Entraînement électrique d'un déshuileur aéronautique
20
RS - RIGE – 10/2007. Avion plus électrique, pages 429 à 448 Entraînement électrique d’un déshuileur aéronautique Utilisation d’une machine à commutation de flux Emmanuel Hoang* — Yacine Amara** — Mohamed Gabsi * Sylvain Allano* — Jean-Yves Routex*** * SATIE (UMR CNRS 8029), Ecole Normale Supérieure de Cachan 61, avenue du Président Wilson, F-94235 Cachan cedex [email protected] ** L2ES, Université de Technologie de Belfort - Montbéliard 13, rue Thierry Mieg, F-90010 Belfort cedex [email protected] *** Hispano-Suiza, Safran 18, boulevard Séguin, F-92707 Colombes cedex jean-yves.routex@hispano-suiza-com RÉSUMÉ. Dans l’objectif de réduire le poids des organes embarqués, nous proposons une structure non conventionnelle de machine électrique pour l’entraînement du système de déshuilage. Cette structure utilise le principe de la commutation de flux et se caractérise par le fait que tous les organes actifs se trouvent placés sur la partie fixe, ce qui permet de faciliter l’évacuation des pertes. Le rotor est passif et robuste. Il peut être réalisé à moindre coût et autorise des vitesses de rotation élevées. Du point de vue de l’alimentation, cette machine est une machine synchrone et peut donc être alimentée par un onduleur de tension triphasé classique. ABSTRACT. To reduce the weight of an aircraft oil breather, we propose a non conventional structure of electric machine. This machine uses the flux switching principle where all the active parts are arranged on the static part (stator) which is beneficial to evacuating the copper and iron losses. The rotor is only a salient passive rotor and can be robust and made with a low cost technology. This new machine can be supplied by means of a traditional three phase voltage converter. MOTS-CLÉS : machine synchrone, aimant permanent, commutation de flux, défluxage. KEYWORDS: synchronous machine, permanent magnet, flux switching, flux weakening. DOI:10.3166/RIGE.10.3-4.429-448© 2007 Lavoisier, Paris
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of Entraînement électrique d'un déshuileur aéronautique

RS - RIGE – 10/2007. Avion plus électrique, pages 429 à 448
Entraînement électrique d’un déshuileur aéronautique Utilisation d’une machine à commutation de flux Emmanuel Hoang* — Yacine Amara** — Mohamed Gabsi * Sylvain Allano* — Jean-Yves Routex***
* SATIE (UMR CNRS 8029), Ecole Normale Supérieure de Cachan 61, avenue du Président Wilson, F-94235 Cachan cedex [email protected]
** L2ES, Université de Technologie de Belfort - Montbéliard 13, rue Thierry Mieg, F-90010 Belfort cedex [email protected]
*** Hispano-Suiza, Safran 18, boulevard Séguin, F-92707 Colombes cedex jean-yves.routex@hispano-suiza-com RÉSUMÉ. Dans l’objectif de réduire le poids des organes embarqués, nous proposons une structure non conventionnelle de machine électrique pour l’entraînement du système de déshuilage. Cette structure utilise le principe de la commutation de flux et se caractérise par le fait que tous les organes actifs se trouvent placés sur la partie fixe, ce qui permet de faciliter l’évacuation des pertes. Le rotor est passif et robuste. Il peut être réalisé à moindre coût et autorise des vitesses de rotation élevées. Du point de vue de l’alimentation, cette machine est une machine synchrone et peut donc être alimentée par un onduleur de tension triphasé classique. ABSTRACT. To reduce the weight of an aircraft oil breather, we propose a non conventional structure of electric machine. This machine uses the flux switching principle where all the active parts are arranged on the static part (stator) which is beneficial to evacuating the copper and iron losses. The rotor is only a salient passive rotor and can be robust and made with a low cost technology. This new machine can be supplied by means of a traditional three phase voltage converter. MOTS-CLÉS : machine synchrone, aimant permanent, commutation de flux, défluxage. KEYWORDS: synchronous machine, permanent magnet, flux switching, flux weakening.
DOI:10.3166/RIGE.10.3-4.429-448© 2007 Lavoisier, Paris

430 RS - RIGE – 10/2007. Avion plus électrique
1. Contexte et objectifs de l’étude
L’étude se déroule dans le cadre du contrat européen POA (Power Optimised Aircraft) dont l’objectif principal est la réduction de la consommation de la puissance non propulsive sans augmenter le volume et le poids des organes embarqués dans un avion.
Plus précisément, notre travail fait partie de la tâche 3.4.5, intitulée « Oil Breather Modifications » du WP3 « Engine electrical systems » dont l’objectif principal est l’amélioration du système de déshuilage par l’utilisation d’un entraînement électrique en lieu et place de l’entraînement mécanique actuel. Le déshuileur a pour fonctions :
– de séparer le mélange « air/huile » provenant des enceintes moteurs, du réservoir d’huile et de l’AGB,
– de collecter l’huile et de la retourner dans le réservoir, –d’éjecter l’air vers l’extérieur. Cet air doit contenir une teneur en huile
minimale réduisant ainsi au maximum les pollutions environnementales.
Actuellement, les déshuileurs comportent un carter contenant une matrice métallique poreuse (mousse) en rotation (figure 1). Les flux d’air chargé d’huile provenant de l’AGB, des enceintes moteur et du réservoir d’huile pénètrent dans le déshuileur, passent au travers de la mousse filtrante en rotation ce qui conduit à la séparation de l’huile et de l’air. L’huile est expulsée par centrifugation et l’air est évacué vers l’extérieur.
Figure 1. Système déshuileur – solution mécanique

Machine à commutation de flux pour déshuileur 431
Figure 2. Système déshuileur – solution électromécanique
La rotation de la mousse est assurée par un jeu d’engrenages mécaniques. Plusieurs valeurs de vitesses de rotation sont imposées à cette éponge et ceci selon que l’avion se trouve au parking aéroport, au décollage ou en vol de croisière. Ces vitesses sont proportionnelles à la vitesse de l’arbre de la turbine. Afin d’améliorer l’efficacité et la souplesse dans le fonctionnement du déshuileur embarqué, les industriels cherchent à remplacer l’entraînement mécanique par un actionneur électrique (figure 2). La machine électrique tournera à une vitesse indépendante par rapport à celle du régime du réacteur améliorant ainsi l’efficacité du déshuileur.
Dans cet article, nous présentons les résultats relatifs à cette étude et en particulier le dimensionnement électromagnétique et l’alimentation d’une machine à commutation de flux, ainsi que le comportement thermique d’un tel actionneur dans cet environnement réputé sévère en température. Ce travail sera structuré de la manière suivante :
– contexte et objectifs de l’étude, – principe et dimensionnement de la machine à commutation de flux, – modélisation et analyse du comportement thermique, – alimentation et stratégie de la commande, – validation expérimentale : essais.
2. Principe et dimensionnement de la machine à commutation de flux
2.1. Présentation
La cellule élémentaire présentée à la figure 3 permet d’appréhender le principe de fonctionnement de cette machine. Selon la position du rotor (partie mobile), le flux de l’aimant dans le bobinage peut être compté positif ou négatif, il est donc alternatif.

432 RS - RIGE – 10/2007. Avion plus électrique
Bobinages
Aimant Permanent
Rot
orSt
ator
Figure 3. Cellule élémentaire
A partir de la cellule élémentaire, nous avons réalisé un prototype (figure 4), selon des règles détaillées dans la partie 2.2. Cette machine est constituée d’un stator comprenant les bobinages de l’induit et les aimants permanents réalisant la fonction inducteur. Le rotor, qui est la partie tournante, est constitué d’un empilement de tôles ferromagnétiques. Le prototype est une machine triphasée comprenant 12 aimants SmCo (Br = 0,8 T). Chaque phase est donc constituée de 4 aimants et de 4 bobinages concentriques.
Le rotor comprend 10 dents, ce qui permet de relier la fréquence de rotation mécanique à la fréquence des grandeurs électriques (felec = 10 fmec).
Figure 4. Section du prototype triphasé
Le calcul des flux à vide, effectué à l’aide du logiciel E.F.2D, MAXWELL de ANSOFT-corporation, permet de constater que nous avons bien affaire à une machine triphasée à flux sinusoïdaux. La fem mesurée sur le prototype, permet de valider le fait qu’elle est bien sinusoïdale (le taux de distorsion harmonique définit comme étant le rapport de la valeur efficace des composantes harmoniques par la valeur efficace de la composante fondamentale est de 12 %).

Machine à commutation de flux pour déshuileur 433
Figure 5. Fem mesurée à 440 tr/min
Cette machine possède un rotor passif mécaniquement robuste, ce qui autorise des vitesses de rotation élevées.
Les parties actives, bobinages et aimants permanents, se trouvent au stator, qui est fixe, ce qui facilite les transferts thermiques.
Compte tenu de la valeur normalisée de son inductance dans l’axe direct, cette machine, associée à un onduleur de tension peut convertir de l’énergie sur une plage de vitesse théoriquement infinie (défluxage électronique). Seules les pertes magnétiques et les pertes de ventilation viennent dégrader les performances de l’ensemble onduleur-machine. La structure de la machine fait que la réaction magnétique d’induit nécessaire au défluxage électronique ne démagnétise pas les aimants. Sur la figure 7 sont représentées les lignes d’iso potentiel (lignes de flux) lorsque l’on applique uniquement une composante du courant dans l’axe direct, où l’on voit bien que le flux de réaction magnétique d’induit ne traverse pratiquement pas les aimants permanents.
Figure 6. Lignes de flux pour Id seul

434 RS - RIGE – 10/2007. Avion plus électrique
2.2. Eléments de dimensionnement
2.2.1. Définition géométrique
Compte tenu des symétries magnétiques, nous pouvons définir une cellule élémentaire présentée sur la figure suivante.
Cellule élémentaire θS
wS
θR
wS/2
wS
wR
Figure 7. Définition de la cellule élémentaire
Les paramètres permettant d’expliciter les relations géométriques de la machine sont définis :
q : nombre de phases, Nc : nombre de cellules par phase, θs : largeur angulaire de la cellule au stator, θr : largeur angulaire de la cellule au rotor, Ns : nombre de dents au stator, Nr : nombre de dents au rotor, ws : largeur angulaire d’une dent statorique, wr : largeur angulaire d’une dent rotorique.
Les relations permettant de définir une structure polyphasée sont les suivantes :
π=θ 2N rr et π=θ 2N ss [1]
cs Nq
2π=θ ; ⎟⎟
⎠
⎞⎜⎜⎝
⎛±π=θ
q2k12 elecs et elecr 2π=θ avec k, entier naturel. [2]
D’où,
⎟⎟⎠
⎞⎜⎜⎝
⎛±
θ=θ
q2k1
sr [3]

Machine à commutation de flux pour déshuileur 435
Nous avons aussi, pour des raisons de symétries : 4
w ss
θ= [4]
La largeur angulaire des dents rotorique est définie par :
rrrw θβ= avec ] [1;0r ∈β [5]
Afin d’équilibrer les efforts radiaux et de minimiser les composantes harmoniques des flux, les nombres de dents au stator (Ns) et au rotor (Nr) doivent êtres pairs.
La machine présentée à la figure 5 est triphasée (q = 3) et avec Nc = 4, nous obtenons : Ns = 12 et Nr = 10.
Pour une machine triphasée, cette structure minimise, pour une vitesse de rotation donnée, la fréquence électrique.
2.2.2. Optimisation du rayon d’entrefer
En régime linéaire (pas de saturation magnétique), nous pouvons établir des formulations simples permettant d’optimiser le rapport entre le rayon extérieur (Rext) et le rayon d’entrefer (Re) afin de maximiser le rapport couple moyen/pertes Joule. Le paramètre à optimiser est donc :
ext
er R
Rk = [6]
– La largeur d’un aimant (ea) et sa hauteur (ha) sont définis par :
4Re se
aθ
= et ⎟⎟⎠
⎞⎜⎜⎝
⎛−=−= 1
k1RRRhr
eeexta [7]
– Le couple statique est donné par : ( ) MMr InN23C ψ= [8]
ψM : flux max par spire, IM : courant crête et n : nombre de spires
– Les pertes Joule linéiques sont données par :
( )bobs2
J SN2P δρ= ; [9]
δ : densité de courant ; Sbob : section d’un bobinage.
Avec nSkN
2I bobb
cM δ= où kb : coefficient de bobinage [10]

436 RS - RIGE – 10/2007. Avion plus électrique
On en déduit que le rapport du couple sur les pertes Joule ne dépend que du flux maximal par spire (les paramètres Nr, Nc, δ, kb étant fixés).
– Le flux ψM peut être exprimé par :
2a
aa
rM
eeh41
LhBk2+
=ψ ψ avec kψ ≈ 0,74, L : longueur active et e : entrefer
Compte tenu des dimensions imposées, par exemple celle du rayon extérieur et celle de l’entrefer, il est possible de déterminer une valeur de kr qui maximise le rapport du couple sur les pertes Joule. Dans notre cas, l’optimum se situe pour une valeur de kr voisine de 0,6. Bien évidemment, un complément d’étude en magnétostatique non linéaire couplée à une étude thermique est nécessaire pour affiner la valeur de ce coefficient.
2.2.3. Minimisation des ondulations du couple de détente
Dans la configuration initiale, pour des raisons magnétiques, la largeur angulaire de la denture rotorique est prise égale à celle du stator (wr = ws), ce qui correspond à une valeur de βr de Nr/4 Ns, soit 0,21 dans notre cas.
Nous avons calculé, à l’aide du logiciel E.F.2D, MAXWELL software - ANSOFT CORPORATION, le couple de détente de la machine. Le résultat est présenté sur la figure suivante (courbe « rotor initial »). Nous pouvons constater que deux composantes harmoniques sont prépondérantes, celle de rang 6 (± 18 Nm/m) et celle de rang 12 (± 16 Nm/m).
-30
-20
-10
0
10
20
30
0 15 30 45 60 75 90 105 120
Position (°élec)
Couple de détente (Nm/m)
Rotor initial
Rotor optimisé
Figure 8. Couple de détente pour deux rotors différents
Nous avons cherché la valeur du paramètre βr permettant de minimiser ces composantes harmoniques et par là même l’amplitude du couple de détente. Nous sommes arrivés à une valeur de 0,5. Le résultat est présenté sur la figure précédente (courbe « rotor optimisé »). Avec ce rotor, seule la composante harmonique de rang 12 reste présente (± 5 Nm/m), soit pour la machine présentée une valeur de ± 0,4 Nm (soit une longueur active de 80 mm).

Machine à commutation de flux pour déshuileur 437
3. Modélisation et analyse du comportement thermique
Cette étude va nous permettre de déterminer le courant thermique qui est le courant (valeur efficace) pour un échauffement interne donné.
3.1. Présentation de la méthode de calcul
Pour le calcul des échauffements, nous utilisons le logiciel « femm » de calculs par éléments finis 2D dédié à la magnétostatique. Ce logiciel permet de résoudre numériquement, dans un plan à deux dimensions, des équations aux dérivées partielles.
Il va nous permettre de modéliser un système thermique afin de déterminer la température en différents points du système et ceci en statique (régime permanent).
Les calculs sont effectués dans le cadre des hypothèses (simplificatrices) suivantes :
– transferts thermiques uniquement radiaux (cas défavorable), – têtes de bobines non prises en compte, aussi bien pour le calcul des pertes que
pour les transferts thermiques.
Concrètement, ce logiciel permet de résoudre les équations de Maxwell afin de déterminer les grandeurs macroscopiques, pour une structure électromagnétique, que sont le champ électrique (E), le champ magnétique (H), l’induction électrique (D) et l’induction magnétique (B).
En magnétostatique, l’équation à résoudre est :
→=
→∇
µ∇− J)A1(
avec →A : potentiel vecteur,
→J : densité de courant et ∇ : opérateur Nabla.
→=
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛→
µ− JAgrad1div avec
→A = [0,0,A(x,y)] et
→J = [0,0,J(x,y)]
⎥⎦
⎤⎢⎣
⎡∂∂
−=∂∂
==→
0,xAB,
yABB yx

438 RS - RIGE – 10/2007. Avion plus électrique
Pour un système magnétique, les conditions aux limites sont de deux types :
– soit une condition aux limites de type « Neumann » : normale B;0nA
=∂∂ ,
– soit une condition aux limites de type « Dirichlet » : A = cte ; B tangente.
En thermique, l’équation à résoudre est :
( ) ( )TThQTk ext −+=∇∇−
avec : – k = conductivité thermique en W/m/°C, – h = coefficient de convection en W/m2/°C, – Q = source de pertes en W, – Text = température extérieure en °C.
Correspondance magnétostatique ⇔ thermique : – T = A, – Q = J, – k = 1/µ.
Paramètres de calcul : – température de la carcasse et de l’axe : 120 °C, – température maximale du point chaud du bobinage = 180 °C, – coefficient de conduction thermique.
Air : λair = 0,03 W/°C/m ⇒ µr = (µ0 λ)-1 = 2,67 107 Fer : λfer = 32 W/°C/m ⇒ µr = 2,5 104 Aimant : λaimant = 5 W/°C/m ⇒ µr = 1,6 105 Bobinage : λbob = 2,35 λair/(1-kb) = 0,118 W/°C/m ⇒ µr = 6,809 106
Source de pertes :
Fer : )kg/W(P780010J 6th
−=
Cuivre : 2b
6th k10J δρ= − avec ( )moy_cu0 T1 α+ρ=ρ
3.2. Résultats de l’étude thermique
Nous avons mesuré les pertes à vide de l’ensemble convertisseur-machine, qui correspondent quasi-intégralement aux pertes fer.

Machine à commutation de flux pour déshuileur 439
pertes à vide (vitesse de rotation)
0100200300400500600700800900
1000
0 2000 4000 6000 8000 10000 12000 14000
Figure 9. Pertes à vide (W) en fonction de la vitesse de rotation (tr/min)
Pour le prototype, la masse des tôles rotor est de 3,3 kg et la masse des tôles stator est de 1,9 kg. Nous en déduisons les pertes fer massiques et la densité de courant équivalente pour le calcul thermique (Tableau 1).
N (tr/min) Pfer (W) Pfer (W/kg) Jth
2000 100 20 0,15
4000 250 50 0,4
8000 550 100 0,8
15000 1000 200 1,6
Tableau 1. Densité de courant thermique en fonction de la vitesse de rotation
Nous avons ensuite calculé la densité de courant qui permet de vérifier les contraintes thermiques, à savoir une température de la carcasse et de l’axe de 120 °C et un échauffement interne de 60 °C au maximum.
Avec : ρ0 = 1,8 10-8 Ωm ; α = 0,0043 °C-1
et pour δ = 5,8 A/mm2 ; kb = 40 % ; Tcu_moy = 150 °C ⇒ Jth = 0,388.
Nous avons constaté (voir Tableau 2) que, quelle que soit la vitesse de rotation, la densité de courant est quasiment constante. Cela signifie que les pertes fer n’influent pas sur la thermique interne. Nous avons aussi calculé la température moyenne des bobinages, qui est différente de la température au point le plus chaud.

440 RS - RIGE – 10/2007. Avion plus électrique
N (tr/min) δ (A/mm2) Tcu_moy
2000 6,0 150
4000 6,0 150
8000 5,9 150
15000 5,8 150
Tableau 2. Densité de courant thermique en fonction de la vitesse de rotation
Figure 10. Lignes isothermes pour N = 15 000 tr/min et δ = 5,8 A/mm2
Pour finir, il faut remarquer que les aimants permanents sont quasiment à la même température que la carcasse extérieure.
4. Alimentation et stratégie de la commande
4.1. Cahier des charges
Le Tableau 3 présente le cahier des charges pour la machine d’entraînement du déshuileur.
Puissance nominale 2 kWVitesse de basse 4000 tr/minVitesse maximale 15 000 tr/minTension du bus DC 350 VDiamètre extérieur 150 mmTempérature ambiante 120 °C
Tableau 3. Cahier des charges de la machine d’entraînement REMARQUE. — A 15 000 tr/min, la vitesse périphérique du rotor est de 85 m/s.
T = 120 °C Tcu_max = 180 °C

Machine à commutation de flux pour déshuileur 441
4.2. Dimensions de la machine électrique
Le tableau suivant donne les principales dimensions de la machine dimensionnée (Tableau 4).
Diamètre extérieur 140 mm Diamètre intérieur 108 mm Longueur de l’entrefer 0,2 mm Longueur active 80 mm Aimants Samarium Cobalt Recoma 20 : Br = 0,8 T
Tableau 4. Dimensions de la machine dimensionnée
4.3. Présentation de la chaîne de conversion
La machine électrique est associée à un onduleur de tension deux niveaux triphasé à IGBT. L’ensemble de l’électronique de puissance est un module PS11037 de MITSUBISHI SEMICONDUCTOR.
La mesure de courant est effectuée à l’aide de sonde de courant LEM HY-15P. Le bus DC est constitué de trois condensateurs électrolytiques de 470 µF, d’une
diode pour annuler les renvois d’énergie vers la source 350 V et d’une résistance de 5 kΩ - 50 W en parallèle sur les condensateurs.
Le contrôle des courants est réalisé à l’aide de correcteurs à hystérésis analogiques qui commandent les deux valeurs extrêmes des rapports cycliques des trois commandes qui se fait avec MLI à une fréquence de 10 kHz. Le schéma de principe est donné à la figure suivante.
∆Ii1mes
i1conscom1
∆Ii2mes
i2cons com2
∆I
com3
Figure 11. Régulateurs à hystérésis pour le contrôle des courants

442 RS - RIGE – 10/2007. Avion plus électrique
La mesure de la position est réalisée avec un capteur optique comportant deux fois trois ensembles photodiode-phototransistor.
Le premier groupe de trois ensembles photodiode-phototransistor est chargé de générer les composantes actives des courants et le deuxième, les composantes réactives.
Figure 12. Ch1 : fem ; Réf1 : composante active du courant ; Ch2 : composante réactive
4.4. Stratégie de commande
L’utilisation d’un composant programmable permet de déterminer la vitesse de rotation de la machine, via une mesure de la fréquence des signaux issus du capteur optique. Pour le défluxage électronique, ce composant permet également de régler l’amplitude de la consigne du courant démagnétisant ou réactifs (Ir) (voir figures ci-dessous), dont le comportement varie non linéairement en fonction de la fréquence. Les caractéristiques non linéaires sont stockées dans une table interne au CPLD (Complex Programmable Logic Device).

Machine à commutation de flux pour déshuileur 443
0
0.5
1
1.5
2
2.5
0 5000 10000 15000speed (rpm)
Vr (V)
Figure 13a Tension de consigne pour le réglage de l’amplitude du courant démagnétisant
0
1
2
3
4
5
6
7
8
0 5000 10000 15000speed (rpm)
Ir_e
ff (A
)
Figure 13b Valeur efficace du courant démagnétisant
5. Validation expérimentale : essais
5.1. Modélisation thermique
Nous avons mesuré la température moyenne du cuivre par mesure de résistance en régime établi. Dans un premier temps, nous avons déterminé la valeur de la résistance, de deux phases, de référence. Cette mesure doit être réalisée au début des essais, lorsque la température des enroulements n’a pas eu le temps d’évoluer.
A Tamb = 20 °C 2 R = 317 mΩ (mesure entre phases) 2 R0 = 292 mΩ (résistance à 0°C)
Nous avons, ensuite, appliqué une tension continue constante aux bornes de deux phases et nous avons relevé le courant lorsque le régime établi est atteint.
– I = 14,6 A (δ = 7,3 A/mm2) Tcu_moy = 41 °C et Tcarc = 21 °C
∆T = 20 °C et par calcul ∆Tmoy = 31 °C
– I = 20,6 A (δ = 10,3 A/mm2) Tcu_moy = 65 °C et Tcarc = 23 °C
∆T = 42 °C et par calcul ∆Tmoy = 67 °C
5.2. Mesure expérimentale du couple par essais d’accélération
Ces essais d’accélération ne nécessitent pas de charge. Il faut cependant connaître le moment d’inertie entraîné. Les essais peuvent se faire sous tension réduite (bus DC : U0 = 150 V).
Nous ajustons l’amplitude du courant actif, le courant réactif étant nul.

444 RS - RIGE – 10/2007. Avion plus électrique
Nous avons utilisé pour ces essais un ensemble « classique » pour la commande, c’est-à-dire un calculateur permettant de générer des consignes de courants sinusoïdaux à partir de la mesure de la position réalisée avec un capteur incrémental optique à 1024 traits par tour.
Nous relevons l’allure du courant (figure 14) et l’image de la vitesse de rotation (figure 15). De ces différents essais nous déduisons le couple moyen quasi-statique (Tableau 5).
Î (A) δ (A/mm2) ∆N (tr/min) ∆t (ms) dΩ/dt Cmoy (Nm) avec J = 0,005 kg m2
6 2,1 300 56 561 2,8 10 3,5 600 60 1047 5,2 15 5,3 600 46 1366 6,8 20 7,1 600 36 1745 8,7
Tableau 5. Mesures lors de l’essai d’accélération
Figure 14. Courant (Ch2 : 10 A/div)
Machine à commutation de flux pour déshuileur 445
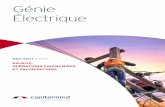
Figure 15. Vitesse (Ch2 : 1 V = 100 tr/min)
5.3. Campagne de mesures sur le banc complet
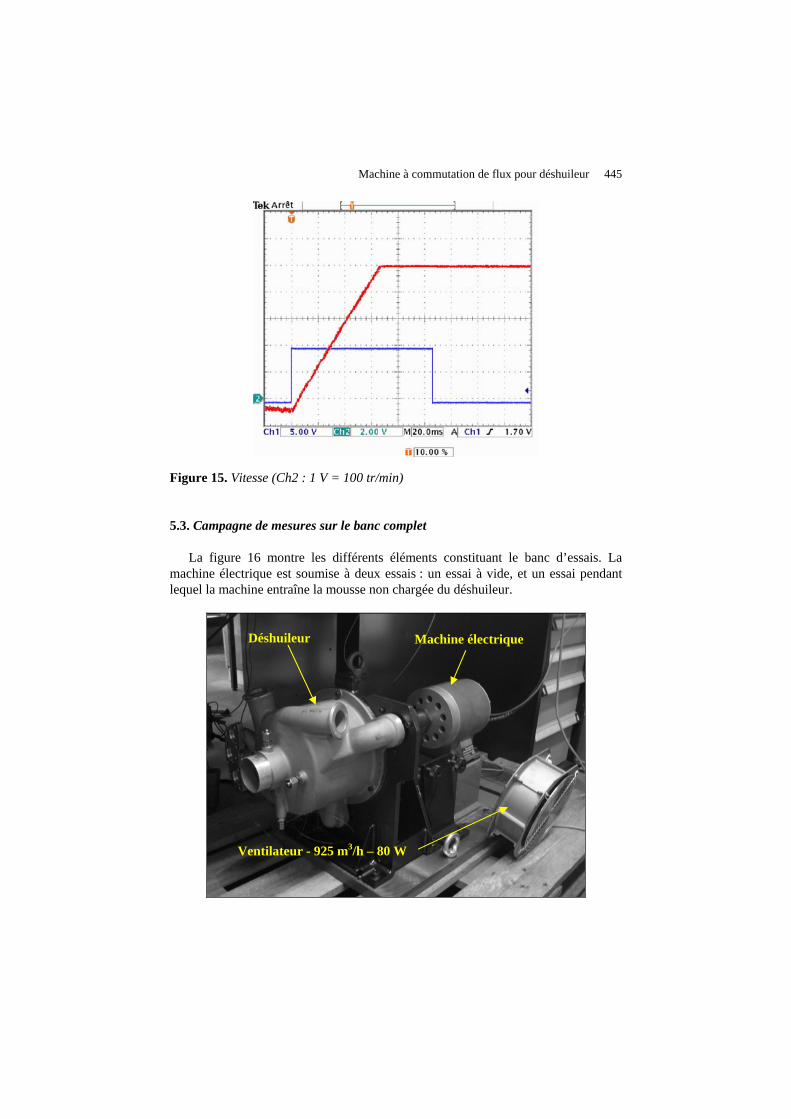
La figure 16 montre les différents éléments constituant le banc d’essais. La machine électrique est soumise à deux essais : un essai à vide, et un essai pendant lequel la machine entraîne la mousse non chargée du déshuileur.
Machine électrique
Ventilateur - 925 m3/h – 80 W
Déshuileur

446 RS - RIGE – 10/2007. Avion plus électrique
Figure 16. Banc d’essais
Un ventilateur externe permet de se rapprocher des conditions thermiques prévues, c’est-à-dire une température de carcasse de 120 °C.
Température de la carcasse, à 15000 tr/min
0
20
40
60
80
100
120
0 500 1000 1500 2000 2500 3000 3500t (s)
sans ventilateuravec ventilateur
Figure 17. Température de la carcasse, moteur à vide, à 15 000 tr/min
Nous avons relevé la puissance au niveau du bus DC de 350 V, pour le deuxième essai (entraînement du déshuileur, la mousse n’étant pas chargée) (figure18).
0
500
1000
1500
2000
2500
0 2000 4000 6000 8000 10000 12000 14000
N (tr/min)
Pabs (W)Pabs_à_vide (W)
Figure 18. Puissance absorbée en charge et à vide (moteur électrique seul)

Machine à commutation de flux pour déshuileur 447
Il faut noter, enfin, que le niveau de bruit acoustique de ce type de structures est relativement élevé. Cependant, cet inconvénient est négligeable dans le contexte de l’application où la machine se trouve à proximité du réacteur.
6. Conclusion
Nous avons proposé et étudié une structure de machine électrique à commutation de flux pour l’entraînement d’un système déshuileur qui doit être embarqué dans un avion. Nous avons pu confronter nos outils de modélisation et de calculs pour une application donnée sur un prototype. Les contraintes sévères en température semblent convenir à ce type de machine électrique où quasiment toutes les sources de pertes sont situées sur la partie fixe, ce qui facilite leurs évacuations vers l’ambiant. Outre cette particularité avantageuse, cette machine possède un rotor passif, constitué uniquement de tôles ferromagnétiques, ce qui est un avantage pour des vitesses de rotation « élevées ». En revanche, le nombre de paires de pôles élevé (ici dix) se trouve être contradictoire pour les vitesses de rotation « élevées » où l’électronique de commande est mise à rude épreuve. Un autre avantage de cette machine est sa réaction magnétique d’induit élevée qui facilite le défluxage électronique et autorise des fonctionnements à des vitesses de rotation « élevées » sans augmentation des pertes Joule. De plus, ce défluxage ne se fait pas au détriment des aimants car la réaction magnétique d’induit n’a aucune incidence sur leur démagnétisation. En ce qui concerne l’application déshuileur, les différents points présentés semblent lui être favorables. Il faut cependant comparer différentes technologies de machines électriques et analyser les performances en termes de puissance massique et de rendement.
7. Bibliographie
Akemekou D., Etude, réalisation et expérimentation de moteurs hybrides spéciaux, Thèse de doctorat, septembre 1996.
Ben Ahmed H., Contribution à la conception de machines synchrones à aimants permanents et bobinage global, Thèse de doctorat, janvier 1994.
Chalmers B.J., Musaba L., Gosden D.F., “Performance characteristics of synchronous motor drives with surface magnets and field weakening”, IEEE - IAS Conf., vol. 1, 1996, p. 511-517.
Chalmers B.J., Musaba L., Gosden D.F., “Variable-frequency synchronous motor drives for electric vehicles”, IEEE trans. on industry applications, vol. 32, n° 4, July/August 1996, p. 896-903.
Chauveau E., Contribution au calcul électromagnétique et thermique des machines électriques – Application à l’étude de l’influence des harmoniques sur l’échauffement des moteurs asynchrones, Thèse de doctorat, Université de Nantes, 2001.

448 RS - RIGE – 10/2007. Avion plus électrique
Chen Y.F., Modélisation thermique des moteurs asynchrones en vue de la réalisation d’un outil CAO, Thèse de doctorat, Université de Rouen, 1994.
General Electric, Heat transfer and fluid flow data book, 1981.
Giraud V., Etude des conductivités en régime permanent dans les matériaux composites, Mémoire de DEA, Université de Poitiers, 1993.
Hoang E., Ben Ahmed A.H., Lucidarme J., “Switching flux permanent magnet polyphased synchronous machines”, EPE’97 Conf., Trondheim, September 1997.
Hoang E., Gabsi M., Lécrivain M., Multon B., “Influence of magnetic losses on maximum power limits of synchronous permanent magnet drives in flux-weakening mode”, IAS 2000 Conf., Roma, Italy, 8-12 October 2000.
Jahns T.M., “Flux-weakening regime operation of an interior permanent-magnet synchronous motor drive”, IEEE trans. on industry applications, vol. IA-231, n° 4, July/August 1995, p. 681-689.
Prévond L., Etude, expérimentation et modélisation de structures hybrides innovantes tournantes et linéaires, Thèse de doctorat, décembre 1994.
Renard B., Etude expérimentale et modélisation du comportement thermique d’une machine électrique multifonction, Application à un alterno-demarreur intégré, Thèse de doctorat, Université de Poitiers, juillet 2003.
Rohsenow W.M., Hartnett J.P., Ganic E.N., Handbook of heat transfer fundamentals, second edition McGraw-Hill, 1998.
Schiferl R.F., Lipo T.A., “Power capability of salient pole permanent magnet synchronous motors in variable speed drive applications”, IEEE trans. on IA, vol. 26, n° 1, January/February 1995, p. 115-122.
Soong W.L., Miller T.J.E., “Field-weakening performance of brushless synchronous AC motor drives”, IEE proc.-elect. power appl., vol. 141, n° 6, November 1994, p. 331-340.
Sylvestre C., Modélisation d’une machine triphasée à aimants permanents et à commutation de flux et étude comparative avec des machines synchrones à aimants permanents classiques, Stage de DEA, ENS de Cachan, juin 1999.
Vrancik J.E., Prediction of windage power loss in alternators, NASA technical note, TN D-4849, October 1968.