
ANTS--Augmented environments
9
Computers & Graphics 28 (2004) 625–633 ANTS—Augmented Environments Teresa Roma˜o a, *, Nuno Correia b , Eduardo Dias a , Jose´ Danado a , Adelaide Trabuco b , Carlos Santos b , Rossana Santos b , Anto´nio Caˆmara c , Edmundo Nobre c a Computer Science Department, University of E ´ vora, Rua Roma˜o Ramalho 59, E ´ vora 7000, Portugal b Computer Science Department and CITI, New University of Lisbon, Quinta da Torre, 2825 Monte da Caparica, Portugal c Environmental Systems Analysis Group, New University of Lisbon, Quinta da Torre, 2825 Monte da Caparica, Portugal Abstract Interaction with natural or urban environments creates numerous situations where it is relevant to have access to further information that we cannot perceive by direct observation through our senses. Augmented Reality (AR) technologies allow real time superimposition of synthetic objects on real images, providing an augmented knowledge about the surrounding world. Users of an AR system can visualize the real surrounding world together with additional data generated in real time in a contextual way. This paper presents the ANTS project, which carries out the development of an AR technological infrastructure that can be used to explore physical and natural structures, namely for environmental management purposes. The system’s architecture has a flexible design based on a client-server model, where several independent, but functionally interdependent modules are articulated. Therefore, modules can be moved from the server side to the client side or vice versa, according to the client processing capacity. Several applications have been developed and are also discussed in this paper. r 2004 Elsevier Ltd. All rights reserved. Keywords: Multimedia information systems; Augmented and virtual realities; Simulation and modelling; Applications; Spatial databases and GIS; Spatial information systems 1. Introduction There are many situations where information about physical locations could be useful, but it is not easy to access. AR technologies are based on combining, in real time, synthetic images with real images, giving more information about the real environment around us. The users of an AR system see the real world and additional data simultaneously, through a Head Mounted Display (HMD). AR provides users with a better perception of the real world and promotes a more efficient interaction with it. Virtual object composition on real images makes available additional insights that users do not detect daily through their senses. This information can help the users to have a better performance on the tasks at hand, minimizing the time spent completing them. The major advantages of AR systems, when com- pared with Virtual Reality (VR) systems, are [1,2]: * The computational resources necessary for compos- ing synthetic images on real images are much less than those necessary to generate the synthetic scenes. * Using real images gives a high level of performance and provides a more realistic view of the environment under study or observation. * The users stay connected with the real world. ARTICLE IN PRESS *Corresponding author. Tel.: +351-266-745-360; fax: +351- 266-746-373. E-mail address: [email protected] (T. Roma˜o). 0097-8493/$ - see front matter r 2004 Elsevier Ltd. All rights reserved. doi:10.1016/j.cag.2004.06.001
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of ANTS--Augmented environments
Computers & Graphics 28 (2004) 625–633
ARTICLE IN PRESS
*Correspond
266-746-373.
E-mail addr
0097-8493/$ - se
doi:10.1016/j.ca
ANTS—Augmented Environments
Teresa Romaoa,*, Nuno Correiab, Eduardo Diasa, Jose Danadoa,Adelaide Trabucob, Carlos Santosb, Rossana Santosb, Antonio Camarac,
Edmundo Nobrec
aComputer Science Department, University of Evora, Rua Romao Ramalho 59, Evora 7000, PortugalbComputer Science Department and CITI, New University of Lisbon, Quinta da Torre, 2825 Monte da Caparica, PortugalcEnvironmental Systems Analysis Group, New University of Lisbon, Quinta da Torre, 2825 Monte da Caparica, Portugal
Abstract
Interaction with natural or urban environments creates numerous situations where it is relevant to have access to
further information that we cannot perceive by direct observation through our senses. Augmented Reality (AR)
technologies allow real time superimposition of synthetic objects on real images, providing an augmented knowledge
about the surrounding world. Users of an AR system can visualize the real surrounding world together with additional
data generated in real time in a contextual way.
This paper presents the ANTS project, which carries out the development of an AR technological infrastructure that
can be used to explore physical and natural structures, namely for environmental management purposes. The system’s
architecture has a flexible design based on a client-server model, where several independent, but functionally
interdependent modules are articulated. Therefore, modules can be moved from the server side to the client side or vice
versa, according to the client processing capacity. Several applications have been developed and are also discussed in
this paper.
r 2004 Elsevier Ltd. All rights reserved.
Keywords: Multimedia information systems; Augmented and virtual realities; Simulation and modelling; Applications; Spatial
databases and GIS; Spatial information systems
1. Introduction
There are many situations where information about
physical locations could be useful, but it is not easy to
access. AR technologies are based on combining, in real
time, synthetic images with real images, giving more
information about the real environment around us. The
users of an AR system see the real world and additional
data simultaneously, through a Head Mounted Display
(HMD).
AR provides users with a better perception of the real
world and promotes a more efficient interaction with it.
ing author. Tel.: +351-266-745-360; fax: +351-
ess: [email protected] (T. Romao).
e front matter r 2004 Elsevier Ltd. All rights reserve
g.2004.06.001
Virtual object composition on real images makes
available additional insights that users do not detect
daily through their senses. This information can help the
users to have a better performance on the tasks at hand,
minimizing the time spent completing them.
The major advantages of AR systems, when com-
pared with Virtual Reality (VR) systems, are [1,2]:
* The computational resources necessary for compos-
ing synthetic images on real images are much less
than those necessary to generate the synthetic scenes.* Using real images gives a high level of performance
and provides a more realistic view of the environment
under study or observation.* The users stay connected with the real world.
d.

ARTICLE IN PRESST. Romao et al. / Computers & Graphics 28 (2004) 625–633626
Another advantage and application of AR is related
with the recent introduction and dissemination of
mobile devices, such as high end mobile phones and
PDAs. These devices provide a good vehicle for non-
immersive AR. Our architecture also considers these
devices as targets for the applications. Although the
initial ANTS prototype uses a HMD, subsequent
developments currently allow the use of PDAs as client
devices. This avoids burdening the user with heavy and
cumbersome devices that require time consuming setups
and restrict mobility. Furthermore, the PDA can be seen
as a virtual window to the augmented world displaying
what the user is seeing superimposed with the additional
virtual objects.
Several complex technical and scientific problems
must be considered when implementing AR systems:
* The register of synthetic images on real images,* Position identification;* Information retrieval;* Presentation.
The development of ANTS, reported in this paper, is
a contribution towards the solution of these problems,
bearing in mind the increasing necessity for mobility,
which, in turn, brings out supplementary technological
limitations due to the use of small displays, small screen
resolution, limited processing power devices, low data
bit rates, out of coverage gaps in wireless networks or
network latency.
The main objectives of ANTS are:
* Establish a more appropriate configuration in AR
systems for the exploration of natural and urban
environments. This includes the definition of the
overall architecture, considering different devices for
access and presentation;* Study new methods for image registry and navigation
in augmented environments;* Study an AR infrastructure that makes it easier to:
* Visualize the evolution process of natural,
urban and artificial environments;* Provide information about geo-referenced ele-
ments in the environment.
ANTS system has been tested through three main
environmental management applications comprising:
* Monitoring water quality using pollutant transport
models;* Visualizing temporal evolution of physical structures
and natural elements;* Superimposing synthetic images on the ground to
reveal the soil’s composition at the user’s current
spatial location (for example, the location of under-
ground water supply networks and subsoil structure).
The remainder of this paper is structured as follows:
next section summarizes research work related with
this project. Section 3 presents the ANTS system’s
infrastructure and architecture. Section 4 describes
the applications developed for the proposed system.
The paper ends with conclusions and directions for
future work.
2. Related work
Augmented reality is a technology in which the user’s
view of the real world is enhanced with virtual objects
that appear to coexist in the same space as real objects.
From the beginning, registration of synthetic images on
real images has been a topic of continuing research.
Many research works have been given emphasis to the
correct implementation of 3D image registry mechan-
isms over a real scenario [3].
Accurately tracking of user’s position and viewing
orientation is crucial for AR registration. An overview
of tracking systems can be found in [4]. Many
approaches to position tracking require the user’s
environment to be equipped with sensors [5], beacons
[6] or visual fiducials [7]. While some recent AR systems
demonstrate to be robust for registration in prepared,
indoor environments [8], tracking in unprepared envir-
onments is still an enormous challenge [9], particularly
concerning outdoor and mobile AR applications. Many
systems employ hybrid-tracking techniques to exploit
strengths and compensate weaknesses of individual
tracking technologies [10,11]. In [12] the early stages of
an experimental mobile AR system that adapts its user
interface automatically to accommodate changes in
tracking accuracy are described. Ultimately, tracking
in unprepared environments may rely heavily on
tracking visible natural features [13,14]. Research on
how to track users with Bluetooth technology is in its
infancy. There are several research efforts using Blue-
tooth for positioning purposes with alternative conclu-
sions [15,16].
Most of the existing AR applications mainly encom-
pass the traditional areas of manufacturing, medicine,
architecture, education and professional training [17–
19]. More recently, research turned also towards mobile
AR systems. These may enable a host of new applica-
tions in navigation, situational awareness, and geo-
referenced information retrieval.
Rekimoto and Nagao [20] proposed a method for
augmented environment construction using a portable
device named NaviCam, which is able to identify the
user’s position by detecting colour codes in the real
world.
The first outdoor system was the Touring Machine [2].
This system, developed at Columbia University, includes
tracking devices (a compass, an inclinometer and a
ARTICLE IN PRESST. Romao et al. / Computers & Graphics 28 (2004) 625–633 627
differential GPS), a mobile computer with a 3D graphics
board and a see-through HMD. It provides the user with
world-stabilized information about an urban environ-
ment (the names of buildings and departments on the
Columbia campus). More recent versions of this system
render models of buildings that previously existed on
campus, display paths that users need to take to reach
objectives, and play documentaries of historical events
that occurred at the observed locations [21].
Human senses are unable to detect several dangerous
conditions, namely harmful radiation or toxic gases. At
the University of Michigan, an AR application is being
developed to allow humans to detect potentially hazard
conditions, combining the collected data in a three
geometric database, and using augmented reality to
present this information to the users (http://www.vrl.
umich.edu/sel prj/ar/hazard). BITS (Browsing in Time
and Space) interface was developed for the exploration
of virtual ecosystems. It allows users to navigate and
explore a complex virtual ecosystem, interact with the
objects that comprise it and make annotations indexed
in time and space [22].
In the Vienna University of Technology, the Hand-
held AR project is developing a PDA-based AR system
to be used in the SignPost project. This system allows a
user to stroll over an unknown building showing him or
her several navigational hints [23].
Apart from a few commercial AR systems, which
include the augmentation of broadcast video to enhance
sport events and to insert or replace advertisements in a
scene [24], the state of the art in AR today is comparable
with the early stages of VR—many systems have been
demonstrated, but few have evolved beyond lab-based
prototypes [9,25].
3. ANTS—augmented environments
ANTS is an AR system that assists users in the
exploration and study of their surrounding environment,
providing additional contextual data about physical
structures and natural elements that compose the real
world around them. The initial hardware infrastructure
includes a laptop/wearable, a HMD (Daeyang E&C Cy-
Visor Mobile Personal Display DH-4400VP) and a
tracker (InterSense Intertrax 2), a video camera and a
GPS receiver (PRETEC—CompactGPS) and it uses
mobile phones for providing the communications. In a
later prototype PDAs are used as client devices, where
the stronger focus is mobility instead of immersion.
ANTS follows a video see-through approach [9].
Users see the results of composing the video image
captured by the camera with the synthetic content
retrieved from the server database (text, graphics,
pictures or even other videos).
The computational system provides functionalities
ranging from image capture and user positioning to
data retrieval from remote databases. These different
functionalities are supported by an architecture that
integrates several modules split between the remote
server and the client that interacts with the users
(Fig. 1). For the PDA version, a proxy database is
necessary to speed up the process of querying the
geo-referenced database. Some modules can be
moved from or to the client entity according to its
available processing capacities and the applications
requirements.
3.1. System architecture
The main modules composing ANTS’s architecture
can be seen in Fig. 1 and are described in the following
subsections. The server components are accessible
through an HTTP server, thus allowing requests from
different clients and platforms.
The process of enhancing or augmenting the real-
world video is driven by the user’s actions. The system
must know the user’s position and orientation to be
able to provide this contextual information. When the
system starts, it identifies the user’s position and
orientation, by explicit interaction and manual calibra-
tion. After this initial calibration process, the tracking
module grants the User AR Module the capability to
track, as precisely as possible, the user position and
orientation.
This positioning process combines several methods:
* GPS data: The absolute position of the user is
indicated by a GPS system. This type of system is
used in combination with the other techniques below,
in order to overcome the limitations and lack of
precision associated with it.* User tracking using appropriate devices: a tracker is
used in order to obtain the current orientation of the
user’s head.* Environment mapping: knowledge of the physical
form and position of the entities on the environment
that is being augmented.* Explicit indication: sometimes, mainly in the boot-
strap process, the users can indicate their position
explicitly.
Every time the users ask for information the system
locates their position and orientation, as accurately as
possible and, with that information, a list of objects in
the user’s field of view can be requested to a remote
application that uses a 3D representation of the real
world. The query to the 3D model server returns basic
object properties, such as name, type and a unique
object identifier (UOI). This request and the correspond-
ing result are identified in steps 1 and 2 of Fig. 2. The

ARTICLE IN PRESS
Fig. 1. ANTS architecture.
Fig. 2. Information flow.
T. Romao et al. / Computers & Graphics 28 (2004) 625–633628
information returned by the 3D model server is the first
layer of information that the User AR Module displays.
For more detailed information about a particular object,
a query can be done to another remote server (Geo-
Referenced Database) using the object identifiers ob-
tained from the 3D model (steps A and B). The images
that are presented in the client device’s display result
from the composition of the images captured in real time
with a video camera, and additional data retrieved from
both servers. The server components are accessible
through HTTP, a common standard, allowing different
devices to perform requests.
3.1.1. 3D model
The 3D model server is an application that synchro-
nizes the position of multiple users in the virtual and real
worlds. With this server it is possible to locate and depict
the users and their surroundings, in order to correctly
map the contextual information.
ARTICLE IN PRESST. Romao et al. / Computers & Graphics 28 (2004) 625–633 629
This module encapsulates a 3D representation of the
physical real space, establishing a relationship between
the user’s experiences in the physical space and the
corresponding computational representation. As most
models, the models used here are simplified representa-
tions of the reality, which however must comply with
several rules to assure the required accuracy. The models
in the 3D model server must:
* Include all the relevant objects using a specific level
of detail.* Respect a scale, and all the relationships between
relevant objects.* Specify the relation between the model position and
orientation and the real world.
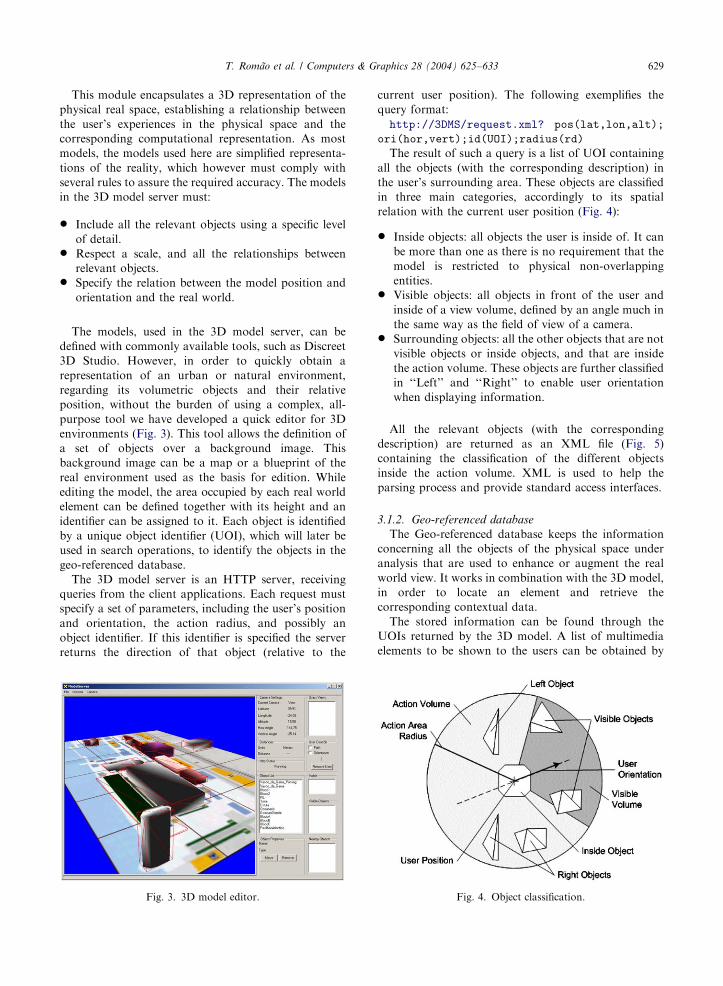
The models, used in the 3D model server, can be
defined with commonly available tools, such as Discreet
3D Studio. However, in order to quickly obtain a
representation of an urban or natural environment,
regarding its volumetric objects and their relative
position, without the burden of using a complex, all-
purpose tool we have developed a quick editor for 3D
environments (Fig. 3). This tool allows the definition of
a set of objects over a background image. This
background image can be a map or a blueprint of the
real environment used as the basis for edition. While
editing the model, the area occupied by each real world
element can be defined together with its height and an
identifier can be assigned to it. Each object is identified
by a unique object identifier (UOI), which will later be
used in search operations, to identify the objects in the
geo-referenced database.
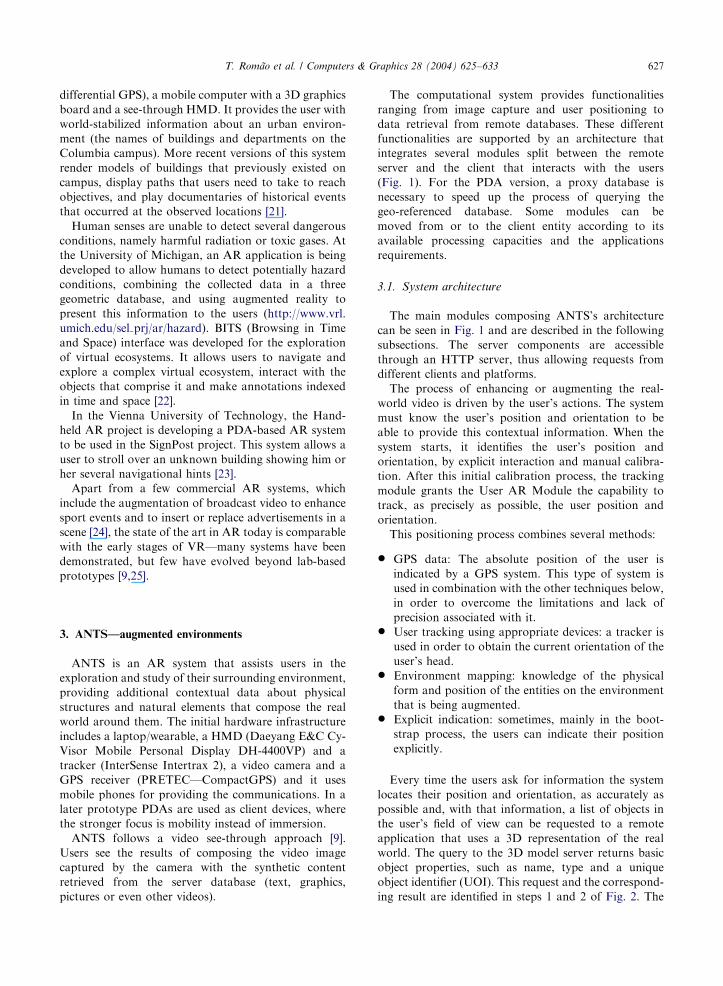
The 3D model server is an HTTP server, receiving
queries from the client applications. Each request must
specify a set of parameters, including the user’s position
and orientation, the action radius, and possibly an
object identifier. If this identifier is specified the server
returns the direction of that object (relative to the
Fig. 3. 3D model editor.
current user position). The following exemplifies the
query format:
http://3DMS/request.xml? pos(lat,lon,alt);
ori(hor,vert);id(UOI);radius(rd)
The result of such a query is a list of UOI containing
all the objects (with the corresponding description) in
the user’s surrounding area. These objects are classified
in three main categories, accordingly to its spatial
relation with the current user position (Fig. 4):
* Inside objects: all objects the user is inside of. It can
be more than one as there is no requirement that the
model is restricted to physical non-overlapping
entities.* Visible objects: all objects in front of the user and
inside of a view volume, defined by an angle much in
the same way as the field of view of a camera.* Surrounding objects: all the other objects that are not
visible objects or inside objects, and that are inside
the action volume. These objects are further classified
in ‘‘Left’’ and ‘‘Right’’ to enable user orientation
when displaying information.
All the relevant objects (with the corresponding
description) are returned as an XML file (Fig. 5)
containing the classification of the different objects
inside the action volume. XML is used to help the
parsing process and provide standard access interfaces.
3.1.2. Geo-referenced database
The Geo-referenced database keeps the information
concerning all the objects of the physical space under
analysis that are used to enhance or augment the real
world view. It works in combination with the 3D model,
in order to locate an element and retrieve the
corresponding contextual data.
The stored information can be found through the
UOIs returned by the 3D model. A list of multimedia
elements to be shown to the users can be obtained by
Fig. 4. Object classification.
ARTICLE IN PRESS
Fig. 5. 3D model response example.
Fig. 6. User AR module architecture.
Fig. 7. Outdoor AR example.
T. Romao et al. / Computers & Graphics 28 (2004) 625–633630
using the set of queries supported by the database. These
elements can be of several types including text, graphics,
images, audio and video. The result of a query is an
XML file that describes the multimedia elements to be
delivered to the client application for visualization
purposes (Fig. 2). Currently a MySQL database is being
used, but other SQL-based database engines can also be
used.
3.1.3. User AR module
This module acts like an interface to the whole system.
It gathers all tracking and position information, sends it
to the 3D model server and retrieves information either
from the module managing the 3D model or from the
multimedia geo-referenced database. It combines this
information with the images of the real world captured,
in real time, by the camera (under the control of this
same module) and displays the resulting image on the
HMD or PDA screen.
The user AR module, represented in Fig. 1 by its
functional components, can be described in a way that is
more close to its implementation. Fig. 6 shows its
subsystems responsible for the image composition as a
set of filters (implemented using Microsoft DirectShow)
that interact with the other components of the system.
These two main filters are the InfoComposer and the
ObjectComposer.
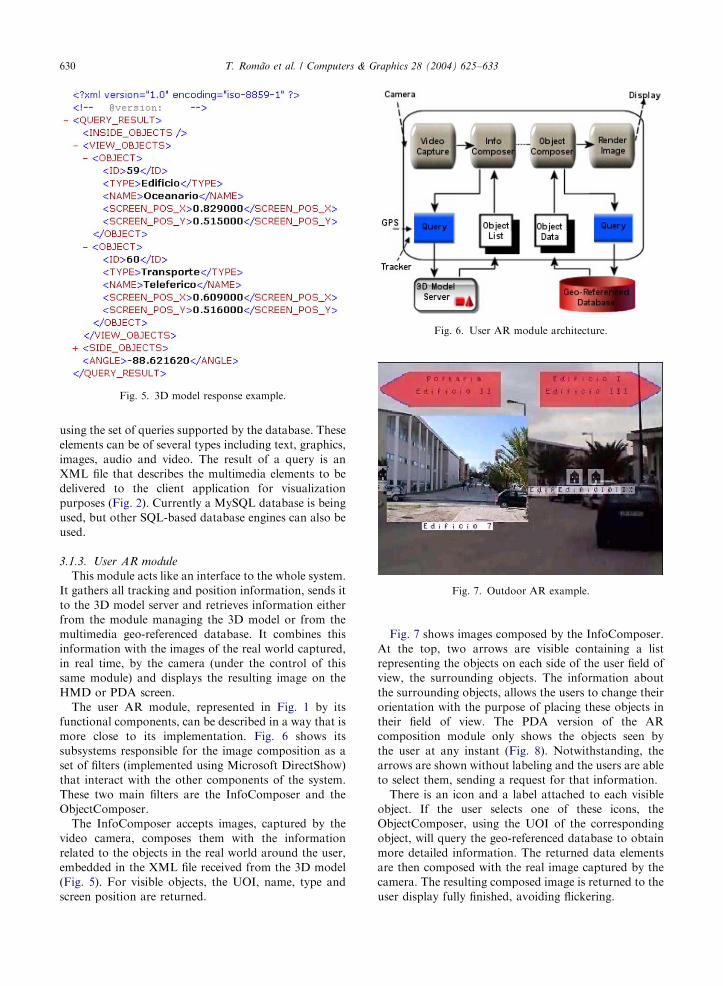
The InfoComposer accepts images, captured by the
video camera, composes them with the information
related to the objects in the real world around the user,
embedded in the XML file received from the 3D model
(Fig. 5). For visible objects, the UOI, name, type and
screen position are returned.
Fig. 7 shows images composed by the InfoComposer.
At the top, two arrows are visible containing a list
representing the objects on each side of the user field of
view, the surrounding objects. The information about
the surrounding objects, allows the users to change their
orientation with the purpose of placing these objects in
their field of view. The PDA version of the AR
composition module only shows the objects seen by
the user at any instant (Fig. 8). Notwithstanding, the
arrows are shown without labeling and the users are able
to select them, sending a request for that information.
There is an icon and a label attached to each visible
object. If the user selects one of these icons, the
ObjectComposer, using the UOI of the corresponding
object, will query the geo-referenced database to obtain
more detailed information. The returned data elements
are then composed with the real image captured by the
camera. The resulting composed image is returned to the
user display fully finished, avoiding flickering.
ARTICLE IN PRESS
Fig. 8. PDA version interface.
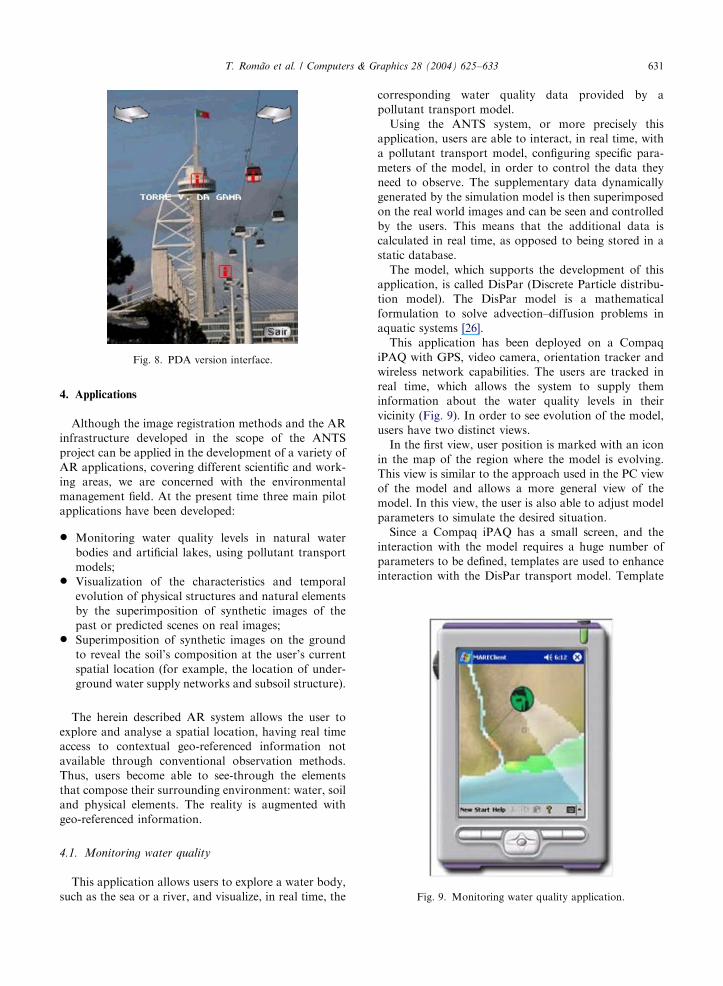
Fig. 9. Monitoring water quality application.
T. Romao et al. / Computers & Graphics 28 (2004) 625–633 631
4. Applications
Although the image registration methods and the AR
infrastructure developed in the scope of the ANTS
project can be applied in the development of a variety of
AR applications, covering different scientific and work-
ing areas, we are concerned with the environmental
management field. At the present time three main pilot
applications have been developed:
* Monitoring water quality levels in natural water
bodies and artificial lakes, using pollutant transport
models;* Visualization of the characteristics and temporal
evolution of physical structures and natural elements
by the superimposition of synthetic images of the
past or predicted scenes on real images;* Superimposition of synthetic images on the ground
to reveal the soil’s composition at the user’s current
spatial location (for example, the location of under-
ground water supply networks and subsoil structure).
The herein described AR system allows the user to
explore and analyse a spatial location, having real time
access to contextual geo-referenced information not
available through conventional observation methods.
Thus, users become able to see-through the elements
that compose their surrounding environment: water, soil
and physical elements. The reality is augmented with
geo-referenced information.
4.1. Monitoring water quality
This application allows users to explore a water body,
such as the sea or a river, and visualize, in real time, the
corresponding water quality data provided by a
pollutant transport model.
Using the ANTS system, or more precisely this
application, users are able to interact, in real time, with
a pollutant transport model, configuring specific para-
meters of the model, in order to control the data they
need to observe. The supplementary data dynamically
generated by the simulation model is then superimposed
on the real world images and can be seen and controlled
by the users. This means that the additional data is
calculated in real time, as opposed to being stored in a
static database.
The model, which supports the development of this
application, is called DisPar (Discrete Particle distribu-
tion model). The DisPar model is a mathematical
formulation to solve advection–diffusion problems in
aquatic systems [26].
This application has been deployed on a Compaq
iPAQ with GPS, video camera, orientation tracker and
wireless network capabilities. The users are tracked in
real time, which allows the system to supply them
information about the water quality levels in their
vicinity (Fig. 9). In order to see evolution of the model,
users have two distinct views.
In the first view, user position is marked with an icon
in the map of the region where the model is evolving.
This view is similar to the approach used in the PC view
of the model and allows a more general view of the
model. In this view, the user is also able to adjust model
parameters to simulate the desired situation.
Since a Compaq iPAQ has a small screen, and the
interaction with the model requires a huge number of
parameters to be defined, templates are used to enhance
interaction with the DisPar transport model. Template

ARTICLE IN PRESST. Romao et al. / Computers & Graphics 28 (2004) 625–633632
icons, representing pollutant agents, with predefined
values are embedded in the interface. This way, users
just have to choose between them and select the initial
point in the map where the pollution began.
In the second view, the users are able to see the
evolution of the DisPar transport model in their
surrounding area superimposed in the view of the real
environment. In this case, the water body is replaced by
the model evolution in the corresponding position.
4.2. Visualization of characteristics and temporal
evolution of physical structures and natural elements
The main goal of this application is to allow users to
navigate through a certain spatial area and have real
time access, in real time, to additional information
related to the physical structures and natural elements
that can be found in that area. Two possible examples of
this application are the superimposition of the image of
a digital terrain model of a landfill before being
renovated into a park, or the superimposition on a
building of the synthetic image of its restoration.
Therefore, the users are able to simultaneously see the
same spatial area or the same object at different stages of
its life cycle. This spatial parallelism takes advantage of
the human notable capacity to compare and reason
about multiple images that appear simultaneous within
our eye span [27]. This human capacity facilitates the
detection and analysis of changes in the natural and
artificial components of a landscape.
This application was developed for the Parque das
Na@oes in Lisbon (former area of the Expo 98). It allowsusers to walk through the park and have access to
contextual information about the different buildings and
natural elements surrounding them. This application
was developed to operate in two different devices, a
laptop computer and a PDA.
4.3. Subsoil structure
A possible scenario for the use of this application
consists in locating infrastructures for public supply
networks (water, sewage, telephone) in order to avoid
damage when intervention to the subsoil is necessary.
Through the use of this application the users are able to
look at the soil and see, projected on it, synthetic images
revealing its internal constitution (subsoil) at the current
point in space and time.
This application was also deployed for the Parque das
Na@oes in Lisbon. Similarly to the application seen
above it is targeted into two different devices, a laptop
and a PDA. While in a stroll, the users may not wish
to be in an immersive environment, so the PDA may be
a better interface, allowing them to see the environment
directly and look for additional information on
the PDA.
5. Conclusions and future developments
The ANTS project proposes an augmented reality
technological infrastructure that can be used in different
applications, ranging from the visualization of physical
structures to complex models of natural and artificial
phenomena. This infrastructure deals with information
presentation and storage, location and identification of
objects, and location of the users. These characteristics
allow the ANTS infrastructure to contribute to the
resolution of the fundamental problems traditionally
found in the construction of AR systems. Thus, the
system described in this paper allows for the creation of
new AR tools, which aid in environmental management by
facilitating the perception and interaction with the
involving spatial area and its natural and artificial
components. The system’s architecture follows the client–
server model and is based on several independent, but
functionally interdependent modules. It has a flexible
design, which allows the transfer of some modules to and
from the client side, according to the available processing
capacities.
Future work includes using the ANTS infrastructure in
new applications and enhancing some of its characteristics.
Our research is currently following a new comple-
mentary course towards the exploration of indoor
environments, which requires distinct positioning me-
chanisms due to physical restrictions. For instance, GPS
receivers can no longer be used, since they can not work
accurately indoor. To overcome these limitations we are
presently developing a server-side Bluetooth positioning
system, which is able to track the users in three
dimensions and is independent of the Bluetooth access
points being used. This positioning system will expand
ANTS AR system capabilities, which will easily support
the development of indoor applications.
In a recently funded project, InStory, we will explore
interactive narratives that take place in the real world.
This project will reuse and extend some of the
components that were developed in the scope of the
ANTS project, namely the 3D model server.
Acknowledgements
The ANTS project was funded by the Funda@ao para
a Ciencia e Tecnologia (FCT, Portugal) (project no.
POCTI/MGS/34376/99-00). We would like to thank
YDreams (www.ydreams.com) for support in the work
described in this paper.
References
[1] Azuma R. A survey of augmented reality. Presence
1997;6(4):355–85.

ARTICLE IN PRESST. Romao et al. / Computers & Graphics 28 (2004) 625–633 633
[2] Feiner S, Macintyre B, Hollerer T, Webster A. A
touring machine: prototyping 3D mobile augmented
reality for exploring the urban environment. In: Proceed-
ings of International Symposium on Wearable Comput-
ing’97, Cambridge, MA, USA 13–14 October 1997.
p. 74–81.
[3] Azuma R, Bishop G. Improving static and dynamic
registration in an optical see-through HMD. In: Proceed-
ings of SIGGRAPH’94, Orlando, USA 24–29 July 1994.
p. 197–204.
[4] Rolland JP, Davis LD, Baillot Y. A survey of tracking
technologies for virtual environments. In: Barfield W,
Caudell T, editors. Fundamentals of wearable computers
and augmented reality. Mahwah, NJ: Lawrence Erlbaum;
2001. p. 67–112.
[5] Harter A, Hopper A, Steggles P, Ward A, Webster P. The
anatomy of a Context-Aware application. In: Proceedings
of the Fifth ACM/IEEE International Conference on
mobile computing and networking (MobiCom’99), Seattle,
WA, USA August 1999. p. 59–68.
[6] Butz A, Baus J, Kruger A. Augmenting building with
infrared information. In: Proceedings of the International
Symposium on Augmented Reality (ISAR 2000), Munich,
Germany 5–6 October 2000. Silver Spring, MD: IEEE CS
Press; 2000. p. 93–6.
[7] Cho Y, Lee J, Neumann U. A multi-ring fiducial system
and an intensity-invariant detection method for scalable
augmented reality. In: Proceeding of the First IEEE
International Workshop on Augmented Reality’98, San
Francisco, CA, USA 1 November 1998. Natick, Mass:
A.K. Peters; 1998. p. 147–65.
[8] Yokokohji Y, Sugawara Y, Yoshikawa, T. Accurate image
overlay on video see-through HMDs using vision and
accelerometers. In: Proceeding of IEEE Virtual Reality’00,
New Brunswick, NJ, USA 18–22 March 2000. Silver
Spring, MD: IEEE CS Press, 2000. p. 247–54.
[9] Azuma R, Baillot Y, Behringer R, Feiner S, Julier S,
Macintyre B. Recent advances in augmented reality. IEEE
Computer Graphics and Applications 2001;21(6):34–47.
[10] Azuma R, Lee JW, Jiang B, Park J, You S, Neumann U.
Tracking in unprepared environments for augmented
reality systems. Computers and Graphics 1999;23(6):
787–93.
[11] You S, Neumann U, Azuma R. Orientation tracking for
outdoor augmented reality registration. IEEE Computer
Graphics and Applications 1999;19(6):36–44.
[12] Hollerer T, Hallaway D, Tinna N, Feiner S. Steps toward
accommodating variable position tracking accuracy in a
mobile augmented reality system. In: Proceedings of
Second International Workshop on Artificial Intelligence
in Mobile Systems (AIMS’01), Seattle, WA, USA 4
August, 2001. p. 31–7.
[13] Behringer R. Registration for outdoor augmented reality
applications using computer vision techniques and hybrid
sensors. In: Proceeding of IEEE Virtual Reality’99,
Houston, TX, USA 13–17 March 1999. Silver Spring,
MD: IEEE CS Press; 1999. p. 244–51.
[14] Neumann U, You S. Natural feature tracking for
augmented reality. IEEE Transactions on Multimedia
1999;1(1):53–64.
[15] Feldmann S, Kyamakya K, Zapater A, Lue Z. An indoor
Bluetooth-based positioning system: concept, implementa-
tion and experimental evaluation. In: Proceedings of the
International Conference on Wireless Networks, ICWN
’03, Las Vegas, Nevada, USA, 2003. p. 109–13.
[16] Yoneyama Y, Shinoda S, Makino M. An indoor location
system with Bluetooth. In: Proceedings of International
Technical Conference on Circuits/Systems, Computers and
Communications (ITC-CSCC’02), Phuket, Thailand, 2002,
CD-ROM.
[17] Curtis D, Mizell D, Gruenbaum P, Janin A. Several devils
in the details: making an AR application work in the
airplane factory. In: Proceedings of the First IEEE
Workshop on Augmented Reality (iwar’98), San Francis-
co, CA, USA 1 November 1998. p. 47–60.
[18] Fuchs H, Livingston M, Raskar R, Colucci D, Keller K,
State A, Crawford J, Rademacher P, Drake S, Meyer A.
Augmented reality visualization for laparoscopic surgery.
In: Proceedings of First International Conference on
Medical Image Computing and Computer-Assisted Inter-
vention (MICCAI’98), Cambridge, MA, USA: MIT; 11–
13 October 1998. p. 934–43.
[19] Webster A, Feiner S, Macintyle B, Massie W, Krueger T.
Augmented reality in architectural construction, inspection
and renovation. In: Proceedings of ASCE Third Congress
on Computing in Civil Engineering’96, Anaheim, CA,
1996. p. 913–9.
[20] Rekimoto J, Nagao K. The world through the computer:
computer augmented interaction with real world environ-
ments. In: Proceedings of ACM UIST’95, Pittsburgh, PA,
USA 15–17 November 1995. New York: ACM Press; 1995.
p. 29–36.
[21] Hollerer T, Feiner S, Terauchi T, Rashid G, Hallaway D.
Exploring MARS: developing indoor and outdoor user
interface to a mobile augmented reality system. Computer
and Graphics 1999;23(6):779–85.
[22] Dias AE, Silva JP, Camara AS. Bits: browsing in time and
space. In: Computer CHI’95 Human Factors in Comput-
ing Systems, Denver, CO, USA 7–11 May 1995. p. 248–9.
[23] Wagner D, Schmalstieg D. First steps towards handheld
augmented reality. In: Proceedings of the Seventh Inter-
national Symposium on Wearable Computers’03, White
Plains, NY, USA 21–23 October 2003. Silver Spring, MD:
IEEE CS Press; 2003. p. 127–37.
[24] Cavallaro R. The foxtrax hockey puck tracking system.
IEEE Computer Graphics and Applications 1997;17(2):6–12.
[25] Brooks Jr FP. What’s real about virtual reality? IEEE
Computer Graphics and Applications 1999;16(6):16–27.
[26] Ferreira JS, Costa M. A determinist advection-diffusion
model based on Markov processes. Journal of Hydraulic
Engineering, ASCE 2002;128(4):399–411.
[27] Tufte ER. Visual explanations: images and quantities,
evidence and narrative. Cheshire, CT: Graphics Press;
1997.




















