
Coanda Etkili VTOL Hareket Edebilen İnsansız Hava Aracı Ön Kontrol Tasarımı ve Donanım...
54
iii Tez Danışmanı : Y. Doç. Dr. Turgut Berat KARYOT .............................. İstanbul Teknik Üniversitesi Jüri Üyeleri : Doç. Dr. Vedat Ziya DOĞAN ............................. İstanbul Teknik Üniversitesi Dr. Murat ŞİMŞEK .............................. İstanbul Teknik Üniversitesi İTÜ, Uçak ve Uzay Bilimleri Fakültesinin …............... numaralı öğrencisi …………….................., ilgili yönetmeliklerin belirlediği gerekli tüm şartları yerine getirdikten sonra hazırladığı “…………………………………………….................... .................................................................... ” başlıklı tezini aşağıda imzaları olan jüri önünde başarı ile sunmuştur. Teslim Tarihi : 20 Mayıs 2014 Savunma Tarihi : 9 Haziran 2014
-
Upload
istanbultek -
Category
Documents
-
view
0 -
download
0
Transcript of Coanda Etkili VTOL Hareket Edebilen İnsansız Hava Aracı Ön Kontrol Tasarımı ve Donanım...

iii
Tez Danışmanı : Y. Doç. Dr. Turgut Berat KARYOT ..............................
İstanbul Teknik Üniversitesi
Jüri Üyeleri : Doç. Dr. Vedat Ziya DOĞAN .............................
İstanbul Teknik Üniversitesi
Dr. Murat ŞİMŞEK ..............................
İstanbul Teknik Üniversitesi
İTÜ, Uçak ve Uzay Bilimleri Fakültesinin …............... numaralı öğrencisi
…………….................., ilgili yönetmeliklerin belirlediği gerekli tüm şartları yerine
getirdikten sonra hazırladığı “……………………………………………....................
.................................................................... ” başlıklı tezini aşağıda imzaları olan jüri
önünde başarı ile sunmuştur.
Teslim Tarihi : 20 Mayıs 2014
Savunma Tarihi : 9 Haziran 2014

iv

v
ÖNSÖZ
Bu bitirme tezi, Uçak ve Uzay Bilimleri, Uzay Mühendisliği lisans eğitimini
tamamlamak üzere yazılmıştır. Bitirme tezinin konusu “Coanda etkisi ile çalışan
VTOL hareket edebilen insansız hava aracı ön kontrol tasarımı” şeklindedir. Gümüş
Uzay Savunma Havacılık şirketi bu konuda KOSGEB destekli askeri ve sivil kullanım
amaçlı “Cevher” adında bir proje geliştirmektedir ve bu proje, bitirme tezime ilham
kaynağı olmuştur. Bitirme tezi kapsamında yapılan, zaman ve imkan kısıtı sebebiyle
temel düzeyde kalan bu ilk çalışma ile birlikte, bu alanda sürdürmeyi planladığım
çalışmalar için ilk adımı attım. Gelecek yıllarda yüksek lisans eğitimi kapsamında veya
hobi olarak bu alanda başladığım çalışmayı, projenin şu anda değinemediğim diğer
kısımlarına da hakim olabilmek açısından kendimi geliştirerek sürdürmeyi
planlamaktayım.
Bitirme tezini hazırlarken yaptığım çalışmalarda emeği geçen başta Murat Süer ve
Burak Sunan olmak üzere tüm Gumush Uzay Savunma Havacılık şirketi çalışanlarına,
Lisans eğitimim süresince, duruşu ve değerli fikirleri ile bana yön veren değerli hocam
Y. Doç. Dr. Turgut Berat Karyot’a,
Yıllardır desteklerini bir an olsun hissetmekten uzak kalmadığım ve bu günlere
gelmemde en önemli payın sahibi olan değerli aileme en içten teşekkürlerimi sunarım.
Mayıs 2014 Enes ERDOĞAN

vi

vii
İÇİNDEKİLER
Sayfa No
ÖNSÖZ ........................................................................................................................ v
İÇİNDEKİLER ........................................................................................................ vii
KISALTMALAR ...................................................................................................... ix
TABLO LİSTESİ ....................................................................................................... x
ŞEKİL LİSTESİ ........................................................................................................ xi
ÖZET ........................................................................................................................ xiii
SUMMARY ............................................................................................................. xiv
1.GİRİŞ ....................................................................................................................... 1
1.1 Havacılık Tarihi .................................................................................................. 1
1.2 İnsansız Hava Araçları ........................................................................................ 2
1.2.1 Kullanım Alanları ......................................................................................... 2
1.3 Coanda Etkisi ...................................................................................................... 3
1.4 Tezin Amacı ........................................................................................................ 4
2. İHA SİSTEM TASARIMI ..................................................................................... 5
2.1 Sistem Tasarımı .................................................................................................. 5
2.1.1 Konsept Tasarım Aşaması ............................................................................ 5
2.1.2 Ön Tasarım Aşaması .................................................................................... 5
2.1.3 Detaylı Tasarım Aşaması ............................................................................. 6
2.1.4 Donanım Seçme ve Satın Alma Aşaması ..................................................... 6
2.1.5 Üretim Aşaması ............................................................................................ 6
2.2 İnsansız Hava Aracı Sistem Bileşenleri .............................................................. 7
3. COANDA ETKİLİ VTOL HAREKET EDEBİLEN İHA ................................. 9
3.1 Coanda Etkili İHA Örnekleri .............................................................................. 9
3.2 Hava Aracının Tasarımı .................................................................................... 12
3.2.1 Yapısal ve Mekanik Tasarımı ..................................................................... 12
3.2.2 Kontrol Mekanizması Tasarımı .................................................................. 14
3.3 Test Düzeneğinin Hazırlanması ........................................................................ 15
3.4 Donanım Seçimi ve Entegrasyonu .................................................................... 18
3.5 Kontrol Sistemi ................................................................................................. 20
3.5.1 Arduino Programlama ................................................................................ 20
3.5.2 Kontrol Yazılımının Hazırlanması ............................................................. 22

viii
4. SONUÇLAR VE DEĞERLENDİRME .............................................................. 27
4.1 Değerlendirme ................................................................................................... 27
4.2 Sonuçlar ve Kazanımlar .................................................................................... 27
4.3 Geliştirme Çalışmaları ...................................................................................... 28
5. KAYNAKLAR ...................................................................................................... 31
6. EKLER .................................................................................................................. 33

ix
KISALTMALAR
İHA : İnsansız Hava Aracı
VTOL : Vertical Take-Off and Landing (Dikey İniş Kalkış)
RC : Remote Control (Uzaktan Kontrol)
RPM : Revolution Per Minute (1 Dakikadaki Tur Sayısı)
CAD : Computer Aided Design (Bilgisayar Destekli Tasarım)
CFD : Computational Fluid Dynamics (Hesaplamalı Akışkan Dinamiği)
IMU : Inertial Measurement Unit (Ölçüm Ünitesi - Sensörler)
GPS : Global Positioning System (Küresel Konumlandırma Sistemi)
Gyro : Gyroscope (Dönü Ölçer)

x
TABLO LİSTESİ
Sayfa No
Tablo A. 1 : Kullanılan Ekipmanlar .......................................................................... 34
Tablo A. 2 : Kullanılan Başlıca Diğer Eşyalar .......................................................... 34
Tablo A. 3 : Arduino Modellerinin Özellikleri ......................................................... 35
Tablo A. 4 : Arduino UNO Kartının Özellikleri ....................................................... 35
Tablo B. 1 : Kullanılan Programlar ........................................................................... 35

xi
ŞEKİL LİSTESİ
Sayfa No
Şekil 1. 1 : Havacılık Tarihi ......................................................................................... 1
Şekil 1. 2 : Coanda Etkisi ............................................................................................ 3
Şekil 1. 3 : Henri Coanda'nın patenti ........................................................................... 3
Şekil 2. 1 : İHA için sistem tasarımı ............................................................................ 7
Şekil 3. 1 : Robert Collins'in Coanda Etkili İHA tasarımı ......................................... 10
Şekil 3. 2 : Geoffrey Hutton ve Coanda Etkisi ile VTOL Hareket Eden İHA'sı ....... 10
Şekil 3. 3 : Jean-Louis Naudin'in Tasarımı ................................................................ 11
Şekil 3. 4 : MEDIAS tasarımı .................................................................................... 11
Şekil 3. 5 : AESIR Firmasının Coanda Etkili İHA'sı ................................................ 12
Şekil 3. 6 : Coanda yüzeyinden akış sırasında Düşük ve Yüksek basınç bölgeleri ... 13
Şekil 3. 7 : Kanatlar (Yandan ve Üstten) ................................................................... 13
Şekil 3. 8 : Coanda Etkili İnsansız Hava Aracı Tasarım Taslağı............................... 14
Şekil 3. 9 : Coanda Etkili VTOL Hareket Eden İHA Kontrol Ön Tasarımı .............. 15
Şekil 3. 10 : Coanda Etkili İHA Test Düzeneği İskeleti ............................................ 16
Şekil 3. 11 : Test Düzeneğinin Hazırlanışı ................................................................ 16
Şekil 3. 12 : Hava Aracı Şeklinde Tasarlanan Test Düzeneği Çizimleri ................... 17
Şekil 3. 13 : Coanda Etkili İHA Test Düzeneği ........................................................ 18
Şekil 3. 14 : Test Düzeneği Üzerinde Kanat ve Servo Numaralandırılması ............. 19
Şekil 3. 15 : Test Düzeneği Üzerinde Kanatçık ve Servo Numaralandırması ........... 19
Şekil 3. 16 : Donanım Entegrasyonundan Sonra Test Düzeneği ............................... 20
Şekil 3. 17 : Arduino UNO ........................................................................................ 21
Şekil 3. 18 : Arduino UNO Pin Bağlantıları .............................................................. 22
Şekil 3. 19 : Test Aşamaları ....................................................................................... 23
Şekil 3. 20 : Kontrol Programı Akış Şeması ............................................................. 24
Şekil 3. 21 : 1. Otonom Yörünge, 3 Eksende Hareket ............................................... 25
Şekil 3. 22 : 2. Otonom Yörünge, 3 Eksende Hareket ............................................... 25
Şekil C. 1 : Otonom Yörünge 1 ve 2 Program Akış Şeması ..................................... 40
Şekil D. 1 : Otonom Yörünge 1 için Servo Hareket Grafikleri (X:zaman, Y:Açı) ... 41
Şekil D. 2 : Otonom Yörünge 2 için Servo Hareket Grafikleri (X:zaman, Y:açı) .... 42

xii

xiii
COANDA ETKİLİ VTOL HAREKET EDEBİLEN İNSANSIZ HAVA ARACI
ÖN KONTROL TASARIMI VE DONANIM ENTEGRASYONU
ÖZET
Bu bitirme tezinde, son yıllarda oldukça popüler hale gelen otonom veya kumanda
kontrolü ile hareket edebilen insansız hava araçları (İHA) konusunda özellikle
ülkemizde yapılan çalışmalara katkıda bulunmak ve daha önce ülkemizde uygulaması
görülmeyen Coanda etkisi ile VTOL (Dikey İniş Kalkış) hareket edebilen bir İHA fikri
üzerine çalışmalar yapılması amaçlanmıştır. Havacılık tarihinin gelişimi, İHA’lar ve
Coanda etkisi üzerine literatür araştırmaları yapılmış, daha önce bu alanda yapılan
çalışmalar tespit edilerek incelenmiştir. Bu inceleme kapsamında, Coanda etkisi ve
insansız hava araçları konusunda bilgi verilip karşılaştırmalar yapılarak bu alanda
yapılan çalışmaların önemine değinilmiştir.
İHA’ların sistem tasarımı aşamaları üzerine bilgiler verilmiş, Coanda etkisi ile hareket
edebilen bir İHA’yı oluşturan bileşenler anlatılmış ve bu alanda yapılan çalışmalar ile
bu bilgiler pekiştirilmiştir. Daha sonra, bu prensipte çalışabilecek bir İHA için yapısal
ve mekanik tasarım ile birlikte kontrol mekanizmasının ön tasarımı
gerçekleştirilmiştir. Bu tasarımı etkin kılabilecek donanım seçimi yapılmıştır.
Tasarlanan bu kontrol mekanizmasının test edilebilmesi için bir test düzeneği
tasarlanmış ve üretilmiştir. Ardından, donanım bu düzenek üzerine entegre edilmiştir.
Sistemin bir bütün halinde kontrolünü sağlayabilecek yazılım üzerine çalışmalar
yapılmıştır. Gerçekleştirilen çalışmaların ardından araç, otonom veya joystick
aracılığıyla manuel olarak kontrol edilebilecek hale gelmiştir. Bu bitirme tezi ile
birlikte tasarlanan sistemin, aracın yapısal, donanımsal ve yazılımsal olarak
geliştirilebilmesine son derece müsait olması hedeflenmiştir.
Son olarak, tasarlanan sistem üzerinde testler yapılmıştır ve sistemin çalışır durumda
olduğu gösterilmiştir. Genel bir değerlendirme yapıldıktan sonra elde edilen
kazanımlardan ve projenin devam edeceği süreç dahilinde yapılması planlanan
geliştirmelerden bahsedilmiştir.

xiv
VERTICAL TAKEOFF AND LANDING CAPABLE COANDA EFFECT
UNMANNED AERIAL VEHICLE PRE CONTROL DESIGN
SUMMARY
The aim of this thesis, to improve the studies about unmanned aerial vehicles which
are controlled by command control or autonomously in Turkey. Based upon this aim,
it will be informed about unmanned aerial vehicles and Coanda effect with information
about aviation history. After literature research, it is mentioned the studies about
unmanned aerial vehicles which is based on Coanda effect.
The information about system design of unmanned aerial vehicles and the parts of
Coanda effect vehicles are given. These information are supported by sample studies
about this topic. Afterwards, pre control, mechanical and structural designs of a
Coanda effect aircraft are planned. The equipment which is necessary for this plan are
chosen. Besides, a test mechanism is designed and built. After that, equipment is
integrated on this test mechanism. It is provided that the mechanism may be improved
easily. A software is developed and tested to control whole system properly. This
software provide opportunity to control manually and autonomously. The whole
system is going to be improvable in terms of structure, hardware and software.
Finally an evaluation is made and the results are presented. Later on, to do list is made
for cont’d of these project and it is mentioned about the necessary improvements.

1
1.GİRİŞ
1.1 Havacılık Tarihi
Havacılık, M.Ö. 5. Yüzyılda Çin’de ilk defa uçurtmaların kullanılmaya
başlanmasından itibaren insanoğlunun ilgisini çekmeye başlamıştır. Yüzyıllar
boyunca insanlar uçmak için birçok yol denemişlerdir. M.S. 9. Yüzyılda Endülüslü
mucit Armen Firman’ın yaptığı planörü uçurması yine bilinen tarihe bir ilk olarak
geçmiştir. M.S. 15. Yüzyılda Leonardo Da Vinci tarafından tasarlanan ve günümüze
kadar ulaşan “Ornithopter” tasarımı, havacılık tarihine önemli bir temel taşı olarak
geçmiştir. Daha sonraları insanların havacılığa duyduğu ilgi ve merak sayesinde bu
alanda yapılan çalışmalar da artmış ve gelişen teknoloji ile birlikte 20. Yüzyılın
başlarında 17 Aralık 1903 tarihinde Wright Kardeşler’in, başarıyla uçuşunu
gerçekleştiren ilk motorlu uçağı yapmasıyla havacılık tarihinde yeni bir sayfa
açılmıştır. Özellikle savaş dönemlerinde teknolojik gelişim sürecinin hızlanmasıyla
birlikte 1. Dünya Savaşı’nın hemen ardından uçaklar ile taşımacılık başlamıştır.
Gelişen teknoloji ve duyulan ihtiyaçlar doğrultusunda havacılık alanında kullanılan
araçlar da çeşitlilik kazanmıştır. Takip eden yıllarda, kullanım alanlarına göre
özelleşen birçok türde uçan araç tasarlanıp üretilmiştir.
Şekil 1. 1 : Havacılık Tarihi

2
Üretilen bu araçların bir kısmı artık tarihte kalmıştır, bir kısmı da günümüzde
farklılaşarak roketler ve uydular gibi farklı türde hava araçlarını oluşturmuştur. [1]
İnsanlık için önemli bir sektör haline gelen havacılıkta gerek duyulan farklı
ihtiyaçlardan ötürü gerek de bu alanda meydana gelen kazalardan dolayı yaşanan can
kayıplarından dolayı birtakım iyileştirmelere ve gelişmelere ihtiyaç duyulmuştur. Bu
doğrultuda son zamanlarda oldukça hızlı gelişen bir alt havacılık alanı ortaya çıkmıştır:
insansız hava araçları (İHA).
1.2 İnsansız Hava Araçları
İnsansız Hava Aracı (İHA), otonom veya kumanda kontrolü ile hareket edebilen,
kullanım alanlarına göre tasarım ve kapasitesi farklılık gösteren ve bu doğrultuda
üzerinde ek donanımlar barındırabilen bir insansız uçak türüdür. İlk olarak 1. Dünya
Savaşı yıllarında geliştirilen İHA’lar, gelişen teknoloji ile modernize edilerek kendi
içinde birçok tasarım ve özelliğe sahip, çok sayıda alanda kullanılabilen araçlar haline
gelmiştir. Kullanım alanlarına göre İHA’lar, onlara rakip sayılabilecek araçlardan olan
uydulara göre geliştirme, üretim ve kontrol maliyetleri açısından çok daha avantajlıdır.
Hareket kabiliyetleri yüksektir, belirli bir rotaya ihtiyaç duymaksızın istenilen anda
istenilen yöne kolayca hareket ettirilebilirler. Atmosfer şartlarından daha az
etkilenirler. Uçak ve helikopterlere kıyasla da daha ucuz maliyete sahiptirler. Eğitimli
pilota ihtiyaç duymazlar ve böylece çalışma esnasında insan hayatı riske edilmemiş
olur. İHA’lar, dikey iniş kalkış yapabilmeleri, havada asılı kalabilmeleri, faydalı yük
taşıyabilme özellikleri sayesinde oldukça geniş bir kullanım alanına sahiptir. [2]
1.2.1 Kullanım Alanları
İHA’lar gözlem yapma amacıyla kullanılabilir. Faydalı yük olarak üzerlerinde kamera
barındıran araçlar çevreyi gözlemlemek için kullanılmaktadır. Araç üzerinde bulunan
sensörler aracılığıyla İHA’lar, bulundukları ortama dair ölçümler yapabilmekte ve veri
toplayabilmektedir. Örneğin; özellikle yaz aylarında ortaya çıkan ve doğa için büyük
bir felaket riski taşıyan orman yangınlarını tespit etmek amacıyla İHA’lar
kullanılabilir. Maden arama gibi işler için, tehlikeli ortamlarda insan hayatını riske
etmemek ve insan kaynaklı hataları indirgemek için çeşitli ölçüm ve tespitler yapabilen
İHA’lar kullanılmaktadır. Diğer bir yandan, tasarımların farklılaşması ve çoğalması

3
ile birlikte İHA’lardan elde edilen verim artmıştır ve kargo amaçlı taşımacılık işlerinde
İHA’lar kullanılmaya başlanmıştır. [3]
1.3 Coanda Etkisi
Coanda etkisi, hızla hareket eden bir akışkanın, doğruca bir yol izlemek yerine
yakınındaki bir yüzeye yapışarak, bu yüzeyin eğimini izleyerek ilerlemesi olayına
verilen isimdir. Örneğin; musluktan akan suyun yanına bir kaşık yaklaştırıldığında,
akan suyun doğrultusunun kaşık yüzeyinin etrafında değiştiği gözlemlenir.
Şekil 1. 2 : Coanda Etkisi
Thomas Young’ın 1800 yılında verdiği bir derste silindirik bir yüzey arkasına saklanan
yanar haldeki bir mumun, alevin arka tarafından üflenen biri tarafından
söndürülebilmesinden bahsetmesi ve Henri Coanda’nın 1910 yılında kendi tasarladığı
bir uçağın düşüş sebebini araştırmaya başlaması ile yapmaya başladığı deneyler
sonucu bu etkinin varlığı tespit edilmiştir. Henri Coanda, Rumen bir mucittir, aynı
zamanda aerodinamik ve havacılığın öncülerindendir. Öte yandan, üretilen ilk jet
motorlu uçağın tasarımcısı ve üretimcisidir.
Şekil 1. 3 : Henri Coanda'nın patenti

4
Henri Coanda’nın patentine göre, bir kanat profile üzerinde yüzeye paralel hareket
edecek akış oluşturacak bir pervanenin çalışmasıyla, Coanda etkisi oluşur ve bu kanat
profili etrafından akan akış basınç farkı ve kanat ucunda hareket doğrultusuna dik
yönde bir sirkülasyon oluşturur. Bu sirkülasyon hareketi sonucu bir taşıma kuvveti
elde edilir. İlk etapta kendi ağırlığı kadar bir taşıma elde edip aracı havalandırarak daha
sonraki aşamalarda yüzey profilinin optimize edilmesi ile birlikte araç ile beraberinde
faydalı yük taşıyabilecek sistemler geliştirilmeye başlanmıştır. [4]
Bu özellikten faydalanılarak tasarlanan Coanda etkisi ile hareket eden VTOL hareket
edebilen insansız hava araçları, bu bitirme tezine ilham kaynağı olmuştur.
1.4 Tezin Amacı
Gelecek yıllarda, gelişen teknoloji ve ihtiyaçlar doğrultusunda havacılık ve uzay
alanında oldukça avantajlı bir konumda yer alacak olan İHA’lar oldukça önemli bir
yere sahip olacaktır. Bu doğrultuda yürütülen bir çok araştırma, geliştirme ve üretim
çalışması mevcuttur. Gümüş Uzay Savunma Havacılık şirketinin, KOSGEB desteği
ile bu alanda geliştirmekte olduğu VTOL harekete edebilen, Coanda etkisi ile hareket
eden rotorlu İHA projesi, ülkemizde bu alanda yürütülen ilk çalışmalardandır. Bu
bitirme tezinin amacı; bu alanda yürütülen çalışmaları incelemek ve bu proje
kapsamında yürütülen çalışmalara katkıda bulunmaktır. Rumen bilim adamı Henri
Coanda’nın keşfederek patentini aldığı “Coanda etkisi” denen prensip ile çalışan
İHA’lar, sahip oldukları özellikler sebebiyle bu bitirme tezinin inceleme konusu
olmuştur. Bu bitirme tezinde, dikey iniş kalkış yapabilen bir insansız hava aracı türü
olan Coanda etkili İHA’nın genel hatlarıyla kontrol sisteminin ön tasarımını
gerçekleştirmek ve bir prototip test düzeneği hazırlayarak aracın donanım
entegrasyonunu gerçekleştirmek amaçlanmıştır.

5
2. İHA SİSTEM TASARIMI
2.1 Sistem Tasarımı
Bir sistemin tasarlanması, genel olarak bazı alt sistemlerin kısmi ve süreli olarak başarı
ile gerçekleştirilmesi sonucu gerçekleşmektedir. Bu kısımda öncelikle bu sistem
tasarımı aşamalarından kısaca bahsedilecektir.
2.1.1 Konsept Tasarım Aşaması
Literatür araştırması ile başlanarak tasarlanması düşünülen ürünün ne olduğunun ve
ne için üretileceğinin belirlenmesi, literatür tarayıp piyasa araştırması yapılarak daha
önce o konuda yapılmış çalışmalar, teknolojik gelişmelerin tespit edilmesi, ürünün
tasarım ve üretim aşamasında takip edilecek yol ve yöntemlerin uygulanabilirliğinin
tespiti, kar ve zarar durumu ile birlikte sayı ve maliyet tahmini, tasarım ve üretim
süreci boyunca karşılaşılabilecek zorluklar gibi faktörler üzerine yapılacak
çalışmaların tamamı konsept tasarım aşamasını oluşturmaktadır.
Konsept tasarım aşaması tamamlandıktan sonra bir diğer süreç olan ön tasarım
aşamasına geçilir.
2.1.2 Ön Tasarım Aşaması
Ön tasarım aşamasında ürünün detaylı tasarım sürecinin özeti ve bu sürecin çıktıları
belirlenir. Elde edilebilecek verimi en yüksek düzeye çekmek ve sistemi en kararlı
halde elde edebilmek için detaylı olarak belirlenen kullanılması muhtemel ürün
parçalarının “tradeoff” çalışması yapılır. Sistemi oluşturan alt sistemler genel
hatlarıyla belirlenir ve bu doğrultuda çalışmalar yapılır. Tasarlanması düşünülen
sistemi ürün haline getirmeden önce bu aşamada çeşitli programlar aracılığıyla detaylı
çizimler yapılır. Bu aşamanın sonunda bütçe de ortaya çıkar.

6
2.1.3 Detaylı Tasarım Aşaması
Ön tasarım aşamasında yapılan çalışmalar, her anlamda detaylandırılarak, süreç
sonuçlandırılmak üzere bu aşamada çalışmalar yapılır. Alt sistemler bütünüyle analiz
edilir.
Ürünün yaşam ömrü, çalışma özellikleri, malzeme seçimleri, boyut analizi, testler gibi
gereklilikler bu aşamada sonuçlandırılır. Satın alma ve üretim süreci öncesi aşama
böylelikle tamamlanmış olur.
2.1.4 Donanım Seçme ve Satın Alma Aşaması
Bu aşamada üretilmesi planlanan ürünün, kullanılacağı alana göre şekillenen
özelliklerini karşılayabilecek donanımların satın alınması ve ürünün o doğrultuda
şekillendirilmesi sağlanır. Üretim aşamasının planı çıkarılır.
2.1.5 Üretim Aşaması
Önceki aşamalarda yürütülen çalışmalara sadık kalınarak ürünün tasarlandığı
doğrultuda ve çıkarılan üretim planı doğrultusunda test sonucunda elde edilecek başarı
ile birlikte ürünün prototipi üretilmiş ve sistemlerin çalışabilirliği test edilmiş olur.
Daha sonra ürün seri üretime geçebilir. [5]

7
İHA Sistem Tasarımı
Konsept Tasarım Aşaması
Literatür Araştırması
Ön Tasarım Aşaması
Uygulanabilirlik
Detaylı Tasarım Sürecinin Özeti Alt Sistemlerin Belirlenmesi
Detaylı Tasarım Aşaması
Detaylı Alt Sistem Analizi Kullanım Ömrünün Belirlenmesi, Tradeoff Çalışması
Donanım Seçme ve Satın Alma
Donanım Seçimi ve Sipariş Üretim Planı
Testler ve Üretim
Şekil 2. 1 : İHA için sistem tasarımı
2.2 İnsansız Hava Aracı Sistem Bileşenleri
İnsansız Hava Aracı (İHA) sistemini oluşturan başlıca bileşenler; aracın yer kontrol
istasyonu ve hava aracının kendisidir. Bu iki bileşenin birbiriyle senkronize çalışması
sonucu hava aracı hareket eder. RC (Uzaktan Kontrol) kontrol aracılığıyla bu bağlantı
kablosuz olarak sağlanır. Bunun için hava aracı ve yer kontrol istasyonu üzerinde birer
adet uzaktan kontrol alıcı ve vericileri bulunmalıdır. Yer kontrol istasyonu olarak
tanımlanan bileşen, istenen komutların şekillendirilebilmesi ve hava aracına
gönderilebilmesi için bir RC kumanda da içermektedir. Aracın uçuşunun otonom
olarak gerçekleşmediği durumlarda kontrol bu kumanda aracılığıyla sağlanabilecektir.
Hava aracı üzerinde faydalı yük olarak bulunabilecek kamera vb. sistemlerin de ihtiyaç

8
doğrultusunda ilave kontrol mekanizmasına sahip olarak kontrolünün
gerçekleştirilebilmesi yine bu kumanda aracılığıyla mümkün olabilecektir. Bu işlemler
telemetri olarak adlandırılır.
Yer istasyonunda, uçuş işleminin kontrolünü ve planlamasını sağlamak üzere bir yer
kontrol bilgisayarı bulunur. Uçuş öncesi, hava aracının kontrol mekanizmasını
işletecek programlar bu bilgisayar aracılığıyla hava aracına gönderilir. Uçuş sırasında
da hava aracı üzerinden toplanacak veriler yine kablosuz iletişim yoluyla bu
bilgisayara iletilir ve anlık analiz işlemi gerçekleştirilebilir.
Hava aracı, öncelikle kanatlar, kuyruklar ve diğer yüzey parçaları ile birlikte
aerodinamik yapıda bir gövdeye sahip olmalıdır. Bu tasarım, birçok analiz ve
hesaplama sonucu ortaya çıkmaktadır. Bunlarla birlikte aracın iniş kalkış ağırlığı,
ağırlık merkezi, faydalı yük ve donanım alanı gibi durumlar da hava aracı tasarımını
oluşturan diğer etmenlerdir.
Hava aracı üzerinde uçuş işlemlerini gerçekleştirmek ve kontrolünü sağlamak üzere,
uçuş kontrol bilgisayarı (kontrolcü) bulunur. Bu kontrolcü, hava aracı üzerinde
bulunan diğer alt sistemlere talimatlar vererek aracın çalışmasını kontrol eder. Hava
aracının kullanım şekline göre bu kontrolcü yeniden programlanır ve uçuş deneyimi
kazanıldıkça uçuş kontrol programı güncellenerek uçuş iyileştirmesi yapılır. Kontrolcü
ile birlikte araç üzerinde tam hakimiyet kurmak üzere IMU denen sensörler topluluğu
bulunur. Bu birimin içinde konum hakkında bilgi veren “GPS”, yönelim ve pozisyon
hakkında bilgi veren “Gyro” ve ivme hakkında bilgi veren “Accelerometer” gibi temel
sensörler bulunur. Kullanım alanına göre ekstra ölçüm yapan sensörler de
bulunmaktadır.
İnsansız hava araçlarının kullanım alanına göre taşıdıkları faydalı yükler de farklılık
gösterir. Aracın görev yükü ve planlanan kullanım alanı, aracın tasarımını etkiler.
Kullanım koşullarına ve görev yüküne göre aracın manevra kabiliyeti, boyutları ve
donanımları değişebilir.
Aracın manevra kabiliyetini kontrol eden pervaneler, kanat ve kanatçıklar ise
motorlarla kontrol edilir. Pervaneler için sessiz çalışan, yüksek tork üretebilen ve
yüksek hızlara ulaşabilen fırçasız DC motor kullanılır. Kanat ve kanatçık kontrolü için
ise servolar tercih edilir. Araç güç sistemi olarak birçok kaynak kullanılabilir.
Bütünüyle bu sistemler bir araya gelerek, insansız hava aracını oluştururlar. [5]

9
3. COANDA ETKİLİ VTOL HAREKET EDEBİLEN İHA
Önceki bölümlerde Coanda Etkisi ve İHA sistemleri ayrı ayrı anlatılmıştır. Bu
bölümde, Coanda Etkisi prensibiyle çalışan ve dikey iniş kalkış yapabilen bir insansız
hava aracı tasarımından bahsedilecektir. Bu konuda daha önceden yapılmış
çalışmalara değinilecek ve bu bitirme tezinin ana amacı olarak böyle bir İHA’nın
kontrol sisteminin kontrol ön tasarımı yapılacak ve prototip olabilecek bir test
düzeneği üretilip, donanım entegrasyonu bunun üzerinde gerçekleştirilecektir.
3.1 Coanda Etkili İHA Örnekleri
Birinci ve İkinci Dünya Savaşı yıllarından itibaren girilen teknoloji yarışında, etkinin
varlığının tespit edilmesinden itibaren faydalanılmaya başlanan Coanda etkisi, o
yıllardan itibaren bir çok araçta kullanılmıştır. Soğuk savaş yıllarında 2 adet olarak
üretilen VZ-9 Avrocar hava aracı prototipi ve daha sonra üretilen Boeing YC-14 uçağı
bu etkiyle hareket eden başarılı ilk örneklerdendir. Takip eden yıllarda yürütülen
çalışmaların ardından özellikle günümüzde bu etkiyi insansız hava araçlarına
uyarlayan ve başarılı ürünler ortaya çıkaran şirket ve eğitim kurumları olmuştur.
2002 yılında Robert Collins, bir elipsin iki odağının ortasından kesilmesi ile elde
edilecek yarım bir elips şeklindeki eğri gövdenin ortasına bir rotor ve bu gövdenin
etrafından hava akışını sağlayabilecek bir pervane sistemi ile birlikte bir insansız hava
aracı tasarımından bahsetmiştir. [6]

10
Şekil 3. 1 :Robert Collins'in Coanda Etkili İHA tasarımı
90’lı yıllarda Geoffrey Hutton önderliğinde başlanan GFS adı verilen bir proje ile yine
Coanda Etkisi ile çalışan bir insansız hava aracı 2005 yılında geliştirilerek üretimi
gerçekleştirilmiştir.
Şekil 3. 2 : Geoffrey Hutton ve Coanda Etkisi ile VTOL Hareket Eden İHA'sı
2006 yılında Jean Louis Naudin, GFS projesinin tasarımının üzerinden giderek kendi
İHA’sını yapmıştır. Ürününde elektrik motorları kullanarak Coanda etkisinden
faydalanarak dikey iniş kalkış yapabilen, havada asılı durabilen helikopter ile benzer
özelliklere sahip olan bu aracı üretmiştir. Bu aracın üretim aşamasını detaylandırarak
öğretici bir doküman hazırlamıştır ve bu aracın benzerini üretmek isteyenlere yol
göstermiştir.

11
Şekil 3. 3 : Jean-Louis Naudin'in Tasarımı
2008 yılında Rumen araştırmacılar bir araya gelerek MEDIAS adı verilen daha
kapsamlı bir Coanda Etkili İHA tasarımı sunmuşlardır. Bu araç üzerinde daha etkin
taşıma kuvveti elde edebilmek için Helyum balonları kullanılması düşünülmüştür.
Şekil 3. 4 : MEDIAS tasarımı
Daha önce bahsedilen GFS Proje şirketinin el değiştirerek AESIR firmasının
kurulmasıyla birlikte Coanda etkili İHA üretiminde günümüzde çalışma yürüten en
etkin firma ortaya çıkmıştır ve bu alanda bir çok farklı ürün üretmiştir. Bu ürünlerin
çoğu askeri amaçla kullanılmaktadır.

12
Şekil 3. 5 : AESIR Firmasının Coanda Etkili İHA'sı
KhAI (Kharkiv Ulusal Havacılık Üniversitesi) ve Bristol Üniversitesi’nin de bu alanda
adından söz ettiren ürünleri bulunmaktadır. Bu ürünler, Coanda etkili İHA’ların ne
denli etkin kullanıldığını ortaya koymaktadır. [4]
3.2 Hava Aracının Tasarımı
3.2.1 Yapısal ve Mekanik Tasarımı
Tasarlanacak hava aracının çalışma prensibi Coanda etkisine dayandığı için, buna
uygun bir yüzey tasarımı yapılacaktır. Bu yüzeyi tasarlarken elde edilebilecek
maksimum taşıma kuvvetini bulabilmek için bazı aerodinamik hesapları ve akışkan
analizleri yapılması gerekmektedir. Bu süreç, uzun bir deneme süreci ve zamanla
birlikte ilave imkanlar gerektireceği için bitirme tezinde bu kısımlar üzerinde
durulmayacaktır.
Taşıma elde edebilmek açısından itki üretebilecek bir sistem gerekir. İlave düzeltme
yapmamak açısından bu sistemin düşey doğrultuda ağırlık merkezi ve simetri merkezi
üzerinde bulunması doğru olacaktır. Coanda etkisinin sağladığı etkili kaldırma kuvveti
sayesinde multikopterlerden farklı olarak bu araç üzerinde tek motor ile kontrol edilen,
tek bir pervaneden oluşan bir sistem olacaktır. Bu pervanenin havayı etrafa dağıtmadan
doğrudan aşağıya üfleyecek özellikte olmasına dikkat edilmelidir. Pervaneyi kontrol
etmek üzere bir adet fırçasız DC motor gerekecektir. Daha sonradan yapılacak testlere
göre aracın üzerinde bulunan donanımlar ve faydalı yüküyle birlikte kaldırma elde
edebilmesini sağlayabilecek RPM değerine sahip, yüksek itki üretebilen, düşük güç
tüketimi olan bir fırçasız DC motor seçilecektir.

13
Pervanenin yarattığı akışı Coanda yüzeyi üzerine yönlendirebilmek için pervane
etrafına oluklar yerleştirilecektir. Pervane, aracın üzerinden aldığı havayı aracın
üzerine üfleyerek yüzey şekli etrafında havanın dolaşıp ardından aracın alt kısmından
ayrılırken girdap oluşturarak taşıma kuvveti elde edilmesini sağlayacaktır. Bu sırada
arada yüksek ve düşük basınç bölgeleri oluşacaktır.
Şekil 3. 6 : Coanda yüzeyinden akış sırasında Düşük ve Yüksek basınç bölgeleri
Hava akışının Coanda yüzeyinden ayrılırken izlediği yolu flap kontrolü ile değiştirerek
araca 2 eksende manevra kabiliyeti kazandırılabilecektir. Araç üzerinde 4 adet
hareketli kanat bulunması planlanmıştır. Bu kanatlar karşılıklı olarak simetrik bir
şekilde aracın üzerinde yer alacaktır. Karşılıklı kanatların servolar aracılığıyla
senkronize hareket etmesi sonucu hava aracının yönelimi kontrol edilebilecektir.
Şekil 3. 7 : Kanatlar (Yandan ve Üstten)

14
Aracın hareket sırasında kendi etrafında dönüşünü (sapma) engellemek için
pervanenin oluşturduğu akışın, yüzey üzerinden akış doğrultusunu düzeltmek üzere
kanatçık sistemi kullanılmalıdır. Kanatçık sisteminin konumu, aracın tasarımına göre
değişebilecektir. Literatür araştırmasında, bu sistemin pervane etrafındaki olukların
içinde yer alabileceği veya yapılan akışkan analizi sonucu yüzey üzerinde bir yerde
yer alabileceği tespit edilmiştir. Bu bitirme projesi kapsamında tasarlanan araçta
kanatçıklar yüzey üzerinde yer alacaktır. Böylece temel anlamda aracın tasarımı ortaya
çıkmıştır.
Şekil 3. 8 : Coanda Etkili İnsansız Hava Aracı Tasarım Taslağı
3.2.2 Kontrol Mekanizması Tasarımı
Coanda Etkisi ile çalışan VTOL hareket edebilen İHA için taşıma kuvvetinin elde
edilmesi, aracın gövdesinin orta üst kısmında bulunan bir fırçasız DC motor ve ona
bağlı pervanenin düzenlediği akışın gövde yüzeyinin etrafından akacak şekilde
yönlendirilmesi sonucu basınç farkı ve ayrılma noktalarında girdap oluşturması ile
olur. Pervanenin bağlı olduğu motorun hızının kontrolü ile elde edilecek taşıma
kuvveti ayarlanabilir. Pervanenin pompaladığı hava, gövdenin uç kısımlarında
bulunacak olan, servoların kontrol ettiği flaplar sayesinde yönlendirilir ve böylece
aracın 2 eksende ileri-geri ve öne-arkaya hareketi sağlanabilir. İki eksende hareketin
sağlanabilmesi için karşılıklı servolar karşılıklı olarak eşleştirirler. Böylece senkronize
servo ve kanat hareketiyle birlikte araç denge kaybına uğramadan hareket eder. Öte
yandan araç üzerinde anti tork sistemi olarak gövde üzerinde simetrik şekilde
konumlandırılmış akışın gövde üzerinden akışını düzenleyici görev üstlenen ve yine
servolar aracılığıyla kontrol edilen kanatçıklar bulunacaktır. Hazırlanan yazılım
sayesinde bu sistemlerin kontrolü mümkün olacaktır.

15
Kontrol ön tasarımı basitçe şu şekilde oluşacaktır;
Şekil 3. 9 : Coanda Etkili VTOL Hareket Eden İHA Kontrol Ön Tasarımı
3.3 Test Düzeneğinin Hazırlanması
Hava aracının prototipini üretmeden önce, kontrol sisteminin çalışmasını denetlemek
amacıyla bir test düzeneği oluşturulması planlanmıştır. Bu test düzeneği üzerine aracın
kontrol mekanizmasını oluşturan donanımların entegrasyonu gerçekleştirilecektir. Bu
test düzeneği sayesinde öncelikle aracın yönelimini sağlayacak olan flap kontrolü test
edilecektir. Aracın tasarımında simetrik olarak planlanan 4 hareketli, 4 adet de sabit
kanat olacaktır. Aynı sistem test düzeneği üzerinde de bulunacaktır. Aracın yüzey
geometrisinin belirlenmesi sürecinin bu bitirme tezinin kapsamı dahilinde değildir. Bu
sebeple, yüzey geometrisi değişikliklerine müsait bir test düzeneği oluşturulması
gerektiği düşünülmüştür. Bu doğrultuda aracın donanımlarını üzerinde barındıracak,
hareketli parçalarının motorlar aracılığıyla kontrolüne uygun, parça değişimlerinin
kolaylıkla gerçekleştirilebileceği bir test düzeneği tasarlanmıştır.

16
Şekil 3. 10 : Coanda Etkili İHA Test Düzeneği İskeleti
Test düzeneğinin iskeletinde sağlamlık açısından ahşap malzeme kullanılmıştır. Alt ve
üst tabaka için hediyelik eşya ve dekorasyon sektöründe yaygın olarak kullanılan
eyong kontrplak türünde ağaç kullanılmıştır. Düzeneğin alt ve üst tabakasını birbirine
bağlamak için ise müzik aleti yapımında sık kullanılan paduk ağacından 8 adet çıta
kullanılmıştır. Bunun sonucunda simetrik yapıda bir düzenek ortaya çıkmıştır.
Parçaların birleştirilmesi için tel zımba kullanılmıştır. Seçilen malzemeler her ne kadar
havacılık için uygun olmasa da, test düzeneğinin hafif olması açısından
kullanılabilecek en hafif ve sağlam ürünler tercih edilmiştir. Test düzeneğinin tasarım
aşamasında, yüzey geometrisi ve kanat profillerinin değişebileceği göz önünde
bulundurularak bu profilleri oluşturmada sert köpükten kesilen parçalar kullanılmıştır
ve bunların kolaylıkla sökülüp takılmasının mümkün olabilmesi sağlanmıştır. Aracın
yüzey şekillerini oluşturacak köpük kısımlar için de ayrıca teknik resim çizimleri
yapılmıştır ve parçalar buna göre kesilmiştir.
Şekil 3. 11 : Test Düzeneğinin Hazırlanışı

17
Düzeneğin CAD çizimi yapılmıştır ve düzeneğin montajı buna göre yapılmıştır.
Şekil 3. 12 : Hava Aracı Şeklinde Tasarlanan Test Düzeneği Çizimleri
Oluşturulan iskeletin üzerine kesilen yüzey şekillerinin 502 süper yapıştırıcıyla
yapıştırılması ve hareketli kanatların bu özelliklerini koruyabilmesi için çift taraftan
bant ile yapıştırılmasıyla birlikte test düzeneğinin montajı tamamlanmıştır. Bu
aşamada test düzeneğinin üzerinde, tasarlanan hava aracının pervane sistemini kontrol
ederek taşıma elde etmeye yarayacak olan fırçasız DC motorun bağlanacağı kısım
bulunmamaktadır.

18
Şekil 3. 13 : Coanda Etkili İHA Test Düzeneği
Test düzeneği oluşturulduktan sonra, kontrol için gerekli diğer mekanizmalar bu
düzenek üzerine entegre edilecektir. Test düzeneğini çalıştırmadan önce, düzeneğin
üzeri hava akışını bozmayacak ve kesilen yüzey profilinin şeklini koruyacak şekilde
ince şeffaf plastik bir örtü ile kaplanacaktır. Yüzey şeklinin modifikasyonunu
kolaylıkla gerçekleştirmek açısından burada şeffaf şemsiye örtüsü kullanılacaktır.
Daha sonra, aracın fırçasız motor ve pervane entegrasyonu gerçekleştirilerek bu yüzey
üzerine hava akışı sağlanacak ve diğer sistemlerin de çalışması ile aracın kontrolü
sağlanabilecektir.
3.4 Donanım Seçimi ve Entegrasyonu
Hazırlanan test düzeneği üzerine, kontrol testleri için gerekli donanımlar
yerleştirilecektir. Test sonuçları ile birlikte optimizasyon ve “tradeoff” çalışmaları
yapılarak en uygun ekipmanlar tespit edilecek ve araç üzerine entegrasyonu
sağlanacaktır. Üretilecek ürünün boyut ve diğer gereksinimlerine göre seçilen bu
ürünler değişecektir. Bu bitirme tezinde öncelikle sistem kontrolünün düzgün bir
biçimde sağlanabilmesi hedeflenmiştir.
Aracın kontrol sistemini oluşturabilmek için kullanılan başlıca ekipman ve diğer
eşyaların detaylı olarak bulunduğu tablolar, EKLER kısmında EK – A başlığında
bulunmaktadır. [Tablo A.1], [Tablo A.2]

19
Kanat Kontrolü;
4 adet hareketli kanadın kontrolü için her bir kanada 1 adet servo bağlanmıştır. Bu
servolar, test düzeneğinin yönüne göre ön-sağ-arka-sol ve 1-2-3-4 olarak
işaretlenmiştir. Bu yerleşim, aracın kontrol yazılımının hazırlanması ve ardından
entegrasyon sürecinde kolaylık sağlayacaktır. Bağlanan bu servolar aracılığıyla
joystick aracılığıyla alınan voltaj değerlerine göre kanatların konumları kontrol
edilebilecektir.
Şekil 3. 14 : Test Düzeneği Üzerinde Kanat ve Servo Numaralandırılması
Kanatçık Kontrolü;
Aracın yüzeyinin 8 parçaya ayrıldığı düşünüldüğünde, hareketli kanatların bulunduğu
4 yüzeyde sabit, diğer 4 yüzeyde ise hareketli olan ve servolar ile kontrol edilecek
kanatçık bulunacaktır.
Şekil 3. 15 : Test Düzeneği Üzerinde Kanatçık ve Servo Numaralandırması

20
Şekilde belirtilen bölgeler üzerinde üçer adet kanatçık birleştirilerek birer servo ile
kontrol edilebilecektir.
Donanımların test düzeneği üzerine entegrasyonu sağlandıktan sonra test düzeneği
donanımsal olarak çalışmaya hazır hale gelmiştir.
Şekil 3. 16 : Donanım Entegrasyonundan Sonra Test Düzeneği
Donanımların çalışmasını sağlayacak yazılım ise “Kontrol Yazılımı” bölümü altında
incelenecektir.
3.5 Kontrol Sistemi
Kontrol sistemi, hazırlanan düzeneğin kanat kontrolü, kanatçık kontrolü ve pervane
kontrolü olmak üzere 3 ana işlevi kontrol etmek üzere hazırlanmıştır. Hava aracının
bu 3 işlevi, 2 adet 2 eksenli joystick ve 1 adet potansiyometre ile anlık ve manuel
olarak kontrol edilebilecektir. Bununla birlikte otonom uçuşu sağlayabilecek 2 adet
yörünge seçeneğiyle birlikte bir kontrol yazılımı oluşturulmuştur. Bu donanımlar,
Arduino platformu üzerinde programlanmıştır.
3.5.1 Arduino Programlama
Arduino, bir takım yazılım ve donanımlar içeren açık kaynak kodlu bir geliştirme
platformudur. İçerisinde kendi mikroişlemcisini barındırır ve analog/dijital giriş
çıkışları vardır. “Processing” ve “wiring” dilleri ile programlamaya imkan tanır. Açık
kaynak kodlu olduğu için baskı devresi, şematik tasarımı ve kütüphaneleri detaylarıyla

21
mevcuttur. Açık kaynak kodlu bir platform olmasının getirisi olarak, gönüllülük
esasına dayanan birçok proje, kütüphane ve ek donanım mevcuttur ve bunlar sürekli
olarak geliştirilmektedir. Farklı ihtiyaçlara yönelik tasarlanan birçok Arduino modeli
vardır. Coanda etkili İHA için ön kontrol tasarımı sürecinde Arduino’nun UNO modeli
kullanılmıştır. Kontrolcü olarak Arduino seçilmesinin sebebi, basit ve kapsamlı olarak
sunduğu imkanlar ile birlikte geliştirilmeye sürekli açık olmasıdır. Ayrıca ihtiyaca
göre kullanılabilecek onlarca Arduino modeli vardır. Bu modellere ilişkin bilgiler,
EKLER kısmında EK – A başlığının altında yer almaktadır. [Tablo A.3] UNO modeli
Arduino’nun en sık kullanılan modelidir. Bu bitirme projesinde oluşturulacak sistem
için maksimum 8 adet servo ve 1 adet fırçasız motor bulunacağı için, giriş ve çıkış
portları ihtiyaç duyulan sayıyı karşılayan en uygun model olan Arduino UNO kartı
seçilmiştir. Arduino UNO kartının özelliklerinin yer aldığı tablo EKLER kısmında,
EK – A başlığının altında yer almaktadır. [Tablo A.4]
Arduino, USB aracılığıyla veya Bluetooth aracılığıyla diğer cihazlar ile haberleşebilir.
Bilgisayar üzerinden USB aracılığıyla derlenebilir ve Arduino Geliştirme Platformu
(IDE) aracılığıyla programlanabilir. [7]
Yapılan testler ile birlikte program ve yapı geliştirildikçe, ihtiyaca göre farklı
platformlarda programlamaya geçiş yapılabilecektir.
Şekil 3. 17 : Arduino UNO

22
3.5.2 Kontrol Yazılımının Hazırlanması
Coanda etkili VTOL hareket edebilen İHA için hazırlanan kontrol yazılımı EKLER
kısmında, EK – C başlığı altında sunulmuştur. Program, bilgisayara kurulan Arduino
Geliştirme Platformu üzerinde yazılmış ve daha sonra derlenerek Arduino UNO içine
yüklenmiştir. Donanım, test düzeneği üzerine entegre edilmeden önce bir çok deneme
sistemi kurulmuş ve testler gerçekleştirilmiştir. Ardından donanım, test düzeneği
üzerine entegre edilmiş, kontrol yazılımı Arduino işlemcisine yüklenmiş ve testler
gerçekleştirilmiştir.
Program hazırlanırken aracın üzerinde bulunacak her donanım, Arduino üzerinde bir
pin ile ilişkilendirilmiş ve gerekli giriş çıkış bilgisi Arduino yazılımına eklenmiştir.
Kullanılan donanımların, Arduino üzerinde bağlanacağı pinler aşağıdaki gibidir;
Şekil 3. 18 : Arduino UNO Pin Bağlantıları

23
Şekil 3. 19 : Test Aşamaları
Program çalıştırıldığında, 2 seçenek mevcuttur. Otonom veya manuel kontrol, joystick
üzerinde bulunan buton sayesinde seçilebilecektir.
Manuel seçilirse, LED ışık yanacak ve hareket kontrolü için kullanılan joysticklerden
gelen veriler denetlenerek anlık olarak ilgili donanımlara Arduino aracılığıyla konum
bilgisi içeren komutlar gönderilecektir. 1. Joystick, yön tayini yani kanatların kontrolü
için kullanılmıştır. 2 eksende hareket; ileri-geri ve sağ-sol olarak belirlenmiştir. Diğer
bir joystick ile de aracın kendi etrafında dönüşü yönetilmek üzere kanatçık kontrolü
sağlanmıştır. Bu joystickin yalnızca 1 ekseni kullanılarak kanatçıkları hareket ettiren
servoların açısı kontrol edilerek aracın saat yönünde veya saat yönünün tersinde
hareketi gerçekleştirilebilmektedir. Potansiyometre aparatı ile de aracın pervanesini
kotrol eden DC motor, ESC hız kontrolcüsü aracılığıyla kontrol edilebilmektedir. Yine
potansiyometre üzerinden gönderilen analog voltaj değeri, program içerisinde
ölçeklenerek hız kontrolcüsüne uygun hareketi sağlaması için gönderilmekte ve daha
sonra motora iletilerek pervanelerin hızı ayarlanabilmektedir.
Otonom seçilirse, hazırlanan yazılım içerisine gömülen 2 adet yörünge arasında seçim
yapılacaktır. Bu seçim, breadboard üzerine bağlanan bir başka buton sayesinde
yapılabilecektir. Butonun konumuna göre seçilen yörüngelerden biri, belirlenen akış
içerisinde döngü halinde sürekli olarak tekrar edecektir.
Hazırlanan kontrol yazılımının akış şeması aşağıdaki gibidir;

24
Başlangıç
IF (joyButon)
INPUT(joyButon ve switchButon)
LOW HIGH
IF(switchButon
)
INPUTJoystick
Data
PROCESSVeri
Ölçekleme[map]
OUTPUTServolara
Pozisyon Bilgisi, Fırçasız Motora
PWM Bilgisi Gönderilir
LOOPDöngü
DISPLAYServo ve Fırçasız Motor Verilerini
Ekrana Yazdır
SETUPPin Atamaları
HIGHLOW
Manuel Kontrol
Otonom Kontrol
Yörünge 1 Yörünge 2
OUTPUTServolara ve
Fırçasız Motora Belirlenen
Pozisyon ve PWM Bilgisi Gönderilir
OUTPUTServolara ve
Fırçasız Motora Belirlenen
Pozisyon ve PWM Bilgisi Gönderilir
Şekil 3. 20 : Kontrol Programı Akış Şeması
Kontrol yazılımı içerisinde tanımlanmış otonom yörüngeler için daha ayrıntılı akış
şemaları, EKLER kısmında EK – C başlığında bulunmaktadır. [Şekil C.1]
Otonom hareket esnasında 2 farklı yörünge için araç üzerinde bulunacak yönelim ve
tork servolarının hareketlerini gösteren zamana göre pozisyon grafikleri EKLER
kısmında EK – D başlığı altında bulunmaktadır. [Şekil D.1], [Şekil D.2]
25
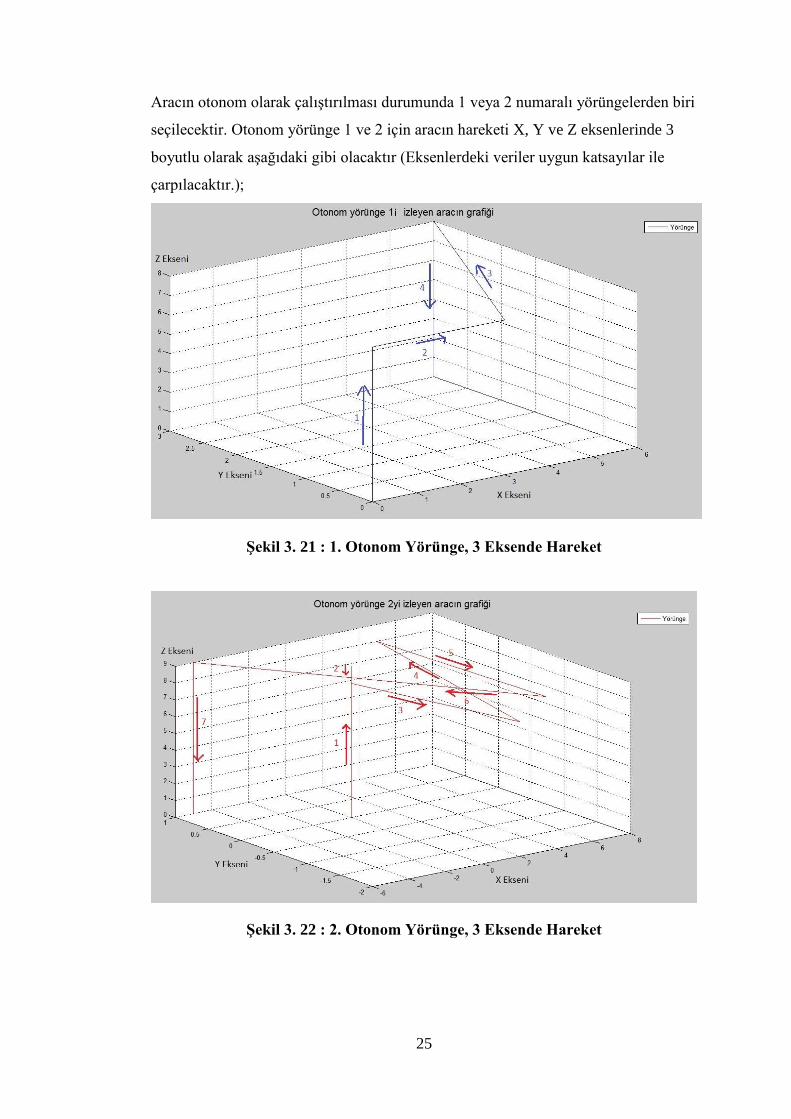
Aracın otonom olarak çalıştırılması durumunda 1 veya 2 numaralı yörüngelerden biri
seçilecektir. Otonom yörünge 1 ve 2 için aracın hareketi X, Y ve Z eksenlerinde 3
boyutlu olarak aşağıdaki gibi olacaktır (Eksenlerdeki veriler uygun katsayılar ile
çarpılacaktır.);
Şekil 3. 21 : 1. Otonom Yörünge, 3 Eksende Hareket
Şekil 3. 22 : 2. Otonom Yörünge, 3 Eksende Hareket

26

27
4. SONUÇLAR VE DEĞERLENDİRME
4.1 Değerlendirme
Bu bitirme tezi kapsamında, öncelikle havacılık tarihinin gelişim sürecinden
bahsedilmiş ve bu doğrultuda gelişen teknoloji ve duyulan ihtiyaçlar ile birlikte
kullanılan hava araçlarının geçirdiği farklılaşma süreci ortaya konmuştur. Son yıllarda
özellikle insansız hava araçları konusunda yapılan çalışmaların öneminden ve bu
araçların kullanım alanlarından bahsedilmiştir. 1910 yılında Henri Coanda tarafından
başlatılan çalışmalar sonucu keşfedilen ve literatüre “Coanda Etkisi” olarak geçen
özellikten yararlanarak tasarlanan bir İHA türünden bahsedilmiştir. Bu alanda daha
önceden yapılmış çalışmalar araştırılarak örneklerle sunulmuştur. Gümüş Uzay
Savunma Havacılık firmasının yürüttüğü proje kapsamında, bu alanda yapılan
çalışmalara katkıda bulunmak için izlenmesi gereken tasarım aşamalarından
bahsedilmiştir ve ardından Coanda etkisi ile çalışan dikey iniş kalkış yapabilme
kabiliyetine sahip bir insansız hava aracının ön kontrol tasarımının ve donanım
entegrasyonunun gerçekleştirilmesine yönelik çalışmalar yapılmıştır.
4.2 Sonuçlar ve Kazanımlar
Yapılan çalışmalar sonucunda, Coanda etkisi ile çalışan dikey iniş kalkış yapabilme
kabiliyetine sahip bir insansız hava aracına manevra kabiliyeti kazandıracak bir
kontrol tasarımı gerçekleştirilmiştir. Bu tasarım ile, kumanda aracılığıyla aracın anlık
olarak manuel veya otonom kontrol edilebilmesi sağlanabilmektedir.
Yapılmış olan ve daha sonra yapılacak olan çalıştırmaları kolaylaştırması ve deneme
çalışmalarının test edilerek sonuçların görülebilmesi için bir test düzeneği
hazırlanmıştır. Hazırlanan bu düzenek ile akışkan ve aerodinamik hesaplamalar
sonucu elde edilecek olan farklı Coanda yüzeylerinin kolaylıkla sökülüp takılarak
etkinliğinin denetlenmesine imkan sağlanabilecektir. Test düzeneğinin üzerinde
28
donanım entegrasyonuna müsait bolca alan bulunmaktadır. Bununla birlikte açık
kaynak kodlu bir platform olan Arduino üzerinde çeşitli denemeler sonucu sürekli
geliştirme halinde, farklı alternatifler ile birlikte yazılan programlar da hazırlanmıştır.
Entegre edilen donanımın, hazırlanan yazılım ile kontrolünün sağlanması ile birlikte
genel anlamda aracın kontrol tasarımı gerçekleştirilmiş bulunmaktadır. Yazılım ve
donanımın birlikte çalışması, test düzeneği üzerinde yapılan denemeler ve bu
denemeler sonrası tespit edilen gerekli iyileştirmelerin belirlenmesiyle birlikte
ilerleyen zamanlarda aracın geliştirilme süreci netlik kazanacaktır.
Yapılan ve sonuçlandırılan çalışmalar ile birlikte, yapılan ama sonuçlandırılmadan
vazgeçilen çalışmalar da olmuştur. Aracın kontrol kumandasının çok daha fonksiyonlu
ve kolaylıkla programlanabilir olması açısından “Logitech Extreme 3D Pro Joystick”
satın alınmıştır ve donanımın bu kumanda aracılığıyla çalıştırılabilmesi için çalışmalar
yapılmıştır. USB bağlantısının çözümlenerek, bu kumandanın istenen fonksiyonları
kullanabilmek için yeniden programlanması gerektiğinden ve bu sürecin bitirme tezi
kapsamına dahil edilemeyeceğinden dolayı bu düşünce daha sonra yapılacak
geliştirmeler arasına eklenmiştir. Programlama işinde kullanılabilecek birden fazla
kontrolcü bulunmaktadır. Öncelikle düşünülen “Raspberry Pi” mikro bilgisayarı
aracılığıyla kontrol işlemini gerçekleştirmekti. “Raspberry Pi” da Arduino gibi sıkça
kullanılan bir mikro kontrolcü kartıdır. “Raspberry Pi” aracılığıyla çalışma
yapabilmek için araştırmalar yapılmıştır ancak donanımsal kontrolü “Raspberry Pi”
aracılığıyla gerçekleştirmek daha karmaşık olduğu için çalışmalarda Arduino
platformu kullanılmıştır.
Bu bitirme projesinin hazırlanması sırasında özellikle literatür araştırması aşamasında
bir çok yeni şey öğrenilmiştir. Donanım entegrasyonu, yazılım hazırlama ve raporlama
aşamalarında ise öğrenilen yeni program paketleri ile birlikte lisans eğitimi süresince
teorik olarak edinilen bilgi ve öğrenilen programların da pratiğe dönüşmesi
sağlanmıştır. Bitirme tezi hazırlama sürecinde kullanılan başlıca programlar EKLER
kısmında EK – B başlığında verilmiştir. [Tablo B.1]
4.3 Geliştirme Çalışmaları
Bitirme tezi kapsamında yapılan çalışmalar, Coanda etkili VTOL hareket edebilen
İHA için temel teşkil etmektedir. Bu çalışmaların sürekli olarak iyileştirilmesi
gerekmektedir. Bitirme tezi kapsamında başlatılan bu çalışmaya daha sonra devam

29
edilerek, geliştirilmesi düşünülen kısımlar üzerinde çalışılarak bu geliştirmeler üzerine
çalışmalar yapılacaktır.
Planlanan ve tespit edilen başlıca geliştirmeler şunlardır;
Arduino platformunun MATLAB programı ile etkileşimi sağlanarak görsel
programlama arayüzü ile bilgisayar ortamında bir kontrol paneli oluşturulacak
ve kumanda olarak kullanılabilecektir.
Kontrol işlemi sırasında program çıktılarının daha etkin olarak elde
edilebilmesi için kumanda üzerine ekran entegresi bağlanacaktır.
Test düzeneği üzerinde kontrol tasarımı geliştirmeleri sağlandıktan sonra
aradaki kablolar kaldırılarak RC kontrol işlemi gerçekleştirilecektir.
Aracı kontrol etmek üzere Logitech Extreme 3D Pro Joystick üzerinde bulunan
tuşların fonksiyonları programlanarak gelişmiş bir kumanda elde edilecektir.
Kontrolcü olarak Arduino temel düzeyde kaldığı için daha sonra gelişmiş
başka bir kontrolcü kullanılarak kontrol sistemi geliştirilecektir.
Sensörler kullanılarak kontrol işlemi daha verimli hale getirilecek ve otonom
uçuş sırasında risk minimize edilerek, maksimum verim alınabilecektir.
Test düzeneği üzerinde, aracın boyutlarına, taşıyacağı faydalı yüke ve diğer
özelliklerine göre donanımlarda “trade off” çalışması ile birlikte optimizasyon
yapılarak en uygun donanımlar seçilecektir.
CFD analiz yapılarak uygun bir yüzey geometrisi elde edilmeye çalışılacak ve
test düzeneği üzerinde deneme çalışmaları yapılacaktır.

30

31
5. KAYNAKLAR
[1] http://www.flyingmachines.org/
[2] Sullivan, J. M. (2006). Evolution of revolution? The rise of UAVs. IEEE
Technology And Society Magazine, (3)
[3] Feasibility of UAV and Coanda Effect UAV (2011). Kharkiv:National
Aerospace University “Kharkiv Aviation Instute”
[4] Nedelcut, F. (2010). Towards a New Class of Aerial Vehicles Using The Coanda
Effect. Dunărea de Jos University, Galaţi, România.
[5] Austin, R. (2010). Unmanned aircraft systems : UAV design, development, and
deployment / Reg Austin. Chichester, West Sussex, U.K. : Wiley.
[6] Collins, R.J. (2002). Coanda – A New Airspace Platform For UAVs. Seventeenth
International Conference, Bristol, United Kingdom.
[7] http://www.arduino.cc

32

33
6. EKLER
EK - A : Kullanılan Malzeme ve Donanımların Özellikleri
EK - B : Kullanılan Programlar
EK - C : Hazırlanan Kontrol Yazılımı ve Akış Şemaları
EK - D : Hareket Grafikleri

34
EK – A : Kullanılan Malzeme ve Donanımların Özellikleri
Tablo A. 1 : Kullanılan Ekipmanlar
Kullanılan Ekipmanlar Miktar Fiyat (TL) Açıklama
Tower Pro 9g mikro servo 8 -
Fırçasız DC motor 1 31
Arduino UNO 1 -
Breadboard 1 -
Joystick 2 26
Multimetre 1 20
Potans 1 1
Elektronik aksesuarlar - 30 Direnç, bağlantı kabloları, konnektörler
Güç kaynağı 1 -
ESC 1 -
LED 2 -
Pervane 1 -
Logitech Extreme 3D Pro Joystick 1 89,24 Kumanda olarak kullanılacaktır.
Arduino USB Host Shield 1 66 Arduino -USB bağlantısı sağlayacaktır.
263,24
Tablo A. 2 : Kullanılan Başlıca Diğer Eşyalar
Kullanılan Diğer Eşyalar Miktar Fiyat (TL) Kullanım Amacı
İnce, sert köpük tabakası 2 (plaka) 10 Yüzey geometrisi oluşturmak için kullanılmıştır
Eyong kontrplak 1 (plaka) - Test düzeneğinin iskeleti için kullanılmıştır.
Paduk ağacı 1 (plaka) - Test düzeneğinin iskeleti için kullanılmıştır.
Kırtasiye Malzemeleri - 20 Falçata, yapıştırıcı, klips, kağıt bant,
Şemsiye 1 5 Coanda yüzeyini örtmek için kullanılmıştır.
35

35
Tablo A. 3 : Arduino Modellerinin Özellikleri
Tablo A. 4 : Arduino UNO Kartının Özellikleri
Arduino UNO
Mikroişlemci Atmega 328
Çalışma Gerilimi 5V
İdeal Besleme Gerilimi 9V
Sayısal Giriş/Çıkış Pinleri 14 pin
Analog Giriş Pinleri 6 pin
Flash 32 KB
EEPROM 1 KB
Saat Frekansı 16 MHz
EK – B : Kullanılan Programlar
Tablo B. 1 : Kullanılan Programlar
Kullanılan Programlar Kullanım Amacı
Arduino IDE (v1.05) Kontrol Yazılımı
MATLAB + Simulink (R2014a,R2012b) Grafik Programlama
Photoshop (CS6) Rapor Düzenleme
Microsoft Office 2013 (Word, Excell, Visio) Rapor Düzenleme
CATIA (V5R20) CAD Çizimler
Uno ATmega328 5 V/7-12 V 16 Mhz 6/0 14/6 1 2 32 Regular 1
Due AT91SAM3X8E 3.3 V/7-12 V 84 Mhz 12/2 54/12 - 96 512 2 Micro 4
Leonardo ATmega32u4 5 V/7-12 V 16 Mhz 12/0 20/7 1 2,5 32 Micro 1
Mega 2560 ATmega2560 5 V/7-12 V 16 Mhz 16/0 54/15 4 8 256 Regular 4
Mega ADK ATmega2560 5 V/7-12 V 16 Mhz 16/0 54/15 4 8 256 Regular 4
Micro ATmega32u4 5 V/7-12 V 16 Mhz 12/0 20/7 1 2,5 32 Micro 1
Mini ATmega328 5 V/7-9 V 16 Mhz 8/0 14/6 1 2 32 - -
ATmega168 0.512 1 16
ATmega328 1 2 32
Ethernet ATmega328 5 V/7-12 V 16 Mhz 6/0 14/6 1 2 32 Regular -
Esplora ATmega32u4 5 V/7-12 V 16 Mhz - - 1 2,5 32 Micro -
ArduinoBT ATmega328 5 V/2.5-12 V 16 Mhz 6/0 14/6 1 2 32 - 1
Fio ATmega328P 3.3 V/3.7-7 V 8 Mhz 8/0 14/6 1 2 32 Mini 1
Pro (168) ATmega168 3.3 V/3.35-12 V 8 Mhz 6/0 14/6 0.512 1 16 - 1
Pro (328) ATmega328 5 V/5-12 V 16 Mhz 6/0 14/6 1 2 32 - 1
3.3 V/3.35-12 V 8 Mhz
5 V/5-12 V 16Mhz
ATmega168V
ATmega328V
LilyPad USB ATmega32u4 3.3 V/3.8-5V 8 Mhz 4/0 9/4 1 0,512 32 Micro -
LilyPad
Simple
LilyPad
SimpleSnap
SRAM
[KB]
2 32 - -
1
1 16 - 1
ATmega328 2.7-5.5 V/2.7-5.5 V 8 Mhz 4/0 9/4 1
1 16 - -
1
0.512
2 32 - -
ATmega328 2.7-5.5 V/2.7-5.5 V 8 Mhz 4/0 9/4
LilyPad 2.7-5.5 V/2.7-5.5 V 8 Mhz 6/0 14/6
Pro Mini ATmega168 6/0 14/6 0.512
Model İşlemci USB UART
Nano 5 V/7-9 V 16 Mhz 8/0 14/6 Mini-B
Voltajİşlemci
Hızı
Analog
Giriş /
Çıkış
Sayısal
Giriş /
Çıkış
(PWM)
EEPROM
[KB]
Flash
[KB]

36
EK – C : Hazırlanan Kontrol Yazılımı
#include <Servo.h> // Servo'ların kontrolü için gerekli servo
kütüphanesini barındırır
const int joy1FB=A0; // Joystick - ileri ve geri hareketi kanat
kontrolü için analog veri girişini sağlar
const int joy1RL=A1; // Joystick - sağ ve sol kanat kontrolü için
analog veri girişini sağlar
const int joy2DON=A2; // Joystick - kanatçık kontrolü için saat
yönünde ve tersinde hareketin veri girişini sağlar
const int potans=A3; // Potans - Anti tork sistemi kapsamında
kanatçık kontrolü için analog veri girişini sağlar
const int joyButon=10; // Otonom veya manuel kontrol için joystick
butonu
const int switchButon=12; // Yörünge seçim butonu
Servo yonservo1; // Ön kanat servo
Servo yonservo2; // Sağ kanat servo
Servo yonservo3; // Arka kanat servo
Servo yonservo4; // Sol kanat servo
Servo torkservo1; // Ön sol kanatçık servo
Servo torkservo2; // Ön sağ kanatçık servo
Servo torkservo3; // Arka sağ kanatçık servo
Servo torkservo4; // Arka sol kanatçık servo
int joyButonOku;
int switchButonOku;
int led1=13; //Otonom - Manuel kontrol butonu için LED
int ESCmotor=11; //DC motora bağlı olan hız ayarlayıcısının Arduino
üzerindeki giriş pini (PWM)
int ESChiz=0;
int yservooku1; // Joystick'ten gelen ön kanat servo değeri
int yservooku2; // Joystick'ten gelen sağ kanat servo değeri
int yservooku3; // Joystick'ten gelen arka kanat servo değeri
int yservooku4; // Joystick'ten gelen sol kanat servo değeri
int tservooku1; // Joystick'ten gelen ön sol kanatçık servo değeri
int tservooku2; // Joystick'ten gelen ön sağ kanatçık servo değeri
int tservooku3; // Joystick'ten gelen arka sağ kanatçık servo
değeri
int tservooku4; // Joystick'ten gelen arka sol kanatçık servo
değeri
int potansoku; // Potanstan gelen analog değer
void setup() {
Serial.begin(9600);
yonservo1.attach(2); // Her bir servo için Arduino üzerinde giriş
pini ayarlaması
yonservo3.attach(3);
yonservo2.attach(4);
yonservo4.attach(5);
torkservo1.attach(6);
torkservo2.attach(7);
torkservo3.attach(8);
torkservo4.attach(9);
pinMode(led1, OUTPUT); // Pinlerin okuma veya yazma durumu için
ayarlanması
pinMode(joyButon, INPUT);
pinMode(switchButon, INPUT);
pinMode(potans, INPUT);
pinMode(ESCmotor, OUTPUT);
}

37
void loop() {
joyButonOku=digitalRead(joyButon);
switchButonOku=digitalRead(switchButon);
if (joyButonOku == LOW) { // Manuel hareket
digitalWrite(led1, HIGH);
yonservo1.write(90); // Servolar için başlangıç koşulları
yonservo2.write(90);
yonservo3.write(90);
yonservo4.write(90);
torkservo1.write(90);
torkservo2.write(90);
torkservo3.write(90);
torkservo4.write(90);
yservooku2 = analogRead(joy1RL);
yonservo2.write(map(yservooku2, 0 , 1023 , 135 , 45));
yservooku4 = analogRead(joy1RL);
yonservo4.write(map(yservooku4, 0 , 1023 , 45 , 135));
yservooku1 = analogRead(joy1FB);
yonservo1.write(map(yservooku1, 0 , 1023 , 135 , 45));
yservooku3 = analogRead(joy1FB);
yonservo3.write(map(yservooku3, 0 , 1023 , 45 , 135));
tservooku1 = analogRead(joy2DON);
torkservo1.write(map(tservooku1, 0 , 1023 , 60 , 120));
tservooku2 = analogRead(joy2DON);
torkservo2.write(map(tservooku2, 0 , 1023 , 60 , 120));
tservooku3 = analogRead(joy2DON);
torkservo3.write(map(tservooku3, 0 , 1023 , 60 , 120));
tservooku4 = analogRead(joy2DON);
torkservo4.write(map(tservooku3, 0 , 1023 , 60 , 120));
potansoku = analogRead(potans);
potansoku = map(potansoku, 0 , 1023 , 0 , 255);
analogWrite(ESCmotor, potansoku);
Serial.print("Joystick / Ileri - Geri : ");
Serial.print((520 - yservooku1) , DEC); // İleri ve geri yönde
hareket için girilen joystick değeri
Serial.print("\tJoystick / Sag - Sol : ");
Serial.print((520 - yservooku2) , DEC); // Sağ ve sol yönde
hareket için girilen joystick değeri
Serial.print("\tJoystick / Anti Tork : ");
Serial.print((515 - tservooku1) , DEC); // Sağ ve sol yönde
hareket için girilen joystick değeri
Serial.print("\tPervane Hizi : ");
Serial.print(potansoku, DEC); // DC motor hızı için girilen
potans değeri
Serial.println("");
delay(10);
}
else {
if (switchButonOku == LOW) { // 1. Otonom Yörünge
digitalWrite(led1, LOW);
yonservo1.write(90); // Servo motorların ilk konum ayarlaması
yonservo2.write(90);
yonservo3.write(90);
yonservo4.write(90);
torkservo1.write(90);
torkservo2.write(90);
torkservo3.write(90);
torkservo4.write(90);

38
delay(2000); //T2=2
for(ESChiz = 0; ESChiz <= 200; ESChiz += 5) {
analogWrite(ESCmotor, ESChiz);
delay(100);
}
delay(3000); //T3=5
torkservo1.write(110);
torkservo2.write(110);
torkservo3.write(110);
torkservo4.write(110);
delay(2000); //T4=7
torkservo1.write(90);
torkservo2.write(90);
torkservo3.write(90);
torkservo4.write(90);
delay(500); //T5=7.5
yonservo1.write(45);
yonservo3.write(135);
delay(5000); //T6=12.5
yonservo2.write(45);
yonservo4.write(135);
delay(3000); //T7=15.5
yonservo1.write(90);
yonservo2.write(90);
yonservo3.write(90);
yonservo4.write(90);
analogWrite(ESChiz, 180);
delay(2000); //T8=17.5
for(ESChiz = 180; ESChiz <= 0; ESChiz -= 2) {
analogWrite(ESCmotor, ESChiz);
delay(100);
Serial.print("\tESC Hizi(PWM) : ");
Serial.print(ESChiz, DEC);
Serial.println("");
}
delay(5000);
}
else {
yonservo1.write(90); // Servo motorların ilk konum ayarlaması
yonservo2.write(90);
yonservo3.write(90);
yonservo4.write(90);
torkservo1.write(90);
torkservo2.write(90);
torkservo3.write(90);
torkservo4.write(90);
delay(2000); //T2=2
for(ESChiz = 0; ESChiz <= 210; ESChiz += 5) {
analogWrite(ESCmotor, ESChiz);
delay(100);
}
delay(3000); //T3=5
analogWrite(ESCmotor, 200);

39
torkservo1.write(80);
torkservo2.write(80);
torkservo3.write(80);
torkservo4.write(80);
delay(1000); //T4=6
torkservo1.write(90);
torkservo2.write(90);
torkservo3.write(90);
torkservo4.write(90);
yonservo1.write(60);
yonservo3.write(120);
yonservo2.write(120);
yonservo4.write(60);
delay(4000); //T5=10
yonservo1.write(90);
yonservo2.write(90);
yonservo3.write(90);
yonservo4.write(90);
delay(2000); //T6=12
analogWrite(ESCmotor, 210);
yonservo1.write(60);
yonservo3.write(120);
yonservo2.write(120);
yonservo4.write(60);
delay(3000); //T7=15
analogWrite(ESCmotor, 200);
yonservo1.write(120);
yonservo3.write(60);
yonservo2.write(120);
yonservo4.write(60);
delay(3000); //T8=18
yonservo1.write(90);
yonservo2.write(90);
yonservo3.write(90);
yonservo4.write(90);
torkservo1.write(100);
torkservo2.write(100);
torkservo3.write(100);
torkservo4.write(100);
delay(1000); //T9=19
torkservo1.write(90);
torkservo2.write(90);
torkservo3.write(90);
torkservo4.write(90);
for(ESChiz = 200; ESChiz <= 0; ESChiz -= 2) {
analogWrite(ESCmotor, ESChiz);
delay(100);
Serial.print("\tESC Hizi(PWM) : ");
Serial.print(ESChiz, DEC);
Serial.println("");
}
delay(5000);
}
}
}

40
Şekil C. 1 : Otonom Yörünge 1 ve 2 Program Akış Şeması

41
EK – D : Hareket Grafikleri
Şekil D. 1 : Otonom Yörünge 1 için Servo Hareket Grafikleri (X:zaman, Y:Açı)

42
Şekil D. 2 : Otonom Yörünge 2 için Servo Hareket Grafikleri (X:zaman, Y:açı)






![Preliminary finding on reconstruction of the late Roman water structure in Sinop (Turkey) [Sinop (Türkiye) geç Roma dönemi su yapılarının rekonstrüksiyonuna ait ön bulgular]](https://static.fdokumen.com/doc/165x107/63184bfd831644824d03d5d5/preliminary-finding-on-reconstruction-of-the-late-roman-water-structure-in-sinop.jpg)











