
Telenovela latinoamericana en España: Identidades culturales y confluencias comerciales
Upload
khangminh22Category
view
0download
0
SISTEMA INALÁMBRICO PARA LA LOCALIZACIÓN DE USUARIOS EN RESTAURANTES DE CENTROS COMERCIALES
HENRY LEMOS BONILLA
UNIVERSIDAD SAN BUENAVENTURA FACULTAD DE INGENIERÍAS
PROGRAMA INGENIERÍA ELECTRÓNICA SANTIAGO DE CALI
2012
SISTEMA INALÁMBRICO PARA LA LOCALIZACIÓN DE USUARIOS EN RESTAURANTES DE CENTROS COMERCIALES.
HENRY LEMOS BONILLA
Tesis de grado presentado como requisito para optar el titulo de Ingeniero Electrónico
Director Edgar Giraldo Orozco
Ms. C
UNIVERSIDAD SAN BUENAVENTURA
FACULTAD DE INGENIERÍAS PROGRAMA INGENIERÍA ELECTRÓNICA
SANTIAGO DE CALI 2012
DEDICATORIA A mis padres y hermanos por creer y confiar siempre en mí, por su apoyo y motivación que me han brindaron a lo largo de la carrera. A mis amigos por su confianza, lealtad y por enseñarme que no hay límites, que lo que me proponga lo puedo lograr y que solo depende de mí.

AGRADECIMIENTOS Mis más profundo agradecimiento a Dios, por ser mi guía y mi compañero, quien me ha dado fortaleza y sabiduría para sobrellevar todos los obstáculos que se presentaron en la ejecución de esta tesis. Al mismo tiempo a todas las personas que directa o indirectamente me han apoyado aportando sus conocimientos y experiencias. A mi director de tesis por su experiencia científica, apoyo y sugerencias en un marco de confianza, afecto y amistad fundamentales para el progreso de este trabajo.

RESPONSABILIDAD DEL AUTOR Yo Henry Lemos Bonilla soy responsable de las ideas, doctrinas y resultados expuestos en esta tesis. Y el patrimonio intelectual de la misma pertenece a la Universidad de San Buenaventura.
GLOSARIO ACL: Asíncrono no orientado a conexión, usado principalmente para transmitir datos. BIT RATE: el término tasa de bits. Define el número de bits que se transmiten por unidad de tiempo a través de un sistema de transmisión digital o entre dos dispositivos digitales. Así pues, es la velocidad de transferencia de datos. CAD (convertidor análogo digital): es un dispositivo electrónico capaz de convertir una entrada analógica de voltaje en un valor binario, Se utiliza en equipos electrónicos como ordenadores, grabadores de sonido y de vídeo, y equipos de telecomunicaciones. La señal analógica, que varía de forma continua en el tiempo, se conecta a la entrada del dispositivo y se somete a un muestreo a una velocidad fija, obteniéndose así una señal digital a la salida del mismo. CDA (convertidor digital análogo): Es un dispositivo electrónico capaz de transformar señales digitales en análogas. DECODIFICADOR: es un circuito combinacional, cuya función es inversa a la del codificador, esto es, convierte un código binario de entrada (natural, BCD, etc.) de N bits de entrada y M líneas de salida (N puede ser cualquier entero y M es un entero menor o igual a 2N), tales que cada línea de salida será activada para una sola de las combinaciones posibles de entrada. Estos circuitos, normalmente, se suelen encontrar como decodificador / demultiplexor. Esto es debido a que un de multiplexor puede comportarse como un decodificador. EM 4001: Son etiquetas codificadas en Manchester a 125KHz. ETHERNET: El nombre viene del concepto físico de ether. Ethernet define las características de cableado y señalización de nivel físico y los formatos de tramas de datos del nivel de enlace de datos del modelo OSI. Ethernet es un estándar de redes de área local para computadores con acceso al medio por contienda CSMA/CD. GPR: Radar de penetración terrestre. GPS: (Global Positioning System) Sistema de Posicionamiento Global. GUI: graphical user interfaces (interfaces graficas de usuario). IEEE: Institute of Electrical and Electronics Engineers; instituto de ingenieros eléctricos y electrónicos. Asociación de EEUU, especialmente famosa por los estándares que promulga; de entre dichos estándares, en este proyecto cabe destacar la serie 802.x, referidos a WLAN (véase WLAN).
IrDA: Infrared data association. Organización que define el conjunto de protocolos para comunicación mediante de ondas infrarrojas. Por extensión, también se conoce con este nombre tanto a los protocolos que permiten dicha comunicación como a la comunicación en sí. Localización: Lugar donde se quiere posicionar a un usuario. Puede ser la planta de una universidad, de un centro comercial, de tu casa. MAX 232: Es un circuito integrado que convierte los niveles de las líneas de un puerto serie RS232 a niveles TTL y viceversa. MINICOM: Es un programa de comunicación que se asemeja al Hyperterminal y al Telix programa shareware, pero es un código fuente libre y se ejecuta en la mayoría de los sistemas Unix. PUERTO SERIAL: El puerto serial se constituye como una de las más básicas conexiones externas a un computador. Los puertos seriales se conocen también con el nombre de puertos de comunicación o COM, y tienen la característica de ser bidireccionales. Ésta característica permite a cada uno de estos dispositivos tanto recibir como enviar datos. RED AD HOC: Es una red inalámbrica descentralizada. La red es ad hoc porque cada nodo está preparado para reenviar datos a los demás y la que los router llevan a cabo esa función RF (radiofrecuencia): También denominado espectro de radiofrecuencia. Se aplica a la porción menos energética del espectro electromagnético, situada entre unos 3 kHz y unos 300 GHz RFID (Radio Frequency IDentification): identificación por radiofrecuencia. Es un sistema de almacenamiento y recuperación de datos remotos que usa dispositivos denominados etiquetas, tarjetas, transponedores o tags RFID. El propósito fundamental de la tecnología RFID es transmitir la identidad de un objeto (similar a un número de serie único) mediante ondas de radio. RSSI: Indicador de fuerza de señal de recepción. Este término se usa comúnmente para medir el nivel de potencia en las señales recibidas en las redes inalámbricas. SCO: El método Síncrono Orientado a Conexión (SCO) es usado principalmente para voz. Tag: etiquetas grabadas en distintas frecuencias su codificación es por medio de Manchester.
USB (Universal Serial Bus): por lo que como su nombre indica, se trata de un sistema de comunicación entre dispositivos electrónicos-informáticos que sólo transmite una unidad de información a la vez. UWB (Ultra Wide Band Networks): Es una tecnología en el rango de las PAN (personal área network). Permite paquetes de información muy grandes (480 Mbits/s) conseguidos en distancias cortas, de unos pocos metros. WiFi: Termino comercial de la Wireless Alliance, usado para denotar una red inalámbrica, y, que, según esta alianza, no significa nada, siendo sólo una marca registrada. Algunos autores sugieren que el nombre pretende hacer pensar en WirelessFidelity, por analogía con High-Fidelity (Hi-fi). Wi-max (Worldwide Interoperability for Microwave Access): Interoperabilidad mundial para acceso por microondas. Windows: Sistema operativo desarrollador por Microsoft Corporation. XBee: dispositivos que integran un transmisor - receptor de ZigBee y un procesador en un mismo módulo. Zigbee: Es el nombre de la especificación de un conjunto de protocolos de alto
nivel de comunicación inalámbrica para su utilización con radiodifusión digital de
bajo consumo, basada en el estándar IEEE 802.15.4 de redes inalámbricas de
área personal (wireless personal área network, WPAN). Su objetivo son las
aplicaciones que requieren comunicaciones seguras con baja tasa de envío de
datos y maximización de la vida útil de sus baterías.
CONTENIDO
pág.
GLOSARIO .............................................................................................................. 6
0. INTRODUCCIÓN ............................................................................................... 15
1. INFORMACIÓN PRELIMINAR .......................................................................... 16 1.1 PLANTEAMIENTO DEL PROBLEMA ............................................................. 16 1.2 ANTECEDENTES Y JUSTIFICACIÓN ............................................................ 16
2. OBJETIVOS ...................................................................................................... 18
2.1 OBJETIVO GENERAL ..................................................................................... 18 2.2 OBJETIVOS ESPECÍFICOS ............................................................................ 18
3. DESCRIPCIÓN DEL PROYECTO ..................................................................... 19
4. REVISIÓN DEL ESTADO DEL ARTE ............................................................... 20 4.1 ESTADO DEL ARTE ACTUAL ......................................................................... 20
4.2 TECNOLOGÍA PARA LA LOCALIZACIÓN ...................................................... 21 4.2.1 GPS .............................................................................................................. 21 4.2.2 RFID ............................................................................................................. 22
4.2.3 Infrarrojo ........................................................................................................ 23 4.2.4 Características .............................................................................................. 24
4.2.5 Bluetooth ....................................................................................................... 25
4.2.6 Funcionamiento ............................................................................................ 26
4.2.6.1 Objetivos de la tecnología Bluetooth .......................................................... 26 4.2.6.1.1 Modo de Trasmisión................................................................................ 26
4.2.7 Wi-Max .......................................................................................................... 27 4.2.7.1 Características ........................................................................................... 28 4.2.8 UWB (Ultra Wideband).................................................................................. 28 4.2.8.1 Características de UWB ............................................................................. 29 4.2.9 Aplicaciones .................................................................................................. 29
4.2.10 ZIGBEE ....................................................................................................... 29 4.2.10.1 Características ......................................................................................... 30 4.2.11 Tipos de dispositivos ................................................................................... 30 4.2.12 Arquitectura ................................................................................................. 30
4.2.12.1 Área de aplicación ................................................................................... 32 4.3 COMPARACIÓN ENTRE TECNOLOGÍAS ESTUDIADAS .............................. 32 4.4 PUERTOS DE COMUNICACIÓN .................................................................... 34
4.4.1 Puerto serial (COM). ..................................................................................... 34 4.4.2 Características .............................................................................................. 34 4.4.3 Puertos USB (Universal Serial ...................................................................... 35

4.4.3.1 Características ........................................................................................... 35 4.4.4 Microcontroladores ....................................................................................... 35 4.4.5 Procesador o CPU ........................................................................................ 37
5. SELECCIÓN DE DISPOSITIVOS Y TECNOLOGÍAS ....................................... 38
5.1 COMUNICACIÓN RF ....................................................................................... 38 5.2 MÓDULOS XBEE ............................................................................................ 39 5.2.1 Modo Idle ...................................................................................................... 40 5.2.2 Herramienta de configuración X-CTU ........................................................... 43 5.2.3 Identificación ................................................................................................. 44
5.2.4 Protocolo de comunicaciones ....................................................................... 46 5.2.4.1 Rangos máximos de actuación y características eléctricas ....................... 46 5.3 INTERFAZ DE VISUALIZACIÓN ..................................................................... 54
6. DISEÑO O PROPUESTA DEL SISTEMA ......................................................... 56
6.1 ESPECIFICACIONES Y COMPONENTES DEL MÓDULO COORDINADOR . 56 6.1.2 Especificaciones y componentes del móvil ................................................... 58
6.2 SOFTWARE DEL SISTEMA MÓVIL ................................................................ 61 6.3 MONITOREO MEDIANTE VISUAL BASIC ...................................................... 63 6.4 REQUISITOS FUNCIONALES ........................................................................ 65
6.4.1 Planos de identificación y localización .......................................................... 65 6.4.2 Infraestructura adecuada .............................................................................. 66
6.4.3 Funcionamiento general del sistema ............................................................ 66
7. PRUEBAS Y RESULTADOS EXPERIMENTALES ........................................... 68 7.1 ENTORNO DE PRUEBAS ............................................................................... 68
7.2 ESCENARIOS DE PRUEBAS ......................................................................... 68
7.2.1 Escenario 1. Módulo coordinador y el módulo móvil ..................................... 68 7.2.2 Escenario 2. Pruebas de mesas ................................................................... 69 7.2.3 Escenario 2. Prueba de distancia con y sin línea de vista ............................ 71
7.3 VISUALIZADOR GRÁFICO ............................................................................. 72 7.4 POSIBLES EXTENSIONES DEL PROYECTO ............................................... 73
8. CONCLUSIONES .............................................................................................. 74
BIBLIOGRAFÍA ..................................................................................................... 76
ANEXO .................................................................................................................. 78

LISTA DE TABLAS
pág.
Tabla 1. Frecuencias de funcionamiento ............................................................... 23
Tabla 2. Arquitectura Zigbee .................................................................................. 31
Tabla 3. Cuadro de comparaciones 1 ................................................................... 33
Tabla 4. Comparaciones entre XBee Y TRF2.4G .................................................. 39
Tabla 5. Cuadro de estructura del modo API ......................................................... 41
Tabla 6. Comparación de RFID vs Infrarrojo ......................................................... 45
Tabla 7. Conexionado del RFID ............................................................................. 46
Tabla 8. Rango de operación ................................................................................. 47
Tabla 9. Características eléctricas ......................................................................... 47
Tabla 10. Formato identificación del tag ................................................................ 48
Tabla 11. Especificaciones de los Tags ................................................................. 48
Tabla 12. Pines del PIC 16f628a .......................................................................... 50
Tabla 13. Memoria de los PIC................................................................................ 51
Tabla 14. Mapa de memoria ................................................................................. 52
Tabla 15. Asignación a las mesas ......................................................................... 69
Tabla 16. Pruebas con distintos materiales de mesa ............................................. 70
Tabla 17. Pruebas con y sin línea de vista ............................................................ 72
LISTA DE FIGURAS
pág.
Figura 1. Redes inalámbricos ................................................................................ 20
Figura 2. Funcionamiento del GPS ........................................................................ 21
Figura 3 Funcionamiento de RFID ......................................................................... 22
Figura 4. Lector infrarrojo de código de barra ........................................................ 24
Figura 5. Como trabaja Wi-Max ............................................................................. 27
Figura 6. Red UWB ................................................................................................ 28
Figura 7. Comparación de las tecnologías ............................................................. 33
Figura 8. Puerto serial ............................................................................................ 34
Figura 9. Puerto USB ............................................................................................. 35
Figura 10. Microcontrolador ................................................................................... 37
Figura 11. Descripción de los dispositivos ............................................................. 38
Figura 12. Moduló XBee serie 2 ............................................................................ 39
Figura 13. Modo de operación ............................................................................... 40
Figura 14. Trama de envió transparente ................................................................ 41
Figura 15. Modo de transmisión ............................................................................ 42
Figura 16. Ejemplo de modelo AT ......................................................................... 43
Figura 17. X-CTU Configuración de los XBee ...................................................... 44
Figura 18. Lector RFID .......................................................................................... 45
Figura 19. PIC 16f628a ......................................................................................... 49
Figura 20. Distribución de pines............................................................................ 50
Figura 21. Diagrama de bloques ........................................................................... 53
Figura 22. Interfaz de PCW................................................................................... 54
Figura 23. Software Visual Basic ........................................................................... 55
Figura 24. Diseño del prototipo ............................................................................. 56
Figura 25. Descripción del módulo Coordinador .................................................... 57
Figura 26. Esquema de conversor Serial-USB ...................................................... 58
Figura 27. Modulo móvil ......................................................................................... 59
Figura 28. Esquemático del módulo móvil ............................................................. 60
Figura 29. Diagrama general ................................................................................. 61
Figura 30 Diagrama de RFID ................................................................................. 62
Figura 31 Diagrama de flujo de XBee .................................................................... 63
Figura 32. Interfaz de localización ......................................................................... 64
Figura 33. Flujo de interfaz .................................................................................... 65
Figura 34. Códigos en X-CTU ................................................................................ 69
Figura 35. Mesas ................................................................................................... 70
Figura 36. Cafetería central ................................................................................... 71
Figura 37. Actualización ......................................................................................... 72
LISTA DE ANEXOS
pág.
ANEXO A. MANUAL DEL SISTEMA ..................................................................... 78
15
0. INTRODUCCIÓN La evolución en los procesos realizados por los centros comerciales ha ido de la mano con la revolución tecnológica de los últimos años, generando en las áreas de ingeniería una búsqueda de opciones para optimizar estos avances. Actualmente, la movilidad es un tema que despierta gran interés en los restaurantes; luego, tener la información necesaria en el momento y lugar indicado es una ventaja que debe ser aprovechada y explotada desde distintos puntos de vista. Conocer la localización de los clientes cobra vital importancia al momento de despachar los pedidos, además, con los avances en tecnologías de transmisión y recepción se puede generar una mejoría en ordenación, desplazamiento y dominio de la plaza. Esta investigación busca aportar en la construcción de conocimiento de sistemas de información inalámbrica y su integración con los diferentes sistemas de adquisición de datos y transmisión, de la misma manera contribuye a incentivar el interés por los temas de localización y de ubicación remota de una persona intentando hacer uso de las nuevas tecnologías de comunicación. Este proyecto permite diseñar e implementar un módulo funcional de comunicación inalámbrica y de identificación, para la localización de clientes en una plaza de comidas amplia. Este sistema facilita a los empleados de restaurantes determinar la posición de los clientes en una interfaz gráfica asociada con un modulo base. La tecnología usada está basada en dispositivos fáciles y seguros de usar para este tipo de entorno, la cual debe ser necesariamente inalámbrica dada las características variables del entorno de las plazas de comidas.
16
1. INFORMACIÓN PRELIMINAR 1.1 PLANTEAMIENTO DEL PROBLEMA En los restaurantes de las plazoletas de comidas ubicados en los centros comerciales, la entrega de los productos se basa en la ubicación visual de los usuarios. El método consiste en que el cliente va a un restaurante donde realiza un pedido y mediante esto se genera un turno, luego, el cliente se desplaza y ubica en una de las mesas en el centro comercial pero lejos del establecimiento, generando así un inconveniente para localizarlo a la hora de despachar los alimentos puesto que el sistema de localización es visual por medio de una bandera que se le da al cliente. Este método de localización es algo limitado y demorado, generando pérdida de tiempo de ubicación y clientes insatisfechos por el servicio. Se presenta la situación donde el cliente desea pedir algo adicional pero ya se encuentra en la mesa se tendrá que desplazar a la caja, o estar pendiente de uno de los meseros para que genere el pedido adicional. No hay tecnología para realizar este tipo de localización y generar un pedido adicional, ocasionando inconvenientes para la administración al no prestar un buen servicio al cliente y perdiendo la oportunidad de generar nuevas ventas. Donde se encuentran un problema de tecnología para aplicar en este sector, se busca una mejora en el sector de prestación de servicios aplicando nuevas opciones para localización por medios de micro controladores, dispositivos de comunicación inalámbrica, la cual podrá brindar un mejor servicio de localización para los meseros y administración en el sector de centros comerciales. 1.2 ANTECEDENTES Y JUSTIFICACIÓN Durante la investigación de este proyecto, se obtuvo información sobre pruebas de acceso inalámbrico llevadas a cabo en centros comerciales, específicamente en Chipichape ubicado en la Av. 6 N ya que en este centro se encuentran restaurantes que prestan un servicio de aviso inalámbrico. En este caso se obtuvo información y recomendaciones sobre la documentación de redes inalámbricas, así mismo se describe la experiencia que se ha obtenido en instalaciones y configuraciones de equipos inalámbricos. Una vez recolectada la información sobre las experiencias inalámbricas en restaurantes de centros comerciales de la ciudad, se procedió a consultar y analizar la información en internet sobre proyectos de redes inalámbricas en centros comerciales. El resultado de dicho análisis indica que las implementaciones de redes inalámbricas locales que se han realizado se basan en tecnología Wi- Fi.
17
Completando el análisis de lo anteriormente expuesto sería importante para todo lugar donde se preste un servicio ya sea restaurante de plazas o individual que cuente con algún sistema de localización de cliente y así serian resueltas las necesidades de tiempo breve, dando como resultado la satisfacción completa de ambas partes: administración y cliente. Actualmente la solución más generalizada en sistemas inalámbricos utilizada en los restaurantes de los centros comerciales es en donde avisan que su orden ya está disponible y acercarse a la caja por su pedido donde esta tecnología se basa en redes Wi-Fi. Estas redes seguirán siendo necesarias para el conjunto de locales que prestan esta forma de servicio pero no para restaurantes que despachan pedidos a la mesa en los centros comerciales donde las redes WI-FI no son una opción para este tipo de establecimientos que quieren prestar un servicio de comodidad y tranquilidad para los clientes.

18
2. OBJETIVOS
2.1 OBJETIVO GENERAL
Diseñar e implementar un prototipo electrónico para la localización de usuarios en restaurantes de los centros comerciales.
2.2 OBJETIVOS ESPECÍFICOS
Describir las características de los sistemas basados en localización en tiempo real.
Investigar y comparar los estándares de comunicación e interpretación de datos entre un dispositivo de información central y otro móvil usando un sistema basado en localización.
Analizar e integrar las arquitecturas que soporten los sistemas basados en localización (LBS), con el fin de proponer alternativas tecnológicas para su uso en los centros comerciales.
Diseñar e implementar un sistema que contenga, hardware y software para los dispositivos central y móvil que permitan su comunicación y la localización de los clientes.
Diseñar la interfaz de usuario y el sistema de adquisición de datos desde el dispositivo coordinador.
Realizar las pruebas de funcionamiento de envío y recepción de señal del prototipo final.
19
3. DESCRIPCIÓN DEL PROYECTO
Capítulo 1: describe de manera general el proyecto, la problemática del sector de las plazas de comidas amplias y se determinan los objetivos a realizar en este trabajo.
Capítulo 2: busca desarrollar una investigación sobre los antecedentes de la tecnología usada en las plazas de comidas de los centros comerciales para localización de clientes. Se realiza un estudio de la teoría y la tecnología asociada con la identificación usando comunicaciones inalámbricas.
Capitulo 3: en este capítulo se dará una descripción y comparación de las especificaciones sobre los dispositivos elegidos de acuerdo a la necesidad de los usuarios, como requisitos técnicos y funcionales de los mismos.
Capitulo 4: con el apoyo del capítulo anterior se realiza el diseño del prototipo propuesto con tecnología y software seleccionados anteriormente por sus descripciones.
Capitulo 5 este consta de pruebas y resultados realizados en distintos entornos por los módulos para observar y demostrar su funcionamiento en distintos entornos que son reflejados actualmente en el mercado.
20
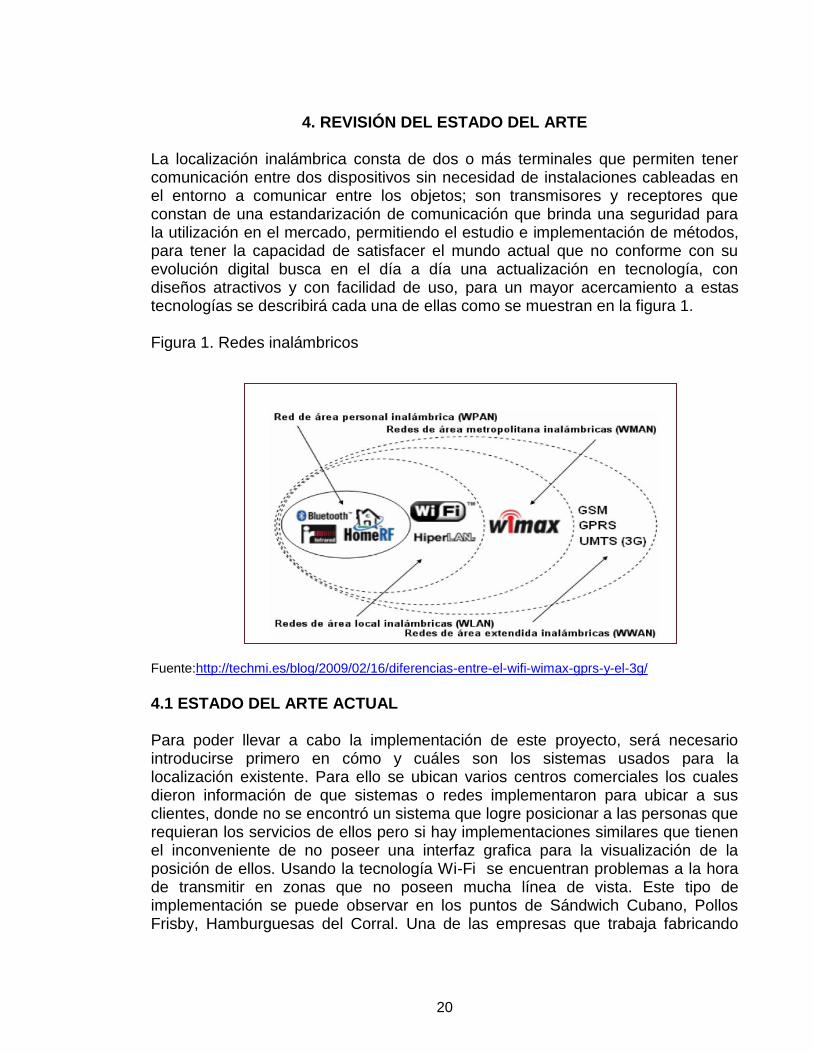
4. REVISIÓN DEL ESTADO DEL ARTE La localización inalámbrica consta de dos o más terminales que permiten tener comunicación entre dos dispositivos sin necesidad de instalaciones cableadas en el entorno a comunicar entre los objetos; son transmisores y receptores que constan de una estandarización de comunicación que brinda una seguridad para la utilización en el mercado, permitiendo el estudio e implementación de métodos, para tener la capacidad de satisfacer el mundo actual que no conforme con su evolución digital busca en el día a día una actualización en tecnología, con diseños atractivos y con facilidad de uso, para un mayor acercamiento a estas tecnologías se describirá cada una de ellas como se muestran en la figura 1. Figura 1. Redes inalámbricos
Fuente:http://techmi.es/blog/2009/02/16/diferencias-entre-el-wifi-wimax-gprs-y-el-3g/
4.1 ESTADO DEL ARTE ACTUAL Para poder llevar a cabo la implementación de este proyecto, será necesario introducirse primero en cómo y cuáles son los sistemas usados para la localización existente. Para ello se ubican varios centros comerciales los cuales dieron información de que sistemas o redes implementaron para ubicar a sus clientes, donde no se encontró un sistema que logre posicionar a las personas que requieran los servicios de ellos pero si hay implementaciones similares que tienen el inconveniente de no poseer una interfaz grafica para la visualización de la posición de ellos. Usando la tecnología Wi-Fi se encuentran problemas a la hora de transmitir en zonas que no poseen mucha línea de vista. Este tipo de implementación se puede observar en los puntos de Sándwich Cubano, Pollos Frisby, Hamburguesas del Corral. Una de las empresas que trabaja fabricando
21
estos sistemas de localización es LRS (Long Range System). Tiene su planta de fabricación en Texas Estado Unidos y ofrecen servicios similares como rastreador de mesas y el sistema de localización de mesas. 4.2 TECNOLOGÍA PARA LA LOCALIZACIÓN
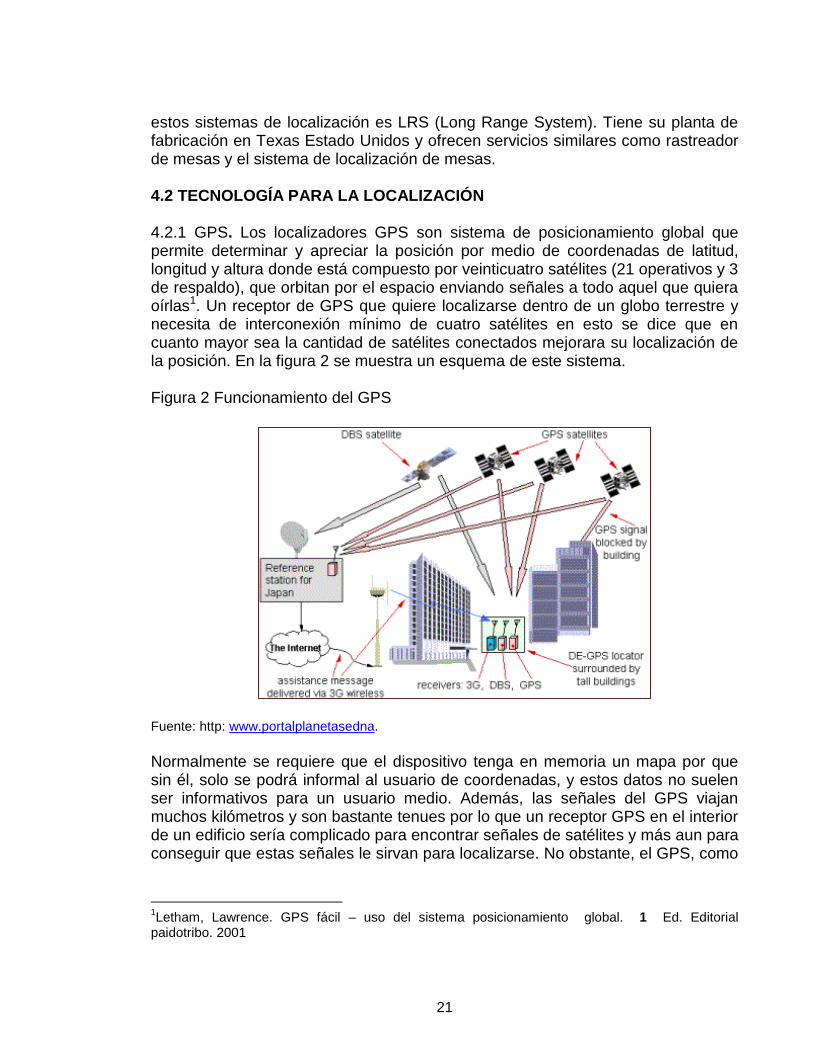
4.2.1 GPS. Los localizadores GPS son sistema de posicionamiento global que permite determinar y apreciar la posición por medio de coordenadas de latitud, longitud y altura donde está compuesto por veinticuatro satélites (21 operativos y 3 de respaldo), que orbitan por el espacio enviando señales a todo aquel que quiera oírlas1. Un receptor de GPS que quiere localizarse dentro de un globo terrestre y necesita de interconexión mínimo de cuatro satélites en esto se dice que en cuanto mayor sea la cantidad de satélites conectados mejorara su localización de la posición. En la figura 2 se muestra un esquema de este sistema. Figura 2 Funcionamiento del GPS Fuente: http: www.portalplanetasedna.
Normalmente se requiere que el dispositivo tenga en memoria un mapa por que sin él, solo se podrá informal al usuario de coordenadas, y estos datos no suelen ser informativos para un usuario medio. Además, las señales del GPS viajan muchos kilómetros y son bastante tenues por lo que un receptor GPS en el interior de un edificio sería complicado para encontrar señales de satélites y más aun para conseguir que estas señales le sirvan para localizarse. No obstante, el GPS, como
1Letham, Lawrence. GPS fácil – uso del sistema posicionamiento global. 1 Ed. Editorial
paidotribo. 2001
22
su nombre lo indica, es un sistema de posicionamiento global, y por tanto no está indicado para permitir la localización a nivel local. Un problema de GPS se debe a que por su diseño y para lo que fue realizado es para localizaciones extensas debido a su tecnología de satélites, esto permite que se localice en lugares no obstaculizados por estructuras físicas como edificios, casas, habitaciones, etc. 4.2.2 RFID. Los sistemas RFID como sus siglas lo dicen (identificación por radio frecuencia) es una forma de identificar remotamente e inalámbricamente como se observa en la figura 3. Esta tecnología existe desde los años 40, donde su mayor uso ha sido en el ejército para misiles con seguimiento, estos dispositivos han sido de gran ayuda en la actualidad desplazando otros métodos de identificación. Un sistema de RFID está compuesto de tres elementos:
Etiquetas (tags). Consiste en una antena que hace las funciones de trasmisor y receptor cuando recibe una onda de radio este la codifica y manda una respuesta en forma de señal 2.
Lectores. Estos se encargan de transferir pulsos de energía al tag el cual envía una respuesta que es el código que posee ella3.
Hardware de procesamiento. Típicamente estos son memorias que se usan para almacenar la información obtenida de los lectores.
Figura 3 Funcionamiento de RFID
Fuente: http://www.osesrfid.es/home/texto/16.html
2 Hunt. V. Puglia, Daniel Albert, Puglia Mike. RFID – A Guide to Radio Frequency Identification.
Willey (2007). 3RFID technology White paper. http://www.prototypexpress.com/rfidwhitepaper.htm [

23
En la tabla 1 se observan las frecuencias de funcionamiento del sistema RFID.
Tabla 1. Frecuencias de funcionamiento
Frecuencia LF 125KHz
HF 14.56MHz
UHF 368-915MHz
Microondas 2.4, 5.8 GHz
Rango máximo de lectura <0.5 m 1 m 3 m 1 m
Características generales Relativamente caro, requiere
antena de cobre, menor
sensibilidad a degradaciones
Menos caro que los LF rango de lectura
relativamente corto
En grandes cantidades pueden ser
baratos ofrece una buena
relación entre la distancia de
lectura y rendimiento
Características similares a UHF
pero con mayores tasas de lectura. Más susceptible a
degradaciones de rendimiento
Alimentación del tag En general, las etiquetas pasivas, utilizando sólo el acoplamiento inductivo
En general, las etiquetas pasivas,
utilizando sólo el
acoplamiento inductivo o capacitivo
etiquetas integral de la
batería o pasiva usando capacitiva, E-
campo de acoplamiento
etiquetas integral de la
batería o pasiva usando
capacitiva, E-campo de
acoplamiento
Lectura en obstáculos
mejor peor
Fuente: RFID technology White paper.
La localización por RFID puede ser una alternativa muy favorable en el momento de localizar e identificar a una persona hoy en día esta tecnología es muy concurrido, donde en la actualidad se encuentran en algunos distribuidores económicos para una diversidad de aplicaciones en redes inalámbricas. 4.2.3 Infrarrojo. Esta tecnología se basa en un tipo de luz como en la figura 4 que no puede ser detectada por el ojo humano ya que estos solo perciben lo que llamamos luz visible. La tecnología infrarroja nos brinda información específica que no podemos obtener con la luz cotidiana puesto que todos los objetos que irradien calor generan luz infrarroja. Estos manejan un estándar IRDA que soportan una amplia distribución electrónica de comunicación, estos permiten comunicación entre 2 dispositivos de forma bidireccional a velocidades entre 9600 bps y 4 Mbps4.
4 Que es infrarrojo http://legacy.spitzer.caltech.edu/espanol/edu/ir/infrared.html
24
Figura 4 Lector infrarrojo de código de barra
Fuente: http://laesa.com.ar/2011/10/02/lector-codigo-de-barras-ejemplo-aplicacion-net-c-mysql/.
4.2.4 Características
El infrarrojo requiere de una comunicación lineal entre el transmisor y el receptor, lo que hace impredecible la línea de vista para su efectiva transmisión.
Las frecuencias de la banda de infrarrojo no permiten la penetración a través de paredes, dándole una importante ventaja a la radiofrecuencia que opera el Bluetooth.
La comunicación con infrarrojo siempre será uno a uno, dejando de lado las configuraciones multipunto.
La red por infrarrojo permite la comunicación entre dos nodos, actualmente se pueden clasificar de acuerdo a dos criterios. El primero es el grado de direccionalidad del transmisor y del receptor, así podemos encontrar enlaces dirigidos y enlaces no dirigidos.
El segundo criterio de clasificación está relacionado con la existencia o no de una línea de vista entre el transmisor y el receptor. En los enlaces de línea de vista, la luz emitida por el transmisor llega directamente al receptor, también en los enlaces sin línea de vista, la luz que sale del transmisor llega al receptor generalmente después de haberse reflejado difusamente en una o varias superficies. Tenemos punto a punto, Cuasdifuso A y Difuso, consulte5:
5Red por infrarrojo
http://cmapserver.unavarra.es/servlet/SBReadResourceServlet?rid=1200396290104_1620023815_17314
25
Punto a Punto. En un enlace punto a punto, el transmisor concentra su potencia en una pequeña región del espacio, por lo cual, para una potencia dada, este sistema es el que mayor distancia puede alcanzar. De una manera parecida, el receptor capta luz infrarroja solo de una pequeña región del espacio, produciéndose así un mínimo de distorsión por multitrayectorias y de ruido causado por las fuentes de luz ambiental. La combinación de estas características da como resultado altas razones de transmisión y grandes alcances. Además de esto, los sistemas punto a punto son relativamente baratos y simples. Difuso. Los sistemas IR difusos son los más fáciles de utilizar y también los más robustos, no se requiere apuntar tanto al transmisor como al receptor, ni se requiere que haya línea de vista entre restos. Sin embargo, los sistemas IR difusos tienen más altas pérdidas de propagación que sus contrapartes de línea de vista, requiriendo altas potencias de transmisión y un receptor que tenga una gran área de colección de luz. La localización por infrarrojo varía en un amplio rango de posibilidades desde visión nocturna hasta el uso militar para rastreos. La localización por infrarrojo es muy limita por el espacio, por lo tanto, actualmente no es una alternativa para el tipo de sistema se desea implementar, además, la limitación de esta alternativa tecnológica es que la radicación no atraviesa las paredes y el sistema va ser diseñado para ubicar al cliente en cualquier parte del centro comercial y así prestarle un buen servicio. Cuasdifuso A. Son métodos de emisión radial, es decir que cuando una estación emite una señal óptica, esta puede ser recibida por todas las estaciones al mismo tiempo en la célula. En este modo las estaciones se comunican entre sí por medio de superficies reflectantes. No es necesaria la línea de visión entre dos estaciones, pero si deben estarlo con la superficie de reflexión. Además es recomendable que las estaciones estén cerca a la superficie de reflexión, esta puede ser activa o pasiva. En las célula basadas en reflexión pasiva, el reflector debe tener altas propiedades reflectivas y dispersivas, mientras que las basadas en la superficie de reflexión activa se requiere de un dispositivo de salida reflexivo, conocido como satélite, que amplifica la señal óptica. La reflexión pasiva requiere más energía, por parte de las estaciones, pero es más flexible de usar. 4.2.5 Bluetooth. Se denomina Bluetooth al protocolo de comunicaciones diseñado especialmente para dispositivos de bajo consumo, con una cobertura baja y basada en transceptores de bajo costo6. Se inicia a principios del año 1998 con (Special Interest Group) publicado por empresas de comunicación como Sony Ericsson, IBM, Intel, Nokia, etc.
6 Bluetooth special interest group https://www.bluetooth.org/apps/content/

26
Implementado para trasmisión de datos entre celulares de gama alta en aquel tiempo. 4.2.5.1 Funcionamiento. Es una especificación industrial para redes inalámbricas de área personal que posibilita la transmisión de datos entre diferentes dispositivos por medio de radio frecuencia segura. Esta tecnología trabaja en dos capas de modelo OSI que son de enlace y aplicación, donde se implementa un transceiver que funciona a frecuencias de 2.4Ghz. Su conexión se realiza uno a uno (dispositivo con dispositivo) a una distancia máxima de 10 metros con deficiencia en la señal o demora en la velocidad de transmisión. Bluetooth cuenta con mecanismos de seguridad por medio de encriptación de 64bits y autenticación para manipular la conexión y evitar que otros dispositivos puedan acceder a los datos o realizar otra operación indeseada. Los trasmisores operan en una frecuencia de banda global. Su velocidad máxima que alcanza durante la transferencia es de 700kb/s. y su consumo de potencia es mucho mayor al de otros dispositivos. 4.2.5.1 Objetivos de la tecnología Bluetooth
Permitir la comunicación sencilla entre dispositivos fijos y móviles.
Eliminar la dependencia de cables que operan la comunicación.
Facilitar la sincronización de pequeñas redes de comunicación.
4.2.5.1.1 Modo de Trasmisión. El modo de transmisión de esta tecnología se puede realizar de 2 formas datos asíncronos y vos síncrona.
Síncrono: este es orientado a conexiones de voz que es conocido como SC
Asíncrono: es utilizada para trasmisión de datos y es conocida con ACL. Es un estándar de red ad hoc de corto alcance que utiliza la misma banda de 2.4 GHz que el estándar 802.11b. Diseñado para ir a una velocidad de 1 Mbps o con un rendimiento en red de alrededor de 700kbps, este omite toda carga de Ethernet para permitir conexiones muy veloces en los dispositivos con transiciones de un solo elemento.
27
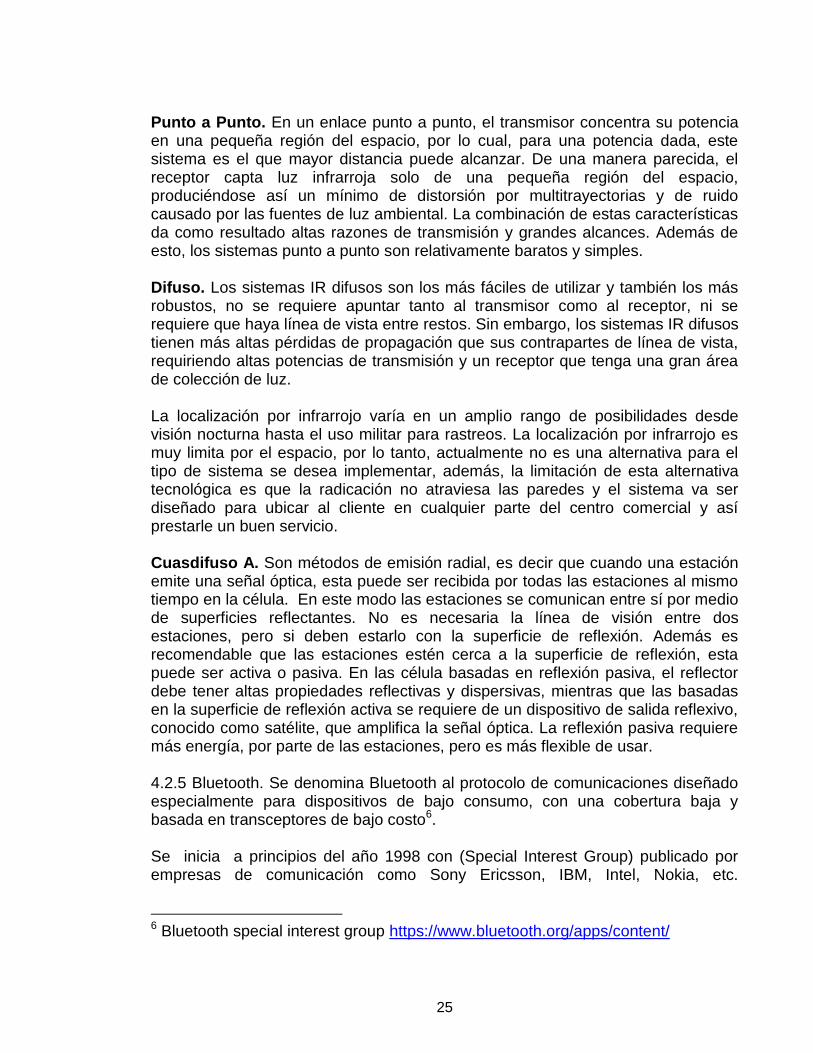
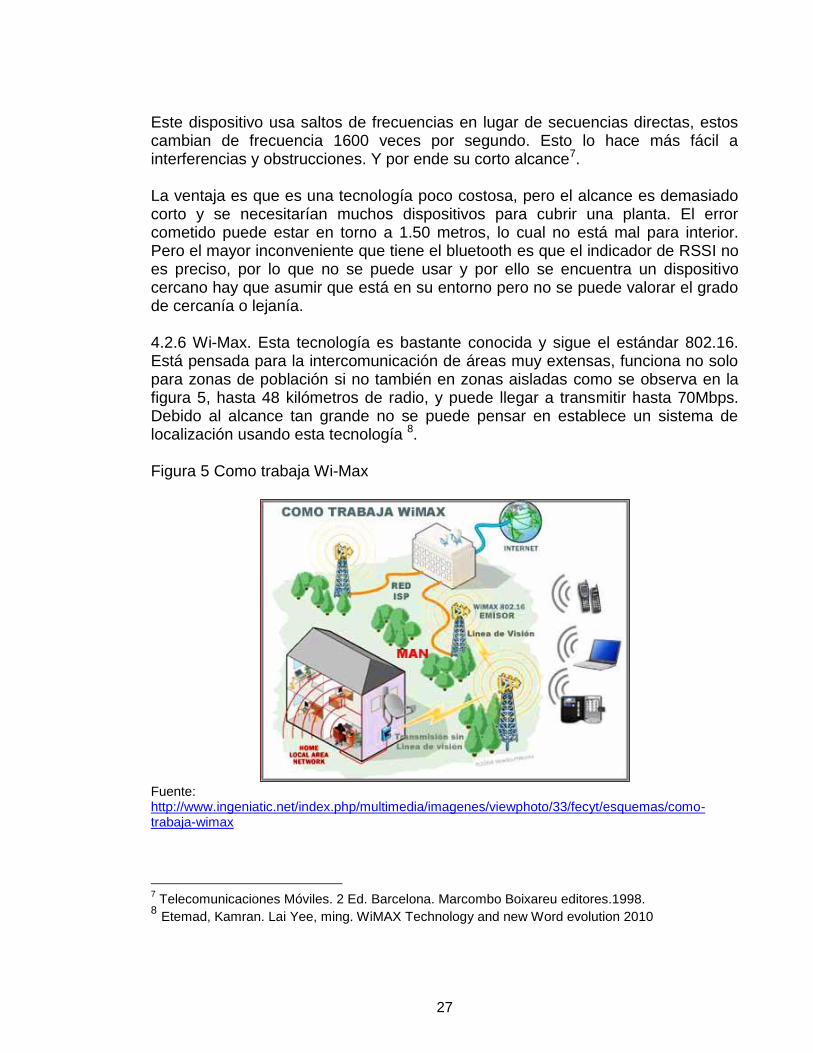
Este dispositivo usa saltos de frecuencias en lugar de secuencias directas, estos cambian de frecuencia 1600 veces por segundo. Esto lo hace más fácil a interferencias y obstrucciones. Y por ende su corto alcance7. La ventaja es que es una tecnología poco costosa, pero el alcance es demasiado corto y se necesitarían muchos dispositivos para cubrir una planta. El error cometido puede estar en torno a 1.50 metros, lo cual no está mal para interior. Pero el mayor inconveniente que tiene el bluetooth es que el indicador de RSSI no es preciso, por lo que no se puede usar y por ello se encuentra un dispositivo cercano hay que asumir que está en su entorno pero no se puede valorar el grado de cercanía o lejanía. 4.2.6 Wi-Max. Esta tecnología es bastante conocida y sigue el estándar 802.16. Está pensada para la intercomunicación de áreas muy extensas, funciona no solo para zonas de población si no también en zonas aisladas como se observa en la figura 5, hasta 48 kilómetros de radio, y puede llegar a transmitir hasta 70Mbps. Debido al alcance tan grande no se puede pensar en establece un sistema de localización usando esta tecnología 8. Figura 5 Como trabaja Wi-Max
Fuente: http://www.ingeniatic.net/index.php/multimedia/imagenes/viewphoto/33/fecyt/esquemas/como-trabaja-wimax
7 Telecomunicaciones Móviles. 2 Ed. Barcelona. Marcombo Boixareu editores.1998.
8 Etemad, Kamran. Lai Yee, ming. WiMAX Technology and new Word evolution 2010
28
4.2.6.1 Características
Capa MAC con soporte múltiples especificaciones físicas (PHY).
Distancias hasta 48 Kilómetros (teórica).
Velocidad de hasta 70 Mbps.
Facilidades para añadir más canales.
Soporte nativo para calidad de servicio (QoS). 4.2.7 UWB (Ultra Wideband).Estos dispositivos como su nombre lo indica “ultra Wideband” que traduce ultra banda ancha. Es unas de las tecnologías que brindan una mayor conectividad y una amplia velocidad como para navegación en web. Es usada más para contenidos de video y audio. Ella fue aprobada por la comisión federal de comunicaciones en marzo de 2002 y se conoce como cualquier tecnología de radio que contenga un espectro de ancho de banda mayor al 27% de la frecuencia establecida o central; o un ancho de banda mayor que 1.5 GHz9. En la figura 6 se observa que los dispositivos UWB funcionan como router Wi-fi pero con un ancho de banda mucho mayor al Wi-Fi. Figura 6 Red UWB
Fuente: http://www.vivasemfio.com/blog/tag/uwb/ Esta tecnología es atractiva ya que maneja velocidades altas y más intensas con distancias cortas. Lo cual lo hace más usable en hogares o en lugares pequeños y específicos de empresas y negocios.
9 Haykin, Simón. Sistemas de comunicación.1 Ed. México. Limusa noriega editores.2002
29
4.2.7.1 Características de UWB Las principales características de UWB son:
Puede operar legalmente en frecuencias de 3.1 GHz a 10.8Ghz con una limitación con la transmisión que es su potencia (-41Dbm/MHz) por esta razón es más corto su alcance, pero asegura libre interferencias y una óptima comunicación10
Su ancho de banda depende mucho de su central.
Esta es más usada en WPAN (Wireless Personal Área Network), puesto que esta permite un menor consumo de potencia y con manejado por corto alcance.
Ofrece una alta velocidad de transmisión con la condición de que el transmisor y el receptor estén en un área de 10 metros o menos.
4.2.7.1 Aplicaciones. Las aplicaciones de este dispositivo son los de remplazar los cables, por comunicación inalámbrica para la transferencia de dispositivos portátiles. Habilitación de alta velocidad por medio del WUSB, un dispositivo USB inalámbrico para conectar computadores y periféricos como los son impresoras, y dispositivos de almacenamiento (Discos duros). Dentro del sector militar y del Gobierno, UWB también ha tenido muchas soluciones muy llamativas y muy usadas. Por ejemplo el gobierno de USA usó esta tecnología después del suceso del 11 de Septiembre en un radar conocido como GPR (Radar de penetración terrestre) para encontrar víctimas entre los escombros del atentado. 4.2.8 ZIGBEE. En este dispositivo se observa que es diseñado y jerarquizado por Zigbee Alliance. Puesto que no es una tecnología, sino un conjunto estandarizado de soluciones que pueden ser implementadas por cualquier distribuidor o empresa. Zigbee se encuentra establecido en el estándar IEEE 802.15.4 que es una norma regida para algunas redes inalámbricas de área personal, es promovida por muchas empresas de comunicación con objetivo de crear y habilitar redes inalámbricas capaces de ser tanto controladas como monitorizadas pero que sean confiables para la sociedad tanto en los entornos industriales, como su bajo consumo energético y de costos, este funciona vía radio frecuencia y de modo bidireccional; todos con una norma única que permita a usuarios y desarrolladores fabricar productos que sean compatibles entre ellos11.
10
Ibid 11 Product Manual v1.xAx - 802.15.4 Protocol www.maxstream.net
30
4.2.9.1 Características Las características más comunes de Zigbee son:
Su banda de operación libres ISM (industrial, Scientífic & medical) de 2.4 GHz, 868MHz (EUROPA) y 915 MHz (USA).
Su velocidad de transmisión redondea entre 250 Kbps a 270 Kbps y rangos de 10 a 75 metros puede ser más dependiendo de la antena.
Debido al estándar de IEEE 802.15.4. su desempeño no se afecta con la frecuencia de otros como Bluetooth y Wi-Fi.
En configuración de red Zigbee posee un identificador de red único, lo que permite una comunicación sin problema puesto que tendría un mayor acceso a enviar la información
4.2.9.2 Tipos de dispositivos Descripción de 3 tipos de dispositivos Zigbee según su distribución en la red:
Coordinador Zigbee. Se puede decir que es unos de los más completos. Puesto que puede actuar como director de una red así como servir de enlace a otras redes. Es el nodo que comienza en principio.
Router Zigbee. Este puede actuar como router interconectando dispositivos separados en la topología de la red.
Dispositivo final. Este puede comunicarse con el nodo padre pero no puede transmitir datos o información a otros dispositivos. Por esto es más económico puesto que la mayor parte del tiempo va a estar dormido (apagado), aumentando la vida útil de las baterías.
4.2.10 Arquitectura. Zigbee posee una pila de protocolos, que es casi igual al modelo OSI está constituido por diferentes capas.
31
Tabla 2. Arquitectura Zigbee
Fuente: http://www.casadomo.com/noticiasDetalle.aspx?id=7123&c=6
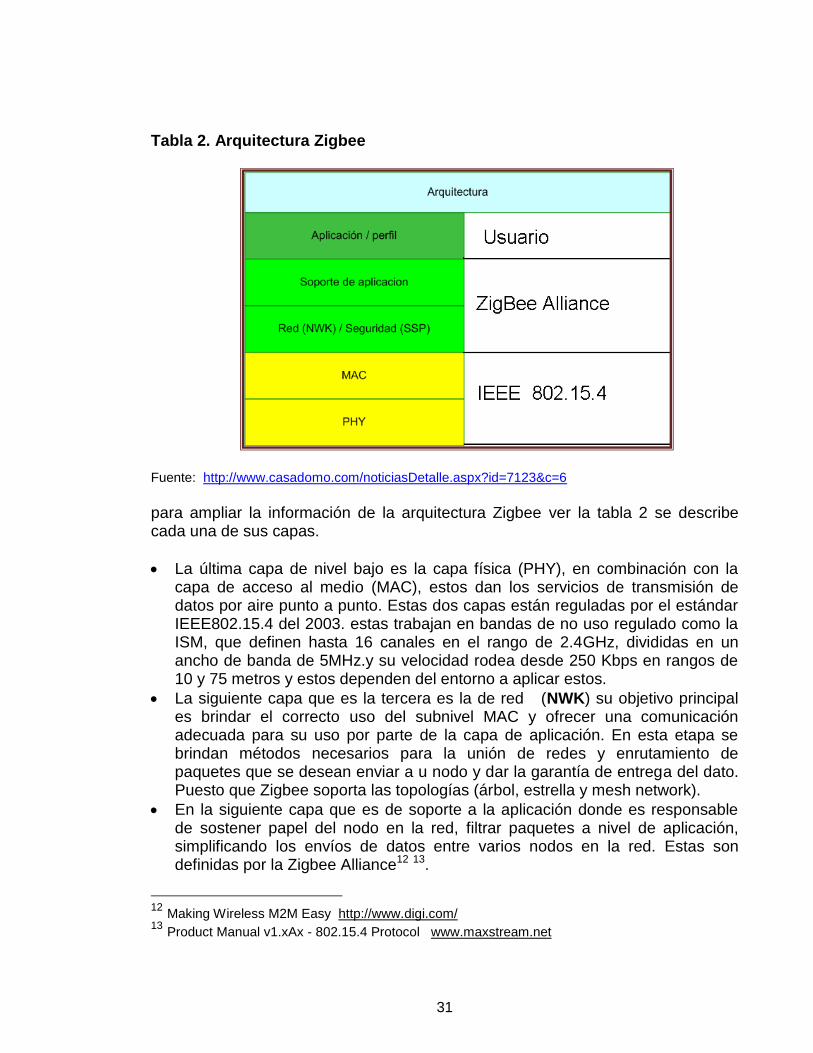
para ampliar la información de la arquitectura Zigbee ver la tabla 2 se describe cada una de sus capas.
La última capa de nivel bajo es la capa física (PHY), en combinación con la capa de acceso al medio (MAC), estos dan los servicios de transmisión de datos por aire punto a punto. Estas dos capas están reguladas por el estándar IEEE802.15.4 del 2003. estas trabajan en bandas de no uso regulado como la ISM, que definen hasta 16 canales en el rango de 2.4GHz, divididas en un ancho de banda de 5MHz.y su velocidad rodea desde 250 Kbps en rangos de 10 y 75 metros y estos dependen del entorno a aplicar estos.
La siguiente capa que es la tercera es la de red (NWK) su objetivo principal es brindar el correcto uso del subnivel MAC y ofrecer una comunicación adecuada para su uso por parte de la capa de aplicación. En esta etapa se brindan métodos necesarios para la unión de redes y enrutamiento de paquetes que se desean enviar a u nodo y dar la garantía de entrega del dato. Puesto que Zigbee soporta las topologías (árbol, estrella y mesh network).
En la siguiente capa que es de soporte a la aplicación donde es responsable de sostener papel del nodo en la red, filtrar paquetes a nivel de aplicación, simplificando los envíos de datos entre varios nodos en la red. Estas son definidas por la Zigbee Alliance12 13.
12 Making Wireless M2M Easy http://www.digi.com/ 13 Product Manual v1.xAx - 802.15.4 Protocol www.maxstream.net
32
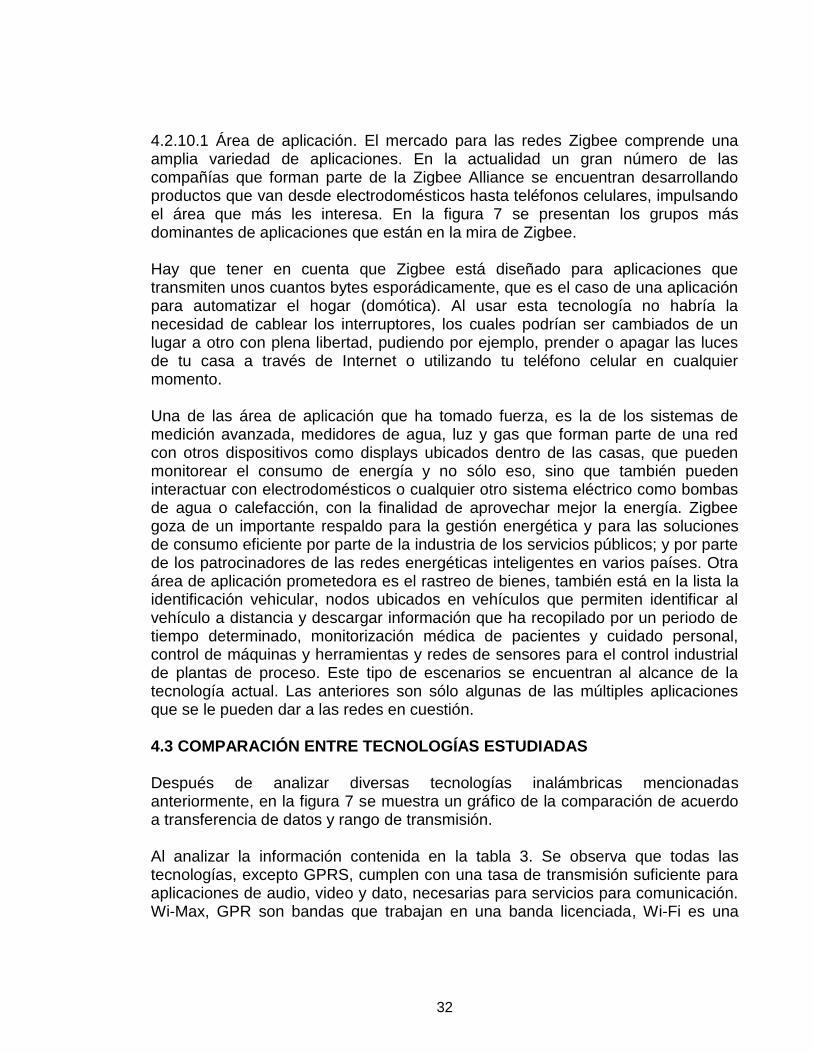
4.2.10.1 Área de aplicación. El mercado para las redes Zigbee comprende una amplia variedad de aplicaciones. En la actualidad un gran número de las compañías que forman parte de la Zigbee Alliance se encuentran desarrollando productos que van desde electrodomésticos hasta teléfonos celulares, impulsando el área que más les interesa. En la figura 7 se presentan los grupos más dominantes de aplicaciones que están en la mira de Zigbee. Hay que tener en cuenta que Zigbee está diseñado para aplicaciones que transmiten unos cuantos bytes esporádicamente, que es el caso de una aplicación para automatizar el hogar (domótica). Al usar esta tecnología no habría la necesidad de cablear los interruptores, los cuales podrían ser cambiados de un lugar a otro con plena libertad, pudiendo por ejemplo, prender o apagar las luces de tu casa a través de Internet o utilizando tu teléfono celular en cualquier momento. Una de las área de aplicación que ha tomado fuerza, es la de los sistemas de medición avanzada, medidores de agua, luz y gas que forman parte de una red con otros dispositivos como displays ubicados dentro de las casas, que pueden monitorear el consumo de energía y no sólo eso, sino que también pueden interactuar con electrodomésticos o cualquier otro sistema eléctrico como bombas de agua o calefacción, con la finalidad de aprovechar mejor la energía. Zigbee goza de un importante respaldo para la gestión energética y para las soluciones de consumo eficiente por parte de la industria de los servicios públicos; y por parte de los patrocinadores de las redes energéticas inteligentes en varios países. Otra área de aplicación prometedora es el rastreo de bienes, también está en la lista la identificación vehicular, nodos ubicados en vehículos que permiten identificar al vehículo a distancia y descargar información que ha recopilado por un periodo de tiempo determinado, monitorización médica de pacientes y cuidado personal, control de máquinas y herramientas y redes de sensores para el control industrial de plantas de proceso. Este tipo de escenarios se encuentran al alcance de la tecnología actual. Las anteriores son sólo algunas de las múltiples aplicaciones que se le pueden dar a las redes en cuestión. 4.3 COMPARACIÓN ENTRE TECNOLOGÍAS ESTUDIADAS Después de analizar diversas tecnologías inalámbricas mencionadas anteriormente, en la figura 7 se muestra un gráfico de la comparación de acuerdo a transferencia de datos y rango de transmisión. Al analizar la información contenida en la tabla 3. Se observa que todas las tecnologías, excepto GPRS, cumplen con una tasa de transmisión suficiente para aplicaciones de audio, video y dato, necesarias para servicios para comunicación. Wi-Max, GPR son bandas que trabajan en una banda licenciada, Wi-Fi es una
33
tecnología que provee una gran tasa de transmisión; sin embargo, no apta para áreas extensa14. Figura 7. Comparación de las tecnologías
UW
B
ZigBee
bluetooth
Red celular
WiFi
Mas cerca rango de cobertura muy lejos
Ma
s le
nto
s tr
an
sfe
ren
cia
de
da
tos m
as r
áp
ido
Aplicaciones inalámbricas de
datos y vos
WiFi y ZigBee redes
inalambricas de sensores y
control Transmisión de datos
Aplicaciones inalámbricas de
video
Fuente: Martin, James. Telecommunications and the computer. 2 Ed. New Jersey. Prentice-hall. 1976.
Tabla 3. Cuadro de comparaciones 1
Tecnología
Capacidad de red
Costos
Estándares Radio de
transmisión Tasa de
transmisión Vida de la
batería
Aplica para esta
propuesta
GPS costosa
GPRS 30 Km 114Kbps Muchos
años No
Bluetooth 7 nodos Costosa
802.15.1 0,1-10m 72 kbps Varias horas
No
Wi-Max 60 nodos Costosa
802.16 1-15Km 100 Mbps Varias horas
Si
Wi-Fi 32 nodos económica
802.11 0,01-100m 54Mbps Varias horas
SI
UWB 20 nodos costosa
IEEE <10m 100Mbps Varios meses
SI
Zigbee 65000 nodos
económica 802.15.4
120m-1.6km
250 Kbps Varios años
Si
Fuente: lapis semiconductor http://www.lapis-semi.com/en/semicon/telecom/zigbee.htm
De acuerdo a la información de la tabla 3, se puede concluir que de las tecnologías relacionadas las que pueden aplicar para este proyecto son: Wi-Max,
14
James. Telecommunications and the computer. 2 Ed. New Jersey. Prentice-hall. 1976.

34
UWB, Zigbee, Wi-Fi debido al alcance y al acceso en interiores. De estas tecnologías las más económicas de acuerdo a los dispositivos comerciales son Zigbee y Wi-Fi por eso se descartan las otras dos y se hace un análisis más detallado en el capítulo 3. 4.4 PUERTOS DE COMUNICACIÓN Los puertos de comunicación son instrumentos que permiten intercambiar información de forma digital entre un computador y su variedad de periféricos, también15 permiten la modalidad de intercomunicar entre computadores permitiendo crear redes cableadas entre los diferentes modos de comunicación distinguimos los siguientes: 4.4.1 Puerto serial (COM). Este puerto aun es visto en computadores por computadores de mesa, por lo que son adaptadores que envían y reciben información de bit a bit por fuera del computador a través de un único cable lo cual permite transferencias sencillas de comunicación. 4.4.2 Características. La comunicación serial se identifica en funcionamiento como puerto COM (comunicaciones). Los voltajes enviados por los pines son en 2 estados, encendido o apagados cuando esta encendido dirá que está transmitiendo una señal entre (-3 y -25) voltios y cuando está apagado que transmite una señal (+3 y +25) voltios, DB-25 (que son de 25 pines) y DB-9 (que son de 9 pines) que es más económico que el DB-25, ver la figura 8.
Figura 8. Puerto serial
Fuente: http://informatica1av.bligoo.com.mx/banco-de-preguntas-y-problemas-tercera-parte
15 puertos de comunicación http://raparaciondehardware11i.blogspot.com/2010/05/15-puertos-usb-
ethernet-tarjeta-red.html
35
4.4.3 Puertos USB (Universal Serial Bus). Este tipo de comunicación comenzó en el año 1995 por Intel, COMPAQ, Microsoft, en 1997 se hizo popular por su rapidez y su sencillez hasta la fecha. Es una arquitectura de bus desarrollada por las industrias de computadoras y telecomunicaciones, que permite trasmisiones de datos mucho más veloz que otros puertos, es decir, que basta con conectar dicho periférico en la parte posterior del computador como se muestra en la figura 9. Figura 9. Puerto USB
Fuente: http://redesangie.blogspot.com/2010_05_01_archive.html
4.4.3.1 Características
Una central USB le permite adjuntar dispositivos periféricos rápidamente, sin necesidad de reiniciar la computadora ni de volver a configurar el sistema.
El USB trabaja como interfaz para la transmisión de datos y distribución de energía que ha sido introducido en el mercado de PC y periféricos para mejorar las lentas interfaces serie y paralelo16.
Los periféricos para puertos USB son reconocidos automáticamente por el computador y se configuran casi automáticamente lo cual evita inconvenientes al instalar un nuevo dispositivo en el PC.
Los puertos USB son capaces de transmitir datos a 12 Mbps. 4.4.4 Microcontroladores. Un microcontrolador es un circuito integrado que posee muchas habilidades importantes, este se deriva de un microprocesador y al tener más funciones se usa frecuentemente para las tareas más robustas. Estos dispositivos se encuentran hoy en día en múltiple acciones haciendo más cómodo y fácil el día a día de las personas, se encuentran como elemento de
16
Configuraciones de quipos http://www.configurarequipos.com/doc435.html
36
control dentro del funcionamiento de la gran mayoría de dispositivos como televisores, radios, cámara, computadores, etc. El nombre de microcontrolador lo reciben porque es un dispositivo donde su uso es gobernar procesos de carácter industrial hasta procesos pequeños como los de una casa etc. Su implementación física es como se muestra en la figura 10. Hace mucho tiempo los controladores electrónicos se construían exclusivamente con componentes de lógica discreta, hoy en día todos los elementos de un controlador se han podido integrar en un solo circuito, el cual es llamado microcontrolador. El microcontrolador posee los siguientes componentes:
Procesador o CPU.
Memoria RAM.
Memoria ROM/EPROM/FLASH.
Líneas de E/S.
Temporizadores.
Puertos serie paralelo.
CAD (convertidor análogo digital).
CDA (convertidor digital análogo).
Generador de impulsos de reloj.
37
Figura 10. Microcontrolador
Fuente: Microprocesador http://www.mitecnologico.com/Main/ProcesadorCpu
4.4.5 Procesador o CPU. Es el corazón de todo ordenador, y es un microchip con una alta escala de integración, es decir, que aloja millones de transistores en su interior. Todos estos transistores forman una serie de circuitos lógicos que permite ejecutar una determinada variedad de instrucciones básicas17. El microprocesador secciona en varias fases de ejecución la realización de cada instrucción:
Fetch, lectura de la instrucción desde la memoria principal.
Decodificación de la instrucción, es decir, determinar qué instrucción es y por tanto qué se debe hacer.
Fetch de los datos necesarios para la realización de la operación.
Escritura de los resultados en la memoria principal o en los registros.
17
Microprocesador http://www.mitecnologico.com/Main/ProcesadorCpu
38
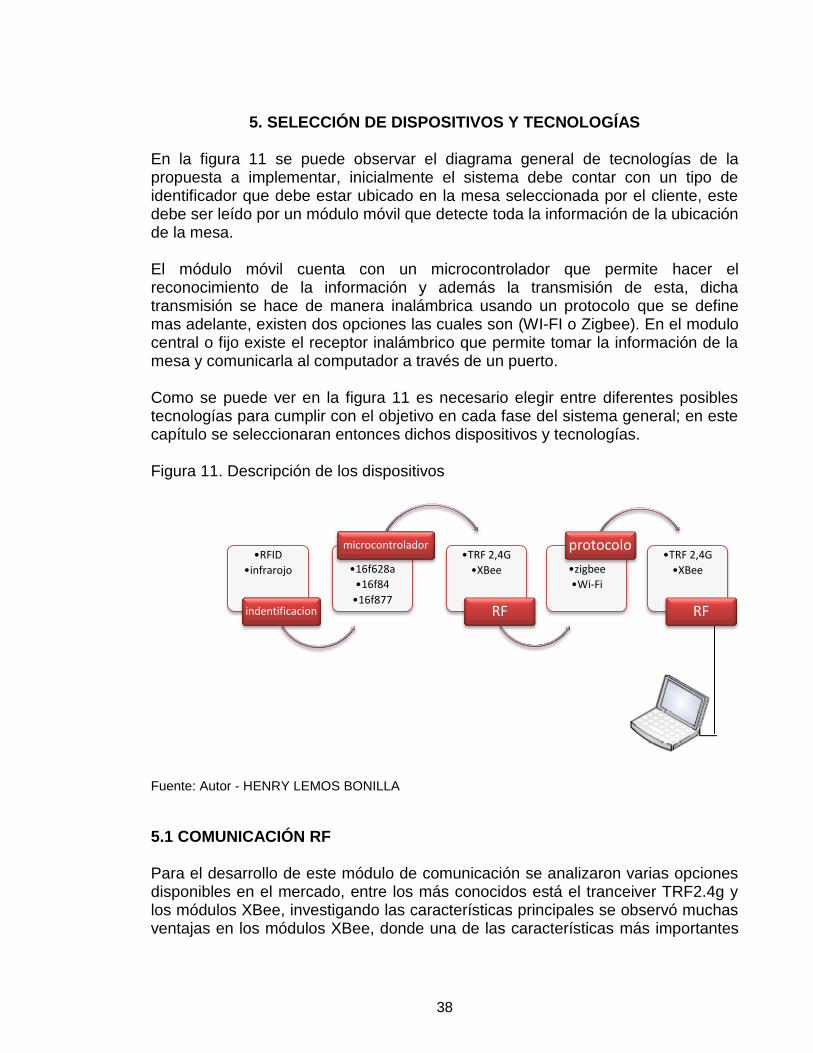
5. SELECCIÓN DE DISPOSITIVOS Y TECNOLOGÍAS En la figura 11 se puede observar el diagrama general de tecnologías de la propuesta a implementar, inicialmente el sistema debe contar con un tipo de identificador que debe estar ubicado en la mesa seleccionada por el cliente, este debe ser leído por un módulo móvil que detecte toda la información de la ubicación de la mesa. El módulo móvil cuenta con un microcontrolador que permite hacer el reconocimiento de la información y además la transmisión de esta, dicha transmisión se hace de manera inalámbrica usando un protocolo que se define mas adelante, existen dos opciones las cuales son (WI-FI o Zigbee). En el modulo central o fijo existe el receptor inalámbrico que permite tomar la información de la mesa y comunicarla al computador a través de un puerto. Como se puede ver en la figura 11 es necesario elegir entre diferentes posibles tecnologías para cumplir con el objetivo en cada fase del sistema general; en este capítulo se seleccionaran entonces dichos dispositivos y tecnologías. Figura 11. Descripción de los dispositivos
Fuente: Autor - HENRY LEMOS BONILLA
5.1 COMUNICACIÓN RF Para el desarrollo de este módulo de comunicación se analizaron varias opciones disponibles en el mercado, entre los más conocidos está el tranceiver TRF2.4g y los módulos XBee, investigando las características principales se observó muchas ventajas en los módulos XBee, donde una de las características más importantes
•RFID
•infrarojo
indentificacion
•16f628a
•16f84
•16f877
microcontrolador •TRF 2,4G
•XBee
RF
•zigbee
•Wi-Fi
protocolo •TRF 2,4G
•XBee
RF
39
y favorable para este proyecto es que se puede crear redes con más de 65000 nodos y permite la recepción y transmisión a grandes distancias, permitiendo que el modelo diseñado en este proyecto sea escalable a las necesidades reales. La frecuencia de operación de los módulos XBee es de 2.4GHz y permiten una velocidad de transmisión de 256 Kbps, los TRF2.4GHz funcionan a la misma frecuencia de los XBee y tienen una velocidad de transmisión de 1Mbsp a 50 metros y de 256 kbps a 100 metros, el modulo XBee permite la comunicación bidireccional en cambio el modulo TRF24GHZ solo permite la comunicación unidireccional, otra ventaja del modulo XBee es la baja circuitería comparada con el TRF 2.4G, esta característica permite reducir el tamaño de los modelos finales en un 70%. Un resumen de lo anterior se expone a continuación en la tabla 4 Tabla 4. Comparaciones entre XBee Y TRF2.4G XBee (Zigbee) TRF 2.4 GHz (Wi-Fi)
Velocidad de transmisión 250Kbps 250Kbps-1Mbps Configuración tipo red 65.000 no Implementación en circuito Sencilla complicada Ahorro energético 80% 40% Distancia de transmisión 50m-1.6Km 20m-100m
Fuente: Autor - HENRY LEMOS BONILLA
Por estas y otras características que se explicaran con más detalle a continuación, la comunicación RF se implementará con los módulos XBee y con el protocolo Zigbee. 5.2 MÓDULOS XBEE Figura 12. Moduló XBee serie 2
Fuente: http://store.nkcelectronics.com/xbee-zb-zigbee-pro-rf-module.html
Los módulos XBee (ver figura 12), tienen una gran variedad de desarrolladores y distribuidores entre ellos están Digi International y manejan el protocolo de
40
comunicación de Sebe. A continuación se presentan sus principales características como su modo de configuración, direccionamiento y distribuciones de pines. Los XBee serie 2 fueron creados para operar dentro del protocolo Zigbee18 puesto que es una de las tecnología de bajo consumo de energía y de bajo costo. Los módulos funcionan con un mínimo de energía y proporciona información segura de datos en una red. Estos operan en una frecuencia de 2.4GHz.
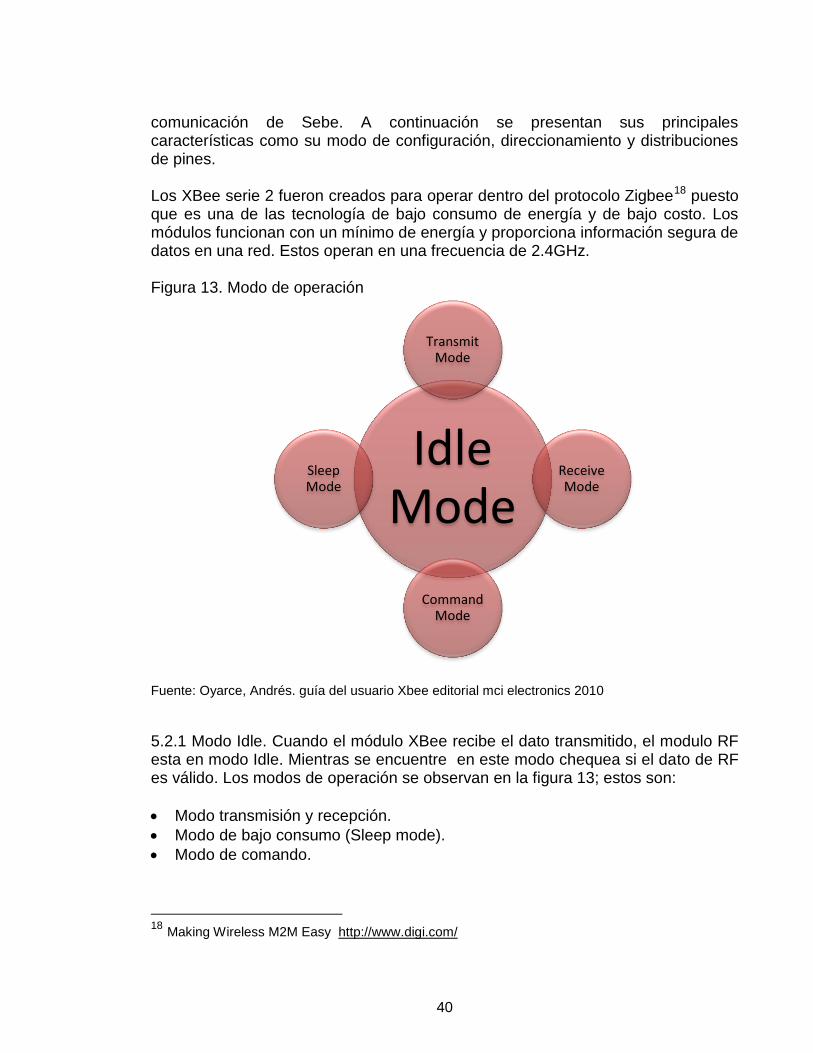
Figura 13. Modo de operación
Fuente: Oyarce, Andrés. guía del usuario Xbee editorial mci electronics 2010
5.2.1 Modo Idle. Cuando el módulo XBee recibe el dato transmitido, el modulo RF esta en modo Idle. Mientras se encuentre en este modo chequea si el dato de RF es válido. Los modos de operación se observan en la figura 13; estos son:
Modo transmisión y recepción.
Modo de bajo consumo (Sleep mode).
Modo de comando.
18 Making Wireless M2M Easy http://www.digi.com/
Idle Mode
Transmit Mode
Receive Mode
Command Mode
Sleep Mode
41
Modo transmisión y recepción. Este modo maneja diversas formas de manejar
el XBee, estos son los más manejados por las personas por su facilidad y su
confiabilidad (ver figura 15)19.
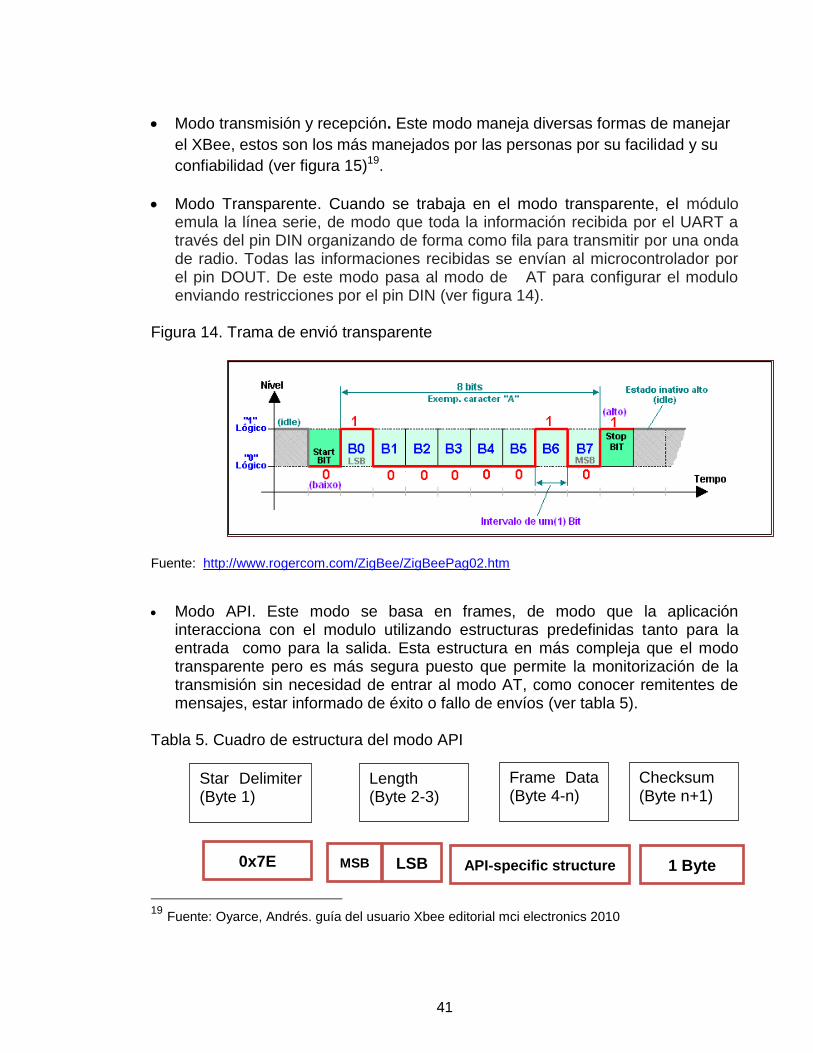
Modo Transparente. Cuando se trabaja en el modo transparente, el módulo emula la línea serie, de modo que toda la información recibida por el UART a través del pin DIN organizando de forma como fila para transmitir por una onda de radio. Todas las informaciones recibidas se envían al microcontrolador por el pin DOUT. De este modo pasa al modo de AT para configurar el modulo enviando restricciones por el pin DIN (ver figura 14).
Figura 14. Trama de envió transparente
Fuente: http://www.rogercom.com/ZigBee/ZigBeePag02.htm
Modo API. Este modo se basa en frames, de modo que la aplicación interacciona con el modulo utilizando estructuras predefinidas tanto para la entrada como para la salida. Esta estructura en más compleja que el modo transparente pero es más segura puesto que permite la monitorización de la transmisión sin necesidad de entrar al modo AT, como conocer remitentes de mensajes, estar informado de éxito o fallo de envíos (ver tabla 5).
Tabla 5. Cuadro de estructura del modo API
19 Fuente: Oyarce, Andrés. guía del usuario Xbee editorial mci electronics 2010
0x7E MSB LSB API-specific structure 1 Byte
Star Delimiter (Byte 1)
Length (Byte 2-3)
Frame Data (Byte 4-n)
Checksum (Byte n+1)

42
Fuente: http://www.rogercom.com/ZigBee/ZigBeePag02.htm
Antes de realizar la transmisión de datos, los módulos almacenan las direcciones de 16-bits que son las correspondientes a la red y de una ruta ya establecida. Si la ruta no se sabe, el descubrimiento de direcciones se lleva a cabo. Si una ruta no es conocida, el paquete suele desecharse. La información transmitida puede ser directa o indirecta. Es una ventaja en los módulos RF XBee que se puede usar en modo de red o transmite y recibe, permitiendo crear redes de 6500 nodos por medio de configuración en modo api la cual permite crear direcciones entre ellos. Si un paquete de RF confirma su paquete de recibido y su dirección coincide con el del modulo coordinador con una fuente de 16-bit de la fuente de dirección como parámetro, este procede a recibir y mandar los datos a la memoria interna de él para almacenarse. Figura 15. Modo de transmisión
Fuente: Oyarce, Andrés. guía del usuario Xbee editorial mci electronics 2010 .
Modo de Bajo Consumo (Sleep Mode). En modo de bajo consumo hace posible que el modulo XBee entre en un modo de suspensión cuando no se encuentra en uso permitiendo un ahorro de energía dando un mejor manejo de los módulos dando una mayor vida útil.

43
El modo de suspensión funciona de forma compatible entre los módulos finales, como los Router y Coordinador ya que envían información a los dispositivos que se encuentran en el modo de bajo consumo informado que hay un paquete para ser recibido por este, ya que esto depende de la configuración que se realice a los módulos.
Modo de Comando.
Este modo permite leer o modificar parámetros del módulo XBee, mediante el envío de comandos AT (ver figura 16). Estos parámetros pueden ser por ejemplo, la dirección propia o la de destino, así como su modo de operación entre otras cosas. Hay tres formas de ingresar estos comandos, una es utilizar el programa Hyperterminal de Windows, el minicom en Linux o algún microcontrolador que maneje UART y tenga los comandos guardados en memoria o los adquiera de alguna otra forma. Por defecto el modulo maneja una velocidad de transmisión de 9600 bps, sin paridad, con bit de inicio igual a 1 y tramas de 8 bits de longitud. Figura 16. Ejemplo de modelo AT
Fuente: Product Manual v1.xAx - 802.15.4 Protocol www.maxstream.net.
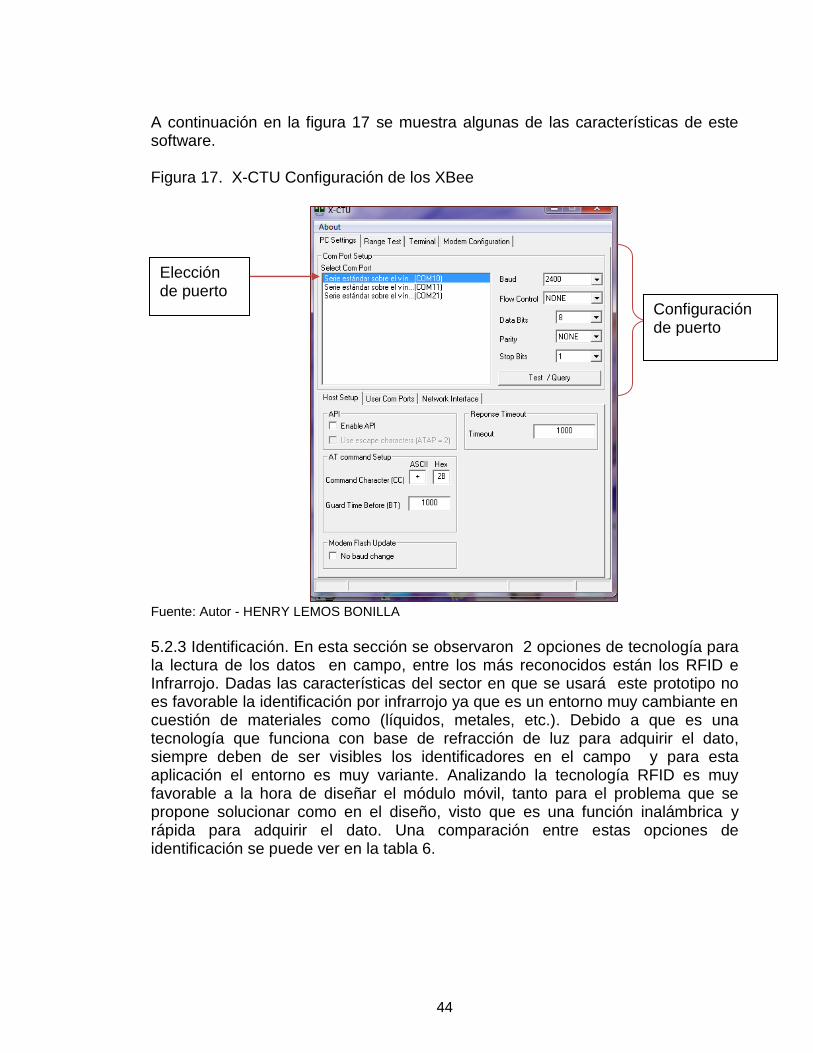
5.2.2 Herramienta de configuración X-CTU. Por medio de este software configuramos los módulos XBee, es una herramienta de libre acceso para los usuarios de Zigbee, donde posee una gran variedad de actividades que nos permite la configuración de los módulos XBee, dando una facilidad de conocer un poco más a fondo al protocolo de comunicación en los módulos, como también se puede observar su distribución de pines en la interfaz logrando observar su esqueleto interno y funcionamiento por medio de los pines.
44
A continuación en la figura 17 se muestra algunas de las características de este software.
Figura 17. X-CTU Configuración de los XBee
Fuente: Autor - HENRY LEMOS BONILLA
5.2.3 Identificación. En esta sección se observaron 2 opciones de tecnología para la lectura de los datos en campo, entre los más reconocidos están los RFID e Infrarrojo. Dadas las características del sector en que se usará este prototipo no es favorable la identificación por infrarrojo ya que es un entorno muy cambiante en cuestión de materiales como (líquidos, metales, etc.). Debido a que es una tecnología que funciona con base de refracción de luz para adquirir el dato, siempre deben de ser visibles los identificadores en el campo y para esta aplicación el entorno es muy variante. Analizando la tecnología RFID es muy favorable a la hora de diseñar el módulo móvil, tanto para el problema que se propone solucionar como en el diseño, visto que es una función inalámbrica y rápida para adquirir el dato. Una comparación entre estas opciones de identificación se puede ver en la tabla 6.
Elección de puerto
Configuración de puerto

45
Tabla 6. Comparación de RFID vs Infrarrojo RFID Infrarrojo
Velocidad de lectura rápida Lenta Adaptación al entorno Fácil complicada Implementación en circuito Reducida reducida Tag o código de barra Duradera a la manipulación Se degrada con la
manipulación Obtener dato Inalámbrico laser
Fuente: Autor - HENRY LEMOS BONILLA 5.2.3.1 Modulo RFID Reader. El modulo RFID es una opción de identificación de bajo costo para localización de objetos, este módulo lector de tarjetas RFID puede ser utilizado para un amplio abanico de aplicaciones como pueden ser control de acceso, identificación automática, robótica, navegación, control de inventario, sistemas de pago o inmovilización de vehículos su representación física se observa en la figura 18 20. Figura 18. Lector RFID
Fuente: Parallax.inc
Las características fundamentales del módulo son las siguientes:
Proporciona un método completamente integrado y de bajo coste para la lectura de tarjetas con transponder RFID pasivo.
Interfaz serie a PC, conexionado con otros Microcontroladores con niveles TTL y una velocidad de transmisión de 2400 baudios.
Requiere tensión de alimentación de +5 Vdc.
Incluye un LED bi-color que indica actividad.
20
Parallax. Inc http://www.parallax.com/StoreSearchResults/tabid/768/txtSearch/RFID/List/0/SortField/4/ProductID/441/Default.aspx

46
El conector está formado por 4 pines macho separados por 2,54 mm para facilitar su integración en prototipos.
Las conexiones eléctricas. Los módulos de lectura RFID pueden ser integrados en aplicaciones desde 4 pines de conexiones como se muestra en la tabla 7. Tabla 7. Conexionado del RFID
Pin Nombre Tipo Función
1 Vcc Alimentación Alimentación del sistema, entrada +5v 2 /Enable Entrada Pin de habilitación del modulo 3 Sout Salida Salida serie interface con niveles TTL 4 Gnd Tierra Tierra del sistema
Fuente: Parallax.inc
5.2.4 Protocolo de comunicaciones. El modulo RFID Reader incorpora un pin de transmisión de datos SOUT (UART_TX) para fines de comunicación serial. Este modulo se puede conectar a productos comerciales disponibles en el mercado. Este lector está configurado a una tasa de transmisión de 2400 bits/segundo, en aplicaciones con interfaces RD232/UART. Los parámetros de la comunicación son los siguientes:
8 bits de datos
1 bit de Fin
Transmisión no invertida. (El bit menos significativo primero)
2400 baudios. Estos parámetros están soportados en la gran mayoría de los microcontroladores de tal forma que el módulo lector de RFID pueda ser conectado directamente a cualquier UART compatible con niveles TTL o a una interfaz RS232 a través de un adaptador externo de niveles como puede ser los microprocesadores con comunicación UART o max23221. 5.2.4.1 Rangos máximos de actuación y características eléctricas. Al manipular los lectores se deben tener en cuenta los rangos de alimentación de ellos puesto que un mal manejo en ello puede dañar los lectores y el alimentarlos por un nivel menor al indicado puede incidir en una mala lectura del identificativo dando una lectura insegura (ver tabla 8 y 9).
21
Parallax. Inc http://www.parallax.com/StoreSearchResults/tabid/768/txtSearch/RFID/List/0/SortField/4/ProductID/441/Default.aspx
47
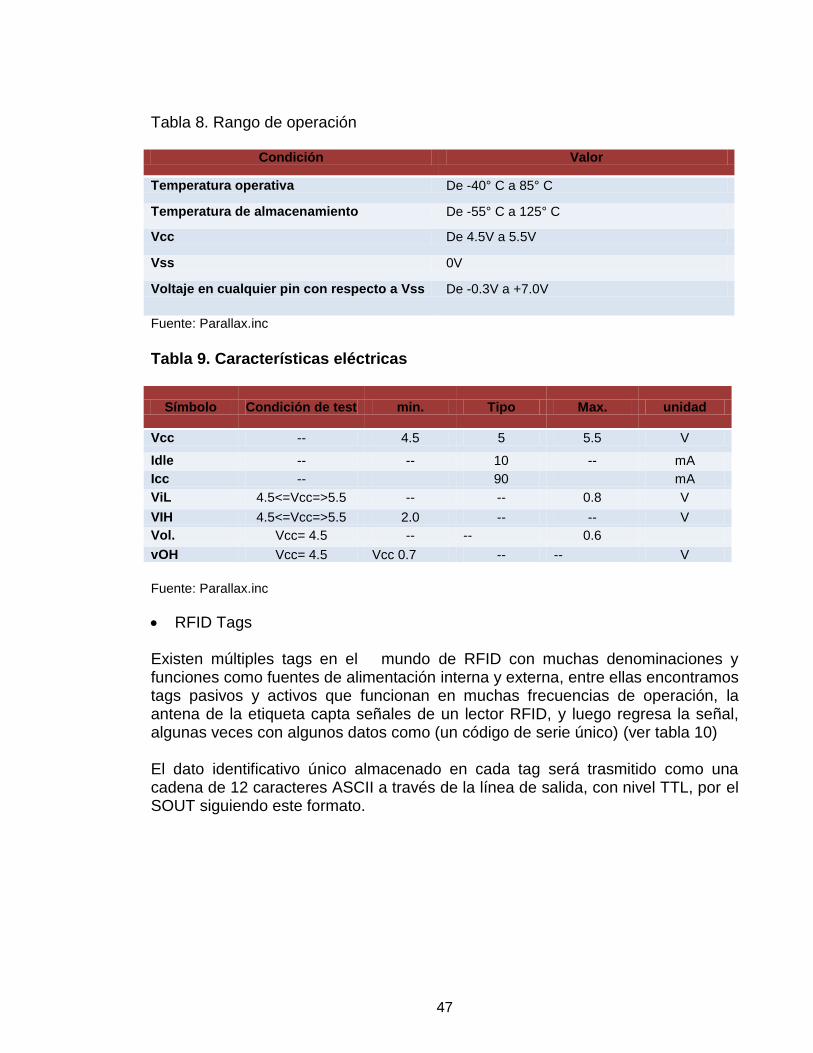
Tabla 8. Rango de operación
Condición Valor
Temperatura operativa De -40° C a 85° C
Temperatura de almacenamiento De -55° C a 125° C
Vcc De 4.5V a 5.5V
Vss 0V
Voltaje en cualquier pin con respecto a Vss De -0.3V a +7.0V
Fuente: Parallax.inc
Tabla 9. Características eléctricas
Símbolo Condición de test min. Tipo Max. unidad
Vcc -- 4.5 5 5.5 V
Idle -- -- 10 -- mA
Icc -- 90 mA
ViL 4.5<=Vcc=>5.5 -- -- 0.8 V
VIH 4.5<=Vcc=>5.5 2.0 -- -- V
Vol. Vcc= 4.5 -- -- 0.6
vOH Vcc= 4.5 Vcc 0.7 -- -- V
Fuente: Parallax.inc
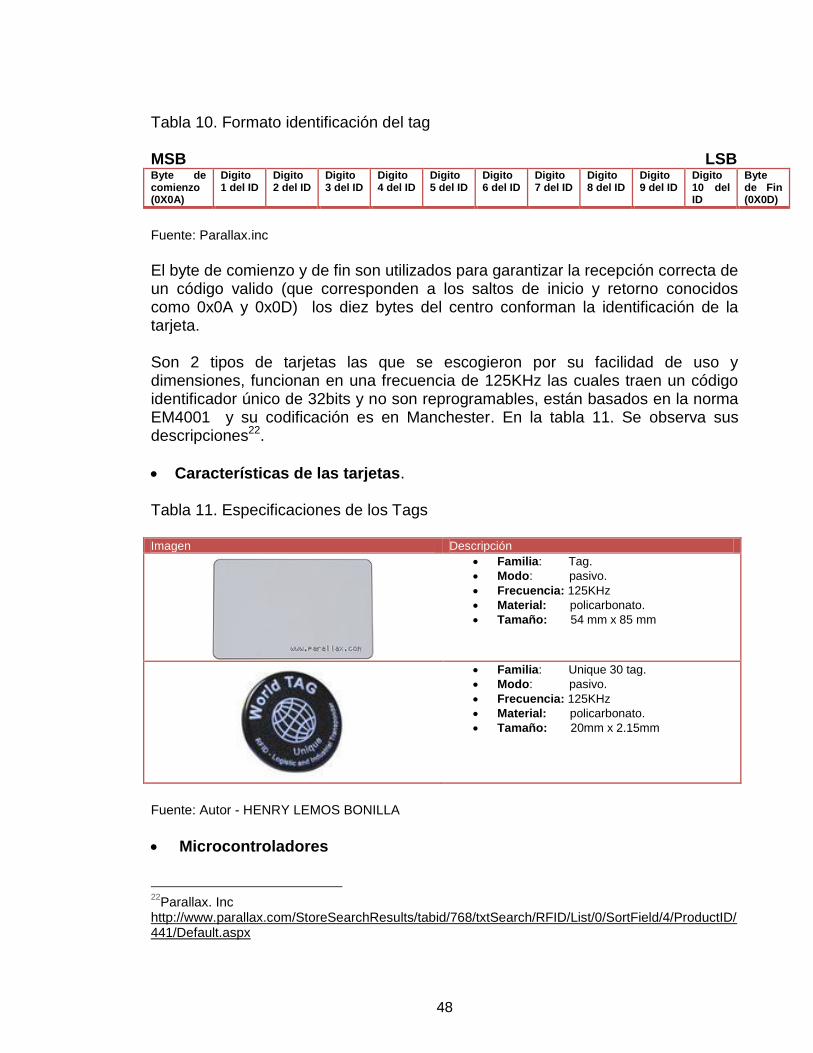
RFID Tags Existen múltiples tags en el mundo de RFID con muchas denominaciones y funciones como fuentes de alimentación interna y externa, entre ellas encontramos tags pasivos y activos que funcionan en muchas frecuencias de operación, la antena de la etiqueta capta señales de un lector RFID, y luego regresa la señal, algunas veces con algunos datos como (un código de serie único) (ver tabla 10) El dato identificativo único almacenado en cada tag será trasmitido como una cadena de 12 caracteres ASCII a través de la línea de salida, con nivel TTL, por el SOUT siguiendo este formato.
48
Tabla 10. Formato identificación del tag MSB LSB Byte de comienzo (0X0A)
Digito 1 del ID
Digito 2 del ID
Digito 3 del ID
Digito 4 del ID
Digito 5 del ID
Digito 6 del ID
Digito 7 del ID
Digito 8 del ID
Digito 9 del ID
Digito 10 del ID
Byte de Fin (0X0D)
Fuente: Parallax.inc
El byte de comienzo y de fin son utilizados para garantizar la recepción correcta de un código valido (que corresponden a los saltos de inicio y retorno conocidos como 0x0A y 0x0D) los diez bytes del centro conforman la identificación de la tarjeta. Son 2 tipos de tarjetas las que se escogieron por su facilidad de uso y dimensiones, funcionan en una frecuencia de 125KHz las cuales traen un código identificador único de 32bits y no son reprogramables, están basados en la norma EM4001 y su codificación es en Manchester. En la tabla 11. Se observa sus descripciones22.
Características de las tarjetas. Tabla 11. Especificaciones de los Tags Imagen Descripción
Familia: Tag.
Modo: pasivo.
Frecuencia: 125KHz
Material: policarbonato.
Tamaño: 54 mm x 85 mm
Familia: Unique 30 tag.
Modo: pasivo.
Frecuencia: 125KHz
Material: policarbonato.
Tamaño: 20mm x 2.15mm
Fuente: Autor - HENRY LEMOS BONILLA
Microcontroladores
22
Parallax. Inc http://www.parallax.com/StoreSearchResults/tabid/768/txtSearch/RFID/List/0/SortField/4/ProductID/441/Default.aspx

49
Para el almacenamiento de la información y el control del modulo se analizo varias opciones de microcontroladores en el mercado, ya que estos poseen una limitada configuración pero es muy útil y versátil a la hora de utilizar en este tipo de procesos, entre ellos están los PIC 16f84, 16f628a, 18f877. Se eligió el PIC 16f628a (ver figura 19) por su arquitectura y su distribución de puerto, ya que por ser un microcontrolador de 18 pines (ver figura 20) reduce su diseño en el prototipo ahorrando espacios y costos, también posee la capacidad de comunicación serial a continuación en la tabla 12 se nombran sus pines. Existen otros microcontroladores más avanzados como el PIC 18F877, este fue diseñado para desarrollos más robustos. El PIC 16F84 es de gama baja y su uso es más limitado por su configuración. Figura 19. PIC 16f628a
Fuente: http://compuinteg.blogspot.com/2012/03/pic-16f628a.html
PIC16f628a El microcontrolador PIC16f628a fue escogido por manejar puerto UART23 de comunicación serial y su fácil manejo e implementación para el diseño. Estas son sus principales características:
Memoria de programa de 1 Kbyte.
Memoria SRAM de 224 Bytes.
Memoria EEPROM de 128 bytes.
16 líneas de entrada y salida analógicas (ADC).
2 temporizadores de 8 Bits.
1 temporizador de 16 Bits.
2 comparadores Canal de comunicación serie: USART.
23 Microchip.inc
http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=2884
50
Oscilador frecuencia máxima 20 MHz.
Oscilador interno de 4 MHz.
18 pines de conexión.
35 instrucciones de palabra.
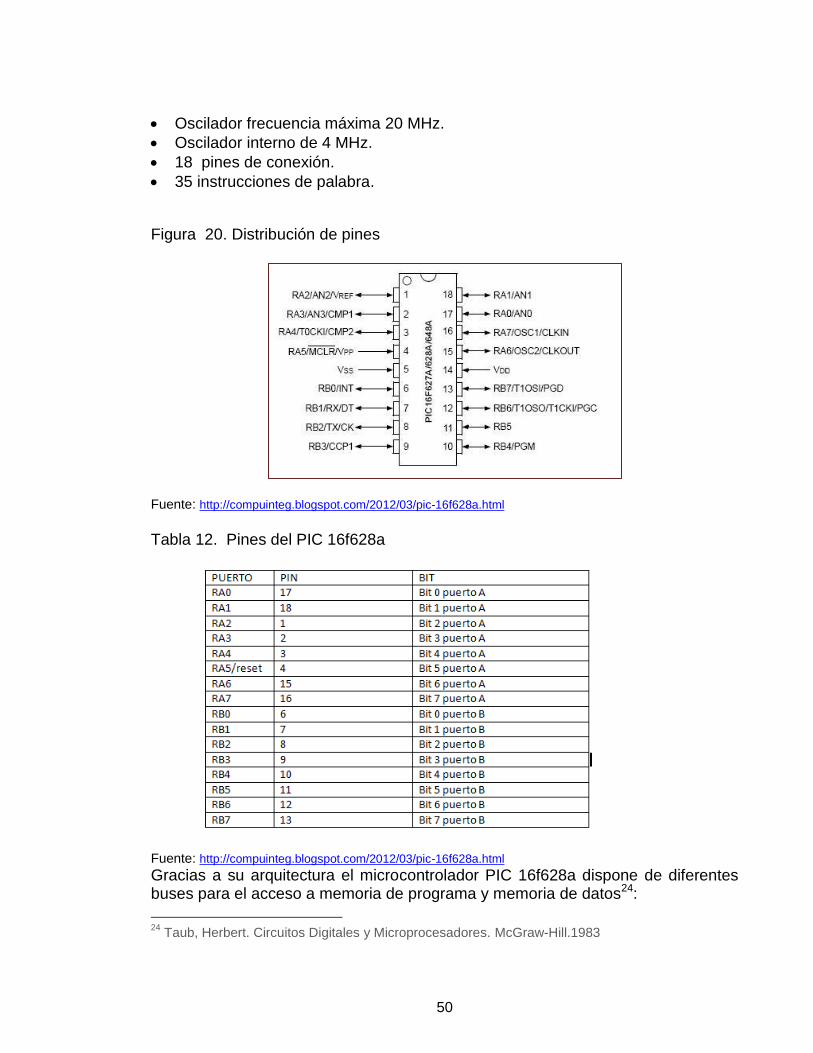
Figura 20. Distribución de pines
Fuente: http://compuinteg.blogspot.com/2012/03/pic-16f628a.html
Tabla 12. Pines del PIC 16f628a
Fuente: http://compuinteg.blogspot.com/2012/03/pic-16f628a.html
Gracias a su arquitectura el microcontrolador PIC 16f628a dispone de diferentes buses para el acceso a memoria de programa y memoria de datos24:
24
Taub, Herbert. Circuitos Digitales y Microprocesadores. McGraw-Hill.1983

51
Tipos de memoria:
Memoria FLASH: este es de tipo volátil.
Memoria RAM: en esta se puede guardar datos y variables, también es de tipo volátil, cuando no es alimentado a Vcc la información desaparece.
Memoria EEPROM: es de tipo no volátil y de poca capacidad de almacenaje esto sirve para archivar datos, ya que cuando no sea alimentado a Vcc no desaparecerá nuestra información. (ver tabla 13)
Tabla 13. Memoria de los PIC
Device Memoria
de programa
Memoria de dato
I/O CPP (PWM)
USART Comparadores Timers
Flash SRAM PIC 16f627a 1024 224 128 16 1 Y 2 2/1 PIC 16f664a 2048 224 128 16 1 Y 2 2/1 PIC 16f628a 4000 256 256 16 1 Y 2 2/1
Fuente: http://compuinteg.blogspot.com/2012/03/pic-16f628a.html
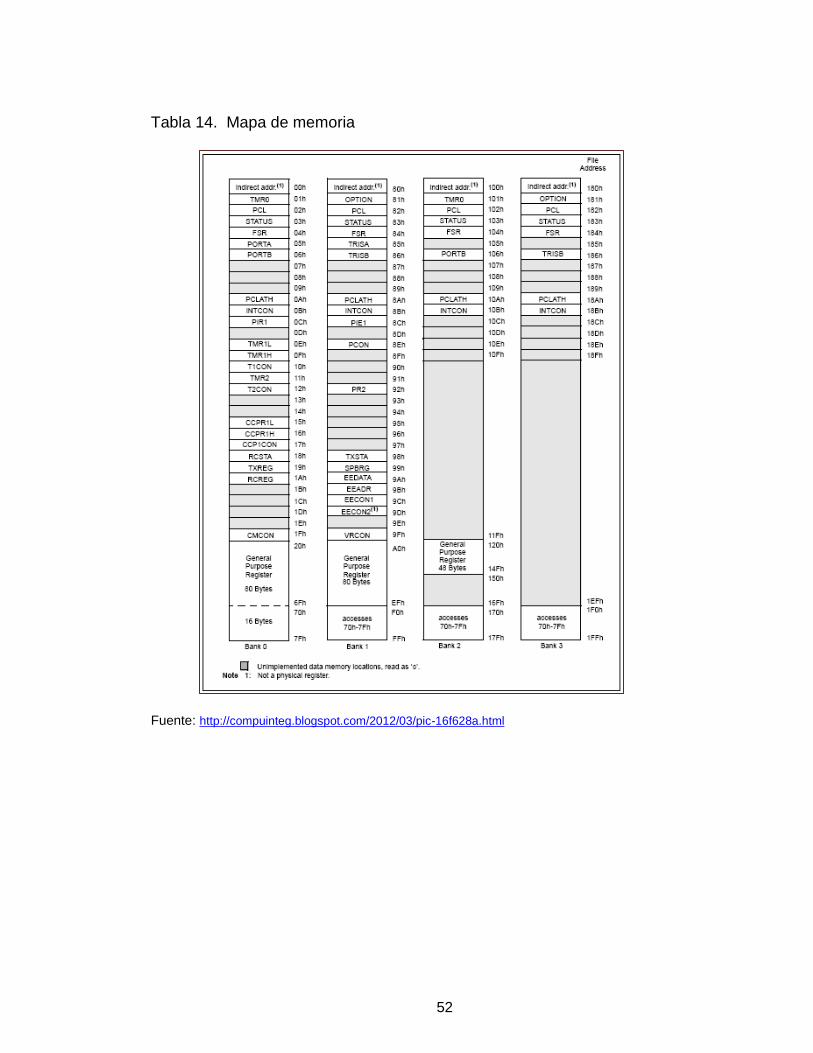
Mapa de memoria del pic16f628a Como se ve en la figura la memoria está dividida en 4 bancos la cual son los que permiten el control del microprocesador (ver tabla 14).
52
Tabla 14. Mapa de memoria
Fuente: http://compuinteg.blogspot.com/2012/03/pic-16f628a.html

53
Diagrama de bloques Como se observa en la figura del diagrama de bloque que los puertos A y B son direccionales los cuales se pueden configurar como entrada o salida (ver figura 21)
Figura 21. Diagrama de bloques
Fuente: http://compuinteg.blogspot.com/2012/03/pic-16f628a.html

54
Compilador CCS para PIC´S. Este software ofrece una suite completa para programar microcontroladores de la marca microchip, abarcando las familias 16, 18, 24 y dsPIC’s, posee una interfaz muy intuitiva y ofrece una serie de utilidades adicionales, como el PIC Wizard que permiten crear aplicación sin ser un experto en la materia, que lo convierte una excelente opción para estudiantes y aficionados. En la figura 22. Se muestra su interfaz de programación. Figura 22. Interfaz de PCW
Fuente: Autor - HENRY LEMOS BONILLA
5.3 INTERFAZ DE VISUALIZACIÓN Para la visualización se observaron varios software de programación que permiten crear interfaces virtuales para estos entornos entre los cuales están: LABVIEW, MATLAB, Visual Basic.net (ver figura 23) entre otros, estos son los más concurridos por los programadores para los sistemas de cómputo por su facilidad de uso y diversidad de usos y aplicaciones que estos brindan. Visual Basic es un programa escrito en un lenguaje orientado a objetos de alto nivel que cumple muchas funciones que no se puede realizar desde otro software donde permite la interacción en tiempo real con el entorno y por su orientación a
55
objetos la hace muy atractiva para el prototipo, donde su ejecutable funciona en la mayoría de sistemas operativos conocidos brindado una mayor objetividad para ser realizada en este trabajo fin de carrera. Figura 23. Software Visual Basic
Fuente: Autor - HENRY LEMOS BONILLA
La plataforma de visual Basic.net es un entorno de programación utilizado por millones de ingenieros y desarrolladores para Microsoft y donde hay una variedad de programación como (c++, c#, studio team system, VB.) otro que provee cientos de bibliotecas integradas para adquisición, análisis y visualización de datos, la plataforma VB es escalable a través de múltiples objetos optimizando la visión de el prototipo como se provee una interfaz grafica este programa es una opción muy acertada para realizar esta integración de software y hardware.
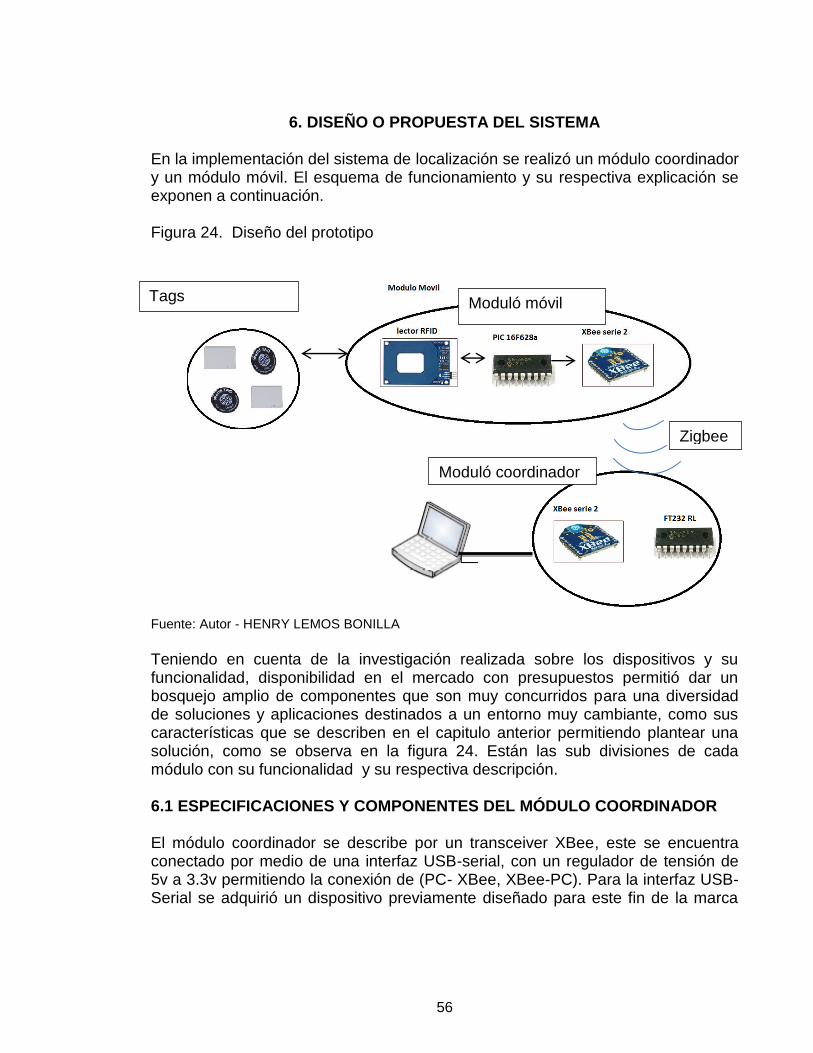
56
6. DISEÑO O PROPUESTA DEL SISTEMA En la implementación del sistema de localización se realizó un módulo coordinador y un módulo móvil. El esquema de funcionamiento y su respectiva explicación se exponen a continuación. Figura 24. Diseño del prototipo
Fuente: Autor - HENRY LEMOS BONILLA
Teniendo en cuenta de la investigación realizada sobre los dispositivos y su funcionalidad, disponibilidad en el mercado con presupuestos permitió dar un bosquejo amplio de componentes que son muy concurridos para una diversidad de soluciones y aplicaciones destinados a un entorno muy cambiante, como sus características que se describen en el capitulo anterior permitiendo plantear una solución, como se observa en la figura 24. Están las sub divisiones de cada módulo con su funcionalidad y su respectiva descripción. 6.1 ESPECIFICACIONES Y COMPONENTES DEL MÓDULO COORDINADOR El módulo coordinador se describe por un transceiver XBee, este se encuentra conectado por medio de una interfaz USB-serial, con un regulador de tensión de 5v a 3.3v permitiendo la conexión de (PC- XBee, XBee-PC). Para la interfaz USB- Serial se adquirió un dispositivo previamente diseñado para este fin de la marca
Moduló coordinador
Tags identificadores
Moduló móvil
Zigbee
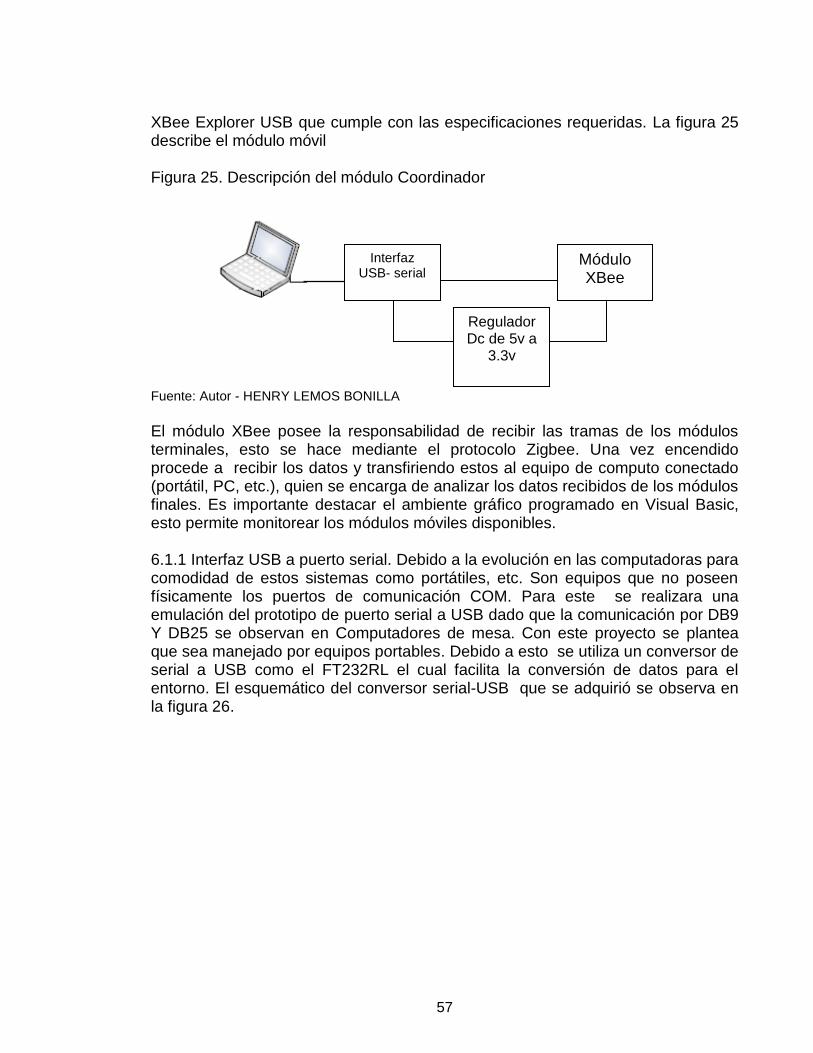
57
XBee Explorer USB que cumple con las especificaciones requeridas. La figura 25 describe el módulo móvil Figura 25. Descripción del módulo Coordinador
Fuente: Autor - HENRY LEMOS BONILLA
El módulo XBee posee la responsabilidad de recibir las tramas de los módulos terminales, esto se hace mediante el protocolo Zigbee. Una vez encendido procede a recibir los datos y transfiriendo estos al equipo de computo conectado (portátil, PC, etc.), quien se encarga de analizar los datos recibidos de los módulos finales. Es importante destacar el ambiente gráfico programado en Visual Basic, esto permite monitorear los módulos móviles disponibles. 6.1.1 Interfaz USB a puerto serial. Debido a la evolución en las computadoras para comodidad de estos sistemas como portátiles, etc. Son equipos que no poseen físicamente los puertos de comunicación COM. Para este se realizara una emulación del prototipo de puerto serial a USB dado que la comunicación por DB9 Y DB25 se observan en Computadores de mesa. Con este proyecto se plantea que sea manejado por equipos portables. Debido a esto se utiliza un conversor de serial a USB como el FT232RL el cual facilita la conversión de datos para el entorno. El esquemático del conversor serial-USB que se adquirió se observa en la figura 26.
Regulador Dc de 5v a
3.3v
Interfaz USB- serial
Módulo XBee
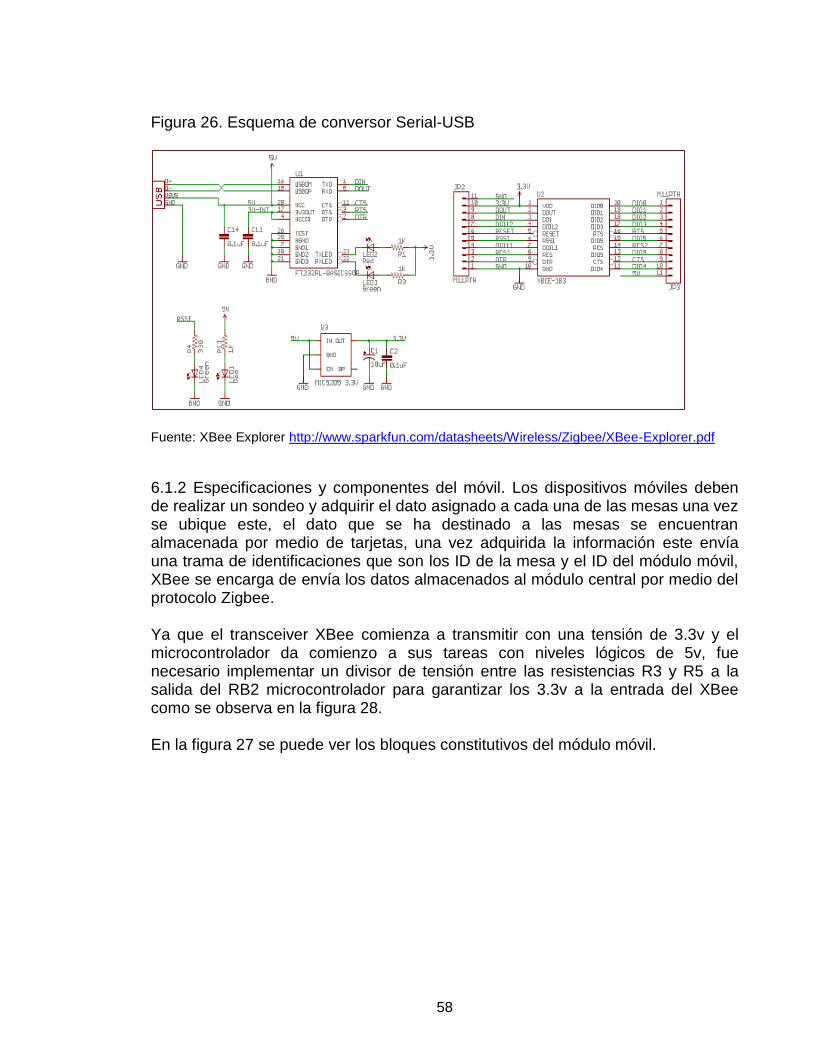
58
Figura 26. Esquema de conversor Serial-USB
Fuente: XBee Explorer http://www.sparkfun.com/datasheets/Wireless/Zigbee/XBee-Explorer.pdf
6.1.2 Especificaciones y componentes del móvil. Los dispositivos móviles deben de realizar un sondeo y adquirir el dato asignado a cada una de las mesas una vez se ubique este, el dato que se ha destinado a las mesas se encuentran almacenada por medio de tarjetas, una vez adquirida la información este envía una trama de identificaciones que son los ID de la mesa y el ID del módulo móvil, XBee se encarga de envía los datos almacenados al módulo central por medio del protocolo Zigbee. Ya que el transceiver XBee comienza a transmitir con una tensión de 3.3v y el microcontrolador da comienzo a sus tareas con niveles lógicos de 5v, fue necesario implementar un divisor de tensión entre las resistencias R3 y R5 a la salida del RB2 microcontrolador para garantizar los 3.3v a la entrada del XBee como se observa en la figura 28. En la figura 27 se puede ver los bloques constitutivos del módulo móvil.
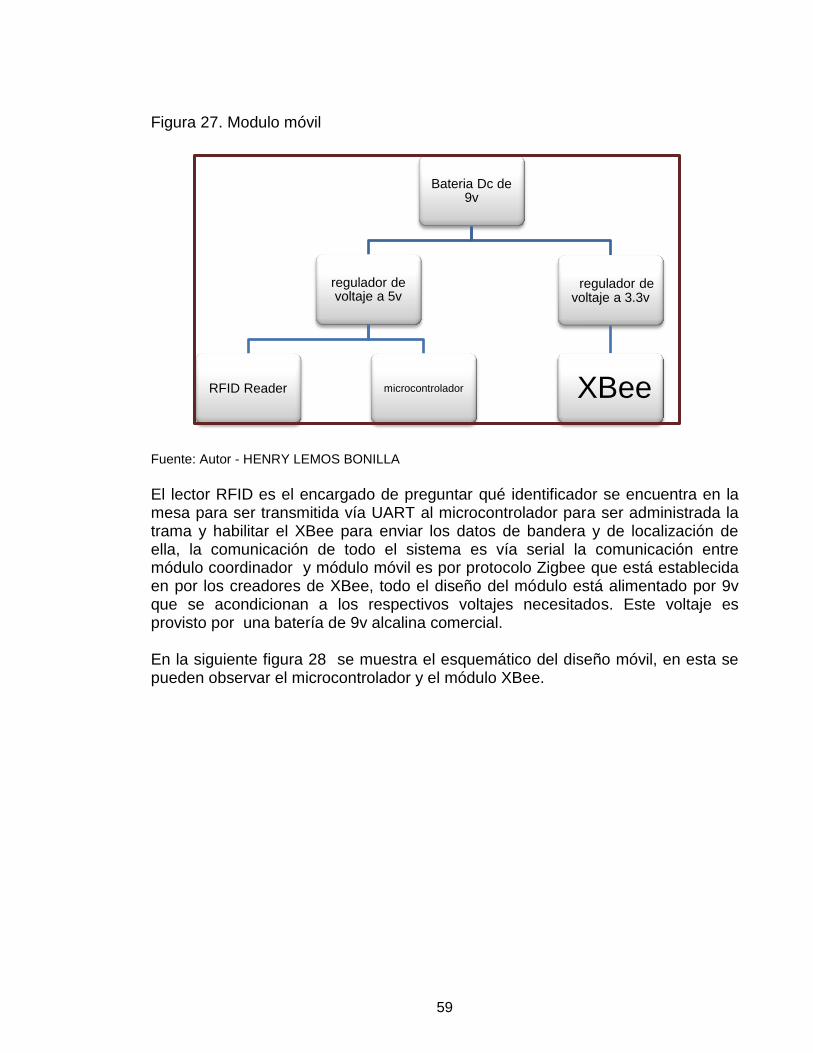
59
Figura 27. Modulo móvil
Fuente: Autor - HENRY LEMOS BONILLA El lector RFID es el encargado de preguntar qué identificador se encuentra en la mesa para ser transmitida vía UART al microcontrolador para ser administrada la trama y habilitar el XBee para enviar los datos de bandera y de localización de ella, la comunicación de todo el sistema es vía serial la comunicación entre módulo coordinador y módulo móvil es por protocolo Zigbee que está establecida en por los creadores de XBee, todo el diseño del módulo está alimentado por 9v que se acondicionan a los respectivos voltajes necesitados. Este voltaje es provisto por una batería de 9v alcalina comercial. En la siguiente figura 28 se muestra el esquemático del diseño móvil, en esta se pueden observar el microcontrolador y el módulo XBee.
Bateria Dc de 9v
regulador de voltaje a 5v
RFID Reader microcontrolador
regulador de voltaje a 3.3v
XBee
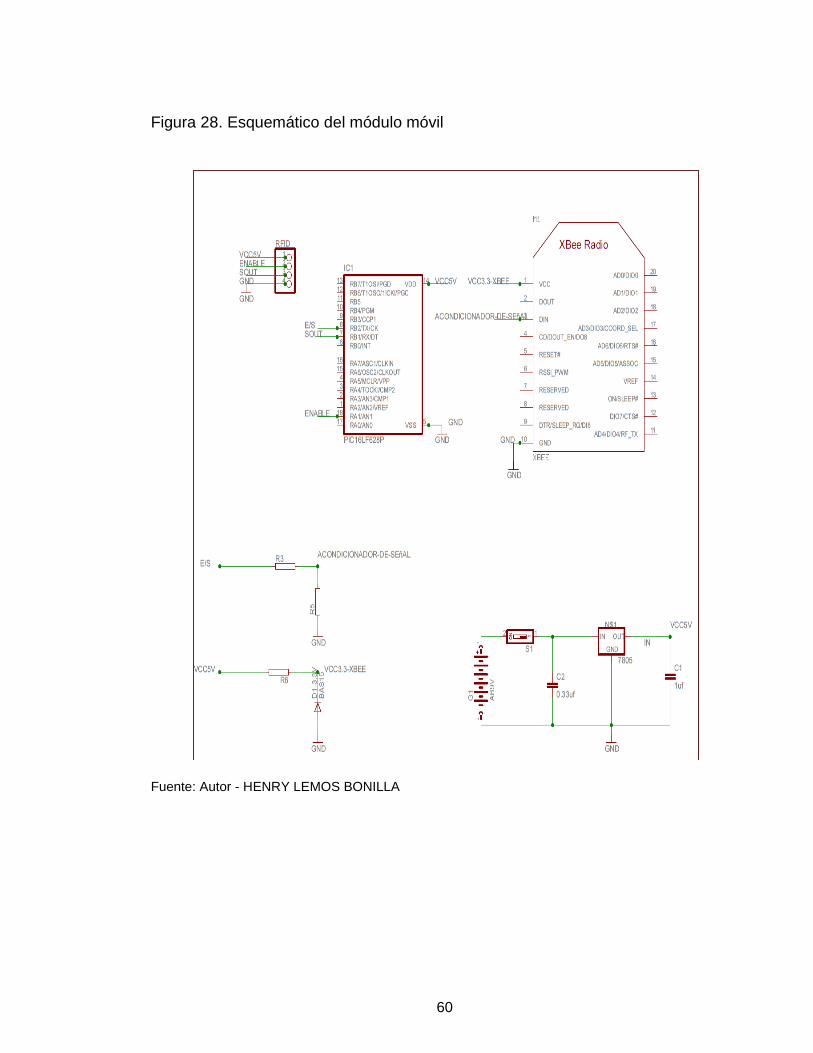
60
Figura 28. Esquemático del módulo móvil
Fuente: Autor - HENRY LEMOS BONILLA

61
6.2 SOFTWARE DEL SISTEMA MÓVIL El diagrama general del software implementado se observa en la figura 29, en “inicializaciones llo primero que se hace es configurar el periférico USART, se define una tasa de transmisión de 2400 b/s, bit de parada igual a uno, tamaño de trama igual 8 bits y control de paridad desactivado. Luego se comprueba si se recibe un dato, el RFID envía una trama que tiene una longitud de 12 bytes, una vez recibida se verifica si efectivamente es la información, desactivando el lector, cabe aclarar que esa información es cargada previamente en la memoria del microcontrolador. Si la verificación da un resultado negativo la trama es ignorada con esto Vuelve a habilitar el RFID. Después de enviar la trama por el XBee, se limpian todos los registros y se vuelve a esperar una nueva trama. En la figura 30 se muestra el diagrama de flujo de la subrutina obtener RFID, se encarga de leer de las tramas encontradas, el identificador de las tarjetas que están asignadas en las mesas. Una vez se tiene el identificador es comparado y almacenado en la memoria del microcontrolador para ser enviado por la subrutina “Enviar XBee tag”, ver figura 31. Una vez habilitado el XBee este se encarga de enviar la trama con los identificativos de la mesa y bandera al modulo central por el protocolo Zigbee. Figura 29. Diagrama general
Fuente: Autor - HENRY LEMOS BONILLA
Inicio
Inicializaciones
Obtener RFID
Deshabilita RFID
Enviar XBee Tag
Habilito RFID

62
Figura 30. Diagrama de RFID
Fuente: Autor - HENRY LEMOS BONILLA
Si
No
No
Si
Obtener RFID
Dato RFID
recibido?
Dato==0x0A
Dato=getc()
Dato_leidos=0
Dato=getc()
++Dato_leidos
TAG[Dato_leidos]=DATO
Dato_leido
<10
FIN
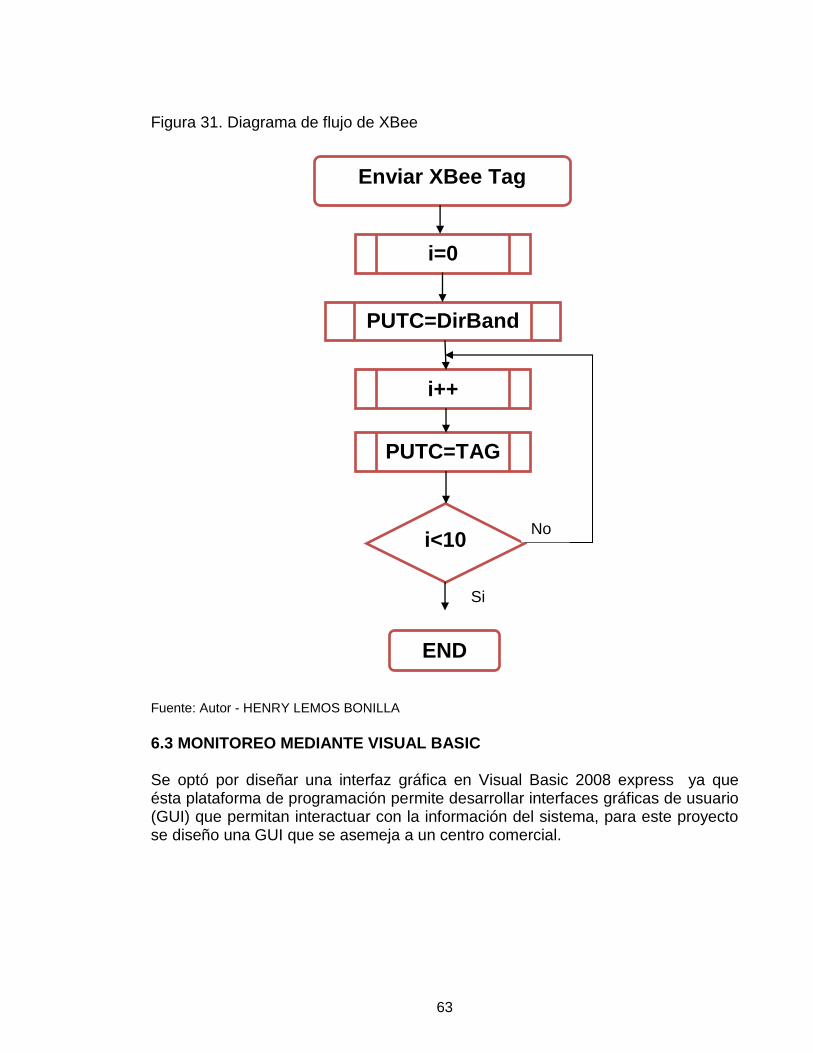
63
Figura 31. Diagrama de flujo de XBee Fuente: Autor - HENRY LEMOS BONILLA 6.3 MONITOREO MEDIANTE VISUAL BASIC Se optó por diseñar una interfaz gráfica en Visual Basic 2008 express ya que ésta plataforma de programación permite desarrollar interfaces gráficas de usuario (GUI) que permitan interactuar con la información del sistema, para este proyecto se diseño una GUI que se asemeja a un centro comercial.
Enviar XBee Tag
i=0
PUTC=DirBanderaa
i++
PUTC=TAG[i]
i<10
END
No
si
Si
si
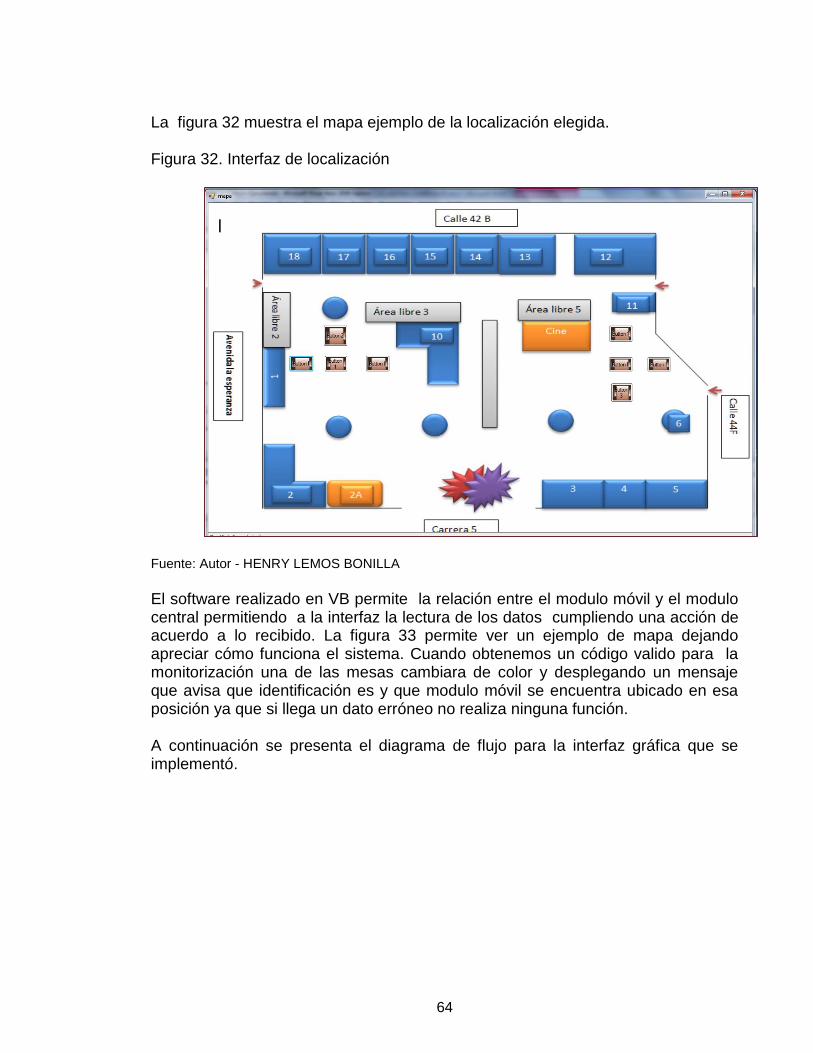
64
La figura 32 muestra el mapa ejemplo de la localización elegida. Figura 32. Interfaz de localización
Fuente: Autor - HENRY LEMOS BONILLA El software realizado en VB permite la relación entre el modulo móvil y el modulo central permitiendo a la interfaz la lectura de los datos cumpliendo una acción de acuerdo a lo recibido. La figura 33 permite ver un ejemplo de mapa dejando apreciar cómo funciona el sistema. Cuando obtenemos un código valido para la monitorización una de las mesas cambiara de color y desplegando un mensaje que avisa que identificación es y que modulo móvil se encuentra ubicado en esa posición ya que si llega un dato erróneo no realiza ninguna función. A continuación se presenta el diagrama de flujo para la interfaz gráfica que se implementó.
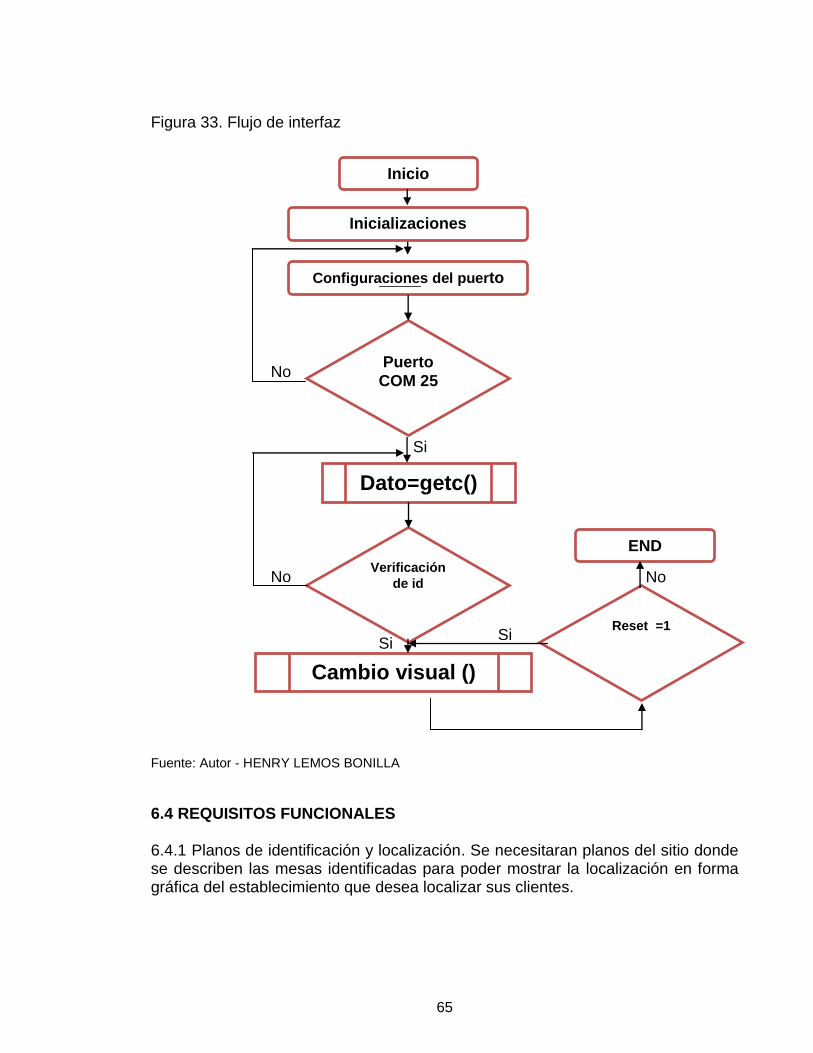
65
Figura 33. Flujo de interfaz
Fuente: Autor - HENRY LEMOS BONILLA
6.4 REQUISITOS FUNCIONALES 6.4.1 Planos de identificación y localización. Se necesitaran planos del sitio donde se describen las mesas identificadas para poder mostrar la localización en forma gráfica del establecimiento que desea localizar sus clientes.
Si
No
Si
No
Si
No
Inicio
Puerto
COM 25
Dato=getc()
Inicializaciones
Configuraciones del puerto
to
No
Verificación
de id
Cambio visual ()
Reset =1
END

66
6.4.2 Infraestructura adecuada. Se necesitan espacios de una amplia estructura física, donde se puedan ubicar una serie de mesas de distintos materiales, El sistema está diseñado para todo tipo de mesas. 6.4.3 Equipos necesarios.
UNA CPU
UN MONITOR
UN TECLADO
UNA PANTALLA LCD, LED, PLASMA (Opcional) 6.4.4 Requerimiento del sistema.
Systems operativos compatibles: Windows serve 2003; Windows Vista; Windows XP; Windows 7.
Un equipo con un procesador de 1.6 GHz o más rápido.
400 MB de RAM como mínimo.
56 MB de espacio disponible en disco duro. Pantalla con una resolución mínima de 1024 x768.
6.4.5 Seguridad. Cuando cualquier usuario intente conectarse al sistema de localización deberá autenticarse, con una clave de acceso (password), y el sistema deberá comprobar que se trata de una clave autorizada. Si el identificador introducido no corresponde a una clave y no coincide con la almacenada, no se le permitirá la conexión. 6.4.6 Funcionamiento general del sistema. Lo primero, que se procede a realizar es configurar el periférico UART, se define una tasa de transmisión de 2400 B/s, un bit de parada, tamaño de la trama igual a 8 bits y control de paridad desactivado. Estas configuraciones se realizan para el módulo central y el PC. Lo segundo se procede a instalar el software de localización con sus respectivas configuraciones de transmisión. El módulo central o coordinador es el primero en encenderse y se crea la responsabilidad de configurar el PC y el XBee puesto que si no tiene los parámetros descriptos no tendrá un funcionamiento óptimo; estos parámetros son: Velocidad de transmisión (2400 baudios), La asignación del puerto (COM 25), los bits de parada y recepción. (Ver anexo A). Se espera que los computadores con los cuales se va a trabajar tengan las especificaciones requeridas por el aplicativo y por el XBee pues el PC es otra extensión más de este desarrollo.
67
Después de realizar la configuración del equipo se procede a mirar el funcionamiento de cada dispositivo y software, una vez encendido el módulo móvil, centrado en la ubicación destinada por un portador de éste y se encuentre en modo de lectura para realizar la identificación dada al destino seleccionado, este procede a enviar tramas de bits para ser interpretadas por el PC, resolviendo la visualización en un monitor a través de la interfaz gráfica que muestra las diferentes ubicaciones asociadas al entorno donde se encuentran las mesas y los datos recibidos por la bandera móvil, para verificar la posición del portador del lector.
68
7. PRUEBAS Y RESULTADOS EXPERIMENTALES En esta sección se procede al análisis de las pruebas y resultados, que se realizaron al sistema. Se comienza con una descripción del entorno de pruebas necesario Para analizar el funcionamiento del hardware y software. 7.1 ENTORNO DE PRUEBAS Las pruebas de los sistemas se han realizado en un entorno similar al de un centro comercial con un tráfico de personas muy alto el cual nos permite tener una apreciación del sistema muy acertada. ”La planta primera del Edificio Horizontes de la Universidad San Buenaventura seccional Cali (cafetería central)”. El sistema presentado en este proyecto consta, como ya hemos visto. De un módulo central, un módulo móvil y una GUI, para probarlo, puesto que la plataforma donde se ejecute han de constar, lógicamente con varias mesas identificada previamente. Para que las pruebas puedan realizarse en distintos puntos y poder comparar los resultados obtenidos en ellos, asimismo de probar la correcta clasificación en una mesa dada, es necesario realizar las pruebas desde distintos equipos de cómputo para realizar las pruebas de compactibilidad con los sistemas existentes. 7.2 ESCENARIOS DE PRUEBAS Una vez desarrollado los módulos se realiza una serie de pruebas para obtener y comprobar el correcto funcionamiento del sistema de localización, se proponen 2 escenarios teniendo en cuenta la disposición del área y las mesas que se encuentran en el lugar a realizar las pruebas.
Escenario 1: Módulo coordinador y el módulo móvil con 3 tipos de tarjetas identificadoras y el aplicativo realizado.
Escenario 3: Realizar las pruebas de materiales de mesas.
Escenario 2: Prueba de distancia con línea de vista y sin línea de vista. 7.2.1 Escenario 1. Módulo coordinador y el módulo móvil. En este primer escenario se dispone de 1 módulo coordinador y 1 módulo móvil, con una interfaz gráfica para el monitoreo de la comunicación. Una vez configurados y situados cada uno de los módulo se accede a la aplicación X-CTU o Hyperterminal para visualizar las tramas enviadas por el módulo móvil donde son recibidas por el módulo coordinador (figura 34).

69
Figura 34. Códigos en X-CTU
Fuente: Autor - HENRY LEMOS BONILLA Estas tramas son los códigos almacenados por las tarjetas que se asignaron a cada mesa para poder tener un reconocimiento de ellas y un punto de referencia. A partir de las tramas recibidas por el módulo móvil y de los datos leídos por el RFID las mesas asignadas quedarían como se visualiza en la tabla 15.
Tabla 15. Asignación a las mesas
Códigos Mesas
4C00844B7C Mesa 1
0415ED3DAB Mesa 2
0F03029642 Mesa 3
Fuente: Autor - HENRY LEMOS BONILLA Una vez seleccionada la mesa este envía un código al coordinador y este procede a ser conjugado en la interfáz gráfica para ser monitoreada por el operador y ser interpretada. Como se observa en la figura 34 la comunicación de estos fue óptima ya que la lectura del módulo móvil y la tarjeta se realiza y al transmitir los datos que se visualizan en la (tabla 14) fue de manera rápida para el ojo humano. 7.2.2 Escenario 2. Pruebas de mesas. En este escenario se procede a verificar la funcionalidad y reacción en mesas de distintos materiales como lo son de (metálicas, de pastico, fibra de vidrio, etc.) como en la figura 35.
70
Figura 35. Mesas
Fuente: http://www.buenacuerdo.com.ar/buenos_aires/hogar_y_muebles/Mesas_cuadradas_de1_20x1_20_235048.htm
Las identificaciones fueron asignadas a distintas formas de mesas la cuales fueron seleccionadas por su entorno y por su material se seleccionaron 3 tipos de mesas y un solo escenario las mesas seleccionadas fueron (en acero inoxidable, madera, acrílico), el escenario escogido para realizar la prueba fue en la cafetería de la Universidad San Buenaventura puesto que esta plaza cuenta con un ambiente similar al de los centro comerciales. Tabla 16. Pruebas con distintos materiales de mesa
Tipo Mesas Acrilico Mesas Metalicas Mesas Maderas
Lectura del dato excelente Muy buena excelente
Envió del dato excelente excelente excelente
Velocidad de envió excelente excelente excelente
Comportamiento Seguro seguro Seguro
Fuente: Autor - HENRY LEMOS BONILLA
71
Figura 36. Cafetería central
Fuente: www.usbcali.edu.co
Los resultados obtenidos fueron excelentes puesto que la recepción de los datos no fueros afectados por los materiales del entorno que se eligió (cafetería central, ver figura 36). 7.2.3 Escenario 2. Prueba de distancia con y sin línea de vista. El módulo fue posicionado a diferentes distancias con línea de vista y sin línea de vista ya que se propone un sistema funcional para un entorno muy extenso y variable en estructuras. Estos fueron posicionados a una distancia de 120 metros sin línea de vista obteniendo lecturas correctas, la comunicación se mantuvo estable hasta que se cambio de tarjeta identificativa observando que la transmisión es estable a distancias considerablemente largas. Se posiciono a la misma distancia pero con línea de vista y se obtuvo resultados favorables para el prototipo móvil idénticos a las mediciones anteriores dando veracidad de que este módulo es funcional en varios aspectos del entorno a ser implementado. Cuando los obstáculos son aproximadamente de 2 cuartos se tiene una disminución de señal y un retardo en recibir los datos pero no afecta en gran manera al sistema, pues los módulos escogidos son robustos para cualquier tipo de entorno. A continuación en la tabla 17 se presenta la relación de pruebas realizadas.

72
Tabla 17. Pruebas con y sin línea de vista
Tipo Barreras(techos, pisos, paredes)
Confiable (metros) Probados(metros)
Área abierta Vista directa 160 220
Área semi abierta Madera material
sintético 120 170
Área cerrada Ladrillo 100 150
Área obstruida Metal concreto 30 80
Fuente: Autor - HENRY LEMOS BONILLA
7.3 VISUALIZADOR GRÁFICO El sistema está orientado a permitir descubrir a un usuario en que mesa se encuentra automáticamente en caso que el mesero desee verificar esto pide una actualización del sistema para verificar si algún módulo móvil se encuentra activo y posicionado en algún sector incluido en el mapa como se muestra en la figura 37. Se selecciona actualizar para que el sistema verifique cuales módulos están activos. Figura 37. Actualización
Fuente: Autor - HENRY LEMOS BONILLA En este caso, las pruebas son muy simples y consisten, básicamente, en comprobar que la localización de cada modulo es correctamente reflejada en la pantalla. Se verifica en el cambio de color de las mesas.

73
7.4 POSIBLES EXTENSIONES DEL PROYECTO
El sistema de desarrollado propone la localización de clientes en restaurantes de los centros comerciales, para lograr beneficios adicionales se puede anexar un botón para llamar al mesero con el fin de adquirir su atención y extender el servicio de los restaurantes permitiendo extender la relación entre cliente y mesero. Este botón estaría ubicado en el módulo móvil.
Se puede incluir en próximos diseños mejoras relacionadas con la seguridad de los módulos móviles, incluyendo alarmas que determinen el hurto de un módulo móvil o por ser llevado fuera del perímetro de alcance del módulo central.
Adicionalmente este servicio puede incluir timers que indiquen el tiempo de espera y un sistema que notifique a los clientes que ya se ha despachado su orden para mantener un ambiente más tranquilo.
74
8. CONCLUSIONES Se observa la necesidad de evolucionar el sector comercial y proyectarlo a los nuevos escenarios competitivos en donde los ingenieros y los comerciantes tienen el reto importante de aprender un nuevo modelo de trabajo que le permita hacer frente a los nuevos desafíos de futuro, como es el caso de las plazas de comidas donde la ubicación de los clientes plantea una exigencia importante a la hora de prestar un mejor servicio. De acuerdo a los resultados obtenidos y a las comparaciones realizadas bajo diferentes condiciones de simulación, se puede concluir que el dispositivo para la localización de usuarios en restaurantes de los centros comerciales presenta un buen desempeño en cuanto a la velocidad (256 Kbps), distintas infraestructuras, el manejo de datos y la integración entre las diferentes tecnologías asociadas a este proyecto En este proyecto se ha realizado un prototipo de sistema de localización en centros comerciales para aprovechar el gran despliegue de comunicaciones inalámbricas como (RFID, Zigbee,) en coordinación de otros dispositivos como Microcontroladores y sistemas de computo. Actualmente, como se mostró en la investigación del estado del arte, existen muchos sistemas desarrollados con aplicaciones que intentan dar solución a la localización de personas en los centros comerciales, estos sistemas aplicados en la gran mayoría de los restaurantes son factibles para un entorno de autoservicio pero son muy limitados en otros donde se despachan pedidos a una localidad desconocida. Por lo tanto, la motivación de este proyecto fue cubrir la necesidad existente en las plazoletas de comidas de forma tecnológica y con vista hacia un futuro distinto donde se pueda insertar nuevas tecnologías. Del estudio y análisis realizado al medio de transmisión se ha extraído la conclusión de que Zigbee es una opción muy buena para este tipo de problema que se acogió. Visto que las principales propiedades del Zigbee son de bajo costo y bajo consumo de potencia, permitiendo realizar una comunicación segura y una sostenibilidad en el sector. De acuerdo al análisis de los diferentes dispositivos compatibles con el entorno de estudio y que se encuentra en el mercado, se obtuvo que el RFID es muy favorable para este tipo de proyecto y para el sector de las plazas de comidas. Con los dispositivos XBee se obtuvo una interpretación y monitorización de los resultados.

75
Las pruebas realizadas a los dispositivos se realizaron considerando diferentes materiales de las mesas y en diversas ubicaciones, obteniendo resultados satisfactorios en cuanto a la velocidad y la correcta ubicación de las mesas en la interfaz gráfica. Estas pruebas permitieron validar el diseño planteado como solución al problema inicial y cumplen las características propuestas en lo técnico y presupuestal.
76
BIBLIOGRAFÍA A. Tanenbaum, Redes de computadoras, Cuarta Edición, Editorial Pearson (2003) ACHA Santiago, Castro A, Manuel Pérez, Julio. Rioseras A, Miguel. Electrónica Digital. Introducción a la lógica digital. México. Alfaomega Grupo editor. 2003. BLUETOOTH SPECIAL INTEREST GROUP https://www.bluetooth.org/apps/content/ CONFIGURACIONES DE QUIPOS http://www.configurarequipos.com/doc435.html DUNGAN R, Frank Sistemas Electrónicos de Telecomunicación. Madrid. Editorial Paraninfo: 1996. ETEMAD, Kamran. Lai Yee, ming. WiMAX Technology and new Word evolution 2010. GAITAN GARAY, Everts. Libro de Visual Basic 2008, Paseo por Visual Basic 2008, 2da Edición Granada, Nicaragua. 2009 HAYKIN, Simón. Sistemas de comunicación.1 Ed. México. Limusa noriega editores.2002. HUNT. V. Puglia, Daniel Albert, Puglia Mike. RFID – A Guide to Radio Frequency Identification. Willey (2007). LETHAM, Lawrence. GPS fácil – uso del sistema posicionamiento global. 1 Ed. Editorial paidotribo. 2001 MARTÍNEZ Roldán, David. Moya Huidobro, José M. Comunicaciones en redes WLAN. Editorial. Creaciones Copyright. MARTIN, James. Telecommunications and the computer. 2 Ed. New Jersey. Prentice-hall. 1976. MAKING WIRELESS M2M Easy http://www.digi.com/ Microchip.inc http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=2884 OYARCE, Andrés. Guía del usuario Xbee editorial mci electronics 2010.
77
PÉREZ HERRERA, Henrique. Introducción a las Telecomunicaciones Modernas. 3 ed. México. Limusa noriega editores.2001. PIC Microcontroller: An Introduction to Software & Hardware Interfacing. 1 Ed.: Thompson. PRODUCT MANUAL v1.xAx - 802.15.4 Protocol www.maxstream.net QUE ES INFRARROJO http://legacy.spitzer.caltech.edu/espanol/edu/ir/infrared.html [Citado en mayo del 2011]. ROSADO, Calos. Comunicación por satélite. Principios, Tecnologías y Sistemas. 1 ed. México. Limusa noriega editores.2001. RFID TECHNOLOGY WHITE PAPER. http://www.prototypexpress.com/rfidwhitepaper.htm RED POR INFRARROJO http://cmapserver.unavarra.es/servlet/SBReadResourceServlet?rid=1200396290104_1620023815_17314 [citado febrero 2012]. TAUB, Herbert. Circuitos Digitales y Microprocesadores. McGraw-Hill.1983. TELECOMUNICACIONES MÓVILES. 2 Ed. Barcelona. Marcombo Boixareu editores. 1998. PUERTOS DE COMUNICACIÓN http://raparaciondehardware11i.blogspot.com/2010/05/15-puertos-usb-ethernet-tarjeta-red.html

78
ANEXOS
ANEXO A. MANUAL DEL SISTEMA Para poder desplegar el sistema se deben seguir los siguientes pasos: Verificar que los módulos se encuentran completos con esto:
CD con software HLB-localízame
Cable USB
Módulo coordinador
Módulo móvil
Batería de 9v (recargable-normal opcional) Insertar el software HLB-localízame en la bandeja de CD/DVD. Procedemos a la configuración del sistema, Instalación de software en la máquina que hará de monitoreo Desde el CD que acompaña al prototipo: Dar doble clic en setup.exe y le damos instalar
Una vez instalado el icono del sistema será visto en el escritorio sistema de localización. Aplicación. Procedemos a configurar el puerto USB con estos requerimientos del sistema.
Vamos a inicio
En equipo damos clic derecho y clic en propiedades.
En la ventana le damos clic en administrador de dispositivos.

79
Buscamos la pestaña Puertos (COM y LPT)
Conectamos el moduló coordinador
Le damos clic derecho en USB serial port (COM XX).

80
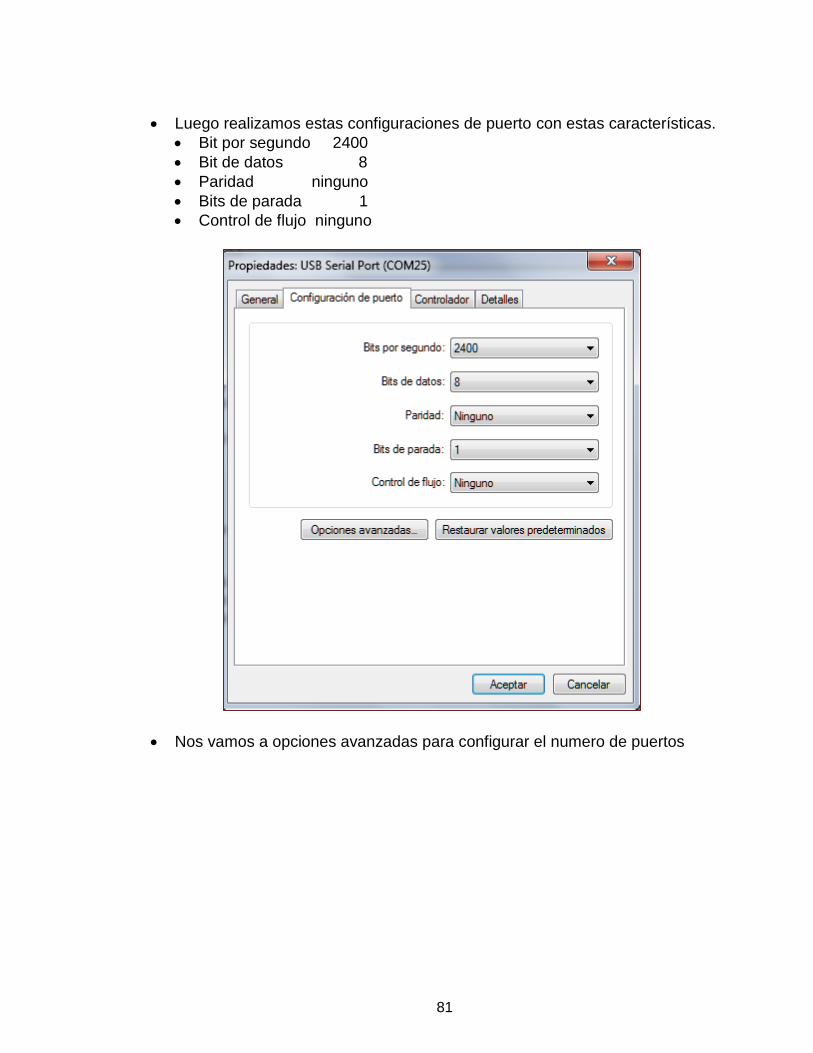
81
Luego realizamos estas configuraciones de puerto con estas características.
Bit por segundo 2400
Bit de datos 8
Paridad ninguno
Bits de parada 1
Control de flujo ninguno
Nos vamos a opciones avanzadas para configurar el numero de puertos
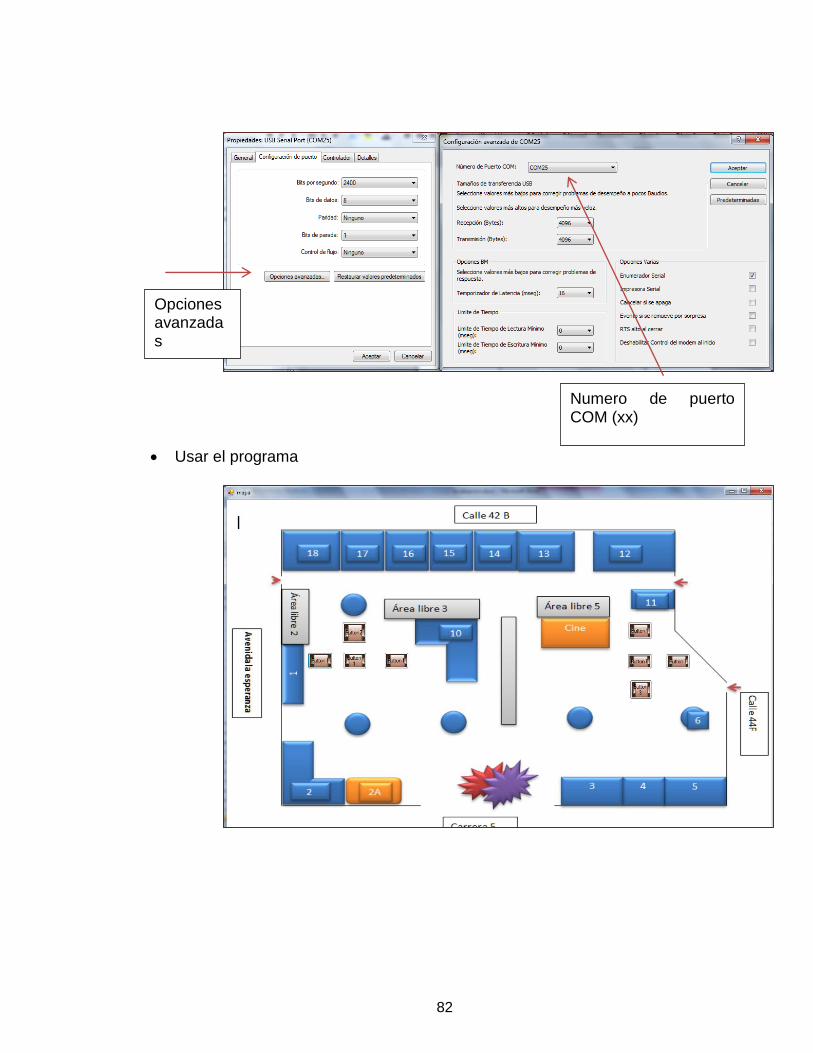
82
Usar el programa
Opciones avanzadas
Numero de puerto COM (xx)
Copyright © 2022 FDOKUMEN





![SOCIEDADES COMERCIALES FINAL[1]](https://static.fdokumen.com/doc/165x107/6322a3f6078ed8e56c0a80ad/sociedades-comerciales-final1.jpg)














