
b2551314x.pdf - PolyU Electronic Theses
278
Copyright Undertaking This thesis is protected by copyright, with all rights reserved. By reading and using the thesis, the reader understands and agrees to the following terms: 1. The reader will abide by the rules and legal ordinances governing copyright regarding the use of the thesis. 2. The reader will use the thesis for the purpose of research or private study only and not for distribution or further reproduction or any other purpose. 3. The reader agrees to indemnify and hold the University harmless from and against any loss, damage, cost, liability or expenses arising from copyright infringement or unauthorized usage. IMPORTANT If you have reasons to believe that any materials in this thesis are deemed not suitable to be distributed in this form, or a copyright owner having difficulty with the material being included in our database, please contact [email protected] providing details. The Library will look into your claim and consider taking remedial action upon receipt of the written requests. Pao Yue-kong Library, The Hong Kong Polytechnic University, Hung Hom, Kowloon, Hong Kong http://www.lib.polyu.edu.hk
-
Upload
khangminh22 -
Category
Documents
-
view
2 -
download
0
Transcript of b2551314x.pdf - PolyU Electronic Theses
Copyright Undertaking
This thesis is protected by copyright, with all rights reserved.
By reading and using the thesis, the reader understands and agrees to the following terms:
1. The reader will abide by the rules and legal ordinances governing copyright regarding the use of the thesis.
2. The reader will use the thesis for the purpose of research or private study only and not for distribution or further reproduction or any other purpose.
3. The reader agrees to indemnify and hold the University harmless from and against any loss, damage, cost, liability or expenses arising from copyright infringement or unauthorized usage.
IMPORTANT
If you have reasons to believe that any materials in this thesis are deemed not suitable to be distributed in this form, or a copyright owner having difficulty with the material being included in our database, please contact [email protected] providing details. The Library will look into your claim and consider taking remedial action upon receipt of the written requests.
Pao Yue-kong Library, The Hong Kong Polytechnic University, Hung Hom, Kowloon, Hong Kong
http://www.lib.polyu.edu.hk

The Hong Kong Polytechnic University Department of Building Services Engineering
Investigation on an Axial Passive Magnetic Bearing System (APMBS) and Its Application in Building
Integrated Vertical Axis Wind Turbines
Jan Kumbernuss
A thesis submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy
June 2012
lbsys
Text Box
This thesis in electronic version is provided to the Library by the author. In the case where its contents is different from the printed version, the printed version shall prevail.

II
Certificate of Originality
I hereby declare that this thesis is my own work and that, to the best of my
knowledge and belief, it reproduces no material previously published or written, nor
material that has been accepted for the award of any other degree or diploma, except
where due acknowledgement has been made in the text.
………………………………………………………………..
Jan Kumbernuss June 2012
Department of Building Services Engineering
The Hong Kong Polytechnic University
Hong Kong SAR, China

III
Dedication
Für Min
und meine Kinder Jan Lukas und Jan Felix
Hong Kong April 2012

IV
Abstract
This thesis is entitled: Investigation on an Axial Passive Magnetic Bearing
System (APMBS) and its application in Building
Integrated Vertical Axis Wind Turbines
Submitted by: Jan Kumbernuss
For the degree of: Doctor of Philosophy
At The Hong Kong Polytechnic University
April 2012
Obvious weather changes have been taking place in the world and global warming
and greenhouse gas emissions is still a hot topic. However, for many people global
warming is of less importance when faced with economic hardships. The link
between the economic development and the consumption of fossil fuel of the past is
analyzed first in this thesis by showing that a sustainable energy supply is crucial not
only for reducing greenhouse gases emissions, but also for the economic
development. The negative economic implication of the dependency on crude oil and
other fossil fuels is introduced. The instability of the world economy has been caused
partially by the crude oil price fluctuations. The only way to create a stable and
sustainable economy is to minimize the consumption of fossil fuels, and the money
that might otherwise be lost in future financial collapses could be used wisely now to
initiate the move away from a petrol-based economy. To facilitate this move, huge
investment is needed for the development of a smart utility grid, non-petroleum
based transportation and renewable energy-based energy supply economy, as along

V
the lines of the financial bailout packages and economic stimulus packages issued by
the American Government after the financial crisis in 2008. The current situation has
forced a number of governments to increase research and development investment in
the renewable energy sector. As one of the well-known renewable energy resources,
wind energy, which attracts a larger part of today’s total investments, is now playing
an increasingly important role, especially in China. The work developed in this thesis
is focusing wind energy utilization in urban areas.
The off-shore and on-shore wind farms are well known, but recently a new
application for wind turbines has attracted significant interest from architects,
engineers and developers, namely the building-integration wind turbine (BIWT).
Several prototype BIWT projects have been developed in Hong Kong, mainland
China and other countries, and it is estimated that future urban wind turbines can
produce a substantial amount of energy if they are integrated into urban buildings.
However, the integration of large rotating machines into buildings has some
structural effects on the buildings, like noise and vibration transmissions. The
purpose of this project was thus to develop a novel Axial Passive Magnetic Bearing
System (APMBS) and to investigate its application in Building Integrated Vertical
Axis Wind Turbines (BIVAWT) for wind power generation from buildings in urban
areas.
In order to get a good estimate of the vibrations of a VAWT, the air velocities and
the rotation speed of the wind turbine must be known, therefore the air velocities
surrounding a building in an urban area were investigated first in this study. A

VI
building in Hong Kong was chosen and its air velocities surrounding the building for
a one-year period were simulated at the beginning of this research project. The
results of the calculations were then used for wind tunnel tests of several Vertical
Axis Wind Turbines (VAWTs), which were designed and manufactured on the basis
of CFD simulations. Each constructed Savonius-type vertical axis wind turbine
(VAWT) was tested with different overlap ratios, shift angles, and the previously
found wind speeds. The wind tunnel test results produced the benchmarks of the
rotation speeds for the development of the novel axial passive magnetic bearing
system, an invention from this project.
An axial passive magnetic bearing system was then invented, which is thought to be
best suited for the VAWTs at inner city locations due to its vibration dampening
character, low maintenance and low friction. This novel and special Axial Passive
Magnetic Bearing System (APMBS) was developed specifically to minimize the
transmission of vibrations to buildings. This permanent magnetic bearing is much
cheaper and simpler than traditional magnetic bearing systems for achieving highly
reliable vertical supporting functions. Many current systems adopt ring magnets to
supply magnetic levitation force, but the current size of ring magnets produced is
limited because of the difficulty of charging the magnet evenly to produce a uniform
magnetic field. This new system consists of small, cuboidal magnets aligned along
the rotation path of the bearing. The only problem was that the repulsion force was
strong when the stator and the rotor magnets aligned, and weak when they did not
align, which caused a higher torque and would induce vibration. This problem was

VII
overcome by introducing a unique configuration of the location of the magnets, in
conjunction with a thin iron or mild steel sheet (mild steel is the most common form
of steel), which was able to unify, strengthen the magnetic field and protect the
magnets from aging. Using this method, thinner air-gaps are produced between the
rotor and stator, which can increase the stiffness of the bearing. Besides that will the
mild steel sheet also distribute the magnetic flux within the iron or mild steel plate
more uniformly, which will lead to reduced vibrations. Furthermore, due to the
enhanced strength of the magnetic field, cheaper magnets can be used, which makes
the bearing desirable for many high performing applications.
To optimize the magnetic block arrangement, countless simulations of the magnetic
field of the bearing were made and a number of prototypes of different versions of
such a bearing were developed from the study.
A test rig was constructed for testing the prototypes. The tests found the invented
system to be reliable during the wind tunnel test of the VAWT. A simulation using
the Finite Element Method (FEM) was carried out to predict the torque of the bearing
of any size and loading. This bearing was then tested extensively under different
rotation speeds for different air velocities. The torque of the bearing and the vibration
transmission form the rotating turbine to the structural frame were recorded and
analyzed. The simulation and experimental results demonstrated the advantages of
such a bearing. The test results showed that the bearing decoupled the wind turbine

VIII
from the building. Overall, this new bearing system can lower rotational friction
considerably, and minimizes vibration transmission as well.
This innovative bearing system should not only be applied to the VAWTs, but also to
other rotating devices like flywheels, which can benefit greatly from such a bearing
system. The findings of this study have shown that the novel bearing is very well
suited for decoupling the buildings from the turbines for renewable power generation
in an urban environment. This development has been condensed into a patent
application and a large VAWT with this bearing system has been designed and
constructed for the Hong Kong Water Services Department (HK WSD) for future on-
site tests.
Another remarkable finding from the wind tunnel tests of the Savonius wind turbines
is that a second performance peak at high Tip Speed Ratios (TSR) of the wind
turbines exists, which has been reported only rarely and not been explained in the
literature to date. The Savonius turbine has considerable lift properties, but the
turbine is commonly considered as a drag driven turbine. The reasons for the
existence of this second performance peak are explained in the thesis. The results of
the study demonstrated that a wider range of rotation speeds has to be considered
during the design of the bearing.
For further development of the VAWTs, the concept of a double rotor motor for
counter rotating VAWTs was also developed. This motor is based on the structure of

IX
a transfer flux machine, which was developed comparatively recently (1989) and has
been used commercially in large horizontal axis wind turbines for power production.
This new development of the double-rotor motor can be used in the VAWTs to solve
the problem of different air velocities at different heights, as well as to eliminate the
gear system. This system can be further developed in the future.

X
Key Words
Levitation; magnetic bearing; permanent magnet; repulsion; magnetic damper; vibration;
Overlap ratio; Shift angle; Vertical axis wind turbine; VAWT; Savonius wind turbine;
Overlap ratio; Phase-shift angle

XI
Publications Arising from the Thesis
Journal papers
1. Jan Kumbernuss, J. Chen, H.X. Yang and W. N. Fu. A novel magnetic
levitated bearing system for Vertical Axis Wind Turbines (VAWT).
International Journal of Applied Energy, Volume 90, Issue 1, Pages 148-153.
February 2012.
2. Jan Kumbernuss, J. Chen, H.X. Yang and L. Lu. Investigation into the
relation of the overlap ratio and shift angle of double stage three bladed
Vertical Axis Wind Turbine (VAWT). Accepted by the International Journal
of Wind Engineering and Industrial Aerodynamics. In press (Ref. No.:
INDAER2527).
3. J. Chen, Jan Kumbernuss, H. X. Yang and L. Lu. Influence of phase-shift and
overlap ratio on Savonius wind turbine’s performance. International Journal
of Solar Energy Engineering (ASME), Volume 134, 011016-1 to 011016-9,
February 2012.
Conference papers
1. Jan Kumbernuss, H.X. Yang. A novel magnetic levitated bearing system for
Vertical Axis Wind Turbines (VAWT) International Conference of Applied
Energy, ICAE 2010, Singapore 2010.
2. Jan Kumbernuss, Kaj Piippo, H. X. Yang, and C. K. Tang. The magnetic
dampening effect of a passive modular magnetic bearing for a Vertical Axis

XII
Wind Turbines (VAWT). International Conference of Applied Energy, ICAE
2012, Suzhou, China 2012, under review.
Patent
Jan Kumbernuss, H.X. Yang, The Hong Kong Polytechnic University.
Passive magnetic levitation system with a saturated metal sheet for track or
axial bearing systems.
Patent application number 12344324

XIII
Acknowledgements
I would like to express my deepest thanks to my Chief Supervisor, Prof. Yang Hong-
xing, from the Department of Building Services Engineering (BSE) of The Hong
Kong Polytechnic University. His ongoing encouragement, support, interest and
patience throughout the course of the last 4 years made this project possible.
Furthermore, special thanks also go to my Co-supervisor, Dr. Lin Lu, Vivien,
Assistant Professor from the BSE Department, for her guidance and patient support.
For the financial support of the research and my subsequent employment as a
research assistant, I would like to thank The Hong Kong Polytechnic University.
For his generous encouragement and endless discussions I would like to thank Dr. Fu
of the Electrical Engineering Department.
Thanks also go to the Industrial Center of The Hong Kong Polytechnic University for
their assistance and help to set up the experiments.
As well, I would like to thank my fellow student Mr. Chen Jian for his participation
and help during the extensive measurement series in Jinan, China and the
construction of the wind turbines.
And last but not least, I thank my wife, Min, and my two sons, Lukas and Felix, for
their understanding, encouragement and support.

XIV
Table of Contents
Certificate of Originality II
Dedication III
Abstract IV
Key Words X
Publications Arising from the Thesis XI
Acknowledgements XIII
Table of Contents XIV
Table of Figures XX
Table of Tables XXXII
Nomenclatures of the wind turbine design XXXIV
Nomenclatures of the magnetic bearing design XXXVII
The energy crisis 1
1.1 Introduction 1
1.2 Thinking of change 7
1.3 Conclusion 9
Chapter 2 Renewable energy – wind energy and buildings 10
2.1 Introduction 10
2.2 Project review: rising interest into a little researched area 12

XV
2.3 Current projects: the “Bahrain World Trade Center” 13
2.4 Current projects: the “Pearl River Tower” 15
2.5 Current projects: the STRATA SE1 - Castle House London” 17
2.6 Current projects: the “Beijing Century City” 18
2.7 Conclusion 21
Chapter 3 A Review on Wind Turbines 22
3.1 Introduction 22
3.2 Energy source: Wind - the theory 23
3.3 The wind resource: wind power density 24
3.4 General concepts of wind turbines 25
3.4.1 The Horizontal Axis Wind Turbine 28
3.4.2 The Vertical Axis Wind Turbine 29
3.4.3 The Darrieus turbine 30
3.4.4 The Savonius turbine 31
3.5 Conclusion 34
Chapter 4 Wind in urban areas 36
4.1 The statistical wind distribution over buildings 38
4.2 Wind speed variation with height 39
4.3 Wind distribution 41
4.4 The roof acceleration effect 42
4.5 Wind speed prediction calculated by CFD 44
4.6 The CFD calculation 47
4.7 Results of the CFD calculation: 49
4.8 Conclusion 50
Chapter 5 Testing the Savonius VAWT 51
5.1 The investigation 51
5.2 Data processing 53
5.3 Measurement uncertainty 54

XVI
5.4 Turbine layout and experiments 55
5.5 The wind tunnel 58
5.5.1 Air velocity correction 59
5.5.2 Reynolds number 60
5.6 Experimental Methodology 61
5.7 Measured Results 62
5.7.1 The static torque measurements 62
5.7.1.1 The effect of the Reynolds number and air velocity 63
5.7.1.2 Effect of the Phase Shift Angle (PSA) 64
5.7.1.3 Effect of the Overlap Ratio (OL) 64
5.7.2 Dynamic torque and power coefficient test results 65
5.7.2.1 The single stage turbines 65
5.7.2.2 The double stage wind turbines 71
5.8 Findings 82
5.8.1 Open questions 86
5.9 Conclusion 88
5.9.1 The turbines 88
5.9.2 The angular velocity 89
Chapter 6 Fundamentals of Magnetic Bearings 92
6.1 Review on Magnetic Bearings 92
6.1.1 The benefits of magnetic bearings 93
6.1.2 AMB Active Magnetic Bearings 94
6.1.3 HTSB High Temperature Superconductor Bearings 94
6.1.4 Passive Magnetic Bearings (PMBs) 95
6.2 Basics of Magnetism 96
6.2.1 Paramagnetism 96
6.2.2 Diamagnetism 96
6.2.3 Ferromagnetism 97
6.2.4 The magnetic field 97
6.2.5 Earnshaw Theorem 98

XVII
6.2.6 Analytical calculation methods for magnetic repulsion 100
6.3 Passive magnetic bearings (PMB) 105
6.4 Analytical approach of a multiple magnet ring bearing. 107
6.5 Conclusion 112
Chapter 7 Development of a novel Magnetic Bearing 113
7.1 The BH curve of the steel and its importance for the bearing. 114
7.1.1 Dimensioning the flux concentrator calculation. 119
7.2 Finite Element Analysis. 121
7.3 Simulation calibration. 124
7.4 The novel APMBS structure / prototype configuration 127
7.4.1 Limitations of the measurement equipment. 127
7.4.1.1 The design details of the bearing. 129
7.4.1.2 Simulation results of the APMB performance. 131
7.4.1.3 The results of the simulated bearing in comparison with the
manufactured prototype. 135
7.4.1.4 The simulated bearing. 136
7.4.1.5 Simulation data versus measured data - error calculation. 136
7.4.2 Measured performance of the prototype of the APMBS. 137
7.5 Conclusion 139
Chapter 8 Improvement of the developed bearing 140
8.1 Influential literature 140
8.1.1 Basic magnetic bearing configuration 0 142
8.1.2 Magnetic bearing configuration 1 143
8.1.3 Magnetic bearing configuration 2 144
8.1.4 Magnetic bearing configuration 3 145
8.1.5 Magnetic bearing configuration 4 146
8.1.6 Magnetic bearing configuration 5 147
8.1.7 The difference between ring magnets and ring configurations consisting
of multiple magnets 148
XVIII
8.1.8 Investigation into multiple magnet ring configurations 154
8.1.9 Magnet block locations between multiple magnet rings 163
8.2 Conclusion 169
Chapter 9 The second prototype –comparison to the simulated test results
171
9.1 The experimental setting 173
9.2 Data acquisition 176
9.3 Comparison between the measurements and the simulation 177
9.4 The magnetic field between the rotor and the stator magnets 180
9.5 Torque comparison of the magnetic bearing with ball bearings 182
9.6 The Vibration transmission 183
9.6.1 Data acquisition 184
9.6.2 The investigation 185
9.6.2.1 Vibration transmission comparison of the magnetic bearing with
the ball bearing 185
9.6.2.2 Torque comparison of the magnetic bearing with the ball bearing
190
9.6.2.3 Investigation of the magnetic bearing with decreasing air gap 191
9.6.3 Findings 195
9.7 Conclusion 196
Chapter 10 The patent application 198
10.1 The structure of the bearing 198
10.2 The stator of the bearing 200
10.3 The rotor of the bearing 200
10.3.1 The order of the magnets: 203
Chapter 11 The application of the bearing 205
11.1 Development of the turbine 206
11.2 The safety of the turbine design 209

XIX
11.3 The assembly 210
Chapter 12 Final Conclusion 214
Chapter 13 Other Innovative Work related with the Development of the
Novel Magnetic Bearing 218
13.1 Development of a double-rotor wind turbine generator 218
Appendix 220
References 226

XX
Table of Figures
Figure 1.2.1 Oil price development 2004-2010. 2
Figure 1.2.2 Oil price and government debt development 1970-2010. 2
Figure 1.2.3 Crude Oil price and GDP of the USA development 2000-2010. 3
Figure 1.2.4 Crude Oil price and GDP growth rate (in percent) of the USA
development 2000-2010. 3
Figure 1.2.5 Crude Oil price and the German GDP development of 2000-2010. 4
Figure 1.2.6 Crude Oil price and the German GDP growth rate (in percentage). 4
Figure 1.2.7 Crude Oil price and the GDP growth of German, Greece, China and
USA in 2000-2010. 6
Figure 1.2.8 Crude Oil price and the percentage of energy produced by alternative
sources in Germany, China and USA from 1960 to 2010. 7
Figure 1.2.9 Electric energy produced by all energy sources of Germany of 1960-
2010. 8
Figure 2.1 Electric energy produced by all energy sources of Germany of 1990-2010.
11
Figure 2.2 Recent picture of an ancient version vertical axial wind turbines used for
grinding grain. 11
Figure 2.3 Experimental setting at the University of Stuttgart, Germany. 12
Figure 2.4 Visualized building structure by the University of Stuttgart, Germany. 12
Figure 2.5 World trade center in Bahrain with 3 horizontal axis wind turbines
between the office towers. 13
Figure 2.6 World trade center in Bahrain night photo. 13
Figure 2.7 Shrouding effect of the two office tower of the World Trade Center 14
Figure 2.8 Visualization of the Pearl River Tower 16
Figure 2.9 The turbine opening in the façade of the Pearl River Tower. 16
Figure 2.10 Turbine location on the façade and strategy to increase the air velocity.16
Figure 2.11 Computational fluid dynamic (CFD) simulation estimating the increased
air velocity through the turbine openings of the façade. 16

XXI
Figure 2.12 The turbines of the “STRATA SE1” under construction. 17
Figure 2.13 Recent picture of an ancient version vertical axial wind turbines used for
grinding grain 17
Figure 2.14 The turbines of the “STRATA SE1” under construction. 18
Figure 2.15 Beijing Century City Plaza proposed in 2006 with a 2 MW VAWT
integrated in the design of the building. 19
Figure 2.16 Section of the “Century City Plaza” project by Paliburg Ltd. 2006. On
top is the turbine visible. 21
Figure 3.1 Explanatory picture of the “Beijing Century City” project. 22
Figure 3.2 Off shore based wind resource map of the USA by the 24
Figure 3.3 Estimated wind turbine type power coefficient versus turbine 26
Figure 3.4 Wind rose for San Po Kong in Hong Kong. 35
Figure 4.1 Example of a monthly wind distribution diagram at a Hong Kong site in
2007. 36
Figure 4.2 Wind direction from A to B 37
Figure 4.3 Schematic plan of the main wind direction (A to B) 37
Figure 4.4 Example of a yearly wind distribution diagram at a Hong Kong site in
2007 37
Figure 4.5 2D simulation of a section of an urban environment. The skyline was
chosen according to the main wind direction (Figure 4.2 and Figure 4.3).
38
Figure 4.6 Example of a table of the wind speed probability of January of 2007. 41
Figure 4.7 Example of a table of the Weibull distribution for probability of January
of 2007. 41
Figure 4.8 The bluff body.[Royal Institute of Technology Sweden (2012)] 43
Figure 4.9 The velocity magnitude of the moving air over an urban contour (the
colors depict the magnitude of velocity – red high - blue low). 43
Figure 4.10 The vorticity magnitude of the moving air over an urban contour (the
colors depict the magnitude of vorticity – red high - blue low). 45
Figure 4.11 Velocity vectors by velocity magnitude. 45
Figure 4.12 Magnitude of vorticity. 46

XXII
Figure 4.13 Magnitude of vorticity. 46
Figure 4.14 Positions on the roof with the acceleration area. 47
Figure 5.1 Photo of the finished VAWT with possible multiple configurations. 52
Figure 5.2 The VAWT with 15º phase shift 55
Figure 5.3 The VAWT in a wind tunnel. 55
Figure 5.4 Single stage turbine 56
Figure 5.5 Double stage turbine with 15 degree phase shift angle 56
Figure 5.6 Diagram of the experimental setup. 56
Figure 5.7 VAWT with 0 rotor overlap ratio. 57
Figure 5.8 VAWT with 0.16 rotor overlap ratio. 57
Figure 5.9 VAWT with 0.32 rotor overlap ratio. 57
Figure 5.10 The wind tunnel for the VAWT tests 58
Figure 5.11 The air flow field in the wind tunnel. 59
Figure 5.12 Values for flat plate and VAWT rotor versus AF/AT. 60
Figure 5.13 Diagram of the static torque measurement setting 62
Figure 5.14 Static torque coefficient measurement results of the wind turbine
DS0PSA0OL 63
Figure 5.15 Static torque coefficient measurement results for 3 wind turbines at 8m/s
air velocity. 64
Figure 5.16 Static torque coefficient measurement results for 5 wind turbines at 8m/s
air velocity. 65
Figure 5.17 Static torque coefficient results of 3 double stage wind turbines at 8m/s
air velocity and PSA 0. 66
Figure 5.18 Static torque coefficient results for 3 double stage wind turbines at 8m/s
air velocity at PSA 30. 66
Figure 5.19 Static torque coefficient of 3 double stage wind turbines at 8m/s air
velocity at PSA 60. 67
Figure 5.20 Static torque coefficient results of 3 single stage wind turbines at 8m/s
air velocity. 67
Figure 5.21 Static torque coefficient results for 3 double stage wind turbines at 8m/s
air velocity at PSA 30. 68

XXIII
Figure 5.22 Static torque coefficient of 3 double stage wind turbines at 8m/s air
velocity at PSA 60. 68
Figure 5.23 Power coefficients of 3 wind turbines at air velocity of 6m/s. 69
Figure 5.24 Power coefficients of the turbines SS0OL, SS0.16OL and SS0.32OL at
air velocity of 8m/ 69
Figure 5.25 Torque coefficients of 3 wind turbines at air velocity of 8 m/s 70
Figure 5.26 Power coefficients of the turbines SS0OL, SS0.16OL, and SS0.32OL at
air velocity of 10m/s. 70
Figure 5.27 Power coefficients of the turbines DS0PSA0OL, DS15PSA0OL,
DS30PSA0OL, DS45PSA0OL, and DS60PSA0OL at air velocity of
6m/s. 71
Figure 5.28 Power coefficients of the turbines DS0PSA0OL, DS15PSA0OL,
DS30PSA0OL, DS45PSA0OL, and DS60PSA0OL at air velocity of
8m/s. 72
Figure 5.29 Torque coefficients of the turbines DS0PSA0OL, DS15PSA0OL,
DS30PSA0OL, DS45PSA0OL, and DS60PSA0OL at air velocity of
8m/s. 72
Figure 5.30 Power coefficients of the turbines DS0PSA0OL, DS15PSA0OL,
DS30PSA0OL, DS45PSA0OL, and DS60PSA0OL at air velocity of
10m/s 74
Figure 5.31 Power coefficients of the turbines DS0PSA0.16OL, DS15PSA0.16OL,
DS30PSA0.16OL, DS45PSA0.16OL and DS60PSA0.16OL at air velocity
of 6 m/s 74
Figure 5.32 Torque coefficients of the turbines DS0PSA0.16OL, DS15PSA0.16OL,
DS30PSA0.16OL, DS45PSA0.16OL and DS60PSA0.16OL at air
velocity of 6m/s 75
Figure 5.33 Power coefficients of the turbines DS0PSA0.16OL, DS15PSA0.16OL,
DS30PSA0.16OL, DS45PSA0.16OL and DS60PSA0.16OL at air
velocity of 8m/s 75

XXIV
Figure 5.34 Power coefficients of the turbines DS0PSA0.16OL, DS15PSA0.16OL,
DS30PSA0.16OL, DS45PSA0.16OL and DS60PSA0.16OL at air
velocity of 10m/s. 76
Figure 5.35 Power coefficients of the turbines DS0PSA0.32OL, DS15PSA0.32OL,
DS30PSA0.32OL, DS45PSA0.32OL and DS60PSA0.32OL at air
velocity of 6m/s. 78
Figure 5.36 Power coefficients of the turbines DS0PSA0.32OL, DS15PSA0.32OL,
DS30PSA0.32OL, DS45PSA0.32OL and DS60PSA0.32OL at air
velocity of 8m/s. 79
Figure 5.37 Torque coefficients of the turbines DS0PSA0.32OL, DS15PSA0.32OL,
DS30PSA0.32OL, DS45PSA0.32OL and DS60PSA0.32OL at air
velocity of 8m/s 79
Figure 5.38 Power coefficients of the turbines DS0PSA0.32OL, DS15PSA0.32OL,
DS30PSA0.32OL, DS45PSA0.32OL and DS60PSA0.32OL at air
velocity of 10m/s. 80
Figure 5.39 Power coefficients of most of the double stage turbines at air velocity of
6m/s. 82
Figure 5.40 Power coefficients of most of the double stage turbines at air velocity of
8m/s. 83
Figure 5.41 Power coefficients of most of the double stage turbines at air velocity of
10m/s. 83
Figure 5.42 Fictional power coefficient. 87
Figure 6.1 Magnetising direction of magnetic cubes after J. P. Yonnet. 102
Figure 6.2 Explanatory drawing by J. P. Yonnet for the following Equations. 102
Figure 6.3 Ring configuration (Figure 8.17) 107
Figure 6.4 Red magnet in alignment. 107
Figure 6.5 Red magnet moved 1/10 of the distance between magnet 2 and 3 towards
magnet 2. 108
Figure 6.6 Red magnet moved 2/10 of the distance between magnet 2 and 3 towards
magnet 2. 108

XXV
Figure 6.7 Red magnet moved 3/10 of the distance between magnet 2 and 3 towards
magnet 2. 108
Figure 6.8 Red magnet moved 4/10 of the distance between magnet 2 and 3 towards
magnet 2. 108
Figure 6.9 The red magnet in centered over the gap between the blue magnets. 108
Figure 7.1 Measurement direction of the Gauss meter on the magnet with mild steel
plate. 114
Figure 7.2 Measurement direction of the Gauss meter on the magnet without mild
steel plate. 114
Figure 7.3 Magnetic field on the surface of magnet and mild steel sheet surface. 114
Figure 7.4 Magnets without mild steel plate and magnetic probe. 115
Figure 7.5 Magnets with mild steel plate and magnetic probe. 115
Figure 7.6 Results of probe measurements (Figure 7.4 and Figure 7.5). 115
Figure 7.7 B-H curve. 117
Figure 7.8 Steel saturation curves [downloaded from lh5.ggpht.com (2000)]. 118
Figure 7.9 Steel permeability curves [downloaded from lh5.ggpht.com (2000)]. 118
Figure 7.10 The BH curves of several materials 118
Figure 7.11 The basic bearing layout. 121
Figure 7.12 Here is the the effect of the mesh number on the precision of the
simulation shown. 122
Figure 7.13 The mesh number versus calculation time. 123
Figure 7.14 location of probe measurements. 124
Figure 7.15 Above are the measurement points 1 and 4 of Figure 7.14 shown. 125
Figure 7.16 Above are the measurement points 2 and 3 of Figure 7.14 shown. 125
Figure 7.17 Above are the measurement points 1 and 4 of Figure 7.14 shown. 126
Figure 7.18 Above are the measurement points 2 and 3 of Figure 7.14 shown. 126
Figure 7.19 Schematic lay out of the bearing: Green the rotor magnets. 128
Figure 7.20 Sectional schematic of the Permanent Magnetic Bearing (PMB). 128
Figure 7.21 First experiment setting. 129
Figure 7.22 Photo of the first experiment setting. 129

XXVI
Figure 7.23 Simulated schematic of a mild-steel plate attached to the rotor magnets.
131
Figure 7.24 Simulated levitation force of the PMB without a mild-steel plate at 300
rpm. 132
Figure 7.25 Simulated torque of the PMB without a mild-steel plate at 300 rpm. 132
Figure 7.26 Simulated torque of a PMB with a mild-steel plate at 300 rpm. 134
Figure 7.27 Simulated force of a PMB with a mild-steel plate at 300 rpm. 134
Figure 7.28 Simulated torque of a PMB with a mild-steel plate at 500 rpm. 134
Figure 7.29 Simulated results of the levitation force in z-direction of the PMB at 500
rpm. 135
Figure 7.30 Simulated results for the torque of the PMB at 500 rpm. 135
Figure 7.31 Diagram of the measured torque and rotation per minute 138
Figure 8.1 H field around the configuration 0. 142
Figure 8.2 H-field around the configuration 0. The blue dotts show the field
direction. 142
Figure 8.3 H field around the configuration 1. 144
Figure 8.4 H-field around the configuration 1. The blue and red dots show the field
direction. 144
Figure 8.5 H field around the configuration 2. 145
Figure 8.6 H-field around the configuration 2. The blue and red dots show the field
direction. 145
Figure 8.7 H field around the configuration 3. The mild steel yoke changes the
magnetic field. 146
Figure 8.8 H-field around the configuration 3. The blue and red dots show the field
direction. 146
Figure 8.9 H field around the configuration 4. 147
Figure 8.10 H-field around the configuration 4. The blue and red dots show the field
direction. 147
Figure 8.11 H field around the configuration 5. 147
Figure 8.12 H-field around the configuration 5. The blue and red dots show the field
direction. 147
XXVII
Figure 8.13 The H-field around the configurations 1 to 5. 148
Figure 8.14 RM SR SP 1AG A 1431mm2 149
Figure 8.15 CM SR SP 0G 1AG 149
Figure 8.16 CM SR SP 0.5G 1AG 149
Figure 8.17 CM SR SP 1G 1AG 149
Figure 8.18 Levitation force at 1mm air-gap distance. 150
Figure 8.19 Torque at 1mm air-gap distance. 150
Figure 8.20 Levitation force at 2.5mm air-gap distance. 151
Figure 8.21 Torque at 2.5mm air-gap distance. 151
Figure 8.22 Levitation force at 5mm air-gap distance. 152
Figure 8.23 Torque at 5mm air-gap distance. 152
Figure 8.24 Levitation force at 10mm air-gap distance. 153
Figure 8.25 Torque at 10mm air-gap distance. 153
Figure 8.26 The ring magnet RM SR SP 1AG A 2623mm2 155
Figure 8.27 Block magnets, double ring, single pole. CM DR SP 2G 1AG 155
Figure 8.28 Block magnets, double ring, single pole, single yoke. 155
Figure 8.29 Block magnets, double ring, single pole, single yoke. 155
Figure 8.30 Ring magnet and block magnets comparison. 156
Figure 8.31 Ring magnet and block magnets comparison. 156
Figure 8.32 Levitation force comparison of the block magnet configuration 157
Figure 8.33 Torque comparison of the block magnet configuration 158
Figure 8.34 Block magnets, double ring, double pole, single yoke. 159
Figure 8.35 Block magnets, double ring, double pole, double yoke. 159
Figure 8.36 Block magnets, double ring, double pole, double yoke. 159
Figure 8.37 Block magnets, double ring, double pole, triple yoke. 159
Figure 8.38 Levitation force comparison of the block magnet configurations to the
ring magnet RM SR SP 1AG A 2623. 160
Figure 8.39 Torque comparison of the block magnet configurations to the ring
magnet configuration RM SR SP 1AG A 2623. 161
Figure 8.40 Levitation force comparison of the block magnet configurations CM DR
DP 2G DY ML and CM DR DP 2G TY HML to the ring magnet RM SR

XXVIII
SP 1AG A 2623. The double yoke configuration has a lower levitation
force than the tripple yoke configuration. 161
Figure 8.41 Torque comparison of the block magnet configurations CM DR DP 2G
DY ML and CM DR DP 2G TY HML to the ring magnet RM SR SP
1AG A 2623. 162
Figure 8.42 The configuration A has an even number of north and south poles. 164
Figure 8.43 The configuration B has an uneven number of north and south poles. 165
Figure 8.44 The configuration C has an even number of north and south poles. 165
Figure 8.45 The Levitation force comparison at 1 mm air-gap between rotor and
stator. 166
Figure 8.46 The Levitation force of configuration A. 166
Figure 8.47 The torque comparison at 1 mm air-gap between rotor and stator. 167
Figure 8.48The Levitation force comparison at 2 mm air-gap between rotor and
stator. 167
Figure 8.49 The torque comparison at 2 mm air-gap between rotor and stator. 168
Figure 8.50 The Levitation force comparison at 3 mm air-gap between rotor and
stator. 168
Figure 8.51 The torque comparison at 3 mm air-gap between rotor and stator. 168
Figure 9.1 The rotor of the magnetic bearing installed with the mild steel yoke 171
Figure 9.2 The stator of the magnetic bearing with its mild steel yoke (here shown a
five ring configuration, but tested was a 4 ring configuration). 171
Figure 9.3 For determining the air gap and the levitation force is the rotor left
levitating over the stator. 172
Figure 9.4 During the test setup is the air-gap distance between rotor and stator
adjusted. 172
Figure 9.5 Schematic drawing of a commercial magnetic bearing prototype. 173
Figure 9.6 Schematic experiment layout 173
Figure 9.7 Experiment setting. 175
Figure 9.8 Measured torque of the four bearing configurations. 177
Figure 9.9 Measured torque of the four bearing configurations. 178
Figure 9.10 Measured torque of the four bearing configurations. 179

XXIX
Figure 9.11 Section of the bearing showing the stator and the rotor. 180
Figure 9.12 Magnetic field density and flux distribution at position 1. 181
Figure 9.13 Magnetic field density and flux distribution at position 2. 181
Figure 9.14 Magnetic field density and flux distribution at position 3. 182
Figure 9.15 Magnetic field density and flux distribution at position 4. Positions 1 to 4
are chosen close to each other, in order to show the magnetic field
change of a small section of the bearing. 182
Figure 9.16 The measured torque and simulated torque of air-gap A3. 183
Figure 9.17 The difference in vibrations between the rotor and stator at different
rotation speeds 186
Figure 9.18 The detail difference in vibrations between the rotor and stator at
different rotation speeds. 186
Figure 9.19 The difference in vibrations between the rotor and stator at different
rotation speeds. 187
Figure 9.20 The difference in vibrations between the rotor and stator at different
rotation speeds. 187
Figure 9.21 The detail difference in vibrations between the rotor and stator at
different rotation speeds. 188
Figure 9.22 The difference in vibrations between the rotor and stator at different
rotation speeds. 188
Figure 9.23 The difference in vibrations between the rotor and stator at different
rotation speeds. 189
Figure 9.24 The difference in vibrations between the rotor and stator at different
rotation speeds. 190
Figure 9.25 The measured torque. 191
Figure 9.26 Magnetic bearing vibration comparison at rotor for different air gaps. 192
Figure 9.27 Magnetic bearing vibration comparison at stator for different air gaps 192
Figure 9.28 Magnetic bearing vibration comparison at rotor for different air gaps. 193
Figure 9.29 Magnetic bearing vibration comparison at stator for different air gaps 193
Figure 9.30 Magnetic bearing vibration comparison at rotor for different air gaps. 193

XXX
Figure 9.31 Magnetic bearing vibration comparison at stator for different air gaps.
194
Figure 10.1 Explanatory drawing of the (to be) patented product. 199
Figure 10.2 Explanatory drawing of the (to be) patented product. 199
Figure 10.3 Explanatory drawing of the stator design of the bearing. 200
Figure 10.4 Explanatory drawing of the stator design of the bearing. 201
Figure 10.5 Explanatory drawing of the stator design of the bearing. 203
Figure 11.1 Visulisation of the prototype turbine. 205
Figure 11.2 A VAWT, twin bladed, the generator mounted above the mast under the
rotor shaft (marked by a red box). 206
Figure 11.3 Overall Turbine design, left the elevation and some details, and right a
section with the braking system. 207
Figure 11.4 Horizontal force transmission via ball bearings 208
Figure 11.5 Vertical force transmission via magnetic bearing 208
Figure 11.6 The generator hub. Marked in red are the rotor parts of the turbine, and
blue are the stator parts. 209
Figure 11.7 The magnetic bearing hub. Marked in red are the rotor parts of the
turbine, and blue are the stator parts. 209
Figure 11.8 Structural simulation of the turbine under typhoon wind speeds in stand
still. 209
Figure 11.9 Structural simulation of the turbine under typhoon wind speeds in
motion. 210
Figure 11.10 Mild steel bearing rings with magnets. 211
Figure 11.11 Finished stator part of the magnetic bearing. 211
Figure 11.12 Testing the bearing. 212
Figure 11.13 Turbine assembly. 212
Figure 11.14 Turbine mast under construction. 213
Figure 11.15 Finished wind turbine with magnetic bearing. 213
Figure 13.1 Schematic picture of the generator. 218
Figure 13.2 Flux analysis. 219

XXXI
Appendix Figure 1: Angular velocity versus power coefficient of the wind turbine at
6m/s and 0 gap rate. 220
Appendix Figure 2: Angular velocity versus power coefficient of the wind turbine at
at 8m/s and 0 gap rate. 220
Appendix Figure 3: Angular velocity versus power coefficient of the wind turbine at
at 10 m/s and 0 gap rate. 221
Appendix Figure 4: Angular velocity versus power coefficient of the wind turbine at
at 6m/s and 0.16 gap rate. 221
Appendix Figure 5: Angular velocity versus power coefficient of the wind turbine at
at 8m/s and 0.16 gap rate. 222
Appendix Figure 6: Angular velocity versus power coefficient of the wind turbine at
at 10m/s and 0.16 gap rate. 222
Appendix Figure 7: Angular velocity versus power coefficient of the wind turbine at
at 6m/s and 0.32 gap rate. 223
Appendix Figure 8: Angular velocity versus power coefficient of the wind turbine at
at 8m/s and 0.32 gap rate. 223
Appendix Figure 9 Angular velocity versus power coefficient of the wind turbine at
at 10m/s and 0.32 gap rate. 224

XXXII
Table of Tables
Table 2.1 Feasibility study for the Beijing Project 2007. 20
Table 3.1 The largest HAWT produced by Enercon (2011). 29
Table 3.2 Pros and Cons of wind turbine typs. 33
Table 3.3 Table the Wind turbine types. 34
Table 4.1 Comparison of the results derived by Mertens (2005) methode to results
derived by CFD simulation. 48
Table 5.1 Uncertainty percentages. 55
Table 5.2 Reynolds numbers of double and single stage wind turbines. 61
Table 5.3 The maximum power coefficient at different air velocities. 70
Table 5.4 Maximum performance of the turbines with overlap ratio 0 with the
highest CP max values in color. 73
Table 5.5 Maximum performance of the turbines with the overlap ratio 0.16 with the
highest CP max values in color. 76
Table 5.6 Maximum performance of the turbines with the overlap ratio 0.32 with the
highest CP max in color. 81
Table 5.7 Summary chart of the CP max, the TSP and the CT. the CP max of each
turbine configuration are printed in red; colored in yellow the phase shift
ratios which have the best overall performance. 85
Table 5.8 Rotating velocities of the turbines. 90
Table 5.9 The Performance table of all double stage wind turbines. 91
Table 6.1 Explanation of Equations 6.18 to 6.25. 103
Table 6.2 Magnetizing direction of magnetic rings in PMB configurations 105
Table 6.3 dimensions of magnets. a, b and c are for the stator magnets, 110
Table 6.4 Magnet positions. Stator magnet (sm1) rotor magnet (rm1). 110
Table 6.5 The results show that the repulsion force differ depending on the
simulation and calculation. 111
Table 7.1 Design data of the magnetic bearing. 130
Table 7.2 Design data of the magnets used for the magnetic bearing. 131

XXXIII
Table 7.3 The error of measurements. 137
Table 8.1 The investigated bearing configurations. 154
Table 8.2 The investigated bearing configurations. 157
Table 8.3 The investigated bearing configurations 160
Table 8.4 The investigated bearing configurations. 163
Table 9.1 Design Data of the bearing rotor and stator. 174
Table 9.2 Design data of the bearing rotor and stator. 174
Table 9.3 Air velocity and Rotation speed. 175
Table 9.4 Investigated cases AG1, AG2, AG3 and AG4. 176
Table 9.5 Simulated torque for the air gap distance of A3 and measured torque
results. 180
Appendix Table 1 The turbine dimensions. 225
Appendix Table 2 Turbine abbreviations. 225

XXXIV
Nomenclatures of the wind turbine design
AR Aspect ratio Equation 5.3
A= As Turbine maximum frontal swept area of
the Savonius turbine
Equation 5.3
AT Wind tunnel area Equation 5.7
C Cord length of blade Equation 3.8
cs Weibull scale parameter Equation 4.6
CD Aerodynamic drag coefficient of the
Savonius turbine
Equation 3.8
CP Power coefficient Equation 3.3
CPS Power coefficient of the Savonius
turbine
Equation 3.8
Cst Static Torque coefficient Equation 5.2
Ct Torque coefficient Equation 5.4
Cx Instantaneous torque in x direction
Equation 3.9
Cy Instantaneous torque in y direction Equation 3.10
d Bucket diameter
Figure 5.7
Figure 5.8
Figure 5.9
D Rotor diameter
Figure 5.7
Figure 5.8

XXXV
Figure 5.9
Est Standard deviation
Equation 5.5
EW Wind tunnel blockage rate
Equation 5.8
H Rotor height Table 4.1
k Weibull shape parameter Equation 4.3
n Total number of measurement values
Equation 5.5
N Number of blades
OL Overlap ratio Figure 5.7
Figure 5.8
Figure 5.9
P Power Equation 3.2
PA Pressure difference between the two
sides of the rotor blades of Blade 1
Equation 3.9
PB Pressure difference between the two
sides of the rotor blades of Blade 2
Equation 3.10
R Radius of rotation of blade Figure 5.7
Figure 5.8
Figure 5.9
Re, Re Reynolds number Table 5.9

XXXVI
S Rotor overlap
Figure 5.7
Figure 5.8
Figure 5.9
T Torque
Equation 5.4
TSR Tip Speed Ratio Equation 3.4
Ts Static torque
Equation 5.2
Uc Corrected air velocity
Equation 5.9
Ur Relative air velocity
Equation 3.7
Ut Movement of turbine blade tip Equation 3.7
UU Uncorrected Air velocity Equation 3.7
Uw Free airstream velocity
Equation 3.7
v(z) Height adjusted air velocity Equation 4.8
v1, v2 and vn Measured values
Equation 5.5
va Mean measured values Equation 5.5

XXXVII
Greek Symbols:
β
Blockage ratio
Equation 5.7
ΔH Height adjustment Table 4.1
θ Position of blade in degrees Equation 3.9
φ Bucket rotation angle [degree]
λ TSR (Tip speed ratio) Equation 5.1
μa air viscosity Equation 5.10
σHAWT Rotor solidity HAWT Equation 3.5
σVAWT Rotor solidity VAWT Equation 3.6
ρ Density of air Equation 5.2
ω Rotor angular speed Equation 5.1
Nomenclatures of the magnetic bearing design
ag air-gap between the two magnets Equation 6.15
A Cross section of flux path Equation 7.2
B Magnetic flux density Equation 6.3
Br Remanent magnetic flux density Equation 7.1

XXXVIII
F Force Equation 6.10
Equation 6.18
Fmmf Magneto motive force Equation 7.4
ht thickness of magnet Equation 6.15
H (x, y, z) Magnetic field strength (x, y and z) Equation 6.1
I Electric current
J Current density
JP Polarization direction Equation 6.2
k Thermal conductivity
K(x, y, z, r) Stiffness (x, y, z and r) Equation 6.5
Equation 6.6
L Flux path length Equation 7.6
nm Number of magnets Equation 10.3
M Magnetization Equation 6.3
ML Length of magnet Equation 10.1
MW Width of magnet Equation 10.4
MH Height of magnet
r Relation of the magnet to each other Equation 6.23
rall Radius of ring of the magnet blocks Equation 10.1
rdm is the radius of the disk magnet Equation 6.15
rm is the radius of the bock magnet Equation 10.4
rm1 is the radius of the bock magnet Equation 10.5

XXXIX
rm2 is the radius of the bock magnet Equation 10.5
R Reluctance Equation 7.2
Uij, Relation of the surfaces of the magnet Equation 6.19
vkl, Relation of the surfaces of the magnet Equation 6.20
wpq, Relation of the surfaces of the magnet Equation 6.21
Greek Symbols:
µ0 Permeability Equation 6.4
μm Permeability of the material Equation 7.1
σ Polarization direction Equation 6.18
σ' Polarization direction Equation 6.18
Φ Magnetic flux Equation 6.23
ωoffset Offset angle between paired magnet rings
Equation 10.7

Chapter 1 The energy crisis
1.1 Introduction
The introduction for this thesis gives the opportunity to explain the main reasons
behind the research done and the urgency to implement a greater use of renewable
energies into large economies.
A survey conducted by the American broadcaster “ABC World News” [Langer
(2010)] stated that 58% of the interviewees were worried about their economic and
financial situations. It suggested that people worry most not about the “invisible
ghost” of climate change or global warming, but the economy and therefore their
jobs and livelihoods.
Today it is a well-known fact that economic activity depends on energy supply and
prices. This was demonstrated in the aftermath of the oil crisis in 1973, when most
OECD (Organization for Economic Co-operation and Development) economies went
into recession with declining Gross Domestic Products (GDP). This has been
repeated in recent years as similar effects, such as energy supply disruptions, have
occurred.
In 2008 the crude oil price rose until the American economy collapsed. One might
argue that the oil price was not the only factor for the economic decline, but it is a
major one, as research into the facts behind economic growth and decline has shown
(Figure 1.1.1 and Figure 1.1.2) [Stern (2002) and Tverberg (2012)].
It was after the oil crisis of 1973 that the factors of economic growth and its decline
were researched extensively [Rasche et al. (1977) and (1981)], and it has become an

2
undisputed fact, that the crude oil price volatility has a rapid negative impact on the
economy [Santini (1985), Carruth et al. (1998), Davis et al. (1996), Davis and
Haltiwanger (2001) ), Lee et al. (1995) and J. Muellbauer et al. ( 2001)], and the
society of developed nations [Cottrell (1955)] as shown in Figure 1.1.3 and Figure
1.1.4.
Figure 1.1.1 Oil price development 2004-2010. [World Bank (2012)]
Figure 1.1.2 Oil price and government debt development 1970-2010. The trend lines 1 and 2 in Figure 1.1.2 demonstrate the change of the American Government debt,
which seems to correlate with the increase of the oil price [World Bank (2012)]

3
The above figures clearly show visible is the negative growth rate from 2008 to 2010
[World Bank (2012)]. The direct impact of the oil prices can be seen in the declines
of the GDPs of OECD countries (Organization for Economic Co-operation and
Development), as indicated by economic data collected over the last 70 years by the
World Bank. Figure 1.1.4 and Figure 1.1.6 show the GDP growth and the crude oil
price for the years 2000 to 2010.
Figure 1.1.3 Crude Oil price and GDP of the USA development 2000-2010. Visible is the dent in the GDP after the Crude oil price hit its peak. [World Bank (2012)]
Figure 1.1.4 Crude Oil price and GDP growth rate (in percent) of the USA development 2000-2010. [World Bank (2012)]

4
A decline in GDP can be seen in most of the OECD countries’ economies during the
period of high oil prices. The past research as laid down by Tverberg and Stern, has
illustrated the underlying economic cycle, which starts (in a simplified version) with
a low economic growth rate and cheap and abundant crude oil.
During this time the manufacturing of goods is cheap and economic activity
increases. This increase in the economic activity in turn leads to increases in the
Figure 1.1.5 Crude Oil price and the German GDP development of 2000-2010. Clearly visible is the dent in the GDP after the Crude oil price hit its peak.
[World Bank (2012)]
Figure 1.1.6 Crude Oil price and the German GDP growth rate (in percentage). [World Bank (2012)]

5
demand for crude oil. With a rising GDP the price of the crude oil increases, until the
oil price reaches levels under which the economy cannot maintain its growth and
then starts to shrink.
As demand decreases so does the oil price, until it reaches a level in which the
economy is starting to grow again. Synchronal to this, does the supply of money to
the economic actors also increase or decrease. During growth times, companies have
easy access to money and therefore borrow more, which will enforce the economic
growth. However, during times of economic decline the opposite happens; access to
money for the economic actors is difficult, which adds to the difficulties that
company’s experience. This adds to the severity of the economic decline [Jiménez-
Rodríguez R. and Sánchez (2011)]. This cycle of economic growth and decline has
been observed many times over the course of the last 100 years. The last time was
the credit crunch of 2008 (Figure 1.1.1). When the oil price reached the highest level;
the supply of money (credit) tightened and the GDP growth decreased, which led to
the collapse of the American housing bubble, and a decline in GDP, which followed
in 2008 and 2010.
In this context, it is interesting that, at the height of the crude oil price in 2008, the oil
importing countries were spending 1.133x1010 US dollars per day on crude oil
(Figure 1.1.1, the highest crude oil price being 132 US dollars per Barrel times the
daily production of 85.836000 Barrels = 1.133x1010 US dollars).
Since the high oil price is one of the reasons for economic misery, the future
certainly does not look bright, with the rising price due to greater demand and
declining resources along with the other factors [Helbing (2011) and Diegel et al.
(2011)].

6
From the oil price chart from 1970 to 2010 (Figure 1.1.2), it is obvious, that the steep
rise of the oil price from 20 US dollars per barrel (in 1970) to more than 100 US
dollars today, is due in part to the rise of the emerging economies (and one could
even argue that the government debt is partially driven by the rising oil price).
Since 1990 are more countries competing for the available crude oil. These new
players are mainly China, India, Korea and Brazil, with China and India the largest
crude oil importers, as their high GDP growth rate demands (Figure 1.1.7). The dent
in the GDP after the Crude oil price hits its peak. However, China’s oil price declines
earlier and rises then [World Bank (2012)].
From 2001 the crude oil production rate has stagnated at around 85.000.000 barrels
per day (Figure 1.1.1). This means that the resource “crude oil” is currently getting
more scarce (due to increased demand), which explains the drastic price increases
seen over the last 10 years, peaking just before the financial crisis of 2008.
Figure 1.1.7 Crude Oil price and the GDP growth of German, Greece, China and USA in 2000-2010. [World Bank (2012)]

7
1.2 Thinking of change
Considering the growth of the emerging economies, the political instability in the oil
producing countries of the Middle East and the declining supply, it is likely that an
oil supply disruption in conjunction with high oil prices will be the norm in the
foreseeable future, which might stifle economic growth in the OECD countries.
There is only one solution for this problem, which is to minimize the dependence on
oil as an essential economic commodity. This could have several positive effects.
First, the money spend on oil (globally in 2008 over 1 trillion US dollars per day)
could be reinvested into economies and a more sustainable economic growth could
be the consequence.
Figure 1.1.8 Crude Oil price and the percentage of energy produced by alternative sources in Germany, China and USA from 1960 to 2010. [World Bank (2012)]
Furthermore, one could argue that the money spent on future bailouts of large
financial institutions or companies could be used better at the present time to change
the economy to a non-petrol based economy, by subsidizing new non-petrol cars,

8
energy storage devices, smart utility grids and new renewable energy production
projects.
Figure 1.1.9 Electric energy produced by all energy sources of Germany of 1960-2010. [World Bank (2012)]
That this is already happening can be seen in the increase of investment in renewable
energies (Figure 1.1.8 and Figure 1.1.9). The investment is well documented by the
number of new installed wind turbines and the dramatic increase of total power
output of wind turbines. This increased drastically during the time of high oil prices,
as shown in Figure 1.1.8.
Because oil is a finite energy source will a reduction of the dependency happen, and
wise investments, namely renewable energy production, non-oil based transport and
manufacturing systems must be made soon.

9
1.3 Conclusion
The risk of a prolonged dependence on crude oil as one of the essential commodities
for economic development is clear from analyses of the trends over the past 50 years.
The fact that crude oil is a scarce resource is mirrored clearly by its price rise over
the last decade. The task the developed nations are now facing is to initiate a large
effort to develop other energy resources, since a reduction in the availability of crude
oil is occurring due to declining resources [Federal Ministry for the Environment
(2011)], more users, and political situations.
Before this scarcity of crude oil can cause economic decline, the necessary
preparations have to be made. In order to do so, governments must focus on two key
sectors:
the replacement of petrol for transportation and manufacturing;
and an increase in the power generation capacity of available (renewable) sources.

10
Chapter 2 Renewable energy – wind energy and buildings
2.1 Introduction
Renewable energy is energy which can be replenished naturally. The currently
known renewable energy sources are:
• Hydro energy,
• Geothermal energy,
• Wind energy,
• Tidal and wave energy,
• Solar energy,
• Biomass.
Of these, wind is the most promising renewable energy source. The development of
renewable energy generating devices started during the first energy crises in 1973.
Since then large scale wind turbines have been developed and wind farms installed in
many countries. This is illustrated in Figure 2.1, which shows an increase of about
20% in the amount of renewable energy used in Germany during the period 1990 to
2009.
The increased interest in wind power has corresponded with investments. For
example, investments increased from 19.9 Billion Euro in 2009 to 26.6 Billion Euro
in 2010 [Smith J. et al. (2007)] (Figure 1.1.8). Germany is generating around 20% of
its total electric energy with renewable energy; 10% is generated by wind turbines
according to “Renewable Energy Sources in Figures”, published in July 2011 by the
Federal Ministry for the Environment, Nature Conservation and Nuclear Safety.

11
At the same time, the demand for sustainable or “green” buildings has grown as
Smith (2007) and Kats (2003) have shown. This is partially due to newer and
updated building standards, but also to clients’ requirements to make environmental
friendliness a selling point of a building.
Figure 2.2 Recent picture of an ancient version vertical axial wind turbines used for grinding grain. [downloaded at Mawer (2012)]
Figure 2.1 Electric energy produced by all energy sources of Germany of 1990-2010.
[World Bank (2012)]

12
2.2 Project review: rising interest into a little researched area
The boom in the renewable energy sector over the past years has led to several
attempts by architects [Huang and Huang (2005), Campbell and Stankovic (2001)
and Yeang (2011)] and engineers to unite buildings with energy conversion devices
like solar cells and wind turbines. Until 2000, however, the integration of wind
turbines was not researched very well, even though most of the ancient vertical axis
wind turbines were actually building integrated turbines (Figure 2.2) [Swift-Hook
(2012)].
Figure 2.3 Experimental setting at the University of Stuttgart, Germany.
[Picture found on the website of Buch der Synergie (2010)]
Figure 2.4 Visualized building structure by the University of Stuttgart, Germany.
[Picture found on the website of Buch der Synergie (2010)]
In 2001, as a consequence of increasing interest from architects and researchers,
some ground-breaking research in building integrated wind turbines was done by a
consortium led by Campbell and Stankovic (2001) including the BDSP, the
Imperial College, Mecal and the University Stuttgart, Germany. Overall, the
integration of wind turbines into the building structure has proven to be more
challenging [Dutton, et al. (2005)], (Figure 2.3 and Figure 2.4).

13
Most of the projects described in the following sections showcase a variety of energy
conversion systems, of which wind energy was one. However, in this thesis is only
the wind power application in buildings considered.
2.3 Current projects: the “Bahrain World Trade Center”
The most well-known prototype project is the Bahrain “World Trade Center”. It was
designed by Atkins Architects and was finished in 2007. In this project three
Horizontal Axis Wind Turbines (HAWT) were installed between two office towers
[Wu (2010)]. The concept was to shape the building in order to serve as a wind
concentrator (Figure 2.5 and Figure 2.6), which channels the wind towards the three
large 12.5m diameter horizontal axis wind turbines.
Figure 2.5 World trade center in Bahrain with 3 horizontal axis wind turbines
between the office towers. [Bahrain World Trade Center (2009)]
Figure 2.6 World trade center in Bahrain night photo.
[Bahrain World Trade Center (2009)]

14
Extensive wind tunnel testing and Computational Fluid Dynamics (CFD) simulation
were used to determine the effect of the building form on the turbine performance. It
was found that the form of the two towers has two positive effects on the
performance of the turbine (Figure 2.7):
1. to channel the wind into the turbine even if the wind is not coming from the
angle perpendicular to the rotor plane.
2. to increase the wind velocity by 30% according to Killa and Smith (2008),
the Architects.
Each wind turbine will reach its maximum power output at 15 to 20 m/s air velocity,
of 225KWh and, with an estimated operation time of 50 to 60%, it is estimated that
each of the turbines can produce 340 to 470MWh/year. This accounts for
approximately 11% to 15% of the yearly energy needs of the building. If the turbines
had been mounted higher, the energy yield would have been even greater.
Figure 2.7 Shrouding effect of the two office tower of the World Trade Center [Wu (2010)]

15
Figure 2.5 and Figure 2.6 show the turbines mounted on bridges. During the wind
tunnel testing it was found that the turbines emit vibrations to the structure of the
building. This is complicated further since the bridges connect three moving
structures:
• the wind turbine,
• the bridge itself,
• two towers.
After extensive simulations and testing, it was decided to make the bridges so stiff
that the natural frequencies of the bridge and the turbine would not resonate.
This was a crucial decision, because resonance could lead to high material fatigue
and possible collapse. Furthermore, the bridges were designed in a V-shape, in order
to avoid collision of the rotating blade with the bridge structure [Killa and Smith
(2008)].
2.4 Current projects: the “Pearl River Tower”
Another recent example of building integrated wind turbines is the recently finished
“Pearl River Tower“ in Guangzhou, designed by SOM Architects.
The office tower was designed by considering the prevailing wind direction to create
an obstacle for the wind stream. This causes a low pressure area on the leeward side
and a high pressure area on the windward side of the building. To harvest the energy
of this pressure difference, the building was equipped with four openings, which
connect the windward side with the leeward side. The dimensions of the openings are
3 by 4 meters (Figure 2.8 and Figure 2.9). The higher pressure on the wind ward side
and the lower pressure on the lee ward side of the building create an increase of air

16
velocity over the ambient air flow, which drives the Vertical Axial Wind Turbines
(VAWT) installed into for openings of the facades.
Figure 2.8 Visualization of the Pearl River Tower [SOM (2011)]
Figure 2.9 The turbine opening in the façade of the Pearl River Tower.
[SOM (2011)]
Figure 2.10 Turbine location on the façade and strategy to increase the air
velocity. [SOM (2011)]
Figure 2.11 Computational fluid dynamic (CFD) simulation estimating the increased air velocity through the
turbine openings of the façade. [SOM (2011)]

17
In the short note ”Towards Zero energy”, a case study of the Pear River Tower,
Guangzhou, China”, the author Frechette and Gilchrist (2011) claims that all of the
four wind turbines have a similar performance regardless of the height where they
are mounted in, and can operate even if the wind direction is not perpendicular to
main façade of the building.
However, since this building was just completed in 2011, no performance data were
available at the time of writing this thesis.
2.5 Current projects: the STRATA SE1 - Castle House London”
This building, scheduled for completion in 2012 and designed by BFLS Architects
London, pioneers a similar concept as the Pearl River Tower.
Figure 2.12 The turbines of the “STRATA SE1” under construction.
[Castle wind (2012)]
Figure 2.13 Recent picture of an ancient version vertical axial wind turbines used for grinding grain [Castle wind (2012)]
Integrated on the roof top of the 408-apartment tower are three 18 KWh horizontal-
axis wind turbines with a rotor diameter of 9m. Since the building is directed towards
the prevailing wind direction, it is estimated that the three Wind turbines can produce
about 8% of the building's total energy consumption.

18
Similar to the Pearl River Tower, the façade is optimized to create a high pressure
area on the windward side and a low pressure area on the lee side. This has been
enhanced by the slanted roof (Figure 2.12 to Figure 2.14). However, unlike the Pearl
River Tower, the turbines cannot work if the wind direction is reversed.
Figure 2.14 The turbines of the “STRATA SE1” under construction. [Castle wind (2012)]
2.6 Current projects: the “Beijing Century City”
This project was developed by the author for Paliburg Ltd. Hong Kong from 2006 to
2008. A vertical-axis wind turbine was to be installed on a 300 m Office and hotel
tower in Beijing (Figure 2.15). Although this project was not built, its concept is still
worth mentioning in this section.
A vertical-axis wind turbine (Figure 2.15) was to be mounted on the roof of a super
high-rise building. At this location much higher wind speeds occur, which would
increase the power production of the turbine. It seemed that the Savonius wind

19
turbine would be best suited for this purpose, as it is less affected by turbulences,
runs slower that other VAWT and HAWT turbines and is omnidirectional.
The turbine dimensions were designed with a height of 40m and a radius of 20m.
These dimensions were based on the notion that, since wind turbines convert power
from the area its rotor covers (Figure 2.16), the larger the turbine, the greater the
energy output. The installation of such large rotating machinery on the roof of a
super high-rise building is a challenging engineering task, since the machinery will
transmit vibration and noise to the building.
Figure 2.15 Beijing Century City Plaza proposed in 2006 with a 2 MW VAWT
integrated in the design of the building. [Picture taken from an explainatory brocure
produced by the author and MAPS Ltd. 2006]

20
One way to solve this problem is to levitate the rotor of the VAWT by a magnetic
bearing, which decouples the turbine from the building and transmits less vibration to
the structure.
A feasibility study was produced by the manufacturer Euro Wind, in which the
performance of the turbine was estimated based on the performance of similar sized
turbines and air velocity from Beijing airport, which was extrapolated to the height
of 320 meters while considering the inner-city conditions. It showed that the power
output at a wind speed of 4 m/s would be 122107.4 Watt (this estimate was given by
the turbine manufacturer and is not publicly available). This does not seem to be a lot
for the effort. However, if the wind speed increases by 2 m/s it means an increase of
412112.6 watts.
The wind power density calculation showed that an air velocity of 6.5m/s at 320m
height was a reasonable mean air velocity prediction, which formed the basis of the
following feasibility calculation (Table 2.1):
Table 2.1 Feasibility study for the Beijing Project 2007. [Table taken from a brocure produced by the author and MAPS Ltd. 2006]
Predicted energy output of the turbine in2006
Rated power output: 2.3 MW
Average energy output
of the turbine per month 424,296 kWh
Average energy output
of the turbine per year 5,091,552 kWh
Investment return: 2,036,620 RMB per year
(Generator’s efficiency: 80%; Gear system’s efficiency: 95%; Annual down time:
5% and 0.4 RMB/kWh feed in tariff given by the Government)

21
2.7 Conclusion
Over the last 10 years several buildings have been built with wind turbines integrated
into their designs, as the four chosen examples show. This demonstrates a clear
desire to unify energy producing applications with building design. Engineers,
investors and architects seem to have embraced the challenge.
Furthermore, the feasibility study (Table 2.1) seems to suggest that the turbine might
offset some of the electricity costs of the building, which translates into a more
energy-efficient and more cost-effective building.
It was estimated that the turbine could produce energy worth around 2,000,000
RMB/year (based on the presumed average wind speed), which led to the estimation
that the integration of such a turbine could be profitable for investors.
Figure 2.16 Section of the “Century City Plaza” project by Paliburg Ltd. 2006. On top is the turbine visible. [Picture taken from an explainatory brocure produced by
the author and MAPS Ltd. 2006]

22
Chapter 3 A Review on Wind Turbines
As previously reported, the transmission of vibration from large machinery such as
BIWT (Building Integrated Wind Turbines) to the building structure can be a
problem (Figure 3.1). This led to the idea to decouple the rotor from the building by
using a permanent magnetic bearing. However, in order to design such a bearing, the
conditions and requirements under which the bearing is going to be used have to be
known. This requires an investigation of the air velocities and turbine rotation
speeds.
3.1 Introduction
The wind condition plays an important role in the design of a magnetic bearing, since
the air velocity will drive the turbine, which rotates on the bearing. So it is necessary
to know how fast the turbine will turn in relation to air velocity, if the energy output
and the turbine efficiency are taken into account.
Figure 3.1 Explanatory picture of the “Beijing Century City” project.[Picture taken from an explainatory brocure produced by the author and MAPS Ltd. 2006]

23
A turbine will turn at a certain rotation speed under a certain air velocity. This
depends on the structure of the turbine. When the turbine is used for energy
production, a generator will slow it down as it produces electricity. For this reason it
was necessary to conduct an investigation into the rotation speed and torque of the
turbine since power is the product of torque and rotation speed.
The following sections explain the wind as a source of power, the main wind turbine
types and air velocity in urban areas in general, and then present a sample calculation
for a building in Hong Kong.
3.2 Energy source: Wind - the theory
Wind, along with the flow of water, is one of the oldest harvested energy sources
(Figure 2.2). Unlike flowing water, however, the speed and direction of wind change
often and rapidly, because it is influenced by the seasons, the weather, the landscape,
day and night etc.
Precise short term predictions of air velocities and direction are difficult to make. In
contrast, long-term predictions are possible and can be used to predict the
performance and power output of wind farms. The general Equation of the energy
content of the moving air is as follows Equation 3.1 [Eriksson, et al. 2008]
2
3UA WPρ
=
Equation 3.1
where A is the area of the wind turbine perpendicular to the wind direction, Uw is the
ambient air velocity and ρ is the density of air.

24
3.3 The wind resource: wind power density
Since wind is a power resource, its occurrence on land and sea is of great interest to
wind-farm investors. Wind resource maps (Figure 3.2) usually give the average
yearly or monthly air velocity, which may inform where to build a wind farm in
order to achieve the highest energy yield.
Figure 3.2 Off shore based wind resource map of the USA by the National Renewable Energy Laboratory (2001)
For the USA the National Renewable Energy Laboratory (NREL) provides online
maps of the average wind speeds and available wind power density per square meter.
Different maps are available in accordance with the height over the terrain, all color
coded and classified into 7 categories, of which the lowest is the category 1 at a
height of 50 m and a power density of 200 W/m2 (Figure 3.2). The highest is
category 7, with over 2000 W/m2. Economic feasible wind energy resources are
starting from category 3 [National Renewable Energy Laboratory (2002), Persaud et
al. (1999) and Jangamshetti and Rau (2001)].

25
3.4 General concepts of wind turbines
In the following section the basic turbine concept will be explained, with the focus
on the Savonius type of VAWT.
There are, in general, two types of wind turbines; the Horizontal Axis Wind Turbines
(HAWT) and the Vertical Axis Wind Turbines (VAWT). Although the turbines are
different in their power coefficients CP, tip speed ratio (TSR) etc., some of the basic
mathematical models are applicable to all of them.
To calculate the energy output of a turbine in an airstream, the turbine efficiency is
usually expressed in the power coefficient CP where the power generated by the
turbine is divided by the total power available in the moving air Equation 3.3 . The
CP will change in accordance with the air velocity and the torque. With the CP the
power output of the turbine can be estimated, if all other conditions are known
Equation 3.3 [Eriksson, et al. 2008].
2
3UAC WSpPρ
= Equation 3.2
UAC
WS
p
P3
21 ρ
=
Equation 3.3
Equation 3.3 states how much of the available energy of the wind can be converted
by the turbine. There is, however, a theoretical maximum of the power to be
converted, which is simple to understand. The higher the CP, the more power is
converted. The more power is converted, the slower is the air leaving the turbine. If
all of the power of the wind is converted, the air will stop moving and the turbine
will stop converting energy.

26
Consequently here is a theoretical maximum, which is around 16/27 for most wind
turbines. This limit is called the “Betz limit”, since it was first published by Betz
(1926).
Figure 3.3 Estimated wind turbine type power coefficient versus turbine tip speed ratio. [picture taken from Hau 2006)]
The power coefficient CP, as shown in Equation 3.3, is a function of the tip speed
ratio (TSR) and the energy content of the moving air. The Tip Speed Ratio is based
on the angular movement (ω) of the rotor blade tip, the rotor radius R versus the
moving air Equation 3.4.
U W
rotor RTSR ωλ =)(
Equation 3.4
Each vertical or horizontal axis wind turbine has its specific performance curve, and
will have a specific TSR. Overall the HAWT turbines have the highest TSR of 4 to 11

27
(which means that the blade tip will rotate 8 times faster than the ambient air
velocity), the VAWT (Darrieus type) will have a TSR of 3 to 7, whereas the “Savonius
type” of VAWT will have a TSR of 0.7 to maximal 1.8 (Figure 3.3).
However, a higher TSR does not necessarily mean more power conversion, because
at higher TSR the airstream will detach from the blade surface and will create
turbulence, which lowers the power conversion.
Another factor which can be used for all turbine types is the solidity of the rotor.
Since the air has to pass through the rotor of a turbine, a low rotor solidity will
increase the turbine performance, but will decrease the self-starting ability [National
Renewable Energy Laboratory (2001)]. For the HAWT the solidity is defined as
Equation 3.5 [Eriksson, et al. 2008]:
RCNBlades
HAWT πσ =
Equation 3.5
where NB is the number of blades, C is the chord length of the blades, and R is the
radius of the rotor. The solidity of a turbine has a direct impact on its performance, as
a turbine with a low solidity will only self-start in high wind speeds; and a high rotor
solidity turbine will have a low power coefficient. The equation to calculate the
solidity of a VAWT is shown in Equation 3.6 [Eriksson, et al. 2008].
RCNBlades
VAWT =σ
Equation 3.6

28
3.4.1 The Horizontal Axis Wind Turbine
The typification “Horizontal Axis Wind Turbines” (HAWT) is based on the fact that
the turbine rotates around a horizontal axis. This turbine type is the most researched
and developed one, and is the most widely used one today.
This turbine is mono directional, since it needs to turn into the wind to generate
power. For smaller turbines this is achieved by a rotor vane and larger turbines have
an array of sensors to find the wind direction and a yawing motor to turn into the
wind. The smaller turbines are driven directly, with the rotor fixed on the same shaft
which drives the generator. For larger turbines, a gear box is used to drive the
generator. However, the latest trend is to modify the generator, so that the gear box
can be omitted, since gearboxes are often the cause of turbine breakdowns [Eriksson,
et al. 2008].
The HAWT uses aerodynamically shaped rotor blades, which utilizes aerodynamic
lift to convert power. Larger HAWTs can change their pitch angles and therefore
optimize the angle of attack. This will generate an optimal air flow over the rotor
blades, which will insure an optimal power transfer from the wind to the rotor blade.
Since these turbines have a circular rotor area, the blade sections near the shaft travel
at a slower speed than the blade tips. Although the rotation numbers per minute are
low, the blade tips still travel at a very high TSR. The rotor blades are optimized to
suit this fact by a changing air foil length and shape.
Most of the HAWT turbines are upwind ones, since the turbulences caused by the
tower are considerable and cause structural fatigue in the blades. This requires the
turbine blades to be very stiff [Eriksson, et al. 2008].

29
HAWT turbines operate best in undisturbed free wind streams with low turbulence
levels, which requires high towers since the air flow near the ground is turbulent. The
largest commercially available turbine since 2011 is produced by Enercon and is
called E126 (Table 3.1).
Table 3.1 The largest HAWT produced by Enercon[online (2011)].
Enercon E126 wind turbine
Rated power: 7,500 kW
Rotor diameter: 127 m
Hub height: 135 m
Turbine concept: Gearless, variable speed, single blade adjustment
Type: Upwind rotor with active pitch control
No. of blades: 3
Swept area: 12,668 m2
Rotational speed: Variable, 5 – 11.7 rpm
Pitch control: ENERCON single blade pitch system; one
independent pitch system per rotor
Main bearing: Single-row tapered roller bearing
Generator: ENERCON direct-drive annular generator
Brake systems: Rotor brake
Yaw system: Active via yaw gear, load-dependent damping
Cut-out wind speed: 28 – 34 m/s (with ENERCON storm control)
3.4.2 The Vertical Axis Wind Turbine
The typification “Vertical Axis Wind Turbine” (VAWT) is based on the fact that the
turbine rotates around a vertical axis. There are two main types of these turbines,
which can be distinguished by the types of rotor blades they use [Gupta et al. (2006)

30
and Paraschivoiu (2002)]. The oldest one is the Savonius type, which does not use air
foils, and a newer model is the Darrieus type, which does use airfoils.
Today the VAWT turbine concept is deemed to be not commercially viable for large
wind turbines and most of the research on large VAWTs stopped after 1990.
However, there are some niches where the concept is still regarded as interesting.
One such niche is the small turbine market for home owners, and another is for
building integrated wind turbines such as those seen in the SOM project the Pearl
River Tower (Figure 2.8 and Figure 2.11). Both niches operate within the turbulent
flow layer near the surface, which implies rapidly changing wind directions, gusts
etc. For this the omni directional VAWTs are well suited.
3.4.3 The Darrieus turbine
The Darrieus turbine was invented and patented by the French engineer G. J. M.
Darrieus in 1931 [Darrieus (1931)]. Following this, a large number of variants
developed which optimized one or another aspect of this turbine structure, but the
core structure did not change.
Due to its use of air foils as rotor blades, the Darrieus turbine has a low rotor solidity,
which has the effect that the turbine will only self-start in high wind speeds. If this
turbine has high rotor solidity, it will have a lower power coefficient.
There are some strategies to overcome this, for example by having patchable rotor
blades, or by combining the Darrieus turbine with a Savonius turbine [Eriksson, et al.
2008].

31
3.4.4 The Savonius turbine
The Savonius turbine is of special interest for this thesis, since this type is installed
on a magnetic bearing. This vertical axis wind turbine (VAWT) has been studied
from the beginning of the last century to the present by many researchers and will be
further examined experimentally in this thesis. The engineer S. J. Savonius (1931)
first published research data in 1931. Although the Darrieus type of Vertical Axis
Wind Turbine is more efficient than the Savonius-type, the Savonius type still has
several advantages, like having a good starting torque, a simple mechanism, a lower
rotation speed, and omni directional characteristics. For a building integrated turbine
the robustness of the Savonius turbine is most important.
The Savonius type wind turbine is commonly considered as a drag driven type of
wind turbine, since it does not use airfoils as rotor blades, in contrast to the propeller
- or the Darrieus type of wind turbines [Darrieus (1931)].
The general theory of the Savonius turbine is simple. The wind exerts a force on a
surface and this surface is then moved around an axis. To estimate the power
coefficient (Cps) E. Hau et al. [Hau et al. (2006) and Strickland (1975)] gave the
equations shown below (Equation 3.7 and Equation 3.8) which are the most
commonly used, where Ur is the relative air velocity, Ut is the movement of turbine
blade tip, CD is the drag coefficient of the Savonius turbine and Uw is the free
airstream velocity:
twr UUU −= Equation 3.7
( )3
2
2
2
ws
rrwsD
ps
UA
UUUACC ρ
ρ −=
Equation 3.8

32
However, the above equation neglects the blade number, the gap ratio, the turbine
blade curvature, etc. since it just uses the CD of the turbine. A more detailed
analytical model to determine the performance of a Savonius turbine was developed
by Chauvin et al. (1983) Chauvin and Benghrib (1989), which was based on
experiments performed before 1989. Chauvin constructed a two-bladed Savonius
turbine with pressure sensors mounted on its rotor blades. The turbine was tested in
air velocities of 10 m/s and 12 m/s at Tip Speed Ratios (TSR) from λ=0.2 to λ=1. The
following equations for estimating the instantaneous dynamic torque were proposed
by Chauvin and Benghrib (Equation 3.9 and Equation 3.10):
{ }2
21
)cos()(
us
iiB
iA
ix
UA
PPRhC
ρ
θαθ Δ+Δ−Δ= ∑
Equation 3.9
{ }2
21
)cos()(
us
jjBj
Aj
y
UA
PPRhC
ρ
θαθ Δ+Δ−Δ= ∑
Equation 3.10
From the pressure difference between the two blade surfaces, the instantaneous
dynamic torque from both turbine blades can be calculated, and is then averaged.
This succeeds in relating the two blades and their force to each other, which gives a
better performance estimate, but does not provide a good estimation of the rotation
speed of the turbine, since the torque coefficient has to be known beforehand. So
wind tunnel testing is still necessary [Ushiyama and Nagai (1988)].The pros and cons
of the general turbine are shown in Table 3.2 Table of Pros and Cons for the Wind
turbine type (Table 3.2) [Eriksson et al. (2008)].
If a turbine is to be integrated into a building, however, it is important that it will not
impact upon the building negatively. Keeping this in mind, the turbines need to be
evaluated differently (Table 3.3).

33
Table 3.2 Pros and Cons of wind turbine typs.
VAWT without air foils (Savonius turbine) VAWT with air foils
(Darrieus turbine)
Less noise and vibration emissions
Lower rotation speed (0-1.8 TSR)
Omnidirectional, efficient operation even
in turbulent areas.
Performs well in “gusty” environments.
The rotor is the only moving part if no gear
box is used.
Will stall in too high wind speeds.
The solid appearance avoids bird deaths.
Robust construction, and
maintenance simple
Large rotors can be heavy + (large inertia).
Lowest efficiency
The appearance can be quite solid.
More noise and vibration emissions
than the Savonius turbine
Medium rotation speed(0-5 TSR)
Omnidirectional, efficient operation
even in turbulent areas.
Performs good in “gusty”
environments.
The rotor is the only moving part if no
gear box is used.
Will stall in too high wind speeds.
Robust construction, and
maintenance simple
Not as heavy as the Savonius rotors.
Medium efficiency
The appearance is not as solid as the
Savonius turbine.
HAWT pros HAWT cons
Operates well in steady wind conditions.
Aesthetically appealing.
Highest efficiency (<30%).
Highest rotation speed (0 to 8 TSR).
High noisy emissions
Not Bird friendly.
Prone to fatigue in turbine wind
conditions.
Not efficient in frequently changing
wind conditions.
Breaking/cut out mechanisms during
high wind speeds.

34
Table 3.3 Table the Wind turbine types with respect to the integration into buildings.
Performance Low (up to 25%) Medium (up to
30%)
High (up to 35%)
Direction of wind
for efficient
operation
Omnidirectional Omnidirectional Mono directional
The acceptable
level of turbulence
for efficient
operation
Much Medium Little
maintenance, Medium Medium Complicated
Performance in
“gustly”
environments.
Medium Medium Little
Number of moving
parts
Medium Medium Complicated
Stall in too high
wind speeds.
Stall, self
regulating
Stall, self
regulating
Stall, self
regulating
Robust
construction
Solid robust,
massive
Not very robust Not very robust
The rotation speed low Medium High

35
3.5 Conclusion
Normally the performance of a wind turbine is the main reason for choosing it, but in
the context of building integration, the effects of the turbine on the building play a
greater role. As shown in the introduction (Chapter 2, Sections 2.3, 2.4, 2.5 and 2.6),
some buildings are using HAWTs while others are using VAWTs, but all are using
the building mass to direct the wind towards the turbines; this is done on basis of an
analysis of the prevailing wind direction. If the wind is coming from more than one
direction over the period of a year, it might be more suitable to install an omni
directional wind turbine. This decision has to be based on the analysis of the wind
pattern, and can be found by evaluating a wind rose diagram (Figure 3.4) [Bivona et
al. (2003)].
The author chose the Savonius type turbine for further evaluation and testing (based
on Table 3.2 and Table 3.3), since it will have the least negative effects on the
building for building integrated wind power generation.
Figure 3.4 Wind rose for San Po Kong in Hong Kong.
[Picture found at Pland (2012)]

36
Chapter 4 Wind in urban areas
The following ideas, pictures, graphs, methods and wording of Chapter 4 were
partially taken from a term paper submitted to Dr. Yang Hong-xing, the supervisor of
this Dissertation in 2007 by the author).
The wind patterns in urban areas are difficult to predict, but some general
assumptions can be made when analyzing the measured wind data. This is usually
done on the basis of annual wind records, which will provide information about the
general wind energy potential of the site, whereas seasonal differences and daily
records will show the variations over day and night. These records usually contain
measurements for several years and can be purchased from the local weather station
if time does not allow for onsite measurements (Figure 4.1).
Figure 4.1 Example of a monthly wind distribution diagram at a Hong Kong site in 2007.
If no onsite measurements are available, the data have to be extrapolated to simulate
the estimated conditions of the site, in terms of elevation, location etc. Extrapolating

37
the given wind speed data will produce a general picture of the conditions, but will
not give information about the gusts and frequent direction changes. A CFD
simulation can be used to evaluate the conditions on the roof (Figure 4.5). After
evaluating the data, the mean wind speed and direction (Figure 4.2 and Figure 4.3)
can be used to predict the air velocity which will produce the most energy.
Figure 4.2 Wind direction from A to B Figure 4.3 Schematic plan of the main wind direction (A to B)
Figure 4.4 Example of a yearly wind distribution diagram at a Hong Kong site in 2007.

38
Figure 4.5 2D simulation of a section of an urban environment. The skyline was chosen according to the main wind direction (Figure 4.2 and Figure 4.3).
4.1 The statistical wind distribution over buildings
The Weibull and the Rayleigh distributions [Wieringa and Rijkoort (1983) and
Mertens (2005)] are the standard tools used to evaluate the wind speed statistically.
These show the probability of the wind speed occurrence. In the Rayleigh
distribution, v is the wind speed and v is the mean wind speed (Equation 4.1 to
Equation 4.5).
( )2
42
2
⎟⎠⎞
⎜⎝⎛−
= vv
evvvf
ππ Equation 4.1
However, the probability density function named after E. H. W. Weibull is used for
the following wind distribution calculation, as other researchers suggested [Fadare
(2008) and Jowder (2009)]:
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=
− k
s
k
ss cv
cv
ckvf exp
1
Equation 4.2
Here f(v) is a function of the wind speed v, k is the dimensionless Weibull shape
parameter and cs is the Weibull scale parameter. Both are referenced by the units of

39
wind speed according to Seguro and Lambert [Seguro and Lambert (2000), Akpinar
and Akpinar (2004)] (Equation 4.3 and Equation 4.6).
1086.0−
⎟⎠⎞
⎜⎝⎛=
vk σ
1<k<10 kvcs /11( +Γ
=
And
Equation 4.3
⎟⎠
⎞⎜⎝
⎛= ∑=
n
iiv
nv
1
1
Finally:
Equation 4.4
( )5.0
1
2
11
⎥⎦
⎤⎢⎣
⎡ −−
= ∑=
n
ii vv
nσ Equation 4.5
The corresponding cumulative probability function of the Weibull distribution is
given as (Equation 4.6):
( )⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
k
scvvF exp1
Equation 4.6
4.2 Wind speed variation with height
After evaluating the probability of the wind speeds measured at a certain level, the
data can be extrapolated to the height on which the turbine is going to be installed.
The log law can be used for this purpose, which determines the wind speed profile.
In other words, the rate in which the wind speed increases is in logarithmic relation
with the height of the point of measurement above the ground.
An important factor is the ground roughness, which causes the wind to slow down.
This is due to the friction caused by geography, the vegetation or, in our case, the

40
buildings. This has been investigated by many researchers. An equation was given by
Wieringa and Rijkoort (1983) as follows:
( ) vz
zz
p
o
o
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛
=60ln
ln
1.31 zv or ( )α
⎟⎟⎠
⎞⎜⎜⎝
⎛=
zv0
0
zzv
for the cityscape 2.0=α
Equation 4.7
where Z is the desired hub height of the turbine, and Z0 is the height of the taken
measurements [Mertens et al. (2005)]. However, this equation falls short of the
influence of the immediate direct surroundings of the building.
According to Mertens et al. (2005), the following equation expresses the conditions
of urban locations better (Equation 4.7 to Equation 4.11):
( ) vz
hz
zzh
p
o
k
o
oo
k
d
dz
⎟⎟⎠
⎞⎜⎜⎝
⎛ −⎟⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛ −⎟⎟⎠
⎞⎜⎜⎝
⎛
=
21
21
ln60ln
lnln1.31 zv Equation 4.8
Where: ( )Ho AHd z −−= 13.4 if HAH <<2.0 Equation 4.9
And: ( ) HAcz Hz σ00 = ( )Hzc σ0 = 0.08 Equation 4.10
As well as: ( )8.0
max,0max,0
28.0 ⎟⎟⎠
⎞⎜⎜⎝
⎛=
Zxxh Zk and ( ) δ2.0<xhk
mxm 5000500 ≤≤
Equation 4.11
By integrating this equation into the Weibull distribution, the air velocity data can be
obtained.

41
4.3 Wind distribution
The wind speed data are recorded half hourly by most weather stations (in this case
by the Hong Kong Observatory) and have to be analysed statistically with Equation
4.7 to Equation 4.10.
Weibull windspeed distribution for January
0.00
0.20
0.40
0.60
0.80
1.00
1.20
-1 1 3 5 7 9 11 13 15
Windspeed in m/s
Prob
abili
ty in
Per
cent
Probability
Figure 4.6 Example of a table of the wind speed probability of January of 2007.
Weibull air velocity distribution diagram for January
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
0.18
0.00
0.90
1.80
2.70
3.60
4.50
5.30
6.20
7.10
8.00
8.90
9.80
10.6
011
.50
12.4
013
.30
14.2
015
.10
15.9
016
.80
17.7
018
.60
19.5
020
.40
21.2
022
.10
23.0
023
.90
24.8
025
.70
26.5
027
.40
28.3
029
.20
30.1
0
Air velocity in m/s
Prob
abili
ty
Weibull distribution
Figure 4.7 Example of a table of the Weibull distribution for probability of January
of 2007.

42
The probability density distribution can be derived from the time series data and the
distributional parameters which have been identified earlier. The wind energy
potential at the location can be evaluated with the Weibull model [Celik (2003)].
With these data, it is possible to estimate the feasibility of installing a wind turbine
(Figure 4.6 and Figure 4.7). The possible wind speeds, which can be height adjusted
with the earlier introduced equations, show the turbine feasibility. The given mean
wind speed will then show the classification of the wind as an energy source [Deaves
et al. (1997)] (Figure 3.2).
In addition to these methods of estimating the increase of the wind speed due to the
surrounding area and the height of the building, the wind speed will be increased
further due to the roof acceleration effect.
4.4 The roof acceleration effect
In the brief introduction of current building projects with integrated wind turbines in
Chapter 2 the architects claimed that the form of the building was used to channel
the wind to the wind turbines, which enhanced their performance. This was
investigated by researchers including Lu L. (2009) and Zhou et al. (2006). They
conducted a numerical investigation with the aim of finding the optimal building
configuration for the installation of wind power.
This investigation was divided into three scenarios. The first was to assess the
increase of flow between two buildings at three gap distances; the second was to
assess the effect of the building height on the air flow between and over two tower

43
buildings, and the third was to study the impact of differently shaped roofs on the air
flow.
In their conclusion, Lu et al. (2009) confirmed the architects’ claim that the height
and the gap distance of the buildings do play a great role in increasing the air
velocity between the buildings. In their simulations the air velocity between the two
tower buildings (diffuser principle) was roughly doubled, which increased the wind
power density eightfold.
Figure 4.8 The bluff body.[Royal Institute of Technology Sweden (2012)]
Figure 4.9 The velocity magnitude of the moving air over an urban contour (the
colors depict the magnitude of velocity – red high - blue low).

44
As well as the “Diffuser” principle, there is also the “Bluff Body” principle (Figure
4.8), which occurs when a stream of air hits an object [Maskell (1965)]. The wind
will decelerate and create turbulence. This will cause the air to rise upwards and to
flow over the top of the object; hence the wind speed over the object will increase.
Wind turbines in an urban environment are able to utilize this increased wind speed
if the right height over the building and the right position on the roof are chosen for
the turbine. This roof top acceleration is called the “wall effect”, and can be
predicted semi analytically [Mertens (2005)] or numerically, as shown in chapter 4.5.
4.5 Wind speed prediction calculated by CFD
A test building was chosen in Hong Kong to simulate this effect. For the 2D
simulation the commercial software “GAMBIT” (2005) was used to create the
model geometry. For the CFD model, a free stream flow was modeled to enter the
simulation (Figure 4.9 and Figure 4.10) from the left side and to leave the domain at
the right side. Hence the left side of the domain was defined as “Velocity Inlet”,
which allowed the magnitude of inlet flow and turbulent quantities to be specified.
The turbulent intensity of 1 % and length scale of 0.01m were applied. The right side
of the domain was defined as Outflow. A total mesh number was 2.5 million.
The other two sides of the domain (top and bottom) were defined as Symmetry and
wall, where the standard wall functions were applied. The relative wind speed was
set to vary from 0 m/s (on the ground) to 6.08 m/s (at 70 m height) to 7.4m/s (in
140m of height) for free-stream wind. Unstructured meshes were applied.

45
Figure 4.10 The vorticity magnitude of the moving air over an urban contour (the
colors depict the magnitude of vorticity – red high - blue low).
Figure 4.11 Velocity vectors by velocity magnitude. Positions on the roof with the angles towards the main wind direction (the colors depict the magnitude of
velocity – red high - blue low).

46
Figure 4.12 Magnitude of vorticity. The red rectangle shows the origin of the separation layer (the colors depict the magnitude of velocity – red high - blue low).
Figure 4.13 Magnitude of vorticity. The red rectangle shows the origin of the separation layer (the colors depict the magnitude of velocity – red high - blue low).
Fine meshes were used around the buildings and regions of interest. The quality of
the mesh was also checked by using the ‘Examine Mesh’ function of GAMBIT. The
standard functions of the commercial software of “FLUENT” (2006) were chosen,
such as the two equation turbulence models known as standard k-ε (since the

47
standard k-ε two equation settings were used, the equations are not reprinted here,
since they can be found in the fluent 6.3 manual, or downloaded under:
http://hpce.iitm.ac.in/website/Manuals/Fluent_6.3/fluent6.3/help/pdf/ug/chp12.pdf).
The settings of the turbulence model, the resultant flow field and the level of solution
accuracy were chosen based on past experience with calculation time and computer
memory constraints.
4.6 The CFD calculation
One problem of 2D Wind flow diagrams is that they are very likely to appear to be
higher than actual wind speeds, because the air can only flow over the obstacle rather
than around. The results were compared to results calculated with method found in
chapter “5.1.2 The acceleration at the roof” (page 70 to 72) by Mertens (2005).
Figure 4.14 Positions on the roof with the acceleration area (the colors depict the magnitude of velocity – red high - blue low).

48
Mertens methode is based on a wide range of CFD simulations, which were then
condensed into values. The values are used adjust the free stream air velocity. The
comparison showes (Table 4.1), that the center position results are very close (6.63
m/s and 6.70 m/s). The higher air velocitied over the center of the roof confirm the
best location of the turbine.
Table 4.1 Comparison of the results derived by Mertens (2005) methode to results derived by CFD simulation.
Mathematically derived results CFD derived results Center Corner Center Corner
25.0/H =Δ H =ΔH
17.5 m 05.0/H =Δ H
=ΔH3.5
25.0/H =Δ H =ΔH
17.5 m 05.0/H =Δ H
=ΔH3.5
Upwind 6.63 m/s 6.93 m/s 6.70 m/s 6.20 m/s Downwind 6.63 m/s 0.79m/s 6.70 m/s 4.88m/s
In Figure 4.9 and Figure 4.10, it can be seen that the buildings on the upwind side of
the building of interest are generating turbulences, which actually slow down the
wind speed. For a realistic simulation, enough buildings must be placed on the
upwind and downwind sides of the building of interest to create a realistic wind flow
at the point of interest. Small amounts of turbulences are, in most cases, the reason
for noise etc., and they slow the wind down. But in some cases they create a buffer
between high wind speeds and the buildings (Figure 4.11 and Figure 4.13). This
happens mostly in densely built up areas. The faster flowing air cannot penetrate the
narrow streets (there has been some discussion about the “wall effect” in Hong Kong
recently [Development Panel Meeting (2008)]). The width of this layer depends on
the wind speed of the faster flowing air masses besides others. This effect can be
seen in Figure 4.9 to Figure 4.14.

49
4.7 Results of the CFD calculation:
The results of the CFD simulation show that the wind speed above the building in the
corner position on the upwind side in 3.5m heights is 6.70m/s; on the downwind side
in 3.5m heights it is 4.88 m/s and in center position in 7.5m heights it is 6.20m/s
(Figure 4.11).
In Figure 4.13 and Table 4.1, the separation layer is shown in light blue. The wind
speed decreases within a small distance drastically from the fast moving 6.2 m/s in
6m height to 0.615m/s directly on the rooftop.
On the downwind side, next to the building, formed a large vortex (Figure 4.10 and
Figure 4.11), which influences the recirculation zone directly on the roof. With
regard to the location of the wind turbine to be placed, it should be noted that this
should be sited above the separation layer, or else the stresses on the rotor blades and
the turbulences caused by different wind speeds at the same time will lead to high
material fatigue.
When comparing the CFD results (Table 4.1), the measurement point is 5m elevated
over the roof and therefore not at precisely the same location as the calculated
location, and the result is therefore different. However, the two results are not too far
away, as the simulated one is around 6.7 m/s and the measured one is at 6.8 m/s.

50
4.8 Conclusion
For the turbine integration into buildings, an overview of different turbines types
(Table 3.2 and Table 3.3) was given. The Savonius type turbine was chosen for
further investigation. A building in Hong Kong was selected and an estimation of the
occurring air velocities was made. It was found that a turbine installed on the chosen
building in Hong Kong would experience air velocities of 6 to 10 m/s most often.

51
Chapter 5 Testing the Savonius VAWT
The following ideas, pictures, methods and wording of Chapter 5 were partially
taken from a paper submitted by the author to the International Journal of Wind
Engineering and Industrial Aerodynamics with the title:”Investigation into the
relation of the overlap ratio and shift angle of double stage three bladed Vertical Axis
Wind Turbine (VAWT)”.
To obtain the actual operation performance of the Savonius VAWT, a number of the
Savonius VAWTs (Figure 5.1) have been tested under wind speeds of 6m/s to 10m/s
to find out the rotation speeds under which the magnetic bearing is going to operate.
Around 20 vertical axial wind turbine configurations were tested in the Wind Tunnel
Lab of the Shandong Institute of Construction Engineering. The performance of the
turbines was compared through the Tip Speed ratio (TSR) and the power coefficient
(CP). Several unexpected findings were made. The angular velocity of the turbines is
summarized in Table 5.8 and Table 5.9.
5.1 The investigation
There are many ways to estimate the rotation speed of turbines and, with the recent
advancements in numerical simulation software, some of the flow phenomena can be
visualized and explained. However, wind tunnel testing still remains the most
reliable way to deliver the required test results. Today, some researchers [Menet and
Bourabaa (2004)] use software packages as investigation tools to estimate the flow

52
fields and performance of new turbine configurations. However, these numerical
models are also not able to predict the performance and rotation speed of the
Savonius turbines precisely. As Fujisawa et al. (1996) stated: “an analytical model
provides only rough information on the performance and flow”, which is still valid,
and makes experimental measurement necessary.
As mentioned above, the Savonius turbine is commonly considered to be a drag
driven turbine, but it became clear through this investigation that the turbine must
also have lift characteristics, which might be under estimated (details are discussed in
chapter 5.8). Recent research [Savonius (1931), Yasuyuki (2003), Chauvin and
Benghrib (1989), Hayashi et al. (2005) and Jones (1979)] showed that the
performance consisted of a mix of lift and drag. Chauvin and Benghrib (1989), stated
that the lift coefficient has a negative contribution to the total power coefficient (CP)
at low values of angular velocity ω or RPM (rounds per minute), which becomes
more significant at high values of the of angular velocity ω.
Figure 5.1 Photo of the finished VAWT with possible multiple configurations.

53
A lot of research has been carried out to improve the lift characteristics of the
Savonius turbine, such as changing the rotor blade design, or twisting the rotor
blades [Jones (1979) and Yasuyuki (2003)]. This improved the starting torque as well
as increased the power coefficient. Further investigations were made by Prabhu et al.
(2009). They found that the performance would increase if the shaft was removed.
This has a direct impact on the rotation speed of the rotor. Blackwell et al. (1978)
investigated this issue in 1978 and concluded that an overlap ratio (s/d) of 0.1 to 0.15
is likely to generate optimal rotation speed and performance.
For this investigation 3 single and 3 double stage vertical axis wind turbines were
investigated. A total of 20 turbine configurations were tested. The focus was on the
effect of the overlap ratio and the phase shift angle (PSA) on the power coefficient
(Cps) and rotation speed of Savonius type vertical-axis wind turbines.
5.2 Data processing
The following equations were used to process the experimental data. The tip speed
ratio (TSR) λ was calculated by using Equation 5.1:
uUD
2ωλ = Equation 5.1
where ω is the angular speed of the rotor. The static torque Cst coefficient was
calculated by Equation 5.2:
2
41
us
sst
DUA
TCρ
= Equation 5.2

54
in which the static torque TS is measured and AS is the turbine swept area calculated
with Equation 5.3:
DHAs = Equation 5.3
The torque coefficient Ct can be expressed by Equation 5.4:
2
41
us
t
DUA
TCρ
= Equation 5.4
5.3 Measurement uncertainty
The percentage of the measurement uncertainty is shown in Table 5.1, which was
derived by the standard deviation Equation 5.5.
After the ‘vmean’ was calculated, the standard deviation was derived. Here Est is the
standard deviation (Equation 5.5), v1, v2 and vn are the measured values. The mean
value of all measured values is vmean. The total number of measurement values is ‘n’.
( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛
−−++−+−
=1
..... 222
21
nvvvvvv
E meannmeanmeanst
Equation 5.5
To find the percentage of uncertainty was Est related to the mean vmean and the
percentage of uncertainty calculated. For the wind tunnel air velocity were 150
measurement points collected, the standard deviation (Est) used and then the
uncertainty calculated. The same method was used to find the uncertainty of the
measured turbine rpm and torque.
100y uncertaint of percentagemean
st
vE
=
Equation 5.6

55
Table 5.1 Uncertainty percentages Parameter Uncertainty (%)
Tunnel air velocity +/- 1.8 Power coefficient +/- 8.24 Measured torque +/- 3.4
Measured turbine RPM +/- 3.2
Some measurements produced unforeseen results (Figure 5.23, Figure 5.39, Figure
5.40 and Figure 5.41 second and third performance peak), and were repeated several
times over a couple of days, to minimize measurement error. In order to compare the
turbine configurations the TSR was used.
5.4 Turbine layout and experiments
The Savonius type wind turbine consists of three semicircular buckets with a small
overlap (S) between two of them, as shown in Figure 5.7 to Figure 5.9.
Figure 5.2 The VAWT with 15º phase shift
Figure 5.3 The VAWT in a wind tunnel.

56
Figure 5.4 Single stage turbine Figure 5.5 Double stage turbine with 15
degree phase shift angle All the tested wind turbines were made with the same material, and had nearly the
same weight and structure. Their dimensions are shown in the Appendix Table 1.
They differ only in their blade forms, phase shift angles and overlap ratios (OL) as
shown in Figure 5.7 to Figure 5.9. However, the swept areas of all the double-stage
turbines are exactly the same.
Figure 5.6 Diagram of the experimental setup.

57
A single stage Savonius turbine (Figure 5.4) is a turbine with only one set of buckets,
where as a double stage turbine is a turbine with two sets of turbine buckets, which
can be twisted at an angle (Figure 5.2 and Figure 5.5), where the upper part (upper
stage Figure 5.3) of the turbine is not at the same angle as the lower part (lower stage
Figure 5.3) of the turbine.
The CNC milling process was employed to achieve a very high manufacturing
precision. The turbine blades have different radii depending on the overlap ratio as
shown in Figure 5.7 to Figure 5.9 and Appendix Table 1. Since each wind turbine
consists of several parts, each wind turbine could be arranged into several turbine
layouts.
Figure 5.7 VAWT with 0 rotor overlap ratio.
Figure 5.8 VAWT with 0.16 rotor overlap ratio.
Figure 5.9 VAWT with 0.32 rotor overlap ratio.
The overlap ratio could be changed from 0 to 0.16 and 0.32, as shown in Figure 5.7
to Figure 5.9, and the phase shift angle could be adjusted from 0 degree to 15, 30, 45
and 60 degree as shown in Figure 5.1 and Figure 5.2. The abbreviations of the
turbine names are shown in Appendix Table 1.

58
5.5 The wind tunnel
The open wind tunnel used for the experiments is shown in Figure 5.10, which
consists of a contraction section, developed air flow section, test section and diffuser
section. The test section has a square cross-section of about 1m by 1m. The air
velocity inside the wind tunnel was measured by a hotwire air velocity meter. The
wind turbine inside the wind tunnel and the experiment setting are shown Figure 5.3
and Figure 5.6.
A variable frequency controller drives the fan of the tunnel and regulates the air
velocity in the range of 0 to 30 m/s. Figure 5.11 shows the air velocity distribution of
the main flow field measured horizontally through the test section at five different
frequencies. The flow field inside the wind tunnel is uniform in the region from
0.12m to 0.88m. The turbulence intensity of the wind tunnel ranges from 0.32% to
0.47% at different frequencies. The Reynolds numbers of the wind turbines indicate
(Table 5.2) the flow in the wind tunnel turbulent.
Figure 5.10 The wind tunnel for the VAWT tests

59
5.5.1 Air velocity correction
The blockage ratio β was calculated by relating the maximum frontal area of the
turbine AF to the cross section area of the wind tunnel AT (Equation 5.7 and Equation
5.8).
Blockage ratio T
F
AA=β Equation 5.7
Wind tunnel blockage rate T
FW A
AE4
= Equation 5.8
In 1965, Pope (1966) and Maskell (1965) developed the basic equation to correct the
air velocity inside the wind tunnel. In 1978, Alexander et al. (1978-1 and 1978-2)
changed Maskell’s method and applied it to Savonius rotors, i.e. (Equation 5.9). This
method will be used in this report.
T
Fu
c
AmAU
U
−=
1
12
2
or T
F
uc
AmA
UU−
=1
2
Equation 5.9
Figure 5.11 The air flow field in the wind tunnel.

60
Uc is the corrected wind velocity, UU is the undisturbed wind velocity, AF is the
frontal area if the wind turbine and AT is the cross sectional area perpendicular to the
direction of the air stream in the wind tunnel; m is found by interpolation through the
datum in Figure 5.12, which was determined by the wind tunnel itself.
Alexander (1978-2) has shown that this method will produce reliable results up to a
blockage rate, β=0.334. The procedure was to determine the m value and then using
Equation 5.9 to find the corrected air velocities. The corrected air velocities for the
air velocities of 4m/s, 6m/s, 8m/s and 10m/s are shown in Table 5.2.
1
1.5
2
2.5
3
3.5
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
m
SQUARE PLATE
SAVONIUS ROTOR
Figure 5.12 Values for flat plate and VAWT rotor versus AF/AT. The m is the wake area divided by the tunnel cross sectional area, which is experimentally determined.
Equation 5.9.
5.5.2 Reynolds number
The Reynolds numbers were calculated based on Equation 5.10,
a
ue
DURμ
ρ= Equation 5.10
where Uu is the undisturbed air velocity, ρ is the density of air, μa is the air viscosity
and D is the diameter of the rotor. In order to compare the tested turbines in this

61
report with other wind turbines from other researchers, the Reynolds numbers are
shown in Table 5.2.
Table 5.2 Reynolds numbers of double and single stage wind turbines
Air
velocity
m/s
Reynolds number
(double stage
turbines)
Adjusted air
velocity (double
stage turbines)
Reynolds number
(single stage
turbines)
Adjusted air
velocity
(single stage
turbines)
4 m/s 7.31 x 104 4.9 m/s 6.64 x 104 4.4 m/s
6 m/s 1.1 x 105 7.3 m/s 0.99 x 105 6.6 m/s
8 m/s 1.46 x 105 9.8 m/s 1.33 x 105 8.9 m/s
10 m/s 1.83 x 105 12.2 m/s 1.66 x 105 11.1 m/s
A direct comparison of the single and double stage turbines seems not to be possible
considering the air velocity correction values of the single and double stage turbines.
To avoid confusion about the air velocities for different wind turbine configurations,
the Reynolds number and the air velocity of the wind tunnel are listed together; e.g.
4m/s at Re6.64 x 104.
5.6 Experimental Methodology
A schematic diagram of the experimental setting is shown in Figure 5.3 and Figure
5.6. The tested turbine was placed inside the test section of the wind tunnel, which
was connected by a shaft to the digital torque meter, rotation meter, adjustable brake
and DC motor. The turbine was fixed at the desired angle for the static torque
measurements, as shown in Figure 5.13, before the tunnel was switched on. After a
steady state of air velocity was reached, the data were recorded.

62
Figure 5.13 Diagram of the static torque measurement setting
For the dynamic torque measurements, a DC motor was used to drive the turbine up
to its maximum rotation speed, which was found when the torque meter read 0 Nm
torque. Each turbine was measured at 10 different rotation speeds.
5.7 Measured Results
Since the turbines measured are three bucket turbines, one rotation of the rotor was
divided into three phases, each of 120 degrees. The static torque was therefore
measured from 0 degree to 120 degrees, as shown in Figure 5.13.
5.7.1 The static torque measurements
The static torque coefficient (Cst) of the double stage turbine DS0PSA0OL is shown
in Figure 5.14. Four different air velocities were tested. The coefficients for the air
velocities of 8m/s (Re1.46 x 105) and 10m/s (1.83 x 105) are very close.

63
Figure 5.14 Static torque coefficient measurement results of the wind turbine DS0PSA0OL
The curves at 4m/s (Re7.31 x 104) and 6m/s (Re1.1 x 105) follow the trends of the
curves at 8m/s and 10m/s until the 90 degree mark. The results at 8m/s (Re1.46 x
105) and 10m/s (Re1.83 x 105) reach their lowest values at 85 to 90 degrees, whereas
the results at 4m/s and 6m/s have their lowest values at 95 to 100 degrees. After the
results at 4m/s and 6m/s reach their lowest points, they follow the trend of the curves
at 8m/s (Re1.46 x 105) and 10m/s (Re1.83 x 105) with an offset of 5 degrees.
5.7.1.1 The effect of the Reynolds number and air velocity
An interesting fact shown in Figure 5.14 is that Cst does not change a lot when the air
velocity or Reynolds number is changed. The same finding was also reported by
Prabhu et al. (2009) and Blackwell et al. (1978). Based on this, it was decided that
the air velocity of 8m/s (Re1.46 x 105) was sufficient for all further static torque
tests.

64
5.7.1.2 Effect of the Phase Shift Angle (PSA)
Figure 5.16 shows that the average Cst of the turbines with an overlap ratio of 0
increases in accordance with its phase shift angle. The turbine (DS60PSA0OL) with
60 degree phase shift angle shows the best Cst average, which is not surprising since
this Phase Shift Angle between the upper and lower turbine is 60 degrees.
5.7.1.3 Effect of the Overlap Ratio (OL)
Figure 5.17 presents the starting torque characteristics of the wind turbines
DS0PSA0OL, DS0PSA0.16OL and DS0PSA0.32OL. The turbine with 0 overlap ratio
shows a negative Cst for the PSA between 85 to 95 degrees, whereas the 0.16 and
0.32 overlap ratio turbines only show positive static torque. The average Cst increases
with a larger overlap ratio (OL). The same applies to the single stage turbines shown
in Figure 5.15.
Figure 5.15 Static torque coefficient measurement results for 3 wind turbines at 8m/s
air velocity.

65
Figure 5.16 Static torque coefficient measurement results for 5 wind turbines at 8m/s
air velocity.
A sharp increase between 95 to 110 degrees has been noted. Similar sharp increases
of the Cst were also found by other researchers [Jones (1979)]. Besides, Figure 5.18,
Figure 5.18 and Figure 5.19 demonstrate that the peak Cst moves according to the
phase shift angle.
5.7.2 Dynamic torque and power coefficient test results
The dynamic torque measurements under 4 m/s air velocity proved to be unreliable
and were not used for the dynamic torque analysis.
5.7.2.1 The single stage turbines
Figure 5.23, Figure 5.24 and show the power coefficient (CP) curves of the turbines
SS0OL, SS0.16OL and SS0.32OL at 6, 8 and 10 m/s air velocity (Re0.99 x 105,
Re1.33 x 105 and Re1.66 x 105). For the different tip speed ratios (TSR) of the
turbines at 6m/s air velocity as shown in Figure 5.25 and Figure 5.26 all of the

66
turbines have their CP max between λ=0.633 (turbine SS0.16OL at Re0.99 x 105) and
λ=0.621 (turbine SS0OL at Re0.99 x 105).
Figure 5.17 Static torque coefficient results of 3 double stage wind turbines at 8m/s air velocity and PSA 0.
Figure 5.18 Static torque coefficient results for 3 double stage wind turbines at 8m/s air velocity at PSA 30.

67
Figure 5.19 Static torque coefficient of 3 double stage wind turbines at 8m/s air velocity at PSA 60.
The same appears for the measurements of 10m/s air velocity ( ), where the CP max
occurred between λ=0.566 (turbine SS0.16OL at Re1.33 x 105) and λ=0.521 (turbine
SS0OL at Re1.33 x 105). The performance of the turbines SS0OL and SS0.32OL is
was similar. Their tip speed ratios (TSR) are very close but the generated dynamic
torque of the SS0OL is higher than that of the turbine SS0.32OL, as shown in Figure
5.25, i.e. the CP max for the SS0OL is higher by 14%.
Figure 5.20 Static torque coefficient results of 3 single stage wind turbines at 8m/s air velocity.

68
Figure 5.21 Static torque coefficient results for 3 double stage wind turbines at 8m/s air velocity at PSA 30.
Figure 5.22 Static torque coefficient of 3 double stage wind turbines at 8m/s air velocity at PSA 60.
Overall, the turbine SS0.16OL is superior to the turbines with the overlap ratios of 0
(turbine SS0OL Re0.99 x 105) and 0.32 (turbine SS0.32OL Re0.99 x 105) by about
25%, as shown in Figure 5.23 and Table 5.3). The same appears at the air velocity of
8m/s (Re1.33 x 105) in Figure 5.24 and Table 5.3, where the CP max of the turbine
SS0.16OL for Re1.33 x 105 is higher by about 40%.

69
Figure 5.23 Power coefficients of 3 wind turbines at air velocity of 6m/s.
Figure 5.24 Power coefficients of the turbines SS0OL, SS0.16OL and SS0.32OL at air velocity of 8m/

70
Figure 5.25 Torque coefficients of 3 wind turbines at air velocity of 8 m/s
Figure 5.26 Power coefficients of the turbines SS0OL, SS0.16OL, and SS0.32OL at
air velocity of 10m/s.
Table 5.3 The maximum power coefficient at different air velocities 6m/s air velocity
(Re 99598.3)
8m/s air velocity
(Re 132794)
10m/s air velocity
(Re 165997.3)
TSR λ CP max TSR λ CP max TSR λ CP max
Overlap ratio
0
0.621 0.125 0.481 0.114 0.521 0.147
Overlap ratio
0.16
0.633 0.189 0.571 0.178 0.566 0.155
Overlap ratio
0.32
0.623 0.109 0.624 0.093 0.534 0.122

71
Remarkably displays the CP of the SS0.16 a second CP peak under 8 and 10 m/s air
velocity. This phenomenon is visible in Figure 5.23 to and seems to become more
prominent with higher air velocities.
5.7.2.2 The double stage wind turbines
The measured results of the double stage turbines are shown in Figure 5.29 to Figure
5.41. Each chart shows the power coefficient curve (CP) of the phase shift 0, 15, 30,
45 and 60.
5.7.2.2.1 The 0 Overlap ratio (OL) Double Stage Turbines
Figure 5.27 seems to follow the example of the SS0OL curve (Figure 5.23). Out of
the turbines tested at 6m/s, the turbine DS0PSA0OL at Re1.1 x 105 (Figure 5.27)
produces the highest CP max of 0.136 at λ=0.53. The CP max of all turbines measured in
6m/s air velocity differs greatly in tip speed ratio as well as dynamic torque (Table
5.4).
Figure 5.27 Power coefficients of the turbines DS0PSA0OL, DS15PSA0OL, DS30PSA0OL, DS45PSA0OL, and DS60PSA0OL at air velocity of 6m/s.

72
When increasing the air velocity, the CP curves change. At 8m/s air velocity, the
performance peaks (CP max) between 0.127 and 0.139 at tip speed ratios of λ=0.51 to
0.53 (Table 5.4). Besides, the turbines DS30PSA0OL, DS45PSA0OL and
DS60PSA0OL show a slight CP increase to a second peak around CP 0.9 and 0.96 at λ
0.89 as shown in Figure 5.28 and Figure 5.29.
Figure 5.28 Power coefficients of the turbines DS0PSA0OL, DS15PSA0OL, DS30PSA0OL, DS45PSA0OL, and DS60PSA0OL at air velocity of 8m/s.
Figure 5.29 Torque coefficients of the turbines DS0PSA0OL, DS15PSA0OL, DS30PSA0OL, DS45PSA0OL, and DS60PSA0OL at air velocity of 8m/s.

73
For comparison, the single stage turbine SS0OL (at Re1.33 x 105) (Figure 5.25)
seems not displaying any increase of CP after the first peak although it has a different
Reynolds number.
5.7.2.2.1.1 The effect of the Phase Shift Angle (PSA)
The effect of the phase shift angle becomes visible when the CP max in Table 5.4 is
compared. At the air velocity of 6 m/s, the turbines with the PSA of 0, 15, 30, and 60
show their CP max at the same TSR (about 0.503 to 0.528), but the turbine with the
PSA of 45 degrees shows a higher TSR (of about 0.626) at its CP max.
The PSA affects the performance of the turbines as shown by the turbine
DS30PSA0OL at 6m/s air velocity, which reaches its CP max of 0.089 at TSR of
λ=0.513 and, as shown in Figure 5.30, its torque generation is much lower than other
turbines. If its CP max is compared to the CP max of the highest performing turbine, the
difference is 35% in power output. The test results of the turbine DS30PSA0OL
Table 5.4 Maximum performance of the turbines with overlap ratio 0 with the highest CP max values in color
Overlap ratio 0 at
6m/s air velocity
Overlap ratio 0
8m/s air velocity
Overlap ratio 0
10m/s air velocity
TSR λ CP max TSR λ CP max TSR λ CP max
Phase shift
0 0.528792 0.136022 0.529797 0.125147 0.522251 0.122096
Phase shift
15 0.503938 0.109069 0.527472 0.13325 0.548467 0.132187
Phase shift
30 0.513864 0.088818 0.510052 0.138051 0.603679 0.115997
Phase shift
45 0.626788 0.123191 0.527615 0.139364 0.50815 0.106794
Phase shift
60 0.524909 0.133451 0.532156 0.127501 0.56625 0.123781

74
demonstrate how the CP max of a turbine depends on the turbine configuration and air
velocity. At an air velocity of 6m/s the turbine DS30PSA0OL shows the worst
performance (CP max); but under the air velocity of 8m/s it performs second best.
Overall, the performance curves of this test series are quite close to the results
before and after their CP max, which is because the dynamic torque generation and the
TSR are not very different among the turbines.
Figure 5.30 Power coefficients of the turbines DS0PSA0OL, DS15PSA0OL, DS30PSA0OL, DS45PSA0OL, and DS60PSA0OL at air velocity of 10m/s
Figure 5.31 Power coefficients of the turbines DS0PSA0.16OL, DS15PSA0.16OL, DS30PSA0.16OL, DS45PSA0.16OL and DS60PSA0.16OL at air velocity of 6 m/s

75
5.7.2.2.2 The 0.16 gap ratio
As shown in Figure 5.23 to Figure 5.25, a second CP peak occurs for the single stage
turbine SS0.16OL (Figure 5.25 to Figure 5.28). This phenomenon is also visible in
some of the performance graphs of the double stage turbines (Figure 5.31 to Figure
5.34) with the same overlap ratio.
Figure 5.32 Torque coefficients of the turbines DS0PSA0.16OL, DS15PSA0.16OL, DS30PSA0.16OL, DS45PSA0.16OL and DS60PSA0.16OL at air velocity of 6m/s
Figure 5.33 Power coefficients of the turbines DS0PSA0.16OL, DS15PSA0.16OL, DS30PSA0.16OL, DS45PSA0.16OL and DS60PSA0.16OL at air velocity of 8m/s

76
Figure 5.34 Power coefficients of the turbines DS0PSA0.16OL, DS15PSA0.16OL, DS30PSA0.16OL, DS45PSA0.16OL and DS60PSA0.16OL at air velocity of 10m/s.
Under the air velocity of 6m/s the turbines DS30PSA0.16OL, DS45PSA0.16OL and
DS60PSA0.16OL (at Re1.09 x 105),shown in Figure 5.31, display an increase of CP
after their first peak, which is also visible in the torque coefficient chart shown in
Table 5.5 Maximum performance of the turbines with the overlap ratio 0.16 with
the highest CP max values in color Overlap ratio 0.16 at
6m/s air velocity
Overlap ratio 0.16
8m/s air velocity
Overlap ratio 0.16
10m/s air velocity
TSR λ CP max TSR λ CP max TSR λ CP max
Phase shift
0 0.631095 0.194032 0.589336 0.173885 0.578259 0.146456
Phase shift
15 0.635505 0.199079 0.57754 0.17358 0.559864 0.17197
Phase shift
30 0.674979 0.197465 0.572397 0.18309 0.596772 0.170686
Phase shift
45 0.676509 0.190639 0.575874 0.195432 0.595614 0.162934
Phase shift
60 0.672073 0.194316 0.565933 0.179597 0.606792 0.158561

77
Figure 5.32. A similar increase of CP is also displayed by the turbines
DS0PSA0.16OL and DS15PSA0.16OL (at Re1.46 x 105) under the air velocity of
8m/s. Their CP rises after their first CP max at λ 1.0 to 1.2 (Figure 5.33). The same
takes place under the air velocity of 10m/s in Figure 5.34.
5.7.2.2.3 The effect of the Phase Shift Angle (PSA)
In Table 5.5 the CP max values and the tip speed ratios of this test series are shown.
The 6m/s air velocity test series is interesting because the CP max values of all the
turbines range from 0.19 to 0.199, but their tip speed ratios are different due to their
different PSAs. The TSRs of the turbines DS0PSA0.16OL and DS15PSA0.16OL (at
Re1.09 x 105) are around λ=0.63, but those of the turbines DS30PSA0.16OL,
DS45PSA0.16OL and DS60PSA0.16OL (at Re1.09 x 105) are at a higher value of
about λ=0.67. This means that the turbines with 0 and 15 degrees of the PSA turn
more slowly, at a higher torque, and the rotation speed of the turbines with the PSA
of 30, 45 and 60 is higher but at a lower torque. At the air velocity of 8m/s the TSR
of all the turbines is quite close (between 0.565 and 0.589), but the CP max of each
turbine differs greatly. One example is the turbine DS0PSA0.16OL (at Re1.46 x 105),
which shows the second lowest CP max of 0.179 but has the highest TSR (λ=0.589).
Overall, the turbine which shows the highest CP max does not necessarily have the
highest TSR.
A remarkable result for this test series is that the PSA seems to be not so important at
lower air velocities like 6m/s (Table 5.5), as the CP max of the turbines did not change
greatly although the TSR and the dynamic torque are different. Under higher air
velocities like 8m/s or 10m/s (Figure 5.33 to Figure 5.34) becomes the influence of

78
the PSA on the dynamic torque generation more significant. The CP max can differ by
15%.
5.7.2.2.4 The 0.32 gap ratio
The CP curves of the turbines with the 0.32 overlap ratio are shown in Figure 5.37,
Figure 5.38 and Figure 5.40. The performance chart at 6m/s air velocity (Figure 5.38)
shows that the turbine DS60PSA0OL has its CP max at TSR λ=0.77, which is
surprising since the single-stage chart of the turbine (SS0.32OL) (Figure 5.23) does
not show such a high TSR as its CP max peak.
Figure 5.35 Power coefficients of the turbines DS0PSA0.32OL, DS15PSA0.32OL, DS30PSA0.32OL, DS45PSA0.32OL and DS60PSA0.32OL at air velocity of 6m/s.

79
Figure 5.36 Power coefficients of the turbines DS0PSA0.32OL, DS15PSA0.32OL, DS30PSA0.32OL, DS45PSA0.32OL and DS60PSA0.32OL at air velocity of 8m/s.
Figure 5.37 Torque coefficients of the turbines DS0PSA0.32OL, DS15PSA0.32OL, DS30PSA0.32OL, DS45PSA0.32OL and DS60PSA0.32OL at air velocity of 8m/s

80
5.7.2.2.4.1 The effect of the Phase Shift Angle (PSA)
Figure 5.38 shows an unusual performance curve for the turbines DS15PSA0.32OL,
DS30PSA0.32OL, DS45PSA0.32OL and DS60PSA0.32OL (at Re1.46 x 105) at 8m/s
air velocity.
Figure 5.38 Power coefficients of the turbines DS0PSA0.32OL, DS15PSA0.32OL, DS30PSA0.32OL, DS45PSA0.32OL and DS60PSA0.32OL at air velocity of 10m/s.
First the CP rises to its first performance peak (CP max) of around 0.14, which lies at
the expected tip speed ratio value of λ=0.55, as do most of the other CP max (Table
5.3Table 5.3 to Table 5.5 - when wind speed is 8m/s). After its first peak, it decreases
but then it rises at the tip speed ratio of λ=0.82 to its second but higher CP peak of
around 0.15. After that, the turbines DS30PSA0.32OL, DS45PSA0.32OL and
DS60PSA0.32OL, seem to have a third peak at around λ=1.1.

81
This is interesting for two reasons:
• First, the first CP max of all other turbines is higher than the second peak (if
they display a second peak).
• Second, the second peak appears to be at a lower tip speed ratio. Most of the
measured turbines show their second peak at around λ=0.9 to λ=1.1 (Figure
5.31, Figure 5.32, and Figure 5.34).
The fact that neither the double stage 0 angle phase shift turbine (DS0PSA0.32OL),
nor the single stage turbine (SS0.32OL) display such a unique curvature leads to the
assumption that its appearance is due to the phase shift. Table 5.6 shows that any
phase shift angle larger than 0 will increase the performance of a turbine with 0.32
OL. The 45 degree one gives the best overall performance.
Table 5.6 Maximum performance of the turbines with the overlap ratio 0.32 with
the highest CP max in color
Overlap ratio 0.32 at
6m/s air velocity
Overlap ratio 0.32
8m/s air velocity
Overlap ratio 0.32
10m/s air velocity
TSR λ CP max TSR λ CP max TSR λ CP max
Phase shift
0 0.645228 0.10857 0.546659 0.104601 0.688234 0.099497
Phase shift
15 0.634144 0.147031 0.545671 0.141697 0.554688 0.139607
Phase shift
30 0.631144 0.143427 0.826694 0.148523 0.546782 0.129514
Phase shift
45 0.622956 0.150464 0.828231 0.157007 0.551312 0.124674
Phase shift
60 0.777311 0.169944 0.820665 0.149854 0.556424 0.124942

82
5.8 Findings
As seen before, the overlap ratio has a direct influence on the overall performance of
the turbines, which is clear from Figure 5.39 to Figure 5.41, where different CP
values can be found easily for different overlap ratios (0, 0.16 and 0.32). The highest
performance is produced when the overlap ratio is 0.16, followed by the 0.32 overlap
ratio. The worst performance can be seen with the 0 overlap ratio.
Figure 5.39 Power coefficients of most of the double stage turbines at air velocity of 6m/s. The dotted line depicts the turbines with 0.16 overlap rate, the continuous line the 0.32 overlap rate and the dashed line shows the 0 overlap rate turbines. The focus here is on the general trend of the graphs, which shows that the graphs with the same
OL are performing similar regardless of their PSA.

83
Figure 5.40 Power coefficients of most of the double stage turbines at air velocity of 8m/s. The dotted line depicts the turbines with 0.16 overlap rate, the continuous line the 0.32 overlap rate and the dashed line shows the 0 overlap rate turbines. The focus here is on the general trend of the graphs, which shows that the graphs with the same
OL are performing similar regardless of their PSA.
Figure 5.41 Power coefficients of most of the double stage turbines at air velocity of 10m/s. The dotted line depicts the turbines with 0.16 overlap rate, the continuous line the 0.32 overlap rate and the dashed line shows the 0 overlap rate turbines. The focus here is on the general trend of the graphs, which shows that the graphs with the same
OL are performing similar regardless of their PSA.

84
The CP performance level is determined by the overlap ratio and, within those CP
performance levels, some phase shift angles perform better than others, which is
visible in Table 5.7. Each turbine performs differently according to its phase shift
angle, air velocity and overlap ratio.
The features of the second and third peaks (Figure 5.40) depend on the air velocity.
In general, the CP curves at air velocities like 6m/s do not show a second peak, but
higher ones of 8m/s and 10m/s show this phenomenon. The fact that most of the
second and third peaks are near or above the λ=1 mark (Figure 5.40 and Figure 5.41)
leads to the impression that the second and third peak phenomena are created by the
lift characteristics of the turbines. The phase shift rate has an effect on the curvature
of the graph but not on the appearance of the second peak. This is supported by the
fact that the single stage turbine displays a second peak as well (Figure 5.17 to
Figure 5.19).
However, there are exceptions. When studying Figure 5.40, it seems that the
phenomena of the third peak, as well as the fact that the CP peak value is found at
λ=0.95, are related to the phase shift angle. The curves of the double stage turbine
(DS0PSA0.32OL), as well as the single stage turbine (SS0.32OL) with the 0 phase
shift angle do not show such phenomena. The phenomenon appears as soon as there
is a phase shift angle. The TSR range in which the CP peak value is found seems to
indicate that the phase shift is enhancing the lift characteristics of the turbine (Figure
5.39 and Figure 5.41). More work is needed to explain this phenomenon.

85
Overlap ratio 0 Air
velocity 6 m/s 8 m/s 10 m/s
PSA TSR CT
CP
max TSR CT
CP
max TSR CT CP max
0 0.52 0.25 0.13 0.53 0.23 0.12 0.52 0.23 0.12
15 0.50 0.21 0.10 0.52 0.25 0.13 0.54 0.24 0.13
30 0.51 0.17 0.08 0.51 0.27 0.13 0.60 0.19 0.11
45 0.62 0.19 0.12 0.52 0.26 0.13 0.50 0.21 0.10
60 0.52 0.25 0.13 0.53 0.24 0.12 0.56 0.21 0.12
Overlap ratio 0.16 Air
velocity 6 m/s 8 m/s 10 m/s
PSA TSR CT
CP
max TSR CT
CP
max TSR CT CP max
0 0.63 0.30 0.19 0.589 0.29 0.17 0.57 0.25 0.14
15 0.63 0.31 0.19 0.57 0.30 0.17 0.56 0.30 0.17
30 0.67 0.29 0.19 0.57 0.32 0.18 0.59 0.28 0.17
45 0.67 0.28 0.19 0.57 0.33 0.19 0.59 0.27 0.16
60 0.67 0.28 0.19 0.56 0.31 0.18 0.60 0.26 0.15
Overlap ratio 0.32 Air
velocity 6 m/s 8 m/s 10 m/s
PSA TSR CT
CP
max TSR CT
CP
max TSR CT CP max
0 0.64 0.16 0.10 0.54 0.19 0.10 0.68 0.14 0.09
15 0.63 0.23 0.14 0.54 0.26 0.14 0.55 0.25 0.14
30 0.63 0.22 0.14 0.82 0.18 0.14 0.54 0.23 0.13
45 0.62 0.24 0.15 0.82 0.19 0.15 0.55 0.22 0.12
60 0.77 0.21 0.17 0.82 0.18 0.15 0.55 0.22 0.12
Table 5.7 Summary chart of the CP max, the TSP and the CT. the CP max of
each turbine configuration are printed in red; colored in yellow the phase shift
ratios which have the best overall performance.

86
5.8.1 Open questions
When λ approaches 1 the turbine rotates with the same turbine blade tip speed as the
passing air, which means that the drag influence on the torque approaches 0 and the
lift force becomes the dominant force to produce the torque. A larger overlap rate of
the turbine changes its lift characteristics drastically. However, the CP peak values of
the 0.32 overlap ratio are still lower than those of the 0.16 overlap ratio. Considering
this result, the conclusion could be drawn that we are actually looking at two curves
unified by the plotted graph (a fictional graph depicting this is shown in Figure 5.42).
The first peak shows the performance of a drag driven turbine, with the CP peak
value at λ=0.55, and the performance declines after that. The second peak indicates a
lift-driven turbine with its CP peak value at λ=1.15 and the performance declines
after that.
RNc=σ
Equation 5.11
The performance peak of a lift driven VAWT (Darrieus type (1931) for example)
depends on several key factors, like the airfoil, the rotation speed, and the turbine
solidity besides others. The solidity of a Darrieus turbine is expressed in Equation
5.11, where “σ” is the solidity, “N” the number of blades, “c” the chord length and
“R” is the radius of the turbine.
If applied to the Savonius turbine, the solidity is one. Paraschivoiu et al. (2002)
published an interesting comparison between Darrieus turbines with low solidity and
those with high solidity turbines, which was based on an earlier publication by
Strickland (1975). In this comparison, Paraschivoiu concluded that the optimal
solidity of a lift driven (Darrieus) turbine is around σ=0.3. If a lower solidity is
chosen the CP max will drop but the operational TSR range will be extended. If a

87
higher solidity is chosen, the CP max will also drop but the operational TSR range will
be shortened.
Figure 5.42 Fictional power coefficient. The dark blue colored graph above shows the power coefficient of DS15PSA0.16OL at 8m/s. The light blue colored graph
depicts a possible (assumed) performance of a drag driven turbine, and the orange color one shows a possible (assumed) performance of a lift driven turbine. The idea for future work is that the orange colored graph is in fact the result of both turbine
performances.
Although Strickland did not investigate very high solidities, it is possible that the
trend will continue until the solidity is σ=1. At this point, it is expected that the CP max
and the TSP will be considerably lower than that of σ=0.3.
Based on the above, a new investigation into the transmission of a Savonius turbine
layout into a Darrieus turbine layout at higher tips speed ratios (TSR) could provide
interesting results. This would be instrumental for designing improved turbine
structures, which could then possibly unify the strengths of the Savonius and the
Darrieus type of vertical axis wind turbines.

88
5.9 Conclusion
5.9.1 The turbines
For the performance of the wind turbine, the overlap ratio is of the highest
importance, since a small in- or decrease will cause a rapid decline of the power
coefficient (CP) from 0.16 to 0.32 and then 0 overlap ratio. The OL must be
determined carefully when designing a Savonius wind turbine since a too small and a
too big overlap ratio can decrease the performance of the turbine seriously.
The phase shift angle affects the performance of the turbine depending on the air
velocity. We have seen that larger phase shift angles will produce better performance
of the turbines at lower air velocities and smaller ones will increase the performance
at higher air velocities. With the extensive knowledge of the performance of this
turbine, the turbine design could be made according to the local wind conditions. If
higher wind speed is expected, one could choose a different PSA (Table 5.7) because
the CP for that wind speed is different. From this report the best phase shift angle can
be determined for each turbine (Table 5.7). The best overall CP for all air velocities
of the 0 OL turbines is 60 degrees, and the same applies for the 0.32 OL turbines, but
for the 0.16 OL turbines it is 30 degrees.
Figure 5.42 shows one of the tested wind turbines. It is a double stage turbine with a
0 Phase Shift Angle (PSA). From the testing results it is obvious that some turbine
configurations are performing better than others.

89
5.9.2 The angular velocity
The expected angular velocity range under which an APMBS would be used was
found in the above and is summarized in Table 5.8 and Table 5.9.
Table 5.8 and Table 5.9 show the rotation speeds chosen from the average
performances of the highest turbine power coefficient CP of all turbine
configurations. The performance graphs are shown in the Appendix Figure 1 to
Appendix Figure 9.
From Table 5.8 the conclusion can be drawn that an inner city turbine with a similar
turbine configuration (as seen in Chapter 5 , Section 5.4) will rotate with a similar
surface speed even if the turbine has a different size.
Central to the understanding of wind turbines is that the velocity of the air passing
over the rotor blade creates the lift- or drag-forces. It is therefore the rotor blade
velocity which is significant for the turbine performance and not the rotor radius.
This is significant for VAWT turbines, since the whole turbine blade rotates at the
same velocity in contrast to the HAWTs, where each section of turbine blade rotates
at a different angular velocity.
Since the power conversion requires a certain air movement in relation to the rotor
blade movement, a smaller rotor will turn faster than a larger rotor. At the same
surface speed a smaller radius will rotate faster than a larger one. This means, for the
bearing, that the larger the bearing diameter the lower the angular velocity. In this
case, it is therefore more useful to find the angular velocity rather than the rotation
speed. For this specific turbine dimension, the following values have been found and
are shown in Table 5.8.

90
The results show no linear increase of rotation speed, even if the air-velocity is
almost doubled from 6 m/s to 10 m/s. This result is surprising and means that the
bearing should be designed to show its best performance around 40 to 60 rad/s or at
5.5 m/s to 7.9m/s rotor blade velocity (angular velocity). The results of all wind
turbines are shown in Table 5.9.
Table 5.8 Rotating velocities of the turbines.
Turbine Turbine Turbine Air Velocity 6 m/s;* 8 m/s;* 10 m/s;*
Angular Velocity 39.806 rad/s* 52.494 rad/s* 57.760 rad/s*
Rotor Blade Velocity 5.433m/s* 7.165 m/s* 7.884 m/s*
*The numbers were derived by averaging the rotation speed of all turbines at the
measured Cp max.

91
Table 5.9 The Performance table of all double stage wind turbines.
VAWT at 6m/s and
0 overlap rate
VAWT at 8m/s and
0 overlap rate
VAWT at 10m/s and
0 overlap rate
Deg. Ct Cp Rad/s m/s Ct Cp Rad/s m/s Ct Cp Rad/s m/s
0 0.257 0.136 31.626 4.317 0.247 0.134 42.248 5.766 0.234 0.122 52.055 7.105
15 0.216 0.109 30.139 4.114 0.264 0.143 42.063 5.741 0.241 0.132 54.668 7.462
30 0.173 0.089 30.733 4.195 0.283 0.148 40.673 5.552 0.192 0.116 60.171 8.213
45 0.197 0.123 37.487 5.117 0.276 0.149 42.074 5.743 0.210 0.107 50.649 6.913
60 0.254 0.133 31.394 4.285 0.251 0.136 42.436 5.792 0.219 0.124 56.440 7.704
Average 0.219 0.118 32.276 4.405 0.264 0.142 41.899 5.719 0.219 0.120 54.796 7.479
VAWT at 6m/s and
0.16 overlap rate
VAWT at 8m/s and
0.16 overlap rate
VAWT at 10m/s and
0.16 overlap rate Deg. Ct Cp Rad/s m/s Ct Cp Rad/s m/s Ct Cp Rad/s m/s
0 0.317 0.200 37.744 5.152 0.309 0.186 46.996 6.415 0.253 0.146 57.637 7.867
15 0.313 0.199 38.008 5.188 0.315 0.186 46.055 6.286 0.280 0.157 55.804 7.617
30 0.293 0.197 40.369 5.510 0.335 0.196 45.645 6.230 0.286 0.171 59.482 8.119
45 0.282 0.191 40.461 5.523 0.355 0.209 45.922 6.268 0.274 0.163 59.367 8.103
60 0.284 0.191 40.195 5.486 0.332 0.192 45.130 6.160 0.261 0.159 60.481 8.255
Average 0.298 0.196 39.356 5.372 0.329 0.194 45.950 6.272 0.271 0.159 58.554 7.992
VAWT at 6m/s and
0.32 overlap rate
VAWT at 8m/s and
0.32 overlap rate
VAWT at 10m/s and
0.32 overlap rate Deg. Ct Cp Rad/s m/s Ct Cp Rad/s m/s Ct Cp Rad/s m/s
0 0.168 0.109 38.590 5.267 0.200 0.112 43.593 5.950 0.145 0.099 68.599 9.363
15 0.232 0.147 37.927 5.177 0.272 0.152 43.514 5.939 0.252 0.140 55.288 7.546
30 0.227 0.143 37.747 5.152 0.188 0.159 65.924 8.998 0.237 0.130 54.500 7.439
45 0.188 0.143 45.664 6.233 0.198 0.168 66.046 9.015 0.226 0.125 54.951 7.500
60 0.215 0.140 39.101 5.337 0.282 0.157 43.393 5.923 0.225 0.125 55.461 7.570
Average 0.206 0.137 39.806 5.433 0.228 0.149 52.494 7.165 0.217 0.124 57.760 7.884
Overall
Average 0.206 0.137 39.806 5.433 0.228 0.149 52.494 7.165 0.217 0.124 57.760 7.884

92
Chapter 6 Fundamentals of Magnetic Bearings
The idea of using magnetic levitation for any rotating machinery started at the
beginning of the last century, after the introduction of electricity. The early
experiments created a repulsion effect due to the alternating current which created
“eddie currents” in nearby conducting objects.
6.1 Review on Magnetic Bearings
Beginning in 1922, the German scientist Hermann Kemper [Kemper (1938)]
developed the concept of an Active Magnetic Bearing (AMB) by using a current
regulating device in conjunction with a position sensor. In 1936 he patented an AMB
to be used to levitate a train [Kemper (1934)] in a vacuum tube which could reach up
to 1000 km/h. He continued his research at the Aerodynamic Research Institute in
Göttingen. In 1969 he was the leading researcher to develop the first MAGLEV train,
the “Transrapid 07” [Heinrich (1989)], which was realized in 2001 in Shanghai,
China.
Japan also developed a MAGLEV train, the HSST (High Speed Surface Transport).
Since 1937, researchers [Beams (1937)] in the USA have focused their interest on
the development of rotating devices which were used after 1960 for flywheel energy
storage devices and position sensing in satellites and rockets or gyroscopes for
navigation. The industrial use increased with the invention of the personal computer
and the mass storage media, as it is used in the hard drive. Nowadays the applications
of magnetic bearings are widespread. They can be found in compressors, turbo
molecular pumps, turbo expanders, gas and steam turbines, turbo-generators, wind

93
sifters, spindles, pumps, blowers, centrifuges, neutron choppers, flywheels, wind
turbines and X-ray tubes [Allaire et al. (1991)]. Today the field of applications is still
expanding.
6.1.1 The benefits of magnetic bearings
Vertical axis wind turbines, flywheel rotors, motors, generators and other rotatable
components are usually supported and held in position by mechanical ball or roller
bearings. Those bearings are securing the positions of rotating parts against radially
and/or axially directed forces. Roller or ball bearings use rolls or balls to transfer the
mechanical forces, which cause friction and can transmit noise, heat and vibration.
Magnetic bearings, however, employ magnetic fields to transmit the forces acting on
the bearings and provide a non-contact, low friction alternative. Due to the benefits,
this technology is used today for a broad variety of applications [Schöb, (2007)].
The benefits of magnetic bearings include:
• No contact, no wear and tear;
• No lubricant required;
• Adjustable stiffness;
• Almost frictionless;
• Less maintenance;
• Reduced transmission of vibration and noise;
• Higher performance.

94
6.1.2 AMB Active Magnetic Bearings
AMBs (Active Magnetic Bearings) usually consist of an array of permanent magnets
and electro magnets, gap sensors and current drivers. The general scheme is that the
gap sensor will sense a change in the position of the rotor and will increase or
decrease the current of the necessary electromagnets. With an adjustable magnetic
field it is possible to achieve 6 degrees of freedom, full levitation. The disadvantages
are the need for a permanent energy supply, a complicated driver/gap-sensor system,
the need for an emergency energy backup system in case of energy black out and the
high cost of constructing the system.
6.1.3 HTSB High Temperature Superconductor Bearings
HTSBs (High Temperature Superconductor Bearings) consist of permanent magnets,
a high temperature superconductor which must be cooled to -177 degree Celsius, a
cooling system and gap and temperature sensors [Nagashima (1999)].
A superconductor has the unique ability to respond to a magnetic field by developing
surface currents (the transition to a superconductor is called the Meissner effect),
which repels the magnetic flux and therefore creates a repelling effect. Furthermore,
small impurities of the superconductor material create “pinning forces”, which can
hold the magnet at its current position [Yamada et al. (2004)]. With the pinning
forces and the repulsion from the superconductor, it is possible to achieve 6 degrees
of freedom.
The disadvantages are that the superconductor will lose its superconductivity if the
temperature is increased by a couple of degrees. To ensure the safe operation of such

95
a bearing, a permanent energy supply, a driver/gap-sensor system, an emergency
energy backup system, permanent cooling, and frequent maintenance are required.
6.1.4 Passive Magnetic Bearings (PMBs)
PMBs (Passive Magnetic bearings) usually consist of an array of permanent magnets
and conventional mechanical bearings. Their advantages are the relatively simple
construction; they are cheap, long lasting, and no electric power or driving systems
are required.
The disadvantages, however, are that only up to 4 degrees of levitation freedom can
be achieved and they are not frictionless, due to the use of classical bearings and a
low stiffness. The reason for the limitation of this technology is the magnetic
moment, which stems from the very fundamentals of magnet physics. The most
commonly used bearing configurations are shown in Table 6.2.

96
6.2 Basics of Magnetism
The phenomenon of magnetism is a subatomic property of certain materials, which
makes them respond to an externally applied magnetic field [Spaldin (2003)]. There
are different types of magnetisms, of which ferromagnetism is the most commonly
known due to the fact that it can exert a strong repulsion or attraction force. Besides
ferromagnetism there are other forms of magnetisms such as paramagnetism and
diamagnetism.
6.2.1 Paramagnetism
If a material is attracted to an externally exerted magnetic field, the phenomenon can
be paramagetism. This is due to its ability to become magnetized under the presence
of an external magnetic field, which leads to a positive magnetic susceptibility. The
phenomenon of paramagnetism is very weak if compared to ferromagnetism.
Typical paramagnetic materials are aluminum, (Al) and platinum (Pt).
6.2.2 Diamagnetism
If a material is repelled by an externally exerted magnetic field, the phenomenon can
be diamagnetism. This is due to a special property of the material, which prevents
any change of the magnetic field and thus creates a repulsion effect.
This effect is very weak at room temperature if compared to ferromagnetism.
Typical diamagnetic materials are:
hydrogen (H2), copper (Cu), bismuth (Bi), water (H2O), etc.

97
6.2.3 Ferromagnetism
As with all magnetisms, ferromagnetism has its origin in the spin and the orbital
magnetic moments of the electrons and atoms. The special property of ferromagnetic
material is that all of the magnetic moments on a nuclear level have the ability to
orient their spins to each other and thus enter a lower energy state due to their order.
This creates a magnetic field which strengthens as the number of aligned “magnetic
domains” increase.
If, in addition, an external magnetic field is applied, differently orientated domains
can align them to the applied magnetic field. The direction of the magnetization of
ferromagnetic material is described by the vector, M, which represents how strongly
the domain is magnetized (it is the magnetic moment per volume [Brown (1940)]).
Every magnetic domain has its own direction (vector), M, of magnetic moment.
Therefore the initial magnetization of ferromagnetic material is zero. However, if a
magnetic field is applied, the magnetic domains are lined up in one direction and a
permanent magnet is created.
6.2.4 The magnetic field
Every magnet has a magnetic field which surrounds it. This field is described in
terms of B and H values. There are many different names for the “B-field”, but we
will stick to the name “magnetic flux density” and for the “H-field”, and we will
stick to the name “magnetic field density” [Chikazumi (1997)].
HB μ 00 = Equation 6.1

98
where B0 is the magnetic flux density, µ0 is the permeability of space, and H is the
magnetic field density. Following are the Equation 6.2 to Equation 6.4, were Jp is
used to represent magnetic polarization and M is the magnetization:
which can be described as:
where µ0 is the permeability of free space, which can be expressed in units of Henry
per meter or in Newton per Ampere squared (Equation 6.4).
6.2.5 Earnshaw Theorem
In the context of magnetic repulsion the Earnshaw Theorem has to be mentioned.
The Earnshaw Theorem (1839)], written in 1839 to 1842, shows that the inverse-
square law of gravitational forces in relation with the repulsion or attraction forces of
magnets when applied in a magnetic suspension system will never achieve a stable
state of equilibrium (no stable levitation is possible in standstill).
Any levitated object has 6 degrees of freedom, 3 translational degrees and 3
rotational degrees. If no forces act on the object, or if all forces (F) are at
equilibrium, the object is at rest. This applies to objects with fixed (magnetic)
polarization (JP).
MJ p μ 0= Equation 6.2
)(0 MHB += μ
Equation 6.3
mH /10*4 7
0
−= πμ
Equation 6.4

99
However, in order to keep the object at its position, some force has to be applied, if
the object is moved from its position of equilibrium.
The strength of this force is called stiffness (Kx,y,z and r)). To keep the position of the
object, the stiffness must be greater than 0 (>0).
This means that each direction must provide a force against movements. If this object
is put into an external magnetic field, the interaction energy (W) is Equation 6.9:
And so the force acting on the object is Equation 6.10:
Therefore if the Laplacian of this energy is set to 0 (Equation 6.11),
dxdFK x
x = ,dy
dFK y
y = ,dz
dFK zz −= (in cartesian system)
Equation 6.5
drdFK r
r −= , dz
dFK zz −= (in cylindrical system)
Equation 6.6
0>=dx
dFK xx
, 0>=dy
dFK y
y, 0>−=
dzdFK z
z
(in cartesian system)
Equation 6.7
0>−=dr
dFK rr
, 0>−=dz
dFK zz
(in cylindrical system) Equation 6.8
∫→→
−= HdVJW m Equation 6.9
WF m−∇=→
Equation 6.10

100
The results are given in Equation 6.11 and Equation 6.12:
This is inconsistent with the previous conditions with the equilibrium of forces as
mentioned before. For this reason, stable levitation in stand-still for a permanent
magnetic bearing is not possible.
However, stable levitation can be achieved if the bearing is stabilized by, for
example, a ball bearing against the radial forces or against the axial forces (in active
magnetic bearings this can be done by electromagnets). However, the Earnshaw
Theorem does not apply to any system in motion. When the system is in motion, the
bearing will be spin-stabilized depending on the rotation speed (as the toy ”Levitron”
shows [Simon et al. (1997)].
6.2.6 Analytical calculation methods for magnetic repulsion
There are a number of methods to approximate the repelling force between magnets.
Most of them are based on the “coulombian model” which sums up the charged
surfaces of the involved magnet, and then relate them over the air-gap distance to
each other, which produces the attracting or repelling force. This is the meaning of
0=Δ→
H Equation 6.11
0=−=++ ∫→→
HdVJKKK zyx (in cartesian system) Equation 6.12
0=−=+ ∫→→
HdVJKK zr (in cylindrical system) Equation 6.13

101
the term “air-gap”, the distance between the rotor (the upper magnetic ring) and the
stator (the lower magnetic ring).
For small disks like magnets, Post et al. (1997) suggested the following equation
(Equation 6.14 to Equation 6.15).
)}/ln()/()]/21(5.0ln[)/21(]/1ln[)/1{(0
22 hahahahahahahrBF dmrZ +++−++= μ
Equation
6.14
⎥⎥⎦
⎤
⎢⎢⎣
⎡= μ0
2
)2ln(2(max) hrBF dmrZ
with possible maximum force at the minimum air-gap
Equation
6.15
where rdm is the radius of the disk-shaped magnet, ht is the thickness and ag is the air-
gap between the two magnets.
One of the pioneers in the development of analytical ways (Equation 6.16 to
Equation 6.25) to calculate the attraction or repulsion forces in 3 dimensional spaces
is the French researcher J. P. Yonnet. In 1974 he developed a set of basic Equations
which are used today in most of the analytical and computational calculations.
He derived a cubical system [Yonnet (1978)], which is based on the “coulombian
model”. The cubical permanent magnets can be simplified into two rectangular
planes, representing the two poles of each magnet. Both have the same magnetic pole
volume density (σ+ or σ-), and the magnetic field density (H) can be derived from
Equation 6.16 and Equation 6.17; calculations from Akoun and Yonnet (1984):

102
Figure 6.1 Magnetising direction of magnetic cubes after J. P. Yonnet.
With J=σ
The exerted force between two magnets can be calculated [Yonnet (1996)]:
Figure 6.2 Explanatory drawing by J. P. Yonnet for the following Equations.
])()][()()[(])()][()()[(ln
4 2222
2222
0ybxayaxaybxayaxaH x −+−+++
−++++−+= μπσ
Equation 6.16
⎥⎦
⎤⎢⎣
⎡++
+−
−+−
−−−= −−−−
byax
byax
byax
byaxH y
1111
0
tantantantan2 μπ
σ Equation 6.17
( ) ( )rwvuF pqklijq
qplkji
plkji,,,
4 1,01,01,01,01,01,00
1 φπ
σσμ ∑ −∑∑∑∑∑
=
+++++
=====
′=
Equation 6.18

103
Here σ and σ’ are the same as J, which represents magnetic polarization direction and
flux density, and F is the force and Φ represents the magnetic flux. u, v and w
represent the relations of different sides (Figure 6.2); and r defines the positions of
the center of magnet 1 in relation to the center of magnet 2.
The following Equation 6.19 to Equation 6.22 will be used to find the relationships
(Equation 6.18):
The two magnets are defined in Table 6.1.:
Table 6.1 Explanation of Equations 6.18 to 6.25. 2a = total length of magnet 1 2A = total length of magnet 2
2b = total width of magnet 1 2B = total width of magnet 2
2c = total height of magnet 1 2C = total height of magnet 2
α = centre of magnet 2 in x direction in relation to centre of magnet 1
β = centre of magnet 2 in y direction in relation to centre of magnet 1
γ = centre of magnet 2 in z direction in relation to centre of magnet 1
For uij aA ij
iju )1()1( −−−+=α Equation 6.19
For vkl bB lk
klv )1()1( −−−+= β Equation 6.20
For w pq cC pq
pqw )1()1( −−−+=γ Equation 6.21
For r ( ) 5.022 wvu pqklijr ++= Equation 6.22

104
For the force calculation (Equation 6.18), the following equations will be used
(Equation 6.23 to Equation 6.25):
Other analytical approaches were introduced by the research team of Marinescu and
Marinescu (1989). Their theory was expanded by Rakotoarison et al. (2007) into a
semi-analytical approach using the “coulombian model”. In 2009 the research team
of Ravaud [Ravaud, et al. (2009 - 1 ), (2009 - 2) and (2009 - 3)] published a number
of analytical solutions which deal with the 3 dimensional space around the axial and
radial bearings. He focused on an analytical way to determine the optimal forces,
stiffness and dimensions of the bearing magnets, by calculating the optimal air-gap
length. His effort was not followed up any further since his focus was on ring or
segmented ring magnets and not on multiple magnet rings.
However, it is important to develop analytical ways for calculating magnetic fields
and forces, since these can be used to improve the precision of the software
packages. Beside that, calculating the magnetic forces and fields using the analytical
way saves computer time, since some simple configurations can be calculated by
programmable pocket calculators.
Contrary to the above, the current trend is using the ever increasing calculation
power of computers for numerical simulations.
For F x ,( ) ( ) ( ) ru
rwuvvwvruvwvwvx 2
1lnln21 tan 122 ++−+−−= −φ
Equation 6.23
For F y , ( ) ( ) ( ) rv
rwuvuwuruvvrwuy 2
1lnln21 tan 122 ++−+−−= −φ
Equation 6.24
and for Fz, ( ) ( ) rw
rwuvuvvrvwuruw
z−+−−−−= −tan 1lnlnφ
Equation 6.25

105
6.3 Passive magnetic bearings (PMB)
Passive permanent magnetic bearings (PMB) are divided in two different types; the
attractive and the repulsive type bearings, which are designed as axial or radial
bearings.
Usually, if attraction is used, iron parts are integrated in the bearing to increase the
magnetic flux density for increasing the attraction forces.
According to Schöb (2007), for bearings using repulsion, no increase of repulsion
force can be achieved since iron cannot be used.
Table 6.2 Magnetizing direction of magnetic rings in PMB configurations [picture taken from Schöb, (2007)]
Depending on the required bearing properties, each bearing consists of either ring
magnets or segmented ring magnets. However, most recent research on PMB has
been based on ring magnets, as these provide the most uniform magnetic field.
In order to limit the scope of this thesis, only vertical axial permanent magnetic
bearings (APMB) were chosen for further investigation. Most bearing configurations
are shown in Table 6.2 (according to Schöb).

106
In the literature, many researchers have expressed the belief that the configuration
1R, 2R, 3A and 4A are most suitable, since they provide stiffness in 4 DOF.
However, current designs of Axial Passive Magnetic Bearing (APMB) systems are
limited by their size. Many current systems use ring magnets to supply the magnetic
levitation force [Chiba et al. (2005), Lemarquand and Yonnet (1998) and Yonnet, et
al. (1991)]. Others use segmented ring magnets [Ravaud R. (2009 - 4 ) and Ravaud et
al. (2009 - 3)]. Most of the configurations shown in Table 6.2 are well researched
and the design equations are available online [Brad et al. (2003)]. Due to the
difficulty of charging the magnet evenly and the brittleness of the material, the
current size of produced ring magnets is limited, and there is still some current
interest in finding other solutions.
One of the solutions is to design an APMB consisting of small magnets, aligned
along the rotation path of the bearing. But this comes with some problems, as the
repulsion force will be stronger at some rotor positions and weaker at others, which
causes a higher torque and induces vibration.
Bassani et al. (2001) and Simon et al. (1997) investigated passive magnetic bearings
in spite of this problem. They studied the instability of passive magnetic bearings and
confirmed that a stable levitation can only be achieved if the rotor is spinning with a
certain velocity. Other researchers have tried to investigate the vibration transmission
problem. One example is the team of Mukhopadhyay et al. (2003). They developed,
for the dairy industry, a pump with a levitated rotor. This machine uses repelling
disk-shaped magnets, which are arranged in a circle around the shaft. In their study
the arranged magnets differ in radii of the rotor and stator. This seemed to minimize
the vibration of the bearing.

107
6.4 Analytical approach of a multiple magnet ring bearing
If no iron is involved in the bearing (Figure 6.3), its properties can easily be
approximated analytically by the previously given equations (Equation 6.18 to
Equation 6.25). The task here is to determine the position of the rotor magnet in
relation to its stator magnet. This, however, requires some geometrical
simplifications.
In general, the multiple magnet ring is changed into a linear sequence of magnets.
For this the radius of the multiple magnet ring is measured from the center of the ring
to the center of the magnet and the circumference calculated.
The location of the magnet is then found by dividing the length of the circumference
by the number of magnets and assuming that the geometrical center of the first
magnet is at 0,0,0. The true length of the magnet on the ring has to be found by the
following equation:
90
arcsin22 r
rmr
m lcl
π⎟⎟⎠
⎞⎜⎜⎝
⎛
+=
Equation 6.26
Figure 6.3 Ring configuration (Figure 8.17)

108
Figure 6.4 Red magnet in alignment. Figure 6.5 Red magnet moved 1/10 of the distance between magnet 2 and 3
towards magnet 2.
Figure 6.6 Red magnet moved 2/10 of the distance between magnet 2 and 3 towards
magnet 2.
Figure 6.7 Red magnet moved 3/10 of the distance between magnet 2 and 3
towards magnet 2.
Figure 6.8 Red magnet moved 4/10 of the distance between magnet 2 and 3 towards
magnet 2.
Figure 6.9 The red magnet in centered over the gap between the blue magnets.
Where mcl is the length of the magnet on the circumference (which is in fact longer
since the magnet is a cube and the circumference is curved; the same applies to the
air gap), and ml is the real magnet length (as measured in mm) and ‘r’ is the radius of
the circumference. After the length of the magnet of the circumference is found, the

109
air-gap is calculated by dividing the circumference by the number of magnets and
subtracting mcl.
To get the best estimate the relation between fife magnets is calculated by assuming
that the influence of the other magnets of the ring on the red magnet will be small
(Figure 6.4 to Figure 6.9). (The number of five magnets was chosen to simulate a
longer “chain” of magnets, since the field of further away magnets will also
influence the repulsion force of the single magnet.) For this purpose, the positioning
of the magnets to each other is important. Since the magnets are rotating around an
axis, the movement is linear, which means that only one axis changes.
To calculate the maxima and minima of the bearing levitation force, only half a
phase has to be calculated. This is from the point where the centers of the rotor and
stator magnets are located over each other (Figure 6.4), to the point at which one
center of magnet is located over the center of the air gap between the two magnets
(Figure 6.9).
The force equation is as follows (suggested by the author and based on the work of
Yonnet Equation 6.18):
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
m
jsmjsmjsmjsm
jsmjsmjsmjsmjsmjsmjsmjsmjsmjsmjsmijsm
q
qplkji
plkji
rmsm
jsmjsmjsmjsm
jsmjsmjsmjsmjsmjsmjsmjsmjsmjsmjsmijsm
q
qplkji
plkji
rmsm
jsmjsmjsmjsm
jsmjsmjsmjsmjsmjsmjsmjsmjsmjsmjsmijsm
q
qplkji
plkji
rmsm
jsmjsmjsmjsm
jsmjsmjsmjsmjsmjsmjsmjsmjsmjsmjsmijsm
q
qplkji
plkji
rmsm
jsmjsmjsmjsm
jsmjsmjsmjsmjsmjsmjsmjsmjsmjsmjsmijsm
q
qplkji
plkji
rmsm
mz n
wrwrvu
vuvrwvurwu
wrwrvu
vuvrwvurwu
wrwrvu
vuvrwvurwu
wrwrvu
vuvrwvurwu
wrwrvu
vuvrwvurwu
nF
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎦
⎤
⎢⎢⎣
⎡−+−−−−
+⎥⎥⎦
⎤
⎢⎢⎣
⎡−+−−−−
+⎥⎥⎦
⎤
⎢⎢⎣
⎡−+−−−−
+⎥⎥⎦
⎤
⎢⎢⎣
⎡−+−−−−
+⎥⎥⎦
⎤
⎢⎢⎣
⎡−+−−−−
=
−
=
+++++
=====
−
=
+++++
=====
−
=
+++++
=====
−
=
+++++
=====
−
=
+++++
=====
∑−∑∑∑∑∑
∑−∑∑∑∑∑
∑−∑∑∑∑∑
∑−∑∑∑∑∑
∑−∑∑∑∑∑
5555
5515555555555
1,01,01,01,01,01,00
15
4444
4414444444444
1,01,01,01,01,01,00
14
3333
3313333333333
1,01,01,01,01,01,00
13
2222
2212222222222
1,01,01,01,01,01,00
12
1111
1111111111111
1,01,01,01,01,01,00
11
tan1
tan1
tan1
tan1
tan1
lnln4
lnln4
lnln4
lnln4
lnln4
μ
μ
μ
μ
μ
πσσ
πσσ
πσσ
πσσ
πσσ
Equation 6.27

110
The dimensions of all magnets and gaps are the same for all magnets of the bearing
(Figure 6.3):
Table 6.3 dimensions of magnets. a, b and c are for the stator magnets, and A, B and C is for the rotor magnet.
Stator magnet (blue in Figure 6.4) Rotor magnet (red in Figure 6.4) σsm (magnetic flux density of stator magnet) σrm (magnetic flux density of stator magnet)
2a = total length of magnet 1 2A = total length of magnet 2
2b = total width of magnet 1 2B = total width of magnet 2
2c = total height of magnet 1 2C = total height of magnet 2
However, since each of the stator magnets has a different position, they will be
defined as shown in Table 6.4:
Table 6.4 Magnet positions. Stator magnet (sm1) rotor magnet (rm1). This has to be repeated for each of the 5 stator magnets.
Position definition for stator magnet 1 (Figure 6.4)
For uijsm1 aA ijsmijsmu )1()1(11 −−−+=α
For vklsm1 bB lk
smklsmv )1()1(11−−−+= β
For wqpsm1 cC pqsmpqsmw )1()1(11 −−−+=γ
For rsm1 ( ) 5.02
1
2
1
2
11 wvu pqsmklsmijsmsmr ++=
αsm1 Centre of magnet sm1 in x direction in relation to center of magnet rm1. Position of center of magnet circumference divided by number of magnets times two
βsm1 Centre of magnet sm1 in y direction in relation to center of magnet rm1 equal to 0
γsm1 Centre of magnet sm1 in z direction in relation to center of magnet rm1 air gap between stator and rotor plus the thickness of a magnet
To evaluate the Equation 6.27 the results for one position were calculated and
compared. The geometry chosen was similar to Figure 6.4. The results are shown in
Table 6.5, where the calculated values are lower than the simulated ones. However,
the final comparison between the calculated or simulated results (which are
introduced later) and the measured result is difficult, because of the uncertainty of

111
the Br value of the magnet. The manufacturer stated a Br of 1.1T and our
measurements show a slightly lower field of 1.08T. This discrepancy could be
caused by the aging of the magnet, or due to unknown reasons. Considering this, it
seems that the simulated result is quite close to the measured one.
Table 6.5 The results show that the repulsion force differ depending on the simulation and calculation. The repulsion force of the tested magnet is higher,
partially because its Br is higher as well. Method Repulsion force under the same
settings:
Br:
Equation 6.14 4.21 N 1.0749 T
Equation 6.18 4.39 N 1.0749 T
Simulation 4.68 N 1.0749 T
Experiment 4.73N Roughly 1.08 T
Since the complexity of the Equation 6.14 and Equation 6.18 increases with the
number of magnetic rings, and flux concentrators, this method was not developed
any further.
112
6.5 Conclusion
In Chapter 6 the basic principles of magnets and magnetic bearings were explained.
The magnetic moment, which causes the instability of magnetic repulsion was
discussed and the natural instability of permanent magnetic bearings explained by
Equation 6.5 to Equation 6.13, given by Earnshaw.
The general developments were explained and some of the problems were discussed.
It was noted that the commonly used magnetic rings have size limitations and that
currently segmented rings are being used to build large ring magnets.
Finally, the equations given by Yonnet (Equation 6.16 to Equation 6.25) were
adapted to calculate the repulsion of a multiple magnet bearing.

113
Chapter 7 Development of a novel Magnetic Bearing
The basic idea of the bearing developed in this thesis stems from the observation of
HTS (high temperature superconductor) bearings. The striking property of these
bearings is that the magnetic flux cannot penetrate the superconductor; the magnet is
therefore repelled and levitates. The fact that the magnetic flux cannot penetrate the
superconductor led to the idea that a similar effect could be created if a mild steel
sheet was thin enough to be saturated by an attached magnet. An approaching
magnet with the same polarization could then be repelled from the mild steel sheet.
Initial observations of thin mild steel plates with mounted magnets on one side,
confirmed that this was indeed the case, which depended on the material properties
and the thickness of the mild steel plate and on whether the approaching magnet was
repelled or not.
The measured configuration was a 0.3mm thick mild steel plate with a magnet
charged with Br=1.08T attached.
Measurements with a Tesla-meter along the surface of the mild steel plate showed
that the magnetic field will not completely be absorbed by the mild steel plate (in this
case) (Figure 7.2 and Figure 7.1). In Figure 7.3 we can see that the field is much
lower on the surface with the mild steel sheet attached, than without. Most of the
magnetic flux is kept inside the mild steel sheet, which is confirmed by the
measurements of the torque meter.

114
Figure 7.1 Measurement direction of the Gauss meter on the magnet with mild steel
plate.
Figure 7.2 Measurement direction of the Gauss meter on the magnet without
mild steel plate.
Figure 7.3 Magnetic field on the surface of magnet and mild steel sheet surface.
7.1 The BH curve of the steel and its importance for the bearing
This repulsion effect depends on the material properties of the mild steel, which can
be expressed in the virgin curve of the BH loop (Figure 7.7). The high permeability
of the mild steel in conjunction with its thickness, keeps the magnetic flux inside the
mild steel sheet (Figure 7.2 to Figure 7.3).

115
However, a slight over-saturation is necessary for the working of the bearing, and
therefore we measure a slight field on the surface of the mild steel sheet.
Figure 7.4 Magnets without mild steel plate and magnetic probe.
Figure 7.5 Magnets with mild steel plate and magnetic probe.
Measured H-field in horizontal direction
0
0,05
0,1
0,15
0,2
0,25
0 2 4 6 8 10Distance from center of magnet [mm]
B-fi
eld
[Tes
la]
Magnet surface Mild steel surface
Figure 7.6 Results of probe measurements (Figure 7.4 and Figure 7.5).
In Figure 7.4 to Figure 7.5, the difference between the measurements without the
mild steel plate (blue line, see Figure 7.3) and with the mild steel plate (red line, see
Figure 7.3) is shown. We see a great drop of the force from the measurement of the
surface of the magnet to the surface of the mild steel plate. The magnetic flux density
(B) drops within 3 mm by 72%. The measurements were performed with the same

116
magnets, therefore the magnetic flux density must be the same at the surface of the
magnet. The mild steel plate made the B-field value drop by two thirds to 60 mT,
whereas the field without the mild steel plate remains high.
If a material with a higher permeability was chosen, the drop would be even lower.
In Figure 7.6 the horizontal measurements of two magnets are shown with and
without the mild steel plate. The blue line shows the measurements without the mild
steel plate and the red line shows the measurements with it. The maxima and minima
of the blue line are much higher compared to the red line.
The difference between the maxima and the minima of the blue line is about 72%,
which is similar to the red line with about 74%.
However, the overall field strength of the red line (measurements of the mild steel
plate) is much lower. Therefore, the exerted (repulsion) force experienced by an
opposing magnetic field is exponentially lower. The permeability and the thickness
of the metal sheet create the decrease of the magnetic field. In return, a smoother
rotation of the rotor magnets is possible since the force changes are minimized.
For the optimal performance of the bearing a continuous slight oversaturation is
necessary. However, increases and decreases of the magnetic flux on the surface of
the mild steel sheet are not desirable for the bearing. This could be avoided by an
increase of steel thickness directly over the magnets, and a thinning of the material in
the gaps between the magnets. However, for the experiments shown here, only steel
sheets of even thickness were used, which created the measured magnetic field on
the surface as shown in Figure 7.6.
The material properties in terms of magnetization are usually shown in a BH curve.
The BH curve shows the properties of the materials and is the result of the alignment

117
of the magnetic domains when a magnet is close. The degree of alignment is
reflected in the curve, which shows an asymptotical approach to complete saturation
of the metal. It is saturated when all domains have been aligned with the direction of
the flow of magnetic flux (see Section 6.2.3 of Chapter 6 ).
Figure 7.7 B-H curve.
The usual form of the B-H-curve is determined by the iron losses, the permeability of
the material and the magnetic saturation of the material. The ideal form of the curve
would be a straight line, which is equal to the permeability of the material. In regard
to the magnetic bearing, it is the saturation point of the material (in this case mild
steel type - US steel type 2-S [downloaded from lh5.ggpht.com (2000)], as shown in
Figure 7.8, Figure 7.9 and Figure 7.10) which will determine the performance of the
bearing.

118
B H curve
0
0,5
1
1,5
2
2,5
3
1 10 100 1000 10000 100000 1000000
H [A/m]
B [T
]
US Steel 1008 US Steel 1010 US Steel Type 2-S US Steel 1006US Steel 12L14 US Steel 1018 Cast Iron Mild Steel 3% Silicon Iron Cobalt-Iron
Figure 7.8 Steel saturation curves [downloaded from lh5.ggpht.com (2000)]. Permeability diagram of steel types
0,0000001
0,000001
0,00001
0,0001
0,001
0,011 10 100 1000 10000 100000 1000000
material suceptability of increased magnetic flux (Permeability) [H/m]
Mag
netic
field streng
th [A
/m]
US Steel Type 2-S US Steel 1008 US Steel 12L14US Steel 1018 US Steel 1010 US Steel 1006Permeability of free space Cast Iron Mild Steel 3% Silicon Iron Cobalt-Iron
Figure 7.9 Steel permeability curves [downloaded from lh5.ggpht.com (2000)].
Figure 7.10 The BH curves of several materials [downloaded from lh5.ggpht.com (2000)].

119
7.1.1 Dimensioning the flux concentrator calculation
The author suggests the following equations (Equation 7.1 to Equation 7.6 to design
the mild steel sheet (yoke or flux-concentrator as it is commonly called).
The optimization of this system is based on the equations introduced in the previous
chapters. For a linear system the Fmmf (magneto motive force) is found by taking the
suppliers’ magnet specifications of the Br (remanent magnetic flux density)
multiplied by the length of the magnet Lm and divided by the permeability of the
material µm (a magnet for this case).
The reluctance of the circuit will be calculated by the length of the flux path L, the
permeability of the material µm and the cross sectional area perpendicular to the flux
path.
Then, the magnetic flux Φcircuit can be calculated by considering the total reluctance
RTotal of the circuit.
This cycle will be repeated until a good agreement between the magnetic flux Φcircuit
and the Fmmf (magneto motive force) is found.
However, in this case it is the thickness of the flux concentrator (called “yoke”), of
great importance, since it is crucial for the bearing that the yoke is completely
m
rmmf
BF μ−= Equation 7.1
ALRmμ
= Equation 7.2
Total
mmfcircuit R
F=Φ
Equation 7.3
Totalcircuitmmf RF Φ= Equation 7.4

120
saturated so that the magnetic flux of other magnets cannot enter the yoke. For this
reason a weak field should be measured on the surface of the mild steel sheet (yoke)
as seen in Figure 7.6, which means, for the discussed circuit, that not all of the flux
should pass through the yoke, and the design should be adjusted so that 5-10% will
travel on the surface (through the air) of the mild steel sheet (yoke). The following
equation can help to design the thickness of the yoke (mild steel sheet). However,
there can only be a rough estimation for the thickness of the steel yoke made, due to
the non-linearity of the system (due to the yokes and their BH curves). This is based
on the summation of all reluctances of the magnetic circuit (Equation 7.5).
The following Equation 7.6 gives greater detail. Today most researchers rely on
computational models to get an estimate on the magnetic field distribution.
Here Lma1 is the length of the magnet, µma1 is its permeability and Ama1is its cross
sectional area. The mild steel yoke is presented as LSt1, µ St1 and A St1; the same
applies for the second magnet Lma2, µma2 and Ama2, and for the air-gaps one, LA2, µA2
and AA2, and two the air gaps LA2, µA2 and AA2.
AirMagnetAirYoke
AirYokeMagnetTotal RR
RRRR
RR ++⎟⎟⎠
⎞⎜⎜⎝
⎛+
+= ∑ 21
Equation 7.5
22
2
22
2
11
1
11
1
11
1
11
1
11
1
AA
A
mama
ma
AA
A
StSt
St
AA
A
StSt
St
mama
maTotal A
LA
L
AL
AL
AL
AL
AL
Rμμ
μμ
μμμ
++
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛
+=
Equation 7.6

121
Due to the above mentioned factors (field propagation in free space, and nonlinear
material properties) the computational method has been chosen for future
investigations.
7.2 Finite Element Analysis
In this section, the Finite Element Analysis (FEA) method was used as the
investigative tool. The software packages available today have matured considerably
over the last 10 years.
In the beginning the Maxwell 14 software, by Ansoft (2012), and JMAG (2012) were
considered for the calculations, but finally Maxwell 14 was chosen for this study
because it was easier to use. It is a very simple-to-use software, which can produce
reliable results within a short time. Some of the simulated results were validated with
the measured results and found to be in general agreement.
Figure 7.11 The basic bearing layout.
Today, for almost all simulation software packages, each part of the object is divided
into a three dimensional mesh. The software will then calculate each node of the

122
mesh. In general, the larger the mesh numbers, the higher the precision of the result.
Depending on the configuration of the software and the generated model, the
package can produce any details of an object with values like H- field, as values and
as vectors, current density, core loss etc. as well as a 3-dimensional visualisation.
This is extremely helpful when designing a motor or a bearing. The procedure to find
out if the mesh number is sufficient is a process by which a number of simulations
are necessary.
Usually three mesh numbers are chosen, based on past experience. The simulation
time is measured with a low mesh number, one medium and one with a high mesh
count. Based on the results, the desired precision based on calculation time,
Mesh number comparisons
0
10
20
30
40
50
60
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1Degree
Forc
e [N
]
-400
-300
-200
-100
0
100
200
300
400
Levitation force mesh number 100000 Levitation force mesh number 170000 Levitation force mesh number 190000 Levitation force mesh number 170000 surface Torque mesh number 100000 Torque mesh number 170000 Torque mesh number 190000 Torque mesh number 170000 surface
Figure 7.12 Here is the the effect of the mesh number on the precision of the simulation shown. The simulated results of Torque mesh number 190000 (purple color) and Torque mesh number 170000 surface (blue color) are very close. This
shows that an increase of mesh numbers does not necessary improve the simulation result. The difference between meshing strategies becomes visible when comparing the graph of Torque mesh number 170000 with the graph of Torque mesh number
170000 surface. The solution of Torque mesh number 170000 surface is very close to the solution of Torque mesh number 190000 with a higher mesh number. This leads to the conclusion that a mixture of space and surface mash can improve the
solution and can reduce the calculation time (Figure 7.13).

123
simulation detail and the final mesh number will be adjusted. The right mesh number
is found when the result does not change much, when the mesh number is increased,
or when more detail is not necessary.
Figure 7.13 The mesh number versus calculation time.
Initial calculations for each model were made to find the best total mesh number and
meshing strategy.
The air-gap and the mild steel plate were particularly meshed with high numbers as
volume mesh as well as surface mesh. The term “Air-gap” means the distance
between the rotor (the upper magnetic ring) and the stator (the lower magnetic ring).
The results are displayed in the diagram above (Figure 7.12 and Figure 7.13). Figure
7.12 displays the different meshing methods and mesh numbers and Figure 7.13
displays the mesh number and the calculation time.
The two diagrams show that the increase of the total mesh number does not
necessarily improve the results. With the right meshing strategy of surface and
volume mesh the total calculation time can be shortened and the result improved.

124
Figure 7.14 location of probe measurements.
7.3 Simulation calibration
In order to produce reasonable simulation results it is necessary to compare the
measured results with the simulated ones. A simple 3D simulation model was
produced and then simulated. The computer model had the same dimensions as the
real model and the magnetic field strength was then compared at certain positions.
This had the advantage to verify the properties of the magnet. The strength of
magnets can vary considerably, especially when low cost magnets are chosen.
The measurement points on the magnet are shown in Figure 7.14. The probe
measurements proved difficult since the probe itself had a thickness of 0.5mm. It was
estimated that the magnetic flux was measured in the center of the probe. To get a
good average, a number of magnets were measured. The measured and simulated
results are shown below in Figure 7.15 to Figure 7.18. The measured magnetic flux
density Br and Hjb were calculated.

125
Figure 7.15 Above are the measurement points 1 and 4 of Figure 7.14 shown. In contrast to the measured values of the short side of the magnet show the measured and simulated values from the center of the magnet a close agreement as they are
located in close proximity. However, there is little agreement between the measurements and simulated curves measured on the center of the short side of the
magnet (light blue and brown graph).
Figure 7.16 Above are the measurement points 2 and 3 of Figure 7.14 shown. There is little agreement between the measurements and simulated curves, as they are located not in close proximity. This is displayed clearly by the green and the yellow
graph, (B[Z-axis] measured edge of magnet) and (B[Z-axis] simulated edge of magnet).

126
Figure 7.17 Above are the measurement points 1 and 4 of Figure 7.14 shown. The measured and simulated values from the center of the magnet show a close agreement, as the measured and simulated curves are located in close proximity.
Figure 7.18 Above are the measurement points 2 and 3 of Figure 7.14 shown. Namely are the measured and simulated values from the center of the magnet in
better agreement, as the measured and simulated curves are located in close proximity.

127
The simulation software “Maxwell” by Ansoft provides many ways of changing the
material properties. However, only the Hjb (in Z direction) of the magnet was
changed. It was actually lowered from 890,000 (according to the manufacturer) to
837,999, since a lower value had a better agreement with the measured values
(Figure 7.15 to Figure 7.18, the measurements shown above only show the H field in
Z direction).
7.4 The novel APMBS structure / prototype configuration
The following ideas, pictures, methods and wording of Chapter 7.4 were partially
taken from a paper submitted by the author to the International Journal of Applied
Energy in 2010 with the title: ”A novel magnetic levitated bearing system for
Vertical Axis Wind Turbines (VAWT)”.
With the previously made investigations and calibrations, a prototype bearing and an
experiment setting were produced (Figure 7.19 and Figure 7.22). Based on the
previously found requirements (Figure 7.6), the test rotation speed was determined to
be 500 rpm.
7.4.1 Limitations of the measurement equipment
Before starting the experiments the measurement equipment must be calibrated and
then evaluated. The torque meter was benchmarked with torque meters available at
the Electrical Engineering Department of The Hong Kong Polytechnic University. It
was found that the readings of torque, rounds per minute and power of both machines

128
were within 3% error of each other, which was deemed acceptable for the purpose.
The used torque meter was calibrated further, and the results showed an increased
error at the lower end of the measurement scope, which meant that at a low torque of
2 mNm, the error increased at low rotation speeds of 100 to 400 rpm.
Figure 7.19 Schematic lay out of the bearing: Green the rotor magnets. Grey-blue the mild-steel plate attached to the rotor. Red: the stator magnets.
Figure 7.20 Sectional schematic of the Permanent Magnetic Bearing (PMB) red: upper magnets poling north up; Grey: the mild steel plate; Green: the lower magnet
with the poling north downwards.

129
7.4.1.1 The design details of the bearing
The axial passive bearing was levitated in the vertical (Z) direction and held in radial
position (X and Y direction) by low torque ball-bearings. Pre-charged block magnets
(Table 7.1 and Table 7.2) were chosen for this model, and fitted in a circle with an
even distance between them. The uniform polarization of the magnets is very crucial.
As shown in Figure 7.20, the south poles of the green magnets are facing the south
poles of the red magnets; therefore, the red magnets will be repelled from the green
magnets.
Figure 7.21 First experiment setting. Figure 7.22 Photo of the first experiment setting.
Below a mild-steel sheet was positioned. A similar layout was produced for the stator
part of the bearing. The inner ring of magnets consists of fewer magnets than the
outer ring. For the simulation model were the dimensions shown in Table 7.1 and
Table 7.2 chosen. The proposed PMB system is shown in Figure 7.19, Figure 7.20,
and Figure 7.21.

130
The integrated mild steel plate (yoke, flux-concentrator) will short circuit the
magnetic flux of the rotor magnets, as the magnetic flux will pass through the mild
steel plate to the opposite pole of the magnet. This will create the desired effect of
lowering the magnetic field strength outside the mild steel plate, as seen previously
seen, and will therefore create a more or less even field strength on the surface of the
mild steel plate.
Table 7.1 Design data of the magnetic bearing.
Number of magnet rings 2
Number of magnets of the inner ring. 36
Number of magnets of the outer ring 42
Air-gap distance (g) 5 mm
Number of Mild-steel plates 1
Rotor diameter 155 mm
Magnet size: W: 5.5mm
H: 3mm
L: 7.3mm
Rotations per minute (rpm) 500
A simulated magnetic field is shown in Figure 7.23. The measurements shown in
Figure 7.6 confirm this effect, although in this experiment the gap between the two
magnets is minimized and therefore the “valley” between the magnets is much lower
than those shown in Figure 7.6.

131
Figure 7.23 Simulated schematic of a mild-steel plate attached to the rotor magnets; the field under the steel plate is considerable more uniform than without the mild-
steel plate.
Table 7.2 Design data of the magnets used for the magnetic bearing
Grade Remanence Coerecive Force Energy Product
Br Hcb Hcj (B.H)max Density
mT KA/m KA/m KJ/m3 g/cm3
KOe KOe MGOe
1.030 T 796 955 119
N27 10,300 10,000 12,000 25 4.5-4.9
7.4.1.2 Simulation results of the APMB performance
For the evaluation of the APMB, a computer simulation model was built with the
simulation software Maxwell 14.1. The properties of the magnets were adjusted to
the previously measured ones, opposite to the manufacturer’s specifications (Table
7.2). For the simulation the properties of the steel were chosen according to the
specifications known for US Steel 1007.
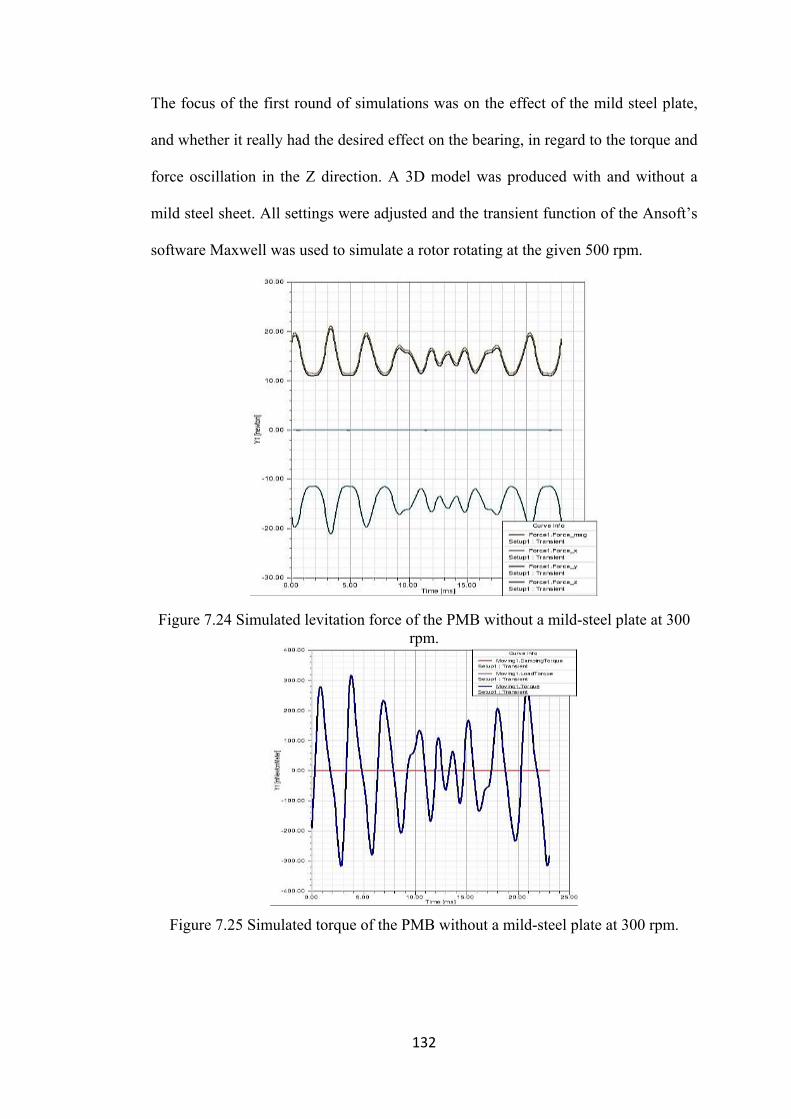
132
The focus of the first round of simulations was on the effect of the mild steel plate,
and whether it really had the desired effect on the bearing, in regard to the torque and
force oscillation in the Z direction. A 3D model was produced with and without a
mild steel sheet. All settings were adjusted and the transient function of the Ansoft’s
software Maxwell was used to simulate a rotor rotating at the given 500 rpm.
Figure 7.24 Simulated levitation force of the PMB without a mild-steel plate at 300
rpm.
Figure 7.25 Simulated torque of the PMB without a mild-steel plate at 300 rpm.

133
7.4.1.2.1 The results of the bearing without the mild-steel plate
Figure 7.25 (simulated torque of a PMB without a mild-steel plate) shows the results
when the torque is 325 mNm (mNewtonMeter) at its peak and about 70 mNm at its
minimum. The levitation force oscillates between 24 Newton at the maximum and 11
Newton at its minimum (Figure 7.24), which shows that the vibrations induced
during operation will be considerable.
7.4.1.2.2 The results of the bearing with the mild-steel plate
The results show that the torque is at -1.7 mNm at its peak and about 0.7 mNm at its
minimum (Figure 7.26, Figure 7.27, Figure 7.28 and Figure 7.29). The average
torque is negative at 0.4 mNm, which indicates an energy loss due to Eddie-currents.
The levitation force is stable at about 11 Newton (Figure 7.27). This means that there
will be no or very little vibration induced during operation.
The fact that the levitation force is very stable demonstrates the effect of the mild-
steel plate and the short circuited magnetic flux.

134
Figure 7.26 Simulated torque of a PMB with a mild-steel plate at 300 rpm.
Figure 7.27 Simulated force of a PMB with a mild-steel plate at 300 rpm. S im u la t e d t o r q u e r e s u l t s
( w i t h m i ld s t e e l p la t e )
- 2 .0 0
- 1 .5 0
- 1 .0 0
- 0 .5 0
0 .0 0
0 .5 0
1 .0 0
- 5 5 1 5 2 5 3 5 4 5M e a s u r e m e n t in te r v a ls [m S e c o n d s ]
Torq
ue [m
New
ton]
S e r ie s 1
Figure 7.28 Simulated torque of a PMB with a mild-steel plate at 500 rpm.

135
S im u la t e d fo r c e r e s u l t s in Z d i r e c t io n ( w i t h m i ld s t e e l p la t e )
- 1 5 . 0 0
- 1 0 . 0 0
- 5 . 0 0
0 . 0 0
5 . 0 0
1 0 . 0 0
1 5 . 0 0
- 5 5 1 5 2 5 3 5 4 5M e a s u r e m e n t i n t e r v a ls [ m S e c o n d s ]
Forc
e in
Z-d
irect
ion
[New
ton]
S e r i e s 1 S e r i e s 2
Figure 7.29 Simulated results of the levitation force in z-direction of the PMB at 500 rpm.
S i m u l a t e d l o s s r e s u l t s( w i t h m i l d s t e e l p l a t e )
0 . 0 0
5 . 0 0
1 0 . 0 0
1 5 . 0 0
2 0 . 0 0
2 5 . 0 0
3 0 . 0 0
3 5 . 0 0
4 0 . 0 0
- 5 5 1 5 2 5 3 5 4 5M e a s u r e m e n t i n t e r v a ls [ m S e c o n d s ]
Wat
t in
[mW
att]
S e r i e s 1
Figure 7.30 Simulated results for the torque of the PMB at 500 rpm.
7.4.1.3 The results of the simulated bearing in comparison with the manufactured
prototype
The simulation results bare little truth if they are not validated by real experiments.
Since the simulations are promising, prototypes were then produced and tested. Due
to differences that occurred during the manufacturing process, a new simulation
model was made and simulated as shown in (Figure 7.28 to Figure 7.30).

136
7.4.1.4 The simulated Bearing
During the simulation, the torque, shown in Figure 7.28, did not display a horizontal
straight line. This shows that the location of each magnet on the mild-steel plate
might be important since the field strength might vary. This might cause vibration in
the real model. However, the force needed to turn the bearing is very low. In fact the
average is 0.4 mNm.
In Figure 7.30, it should be noticed that the energy loss due to the Eddie-current is
minimal. The simulated average loss is 34.38 mWatt (Figure 7.30) and the levitation
force is 9.92N (Figure 7.29).
7.4.1.5 Simulation data versus measured data - error calculation
The process of the measured data is much more difficult, since the data represent the
reality. For a researcher it is sometimes difficult to understand the measured results,
as many factors need to be considered, which may be unknown by the researcher. In
the case of this research, the limitation of the measurement equipment and its error
had to be taken into account as well. The limitations of the torque meter had to be
considered, as it could only record 12 data points per second, whereas the simulation
could be adjusted to any amount of data points per second, which are applied to the
data recording of the torque and the rotation speed. During the experiments, vibration
and other energy loss due to friction could not be avoided, and an average value was
calculated and then deducted from the measured results. An average error calculated
for the rotation speed was found to be around 5.6%. The percentage of the

137
measurement uncertainty is shown in Table 7.3, which was derived by the standard
deviation Equation 5.5.
Table 7.3 The error of measurements. Parameter Uncertainty (%)
Rotation per minute (rpm) 5.6
Torque [Nm] 6.3
7.4.2 Measured performance of the prototype of the APMBS
The prototype bearing was installed in the testing rig (Figure 7.21 and Figure 7.22).
It was driven by a DC motor spinning a flywheel. This flywheel rotated a torque
meter which was attached to the test stator and the test rotor. The flywheel was
installed to provide a constant rotation speed through its inertia.
Vertical force was added by attaching weights to the shaft on top of the of the test
bearing until the force was equal to the force shown in the simulation, 9.92N (Figure
7.29).

138
Figure 7.31 Diagram of the measured torque and rotation per minute
The bearing was installed and tested at an average 506 rpm (Figure 7.31). The rotor
was levitated at an air-gap distance of 6mm in stand-still (the same as in the
simulation). The measurements showed that at a rotation speed of 506 rpm was the
measured torque 5.49 mNm (Figure 7.31) on average; with the highest point of 12.8
mNm and the lowest point of 0.8 mNm.
The friction of the radial ball bearings was measured previously to be 6.5 mNm, and
had to be deducted. Considering this, it can be said that the measured data confirms
the simulated data to some extent.

139
7.5 Conclusion
A novel magnetic bearing was developed in this chapter. Through testing this new
axial passive magnetic bearing system, it was confirmed that the bearing works very
well and adding a mild steel plate on the rotor of the bearing will enhance the
uniformity of the magnetic field on the surface, which will in turn enhance the
performance of the bearing. Averaged torque measurements were in good agreement
with the averaged simulated results.

140
Chapter 8 Improvement of the developed bearing
There were several questions arising from the testing of the first prototype magnetic
bearing, which could be answered by simulations in order to improve the
performance of the bearing. The computational investigation will focus on five areas
of interest:
1. the effect of the gap between the magnets;
2. the effect of single pole or multiple pole configuration;
3. the effect of the integration of mild steel yokes into the bearing;
4. the effect of the air gap (between stator and rotor) on the torque and
levitation;
5. The effect of the location of the magnets on the bearing rings.
8.1 Influential literature
After the testing the first prototype magnetic bearing some improvements were made
based on three publications which inspired some of the changes and are summarized
in the following:
• The first stated the effect of a 0.05mm thick stainless steel sheet (SUS 43)
which was applied to an axially magnetized ring magnet by Ohji et al. (2000).
The reason for applying the stainless steel sheet was that the magnetization
over a long time had lost its uniformity, which caused undesired vibration in
the flywheel system. The report stated that if a steel sheet was added, it
unified the magnetic field to the degree that little or no vibration and noise
were emitted.

141
• The second publication was an investigation by the researcher team around
Nagashima, et al. (1999) into the effect of iron yokes on an array of ring
magnets which levitated over bulk HTS. In this report different magnet sizes
as well as pole arrangements were investigated, and it was found that the
back yoke in relation with the pole number was very effective to strengthen
the levitation force. Therefore the researchers concluded that (quote:) “in
order to enhance the radial stability, an increase in the number of poles is
effective. For the design of the flywheel as well as other levitation systems, it
is important to optimize the thickness, the width, and the number of poles of
magnet for achieving a large EMF.” (Electro Magnetic Field) (Nagashima et
al. (1999) Page 143), which, in conjunction with the air-gap under which the
system is being operated, will determine the levitation force of the bearing.
• The third paper was published in 2009 by Ikeda et al. (2009). In short, it
reported the findings of magnetic rings made of multiple cuboidal magnets,
which were used to levitate a flywheel over HTS blocks. The researchers
used a similar approach as Nagashima, as they also used a back yoke and a
large pole number to increase the EMF. In their conclusion they stated that
the magnetic field measured close to the magnets showed large differences in
their field strength (when measured from magnet to magnet in the rotational
direction), but if measured at a 15mm distance over the surface of the
bearing, these differences in field strength were approaching 10 mT and
lower. This means that the further away from the magnetic ring, the more
uniform is the magnetic field.

142
Similar effects were found during this investigation.
The following section describes the investigation of five basic bearing configurations
(with the magnetic properties as shown in Chapter 7 ). For the purpose of
comparison the 3D simulation models were set up with the same magnetization (Br)
and the same surface area, and were rotated by 10 degrees (with the transient
function of Ansoft’s Maxwell).
8.1.1 Basic magnetic bearing configuration 0
This first model to be described here is the basic repulsion model, where two
repelling magnets are shown. The interest is here on the magnetic field.
Figure 8.1 H field around the configuration 0.
Figure 8.2 H-field around the configuration 0. The blue dotts show the
field direction.
Figure 8.1 and Figure 8.2 show two magnets, one dark green and one yellow. The
dark green one is the magnet with a polarization where the South Pole is facing the
yellow magnet and the North Pole is facing upward. For the yellow magnet the South
Pole is facing the dark green magnet and the North Pole is facing downwards.

143
The colored area around the magnets shows the magnetic field strength, where the
red area indicates a high strength field and the blue area means a low field strength.
In all of the following figures the magnetic polarization is determined by its color.
In Figure 8.1 the magnetic field density is shown. In this case the magnetic field is
emitted at the upper the center of the dark green magnet (North Pole) and is then
transmitted to center of the magnet (as the blue dots indicate in Figure 8.2).
The repulsion effect appears to be due to the field deformation. This is due to the
location of the South Pole of the second magnet. Both fields are deformed and repel
each other (the equations presented in Chapter 6.2.6 can be applied here).
There is an area of weak field strength (indicated by the color green) between the
upper and lower magnet, which indicates that the field is concentrated around the
corners of the magnet and is less dense at the center between the two magnets. This
is the case with any magnet, and the reason is that the traveling distance from the
North Pole to the South Pole is the shortest at the corner of the magnet, whereas the
traveling distance towards the center of the North or South Pole of the magnet
approaches infinity (theoretically). Since the magnetic strength depends on the
permeability (magnetic resistance/reluctance) of the material, the force traveling
through longer path means a weaker field. Therefore, a weak field (shown in green)
can be seen in the center of the magnet.
8.1.2 Magnetic bearing configuration 1
The second configuration doubles what was shown in the first configuration. It
shows the field deformation of the magnets due to the presence of other magnets.

144
The field deformation occurs due to the magnet below and beside. The magnet will
repel those beside and below it.
Figure 8.3 H field around the configuration 1.
Figure 8.4 H-field around the configuration 1. The blue and red dots
show the field direction.
The field direction is indicated by the red dots for the upper magnets and the blue
dots for the lower magnets. It is interesting that there is an area of weak field strength
(indicated by green color) in the center of the four magnets. An explanation for this
could be that the field strength between two fields with the same direction must be 0.
8.1.3 Magnetic bearing configuration 2
The third configuration changed from a uniform pole configuration to an alternating
pole configuration. Here, the upper and lower magnets have their own North and
South Poles, which shortens the traveling length of the magnetic flux, and therefore
strengthens the magnetic field. Furthermore, this configuration uses the fact that the
magnetic fields traveling in the same direction will repel each other, which provides
the levitation for the bearing (as seen in Figure 8.5 and Figure 8.6).

145
Figure 8.5 H field around the configuration 2.
Figure 8.6 H-field around the configuration 2. The blue and red dots
show the field direction.
8.1.4 Magnetic bearing configuration 3
The fourth configuration introduces a yoke into the system. As mentioned in Chapter
7.1.1, the resistance for the magnetic flux to travel through iron is much lower than it
is through air.
The effect of adding a mild steel sheet was demonstrated by measurements in
Chapter 7 , where it was shown that the magnetic field decreased on the surface of
the mild steel plate considerably, which means that most of the magnetic flux will
stay inside the mild steel plate.
The finding is indicated by the magnetic field shown in Figure 8.8 and Figure 8.9.
Furthermore, it is interesting that the formerly seen areas of weaker magnetic field
intensity (green spots in Figure 8.1 and Figure 8.3) have disappeared, which indicates
that, overall, the field is more uniform.

146
Figure 8.7 H field around the configuration 3. The mild steel yoke
changes the magnetic field.
Figure 8.8 H-field around the configuration 3. The blue and red dots
show the field direction.
8.1.5 Magnetic bearing configuration 4
In configuration 4 the effects of two mild steel yokes were investigated. Here it can
be seen that the magnetic field has changed considerably on the outside (above the
dark green and yellow magnet pair), where the yoke was installed. The magnetic
field strength over the upper magnets decreased considerably compared to the field
below the lower magnets. This shows that most of the magnetic flux travels through
the yoke of the upper magnets (the low field is indicated by the color yellow,
whereas it is red under the lower magnet pair without the yoke), which was also seen
in Figure 7.3 and Figure 7.6.

147
Figure 8.9 H field around the configuration 4.
Figure 8.10 H-field around the configuration 4. The blue and red dots
show the field direction.
8.1.6 Magnetic bearing configuration 5
Configuration 5 is the version with three mild steel yokes, i.e. the effects of the
previous versions compiled into one configuration.
Figure 8.11 H field around the configuration 5.
Figure 8.12 H-field around the configuration 5. The blue and red dots
show the field direction.

148
The details about configurations 1 to 5 will be discussed in Section 8.1.7. In Figure
8.13 the magnetic fields of the configurations 1 to 5 are shown. The concentration
effect of the mild steel plate is interesting, which shows clearly that the magnetic
field strength changes between the upper magnet pair and the lower magnet pair.
In configurations 1 and 2 is a green spot visible between the upper and lower
magnetic pair. The explanation for this is shown in Figure 8.1 and Figure 8.3.
In configurations 3 to 5 mild steel yokes have been integrated into the system, and
most of the magnetic flux will pass through the yoke(s) to the opposite pole. This
saturates the yoke and the magnetic field of the other magnet pair cannot penetrate
the yoke. This allows the other pair to create a more uniform field.
configuration
1
configuration
2
configuration
3
configuration
4
configuration
5
Figure 8.13 The H-field around the configurations 1 to 5.
8.1.7 The difference between ring magnets and ring configurations consisting of
multiple magnets
Taking the previously investigated configurations (Figure 8.1 to Figure 8.9), the
effects on the levitation force and torque can now be investigated and compared.

149
This comparison must start with the basic comparison between a ring magnet and a
multiple block magnet arrangement. The simulation settings for the air-gap distance
and block distance are the same as the ring magnet if not stated differently.
Figure 8.14 RM SR SP 1AG A 1431mm2 Figure 8.15 CM SR SP 0G 1AG
Figure 8.16 CM SR SP 0.5G 1AG Figure 8.17 CM SR SP 1G 1AG
Figure 8.14 to Figure 8.17 show the basic model configurations. The results are
shown in Figure 8.18 to Figure 8.23. The effect of the gap between the magnets of
each ring and the effect of an increased air-gap will be investigated. The gap between
the magnet blocks will be increased from 0 to 2 mm (Figure 8.14 to Figure 8.17), as
the air-gap distance will be increased from 1 mm (Figure 8.18 and Figure 8.19) to

150
2.5mm (Figure 8.20 and Figure 8.21) to 5 mm (Figure 8.22 and Figure 8.23) and
finally to 10mm (Figure 8.24 and Figure 8.25).
30
35
40
45
50
55
60
0 2 4 6 8 10
Levi
taio
n Fo
rce
[N]
Degree
Levitation Force Change over 10 degrees
ring magnet 1431mm area, 1mm airgap block magnet 0mm gap, 1mm airgapblock magnet 0,5mm gap, 1mm airgap block magnet 1mm gap, 1mm airgap
Figure 8.18 Levitation force at 1mm air-gap distance.
Figure 8.19 Torque at 1mm air-gap distance.
In Figure 8.18, the effect of the gap between two magnets is clearly visible. The rotor
starts rotating from a position where the magnets of the rotor and the stator are in
alignment, which provides the highest levitation force. After it has rotated for 5

151
degrees, the magnets are positioned over the gap and therefore experience a much
lower levitation force. This is the reason why the configuration with the largest gap
between the magnets provides the lowest repulsion force in this position. Even the
configurations with a 0 gap between the magnets experience a slight change in
levitation force.
Figure 8.20 Levitation force at 2.5mm air-gap distance.
Figure 8.21 Torque at 2.5mm air-gap distance.
The same applies to the torque in Figure 8.19, as it produces the largest negative and
positive torque. Similar trends are visible in Figure 8.20 to Figure 8.25.

152
Figure 8.22 Levitation force at 5mm air-gap distance.
Figure 8.23 Torque at 5mm air-gap distance.
When comparing Figure 8.18 with Figure 8.25, the simulation with the smallest air-
gap (1mm) to the simulation with the largest air-gap (10mm), it is interesting that the
effect described in the previous report becomes visible. Ikeda et al. (2009) also
reported an increasingly unified EMF at a larger (air-gap) distance for the bearing.

153
Figure 8.24 Levitation force at 10mm air-gap distance.
Figure 8.25 Torque at 10mm air-gap distance.
The results for the largest air gap investigated are shown in Figure 8.24 and Figure
8.25. The figures with the smallest air-gap (Figure 8.18 and Figure 8.19) show a
large change of levitation force and torque. With an increasing air-gap (between rotor
and stator) the total levitation force becomes smaller (Figure 8.20 and Figure 8.22).
The same applies to the change of the torque.

154
Overall the ring magnet shows the best performance in torque and levitation force.
However the 0 gap configuration comes very close to that performance, as shown in
Table 8.1.
Table 8.1 The investigated bearing configurations.
8.1.8 Investigation into multiple magnet ring configurations
This comparison is again for a ring magnet (configuration RM SR SP 1AG A
2623mm2), with the same properties and surface area as the multiple block
configurations. Knowing that a multiple pole configuration will increase the
magnetic field strength, it is interesting to see what the effect is on the torque and
levitation force of the bearings.
The simulation settings, the mesh number, the materials, the rotation speed and times
steps are the same for all simulations. In the following section are descriptions of the
investigations of the double ring single pole configurations CM DR SP 2G 1AG, CM
DR SP 2G 1AG SY M, CM DR SP 2G 0.5AG DY ML and CM DR SP 2G 1AG TY
Steel
Yoke
Con
figur
atio
n
Cub
oida
l Mag
nets
[CM
]
Rin
g M
agne
ts [R
M]
Sin g
le R
ing
[SR
]
Dou
ble
Rin
g [D
R]
Sing
le P
ole
[SP]
Dou
ble
Pole
[DP]
Air-
gap
1mm
[AG
]
Mag
net G
ap [G
]
Sin g
le Y
oke
[SY
]
Dou
ble
Yok
e [D
Y]
Tri p
le Y
oke
[TY
]
Are
a [A
]
Torq
ue A
vera
ge
[mN
m]
Ave
rage
Lev
itatio
n
Forc
e [N
]
M L H
Figure
8.14
RM SR SP 1AG A
1431mm2
1
X X X 1 X 0.79 120.6
Figure
8.15
CM SR SP 0G 1AG 1 X X X 1 0 0.62 99.3
Figure
8.16
CM SR SP 0.5G
1AG
1 X X X 1 0.5 9.3 108.8
Figure
8.17
CM SR SP 1G 1AG 1 X X X 1 1 11.82 99.31
CM SR SP 2G 1AG 1 X X X 1 1 149.89 72.7

155
MLH shown. The effect of the integration of a mild steel yoke is visible in the
following Figure 8.30 to Figure 8.36 and in Table 8.2.
Figure 8.31 shows the levitation force comparison between the ring magnet RM SR
SP 1AG A 2623mm2 and the double ring multiple magnet configurations CM DR SP
2G 1AG, CM DR SP 2G 0.5AG and CM DR SP 2G 1AG SY M.
Figure 8.26 The ring magnet RM SR SP 1AG A 2623mm2
Figure 8.27 Block magnets, double ring, single pole. CM DR SP 2G 1AG
Figure 8.28 Block magnets, double ring, single pole, single yoke. CM DR SP 2G
1AG SY L
Figure 8.29 Block magnets, double ring, single pole, single yoke. CM DR SP 2G
1AG SY M

156
Figure 8.30 Ring magnet and block magnets comparison. The ring magnet displays the best performance with no change in its levitation force, whereas the block magnet
show a large change in levitation force.
Figure 8.31 Ring magnet and block magnets comparison. The Ring magnet displays the best performance with no change in its torque, which is close to zero. But the
block magnet configurations show a large change in torque. The graph of RM SR SP 1AG A2623 and the graph of CM DR SP 2G 1AG TY MLH are very close. The
graph of RM SR SP 1AG A2623 is covered by the graph of CM DR SP 2G 1AG TY MLH. Figure 8.33 provides more details.

157
The difference between the ring magnet RM SR SP 1AG A22623 and the other
configurations is shown clearly. It is a straight line, opposite to all the other
configurations. Table 8.2 shows the difference in numbers.
Table 8.2 The investigated bearing configurations. Steel
Yoke
Con
figur
atio
n
Cub
oida
l Mag
nets
[CM
]
Rin
g M
agne
ts [R
M]
Sin g
le R
ing
[SR
]
Dou
ble
Rin
g [D
R]
Sing
le P
ole
[SP]
Dou
ble
Pole
[DP]
Air-
gap
1mm
[AG
]
Mag
net G
ap [G
]
Sin g
le Y
oke
[SY
]
Dou
ble
Yok
e [D
Y]
Tri p
le Y
oke
[TY
]
Are
a [A
]
Torq
ue A
vera
ge
[mN
m]
Ave
rage
Lev
itatio
n
Forc
e [N
] M L H
Figure
8.26
RM SR SP 1AG A
2623mm2
1 X X X 1 X 0.78 304.6
Figure
8.27
CM DR SP 2G 1AG 2 X X X 1 2 195.8 89.13
Figure
8.29
CM DR SP 2G 1AG
SY M
2 X X X 1 X 96.25 46.3 X
Not
shown
CM DR SP 2G
0.5AG DY ML
2 X X X 0.5 X 114.8 51.9 X X
Not
shown
CM DR SP 2G 1AG
TY MLH
2 X X X 1 X 0.12 56.7 X X X
Figure 8.32 Levitation force comparison of the block magnet configuration CM DR SP TY MLH to the ring magnet RM SR SP 1AG A 2623.

158
The levitation force of the ring magnet configuration is constant at 304 N. All other
configurations are experiencing very large force differences and are therefore not
useful for a bearing design.
However, unexpectedly, it shows that the torque of the bearing configuration CM DR
SP 2G 1AG TY MLH is a very low torque (Figure 8.32). This might be attributed to
the low repulsion force in conjunction with the field unifying effect of the mild steel
yoke (similar to what Ikeda et al. (2009) reported). The lower the levitation force, the
lower the force differences.
Finally the bearing configurations were investigated which consist of two multiple
magnet rings with opposite poles (Figure 8.34 to Figure 8.37).
Figure 8.33 Torque comparison of the block magnet configuration CM DR SP TY MLH to the ring magnet configuration RM SR SP 1AG A 2623. The erratic curve (red
line) of the ring magnet configuration RM SR SP 1AG A 2623 might be due to computational errors. In reality it should be a horizontal line

159
Figure 8.34 Block magnets, double ring, double pole, single yoke. CM DR DP 2G
1AG SY M
Figure 8.35 Block magnets, double ring, double pole, double yoke. CM
DR DP 2G 1AG DY LM
Figure 8.36 Block magnets, double ring, double pole, double yoke. CM DR DP 2G
1AG DY LH.
Figure 8.37 Block magnets, double ring, double pole, triple yoke. CM DR
DP 2G 1AG TY LMH.
Figure 8.38 displays the configurations CM DR DP 2G 1AG DY HL, CM DR DP 2G
1AG SY M and CM DR DP 2G 1AG, which show the pattern previously seen in
Figure 8.30 etc. The levitation force decreases when the magnets are not aligned and
increases when the magnets are aligned. Table 8.3 shows the differences.

160
Table 8.3 The investigated bearing configurations
Figure 8.38 Levitation force comparison of the block magnet configurations to the ring magnet RM SR SP 1AG A 2623.
However, there are similarities to the previously seen single pole configuration CM
DR SP 2G 1AG TY MLH. The performance of CM DR DP 2G 1AG TY HML
(Figure 8.37) and CM DR DP 2G 1AG DY ML (Figure 8.35) seen in Figure 8.38 and
Steel
Yoke
Con
figur
atio
n
Cub
oida
l Mag
nets
[CM
]
Rin
g M
agne
ts [R
M]
Sin g
le R
ing
[SR
]
Dou
ble
Rin
g [D
R]
Sing
le P
ole
[SP]
Dou
ble
Pole
[DP]
Air-
gap
1mm
[AG
]
Mag
net G
ap [G
]
Sin g
le Y
oke
[SY
]
Dou
ble
Yok
e [D
Y]
Tri p
le Y
oke
[TY
]
Are
a [A
]
Torq
ue A
vera
ge
[mN
m]
Ave
rage
Lev
itatio
n
Forc
e [N
]
M L H
Figure
8.26
RM SR SP 1AG A
2623mm2
1 X X X 1 X 0.78 304.6
not
shown
CM DR DP 2G 1AG 3 X X X 1 2 X 216.8 154.54
not
shown
CM DR DP 2G 1AG
SY M
3 X X X 1 2 X 129.9 56.7 X
Figure
8.34
CM DR DP 2G 1AG
DY ML
4 X X X 1 2 X 15.9 278.9 X X
Figure
8.36
CM DR DP 2G 1AG
DY HL
4 X X X 1 2 X 204.8 245.7 X X
Figure
8.37
CM DR DP 2G 1AG
TY HML
5 X X X 1 2 X 19.69 297.2 X X X

161
Figure 8.39 shows that the levitation force has increased and displays only slight
oscillations; the same applies to the torque.
Figure 8.39 Torque comparison of the block magnet configurations to the ring magnet configuration RM SR SP 1AG A 2623. The graph of CM DR DP 2G 2AG DY ML is very close to the graph of CM DR SP 2G 1AG TY MLH, and almost
covers it. More details are shown in Figure 8.41.
Figure 8.40 Levitation force comparison of the block magnet configurations CM DR DP 2G DY ML and CM DR DP 2G TY HML to the ring magnet RM SR SP 1AG A 2623.
The double yoke configuration has a lower levitation force than the tripple yoke configuration.

162
Figure 8.38 shows two configurations which come close to the performance of the
ring magnet. The configuration CM DR DP 2G 1AG DY ML has two yokes, and the
configuration CM DR DP 2G 1AG TY HML has three. The torque is shown in
Figure 8.39. The configuration CM DR DP 2G 1AG TY HML and CM DR DP 2G
1AG DY ML display almost a straight line, similar to the ring magnet.
lists the average torque and levitation force. Although the torque of both
configurations is still worse than the torque of the ring magnet, it is still quite close
considering that the levitation force of CM DR DP 2G 1AG TY HML is only 7 N (on
average) less than that of the ring magnet RM SR SP 1AG A 2623mm2.
Figure 8.40 shows the levitation force oscillation of the bearing configurations CM
DR DP 2G 1AG DY ML, CM DR DP 2G 1AG TY HML and RM SR SP 1AG A
2623mm2. Clearly is the effect seen when the magnets are aligned, as the torque and
levitation force increases or decreases. However, measured by the performance of the
Figure 8.41 Torque comparison of the block magnet configurations CM DR DP 2G DY ML and CM DR DP 2G TY HML to the ring magnet RM SR SP 1AG A 2623. The
double yoke configuration has a lower levitation force than the triple yoke configuration.

163
other configurations investigated, the yoke has a positive effect on the performance.
This leads to the next investigation about the location of each magnet on the ring.
8.1.9 Magnet block locations between multiple magnet rings
When looking at the previous simulation results, it seems to be clear that the location
of each magnet will have an effect on the performance of the bearing. This effect is
visible in the increase and decrease of the levitation force and torque and will be
investigated in the following.
Table 8.4 The investigated bearing configurations. Configuration A Configuration B Configuration C
Total number of magnets of
bearing
216 216 216
Rotor 18 South pole up 18 South pole up 18 South pole up Rotor/stator
multiple magnet
ring 1 (Inner ring) Stator 18 North pole up 18 North pole up 18 North pole up
Rotor 18 North pole up 24 North pole up 24 North pole up Rotor/stator
multiple magnet
ring 2 Stator 18 South pole up 24 South pole up 24 South pole up
Rotor 36 South pole up 30 South pole up 30 North pole up Rotor/stator
multiple magnet
ring 3 Stator 36 North pole up 30 North pole up 30 South pole up
Rotor 36 North pole up 36 North pole up 36 South pole up Rotor/stator
multiple magnet
ring 4
(outer ring)
Stator 36 South pole up 36 South pole up 36 North pole up
South 108 96 108 Poles
North 108 120 108
In Figure 8.42 to Figure 8.44, the blue cubes represent magnets with the South Pole
facing upwards, and the red cubes indicate that the North Pole is facing upwards.
Since the multiple magnet rings are concentric, the radius of the ring becomes larger,
which increases the number of magnets used on the rings. The configurations A, B,

164
and C are thus investigated as shown in Table 8.4. Configuration B shows that, due
to its ring polarization of south-north-south-north (for the rotor), it will have 96
South poles facing 120 North poles.
For the following investigations the mild steel yoke was omitted, since the focus was
on the effect of the magnet location, and a mild steel yoke would minimize its effect.
Figure 8.42 The configuration A has an even number of north and south poles. But the arrangements of the rotor and the stator magnets are not the same.
Configuration A (Figure 8.42) consists of two ring pairs with an even number of
North Poles to South Poles. The reason for this configuration was to minimize the
force and torque oscillation. This was thought to be achieved by locating the magnets
such that when the (rotor) magnets of the first and third ring are aligned with the
stator magnets the magnets of the second and the fourth ring are not. Three
simulations were performed with the air-gap length of 2mm 3mm and 4 mm (see
Figure 8.45 to Figure 8.51).

165
Figure 8.43 The configuration B has an uneven number of north and south poles.
Figure 8.43 shows configuration B, which has the same number of magnets as
configuration A, but has an uneven number of Poles (Table 8.4). There are 96 South
Poles to 120 North Poles.
Figure 8.44 The configuration C has an even number of north and south poles.
In configuration C a strategy is shown to keep the pole numbers even. The strategy is
to group the first ring with the fourth and the third to the second. In this way (as seen
in Table 8.4) the pole numbers can be kept even (North and South Poles 108, Table
8.4).

166
Figure 8.45 The Levitation force comparison at 1 mm air-gap between rotor and stator.
Figure 8.45 shows the configurations A, B and C. The highest levitation force is
recorded for configuration B. It seems that the number of poles is not as important as
the traveling distance of the magnetic flux.
Figure 8.46 The Levitation force of configuration A.
Although configuration C does provide an even number of poles for the bearing, it
seems that the magnetic flux path becomes longer, because of the arrangement of
South-North-North-South pole. This might be different if yokes were used for this
bearing. Configuration A shows the lowest levitation force (Figure 8.45).

167
The torque diagram is shown in Figure 8.46, where it is shown that configurations B
and C are close in the torque.
From the previously seen trend, that the levitation force and the torque oscillation
decrease with a widening air-gap, which is confirmed by Figure 8.47 to Figure 8.51.
-600
-400
-200
0
200
400
600
0 10 20 30 40 50 60
Levi
tatio
n Fo
rce
[N]
Degree
Comparison of the Torque of Configuration A, B and C
Torque configuration A 1mm Torque configuration B 1mm Torque configuration C 1mm
Figure 8.47 The torque comparison at 1 mm air-gap between rotor and stator.
Figure 8.48The Levitation force comparison at 2 mm air-gap between rotor and stator.

168
Figure 8.49 The torque comparison at 2 mm air-gap between rotor and stator.
Figure 8.50 The Levitation force comparison at 3 mm air-gap between rotor and stator.
Figure 8.51 The torque comparison at 3 mm air-gap between rotor and stator.

169
8.2 Conclusion
The computational investigation into the structure of the bearing and the location of
the magnets in the bearings has brought some interesting results. The results
indicated that there was a clear impact of the gap between the magnets if compared
with the ring magnet. The performance was poorer and oscillated between a high
levitation force when the magnets were aligned and a lower levitation force when the
magnets were not aligned, which can be explained, i.e. the gap (between the magnets
of each ring) will weaken the uniformity of the magnetic field. Wider gaps between
the magnets on the modular ring will have a larger impact than smaller ones (Figure
8.19). However, even if the magnets are arranged with a 0 gap between them (Figure
8.19), a change in the torque and levitation force is still noted. This negative effect
could be minimized with an increase of magnets for each ring and multiple rings.
When it comes to single or multi pole configurations, the multi pole configurations in
general offer a higher levitation performance but also higher torque if they are
located in close proximity. If combined with a yoke the levitation force can almost
reach the performance of a ring magnet (Figure 8.40 and Figure 8.41), with a much
lowered torque compared to other multiple magnet configurations.
The effect of a larger air-gap distance (between stator and rotor) on the torque and
levitation force is clear. As the torque is linked directly to a change of levitation
force, both will decrease when the air-gap is increased.
And finally, no special arrangement of the magnets is necessary as the test has
shown. Any other configuration will lead to longer flux paths, which lowers the
magnetic field and, in turn, decreases the levitation force. The following conculsions
can thus made:

170
• A difference in the magnetic field occurs, if the modular magnetic ring
consists of more than one magnet.
• If more than one modular magnetic ring configuration is used, multi pole
arrangements will increase the levitation force.
• The effect of the gaps between magnets (point 1) and the levitation force
(point 2) can be improved with yokes added (magnetic flux concentrators)
• A simple NSNS (north-south-north-south) ring pole configuration is the best.

171
Chapter 9 The second prototype –comparison to the
simulated test results
The following ideas, pictures, methods and wording of Chapter 9 were partially
taken from a conference paper submitted by the author to the International
Conference of Applied Energy 2012 with the title: ”The magnetic dampening effect
of a passive modular magnetic bearing for a Vertical Axis Wind Turbines (VAWT).”
A second bearing prototype (Figure 9.1 to Figure 9.5) was produced in accordance
with the findings above. However, for this test the test settings were changed. The
rotor was put between the two sets of stator magnets, which restricted its vertical
Figure 9.1 The rotor of the magnetic bearing installed with the mild steel yoke
Figure 9.2 The stator of the magnetic bearing with its mild steel yoke (here shown a
five ring configuration, but tested was a 4 ring configuration).

172
movement (Figure 9.4). With this method, the bearing could achieve a very high
degree of stiffness by decreasing the upper and lower air-gap (between the rotor and
the stator). This is a necessary step to increase the usability of the bearing and to
create a possible product (Figure 9.5).
Figure 9.3 For determining the air gap and the levitation force is the rotor left levitating over the stator.
Figure 9.4 During the test setup is the air-gap distance between rotor and stator
adjusted.

173
Figure 9.5 Schematic drawing of a commercial magnetic bearing prototype.
`
Figure 9.6 Schematic experiment layout

174
9.1 The experimental setting
The bearing was installed in the testing rig (Figure 9.4 and Figure 9.6) and driven by
a DC motor. The details of the bearing are shown in Table 9.1.
The total weight of the shaft, the rotor and the wind turbine was equal to the force
shown in the simulation, 63.29 N (Table 9.2).
Table 9.1 Design Data of the bearing rotor and stator. Number of magnet rings on the stator and rotor 8
Number of magnets of the 1st ring 18
Number of magnets of the 2nd ring 24
Number of magnets of the 3rd ring 30
Number of magnets of the 4th ring 36
Air-gap distance (g) 5 mm
Number of Mild-steel plates 4
Rotor diameter 255 mm
Magnet size: W: 5.5mm
H: 3mm
L: 7.3mm
Rotations per minute (rpm) 108 rpm to 1084 rpm
Table 9.2 Design data of the bearing rotor and stator. Item Weight in N
Ball bearing 1 5.736
Ball bearing 2 1.618
Rotor incl. Metal sheets, Magnetic
bearing 1 and 2, fixings etc. 14.180
Shaft 3.442
Coupling 0.666
Wind turbine 37.648
Total 63.29

175
The settings were adjusted to those described in Chapter 7 for the Savonius wind
turbine.
Figure 9.7 Experiment setting.
The previously shown investigations gave the most often occurring wind speeds
under which a building integrated wind turbine operates (Table 5.8 and Table 5.9).
The investigated wind turbine operates at the wind speeds (air velocities) of 4m/s,
6m/s and 8 m/s. The measured rotation speeds are shown in Table 9.3.
Table 9.3 Air velocity and Rotation speed Air velocity Rotation speed range
4m/s 0-450 rpm
6m/s 0-768 rpm
8m/s 0-1084 rpm
As previously stated, the bearing does constrain the vertical movements of the
bearing rotor, which consists of two stator plates (Figure 9.4 and Figure 9.5). The

176
lower one restricts the downward movements and the upper one restricts the upward
movements of the rotor. During the experiments the upper stator plate was used to
decrease the air-gap of the bearing by lowering it, which made the bearing stiffer.
There was no change for the supported load, 63.29 N.
Four cases were investigated, and are hereafter referred to as AG1, AG2, AG3 and
AG4, which are referred with an air gap of 10.97mm, 8.35mm, 5.25mm and 3.7mm,
respectively (Table 9.4).
Table 9.4 Investigated cases AG1, AG2, AG3 and AG4.
Upper air-gap
distance
Lower air-gap
distance
Total air-gap including
rotor
AG1 19.86mm 10.97mm 42.83 mm
AG2 12.08mm 8.35mm 32.41mm
AG3 7.75mm 5.25mm 25mm
AG4 4.3mm 3.7mm 20mm
9.2 Data acquisition
The simulations were set up with the same load and the same air-gap distances
(Table 9.1 and Table 9.2). The experimental rig made for the experiment is similar to
the one used previously (Figure 7.21, Figure 7.22 and Figure 9.6).
A precise measurement requires a near perfect alignment of all parts of the
experiment rig. Even a small misalignment will distort the measurements. For this
reason CNC machining was used to achieve a very low tolerance (of a +/-0.05
millimeters).

177
The torque meter was connected to a computer via a RS-232 port (Figure 9.7).
During the measurements a computer recorded the data from the torque-meter into a
Microsoft Excel file. The data were recorded over a time of 30 seconds, which gave
about 300 to 400 measurement points. The uncertainty of the measurements was
calculated to be about 7% (as shown in Section 5.3). The average values of the above
recorded measurements were used for the study reported in this thesis.
Figure 9.8 Measured torque of the four bearing configurations.
9.3 Comparison between the measurements and the simulation
As seen in Section 7.4it is clear that the experimental results cannot be compared
directly to the simulated ones because of the limitations of the measurement
equipment. For that reason the measured values were averaged to a point value. The
same was done with the simulated results.

178
In Figure 9.8 and Figure 9.9 the recorded torque output is shown for the bearing.
There are small differences between the larger air-gap distances and the smaller ones.
Overall the torque increases with the rotation speed.
Figure 9.9 Measured torque of the four bearing configurations.
Figure 9.9 shows an enlarged part of Figure 9.8. Above the line chart are the torque
values of the smallest air-gap (A4, 20mm) shown. Below are the values of the largest
air-gap (A1 42.83mm) shown. The difference is in the mNm range.
Since the experimental setting (Figure 9.7) consists of an array of ball bearings and
the magnetic bearing, the actual magnetic bearing torque value must be found out by
calculation.
In order to be able to calculate the torque of the magnetic bearing, each of the
components had to be measured separately. Besides the previously performed tests,
three other tests were conducted. For test 1, the torque of all of the components
together was recorded (Figure 9.16), for test 2 the torque of all of the components
was recorded without the ball bearing 1; and for test 3 the torque of the components

179
was recorded without the ball bearing 2. Simple subtraction was then used to find the
resulting torque of the bearings 1 and 2 and the magnetic bearing etc.
Figure 9.10 Measured torque of the four bearing configurations.
Figure 9.10 shows the torque results for the complete experimental rig as recorded.
The top lines show an increasing trend in accordance with the increasing rotation
speed.
The increasing torque is due to the energy loss through vibration, vibration
transmission, friction (heat), air friction and others. Since the torque of the ball
bearings have been measured previously could the torque of the magnetic bearing be
found, and has been compared to the simulated torque results (Table 9.5).
The comparison shows, very clearly, that the simulated results are close to the
measured results. The simulated results show an average torque of 0.015 Nm (+/-
0.06 Nm). The measured results display a wider range with the average of 0.011Nm

180
with (+/- 0.004Nm). Based on the uncertainty calculation, it is within the range of
error and is deemed an acceptable result.
Table 9.5 Simulated torque for the air gap distance of A3 and measured torque results. Rotation
speed (rpm) 108 216 324 432 540 648 756 864 972 1080
Simulated torque (Nm)
0.016 0.016 0.017 0.015 0.014 0.018 0.015 0.017 0.018 0.016Measured
torque 0.011 0.015 0.010 0.009 0.012 0.011 0.011 0.013 0.013 0.012
9.4 The magnetic field between the rotor and the stator magnets
The simulation software offers the option to visualize the magnetic field at a chosen
location in 2 D or even 3D. This is an interesting tool to analyze and improve the
bearing. The field distribution for the bearing was investigated and showed the effect
of the mild steel yokes on the magnetic field in the air-gaps of the bearing. In the
following section some of the field distribution diagrams are shown.
Figure 9.11 Section of the bearing showing the stator and the rotor.

181
Figure 9.12 Magnetic field density and flux distribution at position 1.
Figure 9.11 to Figure 9.15 confirm the effect of the yoke on the magnetic field
between the rotor magnets and the stator magnets. The yoke concentrated the
magnetic flux of the rotor magnets with the effect that the magnetic field of the stator
magnets is repelled.
Figure 9.13 Magnetic field density and flux distribution at position 2.

182
Figure 9.14 Magnetic field density and flux distribution at position 3.
Figure 9.15 Magnetic field density and flux distribution at position 4. Positions 1 to 4 are chosen close to each other, in order to show the magnetic field change of a small
section of the bearing.
9.5 Torque comparison of the magnetic bearing with ball bearings
The torque of the magnetic bearing was compared to that of the axial ball bearings
over a rotation speed range of 90 rpm to 1090rpm.
As previously seen, the torque of the magnetic bearing stays constant when the
rotation speed increases. In contrast to the magnetic bearing, the torque of the ball

183
bearing increases with increasing rotation speed. Figure 9.16 also shows the
influence of the frame on the performance of the bearings.
Figure 9.16 The measured torque and simulated torque of air-gap A3.
9.6 The Vibration transmission
The vibration transmissions at certain rotation speeds are of great interest for the use
of this bearing for building integrated wind turbines (Table 3.2). In order to evaluate
the performance, a comparison was made between commonly used ball bearings and
this novel magnetic bearing.
The vibration pattern of wind turbines is non-linear and non-stationary during
operation. This is partially because of the complex operation conditions including
moving mechanical parts, friction, wind speed changes and wind direction changes.

184
It is therefore impossible to get usable results under outdoor conditions. For that
reason several air velocities and rotation speeds were chosen to be measured in the
laboratory.
Other researchers have investigated vibration patterns of horizontal axis wind
turbines [Hameed et al. (2009) and Kalvoda and Hwang (2010)], with the aim to
develop a turbine fault diagnostic.
9.6.1 Data acquisition
The B and K PULSETM multichannel analyzer was used for data acquisition and the
transducers were B and K’s DeltaTron® 4394 accelerometers. The transducers were
mounted on a protruding piece that was connected to the shaft, which allowed
vertical movement but kept it steady in the horizontal axis. They were also mounted
on the structure (stator) below the bearing at X, Y and Z directions. In this
investigation the vertical direction Z is the only one of interest. The vibrations were
recorded for 20 seconds, with a sampling frequency of 65536 samples per second.
The data were then normalized by the local gravitational acceleration constant, g
(~9.81m/s²). The Power Spectral Density, PSD, (or rather the Acceleration Spectral
Density, ASD), was calculated, using the Welch method [Welch (1967)]. The unit
can be expressed as [g²/Hz] as in this case, since the data are normalized by g, or in
metric units as [(m/sec²)²/Hz].
Welch’s method shows a way of “saving computational time by sectioning the record
and averaging their periodograms by using fast Fourier transforms…” [loosely taken
from the abstract of Welch (1967)].
The overall magnitudes (grms = root mean square acceleration) were calculated by
integrating the spectrum, and taking the square root of the value. Further, the values

185
were converted into a dimensionless index number (Equation 9.1) when the reference
case was compared to the others. The air gap distance between the rotor and the
stator of the bearing, when the bearing levitates freely, was chosen as the reference
case (AG1).
( ) ( )i
ii Valueref
kValuenIndex.
=
Equation 9.1
i = 45, 76, 90… 1084 [rpm], k = AG1, AG2, AG3, AG4
If the index value is larger than 1 it indicates a higher magnitude of vibrations
compared to the reference case while less than 1 indicates the opposite
9.6.2 The investigation
The experimental investigation of the magnetic bearing was divided into two parts.
The first part is focused on a comparison of the magnetic bearing to a ball bearing,
and the second part is focused on a comparison of the magnetic bearings with
different air gaps.
9.6.2.1 Vibration transmission comparison of the magnetic bearing with the ball
bearing
The most common bearing type is the ball bearing, which is used widely in all types
of machinery. Unfortunately it is not straightforward to compare the magnetic
bearing to a conventional ball bearing. Using a magnetic bearing decouples the mass
of the turbine from the structure to a certain degree, while the ball bearing is coupled
stiffly to the structure, which acts like a massive inertia block to absorb the
vibrations.

186
Figure 9.17 The difference in vibrations between the rotor and stator at different rotation speeds. : AG1, : AG2, : AG3, : AG4, *: BB. Case AG1 Is the
reference case.
Figure 9.18 The detail difference in vibrations between the rotor and stator at different rotation speeds. : AG2, : AG3, : BB. Case AG1 is the reference case.
The 4 mm air gapgarph (AG4) has been omitted to see the trend.
However, keeping this in mind, a valid comparison can be made by looking solely at
the difference in vibration transmission.
This is obtained by subtracting the stator values from the rotor values, as shown in
Figure 9.17 to Figure 9.24. In Figure 9.17 to Figure 9.24 the graph AG4 has been
omitted in order to get a more detailed image of the trend for the other air gaps.
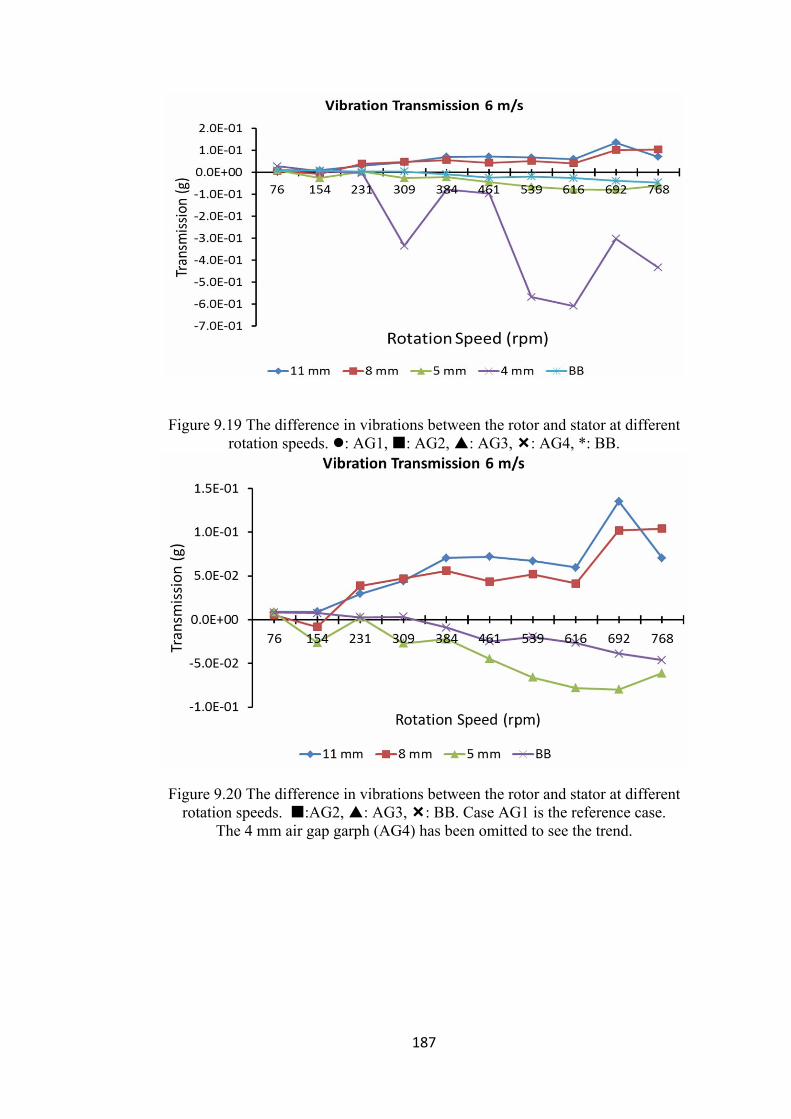
187
Figure 9.19 The difference in vibrations between the rotor and stator at different rotation speeds. : AG1, : AG2, : AG3, : AG4, *: BB.
Figure 9.20 The difference in vibrations between the rotor and stator at different rotation speeds. :AG2, : AG3, : BB. Case AG1 is the reference case.
The 4 mm air gap garph (AG4) has been omitted to see the trend.

188
Figure 9.21 The detail difference in vibrations between the rotor and stator at
different rotation speeds. : AG1, : AG2, : AG3, : AG4, *: BB. Case AG1 is the reference case.
Figure 9.22 The difference in vibrations between the rotor and stator at different rotation speeds. : AG2, : AG3, : AG4, *: BB. Case AG1 is the reference case.
The 4 mm air gap graph (AG1) has been omitted to see the trend.

189
Figure 9.23 The difference in vibrations between the rotor and stator at different rotation speeds. : AG2, : AG3, : AG4, *: BB. Case AG1 is the reference case.
A clear trend can be seen in the above figures, which shows that the vibration
transmission increase with decreasing air gap and increasing rotation speed.
However, when the rotation speed reaches ~650 rpm the vibration transmission starts
to decline (Figure 9.23 and Figure 9.24). As seen in the previous section, the
gyroscopic forces will decrease the vertical movement in the rotor with increasing
rotation speed. Therefore the transmitted vibrations will continue to decrease in the
same fashion. However, when looking at the ball bearing, such a trend cannot be
detected, but instead the vibration seems to increase in accordance with the rotation
speed.

190
Figure 9.24 The difference in vibrations between the rotor and stator at different
rotation speeds. : AG2, : AG3, : AG4, *: BB. Case AG1 is the reference case.
9.6.2.2 Torque comparison of the magnetic bearing with the ball bearing
The torque of the magnetic bearing was compared to the torque of the ball bearing
over a rotation speed range of 90 rpm to 1090rpm.
For this purpose the components of the experiment were tested separately. Three
tests were conducted. For test 1 all of the components were tested together (Figure
9.25), for test 2 all of the components were tested without the ball bearing 1; and for
test 3 were all of the components were tested without the ball bearing 2. Simple
subtraction was then used to find the resulting torque of the bearings 1 and 2 and the
magnetic bearing.

191
Figure 9.25 The measured torque.
It is interesting that the torque of the magnetic bearing seems to stay constant when
the rotation speed increases. In contrast to the magnetic bearing, the torque of the
ball bearing increases with increasing rotation speed. Figure 9.25 also shows the
influence of the frame on the performance of the bearings. Each time, when the
frame is added, the torque increases drastically.
9.6.2.3 Investigation of the magnetic bearing with decreasing air gap
To compare the vibration transmission of the magnetic bearings to each other, the
values were converted into a dimensionless index number (Equation 9.1). Every
measured value was indexed against the bearing configuration with the largest air
gap (11 mm; AG1), since it was assumed that the largest air gap will transmit the
least vibrations, as it is the most decoupled system.

192
When the values are larger than 1, a higher overall acceleration magnitude
(vibration) can be measured compared to the measured acceleration magnitude of the
reference case under the same conditions.
When the index value is smaller than 1, the overall acceleration magnitude is lower
than the acceleration magnitude of the reference case value.
Figure 9.26 Magnetic bearing vibration comparison at rotor for different air gaps. Rotor: 45 – 450 rpm : 11 mm, : 8mm, : 5mm, : 4mm
Figure 9.27 Magnetic bearing vibration comparison at stator for different air gaps Stator: 45 – 450 rpm : 11 mm, : 8mm, : 5mm, : 4mm

193
Figure 9.28 Magnetic bearing vibration comparison at rotor for different air gaps. Rotor: 76 – 768 rpm : 11 mm, : 8mm, : 5mm, : 4mm
Figure 9.29 Magnetic bearing vibration comparison at stator for different air gaps Stator: 76 – 768 rpm : 11 mm, : 8mm, : 5mm, : 4mm
Figure 9.30 Magnetic bearing vibration comparison at rotor for different air gaps. Rotor (top): 108 – 1084 rpm : 11 mm, : 8mm, : 5mm, : 4mm

194
Figure 9.31 Magnetic bearing vibration comparison at stator for different air gaps. Stator (bottom): 108 – 1084 rpm : 11 mm, : 8mm, : 5mm, : 4mm
Looking at the rotor graphs, it can be observed that the vibrations decrease with
increasing rotation speed and a smaller air gap, due to the increasing stiffness of the
bearing. These factors stabilize the rotor in the vertical axis, but the oscillations only
decrease by approximately 5%.
The stator graphs show the effect of decreasing the air gap quite noticeably. When
the air gap is the smallest (4mm shown in Figure 9.26 to Figure 9.31), an increase of
as much as 15 – 20% in vibrations can be detected.
The magnetic bearing requires very little torque to be operated, however, with a
decreasing air gap the magnetic repelling force increases exponentially. This, in turn,
leads to more vibrations being transmitted into the structure. What also can be
observed is that the transmitted vibrations started to decay from 700 rpm onwards
(Figure 9.30 and Figure 9.31). This is most likely due to the gyroscopically
stabilizing forces which grow stronger with an increased rotation speed, and will
finally overcome the repelling forces of the magnets.

195
9.6.3 Findings
No final conclusion can be drawn from this preliminary investigation of the vibration
transmission properties of this novel bearing structure. However, the measured data
certainly indicate several trends.
The magnetic bearing AG1 (at 11mm air gap) is the most decoupled system and
transmits the least vibrations from the rotor to the frame, as can be seen in Figure
9.17 and Figure 9.24.
With a decreasing air gap distance the system becomes more coupled and we can see
more vibrations in the frame and fewer in the rotor. The most coupled system is the
ball bearing, with the highest vibrations in the frame.
In Figure 9.19 and Figure 9.20, it is interesting to notice that the rotation speed is
most important for the system with the smallest air gap (AG4), it is the stiffest tested
magnetic bearing configuration, and transmits most of the rotor vibrations to the
frame. However, the vibrations seem to become smaller with increasing rotation
speed. This is due to the increasing gyroscopic forces, which is making the system
stiffer and is increasing the natural frequency of the rotor. So fewer vibrations are
actually created by the rotor during rotation, and then transmitted to the frame. This
is also indicated by the torque measurements.
The torque measurements in Figure 9.25 clearly show the influence of the rotor (and
the connected wind turbine) as source of vibrations and energy loss.
It is most interesting that the measured trend of the magnetic bearing shows an
almost horizontal line when increasing the rotation speed, whereas the ball bearing
torque increases with increasing rotation speed.

196
Finally, when comparing the magnetic bearings in Figure 9.26 to Figure 9.31, the
stiffest bearing (AG4) has the highest levitation force, but will transmit most
vibrations. This is opposite to the effect of the largest air gap distance which has the
lowest levitation force but has also the lowest vibration transmission.
9.7 Conclusion
An attempt was made to determine the vibration transmission characteristics of a
passive modular magnetic bearing used with a VAWT. A previously constructed
prototype was used, and several air gaps between rotor and stator were investigated
and as well as a conventional ball bearing. The first part of the investigation was
focused on comparing the vibration transmissions from the rotor to the structure
(stator). The present results suggest that the most decoupled setting transmits the
least amount of vibrations to the structure, whereas the ball bearing shows a trend to
transmit the most amounts of vibrations.
The second part of the investigation was focused on determining the vibration
characteristics of the magnetic bearing, when decreasing the air gap between rotor
and stator. The results suggest that the rotor vibrations decrease with increasing
stiffness of the bearing, which is affected directly by increasing rotation speed and
decreasing air gap distance. The opposite was observed at the stator, until a breaking
point at ~700 rpm, where the vibrations started to decline, which was especially
noticeable with the smallest air gap setting.
Finally the torque measurements show clearly the energy saving characteristics of the
magnetic bearing, compared to the conventional ball bearing, where the torque of the
magnetic bearing does not increase opposite to the ball bearings.
197
Overall, this magnetic bearing seems to be suitable for many applications including
vertical axis wind turbines (VAWT) and flywheels. In principle, any stiffness and
levitation force can be produced if the bearing is designed according to the required
stiffness of the application. This is due to the fact that the stiffness is the relationship
of (levitation) force and the number of magnets used in the bearing.
Tests with different air-gap distances were performed which showed that most of the
energy loss happened due to other courses like vibration, heat or noise and that the
integration of yokes into the bearing is beneficial.

198
Chapter 10 The patent application
The following ideas, pictures, methods and wording of Chapter 10 were partially
taken from a patent application submitted by the author for the Polytechnic
University with the title: “Passive magnetic levitation system with a saturated metal
sheet for track or axial bearing systems.” Patent application number 12344324.
Due to the interest for promoting thus novel technology to the industry, a patent
application was developed. For this patent application the magnetization
(polarization) sequence North-South-South-North was chosen, since this has some
advantages during the manufacturing process.
10.1 The structure of the bearing
For the commercialization of the bearing the rotor and stator must be enclosed in a
bearing housing with mounting holes on the surface. This bearing housing consists of
two conventional bearings (Figure 10.1 and Figure 10.2), which can be active
magnetic bearings (AMB), roll or ball bearings, used to stabilize the X and Y
direction of the bearing and the permanent magnetic bearing, which stabilizes the
vertical (Z) direction.
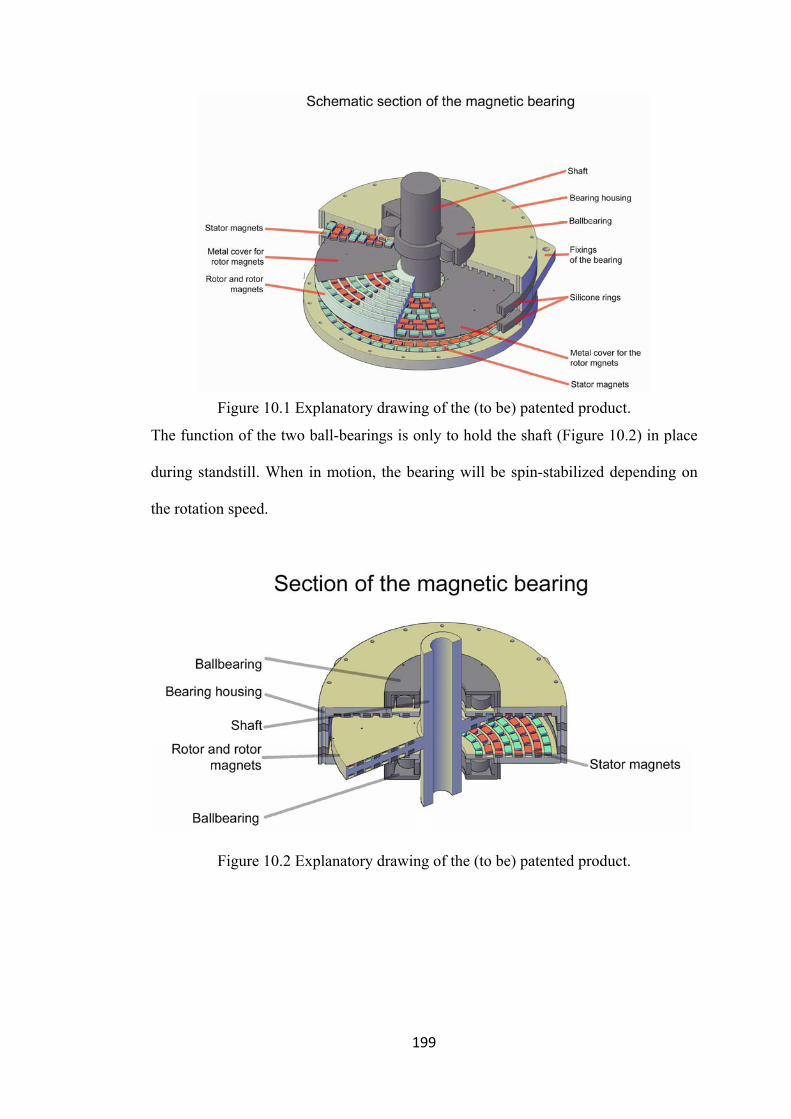
199
Figure 10.1 Explanatory drawing of the (to be) patented product.
The function of the two ball-bearings is only to hold the shaft (Figure 10.2) in place
during standstill. When in motion, the bearing will be spin-stabilized depending on
the rotation speed.
Figure 10.2 Explanatory drawing of the (to be) patented product.

200
10.2 The stator of the bearing
The two ball-bearings are integrated in the bearing housing (Figure 10.1 and Figure
10.2), which is made of a material that conducts magnetic flux (like mild steel, iron
etc.) and serves as the stator of the bearing. Since this bearing uses magnetic
repulsion to provide the levitation force, the bearing is made of two sets of concentric
rings of repelling magnets, which are arranged in a specific order (Equation 10.1 to
Equation 10.7.) The magnets of the stator are held in position by a recess (channel or
pocket) in the stator. This recess in the stator is four-fifths of the height of the
permanent magnets deep (Figure 10.3). The distance between the magnets is defined
by Equation 10.1 to Equation 10.7.
Figure 10.3 Explanatory drawing of the stator design of the bearing.
10.3 The rotor of the bearing
The rotor of the bearing is also made of a material which conducts magnetic flux
(like steel, iron etc.). However, the magnets are embedded in the rotor. The top of the

201
magnets is covered with a material which conducts magnetic flux (like steel, iron etc.
Figure 10.2). The fact that the magnets are covered with a flux-conducting metal
sheet is crucial as this unifies the field of the magnets and thus enables the rotor to
spin vibration less.
The distance between the magnets is defined by Equation 10.1 to Equation 10.7:
Figure 10.4 Explanatory drawing of the stator design of the bearing.

202
Although the bearing can use pre-charged magnets of any shape, form and
magnetization for the bearing, all of these must have the same shape, form and
magnetization. However, small differences (+/- 2.5%) will not have a great impact on
the performance of the bearing. As shown in Figure 10.4, if rectangular magnets are
used, the length (ML) and width (MW) are used for describing its dimension, which
can determine the number of the magnets (nm) per ring and radius (rall) of the ring.
There is a specific air gap included in the dimension; Figure 10.4 shows the magnet
with its dimensions.
The radius of the first and second
ring can be calculated by: )2360sin(2
m
L
n
Mr = Equation 10.1
The length of magnets: )2360sin(2
mL n
rM =
Equation 10.2
Number of magnets:
)2
(sin
1801
rMn
lm
−= Equation 10.3
The distance between the bearing
rings: wMrr 212 +=
Equation 10.4
The distance between all the
bearing rings: 21 rrrall −= Equation 10.5
The offset angle between the
paired rings of the stator: moffset n
360=ω Equation 10.6
The offset angle between the
paired rings of the rotor: moffset n
360−=ω Equation 10.7

203
The size of the air gap between two magnets is typically 0 to 0.2 of the length (ML)
of the magnet. If the size of the magnet is not larger than 20mm, the gap should be
decreased to 0.1 of the length (ML) of the magnet or even smaller. In general, a 0mm
air gap is considered to give the best performance.
Figure 10.5 Explanatory drawing of the stator design of the bearing.
10.3.1 The order of the magnets:
The minimum ring number should be 4 because the number of magnets of each pole
must be the same. Since the number of magnets increases with the radius of each
ring, and the distance between the magnets is always the same, the only logical order
of polarization is that the first ring and the fourth ring have the same direction and

204
the second and the third have the opposite direction to rings one and four (see Figure
10.5).
Since single magnets of any form are used, the size of the bearing is not defined. The
bearing can be designed to be very large and to support very large or very small
loads. It depends on the number of magnet and rings. In very large configurations the
bearing will become a track-like configuration; however the basic principles still
apply. The number of rings should be a multiple of four.
CLAIMS for the patent:
1. The inventor claims the specific location of each magnet based on Equations
10.1 to 10.7, in relation to the integration of a metal sheet to unify the
magnetic fields.
2. The inventor claims the invention of a magnetic flux conducting metal of
0.1mm to 2.0mm thickness covering the magnets for the purpose of creating a
uniform magnetic field or channeling the magnetic flux.
3. The inventor claims the recess depth of each magnet in the stator of the
bearing, which is one fifth of the height of the magnet.
4. The inventor claims that the number of the rings used in this bearing must be
a multiple of 4 in the stator and rotor of the bearing.
5. The inventor claims the sequence of poling of the magnets in each set of 4
must be that the first and the fourth ring have the opposite poling to the
second and the third ring.

205
Chapter 11 The application of the bearing
Figure 11.1 Visulisation of the prototype turbine.
From the beginning of the research the bearing was designed to be used for a VAWT
(Vertical-Axis-Wind-Turbine). The Hong Kong Water Services Department (WSD)
commissioned P-Tec (a subsidiary of The Hong Kong Polytechnic University) to
develop a Vertical-Axis-Wind-Turbine. (Figure 11.1). The main specifications of the
VAWT are as follows:
• Rated power 1.5kW
• Rotor Diameter 2-2.5m
• Rotor Height 2-3m
• Hub Height 5-6m
• Blade number 3 or 4
• Start-up wind speed 1.3m/s
• Cut-in wind speed 2.4m/s
• Rated wind speed 12m/s
• Cut-out wind speed 15m/s
• Survival wind speed 55m/s
• Rated rotor speed 250 rpm
• Total weight 200kg
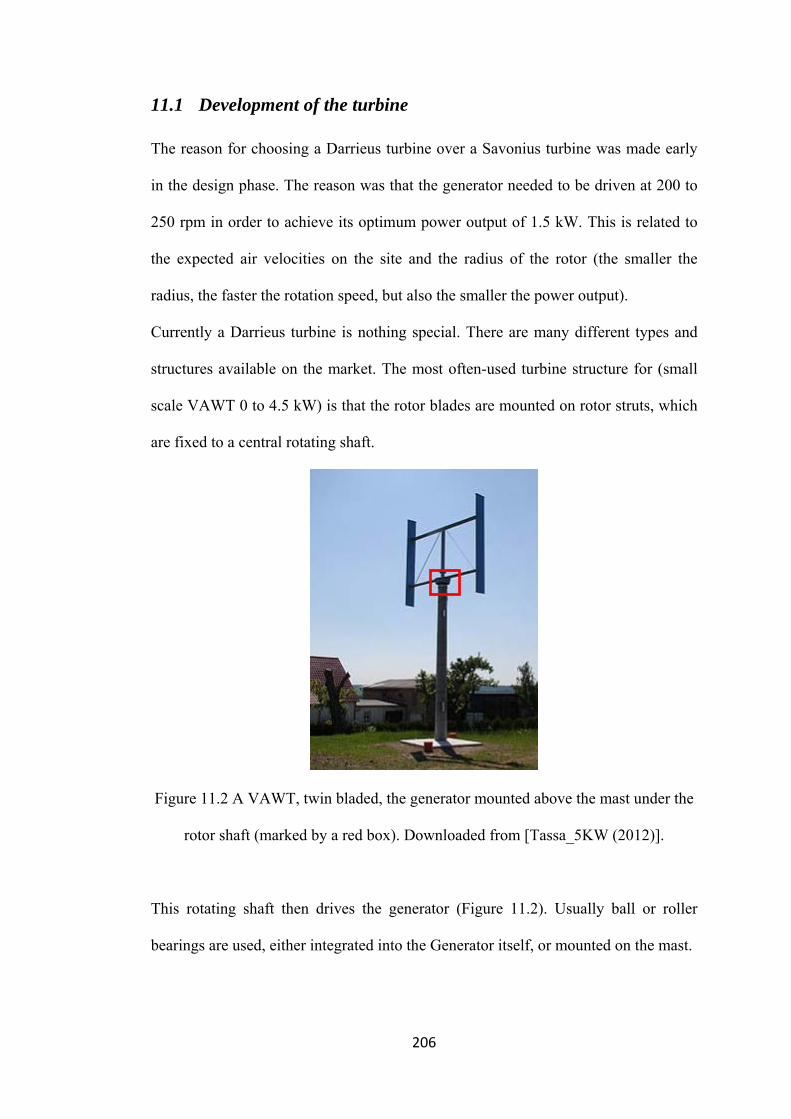
206
11.1 Development of the turbine
The reason for choosing a Darrieus turbine over a Savonius turbine was made early
in the design phase. The reason was that the generator needed to be driven at 200 to
250 rpm in order to achieve its optimum power output of 1.5 kW. This is related to
the expected air velocities on the site and the radius of the rotor (the smaller the
radius, the faster the rotation speed, but also the smaller the power output).
Currently a Darrieus turbine is nothing special. There are many different types and
structures available on the market. The most often-used turbine structure for (small
scale VAWT 0 to 4.5 kW) is that the rotor blades are mounted on rotor struts, which
are fixed to a central rotating shaft.
Figure 11.2 A VAWT, twin bladed, the generator mounted above the mast under the
rotor shaft (marked by a red box). Downloaded from [Tassa_5KW (2012)].
This rotating shaft then drives the generator (Figure 11.2). Usually ball or roller
bearings are used, either integrated into the Generator itself, or mounted on the mast.

207
Figure 11.3 Overall Turbine design, left the elevation and some details, and right a section with the braking system.
This is where the most decisive changes to a common design were made. In order to
lower the cut in wind speed, the bearing friction of the turbine had to be reduced;
since the bearing friction Mb is related to the force (F in this case the weight of the
rotor) acting on the bearing, fb the coefficient of the friction of the bearing and D, the
diameter of the bearing, it is clear that the friction increases with the rotor weight
(Equation 11.1).
To reduce the friction, a system was developed which allows for separating the
horizontal forces from the vertical forces. This way, the ball bearings responded to
the horizontal forces, and the vertical forces were transmitted by the Axial-Passive-
Magnetic-Bearing-System (APMBS) (Figure 11.3).
2d f F M torquefriction bearing The bb
r = Equation 11.1

208
The previously made calculations showed that a 1.25m radius rotor should supply
sufficient torque to overcome the inertia of the rotor to have it spinning at 2m/s air
velocity, if the torque of the rotor bearing was low enough. Through simulation and
testing it was established that the only measurable torque would come from the two
ball bearings.
Figure 11.4 Horizontal force transmission via ball bearings
Figure 11.5 Vertical force transmission via magnetic bearing
The integration of the magnetic bearing required a more complicated structure,
which is shown in Figure 11.6 and Figure 11.7.
As seen in Figure 11.4 and Figure 11.5, the horizontal forces are transmitted through
two radial ball bearings. This structure required a different generator position. Most
VAWTs place their generator under the turbine, above the mast; but in this case that
is not possible, and therefore it was placed on top of the mast. This position had
some advantages, as the generator can easily be replaced or maintained.
Furthermore, one important advantage of this design lies in its assembly.
Horizontal force
(Wind)
Vertical force
(Rotor weight)

209
Figure 11.6 The generator hub. Marked
in red are the rotor parts of the turbine,
and blue are the stator parts.
Figure 11.7 The magnetic bearing hub.
Marked in red are the rotor parts of the
turbine, and blue are the stator parts.
Figure 11.8 Structural simulation of the turbine under typhoon wind speeds in stand still. Picture given by P-Tec Company.
11.2 The safety of the turbine design
In order to verify the safety of the design, a 3D model was produced and the
occurring forces are calculated by our team member. However, as it is related to the

210
structural design of the turbine with the novel bearing, it is also shown here. The
simulation of the structural parts of the turbine showed clearly that the most critical
parts of the turbine were neither the mast nor the rotor hub.
The responsible engineer concluded, on the basis of the simulation, that the structure
is safe, because the yield stress of 275 MPa is more than 1.5 times (safety factor)
larger than the maximum stress in the rotating parts 178MPa. However, under
extreme conditions some deformation may occur.
Figure 11.9 Structural simulation of the turbine under typhoon wind speeds in motion. Picture given by P-Tec Company.
11.3 The assembly
During the design phase the question of how to assemble the turbine and mast was
considered and a concept developed.

211
The mast, with its electric wiring and mechanical brake, can be installed and erected
firstly (Figure 11.4, Figure 11.5, Figure 11.10 and Figure 11.11). After its completion
the complete rotor will be hoisted up and lowered on the inner mast, after which only
the generator has to be connected to the internal wiring. All bearings are preinstalled.
Figure 11.10 Mild steel bearing rings with magnets.
Figure 11.11 Finished stator part of the magnetic bearing.
The magnetic bearing consists of 17 rings (Figure 11.11), which were cut out of a 10
mm mild steel plate. The magnets are 3mm tall, 6mm long and 6 mm wide. They
were mass produced and, as such, charged with Br=0.5T. The magnetization was
parallel to their height. Around 4500 pieces were used to fill the 14 positions of the

212
17 rings (Figure 11.10). The magnetization of the rings was in north-south-north-
south. The system has been produced by a factory in Dongguan of Guangdong
Province and will be set up soon. A data monitoring system will be installed as well
for monitoring the performance of the system for at least one year.
Figure 11.12 Testing the bearing. Figure 11.13 Turbine assembly.
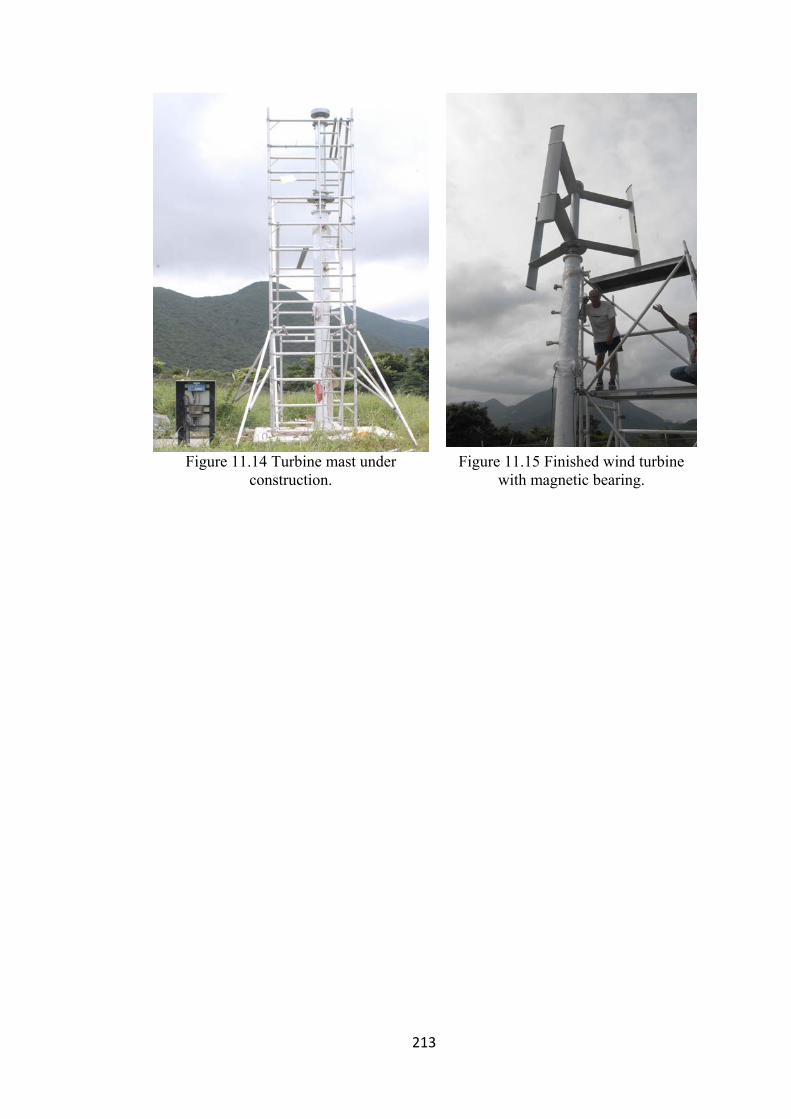
213
Figure 11.14 Turbine mast under
construction. Figure 11.15 Finished wind turbine
with magnetic bearing.

214
Chapter 12 Final Conclusion
This is the concluding chapter of this thesis. The thesis started with a discussion of
the increasing problem of oil scarcity and the problem of price fluctuations, and their
direct impacts on the economy.
Today (April 2012) the price per barrel of crude oil is above 100 US dollars.
According to an article in the South China Morning Post, titled “Mainland GDP
growth slowest in three years” [Huang (2012)], the economies of the USA, China,
Japan and Europe are showing signs of slowing, and there is no imminent recovery in
sight at the time of writing this thesis, due to the weak demand by the importing
economies. This is another indicator that change has to come. The question now is
how to guide the development in the right direction. One solution is that the
economies have to change, from a petrol to non-petrol based. Now is the time to
initiate the right developments in order to make the transition smooth.
In view of this, the production of useful energy from buildings in urban areas is a
step in the right direction. The building-integrated wind turbines (BIWT) have great
potential for renewable power generation. The technology developed in this project
came from this point, i.e. to develop a novel magnetic bearing system for supporting
the VAWTs for power generation from buildings.
Currently, there is a number of buildings under construction, which integrate wind
turbines. The finished wind-turbine buildings are very important as they will catalyze
the progress and development of wind turbine applications, which will lead to
standardized products.

215
Since some of the reports about the building projects reported vibration problems
[Killa and Smith (2008)], an initial investigation of turbine vibration was carried out.
It was discovered that vibration and noise transmissions are major problems for
BIWT applications in urban areas. To counter this problem, a novel passive magnetic
bearing was invented and developed, and the results are presented in this thesis.
To evaluate this novel bearing, the working conditions of building-integrated wind
turbines had to be assessed, which meant that the wind conditions and turbine
performance had to be investigated. It was found that the turbines will turn at blade
tip speeds of 5 to 8 m/s (under 5m/s to 10 m/s wind speeds), which is independent of
the size of the turbine rotor as the result is based on the aerodynamics of the rotor
blades (only for Savonius turbines). Hence, larger turbines will turn slower and
smaller turbines will turn faster.
Since the bearing is the connection point between the rotating machinery and the
building, its design properties are of great importance. It was necessary to invent a
bearing with vibration dampening properties. The solution of the problem was to use
permanent magnets to levitate the turbine and, therefore, to decouple the turbine
from the building.
However, the currently developed magnetic bearings could not be used because their
ring magnets could not be produced with large diameters, and segmented ring
magnets still had to be manufactured specifically according to the required ring
diameter. This issue led to the question of using premade magnetic blocks. However,
since a uniform magnetic field is crucial for the performance of the bearing, the idea
to use a thin mild steel sheet as a flux concentrator for unifying the magnetic field
gave rise for the new bearing developed in this thesis. The integration of the yokes

216
(flux concentrators) into the magnetic repulsion bearings is something new in the
field.
At first the performance of the magnetic bearing was not ideal and oscillated between
a high levitation force when the magnets were aligned and a low levitation force
when they were not. However, even if the magnets were arranged with a 0 gap
between them, a change was recorded in the torque and levitation force recorded.
This negative effect could be minimized with an increase in the number of magnets
used for each ring, multiple rings and the integration of a yoke.
When single or multi pole configurations are compared, the multi pole configuration
offers a better levitation performance, but also produces a higher torque if the air-gap
distance between rotor and stator is small. If the magnets are combined with a yoke
(flux-concentrator), the levitation force will increase and can almost reach the
performance of a ring magnet. At the same time the flux-concentrator will unify the
magnetic field and lower the torque.
The question of the arrangement of the magnets on the ring has also been
investigated, and showed that no special arrangement of the magnets on the ring is
necessary. This is because any different arrangement will lead to longer flux
pathways, which lowers the magnetic field strength and, in turn, lowers the levitation
force.
When the magnetic bearing was compared to a ball bearing, the measured torque of
the magnetic bearing showed an almost horizontal line when increasing the rotation
speed, whereas the torque of the ball bearing increased with the rotation speed.
The developed bearing was tested and the measured data indicate several trends. The
magnetic bearing with the largest air-gap is the most decoupled system and transmits

217
the least vibrations from the rotor, but if the air-gap distance decreases, the system
becomes more coupled and more vibrations are recorded in the frame and fewer in
the rotor. The most coupled system is the ball bearing, with the highest vibrations in
the frame.
In view of the test results, the rotation speed seems to be most important for the
system, with the smallest air-gap. The recorded data showed that it is the stiffest
tested magnetic bearing configuration, and transmits most of the rotor vibrations to
the frame. However, the vibration seems to become smaller with increasing rotation
speed.
This is due to the increasing gyroscopic forces, which make the system stiffer, but
also increase the natural frequency of the rotor. Hence fewer vibrations are created
by the rotor during rotation, and then transmitted to the frame.
Overall, this bearing seems to be suitable for many applications, including vertical
axis wind turbines (VAWT), pumps and flywheels.
As a direct result of this investigation, a real 1.5 vertical-axis-wind-turbine was
equipped with this novel magnetic bearing system. This turbine was designed and
produced for the Water Supplies Department of the Hong Kong SAR Government.
Since this wind turbine with the magnetic bearing is a pilot system, its performance
will be monitored and evaluated for one year. It is anticipated that this novel
magnetic bearing system can be promoted to the industry.

218
Chapter 13 Other Innovative Work related with the
Development of the Novel Magnetic Bearing
13.1 Development of a double-rotor wind turbine generator
As for most generators a high rotation speed will be used to generate electric power.
However, most VAWT generate high torque at low rotation speed. The solution is to
integrate a gear system to increase the rotation speed to the desired level or using
transverse flux machines [Grauers (1996), Henneberger and Bork (1997) and Dubois
et al. (2002)].
Figure 13.1 Schematic picture of the generator.

219
Figure 13.2 Flux analysis.
The counter rotating VAWTs could solve this problem, since they are rotating in
opposite directions. This doubles the rotating speed. The novel design introduced in
this report is a double rotor generator, where the rotor is fabricated by two counter
rotating rings. The structure is similar to a transverse flux machine [Henneberger and
Bork (1997)]. The stator and its windings are stationary (Figure 13.1 and Figure
13.2). The finite element method (FEM) was used to simulate the performance of this
machine.

220
Appendix
Appendix Figure 1: Angular velocity versus power coefficient of the wind turbine at
6m/s and 0 gap rate.
Appendix Figure 2: Angular velocity versus power coefficient of the wind turbine at at
8m/s and 0 gap rate.

221
Appendix Figure 3: Angular velocity versus power coefficient of the wind turbine at at
10 m/s and 0 gap rate.
Appendix Figure 4: Angular velocity versus power coefficient of the wind turbine at at
6m/s and 0.16 gap rate.

222
Appendix Figure 5: Angular velocity versus power coefficient of the wind turbine at at
8m/s and 0.16 gap rate.
Appendix Figure 6: Angular velocity versus power coefficient of the wind turbine at at
10m/s and 0.16 gap rate.

223
Appendix Figure 7: Angular velocity versus power coefficient of the wind turbine at at
6m/s and 0.32 gap rate.
Appendix Figure 8: Angular velocity versus power coefficient of the wind turbine at at
8m/s and 0.32 gap rate.

224
Appendix Figure 9 Angular velocity versus power coefficient of the wind turbine at at
10m/s and 0.32 gap rate.

225
Appendix Table 1 The turbine dimensions
Turbine design 1
(single or double stage)
Turbine design 2
(single or double stage)
Turbine design 3
(single or double stage)
Rotor diameter D 0.25 m 0.25 m 0.25 m
Rotor height (H) (double stage
turbine) 0.54 m 0.54 m 0.54 m
Rotor height (H) (single stage
turbine) 0.27 m 0.27 m 0.27 m
Overlap ratio (OL) 0 0.16 0.32
The rotor overlap (S) 0.012 m 0.034 m 0.06 m
Bucket diameter (d) depending on the
overlap ratio (OL) 61.25 mm (Figure7) 66.75 mm (Figure8) 73.25 mm (Figure9)
Adjusted phase shift Angle (PSA) 0, 15, 30, 45 and 60 0, 15, 30, 45 and 60 0, 15, 30, 45 and 60
Rotor diameter (D) 0.25 m 0.25 m 0.25 m
Swept area of the double stage
turbine As 0.135 m2 0.135 m2 0.135 m2
Swept area of the single stage turbine
As 0.0675m2 0.0675 m2 0.0675 m2
Blockage rate 0.135 0.135 0.135
Blockage rate 0.0675 0.0675 0.0675
Aspect ratio 2.16 2.16 2.16
Blockage rate 1.08 1.08 1.08
Appendix Table 2 Turbine abbreviations
Phase shift angle
0 (PSA) double
stage turbine (DS)
Phase shift angle
15 (PSA) double
stage turbine (DS)
Phase shift angle
30 (PSA) double
stage turbine
(DS)
Phase shift angle
45 (PSA) double
stage turbine
(DS)
Phase shift angle
60 (PSA) double
stage turbine
(DS)
Single
stage
turbine
(SS)
0 overlap
ratio (OL) DS0PSA0OL DS15PSA0OL DS30PSA0OL DS45PSA0OL DS60PSA0OL SS0OL
0.16 over
lap ratio
(OL)
DS0PSA0.16OL DS15PSA0.16OL DS30PSA0.16OL DS45PSA0.16OL DS60PSA0.16OL SS0.16OL
0.32 over
lap ratio
(OL)
DS0PSA0.32OL DS15PSA0.32OL DS30PSA0.32OL DS45PSA0.32OL DS60PSA0.32OL SS0.32OL

226
References
Akoun, G. and Yonnet, J. P.; 1984. 3D analytical calculation of the forces exerted
between two cuboidal magnets. Transactions on Magnetics, 5(20), p.
1962–1964.
Akpinar, E. K. and Akpinar, S.; 2004. Statistical analysis of wind energy potential
on the basis of the weibull and rayleigh distributions for Agin-Elazig.
Proceedings of the Institution of Mechanical Engineers, Part A: Journal of
Power and Energy 2004, 1 12.
Alexander, A. J. and Holownia, B. P.; 1978-1. Wind tunnel tests on a savonius rotor.
Journal of Industrial Aerodynamics, Volume 3, pp. 343-351.
Alexander, A. J.; 1978-2. Wind tunnel corrections for savonius rotors, 2nd
International Symposium on Wind Energy Systems, Paper E6, pp E6-69 –
E6-80, October 3rd – 6th,
Allaire, P.E.; Humphris, R.R. and Lewis, D.W.; 1991. Jesse W. Beams and the first
practical magnetic suspension. NASA Langley Research Center,
International Symposium on Magnetic Suspension Technology.
Anon.; 2012. Ansoft a commercial software by Ansys. s.l., s.n.
Bassani, R.; 2001. Permanent magnetic levitation and stability, fundamentals of
tribology. s.l.:Kluwer Academic Publishing.
Beams, J.W.; 1937. High rotation speeds. Journal of Applied Physics, pp. 795-806.
Betz, A.; 1926. Windenergie und ihre ausnutzung durch windmuehlen. Goettingen,
Germany : Vandenhoeck und Ruprecht.

227
Bivona, S.; Burlon, R. and Leone, C.; 2003. Hourly wind speed analysis in Sicily.
Renewable Energy, Volume 28, p. 1371–1385.
Blackwell, B. F.; Sheldahl, R. E. and Feltz, L. V.; 1978. Wind tunnel performance
data for two- and three-bucket savonius rotors. Energy , 2(3), p. 160–164.
Brad, P.; Nelson G. and James, F. A.; 2003. Design formulas for permanent-magnet
bearings. Journal of Mechanical Design, Volume 125, p. 734–738.
Brown, W. F.; 1940. Theory of the approach to magnetic saturation. Physics
Review, Volume 58, p. 736.
Buch der Synergie; 2010. Buch der synergie. [Online] Available at:
http://www.buch-der synergie.de/c_neu_html/c_08_11_windenergie_neue
_designs.htm [Accessed 17 March 2012].
Campbell, N. and Stankovic, S.; 2001. Wind energy for the built environment
(Project WEB). [Online] Available at: http://www.bdsp.com/web
[Accessed 2010].
Carruth, A. A.; Hooker, M. A. and Oswa, A. J.; 1998. Unemployment equilibria and
input prices: theory and evidence from the United States. [Online]
Available at: http://www.andrewoswald.com/docs/cho.pdf [Accessed 2
March 2012].
Castlewind; 2012. Inhabitat. [Online] Available at: http://inhabitat.com
/files/castlewind.jpg
Celik, A. N.; 2003. Weibull representative compressed wind speed data for energy
and performance calculations of wind energy systems. Energy Conversion
and Management, Volume 44, p. 3057–3072.

228
Chauvin, A. and Benghrib, D.; 1989. Drag and lift coefficients evolution of a
savonius rotor. Experiments in Fluids, 8(2), p. 118–120.
Chauvin, A.; Botrini, M.; Brun, R, and Beguier C.; 1983. Evaluation du coefficient
de puissance d’un rotor Savonius. Comptes Rendus de l’Acade´mie des
Sciences, Volume 298, p. 823 – 826.
Chiba, A.; Fukao, T.; Ichikawa, O.; Oshima, M.; Tak, M.; Fukao, T.; Ichikawa, O.;
Oshima, M. and Tak, M.; 2005. Magnetic bearings and bearing less
drives. ISBN 978-0-7506-5727-3 ed. Oxford,: Elsevier Newnes.
Chikazumi, S.; 1997. Physics of Ferromagnetism. New York: Oxford Univ. Press.
Cottrel, W.; 1955. Energy and society; the relation between energy, social changes,
and economic development. New York(USA): McGraw-Hill.
Darrieus, G. J. M.; 1931. U.S.A., Patent No. U.S. Patent No. 1,835.Cl18.
Davis, S. J. and Haltiwanger, J.; 2001. Sectoral job creation and destruction
responses to oil price changes. Journal of Monetary Economics , 48(1), p.
465–512.
Davis, S. J.; Loungani P. and Mahidhara R.; 1996. Regional labor fluctuations: oil
shocks, military spending, and other driving forces, Chicago: Working
paper, University of Chicago.
Deaves, D. M. and Lines I. G.; 1997. On the fitting of low mean wind speed data to
the Waybill distribution. Wind Engineering and Ind. Aerodynamics,
Volume 66, p. 169–178.
Diegel, S. W.; Boundy R. G. and Davis S. C.; 2011. Transportation energy data
book, s.l.: Oak Ridge National Laboratory.

229
Dubois, M.; Polinder, H. and Ferreira, J.; 2002. Transverse-flux permanent magnet
(TFPM) machine with toothed rotor. s.l., Proceedings of the Power
Electronics, Machines and Drives Conference.
Dutton, A. G.; Halliday, J. A. and Blanch, M. J.; 2005. The feasibility of building-
mounted/integrated wind turbines (BUWTs), UK: Council for the Central
Laboratory of the Research Councils.
Earnshaw, S.; 1839. On the nature of molecular forces which regulate the
constitution of luminiferous ether. Transactions of the Cambridge
Philosophical Society, Cambridge University Press, Volume 7, p. 97–112.
Enercon; 2011. Enercon. [Online] Available at:http://www.enercon.de/p/
downloads/EN_Productoverview_ 0710.pdf [Accessed 4 February 2012].
Eriksson, S.; Bernhoff H. and Leijon M.; 2008. Evaluation of different turbine
concepts for wind power. Renewable and Sustainable Energy Reviews ,
Volume 12, p. 1419–1434.
Fadare, D.; 2008. A statistical analysis of wind energy potential in ibadan, Nigeria,
based on weibull distribution function. The Pacific Journal of Science and
Technology, Volume 9. (Number 1.).
Federal Ministry for the Environment, Nature Conservation and Nuclear Safety.,
2011. Renewable energy sources in figures, Dessau, Germany: Federal
Ministry for the Environment, Nature Conservation and Nuclear Safety.
Fluent 6.3 users guide, 2006. s.l.:ANSYS Inc., Southpointe, 275 Technology Drive,
Canonsburg, Pennsylvania 15317, USA (2006).
Frechette, R. E. and Gilchrist, R.; 2011. Towards zero energy, a case study of the
Pear River Tower, Guangzhou, China. [Online]

230
Available at: http://som. com/resources/content/5/0/4/3/9/0/2/0/
documents/SOM_TowardsZeroEnergy.pdf [Accessed 22 March 2012].
Fujisawa, N.; 1996. Velocity measurements and numerical calculations of flow fields
in and around Savonius rotors. Journal of Wind Engineering and
Industrial Aerodynamics , Volume 59, p. 39–50.
Gambit 2.3.16 users guide, 2005. s.l.:Southpointe, 275 Technology Drive,
Canonsburg, Pennsylvania 15317, USA .
Grauers, A.; 1996. Design of direct-driven permanentmagnet generators for wind
turbines. Ph. D. dissertation, School Elect. and Computer Eng., Chalmers
Univ. Tech..
Gupta, R.; Das, R. and Sharma, K. K.; 2006. Experimental study of a Savonius –
Darrieus wind machine. Proceedings of the International Conference on
Renewable Energy for Developing Countries.
Hameed, Z.; Hong, Y.; Cho, Y.; Ahn, S. and Song, C., 2009. Condition monitoring
and fault detection of wind turbines and related algorithms: a review.
Renewable and Sustainable Energy Reviews, 13(1), pp. 1-39.
Hau, E.; 2006. Wind turbines. Berlin Heidelberg : Springer–Verlag.
Hayashi, T.; Li, Y. and Hara, Y.; 2005. Wind tunnel tests on a different phase three-
stage savonius rotor. Japan Society of Mechanical Engineers International
Journal, 48(1), p. 9–16.
Heinrich, K.; 1989. Magnetbahn transrapid. Darmstadt: Hestra-Verlag .
Helbling, T.; 2011. Oil scarcity, groth, and global imbalences, s.l.: International
Monetary Fund.

231
Henneberger, G. and Bork, M.; 1997. Development of a new transverse flux motor.
Proc. 1997 IEE Colloquium on New Topologies for PM Machines, pp. 1-
16.
Huang, C.; 2012. Mainland GDP growth slowest in three years. in the South china
morning post from the 14/04/2012., Issue 14/04/2012, p. 1.
Huang, Y. and Huang, J.; 2005. Interview research on the current situation and
trends of China green building movement. [Online]
Available at: http://:www.topgreen.org [Accessed 3 December 2011].
Ikeda, M.; Wongsatanawarid, A.; Seki, H. and Murakami, M.; 2009. Interaction of
bulk superconductors with flywheel rings made of multiple permanent
magnets. Physica , Volume 469, p. 1270–1273 .
Jangamshetti, S. H. and Rau, V. G.; 2001. Site matching of wind turbine
generators: a case study. Energy Conversion, Issue 16, p. 8–13.
Jiménez-Rodríguez, R. and Sánchez, M.; 2011. Oil price shocks and real GDP
growth emperical evidence for some OECD countries. Frankfurt: s.n.
JMAG; 2012; JMAG, commercial available software.. [Online]
Available at: http://www.jmag-international.com
Jones, C. N.; Litter, R. D. and Manse, B. L.; 1979. The Savonius rotor-performance
and flow. s.l., Proceedings of the First BWEA Wind Energy Workshop.
Jowder, A. F., 2009. Wind power analysis and site matching of wind turbine
generators in Kingdom of Bahrain. Applied Energy, Volume Applied
Energy 86, p. 538–545.

232
Kalvoda, T. and Hwang, Y.; 2010. Analysis of signals for monitoring of nonlinear
and non-stationary machining processes. Sensors and Actuators A:
Physical, 161(1), pp. 39-45.
Kats G., 2003. The costs and financial benefits of green buildings, California, USA:
Sustainable Building Task Force.
Kemper, H.; 1934. Schwebebahn mit räderlosen Fahrzeugen, die an eisernen
Fahrschienen mittels magnetischer Felder schwebend entlang geführt
werden. Germany, Patent No. Deutsches Patent 643316.
Kemper, H.; 1938. Schwebende Aufhängung durch elektromagnetische Kräfte; eine
Möglichkeit für eine grundsätzlich neue Fortbewegungsarten. Germany,
Patent No. ETZ 59 .
Killa, S. and Smith, R. F.; 2008. Harnessing energy in tall buildings: Bahrain
World Trade Center and beyond. s.l., CTBUH 8th World Congress .
National Renewable Energy Laboratory; 2002. Wind power density map. [Online]
Available at: http://www.nrel.gov/gis/wind.html [Accessed 12 March
2012].
Langer, G.; 2010. ABC WORLD NEWS POLL: THE MIDDLE CLASS; Within the
Middle Class, Four in 10 are Struggling. ABC WORLD NEWS.
Lee, K.; Ni, S. and Ratti, R.; 1995. Oil shocks and the macroeconomy: the role of
price variability. Energy Journal, 16(1), p. 39–56.
Lemarquand, G. and Yonnet, J. P.; 1998. A partially passive magnetic suspension
for a discoidal wheel. Applied Physics, 64(10), p. 5997–5999.

233
lh5.ggpht.com; 2000. Curve, BH. [Online] Available at: http://lh5.ggpht.com/-
6ktykYi25t0/TP1FgJ_r_jI/AAAAAAAAYzo/l3gaiz18ZyI/bhcurves.jpg
[Accessed 2012].
Lu, L.; Ip, K. Y.; 2009. Investigation into the feasibility and enhancement methods of
wind power utilisation in high-rise buildings of Hong Kong. Renewable
and Sustainable energy Reviews, 13(2), p. 450–461.
Marinescu, M.; Marinescu, N.; 1989. Compensation of anisotropy effects in flux-
confining permanent-magnet structures. Transactions on Magnetics, 25(5),
p. 3899–3901.
Maskell, E. C.; 1965. A theory of the blockage effects on bluff bodies and stalled
wings in a closed wind tunnel, Melbourne: ARC Research Memorandum.
Mawer, C.; 2012. carolinemawer.co.uk. [Online] Available at: http://www.
carolinemawer.co.uk/blog/wp-content/uploads/windmill-long-copy.jpg
[Accessed 9 March 2012].
Meeting of the Panel on Development; 2008. Wall effect. Hong Kong: LC Paper No.
CB(1)232/08-09(11); Ref: CB1/PL/DEV.
Menet, J. L. and Bourabaa, N.; 2004. Increase in the Savonius rotors efficiency via
a parametric investigation. European Wind Energy Conference.
Mertens, S.; 2005. Wind energy in the built environment. illustrated edition ed. s.l.:
Multi-Science Publishing Co. Ltd.
Modi, V. J. and Fernando, M.; 1989. On the performance of the Savonius wind
turbine. ASME Journal of Solar Energy Engineering, Volume 111, p. 71–
81.

234
Muellbauer, J. and Nunziata, L.; 2001. 2001. Credit, the stock market, and oil.,
Oxford: Working paper, University of Oxford.
Mukhopadhyay, S. C.; Donaldson, J.; Sengupta, G.; Yamada, S.; Chakraborty, C.
and Kacprzak, D.; 2003. Fabrication of a repulsive-type magnetic bearing
using a novel arrangement of permanent magnets for vertical-rotor
suspension. Transactions on Magnetics, 39(5).
Nagashima, K.; Otani, T. and Murakami M.; 1999. Magnetic interaction between
permanent magnets and bulk superconductors. Physica, Volume 328, p.
137–144.
National Renewable Energy Laboratory; 2001. Wind resource map of the USA.
[Online] Available at: http://www.nrel.gov/gis/images/ 80m_wind/USwind
300dpe4-11.jpg [Accessed 9 March 2012].
Ohji, T.; Mukhopadhyay, S. C.; Iwahara, M. and Yamada, S.; 2000. Performance of
repulsive type magnetic bearings under nonuniform magnetization of
permanent magnet. Transactions on Magnetics, 36(5).
Paraschivoiu, I.; 2002. Wind turbine design – with emphasis on Darrieus concept.
s.l.: Polytechnic International Press.
Persaud, S.; Flynn, D. and Fox, B.; 1999. Potential for wind generation of the
Guyana coastlands. Renewable energy, Volume 18, p. 175–189.
Pland; 2012. [Online] Available at: http://www.pland.gov.hk/pland_en/
info_serv/site_wind/SanPoKong_ site_wind.pdf [Accessed 9 March 2012].
Pope, A. and Harper, J. J.; 1966. Low Speed Wind Tunnel Testing, New York: John
Wiley and Sons.

235
Post, R. F. and Ryutov, D. D.; 1997. Ambient-temperature passive magnetic
bearings: theory and design equations. Cambridge Massachusetts August,
6th international Symposium on magnetic bearings.
Prabhu, S. V.; Kamoji, M.A. and Kedare, S.B.; 2009. Performance tests on helical
Savonius rotors. Renewable Energy , Volume 34, p. 521–529.
Rakotoarison, H.; Yonnet, J. P. and Delinchant, B.; 2007. Using coulombian
approach for modelling scalar potential and magnetic field of a permanent
magnet with radial polarization. Transactions on Magnetics, 43(4), p.
1261–1264.
Rasche, R. H. and Tatom, J. A.; 1977. Energy resources and potential GNP, St.
Louis: Federal Reserve Bank of St. Louis.
Rasche, R. H. and Tatom, J. A.; 1981. Energy price shocks, aggregate supply and
monetary policy: the theory and international evidence. s.l., Carnegie-
Rochester Conference Series on Public Policy, p. 9–33.
Ravaud, R.; Lemarquand, G.; Lemarquand, V. and Depollier, C.; 2009 - 4 .
Magnetic field produced by a tile permanent magnet whose polarization is
both uniform and tangential. Progress In Electromagnetics Research,
Volume 13, pp. 1-20.
Ravaud, R.; Lemarquand, G. and Lemarquand, V.; 2009 - 1 . Force and stiffness of
passive magnetic bearings using permanent magnets. Part 1: Axial
Magnetization. Transactions on Magnetics, 45(7), p. 2996–3002.
Ravaud, R.; Lemarquand, G. and Lemarquand, V.; 2009 - 2. Force and stiffness of
passive magnetic bearings using permanent magnets. Part 2: Radial
magnetization. Transactions on Magnetics, 45(7), p. 3003–3008.

236
Ravaud, R.; Lemarquand, G. and Lemarquand, V.; 2009 - 3. Magnetic field created
by tile permanent magnets. Transactions on Magnetics, 45(7), pp. 2920-
2926. [Accessed 12 March 2012].
Royal Institute of Technology Sweden, 2012. Bluffbodies. [Online]
Available at: http://www.mech.kth.se/courses/5C1211/BluffBodies.pdf
Santini, D.; 1985. The energy-squeeze model: energy price dynamics in U.S. business
cycles. International Journal of Energy Systems, Volume 5, p. 18–25.
Savonius, S. J.; 1931. The S-rotor and its applications. Journal of Mechanical
Engineering, 53(5), p. 333–338.
Schöb, R.; 2007. Theorie und praxis der magnetlagertechnik eine kurze Einführung.
Zuerich, Vorlesungs manuskript ETH Zuerich .
Seguro, J. V. and Lambert, T. W.; 2000. Modern estimation of the parameters of the
weibull wind speed distribution for wind energy analysis. Wind
Engineering and Ind. Aerodynamics, Volume 85, p. 75–84. And online
http://www.physics.ucla.edu /marty/levitron/. Retrieved 2006-12-06.
Simon, M.; Heflinger L. and Ridgway, S.; 1997. Spin stabilized magnetic levitation.
American Journal of Physics, 65(4), p. 286–292.
Smith, J. J.; Ellison, L. and Sayce, S.; 2007. Socially responsible property
investment: quantifying the relationship between sustainability and
investment property worth. Journal of Property Research , Volume 24, p.
191–219.
Smith, A.; 2007. The architecture of Adrian Smith, SOM, Toward a sustainable
future. 1 ed. Australia: Images Publishing Group Ltd..

237
SOM; 2011. Pearl River Tower. [Online] Available at: http://www.som.com/
content.cfm /pearl_river_tower [Accessed 9 March 2012].
Spaldin, N.; 2003. Magnetic materials; fundamentals and device applications.
s.l.:Cambridge University Press .
Stern, D. I.; 2002. Energy use and economic growth in the USA: a multivariate
approach. Energy Economics, 15(2), p. 137–150.
Strickland, J. H.; 1975. The darrieus turbine: A performance prediction model using
multiple streamtubes, s.l.: Sandia Laboratories Report SAND75-0431.
Swift-Hook, D., 2012. 2.03 – History of Wind Power. Wind Energy, Volume Volume
2, Pages 41–72.
Tassa_5KW; 2012. [Online] Available at: http://upload.wikimedia. org/wikipedia/en/
1/18/Tassa_5KW_2_ElectronSolarEnergy2.jpg [Accessed 9 March 2012].
The Bahrain World Trade Center; 2009. www.flickr.com. [Online]
Available at: www.flickr.com [Accessed 9 March 2012].
Tverberg, G. E.; 2012. Oil supply limits and the continuing financial crisis. s.l., s.n.,
p. 27–34.
Ushiyama, I., and Nagai, H.; 1988. Optimum design configurations and performance
of Savonius rotors. Wind Engineering , 12(1), p. 59 – 75.
Welch, P.; 1967. The use of fast fourier transform for the estimation of power
spectra: a method based on time averaging over short, modified
periodograms. Transactions On Audio And Electro acoustic, AU-15(2), p.
70 – 73.
Wieringa, J. and Rijkoort, P. J.; 1983. Wind klima der Niederland, Gravenhage:
Staatsuitgeverij.

238
World Bank; 2012. World Bank Data base. [Online] Available at: http://databank.
worldbank.org/data/ home.aspx [Accessed 26 March 2012].
Wu, K.; 2010. Green design. [Online] Available at: http://www.greendesignetc.net/
Buildings_09/Bulding_Wu_Kevin_paper.pdf [Accessed 21 March 2012].
Yamada, H.; Yamasak, H.; Develos-Bagarinao, K. and Naka, S.; 2004. The pinning
property of Bi-2212 single crystals with columnar defects. Superconductor
Science and Technology, 17(1), pp. 58-64.
Yasuyuki, N.; Ayumu, A. and Ushiyama, I.; 2003. A Study of the twisted Sweeney-
type wind turbine. Wind Engineering, 27(4), p. 317–322.
Yeang, K.; 2011. Eco skyscrapers: Volume 2. 2 ed. Australia: The Images Publishing
Group Pty. Ltd.
Yonnet, J. P.; 1978. Passive magnetic bearings with permanent magnets.
Transactions on Magnetics, 5(14), p. 803–805.
Yonnet, J. P.; 1996. Rare-earth iron permanent magnets. Oxford Science, pp. 430 -
451.
Yonnet, J. P.; Lemarquand, G.; Hemmerlin, S. and Rullier, E.; 1991. Stacked
structures of passive magnetic bearings. Applied Physics, 70(10), p. 6633–
6635.
Zhou, W.; Yang, H. and Zhauhong, F.; 2006. Wind power potential and
characteristic analysis of the Pearl river region, China. Renewable
energy, 31(6), pp. 739-753.




















