INCREASING POWER BY USING HAPLOTYPE SIMILARITY IN A MULTIMARKER TRANSMISSION/DISEQUILIBRIUM TEST

Dp
Ia
b
c
a
ARRAA
KWPPLF
1
irwmro[umam
bpaa
b
(
0d
Electric Power Systems Research 81 (2011) 880–887
Contents lists available at ScienceDirect
Electric Power Systems Research
journa l homepage: www.e lsev ier .com/ locate /epsr
ynamic security issues in autonomous power systems with increasing windower penetration
.D. Margarisa,∗, A.D. Hansenb, P. Sørensenb, N.D. Hatziargyrioua,c
National Technical University of Athens, School of Electrical and Computer Eng., Electric Energy Systems Lab, Iroon Polytechniou 9, Athens 15780, GreeceRisø National Laboratory for Sustainable Energy, Technical University of Denmark, Wind Energy Division, P.O. Box 49, DK-4000 Roskilde, DenmarkPublic Power Corporation S.A. Athens, Greece
r t i c l e i n f o
rticle history:eceived 7 January 2010eceived in revised form 10 June 2010ccepted 28 November 2010vailable online 22 December 2010
a b s t r a c t
Technical requirements set by the network operators nowadays include various aspects, such as faultride-through capability of wind turbines during faults, voltage-reactive power control and overall con-trol of the wind farms as conventional power plants. Detailed models for the power system as well as forthe wind farms are therefore essential for power system studies related to these issues, especially whenapplied to non interconnected systems with high wind power penetration. Detailed generic models for
eywords:ind turbines
ower systemenetrationoad sheddingault ride through
three different wind turbine technologies – Active Stall Induction Generator (ASIG), Doubly Fed Asyn-chronous Generator (DFAG) and Permanent Magnet Synchronous Generator (PMSG) – are applied andissues regarding interaction with the power system are investigated. This paper provides conclusionsabout the dynamic security of non-interconnected power systems with high wind power penetrationbased on a complete model representation of the individual components of the system; three differ-ent types of conventional generators are included in the model, while the protection system is also
eddin
incorporated. The load sh. Introduction
The technical requirements of network operators are becom-ng more onerous. Especially in isolated power systems, theseequirements have to be carefully designed as a rapidly increasingind power penetration can pose serious dynamic security threats,ainly due to low system inertia and relatively low spinning
eserve. There are several publications illustrating the capabilityf wind farms to contribute to system stability during disturbances1–4]. Nevertheless, in most of these studies, simplified models aresed for either the power system or the wind farms. In this paper,ore detailed models for all different components of the system
re used to evaluate with maximum accuracy the dynamic securityargins posed by increasing wind power penetration.In order to allow for wind power penetration to be expanded
eyond the commonly applied rule of thumb of 20–30% of theeak annual load for non-interconnected systems, [5], different key
spects like voltage and frequency stability, power system inertiand protection relays settings have to be thoroughly analyzed.Today, most modern power systems include different wind tur-ine technologies, covering a wide range from older generation
∗ Corresponding author. Tel.: +30 210 7722874; fax: +30 210 7723658.E-mail addresses: [email protected], [email protected]
I.D. Margaris).
378-7796/$ – see front matter © 2010 Elsevier B.V. All rights reserved.oi:10.1016/j.epsr.2010.11.027
g following faults is finally discussed.© 2010 Elsevier B.V. All rights reserved.
fixed speed wind turbines to modern variable speed ones. Thisstudy includes the three most commonly available wind turbinedesigns in the market today and investigates their capability tocontribute to the stability of the power system.
The system used for the investigations is a model of the Rhodespower system for the reference year 2012. Modelling and con-trol issues for normal operation of this power system and of thewind farms, expected to be online in the island by the year ofstudy 2012, have already been described in [6]. In this paper, atten-tion is focused on the additional control features designed fordifferent wind turbine technologies, such as the fault ride throughcapability, power reduction operation and reactive power and volt-age control. The models have been implemented in the dedicatedpower system simulation program Power Factory from DIgSILENT,[7].
2. Rhodes power system in 2012
The Rhodes power system includes a 150 kV transmission sys-tem, two thermal conventional power plants, and five wind farms,
[6].The two conventional power stations include diesel, gas andsteam plants. The models used for the automatic voltage controllersand the governors of the conventional units, as well as the opera-tion of the system during different wind and load profiles have been

I.D. Margaris et al. / Electric Power Syste
Table 1Basic characteristics of Rhodes power system in 2012.
Rhodes power system
Max power demand (MW) 233.1Thermal power capacity (MW) 322.9Wind power capacity (MW) 48.8
Table 2Wind farms in Rhodes power system.
Wind turbine technology Installed capacity (MW)
Wind Farm A1 DFAG 11.05
dty
tap
I
iyympamp
3s
ifIrwtoi
3
cmIo
rsct
Wind Farm A2 DFAG 5.95Wind Farm B1 PMSG 18Wind Farm B2 PMSG 3Wind Farm C ASIG 11.7
escribed in [6]. Table 2 depicts the wind turbine technology andhe size of each wind farm connected to the system for the referenceear (Tables 1 and 2).
Dynamic load models, under/over frequency relays acting onhe substations’ loads and under/overvoltage protection settingsre included in the dynamic model implemented in the DIgSILENTlatform.
Three load scenarios were developed during this study:
I. The Peak Load Demand scenario – (SCEN1)II. The Maximum Wind Power Production scenario (in absolute
values of power) – (SCEN2)II. The Maximum Wind Power Penetration scenario (in percentage
of the load demand) – (SCEN3).
The definition of these scenarios is well described and analyzedn [8], based on the operational data of the power system for theear study 2012. The first scenario corresponds to the periods ofear, where wind power penetration is low and load demand isaximum. The second scenario refers to maximum wind power
roduction in absolute values, where penetration reaches levelsbove 20% of the demand. The last one corresponds to the maxi-um penetration scenario, typical for a winter season, with wind
ower penetration reaching the level of 30%.
. Wind farms’ fault ride-through capability – grid voltageupport
The security of autonomous power systems with a rapidlyncreasing wind power penetration is strongly dependent on theault ride-through capability of wind farms installed in the island.n this section, different control features, which enhance the faultide-through and the grid support capability of the most commonind turbine technologies, considered in the Rhodes power sys-
em, are addressed. The effect of these additional control aspectsn the transient response of the power system during disturbancess assessed and illustrated by simulation.
.1. Fault ride through of DFAG wind turbines
The main electrical components, the mechanical parts and theontrollers of a DFAG wind turbine, which are considered in theodel, are presented in [6], and described in more detail in [9–11].
n this section, attention is paid on the fault ride through capabilityf DFAG wind turbines.
The specific converter arrangement in the DFAG configurationequires advanced protection system, because of the high inrushtator and rotor currents during grid faults. The protection of theonverter against overcurrents, but also of the generator rotor andhe dc-link against overvoltages is ensured via the so-called crow-
ms Research 81 (2011) 880–887 881
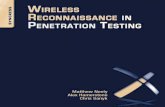
bar. In principle, the crowbar is external rotor impedance, coupledvia the slip rings to the generator rotor, as illustrated in Fig. 1.When the crowbar is triggered, the rotor side converter (RSC) is dis-abled and bypassed, and therefore the independent controllabilityof active and reactive power is lost. Since the grid side converter(GSC) is not directly connected to the generator windings, wherethe high transient currents occur, this converter is not blockedby the protection system during grid faults. When the crowbar isremoved, the RSC is enabled again to control independently theactive and reactive power.
In normal operation of a DFAG wind turbine, the active powerreference for the rotor side converter is given by the maximumpower point tracking (MPPT) characteristic as function of the opti-mal generator speed [9]. In the case of a grid fault, this powerreference is defined as the output of a damping controller [9,10].The damping controller is attenuating the oscillations in the drivetrain produced by the grid fault. It ensures the fault ride-throughcapability of the wind turbine, i.e. avoids an eventual wind turbinegrid disconnection due to undamped oscillations in the generatorspeed. When a fault is detected, the definition of the power ref-erence is thus switched between the normal operation definition(i.e. MPPT) and the fault operation definition (damping controller).The pitch control system is not able to damp the torsional oscilla-tions, because of several delay mechanisms in the pitch [11]. Thepitch control damps the slow frequency variations in the generatorspeed, while the damping controller is able to damp the fast oscil-lations in the generator speed. The effect of the damping controllerboth on the electrical and the mechanical parts of the turbine isillustrated in Section 4.
3.2. Fault ride-through of PMSG wind turbines
A multi-pole PMSG wind turbine (see Fig. 2) is connected via afull-scale frequency converter to the grid and therefore, in princi-ple, can easily accomplish fault ride-through and support the gridduring faults. The presence of the full-scale converter makes it pos-sible for this wind turbine configuration to absorb or produce largeamounts of reactive power also during grid faults. As the converterdecouples the generator from the grid, the generator and the tur-bine system are not directly subjected to grid faults in contrast tothe directly grid connected wind turbine generators.
The control strategy followed in this study for the PMSG windturbines is described in [1,12,13]. As the generator side-converteris not directly connected to the grid, it is able to fulfil its task to con-trol the DC-link voltage also undisturbed during faults. Meanwhile,the grid-side converter cannot deliver the expected active powerwhen subjected to low voltage during faults. The generator-sideconverter starts then to reduce the generator power by decreasingthe stator current in order to keep the DC-link voltage constant. Thepower surplus is transformed in rotational energy of the rotor mass,which starts to accelerate. If the speed exceeds the rated value, thepitch controller acts to limit the speed.
As described in [12,13], the torsional oscillations in the drivetrain system during faults, owing to the torsional spring behaviourof the system following the sudden loss of electrical power, aredamped by a damping controller. This control strategy allows PMSGwind turbine configuration to ride-through grid faults without anyadditional measure. However, it is shown in [13] that the pres-ence of a chopper in the system enhances the fault ride-throughcapability of the turbine. The chopper includes a resistance and apower electronic switch, placed in parallel to the capacitor in the
DC-link. When the DC-link voltage increases over a critical valuethe chopper is triggered and the surplus power is consumed in thechopper resistance. The capacitor discharges and the DC-link volt-age decreases. As shown in Section 4, the use of a chopper can bringadditional benefits to the wind turbine mechanical stress.
882 I.D. Margaris et al. / Electric Power Systems Research 81 (2011) 880–887
AG w
3
ita
gtimracwrc
4
tt
Fig. 1. System configuration and control of a DF
.3. Fault ride-through of ASIG wind turbines
The fault ride-through capability of an ASIG wind farm, and thusts stabilization at a short circuit fault, can be achieved by reducinghe wind turbine power production for duration of few secondsfter the fault occurrence.
In this work, the ASIG wind turbine control strategy duringrid faults is implemented based on [14]. The idea is that duringhe fault, the normal function of the ASIG wind turbine controllers replaced by a control strategy that aims to reduce directly the
echanical power of the rotor to a predefined level. The order toeduce power is given for example, when a fault at the grid volt-ge is monitored. When the grid fault is cleared, the wind turbineontinues to run at reduced power for few more seconds, afterhich it starts to ramp up the mechanical power of the rotor and
e-establishes the control for ASIG wind turbine normal operationonditions.
. Simulation results
The simulations, presented in the following subsections, assumehe Maximum Wind Power Penetration scenario (SCEN3), men-ioned above, as this case is considered the worst case scenario
Fig. 2. System configuration and control o
ind turbine equipped with crowbar protection.
for the dynamic security of the system. As illustrated in [6], thewind power penetration reaches 30% of the peak annual load, limitwhich is considered as the secure operation margin in autonomoussystems.
In each simulation a severe three-phase short circuit is appliedin the transmission grid, at the middle of the line connecting oneof the two conventional power stations to the power system (seeFig. 3). The fault lasts for 100 ms and is cleared by tripping the relaysof the faulted line. It should be noted that the fault location is closeto the busbars, where the wind farms with DFAG and PMSG windturbines are located, thus the stress imposed to the converters andthe generators is very strong. It is assumed that during the gridfault in the maximum penetration scenario, the wind turbines onthe island operate almost at half of their rated capacity.
In the last subsection, an overview of the system frequencyresponse to grid faults is provided, during three different load sce-narios and for wind farms equipped or lacking fault ride-throughcontrol.
4.1. Rhodes power system response to the grid fault in SCEN3
Fig. 4 shows the system frequency and the rotor speed for allfive different wind farms in p.u. As the ASIG wind turbine is directly
f a direct driven PMSG wind turbine.

I.D. Margaris et al. / Electric Power Systems Research 81 (2011) 880–887 883
csqmsfarLpttDo
qdlsrc
Fs
Fig. 3. Simplified net diagram of Rhodes power system and fault location.
onnected to the grid, its rotor speed has similar behaviour as theystem frequency. When the fault occurs, both the system fre-uency and the rotor speed of the ASIG wind turbine increase,ainly due to the reduction of the power inserted into the power
ystem during a fault. The increase in the rotor speed is due to theact that the wind turbine rotor accumulates rotating energy, asresult of the imbalance between the mechanical power and the
educed electrical power exported to the system during the fault.ikewise, the conventional generators compensate for the reducedower infeed into the system by accelerating and thus increasinghe system frequency. Fig. 4 illustrates also the torsional oscilla-ions excited by the grid fault in both variable speed schemes –FAG and PMSG –, which get damped through the control systemf the wind turbines.
This correlation between the rotor speed and the system fre-uency in fixed speed wind turbines is also crucial during frequency
eviations in the system, due to sudden change of generation oroad, i.e. when the system frequency drops, the rotor of the fixedpeed wind turbine also decreases and the kinetic energy of theotating mass is delivered to the system contributing to its primaryontrol, traditionally served by conventional generators [15,16].
ig. 4. System frequency and rotor speeds in p.u. for different wind turbines in the Rhodpeed, DFAG rotor speed, PMSG rotor speed.
Fig. 5. Voltages at the PCC of all wind farms during three phase short circuit gridfault.
Fig. 5 illustrates the voltage in the Point of Common Coupling(PCC) of each individual wind farm. The voltage drops down to0.1 p.u. in the PCC of variable speed wind farms and to 0.2 p.u. forthe fixed speed wind farm WPC. As mentioned before, it is assumedthat the wind farms have fault ride-through capability, i.e. they areable to remain connected and withstand the high inrush currentswhich follow sudden drops in voltage.
Immediately after the fault clearance, the voltage does notrecover to its nominal value in some buses but reaches a slightlylower level (see Fig. 5). The reason for that will be explained inmore detail in the following when the operation of the protectionsystem of the wind turbines is described. The dynamic response togrid faults of each wind turbine configuration present in the islandis presented in the following.
4.2. DFAG wind turbines’ response to the grid fault
Figs. 6–9 show the behaviour of the DFAG wind turbines in oneof the wind farms in the Rhodes power system during the fault, withand without damping controller. It should be noticed that the active
and reactive power correspond to the whole wind farm (WFA1),while the other waveforms refer to one wind turbine only.The sudden drop of the voltage leads to drop in the stator androtor flux, which result in decrease of the active power deliveredby the wind turbine. The electromagnetic torque is also dropping,
es power system during three phase short circuit – system frequency, ASIG rotor

884 I.D. Margaris et al. / Electric Power Systems Research 81 (2011) 880–887
Fig. 6. Active power during the fault for wind farm with DFAG wind turbines – solidline, with damping controller, dashed line, without damping controller.
Fig. 7. Mechanical torque during the fault for DFAG wind turbine – solid line, withdamping controller, dashed line, without damping controller.
Fig. 8. Generator speed during the fault for DFAG wind turbine – solid line, withdamping controller, dashed line, without damping controller.
Fig. 9. Reactive power during the fault for wind farm with DFAG wind turbines.
Fig. 10. Active power during the fault for wind farm with PMSG wind turbines –solid line, with chopper, dashed line, without chopper.
and as the drive train acting as torsion spring gets untwisted duringfault, the mechanical torque drops too, as shown in Fig. 7.
However, the mechanical torque drops more slowly than theelectromagnetic torque and therefore the generator starts to accel-erate (Fig. 8). The high inrush currents, which follow the voltagedrop, trip the crowbar protection system. The rotor side converter(RSC) is blocked and the generator behaves as a conventional squir-rel cage induction generator.
The effect of the damping controller, which acts directly on theactive power reference signal, is very crucial. This controller dampsactively the torsional excitations in the drive train system followingthe grid fault. When no damping controller is used, both the oscil-lations in the mechanical torque and in the generator speed remainundamped and could possibly lead to disconnection of the wind tur-bine by the protection system. The repeated crosses through zero ofthe mechanical torque, when no damping controller is used, wouldcause severe mechanical stress in the drive train. The comparisonreveals the positive effect of the damping controller on both theelectrical and mechanical side of the wind turbine.
In the applied control strategy the RSC is the default reactivepower source controlling the voltage at the Point of Common Cou-pling (PCC) during normal operation. At a fault instant, i.e. a shortcircuit in the grid, the GSC is supplementing reactive power duringthe blocking of the RSC, which occurs when the crowbar is trig-gered. In this case the GSC continues its operation as STATCOM.After the removal of the crowbar the RSC starts to operate and theGSC is controlled to unity power factor as in normal operation.
During the fault, the voltage control of the GSC demands thewind turbine to deliver reactive power to support the voltage atthe PCC of the wind farm. The wind farm manages to provide largeamounts of reactive power (Fig. 9). As expected, the damping con-troller does not have significant effect on the reactive power. Whenthe fault is cleared, the generator starts to absorb reactive power,as it is still behaving as squirrel cage induction generator as long asthe crowbar is triggered. The RSC is still blocked and this delays thequick restoration of the voltage until the tripping of the crowbarprotection system, as it illustrated in Fig. 5.
4.3. PMSG wind turbines’ response to the grid fault
Figs. 10–14 illustrate the fault ride-through capability of thePMSG wind turbines in wind farm WFB2, with and without chop-per. It is shown, how the use of a chopper can improve the response
of the turbine during faults.As illustrated in Fig. 10, during the fault, the grid-side convertercannot deliver the whole active power generated by the genera-tor to the grid but only a reduced amount of it. When no chopperis used, the generator power behaves similar to the grid power,

I.D. Margaris et al. / Electric Power Systems Research 81 (2011) 880–887 885
Fig. 11. Mechanical torque during the fault for a PMSG wind turbine – solid line,with chopper, dashed line, without chopper.
Fig. 12. Generator speed during the fault for a PMSG wind turbine – solid line, withchopper, dashed line, without chopper.
Fig. 13. DC-link voltage during the fault for a PMSG wind turbine – solid line, withchopper, dashed line, without chopper.
Fig. 14. Reactive power during the fault for a wind farm equipped with PMSG windturbines – solid line, with chopper, dashed line, without chopper.
Fig. 15. Active power during the fault for a wind farm equipped with ASIG windturbines.
because it is reduced by the generator side converter, to be able tokeep the DC-link voltage constant. Due to the imbalance betweenaerodynamic and electrical power during the fault, the generatorstarts to accelerate. Meanwhile, the drive train gets untwisted andstarts to oscillate. Fig. 11 illustrates the oscillations in the mechan-ical torque acting on the rotor shaft.
Contrary to the DFAG wind turbine, a PMSG wind turbine canride through a grid fault without any additional measure, i.e. achopper. However, the oscillations visible in the torque and thegenerator speed (see Figs. 11 and 12), are significantly reducedwhen a chopper is used. Besides the faster damping of the oscilla-tions, the chopper helps also to decrease the peak torque and rotoraccelerations following the fault and to minimize the mechanicalstress of the wind turbine.
In addition, the use of a chopper reduces the oscillations in theDC-link voltage, as illustrated in Fig. 13. This happens because thesurplus energy, which cannot be delivered to the grid, is consumedin the chopper resistance.
In Fig. 14, the chopper does not have any effect on the reactivepower response during the fault. The reactive power supply of thewind turbine is ensured through an additional voltage controllerimplemented in the control system of the grid side converter. Inorder to achieve maximum reactive power during the fault, thereactive power production is prioritized over active power pro-duction. Therefore, the active power is forced to zero during thefault and the range for reactive power supply is maximized. How-ever, due to the reduced voltage level, the reactive power reference,reaching its limitation as a consequence of the large voltage droop,cannot be achieved. At the fault clearance, the sudden change in thevoltage leads to respective change in the reactive power injection.The pre-fault reactive power production is restored as soon as thevoltage at the PCC is re-established. Details about the implementedvoltage control can be found in [13].
4.4. ASIG wind turbines’ response to the grid fault
The wind farm equipped with ASIG wind turbines, although notvery close to the fault location has to withstand the low voltageduring the fault, and ensure uninterrupted operation. Figs. 15–19illustrate the behaviour of ASIG wind turbines during grid faults.
Fig. 15 shows the active power delivered to the grid during thefault. After the clearance of the fault, the active power may still bereduced for a few seconds. As explained in Section 3, during thevoltage drop the active power delivered by the generator has to be
reduced, in order to make the turbine able to ride through the fault.Although the inrush currents are high during the fault, the ther-mal constants of the induction generator are also quite high andthe need for protection is reduced compared to the sensitive power

886 I.D. Margaris et al. / Electric Power Systems Research 81 (2011) 880–887
Fig. 16. Mechanical torque during the fault for a ASIG wind turbine.
Fig. 17. Generator speed during the fault for a ASIG wind turbine.
Fig. 18. Pitch angle during the fault for an ASIG wind turbine.
Fig. 19. Reactive power during the fault for a wind farm equipped with ASIG windturbines.
Fig. 20. System frequency during the fault when wind farms are tripped for threedifferent scenarios.
electronics of variable speed wind turbines. As expected, followingthe electromagnetic torque, the mechanical torque is also reducedboth during and after the fault (see Fig. 16). Fig. 17 shows therotor speed of the ASIG wind turbine, which as mentioned before,reflects the power system frequency during the fault. When thefault occurs, the speed is initially increased due to the accelerationof the conventional generators and, after that, drops below nominalvalue.
The reduction of the wind turbine mechanical power is appliedto assess the fault ride-through capability of the active stall windfarms. As shown in Fig. 18, this implies that the pitch is chang-ing according to the control order of power reduction. Once thecorresponding pitch angle is reached, the turbine is still orderedto remain in this mode some more seconds after the clearance ofthe fault and then to start ramping the pitch angle again to itsinitial normal operation value. Reducing the power has no effectduring the fault but rather after the nominal voltage has been re-established.
During the low voltage conditions the ASIG wind turbineabsorbs reactive power. After the initial peak in the reactive power,shown in Fig. 19, the wind farm absorbs reactive power endanger-ing voltage stability. The reactive power in Fig. 18 is measured in thePCC, and includes the power delivered to the grid by the capacitorbanks installed at the wind farm bus to reduce the negative effect onreactive power-voltage control of the system during severe faults.
4.5. System frequency response overview for different loadscenarios with and without FRT in the wind farms
Grid codes for the operation of wind parks on island systems arenot well developed and in most cases wind turbines are allowed totrip during severe faults to avoid destruction of the power elec-tronics and mechanical stress. The task to support the grid duringfaults, therefore, is assigned to the conventional generators andthe spinning reserve is determined without taking into account theavailable wind power.
Fig. 20 illustrates the impact of the grid fault on the Rhodessystem frequency, when the large wind farms are tripped by theirprotection system. During the Maximum Wind Power Penetrationscenario (SCEN3), the frequency of the system drops to 47.6 Hz,thus reaching unacceptable limits. This reduction in frequency iscaused by the loss of large amount of wind power in just few mil-liseconds after the voltage drop. When the frequency reaches thelimits of the under frequency relays, the protection acting on the
loads connected to the substations cuts off a percentage of the con-nected load. For this scenario, the load shedding caused by suchdeep drop in frequency is 65.5%, i.e. 54 MW of load is immediatelydisconnected. The effects of the same disturbance during the Maxi-mum Wind Power Production scenario (SCEN2) are also illustrated.
I.D. Margaris et al. / Electric Power Syste
Fig. 21. System frequency during the fault when FRT is available for three differentscenarios.
Table 3Minimum frequency and load shedding following the fault for three differentscenarios.
Scenarios FRT available FRT not available
SCEN1 fminimum (Hz) 49.9 49.9Load shedding 0 0%
Iidsqlffstptp
irnsflrle
nPttd
5
aotdp
[
[
[
[
[
SCEN2 fminimum (Hz) 49.8 47.9Load shedding 0 34%
SCEN3 fminimum (Hz) 49.7 47.6Load shedding 0 65.5%
n this case the frequency drops to 47.9 Hz due to the grid fault,mplying load shedding of 34%. Although the wind farms are pro-ucing more in this scenario, the percentage of active power in theystem coming from wind is less than in SCEN3. The minimum fre-uency is therefore slightly higher in this case, although still very
ow. The zone 47.5–48.3 Hz is the frequency area where the underrequency protection relays are activated, meaning that in theserequencies even a small drop in frequency can lead to large loadhedding. Finally, during the Peak Load Demand scenario (SCEN1),he frequency does not drop below 49 Hz and load shedding is com-letely avoided. In this case, the wind farms provide only 3% of theotal production, so even when the wind farms trip, the loss of activeower cannot cause significant frequency drop.
Fig. 21 illustrates the grid fault’s impact on the system frequencyn the case when it is assumed that the wind farms have faultide-through capability. In this case, the wind farms remain con-ected to the grid during the fault and the system frequency dropsignificantly less. The minimum frequency in this case is 49.7 Hzor the Maximum Wind Power Penetration scenario (SCEN3) andoad shedding is completely avoided. The contribution of the fault-ide through capability in the frequency stability but also in theoad shedding of power systems, like Rhodes, appears to make FRTssential for their secure operation.
Similar to SCEN3, the frequency in the other two scenarios,amely Peak Load Demand (SCEN1) and Maximum Wind Powerroduction (SCEN2), does not drop below 49 Hz and no load needso be shed. These results, including the minimum frequency afterhe fault, fminimum, and the load shedding in percentage of the loademand, are summarized in Table 3 .
. Conclusions
In this paper dynamic security issues in isolated power systems
re investigated based on detailed models of the power system andf the most common wind turbine configurations together withheir fault ride-through controllers. In many cases the necessaryata for detailed modelling is not available; however the highestossible accuracy needs to be ensured.[
[
ms Research 81 (2011) 880–887 887
It is shown that, next to the protection of non interconnectedpower systems, the FRT capability and the response of wind farmsduring and after severe disturbances in the system determine theload shedding and the frequency deviations.
As a study case, a set of simulations is carried out to analyze thesecurity of the Rhodes system. It should be noted that besides theimportance of the technology of the wind turbines, there are cer-tain parameters (such as inertia, type of thermal plants, distributionof power production, under-frequency relays), that are crucial forsystem response. Especially the rate of power undertaken by ther-mal units and the amount of wind power tripped during grid faults– when FRT capability is not available – define the extent of loadshedding.
As shown in the simulations, in non-interconnected systems,load shedding following grid faults can reach unaccepted lev-els, if the WTs are not equipped with FRT capability. The majorreason for this transient behaviour following a grid fault is theproduction loss which occurs due to the tripping of wind farms.On the other hand, the FRT capability of wind turbines improvessystem response to faults ensuring limited load shedding and fre-quency dips. Another issue worth noting is that the increasedwind power penetration does not only limit the ability of ther-mal plants to undertake power, but also the inertia of the system.System inertia in cases of increased wind penetration is crucialfor system stability, as it defines the rate of frequency change.Provided that uninterrupted operation of wind parks is ensured,wind power penetration could increase beyond 30% of the load,keeping the dynamic security of the system in the acceptablelevels.
References
[1] C. Luo, B.T. Ooi, Frequency deviation of thermal power plants due to wind farms,IEEE Trans. Energy Convers. 3 (2006) 708–716.
[2] M.P. Palsson, T. Toftevaag, K. Uhlen, J.O.G. Tande, Control concepts to enableincreased wind power penetration, in: Proc. Presented at IEEE Power Engi-neering Society General Meeting, Toronto, Canada, 2003.
[3] A.H. Kasem, E.F. El-Saadany, H.H. El-Tamaly, M.A.A. Wahab, A new fault ride-through strategy for doubly fed wind-power induction generator, in: Proc.Presented at Electrical Power Conf. (EPC), Canada, 2007.
[4] B.M. Buchholz, Z.A. Styczynski, W. Winter, Dynamic simulation of renewableenergy sources and requirements on fault ride through behaviour, in: Proc. Pre-sented at IEEE Power Engineering Society General Meeting, Montreal, Canada,2006.
[5] N.D. Hatziargyriou, E.S. Karapidakis, Online preventive dynamic security of iso-lated power systems using decision trees, IEEE Trans. Power Syst. 17 (2002)297–304.
[6] I.D. Margaris, A.D. Hansen, N.A. Cutululis, P. Sørensen, N. Hatziargyriou, Impactof Wind Power in Autonomous Power Systems – Power Fluctuations – Mod-elling and Control Issues, under review in Wind Energy, Wiley, 2009.
[7] DIgSILENT GmbH, DIgSILENT Technical Documentation, PowerFactory, 2006.[8] I.D. Margaris, J.C. Mantzaris, M.E. Karystianos, A.I. Tsouchnikas, C.D. Vournas,
N.D. Hatziargyriou, I.C. Vitellas, Methods for evaluating penetration levels ofwind generation in autonomous systems, in: Proc. Presented at IEEE PowerTechConf. Bucharest, Rumania, 2009.
[9] A.D. Hansen, P. Sørensen, F. Iov, F. Blaabjerg, Centralised power control of windfarm with doubly-fed induction generators, Renew. Energy (Elsevier) 7 (2006)935–951.
10] A.D. Hansen, G. Michalke, Fault ride-through capability of DFIG wind turbines,Renew. Energy (Elsevier) 32 (2007) 1594–1610.
11] A.D. Hansen, G. Michalke, P. Sørensen, T. Lund, F. Iov, Co-ordinated voltagecontrol of DFIG wind turbines in uninterrupted operation during grid faults,Wind Energy (Wiley) 1 (2007) 51–68.
12] A.D. Hansen, G. Michalke, Modelling and control of variable speed multi-polePMSG wind turbine, Wind Energy (Wiley) 5 (2008) 537–554.
13] A.D. Hansen, G. Michalke, Multi-pole PMSG wind turbines’ grid support capa-bility in uninterrupted operation during grid faults, IET Proc. (Renew. PowerGeneration) 3 (2009) 333–348.
14] V. Akhmatov, H. Knudsen, A.H. Nielsen, J.K. Pedersen, N.K. Poulsen, Modellingand transient stability of large wind farms, Int. J. Electrical Power Energy Syst.
(Elsevier) 2 (2003) 123–144.15] N. Kakimoto, K. Baba, Performance of gas turbine-based plants during fre-quency drops, IEEE Trans. Power Syst. 3 (2003) 1110–1115.
16] J. Mantzaris, M. Karystianos, C. Vournas, Comparison of gas turbine and com-bined cycle models for system stability studies, in: Proc. Presented at 6thMediterranean. Conf. MedPower, Thessaloniki, Greece, 2008.
Copyright © 2022 FDOKUMEN