Extracting Buildings from Aerial Images Using Hierarchical Aggregation in 2D and 3D
30
Transcript of Extracting Buildings from Aerial Images Using Hierarchical Aggregation in 2D and 3D

Extracting Buildings from Aerial Images using
Hierarchical Aggregation in �D and �D
Andr�e Fischer�� Thomas H� Kolbe�� Felicitas Lang�
Armin B� Cremers�� Wolfgang F�orstner�� Lutz Pl�umer�� Volker Steinhage�
Computer Science Department I��III�� Institute for Photogrammetry�� University of BonnInstitute for Environmental Sciences�� University of Vechta
Abstract
We propose a model�based approach to automated �D extraction of buildings fromaerial images� We focus on a reconstruction strategy that is not restricted to a small classof buildings� Therefore� we employ a generic modeling approach which relies on the well�de�ned combination of building part models� Building parts are classi�ed by their roof type�Starting from low�level image features we combine data�driven and model�driven processeswithin a multi�level aggregation hierarchy� thereby using a tight coupling of �D image and�D object modeling and processing� ending up in complex �D building estimations of shapeand location� Due to the explicit representation of well de�ned processing states in termsof model�based �D and �D descriptions at all levels of modeling and data aggregation� ourapproach reveals a great potential for reliable building extraction�
Keywords� explicit �D�modeling� coupling of �D� and �D�modeling� multilayer aggrega�tion� building modeling� multi�image correspondence analysis� mid�level feature aggregates�aspect hierarchies� constraint logic programming�
� Introduction
Due to the fact that more than about �� of the world population lives in urban or suburbanenvironments the automation of �D building extraction is an issue of great importance andshows an increasing need for various applications including geo�information systems� townplanning or environmental related investigations�
Aerial images contain on the one hand a certain amount of information not relevant forthe given task of building extraction like vegetation� cars and building details� On the otherhand� there is a loss of relevant information due to occlusions� low contrast or disadvantageousperspective� To compensate for these properties of image data as well as for being able to handlethe complexity of building types and building structures� a promising concept of automatedbuilding extraction from aerial images must incorporate a suciently complete model of theobjects of interest and their relations within the whole process of image interpretation andobject reconstruction ��� �
We propose a model�based approach to automated �D extraction of buildings from aerialimages� The knowledge about buildings is used to control and to evaluate building extraction inall stages of the process� It is encoded by means of a generic �D object model� which describesspatial appearances of buildings and characterizations of their components� Furthermore� a�D image model� which is capable to integrate sensor and illumination modeling� describes theprojective appearances of buildings speci�c for the given aerial imagery�
�

��� Related work
Related work on �D building extraction � or in general on �D scene reconstruction � revealsdi�erent modeling schemes� Polyhedral models show a long tradition as approximative objectdescriptions ��� ��� ��� ��� ��� �� � Obviously polyhedral descriptions are too general for theuse within �D building extraction and therefore move the burden of building modeling toadditional representation schemes to represent and organize domain speci�c heuristics andconstraints� like in the MOSAIC system ��� or in the approach of Braun �� � Parameterizedmodels are restricted to describe the most common building types in the sense of prototypes���� ��� ��� ��� ��� ��� �� but represent few variations and combinations of their shapes as wellas other relations� Prismatic models can describe arbitrary complex polygonal ground plansof buildings� but reveal a strong restriction to buildings with only �at roofs ���� ��� �� � CADmodels are used to describe objects with �xed geometry and topology in object recognition
tasks� especially for controlling industrial processes ���� ��� ��� �� � The use of CAD modelsin building extraction is therefore restricted to the identi�cation of a priori known buildings���� ��� �� �
Generic modeling approaches promise on the one hand the greatest modeling power� buton the other hand demand e�ective constraints and heuristics to restrict modeling to buildingspeci�c shapes� Fua and Hanson ���� �� employ simple box�type primitives but propose anexplicit representation of legal primitive combinations to more complex building aggregates�The approaches of Dickinson et al� ��� and of Bergevin and Levine �� are of outstandingimportance due to the integration of �D generic object models and an explicit modeling of�D projective object appearances within a recognition�by�components strategy �� � Both ap�proaches employ volumetric primitives instead of simple box�types but neglect the descriptionof elaborated schemes for domain dependent primitive combinations� Furthermore� the reli�able extraction of their primitives from real images is the concern of current research ���� �� �Bignone et al� �� propose a generic roof model which assumes planar roof surfaces� The roofpatches are extracted by combining photometric and chromatic attributes of image regionswith spatial edge geometry� The �D patches are grouped by an overall optimization accordingto the simplicity� compactness and completeness of the resulting roof shape� To complete thebuilding shape� vertical walls are assumed� Frere et al� ��� adopt this modeling approach� butextract image regions with homogeneous photometric and chromatic properties by navigatingthrough a constraint triangulation network where each extracted line segment coincides withedges of the triangles� Henricsson et al� ��� present impressive results of their approach onsome test data but show no explicit modeling of building types and building speci�c aggre�gation schemes� Groups of planar �D patches that are optimized according to the criteria ofsimplicity� compactness and completeness� are not necessarily real roof shapes�
For a general and up�to�date overview on the topic of building reconstruction we highlyrecommend the proceedings of the two workshops on �Automatic Extraction of Man�MadeObjects from Aerial and Space Images� ���� �� and the proceedings of the workshop on�Semantic Modeling for the Acquisition of Topographic Information from Images and Maps���� �
��� Overview
In earlier papers ��� � we proposed in detail the concepts and processes which have to be takeninto account for a suciently complete modeling framework for �D building extraction� This
�

modeling framework integrates interrelations between image data and model descriptions atdi�erent aggregation levels and in terms of corresponding �D object and �D projective objectdescriptions� In this paper we present a strategy for a well de�ned path from the unstructuredimage data to the model�based and highly structured �D reconstruction of buildings�
The overall strategy follows the paradigm of hypotheses generation and veri�cation andcombines bottom�up �data�driven� and top�down �model�driven� processes� Domain knowledgeconstrains even the early stages of hypotheses generation due to an elaborated part�of�hierarchyof �D building parts and their corresponding projective descriptions� The reconstruction pro�cess is already carried out for local �D feature aggregates to allow an early domain speci�cclassi�cation as �D local building feature aggregates� A step�wise and strongly model�drivenaggregation process combines �D local building feature aggregates to well de�ned parame�terized �D building parts and then to more complex �D building aggregates� The resultingcomplex �D building hypotheses and their components are reprojected into the images to allowa component�based and robust hypothesis veri�cation applying constraint solving techniques��� �
First results of our approach were presented at the SMATI workshop in Bonn ��� � Thispaper is a substantially extended version which describes our models and operations in moredetail�
Due to the explicit representation of well�de�ned processing states in terms of model�based�D and �D descriptions at all levels of modeling and data aggregation our approach showsgreat potential for reliable building extraction�
� Concept
In this section we present the proposed building model and discuss its implications on thedeveloped strategy�
��� Models
For coping with the complexity of natural scenes we propose an application speci�c modelingof the domain buildings� Our general concept was presented in an earlier paper �� � It containsa close interaction of bottom�up and top�down strategies within an aggregation hierarchy in�D and �D� In this aggregation hierarchy the concept of building parts plays a fundamentalrole for our approach to a generic building model� On the one hand� this model is not based ona polyhedral scheme ���� �� which proved to be too general in order to restrict reconstructionresults to building speci�c shapes in terms of well�de�ned roof types and ground plans etc� Onthe other hand� our approach overcomes the limitations of parametrized CAD models due tothe explicitly de�ned combinations of domain speci�c volumetric and parametrized primitivesin terms of building parts�
Another crucial aspect of the approach is the explicit representation of building appearancesin aerial images in terms of an image model covering all levels of the aggregation hierarchy�This allows a tight coupling of �D and �D reasoning based on a coherent representation ofobject and image model� We start with the modeling of the �D shape of buildings yielding theobject model� The sensor model will transfer many of the concepts of the object model to theimage model describing the expected appearance of the objects�
�
Corner
Wing
Terminal
Region
Point
Line
Whole
Part
part-of
Aggregation
Generalization
Superclass
is-a is-a
Subclass Subclass
Building
Face
Building Part
Feature Aggregate
Feature
Connector
2D 3D
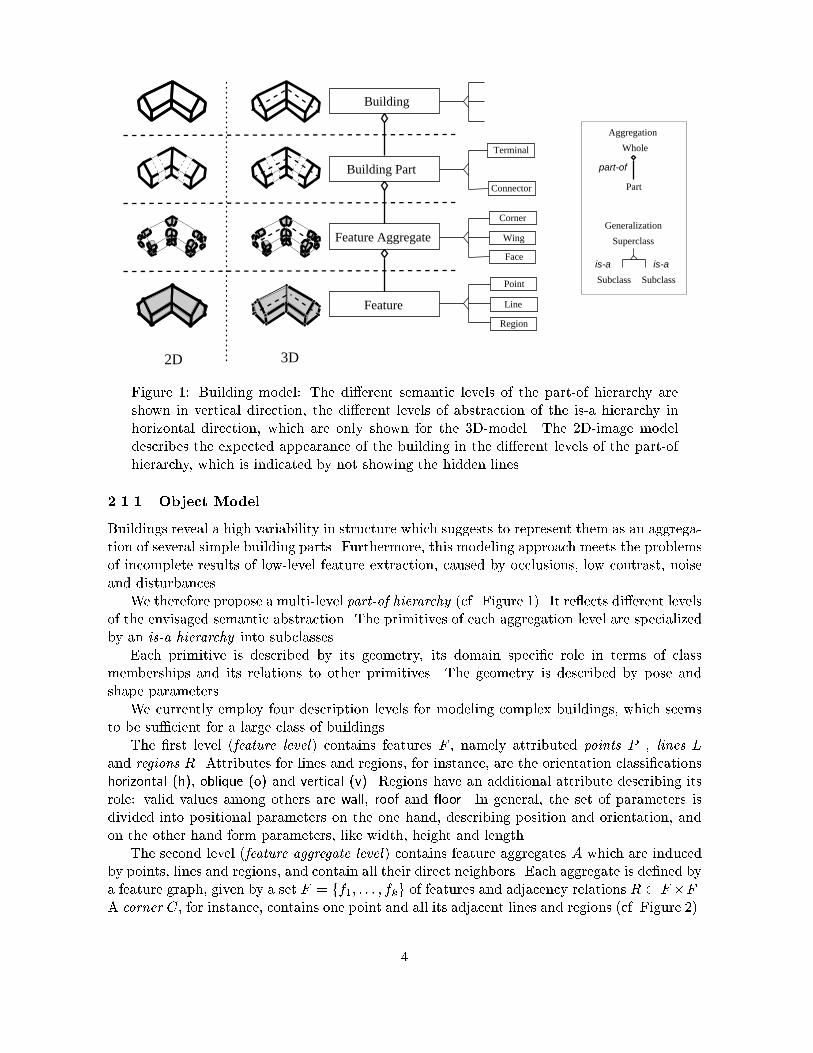
Figure �� Building model� The di�erent semantic levels of the part�of hierarchy areshown in vertical direction� the di�erent levels of abstraction of the is�a hierarchy inhorizontal direction� which are only shown for the �D�model� The �D�image modeldescribes the expected appearance of the building in the di�erent levels of the part�ofhierarchy� which is indicated by not showing the hidden lines�
����� Object Model
Buildings reveal a high variability in structure which suggests to represent them as an aggrega�tion of several simple building parts� Furthermore� this modeling approach meets the problemsof incomplete results of low�level feature extraction� caused by occlusions� low contrast� noiseand disturbances�
We therefore propose a multi�level part�of hierarchy �cf� Figure ��� It re�ects di�erent levelsof the envisaged semantic abstraction� The primitives of each aggregation level are specializedby an is�a hierarchy into subclasses�
Each primitive is described by its geometry� its domain speci�c role in terms of classmemberships and its relations to other primitives� The geometry is described by pose andshape parameters�
We currently employ four description levels for modeling complex buildings� which seemsto be sucient for a large class of buildings�
The �rst level �feature level� contains features F � namely attributed points P � lines Land regions R� Attributes for lines and regions� for instance� are the orientation classi�cationshorizontal �h�� oblique �o� and vertical �v�� Regions have an additional attribute describing itsrole� valid values among others are wall� roof and �oor� In general� the set of parameters isdivided into positional parameters on the one hand� describing position and orientation� andon the other hand form parameters� like width� height and length�
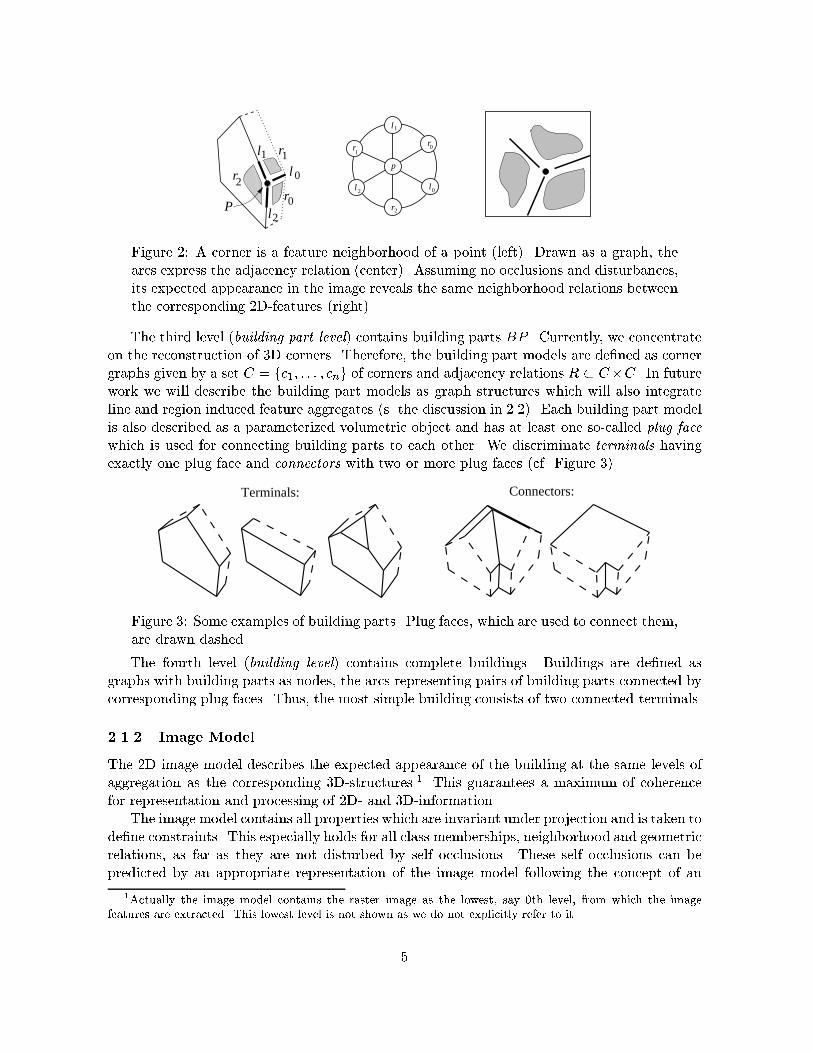
The second level �feature aggregate level� contains feature aggregates A which are inducedby points� lines and regions� and contain all their direct neighbors� Each aggregate is de�ned bya feature graph� given by a set F � ff�� � � � � fkg of features and adjacency relations R � F �F �A corner C� for instance� contains one point and all its adjacent lines and regions �cf� Figure ���
�
2l
r1
l1
0r
0l
r2
p
0
0
11
2
2
r
r
l
rl
l
P
Figure �� A corner is a feature neighborhood of a point �left�� Drawn as a graph� thearcs express the adjacency relation �center�� Assuming no occlusions and disturbances�its expected appearance in the image reveals the same neighborhood relations betweenthe corresponding �D�features �right��
The third level �building part level� contains building parts BP � Currently� we concentrateon the reconstruction of �D corners� Therefore� the building part models are de�ned as cornergraphs given by a set C � fc�� � � � � cng of corners and adjacency relations R � C�C� In futurework we will describe the building part models as graph structures which will also integrateline and region induced feature aggregates �s� the discussion in ����� Each building part modelis also described as a parameterized volumetric object and has at least one so�called plug face
which is used for connecting building parts to each other� We discriminate terminals havingexactly one plug face and connectors with two or more plug faces �cf� Figure ���
Terminals: Connectors:
Figure �� Some examples of building parts� Plug faces� which are used to connect them�are drawn dashed�
The fourth level �building level� contains complete buildings� Buildings are de�ned asgraphs with building parts as nodes� the arcs representing pairs of building parts connected bycorresponding plug faces� Thus� the most simple building consists of two connected terminals�
����� Image Model
The �D image model describes the expected appearance of the building at the same levels ofaggregation as the corresponding �D�structures�� This guarantees a maximum of coherencefor representation and processing of �D� and �D�information�
The image model contains all properties which are invariant under projection and is taken tode�ne constraints� This especially holds for all class memberships� neighborhood and geometricrelations� as far as they are not disturbed by self occlusions� These self occlusions can bepredicted by an appropriate representation of the image model following the concept of an
�Actually the image model contains the raster image as the lowest� say �th level� from which the image
features are extracted� This lowest level is not shown as we do not explicitly refer to it�
�

aspect�based scheme ��� �� � E�g� a �D�corner� being a point induced image aggregate inheritsthe class membership of the corresponding �D gable corner� The neighborhood relation betweentwo faces of a roof in general can be expected to be transferred to a pair of image regions�whereas � assuming weak perspective � parallel �D�roof lines map to parallel �D�roof lines�Constraints of the higher aggregation levels are transferred to the primitives of the lower ones�if necessary�
Thus� the transformation from the object model to the image model needs at least thede�nition of an appropriate projective model� i�e� perspective or parallel projection� dependingon the distance between the sensor and the objects of interest� In fact� to take into account alle�ects which contribute to the process of image formation and feature extraction� there is aneed for models of sensor characteristics� illumination and low�level feature extraction methods�The results� presented in this paper� are derived by using a pinhole camera as sensor modeland assuming weak perspective projection� The potential role of the integration and usage ofan illumination model is discussed elsewhere ��� and will only be sketched in section ����
The image model is currently used for both� the multi�view reconstruction of �D featureaggregates and the �D veri�cation of complete building hypotheses� But of course� an enhancedimage model can be used at each aggregation level� to utilize photometric attributes� to verifyintermediate aggregation results and to estimate certain parameters by monocular analysis�e�g� of shadows and wall projections ��� �
��� Strategy
Our input data is given as digital raster images with multiple overlap� Further informationabout the aerial image �ight like exterior and interior camera orientation and time stamp areused� The starting point of our analysis is the extraction of a polymorphic image descriptionconsisting of points P �D� lines L�D� and regions R�D and their mutual relations ���� �� � Itallows to derive point� line� and region neighborhood aggregates A�D� where the point inducedvertices V �D are the most promising ones for starting our analysis�
To cope with the combinatoric complexity of interpretation and reconstruction processes�a tight integration of �D and �D reasoning has proven to be successful ���� �� � Therefore�we decide to carry out the �D reconstruction process already for local feature aggregates� tomeet projective ambiguities and to allow an early domain speci�c interpretation utilizing �Dgeometry� Due to their relative stability against partial occlusions we select corners �classi�edvertices� as the basic class of feature aggregates for the reconstruction process� This selectionshould be regarded as a �rst choice� Future work will utilize a polymorphic reconstructionapproach on the feature aggregate level� which will also include line and region induced featureaggregates� i�e� wings and faces �� �
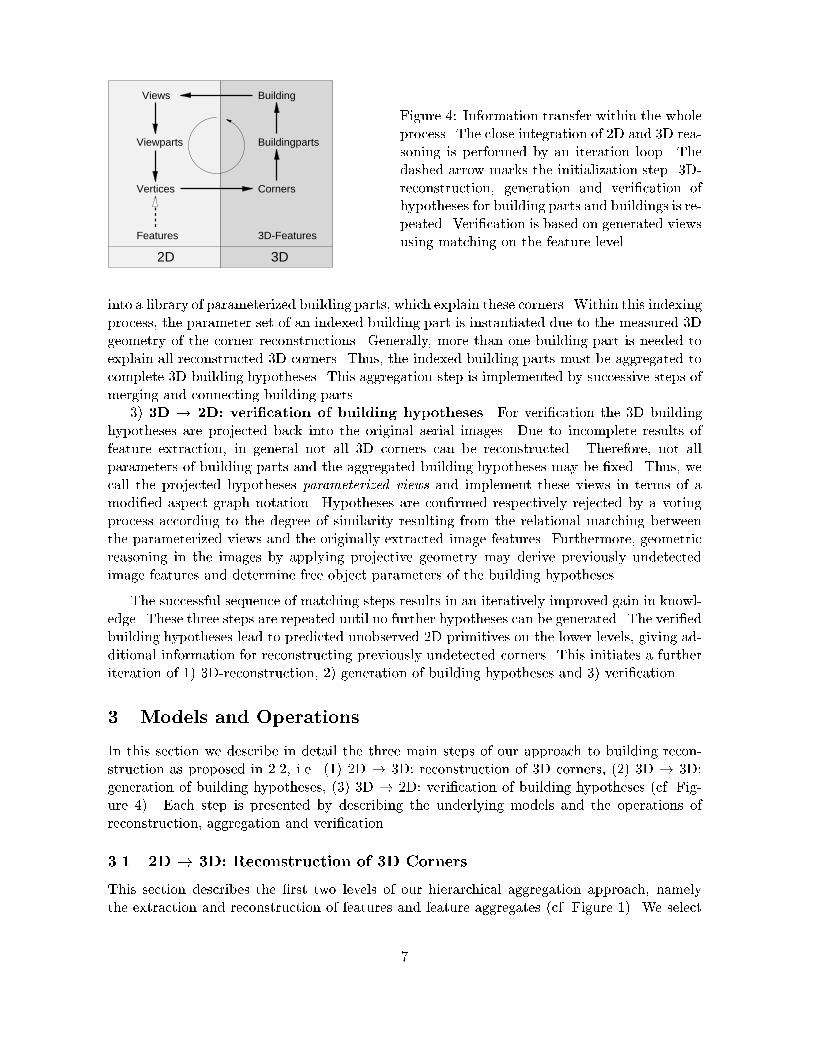
Now� our current strategy consists of three main tasks� which are executed in sequence �cf�Figure �� and will be described in detail in section ��
�� �D � �D� reconstruction of �D corners� To cope with the combinatorics of featureand building aggregation� we aim at an early integration of �D and �D reasoning� in this wayreducing the overall number of future hypotheses� This is done by extracting feature groups�namely vertices in the images� which are evaluated as projections of building corners with thehelp of a �D corner model� These �D corner hypotheses of di�erent images are used to derive �Dcorner reconstructions by multi�image parameter estimation� The �D corner reconstructionswill be interpreted by a domain speci�c �D corner model�
�� �D� �D� generation of building hypotheses� The �D corners are used for indexing
�
Building
Viewparts
Vertices
Features 3D-Features
Corners
Buildingparts
3D2D
Views
Figure �� Information transfer within the wholeprocess� The close integration of �D and �D rea�soning is performed by an iteration loop� Thedashed arrow marks the initialization step� �D�reconstruction� generation and veri�cation ofhypotheses for building parts and buildings is re�peated� Veri�cation is based on generated viewsusing matching on the feature level�
into a library of parameterized building parts� which explain these corners� Within this indexingprocess� the parameter set of an indexed building part is instantiated due to the measured �Dgeometry of the corner reconstructions� Generally� more than one building part is needed toexplain all reconstructed �D corners� Thus� the indexed building parts must be aggregated tocomplete �D building hypotheses� This aggregation step is implemented by successive steps ofmerging and connecting building parts�
�� �D � �D� veri�cation of building hypotheses� For veri�cation the �D buildinghypotheses are projected back into the original aerial images� Due to incomplete results offeature extraction� in general not all �D corners can be reconstructed� Therefore� not allparameters of building parts and the aggregated building hypotheses may be �xed� Thus� wecall the projected hypotheses parameterized views and implement these views in terms of amodi�ed aspect graph notation� Hypotheses are con�rmed respectively rejected by a votingprocess according to the degree of similarity resulting from the relational matching betweenthe parameterized views and the originally extracted image features� Furthermore� geometricreasoning in the images by applying projective geometry may derive previously undetectedimage features and determine free object parameters of the building hypotheses�
The successful sequence of matching steps results in an iteratively improved gain in knowl�edge� These three steps are repeated until no further hypotheses can be generated� The veri�edbuilding hypotheses lead to predicted unobserved �D primitives on the lower levels� giving ad�ditional information for reconstructing previously undetected corners� This initiates a furtheriteration of �� �D�reconstruction� �� generation of building hypotheses and �� veri�cation�
� Models and Operations
In this section we describe in detail the three main steps of our approach to building recon�struction as proposed in ���� i�e� ��� �D � �D� reconstruction of �D corners� ��� �D � �D�generation of building hypotheses� ��� �D � �D� veri�cation of building hypotheses �cf� Fig�ure ��� Each step is presented by describing the underlying models and the operations ofreconstruction� aggregation and veri�cation�
��� �D � �D� Reconstruction of �D Corners
This section describes the �rst two levels of our hierarchical aggregation approach� namelythe extraction and reconstruction of features and feature aggregates �cf� Figure ��� We select
�

point induced corner features as the �rst choice for feature aggregates to be processed� Corners�a� reveal a high stability against occlusions� �b� their projections into the images give strongrestrictions during the correspondence analysis using epipolar geometry� and �c� corners haveproved to be suitable components for the proposed �D aggregation process�
Our experience with fully automatic subprocesses for the purpose of �D reconstruction hasshown a high stability while simultaneously using image patches with multiple overlap �cf����� �� �� Furthermore� we use the commonly available orientation data which de�ne geometricrestrictions during the correspondence analysis�
����� Models of Corner Features
The corner reconstruction is guided top�down by the �D corner model� with the corners beingparts of the hierarchical building model as described in chapter ���� For reconstruction� weperform the transition from image space to object space on the level of feature aggregates �cf�Figure ��� Therefore� we need to model corners in object space as well as their appearance inthe images by using the corner model in �D and �D�
�D Corner Model� The representation of corners is subdivided into the geometric infor�mation and the domain speci�c class labels� Each corner c�Di � �v�Di � �c� is geometricallydescribed by the vertex v�Di which is represented by its components on the feature level� beinga corner point� several lines and planar faces �cf� Figure �� and a corner class label �c � �C
out of the set of all possible corner classes �C �The corner classes are given by a two�level specialization hierarchy� which distinguishes
corners into subclasses �c� The partitioning into classes �c depends on di�erent geometricclass inherent constraints ��D�c � ��D
�c from the set of all possible constraints ��D�c of the class
�c� The �D corner c�D � �v�D� �c� results from implying the class dependent constraints ��D�c
onto the vertex geometry v�D�On the �rst level of the specialization hierarchy we use unary constraints for classi�cation�
They refer to single components of a corner� especially the corner components of type line� Weuse line attributes� given by the qualitative geometric labels horizontal �h�� vertical �v�� and�v�� and oblique �o�� and �o�� �cf� ��� � depending on the slope of the lines� The sign denotesa positive ��� or negative ��� slope with respect to the corner point� We exclude meaninglesscorners like e�g� a corner with line attributes fh�h�hg� which make no sense in the context ofbuildings and their functionality�
This description is further re�ned by the second level of the specialization hierarchy� Ituses binary constraints which refer to the geometric relationship of pairs of corner compo�nents� Examples of binary constraints are symmetry of two lines with respect to the vertical�orthogonality of two lines and verticality of the plane� spanned up by two lines�
If there are no constraints attached to the corner� we call it the unconstrained corner withthe class label ���
Examples of di�erent corner classes are given in Figure �� The typical corner at the ridgeof a hip roof �corner no� �� is given by the line attributes fh�o��o��symmetry �o��o��g� Thedistinction between corner no� � and corner no� � is due to the constraint verticality�o��o�� onthe second level of the specialization hierarchy� whereas on the �rst level both corner classesare described by the line attributes fh�o��o�g�
�
gable roof
o- o-
h
v-
h
6
5
o+ho-
h
o-
v-
o+h
7
8
hip roofh
h
4
3 v-h
h
v+
prismatic roof
hh
h h
v+
v-1
2
rectangular flat roof
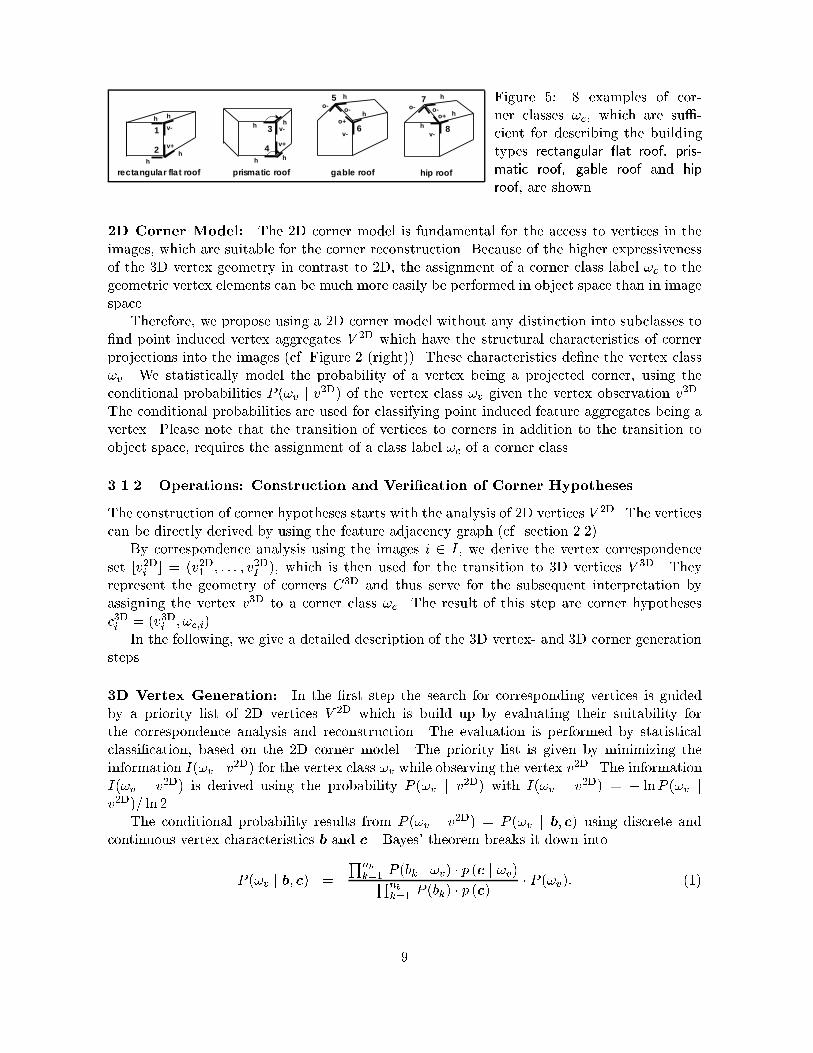
Figure �� � examples of cor�ner classes �c� which are su�cient for describing the buildingtypes rectangular �at roof� pris�
matic roof� gable roof and hip
roof� are shown�
�D Corner Model� The �D corner model is fundamental for the access to vertices in theimages� which are suitable for the corner reconstruction� Because of the higher expressivenessof the �D vertex geometry in contrast to �D� the assignment of a corner class label �c to thegeometric vertex elements can be much more easily be performed in object space than in imagespace�
Therefore� we propose using a �D corner model without any distinction into subclasses to�nd point induced vertex aggregates V �D which have the structural characteristics of cornerprojections into the images �cf� Figure � �right��� These characteristics de�ne the vertex class�v� We statistically model the probability of a vertex being a projected corner� using theconditional probabilities P ��v j v
�D� of the vertex class �v given the vertex observation v�D�The conditional probabilities are used for classifying point induced feature aggregates being avertex� Please note that the transition of vertices to corners in addition to the transition toobject space� requires the assignment of a class label �c of a corner class�
����� Operations� Construction and Veri�cation of Corner Hypotheses
The construction of corner hypotheses starts with the analysis of �D vertices V �D� The verticescan be directly derived by using the feature adjacency graph �cf� section �����
By correspondence analysis using the images i � I� we derive the vertex correspondenceset �v�Di � �v�D� � � � � � v�DI �� which is then used for the transition to �D vertices V �D� Theyrepresent the geometry of corners C�D and thus serve for the subsequent interpretation byassigning the vertex v�D to a corner class �c� The result of this step are corner hypothesesc�Di � �v�Di � �c�i��
In the following� we give a detailed description of the �D vertex� and �D corner generationsteps�
�D Vertex Generation� In the �rst step the search for corresponding vertices is guidedby a priority list of �D vertices V �D which is build up by evaluating their suitability forthe correspondence analysis and reconstruction� The evaluation is performed by statisticalclassi�cation� based on the �D corner model� The priority list is given by minimizing theinformation I��v j v
�D� for the vertex class �v while observing the vertex v�D� The informationI��v j v�D� is derived using the probability P ��v j v�D� with I��v j v�D� � � lnP ��v jv�D�� ln ��
The conditional probability results from P ��v j v�D� � P ��v j b� c� using discrete and
continuous vertex characteristics b and c � Bayes theorem breaks it down into
P ��v j b� c� �
Qnbk�� P �bk j �v� � p �c j �v�Qnb
k�� P �bk� � p �c�� P ��v�� ���
�

With the discrete characteristics bk with k � �� � � � � nb and the continuous characteristics cjwith j � �� � � � � nc� The latter are assumed to be uncorrelated with mean �cj and variance ��cj �This leads to
I��v j b� c� ��
� ln �
�� nbXk��
�� lnP �bk j �v� !
ncXj��
�cj � �cj�cj
���� ���
The characteristics consider the stability� uniqueness and structural richness of the vertex�Actually� we use the number of lines and regions as discrete characteristics and the length ofcorner lines as continuous characteristics�
The second step during the search for corresponding vertices evaluates the structural sim�ilarity of matching candidates by cost minimization� In addition to the information of singlevertices� a score value describing the similarity of vertex components using epipolar geometryis introduced into the cost function�
Based on the correspondence tuple �v�Di � the transition to object space is performed by ajoint forward intersection of the corresponding image feature components points �p�Di and lines�l�Di of the vertex correspondence tuple �v�Di using all images i � I simultaneously� Epipolargeometry once again gives geometric restrictions� which facilitate the matching of the features�
predicted vertex
vertex acces by following reconstructed lines
reconstructed corner
Figure �� The information propagation for selecting and predicting vertices for the nextreconstruction step is shown� The upper left image visualizes one reconstructed corner�The other images show the reduced search space for vertices which are used for the nextcorner reconstruction� The access to these vertices is given by the point�line adjacencyrelation de�ned by image lines which are used for the reconstruction of the previouscorners� The right image shows the top�down prediction of a vertex� generated by lineintersection where no vertex access via the feature adjacency graph was possible�
The search space for the next correspondence set is de�ned by the neighborhood relationsof the corresponding image features of the reconstructed features F �D using the prolongationof lines and the neighborhood of regions� For instance� we have to expect further corners inthe prolongation of reconstructed �D lines� Therefore� we �rst follow line features of recon�structed vertices for directly selecting a set of vertex aggregates V �D which serves for the nextreconstruction step �cf� Figure ��� In case no appropriate vertices are found� the neighborhoodof regions are used for vertex access by analysing the region�induced aggregates�
��

In addition to vertices� which are directly derived by using the feature adjacency graph�we also perform a top�down prediction of additional vertices� Depending on a selected pair ofpossibly corresponding vertices �vi� vj�� we derive the �D position of the vertex point by forwardintersection which we propagate to the expected vertex positions in the remaining images byreprojection� At these positions we can then perform a well�aimed search for line intersectionsto generate additional �D vertices� The prediction helps to bridge the incompleteness of theextracted feature adjacency relations without unnecessarily enlarging the search space�
�D Corner Generation� Establishing corner hypotheses C�D uses the �D corner modelby following the specialization hierarchy of corners� We perform a hierarchical interpretation�starting with the set of all corner classes �C � It is reduced in two steps to ��
C and ���C
by testing possible class inherent constraints ��D�c � ��D�c � The reason for performing a two�
step interpretation� using the corner specialization hierarchy� is to prevent the instantiationof mutually dependent� redundant or contradicting constraints� which is fundamental for thesubsequent veri�cation by parameter estimation �cf� ��� ��
The �rst interpretation step tests the generated �D vertices V �D for unary constraints�Therefore� the corner components of type line are analysed for their qualitative geometriclabels being h� v�� v�� o� or o�� They are used to obtain the subset ��
C � �C of possiblecorner classes� In the second interpretation step� for each element of �c � ��
C possible binaryconstraints like e� g� symmetry and orthogonality are tested� Thus� we yield a further reduced���C � ��
C � where each element in ���C is an admissible interpretation of the vertex v�D� The
corner specialization hierarchy for example ensures that we do not test the line pair �h� v��
for orthogonality because the orthogonality constraint is implicitly contained within the linelabels and may lead to redundant or even contradicting constraints�
If the test accepts no constraints� ���C is the empty set and the underlying vertex represents
an unconstrained corner of class ���Depending on the selected constraints� we complete the reconstructed vertices to corners
by using the most probable corner class �c which contains the selected constraints� In thesimplest case we just index into the corner classes �cf� Figure ��� In general� we may evenhypothesize additional corner components of feature type line L to complete the vertex� Forexample� if we observe a reconstructed vertex of node degree � with line labels h and o� and theconstraint orthogonal�h�o��� we perform a model�based prediction of a corner of node degree� of class fh�o��o��symmetry�o��o���verticality�o��o��g� as it occurs for the corner at the ridge ofa gabled roof building �cf� corner no� �� Figure ��� For a more general approach� a prioriprobability distributions for the di�erent corner classes can be learned as proposed in ��� andcan be introduced to decide for the most probable corner class �c�
The �D corner generation may lead to several corner hypotheses c�Dj � �v�D� �c�j� for each
vertex reconstruction v�D which have to be resolved in the veri�cation step�
Veri�cation of Corner Hypotheses� For veri�cation of the corner hypotheses� we performa second rigorous classi�cation by statistical analysis� This is formulated as an optimizationproblem for �nding the best interpretation "c of the data �v�Di from all possible corner interpre�tations cj � �v�D� �c�j� with �c�j � ���
C � Using Bayes theorem and neglecting the denominatorby normalization� we can break down the conditional probabilites� which leads to
"c � argmaxcj
P �cj j �v�Di � � argmaxcj
P ��v�Di j cj�P �cj� ���
��

Figure �� Examples of �D corner reconstruction� The left column shows the featureaggregates marked in one image� The right column visualizes the reconstructed �Dcorners with each corner plane shown as triangle �please note that the corner planesare open ended� the drawn lines solely support the visualization��
The a priori probability P �cj� for the corner class �c�j can be obtained empirically by learning��� and can in principle be integrated to evaluate the model�dependent in�uence on the result�
The conditional probability P ��v�Di j cj� evaluates how good the corner class instantiation�ts the observed image features points P �D and lines L�D which are contained in the vertex�v�Di � Introducing the unknown class speci�c parameters �j which depend on the geometricconstraints ��c of the corner class �c�j� equation � is transformed to�
"c� "� � argmaxcj
P ��v�Di j cj��j�P ��j j cj�P �cj� ���
� argmaxcj
P ��v�Di j �j�P �cj� ���
As we suppose the unknowns �j to be prede�ned by the model� the probability P ��j j cj� isconstant and eq� � can be reduced to eq� ��
For each hypothesis� we estimate the geometric parameters by a maximum likelihood pa�rameter estimation using all supporting image features� The matching features are selectedby backprojecting the instantiated corner model into the images� Thus� we may get accessto features which were not contained in the selected vertices� Assuming the expected valuesE�y� of the observations being a function E�y� � f��� of the geometric parameters �� theevaluation can be derived from the residuals y� "y of the optimal estimation "y � f���� We usethe probability density function p��v�Di j �� in case the features exist and have been successfullymatched to the model�
p��v�Di j �� ��
���u���det�yy����e��
�
��y� �y�T���
yy �y� �y�� ���
where u is the number of unknowns in � and #yy is the covariane matrix of the observationsy�
��

To decide for the optimal interpretation and its corresponding constraints which de�ne theunknowns �� we �rst test for acceptance of the reconstruction of the unconstrained corner ofclass �� with ��D
��� � If this test is successful� we test for the class speci�c constraints ��D
�c �Both tests use a Fisher distributed test value� depending on the weighted sum of the squaredresiduals� � � �y � "y�T���
yy �y � "y� of the maximum likelihood parameter estimation�Table � gives two examples of the estimation using � images simultaneously� Example �
uses constraints of the corner class no� �� example � of the corner class no� � �cf� Figure �� asselected during corner hypotheses generation�
n u r ��� ��� �x�m �y�m �z�m
Example � no constraints �� � �� ����� ���� ����� ����� �����constraints �� � �� ����� ���� ����� ����� �����
Example � no constraints �� � �� ����� ���� ����� ����� �����constraints �� � �� ����� ���� ����� ����� �����
Table �� The results of the parameter estimation for two examples using the classdepending constraints or no constraints alternatively are given in comparison� In bothcases the constraints are accepted� The precision of the reconstructed vertex point isincreased when using the constraints for stabilization� �n is the number of observations�u the number of unknown parameters and r the redundancy of the estimation system��
According to the second test the increase of the internally derived precision � is notsigni�cant� Thus� in both cases the class speci�c constraints ��D
�c are accepted� The constraintsare useful for geometric stabilization and for improvement of the accuracy of the reconstructionas shown with the decrease of the empirical standard deviation �x� �y and �z of the three cornercoordinates �x� y� z� �cf� Table ���
Further details of the corner reconstruction approach can be found in ��� �The result of the estimation are evaluated corner reconstructions c�D � �v�D� �c� con�
strained by ��D�c � They form the basis for the �D aggregation and generation of building
hypotheses as presented in the next section� After the �rst iteration of the whole buildingreconstruction process� we want to use newly generated �D corners C�D �cf� section �������in addition to the original vertex data and thus expect an increasing number of reconstructedcorners�
��� �D � �D� Generation of Building Hypotheses
This section describes the last two levels of our hierarchical aggregation approach in �D� namelythe reconstruction of building parts and building aggregates� The indexing into a library ofparameterized volumetric building parts uses the �D corner hypotheses derived at the featureaggregate level� Building parts are merged and combined successively to complex buildingaggregates describing complete building hypotheses�
In this section we describe in detail our models of �D building parts and building aggregatesand the operations for the selection and aggregation of building parts to complete �D buildinghypotheses�
�Please note that � in this context is used for a statistical measure in contrast to �c being the set of possible
corner classes �c � �c�
��

����� Models of Building Parts and Buildings
Given a set C�D � fc�D� � � � � � c�Dn g of n reconstructed corner aggregates� one or more buildinghypotheses have to be generated that explain all corners in the following sense� A corner iseither part of the building hypotheses or is explicitly classi�ed as not being part of it� If acorner is part of a hypothesis� this corner must match the hypothesis geometry and structure�
We use a component based approach for the modeling and construction of buildings� Build�ing part models are selected and instantiated according to the reconstructed �D corners� Sub�sequent aggregation operations combine these building parts to more complex ones and �nallyto complete buildings� In the current state of our work the set of building part models is buildup manually� In the future� learning schemes as described in ��� will be used�
Plug Faces Terminals Connectors� Each building part contains one or more so�calledplug faces where it can be connected to other building parts� According to the number ofplug faces the set of building part models is classi�ed into terminals having one plug face andconnectors having two or more plug faces �cf� Figure ��� A type is assigned to each plug face�which represents its geometry and topology� Two building parts may be connected to eachother via two plug faces only if they are of the same type� A building part is called open�if it contains one or more plug faces and closed if it contains no plug face� A �nal buildinghypothesis consists of one closed building part�
Parameterization of Building Parts� Building part models are parameterized by poseparameters determining the location and orientation and by shape parameters determiningfeatures like slope of the roof� width and height �cf� Figure ��� If a parameter has an assignedvalue it is called �xed� otherwise free� Constraints on the parameters restrict them to validvalues�
v5
l5
l4
l3l2
l1
v4
v3
v2
hrv1
w
hs
zy
x vi �
� xi
yizi
A
vi xi yi ziv� !w � �v� !w !hs �v� � !hs ! hr �v� �w !hs �v �w � �
Figure �� Parameterised description of a hip roof terminal� The table on the rightshows the coordinates of the vertices v�� � � � � v�
Closed building parts that cover all corner observations are the requested building hy�potheses� In general� there will be more than one building hypothesis for a given set of cornerobservations�
����� Operations� Selection and Aggregation of Building Parts
The generation of building hypotheses is performed with three basic types of operations�Indexing selects and instantiates building part models from a library of building parts� Thetwo aggregation operations of Merging and Connection combine existing building parts to
��
more complex ones� Closed building parts generated in this process� which cover all cornerobservations� are called building hypotheses�
First we describe these three types of operations in detail� Then we propose our strategyof organizing these operations to derive �D building hypotheses in an ecient way�
Indexing Merging and Connection�
Indexing�c� into the library of building part models yields one partially instantiated buildingpart for the reconstructed �D corner c� Location and orientation of the reconstructedcorner c will also �x position and orientation of the indexed building parts� Also� itsparameters of shape will be determined as far as possible� In general there are severalcompeting building part models and several di�erent instances of each of these modelsthat match a single corner� Therefore� subsequent invocations of Indexing�c� yielddi�erent building parts�
We say that the corner reconstruction c is covered by the instantiated building part�
Indexing �nds for a given corner observation ci all possible mappings to all corners cjof all building part primitives� such that one such maps ci s edge indices onto cj s edgeindices with the following properties�
Every edge of ci is mapped onto one edge of cj�
The model corner cj may have more edges than ci� but not less� due to possiblyunobservable edges in the images�
The labels of a model edge and an observed edge identi�ed by must be the same�
If for a pair of model corner cj and corner observation ci such a mapping is found� it im�plies a set of equations� which determine location� orientation and some form parametersof the instantiated building part template�
Merging�b��b�� joins two building parts b� and b� of the same type� which show the samelocation and orientation and a consistent setting of the �xed parameters of shape �cf�Figure ���� All corners covered by b� and b� are also covered by the resulting buildingpart�
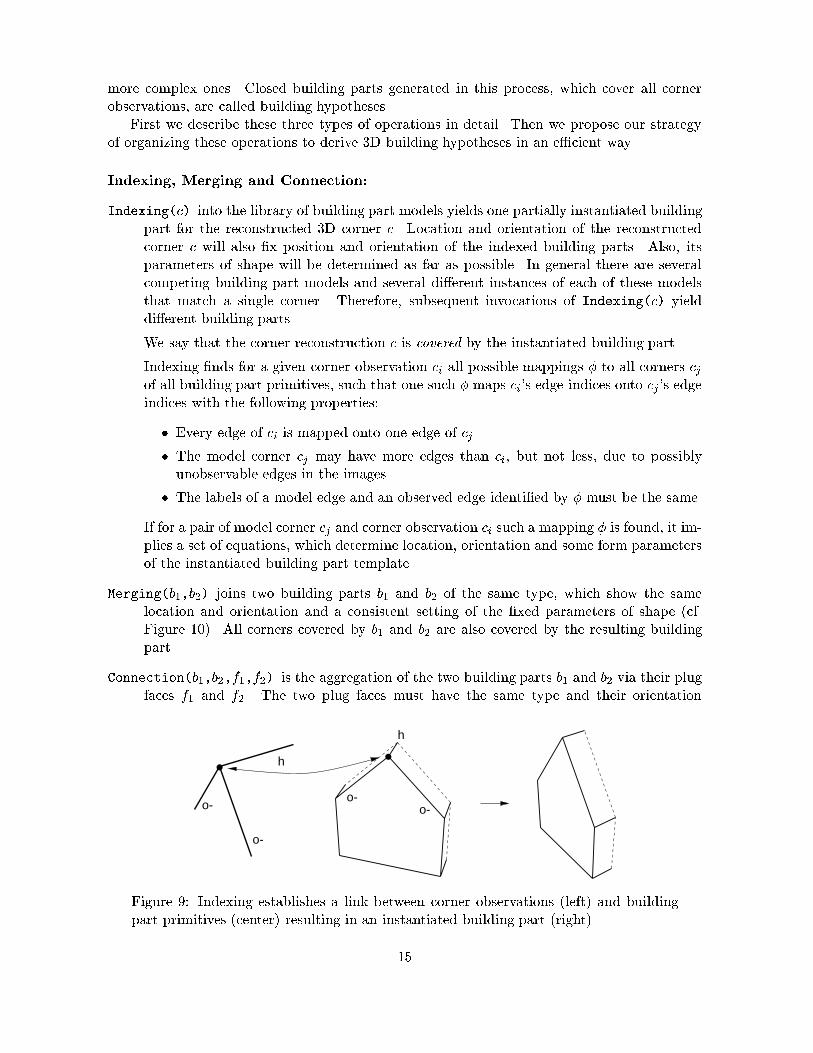
Connection�b��b��f��f�� is the aggregation of the two building parts b� and b� via their plugfaces f� and f�� The two plug faces must have the same type and their orientation
o-
o-
h
o-o-
h
Figure �� Indexing establishes a link between corner observations �left� and buildingpart primitives �center� resulting in an instantiated building part �right��
��
must be opposite to each other� The aggregation is performed by �glueing� f� to f��cf� Figure� ���� Edges of the two building parts� which meet at f� and f�� are joinedtogether�
A new length parameter is introduced� that allows these new edges to shrink or expand�Parameters that de�ne the shape of the plug faces are uni�ed� If parameters which are tobe uni�ed have �xed values� they may di�er only by a small amount� This condition maybe used for an early rejection of the aggregation of two building parts� if for example theposition and orientation of two building parts do not �t� they must not be aggregated�
All corners covered by b� and b� are also covered by the resulting building part�
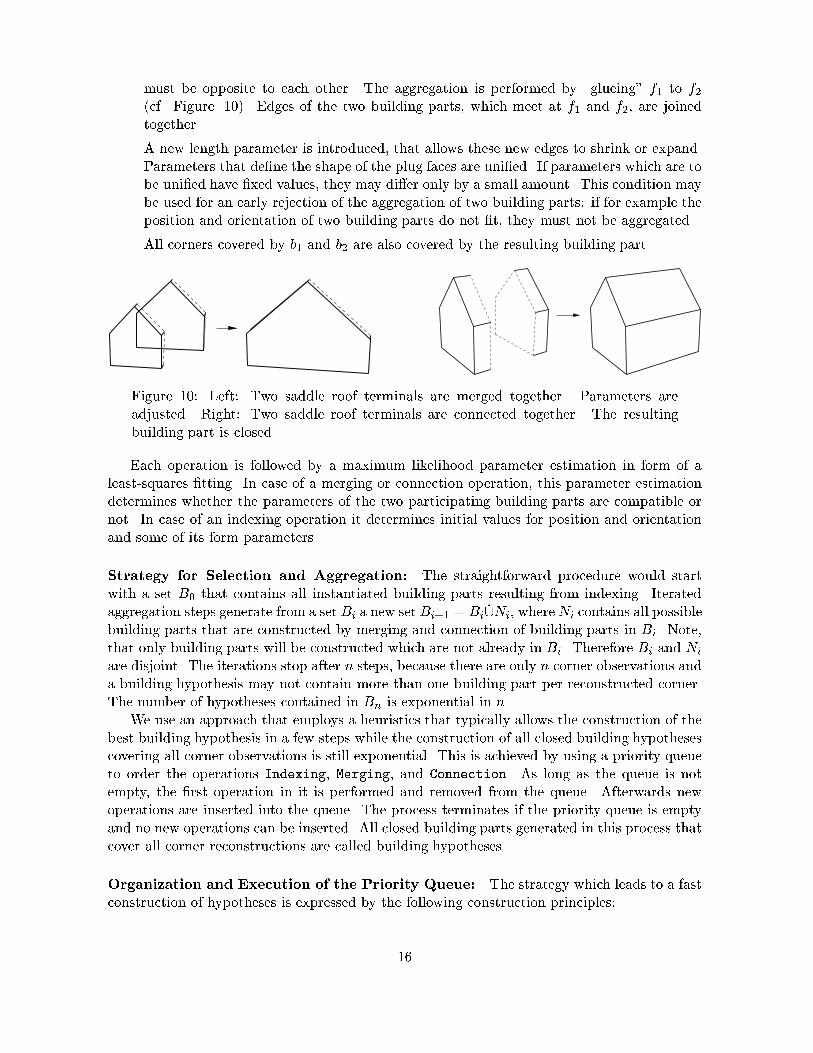
Figure ��� Left� Two saddle roof terminals are merged together� Parameters areadjusted� Right� Two saddle roof terminals are connected together� The resultingbuilding part is closed�
Each operation is followed by a maximum likelihood parameter estimation in form of aleast�squares �tting� In case of a merging or connection operation� this parameter estimationdetermines whether the parameters of the two participating building parts are compatible ornot� In case of an indexing operation it determines initial values for position and orientationand some of its form parameters�
Strategy for Selection and Aggregation� The straightforward procedure would startwith a set B that contains all instantiated building parts resulting from indexing� Iteratedaggregation steps generate from a set Bi a new set Bi�� � Bi $�Ni� where Ni contains all possiblebuilding parts that are constructed by merging and connection of building parts in Bi� Note�that only building parts will be constructed which are not already in Bi� Therefore Bi and Ni
are disjoint� The iterations stop after n steps� because there are only n corner observations anda building hypothesis may not contain more than one building part per reconstructed corner�The number of hypotheses contained in Bn is exponential in n�
We use an approach that employs a heuristics that typically allows the construction of thebest building hypothesis in a few steps while the construction of all closed building hypothesescovering all corner observations is still exponential� This is achieved by using a priority queueto order the operations Indexing� Merging� and Connection� As long as the queue is notempty� the �rst operation in it is performed and removed from the queue� Afterwards newoperations are inserted into the queue� The process terminates if the priority queue is emptyand no new operations can be inserted� All closed building parts generated in this process thatcover all corner reconstructions are called building hypotheses�
Organization and Execution of the Priority Queue� The strategy which leads to a fastconstruction of hypotheses is expressed by the following construction principles�
��
S� Indexing is performed before any aggregations take place� This provides the starting pointfor the algorithm�
S� Aggregation is done depth �rst� Construct building aggregates with as much covered cornerobservations and minimal values for the least�squares �tting as soon as possible�
S� The growth of aggregations shall be as uniform as possible� This avoids having one ker�nel steadily growing by connecting small building parts to it and thus neglecting otherpossible hypotheses�
These construction principles de�ne how the operations are ordered within the priorityqueue and which operation is to be performed next� Let � and � be two operations�
�� If � and � have di�erent types� Indexing comes before Merging before Connection �S���
�� If � and � are both of type Indexing� then
�a� if the operations belong to di�erent corner observations� the corner having lessbuilding part interpretations is preferred �S���
�b� else if the operations belong to the same corner observation� the operation with ana priori better expected result is performed �rst �S���
�� If � and � are both of type Merging or Connection� with the argument building partsbi�� and bi�� of i� the following attributes are considered�
�a� The operation i with the higher number of corner observations covered by bi�� andbi�� is performed �rst� building aggregates with as much covered corner observationsas possible are generated �rst �S���
�b� The operation i with the smaller di�erence in corner observations covered by bi��and bi�� is performed �rst �S���
�c� Finally� the operations i are sorted according to the sum of the values of thefunction minimised in the least�squares �tting performed after the construction ofbi�� and bi��� building aggregates that �t the observed corners best are constructed�rst �S���
Algorithm� The set of building hypotheses H and the set of building parts B are initiallyempty� The priority queue is initialised with all indexing operations for each corner� As longas the queue is not empty� the �rst operation in it is removed and executed� If its result� thebuilding part b� is closed� then if it covers all corner observations it is a new building hypothesisand is added to H� If b does not cover all observations� it is removed� If b is open� new entriesfor the priority queue are constructed�
If b is an instance of a building part model� then for the set fb�� � � � � bkg � B of existingbuilding parts� which are instances of the same building part model and have the sameorientation �with respect to uncertainty�� the operations Merging�b�bi�� � i k� areinserted into the priority queue�
For each plug face f of b and for each plug face f � of another building part b� � B� iff and f � are of the same type and their orientation is opposite to each other� insert theoperation Connection�b�b��f�f �� into the priority queue�
��
An operation is inserted only if its result is not yet a member of B or H and if it covers everycorner observation at least once� After all possible operations are inserted into the queue� b isadded to B�
If no new operations can be inserted and the priority queue is empty the algorithm termi�nates� If H is not empty� it contains all the generated building hypotheses� Otherwise� it hasnot been possible to generate a closed building hypothesis� If there exist closed building partsin B which do not cover all corner observations� the one which covers the most observations ischosen as building hypothesis� If all building parts in B are open� one building part is selectedfrom B and its open plug faces are closed by connection to default terminals� The buildingpart selected� is the one which consists of the most instantiated building models and the fewestplug faces and �ts the corner observations best�
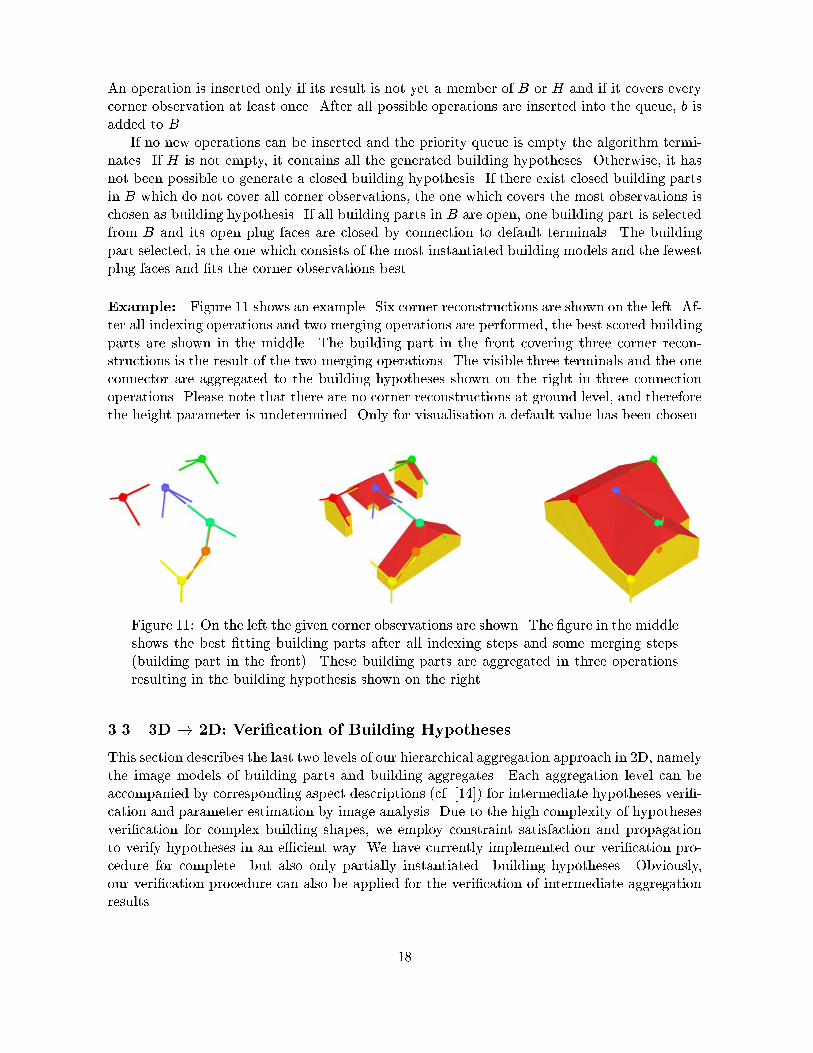
Example� Figure �� shows an example� Six corner reconstructions are shown on the left� Af�ter all indexing operations and two merging operations are performed� the best scored buildingparts are shown in the middle� The building part in the front covering three corner recon�structions is the result of the two merging operations� The visible three terminals and the oneconnector are aggregated to the building hypotheses shown on the right in three connectionoperations� Please note that there are no corner reconstructions at ground level� and thereforethe height parameter is undetermined� Only for visualisation a default value has been chosen�
Figure ��� On the left the given corner observations are shown� The �gure in the middleshows the best �tting building parts after all indexing steps and some merging steps�building part in the front�� These building parts are aggregated in three operationsresulting in the building hypothesis shown on the right�
��� �D � �D� Veri�cation of Building Hypotheses
This section describes the last two levels of our hierarchical aggregation approach in �D� namelythe image models of building parts and building aggregates� Each aggregation level can beaccompanied by corresponding aspect descriptions �cf� ��� � for intermediate hypotheses veri��cation and parameter estimation by image analysis� Due to the high complexity of hypothesesveri�cation for complex building shapes� we employ constraint satisfaction and propagationto verify hypotheses in an ecient way� We have currently implemented our veri�cation pro�cedure for complete�but also only partially instantiated�building hypotheses� Obviously�our veri�cation procedure can also be applied for the veri�cation of intermediate aggregationresults�
��
Thus� in this section we describe the generation of the image models for the �D hypothesesof buildings and building parts and the constraint�based reasoning for hypotheses veri�cationand the derivation of new image features�
����� Image Modeling by Parameterized View Hierarchies
To generate image models of building parts and aggregates� we employ a modi�ed version ofthe aspect hierarchies ��� � Aspect hierarchies describe qualitative image models of volumetricprimitives in terms of aspects� Each aspect is decomposed into a hierarchical feature�baseddescription� to facilitate the recognition of primitives even in the case of partial occlusion bythe detection of its visible features�
While aspects represent qualitatively di�erent object appearences due to di�erent viewpointpositions� di�erent appearences of our building hypotheses are caused by di�erent settings offree shape parameters� The parameters of location and orientation are usually �xed due to the�tting with the �D corner reconstructions� If all parameters of a building hypothesis are �xed�exactly one view is generated due to the �xed camera position and orientation� If one or moreparameters are still undetermined� the valid parameter space is sampled and several views areinserted �see Figure ���� Due to the reliable processes of feature extraction and reconstruction�the number of free parameters is generally low�
To facilitate hypotheses veri�cation� even in the case when occlusions and noise causeincomplete feature extraction� we adopt the hierarchical feature�based representation of theapproach of Dickinson et al� �cf� ���� �� �� The image models of the hypotheses of buildingsand building parts are called parameterized view hierarchies due to their independency fromviewpoint� For each aerial image one parameterized view hierarchy is generated� It consists ofthree levels�
Level �� The highest level contains all three�dimensional building hypotheses� Note that ahypothesis may still have undetermined parameters�
Level �� The medium level contains all relevant two�dimensional views of these hypotheses�
Level �� Each view is decomposed into its image features and their relations like parallelisms�symmetries etc� which describe the lowest level of the hierarchy�
Figure �� shows an example of a view hierarchy for four di�erent building hypotheses forthe same set of corner observations �cf� Figure �� left��
The image model currently employed for hypotheses veri�cation� utilizes a pinhole sen�sor model with weak perspective projection of the visible object contours� Obviously� moreenhanced models of sensor characteristics� illumination and physical properties of building ma�terials allow further analysis for determining shape parameters and verifying intermediate andcomplete results of the aggregation hierarchy� Currently we are investigating view representa�tions which employ a standard lighting model including ambient light and di�use re�ection�where the sun vector is computed from sensor model and time stamp� The analysis of illu�mination and shadows allows to derive �D object parameters and to test the consistency ofshadow�ground transitions and inter�surface intensities �cf� ��� ��
����� Operations for Veri�cation and Parameter Estimation
Hypotheses veri�cation relies on the matching between the image models of complex buildinghypotheses on the one hand and extracted image features of the aerial images on the other
��
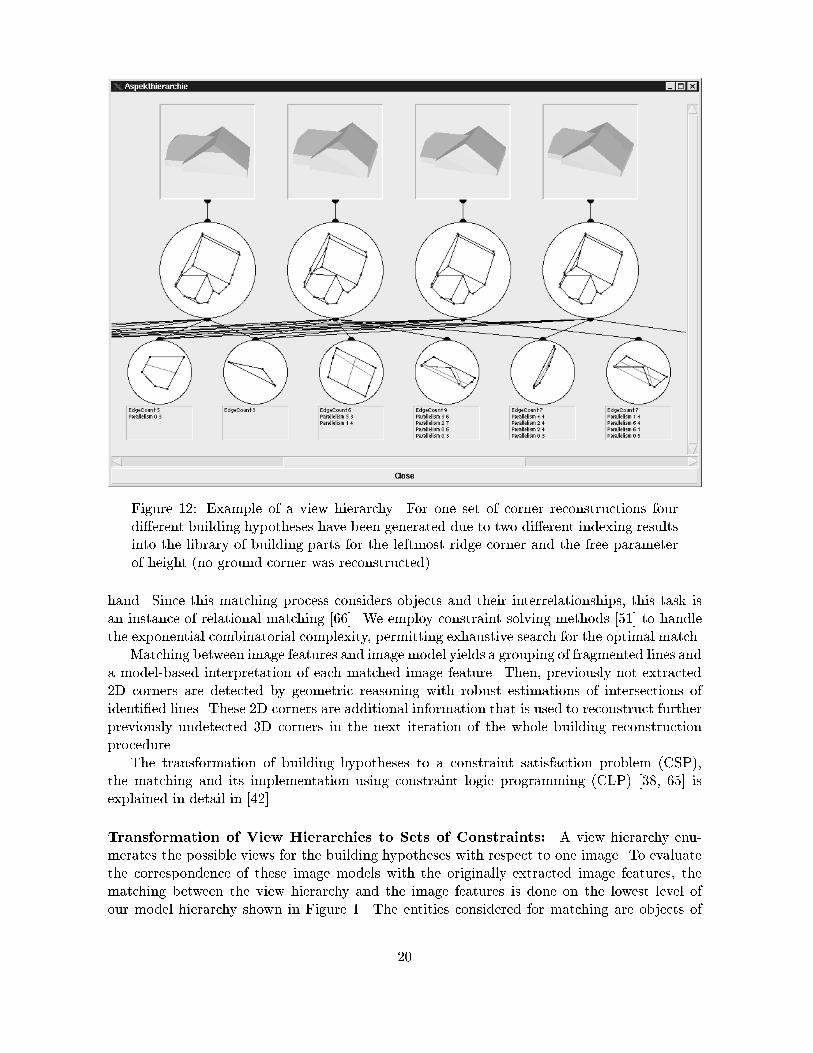
Figure ��� Example of a view hierarchy� For one set of corner reconstructions fourdi�erent building hypotheses have been generated due to two di�erent indexing resultsinto the library of building parts for the leftmost ridge corner and the free parameterof height �no ground corner was reconstructed��
hand� Since this matching process considers objects and their interrelationships� this task isan instance of relational matching ��� � We employ constraint solving methods ��� to handlethe exponential combinatorial complexity� permitting exhaustive search for the optimal match�
Matching between image features and image model yields a grouping of fragmented lines anda model�based interpretation of each matched image feature� Then� previously not extracted�D corners are detected by geometric reasoning with robust estimations of intersections ofidenti�ed lines� These �D corners are additional information that is used to reconstruct furtherpreviously undetected �D corners in the next iteration of the whole building reconstructionprocedure�
The transformation of building hypotheses to a constraint satisfaction problem �CSP��the matching and its implementation using constraint logic programming �CLP� ���� �� isexplained in detail in ��� �
Transformation of View Hierarchies to Sets of Constraints� A view hierarchy enu�merates the possible views for the building hypotheses with respect to one image� To evaluatethe correspondence of these image models with the originally extracted image features� thematching between the view hierarchy and the image features is done on the lowest level ofour model hierarchy shown in Figure �� The entities considered for matching are objects of
��

the three feature classes points� lines� and regions and di�erent relations� e�g� adjacency� lineparallelism� region symmetry� and region contrast� The line parallelism and region symmetry re�lations re�ect the respective �D properties in �D� For each pair of adjacent regions the contrastrelation expresses their expected intensity ratio�
Thus� we employ a representation of the image model� which describes each view as a setof �D image features and a set of relations between them� These relations may be regarded asa set of constraints which have to be satis�ed simultaneously by the corresponding objects� Aconsistent match� also called consistent labeling ��� � is an identi�cation of a set of extractedimage features which satisfy all constraints� The decomposition of the matching problem intothe simultaneous satisfaction of di�erent constraints leads to a structure CSP�V�D� C� whichis adequately represented by the translation of hypotheses into conjunctions of constraints Cwhere the features are represented by variables V with restricted domains D� Figure �� il�lustrates the constraint representation of views of building hypotheses using constraint logicprogramming� For each view of a hierarchy� one corresponding constraint representation willbe employed�
house_aspect(F1,F2,F3,L1,...,L10,Sum) :-
extracted_blobs(BlobDom), [F1,F2,F3 ] ∈ BlobDom ∪ {*},
extracted_lines(LineDom), [L1,...,L 10] ∈ LineDom ∪ {*},
[B1,...,B19] ∈ [-1,0,1],all_distinct([F1,F2,F3]),
all_distinct([L1,...,L10]),
adjacnt(F1,L1,B1), adjacnt(F1,L2,B2), adjacnt(F1,L3,B3),
adjacnt(F1,L4,B4), adjacnt(F1,L5,B5), adjacnt(F2,L4,B6),
adjacnt(F2,L6,B7), adjacnt(F2,L8,B8), adjacnt(F2,L10,B9),
adjacnt(F3,L5,B10),adjacnt(F3,L7,B11),adjacnt(F3,L9,B12),
adjacnt(F3,L10,B13),
line_parallel(L2,L3,B14), line_parallel(L6,L7,B15),
line_parallel(L6,L10,B16), line_parallel(L7,L10,B17),
line_parallel(L4,L8,B18), line_parallel(L5,L9,B19),
Sum = B1 + B2 + ... + B18 + B19.
F1
F2 F3
L1
L3 L2
L4 L5
L8 L9
L6 L7
L10
Figure ��� Constraint representation of a building hypothesis for a saddleback roofhouse� The adjacnt�constraints express the topological adjacencies between lines andregions� The indicator variables B�� � � � � B�� re�ect the status of each constraint� ��means violated� � relaxed� and � satis�ed �see chapter �������
Matching of Constraint Sets to the Image Data� The matching is done separatelyfor every aerial image and view model by searching for a valid assignment of extracted im�age features to the variables of the corresponding CSP such that all constraints are satis�ed�Consistency techniques� like forward checking and look ahead� as described in ���� ��� ��� �� exploit the structured representation of the matching problem as a constraint network� Eachconstraint is used to restrict the domains of its variables and these reductions are propagatedthrough the network� This causes early prunings of the search tree and in most cases dramat�ically reduces the computational e�ort�
These standard techniques for constraint solving demand that a match satisi�es everyconstraint� Due to occlusions and disturbances� often neither every predicted model feature ofa view can be found� nor are all their incident constraints satis�able� Thus� the resulting CSPs
��

are in general over�constrained ��� � The approaches of MaxCSP as proposed by Freuder andWallace ���� �� or inexact graph matching described by Haralick and Shapiro ���� �� handlethis by allowing the relaxation of constraints� The best matching then is de�ned as the onewhich satis�es the maximum number of constraints�
The main problem of this metric lies in the inappropriate representation of unobservabilityand is discussed in detail by Vosselman ��� � If an expected model feature is missing in theimage� the corresponding variable has to be assigned a wildcard value� and all its incidentconstraints have to be relaxed in order to get a solution for the CSP� However� these costs arenot correlated to the importance of the model feature�
To overcome this problem� we also permit the explicit elimination of variables� The domainof every variable is extended by the wildcard � � which is assigned to a variable if the respectivemodel feature could not be found in the image� We further distinguish between the relaxationof constraints due to the unobservability of an incident feature and due to single constraintviolation� Therefore� we extend every constraint c�t�� � � � � tn� of the model by a variable b withthe three possible values ��� �� or � to a constraint c��t�� � � � � tn� b� where
c��t�� � � � � tn� b� � �b � �� � ��b � �� � c�t�� � � � � tn�� � ��b � ��� � �c�t�� � � � � tn�� ���
In the framework of constraint logic programming �CLP�� variable b is used both as an indicatorand a switch� If the original constraint c is satis�ed� b is set to �� If it is violated� b is set to��� If b is set to � �or ���� c has to be satis�ed �or violated respectively� to ful�ll c� and thusc� will be replaced by c �or �c�� If a wildcard is assigned to a variable vi � V� every incidentconstraint c�j�� � � � vi� � � � � bj� � C
� has to be relaxed by setting bj � �� If the wildcard is removedfrom the domains of all variables v�� � � � � vn of a constraint c��v�� � � � � vn� b�� the value � can beremoved from the domain of b� Vice�versa� if b is set to �� the wildcard has to be removed fromthe domains of the variables v�� � � � � vn�
So the original constraint satisfaction problem CSP�V�D� C� is transformed to a problemCSP �V�D�� C�� with D� � D � f�g and C� � fc��t�� � � � � tn� b� j c�t�� � � � � tn� � C� b � f��� �� �gg�To �nd the best mapping we maximize
f�C� �
nXi��
bi with c�i�� � � � bi� � C� ���
using a branch�and�bound algorithm embedded in the CLP system ��� � During the search�the lower bound � is added as a constraint f�C� � � to the constraint system� From thisconstraint the CLP system can infer additional knowledge about the values of the variables bi�For example� if we have eight constraints� six of which have already been �xed �four to � andtwo to ��� and � is �� the �nal two constraints have to be satis�ed to reach the lower boundand so the bi for the remaining two constraints can be set to �� enforcing both constraints�
The solution of the constraint satisfaction problem consists of valid assignments of ex�tracted features to the variables� On one hand� these assignments determine the free geometricparameters of the features of the image model and thus determine free parameters of the wholebuilding hypothesis� On the other hand� every assigned image feature is identi�ed as a speci�ccomponent of the building hypothesis� These matched image features are labeled with respectto the building model� Figure �� shows highlighted on the left the image features that weresuccessfully matched with the image model of building hypothesis of a saddle roof house�
Since lines in general are fragmented into several line image features� corresponding linefeatures are grouped and �tted using the labeling information to determine the lines of theimage model of the building hypothesis�
��
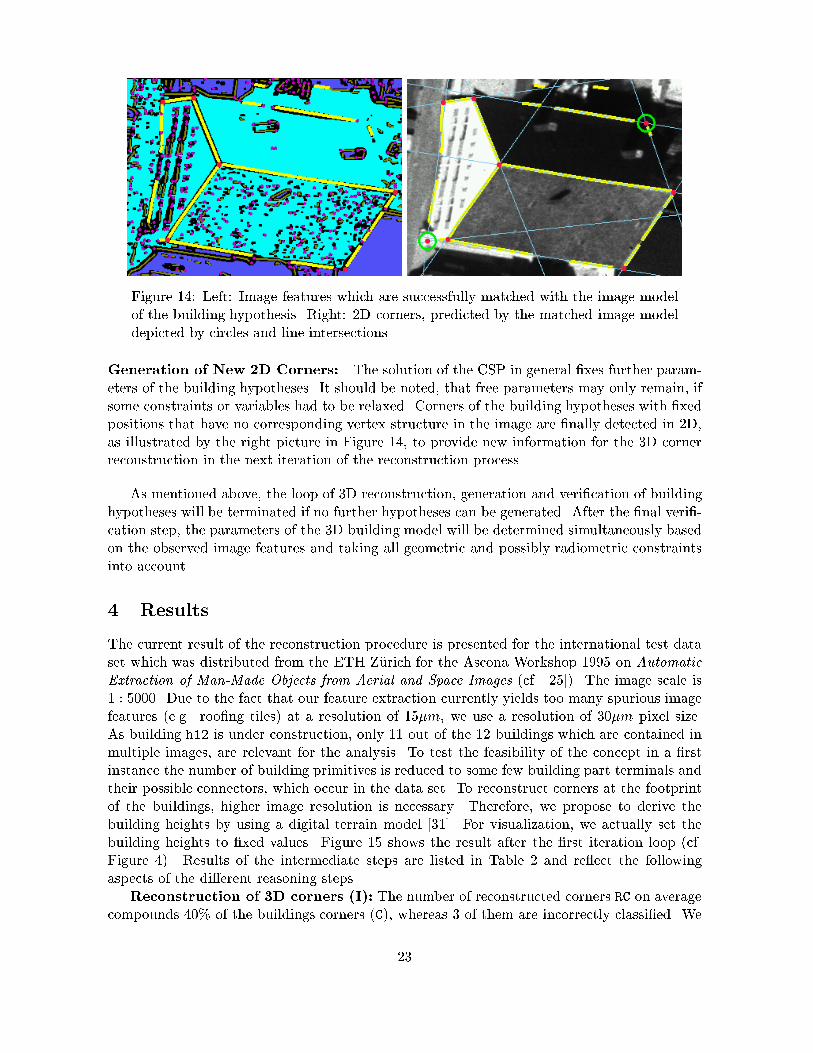
Figure ��� Left� Image features which are successfully matched with the image modelof the building hypothesis� Right� �D corners� predicted by the matched image modeldepicted by circles and line intersections�
Generation of New �D Corners� The solution of the CSP in general �xes further param�eters of the building hypotheses� It should be noted� that free parameters may only remain� ifsome constraints or variables had to be relaxed� Corners of the building hypotheses with �xedpositions that have no corresponding vertex structure in the image are �nally detected in �D�as illustrated by the right picture in Figure ��� to provide new information for the �D cornerreconstruction in the next iteration of the reconstruction process�
As mentioned above� the loop of �D reconstruction� generation and veri�cation of buildinghypotheses will be terminated if no further hypotheses can be generated� After the �nal veri��cation step� the parameters of the �D building model will be determined simultaneously basedon the observed image features and taking all geometric and possibly radiometric constraintsinto account�
� Results
The current result of the reconstruction procedure is presented for the international test dataset which was distributed from the ETH Z%urich for the Ascona Workshop ���� on Automatic
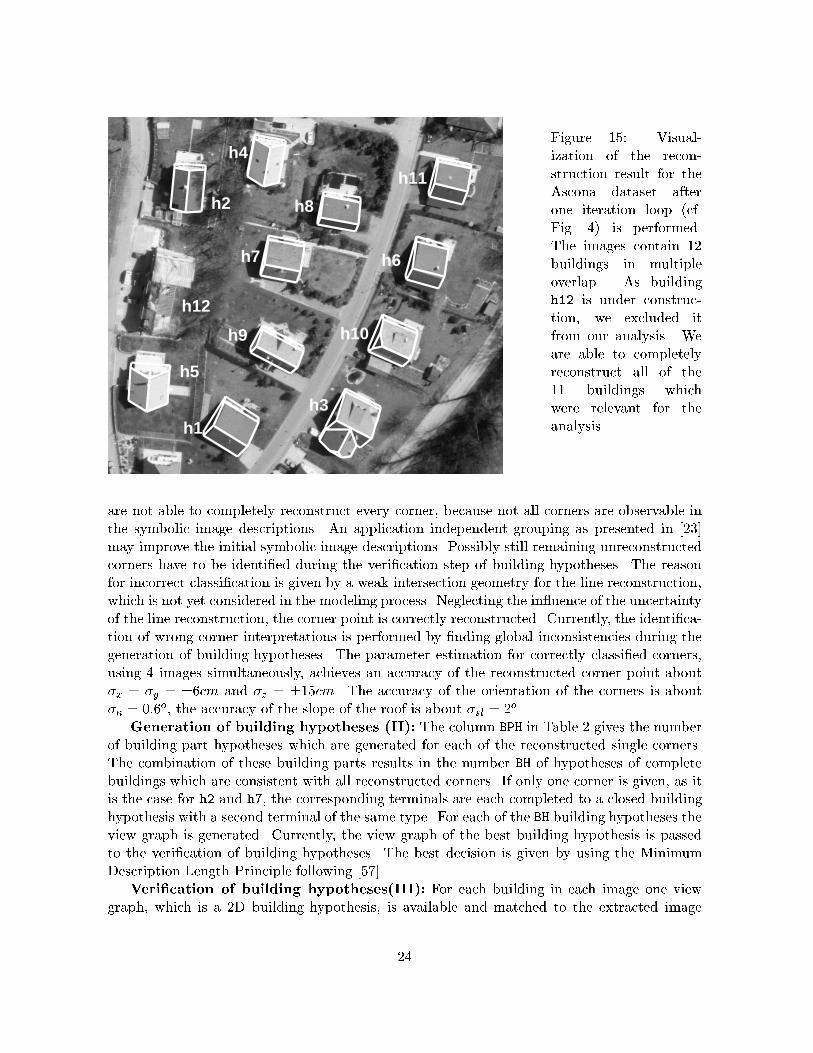
Extraction of Man�Made Objects from Aerial and Space Images �cf� ��� �� The image scale is� � ����� Due to the fact that our feature extraction currently yields too many spurious imagefeatures �e�g� roo�ng tiles� at a resolution of ���m� we use a resolution of ���m pixel size�As building h�� is under construction� only �� out of the �� buildings which are contained inmultiple images� are relevant for the analysis� To test the feasibility of the concept in a �rstinstance the number of building primitives is reduced to some few building part terminals andtheir possible connectors� which occur in the data set� To reconstruct corners at the footprintof the buildings� higher image resolution is necessary� Therefore� we propose to derive thebuilding heights by using a digital terrain model ��� � For visualization� we actually set thebuilding heights to �xed values� Figure �� shows the result after the �rst iteration loop �cf�Figure ��� Results of the intermediate steps are listed in Table � and re�ect the followingaspects of the di�erent reasoning steps�
Reconstruction of �D corners I�� The number of reconstructed corners RC on averagecompounds �� of the buildings corners �C�� whereas � of them are incorrectly classi�ed� We
��
h12
h5
h4
h2 h8
h7
h9
h11
h6
h10
h3h1
Figure ��� Visual�ization of the recon�struction result for theAscona dataset afterone iteration loop �cf�Fig� �� is performed�The images contain ��buildings in multipleoverlap� As buildingh�� is under construc�tion� we excluded itfrom our analysis� Weare able to completelyreconstruct all of the�� buildings whichwere relevant for theanalysis�
are not able to completely reconstruct every corner� because not all corners are observable inthe symbolic image descriptions� An application independent grouping as presented in ��� may improve the initial symbolic image descriptions� Possibly still remaining unreconstructedcorners have to be identi�ed during the veri�cation step of building hypotheses� The reasonfor incorrect classi�cation is given by a weak intersection geometry for the line reconstruction�which is not yet considered in the modeling process� Neglecting the in�uence of the uncertaintyof the line reconstruction� the corner point is correctly reconstructed� Currently� the identi�ca�tion of wrong corner interpretations is performed by �nding global inconsistencies during thegeneration of building hypotheses� The parameter estimation for correctly classi�ed corners�using � images simultaneously� achieves an accuracy of the reconstructed corner point about�x � �y � ��cm and �z � ���cm� The accuracy of the orientation of the corners is about�� � ���o� the accuracy of the slope of the roof is about �sl � �o�
Generation of building hypotheses II�� The column BPH in Table � gives the numberof building part hypotheses which are generated for each of the reconstructed single corners�The combination of these building parts results in the number BH of hypotheses of completebuildings which are consistent with all reconstructed corners� If only one corner is given� as itis the case for h� and h�� the corresponding terminals are each completed to a closed buildinghypothesis with a second terminal of the same type� For each of the BH building hypotheses theview graph is generated� Currently� the view graph of the best building hypothesis is passedto the veri�cation of building hypotheses� The best decision is given by using the MinimumDescription Length Principle following ��� �
Veri�cation of building hypothesesIII�� For each building in each image one viewgraph� which is a �D building hypothesis� is available and matched to the extracted image
��

I II IIIBuilding C RC CE BPH BH UV GV FP
h� � ����� � � ������� h� � � � � � � h� �� � ������������ � ������� h� � ����� � � ������� h� � ����� � � ������� h� � � ���� � � ������� h� � � �� � � � � h � ����� � � ������� h � ������� � � ������� h�� � � ����� � ������� h�� � ��� � � �������
C number of corners of the buildingRC number of reconstructed cornersCE number of corner classi�cation errorsBPH number of building part hypotheses
for each corner
BH number of building hypothesesUV predicted corners �not previously
reconstructed� before veri�cationGV predicted and veri�ed vertices
per imageFP remaining free parameters
Table �� Detailed results of the intermediate reconstruction processes Reconstructionof �D corners �I�� Generation of building hypotheses �II� and Veri�cation of buildinghypotheses�III� for the Ascona dataset� All of the �� buildings can be reconstructed asshown in column FP�
features and mutual relations� Column UV lists the number of corners which initially could notbe �D reconstructed but were predicted by the generated building hypotheses� The columnGV lists for each of the � images the number of correctly matched vertices for the previouslyunknown corners� It shows that �� of the undetermined building corners could be correctlyidenti�ed by the veri�cation procedure� Since in general the building parameters are redun�dantly determined by the geometrical and topological constraints between the model features�all free parameters for every building hypotheses have been determined �see column FP�� Pleasenote that for buildings h� and h� the matching process also determined the formerly unknownlength parameter�
� Conclusions and Outlook
We have proposed a model�based approach to �D building extraction from aerial images� Ourmodeling concept reveals a tight coupling of generic �D object modeling and an explicitlyrepresented image model� Object and image model show corresponding part�of hierarchiesdescribing aggregation states within a recognition�by�components strategy�
The strategy aims at a step by step increase of knowledge during the reasoning� As thedomain speci�c object models of buildings and building parts de�ne the maximum achievableknowledge about an actual scene and its granularity determines the resolution for knowledge�our model spans hierarchically from the smallest observable features to complex building shapesand allows an adequate evaluation of hypotheses within all di�erent reasoning steps�
We have presented �rst experimental results� Currently� we are investigating and developingon
��
the measurement and propagation of uncertainty within the overall reconstruction pro�cess&
the extension of the current building modeling by more sophisticated knowledge aboutbuildings� esp� functional aspects&
the use of enhanced image models including sensor characteristics and lighting modelswithin hypotheses veri�cation&
the derivation of domain dependent heuristics to constrain search spaces&
the handling of incomplete observations within all processes and stages of hypothesesgeneration and veri�cation�
Especially� we have to consider the integration of logical and statistical knowledge into theframework of constraint logic programming� Furthermore� the approach has to be compared todi�erent automatic algorithms for segmentation� �D reconstruction and classical photogram�metry� In order to achieve this goal� an attempt is made to �nd a set of standardized repre�sentations about basic building models� parts of buildings and classes of buildings to ease suchcomparisons on a conceptual level�
Acknowledgments�
This work was largely done within the the project �Semantic Modeling and Extraction ofSpatial Objects from Images and Maps� especially in the subproject �Building Extraction�which is supported by the Deutsche Forschungsgemeinschaft� DFG� We thank the DFG forsupporting our work�
References
��� R� Bergevin and M�D� Levine� Generic Object Recognition� Building and Matching Coarse De�scriptions from Line Drawings� IEEE T�PAMI� � ��������� �����
��� I� Biederman� Recognition�by�Components� A Theory of Human Image Understanding� Psycho�logical Review� ����� ����� �����
��� F� Bignone� O� Henricsson� P� Fua� and M� Stricker� Automatic Extraction of Generic House Roofsfrom High Resolution Aerial Images� In Computer Vision � ECCV ���� number �� in LectureNotes in Computer Science� pages � ��� Springer Verlag� Cambridge� ����
��� K� Bowyer and C� Dyer� Aspect graphs� An introduction and survey of recent results� Int� Journalof Imaging Systems and Technology� ���� ����� ����
� � C� Braun� Interpretation von Einzelbildern zur Geb�audeerfassung� PhD thesis� Institut f�ur Pho�togrammetrie� Universit�at Bonn� �����
�� C� Braun� T� H� Kolbe� F� Lang� W� Schickler� V� Steinhage� A� B� Cremers� W� F�orstner�and L� Pl�umer� Models for Photogrammetric Building Reconstruction� Computer � Graphics�������������� ��� �
��� A� Brunn� E� G�ulch� F� Lang� and W� F�orstner� A hybrid concept for �d building acquisition�ISPRS Journal of Photogrammetry and Remote Sensing� ���������� �����
��

��� A� Brunn� F� Lang� and W� F�orstner� A Procedure for Segmenting Surfaces by Symbolic and IconicImage Fusion� In J�ahne B�� editor� Mustererkennung ��� �� DAGM�Symposium Heidelberg�Informatik aktuell� pages ����� Springer Verlag� Berlin� ����
��� M� Clowes� On Seeing Things� Arti�cial Intelligence� �������� �����
��� R� Dechter and J� Pearl� Network�Based Heuristics for Constraint Satisfaction Problems� Arti�cialIntelligence� �������� � �����
���� S� J� Dickinson� A� P� Pentland� and A� Rosenfeld� ��D Shape Recovery Using Distributed AspectMatching� IEEE Transactions on Pattern Analysis and Machine Intelligence� �������������� �����
���� S� J� Dickinson� A� P� Pentland� and A� Rosenfeld� From Volumes to Views� An Approach to ��DObject Recognition� CVGIP Image Understanding� �������� �� �����
���� R� Englert� Systematic Acquisition of Generic �D Building Model Knowledge� In W� F�orstner andL� Pl�umer� editors� Semantic Modeling for the Acquisition of Topographic Information from Imagesand Maps� pages ������ � Birkh�auser Verlag� Basel� Switzerland� �����
���� A� Fischer and V� Steinhage� On the Computation of Visual Events in Aspect Graph Generation� InMustererkennung ��� �� DAGM�Symposium Braunschweig� Informatik aktuell� pages � ����Springer Verlag� Berlin� �����
�� � A� Fischer� T� H� Kolbe� and F� Lang� Integration of �D and �D Reasoning for Building Recon�struction Using a Generic Hierarchical Model� In W� F�orstner and L� Pl�umer� editors� SemanticModeling for the Acquisition of Topographic Information from Images and Maps� pages � �����Birkh�auser Verlag� Basel� Switzerland� �����
��� P� J� Flynn and A� K� Jain� CAD�Based Computer Vision� From CAD�Models to RelationalGraphs� IEEE T�PAMI� �������������� �����
���� W� F�orstner� A Framework for Low Level Feature Extraction� In J��O� Eklundh� editor� ComputerVision ECCV ��� Vol� II� number �� in Lecture Notes in Computer Science� pages ��������Springer Verlag� Berlin� �����
���� W� F�orstner� Mid�Level Vision Processes for Automatic Building Extraction� In A� Gr�un�O� K�ubler� and P� Agouris� editors� International Workshop on Automatic Extraction of Man�Made Objects from Aerial and Space images� pages �������� Birkh�auser� Basel� ��� �
���� W� F�orstner and L� Pl�umer� editors� Semantic Modeling for the Acquisition of Topographic Infor�mation from Images and Maps� Birkh�auser Verlag� Basel� �����
��� E� C� Freuder and R� J� Wallace� Partial Constraint Satisfaction� In M� Jampel� E� Freuder� andM� Maher� editors� Over�Constrained Systems� number �� in Lecture Notes in Computer Science�pages ����� Springer Verlag� Berlin� ����
���� P� Fua and A� J� Hanson� Resegmentation Using Generic Shape� Locating General CulturalObjects� Pattern Recognition Letters� ������ �� �����
���� P� Fua and A� J� Hanson� An Optimization Framework for Feature Extraction� Pattern RecognitionLetters� �� ����� �����
���� C� Fuchs and W� F�orstner� Polymorphic Grouping for Image Segmentation� In Proceedings �thInternational Conference on Computer Vision� pages �� ����� IEEE Computer Society Press� ��� �
���� A� Gr�un� � E� P� Baltsavias� and O� Henricsson� editors� Automatic Extraction of Man�Made Objectsfrom Aerial and Space Images �II�� Birkh�auser� Basel� �����
�� � A� Gr�un� O� K�ubler� and P� Agouris� editors� Automatic Extraction of Man�Made Objects fromAerial and Space Images� Birkh�auser� Basel� ��� �
��

��� E� G�ulch� A Knowledge�based Approach to Reconstruct Buildings in Digital Aerial Imagery�In L� W� Fritz and J� R� Lucas� editors� International Archives of Photogrammetry and RemoteSensing� volume ��� B�� pages ������� �����
���� C� Hansen and T� C� Henderson� CAD�Based Computer Vision� IEEE T�PAMI� ������������������
���� R� M� Haralick and G� L� Elliott� Increasing Tree Search E�ciency for Constraint SatisfactionProblems� Arti�cial Intelligence� ���������� ����
���� R� M� Haralick and L� G� Shapiro� Computer and Robot Vision� volume II� Addison�WesleyPublishing Company� New York� �����
��� M� Hendrickx� J� Vandekerckhove� D� Fr�ere� T� Moons� and L� Van Gool� On the �D Reconstructionof House Roofs from Aerial Images of Urban Areas� In International Archives of Photogrammetryand Remote Sensing� volume ��� Part ���W�� pages ����� ISPRS� �����
���� O� Henricson� F� Bignone� W� Willuhn� F� Ade� O� K�ubler� E� P� Baltsavias� S� Mason� andA� Gr�un� Project AMOBE� Strategies� Current Status and Future Work� In International Archivesof Photogrammetry and Remote Sensing� volume ��� B�� pages ������� ����
���� O� Henricsson and E� P� Baltsavias� ��D Building Reconstruction with ARUBA� A Qualitativeand Quantitative Evaluation� In A� Gr�un� E� P� Baltsavias� and O� Henricsson� editors� AutomaticExtraction of Man�Made Objects from Aerial and Space Images �II�� pages �������� Birkh�auser�Basel� �����
���� M� Herman and T� Kanade� The �D MOSAIC Scene Understanding System� Incremental Recon�struction of �D Scenes from Complex Images� In M� A� Fischler and O� Firschein� editors� Readingsin Computer Vision Issues Problems Principles and Paradigms� pages �������� Morgan Kauf�mann Publishers� Los Altos� California� �����
���� A� Heyden� Consistency and Correction of Line�Drawings� Obtained by Projections of PiecewisePlanar Objects� In Computer Vision � ECCV ��� Proc� of the �rd Europ� Conf� on ComputerVision� number � in Lecture Notes in Computer Science� pages �������� Springer Verlag� Berlin������
�� � A� Huertas� M� Bejanin� and R� Nevatia� Model Registration and Validation� In A� Gr�un� O� K�ubler�and P� Agouris� editors� Automatic Extraction of Man�Made Objects from Aerial and Space Images�pages ������ Birkh�auser� Basel� ��� �
��� D� A� Hu�man� Impossible Objects as Nonsense Sentences� Machine Intelligence� ��� ����� �����
���� K� Ikeuchi and P� J� Flynn� Recent Progress in CAD�Based Vision� CVGIP Image Understanding�������������� ��� �
���� J� Ja�ar and M� J� Maher� Constraint Logic Programming� A Survey� Journal of Logic Program�ming� ����� �� ��� �����
���� M� Jampel� E� Freuder� and M� Maher� editors� Over�Constrained Systems� Number �� in LectureNotes in Computer Science� Springer Verlag� Berlin� ����
��� K� Kanatani� Group�Theoretical Methods in Image Understanding� Springer Verlag� Berlin� ����
���� J� J� Koenderink and A� J� van Doorn� The Internal Representation of Solid Shape with Respectto Vision� Biological Cybernetics� ���������� �����
���� T� H� Kolbe� L� Pl�umer� and A� B� Cremers� Using Constraints for the Identi�cation of Buildingsin Aerial Images� In Proceedings of the �� Int� Conf� on Practical Applications of ConstraintTechnology PACT��� in London� pages ����� �� The Practical Application Company Ltd�� London�����
��

���� T� L�abe and K��H� Ellenbeck� �D�Wireframe Models as Ground Control Points for the AutomaticExterior Orientation� In International Archives of Photogrammetry and Remote Sensing� volume��� B�� pages �������� ����
���� F� Lang and W� F�orstner� �D�City Modelling with a Digital One�Eye�Stereo System� In Interna�tional Archives of Photogrammetry and Remote Sensing� volume ��� B�� pages ����� ����
�� � F� Lang and W� F�orstner� Surface Reconstruction of Man�Made Objects using Polymorphic Mid�Level Features and Generic Scene Knowledge� Zeitschrift f�ur Photogrammetrie und Fernerkundung��������� ����
��� C� Lin� A� Huertas� and R� Nevatia� Detection of Buildings Using Perceptual Grouping and Shad�ows� In Proceedings of CVPR���� pages ���� �����
���� C� Lin� A� Huertas� and R� Nevatia� Detection of Buildings from Monocular Images� In A� Gr�un�O� K�ubler� and P� Agouris� editors� Automatic Extraction of Man�Made Objects from Aerial andSpace Images� pages �� ����� Birkh�auser� Basel� ��� �
���� C� L� Lin� Q� Zheng� R� Chelappa� L� S� Davis� and X� Zhang� Site Model supported Monitoringof Aerial Images� In Proceedings of CVPR���� pages ������ �����
���� A� K� Mackworth� Consistency in Networks of Relations� Arti�cial Intelligence� ��������� �����
� � D� M� McKeown� Towards Automatic Cartographic Feature Extraction from Aerial Imagery� InH� Ebner� D� Fritsch� and Ch� Heipcke� editors� Digital Photogrammetric Systems� Wichmann�Karlsruhe� ����
� �� P� Meseguer� Constraint Satisfaction Problems� An Overview� AICOM� ���������� �����
� �� D� Metaxas� S� J� Dickinson� R� C� Munck�Fairwood� and L� Du� Integration of Quantitative andQualitative Techniques for Deformable Model Fitting from Orthographic� Perspective and StereoProjection� In Proceedings of the �th Int� Conf� on Computer Vision ICCV ���� pages ������������
� �� O� Munkelt� Aspect�Trees� Generation and Interpretation� CVGIP� ������ ���� ��� �
� �� R� Nevatia� C� Lin� and A� Huertas� A System for Building Detection from Aerial Images� InA� Gr�un� E� P� Baltsavias� and O� Henricsson� editors� Automatic Extraction of Man�Made Objectsfrom Aerial and Space Images �II�� pages ����� Birkh�auser� Basel� �����
� � M� Pilu and R� B� Fisher� Snakes and Splines for Tracking Non�Rigid Heart Motion� In ComputerVision � ECCV ���� number �� in Lecture Notes in Computer Science� pages ������ SpringerVerlag� Cambridge� ����
� � L� Quam and T� M� Strat� SRI Image Understanding Research in Cartographic Feature Extraction�In H� Ebner� D� Fritsch� and C� Heipke� editors� Digital Photogrammetric Systems� pages ��������Wichmann� Karlsruhe� �����
� �� J� Rissanen� Minimum�Description�Length Principle� Encyclopedia of Statistical Sciences� � ��� ��� �����
� �� M� Roux and H� Maitre� ��D Description of Urban Areas Using Maps and Aerial Images� InA� Gr�un� E� P� Baltsavias� and O� Henricsson� editors� Automatic Extraction of Man�Made Objectsfrom Aerial and Space Images �II�� pages �������� Birkh�auser� Basel� �����
� �� W� Schickler� Towards Automation in Photogrammetry� Geodetical Information Magazine� ��������� � �����
�� M� Sester and W� F�orstner� Object Location Based on Uncertain Models� In H� Burkhardt� K��H� H�ohne� and B� Neumann� editors� Mustererkennung ��� � DAGM�Symposium Hamburg�volume ��� of Informatik Fachberichte� pages � ����� Springer Verlag� Berlin� �����
��

��� L� G� Shapiro and R� M� Haralick� A Metric for Comparing Relational Descriptions� IEEE Trans�actions on Pattern Analysis and Machine Intelligence� ���������� ��� �
��� V� Steinhage� On the Integration of Object Modeling and Image Modeling in Automated BuildingExtraction from Aerial Images� In A� Gr�un� E� P� Baltsavias� and O� Henricsson� editors� AutomaticExtraction of Man�Made Objects from Aerial and Space Images �II�� pages �������� Birkh�auser�Basel� �����
��� P� Suetens� P� Fua� and A� J� Hanson� Computational Strategies for Object Recognition� ACMComputing Surveys� ������ ��� �����
��� K� Sugihara� Machine Interpretation of Line Drawings� MIT�Press� ����
� � P� van Hentenryck� Constraint Satisfaction in Logic Programming� Logic Programming Series�MIT Press� Cambridge� MA� �����
�� G� Vosselman� Relational Matching� Number �� in Lecture Notes in Computer Science� SpringerVerlag� Berlin� �����
��� R� J� Wallace and E� C� Freuder� Heuristic Methods for Over�Constrained Constraint SatisfactionProblems� In M� Jampel� E� Freuder� and M� Maher� editors� Over�Constrained Systems� number�� in Lecture Notes in Computer Science� pages ������ Springer Verlag� Berlin� ����
��� D� L� Waltz� Understanding Line Drawings of Scenes with Shadows� In P� H� Winston� editor�Psychology of Computer Vision� pages ������ McGraw�Hill� New York� ��� �
��� U� Weidner� An Approach to Building Extraction from Digital Surface Models� In InternationalArchives of Photogrammetry and Remote Sensing� volume ��� B�� pages �������� ����
��� U� Weidner and W� F�orstner� Towards Automatic Building Extraction from High ResolutionDigital Elevation Models� ISPRS Journal of Photogrammetry and Remote Sensing� ������������� �
��