
Feature preserving speckle filtering of the SAR images by wavelet transform
10
Feature Preserving Speckle Filtering of the SAR Images by Wavelet Transform Karunesh K. Gupta . Rajiv Gupta Received: 28 September 2006 / Accepted: 30 December 2007 Keywords Stationary wavelet transform · Multiresolution · Speckle models Abstract Synthetic Aperture Radar (SAR) images are corrupted by speckle noise due to random inter- ference of electromagnetic waves. The speckle de- grades the quality of the image and makes it difficult to interpret, analyse and classify. This paper proposes a method that reduces the speckle and preserves the features by using scale-space correlation between the scales. The results show that the proposed method is better than the widely used filters based on the spatial domain, such as Lee, Kuan, Frost, Ehfrost, Median, Gamma filters in terms of feature preserva- tion. Moreover the proposed method achieves a wide range of balances between speckle reduction and feature preservation, and thus is applicable in dif- ferent applications such as road detection, detection/ identification of bridge, and ribbon like structures. Furthermore, the proposed method does not require prior modeling of either the image or noise statistics. It uses the variance of the detail wavelets coefficients to estimate noise variance. Introduction Synthetic Aperture Radar (SAR) imagery has become an important source of information about the Earth’s surface and has been widely used in many fields, such as ecology, hydrology, geology, oceanography etc. (Fetter et al., 1994). However, SAR imagery usually exhibits a speckled appearance due to coher- ent imagery systems. Speckle degrades the quality of SAR images, and it is usually desirable to reduce speckle prior to image interpretation, analysis or K. K. Gupta ( ) 1 . R. Gupta 2 1 Instrumentation Group 2 Civil Group B.I.T.S. Pilani - 333 031, India e-mail: [email protected] J. Indian Soc. Remote Sens. (March 2008) 36:51–60 RESEARCH ARTICLE Photonirvachak
-
Upload
bits-pilani -
Category
Documents
-
view
1 -
download
0
Transcript of Feature preserving speckle filtering of the SAR images by wavelet transform

J. Indian Soc. Remote Sens. (March 2008) 36:51–60 51
Feature Preserving Speckle Filtering of the SAR Images by
Wavelet Transform
Karunesh K. Gupta . Rajiv Gupta
Received: 28 September 2006 / Accepted: 30 December 2007
Keywords Stationary wavelet transform · Multiresolution · Speckle models
Abstract Synthetic Aperture Radar (SAR) images
are corrupted by speckle noise due to random inter-
ference of electromagnetic waves. The speckle de-
grades the quality of the image and makes it diffi cult
to interpret, analyse and classify. This paper proposes
a method that reduces the speckle and preserves the
features by using scale-space correlation between the
scales. The results show that the proposed method
is better than the widely used fi lters based on the
spatial domain, such as Lee, Kuan, Frost, Ehfrost,
Median, Gamma fi lters in terms of feature preserva-
tion. Moreover the proposed method achieves a wide
range of balances between speckle reduction and
feature preservation, and thus is applicable in dif-
ferent applications such as road detection, detection/
identifi cation of bridge, and ribbon like structures.
Furthermore, the proposed method does not require
prior modeling of either the image or noise statistics.
It uses the variance of the detail wavelets coeffi cients
to estimate noise variance.
Introduction
Synthetic Aperture Radar (SAR) imagery has become
an important source of information about the Earth’s
surface and has been widely used in many fi elds,
such as ecology, hydrology, geology, oceanography
etc. (Fetter et al., 1994). However, SAR imagery
usually exhibits a speckled appearance due to coher-
ent imagery systems. Speckle degrades the quality
of SAR images, and it is usually desirable to reduce
speckle prior to image interpretation, analysis or
K. K. Gupta (�)1 . R. Gupta2
1Instrumentation Group
2Civil Group
B.I.T.S. Pilani - 333 031, India
e-mail: [email protected]
J. Indian Soc. Remote Sens. (March 2008) 36:51–60
RESEARCH ARTICLE
Photonirvachak

52 J. Indian Soc. Remote Sens. (March 2008) 36:51–60
classifi cation. The principles of speckle reduction
are classifi ed into fi ve categories: 1. control of spa-
tial coherence, 2. control of temporal coherence, 3.
spatial sampling, 4. spatial averaging, and 5. digital
image processing. Category 5 processes detected im-
ages by means of a digital technique in a computer
(Iwai and Asakura 1996). The present research in the
fi eld of speckle reduction conducted so far include
the above fi ve categories without exceptions. The
present paper deals with only digital signal process-
ing based techniques.
Many fi ltering algorithms have been developed to
reduce speckle on SAR imagery such as Lee (Lee,
1980), Enfrost, Kuan (Kuan et al., 1987), Median,
Gamma, Frost (Frost et al., 1982), Fukunda and
Hirosawa (Fukunda and Hirosawa 1998) etc. Never-
theless, speckle suppression and feature preservation
remain the two key issues in speckle fi ltering. Most
commonly used speckle fi lters have speckle-smooth-
ing capabilities. However, the resulting images are
subject to degradation of spatial resolution, which
can result in the loss of image features (Dong
et al., 2001). The amount of speckle reduction desired
must be balanced with the amount of detail required
for the spatial scale and the nature of the particular
application. For broad-scale interpretation or map-
ping, fi ne features can be ignored in many cases.
Thus, signifi cant speckle reduction and consequent
loss of image features may be acceptable. For
applications in which fi ne features and high resolu-
tion are required, the feature preserving performance
of a speckle fi lter is desired. The purpose of this
paper is to present a feature-preserving fi lter for
speckle suppression of SAR imagery. The method is
based on Multiresolution Analysis (MRA) in wavelet
domain.
Speckle-scene models
SAR is modeled as a two-dimensional (range,
azimuth) linear system. Fully developed speckle
is modeled as a white zero-mean complex Gauss-
ian process n(t) that modules the scene complex
refl ectivity r (t) at the 2-D spatial position t, to
form the input signal f (t) = r (t).n (t) to the linear
SAR system. The input signal f (t), is quadratically
phase modulated and amplitude weighted by the
prefi lter w, then compressed by the processor fi lter h,
gives the following complex voltage at the output:
g(t) = f(t) * q(t) + b(t) * h(t); where q is the system
impulse response (q = w * h, where * denoting con-
volution), and b is the receiver noise complex signal
(Touzi, 2002).
The multiplicative speckle model
In order to retrieve the “unspeckled” scene radar
backscatter from the observed image samples (pix-
els), a model that relates the two entities, at each pix-
el, as a function of speckle noise is used. The most
commonly used model is the multiplicative speckle
noise model that expresses the observed intensity as
the product of the scene signal intensity and speckle
noise intensity (Touzi, 2002).
The intensity of fully developed speckle noise is
considered as unit-mean gamma distributed. The ap-
proximate intensity expression is deduced from the
exact intensity expression of multiplicative model
in various ways, leading to various expressions for
the named “multiplicative speckle model” (Touzi,
2002). The models incorporate implicitly certain as-
sumptions on speckle, scene and observed signals.
Few of them assume that the multiplicative speckle
noise intensity is white noise. Others assume that
noise intensity is correlated noise.
The product model
Under the assumption that the multiplicative speckle
model is satisfi ed at each pixel position, the uncondi-
tional pdf of the observed intensity is given by:
The fully developed speckle is assumed to be non-
stationary in intensity mean, with spatially vary-
ing mean E [|n(t)|2] = S(t), and PS
is the spatial
distribution of the speckle mean S(t). The spatial
P I t P I t S t P S t dS tn t
s( ( )) ( ( ) | ( )) ( ( )) ( )
( )=
∞
∫ 2
0
(1)

J. Indian Soc. Remote Sens. (March 2008) 36:51–60 53
averaging of the conditional speckle distribution leads
to the unconditional distribution of stationary mean
S = ‹E(I(t)|S(t)›S(t)
= ‹S(t)›t
. This supposes that the
limit S exists and that the speckle mean variation
process S(t) is ergodic and stationary such that its
spatial average converges to its ensemble average:
E(S(t)) = ‹S(t)›t
= S.
Explicit fi lter model assumptions on the stationary-
nonstationary nature of speckle and speckle noise
All (scalar) speckle fi lters of one channel polarization
SAR images assume that speckle noise is a multiplica-
tive unit-mean wide-sense stationary process. Such an
assumption signifi cantly simplifi es fi lter processing, as
speckle statistics that are constant on the whole scene
need to be estimated once. However, even though
random process, speckle might be considered as a
stationary or nonstationary process. Two categories
of speckle fi lters might be distinguished as a function
of the implicit model assumptions on stationarity-non-
stationarity nature of the speckle random process.
1. Multiplicative Stationary Speckle Model
(MSSM) Filters: MSSM fi lters assume that
the speckle random process is stationary
over the whole image. The most well-known
fi lters, such as the Lee and the Frost fi lters
belong to this category.
2. The Product Model (PM) Filters: PM fi lters
assume that speckle is not “locally” stationary
within the moving processing window. This is
for example the case of the fi lters based on the
product speckle scene model, such as the Kuan
fi lter and the Gamma fi lter which force the
speckle to be nonstationary in mean, with in-
tensity mean Gaussian or Gamma distributed.
Theses fi lters might also be named Multiplica-
tive Non-Stationary Speckle Model (MNSSM)
Filters. Both of the above categories assume
that the multiplicative speckle model is satis-
fi ed at each pixel. The various approximate
expressions of the “multiplicative speckle
model” are used and assessed with reference
to the exact expression of equation (1).
Wavelet theory (WT)
During the last decades the WT has become a popu-
lar and useful tool in the area of signal and image
processing. One of its main features is its ability to
perform multiresolution decomposition. The WT
does this by projecting a signal f(x) onto nested
subspaces Vj
of L2(R) that represent approximations
fj
(x) of the signal at different resolutions (Mallat,
1989). As a result the wavelet decomposition gives a
simultaneous spatial-frequency representation.
The wavelet transform of an image is found by
separable DWT. In the separable multiresolution
approximation, the two-dimensional (2D) scaling
function can be expressed by the product of two one-
dimensional (1D) scaling function:
Φ (x, y) = φ (x) φ (y) (2)
and the 2D wavelet basis function can be expressed
by separable products of functions φ and ψ as
ψ1 (x, y) = φ(x) ψ (y)
ψ2 (x, y) = ψ (x) ψ (y) (3)
ψ3 (x, y) = ψ (x) ψ (y)
The corresponding fi lter equations are:
hLL
(k,l) = h(k)h(l), hLH
(k,l) = h(k)g(l),
hHL
(k,l) = g(k)h(l), hHH
(k,l) = g(k)g(l), (4)
where, the fi rst and the second subscripts denote
the lowpass or highpass fi lter characteristics in the
horizontal and vertical directions, respectively.
The discrete WT (DWT) does not preserve transla-
tion invariance. This means that a translation of the
original signal does not necessarily imply a transla-
tion of the corresponding wavelet coeffi cients. DWT
has a very sparse sampling grid which is desirable for
coding and compression applications but often not
suitable for signal denoising application. Therefore,
the undecimated DWT is used in the present method.
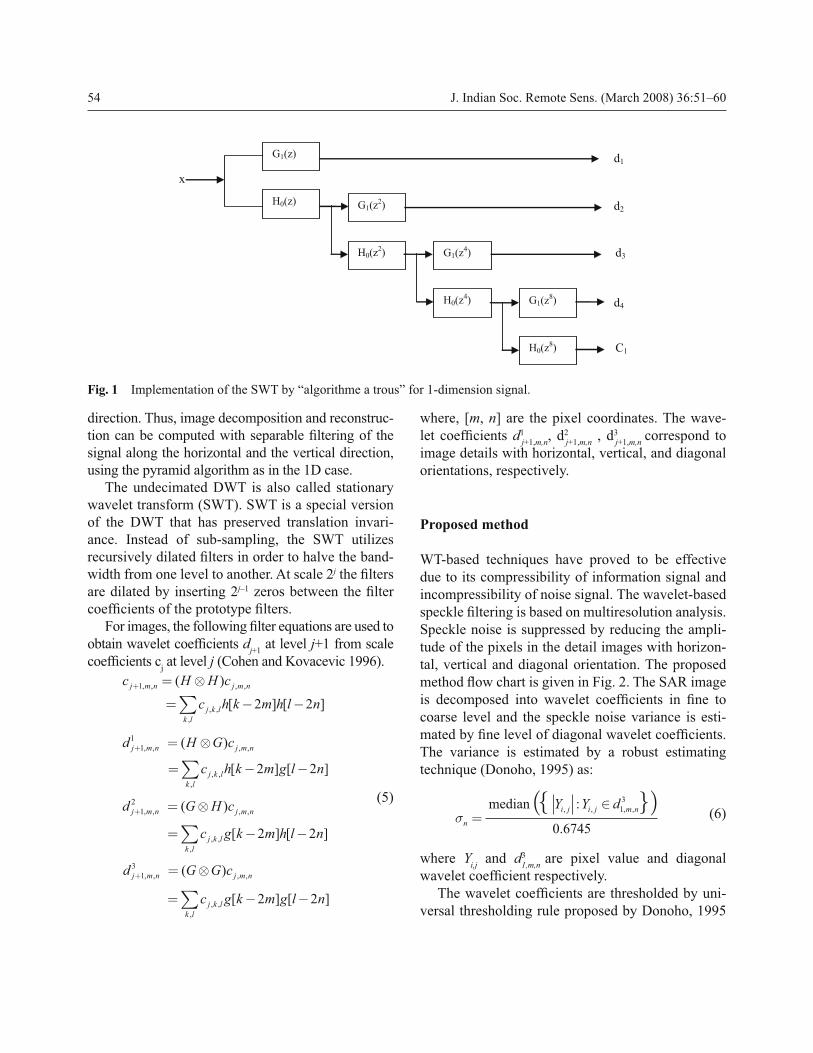
The undecimated DWT can be implemented using
an “algorithme a trous” as shown in Fig. 1 for one
dimensional signal (Cohen and Kovacevic 1996). It is
extended to two dimension signal. The wavelet trans-
form of an image, can be seen as a pair of two 1D-
wavelet transform along the horizontal and vertical
54 J. Indian Soc. Remote Sens. (March 2008) 36:51–60
direction. Thus, image decomposition and reconstruc-
tion can be computed with separable fi ltering of the
signal along the horizontal and the vertical direction,
using the pyramid algorithm as in the 1D case.
The undecimated DWT is also called stationary
wavelet transform (SWT). SWT is a special version
of the DWT that has preserved translation invari-
ance. Instead of sub-sampling, the SWT utilizes
recursively dilated fi lters in order to halve the band-
width from one level to another. At scale 2j the fi lters
are dilated by inserting 2j–1 zeros between the fi lter
coeffi cients of the prototype fi lters.
For images, the following fi lter equations are used to
obtain wavelet coeffi cients dj+1
at level j+1 from scale
coeffi cients cj at level j (Cohen and Kovacevic 1996).
where, [m, n] are the pixel coordinates. The wave-
let coeffi cients d1
j+1,m,n
, d2
j+1,m,n
, d3
j+1,m,n
correspond to
image details with horizontal, vertical, and diagonal
orientations, respectively.
Proposed method
WT-based techniques have proved to be effective
due to its compressibility of information signal and
incompressibility of noise signal. The wavelet-based
speckle fi ltering is based on multiresolution analysis.
Speckle noise is suppressed by reducing the ampli-
tude of the pixels in the detail images with horizon-
tal, vertical and diagonal orientation. The proposed
method fl ow chart is given in Fig. 2. The SAR image
is decomposed into wavelet coeffi cients in fi ne to
coarse level and the speckle noise variance is esti-
mated by fi ne level of diagonal wavelet coeffi cients.
The variance is estimated by a robust estimating
technique (Donoho, 1995) as:
where Yi,j
and d3
1,m,n are pixel value and diagonal
wavelet coeffi cient respectively.
The wavelet coeffi cients are thresholded by uni-
versal thresholding rule proposed by Donoho, 1995
x
d1
d2
d3
d4
C1
G1(z)
H0(z) G1(z
2)
H0(z2) G1(z
4)
H0(z4) G1(z
8)
H0(z8)
Fig. 1 Implementation of the SWT by “algorithme a trous” for 1-dimension signal.
c H H cj m n j m n+ = ⊗
1, , , ,( )
= − −∑c h k m h l nj k l
k l
, ,
,
[ ] [ ]2 2
d H G cj m n j m n+ = ⊗
1
1
, , , ,( )
= − −∑c h k m g l nj k l
k l
, ,
,
[ ] [ ]2 2
d G H cj m n j m n+ = ⊗
1
2
, , , ,( )
= − −∑c g k m h l nj k l
k l
, ,
,
[ ] [ ]2 2
d G G cj m n j m n+ = ⊗
1
3
, , , ,( )
= − −∑c g k m g l nj k l
k l
, ,
,
[ ] [ ]2 2
(5)
σn
i j i j m nmedian Y Y d
=∈{ }( ) , , , ,
:
.
1
3
0 6745
(6)

J. Indian Soc. Remote Sens. (March 2008) 36:51–60 55
as:
where, m × n is size of image.
The modifi ed wavelets coeffi cients are used in
reconstruction of denoised image. The performance
of the proposed fi lter was evaluated and compared
with several of the most widely used adaptive fi l-
ters based on the spatial domain, including the Lee,
Frost, Enfrost, Kuan, Median and Gamma fi lters.
The simulation parameters are given in Table 1.
The window size is 3 × 3 for standard fi lters. For
the Gamma fi lter, only the most commonly used
algorithm was used. A common way of estimat-
ing the speckle noise level in coherent imaging is
to calculate the mean-to-standard-deviation ratio
of the pixel intensity, often termed the Equivalent
Number of Looks (ENL), over a uniform image
area. Unfortunately, we found this measure is not
very robust mainly because of the diffi culty to iden-
tify a uniform area in a real image. For this reason,
we will use here only the mean square difference,
signal to noise ratio, peak signal to noise ratio. Mean
Square Error (MSE) indicates error of the pixels
throughout the image. A higher MSE indicates a
greater difference between the original and denoised
image. This means that there is a less speckle reduc-
tion. Nevertheless, it is necessary to be very careful
with the edges. Signal-to-Noise Ratio (SNR) and
Peak Signal-to-Noise Ratio (PSNR) are used as
quantitative comparison.
Result and discussion
The single band aerial image of Pilani area (512 ×
512 (pixels) × 255 (gray levels)) is taken as origi-
nal image. The image pixels value is normalized
and varies between 0 and 1. It is contaminated by
normal distributed multiplicative noise of variance
range 0.01 (standard deviation 0.1, 10% noise) to
0.05 (standard deviation 0.223, 22.3% noise). The
simulation fi lter parameters are given in Table 1.
The standard fi lters are tested by three window
sizes. It is observed that performance deteriorates
as the window size is increased. The results are
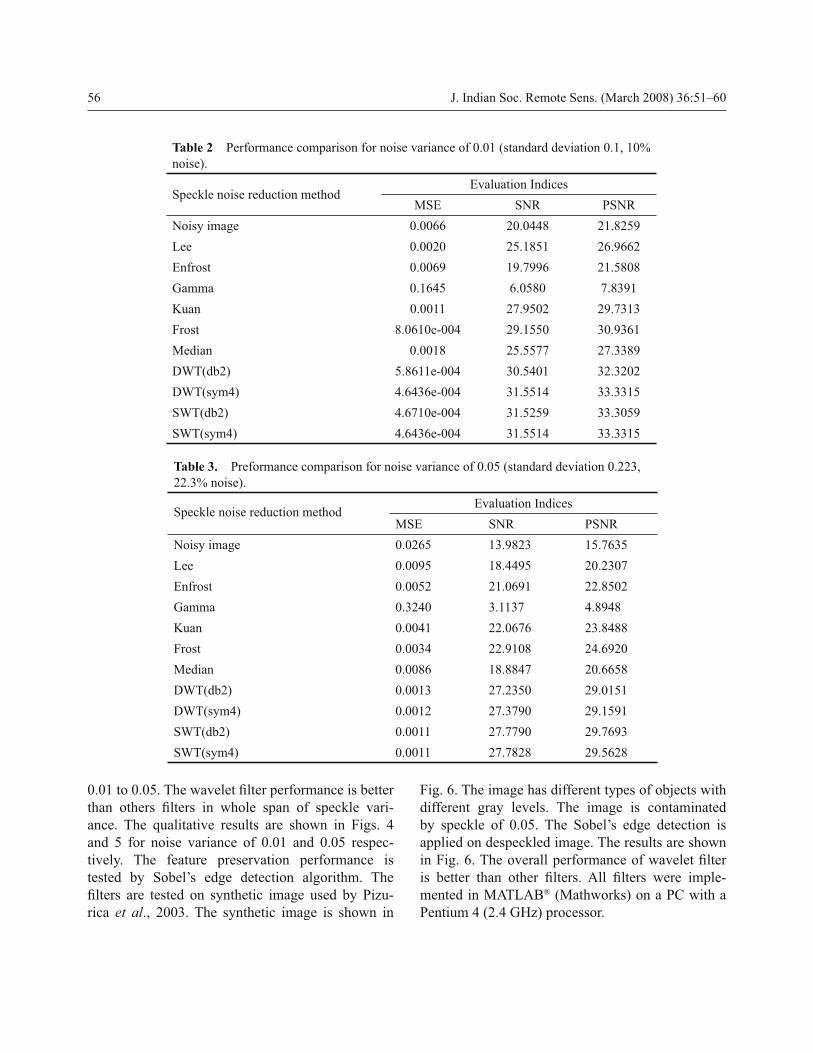
optimal for 3×3 window. The performance com-
parison results are given in Tables 2 and 3 for noise
variance of 0.01 and 0.05 respectively. The MSE,
SNR, PSNR are better for wavelet transform based
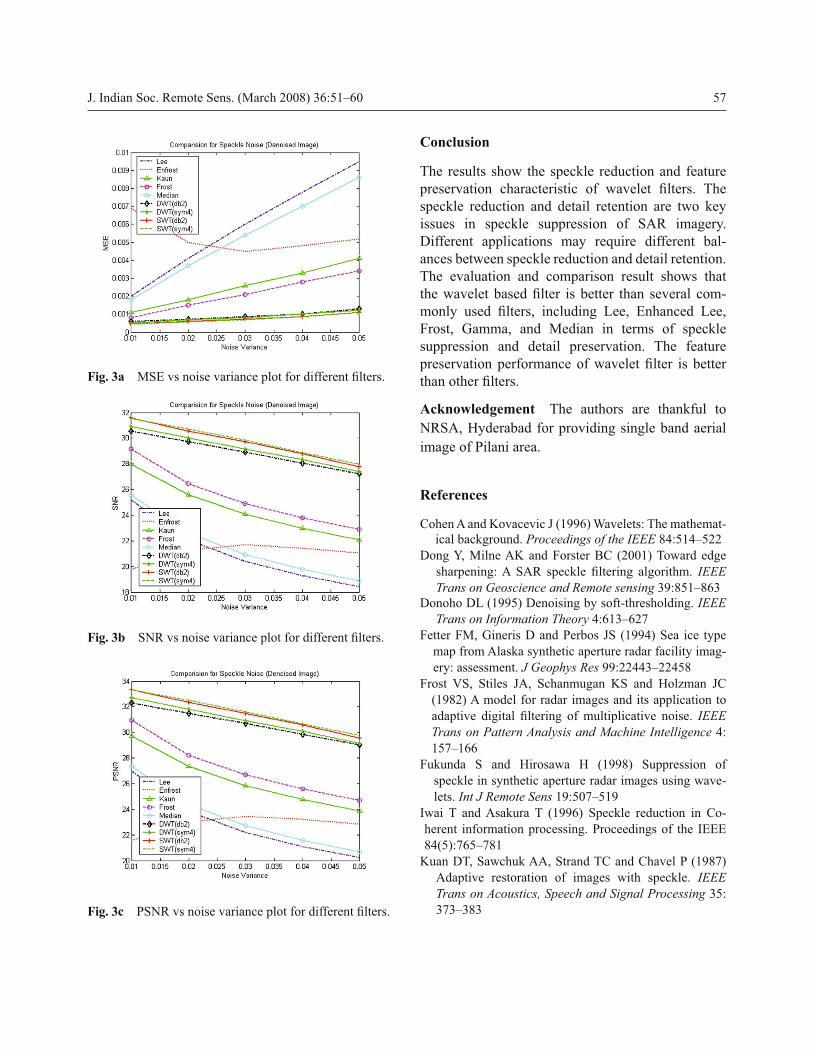
fi lters. To see the over all performance, results
are plotted in Fig. 3. The variance varies from
γ σ= ×2log( )m nn
(7)
Speckled
Image
Denoised Image
Wavelet Decomposition
Thresholding the WC Thresholding
estimation
Wavelet reconstruction
Fig. 2 Block diagram of the proposed algorithm
Table 1 Simulation fi lter parameters used in the paper.
Filters Parameters
Lee 3×3, 5×5, 7×7 window
Enfrost 3×3, 5×5, 7×7 window
Gamma 3×3, 5×5, 7×7 window
Kuan 3×3, 5×5, 7×7 window
Frost 3×3, 5×5, 7×7 window
Median 3×3, 5×5, 7×7 window
DWT(db2) Wavelet db2, level 3
DWT(sym4) Wavelet sym4, level 3
SWT(db2) Wavelet db2, level 3
SWT(sym4) Waveletsym4, level 3
56 J. Indian Soc. Remote Sens. (March 2008) 36:51–60
0.01 to 0.05. The wavelet fi lter performance is better
than others fi lters in whole span of speckle vari-
ance. The qualitative results are shown in Figs. 4
and 5 for noise variance of 0.01 and 0.05 respec-
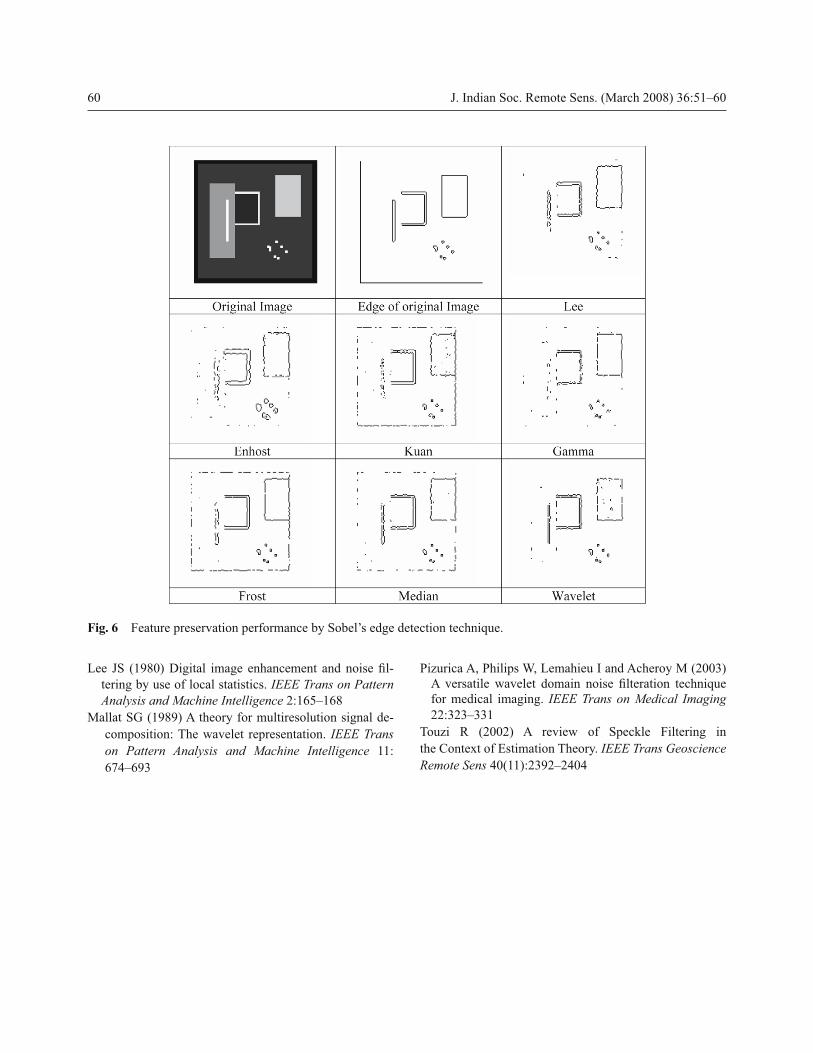
tively. The feature preservation performance is
tested by Sobel’s edge detection algorithm. The
fi lters are tested on synthetic image used by Pizu-
rica et al., 2003. The synthetic image is shown in
Fig. 6. The image has different types of objects with
different gray levels. The image is contaminated
by speckle of 0.05. The Sobel’s edge detection is
applied on despeckled image. The results are shown
in Fig. 6. The overall performance of wavelet fi lter
is better than other fi lters. All fi lters were imple-
mented in MATLAB® (Mathworks) on a PC with a
Pentium 4 (2.4 GHz) processor.
Table 2 Performance comparison for noise variance of 0.01 (standard deviation 0.1, 10%
noise).
Speckle noise reduction methodEvaluation Indices
MSE SNR PSNR
Noisy image 0.0066 20.0448 21.8259
Lee 0.0020 25.1851 26.9662
Enfrost 0.0069 19.7996 21.5808
Gamma 0.1645 6.0580 7.8391
Kuan 0.0011 27.9502 29.7313
Frost 8.0610e-004 29.1550 30.9361
Median 0.0018 25.5577 27.3389
DWT(db2) 5.8611e-004 30.5401 32.3202
DWT(sym4) 4.6436e-004 31.5514 33.3315
SWT(db2) 4.6710e-004 31.5259 33.3059
SWT(sym4) 4.6436e-004 31.5514 33.3315
Table 3. Preformance comparison for noise variance of 0.05 (standard deviation 0.223,
22.3% noise).
Speckle noise reduction methodEvaluation Indices
MSE SNR PSNR
Noisy image 0.0265 13.9823 15.7635
Lee 0.0095 18.4495 20.2307
Enfrost 0.0052 21.0691 22.8502
Gamma 0.3240 3.1137 4.8948
Kuan 0.0041 22.0676 23.8488
Frost 0.0034 22.9108 24.6920
Median 0.0086 18.8847 20.6658
DWT(db2) 0.0013 27.2350 29.0151
DWT(sym4) 0.0012 27.3790 29.1591
SWT(db2) 0.0011 27.7790 29.7693
SWT(sym4) 0.0011 27.7828 29.5628
J. Indian Soc. Remote Sens. (March 2008) 36:51–60 57
Conclusion
The results show the speckle reduction and feature
preservation characteristic of wavelet fi lters. The
speckle reduction and detail retention are two key
issues in speckle suppression of SAR imagery.
Different applications may require different bal-
ances between speckle reduction and detail retention.
The evaluation and comparison result shows that
the wavelet based fi lter is better than several com-
monly used fi lters, including Lee, Enhanced Lee,
Frost, Gamma, and Median in terms of speckle
suppression and detail preservation. The feature
preservation performance of wavelet fi lter is better
than other fi lters.
Acknowledgement The authors are thankful to
NRSA, Hyderabad for providing single band aerial
image of Pilani area.
References
Co hen A and Kovacevic J (1996) Wavelets: The mathemat-
ical background. Proceedings of the IEEE 84:514–522
Do ng Y, Milne AK and Forster BC (2001) Toward edge
sharpening: A SAR speckle fi ltering algorithm. IEEE
Trans on Geoscience and Remote sensing 39:851–863
Do noho DL (1995) Denoising by soft-thresholding. IEEE
Trans on Information Theory 4:613–627
Fe tter FM, Gineris D and Perbos JS (1994) Sea ice type
map from Alaska synthetic aperture radar facility imag-
ery: assessment. J Geophys Res 99:22443–22458
Fr ost VS, Stiles JA, Schanmugan KS and Holzman JC
(1982) A model for radar images and its application to
adaptive digital fi ltering of multiplicative noise. IEEE
Trans on Pattern Analysis and Machine Intelligence 4:
157–166
Fu kunda S and Hirosawa H (1998) Suppression of
speckle in synthetic aperture radar images using wave-
lets. Int J Remote Sens 19:507–519
I wai T and Asakura T (1996) Speckle reduction in Co-
herent information processing. Proceedings of the IEEE
84(5):765–781
Ku an DT, Sawchuk AA, Strand TC and Chavel P (1987)
Adaptive restoration of images with speckle. IEEE
Trans on Acoustics, Speech and Signal Processing 35:
373–383
Fig. 3a MSE vs noise variance plot for different fi lters.
Fig. 3b SNR vs noise variance plot for different fi lters.
Fig. 3c PSNR vs noise variance plot for different fi lters.

58 J. Indian Soc. Remote Sens. (March 2008) 36:51–60
b
e
h
k
c
f
i
l
a
d
g
j
Fig. 4 (a) original image (b) Noisy image with variance of 0.01 (c) Lee (d) Enfrost (e) Gamma (f) Kuan (g) Frost (h)
Median (i) DWT (db2) (j) DWT (sym4) (k) SWT (db2) (l) SWT (sym4).

J. Indian Soc. Remote Sens. (March 2008) 36:51–60 59
b
e
h
k
c
f
i
l
a
d
g
j
Fig. 5 (a) original image (b) Noisy image with variance of 0.05 (c) Lee (d) Enfrost (e) Gamma (f) Kuan (g) Frost (h)
Median (i) DWT (db2) (j) DWT (sym4) (k) SWT (db2) (l) SWT (sym4).
60 J. Indian Soc. Remote Sens. (March 2008) 36:51–60
Le e JS (1980) Digital image enhancement and noise fi l-
tering by use of local statistics. IEEE Trans on Pattern
Analysis and Machine Intelligence 2:165–168
Ma llat SG (1989) A theory for multiresolution signal de-
composition: The wavelet representation. IEEE Trans
on Pattern Analysis and Machine Intelligence 11:
674–693
Pi zurica A, Philips W, Lemahieu I and Acheroy M (2003)
A versatile wavelet domain noise fi lteration technique
for medical imaging. IEEE Trans on Medical Imaging
22:323–331
To uzi R (2002) A review of Speckle Filtering in
the Context of Estimation Theory. IEEE Trans Geoscience
Remote Sens 40(11):2392–2404
Fig. 6 Feature preservation performance by Sobel’s edge detection technique.




















