Brake-Link™ Haldex Trailer ABS Application Operator's Manual

1
OTEKON’14
7. Otomotiv Teknolojileri Kongresi
26 – 27 Mayıs 2014, BURSA
ÇOKLU MODEL GEÇİŞ TABANLI ABS TASARIMI: 1. KISIM
KONTROLCÜ TASARIMI
Morteza Dousti, S.Çağlar Başlamışlı
Hacettepe Üniversitesi, Mühendislik Fakültesi, Makine Müh. Böl. 06800 Beytepe Ankara
ÖZET
Anti-blokaj Fren sistemi (ABS) araç güvenliği sisteminin önemli bir bileşenidir. ABS sisteminin temel amacı bir
yandan araç sürüş kararlılığını korumak için tekerlek kilitlenmesi önlemek diğer taraftan da aracın durma mesafesini en
aza indirmek için lastik fren gücünü en üst düzeye çıkarmaktır. Bu amaçlar doğrultusunda ABS farklı sürtünme
katsayısı yollar gibi farklı durumlarda dayanıklı bir şekilde çalışmalıdır (örneğin asfalt veya kar). ABS sistemi karmaşık
ve doğrusal olmayan bir dinamiğe sahip olup literatürde birçok ABS kontrolcü tasarım metodu geliştirilmiştir. Bu
çalışmada farklı yol koşulları için geliştirilmiş olan çoklu model geçişli kontrolcü tasarımı yöntemi sunulmuş ve
benzetimlerle performansı incelenmiştir.
Anahtar kelimeler: Çoklu Geçişli Kontrolcü, Burckhardt lastik modeli, Lead Lag Kontrolcü
Multi model switching based ABS design: Part 1. Controller design
ABSTRACT
The anti-lock braking system (ABS) is an important component of the vehicle safety system. The main objective of
the ABS system is to avoid wheel lock-up in order to preserve vehicle stability and to maximize tire braking force in
order to minimize the vehicle stopping distance on the other hand. For these purposes, the anti-lock brake system must
work robustly in different situations such as different road friction coefficients (e.g. asphalt or snow). ABS system has a
complex and nonlinear dynamics and there are several controller design methods in literature. In this study a multi
model switching controller is developed to work under different road conditions and the system performance is
examined with computer-based simulations.
Keywords: Switched Controller, Burckhardt tire model, Lead Lag controller
1. GİRİŞ
Bu çalışmada amaç, elektromekanik fren sistemine
sahip binek taşıtlara yönelik, yenilikçi, sürüş ve yol
şartlarına göre uyarlanabilir, yüksek performanslı ABS
kontrol algoritma tasarımıdır. Kontrolcü tasarımı
esnasında Pacejka lastik modeli [1] parametrelerinin
farklı yol şartlarında farklı değerler aldığı bilinmektedir.
Öte yandan, literatürde farklı yol şartları için geliştirilmiş
ve otomotiv sanayiinde geçerliği kabul görmüş daha basit
bir formülasyona sahip olan Burckhardt lastik modeli [2]
Pacejka lastik modelini kısmen yakınsayabilmektedir.
Burchardt lastik modeli birçok araştırmacı tarafından
ABS kontrol algoritması geliştirilmesinde kullanılmıştır.
Şekil 1’de Pacejka lastik modeli ve Burckhardt lastik
modellerinin boylamasına fren kuvvetinin boylamasına
kayma değeriyle değişimleri verilmiştir. Şekilden de
anlaşılağı üzere, farklı yol tiplerinde Pacejka lastik
modeli ve Burckhardt lastik modelleri benzer davranışlar
sergilemektedir. Ortaya çıkan önemli bir davranış
farklılığı Kuru Kaldırım Taşı Tipi yolda görülmektedir.
Burckhardt tarafından belirlenen eğride bu tip yol için
tepe noktasının hayli ötelendiği görülmektedir.

2
Şekil 1. Burckhardt ve Pacejka lastik modelleri
Boylamasına Fren Kuvveti Boylamasına kayma ile
değişimi
Farklı yol tipleri için Burckhardt lastik modelinin
belirlenmiş kesin parametrelerinin olması kontrolcü
tasarımı için sağlam bir dayanak oluşturmaktadır. Bu
çalışmada, Lead Lag tipi ABS kontrolcüleri farklı yol
şartları için geçerli olan Burckhardt lastik modeline, ve
Wulff’un tezinde [3] yer alan çoklu model geçişli
kontrolcü tasarımı yöntemine göre tasarlanmıştır.
Sonrasında simülasyon modelinde gene Pacejka lastik
modeli kullanılmış ancak değişen şartlar altında anlık
olarak en geçerli/en yakın Burckhardt lastik modeli
belirlenmiş ve bu modele göre tasarlanmış kontrolcü işler
hale getirilerek frenleme simülasyonu yapılmıştır. Bahsi
geçen kontrolcülerin etkinlikleri farklı sürtünme katsayılı
yollar arası geçişler esnasında değerlendirilmiştir.
ABS kontrol algoritması geliştirilmesi ile ilgili olarak
bilimsel literatürde burada sayılamayacak kadar fazla
yaklaşım bulunmaktadır. Günümüzde, ticarileşmiş çoğu
ABS donanımı hidrolik sistem tabanlıdır. Bu çalışmada
geliştirilen algoritmalar son 10 yıldır geliştirilmekte olan
Brake by Wire teknolojisini mümkün kılan
Elektromekanik fren sistemine yönelik algoritmalardır.
Bu sistem hidrolik sistemde kullanılan fren sisteminin
aksine devamlı olarak fren basıncını ayarlayabilme
potansiyeline sahiptir.
2. DOĞRUSALLAŞTIRILMIŞ SİSTEM DİNAMİĞİ
Burckhardt fren kuvveti modeli aşağıda verilmiştir:
( ) ( ) (1)
Bu modelde tekerlek boylamasına kaymasını, taşıt
hızını, katsayıları ise birtakım lastik parametrelerini
temsil etmektedir. Bu parametreler farklı yol tipleri için
Tablo 1’de verilmiştir.
Tablo 1. Farklı Yol Tipleri için Burckhardt Lastik
Modeli Parametreleri
Yol tipleri
Kuru asfalt 1.28 23.99 0.52 0.17 1404
Islak asfalt 0.86 33.82 0.35 0.131 964
Kar 0.19 94.13 0.06 0.061 223
Buz 0.05 306.39 0 0.13 60
Kuru Kaldırım
Taşı 1.37 6.46 0.67 0.4 1198
Islak Kaldırım
Taşı 0.4 33.71 0.12 0.14 456
Kontrolcü tasarımı esnasında sistemin doğrusal
modeline ihtiyaç duyulmaktadır. Simülasyon modelinde
lastik modeli olarak Burckhardt tarafından önerilen
model kullanılmıştır. Doğrusallaştırma işleminin
parametreleri Şekil 2’de gösterilmiştir. Buna göre
doğrusallaştırma işlemi, farklı sürtünme katsayıları ve
kayma oranlarında gerçekleştirilmiştir. Kontrolcülerin
tasarımı, Üçüncü bölümde anlatılmaktadır. Fren
dinamiğinin şeması Şekil 3’de verilmiştir. Sistemin
gerçekçiliğini arttırmak için eyleyici dinamiği ve zaman
gecikmesi eklenmiştir. Modelleme esnasında gecikme
için 1.dereceden Padé yaklaşımı [8] kullanılmıştır:
( )
(2)
Burada zaman gecikmesi ve
’dir. Sistem
denklemlerini blok diyagramda görüldüğü gibi
uyguladıktan sonra elde edilen eyleyici dinamiği
denklemleri aşağıda verilmiştir:
{
(
)
(3)
{
(4)
Şekil 2: , kayma oranı, her bir sürtünme ( ) koşulu için
en yüksek fren kuvvetinin elde edildiği orandır
0 0.2 0.4 0.6 0.8 10
500
1000
1500
2000
2500
3000
3500
4000
4500
5000Longitudinal Braking Force
Slip[]
Fx[N
]
Burckhardt
Pacejka
Kuru Asfalt
Kuru Kaldırım taşı
Islak Asfalt
Islak Kaldırım taşı
KarBuz
0 0.2 0.4 0.6 0.8 10
1000
2000
3000
4000
5000
Slip[]
Fx[N
]
*=0.17
*=0.13
Kuru Asfalt
Islak Asfalt

3
Şekil 3: Açık Devre Fren sistemi dinamiği
Bu iki denkleme aşağıda verilen fren dinamiği,
dolayısıyla kayma oranı durumu eklenmiştir:
{
[
]
(5)
Sonuç olarak sistemin doğrusallaştırılmış hali aşağıda
verilmiştir:
{
(
)
(
)
(
) (
)
( )(
)
(6)
Çıktı olarak kayma oranı elde edilmektedir.
3. ÇOKLU GEÇİŞLİ KONTROLCÜ TASARIMI
TEORİSİ
Çoklu model geçişli sistemlerin kontrolü probleminin
çözümüne yönelik yöntem [3], denklemleri aşağıda
verilmiş olan tek girdili tek çıktılı doğrusal zamanla
değişken (linear time varying) parçalı sürekli geçişli
sistem modeli için verilecektir:
{
(7)
Şekil 4: Kontrol edilen çoklu model geçişli sistem
Bu model tasarlamak istediğimiz ABS kontrolcüsünü
temsil eden bir sistem modelidir. Bu sisteme ait sistem
matrisleri:
(
)
(
) ( )
(8)
şeklinde olup, ( ) sistemin anlık olarak
dinamiğini tanımlayan matrislerdir. (Bahsi geçen
matrisler 2. Bölümde elde edilmiştir). Sistemin her bir
dinamik modu, aşağıdaki transfer fonksiyonu ile ifade
edilmektedir:
( )
(9)
Kontrolcü tasarımı açısından her bir moda geçişinin,
anında ölçülebildiği varsayılabilir. Dolayısıyla, N adet
transfer fonksiyonu, doğrusal zamanla değişken sistemi
ifade etmektedir ve her bir transfer fonksiyonu için N
adet çıktı geri beslemeli kontrolcünün sentezlendiği
kontrol mimarisi Şekil 4’te verilmiştir:
Her bir kontrolcünün durum-uzay denklemleri:
{ ( ) ( ) ( )
( ) ( ) ( ) (10)
ve transfer fonksiyonu:
( ) ( ) (11)
şeklinde yazıldığında, (
) durum
vektörü olan (kontrolcü ve ABS fren dinamiğinin bileşik
durum vektörü verilmiştir) kapalı çevrim otonom toplam
kontrol sisteminin denklemi:
{ ( ) ( ) ( ) ( )
{ } (12)
olup, üstte bahsi geçen her bir H matrisi:
(
)
(13)
şeklinde ifade edilebilmektedir. Transfer fonksiyonu:
( ) ( ) ( )
( ) ( ) (14)
ile ifade edilmiş her bir alt kapalı çevrim kontrol
sistemini (i) kararlı hale getiren, (ii) tüm alt kapalı çevrim
kontrol sisteminin tasarım öncesi belirlenen
özdeğerlerinin { } ortak
kümesinde yer almasını sağlayan N adet kontrolcünün
sentezlenmesi ile kapalı çevrim toplam kontrol sisteminin
kararlı hale getirilebilmektedir. Geçiş kararlılığı için
gerekli olan ek koşullar aşağıda verilmiştir.
Teorem: İkiden fazla ( ) alt sistemden oluşan
geçişli kontrol sistem için aşağıdaki ifadeler eşdeğerdir:
(i) Gelişigüzel geçişler esnasında { } sistemi
asimptotik olarak kararlıdır;
(ii) Gelişigüzel geçişler esnasında { } sistemi
asimptotik olarak kararlıdır;
Not: { } matrisleri { }
𝑇𝑏
��𝑏
𝑢
𝜆
Kontrolcü
𝜔𝑎𝑐𝑡
𝑠 𝜔𝑎𝑐𝑡 𝑒 𝜏𝑠
Fren
Dinamiği
eyleyici gecikme
𝑭𝒊
𝑪𝟏(𝒔)
𝑪𝟐(𝒔)
𝑪𝑵(𝒔)
𝑺𝑼
Plant
𝒓 𝒆
𝒖𝟏
𝒖𝟐
𝒖𝑵
𝒖 𝒚

4
matrislerine göre sistem derecesi daha düşük olan
matrislerdir. Dolayısıyla geçiş kararlılığının ispatlanması
için varlığı gerekli olan Lyapunov fonksiyonunun
boyutları da azalmış olacak ve Matlab ortamında
bulunması daha kolay olacaktır. { } matrislerinin nasıl inşa edildikleri Wulff’un [3] tezinde
açıklanmıştır.
3.1. Çoklu Model Geçişli Sistem için Lead Lag
Kontrolcü Tasarımı
Tasarımda her bir alt-sisteme ikinci dereceden bir lead
kontrolcünün eklenmesi ile her bir alt kontrol sisteminin
derecesi 5 olmuştur. Dolayısıyla sistem dinamiklerini
etkin bir şekilde değiştirebilmesi –karakteristik
denklemin her bir parametresini değiştirebilmesi için–
tasarlanan lead lag kontrolcünün 5 adet tasarım
parametresiyle tasarlanması uygun bulunmuştur. Bu
tasarım parametreleri kontrolcü kazancı k, iki adet
kontrolcü sıfırı ve ve iki adet kontrolcü kutbu olan
ve den ibarettir. Kontrolcünün yapısı aşağıda
verilmiştir:
( ) ( )( )
( )( )
( )
( ) (15)
Sıfır ve kutupların karmaşık olabilmeleri nedeniyle ve
Matlab ortamında hazırlanan optimizasyon kodundan
sonuç alınabilmesi için değişken değiştirme yöntemine
başvurulmuş, aşağıdaki yeni değişkenler optimizasyon
parametresi olarak tanımlanmıştır:
{
{
(16)
Böylelikle kontrolcülerin transfer fonksiyonu (17) ve
durum uzayı matrisleri (18) aşağıdaki gibi olmuştur:
( )
(17)
(
) ( )
( )
(18)
Kapalı çevrim sisteminin durum uzay gösterimi:
( ) (
) ( ) (
)
( ) (
) ( ) (
)
(19)
şeklinde elde edilmiştir.
4. BURCKHARDT LASTİK MODELİ İÇİN
HAZIRLANAN LEAD-LAG KONTROLCÜLER
Bu kısımda, üç farklı yol tipi ve iki farklı hız
aralığında toplam 6 tane kontrolcü tasarlanmıştır. Daha
önce de ifade edildiği gibi tasarlanan kontrolcüler
Burckhardt lastik modeline göre tasarlanmıştır. Bu
kontrolcüler Wulff tarafından önerilen çoklu model
geçişli kontrolcülerden oluşmaktadır. Kontrolcüler
simülasyonlarda MF lastik modeliyle sınanmıştır.
Simülasyonlar farklı yol şartlarında geçişlerden
oluşmaktadır. Tablo 2 ’de verilen altı ayrı işletim
bölgesinde altı ayrı lead-lag kontrolcü tasarlanmıştır ve
altı adet ayrı kapalı çevrim sisteminin geçişli kararlılığı
sağlanmıştır.
Tablo 2. Çoklu geçiş modelinde tasarlanan kontrolcüler
ve bunların çalışma aralıkları
Kuru Asfalt Islak Asfalt Kar
Elde edilen 6 adet lead lag kontrolcünün denklemleri
aşağıda verılmıştır:
(
) (
)
( )
(
) ( )
( )
(
) ( )
( )
(
) ( )
( )
(
) ( )
( )
(
) ( )
( )
5. BENZETİM SONUÇLARI
Literatürde yer alan birçok çalışmada eyleyici
dinamikleri kontrolcü tasarımına dahil edilmemiştir. Oysa
Tanelli ve Savaresi [9] tarafından belirtildiği üzere bu tür
bir durumda yüksek kazançlı bir P(Proportional)
kontrolcüsünün bile çok iyi sonuçlar verebildiği
ispatlanabilmektedir. Gerçek bir uygulamada ise bu tür
bir yaklaşım kesinlikle gerçekçi değildir. Dolayısıyla
eyleyici dinamikleri benzetim çalışmasında sisteme
katılmıştır.
Wulff’un doktora tezinde [3] yer alan yöntem
kullanılarak farklı sürtünme katsayısı geçişlerini ön gören
geçiş kararlılığı garantisi olan lead-lag tipi kontrolcüler
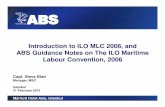
tasarlanmıştır. Şekil 5 ve 8 arasında simülasyon
sonuçlarında görüldüğü gibi salınımların küçük olduğu
gözlemlenmiştir. Bu şekillerde simülasyon esnasında 6 li
Lead-Lag çoklu model geçişli kontrolcülerin Pacejka
lastik modeli ile performansı gösterilmiştir. Kontrolcüler
Tablo 2 deki çalışma aralıklarına göre seçilmektedir
5
Şekil 5. Pacejka lastik modeli arasında geçiş yapmaktadır, buna karşılık simülasyon esnasında kuru
asfalt ve karlı yol Burckhardt lastik modelleri için tasarlanmış kontrolcüler devreye sokulmaktadır.
Şekil 6. Pacejka lastik modeli arasında geçiş yapmaktadır, buna karşılık simülasyon esnasında kuru
asfalt ve karlı yol Burckhardt lastik modelleri için tasarlanmış kontrolcüler devreye sokulmaktadır.
Şekil 7. Pacejka lastik modeli arasında geçiş yapmaktadır, buna karşılık simülasyon esnasında
kuru/ıslak asfalt karlı yol Burckhardt lastik modelleri için tasarlanmış kontrolcüler devreye sokulmaktadır.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Time(s)
slip(
)
ref
sw itched
𝑲𝟑 𝑲𝟒
𝑲𝟔
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 54
6
8
10
12
14
16
18
20
Time(s)
Velo
city(m
/s)
VCar
VWheel
𝑲𝟒
𝑲𝟑
𝑲𝟔
0 0.5 1 1.5 2 2.5 30
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Time(s)
slip(
)
ref
sw itched
𝑲𝟓
𝑲𝟑 𝑲𝟒
0 0.5 1 1.5 2 2.5 34
6
8
10
12
14
16
18
20
Time(s)
Velo
city(m
/s)
VCar
VWheel
𝑲𝟓
𝑲𝟑
𝑲𝟒
0 0.5 1 1.5 2 2.50
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
Time(s)
slip(
)
ref
sw itched
𝑲𝟏 𝑲𝟐
𝑲𝟔
𝑲𝟒
0 0.5 1 1.5 2 2.54
6
8
10
12
14
16
18
20
Time(s)
Velo
city(m
/s)
VCar
VWheel
𝑲𝟏
𝑲𝟐
𝑲𝟔
𝑲𝟒
6
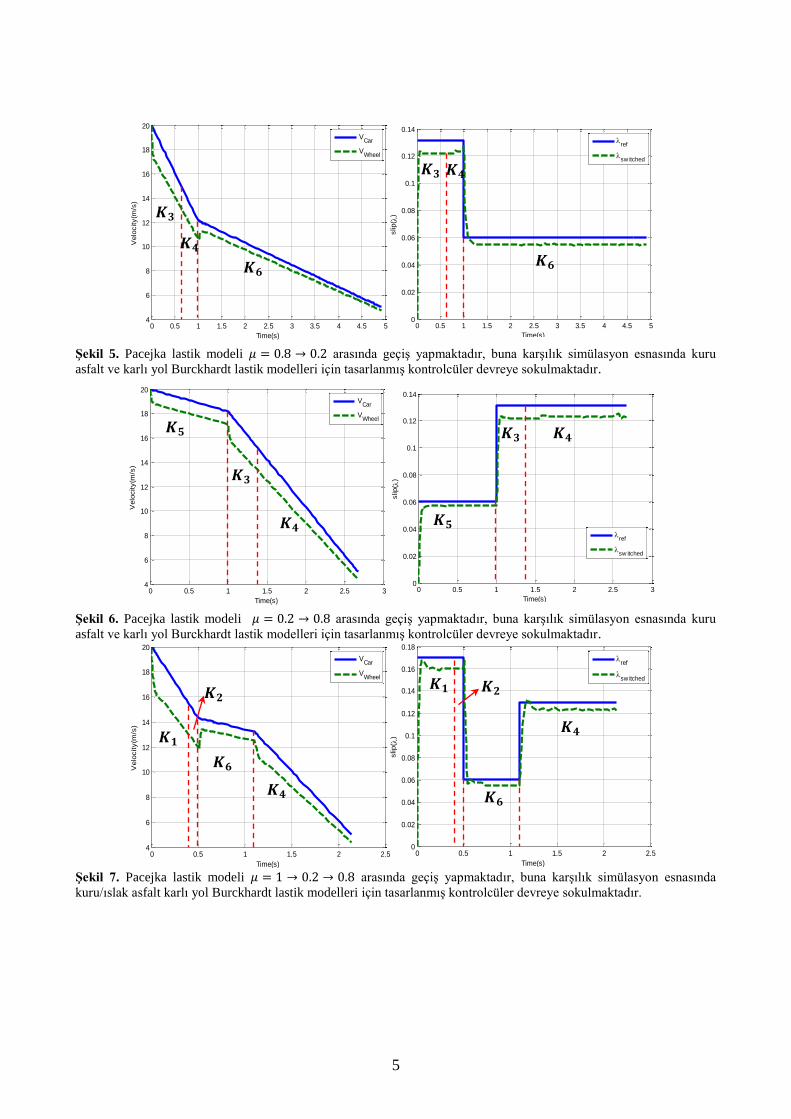
Şekil 8. Pacejka lastik modeli arasında geçiş yapmaktadır, buna karşılık simülasyon
esnasında kuru/ıslak asphalt karlı yol Burckhardt lastik modelleri için tasarlanmış kontrolcüler devreye sokulmaktadır.
6.TARTIŞMA VE SONUÇ
Bu çalışmada farklı yol koşulları için geliştirilmiş
olan çoklu model geçişli kontrolcü tasarımı yöntemi
sunulmuş ve benzetimlerle performansı incelenmiştir.
Benzetimler esnasında sunulan yöntemle çok kararlı bir
yapı elde edildiği gösterilmiştir.
Çalışma esnasında yol koşullarının bilindiği
varsayılmıştır ve buna göre değişen şartlarda en uygun
kontrolcü seçilmiştir. Oysa pratikte bu mümkün
değildir ve yol şartlarının tahmin edilmesi
gerekmektedir. Dolayısıyla bu çalışmanın ikinci
kısmında yol şartlarının nasıl tahmin edileceği
konusuna değinilmiştir (Çoklu Model Geçiş Tabanlı
ABS Tasarımı: 2. Kısım Durum Ve Parametre
Tahmini).
Teşekkür
111M601 nolu araştırma projesi kapsamında
çalışmaların gerçekleştirilmesini mümkün kılan
Tübitak’a teşekkürlerimizi sunarız.
KAYNAKLAR
1. Pacejka, H.B., 2002, “Tire and Vehicle
Dynamics”, Butterworth-Heinemann, Oxford, pp.
192.
2. Burckhardt, M., 1993, “Fahrwerktechnik:
Radschlupfregelsysteme”, Vogel-Verlag,
Almanya.
3. Wulff, K., 2004, “Quadratic and Non-
Quadratic Stability Criteria for Switched
Linear Systems”, Doktora Tezi, Hamilton
Institute, National University of Ireland-
Maynooth, Co. Kildare, Irlanda.
4. Yazıcıoğlu, Y., Ünlüsoy, Y.S., 2008, “A fuzzy
logic controlled anti-lock braking system
(ABS) for improved braking performance and
directional stability”, International Journal of
Vehicle Design-Special Issue: Advanced
Traction/Braking Vehicle Control, 48(3-4), pp.
299-315.
5. Öniz, Y., Kayacan, E., Kaynak, O., 2009, “A
Dynamic Method to Forecast the Wheel Slip
for Antilock Braking System and Its
Experimental Evaluation”, IEEE Transactions
on Systems, Man, and Cybernetics—PART B:
Cybernetics, 39-2, pp. 551-560.
6. Kayacan, E., Öniz, Y., Kaynak, O., 2009, “A
Grey System Modeling Approach for Sliding-
Mode Control of Antilock Braking System”,
IEEE Transactions on Industrial Electronics, 56-
8, pp. 3244-3252.
7. Dousti, M., Başlamışlı, S.Ç., Solmaz, S., Onder,
T., 2013, “ABS fren dinamiğine yönelik üç
farklı kontrol algoritmasının tasarım ve
karşılaştırması”, Otomatik Kontrol Ulusal
Toplantısı(TOK), Malatya, Türkiye, 26-28 Eylül.
8. G.J. Silva, A. Datta, S.P. Bhattacharyya, 2005,
“PID Controllers for Time-delay Systems”,
Springer Book, ISBN 0-8176-4266-8, Texas,
ABD.
9. Savaresi; S.M.; Tanelli, M., 2010, “Active
Braking Control Systems Design for Vehicles”,
Springer-Verlag, London.
10. I., Petersen, “Wheel Slip Control in ABS Brakes
using Gain Scheduled Optimal Control with
Constraints”, (Doktora tezi), Norwegian
University of Science and Technology,
Trondheim, Norveç, 2003.
11. H.B., Pacejka, 2006, “Tire and Vehicle
Dynamics”, 2nd Ed, SAE International, 2006
0 0.5 1 1.5 2 2.54
6
8
10
12
14
16
18
20
Time(s)
Velo
city(m
/s)
VCar
VWheel
𝑲𝟏 𝑲𝟓
𝑲𝟑
𝑲𝟒 𝑲𝟔
𝑲𝟐
0 0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Time(s)
slip(
)
ref
sw itched
𝑲𝟏
𝑲𝟓
𝑲𝟑
𝑲𝟒
𝑲𝟔
𝑲𝟐
Copyright © 2022 FDOKUMEN