
Evaluating The Effects Of Clutter On Information Processing ...
Upload
khangminh22Category
view
1download
0
Clutter Removal in Single
Radar Sensor Reflection
Data via Digital Signal
Processing
Master Thesis Project
Author: Mohammadreza Kazemisaber
Supervisor: J. Peter Hessling
Examiner: Sven-Erik Sandström
Term: Spring 2020
Subject: Electrical Engineering
Level: Master 30 hp
Course Code: 5ED36E Department of Physics and Electrical
Engineering

Dedication
This dissertation is dedicated to my beloved grandfather for his manner,
patience, and love. He has always been an inspiration to me and was the best
grandfather one could have. May his memory forever be a comfort and a
blessing.

Abstract
Due to recent improvements, robots are more applicable in factories and various
production lines where smoke, fog, dust, and steam are inevitable. Despite their
advantages, robots introduce new safety requirements when combined with humans.
Radars can play a crucial role in this context by providing safe zones where robots
are operating in the absence of humans.
The goal of this Master’s thesis is to investigate different clutter suppression methods
for single radar sensor reflection data via digital signal processing. This was done in
collaboration with ABB Jokab AB, Sweden. The calculations and implementation of
the digital signal processing algorithms are made with Octave. A critical problem is
false detection that could possibly cause irreparable damage. Therefore, a safety
system with an extremely low false alarm rate is desired to reduce costs and damages.
In this project, we have studied four different digital low pass filters: moving average,
multiple-pass moving average, Butterworth, and window-based filters. The results are
compared, and it is ascertained that all the results are logically compatible, broadly
comparable, and usable in this context.
Keywords: Surveillance Radar, Ultra-Wideband Radar, Clutter Reduction, FMCW
radar, Digital signal processing, Moving target detection, Doppler Processing.

Acknowledgments
I would like to thank ABB Jokab AB for providing the opportunity for me to learn
and gain knowledge, which is the most valuable favor and benefit that can be gained
at this point in my life.
Then, special thanks to my supervisor Peter Hessling because he patiently provided
me with his knowledge and experience so that I could accomplish this project.
Finally, I would like to express my appreciation to my examiner and course
coordinator, Sven-Erik Sandström, for his precious guidance and support not only
throughout the thesis period but for the past two years.

Table of contents
1 Introduction 1
1.1 Overview and Background 2
1.2 Description of The Radar System 3
1.3 Objectives and Goals 4
1.4 Research Method 5
1.5 Thesis Outline 5
2 Theory 6
2.1 Ultra-Wideband Radar Systems 6
2.2 UWB systems with FMCW 7
2.3 Doppler shift 8
2.4 Radar data cube 11
2.4.1 Range estimation 12
2.4.2 Angle of arrival estimation 12
2.4.3 Velocity estimation 13
2.5 Digital filters 14
2.5.1 Filter characteristics in the frequency domain 15
2.5.2 Time delay and phase shift in digital filters 16
3 Methods 18
3.1 Filter design 18
3.2 Introduction of the scenario for the clutter removal 19
3.3 Moving average filters 19
3.3.1 Frequency response, poles, and zeros of the moving average filters 21
3.3.2 Sidelobe suppression in moving average filters 23
3.3.3 Clutter removal by moving average filters 23
4.3 rettuB hBtowrettuB Error! Bookmark not defined.
3.4.1 Clutter removal by an LP Butterworth filter 25
3.5 Window-based FIR filter 28
3.5.1 Clutter removal by Window-based FIR filter 29
4 Results 32
4.1 Moving average results 35
4.2 Butterworths results 36
4.3 Window-based FIR filter (Hamming) 37
4.4 Comparable results 39
5 Discussion and conclusion 41
5.1 Moving average filters 41
5.2 Butterworth filters 42
5.3 Window-based FIR filter (Hamming) 42
6 References 44

List of Figures
1.11 Safety and availability profile for the safety system 1
1.21 Functional block diagram of IWR6843 3
1.311 Marine radar reflectors used in the project 4
2.11 Comparison of the Power spectrum of a conventional and an UWB radar 5
2.21 Simplified block diagram of an FMCW radar system 7
2.31 Transmitted and received signal in an FMCW radar system 8
2.41 Motion and Doppler frequency shift 8
2.51 FMCW signals with nonzero Doppler shift 9
2.61 Radar processing block diagram 11
2.71 A Radar data cube 11
2.81 Angular estimation 13
2.9 The first and the second FFT for Doppler calculation 13
2.10 Frequency response of the 4 basic filters 15
2.11 The phase response of a linear and nonlinear filter 16
3.1 The defined clutter range in the frequency domain 18
3.2 The RA heat map of the scenario 19
3.3 The scenario seen from the radar 19
3.4 Moving average filter block diagram 20
3.5 Frequency response of some moving average filters 21
3.6 Poles and zeros of a moving average filter with 21 taps 22
3.7 Frequency and phase response of a moving average filter with 21 taps 22
3.8 Multiple-pass filtering with moving average filters 23
3.9 Frequency response of a moving average filter and a multiple-pass
moving average filter 24
3.10 RA heat map of the clutter removed signal in which (a) clutter is removed
by moving average filter, and (b) clutter is removed with the multiple-pass
moving average filter. 25
3.11 Pols and zeros of Butterworth filter where (a) is second-order, (b) is forth
order and (c) is sixth-order Butterworth filter 26

3.12 Phase response of Butterworth filter for second, fourth, and sixth order
26
3.13 Group delay of Butterworth filter for second, fourth, and sixth order 26
3.14 Frequency response of Butterworth filter for the second, fourth, and sixth-order
in a linear scale 27
3.15 The RA heat map of clutter removed signals by the Butterworth filter in which
(a) is the second-order filter,(b) is the fourth-order filter, and (c) is
the sixth-order filter. 27
3.16 Impulse and frequency response of an ideal filter 28
3.17 Poles and zeros of the window-based FIR filter (Hamming Window ) 29
3.18 Frequency and phase response of the 44-tap window-based FIR filter
(Hamming Window) 30
3.19 Frequency response of the 44-tap window-based FIR filter(Hamming Window)
in a linear scale 30
3.20 RA heat map of the 44-tap window-based FIR filter(Hamming Window) 31
4.1 FFT for a chosen pixel of the received signal (before removing clutter) 32
4.2 The weight function compared to the frequency responses of the filters 33
4.3 Captured clutter from the received signal for a chosen pixel 34
4.4 Histogram of captured clutter from the received signal 34
4.5 Frequency response of two types of moving average filters in dB 35
4.6 Histogram of captured clutter by moving average methods
(presented for 20 bins) 35
4.7 Histogram of captured clutter by moving average filters
(presented for 20 bins) 36
4.8 Frequency response of three Butterworth filters in dB 36
4.9 Histogram of captured clutter by Butterworth filters
(presented for 20 bins) 37
4.10 Histogram of captured clutter by Butterworth filters
(presented for 10 bins) 37
4.11 Frequency responses of the window-based filter with different lengths 38
4.12 Histogram of captured clutter by the window-based filters
and different lengths (presented for 20 bins) 38
4.13 Histogram of captured clutter by the window-based filters
with different lengths (presented for 20 bins) 39
4.14 Frequency responses of three applied filters 39

4.15 Histogram of clutter captured of the filters (presented for 20 bins) 40
4.16 Histogram of clutter captured of the filters (presented for 10 bins) 40

Notations
µ Signal relative wideband index
c Speed of light
R Range of the target from the radar
𝑓𝑑 Doppler frequency
𝑡𝑟 Time delay
𝑅0 The distance of the moving object from the radar
𝑣𝑟 The velocity of the moving object
t Time of transmission the signal
𝑡′ The time when the signal reflected from the target
𝜆 Wavelength
𝑓𝑅𝑋 Frequency of the received signal
𝑓𝑇𝑋 Frequency of the transmitted signal
𝑓𝐼𝐹 Frequency of the intermediate frequency
𝑇𝑐 The time duration of the chirp
𝛥𝑑 Distance between two adjacent targets
𝛥𝑓 Difference in IF signals of two adjacent targets
𝛥𝑟 Range resolution
𝜃 Angle of arrival with respect to the normal line
𝜑𝑚 Measured phase difference between two successive chirps
𝑇𝑓 Frame time
𝑡φ Phase delay
𝑡𝑔 Group delay
𝛿𝑠 Stopband ripple
𝛿𝑐 Passband ripple
𝑥𝐶𝑙𝑢𝑡𝑡𝑒𝑟(𝑡) Clutter signal which is captured by an LP filter

𝑦𝐶𝑙𝑢𝑡𝑡𝑒𝑟 𝑟𝑒𝑚𝑜𝑣𝑒𝑑(𝑡) A signal which the clutter has been removed from it
𝑥𝑆𝑖𝑔𝑛𝑎𝑙(𝑡) The received signal by the receiving antenna of the radar sensor
𝑥(𝑡)𝑤𝑒𝑖𝑔ℎ𝑡 Weight signal
𝜎 Target reflection coefficient

Acronyms
CFAR Constant false alarm rate
MTI Moving target indication
SVD Singular value decomposition
HPF High pass filter
UWB Ultra-wideband
FMCW Frequency-modulated continuous wave
RF Radio Frequency
ADC Analog to Digital Converter
Msps Mega samples per second
FFT Fast Fourier transform
DSP Digital signal processing
RCS Radar cross-section
LPF Low-Pass filter
CW Continuous Wave
IF Intermediate Frequency
SFTF Short-time Fourier transform
RA Range-Angle
FIR Finite Impulse Response
FPS Frame per second
DTFT Discrete-Time Fourier Transform
AoA Angle of arrival
CA- CFAR Cell-averaging constant false alarm rate
PFD Probability of Failure on Demand
FM Frequency modulation
Eqn Equation

1(46)
Chapter 1
1 Introduction Since collaboration between humans and robots has been increasing in recent years,
both human safety and machinery performance/availability are of interest in heavy
industry. Safety and availability interact with each other. So, to provide a safe
industrial area observed by a radar system, the availability of machines or robots
should be considered.
As shown in Figure 1.1, reinforcing safety increases cost. The cost comes from
stopping machines without evidence or justification due to false detection, which may
be due to a low detection threshold of the Constant False Alarm Rate (CFAR). As the
detection threshold increases, the availability of the system increases. This means that
the radar may ignore some targets that need to be detected. As a result, the safety
system does not stop the production line. Therefore, increasing the detection
threshold, and hence the availability, is risky and not desirable. In industrial situations
stopping the whole production line can be highly expensive and should be based on
reliable detection of human presence. Accordingly, the current system is based on a
compromise between the two essential factors, availability, and reliable detection
(Figure 1.1).
Figure 1.1: Safety and availability profile for the safety system.

2(46)
Radar imaging systems could be designed with mm-wave radar sensors, which can
provide large bandwidth, and hence high image resolution. Removing clutter, which
has time-varying statistical properties, from the received radar signal, is the focus of
this study. It is intended to improve the availability and raise the reliability of
detection.
Consequently, a new safety system profile can be designed with a higher Safety
Integrity Level (SIL). As stated in [34], SIL measures the reduction in risk in a safety
system. The higher the SIL, the lower the Probability of Failure on Demand (PFD),
ranging from 10−1 to 10−5. In other words, the risk of failure in the safety system
decreases when requiring a higher level of SIL. The desired safety system profile is
presented in Figure 1.1.
The current chapter gives a description of the radar system, a problem formulation,
and a summary of how the objectives are achieved.
1.1 Overview and Background
In order to provide safe area supervision, radar technology is often better than lasers
or cameras. The reason is that radar can provide 3D area supervision even in harsh
environments where smoke, fog, fluids, and debris are inevitable. Hence, the
performance is not affected by dust, dirt, rain, intense light, sparks, or shock. By
overcoming these limitations, we can provide a safe area in a dynamic industrial
environment without physical barriers, while machines and robots are operating
freely.
Various kinds of signals can overwhelm safety radar systems. There could be clutter,
random disturbances, intentional interference, or accidental interference from other
radars or masking effects (due to the imperfection of CFAR methods). Among these,
clutter is the main topic of this study. The definition applicable to radar is that clutter
can be anything, except the target, that scatters the signal back to the receiver. Clutter
refers to those undesirable reflected signals which can interfere with the primary
signal in the data analysis and affect overall performance.
The definition of clutter in this study includes motionless/ slow-moving objects. In
the safe area supervised by the radar, which is usually highly cluttered, stationary
objects should be considered as clutter, and only nonstationary objects are of interest.
As stated, the removal of clutter improves the availability of the system since the main
signal stands out. So, we can improve availability with safety maintained.
There are many studies of radar clutter removal in various environments with the help
of DSP techniques [27]-[31]. Sonia Sethi et al. [2] investigated digital signal
processing techniques for surveillance radar. The objective of her research was to
reduce the rain clutter in the reflected echoes. She used Moving Target Indication
(MTI) filters, Notch filters, and Matched filters. Arun Rane et al. [3] proposed

3(46)
Singular Value Decomposition (SVD) and Wavelet transform techniques besides
bandpass filters to remove the clutter for better detection of a human behind a wall.
Also, V. Goncharenko et al. [4] suggested an adaptive MTI method with a High-Pass
Filter (HPF) in a windblown clutter environment. Since the environment varies, the
characteristics of clutters are consequently different and not entirely comparable.
Therefore, none of the mentioned clutter removal techniques in the quoted work is
used in this study due to the particular characteristics of clutter in the industrial
environment. It is also noteworthy that all clutter removal methods (customized
digital filers) in this study are applied in the Doppler/time-domain (over a sequence
of frames). To the best of our knowledge, few other studies have utilized similar
methods regardless of the characteristics of the clutter.
Previous research shows that clutter removal can be effective, and this study suggests
some approaches to achieve this.
1.2 Description of The Radar System
In this project, an Ultra Wide Band (UWB) radar system is used in various
arrangements to provide a safety zone. The advantage of the UWB radar system is the
high-resolution ranging provided by this radar. The radar system consists of a number
of mm-wave Frequency-Modulated Continuous Wave (FMCW) radar sensors. This
kind of radar sensor is applicable for gesture recognition radar, wall-penetrating radar
for detection, anti-intrusion security radars, and imaging radar. The main idea with
several radar sensors is to expand the viewing angle, minimize the random errors, and
improve resolution. The radar system sends and receives millimeter waves and
produces radar reflection images over the range, angle, and velocity in terms of point
objects.
Figure 1.3: Marine radar reflectors used in the project.

4(46)
Figure 1.2: Functional block diagram of IWR6843.
The single-chip modules that were used in this work are developed by Texas
Instruments. IWR6843 is a mmWave sensor with a Radio Frequency (RF) operating
range between 60 and 64 GHz with an Analog to Digital Converter (ADC) sampling
rate of 25 Msps. This module has 4 receiver antennas and 3 transmission antennas,
with a total of 12 virtual channels. This radar sensor is applicable in industrial
environments and can also do Fast Fourier Transform (FFT) and detection with the
help of its embedded DSP. Its range for large targets like a van is up to 160 m, and
1m for small targets like a coin. The block diagram of this module is shown in Figure
1.2 [12].
A traditional CA-CFAR detection method could be used for this radar system to find
a proper threshold of detection for distributed objects. In the process of data
collection, marine radar reflectors were used as reference targets (Figure 1.3). The
reflectors are typically used in situations where clutter dominates. These reflectors
have a high Radar Cross Section (RCS) in relation to the size [1].
1.3 Objectives and Goals
The main goal of this study is to remove clutter and improve single radar data
reflection by using DSP filtering techniques. Clutter suppression methods can vary
according to speed, application, accuracy, and memory [5].

5(46)
The overall objective can be specified in a number of points:
1. To investigate the possible filtering methods to remove clutter that are
matched to the current clutter.
2. Define and simulate the combined clutter and signal as a platform for filter
design.
3. To evaluate the performance and efficiency of different digital filtering
methods.
4. Compare the results obtained with the various methods.
5. Find constraints that motivate the modification of the current filter design.
1.4 Research Method
Due to the complexity and sensitivity of radar clutter removal methods in safety
applications, this project started with a literature review of methods for clutter
removal, advantages, and disadvantages. Thanks to ABB AB Jokab Safety, some real-
world difficulties regarding data collection in an industrial environment could be
identified. The reviewed theories have been tested and compared and then validated
with experimental results. All calculations and simulations have been made with
GNU Octave.
This study is accomplished in collaboration with ABB AB Jokab Safety and involves
no personal or critical information. No animals were involved in the data collection
and no destructive environmental actions were taken.
1.5 Thesis Outline
This study is divided into chapters as follows.
Chapter 2: Theory
In this chapter, some general radar theory is discussed, involving methods of
clutter removal, filters, algorithms, and their implementation.
Chapter 3: Methods
This part presents the methods used to remove clutter.
Chapter 4: Results
This section demonstrates results obtained when the methods were applied to
the collected data.
Chapter 5: Discussion and Conclusion
This part discusses and compares the results and points to the strengths and
weaknesses of each method.

6(46)
Chapter 2
2 Theory
2.1 Ultra-Wideband Radar Systems
A UWB is a radar system that uses a large part of the radio spectrum but at a lower
power level compared to conventional radar systems (Figure 2.1). UWB has
applications in data transmission, accurate distance measurement, positioning, radar,
and imaging. The cost of implementing this system is lower than for conventional
narrow-band systems. The pulse length of the UWB signals is much shorter than the
coherence time of the channel. Therefore, UWB is inherently resistant to multipath
fading. In addition, UWB is also resistant to intentional and unintentional interference
because its bandwidth is much broader than the bandwidth of the interfering signal.
Figure 2.1: Comparison of the Power spectrum of a conventional and an Ultra Wideband
radar system [33].
Since UWB uses a high bandwidth and low energy, it is applicable for short distances.
Based on the Fourier transform, a pulse with a length of T has a bandwidth of T/2
Hz. The pulse length used in UWB is often in the range of nanoseconds, so the pulse
bandwidth is in the range of several hundred MHz to several GHz. As presented in
Eq 2.1, µ is the relative wideband index, 𝑓max and 𝑓min are the maximum and
minimum frequency of the channel [6][7].
µ = 2 𝑓max −𝑓min
𝑓max +𝑓min (2.1)

7(46)
2.2 UWB systems with FMCW
As stated in [9], FMCW is a radar technique that uses low power and is suitable for
measuring distance. With the help of this technique, low frequencies can penetrate
media like forests. One of the most popular applications is traffic radars that use a
wide band and can measure range with good resolution [10].
Due to the advantages of UWB radar technology, different types of this system have
been developed. There are three categories based on their wave form: pulse UWB
radar, M-sequence UWB radar, and (FMCW) UWB radar [5]. FMCW is used in this
project to provide a safety zone due to its accuracy in short-range applications.
Figure 2.2: Simplified block diagram of an FMCW radar system.
The information in the received signal, including phase and range, can be extracted
after mixing, low pass filtering, and FFT processing, as shown in Figure 2.2.
Continuous Wave (CW) radars can merely measure Doppler frequency since
modulation is necessary for range measurement. FMCW radar, however, is based on
frequency modulation. This radar changes the frequency of the transmitted signals
linearly as a function of time. Consequently, they can measure both range and velocity
of the target simultaneously. By mixing the TX signal and RX signal with a mixer,
there is an output Intermediate Frequency (IF) signal. After ADC and 2D FFT
processing, the IF signal provides range and velocity (Doppler) data [32].
FMCW radar is used here since the updating of data is fast, allowing clutter removal
in the Doppler/time-domain (over a sequence of frames).

8(46)
Figure 2.3 shows transmitted and received signals in time with the frequency
modulation (FM) indicated. The time delay Δ𝑡, and the frequency difference Δ𝑓 are
marked [8].
Figure 2.3: Transmitted and received signal in an FMCW radar system.
2.3 Doppler shift
In this project, every stationary object is seen as clutter. So the velocity of all moving
objects, even low-speed moving objects, is of interest. In our safety test zone, there
are two equidistant targets, one of them is stationary, and the other one is coming
toward the radar sensor (Figure 2.4).
Figure 2.4: Motion and Doppler frequency shift.
When the radar transmits signals toward these two objects, the moving object will
reflect the signal with a shift in the frequency because of the movement, which is
the Doppler shift.
9(46)
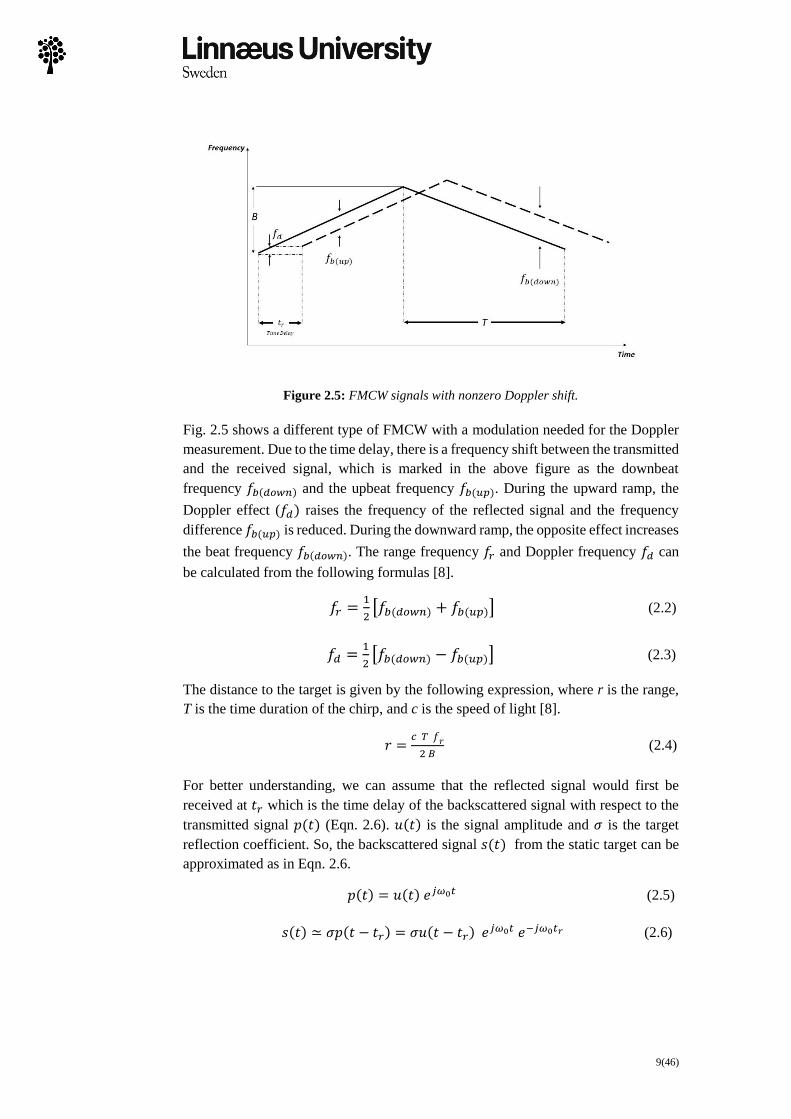
Figure 2.5: FMCW signals with nonzero Doppler shift.
Fig. 2.5 shows a different type of FMCW with a modulation needed for the Doppler
measurement. Due to the time delay, there is a frequency shift between the transmitted
and the received signal, which is marked in the above figure as the downbeat
frequency 𝑓𝑏(𝑑𝑜𝑤𝑛) and the upbeat frequency 𝑓𝑏(𝑢𝑝). During the upward ramp, the
Doppler effect (𝑓𝑑) raises the frequency of the reflected signal and the frequency
difference 𝑓𝑏(𝑢𝑝) is reduced. During the downward ramp, the opposite effect increases
the beat frequency 𝑓𝑏(𝑑𝑜𝑤𝑛). The range frequency 𝑓𝑟 and Doppler frequency 𝑓𝑑 can
be calculated from the following formulas [8].
𝑓𝑟 =1
2[𝑓𝑏(𝑑𝑜𝑤𝑛) + 𝑓𝑏(𝑢𝑝)] (2.2)
𝑓𝑑 =1
2[𝑓𝑏(𝑑𝑜𝑤𝑛) − 𝑓𝑏(𝑢𝑝)] (2.3)
The distance to the target is given by the following expression, where r is the range,
T is the time duration of the chirp, and c is the speed of light [8].
𝑟 =𝑐 𝑇 𝑓𝑟
2 𝐵 (2.4)
For better understanding, we can assume that the reflected signal would first be
received at 𝑡𝑟 which is the time delay of the backscattered signal with respect to the
transmitted signal 𝑝(𝑡) (Eqn. 2.6). 𝑢(𝑡) is the signal amplitude and 𝜎 is the target
reflection coefficient. So, the backscattered signal 𝑠(𝑡) from the static target can be
approximated as in Eqn. 2.6.
𝑝(𝑡) = 𝑢(𝑡) 𝑒𝑗𝜔0𝑡 (2.5)
𝑠(𝑡) ≃ 𝜎𝑝(𝑡 − 𝑡𝑟) = 𝜎𝑢(𝑡 − 𝑡𝑟) 𝑒𝑗𝜔0𝑡 𝑒−𝑗𝜔0𝑡𝑟 (2.6)

10(46)
From the time delay for a static target, we can also calculate the Doppler
characteristics when the target is moving. If a signal is backscattered from a moving
target and is received at 𝑡, then it was transmitted time 𝑡 − 𝑡𝑟. By symmetry, this
signal was then reflected from the target at 𝑡 − 𝑡𝑟/2. Consequently, the distance to
the target from the radar at the time of reception is then given by Eq. 2.7
r = 𝑟0 − 𝑣𝑟𝑡 (2.7)
We assume that the radar is at rest at r= 0, and the target is at 𝑟 = 𝑟0 when 𝑡=0.
Moreover, the distance traveled by the signal is 2𝑟0. Subsequently, the time delay
from emission to reception of the signal by radar can be estimated by Eqn. 2.8 [11]:
𝑡𝑟 ≃2𝑟0
𝑐 (2.8)
There is also the phase relating to the distance. The phase corresponding to the round
trip is [36]:
𝜑 = 2𝜋 2𝑟
𝜆=
2𝜋 2(𝑟0−𝑣𝑟𝑡)
𝜆 (2.9)
The angular frequency then relates to the velocity of the moving object as follows
[35] [36]:
𝜔= 𝑑𝜑
𝑑𝑡= 2𝜋
−2𝑣𝑟
𝜆 (2.10)
And finally, the Doppler frequency is presented in Eqn. 2.11, where 𝑓0 is the start
frequency of the signal or the transmitter frequency. The factor of two indicates the
Doppler frequency corresponds to reflection from a moving target and not from a
moving source [36].
𝑓𝑑 = |𝜔
2𝜋| =
2𝑣𝑟
𝜆 =
2𝑣𝑟𝑓0
𝑐 (2.11)
The Doppler frequency depends on the direction of movement of the moving object
(radial velocity) relative to the radar sensor. As we can see in Eqn. 2.11, only the
radial component of velocity contributes to the Doppler shift. When the object is
moving toward the radar sensor, this frequency is higher than the transmitted signal,
and when the target is moving away from the radar sensor, the frequency of the return
signal is lower than the frequency for 𝑣𝑟 = 0 [11].

11(46)
Figure 2.6: Radar processing block diagram.
2.4 Radar data cube
In radar data processing, the data cube (Fig. 2.7) represents the complete data set. As
shown in Figure 2.6, raw radar data is processed by FFT to calculate the range. A
second FFT should then be done to the data across chirps in one frame. Thus the
second FFT operates on the velocity data in the radar cube. However, by applying the
Short-time Fourier Transform (SFTF) to the range-FFT data, an SFTF heat map can
be obtained but this is out of scope here. To obtain a Range-Angle (RA) heat map for
a spatial representation of the data, a third FFT should be applied to the data after the
2D-FFT. This refers to a radar data cube with three indices corresponding to angle,
range, and velocity [13].
Figure 2.7: A radar data cube.

12(46)
2.4.1 Range estimation
As shown in Figure 2.2, TX transmits a signal toward the target, and the reflected
signal is received by the RX. The IF signal is obtained by mixing the TX signal and
the RX signal. The IF frequency is the difference in the frequency of the TX signal
and the RX signal.
𝑓𝑇𝑋−𝑓𝑅𝑋 = 𝑓𝐼𝐹 =𝐵𝑡𝑟
𝑇 (2.12)
To extract the information in the IF signal in the frequency domain, the first FFT
should be done to the IF signal. The result shows the range of each target in the form
of spectral peaks in the resulting FFT which is called the range FFT. Since the IF
signal contains several tones or frequencies, each tone corresponds to the range of an
object. When two targets are located close to each other with a radial distance
difference of 𝛥𝑑, they will have a difference in their IF signals 𝛥𝑓 =1
𝑇. The range
resolution of the radar determines the ability of the radar to distinguish two adjacent
targets in the range FFT. Eqn. 2.13 gives the range resolution which depends only on
the bandwidth of the chirps [14] [15].
𝛥𝑟 =𝑐
2𝐵 (2.13)
2.4.2 Angle of arrival estimation
The range can be calculated by one transmitter and one receiver. However, to estimate
the target angle to the radar, at least two receiver antennas are required. The angle of
a target corresponds to one of the necessary indices in the radar data cube. Fig. 2.8
shows a reflected echo arriving at an angle 𝜃 at the receiving antennas. However, to
arrive at the second antenna, the reflected signal propagates the additional distance d.
So, the Angle of Arrival (AoA) between the two received signals is different. The
FFT of the received signal by each receiving antenna would yield the same range-
FFT, with the same peaks, but with different phases. This phase difference 𝜑 can be
expressed by Eqn. 2.14, where β is the wave number 𝛽 = 2𝜋/𝜆 [14] [15].
𝜑 = 𝛽 𝛥𝑑 = 𝛽 𝑑 𝑠𝑖𝑛 𝜃 =2𝜋𝑑 sin 𝜃
𝜆 (2.14)
Moreover, the angle of arrival can be estimated from this phase difference by simply
inverting Eq. 2.14 [15].
𝜃 = sin−1(𝜆 𝜑
2𝜋𝑑) (2.15)

13(46)
Figure 2.8: Angular Estimation.
2.4.3 Velocity estimation
The different velocity of two objects produces different phases in two successivew
chirps. Then, there is a phase difference between two successive chirps (𝜑𝑚) with
respect to the movement of the moving objects. This phase differencewis expressed as
follows:
𝜑𝑚 =4𝜋 𝑣𝑟 𝑇
𝜆 (2.16)
Figure 2.9: The first and the second FFT for Doppler calculation.
Then, a number n of transmitted chirps with the constant time difference in a specified
time interval can be called a frame (Fig. 2.9). By doing FFT over the sequence of
chirps in a frame, will have a range-FFT for each chirp, so that a matrix is formed.
This matrix has n columns, the number of chirps in each frame, and N rows that refer
to the number of bins in the range-FFT. By doing 2D-FFT on the sequence of phasors
(each row), we have n values of 𝜑𝑚 which shows different velocities and can then
resolve different velocities in the range-FFT. This is called a Doppler-FFT. The data
cube has three indices; angle, velocity, and range [14] [15].

14(46)
Since the main goal of this study is to improve the reliability of detection, the radar
should provide accurate measurements. To distinguish low-speed moving objects and
stationary objects, a high velocity resolution is required. The velocity resolution for
fast data updates depends on the frame rate. The higher the frame rate, the more chirps
and phase samples, and the higher the resulting velocity resolution. Figure 2.9 shows
that the shorter the duration of the frame time (𝑇𝑓), the higher the frame rate, and the
higher the velocity resolution [14] [16].
𝑉𝑟𝑒𝑠 =𝜆
2𝑇𝑓 (2.17)
2.5 Digital filters
In signal processing, there are two major types of filters, digital and analog filters.
The goal of using these types of filters is the same, but the performance of the digital
filters is higher. Another name for analog filters is electronic filters since they are
built with electronics.
A signal can be combined with signals with different frequencies, like noise. To
separate frequency bands, one uses filters. In the radar context, for example, the
received signal would be combined with thermal noise, clutter, and various
interferences. An FFT of the signal shows this spectrum of frequencies. So, with the
help of digital filters, we can select and separate frequency bands. Moreover, digital
filters are applicable to the restoration of damaged signals due to systematic errors
like faulty equipment [17]. However, what makes digital filers a true game-changer
is their flexibility. It is easier to change a coefficient in a register (digital filters) than
to modify an electronic circuit (analog filters).
To characterize a filter, it is common to focus on three response functions: impulse,
step, and frequency response. They all represent essential but different information
about the filter. An impulse response is the output of a dynamic system. As the
impulse response covers all frequencies, it is a general description of a linear system.
A digital filter is based on a discrete convolution of the impulse response and the input
signal in the time domain:
𝑦(𝑡) = ∑ ℎ(𝑘)𝑥(𝑡 − 𝑘)∞𝑘=1 (2.18)
The step response also describes the filter characteristics in the time domain and
would typically be used when a signal has most of the critical information in the time
domain than the frequency domain. On the other hand, the frequency response relates
to the frequency domain. These responses are all needed to design the desired filter.
Filters that have good performance in the time domain have weak efficiency in the
frequency domain. Conversely, filters with good efficiency in the frequency domain
may be poor in the time domain. The frequency response of a filter is the FFT of its

15(46)
impulse response which is shown by substituting frequency variable 𝑧 = 𝑒𝑗𝜔𝑡 as
follows:
𝐻(𝑧) = 𝑌(𝑒𝑗𝜔𝑡)
𝑋(𝑒𝑗𝜔𝑡) (2.19)
Consequently, the phase response of the filter is:
𝜑(𝐻(𝑧)) = ∠ 𝐻(𝑒𝑗𝜔𝑡) (2.20)
2.5.1 Filter characteristics in the frequency domain
Filters are divided into four groups based on their frequency responses. Low-pass
filters allow only low frequencies to pass while high-pass filters allow high
frequencies. Bandpass filters have a passband between two stop bands. Band reject
filters, or notch filters, have a stop band between two pass bands.
The cutoff frequency refers to the frequency where the power is down to half the
maximum value, and the amplitude is reduced by 0.70, or down 3 dB (Eqn. 2.22). The
filter types are shown in Figure 2.10 [18].
10 log10 (1
2) = −3.01𝑑𝐵 (2.21)
Figure 2.10: Frequency response of the 4 basic filters.
A good property of a filter is a linear phase response. When the phase response is
linear, every frequency component of the signal is shifted in time linearly. Since all
frequencies have the same time shift the phase is not distorted in linear phase filters.
If the phase response is linear and the impulse response is symmetric, then the filter
has no phase distortion. A linear and a nonlinear response is shown in Fig 2.11 [17].

16(46)
Figure 2.11: The phase response of a linear and a nonlinear filter.
2.5.2 Time delay and phase shift in digital filters
Any system has a time delay, and in a digital filter there is a phase shift corresponding
to this delay. For the Laplace transform a time delay 𝑡𝑑 can be described by:
𝐻(𝑠) = ∫ 𝑒−𝑠𝑡∞
0ℎ(𝑡)𝑑𝑡
= ∫ 𝑒−𝑠𝑡∞
𝑡𝑑𝑓(𝑡 − 𝑡𝑑)𝑑𝑡 = ∫ 𝑒−𝑠(𝑡𝑑+τ)∞
0 𝑓(τ)𝑑τ
𝐻(𝑠) = 𝑒−𝑠𝑡𝑑𝐹(𝑠) (2.22)
By letting s=j𝜔, we can examine the time delay in the frequency domain. The
amplitude is not affected since:
|𝑒−𝑗𝜔𝑡𝑑| = 1 (2.23)
But the phase shift and the corresponding delay are important and simply related:
𝑡𝑑 = −∠𝑒−𝑗𝜔𝑡𝑑
𝜔 (2.24)
As shown in Eqn. 2.25, the group delay 𝑡𝑔 in a linear phase filter is the negative
derivative of phase with respect to angular frequency. This relation can be interpreted
as the slope of the phase response of the linear phase filter, which can give us the
number of delayed samples resulting from applying the digital filter.
Consequently, in a linear phase filter, the group delay is not dependent on the
frequency since it constant for all frequencies.

17(46)
𝑡𝑔 = −𝑑∠H(𝜔)
𝑑𝜔 (2.25)
When the phase response of a filter is linear, the group delay is equal to the phase
delay (Eqn. 2.25). Since ∠H(𝜔) = − 𝜔𝑡𝑑, we have the following relation:
𝑡𝑔 = −𝑑(−𝜔𝑡𝑑)
𝑑𝜔= 𝑡𝑑 (2.26)

18(46)
Chapter 3
3 Methods
3.1 Filter design
As stated before, the goal of this work is to remove clutter in order to improve the
availability and raise the reliability of detection. This is dealt with by designing filters
that can capture and remove clutter from the received signal. We relate clutter to any
object that is stationary for more than 11 consecutive frames in the data captured by
the radar module. Assume captured data with a frame rate of 248 Frequency Per
Second (FPS). We then have the exact information in the time domain that is needed
to design the filters. Thus, clutter appears below 9% (11 Hz) of the Nyquist frequency
(Fs/2=124 Hz) in the filter frequency response. Subsequently, we have the exact
characteristics of the clutter in the frequency domain.
Figure 3.1: The defined clutter range in the frequency domain.
The term “ Prohibited Area ” used in Figure 3.1, indicates that the LP filters in
question must not miss capturing any frequency components inside this area. In
designing the filters, the Prohibited Area should lie inside the filter passband so that
the filters can capture all the clutter components. In this way, the maximum amount
of clutter is removed from the received signal in the following subtraction.
In other words, if the LP filter misses any frequency components corresponding to
the prohibited area, there is some remaining clutter in the “clutter removed signal”.

19(46)
Figure 3.2: The RA heat map of the scenario.
3.2 Introduction of the scenario for the clutter removal
To have a well-defined clutter in the data collection, we put a radar reflector at a
distance of 1.6 m from the radar sensor. In addition, there will be some metal tools in
a wider area within 2.5 m to simulate an industrial environment. The data were
captured in 4 seconds, and the duration of each frame is 4 ms. There was no moving
object until frame number 100. Then a person with another radar reflector entered
from behind the industrial tools and moved straight toward the stationary radar
reflector. Thereafter, he passed from the radar reflector and out of the area of
observation. In this way, we have data for both stationary and moving objects from
frame number 100. An RA heat map and a picture of the scenario appear in figures
3.2 and 3.3.
3.3 Moving average filters
In statistics, the moving average is a way of smoothing a time series by using an
average of past data points with the purpose of eliminating short fluctuations.
In DSP, a properly designed moving average filter can be used to reduce fluctuations.
For example, in a signal affected by random white noise, it can suppress the noise and
keep the step response as sharp as possible.

20(46)
Figure 3.3: The scenario seen from the radar.
A moving average filter with constant input coefficients is categorized as a low pass
Finite Impulse Response (FIR) filter. It sums some past samples of the input signal
and then divides the sum by the number of samples. The average is then shifted step
by step to form the filtered signal. This is excellent for random noise, but the moving
average filter is as poor in the frequency domain as it is good in the time domain
because of its inability to separate different frequency components. This filter can be
expressed by Eqn. 3.1, where M is the number of samples, and consequently the
length of the filter, 𝑦 is the output signal, and 𝑥 is the input signal. This filter can be
implemented by convolving an M-point rectangular pulse, with the unit area, with the
input signal (Eqn. 3.1) [20].
Figure 3.4: Moving average filter block diagram [19].

21(46)
𝑦(𝑛) =1
𝑀∑ 𝑥(𝑛 − 𝑗)𝑀−1
𝑗=0 (3.1)
For example, point 40 in the output signal of a 3-point moving average filter becomes:
𝑦(40) =𝑥(40)+𝑥(39)+𝑥(38)
3 (3.2)
3.3.1 Frequency response, poles, and zeros of the moving average filters
The frequency response of the moving average filters can be calculated as the Fourier
transform of a rectangular pulse:
𝑀[𝑓] =sin(𝜋𝑓𝑀)
𝑀 sin(𝜋𝑓) (3.3)
Figure 3.5: Frequency response of some moving average filters.
The cutoff frequency in moving average filters is defined by the number of samples
M. The more samples, the narrower the passband (Figure 3.5). The transition band
characteristics, however, are also related to the length of the filter so that longer
window lengths result in a sharper roll-off and a shorter transition band. This is
described by the following formula where 𝛿𝑠 is the stopband ripple, 𝛿𝑐 is the passband
ripple, 𝜔𝑠𝑇 is the passband edge, and 𝜔𝑐𝑇 is the stopband edge [26]:
𝑀 ≈ −2
3 log(10𝛿𝑐𝛿𝑠)
2𝜋
𝜔𝑠𝑇−𝜔𝑐𝑇+ 1 (3.4)
Poles and zeros determine the filter in the z-plane (z-transform). These two
parameters determine the frequencies where the system is unstable. Poles are the
frequencies where the transfer function 𝐻(𝑧) diverges. The zeroes or nulls result in a
zero output (𝐻(𝑧) → 0) where 𝐻(𝑧) is the transfer function of the moving average
filter (Eqn. 3.5). In moving average filters, the number of zeros is equal to the number
of filter coefficients [21].

22(46)
𝑦(𝑛) =1
𝑀(𝑥(𝑗) + 𝑥(𝑗 − 1) + ⋯ . 𝑥(𝑗 − 𝑀 − 1) (3.5)
𝑌(𝑧) =1
𝑀(𝑧𝑗 + 𝑧𝑗−1 + ⋯ 𝑧𝑗−𝑀−1)𝑋(𝑧) (3.6)
𝐻(𝑧) =𝑌(𝑧)
𝑋(𝑧)=
1
𝑀∑ 𝑧−𝑗𝑀−1
𝑗=0 (3.7)
Figure 3.6: Poles and zeros of a moving average filter with 21 taps.
Figure 3.7: Frequency and phase response of a moving average filter with 21 taps.
As highlighted in Figure 3.7, every zero in the denominator of the filter transfer
function can lead to a -180 degree shift in the phase response of the filter (the red
arrow). Also, at the cutoff frequency, which is marked with the dotted line, the phase
of the system is precisely -90 degrees (the gray arrow).

23(46)
3.3.2 Sidelobe suppression in moving average filters
As shown in Fig. 3.7, there are some significant sidelobes in the moving average filter
stopband. The more samples, the larger the sidelobes that can impair the filter
performance. The reason is that they capture some of the stopband frequency
components that are not defined as clutter and are needed in the clutter removed signal
as the main part of the received data.
One method to suppress these sidelobes is to use another moving average filter to
filter the output. This is repeated until the sidelobes in the stopband are suppressed
enough, as is evident in Figure 3.8. After each pass, the passband becomes narrower,
but the cutoff frequency also varies. Accordingly, the phase of the system changes,
which leads to different time delays.
Figure 3.8: Multiple-pass filtering with moving average filters.
3.3.3 Clutter removal by moving average filters
In the first part of this chapter, we defined the exact characteristics of the clutter in
this study. A moving average filter is good at removing clutter because it averages
previous samples and makes them smoother. Here, the samples are frames, and the
filter is supposed to take the average over previous frames. By choosing M=11, we
set the cutoff frequency to 9% of the Nyquist frequency. So, the first step of the clutter
removal process is to maximize the clutter that is captured by our LP filer. The clutter
signal can be written as:
𝑥𝐶𝑙𝑢𝑡𝑡𝑒𝑟(𝑡) =1
𝑀∑ 𝑥𝑆𝑖𝑔𝑛𝑎𝑙(𝑡 − 𝑗)𝑀−1
𝑗=0 (3.8)
In this study, we have compared two moving average filters with respect to clutter
removal. The first one is a moving average filter with length M and the second filter
is the first one after 4 passes with the same cutoff frequency.

24(46)
Figure 3.9: Frequency response of a moving average filter and a multiple-pass
moving average filter.
As shown in Figure 3.9, we could first design our LP filters with respect to the desired
cutoff frequency. The second step is to subtract this clutter signal from the received
signal. In this way, we have a received signal in which clutter is subtracted. This
means that by defining 10 samples as the background of static objects, we could
subtract the background and only see moving objects (Eqn. 3.9).
𝑦𝐶𝑙𝑢𝑡𝑡𝑒𝑟 𝑟𝑒𝑚𝑜𝑣𝑒𝑑(𝑡) = 𝑥𝑆𝑖𝑔𝑛𝑎𝑙(𝑡) − 𝑥𝐶𝑙𝑢𝑡𝑡𝑒𝑟(𝑡) (3.9)
In order to do the subtraction, the clutter signal and the received signal should be
synchronized, which can be done by compensating for the time delay of the filter
output. As we mentioned before, every linear system causes a time delay, and moving
average filters are no exception. As we proved before, the time delay in the output is
easily calculated by calculating the slope of the phase shift in the filter phase response.
Here the slope is 5 samples (frames).
With a known time delay, we should first shift the output by 5 samples and then
subtract it from the received signal to remove the clutter. Although the RA heat map
is not a good format for comparing outputs, the results are still presented so in Fig.
3.10. This figure shows that there is no significant difference between the two ways
of using the moving average filter, even if there are almost no sidelobes in the
passband of the multiple-pass filter. The radar reflector at 1.5 m has much less
reflectivity compared to the unfiltered results, and the same is true for the industrial
tools at 2.5 m. In contrast, the moving object, which had almost no reflectivity in
Figure 3.2 (before clutter removal), now has the highest reflectivity in the RA heat
maps.

25(46)
Figure 3.10: RA heat map of the clutter removed signal in which (a) clutter isw
removed by moving average filter, and (b) clutter is removed with the multiple-pass
moving average filter.
3.4 Butterworth filter
As stated in [22], the Butterworth is labeled as an optimal maximally flat Infinite
Impulse Response (IIR) filter due to the flat amplitude response in the passband,
which decreases smoothly to the cutoff frequency (-3dB) without a ripple. The
magnitude of the gain is [23]: wwwwwwww
wwwwwwwwwwwwwww|𝐺(𝜔)| =1
√1+(𝜔/𝜔𝑐) 2𝑁 (3.10)
Where N is the order, and the number of poles that are situated on a circle with a
radius equal to the filter cutoff frequency 𝜔𝑐. The magnitude at 𝜔= 𝜔
𝑐 is:
wwwwwwwwwwwwwwwwwwwwwwwwwwwwwwwwwwww|𝐺(𝜔)| =1
√1+(𝜔/𝜔𝑐) 2𝑁=
1
√1+1
= 0.707wwwwwwwwwwwwwwwwwwwww(3.11)
The pole locations, in terms of the number m of the pole pairs, is [23]:
P = -sin(2𝑚−1)𝜋
2𝑁+ 𝑗 cos
(2𝑚−1)𝜋
2𝑁 𝑚 = 1,2, … … , 𝑁 (3.12)
3.4.1 Clutter removal by an LP Butterworth filter
In this project, three LP Butterworth filters with different orders have been used to
remove clutter. The cutoff frequency is based on the characteristic of the clutter in
this project and is set to 9% of the Nyquist frequency. The selected orders range from
2 to 6. The method for removing clutter was explained in Eqn. 3.9. By increasing the
orders, we have more poles in the systemw)Figure 3.11), and this makes the filter more
sensitive to noise. The higher the order, the lower the linearity in the phase response.
This result in more phase distortion, but a sharper roll-off at the cutoff frequency (Fig.
3.14).
26(46)
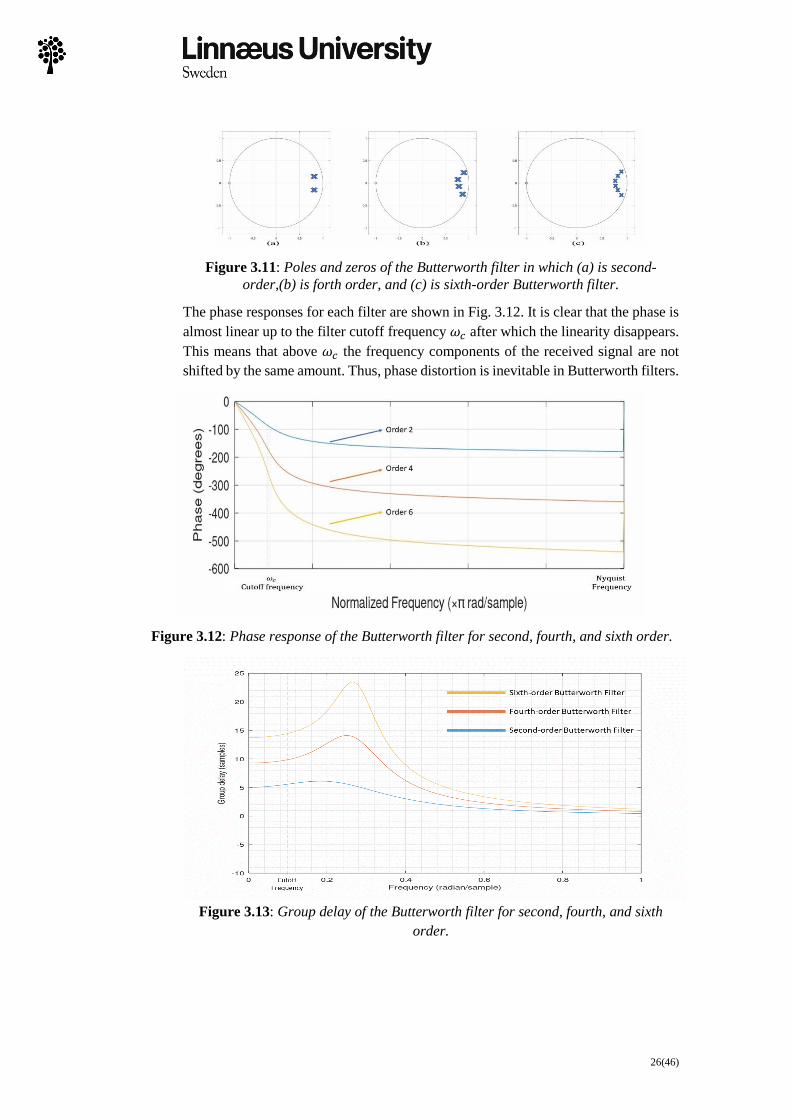
Figure 3.11: Poles and zeros of the Butterworth filter in which (a) is second-
order,(b) is forth order, and (c) is sixth-order Butterworth filter.
The phase responses for each filter are shown in Fig. 3.12. It is clear that the phase is
almost linear up to the filter cutoff frequency 𝜔𝑐 after which the linearity disappears.
This means that above 𝜔𝑐 the frequency components of the received signal are not
shifted by the same amount. Thus, phase distortion is inevitable in Butterworth filters.
Figure 3.12: Phase response of the Butterworth filter for second, fourth, and sixth order.
Figure 3.13: Group delay of the Butterworth filter for second, fourth, and sixth
order.

27(46)
Figure 3.13 presents the group delay, which is the negative derivative of the phase
with respect to frequency (Eqn. 2.27). From this figure, we can tell by how many
samples (frames) the received signal is delayed. This allows a synchronized
subtraction of clutter from the received signal.
The frequency responses of the Butterworth filter is presented in Figure 3.14 on a
linear scale for different orders. The responses show that the filter order does not
affect cutoff frequency since all the filters have the same cutoff frequency at -3dB
(0.707). Also, by increasing the filter order, the slope at the cutoff frequency rolls off
gradually (about -6dB) for each order (Figure 4.9). First-order has 6dB, second-order
12dB, and so on. Also, the higher the order, the flatter the passband.
Figure 3.14: Frequency response of the Butterworth filter for the second, fourth,
and sixth-order in a linear scale.
Figure 3.15: The RA heat map of clutter removed signals by the Butterworth filter
in which (a) is the second-order filter,(b) is the fourth-order filter, and (c) is the
sixth-order filter.
The RA heat map of the cluttered removed signal is plotted in Figure 3.15. It is
obvious that the radar reflector at 1.5 m has less reflection than in the past, while the
industrial tools are almost gone in all three cases. The negative effect of phase
distortion is clear in the third map, where the filter order is 6. The reason is the
increase in the order of the phase distortion.
28(46)
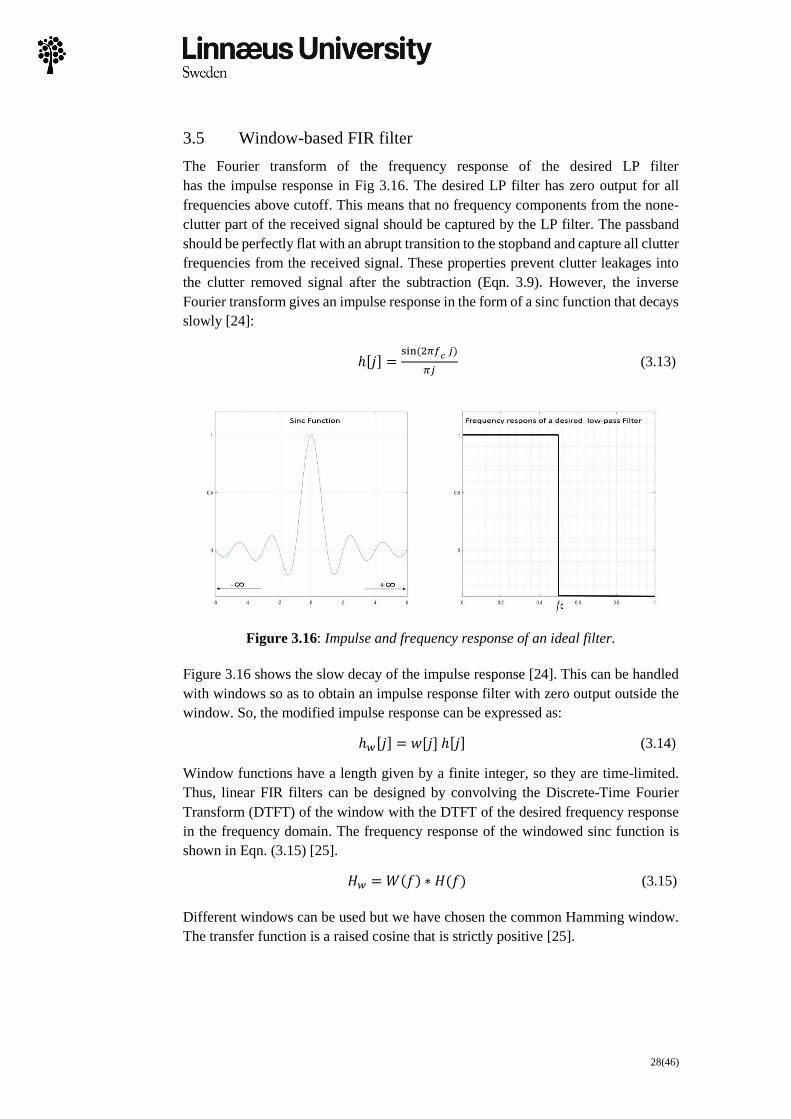
3.5 Window-based FIR filter
The Fourier transform of the frequency response of the desired LP filter
has the impulse response in Fig 3.16.wThe desired LP filter has zero output for all
frequencies above cutoff. This means that no frequency components from the none-
clutter part of the received signal should be captured by the LP filter. The passband
should be perfectly flat with an abrupt transition to the stopband and capture all clutter
frequencies from the received signal. These properties prevent clutter leakages into
the clutter removed signal after the subtraction (Eqn. 3.9). However, the inverse
Fourier transform gives an impulse response in the form of a sinc function that decays
slowly [24]:
ℎ[𝑗] =sin (2𝜋𝑓𝑐 𝑗)
𝜋𝑗 (3.13)
Figure 3.16: Impulse and frequency response of an ideal filter.
Figure 3.16 shows the slow decay of the impulse response [24]. This can be handled
with windows so as to obtain an impulse response filter with zero output outside the
window. So, the modified impulse response can be expressed as:
ℎ𝑤[𝑗] = 𝑤[𝑗] ℎ[𝑗] (3.14)
Window functions have a length given by a finite integer, so they are time-limited.
Thus, linear FIR filters can be designed by convolving the Discrete-Time Fourier
Transform (DTFT) of the window with the DTFT of the desired frequency response
in the frequency domain. The frequency response of the windowed sinc function is
shown in Eqn. (3.15) [25].
𝐻𝑤 = 𝑊(𝑓) ∗ 𝐻(𝑓) (3.15)
Different windows can be used but we have chosen the common Hamming window.
The transfer function is a raised cosine that is strictly positive [25].

29(46)
The Hamming window uses M+1 samples where M is an even number. The larger
the M, the sharper the roll-off, but this may result in undesired ripples in the passband.
So, choosing the filter order is a trade-off. The Hamming window is described by
[24]:
𝑊[𝑗] = 0.54 + 0.46cos (2𝜋𝑗/𝑀) (3.16)
Contrary to other filters, the cutoff frequency of the window-based FIR filter is at the
half amplitude point, or 6 dB down from the passband value. The reason is that the
Hamming window has a symmetrical passband and stopband in the frequency
response. This means that the ripple in the passband is equal to the ripple in stopband
attenuation (figures 3.18 and 3.19) [24].
Figure 3.17: Poles and zeros of the window-based FIR filter (Hamming Window).
3.5.1 Clutter removal by Window-based FIR filter
Among different windows, the Hamming window was used for the LP filter. The
clutter signal in Eqn. 3.17 has ℎ𝑤(𝑗) as the filter coefficients or the impulse response,
M as the filter order, and M+1 as the window length.
The clutter removed signal can be calculated by subtracting the clutter signal from the
received signal, as explained by Eqn. 3.7.
𝑥𝐶𝑙𝑢𝑡𝑡𝑒𝑟(𝑡) = ∑ ℎ𝑤(𝑗) 𝑥𝑆𝑖𝑔𝑛𝑎𝑙(𝑡 − 𝑗)𝑀𝑗=0 (3.17)
In FIR filters like moving average or window-based filters, the number of poles and
zeros are equal. All the poles are located at zero in the z-plane. The number of zeros,
however, is equal to filter length or the length of the window. For this application, we
used two Hamming windows with length M+1 equal to 44 and 20 taps, respectively.
Consequently, there are 44 zeros for the 44-tap filter (Fig. 3.17).
The phase response of this filter is linear, not only up to the cutoff frequency (the
Butterworth filter) but also up to the Nyquist frequency, like all FIR filters. The time
delay here, like all linear phase response filters, is equal to the group delay in Eqn.
2.28, which for these window-based filters is 22 or 10. Also, the number of zeros in
the frequency response corresponds to the change in phase around 180°.

30(46)
Figure 3.18: Frequency and phase response of the 44-tap window-based FIR filter
(Hamming Window).
The filter requirements and the frequency response of the 44-tap Hamming window
filter are plotted in Fig. 3.19. The defined clutter must be included in the filter
passband. Therefore, we called it a prohibited area. It means that all frequency
components in the prohibited area need to be captured by the LP filter in order to have
a clutter signal. The RA heat map after clutter removal is plotted in Figure (3.20). The
industrial tools are almost removed in the range of 2.5 m, and the radar reflector in
the range of 1.5 m has a reduced reflection.
Figure 3.19: Frequency response of the 44-tap window-based FIR filter (Hamming
Window) in a linear scale.

31(46)
Figure 3.20: The RA heat map of the 44-tap window-based FIR filter (Hamming
Window).

32(46)
Chapter 4
4 Results The main goal of this study is to remove clutter. This is most easily done in the
frequency domain and by focusing on the clutter part of the received signal. In order
to obtain measurable results, the comparison of the filters must be made in a suitable
way. As we have said earlier, each pixel in an RA heat map refers to information from
three dimensions, range, angle, and time (sequence of frames). If one employs FFT
to the third dimension (sequence of frames) to each pixel, the received signal can be
presented in the frequency domain for each pixel (Figure 4.1).
Figure 4.1: FFT for a chosen pixel of the received signal (before removing clutter).
Stationary and slow-moving objects would then appear at low frequencies, and
moving objects would appear at high frequencies. So, by applying this FFT over a
sequence of frames of the clutter removed signal, we should not see strong LF signals
because they are supposed to be captured by the LP filter and subtracted from the
received signal. This low-frequency part is the exact information needed to measure
the performance of each filter. It can be compared with the FFT of the same pixel
before removing clutter, and this would show how much clutter has been removed.
Consequently, if we apply FFT to all pixels of both the received and the clutter
removed signals (Eq. 4.1), we can see all frequency components of the signal before
and after the filter (clutter removal) in each pixel over the sequence of frames.
𝑌(𝜔)𝐶𝑙𝑢𝑡𝑡𝑒𝑟 𝑟𝑒𝑚𝑜𝑣𝑒𝑑 = 𝑋(𝜔)𝑆𝑖𝑔𝑛𝑎𝑙 − 𝑋(𝜔)𝐶𝑙𝑢𝑡𝑡𝑒𝑟 (4.1)

33(46)
As stated before, only low frequency components are of interest as a clutter signal.
To compare clutter with clutter, we should precisely determinewthe frequency range
of the clutter in the reflected signal.
Figure 4.2: The weight function compared to the frequency responses of the filters.
Since the ability to extract clutter varies with the filter type, the output differs
accordingly. Hence, we need to weight both clutter signals and the received signal
with a weight function. In other words, to focus on clutter removal rather than random
fluctuations, we apply low-frequency weighting to the recorded signal (received
signal) to construct a relevant calibration signal. We use a modified hyperbolic
tangent (Eq. 4.1) as a weight function (Fig. 4.2) where 𝑎 and 𝑏 define the slope and
scale.
𝑥(𝑡)𝑤𝑒𝑖𝑔ℎ𝑡 = 𝑡𝑎𝑛ℎ((𝑡+𝑎)/𝑏)+1
2 (4.1)
By applying the weight function to both the received and the clutter signals, they
would be weighted for each pixel as follows:
𝑋(𝜔)𝑤𝑒𝑖𝑔ℎ𝑡𝑒𝑑−𝑟𝑒𝑐𝑖𝑒𝑣𝑒𝑑 𝑠𝑖𝑔𝑛𝑎𝑙 = 𝑥(𝜔)𝑤𝑒𝑖𝑔ℎ𝑡 𝑋(𝜔)𝑆𝑖𝑔𝑛𝑎𝑙 (4.2)
And:
𝑋(𝜔)𝑤𝑒𝑖𝑔ℎ𝑡𝑒𝑑−𝑐𝑙𝑢𝑡𝑡𝑒𝑟 𝑠𝑖𝑔𝑛𝑎𝑙 = 𝑥(𝜔)𝑤𝑒𝑖𝑔ℎ𝑡 𝑋(𝜔)𝑐𝑙𝑢𝑡𝑡𝑒𝑟 (4.3)
According to the convolution theorem, this product then corresponds to a convolution
in the time domain. By this procedure, the clutter part of the signal can be extracted.
Moreover, by applying the weight function to the clutter removed signal, we can
capture the residual clutter for each method in question. In this way, the clutter
removal methods can be checked by comparing the captured signals and the reference.

34(46)
Figure 4.3: Captured clutter from the received signal for a chosen pixel.
Figure 4.4: Histogram of captured clutter from the received signal.
The captured clutter from the received signal, which shows only the clutter part in the
frequency domain for a given pixel, is plotted in Fig. 4.3.
Now that both clutter signals and the received signal are weighted, we can measure
the reduction of clutter in each pixel and show the clutter in a histogram. This
presentation of continuous numerical data gives an estimate of the probability density.
Accordingly, each pixel shows how much clutter there is, which can be compared to
the captured clutter from the received signal. Fig 4.4 is a histogram of the captured
clutter from the received signal and shows the distribution of clutter with respect to
the magnitude.

35(46)
Figure 4.5: Frequency response of two types of moving average filters in dB.
4.1 Moving average results
As discussed before, we have applied two kinds of moving average filters to see which
one is better. The frequency responses of these two are presented in Figure 4.5 in a
dB scale.
Figure 4.6 shows which removal method is better and compares the amount of clutter
after filtering with the captured clutter from the received signal.
Figure 4.6: Histogram of captured clutter by moving average methods
(presented for 20 bins).
In Fig 4.6, clutter removal is presented for 3 methods. For transparency, Fig. 4.7
shows the bars for 3 methods next to each other and with respect to the magnitude
and the number of pixels involved.

36(46)
Figure 4.7: Histogram of captured clutter by moving average filters (presented for
20 bins).
4.2 Butterworths results
As stated in the previous chapter, we have compared three Butterworth filters with
orders ranging from 2 to 6 as shown in Fig. 4.8.
Figure 4.8: Frequency response of three Butterworth filters in dB.
All three filters have the same cutoff frequency, but the different transient bands and
phase responses resulted in different outputs. The behavior for each order is presented
in the following histograms.
In Fig. 4.9, clutter reduction is not easily compared since it is small, but it is strong
enough to be compared to the captured clutter from the received signal.

37(46)
For comparison, we can show each bar of this plot with respect to the magnitude and
number of pixels (Figure 4.10).
Figure 4.9: Histogram of captured clutter by Butterworth filters (presented for 20
bins).
Figure 4.10: Histogram of captured clutter by Butterworth filters (presented for 10
bins).
4.3 Window-based FIR filter (Hamming)
To see the effect of window length on the efficiency of the window-based FIR filters,
we used a Hamming window with two different lengths, 44 taps, and 20 taps, but with
the same cutoff frequency. The two responses are shown in Fig. 4.11.

38(46)
In Figure 4.12, the histogram of the clutter captured by the Hamming windows is
presented. This is a comparison of captured clutter before and after clutter removal
that shows thewreduction in clutter magnitude.
Figure 4.11: Frequency responses of the window-based filters with different
lengths.
Figure 4.12: Histogram of captured clutter by the window-based filter and different
lengths (presented for 20 bins).
Figure 4.12 shows that the amount of clutter reduction is not easily compared.
Because the difference in magnitude is small but large enough for comparing with the
captured clutter from the received signal. Again, the bars can be shown next to each
other with respect to the magnitude and number of involved pixels (Figure 4.13).
39(46)
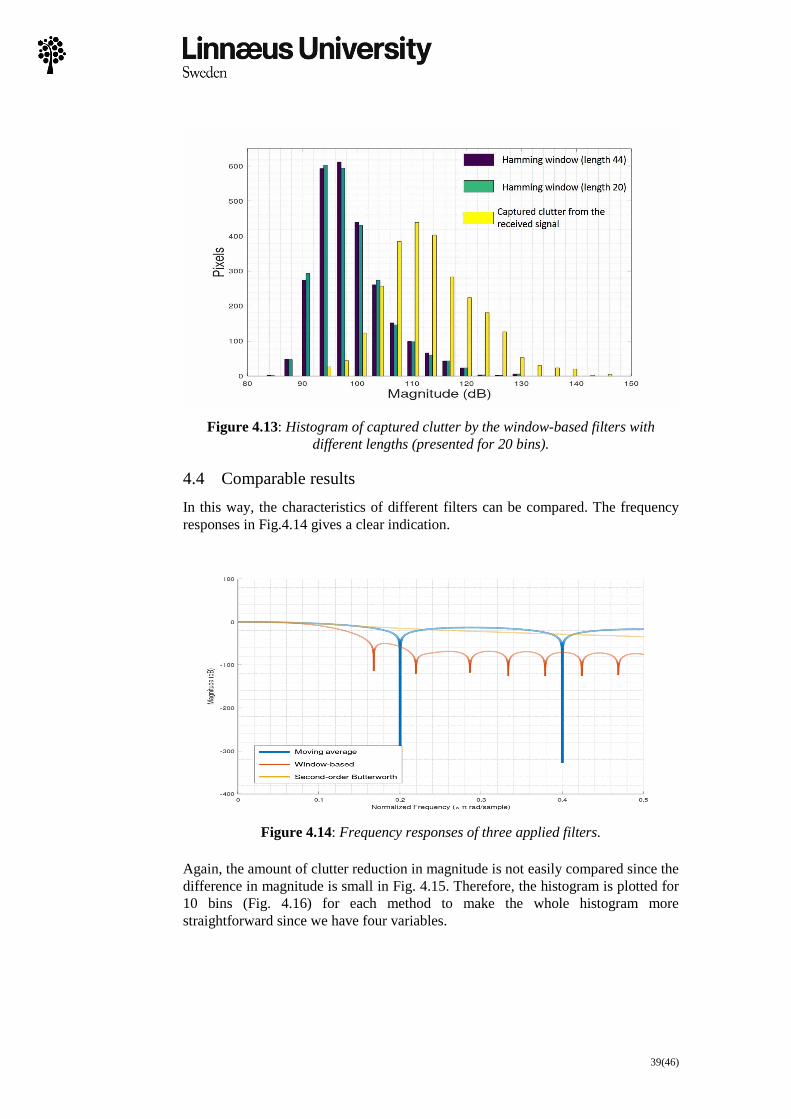
Figure 4.13: Histogram of captured clutter by the window-based filters with
different lengths (presented for 20 bins).
4.4 Comparable results
In this way, the characteristics of different filters can be compared. The frequency
responses in Fig.4.14 gives a clear indication.
Figure 4.14: Frequency responses of three applied filters.
Again, the amount of clutter reduction in magnitude is not easily compared since the
difference in magnitude is small in Fig. 4.15. Therefore, the histogram is plotted for
10 bins (Fig. 4.16) for each method to make the whole histogram more
straightforward since we have four variables.

40(46)
Figure 4.15: Histogram of clutter captured of the filters (presented for 20 bins).
Figure 4.16: Histogram of clutter captured of the filters (presented for 10 bins).
Table 1: Magnitude range of captured clutter for each method in dB.
Column1 1 2 3 4 5 6 7 8 9 10 Average Width
Moving average
83 87 92 97 101 106 111 115 120 124 104 41
Butterworth 84 88 93 98 103 107 112 117 122 127 105 43
Hamming 86 90 95 100 104 109 114 118 123 127 107 42
Clutter before being
removed 95 101 106 112 117 123 128 133 139 144 120 49
If we divide the horizontal axis in Fig. 4.16 into ten sections (bins) and show the
magnitude of each bin for each filter, as in Table 1, the reductions in the magnitude
of the captured clutter can be presented more accurately.

41(46)
Chapter 5
5 Discussion and conclusion
5.1 Moving average filters
By looking at the frequency responses of the two moving average filters (Figure 4.5),
we find that the multiple-pass moving average filter has a flat passband but a rather
slow roll-off. The roll-off is not sharp enough to make a strong frequency separation.
The wider the transition band, the worse the frequency separation will be. The
stopband, however, is almost flat without considerable ripples (Figure 3.9).
Conversely, the moving average filter with a length of 10 taps, has not as good a
stopband attenuation as the multiple-pass moving average filter, due to bigger ripples
in the stopband. These ripples could cause moving target frequency to leak into the
clutter signal, resulting in poor performance of the filter. Due to the large ripples in
the stopband, we would not have a proper estimation of the clutter, since it is supposed
to be subtracted from the received signal. Thus, there is still some clutter remaining
in the clutter removed signal.
The performance of the moving average filters varies with respect to the amount of
sidelobes suppression resulting from multiple-pass filtering. Figures 4.6 and 4.7 show
that the distribution of captured clutter in the clutter removed signal is different from
that of the received signal. This is especially clear for the moving average filter with
a length of 10 taps. This means that in the received signal, the clutter is distributed
over a broader band of magnitude ranging from 95 to 144 dB (Table 1). Whereas,
after clutter removal, the captured clutter is distributed from 80 to 130 dB for both
kinds of moving average filters. This shows that the residual clutter is compressed
into a narrower magnitude range.
Figures 4.6 and 4.7 show that the moving average filter with 10 taps removes more
clutter than the multiple-pass moving average filter. This is due to its faster roll-off
and narrower transition band. In the stopband of the multi-pass moving average,
however, the attenuation is much more significant. To obtain a faster roll-off and a
shorter transition band, we should increase the length of the window, but this would
42(46)
then change the cutoff frequency. So, we can conclude that moving average filters are
not adaptive enough to extract the best possible result because of the tradeoff between
performance criteria.
5.2 Butterworth filters
Butterworth filters of three different orders have been studied. Figure 3.14 and Figure
4.8 show the frequency responses of these three filters. All of them have the same
cutoff frequency, but the orders are different. This means that IIR filters like
Butterworth are more adaptive than moving average filters due to their flexibility for
adjustment. The impact of increasing order on the transition band is presented by
Figure 3.14. This shows the frequency responses of Butterworth filters with different
orders in a dB scale.
Although higher orders can provide a flatter passband and a very narrow transition
band (Figure 3.14), this does not necessarily improve the clutter removal, as shown
in Figure 4.9. The Butterworth filter with low order could capture more clutter than
the higher order ones, but since three histograms are overlapping each other, it is not
clear which one reduces clutter the least. Hence, we need Figure 4.10 to see each bin
separately.
From Figure 4.10, we can see that the high-order Butterworth filter has the least
reduction in the magnitude of captured clutter compared to the other ones. This is due
to more phase distortion resulting from more nonlinearity in the phase response.
However, this high-order Butterworth filter has a flatter passband and a shorter
transition band, and also higher attenuation in the stopband. This difference can be
seen in Figure 3.15. In part (C) of this figure, we have a 6th order Butterworth filter
and, consequently, more distortion around the moving target and more reflection from
the stationary object at 1.5 m.
The histograms and figures of the Butterworth filters tell us that phase distortion is a
decisive factor in clutter removal. This can overshadow the advantages of the
Butterworth filter, adaptivity, and a flat passband.
5.3 Window-based FIR filter (Hamming)
As mentioned before, two Hamming windows with different lengths have been used
as window-based FIR filters. The difference in their frequency responses is more
visible and comparable in a dB scale, as shown in Figure 4.11. The longer filter has
more significant stopband attenuation, smaller ripples, and faster roll-off. These
characteristics are good for separating different frequency bands. Increasing window
length would cause faster roll-off and narrower transition band. These properties can
be seen in the histogram, and also in Figure 4.12. Thewlonger filter resulted in more
reduction in captured clutter magnitude (Figure 4.13). Although the difference in
relation to length is not significant, we have more reduction with the 44-tap filter.

43(46)
Moreover, the clutter captured by the 44-tap Hamming window (86 to 127 dB) is
compressed, compared to the captured clutter of the received signal. It is also less
compressed than clutter captured by the moving average filter and narrower than
clutter captured by the second-order Butterworth filter (84 to 127 dB).
To compare filters, we should choose one filter of each type. The moving average
filter with a length of 10 taps captured more clutter than the multi-pass moving
average filter. The Butterworth filter with the lowest order is better than the longer
ones. Finally, the Hamming window with a length of 44 taps could remove more
clutter.
By looking at the frequency responses (Figure 4.14), we see that the Hamming
window has the fastest roll-off, the narrowest transition band, and the biggest
stopband attenuation. Therefore, the best result would be expected from this filter.
Notwithstanding these advantages, the magnitude at the cutoff frequency for this filter
is lower than the others (-6dB). Because of this behavior, the filter does not outdo all
other filters for a given cutoff frequency. To be more precise, we can look at Figure
4.15 and Table 1, which shows magnitude reduction more accurately. The Hamming
window has the least reduction, and the moving average filter has the most reduction
of the clutter magnitude. This result was predictable due to the short transition band
of the moving average filter compared to Butterworth and Hamming window.
Moreover, Figure 4.16 shows the distribution of the captured clutter for each method
of removal. Clutter captured by the moving average filter is more compressed
compared to the clutter captured by Butterworth and Hamming window.
Table 1 also confirms that the largest reduction of clutter has been achieved with the
moving average filter, and the clutter captured by this filter has the highest
compression compared to the Hamming window. Butterworth also has the widest
distribution of the captured clutter due to its phase distortion. This means that phase
distortion caused smearing out into neighboring pixels.

44(46)
6 References
[1] Briggs, J. N. (2002). Specifications for reflectors and radar target enhancers to
aid detection of small marine radar targets. The Journal of Navigation, Vol. 55, pp.
23-38.
[2] Sethi, S. (2014). Optimization of Digital Signal Processing Techniques for
Surveillance RADAR, Vol. 4, Number 1, pp. 43-49.
[3] Rane, S. A., Gaurav, A., Sarkar, S., Clement, J. C., & Sardana, H. K. (2016, May).
“Clutter suppression techniques to detect behind the wall static human using UWB
radar.” In 2016 IEEE International Conference on Recent Trends in Electronics,
Information & Communication Technology (RTEICT) (pp. 1325-1329). IEEE.
[4] Goncharenko, Y. V., Farquharson, G., Gorobets, V., Gutnik, V., & Tsarin, Y.
(2014). “Adaptive moving target indication in a windblown clutter environment.”
IEEE Transactions on Aerospace and Electronic Systems, 50(4), 2989-2997.
[5] Hozhabri, M. (2019). “Human Detection and Tracking with UWB radar”
(Doctoral dissertation, Mälardalen University).
[6] Chernogor, L. F., & Lazorenko, O. V. (2012, September). “Radar equation for
ultra-wideband signals”. In 2012 6th International Conference on Ultrawideband and
Ultrashort Impulse Signals (pp. 34-38). IEEE.
[7] Immoreev, I. I., & Fedotov, P. D. V. (2002, May). “Ultra-wideband radar systems:
advantages and disadvantages”. In 2002 IEEE Conference on Ultra-Wideband
Systems and Technologies (pp. 201-205).
[8] Chen, W. (2004). The Electrical Engineering Handbook (1st ed.). Saint Louis:
Elsevier Science & Technology.
[9] Sandström, S. E. (2020). “Implementation of FMCW radar at low frequencies.”
AEUE-International Journal of Electronics and Communications, 117, 153082.
[10] Sandström, S. E., & Akeab, I. K. (2016). “A study of some FMCW radar
algorithms for target location at low frequencies”. Radio Science, 51(10), 1676-1685.
[11] Zhang, Q., Luo, Y., & Chen, Y. A. (2016). Micro-Doppler Characteristics of
Radar Targets (pp. 3-4). Kidlington, United Kingdom: Butterworth-Heinemann.
[12] Texas Instruments. (2020). IWR6843, IWR6443 Single-Chip 60- to 64-GHz
mmWave Sensor datasheet (Rev. C) [Online datasheet]. Retrieved July 23, 2020, from
https://www.ti.com/document-viewer/IWR6843/datasheet/device-overview-
x3342#x3342.
[13] Gao, X., Xing, G., Roy, S., & Liu, H. (2019, November). “Experiments with
mmWave Automotive Radar Test-bed.” In 2019 53rd Asilomar Conference on
Signals, Systems, and Computers (pp. 1-6). IEEE.
[14] Rao, S. (2017). “Introduction to mmWave sensing: FMCW radars.” Texas
Instruments (TI) mmWave Training Series.

45(46)
[15] Guerrero-Menéndez, E. (2018). “Frequency-modulated continuous-wave radar
in automotive applications [Master’s thesis]”. Autonomous University of Barcelona.
[16] Zhang, X., Lu, S., Sun, J., & Shangguan, W. (2018). “Low-Altitude and Slow-
Speed Small Target Detection Based on Spectrum Zoom Processing.” Mathematical
Problems in Engineering (pp. 1-10), 2018, 4146212.
[17] Smith, S. W. (1997). Chap.15 Introduction to Digital Filters. The scientist and
engineer's guide to digital signal processing (pp. 261-276). California Technical
Publishing.
[18] Cheong, H. W. (2005). Generalized impedance converter (GIC) filter utilizing
composite amplifier. Naval Postgraduate Sschool Monterey CA.
[19] Katole, D. N., Daigavane, M. B., Gawande, S. P., & Daigavane, P. M. (2017).
“Modified single phase SRF dq theory based controller for DVR mitigating voltage
sag in case of nonlinear load.” Journal of Electromagnetic Analysis and Applications,
9(2), 22-33.
[20] Smith, S.W. (2020). Chap.15 Moving average filter. The Scientist and Engineer's
Guide to Digital Signal Processing (pp. 277-284). California Technical Publishing.
[21] Viswanathan, M. (2020, July 23). Understand Moving Average Filter with
Python & Matlab. Retrieved July 25, 2020, from
https://www.gaussianwaves.com/2010/11/moving-average-filter-ma-filter-2/
[22] Smith, J. O. (2007). Mathematics of the discrete Fourier transform (DFT): with
audio applications, 2nd Edition, Stanford, W3K Publishing.
[23] Thompson, M. T. (2014). Chapter 14 - Analog Low-Pass Filters. Intuitive analog
circuit design. In (Second ed., pp. 531-583). Elsevier.
[24] Smith, S.W.. (2020). Chap.16 Windowed-Sinc Filters. The Scientist and
Engineer's Guide to Digital Signal Processing (pp. 284-297). California Technical
Publishing.
[25] Smith III, J. O. (2011). Spectral audio signal processing. Stanford,W3K
publishing.
[26] Alam, S. A., & Gustafsson, O. (2011, November). “Implementation of narrow-
band frequency-response masking for efficient narrow transition band FIR filters on
FPGAs.” In 2011 NORCHIP (pp. 1-4). IEEE.
[27] Freeman, M. G. (2016). “Target Discrimination Against Clutter Based on
Unsupervised Clustering and Sequential Monte Carlo Tracking”. Arizona State
University.
[28] Le Chevalier, F., Krasnov, O., Deudon, F., & Bidon, S. (2011). “Clutter
suppression for moving targets detection with wideband radar”. In 2011 19th
European Signal Processing Conference (pp. 427-430). IEEE.

46(46)
[29] Leighton, T. G., Chua, G. H., White, P. R., Tong, K. F., Griffiths, H. D., &
Daniels, D. J. (2013). “Radar clutter suppression and target discrimination using twin
inverted pulses.” Proceedings of the Royal Society A: Mathematical, Physical and
Engineering Sciences, Vol.469, No. 2160.
[30] Matsunami, I., & Kajiwara, A. (2010, January). “Clutter suppression scheme for
vehicle radar”. In 2010 IEEE Radio and Wireless Symposium (RWS) (pp. 320-323).
IEEE.
[31] Rummler, W. D. (1966). Clutter suppression by the complex weighting of
coherent pulse trains. IEEE Transactions on Aerospace and Electronic Systems, Vol.
AES-2, pp. 689-699.
[32] Lin, J. J., Li, Y. P., Hsu, W. C., & Lee, T. S. (2016). “Design of an FMCW radar
baseband signal processing system for automotive application.” SpringerPlus, Vol.5.
[33] Kim, S. H., Geem, Z. W., & Han, G. T. (2019). “A Novel Human Respiration
Pattern Recognition Using Signals of Ultra-Wideband Radar Sensor.” Sensors,
19(15), 3340.
[34] Dowell III, A. M. (1998). “Layer of protection analysis for determining safety
integrity level.” ISA Transactions, 37(3), 155-165.
[35] Koks, D. (2014). How to create and manipulate radar range-Doppler plots.
Defence Science and Technology Organization Edinburgh (Australia), Cyber and
Electronic Warfare Div.
[36] Dipl.-Ing. (FH) Christian Wolff, SMSgt G.A.F. (Rtd.). "Radar Basics".
radartutorial.eu. Retrieved 14 April 2018.
Copyright © 2022 FDOKUMEN




















