, each one of these positions remains invariant by all transformations S, andconsequently, the group: X1 f , . . . ,Xr f is systatic.
As a result, it is proved that the r-term group: X1 f , . . . ,Xr f of the space x1, . . . ,xsis in any case systatic when there is an infinitesimal transformation Z f interchange-able with all Xk f . It yet remains to show that the converse also holds true, namelythat for every systatic group: X1 f , . . . ,Xr f , one can indicate a continuous family oftransformations which are interchangeable with all transformations X1 f , . . . ,Xr f .
Thus, we imagine that a systatic r-term group: X1 f , . . . ,Xr f of the space x1, . . . ,xsis given. We will indicate a construction that provides infinitely many transforma-tions which are interchangeable with all transformations of this group.
Every transformation Θ which is interchangeable with all transformations of thegroup: X1 f , . . . ,Xr f transfers every point P of the space to a point P1 which admitsexactly the same transformations of the group as the point P; this is what we showedabove. Hence, we choose two arbitrary points P and P1 which admit the same trans-formations of our group, and we attempt to determine a transformation Θ which isinterchangeable with all transformations of our group and which in addition trans-fers P to P1.
Let P′ be a point to which P can be transferred by means of a transformation Tof the group: X1 f , . . . ,Xr f ; furthermore, let, as earlier on, S be the general symbolof all transformations of this group which leave invariant P and hence P1 too. Then(Chap. 14, Proposition 1, p. 238), ST is the general symbol of all transformations ofour group which transfer P to P′. Obviously, P1 takes the same position by all thesetransformations ST , for one indeed has:

518 24 Systatic and Asystatic Transformation Groups
(P1)ST = (P1)T.
At present, by assuming the existence of one transformation Θ having the con-stitution just demanded, we can easily see that every point P′ = (P)T receives acompletely determined new position by all possible Θ ; indeed, this follows imme-diately from the equations:
(P′)Θ = (P)T Θ = (P)Θ T = (P1)T.
Hence if T is an arbitrary transformation of our group, then by every transformationΘ which actually exists, the point (P)T takes the new position (P1)T .
We add that we obtain in this way no overdetermination [ÜBERBESTIMMUNG]of the new position of the point P′. Indeed, if we replace in the latter equations thetransformation T by an arbitrary other transformation of the group: X1 f , . . . ,Xr fwhich transfers in the same way P to P′, hence if write ST in place of T , then itcomes again:
(P′)Θ = (P)ST Θ = (P)Θ ST = (P1)ST = (P1)T.
We consider at first the special case where the systatic group: X1 f , . . . ,Xr f istransitive.
When the group: X1 f , . . . ,Xr f is transitive, by a suitable choice of T , the point(P)T can be brought to coincidence with every other point (P1)T of the space;hence, if we associate to every point (P)T of the space the point (P1)T , a completelydetermined transformation Θ ′ is defined in this way. If we yet succeed to prove thatΘ ′ is interchangeable with all transformations of our group, then it is clear that Θ ′
possesses all properties which we have required of the transformation Θ , and thatΘ ′ is the only transformation Θ which actually exists.
The fact that Θ ′ is really interchangeable with all transformations of our groupcan be easily proved. Indeed, we have:
(P)T Θ ′ = (P1)T = (P)Θ ′ T,
where T means a completely arbitrary transformation of our group. Hence if weunderstand in the same way by T a completely arbitrary transformation of our group,we obtain:
(P)T TΘ ′ = (P)Θ ′ T T= (P)T Θ ′T,
and therefore, the transformation: TΘ ′T−1Θ ′−1 leaves invariant the point (P)T ,that is to say, every point of the space. From this, it follows that TΘ ′T−1Θ ′−1
is the identity transformation, that is to say: Θ ′ is really interchangeable with alltransformations of our group.
Thus, when the systatic group: X1 f , . . . ,Xr f is transitive, to every pair of points P,P1 having the constitution defined above there corresponds one and only one trans-formation interchangeable with all transformations of the group. If one chooses thepair of points in all possible ways, one obtains infinitely many such transforma-

§ 124. 519
tions, and it is easy to determine how many: In any case, when ∞ρ different pointsremain untouched by all transformations of the group which leave invariant an ar-bitrarily chosen point, then there are exactly ∞ρ different transformations which areinterchangeable with all transformations of the group: X1 f , . . . ,Xr f . This is coher-ent with Theorem 67, p. 388, for because of the assumption made above, amongstthe n(r−n) functions ϕkν(x), there are exactly s−ρ that are mutually independent,hence there are exactly ρ independent infinitesimal transformations Z1 f , . . . ,Zρ fwhich are interchangeable with all Xk f .
We can therefore state the following proposition:
Proposition 5. If the r-term group: X1 f , . . . ,Xr f of the space x1, . . . ,xs is transitive,and if P and P1 are two points which admit exactly the same infinitesimal transfor-mations of the group: X1 f , . . . ,Xr f , then there is one and only one transformationΘ which is interchangeable with all transformations of the group: X1 f , . . . ,Xr f andwhich transfers P to P1. If one understands by T the general symbol of a trans-formation of the group: X1 f , . . . ,Xr f , then Θ can be defined as the transformationwhich transfers every point (P)T to the point (P1)T . If each time exactly ∞ρ dif-ferent points admit precisely the same infinitesimal transformations of the group:X1 f , . . . ,Xr f , then there are exactly ∞ρ different transformations which are inter-changeable with all transformations of the group X1 f , . . . ,Xr f .
The developments about simply transitive groups that we have given in Chap. 20,p. 400–404 are obviously contained as a special case of the developments carriedout just now.
At present, we turn to the case where the r-term systatic group X1 f , . . . ,Xr f isintransitive. However, we want to be brief here.
If the systatic group: X1 f , . . . ,Xr f is intransitive, then there is not only a singletransformation which transfers the point P to the point defined on p. 517 and whichis interchangeable with all transformations of our group, and rather, there are in-finitely many different transformations of this kind. We will indicate how one findssuch transformations.
The intransitive systatic group: X1 f , . . . ,Xr f determines several invariant decom-positions of the space x1, . . . ,xs.
A first decomposition is represented by the s−ρ < s equations:
(a) ϕ1(x1, . . . ,xs) = const., . . . , ϕs−ρ(x1, . . . ,xs) = const.
A second decomposition is determined by s−n > 0 arbitrary independent solutions:u1(x), . . . ,us−n(x) of the n-term complete system: X1 f = 0, . . . , Xn f = 0; the analyticexpression of this decomposition reads:
(b) u1(x1, . . . ,xs) = const., . . . , us−n(x1, . . . ,xs) = const.
In what follows, by Mρ , we always understand one of the ∞s−ρ ρ-times extendedmanifolds (a), and by Mn, we understand one of the ∞s−n n-times extended mani-folds (b).

520 24 Systatic and Asystatic Transformation Groups
Amongst the solutions of the complete system: X1 f = 0, . . . , Xn f = 0, thereis a certain number, say s − q 6 s − n, which can be expressed in terms ofϕ1(x), . . . ,ϕs−ρ(x) alone; we want to assume that u1(x), . . . ,us−q(x) are suchsolutions, so that s−q 6 s−ρ relations of the form:
u1(x) = U1(ϕ1(x), . . . ,ϕs−ρ(x)
), . . . , us−q(x) = Us−q
(ϕ1(x), . . . ,ϕs−ρ(x)
)hold, and therefore, every solution of the complete system: X1 f = 0, . . . , Xn f = 0which can be expressed in terms of ϕ1(x), . . . ,ϕs−ρ(x) alone is a function ofu1(x), . . . ,us−q(x) (cf. Chap. 19, p. 358). Then the s−q equations:
(c) u1(x1, . . . ,xs) = const., . . . , us−q(x1, . . . ,xs) = const.
represent a third decomposition invariant by the group: X1 f , . . . ,Xr f . The individualmanifolds of this decomposition visibly are the smallest manifolds which consistboth of the Mρ and of the Mn (cf. Chap. 8, p. 159). By Mq, we always understandin what follows one of the ∞s−q q-times extended manifolds (c).
Lastly, a fourth invariant decomposition is determined by the manifold sections[SCHNITTMANNIGFALTIGKEITEN] of the Mρ and the Mn (Chap. 8, p. 159), andthis decomposition is obviously determined by the s−ρ +q−n equations:
(d)
ϕ1(x) = const., . . . , ϕs−ρ(x) = const.us−q+1(x) = const., . . . , us−n(x) = const.,
which, according to Chap. 19, p. 358 sq., are independent of each other. In whatfollows, by Nρ+n−q, we want to always understand one of the ∞s−ρ+q−n (ρ+n−q)-times extended manifolds (d).
Now, in order to find a transformation Θ which is interchangeable with all trans-formations of the group: X1 f , . . . ,Xr f , we proceed in the following way:
Inside every Mq, we associate to every Mn another Mn which we may call M′n,
and to be precise, we make this association according to an arbitrary analytic law.Afterwards, on each one of the ∞s−n Mn, we choose an arbitrary point P, and to eachone of the ∞s−n chosen points, we associate an arbitrary point P1 on the Nρ+n−q inwhich the Mρ passing through the point cuts the M′
n which corresponds to the Mnpassing through the point.
There is one and only one transformation Θ ′ which transfers the ∞s−n chosenpoints P to the point P1 corresponding to them. This transformation is defined bythe symbolic equation:
(P)T Θ = (P1)T,
in which P is the general symbol of the ∞s−n chosen points, while T is the generalsymbol of the ∞r transformations of our group.
One convinces oneself easily that the transformation Θ just defined is inter-changeable with all transformations of the group: X1 f , . . . ,Xr f and that one obtainsall transformations Θ of this constitution when one chooses in the most generalway the arbitrary elements which are contained in the definition of Θ .

§ 125. 521
We need not to spend time for proving that; let it only be remarked that when onesets up the analytic expression of the transformation Θ , one sees immediately thatthe number of the arbitrary functions appearing in this expression and the numberof the arguments appearing in these functions agree with the Theorem 67, p. 388.
Finally, yet a remark which applies both to the intransitive and to the the transitivesystatic groups: When the manifold:
ϕkν(x1, . . . ,xs) = ϕkν(x01, . . . ,x
0s ) (k=1 ···r−n ; ν =1 ···n)
decomposes for every system of values x01, . . . ,x
0s in several discrete manifolds, then
the totality of all transformations which are interchangeable with the transforma-tions of the group: X1 f , . . . ,Xr f also decompose in several discrete families.
§ 125.
The functions ϕkν(x) which decide whether a group is systatic or not have alsoplayed a great rôle already in the chapter about the similarity of r-term groups.At present, we want to go back to the developments of that time, and we want tocomplete them in a certain direction.
If, in the same number of variables, two r-term groups are presented:
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r)
and:
Yk f =s
∑i=1
ηki(y1, . . . ,ys)∂ f∂yi
(k=1 ···r),
and if at the same time the relations:
[Xi, Xk] =r
∑σ=1
ciks Xσ f and [Yi, Yk] =r
∑σ=1
ciks Yσ f ,
hold with the same constants ciks in the two cases, then according to Chap. 19, p. 365sq., there is a transformation:
yν = Φν(x1, . . . ,xs) (ν =1 ···s)
which transfers X1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively, if an only if the followingconditions are satisfied: if, between X1 f , . . . ,Xr f , there are relations of the form:
Xn+k f =n
∑ν=1
ϕkν(x1, . . . ,xs)Xν f (k=1 ···r−n),
while X1 f , . . . ,Xr f are linked together by no linear relation, then betweenY1 f , . . . ,Yr f , there must exist analogous relations:

522 24 Systatic and Asystatic Transformation Groups
Yn+k f =n
∑ν=1
ψkν(y1, . . . ,ys)Yν f (k=1 ···r−n)
but Y1 f , . . . ,Yn f should not be linked together by linear relations; in addition, then(r−n) equations:
(e) ϕkν(x1, . . . ,xs) = ψkν(y1, . . . ,ys) (k=1 ···r−n ; ν =1 ···n)
should neither contradict with each other, nor provide relations between the x aloneor the y alone.
If, amongst the functions ϕkν(x), there would be present less than s that aremutually independent, then the determination of a transformation which transfersX1 f , . . . ,Xr f to Y1 f , . . . ,Yr f would require certain integrations; by contrast, if thenumber of independent functions ϕkν(x) would be equal to s, the equations (e)would represent by themselves a transformation transferring X1 f , . . . ,Xr f toY1 f , . . . ,Yr f , respectively, and in fact, the most general transformation of thisnature. Hence, if we remember that in the latter case the group: X1 f , . . . ,Xr f isasystatic, and naturally also the group: Y1 f , . . . ,Yr f , then we obtain the:
Proposition 6. If one knows that two r-term asystatic groups in s variables are sim-ilar and if one has already chosen, in each one of the two groups, r infinitesimaltransformations:
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r)
and:
Yk f =r
∑i=1
ηki(y1, . . . ,ys)∂ f∂yi
(k=1 ···r)
such that there exists a transformation: yi = Φi(x1, . . . ,xs) which transfersX1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively, then one can set up without integra-tion the most general transformation that achieves the concerned transfer; thismost general transformation contains neither arbitrary functions, nor arbitraryparameters.
From this, it follows that one can find without integration the most general trans-formation which actually transfers the asystatic group X1 f , . . . ,Xr f to the group:Y1 f , . . . ,Yr f similar to it. To this end, one has one has to proceed as follows:
One determines in the group: Y1 f , . . . ,Yr f in the most general way r independentinfinitesimal transformations:
Y j f =r
∑k=1
g jk Yk f ( j=1 ···r)
such that firstly, the relations:

§ 125. 523
[Yi, Yk] =r
∑σ=1
ciksYσ f
hold, and secondly such that there exists a transformation which transfersX1 f , . . . ,Xr f to Y1 f , . . . ,Yr f , respectively. Then according to what has been said ashort while ago, one can find without integration the most general transformationwhich achieves the transfer in question, and as a result, one obtains at the sametime the most general transformation which converts the group: X1 f , . . . ,Xr f intothe group: Y1 f , . . . ,Yr f . Obviously, this transformation contains only arbitraryparameters.
In particular, if the group: Y1 f , . . . ,Yr f coincides with the group: X1 f , . . . ,Xr f ,then in the way indicated, one obtains all transformations which leave invariantthe group: X1 f , . . . ,Xr f . According to Chap. 19, p. 372, the totality of all thesetransformations forms a group, and in fact in our case, visibly a finite group. Thus:
Theorem 90. The largest subgroup in which an r-term asystatic group: X1 f , . . . ,Xr fof the space x1, . . . ,xs is contained as an invariant subgroup contains only a finitenumber of parameters. One can find the finite equations of this group without inte-gration as soon as the infinitesimal transformations of the group: X1 f , . . . ,Xr f aregiven.†
It is of importance that one can also find without integration the finite equationsof the asystatic group: X1 f , . . . ,Xr f itself, as soon as its infinitesimal transformationsare given.
One simply sets up the finite equations:
(f) e′k =r
∑j=1
ψk j(ε1, . . . ,εr)e j (k=1 ···r)
of the adjoint group associated to the group: X1 f , . . . ,Xr f ; this demands only exe-cutable operations (cf. Chap. 16, p. 286). Next, if the sought finite equations of thegroup: X1 f , . . . ,Xr f have the form: x′i = fi(x1, . . . ,xn, ε1, . . . ,εr), then according toTheorem 48, p. 287, after the introduction of the new variables: x′i = fi(x,ε), theinfinitesimal transformations Xk f take the form:
Xk f =r
∑j=1
ψ jk(ε1, . . . ,εr)X ′j f (k=1 ···r),
where, as usual, we have set:
n
∑i=1
ξki(x′1, . . . ,x′s)
∂ f∂x′i
= X ′k f .
Now, since the group: X1 f , . . . ,Xr f is asystatic, there is a completely determinedtransformation between the x and the x′ that transfers X1 f , . . . ,Xr f to:
† LIE, Archiv for Math. Vol. 10, p. 378, Christiania 1885.

524 24 Systatic and Asystatic Transformation Groups
r
∑j=1
ψ jk(ε1, . . . ,εr)X ′j f (k=1 ···r),
respectively. If one computes this transformation according to the former rules, onefinds the sought equations x′i = fi(x,ε).
In particular, if the equations (f) are a canonical form of the adjoint group (cf.Chap. 9, p. 187), then evidently, one obtains the finite equations of the group:X1 f , . . . ,Xr f also in canonical form. We therefore have the
Proposition 7. If one knows the infinitesimal transformations of an asystatic groupof the space x1, . . . ,xs, then one can always find the finite equations of this group bymeans of executable operations and to be precise, in canonical form.
There exist yet more general cases for which the finite equations of an r-termgroup, the infinitesimal transformations of which one knows, can be determinedwithout integration. However, we do not want to be involved further in such ques-tions, and we only want to remark that the determination of the finite equations suc-ceeds, amongst other circumstances, when there is no infinitesimal transformationinterchangeable with all Xk f which does not belongs to the group X1 f , . . . ,Xr f .
§ 126.
Let X1 f , . . . ,Xr f , or shortly Gr, be an r-term systatic group of the space x1, . . . ,xs,and let Gr−n be the (r−n)-term subgroup of the Gr which is associated to a deter-mined point x0
1, . . . ,x0s in general position. The manifold:
ϕkν(x1, . . . ,xs) = ϕkν(x01, . . . ,x
0s ) (k=1 ···r−n ; ν =1 ···n)
which consists of all points invariant by the Gr−n may be denoted by M.Since the Gr−n fixes all points of M, it naturally leaves invariant M itself; but is it
thinkable that the Gr contains transformations which also leave invariant the mani-fold M without fixing all of its points. We want to assume that the largest subgroupof the Gr which leaves M invariant contains exactly r− l parameters and we want tocall this subgroup Gr−l .
Of course, the Gr−n is either identical to the Gr−l or contained in it as a subgroup.The latter case occurs always when the Gr is transitive; indeed, in this case, the pointx0
1, . . . ,x0s can be transferred to all points of M by means of suitable transformations
of the Gr, and since every transformation of the Gr which transfers x01, . . . ,x
0s to
another point of M visibly leaves invariant the manifold M, the Gr contains a con-tinuous family of transformations which leave invariant M without fixing all of itspoints; consequently, in the case of a transitive group Gr, the number r− l is surelylarger than r− n. But if the Gr is intransitive, then it is very well possible that alltransformations of the Gr which leave M invariant also fix all points of M, so thatr− l = r−n. This is shown for example by the three-term intransitive systatic group:
∂ f∂x2
, x2∂ f∂x2
, x22
∂ f∂x2

§ 126. 525
of the plane x1, x2.It is easy to see that the Gr−n is invariant in the Gr−l . In fact, the Gr−n is gener-
ated by all infinitesimal transformations of the Gr−l which leave untouched all thepoints of M; but according to Chap. 17, Proposition 7, p. 319, these infinitesimaltransformations generate an invariant subgroup of the Gr−n. We therefore have the:
Proposition 8. If: X1 f , . . . ,Xr f , or Gr, is an r-term systatic group of the spacex1, . . . ,xs, if moreover P is a point in general position, and lastly, if M is themanifold of all points that remain invariant by all transformations of the Gr whichfix P, then the largest subgroup of the Gr which leaves P invariant is either identicalto the largest subgroup which leaves M at rest, or is contained in this subgroup asan invariant subgroup. The first case can occur only when the Gr is intransitive;when the Gr is transitive, the second case always occurs.
On the other hand, if one knows an arbitrary r-term group Gr of the spacex1, . . . ,xs and if one knows that the largest subgroup Gr−n of the Gr which leavesinvariant an arbitrary point P in general position is invariant in a yet larger subgroupGr−h with r− h > r− n parameters, then one can conclude that the Gr belongs tothe class of the systatic groups.
In fact, the point P admits exactly r−n independent infinitesimal transformationsof the Gr−h and hence (Chap. 23, Theorem 85, p. 491), it takes, by all ∞r−h trans-formations of the Gr−h, exactly ∞n−h different positions, where the number n− h,under the assumption made, is at least equal to 1. Now, since the Gr−n is invariantin the Gr−h, then to each of these ∞n−h positions of P is associated exactly the same(r−n)-term subgroup of the Gr as to the point P, that is to say: the Gr is effectivelysystatic. Thus:
Proposition 9. If the r-term group Gr of the space x1, . . . ,xs is constituted in sucha way that its largest subgroup Gr−n which leaves invariant an arbitrary point ingeneral position is invariant in a larger subgroup of the Gr, or even in the Gr itself,then the Gr belongs to the class of the systatic groups.
From this proposition, it follows immediately that for an r-term asystatic group ofthe space x1, . . . ,xs, the subgroup associated to a point in general position is invariantneither in the Gr itself, nor in a larger subgroup of the Gr. But conversely, if the Gr isconstituted in such a way that the subgroup which is associated to a point in generalposition is invariant in no larger subgroup, then it needs not be asystatic for thisreason, and it necessarily so only when it is at the same time also transitive; thisfollows immediately from the Proposition 8, p. 525. We can therefore say:
Proposition 10. An r-term transitive group Gr of the space x1, . . . ,xs is asystatic ifand only if the subgroup associated to a point in general position is invariant in nolarger subgroup.
In Chap. 22, Theorem 79, p. 453, we provided a method for the determination ofall transitive groups which are equally composed with a given r-term group Γ . At

526 24 Systatic and Asystatic Transformation Groups
present, we can specialize this method so that it provides in particular all transitiveasystatic groups which are equally composed with the group Γ .
One determines all subgroups of Γ which neither contain a subgroup invariant inΓ , nor are invariant in a larger subgroup of Γ . Each one of these subgroups provides,when one proceeds according to the rules of Theorem 78, a transitive asystatic groupwhich is equally composed with Γ , and in fact, one finds in this way all transitiveasystatic groups having the concerned composition.
Taking the Proposition 10 as a basis, one can answer the question whether a giventransitive group is systatic, or asystatic. One can set up a similar statement by meansof which one can answer the question whether a given transitive group is primitive,or not.
Let the r-term transitive group Gr of the space x1, . . . ,xs be imprimitive, and let:
u1(x1, . . . ,xs) = const., . . . , us−m(x1, . . . ,xs) = const. (0<m<s)
be a decomposition of the space in ∞s−m m-times extended manifolds which is in-variant by the group.
Since the Gr is transitive, all its transformations which leave invariant a pointx0
1, . . . ,x0s in general position form an (r− s)-term subgroup Gr−s, and on the other
hand, all its transformations which leave invariant the m-times extended manifold:
u1(x1, . . . ,xs) = u1(x0), . . . , us−m(x1, . . . ,xs) = us−m(x0)
form an (r−s+m)-term subgroup Gr−s+m (cf. Chap. 23, p. 487). Here naturally, theGr−s is contained as subgroup in the Gr−s+m, which in turn obviously is an actualsubgroup of the Gr.
At present, we imagine conversely that an arbitrary r-term transitive group Gr ofthe space x1, . . . ,xs is presented, and we assume that the (r− s)-term subgroup Gr−sof the Gr which is associated to a point P in general position is contained in a largersubgroup:
Gr−s+h (r−s<r−s+h<r).
If all transformations of the Gr−s+h are executed on P, then the point takes ∞h
different positions. These ∞h positions form an h-times extended manifold M whichremains invariant by the Gr−s+h (cf. Chap. 23, p. 491). Lastly, if we execute on Mall transformations of the Gr, we obtain ∞s−h different h-times extended manifoldswhich determine a decomposition of the space x1, . . . ,xs.
In fact, since the manifold M remains invariant by the Gr−s+h, then by the ∞r
transformations of the Gr, it takes at most ∞s−h different positions (cf. Chap. 23,p. 491), and on the other hand, thanks to the transitivity of the Gr, it takes at least∞s−h positions, hence it receives by the Gr exactly ∞s−h different positions whichfill exactly the space and hence determine a decomposition. It follows from Theo-rem 85, p. 491, that this decomposition remains invariant by the Gr.
From this, it results that the Gr, under the assumptions made, is imprimitive. Ifwe combine this result with the one gained above, we then obtain at first the:

§ 126. 527
Theorem 91. An r-term transitive group Gr of the space x1, . . . ,xs is primitive ifand only if the (r− s)-term subgroup Gr−s which is associated to a point in generalposition is contained in no larger subgroup of the Gr.
But even more, we obviously obtain at the same time a method for the determi-nation of all possible decompositions of the space x1, . . . ,xs which remain invariantby a given transitive group of this space:
Theorem 92. If an r-term transitive group Gr of the space x1, . . . ,xs is presented,then one finds all possible decompositions of the space invariant by the group in thefollowing way:
One determines at first the (r − s)-term subgroup Gr−s of the Gr by which anarbitrary point P in general position remains invariant, a point which does not lieon any manifold invariant by the Gr. Afterwards, one looks up at all subgroups ofthe Gr which contain the Gr−s. If Gr−s+h is one of these subgroups, then one exe-cutes all transformations of the Gr−s+h on P; in the process, P takes ∞h differentpositions which form an h-times extended manifold M; now, if one executes on Mall transformations of the Gr, then M takes ∞s−h different positions which determinea decomposition of the space invariant by the Gr. If one treats in this way all sub-groups of the Gr which comprise the Gr−s, one obtains all decompositions invariantby the Gr.
At present, we can also indicate how one has to specialize the method explainedin Chap. 22, Theorem 79, p. 453 in order to find all primitive groups which areequally composed with a given r-term group Γ .
Since all primitive groups are transitive, one has to proceed in the following way:One determines all subgroups of Γ which contain no subgroup invariant in Γ and
which are contained in no larger subgroup of Γ . Each of these subgroups provides,when one proceeds according to the rules of Theorem 78, a primitive group equallycomposed with Γ and in fact, one obtains in this way all primitive groups of thissort. —
The Theorem 92 shows that one can find without integration all decompositionsinvariant by a transitive group when the finite equations of the group are known.Now, the same also holds true for intransitive groups, although in order to see this,one needs considerably longer considerations that might not be advisable to develophere.
—————–


Chapter 25Differential Invariants
In n variables, we imagine that a transformation is presented:
(1) yi = fi(x1, . . . ,xn) (i=1 ···n),
and we imagine that this transformation is executed on a system of n−q independentequations:
(2) Ωk(x1, . . . ,xn) = 0 (k=1 ···n−q) ;
we obtain in this way a new system of equations:
(2’) Ω(y1, . . . ,yn) = 0 (k=1 ···n−q)
in the y.Now, by virtue of the equations (2), n−q of the variables x1, . . . ,xn can be repre-
sented as functions of the q remaining ones and these n−q naturally possess certaindifferential quotients: p1, p2, . . . , with respect to the q remaining. On the other hand,by virtue of the equations (2’), n− q of the variables y1, . . . ,yn can be representedas functions of the q remaining ones and these n− q possess in their turn certaindifferential quotients: p′1, p′2, . . . , with respect to the q remaining.
Between the two series of differential quotients so defined, there exists a certainconnection which is essentially independent of the form of the n− q relations (2).In the course of the chapter, we will explain thoroughly this known connection, andwe recall here that the p′ from the first order up to the m-th order can be representedas functions of x1, . . . ,xn and of the p from the first order up to the m-th order, whenthe p are interpreted as functions of x′1, . . . ,x
′n and of the p′. From this, it results
that one can derive from the transformation (1) a new transformation which, asidefrom the x, also transforms the differential quotients from the first order up to them-th order. We want to say that this new transformation is obtained by prolongation[ERWEITERUNG] of the transformation (1).
Visibly, the prolongation of the transformation (1) can take place in several veryvaried ways, because it left just as one likes how many and which ones of the vari-
529

530 25 Differential Invariants
ables x1, . . . ,xn will be seen as functions of the others. One can even increase yet thenumber of possibilities by taking in addition auxiliary variables: t1, t2, . . . , that areabsolutely not transformed by the transformation (1), so that one adds the identitytransformation in the auxiliary variables: t1, t2, . . . , to the equations of the transfor-mation (1).
If an r-term group is presented, we can prolong [ERWEITERN] all its ∞r trans-formations and obtain in this way ∞r prolonged transformations; the latter transfor-mations constitute in their turn, as we will see, an r-term group which is equallycomposed with the original group.
§ 127.
We consider at first a special simple sort of the prolongation.In the transformation:
(1) yi = fi(x1, . . . ,xn) (i=1 ···n),
we consider the variables x1, . . . ,xn as functions of an auxiliary variable t which isabsolutely not transformed by the transformation (1). Obviously, y1, . . . ,yn are thento be interpreted also as functions of t; hence if we set:
dxi
d t= x(1)i ,
dyi
d t= y(1)i ,
then it follows from (1) by differentiation with respect to t:
(3) y(1)i =n
∑ν=1
∂ fi
∂xνx(1)ν (i=1 ···n).
If we take together (1) and (3), we obtain a transformation in the 2n variables xi andx(1)i .
The transformation (1), (3) is in a certain sense the simplest transformation thatone can derive from (1) by prolongation.
If we apply the special prolongation written just now to all ∞r transformations ofthe r-term group: X1 f , . . . ,Xr f , or to:
(4) yi = fi(x1, . . . ,xn, a1, . . . ,ar) (i=1 ···n),
then we obtain ∞r prolonged transformations which have evidently the form:
(5) yi = fi(x1, . . . ,xn, a1, . . . ,ar), y(1)i =n
∑ν=1
∂ fi(x,a)∂xν
x(1)ν (i=1 ···n).
It can be proved that the equations (5) represent an r-term group in the 2n vari-ables xi, x(1)i .
In fact, the equations:

§ 127. 531
yi = fi(x1, . . . ,xn, a1, . . . ,ar) and zi = fi(y1, . . . ,yn, b1, . . . ,br)
have by assumption as a consequence:
zi = fi(x1, . . . ,xn, c1, . . . ,cr),
where the c depend only on the a and on the b. Therefore, from:
y(1)i =n
∑ν=1
∂ fi(x,a)∂xν
x(1)ν and z(1)j =n
∑i=1
∂ f j(y,b)∂yi
y(1)i ,
it follows by elimination of the y(1)i :
z(1)j =1···n
∑i, ν
∂ f j(y,b)∂yi
∂ fi(x,a)∂xν
x(1)ν
=n
∑ν=1
∂ f j(y,b)∂xν
x(1)ν =n
∑ν=1
∂ f j(x,c)∂xν
x(1)ν ,
whence the announced proof is achieved.In addition, from what has been said, it results that the new group possesses the
same parameter group as the original group:
yi = fi(x1, . . . ,xn, a1, . . . ,ar).
The new group:
(5) yk = fk(x,a), y(1)k =n
∑i=1
∂ fk
∂xix(1)i (k=1 ···n)
which shows a first example of a prolonged group has a very simple conceptualmeaning.
Indeed, if one interprets x1, . . . ,xn as ordinary point coordinates of an n-timesextended space, then one can interpret the 2n quantities: x1, . . . ,xn, x(1)1 , . . . ,x(1)n asthe determination pieces [BESTIMMUNGSSTÜCKE] of a line element [LINIENELE-MENT]; about it, x(1)1 , . . . ,x(1)n are homogeneous coordinates in the domain of the∞n−1 directions which pass through the point x1, . . . ,xn.
The new group (5) in the x, x(1) indicates in which way the line elements of thespace x1, . . . ,xn of the original group: yi = fi(x,a) are permuted with each other.
Since the group: yi = fi(x,a) is generated by the r infinitesimal transformations:X1 f , . . . ,Xr f , its finite equations in canonical form read:
yk = xk +r
∑j=1
e j ξ jk + · · · (i=1 ···n).

532 25 Differential Invariants
If we set this form of the group: yi = fi(x,a) as fundamental in order to make up theprolonged group (5), then the equations of this group receive the shape:
(6)yk = xk +
r
∑j=1
e j ξ jk + · · · , y(1)k = x(1)k +r
∑j=1
e j ξ (1)jk + · · ·
(k=1 ···n),
where we have set for abbreviation:
n
∑i=1
∂ξ jk
∂xix(1)i = ξ (1)
jk .
From this, we realize immediately that the prolonged group contains the identitytransformation, and at the same time, we come to the presumption that it is generatedby the r infinitesimal transformations:
X (1)k f =
n
∑i=1
ξki∂ f∂xi
+n
∑i=1
ξ (1)ki
∂ f
∂x(1)i
(k=1 ···r).
The correctness of this presumption can be established in the following way:According to Theorem 3, p. 40, the n functions: yi = fi(x,a) satisfy differential
equations of the form:
(7)∂yi
∂ak=
r
∑j=1
ψk j(a1, . . . ,ar)ξ ji(y1, . . . ,yn) (i=1 ···n ; k=1 ···r)
If we differentiate these equations with respect to t and if take into account that thea are independent of the t, it comes:
(8)∂y(1)i∂ak
=r
∑j=1
ψk j(a)n
∑ν=1
∂ξ ji(y)∂yν
y(1)ν (i=1 ···n ; k=1 ···r).
Now, if a01, . . . ,a
0r are the parameters of the identity transformation in the group:
yi = fi(x,a), then the determinant: ∑ ±ψ11(a) · · · ψrr(a) does not vanish for: a1 =a0
1, . . . , ar = a0r ; but a0
1, . . . ,a0r are also the parameters of the identity transformation
in the prolonged group (5); consequently, from the equations (7) and (8), we canconclude in the known way (cf. Chap. 4, p. 82 sq.), that the prolonged group isreally generated by the r independent infinitesimal transformations X (1)
k f . We call
the X (1)k f the prolonged infinitesimal transformations.
As the independent infinitesimal transformations of an r-term group, the X (1)k f
satisfy pairwise relations of the form:
X (1)k X (1)
j f −X (1)j X (1)
k f =r
∑s=1
c′k js X (1)s f .

§ 127. 533
Here, the coefficients of the ∂ f/∂xi must coincide on the right and on the left, henceone must have: XkX j f −X jXk f = ∑s c′k js Xs f , and consequently, one has:
r
∑s=1
(c′k js − ck js)Xs f = 0,
or, because of the independence of X1 f , . . . ,Xr f :
c′k js = ck js (k, j, s=1 ···r).
Thus, the prolonged group (5) is holoedrically isomorphic to the original group,which is coherent with the fact that, according to p. 531, both groups have the sameparameter group. —
We give yet a second direct proof of the result just found.If Xk f and X j f are arbitrary infinitesimal transformations and if the associated
two prolonged infinitesimal transformations are denoted X (1)k f and X (1)
j f as earlieron, it follows that:
X (1)k X (1)
j f −X (1)j X (1)
k f = XkX j f −X jXk f
+1···n
∑π, i, ν
ξki
∂ 2ξ jπ
∂xi∂xν−ξ ji
∂ 2ξkπ∂xi∂xν
x(1)ν
∂ f
∂x(1)π
+1···n
∑π, i, ν
∂ξki
∂xν
∂ξ jπ
∂xi−
∂ξ ji
∂xν
∂ξkπ∂xi
x(1)ν
∂ f
∂x(1)π,
or that:
(9)
X (1)
k X (1)j f −X (1)
j X (1)k f =
1···n
∑π, i
ξki
∂ξ jπ
∂xi−ξ ji
∂ξkπ∂xi
∂ f∂xπ
+1···n
∑π, i
dd t
ξki
∂ξ jπ
∂xi−ξ ji
∂ξkπ∂xi
∂ f
∂x(1)π.
In particular, if we assume that the Xk f are infinitesimal transformations of anr-term group, hence that:
XkX j f −X jXk f =r
∑s=1
ck js Xs f ,
then it follows that:
X (1)k X (1)
j f −X (1)j X (1)
k f =r
∑s=1
ck js
n
∑π=1
ξsπ∂ f∂xπ
+r
∑s=1
ck js
n
∑π=1
dd t
ξsπ∂ f∂xπ
=r
∑s=1
ck js X (1)s f ,

534 25 Differential Invariants
was what to be shown.†
The general formula (9) in the computations executed just now is of special in-terest and it can be expressed in words as follows:
Proposition 1. If, for two arbitrary infinitesimal transformations:
X1 f =n
∑i=1
ξ1i∂ f∂xi
, X2 f =n
∑i=1
ξ2i∂ f∂xi
,
one forms the prolonged infinitesimal transformations:
X (1)k f =
n
∑i=1
ξki∂ f∂xi
+n
∑i=1
ξ (1)ki
∂ f
∂x(1)i
(k=1, 2),
then X (1)1 X (1)
2 f −X (1)2 X (1)
1 f is the prolonged infinitesimal transformation associatedto X1X2 f −X2X1 f .
§ 128.
At present, we ask how one can decide whether the equation:
n
∑ν=1
Uν(x1, . . . ,xn)x(1)ν = 0
admits every finite transformation of the prolonged one-term group:
X (1) f =n
∑i=1
ξi∂ f∂xi
+1···n
∑i, ν
∂ξi
∂xνx(1)ν
∂ f
∂x(1)i
.
According to Chap. 7, p. 127, this holds true if and if and only if X (1)(∑ Uν x(1)ν )
vanishes by virtue of ∑ Uν x(1)ν = 0. By computation, one finds:
X (1)( n
∑ν=1
Uν x(1)ν
)=
n
∑ν=1
X Uν x(1)ν +n
∑ν=1
Uνn
∑i=1
∂ξν∂xi
x(1)i ,
hence an expression which is linear in the x(1)i . Consequently, the equation:
∑ Uν x(1)ν = 0 admits the one-term group X (1) f when and only when a relation ofthe form:
X (1)( n
∑ν=1
Uν x(1)ν
)= ρ
n
∑ν=1
Uν x(1)ν
holds, where it is understood that ρ is a function of x1, . . . ,xn alone.
† The preceding analytic developments present great similarities with certain developments ofChap. 20 (cf. p. 382 sq.). The inner reason of this connection lies in the fact that the quantities ζon p. 381 are nothing but certain differential quotients: δy/δ t of the y with respect to t.

§ 128. 535
Incidentally, it may be observed that the expression ∑ Uν x(1)ν remains alwaysinvariant by every finite transformation of the prolonged group X (1) f if and only ifthe expression: X (1)
(∑ Uν x(1)ν
)vanishes identically.
Lastly, a system of m equations:
(10)n
∑i=1
Uki(x1, . . . ,xn)x(1)i = 0 (k=1 ···m)
will admit all transformations of the prolonged group X (1) f if and only if everyexpression: X (1)
(∑ Uki x(1)i
)vanishes by virtue of the system, hence when relations
of the form:
X (1)( n
∑i=1
Uki x(1)i
)=
m
∑j=1
ρk j
n
∑i=1
U ji x(1)i (k=1 ···m)
hold, where the ρk j denote functions of the x alone.If we combine the Proposition 5 of Chap. 7, p. 134 with the proposition proved
above (p. 534), it follows immediately the:
Proposition 2. If a system of equations of the form:
(10)n
∑i=1
Uki(x1, . . . ,xn)x(1)i = 0 (k=1 ···m)
admits the two one-term groups: X (1)1 f and X (1)
2 f which are derived from X1 f andX2 f , respectively, by means of the special prolongation defined above, then it admitsat the same time the one-term group: X (1)
1 X (1)2 f −X (1)
2 X (1)1 f , which is derived by
means of prolongation from the group: X1X2 f −X2X1 f .
We have obtained the preceding proposition by applying the Proposition 5 ofChap. 7 to the special case of a system of equations of the form (10). But it must bementioned that our present proposition can be proved in a way substantially easierthan the general Proposition 5 of the Chap. 7. Indeed, one can convince oneselfwithout difficulty by a calculation that a system of equations (10) which admitsX (1)
1 f and X (1)2 f also allows X (1)
1 X (1)2 f −X (1)
2 X (1)1 f .
We call an equation of the form:
n
∑i=1
Ui(x1, . . . ,xn)dxi = 0
a Pfaffian equation [PFAFFSCHE GLEICHUNG], and we denote its left-hand side aPfaffian expression [PFAFFSCHE AUSDRUCK].
From the developments of the present chapter done up to now, it results importantpropositions about systems of Pfaffian equations:

536 25 Differential Invariants
(10’)n
∑i=1
Uki(x1, . . . ,xn)dxi = 0 (k=1 ···m).
The execution of the transformation: yi = fi(x1, . . . ,xn) on the differential expres-sion: ∑i Uki(x1, . . . ,xn)dxi obviously happens in the way that one transforms the 2nquantities x1, . . . ,xn, dx1, . . . ,dxn by means of the transformation:
yi = fi(x1, . . . ,xn), .yi =n
∑ν=1
∂ fi
∂xνdxν (i=1 ···n).
From this, it follows that the system of the Pfaffian equations:
(10’)n
∑i=1
Uki(x1, . . . ,xn)dxi = 0 (k=1 ···m)
remains invariant by the one-term group X f if and only if the system of equations:
n
∑i=1
Uki(x1, . . . ,xn)x(1)i = 0 (k=1 ···m)
admits the one-term prolonged group:
X (1) f =n
∑i=1
ξi∂ f∂xi
+n
∑i=1
ξ (1)i
∂ f
∂x(1)i
,
hence when m relations of the form:
n
∑i=1
X Uki x(1)i +n
∑i=1
Uki
n
∑ν=1
∂ξi
∂xνx(1)ν =
m
∑j=1
ρk j(x)n
∑i=1
U ji x(1)i
(k=1 ···m),
or, what amounts to the same, m relations of the form:
n
∑i=1
X Uki dxi +n
∑i=1
Uki d(X xi) =m
∑j=1
ρk j(x)n
∑i=1
U ji dxi
(k=1 ···m).
Hence if we introduce the abbreviated way of writing:
n
∑i=1
X Uki dxi +n
∑i=1
Uki d(X xi) = X( n
∑i=1
Uki dxi
),
we obtain the
Proposition 3. If the system of the m Pfaffian equations:

§ 128. 537
(10’)n
∑i=1
Uki(x1, . . . ,xn)dxi = 0 (k=1 ···m).
is supposed to admit all transformations: yi = xi+ε X xi+ · · · of the one-term groupX f , hence if for every value of ε , relations of the form:
n
∑i=1
Uki(y1, . . . ,yn)dyi =m
∑j=1
ωk j(x1, . . . ,xn, ε)n
∑i=1
U ji(x)dxi (k=1 ···m)
are supposed to hold, then for this, it is necessary and sufficient that the m expres-sions X(∑ Uki dxi) can be represented under the form:
X( n
∑i=1
Uki dxi
)=
m
∑j=1
ρk j(x)n
∑i=1
U ji dxi (k=1 ···m).
Lastly, if we introduce the language: the system of the Pfaffian equations (10’)admits the infinitesimal transformation X f when m relations of the form:
X( n
∑i=1
Uki dxi
)=
m
∑j=1
ρk j(x)n
∑i=1
U ji dxi
hold, then we can also state the latter proposition in the following way:The system of the m Pfaffian equations (10’) admits all transformations of the
one-term group X f if and only if it admits the infinitesimal transformation X f .
In addition, from Proposition 2, it follows easily:
Theorem 93. If a system of m Pfaffian equations:
n
∑i=1
Uki(x1, . . . ,xn)dxi = 0 (k=1 ···m)
admits the two one-term groups: X1 f and X2 f , then at the same time, it also admitsthe one-term group: X1X2 f −X2X2 f .
It is yet to be remarked that the Pfaffian expression: ∑i Ui(x1, . . . ,xn)dxi remainsinvariant by every transformation of the one-term group X f when the expression:X(∑ Ui dxi) vanishes identically.
Earlier on (p. 68 sq.), we have agreed that in place of ξi, we also want to writeoccasionally δxi/δ t and in place of X f , also δ f/δ t. In a similar way, in place ofX(∑ Ui dxi), we also want to write: δ
δ t ∑ Ui dxi as well; then we have the equation:
δ( n
∑i=1
Ui dxi
)=
n
∑i=1
δ Ui dxi +n
∑i=1
Ui dδxi,
an expression which occurs with the same meaning as in the Calculus of Variations.

538 25 Differential Invariants
§ 129.
The propositions of the preceding paragraph perfectly suffice in order derive in com-plete generality the theory of the prolongation of a group by means of the additionof differential quotients. However, we want first to consider a special case, beforewe tackle the treatment of the general case. At the same time, we go back to knowngeometrical concepts of the thrice-extended space.
By x,y,z, we may understand ordinary point coordinates of the thrice-extendedspace and moreover, let:
(11) x′ = Ξ(x,y,z), y′ = H, z′ = Z
be a transformation of this space.By the transformation (11), all points x,y,z are transformed, that is to say, they
are transferred to the new positions: x′,y′,z′. At the same time, all surfaces take newpositions: every surface: χ(x,y,z) = 0 is transferred to a new surface: ψ(x′,y′,z′) =0, the equation of which is obtained by means of elimination of x,y,z from theequations (11) of the transformation in combination with χ = 0.
It is in the nature of things that the transformation (11) transfer surfaces whichenter in contact to surfaces which stand in the same relationship, at least in gen-eral. Hence, if by the expression surface element [FLÄCHENELEMENT] we call thetotality of a point x,y,z located on the surface and of the tangential plane:
z1 − z = p(x1 − x)+q(y1 − y)(
p =∂ z∂x
, q =∂ z∂y
)passing through it, then we can say that our transformation (11) converts everysurface element x,y,z, p,q to a new surface element x′,y′,z′, p′,q′. In other words,there must exist certain equations:
(12) p′ = Π(x,y,z, p,q), q′ = K(x,y,z, p,q)
which we will moreover really set up below. The equations (11) and (12) takentogether represent a transformation which comes into existence by prolongation ofthe transformation (11).
At present, we assume that the ∞r transformations:
(13) x′ = Ξ(x,y,z, a1, . . . ,ar), y′ = H, z′ = Z
are given which represent an r-term group of point transformations of the space, andwe imagine that for each of these ∞r transformations, the prolonged transformationjust defined is set up. We claim that the ∞r prolonged transformations:
(14)
x′ = Ξ(x,y,z, a1, . . . ,ar), y′ = H, z′ = Z
p′ = Π(x,y,z, p,q, a1, . . . ,ar), q′ = H
that we obtain in this way do form an r-term group in the variables x,y,z, p,q.

§ 129. 539
For the proof, we interpret the ∞r transformations (13) as operations and weobserve that these operations permute with each other both the points x,y,z andthe surface elements x,y,z, p,q. When regarded as permutations of the points, theseoperations form a group, and consequently, when interpreted as permutations ofthe surface elements, they must also form a group, whence the fact that the equa-tions (14) represent a group finds its analytic expression.
We will make more precise the considerations made up to now by developingthem in a purely analytic way.
Let:
(11) x′ = Ξ(x,y,z), y′ = H(x,y,z), z′ = Z(x,y,z)
be a transformation between the variables x,y,z and x′,y′,z′. If we imagine z as anarbitrarily chosen function: z = ϕ(x,y) of x and y, there exist partial differentialquotients of first order of z with respect to x and y; these are defined by means of theequation:
dz− pdx−qdy = 0.
But on the other hand, our transformation converts every relationship of dependence[ABHÄNGIGSKEITSVERHÄLTNISS]: z = ϕ(x,y) between x,y,z in just such a rela-tionship between z′,x′,y′ which can in general be given the form: z′ = ϕ(x′,y′);hence z′ also has two partial differential quotients p′ and q′ which, in their turn,satisfy the condition:
dz′− p′ dx′−q′ dy′ = 0.
If, in the equation just written, we substitute z′,x′,y′ with their values Z, Ξ , Hand if we organize the result with respect to dz, dx, dy, it comes:(
∂Z∂ z
− p′∂Ξ∂ z
−q′∂H∂ z
)dz+
(∂Z∂x
− p′∂Ξ∂x
−q′∂H∂x
)dx
+
(∂Z∂y
− p′∂Ξ∂y
−q′∂H∂y
)dy = 0,
or, because of dz = pdx+qdy:
(15)
∂Z∂x
− p′∂Ξ∂x
−q′∂H∂x
+ p(
∂Z∂ z
− p′∂Ξ∂ z
−q′∂H∂ z
)dx
+
∂Z∂y
− p′∂Ξ∂y
−q′∂H∂y
+q(
∂Z∂ z
− p′∂Ξ∂ z
−q′∂H∂ z
)dy = 0.
In the equation (15), the two factors of dx and of dy must vanish, because dx anddy are not linked together by a relation. We therefore obtain the two equations:

540 25 Differential Invariants
(16)
p′(
∂Ξ∂x
+ p∂Ξ∂ z
)+q′
(∂H∂x
+ p∂H∂ z
)=
∂Z∂x
+ p∂Z∂ z
p′(
∂Ξ∂y
+q∂Ξ∂ z
)+q′
(∂H∂y
+q∂H∂ z
)=
∂Z∂y
+q∂Z∂ z
.
These equations can be solved with respect to p′ and q′. Indeed, if the determi-nant:
(17)
∣∣∣∣∣ ∂Ξ∂x + p ∂Ξ
∂ z∂Ξ∂y +q ∂Ξ
∂ z∂H∂x + p ∂H
∂ z∂H∂y +q ∂H
∂ z
∣∣∣∣∣would vanish for arbitrary functions z of x and y, then it would actually vanishidentically, that is to say, for every value of the variables x,y,z, p,q. Evidently, thiscase can occur only when all 2×2 determinants of the matrix:∣∣∣∣∣ ∂Ξ
∂x∂Ξ∂y
∂Ξ∂ z
∂H∂x
∂H∂y
∂H∂ z
∣∣∣∣∣vanish identically. But this is excluded from the beginning.
We therefore see that the equations (16) are in general solvable with respect to p′
and q′, whichever function of x and y can z be, and that the resolution is not possibleonly when the function z = ϕ(x,y) satisfies the partial differential equation whicharises by setting to zero the determinant (17). By really executing the resolutionof the equations (16), we obtain for p′ and q′ completely determined functions ofx,y,z, p,q:
p′ = Π(x,y,z, p,q), q′ = K(x,y,z, p,q).
This determination is generally valid, because we have made no special assumptionon the function z = ϕ(x,y).
Besides, all of that is known long since.The equation (15) shows that it is possible to determine a quantity a in such a
way that the relation:
(18) dZ− p′ dΞ −q′ dH= a(dz− pdx−qdy)
holds identically in dx, dy, dz. Indeed, if one expands (18) with respect to dx, dy,dz, one obtains at first by comparing the factors of dz in both sides:
a=∂Z∂ z
− p′∂Ξ∂ z
−q′∂H∂ z
;
but if one sets this value in the equation (18), then this equation converts into (15).In its turn, the equation (18) has a very simple meaning: it expresses that the
prolonged transformation:
x′ = Ξ , y′ = H, z′ = Z, p′ = Π , q′ = K

§ 129. 541
leaves invariant the Pfaffian equation: dz− pdx−qdy = 0.†
For what follows, it is very important to observe that the prolonged transforma-tion: x′ = Ξ , . . . , q′ = K is perfectly determined by this property. In other words: ifone knows Ξ , H, Z, then Π and K are uniquely determined by the requirement thatthe transformation: x′ = Ξ , . . . , q′ = K should leave invariant the Pfaffian equation:dz− pdx−qdy = 0.
At present, we again pass to the consideration of an r-term group:
(19) x′ = Ξ(x,y,z, a1, . . . ,ar), y′ = H, z′ = Z,
and we imagine that each one of the ∞r transformations of this group is prolongedin the way indicated formerly by adding the equations:
(20) p′ = Π(x,y,z, p,q, a1, . . . ,ar), q′ = K.
Then we already know (cf. p. 538) that the equations (19) and (20) taken togetherrepresent an r-term group, but at present, we want to prove this also in an analyticway.
If the equations:
x′′ = Ξ(x′,y′,z′, b1, . . . ,br), y′′ = H, z′′ = Z
are combined with (19), then one obtains in the known way:
x′′ = Ξ(x,y,z, c1, . . . ,cr), y′′ = H, z′′ = Z,
where c depends only on the a and on the b. But on the other hand, the two equations:
dz′− p′ dx′−q′ dy′ = a(d z− pdx−qdy)
dz′′− p′′ dx′′−q′′ dy′′ = a′ (dz′− p′ dx′−q′ dy′)
give the analogous equation:
dz′′− p′′ dx′′−q′′ dy′′ = aa′ (dz− pdx−qdy),
which, according to the observation made above, shows that p′′ and q′′ depend onx,y,z, p,q and on the c in exactly the same way as p′ and q′ depend on x,y,z, p,qand on the a. We therefore have the
Proposition 4. If the equations:
(19) x′ = Ξ(x,y,z, a1, . . . ,ar), y′ = H, z′ = Z
represent an r-term group and if one determines the functions Π(x,y,z, a1, . . . ,ar),K(x,y,z, a1, . . . ,ar) in such a way that the prolonged transformation equations:
† LIE, Göttinger Nachr. 1872, p. 480, Verhandl. d. G. d. W. zu Christiania 1873; Math. Ann. Vol.VIII.

542 25 Differential Invariants
(21) x′ = Ξ , y′ = H, z′ = Z, p′ = Π , q′ = K
leave invariant the Pfaffian equation: dz− pdx−qdy = 0, so that a relation of theform:
dz′− p′ dx′−q′ dy′ = a(x,y,z, p,q, a1, . . . ,ar)(dz− pdx−qdy)
holds, then these transformation equations represent in the same way an r-termgroup and to be precise, a group which has the same parameter group as the originalgroup.
We now claim: If the r-term group (19) is generated by r independent infinitesi-mal transformations — and as always, we naturally assume this also here —, then atthe same time, the same holds true of the prolonged group (21).
We will prove this claim at first for the simple case: r = 1. Let therefore r = 1and let the group (19) be generated by the infinitesimal transformation:
X f = ξ∂ f∂x
+η∂ f∂y
+ζ∂ f∂ z
.
In order to prove that the prolonged group is generated by an infinitesimal transfor-mation, we only need to show that from X f , a prolonged infinitesimal transforma-tion:
X (1) f = ξ∂ f∂x
+η∂ f∂y
+ζ∂ f∂ z
+π∂ f∂ p
+χ∂ f∂q
can be derived which leaves invariant the Pfaffian equation:
(22) dz− pdx−qdy = 0.
If this is proved, then it is clear that the one-term group in the variables x,y,z, p,qgenerated by X (1) f is identical to the one-term group (21), for this last group thenleaves invariant the Pfaffian equation (22) and comes into existence by prolongationof the group X f which, according to the assumption, is just the group (19).
According to p. 537, the infinitesimal transformation X (1) f leaves invariant thePfaffian equation (22) if and only if π and χ satisfy an equation of the form:
dζ − pdξ −qdη −π dx−χ dy = b(dz− pdx−qdy),
where it is understood that b is a function of x,y,z, p,q. This equation decomposesin three equations:
b=∂ζ∂ z
− p∂ξ∂ z
−q∂η∂ z
π =∂ζ∂x
− p∂ξ∂x
−q∂η∂x
+b p
χ =∂ζ∂y
− p∂ξ∂y
−q∂η∂y
+bq,

§ 129. 543
whence it comes for π and χ the completely determined values:
π =dζdx
− pdξdx
−qdηdx
, χ =dζdy
− pdξdy
−qdηdy
,
where for brevity, we have set:
∂Φ(x,y,z)∂x
+ p∂Φ(x,y,z)
∂ z=
dΦdx
,∂Φ(x,y,z)
∂y+q
∂Φ(x,y,z)∂ z
=dΦdy
.
With these words, the existence of the infinitesimal transformation X (1) f isproved, and also at the the same time, the correctness for r = 1 of the claim statedabove.
Now, let r be arbitrary. Next, if e1 X1 f + · · ·+ er Xr f is an arbitrary infinitesi-mal transformation of the group (19), then evidently, the one-term group which isgenerated by the prolonged infinitesimal transformation: e1 X (1)
1 f + · · ·+ er X (1)r f
belongs to the group (21), because the concerned one-term group comes indeed intoexistence by prolongation of the one-term group: e1 X1 f + · · ·+ er Xr f . From this,it results that the group (21) contains the ∞r−1 one-term groups: e1 X (1)
1 f + · · ·+er X (1)
r f , so that it is generated by the r independent infinitesimal transformations:X (1)
1 f , . . . ,X (1)r f .
Of course, the X (1)k f satisfy pairwise relations of the form:
X (1)i X (1)
k f −X (1)k X (1)
i f =r
∑s=1
c′iks X (1)s f ;
we will verify this by means of a computation, and hence in addition, we will rec-ognize that the c′iks here have the same values as the ciks in the relations:
XiXk f −XkXi f =r
∑s=1
ciks Xs f .
According to Theorem 93, p. 537, the Pfaffian equation: dz− pdx− qdy = 0admits, simultaneously with the two infinitesimal transformations: X (1)
i f and X (1)k f
also the following: X (1)i X (1)
k f −X (1)k X (1)
i f , which has visibly the form:
X (1)i X (1)
k f −X (1)k X (1)
i f = XiXk f −XkXi f +α∂ f∂ p
+β∂ f∂q
.
From this, it results that the infinitesimal transformation: X (1)i X (1)
k f −X (1)k X (1)
i f isobtained by prolongation of:
XiXk f −XkXi f =r
∑s=1
ciks Xs f ,

544 25 Differential Invariants
so that the relations:
X (1)i X (1)
k f −X (1)k X (1)
i f =r
∑s=1
ciks X (1)s f
hold.From this, we yet see that the prolonged group (21) is holoedrically isomorphic
to the group (19), which is coherent with the fact that the two groups have the sameparameter group (Proposition 4, p. 541).
The group:
(19) x′ = Ξ(x,y,z, a1, . . . ,ar), y′ = H, z′ = Z
can still be prolonged further, namely by taking also differential quotients of orderhigher than the first order. Here, we only want to consider also the prolongation bymeans of the addition of differential quotients of second order.
Since z is considered as a function of x and y, apart from p and q, we have to takealso account of the three differential quotients:
∂ 2z∂x2 = r,
∂ 2z∂x∂y
= s,∂ 2z∂y2 = t.
Through the transformations of our group, x′,y′,z′ depend in the known wayupon x,y,z, and according to what precedes, p′,q′ depend likewise upon x,y,z, p,q.As should at present be shown, r′,s′, t ′ can also be represented as functions ofx,y,z, p,q,r,s, t:
r′ = P(x,y,z, p,q,r,s, t; a1, . . . ,ar), s′ = Σ , t ′ = T.
The quantities r′,s′, t ′ are defined by:
d p′− r′ dx′− s′ dy′ = 0, dq′− s′ dx′− t ′ dy′ = 0.
Here, if the dx′, dy′, d p′, dq′ are expanded with respect to dx, dy, dz, d p, dq,and next, if the values for dz, d p, dq are inserted from:
dz− pdx−qdy = 0, d p− r dx− sdy = 0, dq− sdx− t dy = 0,
then one obtains two equations of the form: Adx+Bdy = 0 whose coefficients,apart from x′,y′,z′ and their differential quotients, yet contain also p′, q′, r′, s′, t ′, p,q, r, s, t. Since dx and dy are independent of each other, A and B must in the twocases vanish individually, and hence we find the four equations:

§ 129. 545
r′(
∂Ξ∂x
+ p∂Ξ∂ z
)+ s′(
∂H∂x
+ p∂H∂ z
)=
∂Π∂x
+ p∂Π∂ z
+ r∂Π∂ p
+ s∂Π∂q
r′(
∂Ξ∂y
+q∂Ξ∂ z
)+ s′(
∂H∂y
+q∂H∂ z
)=
∂Π∂y
+q∂Π∂ z
+ s∂Π∂ p
+ t∂Π∂q
and so on.
Of these equations, the first two are solvable with respect to r′ and s′, the last twowith respect to s′ and t ′, exactly as the equations (16) were solvable with respectto p′ and q′. Still, the question is only whether the two values which are found inthis way for s′ coincide with each other. But as is known, this is indeed the case,since otherwise, we would receive a relation between x, y, z, p, q, r, s, t not holdingidentically which should be satisfied identically after the substitution: z = ϕ(x,y),and this is impossible, because ϕ is submitted to absolutely no restriction.
Similarly as before, we realize also here that the quantities r′,s′, t ′ are defineduniquely as functions of x, y, z, p, q, r, s, t by the condition that equations of theform:
d p′− r′ dx′− s′ dy′ = α1(dz− pdx−qdy)+β1(d p− r dx− sdy)
+ γ1(dq− sdx− t dy)
dq′− s′ dx′− t ′ dy′ = α2(dz− pdx−qdy)+β2(d p− r dx− sdy)
+ γ2(dq− sdx− t dy)
hold identically in d p, dq, dz, dy, dx. For this, if we remember the former identity:
dz′− p′ dx′−q′ dy′ = a(dz− pdx−qdy)
which determine p′ and q′, we can say that for given Ξ , H, Z, the transformationequations:
(23) x′ = Ξ(x,y,z,a1, . . . ,ar), . . . , t ′ = T(x,y,z, p,q,r,s, t, a1, . . . ,ar)
are completely and uniquely determined by the condition that they should leaveinvariant the system of Pfaffian equations:
(24) dz− pdx−qdy = 0, d p− r dx− sdy = 0, dq− sdx− t dy = 0.
From this, it becomes clear that after the succession of two transformations (23),a transformation comes into existence with again leaves invariant the system (24).But by assumption, the equations:
x′ = Ξ(x,y,z, a1, . . . ,ar), y′ = H, z′ = Z
x′′ = Ξ(x′,y′,z′, b1, . . . ,br), y′′ = H, z′′ = Z
have as a consequence:
(19’) x′′ = Ξ(x,y,z, c1, . . . ,cr) y′′ = H, z′′ = Z,

546 25 Differential Invariants
where the c depend only on the a and on the b. Therefore, the two transformations:
x′ = Ξ(x,y,z, a1, . . . ,ar), . . . , t ′ = T(x,y,z, p,q,r,s, t, a1, . . . ,ar)
x′′ = Ξ(x′,y′,z′, b1, . . . ,br), . . . , t ′′ = T(x′,y′,z′, p′,q′,r′,s′, t ′, b1, . . . ,br)
when executed one after the other, give a transformation which results from (19’)by the same prolongation as the one by which (23) comes into existence from:
(19) x′ = Ξ(x,y,z, a1, . . . ,ar), y′ = H, z′ = Z,
a transformation therefore which belongs in the same way to the family (23). Thus,the transformations (23) form an r-term group.
We will convince ourselves directly that the group (23) is generated by r inde-pendent infinitesimal transformations.
To begin with, we again assume that r = 1 and that the group (19) is generatedby the infinitesimal transformation X f . Then obviously, we need only to prove thatthere is a prolonged infinitesimal transformation:
X (2) f = X f +π∂ f∂ p
+χ∂ f∂q
+ρ∂ f∂ r
+σ∂ f∂ s
+ τ∂ f∂ t
which leaves invariant the system of the Pfaffian equations (24). But there is nodifficulty to do that; for π and χ , we find the same values as before, and for ρ , σ , τ ,we obtain in a similar way expressions which depend linearly and homogeneouslyin the ξ , η , ζ and their differential quotients of first order and of second order.
Also, we find here at first four equations for ρ , σ , τ; but it can easily be provedthat these equations are compatible with each other. We postpone the realization ofthis proof to the consideration of the general case, which appears to be clearer thanthe case at hand here.
From the existence of X (2) f , it naturally follows that the group (23) is just gen-erated by X (2) f in the case r = 1.
One realizes in the same way that for an arbitrary r, the group (23) is generatedby the r infinitesimal transformations: X (2)
1 f , . . . ,X (2)r f which are obtained by pro-
longation of the infinitesimal transformations: X1 f , . . . ,Xr f . As a result, it is provedat the same time that relations of the form:
X (2)i X (2)
k f −X (2)k X (2)
i f =r
∑s=1
c′′iks X (2)s f
hold.It can be seen easily that c′′iks = ciks. In fact, together with X (2)
i f and X (2)k f , the
system of the Pfaffian equations (24) also admits the infinitesimal transformation:X (2)
i X (2)k f − X (2)
k X (2)i f =
[X (2)
i , X (2)k
], but this transformation obviously has the
form: [X (2)
i , X (2)k
]= [Xi, Xk]+α
∂ f∂ p
+β∂ f∂q
+λ∂ f∂ r
+µ∂ f∂ s
+ν∂ f∂ t
,

§ 130. 547
hence it comes into existence by prolongation of the transformation:
[Xi, Xk] =r
∑s=1
ciks Xs f ,
and it can be represented in the following way:
[X (2)
i , X (2)k
]=
r
∑s=1
ciks X (2)s f .
Here lies the reason why the prolonged group (23) is equally composed with theoriginal group (19).
§ 130.
After the realization of the special studies of the preceding paragraph, the generaltheory of the prolongation of a finite continuous group by addition of differentialquotients will cause us no more difficulty.
To begin with, we consider an individual transformation in the n+m variables:x1, . . . ,xn, z1, . . . ,zm, say the following:
(25)x′i = fi(x1, . . . ,xn, z1, . . . ,zm) (i=1 ···n)
z′k = Fk(x1, . . . ,xn, z1, . . . ,zm) (k=1 ···m).
If we want to prolong this transformation by adding differential quotients, then wemust at first agree on how many and which of the variables x1, . . . ,xn, z1, . . . ,zmshould be considered as independent, and which ones should be considered as de-pendent. This can occur in very diverse ways and to each such possible way therecorresponds a completely determined prolongation of the transformation (25).
In the sequel, we will always consider x1, . . . ,xn as independent variables andz1, . . . ,zm as functions of x1, . . . ,xn, but which can be chosen arbitrarily. Under thisassumption, x′1, . . . ,x
′n are in general mutually independent, while z′1, . . . ,z
′m are
functions of x′1, . . . ,x′n.
For the differential quotients of the z with respect to the x and of the z′ withrespect to the x′, we introduce the following notation:
∂ zν∂xk
= zν ,k,∂ α1+···+αnzµ
∂xα11 · · · ∂xαn
n= zµ,α1,...,αn ,
∂ α1+···+αnz′µ∂x′1
α1 · · · ∂x′nαn
= z′µ,α1,...,αn,
and we claim that z′µ,α1,...,αncan be expressed by means of x1, . . . ,xn, z1, . . . ,zm, and
by means of the differential quotients zν ,β1,...,βn of first order up to the (α1 + · · ·+αn)-th order:
(26)z′µ,α1,...,αn
= Fµ,α1,...,αn
(x1, . . . ,xn, z1, . . . ,zm, zν ,β1,...,βn
)(ν =1 ···m ; β1 + ···+βn 6α1 + ···+αn).

548 25 Differential Invariants
If we set α1 + · · ·+αn = N, then the existence of equations of the form (26) isclear for N = 0; in order to establish this existence for an arbitrary N, we thereforeneed only to show that equations of the form (26) hold also for α1+ · · ·+αn =N+1as soon as such equations hold for α1 + · · ·+αn 6 N.
Thus, let the functions Fµ,α1,...,αn (α1 + · · ·+αn 6 N) be known; then the valuesof the z′µ,α1,...,αn
(α1 + · · ·+αn = N +1) are to be determined from the equations:
(27) dz′µ,α1,...,αn−
n
∑i=1
z′µ,α1,...,αi+1,...,αndx′i = 0 (α1 + ···+αn =N),
and to be precise, (27) must hold identically by virtue of the system of equations:
(28)dzν ,β1,...,βn −
n
∑i=1
zν ,β1,...,βi+1,...,βn dxi = 0
(ν =1 ···m ; 06β1 + ···+βn 6N),
while dx1, . . . ,dxn are fully independent of each other. For z′µ,α1,...,αi+1,...,αn, we
therefore obtain the equations:
(29)n
∑i=1
z′µ,α1,...,αi+1,...,αn
∂ fi
∂xk+
m
∑ν=1
zν ,k∂ fi
∂ zν
=
dFµ,α1,...,αn
dxk(k=1 ···n),
where the right-hand side means the complete differential quotient:
∂Fµ,α1,...,αn
∂xk+
m
∑ν=1
zν ,k∂Fµ,α1,...,αn
∂ zν+
m
∑ν=1
∑β
zν ,β1,...,βk+1,...,βn
∂Fµ,α1,...,αn
∂ zν ,β1,...,βn
(1<β1 + ···+βn 6α1 + ···+αn)
of Fµ,α1,...,αn with respect to xk.If the equations (29) would not be solvable with respect to the z′µ,α1,...,αi+1,...,αn
(i = 1, . . . ,n), then the determinant:∣∣∣∣∣∣∣∣∣∂ f1∂x1
+∑mµ=1 zµ,1
∂ f1∂ zµ
· · ∂ f1∂xn
+∑mµ=1 zµ,n
∂ f1∂ zµ
· · · ·· · · ·
∂ fn∂x1
+∑mµ=1 zµ,1
∂ fn∂ zµ
· · ∂ fn∂xn
+∑mµ=1 zµ,n
∂ fn∂ zµ
∣∣∣∣∣∣∣∣∣would necessarily be zero, whichever functions of x1, . . . ,xn one could substitute forz1, . . . ,zm, that is to say: this determinant should vanish identically for every valueof the variables xi, zµ , zµ,i. One convinces oneself easily that this can happen onlywhen all m×m determinants of the matrix:

§ 130. 549∣∣∣∣∣∣∣∂ f1∂x1
· · ∂ f1∂xn
∂ f1∂ z1
· · ∂ f1∂ zm
· · · · · · · ·∂ fn∂x1
· · ∂ fn∂xn
∂ fn∂ z1
· · ∂ fn∂ zm
∣∣∣∣∣∣∣vanishes identically, hence when the functions f1, . . . , fn are not independent of eachother. But since this is excluded, it follows that the equations (29) are solvable withrespect to the z′µ,α1,...,αi+1,...,αn
(i = 1, . . . ,n).It still remains to eliminate an objection. Apparently, the equations (29) provide
in general different values for the differential quotients z′µ,α1,...,αi+1,...,αn. But in re-
ality, this is only fictitious, because otherwise this would give certain not identicalrelations between the xi, the zµ and their differential quotients which should holdfor completely arbitrary functions z1, . . . ,zm of x1, . . . ,xn, which is impossible.
We therefore see: the equations (29) determine all z′µ,α1,...,αi+1,...,αncompletely
and uniquely, and consequently, there are, under the assumptions made, equationsof the form (26) also for α1 + · · ·+αn = N + 1, whence their general existence isestablished. But in addition, we yet realize that the transformation:(30)
x′i = fi(x1, . . . ,xn, z1, . . . ,zm) z′µ = Fµ(x1, . . . ,xn, z1, . . . ,zm)
z′µ,α1,...,αn= Fµ α1,...,αn
(x1, . . . ,xn, z1, . . . ,zm, zν ,β1,...,βn
)(∑χ βχ 6∑χ αχ )
(i=1 ···n ; µ =1 ···m ; 0<α1 + ···+αn 6N)
leaves invariant the system of equations:
(31) dzµ,β1,...,βn −n
∑i=1
zµ,β1,...,βi+1,...,βn dxi = 0 (µ =1 ···m ; 06∑χ βχ <N)
and that it is completely defined by this property. Lastly, it is yet also clear that thesuccession of two transformations (30) which leave invariant the Pfaffian system ofequations (31) again provides a transformation having this constitution.
At present, we assume that the original transformation equations (25) contain acertain number, say r, of parameters:
(32)
x′i = fi(x1, . . . ,xn, z1, . . . ,zm, a1, . . . ,ar) (i=1 ···n)
z′µ = Fµ(x1, . . . ,xn, z1, . . . ,zm, a1, . . . ,ar) (µ =1 ···m)
and that they represent an r-term group generated by r independent infinitesimaltransformations. From (32), we imagine that all equations of the form (26) are de-rived, in which α1 + · · ·+αn 6 N; we claim that these equations taken togetherwith (32):
(33)
x′i = fi(x,z,a), z′µ = Fµ(x,z,a)
z′µ,α1,...,αn= Fµ,α1,...,αn(x,z,zν ,β1,...,βn , a)
(i=1 ···n ; µ =1 ···m ; 0<α1 + ···+αn 6N)

550 25 Differential Invariants
represent again an r-term group.The proof is very simple.The transformations:
x′i = fi(x,z,a), z′k = Fk(x,z,a)
x′′i = fi(x′,z′,b), z′′k = Fk(x′,z′,b)
executed one after the other give a transformation:
x′′i = fi(x,z,c), z′′k = Fk(x,z,c)
in which the c are certain functions of the a and of the b. According to what hasbeen said above, the z′′µ,α1,...,αn
express in terms of the xi, zk, zν ,β1,...,βn and of the c jin exactly the same way as the z′µ,α1,...,αn
express in terms of the xi, zk, zν ,β1,...,βn andof the a. As a result, our claim is proved.
It still remains to prove that the prolonged group (33) is generated by r infinites-imal transformations, just as the original group (32). In order to be able to performthis proof, we make at first the following considerations:
We start from an arbitrary infinitesimal transformation:
X f =n
∑i=1
ξi(x,z)∂ f∂xi
+m
∑µ=1
ζµ(x,z)∂ f∂ zµ
and we attempt to form a prolonged infinitesimal transformation from it:
X (N) f = X f +m
∑ν=1
∑α
ζν,α1,...,αn
∂ f∂ zν ,α1,...,αn
(0<α1 + ···+αn 6N)
which leaves invariant the Pfaffian system of equations:
(31)dzν ,β1,...,βn −
n
∑i=1
zν ,β1,...,βi+1,...,βn dxi = 0
(ν =1 ···m ; 06β1 + ···+βn <N)
For N = 0 and N = 1, there certainly exists an infinitesimal transformation X (N) f ofthe constitution just described, and this does not require any justification. Hence wecan conduct the general proof for the existence of X (N) f in the way that we showthat, as soon as X (N−1) f and X (N) f exist, then X (N+1) f also exists.
So the assumption is that X (N−1) f and X (N) f exist. Now, if there is an infinitesi-mal transformation X (N+1) f which leaves invariant the system of equations:
(34)dzν ,β1,...,βn −
n
∑i=1
zν ,β1,...,βi+1,...,βn dxi = 0
(ν =1 ···m ; 06β1 + ···+βn <N+1)

§ 130. 551
then the coefficients still unknown:
δ zµ,γ1,...,γn
δ t= ζµ,γ1,...,γn (γ1 + ···+γn =N+1)
must satisfy certain equations of the form:
dζµ,α1,...,αn −n
∑i=1
zµ,α1,...,αi+1,...,αn dξi −n
∑i=1
ζµ,α1,...,αi+1,...,αn dxi
=m
∑ν=1
∑βPν ,β1,...,βn
dzν ,β1,...,βn −
n
∑i=1
zν ,β1,...,βi+1,...,βn dxi
(α1 + ···+αn =N ; 06β1 + ···+βn <N+1),
and to be precise, independently of the differentials: dxi, dzν ,β1,...,βn .
From this at first, the Pν ,β1,...,βn determine themselves uniquely and it remainsonly equations between the mutually independent differentials: dx1, . . . ,dxn. Henceif one inserts the values of the Pν ,β1,...,βn and if one compares the coefficients of thedxi in both sides, one obtains for ζµ,α1,...,αi+1,...,αn the following expression:
(35)
δδ t
zµ,α1,...,αi+1,...,αn = ζµ,α1,...,αi+1,...,αn
dζµ,α1,...,αn
dxi−
n
∑j=1
zµ,α1,...,α j+1,...,αn
dξ j
dxi
(α1 + ···+αn =N),
where d/dxi denotes a complete differential quotient with respect to xi.†
But now, it yet remains a difficulty; indeed, in general, we obtain for eachζµ,α1,...,αi+1,...,αn a series of apparently different expressions.
The expression in the right-hand side of (35) is the derivation of ζµ,α1,...,αi+1,...,αn
from the value of:
δδ t
∂ zµ,α1,...,αn
∂xi=
δδ t
zµ,α1,...,αi+1,...,αn .
But on the other hand, we also have:
(36)
δδ t
zµ,α1,...,αi+1,...,αn =δδ t
∂ zµ,α1,...,αh−1,...,αi+1,...,αn
∂xh
=dζµ,α1,...,αh−1,...,αi+1,...,αn
dxh−
n
∑j=1
zµ,α1,...,α j+1,...,αh−1,...,αi+1,...,αn
dξ j
dxh,
† The formula (35) is fundamentally identical with a formula due to POISSON in the Calculusof Variations.

552 25 Differential Invariants
where h denotes an arbitrary number amongst 1,2, . . . ,n different from i. Thus, allpossibilities are exhausted. Therefore, it only remains to prove yet that the lattervalue of δ
δ t zµ,α1,...,αi+1,...,αn coincides with the value (35).In order to prove this, we remember that the following equations hold:
ζµ,α1,...,αn =δδ t
∂ zµ,α1,...,αh−1,...,αn
∂xh
=dζµ,α1,...,αh−1,...,αn
dxh−
n
∑j=1
zµ,α1,...,α j+1,...,αh−1,...,αn
dξ j
dxh,
and:
ζµ,α1,...,αh−1,...,αi+1,...,αn =δδ t
∂ zµ,α1,...,αh−1,...,αn
∂xi
=dζµ,α1,...,αh−1,...,αn
dxi−
n
∑j=1
zµ,α1,...,α j+1,...,αh−1,...,αn
dξ j
dxi.
If we insert the value of ζµ,α1,...,αn in (35), we obtain:
δδ t
∂ zµ,α1,...,αn
∂xi=
ddxi
ddxh
ζµ,α1,...,αh−1,...,αn −n
∑j=1
zµ,α1,...,α j+1,...,αh−1,...,αi+1,...,αn
dξ j
dxh
−n
∑j=1
zµ,α1,...,α j+1,...,αn
dξ j
dxi−
n
∑j=1
zµ,α1,...,α j+1,...,αh−1,...,αn
ddxi
dξ j
dxh.
On the other hand, if we insert the value of ζµ,α1,...,αh−1,...,αi+1,...,αn in (36) and ifwe take into account that d
dxid
dxh= d
dxh
ddxi
, we find:
δδ t
∂ zµ,α1,...,αh−1,...,αi+1,...,αn
∂xh=
δδ t
zµ,α1,...,αn
∂xi.
But this is what was to be shown.At present, it is shown that under the assumptions made, the ζµ,γ1,...,γn (γ1+ · · ·+
γn = N+1) really exist and are uniquely determined; consequently, it is certain that,according to what was said above, to every X f and for every value of N, there isassociated a completely determined prolonged infinitesimal transformation X (N) f .
The coefficients of X (N) f are obviously linear and homogeneous in the ξi, ζkand their partial differential quotients with respect to the x and the z. Hence if Xi fand X j f are two infinitesimal transformations of the form X f , and moreover, ifX (N)
i f and X (N)j f are the infinitesimal transformations prolonged in the way indi-
cated, then:ci X (N)
i f + c j X (N)j f
results from ci Xi f + c j X j f by means of the prolongation in question. In addition,since X (N)
i X (N)j f −X (N)
j X (N)i f leaves invariant the Pfaffian system of equations (31)
simultaneously with X (N)i f and X (N)
j f , it follows that:

§ 130. 553
X (N)i X (N)
j f −X (N)j X (N)
i f
must come into existence from XiX j f −X jXi f by means of this prolongation.Lastly, let X1 f , . . . ,Xr f be independent infinitesimal transformations of the r-
term group (32) so that they satisfy the known relations:
XiX j f −X jXi f =r
∑s=1
ci js Xs f .
If we form the prolonged infinitesimal transformations: X (N)1 f , . . . ,X (N)
r f , thenX (N)
i X (N)j f −X (N)
j X (N)i f also comes from XiX j f −X jXi f by means of this prolonga-
tion, and consequently, it comes from ∑ ciks Xs, which again means that we have:
X (N)i X (N)
j f −X (N)j X (N)
i f =r
∑s=1
ci js X (N)s f .
Therefore, the r infinitesimal transformations X (N)i f generate, for every value of N, a
group equally composed with the group Xi f ; the former group is obviously identicalto the group (33) discussed earlier on which was obtained by prolongating the finiteequations (32) of the group: X1 f , . . . ,Xr f .
Theorem 94. If the ∞r transformations:
x′i = fi(x1, . . . ,xn, z1, . . . ,zm, a1, . . . ,ar) (i=1 ···n)
z′k = Fk(x1, . . . ,xn, z1, . . . ,zm, a1, . . . ,ar) (k=1 ···m)
in the variables x1, . . . ,xn, z1, . . . ,zm form an r-term group and if one considers the zkas functions of the xi which can be chosen arbitrarily, then the differential quotientsof the zk with respect to the xi are also subjected to transformations. If one takestogether all differential quotients from the first order up to, say, the N-th order, thenone obtains certain equations:
z′µ,α1,...,αn= Fµ,α1,...,αn(x1, . . . ,xn, z1, . . . ,zm, zν ,β1,...,βn ; a1, . . . ,ar)
(β1 + ···+βn 6α1 + ···+αn 6N)
which, when joined to the equations of the original group, represent an r-term groupequally composed with the original group.†
Above, we already mentioned that every given group can be prolonged in verymany different ways; indeed, it is left just as one likes which variables one wants tochoose as the independent ones.
In addition, one can, from the beginning, substitute the given group for a groupequally composed with it by adding a certain number of variables: t1, . . . , tσ whichare absolutely not transformed by the group, or said differently, that are transformed
† LIE, Math. Annalen Vol. XXIV, 1884; Archiv for Math., Christiania 1883.

554 25 Differential Invariants
only by the identity transformation:
t ′1 = t1, . . . , t ′σ = tσ .
Now, if one regards as the independent variables an arbitrary number amongst theoriginal variables and amongst the ti, one can add differential quotients and prolong;one always comes to an equally composed group.
As one sees, the number of possibilities is very large here.
§ 131.
The theory of the invariants of an arbitrary group developed earlier on in Chap. 13can be immediately applied to our prolonged groups.
Since one can always choose the number N so large that the infinitesimal transfor-mations X (N)
i f contain more than r independent variables, one can always arrangethat the r equations X (N)
k f = 0 form a complete system with one or more solutions.These solutions are functions of the x, of the z and of the differential quotients ofthe latter, they admit every finite transformation of the prolonged group X (N)
k f andhence are absolute invariants of this group; they shall be called the differential in-variants [DIFFERENTIALINVARIANTEN] of the original group.
A function Ω of x1, . . . ,xn, z1, . . . ,zm and of the differential quotients of the z withrespect to the x is called a differential invariant of the r-term group:
x′i = fi(x1, . . . ,xn, z1, . . . ,zm ; a1, . . . ,ar)
z′k = Fk(x1, . . . ,xn, z1, . . . ,zm ; a1, . . . ,ar)
when a relation of the form:
Ω(x′1, . . . ,x
′n, z′1, . . . ,z
′m, z′µ,α1,...,αn
)= Ω(x1, . . . ,xn, z1, . . . ,zm, zµ,α1,...,αn)
holds identically.
Since we can choose N arbitrarily large, we have instantly:
Theorem 95. Every continuous transformation group: X1 f , . . . ,Xr f determines aninfinite series of differential invariants which define themselves as solutions of com-plete systems.†
If one knows the finite equations of the group: X1 f , . . . ,Xr f , then in the wayexplained above, one finds the finite equations of the prolonged group and after-wards, under the guidance of Chap. 13, the differential invariants of any order with-out integration. But in general, this method for the determination of the differentialinvariants is not practically applicable. In most cases, the direct integration of thecomplete system: X (N)
k f = 0 is preferable.
† LIE, Gesellsch. d. W. zu Christiania 1882; Math. Ann. Vol. XXIV, 1884.

§ 133. 555
We shall not enter these considerations here. Still, we should only observe thatfrom sufficiently well known differential invariants, one can derive new differentialinvariants by differentiation and by formation of determinants.
In the variables x1, . . . ,xn, z1, . . . ,zm, if a group is represented by several systemsof equations, each one with r parameters, then naturally, there are in the same wayprolonged groups whose differential invariants are those of the original group. Theformer general developments not only show that each such group possesses differen-tial invariants, but also at the same time, they show how these differential invariantscan be found.
§ 132.
One can also ask for possible systems of differential equations which remain invari-ant by a given group. The determination of a system of this sort can obviously becarried out by prolonging the concerned group in a suitable way and by applying thedevelopments of Chap. 14, on the basis of which all systems of equations invariantby the group can be determined. Each system of equations found in this way thenrepresents a system of differential equations invariant by the original group.
However, in each individual case, it must yet be specially studied whether theconcerned system of differential equations satisfies the condition of integrability. —
Conversely, one can imagine that a system of differential equations is given —integrable or not integrable — and one can ask the question whether this systemadmits a given group. The answer to this question also presents no difficulty atpresent. One only has to prolong the given group in the right way and afterwards, tostudy whether the given system of equations admits the prolonged group; accordingto Chap. 7, this study can be conducted without integration.
§ 133.
In order to give a simple application of the preceding theory, we want to seek theconditions under which a system of differential equations of the form:
Akϕ =n
∑i=1
αki(x1, . . . ,xn)∂ϕ∂xi
= 0 (k=1 ···q)
admits the r-term group:
X j f =n
∑i=1
ξ ji(x1, . . . ,xn)∂ f∂xi
( j=1 ···r)
in the variables x1, . . . ,xn; here naturally, the q equations Akϕ = 0 are assumed to bemutually independent.
In order to be able to answer the question raised, to the variables x1, . . . ,xn of thegroup Xk f , we must add yet the variable ϕ which is not at all transformed by thegroup. The x are to be considered as independent variables, ϕ as dependent and thegroup: X1 f , . . . ,Xr f is thus to be prolonged by adding the n differential quotients:

556 25 Differential Invariants
∂ϕ∂xi
= ϕi (i=1 ···n).
Afterwards, one has to examine whether the system of equations: ∑k αki ϕi = 0 al-lows the prolonged group.
To begin with, we compute the infinitely small increment δ ϕi that ϕi is given bythe infinitesimal transformation X j f . This increment is to be determined so that theexpression:
δ(
dϕ −n
∑ν=1
ϕν dxν
)= dδ ϕ −
n
∑ν=1
ϕν dδ xν +δ ϕν dxν
vanishes by virtue of dϕ = ∑ ϕν dxν . But since, as remarked above, δϕ is zero, weobtain for the δ ϕν the equation:
n
∑ν=1
ϕν dξ jν δ t +δ ϕν dxν
= 0
which must hold identically. Consequently, we have:
δ ϕν =−n
∑µ=1
∂ξ jµ
∂xνϕµ δ t,
and the prolonged infinitesimal transformation X j f has the shape:
X (1)j f =
n
∑i=1
ξ ji∂ f∂xi
−n
∑i=1
n
∑µ=1
∂ξ jµ
∂xiϕµ
∂ f∂ϕi
.
Now, if the system of equations: ∑i αki(x)ϕi = 0 in the 2n variables x1, . . . ,xn,ϕ1, . . . ,ϕn is supposed to admit the infinitesimal transformation X (1)
j f , then all the qexpressions:
X (1)j
( n
∑i=1
αki ϕi
)=
n
∑i=1
X j αki ϕi −n
∑µ=1
n
∑i=1
αki∂ξ jµ
∂xi
ϕµ (k=1 ···q)
must vanish by virtue of the system of equations. This necessary, and at the sametime sufficient, condition is then satisfied only when relations of the form:
X (1)j
( n
∑i=1
αki ϕi
)=
q
∑σ=1
ρ jkσ (x)n
∑i=1
ασ i ϕi
hold, where the ρ jkσ denote functions of x1, . . . ,xn only which do not depend on theϕi.
With these words, we have found the desired conditions; they can be written:

§ 133. 557
r
∑i=1
(X j αki −Ak ξ ji
)ϕi =
q
∑σ=1
ρ jkσ
n
∑i=1
ασ i ϕi,
or, if we insert again ∂ϕ/∂xi in place of ϕi:
X j(Ak(ϕ)
)−Ak
(X j(ϕ)
)=
q
∑σ=1
ρ jkσ (x)Aσ ϕ .
Relations of this sort must be satisfied for every arbitrary function ϕ(x1, . . . ,xn).The system of the q linear partial differential equations: A1ϕ = 0, . . . , Aqϕ = 0always remains invariant by every transformation of the group: X1 f , . . . ,Xr f whenthese relations hold, and only when they hold.
In the case where the q equations: Akϕ = 0 form a q-term complete system,this result is not new for us. Indeed, in this special case, we have already indicatedin Chap. 8, Theorem 20, p. 155 the necessary and sufficient condition just found.However, our present developments accomplish more than the developments done atthat time, for we have shown at present that the criterion in question holds generally,also when the equations: Akϕ = 0 do not form a q-term complete system.
—————–
The origins of the theory of the differential invariants goes back long ago; indeed,mathematicians of the previous century already have considered and integrated thedifferential invariants associated to several specially simple groups.
For instance, it is known long since that every differential equation of first orderbetween x and y in which one variable, say y, does not explicitly appear, can beintegrated by quadrature; but obviously:
f(
x,dydx
)= 0 = f (x, y′)
is nothing but the most general differential equation of first order that admits theone-term group:
(37) x= x, y= y+a
with the parameter a. The most general integral equation [INTEGRALGLEICHUNG]can be deduced from a particular integral equation, and in fact, as we can now say, insuch a way that one executes the general transformation of the one-term group (37)on the particular solution in question; thanks to this, one indeed obtains the equation:y= ϕ(x)+a with the arbitrary constant a.
Furthermore, the homogeneous differential equation:
f(
yx,
dydx
)= 0 = f
(yx, y′)

558 25 Differential Invariants
is the general form of a differential equation of first order which admits the one-termgroup: x = ax, y = ay; here, f (y/x, y′) is the most general first order differentialinvariant associated to this group.
It has been observed since a long time that every particular integral equation:F(x,y) = 0 of a homogeneous differential equation: f = 0 can, by executing thegeneral transformation: x= ax, y = ay, be transferred to the general integral equa-tion:
F(x
a,y
a
)= 0.
However, the equation xy′− y = 0 must be disregarded here.A third example is provided by differential equations of the form:
f(
dm ydxm ,
dm+1ydxm+1
)= 0 = f
(y(m), y(m+1)) ;
nevertheless, it is not necessary here to write down the group of all equations of thisform.
In the invariant theory of linear transformations, there often appear true differen-tial invariants relatively to all linear transformations. They have been considered byCAYLEY for the first time. Nevertheless, it is to be observed on the occasion firstlythat the differential invariant of CAYLEY are not the simplest ones which are as-sociated to the general linear homogeneous group, and secondly, that CAYLEY hasnot considered invariants of differential equations, and even less has integrated suchequations.
In a prized essay [PREISSCHRIFT] achieved in 1867 and published in 1871 (De-termination of a special minimal surface, Akad. d. W. zu Berlin), H. SCHWARZconsidered differential equations of the form:
J =y′ y′′′− 3
2 y′′2
y′2− f ( f ) = 0
which, as he himself indicated, had already appeared occasionally apud LA-GRANGE. SCHWARZ observed that the most general solution can be deduced fromevery particular solution: y = ϕ(x), namely the former has the form:
y =a+bϕc+d ϕ
,
with the arbitrary constants: a : b : c : d. Thus, as we can say, the expression J isa differential invariant, and to be precise, the most general third order differentialinvariant of the group:
x= x, y=a+byc+d y
.
But now, although all these special theories are undoubtedly valuable, it is how-ever still to be remarked that the inner connection between them, the general prin-

§ 133. 559
ciple from which they flow [FLIESSEN], was missed by the mathematicians. Theyhave not observed that differential invariants are associated to every finite continu-ous group.
In the years 1869–1871, LIE occupied himself with differential equationswhich allow interchangeable infinitesimal transformations and in 1874, he pub-lished a work already announced in 1872 about a general integration theory ofordinary differential equations which admit an arbitrary continuous group oftransformations.†
Afterwards, HALPHEN computed the simplest differential invariants relatively toall projective transformations and he gave in addition nice applications to the theoryof the linear differential equations.††
After that, LIE developed in the years 1882–1884 a general theory of the dif-ferential invariants of the finite and infinite continuous groups, where he speciallyoccupied himself with finite groups in two variables.††† As far as it relates to finitegroups, this general theory is explained in what precedes.
Finally, after 1884, SYLVESTER and many other English and American mathe-maticians have published detailed but special studies about differential invariants.
—————–
† Verhandlungen der Gesellsch. d. W. zu Christiania 1870–1874; Math. Ann. Vol. V, XI; Gött.Nachr. 1874.†† Thèse sur les invariants différentiels 1878; Journal de l’École Pol. 1880. Cf. also ComptesRendus Vol. 81, 1875, p. 1053; Journal de Liouville Novemb. 1876. Mémoire sur la réduction deséquat. diff. lin. aux formes intégrables 1880–1883.††† Verh. d. Gesellsch. d. W. zu Christiania, 1882, 1883 and February 1875; Archiv for Math.1882, 1883; Math. Ann. Vol. XXIV, 1884.


Chapter 26The General Projective Group
The equations:
(1) x′ν =a1ν x1 + · · ·+anν xn +an+1,ν
a1,n+1 x1 + · · ·+an,n+1 xn +an+1,n+1(ν =1 ···n)
determine a group, as one easily convinces oneself, the so-called general projectivegroup of the manifold x1, . . . ,xn. In the present chapter, we want to study somehowmore closely this important group, which is also called the group of all collineations[COLLINEATIONEN] of the space x1, . . . ,xn, by focusing our attention especially onits subgroups.
§ 134.
The (n+ 1)2 parameters a are not all essential: there indeed appears just their ra-tios; one of the parameters, best an+1,n+1, can hence be set equal to 1. The valuesof the parameters are subjected to the restriction that the substitution determinant[SUBSTITUTIONSDETERMINANT] ∑ ±a11 · · ·an+1,n+1 should not be equal to zero,because simultaneously with it, the functional determinant [FUNCTIONALDETER-MINANT]: ∑ ± ∂x′1
∂x1. . . ∂x′n
∂xnwould also vanish.
The identity transformation is contained in our group, it corresponds to the pa-rameter values:
aνν = 1, aµν = 0 (µ,ν =1 ···n+1, µ 6=ν),
for which indeed it comes x′i = xi. As a consequence of that, one obtains the in-finitesimal transformations of the group by giving to the aµν the values:
aνν = 1+ωνν , an+1,n+1 = 1, aµν = ωµν ,
where the ωµν mean infinitesimal quantities. Thus one finds:
561

562 26 The General Projective Group
x′ν =
(xν +
n
∑µ=1
ωµν xµ +ωn+1,ν
)(1−
n
∑µ=1
ωµ,n+1 xµ + · · ·),
or by leaving out the quantities of second or higher order:
x′ν − xν =n
∑µ=1
ωµν xµ +ωn+1,ν − xνn
∑µ=1
ωµ,n+1 xµ .
If one sets here all the ωµν with the exception of a single one equal to zero, then onerecognizes gradually that our group contains the n(n+2) independent infinitesimaltransformations:
(2)∂ f∂xi
, xi∂ f∂xk
, xi
n
∑j=1
x j∂ f∂x j
(i, k=1 ···n).
The general projective group of the n-times extended space x1, . . . ,xn thereforecontains n(n+ 2) essential parameters and is generated by infinitesimal transfor-mations. The analytic expressions of the latter behave regularly for every point ofthe space.
From now on, we will as a rule write pi for ∂ f/∂xi. In addition, for reasons ofconvenience, we want in this chapter to introduce the abbreviations:
xi pk = Tik, xi
n
∑k=1
xk pk = Pi.
Lastly, we still want to agree that εik should mean zero whenever i and k are distinctfrom each other, whereas by contrast εii is supposed to have the value 1; this is afixing of notation that we have already adopted from time to time. On such a basis,we can write as follows the relations which come out through combination of theinfinitesimal transformations pi, Tik, Pi:[
pi, pk]= 0,
[Pi, Pk
]= 0,
[pi, Pk
]= Tki + εik
n
∑ν=1
Tνν ,[pi, Tkν
]= εik pν ,
[Pi, Tkν
]=−εiν Pk,[
Tik, Tµν]= εkµ Tiν − εν i Tµk.
One easily convinces oneself that these relations remain unchanged when onesubstitutes in them the pi, Tik and Pi by the respective expressions standing underthem in the pattern:
(3)pi, Tik, Pi
Pi, −Tki, pi.

§ 134. 563
Thus in this way, the general projective group is related to itself in a holoedricallyisomorphic way.
One could presume that there is a transformation: x′i =Φi(x1, . . . ,xn) which trans-fers the infinitesimal transformations:
pi, xi pk, xi
n
∑k=1
xk pk
to, respectively:
x′in
∑k=1
x′k p′k, −x′k p′i, p′i.
But there is no such transformation, and this, for simple reasons, because the ninfinitesimal transformations p1, . . . , pn generate an n-term transitive group, while:x′1 ∑ x′k p′k, . . . , x′n ∑ x′k p′k generate an n-term intransitive group.
First in the next Volume we will learn to see the full signification of this impor-tant property of the projective group, when the concept of contact transformation[BERÜHRUNGSTRANSFORMATION] and especially the duality will be introduced.
The general infinitesimal transformation:
n
∑i=1
ai pi +n
∑i, k=1
bik Tik +n
∑i=1
ci Pi
of our group is expanded in powers of x1, . . . ,xn and visibly contains only terms ofzeroth, first and second order in the x. One realizes easily that the group containsn independent infinitesimal transformations of zeroth order in x, out of which noinfinitesimal transformation of first or second order in the x can be deduced linearly.For instance, p1, . . . , pn are n such infinitesimal transformations. From this it followsthat the general projective group is transitive.
Besides, there are n2 infinitesimal transformations of first order in the xi, for in-stance all xi pk = Tik, out of which no transformation of second order can be deducedlinearly. Finally it yet arises n transformations of second order in the x:
xi
n
∑k=1
xk pk = Pi.
In agreement with the Proposition 9 of the Chap. 15 on p. 276, the Pi are pairwiseinterchangeable and in addition, the Tik together with the Pi generate a subgroup inwhich the group of the Pi is contained as an invariant subgroup.
As one sees, and also as it follows from our remark above about the relationshipbetween the pi and the Pi, the pi are also interchangeable in pairs and they generatetogether with the Tik a subgroup in which the group of the pi is invariant.

564 26 The General Projective Group
§ 135.
For the most important subgroups of the general projective group, it is advisable toemploy special names. If, in the general expression (1) of a projective transforma-tion, one lets the denominator reduce to 1, then one gets a linear transformation:
x′ν = a1ν x1 + · · ·+anν xn +an+1,ν (ν =1 ···n);
all transformations of this form constitute the so-called general linear group. Wehave already indicated at the end of the previous paragraph the infinitesimal trans-formations of this group; they are deduced by linear combination from the the fol-lowing n(n+1) ones:
pi, xi pk (i,k=1 ···n).
If one interprets x1, . . . ,xn as coordinates of an n-times extended space Rn andif one translates the language of the ordinary space, then one can say that the gen-eral linear group consists of all projective transformations which leave invariant theinfinitely far (n− 1)-times extended straight manifold, or briefly, the infinitely farplane [UNENDLICH FERNE EBENE] Mn−1.
Next, if one remembers that by execution of two finite linear transformationsone after the other, the substitution determinants: ∑ ±a11 · · ·ann multiply with eachother, then one realizes without difficulty that the totality of all linear transforma-tions whose determinant equals 1 constitutes a subgroup, and in fact, an invariantsubgroup, which we want to call the special linear group. One finds easily that, as then(n+1)−1 independent infinitesimal transformations of this group, the followingones can be chosen:
pi, xi pk, xi pi − xk pk (i≷k).
If, amongst all linear transformations, one restricts oneself to those homogeneousin x, then one obtains the general linear homogeneous group:
x′ν = a1ν x1 + · · ·+anν xn (ν =1 ···n),
all infinitesimal transformations of which possess the form: ∑ bik xi pk and hencecan be linearly deduced from the n2 transformations: xi pk. Also this group visiblycontains an invariant subgroup, the special linear homogeneous group, for which:∑ ±a11 · · ·ann has the value 1. The n2 −1 infinitesimal transformations of the lattergroup are:
xi pk, xi pi − xk pk (i≷k) ;
hence, the general infinitesimal transformation of the group in question has the form:∑i,k αik xi pk, where the n2 arbitrary constants αik are only subjected to the condition∑ αii = 0.
Since the expression:[xi pk, ∑ j x j p j
]always vanishes, it is obvious that the last
two named groups are systatic and consequently imprimitive. Indeed, if one sets:

§ 135. 565
xi
xn= yi,
x′ix′n
= y′i (i=1 ···n−1),
then one receives:
y′ν =a1ν y1 + · · ·+an−1,ν yn−1 +anνa1,n y1 + · · ·+an−1,n yn−1 +an,n
(ν =1 ···n−1).
From this, it results that in both cases the y are transformed by the (n2 − 1)-termgeneral projective group of the (n− 1)-times extended manifold y1, . . . ,yn−1. Con-sequently, this group is isomorphic with the general linear homogeneous group ofan n-times extended manifold and with the special linear homogeneous group aswell, though the isomorphism is holoedric only for the special linear homogeneousgroup, since this one contains n2 −1 parameters.
Theorem 96. The special linear homogeneous group:
xi pk, xi pi − xk pk (i≷k=1 ···n)
in the variables x1, . . . ,xn is imprimitive and holoedrically isomorphic with the gen-eral projective group of an (n−1)-times extended manifold.
The formally simplest infinitesimal transformations of the general projectivegroup are p1, . . . , pn; these generate, as already observed, a group actually: thegroup of all translations:
x′i = xi +ai (i=1 ···n),
which obviously is simply transitive.In fact, m arbitrary infinitesimal translations, for instance p1, . . . , pm, always gen-
erate an m-term group. For all of these groups, the following holds:
Proposition 1. All m-term groups of translations are conjugate to each other insidethe general projective group, and even already inside the general linear group.
Indeed, the m independent infinitesimal transformations of such a group alwayshave the form:
n
∑ν=1
bµν pν (µ =1 ···m),
where not all m×m determinants of the bµν vanish.But we can very easily show that by means of some linear transformation, new
variables x′1, . . . ,x′n can be introduced for which one has:
p′µ =n
∑ν=1
bµν pν (µ =1 ···m).
In fact, let p′µ = p1∂x1∂x′µ
+ · · ·+ pn∂xn∂x′µ
; then we only need to set:

566 26 The General Projective Group
∂xν∂x′µ
= bµν (ν =1 ···n; µ =1 ···m),
while the ∂xν∂x′m+1
, . . . , ∂xν∂x′n
remain arbitrary. We can give to these last ones some valuessuch that the equations:
xν =n
∑µ=1
bµν x′µ +n
∑π=m+1
cπν x′π (ν =1 ···n)
determine a transformation, and then, this transformation transfers the given groupof translations to the group p′1, . . . , p′m. From this, our proposition follows immedi-ately.
We want to at least indicate a second proof of the same proposition. As alreadyobserved, the general linear group leaves invariant the infinitely far plane Mn−1,and in fact, it is even the most general projective group of this nature. Now, everyinfinitesimal translation is directed by an infinitely far point and is completely deter-mined by this point; every m-term group of translations can therefore be representedby an m-times extended, infinitely far, straight manifold Mm. But two infinitely farstraight Mm always can be transferred one to the other by a linear transformationwhich leaves invariant the infinitely far plane. Consequently, all m-term groups oftranslations are conjugate to each other inside the general linear group, and in thesame way, inside the general projective group.
The correspondence indicated earlier on which takes place between the pi andthe Pi yields, as we prove instantly, the
Proposition 2. All m-term groups, whose infinitesimal transformations possess theform ∑ ei Pi, are conjugate to each other inside the general projective group.
For the proof, we start from the fact that two subgroups are conjugate inside agroup Gr when the one can be, by means of a transformation of the adjoint group ofGr, transferred to the other; here, we have to imagine the subgroup as a straight man-ifold in the space e1, . . . ,er which is transformed by the adjoint group (cf. Chap. 16,p. 292). If we now write the transformations of the projective group firstly in the se-quence pi, Tik, Pi and secondly in the sequence Pi, −Tki, pi, then in the two cases weget the same adjoint group. But since two m-term groups of translations can alwaysbe transferred one to the other by the adjoint group, this must also always be thecase with two m-term groups whose infinitesimal transformations can be deducedlinearly from the Pi. Furthermore, it even immediately comes out that two m-termgroups of this sort are already conjugate to each other inside the group Pi, Tik. Withthat, our proposition is proved.
§ 136.
We consider now one after the other the general projective group, the general lineargroup and the general linear homogeneous group, and to be precise, we want to

§ 136. 567
examine whether there are invariant subgroups and which one are contained in thesethree groups.
To begin with, the general projective group. Let:
S =n
∑i=1
αi pi +n
∑i=1
n
∑k=1
βik xi pk +n
∑i=1
γi xi
n
∑k=1
xk pk
be an infinitesimal transformation of an invariant subgroup; then necessarily [pν , S]and
[pµ , [pν , S]
]are also transformations of the same subgroup. Consequently, in
our invariant subgroup, there would certainly appear an infinitesimal translation∑ ρi pi.
But because all infinitesimal translations are conjugate to each other inside thegeneral projective group, they would all appear. Furthermore, since it is invariant,the subgroup would necessarily contain all transformations:
[pi, xi ∑ j x j p j
], or after
computation:
xi pk (i≷k), xi pi +n
∑j=1
x j p j.
Adding the n transformations: xi pi +∑ j x j p j, one obtains: (n+ 1) ∑ x j p j, hencexi pi and therefore actually all xi pk. Finally, the invariant subgroup would yet con-tain all transformations:
[xi pi, xi ∑k xk pk
], hence all xi ∑k xk pk and thus it would be
identical to the general projective group itself. Thus, our first result is:
Theorem 97. The general projective group in n variables is simple.†
Correspondingly, the special linear homogeneous group:
(4) xi pk, xi pi − xk pk (i≷k)
is also simple.The general linear homogeneous group with the n2 infinitesimal transformations
xi pk contains, as we saw above, an invariant subgroup with n2 − 1 parameters,namely the group (4) just named.
If there is yet a second invariant subgroup, then this subgroup obviously can-not comprise the group (4), and in the same way, it even cannot have infinitesimaltransformations in common with the same group, since such transformations wouldconstitute an invariant subgroup in the simple group (4) (cf. Proposition 10 of theChap. 15 on p. 276). Taking the Proposition 7 of Chap. 12 on p. 223 into account,it hence follows that a possible second invariant subgroup can contain only one in-finitesimal transformation, and to be precise, one of the form:
n
∑i=1
xi pi +1···n
∑i, k
αik xi pk(
∑ni=1 αii =0
).
† Lie, Math. Ann., Vol. XXV, p. 130.

568 26 The General Projective Group
In addition, according to Proposition 11 of Chap. 15 on p. 276, the same transfor-mation must be interchangeable with every transformation of the group (4), fromwhich it follows that the transformation:
1···r
∑i, k
αik xi pk(
∑ni=1 αii =0
)must be excellent inside the group (4). But there is no such transformation, whenceall the αik vanish and it shows up that x1 p1 + · · ·+ xn pn and (4) are the only twoinvariant subgroups of the group xi pk.
Theorem 98. The general linear homogeneous group xi pk in n variables containsonly two invariant subgroups, namely the special linear homogeneous group andthe one-term group: x1 p1 + · · ·+ xn pn.
At present, one easily manages to set up all invariant groups of the general lineargroup. Let:
S =n
∑i=1
αi pi +n
∑i=1
n
∑k=1
βik xi pk
be a transformation of such a subgroup. Then together with S, also [p j,S] belongsto the invariant subgroup; hence this subgroup certainly contains a translation, andbecause of Proposition 1, p. 565, it contains all of them. The smallest invariant sub-group therefore consists of the translations themselves; every other subgroup mustcontain, aside from the translations, yet a series of infinitesimal transformations ofthe form: ∑i ∑k αik xi pk. But these last transformations visibly generate an invariantsubgroup, the linear homogeneous group xi pk. So we find:
Theorem 99. The general linear group: pi, xi pk contains only three invariant sub-groups†, namely the three ones:
pi pi, x1 p1 + · · ·+ xn pn pi, xi pk, xi pi − xk pk (i≷k),
with respectively n, n+1 and n2 +n−1 parameters.
If, as already done several times, we employ the terminology which is commonfor the ordinary space, we can say: the three invariant subgroups of the generallinear group are firstly the group of all translations, secondly the group of all simil-itudes [AEHNLICHKEITSTRANSFORMATIONEN]: (x1 − x0
1)p1 + · · ·+ (xn − x0n)pn,
and lastly the most general linear group which leaves all volumes unchanged.
§ 137.
Before we pass to determining the largest subgroups of the general projective group,we put on ahead an observation which will find several applications in the sequel.
† Lie, Math. Ann., Vol. XXV, p. 130.

§ 138. 569
Let X1 f , . . . ,Xr f be independent infinitesimal transformations of an r-term groupGr and let a family of ∞r−m−1 infinitesimal transformations of this group be deter-mined by m independent equations of the form:
(5)r
∑j=1
αk j e j = 0 (k=1 ···m).
Assume furthermore that one knows from some reason that amongst the infinites-imal transformations: e1 X1 f + · · ·+ er Xr f , no infinitesimal transformation of theform: e1 X1 f + · · ·+ emXm f is contained in this family. Then at first, it can be de-duced that the equations (5) are solvable with respect to e1, . . . ,em, for if one sets:em+1 = · · · = er = 0 in these equations, it must follow: e1 = · · · = em = 0, whichhappens only when the determinant: ∑ ±α11 · · · αmm does not vanish. Hence if onechooses em+1, . . . ,er arbitrary, though not all zero, it follows that e1, . . . ,em receivedetermined values and therefore, the family contains r −m mutually independentinfinitesimal transformations of the form:
Xm+ j f + e1 j X1 f + · · ·+ em j Xm f ( j=1 ···r−m).
Thus, the following holds:
Proposition 3. If, amongst the infinitesimal transformations: ∑ ek Xk f of the r-termgroup: X1 f , . . . ,Xr f , a family is sorted by means of m independent linear equations:
r
∑j=1
αk j e j = 0 (k=1 ···m)
which embraces no infinitesimal transformation of the form: e1 X1 f + · · ·+ em Xm f ,then this family contains r−m infinitesimal transformations of the shape:
Xm+ j +m
∑ν=1
e jν Xν f ( j=1 ···r−m).
§ 138.
After these preparations, we turn ourselves specially to the general projective group.We denote for its number n(n+ 2) of parameters shortly by N and we seek at firstall subgroups with more than N−n parameters, hence some GN−m for which m < n.Naturally, this way of putting the question is meaningful only when the number n islarger than 1.
According to an observation made earlier on (cf. Chap. 12, Proposition 7, p. 223),the sought GN−m has at least n−m independent infinitesimal transformations incommon with the n-term group p1, . . . , pn. So GN−m contains in any case n−m in-dependent infinitesimal translations. If it contains no more than n−m translations,then thanks to Proposition 1, we can assume that pm+1, . . . , pn are these translations,while no translation of the form: e1 p1 + · · ·+ em pm is extant. From the Proposi-

570 26 The General Projective Group
tion 3, it then follows that there appears a transformation:
xm+1 p1 + e1 p1 + · · ·+ em pm,
but by combination with pm+1, it would give p1, which would be a contradiction.Hence in our GN−m there are surely more than n−m, say n−q (q < m) infinitesimaltranslations, and we want to assume that these are: pq+1, . . . , pm, . . . , pn; by contrast,when q > 0, there appear no translations of the form: e1 p1+ · · ·+eq pq. Now in anycase (cf. Chap. 12, Proposition 7, p. 223), there is in the GN−m one transformation:
λn xn p1 + · · ·+λq+1 xq+1 p1 + eq pq + · · ·+ e1 p1
in which, according to what precedes, the λ cannot vanish all. By combination withone of the translations pq+1, . . . , pn, we therefore obtain at least once p1, but thiswas excluded. Hence the number q cannot be bigger than zero, so q = 0 and thesought GN−m therefore comprises, when m < n, all translations.
Thanks to completely analogous considerations, one realizes that the GN−m (m <n) must contain all transformations Pi. These considerations coincide even literallywith those undertaken just now, when one replaces the pi, xi pk, Pi by Pi, −xk pi, pi,respectively, and when one relates to Proposition 2, p. 566.
Thus, our GN−m contains all pi and all Pi simultaneously, but then as was alreadyshown earlier on some occasion (on page 567), it contains yet also all xi pk and ishence identical to the general projective group itself. Consequently:
Theorem 100. The general projective group of the manifold x1, . . . ,xn contains nosubgroup with more than n(n+2)−n = n(n+1) parameters.
§ 139.
At present, the question is to determine all subgroups contained in the general pro-jective group having N−n = n(n+1) parameters. In order to be able to settle com-pletely this problem, we must treat individually a series of various possibilities.
At first, we seek all n(n + 1)-term subgroups which contain no infinitesimaltranslation ∑ ek pk. According to Proposition 3, p. 569, there surely exists atransformation:
U =n
∑i=1
xi pi −n
∑i=1
αi pi =n
∑i=1
(xi −αi) pi
and for every value of i and k, there is in the same way a transformation of the form:
T = (xi −αi) pk +n
∑j=1
βik j p j.
By combination of the two infinitesimal transformations U and T , we obtain theexpression: [U, T ] = − ∑ j βik j p j, and because our group contains no infinitesimaltransformation of this form, all βik j must vanish.
Lastly, there are yet n infinitesimal transformations:

§ 139. 571
Pi +n
∑k=1
γik pk,
or, what amounts to the same:
P′i = (xi −αi)
n
∑j=1
(x j −α j) p j +n
∑k=1
δik pk.
If we make the combination of P′i with ∑(xk −αk) pk =U , we obtain:
[U, P′i ] = (xi −αi)
n
∑j=1
(x j −α j) p j −n
∑k=1
δik pk,
so that all δik vanish.Thus, in the sought n(n+1)-term subgroups, the following n(n+1) independent
infinitesimal transformations must appear:
(6) (xi −αi) pk, (xi −αi)n
∑j=1
(x j −α j) p j (i, k=1 ···n).
Thanks to pairwise combinations, one easily convinces oneself that these infinitesi-mal transformations effectively generate an n(n+1)-term group. Besides, this alsofollows from the fact that all the infinitesimal transformations (6) leave invariant thepoint xi = αi lying in the domain of the finite. Indeed, they are mutually indepen-dent and their number equals n(n+1), that is to say, exactly equal to the number ofindependent infinitesimal transformations there are in the n(n+ 2)-term projectivegroup that leave invariant the point xi = αi. According to Proposition 2, p. 218, theinfinitesimal transformations (6) therefore generate an n(n+1)-term group.
As a result, every n(n+1)-term projective group of the Rn in which no infinites-imal translation ∑ ek pk appears consists of all projective transformations that fix apoint located in the domain of the finite.
If, in the above computations, we would actually have written Pi, −xi pk, pi inplace of pi, xk pi, Pi, respectively, then we would have found all n(n + 1)-termsubgroups which contain no infinitesimal transformation ∑ ek Pk. We can thereforemake exactly the same exchange in the expressions (6) and we obtain in this way:
xk pi +αi Pk, pi +αi
n
∑j=1
x j p j +n
∑j=1
α j (x j pi +αi Pj).
Here, we may clearly take away the the term ∑ α j (x j pi +αi Pj) and we thereforeobtain the general form of the n(n+1)-term subgroups which contain no transfor-mation ∑ ek Pk as follows:
(7) pi +αi
n
∑j=1
x j p j, xi pk +αk Pi.

572 26 The General Projective Group
The fact that these infinitesimal transformation generate a group follows from theirderivation, but naturally, one could also corroborate this directly.
If all αi vanish, then we have the general linear group already discussed earlier onwhich leaves invariant the plane Mn−1 located at infinity. Hence we are very close topresume that in the general case where not all αi are equal to zero, there exists in thesame way a plane Mn−1 : λ1 x1 + · · ·+λn xn +λ = 0 which admits all infinitesimaltransformations (7).
By execution of the infinitesimal transformations: pi +αi ∑ x j p j, we obtain thefollowing conditions for the λi:
λi +αi
n
∑j=1
λ j x j = 0 = λi −αi λ .
The quantity λ can hence in any case not vanish and may be set equal to 1; so ifthere actually is an invariant plane Mn−1, this plane can only have the form: α1 x1 +· · ·+αn xn + 1 = 0. In fact, this latter plane yet admits also the infinitesimal trans-formations: xi pk +αk Pi.
Every subgroup (7) therefore leaves invariant a plane Mn−1 of the Rn and is inaddition the most general projective group of the Rn which leaves at rest the planeMn−1 in question. Every further infinitesimal projective transformation which wouldleave invariant the plane: Mn−1 : α1 x1 + · · ·+αn xn +1 = 0 could indeed be giventhe form:
n
∑k=1
ek Pk =n
∑k=1
ek xk
n
∑i=1
xi pi.
But if one executes this infinitesimal transformation on the Mn−1, it comes:
n
∑k=1
ek xk
n
∑i=1
αi xi = 0 =−n
∑k=1
ek xk,
whence e1 = · · ·= en = 0.Thus, if an n(n+ 1)-term projective group of the Rn contains no infinitesimal
transformation ∑ ek Pk, it consists of all projective transformations which leave in-variant a plane Mn−1 not passing through the origin of coordinates.
From the previous results, we can yet derive, thanks to a simple transformation,a few other results which will be useful to us in the future. Indeed, if we transfer toinfinity the former origin of coordinates by means of the collineation:
(7’) x1 =1x′1, x2 =
x′2x′1, . . . , xn =
x′nx′1,
we then obtain:
p′1 =n
∑i=1
pi∂xi
∂x′1=− 1
x′12
(p1 +
n
∑i=2
x′i pi
),
and hence:

§ 139. 573
p′1 =−x1
n
∑i=1
xi pi =−P1,
x′k p′1 =−xk
n
∑i=1
xi pi =−Pk (k=2 ···n).
In the same way, we obtain:
x′1n
∑i=1
x′i p′i =− p1, x′1 p′k =− pk (k=2 ···n),
as every infinitesimal projective transformation is actually transferred to a transfor-mation of the same kind after the introduction of the x′ (cf. Chap. 3, Proposition 4,p. 48).
From this, we see: our collineation (7’) converts every n(n + 1)-term projec-tive group in which no infinitesimal transformation ∑ ek Pk appears into a projectivegroup which contains no transformation e1 p1 +e2 x2 p1 + · · ·+en xn p1. In the sameway, every projective group free of all ∑ ek pk is transferred to a projective groupwhich contains no transformation: e1 P1 + e2 x1 p2 + · · ·+ en x1 pn.
Thus, if in an n(n+ 1)-term projective group, there are no infinitesimal trans-formations: e1 p1 +e2 x2 p1 + · · ·+en xn p1, then this group consists of all projectivetransformations which leave invariant a certain plane Mn−1. By contrast, if in thegroup there are no infinitesimal transformations: e1 P1+e2 x1 p2+ · · ·+en x1 pn, thenthis group consists of all projective transformations which leave invariant a certainpoint.
The general projective group possesses the property of being able to transferevery point of the Rn to every other point, and every plane Mn−1 to every otherplane. From this, it results that every n(n+1)-term projective group of the Rn whichleaves invariant a point is conjugate, inside the general projective group of the Rn, toevery other group of the same sort, and likewise, it follows that every n(n+1)-termprojective group of the Rn which leaves invariant a plane Mn−1 is conjugate to everyother projective group of this sort.
Finally, we can at present look up at all n(n+1)-term groups of the Rn.Since we know all groups that contain no translation, it only remains to find the
groups in which some infinitesimal translations appear. We assume that there areexactly q independent such infinitesimal translations, say pn, . . . , pn−q+1, so that,when n−q is > 0, no translation of the form: e1 p1 + · · ·+ en−q pn−q is extant.
Then in our group, there surely exists an infinitesimal transformation of the form:
(8)q
∑i=1
xn−q+i
n−q
∑k=1
λik pk + e1 p1 + · · ·+ en−q pn−q,
only when the number (n−q)(q+1) of terms contained in this infinitesimal trans-formation is larger than n.
This is the case only when (n−q)(q+1)−n = q(n−q−1) is larger than zero,from which it follows that we must temporarily disregard the cases q = n− 1 and

574 26 The General Projective Group
q = n. But if we assume that q is smaller than n−1 and if we make a combinationof the transformation (8) — in which obviously not all λik vanish — with each oneof the extant translations pn−q+1, . . . , pn, we then obtain in all circumstances a notidentically vanishing transformation of the form µ1 p1 + · · ·+µn−q pn−q, and this isa contradiction. Thus, the number q cannot be smaller than n−1.
Therefore, if an n(n+1)-term projective group contains one infinitesimal trans-lation ∑ ek pk, it contains at least n−1 independent translations.
In this result we can again, as so often before, replace the pi by the Pi and findthat there always exist n−1 independent transformations ∑ ek Pk in every group ofthe said sort as soon as there exists only a single transformation of this form.
At present, we seek all n(n+1)-term projective groups with exactly n−1 inde-pendent infinitesimal translations ∑ ek pk, say with p2, . . . , pn. No such group cancontain a transformation of the form:
e1 p1 + e2 x2 p1 + · · ·+ en xn p1,
because by combination with p2, . . . , pn, we would obtain p1, what is excluded.According to what has been seen above, all these groups belong to the categoryof the n(n+ 1)-term projective groups which leave invariant a plane Mn−1. Corre-spondingly, it results that every n(n+ 1)-term group which contains exactly n− 1independent transformations ∑ ek Pk leaves invariant a point.
It still remains to determine the n(n+1)-term projective groups which contain allthe n translations p1, . . . , pn. Besides, the Pi cannot yet appear all, because otherwise,the group would coincide with the general projective group itself.
Therefore, according to what has been said above, there are only two possibili-ties: either there is absolutely no transformation ∑ ek Pk, or there are n−1 indepen-dent such transformations. Both cases are already settled above.
As a result, our study is brought to a conclusion. The result is the following:
Theorem 101. The largest subgroups of the general projective group of an n-timesextended manifold contain n(n+1) parameters. Each such subgroup consists of allprojective transformations which leave invariant either a plane Mn−1, or a point. Inthe first case, the subgroup is conjugate inside the general projective group to thegeneral linear group pi, xi pk, and in the second case, to the group xk pi, Pk.†
Because the groups of the one category come from the groups of the other cate-gory through the exchange of pi, xi pk, Pi with Pi, −xk pi, pi, all n(n+1)-term sub-groups of the general projective group are holoedrically isomorphic to each other.From what precedes, it follows in addition the
Proposition 4. The general projective group of the space x1, . . . ,xn can be relatedto itself in a holoedrically isomorphic way so that the largest subgroups which leaveinvariant one point correspond each time to the largest subgroups which leave in-variant a plane Mn−1.
† LIE, Math. Ann. Vol. XXV, p. 130.

§ 140. 575
If n = 1, the difference between point and plane Mn−1 disappears; the generalthree-term projective group of the once-extended manifold therefore contains onlyone category of two-term subgroups, and all of these are conjugate in the three-termprojective group.
According to the previous developments, the general projective group of an n-times extended space contains n(n+ 1) independent infinitesimal transformationswhich leave at rest a given point, and to be precise, these infinitesimal transforma-tions generate a subgroup which is contained in no larger subgroup. From this, itfollows (Chap. 24, Theorem 91, p. 526) that the general projective group is primi-tive and all the more asystatic.
§ 140.
We derive here a few general considerations about the determination of all sub-groups of the general linear group pi, xi pk (i, k=1 ···n) of the Rn.
The general infinitesimal transformation of a linear group of the Rn can be writ-ten:
(9)
i≷k
∑i, k
aik xi pk +n−1
∑i=1
bi (xi pi − xn pn)
+ cn
∑k=1
xk pk +n
∑k=1
dk pk.
If one makes combination between two infinitesimal transformations of this shape,one obtains a transformation:
i≷k
∑i, k
Aik xi pk +n−1
∑i=1
Bi (xi pi − xn pn)+Cn
∑k=1
xk pk + cn
∑k=1
Dk pk,
in which the Aik, Bi and C (C = 0) depend only of aik, bi and c. Consequently, thereduced infinitesimal transformation:
(10)i≷k
∑i, k
aik xi pk +n−1
∑i=1
bi (xi pi − xn pn)+ cn
∑k=1
xk pk
is in turn the general infinitesimal transformation of a linear homogeneous group inx1, . . . ,xn.
From this, we realize that the problem of determining all subgroups of the generallinear group decomposes in two problems which must be settled one after the other.At first, all subgroups of the general linear homogeneous group xi pk (i, k=1 ···n) haveto be sought; afterwards, to the infinitesimal transformations of each of the foundgroups, one must add terms ∑ βk pk in the most general way so that one again obtainsa group. Thus, if X1 f , . . . ,Xr f is one of the found linear homogeneous groups, onehas to determine all groups of the form:

576 26 The General Projective Group
Xk f +n
∑i=1
αki pi,n
∑i=1
βµi pi
(k=1 ···r ; µ =1 ···m, m6n).
We do not want here to say anything more about the further treatment of these tworeduced problems; rather, we refer to the third volume where the detailed studiesabout the projective groups of the plane and of the thrice-extended space will bebrought.
By contrast, we do not want to neglect to draw attention to the geometrical sig-nification that the decomposition just said of the problem in question has.
To this end, we imagine that the group (9) is prolonged, by regarding, as inChap. 25, p. 530 sq., the x as functions of an auxiliary variable t and by taking withthem the differential quotients dxi/d t = x′i. In the process, we obtain the group:
∑ aik xi pk +∑ bi (xi pi − xn pn)+ c ∑ xk pk +∑ dk pk
+∑ aik x′i p′k +∑ bi (x′i p′i − x′n p′n)+ c ∑ x′k p′k,
in which the terms in the x′i determine for themselves a group, namely precisely thegroup (10) just found. But now, as we have seen loc. cit., the x′i can be interpretedas homogeneous coordinates of the directions through the point x1, . . . ,xn of the Rn.The fact that the x′i are transformed for themselves by the above group thereforemeans nothing else than the fact that parallel lines are transferred to parallel linesby every linear transformation of the x; the directions which a determined systemof values x′i associates to all points of the Rn are indeed parallel to each other. Butevery bundle [BÜNDEL] of parallel lines provides a completely determined point onthe plane Mn−1 at the infinity of the Rn, hence x′1, . . . ,x
′n can be virtually interpreted
as homogeneous coordinates of the points on the infinitely far plane Mn−1 and thegroup:
(11) ∑ aik x′i p′k +∑ bi (x′i p′i − x′n p′n)+ c ∑ x′k p′k
therefore indicates how the infinitely far points of the Rn are transformed by thegroup (9). At the same time, it is yet to be observed that the infinitesimal transforma-tion ∑ x′k p′k leaves fixed all infinitely far points, so that these points are transformedby the last group exactly as if c would be zero.
At present, we have the inner reason for the decomposition indicated above ofthe problem of determining all linear groups of the Rn. The groups in question aresimply thought to be distributed in classes, and in each class are reckoned all thegroups for which the group (11) is the same, so that the infinitely far points of theRn are transformed in the same way (cf. for this purpose Theorem 40, p. 243).
§ 141.
In order to give at least one application of the general considerations developedjust above, we want to determine all linear groups of the Rn which transform theinfinitely far points of the Rn in the most general way. For all of these groups, the

§ 141. 577
associated group (11) has the form:
x′i p′k, x′i p′i − x′k p′k (i, k=1 ···n, i≷k),
where in certain circumstances, the transformation x′1 p′1 + · · ·+ x′n p′n can yet oc-cur, which leaves individually fixed all infinitely far points. The infinitely far pointsare thus transformed by an (n2 − 1)-term group and to be precise, by the generalprojective group of an (n−1)-times extended space.
Each one of the sought groups must contain n2 −1 infinitesimal transformationsout of which none can be linearly deduced which leaves invariant all infinitely farpoints, hence none which possesses the form: γ ∑ j x j p j +∑ γk pk. Therefore, thegroup surely contains n2 −1 infinitesimal transformations of the form:
(12)
xi pk +αik
n
∑j=1
x j p j +n
∑ν=1
βikν pν (i≷k)
xi pi − xn pn +αi
n
∑j=1
x j p j +n
∑ν=1
βiν pν .
In addition, one or several infinitesimal transformations of the form: γ ∑ j x j p j +
∑ν γν pν can yet occur.If a group of the demanded sort contains a translation, then it contains all trans-
lations. Indeed, if p1 + e2 p2 + · · ·+ en pn is the translation in question, we make acombination of it with:
x1 pk +α1k
n
∑j=1
x j p j +n
∑ν=1
β1kν pν (k=2 ···n)
and we obtain in this way p2, . . . , pn and therefore all pi.Consequently, we want at first to assume that all translations appear. Then if
there is yet the transformation ∑ x j p j, we have the general linear group itself. Bycontrast, if the transformation ∑ x j p j is not extant, we obtain by combination of thetransformations (12) in which we can set beforehand the βikν and βiν equal to zero:[
xi pk +αik
n
∑j=1
x j p j, xk pi +αki
n
∑j=1
x j p j
]= xi pi − xk pk,
so that all the αi are zero. But in addition, it comes:[xi pi − xk pk, xi pk +αik
n
∑j=1
x j p j
]= 2xi pk.
The concerned group is therefore the special linear group.If in the sought group there is absolutely no translation, but by contrast a trans-
formation:

578 26 The General Projective Group
(13)n
∑j=1
x j p j +n
∑ν=1
γν pν =n
∑j=1
(x j + γ j) p j,
then all αik and all αi can be set equal to zero. If we yet write the infinitesimaltransformations (12) in the form:
(xi + γi) pk +n
∑ν=1
β ′ikν pν (i≷k)
(xi + γi) pi − (xn + γn) pn +n
∑ν=1
β ′iν pν ,
we then realize immediately by combination with ∑(xi + γi) pi that all β ′ikν and β ′
iνvanish and we thus find the group:
(xi + γi) pk (i, k=1 ···n).
Lastly, if there also occurs no transformation of the form (13), then one obtainsat first by combination from (12) that all αik and αi are equal to zero. Furthermore,it comes:[
xi pk +n
∑ν=1
βikν pν , xk pi +n
∑ν=1
βkiν pν
]= xi pi − xk pk +βikk pi −βkii pk,
and in addition: [(xi +βikk) pi − (xk +βkii) pk, xi pk +
n
∑ν=1
βikν pν
]= 2xi pk +2βikk pk −βiki pi,
so that all βikν vanish with the exception of the βikk and βkii, by means of which alsothe βiν can be expressed.
Now, if n > 2, the βikk could vary with k; however, this is not the case. Indeed, ifwe replace i and k firstly by k, j and secondly by j, i in:
(xi +βikk) pi − (xk +βkii) pk
and if we add together the three obtained infinitesimal transformations, then the summust vanish, since no translation should occur. So we obtain: βikk = βi j j and so on.Thus, if we write shortly βi for βikk, we have the group:
(xi +βi) pk, (xi +βi) pi − (xk +βk) pk (i≷k).
With that, all cases are settled. If, in the two latter forms of groups [GRUPPEN-FORMEN], we yet introduce xi + γi and xi +βi as new xi, respectively, we may reca-pitulate our result as follows:

§ 142. 579
Theorem 102. The general linear group in n variables contains only three differentsorts of subgroups which transform the points of the infinitely far plane in an (n2 −1)-term way, as does the general linear group itself: firstly, the special linear groupand secondly all groups that are conjugate to the two homogeneous groups:†
xi pk ; xi pk xi pk − xk pk (i≷k).
Here, we thus have a characteristic property which is common to all these groupsalready known to us. By contrast, the distinctive marks of the four groups in questionare briefly the following: The general linear group leaves invariant the ratios of allvolumes; the special linear group leaves invariant all volumes. The general and thespecial linear homogeneous groups differ from the general and the special lineargroups, respectively, in that they yet leave invariant the point xi = 0.
§ 142.
In the beginning of the previous paragraph, we have seen that the determination ofall linear groups of the Rn is essentially produced as soon as all linear homogeneousprojective groups of the Rn are determined. There is no special difficulty to settlethis last problem when one knows all projective groups of the Rn−1. At present, weyet want to show that.
As we know, the general linear homogeneous group of the Rn: xi pk (i, k=1 ···n)contains an invariant subgroup with n2 − 1 parameters, namely the special linearhomogeneous group:
xi pk, xi pi − xk pk (i, k=1 ···n, i≷k).
This last group is equally composed with the general projective group of theRn−1, so its subgroups can immediately be written down when all projective groupsof the Rn−1 are known (cf. about that the next chapter). After that, one finds thesubgroups of the group xi pk thanks to the following considerations:
An r-term subgroup Gr of the group xi pk is either contained at the same time inthe group xi pk, xi pi − xk pk (i≷k) or it is not. In the first case it would be alreadyknown, and in the second case, according to Proposition 7, p. 223, it would have aGr−1 in common with the special linear homogeneous group. Hence, in order to findall linear homogeneous groups Gr of this sort, we need only to add, to every Gr−1 :X1 f , . . . ,Xr−1 f of the group xi pk, xi pi − xk pk (i≷k), an infinitesimal transformationof the form:
Y f =n
∑i=1
xi pi +1···n
∑k, j
αk j xk p j (∑k αkk =0),
and to determine, by combination with X1 f , . . . ,Xr−1 f , all values of the αk j whichproduce a group. Here, it is to be observed that the (r−1)-term group X1 f , . . . ,Xr−1 fmust obviously be invariant in the sought r-term group; we therefore find, so to say,the most general values of the αk j when we seek the most general linear homoge-
† LIE, Archiv for Math. og Nat. Vol. IX, p. 103 and 104, Christiania 1884.

580 26 The General Projective Group
neous infinitesimal transformation Y f which leaves invariant the given (r−1)-termgroup. Besides, we always find one r-term group, namely when we choose all αk jequal to zero.
By taking into consideration the infinitesimal transformations X1 f , . . . ,Xr−1 f ,one realizes that r−1 of the αk j can be made equal to zero. Hence the smaller thenumber r is, the more some constants must be determined. But for small values ofr, the following method is otherwise often more convenient:
Indeed, the r-term subgroups of the group xi pk can yet in another way be dis-tributed in two categories; firstly, in the category of subgroups which contain thetransformation ∑ xi pi — they can, under the assumptions made, be written downinstantly — and secondly, in the category of subgroups which do not contain thetransformation x1 p1 + · · ·+ xn pn. The r infinitesimal transformations of a groupfrom the latter category must have the form:
(14) Xk f +αk
n
∑i=1
xi pi,
where the Xk f represent infinitesimal transformations of the special linear homoge-neous group. Because the transformation ∑ xi pi is interchangeable with all Xk f , forthe execution of the bracket operation [KLAMMEROPERATION], it is completely in-different whether the αi vanish or not; hence X1 f , . . . ,Xr f must themselves generatea group and to be precise, an r-term subgroup of the group xi pk, xi pi − xk pk (i≷k),one of those which we assume as known. Therefore, it only remains to determine theαk in the most general way so that the infinitesimal transformations (14) generatea group. In certain circumstances, one can realize easily that certain of the αk mustvanish; indeed, if there is an equation of the form:
[Xi, Xk] = X j f ,
then α j must necessarily be zero.If all [Xi, Xk] generate a ρ-term group (Chap. 15, Proposition 6, p. 274), then we
can assume that the infinitesimal transformations are chosen so that all [Xi, Xk] canbe linearly deduced from X1 f , . . . ,Xρ f . Then we have α1 = · · ·= αρ = 0, while allother αi can be different from zero. It must be specially studied in every individualcase whether the different values of these parameters produce different types oflinear homogeneous groups, or in other words, whether the concerned parametersare essential. The settlement of this problem for n = 2 and for n = 3 appears in thethird volume.
§ 143.
If an arbitrary linear homogeneous group Gr is presented which is not contained inthe special linear homogeneous group, then as we have already observed above, thisGr comprises an invariant (r − 1)-term subgroup whose infinitesimal transforma-tions are characterized by the fact that they possess the form:

§ 143. 581
i≷k
∑i, k
aik xi pk +n−1
∑i=1
ai (xi pi − xn pn).
If we now apply this observation to the adjoint associated to an arbitrary r-termgroup: X1 f , . . . ,Xr f :
Eν f =1···r
∑k, s
ckνs ek∂ f∂es
(ν =1 ···r),
then we recognize immediately that this adjoint group, when the r sums ∑k ckνk donot all vanish, contains an invariant subgroup whose infinitesimal transformations:λ1 E1 f + · · ·+λr Er f are defined by means of the condition-equations:
r
∑ν=1
λνr
∑k=1
ckνk = 0.
Lastly, if we remember that every group is isomorphic with its adjoint group, weobtain the
Proposition 5. If r independent infinitesimal transformations X1 f , . . . ,Xr f of an r-term group stand pairwise in the relationships: [Xi, Xk] = ∑s ciks Xs f and if at leastone of the r sums ∑k cνkk is different from zero, then all infinitesimal transformationsλ1 X1 f + · · ·+λr Xr f which satisfy the condition:
r
∑ν=1
λνr
∑k=1
cνkk = 0
generate an invariant (r−1)-term subgroup.†
For a thorough study of the general projective group, one must naturally devote aspecial attention to its adjoint group ∑ ek Ek f and to the associated invariant systemsof equations in the ek as well. Here only two brief, but important observations.
If, as usual, one interprets the ek as homogeneous point coordinates of a spacewith n2 + 2n− 1 dimensions, then amongst all invariant manifolds of this space,there is a determined one whose dimension number possesses the smallest value.This important manifold consists of all points ek which represent either translationsor transformations conjugate to translations. This manifold is contained in no even[EBEN] manifold of the space in question. Besides, the known classification of allprojective transformations naturally provides without effort all invariant manifoldsof the space e1, . . . ,er.
For every infinitesimal projective transformation which is conjugate to a transla-tion, all points of a plane Mn−1 in the space xk remain invariant and simultaneously,
† LIE, Archiv for Math., Vol. IX, p. 89, Christiania 1884; Fortschritte der Mathematik, Vol. XVI,p. 325.

582 26 The General Projective Group
all planes Mn−1 which pass through a certain point of this Mn−1. Every transforma-tion of this sort is completely determined by means of the firstly said plane Mn−1and by the distinguished invariant point of this plane.
If n = 2, then as we can say, every projective transformation of the plane x1,x2 which is conjugate to an infinitesimal translation is completely represented bymeans of a line element. Accordingly, in thrice-extended space x1, x2, x3, every pro-jective transformation conjugate to an infinitesimal translation is represented by asurface element, and so on. These observations will be exploited in the third volume.
—————–

Chapter 27Linear Homogeneous Groups
In the previous chapter, p. 579, we have characterized the general linear homoge-neous group in n variables x1, . . . ,xn as the most general projective group of then-times extended space x1, . . . ,xn, or shortly Rn, that leaves invariant the infinitelyfar plane Mn−1 and simultaneously the point x1 = · · ·= xn = 0. This group receivesanother meaning when one interprets x1, . . . ,xn as homogeneous coordinates in an(n− 1)-times extended space Rn−1. In the present chapter, this interpretation shallbe led at the foundation.
§ 144.
We imagine that the transition from the ordinary Cartesian coordinates y1, . . . ,yn−1of the (n−1)-times extended space Rn−1 to the homogeneous coordinates x1, . . . ,xnof the same space is procured by means of the equations:
yk =xk
xn(k=1 ···n−1).
To the n2-term general linear homogeneous group:
(1) x′i =n
∑k=1
αik xk (i=1 ···n)
then corresponds, in the variables y1, . . . ,yn−1, the meroedrically isomorphic group:
(2) y′i =∑n−1
k=1 αik yk +αin
∑n−1k=1 αnk yk +αnn
(k=1 ···n−1),
the (n2 − 1)-term general projective group of the Rn−1. Thus, to every linear ho-mogeneous transformation (1) corresponds a single projective transformation (2),hence a completely determined collineation of the Rn−1, whereas conversely, to ev-ery projective transformation (2), there correspond in total ∞1 different linear ho-mogeneous transformations (1).
583

584 27 Linear Homogeneous Groups
In addition, one can also establish a univalent invertible association betweenlinear homogeneous transformations in x1, . . . ,xn and projective transformations iny1, . . . ,yn−1 when one submits the constants αik to the condition ∑ ±α11 · · · αnn = 1,hence when one considers instead of the general the special linear homogeneousgroup which is holoedrically isomorphic to the general projective group (2) (cf.Chap. 26, p. 565). We want to develop in details this association for the infinitesimaltransformations of the two groups.
The special linear homogeneous group in x1, . . . ,xn contains the following n2−1independent infinitesimal transformations:
(3) xi pk, xi pi − xk pk (i≷k).
In order to find the corresponding infinitesimal transformations in y1, . . . ,yn−1, weonly have to compute, for each of the individual infinitesimal transformations justwritten, the increment:
δ yi =xn δ xi − xi δ xn
x2n
(i=1 ···n−1).
In this way, we find the following table:
(4)
xn pk ≡ qk, xk pn ≡−yk (y1 q1 + · · ·+ yn−1 qn−1)
xk pk − xn pn ≡ yk qk + y1 q1 + · · ·+ yn−1 qn−1, xi pk ≡ yi qk
(i, k=1 ···n−1; i≷k),
where qi is written for ∂ f/∂yi. This table also provides inversely the infinitesimaltransformations of the special linear homogeneous group (3) corresponding to ev-ery infinitesimal transformation of the projective group (2); indeed, from the equa-tions (4), we obtain without effort:
n(y1 q1 + · · ·+ yn−1 qn−1)≡ x1 p1 + · · ·+ xn pn −nxn pn
nyk qk ≡ nxk pk − (x1 p1 + · · ·+ xn pn).
At present, it is also easy to indicate which ∞1 infinitesimal transformations of thegeneral linear homogeneous group (1) correspond to a given infinitesimal transfor-mation of the projective group (2). Indeed, the infinitesimal transformation x1 p1 +· · ·+ xn pn reduces in the variables y1, . . . ,yn−1 to the identity, for all increases ofthe yk vanish. Consequently, if the infinitesimal transformation Y f of the projectivegroup (2) corresponds to the infinitesimal transformation X f of the special homo-geneous group (3), then all ∞1 infinitesimal transformations of the general homo-geneous group (1) which correspond to Y f are contained in the expression X f +c(x1 p1 + · · ·+ xn pn), where c denotes an arbitrary constant.
If a system of equations:
Ωk(y1, . . . ,yn−1) = 0 (k=1 ···m)

§ 145. 585
in y1, . . . ,yn−1 admits a finite or an infinitesimal projective transformation, then nat-urally, the corresponding system of equations in the x:
Ωk
(x1
xn, . . . ,
xn−1
xn
)= 0 (k=1 ···m)
admits the corresponding finite or infinitesimal transformation of the group (3); butin addition, because of its homogeneity, it also admits yet the infinitesimal transfor-mation: x1 p1 + · · ·+ xn pn.
Conversely, every system of equations in x1, . . . ,xn which admits x1 p1 + · · ·+xn pn is homogeneous. But now, when we write a projective group of the Rn−1 in thehomogeneous variables x1, . . . ,xn, we are concerned only with the ratios of the x,hence also, we are concerned only with systems of equations that are homogeneousin the x. So, when we have written in a homogeneous way the infinitesimal trans-formations of a projective group of the Rn−1 with the help of the table (4) and whenwe want to look up at the associated invariant systems of equations, that is why wewill always add yet the infinitesimal transformation x1 p1 + · · ·+ xn pn. The groupin x1, . . . ,xn obtained in this way is the true analytic representation in homogeneousvariables of the concerned projective group of the Rn−1.
For the study of a projective group, if one also wants to take the infinite intoconsideration, then one must write the group in homogeneous variables.
§ 145.
In the preceding paragraph, we have shown that the infinitesimal projective trans-formations of the Rn−1 can be replaced by infinitesimal linear homogeneous trans-formations in n variables. At present, we want to imagine that an arbitrary transfor-mation of this sort in x1, . . . ,xn is presented, say:
X f =1···n
∑i, k
aki xi pk,
and we want to submit it to a closer examination. Namely, we want to look for planemanifolds of the Rn−1 which admit the infinitesimal transformation in question. Inthis way, we will succeed to show that X f can always be given a certain canonicalform after the introduction of appropriate new variables: x′i = ∑ cik xk.
If a plane: Mn−2 : ∑ ci xi = 0 of the Rn−1 admits the infinitesimal transformationX f , then according to Theorem 14, p. 127, it admits at the same time all finite trans-formations of the associated one-term group. Now, the Mn−2 admits the infinitesimaltransformation if and only if the expression X(∑ ci xi) vanishes simultaneously with∑ ci xi. Since X(∑ ci xi) is linear in the xi, this condition amounts to the fact that arelation of the form:
X( n
∑k=1
ck xk
)= ρ
n
∑i=1
ci xi
holds identically, where ρ denotes a constant. The condition-equation followingfrom this:

586 27 Linear Homogeneous Groups
n
∑i=1
( n
∑k=1
aki ck −ρ ci
)xi = 0
decomposes in the n equations:
(5) a1i c1 + · · ·+(aii −ρ)ci + · · ·+ani cn = 0 (i=1 ···n),
which can be satisfied only when the determinant:
(6)
∣∣∣∣∣∣∣∣a11 −ρ a21 · · · an1
a12 a22 −ρ · · · an2· · · · · ·
a1n a2n · · · ann −ρ
∣∣∣∣∣∣∣∣= ∆(ρ)
vanishes. This produces for ρ an equation of degree n with surely n roots, amongstwhich some can be multiple, though. Therefore in all circumstances, there is at leastone plane Mn−2 : c1 x1 + · · ·+ cn xn = 0 which remains invariant by the one-termgroup X f .
It is known that one sees in exactly the same way that every finite projectivetransformation, or, when written homogeneously, every transformation x′i = ∑ bik xklikewise leaves fixed at least one plane Mn−2. In addition, this follows from the factthat every transformation x′i = ∑ bik xk is associated to a one-term group X f .
If the equation ∆(ρ) = 0 found above has exactly n different roots ρ , then thereare in total n separate planes Mn−2 which remain invariant by the group X f ; indeed,two distinct roots ρ1 and ρ2 of the equation for ρ always provide, because of theform of the equations (5), two distinct systems of values c1 : c2 : · · · : cn. By con-trast, if there are multiple roots ρ , then various cases can occur. If, for an m-foldroot ρ , the determinant (6) vanishes itself, but not all of its (n−1)× (n−1) deter-minants, then for the concerned value of ρ , exactly n− 1 of the equations remainindependent of each other and the ratios of the ci are then determined all. To them-fold root is hence associated only a single invariant plane Mn−2, but this planecounts m times. By contrast, if for an m-fold root not only the determinant (6) it-self is equal to zero, but if all its (n− 1)× (n− 1), . . . , (n− q+ 1)× (n− q+ 1)subdeterminants also vanish, whereas not all (n− q)× (n− q) subdeterminants do(q 6 m), then the equations (5) reduce to exactly n− q independent equations andamongst the ratios of the ci, there remain q−1 that can be chosen arbitrarily. Thusin this case, the m-fold root ρ gives a family of ∞q−1 planes Mn−2 which remainindividually invariant.
It is easy to realize that a root of the equation ∆(ρ) = 0 is at least q-fold when all(n− q+ 1)× (n− q+ 1) subdeterminants of ∆(ρ) vanish for this root. Indeed, thedifferential quotients of order (q−1) of ∆(ρ) with respect to ρ express themselvesas sums of the (n−q+1)× (n−q+1) subdeterminants of ∆(ρ).
If we would assume that the duality theory is already known at this place, thenwe could immediately conclude that the infinitesimal transformation X f leaves in-

§ 145. 587
variant at least one point in the Rn−1. But we prefer to prove this also directly,particularly because we gain on the occasion a deeper insight in the circumstances.
In the homogeneous variables x1, . . . ,xn, a point is represented by n−1 equationsof the form xi x0
k − xkx0i ; so the point will admit all transformations of the one-term
group X f when x0k Xxi −x0
i Xxk vanishes by virtue of the equations xi x0k −xk x0
i = 0,hence when n relations of the form:
Xxi = σ xi (i=1 ···n)
hold. For the xi and for σ , we therefore obtain the n condition-equations:
ai1 x1 + · · ·+(aii −σ)xi + · · ·+ain xn = 0 (i=1 ···n).
If we disregard the nonsensical solution x1 = · · · = xn = 0, σ must be a root of theequation:
∆(σ) =
∣∣∣∣∣∣∣∣a11 −σ a12 · · · a1n
a21 a22 −σ · · · a2n· · · · · ·
an1 an2 · · · ann −σ
∣∣∣∣∣∣∣∣and each such root produces an invariant point. The determination of the pointswhich stay fixed by X f therefore conducts to the same algebraic equation as doesthe determination of the invariant plane: Mn−2 : c1 x1 + · · ·+ cn xn = 0.
Thus, if this equation of degree n has n different roots, then in the Rn−1 :x1 : x2 : · · · : xn, not only n different planes Mn−2 : ∑ ck xk = 0 remain invariant,but also simultaneously, n separate points. In the process, these n points do not lieall in one and the same plane Mn−2, because if n points stay fixed in a plane Mn−2,then necessarily, infinitely many points of the Mn−2 keep their positions, whichis excluded under the assumption made. We can express briefly this property ofthe n invariant points by saying that a nondegenerate n-frame [n-FLACH] remainsinvariant by X f .
If there appear multiple roots, then two cases must again be distinguished. If, foran m-fold root, not all (n−1)× (n−1) subdeterminants of the determinant (6) van-ish, then this root gives an invariant plane Mn−2 counting m times and an invariantpoint counting m times. By contrast, if, for the root in question, all (n−1)×(n−1),. . . , (n−q+1)× (n−q+1) subdeterminants are equal to zero (q 6 m) without all(n−q)× (n−q) subdeterminants vanishing, then to this root is associated a familyof ∞q−1 individually invariant planes Mn−2 and a plane manifold of ∞q−1 individu-ally invariant points. Therefore, the following holds
Proposition 1. Every infinitesimal transformation:
1···n
∑i, k
aki xi pk
in the homogeneous variables x1, . . . ,xn, or, what is the same, every infinitesimalprojective transformation in n−1 variables:

588 27 Linear Homogeneous Groups
x1
xn, . . . ,
xn−1
xn,
leaves invariant a series of points x1 : x2 : · · · : xn and a series of planes Mn−2 :c1 x1 + · · ·+ cn xn = 0. The points which stay fixed fill a finite number, and to beprecise at most n, separate manifolds. Likewise, the invariant planes Mn−2 form afinite number, and to be precise at most n, separate linear pencils.
If the infinitesimal transformation X f has the form: ∑ xk pk, then it actuallyleaves invariant all points x1 : x2 : · · · : xn and naturally also, all planes Mn−2 :∑ ci xi = 0.
From what has been found up to now, one can now draw further conclusions.At first, we consider once more the special case where the equation of degree ndiscussed above has n different roots. Then there are n separate invariant planesMn−2 : ∑i cki xi = 0 which form a true n-frame according to what precedes. We cantherefore introduce:
x′k =n
∑i=1
cki xi (k=1 ···n)
as new homogeneous variables and in the process, we must obtain an infinitesi-mal transformation in x′1, . . . ,x
′n which leaves invariant the n equation x′k = 0, hence
which possesses the form:
X f = a′1 x′1 p′1 + · · ·+a′n x′n p′n.
Under the assumptions made, X f can be brought to this canonical form. Naturally,no two of the quantities a′1, . . . ,a
′n are equal to each other here, for the equation:
(a′1 −ρ) · · · (a′n −ρ) = 0
must obviously have n distinct roots.Now, similar canonical forms of X f also exist when the equation for ρ pos-
sesses multiple roots. However, we do not want to get involved in the considerationof them, and we only want to show that there is a canonical form to which everyinfinitesimal transformation:
X f =1···n
∑i, k
aki xi pk
can be brought thanks to an appropriate change of variables: x′k = ∑ hki xi, that isto say hence, thanks to an appropriate collineation of the Rn−1, completely withoutpaying heed to the constitution of the equation ∆(ρ) = 0.
Since X f always leaves a point invariant, we can imagine that our coordinatesare chosen so that the point: x1 = · · · = xn−1 = 0 stay fixed. On the occasion, wefind:

§ 146. 589
(7) X f =n−1
∑k=1
n−1
∑i=1
a′ik xk pi +n
∑k=1
a′nk xk pn = X ′ f +n
∑k=1
a′nk xk pn.
To the linear homogeneous infinitesimal transformation X ′ f in the n− 1 variablesx1, . . . ,xn−1 we can apply the same process as the one which provided us with thereduction of X f to the form (7), and we obtain in this way:
X f =n−2
∑k=1
n−2
∑i=1
a′′ik xk pi +n−1
∑k=1
a′′n−1,k xk pn−1 +n
∑k=1
a′nk xk pn.
Here, we can again treat in an analogous way the first term of the right-hand side.Finally, we obtain the
Theorem 103. In every linear homogeneous infinitesimal transformation with nvariables, one can introduce as new independent variables n linear homogeneousfunctions of these variables so that the concerned infinitesimal transformation takesthe form:
a11 x1 p1 +(a21 x1 +a22 x2) p2 + · · ·+(an1 x1 + · · ·+ann xn) pn.
It is of a certain interest to interpret the way in which this result has been gained.Since X f leaves a point invariant in any case, if we chose above such a point as
corner of coordinates [COORDINATENECKPUNKT]: x1 = · · ·= xn−1 = 0. The ratiosx1 : x2 : · · · : xn−1 then represent the straight lines through the chosen point; simulta-neously with the points x1 : x2 : · · · : xn, these straight lines are permuted with eachother by the transformation X f , and to be precise, by means of the linear transforma-tion X ′ f in the n−1 variables x1, . . . ,xn−1. But according to what precedes, a systemof ratios x1 : · · · : xn−1 must remain unchanged by X ′ f , that is to say, a straight linethrough the point just said. If we choose this line as edge x1 = · · ·= xn−2 = 0 of ourcoordinate system, then the ratios x1 : · · · : xn−2 represent the planes M2 passingthrough this edge. In the same way, these M2 are permuted with each other by X f ;one amongst them surely remains invariant and gives again a closer determinationof the coordinate system, and so on.
In this way, one realizes that the coordinate system can be chosen so that X freceives the normal form indicated above. However, we want to recapitulate yetin a specific proposition the considerations just made, since they express a generalproperty of the infinitesimal projective transformations of the Rn−1:
Proposition 2. By every infinitesimal projective transformation of the Rn−1 thereremain invariant: at least one point; through every invariant point: at least onestraight line; . . . ; and lastly, through every invariant plane Mn−2: at least one planeMn−2.
§ 146.
In the essence of things, the results of the previous paragraph are known long sinceand they coincide in the main thing with the reduction to a normal form, due to

590 27 Linear Homogeneous Groups
CAUCHY, of a system of linear ordinary differential equations with constant coeffi-cients.
In what follows, we will generalize in an essential way the developments con-ducted up to now, but beforehand, we must insert a few observations which, strictlyspeaking, are certainly subordinate to the general developments in Chap. 29, p. 488sq.
Let an arbitrary r-term group Gr with an (r−m)-term invariant subgroup Gr−mbe presented, and let T denote an arbitrary transformation of the Gr, while S denotesan arbitrary transformation of the Gr−m. Then according to the assumption, there arecertain equations of the form:
T−1 ST = S1, T S1 T−1 = S,
where S1 is again a transformation of the Gr−m, and in fact, a completely arbitraryone, provided only that one chooses the S appropriately.
Now, if every transformation S leaves invariant a certain point figure [PUNKT-FIGUR] M, so that:
(M)S = (M),
then the following equation also holds:
(M)T T−1 ST = (M)T,
and it shows that the figure (M)T admits every transformation T−1 ST , hence actu-ally, every transformation S.
Proposition 3. If Gr is an r-term group, if Gr−m is an invariant subgroup of it, andlastly, if M is a point figure which admits all transformations of the Gr−m, then everyposition that M takes by means of a transformation Gr also remains invariant by alltransformations of the Gr−m.
Now in particular, let the two groups Gr and Gr−m be projective groups of theRn−1 and let them be written down in n homogeneous variables. Let the figure M be apoint. Then every individual point invariant by all S is transferred, by the executionof all transformations T , only to points which again admit all transformations S.Consequently, the totality of all points invariant by the group Gr−m also remainsinvariant by the group Gr, though in general, the individual points of this totality arepermuted with each other by the Gr.
Above, we saw that all the points which remain invariant by a one-term projectivegroup can be ordered in at most n mutually distinct plane manifolds. Naturally, thisalso holds true for the points which keep their position by our Gr−m. Hence, let M1,M2, . . . , Mρ (ρ 6 n) be distinct plane manifolds all points of which remain fixed bythe Gr−m, whereas, out of these manifolds, there are no points invariant by the Gr−m.Now, if the group Gr were discontinuous — the considerations made remain validalso for this case —, then the manifolds M1, . . . ,Mρ could be permuted with eachother by the Gr. Not so when the Gr is continuous, hence when it is generated byinfinitesimal transformations, because if for instance M1 would take new positions

§ 146. 591
by means of the transformations contained in the Gr, then these positions wouldform a continuous family. But now, we have just seen that M1 can at most be giventhe finitely different positions M1, . . . ,Mρ . Consequently, no transformation of theGr can change the position of M1. In the same way, every other of the ρ Mk naturallystays at its place by all transformations of the Gr.
At present, we want to add yet the assumption that m has the value 1. LetX1 f , . . . ,Xr−1 f be independent infinitesimal transformations of the Gr−1 invariantin Gr, and let X1 f , . . . ,Xr−1 f , Y f be the transformations of the Gr; moreover, letx1 = 0, . . . , xq = 0 be one of the plane manifolds M1, . . . ,Mρ all points of whichremain invariant by X1 f , . . . ,Xr−1 f .
Since, as we know, Y f surely leaves invariant the manifold x1 = 0, . . . , xq = 0, itmust have the form:
Y f =1···q
∑i, k
aki xi pk +n
∑j=q+1
n
∑ν=1
a jν xν p j.
The points of the manifold in question are transformed by Y f (cf. Theorem 40,p. 243) and to be precise, by means of the transformation which is comes from Y fafter the substitution x1 = · · ·= xq = 0, namely:
(8)n
∑j=q+1
n
∑ν=q+1
a jν xν p j ;
here, the variables xq+1, . . . ,xn are to be considered as coordinates for the pointsof the manifold. Now, the transformation (8) leaves invariant at least one pointx0
q+1 : · · · : x0n inside the manifold x1 = · · · = xq = 0, further, it leaves invariant a
straight line passing through this point, and so on.Saying this, we have the
Theorem 104. If an (r+1)-term projective group X1 f , . . . ,Xr f , Y f of the Rn−1 con-tains an r-term invariant subgroup X1 f , . . . ,Xr f and if there are points of the Rn−1which remain invariant by all Xk f , then every plane manifold consisting of such in-variant points which is not contained in a larger manifold of this sort also admits alltransformations of the (r+1)-term group. Besides, the points of each such manifoldare are permuted with each other, but so that at least one of these points keeps itsposition by all transformations of the (r+1)-term group.
Now, we will apply this theorem to a special category of linear homogeneousgroups.
Let X1 f , . . . ,Xr f be the infinitesimal transformations of an r-term linear homoge-neous group, and let, as is always possible, X1 f , . . . ,Xρ f generate a ρ-term subgroupwhich is invariant in the (ρ +1)-term subgroup X1 f , . . . ,Xρ+1 f , when ρ is smallerthan r. Analytically, these assumptions find their expressions in certain relations ofthe form:
[Xi, Xi+k] =i+k−1
∑s=1
ciks Xs f (i=1 ···r−1; k=1 ···r− i).

592 27 Linear Homogeneous Groups
Now, if we interpret as before x1, . . . ,xn as homogeneous coordinates of an Rn−1,we then see that there always is in this Rn−1 a point invariant by X1 f , moreoverthat there always is a point invariant by X1 f and by X2 f as well, and finally, a pointwhich actually admits all transformations X1 f , . . . ,Xr f , hence for which relations ofthe form:
Xk xi = αk xi (k=1 ···r ; i=1 ···n)
hold. If we choose the variables xi so that x1 = · · ·= xn−1 = 0 is this invariant point,then in each of the r expressions:
Xk f = ξk1 p1 + · · ·+ξkn pn,
the n − 1 first coefficients ξk1, . . . ,ξk,n−1 depend only upon x1, . . . ,xn−1. Conse-quently, the reduced expressions:
X ′k f = ξk1 p1 + · · ·+ξk,n−1 pn−1
stand again in the relationships:
[X ′i , X ′
i+k] =i+k−1
∑s=1
ciks X ′s f .
However, X ′1 f , . . . ,X ′
r f need not be mutually independent anymore, but nevertheless,we can apply to them the same considerations as above for X1 f , . . . ,Xr f , becauseon the occasion, it was made absolutely no use of the independence of the Xk f .Similarly as above, we can hence imagine that the variables x1, . . . ,xn−1 are chosenin such a way that all ξk1, . . . ,ξk,n−2 depend only on x1, . . . ,xn−2. At present, theexpressions:
X ′′k f = ξk1 p1 + · · ·+ξk,n−2 pn−2
can be treated in exactly the same way, and so on.We therefore obtain the
Theorem 105. If X1 f , . . . ,Xr f are independent infinitesimal transformations of anr-term linear homogeneous group in the variables x1, . . . ,xn and if relations of thespecific form:
[Xi, Xi+k] =i+k−1
∑s=1
ciks Xs f (i=1 ···r−1; k=1 ···r− i)
hold, then one can always introduce linear homogeneous functions of x1, . . . ,xn asnew independent variables so that all Xk f simultaneously receive the canonicalform:†
ak11 x1 p1 +(ak21 x1 +ak22 x2) p2 + · · ·+(akn1 x1 + · · ·+aknn xn) pn.
† LIE, Archiv for Math., Vol. 3, p. 110 and p. 111, Theorem 3; Christiania 1878.

§ 147. 593
On the other hand, if we remember that X1 f , . . . ,Xr f is also a projective group ofthe Rn−1, we can say:
Proposition 4. If X1 f , . . . ,Xr f is an r-term projective group of the Rn−1 having thespecific composition:
[Xi, Xi+k] =i+k−1
∑s=1
ciks Xs f (i=1 ···r−1; k=1 ···r− i),
then in the Rn−1, there is at least one point M0 invariant by the group; through everyinvariant point, there passes at least one invariant straight line; . . . ; through everyinvariant plane Mn−3, there passes at least one invariant plane Mn−2. In certaincircumstances, several (infinitely many) such series of invariant manifolds M0, M1,. . . , Mn−2 are associated to the group.
If we maintain the assumptions of this last proposition and if we assume inaddition that in the space x1 : x2 : · · · xn, already several invariant plane manifoldsMρ1 , . . . ,Mρq are known, about which each one is contained in the one followingnext, then amongst the series of invariant manifolds M0, M1, . . . , Mn−2 mentionedin Proposition 4, there obviously is at least one for which Mρ1 coincides with Mρ1 ,at least one for which Mρ2 coincides with Mρ2 , . . . , at least for which Mρq coincideswith Mρq .
§ 147.
Apparently, the studies developed above certainly have a considerably special char-acter, but this special character is the very reason why they nevertheless possess ageneral signification for any finite continuous group, because for every such group,an isomorphic linear homogeneous group can be shown, namely the associated ad-joint group (Chap. 16).
Amongst other things, we can employ our theory mentioned above in orderto prove that every group with more than two parameters contains two-term sub-groups, and that every group with more than three parameters contains three-termsubgroups.
Let X1 f , . . . ,Xr f be an arbitrary r-term group and let:
Ek f =1···r
∑i, j
c jki e j∂ f∂ei
(k=1 ···r)
be the associated adjoint group, so that the relations:
[Xi, Xk] =r
∑s=1
ciks Xs f , [Ei, Ek] =r
∑s=1
ciks Es f
hold simultaneously.We claim that in any case, X1 f belongs to one two-term group, hence that an
infinitesimal transformation λ2 X2 f + · · ·+λr Xr f exists for which one has:

594 27 Linear Homogeneous Groups
[X1, λ2 X2 + · · ·+λr Xr] = ρ X1 f +µr
∑k=2
λk Xk f .
This condition represents itself in the form:
r
∑k=2
λk
r
∑s=1
c1ks Xs f = ρ X1 f +µr
∑k=2
λk Xk f ,
and it decomposes itself in the r equations:
(9)
r
∑k=2
λk c1k1 = ρ
r
∑k=2
λk c1ks = µ λs (s=2 ···r).
Here, this obviously amounts to satisfying only the last r − 1 equations; but onesees directly in the simplest way that this is possible. Indeed, one obtains for µ theequation: ∣∣∣∣∣∣∣∣
c122 −µ c132 · · · c1r2c123 c133 −µ · · · c1r3· · · · · ·
c12r c13r · · · c1rr −µ
∣∣∣∣∣∣∣∣which always possesses roots; for this reason, there always exists a system of λk notall vanishing which satisfies the above conditions and which also determines ρ .
But the fact that the equations (9) may be satisfied is also an immediate con-sequence of our theory mentioned above; although this observation seems hardlynecessary here, where the relationships are so simple, we nevertheless do not wantto miss this, because for the more general cases that are to be treated next, we willnot make it without this theory.
In the infinitesimal transformation:
E1 f =r
∑i=1
r
∑k=1
ck1i ek∂ f∂ei
=r
∑i=1
εi∂ f∂ei
of the adjoint group, all εi are free of e1, since c11i is always zero. Now, the cut linearhomogeneous infinitesimal transformation ε2 p2 + · · ·+ εr pr in the r− 1 variablese2, . . . ,er surely leaves invariant a system e2 : · · · : er; so it is possible to satisfy theequations:
r
∑k=2
ck1i ek = σ ei (i=2 ···r),
but these equations differ absolutely not from the last r−1 equations (9), since onehas ck1i =−c1ki indeed.
At present, we can state more precisely our claim above that every group withmore than two parameters contains two-term subgroups, in the following way:

§ 147. 595
Proposition 5. Every infinitesimal transformation of a group with more than twoparameters is contained in at least one two-term subgroup.†
At present, we want to assume that X1 f and X2 f generate a two-term subgroup,so that a relation of the form:
[X1, X2] = c121 X1 f + c122 X2 f
holds; we claim that, as soon as r is larger than 3, there also always exists a three-term subgroup in which X1 f and X2 f are contained.
At first, of the constants c121 and c122, when the two are not already zero, we canalways make one equal to zero. In fact, if, say, c121 is different from zero, then weintroduce X1 f + c122
c121X2 f as new X1 f and we obtain:
[X1, X2] = c121 X1 f .
Thus, every two-term group can be brought to this form.If λ3 X3 f + · · ·+λr Xr is supposed to generate a three-term group together with
X1 f and X2 f , then one must have:
(10)
[X1, λ3 X3 + · · ·+λr Xr
]= α1 X1 f +α2 X2 f +µ (λ3 X3 f + · · ·+λr Xr f )[
X2, λ3 X3 + · · ·+λr Xr]= β1 X1 f +β2 X2 f +ν (λ3 X3 f + · · ·+λr Xr f ).
From this, we obtain the following condition-equations:
(11)
r
∑k=3
λk c1k1 = α1,r
∑k=3
λk c1k2 = α2,
r
∑k=3
λk c2k1 = β1,r
∑k=3
λk c2k2 = β2,
r
∑k=3
c1ks λk = µ λs,r
∑k=3
c2ks λk = ν λs (s=3 ···r).
As one has observed, it is only necessary to prove that the 2(r−2) equations inthe last row can be satisfied, since the remaining equations can always be satisfiedafterwards.
In order to settle this question, we form the infinitesimal transformations:
E1 f =r
∑i=1
r
∑k=1
ck1i ek∂ f∂ei
=r
∑i=1
ε1i∂ f∂ei
E2 f =r
∑i=1
r
∑k=1
ck2i ek∂ f∂ei
=r
∑i=1
ε2i∂ f∂ei
,
which, as we know, stand in the relationship:
† LIE, Archiv for Math. Vol. 1, p. 192. Christiania 1876.

596 27 Linear Homogeneous Groups
[E1, E2] = c121 E1 f .
Since all c11i, c22i and the c122, . . . ,c12r are equal to zero, both e1 and e2 do notappear at all in ε13, . . . ,ε1r, ε23, . . . ,ε2r. The reduced expressions:
E1 f =r
∑i=3
ε1i∂ f∂ei
, E2 f =r
∑i=3
ε2i∂ f∂ei
therefore are linear homogeneous infinitesimal transformations in e3, . . . ,er and theysatisfy the relation: [
E1, E2]= c121 E1 f .
According to what precedes, it follows from this that there exists at least one systeme3 : · · · : er which admits the two infinitesimal transformations E1 f and E2 f , hencewhich satisfies conditions of the form:
r
∑k=3
ck1i ek = σ ei,r
∑k=3
ck2i ek = τ ei (i=3 ···r).
But this is exactly what was to be proved, for these last equations are nothing elsethan the last equations (11), about which the question was whether they could besatisfied. Naturally, the quantities α1, α2, β1, β2 are also determined together withthe λi.
Since we can choose in all circumstances λ3, . . . ,λr so that equations of theform (3) hold, we can say:
Theorem 106. Every infinitesimal transformation and likewise every two-term sub-group of a group with more than three parameters is contained in at least one three-term subgroup.†
One could be conducted to presume that every three-term subgroup is also con-tained in at least one four-term subgroup, and so on, but this presumption is notconfirmed. Our process of proof could be employed further only when every three-term group X1 f , X2 f , X3 f could be brought to the form:
[X1, X2] = c121 X1 f , [X1, X3] = c131 X1 f + c132 X2 f
[X2, X3] = c231 X1 f + c232 X2 f ,
hence not only when X1 f would be invariant in the group X1 f , X2 f , but when thislast group would also be invariant in the entire three-term group.
But for all three-term groups of the composition:
[X1, X2] = X1 f , [X1, X3] = 2X2 f , [X2, X3] = X3 f ,
this is not the case (Chap. 15, Proposition 12, p. 281).
† LIE, Archiv for Math. Vol. 1, p. 193, Vol. 3, pp. 114–116, Christiania 1876 and 1878.

§ 147. 597
Still, we want to briefly dwell on a special case in which an m-term subgroup isreally contained in an (m+1)-term subgroup.
Let an arbitrary r-term group X1 f , . . . ,Xr f be presented which contains an m-term subgroup X1 f , . . . ,Xm f having the characteristic composition:
[Xi, Xi+k] =i+k−1
∑s=1
ci, i+k,s Xs f (i<m, i+k6m)
already mentioned. We claim that there always exists an (m+1)-term subgroup ofthe form:
X1 f , . . . ,Xm f , λm+1 Xm+1 f + · · ·+λr Xr f .
Our assertion amounts to the fact that certain relations of the form:[X j, λm+1 Xm+1 + · · ·+λr Xr
]=
m
∑k=1
α jk Xk f +µ j
r
∑s=m+1
λs Xs f
( j=1 ···m)
hold. By decomposition, it comes:
(12)
r
∑i=m+1
λi c jik = α jk ( j, k=1 ···m)
r
∑i=m+1
λi c jis = µ j λs ( j=1 ···m ; s=m+1 ···r).
Thus, the question is whether the last m(r−m) equations can be satisfied; thenalways, the first m2 equations can be satisfied.
In order to settle this question, we form the m infinitesimal transformations:
Ek f =r
∑i=1
r
∑j=1
c jki e j∂ f∂ei
=r
∑i=1
εki∂ f∂ei
(k=1 ···m)
which satisfy in pairs the relations:
[Ei, Ei+k] =i+k−1
∑s=1
ci, i+k,s Es f (i+k6m).
We observe that all c j,k,m+1, . . . , c jkr vanish for which j and k are smaller thanm+1, and from this we deduce that in E1 f , . . . ,Em f , all coefficients εk,m+1, . . . ,εkrare free of e1, . . . ,em. The reduced infinitesimal transformations:
Ek f =r
∑i=m+1
εki∂ f∂ei
(k=1 ···m)

598 27 Linear Homogeneous Groups
in the variables em+1, . . . ,er therefore stand pairwise in the relationships:
[E i, Ek
]=
i+k−1
∑s=1
ci, i+k,s Es f (i+k6m)
and consequently, according to Proposition 4, p. 593, there is a system em+1 : · · · : erwhich admits all infinitesimal transformations E1 f , . . . ,Em f . But this says nothingbut that it is possible to satisfy the equations:
r
∑j=m+1
c jks e j = σk es (k=1 ···m ; s=m+1 ···r).
But these equations are exactly the same as the equations (12) found above and thus,everything we wanted to show is effectively proved.
Theorem 107. If, in an r-term group X1 f , . . . ,Xr f , there is an m-term subgroupX1 f , . . . ,Xm f having the specific composition:
[Xi, Xi+k] =i+k−1
∑s=1
ci, i+k,s Xs f (i<m, i+k6m),
then this m-term subgroup is always contained in at least one (m+ 1)-term sub-group.†
§ 148.
We yet want to derive the theorem stated just now also thanks to conceptual consid-erations, by interpreting, as in Chap. 16, the infinitesimal transformations e1 X1 f +· · ·+ er Xr f of our group as points of an (r− 1)-times extended space with the ho-mogeneous coordinates e1, . . . ,er.
Since the group X1 f , . . . ,Xm f , . . . ,Xr f is isomorphic with its adjoint group:E1 f , . . . ,Em f , . . . ,Er f , then under the assumptions made, E1 f , . . . ,Em f satisfyrelations of the form:
[Ei, Ei+k] =i+k−1
∑s=1
ci, i+k,s Es f (i+k6m),
hence they generate a subgroup which, in the space ek, is represented by the (m−1)-times extended plane manifold:
em+1 = 0, . . . , er = 0.
This plane manifold naturally admits the subgroup E1 f , . . . ,Em f , and the same ob-viously holds true of the family of all m-times extended plane manifolds:
† LIE, Archiv for Math., Vol. 3, pp. 114–116, Christiania 1878.

§ 148. 599
em+1
em+1=
em+2
em+2= · · ·= er
er
which pass through the manifold em+1 = 0, . . . , er = 0. But since the parametersem+1 : · · · : er are transformed by a linear homogeneous group which is isomorphicwith the subgroup E1 f , . . . ,Em f (Chap. 23, Proposition 5, p. 481), then amongstthe m-times extended manifolds of our invariant family, there is at least one whichremains invariant by the subgroup E1 f , . . . ,Em f . This m-times extended manifold isthe image of an (m+1)-term subgroup of the group: X1 f , . . . ,Xr f (cf. Proposition 5,p. 298).
The conceptual considerations made just now which have again conducted us toTheorem 107 are in essence identical to the analytical considerations developed ear-lier on. However, the synthetical explanation is more transparent than the analyticalone [DOCH IST DIE SYNTHETISCHE BEGRÜNDUNG DURCHSICHTIGER ALS DIEANALYTISCHE].
For the studies about the composition of transformation groups, it is actually ad-visable to set as fundamental the interpretation of all infinitesimal transformationse1 X1 f + · · ·+ er Xr f as the points of a space which is transformed by the linear ho-mogeneous adjoint group. Thanks to a example, we will yet put in light the fruitful-ness and the simplicity of this method which shall also find multiple applications inthe third volume, and at the same time, we will derive a new remarkable statement.
We consider an r-term group X1 f , . . . ,Xr f , the infinitesimal transformations ofwhich are linked together by relations of the form:
[Xi, Xi+k] =i+k−1
∑s=1
ci, i+k,s Xs f .
The infinitesimal transformations E1 f , . . . ,Er f of the adjoint group then satisfy theanalogous equations:
[Ei, Ei+k] =i+k−1
∑s=1
ci, i+k,s Es f .
Consequently (Proposition 4, p. 593), the space ek contains at least one pointinvariant by the adjoint group. Through every point of this sort, there passes at leastone invariant straight line M1, through every such straight line, there passes at leastone invariant plane M2, and so on.
Now, if we interpret the points ek as infinitesimal transformations, we see thatour r-term group: X1 f , . . . ,Xr f contains at least one invariant one-term subgroup;next, that every invariant one-term subgroup is contained in at least one invarianttwo-term subgroup; next, that every invariant two-term subgroup is contained in atleast one invariant three-term subgroup; and so on (cf. p. 292).
Thus, the following holds true.
Theorem 108. If an r-term group contains r independent infinitesimal transforma-tions Y1 f , . . . ,Yr f which satisfy relations of the form:

600 27 Linear Homogeneous Groups
[Yi, Yi+k] =i+k−1
∑s=1
ci, i+k,s Ys f ,
then at the same time, it contains r independent infinitesimal transformationsZ1 f , . . . ,Zr f between which relations of the form:
[Zi, Zi+k] =i+k−1
∑s=1
ci, i+k,s Zs f ,
hold; then Z1 f , . . . ,Zi f generate for every i < r an i-term subgroup Gi and to beprecise, every Gi is invariant in every Gi+k and in the group itself Y1 f , . . . ,Yr f aswell.†
If we maintain the assumptions of this theorem and if we assume in additionthat by chance, several invariant subgroups, say Gρ1 , Gρ2 , . . . , Gρq are known, ofwhich each one comprises the one following next, then it becomes evident (cf. theconcluding remarks of the § 146) that the subgroups Gi discussed in Theorem 108can be chosen in such a way that Gρ1 coincides with Gρ1 , that Gρ2 coincides withGρ2 , . . . , that Gρq coincides with Gρq .
On the other hand, when an r-term group: X1 f , . . . ,Xr f of the specific compo-sition considered here is presented, it is always possible to derive certain invariantsubgroups by differentiation. Indeed, all [Xi, Xk] generate a firstly derived invari-ant subgroup with say r1 < r independent infinitesimal transformations. If, as inChap. 15, p. 278, we denote them by X ′
1 f , . . . ,X ′r1
f , then all [X ′i , X ′
k] generate a sec-ondly derived invariant subgroup of the r-term group with, say, r2 < r1 independentinfinitesimal transformations X ′′
1 f , . . . ,X ′′r2
f , and so on.It is therefore possible to bring our group to a form U1 f , . . . ,Ui f , . . . ,Ur f such
that firstly for every i, the infinitesimal transformations U1 f , . . . ,Ui f generate aninvariant subgroup, such that secondly all [Ui,Uk] can be linearly deduced fromU1 f , . . . ,Ur1 f , such that thirdly all
[[Ui,Uk], [Uα ,Uβ ]
]can be linearly deduced from
U1 f , . . . ,Ur2 f , and so on.
—————–
† LIE, Archiv for Math., Vol. 3, p. 112 and p. 113, Christiania 1878; cf. also Vol. IX, pp. 79–82.

Chapter 28Approach [ANSATZ] towards the Determinationof All Finite Continuous Groupsof the n-times Extended Space
It is unlikely that one becomes close to be in the position of determining all finitecontinuous transformation groups; indeed, it is even uncertain whether this will eversucceed. Therefore, instead of the general problem to determine all finite continuousgroups, one would do well to tackle at first more special problems which concernthe determination of certain categories of finite continuous groups. Namely, morespecial problems of this kind are the following three:
Firstly the determination of all r-term groups in n variables.Secondly the determination of all r-term groups in general.Thirdly the determination of all finite continuous groups in n variables.
In Chap. 22, p. 441 sq., we have shown that the settlement of the first of theseproblems, aside from executable operations, requires in any case only the integrationof simultaneous systems of ordinary differential equations. Moreover, we found thatthe second of our three problems can be led back to the first one (Theorem 84,p. 467).
By contrast, the third problem is not at all settled by means of the developmentsof the Chap. 22. Namely if n > 1, then for every value of r, how large can it bethough, there always are r-term groups in n variables. For instance, if one choosesr functions F1, . . . ,Fr of x1, . . . ,xn−1 so that between them, no linear relation of theform:
c1 F1 + · · ·+ cr Fr = 0
with constant coefficients holds, then the r infinitesimal transformations:
F1(x1, . . . ,xn−1)∂ f∂xn
, . . . , Fr(x1, . . . ,xn−1)∂ f∂xn
are mutually independent and pairwise exchangeable, hence they generate an r-termgroup in the n variables x1, . . . ,xn.
601

602 28 Approach towards the Determination of All Finite Groups of the Rn
In spite of the important results of the Chap. 22, the third one of the problemsindicated therefore still awaits for a solution. This is why we will tackle this problemin the present chapter and at least provide an approach towards its settlement.
In the sequel, we decompose the problem of determining all groups of an n-timesextended space Rn in a series of individual problems which are independent of eachother. We make it to thanks to a natural division of the groups of the Rn in classeswhich are selected in such a way that the groups of some given class can be deter-mined without it to be necessary to know any of the groups of the remaining classes.Admittedly, we cannot indicate a general method which accomplishes in every casethe determination of all groups of a class; nonetheless, we provide important state-ments about the groups belonging to a given class and on the other hand, we developa series of considerations which facilitate the determination of all groups in a class;in the next chapter, this shall be illustrated by special applications. For these gen-eral discussions, we essentially restrict ourselves to transitive groups, because ourclassification precisely is of specific practical meaning for the transitive groups.
This finds good reasons in the fact that later (in the third Volume), for the de-termination of all finite continuous groups in one or two or three variables, we willexploit only in part the developments of the present chapter. For the determinationof the primitive groups of a space, the process explained here is firmly effective;not so for the determination of the imprimitive groups, and rather, it is advisableto take a different route. Every imprimitive group of the Rn decomposes this spacein an invariant family of manifolds and transforms the manifolds of this family bymeans of an isomorphic group in less than n variables. From this, it results that onewould do well to tackle at first the determination of all imprimitive groups of the Rn,when one already know all groups in less than n variables. Applying this fundamen-tal principle, we shall undertake in Volume III the determination of all imprimitivegroups of the R2 and of certain imprimitive groups of the R3.
§ 149.
Let:
Xk f =n
∑i=1
ξki(x1, . . . ,xn)∂ f∂xi
(k=1 ···r)
be a completely arbitrary r-term group of the n-times extended space x1, . . . ,xn, orbriefly of the Rn.
Under the guidance of Chap. 25, p. 529, we prolong this group by viewingx1, . . . ,xn as functions of an auxiliary variable t which is absolutely not transformedby our group and by considering that the differential quotients: dxi/d t = x′i aretransformed by the group. In the 2n variables: x1, . . . ,xn, x′1, . . . ,x
′n, we then obtain
the prolonged group:
Xk f =n
∑i=1
ξki(x)∂ f∂xi
+n
∑i=1
( n
∑ν=1
∂ξki
∂xνx′ν
)∂ f∂x′i
(k=1 ···r).

§ 149. 603
As we know, this prolonged group indicates in which way the ∞2n−1 line elements:x1, . . . ,xn, x′1 : x′2 : · · · : x′n of the space x1, . . . ,xn are permuted with each other bythe group: X1 f , . . . ,Xr f (cf. p. 531).
Every point: x01, . . . ,x
0n in general position remains invariant by a completely de-
termined number of independent infinitesimal transformations: e1 X1 f + · · ·+er Xr fand to be precise, at least by r− n such transformations, and at most by r− 1. Wewant to denote by r − q the number of these independent infinitesimal transfor-mations and to suppose that: X0
1 f , . . . ,X0r−q f are such independent infinitesimal
transformations; then they certainly generate an (r−q)-term subgroup of the group:X1 f , . . . ,Xr f (cf. Chap. 12, p. 218 sq.).
In the series expansions of X01 f , . . . ,X0
r−q f with respect to the powers of the xi −x0
i , all terms of order zero are naturally lacking and there appear only terms of firstor higher order:
X0k f =
n
∑ν=1
n
∑i=1
αkiν(x01, . . . ,x
0n)(xi − x0
i )+ · · ·
∂ f∂xν
(k=1 ···r−q).
The group: X01 f , . . . ,X0
r−q f leaves the point x01, . . . ,x
0n invariant, but it permutes
the line elements which pass through this point; how? this is what the associatedprolonged group shows:
X0k f =
n
∑ν=1
n
∑i=1
αkiν(x01, . . . ,x
0n)(xi − x0
i )+ · · ·
∂ f∂xν
+n
∑ν=1
n
∑i=1
αkiν(x01, . . . ,x
0n)x′n + · · ·
∂ f∂x′ν
(k=1 ···r−q),
and it transforms the ∞2n−1 line elements of the space x1, . . . ,xn in exactly the sameway as the group: X0
1 f , . . . ,X0r−q f . Hence, if one wants to restrict oneself to the line
elements which pass through the point x01, . . . ,x
0n, and to disregard the remaining
ones, then under the guidance of Chap. 14, p. 244 sq., one has to leave out, in theX0
k f , all terms with the differential quotients of f with respect to x1, . . . ,xn and tomake the substitution: x1 = x0
1, . . . , xn = x0n in the terms remaining. The so obtained
reduced infinitesimal transformations:
(1) Lk f =1···n
∑i, ν
αkiν(x01, . . . ,x
0n)x′i
∂ f∂x′ν
(k=1 ···r−q)
generate a linear homogeneous group in the n variables x′1, . . . ,x′n; this group, which
is isomorphic with the group: X01 f , . . . ,X0
r−q f , and naturally also, with the group:X0
1 f , . . . ,X0r−q f , indicates in which way the two groups said just now transform the
∞n−1 line elements: x′1 : x′2 : · · · x′n through the point x01, . . . ,x
0n.
Visibly, the linear homogeneous group: L1 f , . . . ,Lr−q f is perfectly determined bythe terms of first order in the power series expansions of X0
1 f , . . . ,X0r−q f , and there-
fore, it contains as many essential parameters as the group: X01 f , . . . ,X0
r−q f contains

604 28 Approach towards the Determination of All Finite Groups of the Rn
independent infinitesimal transformations of first order out of which no transfor-mation of second order, or of higher order, can be linearly deduced. From this, itfollows that one can set up the group: L1 f , . . . ,Lr−q f as soon as one knows howmany independent infinitesimal transformations of first order the group: X1, . . . ,Xrcontains in the neighbourhood of x0
1, . . . ,x0n out of which no transformation of sec-
ond or higher order can be linearly deduced, and in addition, as soon as one knowsthe terms of first order in the power series expansions of these infinitesimal transfor-mations. Conversely, as soon as one knows the group: L1 f , . . . ,Lr f , one can indicatethe number of and the terms of those independent infinitesimal transformations offirst order in the group: X1 f , . . . ,Xr f out of which no transformation of second orhigher order in the xi − x0
i can be linearly deduced.One can derive the linear homogeneous group: L1 f , . . . ,Lr−q f also in the follow-
ing way:Since the question is about the way in which the directions through the fixed
point: x01, . . . ,x
0n are transformed, one may substitute the group: X0
1 f , . . . ,X0r−q f for
the following:
1···n
∑i, ν
αkiν(x01, . . . ,x
0n)(xi − x0
i )∂ f∂xν
(k=1 ···r−q)
which is obtained by leaving out all terms of second and higher order. Now, x1 −x01,
. . . , xn − x0n can here directly conceived as homogeneous coordinates of the line
elements through the point x01, . . . ,x
0n, whence the group:
1···n
∑i, ν
αkiν(x01, . . . ,x
0n)(xi − x0
i )∂ f
∂ (xν − x0ν)
(k=1 ···r−q)
indicates how these line elements are transformed. This is coherent with the above.
We have seen that the r-term group: X1 f , . . . ,Xr f associates to every pointx0
1, . . . ,x0n in general position a completely determined linear homogeneous
group (1) which, though, turns out to be different for different points. At present,we study how this linear homogeneous group behaves after the introduction ofsome new variables.
In place of x1, . . . ,xn, we introduce the new variables:
(2) yi = y0i +
n
∑ν=1
aiν(xν − x0ν)+ · · · (i=1 ···n)
which are ordinary power series of x1 − x01, . . . , xn − x0
n; as always, we assume onthe occasion that the determinant:
∑ ±a11 · · · ann
is different from zero, so that inversely also, the xi are ordinary power series ofy1 − y0
1, . . . , yn − y0n.

§ 149. 605
In y1, . . . ,yn, let the X0k receive the form:
Y 0k f =
n
∑ν=1
n
∑i=1
βkiν (yi − y0i )+ · · ·
∂ f∂yν
(k=1 ···r−q).
Then it is clear at first that the group which comes into existence from X1 f , . . . ,Xr fafter the introduction of the new variables y1, . . . ,yn associates to the point y0
1, . . . ,y0n
the linear homogeneous group:
(1’) Lk f =1···n
∑i, ν
βkiν y′i∂ f∂y′ν
(k=1 ···r−q).
But on the other hand, it is clear (cf. Chap. 11, p. 209 sq.) that the terms of firstorder:
1···r
∑i, ν
βkiν (yi − y0i )
∂ f∂yν
of Y 0k can be obtained from the terms of first order:
1···n
∑i, ν
αkiν (xi − x0i )
∂ f∂xν
of X0k f after the introduction of the new variables:
yi = y0i +
n
∑ν=1
aiν (xν − x0ν) (i=1 ···n).
Consequently, it follows that the linear homogeneous group (1’) comes into exis-tence from the linear homogeneous group (1) when one introduces in (1), by meansof the linear homogeneous transformation:
y′i =n
∑ν=1
aiν x′ν (i=1 ···n),
the new variables: y′1, . . . ,y′n in place of the x′.
In this lies the reason why the linear homogeneous group (1) is essentially inde-pendent from the analytic representation of the group: X1 f , . . . ,Xr f , that is to say,from the choice of the variables; indeed, if, by means of a transformation (2), oneintroduces new variables in the group: X1 f , . . . ,Xr f , then the linear homogeneousgroup (1) converts into another linear homogeneous group (1’) which is conjugateto (1) inside the general linear homogeneous group of the Rn (cf. Chap. 16, p. 292).Thanks to an appropriate choice of the constants aiν in the transformation (2), onecan obviously insure that the group (1’) associated to the point y0
k becomes an arbi-trary group conjugate to (1).

606 28 Approach towards the Determination of All Finite Groups of the Rn
Now, we specially assume that the transformation (2) belongs to the group:X1 f , . . . ,Xr f itself. In this case, (1’) is visibly the linear homogeneous group thatthe group: X1 f , . . . ,Xr f associates to the point: y0
1, . . . ,y0n, and consequently, (1’)
comes from (1) when one replaces the x0 in the αkiν(x01, . . . ,x
0n) by the y0. But since
the two groups (1) and (1’) are conjugate inside the general linear homogeneousgroup of the Rn, we have the following
Theorem 109. Every r-term group: X1 f , . . . ,Xr f of the space x1, . . . ,xn associatesto every point x0
1, . . . ,x0n in general position a completely determined linear homo-
geneous group of the Rn which indicates in which way the line elements through thispoint are transformed, as soon as the point is fixed. To those points which can betransferred one to another by means of transformations of the group: X1 f , . . . ,Xr fare associated linear homogeneous groups which are conjugate inside the generallinear homogeneous group of the Rn. In particular, if the group: X1 f , . . . ,Xr f istransitive, then to all points which lie in no invariant manifold, it associates lin-ear homogeneous groups that are conjugate to each other inside the general linearhomogeneous group.
The above theorem which recapitulates the most important result up to now, pro-vides now the classification of all groups of the Rn announced in the introduction.
We consider at first the transitive groups.We reckon as belonging to the same class two transitive groups G and Γ when the
linear homogeneous group that G associates to an arbitrary point in general positionis conjugate to the linear homogeneous group that Γ associates to such an arbitrarypoint. In the opposite case, we reckon G and Γ as belonging to different classes.
Thus, we differentiate as many classes of transitive groups of the Rn as there aretypes of subgroups of the general linear homogeneous group of the Rn (cf. p. 292).Later, we will see that to each one of such classes, there belongs in any case atransitive group of the Rn.
If two transitive groups G and Γ of the space x1, . . . ,xn belong to the same class,then in the neighbourhood of any point x0
1, . . . ,x0n in general position, they obviously
contain the same number of independent infinitesimal transformations of first orderin the xi − x0
i out of which no transformation of second or of higher order can belinearly deduced. In addition, since one can always, by introducing new variables,reshape Γ so that it associates to the point x0
1, . . . ,x0n exactly the same linear homo-
geneous group as does G, then in all cases, one can insure that the terms of first orderin the infinitesimal transformations of first order in question are the same for the twogroups. In addition, because they are transitive, G and Γ contain, in the neighbour-hood of x0
1, . . . ,x0n, n independent infinitesimal transformations of zeroth order out
of which no transformation of first or higher order can be linearly deduced; by con-trast, the numbers of terms and the initial terms of second, third, . . . orders can verywell be different for Γ and for G. Here lies the reason why two transitive groupsof the space x1, . . . ,xn which belong to the same class need absolutely not have thesame number of parameters.
We now turn ourselves to the intransitive groups.

§ 105. 607
To every transitive group of the Rn was associated a completely determined typeof linear homogeneous group of the Rn; for the intransitive groups, this is in generalnot the case. Every intransitive group G of the Rn decomposes this space in a familyof ∞n−q (0 < q < n) individually invariant q-times extended manifolds Mq, but sothat the points of every individual Mq are transformed transitively (cf. Chap. 13,p. 228). From this, it follows that G associates to all points of one and the same Mqalways conjugate linear homogeneous groups, but not necessarily to the points ofdifferent Mq.
In general, our ∞n−q Mq are gathered in continuous families so that conjugate lin-ear homogeneous groups are associated only to the points which belong to the Mqin the same family. If each such family consists of exactly ∞m Mq, then the wholeRn decomposes in ∞n−q+m (q+m)-times extended manifolds Mq+m and to everyMq+m is associated a completely determined type of linear homogeneous groups,while to different Mq+m are associated different types too. So to our group is associ-ated a family of ∞n−q−m different types; the totality of all these types can naturallybe represented by certain analytic expressions with n−q−m essential arbitrary pa-rameters. We can also express this as follows: all the concerned types belong to thesame kind of types [TYPENGATTUNG] (cf. Chap. 22, p. 457).
Now, we reckon two intransitive groups of the Rn as belonging to the same classwhen the same kind of type of linear homogeneous groups of the Rn is associated toboth of them.
§ 105.
We can use the classification of all groups of the Rn just described in order to providean approach [ANSATZ] towards the determination of these groups. But we will onlyundertake this for the transitive groups.
If we imagine the variables chosen so that the origin of coordinates: x1 = 0, . . . ,xn = 0 is a point in general position, then every transitive group of the Rn contains,in the the neighbourhood of the origin of coordinates, n independent infinitesimaltransformations of zeroth order in the xi:
T (0)i =
∂ f∂xi
+ · · · (i=1 ···n)
out of which no transformation of first or higher order can be linearly deduced.Furthermore, every transitive group of the Rn contains in general also certain in-
finitesimal transformations of first order in the xi that depend, according to what pre-cede, on the class to which the group belongs. Now, since a completely determinedclass of transitive groups of the Rn is associated to every type of linear homogeneousgroups of this space, we want to choose any such type and to restrict ourselves to theconsideration of those transitive groups which belong to the corresponding class.
Let the m1-term group:
(3)1···n
∑i, ν
α jiν x′i∂ f∂x′ν
( j=1 ···m1 ; 06m1 6n2)

608 28 Approach towards the Determination of All Finite Groups of the Rn
be a representative of the chosen type of linear homogeneous groups. Then accord-ing to the above, every transitive group of the Rn which belongs to the correspondingclass can, by means of an appropriate choice of variables, be brought to a form suchthat in the neighbourhood of: x1 = 0, . . . , xn = 0, it contains the following m1 inde-pendent infinitesimal transformations of first order:
T (1)j =
n
∑ν=1
n
∑i=1
α jiν xi + · · ·
∂ f∂xν
( j=1 ···m1).
These m1 infinitesimal transformations T (1)j are constituted in such a way that out
of them, no transformation of second or higher order can be linearly deduced andon the other hand, such that in every first order infinitesimal transformation of thegroup, the terms of first order can be linearly deduced from the terms of first orderin T (1)
1 , . . . ,T (1)m1 .
Besides, we already see now that in all circumstances, there is at least one tran-sitive group which belongs to the class chosen by us; indeed, one such group can beimmediately indicated, namely the (n+m1)-term group:
∂ f∂x1
, . . . ,∂ f∂xn
,1···n
∑i, ν
α jiν xi∂ f∂xν
( j=1 ···m1),
and it is obtained by leaving out all terms of first, second, higher orders in the Pi andin the T (1)
j .Aside from the infinitesimal transformations of zeroth and first order already in-
dicated, every group which belongs to our class can contain, in the neighbourhoodof: x1 = 0, . . . , xn = 0, yet a certain number of independent infinitesimal transforma-tions of second order, out of which no transformation of third or higher order can belinearly deduced, and moreover, a certain number of infinitesimal transformations ofthird, fourth, . . . orders; but according to Theorem 29, p. 206, there always is an en-tire number s > 1 characteristic to the group of such a nature that the group containsinfinitesimal transformations of second, third, . . . , s-th orders, while by contrast, itcontains no transformations of orders (s+ 1) or higher.† From this, it follows thatthe totality of all groups of our class decomposes in a series of subclasses: to eachvalue of s there corresponds a subclass.
Since there are infinitely many entire numbers s which are > 1, the number ofthe subclasses just defined is infinitely large, though every subclass needs absolutelynot be represented effectively by a group. We will show how it can be decided forevery individual value of s whether some groups belong to the concerned subclass;for all that, the question fundamentally is about values of s larger than 1 only, forwe already know that the subclass: s = 1 contains some groups.
Let s0 > 1 be an arbitrarily chosen but completely determined entire number; weask whether there are groups in our class which belong to the subclass: s = s0.
† What we denoted by s in Theorem 29 is called here s+1.

§ 105. 609
If there are groups of this sort, let for instance G be one of them. If, for k =0,1,2, . . . ,s0, we leave out from the infinitesimal transformations of order k of G allterms of orders (k+1) and higher, then we obviously obtain independent infinites-imal transformations which generate a certain group Γ and to be precise, a groupwhich belongs to the subclass s = s0 just as G.
From this, it follows that the subclass: s = s0, as soon as it actually comprisesgroups, contains at least one group Γ having the following specific constitution: Γis generated by the n+m1 infinitesimal transformations of zeroth and of first orders:
T(0)i =
∂ f∂xi
, T(1)j =
1···n
∑i, ν
α jiν xi∂ f∂xν
(i=1 ···n ; j=1 ···m1),
and in addition, by m2 independent infinitesimal transformations of second order,by m3 independent ones of third order, . . . , by ms0 independent ones of s0-th order;the general form of these transformations is:
T(k)ik
=n
∑ν=1
ξ (k)ik,ν(x1, . . . ,xn)
∂ f∂xν
(k=2,3 ···s0 ; ik =1,2 ···mk),
where the ξ (k) are entire k-th order homogeneous functions of their arguments. Atthe same time, it results that to every group G which belongs to the subclass s= s0 isassociated a completely determined group Γ having the constitution just described.
By executable operations, it can be decided whether there is a group Γ whichpossesses the properties just described; by means of executable operations, one caneven determine all possibly existing groups Γ .
In fact, the number of all possible systems: m2, m3, . . . , ms0 is at first finite.Furthermore, if one has chosen such a system, one can always determine, in themost general way and by means of algebraic operations, m2+ · · ·+ms0 independentinfinitesimal transformations:
T(k)ik
(k=2,3 ···s0 ; ik =1,2 ···mk)
which, together with the T(0)i , T(1)
j generate an (n+m1 + · · ·+ms0)-term group.Indeed, for that, one only needs to determine in the most general way the coefficientsin the functions ξ (k) so that every transformation:[
T(k)ik, T
(µ)jµ
](k, µ =2,3 ···s0)
may be linearly deduced from:
T(k+µ−1)π (π =1 ···mk+µ−1),

610 28 Approach towards the Determination of All Finite Groups of the Rn
as soon as k + µ − 1 6 s0, and vanishes identically as soon as k + µ − 1 > s0. Itis clear on the occasion that one obtains only algebraic equations for the unknowncoefficients.
In what precedes, it is shown that for every individual entire number s0 > 1, itcan be realized by means of executable operations whether there are groups of ourclass which belong to the subclass: s = s0. But we possess no general method whichaccomplishes this for all entire numbers s > 1 in one stroke. Only in special cases,for special constitutions of the linear homogeneous group (3) did we succeed to rec-ognize how many and which ones of the infinitely many subclasses are representedby some groups. On the occasion, it happens that a maximum exists for the num-ber s, so that only the classes whose number s does not exceed a certain maximumreally contain some groups (cf. the Chap. 29); however, for the existence of sucha maximum, we do not have a general criterion. Nevertheless, we believe that it ispossible to set up such a criterion.
In consequence of that, we will restrict ourselves to explain how one can findall groups of our class which belong to a determined subclass, say in the subclass:s = s0 > 1.
According to p. 609, to every group of the subclass: s = s0 is associated a com-pletely determined group Γ of the same subclass with infinitesimal transformationswhich have a specific form described above. Now, since all groups Γ of this sortwhich belong to the subclass: s = s0 can be determined, as we know, by means ofexecutable operations, we yet need only to show in which way one can find thegroups of the subclass: s = s0 to which are associated an arbitrarily chosen con-cerned group Γ .
Let:
(4)
T(0)i =
∂ f∂xi
, T(1)j =
1···n
∑ν , π
α jνπ xν∂ f∂xπ
=n
∑π=1
ξ (1)jπ (x1, . . . ,xn)
∂ f∂xπ
T(k)ik
=n
∑ν=1
ξ (k)ik,ν(x1, . . . ,xn)
∂ f∂xν
(i=1 ···n ; j=1 ···m1 ; ik =1 ···mk ; k=2 ···s0)
be the n+m1 + · · ·+msO independent infinitesimal transformations of an arbitrarygroup amongst the discussed groups Γ , and let the composition of this group bedetermined by the relations:
(5)
[T(k)ik, T
(µ)jµ
]=
mk+µ−1
∑π=1
cik jµ π T(k+µ−1)π
(k, µ =0, 1 ···s0 ; ik =1 ···mk ; jµ =1 ···mµ ; m0 =n),
in which the c of the right-hand side are to be considered as known and in particular,do vanish as soon as k+µ −1 exceeds the number s0.
Every group G belonging to the subclass: s = s0 to which is associated thegroup (4) contains n + m1 + · · ·+ ms0 parameters and is generated by the same

§ 105. 611
number of independent infinitesimal transformations; these transformations havethe form:
(6)T (0)
i =∂ f∂xi
+ · · · , T (k)ik
=n
∑ν=1
ξ (k)ik,ν(x1, . . . ,xn)
∂ f∂xν
+ · · ·
(i=1 ···n ; ik =1 ···mk ; k=1 ···s0),
where, generally, the left out terms are of higher order than those written. Thequestion is nothing but to determine all groups, the infinitesimal transformations ofwhich have the form (6).
Evidently, the composition of a group with the infinitesimal transformations (6)is represented by relations of the form:
(7)
[T (k)
ik, T (µ)
jµ
]=
mk+µ−1
∑π=1
cik jµ π T (k+µ−1)π
+s0
∑τ=k+µ
1···mτ
∑πτ
Cik jµ πτ T (τ)πτ
(k, µ =0, 1 ···s0 ; ik =1 ···mk ; jµ =1 ···mµ ; m0 =n).
Here, the C are certain constants which, as is known, satisfy relations derived fromthe Jacobi identity (cf. Chap. 9, p. 184 sq.).
We imagine that the concerned relations between the C are set up and that themost general system of C which satisfies them is computed. Since all the relationsare algebraic, this computation requires only executable operations. In addition, theform of the relations (7) can be simplified by replacing every infinitesimal transfor-mation of k-th order: T (k)
ikby another transformation of order k:
(8)T(k)ik
= T (k)ik
+s0
∑τ=k+1
1···mτ
∑πτ
Pik πτ T (τ)πτ
(ik =1 ···mk ; k=0, 1 ···s0),
where it is understood that the P are arbitrary numerical quantities. Indeed, if oneintroduces the T in place of the T , one obtains in place of (7) relations of the form:
(7’)
[T(k)ik, T
(µ)jµ
]=
mk+µ−1
∑π=1
cik jµ π T(k+µ−1)π
+s0
∑τ=k+µ
1···mτ
∑πτ
Cik jµ πτ T(τ)πτ ,
where, between the C and the C, a connection holds which can be easily indicated.Now, one will provide the P, which are perfectly arbitrary in order that the coeffi-

612 28 Approach towards the Determination of All Finite Groups of the Rn
cients C receive the simplest possible numerical values; thanks to this, one achievesa certain simplification.
If, in the equations (8), all P are chosen fixed, then we say that the infinitesimaltransformation of k-th order: T(k)
ikis normalized.
If one knows all systems of C which satisfy the relations mentioned a short whileago, then one therefore knows at the same time all compositions that a group ofthe form (6) can possibly have. Still, the question is only whether, for each of theso defined compositions, there are groups of the form (6) which have precisely thecomposition in question, and how these groups can be found, in case they exist.
Thus, we imagine that an arbitrary system of values C is given in the equations (7)which satisfies the relations discussed, so that the equations (7) represent a possiblecomposition of an (n+m1 + · · ·+ms0)-term group (cf. p. 309).
At first, we realize easily that if there actually are groups of the form (6) whichhave the composition (7), then they all are similar to each other, whence they all be-long to the same type of transitive groups of the space x1, . . . ,xn (Chap. 22, p. 445).
In fact, if we have two groups G and G′ which both possess the form (6) andthe composition (7), then these two groups can obviously be related to each otherin a holoedrically isomorphic way thanks to a choice of their infinitesimal transfor-mations so that the largest subgroup of G which leaves invariant the point: x1 = 0,. . . , xn = 0 corresponds to the largest subgroup of G′ which fixes this point. Now,since under the assumptions made, the point: x1 = 0, . . . , xn = 0 is a point in generalposition, then according to Theorem 76, p. 434, these two transitive group G and G′
are similar to each other. But this is what was to be proved.Moreover, we will show that there always are groups of the form (6) which pos-
sess the composition (7).We determine right at the front in a space RN of N = n+m1 + · · ·+ms0 dimen-
sions a simply transitive group:
(9) Wi f , W (k)ik
f (i=1 ···n ; k=1 ···s0 ; ik =1 ···mk)
of the composition (7); according to Chap. 22, pp. 441–444, this is always pos-sible and this requires at most the integration of ordinary differential equations.Afterwards, we choose any manifold M of the RN which admits the (N − n)-termsubgroup:
(10) W (k)ik
f (k=1 ···s0 ; ik =1 ···mk),
of the group (9), but no larger subgroup; this property is possessed by every charac-teristic manifold (p. 116) of the (N −n)-term complete system:
W (k)ik
f = 0 (k=1 ···s0 ; ik =1 ···mk).
Through the ∞N transformations of the group (9), M takes precisely ∞n differentpositions whose totality forms an invariant family. If we characterize the individualmanifolds of this family by means of n coordinates x1, . . . ,xn, we obtain a transitive

§ 105. 613
group in x1, . . . ,xn:
(11) X (0)i f , X (k)
ikf (i=1 ···n ; k=1 ···s0 ; ik =1 ···mk)
that indicates in which way the manifolds of our invariant family are permuted witheach other by the group (9). This new group is isomorphic with the group (9) so thatrelations of the form:
(7”)
[X (k)
ik, X (µ)
jµ
]=
mk+µ−1
∑π=1
cik jµ π X (k+µ−1)π f +
s0
∑τ=k+µ
1···mτ
∑πτ
Cik jµ πτ X (τ)πτ f
(k, µ =0, 1 ···s0 ; ik =1 ···mk ; jµ =1 ···mµ ; m0 =n).
hold (cf. Theorem 85, p. 491).It can be easily proved that the infinitesimal transformations of the group (11)
receive the form (6) after an appropriate choice of the variables x1, . . . ,xn.In order to conduct the concerned proof, we imagine above all that the variables
are chosen so that M receives the coordinates: x1 = 0, . . . , xn = 0. Then obviously,all infinitesimal transformations:
X (k)ik
f (k=1 ···s0 ; ik =1 ···mk)
in the xν are of first or higher order, while by contrast: X01 f , . . . ,X0
n f are independentinfinitesimal transformations of zeroth order, out of which no transformation of firstor higher order can be linearly deduced; this last fact follows from the transitivity ofthe group (11). It is therefore clear that, notwithstanding our assumption just made,we can choose the variables x1, . . . ,xn so that X0
1 f , . . . ,X0n f receive the form:
X (0)i f =
∂ f∂xi
+ · · · (i=1 ···n).
After these preparations, we want at first to determine the initial terms in thepower series expansions of the m1 infinitesimal transformations X (1)
j f .We have:
X (1)j f =
n
∑ν=1
ζ (1)jν (x1, . . . ,xn)
∂ f∂xν
+ · · · ( j=1 ···m1),
where it is understood that the ζ (1) are linear homogeneous functions of their argu-ments. If we insert this expression in the n relations:
[X (0)
i , X (1)j
]=
n
∑π=1
ci jπ X (0)π f +
s0
∑τ=1
1···mτ
∑πτ
Ci jπτ X (τ)πτ f (i=1 ···n)
and if we compare the terms of zeroth order in the two sides, it then comes:

614 28 Approach towards the Determination of All Finite Groups of the Rn
n
∑ν=1
∂ζ (1)jν
∂xi
∂ f∂xν
=n
∑π=1
ci jπ∂ f∂xπ
(i=1 ···n),
hence all first order differential quotients of ζ (1)jν are completely determined, and
because of the known equation:
n
∑i=1
xi∂ζ (1)
jν
∂xi= ζ (1)
jν ,
also ζ (1)ν itself is completely determined. Now, since ξ (1)
jν obviously satisfies all
differential equations which we have found just now, it results that: ζ (1)jν = ξ (1)
jν , andconsequently:
X (1)j f =
n
∑ν=1
ξ (1)jν (x1, . . . ,xn)
∂ f∂xν
+ · · · ( j=1 ···m1).
In the same way, we find generally:
X (k)ik
f =n
∑ν=1
ξ (k)ik ν(x1, . . . ,xn)
∂ f∂xν
+ · · · (k=1 ···s0 ; ik =1 ···mk),
or in other words: we find that the infinitesimal transformations of the group (11)have the form (6). Evidently, here lies the reason why the N infinitesimal transfor-mations (11) are mutually independent, so that the group (11) is N-term and has thesame composition as the group (9).
Since, as we have seen just now, the group (11) is N-term, the group:
(9) W (0)i f , W (k)
ikf (i=1 ···n ; k=1 ···s0 ; ik =1 ···mk)
can contain no invariant subgroup which belongs to the group:
(10) W (k)ik
f (k=1 ···s0 ; ik =1 ···mk)
(Theorem 85, p. 491). But one can also realize directly that there is no such invariantsubgroup of the group (9); in this way, by taking the Theorem 85 into consideration,one obtains a new proof of the fact that the group (11) has N essential parameters.
Every invariant subgroup of (9) which belongs to the group (10) obviously con-tains an infinitesimal transformation:
W f =mp
∑τ=1
ρτ W (p)τ f +
s0
∑k=p+1
1···mk
∑τk
στk W (k)τk f (p>1),
in which not all the mp quantities ρτ vanish. Simultaneously with W f , there appearin g also the n infinitesimal transformations:

§ 105. 615
[W 01 ,W], · · · , [W 0
n ,W] ;
consequently, as one sees from the composition (7) of the group (9), there surelyappears in g a transformation of the form:
W′ f =mp−1
∑τ=1
ρ ′τ W (p−1)
τ f +s0
∑k=p
1···mk
∑τk
σ ′τk
W (k)τk f ,
in which not all the mp−1 quantities ρ ′τ are zero. In this way, one realizes finally
that g must contain an infinitesimal transformation which does not belong to thegroup (10); but this contradicts the assumption that g should be contained in thegroup (10), hence there is no group g having the supposed constitution.
The developments achieved up to now provide the
Theorem 110. In the variables x1, . . . ,xn, let a transitive group be presented which,in the neighbourhood of the point: x1 = 0, . . . , xn = 0 in general position con-tains the following infinitesimal transformations: firstly, n zeroth order independenttransformations of the form:
T(0)1 =
∂ f∂x1
, . . . , T(0)n =
∂ f∂xn
,
and secondly, for every k = 1,2, . . . ,s, mk > 0 independent k-th order transforma-tions of the form:
T(k)ik
=n
∑ν=1
ξ (k)ik ν(x1, . . . ,xn)
∂ f∂xν
(k=1 ···s ; ik =1 ···mk),
where the ξ (k) denote completely homogeneous functions of order k. Also, let thecomposition of the group be determined by the relations:
[T(k)ik, T
(µ)jµ
]=
mk+µ−1
∑π=1
cik jµ π T(k+µ−1)π
(k, µ =0, 1 ···s ; ik =1 ···mk ; jµ =1 ···mµ ; m0 =n),
where the c in the right-hand side vanish all as soon as k+ µ − 1 is larger than s.Then one finds in the following way all (n+m1+ · · ·+ms)-term groups of the spacex1, . . . ,xn, the infinitesimal transformations of which possess the form:
(6)T (0)
i =∂ f∂xi
+ · · · , T (k)ik
=n
∑ν=1
ξ (k)ik,ν(x1, . . . ,xn)
∂ f∂xν
+ · · ·
(i=1 ···n ; ik =1 ···mk ; k=1 ···s),
in the neighbourhood of: x1 = 0, . . . , xn = 0.One determines the constants C in the equations:

616 28 Approach towards the Determination of All Finite Groups of the Rn
(7)
[T (k)
ik, T (µ)
jµ
]=
mk+µ−1
∑π=1
cik jµ π T (k+µ−1)π
+s0
∑τ=k+µ
1···mτ
∑πτ
Cik jµ πτ T (τ)πτ
(k, µ =0, 1 ···s ; ik =1 ···mk ; jµ =1 ···mµ ; m0 =n)
in the most general way so that they satisfy the relations following from the Jacobiidentity. If this takes place, then the equations (7) represent all compositions thatthe sought groups may have. To every individual composition amongst these com-positions correspond groups of the form (6) which are all similar to each other andwhich can be found in any case by integrating ordinary differential equations.†
§ 151.
In the preceding paragraphs, we have reduced the problem of determining all tran-sitive groups of the Rn to the following four problems:
A. To find all types of linear homogeneous groups in n variables.
If one has solved this problem, then in the neighbourhood of any point in gen-eral position, one knows the possible forms of the initial terms in all infinitesimaltransformations of first order which can appear in a transitive group of the Rn.
B. Assuming that, in the neighbourhood of a point in general position, the initialterms of the first order infinitesimal transformations of a transitive group of the Rnare given, to determine all possible forms of the initial terms in the infinitesimaltransformations of second and higher order.
C. To determine all compositions that a transitive group of the Rn can have, agroup which, in the neighbourhood of a point in general position contains certaininfinitesimal transformations of first, second, . . . , s-th order with given initial terms,and which by contrast, contains no transformation of (s+1)-th or higher order.
D. Assuming that one of the compositions found in the preceding problem isgiven, to set up a transitive group which possesses this composition and whose in-finitesimal transformations of first, . . . , s-th order have the form given in the preced-ing problem.
If one knows one group having the constitution demanded in the last problem,then one knows all such groups, since these are, according to Theorem 110, similarto each other.
The settlement of the first one amongst these four problems requires only exe-cutable, or said more precisely: only algebraic operations (cf. Chap. 12, p. 222 andChap. 23, p. 501 sq.). By contrast, we did not succeed to reduce the problem B to afinite number of executable operations. The problem C again requires only algebraicoperations. Lastly, as we have shown in the previous paragraph, the problem D canin any case be settled by integrating ordinary differential equations.
† LIE, Archiv for Math. Vol. X, pp. 381–389. 1885.

§ 151. 617
At present, we want to consider a special case which presents a characteristicsimplification and we want to carry it out in details.
Assume that the (n+m1 + · · ·+ms)-term group:
(12)T(0)i =
∂ f∂xi
, T(k)ik
=n
∑ν=1
ξ (k)ik ν(x1, . . . ,xn)
∂ f∂xν
(i=1 ···n ; k=1 ···s ; ik =1 ···mk)
which we imagined as given in Theorem 110, p. 615, contains amongst its first-orderinfinitesimal transformations:
e1T(1)1 + · · ·+ em1 T
(1)m1
specially one of the form:
x1∂ f∂x1
+ · · ·+ xn∂ f∂xn
and let, say, T(1)m1 have this form. We will show that under this assumption, it is
always possible to determine all transitive (n+m1 + · · ·+ms)-term groups of thespace whose transformations, in the neighbourhood of the point: x1 = 0, . . . , xn = 0in general position, have the form:
(12’)T (0)
i =∂ f∂xi
+ · · · , T (k)ik
=n
∑ν=1
ξ (k)ik ν(x1, . . . ,xn)
∂ f∂xν
+ · · ·
(i=1 ···n ; k=1 ···s ; ik =1 ···mk).
For:
T (1)m1 =
n
∑ν=1
xν∂ f∂xν
+ · · · ,
we write U , a notation which we shall also employ on later occasions.At first, it is clear that between U and the infinitesimal transformations of order
s of a group of the form (12’), the following relations hold:[T (s)
π ,U]= (1− s)T (s)
π (π =1 ···ms).
In the same way, between U and the infinitesimal transformations of order (s−1),there are relations of the form:[
T (s−1)j ,U
]= (2− s)T (s−1)
j +ms
∑π=1
K jπ T (s)π ( j=1 ···ms−1),
where the K are unknown constants. In order to simplify these relations, we set (cf.p. 611):
T(s−1)j = T (s−1)
j +ms
∑π=1
P jπ T (s)π ( j=1 ···ms−1),

618 28 Approach towards the Determination of All Finite Groups of the Rn
and we find:[T(s−1)j , U
]= (2− s)T(s−1)
j +ms
∑π=1
(K jπ +(1− s−2+ s)P jπ
)T (s)
jπ ,
hence when we choose the P in an appropriate way:[T(s−1)j , U
]= (2− s)T(s−1)
j ( j=1 ···ms−1).
As a result, the infinitesimal transformations of order (s−1) of the group (12’) arenormalized.
In exactly the same way, we can normalize the infinitesimal transformations oforder (s−2) by setting:
T(s−2)j = T (s−2)
j +ms−1
∑π=1
P′jπ T
(s−1)π +
ms
∑π=1
P′′jπ T (s)
π
( j=1 ···ms−2),
and dispose appropriately of the P′ and of the P′′; in this way, it comes:[T(s−2)j , U
]= (3− s)T(s−2)
j ( j=1 ···ms−2).
By proceeding alike, we obtain finally, when we generally write T for T:
(13)[T (k)
ik, U]= (1− k)T (k)
ik(k=0, 1 ···s ; ik =1 ···mk ; m0 =n).
As a result, the infinitesimal transformations of zeroth, first, up to s-th order areall normalized, except for U itself.
At present, we remember that because of the composition of the group (12’),between the T , there are relations of the form:
(14)
[T (k)
ik, T (µ)
jµ
]=
mk+µ−1
∑π=1
cik jµ π T (k+µ−1)π
+s
∑τ=k+µ
1···mτ
∑πτ
Cik jµ πτ T (τ)πτ
(k, µ =0, 1 ···s ; ik =1 ···mk ; jµ =1···mµ ; m0 =n),
in which the c actually vanish as soon as k+ µ − 1 > s. In order to determine theunknown constants C, we form the Jacobi identity:[
[T (k)ik
, T (µ)jµ ], U
]+[[T (µ)
jµ ,U ], T (k)ik
]+[[U, T (k)
ik], T (µ)
jµ
]= 0,
which, because of (13), obviously takes the form:

§ 151. 619[[T (k)
ik, T (µ)
jµ ], U]= (2− k−µ)
[T (k)
ik, T (µ)
jµ
].
Here, if we insert the expression (14) and if we use once more the equations (13), itcomes:
mk+µ−1
∑π=1
cik jµ π (2− k−µ)T (k+µ−1)π +
s
∑τ=k+µ
1···mτ
∑πτ
Cik jµ πτ (1− τ)T (τ)πτ
= (2− k−µ)[T (k)
ik, T (µ)
jµ
],
or, because the T are independent infinitesimal transformations:
Cik jµ πτ (τ +1− k−µ) = 0 (k+µ 6τ 6s).
From this, it results that all the C vanish.Thus, under the assumption made, all groups of the form (12’) have the same
composition as the group (12), hence according to Theorem 110, p. 615, they all aresimilar to each other and similar to the group (12).
In consequence of that, we can say:
Theorem 111. If a transitive (n + m1 + · · · + ms)-term group in the variablesx1, . . . ,xn contains, in the neighbourhood of the point in general position: x1 = 0,. . . , xn = 0, aside from the n independent infinitesimal transformations of zerothorder in the x:
Ti =∂ f∂xi
+ · · · (i=1 ···n),
yet mk, for k = 1,2, . . . ,s, independent infinitesimal transformations of order k outof which no transformation of order k+1 or higher can be linearly deduced, and ifit specially contains a first order infinitesimal transformation of the form:
n
∑ν=1
xν∂ f∂xν
+ · · · ,
then thanks to the introduction of new variables x′1, . . . ,x′n, it can be brought to the
form:
Ti = Ti =∂ f∂x′i
, T (k)ik
= T(k)ik
=n
∑ν=1
ξ (k)ik ν(x
′1, . . . ,x
′n)
∂ f∂x′ν
(i=1 ···n ; k=1 ···s ; ik =1 ···mk) ;
here, the ξ (k) are the entire homogeneous functions of order k which determine theterms of order k in the infinitesimal transformations of order k:
T (k)ik
=n
∑ν=1
ξ (k)ik ν(x1, . . . ,xn)
∂ f∂xν
+ · · · (k=1 ···s ; ik =1 ···mk)
of the group.

620 28 Approach towards the Determination of All Finite Groups of the Rn
—————–

Chapter 29Characteristic Properties of the GroupsWhich are Equivalent to Certain ProjectiveGroups
In the preceding chapter, we gave a classification of all transtitive groups:X1 f , . . . ,Xr f of the n-fold extended space x1, . . . ,xn. We chose a point x0
1, . . . ,x0n in
general position and considered all infinitesimal transformations of the group whichleave this point at rest, hence all transformations whose power series expansionwith respect to the xi − x0
i have the form:
n
∑i,ν =1
α jiν(x01, . . . ,x
0n) · (xi − x0
i )∂ f∂xν
+ · · · ( j=1 ,2, ...),
where the left out terms are of second or of higher order1. Then the linear homoge-neous group:
L j f =n
∑i,ν =1
α jiν(x01, . . . ,x
0n)x′i
∂ f∂x′ν
( j=1 ,2, ...),
showed in which way the ∞n−1 line-elements x′1 : x′2 : · · · : x′n through the pointx0
1, . . . ,x0n are transformed by those transformations of the group: X1 f , . . . ,Xr f ,
which leave this point invariant.In the present chapter, to begin with, we solve the problem of determining all
transitive groups: X1 f , . . . ,Xr f of the space x1, . . . ,xn for which the linear homoge-neous group: L1 f ,L2 f , . . . assigned to a point in general position coincides eitherwith the general linear homogeneous group or with the special linear homogeneousgroup †. Then it comes out the curious result that every such group: X1 f , . . . ,Xr f is
1 Such terms are systematically written “+ · · ·” by Engel and Lie.† It is easy to see that a group of Rn which assigns the general or the special linear homogeneousgroup to a point x0
1, . . . ,x0n in general position, is always transitive. Indeed, in the neighborhood
of x01, . . . ,x
0n, the group certainly comprises an infinitesimal transformation of zeroth order in the
xi − x0i , hence a transformation: ∑ αi pi + · · · , in which not all αi are equally null. In addition, the
group surely comprises n(n−1) first order transformations of the form:
(xi − x0i ) pk + · · · (i,k=1 ···n; i 6=k).
621

622 29 Groups that are Equivalent to Certain Projective Groups
equivalent either to the general projective group, or to the general linear group, orto the special linear group of the space x1, . . . ,xn.
In addition, we yet show in the last paragraph of the chapter that in the spacex1, . . . ,xn there is no finite continuous group which can transfer m > n+2 arbitrarilychosen points in general position to just the same kind of m points; at the same time,we show that the general projective group and the groups that are equivalent to it arethe only groups of the space x1, . . . ,xn which can transfer n+ 2 arbitrarily chosenpoints in general position to just the same kind of n+2 points.
§ 152.
Every transitive group of Rn comprises, in the neighborhood of the point: x01, . . . ,x
0n
in general position, n independent infinitesimal transformations of zeroth order inthe xi − x0
i :p1 + · · · , p2 + · · · , . . . , pn + · · · ,
where, according to the fixation of notation on p. 555, pi is written in place of ∂ f∂xi
.
Now, if G assigns to the point x01, . . . ,x
0n the general linear homogeneous group as
group: L1 f ,L2 f , . . . , then it comprises in the neighborhood of x01, . . . ,x
0n the largest
possible number, namely n2, of such infinitesimal transformations of first order inx1 − x0
1, . . . ,xn − x0n, out of which no transformation of second or of higher order
can be deduced by linear combination. These n2 first order transformations have theform:
(xi − x0i ) pk + · · · (i,k=1 ···n).
If, on the other hand, G assigns to the point x01, . . . ,x
0n the special linear homogeneous
group, then it comprises, in the neighborhood of the point, only n2 −1 independentfirst order infinitesimal transformations out of which no transformation of secondor of higher order can be deduced by linear combination; the same transformationshave the form:
(xi − x0i ) pk + · · · , (xi − x0
i ) pi − (xk − x0k) pk + · · ·
(i,k=1 ···n ; i≷k).
Therefore, when we yet choose the point x01, . . . ,x
0n as the origin of coordinates,
we can enunciate as follows the problem indicated in the introduction of the chapter:In the variables x1, . . . ,xn, to seek all groups X1 f , . . . ,Xr f , or shortly G, which,
in the neighborhood of the point in general position: x1 = 0, . . . ,xn = 0, comprisethe following infinitesimal transformations of zeroth and of first order: either then+n2:
pi + · · · , xi pk + · · · (i,k=1 ···n);
or the n+n2 −1:
If one makes Combination [bracketting] of the latter with ∑ αi pi + · · · , then one recognizes thatn transformations of the form: p1 + · · · , . . . , pn + · · · do appear, whence the group is actuallytransitive.

§ 152. 623
pi + · · · , xi pk + · · · , xi pi − xk pk + · · ·(i,k=1 ···n ; i≷k).
To begin with, the two cases can be treated simultaneously; one must only, aslong as possible, disregard the fact that in the first case, aside from the transforma-tions which occur in the second case, yet one transformation appears: ∑i xi pi.
The group X1 f , . . . ,Xr f comprises infinitesimal transformations whose expan-sion in power series begins with terms of second, or of relatively higher order in thex, shortly, infinitesimal transformations of second or higher order, respectively. Wesearch for the highest order number2 s of the existing transformations and we evenlook for the determination of such transformations.
We can suppose this number s to be bigger than 1, since we already know all thefirst order infinitesimal transformations that appear. Let
K = ϑ1 p1 + · · ·+ϑn pn + · · ·
be a s-th order infinitesimal transformation of the group; at the same time, the ϑ ’sare supposed to denote completely homogeneous functions of order s in x1, . . . ,xn,while the left out terms are of higher order. Obviously, ϑ1, . . . ,ϑn do not vanish all,because there should not be given any infinitesimal transformation ∑ ck Xk f whosepower series expansion starts with terms of (s+1)-th or of higher order; so we canassume in any case that ϑ1 is not identically null.
Let the lowest power of x1 which appears in ϑ1 be the α1-th and let
xα11 xα2
2 · · ·xαnn (α1 + ···+αn =s)
be a term of ϑ1 with nonvanishing coefficient. Now, we make Combination of thetransformation x1 p2 + · · · with K, and we make Combination of the result oncemore with x1 p2 + · · · , and so on — in total α2 times. We make Combination ofthe s-th order infinitesimal transformation obtained this way with x1 p3 + · · · , andwe then proceed α3 times one after the other, etc., and finally, we still apply αntimes x1 pn + · · · one after the other. In this way, we recognize in the end that atransformation of the form:
K′ = xs1 p1 +ϑ ′
2 p2 + · · ·+ϑ ′n pn + · · ·
belongs to our group.All remaining terms of ϑ1 are cancelled; indeed, the same terms contain either
also the power xα11 or a higher one, and in both cases, the power of a variable xi
(i > 1) is certainly not the αi-th, but a lowest one; consequently, the correspondingterm vanishes by making αi times Combination with x1 pi + · · · . As always, the
2 Actually, s will be shown to be equal to 2, not more, and the corresponding transformations ofsecond order to be necessarily of the form xi(x1 p1 + · · ·+ xn pn)+ · · · , i = 1, . . . ,n.

624 29 Groups that are Equivalent to Certain Projective Groups
terms of (s+1)-th and of higher order are, also here, left out of consideration3 (cf.Chap. 11, Theorem 30, p. 207).
In order to determine more precisely the form of the transformation K′, we makeuse of an auxiliary proposition which can be exploited several times with benefit.
Proposition 1. If the infinitesimal transformations C f and B1 f + · · ·+Bm f belongto a group and if furthermore, there are m relations of the form [C, Bk] = εk Bk f ,where the constants εk are all distinct one another, then the group comprises all them infinitesimal transformations B1 f , . . . ,Bm f .
The proof of this auxiliary proposition is very simple. Aside from B1 f + · · ·+Bm f , the group yet obviously comprises the following infinitesimal transformations:[
C, B1 + · · ·+Bm]= ε1 B1 f + · · ·+ εm Bm f[
C, ε1 B1 + · · ·+ εm Bm]= ε2
1 B1 f + · · ·+ ε2m Bm f
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·[C, εm−2
1 B1 + · · ·+ εm−2m Bm
]= εm−1
1 B1 f + · · ·+ εm−1m Bm f .
But since the determinant:∣∣∣∣∣∣∣∣∣1 · · · 1ε1 · · · εm...
. . ....
εm−11 · · · εm−1
m
∣∣∣∣∣∣∣∣∣= ∏i>k
(εi − εk)
does not vanish by assumption, each individual transformation Bk f can be deduced,by multiplication with appropriate constants and by subsequent addition, from thejust found transformations. Thus the proposition is proved.
In order to apply the same proposition, we now make Combination of the trans-formation K′, written in detail:
xs1 p1 +
∑Aβ xβ1
1 · · ·xβnn
p2 + · · ·+
∑Nν xν11 · · ·xνn
n
pn + · · ·(β1 + ···+βn = ···=ν1 + ···+νn =s)
with the transformation:x1 p1 − xi pi + · · · ,
on the understanding that i is any of the numbers 2, . . . ,n. Then one obtains:
3 Here is an equivalent reformulation. Adapting slightly notation, let ϑ1 = ∑|α|=s Aα xα andchoose β ∈ Nn with |β | = s so that β1 = infα1 : Aα 6= 0. For any other monomial Aα xα withAα 6= 0 we have either α1 > β1 or α1 = β1. In the first case, since α1 +α2 + · · ·+αi + · · ·+αn =β1 +β2 + · · ·+βi + · · ·+βn = s, there must exist a i with 2 6 i 6 n such that αi < βi. In the secondcase, namely if α1 = β1, then α2 + · · ·+αi + · · ·+αn = β2 + · · ·+βi + · · ·+βn, and again, theremust exist a i with 2 6 i 6 n such that αi < βi, because otherwise, α2 > β2, . . . , αn > βn togetherwith |α |= |β | implies α2 = β2, . . . , αn = βn, hence α = β , a contradiction.

§ 152. 625
(s−1)xs1 p1 +
∑Aβ (β1 −βi + ε2i)xβ1
1 · · ·xβnn
p2 + · · ·++
∑Nν (ν1 −νi + εni)xν11 · · ·xνn
n
pn + · · · ,
where εii has the value 1, while all εki (i 6= k) vanish. Therefore the s-th order terms ofthe infinitesimal transformation K′ have the form B1 f + · · ·+Bm f discussed above,where the Bk f are reproduced through Combination with x1 p1 − xi pi, but with dis-tinct factors4.
4 Here are considerations about derived homogeneous groups. The next phrase of the text appliesa fundamental observation of Chap. 28 that we must reconstitute just as a preparation. Let G bea finite continuous (locally) transitive homogeneous group acting on the (x1, . . . ,xn)-space andsuppose that the origin 0 is the central point, of course in general position whenever needed. ThenG comprises n transformations of zeroth order:
T(0)i =
∂ f∂xi
+ · · · (i=1 ···n)
out of which no transformation of first or of higher order can be deduced by linear combination.Further, G contains a certain number, say m1 (possibly null), of infinitesimal transformations offirst order:
T(1)j =
n
∑ν=1
n
∑i=1
α jiν xi + · · ·
∂ f∂xν
( j=1 ···m1)
that are linearly independent modulo transformations of order > 2. Generally, for k = 1,2, . . . upto a finite maximal order s0, the group G comprises a certain number mk (possibly null, and indeednull for k > s0 +1 by definition of s0) of infinitesimal transformations of k-th order:
T(k)j =
n
∑ν=1
ξ (k)
jν (x)+ · · · ∂ f
∂xν( j=1 ···mk)
that are linearly independent modulo transformations of order > mk + 1, where each ξ (k)jν (x) is
a homogeneous polynomial of degree mk in x1, . . . ,xn, and where the left out terms are of order> mk +1.
By bracketing (cf. Chap. 11, Theorem 30, p. 207), we get:
(a)[T(k1)j1
, T(k2)j2
]=
n
∑ν=1
ξ (k1)
j1µ∂ξ (k2)
j2ν
∂xµ−ξ (k2)
j2µ∂ξ (k1)
j1ν
∂xµ+ · · ·
∂ f∂xν
,
where the written terms are of order k1 + k2 −1 (they might be null) and where the left out termsare of order > k1+k2. The linear combination of infinitesimal transformations to which the bracket[T(k1)j1
, T(k2)j2
]should be equal can only contain transformations of order > k1 + k2 −1, hence may
be written:
(b)[T(k1)j1
, T(k2)j2
]=
mk1+k2−1
∑l=1
Ck1k2j1 j2l ·T
(k1+k2−1)l + · · · ,
where the left out terms comprise linear combinations of transformations of order > k1 + k2. Inparticular, if k1 + k2 −1 > s0 +1, the brackets
[T(k1)j1
, T(k2)j2
]must vanish.
For every k = 0,1, . . . ,s0 and every j = 1, . . . ,mk, we define the projected infinitesimal trans-formation:
T(k)j :=
n
∑ν=1
ξ (k)jν (x)
∂ f∂xν
,

626 29 Groups that are Equivalent to Certain Projective Groups
Now, since from the expansion in power series of our group a new group Γ can bederived in such a way that in each power series expansion, only the terms of lowestorder are kept (Chap. 28, p. 607), then our Proposition 1 shows that each individualBk f belongs to the group Γ . Next, there evidently is a Bk f which embraces the termxs
1 p1 and hence is reproduced with the factor s−1. The remaining terms of this Bk fare defined through the equations5:
defined by erasing all remainders, which is homogeneous of order mk. Equivalently, T(k)j =
πk(T(k)j
)if, by πk, we denote the projection of infinitesimal transformations (and of analytic func-
tions) onto the vector space of all homogeneous monomials of degree k. We notice that a reformu-lation of (a) simply says:
πk1+k2−1
([T(k1)j1
, T(k2)j2
])=[πk1
(T(k1)j1
), πk2
(T(k2)j2
)]=[T(k1)j1
, T(k2)j2
].
Finally, by taking the πk1+k2−1-projection of both sides of (b), we obtain Lie algebra-type identities:[T(k1)j1
, T(k2)j2
]= πk1+k2−1
([T(k1)j1
, T(k2)j2
])= πk1+k2−1
(mk1+k2−1
∑l=1
Ck1k2j1 j2l T
k1+k2−1l + · · ·
)
=
mk1+k2−1
∑l=1
Ck1k2j1 j2l T
k1+k2−1l
which show that to the arbitrary initial group G is always associated a group G constituted byinfinitesimal transformations T(k)
j , k = 0,1, . . . ,s0, j = 1, . . . ,mk, having polynomial, homogeneouscoefficients.5 Here is an enlightement. The derived homogeneous group G ≡ Γ contains the infinitesimaltransformations Di = x1 p1 − xi pi, for i = 1, . . . ,n, and also:
K′ = xs1 p1 +
∑Aβ xβ p2 + · · ·+
∑Nγ xγ pn,
all the remainders being suppressed (one must have a group for Proposition 1 to apply). At first, forfixed i, one looks at the Lie bracket, joint with Di, of each monomial homogeneous infinitesimaltransformation
Bγ xγ pk, k > 2, |γ |= s, which appears in K′ and which is distinct from xs
1 p1:[Di,
Bγ xγ pk]= (γ1 − γi + εki)
Bγ xγ pk.
One then collects all the monomials
Bγ xγ pk of K′ having the same reproducing factor γ1 −γi +
εki = s− 1 as the infinitesimal transformation xs1 p1, and one calls Bi
1 the corresponding sum (itdepends on i), which is a part of K′. On the other hand, there are finitely many other values of theintegers γ1 − γi + εki, say m(i), and one decomposes accordingly K′ = Bi
1 + Bi2 + · · ·+ Bi
m(i). Then
Proposition 1 yields that Bi1 belongs to G. Other Bk
1 are left out.Let i′ 6= i be another integer and consider bracketing with Di′ . The same reasoning applied to
Bi1 (instead of K′) yields a decomposition Bi
1 = Bi,i′1,1 + Bi,i′
1,2 + · · ·+ Bi,i′
1,m(i′) with the first term Bi,i′1,1
collecting monomials of Bi1 that are reproduced with the factor s− 1; clearly, xs
1 p1 still belongsto Bi,i′
1,1. Proposition 1, yields again that Bi,i′1,1 belongs to G. By induction, letting i = 1, i′ = 2, . . . ,
i(n) = n, one gets an infinitesimal transformation B1,2,...,n1,1,...,1 of G — denoted by Bk f in the translated
text — such that[Di, B1,2,...,n
1,1,...,1
]= (s−1) B1,2,...,n
1,1,...,1, for all i = 1,2, . . . ,n.

§ 152. 627
β1 −βi + ε2i = · · ·= ν1 −νi + εni = s−1.
Since ε23, . . . ,ε2n vanish, from the same equations, we obtain immediately β3 =· · ·= βn and consequently:
β1 +β2 + · · ·+βn = β1 +β2 +(n−2)β3 = s,
whence it yet comes:
β2 = β1 − s+2, β3 = β1 − s+1.
By elimination of β2 and β3, it follows:
(β1 − s+1)n = 0hence β1 = s−1, β2 = 1, β3 = · · ·= βn = 0.
In the same way, the νk determine themselves, and so on. In brief, we realize thatour group: X1 f , . . . ,Xr f comprises an infinitesimal transformation of the form:
K′′ = xs1 p1 +A2 xs−1
1 x2 p2 + · · ·+An xs−11 xn pn + · · · .
By making Combination of K′′ with p1 + · · · , we get:
sxs−11 p1 +(s−1)A2 xs−2
1 x2 p2+
+ · · ·+(s−1)An xs−21 xn pn + · · ·= L,
and hence our group comprises an infinitesimal transformation, namely[L, K′′],
which possesses the form:
sx2s−21 p1 +η2 p2 + · · ·+ηn pn + · · · .
But now, since 2s− 2 should not be larger than s and since, on the other hand, s islarger than 1, it follows that:
s = 2,
so that we have:
K′′ = x21 p1 +A2 x1 x2 p2 + · · ·+An x1 xn pn + · · · .
Furthermore, it comes:[x1 pi + · · · , K′′]= (Ai −1)x2
1 pi + · · · .
If now Ai were different from 1, then we would obtain, one after the other, bothtransformations: [
x21 pi + · · · , xi p1 + · · ·
]= x2
1 p1 −2x1xi pi + · · · ,[x2
1 p1 −2x1xi pi + · · · , x21 pi + · · ·
]= 4x3
1 pi + · · · .

628 29 Groups that are Equivalent to Certain Projective Groups
But since no infinitesimal transformation of third order should be found, all the Aiare equal to 1. Therefore K′′ has the form:
x1(x1 p1 + x2 p2 + · · ·+ xn pn
)+ · · ·
and thereupon lastly, by making Combination with xi p1 + · · · , we find generally:
xi(x1 p1 + · · ·+ xn pn
)+ · · · .
Consequently, if a group X1 f , . . . ,Xr f of the nature required on p. 622 comprisesinfinitesimal transformations of order higher than the first, then it comprises onlysuch transformations that are of order two, and in fact in any case, n of the form:
xi(x1 p1 + · · ·+ xn pn
)+ · · · (i=1 ···n).
If we add up all the n transformations:[pi + · · · , xi ∑n
k=1 xk pk + · · ·]= xi pi +∑n
k=1 xk pk + · · · ,
together, then we obtain the transformation x1 p1 + · · ·+ xn pn + · · · . Hence if thegroup X1 f , . . . ,Xr f contains infinitesimal transformations of second order, then theassociated linear homogeneous group L1 f ,L2 f , . . . is the general linear homoge-neous group. Or conversely:
The group X1 f , . . . ,Xr f never contains infinitesimal transformations of orderhigher than the first, when the associated group L1 f ,L2 f , . . . is the special linearhomogeneous group.
For abbreviation, we write the infinitesimal transformation xi(x1 p1 + · · · +
xn pn)+ · · · in the form Hi + · · · , on the understanding that Hi denotes the terms of
second order. Now, it could be thinkable that in one group X1 f , . . . ,Xr f , except then transformations Hk + · · · , there still appeared others of second order. Let such aone be for instance:
τ1 p1 + · · ·+ τn pn + · · ·= T+ · · · ,
where the τi mean homogeneous functions of second order in x1, . . . ,xn and T thesum ∑ τk pk. Then the expression
[Hi, T
]must obviously vanish, since the lowest
term of this bracket represents an infinitesimal transformation of third order. Con-sequently, τ1, . . . ,τn satisfy the equation:[
xi
n
∑k=1
xk pk,n
∑j=1
τ j p j
]= 0;
this equation decomposes into the following n equations:

§ 152. 629
xi
( n
∑k=1
xk∂τ j
∂xk− τ j
)− x j τi = 0
and from this it follows, aside from the natural equation:
n
∑k=1
xk∂τ j
∂xk= 2τ j
yet also xi τ j − x j τi = 0. Therefore the τi and T have the form:
τi =n
∑k=1
αk xkxi, T=n
∑k=1
αk Hk.
Thus we have proved that a group: X1 f , . . . ,Xr f of the indicated constitution cancomprise no second order infinitesimal transformation apart from the n transforma-tions Hk + · · · .
In total, we therefore have the following cases:If the linear homogeneous group L1 f ,L2 f , . . . is the general linear homogeneous
group, then the concerned group X1 f , . . . ,Xr f comprises exactly n infinitesimaltransformations of zeroth order:
Pi = pi + · · · (i=1 ···n)
and n2 of first order:Tik = xi pk + · · · (i,k=1 ···n).
Either transformations of higher order do not occur at all, or there are extant thefollowing n:
Si = xi(x1 p1 + · · ·+ xn pn
)+ · · · (i=1 ···n).
If the group: L1 f ,L2 f , . . . is the special linear homogeneous group, then thegroup: X1 f , . . . ,Xr f comprises exactly n infinitesimal transformations of zerothorder:
Pi = pi + · · · (i=1 ···n)
and in addition, n2 −1 of first order:
Tik = xi pk + · · · , Tii −Tkk = xi pi − xk pk + · · · (i≷k=1 ···n).
but no one of higher order.
We will treat these three cases one after the other. At first, we bring the Re-lations [brackets] between the infinitesimal transformations, and afterwards, eventhese transformations themselves, to a form which is as simple as possible. On theoccasion, we remark that among the three cases, the first two are already finished offby the developments of the paragraph 151 on p. 616 sq. Nonetheless, we maintainthat it is advisable to also treat in detail these two cases.

630 29 Groups that are Equivalent to Certain Projective Groups
§ 153.
The first case, where n transformations of zeroth order and n2 of first order do ap-pear, is the simplest one.
We can indicate without effort the Relations between the n2 infinitesimal trans-formations. They are: [
Tik, Tνπ]= εkν Tiπ − επi Tνk,
where εik vanishes as soon as i and k are distinct, whereas εii has the value 1. Inparticular, it is of importance that each expression:[
Tik,n
∑ν=1
Tνν
]vanishes. Further, if, for reasons of abbreviation, we introduce the symbol:
U =n
∑ν=1
Tνν ,
there exist Relations of the form:[Pi,U
]= Pi +
n
∑ν=1
n
∑π=1
ανπ Tνπ ,
or, when we introduce as new Pi the right-hand side:[Pi,U
]= Pi.
Lastly, there are Relations of the form:[Pi, Tk j
]= εik Pj +∑ ∑ βνπ Tνπ ,[
Pi, Pk]= ∑ γν Pν +∑ ∑ δνπ Tνπ .
But the Jacobian identities:[[Pi, Tk j
],U]−[Pi, Tk j
]= 0,[[
Pi, Pk],U]−2[Pi, Pk
]= 0
show immediately that all constants β , γ , δ do vanish, whence it is valid that:[Pi, Tk j
]= εik Pj,
[Pi, Pk
]= 0.
As a result, all the Relations between the infinitesimal transformations of ourgroup are known.
The r infinitesimal transformations Pi = pi + · · · generate a simply transitivegroup which has the same composition 6 [GLEICHZUSAMMENGESETZ IST] as the
6 Namely here: they both have the same, in fact vanishing, Lie brackets.

§ 153. 631
group p′1, . . . , p′n and is hence also equivalent to it (Chap. 19, p. 339, Prop. 17). Sowe can introduce such new variables x′1, . . . ,x
′n achieving that:
Pi = p′i (i=1 ···n).
The form ξ1 p′1 + · · ·+ ξn p′n which U takes in the new variables determines itselffrom the Relations
[Pi,U
]= Pi; the same Relations yield:
U =n
∑k=1
(x′k +αk) p′k
and, when x′k +αk is introduced as new xk, which does not change the form of thePi, one achieves U = ∑ xk pk. From the Relations:[
Pi, Tk j]= εik Pj
one finds in the same way:
Tk j = xk p j +n
∑ν=1
αk jν pν ;
but since[Tk j,U
]must vanish, all the αk jν are equally null. Therefore we have the
group:Pi = pi, Tik = xi pk (i,k=1 ···n),
that is to say, all groups which belong to the first case are equivalent to the generallinear group of the manifold x1, . . . ,xn.
7 The so-called Frobenius theorem is needed in the phrase just below. Classically (cf. [1]), oneperforms a preliminary reduction to a commuting system of vector fields, reducing the proof to thefollowing concrete
Proposition. If the r 6 s independent infinitesimal transformations:
Xk f =s
∑i=1
ξki(x1, . . . ,xs)∂ f∂xi
(k=1 ···r)
stand in the Relationships: [Xi, Xk
]= 0 (i,k=1 ···r)
without though being tied up together through a linear relation of the form:
n
∑k=1
χk(x1, . . . ,xs)Xs f = 0,
then they generate an r-term group which is equivalent to the group of translations:
Y1 f =∂ f∂y1
, . . . , Yr f =∂ f∂yr
.
(Namely, in a neighborhood of a generic point, there is a local diffeomorphism x 7→ y = y(x)straightening each Xk to Yk =
∂∂yk
.)

632 29 Groups that are Equivalent to Certain Projective Groups
§ 154.
We now come to the second case, where, apart from the n transformations of zerothorder Pi = pi + · · · and the n2 of first order Tik = xi pk + · · · , there still appear the ntransformations of second order:
Si = xi(x1 p1 + · · ·+ xn pn)+ · · · .
The following Relations are obtained without any effort:[Si, Sk
]= 0,
[Tik, S j
]= εk j Si,
[U, S j
]= S j.
Moreover, there are equations of the form:
[Tik,U
]=
n
∑j=1
αik j S j.
If at first we suppose that i and k are not all both equal to n, then we can introduceTik +∑ αik j S j as new Tik and obtain correspondingly the Relation:
[Tik,U
]= 0 for
the concerned values of i and k. Since in addition[U,U
]= 0 it comes generally:[
Tik,U]= 0 (i,k=1 ···n).
Further, one has:
[Tik, Tνπ
]= εkν Tiπ − επi Tνk +
n
∑j=1
β j S j;
but the identity: [[Tik, Tνπ
],U]= 0
enables to recognize that all β j vanish, so it holds:[Tik, Tνπ
]= εkν Tiπ − επi Tνk.
From the relation: [Pi,U
]= Pi +
n
∑ν=1
n
∑π=1
γνπ Tνπ +n
∑ν=1
δν Sν
when:
Pi +n
∑ν=1
n
∑π=1
γνπ Tνπ +12
n
∑ν=1
δν Sν
is introduced as new Pi, it comes: [Pi,U
]= Pi.
Furthermore, one has:

§ 154. 633
[Pi, Sk
]= εik U +Tki +
n
∑ν=1
λν Sν ;
but if we form the identity:[[Pi, Sk
],U]+[Pi, Sk
]−[Pi, Sk
]= 0,
we then find that the λν are null; consequently we have:[Pi, Sk
]= εik U +Tki.
Finally, there are relations of the form:[Pi, Tk j
]= εik Pj +∑ ∑ ανπ Tνπ +∑ λν Sν ,[
Pi, Pk]= ∑ gν Pν +∑ ∑ hνπ Tνπ +∑ lν Sν ;
but also here all constants do vanish because of the identities:[[Pi, Tk j
],U]−[Pi, Tk j
]= 0,[[
Pi, Pk],U]−2[Pi, Pk
]= 0.
Therefore it comes: [Pi, Tk j
]= εik Pj,
[Pi, Pk
]= 0.
All the relations between the infinitesimal transformations of our group are nowdetermined. One will notice that the infinitesimal transformations Pi, Tik generate asubgroup which possesses the form considered in the first case and hence takes theform:
Pi = pi, Tik = xi pk (i,k=1 ···n)
by an appropriate choice of the variables. In the new variables, the infinitesimaltransformations Si are, say, equal to ∑ ξik pk, where the ξik satisfy the relations:[
Pν , Si]= εν i U +Tiν ,
[U, Si
]= Si.
We find from this:
∂ξik
∂xν= εν i xk + ενk xi,
n
∑ν=1
xν∂ξik
∂xν= 2ξik,
therefore ξik = xixk and:
Si = xi(x1 p1 + · · ·+ xn pn
).
Consequently we have the group:
Pi = pi, Tik = xi pk, Si = xi(x1 p1 + · · ·+ xn pn
)(i,k=1 ···n);

634 29 Groups that are Equivalent to Certain Projective Groups
that is to say, all groups which belong to the second case are equivalent to thegeneral projective group of the manifold x1, . . . ,xn.
§ 155.
It remains the third and last case with n infinitesimal transformations of zerothorder: Pi = pi + · · · and n2 −1 of first order:
Tik = xi pk + · · · , Tii −Tkk = xi pi − xk pk + · · · (i,≷k=1 ···n),
while transformations of higher order do not occur.It is convenient to replace the infinitesimal transformations Tii − Tkk by one of
the form: α1 T11 + · · ·+αn Tnn, thinking that the αi are arbitrary constants, thoughsubjected to the condition ∑i αi = 0. Then to begin with, the following Relationshold: [
Tik, Tνπ]= εkν Tiπ − επi Tνk (i≷k, ν ≷π),[
Tik,n
∑ν=1
αν Tνν
]= (αk −αi)Tik,
[Tii −Tkk,
n
∑ν=1
αν Tνν
]= 0.
Further, there is an equation of the form:[Pi,
n
∑ν=1
αν Tνν
]= αi Pi +
n
∑k=1
n
∑j=1
λik j Tk j (∑nk=1 λikk =0).
Therefore if we set:
P′i = Pi +
n
∑k=1
n
∑j=1
lik j Tk j (∑nk=1 likk =0),
it comes: [P′
i ,n
∑ν=1
αν Tνν
]= αi P′
i +n
∑k=1
n
∑j=1
λik j − (αi +αk −α j)
Tk j.
Now, we imagine that a completely determined system of values is chosen forα1, . . . ,αn which satisfies the condition ∑ αi = 0 and has in addition the propertythat no expression αi +αk −α j vanishes, a demand which can always be satisfied.Under these assumptions, we can choose the lik j so that the equations:
λik j − (αi +αk −α j) lik j = 0
are satisfied, where the condition ∑k likk = 0 is automatically fulfilled. Consequently,we obtain after utilizing again the initial designation:[
Pi,n
∑ν=1
αν Tνν
]= αi Pi (∑n
ν=1 αν =0).

§ 154. 635
If the expression: [Pi,
n
∑k=1
βk Tkk
]= βi Pi +
n
∑ν=1
n
∑π=1
gνπ Tνπ
(∑ βk =∑ gνν =0)
is inserted into the identity:[[Pi,
n
∑k=1
βk Tkk
],
n
∑k=1
αk Tkk
]−αi
[Pi,
n
∑k=1
βk Tkk
]= 0,
then it comes:n
∑ν=1
n
∑π=1
(απ −αν −αi)gνπ Tνπ = 0.
Because of the nature of the α , it follows from this that all gνπ are equally null, andtherefore the equation: [
Pi,n
∑k=1
βk Tkk
]= βi Ti
holds for all systems of values β1, . . . ,βn which satisfy the condition ∑ βk = 0. Fur-thermore, there is a relation of the form:
[Pi, Tk j
]= εik Pj +
n
∑ν=1
n
∑π=1
hνπ Tνπ
(k≷ j, ∑ν hνν =0).
The identity: [[Pi, Tk j
],
n
∑τ=1
βτ Tττ
]− (βi +β j −βk)
[Pi, Tk j
]= 0
therefore takes the form:
εik (βk −βi)Pj +n
∑ν=1
n
∑π=1
(βπ −βν −βi +βk −β j
)hνπ Tνπ = 0;
consequently the hνπ must vanish, since the βν , while disregarding the condition∑ν βν = 0, are completely arbitrary:[
Pi, Tk j]= εik Pj (k≷ j).
Finally, the relations:
[Pi, Pk
]=
n
∑ν=1
mν Pν +n
∑ν=1
n
∑π=1
mνπ Tνπ (∑nν=1 mνν =0)

636 29 Groups that are Equivalent to Certain Projective Groups
are still to be examined. By calculating the identity:[[Pi, Pk
],
n
∑τ=1
βτ Tττ
]− (βi +βk)
[Pi, Pk
]= 0,
we find:n
∑ν=1
(βν −βi −βk)mν Pν +n
∑ν=1
n
∑π=1
(βπ −βν −βi −βk)mνπ Tνπ = 0;
because of the arbitrariness of the βν , all the mν and mνπ must be equally null.Consequently, we have: [
Pi, Pk]= 0
and we therefore know all Relations between the infinitesimal transformations ofour group.
In the same way as it has been achieved in the first case, we bring P1, . . . ,Pn bymeans of an appropriate choice of variables to the form:
Pi = pi (i=1 ···n).
From this, by proceeding as in the end of the paragraph 153, we conclude that allgroups which belong to the third case are equivalent to the special linear group ofthe manifold x1, . . . ,xn.
By unifying the found results we therefore obtain the
Theorem 112. If a transitive group G in n variables is constituted so that all of itstransformations which leave invariant a point in general position do transform theline-elements passing through the point by means of the general or of the speciallinear homogeneous group L1 f ,L2 f , . . . , then G is equivalent either to the generalprojective group, or to the general linear group, or to the special linear group, in nvariables†.
If we call m-fold transitive an r-term group of the space x1, . . . ,xn when it con-tains at least one transformation which transfers any m given points in mutuallygeneral position to m other arbitrary given points in general position, then we cannow easily prove firstly, that m is always 6 n+2 and secondly, that every group forwhich m = n+2 is equivalent to the general projective group of the n-fold extendedspace.
Indeed, if the infinitesimal transformations: X1 f , . . . ,Xr f in the variablesx1, . . . ,xn generate an m-fold transitive group, then it stands immediately to reasonthat the linear homogeneous group L1 f ,L2 f , . . . assigned to a point x0
k in generalposition does transform the ∞n−1 line-elements passing through this point by meansof an (m−1)-fold transitive projective group. But now, since the general projectivegroup of an (n− 1)-fold extended space is known to be (n+ 1)-transitive, we thenrealize that:
† Lie, Archiv for Math., Vol. 3, Christiania 1878; cf. also Math. Ann. Vol. XVI, Vol. XXV andGötting. Nachr. 1874, p. 539.

References 637
m−1 6 n+1 and hence: m 6 n+2.
Therefore, the following holds.
Theorem 113. A finite continuous group in n variables is at most (n+2)-fold tran-sitive.
If an r-term group: X1 f , . . . ,Xr f in n variables is exactly (n+2)-transitive, then asobserved earlier on, the group L1 f ,L2 f , . . . assigned to a point x0
k in general positionis the general or the special linear homogeneous group in n variables; consequently,the group: X1 f , . . . ,Xr f is equivalent either to the general projective group, or to thegeneral linear group, or to the special linear group in n variables. But now, becauseonly the first-mentioned among these three groups is (n+ 2)-transitive, we obtainthe
Theorem 114. If an r-term group in n variables is (n+2)-transitive, then it is equiv-alent to the general projective group of the n-fold extended space.
In the second and in the third volume, a series of studies which are analogous tothose conducted in this chapter shall be, among other things, undertaken.
—————–
References
1. Stormark, O.: Lie’s structural approach to PDE systems, Encyclopædia of mathematics andits applications, vol. 80, Cambridge University Press, Cambridge, 2000, xv+572 pp.


Chapter 30Glossary of significantly used words
Symbolsn-FACH, n-foldn-FLACH, n-frameq-GLIEDRIG VOLLSTÄNDIG SYSTEM, q-termcomplete system
AABBILDEN, to representABHÄNGIGSKEITSVERHÄLTNISS, relationshipof dependenceABKÜRZEN, to abbreviateABSCHNITT, sectionABSCISSE, abscissaADJUNGIRTE GRUPPE, adjoint groupÄHNLICH, similarÄHNLICHKEIT, similarityÄHNLICHKEITSTRANSFORMATION, simili-tudeALGEBRAISCHE DISCUSSION, algebraicdiscussionANALYTISCH, analyticANALYTISCHE BEGRÜNDUNG, analytic expla-nationANFANGSWERTH, initial valueANGEBEN, to indicateANGEHÖREN, to belong toANNAHME, assumptionANORDNEN, to orderANSATZ, approachANSCHAULICH, graphicANSCHAULICH AUFFASUNG, graphic interpre-tationANSCHAULICHKEIT, graphic natureANZEIGEN, to indicate
ASSOCIATIVE GESETZ, associative ruleASYSTATISCH, asystaticAUFEINANDERFOLGE, successionAUFFASSEN, to interpretAUFFINDUNG, findingAUFFÜHREN, to listAUFGABE, problemAUFLÖSUNG, solutionAUFSTELLEN, to set upAUFSTELLUNG, listAUFZÄHLUNG, enumerationAUSDEHNEN AUF, to extend to, generalize toAUSDEHNUNG, (complete) extensionAUSFÜRLICH, in detailAUSGEARTET, degenerateAUSGEZEICHNET, excellentAUSRECHNUNG, calculationÄUSSERST WICHTIG, utmost importanceAUSSPRECHEN, to enunciateAUSSTELLEN, to showAUSZEICHNEN, to distinguish
BBAHNCURVE, integral curveBEDENKEN, to considerBEDENKEN, thoughtBEDEUTEN, to meanBEDEUTUNG, meaning, sense, significationBEDIENEN SICH, to make use ofBEDINGEN, to give rise toBEDINGUNGSGLEICHUNGEN, condition-equationsBEFRIEDIGEN, to satisfyBEGRIFF, concept
639

640 30 Glossary
BEGRIFFLICH SINN, conceptual senseBEGRIFFLICHE INHALT, conceptual contentBEGRIFFSBILDUNG, forming of conceptsBEGRÜNDEN, to give reasons forBEGRÜNDUNG, reasonBEHALTEN, to keepBEHAUPTUNG, assertionBEHUFE, for this purposeBEKANNTLICH, as everybody knowsBEKOMMEN, to receiveBELIEBIG, arbitraryBEMERKEN, to remarkBEMERKENSWERTH IST, it is noteworthy thatBENACHBARCHT, neighbouringBENENNUNG, naming, nomenclatureBENUTZEN, to useBEQUEM, convenientBERECHTIGT, legitimateBEREICH, regionBERÜCKSICHTIGEN, to take into accountBERÜCKSICHTIGUNG, considerationBERUHEN, to be based onBERÜHREN, to come into contact withBERÜHRUNGSTRANSFORMATION, contacttransformationBESCHAFFEN, to procureBESCHAFFENHEIT, constitutionBESCHÄFTIGEN SICH, to occupy oneself in(with) doing somethingBESCHRÄNKUNG, restrictionBESCHREIBEN, to describeBESITZEN, to possessBESONDER, special, particular, specificBESONDERS, particularly, especially, notably,BESPROCHENE (OBEN), discussed (above)BESTÄTIGEN, to confirmBESTEHEN, existenceBESTEHEN AUS, to be made of (up)BESTIMMEN, to determineBESTIMMT, determinate, definiteBESTIMMUNGSSTÜCKE, determination piecesBETONEN, to stress, emphasize, underlineBETRACHTEN, to considerBETRACHTUNG, considerationBETREFFEND, concerned, in questionBEWEGUNG, movementBEWEIS, proofBEWEISEN, to prove, to demonstrateBEWUSSTEN, said, in questionBEZEICHNUNG, notation, namingBEZIEHUNG, relationshipBILDEN, to formBILDPUNKT, image-pointBÜNDEL, bundle
BÜSCHEL, bundle, pencil
CCOLLINEATIONEN, collineationCOMBINATION, combinationCONSEQUENTERWEISE, consequentlyCOORDINATENECKPUNKT, point as corner ofcoordinates
DDARSTELLEN, to representDECKEN SICH, to coincideDENKBAR, thinkableDETERMINANT, determinantDEUTEN, to interpretDEUTLICH, clearly, distinctlyDIFFERENTIALINVARIANT, differential invari-antDREIFACH AUSGEDEHNTEN, thrice-extendedDUALISTISCH, dualisticDUALITÄT, dualityDURCH ANALYTISCHE METHODEN, by meansof the analytic methodDURCH DETERMINANTENBILDUNG, by form-ing determinantsDURCH UNENDLICHMALIGE WIEDERHOL-UNG, by repeating infinitely many timesDURCHFÜHRUNG, realizationDURCHSICHTIG, transparent
EEBEN, straight, evenEIGENSCHAFT, propertyEIGENTHÜMLICH, characteristicEINDEUTIG, univalentEINFACH, simpleEINFACH AUSGEDEHNTEN, once-extendedEINFACH TRANSITIV, simply transitiveEINFÜHREN, to introduceEINGEHEN AUF, to deal withEINGEKLAMMERT, in bracketsEINSETZEN, to insertEINTHEILEN, to distributeEINTHEILUNG, division, classificationEINTHEILUNGSGRUNDE, principle of classifi-cationEINTRETEN, to occurEINZELN, individualENDERGEBNISS, final resultENTHALTEN, to containENTSPRECHEN, to correspond toENTSTANDEN, to be generated, to be producedENTSTEHEN, to come into being

30 Glossary 641
ENTSTEHUNG, generation, productionENTWICKELN, to developeENTWICKLUNG, developmentENTWICKELUNGSCOEFFICIENT, expansioncoefficientERBRINGEN, to produceERFORDERN, to requireERFÜLLEN, to fulfill, to satisfyERGEBEN, to yield, to produce, to result inERGEBNISS, to resultERHALTEN, to get, to receive, to obtainERHELLEN, to become clear, to be evidentERINNERN SICH, to rememberERKENNEN, to recognizeERKLÄREN, to explainERLEDIGEN, to settle, to carry outERLEICHTERUNG, simplificationERREICHEN, to insureERSCHEINEN, to appear, to become visibleERSCHÖPFEN, to exhaustERSETZEN DURCH, to replace by, to substituteforERSICHTLICH, clear, obvious, evidentERWÄHNEN, to mentionERWÄHNUNG, mention ofERWEISEN, to show, to demonstrate, to estab-lishERWEISEN SICH, to prove to beERWEITERN, to prolongERWEITERUNG, prolongationERZHIELEN, to achieveERZEUGEN, to produce, to generateETWA, for instance, for example
FFASSUNG, version, interpretationFESTSETZEN, to fixFESTSETZUNG, fixing of terminologyFESTSTELLEN, to find outFIGUR, figure (number of manifolds), diagramFLÄCHENELEMENT, surface elementFLIESSEN, to flowFLÜSSIGKEITSTHEILCHENS, velocity of thefluid particleFOLGENDERMASSEN, as followsFOLGLICH, so, consequently, thereforeFÖRDERN, to produceFORDERUNG (ERFÜLLEN), requirement (meet,satisfy)FORMELL, formallyFORTSCHREITUNGSRICHTUNG, direction ofprogressFRAGE, questionFRAGEN NACH, to ask for
FRAGESTELLUNG, way of putting the questionFUNCTIONALDETERMINANT, functional deter-minant
GGANZE RATIONALE FUNCTION, entire rationalfunction (polynomial)GATTUNG, kindGEBIETE, domainGEGENSEITIG, mutuallyGELANGEN, to reach, to get to, to arrive atGENAU GENOMMEN, strictly speakingGERADE, straightGERADE, straight lineGESICHTSPUNKT, point of viewGESONDERT, separateGESTALT, shape, formGESTALTEN SICH, to take shapeGESTATTEN, to admitGETRENNT, separateGEWINNEN, to gainGEWISS, certainGEWÖHNLICH (WIE), as usualGLEICHBERECHTIGT, conjugateGLEICH NULL, identically nullGLEICHWERTIG, equally goodGLEICHZEITIG, simultaneously, at the sametimeGLEICHZUSAMMENGESETZT, equally com-posed, identically compound asGLEICHZUSAMMENGESETZTSEINS, propertyof being equally composedGRUND, foundation, reason, backgroundGRUNDSATZ, principleGRUNDZÜGE, foundationsGRUPPENEIGENSCHAFT, group propertyGRUPPENFORM, form of group
HHAUPTSACHE, main thingHERLEITEN, to deriveHERLEITUNG, derivationHERRÜHREN VON, to come fromHERVORGEHEN AUS, to result from, to comefromHERVORHEBEN, to emphasize, to underline, tostressHERVORRAGEND, outstandingHINAUSKOMMEN, to amount to the same, tocome down toHINEINFALLEN, to fall intoHINREICHEND, sufficientHINSCHREIBEN, to write downHINSICHTLICH, concerning, regarding

642 30 Glossary
HINWEISEN, point out toHINZUFÜGEN, to addHINZUNEHMEN, to add
IIM EINZELNEN, in(to) detailsIM ENDLICHEN, in the domain of the finiteIM GANZEM, in sum, in total, in allIM GRUNDE, fundamentallyIM WESENTLICHEN, essentiallyIM WIDERSPRUCH STEHEN, to be inconsistentwith, to contradictIM ZUSAMMENHANGE WIEDERHOLEN, to re-capitulate in cohesionIMPRIMITIV, imprimitiveIN ALLER KÜRZE, very brieflyIN ANGRIFF NEHMEN, to tackleIN COGREDIENTER WEISE, in cogredient wayIN DER PRAXIS, in practiceIN DER THAT, in fact, actuallyIN EIN NEUES LICHT SETZEN, to place in a newlightIN EINZELNEN, in detailsIN FOLGE, as a consequenceINBEGRIFF, (complete) totalityINCREMENT, incrementINDIVIDUEN, individualsINFOLGEDESSEN, as a result (of this), conse-quentlyINHALT, content(s)INNERE GRUND, inner reasonINS AUGE FASSEN, to considerINSBESONDERE, particularly, especially,notablyINTEGRALGLEICHUNG, integral equationIRREDUCIBEL, irreducibleISOMORPH, isomorphicISOMORPHISMUS, isomorphismIN VERBINDUNG BRINGEN, to associate with
JJETZT, now
KKATEGORIE, categoryKEGEL, coneKEGELSCHNITT, conic sectionKENNEN, to knowKENNEN LERNEN, to get to knowKENNZEICHNEN, mark, identifyKLAMMER, bracketKLAMMEROPERATION, bracketing [·, ·]KLARLEGEN, to explain, to clarify
KLARSTELLEN, to get straight, to clarifyKLEIDEN, to express, to put into wordsKREIS, circleKRITERIUM, criterionKUGEL, sphereKÜNFTIG, from now onKURZ, shortlyKURZWEG, briefly
LLEHRE, theoryLEICHT, easilyLEISTEN, to accomplish, to achieveLIEFERN, to deliverLIEGEN, to lie onLINIENELEMENT, line-element
MMAL, timeMANNIGFALTIGKEITSBETRACHTUNGEN,manifold considerationsMANNIGFALTIGKEITSLEHRE, theory of mani-foldsMASSREGEL, ruleMATERIELL, materiallyMENGE, amountMERKWÜRDIG, curiousMIT AUSNAHME, with the exception ofMITBEKOMMEN, to catch, to understandMITSCHREIBEN, to write downMITSTEHENDLASSEND, ‘with leaving fixed’
NNACHSTEHEND, following, belowNÄCHSTFOLGEND, following nextNACHWEIS, proof, evidence, certificateNACHWEISEN, to prove, to showNÄHER, closer, into more detail, more preciselyNAMENTLICH, especially, particularly, notablyNÄMLICH, namely, that is to sayNATURE DER SACHE, nature of thingsNATURGEMÄSS, naturalNEBENBEI BEMERKT, incidentallyNENNER, denominatorNICHTMITSTEHENDLASSEND, ‘withoutleaving fixed’NOTHWENDIG, nessaryNUNMEHR, now, at present
OOBENSTEHEND (DAS), the aboveOBIG, above, above-mentionedOFFENBAR, obviously, evidently

30 Glossary 643
ÖFTERS, frequentlyOHNE WEITERES, without any effortOPERATIONSGRUPPE, group operationORDNEN SICH, to organize, to arrange
PPAARWEISE, pairwisePARAMETERGRUPPE, parameter groupPFAFFSCHE GLEICHUNG, Pfaffian equationPREISSCHRIFT, prized essayPRIMITIV, primitivePUNKTCOORDINATEN, point-coordinatesPUNKTFIGUR, point figurePUNKTTRANSFORMATION, point transforma-tion
RRECHTWINKLING, right-angledRECIPROCITÄTSVERHÄLTNISS, relationship ofreciprocityRECIPROKE, reciprocalREDEWEISE, languageREGULÄR VERHALTEN, to behave regularly, tobe smooth, to be regularREIHE, row, lineREIHENFOLGE, order (of execution)REPRÄSENTANT, representativeRICHTUNG, directionRUHE, rest
SSCHAAR, familySCHLUSS ZIEHEN, to draw a conclusionSCHNEIDEN, to cutSCHNITT, cuttingSCHNITTMANNIGFALTIGKEIT, manifoldsectionSELBSTSTÄNDIG, independentlySELBSTVERSTÄNDLICH, naturally, of course,obviouslySOGENNANTE, so-calledSTANDPUNKT, point of view, standpointSTEHEN LASSEN, leave untouchedSTELLE, position, point, placeSTELLEN, to put, to setSTELLUNG, positionSTIMMEN, to be right, to be correctSTRAHLBÜSCHEL, bundle of raysSTRECKE, (infinitely small) lineSUBSTITUTIONENTHEORIE, theory ofsubstitutionsSUBSTITUTIONSDETERMINANT, substitutiondeterminant
SUCHEN, to look for, to search for, to seekSYMBOLIK, symbolismSYNTHETISCHE BEGRÜNDUNG, synthetic ex-planationSYSTATISCH, systatic
TTABELLE, tableTERMINOLOGIE, terminologyTHATSACHE, factTHEILBAR, divisibleTHEILEN, to distributeTHEILGEBIETE, subsidiary domainTHEILWEISE, partiallyTHEORETISCH, theoreticalTRANSFORMATION, transformationTYPE, typeTYPENGATTUNG, kind of type
UÜBERALL, everywhereÜBEREINSTIMMEN, to correspondÜBEREINSTIMMUNG, correspondenceÜBERGANG, transitionÜBERGEHEN, to transfer toÜBERHAUPT, generally, altogether, actuallyÜBERLEGUNG, consideration, reflectionÜBERSEHEN, to overview, to have a view ofÜBERSICHTLICH, clear,ÜBERTRAGEN AUF, to translate intoÜBERZEUGEN, to convinceUMFASSEN, to embrace, to compriseUMGEBUNG, neighbourhoodUMGEKEHRT, inversely, converselyUMKEHREN, reverseUMSTAND, circumstanceUNABHÄNGIG VON, independent ofUNBESCHRÄNKT INTEGRABEL, unrestrictedlyintegrableUNENDLICH FERNE EBENE, infinitely far planeUNTERSCHIED, difference, distinctionUNTERSCHEIDEN, to distinguishUNTERSUCHEN, to studyUNTERSUCHUNG, research on (into), studyURSPRÜNGLICH, initial(ly), original(ly)
VVERBINDEN, to connectVERBINDUNG, connectionVERBINDUNGSLINIE, connection lineVERDEUTLICHEN, to make clear, to elucidateVEREINFACHUNG, simplificationVERFAHREN, to proceed

644 30 Glossary
VERFAHREN, method, processVERFOLGEN, to follow, to pursueVERGLEICHUNG, comparisonVERHÄLTNIS, ratioVERHANDLUNG, essay, memoirVERKÜRZTE, reducedVERMÖGE, by virtue ofVERMUTEN, to presumeVERMUTHUNG, presumptionVERNÜKPFT, linked withVERSCHIEDENE, different, variousVERSUCHEN, to try, to attemptVERTAUSCHBAR, interchangeableVERTAUSCHEN, to permuteVERTAUSCHUNG, permutationVERVOLLSTÄNDIGEN, to completeVERWEILEN AUF, to dwell onVOLLKOMMEN, perfectly, absolutelyVOLLSTÄNDIG, completely, fully, totallyVON JETZ AB, from now onVON VORNERHEIN, from the beginningVOR ALLEN DINGEN, above allVORANGEHENDEN, previous, aboveVORAUSGESETZT, provided thatVORAUSSCHICKEN, to begin by mentioningthatVORAUSSETZEN, to assumeVORGANG, processVORHABEN, to have in mindVORHANDEN, extant, in existence, presentVORHANDENSEIN, existenceVORHER, beforehandVORHERGEHEND, precedingVORHIN, earlier on, a short while agoVORIG, previous, formerVORKOMMEN, to appear, to happen, to occurVORLÄUFIG, provisionallyVORLESUNG, lectureVORNEHMEN, to carry outVORSCHREIBEN, to prescribe, to stipulateVORSTEHENDEN, preceding, aboveVORSTELLEN SICH, to imagine, to representVORSTELLUNG, idea
WWAHRHEIT, truthWEG EINSCHLAGEN, to take a routeWEGEN, because of, on account of, due toWESENTLICH, essentially, substantiallyWICHTIG, importantWIE DER AUGENSCHEIN LEHRT, as an exami-nation teachesWIEDERHOLEN, to recapitulateWILLKÜRLICH, arbitrary
WILLKÜRLICHKEIT, arbitrarinessWIRKLICH, reallyWÜNSCHENWERTH, desirable
ZZAHLENWERTH, numerical valueZEICHEN, sign, symbolZEIGEN, to showZEIGEN SICH, to come outZEITABSCHNITT, (infinitely small) time inter-valZERFALLEN, to decomposeZERLEGEN, to decomposeZERLEGUNG, decomposition (of space)ZIEHL, goal, objectiveZU DIESEM ZWECKE, to this endZUERST, first of all,ZUFÄLLIGKEIT, incidental characterZUGEORDNET, attachedZUGLEICH, at the same timeZUGRUNDELEGUNG, taking as a basisZULASSEN, to allowZULÄSSIG, admissibleZUNÄCHST, at first, to begin withZUORDNEN, to associate, to attachZUORDNUNG, association, classificationZUR ABKÜRZUNG, for abbreviationZURÜCKFÜHREN, to reduce toZURÜCKKEHREN, to returnZUSAMMENFASSEN, to sum up, to summarize,to recapitulateZUSAMMENFASSEND, in summary, to sum upZUSAMMENGESETZ, made up of, compoundZUSAMMENHANG, coherenceZUSAMMENHANGEN, to be linked, to be con-nectedZUSAMMENNEHMEN, to take togetherZUSAMMENSETZUNG, compositionZUSAMMENSTELLEN, to put togetherZU TAGE TRETEN, to come to lightZUWACHS, increaseZWEIFACH AUSGEDEHNTEN, twice-extended

Index
Symbols(P)S = (P′), 236Gr , 238M, 236P, 236SS−1, 236ST , 236T(a), 270T−1(a) T(b) T(a) = T(c′), 271
X( f ), 68X1( f ), . . . ,Xr( f ), 173X1(X2( f )
)−X2
(X1( f )
), 99
Xk(X j( f )
)−X j
(Xk( f )
)= ∑r
s=1 ck js Xs( f ), 165[ ] substitution x = ϕ , 125, 244[X ,Y ], 109, 272[[Xk, X j], Xl ], [[Xk, X j], [Xh, Xl ]], 134∞r , 4, 30p(k)i , 188r-term, 19
AAdjoint action, 49Adjoint group, 284Analytic, 4, 5Associative rule, 412
BBoole, 106Bouquet, 6, 106Briot, 6, 106
CCauchy, 5, 106, 590Cayley, 558Clebsch, 95, 97, 101, 106Collineation, 561
Composition [X ,Y ], 109Contact
direction, 115transformation, 12
DDarboux, 106Decomposition of space, 117Determinant, 135, 138, 586
(n−m)× (n−m), 123Differential invariant, 554Direction, 115, 117
∞q−1, 118independent, 117, 121
Domain, 3, 6, 51
EEngel, 20, 53, 58, 110, 180, 438, 509Essential parameters, 15
infinitesimal transformations, 75Exponential series, 61
FFamily, 7, 157
of infinitesimal transformations, 257admitting a transformation, 257
First fundamental theorem, 40Free generic relocalization, 4Function
absolute invariant, 111admitting a transformation, 111admitting an r-term group, 111admitting an infinitesimal transformation,
112invariant by an r-term group, 111, 336invariant through a transformation, 111
Fundamental differential equations, 23
645

646 Index
as an assumption, 57
GGeneral position, 486Generic rank, 14
HHalphen, 559Hyperplane at infinity, 564
IIncrement, 68Infinite coefficient mapping, 14Infinitesimal transformation, 32, 68, 74, 97
belonging to an r-term group, 32, 86change of variables, 71combination, 298essential parameters, 75excellent, 288exponential, 66general, 88independent, 74interchangeable, 272lift to r-fold point space, 79order, 207reduced, 141, 234straightening, 64symbol X( f ), 68transfer by a group transformation, 48, 73type, 294
Integral curve, 63, 121Inverse
axiom of, 19, 59fundamental differential equations, 43transformation, 6
JJacobi, 97, 106Jacobi identity, 109, 185Jordan, 60, 305
KKilling, 274Kowalewsky, 106
LLagrange, 558Leibniz, 31Lie, 123, 180, 199, 222, 225, 235, 266, 272,
284, 289, 308, 315, 323, 338, 366, 377,388, 391, 410, 417, 428, 434, 435, 453,457, 467, 491, 498, 500, 509, 515, 523,541, 553, 559, 574, 579, 581, 592, 595,596, 616
Lie bracket, 73Lie’s principles of thought, 4Linear group, 564
homogeneous, 564, 583special, 564special linear, 564
MManifold, 115, 120
admitting a transformation, 120, 149figure, 495invariant, 295smooth, 297theory, 116, 147
Mayer, 101Monge, 115Movements of space, 12
NNeighbourhood, 5, 6
OOne-term group, 49, 50, 61
finite equations, 69infinitesimal generation, 69interchangeable, 272
Operation, 3, 30∞r , 30executable, 445
PParameter group, 414Partial differential equations
characteristic, 115complete integral equations, 108complete system, 95
q-term, 101admitting a transformation, 151, 156
general solutions, 98, 105integral function, 98, 107linear, 97system, 187unrestricted integrability, 108
Permutation, 4∞r , 30
Pfaffian equation, 535Point transformation equations, 3
r-term, 19associativity, 25canonical for an r-term group, 58, 186homogeneous, 294
Poisson, 551Projective group, 561

Index 647
RRegular behaviour, 6
SSchwarz, 558Second Fundamental Theorem, 50Subgroup
conjugate, 292enumeration, 293one-term, 49, 291type, 292
Surface element, 538Sylvester, 559System of equations
admitting a transformation, 114, 124, 132irreducible, 139
TTheory of substitutions, 7, 59, 231, 270
permutation, 290Transformation, 3
∞r , 30, 57, 59dualistic, 12image-points, 293interchangeable, 7, 271projective, 12prolongation, 529
Transformation group, 7r-term, 19, 27
X1( f ), . . . ,Xr( f ), 173, 186associativity, 25asystatic, 509composition, 52, 301compound, 276continuous, 8defining equations, 200discontinuous, 7
dualistic, 500equally composed, 303finite continuous, 8finite equations, 69
canonical, 80fundamental differential equations, 34generation by infinitesimal transformations,
81identity, 23imprimitive, 232infinite continuous, 8, 10intransitive, 225inverse map, 23isomorphic, 304
holoedric, 305, 321, 343meroedric, 305
multiplication map, 23, 25primitive, 233reciprocal, 391similar, 29, 341simple, 276, 567subgroup, 217
invariant, 273systatic, 509, 525transitive, 225, 445
simply, 226, 353type, 445
Translation, 565Type, 607
UUnivalent
function, 6, 29invertible relationship, 6
WWeierstrass, 6, 26, 106