
From Kinematics to Dynamics: Robotics Control
40
From Kinematics to Dynamics: Robotics Control Endra Pitowarno © 2009 Kuliah Tamu Teknik Mesin dan Industri – Universitas Gajah Mada 16 Maret 2009 Dr. Endra Pitowarno PENS ITS ©2009
-
Upload
independent -
Category
Documents
-
view
8 -
download
0
Transcript of From Kinematics to Dynamics: Robotics Control

From Kinematics to Dynamics:Robotics Control
Endra Pitowarno © 2009
Kuliah Tamu Teknik Mesin dan Industri – Universitas Gajah Mada
16 Maret 2009
Dr. Endra PitowarnoPENS ITS ©2009

I s i• Tinjauan kinematika
dan dinamika pada kontrol robotika: posisi, kecepatan dan percepatan.
• Perspektif kontrol • Perspektif kontrol internal dan eksternal pada robotika.
• Studi Kasus: Kontrol robot berbasis penglihatan.

GERAK-an (MOTION)
• Perpindahan Posisi: Kontrol Posisi
• Perubahan Kecepatan: Kontrol Kecepatan
• Perubahan Percepatan: Kontrol PercepatanPercepatan
• Konsep Gerak: Hukum Newton 1, 2, 3
• Konsep Utama kontrol gerak: Hukum Newton II >> F=m.a >> a=F/m

Sistem Robot dengan kontroler berbasisprosesor

Sistem Kontrol Robotik(kontrol robot loop terbuka/tertutup)
GERAK GERAK
Terminologi
• Kecerdasan Alami: Konsep kontrol secara alami, fenomena elektris (R/L/C), mekanis (mass/ stiffness/damping) >> P-I-D >> (human-like) adaptive
• Kecerdasan Buatan: konsep kecerdasan manusia yang ditanam pada mesin
• Kecerdasan Buatan: konsep kecerdasan manusia yang ditanam pada mesin
• Kontrol Klasik: konvensional(?), natural(apakah cerdas?), mathematical-based, model-based control category
• Kontrol Modern: (mostly) non-model-based, AI (pendekatan pragmatis), ex. NN vs. Fuzzy
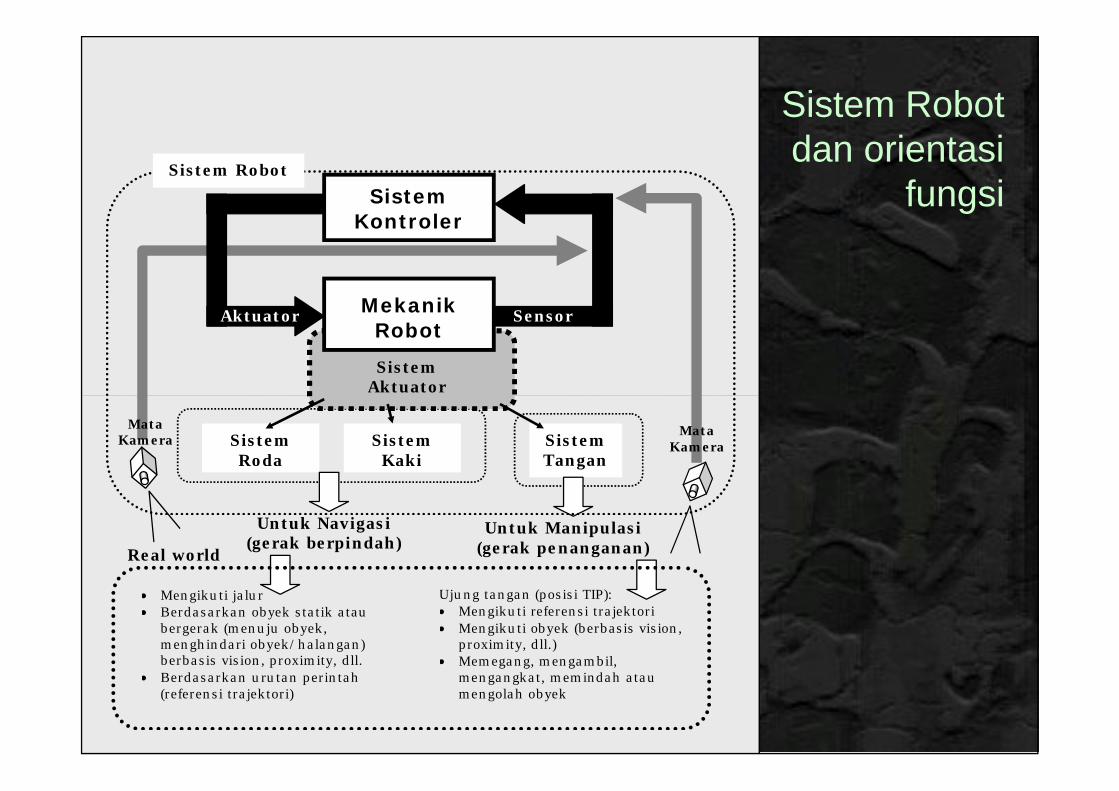
Sistem Robot dan orientasi
fungsiSistem Kontroler
Sistem Aktuator
Mekanik Robot
SensorAktuator
Sistem Robot
Aktuator
SistemRoda
SistemKaki
SistemTangan
Untuk Navigasi(gerak berpindah)
Untuk Manipulasi(gerak penanganan)
Mengikuti jalur Berdasarkan obyek statik atau
bergerak (menuju obyek, menghindari obyek/halangan)berbasis vision, proximity, dll.
Berdasarkan urutan perintah (referensi trajektori)
Ujung tangan (posisi TIP): Mengikuti referensi trajektori Mengikuti obyek (berbasis vision,
proximity, dll.) Memegang, mengambil,
mengangkat, memindah atau mengolah obyek
Real world
MataKamera
MataKamera

Kontrol ON/OFF

Kontrol ON/OFF

Kontroler berbasis prosesor:
Konsep model Kontrol Linier
ANALOG ANALOG
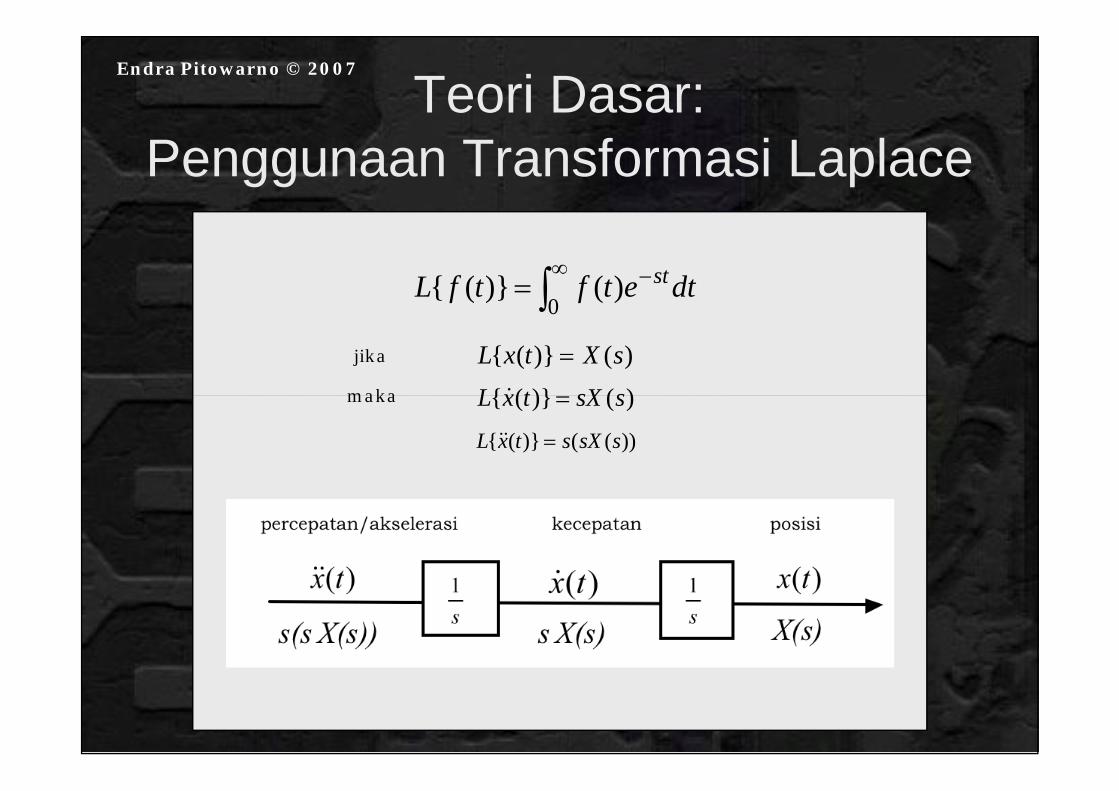
Teori Dasar:Penggunaan Transformasi Laplace
0
)()}({ dtetftfL st
jika )()}({ sXtxL maka )()}({ ssXtxL
Endra Pitowarno © 2007
maka )()}({ ssXtxL
))(()}({ ssXstxL

Contoh: Robot Tangan Satu Sendi (RTSS)
Robot (lengan tunggal)
Sensor posisi (potensiometer)
Y
tact
tact
Endra Pitowarno © 2009
Aktuator(Motor DC)
X
t

RTSS menggunakan:1 Motor DC magnet permanen
R L
Ia
,,
Endra Pitowarno © 2009
Va
IaVb
baa
a KRIdt
dILV
][)(
)(
btneffeff
tn
a
L
KKfRJsRs
nK
sV
s

Persamaan Matematik Motor DC magnet permanen (open loop transfer function)
Endra Pitowarno © 2009

Persamaan Matematik Motor DC magnet permanen (open loop transfer function)
Endra Pitowarno © 2009
H(s)
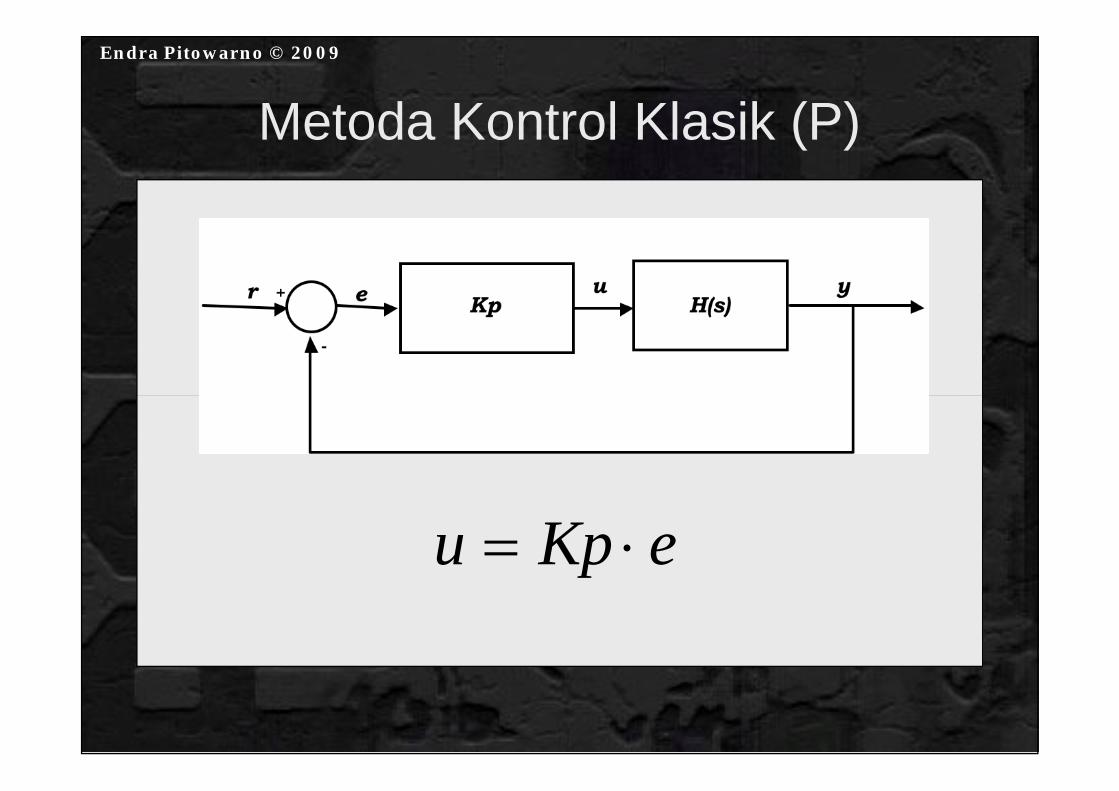
Metoda Kontrol Klasik (P)
Endra Pitowarno © 2009
eKpu

Kontrol Linier: Kecepatan(kontrol Proportional)

Metoda Kontrol Klasik (I)
Endra Pitowarno © 2009
u(t) e(T)dT0
t Ki

Metoda Kontrol Klasik (P-I)
Endra Pitowarno © 2009
G(s) KpKi
s

Kontrol Linier: Kecepatan(kontrol Proportional-Integral)

Metoda Kontrol Klasik (D)
Endra Pitowarno © 2009
u Kd Ýe u Kd e
t

Metoda Kontrol Klasik (P-I-D)
Endra Pitowarno © 2009

Kontrol Linier: Kecepatan(kontrol Proportional-Integral-Derivative)

Skema ekivalen Motor DC Servodengan kontrol kecepatan

Motor DC Servo dengan kontrolkecepatan

Studi Kasus: kontrol posisi &kecepatan

Konsep Kontrol Percepatan:Kontrol Dinamik

Dimana letak Kecerdasan Alamikonsep Kontrol Dinamik?

Active Force Control
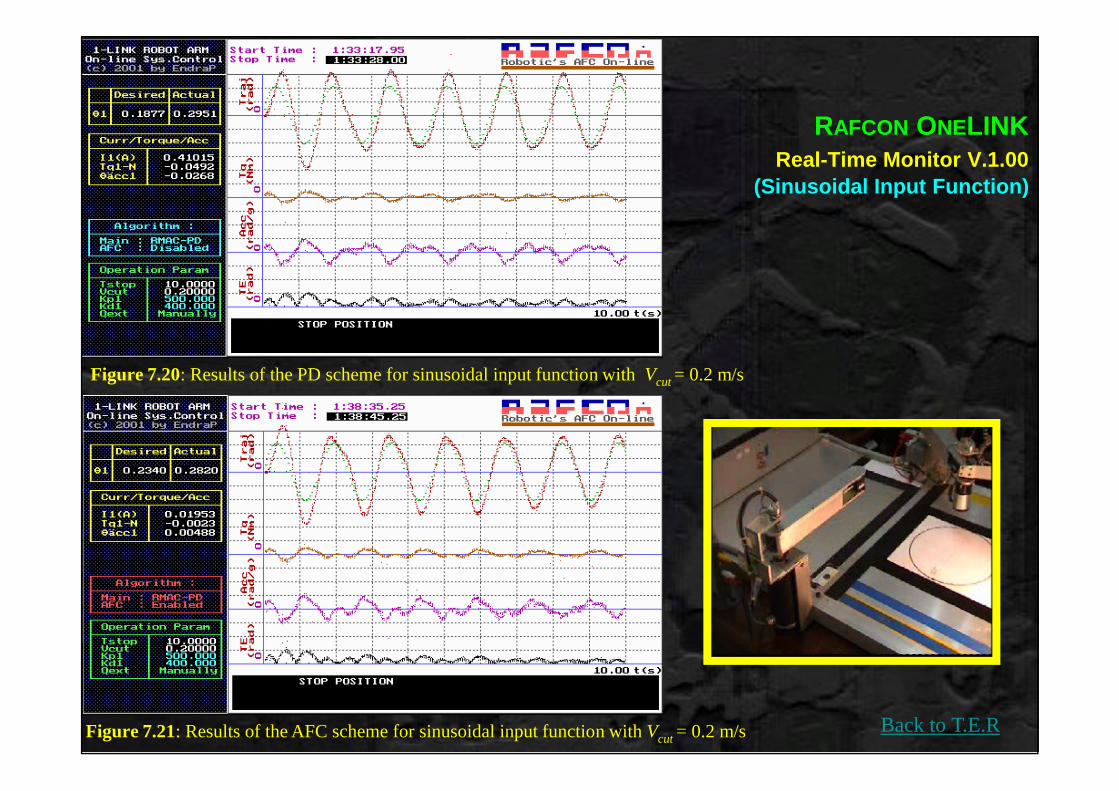
RAFCON ONELINK Real-Time Monitor V.1.00
(Sinusoidal Input Function)
Figure 7.20: Results of the PD scheme for sinusoidal input function with Vcut = 0.2 m/s
Figure 7.21: Results of the AFC scheme for sinusoidal input function with Vcut = 0.2 m/s Back to T.E.R

RAFCON ONELINK Real-Time Monitor V.1.00
(Step Input Function)
Figure 7.16: Results of the PD scheme for a step input function
Figure 7.18: Results of the AFC scheme for a step input functionBack to T.E.R

Kenapa menggunakan KontrolCerdas?
• Konsep P-I-D tanpa kemampuan adaptasi hanya “sempurna” untuk SATU keadaan DINAMIK
• Konsep P-I-D adaptif memerlukan analisa matematik yg rumit (bikin “putus asa”?) >> matematik yg rumit (bikin “putus asa”?) >> konsep kecerdasan alami (?)
• Idiom insinyur masakini: berpikir “boleh rumit”, tapi bertindak(lah) sesederhana mungkin
• Konsep pragmatis: GUNAKAN kecerdasan buatan (daripada “pusing-pusing”)

Penggunaan Kontrol Cerdas
• AI & Terminologi:orang pertama > Alan Turing (1937)• Neural Network: Warren McCulloch (1943)• Teori Fuzzy: Lukacewick (1930an)• Fuzzy Sets: Lotfi Zadeh (1965)• Genetic Algorithm: Teori Darwin• Konsep GA dalam Evolutionary Computation (EC): Holland (1975)
Klasifikasi Kontrol berbasis Sensor:Low-level & High Level Control
Sensor Internal:sensor posisi,
sensor kecepatan, dan sensor percepatan,sensor percepatan,
Sensor Eksternal: sensor taktil (tactile), berbasis sentuhan: misalnya limit switch pada bemper robot,
sensor force dan sensor torsi (torque sensor),sensor proksimiti,
sensor jarak (sonar, PSD, dll),sensor vision (kamera),
gyro, kompas digital, detektor api, dan sebagainya.

Low-level & High Level Control
Perintah Gerak Aktuator
Lingkungan Robot
Low-level Control
Kontroler
ROBOT
Sensor Internal
Sensor Eksternal
High-level Control
Kontroler

Perintah Gerak Aktuator
Lingkungan Robot
Low-level Control
Kontrol PosisiReferensi posisi yg selalu berubah
Posisi aktual tiap derajat aktuator
ROBOT
Sensor Internal
Sensor Eksternal
High-level Control
Kontroler

Algoritma program (ex:
IF-THEN-ELSE)
Kontroler PID + Aktuator
Lingkungan Robot
Low-level Control
Kontrol PosisiReferensi posisi yg selalu berubah
Posisi aktual tiap derajat aktuator
ROBOT
Endra Pitowarno © 2009
Sensor posisi (rotary encoder)
Proximity sensor (ex: line
sensor)
High-level Control
Kontroler

Perintah Gerak
(posisi) & Kecepatan
Lingkungan Robot
Low-level Control
Kontroler PID
Aktuator
Endra Pitowarno © 2009
Kontrol Posisi & KecepatanReferensi posisi & kecepatan yg selalu berubah
Posisi & kecepatan aktual tiap derajat aktuator
ROBOT
Sensor Internal(posisi &
kecepatan)
Sensor Eksternal
High-level Control
Kontroler

Perintah Gerak(posisi,
kecepatan & percepatan)
Lingkungan Robot
Low-level Control
Kontroler PID
Aktuator
Endra Pitowarno © 2009
Kontrol Posisi, Kecepatan & PercepatanReferensi posisi, kecepatan & percepatan
posisi, kecepatan & percepatan aktual tiap derajat aktuator
ROBOT
Sensor Internal(posisi, kecepatan &
percepatan)
Sensor Eksternal
High-level Control
Kontroler

WassalaamWassalaam




















