
Sistema de localización inalámbrica para centros comerciales

Localización
Ciclo de charlas sobre robótica móvil
El problema de la navegación
La navegación es la habilidad que caracteriza a un robot móvil y al mismo tiempo la más desafiante
El problema de la navegación para un robot móvil se define como:
Dado un punto de partida A alcanzar el (los) punto(s) de destino B (B1,B2,...) utilizando su conocimiento [el del robot] y la información sensorial que recibe [el robot].
2
El problema de la navegación
La navegación implica resolver a nivel de:
–PERCEPCIÓN: interpretar los datos que le suministra sus sensores para extraer información útil
–LOCALIZACIÓN: determinar su posición en el entorno
–PLANIFICACIÓN (conocimiento): decidir cómo actuar para alcanzar el objetivo
–CONTROL DE MOVIMIENTO: gestionar sus actuadores para conseguir la trayectoria deseada.
(enfoque deliberativo)
3
El problema de la navegación
Dos situaciones a distinguir:
–Existe un mapa del entorno (suficientemente adecuado para la navegación). Planificación de caminos (análisis global).
–No existe un mapa
Construir el mapa por exploración del entorno y luego planificar caminos.
Navegar sin mapa: control reactivo basado en comportamientos.
En ambos casos, es posible que aparezcan obstáculos en el camino de cuya existencia no se tenía conocimiento ⇒evitar obstáculos (análisis local).
4
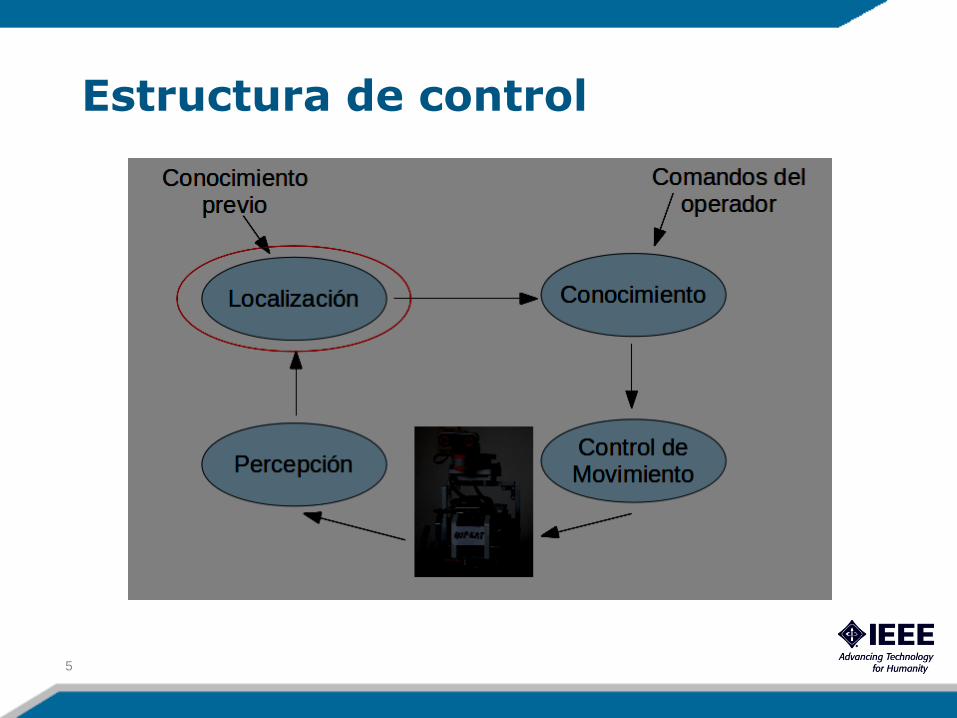
Estructura de control
5
Que es localización?
Es la construcción de modelos matemáticos, geométricos o lógicos de entornos físicos, para resolver los problemas que plantea el
colocar un robot móvil en un entorno y posición desconocidos, y que él mismo sea capaz de construir incrementalmente un
mapa consistente del entorno al tiempo que utiliza dicho mapa para determinar su propia
localización.
6

Esquema del curso
1. Herramientas de localización
2. Algoritmos de localización
3. Mapas métricos y topológicos
4. Kalman vs. Markov
5. Monte Carlo
6. SLAM
7. Fuzzy Cognitive Maps
7

1. Herramientas de localización
8
Representación conocida
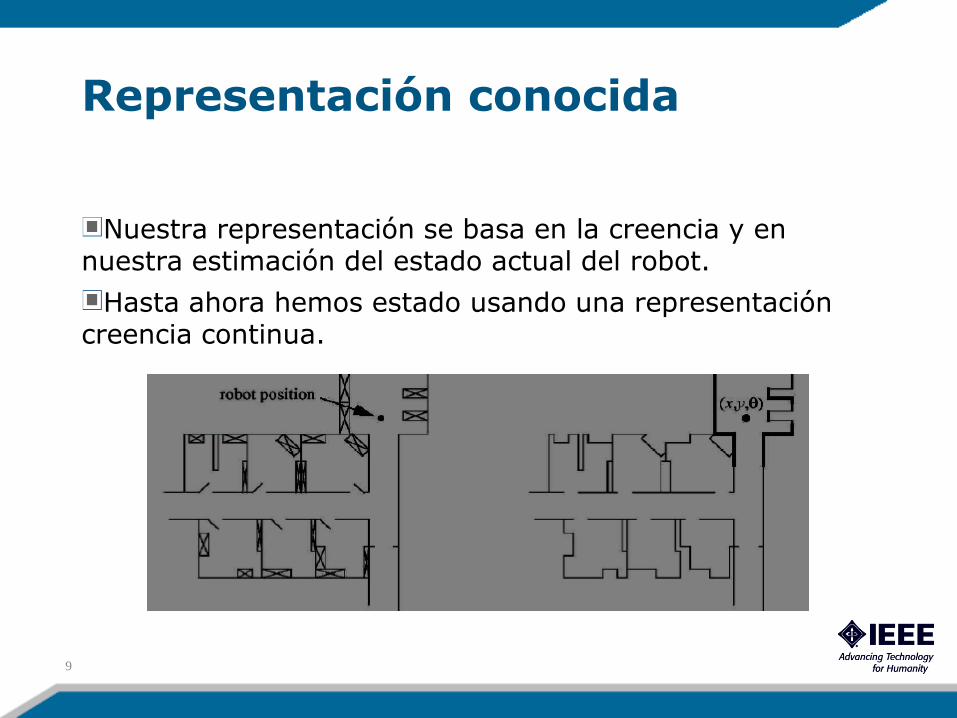
Nuestra representación se basa en la creencia y en nuestra estimación del estado actual del robot.
Hasta ahora hemos estado usando una representación creencia continua.
9
Representación conocida
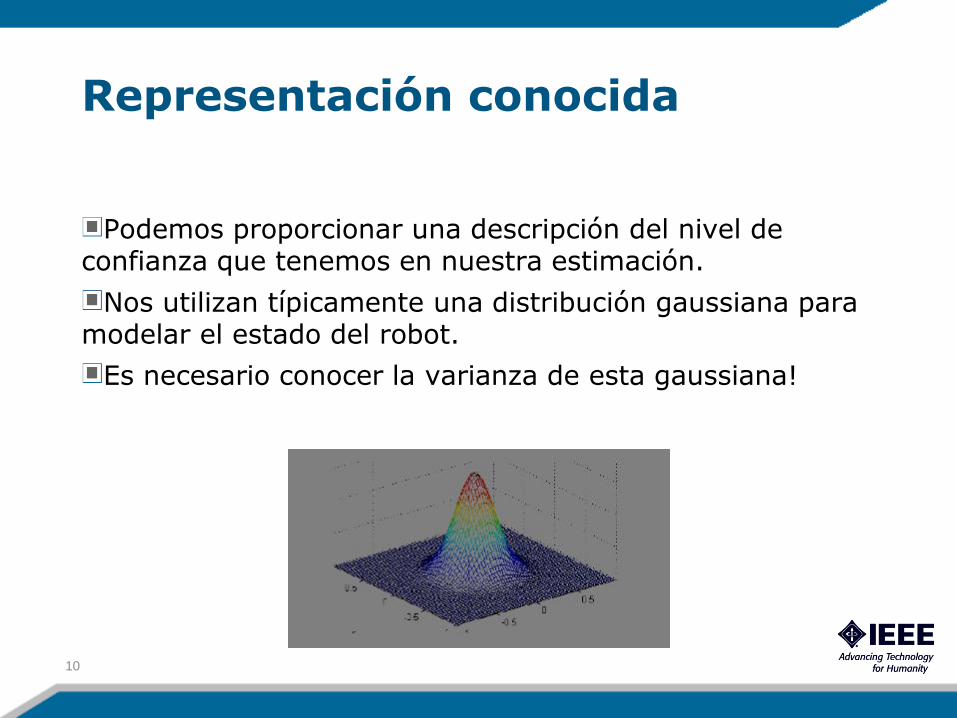
Podemos proporcionar una descripción del nivel de confianza que tenemos en nuestra estimación.
Nos utilizan típicamente una distribución gaussiana para modelar el estado del robot.
Es necesario conocer la varianza de esta gaussiana!
10
Representación conocida
Continua
–Precisión obligado por los datos del sensor
–Normalmente sola hipótesis plantean estimación
–Perdió cuando divergente (por hipótesis simple)
–Representación compacta
–Razonable en el poder de procesamiento
11
Representación conocida
Discreta
–Precisión obligado por resolución de discretización
–Normalmente múltiples hipótesis plantean estimación
–Nunca pierde (cuando diverge converge a otra celda).
–Memoria y potencia de procesamiento necesario (a menos mapa topológico utilizado)
–Ayuda para implementar planificador discreto
12
Mapas
La aplicación determina la precisión del mapa.
Las precisiones del mapa y su función deben coincidir con las precisiones de los sensores.
Hay un claro equilibrio entre precisión y complejidad computacional.
Al igual que en las representaciones de creencia, hay dos tipos principales:
–Continuos
–Discretizados
13
Mapas
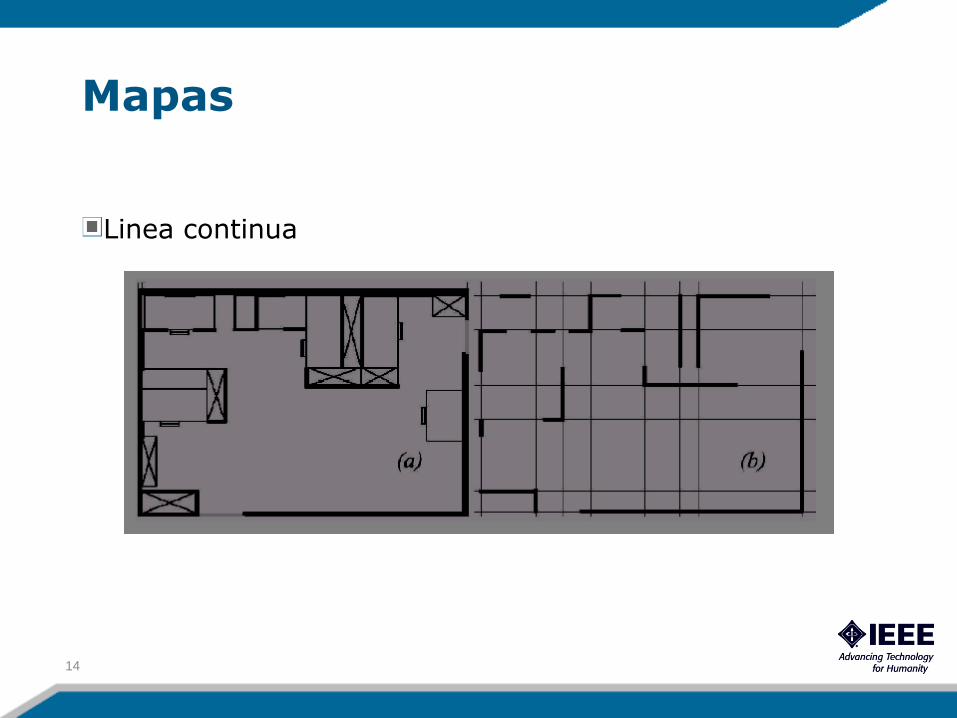
Linea continua
14
Mapas
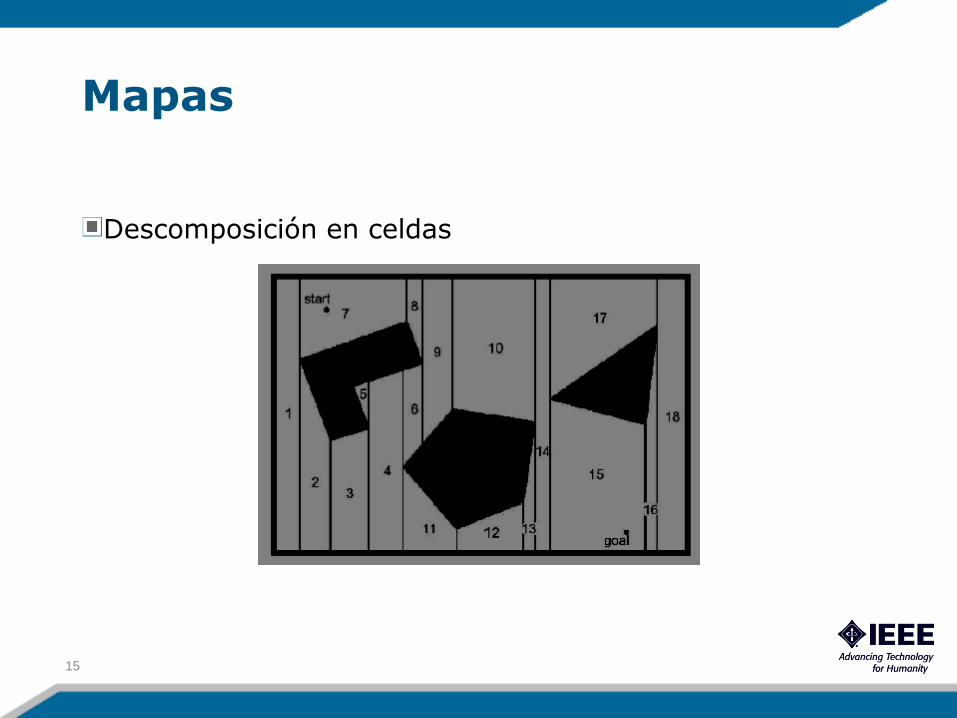
Descomposición en celdas
15
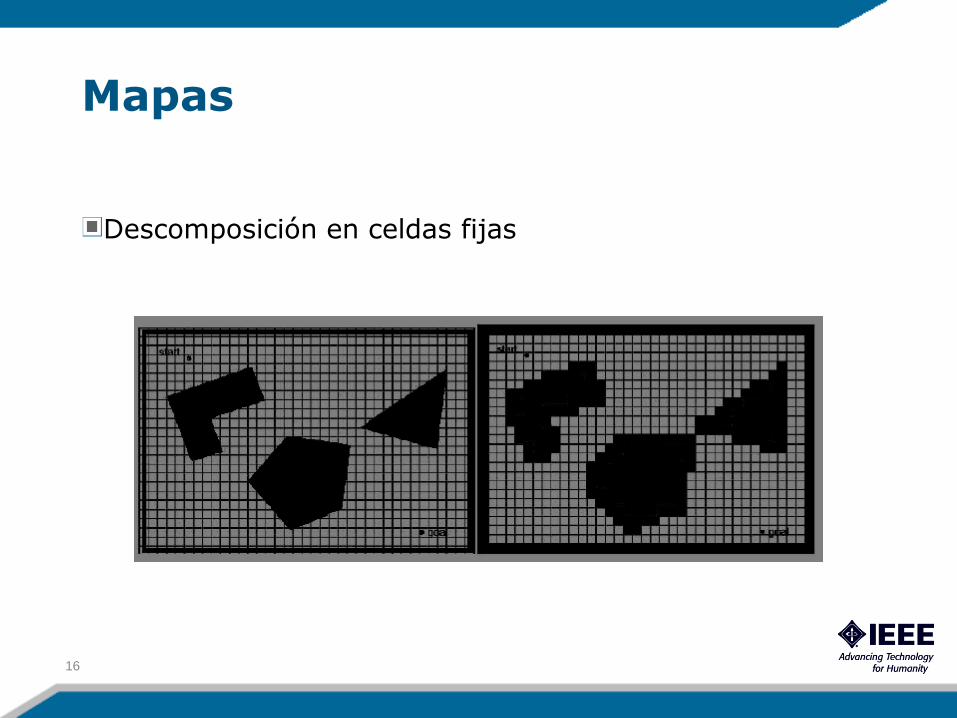
Mapas
Descomposición en celdas fijas
16
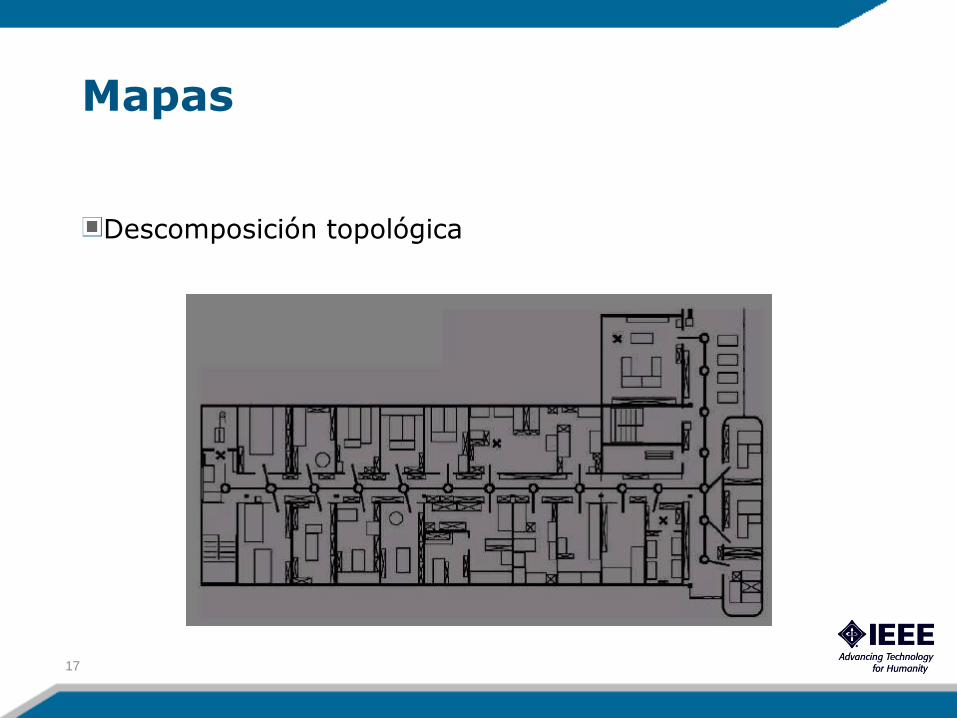
Mapas
Descomposición topológica
17
Teoría de la probabilidad
Probabilidad de que A sea verdadero
P (A)
–Se calcula la probabilidad de cada estado dado acciones del robot y medidas.
Probabilidad condicional de que A sea cierto dado que B sea verdadero
P (A | B)
–Por ejemplo, la probabilidad de que el robot se encuentra en posición xt dada la entrada del sensor de Zt es P(xt | zt)
18
Teoría de la probabilidad
Regla del producto
p(A ^ B) = p(A | B) p(B)
p(A ^ B) = p(B | A) p(A)
–Se puede equiparar estas expresiones para llegar a la regla de Bayes.
Regla de Bayes
19
2. Algoritmos de localización
20
Métodos de localización probabilísticos
Planteo del problema:
–Determinar el estado de un robot en un ambiente conocido.
Estrategia:
–Se podría empezar con moverse de un lugar conocido, y realizar un seguimiento de su posición utilizando odometría.
–Sin embargo, cuanto más se mueve, es mayor la incertidumbre en su posición.
–Por lo tanto, se actualizará su estimación de la posición mediante la observación de su entorno.
21
Métodos de localización probabilísticos
Método:
–Fusionar la estimación de la posición odométrica con la estimación de la observación para obtener la mejor actualización posible de la posición real
Esto puede ser implementado con dos funciones principales:
–Actuar
–Ver
22

Filtrado de Kalman vs Markov
Localización de Markov
–Se puede localizar desde cualquier posición desconocida en el mapa
–Se recupera de situaciones ambiguas
–Sin embargo, actualizar la probabilidad de todas las posiciones dentro de todo el espacio requiere la representación discreta del espacio. Esto puede requerir gran cantidades de memoria y potencia de procesamiento.
Kalman Filter localización
–Seguimiento del robot y es intrínsecamente preciso y eficiente.
–Sin embargo, si la incertidumbre es demasiado grande, KF fallará y hará que el robot se pierda.
23

3. Mapas métricos y topológicos
24

Representación del EspacioRepresentación del espacio
Mapas:
–Descomposición espacial
–Mapas Geométricos
–Mapas topológicos
25
Representación del Espacio
Una representación interna del espacio puede servir para al menos 3 objetivos:
–Identificar el espacio libre
–Reconocer regiones en el ambiente
–Reconocer objetos en el ambiente
26
Mapas
Modelo del ambiente – generalmente se representa el espacio libre y el espacio ocupado (obstáculos) mediante una representación geométrica: un mapa
Tipos de mapas:
–Mapas métricos
Descomposición espacial
Representaciones geométricas
–Mapas topológicos
27

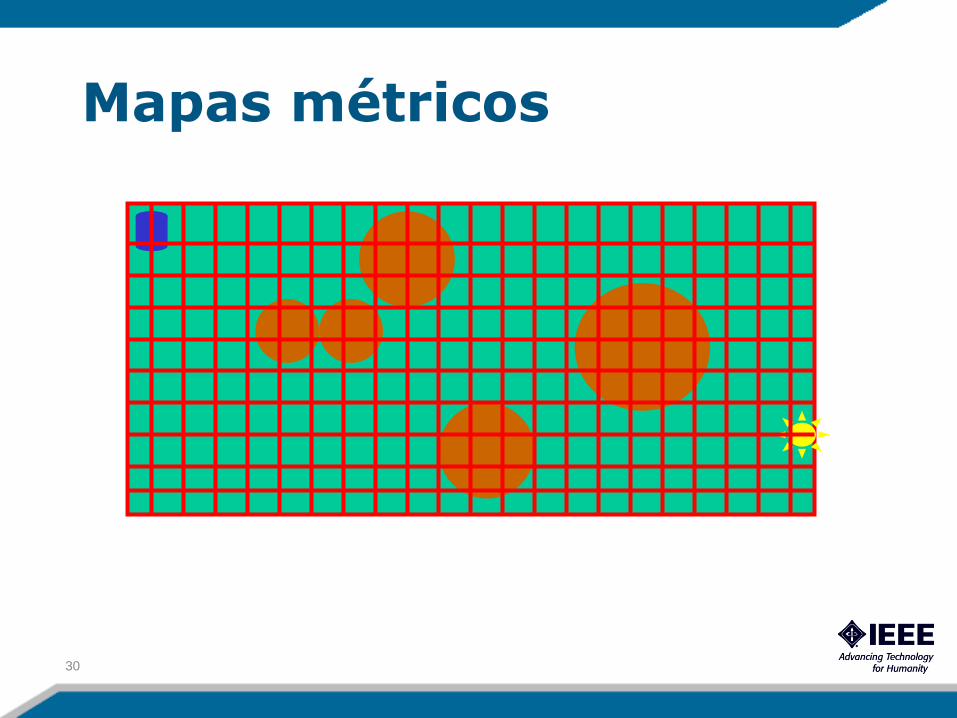
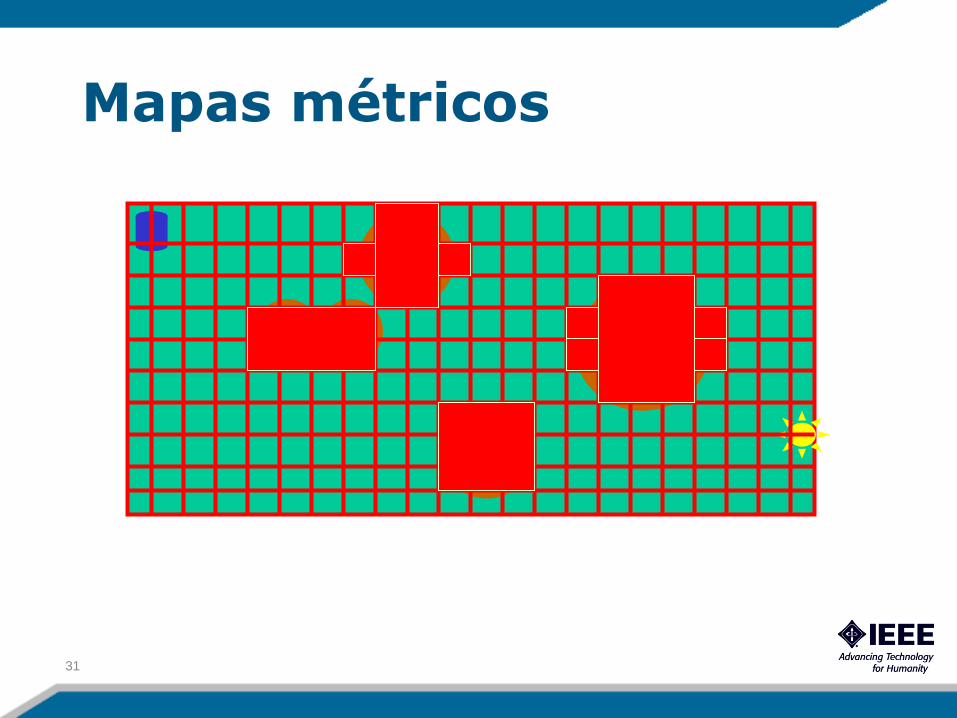
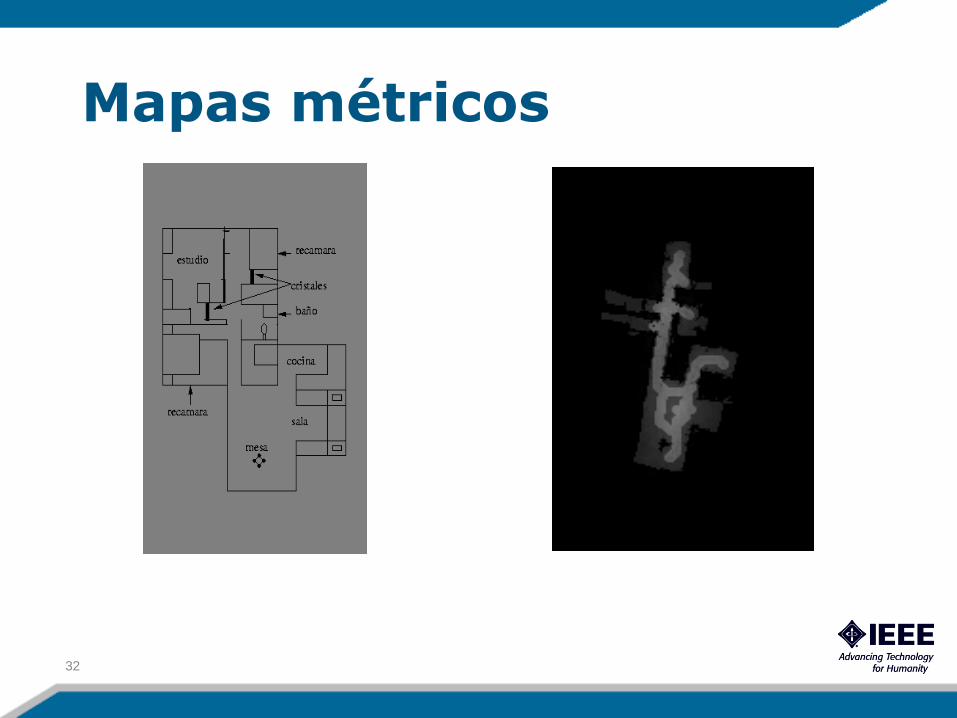
Mapas métricos
Se representa el espacio libre y/o obstáculos directamente mediante una discretización.
Dos formas básicas:
–Descomposición: se representa mediante una discretización en un conjunto de celdas básicas, por ejemplo con una rejilla de ocupación espacial (occupancy grids).
–Geométrico: se representa mediante figuras geométricas básicas en 2 ó 3 dimensiones, por ejemplo con triangulación.
28

Mapas métricos
29
Mapas métricos
30
Mapas métricos
31
Mapas métricos
32
Mapas métricos
Se representa el espacio libre y/o obstáculos directamente mediante una discretización.
Dos formas básicas:
–Descomposición: se representa mediante una discretización en un conjunto de celdas básicas, por ejemplo con una rejilla de ocupación espacial (occupancy grids).
–Geométrico: se representa mediante figuras geométricas básicas en 2 ó 3 dimensiones, por ejemplo con triangulación.
33

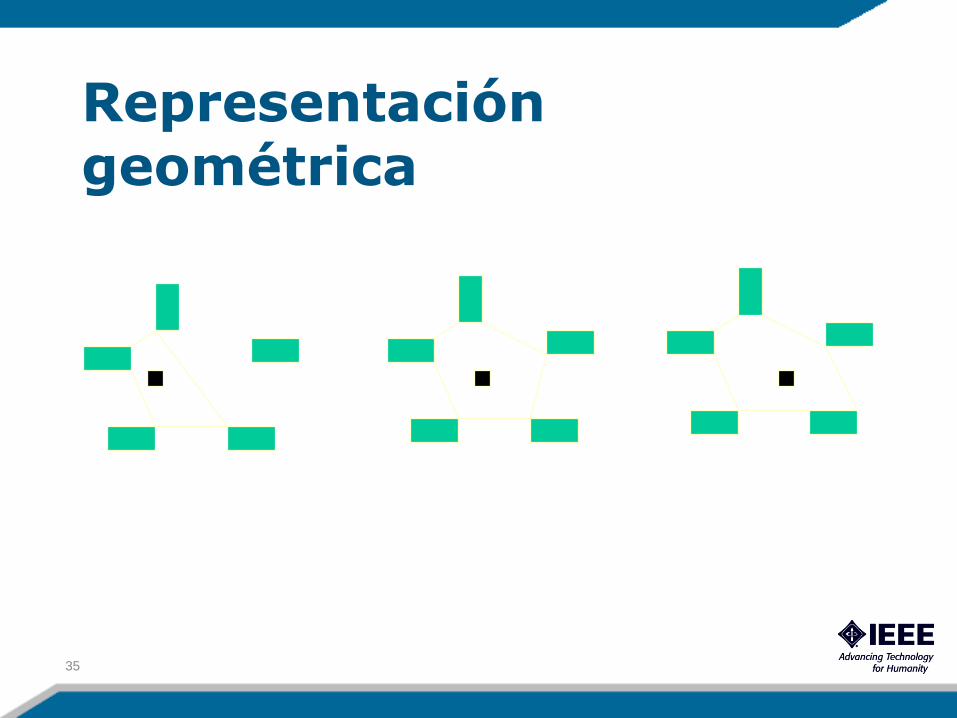
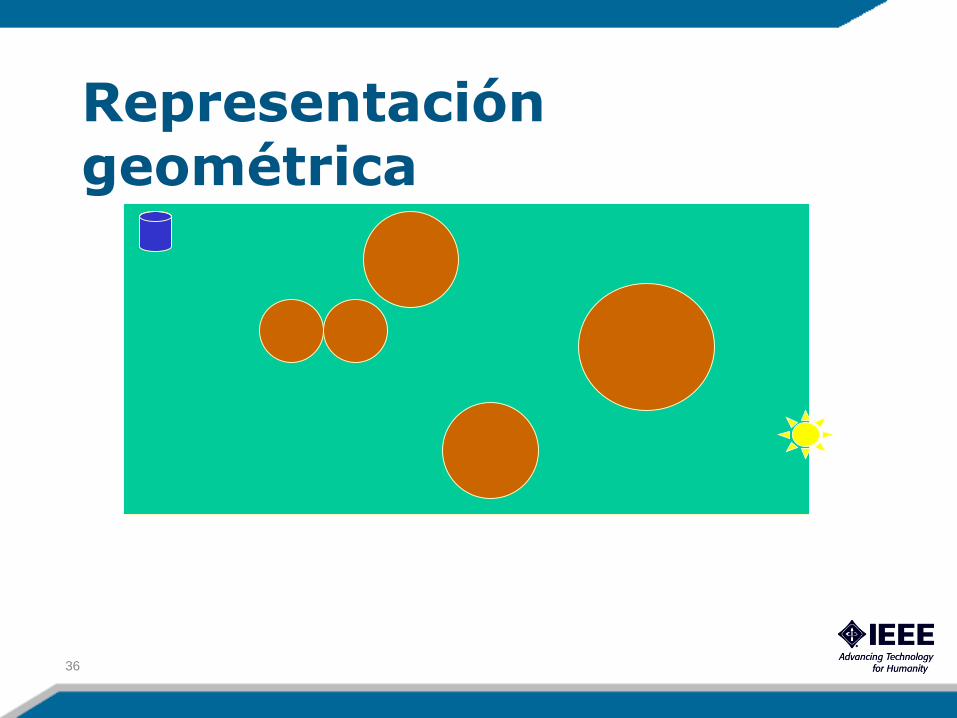
Representación geométrica
Geométrico: se representa mediante figuras geométricas básicas en 2 ó 3 dimensiones.
2-D
–Puntos
–Líneas, polilíneas
–Círculos
–Poliedros (triángulos)
–Splines
34
Representación geométrica
35
Representación geométrica
36

Representación geométrica
37
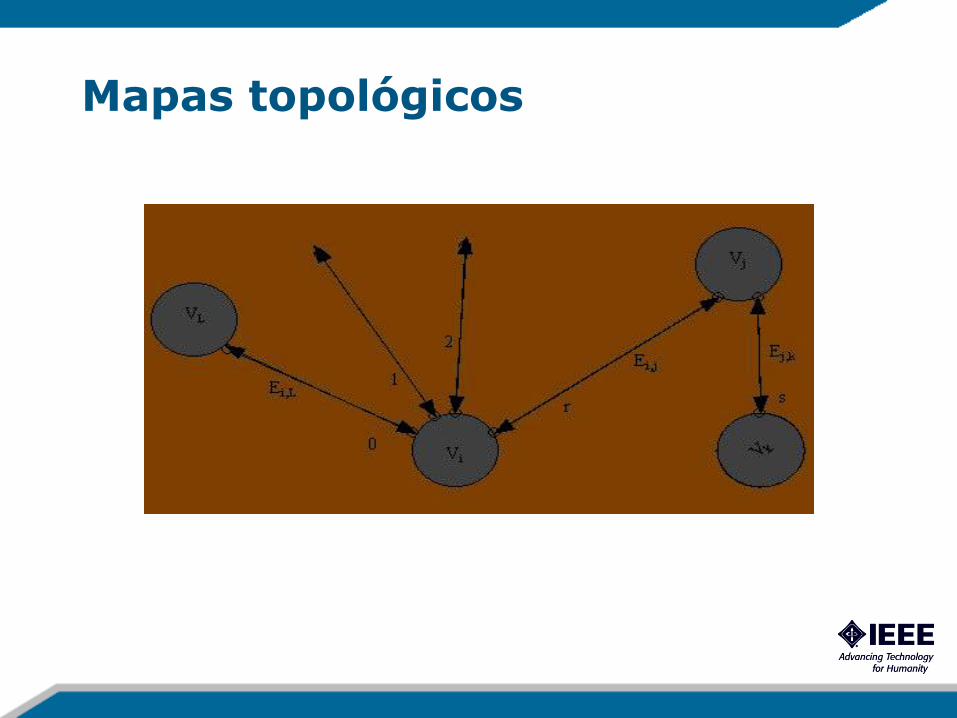
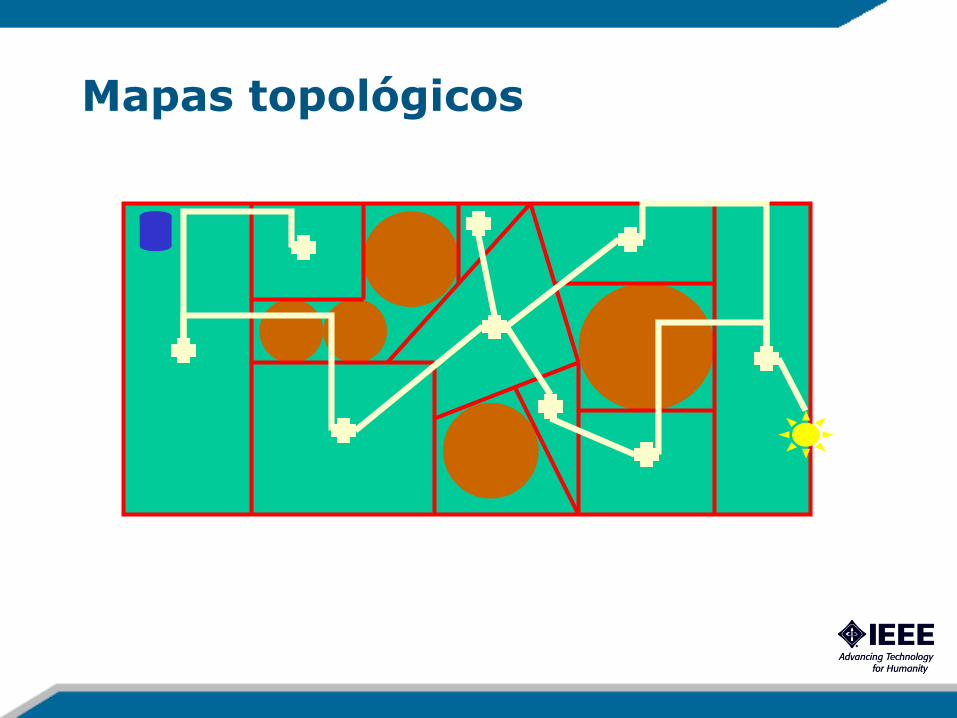
Mapas topológicos
Se considera el ambiente como una serie de lugares y conexiones entre dichos lugares.
Esto se puede considerar como un grafo:
–Nodos: lugares.
–Arcos: conexiones.
Se le puede incorporar información métrica al grafo – longitud y orientación de los arcos.
Mapas topológicos
Mapas topológicos
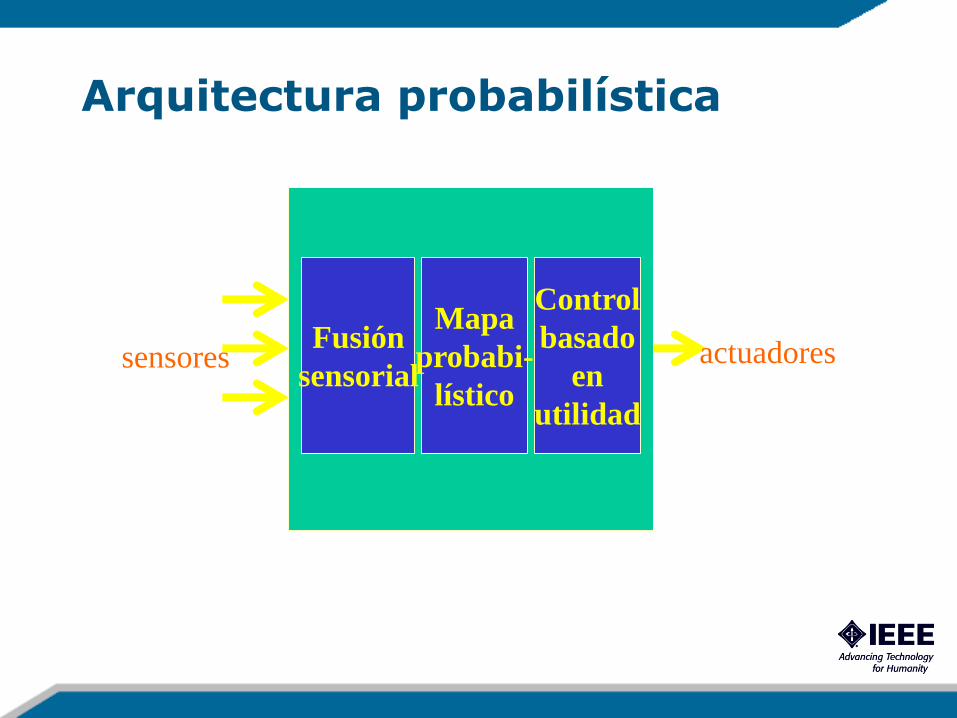
Arquitectura probabilística
sensores actuadoresFusión
sensorial
Mapa
probabi-
lístico
Control
basado
en
utilidad
4. Kalman vs. Markov
42

Kalman vs. Markov
Markon can:
–Can localize from any unknown position in map
–Recovers from ambiguous situation
–However, to update the probability of all positions within the whole state space requires discrete representation of space. This can require large amounts of memory and processing power.

Kalman vs. Markov
Kalman can:
–Tracks the robot and is inherently precise and efficient
–However, if uncertainty grows too large, the KF will fail and the robot will get lost.
5. Monte Carlo
45
Monte Carlo
Dado un mapa de su entorno basado en la localización de Markov. Se trata básicamente de una implementación de la aplicación del filtro de partículas a la localización del robot.
Monte Carlo
En este método, un gran número de hipotéticas configuraciones actuales son inicialmente dispersas al azar, en el espacio de configuración.
Con cada actualización del sensor, la probabilidad de que cada configuración hipotética es correcta y se actualiza sobre la base de un modelo estadístico de los sensores y el teorema de Bayes.
6. SLAM
48

Que es SLAM?
Accurate position estimation is one of the major problems when working with mobile autonomous robots and a key component of them. Most of the times, there are three phases that comprise the movement sequence of a mobile robot (not only autonomous robots): localization, path planning, and path execution.
Que es SLAM?
Mobile robot localization and mapping is the process of simultaneously tracking the position of a mobile robot relative to its environment.
Building a map of the environment, has been a central research topic in mobile robotics.
Accurate localization, and having an accurate map is essential for good localization. Therefore, simultaneous localization and map building (SLAM) is a critical underlying factor for successful mobile robot navigation in a large environment, irrespective of what the high-level
7. Fuzzy Cognitive Maps
51
El desafío
Intelligent agents use mental models and have various “internal” processes (physical, mental, emotional) as they interact with other agents.
Many simulations ignore intra-agent life, or model intra-agent characteristics as discrete from the larger inter-agent simulation.
When needed, we can use the “fuzzy cognitive map” (an iterative network) to model agent life in a unified continuous way.
Un FCM es...
A thematic network with…
Nodes and links, that have…
Weights and states (+1, 0, -1).
We start with initial conditions, then…
Iterate the network over time to get…
Attractors (emergent system behavior).
We can test leverage points, and…
Compare & match to known systems

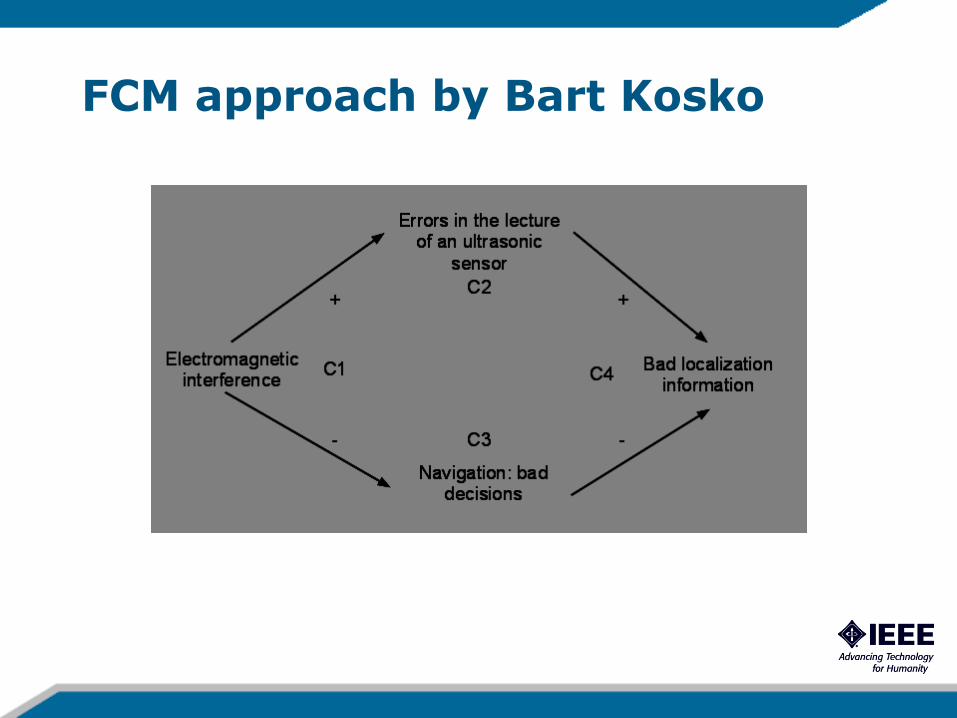
FCM approach by Bart Kosko
DEFINITION: An FCM is a directed graph with concepts like policies, events etc. as nodes and causalities as edges. It represents causal relationship between concepts.
In other words, a Fuzzy cognitive map is a cognitive map where the relations between the elements (e.g. concepts) of a "mental landscape" can be used to compute the "strength of impact" of these elements. and one of its applications is to
FCM approach by Bart Kosko
FCM approach by Bart Kosko
According to Bart Kosko "Fuzzy cognitive maps are fuzzy-graph structures for representing casual reasoning. Their fuzziness allows hazy degrees of casuality between hazy casual objects(concepts).
Their graph structure allows systematic casual propagation, in particular forward and backward chaining, and it allows knowledge bases to be grown by connecting different FCMs. FCMs are especially applicable to soft knowledge

Fuentes
Libros
–Introduction to autonomous mobile robots (Siegwart, Nourbakshsh y Scaramuzza).
–Probabilistic robotics (Thrun, Burgard y Fox).
Cursos
–CPE 485 – Course lectures on Autonomous Mobile Robots
Web
–http://www.mobilerobots.ethz.ch/
–wiki.aigroup.com.ar
Imágenes cortesía de Siegwart & Nourbakhsh

FIN
dtrejo.com.ar
Capítulo de Inteligencia Computacional
Copyright © 2022 FDOKUMEN




















