energy-efficient control of commercial building hvac systems and
129
ENERGY-EFFICIENT CONTROL OF COMMERCIAL BUILDING HVAC SYSTEMS AND ANALYSIS FOR GRID SUPPORT By NAREN SRIVATHS RAMAN A DISSERTATION PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY UNIVERSITY OF FLORIDA 2021
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of energy-efficient control of commercial building hvac systems and

ENERGY-EFFICIENT CONTROL OF COMMERCIAL BUILDING HVAC SYSTEMS ANDANALYSIS FOR GRID SUPPORT
By
NAREN SRIVATHS RAMAN
A DISSERTATION PRESENTED TO THE GRADUATE SCHOOLOF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE DEGREE OFDOCTOR OF PHILOSOPHY
UNIVERSITY OF FLORIDA
2021

© 2021 Naren Srivaths Raman
To my parents

ACKNOWLEDGMENTS
I thank my advisor, Dr. Prabir Barooah, for understanding my strengths and weaknesses
right from the beginning and guiding me accordingly throughout my Ph.D. program. He taught
me to communicate scientific ideas in a clear and concise manner. He gave me an opportunity
to work on a variety of projects, always believed in my abilities, and constantly pushed me to
expand my boundaries. I am very grateful for his continuous support.
I would like to thank Dr. Herbert Ingley, as my first exposure to commercial heating,
ventilation, and air conditioning (HVAC) systems was through his course during my master’s
program in the fall of 2011. He has always been very kind, supportive, and has patiently shared
his expertise in HVAC systems.
I thank Dr. Oscar Crisalle and Dr. Matthew Hale for being in my committee, and giving
feedback to improve the quality and presentation of this work. Dr. Oscar Crisalle’s feedback
after my oral proposal has helped in making me a confident speaker.
I am very thankful to Dr. Sean Meyn for providing my first exposure to reinforcement
learning (RL) and several helpful discussions on using RL for various applications and controls
in general. I also thank Dr. Timothy Middelkoop for teaching me to manage the information
technology (IT) infrastructure used to communicate with the energy management system at
the Innovation Hub building.
My special thanks to Skip Rockwell and others from the University of Florida Physical
Plant Division for various helpful discussions and their help with experiments at the Innovation
Hub building. I also thank David Brooks for taking the time to share his expertise in HVAC
systems.
I thank Dr. Jonathan Brooks, Dr. Adithya Devraj, Vignesh Subramaniam, Dr. Surya
Chandan Dhulipala, Karthikeya Devaprasad, Bo Chen, Rahul Umashankar Chaturvedi, Zhong
Guo, Srivattsan Sridharan, my lab-mates, friends, teachers, co-authors of the various papers
I have written, and all others who supported me in any respect during the completion of this
work.
4

I thank my parents and my family for their constant love and support. I dedicate this
dissertation to my parents.
The research reported here was partially supported by the National Science Foundation
through grants 1646229 (CPS/ECCS) and 1934322 (CMMI), the State of Florida through a
REET (Renewable Energy and Energy Efficient Technologies) grant, and the Department of
Energy through GMLC program (Virtual Batteries).
5
TABLE OF CONTENTSpage
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
CHAPTER
1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2 MPC FOR ENERGY-EFFICIENT HVAC OPERATION WITH HUMIDITY ANDLATENT HEAT CONSIDERATIONS . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2 Review of Prior Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.3 System Description and Models . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.1 Hygro-Thermal Dynamics Model . . . . . . . . . . . . . . . . . . . . 272.3.2 Cooling and Dehumidifying Coil Model . . . . . . . . . . . . . . . . . 272.3.3 Power Consumption Models . . . . . . . . . . . . . . . . . . . . . . . 30
2.4 Control Algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.4.1 Proposed Controller: SL-MPC . . . . . . . . . . . . . . . . . . . . . . 312.4.2 Model Predictive Control Incorporating Only Sensible Heat (S-MPC) . 352.4.3 Baseline Control (BL) . . . . . . . . . . . . . . . . . . . . . . . . . . 362.4.4 Information Requirement for Implementation . . . . . . . . . . . . . . 37
2.5 Simulation Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.5.1 Plant Parameters and Thermal Comfort Envelope . . . . . . . . . . . 392.5.2 Controller Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . 402.5.3 Performance Metrics . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.6 Results and Discussions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422.6.1 Results for the Different Outdoor Weather Conditions . . . . . . . . . 42
2.6.1.1 Hot-humid day . . . . . . . . . . . . . . . . . . . . . . . . 422.6.1.2 Mild day . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442.6.1.3 Cold day . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.6.2 Comparison among Controllers . . . . . . . . . . . . . . . . . . . . . 462.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3 MPC-BASED HIERARCHICAL CONTROL OF A MULTI-ZONE COMMERCIALHVAC SYSTEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.2 Comparison with Literature on Multi-Zone MPC . . . . . . . . . . . . . . . . 533.3 System and Problem Description, and Plant Simulator . . . . . . . . . . . . . 543.4 Proposed Multi-Zone Hierarchical Control (MZHC) . . . . . . . . . . . . . . 59
6
3.4.1 MPC-Based High-Level Controller (HLC) . . . . . . . . . . . . . . . . 603.4.2 Projection-Based Low-Level Controller (LLC) . . . . . . . . . . . . . . 65
3.5 Baseline Control (BL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 683.6 Simulation Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 693.7 Results and Discussions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.7.1 Hot-Humid Week . . . . . . . . . . . . . . . . . . . . . . . . . . . . 753.7.2 Mild Week . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 773.7.3 Cold Week . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.8 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4 ANALYSIS OF ROUND-TRIP EFFICIENCY OF AN HVAC-BASED VIRTUAL BATTERY 82
4.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 824.2 Definitions and Other Preliminaries . . . . . . . . . . . . . . . . . . . . . . . 85
4.2.1 Round-Trip Efficiency of an Electrochemical Battery . . . . . . . . . . 854.2.2 Round-Trip Efficiency of an HVAC-Based VES System . . . . . . . . . 864.2.3 Charging vs. Change in SoC . . . . . . . . . . . . . . . . . . . . . . . 87
4.3 Model of an HVAC-Based VES System . . . . . . . . . . . . . . . . . . . . . 884.3.1 Thermal Dynamics of HVAC-Based VES . . . . . . . . . . . . . . . . 894.3.2 HVAC Power Consumption Model . . . . . . . . . . . . . . . . . . . . 904.3.3 VES System Dynamics and Power Consumption . . . . . . . . . . . . 92
4.4 RTE with Zero-Mean Square-Wave Power Consumption . . . . . . . . . . . . 934.4.1 A Single Period of Square-Wave Power Consumption . . . . . . . . . . 944.4.2 Multiple Periods of Square-Wave Power Consumption . . . . . . . . . 984.4.3 Numerical Verification . . . . . . . . . . . . . . . . . . . . . . . . . . 100
4.5 RTE with Nonzero-Mean Square-Wave Power Consumption . . . . . . . . . . 1024.5.1 Nonzero-Mean Power Deviation to Ensure Zero-Mean Temperature
Deviation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1024.5.2 Effect of Various Parameters on η∞rt . . . . . . . . . . . . . . . . . . . 105
4.5.2.1 Building size . . . . . . . . . . . . . . . . . . . . . . . . . . 1064.5.2.2 Time period of the power deviation . . . . . . . . . . . . . . 107
4.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5 CONCLUSION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
APPENDIX
A PROOFS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
B EXPRESSIONS FOR ∆P AND TO . . . . . . . . . . . . . . . . . . . . . . . . . . 118
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
BIOGRAPHICAL SKETCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
7
LIST OF TABLESTable page
2-1 Parameters used in the MPC controllers. . . . . . . . . . . . . . . . . . . . . . . . 40
3-1 VAV schedule. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3-2 Parameters used for the aggregate thermal dynamic model in the HLC. . . . . . . . 72
8
LIST OF FIGURESFigure page
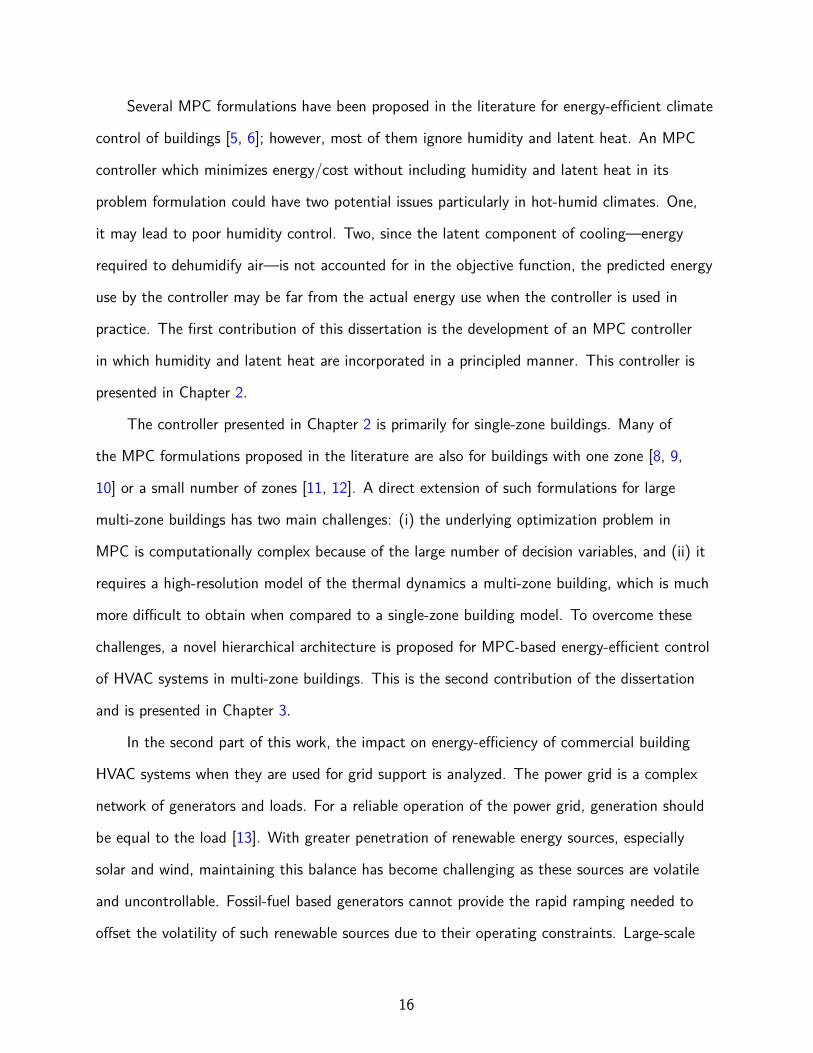
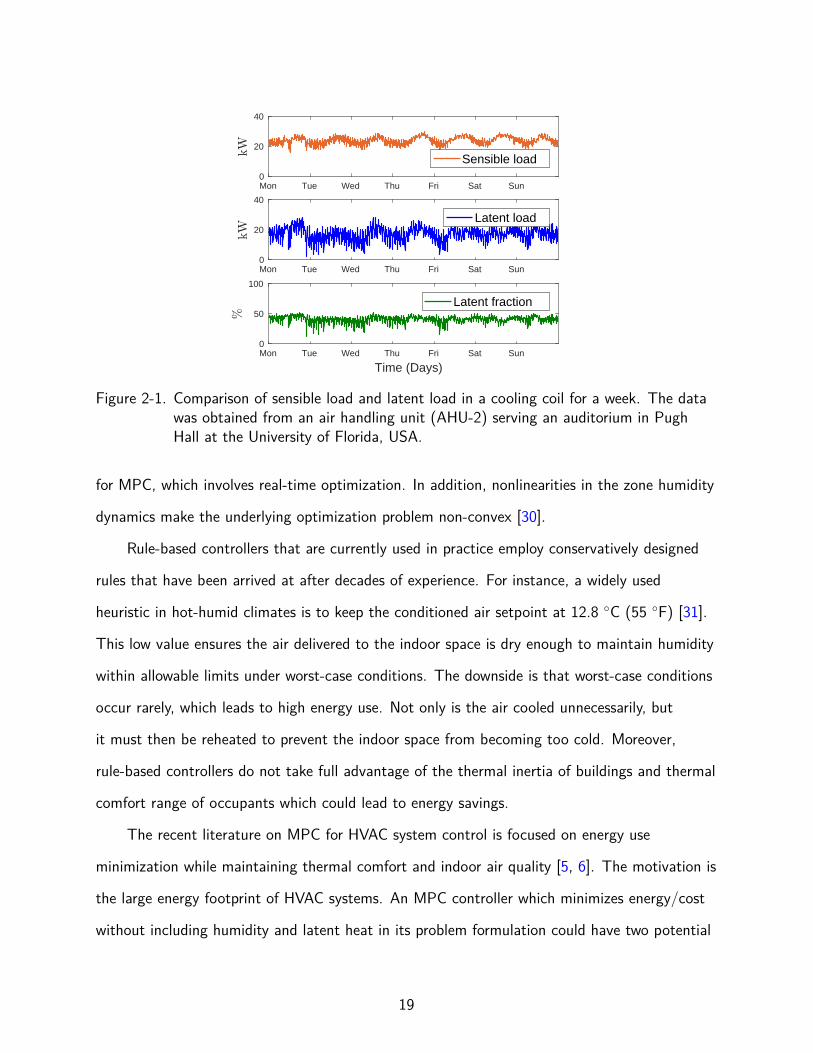
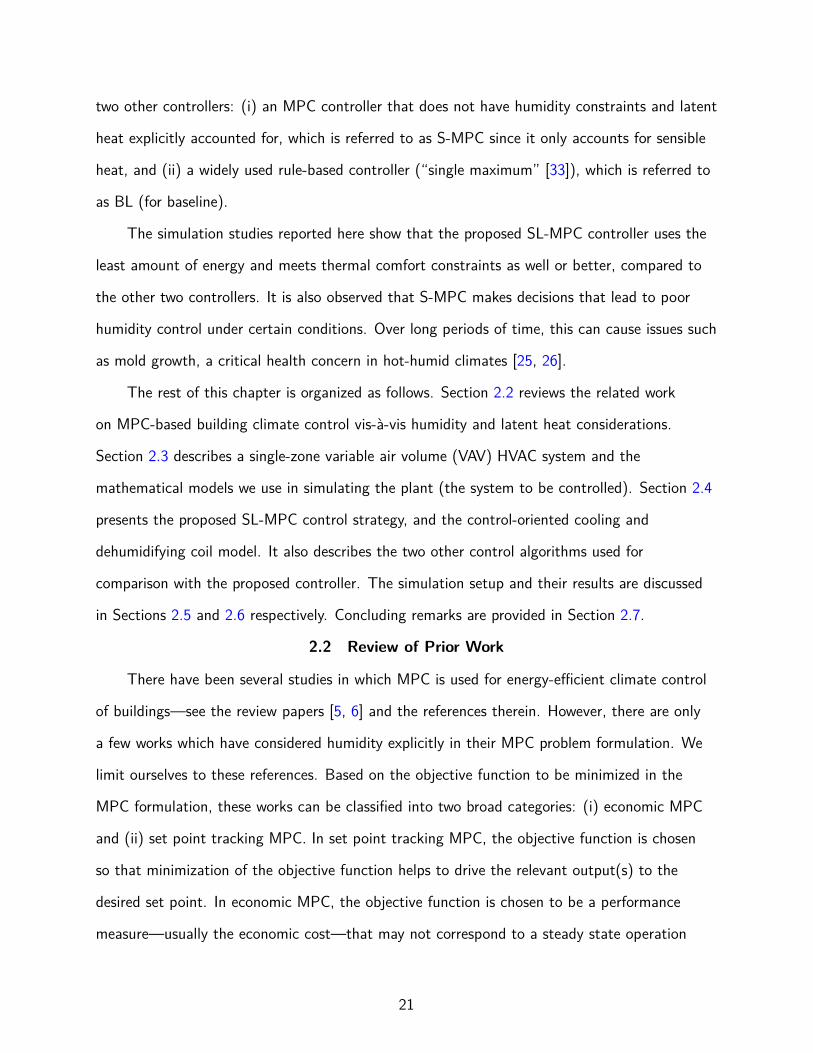
2-1 Comparison of sensible load and latent load in a cooling coil for a week. The datawas obtained from an air handling unit (AHU-2) serving an auditorium in Pugh Hallat the University of Florida, USA. . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
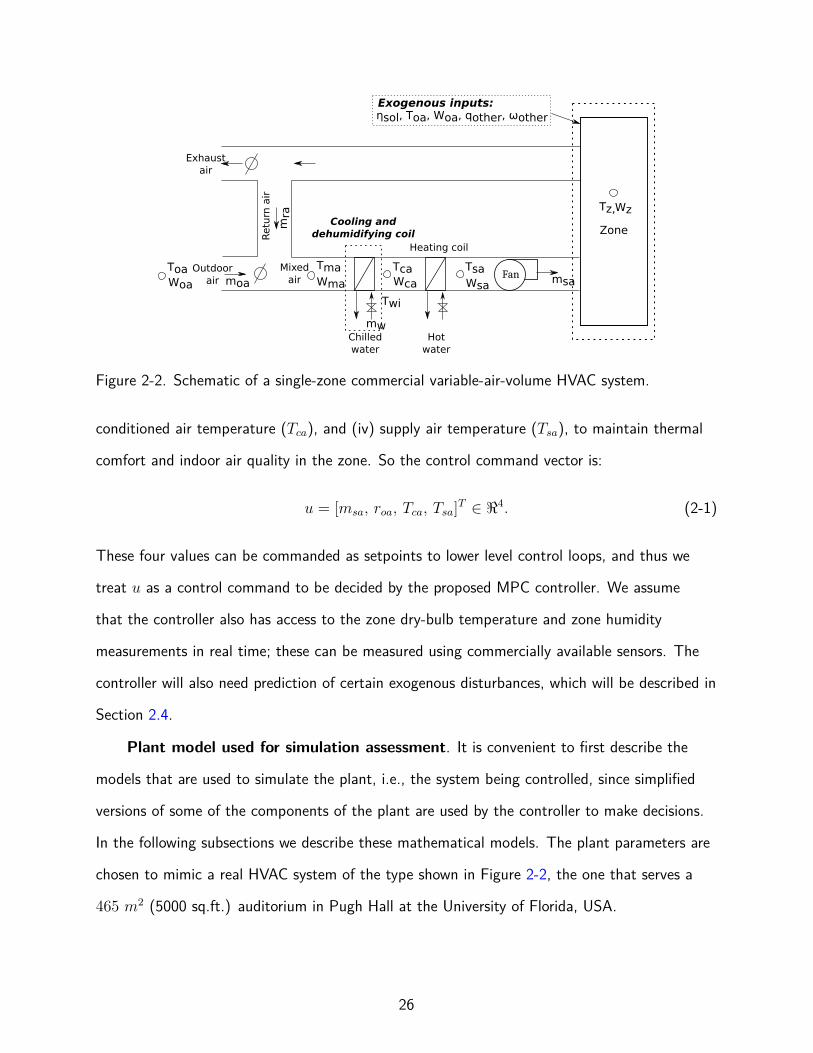
2-2 Schematic of a single-zone commercial variable-air-volume HVAC system. . . . . . . 26
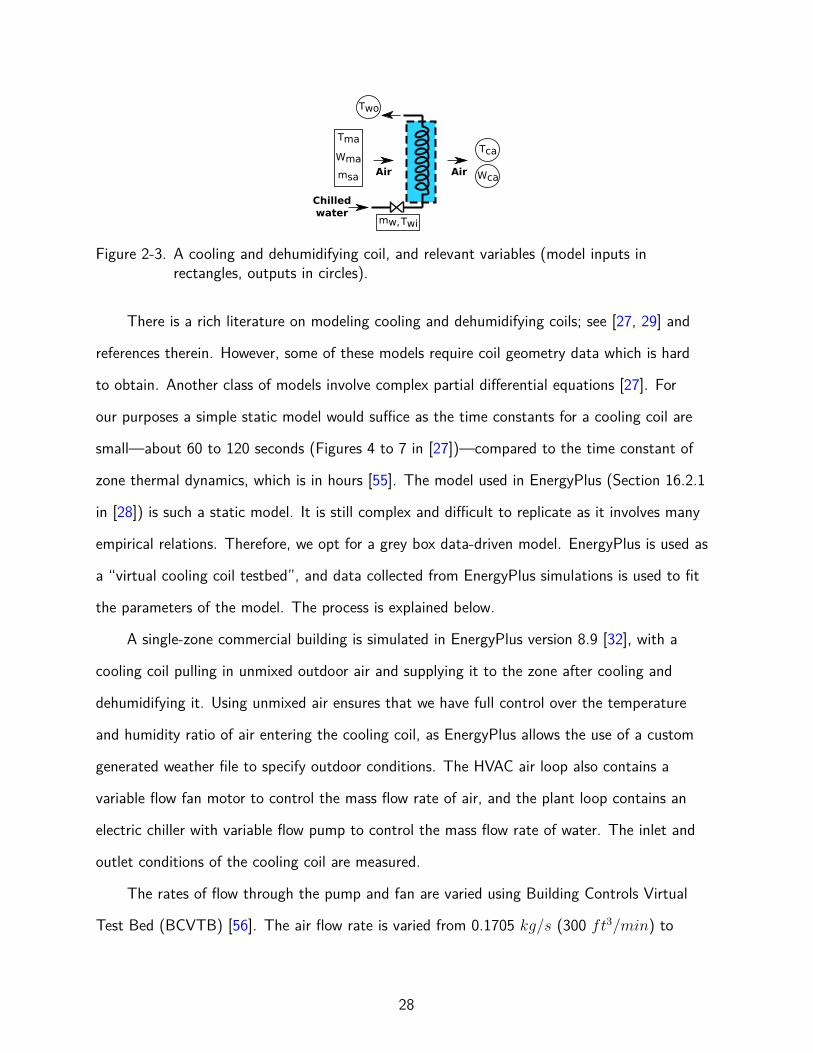
2-3 A cooling and dehumidifying coil, and relevant variables (model inputs in rectangles,outputs in circles). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
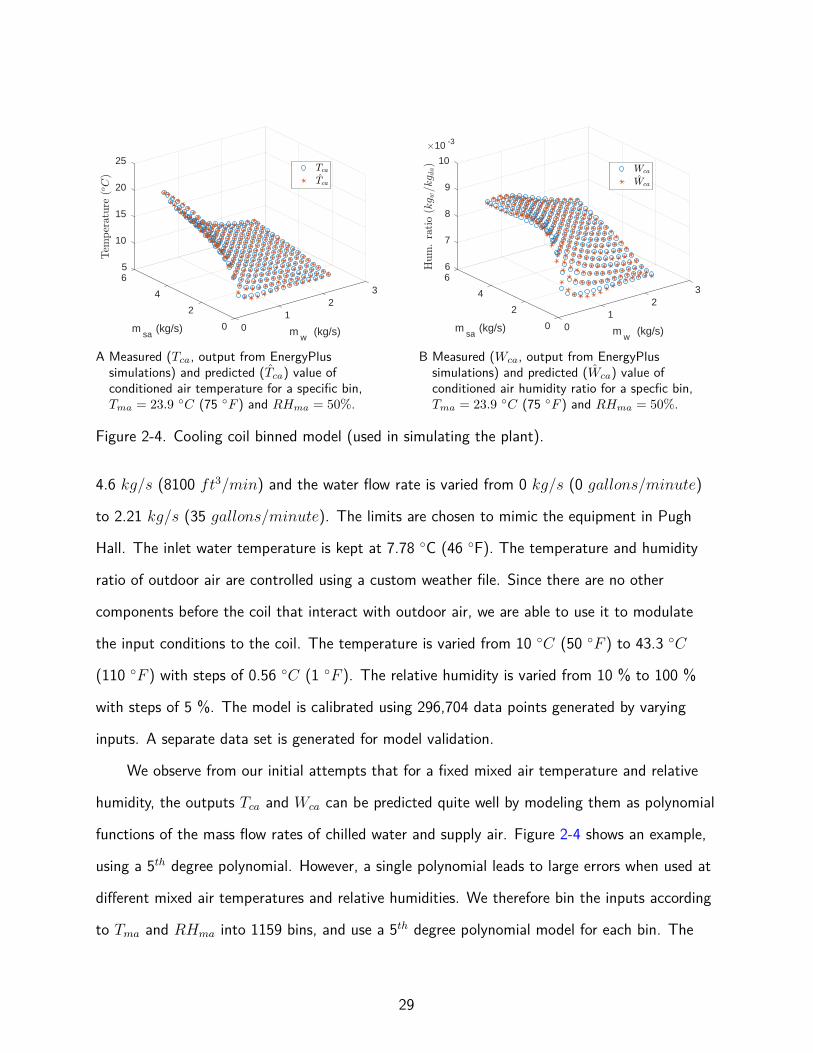
2-4 Cooling coil binned model (used in simulating the plant). . . . . . . . . . . . . . . 29
2-5 Proposed SL-MPC control architecture. . . . . . . . . . . . . . . . . . . . . . . . . 31
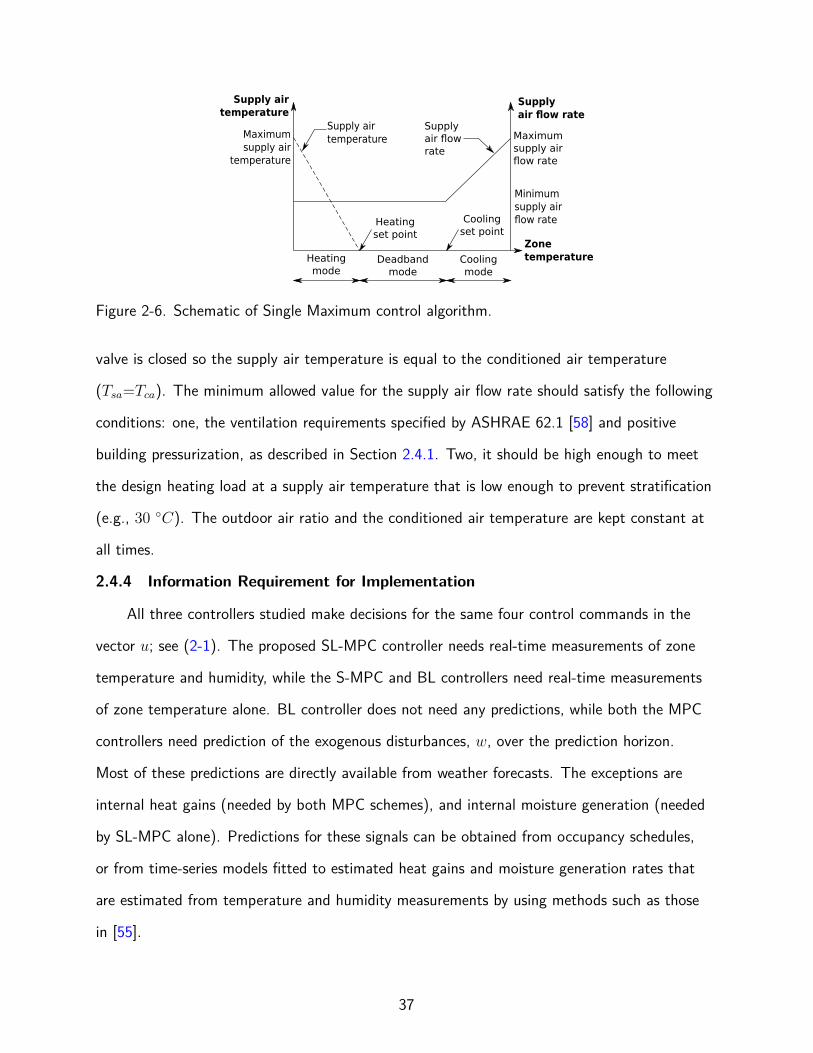
2-6 Schematic of Single Maximum control algorithm. . . . . . . . . . . . . . . . . . . . 37
2-7 Thermal comfort envelope from [1] shown as the hatched areas. Comfort envelopechosen in this work shown as the shaded area during scheduled hours of occupancyand the unshaded area enclosed by dashed line during unoccupied hours. . . . . . . 39
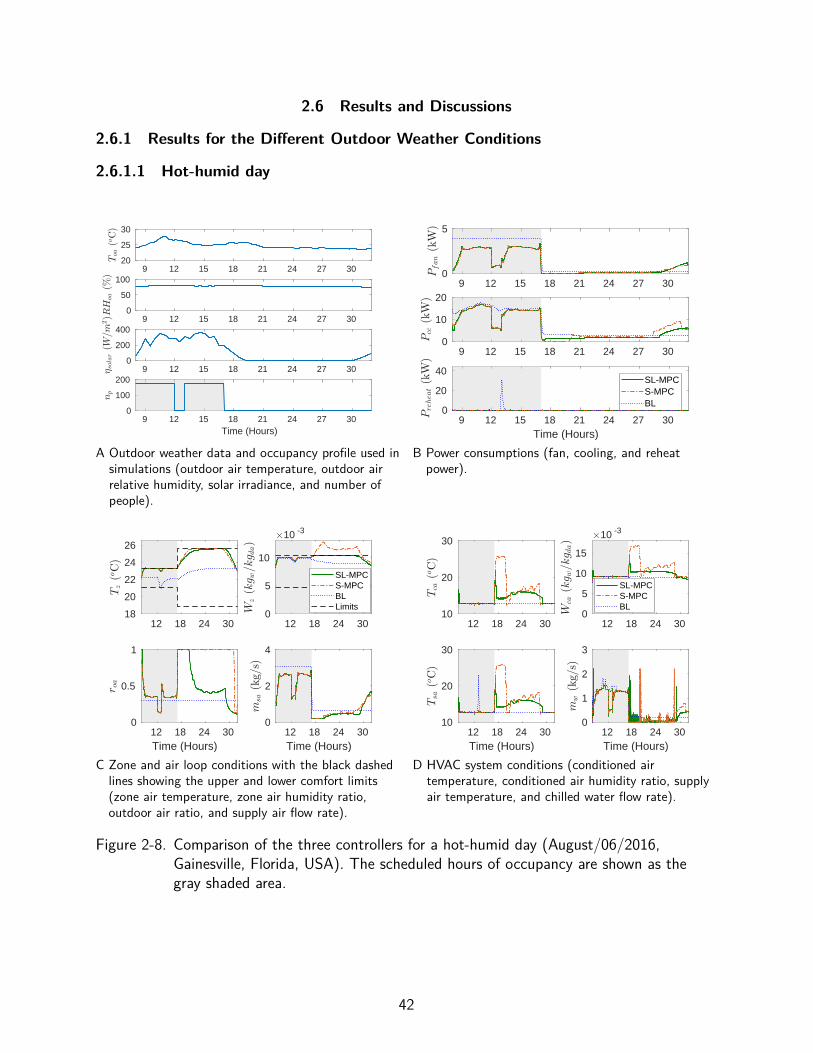
2-8 Comparison of the three controllers for a hot-humid day (August/06/2016, Gainesville,Florida, USA). The scheduled hours of occupancy are shown as the gray shaded area. 42
2-9 Comparison of the three controllers for a mild day (March/25/2016, Gainesville,Florida, USA). The scheduled hours of occupancy are shown as the gray shaded area. 45
2-10 Comparison of controllers’ performance. . . . . . . . . . . . . . . . . . . . . . . . 47
3-1 Schematic of a multi-zone—specifically, a two zone—commercial variable-air-volumeHVAC system. In this figure, oa: outdoor air, ra: return air, ma: mixed air, ca: conditionedair, and sa: supply air. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3-2 Innovation Hub building located at the University of Florida campus. . . . . . . . . 56
3-3 Floor plans of the southern half of phase-1 which is serviced by AHU-2. . . . . . . . 56
3-4 Floor 1 of the virtual building created in Dymola using components from the IDEASlibrary [2]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3-5 Structure of the proposed multi-zone hierarchical controller (MZHC). We denoteestimates as • and forecasts as ˆ•. Variables with a subscript i are for the individualzones, while the variables with a subscript f represent the aggregate quantities foreach floor/meta-zone. In this figure, Tz,f , Wz,f , qac,f , Tz,f , Tw,f , ˆqint,f , ˆωint,f , andTHLCz,f are ∀f ∈ F; msa,i and Tz,i are for i ∈ If , ∀f ∈ F; Tsa,i is for i ∈ Irh,f , ∀f ∈ F. 60
3-6 Schematic of the Dual Maximum control algorithm. . . . . . . . . . . . . . . . . . 68
9
3-7 Thermal comfort envelope from [1] shown as the hatched areas. Comfort envelopechosen in this chapter shown as the green shaded area. . . . . . . . . . . . . . . . 71
3-8 Out of sample aggregate zone temperature (Tz,f ) prediction results using the estimatedaggregate RC network model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3-9 Comparison of the total energy consumed for a week when using the baseline (BL)and proposed (MZHC) controllers for different outdoor weather conditions. . . . . . 74
3-10 Comparison of the two controllers for a hot-humid week (Jul/06 to Jul/13, Gainesville,Florida, USA). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3-11 Individual zone conditions (temperatures and relative humidities) when using MZHCand BL for a hot-humid week. The black dashed lines are the thermal comfort limits. 77
3-12 Comparison of the two controllers for a mild week (Feb/19 to Feb/26, Gainesville,Florida, USA). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4-1 Simplified schematic of a commercial variable-air-volume HVAC system. . . . . . . . 88
4-2 VES system; we assume that the VES controller provides perfect tracking so thatP (t) tracks P r(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
4-3 Up/down scenario, possibility 1: since T (2tp) > 0 additional charging is neededto bring back T to its initial value(=0). Possibility 2: since T (2tp) < 0 additionaldischarging is needed to bring back T to its initial value(=0). . . . . . . . . . . . . 94
4-4 Down/up scenario, possibility 1: since T (2tp) > 0 additional charging is needed tobring back T to its initial value (=0). Possibility 2: since T (2tp) < 0 additionaldischarging is needed to bring back T to its initial value (=0). . . . . . . . . . . . . 95
4-5 ηrt vs. tp, for roa = 1 and roa = 0.5; ∆P = 0.2P(b)hvac. The vertical line shown is t∗p
(≈12 minutes) computed from (4-24) for roa = 1. . . . . . . . . . . . . . . . . . . 97
4-6 Fan power vs. airflow rate; measurements from AHU-2 of Pugh Hall at UF (circles),and predictions from the best fit model (4-9) to the measurements (curve). . . . . . 97
4-7 Additional charging or discharging needed to bring T to its initial value (=0) aftern periods of down/up cycle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
4-8 Robustness to modeling assumptions. . . . . . . . . . . . . . . . . . . . . . . . . . 101
4-9 Zero-mean power deviation leads to a nonzero-mean temperature deviation at steadystate (plot shown on the bottom right corner). The values used were: ∆P = 0.3P (b)
hvac= 2917.7 W, roa = 0.5, and 2tp = 3600 seconds. . . . . . . . . . . . . . . . . . . . 103
10
4-10 Nonzero-mean power deviation used to ensure that the temperature deviation atsteady state is zero-mean (plot shown on the bottom right corner). The value of∆P used was 168.6 W, for P (b)
hvac = 9725.6 W and ∆P = 0.3P(b)hvac = 2917.7 W,
computed from (B-1). Also roa = 0.5 and 2tp = 3600 seconds. . . . . . . . . . . . 103
4-11 Nonzero-mean power deviation to ensure zero-mean temperature deviation (at steadystate). As before, the time trecov is the time needed to bring the temperature deviationto 0 after n periods of the square-wave power deviation. To is the maximum valueof T after the building reaches steady state. . . . . . . . . . . . . . . . . . . . . . 104
4-12 ηrt vs n, when the virtual battery tracks a nonzero-mean square-wave power consumptionso that the average steady state temperature deviation is zero. η∞rt = 0.8907 for∆P = 0.3P
(b)hvac = 2917.7 W, roa = 0.5, and 2tp = 3600 seconds. . . . . . . . . . . 105
4-13 η∞rt (left axis) and RC (right axis) vs. building size; for roa = 0.5. Case (i): Same∆P (1945.1 W) irrespective of building size. Case (ii): ∆P increasing with buildingsize. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4-14 η∞rt vs. time period (2tp); for roa = 0.5 and ∆P = 0.2P(b)hvac = 1945.1 W. . . . . . . 107
11

Abstract of Dissertation Presented to the Graduate Schoolof the University of Florida in Partial Fulfillment of theRequirements for the Degree of Doctor of Philosophy
ENERGY-EFFICIENT CONTROL OF COMMERCIAL BUILDING HVAC SYSTEMS ANDANALYSIS FOR GRID SUPPORT
By
Naren Srivaths Raman
May 2021
Chair: Prabir BarooahMajor: Mechanical Engineering
Commercial buildings account for 19% of the total energy consumption in the U.S.,
about half of which is used by heating, ventilation, and air conditioning (HVAC) systems. A
two-pronged approach utilizing these commercial HVAC systems can pave the way towards a
sustainable energy future: (i) by improving their energy efficiency, and (ii) by facilitating the
penetration of renewable energy sources into the power grid using inherent flexibility in their
power consumption because of thermal inertia. The goals of this dissertation are twofold,
which will contribute to this approach. One is to improve the energy efficiency of HVAC
systems by developing advanced climate control algorithms. The other is to analyze the impact
on energy efficiency of commercial building HVAC systems when they are used for grid support.
In recent years, model predictive control (MPC) has emerged as the popular tool of choice
for advanced climate control of buildings. Even though several MPC formulations have been
proposed in the literature, most of them ignore humidity and latent heat. The inclusion of
moisture makes the problem considerably more challenging, primarily since a cooling and
dehumidifying coil model which accounts for both sensible and latent heat transfers is needed.
The first algorithm proposed in this dissertation is an MPC controller in which humidity and
latent heat are incorporated in a principled manner. Its performance is tested in simulation
using a plant that differs significantly from the model used by the optimizer. Additionally, the
performance of the proposed controller is compared with that of an MPC controller which
does not explicitly consider humidity, and also to that of a conventional rule-based controller.
12
Simulations show that the proposed MPC controller outperforms the other two consistently. It
is also observed that under certain conditions, the MPC formulation which does not consider
humidity leads to poor humidity control, or higher energy usage as it is unaware of the latent
load on the cooling coil.
The controller proposed above is primarily for single-zone buildings. Several of the
MPC formulations proposed in the literature are also for buildings with one zone or a small
number of zones. A direct extension of such formulations for large multi-zone buildings
has two main challenges: (i) the optimization problem in MPC is computationally complex
because of the large number of decision variables, and (ii) it requires a high-resolution model
of the thermal dynamics of the multi-zone building. To overcome these challenges, a novel
MPC-based hierarchical architecture is proposed. Unlike prior works we do not assume the
availability of a high-resolution multi-zone building model. Instead, the architecture uses a
low-resolution model of the building which is divided into a small number of “meta-zones”
that can be easily identified using existing data-driven modeling techniques. At the higher
level, an MPC controller uses the low-resolution model to make decisions for the air handling
unit (AHU) and the meta-zones. Since the meta-zones are fictitious, a lower level controller
converts the high-level MPC decisions into commands for the individual zones by solving
a projection problem that strikes a trade-off between two potentially conflicting goals: the
AHU-level decisions made by the MPC are respected while the climate of the individual
zones is maintained within the comfort bounds. The performance of the proposed controller
is assessed via simulations in a high-fidelity simulation testbed and compared to that of a
rule-based controller that is used in practice. Simulations in multiple weather conditions show
the effectiveness of the proposed controller in terms of energy savings, climate control, and
computational tractability.
In the second part of this work, the impact on the energy efficiency of commercial building
HVAC systems when they are used for grid support is analyzed. Flexible loads, especially
HVAC systems can be used to provide a battery-like service to the power grid by varying their
13

demand up and down over a baseline. Recent work has reported that providing virtual energy
storage with HVAC systems leads to a net loss of energy, akin to a low round-trip efficiency
(RTE) of a battery. In this work, we rigorously analyze the RTE of a virtual battery through a
simplified physics-based model. We show that the low RTEs reported in recent experimental
and simulation work are an artifact of the experimental/simulation setup. When the HVAC
system is repeatedly used as a virtual battery, the asymptotic RTE is 1. Robustness of the
result to assumptions made in the analysis is illustrated through a simulation case study. We
also show that when an additional constraint is imposed—that the mean temperature of the
building must remain the same—the asymptotic RTE can be lower than 1. Dependence on
parameter values is explored numerically.
14
CHAPTER 1INTRODUCTION
Commercial buildings account for 19% of the total energy consumption in the U.S. [3], of
which about 44% is used by heating, ventilation, and air conditioning (HVAC) systems [4].
The vision for a sustainable energy future is to reduce greenhouse gas emissions and
increase the utilization of renewable energy sources. A two-pronged approach using HVAC
systems in commercial buildings—which have such a large energy footprint—can pave the
way towards this vision: (i) by improving their energy efficiency, and (ii) by facilitating the
penetration of renewable energy sources into the grid using inherent flexibility in their power
consumption because of thermal inertia.
A cost-effective way to improve the energy efficiency of HVAC systems is by using
advanced climate control algorithms. This is especially so in commercial buildings, as most
modern-day commercial buildings are already equipped with the required sensors, actuators,
and communication infrastructure, and have a significant amount of data available [5].
Moreover, currently used control algorithms are rule-based and utilize conservatively designed
set points, which do not make full use of the available resources.
In the first part of this work, advanced climate control algorithms are developed
to improve the energy efficiency of HVAC systems. In recent years, model predictive
control (MPC) has emerged as the popular tool of choice for advanced climate control of
buildings [5, 6]. A main reason for this is that MPC can satisfy conflicting goals such as
keeping energy use small while maintaining thermal comfort and indoor air quality. In MPC,
control commands for a planning horizon are decided at every decision instant by solving an
optimization problem, implementing only the first segment of the plan, and then repeating the
process ad infinitum. Because of its use of numerical optimization, MPC can handle various
constraints that are otherwise challenging to ensure, which has led to the success of MPC in
many applications [7]. Therefore, we focus on MPC-based control algorithms in this study.
15
Several MPC formulations have been proposed in the literature for energy-efficient climate
control of buildings [5, 6]; however, most of them ignore humidity and latent heat. An MPC
controller which minimizes energy/cost without including humidity and latent heat in its
problem formulation could have two potential issues particularly in hot-humid climates. One,
it may lead to poor humidity control. Two, since the latent component of cooling—energy
required to dehumidify air—is not accounted for in the objective function, the predicted energy
use by the controller may be far from the actual energy use when the controller is used in
practice. The first contribution of this dissertation is the development of an MPC controller
in which humidity and latent heat are incorporated in a principled manner. This controller is
presented in Chapter 2.
The controller presented in Chapter 2 is primarily for single-zone buildings. Many of
the MPC formulations proposed in the literature are also for buildings with one zone [8, 9,
10] or a small number of zones [11, 12]. A direct extension of such formulations for large
multi-zone buildings has two main challenges: (i) the underlying optimization problem in
MPC is computationally complex because of the large number of decision variables, and (ii) it
requires a high-resolution model of the thermal dynamics a multi-zone building, which is much
more difficult to obtain when compared to a single-zone building model. To overcome these
challenges, a novel hierarchical architecture is proposed for MPC-based energy-efficient control
of HVAC systems in multi-zone buildings. This is the second contribution of the dissertation
and is presented in Chapter 3.
In the second part of this work, the impact on energy-efficiency of commercial building
HVAC systems when they are used for grid support is analyzed. The power grid is a complex
network of generators and loads. For a reliable operation of the power grid, generation should
be equal to the load [13]. With greater penetration of renewable energy sources, especially
solar and wind, maintaining this balance has become challenging as these sources are volatile
and uncontrollable. Fossil-fuel based generators cannot provide the rapid ramping needed to
offset the volatility of such renewable sources due to their operating constraints. Large-scale
16
electrical energy storage is an option, but it is expensive [14]. In recent years, it has been
recognized that the power demand of certain electric loads is flexible, allowing it to be varied
above and below a baseline, and can be used to provide a battery-like service to the power
grid. Thus, such a load, or collection of loads, can be called virtual batteries (VB) or virtual
energy storage (VES) systems [15]. HVAC systems in commercial buildings are a great resource
for this as they consume a significant amount of power, have huge thermal inertia, and are
equipped with the necessary control and communication infrastructure [16].
Consumers’ quality of service (QoS) must be maintained by these virtual batteries. When
HVAC systems are used for VES, a key QoS measure is indoor temperature. Another important
QoS measure is the total energy consumption. Continuously varying the power consumption
of loads around a baseline may lead to a net reduction in the efficiency of energy use, causing
the load to consume more energy in the long run. If so, that will be analogous to the virtual
battery having a round-trip efficiency (RTE) less than unity. Electrochemical batteries also
have a less-than-unity round-trip efficiency due to various losses [17]. The aim of Chapter 4 is
to analyze the RTE of a VES system comprised of HVAC equipment in commercial buildings.
This is the third contribution of the dissertation.
This document is organized as follows. The MPC controller primarily for single-zone
buildings is presented in Chapter 2, which is available in [18, 19]. The MPC-based hierarchical
controller for multi-zone buildings is presented in Chapter 3. This work has been submitted
to a journal and is currently under review; it is available in [20]. In Chapter 4, the effects
of providing grid support on energy efficiency are analyzed. These results are published
in [21, 22]. Chapter 5 concludes this dissertation and discusses topics for future work.
17

CHAPTER 2MPC FOR ENERGY-EFFICIENT HVAC OPERATION WITH HUMIDITY AND LATENT
HEAT CONSIDERATIONS
2.1 Overview
In this chapter, an MPC formulation for energy-efficient climate control of a commercial
building in which humidity and latent heat are taken into account in a principled manner is
presented.
As explained in Chapter 1, a main reason for the popularity of using MPC for building
climate control is that it can satisfy conflicting goals such as keeping energy use small while
maintaining thermal comfort and indoor air quality. Thermal comfort of occupants is influenced
by several factors such as space temperature, humidity, air speed, clothing, metabolic rate,
etc. [23]. Space temperature and humidity are especially important factors in determining
comfort and health [24, 25, 26]. Despite the importance of humidity and latent heat in
building climate control, it is ignored in most existing MPC formulations.
The principal challenge in including humidity and latent heat is that variables that
determine the building’s temperature and humidity—humidity and temperature of the
conditioned air—are a complex function of control commands, and cannot be independently
chosen. The control commands that can be independently chosen are inlet conditions of the
cooling coil that cools and dehumidifies the air supplied to the indoor space. Incorporating
humidity into MPC requires a model of the cooling and dehumidifying coil that accounts for
both sensible and latent heat transfers, and predicts how control commands (conditions at the
coil inlet) determines the temperature and humidity of the conditioned air. Such models are
usually highly complex. Some are partial differential equations (PDEs) with a large number
of parameters and several sub-models based on the condition of the cooling coil such as
completely dry, completely wet, and partly wet [27]. Some are ordinary differential equations or
even static models consisting of a large number of empirical relations that vary depending on
coil geometry, configuration, and manufacturer [28, 29]. Such complex models are not suitable
18
Mon Tue Wed Thu Fri Sat Sun0
20
40
Sensible load
Mon Tue Wed Thu Fri Sat Sun0
20
40
Latent load
Mon Tue Wed Thu Fri Sat Sun
Time (Days)
0
50
100
Latent fraction
Figure 2-1. Comparison of sensible load and latent load in a cooling coil for a week. The datawas obtained from an air handling unit (AHU-2) serving an auditorium in PughHall at the University of Florida, USA.
for MPC, which involves real-time optimization. In addition, nonlinearities in the zone humidity
dynamics make the underlying optimization problem non-convex [30].
Rule-based controllers that are currently used in practice employ conservatively designed
rules that have been arrived at after decades of experience. For instance, a widely used
heuristic in hot-humid climates is to keep the conditioned air setpoint at 12.8 ◦C (55 ◦F) [31].
This low value ensures the air delivered to the indoor space is dry enough to maintain humidity
within allowable limits under worst-case conditions. The downside is that worst-case conditions
occur rarely, which leads to high energy use. Not only is the air cooled unnecessarily, but
it must then be reheated to prevent the indoor space from becoming too cold. Moreover,
rule-based controllers do not take full advantage of the thermal inertia of buildings and thermal
comfort range of occupants which could lead to energy savings.
The recent literature on MPC for HVAC system control is focused on energy use
minimization while maintaining thermal comfort and indoor air quality [5, 6]. The motivation is
the large energy footprint of HVAC systems. An MPC controller which minimizes energy/cost
without including humidity and latent heat in its problem formulation could have two potential
19
issues. One, it may lead to poor humidity control. Two, since the latent component of
cooling—energy required to dehumidify air—is not accounted for in the objective function,
the predicted energy use by the controller may be far from the actual energy use when the
controller is used in practice. Figure 2-1 shows the sensible load, latent load, and the latent
fraction (ratio of latent load to the total load) in a cooling coil for a week which was obtained
from an air handling unit (AHU-2) serving an auditorium in Pugh Hall at the University of
Florida, USA. It can be seen that the latent load is not negligible and constitutes about 41% of
the total cooling load.
In this chapter, we propose an MPC formulation for energy-efficient climate control of a
commercial building in which humidity and latent heat are taken into account in a principled
manner. The proposed controller is hereafter referred to as SL-MPC, because it accounts
for both sensible and latent components of cooling. We specifically focus on a single-zone
variable-air-volume (VAV) HVAC system that uses chilled water to cool and dehumidify, i.e.,
condition the air supplied to the building. Figure 2-2 shows the schematic of a VAV HVAC
system.
As mentioned earlier, one of the main challenges of including humidity and latent heat
is the need for a cooling and dehumidifying coil model that is simple enough to be used in
real-time optimization and yet accurate enough to lead to useful results. To address this
challenge we develop a data-driven low order model that predicts temperature and humidity of
the conditioned air (outputs) as a function of the inputs: the temperature, humidity and flow
rate of air incident on the coil, and temperature and flow rate of chilled water entering the coil.
This model is used in the optimizer used by the MPC controller. We also develop a slightly
more complex, but much higher accuracy, data-driven model that is used to simulate the plant.
Both models are identified from data, which can come from experiments or from software such
as EnergyPlus [32].
Apart from the proposed MPC controller and the data-driven cooling coil models, a third
contribution of this work is a comparison of the performance of the proposed controller with
20
two other controllers: (i) an MPC controller that does not have humidity constraints and latent
heat explicitly accounted for, which is referred to as S-MPC since it only accounts for sensible
heat, and (ii) a widely used rule-based controller (“single maximum” [33]), which is referred to
as BL (for baseline).
The simulation studies reported here show that the proposed SL-MPC controller uses the
least amount of energy and meets thermal comfort constraints as well or better, compared to
the other two controllers. It is also observed that S-MPC makes decisions that lead to poor
humidity control under certain conditions. Over long periods of time, this can cause issues such
as mold growth, a critical health concern in hot-humid climates [25, 26].
The rest of this chapter is organized as follows. Section 2.2 reviews the related work
on MPC-based building climate control vis-à-vis humidity and latent heat considerations.
Section 2.3 describes a single-zone variable air volume (VAV) HVAC system and the
mathematical models we use in simulating the plant (the system to be controlled). Section 2.4
presents the proposed SL-MPC control strategy, and the control-oriented cooling and
dehumidifying coil model. It also describes the two other control algorithms used for
comparison with the proposed controller. The simulation setup and their results are discussed
in Sections 2.5 and 2.6 respectively. Concluding remarks are provided in Section 2.7.
2.2 Review of Prior Work
There have been several studies in which MPC is used for energy-efficient climate control
of buildings—see the review papers [5, 6] and the references therein. However, there are only
a few works which have considered humidity explicitly in their MPC problem formulation. We
limit ourselves to these references. Based on the objective function to be minimized in the
MPC formulation, these works can be classified into two broad categories: (i) economic MPC
and (ii) set point tracking MPC. In set point tracking MPC, the objective function is chosen
so that minimization of the objective function helps to drive the relevant output(s) to the
desired set point. In economic MPC, the objective function is chosen to be a performance
measure—usually the economic cost—that may not correspond to a steady state operation
21
as it does in case of set point tracking. See [34, 35] for a through exposition of tracking and
economic MPC.
References [36, 37, 38, 39, 40] are examples of setpoint tracking MPC. In [36], an MPC
controller is designed to maintain the supply air temperature and humidity at a given set point
by varying the mass flow rate of chilled water and inlet water temperature of the heating coil.
A two layered control architecture is presented in [37] and [38] for operating direct expansion
(DX) cooling systems. The upper layer is an open loop controller while the lower layer is based
on MPC. In [39], an aggregated model of the building and HVAC system is obtained with the
supply air fan speed and the chilled water valve opening as inputs, and room temperature and
relative humidity as outputs. Subsequently, an MPC controller is used to maintain the room
temperature and relative humidity at its set point with the above model. Both temperature
and humidity are considered in the problem formulation. A control-oriented desiccant wheel
model is used in an MPC-based control scheme to regulate humidity in [40].
The MPC controller proposed in this work, and those in references [8, 41, 42, 43, 44,
9, 10, 45, 46, 47] belong to the category of economic MPC, with total energy use being
the objective function to minimize in this work. In [8], it is assumed that the relative
humidity of the conditioned air after the cooling coil is always 90%, while [41] assumes
both the temperature and the humidity ratio of the conditioned air are constant. These
assumptions avoid the need for a cooling coil model though the validity of these assumptions is
questionable. Occupancy-based control algorithms are experimentally evaluated in [42]. These
algorithms are used to vary the control inputs at the zone-level, while the inputs at the air
handling unit are not affected. An economic MPC scheme—for energy use minimization—with
humidity and latent heat considerations is presented in [43]. Unlike the chilled water system
used in this work, the focus in [43] is on DX cooling systems.
In [44], MPC is used to control a variable refrigerant flow (VRF) based HVAC system.
The goal is to minimize economic costs while maintaining the thermal comfort of occupants.
Thermal comfort is measured using the predicted mean vote (PMV) index [48, 23]. PMV is
22

dependent on several variables one of which is humidity. Even though humidity is explicitly
considered in this work, unlike the chilled water system used in our work, the focus is on a VRF
system.
A framework which concurrently optimizes thermal and electric storage in buildings is
presented in [47]. The goal of the optimizer is to reduce the operating cost and demand
peaks under time-of-use tariffs by varying the temperature setpoints of the zones in a building
and battery dispatch. In [9], MPC is used to optimize the performance of a hydronic radiant
floor system in an office building. However, the humidity in the building is controlled using a
proportional-integral (PI) controller, and is not considered in the MPC formulation.
In [10], MPC is used to control an environmental chamber located at the Pennsylvania
State University campus. Humidity is indirectly considered through a data-driven thermal
comfort model (dynamic thermal sensation model) developed by the authors. However, latent
heat is ignored in the MPC formulation. In [46], a token based scheduling algorithm is used
to minimize the energy consumption for a building located at the Nanyang Technological
University, Singapore campus. It is based on a distributed control algorithm presented in [49],
and is used to vary the supply air flow rate to the zones. Humidity is indirectly maintained
through the thermal sensation model used but latent heat is ignored.
Ref. [45] provides a comprehensive MPC framework which uses real-time building energy
management system data. An enthalpy control algorithm is used to regulate the amount of
outdoor air supplied to a building.
There are also a few papers in which the terms in the objective function consist of both
energy use and deviation from set points, so these can be thought of as a hybrid between
tracking and economic MPC—[50, 51, 52]. Multiple MPC strategies are compared for an air
handling unit serving a single-zone in [50]. It is assumed that the temperature and humidity
ratio after the cooling coil can be chosen independently, thereby not requiring the use of a
cooling coil model. This assumption will not hold in physical systems, as the only variables that
can be independently chosen are the inlet conditions to the coil. Unlike the cooling-based air
23
dehumidification considered in this work, reference [51] uses a liquid desiccant air conditioning
(LDAC) system. The inlet desiccant solution flow rate and temperature are varied to maintain
the temperature and humidity ratio of the outlet air.
Ref. [52] is the most relevant to our work; they use a cooling coil model in their
optimization in which temperature and humidity of the conditioned air is modeled correctly
to be thermodynamically coupled. The supply air flow rate is not a control command, while
in our formulation it is. The controller in [52] will be unaware of disturbances in the longer
time scales, since a short prediction horizon of 10 minutes is used. In contrast, we use a
prediction horizon of 24 hours. Moreover, there are multiple elements included in the objective
function: energy use, thermal comfort, indoor air quality, etc., which needs careful tuning of
weights. In our formulation, energy use is the objective to be minimized, with thermal comfort
and indoor air quality being constraints to be met. Lastly, a nondeterministic optimization
algorithm (genetic algorithm) is used to perform the minimization which is challenging to use
for real-time control. In contrast, we use a deterministic search method through a nonlinear
programming (NLP) solver.
Although the papers on HVAC control that do not consider humidity and latent heat are
outside the scope of this review, a subset of those works report experimental evaluations in
real buildings. These deserve special attention: if an MPC controller that does not consider
humidity and latent heat can still provide good performance in real buildings that are affected
by humidity and latent heat, then incorporating these features into the controller—which
necessarily increase complexity—is perhaps not necessary. In particular, refs. [53, 54, 12]
describe experimental demonstrations that have been carried out with MPC-based controllers
on real buildings. The problem formulations in these references do not consider latent
heat/room humidity dynamics. It is not clear from the reported assessment if the controllers
were able to maintain humidity, since humidity measurements were not reported.
In [53], an MPC based controller was implemented in a Swiss office building. They used
thermally activated building systems, an air handling unit, and blinds, for actuation. Majority
24
of the experiments were done when the weather was cold and dry in which humidity and
latent cooling loads were unlikely to be of concern. However, one set of experiments was
done between May-August when it was hot and humid. Space humidity was not reported in
the evaluations. The MPC demonstration reported in [54] controlled the heating system of a
building in Prague during winter when humidity is not a concern for that climate.
The work [12] describes an MPC-based controller that was implemented in a mid-size
(650m2) commercial building in Champaign, Illinois, which is hot and humid during the
summer. Two sets of tests were conducted. One was during the transition season in October
and the other was during cold season (February). It is not clear from published results whether
humidity was maintained within acceptable limits, since only zone temperature and CO2 levels
were reported, not humidity.
In summary, it is not possible to say from the published literature if an MPC controller
that does not consider humidity and latent heat is able to provide good performance—in terms
of humidity control and energy savings. Our results—reported later in the chapter—indicate
it is unlikely in hot and humid climates, thus motivating a need for an MPC formulation that
includes these features.
2.3 System Description and Models
Our focus is a single-zone variable-air-volume HVAC system used in commercial buildings.
The schematic of a typical configuration used is shown in Figure 2-2. In such a system, part
of the air exhausted from the zone is recirculated and mixed with outdoor air. Then the
mixed air is sent through a cooling coil where it is cooled and dehumidified to conditioned
air temperature (Tca) and humidity ratio (Wca). This air is then passed through a reheat coil
where the air is heated to supply air temperature (Tsa) before being supplied to the zone.
There is no water vapor phase change across the heating coil, so the humidity ratio of supply
air and conditioned air is the same: Wsa = Wca. The role of the climate control system is to
vary the following control commands: (i) supply air flow rate (msa), (ii) outdoor air ratio (roa,
which is the ratio of outdoor air flow rate to supply air flow rate, roa = moa
msa= moa
moa+mra), (iii)
25
Retu
rn a
ir
Exhaustair
Outdoor air
Mixedair
Zone
Cooling and
dehumidifying coil
Tca
Chilledwater
msaTma
FanToa
Tz,Wz
WcaWmaWoa
Twi
mw
Heating coil
Hotwater
TsaWsa
Exogenous inputs:
mra
moa
ηsol, Toa, Woa, qother, ωother
Figure 2-2. Schematic of a single-zone commercial variable-air-volume HVAC system.
conditioned air temperature (Tca), and (iv) supply air temperature (Tsa), to maintain thermal
comfort and indoor air quality in the zone. So the control command vector is:
u = [msa, roa, Tca, Tsa]T ∈ ℜ4. (2-1)
These four values can be commanded as setpoints to lower level control loops, and thus we
treat u as a control command to be decided by the proposed MPC controller. We assume
that the controller also has access to the zone dry-bulb temperature and zone humidity
measurements in real time; these can be measured using commercially available sensors. The
controller will also need prediction of certain exogenous disturbances, which will be described in
Section 2.4.
Plant model used for simulation assessment. It is convenient to first describe the
models that are used to simulate the plant, i.e., the system being controlled, since simplified
versions of some of the components of the plant are used by the controller to make decisions.
In the following subsections we describe these mathematical models. The plant parameters are
chosen to mimic a real HVAC system of the type shown in Figure 2-2, the one that serves a
465 m2 (5000 sq.ft.) auditorium in Pugh Hall at the University of Florida, USA.
26

2.3.1 Hygro-Thermal Dynamics Model
We use the following RC (resistor-capacitor) network model for the temperature dynamics
of the zone serviced by the HVAC system [55]:
CzTz(t) =(Tw(t)− Tz(t))
Rw
+ qHV AC(t) + Aeηsol(t) + qother(t) (2-2)
CwTw(t) =(Toa(t)− Tw(t))
Rz
+(Tz(t)− Tw(t))
Rw
(2-3)
where Tz is the zone temperature, Tw is the wall temperature, Toa is the outdoor air
temperature, qHV AC is the heat influx due to the HVAC system, ηsol is the solar irradiance,
qother is the internal heat load due to occupants, lights, equipments, etc., Cz and Cw are
the thermal capacitance of the zone and the wall respectively, Rz is the resistance to heat
exchange between the outdoors and wall, Rw is the resistance to heat exchange between the
wall and indoors and Ae is the effective area of the building. The heat influx due to the HVAC
system is a function of the supply air temperature and zone temperature:
qHV AC(t) = msa(t)Cpa(Tsa(t)− Tz(t)), (2-4)
where msa is the supply air flow rate and Cpa is the specific heat of air at constant pressure.
The dynamics of zone humidity ratio Wz is modeled as:
Wz(t) =RgTz(t)
V P da
[ωother(t) +msa(t)
Wsa(t)−Wz(t)
1 +Wsa(t)
](2-5)
where V is the zone volume, Rg is the specific gas constant of dry air, P da is the partial
pressure of dry air, Wsa is the supply air humidity ratio, and ωother is the rate of internal water
vapor generation due to people and other sources [30].
2.3.2 Cooling and Dehumidifying Coil Model
The inputs for the model are supply air flow rate (msa), mixed air temperature (Tma),
mixed air humidity ratio (Wma), chilled water flow rate (mw), and inlet water temperature
(Twi); see Figure 2-3. The outputs are conditioned air temperature (Tca) and humidity
ratio (Wca).
27
Tma
Wma
msa
Twimw,
Tca
WcaAir Air
Two
Chilledwater
Figure 2-3. A cooling and dehumidifying coil, and relevant variables (model inputs inrectangles, outputs in circles).
There is a rich literature on modeling cooling and dehumidifying coils; see [27, 29] and
references therein. However, some of these models require coil geometry data which is hard
to obtain. Another class of models involve complex partial differential equations [27]. For
our purposes a simple static model would suffice as the time constants for a cooling coil are
small—about 60 to 120 seconds (Figures 4 to 7 in [27])—compared to the time constant of
zone thermal dynamics, which is in hours [55]. The model used in EnergyPlus (Section 16.2.1
in [28]) is such a static model. It is still complex and difficult to replicate as it involves many
empirical relations. Therefore, we opt for a grey box data-driven model. EnergyPlus is used as
a “virtual cooling coil testbed”, and data collected from EnergyPlus simulations is used to fit
the parameters of the model. The process is explained below.
A single-zone commercial building is simulated in EnergyPlus version 8.9 [32], with a
cooling coil pulling in unmixed outdoor air and supplying it to the zone after cooling and
dehumidifying it. Using unmixed air ensures that we have full control over the temperature
and humidity ratio of air entering the cooling coil, as EnergyPlus allows the use of a custom
generated weather file to specify outdoor conditions. The HVAC air loop also contains a
variable flow fan motor to control the mass flow rate of air, and the plant loop contains an
electric chiller with variable flow pump to control the mass flow rate of water. The inlet and
outlet conditions of the cooling coil are measured.
The rates of flow through the pump and fan are varied using Building Controls Virtual
Test Bed (BCVTB) [56]. The air flow rate is varied from 0.1705 kg/s (300 ft3/min) to
28
56
10
3
15
4
20
msa
(kg/s)
2
mw
(kg/s)
25
2 10 0
A Measured (Tca, output from EnergyPlussimulations) and predicted (Tca) value ofconditioned air temperature for a specific bin,Tma = 23.9 ◦C (75 ◦F ) and RHma = 50%.
66
7
3
8
10 -3
4
9
msa
(kg/s)
2
mw
(kg/s)
10
2 10 0
B Measured (Wca, output from EnergyPlussimulations) and predicted (Wca) value ofconditioned air humidity ratio for a specfic bin,Tma = 23.9 ◦C (75 ◦F ) and RHma = 50%.
Figure 2-4. Cooling coil binned model (used in simulating the plant).
4.6 kg/s (8100 ft3/min) and the water flow rate is varied from 0 kg/s (0 gallons/minute)
to 2.21 kg/s (35 gallons/minute). The limits are chosen to mimic the equipment in Pugh
Hall. The inlet water temperature is kept at 7.78 ◦C (46 ◦F). The temperature and humidity
ratio of outdoor air are controlled using a custom weather file. Since there are no other
components before the coil that interact with outdoor air, we are able to use it to modulate
the input conditions to the coil. The temperature is varied from 10 ◦C (50 ◦F ) to 43.3 ◦C
(110 ◦F ) with steps of 0.56 ◦C (1 ◦F ). The relative humidity is varied from 10 % to 100 %
with steps of 5 %. The model is calibrated using 296,704 data points generated by varying
inputs. A separate data set is generated for model validation.
We observe from our initial attempts that for a fixed mixed air temperature and relative
humidity, the outputs Tca and Wca can be predicted quite well by modeling them as polynomial
functions of the mass flow rates of chilled water and supply air. Figure 2-4 shows an example,
using a 5th degree polynomial. However, a single polynomial leads to large errors when used at
different mixed air temperatures and relative humidities. We therefore bin the inputs according
to Tma and RHma into 1159 bins, and use a 5th degree polynomial model for each bin. The
29

resulting model is called a “binned model”. The root mean square error for the validation data
is less than 0.28 ◦C (0.5 ◦F , 1%) for Tca and 0.3× 10−4 kgw/kgda (1%) for Wca.
2.3.3 Power Consumption Models
We assume that the power consumed by components such as dampers is negligible; the
only power consuming components are the air supply fan, the reheat coil, and the cooling coil.
The fan power is usually modeled as a quadratic function of the supply air flow rate [57]:
Pfan(t) = αfmsa(t)2. (2-6)
The power consumed by the cooling and dehumidifying coil is modeled as being proportional to
the heat it extracts from the mixed air stream as follows:
Pcc(t) =msa(t)
[hma(t)− hca(t)
]ηccCOPc
, (2-7)
where hma(t) and hca(t) are the specific enthalpies of the mixed and supply air respectively, ηcc
is the cooling coil efficiency, and COPc is the chiller coefficient of performance. Since a part of
the return air is mixed with the outside air, the specific enthalpy of the mixed air is:
hma(t) = roa(t)hoa(t) + (1− roa(t))hz(t), (2-8)
where hoa(t) and hz(t) are the specific enthalpies of the outdoor and zone air respectively,
and roa(t) is the outside air ratio: roa(t) := moa(t)msa(t)
. The specific enthalpy of moist air with
temperature T and humidity ratio W is given by [1]: h(T,W ) = CpaT + W (gH20 + CpwT ),
where gH20 is the heat of evaporation of water at 0 ◦C, and Cpa, Cpw are specific heat of air
and water at constant pressure.
The power consumed by the reheat coil is modeled as being proportional to the heat
added to the conditioned air stream by the coil. Since the humidity ratio does not change
across the reheat coil (Wsa = Wca), the power consumption has the form
Preheat(t) =msa(t)Cpa
[Tsa(t)− Tca(t)
]ηreheatCOPh
, (2-9)
30

where ηreheat is the reheat coil efficiency, and COPh is the boiler coefficient of performance.
2.4 Control Algorithms
2.4.1 Proposed Controller: SL-MPC
Figure 2-5 shows the control architecture for the proposed SL-MPC controller. Control
decisions are computed in discrete time indices k = 0, 1, . . . , with ∆t being the sampling
interval.
The control inputs for N time steps are obtained by solving a constrained optimization
problem of minimizing the energy consumption subject to thermal comfort, indoor air quality,
and actuator constraints. Then the control inputs obtained for the first time step are applied to
the plant. The optimization problem is solved again for the next N time steps with the initial
state of the model obtained from plant measurements. This process is repeated at the next
time instant. To describe the optimization problem, first we define the state vector x(k) and
the vector of control commands and internal variables v(k) as:
x(k) := [Tz(k), Wz(k)]T ∈ ℜ2,
v(k) := [u(k)T , mw(k), Wca(k)]T ∈ ℜ6,
where u(k) is the control command vector defined in (2-1). The exogenous input vector is:
w(k) := [ηsol(k), Toa(k), Woa(k), qother(k), ωother(k)]T ∈ ℜ5. (2-10)
PlantSL-MPC
u = [msa, roa, Tca, Tsa]
w
x = [Tz, Wz]
w = [ηsol, Toa, Woa, qother, ωother]
Figure 2-5. Proposed SL-MPC control architecture.
31

At time index j, the decision variables in the optimization problem underlying the proposed
MPC controller are denoted by X and V , where X = [xT (j + 1), xT (j + 2), . . . , xT (j + N)]T
and V = [vT (j), vT (j + 1), . . . , vT (j + N − 1)]T . The predictions of the exogenous inputs
W = [wT (j), wT (j + 1), . . . , wT (j + N − 1)]T are assumed known at time index j. In
simulations reported later, we use ∆t = 5 minutes and prediction/planning horizon of N = 288
(corresponding to 24 hours).
The optimization problem at time index j is:
minV,X
j+N−1∑k=j
[Pfan(k) + Pcc(k) + Preheat(k)
]∆t, (2-11)
where Pfan, Pcc and Preheat are given by (2-6), (2-7) and (2-9) respectively, and is subject to
the following constraints:
Tz(k + 1) = Tz(k) +∆t
C
[(Toa(k)− Tz(k))
R+ qHV AC(k) + Aeηsol(k) + qother(k)
], (2-12a)
Wz(k + 1) = Wz(k) +∆tRgTz(k)
V P da
[ωother(k) +msa(k)
Wsa(k)−Wz(k)
1 +Wsa(k)
], (2-12b)
Tca(k) = fco(Tma(k),Wma(k),msa(k),mw(k)
), (2-12c)
Wca(k) = gco(Tma(k),Wma(k),msa(k),mw(k)
), (2-12d)
T lowz (k) ≤ Tz(k) ≤ T high
z (k), (2-12e)
W lowz (k) ≤ Wz(k) ≤ W high
z (k), (2-12f)
msa(k + 1) ≤ min(msa(k) +mrate
sa ∆t,mhighsa
), (2-12g)
msa(k + 1) ≥ max(msa(k)−mrate
sa ∆t,mlowsa
), (2-12h)
roa(k + 1) ≤ min(roa(k) + rrateoa ∆t, rhighoa
), (2-12i)
roa(k + 1) ≥ max(roa(k)− rrateoa ∆t, rlowoa
), (2-12j)
Tca(k + 1) ≤ min(Tca(k) + T rate
ca ∆t, Tma(k + 1)), (2-12k)
Tca(k + 1) ≥ max(Tca(k)− T rate
ca ∆t, T lowca
), (2-12l)
Tsa(k + 1) ≤ min(Tsa(k) + T rate
sa ∆t, T highsa
), (2-12m)
32
Tsa(k + 1) ≥ max(Tsa(k)− T rate
sa ∆t, Tca(k + 1)), (2-12n)
Wca(k) ≤ Wma(k), (2-12o)
where constraints (2-12a)-(2-12d) and (2-12o) are for k = j, ..., j + N − 1, constraints
(2-12e) and (2-12f) are for k = j + 1, ..., j + N , and constraints (2-12g)-(2-12n) are for
k = j, ..., j +N − 2.
The constraint (2-12a) is due to the thermal dynamics of the zone, which is a discretized
form of a first-order RC network model where R is the resistance to heat exchange between
outdoors and indoors, and C is the thermal capacitance of the zone. Note that this is a
simpler model of building hygro-thermal dynamics than that used in the plant simulation. The
constraint (2-12b) is due to the zone humidity dynamics which is a discretized form of (2-5)
presented in Section 2.3.1.
Constraints (2-12c) and (2-12d) are for the cooling and dehumidifying coil model which is
presented in the next subsection (Section 2.4.1).
Constraints (2-12e) and (2-12f) are thermal comfort constraints: they specify the
range in which the zone temperature and humidity ratio can vary without compromising
occupants’ comfort. The upper and lower limits for these vary based on the scheduled
hours of occupancy. Usually the limits during unoccupied mode (unocc) are relaxed when
compared to the occupied mode (occ), i.e. [T low,occz , T high,occ
z ] ⊆ [T low,unoccz , T high,unocc
z ],
[W low,occz ,W high,occ
z ] ⊆ [W low,unoccz ,W high,unocc
z ], as shown in Figure 2-7.
Constraints (2-12g) and (2-12h) are to take into account the capabilities of the
fan. The minimum allowed value for the supply air flow rate is computed based on the
ventilation requirements specified in ASHRAE 62.1 [58] as well as to maintain positive building
pressurization. ASHRAE 62.1 demands ventilation based on two factors: number of people and
floor area. Positive pressurization is required as dehumidification results in a drop in indoor
vapor pressure. This negative pressure gradient may cause the infiltration of moisture from
outside, especially if the building envelope is not airtight [1]. The minimum allowed supply air
33

flow rate is:
mlowsa = max
((mp
oanp +mAoaA)/roa, mbp
oa/roa), (2-13)
where mpoa is the outdoor air rate required per person, np is the number of people, mA
oa is the
outdoor air required per zone area, A is the zone area, mbpoa is the outdoor air rate required to
maintain positive building pressurization, and roa is the outdoor air ratio.
Constraints (2-12i)-(2-12n) are to take into account the capabilities of the damper
actuators, cooling and reheat coils. In constraints (2-12k) and (2-12o) the inequalities
Tca(k + 1) ≤ Tma(k + 1) and Wca(k) ≤ Wma(k) ensure that the cooling coil can only cool
and dehumidify the mixed air stream; it cannot add heat or moisture. Similarly, in constraint
(2-12n) the inequality Tsa(k + 1) ≥ Tca(k + 1) ensures that the reheat coil can only add heat;
it cannot cool.
Cooling and dehumidifying coil model used in SL-MPC. Even though the binned
model of cooling and dehumidifying coil presented in Section 2.3.2 is quite accurate, it
cannot be used in the optimizer as doing so makes the optimization a mixed integer nonlinear
programming (MINLP) problem which is quite challenging to solve. Therefore, we develop a
control-oriented cooling and dehumidifying coil model which makes the optimization problem a
nonlinear program (NLP). It is a static model with the outputs being a polynomial function of
the inputs. Note that when the chilled water flow rate is zero, no cooling or dehumidifying of
the air can occur so that the conditioned air temperature and humidity ratio must be equal to
the mixed air temperature and humidity ratio: Tca = Tma and Wca = Wma, when mw = 0. To
make the model have this behavior, the following functional form is chosen:
Tca = Tma +mw f(Tma,Wma,msa,mw) (2-14)
Wca = Wma +mw g(Tma,Wma,msa,mw) (2-15)
34

For the functions f and g, we use a quadratic form as higher degree polynomials did not show
substantial gain in accuracy. The final form of the model is:
Tca = fco(Tma,Wma,msa,mw) (2-16)
= Tma +mw
[α1Tma + α2Wma + α3msa + α4mw + α5+
α6T2ma + α7W
2ma + α8m
2sa + α9m
2w+
α10TmaWma + α11Wmamsa + α12msamw + α13mwTma + α14Tmamsa + α15Wmamw
]Wca = gco(Tma,Wma,msa,mw) (2-17)
= Wma +mw
[β1Tma + β2Wma + β3msa + β4mw + β5+
β6T2ma + β7W
2ma + β8m
2sa + β9m
2w+
β10TmaWma + β11Wmamsa + β12msamw + β13mwTma + β14Tmamsa + β15Wmamw
],
where the αi’s and βj’s are the model parameters to be determined. For the numerical results
shown next, data obtained from EnergyPlus simulations—as explained in Section 2.3.2—
are used to fit these parameters. In practice, measurements can be used to fit them. For
the validation data set, the maximum prediction errors observed are 1.61 ◦C (3 ◦F ) and
1.1 × 10−3 kgw/kgda for Tca and Wca, respectively. This is twice the maximum error observed
when using the binned cooling and dehumidifying coil model presented in Section 2.3.2.
2.4.2 Model Predictive Control Incorporating Only Sensible Heat (S-MPC)
This controller is similar to the one described in Section 2.4.1, with the main difference
being that the moisture and latent heat of the air are not considered. The optimization
problem formulation is similar to the one presented in [59].
For this controller, the vectors x(k) and v(k) are defined as follows: x(k) := Tz(k) ∈ ℜ1
and v(k) := u(k) ∈ ℜ4, where u(k) is the control command vector defined in (2-1). The
optimization problem at time index j is:
minV,X
j+N−1∑k=j
[Pfan(k) + P S
cc(k) + Preheat(k)
]∆t, (2-18)
35
subject to the constraints: (2-12a),(2-12e), (2-12g)-(2-12n), where Pfan and Preheat are given
by (2-6) and (2-9), and
P Scc(k) =
msa(k)Cpa
[Tma(k)− Tca(k)
]ηccCOPc
, (2-19)
where Tma(t) and Tca(t) are the dry bulb temperatures of the mixed and conditioned air. The
exogenous disturbance needed to compute the constraints in the optimizer are:
w(k) := [ηsol(k), Toa(k), qother(k)]T ∈ ℜ3. (2-20)
Notice the difference with SL-MPC: since this controller does not consider humidity and
latent heat, the constraints placed on the humidity ratio at various locations in the air loop as
well as the zone—(2-12b), (2-12f), and (2-12o)—are no longer used. The constraints placed
on the system due to the cooling and dehumidifying coil model—(2-12c) and (2-12d)—are also
not present. The cooling power term in the objective function is based only on the sensible
heat; latent heat is ignored.
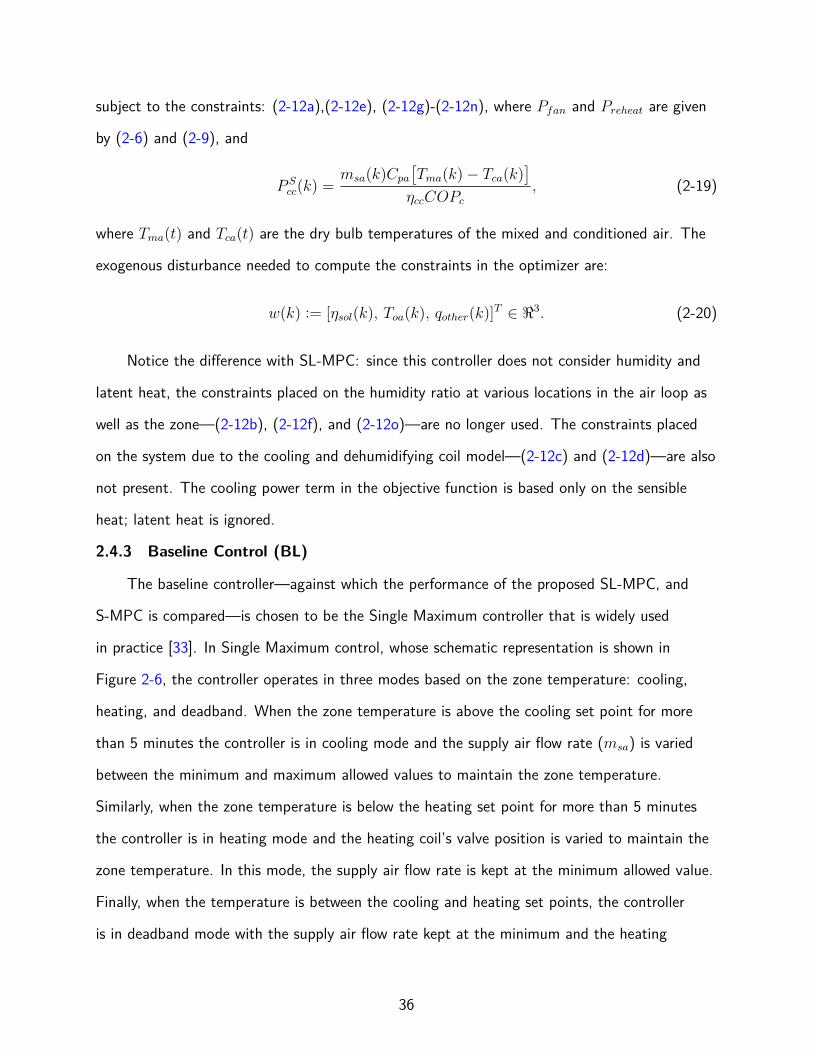
2.4.3 Baseline Control (BL)
The baseline controller—against which the performance of the proposed SL-MPC, and
S-MPC is compared—is chosen to be the Single Maximum controller that is widely used
in practice [33]. In Single Maximum control, whose schematic representation is shown in
Figure 2-6, the controller operates in three modes based on the zone temperature: cooling,
heating, and deadband. When the zone temperature is above the cooling set point for more
than 5 minutes the controller is in cooling mode and the supply air flow rate (msa) is varied
between the minimum and maximum allowed values to maintain the zone temperature.
Similarly, when the zone temperature is below the heating set point for more than 5 minutes
the controller is in heating mode and the heating coil’s valve position is varied to maintain the
zone temperature. In this mode, the supply air flow rate is kept at the minimum allowed value.
Finally, when the temperature is between the cooling and heating set points, the controller
is in deadband mode with the supply air flow rate kept at the minimum and the heating
36
Maximum supply air
temperature
Supply airtemperature Maximum
supply air flow rate
Supply air flow rate
Deadband mode
Cooling mode
Heating mode
Zonetemperature
Supply air flow rate
Minimumsupply airflow rate
Supply airtemperature
Heatingset point
Cooling set point
Figure 2-6. Schematic of Single Maximum control algorithm.
valve is closed so the supply air temperature is equal to the conditioned air temperature
(Tsa=Tca). The minimum allowed value for the supply air flow rate should satisfy the following
conditions: one, the ventilation requirements specified by ASHRAE 62.1 [58] and positive
building pressurization, as described in Section 2.4.1. Two, it should be high enough to meet
the design heating load at a supply air temperature that is low enough to prevent stratification
(e.g., 30 ◦C). The outdoor air ratio and the conditioned air temperature are kept constant at
all times.
2.4.4 Information Requirement for Implementation
All three controllers studied make decisions for the same four control commands in the
vector u; see (2-1). The proposed SL-MPC controller needs real-time measurements of zone
temperature and humidity, while the S-MPC and BL controllers need real-time measurements
of zone temperature alone. BL controller does not need any predictions, while both the MPC
controllers need prediction of the exogenous disturbances, w, over the prediction horizon.
Most of these predictions are directly available from weather forecasts. The exceptions are
internal heat gains (needed by both MPC schemes), and internal moisture generation (needed
by SL-MPC alone). Predictions for these signals can be obtained from occupancy schedules,
or from time-series models fitted to estimated heat gains and moisture generation rates that
are estimated from temperature and humidity measurements by using methods such as those
in [55].
37
The BL controller does not need any models while both the MPC controllers do. These
models are learned off-line. Both the MPC controllers need models of the thermal dynamics
of the zone; its parameters can be identified off-line by one of several existing methods. The
parameters used in this work are fitted to Pugh Hall data by using the method in [55]. The
SL-MPC requires a humidity dynamic model of the zone and a cooling coil model while the
S-MPC does not. The humidity dynamic model used in this work is a physics-based model;
volume of the zone is the only parameter and was obtained from the mechanical drawings
for the Pugh Hall building. The cooling coil model parameters can be fitted by a regression
technique, to data collected from an actual HVAC system or a high fidelity simulation.
The parameters used in this work are fitted using least squares to data collected from an
EnergyPlus model of an AHU. The EnergyPlus model was created using manufacturer provided
data about the Pugh Hall equipment; see Section 2.3.2.
2.5 Simulation Setup
The plant is simulated in SIMULINK. The optimization problem is solved using CasADi
[60] and IPOPT [61], a nonlinear programming (NLP) solver, on a Desktop Linux computer
with 16GB RAM and a 3.60 GHz × 8 CPU. On an average it takes 2 seconds for SL-MPC
and 0.6 seconds for S-MPC to solve their respective optimization problems. The higher
computation time for SL-MPC is attributed to the larger number of decision variables. Both
the NLPs are non-convex, and the NLP solver indicates that it is able to find a local minimum
successfully 100% of the time. In cases where they may not be feasible, the controllers are
programmed to use the control command computed at the previous time step.
Three types of outdoor weather conditions are tested: hot-humid (Aug/06/2016), mild
(Mar/25/2016), and cold (Dec/20/2016), all for Gainesville, FL, USA. The weather data is
obtained from Weather Underground [62] and National Solar Radiation Database [63]. The
simulations are run for 24 hours starting at 8:00 AM.
38
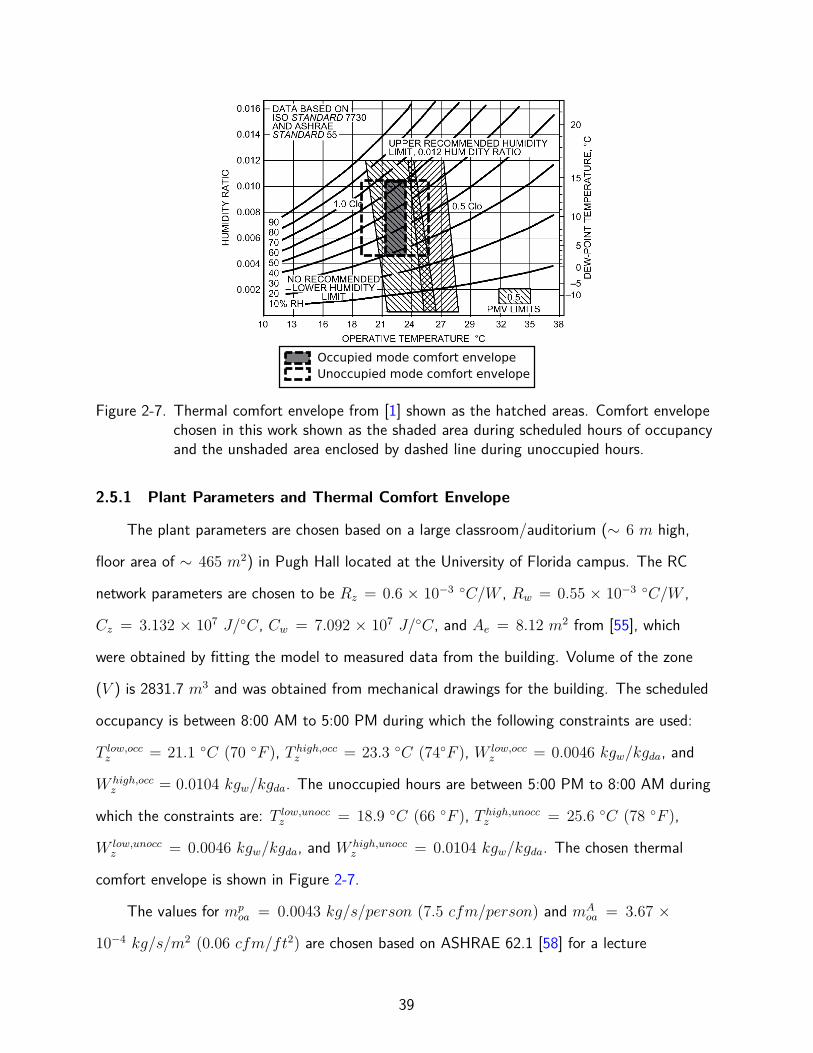
Occupied mode comfort envelopeUnoccupied mode comfort envelope
Figure 2-7. Thermal comfort envelope from [1] shown as the hatched areas. Comfort envelopechosen in this work shown as the shaded area during scheduled hours of occupancyand the unshaded area enclosed by dashed line during unoccupied hours.
2.5.1 Plant Parameters and Thermal Comfort Envelope
The plant parameters are chosen based on a large classroom/auditorium (∼ 6 m high,
floor area of ∼ 465 m2) in Pugh Hall located at the University of Florida campus. The RC
network parameters are chosen to be Rz = 0.6 × 10−3 ◦C/W , Rw = 0.55 × 10−3 ◦C/W ,
Cz = 3.132 × 107 J/◦C, Cw = 7.092 × 107 J/◦C, and Ae = 8.12 m2 from [55], which
were obtained by fitting the model to measured data from the building. Volume of the zone
(V ) is 2831.7 m3 and was obtained from mechanical drawings for the building. The scheduled
occupancy is between 8:00 AM to 5:00 PM during which the following constraints are used:
T low,occz = 21.1 ◦C (70 ◦F ), T high,occ
z = 23.3 ◦C (74◦F ), W low,occz = 0.0046 kgw/kgda, and
W high,occz = 0.0104 kgw/kgda. The unoccupied hours are between 5:00 PM to 8:00 AM during
which the constraints are: T low,unoccz = 18.9 ◦C (66 ◦F ), T high,unocc
z = 25.6 ◦C (78 ◦F ),
W low,unoccz = 0.0046 kgw/kgda, and W high,unocc
z = 0.0104 kgw/kgda. The chosen thermal
comfort envelope is shown in Figure 2-7.
The values for mpoa = 0.0043 kg/s/person (7.5 cfm/person) and mA
oa = 3.67 ×
10−4 kg/s/m2 (0.06 cfm/ft2) are chosen based on ASHRAE 62.1 [58] for a lecture
39
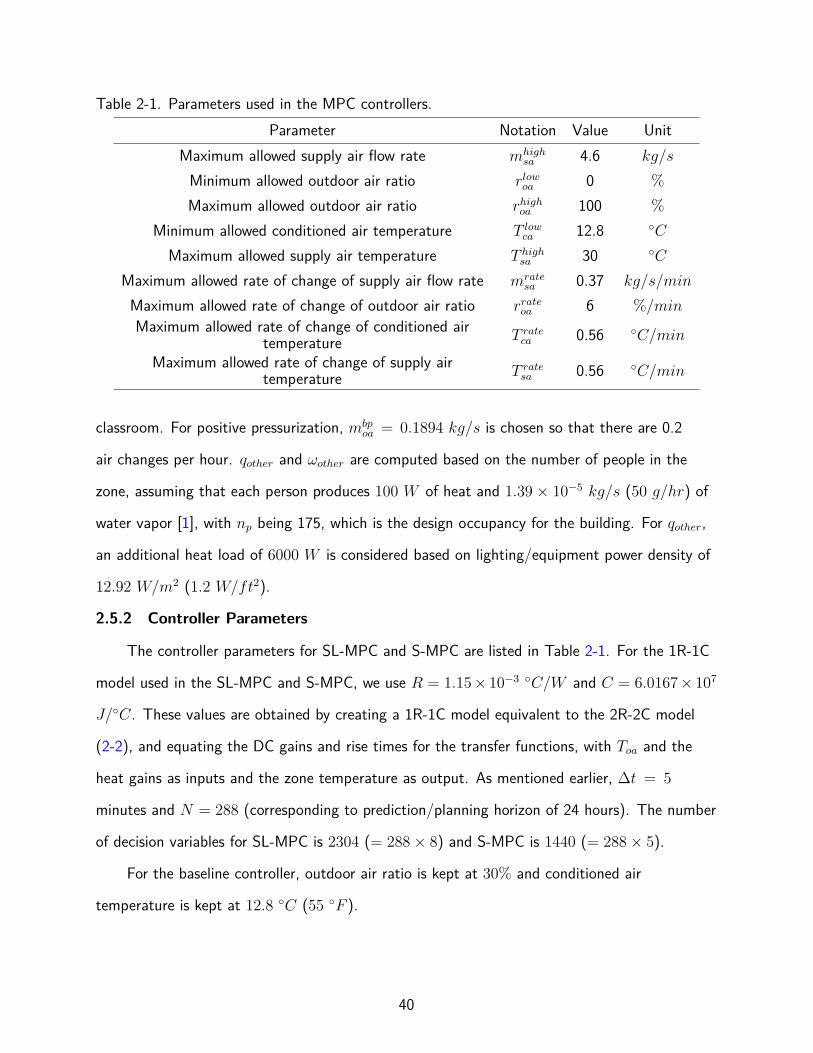
Table 2-1. Parameters used in the MPC controllers.Parameter Notation Value Unit
Maximum allowed supply air flow rate mhighsa 4.6 kg/s
Minimum allowed outdoor air ratio rlowoa 0 %
Maximum allowed outdoor air ratio rhighoa 100 %
Minimum allowed conditioned air temperature T lowca 12.8 ◦C
Maximum allowed supply air temperature T highsa 30 ◦C
Maximum allowed rate of change of supply air flow rate mratesa 0.37 kg/s/min
Maximum allowed rate of change of outdoor air ratio rrateoa 6 %/min
Maximum allowed rate of change of conditioned airtemperature T rate
ca 0.56 ◦C/min
Maximum allowed rate of change of supply airtemperature T rate
sa 0.56 ◦C/min
classroom. For positive pressurization, mbpoa = 0.1894 kg/s is chosen so that there are 0.2
air changes per hour. qother and ωother are computed based on the number of people in the
zone, assuming that each person produces 100 W of heat and 1.39 × 10−5 kg/s (50 g/hr) of
water vapor [1], with np being 175, which is the design occupancy for the building. For qother,
an additional heat load of 6000 W is considered based on lighting/equipment power density of
12.92 W/m2 (1.2 W/ft2).
2.5.2 Controller Parameters
The controller parameters for SL-MPC and S-MPC are listed in Table 2-1. For the 1R-1C
model used in the SL-MPC and S-MPC, we use R = 1.15× 10−3 ◦C/W and C = 6.0167× 107
J/◦C. These values are obtained by creating a 1R-1C model equivalent to the 2R-2C model
(2-2), and equating the DC gains and rise times for the transfer functions, with Toa and the
heat gains as inputs and the zone temperature as output. As mentioned earlier, ∆t = 5
minutes and N = 288 (corresponding to prediction/planning horizon of 24 hours). The number
of decision variables for SL-MPC is 2304 (= 288× 8) and S-MPC is 1440 (= 288× 5).
For the baseline controller, outdoor air ratio is kept at 30% and conditioned air
temperature is kept at 12.8 ◦C (55 ◦F ).
40

2.5.3 Performance Metrics
To evaluate the various controllers in this study, we look at the energy consumed by each
of them as well as the violations caused with respect to thermal comfort limits specified in
Section 2.5.1.
The total energy consumed by the controllers for 24 hours is computed as follows:
Etotal =
∫24hrs
Pfan(t) + Pcc(t) + Preheat(t) dt, (2-21)
where Pfan, Pcc, and Preheat are computed using (2-6), (2-7), and (2-9) respectively.
We define the daily temperature violation as:
VT =
∫24hrs
∆Tz(t)dt, (2-22)
where the term ∆Tz(t) is defined as [41]:
∆Tz(t) =
Tz(t)− T high
z , if Tz(t) > T highz
T lowz − Tz(t), if Tz(t) < T low
z
0, otherwise.
(2-23)
The unit of VT is ◦C-hours. Similarly, we define the daily humidity violation as:
VW =
∫24hrs
∆Wz(t)dt, (2-24)
where the term ∆Wz(t) is defined as [41]:
∆Wz(t) =
Wz(t)−W high
z , if Wz(t) > W highz
W lowz −Wz(t), if Wz(t) < W low
z
0, otherwise.
(2-25)
The unit of VW is kgw/kgda-hours.
The larger VT and VW are, greater the adverse impact on occupants’ comfort and health.
41
2.6 Results and Discussions
2.6.1 Results for the Different Outdoor Weather Conditions
2.6.1.1 Hot-humid day
9 12 15 18 21 24 27 3020
25
30
9 12 15 18 21 24 27 300
50
100
9 12 15 18 21 24 27 300
200
400
9 12 15 18 21 24 27 30Time (Hours)
0
100
200
A Outdoor weather data and occupancy profile used insimulations (outdoor air temperature, outdoor airrelative humidity, solar irradiance, and number ofpeople).
9 12 15 18 21 24 27 300
5
9 12 15 18 21 24 27 300
10
20
9 12 15 18 21 24 27 30Time (Hours)
0
20
40SL-MPCS-MPCBL
B Power consumptions (fan, cooling, and reheatpower).
12 18 24 3018
20
22
24
26
12 18 24 300
5
10
10 -3
SL-MPCS-MPCBLLimits
12 18 24 30Time (Hours)
0
0.5
1
12 18 24 30Time (Hours)
0
2
4
C Zone and air loop conditions with the black dashedlines showing the upper and lower comfort limits(zone air temperature, zone air humidity ratio,outdoor air ratio, and supply air flow rate).
12 18 24 3010
20
30
12 18 24 300
5
10
15
10 -3
SL-MPCS-MPCBL
12 18 24 30Time (Hours)
10
20
30
12 18 24 30Time (Hours)
0
1
2
3
D HVAC system conditions (conditioned airtemperature, conditioned air humidity ratio, supplyair temperature, and chilled water flow rate).
Figure 2-8. Comparison of the three controllers for a hot-humid day (August/06/2016,Gainesville, Florida, USA). The scheduled hours of occupancy are shown as thegray shaded area.
42
Figure 2-8 shows the simulation results for a hot-humid day. It is found that SL-MPC
consumes the least amount of energy when compared to S-MPC and BL, as presented in
Figure 2-10. There are large violations in humidity limits by S-MPC, specifically during the
unoccupied hours, as shown in Figures 2-10 and 2-8C.
All three controllers are able to maintain thermal comfort limits during scheduled hours
of occupancy almost all the time; see 08:00-17:00 hours in Figure 2-8C. The BL ensures that
dry air is supplied to the zone and hence the humidity limit is not violated since it keeps the
conditioned air temperature at a constant value of 12.8 ◦C (55◦F ). In the case of S-MPC,
the optimal control decisions made by it are observed to be similar to those made by SL-MPC.
This can be attributed to the high internal heat load and hot outdoor air temperature.
Specifically, S-MPC decides to keep the conditioned air temperature low enough (at 12.8 ◦C)
to meet the heat load which has the unintended, but good, side effect of maintaining zone
humidity within the comfort limits.
Both the MPC controllers consume lesser energy when compared to BL during occupied
hours; see 08:00-17:00 hours in Figure 2-8B. The reason for this is that the outdoor air ratio is
kept constant for BL and it also assumes full occupancy from 08:00 to 17:00 hours. Therefore,
the air flow rate has to be kept high enough so that the ventilation requirements specified
in ASHRAE 62.1 [58] are met. This high air flow rate, combined with the low conditioned
air temperature, is highly suboptimal, especially when there is a reduction in occupancy: not
only is the air cooled unnecessarily, but reheating must also be performed to prevent the
zone from becoming too cold. This phenomenon can be seen between 12:00-13:00 hours in
Figures 2-8B and 2-8C. The MPC controllers in contrast vary the outdoor air ratio and air flow
rate as occupancy varies, leading to a lower fan and cooling energy consumption. It should be
noted that this reduction in energy use by the MPC controllers requires accurate prediction of
occupancy.
From Figure 2-8C it can be seen that S-MPC violates the humidity limits during
unoccupied hours while SL-MPC and BL do not. This is because S-MPC decides to bring
43
in the slightly cooler outside air in an attempt to provide “free” cooling but fails to realize that
the air is humid and it decides to increase the conditioned air temperature. If this violation of
humidity limit occurs over several months, serious and costly issues such as mold growth are
a real possibility [25]. This does not occur with SL-MPC as humidity is a part of the problem
formulation—the humidity constraint is found to be active between 18:00-28:00 hours as
shown in Figure 2-8C.
The difference in energy consumption between S-MPC and SL-MPC occurs over
unoccupied hours. This is another effect of the attempt to use “free” cooling by S-MPC.
The use of slightly cool, but humid, outdoor air results in the cooling coil always having to
reduce the temperature of mixed air and de-humidify it, resulting in high power consumption.
In the case of SL-MPC, it decides to re-circulate return air and reduce the outdoor air ratio,
thereby reducing the amount of de-humidification required. This lowers the cooling coil energy
consumption and the overall energy consumption.
2.6.1.2 Mild day
Figure 2-9 shows the simulation results for a mild day. It is found that SL-MPC consumes
the least amount of energy when compared to S-MPC and BL, as seen in Figure 2-10. Similar
to the results from hot day, there are huge violations in humidity limit during unoccupied hours
when using S-MPC. The conservative set points in BL ensure that the comfort limits are not
violated but at the cost of high energy use. Therefore, we discuss only the MPC controllers in
further detail here.
As discussed in Section 2.3, there are four control commands the MPC controllers need
to decide. They are msa, roa, Tca, and Tsa. Since the weather condition is not too cold, there
will be no reheat (Tsa = Tca) and the controllers need to decide the remaining three: msa, roa,
and Tca. During the occupied hours, it is seen that S-MPC decides to keep Tca low enough
(at 12.8 ◦C) similar to SL-MPC due to the high internal heat load, and hence maintains the
zone humidity. This behavior is similar to the one seen for a hot-humid day. But, the biggest
difference in the decisions made by the two MPC controllers are for roa and msa. S-MPC
44
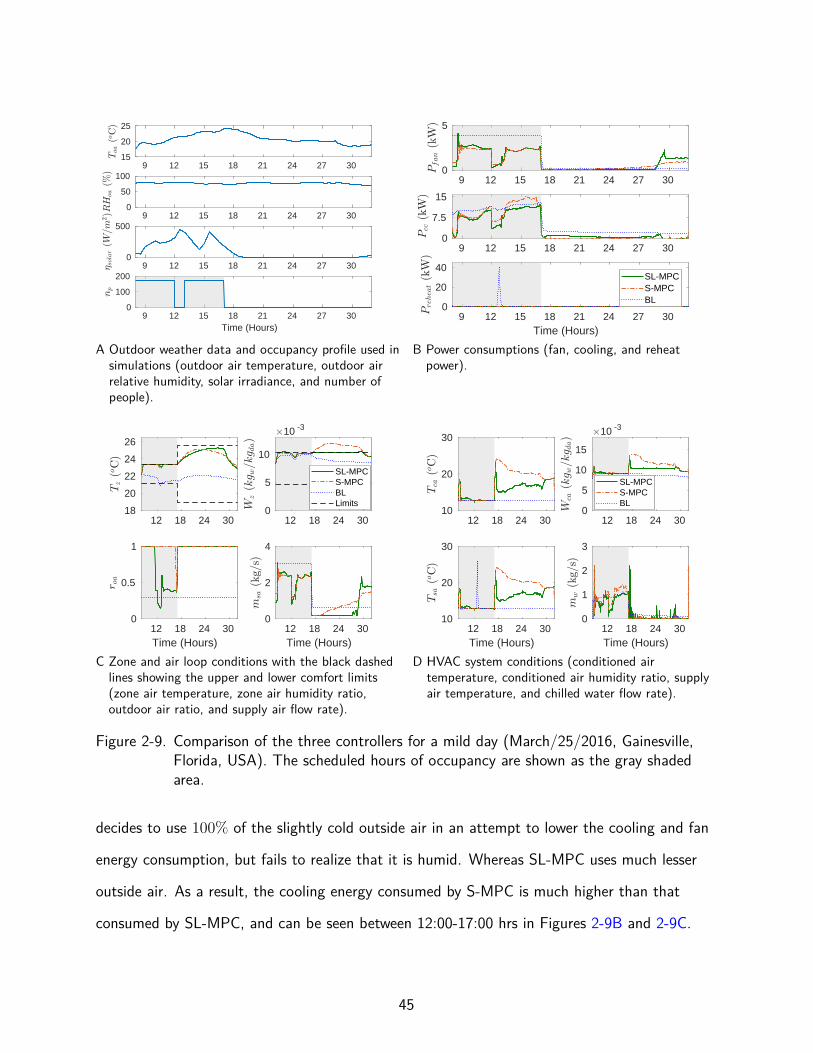
9 12 15 18 21 24 27 3015
20
25
9 12 15 18 21 24 27 300
50
100
9 12 15 18 21 24 27 300
500
9 12 15 18 21 24 27 30Time (Hours)
0
100
200
A Outdoor weather data and occupancy profile used insimulations (outdoor air temperature, outdoor airrelative humidity, solar irradiance, and number ofpeople).
9 12 15 18 21 24 27 300
5
9 12 15 18 21 24 27 300
7.5
15
9 12 15 18 21 24 27 30Time (Hours)
0
20
40SL-MPCS-MPCBL
B Power consumptions (fan, cooling, and reheatpower).
12 18 24 3018
20
22
24
26
12 18 24 300
5
10
10 -3
SL-MPCS-MPCBLLimits
12 18 24 30Time (Hours)
0
0.5
1
12 18 24 30Time (Hours)
0
2
4
C Zone and air loop conditions with the black dashedlines showing the upper and lower comfort limits(zone air temperature, zone air humidity ratio,outdoor air ratio, and supply air flow rate).
12 18 24 3010
20
30
12 18 24 300
5
10
15
10 -3
SL-MPCS-MPCBL
12 18 24 30Time (Hours)
10
20
30
12 18 24 30Time (Hours)
0
1
2
3
D HVAC system conditions (conditioned airtemperature, conditioned air humidity ratio, supplyair temperature, and chilled water flow rate).
Figure 2-9. Comparison of the three controllers for a mild day (March/25/2016, Gainesville,Florida, USA). The scheduled hours of occupancy are shown as the gray shadedarea.
decides to use 100% of the slightly cold outside air in an attempt to lower the cooling and fan
energy consumption, but fails to realize that it is humid. Whereas SL-MPC uses much lesser
outside air. As a result, the cooling energy consumed by S-MPC is much higher than that
consumed by SL-MPC, and can be seen between 12:00-17:00 hrs in Figures 2-9B and 2-9C.
45

During unoccupied hours both the MPC controllers decide to bring in 100% outside air,
but SL-MPC decides to keep Tca lower than the one decided by S-MPC to ensure that the air
is dehumidified enough before being supplied to the zone.
2.6.1.3 Cold day
Since the outdoor weather is dry, no matter what decisions are made by a controller, it
is unlikely to violate humidity constraints in the building. The energy consumed by the two
MPC controllers is almost the same, which is much smaller than that by BL (Figure 2-10).
BL performs simultaneous heating and cooling in a pronounced manner leading to high energy
consumption: the fixed outdoor air ratio combined with the 12.8 ◦C (55 ◦F ) conditioned air
requires usage of cooling energy, additionally reheating is required to keep the building warm
enough because of the cold weather. The MPC controllers choose to use as much outdoor air
as possible, since the cold outdoor conditions provide free cooling without having to use chilled
water.
2.6.2 Comparison among Controllers
The performance metrics discussed in Section 2.5.3 are computed from simulation data for
each of the three controllers, and are shown in Figure 2-10. The temperature violation VT was
observed to be minimal for all three controllers, and is therefore not shown in the figure. We
see from the figure that space humidity is a concern only during hot-humid and mild weather
conditions.
Figure 2-10 shows that SL-MPC outperforms the other two controllers: it consumes the
least amount of energy under various outdoor weather conditions with negligible violation in
thermal comfort constraints.
The simulation results discussed in the previous section show that S-MPC makes decisions
that either leads to thermal comfort violations, or higher energy use when compared to
SL-MPC, under the following conditions.
1. Mild internal heat load but high outdoor humidity (e.g. spring/summer night): In such
a condition, S-MPC decides that slightly cooler outside air can provide free cooling and
46
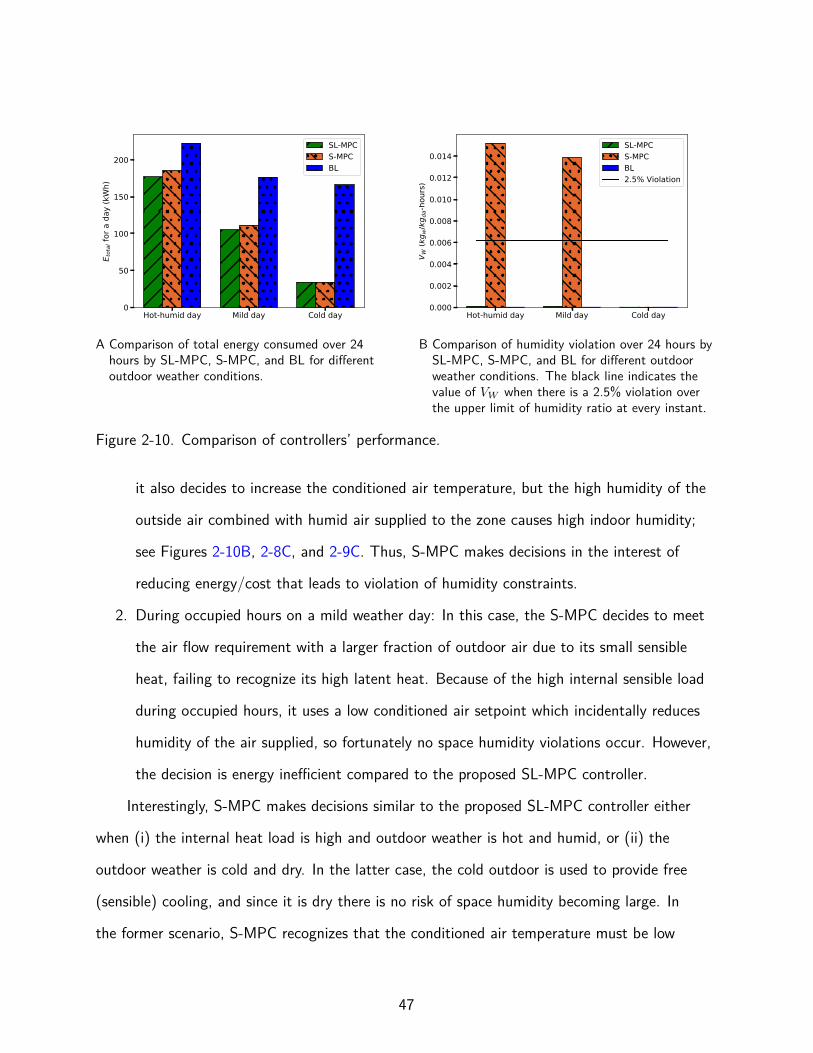
Hot-humid day Mild day Cold day0
50
100
150
200
E tot
al fo
r a d
ay (k
Wh)
SL-MPCS-MPCBL
A Comparison of total energy consumed over 24hours by SL-MPC, S-MPC, and BL for differentoutdoor weather conditions.
Hot-humid day Mild day Cold day0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.014
V W (k
g w/k
g da-h
ours
)
SL-MPCS-MPCBL2.5% Violation
B Comparison of humidity violation over 24 hours bySL-MPC, S-MPC, and BL for different outdoorweather conditions. The black line indicates thevalue of VW when there is a 2.5% violation overthe upper limit of humidity ratio at every instant.
Figure 2-10. Comparison of controllers’ performance.
it also decides to increase the conditioned air temperature, but the high humidity of the
outside air combined with humid air supplied to the zone causes high indoor humidity;
see Figures 2-10B, 2-8C, and 2-9C. Thus, S-MPC makes decisions in the interest of
reducing energy/cost that leads to violation of humidity constraints.
2. During occupied hours on a mild weather day: In this case, the S-MPC decides to meet
the air flow requirement with a larger fraction of outdoor air due to its small sensible
heat, failing to recognize its high latent heat. Because of the high internal sensible load
during occupied hours, it uses a low conditioned air setpoint which incidentally reduces
humidity of the air supplied, so fortunately no space humidity violations occur. However,
the decision is energy inefficient compared to the proposed SL-MPC controller.
Interestingly, S-MPC makes decisions similar to the proposed SL-MPC controller either
when (i) the internal heat load is high and outdoor weather is hot and humid, or (ii) the
outdoor weather is cold and dry. In the latter case, the cold outdoor is used to provide free
(sensible) cooling, and since it is dry there is no risk of space humidity becoming large. In
the former scenario, S-MPC recognizes that the conditioned air temperature must be low
47
enough to maintain the indoor temperature within allowable limits. That decision has an
unintended, but good, side effect of maintaining space humidity even though the controller has
no knowledge of humidity.
BL uses conservative set points which ensures that there are no violations in humidity and
temperature constraints almost all the time, but leads to higher energy use when compared to
the two MPC controllers.
These observations provide a basis for a cost-benefit trade-off analysis of the three
controllers. One should first note that the proposed SL-MPC requires more sophisticated
modeling and additional humidity sensors compared to an MPC controller that ignores
humidity/latent heat, and thus is more expensive to use in practice. The additional energy cost
savings due to the proposed MPC controller over the naive MPC controller S-MPC is small,
about 5%; see Figure 2-10A. The larger difference is space humidity. As discussed previously, in
mild outdoor weather conditions such as spring/summer nights, the proposed MPC controller is
able to maintain space humidity constraints while the naive MPC controller leads to poor space
humidity. Since this large space humidity occurs over many hours in a night (Figures 2-8C
and 2-9C), and this behavior is likely to repeat every night over the entire season, it may lead
to mold growth which can seriously affect occupant health. In fact, additional simulations
that are not reported here due to space constraints, show that with larger internal moisture
generation, poor space humidity occurs even during occupied hours. Therefore, the benefit of
incorporating humidity/latent heat in MPC control of HVAC—or conversely the cost of not
doing so—maybe more about occupant health and comfort, and less about energy savings.
Additionally, since these benefits (conversely, costs) manifest only over long time periods,
experimental evaluations conducted over a short time period, say, less than a few months, may
not be adequate to provide a complete assessment.
2.7 Summary
An MPC-based controller which incorporates humidity and latent heat in a principled
manner is presented. Simulations show that the proposed MPC controller outperforms both a
48

naive MPC controller (that does not consider humidity/latent heat) and a baseline rule-based
controller, despite large plant-model mismatch. A thorough comparison for several weather
conditions indicate the key advantage of the proposed controller over the naive MPC is not
energy savings but humidity control. The naive controller may lead to poor humidity control,
especially during mild outdoor weather conditions such as spring or summer nights. Such
violations in humidity over long periods can cause mold growth and can affect occupant health
and comfort.
This study is a first step; there are several avenues for further exploration. A natural
extension is to multi-zone buildings, which is presented in Chapter 3. A thorough numerical
investigation for various climate zones and HVAC systems is also needed. It may be possible
to reformulate the underlying optimization problem in the proposed controller to guarantee
feasibility and convexity. Theoretical properties of the controller need to be investigated
as well. Another avenue for future work is extension to supply side applications, such as
development of humidity- and latent heat-aware HVAC control to provide ancillary services to
power grid.
49
CHAPTER 3MPC-BASED HIERARCHICAL CONTROL OF A MULTI-ZONE COMMERCIAL HVAC
SYSTEM
3.1 Overview
In this chapter, a novel hierarchical architecture for MPC-based indoor climate control of
multi-zone buildings to provide energy-efficiency is proposed.
Several of the MPC formulations proposed in the literature are for buildings with one
zone [8, 9, 10] or a small number of zones [11, 12]. The algorithm presented in Chapter 2
is also primarily for single-zone buildings. A direct extension of such formulations for large
multi-zone buildings has two main challenges. First, solving the underlying optimization
problem in MPC for a building with a large number of zones is computationally complex
because of the large number of decision variables. To reduce the computational complexity,
several distributed and hierarchical approaches have been proposed [49, 46, 59, 64, 65, 66,
67]. The second challenge, which has attracted far less attention, is that MPC requires a
“high-resolution” model of the thermal dynamics of a multi-zone building. High-resolution
means that the temperature of every zone in the building is a state in the model and the
control commands for every zone are inputs in the model. One way of obtaining such a
multi-zone model is by first constructing a “white box” model, such as by using a building
energy modeling software, and then simplifying it to make it suitable for MPC, e.g., [68]. But
constructing a white box model is expensive; it requires significant effort [69]. Moreover, the
resulting model may not reflect the building as is. Another way of obtaining a high-resolution
multi-zone model is by utilizing data-driven techniques, which use input-output measurements.
Getting reliable estimates using data-driven modeling is challenging even for a single-zone
building, as a building’s thermal dynamics is affected by a non-trivial and unmeasurable
disturbance, the heat gain from occupants and their use of equipment, that strongly affects
quality of the identified model [70]. In the case of multi-zone model identification, it becomes
intractable since the model has too many degrees of freedom: as many unknown disturbance
signals as there are number of zones. To the best of our knowledge, there are no works on
50

Return airExhaustair
Outdoor air
Mixedair
Cooling and
dehumidifying coil
Tca
Chilledwater
msaTma Fan
ToaWcaWmaWoa
Twi
mwTsa,1
mra
moa
Zone 2
Zone 1
VAVW/REHEAT
msa,1
Tsa,2msa,2
VAVW/REHEAT
Tz,1 Wz,1
Tz,2 Wz,2
pduct
Air Handling Unit
TraWra
Wsa,1
Wsa,2
Figure 3-1. Schematic of a multi-zone—specifically, a two zone—commercialvariable-air-volume HVAC system. In this figure, oa: outdoor air, ra: return air,ma: mixed air, ca: conditioned air, and sa: supply air.
reliable identification of multi-zone building models without making assumptions on the nature
of the disturbance affecting individual zones [71].
In addition to the challenges mentioned above, most of the prior works—whether
on single-zone or on multi-zone buildings—ignore humidity and latent heat in their MPC
formulations, as explained in Chapter 2.
In this chapter, a humidity- and latent heat-aware MPC formulation for a multi-zone
building with a variable air volume (VAV) HVAC system is proposed. Figure 3-1 shows the
schematic of such a system.
To overcome the challenges mentioned above, we propose a two-level control architecture.
The high-level controller (HLC) decides on the AHU-level control commands. The HLC is an
MPC controller that uses a “low-resolution” model of the building with a small number of
“meta-zones”, with each meta-zone being a single-zone equivalent of a part of the building
consisting of several zones. In the case study presented here, a 33 zone three-floor building
is aggregated to a 3 meta-zone model, with each meta-zone corresponding to a floor. The
advantage of such an approach is that a high-resolution multi-zone model is not needed as a
starting point. Rather, a single-zone equivalent model of each meta zone, in which disturbance
in all the zones are aggregated into one signal, can be directly identified from measurements
collected from the building. The identification problem of such a single-zone equivalent model
51
is more tractable [72]. In this chapter, we use the system identification method from [72],
though other identification methods can also be used. Since the HLC uses a low-resolution
model with a much smaller number of meta-zones than that in the building, its computational
complexity is low. However, this reduction of computational complexity creates a different
challenge. Since the decision variables of the optimization problem in the HLC correspond
to the meta-zones (air flow rate, temperature, etc.), they do not correspond to those for the
actual zones of the building. The low-level controller (LLC) is now used to compute the control
commands for individual zones. It does so by solving a projection problem that appropriately
distributes aggregate quantities computed by the HLC to individual zones. The LLC uses
feedback from each zone to assess their needs and ensures indoor climate of each zone is
maintained.
The proposed controller—that includes the HLC and LLC—is hereafter referred to as
MZHC which stands for multi-zone hierarchical controller. Its performance is assessed through
simulations on a “virtual building” plant. The plant is representative of a section of the
Innovation Hub building comprising of 33 zones and is located at the University of Florida
campus. The plant is constructed using Modelica [73]. The performance of the proposed
controller is compared with that of Dual Maximum controller as a baseline [33]. The Dual
Maximum controller—which is referred to as BL (for baseline)—is a rule-based controller, and
is one of the more energy efficient controllers among those used in practice [33]. Simulation
results show that using the proposed controller provides significant energy savings when
compared to BL while maintaining indoor climate.
Compared to the literature on MPC design for multi-zone building HVAC systems, our
work makes four principal contributions, with details discussed in Section 3.2. (i) The first
contribution is that the proposed method does not assume availability of a high-resolution
model of the multi-zone building which is difficult to obtain. Instead, it can utilize existing
data-driven methods that can quickly identify a low-resolution model of the multi-zone building
from measurements. (ii) Since the MPC part of the proposed controller uses a low-resolution
52
model with a small number of meta-zones, the method is scalable to buildings with a large
number of zones. Although distributed iterative computation has been proposed in the
literature as an alternate approach to reducing computational complexity, ours can be solved
in a centralized setting. (iii) The third contribution is the incorporation of humidity and latent
heat in our multi-zone MPC formulation, which has been largely ignored in the literature
on MPC for buildings, and especially so in the literature on multi-zone building MPC. Our
simulations show that when using MZHC, the indoor humidity constraint is active, especially
during hot-humid weather. Without humidity being explicitly considered, the controller would
have caused high space humidity in an effort to reduce energy use. (iv) The fourth contribution
is a realistic evaluation of the proposed controller in a high-fidelity simulation platform that
introduces a large plant-model mismatch. In many prior works on multi-zone MPC, the model
used by the controller is the same as that used in simulating the plant. In contrast, the only
information provided to the proposed controller about the building is sensor measurements
(past data for model identification and real-time data during control) and design parameters
such as expected occupancy, minimum design airflow rates for each VAV box, etc.
The rest of this chapter is organized as follows. Section 3.2 discusses our work in relation
to the literature on multi-zone MPC. Section 3.3 describes a multi-zone building equipped
with a VAV HVAC system and the models we use in simulating the plant (the system to be
controlled). Section 3.4 presents the proposed MPC-based hierarchical controller. Section 3.5
describes a rule-based baseline controller with which the performance of the proposed controller
is compared. The simulation setup is described in Section 3.6. Simulation results are presented
and discussed in Section 3.7. Finally, the main conclusions are provided in Section 3.8.
3.2 Comparison with Literature on Multi-Zone MPC
Several distributed and hierarchical approaches have been proposed to reduce the
computational complexity of MPC for multi-zone buildings [49, 46, 59, 64, 65, 66, 67]. In [49],
a hierarchical distributed algorithm called token-based scheduling is proposed to vary the supply
airflow rate to the zones. A modified version of this algorithm is used in [46] to minimize the
53
energy consumption of a multi-zone building located at the Nanyang Technological University,
Singapore campus.
In [64], a two-layered control architecture is proposed for operating a VAV HVAC system.
The upper layer is an open loop controller, while the lower layer is based on MPC and it varies
the supply airflow rates to the zones. Similar to [49], [46], and [64], the works [66, 65, 67]
consider varying only the zone-level control inputs such as the supply airflow rates and
zone temperature set points. These works exclude the AHU-level control inputs such as the
conditioned air temperature and outside airflow rate. Unlike the works mentioned above, the
work [74] uses MPC to vary only the AHU-level control inputs; the zone-level control inputs are
excluded in this formulation.
One of the few works similar to ours is [59], as they consider both the zone-level and
AHU-level control inputs in their formulation. But their algorithm requires a high-resolution
multi-zone model, and they do not consider humidity and latent heat in their formulation.
3.3 System and Problem Description, and Plant Simulator
Our focus is a multi-zone building equipped with a variable-air-volume (VAV) HVAC
system, whose schematic is shown in Figure 3-1. In such a system, part of the air exhausted
from the zones is recirculated and mixed with outdoor air. This mixed air is sent through the
cooling coil where the air is cooled and dehumidified to the conditioned air temperature (Tca)
and humidity ratio (Wca). This conditioned air is then sent through the supply ducts to the
VAV boxes, which have a damper to control airflow, and finally supplied to the zones. Some
VAV boxes have reheat coils; they can change temperature of supply air but not humidity, i.e.,
Tsa,i ≥ Tca and Wsa,i = Wca, where Tsa,i and Wsa,i are the temperature and humidity ratio of
supply air to the ith zone. If a VAV box is not equipped with a reheat coil (cooling only), then
the temperature of air supplied by it to its zone will be at the conditioned air temperature, i.e.,
Tsa,i = Tca.
54
The control commands for a multi-zone VAV HVAC system with nz zones (i.e., VAV
boxes) are:
u := (moa, Tca,msa,i, Tsa,i, i = 1, . . . , nz), (3-1)
where moa is the outdoor airflow rate, Tca is the conditioned air temperature, msa,i is the
supply airflow rate to the ith zone, and Tsa,i is the supply air temperature to the ith zone.
Note that the humidity of conditioned air (Wca) which is supplied to all the zones is indirectly
controlled through Tca. Of the nz VAVs/zones in the building, nrhz VAVs are equipped with
a reheat coil and nz − nrhz VAVs do not have a reheat coil (cooling only). For the latter, the
supply air temperature will be the same as the conditioned air temperature, i.e., Tsa,i(k) =
Tca(k).
The control commands in (3-1) are sent as set points to the low-level control loops which
are typically comprised of proportional integral (PI) controllers. The role of a climate control
system is to vary these control commands so that three main goals are satisfied: (i) ensure
thermal comfort, (ii) maintain indoor air quality, and (iii) use minimum amount of energy/cost.
In an HVAC system as the one shown in Figure 3-1, the supply duct static pressure
setpoint, pduct, is also usually a command that the climate control system has to decide. We
assume that the supply duct static pressure setpoint (pduct) is controlled based on “trim and
respond” strategy [75], which is commonly used in VAV systems, including in the Innovation
Hub building that we use as a case study.
Virtual building (Simulator). The virtual building (VB) is a high-fidelity model of a
building’s thermal dynamics and its HVAC system that will act as the plant for the controllers.
The VB is chosen to mimic part of the Innovation Hub building in Gainesville, FL, USA, which
is serviced by AHU-2 (among the two AHUs that serve Phase I). Figures 3-2 and 3-3 show
photos of the building and the relevant floor plans, respectively. The rooms supplied by the
same VAV box are grouped together to form one large space (zone); the zones are enclosed
by dotted lines in Figure 3-3. The first floor has 15 rooms which are grouped into 9 zones,
55
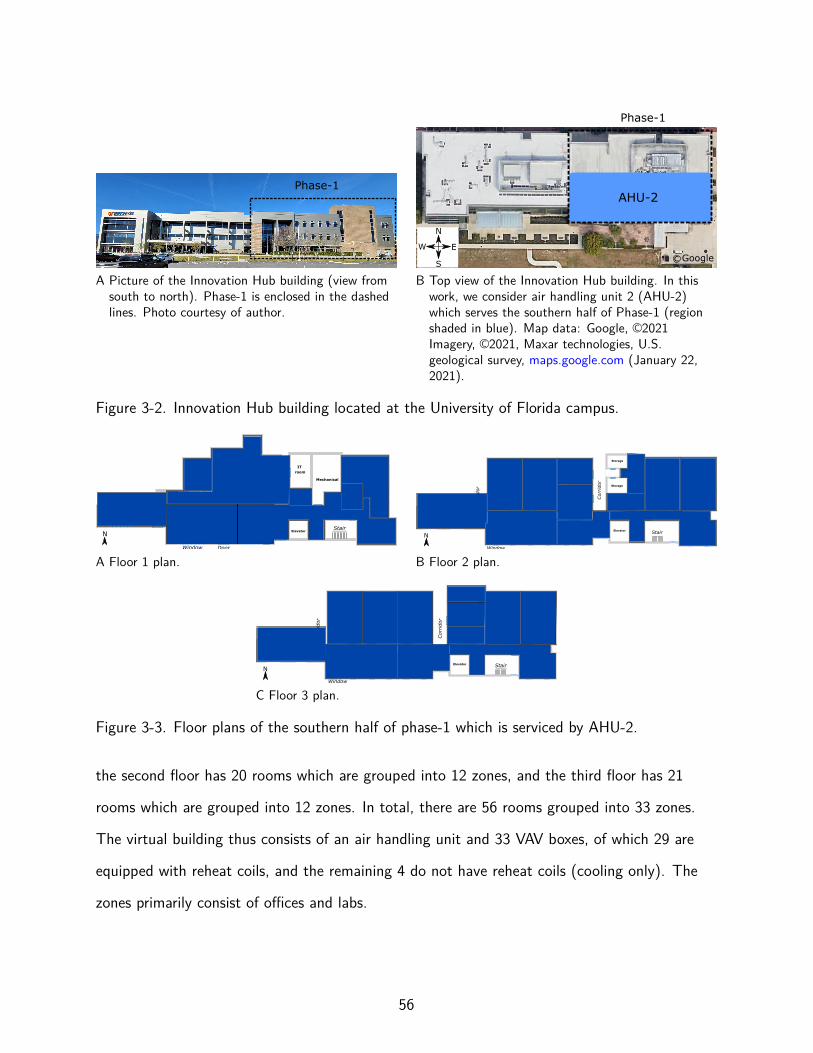
Phase-1
A Picture of the Innovation Hub building (view fromsouth to north). Phase-1 is enclosed in the dashedlines. Photo courtesy of author.
Phase-1
AHU-2
c Google
N
S
EW
B Top view of the Innovation Hub building. In thiswork, we consider air handling unit 2 (AHU-2)which serves the southern half of Phase-1 (regionshaded in blue). Map data: Google, ©2021Imagery, ©2021, Maxar technologies, U.S.geological survey, maps.google.com (January 22,2021).
Figure 3-2. Innovation Hub building located at the University of Florida campus.
Lunch & Vending
roomConference Conference
Copy/
Mailroom Men Women Storage
ITroom
Mechanical
StorageTelecom
Electrical
Client room
IToffice
Recycling/DumpstersMechElevator
Stair
Corridor
Corridor
Corridor
DoorWindow
N
VAV-104 VAV-105
VAV-101
VAV-102
VAV-103
VAV-108
VAV-106VAV-107
VAV-109
A Floor 1 plan.
Lab Lab
Lab
Lab
LabLab
Office Office Office Office Office Office Office Office
Office Office
Storage
Telecom Electrical
Storage
Shared hood room
StorageElevator Stair
Door
Window
Corridor
Corridor
Corridor Corridor
N
VAV-201
VAV-202 VAV-203
VAV-204
VAV-206
VAV-207
VAV-208
VAV-205
SV-209VAV-210 VAV-212
VAV-211
B Floor 2 plan.
Office Office Office Office Office Office
Office Office
Office Office
Lab Lab Lab Autoclave Lab Lab
Telecom Electrical
Elevator Storage
Shared Equipment
Stair
Corridor Corridor
Corridor
Corridor
Door
Window
N
VAV-301
VAV-304
VAV-302 SV-303 VAV-306
VAV-305
VAV-307
VAV-312
VAV-309
SV-310 VAV-311VAV-308
C Floor 3 plan.
Figure 3-3. Floor plans of the southern half of phase-1 which is serviced by AHU-2.
the second floor has 20 rooms which are grouped into 12 zones, and the third floor has 21
rooms which are grouped into 12 zones. In total, there are 56 rooms grouped into 33 zones.
The virtual building thus consists of an air handling unit and 33 VAV boxes, of which 29 are
equipped with reheat coils, and the remaining 4 do not have reheat coils (cooling only). The
zones primarily consist of offices and labs.
56
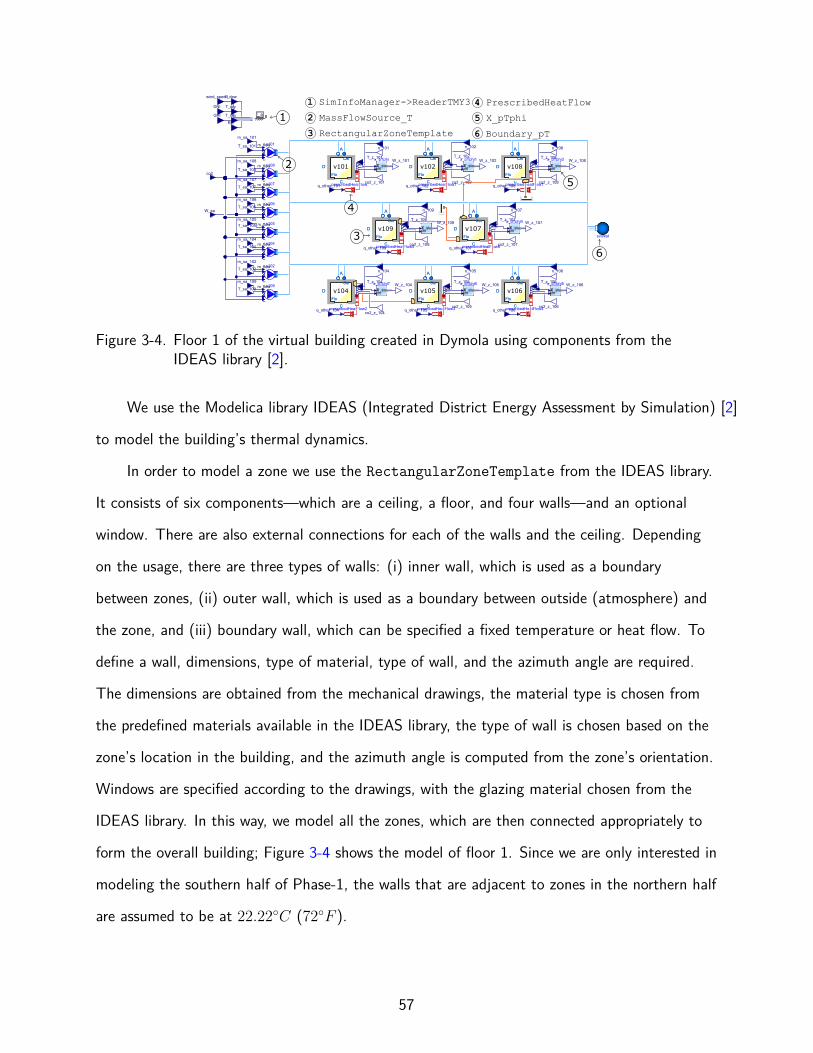
v108Flo
B
C
D
Cei
A
Flo
B
C
D
Cei
A
v107Flo
B
C
D
Cei
A
Flo
B
C
D
Cei
A
v106Flo
B
C
D
Cei
A
Flo
B
C
D
Cei
A
v105Flo
B
C
D
Cei
A
Flo
B
C
D
Cei
A
v104Flo
B
C
D
Cei
A
Flo
B
C
D
Cei
A
v102Flo
B
C
D
Cei
A
Flo
B
C
D
Cei
A
v101Flo
B
C
D
Cei
A
Flo
B
C
D
Cei
A
prescribedHeatFlow prescribedHeatFlow1
prescribedHeatFlow2 prescribedHeatFlow3 prescribedHeatFlow4
prescribedHeatFlow7
prescribedHeatFlow8
sinWat
i
Xi
C
m_flow
T m
s101
Xi
C
m_flow
T m
s108
Xi
C
m_flow
T m
s107
Xi
C
m_flow
T m
s106
Xi
C
m_flow
T m
s105
Xi
C
m_flow
T m
s104
Xi
C
m_flow
T m
s102
Xi
C
m_flow
T m
s109
v109Flo
B
C
D
Cei
A
Flo
B
C
D
Cei
A
prescribedHeatFlow5
x_pTphi
TphiX_steam
x_pTphi1
TphiX_steam
x_pTphi2
TphiX_steam
x_pTphi3
TphiX_steam
x_pTphi4
TphiX_steam
x_pTphi5
TphiX_steam
x_pTphi6
TphiX_steam
x_pTphi7
TphiX_steam
T_sa_108
T_sa_107
m_sa_108
m_sa_107
W_z_108T_z_108
T_z_107W_z_107
m_sa_106
T_sa_106
m_sa_105
T_sa_105
T_sa_104
m_sa_104
T_sa_102
m_sa_102
T_sa_101
T_z_101W_z_101 W_z_102
T_z_102
T_z_104W_z_104 W_z_105
T_z_105 T_z_106W_z_106
q_other_101
co2_z_106
co2_z_108co2_z_102co2_z_101
co2_z_105
co2_z_104
co2_z_107
q_other_102
q_other_104 q_other_105 q_other_106
q_other_108
q_other_107
n_101 n_108
n_106n_105
n_107
n_104
n_102
W_sa
E
T_dry
RH
wind_speedT_dew
T_sky
DNI
GHI
m_sa_109
T_sa_109
n_109
T_z_109
co2_z_109
W_z_109
q_other_109
co2
m_sa_101
1
2
3
4
5
1 SimInfoManager->ReaderTMY3
2 MassFlowSource_T
3 RectangularZoneTemplate
4 PrescribedHeatFlow
5 X_pTphi
6
6 Boundary_pT
Figure 3-4. Floor 1 of the virtual building created in Dymola using components from theIDEAS library [2].
We use the Modelica library IDEAS (Integrated District Energy Assessment by Simulation) [2]
to model the building’s thermal dynamics.
In order to model a zone we use the RectangularZoneTemplate from the IDEAS library.
It consists of six components—which are a ceiling, a floor, and four walls—and an optional
window. There are also external connections for each of the walls and the ceiling. Depending
on the usage, there are three types of walls: (i) inner wall, which is used as a boundary
between zones, (ii) outer wall, which is used as a boundary between outside (atmosphere) and
the zone, and (iii) boundary wall, which can be specified a fixed temperature or heat flow. To
define a wall, dimensions, type of material, type of wall, and the azimuth angle are required.
The dimensions are obtained from the mechanical drawings, the material type is chosen from
the predefined materials available in the IDEAS library, the type of wall is chosen based on the
zone’s location in the building, and the azimuth angle is computed from the zone’s orientation.
Windows are specified according to the drawings, with the glazing material chosen from the
IDEAS library. In this way, we model all the zones, which are then connected appropriately to
form the overall building; Figure 3-4 shows the model of floor 1. Since we are only interested in
modeling the southern half of Phase-1, the walls that are adjacent to zones in the northern half
are assumed to be at 22.22◦C (72◦F ).
57
Inputs to the building thermal dynamics portion of the VB are supply airflow rate (msa,i),
supply air temperature (Tsa,i), and supply air humidity ratio (Wsa,i) for all the zones. These
are implemented using the MassFlowSource_T block from the IDEAS library; an ideal flow
source that produces a specified mass flow with specified temperature, composition, and trace
substances. Outputs of the simulator are temperature (Tz,i) and humidity ratio (Wz,i) of all
the zones. The zone temperature and humidity are also influenced by several exogenous inputs:
(i) outdoor weather conditions such as solar irradiation (ηsol), outdoor air temperature (Toa),
etc. which are provided using the ReaderTMY3 block from the IDEAS library, (ii) internal
sensible and latent heat loads due to occupants, which are computed based on the number
of occupants provided to the zone block, and (iii) internal heat load due to lighting and
equipment which is given using the PrescribedHeatFlow from the Modelica standard library.
Cooling and dehumidifying coil model: The cooling coil model has five inputs and two
outputs. The inputs are supply airflow rate (msa), mixed air temperature (Tma) and humidity
ratio (Wma), chilled water flow rate (mw), and chilled water inlet temperature (Twi). The
outputs are conditioned air temperature (Tca) and humidity ratio (Wca). We use the gray box
data-driven model presented in Chapter 2.
Power consumption models: For the HVAC system configuration presented in
Figure 3-1, there are three main components which consume power. They are supply fan,
cooling and dehumidifying coil, and reheating coils. The fan power consumption is modeled as:
Pfan(k) = αfanmsa(k)3, (3-2)
where msa(k) is the total supply airflow rate at the AHU [76].
The cooling and dehumidifying coil power consumption is modeled to be proportional to
the heat it extracts from the mixed air stream:
Pcc(k) =msa(k)
[hma(k)− hca(k)
]ηccCOPc
, (3-3)
58
where hma(k) and hca(k) are the specific enthalpies of the mixed and conditioned air
respectively, ηcc is the cooling coil efficiency, and COPc is the chiller coefficient of performance.
Since a part of the return air is mixed with the outside air, the specific enthalpy of the mixed
air is:
hma(k) = roa(k)hoa(k) + (1− roa(k))hra(k), (3-4)
where hoa(k) and hra(k) are the specific enthalpies of the outdoor and return air respectively,
and roa(k) is the outside air ratio: roa(k) :=moa(k)msa(k)
.
The reheating coil power consumption in the ith VAV box is modeled to be proportional to
the heat it adds to the conditioned air stream:
Preheat,i(k) =msa,i(k)Cpa
[Tsa,i(k)− Tca(k)
]ηreheatCOPh
, (3-5)
where ηreheat is the reheating coil efficiency, and COPh is the boiler coefficient of performance.
Overall plant: The overall plant, i.e., virtual building—consisting of the building thermal
model, cooling and dehumidifying coil model, and power consumption models—is simulated
using SIMULINK and MATLAB©. The building thermal model is constructed in DYMOLA
2021 and it is exported into an FMU (Functional Mockup Unit). It is then imported into
SIMULINK using the FMI Kit for SIMULINK. The remaining models are constructed directly in
SIMULINK.
3.4 Proposed Multi-Zone Hierarchical Control (MZHC)
Recall that both the proposed and the baseline controllers need to decide the following
control commands:
u(k) := [moa(k), Tca(k),msa,i(k), Tsa,i(k)]T ∈ ℜ2+nz+nrh
z .
Figure 3-5 shows the structure of the proposed MZHC. The high-level controller is based
on MPC and decides the control commands for the AHU: outdoor air flow rate (moa) and
conditioned air temperature (Tca). The low-level controller is a projection-based feedback
59
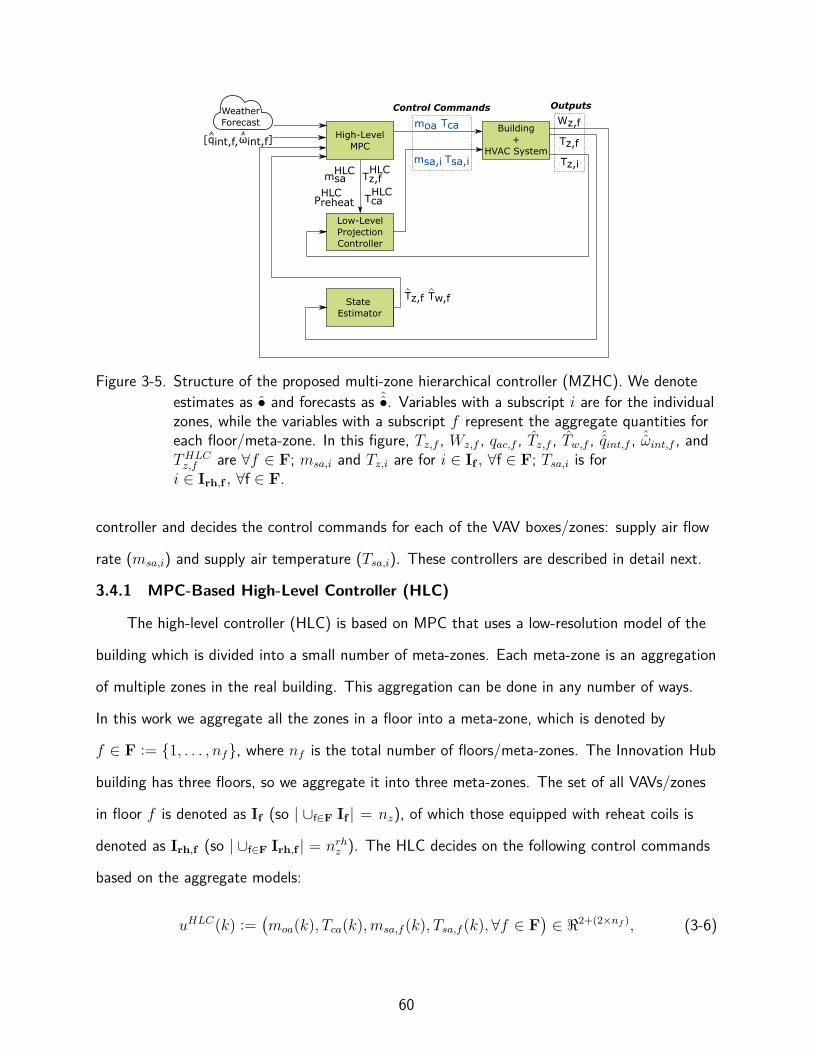
Tcamoa
Tz,fBuilding
+HVAC System
High-LevelMPC
Low-LevelProjectionController
State Estimator
Tsa,imsa,imsa
Preheat
Wz,f
Tz,i
Tz,f Tw,f
[qint,f,ωint,f]
Tz,fHLC
WeatherForecast
HLC
HLC
OutputsControl Commands
TcaHLC
Figure 3-5. Structure of the proposed multi-zone hierarchical controller (MZHC). We denoteestimates as • and forecasts as ˆ•. Variables with a subscript i are for the individualzones, while the variables with a subscript f represent the aggregate quantities foreach floor/meta-zone. In this figure, Tz,f , Wz,f , qac,f , Tz,f , Tw,f , ˆqint,f , ˆωint,f , andTHLCz,f are ∀f ∈ F; msa,i and Tz,i are for i ∈ If , ∀f ∈ F; Tsa,i is for
i ∈ Irh,f , ∀f ∈ F.
controller and decides the control commands for each of the VAV boxes/zones: supply air flow
rate (msa,i) and supply air temperature (Tsa,i). These controllers are described in detail next.
3.4.1 MPC-Based High-Level Controller (HLC)
The high-level controller (HLC) is based on MPC that uses a low-resolution model of the
building which is divided into a small number of meta-zones. Each meta-zone is an aggregation
of multiple zones in the real building. This aggregation can be done in any number of ways.
In this work we aggregate all the zones in a floor into a meta-zone, which is denoted by
f ∈ F := {1, . . . , nf}, where nf is the total number of floors/meta-zones. The Innovation Hub
building has three floors, so we aggregate it into three meta-zones. The set of all VAVs/zones
in floor f is denoted as If (so | ∪f∈F If | = nz), of which those equipped with reheat coils is
denoted as Irh,f (so | ∪f∈F Irh,f | = nrhz ). The HLC decides on the following control commands
based on the aggregate models:
uHLC(k) :=(moa(k), Tca(k),msa,f (k), Tsa,f (k),∀f ∈ F
)∈ ℜ2+(2×nf ), (3-6)
60
where msa,f (k) :=∑i∈If
msa,i(k) is the aggregate (total) supply airflow rate to all the zones
in floor/meta-zone f and Tsa,f (k) is the aggregate supply air temperature. Of the control
commands computed in (3-6), moa(k) and Tca(k) can be directly sent to the plant. The
remaining information computed by the HLC including msa,f (k) and Tsa,f (k) are used by the
low-level controller (LLC), described in Section 3.4.2, to decide on the supply airflow rate
(msa,i(k)) and supply air temperature (Tsa,i(k)) for the individual zones/VAV boxes in each
floor.
A comment on notation: all variables with a subscript i are for the individual zones, while
the variables with a subscript f represent the aggregate quantities for each meta-zone.
For MPC formulation, we use a model interval of ∆t = 5 minutes, a control interval
of ∆T = 15 minutes, and a prediction/planning interval of T = 24 hours. So we have
T = N∆T and ∆T = M∆t, where N = 96 (planning horizon) and M = 3. The control
inputs for N time steps are obtained by solving an optimization problem of minimizing the
energy consumption subject to thermal comfort, indoor air quality, and actuator constraints.
Then the control commands obtained for the first time step are sent to the plant and the LLC.
The optimization problem is solved again for the next N time steps with the initial states of
the model obtained from a state estimator, which uses measurements from the plant. This
process is repeated at the next control time step, i.e., after an interval of ∆T [77].
To describe the optimization problem, first we define the state vector x(k) and the vector
of control commands and internal variables v(k) as:
x(k) :=(Tz,f (k), Tw,f (k),Wz,f (k), ∀f ∈ F
)∈ ℜ3×nf , (3-7)
v(k) :=(uHLC(k),mw(k),Wca(k)
)∈ ℜ2+(2×nf )+2, (3-8)
where Tz,f (k), Tw,f (k), and Wz,f (k) are the aggregate zone temperature, wall temperature,
and humidity ratio of floor/meta-zone f , respectively; uHLC(k) is the control command vector
defined in (3-6) and mw(k) is the chilled water flow rate into the cooling coil. The exogenous
61

input vector is:
w(k) :=(ηsol(k), Toa(k),Woa(k), qint,f (k), ωint,f (k), ∀f ∈ F
)∈ ℜ3+(2×nf ), (3-9)
where ηsol(k) is the solar irradiance, Toa(k) is the outdoor air temperature, Woa(k) is the
outdoor air humidity ratio, qint,f (k) is the aggregate internal heat load in floor/meta-zone f
due to occupants, lights, equipment, etc., and ωint,f (k) is the aggregate rate of water vapor
generation in floor/meta-zone f due to occupants and other sources. We denote the forecast
of these exogenous inputs as ˆw; in Section 3.6, we discuss how these forecasts are obtained.
The vector of nonnegative slack variables ζ(k) :=(ζ lowT,f (k), ζ
highT,f (k), ζ lowW,f (k), ζ
highW,f (k), ∀f ∈
F)∈ ℜ4×nf , is introduced for feasibility of the optimization problem.
The optimization problem at time index j is:
minV,X,Z
j+NM−1∑k=j
[Pfan(k) + Pcc(k) +
∑f∈F
Preheat,f (k)
]∆t+ Pslack(k), (3-10a)
where Pfan(k) is given by (3-2), Pcc(k) is given by (3-3), Preheat,f (k) :=msa,f (k)Cpa
[Tsa,f (k)−Tca(k)
]ηreheatCOPh
,
V := [vT (j), vT (j+1), . . . , vT (j+NM −1)]T , X := [xT (j+1), xT (j+2), . . . , xT (j+NM)]T ,
and Z := [ζT (j + 1), ζT (j + 2), . . . ζT (j + NM)]T . The last term, Pslack, penalizes the
aggregate zone temperature and humidity slack variables:
Pslack(k) :=∑f∈F
[λlowT ζ lowT,f (k + 1) + λhigh
T ζhighT,f (k + 1) + λlowW ζ lowW,f (k + 1) + λhigh
W ζhighW,f (k + 1)
],
where the λs are penalty parameters. The total supply airflow rate msa(k) used in Pfan(k) and
Pcc(k), is given by msa(k) =∑f∈F
msa,f (k) =∑f∈F
∑i∈If
msa,i(k). The optimal control commands
are obtained by solving the optimization problem (3-10a) subject to the following constraints:
Tz,f (k + 1) = Tz,f (k) + ∆t
[Toa(k)− Tz,f (k)
τza,f+
Tw,f (k)− Tz,f (k)
τzw,f
+ Az,fηsol(k)+
qint,f (k) + qac,f (k)
Cz,f
](3-10b)
Tw,f (k + 1) = Tw,f (k) + ∆t
[Toa(k)− Tw,f (k)
τwa,f
+Tz,f (k)− Tw,f (k)
τwz,f
+ Aw,fηsol(k)
](3-10c)
62
Wz,f (k + 1) = Wz,f (k) +∆tRgTz,f (k)
VfP da
[ωint,f (k) +msa,f (k)
Wca(k)−Wz,f (k)
1 +Wca(k)
](3-10d)
Tca(k) = Tma(k) +mw(k)f(Tma(k),Wma(k),msa(k),mw(k)
)(3-10e)
Wca(k) = Wma(k) +mw(k)g(Tma(k),Wma(k),msa(k),mw(k)
)(3-10f)
T lowz,f (k)− ζ lowT,f (k) ≤ Tz,f (k) ≤ T high
z,f (k) + ζhighT,f (k) (3-10g)
alowTz,f (k) + blow − ζ lowW,f (k) ≤ Wz,f (k) ≤ ahighTz,f (k) + bhigh + ζhighW,f (k) (3-10h)
mminoa ≤ moa(k) ≤ mmax
oa (3-10i)
Tca(k + 1) ≤ min(Tca(k) + T rate
ca ∆t, Tma(k + 1), T highca
)(3-10j)
Tca(k + 1) ≥ max(Tca(k)− T rate
ca ∆t, T lowca
)(3-10k)
Wca(k) ≤ Wma(k) (3-10l)
roa(k) = moa(k)/msa(k) (3-10m)
roa(k + 1) ≤ min(roa(k) + rrateoa ∆t, rhighoa
)(3-10n)
roa(k + 1) ≥ max(roa(k)− rrateoa ∆t, rlowoa
)(3-10o)
mlowsa,f ≤ msa,f (k) ≤ mhigh
sa,f (3-10p)
Tca(k) ≤ Tsa,f (k) ≤ T highsa (3-10q)
ζ lowT,f (k + 1), ζhighT,f (k + 1), ζ lowW,f (k + 1), ζhighW,f (k + 1) ≥ 0 (3-10r)
where constraints (3-10b)-(3-10d), (3-10g)-(3-10h), and (3-10p)-(3-10r) are ∀f ∈ F.
Constraints (3-10b)-(3-10f), (3-10i), (3-10l)-(3-10m), and (3-10p)-(3-10r) are for k ∈
{j, . . . , j +NM − 1}, constraints (3-10g) and (3-10h) are for k ∈ {j + 1, . . . , j +NM}, and
constraints (3-10j)-(3-10k) and (3-10n)-(3-10o) are for k ∈ {j − 1, . . . , j + NM − 2}. The
control commands remain the same for M time steps, as the control interval ∆T = M∆t, i.e.,
uHLC(k) = uHLC(k + 1) = · · · = uHLC(k +M − 1), ∀k ∈ {j, j +M, . . . , j +NM − 1}.
Constraints (3-10b) and (3-10c) are due to the aggregate thermal dynamics of
floor/meta-zone f , which is a discretized form of an RC (resistor-capacitor) network model,
specifically a 2R2C model. The two states of the model are aggregate zone temperature (Tz,f )
63

and wall temperature (Tw,f , a fictitious state). In constraint (3-10b), qac,f (k) is the heat
influx due to the HVAC system and is given by qac,f (k) := msa,f (k)Cpa(Tsa,f (k) − Tz,f (k)).
The model has seven parameters {Cz,f , τzw,f , τza,f , Az,f , τwz,f , τwa,f , Aw,f}. In the evaluation
study, they are estimated using the algorithm presented in [72] and will be discussed later in
Section 3.6.
The constraint (3-10d) is for the aggregate humidity dynamics of floor/meta-zone f ,
where Wz,f is the aggregate zone humidity ratio, Vf is the volume of meta-zone f , Rg is
the specific gas constant of dry air, P da is the partial pressure of dry air, and Wca is the
conditioned air humidity ratio [30].
Constraints (3-10e) and (3-10f) are for the control-oriented cooling and dehumidifying coil
model, which was developed in Chapter 2. The specific functional form in (3-10e) and (3-10f)
is chosen so that when the chilled water flow rate is zero, no cooling or dehumidification of the
air occurs, so the conditioned air temperature and humidity ratio are equal to the mixed air
temperature and humidity ratio: Tca = Tma and Wca = Wma, when mw = 0.
Constraints (3-10g) and (3-10h) are box constraints to maintain the temperature and
humidity of the meta-zones within the allowed comfort limits. The constraints are softened
using slack variables ζ lowT,f (k), ζhighT,f (k), ζ lowW,f (k), and ζhighW,f (k); constraint (3-10r) ensures that
these slack variables are nonnegative. Imposing constraints directly on the relative humidity
of zones (RHz) is difficult, as relative humidity is a highly nonlinear function of dry bulb
temperature and humidity ratio [1, Chapter 1]. So we linearize this function which gives us
alow, blow, ahigh, and bhigh in (3-10h), and helps in converting the constraints on relative
humidity to humidity ratio (Wz).
Constraint (3-10i) is for the outdoor airflow rate, where the minimum allowed value
(mminoa ) is computed based on the ventilation requirements specified in ASHRAE 62.1 [58] and
to maintain positive building pressurization.
Constraints (3-10j)-(3-10k) and (3-10n)-(3-10o) are to take into account the capabilities
of the cooling coil and damper actuators. In constraints (3-10j) and (3-10l), the inequalities
64

Tca(k + 1) ≤ Tma(k + 1) and Wca(k) ≤ Wma(k) ensure that the cooling coil can only
cool and dehumidify the mixed air stream; it cannot add heat or moisture. Similarly, in
constraint (3-10q) the inequality Tsa,f (k) ≥ Tca(k) ensures that the reheat coils can only add
heat; it cannot cool.
Constraint (3-10p) is to take into account the capabilities of the fan and aggregate
capabilities of the VAV boxes. The limits mlowsa,f and mhigh
sa,f are computed using the VAV
schedule from the mechanical drawings of a building as follows: mlowsa,f :=
∑i∈If
mlowsa,i and
mhighsa,f :=
∑i∈If
mhighsa,i .
Note that of the states x(k) defined in (3-7), Tw,f is a fictitious state that cannot be
measured, while the other two states aggregate zone temperature (Tz,f ) and aggregate zone
humidity ratio (Wz,f ) are measured. So we estimate the current state x(k) using a Kalman
filter.
3.4.2 Projection-Based Low-Level Controller (LLC)
The role of the low-level controller (LLC) is to appropriately distribute the aggregate
quantities—such as the total supply airflow rate and reheat power consumption—computed
by the HLC to individual zones/VAVs. The LLC needs to do so by capturing two important
properties: (i) it should consider the needs of individual zones and distribute accordingly, and
(ii) it should act in coherence with the HLC, so that there is minimal mismatch for the MPC
optimization.
The LLC is a projection-based feedback controller that decides on the supply airflow rate
and supply air temperature for each VAV box/zone. That is, the control command vector that
the LLC needs to decide is:
uLLC(k) := [msa,i(k), Tsa,i(k)]T ∈ ℜnz+nrh
z ,
where for msa,i, i ∈ If , ∀f ∈ F, and for Tsa,i, i ∈ Irh,f , ∀f ∈ F. It decides these control
commands by using the following information from the HLC: (i) total allowed supply airflow
rate to all the zones msa(k) =∑f∈F
msa,f (k), (ii) total allowed reheat power consumption
65
Preheat(k) =∑f∈F
Preheat,f (k), (iii) the temperature at which the zones in each meta-zone
should be maintained at Tz,f (k + 1), and (iv) the conditioned air temperature Tca(k). Here on
in this section, we will be using the superscript HLC (•HLC) for these variables to make it clear
that these are obtained from the high-level controller.
First the needs of each zone are assessed based on the current measured temperature
Tz,i(k) and the range it should be in [T htgz,i (k), T
clgz,i (k)] and are translated into the desired
supply airflow rate mdsa,i(k) and supply air temperature T d
sa,i(k). Then these desired values
along with the information obtained from the HLC are used to solve a projection problem to
compute the control commands for all the zones, uLLC(k).
The procedure used to compute the desired values mdsa,i(k) and T d
sa,i(k) is explained
below. This is similar to the Dual Maximum control logic presented in Section 3.5; a schematic
representation of it is shown in Figure 3-6.
• First the temperature range [T htgz,i (k), T
clgz,i (k)] in which each zone should be is computed
as follows: T htgz,i (k) = max
(THLCz,f (k + 1) − T db
z /2, T lowz,f
)∀i ∈ If and T clg
z,i (k) =
min(THLCz,f (k + 1) + T db
z /2, T highz,f
)∀i ∈ If , where THLC
z,f (k + 1) is obtained from theHLC, T db
z is a deadband, and T lowz,f and T high
z,f are the limits used in constraint (3-10g).
• If the zone temperature is between the cooling and heating setpoints (Tz,i(k) ∈[T htg
z,i (k), Tclgz,i (k)]), then the controller is in deadband mode. The supply airflow rate
is desired to be at its minimum and no heating is required, i.e., mdsa,i(k) = mlow
sa,i andT dsa,i(k) = THLC
ca (k).
• If the zone temperature is warmer than the cooling setpoint (Tz,i(k) > T clgz,i (k)), then
the controller is in cooling mode. The supply airflow rate is desired to be increasedas needed and no heating is required, i.e., md
sa,i(k) = min(mlow
sa,i + Kclgm,i(Tz,i(k) −
T clgz,i (k)), m
highsa,i
)and T d
sa,i(k) = THLCca (k).
• If the zone temperature is cooler than the heating setpoint (Tz,i(k) < T htgz,i (k)),
then the controller is in heating mode. Heating is required, and the supply airflowrate is desired to be increased only if additional heating is needed, i.e., T d
sa,i(k) =
min(THLCca (k) + Khtg
T,i (Thtgz,i (k) − Tz,i(k)), T
highsa
); if T d
sa,i(k) = T highsa , then md
sa,i(k) =
min(mlow
sa,i +Khtgm,i(T
htgz,i (k)− Tz,i(k)), m
high,reheatsa,i
), otherwise md
sa,i(k) = mlowsa,i.
66

• Finally, we impose the following rate constraints:
msa,i(k −M)−mratesa,i∆T ≤ md
sa,i(k) ≤ msa,i(k −M) +mratesa,i∆T,
Tsa,i(k −M)− T ratesa,i ∆T ≤ T d
sa,i(k) ≤ Tsa,i(k −M) + T ratesa,i ∆T,
where msa,i(k − M) and Tsa,i(k − M) are the supply airflow rate and supply airtemperature from the previous control time step.
These desired values—mdsa,i(k) and T d
sa,i(k)—along with information from the HLC are
used to solve the following projection problem to obtain the control commands for all the
zones, uLLC(k):
minuLLC(k)
∑f∈F
∑i∈If
λm,i(msa,i(k)−mdsa,i(k))
2 +∑f∈F
∑i∈Irh,f
λT,i(Tsa,i(k)− T dsa,i(k))
2 (3-11a)
subject to the following constraints:
∑f∈F
∑i∈If
msa,i(k) ≤ mHLCsa (k) (3-11b)
∑f∈F
∑i∈Irh,f
msa,i(k)Cpa
(Tsa,i(k)− THLC
ca (k))
ηreheatCOPh
≤ PHLCreheat(k) (3-11c)
mlowsa,i ≤ msa,i(k) ≤ mhigh
sa,i , ∀i ∈ If , ∀f ∈ F (3-11d)
THLCca (k) ≤ Tsa,i(k) ≤ T high
sa , ∀i ∈ Irh,f , ∀f ∈ F (3-11e)
where the sets If and Irh,f are defined at the beginning of this section, λs are weights,
mHLCsa (k) =
∑f∈F
mHLCsa,f (k), and PHLC
reheat(k) =∑f∈F
PHLCreheat,f (k).
Constraints (3-11b) and (3-11c) are to ensure that the total supply airflow rate and
reheat power consumption do not exceed the limits computed by the HLC. Constraints (3-11d)
and (3-11e) are to take in to account the capabilities of the VAV boxes and reheat coils. In
constraint (3-11e), the inequality Tsa,i(k) ≥ Tca(k) ensures that the reheat coils can only add
heat to the conditioned air and cannot cool. The upper limit on supply air temperature (T highsa )
in constraint (3-11e) is to prevent thermal stratification [33].
67
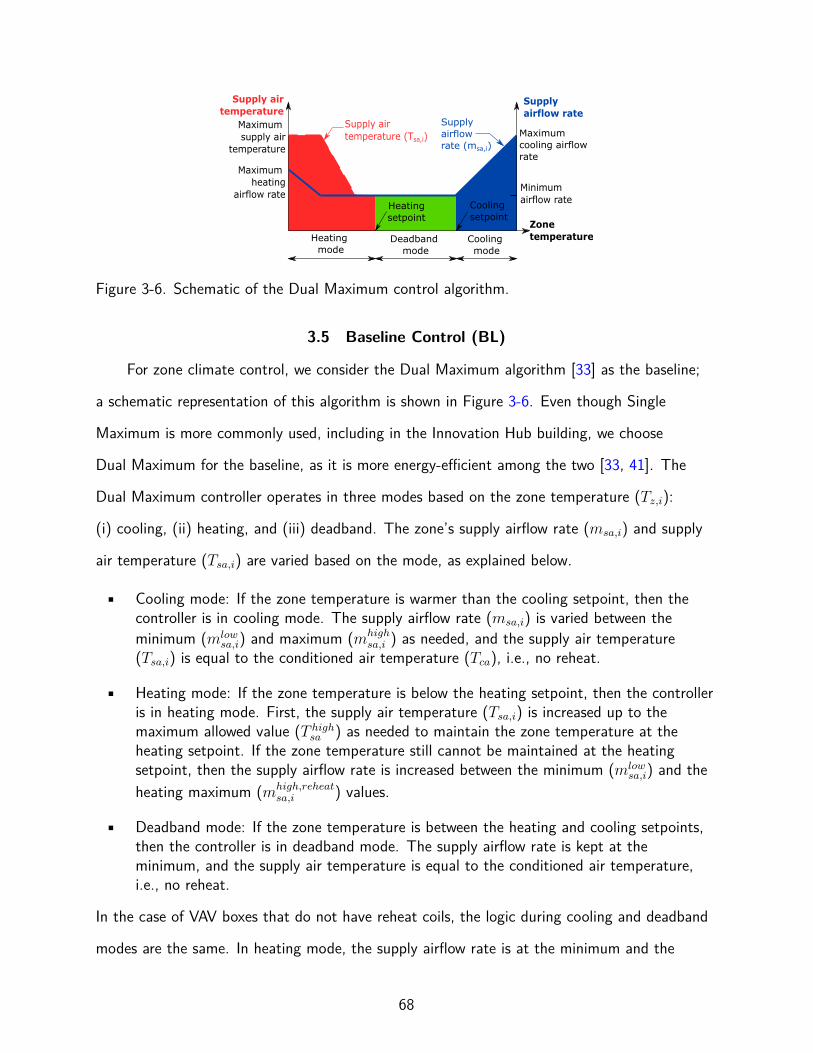
Maximum supply air
temperature
Supply airtemperature (Tsa,i) Maximum
cooling airflow rate
Supply airflow rate (msa,i)
Deadband mode
Cooling mode
Heating mode
Zonetemperature
Supply airflow rate
Minimumairflow rate
Supply airtemperature
Heatingsetpoint
Cooling setpoint
Maximum heating
airflow rate
Figure 3-6. Schematic of the Dual Maximum control algorithm.
3.5 Baseline Control (BL)
For zone climate control, we consider the Dual Maximum algorithm [33] as the baseline;
a schematic representation of this algorithm is shown in Figure 3-6. Even though Single
Maximum is more commonly used, including in the Innovation Hub building, we choose
Dual Maximum for the baseline, as it is more energy-efficient among the two [33, 41]. The
Dual Maximum controller operates in three modes based on the zone temperature (Tz,i):
(i) cooling, (ii) heating, and (iii) deadband. The zone’s supply airflow rate (msa,i) and supply
air temperature (Tsa,i) are varied based on the mode, as explained below.
• Cooling mode: If the zone temperature is warmer than the cooling setpoint, then thecontroller is in cooling mode. The supply airflow rate (msa,i) is varied between theminimum (mlow
sa,i) and maximum (mhighsa,i ) as needed, and the supply air temperature
(Tsa,i) is equal to the conditioned air temperature (Tca), i.e., no reheat.
• Heating mode: If the zone temperature is below the heating setpoint, then the controlleris in heating mode. First, the supply air temperature (Tsa,i) is increased up to themaximum allowed value (T high
sa ) as needed to maintain the zone temperature at theheating setpoint. If the zone temperature still cannot be maintained at the heatingsetpoint, then the supply airflow rate is increased between the minimum (mlow
sa,i) and theheating maximum (mhigh,reheat
sa,i ) values.
• Deadband mode: If the zone temperature is between the heating and cooling setpoints,then the controller is in deadband mode. The supply airflow rate is kept at theminimum, and the supply air temperature is equal to the conditioned air temperature,i.e., no reheat.
In the case of VAV boxes that do not have reheat coils, the logic during cooling and deadband
modes are the same. In heating mode, the supply airflow rate is at the minimum and the
68
supply air temperature is equal to the conditioned air temperature, as the VAV box cannot
heat.
The conditioned air temperature (Tca) is typically kept at a constant low value (55◦F or
12.8◦C), especially in hot-humid climates, which ensures that dry enough air is sent to the
zones at all times [31]. The outdoor airflow rate (moa) is maintained at a constant value such
that the ventilation requirements specified in ASHRAE 62.1 [58] and the positive building
pressurization requirements [1] are satisfied.
3.6 Simulation Setup
Recall that the plant is based on an air handling unit serving 33 zones, of which 29
are equipped with reheat coils, and the remaining 4 do not have reheat coils (cooling only).
See Table 3-1 and Figure 3-3 for the entire list of VAV boxes/zones. Of the 29 VAV boxes
with reheat, three of them serve laboratories which are equipped with fume hoods (209,
303, and 310), and one of them serve restrooms (103). The VAV boxes serving these labs
need to be controlled to satisfy the negative pressurization requirements with respect to
corridor, so we assume that they operate according to the existing rule based feedback control
strategy. Therefore, nz = 29 and nrhz = 25; for msa,i, i ∈ {I1 := {101-102, 104-109},
I2 := {201-208, 210-212}, I3 := {301-302, 304-309, 311-312} and for Tsa,i, i ∈ {Irh,1 :=
{I1\{106, 107}}, Irh,2 := {I2\{205}}, Irh,3 := {I3\{307}}}. The sets I1, I2, and I3 defined
above are the VAVs/zones in floors 1, 2, and 3, respectively. The sets Irh,1, Irh,2, and Irh,3
exclude the VAV boxes which do not have a reheat coil.
The outdoor weather data used in simulations is obtained from the National Solar
Radiation Database [63] for Gainesville, Florida. As mentioned in Section 3.3, the internal heat
load due to occupants are computed based on the number of occupants provided to the zone
block. We assume that the zones are occupied from Monday to Friday between 8:00 a.m. to
noon and 1:00 p.m. to 5:00 p.m., with the total number of occupants (np,f ) in floor 1 as 24,
in floor 2 as 26, and in floor 3 as 22. We assume a power density of 12.92 W/m2 (1.2 W/ft2)
for internal heat load due to lighting and equipment. For special purpose rooms like electrical
69
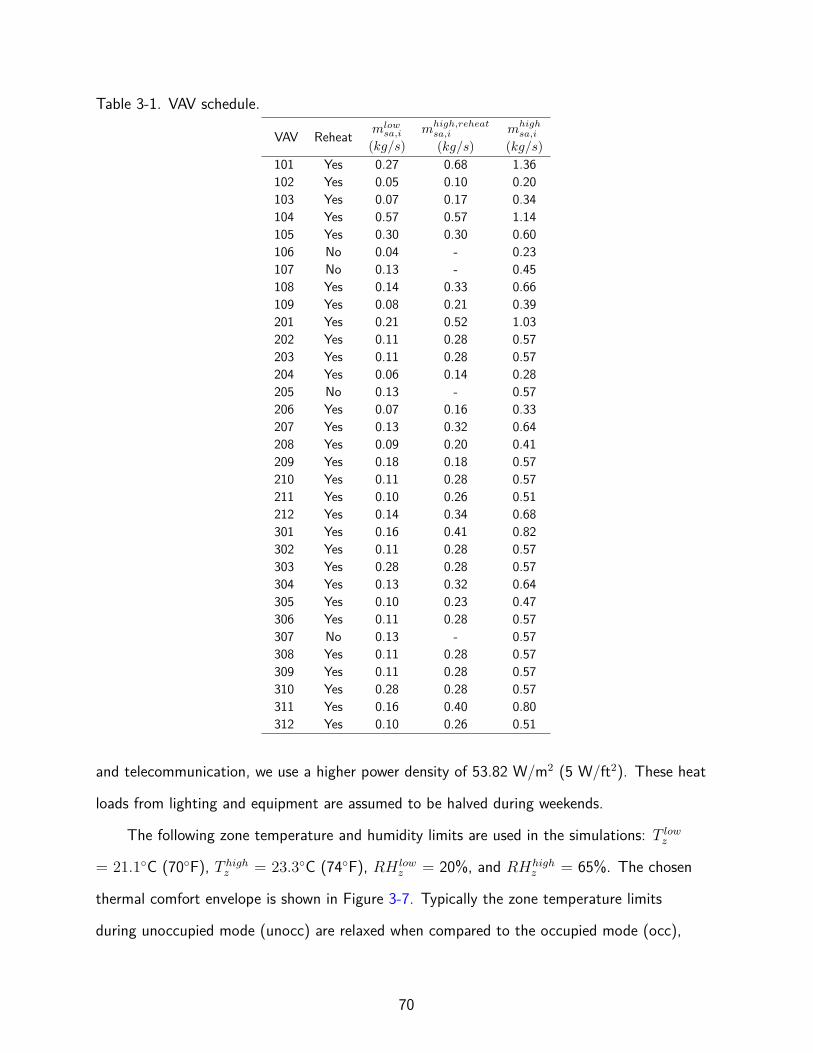
Table 3-1. VAV schedule.
VAV Reheat mlowsa,i
(kg/s)
mhigh,reheatsa,i
(kg/s)
mhighsa,i
(kg/s)
101 Yes 0.27 0.68 1.36102 Yes 0.05 0.10 0.20103 Yes 0.07 0.17 0.34104 Yes 0.57 0.57 1.14105 Yes 0.30 0.30 0.60106 No 0.04 - 0.23107 No 0.13 - 0.45108 Yes 0.14 0.33 0.66109 Yes 0.08 0.21 0.39201 Yes 0.21 0.52 1.03202 Yes 0.11 0.28 0.57203 Yes 0.11 0.28 0.57204 Yes 0.06 0.14 0.28205 No 0.13 - 0.57206 Yes 0.07 0.16 0.33207 Yes 0.13 0.32 0.64208 Yes 0.09 0.20 0.41209 Yes 0.18 0.18 0.57210 Yes 0.11 0.28 0.57211 Yes 0.10 0.26 0.51212 Yes 0.14 0.34 0.68301 Yes 0.16 0.41 0.82302 Yes 0.11 0.28 0.57303 Yes 0.28 0.28 0.57304 Yes 0.13 0.32 0.64305 Yes 0.10 0.23 0.47306 Yes 0.11 0.28 0.57307 No 0.13 - 0.57308 Yes 0.11 0.28 0.57309 Yes 0.11 0.28 0.57310 Yes 0.28 0.28 0.57311 Yes 0.16 0.40 0.80312 Yes 0.10 0.26 0.51
and telecommunication, we use a higher power density of 53.82 W/m2 (5 W/ft2). These heat
loads from lighting and equipment are assumed to be halved during weekends.
The following zone temperature and humidity limits are used in the simulations: T lowz
= 21.1◦C (70◦F), T highz = 23.3◦C (74◦F), RH low
z = 20%, and RHhighz = 65%. The chosen
thermal comfort envelope is shown in Figure 3-7. Typically the zone temperature limits
during unoccupied mode (unocc) are relaxed when compared to the occupied mode (occ),
70
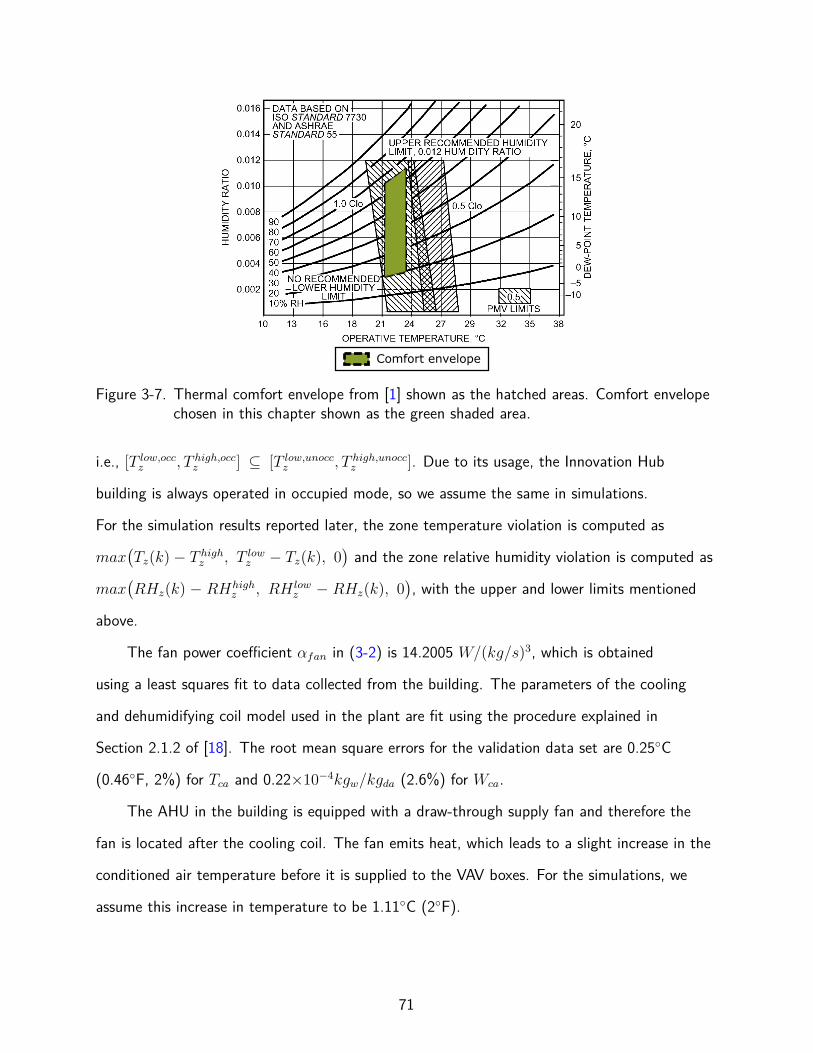
Comfort envelope
Figure 3-7. Thermal comfort envelope from [1] shown as the hatched areas. Comfort envelopechosen in this chapter shown as the green shaded area.
i.e., [T low,occz , T high,occ
z ] ⊆ [T low,unoccz , T high,unocc
z ]. Due to its usage, the Innovation Hub
building is always operated in occupied mode, so we assume the same in simulations.
For the simulation results reported later, the zone temperature violation is computed as
max(Tz(k)− T high
z , T lowz − Tz(k), 0
)and the zone relative humidity violation is computed as
max(RHz(k) − RHhigh
z , RH lowz − RHz(k), 0
), with the upper and lower limits mentioned
above.
The fan power coefficient αfan in (3-2) is 14.2005 W/(kg/s)3, which is obtained
using a least squares fit to data collected from the building. The parameters of the cooling
and dehumidifying coil model used in the plant are fit using the procedure explained in
Section 2.1.2 of [18]. The root mean square errors for the validation data set are 0.25◦C
(0.46◦F, 2%) for Tca and 0.22×10−4kgw/kgda (2.6%) for Wca.
The AHU in the building is equipped with a draw-through supply fan and therefore the
fan is located after the cooling coil. The fan emits heat, which leads to a slight increase in the
conditioned air temperature before it is supplied to the VAV boxes. For the simulations, we
assume this increase in temperature to be 1.11◦C (2◦F).
71
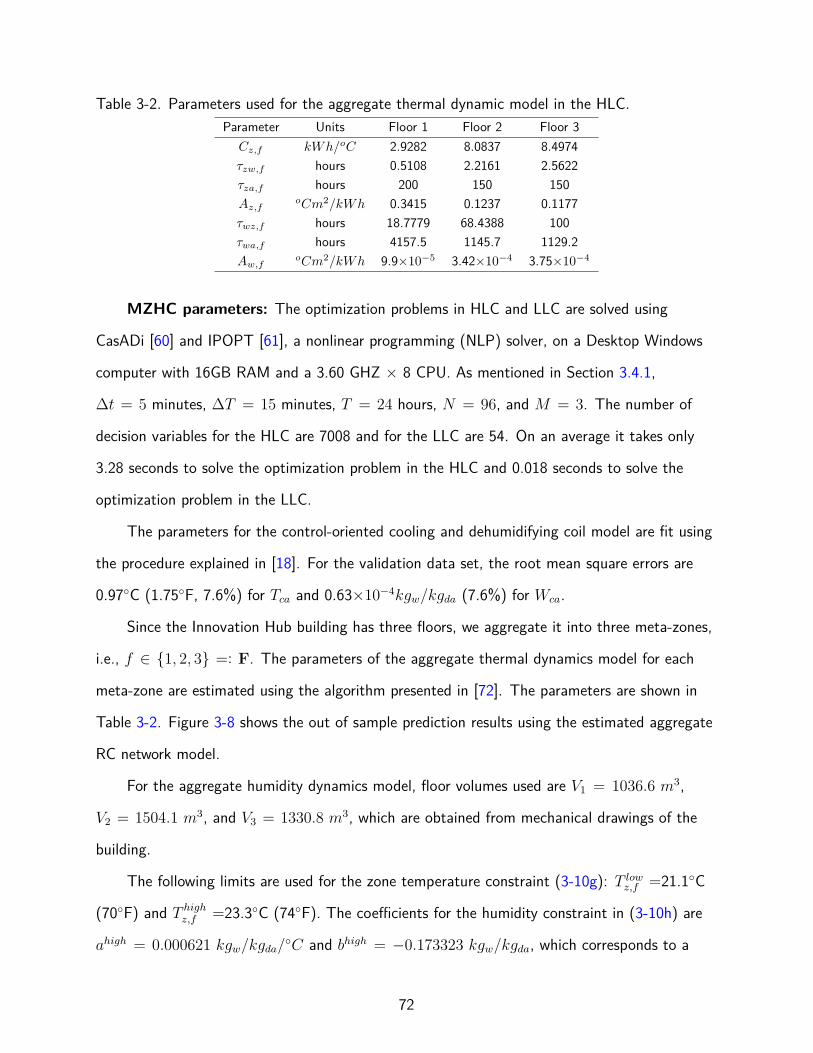
Table 3-2. Parameters used for the aggregate thermal dynamic model in the HLC.Parameter Units Floor 1 Floor 2 Floor 3
Cz,f kWh/oC 2.9282 8.0837 8.4974τzw,f hours 0.5108 2.2161 2.5622τza,f hours 200 150 150Az,f
oCm2/kWh 0.3415 0.1237 0.1177τwz,f hours 18.7779 68.4388 100τwa,f hours 4157.5 1145.7 1129.2Aw,f
oCm2/kWh 9.9×10−5 3.42×10−4 3.75×10−4
MZHC parameters: The optimization problems in HLC and LLC are solved using
CasADi [60] and IPOPT [61], a nonlinear programming (NLP) solver, on a Desktop Windows
computer with 16GB RAM and a 3.60 GHZ × 8 CPU. As mentioned in Section 3.4.1,
∆t = 5 minutes, ∆T = 15 minutes, T = 24 hours, N = 96, and M = 3. The number of
decision variables for the HLC are 7008 and for the LLC are 54. On an average it takes only
3.28 seconds to solve the optimization problem in the HLC and 0.018 seconds to solve the
optimization problem in the LLC.
The parameters for the control-oriented cooling and dehumidifying coil model are fit using
the procedure explained in [18]. For the validation data set, the root mean square errors are
0.97◦C (1.75◦F, 7.6%) for Tca and 0.63×10−4kgw/kgda (7.6%) for Wca.
Since the Innovation Hub building has three floors, we aggregate it into three meta-zones,
i.e., f ∈ {1, 2, 3} =: F. The parameters of the aggregate thermal dynamics model for each
meta-zone are estimated using the algorithm presented in [72]. The parameters are shown in
Table 3-2. Figure 3-8 shows the out of sample prediction results using the estimated aggregate
RC network model.
For the aggregate humidity dynamics model, floor volumes used are V1 = 1036.6 m3,
V2 = 1504.1 m3, and V3 = 1330.8 m3, which are obtained from mechanical drawings of the
building.
The following limits are used for the zone temperature constraint (3-10g): T lowz,f =21.1◦C
(70◦F) and T highz,f =23.3◦C (74◦F). The coefficients for the humidity constraint in (3-10h) are
ahigh = 0.000621 kgw/kgda/◦C and bhigh = −0.173323 kgw/kgda, which corresponds to a
72
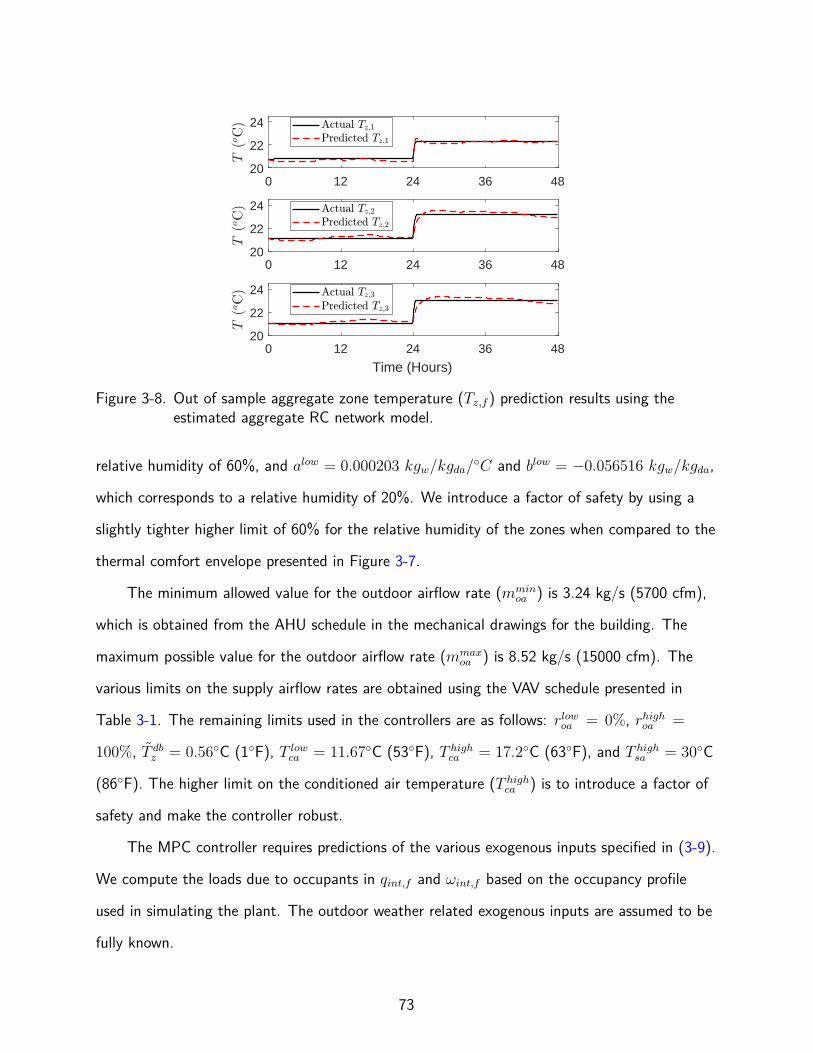
0 12 24 36 4820
22
24
0 12 24 36 4820
22
24
0 12 24 36 48
Time (Hours)
20
22
24
Figure 3-8. Out of sample aggregate zone temperature (Tz,f ) prediction results using theestimated aggregate RC network model.
relative humidity of 60%, and alow = 0.000203 kgw/kgda/◦C and blow = −0.056516 kgw/kgda,
which corresponds to a relative humidity of 20%. We introduce a factor of safety by using a
slightly tighter higher limit of 60% for the relative humidity of the zones when compared to the
thermal comfort envelope presented in Figure 3-7.
The minimum allowed value for the outdoor airflow rate (mminoa ) is 3.24 kg/s (5700 cfm),
which is obtained from the AHU schedule in the mechanical drawings for the building. The
maximum possible value for the outdoor airflow rate (mmaxoa ) is 8.52 kg/s (15000 cfm). The
various limits on the supply airflow rates are obtained using the VAV schedule presented in
Table 3-1. The remaining limits used in the controllers are as follows: rlowoa = 0%, rhighoa =
100%, T dbz = 0.56◦C (1◦F), T low
ca = 11.67◦C (53◦F), T highca = 17.2◦C (63◦F), and T high
sa = 30◦C
(86◦F). The higher limit on the conditioned air temperature (T highca ) is to introduce a factor of
safety and make the controller robust.
The MPC controller requires predictions of the various exogenous inputs specified in (3-9).
We compute the loads due to occupants in qint,f and ωint,f based on the occupancy profile
used in simulating the plant. The outdoor weather related exogenous inputs are assumed to be
fully known.
73
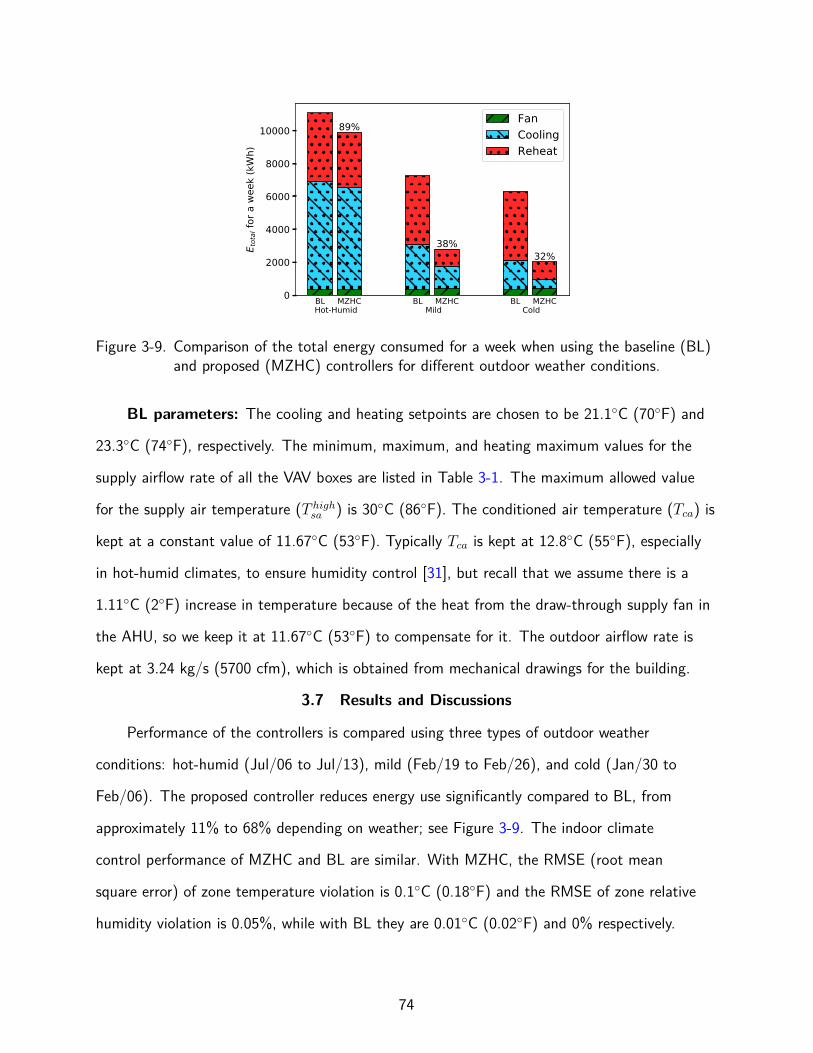
BL Hot-Humid
MZHC BL Mild
MZHC BL Cold
MZHC0
2000
4000
6000
8000
10000
E tot
al fo
r a w
eek
(kW
h)
89%
38%32%
FanCoolingReheat
Figure 3-9. Comparison of the total energy consumed for a week when using the baseline (BL)and proposed (MZHC) controllers for different outdoor weather conditions.
BL parameters: The cooling and heating setpoints are chosen to be 21.1◦C (70◦F) and
23.3◦C (74◦F), respectively. The minimum, maximum, and heating maximum values for the
supply airflow rate of all the VAV boxes are listed in Table 3-1. The maximum allowed value
for the supply air temperature (T highsa ) is 30◦C (86◦F). The conditioned air temperature (Tca) is
kept at a constant value of 11.67◦C (53◦F). Typically Tca is kept at 12.8◦C (55◦F), especially
in hot-humid climates, to ensure humidity control [31], but recall that we assume there is a
1.11◦C (2◦F) increase in temperature because of the heat from the draw-through supply fan in
the AHU, so we keep it at 11.67◦C (53◦F) to compensate for it. The outdoor airflow rate is
kept at 3.24 kg/s (5700 cfm), which is obtained from mechanical drawings for the building.
3.7 Results and Discussions
Performance of the controllers is compared using three types of outdoor weather
conditions: hot-humid (Jul/06 to Jul/13), mild (Feb/19 to Feb/26), and cold (Jan/30 to
Feb/06). The proposed controller reduces energy use significantly compared to BL, from
approximately 11% to 68% depending on weather; see Figure 3-9. The indoor climate
control performance of MZHC and BL are similar. With MZHC, the RMSE (root mean
square error) of zone temperature violation is 0.1◦C (0.18◦F) and the RMSE of zone relative
humidity violation is 0.05%, while with BL they are 0.01◦C (0.02◦F) and 0% respectively.
74
The computational cost of the proposed MZHC is small, just a few seconds are needed to
compute decisions at every control update. On an average it takes 3.28 seconds to solve the
optimization problem in the HLC and 0.018 seconds to solve the optimization problem in the
LLC.
Simulation results for the different weather conditions are discussed in detail next.
3.7.1 Hot-Humid Week
Figure 3-10 shows the simulation time traces for a hot-humid week. It is found that
using the proposed MZHC leads to 11% energy savings when compared to BL, as presented in
Figure 3-9.
Both controllers lead to negligible violations of aggregate zone temperature (Tz,f )
and relative humidity (RHz,f ) constraints. Data for the three meta-zones are shown in
Figure 3-10C, and for three individual zones, one from each floor, are shown in Figure 3-11. BL
ensures that dry enough air is supplied to the zones at all times by keeping the conditioned air
temperature (Tca) at a constant low value of 11.67◦C (53◦F), and hence the humidity limit is
not violated. In the case of MZHC, the humidity constraint is found to be active always. This
can be seen in Figure 3-10C; recall that we use a tighter constraint of 60% instead of 65%
to introduce a factor of safety. This active constraint limits the increase in Tca, which can be
seen in Figure 3-10D. One of the reasons reheating is required even during such a hot week
(the outdoor air temperature is as high as 32.2◦C/90◦F) is because of this active humidity
constraint, which requires dry, and thus, cold air to be supplied to the zones. This could also
be one of the reasons MZHC decides to maintain the zone temperatures at the lower limit
(Figure 3-10C). Keeping the zones at a higher temperature will require an increase in reheating
energy.
The above observations indicate the need to incorporate humidity and latent heat in
MPC formulations. In an effort to reduce energy/cost, MPC controllers that ignore humidity
are likely to make decisions during these hot-humid conditions which will lead to poor indoor
humidity, as they are unaware of the factors mentioned above.
75
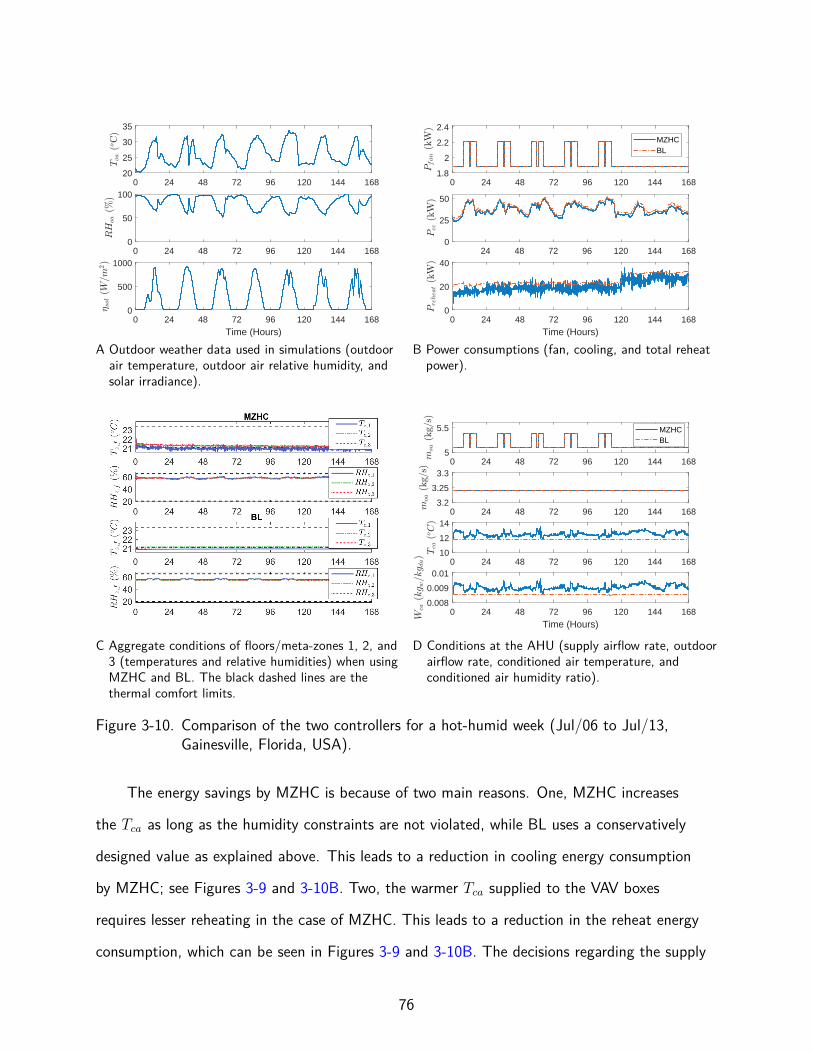
0 24 48 72 96 120 144 16820
25
30
35
0 24 48 72 96 120 144 1680
50
100
0 24 48 72 96 120 144 168
Time (Hours)
0
500
1000
A Outdoor weather data used in simulations (outdoorair temperature, outdoor air relative humidity, andsolar irradiance).
0 24 48 72 96 120 144 1681.8
2
2.2
2.4MZHCBL
24 48 72 96 120 144 1680
25
50
0 24 48 72 96 120 144 168
Time (Hours)
0
20
40
B Power consumptions (fan, cooling, and total reheatpower).
C Aggregate conditions of floors/meta-zones 1, 2, and3 (temperatures and relative humidities) when usingMZHC and BL. The black dashed lines are thethermal comfort limits.
0 24 48 72 96 120 144 1685
5.5 MZHCBL
0 24 48 72 96 120 144 1683.2
3.25
3.3
0 24 48 72 96 120 144 16810
12
14
0 24 48 72 96 120 144 168
Time (Hours)
0.008
0.009
0.01
D Conditions at the AHU (supply airflow rate, outdoorairflow rate, conditioned air temperature, andconditioned air humidity ratio).
Figure 3-10. Comparison of the two controllers for a hot-humid week (Jul/06 to Jul/13,Gainesville, Florida, USA).
The energy savings by MZHC is because of two main reasons. One, MZHC increases
the Tca as long as the humidity constraints are not violated, while BL uses a conservatively
designed value as explained above. This leads to a reduction in cooling energy consumption
by MZHC; see Figures 3-9 and 3-10B. Two, the warmer Tca supplied to the VAV boxes
requires lesser reheating in the case of MZHC. This leads to a reduction in the reheat energy
consumption, which can be seen in Figures 3-9 and 3-10B. The decisions regarding the supply
76
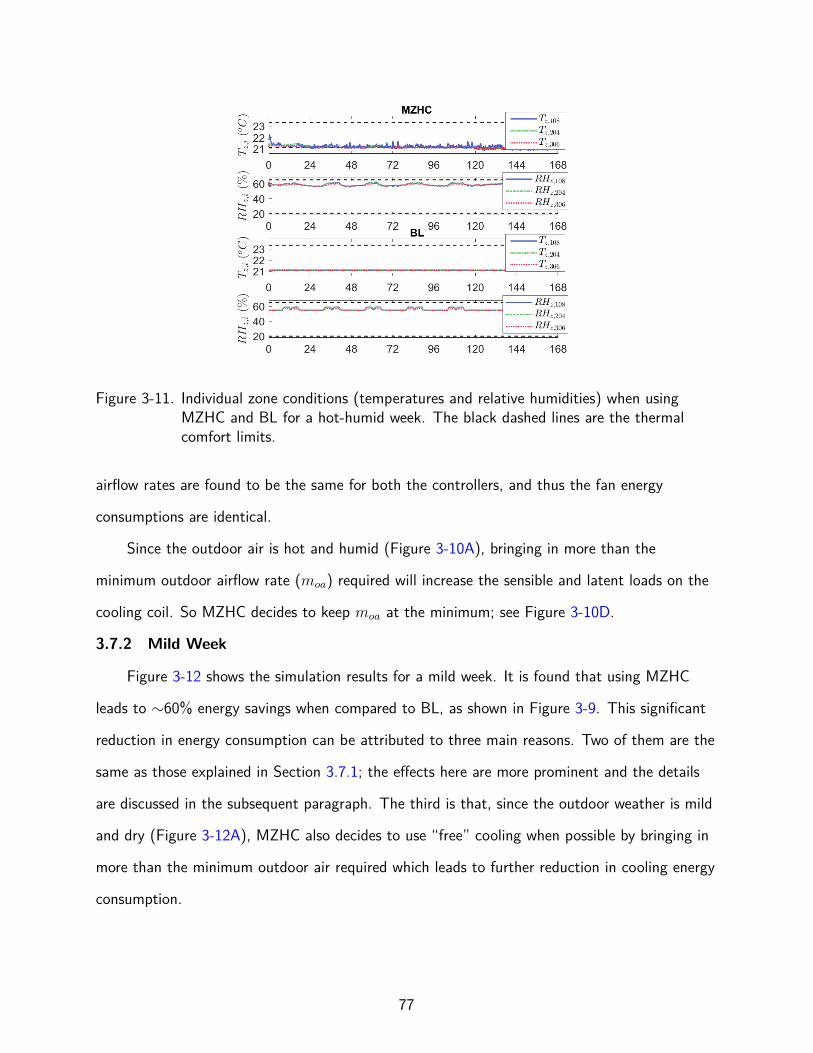
Figure 3-11. Individual zone conditions (temperatures and relative humidities) when usingMZHC and BL for a hot-humid week. The black dashed lines are the thermalcomfort limits.
airflow rates are found to be the same for both the controllers, and thus the fan energy
consumptions are identical.
Since the outdoor air is hot and humid (Figure 3-10A), bringing in more than the
minimum outdoor airflow rate (moa) required will increase the sensible and latent loads on the
cooling coil. So MZHC decides to keep moa at the minimum; see Figure 3-10D.
3.7.2 Mild Week
Figure 3-12 shows the simulation results for a mild week. It is found that using MZHC
leads to ∼60% energy savings when compared to BL, as shown in Figure 3-9. This significant
reduction in energy consumption can be attributed to three main reasons. Two of them are the
same as those explained in Section 3.7.1; the effects here are more prominent and the details
are discussed in the subsequent paragraph. The third is that, since the outdoor weather is mild
and dry (Figure 3-12A), MZHC also decides to use “free” cooling when possible by bringing in
more than the minimum outdoor air required which leads to further reduction in cooling energy
consumption.
77
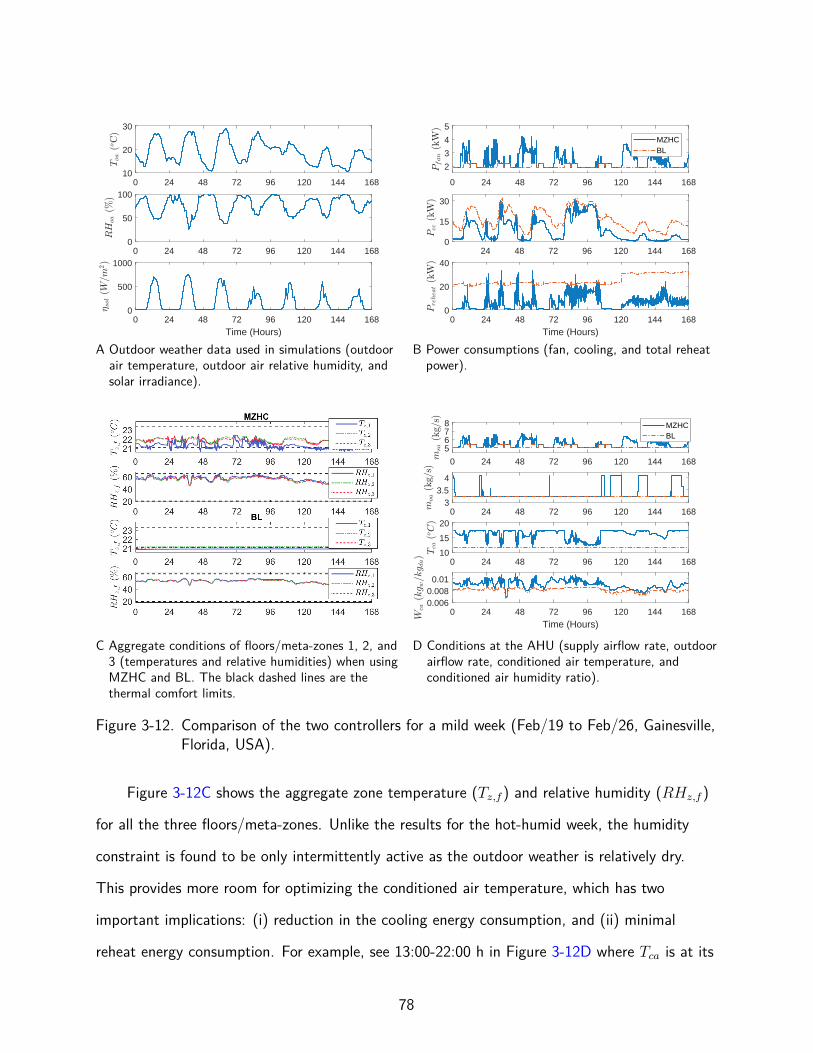
0 24 48 72 96 120 144 16810
20
30
0 24 48 72 96 120 144 1680
50
100
0 24 48 72 96 120 144 168
Time (Hours)
0
500
1000
A Outdoor weather data used in simulations (outdoorair temperature, outdoor air relative humidity, andsolar irradiance).
0 24 48 72 96 120 144 168
2
3
4
5
MZHCBL
24 48 72 96 120 144 1680
15
30
0 24 48 72 96 120 144 168
Time (Hours)
0
20
40
B Power consumptions (fan, cooling, and total reheatpower).
C Aggregate conditions of floors/meta-zones 1, 2, and3 (temperatures and relative humidities) when usingMZHC and BL. The black dashed lines are thethermal comfort limits.
0 24 48 72 96 120 144 168
5678 MZHC
BL
0 24 48 72 96 120 144 1683
3.54
0 24 48 72 96 120 144 16810
15
20
0 24 48 72 96 120 144 168
Time (Hours)
0.0060.008
0.01
D Conditions at the AHU (supply airflow rate, outdoorairflow rate, conditioned air temperature, andconditioned air humidity ratio).
Figure 3-12. Comparison of the two controllers for a mild week (Feb/19 to Feb/26, Gainesville,Florida, USA).
Figure 3-12C shows the aggregate zone temperature (Tz,f ) and relative humidity (RHz,f )
for all the three floors/meta-zones. Unlike the results for the hot-humid week, the humidity
constraint is found to be only intermittently active as the outdoor weather is relatively dry.
This provides more room for optimizing the conditioned air temperature, which has two
important implications: (i) reduction in the cooling energy consumption, and (ii) minimal
reheat energy consumption. For example, see 13:00-22:00 h in Figure 3-12D where Tca is at its
78
higher limit, and also see Figure 3-12B where Pcc is significantly reduced and Preheat is almost
zero.
3.7.3 Cold Week
The energy savings when using MZHC is found to be significant as can be seen in
Figure 3-9. Since the outdoor weather is cold and dry, there is a lot of room for optimizing the
control commands. The reasons for energy reduction when using MZHC are the same as those
explained in Section 3.7.2, therefore we do not discuss them in detail here.
Comment 3.1. Recall that as mentioned in Section 3.5, the Innovation Hub building uses
Single Maximum algorithm for zone climate control as opposed to the Dual Maximum
algorithm presented here [33]. In the case of Single Maximum algorithm, the minimum allowed
value for the supply airflow rate has to be high enough so that the heating load can be met
with low enough supply air temperature to prevent thermal stratification [33]. While in the
case of Dual Maximum algorithm, the airflow rate is varied during the heating mode, thus the
minimum allowed airflow rate is not limited by stratification. Therefore using Single Maximum
algorithm leads to higher fan, cooling, and reheating energy consumptions. This also implies
that the energy savings by the proposed controller will be even higher.
3.8 Summary
The proposed control architecture is designed to address a number of limitations in the
existing literature on multi-zone building control using MPC. The main one is the reliance
on a high-resolution multi-zone model, which can be challenging to obtain. A low-resolution
model of the building is more convenient since such a model can be identified in a tractable
manner from measurements. The challenge then is to convert the MPC decisions, which are
computed for the fictitious zones in the model, to the commands for the VAV boxes of the
actual building. The proposed architecture does that by posing this conversion as a projection
problem that uses not only what the MPC computes but also feedback from zones. The result
is a principled method of computing VAV box commands that are consistent with the optimal
decisions made by the MPC without needing dynamic models of individual zones. At the same
79
time, the use of feedback from the zones ensures that zone climate states are also close to the
aggregate climate states computed by the MPC.
The positive simulation results provide confidence on the effectiveness of the proposed
controller especially because of the large plant model mismatch. The simulation testbed
mimics a real building closely, including the heterogeneous nature of the zones in the building.
Another observation from the simulations that should be emphasized is the need to incorporate
humidity and latent heat. The indoor humidity constraint is seen to be active when using the
proposed controller, especially during hot-humid weather. Without humidity being explicitly
considered, the controller is likely to have caused high space humidity in an effort to reduce
energy use.
Recall that as mentioned in Chapter 1, the energy savings reported in this chapter and
in Chapter 2 will lead to a corresponding reduction in greenhouse gas emissions. The fan and
cooling energy savings will translate to a reduction in electricity usage and the heating energy
savings will translate to a reduction in the usage of gas, as heating in commercial buildings
is typically provided using gas-fired boilers. An approximate estimate of the corresponding
reduction in greenhouse gas emissions can be computed using the greenhouse gas equivalencies
calculator proposed by the United States Environmental Protection Agency (EPA) [78].
Using this calculator, the energy savings reported in this chapter correspond to a reduction
in greenhouse gas emissions by 0.419 to 1.508 metric tons of carbon dioxide equivalent per
week depending on the weather. Note that this estimate is only an approximation, obtaining
an accurate estimate will require considering several factors such as: (i) energy sources,
(ii) location, (iii) time of usage, etc. This is a topic for future work.
Another positive effect of the energy savings on the environment could be a reduction
in cooling tower make-up water usage and a reduction in the emission of water vapor, a
greenhouse gas [79], from cooling towers. Several factors need to be considered in estimating
this, such as: (i) reduction at the site (building) because of chiller cooling load reduction,
80

(ii) reduction at the source (power plant) because of electricity usage reduction, etc. This is
another topic for future work.
81
CHAPTER 4ANALYSIS OF ROUND-TRIP EFFICIENCY OF AN HVAC-BASED VIRTUAL BATTERY
4.1 Overview
In this chapter, the impact on energy efficiency of commercial building HVAC systems
when they are used for grid support is analyzed. There is a growing recognition that the
power demand of most electric loads is flexible, and this flexibility can be exploited to provide
ancillary services to the grid by varying the demand up and down over a baseline [80, 81].
To the grid they appear to be providing the same service as a battery [82]. Such a load, or
collection of loads, can therefore be called Virtual Energy Storage (VES) systems or virtual
batteries.
Consumers’ quality of service (QoS) must be maintained by these virtual batteries. When
HVAC systems are used for VES, a key QoS measure is indoor temperature. Another important
QoS measure is the total energy consumption. Continuously varying the power consumption
of loads around a baseline may lead to a net reduction in the efficiency of energy use, causing
the load to consume more energy in the long run. If so, that will be analogous to the virtual
battery having a round-trip efficiency (RTE) less than unity. Electrochemical batteries also
have a less-than-unity round-trip efficiency due to various losses [17].
The aim of this chapter is to analyze the RTE of VES system comprised of HVAC
equipment in commercial buildings. The inspiration for this work comes from [16] and its
follow-on work [83]. To the best of our knowledge, the article [16] is the first to provide
experimental data on the round-trip efficiency of buildings providing virtual energy storage
from an experiment carried out at a building in the Los Alamos National Laboratory (LANL)
campus. The average RTE (over many tests) reported in [16] was less than 0.5. These values
are quite low compared to that for electrochemical batteries, which vary from 0.75 to 0.97
depending on the electrochemistry [17]. If the RTE estimates in [16] are representative, that
bodes ill for the use of building HVAC systems to be virtual batteries.
82

This chapter provides an analysis of the RTE of an HVAC based VES system using a
simple physics-based model. We establish that the RTE in fact approaches 1 when the HVAC
system is repeatedly used as a virtual battery for many cycles. The low RTE values seen in the
LANL experiments was due to the fact that the experiment was run for one cycle.
Literature review and statement of contribution. In the experiments reported in
[16], fan power was varied in an approximately square wave fashion with a time period of 30
minutes in a ∼ 30, 000 m2 building in the LANL campus. After one cycle of the square wave,
the climate control system was re-activated to bring the building temperature back to its
baseline value. It was observed that the control system had to expend a considerable amount
of additional energy in the recovery phase in almost all the tests performed. This loss was
expressed as a round-trip efficiency less than unity. In a small number of tests, the RTE was
observed to be greater than unity. The mean RTE observed from all the tests was in the order
of 0.5.
In the experiments reported in the article [81], fan power in a ∼ 3700 m2 building at the
University of Florida (UF) campus was varied to track Pennsylvania-New Jersey-Maryland’s
(PJM) RegD signal [84]. When the VES controller was turned off at the end of the
experiment, no large transient was observed in either power or temperature; see Figure 8
of [85]. A more recent paper that also presented results from experiments in a test building
at Lawrence Berkeley National Laboratory (LBNL) in which HVAC fan power was varied to
track RegD, observed similar behavior [86]. In fact [86] reported a slight decrease in energy
use compared to the baseline. Unlike the LANL experiments, the UF and LBNL experiments
involved higher frequency variation in the HVAC power, of time scales shorter than 10 minutes.
The paper [83] attempted to explain the experimental observations in [16] by conducting
simulations. They also examined the effect of several model parameters and sources of
experimental uncertainty such as imprecise knowledge of baseline power consumption. They
were able to replicate several trends observed in the LANL experiments, but there were also
significant differences.
83

The purpose of this work is to rigorously analyze the RTE of a VES system that is based
on commercial-building HVAC equipment and to determine factors that affect the RTE. In
that sense, our goal is similar to that of [83]. In contrast to [83], which explored the effect of
many factors on the RTE by simulation alone, we focus on deriving results for a limited set of
conditions for which provable results can be provided. Following [83], we also use a simplified
physics-based model of a building’s temperature dynamics and power consumption instead of
using a simulation software so that rigorous analysis is possible.
This work makes three main contributions to the nascent literature on the RTE of
HVAC-based virtual batteries. The first contribution is to show that the RTE values much
smaller than unity that were reported in prior work were an artifact of the experimental/simulation
set up. In particular, the HVAC system underwent only “one demand-response event” in [16],
i.e., one period of a square-wave power variation. The simulation study [83] also focused on
that situation and observed similar values of the RTE. It did explore multiple demand-response
events, in which the RTE was found to be close to 1. These events, however, were chosen in
a particular manner that are unlikely to occur in practice. We focus on a general case in which
an HVAC-based virtual battery undergoes n repeated cycles of a square-wave power variation.
We show through rigorous analysis that the RTE approaches 1 as n → ∞. When n is small,
especially when n = 1, we show that the RTE can indeed be larger or smaller than 1 depending
on the time period of the reference signal.
Second, we show that if an additional constraint is imposed—that the mean steady state
temperature of the building must not be changed by the VES service—then additional energy
consumption may be needed, which reduces the asymptotic RTE to a value strictly below
1. We then examine how this RTE varies with various model parameters such as building
size and time period of power deviation. The trends observed are valuable in choosing design
parameters, such as whether a smaller or larger building is better suited to provide VES service.
Third, we explicitly define terms and concepts that are standard for electrochemical
batteries, such as “state of charge”, but not yet for HVAC-based virtual batteries. Some of
84

these terms were used—even implicitly defined—in prior work [16, 83]. We believe future
studies on RTE of virtual batteries will benefit from the definitions proposed here.
The rest of this chapter is organized as follows. Section 4.2 describes the terminology and
definitions needed for the sequel. Section 4.3 describes the HVAC system model used. Section
4.4 and 4.5 provides analysis of RTE, with and without the “zero-mean temperature deviation”
constraint, respectively. Section 4.6 summarizes the conclusions.
4.2 Definitions and Other Preliminaries
4.2.1 Round-Trip Efficiency of an Electrochemical Battery
The state of charge (SoC) of a battery, which we denote by SB(t), is defined as [87]
SB(t) = SB(0) +1
Q0
∫ t
0
IB(t)dt, (4-1)
where IB(t) is the current drawn by the battery (positive during charging and negative
during discharging) and Q0 is its maximum charge (in Coulomb). The SoC is a number
between 0 and 1. It is more convenient to use power drawn (or discharged) instead of current
in (4-1). For simplicity, we assume the voltage across the battery is constant, V0, so the
power drawn by the battery from the grid is PB(t) := V0IB(t). Eq. (4-1) then becomes
SB(t) = SB(0) +1
Q0V0
∫ t
0PB(t)dt. Differentiating, we get
C0SB(t) = PB(t) (4-2)
where C0 = Q0V0.
Definition 4.1 (Complete charge-discharge). We say a battery has undergone a complete
charge-discharge during a time interval [ti, tf ] if SoC(ti) = SoC(tf ). The time interval [ti, tf ]
is called a complete charge-discharge interval.
The qualifier “complete” does not mean the SoC reaches 1 or 0. It only means the SoC
comes back to where it started from.
Definition 4.2 (RTE). Suppose a battery undergoes a complete charge-discharge over a time
interval [0, tcd]. Let tc be the length of time during which the battery is charging and td be the
85
length of time during which the battery is discharging so that tc + td = tcd. The round-trip
efficiency (RTE) of the battery, denoted by ηrt, during this interval is
ηrt , Ed
Ec
=−∫tdPB(t)dt∫
tcPB(t)dt
, (4-3)
where Ed is the energy released by the battery to the grid during discharging, Ec is the energy
consumed by the battery from the grid during charging, and∫tc
(resp.,∫td
) denotes integration
performed over the charging times (resp., discharging times).
Notice that by convention PB(t) < 0 means the battery is releasing power to the grid at
time instant t. In general, the RTE depend on many factors including how a particular SoC
was achieved [88]. For simplicity, we ignore those effects and use (4-3) to define the RTE of
the battery.
4.2.2 Round-Trip Efficiency of an HVAC-Based VES System
We now consider an HVAC system whose power demand is artificially varied from its
baseline demand to provide virtual energy storage. The power consumption of the virtual
battery, P , is defined as the deviation of the electrical power consumption of the HVAC system
from the baseline power consumption:
P (t) := Phvac(t)− P(b)hvac(t), (4-4)
where P(b)hvac is the baseline power consumption of the HVAC system, defined as the power the
HVAC system needs to consume to maintain a baseline indoor temperature T (b).
To make a connection between a real battery and a virtual battery, consider the simple
dynamic model of a building’s temperature:
CT (t) = q(t), (4-5)
where C is the heat capacity of the building (J/K) and q is the net heat influx rate (J/s),
which is the combined effect of heat gain of the building from solar, outdoor weather,
occupants, and the HVAC system. Comparing (4-5) and (4-2), we see that indoor temperature,
86
T (t), and the SoC of an electrochemical battery, SB, are analogous. Just as the SoC of a real
battery must be kept between 0 and 1, the temperature of a building must be kept between a
minimum value, denoted by TL (low), and a maximum value, denoted by TH (high), to ensure
QoS. We therefore define the SoC of an HVAC-based virtual battery as follows, which is similar
to the one used in [89] for water heaters.
Definition 4.3 (SoC of a VES system). The SoC of an HVAC-based VES system with
indoor temperature T is the ratio TH − T
TH − TL
where [TL, TH ] is the allowable range of indoor
temperature.
The definition of a complete charge-discharge interval of a virtual battery is the
same as that for a battery: Definition 4.1, with SoC as defined in Definition 4.3. The
round-trip efficiency of the virtual battery, denoted as ηrt, is also the same as that of a
battery (Definition 4.2), with power consumption of the battery, PB(t), replaced by power
consumption of the virtual battery, P (t). Thus,
ηrt =−∫tdP (t)dt∫
tcP (t)dt
=−∫td(Phvac(t)− P
(b)hvac(t))dt∫
tc(Phvac(t)− P
(b)hvac(t))dt
(4-6)
4.2.3 Charging vs. Change in SoC
A comment on the implication of Definition 4.3 is in order. Whether an increase in SoC is
accompanied by an increase in the VES system’s power consumption depends on the baseline
condition. Imagine the scenario when the HVAC system provides net cooling. When the VES
system charges, i.e., P > 0, additional cooling is provided to the building (Equation (4-4)),
and the temperature decreases over baseline, thereby increasing the SoC according to the
definition above. Similarly, when it discharges, i.e., P < 0, less cooling is provided and
temperature increases over baseline, thereby lowering the SoC. If the HVAC system is in the
heating mode, the opposite occurs. Charging (P > 0) means more heating, increase in
temperature and therefore lowering of the SoC, and vice versa for discharging. Although that
may appear contrary to intuition based on electrochemical batteries, we believe it is sensible
since charging (resp., discharging) of a battery, real or virtual, should correspond to positive
87
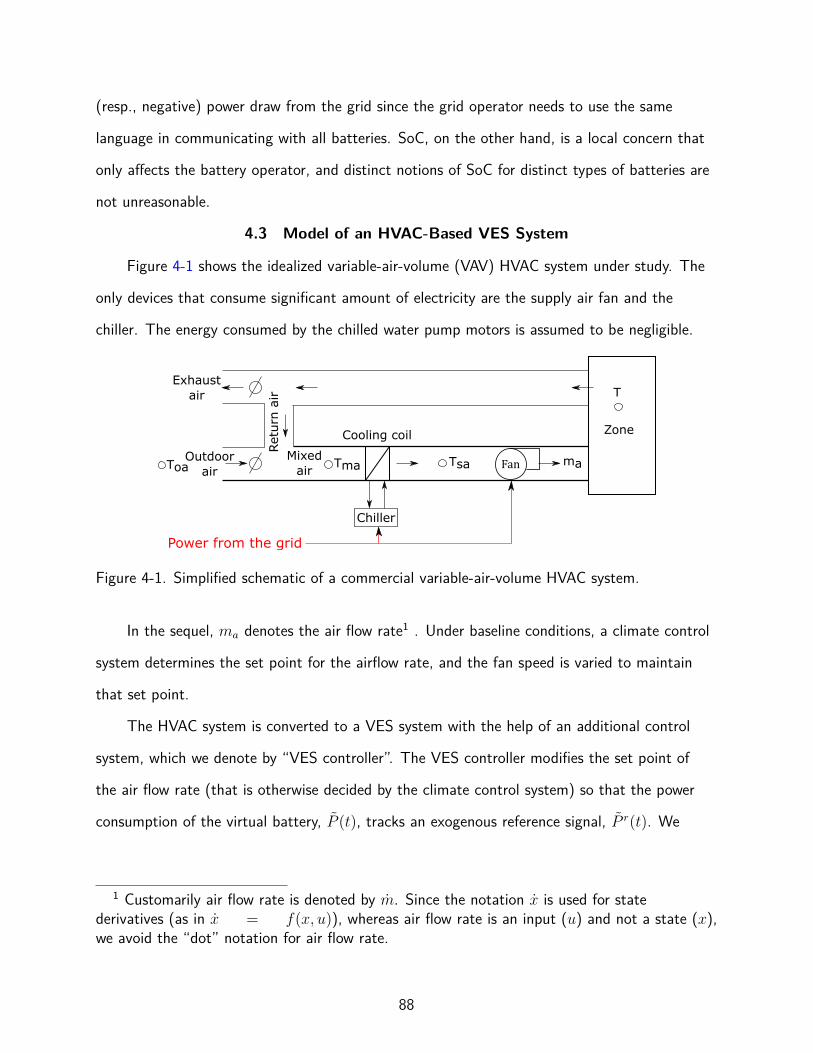
(resp., negative) power draw from the grid since the grid operator needs to use the same
language in communicating with all batteries. SoC, on the other hand, is a local concern that
only affects the battery operator, and distinct notions of SoC for distinct types of batteries are
not unreasonable.
4.3 Model of an HVAC-Based VES System
Figure 4-1 shows the idealized variable-air-volume (VAV) HVAC system under study. The
only devices that consume significant amount of electricity are the supply air fan and the
chiller. The energy consumed by the chilled water pump motors is assumed to be negligible.
Ret
urn
air
Exhaustair
Outdoor air
Mixedair
Zone
T
Cooling coil
Tsa
Chiller
Power from the grid
maTma FanToa
Figure 4-1. Simplified schematic of a commercial variable-air-volume HVAC system.
In the sequel, ma denotes the air flow rate1 . Under baseline conditions, a climate control
system determines the set point for the airflow rate, and the fan speed is varied to maintain
that set point.
The HVAC system is converted to a VES system with the help of an additional control
system, which we denote by “VES controller”. The VES controller modifies the set point of
the air flow rate (that is otherwise decided by the climate control system) so that the power
consumption of the virtual battery, P (t), tracks an exogenous reference signal, P r(t). We
1 Customarily air flow rate is denoted by m. Since the notation x is used for statederivatives (as in x = f(x, u)), whereas air flow rate is an input (u) and not a state (x),we avoid the “dot” notation for air flow rate.
88

assume that the VES controller is perfect; it can determine the variation in airflow required
to track a power deviation reference exactly. Figure 4-2 illustrates the action of the VES
controller. When the HVAC system is not providing VES service, the VES controller is turned
off: P (t) ≡ 0. In other words, the building is under baseline operation.
Building+
HVAC system+
VES controller
P Pb+Pr ∼∼
Figure 4-2. VES system; we assume that the VES controller provides perfect tracking so thatP (t) tracks P r(t).
4.3.1 Thermal Dynamics of HVAC-Based VES
A commonly used modeling paradigm for dynamics of temperature is resistor-capacitor
(RC) networks [90]. The following simple RC network model is used to model the temperature
of the zone serviced by the HVAC system:
CT (t) =1
R(Toa(t)− T (t)) + qx(t) + qhvac(t), (4-7)
where R is the building structure’s resistance to heat exchange between indoors and outdoors,
C is the thermal capacitance of the building, Toa is the outdoor air temperature, qx is the
exogenous heat influx into the building, and qhvac is the heat influx due to the HVAC system,
which is due to the temperature of the air supplied to the building and the air removed from
the zone:
qhvac(t) = ma(t)Cpa[Tsa(t)− T (t)], (4-8)
where ma is the supply air flow rate, Cpa is the specific heat capacity of air at constant
pressure, Tsa is the temperature of the supply air, and T is the temperature of the air leaving
the zone. Some of the air leaving the zone is recirculated while some exit the building; see
Figure 4-1. Although much more complex models are possible, the simplified model (4-7)
89
aids analysis. Furthermore, it is argued in [91] that a first-order RC network model—such as
(4-7)—is adequate for prediction up to a few days.
4.3.2 HVAC Power Consumption Model
The power consumption of the HVAC system is a sum of the fan power and chiller power:
Phvac(t) = Pf (t) + Pch(t).
We model the fan power consumption as:
Pf (t) = α1fm2a(t) + α2fma(t), (4-9)
where α1f (> 0) and α2f are coefficients that depend on the fan. Variable speed air supply fan
power models reported in the literature are typically cubic [76]. We use a quadratic model for
two main reasons. One is ease of analysis, which will be utilized in Section 4.4. The other is
that a quadratic model is adequate to fit measured data, which we will show in Section 4.4.1.
Note that α2f is allowed to be negative to better fit measurements, though Pf is always
non-negative for the range of airflows in which we consider the VES system to be operating.
Electrical power consumption by the chiller, Pch, is modeled as being proportional to the
heat it extracts from the mixed air stream that passes through the evaporator (or the cooling
coil in a chilled water system):
Pch(t) =ma(t)[hma(t)− hsa(t)]
COP, (4-10)
where COP is the coefficient of performance of the chiller, h(·) is specific enthalpy of air, and
the subscripts ma and sa stand for “mixed air” and “supply air”; see Figure 4-1. Since a part
of the return air is mixed with the outside air, the specific enthalpy of the mixed air is:
hma(t) = roa(t)hoa(t) + (1− roa(t))h(t), (4-11)
where roa is the so-called outside air ratio: roa := moa
ma, hoa is the specific enthalpy of outdoor
air, and h is the specific enthalpy of the air leaving the zone. The specific enthalpy of moist air
with temperature T and humidity ratio W is given by: h(T,W ) = CpaT +W (gH20 + CpwT ),
90

where gH20 is the heat of evaporation of water at 0◦C, and Cpa, Cpw are specific heat of air and
water at constant pressure. We assume the following throughout this chapter to simplify the
analysis:
Assumption 4.1. (i) The ambient temperature (Toa), the exogenous heat gain (qx), and the
coefficient of performance of the chiller (COP) are constants. (ii) The ambient is warmer than
the maximum allowable indoor temperature: Toa > TH , so the HVAC system only provides
cooling. (iii) Effect of humidity change is ignored so that the specific enthalpy of an air stream,
h, with (dry-bulb) temperature T is h = CpaT , where Cpa is the specific heat capacity of dry
air. (iv) The supply air temperature, Tsa, is constant, and Tsa < T (b).
The first three are taken for the ease of analysis. The fourth usually holds in practice
because the cooling coil control loop maintains Tsa at a constant set point, which is lower than
indoor temperature in cooling applications.
With Assumption 4.1, (4-9), (4-10), and (4-11) yield
Phvac(ma, T ) = α1f (ma)2 + α2fma +
maCpa[roaToa + (1− roa)T − Tsa]
COP. (4-12)
Similarly, the temperature dynamics (4-7) and (4-8) become
T =1
RC(Toa − T ) +
1
Cqx +
1
CmaCpa(Tsa − T ). (4-13)
Definition 4.4 (Baseline). Baseline corresponds to an equilibrium condition in which zone
temperature and air flow rate are held at constant values, denoted by T (b) and m(b)a .
It follows from Definition 4.4 and (4-13) that the baseline variables T (b) and m(b)a must
satisfy
0 =1
R(Toa − T (b)) + qx +m(b)
a Cpa(Tsa − T (b)). (4-14)
The baseline power consumption, P (b)hvac, is obtained by plugging in T (b) and m
(b)a into the
expression for Phvac in (4-12).
91

The baseline temperature is best thought of as the setpoint that the climate controller
uses, and can be any temperature that is strictly inside the allowable interval, meaning
TL < T (b) < TH . Since some variation of the temperature around the setpoint is inevitable
due to imperfect reference tracking by a climate controller, the setpoint is always chosen to be
inside the allowable limits. The requirement TL < T (b) < TH is consistent with this practice.
4.3.3 VES System Dynamics and Power Consumption
Now we will derive the expressions for the VES system dynamics and power consumption
which will be used in the subsequent analysis presented in Section 4.4. Let ma(t) be the
airflow rate deviation (from the baseline) commanded by the VES controller. Note that
ma(t) = m(b)a + ma(t). Let the resulting deviation in the zone temperature be
T (t) := T (t)− T (b). (4-15)
The power consumption by the virtual battery is:
P (t) :=Phvac(ma(t), T (t))− P(b)hvac(m
(b)a , T (b)), (4-16)
where Phvac(·, ·) is given by (4-12).
By expanding (4-16), we obtain:
P = ama + bT + cmaT + dm2a, (4-17)
where the constants a, b, c, and d are:
a := 2α1fm(b)a + α2f +
Cpa[roaToa + (1− roa)T(b) − Tsa]
COP, (4-18)
b :=Cpam
(b)a (1− roa)
COP, c :=
Cpa(1− roa)
COP, d := α1f . (4-19)
Differentiating (4-15), and using (4-13) and (4-14) we obtain:
˙T = −αT − βma − γT ma, (4-20)
where α :=RCpam
(b)a + 1
RC, β :=
Cpa(T(b) − Tsa)
C, γ :=
Cpa
C. (4-21)
92
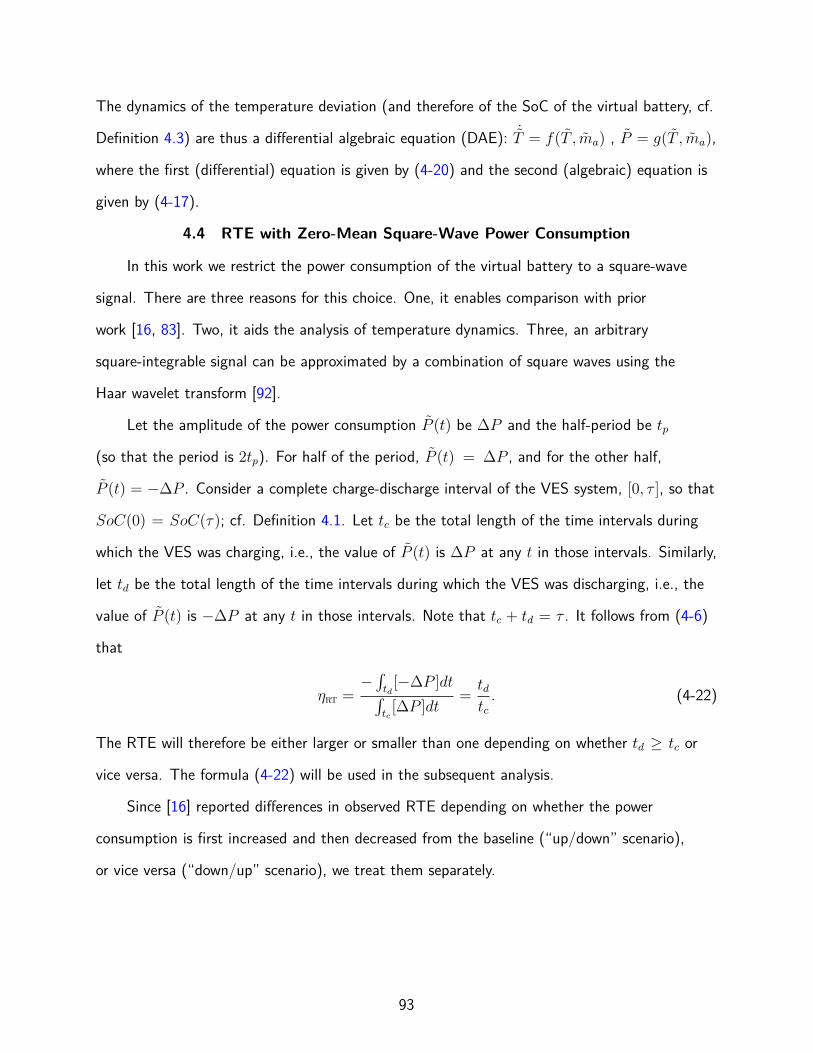
The dynamics of the temperature deviation (and therefore of the SoC of the virtual battery, cf.
Definition 4.3) are thus a differential algebraic equation (DAE): ˙T = f(T , ma) , P = g(T , ma),
where the first (differential) equation is given by (4-20) and the second (algebraic) equation is
given by (4-17).
4.4 RTE with Zero-Mean Square-Wave Power Consumption
In this work we restrict the power consumption of the virtual battery to a square-wave
signal. There are three reasons for this choice. One, it enables comparison with prior
work [16, 83]. Two, it aids the analysis of temperature dynamics. Three, an arbitrary
square-integrable signal can be approximated by a combination of square waves using the
Haar wavelet transform [92].
Let the amplitude of the power consumption P (t) be ∆P and the half-period be tp
(so that the period is 2tp). For half of the period, P (t) = ∆P , and for the other half,
P (t) = −∆P . Consider a complete charge-discharge interval of the VES system, [0, τ ], so that
SoC(0) = SoC(τ); cf. Definition 4.1. Let tc be the total length of the time intervals during
which the VES was charging, i.e., the value of P (t) is ∆P at any t in those intervals. Similarly,
let td be the total length of the time intervals during which the VES was discharging, i.e., the
value of P (t) is −∆P at any t in those intervals. Note that tc + td = τ . It follows from (4-6)
that
ηrt =−∫td[−∆P ]dt∫
tc[∆P ]dt
=tdtc. (4-22)
The RTE will therefore be either larger or smaller than one depending on whether td ≥ tc or
vice versa. The formula (4-22) will be used in the subsequent analysis.
Since [16] reported differences in observed RTE depending on whether the power
consumption is first increased and then decreased from the baseline (“up/down” scenario),
or vice versa (“down/up” scenario), we treat them separately.
93
4.4.1 A Single Period of Square-Wave Power Consumption
In this section we consider a single period of square-wave power deviation signal. In
the “up/down” scenario, there are two possibilities for the temperature deviation. The first
possibility, which is shown in Figure 4-3, is that the temperature deviation T is above 0 at the
end of one period of the square wave. This means additional charging is needed to bring T to
0 or alternatively to bring the SoC back to its starting value, which makes the time interval
[0, 2tp + trecov1] a complete charge-discharge interval according to Definition 4.1. The RTE
computed over this interval using Definition 4.2 or equivalently (4-22) is called the RTE for
one cycle. So for the first possibility tc = tp + trecov1 and td = tp, and (4-22) tells us that
ηrt < 1. The second possibility is that the temperature deviation T is below 0 at the end of
one period of the square wave. This means additional discharging is needed to bring T to 0,
which makes the time interval [0, 2tp + trecov2] a complete charge-discharge interval. Therefore,
tc = tp and td = tp + trecov2, and (4-22) tells us that ηrt > 1.
P∼ΔP
-ΔPTime
02tp
T∼
Time0
} trecov1
2tp
tp
tp
}
trecov2
Poss. 1
Poss. 2
Figure 4-3. Up/down scenario, possibility 1: since T (2tp) > 0 additional charging is needed tobring back T to its initial value(=0). Possibility 2: since T (2tp) < 0 additionaldischarging is needed to bring back T to its initial value(=0).
The situation in the “down/up” scenario is similar. The RTE will be smaller or larger
than 1 depending on whether the temperature deviation in the first half period is larger or
smaller (in magnitude) than that in the second half period. These two possibilities are shown
in Figure 4-4.
94
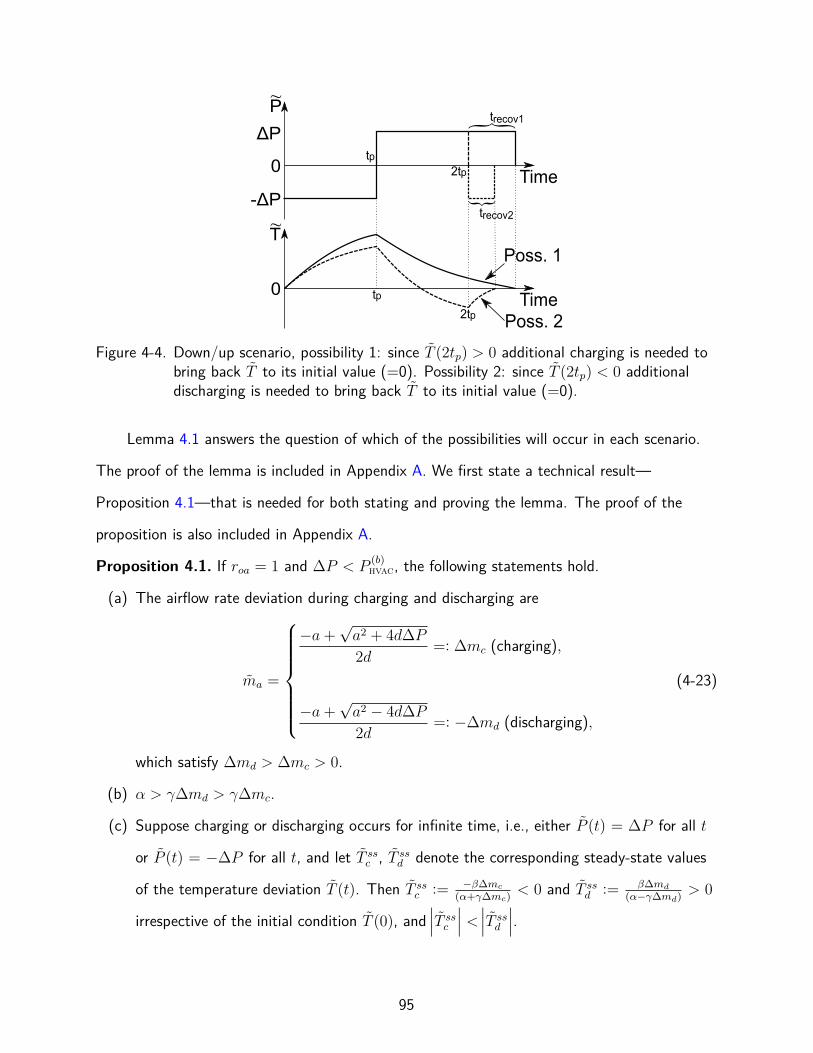
P∼
ΔP
-ΔPTime
0 2tp
T∼
Time0
}
trecov2
2tp
tp
tp
} trecov1
Poss. 1
Poss. 2
Figure 4-4. Down/up scenario, possibility 1: since T (2tp) > 0 additional charging is needed tobring back T to its initial value (=0). Possibility 2: since T (2tp) < 0 additionaldischarging is needed to bring back T to its initial value (=0).
Lemma 4.1 answers the question of which of the possibilities will occur in each scenario.
The proof of the lemma is included in Appendix A. We first state a technical result—
Proposition 4.1—that is needed for both stating and proving the lemma. The proof of the
proposition is also included in Appendix A.
Proposition 4.1. If roa = 1 and ∆P < P(b)hvac, the following statements hold.
(a) The airflow rate deviation during charging and discharging are
ma =
−a+√a2 + 4d∆P
2d=: ∆mc (charging),
−a+√a2 − 4d∆P
2d=: −∆md (discharging),
(4-23)
which satisfy ∆md > ∆mc > 0.
(b) α > γ∆md > γ∆mc.
(c) Suppose charging or discharging occurs for infinite time, i.e., either P (t) = ∆P for all t
or P (t) = −∆P for all t, and let T ssc , T ss
d denote the corresponding steady-state values
of the temperature deviation T (t). Then T ssc := −β∆mc
(α+γ∆mc)< 0 and T ss
d := β∆md
(α−γ∆md)> 0
irrespective of the initial condition T (0), and∣∣∣T ss
c
∣∣∣ < ∣∣∣T ssd
∣∣∣.
95

Now we are ready to state the lemma.
Lemma 4.1. Suppose roa = 1 (i.e., 100% outside air) and the time period 2tp is small
enough so that (α + γ∆mc)tp ≪ 1 (α, γ are defined in (4-21) and ∆mc is defined in
Proposition 4.1(a)), which implies that the approximation ex ≈ 1 + x is accurate with x
replaced by (α + γ∆mc)tp. Then, in the up/down scenario, the RTE for one cycle is ηrt < 1
(possibility 1 shown in Figure 4-3). In down/up scenario, there is a critical value t∗p:
t∗p :=−1
α + γ∆mc
log∆mc
∆md
, (4-24)
such that if tp < t∗p, then ηrt < 1 for one cycle (possibility 1 shown in Figure 4-4); otherwise
ηrt > 1 (possibility 2 shown in Figure 4-4).
Comment 4.1. The RTE values obtained in the LANL experiments are almost always less
than 1, in both up/down and down/up scenarios, but in a small fraction of up/down and
down/up experiments the RTE was observed to be larger than one; see Figure 5 of [16].
While Lemma 4.1 shows that it is possible for the RTE to be either larger or smaller than 1 as
observed in the experiments, its prediction that ηrt cannot be greater than 1 for the up/down
scenario is inconsistent with the observation in [16]. Interestingly, the simulation study [83]
also observed that the RTE is smaller than 1 for the up/down scenario and greater than 1 for
down/up scenario. This is consistent with our results but inconsistent with LANL experiments.
In [83], they did not test for small enough values for the time period to notice the existence of
a critical time period in the down/up scenario.
The assumptions made in the lemma are for ease of analysis; its predictions still hold
when they are violated. Figure 4-5 shows the numerically computed ηrt for various values of tp
using the parameter values listed in the next paragraph. We see from the Figure 4-5 that the
predictions regarding ηrt from Lemma 4.1 hold even when (α + γ∆mc)tp is not small and roa
is not 1. For instance, when tp = 300 minutes, (α + γ∆mc)tp = 1.8, which is not tiny; yet
numerically computed values are consistent with the lemma’s prediction.
96

1 5 10 15 30 60 120 180 300
tp (minutes)
0.7
0.8
0.9
1
1.1
1.2
1.3
RT
Up/down cycle: roa
=1
Up/down cycle: roa
=0.5
Down/up cycle: roa
=1
Down/up cycle: roa
=0.5
Figure 4-5. ηrt vs. tp, for roa = 1 and roa = 0.5; ∆P = 0.2P(b)hvac. The vertical line shown is t∗p
(≈12 minutes) computed from (4-24) for roa = 1.
1.8 2 2.2 2.4 2.6 2.8 3
Supply air flow rate (kg/s)
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
Fan
pow
er (
W)
Figure 4-6. Fan power vs. airflow rate; measurements from AHU-2 of Pugh Hall at UF(circles), and predictions from the best fit model (4-9) to the measurements(curve).
The following parameters were chosen for the numerical computations: Tsa = 55◦F,
T (b) = 72◦F, TL = 70◦F, and TH = 74◦F. The building in this chapter is based on a large
auditorium (∼ 6 m high, floor area of ∼ 465 m2) in Pugh Hall located in the University of
Florida campus, which is served by a dedicated air handling unit. We choose m(b)a = 2.27
kg/s since that is representative of the airflow rate to this zone. We choose the following
parameters, guided by [93]: C = 3.4 × 107 J/K and R = 1.3 × 10−3 K/W. We also choose
97

P∼
ΔP
-ΔPTime
0 2tp
∼ ∼
(n-1)2tp n2tp
T∼
Time0
∼ ∼
}t (n) recov1
}
t (n)recov2
4tp
2tp
(n-1)2tp
n2tp
4tp
Poss. 1
Poss. 2
Figure 4-7. Additional charging or discharging needed to bring T to its initial value (=0) aftern periods of down/up cycle.
Toa = 80◦F and COP = 3.5, somewhat arbitrarily. The fan power coefficients were chosen to
be α1f = 662 W/(kg/s)2 and α2f = −576 W/(kg/s), based on fitting a quadratic model to
measured fan power from the zone in question; see Figure 4-6.
4.4.2 Multiple Periods of Square-Wave Power Consumption
We now consider n periods of the square-wave, n > 1. At the end of n periods, the
temperature deviation may not be exactly 0 (i.e., T (n2tp) = 0), even though its initial value
was 0 (i.e., T (0) = 0). Charging or discharging might be needed for an additional amount of
time trecov to bring the temperature deviation back to 0. Whether recovery to the initial SoC
requires additional charging or additional discharging depends on whether T (n2tp) is positive
or negative. In either case, since T (0) = T (n2tp + trecov) = 0, according to Definition 4.1, the
time interval [0, n2tp + trecov] constitutes a complete charge-discharge interval of the virtual
battery. The RTE computed over this interval using Definition 4.2 or equivalently (4-22) is
called the RTE for n cycles or ηrt(n).
Figure 4-7 shows an illustration of the two possible scenarios for the possible values
of T (n2tp). For the sake of concreteness, we have assumed the VES service starts with a
down/up cycle in the figure. In the first possibility, denoted by the solid lines, T (n2tp) ≥ 0,
and therefore additional charging is performed for trecov1 ≥ 0 amount of time in order to
bring the temperature deviation to 0. If this possibility were to occur, within the complete
98

charge-discharge interval of [0, n2tp + trecov1], the charging time is ntp + trecov1, while the
discharging time is ntp. It now follows from (4-22) that for possibility 1
ηrt(n) =tdtc
=ntp
ntp + trecov1(n)≤ 1. (4-25)
In the second possibility, denoted by the dashed lines, T (n2tp) ≤ 0 and therefore additional
discharging is needed for trecov2 ≥ 0 amount of time. For this possibility,
ηrt(n) =tdtc
=ntp + trecov2(n)
ntp≥ 1. (4-26)
If the VES service were to start with an up/down cycle, the same two possibilities exist in
principle, so again the RTE can be smaller or larger than one depending on whether the
temperature deviation at the end of the n periods is positive or negative.
The proof of the main result of this chapter, Theorem 4.1, needs a key intermediate result
which is presented in the next lemma.
Lemma 4.2. For roa = 1 and T (0) = 0, the magnitude of the temperature deviation |T (t)| is
bounded by max{|T ss
c |, |T ssd |
}, ∀t (T ss
c and T ssd are defined in Proposition 4.1(c)).
The proof of Lemma 4.2 is presented in Appendix A.
Theorem 4.1. If roa = 1, limn→∞ ηrt(n) = 1.
Proof of Theorem 4.1. Consider the first possibility: T (n2tp) ≥ 0 so that additional
charging is needed for some time, and call that time trecov(n) ≥ 0. From (4-25), we have
limn→∞
ηrt(n) = limn→∞
ntpntp + trecov(n)
= limn→∞
tptp +
1ntrecov(n)
.
Since the building is undergoing charging for t > n2tp, it follows from Proposition 4.1(c) that
the temperature deviation monotonically decays toward the value T ssc from the “initial value”
T (n2tp). Since T (n2tp) is bounded by a constant that is independent of n, which follows
from Lemma 4.2, the time it takes for T (t) to reach 0 from its “initial value” T (n2tp) is upper
bounded by a constant independent of n, which we denote by trecov. Thus, trecov(n) ≤ trecov,
and trecov is a constant independent of n. Therefore, limn→∞1ntrecov(n) = 0, and therefore,
99
limn→∞ ηrt(n) = 1. A similar analysis holds for the second possibility: T (n2tp) ≤ 0. In this
case additional discharging is needed for t > n2tp. Again, the time it takes for the temperature
deviation to get back to 0 is upper bounded by a constant independent of n since the “initial
condition” T (n2tp) is upper bounded (in magnitude) by a constant independent of n. Thus,
again 1ntrecov(n) → 0 as n → ∞, and therefore limn→∞ ηrt(n) = limn→∞
ntp+trecov(n)
ntp= 1.
Comment 4.2. (a) Theorem 4.1 indicates that it is better for an HVAC-based virtual
battery to provide VES services for an extended period of time, so that n is large and
hence RTE is close to 1. If VES service is stopped after a small number of cycles, RTE
can be significantly lower than 1. This will entail a loss of efficiency and thus an increase
in the energy cost for the building owner/operator.
(b) Theorem 4.1 holds as long as the temperature deviation T (t) is bounded by a constant
independent of t, since that alone is sufficient to guarantee that 1ntrecov(n) → 0 as
n → ∞. Therefore, the Theorem is robust to the kinds of model (and parameter values
in the model) used in the analysis; the asymptotic RTE is 1 as long as the temperature
deviation is bounded by a constant.
4.4.3 Numerical Verification
In order to show that the main result—Theorem 1—is robust to modeling assumptions
made during analysis, we test the prediction using a more sophisticated model in simulations
that includes humidity. The temperature dynamics are modeled as follows:
CzT (t) =1
Rw
(Tw(t)− T (t)) + qx(t) + qhvac(t)
CwTw(t) =1
Rz
(Toa(t)− Tw(t)) +1
Rw
(T (t)− Tw(t))
where Tw is the wall temperature, Cz and Cw are the thermal capacitance of the zone and the
wall respectively, Rz is the resistance to heat exchange between the outdoors and wall, and Rw
is the resistance to heat exchange between the wall and indoors. qhvac is the heat influx due to
the HVAC system which is given by (4-8). The dynamics of zone humidity ratio W is modeled
100
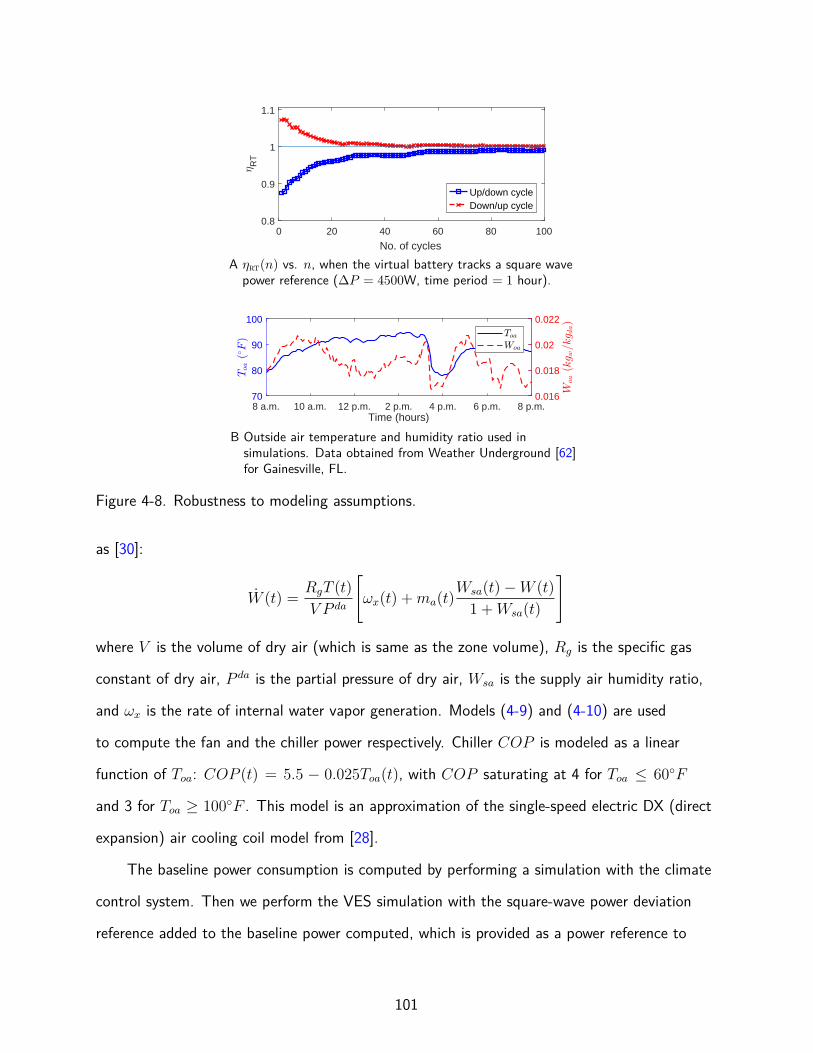
0 20 40 60 80 100
No. of cycles
0.8
0.9
1
1.1
RT
Up/down cycleDown/up cycle
A ηrt(n) vs. n, when the virtual battery tracks a square wavepower reference (∆P = 4500W, time period = 1 hour).
8 a.m. 10 a.m. 12 p.m. 2 p.m. 4 p.m. 6 p.m. 8 p.m.Time (hours)
70
80
90
100
0.016
0.018
0.02
0.022
B Outside air temperature and humidity ratio used insimulations. Data obtained from Weather Underground [62]for Gainesville, FL.
Figure 4-8. Robustness to modeling assumptions.
as [30]:
W (t) =RgT (t)
V P da
[ωx(t) +ma(t)
Wsa(t)−W (t)
1 +Wsa(t)
]
where V is the volume of dry air (which is same as the zone volume), Rg is the specific gas
constant of dry air, P da is the partial pressure of dry air, Wsa is the supply air humidity ratio,
and ωx is the rate of internal water vapor generation. Models (4-9) and (4-10) are used
to compute the fan and the chiller power respectively. Chiller COP is modeled as a linear
function of Toa: COP (t) = 5.5 − 0.025Toa(t), with COP saturating at 4 for Toa ≤ 60◦F
and 3 for Toa ≥ 100◦F . This model is an approximation of the single-speed electric DX (direct
expansion) air cooling coil model from [28].
The baseline power consumption is computed by performing a simulation with the climate
control system. Then we perform the VES simulation with the square-wave power deviation
reference added to the baseline power computed, which is provided as a power reference to
101
the VES controller, as described in Section 4.3. At the end of the ancillary service event the
VES controller is turned off and the zone climate controller is turned on to bring the zone
temperature to its set point. Figure 4-8A shows numerically computed values of ηrt(n) as
a function of n. The RTE was computed using (4-6). The result presented in the figure is
consistent with the prediction of Theorem 4.1 that the RTE tends to 1 as n → ∞. Note that
many of the modeling assumptions are violated in these simulations, providing confidence that
the analysis is robust to these modeling assumptions.
4.5 RTE with Nonzero-Mean Square-Wave Power Consumption
In the previous section, the power deviation signal P (t) was zero-mean. However, the
resulting zone temperature deviation from baseline may not be zero-mean. One may argue that
to perform a fair comparison, the mean temperature deviation at steady state must be kept
at zero somehow. Such a change may necessitate additional power consumption, which may
change the asymptotic RTE away from unity. Figure 4-9 shows numerical evidence of such a
phenomenon: P (t) is a zero-mean square wave with amplitude ∆P = 2917.7 W (30% of the
baseline power consumption P(b)hvac = 9725.6 W). When the temperature deviation T (t) reaches
periodic steady state, its average value over one cycle is ∼ 0.11 K. If ∆P were to be 20% and
40% of the baseline, the average temperature deviation turns out to be 0.05 K and 0.21 K
respectively.
4.5.1 Nonzero-Mean Power Deviation to Ensure Zero-Mean Temperature Deviation
Suppose with a zero-mean square-wave power variation P over the baseline, the mean
of T at periodic steady state is positive, meaning the building is on average warmer than
the baseline temperature. In order to ensure that the mean of T is 0, an additional constant
∆P > 0 will have to be added to P , to provide additional cooling, as shown in Figure 4-11.
Adding a constant ∆P to the power deviation command can be interpreted as the building
operating at a new, shifted baseline. Suppose we start with an up/down cycle, there are
two possibilities that can occur in principle: T (n2tp) > 0 or T (n2tp) < 0. It follows from
Definitions 4.1 and 4.2 that the RTE at the end of n cycles of the power deviation command
102
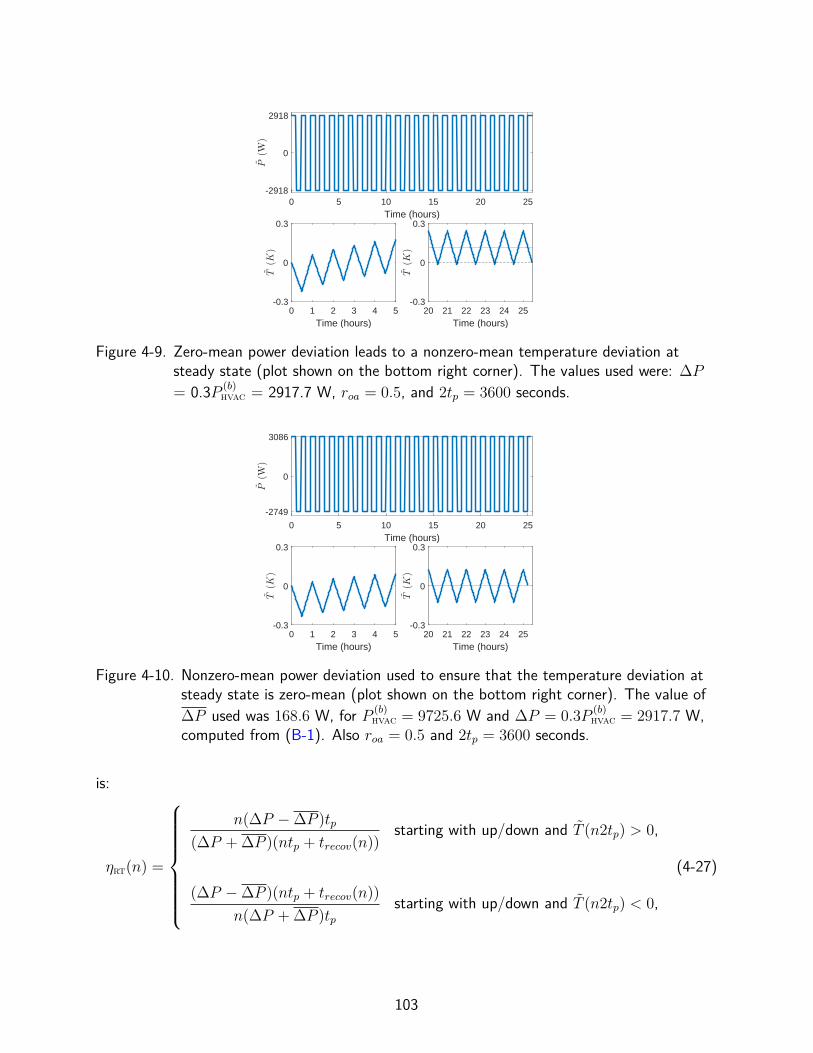
0 5 10 15 20 25Time (hours)
-2918
0
2918
0 1 2 3 4 5Time (hours)
-0.3
0
0.3
20 21 22 23 24 25Time (hours)
-0.3
0
0.3
Figure 4-9. Zero-mean power deviation leads to a nonzero-mean temperature deviation atsteady state (plot shown on the bottom right corner). The values used were: ∆P
= 0.3P (b)hvac = 2917.7 W, roa = 0.5, and 2tp = 3600 seconds.
0 5 10 15 20 25Time (hours)
-2749
0
3086
0 1 2 3 4 5Time (hours)
-0.3
0
0.3
20 21 22 23 24 25Time (hours)
-0.3
0
0.3
Figure 4-10. Nonzero-mean power deviation used to ensure that the temperature deviation atsteady state is zero-mean (plot shown on the bottom right corner). The value of∆P used was 168.6 W, for P (b)
hvac = 9725.6 W and ∆P = 0.3P(b)hvac = 2917.7 W,
computed from (B-1). Also roa = 0.5 and 2tp = 3600 seconds.
is:
ηrt(n) =
n(∆P −∆P )tp
(∆P +∆P )(ntp + trecov(n))starting with up/down and T (n2tp) > 0,
(∆P −∆P )(ntp + trecov(n))
n(∆P +∆P )tpstarting with up/down and T (n2tp) < 0,
(4-27)
103

P∼
ΔP
-ΔP
Time0
∼ ∼
T∼
Time0
∼ ∼
trecov
2tp n2tp4tp
To
∼
(n-1)2tp
}}ΔP
}ΔP
}ΔP
ΔP+ΔP
-ΔP+ΔP }ΔP
Periodic steady state
Figure 4-11. Nonzero-mean power deviation to ensure zero-mean temperature deviation (atsteady state). As before, the time trecov is the time needed to bring thetemperature deviation to 0 after n periods of the square-wave power deviation. To
is the maximum value of T after the building reaches steady state.
where trecov(n) is the additional time needed to bring the temperature to zero at the end of
n periods. Figure 4-11 shows an example of P starting with an up/down cycle and T (n2tp)
being greater than zero. It follows that:
η∞rt = limn→∞
ηrt(n) =∆P −∆P
∆P +∆P< 1. (4-28)
It is to be noted that the same two possibilities can occur when starting with a down/up cycle.
However, (4-28) and the result that η∞rt < 1 remain unchanged.
If, on the other hand, the mean temperature deviation is negative when the power
deviation command is zero-mean, that would mean the building is colder on average. In order
to ensure that the mean of T is 0, an additional constant ∆P > 0 will have to be subtracted
from the original P to provide additional heating. By a similar analysis as above it can be
shown that the limiting RTE is:
η∞rt =∆P +∆P
∆P −∆P> 1. (4-29)
104
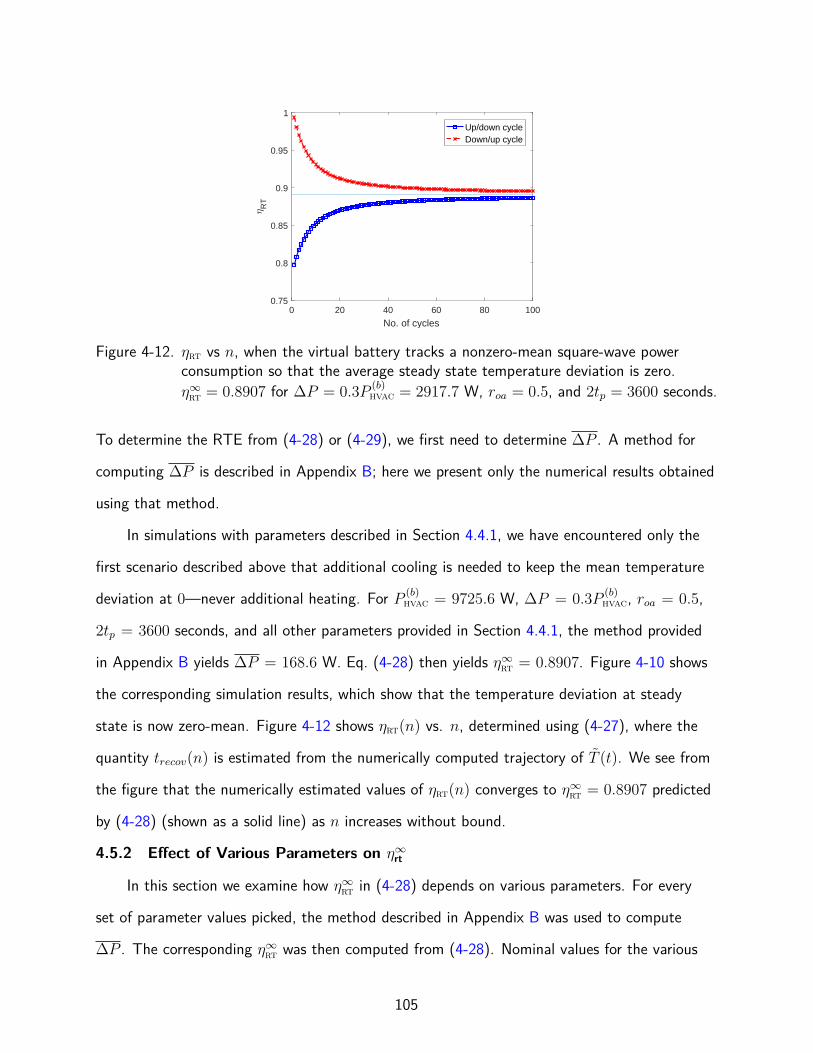
0 20 40 60 80 100
No. of cycles
0.75
0.8
0.85
0.9
0.95
1
RT
Up/down cycleDown/up cycle
Figure 4-12. ηrt vs n, when the virtual battery tracks a nonzero-mean square-wave powerconsumption so that the average steady state temperature deviation is zero.η∞rt = 0.8907 for ∆P = 0.3P
(b)hvac = 2917.7 W, roa = 0.5, and 2tp = 3600 seconds.
To determine the RTE from (4-28) or (4-29), we first need to determine ∆P . A method for
computing ∆P is described in Appendix B; here we present only the numerical results obtained
using that method.
In simulations with parameters described in Section 4.4.1, we have encountered only the
first scenario described above that additional cooling is needed to keep the mean temperature
deviation at 0—never additional heating. For P (b)hvac = 9725.6 W, ∆P = 0.3P
(b)hvac, roa = 0.5,
2tp = 3600 seconds, and all other parameters provided in Section 4.4.1, the method provided
in Appendix B yields ∆P = 168.6 W. Eq. (4-28) then yields η∞rt = 0.8907. Figure 4-10 shows
the corresponding simulation results, which show that the temperature deviation at steady
state is now zero-mean. Figure 4-12 shows ηrt(n) vs. n, determined using (4-27), where the
quantity trecov(n) is estimated from the numerically computed trajectory of T (t). We see from
the figure that the numerically estimated values of ηrt(n) converges to η∞rt = 0.8907 predicted
by (4-28) (shown as a solid line) as n increases without bound.
4.5.2 Effect of Various Parameters on η∞rt
In this section we examine how η∞rt in (4-28) depends on various parameters. For every
set of parameter values picked, the method described in Appendix B was used to compute
∆P . The corresponding η∞rt was then computed from (4-28). Nominal values for the various
105
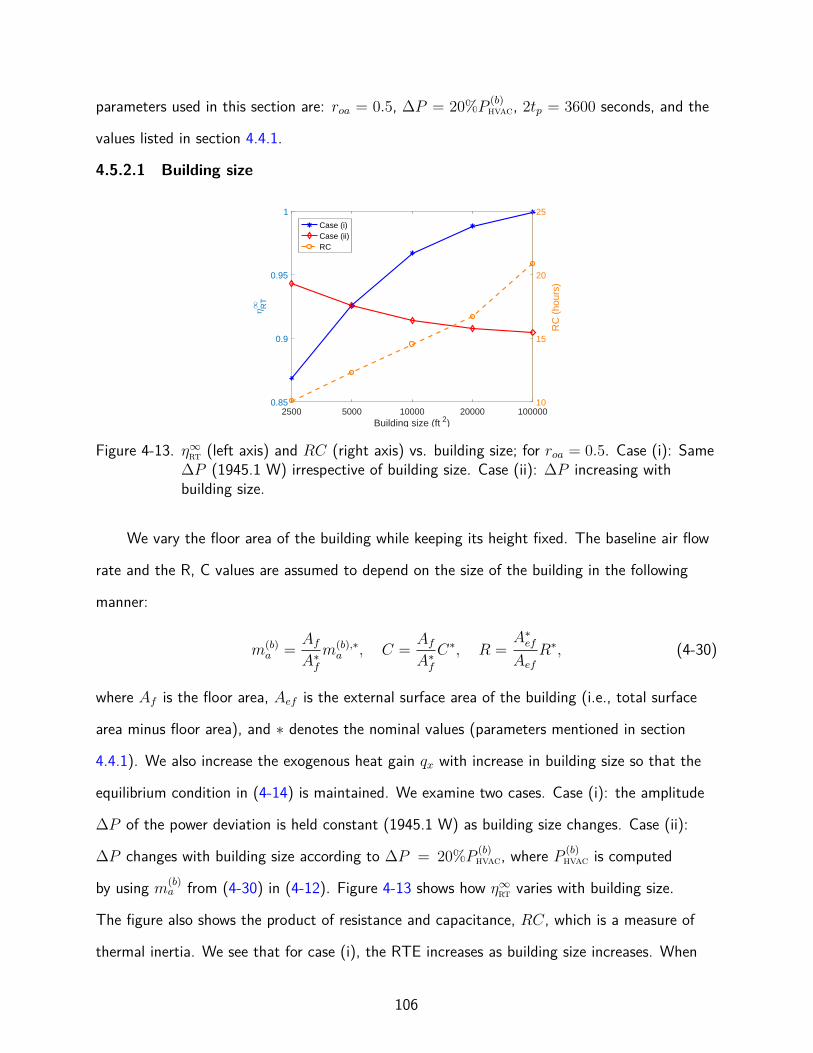
parameters used in this section are: roa = 0.5, ∆P = 20%P(b)hvac, 2tp = 3600 seconds, and the
values listed in section 4.4.1.
4.5.2.1 Building size
2500 5000 10000 20000 100000Building size (ft 2)
0.85
0.9
0.95
1
RT
10
15
20
25
RC
(ho
urs)
Case (i)Case (ii)RC
Figure 4-13. η∞rt (left axis) and RC (right axis) vs. building size; for roa = 0.5. Case (i): Same∆P (1945.1 W) irrespective of building size. Case (ii): ∆P increasing withbuilding size.
We vary the floor area of the building while keeping its height fixed. The baseline air flow
rate and the R, C values are assumed to depend on the size of the building in the following
manner:
m(b)a =
Af
A∗f
m(b),∗a , C =
Af
A∗f
C∗, R =A∗
ef
Aef
R∗, (4-30)
where Af is the floor area, Aef is the external surface area of the building (i.e., total surface
area minus floor area), and ∗ denotes the nominal values (parameters mentioned in section
4.4.1). We also increase the exogenous heat gain qx with increase in building size so that the
equilibrium condition in (4-14) is maintained. We examine two cases. Case (i): the amplitude
∆P of the power deviation is held constant (1945.1 W) as building size changes. Case (ii):
∆P changes with building size according to ∆P = 20%P(b)hvac, where P
(b)hvac is computed
by using m(b)a from (4-30) in (4-12). Figure 4-13 shows how η∞rt varies with building size.
The figure also shows the product of resistance and capacitance, RC, which is a measure of
thermal inertia. We see that for case (i), the RTE increases as building size increases. When
106
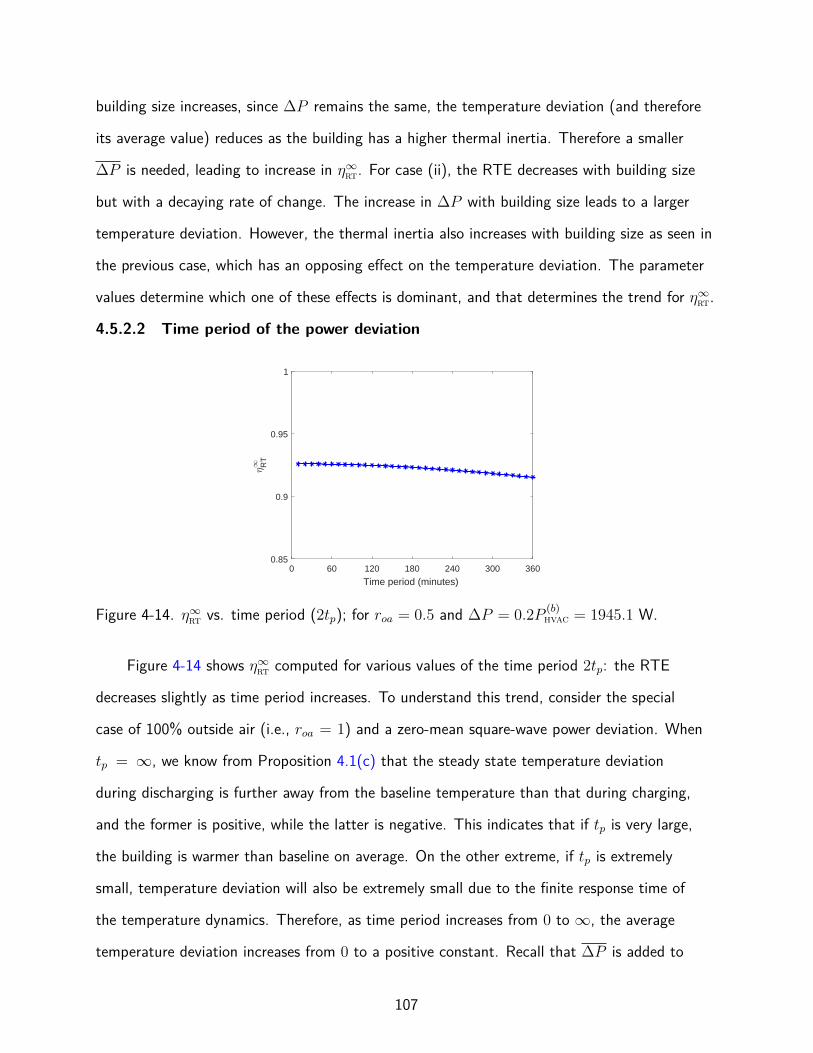
building size increases, since ∆P remains the same, the temperature deviation (and therefore
its average value) reduces as the building has a higher thermal inertia. Therefore a smaller
∆P is needed, leading to increase in η∞rt. For case (ii), the RTE decreases with building size
but with a decaying rate of change. The increase in ∆P with building size leads to a larger
temperature deviation. However, the thermal inertia also increases with building size as seen in
the previous case, which has an opposing effect on the temperature deviation. The parameter
values determine which one of these effects is dominant, and that determines the trend for η∞rt.
4.5.2.2 Time period of the power deviation
0 60 120 180 240 300 360
Time period (minutes)
0.85
0.9
0.95
1
RT
Figure 4-14. η∞rt vs. time period (2tp); for roa = 0.5 and ∆P = 0.2P(b)hvac = 1945.1 W.
Figure 4-14 shows η∞rt computed for various values of the time period 2tp: the RTE
decreases slightly as time period increases. To understand this trend, consider the special
case of 100% outside air (i.e., roa = 1) and a zero-mean square-wave power deviation. When
tp = ∞, we know from Proposition 4.1(c) that the steady state temperature deviation
during discharging is further away from the baseline temperature than that during charging,
and the former is positive, while the latter is negative. This indicates that if tp is very large,
the building is warmer than baseline on average. On the other extreme, if tp is extremely
small, temperature deviation will also be extremely small due to the finite response time of
the temperature dynamics. Therefore, as time period increases from 0 to ∞, the average
temperature deviation increases from 0 to a positive constant. Recall that ∆P is added to
107
provide additional cooling to bring the average temperature deviation back to 0. The previous
discussion tells us that a larger ∆P is required to do so as time period increases, which leads
to a decrease in RTE.
4.6 Summary
The main result of this chapter is that the asymptotic RTE is unity. It is therefore better
for an HVAC-based VES system to be used continuously for a long time than occasionally. The
latter can cause low round-trip efficiency, while the former has an efficiency close to 1.
We also show that imposing an additional constraint, that the mean temperature of the
building must remain at its baseline value, can cause asymptotic RTE to be less than 1. For
the range of parameters we examined, the asymptotic RTE is in the range 0.85 − 1, still
comparable to that of Li-ion batteries.
Nonlinearity plays a critical role in the analysis. If the models of power and temperature
dynamics were both linear, it can be shown using basic linear system theory that a zero-mean
deviation of power consumption (from baseline) will lead to a zero-mean deviation of the
indoor temperature at steady state. As a result, there is no need for additional cooling (or
heating) to keep the temperature deviation zero mean, so the asymptotic RTE is 1.
There are several additional avenues for further exploration. The discrepancy between our
predictions and results in [16] for the “single demand-response event” calls for further studies;
see Comment 4.1. Additional analysis is needed for HVAC systems that provide heating rather
than cooling and examination of the role of humidity.
108
CHAPTER 5CONCLUSION
In this dissertation, two MPC-based algorithms for energy-efficient control of HVAC
systems in commercial buildings are developed and tested through simulations. In addition, the
RTE when HVAC systems in commercial buildings are used for grid-support as a virtual battery
is rigorously analyzed.
In Chapter 2, an MPC controller which incorporates humidity and latent heat in a
principled manner is presented; this controller is primarily for single-zone buildings. Simulations
show that the proposed controller outperforms both an MPC controller which does not
consider humidity/latent heat and a baseline rule-based controller. Simulations also indicate
that under certain conditions, using the MPC controller which ignores humidity/latent heat
can lead to two issues. One, it may lead to poor humidity control. Two, it may lead to higher
energy usage as it is unaware of the latent load on the cooling coil. Since our proposed
controller explicitly considers these factors, it is able to perform well under various weather
conditions.
In Chapter 3, an MPC-based hierarchical controller for multi-zone buildings is presented.
The proposed control architecture is designed to address a number of limitations in the existing
literature on multi-zone buildings. The main one is the reliance on a high-resolution multi-zone
model, which can be challenging to obtain. Instead, we use a low-resolution model of the
building, which can be identified in a tractable manner from measurements. The challenge then
is to convert the MPC decisions, which are computed for the fictitious zones in the model, to
the commands for the VAV boxes of the actual building. The proposed architecture does that
by posing this conversion as a projection problem that uses not only what the MPC computes
but also feedback from zones. The result is a principled method of computing VAV box
commands that are consistent with the optimal decisions made by the MPC without needing
dynamic models of individual zones. At the same time, the use of feedback from the zones
ensures that zone climate states are also close to the aggregate climate states computed by the
109
MPC. The positive simulation results provide confidence on the effectiveness of the proposed
controller especially because of the large plant model mismatch.
In Chapter 4, the RTE of an HVAC-based virtual battery is rigorously analyzed. The
main result is that the asymptotic RTE is unity. It is therefore better for an HVAC-based VES
system to be used continuously for a long time than occasionally. The latter can cause low
round-trip efficiency, while the former has an efficiency close to 1. We also show that imposing
an additional constraint, that the mean temperature of the building must remain at its baseline
value, can cause asymptotic RTE to be less than 1. For the range of parameters we examined,
the asymptotic RTE is in the range 0.85− 1, still comparable to that of Li-ion batteries.
This dissertation is only a first step, there are several avenues for further exploration.
(i) Experimentally verifying the performance of the two proposed MPC-based controllers.
(ii) Modifying the MPC formulations to minimize cost instead of energy and to include demand
charges. (iii) Improving methods to forecast disturbances that are used in the controllers.
(iv) Experimentally verifying the results on RTE. Inspired by this work, some experiments
were performed by researchers from the University of Michigan and North Carolina State
University to investigate the impact on energy efficiency caused by successive load shifting, and
preliminary results are reported in [94].
110

APPENDIX APROOFS
We start with a technical result first.
Proposition A.1. (a) The parameter a defined in (4-18) is positive for every positive ma.
(b) If roa = 1, then a2 > 4d∆P for any feasible ∆P .
(c) If roa = 1, then ad> m
(b)a .
(d) If roa = 1 and ∆P ≤ P(b)hvac, then m
(b)a ≤ 1
2d(a +
√a2 − 4d∆P ), with equality only if
∆P = P(b)hvac.
Proof of Proposition A.1. (a) It follows from (4-18) that
am(b)a = α1f (m
(b)a )2 + P
(b)hvac.
Since the right hand side is positive and m(b)a > 0, we have that a > 0.
(b) For roa = 1 it follows from (4-18) that:
a = 2α1fm(b)a + α2f +
Cpa[Toa − Tsa]
COP.
The maximum value that 4d∆P can take is when ∆P = P(b)hvac. Substituting for
∆P = P(b)hvac and from (4-19) we get:
4α1fP(b)hvac = 4α1f
[α1f (m
(b)a )2 + α2fm
(b)a +
m(b)a Cpa[Toa − Tsa]
COP
].
So we need to prove that:[2α1fm
(b)a + α2f +
Cpa[Toa − Tsa]
COP
]2
> 4α1f
[α1f (m
(b)a )2 + α2fm
(b)a +
m(b)a Cpa[Toa − Tsa]
COP
].
This simplifies to [α2f +
Cpa[Toa − Ts]
COP
]2
> 0
111

which is always true, and therefore a2 > 4d∆P .
(c) It follows from (4-18) and (4-19) that when roa = 1
a
d=
2α1fm(b)a + α2f +
Cpa[Toa−Tsa]
COP
α1f
.
With further algebraic manipulation it reduces to m(b)a + P
(b)hvac/(α1fm
(b)a ). Since α1f ,
m(b)a , and P
(b)hvac are positive, we have a/d > m
(b)a .
(d) Let us look at the following expression:
a+√a2 − 4d∆P
2d. (A-1)
Substituting for ∆P = P(b)hvac in the above expression and using the expressions for a and
d from (4-18) and (4-19) respectively, we get:
2α1fm(b)a + α2f +
Cpa[Toa−Tsa]
COP+∣∣∣α2f +
Cpa[Toa−Tsa]
COP
∣∣∣2α1f
. (A-2)
If α2f +Cpa[Toa−Tsa]
COP> 0 then (A-2) becomes:
m(b)a +
α2f +Cpa[Toa−Tsa]
COP
α1f
,
which is greater than m(b)a since α1f > 0. If α2f +
Cpa[Toa−Tsa]
COP< 0, then (A-2) becomes
equal to m(b)a . In (A-1) for any ∆P < P
(b)hvac the value of (A-1) increases and therefore is
greater than m(b)a . This completes the proof.
Proof of Proposition 4.1. (a) Since roa = 1 from (4-19), b = 0 and c = 0. Therefore the
solution for ma as a function of P from (4-17) reduces to:
ma =−a±
√a2 + 4dP
2d.
During charging P = ∆P , so the the two roots in the equation above are −a+√a2+4d∆P2d
and −a−√a2+4d∆P2d
. The second root is not possible, since it is negative with a minimum
112

magnitude +a+√a2
2d= a
d, which is larger than m
(b)a by Proposition A.1(c), making the
total airflow rate negative. Therefore during charging, the airflow rate is −a+√a2+4d∆P2d
.
This proves the first statement, regarding ∆mc. During discharging, P = −∆P , so the
two possible roots are −a+√a2−4d∆P2d
and −a−√a2−4d∆P2d
. The second root is not possible,
since it is negative with a minimum magnitude larger than m(b)a for ∆P < P
(b)hvac from
Proposition A.1(d), which will make the total air flow rate negative. Therefore during
charging, the airflow rate is −a+√a2−4d∆P2d
. This proves the second statement, regarding
∆md.
To prove the inequality ∆md > ∆mc, let ν , 4d∆P for simplifying the notation. The
inequality ∆md > ∆mc is equivalent to:
−a+√a2 + ν
2d<
a−√a2 − ν
2d
⇒ −a+√a2 + ν < a−
√a2 − ν, as d > 0.
Further algebraic manipulation gives,
√a2 + ν −
√a2 − ν >
ν
a. (A-3)
Since a2 > ν from Proposition A.1(b), let us define a2 = ν + ϵ where ϵ > 0. Therefore,
(A-3) becomes:
√2ν + ϵ−
√ϵ >
ν√ν + ϵ
⇒√
(2ν + ϵ)(ν + ϵ) > ν +√
ϵ(ν + ϵ).
Squaring on both sides yields:
⇒ ν2 + 2νϵ > 2ν√
ϵ(ν + ϵ),
squaring again on both sides and simplifying, we get: ν4 > 0, which is true, and
therefore ∆mc < ∆md.
113

(b) Note that the maximum value that ∆md can take is m(b)a ; otherwise, the total airflow
rate will be negative. For that value of ∆md, γ∆md = Cpam(b)a
C(as γ = Cpa/C).
Substituting for α from (4-21) and since R,C > 0, we have Cpam(b)a
C+ 1
RC> Cpam
(b)a
C
so that α > γ∆md. For the second inequality, note that from Proposition4.1(a)
∆mc < ∆md. Since γ is positive, γ∆mc < γ∆md. Therefore, α > γ∆md > γ∆mc.
(c) We have already proved above that, ma(t) ≡ ∆mc when charging and ma(t) ≡ −∆md
when discharging. It follows from (4-20) that the temperature dynamics reduce in the
charging scenario to
˙T (t) = −(α + γ∆mc)T − β∆mc, (A-4)
and in the discharging scenario to
˙T (t) = −(α− γ∆md)T + β∆md. (A-5)
Both of these are linear time invariant systems driven by constant inputs that are
asymptotically stable; stability follows from α > γ∆md, which was proved above and
α, γ, and ∆mc being positive. It follows from elementary linear systems analysis [95]
that T (t) converges to a constant steady-state value irrespective of the initial condition,
which is, in the charging scenario: T ssc = β∆mc
−(α+γ∆mc), and in the discharging scenario:
T ssd = β∆md
(α−γ∆md). Since α, β, γ, ∆mc and ∆md are all positive, T ss
c < 0, and the fact
that T ssd > 0 follows from Proposition 4.1(b), proved above.
For the second part of the statement, we need to prove that
β∆mc
(α + γ∆mc)<
β∆md
(α− γ∆md). (A-6)
It follows from Proposition 4.1(b) that α + γ∆mc > α − γ∆mc > 0. Therefore, and
since all relevant parameters are positive,
β∆mc
α + γ∆mc
<β∆mc
α− γ∆mc
. (A-7)
114

Again from Proposition 4.1(b), we get
β∆mc
α + γ∆mc
<β∆mc
α− γ∆mc
<β∆md
α− γ∆md
, (A-8)
where the second inequality follows from ∆mc < ∆md. Thus from (A-8) we get the
desired inequality (A-6), which proves the second statement.
Now we are ready to prove Lemma 4.1.
Proof of Lemma 4.1. Since roa = 1, recall that we established in the proof of Proposition 4.1(c)
that T (t) is governed by two asymptotically stable linear time invariant systems, with step
inputs, (A-4) and (A-5), during the charging and discharging half-periods respectively. Consider
first the up/down scenario, with initial condition T (0) = 0. By solving the two differential
equations (A-4)-(A-5), we obtain the temperature deviation at the end of one period of the
square wave:
T (2tp) =−β∆mce
−(α−γ∆md)tp(1− e−(α+γ∆mc)tp)
α + γ∆mc
+β∆md(1− e−(α−γ∆md)tp)
α− γ∆md
.
By hypothesis, (α − γ∆md)tp < (α + γ∆mc)tp ≪ 1, so we can use a first order Taylor
expansion to get the following approximation:
T (2tp) ≈ tpβ(∆md −∆mce
−(α−γ∆md)tp). (A-9)
Since ∆mc < ∆md and (α − γ∆md) > 0, we get T (2tp) > 0. This is possibility 1 shown
in Figure 4-3: td = tp, while tc = tp + trecov for some trecov > 0. It follows from (4-22)
that ηrt < 1. Consider second the down/up scenario, with initial condition T (0) = 0. The
corresponding expression becomes:
T (2tp) =β∆mde
−(α+γ∆mc)tp(1− e−(α−γ∆md)tp)
α− γ∆md
− β∆mc(1− e−(α+γ∆mc)tp)
α + γ∆mc
.
115

A similar approximation gives:
T (2tp) ≈ tpβ(e−(α+γ∆mc)tp∆md −∆mc
). (A-10)
As long as tp > t∗p, we have e−(α+γ∆mc)tp < ∆mc/∆md, and thus T (2tp) < 0. This is
possibility 2 shown in Figure 4-4: tc = tp, while td = tp + trecov for some trecov > 0. It now
follows from (4-22) that ηrt > 1. However, if tp < t∗p, then e−(α+γ∆mc)tp > ∆mc/∆md, and we
have T (2tp) > 0. This is possibility 1 shown in Figure 4-4: td = tp, while tc = tp + trecov for
some trecov > 0, and it follows from (4-22) that ηrt < 1.
Proof of Lemma 4.2. Recall that we established in the proof of Proposition 4.1(c) that
T (t) is governed by two asymptotically stable, linear, time invariant systems, with step inputs,
(A-4) and (A-5), during the charging and discharging half-periods respectively. It follows
from elementary linear systems theory that the step response of a stable first-order LTI
system monotonically increases (or decreases, depending on the initial condition) towards the
steady-state value. Therefore, in the time interval [0, tp], the maximum value of |T (t)| will be
(depending on whether the system is charging or discharging)
|T (t)| ≤ max{|T (0)|, |T ss
c |, |T ssd |
}, ∀t ∈ [0, tp]. (A-11)
The value of T (tp) will serve as the initial condition to the LTI dynamics that govern T (t)
during the interval [tp, 2tp], which is either (A-4) or (A-5). Using the same argument, we see
that the maximum value of |T (t)| in this time interval will satisfy
|T (t)| ≤ max{|T (tp)|, |T ss
c |, |T ssd |
}, ∀t ∈ [tp, 2tp],
≤ max{|T (0)|, |T ss
c |, |T ssd |
}, ∀t ∈ [0, tp],
where the second inequality follows from combining the first inequality with (A-11). Since
T (2tp) serves as the initial condition for the second period [2tp, 4tp] and so on, we can repeat
this argument ad infinitum, and arrive at the conclusion that |T (t)|, for any t ≥ 0, is bounded
by the constants |T (0)|, |T ssc |, and |T ss
d |. Since T (0) = 0, max{|T (0)|, |T ss
c |, |T ssd |
}=
116

max{|T ss
c |, |T ssd |
}. Therefore, |T (t)|, for any t ≥ 0, is bounded by the constants |T ss
c |, |T ssd |,
which proves the statement.
117

APPENDIX BEXPRESSIONS FOR ∆P AND TO
First we present the formulas for ∆P and To, where ∆P is the constant that needs to
be added to P (zero-mean power-deviation signal) so that the steady-state average is T = 0
and To is the maximum value of the temperature deviation T after the building reaches steady
state; see Figure 4-11. The outline of the procedure we used to derive these formulas is
presented in Section B.
∆P =(µ1µ4 − 1)(µ8 + µ11)− (µ7 + µ10)(µ2µ4 + µ5)
−(µ1µ4 − 1)(µ9 + µ12) + (µ7 + µ10)(µ3µ4 + µ6), (B-1)
To =−(µ8 + µ11)− (µ9 + µ12)∆P
(µ7 + µ10), (B-2)
where
µ1 , em1tp , µ2 , −(n1∆P + s1)[1− em1tp
m1
], µ3 , −n1
[1− em1tp
m1
], µ4 , em2tp ,
µ5 , (n2∆P − s2)[1− em2tp
m2
], µ6 , −n2
[1− em2tp
m2
], µ7 ,
em1tp − 1
m1
,
µ8 , −(n1∆P + s1)tpm1
+(n1∆P + s1)(e
m1tp − 1)
(m1)2,
µ9 ,n1(−m1tp + em1tp − 1)
(m1)2, µ10 ,
µ1(em2tp − 1)
m2
,
µ11 ,(n2∆P − s2)tp
m2
+(−n2∆P + s2)(e
m2tp − 1)
(m2)2+
µ2(em2tp − 1)
m2
,
µ12 ,n2(−m2tp + em2tp − 1)
(m2)2+
µ3(em2tp − 1)
m2
,
and the parameters appearing in the formulas of µ’s are given by:
m1 , −α− β[−c
2d+
ac− 2db
2d√a2 + 4d∆P
]− γ(−a+
√a2 + 4d∆P )
2d, (B-3)
n1 ,−β√
a2 + 4d∆P, s1 , q1 − n1∆P, q1 ,
−β(−a+√a2 + 4d∆P )
2d, (B-4)
m2 , −α− β[−c
2d+
ac− 2db
2d√a2 − 4d∆P
]− γ(−a+
√a2 − 4d∆P )
2d, (B-5)
n2 ,−β√
a2 − 4d∆P, s2 , q2 + n2∆P, q2 ,
−β(−a+√a2 − 4d∆P )
2d. (B-6)
118
Derivation of the formulas (B-1) and (B-2). We only provide the outline, since the
details involve messy algebra that does not offer any insight. Since we are limiting ourselves
to times after steady state is reached, we can shift the origin of time so that charging occurs
when t ∈ [0, tp] and discharging occurs when t ∈ [tp, 2tp]. This makes the results valid
irrespective of whether the power deviation started with an up/down cycle or down/up cycle,
since transients play no role. Let To be the maximum value of the temperature deviation T
after the building reaches steady state; see Figure 4-11. Clearly, the maximum temperature will
be achieved at the end of a discharging (power-down) half-cycle. That is, T (0) = T (2tp) = To.
Since our hypothesis is that the mean temperature deviation is zero and the temperature is in
(periodic) steady state, we must have the integral of the temperature over one period is 0 after
steady state is reached: ∫ 2tp
0
T (t)dt = 0. (B-7)
Recall that we also have
T (2tp) = To (B-8)
The two equations (B-7)-(B-8) can be solved to determine the two unknowns To and ∆P .
To determine expressions for the left hand side of these equations, we need expressions
for the temperature deviation T (t) as a function of the two unknowns. As discussed in
Section 4.3.3, to determine T (t) one has to solve a nonlinear DAE. To determine the required
expressions, therefore, we need to perform some simplifications. First, based on numerical
evidence, we eliminate one of the roots for (4-17), which gives:
ma =−(cT + a) +
√(cT + a)2 − 4d(bT − P )
2d, (B-9)
so the DAE reduces to the nonlinear ODE:
˙T (t) = −αT − βma − γT ma,
119

where ma is the expression from (B-9). In order to obtain an analytical solution, we linearize
the ODE around two operating points: (T ∗, P ∗) = (0,∆P ) and (T ∗, P ∗) = (0,−∆P ). The
linearized ODEs, respectively, are:
˙T = m1T + n1P + s1, (B-10)˙T = m2T + n2P + s2, (B-11)
where the constants mi, ni, si are defined in (B-3) through (B-6). The linear ODE (B-10) is
an approximation of the nonlinear differential algebraic system during the charging half period,
while the linear ODE (B-11) is an approximation during the discharging half period.
Since linear, time-invariant ODEs have explicit solutions (the so-called variation of
constants formula), we can write down the expression for T (t) during t ∈ [0, tp], starting with
the initial condition T (0) = To, from (B-10). Similarly, we can write down the expression for
T (t) during t ∈ [tp, 2tp], with the initial condition T (tp) determined in the previous step, from
(B-11). The variables To and ∆P appear as unknown constants in these expressions. Armed
with these expressions, we can determine the left sides of the two equations: T (2tp) = To and
(B-7), which are then solved to determine the two unknowns To and ∆P . This results in the
expressions (B-1) and (B-2).
120

REFERENCES
[1] ASHRAE, “The ASHRAE handbook fundamentals (SI Edition),” 2017.
[2] F. Jorissen, G. Reynders, R. Baetens, D. Picard, D. Saelens, and L. Helsen,“Implementation and Verification of the IDEAS Building Energy Simulation Library,”Journal of Building Performance Simulation, vol. 11, pp. 669–688, 2018.
[3] U.S. DoE, “Buildings energy data book,” Energy Efficiency & Renewable Energy Depart-ment, 2011.
[4] “Commercial buildings energy consumption survey (CBECS): Overview ofcommercial buildings, 2012,” Energy information administration, Departmentof Energy, U.S. Govt., Tech. Rep., December 2012. [Online]. Available:https://www.eia.gov/consumption/commercial/reports/2012/energyusage/
[5] G. Serale, M. Fiorentini, A. Capozzoli, D. Bernardini, and A. Bemporad, “Model predictivecontrol (MPC) for enhancing building and HVAC system energy efficiency: Problemformulation, applications and opportunities,” Energies, vol. 11, no. 3, p. 631, 2018.
[6] P. H. Shaikh, N. B. M. Nor, P. Nallagownden, I. Elamvazuthi, and T. Ibrahim, “A reviewon optimized control systems for building energy and comfort management of smartsustainable buildings,” Renewable and Sustainable Energy Reviews, vol. 34, pp. 409 – 429,2014.
[7] S. Qin and T. A. Badgwell, “A survey of industrial model predictive control technology,”Control Engineering Practice, vol. 11, no. 7, pp. 733 – 764, 2003.
[8] S. Goyal and P. Barooah, “Energy-efficient control of an air handling unit for a single-zoneVAV system,” in IEEE Conference on Decision and Control, 2013, pp. 4796 – 4801.
[9] J. Joe and P. Karava, “A model predictive control strategy to optimize the performance ofradiant floor heating and cooling systems in office buildings,” Applied Energy, vol. 245, pp.65 – 77, 2019.
[10] X. Chen, Q. Wang, and J. Srebric, “Occupant feedback based model predictive control forthermal comfort and energy optimization: A chamber experimental evaluation,” AppliedEnergy, vol. 164, pp. 341 – 351, 2016.
[11] J. Ma, J. Qin, T. Salsbury, and P. Xu, “Demand reduction in building energy systems basedon economic model predictive control,” Chemical Engineering Science, vol. 67, no. 1, pp.92 – 100, 2012, dynamics, Control and Optimization of Energy Systems.
[12] S. C. Bengea, A. D. Kelman, F. Borrelli, R. Taylor, and S. Narayanan, “Implementation ofmodel predictive control for an HVAC system in a mid-size commercial building,” HVAC&RResearch, vol. 20, pp. 121–135, 2013.
121
[13] B. Kirby, “Ancillary services: Technical and commercial insights,” Oak Ridge NationalLaboratory, Oak Ridge, Tennessee, USA, Tech. Rep., 2007, prepared for Wärtsilä NorthAmerica Inc.
[14] N. J. Cammardella, R. W. Moye, Y. Chen, and S. P. Meyn, “An energy storage costcomparison: Li-ion batteries vs Distributed load control,” in 2018 Clemson UniversityPower Systems Conference (PSC), Sep. 2018, pp. 1–6.
[15] P. Barooah, A. Bušić, and S. Meyn, “Spectral decomposition of demand side flexibilityfor reliable ancillary service in a smart grid,” in 48th Hawaii International Conference onSystems Science (HICSS), January 2015, pp. 2700–2709, invited paper.
[16] I. Beil, I. A. Hiskens, and S. Backhaus, “Round-trip efficiency of fast demand response in alarge commercial air conditioner,” Energy and Buildings, vol. 97, pp. 47 – 55, 2015.
[17] X. Luo, J. Wang, M. Dooner, and J. Clarke, “Overview of current development in electricalenergy storage technologies and the application potential in power system operation,”Applied Energy, vol. 137, pp. 511 – 536, 2015.
[18] N. S. Raman, K. Devaprasad, B. Chen, H. A. Ingley, and P. Barooah, “Modelpredictive control for energy-efficient HVAC operation with humidity and latent heatconsiderations,” Applied Energy, vol. 279, p. 115765, December 2020. [Online]. Available:https://doi.org/10.1016/j.apenergy.2020.115765
[19] N. S. Raman, K. Devaprasad, and P. Barooah, “MPC-based building climate controllerincorporating humidity,” in American Control Conference, July 2019, pp. 253–260.[Online]. Available: https://doi.org/10.23919/ACC.2019.8814615
[20] N. S. Raman, R. U. Chaturvedi, Z. Guo, and P. Barooah, “MPC-Based Hierarchical Controlof a Multi-Zone Commercial HVAC System,” arXiv preprint:2102.02914, 2021.
[21] © 2020 IEEE. Reprinted, with permission, from, N. S. Raman, and P. Barooah,“On the round-trip efficiency of an HVAC-based virtual battery,” IEEE Transactionson Smart Grid, vol. 11, no. 1, pp. 403–410, Jan 2020. [Online]. Available:https://doi.org/10.1109/TSG.2019.2923588
[22] N. S. Raman and P. Barooah, “Analysis of round-trip efficiency of an HVAC-based virtualbattery,” in 5th International Conference on High Performance Buildings, July 2018, pp.1–10.
[23] American Society of Heating, Refrigerating and Air-Conditioning Engineers,“ANSI/ASHRAE standard 55-2017, Thermal environmental conditions for humanoccupancy,” 2017.
[24] W. S. Duda, “Pitfalls of single-fan dual-duct systems in humid climates,” ASHRAE Journal,vol. 60, no. 9, pp. 60–66, 2018.
122
[25] A. Baughman and E. A. Arens, “Indoor humidity and human health–Part I: Literaturereview of health effects of humidity-influenced indoor pollutants,” ASHRAE Transactions,vol. 102 Part1, pp. 192–211, 1996.
[26] J. C. Fischer and C. W. Bayer, “Humidity control in school facilities,” Energy, vol. 30,no. 35, pp. 606–613, 2003.
[27] X. Zhou and J. E. Braun, “A simplified dynamic model for chilled-water cooling anddehumidifying coils—Part 1: Development (RP-1194),” HVAC&R Research, vol. 13, no. 5,pp. 785–804, 2007.
[28] U.S. DOE, “EnergyPlus engineering reference: The reference to EnergyPlus calculations,”Lawrence Berkeley National Laboratory, pp. 1–1704, 2018.
[29] S. Klein, W. Beckman, J. Mitchell, J. Duffie, N. Duffie, T. Freeman et al., “Trnsys 17: Atransient system simulation program: Mathematical reference,” University of Wisconsin:Madison, WI, USA, pp. 1–486, 2009.
[30] S. Goyal and P. Barooah, “A method for model-reduction of non-linear thermal dynamicsof multi-zone buildings,” Energy and Buildings, vol. 47, pp. 332–340, April 2012.
[31] J. Williams, “Why is the supply air temperature 55F?” http://8760engineeringblog.blogspot.com/2013/02/why-is-supply-air-temperature-55f.html, 2013, last accessed: Aug,03, 2020.
[32] D. B. Crawley, L. K. Lawrie, F. C. Winkelmann, W. F. Buhl, Y. J. Huang, C. O. Pedersenet al., “EnergyPlus: creating a new-generation building energy simulation program,” Energyand buildings, vol. 33, no. 4, pp. 319–331, 2001.
[33] ASHRAE, “The ASHRAE handbook : HVAC applications (SI Edition),” 2011.
[34] J. B. Rawlings, D. Q. Mayne, and M. Diehl, Model Predictive Control: Theory,Computation, and Design. Nob Hill, 2017.
[35] J. B. Rawlings, D. Angeli, and C. N. Bates, “Fundamentals of economic model predictivecontrol,” in 51st IEEE Conference on Decision and Control (CDC), Dec 2012, pp.3851–3861.
[36] D. Schwingshackl, J. Rehrl, and M. Horn, “LoLiMoT based MPC for air handling units inHVAC systems,” Building and Environment, vol. 96, pp. 250 – 259, 2016.
[37] J. Mei, X. Xia, and M. Song, “An autonomous hierarchical control for improving indoorcomfort and energy efficiency of a direct expansion air conditioning system,” AppliedEnergy, vol. 221, pp. 450 – 463, 2018.
[38] J. Mei and X. Xia, “Energy-efficient predictive control of indoor thermal comfort and airquality in a direct expansion air conditioning system,” Applied Energy, vol. 195, pp. 439 –452, 2017.
123
[39] X.-C. Xi, A.-N. Poo, and S.-K. Chou, “Support vector regression model predictive controlon a HVAC plant,” Control Engineering Practice, vol. 15, no. 8, pp. 897–908, 2007.
[40] N. Wang, J. Zhang, and X. Xia, “Desiccant wheel thermal performance modeling for indoorhumidity optimal control,” Applied Energy, vol. 112, pp. 999–1005, 2013.
[41] S. Goyal, H. Ingley, and P. Barooah, “Occupancy-based zone climate control for energyefficient buildings: Complexity vs. performance,” Applied Energy, vol. 106, pp. 209–221,June 2013.
[42] S. Goyal, P. Barooah, and T. Middelkoop, “Experimental study of occupancy-based controlof HVAC zones,” Applied Energy, vol. 140, pp. 75–84, February 2015.
[43] M. Kumar and I. N. Kar, “Design of model-based optimizing control scheme for anair-conditioning system,” HVAC&R Research, vol. 16, no. 5, pp. 565–597, 2010.
[44] A. E. Ruano, S. Pesteh, S. Silva, H. Duarte, G. Mestre, P. M. Ferreira et al., “The IMBPCHVAC system: A complete MBPC solution for existing HVAC systems,” Energy andBuildings, vol. 120, pp. 145–158, 2016.
[45] Y. Kwak, J.-H. Huh, and C. Jang, “Development of a model predictive control frameworkthrough real-time building energy management system data,” Applied Energy, vol. 155, pp.1 – 13, 2015.
[46] E. Png, S. Srinivasan, K. Bekiroglu, J. Chaoyang, R. Su, and K. Poolla, “An internet ofthings upgrade for smart and scalable heating, ventilation and air-conditioning control incommercial buildings,” Applied Energy, vol. 239, pp. 408 – 424, 2019.
[47] C. J. Meinrenken and A. Mehmani, “Concurrent optimization of thermal and electricstorage in commercial buildings to reduce operating cost and demand peaks undertime-of-use tariffs,” Applied Energy, vol. 254, p. 113630, 2019.
[48] P. Fanger, Thermal comfort: Analysis and applications in environmental engineering.McGraw-Hill, 1970.
[49] N. Radhakrishnan, Y. Su, R. Su, and K. Poolla, “Token based scheduling for energymanagement in building HVAC systems,” Applied Energy, vol. 173, pp. 67 – 79, 2016.
[50] V. M. Zavala, “Real-time optimization strategies for building systems,” Industrial &Engineering Chemistry Research, vol. 52, no. 9, pp. 3137–3150, 2012.
[51] Y. Jiang, X. Wang, H. Zhao, L. Wang, X. Yin, and L. Jia, “Dynamic modeling andeconomic model predictive control of a liquid desiccant air conditioning,” Applied Energy,vol. 259, p. 114174, 2020.
[52] S. Wang and X. Jin, “Model-based optimal control of VAV air-conditioning system usinggenetic algorithm,” Building and Environment, vol. 35, no. 6, pp. 471–487, 2000.
124
[53] D. Sturzenegger, D. Gyalistras, M. Morari, and R. S. Smith, “Model predictive climatecontrol of a Swiss office building: Implementation, results, and cost-benefit analysis,” IEEETransactions on Control Systems Technology, vol. 24, no. 1, pp. 1–12, Jan 2016.
[54] J. Široký, F. Oldewurtel, J. Cigler, and S. Privara, “Experimental analysis of modelpredictive control for an energy efficient building heating system,” Applied Energy, vol. 88,no. 9, pp. 3079–3087, September 2011.
[55] A. Coffman and P. Barooah, “Simultaneous identification of dynamic model andoccupant-induced disturbance for commercial buildings,” Building and Environment, vol.128, pp. 153–160, 2018.
[56] M. Wetter and P. Haves, “A modular building controls virtual test bed for the integrationof heterogeneous systems,” Proceedings of SimBuild, vol. 3, no. 1, pp. 69–76, 2008.
[57] N. S. Raman and P. Barooah, “On the round-trip efficiency of an HVAC-based virtualbattery,” ArXiv e-prints, 2018, ArXiv:1803.02883 (2018).
[58] ASHRAE, “ANSI/ASHRAE standard 62.1-2016, ventilation for acceptable air quality,”2016.
[59] Y. Ma, S. Richter, and F. Borrelli, “Chapter 14: Distributed model predictive control forbuilding temperature regulation,” In Control and Optimization with Differential-AlgebraicConstraints, vol. 22, pp. 293–314, March 2012.
[60] J. A. E. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “Casadi: a softwareframework for nonlinear optimization and optimal control,” Mathematical ProgrammingComputation, vol. 11, no. 1, pp. 1–36, Mar 2019.
[61] A. Wächter and L. T. Biegler, “On the implementation of an interior-point filter line-searchalgorithm for large-scale nonlinear programming,” Mathematical Programming, vol. 106,no. 1, pp. 25–57, Mar 2006.
[62] “Weather Underground,” https://www.wunderground.com.
[63] “National Solar Radiation Database (NSRDB),” https://nsrdb.nrel.gov.
[64] J. Mei and X. Xia, “Multi-zone building temperature control and energy efficiency usingautonomous hierarchical control strategy,” in 2018 IEEE 14th International Conference onControl and Automation (ICCA), 2018, pp. 884–889.
[65] N. R. Patel, M. J. Risbeck, J. B. Rawlings, M. J. Wenzel, and R. D. Turney, “Distributedeconomic model predictive control for large-scale building temperature regulation,” in 2016American Control Conference (ACC), July 2016, pp. 895–900.
[66] Y. Yang, G. Hu, and C. J. Spanos, “HVAC energy cost optimization for a multizone buildingvia a decentralized approach,” IEEE Transactions on Automation Science and Engineering,vol. 17, no. 4, pp. 1950–1960, 2020.
125
[67] Yushen Long, Shuai Liu, Lihua Xie, and K. H. Johansson, “A hierarchical distributed MPCfor HVAC systems,” in 2016 American Control Conference (ACC), 2016, pp. 2385–2390.
[68] F. Jorissen and L. Helsen, “Towards an automated tool chain for MPC in multi-zonebuildings,” in 4th International Conference on High Performance Buildings, July 2016, pp.1–10.
[69] X. Li and J. Wen, “Review of building energy modeling for control and operation,”Renewable and Sustainable Energy Review, vol. 37, p. 517–537, 2014.
[70] D. Kim, J. Cai, K. B. Ariyur, and J. E. Braun, “System identification for building thermalsystems under the presence of unmeasured disturbances in closed loop operation: Lumpeddisturbance modeling approach,” Building and Environment, vol. 107, pp. 169 – 180, 2016.
[71] T. Zeng and P. Barooah, “Identification of network dynamics and disturbance for amulti-zone building,” IEEE Transactions on Control Systems Technology, vol. 28, pp. 2061– 2068, August 2020.
[72] Z. Guo, A. R. Coffman, J. Munk, P. Im, T. Kuruganti, and P. Barooah, “Aggregation anddata driven identification of building thermal dynamic model and unmeasured disturbance,”Energy and Buildings, September 2020, in press, available online Sept 2020.
[73] P. Fritzson and V. Engelson, “Modelica — A unified object-oriented language for systemmodeling and simulation,” in ECOOP’98 — Object-Oriented Programming, E. Jul, Ed.Berlin, Heidelberg: Springer Berlin Heidelberg, 1998, pp. 67–90.
[74] W. Liang, R. Quinte, X. Jia, and J.-Q. Sun, “MPC control for improving energy efficiencyof a building air handler for multi-zone VAVs,” Building and Environment, vol. 92, pp. 256– 268, 2015.
[75] S. T. Taylor, “VAV system static pressure setpoint reset,” ASHRAE journal, vol. 6, 2007.
[76] C.-A. Roulet, F. Heidt, F. Foradini, and M.-C. Pibiri, “Real heat recovery with air handlingunits,” Energy and Buildings, vol. 33, no. 5, pp. 495 – 502, 2001.
[77] S. Huang, Y. Lin, V. Chinde, X. Ma, and J. Lian, “Simulation-based performance evaluationof model predictive control for building energy systems,” Applied Energy, vol. 281, p.116027, 2021.
[78] United States Environmental Protection Agency, “Greenhouse gas equivalencies calculator,”https://www.epa.gov/energy/greenhouse-gas-equivalencies-calculator, 2019.
[79] ——, “Climate change indicators: Atmospheric concentrationsof greenhouse gases,” https://www.epa.gov/climate-indicators/climate-change-indicators-atmospheric-concentrations-greenhouse-gases.
[80] Y. V. Makarov, J. Ma, S. Lu, and T. B. Nguyen, “Assessing the value of regulation resourcesbased on their time response characteristics,” Pacific Northwest National Laboratory, June2008.
126
[81] Y. Lin, P. Barooah, S. Meyn, and T. Middelkoop, “Experimental evaluation of frequencyregulation from commercial building HVAC systems,” IEEE Transactions on Smart Grid,vol. 6, no. 2, pp. 776 – 783, 2015.
[82] M. Cheng, S. S. Sami, and J. Wu, “Benefits of using virtual energy storage system forpower system frequency response,” Applied Energy, vol. 194, no. Supplement C, pp. 376 –385, 2017.
[83] Y. Lin, J. L. Mathieu, J. X. Johnson, I. A. Hiskens, and S. Backhaus, “Explaininginefficiencies in commercial buildings providing power system ancillary services,” Energyand Buildings, vol. 152, pp. 216 – 226, 2017.
[84] PJM, “PJM manual 12: Balancing operations, rev. 27,” December 2012.
[85] Y. Lin, P. Barooah, S. Meyn, and T. Middelkoop, “Demand side frequency regulationfrom commercial building HVAC systems: An experimental study,” in American ControlConference, 2015, pp. 3019 – 3024.
[86] E. Vrettos, E. C. Kara, J. MacDonald, G. Andersson, and D. S. Callaway, “Experimentaldemonstration of frequency regulation by commercial buildings—Part II: Results andperformance evaluation,” IEEE Transactions on Smart Grid, vol. 9, no. 4, pp. 3224–3234,Jul. 2018.
[87] K. S. Ng, C.-S. Moo, Y.-P. Chen, and Y.-C. Hsieh, “Enhanced coulomb counting methodfor estimating state-of-charge and state-of-health of lithium-ion batteries,” Applied Energy,vol. 86, no. 9, pp. 1506 – 1511, Sep. 2009.
[88] V. Sprenkle, D. Choi, A. Crawford, and V. Viswanathan, “(Invited) Life-cycle comparison ofEV Li-ion battery chemistries under grid duty cycles,” Meeting Abstracts, vol. MA2017-02,no. 4, p. 218, 2017.
[89] K. Vanthournout, R. D’hulst, D. Geysen, and G. Jacobs, “A smart domestic hot waterbuffer,” IEEE Transactions on Smart Grid, vol. 3, no. 4, pp. 2121–2127, Dec. 2012.
[90] R. Kramer, J. van Schijndel, and H. Schellen, “Simplified thermal and hygric buildingmodels: A literature review,” Frontiers of Architectural Research, vol. 1, no. 4, pp. 318 –325, 2012.
[91] S. F. Fux, A. Ashouri, M. J. Benz, and L. Guzzella, “EKF based self-adaptive thermalmodel for a passive house,” Energy and Buildings, vol. 68, Part C, pp. 811 – 817, 2014.
[92] S. Mallat, A wavelet tour of signal processing: The sparse way. Academic press, 2008.
[93] Y. Lin, “Control of commercial building HVAC systems for power grid ancillary services,”Ph.D. dissertation, University of Florida, August 2014.
[94] A. Keskar, S. Lei, T. Webb, S. Nagy, H. Lee, I. A. Hiskens, J. L. Mathieu, and J. X.Johnson, “Stay cool and be flexible: Energy-efficient grid services using commercial
127

buildings HVAC systems,” in ACEEE Summer Study on Energy Efficiency in Buildings,2020.
[95] H. Kwakernaak and R. Sivan, Linear Optimal Control Systems. Wiley-Interscience, 1972.
128
BIOGRAPHICAL SKETCH
Naren Srivaths Raman was born in Tamil Nadu, India in 1990. He received his Bachelor of
Engineering degree in mechanical engineering from Anna University, India in 2011 and Master
of Science in mechanical engineering from the University of Florida in 2013. After completing
his master’s program, he worked as an application engineer designing, programming, and
implementing energy management systems for commercial buildings. He also had his own
heating, ventilation, and air conditioning (HVAC) controls consulting firm. Working in the
HVAC industry helped him understand the current practices and the potential for improvement,
specifically in terms of controls. He joined the Ph.D. program under the supervision of
Dr. Prabir Barooah in 2016. He received his Ph.D. degree in mechanical engineering from
the University of Florida in 2021. He has given talks at various international conferences
and was invited to be the chair for a session on Smart Grids at the 4th IEEE conference on
control technology and applications (CCTA), 2020. He has also published several papers in
international conferences and journals. His research focus is on control of building HVAC
systems for energy efficiency and grid support.
129