
Geometry?The key to Mechanical movements
11
Mechenism and Machine Theory. 1976, Vol. 11, pp. 79-89. Pergamon Press. Printed in Great Britain Geometry-The Key to Mechanical K. H. HuntS Received on 12 September 1975 Abstract Movements? The powerful analytical and numerical techniques available today are so attractive that they tend to eclipse geometry, especially synthetic geometry. Yet Geometry is extraordinarily useful in studying mechanisms, and it provides important criteria which can sometimes lead directly to actual designs. This lecture concentrates mainly on three dimensions, highlighting kinematic inversion and geometrical duality. Some possible lines of research are suggested. While you might doubt whether there can be anything original to say in a lecture with this title, I hope that your exertion to come to this Congress at all does signify that you accept Geometry as the Key to mechanisms, and to many other mechanical devices. I hope I may persuade you that not all by any means has yet been said about kinematic geometry; a great deal more needs to be both discovered and re-discovered, and then put in useful order. In theory of machines and mechanisms we concentrate on the movements of components that are often to all intents and purposes rigid; we are concerned with their shapes and positions, and how to measure them; and we study paths traced in the plane and in three dimensions by components. These are the very things that geometry is made of; in fact it was to a large extent the practical need to move things and measure things that led the ancient geometers to lay the very foundations of mathematics. But nowadays the geometry of tangible shapes is unfashionable; we don’t usually think of using geometry, as distinct from graphics, to help us to visualise. Our powers of observation are, if anything, dulled by the hypnotic surge of numerical print-outs which, we convince ourselves, give us the answers we seek. Perhaps they do, but sometimes the problems we want answered are not formulated with enough visual, or geometrical, perception. It’s not good enough to say that geometry was the key to mechanical movements; it still is the key. Are there now enough of us ready to place this key in the lock and turn it? The key is a product of fine craftsmanship, superbly wrought from the knowledge acquired over many centuries, and it fits many locks. Those locks which lead to graphical constructions, and those which enclose metrical and analytical treasures, we keep in a tolerable state of repair. But what about projective geometry, and the broader realm, synthetic geometry, which includes projective? The locks for these storehouses are in a sad state of rusty neglect, so much so that many people pass them by without recognising them. I hope in this lecture to convince you that it is well worth your while to re-focus your eyes and adjust your touch so that you can sense the value of this delicate yet responsive area of study. But let me hasten to add that I am no expert; I follow along paths established by giants, and the more I read the more I recognise my ignorance. Yet the process of discovery, or as often as not re-discovery, is thrilling; much that one thinks is new is later found to be a century old. I know that others in this room have shared this disarming experience too. Only recently some expert referees were quite ethusiastic, I think, about some novel geometrical revelations [I] which, as we later discovered, had been substantially pre-empted by Darboux in a two-page Note in an eighty-year-old book[2], and were also referred to in slightly expanded detail more recently[3]. This acknowledgment of “prior art” exemplifies what, I’m afraid, quite often happens; it also serves as a warning to those of US who are too busy to think, and to read, and who take refuge in action. tThis paper was presented as a General Lecture to the Fourth World Congress on the Theory of Machines and Mechanisms, Newcastle upon Tyne, England, on 12 September 1975. Dean, Faculty of Engineering, Monash University, Clayton, Victoria 3168, Australia. 79
Transcript of Geometry?The key to Mechanical movements
Mechenism and Machine Theory. 1976, Vol. 11, pp. 79-89. Pergamon Press. Printed in Great Britain
Geometry-The Key to Mechanical
K. H. HuntS
Received on 12 September 1975
Abstract
Movements?
The powerful analytical and numerical techniques available today are so attractive that they tend to eclipse geometry, especially synthetic geometry. Yet Geometry is extraordinarily useful in studying mechanisms, and it provides important criteria which can sometimes lead directly to actual designs. This lecture concentrates mainly on three dimensions, highlighting kinematic inversion and geometrical duality. Some possible lines of research are suggested.
While you might doubt whether there can be anything original to say in a lecture with this title, I hope that your exertion to come to this Congress at all does signify that you accept Geometry as the Key to mechanisms, and to many other mechanical devices. I hope I may persuade you that not all by any means has yet been said about kinematic geometry; a great deal more needs to be both discovered and re-discovered, and then put in useful order.
In theory of machines and mechanisms we concentrate on the movements of components that are often to all intents and purposes rigid; we are concerned with their shapes and positions, and how to measure them; and we study paths traced in the plane and in three dimensions by components. These are the very things that geometry is made of; in fact it was to a large extent the practical need to move things and measure things that led the ancient geometers to lay the very foundations of mathematics. But nowadays the geometry of tangible shapes is unfashionable; we don’t usually think of using geometry, as distinct from graphics, to help us to visualise. Our powers of observation are, if anything, dulled by the hypnotic surge of numerical print-outs which, we convince ourselves, give us the answers we seek. Perhaps they do, but sometimes the problems we want answered are not formulated with enough visual, or geometrical, perception. It’s not good enough to say that geometry was the key to mechanical movements; it still is the key. Are there now enough of us ready to place this key in the lock and turn it? The key is a product of fine craftsmanship, superbly wrought from the knowledge acquired over many centuries, and it fits many locks. Those locks which lead to graphical constructions, and those which enclose metrical and analytical treasures, we keep in a tolerable state of repair. But what about projective geometry, and the broader realm, synthetic geometry, which includes projective? The locks for these storehouses are in a sad state of rusty neglect, so much so that many people pass them by without recognising them. I hope in this lecture to convince you that it is well worth your while to re-focus your eyes and adjust your touch so that you can sense the value of this delicate yet responsive area of study. But let me hasten to add that I am no expert; I follow along paths established by giants, and the more I read the more I recognise my ignorance. Yet the process of discovery, or as often as not re-discovery, is thrilling; much that one thinks is new is later found to be a century old. I know that others in this room have shared this disarming experience too. Only recently some expert referees were quite ethusiastic, I think, about some novel geometrical revelations [I] which, as we later discovered, had been substantially pre-empted by Darboux in a two-page Note in an eighty-year-old book[2], and were also referred to in slightly expanded detail more recently[3]. This acknowledgment of “prior art” exemplifies what, I’m afraid, quite often happens; it also serves as a warning to those of US who are too busy to think, and to read, and who take refuge in action.
tThis paper was presented as a General Lecture to the Fourth World Congress on the Theory of Machines and Mechanisms, Newcastle upon Tyne, England, on 12 September 1975.
Dean, Faculty of Engineering, Monash University, Clayton, Victoria 3168, Australia.
79
80
When we turn through the works of many great geometers of the nineteenth century we see an unashamed mixture of the synthetic with the analytic. Roberts [4], in a paper that was a precursor to his exposition of the planar coupler-curve equation [5], succeeded, by synthetic argument, in mapping a region of kinematic geometry by establishing the order, class, and certain singularities, of planar curves be[ore he pursued deeper analysis of specific instances. Interestingly enough Roberts starts in three dimensions and then confines himself to the plane; also, because a circle is a very special variety of conic, he finds difficulty with its imaginary elements, and so he prefers to begin with more general algebraic curves as the guiding curves for what we now call the coupler-plane. Cayley[6] too established some important kinematic theorems, considering general projective correspondences between points on curves, even when the coupler was allowed to change its length. At a first glance this purely geometrical study looks like kinematic fantasy; yet his results have real significance in two- and three-dimensional rigid body kinematics.
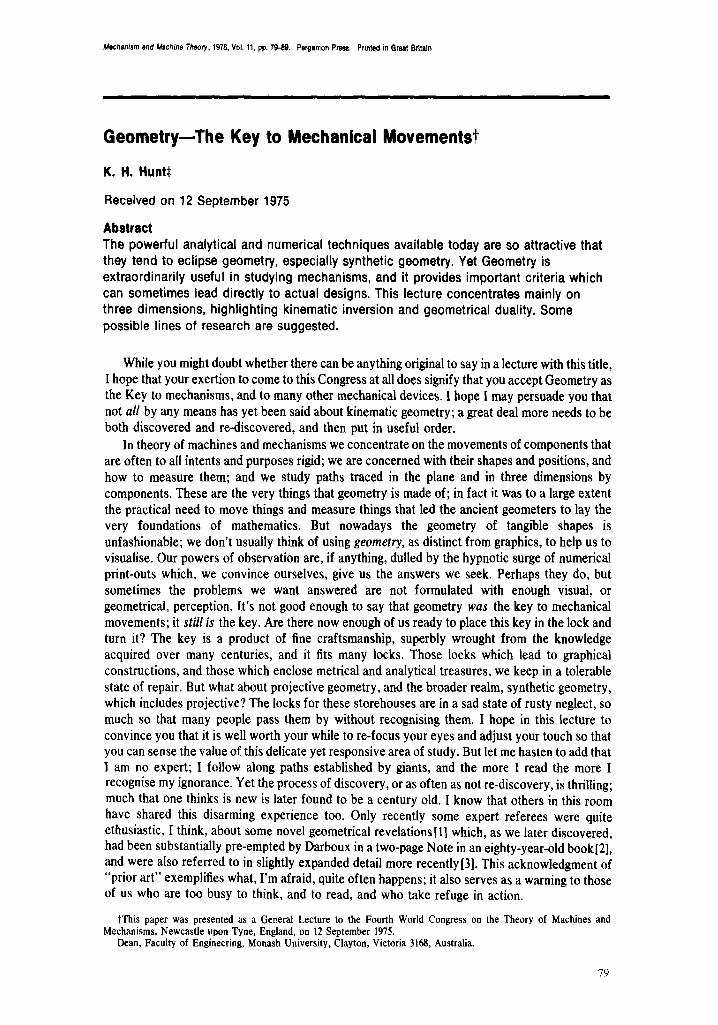
Roberts and Cayley were mathematicians, not engineers. Watt, a century earlier, had used geometry intuitively to get engineering results, with his straight line linkage and with the pantograph. I shall not expand on the many mid-nineteenth century endeavours to trace straight-line paths by linkages; we all know the names of Peaucellier, Hart and Sarrut (or is it Sarrus?); much on linkages of this kind can be found in the literature, for instance in [7]. There was, early in the industrial era, a real need for "parallel motion"; but much of the mathematical theory came quite late, long after many practical engineering devices had appeared. The general theorem of Kempe [8] that any algebraic planar curve can be traced by means of a linkage with turning and sliding pairs is remarkable. The inverse of Kempe's theorem, namely that all loci traced by any planar linkage are algebraic, is also true. But one thing we do not learn from Kempe----or from any researchers since then--is how, most simply, or most elegantly, to devise a linkage which will trace a given algebraic curve. True, Artobolevskii[9] has given us a superb practical treatise on planar curve-tracing, but even he doesn't answer the question "having proved that it can be done, how best can we do it?" This sums up many of the difficulties and paradoxes in kinematics of mechanisms. May I take, as a frivolous example, the drawing of a circle by a linkage? I suggest that the simplest is the linkage of Fig. l(a). Or, noting that the angle in a semicircle is a right-angle, the linkage of Fig. l(b) would serve. But its geometry is nothing more than a special case of Fig. l(c), a carpenter's square sliding round an elliptic profile. Artobolevskii[9] presents us with several tangent-type linkages for ellipses, all festooned with members and joints; to adapt the carpenter's square device to a linkage requires two interconnected tangent-type linkages, each of which may, for example, be an anti-parallelogram with an angle-bisecting device at sliders where the arms cross. Then a bar can be kept tangential to the ellipse. In toto this linkage has twenty members and twenty-eight joints. I've found another one which is slightly simpler (but less self-evident in its action), and there are several others which have at least this number of members and joints. But we would be crazy to consider any of them. Yet when we search for a linkage to trace not a circle but some other more complicated
I \
' I t
la;
Figure 1.
81
curve, can we always guarantee to discard the ridiculous? My example serves as an object-lesson, since geometry can assist in exposing this kind of fatuity; in contrast, if one shuts one's eyes to geometry, one risks having one's illusions fortified by analysis!
Koenigs[2] extended Kempes theorem to cover loci traced by three-dimensional linkages. Provided that no screw-pairs, or higher pairs, intrude into any mechanical device, all the loci traced are algebraic, and, in theory at least, any given algebraic locus in three dimensions is capable of being traced by some "algebraic" linkage, if only one can find it. In three dimensions things not unexpectedly get more complicated, and this isn't just by reason of the spatial nature of curves and surfaces; there are now other forms of locus available to us as well, in particular two- and three-parameter line-systems, called congruences and complexes. Freudenstein[10] used the theorems of Kempe and Koenigs to state important existence criteria, one on the impossibility of any true linkage being devised to give an irrational gear ratio, another on the impossibility of ever devising a truly positive infinitely variable gear-box. Some manufacturers claim that their gear-boxes are "positively-infinitely-variable", but one can always show that the ratio depends on load, and that an absolutely precise geometrical ratio cannot be achieved and held solely by presetting the control. Freudenstein's theorems are, in my view, important contributions to the practical engineering study of mechanisms. He used some subtle analysis to prove them, but he need not have done so, since I have recently come to believe that both of his theorems can be derived with equal rigour using nothing more than synthetic geometrical logic. At any rate they are in essence geometrical theorems. Analogously with the laws of thermodynamics, though (let us be honest) not quite so far-reaching, they establish frontiers beyond which one cannot venture; they enable the kinematician to refute absolutely any claim on the part of any inventor that he has achieved what a theorem says is impossible. This frontier is an important part of the map. It does not tell us how to get to it, nor how near to it we can safely roam. But it should encourage us to explore, to search, and to think; to add more markers, and to survey more contours; to persuade others to get to know the region so mapped, not only to guide them away from circuitous routes and impassable terrain but also to encourage them too to extend the survey. Now, within the known terrain, you can invent and design in detail to your heart's content, using all the algebraic and numerical tools you can muster; but do not ignore the geometrical markers.
Of course this is far more easily said than done. But it needs to be said. I have, all too recently, come to the conclusion that everyone even remotely interested in kinematics should read Schoenflies's remarkable book The Geometry o[ Movement[l 1] originally in German but excellently translated into French and expanded. It should, now, be translated into English, with added annotations to assist the student whose background, today, is so different from that of the reader Schoenflies had in mind. From beginning to end be hardly ever enters into the realm of analytical or metrical geometry, and yet he demonstrates the extraordinary power of the synthetic method. Let me be honest and admit that I cannot follow some of his steps, particularly when he invokes some "well known theorem in projective geometry" which is clearly beyond the scope of the more readily available and comprehensible texts of today. Good purpose is served even by skimming through it, to recognise certain synthetic principles. For instance, to establish that a certain surface is of third order, say, it is su~fcient to prove that a general line cuts it in three points. This is the classical way of showing that the ruled surface of screws representing the two-degree-of-freedom motion is a right cubic conoid with one double line[12]. Synthetic geometrical reasoning can be extended to prove that this surface, Pliicker's conoid, contains two imaginary lines, and that a planar section through one of its generators also cuts it in an ellipse. Later in the nineteenth century Ball[13] admitted in his outstanding journey of discovery through the theory of screws that he had re-discovered Pliicker! Ball expressed this surface, his "cylindroid", algebraically and drew largely on analysis to confirm all the properties derivable synthetically, and to extend them metrically. Algebra was there for the geometers to use, but to so many workers on the Continent of Europe it was less essential; for progress could be made, swiftly and elegantly, by the equally logical synthetic means. On occasions, when I have tried, perhaps lamely, to get across to people, including at least once a mathematician, that in a particular instance an easy synthetic proof was as valid as a tortuous analytical one, my remarks have been greeted not merely with disbelief, but even with derision. How can such scepticism exist? It is as if a vital chapter of man's mathematical heritage had, by tacit consent among quite a
82
number who should know better, been expunged from their consciousness. It's not as if this ,synthetic geometry chapter of mathematics is sterile or abstractly philosophical. It is highly relevant to what we, here at this Congress, are, or should be, interested in, and I venture to suggest that it is vastly more useful and meaningful than most of the research endeavours of present-day mathematicians.
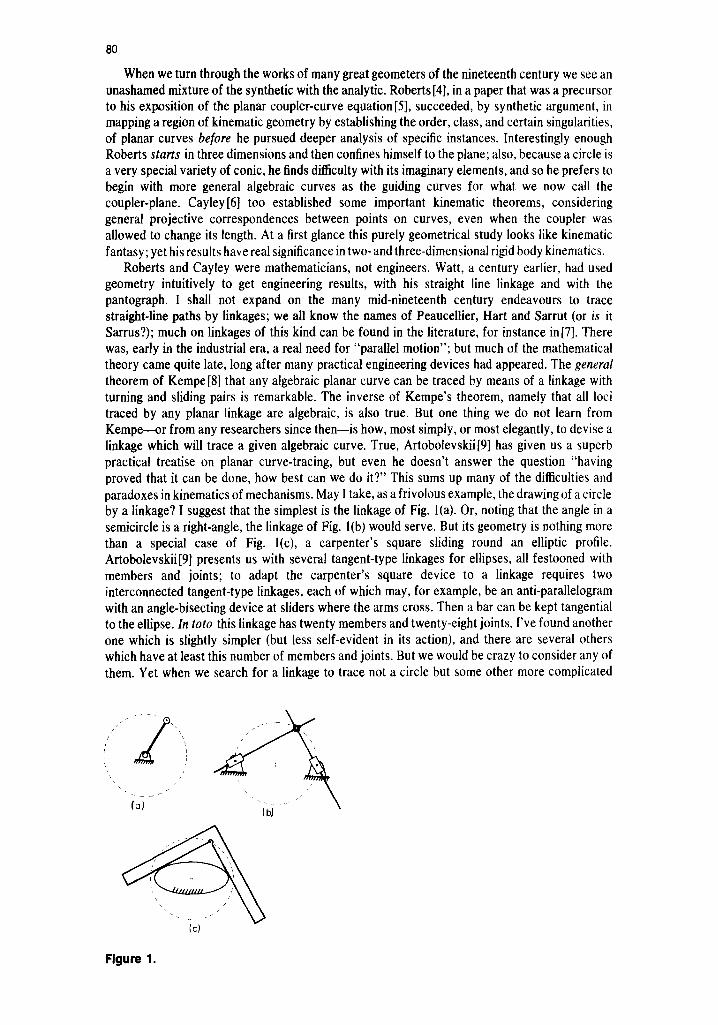
Contemporaneously with the great nineteenth-century geometers, the engineering founda- tions of the science of mechanisms were being laid, and we all accept the singular prowess of one man, Franz Reuleaux[14]. Of course Reuleaux could think geometrically, and he brought his thoughts to life through his remarkable models. He must have had an immense urge to observe and demonstrate the actual movements of properly-made hardware. He recognised the principle of kinematic inversion, the relativity of movements within a kinematic chain any member of which can be taken as the fixed reference frame. This is a principle whose geometrical significance is not, I contend, yet recognised fully enough. For example in planar curvature theory, we know that there is at every instant a circle inscribed in the moving lamina, the inflexion circle, the paths of all points on which osculate with straight lines (Fig. 2). We also learn, from
~nflexion circle for
f I j / L.
centrodes ~ I /
........ ~ "' ' ' ~,,5~ ? | ' "~'<-~ ............... com mon tangent j ./I \ / ('c.0!d., <,,el. ,o,
Figure 2.
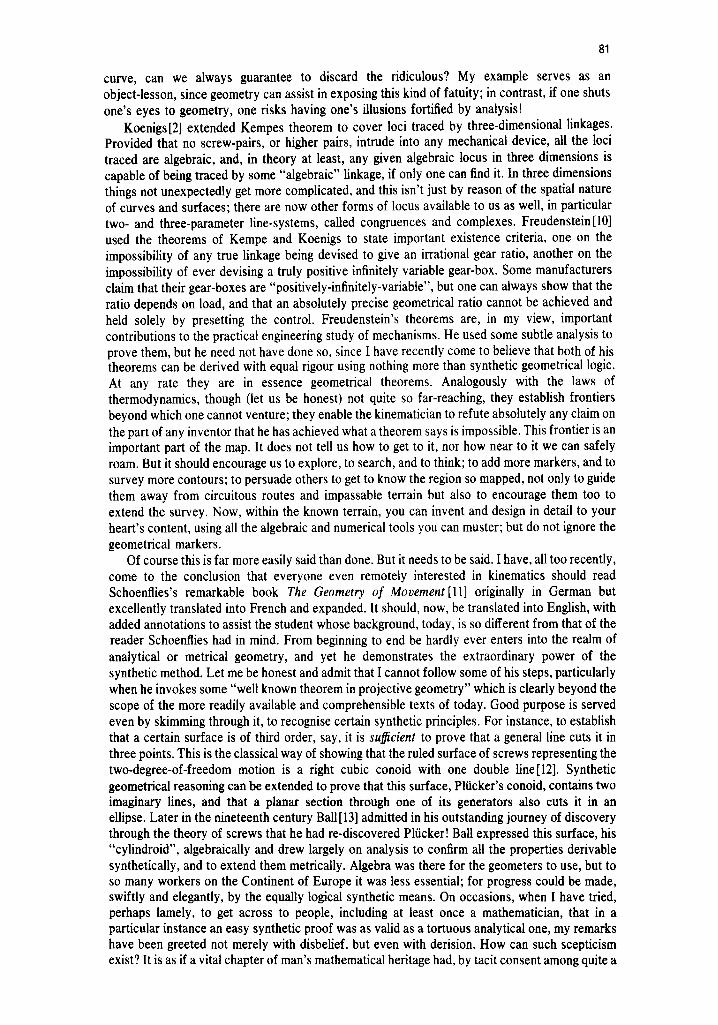
several standard texts, that, when this circle is exactly reflected in the tangent to the centrodes and inscribed in the fixed lamina, it becomes the inflexion circle for the inverted motion when the fixed and moving centrodes exchange their roles. We might also recall that this reflected circle has another significance in the direct, uninverted, motion; the curves which envelop all lines in the moving lamina have their centres of curvature on it, and, where such an envelope tries to cut it, it bounces back, and there's a cusp in the envelope. This property was proved by Aronhold, and the proper name for this reflected circle is the cuspidal circle, better than a common English term "return circle". But, you wilt assert, "who is interested in envelopes, or cusps?--Nice geometrical notions, certainly, but of what use are they to the engineer?" This is a short-sighted view. First consider the geometry of a point of inflexion and a cusp. These are geometrically dual to one another; as a point traces a curve its corresponding tangent-line changes direction at an inflexion-point; as a tangent-line envelops a curve its corresponding point changes direction at a cusp (Fig. 3). What had been the intlexion circle (containing (as it were) "centres of straightness of point-loci" for the direct motion) has become, for the inverse motion, the cuspidal circle (containing "centres of curvature of line-loci"); this is another way of highlighting the duality. Now we have all been conditioned, in the science of mechanisms, to concentrate on the point-locus, and its common Cartesian form of equation, and we attach the physical meaning of hinge-centre to a moving point. Somehow we are prejudiced against the dual; the axis of a sliding pair can be identified with a line, and, if we use a sliding pair as a connector incorporated in, say, the coupler of a four-bar linkage, it's not the common coupler point-curves that concern us but rather the loci of the coupler-lines, and the envelope of these lines. Atlases,

83
Figure 3.
and theories, abound on coupler point-loci, but how much do we know about their duals, line-loci, and the line-envelopes to which they are tangent? Very little. Higher curvature theory has been developed for point-loci, but what progress has been made with lines? Just as there are higher osculations of point-loci with circles and straight lines, so there are analogous singularities on line-envelopes which, as duals, have not just geometrical but also direct engineering significance. But apart from[15] I cannot recall ever having seen any sign of such extensions to the infinitesimal theory, let alone the line-equivalent of l~nite Burmester theory. Roberts did have a little to say about envelopes; simple instantaneous theory is touched on in some standard texts; and envelopes of curvilinear profiles form an important part of gear theory. But these are just scratches on the surface; surely we should look into it further? The scope may be more limited than with point-loci, but kinematicians have not been accustomed to use limited scope as excuse for ignoring a branch of theory! Surprises are never in full view, and some useful ones may be lurking around the corner. Yet formulation of the theory is not easy; while coupler point-loci on the whole remain in fairly accessible circuits, envelopes have a nasty habit of darting off to infinity. But this probably doesn't matter; it isn't so much the envelope itself that we make use of; it is the system of tangent-lines to the envelope. If a moving tangent-line is to be the axis of a sliding pair it can occupy perfectly sensible accessible positions even when its point of tangency with the envelope is at an infinite distance along it.
As a rule we prefer to visualise a given algebraic curve in the plane as a point-equation in x and y. We have been brought up this way, and we are familiar with the term order, or degree, as meaning the degree of this algebraic point-equation. We don't take kindly to the idea of "line-equation", in I and m say, to describe not the locus of all possible points on the curve but the positions of all lines that are tangent to it. Taking the familiar four-bar linkage as an example, we know that the point-equation of the coupler curve is of sixth degree, and this is formidable enough as it stands for most of us. As far as I know nobody has succeeded in formulating the line-equation for it. It would require extraordinarily tedious elimination, and the result, we know from other indirect reasoning, would be an equation of degree 12 for a general point on the moving lamina, but not for all points. (The points on the moving centrode have a line-equation whose degree is 11.) Geometrically we say that the coupler-curve's order is 6 and class is (generally) 12. You might now conclude that my earlier enthusiasm for line-equations and envelopes was misjudged; that the sheer complications bog it down. But not a bit of it! The line that wanders around tangentially to the coupler point-curve has, as far as I can see, no kinematic significance at all. What we do need to find out is the sort of locus traced by a line, or sliding pair axis, itself attached to the moving coupler. Now it can easily be proved that this locus has a line-equation of degree 6; the principles of inversion on the one hand and geometrical duality on the other work precisely in parallel with one another and lead to the conclusion that, if the order of the coupler point-locus is 6, so must the class of the line-envelope be 6. (The algebraic derivation of this follows lines very similar to that of the coupler point-curve.) If now, knowing this, we were to try to write down the point-equation of this envelope we would get into very deep water, just as we do when we try to find the line-equation of the coupler point-locus. But again, there is no kinematic significance in the point-locus of the envelope when regarded in isolation from its generating coupler-line which is always tangential to it.
This theorem, connecting duality and inversion, can be expressed far more generally, and is quite easily extended from the plane into three dimensions. Fichter discovered this, and more [1]; but, as I have already mentioned, it was only a re-discovery of Darboux! It is, however, always a

84
comfort to have one's results checked by a classical geometer. The proof is illustrated in Fig. 4 where, first (Fig. 4a), the fixed line cuts the coupler point-curve in six distinct points (consistent with the curve's being a sextic). On inversion, when that same line is now moving (Fig. 4b), it envelops a curve, and it passes through a fixed point in the (new) base six times, confirming that the class of the envelope is 6. You can see that this envelope is shaped altogether differently from the more familiar coupler point-curve. We need to readjust our thinking a little to see how to use its tangents in an extended linkage, via a sliding pair, for dwell or for intermittent motion for example, and its potential must be studied. We need to reveal the conditions for higher singularities, such as bitangent-lines and special forms of cusp, to occur. Might it not be more worth someone's while to work along these lines rather than to flog what is not quite a dead (coupler point-curve) horse, but one which has taken a lot of beating over the last century? I think I am right in saying that, apart from some elementary instantaneous properties, very little is known about coupler line-envelopes; if I am wrong I hope someone will contradict me here and now, and put the record straight.
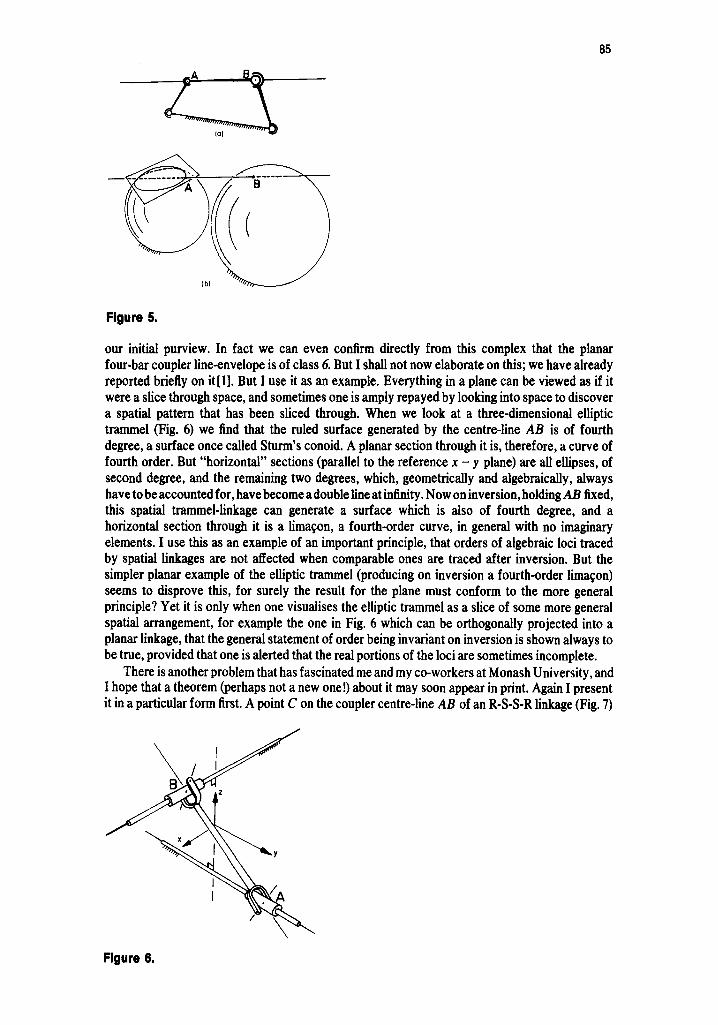
Let me now move into three dimensions and put before you an apparently useless linkage (Fig. 5a). This is a freely deformable spatial quadrilateral with spherical pairs at all four corners. With one member fixed the opposite side, considering it only as a centre-line, has three degrees of freedom. On this centre-line the length AB does not change; A lies on one sphere, B on the other (Fig. 5b). Through an arbitrary fixed point as vertex there is a cone of possible centre-line positions. And it can quite easily be established that the algebraic equation of this cone is degree 6. In geometrical terms this means that the complex of lines, namely the triply infinite locus of all the positions that can be occupied by this coupler centre-line, is of degree 6. Now while this may be of no value in itself, when we start to restrict the freedom of the coupler centre-line AB so that one or both of its ends lie not on spheres but on circles, say (and the planar section through one of the spheres in Fig. 5(b) indicates just this), then certain truths emerge about other linkages, for instance the R-S-S-R linkage, which would not necessarily have been observed if we had limited
moving point
f I \ po in t -curve
m . r Li n e
\
fixed p~ // x / c:uo,,r
- lope
Figure 4.
85
Figure 5.
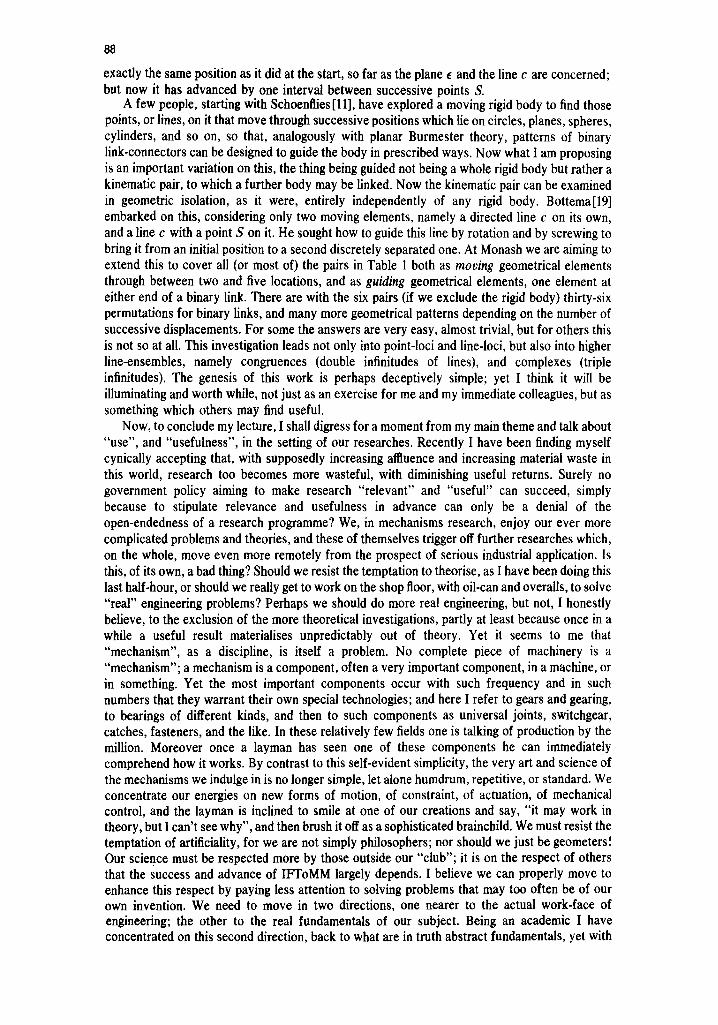
our initial purview. In fact we can even confirm directly from this complex that the planar four-bar coupler line-envelope is of class 6. But I shah not now elaborate on this; we have already reported briefly on it[l]. But I use it as an example. Everything in a plane can be viewed as if it were a slice through space, and sometimes one is amply repayed by looking into space to discover a spatial pattern that has been sliced through. When we look at a three-dimensional elliptic trammel (Fig. 6) we find that the ruled surface generated by the centre-line AB is of fourth degree, a surface once called Sturm's conoid. A planar section through it is, therefore, a curve of fourth order. But "horizontal" sections (parallel to the reference x - y plane) are all ellipses, of second degree, and the remaining two degrees, which, geometrically and algebraically, always have to be accounted for, have become a double line at infinity. Now on inversion, holding AB fixed, this spatial trammel-linkage can generate a surface which is also of fourth degree, and a horizontal section through it is a lima,;on, a fourth-order curve, in general with no imaginary elements. I use this as an example of an important principle, that orders of algebraic loci traced by spatial linkages are not ~ e c t e d when comparable ones are traced after inversion. But the simpler planar example of the elliptic trammel (producing on inversion a fourth-order lima~on) seems to disprove this, for surely the resuR for the plane must conform to the more general principle? Yet it is only when one visualises the elliptic trammel as a slice of some more general spatial arrangement, for example the one in Fig. 6 which can be orthogonally projected into a planar linkage, that the general statement of order being invariant on inversion is shown always to be true, provided that one is alerted that the real portions of the loci are sometimes incomplete.
There is another problem that has fascinated me and my co-workers at Monash University, and I hope that a theorem (perhaps not a new one!) about it may soon appear in print. Again I present it in a particular form first. A point C on the coupler centre-line AB of an R-S-S-R linkage (Fig. 7)
Figure 6.

86
s rfaoe-Loco5 o, Line A .
\ \ \ \ \ \ j / I curve-tocus
of point S ~ " Figure 7.
traces a curve of order 8 [16]. Also the coupler centre-line generates a ruled surface of degree 8 [17]. It can incidentally be shown by synthetic argument that the equality of these two degrees is no coincidence; it is always true for all single-degree-of-freedom linkages whose loci are algebraic. Any apparent contradiction of this can always be explained as arising from multiple tracing or imaginary elements or elements at infinity. Now if the tracing point S is not on the centre-line AB it traces a complicated surface which comprises successive circles of spin about AB--a kind of deformed-sausage-surface. We think that Wurstflfiche sounds better, though "spin-surface" is both descriptive, and rather less flippant! It is of sixteenth order[18]. One is prompted to ask whether this too is a special example of a general rule; when a point is spun about a line, is the order of its spin-surface always twice the degree of the ruled surface generated by the line? The answer is "yes". Figure 8 demonstrates this in a more general way. Body 2 is connected by any "algebraic" linkage whatever to base 1 so that body 2 has one degree of freedom. Line a is arbitrarily located on 2 and it generates a ruled surface of degree n which is the same for all lines on body 2. The point S spins about a turning pair conveniently shown with its axis along the general line a; the spin-surface traced by S is of order 2n. The synthetic-geometry proof of this is a little more difficult than some of the others, requiring inversion and re-inversion, and some properties of geometrical loci-of-revolution; it has withstood our efforts to find anything to contradict it. The value of such a theorem is not confined to its bare exposition, for, as with all worth-while theorems, there are corollaries, consequences, and particular cases. Speaking more generally there is room for great exploration, with the virtual certainty of finding results which would not merely be re-discoveries but truly break new ground. With more people interested there could be useful collateral link-ups with research workers using algebraic and numerical methods.
I now risk putting before you some elementary thoughts that I have recently been formulating regarding the geometrical nature of the lower kinematic pairs. Already I have remarked on the preoccupation we all have in planar kinematics with the point (as the centre of a turning pair), as distinct from the line (as the axis of a sliding, or prismatic, pair). Let us now broaden our view and examine all the lower pairs in their three-dimensional setting, relating them one at a time to the three basic geometrical elements, the point, the plane, and the line. In three dimensions it is the plane (not the line) which is the geometrical dual of the point; the line stands on its own and is self-dual. Table 1 represents all the pairs--together with one entry for the rigid body--in what are their simplest geometrical forms. A point S is, of course, identifiable with the centre of a spherical pair, and a plane e with a planar pair. But, given one half of a planar pair in a given position it is essential to know which way it faces, so that there is no doubt about which side is its
-~f~Ytreedom ~ ~ ~ connect ion~ ~ . ~,,,l ~
Figure 8.

Table 1. Lower pairs and their simplest geometrical elements Number of Oe~rees of
Kinematic Its geometrical coordinates freedom of Remarks on pair element(s) required pair duality
spherical point
s. 3 3 } ( :6-3)
planar directed ~ dual plane ~ 3 3
(:6-31
cylindrical directed line
1:6.41 self-dual
turning ,-, directed tine ,~, ~ ~ ~ th[ough a ~ 5 (:6.1S) } eliding (prismatic) directed line_ 1
in a directedg= c 5 ~6.5)
dual
rigid body directed line in a directed plane A 6 0 and through "re X.. (:6-6) serf-dual
screw (helical) directed line in a self-dual,since directed plane and an indefinite regularly-spaced through a regular number of parallel planes series of points indefinite discrete may be sustJtuted
positions for the regular linear series of points
87
open flat face against which the other half of the kinematic pair must engage; a physical kinematic addition has therefore to be added to the pure geometrical notion of a plane. Accordingly to the planar element e must be attached a direction e normal to the plane to identify the way the planar element is facing, e can be regarded as a free vector through any point in the plane e. Both of these pairs have, as we know, three degrees of relative freedom, which, when added to the three coordinates required for a point, or for a plane, make up a total of six. Geometrically one is the dual of the other.
The cylindrical pair is represented by a line vector c, shown with a dark arrow to distinguish it from the outline arrow of the free vector e. Four coordinates are needed to fix a line, and its exact alignment along the cylindrical pair is vital. For the two halves of the pair to be always reassembled facing the same way, the senses of the two vectors must always correspond. Since a line is dual to itself this representation is self-dual; the pair has two degrees of freedom, which, when added to the four coordinates required for a line, again make up a total of six.
Now all the three geometrical elements are used up. For a turning pair one needs two elements, and I have chosen the directed line c and a point S on it. This c - S combination requires five coordinates, four for the line and one more to fix a current point on it. A spherical pair attached on the axis of a cylindrical pair prevents its axial freedom and allows turning only, with one, or (6-5), degrees of freedom. The geometrical dual is a directed line c in a directed plane ~, and this fits the requirements of a prismatic pair; it has one, or (6-5), degrees of freedom too.
Now let us combine all three geometrical elements. This combination of a directed plane through a point S and a directed line c in ¢ through S requires six coordinates, and is therefore just sufficient to remove all the degrees of freedom and fix a rigid body; it contains no redundant information. It is self-dual. A screw pair can be identified with a regularly-spaced series of points S along a directed line c in a directed plane e When the nut is turned one full rotation it occupies
88
exactly the same position as it did at the start, so far as the plane E and the line c are concerned; but now it has advanced by one interval between successive points S.
A few people, starting with Schoenflies [11], have explored a moving rigid body to find those points, or lines, on it that move through successive positions which lie on circles, planes, spheres, cylinders, and so on, so that, analogously with planar Burmester theory, patterns of binary link-connectors can be designed to guide the body in prescribed ways. Now what I am proposing is an important variation on this, the thing being guided not being a whole rigid body but rather a kinematic pair, to which a further body may be linked. Now the kinematic pair can be examined in geometric isolation, as it were, entirely independently of any rigid body. Bottema[19] embarked on this, considering only two moving elements, namely a directed line c on its own, and a line c with a point S on it. He sought how to guide this line by rotation and by screwing to bring it from an initial position to a second discretely separated one. At Monash we are aiming to extend this to cover all (or most of) the pairs in Table 1 both as moving geometrical elements through between two and five locations, and as guiding geometrical elements, one element at either end of a binary link. There are with the six pairs (if we exclude the rigid body) thirty-six permutations for binary links, and many more geometrical patterns depending on the number of successive displacements. For some the answers are very easy, almost trivial, but for others this is not so at all. This investigation leads not only into point-loci and line-loci, but also into higher line-ensembles, namely congruences (double infinitudes of lines), and complexes (triple infinitudes). The genesis of this work is perhaps deceptively simple; yet I think it will be illuminating and worth while, not just as an exercise for me and my immediate colleagues, but as something which others may find useful.
Now, to conclude my lecture, I shall digress for a moment from my main theme and talk about "use", and "usefulness", in the setting of our researches. Recently I have been finding myself cynically accepting that, with supposedly increasing affluence and increasing material waste in this world, research too becomes more wasteful, with diminishing useful returns. Surely no government policy aiming to make research "relevant" and "useful" can succeed, simply because to stipulate relevance and usefulness in advance can only be a denial of the open-endedness of a research programme? We, in mechanisms research, enjoy our ever more complicated problems and theories, and these of themselves trigger off further researches which, on the whole, move even more remotely from the prospect of serious industrial application. Is this, of its own, a bad thing? Should we resist the temptation to theorise, as I have been doing this last half-hour, or should we really get to work on the shop floor, with oil-can and overalls, to solve "real" engineering problems? Perhaps we should do more real engineering, but not, I honestly believe, to the exclusion of the more theoretical investigations, partly at least because once in a while a useful result materialises unpredictably out of theory. Yet it seems to me that "mechanism", as a discipline, is itself a problem. No complete piece of machinery is a "mechanism"; a mechanism is a component, often a very important component, in a machine, or in something. Yet the most important components occur with such frequency and in such numbers that they warrant their own special technologies; and here I refer to gears and gearing, to bearings of different kinds, and then to such components as universal joints, switchgear, catches, fasteners, and the like. In these relatively few fields one is talking of production by the million. Moreover once a layman has seen one of these components he can immediately comprehend how it works. By contrast to this self-evident simplicity, the very art and science of the mechanisms we indulge in is no longer simple, let alone humdrum, repetitive, or standard. We concentrate our energies on new forms of motion, of constraint, of actuation, of mechanical control, and the layman is inclined to smile at one of our creations and say, "it may work in theory, but I can't see why", and then brush it off as a sophisticated brainchild. We must resist the temptation of artificiality, for we are not simply philosophers; nor should we just be geometers[ Our science must be respected more by those outside our "club"; it is on the respect of others that the success and advance of IFToMM largely depends. I believe we can properly move to enhance this respect by paying less attention to solving problems that may too often be of our own invention. We need to move in two directions, one nearer to the actual work-face of engineering; the other to the real fundamentals of our subject. Being an academic I have concentrated on this second direction, back to what are in truth abstract fundamentals, yet with

89
highly relevant overtones. I hope you do not think I have departed too far f rom the real world in
which mechanisms must always find their place.
Acknowledgements--Without the inspiration and patient guidance on many occasions, in conversation and through correspondence, of Prof. Emeritus Dr. O. Bottema (Delft), Prof. F. Freudenstein (Columbia University), and Dr. E. J. F. Primrose (Leicester), I could not have lectured on this subject. To Mr. E. F. Fichter, Senior Tutor in Mechanical Engineering, Monash University, I am indebted not only for many of the ideas and theorems which comprise a major part of the lecture, but also for painstaking searches of the literature. To Mr. P. J. Heyblok, Monash University, I express thanks for this careful drafting assistance.
References 1. E. F. Fichter and K. H. Hunt, Some properties of mechanically-traceable algebraic loci. Trans. ASME, J. Engng Ind. 97B
(1975). 2. G. Koenigs, Lefons de Cin~matique. Hermann, Paris (1897). 3. R. Gamier, Cours de Cin~matique, Vol. 2, 3rd Edn. Gauthier-Villars, Paris (1956). 4. S. Roberts, On the motion of a plane under certain conditions. Proc. London Math. Soc. 3, 286-318 (1971). 5. S. Roberts, On three-bar motion in plane space. Proc. London Math. $oc. 7, 14-23 (1876). 6. A. Cayley, On the correspondence of two points on a curve. Proc. London Math. Soc. 1, 1-6 (1866). 7. R. S. Hartenberg and J. Denavit, Kinematic Synthesis o[ Linkages. McGraw-Hill, New York (1964). 9. I. I. Artobolevskii, Mechanisms for the Generation o[ Plane Curves (translated from the Russian by R. D. Wills).
213-16 (1876). 9. I. I. Artobolevskii, Mechanisms [or the Generation o/Plane Curves translated from the Russian by R. D. Wills).
Pergamon, Oxford (1964). 10. F. Freudenstein, On the variety of motions generated by mechanisms. Trans. ASME, J. Engng. Ind., 84B, 156-60 (1%2). 11. A. Schoenflies, Geometric der Bewegung in synthetische DarsteUung. Teubner, Leipzig (1886). (Also translated by C.
Speckel into French as La G~om~trie du Mouvement, Gauthier-Villars, Paris (1893), with an important Appendix on line geometry added by G. Fouret.)
12. J. Pliicker, Neue Geometrie des Raumes gegrundet au[ die Betrachtung der geraden Linie als Raumelement. Teubner, Leipzig (1868/9).
13. R. S. Ball, Theory o/Screws. Cambridge University Press, London (1900). 14. F. Reuleaux, TheoretischeKinematik: Grundzi~geeinerTheoriedesMaschinenwesens. Vieweg, Braunschweig (1875). (The
1876 translation into English by A. B. W. Kennedy is reprinted by Dover, New York (1%3). 15. R. Bereis, Uber die Geraden-Hiillbahnen bei der Bewegung eines starren ebenen Systems. Osterr. lng. Arch. 9, 44..45
(1955). 16. E. J. F. Primrose and F. Freudenstein, Spatial Motions I--Point paths of mechanisms with four or fewer links. Trans.
ASME, J. Engng Ind. 91B, 103-14 (1%9). 17. D. J. Smeenk, Rational Motion o[ Special Spatial Four-Bars. Ph.D. Dissertation, University of Delft, The Netherlands
(1973). 18. H. Nolle, Linkage Coupler Curve Synthesis. Ph.D. Thesis, Monash University, Australia (1%9). 19. O. Bottema, On a set of displacements in space. Trans. ASME, J. Engng Ind. 95B, 451-4 (1973).




















