
DIRECTION FINDING WITH A UNIFORM CIRCULAR ARRAY PLACED ON A MOVING PLATFORM
115
DIRECTION FINDING WITH A UNIFORM CIRCULAR ARRAY PLACED ON A MOVING PLATFORM A THESIS SUBMITTED TO THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES OF THE MIDDLE EAST TECHNICAL UNIVERSITY BY EVRİM ANIL EVİRGEN IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR DEGREE OF MASTER OF SCIENCE IN THE DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING SEPTEMBER 2001
Transcript of DIRECTION FINDING WITH A UNIFORM CIRCULAR ARRAY PLACED ON A MOVING PLATFORM

DIRECTION FINDING WITH A UNIFORM CIRCULAR ARRAY
PLACED ON A MOVING PLATFORM
A THESIS SUBMITTED TO
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES
OF
THE MIDDLE EAST TECHNICAL UNIVERSITY
BY
EVRİM ANIL EVİRGEN
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR DEGREE OF
MASTER OF SCIENCE
IN
THE DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING
SEPTEMBER 2001
Approval of the Graduate School of Natural and Applied Sciences
_______________________ Prof. Dr. Tayfur Öztürk Director
I certify that this thesis satisfies all the requirements as a thesis for the degree of Master of Science.
_______________________ Prof. Dr. Fatih CANATAN Head of Department
This is to certify that we have read this thesis and that in our opinion it is fully adequate, in scope and quality, as a thesis for the degree of Master of Science.
_______________________ Assist. Prof. Dr. Arzu Tuncay Koç Supervisor
Examining Committee Members
Prof. Dr. Yalçın TANIK _______________________
Assist. Prof. Dr. Arzu Tuncay Koç _______________________
Prof. Dr. Mete SEVERCAN _______________________
Assoc. Prof. Dr. Sencer KOÇ _______________________
Levent Alkışlar _______________________
iii
ABSTRACT
DIRECTION FINDING WITH A UNIFORM CIRCULAR ARRAY PLACED
ON A MOVING PLATFORM
EVİRGEN, Evrim Anıl
MSc. , Department of Electrical and Electronic Engineering
Supervisor: Assist. Prof. Dr. Arzu Tuncay Koç
September 2001, 99 pages
In this study direction finding (DF) with a uniform circular array (UCA), which is
placed on a moving platform, is studied. First, the problem is formulated in which
the effects of both antenna array and source movements are included as Doppler
phase shifts. Then, assuming that the array moves in one direction with a constant
speed, a new DF algorithm is proposed. The proposed algorithm uses different time
samples of the UCA’s spatial samples to construct two virtual subarrays, and
therefore there is an inherent displacement between subarrays. In the proposed
algorithm, the direction of arrivals (DOAs) of the incoming signals are estimated by
using the sample correlation matrices of the two virtual subarrays. Thus proposed
algorithm is based on the ESPRIT algorithm, and it is named as SAPESA (synthetic
aperture ESPRIT algorithm). An iterative procedure is proposed for the estimation

iv
of the DOAs in both azimuth and elevation. The performance of the proposed DF
algorithm is investigated through computer simulations. Its performance is
compared to that of the MUSIC algorithm. It is observed that each algorithm is
superior to the other in different occasions.
Keywords : direction finding, uniform circular array, moving platform, synthetic
aperture.

v
ÖZ
HAREKETLİ PLATFORMA YERLEŞTİRİLEN DÜZGÜN DAİRESEL
ANTEN DİZİSİ İLE YÖN BULUNMASI
EVİRGEN, Evrim Anıl
Yüksek Lisans, Elektrik ve Elektronik Mühendisliği Bölümü
Tez Yöneticisi: Yrd. Doç. Dr.Arzu Tuncay Koç
Eylül 2001, 99 sayfa
Bu araştırmada, hareketli bir platform üzerine yerleştirilmiş düzgün dairesel bir
anten dizisi ile yön bulunması konusu üzerinde çalışılmıştır. Öncelikle problem
anten dizisi ve kaynak hareketlerini, Doppler faz kaymaları olarak içerecek şekilde
formüle edilmiştir. Daha sonra, anten dizisinin sadece bir yönde ve sabit hızla
hareket ettiği varsayılarak yeni bir yön bulma algoritması önerilmiştir. Önerilen
algoritma düzgün dairesel anten dizisinin değişik zaman ve yerlerdeki örneklerini
iki sanal altdizi oluşturmakta kullanır, bu nedenle iki altdizi arasında doğal olarak
uzaysal farklılık oluşacaktır. Önerilen algoritmada edinilen sinyallerin geliş açıları
sanal altdizilerin örnek korelasyon matrisleri kullanılarak kestirilir. Dolayısıyla,
önerilen algoritma ESPRIT algoritmasına dayanır ve SAPESA olarak adlandırılır.
Geliş açılarının yanca açısı ve yükseliş açısı kısımlarının kestirimi için tekrarlı bir
vi
metod önerilmiştir. Önerilen yön bulma algoritmasının performansı bilgisayar
simülasyonları ile araştırılmıştır. Bu algoritmanın performansı MUSIC
algoritmasının performansı ile karşılaştırılmıştır. Herbir algoritmanın diğerine
değişik durumlarda üstünlük sağladığı simülasyonlarda gözlenmiştir.
Anahtar Kelimeler: yön bulma, düzgün dairesel anten dizisi, hareketli platform,
sentetik aralık.

vii
ACKNOWLEDGEMENTS
I appreciate to Assist. Prof. Dr. Arzu Tuncay Koç for her valuable supervision
during the development and the improvement stages of this thesis. This thesis
would not be completed without her guidance and support.
I also wish to thank to ASELSAN Inc. for the facilities provided for the completion
of this thesis.
Thanks a lot to my parents, Aydın and Sevinç Evirgen; my sister, Beril Evirgen; and
my friends, Tuçe Sarı, Özgür Gören, Ziya Ulusoy, Aslı Dinç, Ayşegül Dersan,
Taner Yaldız, Ceren Serim, Ebru Solak, Anıl Helvacı, Özgür Aslan for their trust,
great encouragement and continuous morale support.

viii
TABLE OF CONTENTS
ABSTRACT ............................................................................................................. iii
ÖZ .............................................................................................................................. v
ACKNOWLEDGEMENTS ................................................................................... vii
TABLE OF CONTENTS ...................................................................................... viii
LIST OF FIGURES ............................................................................................... xii
LIST OF ABBREVIATIONS ..................................................................... .........xvi
CHAPTER
1 INTRODUCTION ................................................................................................. 1
1.1. Direction Finding ....................................................................................... 1
1.2. The Motivation and Purpose of This Work................................................ 7
1.3. Outline of the Thesis .................................................................................. 9
2 THE DF ALGORITHM.. ................................................................................... 10
2.1. Signal Modeling ....................................................................................... 11
2.1.1. Uniform Circular Array (UCA) ....................................................... 15
2.1.2. Doppler Effect .................................................................................. 16
2.1.3. Description of Source and Array Motions ....................................... 17
2.1.4. Signal Model .................................................................................... 24
ix
2.2. Subspace Based Methods ......................................................................... 26
2.2.1. Basic Principles ................................................................................ 26
2.2.2. Summary of the MUSIC Algorithm ................................................ 29
2.2.3. Summary of the ESPRIT Algorithm ................................................ 29
2.3. SAPESA (Synthetic APerture ESPRIT Algorithm) ................................. 31
2.3.1. Resolving Left-Right Ambiguity ..................................................... 36
2.3.2. Elevation Estimation (2-D SAPESA) .............................................. 39
2.4. Estimation of Source Signals and Estimation of Source Speeds ............. 42
2.5. Discrimination of Source Signals and Reflections................................... 44
3 SIMULATIONS .................................................................................................. 46
3.1. Explanations about the Simulations ......................................................... 46
3.1.1. Iterative MUSIC Algorithm for 2-Dimensional DOA Estimation ... 48
3.2. Simulations about 2-D SAPESA & MUSIC for Single Source Case ...... 49
3.2.1. Effect of the Number of Iterations on Performance ......................... 49
3.2.2. Effect of the Change in the Statistical Properties of the Source
Signals During the Observation Duration on Performance ............................. 51
3.2.3. Effect of the Number of Antennas on Performance ......................... 53
3.2.4. Effect of the Number of Samples on Performance .......................... 55
3.2.5. Effect of the Signal-to-Noise Ratio on Performance ....................... 56
3.2.6. Effect of the Percent Overlapping between Virtual Subarrays on
Performance ..................................................................................................... 57
3.2.7. Effect of the Sampling Frequency on Performance ......................... 59
x
3.2.8. General Comments on the Results of Simulations about 2-D
SAPESA & MUSIC for Single Source Case ................................................... 61
3.3.Simulations about 1-D SAPESA & MUSIC for Two Source Case ............... 61
3.3.1. Effect of the Number of Antennas on Performance ......................... 61
3.3.2. Effect of the Number of Samples on Performance .......................... 62
3.3.3. Effect of the Signal-to-Noise Ratio on Performance ....................... 63
3.3.4. Effect of the Percent Overlapping between Virtual Subarrays on
Performance ..................................................................................................... 64
3.3.5. Effect of the Sampling Frequency on Performance ......................... 66
3.4. Simulations about 2-D SAPESA & MUSIC for Two Source Case ......... 67
3.4.1. Effect of the Number of Iterations on Performance ......................... 67
3.4.2. Effect of the Number of Antennas on Performance ......................... 69
3.4.3. Effect of the Number of Samples on Performance .......................... 70
3.4.4. Effect of the Signal-to-Noise Ratio on Performance ....................... 72
3.4.5. Effect of the Percent Overlapping between Virtual Subarrays on
Performance ..................................................................................................... 73
3.4.6. Effect of the Sampling Frequency on Performance ......................... 75
3.4.7. General Comments on Simulations about 2-D SAPESA & MUSIC
for Two Source Case ........................................................................................ 77
3.5. Effect of Array Speed on the Performance of MUSIC for Coherent
Sources Case ........................................................................................................ 77
4 CONCLUSIONS ................................................................................................. 80
REFERENCES ....................................................................................................... 85
xi
APPENDICES ........................................................................................................ 87
A - DERIVATION OF CRAMÉR-RAO BOUNDS ............................................ 87
B - RESULTS ......................................................................................................... 94
xii
LIST OF FIGURES
FIGURE
2.1. Graphical explanation of the problem ............................................................... 12
2.2. Antenna placement of a uniform circular array ................................................ 16
2.3. Straight motion of sensor array ......................................................................... 18
2.4. Rotational motion of sensor array ..................................................................... 18
2.5. Motion of emitting source ................................................................................. 19
2.6. Description of array motion and construction of virtual subarrays................... 31
2.7. Antennas that are used to resolve left-right ambiguity ..................................... 36
2.8. Estimation of the emitter location in the case of the array placed on an aircraft
.......................................................................................................................... 39
3.1. Effect of the number of iterations on performance (w=30, w=25) .............. 50
3.2. Effect of the number of iterations on performance (w=60, w=60) .............. 50
3.3. Effect of the change in the statistical properties of the signal during observation
duration on performance (w=30, w=25) ..................................................... 52
xiii
3.4. Effect of the change in the statistical properties of the signal during observation
duration on performance (w=60, w=60) ..................................................... 52
3.5. Effect of the number of antennas on performance (w=30, w=25) ............... 53
3.6. Effect of the number of antennas on performance (w=60, w=60) ............... 54
3.7. Effect of the number of samples on performance (w=30, w=25) ................ 55
3.8. Effect of the number of samples on performance (w=60, w=60) ................ 55
3.9. Effect of the SNR on performance (w=30, w=25) ...................................... 56
3.10. Effect of the SNR on performance (w=60, w=60) .................................... 57
3.11. Effect of the percent overlapping on performance (w=30, w=25) ............ 58
3.12. Effect of the percent overlapping on performance (w=60, w=60) ............ 59
3.13. Effect of the sampling frequency on performance (w=30, w=25) ............ 60
3.14. Effect of the sampling frequency on performance (w=60, w=60) ............ 60
3.15. Effect of the number of antennas on performance .......................................... 62
3.16. Effect of the number of samples on performance ........................................... 63
3.17. Effect of the SNR on performance .................................................................. 64
3.18. Effect of the percent overlapping on performance .......................................... 65
3.19. Effect of the sampling rate on performance .................................................... 66
3.20. Effect of the number of iterations on performance (Source 1) ....................... 68
3.21. Effect of the number of iterations on performance (Source 2) ....................... 68

xiv
3.22. Effect of the number of antennas on performance for source 1 (Modulation
=AM) ................................................................................................................ 69
3.23. Effect of the number of antennas on performance for source 2 (Modulation
=AM) ................................................................................................................ 70
3.24. Effect of the number of samples on performance for source 1 (Modulation
=AM) ................................................................................................................ 71
3.25. Effect of the number of samples on performance for source 2 (Modulation
=AM) ................................................................................................................ 71
3.26. Effect of the signal-to-noise ratio on performance for source 1 (Modulation
=AM) ................................................................................................................ 72
3.27. Effect of the signal-to-noise ratio on performance for source 2 (Modulation
=AM) ................................................................................................................ 73
3.28. Effect of the percent overlapping on performance for source 1 (Modulation
=AM) ................................................................................................................ 74
3.29. Effect of the percent overlapping on performance for source 2 (Modulation
=AM) ................................................................................................................ 75
3.30. Effect of the sampling rate on performance for source 1 (Modulation=AM) . 76
3.31. Effect of the sampling rate on performance for source 2 (Modulation=AM) . 76
3.32. Effect of the array speed on the performance of MUSIC algorithm (All results
of 100 trials are given in the graph) ................................................................. 78

xv
3.33. Effect of the array speed on the rms errors of the estimates of azimuth only
DOAs for the MUSIC algorithm ...................................................................... 78
xvi
LIST OF ABBREVEATIONS
CRB Cramér-Rao Bound
DOA Direction of Arrival
ESPRIT Estimation of Parameters via Rotational
Invariance Techniques
MUSIC Multiple Signal Classification
SAPESA Synthetic Aperture ESPRIT Algorithm
SNR Signal-to-Noise Ratio
UCA Uniform Circular Array

1
CHAPTER 1
INTRODUCTION
1.1. Direction Finding
Array signal processing deals with the processing of signals carried by propagating
waves. The signal is received by an array of sensors located at different points in
space in the field of interest. The aim of array processing is to extract useful
characteristics of the received signal (e.g., its signature, direction, speed of
propagation). [1]
The goals of array processing are to combine the sensors' outputs cleverly
to enhance the signal-to-noise ratio (SNR) beyond that of a single sensor's
output,
to characterize the field by determining the number of sources of propagating
energy, the locations of these sources, and the waveforms they are emitting,
to track the energy sources as they move in space. [2]
The sources under consideration, may be uncorrelated (i.e., independent
from each other), correlated (i.e., dependent by some amount designated by the
correlation coefficient), or coherently related (i.e., correlation coefficient is 1, these
sources are identical) to each other.

2
The array itself takes a variety of different geometries depending on the
application of interest. The most commonly used configuration is the linear array, in
which the sensors (all of a common type) are spaced along a straight line. If sensor
spacings are uniform, this is called a uniform linear array (ULA). Another common
configuration is a planar array, in which the sensors form a rectangular grid or lie on
concentric circles. If the sensors are placed on a single circle with uniform spacings,
this is called a uniform circular array (UCA).
Array signal processing has a variety of application areas. Some of them are
exploration seismology, sonar, radar, radio astronomy, and tomography.
In exploration seismology, array processing is used to bring out the physical
characteristics of a limited region of the interior of the earth, which may have
potential for trapping commercial quantities of hydrocarbons.
In passive, listening-only sonar, the received signal is externally generated,
and the primary requirement of array processing is to estimate both the temporal
and spatial structure of the received signal field. The array sensors consist of sound
pressure-sensing electromechanical transducers known as hydrophones, which are
immersed in the underwater medium.
In radar array processing, a transmitting antenna is used to floodlight the
environment surrounding the radar site, and a receiving array of antenna elements
are used to listen to the radar returns caused by reflections from targets located in
the path of the propagating wave.

3
In tomography, array processing is used to obtain cross-sectional images of
objects from either transmission or reflection data. In most cases the object
illuminated from many different directions either sequentially or simultaneously
and the image is reconstructed from data collected either in transmission or
reflection. [1]
Besides having these various areas of applications, array signal processing
has one important purpose: direction finding (DF). A direction finder is a passive
device that determines the direction/angle of arrival (DOA/AOA) of radio-
frequency energy [3]. Purpose of most direction finding operations is to detect the
position of the emitter, which can be calculated from the bearings of several
direction finders.
There are 3 types of information, which can be extracted from the received
signal:
Amplitude information
Phase information
Frequency information
One needs to make at least two observations in order to find the direction.
One of these observations is used as reference. From other observations, amplitude,
phase and/or time-difference are determined with respect to this reference.
There are basically five different DF methods [3]:
4
Amplitude Information Based Methods: Methods using either direct or
comparative amplitude response of the antenna subsystem for DOA
information.
Phase Differential-to-Amplitude Based Methods: Methods using the phase
differential between disposed antenna elements with the phase differential
converted to amplitude DOA information.
Phase Information Based Methods: Methods using the phase differential
between disposed antenna elements for DOA information.
Time Information Based Methods: Methods using the time-of-arrival
differential between disposed antenna elements for DOA information.
High Resolution Methods: These methods are more complex than the previous
ones. They are based on correlation matrix, eigenvalue and eigenspace
computations. Computational costs of these methods are higher than those of the
previous ones, which is an important drawback for many practical systems.
In general, the problems of determining the number of sources and
estimating the DOAs of the received signals have been treated separately. A good
summary of high resolution methods as well as the initial approaches for the DOA
estimation, and also some approaches the determination of the number of sources,
can be found in [4].
In DF antenna array design the closest array elements have to be at most /2
apart so as to overcome the ambiguity problem, where is the wavelength of the
received signal [3].
5
In practice, there are two widely used array configurations:
Linear Arrays: Antennas are placed on a straight line. Traditionally, sensors are
equally spaced (uniform linear array-ULA); but non-uniform spacing is also
used. They have the so-called left-right ambiguity. Covers only 180 ° of
horizontal surface. They do not provide uniform resolution over the entire
space.
Circular Arrays: Antennas are placed on a circle, mostly with uniform spacing
(uniform circular array-UCA). They provide 360° azimuthal coverage. They can
provide also information about the source elevation angle due to its planar
structure. They provide better resolution capabilities compared to linear arrays.
There are basically two different types of DF [3]:
Cooperative direction finding, is the one in which the emitter of information is
interested in being received, detected and located. They operate in narrow
frequency bands, typically between 118-400 MHz
Uncooperative direction finding, is the case where the monitoring or worse still
the location of emissions by a third party is not in the interest of the originator.
As the frequency bands to be monitored vary with the users, most monitoring
direction finders are of broadband design.
Application areas of DF systems can be listed as follows [3]:
Military:
6
Cooperative Emitters: Air and marine navigation, search and rescue, para-
rescue, landing-drop-zone location, drop-zone assembly, personnel and
vehicle locators, emission control, frequency management.
Uncooperative Emitters: Communication intelligence (COMINT), electronic
order of battle (EOB), electronic support measures (ESM), emitter homing
and targeting, friendly force location, force strength assessments,
interference source location.
Civilian:
Cooperative Emitters: Air and marine navigation, emergency beacon
location, search and rescue, para-rescue, wildlife tracking, personnel and
vehicle location, position radio markers.
Uncooperative Emitters: Spectrum monitoring, spectrum density
calibrations, amateur radio-frequency management.
Government:
Cooperative Emitters: Same as in the civilian area.
Uncooperative Emitters: Regulatory enforcement, spectrum density
calibrations, spectrum monitoring, para-military.
Research:
Cooperative Emitters: Advanced modulation DF vulnerability, propagation
studies, component and device evaluation, remote environmental sensing.
7
Uncooperative Emitters: Advanced COMINT investigations, DF network
architectures, radio noise definitions, and electromagnetic studies of severe
weather.
1.2. The Motivation and Purpose of This Work
The motivation of this work is to investigate some DF algorithms' performance, in
the case of a moving antenna array platform, and to propose an effective algorithm
if possible. This is a fairly important subject since some DF systems are intended to
operate on moving platforms. This can be a land vehicle, a naval or an airborne
platform. As these arrays can move freely, they can be used more effectively
compared to the stationary ones.
The particular problem considered in this work is the estimation of DOAs,
in both azimuth and elevation, of L incident plane waves, at a known wavelength
, by using N data samples taken from a UCA with M antennas. The sources can
be anywhere in the 3-dimensional space, and therefore, the DOAs of the incoming
signals are estimated in both azimuth and elevation. The problem is formulated in
which the effects of both antenna array and source movements are included as
Doppler frequency shifts. Then assuming that the array moves only in the +x
direction with a fixed speed, a new DF algorithm is proposed. The array in that type
of motion can be thought as creating a synthetic aperture, simulating a ULA. This
situation makes it possible to apply the traditional ESPRIT algorithm [5,6] to this
virtual ULA. The proposed algorithm is based on this idea. Although this property
is used to develop the DF algorithm, this part of the algorithm only makes a
direction estimation covering (0) – (180) in azimuth. The UCA geometry of the
8
real array is used to increase the azimuthal coverage to (0) – (360) and to estimate
elevation angle, which is assumed to be between (0) – (90).
In the proposed algorithm, the temporal samples of the spatial samples of
the array are grouped into two virtual subarrays such that there is a known
displacement between the 1st, 2
nd and n
th elements of each virtual subarray. So if the
speed of antenna array is known, this displacement can be calculated. Finally, the
key idea in the ESPRIT algorithm is applied using these two virtual subarrays to
estimate the DOAs with the assumption that the characteristics of the signal under
concern do not change much during observation duration. This is the basic idea that
lies behind the development of the algorithm. There are several parameters, that
affect the algorithm’s performance and these parameters are restricted by some
practical values (for instance, the sampling rate cannot exceed a certain limit value).
Therefore, a compromise should be made between the performance of the proposed
algorithm and the practical limitations on the parameters that can improve the
performance. The performance of the proposed algorithm is investigated through
computer simulations, for which the variable parameters are chosen carefully in
making the compromise indicated above. The behavior of the algorithm is examined
by also observing the behavior of the MUSIC algorithm [7] for comparison
purposes. It is observed that the proposed algorithm outperforms the MUSIC
algorithm in some scenarios.

9
1.3. Outline of the Thesis
This thesis is organized as follows: In Chap. 2, the problem is stated and
formulated; the proposed DF algorithm is developed and described in detail. Some
practical values, limitations, and practical advantages related to the implementation
of this algorithm, are also indicated. Being related to the DOA estimation problem,
some ideas about the estimation of the complex envelopes of emitter signals,
estimation of source speeds, and discrimination of original signal from reflected
signals are discussed.
In Chap. 3, typical results of the computer simulations are presented, along
with the discussions related to effects of different parameters. To investigate the
performance of the proposed algorithm, the root-mean-square (rms) errors and bias
of DOA estimates are plotted along with those of the MUSIC algorithm; the
Cramér-Rao bounds (CRBs) on the rms errors of DOA estimates are also indicated
to see the lower bounds on the performance measure.
Finally, some concluding remarks are given in Chap. 4.

10
CHAPTER 2
THE DF ALGORITHM
In this study, the problem of estimating the direction of arrivals (DOAs) of plane
waves by using a uniform circular antenna array, which is placed on a moving
platform, is investigated. Aim of this study is to find the DOA estimates of L
narrowband plane waves from the measurements taken by an array consisting of M
sensors ( )(1 iMx
ty for 1,...,0 Ni ).
The problem is formulated, in which the effects of both antenna array and
source movements are included as Doppler phase shifts. Array movement under
concern includes straight and circular motions whereas only radial motion of the
sources relative to the array is included in the formulation.
In this chapter, the proposed algorithm (Synthetic APerture ESprit
Algorithm - SAPESA), which is based on the well-known ESPRIT algorithm, is
developed. Some limitations about the implementations of SAPESA are discussed,
whereas certain advantages of the algorithm are also given.
Basic principles of subspace based methods are presented briefly. A
summary of the MUSIC algorithm [7] is presented, since it will be used throughout
the simulations for comparison with the proposed algorithm. A summary of the
ESPRIT algorithm [5,6] is also given for being a basis to the proposed algorithm.
11
After the discussion of DOA estimation, other problems related to this
subject are briefly introduced, such as estimation of the complex envelopes of
source signals, estimation of source speeds, and discrimination of original signal
and its reflections. Some ideas about the solution of these problems are suggested in
the last sections of this chapter.
2.1.Signal Modeling
In order to fit a proper mathematical model to a practical problem and to solve it,
obviously some reasonable assumptions should be put forward. Details of the
assumptions given in this section can be found in [4]. For the problem under
concern the followings will be assumed:
It will be assumed that the transmission medium is isotropic and homogenous so
that the radiation propagates in straight lines.
The sources are assumed to be in the far field of the array. With these
assumptions, the radiations impinging on the array can be written in the form of
a sum of plane waves.
It will also be assumed that the transmission medium is non-dispersive so that
the signal waveforms do not change as they propagate.
Another assumption is that, the incoming signals are narrowband; time delay
between any two elements of the array is small compared to the time variations
and phase modulations of the carrier frequency. Therefore, the propagation of a
wavefront between sensors is modeled as a simple phase delay of the carrier.
It is assumed that the antennas are polarization matched to the incident wave.
12
Each channel of the receiver is assumed to be ideal in the sense that its transfer
characteristics are independent of frequency. The bandwidth of the receiver
employed should be selected to be at least equal the bandwidth of source
signals. If the transfer characteristics of the channels are not identical this can be
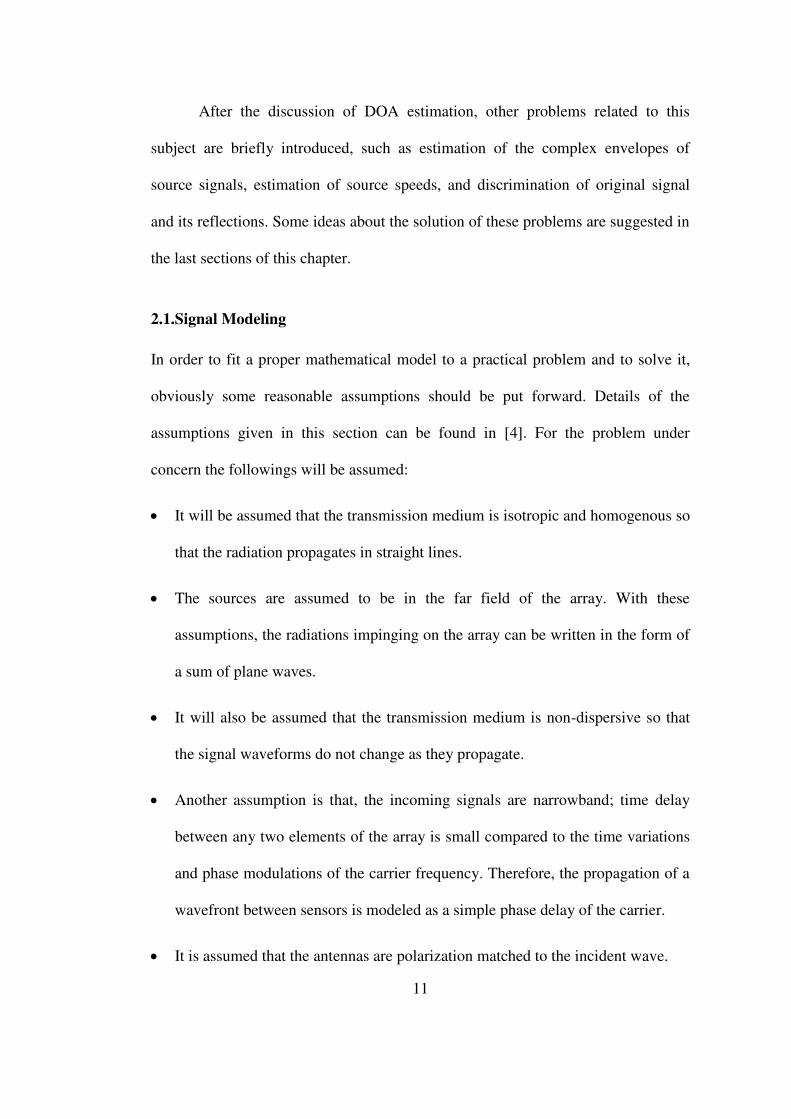
corrected by means of calibration. Figure 2.1 is given to introduce the notation
that will be used in signal modeling.
Figure 2.1. – Graphical explanation of the problem
w : azimuth angle of DOA,
w ( w ) : elevation angle of DOA )2
( ww ,
p : position vector of the sensor,
u : unit vector along the direction of propagation,
u : unit vector along the direction of arrival.

13
If the signal waveform is f(t) at the origin, then the sensor output is
)),(()()(~ww ptfPts , (2.1)
where
(.)P : the antenna pattern,
www : the DOA parameter vector,
: the time required for the wave to travel the distance between the origin and
sensor. It can be calculated as follows:
pu τ
c
, (2.2)
where
pu : the dot product of the vectors u and p ,
c : the speed of light ( 810.3c m/s).
The vector u can be decomposed as follows:
zwywwxww
zwywwxww
uuu
uuuu
.sin.cos.sin.cos.cos
.cos.sin.sin.sin.cos
(2.3)
(ux , uy , uz are the unit vectors in the directions +x, +y, and +z respectively).
Representing the amplitude and phase of the signal waveform at the origin
by )(t and )(t , respectively, and assuming that the receiver gain and phase are
known, the signal at the receiver output can be expressed as
))()(cos().().()(~0 tttPts w , (2.5)
14
where 0 is the center frequency of the narrowband receiver. Narrowband
assumption implies that, (t) and (t) remain unchanged in value during a time
interval of duration || ( tt and tt ). So (2.5) equation
becomes
))()(cos().().()(~0 tttPts w . (2.6)
Therefore, the complex envelope of the received signal is
0.).().()( )( jtj
w eetPts , (2.7)
and a sample at the receiver output at a time instant it can be written as
0).().()(j
iwi etaPts , (2.8)
where
)().()( itj
ii etta
. (2.9)
If the array consists of M sensors located at p1, p2, ..., pM , the receiver
consists of M identical channels, ignoring the interferences between channels
caused by the mutual couplings between array elements, outputs of each channel
can be written as
mj
iwmim etaPts0).().()(
. (2.10)
For L plane waves impinging on the array from L distinct directions,
denoted by vectors u1, u2, ..., uL, the output of the m'th channel is
L
l
τj
ilwlmimmloetaPts
1
).().()(
, (2.11)

15
where
c
puml
ml
.
The L plane wave signals considered may either be radiated from different
sources or may arise from multipath propagation.
In practice, measurements are often corrupted by a noise, which is additive,
stationary, zero-mean Gaussian, and the received signal at the output of the m'th
channel can be expressed as
)()()( imimim tntsty . (2.12)
2.1.1. Uniform Circular Array (UCA)
A uniform circular array with radius r is shown in Fig.2.2. Choosing the origin as
the reference point, and the x-axis as the reference line, the angular position of the
m'th sensor is
M
msm
2 for m = 0, ..., M-1 , (2.13)
and the position vector for the m'th sensor is
ysmxsmmururp .sin..cos. for m = 0, ..., M-1. (2.14)

16
Figure 2.2. – Antenna placement of a uniform circular array
Phase difference between the complex envelopes of the signals received at
the origin and at element m is obtained as (see equations (2.3), (2.11), and (2.14))
)cos(.cos.2
]sin.sincos..[coscos.2
.2. 00
smwlwl
smwlsmwlwl
ml
ml
r
r
c
puf
(2.15)
2.1.2. Doppler Effect
If there is a movement associated with the sensor array or the emitting sources,
there will be a Doppler effect in the measurements taken. [8]
Doppler frequency associated with a source and/or a sensor moving with
some speed and the source that emits a wave with wavelength is
r
d
vf . (2.16)

17
Here rv denotes the radial component of the source's velocity with respect
to the sensor. Then phase shift associated with the Doppler frequency shift
occurring at the m’th sensor due to the motion of the l’th source relative to this
sensor at time it is
i
rml
idml tv
t ..2.
. (2.17)
Here rmlv denotes the radial component of the l'th source's relative velocity with
respect to the m'th sensor of the array. The relative velocity can be investigated with
the help of three separate motions as will be explained in the next section.
2.1.3. Description of Source and Array Motions
The relative velocities associated with the source motion and associated with
the straight and rotational motions of the array will be combined in obtaining the
relative velocity of the l'th source with respect to the m'th sensor.
1) Relative velocity associated with the straight motion of sensor array
In this type of motion, each element and the center of the circle of array moves with
strv vector, which is a 3-dimensional vector with vstr and vstr representing the
corresponding azimuth and elevation angles of this vector, respectively, which is
defined using the similar notation given in Fig.2.1. Figure 2.3 shows a case for
which 0vstr and 0vstr .

18
Figure 2.3. - Straight motion of sensor array
The vector strv can be expressed in terms of vstr and vstr as
zvstryvstrvstrxvstrvstrstrvstrstrstr uuuvuvv .sin.cos.sin.cos.cos.. . (2.18)
2) Relative velocity associated with the rotational motion of sensor array
Figure 2.4. is given in order to introduce the notation for the rotational motion of
the array. This type of motion is 2-dimensional since the circle, where the sensors
located, stands in the xy-plane.
Figure 2.4. - Rotational motion of sensor array
In the rotational motion, the center of the circle of array is stationary while
each array element turns around the circle with the speed rotv , where

19
rotrotrot vrv . is the speed of each array element and rot is the angular speed
of the rotation of the array, and rotrot T2 is the rotation period of the array.
Therefore, the angular position of the m’th sensor at time it , due to the rotational
movement can be expressed as
)(.2
)( irotiism ttM
mt for m=0,…,M-1, (2.19)
The velocity vector for the m’th array element becomes
yismxismirotirotm ututtvtv ).
2)(sin().
2)(cos().()(
for m=0,…,M-1.
(2.20)
3) Relative velocity associated with the motion of emitting source
In order to explain the concept, Fig.2.5 is given.
Figure 2.5. - Motion of emitting source
20
The vector srclv represents the motion of the l’th source, and it can be
decomposed into two orthogonal parts as follows:
vrsrclrsrclvrsrclrsrclvsrclsrcl uvuvuv ... (2.21)
where
srclv : the speed of the l’th source
vsrclu : the unit vector along the direction of the l’th source’s motion
rsrclv : the radial component of the l’th source’s speed
lvrsrcl uu : the unit vector along the direction of the l’th source’s motion’s radial
component (see Fig.2.1)
rsrclv : the tangential component (perpendicular to the radial component) of the l’th
source’s speed
vrsrclu : the unit vector along the direction of the l’th source’s motion’s tangential
component
The interested part of the source's motion, which is interested, is the radial
motion of the source with respect to the sensor array (approaching or receding of
the source relative to the sensor array) since other part of source motion that is
perpendicular to the radial motion of the source with respect to the sensor array, has
no effect on the formulation, as long as it does not affect the DOA parameters.
Since Doppler frequency shift is related to the relative approaching/receding
motion of the interested emitter, the formulation includes only this type of motion,

21
whereas other motions, which are perpendicular to the straight line connecting the
sensor and the emitter, are out of concern in this formulation. It is known that the
relative approaching motion increases the Doppler frequency shift, whereas the
relative receding motion decreases it. [8]
To extract the necessary components that are parallel to the DOA vector, dot
product of sensor's velocity with lu (remembering that lu points the DOA of
the l’th source signal) and dot product of source's velocity with lu will be added.
(See Figs. 2.1, 2.3 - 2.5)
Therefore, the radial component of the relative velocity of the m’th sensor with
respect to the l’th source, at time it , is
lvsrcisrclvrotmirotvstristrrml uutvuutvutvv )).(()()).().(( . (2.22)
Using (2.3) and (2.18) - (2.21), (2.22) becomes
)()().()().(
).(sin).(cos).(sin).(cos).(cos
).2
2.).(sin(
).2
2.).(cos(
).(
).(sin
).(cos).(sin
).(cos).(cos
).(
ilivsrclirsrclivrscrlirsrcl
ziwlyiwliwlxiwliwl
yiirot
xiirot
irot
zivstr
yivstrivstr
xivstrivstr
istrrml
tututvtutv
ututtutt
uM
mtt
uM
mtt
tv
ut
utt
utt
tvv
(2.22)
(It should be noted that vsrcll uu )
Since the problem is too difficult to solve with this generality, some
reasonable assumptions should be put forward to continue further from this stage. A
simplifying assumption is that the speed of the straight and the rotational motions of
22
the array are constant; stristr vtv )( ; rotirot vtv )( . Furthermore, it can be assumed
that the sources' accelerations are not too much so the sources' velocities remain
constant during observation duration; ivtv rsrclirsrcl ,)( . (For the worst case in
which number of samples is large, e.g., 4000, and sampling rate is small, e.g., 50
kHz, observation duration becomes 4000*(1/50000) seconds = 0.08 seconds. For a
fast ground vehicle, acceleration is around 5.56 m/s2 . So the change in its speed is
0.44 m/s during observation interval, and it can be neglected.)
It can also be assumed that the sources' motions do not affect DOA
parameters (azimuth and elevation angles of the incoming wave) significantly. For
the worst case, in which the observation duration is long, e.g, 0.08 s and the average
speed of a fast ground vehicle is around 250 m/s, a displacement is of 20 meters but
since the sources are assumed to be in the far field of the array, a distance between
the sensor array and emitter is of at least 3-4 km. By some straightforward
calculations, the change in the direction of the emitter in azimuth is found to be
41016.1 x degree, and it can be assumed to be negligible. Therefore, the DOA
parameters can be considered to remain unchanged during observation duration.
Using these assumptions and applying dot product, (2.23) becomes:
.
cos.sin).2
2.sin(
cos.cos).2
2.cos(
.
sin.sin
cos.sin.cos.sin
cos.cos.cos.cos
.
rsrcl
wlwlirot
wlwlirot
rot
wlvstr
wlwlvstrvstr
wlwlvstrvstr
strrml
v
M
mt
M
mt
v
vv
(2.24)

23
Using the well-known trigonometric identities, (2.24) can be simplified further,
.cos.2
2.cos.
sin.sincos.cos).cos(.
rsrclwlwlirotrot
wlvstrwlvstrwlvstrstrrml
vM
mtv
vv
(2.25)
Therefore, the Doppler phase shift caused by the relative motions of the
m’th sensor and the l’th source, can be expressed as (see (2.17))
i
rsrclirotwlwlrot
wlvstrwlvstrwlvstrvstr
idml tv
M
mtr
v
t .2.sin.cos..
sin.sincos.cos).cos(.
.2
.
(2.26)
Thus the signal received at the output of the m'th channel of the receiver,
including the Doppler effect caused by the motions of the array and/or the sources,
can be written as (see Eqns. (2.11), (2.12) and (2.15))
)(
..exp.
).(2
cos.cos..2
.exp).().()(
1
im
L
l
idml
wliirotwlwlmil
im
tn
tj
ttM
mrjPta
ty
,for
m=0,…,M-1.
(2.27)
Substituting (2.26) in (2.27) concludes the formulation of the problem.

24
2.1.4. Signal Model
If it is assumed that the array moves only in the +x direction, i.e, vrot = 0,
vstr = 0, vstr = 0, then (2.27) becomes
)(
].cos.cos..[2
.exp.
2cos.cos.
2.exp).().(
)(1
im
L
l
irsrclwlwlstr
wlwlwlmil
im tn
tvvj
M
mrjPta
ty
for m=0,…,M-1. (2.28)
Equation (2.28) can be written in a more compact form as:
)()().,().()( 111 iMxiLxiLxLMxLiMxtntxtFAty , (2.29)
where
LLll ,..,.., 11
TiLiiLx tatatx )(...)()( 11
: complex envelopes of the incoming signals at
time it ,
wlwlMxL
M
mrjlmA
2
cos.cos...2
.exp),1( m=0,…,M-1, l=1,…,L :
array manifold matrix (for omnidirectional antennas),
)(1 iMx tn : vector of spatial samples of additive white Gaussian noise,

25
irsrclwlwlstriLxL tvvjdiagtF .cos.cos...2
.exp),(
, l=1,…,L : phase
shift matrix caused by array and source movements. The matrix ),( iLxL tF can be
re-written in combination of two matrices as follows
)().,(),( iLxLvrsrcliLxLvstriLxL tFtFtF , (2.30)
where
iwlwlstrivstr tvjdiagtF .cos.cos...2
.exp),( , l=1,…,L : phase shift matrix
caused by array
movement only,
irsrclivrsrcl tvjdiagtF ...2
.exp)(
, l=1,…,L : phase shift matrix caused by
source movements only.
Since N
iiMxty
11)(
is available, in the case under study, a more compact form
of (2.29) can be formed as
MxNLxNiLxLvrsrcliLxLvstrMxLMxN NXtFtFAY ).().,().( (2.31)
where
)(...)(111 NMxMxMxN tytyY
: data matrix,
)(...)( 111 NLxLxLxN txtxX
,

26
)(...)( 111 NMxMxMxN tntnN
.
Now the problem is to estimate when MxNY is available. In order to solve
this problem, the use of a high resolution method is attractive.
2.2. Subspace Based Methods
Throughout the subsections, M, L, and N will represent the number of antennas, the
number of sources and the number of samples, respectively.
2.2.1. Basic Principles
The subspace based methods exploit the underlying structure of the array
correlation matrix:
IARAtytyERH
xi
H
i .)(.).()().( 2 , (2.32)
where
)(...)()( 1 LaaA : array manifold matrix,
)(a : array steering vector,
)().( i
H
ix txtxER : signal correlation matrix,
2 : power of the additive white Gaussian noise.
These methods are based on the fact that the signal part of the array output
vectors lies in the so-called signal subspace, which is a lower dimensional subspace
of the array manifold.

27
If the rank of the signal correlation matrix is L , then the rank of the matrix
H
x ARA .. is also L since A is assumed to be of full rank due to the unambigious
array assumption. Any vector in the null space of the matrix H
x ARA .. is an
eigenvector of R with the corresponding eigenvalue 2 . Since H
x ARA .. is positive
semi-definite, 2 is the smallest eigenvalue of R with multiplicity LM . The
array covariance matrix has the eigendecomposition,
H
NN
H
SS
M
i
H
iii EEEEeeR ...... 2
1
, (2.33)
where 2
11 ...... MLL are the eigenvalues of R , and Mee ,...,1
denote the corresponding orthonormal eigenvectors, S is a diagonal matrix with
diagonal entries being L ,...,1 which will be denoted by Ldiag ...1 ,
and LS eeE ...1 , MLN eeE ...1 . Since the range space of
H
x ARA .. and the range space of SE are the same, the L -dimensional range space
of SE is contained in the L -dimensional range space of A . Obviously, LL ,
equality being true only if all the signal waveforms are noncoherent, in which case
the range spaces of SE and A coincide. The range space of SE is referred to as the
signal subspace and its orthogonal complement, the range space of NE , is
commonly called the noise subspace although in fact the noise has values in the
whole M -dimensional space.
It must be noted that only when LL , any vector in the noise subspace is
also in the null space of H
A , i.e.,
28
0).( N
HEA . (2.34)
The subspace based methods use either the signal subspace or the noise subspace
for the estimation of the signal parameters. In practice a finite number of noisy
data vectors is available, i.e. 1
0)(
N
iity . Therefore, an estimate of the array
correlation matrix, which is called the sample correlation matrix, should be found.
The most popular estimate for R is
)(.)(.1ˆ
i
H
i
i tytyN
R . (2.35)
The issue is then the estimation of either signal or the noise subspace. The
estimates of these subspaces are commonly found either from the
eigendecomposition of the sample correlation matrix, or equivalently, from the
singular value decomposition of the data matrix itself, although there are other
approaches which do not use eigendecomposition techniques in an attempt to
reduce the computational complexity at the cost of performance.
The signal and noise subspaces can be estimated from a consistent estimate
R . Let M ...1 represent the eigenvalues of R , and Mee ,...,1 are the
corresponding eigenvectors. Assuming that L is known, the signal and noise
subspace estimates can be formed as MxLLS eeE ...ˆ
1 and
)(1 ...ˆ
LMMxMLN eeE , respectively.
A good summary of subspace based methods and other approaches for DF
can be found in [4].

29
2.2.2. Summary of the MUSIC (Multiple Signal Classification) Algorithm [7]
In the MUSIC algorithm, DOA estimates are obtained using the noise subspace.
The algorithm is based on the fact that the noise subspace is orthogonal to the signal
subspace, which implies that the noise subspace is orthogonal to the array steering
vectors corresponding to the DOAs if the rank of the signal covariance matrix is
equal to the number of signals, L (i.e., signals are noncoherent).
Outline of the MUSIC algorithm:
1. The MUSIC spectrum is calculated as
)(.ˆ.ˆ).(
)().()(
aEEa
aaP
H
NN
H
H
, (2.36)
where can be either one (azimuth only, ) or two (azimuth and
elevation, ) dimensional. The MUSIC spectrum corresponds to the
reciprocal of the distance between two subspaces for a given vector and it
has peaks around the locations of DOAs.
2. Assuming that L is known, the estimates of the DOAs are determined as the
locations where the MUSIC spectrum has its L peaks.
2.2.3. Summary of the ESPRIT (Estimation of Signal Parameters via
Rotational Invariance Techniques) Algorithm [5,6]
In the classical ESPRIT algorithm two identical subarrays, which are placed at two
different locations with a known displacement, are used to sample the same signals
at the same time. Since there is a displacement invariance between these subarrays,
30
the only difference between the samples of these subarrays is the phase difference
related to the DOAs of the incoming signals. The two signal subspaces, associated
with these identical subarrays having a known displacement d , are related to each
other by a shift matrix as follows:
21 . SS EE , where
)cos..
2.exp( wldjdiag
l=1,…,L. (2.37)
Therefore, after determining , the DOAs in azimuth only can be determined by
using the eigenvalues of .
Outline of the ESPRIT algorithm:
1. Consider the eigendecomposition of the sample covariance matrices for each
subarray, MxM
R1ˆ and
MxMR2ˆ . Form the corresponding signal subspace
estimates MxLSE 1
ˆ and MxLSE 2
ˆ .
2. is determined by solving 21ˆ.ˆˆ
SS EE either in a least squares or in a total
least squares sense. [9]
3. From the eigenvalues (μ1, μ2, ..., μL) of , the estimates of the azimuth only
DOAs can be found using the following relation:
/..2cosˆ 1
dl
wl for Ll ,...,1 . (2.38)

31
2.3. SAPESA (Synthetic APerture ESPRIT Algorithm)
When the array is moving in one direction with a constant speed, its trajectory is a
straight line. Proposed algorithm uses different time samples of the real array to
generate two virtual subarrays. Since different time instants of the same array are
used to form the two subarrays, there is a displacement between them inherently. To
introduce the idea Fig.2.6. is given.
Figure 2.6. – Description of array motion and construction of virtual subarrays
In this algorithm the first K snapshots are assumed to behave as the first
virtual subarray and the last K snapshots are assumed to behave as the second
virtual subarray ( NK ). If KN 2 , virtual subarrays are overlapping. If
KN 2 , virtual subarrays are non-overlapping. Since a displacement of
sstr TKNvd )..( is present between the n’th samples taken from each virtual
subarray, the classical ESPRIT algorithm can be applied for this case as if two
identical subarrays, which are placed d apart, are present.
32
The estimates of correlation matrices, signal subspaces, and shift matrix can
be calculated as in the ESPRIT algorithm to estimate DOAs. This method is a close
approximation of ESPRIT as long as the statistical properties of the signal under
concern do not change much during the observation duration.
Two signal subspace estimates are related by a shift matrix:
21ˆ.ˆˆ
SS EE , (2.39)
where
1ˆ
SE : the signal subspace’s estimate of the first virtual subarray,
2ˆ
SE : the signal subspace’s estimate of the second virtual subarray,
: estimate of the shift matrix that relates the two virtual subarrays, and that has
the diagonal elements being approximated as
)cos.)..(.2
.exp( l wlsstr TKNvj , l=1,…,L. (2.40)
Although is not a diagonal matrix in SAPESA, assuming that the off diagonal
elements are negligibly small compared to the diagonal elements, the estimates of
DOAs in azimuth can be found from l . Eigenvalues of gives the values of l
from which wl can be estimated.

33
Outline of SAPESA:
)(...)( 101 KMxKtytyY : data matrix for virtual subarray 1
)(...)( 12 NKNMxKtytyY : data matrix for virtual subarray 2
1. From the corresponding data matrices MxK
Y 1 and MxK
Y 2 , the sample
covariance matrices are calculated for each subarray, as follows
K
YYR
H
MxM
111
.ˆ and K
YYR
H
MxM
222
.ˆ . (2.41)
2. Consider the eigendecomposition of both 1R and 2R . Form 1ˆ
SE and 2ˆ
SE using
the orthonormal eigenvectors corresponding to the L largest eigenvalues of 1R
and 2R , respectively.
3. It is assumed that 21ˆ.ˆˆ
SS EE is the relation between 1ˆ
SE and 2ˆ
SE . The shift
matrix is calculated by using a least squares approach
#
21ˆ.ˆˆ
SS EE
4. From the eigenvalues (μ1, μ2, ..., μL) of , the azimuth only DOA estimates are
found using the following relation:
/..2cosˆ 1
dl
wl , (2.42)
where
sstr TKNvd )..( (2.43)

34
is the displacement between the two virtual subarrays as defined before.
While performing this method, there are certain limitations as indicated
below:
1. It should be guaranteed that the source signals received in two virtual subarrays
are as close to each other as possible (i.e., statistical properties of the signals are
similar; they are the same in the ideal case). So that the shift information can be
extracted well enough to estimate the DOAs in azimuth accurately.
The observation duration should be chosen small enough so that the changes in
the source signals are small. On the other hand, choosing a short observation
duration results in less known signal characteristics and less information
gathered. So a compromise should be made between these two contradicting
situations.
2. Appropriate values of strv , ss fT 1 , K, and N should be chosen so that the
arguments of l satisfies the following inequality (see (2.40)):
wlsstr TKNv cos.)..(.
2 (2.44)
which implies
5.0)..(
sstr
d
TKNvR . (2.45)
Otherwise, phase jumps occur in phase of eigenvalues of vs. DOA graphs
and the mapping given in (2.42) becomes ambiguous, i.e., two different DOAs
35
produce the same phase shifts, and therefore, it is not possible to correctly
determine the DOA estimates.
On the other hand, choosing dR closer to zero makes the algorithm less
sensitive to DOA changes. The algorithm still works although its performance
degrades.
So the best choice of dR appears to be 0.5, for which the resolution is the best
and the performance is optimum (in terms of the rms errors of the DOA
estimates).
Besides the limitations, this algorithm has two important practical
advantages:
1. SAPESA needs only one array for DF instead of two identical subarrays, unlike
the classical ESPRIT algorithm. Some drawbacks of using two identical
subarrays are to manufacture two identical subarrays, and to match the channels
of these two subarrays by means of calibration, and therefore, a larger cost for
the system.
2. As in the classical ESPRIT algorithm, SAPESA does not need exact knowledge
of array manifold unlike MUSIC and some other subspace-based algorithms.
The measurement process to have a knowledge of array manifold, is difficult
and has a cost in practice, and this fact makes SAPESA an attractive alternative
to the algorithms, which use exact knowledge of array manifold for the
estimation process.
36
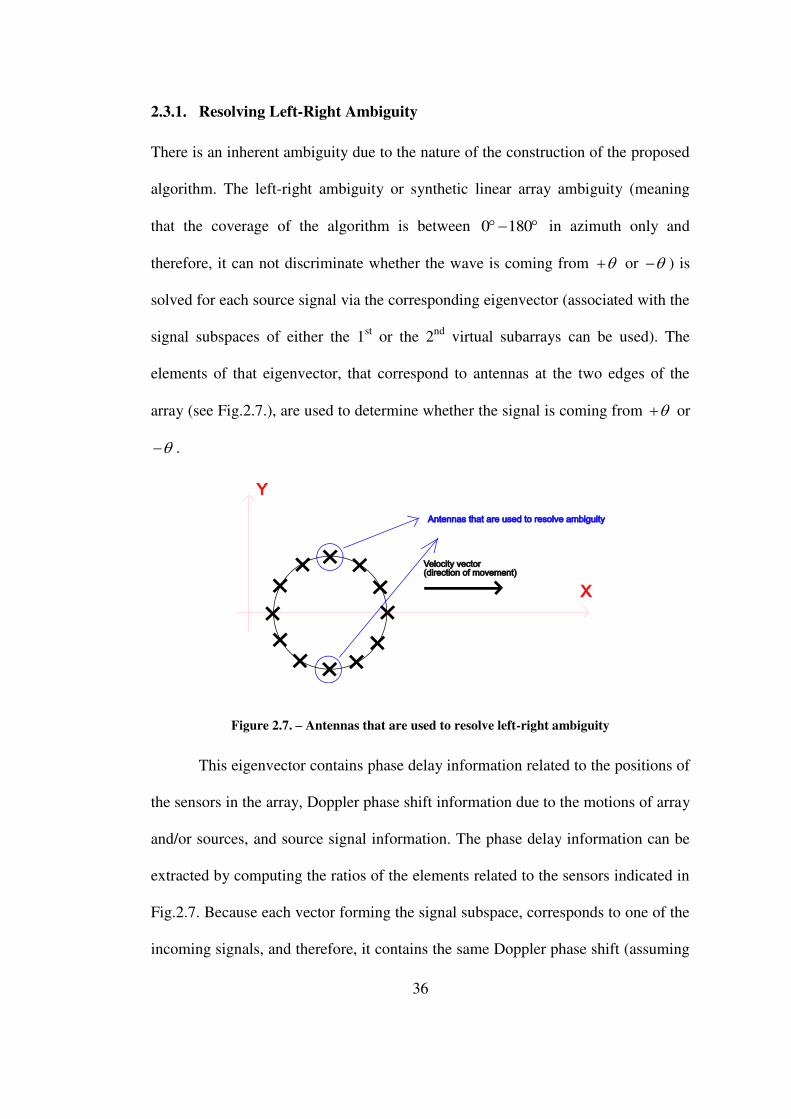
2.3.1. Resolving Left-Right Ambiguity
There is an inherent ambiguity due to the nature of the construction of the proposed
algorithm. The left-right ambiguity or synthetic linear array ambiguity (meaning
that the coverage of the algorithm is between 1800 in azimuth only and
therefore, it can not discriminate whether the wave is coming from or ) is
solved for each source signal via the corresponding eigenvector (associated with the
signal subspaces of either the 1st or the 2
nd virtual subarrays can be used). The
elements of that eigenvector, that correspond to antennas at the two edges of the
array (see Fig.2.7.), are used to determine whether the signal is coming from or
.
Figure 2.7. – Antennas that are used to resolve left-right ambiguity
This eigenvector contains phase delay information related to the positions of
the sensors in the array, Doppler phase shift information due to the motions of array
and/or sources, and source signal information. The phase delay information can be
extracted by computing the ratios of the elements related to the sensors indicated in
Fig.2.7. Because each vector forming the signal subspace, corresponds to one of the
incoming signals, and therefore, it contains the same Doppler phase shift (assuming

37
that the array motion is in one direction only) and the same source signal
information. This observation leads to the idea of resolving left-right ambiguity and
that of estimating the elevation angle as well, by using the phase delay information
extracted as explained above. Details of the estimation of elevation angle will be
given in the following section.
The idea explained in the previous paragraph, is originated from the
following observation: Remembering (2.28), and assuming that the antennas have
omnidirectional patterns, the received signals correspond to the sensors m=M/4 and
m=3M/4 can be expressed as follows (M is assumed to be an integer multiple of 4):
)(
].cos.cos..[2
.exp.
4.
2cos.cos.
.2.exp).(
)( 4/
1
4/ iM
L
l
irsrclwlwlstr
wlwlil
iM tn
tvvj
M
M
rjta
ty
(2.46)
)(
].cos.cos..[2
.exp.
4
3.
2cos.cos.
.2.exp).(
)( 4/3
1
4/3 iM
L
l
irsrclwlwlstr
wlwlil
iM tn
tvvj
M
M
rjta
ty
(2.47)
Although the signal only parts in (2.47) and (2.48) contain the summation of L
terms, it seems reasonable to consider the ratio of each term separately to build the
idea. Assuming that there is only one incoming signal (L=1) and no noise, may be
helpful in explaining the idea.

38
.sin.2.cos..2
.exp
2
3cos
2cos.cos.
.2.exp
2
3cos.cos.
.2.exp
2cos.cos.
.2.exp
4/3
4/
wlwl
wlwlwl
wlwl
wlwl
M
M
rj
rj
rj
rj
y
y
(2.48)
Since it is known that each eigenvector in the signal subspace gives
characteristics of the corresponding signal, the ratio of the corresponding elements
of that vector can be approximated as follows:
wlwl
l
l
l
rj
Me
Me
sin.2.cos.
.2.exp
)14/3(
)14/(, l=1,...,L, (2.49)
where le denotes the eigenvector (in the signal subspace’s estimate for the 1st
virtual subarray) corresponding to the l’th DOA estimate in azimuth.
Remark: It should be emphasized that the signal subspace’s estimate for the 2nd
virtual subarray can also be used for left-right ambiguity resolution.
From the sign of the argument of the ratio given in (2.49) )(l , it is
possible to determine that whether the signal is coming from or . ( wlsin is
positive for 0wl and wlsin is negative for 0wl )
The correction procedure can be summarized as follows (For 25.00 r ):
If 0 l , then ll ˆ360ˆ ,
else l is correct, do not make a correction.

39
2.3.2. Elevation Estimation (2-D SAPESA)
Although DF systems are generally intended to estimate DOA in only 1-dimension
(azimuth only), in some situations, 2-dimensional (azimuth and elevation) DOA
estimation is needed, especially if the receiving sensor array and/or the emitter
are/is placed on an airborne platform.
In case of the emitter located on the ground and the sensor array placed on
an aircraft, approximate position of the emitter can also be determined since the
distance between the emitter and the aircraft can be calculated using the altitude of
the aircraft and the estimated elevation angle as depicted in Fig.2.8.
Figure 2.8. – Estimation of the emitter location in the case of the array placed on an aircraft
(Distance between the aircraft and the emitter) = (Altitude of the aircraft) / sin
(2.50)
This scenario shows how important the elevation angle estimation can be in some
situations.
40
The proposed DF algorithm, SAPESA, can estimate DOA in 1-D, but it can
be further developed for estimating DOA in 2-D. DOA azimuth is estimated as
previously in SAPESA but a correction factor is included to compensate for the
effect of elevation. Thus 2-D SAPESA is an iterative algorithm. In the first step of
the iteration process elevation angle is chosen to be 0°. For elevation estimation, the
same idea as in the left-right ambiguity resolution is used. The phase delay
information is extracted by computing the ratios of certain elements of each vector
in the estimate of the signal subspace for either the 1st or the 2
nd virtual subarrays.
Remembering (2.49), and using the similar reasoning, the ratio of the elements of
the signal eigenvector related to m=0 and m=2M/4 can be approximated as follows
(M is assumed to be an integer multiple of 4):
wlwl
l
l
l
rj
Me
e
cos.2.cos.
.2.exp
)14/2(
)1(, l=1,...,L. (2.51)
After estimating the azimuth angle for the l’th source, the elevation angle
estimate can be found by combining the phase information obtained from l and
l ;
wl
l
wl
l
lr
wr
w
ˆcos...4
.cos.ˆsin...4
.cos.ˆ 11 (2.52)
where w and w are the weighting coefficients.
Outline of 2-D SAPESA:
1-3. Steps 1-3 are the same as in the 1-D SAPESA. From the eigenvalues (μ1, μ2,
..., μL) of , azimuth angle of the incident wave is estimated.

41
/..2cosˆ 10
dl
wl , (2.53)
where
sstr TKNvd )..(
It should be noted that elevation is assumed to be 0° in this step as a starting
point for the iteration process.
4. Using the estimated azimuth angle, elevation angle is estimated as follows
(remember (2.49), (2.51) and (2.52)) :
)14/3(
)14/(ˆ
Me
Me
l
ll ,
)14/2(
)1(ˆ
Me
e
l
ll ; (M is an integer multiple of 4)
i
wl
l
i
wl
li
wlr
wr
w
ˆcos...4
ˆ.cos.ˆsin...4
ˆ.cos.ˆ 11
,
where le denotes the signal subspace eigenvector corresponding to the l’th
azimuth angle estimate for the first virtual subarray
Remark: In this work, i
lw ˆsin 2 and i
lw ˆcos2 are chosen arbitrarily as
the weighting coefficients and used to average two different elevation estimates.
Different weighting coefficients can be used but this pair is used in the
simulations whose results are given in the following chapter. For 25.0r , the
elevation estimates are unambigious, i.e., the field of view is 900 w .
42
Remark: It should be noted that instead of the signal eigenvectors of the first
virtual subarray, signal eigenvectors of the second virtual subarray can also be
used for elevation angle estimation.
5. Using the estimated elevation angle, the estimate of azimuth angle is updated as
follows:
1
1
ˆcos)./.(.2cosˆ
i
ll
li
wld
e
(2.54)
Remark: Although the azimuth estimates are found by (2.54), the following
equation is used in this work to improve the convergence rate of the algorithm:
2
ˆˆcos)./.(.2
cos
ˆ
1
1
1
i
wli
ll
l
i
wl
d
e
. (2.55)
6. Steps 4 & 5 can be performed iteratively to get better estimates. But while
performing such an iterative estimation technique, the convergence of the
estimates should be checked (for instance; if 211 ˆˆˆˆ i
l
i
l
i
l
i
l , continue
the iteration loop, else stop), otherwise wrong estimates could be obtained.
2.4. Estimation of Source Signals and Estimation of Source Speeds
Once the DOAs of the incoming signals are estimated, the next step is to estimate
the complex envelopes of these signals. Equation (2.31) can be rewritten as:
MxN
FF
LxNMxLMxN NXAY ).( , (2.56)
where

43
LxNiLxLvrsrcliLxLvstr
FF
LxN XtFtFX ).().,( , (2.57)
and others are as defined in section 2.1.4.
After estimating the DOAs, FF
LxNX can be found by solving (2.56), for
instance as follows:
MxNLxM
FF
LxN YAX .)ˆ(ˆ # . (2.58)
Since the speed of the array is known, the Doppler effect due to the array
movement can be compensated by the following multiplication:
)(ˆ).,ˆ()(ˆ11 i
FF
Lxivstri
F
Lx txtFtx , i=0,...,N-1 (2.59)
where )(ˆ1 i
FF
Lx tx represents the ith
column of FF
LxNX . The signal, )(ˆ1 i
F
Lx tx , includes
only the source signal and the Doppler phase shift due to the source motion (see
(2.57)).
Since this method relies on the assumption that the DOA estimates are good
enough, the proper DF algorithm should be carefully chosen.
Phase changes of F
LxNX are due to only source motions and source signals.
So source motion can be estimated by differentiating phase of F
LxNX with respect to
time, averaging them and multiplying the result with sT.2
, a factor, which comes
from (2.28).
Averaging the derivatives related to the time instants, for which the
amplitudes of the signal are high, is more appropriate for the explained purposes

44
while their phases are less affected from noise than the others, which means that
more accurate estimates of the source speed can be obtained by this way.
Finally, complex envelopes of the source signals can be estimated by
compensating the effect of source movements as follows:
)(ˆ).(ˆ)(ˆ1
#
1 i
F
LxivrsrcliLx txtFtx , i=1,...,N (2.60)
2.5. Discrimination of Source Signals and Reflections
After estimating the source signals as discussed previously, the reflection signals
can be determined. The idea is as follows: a time delay in the reflected signals with
respect to the original signals can be observed if the sampling rate is high enough.
As a numerical example:
metersmTc
skHz
T
kHzf
smc
s
s
s
60010*6.
10*2500
1
500
10*3
2
6
8
For this case, a time delay of at least sT can be observed, if the reflected
signal travels 600 meters more than the original one if a sampling rate of 500kHz is
used.
So the cross-correlation function of two different estimated source signals
can be used as a measure for determining whether a signal is the reflection of
another, since the peak of this function is high if they are similar signals. Also by
examining the cross-correlation function it can be determined which signals are the
45
delayed version of another. Therefore, the delayed signals are determined as the
reflections.
Comparing the powers of similar estimated source signals may be another
criterion for determining the reflected signal. Obviously, the reflected one have less
energy than the original signals and this criterion may be used if the time delay
between signals are not enough for using the previous approach.
46
CHAPTER 3
SIMULATIONS
3.1.Explanations about the Simulations
Mainly two algorithms are considered for DF purposes: MUSIC and SAPESA
(Synthetic Aperture ESPRIT Algorithm). It is observed by the simulations that each
algorithm is superior to the other in different occasions.
Simulations are carried out with the MATLAB, in order to observe the
effects of several parameters for the SAPESA and MUSIC. Those parameters are
the change in the statistical properties of the signal during observation duration,
number of samples, number of antennas, percent of the overlapping between virtual
subarrays, sampling rate, and signal-to-noise ratio (SNR). In the following sections,
the SNR for each signal is defined as
2log.10
rSignalPoweSNR , (3.1)
where 2 is the power of the additive white Gaussian noise corrupting the
measurements.
Unless otherwise stated, the parameters chosen as follows: number of
antennas, M=4; total number of samples, N=900; number of samples for each

47
virtual subarray, K=675; speed of the array, strv =88.2m/s; center frequency of the
signal(s), cf =500MHz; sampling frequency, sf =66.150kHz; relative source
speed(s), rsrclv =0m/s; radius of the array, 25.0r .
In chosing the parameters, it is intended to select the parameters close to
practical values and to keep the parameter
sstr TKNvd )..(
, which is related to
SAPESA (see (2.43)), around 0.5 to observe the best performance of SAPESA. For
some simulations, two parameters are varied simultaneously in keeping that
parameter, around 0.5 and observe only the effect of the varied parameters.
For each data point, simulations are repeated 100 times. Root-mean-square
(rms) errors and bias errors of the DOA estimates, for these 100 trials are given in
the graphs. Bias errors for azimuth and elevation estimates are defined as follows:
100)(ˆ)ˆ(100
1
Trial
wlwlwl TrialBiasError ,
100)(ˆ)ˆ(100
1
Trial
wlwlwl TrialBiasError .
The Cramér-Rao bounds (CRBs) on the rms error of DOA estimates are also given
for each case for performance evaluation.
It is expected that the type of the modulation of source signal affects the
performance of SAPESA, since the changes in the phase of the received signal is
more in phase modulation and frequency modulation compared to the amplitude
modulated and continuous wave signals. So the simulations are performed for both
AM and FM type modulations but it is observed that the type of signal modulation
48
does not affect performance much, so only the results of simulations for AM type
modulated signals are given in this chapter.
3.1.1. Iterative MUSIC Algorithm for 2-Dimensional DOA Estimation
Since the DOAs are estimated in both azimuth and elevation (2-dimensional), the
MUSIC spectrum is 2-dimensional for this case. Therefore, a 2-dimensional search
has to be performed. The following peak search algorithm for the MUSIC spectrum
is used in the simulations:
1. First the elevation angle is assumed to be zero for each signal. The MUSIC
spectrum is calculated with 310 degree resolution for different azimuth angles
between 0 - 360 degrees. Then a peak search is performed over this 1-
dimensional spectrum to estimate the azimuth angles corresponding to L peaks
of this spectrum, where L is the number of signals.
2. The MUSIC spectrum is calculated with 310 degree resolution for different
elevation angles between 0 - 90 degrees, for each of the L azimuth angles
estimated in the previous step. Then a peak search is performed separately over
these 1-dimensional spectras for each signal to update the estimates of the
elevation angles.
3. The MUSIC spectrum is calculated with 310 degree resolution for different
azimuth angles between 0 - 360 degrees, for each of the L elevation angles
estimated in the previous step. Then a peak search is performed separately over
these 1-dimensional spectras for each signal to update the estimates of the
azimuth angles.
49
4. Steps 2 & 3 are performed iteratively until two successive azimuth (or
elevation) estimates have a difference smaller than a certain limit value.
During the simulations whose results are given in the following sections,
iteration loop is repeated until two successive azimuth estimates have a difference
smaller than 310 degree or iteration loop is repeated 10 times.
3.2.Simulations about 2-D SAPESA & MUSIC for Single Source Case
In the simulations whose results are given in the subsections of this section, sources
are located at either 25,30 or 60,60 . The SNR is 10dB for
single source case, unless otherwise stated.
For the simulations with single source, the reason for repeating every
simulation for different angle pairs ( 25,30 and 60,60 ) is that,
due to the synthetic linear array structure, the performance of SAPESA is different
for different azimuth angles, and it is thought that it would be better to observe this
behavior.
3.2.1. Effect of the Number of Iterations on Performance
In this section, it is intended to show the effect of the number of iterations on the
performances of SAPESA and MUSIC algorithms. The performance improvement
of SAPESA with iterations can be observed from Figs. 3.1 and 3.2.
It is observed that the iterative MUSIC algorithm converges after 2-3
iterations. Although it can not be seen by the graphs given, number of iterations of
the iterative SAPESA algorithm required for convergence varies between 6 steps to

50
50 steps depending on the trial but limiting the number of steps to 10 was observed
to be reasonable for a good performance, as it can be seen from the graphs.
Since it was observed that the first step of the iteration of SAPESA does not give
reasonable results, so the corresponding results will not be presented in the
following subsections.
0 2 4 6 8 10 120
2
4
6
8
10Effect of number of iterations on performance
Azim
uth
RM
S e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
CRB
0 2 4 6 8 10 120
2
4
6
8
10Effect of number of iterations on performance
Azim
uth
Bia
s e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
0 2 4 6 8 10 120
2
4
6
8Effect of number of iterations on performance
Ele
vation R
MS
err
or
Number of iterations
Iterative MUSIC
Iterative SAPESA
CRB
0 2 4 6 8 10 12-2
0
2
4
6
8Effect of number of iterations on performance
Ele
vation B
ias e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
Figure 3.1. - Effect of the number of iterations on performance (w=30, w=25)
0 2 4 6 8 10 120
5
10
15
20Effect of number of iterations on performance
Azim
uth
RM
S e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
CRB
0 2 4 6 8 10 120
5
10
15
20Effect of number of iterations on performance
Azim
uth
Bia
s e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
0 2 4 6 8 10 120
0.1
0.2
0.3
0.4
0.5Effect of number of iterations on performance
Ele
vation R
MS
err
or
Number of iterations
Iterative MUSIC
Iterative SAPESA
CRB
0 2 4 6 8 10 120
0.1
0.2
0.3
0.4Effect of number of iterations on performance
Ele
vation B
ias e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
Figure 3.2. - Effect of the number of iterations on performance (w=60, w=60)
51
3.2.2. Effect of the Change in the Statistical Properties of the Source Signals
During the Observation Duration on Performance
In this section, it is intended to show the effect of the change in the statistical
properties of source signals during observation duration on performance of
SAPESA. The correlation coefficient between the first K samples and the last K
samples of the complex envelope of the emitted signal,
)(...)( 101 NxN tstss , is taken as a measure to observe this effect as
follows:
H
VAVA
H
VAVA
H
VAVA
ssss
ssntnCoefficieCorrelatio
2211
21
...
.
where
)(...)( 1011
KxKVA tstss
)(...)( 112
NKNxKVAtstss .
For the simulations presented in this chapter, the signal is created to observe this
specific behavior and it is not an AM signal.
It is observed by the simulations whose results are given in Figs 3.3 and 3.4
that the performance of the SAPESA increases, as the changes in the statistical
properties of the source signals get smaller, i.e., correlation coefficient gets larger.
For both 25,30 ww and 60,60 ww cases optimum performance is
achieved when correlation is between 0.8 and 1.0. Although this parameter has very
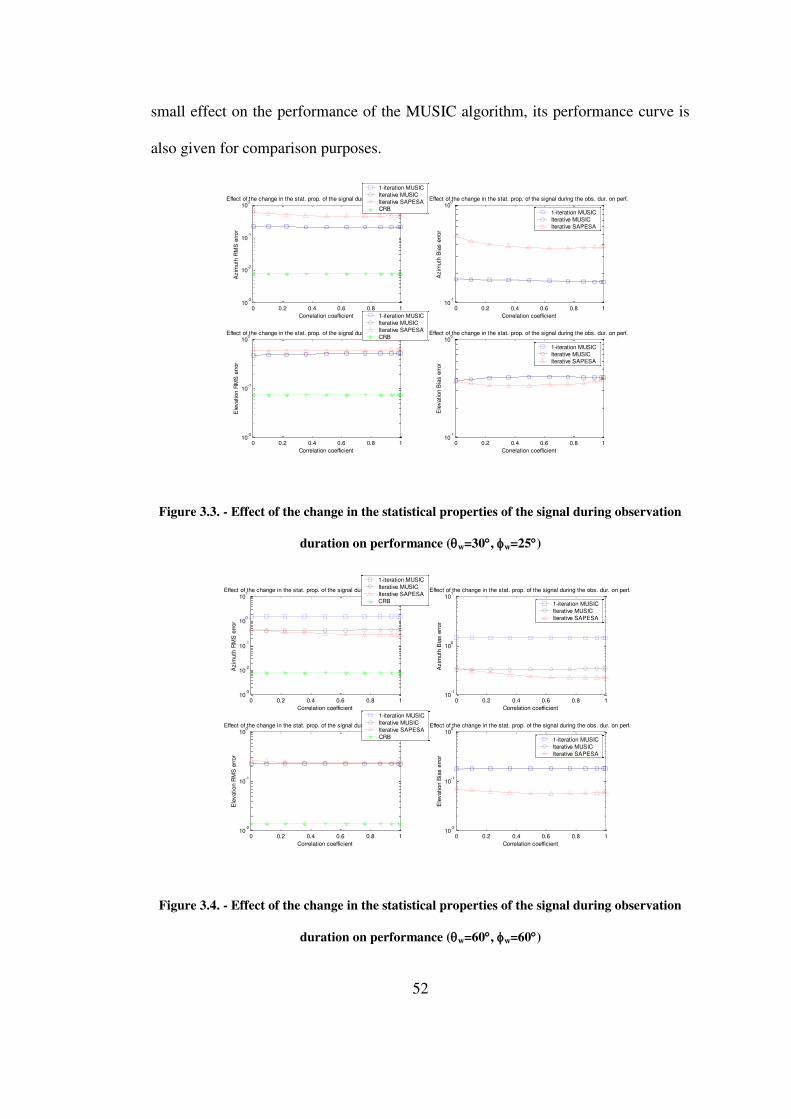
52
small effect on the performance of the MUSIC algorithm, its performance curve is
also given for comparison purposes.
0 0.2 0.4 0.6 0.8 110
-3
10-2
10-1
100
Effect of the change in the stat. prop. of the signal during the obs. dur. on perf.
Azim
uth
RM
S e
rror
Correlation coefficient
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 0.2 0.4 0.6 0.8 110
-1
100
Effect of the change in the stat. prop. of the signal during the obs. dur. on perf.
Azim
uth
Bia
s e
rror
Correlation coefficient
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
0 0.2 0.4 0.6 0.8 110
-2
10-1
100
Effect of the change in the stat. prop. of the signal during the obs. dur. on perf.
Ele
vation R
MS
err
or
Correlation coefficient
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 0.2 0.4 0.6 0.8 110
-1
100
Effect of the change in the stat. prop. of the signal during the obs. dur. on perf.
Ele
vation B
ias e
rror
Correlation coefficient
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.3. - Effect of the change in the statistical properties of the signal during observation
duration on performance (w=30, w=25)
0 0.2 0.4 0.6 0.8 110
-3
10-2
10-1
100
101
Effect of the change in the stat. prop. of the signal during the obs. dur. on perf.
Azim
uth
RM
S e
rror
Correlation coefficient
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 0.2 0.4 0.6 0.8 110
-1
100
101
Effect of the change in the stat. prop. of the signal during the obs. dur. on perf.
Azim
uth
Bia
s e
rror
Correlation coefficient
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
0 0.2 0.4 0.6 0.8 110
-2
10-1
100
Effect of the change in the stat. prop. of the signal during the obs. dur. on perf.
Ele
vation R
MS
err
or
Correlation coefficient
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 0.2 0.4 0.6 0.8 110
-2
10-1
100
Effect of the change in the stat. prop. of the signal during the obs. dur. on perf.
Ele
vation B
ias e
rror
Correlation coefficient
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.4. - Effect of the change in the statistical properties of the signal during observation
duration on performance (w=60, w=60)

53
3.2.3. Effect of the Number of Antennas on Performance
In this section, it is intended to show the effect of the number of antennas on the
performances of SAPESA and MUSIC algorithms.
As it can be observed from Figs 3.5 and 3.6, increasing the number of
antennas improves the performance of MUSIC greatly as expected, whereas it does
not seem to improve the performance of SAPESA much. Performance of SAPESA
is close to the performance of MUSIC when the number of antennas is small. This
behavior should be further examined in the future.
0 5 10 15 20 25 30 3510
-3
10-2
10-1
100
Effect of number of antennas on performance
Azim
uth
RM
S e
rror
Number of antennas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 5 10 15 20 25 30 3510
-2
10-1
100
Effect of number of antennas on performance
Azim
uth
Bia
s e
rror
Number of antennas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
0 5 10 15 20 25 30 3510
-2
10-1
100
Effect of number of antennas on performance
Ele
vation R
MS
err
or
Number of antennas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 5 10 15 20 25 30 3510
-2
10-1
100
Effect of number of antennas on performance
Ele
vation B
ias e
rror
Number of antennas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.5. - Effect of the number of antennas on performance (w=30, w=25)
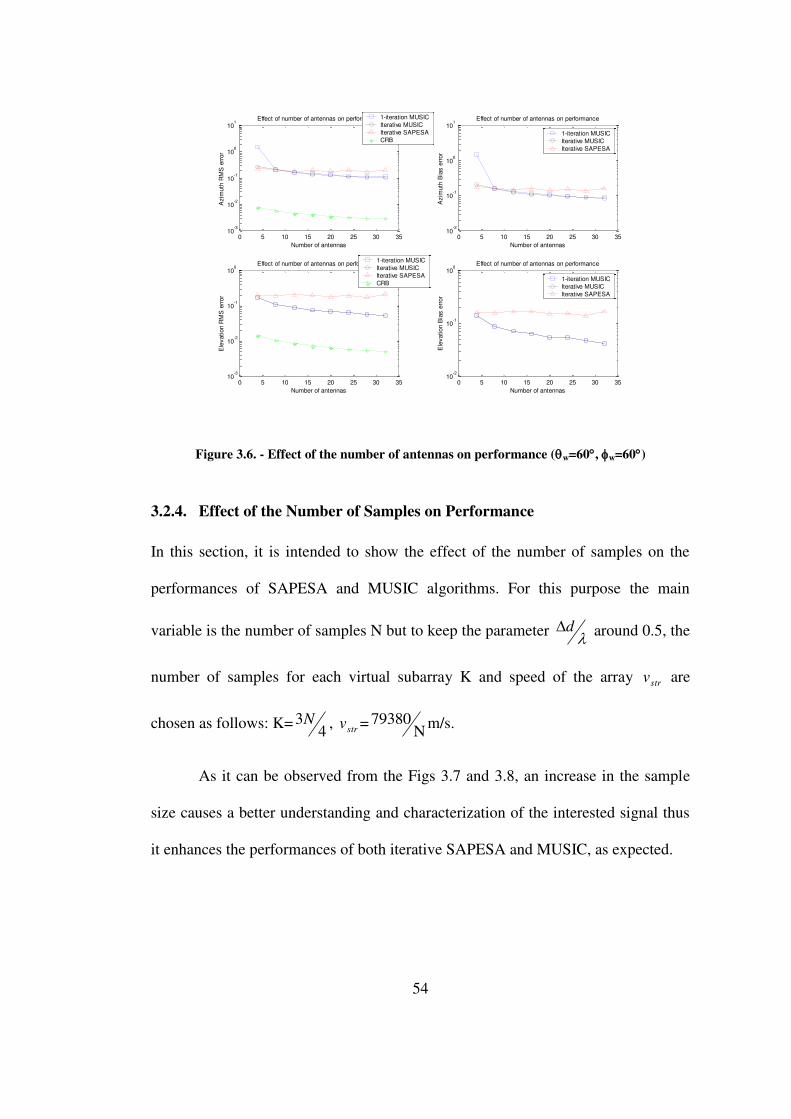
54
0 5 10 15 20 25 30 3510
-3
10-2
10-1
100
101
Effect of number of antennas on performance
Azim
uth
RM
S e
rror
Number of antennas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 5 10 15 20 25 30 3510
-2
10-1
100
101
Effect of number of antennas on performance
Azim
uth
Bia
s e
rror
Number of antennas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
0 5 10 15 20 25 30 3510
-3
10-2
10-1
100
Effect of number of antennas on performance
Ele
vation R
MS
err
or
Number of antennas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 5 10 15 20 25 30 3510
-2
10-1
100
Effect of number of antennas on performance
Ele
vation B
ias e
rror
Number of antennas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.6. - Effect of the number of antennas on performance (w=60, w=60)
3.2.4. Effect of the Number of Samples on Performance
In this section, it is intended to show the effect of the number of samples on the
performances of SAPESA and MUSIC algorithms. For this purpose the main
variable is the number of samples N but to keep the parameter d around 0.5, the
number of samples for each virtual subarray K and speed of the array strv are
chosen as follows: K=4
3N , strv =N
79380 m/s.
As it can be observed from the Figs 3.7 and 3.8, an increase in the sample
size causes a better understanding and characterization of the interested signal thus
it enhances the performances of both iterative SAPESA and MUSIC, as expected.
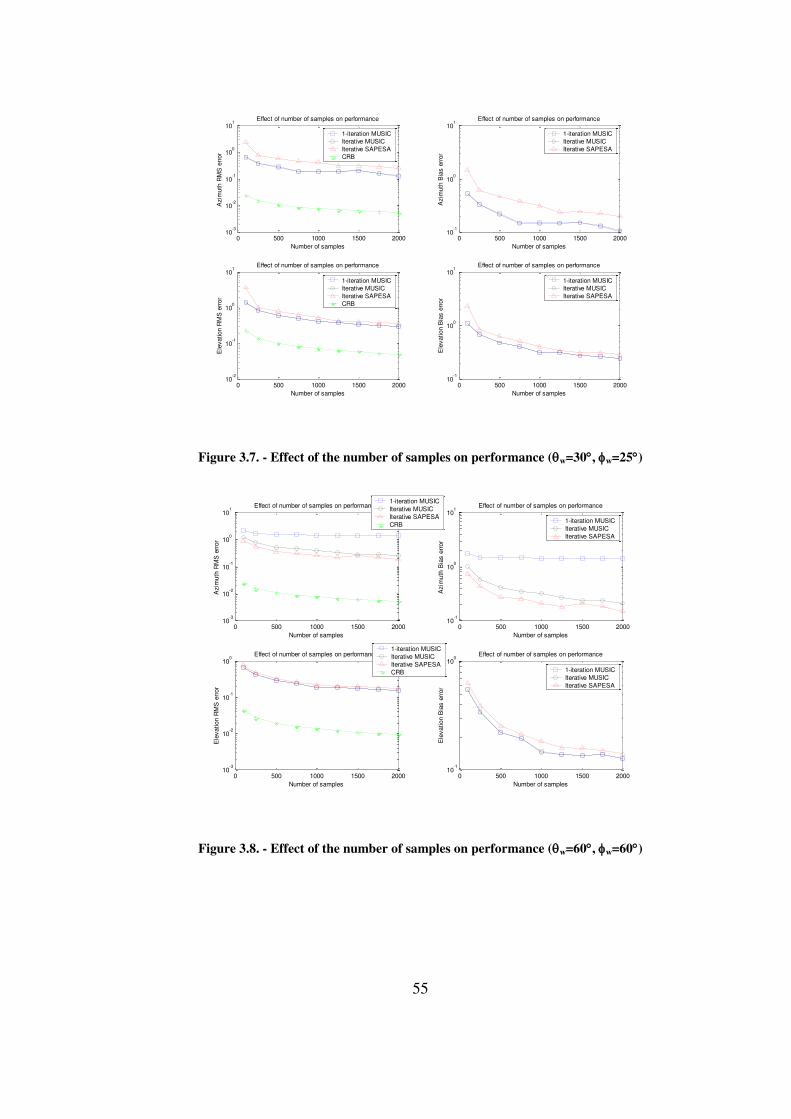
55
0 500 1000 1500 200010
-3
10-2
10-1
100
101
Effect of number of samples on performance
Azim
uth
RM
S e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 500 1000 1500 200010
-1
100
101
Effect of number of samples on performance
Azim
uth
Bia
s e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
0 500 1000 1500 200010
-2
10-1
100
101
Effect of number of samples on performance
Ele
vation R
MS
err
or
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 500 1000 1500 200010
-1
100
101
Effect of number of samples on performance
Ele
vation B
ias e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.7. - Effect of the number of samples on performance (w=30, w=25)
0 500 1000 1500 200010
-3
10-2
10-1
100
101
Effect of number of samples on performance
Azim
uth
RM
S e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 500 1000 1500 200010
-1
100
101
Effect of number of samples on performance
Azim
uth
Bia
s e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
0 500 1000 1500 200010
-3
10-2
10-1
100
Effect of number of samples on performance
Ele
vation R
MS
err
or
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
0 500 1000 1500 200010
-1
100
Effect of number of samples on performance
Ele
vation B
ias e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.8. - Effect of the number of samples on performance (w=60, w=60)
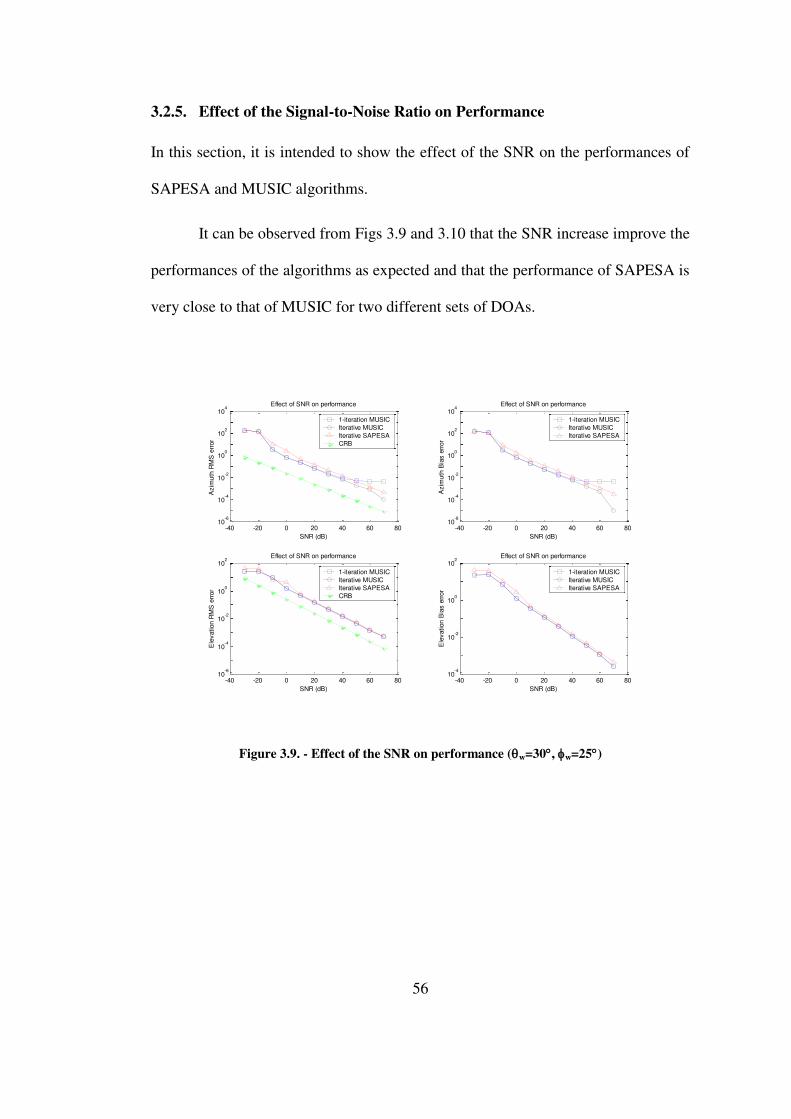
56
3.2.5. Effect of the Signal-to-Noise Ratio on Performance
In this section, it is intended to show the effect of the SNR on the performances of
SAPESA and MUSIC algorithms.
It can be observed from Figs 3.9 and 3.10 that the SNR increase improve the
performances of the algorithms as expected and that the performance of SAPESA is
very close to that of MUSIC for two different sets of DOAs.
-40 -20 0 20 40 60 8010
-6
10-4
10-2
100
102
104
Effect of SNR on performance
SNR (dB)
Azim
uth
RM
S e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
-40 -20 0 20 40 60 8010
-6
10-4
10-2
100
102
104
Effect of SNR on performance
SNR (dB)
Azim
uth
Bia
s e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
-40 -20 0 20 40 60 8010
-6
10-4
10-2
100
102
Effect of SNR on performance
SNR (dB)
Ele
vation R
MS
err
or
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
-40 -20 0 20 40 60 8010
-4
10-2
100
102
Effect of SNR on performance
SNR (dB)
Ele
vation B
ias e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.9. - Effect of the SNR on performance (w=30, w=25)
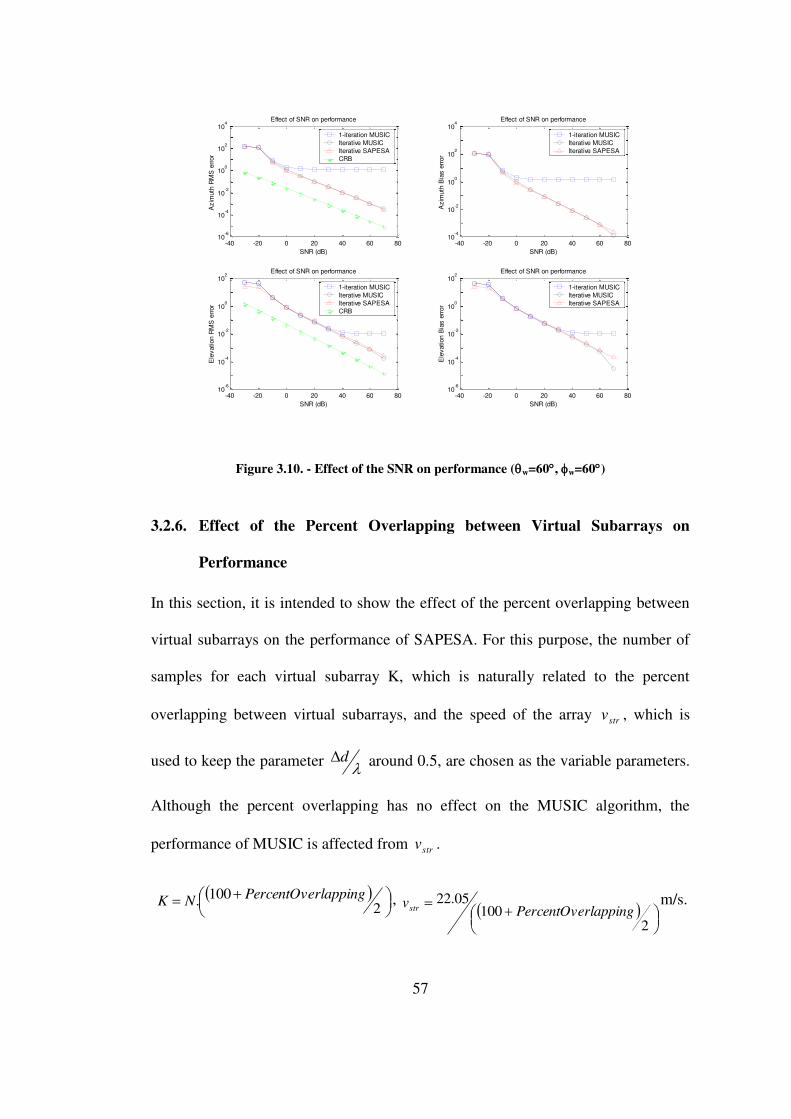
57
-40 -20 0 20 40 60 8010
-6
10-4
10-2
100
102
104
Effect of SNR on performance
SNR (dB)
Azim
uth
RM
S e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
-40 -20 0 20 40 60 8010
-4
10-2
100
102
104
Effect of SNR on performance
SNR (dB)
Azim
uth
Bia
s e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
-40 -20 0 20 40 60 8010
-6
10-4
10-2
100
102
Effect of SNR on performance
SNR (dB)
Ele
vation R
MS
err
or
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
-40 -20 0 20 40 60 8010
-6
10-4
10-2
100
102
Effect of SNR on performance
SNR (dB)
Ele
vation B
ias e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.10. - Effect of the SNR on performance (w=60, w=60)
3.2.6. Effect of the Percent Overlapping between Virtual Subarrays on
Performance
In this section, it is intended to show the effect of the percent overlapping between
virtual subarrays on the performance of SAPESA. For this purpose, the number of
samples for each virtual subarray K, which is naturally related to the percent
overlapping between virtual subarrays, and the speed of the array strv , which is
used to keep the parameter d around 0.5, are chosen as the variable parameters.
Although the percent overlapping has no effect on the MUSIC algorithm, the
performance of MUSIC is affected from strv .
2100
.rlappingPercentOve
NK ,
2100
05.22rlappingPercentOve
vstrm/s.
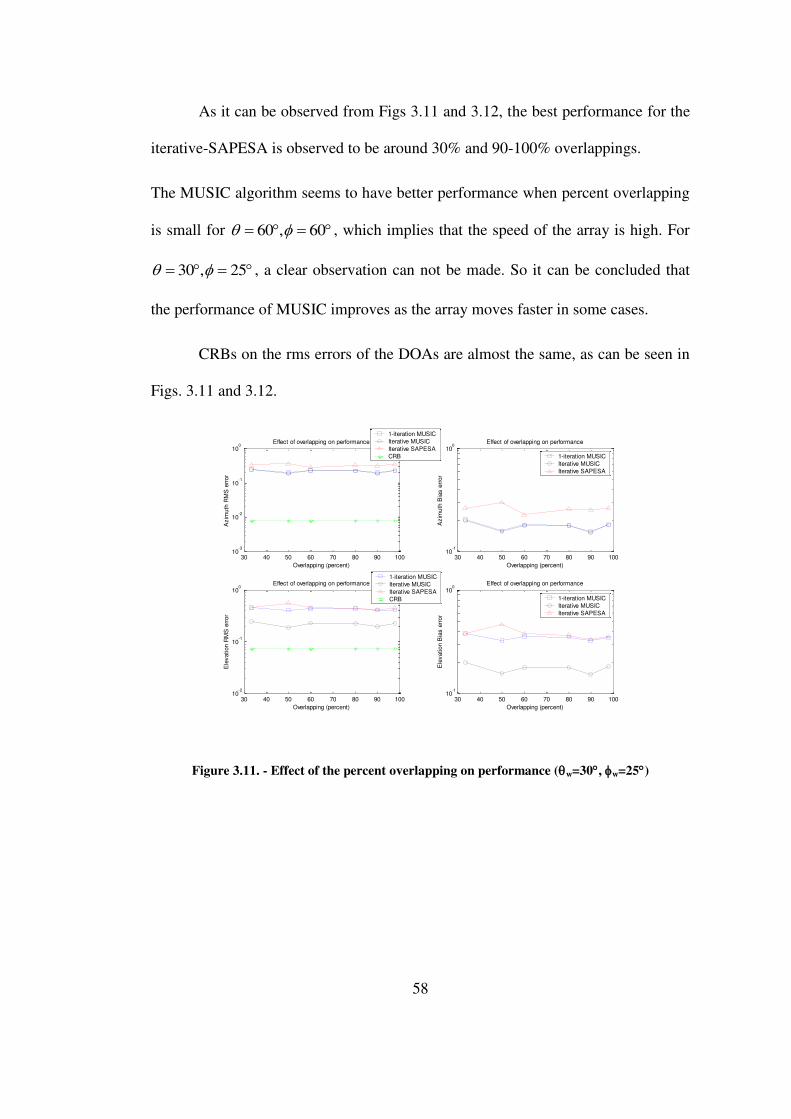
58
As it can be observed from Figs 3.11 and 3.12, the best performance for the
iterative-SAPESA is observed to be around 30% and 90-100% overlappings.
The MUSIC algorithm seems to have better performance when percent overlapping
is small for 60,60 , which implies that the speed of the array is high. For
25,30 , a clear observation can not be made. So it can be concluded that
the performance of MUSIC improves as the array moves faster in some cases.
CRBs on the rms errors of the DOAs are almost the same, as can be seen in
Figs. 3.11 and 3.12.
30 40 50 60 70 80 90 10010
-3
10-2
10-1
100
Effect of overlapping on performance
Azim
uth
RM
S e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
30 40 50 60 70 80 90 10010
-1
100
Effect of overlapping on performanceA
zim
uth
Bia
s e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
30 40 50 60 70 80 90 10010
-2
10-1
100
Effect of overlapping on performance
Ele
vation R
MS
err
or
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
30 40 50 60 70 80 90 10010
-1
100
Effect of overlapping on performance
Ele
vation B
ias e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.11. - Effect of the percent overlapping on performance (w=30, w=25)
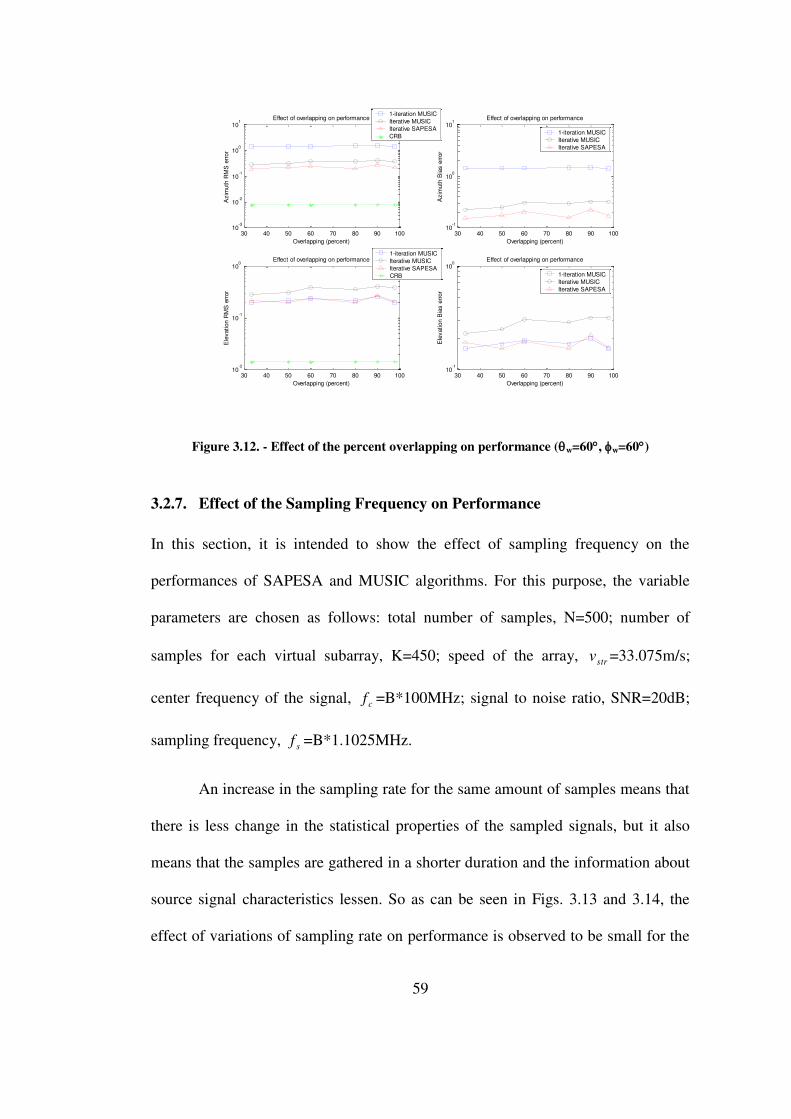
59
30 40 50 60 70 80 90 10010
-3
10-2
10-1
100
101
Effect of overlapping on performance
Azim
uth
RM
S e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
30 40 50 60 70 80 90 10010
-1
100
101
Effect of overlapping on performance
Azim
uth
Bia
s e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
30 40 50 60 70 80 90 10010
-2
10-1
100
Effect of overlapping on performance
Ele
vation R
MS
err
or
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
30 40 50 60 70 80 90 10010
-1
100
Effect of overlapping on performance
Ele
vation B
ias e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.12. - Effect of the percent overlapping on performance (w=60, w=60)
3.2.7. Effect of the Sampling Frequency on Performance
In this section, it is intended to show the effect of sampling frequency on the
performances of SAPESA and MUSIC algorithms. For this purpose, the variable
parameters are chosen as follows: total number of samples, N=500; number of
samples for each virtual subarray, K=450; speed of the array, strv =33.075m/s;
center frequency of the signal, cf =B*100MHz; signal to noise ratio, SNR=20dB;
sampling frequency, sf =B*1.1025MHz.
An increase in the sampling rate for the same amount of samples means that
there is less change in the statistical properties of the sampled signals, but it also
means that the samples are gathered in a shorter duration and the information about
source signal characteristics lessen. So as can be seen in Figs. 3.13 and 3.14, the
effect of variations of sampling rate on performance is observed to be small for the
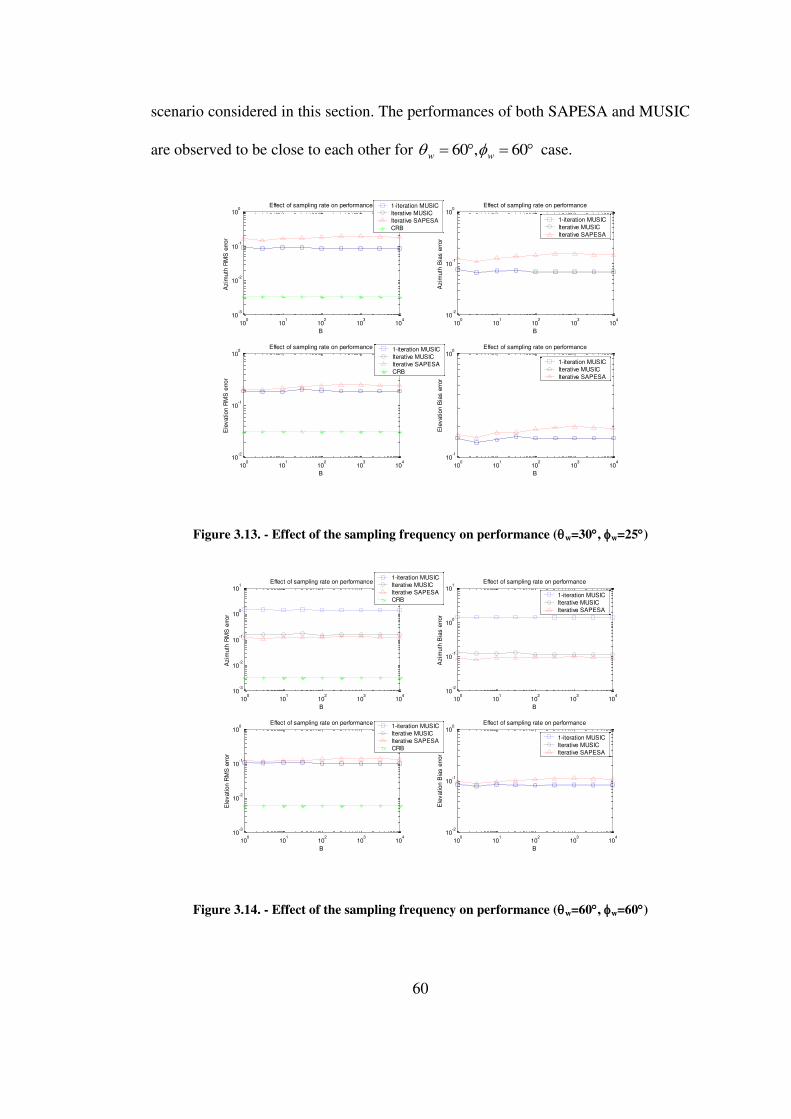
60
scenario considered in this section. The performances of both SAPESA and MUSIC
are observed to be close to each other for 60,60 ww case.
100
101
102
103
104
10-3
10-2
10-1
100
Effect of sampling rate on performance
B
Azim
uth
RM
S e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
100
101
102
103
104
10-2
10-1
100
Effect of sampling rate on performance
B
Azim
uth
Bia
s e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
100
101
102
103
104
10-2
10-1
100
Effect of sampling rate on performance
B
Ele
vation R
MS
err
or
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
100
101
102
103
104
10-1
100
Effect of sampling rate on performance
B
Ele
vation B
ias e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.13. - Effect of the sampling frequency on performance (w=30, w=25)
100
101
102
103
104
10-3
10-2
10-1
100
101
Effect of sampling rate on performance
B
Azim
uth
RM
S e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
100
101
102
103
104
10-2
10-1
100
101
Effect of sampling rate on performance
B
Azim
uth
Bia
s e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
100
101
102
103
104
10-3
10-2
10-1
100
Effect of sampling rate on performance
B
Ele
vation R
MS
err
or
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
CRB
100
101
102
103
104
10-2
10-1
100
Effect of sampling rate on performance
B
Ele
vation B
ias e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
Figure 3.14. - Effect of the sampling frequency on performance (w=60, w=60)
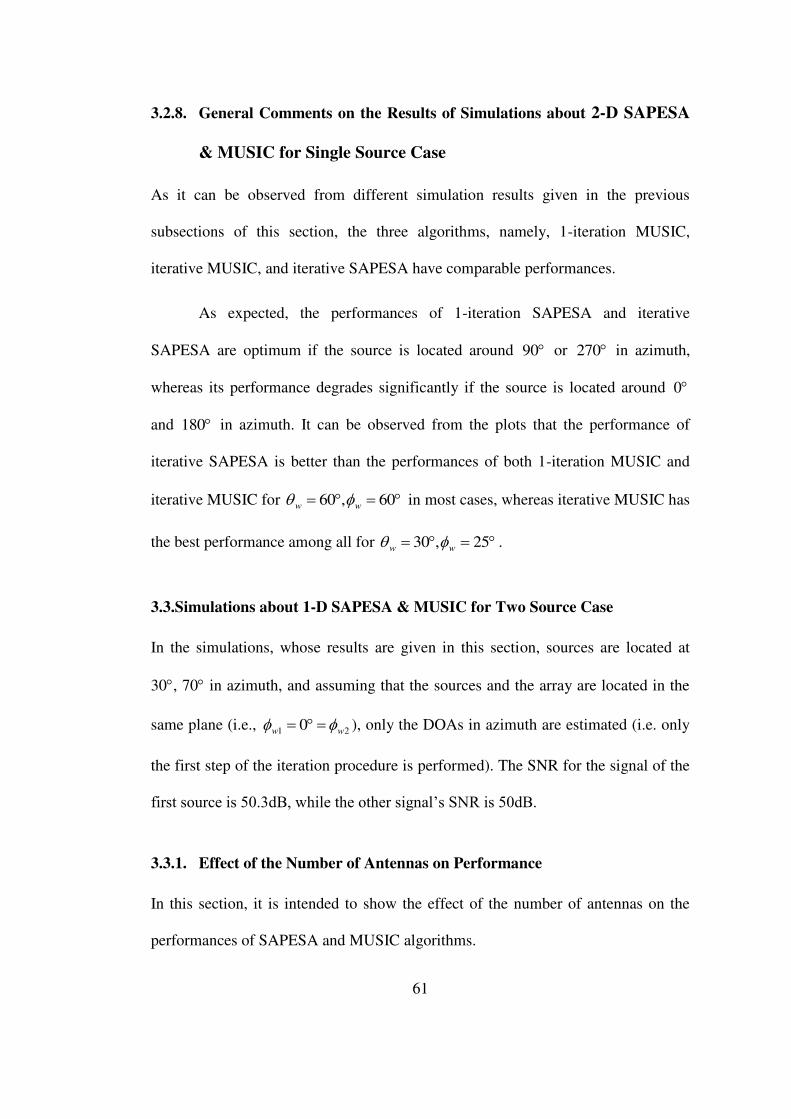
61
3.2.8. General Comments on the Results of Simulations about 2-D SAPESA
& MUSIC for Single Source Case
As it can be observed from different simulation results given in the previous
subsections of this section, the three algorithms, namely, 1-iteration MUSIC,
iterative MUSIC, and iterative SAPESA have comparable performances.
As expected, the performances of 1-iteration SAPESA and iterative
SAPESA are optimum if the source is located around 90 or 270 in azimuth,
whereas its performance degrades significantly if the source is located around 0
and 180 in azimuth. It can be observed from the plots that the performance of
iterative SAPESA is better than the performances of both 1-iteration MUSIC and
iterative MUSIC for 60,60 ww in most cases, whereas iterative MUSIC has
the best performance among all for 25,30 ww .
3.3.Simulations about 1-D SAPESA & MUSIC for Two Source Case
In the simulations, whose results are given in this section, sources are located at
30, 70 in azimuth, and assuming that the sources and the array are located in the
same plane (i.e., 21 0 ww ), only the DOAs in azimuth are estimated (i.e. only
the first step of the iteration procedure is performed). The SNR for the signal of the
first source is 50.3dB, while the other signal’s SNR is 50dB.
3.3.1. Effect of the Number of Antennas on Performance
In this section, it is intended to show the effect of the number of antennas on the
performances of SAPESA and MUSIC algorithms.
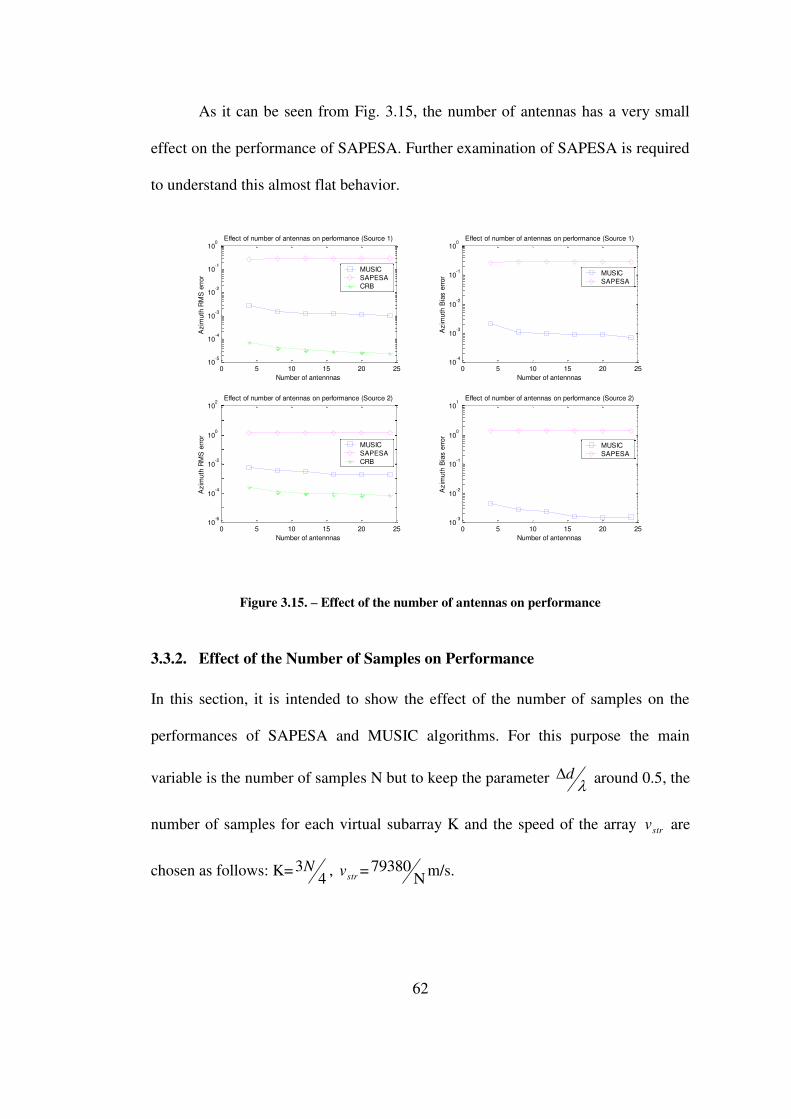
62
As it can be seen from Fig. 3.15, the number of antennas has a very small
effect on the performance of SAPESA. Further examination of SAPESA is required
to understand this almost flat behavior.
0 5 10 15 20 2510
-5
10-4
10-3
10-2
10-1
100
Effect of number of antennas on performance (Source 1)
Azim
uth
RM
S e
rror
Number of antennnas
MUSIC
SAPESA
CRB
0 5 10 15 20 2510
-4
10-3
10-2
10-1
100
Effect of number of antennas on performance (Source 1)
Azim
uth
Bia
s e
rror
Number of antennnas
MUSIC
SAPESA
0 5 10 15 20 2510
-6
10-4
10-2
100
102
Effect of number of antennas on performance (Source 2)
Azim
uth
RM
S e
rror
Number of antennnas
MUSIC
SAPESA
CRB
0 5 10 15 20 2510
-3
10-2
10-1
100
101
Effect of number of antennas on performance (Source 2)
Azim
uth
Bia
s e
rror
Number of antennnas
MUSIC
SAPESA
Figure 3.15. – Effect of the number of antennas on performance
3.3.2. Effect of the Number of Samples on Performance
In this section, it is intended to show the effect of the number of samples on the
performances of SAPESA and MUSIC algorithms. For this purpose the main
variable is the number of samples N but to keep the parameter d around 0.5, the
number of samples for each virtual subarray K and the speed of the array strv are
chosen as follows: K=4
3N , strv =N
79380 m/s.

63
As it can be seen from the Fig. 3.16, the performance of SAPESA is
optimum when the number of samples is around 750. On the other hand, as it can be
observed clearly, increasing the number of samples improves the performance of
MUSIC as expected. The behavior of SAPESA should be further examined.
0 500 1000 150010
-4
10-3
10-2
10-1
100
101
Effect of number of samples on performance (Source 1)
Azim
uth
RM
S e
rror
Number of samples
MUSIC
SAPESA
CRB
0 500 1000 150010
-3
10-2
10-1
100
101
Effect of number of samples on performance (Source 1)
Azim
uth
Bia
s e
rror
Number of samples
MUSIC
SAPESA
0 500 1000 150010
-4
10-3
10-2
10-1
100
Effect of number of samples on performance (Source 2)
Azim
uth
RM
S e
rror
Number of samples
MUSIC
SAPESA
CRB
0 500 1000 150010
-3
10-2
10-1
100
Effect of number of samples on performance (Source 2)A
zim
uth
Bia
s e
rror
Number of samples
MUSIC
SAPESA
Figure 3.16. – Effect of the number of samples on performance
3.3.3. Effect of the Signal-to-Noise Ratio on Performance
In this section, it is intended to show the effect of the SNR on the performances of
SAPESA and MUSIC algorithms.
As it can be observed from Fig. 3.17, the performance of SAPESA is better
than that of MUSIC for low SNR values. For high SNR values, the performance of
SAPESA is limited by a threshold, which may be due to the assumption introduced
in the development of the algorithm in which it is assumed that the characteristics of

64
the signals do not change much during observation duration (see section 2.3).
Validity of this assumption lessens especially for scenarios where more than one
signal exists, since the signals can interfere each other.
On the other hand, as it can be observed clearly, increasing the SNR
improves the performance of MUSIC as expected. The behavior of SAPESA should
be examined further.
-20 0 20 40 60 8010
-6
10-4
10-2
100
102
Effect of SNR on performance (Source 1)
SNR (dB)
Azim
uth
RM
S e
rror
MUSIC
SAPESA
CRB
-20 0 20 40 60 8010
-6
10-4
10-2
100
102
Effect of SNR on performance (Source 1)
SNR (dB)
Azim
uth
Bia
s e
rror
MUSIC
SAPESA
-20 0 20 40 60 8010
-6
10-4
10-2
100
102
104
Effect of SNR on performance (Source 2)
SNR (dB)
Azim
uth
RM
S e
rror
MUSIC
SAPESA
CRB
-20 0 20 40 60 8010
-4
10-2
100
102
104
Effect of SNR on performance (Source 2)
SNR (dB)
Azim
uth
Bia
s e
rror
MUSIC
SAPESA
Figure 3.17. – Effect of the SNR on performance
3.3.4. Effect of the Percent Overlapping between Virtual Subarrays on
Performance
In this section, it is intended to show the effect of the percent overlapping between
virtual subarrays on the performance of SAPESA. For this purpose, the number of
samples for each virtual subarray, K, which is naturally related to the percent

65
overlapping between virtual subarrays and the speed of the array, strv , which is
used to keep the parameter d around 0.5, are chosen as the variable parameters.
Although the percent overlapping has no effect on the MUSIC algorithm, the
performance of MUSIC is affected from strv .
2100
.rlappingPercentOve
NK ,
2100
05.22rlappingPercentOve
vstrm/s.
As can be seen in Fig. 3.18, the best performance for the iterative-SAPESA
is observed to be around 30% and 80% overlappings. Although it can not be clearly
observed, the MUSIC algorithm seems to give its best performance when percent
overlapping is small, which implies that the speed of the array is high.
30 40 50 60 70 80 90 10010
-6
10-4
10-2
100
102
Effect of overlapping on performance (Source 1)
Azim
uth
RM
S e
rror
Overlapping (percent)
MUSIC
SAPESA
CRB
30 40 50 60 70 80 90 10010
-3
10-2
10-1
100
101
Effect of overlapping on performance (Source 1)
Azim
uth
Bia
s e
rror
Overlapping (percent)
MUSIC
SAPESA
30 40 50 60 70 80 90 10010
-4
10-3
10-2
10-1
100
101
Effect of overlapping on performance (Source 2)
Azim
uth
RM
S e
rror
Overlapping (percent)
MUSIC
SAPESA
CRB
30 40 50 60 70 80 90 10010
-3
10-2
10-1
100
101
Effect of overlapping on performance (Source 2)
Azim
uth
Bia
s e
rror
Overlapping (percent)
MUSIC
SAPESA
Figure 3.18. – Effect of the percent overlapping on performance

66
3.3.5. Effect of the Sampling Frequency on Performance
In this section, it is intended to show the effect of sampling frequency on the
performances of SAPESA and MUSIC algorithms. For this purpose, the variable
parameters are chosen as follows: total number of samples, N=500; number of
samples for each virtual subarray, K=450; speed of the array, strv =33.075m/s;
center frequency of the signal, cf =B*100MHz; sampling frequency,
sf =B*1.1025MHz.
As it can be seen from Fig. 3.19, the best performance of SAPESA is
acceptable for some B values and its best performance is achieved for 110B . It
seems that some modifications of SAPESA are necessary to improve its
performance.
100
101
102
103
104
10-6
10-4
10-2
100
102
Effect of sampling rate on performance (Source 1)
B
Azim
uth
RM
S e
rror
MUSIC
SAPESA
CRB
100
101
102
103
104
10-3
10-2
10-1
100
101
102
Effect of sampling rate on performance (Source 1)
B
Azim
uth
Bia
s e
rror
MUSIC
SAPESA
100
101
102
103
104
10-4
10-2
100
102
104
Effect of sampling rate on performance (Source 2)
B
Azim
uth
RM
S e
rror
MUSIC
SAPESA
CRB
100
101
102
103
104
10-4
10-2
100
102
104
Effect of sampling rate on performance (Source 2)
B
Azim
uth
Bia
s e
rror
MUSIC
SAPESA
Figure 3.19. – Effect of the sampling rate on performance

67
3.4.Simulations about 2-D SAPESA & MUSIC for Two Source Case
Sources are located at 30, 70 in azimuth and 30, 10 in elevation, respectively.
The SNR for the signal of the first source is 50.3dB, while the other signal’s SNR is
50dB.
3.4.1. Effect of the Number of Iterations on Performance
In this section, it is intended to show the effect of the number of iterations on the
performances of SAPESA and MUSIC algorithms. For this purpose: total number
of samples, N=2000; number of samples for each virtual subarray, K=1775.
Figures 3.20 and 3.21 show that iterative SAPESA has a reasonable
performance except for the 2nd
signal’s elevation estimate. Iterative SAPESA
achieves a reasonable convergence in 10 steps; on the other hand, iterative MUSIC
has a very slow convergence rate, especially for the source having larger elevation
angle, which is a very important drawback for this algorithm. The plots show that
how SAPESA can give a reasonable performance even in some situations where
MUSIC fails. To increase the convergence rate of iterative MUSIC, some
modifications should be made in the iterative peak search procedure.

68
0 2 4 6 8 10 120
5
10
15
20Effect of number of iterations on performance (Source 1)
Azim
uth
RM
S e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
CRB
0 2 4 6 8 10 120
5
10
15
20Effect of number of iterations on performance (Source 1)
Azim
uth
Bia
s e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
0 2 4 6 8 10 120
5
10
15
20
25Effect of number of iterations on performance (Source 1)
Ele
vation R
MS
err
or
Number of iterations
Iterative MUSIC
Iterative SAPESA
CRB
0 2 4 6 8 10 120
5
10
15
20
25Effect of number of iterations on performance (Source 1)
Ele
vation B
ias e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
Figure 3.20. - Effect of the number of iterations on performance (Source 1)
0 2 4 6 8 10 120
0.5
1
1.5
2Effect of number of iterations on performance (Source 2)
Azim
uth
RM
S e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
CRB
0 2 4 6 8 10 120.2
0.4
0.6
0.8
1
1.2
1.4
1.6Effect of number of iterations on performance (Source 2)
Azim
uth
Bia
s e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
0 2 4 6 8 10 120
2
4
6
8
10Effect of number of iterations on performance (Source 2)
Ele
vation R
MS
err
or
Number of iterations
Iterative MUSIC
Iterative SAPESA
CRB
0 2 4 6 8 10 125
5.5
6
6.5
7
7.5
8
8.5Effect of number of iterations on performance (Source 2)
Ele
vation B
ias e
rror
Number of iterations
Iterative MUSIC
Iterative SAPESA
Figure 3.21. - Effect of the number of iterations on performance (Source 2)
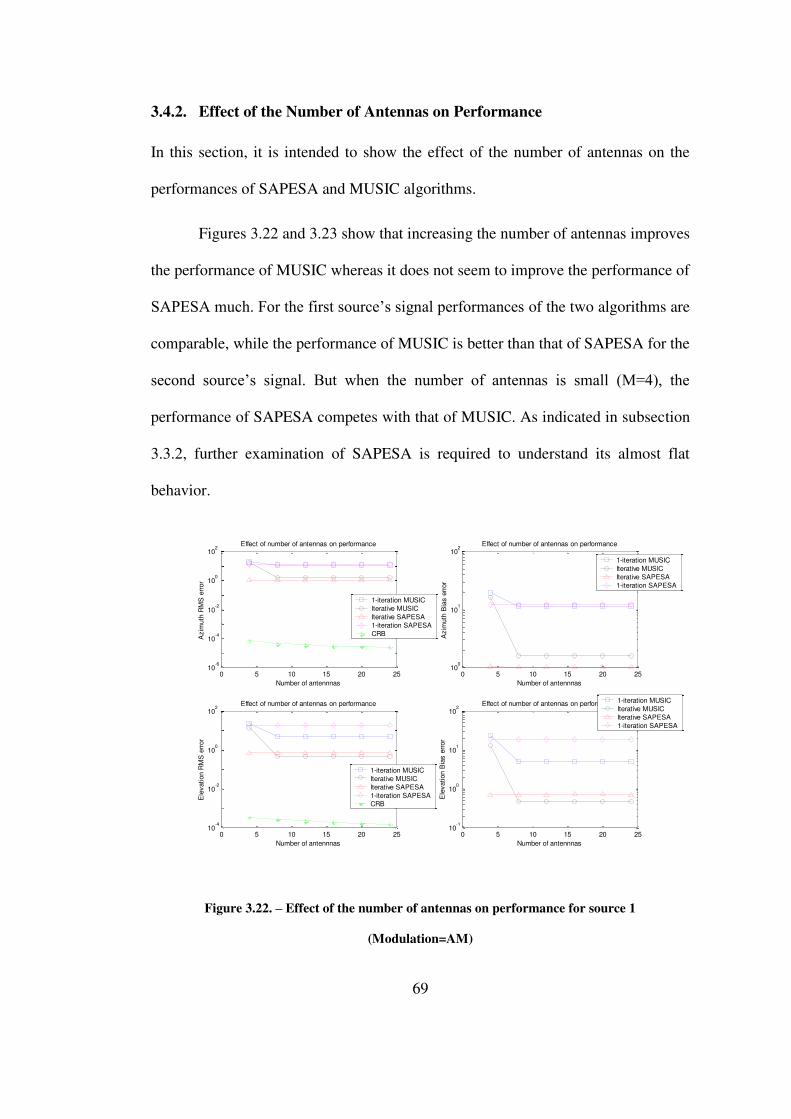
69
3.4.2. Effect of the Number of Antennas on Performance
In this section, it is intended to show the effect of the number of antennas on the
performances of SAPESA and MUSIC algorithms.
Figures 3.22 and 3.23 show that increasing the number of antennas improves
the performance of MUSIC whereas it does not seem to improve the performance of
SAPESA much. For the first source’s signal performances of the two algorithms are
comparable, while the performance of MUSIC is better than that of SAPESA for the
second source’s signal. But when the number of antennas is small (M=4), the
performance of SAPESA competes with that of MUSIC. As indicated in subsection
3.3.2, further examination of SAPESA is required to understand its almost flat
behavior.
0 5 10 15 20 2510
-6
10-4
10-2
100
102
Effect of number of antennas on performance
Azim
uth
RM
S e
rror
Number of antennnas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
0 5 10 15 20 2510
0
101
102
Effect of number of antennas on performance
Azim
uth
Bia
s e
rror
Number of antennnas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
0 5 10 15 20 2510
-4
10-2
100
102
Effect of number of antennas on performance
Ele
vation R
MS
err
or
Number of antennnas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
0 5 10 15 20 2510
-1
100
101
102
Effect of number of antennas on performance
Ele
vation B
ias e
rror
Number of antennnas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
Figure 3.22. – Effect of the number of antennas on performance for source 1
(Modulation=AM)
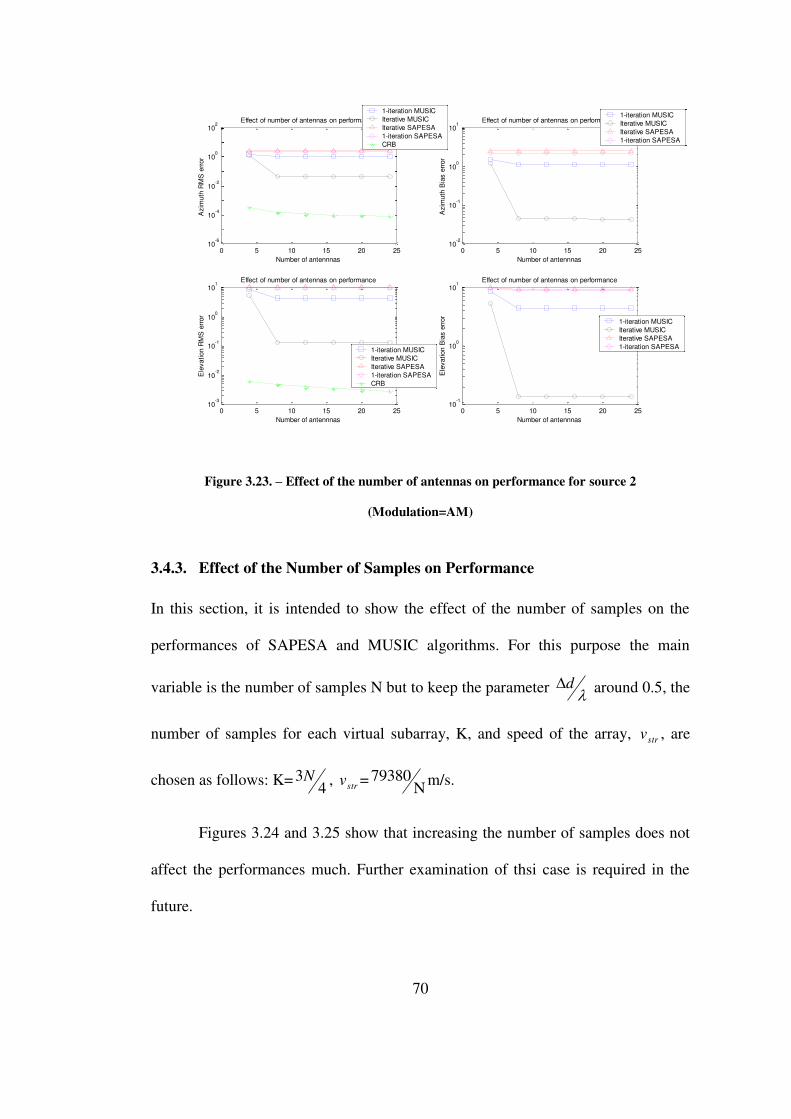
70
0 5 10 15 20 2510
-6
10-4
10-2
100
102
Effect of number of antennas on performance
Azim
uth
RM
S e
rror
Number of antennnas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
0 5 10 15 20 2510
-2
10-1
100
101
Effect of number of antennas on performance
Azim
uth
Bia
s e
rror
Number of antennnas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
0 5 10 15 20 2510
-3
10-2
10-1
100
101
Effect of number of antennas on performance
Ele
vation R
MS
err
or
Number of antennnas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
0 5 10 15 20 2510
-1
100
101
Effect of number of antennas on performance
Ele
vation B
ias e
rror
Number of antennnas
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
Figure 3.23. – Effect of the number of antennas on performance for source 2
(Modulation=AM)
3.4.3. Effect of the Number of Samples on Performance
In this section, it is intended to show the effect of the number of samples on the
performances of SAPESA and MUSIC algorithms. For this purpose the main
variable is the number of samples N but to keep the parameter d around 0.5, the
number of samples for each virtual subarray, K, and speed of the array, strv , are
chosen as follows: K=4
3N , strv =N
79380 m/s.
Figures 3.24 and 3.25 show that increasing the number of samples does not
affect the performances much. Further examination of thsi case is required in the
future.
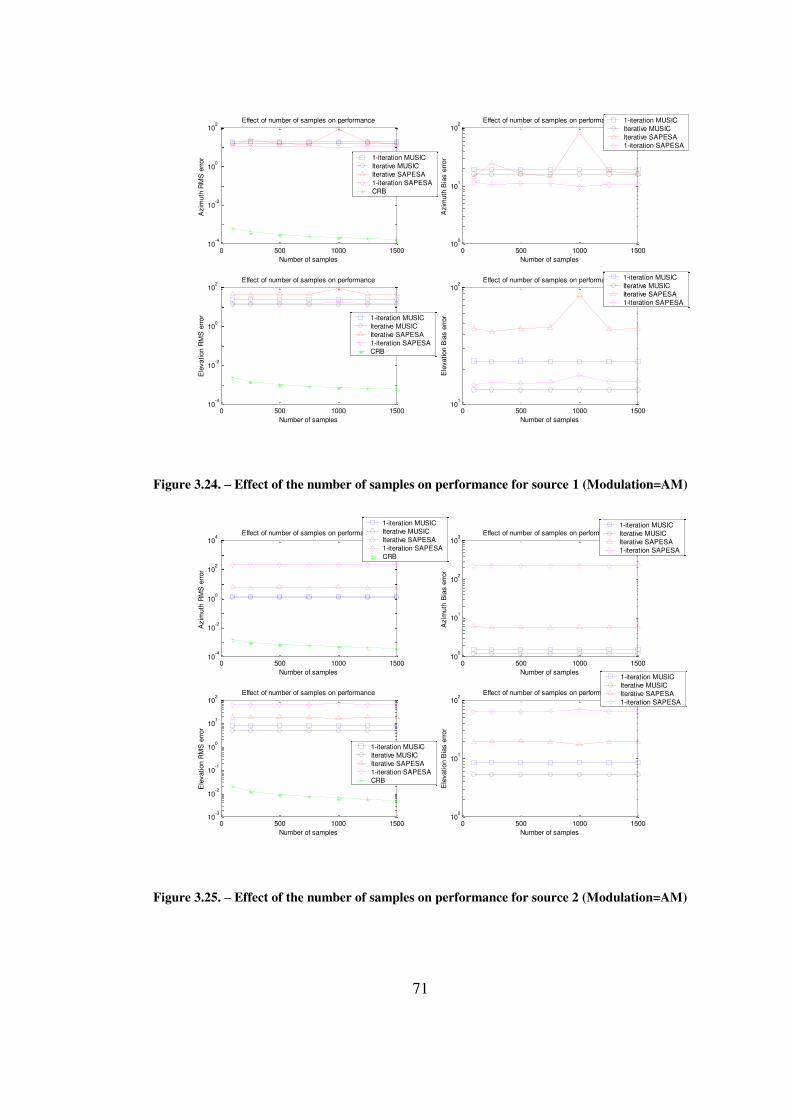
71
0 500 1000 150010
-4
10-2
100
102
Effect of number of samples on performance
Azim
uth
RM
S e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
0 500 1000 150010
0
101
102
Effect of number of samples on performance
Azim
uth
Bia
s e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
0 500 1000 150010
-4
10-2
100
102
Effect of number of samples on performance
Ele
vation R
MS
err
or
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
0 500 1000 150010
1
102
Effect of number of samples on performance
Ele
vation B
ias e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
Figure 3.24. – Effect of the number of samples on performance for source 1 (Modulation=AM)
0 500 1000 150010
-4
10-2
100
102
104
Effect of number of samples on performance
Azim
uth
RM
S e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
0 500 1000 150010
0
101
102
103
Effect of number of samples on performance
Azim
uth
Bia
s e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
0 500 1000 150010
-3
10-2
10-1
100
101
102
Effect of number of samples on performance
Ele
vation R
MS
err
or
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
0 500 1000 150010
0
101
102
Effect of number of samples on performance
Ele
vation B
ias e
rror
Number of samples
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
Figure 3.25. – Effect of the number of samples on performance for source 2 (Modulation=AM)
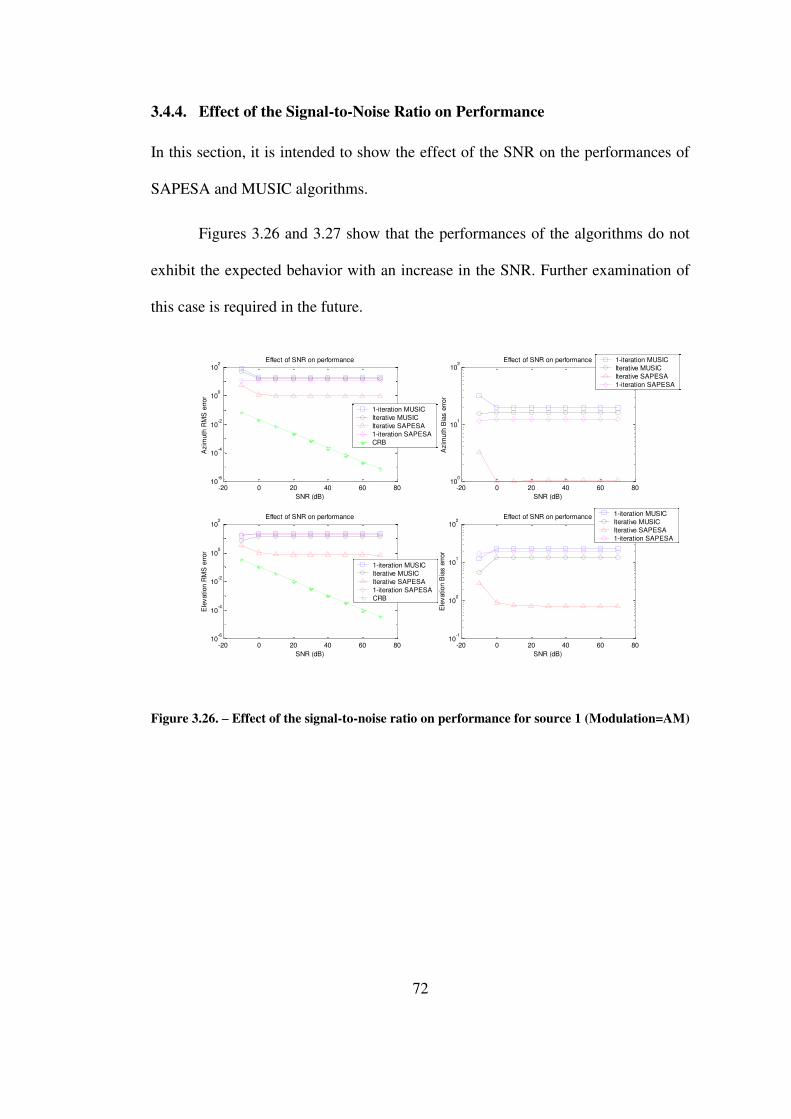
72
3.4.4. Effect of the Signal-to-Noise Ratio on Performance
In this section, it is intended to show the effect of the SNR on the performances of
SAPESA and MUSIC algorithms.
Figures 3.26 and 3.27 show that the performances of the algorithms do not
exhibit the expected behavior with an increase in the SNR. Further examination of
this case is required in the future.
-20 0 20 40 60 8010
-6
10-4
10-2
100
102
Effect of SNR on performance
SNR (dB)
Azim
uth
RM
S e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
-20 0 20 40 60 8010
0
101
102
Effect of SNR on performance
SNR (dB)
Azim
uth
Bia
s e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
-20 0 20 40 60 8010
-6
10-4
10-2
100
102
Effect of SNR on performance
SNR (dB)
Ele
vation R
MS
err
or
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
-20 0 20 40 60 8010
-1
100
101
102
Effect of SNR on performance
SNR (dB)
Ele
vation B
ias e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
Figure 3.26. – Effect of the signal-to-noise ratio on performance for source 1 (Modulation=AM)

73
-20 0 20 40 60 8010
-6
10-4
10-2
100
102
104
Effect of SNR on performance
SNR (dB)
Azim
uth
RM
S e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
-20 0 20 40 60 8010
0
101
102
103
Effect of SNR on performance
SNR (dB)
Azim
uth
Bia
s e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
-20 0 20 40 60 8010
-4
10-2
100
102
Effect of SNR on performance
SNR (dB)
Ele
vation R
MS
err
or
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
-20 0 20 40 60 8010
0
101
102
Effect of SNR on performance
SNR (dB)
Ele
vation B
ias e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
Figure 3.27. – Effect of the signal-to-noise ratio on performance for source 2 (Modulation=AM)
3.4.5. Effect of the Percent Overlapping between Virtual Subarrays on
Performance
In this section, it is intended to show the effect of the percent overlapping between
virtual subarrays on the performance of SAPESA. For this purpose, the number of
samples for each virtual subarray, K, which is naturally related to the percent
overlapping between virtual subarrays, and the speed of the array, strv , which is
used to keep the parameter d around 0.5, are chosen as follows:
2100
.rlappingPercentOve
NK ,
2100
05.22rlappingPercentOve
vstrm/s.
Although the percent overlapping has no effect on the MUSIC algorithm, it is
thought that the performance of MUSIC may be affected from strv .
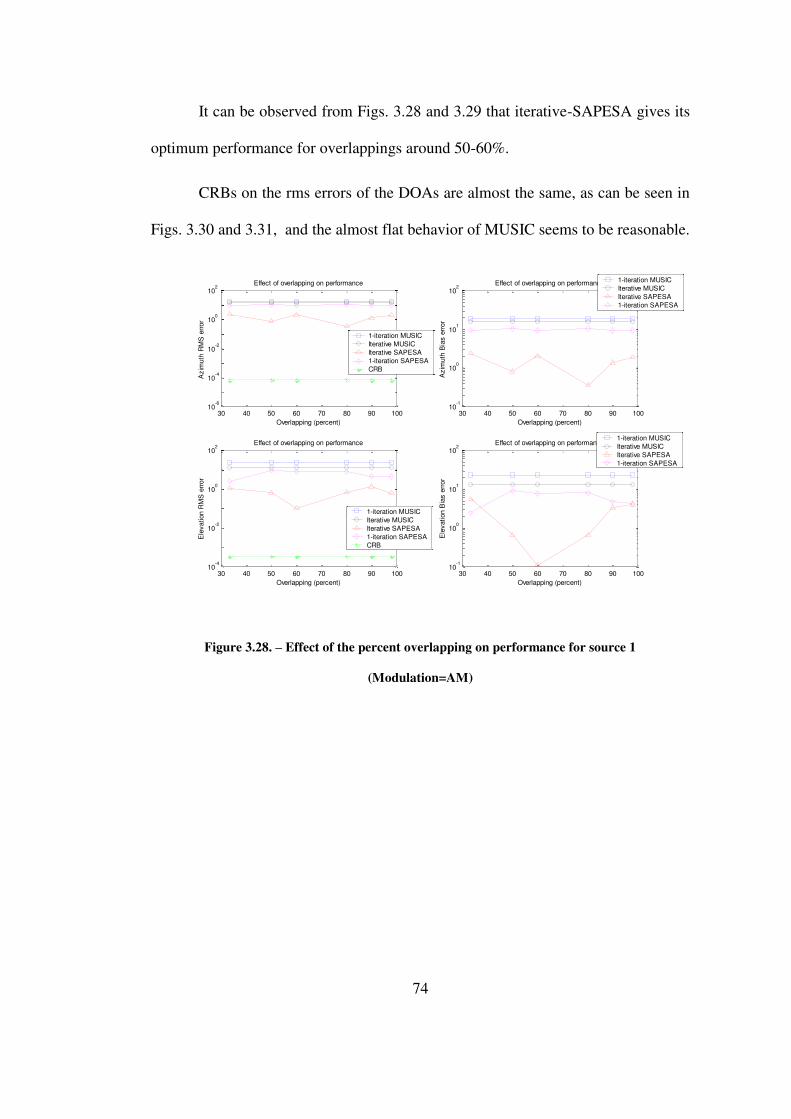
74
It can be observed from Figs. 3.28 and 3.29 that iterative-SAPESA gives its
optimum performance for overlappings around 50-60%.
CRBs on the rms errors of the DOAs are almost the same, as can be seen in
Figs. 3.30 and 3.31, and the almost flat behavior of MUSIC seems to be reasonable.
30 40 50 60 70 80 90 10010
-6
10-4
10-2
100
102
Effect of overlapping on performance
Azim
uth
RM
S e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
30 40 50 60 70 80 90 10010
-1
100
101
102
Effect of overlapping on performance
Azim
uth
Bia
s e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
30 40 50 60 70 80 90 10010
-4
10-2
100
102
Effect of overlapping on performance
Ele
vation R
MS
err
or
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
30 40 50 60 70 80 90 10010
-1
100
101
102
Effect of overlapping on performanceE
levation B
ias e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
Figure 3.28. – Effect of the percent overlapping on performance for source 1
(Modulation=AM)
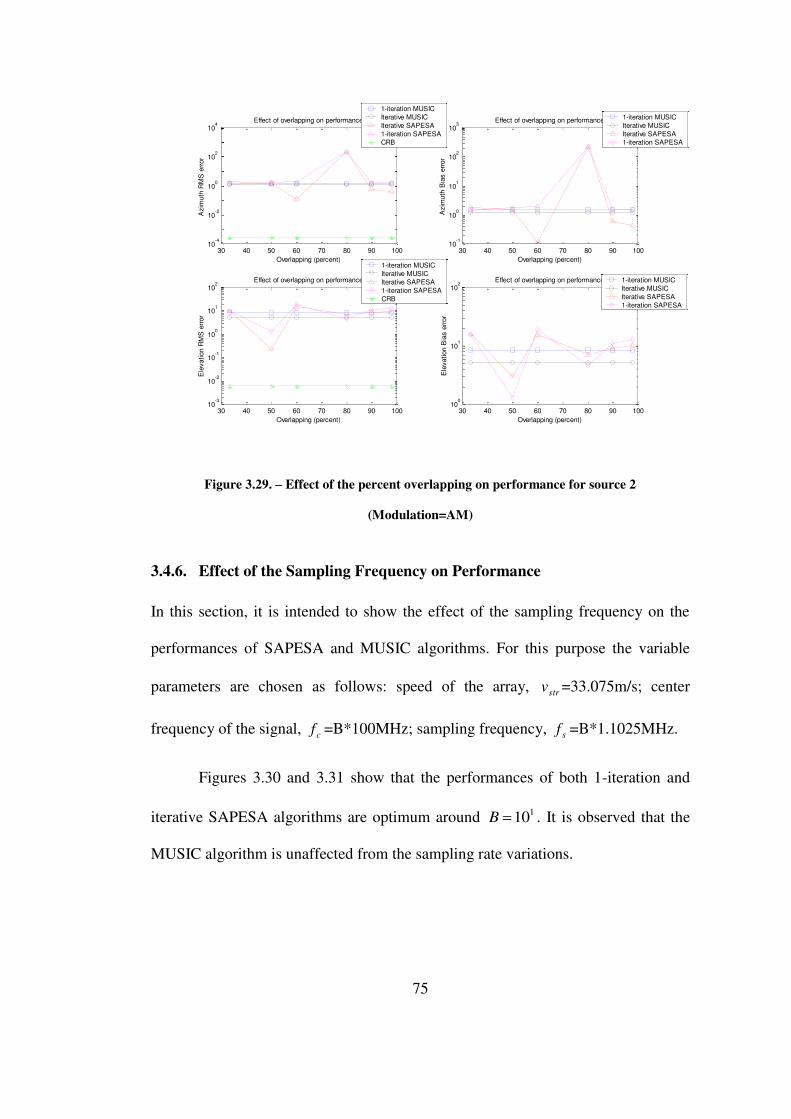
75
30 40 50 60 70 80 90 10010
-4
10-2
100
102
104
Effect of overlapping on performance
Azim
uth
RM
S e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
30 40 50 60 70 80 90 10010
-1
100
101
102
103
Effect of overlapping on performance
Azim
uth
Bia
s e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
30 40 50 60 70 80 90 10010
-3
10-2
10-1
100
101
102
Effect of overlapping on performance
Ele
vation R
MS
err
or
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
30 40 50 60 70 80 90 10010
0
101
102
Effect of overlapping on performance
Ele
vation B
ias e
rror
Overlapping (percent)
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
Figure 3.29. – Effect of the percent overlapping on performance for source 2
(Modulation=AM)
3.4.6. Effect of the Sampling Frequency on Performance
In this section, it is intended to show the effect of the sampling frequency on the
performances of SAPESA and MUSIC algorithms. For this purpose the variable
parameters are chosen as follows: speed of the array, strv =33.075m/s; center
frequency of the signal, cf =B*100MHz; sampling frequency, sf =B*1.1025MHz.
Figures 3.30 and 3.31 show that the performances of both 1-iteration and
iterative SAPESA algorithms are optimum around 110B . It is observed that the
MUSIC algorithm is unaffected from the sampling rate variations.
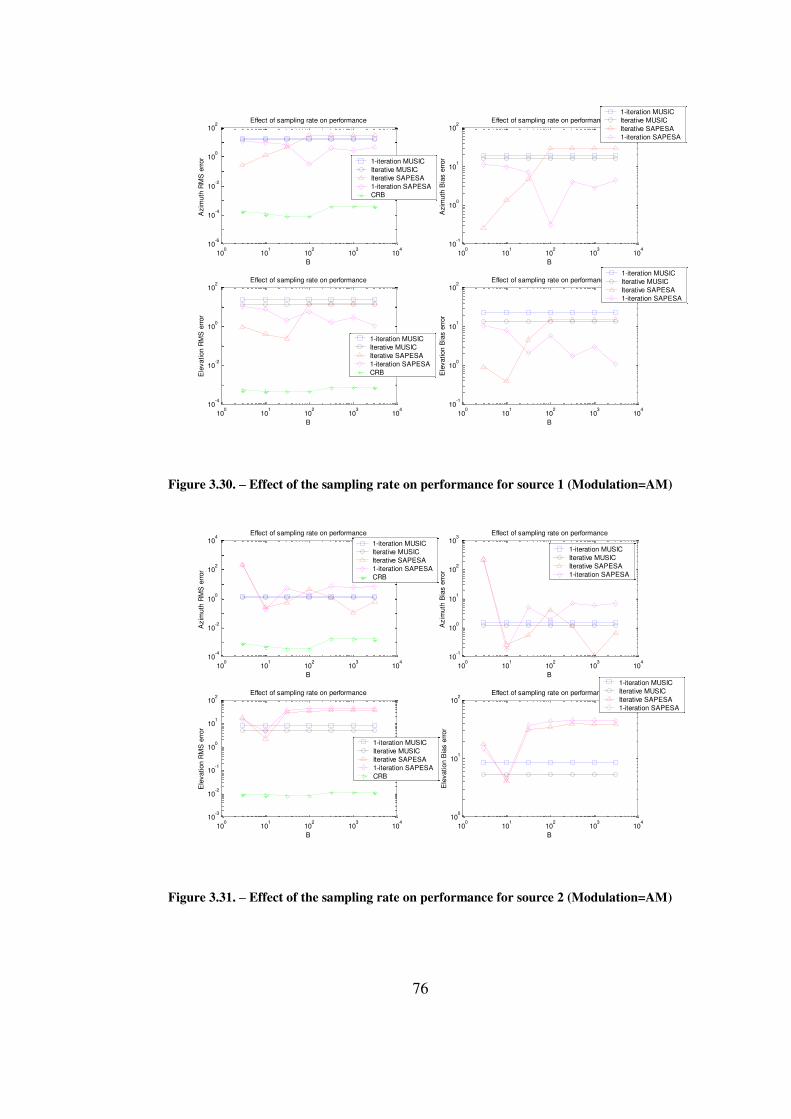
76
100
101
102
103
104
10-6
10-4
10-2
100
102
Effect of sampling rate on performance
B
Azim
uth
RM
S e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
100
101
102
103
104
10-1
100
101
102
Effect of sampling rate on performance
B
Azim
uth
Bia
s e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
100
101
102
103
104
10-4
10-2
100
102
Effect of sampling rate on performance
B
Ele
vation R
MS
err
or
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
100
101
102
103
104
10-1
100
101
102
Effect of sampling rate on performance
B
Ele
vation B
ias e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
Figure 3.30. – Effect of the sampling rate on performance for source 1 (Modulation=AM)
100
101
102
103
104
10-4
10-2
100
102
104
Effect of sampling rate on performance
B
Azim
uth
RM
S e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
100
101
102
103
104
10-1
100
101
102
103
Effect of sampling rate on performance
B
Azim
uth
Bia
s e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
100
101
102
103
104
10-3
10-2
10-1
100
101
102
Effect of sampling rate on performance
B
Ele
vation R
MS
err
or
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
CRB
100
101
102
103
104
100
101
102
Effect of sampling rate on performance
B
Ele
vation B
ias e
rror
1-iteration MUSIC
Iterative MUSIC
Iterative SAPESA
1-iteration SAPESA
Figure 3.31. – Effect of the sampling rate on performance for source 2 (Modulation=AM)

77
3.4.7. General Comments on Simulations about 2-D SAPESA & MUSIC for
Two Source Case
It is observed by the simulation results that the iterative-MUSIC algorithm has a
slow convergence rate, especially for sources with high elevation angles, which is
an important drawback for this algorithm. On the other hand, iterative-SAPESA has
a fast convergence but it has good performance only for certain situations.
Therefore, further examination of SAPESA is required to improve its performance
in terms of several variable parameters.
3.5.Effect of Array Speed on the Performance of MUSIC for Coherent Sources
Case
In this section, effect of the array speed on the MUSIC algorithm’s performance is
investigated. It was previously observed in [10] that array movement has a
decorrelating effect on source signals thus improves the performance. In this work,
it is observed that in correlated signals’ case increasing the speed reduces the rms
error and that especially the source signals, whose DOAs are close to each other,
can be distinguished easier.
To observe the effect of the speed of the array on the performance of
MUSIC algorithm, when the sources are coherent: number of antennas, M=4;
number of source signals, L=3; the sources are placed at 60, 65, 70 azimuth with
0 degree elevation angles; total number of samples, N=2000; the array moves in
the +x direction with a speed of strv =88.2m/s; relative source speeds, rsrclv =0m/s
for all three sources; center frequency of the signal, cf =500MHz; signal to noise
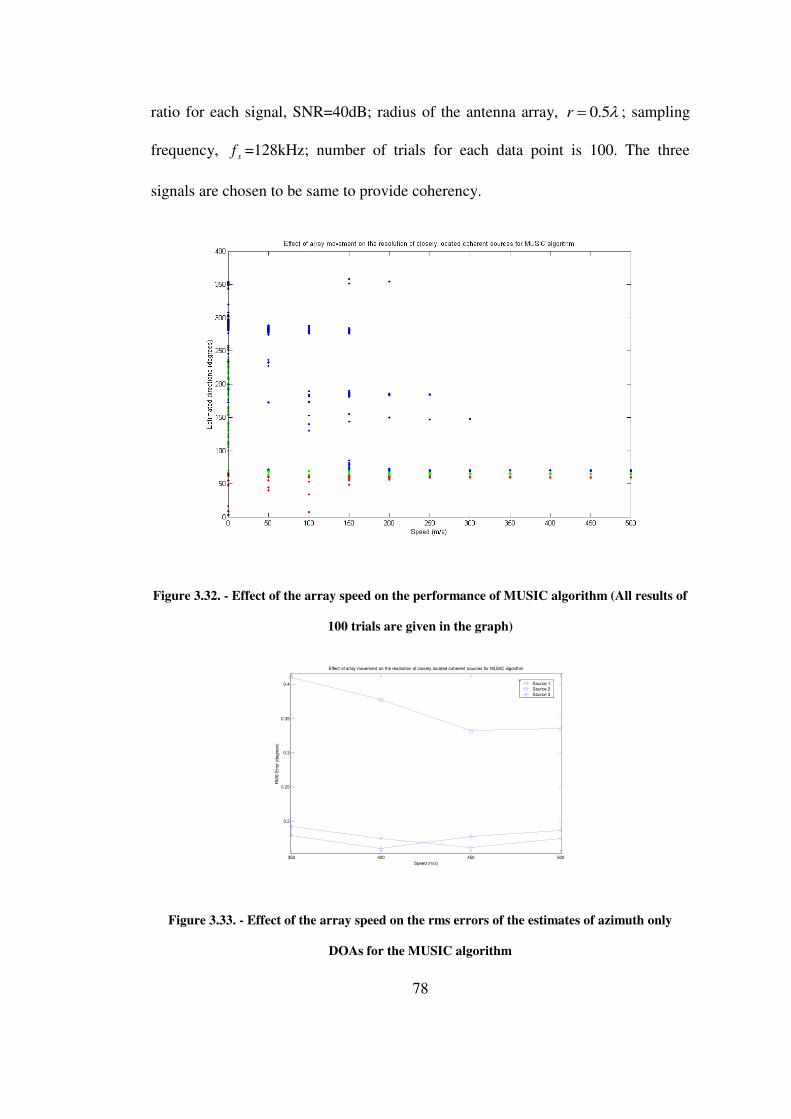
78
ratio for each signal, SNR=40dB; radius of the antenna array, 5.0r ; sampling
frequency, sf =128kHz; number of trials for each data point is 100. The three
signals are chosen to be same to provide coherency.
Figure 3.32. - Effect of the array speed on the performance of MUSIC algorithm (All results of
100 trials are given in the graph)
350 400 450 500
0.2
0.25
0.3
0.35
0.4
Speed (m/s)
RM
S E
rror
(degre
es)
Effect of array movement on the resolution of closely located coherent sources for MUSIC algorithm
Source 1
Source 2
Source 3
Figure 3.33. - Effect of the array speed on the rms errors of the estimates of azimuth only
DOAs for the MUSIC algorithm
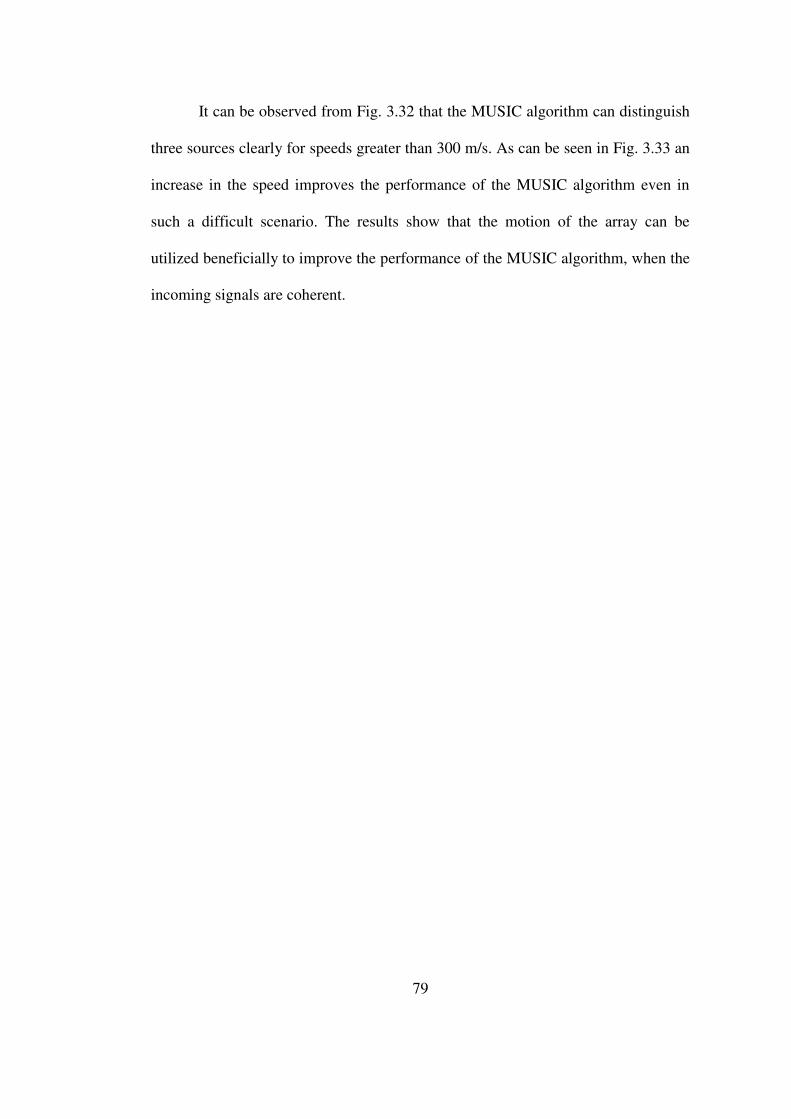
79
It can be observed from Fig. 3.32 that the MUSIC algorithm can distinguish
three sources clearly for speeds greater than 300 m/s. As can be seen in Fig. 3.33 an
increase in the speed improves the performance of the MUSIC algorithm even in
such a difficult scenario. The results show that the motion of the array can be
utilized beneficially to improve the performance of the MUSIC algorithm, when the
incoming signals are coherent.

80
CHAPTER 4
CONCLUSIONS
In this work, multiple emitter DF by using a UCA which is placed on a moving
platform is considered. In the problem formulation, the Doppler frequency shift
caused by both the movements of the array and the emitters are taken into
consideration. Then, assuming that the array moves in the +x direction with a
constant speed, a new algorithm is developed and it is named as SAPESA (synthetic
aperture ESPRIT algorithm).
SAPESA creates two virtual subarrays by using different temporal samples
of the spatial samples of the array, thus there is a known displacement between
these virtual subarrays. Afterwards, SAPESA performs the ESPRIT algorithm using
these two virtual subarrays. For better resolution, it is desired that the distance
between two virtual subarrays ( sstr TKNvd )..( ) is maximum without causing
an ambiguity. The parameters that affect the performance are strv (speed of the
array), sT (sampling period), )( KN (N: total number of samples, K: number of
samples used to construct each subarray). strv , sT , N , K are the design parameters
that can be controlled and affect the performance of SAPESA.
It is observed by the simulations, given in Chapter 3, that the performance of
the SAPESA competes with that of the MUSIC algorithm for certain situations

81
(when number of antennas are small, SNR is low, variations in the signal
characteristics is small and overlapping between two virtual subarrays is large).
SAPESA has a faster convergence rate than the MUSIC algorithm if there are two
signals; a few steps of iterations is sufficient for SAPESA to converge. On the other
hand, both MUSIC and SAPESA does not exhibit expected behaviors especially
with respect to increases in number of antennas, number of samples and SNR for
two source, 2-D DOA estimation case. These behaviors should be examined more
detailly in future.
Since the performance of SAPESA is closely related to the changes in the
signal characteristics during observation duration, the simulations are carried out for
both AM and FM type modulated signals. Although the performance is expected to
be better for AM type modulated signals compared to the FM type modulated
signals, since the changes in the phase of the signal is less for AM type modulated
signals, the performances for both cases are observed to be similar. This can be
reasonable since the variations in the amplitude of the modulated signal is more in
the case of AM type modulated signals compared to the FM type modulated signals.
So it can be concluded that the type of the modulation of the received signal is not a
critical parameter for the performance of the algorithm.
Some advantages of SAPESA can be given as follows: SAPESA has no
resolution limit while MUSIC has the drawback of having a resolution limit,
meaning that, MUSIC spectrum is calculated only for a limited set of azimuth and
elevation values, which is a difficulty in estimating the actual peak of the MUSIC
spectrum. SAPESA has also lower computational cost and does not need storage for

82
antenna manifolds, like the ESPRIT algorithm, which is a very important advantage
especially in 2-dimensional DOA estimation problems. SAPESA, has a better
performance if the interested source is located around 90 and 270 azimuth angles.
While its performance decreases if the interested source is located around 0 and
180 azimuth angles. This is due to the synthetic linear array structure created by
the algorithm, which makes it an attractive alternative, especially for the situations
where the field of view is narrow.
The advantages, given in the previous paragraphs, make SAPESA a good
alternative for both 1 and 2-dimensional direction estimation problems.
In Chapter 3, simulations about the effect of array movement on the
performance of MUSIC algorithm is given, which shows that the motion of the
array can be utilized beneficially to improve DOA estimation performance of
MUSIC in the case of coherent signals.
Both the 2-dimensional iterative MUSIC and the 2-dimensional iterative
SAPESA algorithms have some convergence measures, so as to check the reliability
of the iteration process. In the simulations the following measures are used. For
MUSIC, if two successive azimuth estimates have a difference smaller than a
number, iteration stops, i.e, 1ˆˆ i
l
i
l . For SAPESA, if the difference between
two successive azimuth estimates gets larger than the previous difference, iteration
stops, i.e, 211 ˆˆˆˆ i
l
i
l
i
l
i
l , (see Section 2.3.2.). But instead of the
convergence of the azimuth estimates, the convergence of the elevation estimates
83
(i.e, 211 ˆˆˆˆ i
l
i
l
i
l
i
l ) or the convergence of both azimuth and elevation
estimates (i.e, 212111 ˆˆˆˆˆˆˆˆ i
l
i
l
i
l
i
l
i
l
i
l
i
l
i
l ) can also be used
as measures to check the convergence.
For the 2-dimensional iterative SAPESA algorithm, the weighting
coefficients used to obtain the elevation estimates are chosen to be i
lw ˆsin 2 and
i
lw ˆcos2 for the simulations, but other weighting coefficients can also be used
to improve the performance (see Section 2.3.2). Effects of different weighting
coefficients on performance should be examined more detailly.
It is also observed that the performance of the proposed algorithm is not
satisfactory when there is more than one source. This is due to the deviations in the
diagonal structure of the shift matrix and direction estimations interfere to each
other. In order to overcome this problem, as a future work, different filtering,
weighting, smoothing and whitening methods on the sample data matrix or the
sample covariance matrix can be used to improve the performance and reduce the
bias values of the estimates that deviate the rms errors of DOA estimates. Effects of
the proposed methods on performance should be analyzed more detailly, which can
be the subject of another study.
In the simulations, it is observed that the performance of the MUSIC
algorithm is not satisfactory in 2-D DOA estimation for two source case, which is
due to the slow rate of convergence of the peak search algorithm, as it was shown
by the simulations in Section 3.4.1. The performance of the MUSIC algorithm can
be improved by using different peak search methods. Another method that can be

84
used to improve the performance of the MUSIC algorithm is to use the estimates of
the SAPESA as the initial points to start the iteration process of the iterative
MUSIC algorithm.
In the formulations and the development of the algorithm, mutual coupling
effects of the antennas are ignored, which is a fairly important subject in practical
systems, since the array elements are close to each other especially for the signals
having high center frequencies, implying shorther wavelengths. As a future work
effects of the mutual coupling of array elements should be taken into account in
both formulation and simulations, and some modifications to the algorithms should
be proposed to lower these effects if possible.
In this work, the simulations are performed assuming that the array
manifolds are ideal. But in the practical systems, the array manifolds can be fairly
different from the ideal characteristics. As a future work, the algorithms’
performances should be investigated by the simulations using the measured array
manifolds.
In this work it is intended to develop an algorithm for estimating the
directions of telecommunication waves whose observation durations are relatively
short compared to radar systems. As a future work, assuming that the observation
duration is long, which may be the case for many radar systems, a formulation for
the purpose of localization may be more meaningful, since the DF estimates are
found at different points in the space and localization is possible.
85
REFERENCES
[1] S. Haykin (Editor), J. H. Justice, N. L. Owsley, J. L. Yen and A. C. Kak,
Array Signal Processing, Prentice Hall Inc., Englewood Cliffs, NJ, 1985.
[2] Don H. Johnson and Dan E. Dudgeon, Array Signal Processing, Prentice
Hall Inc., Englewood Cliffs, NJ, 1993.
[3] Herndon H. Jenkins, Small-Aperture Radio Direction-Finding, Artech
House, 1991.
[4] Arzu Tuncay Koç, “Direction Finding with a Uniform Circular Array via
Single Snapshot Processing”, Ph.D. thesis, Middle East Technical Univ.,
1996.
[5] Richard Roy, “ESPRIT – Estimation of Signal Parameters via Rotational
Invariance Techniques”, Ph. D. Dissertation, Stanford University, 1987.
[6] Richard Roy and Thomas Kailath, “ESPRIT – Estimation of Signal
Parameters via Rotational Invariance Techniques”, IEEE Transactions on
Acoustics, Speech, and Signal Processing, Vol. 37, No. 7, pp. 984-995, July
1989.
86
[7] Ralph Otto Schmidt, “Signal Subspace Approach to Multiple Emitter
Location and Spectral Estimation”, PhD. Dissertation, Stanford University,
1982.
[8] M. Skollnik, Introduction to Radar Systems, McGraw-Hill, Inc., NY, 1980.
[9] Gene H. Golub and Charles F. Van Loan, Matrix Computations, The Johns
Hopkins University Press, London, 1993.
[10] Fred Haber and Michael Zoltowski, “Spatial Spectrum Estimation in a
Coherent Signal Environment Using an Array in Motion”, IEEE
Transactions on Antennas and Propagation, Vol. AP-34. No. 3, pp. 301-310,
March 1986.
[11] H. L. Van Trees, Detection, Estimation, and Modulation Theory, Part I,
Wiley, NY, 1968.

87
APPENDIX A
DERIVATION OF CRAMÉR-RAO BOUNDS
The reason underlying the need for the Cramér-Rao bounds (CRBs) is to compare
the simulation results with a lower bound and to get an idea about the performance
of the experimented algorithms. The CRB is the ultimate limit an algorithm can
achieve. Thus the algorithm’s efficiency can be observed by comparing its
performance with this limit value.
In order to compute the Cramér-Rao bounds of the estimated parameters,
CRB covariance matrix must be calculated. [11]
1
.
TE : CRB covariance matrix (A.1)
where
TE . : Fischer Information Matrix (FIM)
)ln(LT
(A.2)
|)(...)( 1 NtytypL : Joint pdf of N
iity1
)(
given (A.3)
where
)()().(.)( 111tetxtFAty MxLxLxLMxLMx
(A.4)

88
)(1
tyMx
is the observation vector at time t.
TLLx txtxtx )(...)()( 11 is the vector of complex envelopes of source
signals at time t.
MxLA is the array manifold matrix. )(...)( 111 LMxMxMxL aaA
( )(1 lMxa is the array steering vector corresponding to the DOA vector l .)
)(tF LxL is the Doppler frequency shift matrix at time t. Assuming that the sources
are stationary, it is as follows:
tvjtvjdiagtF LLstrstrLxL .cos.cos..
2.exp....cos.cos..
2.exp)( 11
(A.5)
M is the number of antennas.
L is the number of sources.
)(1 teMx : vector representing the additive white Gaussian noise which corrupts the
measurements
2 : the noise variance, is the standard deviation of the additive white Gaussian
noise.
is the unknown parameters’ vector (for this problem
TTTTTNxNxxx )(~)(...)1(~)1( ) (A.6)
where v represents the real part of a vector/matrix v , v~ represents the imaginary
part of a vector/matrix v .

89
The CRB on the rms error of the thi parameter of the vector is the square
root of the thi diagonal entry of .
Remembering the formula derived at Section 2.1 of Chapter 2, the likelihood
function can be written as follows:
N
t
H
MNMN
txtFAtytxtFAty
NyyL
12
2
)()..(.)(.)()..(.)(.2
1exp.
.2
1))(),...,1((
(A.7)
where,
First the derivatives of the log-likelihood function with respect to ,
)}(Re{)( txtx , )}(Im{)(~ txtx and TLL ..11 have to be
calculated.
N
t
HHHHAtFtxtyAtFtxty
MNMNL
12
2
).().()(.).().()(..2
1
ln.2
2ln.2
)ln(
(A.8)
N
t
Htete
MNL
12222
)().(..2
1
2
)ln(
(A.9)
)(.).(Re.1
)(.).()(.).(..2
1
)(
)ln(
2
2
keAkF
keAkFkeAkFkx
L
HH
cHH
k=1,...,N (A.10)

90
)(.).(Im.1
)(.).(.)(.).(...2
1
)(~)ln(
2
2
keAkF
keAkFjkeAkFjkx
L
HH
cHH
k=1,...,N (A.11)
N
t
HH
N
t i
HHH
N
t
c
i
TTT
i
HHH
i
tetDtXL
ted
AtFdtx
ted
AtFdtxte
d
AtFdtx
L
12
12
12
)().().(Re.2
1)ln(
)(.).(
).(Re.2
1
)(.).(
).()(.).(
).(..2
1)ln(
(A.12)
where
i
i
i
LMxL
LLxL
L
d
add
ddtD
tx
tx
tx
tx
tX
)()(
)(...)()(
)(..00
.)(..0
.....
0..)(.
00..)(
)(
221
22
1
1
Then the entries of the FIM are computed as follows:
Using Result 1 given in Appendix 2:

91
22
2222
22
22
22
1 142
132
2
22
22
4
.
)1().1(.4
.
4
..2
4
.
)().().().(.4
1
)().(.4
..2
4
.)ln(
NM
MMNMNNMNM
seseteteE
teteENMNML
E
HHN
t
N
s
N
t
H
(A.13)
By Result 2 given in Appendix 2 ,
)ln(L is uncorrelated with any of the other
derivatives.
pk
HH
HHH
T
pFAAkF
pFApekeAkFE
px
L
kx
LE
,2
22
.)(..).(Re.2
1
)(.).().(.).(Re.2
1.
1
)(
)ln(.
)(
)ln(
(A.14)
where
elsewhere
pkpk
,0
,1, is the dirac delta function.
pk
HH
HHH
T
pFAAkF
pFApekeAkFE
px
L
kx
LE
,2
22
.)(..).(Im.2
1
)(.).().(.).(Im.2
1.
1
)(~)ln(
.)(
)ln(
(A.15)

92
)().(.).(Re.2
1
)().().().(.).(Re.2
1.
1
)ln(.
)(
)ln(
2
122
kXkDAkF
tXtDtekeAkFE
L
kx
LE
HH
N
t
HHH
T
(A.16)
pk
HH
HHH
T
pFAAkF
pFApekeAkFE
px
L
kx
LE
,2
22
.)(..).(Re.2
1
)(.).().(.).(Re.2
1.
1
)(~)ln(
.)(~)ln(
(A.17)
)().(.).(Im.
2
1
)(.).().(Im.2
1
)(.).().().().(Im.2
1.
1
)ln(.
)(~)ln(
2
2
122
kXkDAkF
kFAkDkX
kFAketetDtXE
L
kx
LE
HH
THH
N
t
HHH
T
(A.18)
N
t
HH
N
t
N
s
HHH
T
tXtDkDkX
sXsDsetetDtXE
LLE
12
1 122
)().().().(Re.2
1
)().().().().().(Re.2
1.
1
)ln(.
)ln(
(A.19)
Defining:
NM
CR.
4)(var
22
(A.20)

93
)(..)(.2
12
tFAAtFHHH
(A.21)
1
HG (A.22)
)().(.).(.2
12
kXkDAkFHH
k
(A.23)
Since H is Hermitian, HHT ~~
1
11
1
1
1
~..
~0
~~0.00.
~0....
.00....
....00.
~0..0
~0
0..0~
0
0....00)(var
NN
N
N
CR
HH
HH
HH
HH
(A.24)
Using Result 4 & Result 5 given in Appendix 2:
N
t
HHHHHH
N
tHHHHH
HH
N
t
tt
tXtDAtFtFAAtFtFAItDtX
tXtDtFAtFAAtFtFAtDtX
tXtDtDtX
GCRB
1
1
2
11*2
1
*1
)().(.).(.)(..).().(.).().(Re.2
1
)().().(..)(..).().(.).().(
)().().().(Re.
2
1
..Re)(
(A.25)

94
APPENDIX B
RESULTS
Result 1 :
stMM
stMseseteteE
HH
,).(
,.)().().().(
22
22
(A.26)
Proof : For st ,
(A.27)
For st ,
(A.28)
Since,
4).2.(
4.3
4.).1(
)()(.)()().()().(
222
1
42
1 1
2
1 1
222
MMMMM
teEteEteEteteEteteEM
i
ij
M
i
M
ijj
i
M
i
M
j
ji
T
22
2
2
.)(~).(~)().(
)().()().(.)().()().().().(
MteteEteteE
teteEseseEteteEseseteteE
TT
HHHHH
22
2
22
2
2
1)().(2
)(~).(~)().(.)(~).(~2)().(
)(~).(~)().()().(.)().()().().().(
MteteE
teteEteteEteteEteteE
teteEteteEseseEteteEseseteteE
T
TTTT
TTHHHH

95
(A.29)
Result 2 : 0)().().( seteteETH
for all t and s. (A.30)
Proof : For st , 0)().().( seteteETH
since e(t) and e(s) are independent . For
st , 0)().().( seteteETH
since third-order moments of Gaussian variables are
zero.
Result 3 : ).Re().Re(.2
1)Re().Re(
HTTyxyxyx (A.31)
).Re().Re(.2
1)Im().Im(
HTTyxyxyx
(A.32)
).Im().Im(.2
1)Im().Re(
HTTyxyxyx (A.33)
Result 4 : If H is a nonsingular complex matrix and if its inverse is G, then:
GG
GG
HH
HH~
~
~
~ 1
(A.34)
Proof :
GG
GG
HH
HHI ~
~
.~
~
(A.35)
IGHGH ~
.~
. (A.36)
0.~~
. GHGH (A.37)
222
22
2 ).(2
.2
).2()().().().( MMMMMseseteteE
HH

96
which is true since,
).~~
..()~
.~
.()~
.).(~
.(. GHGHjGHGHGjGHjHGHI (A.38)
Result 5 : From Basic Linear Algebra, inverse of a square matrix can be found as:
IA | performing elementary row operations BI |
(Elementary row operations: multiply a row by a constant and add this
multiplication to another one, multiply a row by a number, add a row to another.)
where I is the identity matrix, whose dimensions are same as A .
Then the matrix B is the inverse of the matrix A . (1 AB )
Remembering the Fischer Information Matrix HE . for the current situation,
and knowing that the inverse of it must be calculated in order to find the CRB
covariance matrix ( 1
.
HE ) :
)(...
.
.
..
.....
~..
~0
~~0.00.
~0....
.00....
....00.
~0..0
~0
0..0~
0
0....00)(var1
11
1
1
1
CRB
Something
HH
HH
HH
HH
NN
N
N
CR
(A.39)
Only the lower right corner of the matrix is under concern since it is intended to
find the CRB of the only.

97
I
I
I
I
I
I
I
I
HH
HH
HH
HH
NN
N
N
CR
..00
.0
..
.
.
..
0.
00..
|
|
|
|
|
|
|
|
~..
~0
~~0.00.
~0....
.00....
....00.
~0..0
~0
0..0~
0
0....00)(var
11
1
1
1
(A.40)
Define 1
HG
Perform the following elementary row operations:
Multiply n’th row by ( GT
n . ) and add to the last row. (n is even; n=2,4,…)
Multiply n’th row by ( GT
n
~. ) and add to the last row. (n is odd, n>2;
n=3,5,…)
I
Something
G
G
HH
HH
HH
HH
N
nn
T
n
n
T
n
N
N
N
CR
|
|
|
|
|
|
|
|
~.
~.
..~0..
~00
~~0.00.
~0....
.00....
....00.
~0..0
~0
0..0~
0
0....00)(var
1
1
1
1
1
(A.41)
Perform the following elementary row operations:
Multiply n’th row by ( GT
n .~ ) and add to the last row. (n is even; n=2,4,…)

98
Multiply n’th row by ( GT
n
~.
~ ) and add to the last row. (n is odd, n>2;
n=3,5,…)
I
Something
G
G
G
G
HH
HH
HH
HH
N
n
n
T
n
n
T
n
n
T
n
n
T
n
N
N
CR
|
|
|
|
|
|
|
|
~..
~
.~
.~
~.
~.
..
00..000
~~0.00.
~0....
.00....
....00.
~0..0
~0
0..0~
0
0....00)(var
1
1
1
1
(A.42)
Divide last row by
N
n
n
T
nn
T
nn
T
nn
T
n GGGG1
~..
~.
~.
~~.
~...
1
1
1
1
1
~..
~
.~
.~
~.
~.
..
|
|
|
|
|
|
|
|
00..000
~~0.00.
~0....
.00....
....00.
~0..0
~0
0..0~
0
0....00)(var
N
n
n
T
n
n
T
n
n
T
n
n
T
n
N
N
CR
G
G
G
G
Something
I
HH
HH
HH
HH
(A.43)
99
1
1
1
1
1
1
1
1
..Re
.Im.~
.Re.
~..
~.
~~.
~..
~..
~.
~.
~~.
~...)(
N
n
n
H
n
N
n
n
T
nn
T
n
N
n
nn
T
nnn
T
n
N
n
n
T
nn
T
nn
T
nn
T
n
G
GG
GGGG
GGGGCRB
(A.44)




















