Designing heterogeneous sensor networks for estimating and predicting path travel time dynamics: An...
45
Transportation Research Part B 00 (2013) 000–000 1 Designing Heterogeneous Sensor Networks for Estimating and Predicting Path Travel Time Dynamics: An Information-Theoretic Modeling Approach Tao Xing a , Xuesong Zhou b, * Jeffrey Taylor c a Department of Civil and Environmental Engineering, University of Utah, Salt Lake City, UT 84112-0561,USA [email protected] b School of Sustainable Engineering and the Built Environment, Arizona State University, Tempe, AZ 85287, USA [email protected] c Department of Civil and Environmental Engineering, University of Utah, Salt Lake City, UT 84112-0561,USA [email protected] Abstract With a particular emphasis on the end-to-end travel time prediction problem, this paper proposes an information-theoretic sensor location model that aims to minimize total travel time uncertainties from a set of point, point-to-point and probe sensors in a traffic network. Based on a Kalman filtering structure, the proposed measurement and uncertainty quantification models explicitly take into account several important sources of errors in the travel time estimation/prediction process, such as the uncertainty associated with prior travel time estimates, measurement errors and sampling errors. By considering only critical paths and limited time intervals, this paper selects a path travel time uncertainty criterion to construct a joint sensor location and travel time estimation/prediction framework with a unified modeling of both recurring and non-recurring traffic conditions. An analytical determinant maximization model and heuristic beam-search algorithm are used to find an effective lower bound and solve the combinatorial sensor selection problem. A number of illustrative examples and one case study are used to demonstrate the effectiveness of the proposed methodology. Key words: travel time prediction, sensor network design, automatic vehicle identification sensors, automatic vehicle location sensors 1. Introduction 1.1. Motivation To provide effective traffic congestion mitigation strategies, transportation planning organizations and traffic management centers need to (1) reliably estimate and predict network-wide traffic conditions and (2) effectively inform and divert travelers to avoid recurring and non-recurring congestion. Traffic monitoring systems provide fundamental data inputs for public agencies to measure time-varying traffic network flow patterns and accordingly generate coordinated control strategies. Furthermore, reliable end-to-end trip travel time information is critically needed in a wide range of intelligent transportation system applications, such as personalized route guidance and pre-trip traveler information provision. In this paper, we focus on a series of critical and challenging modeling issues in traffic sensor network design, in particular, how to locate different types of detectors to improve path travel time estimation/prediction accuracy. Based on the types of measurement data, traffic sensors can be categorized into three groups, namely point sensors, point-to-point sensors, and probe sensors. Point sensors collect vehicle speed (more precisely, time-mean
Transcript of Designing heterogeneous sensor networks for estimating and predicting path travel time dynamics: An...

Transportation Research Part B 00 (2013) 000–000
1
Designing Heterogeneous Sensor Networks for Estimating and
Predicting Path Travel Time Dynamics: An Information-Theoretic
Modeling Approach
Tao Xinga, Xuesong Zhoub,* Jeffrey Taylorc
aDepartment of Civil and Environmental Engineering, University of Utah, Salt Lake City, UT 84112-0561,USA [email protected] bSchool of Sustainable Engineering and the Built Environment, Arizona State University, Tempe, AZ 85287, USA [email protected]
cDepartment of Civil and Environmental Engineering, University of Utah, Salt Lake City, UT 84112-0561,USA [email protected]
Abstract
With a particular emphasis on the end-to-end travel time prediction problem, this paper proposes an information-theoretic sensor
location model that aims to minimize total travel time uncertainties from a set of point, point-to-point and probe sensors in a
traffic network. Based on a Kalman filtering structure, the proposed measurement and uncertainty quantification models
explicitly take into account several important sources of errors in the travel time estimation/prediction process, such as the
uncertainty associated with prior travel time estimates, measurement errors and sampling errors. By considering only critical
paths and limited time intervals, this paper selects a path travel time uncertainty criterion to construct a joint sensor location and
travel time estimation/prediction framework with a unified modeling of both recurring and non-recurring traffic conditions. An
analytical determinant maximization model and heuristic beam-search algorithm are used to find an effective lower bound and
solve the combinatorial sensor selection problem. A number of illustrative examples and one case study are used to demonstrate
the effectiveness of the proposed methodology.
Key words: travel time prediction, sensor network design, automatic vehicle identification sensors, automatic vehicle location sensors
1. Introduction
1.1. Motivation
To provide effective traffic congestion mitigation strategies, transportation planning organizations and traffic
management centers need to (1) reliably estimate and predict network-wide traffic conditions and (2) effectively
inform and divert travelers to avoid recurring and non-recurring congestion. Traffic monitoring systems provide
fundamental data inputs for public agencies to measure time-varying traffic network flow patterns and accordingly
generate coordinated control strategies. Furthermore, reliable end-to-end trip travel time information is critically
needed in a wide range of intelligent transportation system applications, such as personalized route guidance and
pre-trip traveler information provision. In this paper, we focus on a series of critical and challenging modeling issues
in traffic sensor network design, in particular, how to locate different types of detectors to improve path travel time
estimation/prediction accuracy.
Based on the types of measurement data, traffic sensors can be categorized into three groups, namely point
sensors, point-to-point sensors, and probe sensors. Point sensors collect vehicle speed (more precisely, time-mean

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
2
speed), volume and road occupancy data at fixed locations. With point detectors having significant failure rates,
existing in-pavement and road-side traffic detectors are typically instrumented on a subset of freeway links. Point-
to-point sensors can track the identities of vehicles through mounted transponder tags, license plate numbers, or
mobile phone Bluetooth signals, as vehicles pass multiple but non-contiguous reader stations. A raw tag read
typically records a vehicle ID number, the related time stamp, and the location. If two readers at different locations
sequentially identify the same probe vehicle, then the corresponding data reads can be fused to calculate the reader-
to-reader travel time and the counts of identified vehicles between instrumented points.
Automatic license plate matching techniques have been used in the traffic surveillance field since the 1970s, and
many statistical and heuristic methods have been proposed to reduce reading errors to provide reliable data
association (Turner et al., 1998). Many feature-based vision and pattern recognition algorithms (e.g., Coifman et al.,
1998) have been developed to track individual vehicle trajectories using camera surveillance data. Radio Frequency
Identification (RFID) technologies first appeared in Automated Vehicle Identification (AVI) applications during the
1980s and has become a mature traffic surveillance technology that produces various traffic measures with high
accuracy and reliability. Currently, many RFID-based AVI systems are widely deployed in road pricing, parking lot
management, and real-time travel time information provision. For instance, prior to 2001, around 51 AVI sites were
installed and approximately 48,000 tags had been distributed to users in San Antonio, United States, which
represents a 5% market penetration rate. Additionally, Houston’s TranStar relies on AVI data to provide current
travel time information (Haas et al., 2001). Many recent studies (e.g., Wasson et al., 2008, Haghani et al., 2010)
started to use mobile phone Media Access Control (MAC) addresses as unique traveler identifiers to track travel
time for vehicles and pedestrians.
Many Automatic Vehicle Location (AVL) technologies, such as Global Positioning System (GPS) and
electronic Distance Measuring Instruments (DMI’s), provide new possibilities for traffic monitoring databases to
semi-continuously obtain detailed passing time and location information along individual vehicle trajectories. As the
personal navigation market grows rapidly, probe data from in-vehicle Personal Navigation Devices (PND) and cell
phones become more readily available for continuous travel time measurement. On the other hand, privacy concerns
and expensive one-time installation costs are two important disadvantages influencing AVL deployment progress.
1.2. Literature review
Essentially, any application of real-time traffic measurements for supporting Advanced Traveler Information
Systems (ATIS) and Advanced Traffic Management Systems (ATMS) functionalities involves the estimation and/or
prediction of traffic states. Depending on underlying traffic process assumptions, the existing traffic state estimation
and prediction models can be classified into three major approaches: (1) approach purely based on statistical
methods, focusing on travel time forecasting, (2) approach based on macroscopic traffic flow models, focusing on
traffic flow estimation on successive segments of a freeway corridor, (3) approach based on dynamic traffic
assignment (DTA) models, focusing on wide-area estimation of origin-destination trip demand and route choice
probabilities so as to predict traffic network flow patterns for links with and without sensors. In this research, we are
interested in how to place different types of sensors to reduce traffic uncertainty for the first statistical method-based
travel time estimation and prediction applications.
In sensor location models for the second approach, significant attention (e.g., Leow et al., 2008, Liu and
Danczyk, 2009, Danczyk and Liu, 2011) has been devoted to placing point detectors along a freeway corridor to
minimize the traffic measurement errors of critical traffic state variables, such as segment density and flow. The
traffic origin-destination (OD) matrix estimation problem is also closely related to the travel time estimation
problem under consideration. To determine the priority of point detector locations, there are a wide range of
selection criteria, including the “traffic flow volume” and “OD coverage” criteria proposed by Lam and Lo (1990),
and a “maximum possible relative error (MPRE)” criterion proposed by Yang et al. (1991) that aims to calculate the
greatest possible deviation from an estimated demand table to the unknown true OD trip demand.
Recently, based on the trace of the a posteriori covariance matrix produced in a Kalman filtering model, Zhou
and List (2010) proposed an information-theoretic framework for locating fixed sensors in the traffic OD demand
estimation problem. Related studies along this line include an early attempt by Eisenman et al. (2006) that uses a
Kalman filtering model to minimize the total demand estimation error in a dynamic traffic simulator, and a recent
study by Fei and Mahmassani (2011) that considers additional criteria, such as OD demand coverage, within a

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
3
multi-objective decision making structure. Furthermore, in the travel time estimation problem, the Kalman filtering
based framework has also been employed by many researchers. For instance, an ensemble Kalman filtering model is
proposed by Work et al. (2008) to estimate freeway travel time with probe measurements.
Several recent studies have been conducted on the sensor location problem from different perspectives. Chen et
al. (2004) studied the AVI reader location problem for both travel time and OD estimation applications. They
presented the following three location section criteria: minimizing the number of AVI readers, maximizing the
coverage of OD pairs, and maximizing the number of AVI readings. To maximize the information captured with
regard to the network traffic conditions under budget constraints, Lu et al. (2006) formulated the roadside server
locating problem as a two-stage problem. The first stage was a sensitivity analysis to identify a subset of links on
which the flows have large variability of travel demand, and more links were gradually selected to maximize the
overall sensor network coverage in the second stage. Sherali et al. (2006) proposed a discrete optimization approach
for locating AVI readers to estimate corridor travel times. They used a quadratic zero-one optimization model to
capture travel time variability along specified trips. In a recent study by Ban et al. (2009), link travel time estimation
errors are selected as the optimization criterion for point sensor location problems, and a dynamic programming-
based solution method is constructed to optimize the location of point sensors on link segments along a corridor. Li
and Ouyang (2011) proposed a reliable sensor location method that considers probabilistic sensor failures, and
developed a Lagrangian relaxation based solution algorithm. By considering uncertainty in the traffic system, Fei et
al. (2013) proposed a two-stage stochastic model to find near-optimal sensor location solutions for OD flow
estimation with random non-recurring traffic events. In another recent study by Mirchandani et al. (2009), two AVI
sensor locating models were proposed: one considering the total vehicle-mileage coverage, while the other focusing
on monitoring the travel time prediction performance. Specifically, for their second model, a Bayesian statistical
theory based method was used to update the travel time estimates, and a two-stage heuristic approach was proposed
for locating AVI sensor. In addition, as a comprehensive review for existing flow-oriented sensor network studies,
Gentili and Mirchandani (2012)’s paper systematically classifies sensor location modeling methods as two major
categories of flow observability and flow estimation, with detailed descriptions and comparisons of several
optimization rules and models.
1.3. Proposed approach
While significant progress has been made in formulating and solving the sensor location problem for travel time
estimation and prediction, a number of challenging theoretical and practical issues remain to be addressed.
First, as one of the most important applications of traffic surveillance systems, real-time traffic
estimation/prediction plays a key role in intelligent transportation systems. However, the optimization criteria used
in the existing sensor location models typically differ from those used in real-time travel time estimation and
prediction applications. Due to the inconsistency between these two models, sensor design plans (e.g., focusing on
network coverage) might not fully recognize the underlying stochastic traffic process and lead to sub-optimal
solutions in the actual traffic information provision stage, particularly in terms of minimizing end-to-end travel time
forecasting errors. For example, an AVI sensor location plan that maximizes sensor coverage does not necessarily
yield the least end-to-end travel time estimation and prediction uncertainty if there are multiple likely paths between
pairs of AVI sensors. As a result, a simplified but unified travel time estimation and prediction model for utilizing
different data sources is critically required as the underlying building block for the sensor network design problem.
Second, since most of the existing studies typically focus on real-time speed estimation errors (when using
measured speed from point sensors to approximate speed on adjacent segments without sensors), they do not
explicitly take into account uncertainty reduction and propagation in a heterogeneous sensor network with both
point and point-to-point travel time measurements, as well as possible error correlation between new and existing
sensors.
Third, how to quantify the uncertainty increase in an integrated travel time and prediction process, especially
under non-recurring traffic conditions, has not received sufficient attention. Under recurring conditions, the travel
time is more likely to be estimated and predicted accurately for links with sensor measurements. For locations
without sensors, one can resort to historical information (e.g., through limited floating car studies) or adjacent
sensors to approximate traffic conditions. However, under non-recurring traffic conditions due to incidents or
special events, without real-time measurements from impacted locations, traffic management centers or traffic

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
4
information provision companies might still offer biased traffic information based on outdated historical estimates or
incorrect approximations from unimpacted neighboring detectors.
By extending a Kalman filtering-based information theoretic approach proposed by Zhou and List (2010) for
OD demand estimation applications, this research focuses on how to analyze the uncertainty for the travel time
estimation and prediction problem with heterogeneous data sources. Since the classical information theory proposed
by Shannon (1948) on measuring information gain related to signal communications, the sensor location problem
has been an important and active research area in the fields of electrical engineering and information science.
Various measures have been used to quantify the value of sensor information in different sensor network
applications, where the unknown system states (e.g., the position and velocity of targets studied by Hintz and
McVey, 1991) can typically be directly measured by sensors. In comparison, sensing network-wide travel time
patterns is difficult in its own right because point sensors only provide a partial coverage of the entire traffic state.
Using AVI data involves complex spatial and temporal mapping from raw measurements, and AVL data are not
always available on a fixed set of links, especially under an early sensor network deployment stage.
Compared with the sensor design method for OD demand estimation studied by Zhou and List (2010), the
sensor location problem considered in this paper needs to address a number of unique challenges for more complex
network-wide travel time applications. In Zhou and List’s paper, the core state transition process in the offline OD
estimation problem is assumed to be stationary. For the travel time estimation and prediction problem, however, the
time-dependent travel time variables are essentially a mixture of stationary and non-stationary processes with
complicated transition dynamics. In this research, the stochasticity sources of non-recurring traffic conditions need
to be explicitly modeled and further captured through instrumented sensors. Moreover, the time-varying path travel
time matrix considered in this study has a much larger dimension compared to an origin-destination matrix, and
therefore it is very challenging to quantify the information gain from an underlying heterogeneous sensor network.
Compared to the travel time prediction-based sensor location model proposed by Mirchandani et al. (2009), this
study utilizes the Kalman Filtering framework to model both sensor location problem and travel time
estimation/prediction problem with a special focus on inherent model consistency. Moreover, by using the
information uncertainty as the driving force of both analytical and heuristic models, this study proposes a unified
framework that can be applied to heterogeneous data sources. Furthermore, to better capture the effects of dynamic
traffic behaviors, separate travel time prediction models are derived for both recurring and non-recurring traffic
conditions.
A wide range of studies (e.g., Zhang and Rice, 2003; Stathopoulos and Karlaftis, 2003) have been devoted to
travel time prediction using Kalman filtering and Bayesian learning approaches. To extract related statistics from
complex spatial and temporal travel time correlations, a recent study by Fei et al. (2011) extends the structure state
space model proposed by Zhou and Mahmassani (2007) to detect the structural deviations between the current and
historical travel times and apply a polynomial trend filter to construct the transition matrix and predict future travel
time. This paper presents a unified Kalman filtering-based framework under both recurring and non-recurring traffic
conditions. More importantly, a spatial queue-based cumulative flow count diagram is introduced to derive the
important transition matrix for modeling traffic evolution under non-recurring congestion. Different from existing
data-driven or time-series-based methods, this paper aims to derive a series of point-queue-model-based analytical
travel time transition equations which lay out a core modeling building block for quantifying prediction uncertainty
under non-recurring traffic conditions. In addition, with an extended discussion on the measure of uncertainty, this
study proposes both analytical and heuristic approaches that capture the travel time estimation/prediction uncertainty
reduction from different perspectives. We also extend a maximum determinant based analytical approach to show
that the point sensor location problem can be constructed as a convex optimization problem, which can serve as an
effective lower bound for the corresponding integer programming model for the sensor location problem.
The remainder of this paper is organized as follows. The overall framework and notation are described in the
next section. In Sections 3 and 4, a state-dependent transition model and a measurement model are described,
respectively. Section 5 presents a Kalman filtering based travel time estimation and prediction model. A
comprehensive discussion of information measure models is presented in Section 6, followed by Section 7 which
describes the beam-search based sensor design model and solution algorithms. Finally, illustrative example and
numerical experiment results on a test network are shown in Section 8.
2. Notations and modeling framework overview

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
5
We first introduce some key notation used in the travel time prediction and sensor network design problems.
2.1. Notations
Sets and Subscripts:
N = set of nodes.
A = set of links.
m = number of links in set A.
'A = set of links with point sensors (e.g., loop detectors), 'A A .
''N = set of nodes with point-to-point sensors, ''N N .
'''A = set of links with probe sensor data, '''A A .
'n , ''n , '''n = numbers of measurements, respectively, from point sensors, point-to-point sensors and probe
sensors.
n = number of total measurements, ' '' '''n n n n .
t = time index for state variables.
h = travel time prediction horizon.
o = subscript for origin index, o O , O = set of origin nodes.
d = subscript for destination index, d D , D = set of destination nodes.
a,b = subscript for link index, ,a b A .
i, j = subscript for node index, ,i j N .
k, λ = subscript for path.
p(i,j,k) = set of links which belong to path k from origin node i to destination node j.
State and measurement variables
,t ax = travel time of link a at time t.
, , ,t o d kx = travel time on path k from origin o to destination d, at time t.
,'t ay = single travel time measurement from a point sensor on link a, at time t.
, , ,''t i j ky = single travel time measurement from a pair of AVI readers on path k at time t from node i to node j,
where the first and second AVI sensors are located at nodes i and node j, respectively.
,'''t ay = a set of travel time measurements from a probe sensor that contain map-matched travel time records on
links a on path k and time t from node i to node j, where ( , , )a p i j k .
Vector and matrix forms in Kalman filtering framework:
Xt = travel time vector at time t, consisting of m elements xt,a.
tX = a priori estimate of the mean values in the travel time vector at time t, consisting of m elements.
tX = a posteriori estimate of the mean values in the travel time vector at time t, consisting of m elements.
h
tX = historical regular travel time estimates for the corresponding time interval t.
Vt = historical pattern deviation at time t.
Yt = sensor measurement vector at time t, consisting of n elements.
tP = a priori variance covariance matrix of travel time estimate, consisting of (m × m) elements.
tP = a posteriori error covariance matrix, i.e. conditional covariance matrix of estimation errors after including
measurements.
tH = sensor matrix that maps unknown travel times Xt to measurements Yt, consisting of (n × m) elements.
Kt = updating gain matrix, consisting of (n × m) elements, at time t.

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
6
t = autoregressive parameter set at time t.
,t t hL = non-recurring traffic transition matrix from time t to t+h at time t.
ωt = system evolution noise vector for link travel times, ~ (0, )t tN Q .
Qt = system evolution noise variance-covariance matrix, at time t.
εt = combined measurement error term, εt ~ N(0, Rt ) , at time t.
Rt = variance-covariance matrix for measurement errors, at time t.
Parameters and variables used in information measure and sensor design models
, , ,i j k a = path-link incidence coefficient, , , ,i j k a =1 if path k from node i to node j passes through link a, and 0
otherwise.
,'''
t a = stochastic link traversing coefficient for GPS probe vehicles;
,''' 1
t a if GPS probe vehicles pass
through link a at time t, and 0 otherwise.
, , ,t o d kE = path travel time estimation error on path k from origin o to destination d at time t.
, , ,t o d kf = traffic flow volume on path k from origin o to destination d at time t.
α = market penetration rate for vehicles equipped with AVI sensors/tags.
β = market penetration rate for vehicles equipped with AVL sensors.
l = subscript of sensor design solution index.
lS = lth sensor design solution, represented by ', '', ''', ,lS A N A .
*S = optimal sensor design solution.
2.2. Problem statement and assumptions
Consider a traffic network with multiple origins oO and destinations dD, as well as a set of nodes connected
by a set of directed links. We assume the following input data are available:
(1) The prior information on the time-dependent historical travel time pattern for all the links in the network,
including a vector of historical travel time estimates h
tX and the corresponding variance-covariance matrix
tP . For instance, the historical pattern can be obtained through aggregating travel time every 5 minutes for
the same day of the week across different weeks/months.
(2) The current link sets with point sensor and point-to-point AVI sensor data, specified by 'A and "N .
(3) Estimated market penetration rate α for point-to-point AVI sensors.
(4) Estimated market penetration rate β for probe sensors, and set of links with accurate probe data '''A .
The sensor network to be designed and deployed will include additional point sensors and point-to-point
detectors that lead to sensor location sets of 'A and ''N , where ' 'A A , '' ''N N . In the new sensor network,
through GPS map-matching algorithms, GPS probe data can be converted from raw longitude/latitude location
readings to link travel time records on a set of links '''A . In this study, we assume that probe data will be available
through a certain data sharing program (e.g., Herrera and Bayen, 2010), or from vehicles equipped with Internet-
connected GPS navigation systems or GPS-enabled mobile phones. It should also be noticed that, depending on the
underlying map-matching algorithm and data collection mechanism, only a subset of links in a network, denoted by
'''A , can produce reliable GPS map-matching results. For example, it is practically difficult to distinguish driving
vs. walking mode on arterial streets through data from GPS-equipped mobile phones, so one might need to consider
'''A as a set of freeway links (with reliable travel time estimates available).
Another key assumption in our study is that the historical travel time information can be characterized by the
time-dependent a priori historical travel time pattern tX and estimation error variance matrix tP . In practice, if

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
7
point or point-to-point sensor data are available from the existing sensor sets 'A and "N , it is relatively easy to use
archived data to estimate tX and tP on the corresponding links. For links without direct sensor measurements, the
travel time mean estimate can be approximated by using a national or regional travel time index and set the
corresponding variance to a sufficiently large value (to represent high uncertainty). One complicated issue is how to
estimate non-diagonal elements in matrix tP . For simplicity, one can assume zero correlation between links in the
initial travel time covariance matrix, and in the case of a complete lack of historical demand information, we can set 1( ) 0tP .
It should be remarked that, measurements from a point sensor are typically instantaneous speed values observed
at the exact location of the detector. Using a section-level travel time modeling framework (e.g., Lindveld et al.,
2000), a homogenous physical link can be decomposed into multiple cells or sections, with the speed measurement
directly reflecting only the section where the sensor is located. In some previous studies, the link or corridor speed
can be estimated using the section based speed, while cells without sensors use approximated values from adjacent
instrumented sections. As shown in Fig. 1, travel times on section A and D are directly measured using sensors 1
and 2, respectively. Meanwhile, the travel times for sections B, C and E, as well as the entire corridor, are estimated
using upstream and downstream sensors. There are a number of travel time reconstruction approaches, such as
constant speed based methods and trajectory methods (Van Lint and Van der Zijpp, 2003).
Fig. 1. Section-level travel time estimation
In this study, for sections without point sensors, the above mentioned approximation error is modeled as prior
estimation errors, which can be obtained through a historical travel time database by considering other related links
such as adjacent links or links with similar characteristics. Furthermore, our proposed framework can also be easily
generalized to a section-based representation scheme, where a section in Fig. 1 can be viewed as a link in our link-
to-path-oriented modeling structure. In this study, we consider instantaneous path travel time as a sum of link travel
time, that is, , , , ,
( , , )
t o d k t a
a p o d k
x x
, rather than experienced path travel time, which is more realistic but requires
complex recursive computation along the links on a path.
2.3. Modeling procedure
Focusing on predicting end-to-end path travel time applications and considering future availability of GPS
probe data on links '''A , the goal of the sensor location problem is to minimize the overall information uncertainty
TU by locating point and point-to-point sensors in sets 'A and ''N , subject to budget constraints for installation and
maintenance. To systematically present our key modeling components in the proposed sensor design model, we will
sequentially describe the following four modules.
Travel time state transition and measurement modeling module:
In this module a unified model of the travel time state transition is constructed for both recurring and non-
recurring traffic conditions. In addition, measurement models for each type of sensors are discussed with a special
focus on representing measurement errors.
Link travel time estimation and prediction module:
Given prior travel time information tX and tP , with traffic measurement vector tY that includes ,'t ay ,
, , ,''t i j ky and ,"'t ay from sensor location sets 'A , ''N and '''A , the link travel time estimation and prediction module
seeks to update current link travel times tX and their variance-covariance matrix tP using a Kalman filtering
framework that is built on proposed state transition and measurement models.
Information quantification module:

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
8
With prior knowledge on the link travel time estimates tX and tP , the information quantification module aims
to find the single-valued information uncertainty ( )lTU S for the critical path travel times for a sensor design
scenario Sl represented by location sets 'A , ''N , '''A , as well as AVI and AVL market penetration rates α and β .
Sensor network design module:
The sensor network design module uses an approximation approach to find the optimal solution * arg min ( )l lS TU S , subject to budget constraints for installation and maintenance.
For each candidate solution Sl,
this module needs to call the information quantification module to calculate ( )lTU S . The optimal solution *
S
produces optimal location sets 'A and ''N , under predicted AVI and AVL market penetration rates α and β, and
(stochastic) location set '''A travelled through by probe vehicles.
3. State Transition Models
In practice, the time-dependent travel time is usually considered as a non-stationary variable, especially for links
with high travel time variability. To better describe the state transition of travel times, we define a historical pattern
deviation as: h
t t tV X X (1)
where Xt represents the (real-world) travel time vector at time t and Xth denotes the historical travel time vector for
the corresponding time interval t. In our proposed state transition model, the travel time deviation in Eq. (1) is
assumed to be a stationary time series under recurring traffic conditions.
3.1. State-dependent transition models
Under recurring traffic conditions, the travel time deviation in Eq. (1) is modeled by a first-order autoregressive
(AR) formula:
1 1
h h R
t t t t t tX X X X (2)
In Eq. (2), t is an autoregressive coefficient for the structure deviation variable h
t tX X , which has been de-
trended from the historical average. Similar AR or structure deviation models have been proposed within a Kalman
filtering framework by Okutani and Stephanedes (1984), Zhou and Mahmassani (2007) and Fei et al. (2011). ωtR is
the error vector of deviation under recurring conditions and can be assumed as white noise in the autoregressive
model. ωtR needs to be calibrated from historical data. In an extreme case of t = 0, Eq. (2) becomes
1 1
h R
t t tX X , meaning that no significant temporal autocorrelation exists and the real-time travel time 1tX
can be predominantly predicted using the corresponding historical pattern 1
h
tX .
For non-recurring traffic conditions, e.g. due to various irregular demand/capacity changes, the process equation
of the deviation in real-time prediction applications can be written in the following state space form:
1 1 , 1
h h NR
t t t t t t tX X L X X (3)
In Eq. (3), the transition matrix Lt,t+1 denotes the non-recurring process matrix of the deviation, and the process error
ωtNR is considered as a time-dependent normally distributed random noise vector. Lt,t+1 can be derived through a
cumulative flow based model as discussed in appendix.
We notice that Eq. (2) and (3) share a similar structure. By re-grouping variables in Eqs. (2) and (3), a unified
state-dependent transition model can be derived for the non-stationary variable Xt.
1t t t t tX A X B (4)
T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
9
, 1
Links under recurring congestion
Links under non-recurring congestion
t
t
t t
AL
(5)
1
h h
t t t tB X A X (6)
~ (0, )t tN Q
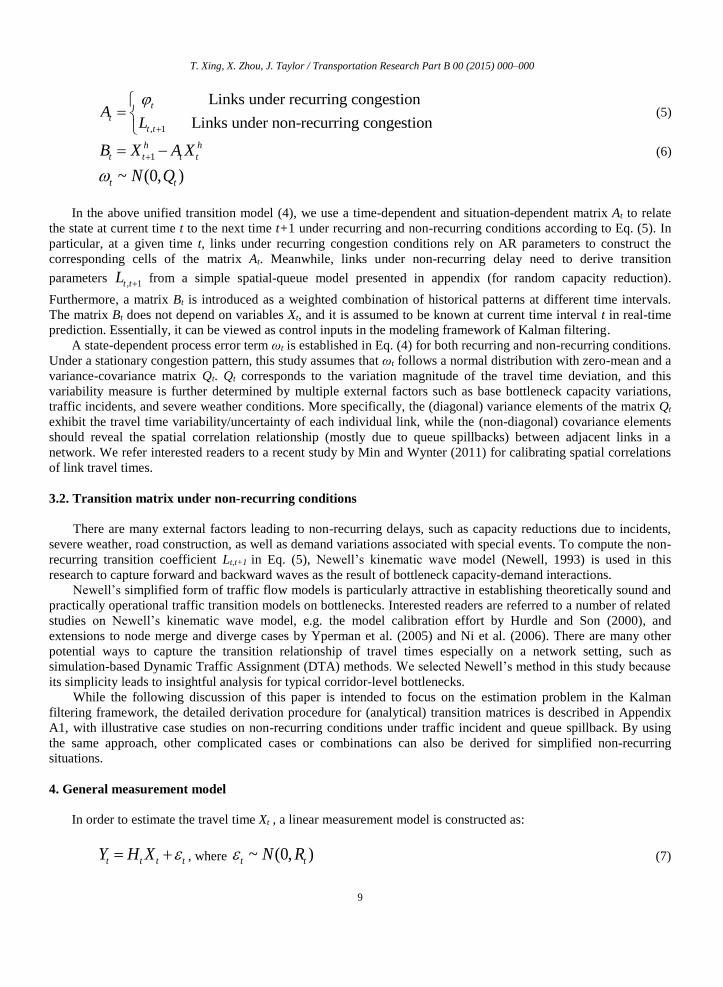
In the above unified transition model (4), we use a time-dependent and situation-dependent matrix At to relate
the state at current time t to the next time t+1 under recurring and non-recurring conditions according to Eq. (5). In
particular, at a given time t, links under recurring congestion conditions rely on AR parameters to construct the
corresponding cells of the matrix At. Meanwhile, links under non-recurring delay need to derive transition
parameters , 1t tL from a simple spatial-queue model presented in appendix (for random capacity reduction).
Furthermore, a matrix Bt is introduced as a weighted combination of historical patterns at different time intervals.
The matrix Bt does not depend on variables Xt, and it is assumed to be known at current time interval t in real-time
prediction. Essentially, it can be viewed as control inputs in the modeling framework of Kalman filtering.
A state-dependent process error term ωt is established in Eq. (4) for both recurring and non-recurring conditions.
Under a stationary congestion pattern, this study assumes that ωt follows a normal distribution with zero-mean and a
variance-covariance matrix Qt. Qt corresponds to the variation magnitude of the travel time deviation, and this
variability measure is further determined by multiple external factors such as base bottleneck capacity variations,
traffic incidents, and severe weather conditions. More specifically, the (diagonal) variance elements of the matrix Qt
exhibit the travel time variability/uncertainty of each individual link, while the (non-diagonal) covariance elements
should reveal the spatial correlation relationship (mostly due to queue spillbacks) between adjacent links in a
network. We refer interested readers to a recent study by Min and Wynter (2011) for calibrating spatial correlations
of link travel times.
3.2. Transition matrix under non-recurring conditions
There are many external factors leading to non-recurring delays, such as capacity reductions due to incidents,
severe weather, road construction, as well as demand variations associated with special events. To compute the non-
recurring transition coefficient Lt,t+1 in Eq. (5), Newell’s kinematic wave model (Newell, 1993) is used in this
research to capture forward and backward waves as the result of bottleneck capacity-demand interactions.
Newell’s simplified form of traffic flow models is particularly attractive in establishing theoretically sound and
practically operational traffic transition models on bottlenecks. Interested readers are referred to a number of related
studies on Newell’s kinematic wave model, e.g. the model calibration effort by Hurdle and Son (2000), and
extensions to node merge and diverge cases by Yperman et al. (2005) and Ni et al. (2006). There are many other
potential ways to capture the transition relationship of travel times especially on a network setting, such as
simulation-based Dynamic Traffic Assignment (DTA) methods. We selected Newell’s method in this study because
its simplicity leads to insightful analysis for typical corridor-level bottlenecks.
While the following discussion of this paper is intended to focus on the estimation problem in the Kalman
filtering framework, the detailed derivation procedure for (analytical) transition matrices is described in Appendix
A1, with illustrative case studies on non-recurring conditions under traffic incident and queue spillback. By using
the same approach, other complicated cases or combinations can also be derived for simplified non-recurring
situations.
4. General measurement model
In order to estimate the travel time Xt , a linear measurement model is constructed as:
t t t tY H X , where ~ (0, )t tN R (7)

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
10
With the measurement model in Eq. (7), the travel times can be estimated using the latest measurements Yt .
Measurement vector Yt with (n × 1) elements is composed of travel time observations from point sensors, point-to-
point sensors and probe sensors. In particular, each row of the vector contains a travel time observation value from
an individual sensor (or sensor pair for AVI) available at time t. An n-by-1 measurement error term εt is assumed to
be zero-mean and normally distributed according to a time-dependent variance matrix Rt.
The mapping matrix Ht , with (n × m) elements, connects unknown link travel time Xt to measurement data Yt .
Particularly, each row in the mapping matrix Ht corresponds to a measurement and each column corresponds to a
physical link in the network. For an element at the uth row and wth column of the matrix Ht , value = 1 indicates that
the uth measurement covers or includes the travel time on the wth link of the network, otherwise the value is equal to
0. Specifically, for links covered with more than one sensor, each sensor has its own measurement and error values
in the corresponding rows of the matrix Yt and εt. For instance, for a link a covered by two sensors 1 and 2, the
measurement model can be written as , ,1 , ,1
,
, ,2 , ,2
1
1
t a t a
t a
t a t a
yx
y
, where yt,a,1 and εt,a,1 are the measurement
and error from sensor 1, respectively.
4.1. Measurement model for different types of sensors
Shown in Eq. (7), a linear measurement model is used to map the measurement vector Yt to the travel time
vector Xt by taking into account measurement error term εt from variant sources.
The following three equations aim to show how Ht is constructed for a specific type of measurement at time t. For a point sensor on link a, each measurement covers one link,
, , ,' ' , 't a t a t ay x a A . (8)
For a pair of point-to-point sensors that capture end-to-end travel time from node i to node j through path k,
, , , , , , , , , ,'' '' , , ''t i j k i j k a t a t i j k
a
y x i j N , (9)
where , , ,i j k a is the path-link incidence coefficient for AVI sensors, , , ,i j k a =1 if path k from node i to node j passes
through link a, and 0 otherwise.
For an AVL sensor/probe on link a,
, , , ,''' ''' ''' , '''t a t a t a t ay x a A ,
(10)
with ,'''t a represents the stochastic link traversing coefficient for GPS probe vehicles. ,''' 1t a if GPS probe
vehicles pass through link a at time t, and 0 otherwise.
For AVI and AVL sensors, a measurement in models (9) or (10) might be referred to as an average value of
multiple raw samples within a certain time period (e.g., from 8:00 AM to 8:15AM). The temporal-spatial coverage
of different types of sensors is illustrated in Fig. 2. For a corridor network with three links (1, 2, 3) and four nodes (a,
b, c, d), one point sensor covers link 2, and two AVI sensors are located at node a and d. As shown in Fig. 2, from
8:00 to 8:30 AM, two GPS probe location sequences (P1 and P2) and two AVI travel time records (A1 and A2) are
received on this corridor, along with three point sensor observations. In practice, the raw data from AVI and AVL
sensors will first be converted to records at corresponding time intervals, and then used in the travel time estimation.
In the example of Fig. 2, the AVI sensor pair covers all three links, with its measurement aggregated from all
records observed in a particular time period. For instance, the AVI measurement at the time interval from 8:15 AM
to 8:30 AM is aggregated from the average of travel time records A1 and A2, and it provides a measurement
equation for instantaneous travel time from a to d : , , ,1 ,2 ,3 , ,'' ''t a d t t t t a dy x x x , where , ''a d N , t is the
time interval between 8:15AM and 8:30AM.
The GPS location sequences P1 and P2 provide three measurement equations:

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
11
,1 ,1 ,1''' '''t t ty x , ,2 ,2 ,2''' '''t t ty x , ,3 ,3 ,3''' '''t t ty x ,
where ,1'''ty and ,2'''ty are constructed based on single-probe travel time records from P1, and ,3'''ty is an average
travel time based on records P1 and P2, and t is the time interval between 8:00AM and 8:15AM. ,3'''t has a smaller
sampling error than ,1'''t and ,2'''t , as the former includes samples from two GPS probes.
Fig. 2. Spatial-temporal coverage representation for AVI, GPS and point sensors
4.2. Measurement error analysis
The measurement error term ε in the above equations (8-10) are combined terms that reflect the overall effect of
errors from the data conversion, measurement reading and sampling processes, as discussed below.
Data conversion error: Typically, only time-mean speed data are available from a point sensor, and the travel
time value (i.e. space-mean speed) needs to be inferred and approximated from a point speed reading. This
introduces significant data conversion errors, depending on the placement of a point sensor on a link (e.g., the
relative location with respect to the tail of a queue from the downstream node of a link). In addition, a single-loop
detector has to use the observed occupancy and flow counts to calculate the point speed value, which might further
lead to larger approximation errors. Detailed discussions on the above types of data conversion errors can be found
at Rakha and Zhang (2005) and Van Lint (2004). For probe sensors, GPS location data (in terms of longitude,
latitude, point speed, bearing and timestamps) need to be map-matched to specific links in the study network to
estimate corresponding link travel times. This map-matching process again introduces data conversion errors to the
final link travel time estimates.
Sensor reading error: Point sensors that are not carefully calibrated are more likely to generate large
measurement noises. The detection rates of AVI readers are relatively low when vehicle tags are not powered by
batteries. The data quality of GPS location readings depends on the number of satellites that a GPS receiver can
“see” and nearby environment (e.g., urban canyon effect).
Sampling error: Assume , , ,''t i j kg is the number of samples collected through AVI sensors on path k at time t
from node i to node j. As a probe travel time measurement can come from multiple readings, the variance of
sampling error (e.g., for an AVI measurement that is aggregated from , , ,''t i j kg samples) can be described as
, , ,
, , ,
, , ,
var( )var( '' )
''
t i j k
t i j k
t i j k
x
g
(11)
If we assume no correlation between link travel times along path k from node i to node j, then
, , , , ,
( , , ) ( , , )
var( ) var( )t i j k t a t a
a p i j k a p i j k
x x q
.
(12)
Assuming there are a total of , , ,d i j kf vehicles traveling from node i to node j through path k, then the AVI
market penetration rate α can be derived as , , , , , , , , ,''t i j k t i j k t i j kg f . That is, when the market penetration rate
increases, the size of samples also becomes larger, leading to a smaller sampling error and a more reliable travel
time measurement. In practice, due to the lack of data, a single market penetration rate α can be used for a certain
area.
In summary, the magnitude of the combined error εt is determined by a number of external factors, and there are
also possible error correlations among different sensors depending on traffic conditions. For simplicity, the
following analysis assumes the combined errors belong to a normal probability distribution (without autocorrelation)
with zero-mean and a variance-covariance matrix Rt.

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
12
As point and AVI detectors are installed at fixed locations, the corresponding sensor mapping matrices, denoted
as 'tH and ''tH , typically remain the same within the study time horizon, that is ' 'tH H and '' ''tH H . Even
with more accurate vehicle based link travel time samples, the probe sensors still have two major limitations: low
market penetration rate and stochastic temporal coverage. Specifically, similar to the point-to-point AVI sensor, a
large sampling error is introduced to probe sensor measurements under a low market penetration rate, as shown in
Eq. (11). Moreover, individual travelers with GPS probes can use different paths and links on different days, which
leads to a time-dependent sensor mapping matrix '''tH that consists of stochastic link traversing coefficient ,"'t a
for GPS probe vehicles.
4.3. AVI extension with multiple paths
The point-to-point sensor measurement model in Eq. (9) assumes that all AVI-equipped travelers use only a
single path between each pair of AVI sensors. The following discussion considers a more complex but realistic
situation with multiple used paths between a pair of AVI sensors. For simplicity, we assume the route choice
probabilities for those paths can be computed from a deterministic or stochastic traffic assignment program.
This study adapts a multivariate normal (MVN) distribution to represent the route choice behavior. In particular,
each route choice decision from an individual traveler can be considered as an independent Bernoulli trial from one
of the K possible outcomes (i.e. paths) with probabilities µ1, …, µk,…, µK.
Fig. 3. Two partially overlapping paths between AVI readers at nodes a and c
Consider an example network shown in Fig. 3, where two AVI sensors are located at nodes a and c. Travelers
can take either of two routes: p1 = x1 + x3 or p2 = x2 + x3, where link 3 is shared by these two paths. We now extend
AVI measurement equation (9) from a single-path sensor pair to the following two-path measurement equation
(subscripts t, i, j are omitted for notation simplicity):
1
1 2 2 1 1 2 2 3
3
'' '' '' 1
x
y H X x x x x
x
(13)
where µ1 and µ2 represent the route choice probability for link 1 and 2, with 1 2 1 .
''y is the average travel time from travelers captured by this AVI sensor pair, the contribution from travelers
using route 1 is 1 1p and the contribution from route 2 is
2 2p .
is the error term introduced by sampling variations due to multiple paths.
is the error term associated with using the sample average value to approximate the population mean value X,
as described in Eq. (11).
The variance of multi-choice sampling variation can be calculated through a path travel time point of view:
2 2
1 1 2 2 3 1 1 2 2 1 1 2 2 1 2 1 2var( ) var( ) var( ) var( ) var( ) 2 cov( , )x x x p p p p p p (14)
Assuming there are g AVI samples observed between this AVI sensor pair, and among the g samples, fk drivers
using path k, we can derive E( ) E( )k k k
f g , 2
var( ) var( ) (1 )k k k k
f g g , and
cov( , )k k g .
Thus, Eq. (14) is reduced to
2 1 2
2 1var( ) ( )p pg
(15)

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
13
First, it is clear that the overlapping portion between different paths does not affect the variance associated with
the multi-choice sampling error, as it is canceled out in 2 1
( )p p . Under perfect deterministic user equilibrium
conditions, all of the used routes have the same travel time, so the var( ) further reduces to zero. Under a more
realistic stochastic user equilibrium assumption, the travel time difference between different traveled routes leads to
an increase in the magnitude of the combined error var( '') var( )R . Similarly, Fig. 4 demonstrates a case
on a corridor with K=3 parallel routes. In general, the variance of the combined error increases as there are more
used paths with significant travel time differences.
2
1 1
, :
1var( ) var( ... ) ( )k k K K k k
k k
p p p p pg
(16)
Fig. 4. Example network with three parallel paths
5. Travel time estimation and prediction models
5.1. Travel time estimate updating
This section discusses the travel time estimation and prediction models as the building block for the (upper-
level) sensor design model. Obviously, there is a wide range of time series-based methods for traffic state
estimation, including autoregressive moving average models and Bayesian learning models, to name a few. The
application of Kalman filtering in dynamic traffic state estimation and prediction starts with early research by
Okutani and Stephanedes (1984). In this section, a Kalman Filtering based estimation and prediction model is
proposed to update link travel times with different types of measurements. Specifically, we want to highlight how a
classical Kalman filtering model can be used to estimate link travel time and, more importantly, the associated
uncertainty propagation with heterogeneous data sources, especially for emerging sensor technologies such as AVI
and AVL.
The targeted variable Xt mentioned in the state transition equation (4) and the measurement equation (7) are
modeled as the true values of travel times for each link. In a state-space travel time estimation/prediction model, we
distinguish two states of the travel time Xt : (1) a priori state before the start of the current time (e.g., before
observations at the current stage are received), corresponding to the predicted travel time tX and uncertainty tP
,
and (2) a posteriori state after taking into account new measurements tY available at time t, corresponding to
estimated travel time tX and uncertainty tP
. We further define the a priori estimate error tX as the difference
between the true travel time vector Xt and the a priori link travel time estimate tX , where t t tX X X . The a
posteriori estimate error tX is the difference between the true travel time vector
tX and the a posteriori link travel
time estimate tX , with t t tX X X . Consequentially, the variance-covariance matrices of the a priori is
expressed as 𝑃𝑡− = 𝑐𝑜𝑣(𝑋𝑡 − 𝑋𝑡
−), and the a posteriori estimate error as 𝑃𝑡+ = 𝑐𝑜𝑣(𝑋𝑡 − 𝑋𝑡
+).
In Kalman filtering, by deriving an optimal Kalman gain factor T T 1( )
t t t t t tK P H H P H R
, a simplified
expression for the estimation error covariance can be derived as
( )t t t tP I K H P (17)
Other formulas for the estimation error covariance are available, for example,
1
1 1 11 1 or T T
t t t t t t t t t tP P H R H P P H R H
. (18)
Eq. (18) provides a convenient approach to evaluate the uncertainty propagation from an information gain
perspective, e.g., P-1. Interested readers are referred to Zhou and List (2010) for more detailed derivations of Kalman
filtering factor and formulas.

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
14
5.2. Travel time prediction
After updating the travel time mean estimate and its covariance on time t, we now need to predict the travel time
and its uncertainty range for the next time interval t+1. According to the system process model (4), the mean
estimate can be updated to the next time interval with the corresponding transition matrix At.
1t t t tX A X B
(19)
As the real-world traffic process evolves to the next time interval, its corresponding travel time uncertainty
should also be updated according to the state process model (4). Specifically, by taking into account the time-
dependent random realizations of traffic demand and capacity, characterized by the system error matrix tQ , we can
update the uncertainty estimate for 1tX
1
T
t t t t tP A P A Q
(20)
With the above uncertainty updating equations (17 & 18), and prediction equation (20), the Kalman filtering
based travel time estimation and prediction model is able to recursively correct the link travel time estimates from
streaming traffic measurements and dynamically adjust the error covariance matrix that indicates the uncertainty
range of the estimation and prediction results.
6. Measure of Uncertainty
One of the fundamental questions in sensor location problems is which criteria should be selected to drive the
core optimization processes. Equations (17, 18 & 20) in the above travel time estimation and prediction model offer
an information-theoretic approach for evaluating a certain heterogeneous sensor deployment strategy. That is, as a
by-product of the proposed Kalman filtering framework, the error matrices P+ and P- provide possible measures to
quantify the uncertainty reduction of the sensor network design. Therefore, by using the error matrices, we can
leverage the inherent consistency of the Kalman filtering framework and design a sensor network that may
potentially optimize the outcome of its main application – travel time estimation and prediction.
The travel time estimation/prediction uncertainty matrices can be analyzed with different approaches. As
discussed in Zhou and List (2010), both the trace and determinant of the error matrix can be used to quantitatively
measure the network wide uncertainty level. Moreover, since both the trace and determinant can be calculated using
the eigenvalues of a matrix, their computational complexities are considered equivalent. Interested readers are
referred to Zhou and List (2010) for more discussions about the comparison of different information or uncertainty
measures.
In this study, two measures of uncertainty are proposed for the travel time estimation application: (1) a
determinant-based analytical approach that optimizes the one-step estimation uncertainty with lower bound
evaluation, and (2) a path travel time oriented heuristic approach that aims to maximize the total uncertainty
reduction of critical OD/paths.
6.1. Analytical Approach with Determinant Maximization of Uncertainty
We first discuss a determinant maximization-based analytical approach to solve the one-step estimation-based
sensor network optimization problem. The uncertainty matrix minimization is a convex optimization problem, and
interested readers are referred to a paper by Vandenberghe et al. (1998) for a discussion on the convexity of the
determinant maximization problem and an efficient interior-point solution algorithm. In this study, we propose an
uncertainty optimization problem by adapting the linear matrix inequality-constrained determinant maximization
problem as the following:

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
15
1
0 1 1
0 1 1
min log det ( )
. . : ( ) ... 0
... 0
T
m m
m m
c x G x
s t G x G x G x G
F x F x F
(21)
By omitting the term Tc x (the analytical centering problem mentioned in Vandenberghe et al., 1998), a log
determinant problem can be proposed to minimize the estimation uncertainty P+:
min logdet P
(22)
with a strict linear matrix inequality constraint adopted from the estimation error covariance equation (18) to
describe the information/entropy updating:
1 1 1. . : ( ) ( ) 0T
l l l
l
s t P P x H R H
(23)
Problem (22) aims to optimize the estimation uncertainty P+ from a determinant perspective, given the prior
travel time uncertainty condition P- and a set of sensor location candidates Hl. In this model, xl represents the
decision variable for each sensor location design Hl. Consequently, additional constraints 1 0, *l l
l
x x l are
introduced for problem (22), with l* being the pre-defined sensor budget value.
This analytical approach has a significant advantage when applied for optimizing point sensor locations.
Particularly, as each point sensor collects data individually, the corresponding additional information term is
expressed as the matrix format HTR-1H, i.e.: let
10 0
0
0 0
0
0 0
l
L
x
H x
x
, and 0 0l l
H x ,
then we have 1 12
0 0 0
0
0 0
0
0 0 0
T T
l l l l
l l
H R H H R Hx r
. Therefore, each point sensor location strategy
Hl may contain as few as one point sensor, and the variable x may represent the selection of each individual location,
with the predefined constraint value l* as the given budget number of point sensors.
On the other hand, since each additional AVI or AVL sensor could potentially change the structure of the entire
sensor network matrix H, candidate AVI/AVL designs need to be enumerated to generate one sensor scenario for
each Hl, and the constraint value l* should be set as 1.
The proposed determinant maximization problem (22) can be solved using several open source and commercial
packages. In this study, the corresponding numerical experiments for the analytical method are prepared using open-
source Matlab libraries YALMIP (Löfberg, 2004) and SDPT3 (Toh et al., 1999).
One of the advantages of using the semidefinite-quadratic-linear programming package SDPT3 is that it
provides an efficient lower bound evaluation for the solution found. Specifically, by relaxing the decision variables
xl as linear variables between 0 and 1, a primal-dual approach can be applied in the lower bound solver to minimize
the log-determinant of the uncertainty matrix. The resulting uncertainty matrix P+ is calculated from a combination
of linear decision variables (with possible fractional values), and serves as a lower bound for any integer solution set
of xl. An illustrative example and numerical experiments are discussed in Section 8.

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
16
6.2. Heuristic Approach with Flow Weighted Measure of Total Uncertainty
When selecting the optimal gain factor K to estimate the travel time matrix, the classic Kalman filter aims to
minimize the mean-square error, i.e., the trace of tP . Using a similar approach, this research further proposes a
heuristic method to quantify the travel time uncertainty of the entire network, with an emphasis on critical OD/paths.
To consider the priority of different links, we first denote Ft as the network-wide flow matrix at time t, which
contains the total flow volume of each link. Specifically, each diagonal cell of matrix Ft represents the total flow
count of the corresponding link, while each off-diagonal cell contains the total flow volume shared by the two
correlated links. With flow matrix Ft, the uncertainty measure can be expressed using weighted
estimation/prediction error matrices P- and P+:
+sumest t tTU F P
(24)
where the weighted estimation uncertainty TUest is calculated from the Hadamard product – the element-by-element
product of two same-dimension matrices F and P+, and sum() represents the summation of all elements in the
matrix.
Eq. (24) provides a matrix format of the weighted uncertainty quantification. In practice, with the knowledge of
critical path/OD flow volume, Eq. (24) can be easily reformatted into a set of linear equations. We first denote the
path travel time uncertainty of a specified critical path p(o,d,k) at time t as Et,o,d,k. The travel time uncertainty of path
k from origin o to destination d can be calculated with:
, , , ,
( , , )
var( )t o d k t a
a p o d k
E x
, (25)
where var() represents the variance coefficients of the link travel time estimate matrix tP. If the covariance terms
cov() in tP are also considered, another possible measure of information can be expressed as:
, , , , , ,
( , , ) ; , ( , , )
var( ) 2 cov( , )t o d k t a t a t b
a p o d k a b a b p o d k
E x x x
(26)
For travel time estimation applications, path-level uncertainties are calculated using the estimation uncertainty
matrix tP for a selected set of time intervals. Weighted by the path flow volume of different origin-destination
pairs , , ,t o d kf , the total estimation uncertainty TUest of the network-wide traffic conditions can be determined from
the following equation:
, , , , , ,
, ,
est t o d k t o d k
t o d k
TU f E
(27)
which is equivalent to the matrix format in Eq. (24).
By considering
, , ,
, ,
est
t o d k
t o d k
TU
f, we can interpret the above measure as the average end-to-end path travel
time estimation error for each individual traveler.
Furthermore, we can derive a total forecasting error measure formula, similar to Eq. (27), using the a priori
travel time variance-covariance tP calculated from Eq. (20). However, different from the uncertainty estimation
model in Eq. (17), the stochastic state transition matrix At in Eq. (20) needs to be explicitly considered in order to
quantify the prediction uncertainty. To incorporate different sources of non-recurring delay (e.g., incidents, severe
weather, work zones), their location-specific occurrence probabilities and stochastic characteristics, an Ensemble
Kalman filter (EnKF) is proposed for the one-step prediction procedure. Under the proposed approach, a Monte
Carlo simulation is used to “simulate” the state transition ensembles under different realizations of random capacity

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
17
drops and capacity reduction durations, and the sample matrices At and the sample variance , ( )t NR eP
over different
ensembles e is then used to approximate the average prediction errors. For more details about EnKF, interested
readers are referred to a widely-cited tutorial paper by Evensen (2003).
Using Eq. (25) or (26), an approximation of the total prediction uncertainty measure is proposed by combining
both the recurring path uncertainty , , , ,t o d k RE and non-recurring path uncertainty , , , , ( )t o d k NR eE with ensemble
probability ,t e for different non-recurring sources or samples/ensembles e.
, , , , , , , , , , , , , ( )
, ,
1pred t o d k t e t o d k R t e t o d k NR e
t o d k e e
TU f E E
(28)
The above total path travel time estimation/prediction uncertainty measures (Eqs. 27 and 28) include three
important components: (1) the sum of diagonal elements in the variance covariance matrix for link travel time; (2)
the sum of the travel time variance for each feasible or critical path in the network; and (3) weights of path flow
volume for different paths. As the path travel time estimation/prediction accuracy (as opposed to individual link
travel times) captures the ultimate information quality requirement for commuters traveling along their end-to-end
trips, this measure of information can serve as a systematic measure of effectiveness (MOE) for network-wide
traffic monitoring applications.
Calculating the uncertainty measures in Eqs. (27) and (28) involves computing P- and P+ for each consecutive
time interval during the planning horizon (e.g., 12 months). However, this day-to-day “simulation” approach is
computationally intensive, especially for regional networks with a large number of links, and obtaining a stable
estimate on the information gain under probabilistic non-recurring conditions requires a large number of samples (or
days). To provide a reasonable approximation for network-wide uncertainty quantification, we adopt the following
simplifying assumptions to estimate the measure of information on a traffic network. (1) This study focuses on a
limited number of representative individual time intervals, rather than a 24-hour daily horizon, and each interval
only involves a one-step estimation and prediction process. (2) Under non-recurring congestion, we focus on the
impact of capacity reduction on individual links, while possible between-link travel time correlations due to queue
spillback are ignored for simplicity. It should be remarked that, the use of traffic flows and ensembles may introduce
additional errors into the total utility calculation. As this study is focused on the travel time estimation and
prediction based sensor designs, the modeling of uncertainty associated with flow estimation and non-recurring
traffic stochasticity is not considered in this paper.
7. Sensor network design model
In this section we propose a beam search-based algorithm to solve the heuristic approach with a flow-weighted
measure of total uncertainty.
7.1. Objective function
The proposed sensor network design model is essentially a special case of the discrete network design problem,
so an integer programming model, shown below, can be constructed to find the optimal sensor location solution.
Min network-wide total uncertainty TU obtained from Eqs. (27) or (28)
Subject to
Traffic pattern uncertainty propagation constraints Eqs. (17) and (20);
Sensor mapping matrix constraint:
, ,' ' , '' '' , ''' , ''' , ,t a i t a t aH function A x N x A
(29)
Budget constraint:

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
18
' ' '' '' ''' '''a i
a i
x x x (30)
'ax = 1 if a point sensor is installed on link a, 0 otherwise.
''ix =1 if an AVI sensor (point-to-point sensor) is installed on node i, 0 otherwise.
'''x =1 if probe sensor data are collected/purchased, 0 otherwise.
' , '' = installation and maintenance costs for point sensors and point-to-point sensors.
''' = costs for collecting/purchasing data from probe vehicles such as commercial fleet.
= total available budget for building or extending the sensor network.
tH is determined by the sensor location set ' 'aA x and '' ''iN x , randomly generated link traversing
coefficients for GPS probe vehicles ,
'''t a
, and AVI and AVL market penetration rates α and β. This paper considers
only third-party AVL probe data sources, such as vehicle trajectory data collected from commercial fleets or truck
companies. Such external data streams do not require dedicated sensor infrastructure for public-sector traffic
management agencies, so the costs of locating AVL sensor facilities are not explicitly considered in the above
formulation for simplicity, and the cost term ''' for purchasing probe data sources are typically given by private
data vendors.
7.2. Beam search algorithm
The overarching goal of the above sensor location model is to fuse and incorporate information from spatially
distributed sensors to minimize the network-wide path travel time estimation or prediction uncertainty measure. In
this study, a branch-and-bound search procedure can be used to solve the integer programming problem. To further
reduce the computational complexity, a beam search heuristic algorithm is extended from the study by Zhou and
List (2010) in this study. The description below only highlights the key features of the algorithm for travel time
estimation. Given prior information on the link travel time vector and its estimation error covariance from a
historical database, the proposed algorithm tries to find the best sensor location scenario from a set of sensor
location candidates under particular budget constraints. Based on a breadth-first selection mechanism, the beam
search algorithm branches from candidate nodes level-by-level. At each level, it keeps only a limited number of
promising nodes, and prunes the other nodes permanently to limit the total number of nodes to be examined.
Beam search Algorithm
Step 1: Initialization
Generate link candidate set LC and node candidate set NC for point and point-to-point sensors, respectively;
Set the active node list ANL . Create the root node u with '( ) , "( )A u N u , search level
( ) 0sl u , where u is the search node index. Insert the root node into ANL.
Step 2: Termination criterion
Under one of the two following conditions, stop the process and output the best feasible solution;
(1) All the active nodes in ANL have been visited,
(2) The number of active nodes in ANL is exceeded by a predefined maximum capacity.
Step 3: Node generation and evaluation
For each node u at search level sl in ANL, remove it from ANL, and generate child nodes;
Scan through the link candidate sets LC: if a link a is not in A'(u), generate a new child node v’ where
'( ') '( ) , "( ') "( ), ( ') ( ) 1A v A u a N v N u sl v sl u ;
Scan through the node candidate sets NC: if a node i is not in N''(u), generate a new child node v” where
"( ") "( ) , '( ") '( ), ( ") ( ) 1N v N u i A v A u sl v sl u ;
For each newly generated node v, calculate the objective function with Eq. (27) or (28). If the budget constraint
(30) is satisfied for the newly generated node, add this node v into the ANL.
Step 4: Node filtering

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
19
Select ψ best nodes from the ANL in the search tree, and go back to Step 2.
In the above beam search algorithm, the total computational time is determined by the number of nodes to be
evaluated, which depends on the beam width ψ and the size of the candidate sensor links/nodes. For each node in the
tree search process, the complexity is determined by the evaluation of the objective function, which is mainly
determined by the calculation of the uncertainty matrix P- and P+.
For a large-scale sensor network design application, we can adopt four solution strategies to reduce the size of
the problem and, therefore, the computational time. (1) One can focus on critical OD pairs with significant volumes.
(2) One can aggregate original OD demand zones into a set of super zones within a manageable size, with this
strategy being especially suitable for a subarea analysis where many OD zones outside the study area can be
consolidated together. (3) We can reduce the size of candidate AVI sensor nodes and point sensor links in order to
decrease the number of search nodes to be evaluated. (4) To provide a tight upper bound and eliminate some non-
promising solutions during the beam search procedure, we can first generate some good feasible solutions based on
the current sensor network and bottleneck links.
8. Illustrative example and numerical experiments
8.1. Illustrative example
In Fig. 5, we present an illustrative example with a 6-node hypothetical transportation network to demonstrate
how the proposed measures of information can systematically evaluate the trade-offs between the accuracy and
placement of individual AVI sensors for path travel time estimation reliability. Using Eqs. (26) and (27), this
example focuses on the measure of estimation uncertainty with the heuristic approach described in Section 6.2. As a
comparison, the results of the proposed analytical method, described in Section 6.1, are also provided with lower
bound evaluation. In addition, subscript time interval t is omitted for simplicity.
As shown in the base case in Fig. 5, there are three traffic analysis zones at nodes a, d and b, and three major
origin-to-destination trips: (1) a to b, (2) a to d and (3) d to b, each with a unit of flow volume. P
(e.g., obtainable
from a historical travel time database with point detectors) leads to a trace of 12 and a determinant of 48. Among the
5 links along the corridor, link 5 from node f to b has the highest uncertainty in terms of link travel time estimation
variance. We can view node b as a downtown area, and the incoming flow from the other two zones creates dramatic
traffic congestion and travel time uncertainty, first on link 5 and then on link 4. For the base case, we can calculate
the variance of path travel time estimates for these three OD pairs, respectively, as 1+2+2+3+4=12, 1+2=3 and
2+3+4=9, leading to a total path travel time estimation uncertainty as TU = 12×1+3×1+9×1 = 24.
In both cases (I) and (II), two AVI sensors are first installed at nodes a and b. In case (I), an additional AVI
sensor is located at node f so that we can obtain two pairs of end-to-end travel time measurements: from node a to
node f, and from node f to node b. The second measurement directly monitors travel time dynamics on link 5. In this
particular example along the linear corridor, the end-to-end travel time statistics from a to b can be explicitly
determined from the above two mutually exclusive observations. In order to avoid double-counting the information
gain for the same data sources, the information quantification module in this study only considers two raw
measurements: from a to f, and from f to b, to update the link travel time variance covariance matrix from P
to P
.
To do so, the measurement error matrix is assumed to be 1 0
0 1
R
, and the mapping matrix
1 1 1 1 0
0 0 0 0 1H
, where the first measurement from a to f covers links 1,2,3 and 4, and the second
measurement from f to b covers link 5. As link 5, with the highest travel time uncertainty, is directly measured from
AVI readings in case (I), its link travel time estimate variance is reduced from 4 to 0.8, but the resulting P+ contains
a large amount of correlation in its link travel time estimates for links 1 to 4. All the path travel time uncertainties
for the three OD pairs have been reduced, and TU = 6.74.

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
20
In case (II), the third AVI sensor is installed at node d to match the underlying OD trip demand pattern, which
produces sensor mapping matrix1 1 0 0 0
0 0 1 1 1 H
. The resulting P+ still contains two clusters of
correlations corresponding to two individual measurements from a to d and from d to b. The path travel time
estimate variances for the OD pairs from a to d and from d to b are dramatically reduced to 0.75 and 0.9,
respectively. Although link 5 still has a relatively large estimate variance of 2.4 (its overall estimation error
measure), the total travel time estimation uncertainty TU is now 3.3, which is much lower than TU = 6.74 in case (I).
In comparison, the analytical model (22) with log-determinant maximization does not consider the flow weight
on each link, and results in a decision value 0.52 for case (I) and 0.48 for case (II). For the targeted estimation
uncertainty P+, case (I) has a log-determinant value of 0.065 and case (II) of 0.18, with the lower bound of the log-
determinant value being -0.53.
This example shows that by locating and spacing AVI sensors to naturally match the spatial trip patterns of
commuters, case (II) is able to systematically balance the trade-off between the needs for monitoring local traffic
variations and end-to-end trip time dynamics. It is also important to notice that, both cases (I) and (II) have the same
sensor network size and generate the same number of measurements every day, but with different amounts of
estimation uncertainty from a commuter/road user perspective. Thus, simple measures of information, such as traffic
network coverage and the number of measurements, might not be able to quantify the system-wide uncertainty
reduction and information gain for traveler information provision applications.
Fig. 5. Example of locating AVI sensors on a linear corridor
8.2. Sensor location design for traffic estimation with recurring conditions
In this study, we examine the performance of the proposed modeling approach through a set of experiments on a
simplified Irvine, California network, which is comprised of 16 zones, 31 nodes and 80 directed links. This study
considers a single path between each OD pair in this simple network.
All the experiments are performed on a computer system equipped with an Intel Core Duo 1.8GHz CPU and 2
GB memory. Shown in Table 1, a set of critical OD pairs with large flow volumes is selected to estimate the
network-wide path travel time based uncertainty. In this experiment, starting from the zero-sensor case, we
initialized the uncertainty matrix P with large variance values. Specifically, the initial variance of each link is equal
to the square of its own free flow travel time (FFTT). Furthermore, we use 20% and 40% of the FFTT as the
experimental values for the state processing error under recurring and non-recurring traffic conditions, respectively.
In addition, the state transition value used in this example is L = 2.
For the algorithm implementation, a beam search width of 10 is used in the beam search algorithm to reduce the
computational complexity. The total number of nodes in the search tree is the number of additional sensors
multiplied by the beam search width. In our experiments, with standard Matlab matrix calculation functions, it takes
about 30 min to compute 160 nodes in the beam search tree for this small-scale network.
In this section, we examine the proposed information measure model and sensor location algorithm for the
estimation of recurring traffic conditions. With given OD flow and prior uncertainty information, three sensor
location plan scenarios are designed for comparison with the existing sensor network.
We first conduct experiments to compare the existing point sensor network (Fig. 6a) and an optimized point
sensor network plan (Fig. 6b), both with the same number (i.e. 16) of point sensors. Table 1 shows the critical path
travel time estimation errors under those two scenarios. The results show that, comparing the prior travel time
estimation variance, the proposed optimization model can reduce the path travel time estimation variance by an
average of 34.3%, while the existing sensor plan only reduces the same measure by about 16.5%. By factoring in the
OD demand volume (shown in the third column in Table 1), we can compute the proposed measure of information:
the total path travel time estimation variance. The base case with zero sensors produces TU_zero_sensor=114855,
the existing locations reduce TU to 88878 (77.3% of TU_zero_sensor), and the optimized sensor location scenario
using the proposed model further decreases the system-wide uncertainty to TU= 63586 (55.3% of TU_zero_sensor).

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
21
This clearly demonstrates the advantage of the proposed model in terms of improving end-to-end travel time
estimation accuracy.
Table 1
Critical Path Travel Time Estimation Error under Existing and Optimized Sensor Location Strategies
Fig. 6. Numerical experiment results for regular traffic pattern estimation.
In the next set of numerical experiments, we compare two scenarios with additional sensors installed with the
existing sensors.
1) Add 4 point sensors on unmeasured links with remaining large travel time variances, leading to a total
16+4=20 point sensors, shown in Fig. 6(c);
2) Add 6 AVI readers on major OD-pairs with large volumes, leading to a network with 16 point sensors and 6
AVI readers, shown in Fig. 6(d).
Fig. 7 further compares the measure of uncertainty of different scenarios. It is interesting to observe that,
compared to the optimized scenario (from Fig. 6b) with 16 sensors, the “additional point sensors” scenario (with 20
sensors) does not offer a superior uncertainty reduction performance for different OD pairs. On the other hand,
compared to adding 4 point sensors to cover highly dynamic links, installing 6 additional AVI sensors does not
further improve the path travel time estimation performance dramatically.
Fig. 7. Comparison of different sensor location schemes (for regular traffic estimation)
8.3. Sensor location design for traffic prediction with recurring and non-recurring conditions
Now we implement the proposed algorithm by considering both regular (recurring) and non-recurring traffic
conditions. As discussed in Section 6, the total traffic prediction uncertainty is computed as a probabilistic
combination of recurring and non-recurring uncertainties in Eq. (28). In this illustrative numerical experiment, we
consider incidents as the only non-recurring delay source, with the link-based incident rates shown in Fig. 8(a). For
simplicity, one ensemble is generated for each link with its individual incident probability. The proposed sensor
location algorithm is applied in three scenarios: (1) optimized sensor network with 16 point sensors, (2) current
network with 4 additional point sensors, and (3) current network with 6 additional AVI sensors. Consequentially,
these three sensor network design results are plotted in Figs. 8(b-d). It is interesting to note that, when considering
non-recurring traffic conditions (incidents), the optimized sensor locations (Fig. 8b) are more focused on links with
higher incident rates, compared to the regular pattern estimation based planning result in Fig. 6(b).
Fig. 8. Numerical experiment results under recurring and non-recurring traffic conditions
8.4. Performance Evaluation of Beam Search Heuristic Algorithm
To evaluate the computational efficiency and solution quality of the proposed beam search algorithm for the
sensor location problem, we further performed a comparison between the beam search approach and the lower
bound calculated from the proposed analytical approach, both described in Section 6. Specifically, in this test, the
log-determinant based uncertainty matrix minimization problem (22) was used as the objective function for the
beam search algorithm, so that the two approaches are targeting the same model.
We first applied the analytical model for a point sensor-only design problem, and solved it with the primal-dual
based open-source solver SDPT3. Specifically, the semidefinite-quadratic-linear programming package solves the
overall problem using a continuous range of the decision variables, and its objective function value thus serves as a
lower bound for our original integer problem. Then an approximate solution was generated by rounding non-integer
variables from the optimal solution found by the analytical model. For our testing network with 80 links, the
proposed analytical approach reduced the log-determinant of the estimation uncertainty from -49.226 to -63.439,
with a lower bound of -64.369.

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
22
We then implemented the proposed beam search algorithm using C# programming language, and found the
same optimal sensor location strategy, with a beam search width ψ of 10. Table 2 shows the log-determinant values
for the two proposed algorithms implemented on networks with different link sizes. The results show that the beam
search heuristic algorithm finds the same best solutions compared to the semidefinite-quadratic-linear programming
package SDPT3, and the solution quality is acceptable compared to the lower bound found by the analytical method.
Additionally, as illustrated in Fig. 9, although the beam search algorithm takes longer computational time than the
proposed analytical approach, it is generally easier to implement in practice, as (1) it does not rely on linear
programming packages and has more flexibility for model development, and (2) it can handle larger networks on the
same computing environment, compared with the analytical approach which can only handle networks with no more
than 160 links in our experiment, which might be also due to the inherent limitation of the SDPT3 solver.
Table 2
Log-determinant values of uncertainty matrix using beam search and analytical approaches
Fig. 9. Computational time for two proposed methods with different network sizes
9. Conclusions
To provide effective congestion mitigation strategies, transportation engineers and planners need to
systematically measure and identify both recurring and non-recurring traffic patterns through a network of sensors.
The collected data are further processed and disseminated for travelers to make smart route and departure decisions.
There are a variety of traditional and emerging traffic monitoring techniques, each with the ability to collect real-
time traffic data in different spatial and temporal resolutions. This study proposes a theoretical framework for the
heterogeneous sensor network design problem. In particular, we focus on how to better construct network-wide
historical travel time databases, which need to characterize both mean and uncertainty of end-to-end path travel time
in a regional network.
A unified Kalman filtering based travel time estimation and prediction framework is first proposed in this
research to integrate heterogeneous data sources and model both recurring and non-recurring traffic evolution.
Specifically, the travel time estimation model starts with the historical travel time database as prior estimates. Point-
to-point sensor data and GPS probe data are mapped to a sequence of link travel times along a set of the most likely
traveled paths. Through an analytical information updating equation derived from Kalman filtering, the variances of
travel times on different links are estimated for possible sensor design solutions with different degrees of sampling
or measurement errors. The variance of travel time estimates for spatially distributed links are further assembled to
calculate the overall path travel time estimation/prediction uncertainty for the entire network as a single-valued
information measure. The proposed uncertainty quantification models and beam search solution algorithm can assist
decision-makers to select and integrate different types of sensors, as well as to determine how, when, and where to
integrate them in an existing traffic sensor infrastructure.
Compared to the early study by Zhou and List (2010), this study has its unique and additional contributions.
First, focusing on the travel time problem, this paper proposed analytical formulas with transition matrix to describe
the travel time prediction under recurring and non-recurring conditions. Second, the information uncertainty of AVI
sensors has been evaluated in a systematic format that is consistent with the travel time estimation/prediction
problems. Third, this paper has an extended discussion on the measure of information. In particular, we proposed
one maximum determinant based analytical approach with lower bound evaluation, and one heuristic approach
which captures the network-wide uncertainty with a focus on the critical OD/paths.
In our on-going research, we plan to expand this methodology in the following ways. First, this study only
focuses on the sensor design problem for better estimating the mean of path travel time, and a natural extension is to
assist sensor design decisions for other network-wide traffic state estimation domains, such as measuring and
forecasting point-to-point travel time reliability, and incident detection probability. Second, under assumptions of
normal distributions for most error terms, the proposed sensor location model is specifically designed for the
minimum path travel time variance criterion, and our future work should consider other crucial factors for real-
world sensor network design, such as allowing log-normally distributed error terms and minimizing maximum
estimation errors. Furthermore, the offline planning-level model developed in this study could be extended to a real-

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
23
time traffic state estimation and prediction framework with mobile and agile sensors. The numerical experimental
results (for a small-scale network) in this study also demonstrate computational challenges (due to computationally
intensive matrix operations) in applying the proposed information-theoretic sensor location strategy in large-scale
real-world networks, and these challenges call for more future research for developing efficient heuristic and
approximation methods.
Acknowledgement This paper is based on research work partially supported through the TRB SHRP 2 L02 project titled
“Establishing Monitoring Programs for Mobility and Travel Time Reliability”. Special thanks to anonymous
reviewers and our colleagues Jay Przybyla and Hao Lei at the University of Utah for their constructive comments.
The work presented in this paper remains the sole responsibility of the authors.
Appendix
A1. Transition matrix derivation under non-recurring conditions
This study proposes an analytical approach to derive the non-recurring transition coefficient Lt,t+h in Eq. (5). In
this section we demonstrate the derivation of transition matrix/factor with several non-recurring traffic conditions,
including (1) single-link capacity reduction caused by incident and (2) queue spillback from adjacent link. These
two illustrative examples are designed to showcase a set of elementary non-recurring conditions: capacity change,
demand change, and spatial correlation.
A1.1 Transition matrix derivation under non-recurring congestion due to capacity reduction
Corresponding to a recurring congestion with a constant queue discharging rate C, Fig. A1 shows the
cumulative flow diagram with original shifted arrival curve A and departure curve D'. The shaded area represents the
additional delay due to an incident (or any significant capacity reduction), which begins at time s and ends at time e
with a reduced capacity CR . The road capacity is restored back to normal capacity C after time e. In order to derive
the transition coefficient Lt,t+h for updating the travel time of this link, we now examine the additional delay vt and
vt+h for vehicles leaving from the bottleneck at time t and t+h, respectively.
Fig. A1. Cumulative flow count curve for a single bottleneck with reduced capacity due to an incident
A detailed illustration in Fig. A2 showsh
t t tv x x , where tx is the travel delay for a vehicle leaving from the
bottleneck at departure time t under reduced capacity conditions, and tx can be calculated as the horizontal distance
between the shifted cumulative arrival and actual departure time curves A and D. h
tx is the corresponding recurring
delay for the same vehicle (with the actual departure time t under incidents), and it is equivalent to the horizontal
distance between curves A and D'. In Figs. A1 and A2, timestamps t' and t are the original and actual departure times,
respectively, for the vehicle of interest.
Let us denote Δ as the number of vehicles which can be discharged under recurring congestion from s to t'. It is
easy to show that ( ' ) ( )R
C t s C t s through the flow balance, where 'h
tt s x and ( ) tt s x . That
is, ' / ( / )( )R
t s C C C t s . Thus, the travel time deviation term can be determined as
' ( ) ( ' ) ( ) 1R
h
t t t
Cv x x t t t s t s t s
C
.
(A1)
After the incident ending time e, vt becomes a constant value 1RC
e sC
.

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
24
Fig. A2. A close-up view on capacity reduction from Fig. A1
We can further examine the transition coefficient L in three cases (as shown in Table A1), with a pre-defined
prediction period h (e.g., 15 minutes). According to the non-recurring state transition equation (3), the transition
matrix L (a single value in this example) is derived as the ratio of structure deviation terms between current time t
and future time t+h.
,t h
t t h
t
vL
v
(A2)
As shown in Table A1, with the current time stamp t located in different stages of an incident event, the
transition coefficient L can be analytically derived in different forms. Fig. A3 details an example on how the
transition coefficient L varies according to time after an incident, by assuming the prediction period h is fixed as 15
minutes and a typical incident duration e – s = 30 minutes. It should be noticed that, after the non-recurring
condition ends at time e, the state transition value L will retain a value of 1, and L decreases as the time approaches
the end of the congestion period. Eventually, when the real-time traffic process evolves to congestion time periods
without incidents, then the transition coefficient becomes an autoregressive parameter φt as it enters the regime of
recurring congestion.
Table A1 Derivation of transition matrix L for different time periods
Fig. A3. Illustration of time-dependent transition coefficient L
The above example demonstrates how to derive the non-recurring components of the transition matrix At under
conditions with short-term capacity drops. Similar derivation could be performed for severe weather and work zone
cases. In on-line travel time prediction applications, Lt , as a time-dependent and state-dependent parameter, needs to
be estimated in real-time according to a specific incident duration and degree of capacity reduction. In reality, the
bottleneck discharge capacity is highly dynamic, so estimating the transition matrix using the above analytical
method might not be able to capture the inherent complexity in network traffic, especially under possible queue
spillback conditions. In the planning-level sensor location problem considered in this paper, however, we are more
interested in finding a reasonable estimate on the likely transition matrix so as to establish a Kalman filtering
framework, which will be used to quantify uncertainty associated with different sensor location plans. For instance,
in our experiments presented in Section 8, we consider the following setting for typical incidents, with average
incident duration = (e-s) = 30 min, and the time for making prediction at the middle stage of an incident as (t-s) = 15
min, which leads to a typical value L = 2.
A1.2. Transition matrix for adjacent links with queue spillback
The above example in Section A1.1 considers a simple vertical queue, with an aim of deriving the time-
dependent travel time transition coefficient for an individual link/bottleneck. The following discussions consider a
more realistic, more complicated case with queue spillback from a downstream link (denoted with subscript d) to an
upstream link (subscript u). Our goal is to examine the possible transition matrix Lt,t+h for the upstream link when a
capacity reduction event occurs on the downstream link, as illustrated in Fig. A4. Without loss of generality, we
assume that the recurring congestion on the downstream link has been propagated back to the upstream link during
typical days, which leads to parallel original departure curves Dd’ and Du’, assuming discharge capacity is the same
at both locations. During a day with non-recurring congestion, an incident occurs on the downstream link and
further causes a reduced capacity CR. The queue associated with this non-recurring congestion propagates back to
the upstream link at time s', so the upstream departure curve Du will be also changed.
Fig. A4: Cumulative flow count curve for two adjacent links with queue spillback due to an incident

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
25
According to Newell’s simplified kinematic wave model (Newell, 1993; and Hurdle and Son, 2000) which
assumes a triangular flow-density relationship, when there is a queue spillback along the backward wave
propagation line from the downstream bottleneck to the upstream link, the departure curve for the upstream link (Du
= Ad) is constrained by the departure curve Dd of the downstream link plus a constant link storage factor (with jam
density kjam times link length ld and number of lanes nd),
, ,u t d t BWTT jam d dD D k l n
(A3)
That is to say, after the queue spills back to the upstream link, the upstream departure curve will be in parallel
with the downstream departure curves due to the constraint in Eq. (A3), with a time shift of backward wave travel
time (BWTT). Consequently, the upstream additional delay at time t+h caused by the incident, denoted as vu,t+h
(point 2 4 in Fig. A4), matches with a downstream additional delay vd,t+h-BWTT (point 1 3). In other words, the
horizontal distance from point 2 to 4 (additional delay on the upstream link) is equivalent to the horizontal distance
from point 1 to 3 (additional delay on the downstream link). In this special case, it is possible to connect the
upstream additional delay at time t+h with the detected downstream additional delay at time t, which leads to a
transition coefficient across two adjacent links by extending Eq. (A2):
, ,
,
, ,
( ) 1
,
( ) 1
R
u t h d t h BWTT
t t h Rd t d t
Ce s
v v C e sL t h BWTT e
v v t sCt s
C
(A4)
where s and e are the starting and ending timestamps of the incident on the downstream link, respectively.
The above discussion can serve as a starting point for analytically deriving possible spatial correlation between
two adjacent links for more complex conditions. However, the detailed changes of cumulative arrival and departure
curves need to be analyzed case-by-case. As a result, in the subsequent sensor design model, we only consider the
uncomplicated point-queue based formulation for L for simplicity.
In summary, the illustrative cases mentioned in Appendix A1 are only used for demonstrating the derivation
procedure of the transition matrix. With the help of Newell’s cumulative flow model, similar derivation could be
performed for a broader set of non-recurring traffic conditions.
References
Ban, X., Herring, R., Margulici, J.D., Bayen, A., 2009. Optimal sensor placement for freeway travel time
estimation. In: W.H.K. Lam, S.C. Wong, H.K. Lo ed. Transportation and Traffic Theory, Springer, Ch. 34, 697-721.
Chen, A., Chootinan, P., Pravinvongvuth, S., 2004. Multiobjective model for locating automatic vehicle
identification readers. Transportation Research Record, 1886, 49-58.
Coifman, B., Beymer, D., Mc Lauchlan, P., Malik, J., 1998. A real-time computer vision system for vehicle
tracking and traffic surveillance. Transportation Research Part C, 6(4), 271-288.
Danczyk, A., Liu, H., 2011. A mixed-integer linear program for optimizing sensor locations along freeway
corridors. Transportation Research Part B, 45(1), 208-217.
Eisenman, S.M., Fei, X., Zhou, X., Mahmassani, H.S., 2006. Number and location of sensors for real-time
network traffic estimation and prediction: a sensitivity analysis. Transportation Research Record, 1964, 260-269.
Evensen, G., 2003. The Ensemble Kalman Filter: theoretical formulation and practical implementation. Ocean
Dynamics, 53(4), 343-367.
Fei, X., Mahmassani, H.S., 2011. Structural analysis of near-optimal sensor locations for a stochastic large-scale
network. Transportation Research Part C 19(3), 440-453.
T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
26
Fei, X., Mahmassani, H.S., Murray-Tuite, P., 2013. Vehicular network sensor placement optimization under
uncertainty. Transportation Research Part C 29, 14-31.
Fei, X., Lu, C-C., Liu, K., 2011. A Bayesian dynamic linear model approach for real-time short-term freeway
travel time prediction. Transportation Research Part C, 19(6), 1306-1318.
Haas, C., Mahmassani, H.S., Khoury, J., Haynes, M., Rioux, T., Logman, H., 2001. Evaluation of automatic
vehicle identification for San Antonio’s transguide for incident detection and advanced traveler information
systems. Center for Transportation Research, University of Texas at Austin, Research Report No. 4957-1.
Gentili, M., Mirchandani, P.B., 2012. Locating sensors on traffic networks: Models, challenges and research
opportunities. Transportation Research Part C, 24, 227-255.
Haghani, A., Hamedi, M., Sadabadi, K. F., Young, S., Tarnoff, P., 2010. Data collection of freeway travel time
ground truth with Bluetooth sensors. Transportation Research Record, 2160, 60-68.
Herrera, J.-C., Bayen, A., 2010. Incorporation of Lagrangian measurements in freeway traffic state estimation.
Transportation Research Part B, 44(4), 160-481.
Hintz, K.J., McVey, E.S., 1991. Multi-Process constrained estimation. IEEE Transactions on Systems, Man and
Cybernetics, 21(1), 237-244.
Hurdle, V. F., Son, B., 2000. Road test of a freeway model. Transportation Research Part A, 34(7), 537-564.
Lam, W.H.K., Lo, H.P., 1990. Accuracy of O-D estimates from traffic counts. Traffic Engineering and Control,
31(6), 358-367.
Leow, W.L., Ni, D., Pishro-Nik, H., 2008. A sampling theorem approach to traffic sensor optimization. IEEE
Transactions on Intelligent Transportation Systems, 9(2), 369-374.
Li, X., Ouyang, Y., 2011. Reliable sensor deployment for network traffic surveillance. Transportation Research
Part B, 45(1), 218-231.
Lindveld, Ch.D.R., Thijs, R., Bovy, P.H.L., Van der Zijpp, N.J., 2000. Evaluation of on-line travel time
estimators and predictors, Transportation Research Record, 1719, 45-53.
Liu, H., Danczyk, A., 2009. Optimal sensor locations for freeway bottleneck identification. Computer-Aided
Civil and Infrastructure Engineering, 24(8), 535-550.
Löfberg, J., 2004. YALMIP: A toolbox for modeling and optimization in Matlab. Proceedings of the CACSD
Conference, Taipei, Taiwan, Sep. 2004, 284-289.
Lu, J., Tang, H., Lu, S., Ran, B., 2006. Locating roadside servers for advanced traveler information systems.
Transportation Research Board 85th Annual Meeting, CD 06-1544, Washington DC, USA, January 2006.
Min, W., Wynter, L., 2011. Real-time road traffic prediction with spatio-temporal correlations, Transportation
Research Part C, 19(4), 606-616.
Mirchandani, P.B., Gentili, M., He, Y., 2009. Location of vehicle identification sensors to monitor travel-time
performance. IET Intelligent Transport Systems, 3(3), 289-303.
Newell, G.F., 1993. A simplified theory on kinematic waves in highway traffic, part I: general theory.
Transportation Research Part B, 27(4), 281-287.
Ni, D., Leonard, J.D., Williams, B.M., 2006. The network kinematic waves model: a simplified approach to
network traffic. Journal of Intelligent Transportation Systems: Technology, Planning, and Operations, 10(1), 1-14.
Okutani, I., Stephanedes, Y., 1984. Dynamic prediction of traffic volume through Kalman filtering theory.
Transportation Research Part B, 18(1), 1-11.
Rakha, H., Zhang, W., 2005. Estimating traffic stream space-mean speed and reliability from dual and single
loop detectors. Transportation Research Record, 1925, 38-47.

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
27
Shannon, C.E., 1948. A mathematical theory of communication. Bell System Technical Journal, 27, 379-423.
Sherali, H.D., Desai, J., Rakha, H., 2006. A discrete optimization approach for locating automatic vehicle
identification readers for the provision of roadway travel times. Transportation Research Part B, 40(10), 857-871.
Stathopoulos, A., Karlaftis, M.G., 2003. A multivariate state space approach for urban traffic flow modeling and
prediction. Transportation Research Part C, 11(2), 121–135.
Toh, K.C., Todd, M.J., Tutuncu, R.H., 1999. SDPT3 - a Matlab software package for semidefinite programming,
Optimization Methods and Software, 11, 545-581.
Turner, S.M., Eisele, W.L., Benz, R.J., Holdener, D.J., 1998. Travel time data collection handbook, Federal
Highway Administration, Office of Highway Information Management, Washington D.C. Report FHWA-PL-98-
035.
Vandenberghe, L., Boyd, S., Wu, S.-P., 1998. Determinant maximization with linear matrix inequality
constraints. SIAM Journal on Matrix Analysis and Applications, 19(2), 499-533.
Van Lint, J.W.C., 2004. Reliable travel time prediction for freeways. Ph.D. Dissertation, Delft University of
Technology, Netherland.
Van Lint, J.W.C., Van der Zijpp, N.J., 2003. Improving a travel-time estimation algorithm by using dual loop
detectors. Transportation Research Record, 1855, 41-48.
Wasson, J.S., Sturdevant, J.R., Bullock, D.M., 2008. Real-time travel time estimates using MAC address
matching. Institute of Transportation Engineers Journal, 78(6), 20-23.
Work, D., Tossavainen, O.-P., Blandin, S., Bayen, A., Iwuchukwu, T., Tracton, K., 2008. An ensemble Kalman
filtering approach to highway traffic estimation using GPS enabled mobile devices. Proceedings of the 47th IEEE
Conference on Decision and Control, Cancun, Mexico, Dec. 9-11, 2008, 5062-5068.
Yang, H., Iida, Y., Sasaki, T., 1991. An analysis of the reliability of an origin-destination trip matrix estimated
from traffic counts. Transportation Research Part B, 25(5), 351-363.
Yperman I., Logghe S., Immers B., 2005. The link transmission model: an efficient implementation of the
kinematic wave theory in traffic networks. Proceedings of the 10th EWGT Meeting and 16th Mini-Euro Conference,
Poznan, Poland, Sep. 2005, 122-127.
Zhang, X., Rice, J.A., 2003. Short-term travel time prediction. Transportation Research Part C, 11(3-4), 187-
210.
Zhou, X., List, G.F., 2010. An information-theoretic sensor location model for traffic origin-destination demand
estimation applications. Transportation Science, 44(2), 254-273.
Zhou, X., Mahmassani, H.S., 2007. A structural state space model for real-time origin-destination demand
estimation and prediction in a day-to-day updating framework. Transportation Research Part B, 41(8), 823-840.

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
28
List of Figures:
Fig. 1. Section-level travel time estimation
Fig. 2. Spatial-temporal coverage representation for AVI, GPS and point sensors
Fig. 3. Two partially overlapping paths between AVI readers at nodes a and c
Fig. 4. Example network with three parallel paths
Fig. 5. Example of locating AVI sensors on a linear corridor
Fig. 6. Numerical experiment results for regular traffic pattern estimation.
Fig. 7. Comparison of different sensor location schemes (for regular traffic estimation)
Fig. 8. Numerical experiment results under recurring and non-recurring traffic conditions
Fig. 9. Computational time for two proposed methods with different network sizes
Fig. A1. Cumulative flow count curve for a single bottleneck with reduced capacity due to an incident
Fig. A2. A close-up view on capacity reduction from Fig. A1
Fig. A3. Illustration of time-dependent transition coefficient L
Fig. A4: Cumulative flow count curve for two adjacent links with queue spillback due to an incident

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
29
A B C D E
Sensor 1 Sensor 2
Fig. 1. Section-level travel time estimation
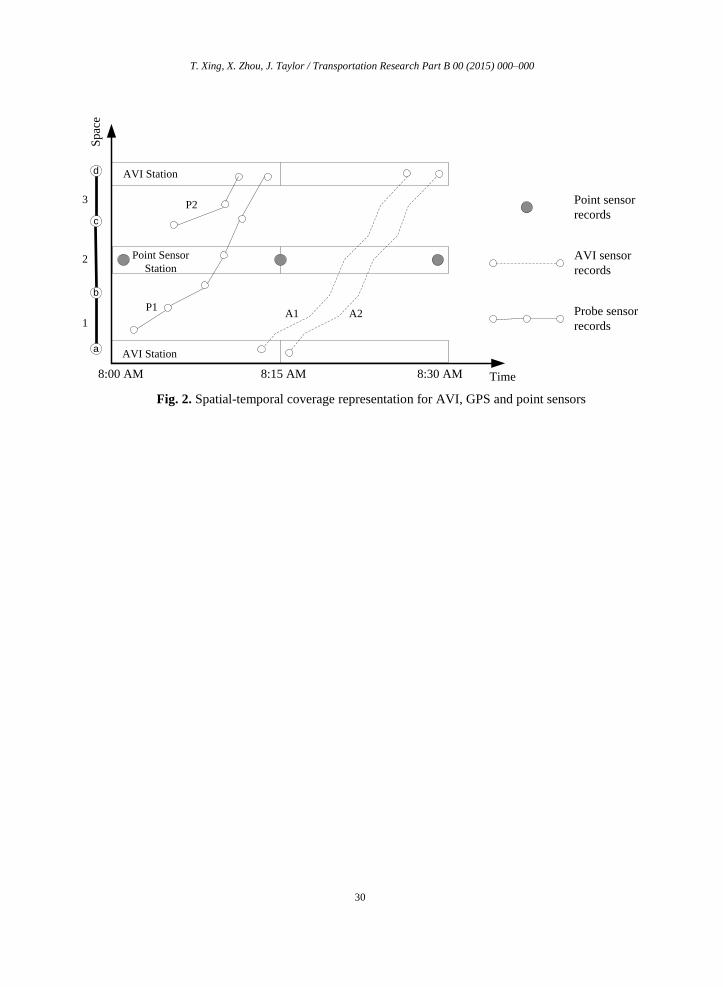
T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
30
Sp
ace
Time
Point sensor
records
AVI sensor
records
Probe sensor
records
AVI Station
AVI Station
Point Sensor
Station
d
8:00 AM 8:15 AM 8:30 AM
c
b
a
2
3
1
P1
P2
A1 A2
Fig. 2. Spatial-temporal coverage representation for AVI, GPS and point sensors

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
31
a b c3
AVI readernode
1
2
Fig. 3. Two partially overlapping paths between AVI readers at nodes a and c

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
32
a b2
AVI readernode
1
3
4
Fig. 4. Example network with three parallel paths

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
33
Fig. 5. Example of locating AVI sensors on a linear corridor
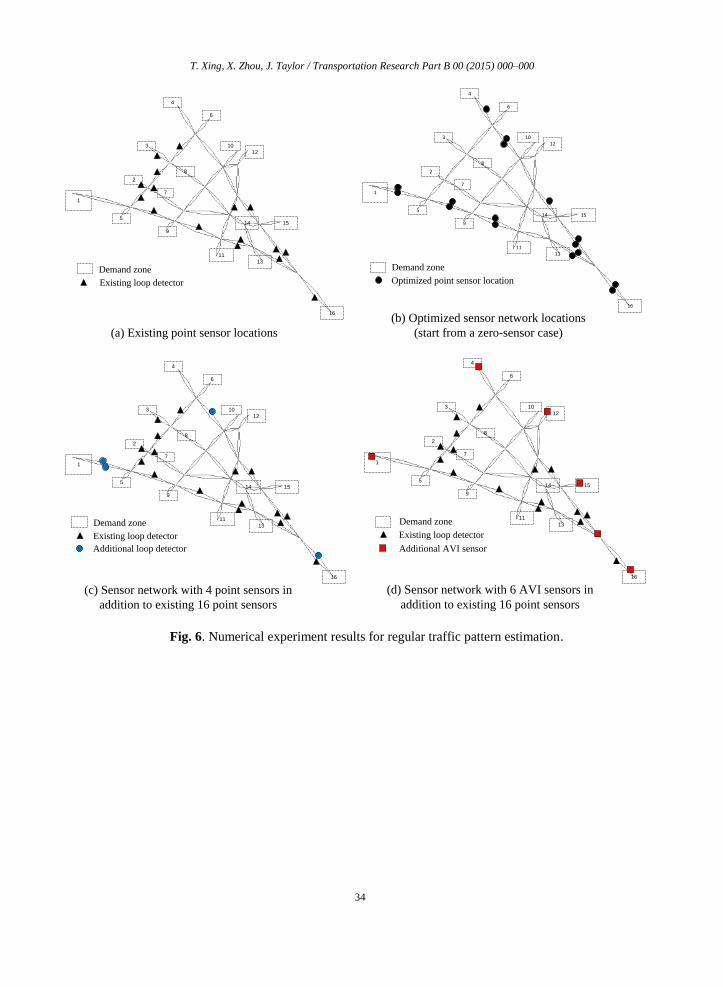
T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
34
1
2
3
4
5
6
7
8
9
10
12
11
13
14 15
16
Existing loop detector
Demand zone
(a) Existing point sensor locations
1
2
3
4
5
6
7
8
9
1012
1113
14 15
16
(b) Optimized sensor network locations
(start from a zero-sensor case)
Optimized point sensor location
Demand zone
1
2
3
4
5
6
7
8
9
10
12
11
13
14 15
16
Existing loop detector
Demand zone
Additional loop detector
(c) Sensor network with 4 point sensors in
addition to existing 16 point sensors
1
2
3
4
5
6
7
8
9
10
12
11
13
14 15
16
Existing loop detector
Demand zone
Additional AVI sensor
(d) Sensor network with 6 AVI sensors in
addition to existing 16 point sensors
Fig. 6. Numerical experiment results for regular traffic pattern estimation.
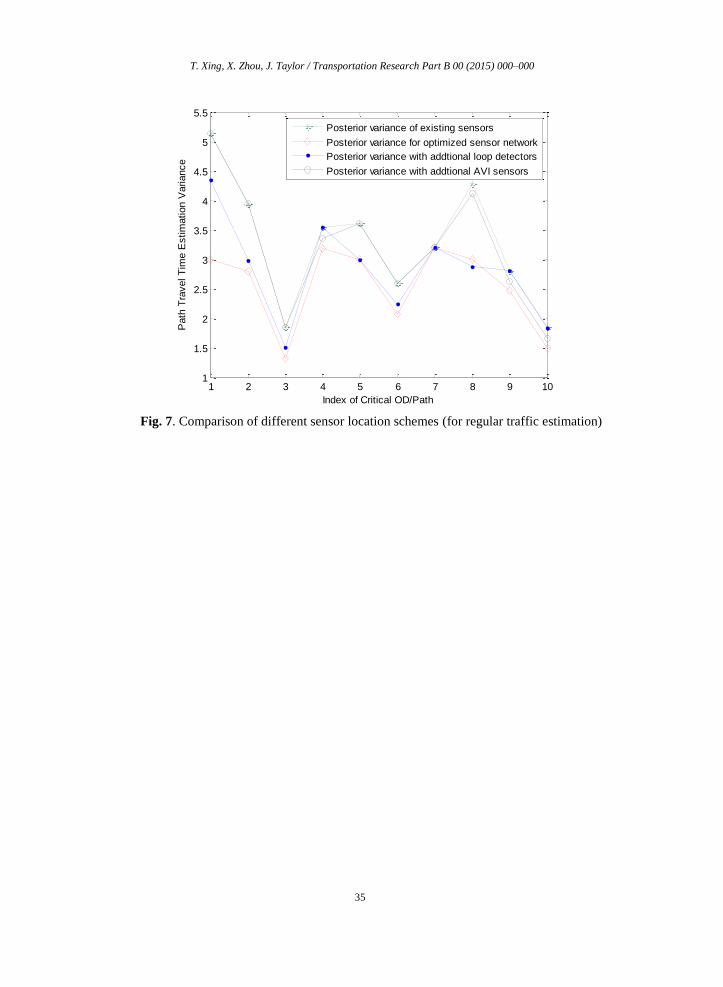
T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
35
Fig. 7. Comparison of different sensor location schemes (for regular traffic estimation)
1 2 3 4 5 6 7 8 9 101
1.5
2
2.5
3
3.5
4
4.5
5
5.5
Index of Critical OD/Path
Path
Tra
vel T
ime E
stim
ation V
ariance
Posterior variance of existing sensors
Posterior variance for optimized sensor network
Posterior variance with addtional loop detectors
Posterior variance with addtional AVI sensors

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
36
(a) Annual incident rate
1
2
3
4
5
6
7
8
9
10
12
11
13
14 15
16
Annual incidents per mile
Demand zone
50
100
150
200
300
(b) Optimized sensor network locations
(start from a zero-sensor case)
1
2
3
4
5
6
7
8
9
10
12
11
13
14 15
16
Optimized point sensor location
Demand zone
1
2
3
4
5
6
7
8
9
10
12
11
13
14 15
16
Existing loop detector
Demand zone
Additional loop detector
(c) Sensor network with 4 point sensors in
addition to existing 16 point sensors
1
2
3
4
5
6
7
8
9
10
12
11
13
14 15
16
Existing loop detector
Demand zone
Additional AVI sensor
(d) Sensor network with 6 AVI sensors in
addition to existing 16 point sensors
Fig. 8. Numerical experiment results under recurring and non-recurring traffic conditions
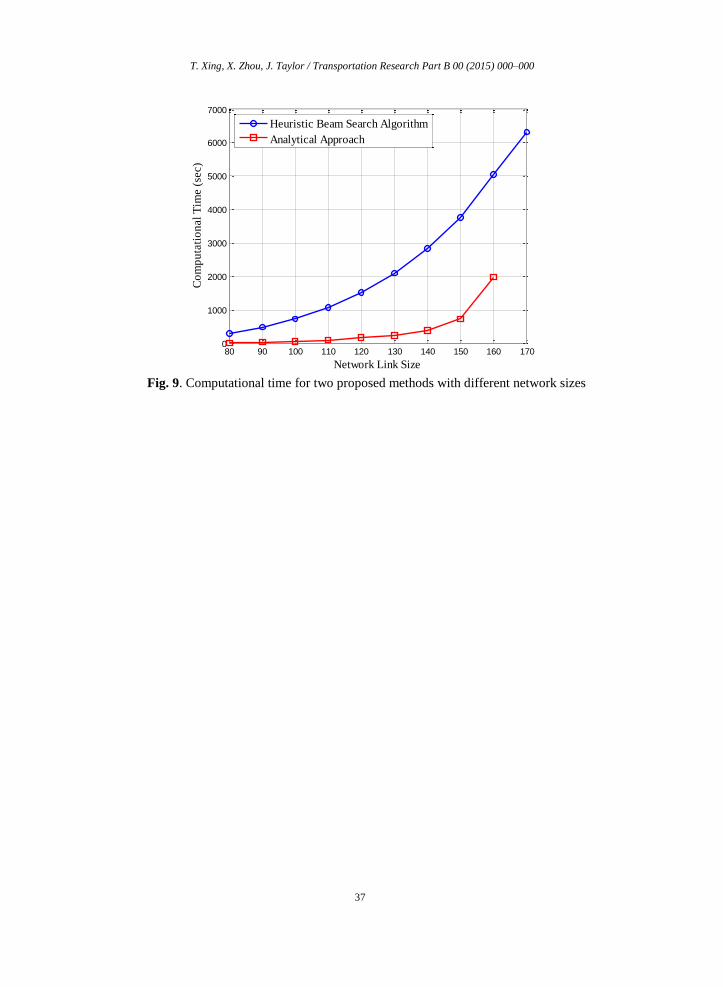
T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
37
Fig. 9. Computational time for two proposed methods with different network sizes
80 90 100 110 120 130 140 150 160 1700
1000
2000
3000
4000
5000
6000
7000
Network Link Size
Co
mp
uta
tio
nal
Tim
e (
sec)
Heuristic Beam Search Algorithm
Analytical Approach

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
38
Cu
mu
lati
ve
Flo
w C
ou
nt
Incident
Duration
Time
C
e
C
s
Shifted
Arrival
Curve ADeparture Curve D
with Incident
Original Departure
Curve D’
Reduced
Capacity CR
t + ht
xt
xt+h
xht+h
vt
vt+h
xht
t'
Shifted
Arrival
Curve A
Original
Departure
Curve D’
Actual Departure
Curve D with
Incident
Additional Delay
due to Incident
Fig. A1. Cumulative flow count curve for a single bottleneck with reduced capacity due to an incident
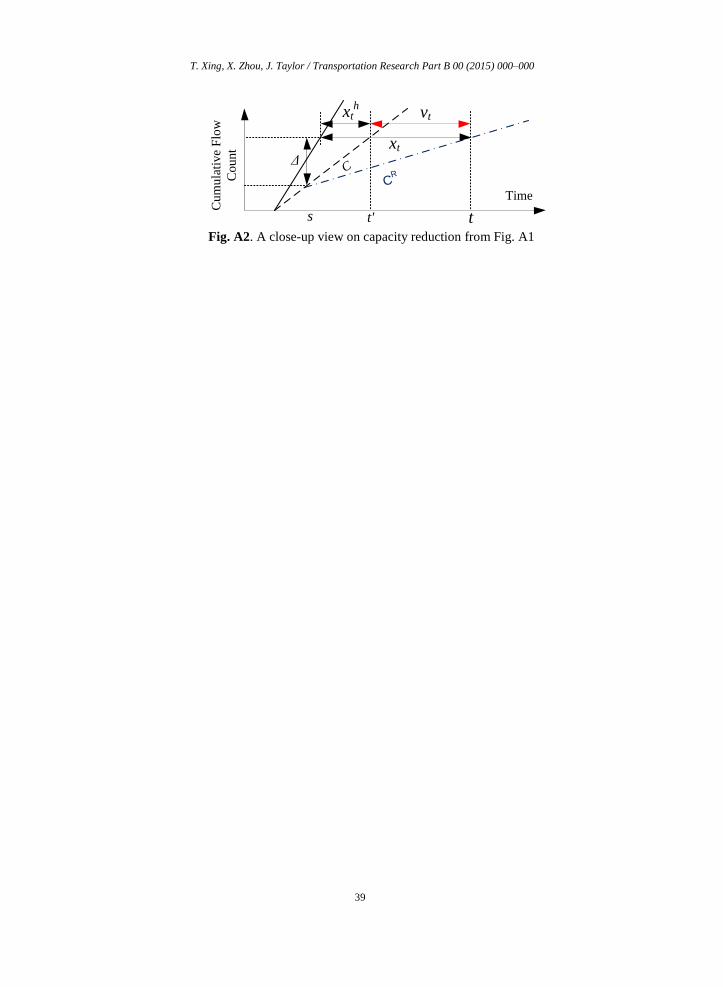
T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
39
CΔ
ts
xth
Time
Cu
mu
lati
ve
Flo
w
Co
un
tt'
CR
xt
vt
Fig. A2. A close-up view on capacity reduction from Fig. A1
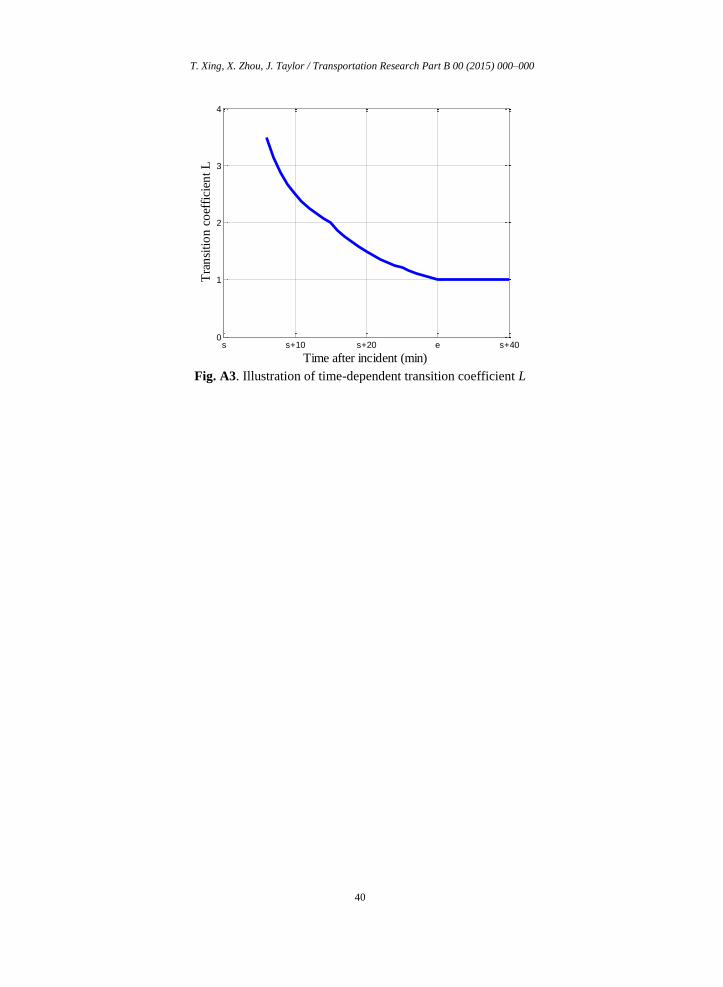
T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
40
Fig. A3. Illustration of time-dependent transition coefficient L
s s+10 s+20 e s+400
1
2
3
4
Time after incident (min)
Tra
nsi
tio
n c
oef
fici
ent
L

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
41
Cu
mu
lati
ve
Flo
w C
ou
nt
Time
C
C
s' t + h
1
vd,t
BWTT
Upstream Arrival Curve Au
Original Downstream
Departure Curve Dd '
Actual Downstream Departure
Curve Dd with Incident
Additional Delay
due to Incident
CR
vu,t+h
Actual Upstream Departure
Curve Du / Downstream Arrival
Curve Ad , under incident
CR
C
t + h-BWTT
vd,t+h-BWTT
C
t
4
3
2 Original Upstream Departure
Curve Du'
Fig. A4: Cumulative flow count curve for two adjacent links with queue spillback due to an incident
T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
42
List of Tables:
Table 1: Critical Path Travel Time Estimation Error under Existing and Optimized Sensor Location Strategies
Table 2: Log-determinant values of uncertainty matrix using beam search and analytical approaches
Table A1: Derivation of transition matrix L for different time periods
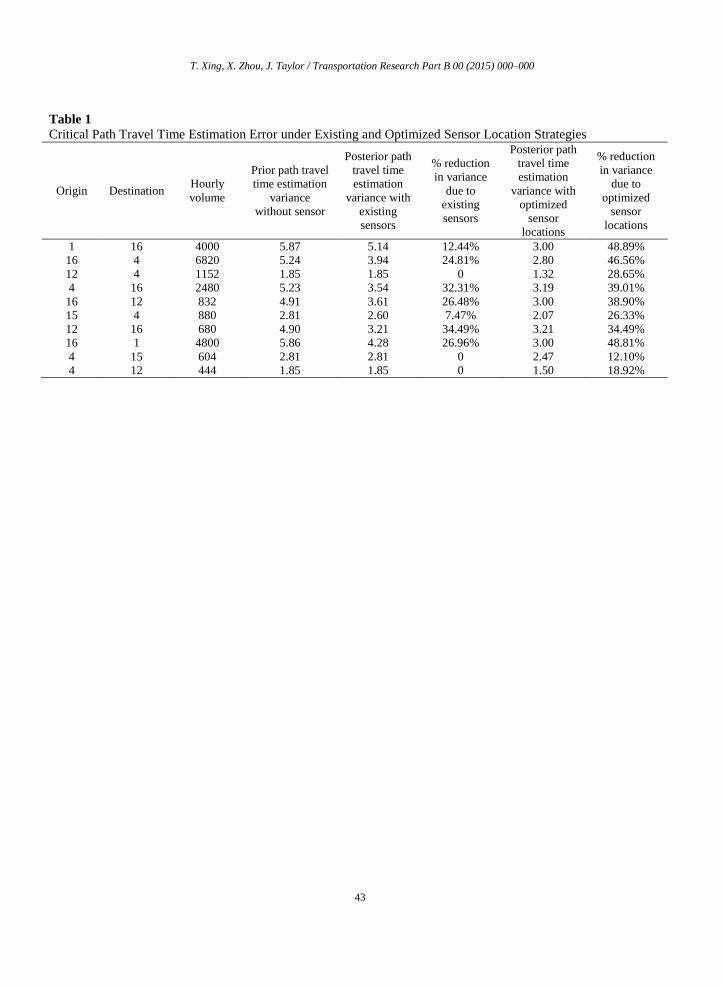
T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
43
Table 1
Critical Path Travel Time Estimation Error under Existing and Optimized Sensor Location Strategies
Origin Destination Hourly
volume
Prior path travel
time estimation
variance
without sensor
Posterior path
travel time
estimation
variance with
existing
sensors
% reduction
in variance
due to
existing
sensors
Posterior path
travel time
estimation
variance with
optimized
sensor
locations
% reduction
in variance
due to
optimized
sensor
locations
1 16 4000 5.87 5.14 12.44% 3.00 48.89%
16 4 6820 5.24 3.94 24.81% 2.80 46.56%
12 4 1152 1.85 1.85 0 1.32 28.65%
4 16 2480 5.23 3.54 32.31% 3.19 39.01%
16 12 832 4.91 3.61 26.48% 3.00 38.90%
15 4 880 2.81 2.60 7.47% 2.07 26.33%
12 16 680 4.90 3.21 34.49% 3.21 34.49%
16 1 4800 5.86 4.28 26.96% 3.00 48.81%
4 15 604 2.81 2.81 0 2.47 12.10%
4 12 444 1.85 1.85 0 1.50 18.92%

T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
44
Table 2
Log-determinant values of uncertainty matrix using beam search and analytical approaches Link size 80 90 100 110 120 130 140 150 160 170
Initial uncertainty -49.22 -52.40 -56.47 -60.11 -61.02 -74.21 -81.97 -90.14 -98.45 -101.62
Beam search optimal -63.44 -66.93 -71.44 -75.49 -76.54 -89.73 -97.62 -105.80 -114.11 -117.28
Approximate solution by
rounding analytical
optimal solution
-63.44 -66.93 -71.44 -75.49 -76.54 -89.73 -97.62 -105.80 -114.11 N/A
Analytical lower bound -64.37 -68.08 -72.83 -76.98 -78.45 -91.71 -99.69 -107.90 -116.24 N/A
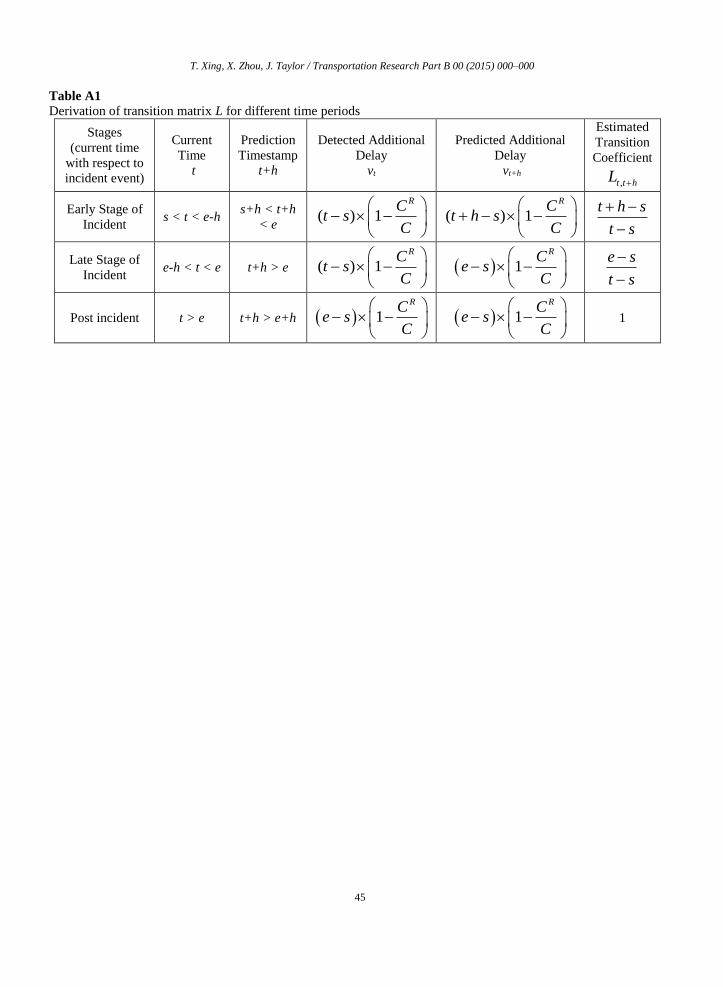
T. Xing, X. Zhou, J. Taylor / Transportation Research Part B 00 (2015) 000–000
45
Table A1 Derivation of transition matrix L for different time periods
Stages
(current time
with respect to
incident event)
Current
Time
t
Prediction
Timestamp
t+h
Detected Additional
Delay
vt
Predicted Additional
Delay
vt+h
Estimated
Transition
Coefficient
,t t hL
Early Stage of
Incident s < t < e-h
s+h < t+h
< e ( ) 1
RCt s
C
( ) 1
RCt h s
C
t h s
t s
Late Stage of
Incident e-h < t < e t+h > e ( ) 1
RCt s
C
1
RCe s
C
e s
t s
Post incident t > e t+h > e+h 1RC
e sC
1
RCe s
C
1