i ANALISIS GAYA BUCKET DENGAN PERBEDAAN POSISI ...
66
ANALISIS GAYA BUCKET DENGAN PERBEDAAN POSISI DAN KEKUATAN STAB LINK PADA WHEEL LOADER Diajukan Sebagai Salah Satu Persyaratan Guna Memperoleh Gelar Sarjana Teknik Program Studi Teknik Mesin Disusun oleh : ZEFFY AGUNG WIDHIYANTO NIM : 165214107 PROGRAM STUDI TEKNIK MESIN JURUSAN TEKNIK MESIN FAKULTAS SAINS DAN TEKNOLOGI UNIVERSITAS SANATA DHARMA YOGYAKARTA 2020 PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of i ANALISIS GAYA BUCKET DENGAN PERBEDAAN POSISI ...

i
ANALISIS GAYA BUCKET DENGAN PERBEDAAN POSISI DAN KEKUATAN STAB LINK PADA WHEEL LOADER
Diajukan Sebagai Salah Satu Persyaratan Guna Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Mesin
Disusun oleh : ZEFFY AGUNG WIDHIYANTO
NIM : 165214107
PROGRAM STUDI TEKNIK MESIN JURUSAN TEKNIK MESIN
FAKULTAS SAINS DAN TEKNOLOGI UNIVERSITAS SANATA DHARMA
YOGYAKARTA 2020
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

ii
ANALYSIS OF BUCKET FORCE WITH DIFFERENT POSITION AND THE STRENGTH OF STAB LINK ON WHEEL LOADER
FINAL PROJECT Presented As Partial Fullfilment of the Requirement To
Obtain the Egineering Degree In Mechanical Egineering
Arranged by : ZEFFY AGUNG WIDHIYANTO
Student Number : 165214107
DEPARTMENT OF MECHANICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY UNIVERSITY OF SANATA DHARMA
YOGYAKARTA 2020
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

iii
LEMBAR PERNYATAAN KEASLIAN TUGAS AKHIR
Dengan ini saya menyatakan dengan sesungguhnya bahwa Tugas Akhir dengan judul :
ANALISIS GAYA BUCKET DENGAN PERBEDAAN POSISI DAN KEKUATAN STAB LINK PADA WHEEL LOADER
Dibuat untuk memperoleh gelar Sarjana Teknik pada Program Strata 1, Program Studi Teknik Mesin, Fakultas Sains dan Teknologi, Universitas Sanata Dharma. Sejauh yang saya ketahui, penelitian ini bukan merupakan tiruan dari tugas akhir maupun penelitian yang sudah dipublikasikan di Universitas Sanata Dharma atau di Perguruan Tinggi manapun, kecuali bagian informasi yang dicantumkan dalam Daftar Pustaka sebagaimana layaknya karya ilmiah.
Yogyakarta, 9 Juli 2020 Penulis
Zeffy Agung Widhiyanto 165214107
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

iv
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : Zeffy Agung Widhiyanto
Nomor Mahasiswa : 165214107
Demi pengembangan ilmu pengetahuan, saya memberikan kepada perpustakaan Universitas Sanata Dharma karya ilmiah dengan judul :
ANALISIS GAYA BUCKET DENGAN PERBEDAAN POSISI DAN
KEKUATAN STAB LINK PADA WHEEL LOADER
Dengan demikian, saya memberikan hak kepada Perpustakaan Universitas Sanata Dharma untuk menyimpan, mengalihkan dalam bentuk media lain, mengelola dalam bentuk pangkalan data, mempublikasikan di internet atau media lain untuk kepentingan akademis tanpa perlu meminta izin kepada saya selama masih mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini saya buat dengan sebenar-benarnya. Yogyakarta, 9 Juli 2020
Penulis
Zeffy Agung Widhiyanto 165214107
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

v
INTISARI
Wheel loader merupakan salah satu alat bantu yang sering digunakan untuk membantu pengolahan di industri-industri besar, salah satunya di pertambangan seperti tambang emas atau mineral lainya. Wheel Loader yang di gunakan dalam pertambangan memiliki spesifikasi tertentu dalam penggunaanya, dalam industri pertambangan mempunyai beberapa kriteria pekerjaan yang berbeda seperti yang dilakukan di atas tanah atau di bawah tanah yang digunakan untuk memindahkan material dari suatu tempat ke tempat lainya. Wheel Loader yang dibahas dalam hal ini merupakan jenis yang di pakai dalam tambang bawah tanah dengan tipe scooptram ST 3.5. Penelitian ini di lakukan dengan tujuan untuk mengetahui besar gaya dari perbedaan bucket position dan kekuatan dari stab link. Dilakukan perhitungan besar gaya bucket dengan perbedaan posisi pada saat kemiringan bucket 13°, 22° dan pada kemiringan 22° juga dilakukan perhitungan breakoutforce dengan gaya acuan pada silinder hidrolik, selanjutnya dilakukan analisis pada kekuatan stablink menggunakan bantuan software SolidWorks untuk penggambaran dan analisis struktur, dengan keluaran data analisis dari SolidWorks yaitu displacement, kriteria vonmises dan factor of safety.
Hasil analisis dari besar gaya bucket dengan perbedaan posisi dengan acuan silinder hidrolik yang memiliki gaya tarik sebesar 19.475 Kg dengan waktu 5,9 detik dan gaya dorong sebesar 25.855 Kg dengan waktu 7,9 detik. Bucket position pada kemiringan 13° gaya dorong sebesar 39.132 Kg dan pada posisi 22° didapatkan gaya dorong sebesar 26.586 Kg, untuk gaya breakoutforce dalam mengangkat material pada posisi 22° dari perhitungan didapatkan hasil sebesar 8.102 Kg. Analisis kekuatan pada stablink di dapatkan hasil dari data pada gaya dorong pada kriteria vonmises maksimal = 132 MPa, displacement maksimal = 0,19 mm dan factor of safety minimal = 1,4, serta pada gaya tarik didapatkan hasil data kriteria von mises maksimal = 130 MPa, displacement maksimal = 0,14 mm dan factor of safety minimal = 1,9, kriteria vonmises memiliki batasan titik luluh maksimal dari material yang di pakai senilai 250 MPa.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

vi
ABSTRACT
Wheel loader is one of the tools that is often used to assist in processing in large industries, one of which is in mining such as gold or other minerals. Wheel Loader used in mining have certain specifications for their use. In the mining industry there are a number of mines that carry out their work on the ground or underground for used to transport materials from the ground to be taken to a shelter where they will be processed. Wheel Loader to discussed are usually used in underground mines with the type of scooptram ST 3.5 a. This research was conducted with the aim to determine the bucket force with different position and the strength of the stab link.
Bucket force performed to calculate the effectiveness when the slope of the bucket is 13 °, 22 ° and at a slope of 22 ° is also calculated using breakoutforce calculation, with the reference force on the hydraulic cylinder. Stablink analyzes were also carried out using the help of SolidWorks software for portrayal and structural analysis, with analytical data output from SolidWorks namely displacement, vonmises criteria and factor of safety.
The results of the analysis show the productivity efficiency of the bucket position with a reference hydraulic cylinder which has a tensile force of 19.475 Kg with a time of 5.9 seconds and a thrust of 25.855 Kg with a time of 7.9 seconds. Bucket position at the slope of 13 ° thrust is 39.132 Kg and at 22 ° position the thrust is 26.586 Kg. The result of the breakout force in lifting the material at 22 ° position from the calculation is 8.102 Kg. Analysis of the strength of the stablink was obtained from the data on the maximum thrust vonmises = 172 MPa, maximum displacement = 0.19 mm and a minimum factor of safety = 1.4, and the results of the pull force are the maximum von mises data results = 130 MPa, displacement maximum = 0.14 mm and minimum factor of safety = 1.9, with a yield strength of maximum vonmises criteria of 250 MPa.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

vii
KATA PENGANTAR
Dengan rahmat dan hidayah dar Allah SWT penulis dapat menyelesaikan skripsi dengan judul “Analisis Efisiensi Produktifitas Bucket Position dan Kekuatan Stab Link pada Wheel Loader”. Skripsi ditulis dalam rangka menyelesaikan studi strata satu untuk mendapatkan gelar Sarjana Teknik di Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta. Skirpsi ini dapat terselesaikan berkat bimbingan, bantuan dan motivasi dari berbagai pihak. Oleh karena itu dengan penuh kerendahan hati disampaikan ucapan terimakasih kepada semua pihak yang telah membantu dalam penyelesaian skripsi ini. Penulis mengucapkan terimakasih kepada : 1. Budi Setyahandana ST.,M.T. selaku ketua program studi Teknik Mesin
Fakultas Sains dan Teknologi Unoversitas Sanata Dharma. 2. Budi Sugiharto, ST.,MT. selaku dosen pembimbing atas segala bimbingan,
kepercayaan, saran, kesabaran dan kritik selama penyusunan skripsi ini. 3. Seluruh dosen Fakultas Teknik Universitas Sanata Dharma untuk segala ilmu,
pengetahuan, pengalaman, dan bantuan untuk memajukan kami sebagai anak didik.
4. Wihadi, ST.,M.Si. yang telah mengenalkan program SolidWorks dan Wibowo Kusbandono ST.,M.T. yang mengajarkan berbagai trik tips program yang sangat mendukung dalam penyusunan skripsi ini
5. Winarso dan P.D Haryanti terhormat atas doa, kepercayaan, kesabaran, dan kasih tuntunan di segala aspek hidup.
6. Motivator hebat, Shavira Zulfa atas bantuan, saran, pengetahuan, dan kritik yang membangun.
7. Seluruh Dosen Program Studi Teknik Mesin, Fakultas Sains dan Teknologi Universitas Sanata Dharma, Yogyakarta. Atas semua ilmu yang telah diberikan kepada penulis selama perkuliahan.
8. Seluruh tenaga Kependidikan Program Studi Teknik Mesin, Fakultas Sains dan Teknologi, yang telah membantu penulis selama perkuliahan hinga selesainya penulis skripsi ini.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

viii
9. Semua teman-teman Teknik Mesin dan pihak yang tidak dapat penulis sebutkan satu persatu yang telah memberikan bantuan moril maupun materi sehingga proses penyelesaian skripsi ini berjalan dengan benar.
Penulis
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

ix
DAFTAR ISI LEMBAR PERSETUJUAN ..................................................................................... i LEMBAR PERNYATAAN KEASLIAN TUGAS AKHIR .................................. iii LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS .............................................................. iv INTISARI ................................................................................................................ v ABSTRACT ........................................................................................................... vi KATA PENGANTAR .......................................................................................... vii DAFTAR ISI .......................................................................................................... ix DAFTAR GAMBAR ............................................................................................. xi DAFTAR TABEL ................................................................................................ xiii BAB I ...................................................................................................................... 1 PENDAHULUAN ................................................................................................... 1
1.1. Latar belakang .................................................................................................... 1 1.2. Rumusan masalah .............................................................................................. 2 1.3. Batasan masalah ................................................................................................. 2 1.4. Tujuan penelitian ............................................................................................... 2 1.5. Manfaat Penelitian ............................................................................................. 3
BAB II ..................................................................................................................... 4 LANDASAN TEORI .............................................................................................. 4
2.1. Wheel loader ............................................................................................................ 4 2.2. Sistem hidrolik pada wheel loader ........................................................................... 5 2.3. Hydraulic cylinder ................................................................................................. 11 2.4. Kondisi pembebanan yang bekerja pada bucket .................................................... 14 2.5. Linkage .................................................................................................................. 15 2.6. Analisa struktur ...................................................................................................... 19
BAB III .................................................................................................................. 23 METODOLOGI PENELITIAN ............................................................................ 23
3.1. Diagram cylinder system ....................................................................................... 23 3.2. Dump position ........................................................................................................ 25 3.3. Proses penelitian .................................................................................................... 26 3.4. Langkah penelitian ................................................................................................. 27
BAB IV ................................................................................................................. 33 ANALISIS PERHITUNGAN DAN PEMBAHASAN ......................................... 33
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

x
4.1. Hydraulic pump ..................................................................................................... 33 4.2. Perhitungan cylinder hydraulic .............................................................................. 34 4.3 Perhitungan besar gaya prefilling bucket position .................................................. 38
BAB V ................................................................................................................... 48 KESIMPULAN DAN SARAN ............................................................................. 48
5.1 Kesimpulan ............................................................................................................. 48 5.2 Saran ....................................................................................................................... 48
DAFTAR PUSTAKA ........................................................................................... 50
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xi
DAFTAR GAMBAR
Gambar 2.1. Skema wheel loader. .......................................................................... 4 Gambar 2.2. Dasar sistem hidrolik. ......................................................................... 6 Gambar 2.3. Skema tangki hidrolik. ....................................................................... 8 Gambar 2.4. Skema engine. .................................................................................... 9 Gambar 2.5. Skema dump and hoist control valve. .............................................. 10 Gambar 2.6. Skema hydraulic pump. .................................................................... 11 Gambar 2.7. Skema cylinder bucket. .................................................................... 12 Gambar 2.8. Skema cylinder boom. ...................................................................... 12 Gambar 2.9. Skema potongan silinder hidrolik. ................................................... 13 Gambar 2.10. Pergerakan parallel. ........................................................................ 16 Gambar 2.11. Skema breakoutforce. ..................................................................... 17 Gambar 2.12. Struktur Z-bar linkage. ................................................................... 18 Gambar 2.13. Struktur TP linkage. ....................................................................... 19 Gambar 2.14. Distorsi suatu elemen yang mendapatkan tegangan. ...................... 21 Gambar 2.15. Defleksi yang terjadi pada batang. ................................................. 22 Gambar 3.1. Diagram alir cylinder system ........................................................... 23 Gambar 3.2. Dump and hoist system hydraulic. ................................................... 24 Gambar 3.3. Skema hoist and dump cylinder hydraulic ....................................... 25 Gambar 3.4. Model stab link dan bushing stab link. ............................................. 27 Gambar 3.5. 3D model stab link dan bushing stab link. ....................................... 28 Gambar 3.6. Model 3D stab link dan bushing stab link. ....................................... 28 Gambar 3.7. Menentukan elemen material pada SolidWorks. ............................. 29 Gambar 3.8. Menentukan restrain atau tumpuan. ................................................. 29 Gambar 3.9. Menentukan arah gaya dan besar gaya. ............................................ 30 Gambar 3.10. Menentukan besaran mesh. ............................................................ 31 Gambar 3.11. Run simulasi Solid Works. ............................................................. 31 Gambar 4.1. Skema hydraulic pump. .................................................................... 33 Gambar 4.2. Cylinder dump atau bucket .............................................................. 34 Gambar 4.3. Skema cylinder hydraulic ................................................................. 35 Gambar 4.4. Skema silinder hidrolik .................................................................... 37 Gambar 4.5. Skema silinder hidrolik .................................................................... 37
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xii
Gambar 4.6. Skema bucket pada 13° .................................................................... 38 Gambar 4.7. Skema linkage bucket pada kemiringan 13° .................................... 38 Gambar 4.8. Skema bucket pada 22° .................................................................... 39 Gambar 4.9. Skema linkage bucket pada 22° ....................................................... 39 Gambar 4.10. Skema breakoutforce linkage bucket pada 22° .............................. 40 Gambar 4.11. Distribusi von mises keadaan dorong. ............................................ 42 Gambar 4.12. Distribusi von mises keadaan tarik ................................................. 42 Gambar 4.13. Distribusi displacement pada keadaan dorong. .............................. 44 Gambar 4.14. Distribusi displacement pada keadaan tarik. .................................. 44 Gambar 4.15. Distribusi factor of safety pada keadaan dorong. ........................... 46 Gambar 4.16. Distribusi factor of safety pada keadaan tarik. ............................... 46
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xiii
DAFTAR TABEL
Tabel 4.1. Spesifikasi hydraulic pump dump and hoist, steering dan transmission. ............................................................................................................................... 33 Tabel 4.2. Tabel spesifikasi dari silinder dump atau bucket. ................................ 34 Tabel 4.3. Luas penampang hidrolik ..................................................................... 35 Tabel 4.4. Volume silinder hidrolik ...................................................................... 35 Tabel 4.5. Kecepatan silinder masuk dan keluar. .................................................. 36 Tabel 4.6. Tabel spesifikasi control valve. ............................................................ 36 Tabel 4.7. Gaya pada silinder ................................................................................ 37 Tabel 4.8. Perhitungan gaya dorong pada saat kemiringan bucket 13°. ............... 39 Tabel 4.9. Perhitungan gaya dorong pada saat kemiringan bucket 22°. ............... 40 Tabel 4.10. Perhitungan gaya Breakout force pada kemiringan 22°. .................... 41 Tabel 4.11. Data distribusi von mises pada keadaan tarik dan dorong. ................ 43 Tabel 4.12. Data distribusi displacement dalam keadaan tarik dan dorong .......... 45 Tabel 4.13. Data distribusi factor of safety dalam keadaan tarik dan dorong. ...... 47
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

1
BAB I
PENDAHULUAN
1.1. Latar belakang Dalam dunia industri banyak sekali yang bekerja dalam skala besar dengan
nilai investasi yang sangat besar, oleh karena itu sangat diperlukan berbagai alat untuk menunjang beban kerja yang besar dan mampu menjamin efektifitas kerja yang baik. Kesesuaian antara pekerjaan dan alat-alat yang digunakan akan membentuk suatu standar kerja yang efektif. Salah satu alat berat yang mampu memenuhi kebutuhan di industri yang berjalan di skala besar adalah wheel loader, yang berarti alat ini digunakan sebagai alat untuk memuat suatu material. Dalam pengangkutan suatu material sangat tergantung pada besar bucket yang digunakan serta posisi bucket saat digunakan untuk pengambilan material (prefilling). Besar bucket yang di pakai akan menentukan besar muatan yang akan di tanggung, bucket yang di pasang pada suatu loader biasanya dihubungkan dengan suatu alat yang berfungsi sebagai alat atau disebut dengan istilah boom. Di dalam industri-industri di Indonesia sendiri banyak sekali tambang-tambang yang memanfaatkan loader sebagai alat bantu untuk memudahkan pemindahan material, di Indonesia sendiri terdapat beberapa pertambangan bawah tanah yang di haruskan menggunakan loader sebagai alat pengangkut material dari underground untuk di pindahkan ke tempat pengumpulan. Salah satu loader yang digunakan adalah loader scooptram ST 3.5. Kapasitas muatan maksimalnya 3m3 tanah lepas, dengan bucket jenis spade nose rock bucket yang digunakan untuk menangani batu-batu pecah, yang terhubung dengan link (penyambung) antara bucket dan silinder secara langsung. Selanjutnya akan dilakukan analisis kekuatan yang terdapat pada link yang terhubung antara bucket dan silinder, serta efektifitas dari posisi bucket saat akan memuat material atau prefilling sehingga dapat mengisi bucket secara maksimal.
Analisis dilakukan dengan software SolidWorks menggunakan analisis metode elemen material. Sehingga akan didapatkan hasil nilai kekuatan dan analisis faktor keamanan serta dilakukan perhitungan manual dalam menentukan posisi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

2
yang efektif dalam prefilling bucket. hasil dari analisis ini adalah kekuatan yang di hasilkan stab link serta kerja maksimal bucket saat melakukan prefilling material.
1.2. Rumusan masalah Masalah yang ingin diketahui dari analisis tersebut :
1. Menentukan besar gaya pada saat silinder bucket dorong dan tarik. 2. Besar gaya bucket pada posisi prefilling material dengan kemiringan 13°
dan 22°, serta besar gaya breakoutforce pada saat 22°. 3. Bagaimana simulasi desain dari stab link dengan sistem hidrolik
menggunakan program aplikasi simulasi SolidWorks pada stab link scooptram ST3.5.
4. Apa hasil yang didapatkan dari berbagai posisi prefilling bucket untuk melakukan kerja secara maksimal?
1.3. Batasan masalah Supaya permasalahan tidak terlalu berkembang menjadi luas, maka diperlukan batasan masalah sebagai berikut :
1. Menentukan besar gaya hanya pada silinder bucket. 2. Variasi posisi bucket hanya pada posisi di bawah tanah dan sejajar
dengan tanah atau pada kemiringan 13° dan 22°. 3. Simulasi stab link memiliki data keluaran kriteria vonmises,
displacement dan factor of safety. 4. Analisis bucket position pada keadaan boom diam di bawah atau fixed
boom.
1.4. Tujuan penelitian Adapun tujuan penelitian dari analisis yang dilakukan pada bucket :
1. Menganalisa tentang besar gaya silinder bucket. 2. Menentukan besar gaya dorong bucket position pada sudut kemiringan
13°, 22° dan breakoutforce di kemiringan 22°. 3. Menentukan kekuatan stab link.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

3
1.5. Manfaat Penelitian Manfaat penelitian dari analisis kekuatan bucket adalah :
1. Menambah pengetahuan dan dapat menganalisis besar gaya silinder bucket pada berbagai posisis.
2. Besar gaya bucket position yang diketahui dapat digunakan memperhitungkan beban yang dapat di dorong.
3. Membuka wawasan terhadap kekuatan pada stab link. 4. Mengetahui posisi bucket yang paling maksimal dalam melakukan
kinerja.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

4
BAB II
LANDASAN TEORI
2.1. Wheel loader Wheel loader adalah traktor dengan roda karet yang dilengkapi dengan
sebuah perlengkapan kerja, yaitu bucket yang berfungsi untuk menggali (digging), membawa (carrying), dan memuat (loading). Wheel loader sangat efisien untuk bekerja di daerah kering, rata, dan kuat. Terutama jika diharuskan untuk meminimalkan kerusakan landasan kerja dengan mobilitas kerja yang tinggi. Wheel loader mempunyai kemampuan beroperasi di area rata, kering, dan keras. Secara umum fungsi wheel loader digunakan untuk mengangkat material atau memindahkan ke tempat lain dan dimasukan ke dalam dump truck. Ketika loader melakukan penggalian maka bucket didorong ke material. Bagian-bagian dari skema ST 3.5 scooptram wheel loader ditampilkan pada Gambar 2.1.
Gambar 2.1. Skema wheel loader.
(Sumber : Shop manual ST 3.5 scooptram wheel loader)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

5
1. Boogie (Load frame) 2. Power frame 3. Fuel tank 4. Boom 5. Bucket 6. Articulation hinge
7. Rear axle 8. Dump cylinder 9. Hoist cylinder 10. Front axle 11. Engine tub 12. Steering cylinder
Secara spesifik kegunaan alat berat wheel loader adalah sebagai berikut : 1. Menggusur atau mendorong tanah dengan jarak yang dekat 2. Meratakan gundukan atau timbunan tanah yang mengisi lubang bekas galian
tanah. 3. Pengambilan atau persiapan bahan material 4. Land cleaning (proses pembersihan area atau lokasi pekerjaan) 5. Stripping (mengelupas bagian tanah yang terlihat jelek) 6. Finishing (proses meratakan atau menghaluskan permukaan tanah atau dalam
objek bidang yang rata.) Sistem kerja alat berat wheel loader di operasikan dengan alat penggerak yang menggunakan sistem hidrolik, kemudahannya dalam mengeruk atau mengangkut material volume besar di sebabkan oleh sistem hidrolik yang menghasilkan daya yang sangat besar. Pengoperasian bucket tidak hanya memakai cable controlled tetapi menggunakan hydraulic controlled atau kendali hidrolik. Wheel loader mampu bergerak atau manuver secara baik apabila di sekitar material yang di kerjakan rata atau datar. Adapun gerakan dasar dari alat berat ini yaitu saat manuver menurunkan bucket diatas tanah dan ketika mendorong (menggusur) ke depan, mengangkat bucket, mengambil dan membuang muatan.
2.2. Sistem hidrolik pada wheel loader Sistem hidrolik merupakan suatu bentuk perubahan atau pemindahan daya dengan suatu media penghantar yang berupa fluida cair, untuk mendapatkan daya yang lebih besar dari daya awal yang di keluarkan. Fluida penghantar ini
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

6
dinaikkan tekanannya oleh pompa pembangkit tekanan yang kemudian di teruskan ke silinder kerja melalui pipa-pipa saluran dan katup. Sehingga gerakan translasi batang piston dari silinder kerja yang di akibatkan oleh tekanan fluida pada ruang silinder yang dimanfaatkan untuk gerak maju mundur. Prinsip dari dasar sistem hidrolik berasal dari hukum pascal “tekanan yang diberikan pada fluida dalam sebuah wadah tertutup maka tekanannya akan di teruskan sama besar dan merata ke semua arah”, atas dasar tersebut maka ditemukan metode sistem hidrolik menggunakan fluida yang bersifat incompressible yang mengirimkan gaya dari satu titik ke titik lainnya di sepanjang jalur yang dilewati fluida tersebut. Dengan dibantu oleh metode dapat menghasilkan output gaya yang sangat besar, dengan menggunakan input daya yang sangat kecil, hasil perpaduan gaya yang sangat besar dapat di capai dengan menggunakan prinsip pada Gambar 2.2.
Gambar 2.2. Dasar sistem hidrolik.
(Sumber : Fundamental of physic Halliday & Resnick 10th edition)
Pada Gambar 2.2 menunjukkan bagaimana prinsip pascal yang dapat dijadikan gambaran atau dasar dari sistem hidrolik. Dalam operasinya gaya eksternal Fi di alirkan atau ditekan ke arah bawah pada piston bagian kiri (atau masukan), yang mempunyai luas permukaan Ai. Sehingga mampu mampat dalam perangkat kemudian menghasilkan kekuatan ke atas sebesar Fo di sebelah kanan (atau output) piston, yang memiliki luas permukaan Ao. Untuk menjaga sistem tetap dalam keseimbangan, harus ada kekuatan ke bawah sebesar Fo pada piston output dari beban eksternal (tidak ditampilkan). Gaya F diterapkan di sebelah kiri dan ke
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

7
bawah sama dengan gaya dari beban disebelah kanan yang menghasilkan perubahan dalam tekanan cairan, maka diperoleh persamaan :
∆P = F&A&= F(F&
Dari persamaan di atas maka dapat dicari besar gaya (Fo) dengan rumus :
F( = F&.A(A&
Secara garis besar sistem hidrolik mempunyai komponen-komponen utama yaitu : 1. Tangki hidrolik (Hydraulic tank) sebagai tempat penampung oli dari sistem,
selain itu juga berfungi sebagai pendingin oli kembali. 2. Motor (Engine) adalah sebuah alat yang menghasilkan torsi dari daya untuk
memutar pompa hidrolik. 3. Pompa hidrolik (Hydraulic pump) sebagai pemindah oli dari tangki ke dalam
sistem dan bersama komponen lain menimbulkan hydraulic pressure (tenaga hidrolik)
4. Control valve digunakan untuk mengarahkan jalannya oli ke tempat yang di inginkan.
5. Actuator (Hydraulic cylinder) sebagai perubahan tenaga hidrolik menjadi tenaga mekanik.
6. Main relief valve digunakan untuk membatasi tekanan maksimum yang diizinkan dalam sistem hidrolik, agar sistem tidak rusak akibat tekanan berlebih.
Selain itu diperlukan juga filter (strainer) untuk menyaring kotoran seperti gram-gram agar tidak ikut masuk dalam sirkulasi kembali. Dalam sebuah sistem hidrolik terjadi perubahan dari tenaga hidrolik menjadi tenaga mekanis. Sebelum diubah menjadi mekanis besarnya arah aliran dan besarnya tekanan di dalam sistem hidrolik harus diatur agar didapatkan tenaga mekanis yang terkontrol arah geraknya kecepatan geraknya atau besar tenaganya. 2.2.1 Tangki hidrolik
Tangki hidrolik adalah komponen sebagai tempat penampungan fluida atau oli hidrolik, yang berfungsi sebagai penampung fluida atau oli hidrolik yang akan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

8
dialirkan oleh pompa hidrolik menuju ke actuator, biasanya tangki hidrolik ini dilengkapi dengan hydraulic tank breather yang berbentuk katup yang di gunakan untuk mencegah kelebihan tekanan fluida di dalam tangki, sehingga dapat digunakan untuk mencegah terjadi kerusakan. Bagian-bagian tangki hidrolik akan ditunjukkan pada Gambar 2.3.
Gambar 2.3. Skema tangki hidrolik.
(Sumber : Shop manual ST 3.5 scooptram wheel loader) 2.2.2 Engine Engine (mesin) adalah salah satu komponen terpenting yang ada dalam sistem hidrolik yang digunakan untuk mengoperasikan unit, karena engine yang menghasilkan daya dan torsi untuk memutar komponen lain yang beroperasi apabila mendapatkan torsi seperti hydraulic pump, alternator, transmission, dll. Untuk unit ST 3.5 scooptram menggunakan engine Deutz FSL 413FW VS tier I Stage air cooled engine untuk dijadikan sebagai sumber torsi dan daya, engine ini dapat menghasilkan torsi 613 Nm pada 1500 rpm, dan akan menghasilkan 182 HP pada putaran 2300 rpm. Bagian-bagian mesin (engine) yang digunakan ditunjukkan pada Gambar 2.4
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
9
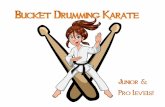
Gambar 2.4. Skema engine.
(Sumber : Shop manual ST 3.5 scooptram wheel loader.) 1. Injector 2. Piston 3. Camshaft 4. Hydraulic blower (exhaust
thermostat-controlled) 5. Oil cooler 6. Oil filler neck 7. Spin-on lube oil filter 8. Oil pan 9. Crankshaft 10. Spray nozzle for piston cooling 11. Crankcase 12. Cylinder 13. Exhaust manifold 14. Air intake pipe
15. Flame-type heater plug (cold-starting aid)
16. Cylinder head cover.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

10
2.2.3 Control valve Control valve adalah alat yang digunakan untuk mengalirkan oli hidrolik dari pompa hidrolik menuju ke hoist cylinder dan stab cylinder dan mengatur debit aliran oli hidrolik yang masuk sehingga bisa manufer gerakan hoist cylinder dan stab cylinder sesuai yang di kehendaki operator. Untuk mencegah sistem loading yang bermasalah dan menghindari rusaknya komponen pada loading system maka di multiple control valve yang menggunakan beberapa valve yaitu seperti main relief valve, anti-cavitation relief valve dan load check valve dimana masing-masing valve memiliki tugasnya sendiri-sendiri. Sebelum oli hidrolik mulai mengalir ke control valve terlebih dahulu oli hidrolik masuk ke pilot control valve dengan tekanan yang rendah, untuk mengoperasikan hidrolik di main control valve dan digunakan untuk menggerakan dump dan hoist system, arah aliran hidrolik setelah masuk melalui pilot control valve terbagi menjadi dua yaitu ke dump spool dan hoist spool. Nantinya akan digunakan sebagai penggerak cylinder boom dan stab cylinder (cylinder bucket). skema dari dump and hoist control valve ditunjukkan pada Gambar 2.5.
Gambar 2.5. Skema dump and hoist control valve.
(Sumber : Shop manual ST 3.5 scooptram wheel loader)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

11
2.2.4 Hydraulic pump Hydraulic pump atau pompa hidrolik adalah alat yang berfungsi untuk
menyuplai oli hidrolik dari tangki hidrolik. Unit ini menggunakan pompa hidrolik dengan jenis fixed displacement gear pump, hydraulic pump ini menggunakan dua buah roda gigi yang berputar di dalam casing. Satu roda gigi sebagai driver gear dan lainnya berupa idle gear. Poros dari driven gear berhubungan dengan alat yang di gerakan dan poros dari idler gear hanya mengikuti arah putaran saja. Fluida hidrolik bertekanan masuk melalui sisi inlet, dan mengalir ke sisi masing-masing dari roda gigi sehingga dapat menggerakan dan timbul torsi serta putaran yang dapat digunakan untuk proses selanjutnya. Bentuk dari hidrolik pump yang dipakai dalam scooptram ST 3.5 akan di tampilkan pada Gambar 2.6.
Gambar 2.6. Skema hydraulic pump.
(Sumber : Shop manual ST 3.5 scooptram wheel loader)
2.3. Hydraulic cylinder Silinder merupakan aktuator linier yang akan mengubah aliran tekanan fluida menjadi gerakan linier yang memaksa. Silinder memiliki sisi plus dan sisi minus, dalam jenisnya hanya ada dua silinder yang dapat dikendalikan dalam satu arah atau singel acting, yang sering digunakan ketika gravitasi atau pegas mendorongnya kembali. Terdapat juga silinder yang dapat dikendalikan di kedua
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

12
arah atau aksi ganda, pada hubungan ini wheel loader silinder bertindak ganda karena ada kebutuhan kekuatan yang melibatkan aksi dari kedua arah tersebut. Hydraulic cylinder adalah komponen yang mengubah energi potensial dari suatu tekanan dari suatu fluida menjadi energi mekanik atau gerak yang di aplikasikan dalam hydraulic cylinder. Wheel loader jenis ST 3.5 scooptram memiliki tiga hydraulic cylinder yaitu cylinder bucket atau stab cylinder satu buah yang ditunjukkan pada Gambar 2.7, cylinder boom atau hoist cylinder dua buah yang ditunjukkan pada Gambar 2.8. Dimana masing-masing cylinder memiliki perbedaan spesifikasi masing-masing.
Gambar 2. 7. Skema cylinder bucket.
(Sumber : Shop manual ST 3.5 scooptram wheel loader)
Gambar 2.8. Skema cylinder boom.
(Sumber : Shop manual ST 3.5 scooptram wheel loader)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

13
Gambar 2.9. Skema potongan silinder hidrolik.
(Sumber : Shop manual ST 3.5 scooptram wheel loader)
Pada Gambar 2.9 gaya yang akan diberikan oleh silinder dapat di hitung melalui tekanan dalam sistem pada area silinder. Batang piston akan menggunakan beberapa area di silinder yang dapat di dorong oleh fluida, karena tekanan yang berbeda pada kedua sisi tersebut sehingga dapat menjadi tetap terjaga tekanannya. Ketika cairan fluida didorong ke silinder maka batang silinder akan berhgerak keluar . 2.3.1 Gaya pada silinder hidrolik Gaya yang terjadi pada silinder merupakan gaya yang diberikan untuk menggerakan silinder dalam mendorong dan menarik lengan silinder, dari dua gerakan tersebut dapat dilakukan perhitungan gaya pada silinder menggunakan persamaan (1).
* = +. , (1)
F adalah besaran gaya yang di keluarkan (Kg), P adalah besaran tekanan yang dikeluarkan dari pump (kg/mm2), A adalah luas penampang dari sisi head dan rod silinder (mm²). 2.3.2 Kecepatan silinder
Kecepatan silinder “ν” tidak bergantung pada suatu tekanan dalam
suatu sistem melainkan pada aliran fluida serta area silinder, kecepatan pada silinder dapat dilakukan perhitungan sebagai perubahan posisi dibagi dengan waktu menggunakan persamaan (2).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

14
ν = .
/ (2)
"v" adalah kecepatan dari langkah silinder rod (m/s), “d” atau distance adalah jarak
langkah dari rod silinder (m), “t” adalah waktu yang dibutuhkan untuk mengisi sistem hidrolik (s), untuk menghitung waktu dapat di gunakan persamaan (3).
t = 3
4567 (3)
“Qact” adalah debit aktual yang dari hidrolik pump (l/min), “V” adalah volume yang terdapat di ruang silinder (m3) untuk melakukan perhitungan “V” maka dapat di gunakan persamaan (4).
8 = , ∙ : (4)
“d” atau distance adalah jarak langkah dari rod silinder (mm), “A” adalah luas penampang dari silinder (mm2) yang dapat dihitung menggunakan persamaan (5)
A; =<
=D? (5)
“D” adalah diameter dari head silinder (mm), untuk melakukan perhitungan pada diameter rod silinder maka di lakukan dengan persamaan (6)
A? =<
=D? −dr? (6)
“D” adalah diameter dari head silinder (mm), “dr” adalah diameter dari rod silinder (mm).
2.4. Kondisi pembebanan yang bekerja pada bucket Pada saat wheel loader bekerja, ada beberapa macam gerakan standar yang bertujuan untuk memindahkan material. Gerakan tersebut memiliki siklus waktu, satu siklus waktu berarti satu aktivitas kerja suatu pengangkutan dan pemindahan material, dari selesai hingga memulainya kembali. a. Prefilling load Prefiling load adalah suatu kerja yang dilakukan untuk mengambil suatu material dengan cara mengangkat (breakout) dan memenuhi bucket dengan material penuh. b. Raise time over payload Raise time over payload adalah sebuah waktu yang diperlukan suatu loader untuk menaikan bucket dari tempat yang rendah ke tempat yang lebih tinggi. Raise time
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

15
adalah waktu dimana bucket silinder selesai diisi dengan material (loading), bucket sudah terisi penuh (loaded) dan siap dipindahkan. c. Dump static Dump time static adalah waktu yang diperlukan bucket untuk membongkar muatan. Jika loader telah mencapai situasi muatan akan dibongkar, maka bucket akan mulai menurunkan material yang di bucket hingga habis. d. Lower time Lower time adalah suatu waktu yang diperlukan untuk menurunkan bucket dari setelah meletakan material hingga kembali ke sudut yang semula. Penurunan dari bucket sendiri termasuk menjadi unsur kenyamanan pada masalah pandangan ke depan saat loader berjalan. e. Variable time Variable time adalah waktu tambahan untuk mengatur posisi loader, waktu pemindahan, instruksi, dan lain-lain. Dari siklus-siklus di atas, prefilling load dan raise time memiliki beban yang paling berat, dikarenakan pada saat boom set harus bergerak untuk mengangkat, mengisi material lalu menahan bucket yang sudah terisi material. Pergerakan ke atas oleh boom terhadap bucket dengan heaped capacity diakibatkan gaya yang berkesinambungan dari set hidrolik. Set hidrolik sebagai pengangkat dalam analisis beban dapat ditiadakan dan di gantikan sebagai tumpuan roll, atau di buat dalam keadaan diam (statis).
2.5. Linkage Linkage adalah sistem yang digunakan wheel loader untuk menggerakan attachment. Agar dapat menggerakan attachment wheel loader sendiri menggunakan serangkaian fungsi mechanical seperti silinder, bar dan kopling. Linkage sendiri bekerja berdasarkan prinsip momen, dalam meningkatkan performa saat proses loading berbagai inovasi telah dikembangkan untuk mendapatkan desain linkage yang bekerja secara optimal. Berbagai macam jenis linkage yang telah dikembangkan seperti Z-Bar linkage, TP linkage dan masih banyak lagi yang lainnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

16
2.5.1 Pergerakan paralel Struktur linkage yang paling sederhana adalah hanya terdiri dari boom dan silinder angkat seperti pada Gambar 2.10. karena hanya silinder angkat dan boom maka linkage tidak terlalu banyak berguna bagi siapa-pun karena hanya dapat digunakan untuk mengangkat dan menurunkan, hal ini juga membatasi jenis beban yang akan di angkat. Alasannya adalah bahwa sudut kemiringan akan bertambah seiring bertambah tinggi barang yang diangkat. Dikarenakan semua linkage yang digunakan pada wheel loader dilengkapi dengan tilt cylinder atau cylinder bucket yang memungkinkan pengemudi dapat mengontrol sudut kemiringan .
Gambar 2.10. Pergerakan parallel.
(Sumber : Energy study bucket positioning system on wheel loader, Gabriel Napadow)
Struktur linkage dapat menjadi kaku dan dapat menyesuaikan diri. Kaku yang berarti sudut kemiringan akan berubah sama dengan rotasi boom di sekitar bearing “O”, ketika hanya silinder boom yang digunakan. Sebuah linkage yang menyesuaikan diri akan memiliki geometri yang mengubah sudut kemiringan kurang atau kemungkinan lebih dari rotasi boom yang berada di sekitar O-bearing. 2.5.2 Breakoutforce dan gaya dorong Dalam proses loading yang dilakukan ada beberapa gaya yang bekerja pada struktur linkage yaitu gaya dorong bucket yang dihasilkan dan gaya dobrak (breakoutforce) yang dihasilkan oleh silinder bucket. a. Breakoutforce Gaya dobrak atau breakoutforce adalah gaya yang digunakan untuk proses penggalian atau mengeruk material, breakoutforce dihasilkan dari silinder bucket
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

17
dan ditransmisikan oleh struktur linkage menuju pin bucket atau tilt link. Secara umum breakoutforce merupakan gaya yang ada diujung bucket dan dirumuskan,
∑Mx = 0 sehingga dapat dilakukukan perhitungan dengan persamaan (7).
FGH =I∙JKJL
(7)
Fbf adalah gaya dobrak breakoutforce (kg), F adalah besaran gaya yang di keluarkan dari gerakan tarik atau dorong dari lengan silinder (Kg), R2 adalah jarak antara pin boom-bucket dengan ujung bucket (m), R1 adalah jarak antara pin tilt-bucket dengan pin boom bucket (m). Breakoutforce umumnya dinyatakan dalam kilogram yang merupakan gaya maksimal dari bucket dalam melakukan gerak berputar (pada daerah paling ujung dari cutting edge atau pisau), serta berputar ke belakang pada saat bucket di kondisi melakukan pemuatan maksimal dari posisi awal bermuatan di ujung cutting edge (ujung pisau) sehingga dapat menggerakan bucket untuk memuat material sehingga breakoutforce dapat disimpulkan sebagai gaya mengangkat maksimum bucket mengambil material. Skema dari breakoutforce sendiri ditunjukkan pada Gambar 2.11.
Gambar 2.11. Skema breakoutforce.
(Sumber : Energy study bucket positioning system on wheel loader, Gabriel Napadow)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

18
b. Gaya dorong bucket. Gaya dorong bucket ditunjukkan sebagai gaya yang diberikan oleh silinder bucket dan di transmisikan ke bucket pada beban yang di ukur dari pusat beban gravitasi. Dalam hal ini desain dari kemiringan bucket ke ground sangat berpengaruh pada gaya yang akan di hasilkan oleh silinder bucket. Gaya dorong bucket dapat di lakukan perhitungan dengan persamaan (8).
F.(M(NO =I∙JKPL
(8)
Fdorong adalah gaya dobrak ke arah depan untuk mengambil material, F adalah besaran gaya yang di keluarkan dari gerakan tarik atau dorong dari lengan silinder (Kg), h2 adalah tinggi dari pin boom bucket dengan ujung bucket (m), R1 adalah jarak antara pin tilt bucket dengan pin boom bucket (m). 2.5.3 Z-Bar Linkage
Z-Bar linkage prinsip kerjanya cylinder bucket mendorong bar besar, sehingga menyebabkan bar tersebut berputar pada sumbunya, gerakan bar ini akan menyebabkan bar kecil yang bekerja pada bagian bawah attachment tertarik dan sekaligus menarik attacment yang terpasang sehingga akan menunduk ke bawah. Begitupun untuk membuat attachment (menunduk), cylinder bucket akan menarik bar besar yang akan mendorong bar kecil sehingga attachment akan terdorong pada bagian bawahnya dan attachment akan mendongak ke atas. Istilah Z-bar mengacu pada garis imajiner yang menghubungkan bucket cylinder, bar besar dan bar kecil yang membentuk huruf “Z” yang ditunjukkan pada Gambar 2.12.
Gambar 2.12. Struktur Z-bar linkage.
(Sumber : Energy study bucket positioning system on wheel loader, Gabriel Napadow)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

19
2.5.4 TP linkage TP (Torque Paralel) adalah sistem linkage yang dikembangkan Volvo Construction Equipment. Berbeda dengan Z-bar linkage, TP linkage justru menggunakan dorongan boom cylinder untuk mengangkat boom. Dengan terangkatnya boom akan menyebabkan bar kecil tertarik atau terdorong dan menarik atau mendorong attachment. Skema dari TP linkage ditunjukkan pada Gambar 2.13.
Gambar 2.13. Struktur TP linkage.
(Sumber : Energy study bucket positioning aystem on wheel loader, Gabriel Napadow )
2.6. Analisa struktur Perancangan suatu stab link bertujuan agar dalam suatu struktur memiliki kekuatan dan kestabilan dalam memuat suatu material. Diperlukan sebuah perhitungan yang matang dan kompleks. Dari itu semua tidak terlepas dari faktor keamanan dan kekuatan material, penyusunan struktur loading sangat berpengaruh karena jenis pekerjaan yang di terima sangat berat. Secara sederhana gaya-gaya yang diterima oleh struktur dapat dihitung dan di analisa dengan metode simulasi yang di lakukan di suatu aplikasi bantuan.
2.6.1 Faktor keamanan Definisi struktur adalah susunan atau obyek yang harus menyalurkan beban maka kegagalan struktural harus di hindari, maka beban yang harus dipikul dalam suatu struktur harus lebih besar daripada beban yang akan dialaminya pada saat masa pakai. Kemampuan suatu struktur untuk menahan suatu beban disebut
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

20
kekuatan, yang menjadikan kriteria terdahulu dapat di tulis ulang menjadi. Kekuatan aktual suatu struktur harus melebihi kekuatan yang dibutuhkan. Rasio kekuatan aktual terhadap suatu kekuatan yang di butuhkan dapat disebut sebagai faktor keamanan :
faktorkeamanan = kekuatanaktual
kekuatanyangdibutuhkan
Tentu saja dalam faktor keamanan harus lebih besar daripada 1,0 jika kegagalan ingin di hindari, dalam bergantung pada situasinya. Maka digunakan faktor keamanan dengan harga sedikit diatas 1,0 hingga 10. Penggunaan faktor keamanan di dalam desain bukan merupakan hal yang sederhana karena kekuatan maupun kegagalan memiliki arti yang beragam. Kekuatan dapat diukur dengan kapasitas pikul beban suatu struktur, atau dapat di ukur dengan tegangan bahan. Kegagalan dapat terjadi pada beban yang jauh lebih kecil daripada taraf beban yang mengakibatkan kolaps aktual. 2.6.2 Teori energi distorsi Teori kegagalan juga disebut teori energi geser (shear energy theory) dan teori Von Mises-Hencky, untuk bahan-bahan yang ulet (daktil) untuk menganalisis kegagalannya yang terjadi teori kegagalan von mises biasanya banyak digunakan. Teori ini muncul dari hasil observasi suatu elemen yang mendapatkan tegangan tarik dan tekan yang sama (hidrostatis) mempunyai kekuatan yield yang lebih tinggi dibandingkan kekuatan yang di peroleh dari pengujian tarik. Tekanan hidrostatis terjadi apabila suatu materi diberikan tekanan dalam arah tiga sumbu dengan besar tekanan yang sama besarnya (Perancangan Teknik Mesin, Shiglie, jilid 1, hal 238). Kriteria distorsi akan memberikan harga kekuatan yield lebih tinggi atau dapat di katakan aman dibanding teori geser maksimum. Untuk kriteria tegangan von mises yang digunakan dalam analisis kegagalan nantinya yang akan ditunjukkan adalah hasil dari program SolidWorks. Hal tersebut menunjukkan bahwa yield tidak hanya merupakan suatu fenomena yang berkaitan dengan bahan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

21
tersebut di tarik atau di tekan, tetapi lebih dari itu yield berkaitan dengan distorsi suatu elemen yang mendapatkan tegangan yang ditunjukkan pada Gambar 2.14.
Gambar 2.14. Distorsi suatu elemen yang mendapatkan tegangan.
(a) Elemen dengan tegangan pada ketiga arah sumbu yang mengalami perubahan volume maupun perubahan sudut.
(b) Elemen menerima tegangan tarik hidrostatis hanya menerima perubahan isi. (c) Elemen menerima distorsi sudut tanpa perubahan volume.
2.6.3 Defleksi Defleksi adalah perubahan bentuk pada balok atau batang dalam arah
vertical dan horizontal akibat dari pembebanan yang di berikan pada balok atau batang (Joko, 2010 : 12). Sumbu sebuah batang akan terdeteksi dari kedudukannya semula bila benda dibawah pengaruh gaya terpakai, dengan kata lain suatu batang akan mengalami pembebanan transversal baik itu beban terpusat ataupun terbagi secara merata akan mengalami defleksi. Defleksi dapat di ukur dari permukaan netral setelah terjadi deformasi Gambar 2.15, (a) memperlihatkan bahwa batang pada posisi awal sebelum terjadi deformasi dan (b) adalah batang dalam konfigurasi ter-deformasi yang di asumsikan akibat aksi pembebanan.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

22
Gambar 2.15. Defleksi yang terjadi pada batang.
(Sumber : Joko, 2010:12) Jarak perpindahan yang ditunjukkan pada Gambar 2.15 Dapat didefinisikan sebagai defleksi batang. Disamping faktor tegangan, spesifikasi untuk rancang bangun sering ditentukan dengan adanya defleksi. Sehingga batang yang dirancang dengan baik tidak hanya mampu menahan beban yang di terima saja, namun tetapi juga harus mampu mengatasi terjadinya defleksi sampai batas tertentu. Hal-hal yang mempengaruhi terjadinya defleksi yaitu kekakuan batang, besar kecilnya gaya yang di berikan, jenis tumpuan yang diberikan dan jenis beban yang terjadi pada batang (Mulyati, 2008: 3). Buku elemen mesin perancangan mekanis karangan Robert L. Mott membahas tentang batasan defleksi yang disarankan yakni tidak boleh melebihi 0,003 inch atau sekitar 0,0762 mm yang dibagi dengan Panjang keseluruhan.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

23
BAB III METODOLOGI PENELITIAN
3.1. Diagram cylinder system Dalam diagram cylinder system terdapat diagram alir hidrolik dari dump
hydraulic cylinder, hoist cylinder hydraulic dan steering hydraulic cylinder yang ditunjukkan pada Gambar 3.1.
Gambar 3.1. Diagram alir cylinder system
Dalam suatu unit wheel loader terdapat suatu sistem yang digunakan untuk mengubah daya dan torsi yang dihasilkan oleh engine menjadi gerak mekanis, sistem itu adalah sistem loading yaitu sistem yang dapat mengubah suatu torsi dan daya menjadi sebuah gaya yang digunakan untuk menggerakan suatu
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

24
silinder yang digunakan untuk menggerakan bucket dalam memuat material dan menggerakan silinder steering, dalam diagram alir loading system dapat di lihat pada Gambar 3.2.
Gambar 3. 2. Dump and hoist system hydraulic.
(Sumber : Shop manual ST 3.5 scooptram wheel loader
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

25
3.2. Dump position
Gambar 3.3. Skema hoist and dump cylinder hydraulic
dan dump positioning (Sumber : Shop Manual ST 3.5 scooptram wheel loader)
Dari Gambar 3.3 ditunjukkan diagram alir control valve yang menunjukkan dump atau juga sering disebut bucket ketika control level diposisikan untuk mengarah ke bawah atau dump down, maka minyak hidrolik dari hydraulic tank akan menuju ke hydraulic pump dan akan mengalirkan ke control valve pada bagian control valve dump bagian kiri akan mengalir minyak ke arah (A2) minyak akan menaikan head piston dump silinder sehingga bucket akan turun (dump down), setelah itu minyak kembali ke control valve dan kembali ke hydraulic tank. ketika dump up maka akan menggunkan dump hydraulic spool bagian kanan, sehingga minyak akan mengalir melewati (B2) yang akan menurunkan head piston
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

26
sehingga akan menaikan bucket, setelah head piston penuh minyak kembali ke control valve dan mengalir kembali ke hydraulic tank.
3.3. Proses penelitian Pada penelitian ini dilakukan beberapa metode yang dilakukan antara lain : 1. Pengumpulan data Tahap awal ini adalah pengumpulan data-data dari alat berat yang akan dilakukan proses analisis. Data yang dimaksud adalah seperti data spesifikasi, spare part dan service manual. Data di dapatkan dari salah satu perusahaan alat berat di Indonesia. Data yang didapatkan pada manual book hanya sebatas data general yang tidak mengerucut secara rinci guna menghindari tindak peniruan dari pihak lain, dan hanya lebih menekankan pada spare part alat berat dan fungsional secara signifikan. 2. Langkah analisis Penelitian ini akan menganalisis tentang keefektifan posisi bucket pada saat pengambilan material pada dua posisi dan di lanjutkan pada saat bucket dalam keadaan breakoutforce, dalam keadaan dua posisi bucket saat pengambilan material yang sudah siap untuk di angkut sejajar dengan bumi (on materials) dan material yang masih murni jadi satu lanskap dengan bumi (in materials). serta kekuatan dari stab link dalam keadaan payload yang di simulasi secara static dengan program SolidWorks. Analisis yang dilakukan terbagi menjadi dua yaitu :
a. Untuk menganalisis keefektifan dalam pemuatan material pada bucket yang di ambil dari dua posisi yaitu pada saat posisi di atas tanah dan di bawah tanah, dalam keadaan tersebut dilakukan variasi sudut kemiringan pada posisi bucket yaitu pada saat bucket posisi 13° dan 22°. Dalam analisis ini tidak hanya membahas pemuatan tetapi juga saat melakukan gerakan angkat (breakout force) dalam breakoutforce dilakukan pada sudut kemiringan 22° dikarenakan breakoutforce terjadi pada saat material sejajar dengan bumi (on material) atau pada saat di bawah tanah (in material).
b. Untuk menganalisis kekuatan dari stab link digunakan pembebanan dari gaya yang berasal dari gaya silinder saat masuk dan gaya silinder saat keluar, dilakukan pada bagian stab link yang berhubungan langsung dengan silinder
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

27
bucket. Dengan pencatatan data yang didapatkan dari bagian-bagian yang mengalami stress, displacement dan factor of Safety.
3.4. Langkah penelitian Penelitian dapat diawali dengan perhitungan pada silinder bucket secara manual hingga analisis kekuatan stab link menggunakan SolidWorks, secara rinci langkah-langkah dari penelitian dapat dilakukan sebagai berikut : 1. Perhitungan silinder dengan mengetahui luas sisi penampang pada head piston
dan sisi rod untuk dapat mengetahui volume sisi head silinder dan rod sillinder, dan besar gaya yang di hasilkan saat silinder masuk dan keluar, sehingga dapat diketahui kecepatan langkah saat silinder keluar dan pada saat masuk.
2. Perhitungan besar gaya yang dapat ditimbulkan pada posisi bucket pada saat sudut kemiringan bucket 13° dan 22° sehingga diketahui beban maksimal dari kemiringan tersebut.
3. Perhitungan breakoutforce dari bucket pada saat melakukan gerakan mengangkat material dari dalam tanah pada saat posisi 22° di karenakan pada posisi 22° bucket sudah pada posisi in materials, maka dapat dikatakan sebagai gaya breakoutforce.
4. Melakukan analisis kekuatan stab link dengan SolidWork, dengan pengambilan data stress, displacement dan factor of Safety. Dengan analisis yang dilakukan pada SolidWork sebagai berikut :
a. Menggambarkan model dari stab link yang ada pada spare part di manual book yang ditunjukkan pada Gambar 3.4, yang di gambarkan pada SolidWork.
Gambar 3.4. Model stab link dan bushing stab link.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

28
b. Menggambarkan sehingga menjadi model 3D pada SolidWork dari bagian stab link hingga bushing pada stab link. Contoh dari hasil desain SolidWorks ditunjukkan pada Gambar 3.5.
Gambar 3.5. 3D model stab link dan bushing stab link.
c. Melakukan penggabungan dari desain (Assembly) menggunakan SolidWork antara part bushing dan part stab link. Assembly yang telah dilakukan ditunjukkan pada Gambar 3.6.
Gambar 3.6. Model 3D stab link dan bushing stab link.
d. Setelah selesai penggabungan dilakukan SolidWork simulation untuk memulai analisis, analisis dimulai menuju menu office product > solidworks simulation > new study. Setelahnya penentuan material pada stab link dan bushing stab link dengan pilih menu parts > add material pada Gambar 3.7 menunjukkan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

29
preview dari pemilihan material pada SolidWorks. Untuk bagian selanjutnya menentukan tumpuan (restrain) yang terjadi dengan fixtures > Fixed geometry. Gambar 3.8 menunjukkan preview dari pemilihan menentukan tumpuan pada analisis SolidWorks.
Gambar 3.7. Menentukan elemen material pada SolidWorks.
Gambar 3.8. Menentukan restrain atau tumpuan.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

30
e. Menentukan arah gaya dan besar gaya pada bagian yang akan disimulasi dengan menu external load > force > tentukan bagian yang akan dikenakan gaya > select direction (arah gaya) > force (beban gaya yang diberikan), dalam menentukan arah gaya di gunakan pemilihan select direction (arah gaya) yang nantinya pemilihan arah gaya sesuai bidang edge. Gambar 3.9 menunjukkan bagian yang menerima gaya serta arah gaya yang telah ditentukan.
Gambar 3.9. Menentukan arah gaya dan besar gaya.
f. Dilakukan create mesh untuk detailing hasil penelitian dikarenakan mesh
merupakan detailing pada suatu desain apabila desain dengan mesh normal maka akan mendapat hasil analisis normal dan apabila meshing dengan ketelitian tinggi maka akan menghasilkan hasil analisis yang akurat, dengan cara create mesh > mesh parameters ( menentukan ketelitian meshing). Gambar 3.10 menunjukkan desain yang sudah dilakukan create mesh.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

31
Gambar 3.10. Menentukan besaran mesh.
g. Melakukan run study dari desain yang akan di simulasi dan akan muncul data dari SolidWorks berupa stress, displacement dan factor of safety. Gambar 3.11 merupakan preview dari desain yang siap di analisis dan dilakukan run.
Gambar 3.11. Run simulasi Solid Works.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

32
Dalam pencatatan data yang dilakukan setelah melakukan SolidWorks simulation, dilakukan pembatasan antara batas maximum dan minimum yang sama untuk mengetahui besar beban, regangan dan factor of safety dari simulasi yang dilakukan pada pembatasan maximum dan minimum diambil dari nilai yang terbesar pada simulasi gaya tarik dan dorong. Maka akan terlihat dari preview gambar di simulasi berdasarkan gradasi warna yang tertera dan besaran nilai yang akan di munculkan.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

33
BAB IV
ANALISIS PERHITUNGAN DAN PEMBAHASAN
4.1. Hydraulic pump
Gambar 4.1. Skema hydraulic pump.
(Sumber : Shop Manual ST 3.5 Scooptram wheel loader) Unit wheel loader scooptram ST 3.5, menggunakan pompa hidrolik dengan tipe eksternal gear pump. Dengan spesifikasi yang didapat dari shop manual ST 3.5 scooptram wheel loader sebagai tertera dalam Tabel 4.1. Tabel 4.1. Spesifikasi hydraulic pump dump and hoist, steering dan transmission.
(Sumber : Shop manual ST 3.5 scooptram wheel loader.)
Dalam Tabel 4.1 yang digunakan hanya spesifikasi dump and hoist pump (129 l/min) yang di asumsikan sebagai Qact dalam perhitungan waktu langkah rod silinder pada persamaan (3)
No Part Spesifikasi
1 Steering pump and Brake Pump
(129 l/min (steer), 53 l/min (brake) @ 2100 rpm)
2 Transmision change Pump (80 l/min @ 2100 rpm)3 Dump and hoist Pump (129 l/min@ 2400 rpm)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

34
4.2. Perhitungan cylinder hydraulic 4.2.1 Perhitungan cylinder bucket
Gambar 4.2. Cylinder dump atau bucket
(Sumber : Shop manual ST 3.5 scooptram wheel loader) Gaya yang dihasilkan oleh silinder ini digunakan untuk menggerakan bucket untuk melakukan proses digging maupun dumping, untuk spesifikasi dari silinder tersebut dapat dilihat pada Tabel 4.2.
Tabel 4. 2. Tabel spesifikasi dari silinder dump atau bucket.
(Sumber : Shop manual ST 3.5 scooptram wheel loader) Dari data Tabel 4.2 dapat diketahui data cylinder bucket dengan diameter head silinder 153 (mm), rod silinder 76 (mm) dan jarak langkah rod silinder 927 (mm). Maka mendapatkan suatu perhitungan gaya yang dihasilkan untuk mendapatkan besar gaya yang di keluarkan oleh silinder, menggunakan persamaan (1). a. Silinder bucket seperti yang ditunjukkan pada Gambar 4.3 mempunyai dua sisi
dalam perhitungan yaitu sisi head silinder (A1) dan sisi rod silinder (A2).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

35
Gambar 4.3. Skema cylinder hydraulic
(Sumber : Energy study bucket positioning system on wheel loader, Gabriel Napadow )
Penentuan luas penampang silinder secara umum dinyatakan pada persamaan (5). Karena dalam silinder hidrolik memiliki dua sisi yaitu sisi rod dan sisi head piston maka untuk penampang-nya akan berbeda, dalam penyelesaiannya perhitungan luas penampang sisi head menggunakan persamaan (5) dan luas penampang sisi rod menggunakan persamaan (6), hasil perhitungan di tampilkan pada Tabel 4.3.
Tabel 4.3. Luas penampang hidrolik
b. Volume silinder dapat dilakukan perhitungan dengan mengalikan antara luas
penampang dan panjang langkah yang sesuai dengan persamaan (4), dikarenakan memiliki luas penampang yang berbeda maka volume akan berbeda. Hasil perhitungan di tampilkan pada Tabel 4.4.
Tabel 4.4. Volume silinder hidrolik
dr
D A1 A2
A (mm2)A1 penampang sisi Head 18.385A2 penampang sisi rod 13.848
Tabel luas penampang hidrolikKeterangan
V (mm3)V1 sisi head piston 17.043.252V2 sisi rod silinder 12.837.954
Tabel Volume silinder hidrolikKeterangan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

36
c. Kecepatan langkah rod silinder, dalam perhitungan yang akan dilakukan ini di asumsikan silinder tanpa pembebanan dan debit oli hidrolik. Tetapi telah di ketahui Qact untuk hoist and dump. Data yang ada pada shop manual book adalah (129 l/min). Perhitungan yang dilakukan menghitung waktu saat silinder masuk dan silinder keluar menggunakan persamaan (3), diteruskan menghitung kecepatan silinder dengan persamaan (2). Hasil perhitungan ditampilkan di Tabel 4.5.
Tabel 4.5. Kecepatan silinder masuk dan keluar.
d. Gaya yang dari silinder bucket merupakan perkalian antara luas penampang
pada silinder bucket dengan tekanan oli hidrolik. Tekanan oli hidrolik di dapatkan dari shop manual book scooptram ST 3.5 yaitu tekanan pada main relief valve yang besarnya (2000 psi) yang di konversi menjadi (13,8 MPa)/ (140,7 Kg/cm2) seperti yang ditunjukkan pada Tabel 4.6. Maka gaya yang akan dihasilkan dari pompa adalah dengan persamaan (1).
Tabel 4.6. Tabel spesifikasi control valve.
(Sumber : Shop manual ST 3.5 scooptram wheel loader) o Silinder pada Gambar 4.4 menunjukkan (A1) pada bagian sisi head piston yang
digunakan untuk mengetahui gaya saat rod silinder keluar. Penyelesaian dari perhitungan ini dapat dilakukan menggunakan persamaan (5)untuk melakukan
2000 psi
140,7 (kg/cm2)
13,8 Mpa
2500 psi
175,4 (kg/cm2)
17,2 Mpa
Main relief valve setting
pressure
Overload relief valve
setting pressure
Main Relief valve Operation Dump and Hoist
t (detik)t1 waktu silinder keluar 7,93t2 waktu silinder masuk 5,97
v (m/detik)v1 kecepatan silinder keluar 0,12v2 kecepatan silinder masuk 0,15
Keterangan
Keterangan
Kecepatan silinder masuk dan keluar
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
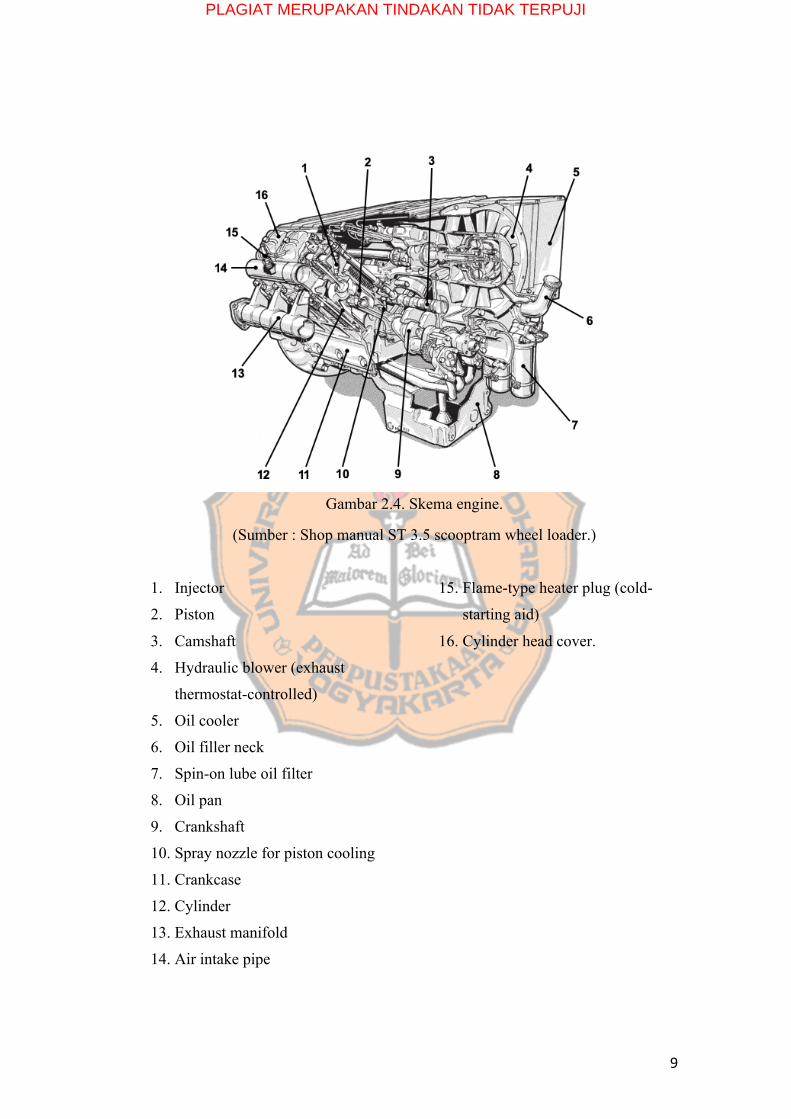
37
perhitungan pada luas penampang head piston. Dilanjutkan perhitungan gaya dengan persamaan (1).
Gambar 4.4. Skema silinder hidrolik
(Sumber : Energy study bucket positioning system on wheel loader, Gabriel Napadow )
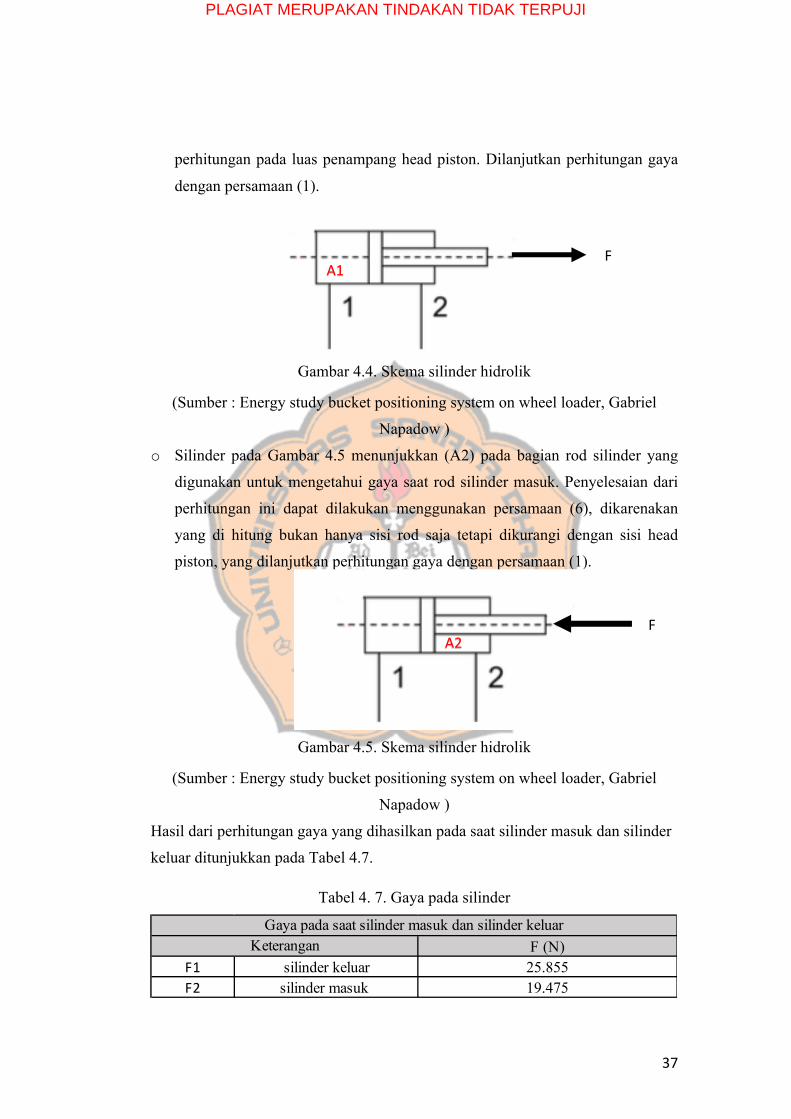
o Silinder pada Gambar 4.5 menunjukkan (A2) pada bagian rod silinder yang digunakan untuk mengetahui gaya saat rod silinder masuk. Penyelesaian dari perhitungan ini dapat dilakukan menggunakan persamaan (6), dikarenakan yang di hitung bukan hanya sisi rod saja tetapi dikurangi dengan sisi head piston, yang dilanjutkan perhitungan gaya dengan persamaan (1).
Gambar 4.5. Skema silinder hidrolik
(Sumber : Energy study bucket positioning system on wheel loader, Gabriel Napadow )
Hasil dari perhitungan gaya yang dihasilkan pada saat silinder masuk dan silinder keluar ditunjukkan pada Tabel 4.7.
Tabel 4. 7. Gaya pada silinder
F
A2
A1
F
F (N)F1 silinder keluar 25.855F2 silinder masuk 19.475
Gaya pada saat silinder masuk dan silinder keluarKeterangan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

38
4.3 Perhitungan besar gaya prefilling bucket position 4.3.1 Perhitungan besar gaya dengan perbandingan sudut kemiringan
Perhitungan ini akan dilakukan pada saat bucket berada sejajar dengan permukaan tanah atau dapat dikatakan sebagai (on material) pada saat kemiringan bucket (13°) serta perhitungan kemiringan bucket pada (22°) dikarenakan pada kemiringan ini bucket berada pada posisi (in material) di bawah tanah dan perhitungan breakoutforce dilakukan pada kemiringan yang sama pada (22°) dikarenakan dalam gerakan breakoutforce merupakan gerakan dobrak atau gaya angkat maksimal dari suatu bucket untuk memindahkan material. a. Perhitungan besar gaya dorong bucket pada posisi (13°) pada saat bucket
berada sejajar dengan permukaan tanah.
Gambar 4.6. Skema bucket pada 13°
(Sumber : Shop manual ST 3.5 scooptram wheel loader )
Gambar 4.7. Skema linkage bucket pada kemiringan 13°
Pada Gambar 4.6 merupakan suatu ilustrasi bucket yang pada posisi awal 13° untuk melakukan persiapan untuk melakukan prefilling dan Gambar 4.7 menampilkan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

39
skema linkage bucket yang pada posisi awal 13°. Gaya tekan piston yang dihasilkan oleh silinder hidrolik dapat diketahui dari Tabel 4.7 yang berupa gaya pada saat silinder bucket keluar yang dihitung dari persamaan (1) yang didapatkan nilai Fdorong sebesar 25.855 Kg. karena gerak translasi yang terjadi secara horizontal dan masih dalam garis lurus, maka akan di ambil garis tegak lurus dari D-C (R1) dan di tarik garis lurus ke titik B untuk mendapatkan jarak antara pin boom dan pin bucket. Pada bagian B-A (h2) di ambil tinggi antara pin boom ke cutting edge. Perhitungan ini dilakukan dengan menggunakan persamaan (8). Hasilnya akan dimunculkan pada Tabel 4.8.
Tabel 4.8. Perhitungan gaya dorong pada saat kemiringan bucket 13°.
b. Perhitungan besar gaya dorong bucket pada posisi 22° pada saat bucket berada
dibawah tanah.
Gambar 4.8. Skema bucket pada 22°
(Sumber : Shop manual ST 3.5 scooptram wheel loader )
Gambar 4.9. Skema linkage bucket pada 22°
Fdorong (Kg)Fdorong1 posisi bucket 17° 39.132
keterangangaya dorong bucket pada kemiringan 17°
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
40
Pada Gambar 4.8 merupakan suatu ilustrasi bucket yang pada posisi awal 22° untuk melakukan persiapan untuk melakukan prefilling dan Gambar 4.9 menampilkan skema linkage bucket yang pada posisi awal 22°. Gaya tekan piston yang dihasilkan oleh silinder hydraulic dapat di ketahui dari Tabel 4.7 yang berupa gaya pada saat silinder bucket keluar yang dihitung dari persamaan (1) yang di dapatkan nilai Fdorong sebesar 25.855 Kg. dikarenakan gerak translasi yang terjadi secara horizontal dan masih dalam garis lurus maka akan di ambil garis tegak lurus dari D-C (R1) dan di tarik garis lurus ke titik B untuk mendapatkan jarak antara pin boom dan pin bucket. Pada bagian B-A (h2) di ambil tinggi antara pin boom ke cutting edge. Perhitungan ini dilakukan dengan menggunakan persamaan (8). Hasilnya akan dimunculkan pada Tabel 4.9.
Tabel 4.9. Perhitungan gaya dorong pada saat kemiringan bucket 22°.
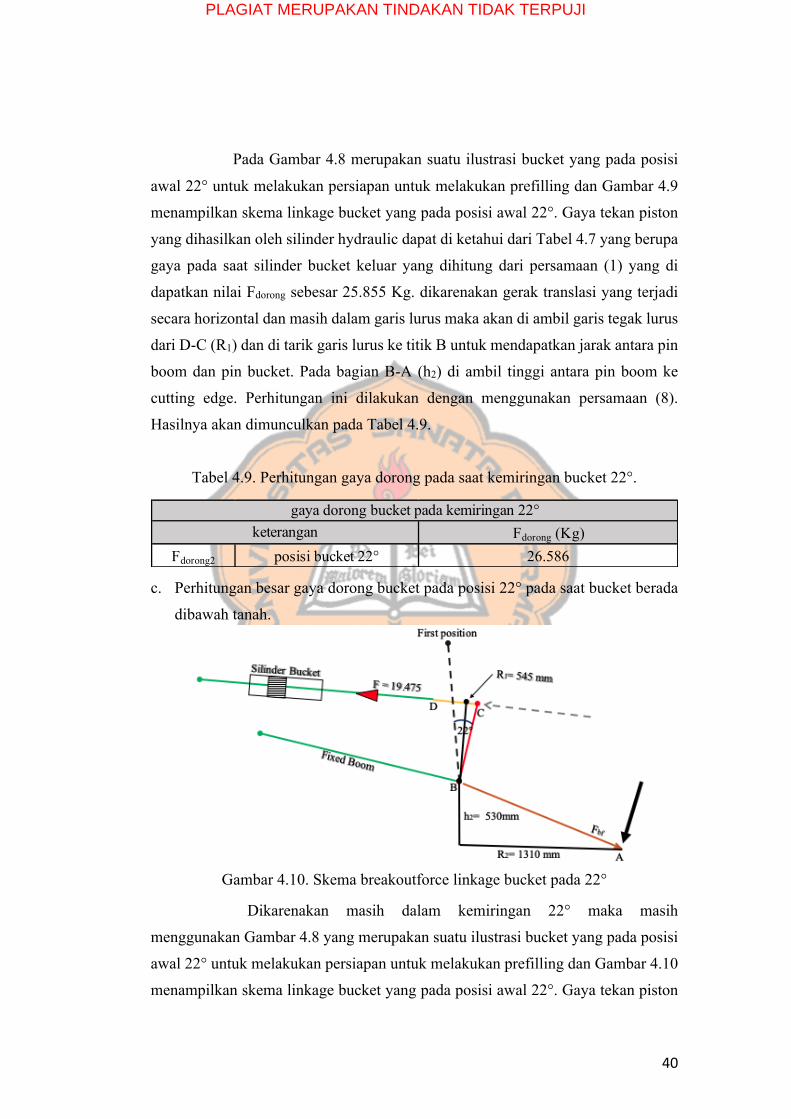
c. Perhitungan besar gaya dorong bucket pada posisi 22° pada saat bucket berada
dibawah tanah.
Gambar 4.10. Skema breakoutforce linkage bucket pada 22°
Dikarenakan masih dalam kemiringan 22° maka masih menggunakan Gambar 4.8 yang merupakan suatu ilustrasi bucket yang pada posisi awal 22° untuk melakukan persiapan untuk melakukan prefilling dan Gambar 4.10 menampilkan skema linkage bucket yang pada posisi awal 22°. Gaya tekan piston
Fdorong (Kg)Fdorong2 posisi bucket 22° 26.586
gaya dorong bucket pada kemiringan 22°keterangan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

41
yang dihasilkan oleh silinder hidrolik dapat di ketahui dari Tabel 4.7 yang berupa gaya pada saat silinder bucket masuk yang dihitung dari persamaan (1) yang didapatkan nilai Fbf sebesar 19.475 Kg. dikarenakan gerak translasi yang terjadi secara horizontal dan masih dalam garis lurus maka akan diambil garis tegak lurus dari D-C (R1) dan di tarik garis lurus ke titik B untuk mendapatkan jarak antara pin boom dan pin bucket. Pada bagian B-A (R2) di ambil panjang antara pin boom ke cutting edge. Perhitungan ini dilakukan dengan menggunakan persamaan (7). Hasilnya akan dimunculkan pada Tabel 4.10.
Tabel 4. 10. Perhitungan gaya Breakout force pada kemiringan 22°.
4.2 Analisis kekuatan pada stab link bucket
Besar pembebanan pada masing-masing penerapan didasarkan pada pergerakan stab link yang tidak lain hanya dalam keadaan dorong dan tarik dengan pembebanan payload, analisis yang dilakukan menggunakan pemodelan elemen dengan bantuan program SolidWorks, dengan kriteria elemen material yang solid dan ulet. Tegangan yang di hasilkan adalah tegangan dengan nilai von mises, stress dan displacement hingga ke analisis faktor keamanan. Analisis tegangan dan defleksi didasarkan pada nilai resultan pembebanan yang ada pada bagian sebelumnya, perhitungan tegangan yang dilakukan pada stab link scooptram ST 3.5 dengan metode static pada program SolidWorks. 4.2.1 Pembebanan gaya pada stab link saat keadaan dorong dan tarik a. Distribusi von mises pada pembebanan gaya dorong dan tarik Hasil yang akan didapatkan dalam analisis ini adalah nilai tegangan (stress) dimana dalam diagram akan diketahui bagian dari struktur stab link yang akan mengalami beban kritis dan bagian yang mengalami kegagalan.
Fbf (Kg)Fbf posisi bucket 22° 8.102
gaya breakout force pada kemiringan 22°keterangan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

42
Gambar 4.11. Distribusi von mises keadaan dorong.
Gambar 4.12. Distribusi von mises keadaan tarik
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

43
Tabel 4. 11. Data distribusi von mises pada keadaan tarik dan dorong.
Bagian yang mengalami beban akan ditunjukkan dengan simbol gradasi warna yang dibantu dengan penunjukan arti bilangan terhadap warna. Untuk menunjukkan perbedaan tingkatan tegangan yang ditunjukkan dengan warna biru untuk tegangan yang terkecil dan warna merah untuk tegangan yang terbesar. Hal ini diterapkan dalam analisis pada Gambar 4.11 dan 4.12, kondisi diatas menunjukkan bahwa tegangan maksimum terjadi pada gaya dorong yang terjadi pada stab link yang ditunjukkan dalam Tabel 4.11, dengan nilai (132 MPa), sedangkan pada gaya tarik yang terjadi pada stab link memiliki nilai (130 MPa) yang masih berada dalam node yang sama dari gaya dorong ataupun gaya tarik. Nilai ini masih berada dibawah nilai batas izin kekuatan bahan untuk luluh (yield) dari elemen material ASTM A36 sebesar (250 MPa), sehingga masih dapat dikatakana dalam batas aman. Pembeda tegangan dari Gambar 4.11 dan 4.12 adalah pada bagian garis kuning dan titik batas maximal pada Gambar 4.11 yang mengalami gradasi warna hijau yang lebih mendekati ke kuning, dapat dinyatakan mengalami tegangan yang lebih tinggi dari Gambar 4.12 (gaya tarik) dimana pada bagian yang sama masih terlihat berwarna hijau. Hal ini dapat dikatakana bahwa tegangan tertinggi terjadi pada saat stab link dilakukan gaya dorong yang maximum.
NO PART ITEM NODE X(mm) Y(mm) Z(mm) MAX MIN1 STAB LINK 18483 27.773 -47.945 -59.089 1722 STAB LINK 23207 61.069 -16855 305619 0,005
NO PART ITEM NODE X(mm) Y(mm) Z(mm) MAX MIN1 STAB LINK 18483 27.773 -47.945 -59.089 1302 STAB LINK 23207 61.069 -16.855 305.619 0,004
VON MISESDESTINATION VON MISES (MPa)
VON MISESDESTINATION VON MISES (MPa)
ANALISIS SOLID STAB LINK SCOOPTRAM 3.5ARAH (TARIK)
BAGIAN BELAKANGJENIS MATERIAL ASTM A36
ANALISIS SOLID STAB LINK SCOOPTRAM 3.5ARAH (DORONG)
BAGIAN BELAKANGJENIS MATERIAL ASTM A36
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

44
b. Distribusi displacement pada keadaan tarik dan dorong. Hasil analisis dari displacement pada stab link ini berupa daerah yang mengalami perubahan bentuk atau perubahan jarak terbesar dari daerah yang dikenai gaya, yang di tunjukan dengan gradasi warna.
Gambar 4.13. Distribusi displacement pada keadaan dorong.
Gambar 4.14. Distribusi displacement pada keadaan tarik.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

45
Hasil dari analisis SolidWorks yang didapatkan berupa data besar kekuatan maksimal dan minimal, serta data visual yang ditampilkan dengan Gambar yang memiliki karakteristik berupa gradasi warna sebagai batasan dalam menentukan bagian maksimal dan minimal. Hasilnya akan di tampilkan pada Tabel 4.12.
Tabel 4.12. Data distribusi displacement dalam keadaan tarik dan dorong
Berdasarkan Gambar 4.13 dan Gambar 4.14 terlihat perbedaan gradasi warna yang sangat mencolok pada bagian belakang stab link, dimana warna merah dalam keadaan stab link di dorong lebih banyak daripada pada saat keadaan stab link di tarik, dari stab link pada Gambar 4.13 (gaya dorong) bagian belakang yang melengkung adalah daerah yang berwarna merah sebesar 0,19 mm, sedangkan pada Gambar 4.14 (gaya tarik) bagian yang melengkung sama seperti gaya dorong yang berada dibelakang dengan nilai sebesar 0,14 mm, dari kedua gambar tersebut menunjukkan bahwa gaya dorong memiliki displacement yang terbesar dari pada gaya tarik. c. Distribusi factor of safety pada keadaan tarik dan dorong. Factor of safety merupakan suatu patokan yang digunakan dalam menentukan kualitas suatu desain, jika nilai factor of safety minimal kurang dari satu, maka desain tersebut dapat dikatakan tidak aman atau cenderung membahayakan. Sebaliknya jika nilai factor of safety lebih dari 1 ( antara 1 – 3) maka kualitas dapat dikatakan berkualitas baik, aman dan layak digunakan.
NO PART ITEM NODE Xmm Ymm Zmm MAX MIN1 STAB LINK 11481 -85.805 -17.995 305.617 0,192 STAB LINK 3766 47.408 32376 265525 0
NO PART ITEM NODE Xmm Ymm Zmm MAX MIN1 STAB LINK 11481 -85.805 -17.995 305.617 0,142 STAB LINK 3766 47.408 32.376 265.525 0
ANALISIS SOLID STAB LINK SCOOPTRAM 3.5ARAH (DORONG)
BAGIAN BELAKANGJENIS MATERIAL ASTM A36
DISPLACEMENTDISPLACEMENT (mm)
ANALISIS SOLID STAB LINK SCOOPTRAM 3.5ARAH (TARIK)
BAGIAN BELAKANG
DESTINATION
DESTINATION DISPLACEMENT (mm)
JENIS MATERIAL ASTM A36DISPLACEMENT
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

46
Gambar 4.15. Distribusi factor of safety pada keadaan dorong.
Gambar 4.16. Distribusi factor of safety pada keadaan tarik.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

47
Tabel 4.13. Data distribusi factor of safety dalam keadaan tarik dan dorong.
Hasil analisis dari factor of safety didapatkan dari gaya dorong nilai minimal dari factor of safety adalah 1,45 dan pada gaya tarik di dapatkan nilai minimal dari factor of safety adalah 1,93 dari kedua nilai minimal yang didapatkan dari Analisa tersebut keduanya memiliki batas maksimal masing-masing pada gaya tarik memiliki batas minimal 1.9 dan pada gaya dorong memiliki batas minimal 1.5. Berdasarkan pernyataan diatas dengan batas minimal nilai yang di dapatkan pada gaya tarik dan dorong pada stab link, dapat dikatakan berkualitas baik dan layak di gunakan, dikarenakan batas minimal dari factor of safety gaya tarik dan gaya dorong lebih dari satu. Antara Gambar 4.15 dan 4.16 dalam gradasi warna menunjukkan Gambar 4.15 pada bagian minimal menunjukkan warna yang lebih merah dibandingkan dari bagian minimal Gambar 4.16, sehingga dapat disimpulkan bahwa Gambar 4.15 akan memiliki factor of safety lebih rendah dari Gambar 4.16.
DESTINATIONNO PART ITEM NODE Xmm Ymm Zmm MAX MIN1 STAB LINK 23207 61.069 -16855 305619 48.4872 STAB LINK 18483 27.773 -47.945 -59.089 1,45
NO PART ITEM NODE Xmm Ymm Zmm MAX MIN1 STAB LINK 23207 61.069 -16855 305619 64.3542 STAB LINK 18483 27.773 -47.945 -59.089 1,93
FOSDESTINATION FOS
FOSFOS
ANALISIS SOLID STAB LINK SCOOPTRAM 3.5ARAH (TARIK)
BAGIAN BELAKANGJENIS MATERIAL ASTM A36
ANALISIS SOLID STAB LINK SCOOPTRAM 3.5ARAH (DORONG)
BAGIAN BELAKANGJENIS MATERIAL ASTM A36
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

48
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan Berdasarkan analisis yang telah dilakukan mengenai efektifitas kekuatan dorong dan breakoutforce bucket terhadap material dengan kemiringan 13° dan 22°. Serta analisis kekuatan stab link yang di berikan beban dorong dan tarik, diperoleh kesimpulan sebagai berikut :
1. Besar gaya pada saat silinder masuk (tarik) sebesar 19.475 Kg dengan waktu 5,9 detik dan saat silinder keluar (dorong) sebesar 25.855, Kg dengan waktu 7,9 detik.
2. Besar gaya dorong terbesar dapat dilakukan pada saat posisi bucket 13° gaya dorong sebesar 39.132 Kg dan pada posisi 22° didapatkan gaya dorong sebesar 26.586 Kg untuk gaya breakoutforce dalam mengangkat material pada posisi 22° dari perhitungan didapatkan hasil sebesar 8.102 Kg.
3. Kekuatan pada saat gaya dorong didapatkan hasil data kriteria von mises maksimal = 172 MPa, displacement maksimal = 0,19 mm dan factor of safety minimal = 1,4, serta pada gaya tarik didapatkan hasil data kriteria von mises maksimal = 130 MPa, displacement maksimal = 0,14 mm dan factor of safety minimal = 1,9.
5.2 Saran Saran dari penulis untuk mengambangkan penelitian-penelitian berikutnya :
1. Pengaruh posisi bucket terhadap kekuatan gaya dorong pada wheel loader pada analisis saat ini tidak berpengaruh akan adanya pergerakan boom yang semestinya, melainkan boom hanya berada dalam keadaan diam, sehingga untuk analisis selanjutnya dapat dikembangkan dengan variasi pergerakan boom yang akan mendapatkan banyak variasi gaya dorong dalam berbagai arah pergerakan boom.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

49
2. Penyelesaian analisis pada bagian stab link menggunakan program SolidWorks dengan metode beban statis yang hanya menggunakan satu tumpuan masih dapat dilakukan pengembangan di penelitian selanjutnya untuk menggunakan beban dinamis atau dengan dua arah tegangan yang mengalami dua perbedaan beban atau gaya, sehingga di dapatkan variasi pembebanan yang beragam antara beban tarik dan dorong yang menghasilkan efek pada bagian yang di analisis dengan banyak variasi.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
50
DAFTAR PUSTAKA
Hallway dan Resnick. 2008. Fundamentals of Physics 9th. United States of America: John Wiley dan Sons, Inc. 393. Joko, A. 2010. Aplikasi Motode Elemen Hingga (MEH) pada Stuktur Rib Bodi Angkutan Publik. Jurnal Inkuiri. Volume 1. Nomor 2: 10-15. Mott, R.L. 2009. Elemen-Elemen Mesin dalam Perancangan Mekanis (Buku 1). Translated by Rines, Agus,U.S, Wibowo Kusbandono, Rusdi Sambada, I Gusti Ketut Puja dan A. Teguh Siswantoro. Yogyakarta: ANDI. 113. Mulyati. 2008. Bahan Ajar Mekanika bahan. Surakarta: Jurusan Teknik Mesin Fakultas Teknik Universitas Sebelas Maret. Napadov, G. 2013. Energy Study of Bucket Positioning System on Wheel Loaders. Russia : Lund University. 16-19. Shiegley, J.E.,1986, Perencanaan Teknik Mesin, Edisi Keempat, Penerbit Erlangga, Yogyakarta. 238.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI