Control of an offshore wind turbine modeled as discrete system
21
Control of an offshore wind turbine modeled as discrete system Pedro Varella Barca Guimarães Suzana Moreira Avila UNIVERSIDADE DE BRASÍLIA - BRAZIL EO L UnB-UFG
Transcript of Control of an offshore wind turbine modeled as discrete system

Control of an offshore wind turbine modeled as discrete system
Pedro Varella Barca Guimarães Suzana Moreira Avila
UNIVERSIDADE DE BRASÍLIA - BRAZIL
EO L UnB-UFG

Guide
• Introduction
• Objectives
• Inverted Pendulum Model • Motion’s Equation
• Transfer Function
• Numerical Analysis
• Proportional Control • Block Diagram (Closed-Loop)
• Graphic Result
• Block Diagram (Open-Loop)
• Conclusions

Guide
• Introduction
• Objectives
• Inverted Pendulum Model • Motion’s Equation
• Transfer Function
• Numerical Analysis
• Proportional Control • Block Diagram (Closed-Loop)
• Graphic Result
• Block Diagram (Open-Loop)
• Conclusions

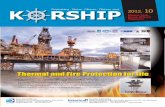
Introduction

Introduction
Offshore wind park at Cumbria Onshore wind park at Britain

Introduction

Guide
• Introduction
• Objectives
• Inverted Pendulum Model • Motion’s Equation
• Transfer Function
• Numerical Analysis
• Proportional Control • Block Diagram (Closed-Loop)
• Graphic Result
• Block Diagram (Open-Loop)
• Conclusions

Objectives
• Analise offshore wind turbine’s linear dinamic behavior and stability, modeled as an inverted pendulum;
• Look for a critical situation for its torcional spring to apply a proportional control.

Guide
• Introduction
• Objectives
• Inverted Pendulum Model • Motion’s Equation
• Transfer Function
• Numerical Analysis
• Proportional Control • Block Diagram (Closed-Loop)
• Graphic Result
• Block Diagram (Open-Loop)
• Conclusions

Inverted Pendulum Model
Motion’s Equation
(𝑀 +𝑚𝑏 +𝑚𝑐) (𝑚𝑏 + 2.𝑀). 𝑎
(𝑚𝑏 + 2.𝑀). 𝑎 𝐼 + (𝑚𝑏 + 2.𝑀). 𝑎2𝑢 𝜃
+ 𝑐 00 0
𝑢 𝜃
+ 0 00 𝐾𝑚 − 𝑚𝑏 + 2.𝑀 . 𝑔. 𝑎
𝑢𝜃
=𝐹
2. 𝑎. 𝐹

Inverted Pendulum Model
Transfer Function
• A = (mb + 2.M).a².(mc - M) + (M + mb + mc).I
• B = (I + (mb + 2.M).a²).c
• C = (M + mb + mc).(Km – (mb + 2M).a.g)
• D = (Km – (mb+2M).a.g).c
𝐺 = 𝑠 𝑚𝑏 +𝑚𝑐 . 𝑎 + 2. 𝑐. 𝑎
𝑠3. 𝐴 + 𝑠2. 𝐵 + 𝑠. 𝐶 + 𝐷

Inverted Pendulum Model
Numerical Analysis
Km values Poles
Km = 8,2763.1014 -0,0000 + 840,21i -0,0000 - 840,21i
-0,0000
Km = 8,2763.108 -0.0014 + 0.6997i -0.0014 - 0.6997i
-0.0034
Km = 8,2763.107 0.3805 -0.3832 -0.0034

Guide
• Introduction
• Objectives
• Inverted Pendulum Model • Motion’s Equation
• Transfer Function
• Numerical Analysis
• Proportional Control • Block Diagram (Closed-Loop)
• Graphic Result
• Block Diagram (Open-Loop)
• Conclusions

Proportional Control
Block Diagram (Closed-Loop)

Proportional Control
Graphic Result

Proportional Control
Block Diagram (Open-Loop)

Proportional Control
Transfer Function
• A = (mb + 2.M).a².(mc - M) + (M + mb + mc).I
• B = (I + (mb + 2.M).a²).c
• C = (M + mb + mc).(Km – (mb + 2M).a.g) + (mb+mc).(mc + mb + M)
• D = (Km – (mb+2M).a.g).c + 2.c.a.(mc + mb + M)
Poles:
• -0,0000 + 0,1656i;
• -0,0000 - 0,1656i;
• -0,0061.
𝐺 = 𝑠 𝑚𝑏 +𝑚𝑐 . 𝑎 + 2. 𝑐. 𝑎
𝑠3. 𝐴 + 𝑠2. 𝐵 + 𝑠. 𝐶 + 𝐷

Guide
• Introduction
• Objectives
• Inverted Pendulum Model • Motion’s Equation
• Transfer Function
• Numerical Analysis
• Proportional Control • Block Diagram (Closed-Loop)
• Graphic Result
• Block Diagram (Open-Loop)
• Conclusions

Conclusions
• The inverted pendulum is a system originally unstable and with a non-linear behavior;
• It was possible to identify a critical situation to apply the proportional control;
• The proportional control was effective for this problem:
• Stabilized the system;
• Kept it within the regime of small displacements.

References
• Ogata, K., Modern Control System, 4ª Edição, Prentice-Hall, New Jersey, 2002
• Pao L.Y. and Johnson K.E., A tutorial on the dynamics and control of wind turbines and wind farms Proceedings of the American Control Conference, St Louis, EUA, 2009
• A. C. Drummond, K. C. Oliveira, A. Bauchspiess, Estudo do Controle de Pêndulo Inverso sobre Carro utilizando Rede Neural de Base Radial, IV Congresso Brasileiro de Redes Neurais, 1999.
• Gordon M. Stewart, Matthew A. Lackner, The effect of actuator dynamics on active structural control of offshore wind turbine, 2011