Dynamic integral sliding mode for MIMO uncertain nonlinear systems
10
International Journal of Control, Automation, and Systems (2011) 9(1):1-10 DOI http://www.springer.com/12555 Dynamic Integral Sliding Mode for MIMO Uncertain Nonlinear Systems Qudrat Khan, Aamer Iqbal Bhatti, Sohail Iqbal, and Mohammad Iqbal Abstract: In this paper the authors propose a novel sliding mode control methodology for Multi-Input and Multi-Output (MIMO) uncertain nonlinear systems. The proposed approach synthesizes dynamic sliding mode and integral sliding mode control strategies into dynamic integral sliding mode. The new control laws establish sliding mode without reaching phase with the use of an integral sliding manifold. Consequently, robustness against uncertainties increases from the very beginning of the process. Fur- thermore, the control laws considerably alleviate chattering along the switching manifold. In addition, the performance of the controller boost up in the presence of uncertainties. A comprehensive compara- tive analysis carried out with dynamic sliding mode control and integral sliding mode control demon- strates superiority of the newly designed control law. A chatter free regulation control of two uncertain nonlinear systems with improved performance in the presence of uncertainties ensures the robustness of the proposed dynamic integral sliding mode controller. Keywords: Chattering, dynamic sliding modes, integral manifold, MIMO non-linear control, robustness. 1. INTRODUCTION The theory of sliding mode control (SMC) plays a vital role in variable structure system’s (VSS) theory. It emerged as a technique capable of use in given robust control systems [1,2]. The basic idea of this technique is to enforce sliding mode in the system’s state space. These sliding manifolds are normally constructed as intersection of hyper surfaces in state space termed as switching surface. In sliding mode robustness is guaranteed against certain class of uncertainties, un- modeled dynamics, parametric uncertainties and external disturbances [3,4]. However, it experiences chattering phenomena associated with high frequency vibrations across the sliding manifold which leads to damage in actuators and system itself. A brief overview of the contributions for robustness enhancement, chattering reduction and performance improvement is given in the following paragraphs. Robust stabilization of uncertain systems has been widely addressed in [5-9]. The robustness of the SMC based control algorithms is directly related to chattering phenomena and vice versa. In order to avoid chattering and its adverse effects, in the last two decades many of the researchers devoted their efforts to handle the chattering reduction. The approach of Higher Order Sliding Mode Control (HOSM) generalizes the basic idea of SMC. A number of HOSM based controllers are described in [10-14]. Some realization problems of r- sliding mode are caused by the complicated structure of the transient process, which is difficult to monitor with r > 2 [14,15]. Another problem concern the above mentioned procedure, when u (l ) is treated as new control. Due to the intersection of u and its derivatives during the convergence of (r + l ) sliding mode ,..., s s s = = = = s (r + l -1) =0, any (r + l ) sliding controller is only effective in some vicinity of the mode. Global convergence is only proved for r = l = 1 [13]. The robust stabilization of uncertain systems attracted many researchers but performance was addressed by very few. The performance was addressed by [15-17] which robustly asymptotically stabilizes the nonlinear systems. This paper proposes a dynamic integral sliding mode controller for uncertain MIMO nonlinear systems. The new controller design incorporates an integral sliding manifold which results in the elimination of reaching phase. Consequently, sliding starts from the beginning of the process and the system becomes robust against external disturbance and parametric uncertainties with improved performance and considerable attenuation in chattering. A convincing comparative analysis carried out with DSMC and Integral Sliding mode Control (ISMC) demonstrates superiority of the newly designed control law. The remaining part of this paper is managed as follows: In Section 2 the problem is formulated and in Section 3 the design method of the new control law is discussed. In Section 4 two illustrative examples are considered for comparative study of the proposed controller design with the existing techniques to certify the domination of the new control design strategy. © ICROS, KIEE and Springer 2011 __________ Manuscript received November 20, 2009; revised June 30, 2010; accepted August 31, 2010. Recommended by Editorial Board member Guang-Hong Yang under the direction of Editor Jae Weon Choi. This research work is conducted at Control and Signal Processing Research (CASPR) Group. Qudrat Khan, Aamer Iqbal Bhatti, and Sohail Iqbal are with the Department of Electronic Engineering, Mohammad Ali Jinnah University Islamabad, Pakistan (e-mails: {qudratullahqau, aamer987, siayubi}@gmail.com). Mohammad Iqbal with the Department of Computer Engineer- ing, Centre for Advanced Studies in Engineering (CASE), Islama- bad, Iran (e-mail: [email protected]).
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Dynamic integral sliding mode for MIMO uncertain nonlinear systems

International Journal of Control, Automation, and Systems (2011) 9(1):1-10 DOI
http://www.springer.com/12555
Dynamic Integral Sliding Mode for MIMO Uncertain Nonlinear Systems
Qudrat Khan, Aamer Iqbal Bhatti, Sohail Iqbal, and Mohammad Iqbal
Abstract: In this paper the authors propose a novel sliding mode control methodology for Multi-Input
and Multi-Output (MIMO) uncertain nonlinear systems. The proposed approach synthesizes dynamic
sliding mode and integral sliding mode control strategies into dynamic integral sliding mode. The new
control laws establish sliding mode without reaching phase with the use of an integral sliding manifold.
Consequently, robustness against uncertainties increases from the very beginning of the process. Fur-
thermore, the control laws considerably alleviate chattering along the switching manifold. In addition,
the performance of the controller boost up in the presence of uncertainties. A comprehensive compara-
tive analysis carried out with dynamic sliding mode control and integral sliding mode control demon-
strates superiority of the newly designed control law. A chatter free regulation control of two uncertain
nonlinear systems with improved performance in the presence of uncertainties ensures the robustness
of the proposed dynamic integral sliding mode controller.
Keywords: Chattering, dynamic sliding modes, integral manifold, MIMO non-linear control,
robustness.
1. INTRODUCTION
The theory of sliding mode control (SMC) plays a
vital role in variable structure system’s (VSS) theory. It
emerged as a technique capable of use in given robust
control systems [1,2]. The basic idea of this technique is
to enforce sliding mode in the system’s state space.
These sliding manifolds are normally constructed as
intersection of hyper surfaces in state space termed as
switching surface. In sliding mode robustness is
guaranteed against certain class of uncertainties, un-
modeled dynamics, parametric uncertainties and external
disturbances [3,4]. However, it experiences chattering
phenomena associated with high frequency vibrations
across the sliding manifold which leads to damage in
actuators and system itself. A brief overview of the
contributions for robustness enhancement, chattering
reduction and performance improvement is given in the
following paragraphs.
Robust stabilization of uncertain systems has been
widely addressed in [5-9]. The robustness of the SMC
based control algorithms is directly related to chattering
phenomena and vice versa. In order to avoid chattering
and its adverse effects, in the last two decades many of
the researchers devoted their efforts to handle the
chattering reduction. The approach of Higher Order
Sliding Mode Control (HOSM) generalizes the basic idea
of SMC. A number of HOSM based controllers are
described in [10-14]. Some realization problems of r-
sliding mode are caused by the complicated structure of
the transient process, which is difficult to monitor with r
> 2 [14,15]. Another problem concern the above
mentioned procedure, when u(l ) is treated as new control.
Due to the intersection of u and its derivatives during the
convergence of (r + l ) sliding mode ,...,s s s= = = =� ��
s(r + l −1) =0, any (r + l ) sliding controller is only effective
in some vicinity of the mode. Global convergence is only
proved for r = l = 1 [13]. The robust stabilization of
uncertain systems attracted many researchers but
performance was addressed by very few. The
performance was addressed by [15-17] which robustly
asymptotically stabilizes the nonlinear systems.
This paper proposes a dynamic integral sliding mode
controller for uncertain MIMO nonlinear systems. The
new controller design incorporates an integral sliding
manifold which results in the elimination of reaching
phase. Consequently, sliding starts from the beginning of
the process and the system becomes robust against
external disturbance and parametric uncertainties with
improved performance and considerable attenuation in
chattering. A convincing comparative analysis carried
out with DSMC and Integral Sliding mode Control
(ISMC) demonstrates superiority of the newly designed
control law. The remaining part of this paper is managed
as follows: In Section 2 the problem is formulated and in
Section 3 the design method of the new control law is
discussed. In Section 4 two illustrative examples are
considered for comparative study of the proposed
controller design with the existing techniques to certify
the domination of the new control design strategy.
© ICROS, KIEE and Springer 2011
__________
Manuscript received November 20, 2009; revised June 30,2010; accepted August 31, 2010. Recommended by EditorialBoard member Guang-Hong Yang under the direction of EditorJae Weon Choi. This research work is conducted at Control andSignal Processing Research (CASPR) Group. Qudrat Khan, Aamer Iqbal Bhatti, and Sohail Iqbal are with theDepartment of Electronic Engineering, Mohammad Ali JinnahUniversity Islamabad, Pakistan (e-mails: {qudratullahqau,aamer987, siayubi}@gmail.com). Mohammad Iqbal with the Department of Computer Engineer-ing, Centre for Advanced Studies in Engineering (CASE), Islama-
bad, Iran (e-mail: [email protected]).

Qudrat Khan, Aamer Iqbal Bhatti, Sohail Iqbal, and Mohammad Iqbal
2
Section 5 contains the all-encompassing concluding
remarks followed by references.
2. MIMO PROBLEM FORMULATION
Consider a MIMO nonlinear system described by a
state equation:
( , , ) ( , ),
( , ),
x f x u t x t
y g x t
ζ= +
=
�
(1)
where x∈Rn is the measurable state vector, u∈Rm is the
control input, :n m nf R R R R
+× × → is a sufficiently
smooth vector field and ( , )x tζ is some norm bounded
uncertainty. The function g: Rn× R+→ Rp is a smooth
vector function which represents the output vector. For
simplicity, it is assumed:
Assumption 1: The system (1) is square (i.e., p = m).
The system (1) in locally equivalent differential Input-
Output (I-O) form can be expressed in compact from as
( ) ( ) *ˆ ˆ ˆ ˆ( , ) ( ) ( , ), 1,..., ,i in
i i i i iy y u y u y t i p
βϕ γ ζ= + + = (2)
where i
β for 1,2,...,i p= are non negative integers
which indicate the derivative of the control input.
where 1 2
ˆ ˆ ˆ ˆ( , ,..., )p
y y y y= and ( 1)
ˆ ( , ,..., )in
i i i iy y y y
−
= �
1 2ˆ ˆ ˆ ˆ( , ,..., ),
pu u u u=
( 1)ˆ ( , ,..., ),i
i i i iu u u u
β −
= � with
1
.
p
i
i
n n
=
=∑
Furthermore, each * ˆ( , )iy tζ is Lebesgue measurable and
satisfy
* ˆ ˆ( , ) ,i i iy t y lζ ρ≤ + (3)
where 0i
ρ ≥ and 0,il ≥ for 1,2,..., .i p=
The system (2) in controllable canonical form
becomes
1 2
2 3
i i
i i
y y
y y
=
=
�
�
�
(4)
( ) *
( ) *
ˆ ˆ ˆ ˆ( , ) ( ) ( , )
ˆ ˆ ˆ( , , ) ( , ).
i
i
i
in i i i i
i i i
y y u y u y t
y u u y t
β
β
ϕ γ ζ
φ ζ
= + +
= +
�
This representation is called Local Generalized
Controllable Canonical Form (LGCCF) of Fliess [19].
The nominal system corresponding to (4) can be
obtained by replacing * ˆ( , ) 0.iy tζ =
Definition 1: The LGCCF in (4) is termed as proper if
(1) ,p m=
(2) ( ) 1ˆ ˆ( , , ) ,i
i iy u u C
βφ ∈
(3) 1 2
1 2
( )( ) ( )1 2
( , ,..., ),det 0.
( , ,..., )p
p
pu u u
ββ β
φ φ φ ∂ ≠ ∂
Majority of nonlinear systems can be put into LGCCF.
Differentially flat system can also be put into I-O form
with the addition of compensator term which appears as
a chain of integrators [19].
Definition 2: Zero Dynamics: The zero dynamics of
system (4) are defined as
( )ˆ(0, , ) 0, 1, 2,..., .i
i iu u i p
βφ = = (5)
The system (4) is called minimum phase if the zero
dynamics in (5) are uniformly asymptotically stable. The
zero dynamics in the I-O is the dynamics of control and
is the generalization of definition in [20]. It is different
from the zero dynamics mentioned in [21] which is the
dynamics of uncontrollable states.
Assumption 2: The system in (4) is either minimum
phase in sense defined in Definition 2 or the zero
dynamics are equal to some constant.
Remark 1: The subsequent controller strategy will be
applicable to systems satisfying Assumption 2.
3. CONTROL LAW DESIGN
In existing dynamic sliding mode controller design the
controller consists of only a discontinuous part. In
contrast, this dynamic controller methodology contains a
dynamic continuous controller and a dynamic
discontinuous controller. The proposed control law for
the system (4) is of dynamic nature which can be
expressed as
( ) ( ) ( )0 1 , 1, 2,..., .i i i
i i iu u u i p
β β β= + = (6)
The first part ( )0 ,
i
iu R
β∈ is continuous which
stabilizes the system at the equilibrium point and the
second part ( )1
i
iu R
β∈ is discontinuous in nature which
is named as the dynamic integral control. This effectively
rejects the uncertainties. In the next two subsections, the
design of ( )0
i
iu
β and
( )1
i
iu
β is explored.
3.1. Design of linear controller ( )0
i
iu
β
To facilitate the design of ( )0 ,
i
iu
β system (4) can be
expressed in an alternate form as follows:
1 2
2 3
( ) ( ) *ˆ ˆ ˆ( , , ) ( , ),i i
i
i i
i i
in i i i i
y y
y y
y y u u u y tβ β
χ ζ
=
=
= + +
�
�
�
�
(7)
where ( ) ( )ˆ ˆ ˆ ˆ ˆ( , , ) ( , ) ( ( ) 1) .i i
i i i i iy u u y u y u
β βχ ϕ γ= + −
The linear control law is designed in ideal case which
is based on assuming that:
Assumption 3: Initially, the system is assumed
independent of nonlinearities i.e., ( )ˆ ˆ( , , ) 0i
i iy u u
βχ =
and it is also supposed that the system operates under ( )0
i
iu
β only.
Assumption 4: The system at the initial time is

Dynamic Integral Sliding Mode for MIMO Uncertain Nonlinear Systems
3
independent of uncertainties. i.e., * ˆ( , ) 0.iy tζ =
Using Assumptions 3 and 4, the system (7) acquires
the following form
1 2
2 3
( )0 , 1,2,..., .i
i
i i
i i
in i
y y
y y
y u i pβ
=
=
= =
�
�
�
�
(8)
This is an ith linear subsystem which can also be
expressed in the following standard form
( )0 ,
i
i i i i iy A y B u
β= +�
where
( 1) 1 ( 1) ( 1) ( 1) 1
1 1 1 ( 1) 1 1
, ,
i i i i
i
n n n n
i i
n
O I OA B
O O I
− × − × − − ×
× × − ×
= =
and in
iy R∈ is the state space vector of the sub system.
The input ( )0
iiuβ
is designed as linear state feedback
control
( )0 ,i T
i iiu k yβ
= (9)
which minimizes the Quadratic cost function
( )( ) ( )0 00
1
2
i iT
i i i i ii iJ y Q y u R u dt
β β∞
= +∫
subject to the system dynamics
( )0 .i
i i i i iy A y B uβ
= +�
The vectors T
ik can be determined by solving the
Riccati’s equation
10,
T T
i i i i i i i i iA P P A PB R B P Q
−
+ − + =
and
1,
T
i i i ik R B P
−
= (10)
where Pi and Qi are symmetric positive definite matrices.
This completes the design of each ( )0 .iiuβ
Remark 2: In order to have good performance, the
linear controller ( )0
iiuβ
can be designed through other
techniques.
Remark 3: The whole linear system becomes
,y Ay Bu= +� �
where
1 2( , ,..., ),
pA diag A A A=
1 2( , ,..., ),pB diag B B B=
and
1 2( )( ) ( )
1 2[ , ,..., ] .p Tpu u u uββ β
=�
3.2. Design of nonlinear controller ( )1
iiuβ
In the proposed design technique, the dynamic
controller design uses an integrals manifold instead of
conventional sliding surface which is used in the existing
dynamic sliding mode controller. In order to attain the
desired performance and to robustly compensate the
uncertainties with reduced chattering, the dynamic
controllers ( )1
iiuβ
is formulated by first defining the
integral sliding surface. The integral sliding surface is
designed in such a way that the reaching phase is
eliminated. This elimination boosts the robustness
against uncertainties from the very beginning. The
integral manifold is defined as follows
0( ) ( ) ,i i iy yσ σ ζ= + (11)
where 0 ( )i yσ is the conventional sliding surface,
frequently used for the SMC design and iζ is the
integral term which can be determined. For this design
procedure it is defined by 0
1
( )in
i il il
i
y c yσ
=
=∑ with
1.iin
c =
The time derivative of (11) along (7) becomes
1( ) ( ) ( )
1 0 11
*
ˆ ˆ( ) ( , , )
ˆ( , ).
i
i i i
n
i il il i i i i
l
i i
y c y y u u u u
y t
β β βσ χ
ζ ζ
−
+
=
= + + +
+ +
∑�
�
(12)
Taking
1( )
1 01
i
i
n
i il il i
l
c y uβ
ζ
−
+
=
= − +
∑� (13)
and the initial conditions of (0)i
ζ are selected in such a
way that satisfy the requirement (0) 0.i
σ =
Then,
( ) ( ) *1
( )0
( ) *1
ˆ ˆ ˆ( ) ( , , ) ( , )
ˆ ˆ ˆ( , ) ( ( ) 1)
ˆ ˆ( ) ( , ).
i i
i
i
i i i ii
i i i
i ii
y y u u u y t
y u y u
y u y t
β β
β
β
σ χ ζ
ϕ γ
γ ζ
= + +
= + −
+ +
�
(14)
Definition 3: A general sliding convergence condition
( , ),i i i i
Kσ µ σ= −�
where Ki are design parameters, satisfies
(1) ( ,0) 0,i iKµ =
(2) 1( , )i i iK Cµ σ ∈ if 0,σ =
(3) each ( , )i i i i
Kσ µ σ= −�
is globally uniformly asymptotically stable. For this
design procedure, it is defined as
0( ).
i i i i iK K signσ σ σ= − −� (15)
By comparing (14) and (15), the expression of

Qudrat Khan, Aamer Iqbal Bhatti, Sohail Iqbal, and Mohammad Iqbal
4
dynamic controller ( )1
i
iu
β is
( )( ) 01
0
ˆ ˆ ˆ( , ) ( ( ) 1)1.
ˆ( ) ( )
i
i i i i
i
i i i i i
y u y uu
y K K sign
ββ ϕ γ
γ σ σ
+ −= − + +
(16)
The constants Ki and K0i are control gains which are
selected according to uncertainty bounds [12], which
satisfy the Eq(3). This control law enforces sliding mode
along the manifold (11) from the very beginning. This
completes the design of the discontinuous controller.
Remark 4: The final ith ith controller is obtained by
substituting (9) and (16) in (6) and can be used by
integrating i
β -times in the implementation.
3.3. Stability analysis
Theorem 1: Consider the nonlinear system in (4),
subject to Assumptions 1, 2, 3 and 4, if the sliding
surface, ( )1
i
iu
β and
iζ� are chosen according to (11),
(13) and (16), respectively
Then, the convergence condition is satisfied.
Proof: Consider a Lyapunov function candidate as
follows:
21, 1,2,..., .
2i iv i pσ= =
The time derivative of this Lyapunov’s function
becomes
1( ) ( ) ( )
1 0 11
*
, 1,2,..., .
ˆ ˆ( , , ).
ˆ( , )
i
i i i
i i i
n
il il i i i i
li i
i i
v i p
c y y u u u uv
y t
β β β
σ σ
χσ
ζ ζ
−
+
=
= =
+ + +
=
+ +
∑
� �
�
�
(17)
Substituting the value of i
ζ� in (17), the expression
becomes
( )( ) ( ) *1
ˆ ˆ ˆ( , , ) ( , ) .i i
i i i i iiv y u u u y t
β βσ χ ζ= + +� (18)
Now, substituting the value of ( )1 ,
i
iu
β the expression
in (18) takes the form
( )0( ) 0.
i i i i i iv K K signσ σ σ≤ − + <�
This ensures the stability of the ith sub system.
Since
2
1
1 1
2 2
pT
i
i
V σσ σ
=
= = ∑
then
1
.
p
i
i
V v
=
≤∑� � (19)
Thus 0σ = is stable equilibrium point guaranteeing
that sliding mode exists in dynamic integral sliding mode
even in the presence of uncertainties.
4. ILLUSTRATIVE EXEMPLES
Design algorithm presented in Section 3 has been
applied to design controller for Three Tank System and a
Nonlinear System. A comparative analysis of DISMC,
DSMC and Integral Sliding Mode Controller (ISMC), is
put forwarded in the following two subsections. The
assessment of controllers is carried out on the basis of
output convergence, sliding manifold convergence and
chattering free controller effort in the presence of
uncertainties.
4.1. MIMO three tank system
4.1.1 System description
The Three Tank System is extensively used for
nonlinear controller analysis and represents a typical
system in process industry, fuel management system in
aircrafts and flight vehicles. A Three Tank System as
depicted in Fig. 1 contains three interconnected tanks
with same surface area S. The terms qij represents the
water flow rates from tank i to j.
The system parameters µi, Sp and S are the flow
coefficients, cross sectional areas of the interconnecting
pipes and surface area of the tanks. Li, q1 and q2 are the
liquids levels in the tanks, flow rates into tank 1 and tank
2, respectively. The full model of the system in state
space [22], is given by
1
1 1 1 3 1 3
2 3 3 2 3 2
2
2 2 2
3 1 1 3 1 3
3 3 2 3 2
( ) ( ) ,
( ) ( )
( ) ,
( ) ( )
( ) ( ) ,
ux C sign x x x x
S
x C sign x x x x
uC sign x x
S
x C sign x x x x
C sign x x x x
= − − − +
= − −
− +
= − −
− − −
�
�
�
(20)
where xi (t) is the liquid level in tank i and Ci =
2
12 ,
pS g
sµ are derived parameters. The control
signals u1 and u2 are input flow rates respectively. The
typical parameters values of three tank system are given
in Table 1. For the sake of clarity it is supposed that x1 >
x3 > x2, then the equations of motion (20), reduces to a
simplest form.
The control objective in three tank system is to
maintain a certain tank level under disturbances and
parametric variations.
Fig. 1. Three Tank System Schematic Diagram.

Dynamic Integral Sliding Mode for MIMO Uncertain Nonlinear Systems
5
Table 1. Typical parameter values of benchmark TTS.
Parameter Description Nominal Values Units
S Surface area of tanks 0.0154 m2
Sp Surface area of pipes 5x10-5 m2
u1max
u2max Input Flow rates 100 ml/s
yimax
1,2,3i = Maximum level
in tanks 0.62 m
1µ
2µ
3µ
Viscosity or flow
coefficients --
0.5,
0.675
0.5
4.1.2 Controller design
In order to achieve the above task, the proposed
methodology is employed. The outputs of interest are y11
= x1 and y21 = x2. The final expression of the controllers is
as follows:
( )
1 11 11 12 12
1 1
1 3 3 3 2
1 3
1 1 01 1
22
( )
u k y k y
C ux x C x x
Sx x
s K s K sign s
= − −
+ − − + − +
−
− +
�
(21)
and
2 21 21 2 2 02 2( ( .)).u k y s K s K sign s= − − + (22)
4.1.3 Simulation results
The evaluation of the proposed control algorithm is
carried out in the presence of parametric variations and
state dependent uncertainties in three tank system. The
comparative analysis of ISMC, DSMC and DISMC is
executed in the presence of these uncertainties.
Case 1: Output Additive Uncertainty
A state dependent uncertainty
1 2 3( , ) 3 sin( ), 1,2ix t x x x t iζ π= = (23)
is introduced in both the output channels from the very
beginning of the process in simulations. The controllers
gains used in this analysis are defined in Table 2.
The outputs convergence using ISMC, DSMC and the
proposed DISMC are shown in Figs. 2 and 3. It is clear
from both the figures that DISMC quickly steers the
outputs to zero in finite settling time which is
approximately equal to 0.1sec. The response time of
DSMC is 0.8 and 0.1 seconds for the outputs while the
outputs regulation via ISMC oscillates against the origin
with considerable magnitude and high frequency.
Similarly, the convergence of sliding manifolds is shown
in Figs. 4 and 5. It is visible that the convergence of
sliding surface for DSMC and new control law DISMC
are very close to each other. However, the convergence
of DISMC exhibits speedy response. The sliding variable
for ISMC oscillates around the origin.
The control efforts of both controllers are illustrated in
Figs. 6 and 7. One can observe easily that the controller
u1 and u2 via DSMC and proposed control law are chatter
free while that of ISMC has chattering with significant
magnitude. Thus, the proposed controller may evolve as
a better controller as compared to DSMC and ISMC.
Table 2. Parameters of designed controller with additive
uncertainty.
Constants K1 K2 K01 K02 c11 c12 c21 k11 k12 k21
Values 10 0.001 25 1 6.5 31.6 32.60 1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.2
-0.1
0
0.1
0.2
0.3
Time(sec)
Output y1
ISMC
DSMC
DISMC
Fig. 2. y11 trajectories in the presence of uncertainty via
ISMC, DSMC and DISMC.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
Time(sec)
Output y2
ISMC
DSMC
DISMC
Fig. 3. y21 trajecotries in the presence of uncertainty via
ISMC, DSMC and DISMC.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-4
-2
0
2
4
6
8
Time(sec)
Sliding Surface s1
ISMC
DSMC
DISMC
Fig. 4. Sliding Surface s1 convergence for ISMC,
DSMC and DISMC in the presence of
uncertainty.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Time(sec)
Sliding Surface s2
ISMC
DSMC
DISMC
Fig. 5. Sliding Surface s2 convergence for ISMC,
DSMC and DISMC in the presence of
uncertainty.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-4
-2
0
2
4
6
8
ISMC
DSMC
DISMC
0 0.05 0.1 0.1
-0.5
0
0.5
ISMC
DSMC
DISMC

Qudrat Khan, Aamer Iqbal Bhatti, Sohail Iqbal, and Mohammad Iqbal
6
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-1.5
-1
-0.5
0
0.5
1
Time(sec)
Control Input u1
ISMC
DSMC
DISMC
Fig. 6. Control Effort u1 via ISMC, DSMC and DISMC
in the presence of uncertainty.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Time(sec)
Control Input u2
ISMC
DSMC
DISMC
Fig. 7. Control Effort u2 via ISMC, DSMC and DISMC
in the presence of uncertainty.
Case 2: Parametric Variations
This experiment involves the evaluation of the
proposed controller under parametric variations in the
Three Tank System. This system has four parameters s,
c1, c2 and c3 with their nominal values 0.0154, 0.0072,
0.0097 and 0.0072, respectively. These parameters are
varied with 30% increase in each. These varitions are
initiated in the system in steady state. The controller
gains are give in Table 3.
The convergence of the outputs y11 and y21 is displayed
in Figs. 8 and 9. This ensures the quick and oscillation
free convergence of the outputs to the origin via DISMC.
On the other hand, it is obvious from these figures that
outputs convergence of DSMC is not only slower than
that of DISMC but is also oscillatory in behavior. In
addition, the output of ISMC has fast convergence but
shows oscillatory pattern with high frequency and
considerable magnitude as illustrated in the zoomed
views in Figs. 8 and 9.
0 5 10 15 20 25 30-0.05
0
0.05
0.1
Time(sec)
Output y2
ISMC
DSMC
DISMC
Fig. 9. y21 trajecotries in the presence of parametric
variation via ISMC, DSMC and DISMC.
0 5 10 15 20 25 30-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Time(sec)
Control Input u1
ISMC
DSMC
DISMC
Fig. 10. Control Effort u1 via ISMC, DSMC and DISMC
in the presence of parametric variation.
0 5 10 15 20 25 30-0.15
-0.1
-0.05
0
0.05
0.1
Time(sec)
Control Input u2
ISMC
DSMC
DISMC
Fig. 11. Control Effort u2 via ISMC, DSMC and DISMC
in the presence of parametric variation.
Figs. 10 and 11, confirm the chattering free nature of
DISMC. It is obvious that ISMC controller experiences
chattering phenomena. Similarly, the DSMC controller
exhibits oscillation and a significant peak appears when
the variations are introduced. In this regards, the
proposed controller may be superior to the other two
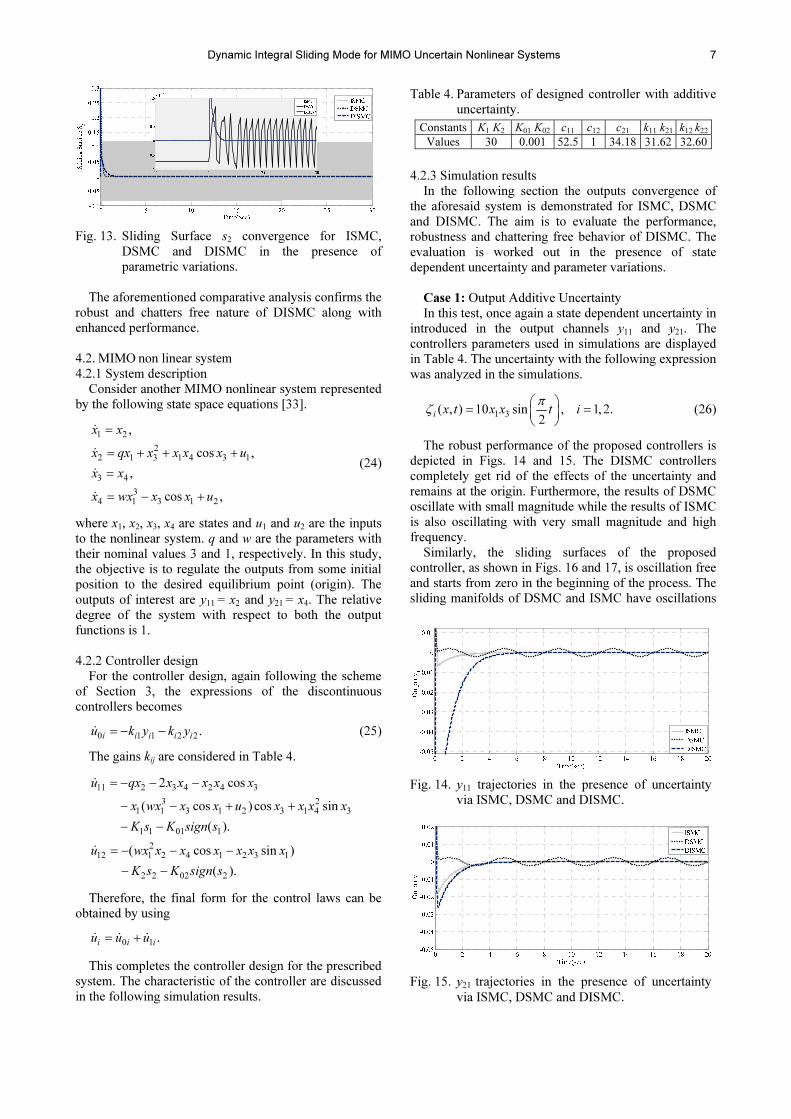
controllers. Same analysis can be seen in Figs. 12 and 13.
The convergence of sliding manifolds is displayed over
there.
0 5 10 15 20 25 30-2
0
2
4
6
8
Time(sec)
Sliding Surface s1
ISMC
DSMC
DISMC
Fig. 12. Sliding Surface s1 convergence for ISMC,
DSMC and DISMC in the presence of
parametric variations.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-1.5
-1
-0.5
0
0.5
1
ISMC
DSMC
DISMC
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2.4
.2
0
.2
.4
ISMC
DSMC
DISMC
Table 3. Parameter values for designed controller with
parametric variations.
Constants K1 K2 K01 K02 c11 c12 c21 k11 k12 k21
Values 3 0.001 25 1 3 31.6 32.6 1
0 5 10 15 20 25 30-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Time(sec)
Output y1
ISMC
DSMC
DISMC
Fig. 8. y11 trajecotries in the presence of parametric
variation via ISMC, DSMC and DISMC.
10 15 20 25
-4
-2
0
x 10-5
Time(sec)
Output y1
15 20 25 30
-3
-2
-1
0
x 10-4
ISMC
DSMC
DISMC
0 5 10 15 20 25 30-5
0
5x 10
-4
Time(sec)
Output y2
19 20 21 22 23 24 25 26 27 28 29 30
-5
0
5
10x 10
-5
ISMC
DSMC
DISMC
15 20 25 300
2
4
6
8
10x 10
-5
ISMC
DSMC
DISMC
Dynamic Integral Sliding Mode for MIMO Uncertain Nonlinear Systems
7
0 5 10 15 20 25 30-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Time(Sec)
Sliding Surface S2
ISMC
DSMC
DISMC
Fig. 13. Sliding Surface s2 convergence for ISMC,
DSMC and DISMC in the presence of
parametric variations.
The aforementioned comparative analysis confirms the
robust and chatters free nature of DISMC along with
enhanced performance.
4.2. MIMO non linear system
4.2.1 System description
Consider another MIMO nonlinear system represented
by the following state space equations [33].
1 2
2
2 1 3 1 4 3 1
3 4
3
4 1 3 1 2
,
cos ,
,
cos ,
x x
x qx x x x x u
x x
x wx x x u
=
= + + +
=
= − +
�
�
�
�
(24)
where x1, x2, x3, x4 are states and u1 and u2 are the inputs
to the nonlinear system. q and w are the parameters with
their nominal values 3 and 1, respectively. In this study,
the objective is to regulate the outputs from some initial
position to the desired equilibrium point (origin). The
outputs of interest are y11 = x2 and y21 = x4. The relative
degree of the system with respect to both the output
functions is 1.
4.2.2 Controller design
For the controller design, again following the scheme
of Section 3, the expressions of the discontinuous
controllers becomes
0 1 1 2 2.
i i i i iu k y k y= − −� (25)
The gains kij are considered in Table 4.
11 2 3 4 2 4 3
3 2
1 1 3 1 2 3 1 4 3
1 1 01 1
2 cos
( cos )cos sin
( ).
u qx x x x x x
x wx x x u x x x x
K s K sign s
= − − −
− − + +
− −
�
2
12 1 2 4 1 2 3 1
2 2 02 2
( cos sin )
( ).
u wx x x x x x x
K s K sign s
= − − −
− −
�
Therefore, the final form for the control laws can be
obtained by using
0 1.
i i iu u u= +� � �
This completes the controller design for the prescribed
system. The characteristic of the controller are discussed
in the following simulation results.
Table 4. Parameters of designed controller with additive
uncertainty.
Constants K1 K2 K01 K02 c11 c12 c21 k11 k21 k12 k22
Values 30 0.001 52.5 1 34.18 31.62 32.60
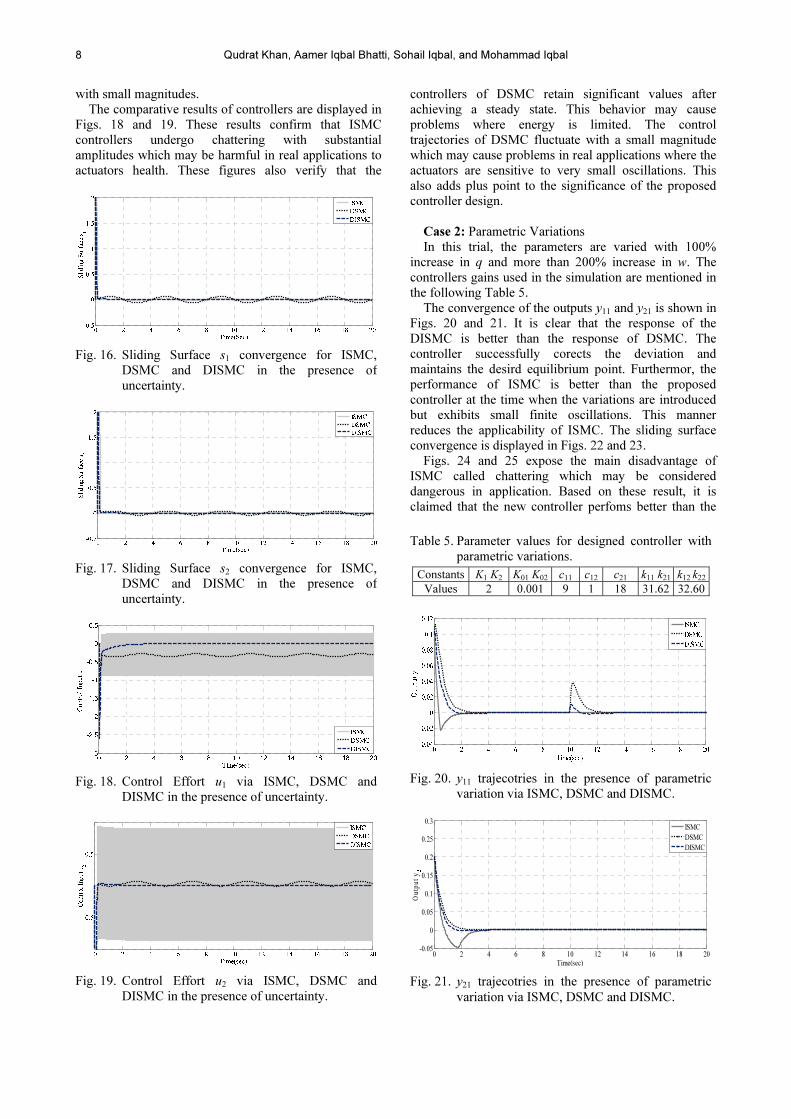
4.2.3 Simulation results
In the following section the outputs convergence of
the aforesaid system is demonstrated for ISMC, DSMC
and DISMC. The aim is to evaluate the performance,
robustness and chattering free behavior of DISMC. The
evaluation is worked out in the presence of state
dependent uncertainty and parameter variations.
Case 1: Output Additive Uncertainty
In this test, once again a state dependent uncertainty in
introduced in the output channels y11 and y21. The
controllers parameters used in simulations are displayed
in Table 4. The uncertainty with the following expression
was analyzed in the simulations.
1 3( , ) 10 sin , 1,2.
2ix t x x t i
πζ
= =
(26)
The robust performance of the proposed controllers is
depicted in Figs. 14 and 15. The DISMC controllers
completely get rid of the effects of the uncertainty and
remains at the origin. Furthermore, the results of DSMC
oscillate with small magnitude while the results of ISMC
is also oscillating with very small magnitude and high
frequency.
Similarly, the sliding surfaces of the proposed
controller, as shown in Figs. 16 and 17, is oscillation free
and starts from zero in the beginning of the process. The
sliding manifolds of DSMC and ISMC have oscillations
15 20 25 30-1
-0.5
0
0.5
1
1.5x 10
-4
ISMC
DSMC
DISMC
0 2 4 6 8 10 12 14 16 18 20-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
Time(sec)
Output y1
ISMC
DSMC
DISMC
Fig. 14. y11 trajectories in the presence of uncertainty
via ISMC, DSMC and DISMC.
0 2 4 6 8 10 12 14 16 18 20-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
Time(sec)
Output y2
ISMC
DSMC
DISMC
Fig. 15. y21 trajectories in the presence of uncertainty
via ISMC, DSMC and DISMC.
Qudrat Khan, Aamer Iqbal Bhatti, Sohail Iqbal, and Mohammad Iqbal
8
with small magnitudes.
The comparative results of controllers are displayed in
Figs. 18 and 19. These results confirm that ISMC
controllers undergo chattering with substantial
amplitudes which may be harmful in real applications to
actuators health. These figures also verify that the
controllers of DSMC retain significant values after
achieving a steady state. This behavior may cause
problems where energy is limited. The control
trajectories of DSMC fluctuate with a small magnitude
which may cause problems in real applications where the
actuators are sensitive to very small oscillations. This
also adds plus point to the significance of the proposed
controller design.
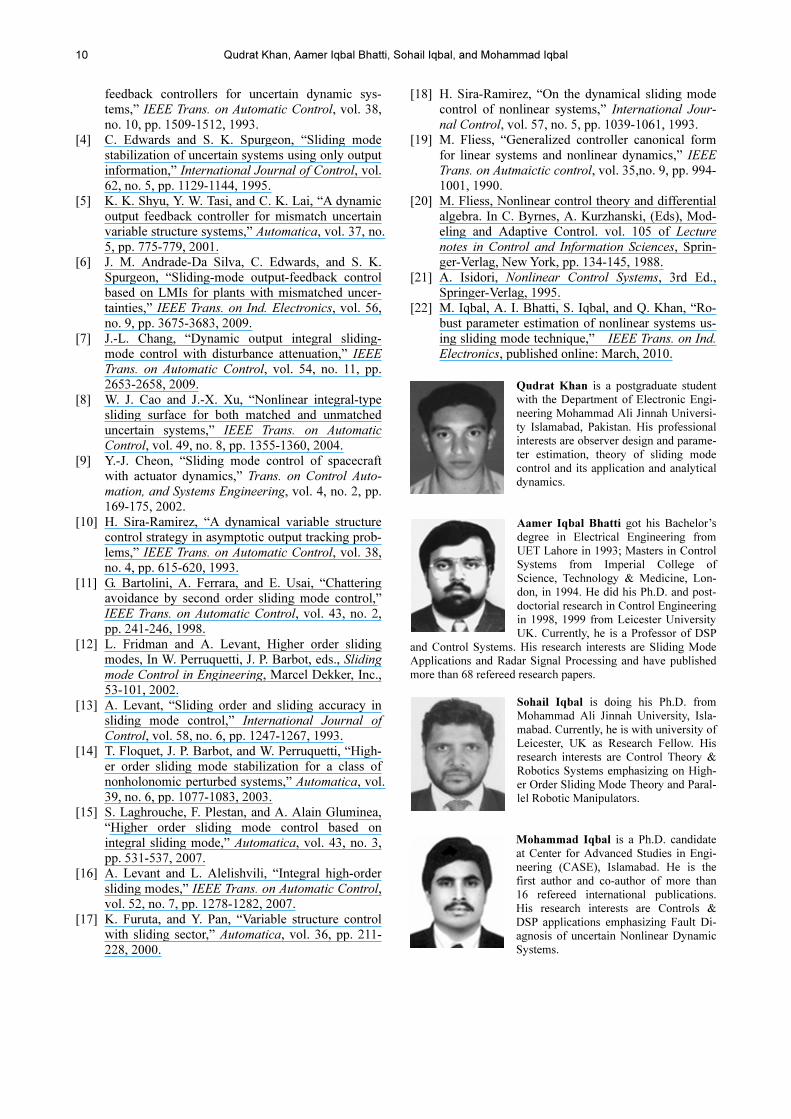
Case 2: Parametric Variations
In this trial, the parameters are varied with 100%
increase in q and more than 200% increase in w. The
controllers gains used in the simulation are mentioned in
the following Table 5.
The convergence of the outputs y11 and y21 is shown in
Figs. 20 and 21. It is clear that the response of the
DISMC is better than the response of DSMC. The
controller successfully corects the deviation and
maintains the desird equilibrium point. Furthermor, the
performance of ISMC is better than the proposed
controller at the time when the variations are introduced
but exhibits small finite oscillations. This manner
reduces the applicability of ISMC. The sliding surface
convergence is displayed in Figs. 22 and 23.
Figs. 24 and 25 expose the main disadvantage of
ISMC called chattering which may be considered
dangerous in application. Based on these result, it is
claimed that the new controller perfoms better than the
Table 5. Parameter values for designed controller with
parametric variations.
Constants K1 K2 K01 K02 c11 c12 c21 k11 k21 k12 k22
Values 2 0.001 9 1 18 31.62 32.60
0 2 4 6 8 10 12 14 16 18 20-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
Time(sec)
Output y1
ISMC
DSMC
DISMC
Fig. 20. y11 trajecotries in the presence of parametric
variation via ISMC, DSMC and DISMC.
0 2 4 6 8 10 12 14 16 18 20-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Time(sec)
Ou
tpu
t y
2
ISMC
DSMC
DISMC
Fig. 21. y21 trajecotries in the presence of parametric
variation via ISMC, DSMC and DISMC.
0 2 4 6 8 10 12 14 16 18 20-0.5
0
0.5
1
1.5
2
Time(Sec)
Sliding Surface s1
ISMC
DSMC
DISMC
Fig. 16. Sliding Surface s1 convergence for ISMC,
DSMC and DISMC in the presence of
uncertainty.
0 2 4 6 8 10 12 14 16 18 20-0.5
0
0.5
1
1.5
2
Time(sec)
Sliding Surface s2
ISMC
DSMC
DISMC
Fig. 17. Sliding Surface s2 convergence for ISMC,
DSMC and DISMC in the presence of
uncertainty.
0 2 4 6 8 10 12 14 16 18 20-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
Time(sec)
Control Input u1
ISMC
DSMC
DISMC
Fig. 18. Control Effort u1 via ISMC, DSMC and
DISMC in the presence of uncertainty.
0 2 4 6 8 10 12 14 16 18 20-1
-0.5
0
0.5
1
Time(sec)
Control Input u2
ISMC
DSMC
DISMC
Fig. 19. Control Effort u2 via ISMC, DSMC and
DISMC in the presence of uncertainty.

Dynamic Integral Sliding Mode for MIMO Uncertain Nonlinear Systems
9
other two controllers.
Table 6 contains all the attributes utilized to evaluate
the proposed DISMC. Based on the results enumerated in
Table 6 and shown above figures, it can be claimed that
proposed DISMC outshines DSMC and ISMC control in
maximum aspects.
Table 6. Comparative analysis of ISMC, DSMC and
DISMC.
ATTRIBUTES ISMC DSMC DISMC
Robustness
Rejects the
uncertainties
with high
frequency
oscillations
Rejects the
uncertainties
but with slight
deviation from
the origin
Effectively
rejects the
uncertainties
with very small
deviation
Settling
Time Small
Comparatively
Large Small
Oscillations
High
Frequency
Oscillations
with significant
magnitude.
Oscillations
exists in some
cases
No Oscillations
Regulation
Control
To the vicinity
of the origin
To the vicinity
of the origin
Exactly to the
Origin
Chattering
Analysis
Severe
chattering.
No chattering
but oscillatory
response
No chattering
&
No oscillations
Sliding
Surface
Convergence
Chattering
exists with
considerable
magnitude.
Converges to
origin with
slight chattering
in some cases
Converges to
(origin),
No chattering
Control EffortHigh control
efforts.
High Controller
efforts
Low control
efforts
Computational
Complication
Low
computation
complexities
Low
computation
complexities
Comparatively
high
computation
complexities
5. CONCLUSIONS
In this work, a novel dynamic integral sliding mode
approach is proposed for a class of MIMO uncertain
nonlinear systems. This design methodology synthesizes
DSMC and ISMC technique into the so-called Dynamic
Integral Sliding Mode. This provides dynamic controller
which enforces sliding mode along the integral manifold
from the beginning of the process. Consequently, sliding
mode without reaching phase is established. This
elimination enhances robustness of the proposed
controller against uncertainties. The robustness is also
inherited from DSMC. The control law designed via the
proposed strategy comprises of two terms. The first term
improved the performance of the control law and the
second term performed for improving robustness. In
addition, the proposed control law establishes sliding
mode with reduced chattering phenomena. Thus, it is
claimed that the new designed technique captured the
good features of ISMC and DSMC. Based on the
simulation results it can also be claimed that the
proposed DISMC outshines DSMC and ISMC control in
maximum aspects.
REFERENCES
[1] C. Edwards and S. K. Spurgeon, Sliding Mode Con-
trol: Theory and Applications, Taylor and Francis,
London, 1998.
[2] V. I. Utkin, Sliding Mode Control in Electrome-
chanical Systems, Taylor and Francis, 1999.
[3] S. H. Zak and S. Hui, “On variable structure output
0 2 4 6 8 10 12 14 16 18 20-0.5
0
0.5
1
1.5
2
2.5
Time(sec)
Sliding Surface s1
ISMC
DSMC
DISMC
Fig. 22. Sliding Surface s1 convergence for ISMC,
DSMC and DISMC in the presence of
uncertainty.
0 2 4 6 8 10 12 14 16 18 20-1
0
1
2
3
4
5
Time(sec)
S
liding S
urface s2
ISMC
DSMC
DISMC
Fig. 23. Sliding Surface s2 convergence for ISMC,
DSMC and DISMC in the presence of
uncertainty.
0 2 4 6 8 10 12 14 16 18 20-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
Time(sec)
C
ontrol Input u1
ISMC
DSMC
DISMC
Fig. 24. Control Effort u1 via ISMC, DSMC and
DISMC in the presence of parametric variation.
0 2 4 6 8 10 12 14 16 18 20-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Time(sec)
Control Input u2
ISMC
DSMC
DISMC
Fig. 25. Control Effort u2 via ISMC, DSMC and
DISMC in the presence of parametric variation.
Qudrat Khan, Aamer Iqbal Bhatti, Sohail Iqbal, and Mohammad Iqbal
10
feedback controllers for uncertain dynamic sys-
tems,” IEEE Trans. on Automatic Control, vol. 38,
no. 10, pp. 1509-1512, 1993.
[4] C. Edwards and S. K. Spurgeon, “Sliding mode
stabilization of uncertain systems using only output
information,” International Journal of Control, vol.
62, no. 5, pp. 1129-1144, 1995.
[5] K. K. Shyu, Y. W. Tasi, and C. K. Lai, “A dynamic
output feedback controller for mismatch uncertain
variable structure systems,” Automatica, vol. 37, no.
5, pp. 775-779, 2001.
[6] J. M. Andrade-Da Silva, C. Edwards, and S. K.
Spurgeon, “Sliding-mode output-feedback control
based on LMIs for plants with mismatched uncer-
tainties,” IEEE Trans. on Ind. Electronics, vol. 56,
no. 9, pp. 3675-3683, 2009.
[7] J.-L. Chang, “Dynamic output integral sliding-
mode control with disturbance attenuation,” IEEE
Trans. on Automatic Control, vol. 54, no. 11, pp.
2653-2658, 2009.
[8] W. J. Cao and J.-X. Xu, “Nonlinear integral-type
sliding surface for both matched and unmatched
uncertain systems,” IEEE Trans. on Automatic
Control, vol. 49, no. 8, pp. 1355-1360, 2004.
[9] Y.-J. Cheon, “Sliding mode control of spacecraft
with actuator dynamics,” Trans. on Control Auto-
mation, and Systems Engineering, vol. 4, no. 2, pp.
169-175, 2002.
[10] H. Sira-Ramirez, “A dynamical variable structure
control strategy in asymptotic output tracking prob-
lems,” IEEE Trans. on Automatic Control, vol. 38,
no. 4, pp. 615-620, 1993.
[11] G. Bartolini, A. Ferrara, and E. Usai, “Chattering
avoidance by second order sliding mode control,”
IEEE Trans. on Automatic Control, vol. 43, no. 2,
pp. 241-246, 1998.
[12] L. Fridman and A. Levant, Higher order sliding
modes, In W. Perruquetti, J. P. Barbot, eds., Sliding
mode Control in Engineering, Marcel Dekker, Inc.,
53-101, 2002.
[13] A. Levant, “Sliding order and sliding accuracy in
sliding mode control,” International Journal of
Control, vol. 58, no. 6, pp. 1247-1267, 1993.
[14] T. Floquet, J. P. Barbot, and W. Perruquetti, “High-
er order sliding mode stabilization for a class of
nonholonomic perturbed systems,” Automatica, vol.
39, no. 6, pp. 1077-1083, 2003.
[15] S. Laghrouche, F. Plestan, and A. Alain Gluminea,
“Higher order sliding mode control based on
integral sliding mode,” Automatica, vol. 43, no. 3,
pp. 531-537, 2007.
[16] A. Levant and L. Alelishvili, “Integral high-order
sliding modes,” IEEE Trans. on Automatic Control,
vol. 52, no. 7, pp. 1278-1282, 2007.
[17] K. Furuta, and Y. Pan, “Variable structure control
with sliding sector,” Automatica, vol. 36, pp. 211-
228, 2000.
[18] H. Sira-Ramirez, “On the dynamical sliding mode
control of nonlinear systems,” International Jour-
nal Control, vol. 57, no. 5, pp. 1039-1061, 1993.
[19] M. Fliess, “Generalized controller canonical form
for linear systems and nonlinear dynamics,” IEEE
Trans. on Autmaictic control, vol. 35,no. 9, pp. 994-
1001, 1990.
[20] M. Fliess, Nonlinear control theory and differential
algebra. In C. Byrnes, A. Kurzhanski, (Eds), Mod-
eling and Adaptive Control. vol. 105 of Lecture
notes in Control and Information Sciences, Sprin-
ger-Verlag, New York, pp. 134-145, 1988.
[21] A. Isidori, Nonlinear Control Systems, 3rd Ed.,
Springer-Verlag, 1995.
[22] M. Iqbal, A. I. Bhatti, S. Iqbal, and Q. Khan, “Ro-
bust parameter estimation of nonlinear systems us-
ing sliding mode technique,” IEEE Trans. on Ind.
Electronics, published online: March, 2010.
Qudrat Khan is a postgraduate student
with the Department of Electronic Engi-
neering Mohammad Ali Jinnah Universi-
ty Islamabad, Pakistan. His professional
interests are observer design and parame-
ter estimation, theory of sliding mode
control and its application and analytical
dynamics.
Aamer Iqbal Bhatti got his Bachelor’s
degree in Electrical Engineering from
UET Lahore in 1993; Masters in Control
Systems from Imperial College of
Science, Technology & Medicine, Lon-
don, in 1994. He did his Ph.D. and post-
doctorial research in Control Engineering
in 1998, 1999 from Leicester University
UK. Currently, he is a Professor of DSP
and Control Systems. His research interests are Sliding Mode
Applications and Radar Signal Processing and have published
more than 68 refereed research papers.
Sohail Iqbal is doing his Ph.D. from
Mohammad Ali Jinnah University, Isla-
mabad. Currently, he is with university of
Leicester, UK as Research Fellow. His
research interests are Control Theory &
Robotics Systems emphasizing on High-
er Order Sliding Mode Theory and Paral-
lel Robotic Manipulators.
Mohammad Iqbal is a Ph.D. candidate
at Center for Advanced Studies in Engi-
neering (CASE), Islamabad. He is the
first author and co-author of more than
16 refereed international publications.
His research interests are Controls &
DSP applications emphasizing Fault Di-
agnosis of uncertain Nonlinear Dynamic
Systems.