Análisis de Señales de Medidas Mecánicas para el ...
463
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of Análisis de Señales de Medidas Mecánicas para el ...

Departamento de Física Aplicada a los Recursos Naturales
Escuela Técnica Superior de Ingenieros de Minas
TESIS DOCTORAL
Análisis de Señales de Medidas Mecánicas
para el
Mantenimiento Predictivo Avanzado
Cristina Montalvo Martín
Ingeniero de Minas
Directores
Miguel Balbás Antón
Agustín García-Berrocal Sánchez
Septiembre 2010


Agradecimientos
Sin duda, cuando empecé a escribir los agradecimientos, las primeras personas en las
que pensé fueron mis padres, sin su ayuda esto hubiera sido imposible. Después pensé en
mis hermanos que siempre me ayudan tanto y me dan tan buenos consejos. Por supuesto,
Miguel, Agustín y Juan son piezas fundamentales en este trabajo. Sin ellos esto no hubiera
sido posible, no sólo por su apoyo técnico sino por su apoyo moral.
Es inevitable dar las gracias a Diego, Ester, Marcos y Ruben, que aunque ellos no
saben lo que es una tesis doctoral, me hacen muy feliz con sus Gormitis, Spidermans,
Hello Kitties y sus fondos de bikini.
Mi estancia en Göteborg y conocer a Imre ha sido muy positivo para mi y para la
tesis.
El orienteering me ha ayudado mucho a desconectar y ahí tengo que dar las gracias a
Alberto y a Juan, que no se pierden una y siempre cuentan conmigo.
Antonio ha sido una persona muy inuyente en mi vida y aunque no ha participado
directamente en esta tesis, sus consejos deportivos y de todas las clases siempre se han
tenido en cuenta.
i

A Jose, que de vez en cuando tiene que aguantar mis historias para no dormir y siempre
me encuentra una solución sabia para mis problemas.
A Pablo, por ser como es, por comprender y perdonar mis meteduras de pata y porque
a su lado me siento en una burbuja.
A So, porque es mi muy mejor amiga y lo seguirá siendo desde el otro lado del planeta.
A Fer, porque eres genial y porque jamás olvidaré cuánto me ayudaste para aprobar
estructuras. Ah, y porque el Puerto Rico es super divertido.
A Gemix, Tobich y Mongo que aunque ya no les veo mucho y nunca conseguí ganarles
al Risk, las tardes interminables de juegos de mesa con ellos eran estupendas.
ii

Índice general
1. INTRODUCCIÓN 1
I FUNDAMENTOS TEÓRICOS 7
2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS 9
2.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2. Ruido y señal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3. Procesos estocásticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.1. Función de densidad de probabilidad . . . . . . . . . . . . . . . . . 20
2.3.2. Esperanza Matemática . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3.3. Desviación típica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3.4. Autocorrelación y autocovarianza . . . . . . . . . . . . . . . . . . . 24
2.4. Sistemas en el dominio del tiempo . . . . . . . . . . . . . . . . . . . . . . . 28
2.4.1. Sistemas Linealas LTI . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4.2. Función de respuesta al impulso . . . . . . . . . . . . . . . . . . . . 32
2.5. Sistemas en el dominio de la frecuencia . . . . . . . . . . . . . . . . . . . . 34
iii

ÍNDICE GENERAL
2.5.1. La transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . 34
2.5.2. La transformada de Laplace discreta: transformada z . . . . . . . . 38
2.5.3. La transformada de Fourier . . . . . . . . . . . . . . . . . . . . . . 44
2.5.4. Procesamiento de señales de aleatorias: densidad espectral . . . . . 49
2.6. Modelos Autorregresivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.7. Ajuste de resonancias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.7.1. Justicación para el uso de la fórmula de Breit-Wigner en resonan-
cias mecánicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.8. La transformada de Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . . 63
2.8.1. Relación con la transformada de Laplace . . . . . . . . . . . . . . . 68
2.8.2. Relación con la transformada de Fourier . . . . . . . . . . . . . . . 70
2.8.3. Propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
2.8.4. Señal analítica: amplitud y fase instantáneas . . . . . . . . . . . . . 77
2.8.5. Ejemplo de un sistema no lineal: Oscilador de Dung . . . . . . . . 78
II SISTEMAS LINEALES 85
3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO
DE CENTRALES NUCLEARES 87
3.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.1.1. Ruido neutrónico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.1.2. Medida de los modos de vibración de los internos de un reactor . . 93
iv

ÍNDICE GENERAL
3.2. Evolución de la investigación precedente . . . . . . . . . . . . . . . . . . . 95
3.3. Ajustes de Breit-Wigner de señales in-core y ex-core . . . . . . . . . . . . . 101
3.3.1. Toma de datos en Ringhals . . . . . . . . . . . . . . . . . . . . . . 104
3.3.2. Procesamiento de datos y ajuste no lineal . . . . . . . . . . . . . . 107
3.3.3. Resultados de las medidas ex-core . . . . . . . . . . . . . . . . . . . 113
3.3.4. Resultados de las medidas in-core . . . . . . . . . . . . . . . . . . . 122
3.3.5. Coherencia entre medidas in-core y ex-core . . . . . . . . . . . . . . 134
3.4. Breit-Wigner y álgebra de cuaterniones: una herramienta para el manteni-
miento predictivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
3.4.1. Índice global de vigilancia . . . . . . . . . . . . . . . . . . . . . . . 138
3.4.2. Discusión de los resultados . . . . . . . . . . . . . . . . . . . . . . . 141
3.5. Conclusiones relativas al Capítulo 3 . . . . . . . . . . . . . . . . . . . . . . 144
3.6. Publicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALES
NUCLEARES 149
4.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
4.1.1. El sensor capacitivo de presión y la línea sensora . . . . . . . . . . . 153
4.1.2. Modelo dinámico del sensor . . . . . . . . . . . . . . . . . . . . . . 156
4.2. Evolución de la investigación precedente . . . . . . . . . . . . . . . . . . . 164
4.3. Propuesta de un modelo de cuatro polos para los sensores de presión capa-
citivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
v

ÍNDICE GENERAL
4.3.1. Modelo de cuatro polos . . . . . . . . . . . . . . . . . . . . . . . . . 170
4.3.2. Valores de las constantes del modelo de 4 polos . . . . . . . . . . . 173
4.3.3. PSD y longitud de la línea sensora . . . . . . . . . . . . . . . . . . 175
4.3.4. Método de Monte-Carlo para la medida del tiempo de respuesta . . 178
4.4. Incertidumbre en la estimación del tiempo de respuesta . . . . . . . . . . . 185
4.4.1. Fuentes de incertidumbre . . . . . . . . . . . . . . . . . . . . . . . . 186
4.4.2. Función modelo para el tiempo de respuesta . . . . . . . . . . . . . 187
4.4.3. Factor de cobertura para el tiempo de respuesta . . . . . . . . . . . 188
4.5. Obtención in situ del cuarto polo de un sensor de presión capacitivo tipo
Rosemount . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
4.6. Modelo bilineal de un sensor de presión capacitivo para la detección del
síndrome de la pérdida de aceite . . . . . . . . . . . . . . . . . . . . . . . . 210
4.6.1. Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
4.6.2. Modelización del síndrome . . . . . . . . . . . . . . . . . . . . . . . 212
4.6.3. Resultados de la simulación del análisis de ruido . . . . . . . . . . . 215
4.7. Conclusiones relativas al Capítulo 4 . . . . . . . . . . . . . . . . . . . . . . 220
4.8. Publicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
III SISTEMAS NO LINEALES 225
5. LA TRANSFORMADADEHILBERT Y ELMANTENIMIENTO PRE-
DICTIVO 227
vi

ÍNDICE GENERAL
5.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
5.2. La transformada de Hilbert-Huang . . . . . . . . . . . . . . . . . . . . . . 229
5.2.1. La descomposición en modos empíricos . . . . . . . . . . . . . . . . 229
5.3. Evolución de la investigación precedente . . . . . . . . . . . . . . . . . . . 235
5.4. La transformada de Hilbert como herramienta para el control de calidad . 238
5.4.1. Estudio de un caso . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
5.4.2. Modelo no lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
5.4.3. Validación del modelo no lineal . . . . . . . . . . . . . . . . . . . . 246
5.5. La transformada de Hilbert-Huang para caracterizar las palas de un aero-
generador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
5.5.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
5.5.2. Modos propios de vibración . . . . . . . . . . . . . . . . . . . . . . 252
5.5.3. Análisis de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . 254
5.5.4. Estimación del rozamiento de los modos empíricos . . . . . . . . . . 256
5.6. Conclusiones relativas al Capítulo 5 . . . . . . . . . . . . . . . . . . . . . . 261
5.7. Publicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
6. CONCLUSIONES Y PUBLICACIONES 265
A. Álgebra de cuaterniones 275
B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner279
B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009 . . . . . . . . . . . 279
vii

ÍNDICE GENERAL
B.1.1. Señales de los detectores ex-core . . . . . . . . . . . . . . . . . . . . 280
B.1.2. Señales de los detectores in-core . . . . . . . . . . . . . . . . . . . . 292
B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009 . . . . . . . . . . . 322
B.2.1. Señales de los detectores ex-core . . . . . . . . . . . . . . . . . . . . 322
B.2.2. Señales de los detectores in-core . . . . . . . . . . . . . . . . . . . . 334
B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009 . . . . . . . . . . . . . 364
B.3.1. Señales de los detectores ex-core . . . . . . . . . . . . . . . . . . . . 364
B.3.2. Señales de los detectores in-core . . . . . . . . . . . . . . . . . . . . 376
C. INSTRUMENTACIÓNNUCLEARDE UN PWRDISEÑOWESTING-
HOUSE 395
C.1. Instrumentación intra-nuclear o in-core . . . . . . . . . . . . . . . . . . . . 396
C.2. Instrumentación extra-nuclear o ex-core . . . . . . . . . . . . . . . . . . . . 401
D. INSTRUMENTACIÓNNUCLEARDE LOS REACTORES TIPO BWR407
viii

Índice de guras
2.1. Lazo de un reactor PWR mostrando la ubicación de sus sensores. Tomado
de[57]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2. Ruido asociado a una señal. . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3. Representación esquemática de un proceso estocástico. . . . . . . . . . . . 19
2.4. Representación de una función de densidad gaussiana. . . . . . . . . . . . 22
2.5. Autocorrelación de un ruido blanco gaussiano. . . . . . . . . . . . . . . . . 27
2.6. Esquema de un sistema que relaciona la señal de entrada x(t) con la de
salida y(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.7. Ejemplo de una señal armónica continua. . . . . . . . . . . . . . . . . . . . 29
2.8. Ejemplo de una señal armónica discreta del tipo x[n] = Acos(ωn). . . . . . 30
2.9. Ejemplo de una delta de Dirac δ(t) continua. . . . . . . . . . . . . . . . . . 32
2.10. Ejemplo de una delta de Dirac δ[n] discreta. . . . . . . . . . . . . . . . . . 32
2.11.Mapa complejo de estabilidad de polos en el plano s. . . . . . . . . . . . . . 37
2.12. Ejemplo de tres secuencias discretas con retardos entre ellas de un tiempo
de muestreo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
ix

ÍNDICE DE FIGURAS
2.13. Región de convergencia de la transformada z. . . . . . . . . . . . . . . . . . 42
2.14. Representación gráca de los coecientes de la serie de Fourier. . . . . . . 46
2.15. Espectro de las resonancias de vibración de los internos de un PWR obte-
nidas a partir de una señal de un detector de neutrones ex-core. . . . . . . 51
2.16. Coherencia y fase entre una señal de temperatura del termopar de salida del
núcleo y un detector in-core de neutrones de un PWR de diseño Westinghouse. 53
2.17. PSD de una señal de un sensor de presión capacitivo y la obtenida con un
modelo autorregresivo con 20 coecientes. . . . . . . . . . . . . . . . . . . . 56
2.18. Criterio de Akaike para la señal cuya PSD está representada en la gura
2.17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.19. Vista de los internos de un reactor PWR. . . . . . . . . . . . . . . . . . . 59
2.20. PSD de los internos de un reactor. . . . . . . . . . . . . . . . . . . . . . . 60
2.21. Contorno cerrado con un punto singular en x0. . . . . . . . . . . . . . . . . 64
2.22. Descomposición del contorno C dado en la gura 2.21. . . . . . . . . . . . 65
2.23. Pulso de Cauchy para θ = 0, 5. . . . . . . . . . . . . . . . . . . . . . . . . . 67
2.24. Transformada de Hilbert del pulso de Cauchy para θ = 0, 5. . . . . . . . . . 68
2.25. Respuesta al impulso de un oscilador de Dung no lineal con ε = 5 . . . . 79
2.26. Respuesta al impulso de un oscilador armónico lineal. . . . . . . . . . . . . 80
2.27. Amplitud instantánea frente al tiempo de un oscilador de Dung con ε = 5
y de un oscilador lineal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
2.28. Frecuencia instantánea frente al tiempo de un oscilador de Dung con
ε = 5 y de un oscilador lineal. . . . . . . . . . . . . . . . . . . . . . . . . . 82
x

ÍNDICE DE FIGURAS
2.29. Amplitud instantánea vs frecuencia instantánea para los casos lineal y no
lineal de un oscilador Dung con ε = 5. . . . . . . . . . . . . . . . . . . . 83
2.30. Detalle de la amplitud instantánea vs frecuencia instantánea para los casos
lineal y no lineal de un oscilador de Dung con ε = 5. . . . . . . . . . . . 84
3.1. Esquema de una planta nuclear tipo PWR. . . . . . . . . . . . . . . . . . . 88
3.2. Reactor Westinghouse PWR de cuatro lazos. . . . . . . . . . . . . . . . . . 89
3.3. Vista 3D y sección lateral de la vasija de un reactor PWR. . . . . . . . . . 90
3.4. Esquema de un detector de neutrones ex-core. . . . . . . . . . . . . . . . . 92
3.5. Esquema de un detector de neutrones in-core o cámara de sión. . . . . . . 93
3.6. PSDs en tres momentos del ciclo (febrero, marzo y abril) procedentes de
señales in-core (a) y ex-core (b). . . . . . . . . . . . . . . . . . . . . . . . . 94
3.7. Ubicación de los detectores ex-core alrededor del núcleo en la central de
Ringhals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3.8. Ubicación en el interior del núcleo del reactor 4 de Ringhals de los detec-
tores in-core cuyas medidas han sido analizadas. . . . . . . . . . . . . . . . 105
3.9. Ejemplo de señal obtenida a través de un detector in-core móvil. Cada uno
de los picos corresponde al momento en el que el detector es desplazado
de una posición a la siguiente. . . . . . . . . . . . . . . . . . . . . . . . . . 107
3.10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
3.10. Secuencia del procedimiento de ajuste. En (a) el ajuste se realiza hasta 4
Hz, en (b) hasta 9 Hz, y en (c) hasta 12 Hz. . . . . . . . . . . . . . . . . . 111
xi

ÍNDICE DE FIGURAS
3.11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
3.11. PSDs de señales de detectores ex-core durante los tres periodos de medida.
Detector N41 superior (a), detector N43 superior (b) y detector N41 inferior
(c) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
3.12. Ajustes no lineales de los promedios de las PSDs de las señales de los
detectores superiores (a) e inferiores (b) correspondiente al mes de febrero. 116
3.13. Ajuste de la PSD de la señal procedente del detector N-44 superior. (To-
mada en febrero). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
3.14. (a) y (b) evolución de la frecuencia. (c) y (d) amplitud de los modos 1 y 2
para dos ciclos de combustible diferentes. . . . . . . . . . . . . . . . . . . . 119
3.15. PSDs obtenidas de las señales del detector in-core B en la posición 1(a) y
en todas las posiciones (b) . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
3.16. PSDs obtenidas de las señales del detector in-core A en la posición 1 en
tres periodos diferentes(a) y del detector in-core E en la posición 3 en los
mismos periodos (b) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
3.17. PSD de la señal del detector B en la posición 6 y su ajuste no lineal de
Breit-Wigner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
3.18. PSD de la señal del detector C en la posición 3 y su ajuste no lineal de
Breit-Wigner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
3.19. PSD de la señal del detector A en la posición 4 y su ajuste no lineal de
Breit-Wigner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
3.20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
xii

ÍNDICE DE FIGURAS
3.20. Perles de amplitudes obtenidos a través del ajuste no lineal de Breit-
Wigner de las PSDs de los detectores in-core A(a) C(b) y E(c) corres-
pondientes al Modo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
3.21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
3.21. Axialmodo2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
3.22. Coherencias entre el detector ex-core N41 superior y los detectores in-core
(d) y entre el detector ex-core N44 inferior y los detectores in-core (e) . . . 135
3.23. Vigilancia global de resonancias para el combustible (a) y el barrilete (b).
Los casos (c) y (d) recogen los resultados anteriores, haciendo que el factor
de asimetría B se considere nulo. . . . . . . . . . . . . . . . . . . . . . . . 142
4.1. Ubicación de los principales sensores de presión, caudal y nivel en un lazo
de un PWR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
4.2. Medida del tiempo de respuesta de un sensor de presión a partir de una
rampa de presión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
4.3. Obtención de la respuesta del sensor. . . . . . . . . . . . . . . . . . . . . . 153
4.4. Tipos de medida de presión. . . . . . . . . . . . . . . . . . . . . . . . . . . 154
4.5. Módulo sensor de un transmisor de presión capacitivo tipo Rosemount. . . 155
4.6. Esquema de presiones al inicio (Pi) y al nal de la línea sensora (P0). . . . 157
4.7. Analogía eléctrica de la línea sensora y la membrana de aislamiento. . . . . 158
4.8. Diagrama de la línea sensora y la parte interna del sensor Rosemount. . . . 160
4.9. Analogía eléctrica de la línea sensora y la membrana de aislamiento. . . . . 161
xiii

ÍNDICE DE FIGURAS
4.10. Analogía eléctrica del sistema compuesto por la línea y el sensor nombrando
las intensidades de corriente. . . . . . . . . . . . . . . . . . . . . . . . . . . 161
4.11. PSD de una señal tomada en un experimento de laboratorio procedente de
un Rosemount . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
4.12. Analogía eléctrica propuesta para modelar el sensor acoplado a la línea
sensora. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
4.13. Analogía eléctrica propuesta para modelar el sensor acoplado a la línea
sensora con las intensidades que recorren cada rama. . . . . . . . . . . . . 171
4.14. Detalle de la analogía eléctrica propuesta para modelar el sensor acoplado
a la línea sensora con las intensidades que recorren cada rama. . . . . . . . 172
4.15. PSD de la respuesta simulada del sistema sensor-línea y su ajuste por medio
de un modelo autorregresivo. . . . . . . . . . . . . . . . . . . . . . . . . . . 176
4.16. PSDs de dos sensores acoplados a líneas sensoras cuyas longitudes son 6
y 17 m. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
4.17. Procedimiento seguido para obtener el tiempo de respuesta simulando la
excitación con ruido blanco. . . . . . . . . . . . . . . . . . . . . . . . . . . 179
4.18. Distribución estadística del tiempo de respuesta de un sensor acoplado a
una línea corta (10 m). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
4.19. Distribuciones estadísticas de sensores acoplados a líneas de diferente lon-
gitud. (a) l = 31 m , τ = 0, 15 s y στ = 0, 05 s.(b) l = 65 m , τ = 0, 15 s
y στ = 0, 05 s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
xiv

ÍNDICE DE FIGURAS
4.20. (a) Simulación de Monte-Carlo obtenida con n = 5 (Orden de Akaike) para
un sensor acoplado a una línea sensora corta (12 m). (b) Simulación de
Monte-Carlo con n = 5 (Orden de Akaike) para una línea sensora larga
(26 m). (c) Simulación de Monte-Carlo con n = 10 (Orden óptimo) para
una línea sensora corta (12 m). (b) Simulación de Monte-Carlo con n = 10
(Orden óptimo) para una línea sensora larga (26 m). . . . . . . . . . . . . 183
4.21. Función de probabilidad rectangular que sigue la incertidumbre tipo B aso-
ciada a la causa sistemática de elegir un número no óptimo de coecientes
autorregresivos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
4.22. Señales registradas in situ de tres sensores de caudal tipo Rosemount ubi-
cados en un reactor PWR . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
4.23. Interface gráca de la herramienta sptool de Matlab para diseño de ltros. . 195
4.24. Interface gráca de la herramienta sptool de Matlab para diseño de ltros
donde se muestra la frecuencia de corte (Fc) y la frecuencia de muestreo
(Fs). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
4.25. Señal correspondiente al sensor 1(superior) y su correspondiente tras el
ltrado(inferior). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
4.26. Señal correspondiente al sensor 2(superior) y su correspondiente tras el
ltrado(superior). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
4.27. Señal correspondiente al sensor 3(superior) y su correspondiente tras el
ltrado(superior). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
xv

ÍNDICE DE FIGURAS
4.28. PSD de la señal procedente del sensor capacitivo de caudal número 1 y su
ajuste autorregresivo utilizando cuatro coecientes . . . . . . . . . . . . . . 200
4.29. PSD de la señal procedente del sensor capacitivo de caudal número 2 y su
ajuste autorregresivo utilizando cuatro coecientes. . . . . . . . . . . . . . . 201
4.30. PSD de la señal procedente del sensor capacitivo de caudal número 3 y su
ajuste autorregresivo utilizando cuatro coecientes. . . . . . . . . . . . . . . 202
4.31. PSD de la señal procedente del sensor capacitivo de caudal número 1 y su
ajuste autorregresivo utilizando seis coecientes. . . . . . . . . . . . . . . . 204
4.32. PSD de la señal procedente del sensor capacitivo de caudal número 2 y su
ajuste autorregresivo utilizando seis coecientes. . . . . . . . . . . . . . . . 205
4.33. PSD de la señal procedente del sensor capacitivo de caudal número 3 y su
ajuste autorregresivo utilizando seis coecientes. . . . . . . . . . . . . . . . 206
4.34. Ruido típico en el síndrome de pérdida de aceite. . . . . . . . . . . . . . . . 212
4.35.Modelo físico simplicado del sensor de presión y su correspondiente eléctrico.213
4.36. Reducción de la varianza del ruido en función del cambio de capacidad
∆C/C1 = (C2 − C1)/C1 asociado a la presencia del síndrome. . . . . . . . 215
4.37. Aumento del sesgo del ruido en función del cambio de capacidad ∆C/C1 =
(C2 − C1)/C1 asociado a la presencia del síndrome. . . . . . . . . . . . . . 216
4.38. Tiempo de respuesta, calculado suponiendo linealidad, en funcion del cam-
bio de capacidad ∆C/C1 = (C2−C1)/C1 asociado a la presencia del síndrome.217
4.39. Índice ∆τ/τ en función del cambio de capacidad ∆C/C1 = (C2 − C1)/C1
asociado a la presencia del síndrome. . . . . . . . . . . . . . . . . . . . . . 219
xvi

ÍNDICE DE FIGURAS
5.1. Señal inicial (a) y señal con las envolventes de los máximos y mínimos
locales y la media de éstas (b) . . . . . . . . . . . . . . . . . . . . . . . . . 231
5.2. Señal de partida x(t) y el residuo r1(t) obtenido tras calcular el primer
modo empírico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
5.3. Respuesta dinámica de una viga , sus modos empíricos y el residuo nal. . 234
5.4. Respuesta de un sensor de presión capacitivo tipo Rosemount 1153 deun
PWR que sufre el síndrome de la pérdida de aceite ante una entrada armónica.239
5.5. Backbones correspondientes a la respuesta de un sensor lineal ante una
entrada armónica y a la respuesta de un sensor no lineal averiado ante
una entrada armónica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
5.6. Respuesta de un sensor de presión capacitivo tipo Rosemount 1153 de un
PWR que sufre el síndrome de la pérdida de aceite ante una entrada armónica.241
5.7. Backbones correspondientes a la respuesta de un sensor lineal ante una
entrada armónica y a la respuesta de un sensor no lineal averiado ante
una entrada armónica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
5.8. Esquema sencillo de presiones inicial y nal en un sensor capacitivo tipo
Rosemount. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
5.9. Relación entre la presión y el volumen de la cámara interna de un sensor
no lineal, debido al síndrome de la pérdida de aceite. . . . . . . . . . . . . . 244
5.10. Backbones simuladas correspondientes a un modelo lineal del sensor (k = 0)
y a un modelo no lineal con k = 0, 3. . . . . . . . . . . . . . . . . . . . . . 247
xvii

ÍNDICE DE FIGURAS
5.11. Backbones simuladas correspondientes a un modelo lineal del sensor (k = 0)
y a un modelo no lineal con k = 0, 05. . . . . . . . . . . . . . . . . . . . . . 248
5.12. PSD de las señales simuladas del sensor para un caso lineal (k = 0) y para
un caso no lineal con k = 0, 05. . . . . . . . . . . . . . . . . . . . . . . . . 249
5.13. Esquema del ensayo realizado para medir frecuencias en ap y en lag en
una pala de aerogenerador de 20 metros. . . . . . . . . . . . . . . . . . . . 251
5.14. Respuesta al impulso de la pala de un aerogenerador de 20 metros. . . . . . 255
5.15. Espectro de Fourier de la respuesta al impulso representada en la gura 5.14.255
5.16.Modos empíricos y residuo de la señal de respuesta al impulso de una pala
de aerogenerador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
5.17. Frecuencias instantáneas de los modos empíricos de la señal de respuesta
al impulso de una pala de aerogenerador. . . . . . . . . . . . . . . . . . . . 259
5.18. Rozamiento frente al tiempo de cada modo empírico de la respuesta al im-
pulso de una pala de aerogenerador . . . . . . . . . . . . . . . . . . . . . . 260
B.1. Ajuste no lineal de Breit-Wigner, detector ex-core N41 superior. . . . . . . 280
B.2. Ajuste no lineal de Breit-Wigner, detector ex-core N42 superior. . . . . . . 281
B.3. Ajuste no lineal de Breit-Wigner, detector ex-core N43 superior. . . . . . . 282
B.4. Ajuste no lineal de Breit-Wigner, detector ex-core N44 superior. . . . . . . 283
B.5. Ajuste no lineal de Breit-Wigner, detector ex-core N41 inferior. . . . . . . 284
B.6. Ajuste no lineal de Breit-Wigner, detector ex-core N42 inferior. . . . . . . 285
B.7. Ajuste no lineal de Breit-Wigner, detector ex-core N43 inferior. . . . . . . 286
xviii

ÍNDICE DE FIGURAS
B.8. Ajuste no lineal de Breit-Wigner, detector ex-core N44 inferior. . . . . . . 287
B.9. Ajuste no lineal de Breit-Wigner, detectores superiores ex-core. . . . . . . . 288
B.10.Ajuste no lineal de Breit-Wigner, detectores inferiores ex-core. . . . . . . . 289
B.11.Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores superiores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
B.12.Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores inferiores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
B.13.Ajuste no lineal de Breit-Wigner, detector A, posición 1. . . . . . . . . . . 292
B.14.Ajuste no lineal de Breit-Wigner, detector A, posición 2. . . . . . . . . . . 293
B.15.Ajuste no lineal de Breit-Wigner, detector A, posición 3. . . . . . . . . . . 294
B.16.Ajuste no lineal de Breit-Wigner, detector A, posición 4. . . . . . . . . . . 295
B.17.Ajuste no lineal de Breit-Wigner, detector A, posición 5. . . . . . . . . . . 296
B.18.Ajuste no lineal de Breit-Wigner, detector A, posición 6. . . . . . . . . . . 297
B.19.Ajuste no lineal de Breit-Wigner, detector B, posición 1. . . . . . . . . . . 298
B.20.Ajuste no lineal de Breit-Wigner, detector B, posición 2. . . . . . . . . . . 299
B.21.Ajuste no lineal de Breit-Wigner, detector B, posición 3. . . . . . . . . . . 300
B.22.Ajuste no lineal de Breit-Wigner, detector B, posición 4. . . . . . . . . . . 301
B.23.Ajuste no lineal de Breit-Wigner, detector B, posición 5. . . . . . . . . . . 302
B.24.Ajuste no lineal de Breit-Wigner, detector B, posición 6. . . . . . . . . . . 303
B.25.Ajuste no lineal de Breit-Wigner, detector C, posición 1. . . . . . . . . . . 304
B.26.Ajuste no lineal de Breit-Wigner, detector C, posición 2. . . . . . . . . . . 305
B.27.Ajuste no lineal de Breit-Wigner, detector C, posición 3. . . . . . . . . . . 306
xix

ÍNDICE DE FIGURAS
B.28.Ajuste no lineal de Breit-Wigner, detector C, posición 4. . . . . . . . . . . 307
B.29.Ajuste no lineal de Breit-Wigner, detector C, posición 5. . . . . . . . . . . 308
B.30.Ajuste no lineal de Breit-Wigner, detector C, posición 6. . . . . . . . . . . 309
B.31.Ajuste no lineal de Breit-Wigner, detector D, posición 1. . . . . . . . . . . 310
B.32.Ajuste no lineal de Breit-Wigner, detector D, posición 2. . . . . . . . . . . 311
B.33.Ajuste no lineal de Breit-Wigner, detector D, posición 3. . . . . . . . . . . 312
B.34.Ajuste no lineal de Breit-Wigner, detector D, posición 4. . . . . . . . . . . 313
B.35.Ajuste no lineal de Breit-Wigner, detector D, posición 5. . . . . . . . . . . 314
B.36.Ajuste no lineal de Breit-Wigner, detector D, posición 6. . . . . . . . . . . 315
B.37.Ajuste no lineal de Breit-Wigner, detector E, posición 1. . . . . . . . . . . 316
B.38.Ajuste no lineal de Breit-Wigner, detector E, posición 2. . . . . . . . . . . 317
B.39.Ajuste no lineal de Breit-Wigner, detector E, posición 3. . . . . . . . . . . 318
B.40.Ajuste no lineal de Breit-Wigner, detector E, posición 4. . . . . . . . . . . 319
B.41.Ajuste no lineal de Breit-Wigner, detector E, posición 5. . . . . . . . . . . 320
B.42.Ajuste no lineal de Breit-Wigner, detector E, posición 6. . . . . . . . . . . 321
B.43.Ajuste no lineal de Breit-Wigner, detector ex-core N41 superior. . . . . . . 322
B.44.Ajuste no lineal de Breit-Wigner, detector ex-core N42 superior. . . . . . . 323
B.45.Ajuste no lineal de Breit-Wigner, detector ex-core N43 superior. . . . . . . 324
B.46.Ajuste no lineal de Breit-Wigner, detector ex-core N44 superior. . . . . . . 325
B.47.Ajuste no lineal de Breit-Wigner, detector ex-core N41 inferior. . . . . . . 326
B.48.Ajuste no lineal de Breit-Wigner, detector ex-core N42 inferior. . . . . . . 327
B.49.Ajuste no lineal de Breit-Wigner, detector ex-core N43 inferior. . . . . . . 328
xx

ÍNDICE DE FIGURAS
B.50.Ajuste no lineal de Breit-Wigner, detector ex-core N44 inferior. . . . . . . 329
B.51.Ajuste no lineal de Breit-Wigner, detectores superiores ex-core. . . . . . . . 330
B.52.Ajuste no lineal de Breit-Wigner, detectores inferiores ex-core. . . . . . . . 331
B.53.Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores superiores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332
B.54.Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores inferiores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
B.55.Ajuste no lineal de Breit-Wigner, detector A, posición 1. . . . . . . . . . . 334
B.56.Ajuste no lineal de Breit-Wigner, detector A, posición 2. . . . . . . . . . . 335
B.57.Ajuste no lineal de Breit-Wigner, detector A, posición 3. . . . . . . . . . . 336
B.58.Ajuste no lineal de Breit-Wigner, detector A, posición 4. . . . . . . . . . . 337
B.59.Ajuste no lineal de Breit-Wigner, detector A, posición 5. . . . . . . . . . . 338
B.60.Ajuste no lineal de Breit-Wigner, detector A, posición 6. . . . . . . . . . . 339
B.61.Ajuste no lineal de Breit-Wigner, detector B, posición 1. . . . . . . . . . . 340
B.62.Ajuste no lineal de Breit-Wigner, detector B, posición 2. . . . . . . . . . . 341
B.63.Ajuste no lineal de Breit-Wigner, detector B, posición 3. . . . . . . . . . . 342
B.64.Ajuste no lineal de Breit-Wigner, detector B, posición 4. . . . . . . . . . . 343
B.65.Ajuste no lineal de Breit-Wigner, detector B, posición 5. . . . . . . . . . . 344
B.66.Ajuste no lineal de Breit-Wigner, detector B, posición 6. . . . . . . . . . . 345
B.67.Ajuste no lineal de Breit-Wigner, detector C, posición 1. . . . . . . . . . . 346
B.68.Ajuste no lineal de Breit-Wigner, detector C, posición 2. . . . . . . . . . . 347
B.69.Ajuste no lineal de Breit-Wigner, detector C, posición 3. . . . . . . . . . . 348
xxi

ÍNDICE DE FIGURAS
B.70.Ajuste no lineal de Breit-Wigner, detector C, posición 4. . . . . . . . . . . 349
B.71.Ajuste no lineal de Breit-Wigner, detector C, posición 5. . . . . . . . . . . 350
B.72.Ajuste no lineal de Breit-Wigner, detector C, posición 6. . . . . . . . . . . 351
B.73.Ajuste no lineal de Breit-Wigner, detector D, posición 1. . . . . . . . . . . 352
B.74.Ajuste no lineal de Breit-Wigner, detector D, posición 2. . . . . . . . . . . 353
B.75.Ajuste no lineal de Breit-Wigner, detector D, posición 3. . . . . . . . . . . 354
B.76.Ajuste no lineal de Breit-Wigner, detector D, posición 4. . . . . . . . . . . 355
B.77.Ajuste no lineal de Breit-Wigner, detector D, posición 5. . . . . . . . . . . 356
B.78.Ajuste no lineal de Breit-Wigner, detector D, posición 6. . . . . . . . . . . 357
B.79.Ajuste no lineal de Breit-Wigner, detector E, posición 1. . . . . . . . . . . 358
B.80.Ajuste no lineal de Breit-Wigner, detector E, posición 2. . . . . . . . . . . 359
B.81.Ajuste no lineal de Breit-Wigner, detector E, posición 3. . . . . . . . . . . 360
B.82.Ajuste no lineal de Breit-Wigner, detector E, posición 4. . . . . . . . . . . 361
B.83.Ajuste no lineal de Breit-Wigner, detector E, posición 5. . . . . . . . . . . 362
B.84.Ajuste no lineal de Breit-Wigner, detector E, posición 6. . . . . . . . . . . 363
B.85.Ajuste no lineal de Breit-Wigner, detector ex-core N41 superior. . . . . . . 364
B.86.Ajuste no lineal de Breit-Wigner, detector ex-core N42 superior. . . . . . . 365
B.87.Ajuste no lineal de Breit-Wigner, detector ex-core N43 superior. . . . . . . 366
B.88.Ajuste no lineal de Breit-Wigner, detector ex-core N44 superior. . . . . . . 367
B.89.Ajuste no lineal de Breit-Wigner, detector ex-core N41 inferior. . . . . . . 368
B.90.Ajuste no lineal de Breit-Wigner, detector ex-core N42 inferior. . . . . . . 369
B.91.Ajuste no lineal de Breit-Wigner, detector ex-core N43 inferior. . . . . . . 370
xxii

ÍNDICE DE FIGURAS
B.92.Ajuste no lineal de Breit-Wigner, detector ex-core N44 inferior. . . . . . . 371
B.93.Ajuste no lineal de Breit-Wigner, detectores superiores ex-core. . . . . . . . 372
B.94.Ajuste no lineal de Breit-Wigner, detectores inferiores ex-core. . . . . . . . 373
B.95.Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores superiores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374
B.96.Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores inferiores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
B.97.Ajuste no lineal de Breit-Wigner, detector A, posición 1. . . . . . . . . . . 376
B.98.Ajuste no lineal de Breit-Wigner, detector A, posición 2. . . . . . . . . . . 377
B.99.Ajuste no lineal de Breit-Wigner, detector A, posición 3. . . . . . . . . . . 378
B.100.Ajuste no lineal de Breit-Wigner, detector A, posición 4. . . . . . . . . . . 379
B.101.Ajuste no lineal de Breit-Wigner, detector A, posición 5. . . . . . . . . . . 380
B.102.Ajuste no lineal de Breit-Wigner, detector A, posición 6. . . . . . . . . . . 381
B.103.Ajuste no lineal de Breit-Wigner, detector C, posición 1. . . . . . . . . . . 382
B.104.Ajuste no lineal de Breit-Wigner, detector C, posición 2. . . . . . . . . . . 383
B.105.Ajuste no lineal de Breit-Wigner, detector C, posición 3. . . . . . . . . . . 384
B.106.Ajuste no lineal de Breit-Wigner, detector C, posición 4. . . . . . . . . . . 385
B.107.Ajuste no lineal de Breit-Wigner, detector C, posición 5. . . . . . . . . . . 386
B.108.Ajuste no lineal de Breit-Wigner, detector C, posición 6. . . . . . . . . . . 387
B.109.Ajuste no lineal de Breit-Wigner, detector E, posición 1. . . . . . . . . . . 388
B.110.Ajuste no lineal de Breit-Wigner, detector E, posición 2. . . . . . . . . . . 389
B.111.Ajuste no lineal de Breit-Wigner, detector E, posición 3. . . . . . . . . . . 390
xxiii

ÍNDICE DE FIGURAS
B.112.Ajuste no lineal de Breit-Wigner, detector E, posición 4. . . . . . . . . . . 391
B.113.Ajuste no lineal de Breit-Wigner, detector E, posición 5. . . . . . . . . . . 392
B.114.Ajuste no lineal de Breit-Wigner, detector E, posición 6. . . . . . . . . . . 393
C.1. Disposición típica de la instrumentación nuclear en un PWR. . . . . . . . 400
C.2. Localización típica de los detectores de rango de potencia. . . . . . . . . . . 401
C.3. Sistema de instrumentación ex-core o extra-nuclear, detectores de neutrones
y rango de operación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
D.1. Rangos y solapes de la instrumentación nuclear de un BWR. . . . . . . . . 410
D.2. Situación relativa de la instrumentación nuclear en un BWR. . . . . . . . 411
xxiv

Índice de tablas
3.1. Identicación de las vibraciones registradas en las PSDs procedentes de las
señales de los detectores de neutrones . . . . . . . . . . . . . . . . . . . . . 95
3.2. Lista de medidas in-core y ex-core realizadas en Febrebero, Marzo y Abril
de 2009 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
3.3. Parámetros obtenidos del ajuste de las PSDs de las señales de tres detec-
tores ex-core correspondientes a febrero de 2009 . . . . . . . . . . . . . . . 118
3.4. Datos de amplitud y frecuencia de los modos 1 y 2 correspondientes a las
fases 12 y 13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
3.5. Parámetros obtenidos del ajuste de las PSDs de las señales de tres detec-
tores in-core en tres posiciones axiales diferentes . . . . . . . . . . . . . . . 129
3.6. Cuaterniones adimensionales para la primera resonancia de los elementos
combustibles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
3.7. Cuaterniones adimensionales para la resonancia del soporte del barrilete . 141
4.1. Clasicación de seguridad de los equipos de las plantas nucleares . . . . . . 151
xxv

4.2. Coecientes del denominador de la función de transferencia del sensor y la
línea sensora en función de los parámetros de la analogía eléctrica . . . . . 173
4.3. Valores de las constantes de la analogía eléctrica de 4 polos . . . . . . . . . 174
4.4. Descriptores estadísticos del tiempo de respuesta de sensores acoplados a
líneas de diferentes longitudes . . . . . . . . . . . . . . . . . . . . . . . . . 179
4.5. Valores de tiempos de respuesta medios, desviaciones típicas y curtosis para
modelos autorregresivos de diferentes número de coecientes y longitud de
línea de 21 m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
4.6. Valores típicos de los parámetros del sensor y la línea sensora . . . . . . . 214
4.7. Coecientes AR: a+ corresponde al caso normal (C2 = 0) y a− corresponde
al caso de pérdida de aceite en el que C2/C1 = 2. Tiempo de muestreo 0,01 s.218
5.1. Diferentes modos de vibración de una viga dependiendo de la longitud de
la misma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254

Resumen
Para contribuir al diseño de un mantenimiento mecánico avanzado, se utilizan en esta
tesis las técnicas de análisis de ruido para monitorizar las vibraciones de los internos de
un reactor PWR y para vigilar la respuesta dinámica de los sensores de presión capaci-
tivos tipo Rosemount ampliamente utilizados en la industria, sobre todo en las plantas
nucleares. Para el primer caso, se han ajustado mediante un método no lineal de Breit-
Wigner los espectros de resonancias obtenidos por medio de las señales de detectores de
neutrones in-core y ex-core en tres periodos de tiempo distintos. El ajuste persigue como
objetivo una vigilancia avanzada de los parámetros de cada resonancia y una mejora en
la identicación de éstas. En este sentido, se propone un método basado en el álgebra de
cuaterniones para llevar a cabo una monitorización más sencilla. El segundo caso incluye
la propuesta de un nuevo modelo de cuatro polos (en vez de tres) para los sensores de
presión capacitivos y la búsqueda de éste en el ruido de salida registrado en los sensores.
Además, se incluye un modelo bilineal para detectar una avería muy extendida del sensor:
el síndrome de la pérdida de aceite. Por último, se realiza un análisis de señales no linea-
les correspondiente a un sensor a través de la transformada de Hilbert. A raíz de él, se
xxvii

establece un nuevo sistema de control de calidad del sensor basado en el análisis armónico
de Hilbert. En vista de este resultado, se aplica la transformada de Hilbert-Huang a otras
señales mecánicas para identicar parámetros de rozamiento.

Abstract
In oder to contribute to the design of an advanced mechanical maintenance, in this
thesis the noise analysis technique is used to monitor the vibrations of the internals of a
PWR reactor and to carry out the surveillance of the dynamical response of Rosemount
type capacitive pressure transmitters that are widely used in the industry, above all in
nuclear plants. For the rst case, the resonance spectrums obtained through the signals
coming from in-core and ex-core neutron detectors in three periods of time have been
tted using a non-linear method based on a Breit-Wigner formula. The tting pursues an
advanced surveillance of the parameters of each resonance and an improvement in their
identication. Moreover, a method based in the quaternion algebra is proposed so as to
achieve a simpler monitoring. The second case includes the proposal of a new model of
four poles (instead of three) for the capacitive pressure transmitters and the search of the
fourth pole in the output noise registered in the transmitters. Besides, a bilinear model is
outlined to detect a very spread out breakdown of the sensor, the oil loss syndrome. At
last, a sensor non-linear signal is analyzed using the Hilbert transform and due to this, a
new system for the quality control of the sensors based on harmonic Hilbert analysis is
xxix

established. At the sight of this result, the Hilbert Huang transform is applied to other
mechanical signals in order to indetify friction parameters.

Capítulo 1
INTRODUCCIÓN
El mantenimiento predictivo de maquinaria por medio del análisis de vibraciones es
uno de los paradigmas más conocidos y estudiados de la Ingeniería Mecánica, y que ade-
más ha servido de referencia en otros campos de la técnica. El desarrollo de técnicas de
medida requiere de inversión en equipamiento y la puesta a punto de las herramientas
matemáticas de tratamiento de los datos registrados. Sin embargo, la capacidad de aná-
lisis está muy determinada por la potencia de dichas herramientas. En esta tesis, por
mantenimiento avanzado se entiende el desarrollo de metodologías que permitan mejorar
los procedimientos ya establecidos o nuevas técnicas de tratamiento de señales que per-
mitan ir más allá de los análisis estandarizados, sin necesidad de una inversión adicional
en equipamiento; y a veces, sin necesidad siquiera de recoger nuevos registros in situ.
En relación al término I+D+i, el mantenimiento avanzado debería encuadrarse en la
innovación, ya que no crea los fundamentos básicos de las herramientas de tratamiento
(Investigación) y no requiere de la ejecución material de novedades técnicas en cuanto
a sensores y cadenas de registro (Desarrollo). En este último sentido, si el desarrollo
1

1. INTRODUCCIÓN
proporciona tecnología a partir de inversión económica, el mantenimiento avanzado, en
tanto que innovación, proporciona benecios económicos a partir de la aplicación del
conocimiento. También en esto se ve su diferencia con la Investigación básica, donde la
inversión da como resultado el acopio de conocimiento.
Los trabajos de la tesis se inscriben en el ámbito de las señales de medida mecánicas,
y pueden considerarse dentro de la Ingeniería Mecánica como continuadores del mante-
nimiento clásico por análisis de vibraciones. Sin embargo el nivel avanzado del manteni-
miento que se ha abordado, encuentra su aplicación natural en el ámbito de la operación
de las Centrales Nucleares, y desde ahí puede extenderse a otros campos que puedan de-
mandárselo. El mantenimiento de las centrales nucleares, dada la necesidad de precisión
y exactitud, y la dicultad de implantación en entorno hostil, aporta un campo de prueba
muy adecuado donde las nuevas ideas son bien recibidas como innovación, ya que éste
se traduce en mejoras de la seguridad de las plantas, optimización en la producción e,
incluso y más importante, en la posibilidad de aumentar el tiempo de operación.
Por tanto, se han realizado diferentes trabajos donde el avance en el mantenimiento
predictivo se centra en el análisis de las señales de medida de sistemas mecánicos. Dentro
del análisis de los sistemas mecánicos, la problemática es muy diferente según puedan
aplicarse técnicas lineales o no; por ello la tesis, después de exponer la fundamentación
teórica en el Capítulo 2, divide sus aportaciones en dos Partes: la primera dedicada a los
métodos lineales y la segunda a los no lineales.
La primera parte está compuesta por dos capítulos: Capítulo 3 y Capítulo 4. El primero
de éstos está dedicado al análisis de ruido neutrónico procedente de los detectores in-core
2

y ex-core, es decir, ubicados en el interior y exterior del núcleo respectivamente. Estos
detectores se utilizan normalmente para el cálculo de la potencia del reactor, no obstante,
sus registros pueden utilizarse para monitorizar las vibraciones de las partes mecánicas
internas del reactor tales como los elementos combustibles, el movimiento del barrilete, los
efectos termohidráulicos, etc. Las Densidades Espectrales de Potencia (PSDs) obtenidas
por medio del análisis de este ruido se han venido estudiando desde los años 80, y aunque
cada reactor es distinto, sus espectros tienen patrones semejantes.
En el Capítulo 3 se recogen los resultados de los análisis de más de 100 señales proce-
dentes de estos detectores ubicados en el reactor cuarto de la central sueca de Ringhals,
que corresponde a un reactor de agua a presión (PWR) diseño Westinghouse. El objetivo
de este análisis es la identicación de los modos de vibración interpretando ciertas zonas
del espectro obtenido a través de las señales tanto in-core como ex-core. Especialmente el
estudio se enfoca al movimiento del barrilete y a las vibraciones de los elementos combus-
tibles; así como al seguimiento de su evolución temporal, a través de la vigilancia de los
parámetros de las resonancias obtenidos por medio de un ajuste no lineal de Breit-Wigner.
Este trabajo se encuadra dentro de un proyecto de investigación fruto del acuerdo entre la
central de Ringhals y el Departamento de Ingeniería Nuclear de la Universidad de Chal-
mers en Göteborg, donde la autora realizó una estancia de doctorado bajo la dirección del
profesor Imre Pázsit. También, dentro del Capítulo 3 se incluye una aplicación del álge-
bra de cuaterniones para simplicar la monitorización conjunta de los cuatro parámetros
que caracterizan cada resonancia según la fórmula de Breit-Wigner: amplitud, frecuencia,
amortiguamiento y asimetría. Esta aplicación de los cuaterniones es especialmente útil
3

1. INTRODUCCIÓN
cuando deben vigilarse múltiples picos de resonancia y, además, se desea vigilar cómo
evoluciona no sólo la posición de los mismos, sino su amplitud y amortiguamiento.
En el Capítulo 4, que corresponde al segundo capítulo de la primera parte, se estudian
las aplicaciones del análisis de ruido para el mantenimiento predictivo de los sensores de
presión capacitivos. La respuesta dinámica de estos sensores se vigila por medio de la
medida de su tiempo de respuesta. Una de las técnicas más utilizada para medirlo in
situ es realizar el análisis de ruido de la señal de salida del sensor y obtener un modelo
autorregresivo que caracterice la dinámica del sensor. Esto se traduce en una serie de
coecientes que pueden emplearse para reproducir la respuesta del sensor ante cualquier
entrada. El tiempo de respuesta se mide como la respuesta ante una rampa de presión
simulada numéricamente. Este procedimiento implica realizar un modelo teórico previo
que describa el comportamiento dinámico del sistema sensor-línea y que pueda indicar
que parámetros deben vigilarse. En esta tesis se propone un nuevo modelo del sensor,
compuesto por cuatro polos (dos complejos conjugados y dos reales), ante la evidencia
empírica recogida en recientes estudios de que un solo polo real no es suciente. Una vez
se han simulado respuestas correspondientes a diferentes longitudes de la línea sensora, se
ha descubierto que la aplicación del criterio de Akaike para seleccionar el orden óptimo
del modelo autorregresivo conduce a errores de medida por falta de repetibilidad. Se ha
estudiado como evitarlo en la aplicación en planta aplicando un criterio de selección basado
en la curtosis de la distribución asociada a la repetibilidad de la medida. Se simula la
repetibilidad de la medición del tiempo de respuesta aplicando el método de Monte-Carlo
para determinar el error sistemático asociado a la medida en función de la longitud de la
4

línea sensora. En este sentido, se ha elaborado un procedimiento analítico para calcular
el nivel de conanza de la incertidumbre asociada a dicha medida. Además, se propone
un modelo bilineal para simular una avería típica del sensor, el síndrome de la pérdida de
aceite. Por último, debido a la evidencia empírica de que es necesario un cuarto polo para
describir la dinámica del sensor, se han analizado señales de planta procedentes de tres
sensores capacitivos y se ha conseguido obtener, a través de sus modelos autorregresivos,
el cuarto polo de cada sensor, así como los tiempos de respuesta asociados a los mismos.
En la última parte de la tesis, dedicada a la no linealidad, se hace referencia a los
sistemas que presentan salidas no lineales y se utilizan herramientas destinadas a detectar
y caracterizar la no linealidad, como la transformada de Hilbert o la transformada de
Hilbert-Huang. En el Capítulo 5 se introduce la transformada de Hilbert-Huang y se
especica a qué clase de señales se aplica. En cuanto a las aplicaciones desarrolladas en la
tesis, se incluye un trabajo basado en el uso de la transformada de Hilbert para controlar
el proceso de fabricación de los sensores de presión capacitivos. Si se registra la respuesta
de un sensor recién fabricado sometido a excitación sinusoidal, el análisis por medio de la
transformada de Hilbert permite detectar defectos en el llenado de la cámara de medida
con aceite de silicona, ya que, un llenado deciente se traduce en una falta de linealidad
en la respuesta. Por último, y como contrapartida al análisis global que se puede realizar
por medio de la transformada de Fourier, se aplica la transformada de Hilbert-Huang a
señales mecánicas provenientes de sistemas no lineales para conseguir un estudio local de
los diferentes modos empíricos de vibración, con objeto de estimar el rozamiento asociado
a los mismos. Como aplicación a un caso de estudio se presenta la dinámica del ensayo de
5

1. INTRODUCCIÓN
frecuencias de vibración de una pala de aerogenerador, reinterpretando los registros, ya
analizados con la transformada de Fourier aplicando ahora la descomposición en modos
empíricos de Hilbert-Huang.
En resumen, se han presentado avances en el mantenimiento; tanto en el campo de
los sistemas lineales, como en aquellos que dejan de serlo por avería o por una dinámica
intrínsecamente no lineal. En los casos lineales, las propuesta se han centrado en la mejora
y optimización de técnicas ya establecidas. Los resultados obtenidos tienen una gran
incidencia en la práctica, dada la amplia utilización que el análisis de señales de medida
mecánicas tiene actualmente.
La no linealidad, sin embargo, es una especicación que solamente indica que no
es posible aplicar las metodologías habituales (análisis de Fourier, vigilancia paramétrica,
etc.). Por ello, según sea la manera en que el sistema sea no lineal, el tipo de herramienta a
aplicar es muy distinto; siendo necesario entonces un desarrollo especíco para cada caso.
De ahí que en la tesis se hayan observado solamente aquellos problemas donde es aplicable
la transformada de Hilbert, tanto en la versión clásica como la empírica de Hilbert-Huang.
El trabajo desarrollado en este sentido, en vez de encaminarse a la mejora y optimización,
ha ido hacia la propuesta de nuevas técnicas de vigilancia de sistemas mecánicos sometidos
a vibración que, además, puedan aplicarse en el control de calidad de fabricación.
6

Parte I
FUNDAMENTOS TEÓRICOS
7


Capítulo 2
FUNDAMENTOS DEL ANÁLISIS DE
VIBRACIONES ALEATORIAS
2.1. Introducción
El estudio de las vibraciones aleatorias y de los procesos estocásticos no es nuevo, hay
que remontarse a principios del siglo XX para encontrar los primeros estudios. De hecho,
fue Einstein, quien al realizar sus trabajos sobre el movimiento browniano, estableció un
marco para comprender la oscilación aleatoria de partículas suspendidas en un medio
uido [42][43]. Después de Einstein, se sucedieron varios trabajos para generalizar su
estudio del movimiento browniano [93]. No fue hasta 1930 cuando Wiener desarrolló el
concepto de Densidad Espectral de Potencia [125], tan usado hoy en día para describir en el
dominio de la frecuencia el contenido de una señal de un proceso estacionario estocástico.
La aportación de Wiener fue tan importante que estableció la relación entre la función
de autocorrelación y la Densidad Espectral de Potencia a través de la transformada de
9

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Fourier. Un proceso estocástico se dividía de esta manera en un conjunto de infnitas
señales cuyas varianzas estaban vinculadas a una determinada banda de frecuencia. Pero
sin duda una de las aportaciones más notables es la que se ha denominado la armación
de Wiener,
Sxx(ω) = |H(ω)|2 Sww (2.1)
donde Sxx(ω) es la transformada de Fourier de la autocorrelación de la respuesta de un
sistema,|H(ω)| es el modulo de la transformada de Fourier de la respuesta al impulso del
sistema y Sww la transformada de Fourier de la autocorrelación de la entrada.
Uno de los acontecimientos más importantes para la aplicación de la teoría de los
procesos estocásticos a la ingeniería mecánica se produjo en 1958 cuando Crandall organizó
un programa de verano dedicado a presentar los temas fundamentales de las vibraciones
aleatorias [93] al que le siguió otro de similares características en 1963 [34]. En estos
años la teoría de las vibraciones aleatorias se extendió a campos muy diversos, desde la
automoción, los vehículos espaciales e incluso el diseño de misiles. En casi todos los casos
las vibraciones eran una causa de fatiga y de fallo de componentes que debía vigilarse y
evitarse. Tal y como Crandall comenta en su libro Random Vibration [35], el estudio del
ruido, muy extendido en los circuitos de comunicación, pasa a ser un tema clave en la
ingeniería mecánica.
Otro de los campos donde el ruido merecía estudiarse fue en la ingeniería nuclear. Las
investigaciones llevadas a cabo en el reactor experimental del actual Oak Ridge National
Laboratory (ORNL) se dedicaban a la medida de las oscilaciones de los neutrones [38].
A mediados de siglo se pudo ver como a través del espectro de frecuencia de detectores
10

2.1. Introducción
de neutrones se podían identicar vibraciones anómalas de las barras de control. De
hecho, Moore a nales de los años 50 [85] ya estableció las bases para calcular la función
de transferencia del reactor a través del ruido neutrónico. De esta manera, el análisis
de señales aleatorias y concretamente del ruido neutrónico se convirtió en una potente
herramienta para el mantenimiento predictivo avanzado en las plantas nucleares.
Desde nales de los 50 hasta los 80 el avance de las técnicas de análisis de ruido
marcaron un antes y un después. A principios de los 60 Thie [115] estableció una serie de
métodos para estudiar el ruido, calcular su potencia espectral así como la utilización de
la desviación típica para propósitos de vigilancia. Los espectros de frecuencia procedentes
del ruido se estudiaban para calcular ciertos parámetros de la planta con la ventaja de
que el análisis de ruido no interrumpe la operación de la misma [130]. Pero sin duda, uno
de los campos de investigación más fructíferos desde aquellos años y que continúa hasta
la actualidad es la vigilancia del movimiento de los internos del reactor a partir del ruido
neutrónico procendente de detectores in-core y ex-core (interiores y exteriores al núcleo).
En los primeros trabajos,el movimiento del núcleo se ajustaba a la de un simple oscilador
armónico [116], mientras que en posteriores trabajos se utilizaron modelos estocásticos
más complicados basados en la fórmula de Breit-Wigner que facilitaban las tareas de
monitorización y vigilancia [128][100].
En este sentido, no se puede olvidar el tratamiento de las series temporales de ruido
ya sean de potencia, ujo en el interior del reactor, ujo del agua de alimentación del
núcleo, de presión, etc. Para ello se comenzaron a utilizar métodos como los modelos
autorregresivos (AR model) que sostienen que una serie temporal puede reconstruirse a
11

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
través de su historia anterior y de una serie de coecientes tal y como indica la ecuación
siguiente:
X(n) =M∑m=1
A(m)X(n−m) + Z(n) (2.2)
donde X(n) es la serie temporal, A(m) son los coecientes autorregresivos que multiplican
a los valores de la serie en instantes anteriores X(n−m) y Z(n) constituye un ruido blanco
de entrada al sistema no correlacionado con X(n). Teniendo en cuenta esta última ar-
mación se llega a la denominada ecuación de Yule-Walker que relaciona la autocorrelación
de la serie temporal C(l) con los coecientes autorregresivos:
C(l) =M∑m=1
A(m)C(l −m); l = 1, 2.....M (2.3)
De esta manera los coecientes autorregresivos son capaces de simular las respuestas diná-
micas de diferentes sistemas de la planta para vericar si se cumplían las especicaciones
dadas por las autoridades nucleares [119]. También surgió el modelo autorregresivo de
media móvil o ARMA(autoregressive moving average) en el que el ruido excitador en un
instante n también depende de sí mismo en instantes anteriores a través de unos coe-
cientes:
X(n) =M∑m=1
A(m)X(n−m) +B(m)Z(n−m) (2.4)
Una de las incógnitas a la hora de aplicar estos métodos era determinar el orden M . Así
en 1974 surgió el criterio de información de Akaike basado en la minimización de la en-
tropía [2]. La metodología basada en los modelos autorregresivos propició la investigación
también en España, concretamente en el Ciemat, donde se redactaron informes técnicos
explicando la metodología y su implementación informática [15]
12

2.1. Introducción
Los hallazgos y el interés en el diagnóstico de plantas era tan grande que se comenzaron
a organizar congresos para reunir a los expertos de la materia. En este sentido cabe citar
el SMORN o Specialist Meeting On Reactor Noise, cuya primera cita se produjo en 1975
y se celebra cada 4 años y el IMORN o Informal Meeting on Reactor Noise que ya ha
celebrado su edición 29 desde el año 1969 [121]. Ya en el año 1979 aparecieron los primeros
reviews en análisis de ruido [109]. Era necesario recopilar toda los avances producidos
hasta el momento, correlacionando la teoría estocática con la mecánica estadística y el
procesamiento de señales. El análisis de ruido era y sigue siendo una potente herramienta
para la seguridad de las plantas y la extensión de su vida útil, problema que tanto preocupa
hoy en día.
Los estudios a este respecto son muy variados y se han realizado en los últimos 30
años en muchos reactores, tanto comerciales como experimentales. Los objetivos de es-
tos trabajos estaban dirigidos principalmente a reconocer las frecuencias de resonancia
de los soportes del combustible del reactor, como por ejemplo en el reactor Sequoyah-1,
un reactor PWR de diseño Westinghouse de 1150-MW [113, 112]. Otros ejemplos son la
colaboración entre las centrales nucleares suecas y el departamento de ingeniería nuclear
de la Chalmers University of Technology de Göteborg[3, 104, 102]. En todos estos tra-
bajos, las mejoras en el ajuste de los espectros de resonancia tanto de detectores in-core
como ex-core han dado lugar a un progresivo entendimiento de las diferentes resonancias,
tanto su origen físico como su evolución con el quemado de combustible. Otros reactores
donde se han realizado similares trabajos de diagnóstico son: el reactor PWR de Bors-
sele(Holanda) [118, 39] en los reactores CANDU de Ontario Power Generation y Bruce
13

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Power [54], en Corea (PWR) [96], o Laguna Verde en Méjico (BWR) [92]. En otro ca-
sos, como ocurrió en España, las investigaciones perseguían la mejora del mantenimiento
aunando los parámetros de la resonancia en un número único [51].
Otra de las vertientes fundamentales del análisis de ruido es su aplicación al mante-
nimiento de sensores en la planta. Presión, temperatura, caudal y otras variables deben
medirse adecuadamente para garantizar la seguridad. En la gura siguiente se muestra un
gráco de la ubicación de ciertos sensores en una central nuclear. Como se ha mencionado
Figura 2.1: Lazo de un reactor PWR mostrando la ubicación de sus sensores. Tomado
de[57].
antes, los métodos en el dominio del tiempo como los modelos AR y ARMA propiciaron
la mejora del mantenimiento y se aplicaron para el cálculo del tiempo de respuesta de sen-
14

2.1. Introducción
sores de temperatura [120]. Un poco más adelante Hashemian propuso las posibilidades
de conocer los diferentes sensores de la planta a través del estudio del ruido de proceso
excitador [68]. Todos estos avances se tradujeron en el encargo por parte de la Nuclear
Regulatory Comission de una serie de informes técnicos cuyos objetivos eran investigar
los procesos de envejecimiento, los tiempos de respuesta, las averías más comunes, así
como la comparación de diferentes fabricantes de los sensores de presión y temperatura
utilizados en la planta [26, 86, 67, 44, 33, 61, 60].
El ímpetu del análisis de ruido aplicado a la instrumentación también se dejó notar
en España. En el Ciemat se diseñaron unos termómetros gamma in-core para el Proyecto
Halden que además se podían utilizar para calcular la velocidad del caudal en el interior
del núcleo a través de la correlación cruzada entre las señales de dos sensores colocados
en el mismo eje vertical [14]. Por otro lado se exploraron técnicas en las que a través de la
Densidad Espectral de Potencia de un sensor de presión, se obtenía la autocorrelación y
con ella los coecientes autorregresivos para el cálculo del tiempo de respuesta [8]. No era
necesario de esta manera tener la propia señal de ruido para realizar el análisis, sino que
era suciente el gráco de la PSD obtenida en planta. Otro informe técnico de relevancia es
el realizado tras nalizar el proyecto VISSP de Vigilancia in Situ de Sensores de Presión
del Ciemat donde los datos de ruido de presión se apoyaban en un modelo teórico del
mismo basado en una analogía eléctrica [6]. Con este modelo se pudo calcular de una
manera analítica la expresión del tiempo de respuesta [123]. Así, más adelante, gracias a
los modelos teóricos realizados del sensor, se investigaron métodos para simular la línea
sensora acoplada a éste [80] y la manera de vigilar averías como el bloqueo de la línea
15

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
[81][57] o la presencia de burbujas en ésta[11]. También, el comportamiento no lineal
de los sensores asociados a ciertas averías han establecido otras líneas de investigación
encaminadas a construis modelos no lineales que sean útiles para el mantenimiento de
éstos [49, 22].
2.2. Ruido y señal
La palabra ruido se encuentra muy a menudo en nuestro vocabulario diario; "Qué
ruidoso es este sitio", "Deja de hacer ruido", "Sus declaraciones han producido mucho
ruido","Mucho ruido y pocas nueces", etc. Si se busca la palabra en el diccionario de la
Real Academia de la Lengua, se pueden ver varias acepciones, las tres primeras son:
1. Sonido inarticulado, por lo general desagradable.
2. Litigio, pendencia, pleito, alboroto o discordia.
3. Apariencia grande en las cosas que no tienen gran importancia.
Como se puede ver, la palabra ruido no tiene demasiada buena publicidad en nuestro
idioma, de hecho, la propia fonética de la palabra es hasta un poco desagradable.
El ruido se reere a algo cuya naturaleza no es determinista sino aleatoria, de carácter
estocástico. En el mundo del tratamiento de señales una perturbación aleatoria o esto-
cástica x(t) es aquella que no es previsible, es decir, es tal que su valor en un instante
cualquiera t no puede deducirse o preverse a partir de los valores que ha tomado en los
instantes anteriores [5, 4]. ¾Dónde puede aparecer el ruido? En toda señal siempre hay un
16

2.2. Ruido y señal
ruido asociado. De hecho, algunos autores hablan de éste como de una uctuación natu-
ral, inherente a cualquier proceso dinámico [59]. Así, si se registra una determinada señal,
una vez alcanzado el régimen permanente, la componente continua de ésta constituye la
señal en sí, mientras que la componente alterna constituye el ruido [58]. En la gura 2.2,
se muestra un ejemplo tomado de [57]. Por tanto, la señal proporciona una cantidad, un
Figura 2.2: Ruido asociado a una señal.
valor cuantitativo del proceso a estudiar, mientras que el ruido se concentra en el aspecto
cualitativo, en el cómo. En muchas ocasiones, el ratio señal-ruido se usa frecuentemente
como una medida del nivel de éste último [114]. Esta tesis, encuadrada en la ingeniería
mecánica aplicada a instalaciones nucleares se concentrará en el ruido registrado en el
17

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
reactor. De hecho, la propia naturaleza estocástica de las siones establece un contexto
muy adecuado para el análisis de ruido.
Así, se pueden clasicar los ruidos en el reactor de dos maneras distintas:
Clasicación según la fuente del ruido, normalmente referido a un proceso dentro
del reactor como el ruido neutrónico o ruido de ebullición.
Clasicación según la variable del sistema que contiene el ruido. En los reactores,
existe una gran cantidad de instrumentación que proporciona señales de ujo neu-
trónico, presión, caudal, temperatura, posición de las barras de control, etc [114].
En todos estos casos, el ruido de interés no debe confundirse con el ruido de fondo que
debe eliminarse adecuadamente a través de ltros.
Como se puede apreciar, el estudio del ruido puede proporcionar mucha información
de la dinámica de un proceso, de un sensor, en denitiva, de un sistema. No obstan-
te, debido a su carácter estocástico, existen varias disciplinas implicadas en su análisis;
estadística, probabilidad, teoría de sistemas, análisis armónico, etc. En los siguientes epí-
grafes se tratarán los aspectos fundamentales de éstas para su estudio y su aplicación al
mantenimiento en plantas.
2.3. Procesos estocásticos
En una planta nuclear, la componente de alterna de las señales procedentes de los sen-
sores, ya sean éstos de presión, temperatura, detectores de neutrones, etc, representan la
18

2.3. Procesos estocásticos
uctuaciones naturales(ruido) existentes como consecuencia del ujo de agua, del proceso
de sión, de las vibraciones de los compoenentes del sistema, etc. Si se desean registrar
todas las posibles uctuaciones que tienen lugar correspondientes a un determinado fenó-
meno, se obtendrá un conjunto de señales aleatorias que componen lo que se denomina un
proceso estocástico. Así, en la gura 2.3 se muestra el registro de varias señales aleatorias
y todas ellas, representan un proceso estocástico. Como se puede observar, existen dos
Figura 2.3: Representación esquemática de un proceso estocástico.
variables en el proceso para cada señal aleatoria x, por un lado el tiempo t, y por otro el
número de muestra ξ . Así pues, se tiene una familia de funciones, que son las diferentes
realizaciones del proceso estocástico[95]:
x(t, ξ)
La idea central en el concepto de proceso estocástico es que no sólo una única señal tempo-
ral describe el proceso sino que se necesita todo el conjunto(ensemble) para su completa
19

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
denición[35]. Además, es necesario mencionar que para una realización concreta ξi, la
expresión x(t, ξi) es una función del tiempo. Por otro lado, para un instante determinado
ti, x(ti, ξ) es una cantidad que depende de ξ, es decir, es una variable aleatoria[95]. Debido
a que existe un innito número de funciones x(t, ξ), es conveniente revisar los conceptos
de probabilidad para estimar las propiedades de las muestras de ruido.
El ruido presente en un reactor es estacionario lo que implica que los parámetros
de su modelo probabilístico, como la esperanza matemática, la varianza o la función de
densidad de probabilidad, son invariantes en el tiempo y por tanto en vez de referirnos
a p(x, t) (función de densidad de probabilidad) es suciente hablar de p(x). Además es
común encontrar procesos que son estacionarios y ergódicos. Por proceso ergódico se
entiende aquel en el que una de sus realizaciones contiene toda la información del conjunto
estadístico (ensemble).
2.3.1. Función de densidad de probabilidad
Si se desea saber, en una realización concreta, con qué frecuencia ocurre un determi-
nado valor de una uctuación aleatoria, se necesitará conocer el ratio entre el número de
veces que ocurre dicho valor y el número total de valores posibles que se pueden registrar.
p =número de veces que aparece el valor xnúmero total de valores registrados
(2.5)
Cuando se conocen todas las probabilidades de todos los posibles valores, se tiene la
denominada función de densidad de probabilidad p(x). No obstante, teniendo en cuenta
20

2.3. Procesos estocásticos
que un proceso estocástico depende del tiempo y de la muestra que se considere, se pueden
denir diferentes tipos de funciones de densidad de probabilidad. Así, se puede hablar de
la función de densidad de los posibles valores registrados para un cierto tiempo t1, es decir,
p(x(t1, ξ)) o de la función de densidad de probabilidad para obtener pares de valores en dos
instantes diferentes t1 y t2, es decir, p(x(t1, ξ), x(t2, ξ)). En este caso, se pueden considerar
funciones de densidad de probabilidad de primer orden, de segundo orden, etc. Una de
las funciones de probabilidad más usadas en estadística es la gaussiana o normal. El
teorema central del límite establece que cuando los resultados de un cierto experimento
son debidos a un conjunto de causas independientes que actáun sumando sus efectos,
siendo cada efecto individual de poca importancia respecto del conjunto, es esperable
que los resultados sigan una distribución normal[97]. En la gura 2.4 se representa dicha
distribución:
21

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Figura 2.4: Representación de una función de densidad gaussiana.
Las variables µ y σ son la media y la desviación típica respectivamente y se explicarán
en los epígrafes siguientes.
No se puede olvidar dentro de las funciones de densidad de probabilidad, que el área
encerrada bajo ellas debe ser igual a la unidad, ya que dicha integral representa la proba-
bilidad de que ocurra alguno de entre todos los sucesos posibles.∫ ∞−∞
p(x)dx = 1 (2.6)
Si por el contrario, nos interesara calcular la probabilidad de que x se encuentre entre a
y b, la integral sería:
p(a < x < b) =
∫ b
a
p(x)dx (2.7)
En cualquier caso, la probabilidad siempre es un número positivo o nulo.
22

2.3. Procesos estocásticos
2.3.2. Esperanza Matemática
Si se tiene una variable aleatoria X que puede tomar un conjunto de M valores dis-
cretos xi con probabilidades p(xi), la esperanza matemática de dicha variable como su
propio nombre indica es su valor esperado que se denota por E[x] y es un número real
denido por[52]:
E[x] =M∑i=1
xip(xi) (2.8)
Es por tanto una suma ponderada de probabilidades y se representa, en el caso de una
variable aleatoria continua como:
E[x] =
∫ ∞−∞
xp(x)dx (2.9)
siendo p(x) la función de densidad de probabilidad.
Como se puede observar, la esperanza matemática también es el primer momento de
la función de densidad de probabilidad p(x) y en consecuencia es una medida del centro
de la función. Se conoce más a menudo como media de X y se representa por µ.
Sin embargo, para el caso de datos experimentales registrados a lo largo del tiempo,
la media se denota por[6, 114]:
µ = lımT→∞
1
T
∫ T/2
−T/2xdt (2.10)
Por supuesto, como en la práctica no se pueden tener registros innitos, la media puede
estimarse de la siguiente manera:
x =1
N
N∑i=1
xi (2.11)
siendo N en esta expresión, el número total de observaciones.
23

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
2.3.3. Desviación típica
La desviación típica es una medida de la dispersión con respecto a la media de los
valores de la variable aleatoria o, en nuestro caso, de los diferentes valores que toma el
ruido. Desde un punto de vista discreto su expresión es:
σx =
√√√√ 1
N
N∑i=1
(xi − µ)2p(xi) (2.12)
Como se puede apreciar, al escribir la notación continua de la desviación típica y elevarla
al cuadrado, se obtiene la varianza que coincide con el momento de orden dos de la función
de densidad de probabilidad p(x)
σ2x =
∫ ∞−∞
(x− µ)2p(x)dx (2.13)
Se podría denir igualmente el momento de orden n de la siguiente manera:
mn =
∫ ∞−∞
(x− µ)np(x)dx (2.14)
Estos momentos que se acaban de denir son momentos centrales, ya que a cada x se le
resta la media µ.
Como se mencionaba anteriormente, debido a la imposibilidad de tener señales inni-
tas, la estimación de la varianza en la práctica se realiza como sigue:
s2 =1
N
N∑i=1
(xi − x)2 (2.15)
2.3.4. Autocorrelación y autocovarianza
Puesto que las muestras de ruido a tratar son aleatorias, será preciso medir de una
manera cuantitativa la similitud entre dos ruidos. Así, si se tienen dos procesos x(t) e y(t),
24

2.3. Procesos estocásticos
la medida cuantitativa de la dependencia estadística entre ambos en un cierto instante
t1 se calcula como el valor esperado del producto x1y1, siendo x1 = x(t1) e y1 = y(t1)
respectivamente. El producto x(t)y(t) es una variable aleatoria con cierta función de
densidad de probabilidad conjunta p[x(t)y(t)], por lo que:
E[xy] =
∫ +∞
−∞
∫ +∞
−∞xyp(x, y)dxdy (2.16)
En la práctica, los procesos son estacionarios y ergódicos, y se dispone de un registro nito
de longitud N , xii=1,...,N que representa una realización de x(t), y otra yii=1,...,N para
y(t). Entonces la esperanza se estima como:
E[xy] =1
N
N∑i=1
(xiyi) (2.17)
Si se desea calcular la dependencia entre el proceso x en el instante t, y el proceso y en el
instante t + τ . debería obtenerse la esperanza E[x(t)y(t + τ)]. Si se vuelven a considerar
registros de longitud nita, dicho valor esperado puede estimarse como:
E[x(t)y(t+ τ)] =1
N
N∑i=1
(xiyi+ τ∆t
) (2.18)
donde se ha supuesto que τ es múltiplo del tiempo de muestreo empleado para digitalizar
las realizaciones de los procesos, y que además:
yi+ τ∆t
= 0 siτ
∆t> N (2.19)
El tiempo total de registro de las señales, T , será T = N . Por tanto, si se calculara este
valor para τ = 1, τ = 2, hasta τ = N − 1, se obtendría una función de τ denominada
correlación cruzada. En general, dicha función se expresa como:
Rxy(τ) = lımT→∞
1
T
∫ T/2
−T/2x(t)y(t+ τ)dt (2.20)
25

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Como se mencionaba anteriormente, también se puede denir la autocorrelación, que sería
igual que (2.20) pero cambiando la función y por x:
Rxx(τ) = lımT→∞
1
T
∫ T/2
−T/2x(t)x(t+ τ)dt (2.21)
Otra función que se puede denir en este contexto, es la autocovarianza, aunque es cierto
que en la nomenclatura del análisis de ruido y de la señal es mucho más común hablar de
correlación:
Cxx(τ) = lımT→∞
1
T
∫ T/2
−T/2[x(t)− µ][x(t+ τ)− µ]dt (2.22)
Como se puede observar, la diferencia existente entre ambas funciones está en que en el
caso de la autocovarianza, a la señal se le resta su media. En muchas ocasiones se menciona
el denominado coeciente normalizado de correlación como:
ρxy =Cxyσxσy
(2.23)
que evidentemente puede ser también una función del desfase temporal τ . Puede demostrarse[88]
que este coeciente puede relacionarse tanto con la correlación como con la covarianza
cruzadas:
ρxy(τ)σxσy = Cxy(τ)
ρxy(τ)σxσy = Rxy(τ)− µxµy
(2.24)
La función de autocorrelación mide de una manera cuantitativa si en un instante determi-
nado la señal x(t) determina el valor de x(t+ τ), o, en el caso de dos señales distintas, si
existe una relación de causa y efecto entre ellas. Uno de los casos más sencillos llegados a
este punto, es el caso de la autocorrelación de un ruido blanco gaussiano, entendiendo por
26

2.3. Procesos estocásticos
tal aquel ruido cuya distribución de amplitudes es una gaussiana y cuya autocovarianza
es nula para τ > 0.
En la gura 2.5 se ha calculado la autocorrelación de una señal aleatoria gaussiana
creada a través del comando randn de Matlab. Como se observa, la función de autoco-
rrelación en este caso es una delta de Dirac1. El ruido sólo está correlacionado consigo
mismo para τ = 0.
Figura 2.5: Autocorrelación de un ruido blanco gaussiano.
1Véase el epígrafe 2.4.2 para la denición de delta de Dirac
27

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
2.4. Sistemas en el dominio del tiempo
Las señales estocásticas o deterministas son datos que se registran en el dominio del
tiempo. En estos epígrafes se van a establecer las bases para comprender los sistemas
lineales y las propiedades que los denen. Al nal de esta sección se llegará al concepto
de función de respuesta al impulso que permite realizar el análisis de los sistemas en el
dominio de la frecuencia.
2.4.1. Sistemas Linealas LTI
Un sistema es un conjunto de elementos en el que puede originarse un proceso consis-
tente en que a cada estímulo o entrada corresponde una salida o respuesta. Así, de esta
manera, se tiene una señal de entrada y una de salida que se relacionan entre sí mediante
la transformación que provoca el sistema.
Normalmente los sistemas se esquematizan a través de una caja negra que relaciona
la señal de entrada con la señal de salida. En la gura 2.6 se representa un esquema de
un sistema.
Figura 2.6: Esquema de un sistema que relaciona la señal de entrada x(t) con la de salida
y(t).
28

2.4. Sistemas en el dominio del tiempo
Los sistemas pueden ser discretos o continuos. Un sistema de tiempo continuo es aquel
en el que las señales de entrada y salida se expresan mediante funciones continuas del
tiempo. La notación utilizada en estos sistemas es la siguiente:
x(t)→ y(t) (2.25)
Una señal continua y armónica se representa de la siguiente manera:
Figura 2.7: Ejemplo de una señal armónica continua.
Por otro lado, un sistema de tiempo discreto es aquel en el que las señales de entrada
y salida se expresan a través de señales discretas y se simboliza de la siguiente manera:
x[n]→ y[n] (2.26)
Así, una señal armónica discreta del tipo x[n] = Acos(ωn) se representa tal y como se
muestra en la gutra 2.8
29

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Figura 2.8: Ejemplo de una señal armónica discreta del tipo x[n] = Acos(ωn).
Es importante evaluar si los sistemas son lineales o no. Diremos que un sistema es
lineal si: siendo g1(t) la salida de un sistema cuya entrada es f1(t) y g2(t) la salida a una
entrada f2(t) del mismo sistema, y a1 y a2 dos constantes arbitrarias, entonces se cumple:
L[a1f1(t) + a2f2(t)] = a1L[f1(t)] + a2L[f2(t)] (2.27)
siendo L una transformación lineal[91]. En denitiva, se trata de cumplir el denominado
principio de superposición que consiste en: si una entrada consta de la suma ponderada
de varias señales, entonces la salida es la suma ponderada de las respuestas del sistema a
cada una de estas señales[94].
Otra de las propiedades a tener en cuenta en el estudio de sistemas es la invarianza
en el tiempo. Se dice que un sistema es invariante en el tiempo si un desplazamiento de la
30

2.4. Sistemas en el dominio del tiempo
señal de entrada causa un desplazamiento de la señal de salida. En concreto si y[n] es la
salida a una entrada x[n] , entonces y[n− n0] es la salida a una entrada x[n− n0] . Para
sistemas continuos diríamos que ante la entrada x(t) se obtiene la salida y(t) y, que por
tanto, ante la entrada x(t − t0) la respuesta correspondiente es y(t − t0) . Los sistemas
discretos o continuos que cumplen la invarianza en el tiempo y la linealidad se denominan
genéricamente Sistemas Lineales Invariantes en el Tiempo y se les denota con las letras
LTI ( Linear Time Invariant). Estos sistemas juegan un importante papel en el diseño
y análisis de sistemas ya que muchos procesos de la naturaleza se pueden modelar como
tales.
31

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
2.4.2. Función de respuesta al impulso
Existe una señal en el estudio de sistemas que es muy útil, se trata del impulso uni-
tario o delta de Dirac. Una delta de Dirac δ(t) se dene formalmente como aquella señal
que es nula en todo instante excepto en el instante cero, en que se hace innita, siendo∫ +∞−∞ δ(t)dt = 1. En la gura 2.9 se muestra un ejemplo de una δ(t).
Figura 2.9: Ejemplo de una delta de Dirac δ(t) continua.
En el caso de un sistema discreto, la representación se muestra en la gura 2.10:
Figura 2.10: Ejemplo de una delta de Dirac δ[n] discreta.
32

2.4. Sistemas en el dominio del tiempo
También se la puede denir a través de la denominada propiedad de la selección, tal
que: ∫ ∞−∞
x(t)δ(t− τ)dt = x(τ) (2.28)
Como se puede observar, la delta de Dirac selecciona un determinado valor de la
función x(t), en este caso x(τ), puesto que la delta está desplazada en t = τ .
Teniendo en cuenta la propiedad de la selección, la función impulso unitario nos per-
mite denir las señales como suma de impulsos. Así una señal continua x(t) se puede
expresar:
x(t) =
∫ ∞−∞
x(τ)δ(t− τ)dτ (2.29)
Por tanto, se puede pensar en x(t) como una "superposición"de impulsos ponderados y
desplazados , donde el peso en el impulso δ(t− τ) es x(τ)dτ [91]. Para el caso de una señal
discreta, la notación sería algo distinta:
x[n] =∞∑
−k=−∞
x[k]δ[n− k] (2.30)
Considerando esta última propiedad, se puede evaluar la respuesta de un sistema como
suma de las respuestas a impulsos unitarios. Supongamos que h(t) denota la respuesta
de un sistema lineal a un impulso unitario. Por tanto, teniendo en cuenta el principio
de superposición y la propiedad de selección, se puede expresar la respuesta y(t) de un
sistema a una entrada x(t) por la siguiente integral:
y(t) =
∫ ∞−∞
x(τ)h(t− τ)dτ (2.31)
33

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Que para el caso de sistemas discretos se expresaría como sigue:
y[n] =∞∑
k=−∞
x[k]h[n− k] (2.32)
La ecuación 2.31 es la integral de convolución y representa un sistema LTI en términos
de su respuesta al impulso. La convolución de dos señales se indica de forma simbólica a
continuación:
y(t) = x(t) ∗ h(t) (2.33)
2.5. Sistemas en el dominio de la frecuencia
Hasta este momento se han visto los sistemas en el dominio del tiempo y se ha llegado
al concepto de función de respuesta al impulso que dene las características de un sistema
desde el punto de vista temporal. No obstante, el contenido frecuencial de las señales
es muy importante para conocer mejor los sistemas de los que derivan. Existen varias
herramientas que nos permiten pasar desde el dominio del tiempo al de la frecuencia
como son la transformada de Laplace y la transformada de Fourier. En los siguientes
epígrafes se explican ambas herramientas y se relacionan con los conceptos propios del
dominio temporal.
2.5.1. La transformada de Laplace
El método de la transformada de Laplace es un método operativo que aporta muchas
ventajas cuando se usa para resolver ecuaciones diferenciales lineales. Mediante el uso de
la transformada de Laplace, es posible convertir muchas funciones comunes, tales como
34

2.5. Sistemas en el dominio de la frecuencia
las funciones senoidales o exponenciales en funciones de una variable s compleja[90]. La
transformada de Laplace de una función f(t) se dene de la siguiente manera:
L[f(t)] = F (s) =
∫ ∞0
e−stf(t)dt (2.34)
La variable compleja es s = σ + jω, donde σ y ω son las partes real e imaginaria
respectivamente. Se dice que la transformada de Laplace es una aplicación desde el dominio
del tiempo al de la frecuencia, pero en general es una aplicación desde un dominio a su
dominio inverso. La transformada inversa de Laplace se dene a continuación:
L−1[F (s)] = f(t) =
∫ ∞0
estF (s)ds (2.35)
Parece complicado evaluar la integral de inversión, de hecho, rara vez se utiliza para
encontrar f(t)[90]. La transformada de Laplace se utiliza para sistemas que poseen unas
condiciones iniciales nulas y por tanto nos interesa conocer el transitorio y el permanente.
De hecho los límites de la integral 2.34 nos indican que efectivamente el sistema parte del
reposo.
Existencia de la transformada de Laplace
La transformada de Laplace de una función f(t) existe si la integral converge. La
integral convergerá si f(t) es seccionalmente continua en cada intervalo nito en el rango
t > 0 y si es de orden exponencial conforme t tiende a innito. Se dice que una función
f(t) es de orden exponencial si existe una constante σc real positiva tal que la función:
e−σct |f(t)| (2.36)
35

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
tiende a cero conforme t tiende a innito. Si el límite de la función e−σt |f(t)| tiende a
cero para σ mayor que σc y el límite tiende a innito para σ menor que σc, el valor de σc
se denomina abscisa de convergencia. Por ejemplo, para la función Ae−αt:
lımt→∞
e−σt∣∣Ae−αt∣∣ (2.37)
tiende a cero si σ > −α. En este caso, la abcisa de convergencia es σc = α. La integral∫∞0e−stf(t)dt sólo converge si σ, la parte real de s, es mayor que la abscisa de convergencia
σc .Por tanto, debe elegirse el operador L de forma tal que la integral converja.
Función de transferencia
Una de las propiedades más importantes de la transformada de Laplace es que la trans-
formada de un producto de convolución es igual al producto de las transformadas. Esta
propiedad indica que si se aplica la transformada de Laplace al producto de convolución
dado en la ecuación 2.33 se obtiene:
L [y (t)] = L [x (t) ∗ h (t)] (2.38)
Si a continuación se tiene en cuenta dicha propiedad, se obtiene:
Y (s) = X (s) ·H (s) (2.39)
Como se puede observar la señal de entrada y salida en el dominio de la frecuencia
quedan relacionadas entre sí mediante una simple operación, evitando realizar la integral
2.31. El término H(s) correspondiente a la transformada de Laplace de la respuesta al
impulso del sistema se denomina función de transferencia. Por tanto, la salida del sistema
se puede obtener realizando la transformada inversa de Laplace de Y (s).
36

2.5. Sistemas en el dominio de la frecuencia
Análisis de estabilidad de H(s) en el plano complejo
Si se tiene una ecuación diferencial con coecientes constantes del tipo:
andny(t)
dtn+ an−1
dn−1y(t)
dtn−1+ ...+ a1
dy(t)
dt+ a0y(t) = x(t) (2.40)
Al realizar la transformada de Laplace a ambos lados de la ecuación, se puede obtener la
función de transferencia del sistema que es:
H(s) =Y (s)
X(s)=
1
ansn + an−1sn−1 + ...a1s1 + ao(2.41)
Como se puede apreciar se trata de una función racional en s.
Las raíces del denominador de la función de transferencia se denominan polos. Así, si
se tiene la función de transferencia dada por:
H(s) =1
s2 + 2s+ 5(2.42)
Sus polos se obtendrán calculando las raíces del denominador, que en este caso son:
s1 = −1 + 2j y s∗1 = −1 − 2j. Se pueden representar dichos polos en un diagrama
de Argand, tal que aquellos situados en el semiplano derecho darán lugar a un sistema
inestable, mientras que los situados en el izquierdo corresponden a un sistema estable. En
la gura 2.11 se han representado los polos s1 y s∗1 y la región de estabilidad
Figura 2.11: Mapa complejo de estabilidad de polos en el plano s.
37

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
2.5.2. La transformada de Laplace discreta: transformada z
La transformada z es la contrapartida de la transformada de Laplace para señales
discretas. Para entender la transformada z hay que tener en cuenta como convertir una
señal continua x(t) en una discreta x[n]:
x(t)→ x(n ·∆t)→ x[n] (2.43)
Así, la variable t queda dividida en n puntos separados un cierto intervalo de tiempo ∆t
denominado intervalo de muestreo. Por otro lado, la integral que dene la Transformada
de Laplace se cambiaría a un sumatorio tal y como sigue:
X(s) =
∫ ∞0
x(t)e−stdt→ X[z] =∞∑n=0
x[n]z−n (2.44)
lo que implica que la variable z es:
e−st = e−sn∆t = z−n → z = es∆t (2.45)
Operador retardo
Una de las propiedades fundamentales de la transformada z es el denominado operador
retardo. El operador retardo o z−1 indica que existe un periodo de muestreo de desfase.
Así, si la transformada z de x[n] es X(z), la transformada de la misma secuencia retardada
un periodo de muestreo es:
x[n]→ X(z) x[n− 1]→ z−1X(z) (2.46)
Veámoslo con un ejemplo numérico sencillo. Si se tiene la secuencia x[n]:
38

2.5. Sistemas en el dominio de la frecuencia
3,2,1,0,0,0,...
Su transformada z será:
X(z) = 3 + 2z−1 + 1z−2
Como se puede ver, el valor 3, al ser el primer valor, está multiplicado por z0, o lo que
es lo mismo, el desfase es 0, el siguiente valor, que se encuentra desfasado con respecto al
primero un tiempo de muestreo, vendrá multiplicado por z−1 y así sucesivamente con el
resto de valores. Por otro lado, como se mencionaba antes, la secuencia x[n−1] retardada
con respecto a x[n] un tiempo de muestreo tendrá la siguiente transformada z:
z−1X(z) = 3z−1 + 2z−2 + 1z−3
En la gura 2.12 se muestran tres señales x[n], x[n− 1] y x[n− 2].
39

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Figura 2.12: Ejemplo de tres secuencias discretas con retardos entre ellas de un tiempo de
muestreo.
Función de transferencia
Cuando se tiene un sistema discreto y se desea calcular la respuesta, tal y como se ha
comentado antes, se debe calcular la convolución entre la función de respuesta al impulso
y la entrada:
y[n] = x[n] ∗ h[n] (2.47)
En el caso de la transformada z, la convolución se transforma en una multiplicación
de polinomios en z, de manera que la transformada z de la salida Y (z) se obtiene:
Y (z) = X[z]×H(z) (2.48)
donde H(z) es la transformada z de la secuencia de respuesta al impulso h[n].
40

2.5. Sistemas en el dominio de la frecuencia
Región de convergencia
Si se representa la variable z como una exponencial compleja se tiene:
z = rejΩ (2.49)
Así, en un diagrama de Argand, z es un número complejo cuyo módulo es r y su
ángulo es Ω . Como se mencionaba anteriormente, la región de estabilidad en el plano s
se encuentra en el semiplano izquierdo. Por tanto, un polo de una determinada función
de transferencia en s es del tipo:
s1 = −a± bj (2.50)
donde a y b son números reales positivos. Si se tiene en cuenta la relación existente entre
la variable s y z:
z = es∆t (2.51)
Por tanto, al tomar logaritmos se tiene:
ln(rejΩ) = s∆t (2.52)
Aplicando las propiedades de los logaritmos, la ecuación 2.52 queda convertida susti-
tuyendo s por un número complejo del semiplano izquierdo en lo que sigue:
ln(r) + jΩ = (−a± bj)∆t (2.53)
Si se igualan las partes reales y complejas separadamente se tiene:
ln(r) = −a ·∆t jΩ = ±bj ·∆t (2.54)
41

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
De la primera ecuación se puede ver, que dado que el periodo de muestreo ∆t es
siempre un número positivo, el logaritmo natural de r debe tener el mismo signo que la
parte real de s, es decir, negativo. Esto sólo puede ocurrir si r es menor o igual que 1. Por
tanto, la región de convergencia de los polos en la transformada z es el círculo unidad.
Figura 2.13: Región de convergencia de la transformada z.
Aplicación de la transformada z a las ecuaciones diferenciales
Es fácil reconocer las posibilidades de la transformada de Laplace para resolver ecua-
ciones diferenciales al transformar las derivadas de orden n en simples polinomios del
mismo orden. La transformada z tiene unas características muy similares pero aplicada
a las ecuaciones diferenciales discretas, es decir, en diferencias nitas. Así por ejemplo,
la función de transferencia en s que relacione la respuesta del sistema con la fuerza exci-
tadora de un oscilador armónico de masa m, rigidez k y amortiguación c es la siguiente:
md2y(t)
dt2+ c
dy(t)
dt+ ky(t) = x(t)→ H(s) =
Y (s)
X(s)=
1
ms2 + cs+ k(2.55)
42

2.5. Sistemas en el dominio de la frecuencia
No obstante, si la ecuación estuviera discretizada, es decir, en diferencias nitas, habría
que proceder de manera distinta. En primer lugar, hay que aproximar los términos de
derivada segunda y primera con los desarrollos en serie de Taylor:
y(t+ ∆t) = y(t) + ∆tdy
dt+
∆t2
2
d2y
dt2+ ...
y(t−∆t) = y(t)−∆tdy
dt+
∆t2
2
d2y
dt2+ ..
(2.56)
teniendo en cuenta esto, se obtiene que las derivadas primera y segunda son:
dy
dt=y(t+ ∆t)− y(t−∆t)
2∆t
d2y
dt2=y(t+ ∆t)− 2y(t) + y(t−∆t)
∆t2
(2.57)
De esta manera, se obtiene una aproximación de las derivadas que puede ser más o
menos exacta en función del número de términos que se empleen de la serie de Taylor. A
continuación, dado que se está trabajando con señales discretas, y(t) pasa a ser y[n], y
y(t + ∆t), y[n + 1]. Para abreviar la notación, a partir de ahora se escribirá yi en vez de
y[n] y por consiguiente, yi+1 e yi−1 para y(t+ ∆t) e y(t−∆t) respectivamente. Por tanto,
la aproximación de las derivadas queda de la siguiente manera:(dy
dt
)i
=yi+1 − yi−1
2∆t(d2y
dt2
)i
=yi+1 − 2yi + yi−1
∆t2
(2.58)
Una vez obtenidas estas aproximaciones, se puede sustituir en la ecuación diferencial,
que ahora quedaría convertida en una ecuación en diferencias nitas:
xi+1 = myi+1 − 2yi + yi−1
∆t2+ c
yi+1 − yi2∆t
+ κyi (2.59)
43

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Se puede reordenar la ecuación de manera que la respuesta del sistema yi+1 quede en
función de los valores de y[n + 1] en instantes anteriores y del valor de la entrada en ese
momento xi+1:
yi+1 = a1yi+ a2yi−1 + κxi+1 (2.60)
o también
yi = a1yi− 1 + a2yi−2 + κxi (2.61)
Los coecientes a1 a2 y κ dependen de las propiedades intrínsecas del sistema, es decir,
de los valores de m, c y k. Hallando la transformada z a ambos lados de la ecuación:
X(z) = a1z−1X(z) + a2z
−2X(z) + κY (z) (2.62)
Finalmente, la función de transferencia del sistema en z queda:
H(z) =X(z)
Y (z)=
κ
1− a1z−1 − a2z−2(2.63)
2.5.3. La transformada de Fourier
La transformada de Fourier es una aplicación que al igual que la transformada de
Laplace transforma una función del tiempo en una función de la frecuencia. Se utiliza en
aquellos casos en los que las condiciones inciales se han olvidado, es decir para señales
estacionarias. En esta sección se llegará a la expresión de la transformada de Fourier una
vez revisado el concepto de serie de Fourier.
44

2.5. Sistemas en el dominio de la frecuencia
La serie de Fourier
El análisis en el dominio de la frecuencia implica, entre otras cosas, que toda función
periódica puede ser descompuesta en una serie de componentes armónicos. Así, una cierta
función x(t) de periodod T se puede escribir como una serie innita cuyos términos son:
x(t) = a0 + a1cos(2πt
T) + a2cos(
4πt
T) + ...+ b1sin(
2πt
T) + b2sin(
4πt
T) + ... (2.64)
o en notación más compacta
x(t) = a0 +∞∑k=1
akcos(2πkt
T) + bksin(
2πkt
T) (2.65)
donde cada uno de los coecientes ak y bk se obtienen por medio de las integrales siguientes:
a0 =1
T
∫ T/2
−T/2x(t)dt
ak =2
T
∫ T/2
−T/2x(t) cos
2πkt
Tdt k ≥ 1
bk =2
T
∫ T/2
−T/2x(t) sin
2πkt
Tdt k ≥ 1
(2.66)
Si se representan estos coecientes frente a la frecuencia, se obtiene la gura 2.14:
45

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Figura 2.14: Representación gráca de los coecientes de la serie de Fourier.
Como se puede ver, la separación entre un punto y otro del eje de las abscisas es
∆ω = 2πT, siendo ωk = 2πk
T. Así, a medida que aumente el periodo de la función x(t), dicha
separación disminuye. En el caso límite, cuando T → ∞, la gráca de los coecientes se
convierte en una función continua dependiente de la frecuencia y, en consecuencia, ∆ω se
convierte en dω. Por otro lado, si se sustituye la ecuación 2.65 en 2.66 y se toma que el
coeciente a0 es nulo(x(t) tiene media nula), se obtiene:
x(t) =∞∑k=1
2
T
∫ T/2
−T/2x(t) cos
2πkt
Tdt
cos
2πkt
T+
+∞∑k=1
2
T
∫ T/2
−T/2x(t) sin
2πkt
Tdt
sin
2πkt
T
(2.67)
sustituyendo y expresando todo en función de ∆ω y ωk:
x(t) =∞∑k=1
∆ω
π
∫ T/2
−T/2x(t) cosωktdt
cosωkt+
+∞∑k=1
∆ω
π
∫ T/2
−T/2x(t) sinωktdt
sinωkt
(2.68)
como se decía anteriormente, para el caso en que T → ∞, entonces ∆ω → dω y los
46

2.5. Sistemas en el dominio de la frecuencia
sumatorios se transforman en integrales según:
x(t) =
∫ ∞ω=0
dω
π
∫ ∞−∞
x(t) cosωtdt
cosωt+
+∞∑ω=1
dω
π
∫ ∞−∞
x(t) sinωtdt
sinωt
si se toma
A(ω) =1
2π
∫ ∞−∞
x(t) cosωtdt
B(ω) =1
2π
∫ ∞−∞
x(t) sinωtdt
(2.69)
De esta manera, la función x(t) se puede expresar como:
x(t) = 2
∫ ∞0
A(ω) cosωtdω + 2
∫ ∞0
B(ω) sinωtdω (2.70)
La ecuación 2.70 es una representación de x(t) mediante una integral de Fourier o una
transformada inversa de Fourier
La transformada directa e inversa de Fourier
La fórmula de Euler es el recurso que nos permitirá llegar a la representación formal
de la transformada de Fourier. Se sabe que:
eiθ = cos θ + i sin θ (2.71)
Deniendo X(ω) como
X(ω) = A(ω)− iB(ω) (2.72)
47

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
se pueden reordenar las ecuaciones 2.69 resultando:
X(ω) =1
2π
∫ ∞−∞
x(t)(cosωt− i sinωt)dt
=1
2π
∫ ∞−∞
x(t)e−iωtdt
(2.73)
Esta es la expresión de la transformada de Fourier de la función x(t) y la transformada
inversa de dene como:
x(t) =
∫ ∞−∞
X(ω)e−iωtdω (2.74)
Condiciones de existencia de la transformada de Fourier
La existencia de la trasformada de Fourier para x(t) está denida por las condiciones
siguientes:
1. x(t) sea integrable absolutamente, es decir,
x(t) =
∫ ∞−∞
x(t)dt <∞ (2.75)
2. x(t) tenga un número nito de máximos y mínimos dentro de cualquier intervalo
nito.
3. x(t) tenga un número nito de discontinuidades dentro de cualquier intervalo nito.
Además, cada una de esas discontinuidades debe ser nita. (Condición de Dirichlet).
4. x(t)→ 0 cuando t→∞
Por lo tanto, las señales absolutamente integrables que son continuas o tienen varias dis-
continuidades tienen transformada de Fourier. Además, como ocurría con la transformada
48

2.5. Sistemas en el dominio de la frecuencia
de Laplace, la transformada de un producto de convolución de dos funciones es igual al
producto de las transformadas. Así, la transformada de Fourier de la respuesta de un
sistema será igual a:
Y (ω) = X(ω)H(ω) (2.76)
siendoX(ω) la transformada de Fourier de la entrada a un sistema yH(ω) la transformada
de Fourier de la función de respuesta al impulso de dicho sistema.
2.5.4. Procesamiento de señales de aleatorias: densidad espectral
Las señales aleatorias no cumplen los requisitos dados en la sección anterior para la
existencia de la transformada de Fourier, por tanto, será su autocorrelación ( o correlación
cruzada, en el caso de dos señales distintas) la que se someterá a un análisis de Fourier.
Así, la función de autocorrelación Rx(τ) cumplirá el requisito dado por la ecuación 2.75
y además, dado que los ruidos tienen media nula, puesto que la componente de continua
se ha eliminado, se cumple que su autocorrelación tienda a cero cuando τ →∞.
Así, a la transformada de Fourier de la autocorrelación se le denomina densidad es-
pectral de potencia (PSD)y se denota por:
Sx(ω) =1
2π
∫ ∞−∞
Rx(τ)e−iωτdτ (2.77)
La transformada inversa de la PSD, nos daría la autocorrelación:
Rx(τ) =
∫ ∞−∞
Sx(ω)eiωτdω (2.78)
49

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Como se puede observar, para τ = 0, la autocorrelación, por su propia denición, es
la esperanza del valor cuadrático medio y en función de la PSD es:
Rx(τ = 0) =
∫ ∞−∞
Sx(ω)dω (2.79)
lo que implica que el área encerrada bajo la PSD es el valor cuadrático medio o varianza
del ruido x(t). La PSD muestra, para cada intervalo de frecuencia f + df ,la varianza
que tiene la componente del ruido en dicha banda de frecuencia. En la gura 2.15 se ha
representado la PSD de una señal de un detector ex-core de neutrones. En ella se muestran
las resonancias de vibración de los internos de un reactor de agua a presión (PWR).
50

2.5. Sistemas en el dominio de la frecuencia
Figura 2.15: Espectro de las resonancias de vibración de los internos de un PWR obtenidas
a partir de una señal de un detector de neutrones ex-core.
En el caso en el que se analice un ruido blanco, es decir, aquel cuya autocorrelación
sea una delta de Dirac ∆(t), al calcular la PSD, se obtiene un valor constante, lo que
signica que el ruido blanco abarca todas las frecuencias posibles. Siempre y cuando un
determinado ruido tenga un espectro continuo en las frecuencias que sean de interés,
diremos que es blanco. Cuando se excita a un sistema con un ruido blanco, al contener
éste todas las frecuencias, se puede caracterizar el sistema con el simple hecho de conocer
su respuesta. La teoría general de vibraciones y concretamente la armación de Wiener
dice:
Sy(ω) = |H(ω)|2 Sx(ω) (2.80)
51

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Donde Sy(ω) es la PSD de la señal de salida, Sx(ω) la PSD de la de entrada y H(ω) la
función de transferencia. Así, sabiendo que la señal excitadora de un sistema es un ruido
blanco y, en consecuencia, que su PSD es constante, se tiene:
Sy(ω) = |H(ω)|2 S0 (2.81)
Como se puede observar, la densidad espectral de potencia de la salida es suciente para
encontrar la función de transferencia del sistema. Si en lugar de la autocorrelación, se
tiene la correlación cruzada de x e y, se puede obtener la Densidad Espectral Cruzada(
Cross Spectrum Density, CPSD) a través de la transformada de Fourier:
Sxy(ω) =1
2π
∫ ∞−∞
Rxy(τ)e−iωτdτ (2.82)
Descriptores espectrales: la Coherencia y la Fase
Cuando se tienen dos ruidos y se quiere saber la relación de causa efecto entre dos
magnitudes, se suele representar la denominada coherencia que se dene como:
γ2(ω) =|Sxy(ω)|2
Sx(ω)Sy(ω)(2.83)
Para cuanticar el retraso existente entre una señal y otra, es necesario calcular la fase
de la coherencia.Así por ejemplo, para saber si las oscilaciones en la temperatura producen
oscilaciones en la potencia, se puede calcular la coherencia entre la señal del termopar de
salida del núcleo y la de un detector in-core de neutrones. En la gura siguiente se muestra
la coherencia y la fase existentes entre amabas señales:
Se observa que la coherencia es mayor en la zona de baja frecuencia, concretamente
para f < 0,8Hz, lo que implica que existe una relación entre las uctuaciones de tempe-
52

2.6. Modelos Autorregresivos
Figura 2.16: Coherencia y fase entre una señal de temperatura del termopar de salida del
núcleo y un detector in-core de neutrones de un PWR de diseño Westinghouse.
ratura y las de potencia y que se producen para frecuencias pequeñas. Además, la zona
de alta coherencia coincide con una fase lineal, es decir, existe un retraso entre la señal
de temperatura y la de potencia.
2.6. Modelos Autorregresivos
Esta sección se podría haber incluido dentro de los sistemas en el dominio del tiempo,
ya que los modelos autorregresivos(AR) se encuentran en ese dominio. No obstante, se ha
53

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
preferido incluirlos en una sección diferente debido a su gran utilidad dentro del análisis
de ruido y a que también es necesario utilizar la información que nos proporcionan en el
dominio frecuencial.
Un sistema autorregresivo se representa de la siguiente manera2:
yi =n∑k=1
akyi−k + xi (2.84)
donde yi es la respuesta de un sistema en el instante i, yi−k es la respuesta del sistema en
instantes anteriores, ak son los denominados coecientes autorregresivos y xi es la entrada
del sistema. Así, con esta ecuación se pone de maniesto que la salida de un determinado
sistema puede ser conocida sabiendo la respuesta del sistema en instantes anteriores (yi−k),
una serie de coecientes y la propia entrada. Si la entrada es un ruido blanco, al multiplicar
la ecuación (2.84) miembro a miembro por yi−m y tomar el valor esperado, el término del
ruido blanco desaparece porque xi sólo está correlacionado consigo mismo en el instante
i y por tanto:
E[yiyi−m] =n∑k=1
akE[yi−kyi−m] (2.85)
al estimar los valores esperados empleando toda la muestra de N datos se obtiene:
1
N
N∑i=1
yiyi−m =n∑k=1
ak
(1
N
N∑i=1
yi−kyi−m
)(2.86)
que como se puede ver, se trata de esperanzas matemáticas de productos de señales en
2En el epígrafe 2.5.2 se vio como la aplicación de un esquema numérico a la ecuación diferencial de un
sistema dinámico conduce a un modelo autorregresivo. La ecuación (2.60) es un ejemplo de un modelo
autorregresivo de orden 2
54

2.6. Modelos Autorregresivos
instantes distintos, o sea, son autocorrelaciones:
Ci =n∑k=1
akCi−k i = 1, 2...N (2.87)
Esta expresión es la denominada ecuación de Yule-Walker y se escribe en forma ma-
tricial como:
C1
C2
...
Cm
=
C0 C1 . . . Cm−1
C1 C0 . . . Cm−2
......
......
Cm−1 Cm−2 . . . C0
·
a1
a2
...
am
que en forma abreviada es:
~C = P~a (2.88)
donde la matriz P , es simétrica y es una matriz de Toeplitz. Por tanto, multiplicando por
la inversa de P a ambos lados de 2.88, se obtienen los coecientes autorregresivos. Dichos
coecientes nos caracterizan el sistema que estemos estudiando y simplican considera-
blemente el análisis de sistemas discretos. Además, es posible conseguir por medio de ellos
la función de transferencia del sistema. En la sección de la transformada z, se detalló de
qué manera se puede obtener la función H(z) a través de una ecuación en diferencias
nitas. Una ecuación autorregresiva es equivalente a una ecuación en diferencias nitas
y por tanto, la función de transferencia se obtendría de manera equivalente quedando
55

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
nalmente:
H (f) =κ
1−n∑k=1
ake−j2πf∆t
(2.89)
Esto supone un importante aspecto para la aplicación de los modelos autorregresivos
en el mantenimiento industrial. Por un lado, la simplicidad matemática de los coecientes
facilitan las tareas de monitorización, y por otro, se puede comparar la PSD obtenida con
el modelo AR, con la que daría el análisis en frecuencia de una determinada señal. En la
gura 2.17 se muestra la PSD de un sensor de presión capacitivo con la obtenida a través
de los coecientes autorregresivos.
Figura 2.17: PSD de una señal de un sensor de presión capacitivo y la obtenida con un
modelo autorregresivo con 20 coecientes.
En este caso concreto, se ha utilizado un número muy alto de coecientes autorregre-
56

2.7. Ajuste de resonancias
sivos, no obstante para propósitos de vigilancia, habría que buscar el orden óptimo del
modelo. Existen varios criterios, pero sin duda el más utilizado es el denominado Criterio
de Información de Akaike (AIC)[2] que está basado en la minimización de la entropía y
se expresa como:
AIC = Nln(σν2) + 2n (2.90)
donde N es el número de datos de la señal o ruido,σ2ν es la varianza del ruido y n es el orden
del modelo. La varianza del ruido se calcula a través de los coecientes autorregresivos y
de los valores de la autocorrelación de la siguiente manera:
σ2ν = Co −
n∑i=1
aiCi (2.91)
Así, para diferentes valores de n, se tendrá un valor de AIC diferente y un valor de la
varianza del ruido distinto. Aquel valor de n que minimice AIC proporciona el orden
óptimo. En la gura 2.18 se muestra una representación de los valores de AIC para
diferentes órdenes del modelo. La señal bajo estudio es la misma cuya PSD se representó
en la gura 2.17.
Como se puede observar en la gura, si se escogiera el mínimo valor del criterio de
Akaike, prácticamente habría que quedarse con el orden 50, no obstante, se suele seguir
el principio de parsimonia y en este caso concreto, un orden 4 o 5 sería suciente.
2.7. Ajuste de resonancias
Hasta este momento se ha tratado la naturaleza de las señales estocásticas, su pro-
cesamiento y análisis tanto en el tiempo como en la frecuencia. Gracias a los modelos
57

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Figura 2.18: Criterio de Akaike para la señal cuya PSD está representada en la gura
2.17.
autorregresivos se han detallado las posibilidades de mantenimiento predictivo y vigilan-
cia que ofrecen los coecientes hallados por medio de dichos modelos. No obstante, aunque
a través de ellos sea posible determinar los polos de las funciones de transferencia de los
sistemas de la planta, los coecientes por sí mismos no tienen un signicado físico, o al
menos, no es trivial obtenerlo.
Por tanto, existen determinadas situaciones en las que ese problema puede solucionarse
y abordarse el tratamiento y el ajuste de la PSD de una manera diferente. En el marco del
mantenimiento predictivo en Centrales Nucleares al considerar el caso de los internos de un
reactor de agua a presión (PWR), se calcula la PSD de su señal de vibración obteniéndose,
en denitiva, un espectro de resonancias asociado a cada uno de los componentes. En la
58

2.7. Ajuste de resonancias
gura 2.19 se representan de manera esquemática cada uno de estos elementos.
Figura 2.19: Vista de los internos de un reactor PWR.
En una PSD se pueden identicar las zonas de frecuencia de los elementos más im-
portantes, si bien es cierto, la identicación detallada es todavía una tarea de futuros
trabajos de investigación. En la gura 2.20 se señalan los intervalos de frecuencia y los
elementos que producen dicha vibración.
59

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Figura 2.20: PSD de los internos de un reactor.
Toda vibración está caracterizada por una amplitud, un amortiguamiento y una fre-
cuencia. Así, cada una de las resonancias que se pueden ver en la gura 2.20 podrían
ajustarse a un modelo de oscilador armónico del tipo siguiente:
|x|2 =
∣∣∣∣ F0/m
−ω2 + 2jγω + ω20
∣∣∣∣2 (2.92)
No obstante, debido a que las resonancias se solapan entre sí, ajustar esta ecuación a
cada una de ellas puede resultar una tarea muy tediosa. A esto se le suma la dicultad
añadida de que normalmente las resonancias cabalgan sobre un fondo que depende de
60

2.7. Ajuste de resonancias
la frecuencia. Por eso, existen otras fórmulas mucho más adecuadas y que se han venido
usando para el ajuste de las PSDs en diferentes momentos del ciclo. La más usada es
la fórmula de Breit-Wigner [100, 128, 129]que asigna a cada resonancia 4 parámetros; A,
amplitud, B, coeciente de asimetría, ν, la frecuencia amortiguada y µ el amortiguamien-
to. Así, para cada resonancia indicada con el subíndice λ, se tiene la siguiente expresión:
φ =
∑λ
µλAλ + (ω − νλ)Bλ
µ2λ + (ω − νλ)2
+µλAλ − (ω + νλ)Bλ
µ2λ + (ω + νλ)2
(2.93)
De esta manera, a medida que aumenta el ciclo, las resonancias se solapan y con el
parámetro B de asimetría se pueden discernir unas resonancias de otras. Como todos
los parámetros tienen un signicado físico y van asociados a una zona determinada del
espectro, la vigilancia parámetrica se simplica. Si el ajuste se hubiera realizado con un
modelo autorregresivo, se tendría un número elevado de coecientes cuyo signicado físico
es difícil de asignar. No obstante, a pesar de las ventajas de esta fórmula, el ajuste de
resonancias está basado en la experiencia, ya que es el propio analista el que tiene que
identicar el número de resonancias presentes para poder realizar el ajuste. Es por ello,
que la investigación del movimiento de los internos del reactor sigue estando en continua
mejora.
61

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
2.7.1. Justicación para el uso de la fórmula de Breit-Wigner en
resonancias mecánicas
La función de transferencia de un sistema que vibra y que posee una única resonancia se
expresa en el dominio s como un par de polos complejos conjugados p y p∗ respectivamente:
H(s) =A0
(s− p)(s− p∗)(2.94)
donde A0 es una constante relacionada con la amplitud de la resonancia. La correspon-
diente PSD para s = jω es:
PSD(ω) = |H(jω)|2 =A2
0
(|p|2 − ω2)2 + [2ωRe(p)]2(2.95)
Esta expresión es válida para todas las frecuencias, pero en la cercanía de una reso-
nancia se pude simplicar porque la ecuación 2.94 se puede escribir como:
H(s) ≈ A0
2jIm(p)(
1
s− p− 1
s− p∗) (2.96)
En una resonancia, si s está cerca de p, entonces debe estar alejado de p∗, porque
Re(p) << Im(p) y s = jω, así que el primer término en la ecuación 2.96 es mucho mayor
que el segundo. Despreciando el segundo término, la función de transferencia se aproxima
como sigue:
H(s)A0
2jIm(p)(
1
s− p) (2.97)
Por tanto, la PSD es:
PSD(ω) =A2
0
4Im2(p)
1
re2(p) + [ω − Im(p)]2(2.98)
62

2.8. La transformada de Hilbert
que es una fórmula, más simple que la ecuación 2.95 pero válida únicamente en la cer-
canía de la resonancia. Por tanto, la PSD de un sistema vibratorio con n resonancias se
representa por:
PSD(f) =n∑k=1
φ(f) +BGk (2.99)
donde BGk es el fondo, que se estima por medio de la representación gráca de la PSD
para cada resonancia, y φk la expresión de Breit-Wigner para la resonancia k. Cada
resonancia se caracteriza explicitamente por:
φk =Akµ
2k +Bk(fk − f)
µ2k + 4π2(f − fk)2
(2.100)
donde, como se ha mencionado anteriormente, para la resonancia k se tiene:
fk, frecuencia de la resonacia
Ak, amplitud
µk, amortiguamiento
Bk, factor de asimetría
2.8. La transformada de Hilbert
La transformada de Hilbert de una función f(x) se dene como:
f (x0) =1
πP
∞∫−∞
f (x)
x− x0
dx (2.101)
donde P denota el valor principal de Cauchy y permite expandir el tipo de funciones
para las que la denición dada por (2.101) existe. Así, la integral se puede calcular de
63

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
forma simétrica en torno a x = x0 de la siguiente manera siguiendo la denición del valor
principal de Cauchy:
P
∞∫−∞
f (x)
x− x0
dx = lımε→0
x0−ε∫−∞
f (x)
x− x0
dx+
∞∫x0+ε
f (x)
x− x0
dx
(2.102)
La transformada de Hilbert se parece mucho a la integral de Cauchy en el campo
complejo:
f (z0) =1
2πj
∮C
f (z) dz
z − z0
(2.103)
donde C es cualquier curva cerrada del plano complejo que contenga al punto z = z0.
Figura 2.21: Contorno cerrado con un punto singular en x0.
Por tanto, para calcular una transformada de Hilbert, se pueden utilizar las propieda-
des de la variable compleja. Así, la integral a realizar en un contorno como el de la gura
2.21, sería la siguiente:
∮C
f (z) dz
z − x0
=
∫Γ
f (z) dz
z − x0
+ P
∫f (x) dx
x− x0
+
∫Ω
f (z) dz
z − x0
(2.104)
Los contornos vienen dibujados en la gura 2.22.
64

2.8. La transformada de Hilbert
Figura 2.22: Descomposición del contorno C dado en la gura 2.21.
Hay que tener en cuenta que para resolver estas integrales hay que suponer que R
tiende a innito y que ε tiende a cero. Por tanto, las integrales son en realidad los siguientes
límites:
∮C
f (z) dz
z − x0
= lımR→∞
∫Γ
f (z) dz
z − x0
+ P
∫f (x) dx
x− x0
+ lımε→0
∫Ω
f (z) dz
z − x0
(2.105)
La integral en el lado izquierdo de la ecuación se puede resolver mediante el teorema
de los residuos; la primera del lado derecho, por el teorema de Jordan se hace cero, ya
que el radio tiende a innito; la segunda integral del valor principal de Cauchy, es la
transformada de Hilbert multiplicada por π ; y la última, se resuelve parametrizando el
contorno Ω mediante:
z − x0 = rejθ
dz = jrejθdθ
(2.106)
sustituyendo en 2.105, nos queda:
2πj
∑semiplanosuperior
res
(f (z)
z − x0
) = P
∫f (x) dz
x− x0
+ lımε→0
0∫π
f(x0 + rejθ
)jrejθdθ
rejθ(2.107)
En la última integral, en el límite, cuando ε tiende a cero, f(x0 +rejθ) = f(x0), por tanto,
65

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
si se despeja el valor principal:
P
∫f (x) dz
x− x0
= 2πj
∑semiplanosuperior
res
(f (z)
z − x0
)−f (x0)
0∫π
jdθ (2.108)
y operando un poco
P
∫f (x) dz
x− x0
= 2πj
∑semiplanosuperior
res
(f (z)
z − x0
)+f (x0)πj (2.109)
En denitiva, la integral del valor principal de Cauchy se puede expresar como:
P
∫f (x) dz
x− x0
= 2πj
∑semiplanosuperior
res
(f (z)
z − x0
)+
1
2residuo en x0
(2.110)
Pongamos un ejemplo práctico de cómo calcular una transformada de Hilbert de una
función denominada pulso de Cauchy y de expresión h(t) = 1t2+θ2 donde θ es un parámetro
. Lo primero, como se va a utilizar la variable compleja para calcularla, se construye con
h(t) la siguiente función en z:
F (z) =1
(z2 + θ2) (z − t)=h (z)
z − t(2.111)
A continuación, se identican los polos de la función:
z1 = jθ z2 = −jθ z3 = t (2.112)
Para cada polo, se calculan los residuos:
Residuo en z = jθ → (z − jθ) · F (jθ) =1
2jθ (jθ − t)
Residuo en z = t→ (z − t) · F (t) =1
(θ2 + t2)
(2.113)
66

2.8. La transformada de Hilbert
Para el polo en z = −jθ no se ha calculado el residuo ya que está dentro del semiplano
inferior tal y como se obtuvo en 2.110.
La transformada de Hilbert de h(t) queda de la siguiente manera:
h (t) =2πj
π
[1
2jθ (jθ − t)+
1
2
1
(θ2 + t2)
](2.114)
Si se opera,
h (t) =
[− (jθ + t)
θ (θ2 + t2)+j
θ
θ
(θ2 + t2)
]=
−tθ (θ2 + t2)
= −h (t)t
θ(2.115)
En las guras siguientes se representa el pulso de Cauchy para θ = 0, 5 y su transfor-
mada de Hilbert de acuerdo al resultado obtenido en (2.115).
Figura 2.23: Pulso de Cauchy para θ = 0, 5.
67

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Figura 2.24: Transformada de Hilbert del pulso de Cauchy para θ = 0, 5.
2.8.1. Relación con la transformada de Laplace
La transformada de Laplace se dene como una aplicación que va desde un dominio
al dominio inverso, en el caso más común, del tiempo a la frecuencia y se dene como:
L [f (t) , s] =
∞∫0
f (t) e−stdt (2.116)
Si se aplica la doble transformada, se vuelve al dominio original. Veamos qué ocurre si se
transforma dos veces f(t):
L L [f (t) , s] , τ =
∞∫0
L [f (t) , s] e−sτds (2.117)
Como se puede ver, en la primera transformada se pasa del dominio del tiempo t al de s, y
en la segunda, se va desde s al dominio τ . Si se desarrolla la primera de las transformadas,
68

2.8. La transformada de Hilbert
se tiene:
L L [f (t) , s] , τ =
∞∫s=0
∞∫t=0
f (t) e−ste−sτdsdt (2.118)
Primero se integra respecto a la variable s y empleando la notación LL para la doble
transformada, se obtiene:
L f (t) , τ =
∞∫t=0
f (t)
t+ τdt (2.119)
Esta integral se parece mucho a la transformada de Hilbert sólo que la variable t sólo se
extiende a valores positivos. Si se parte de un desarrollo numérico de la integral de Hilbert
como el que sigue:
f (t) =∆t
π
[...+
f (−2)
−2− t+f (−1)
−1− t+f (0)
−t+f (1)
1− t+f (2)
2− t+ ...
](2.120)
y se toma la mitad izquierda de la serie:
A =
∞∫0
f (−τ)
−τ − tdτ = −
∞∫0
f (−τ)
τ + tdτ = −LL [f (−τ) , t] (2.121)
ahora si se toma la mitad derecha:
B =
∞∫0
f (τ)
τ − tdτ = LL [f (τ) ,−t] (2.122)
resultando:
f (t) =1
π(A+B) =
1
π(LL [f (τ) ,−t]− LL [f (−τ) , t]) (2.123)
Así la transformada de Hilbert se expresa como una resta de dos transformadas dobles de
Laplace.
69

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
2.8.2. Relación con la transformada de Fourier
La transformada de Hilbert se determina fácilmente a través de la transformada de
Fourier que se denota por F (ω):
F (ω) =
∞∫−∞
f (t) e−jωtdt (2.124)
La transformada inversa de Fourier es:
f (t) =1
2π
∞∫−∞
F (ω) ejωtdω (2.125)
Así, la transformada inversa de la función f(t) = 1tes:
F (ω) =
∞∫−∞
1
te−jωtdω = −jπ sgn (ω) (2.126)
donde sgn(ω) es la función signo. Se puede, por tanto, considerar la transformada de
Hilbert como un producto de convolución:
h (t) = − 1
π
∞∫−∞
h (τ)1
t− τdτ = − 1
πh (t) ∗ 1
t(2.127)
Como se sabe que la transformada de la convolución de un producto es el producto de las
transformadas, se obtiene:
TF[h (t)
]= − 1
πTF [h (t)] ·TF
[1
t
]= − 1
πH (ω) [−jπ sgn (ω)] = j sgn (ω)H (ω) (2.128)
Si se realiza la transformada inversa:
h (t) =1
2π
∞∫−∞
j sgn (ω)H (ω) ejωtdω (2.129)
70

2.8. La transformada de Hilbert
Como la transformada de Fourier es en general un número complejo con su parte real e
imaginaria tal que H(ω) = Re(H) + jIm(H), entonces:
si ω > 0→ j sgn (ω)H (ω) = − Im (H) + j Re (H)
si ω < 0→ j sgn (ω)H (ω) = Im (H)− j Re (H)
(2.130)
Por tanto, para calcular la transformada de Hilbert de una función h(t) primero se calcula
su transformada de Fourier, después las frecuencias positivas se multiplican por j, es decir,
se giran 90o, y a las negativas se les gira -90o. Por último, se calcula la transformada inversa
de Fourier.
Pongamos como ejemplo la transformada de Hilbert de las funciones seno y coseno.
Así, primeramente, se calculan sus transformadas de Fourier:
TF [cos (ω0t)] = π [δ (ω − ω0) + δ (ω + ω0)]
TF [sen (ω0t)] = jπ [δ (ω + ω0)− δ (ω − ω0)]
(2.131)
calculando ahora la transformada inversa y multiplicando por jsgn(ω) se tiene:
1
2π
∞∫−∞
j sgn (ω) π [δ (ω + ω0) + δ (ω − ω0)] ejωtdω =j
2
[−e−jω0t + ejω0t
] jj
= − sen (ω0t)
1
2π
∞∫−∞
j sgn (ω) jπ [δ (ω + ω0)− δ (ω − ω0)] ejωtdω = −1
2
[−e−jω0t − ejω0t
]= cos (ω0t)
(2.132)
Por tanto, las transformadas de Hilbert son:
H [cos (ω0t)] = − sen (ω0t)
H [sen (ω0t)] = cos (ω0t)
(2.133)
71

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
2.8.3. Propiedades
Para poder usar la transformada de Hilbert es necesario conocer alguna de sus pro-
piedades. En este epígrafe se explican algunas de sus propiedades desde el punto de vista
de las aplicaciones sin entrar demasiado en la demostración matemática.
Existencia
Puesto que la transformada de Hilbert requiere realizar una transformada directa e
inversa de Fourier, en principio todas aquellas funciones sobre las que se puede aplicar el
análisis de Fourier podrán transformarse mediante Hilbert. A nosotros nos interesa ana-
lizar con la transformada de Hilbert todas aquellas señales como las de los sismogramas,
cardiogramas, ruidos, uctuaciones térmicas, etc. que en la mayor parte de los casos, por
ser desarrollables en serie de Fourier, y en consecuencia, tendrán transformada de Hilbert.
Doble transformada
La doble transformada de una función h(t) es −h(t). Para demostrarlo, partamos de
la serie de Fourier de h(t):
h (t) =∞∑
k=−∞
hkejωkt (2.134)
La transformada de Hilbert de esta expresión es:
h (t) =∞∑
k=−∞
hkj sgn (ω) ejωkt (2.135)
72

2.8. La transformada de Hilbert
y aplicando de nuevo la transformada de Hilbert:
ˆh (t) =
∞∑k=−∞
hkj sgn (ω) j sgn (ω) ejωkt = −h (t) (2.136)
Linealidad
De la propia denición de la transformada se deduce la linealidad.
Norma
Si h(t) es una función de cuadrado integrable también lo es su transformada de Hilbert,
y además:∞∫
−∞
h2 (t) dt =
∞∫−∞
h2 (t) dt (2.137)
Si se desarrolla en serie de Fourier, la integral del lado izquierdo de la ecuación se puede
expresar como:∞∫
−∞
h2 (t) dt =∞∑
k=−∞
|hk|2 (2.138)
Ortogonalidad
Una función y su transformada de Hilbert son ortogonales, es decir:
∞∫−∞
h (t) h (t) dt = 0 (2.139)
Para su demostración aprovecharemos que conocemos la transformada de Hilbert del
coseno y del seno y utilizaremos la serie de Fourier:
∞∫−∞
∞∑k=−∞
[ak cos (ωkt) + bksen (ωkt)]∞∑
n=−∞
[−ansen [ωnt) + bn cos (ωnt)]dt = 0 (2.140)
73

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Teniendo en cuenta las propiedades de ortogonalidad de las funciones trigonométricas,
para las integrales son nulas, resultando:
∞∑k=−∞
∞∫−∞
[akbk cos2 (ωkt)− akbk sen2 (ωkt)
]dt =
∞∑k=−∞
∞∫−∞
[akbk cos (2ωkt)] dt = 0 (2.141)
Transformada de una función constante
Si se tiene una función constante del estilo a h(t) = A, su serie de Fourier asociada es
h(t) = A cos(ωt) con ω = 0, la transformada de Fourier será −A sen(ωt) que es nula para
todos los instantes.
Funciones pares e impares
Si h(t) es una función par, entonces su transformada es impar y viceversa, si es impar,
su transformada es par. Esto se demuestra fácilmente ya que si una función es par, su
desarrollo en serie de Fourier sólo tendrá términos coseno, cuya transformada de Hilbert
son términos en seno que son funciones impares.
Transformada de la convolución
La transformada de Hilbert de la convolución de dos funciones es la convolución de
una de ellas con la transformada de Hilbert de la otra. En efecto, si h(t) es la convolución
de dos funciones:
h (t) = h1 (t) ∗ h2 (t) (2.142)
74

2.8. La transformada de Hilbert
al realizar la transformada de Fourier, se tiene:
H(ω) = TF [h (t)] = TF [h1 (t) ∗ h2 (t)] = H1 (ω) ·H2 (ω) (2.143)
introduciendo el factor j(ω):
j(ω)H(ω) = [j(ω)H1(ω) ·H2(ω)(2.144)
y por último, se realiza la transformada inversa de Fourier:
h (t) = h1 (t) ∗ h2 (t) (2.145)
donde se comprueba, que la transformada de la convolución es la convolución de la trans-
formada de Hilbert de una de las funciones por la otra sin transformar.
Generalización del teorema de Parseval
Se cumple que:∞∫
−∞
h1 (t) · h2 (t) dt =
∞∫−∞
h1 (t) · h2 (t) dt (2.146)
Si se desarrollan ambas funciones en serie de Fourier compleja:
∞∫−∞
h1 (t) · h2 (t) dt =
∞∫−∞
∑k,n
h1kejωkt · h2ne
jωntdt =∑k,n
|h1kh2k| (2.147)
Realizando el producto de las transformadas de Hilbert de ambas funciones se tiene:
∞∫−∞
h1 (t) · h2 (t) dt =
∞∫−∞
∑k,n
h1kh2nejt(ωn+ωk)+j π
2(sgnωn+sgnωk)dt =
∑k
|h1kh2k| (2.148)
ya que los desfases ±π/2 no cambian el módulo.
75

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Intercambio con la derivada
La transformada de la derivada es la derivada de la transformada. En efecto, partiendo:
h (t) =∑k
hkejtωk ; h (t) =
∑k
j sgn (ω)hkejtωk (2.149)
entonces la derivada respecto del tiempo es:
dh
dt=∑k
jωkhkejtωk (2.150)
transformando por Hilbert ambos miembros:
H
[dh
dt
]=∑k
jωkj sgn (ω)hkejtωk =
dh
dt(2.151)
Esta es una de las propiedades más interesantes pues permite aplicar la transformada a
ecuaciones diferenciales lineales. No obstante, el caso más interesante se encuentra en las
ecuaciones no lineales y para ello se necesita además la transformada de un producto de
funciones.
Transformada de un producto de funciones
La transformada de un producto de funciones es:
H [f · g] = f · g + f · g +H(f · g
)(2.152)
Comprobémoslo con un caso sencillo:
H [sen 2x] = cos 2x o H [sen 2x] = 2H [senx cosx] (2.153)
76

2.8. La transformada de Hilbert
En la segunda ecuación se tiene un producto de funciones, si f = cosx y g = senx,
entonces:
2H [f · g] = cos 2x = cos2 x− sen2 x = f · g + f · g (2.154)
que en este caso:
H [f · g] = cos 2x = cos2 x− sen2 x = f · g + f · g −H [f · g] (2.155)
pero observamos en este caso que −H[f ] = H[f · g] , así pues se concluye que:
H [senx · cosx] = ˆsenx · cosx+ senx · ˆcosx+H [ ˆsen x · ˆcosx] (2.156)
2.8.4. Señal analítica: amplitud y fase instantáneas
La transformada de Hilbert permite denir el concepto de señal analítica. Sea x(t) una
señal, entonces, se dene su señal analítica como:
xa (t) = x (t) + jH [x (t)] = x (t) + jx (t) (2.157)
donde xa(t) es la señal analítica y x(t) la transformada de Hilbert de la señal x(t). La
señal analítica se puede expresar como:
xa (t) = A (t) ejφ(t) (2.158)
Donde A(t) es el módulo de xa(t) y se denomina amplitud instantánea y φ(t) es la fase
instantánea que se calcula a través de φ = tan−1 x(t)x(t)
. Por tanto para denir la frecuencia
instantánea ω(t), se opera de la siguiente manera:
ω (t) =dφ
dt(rad/s)→ f =
1
2π
dφ
dt(Hz) (2.159)
77

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Así, para detectar la no linealidad de una determinada señal, se calculan su frecuencia
y amplitud instantáneas[25][72] y se representan en una gráca donde la frecuencia está
en eje de las abscisas y la amplitud en el de las ordenadas. Esta representación se deno-
mina columna vertebral o backbone en inglés. En un sistema lineal, la columna vertebral
suele consistir en una recta vertical, es decir, una única frecuencia que tiene varias am-
plitudes, como ocurre en la respuesta al impulso de un oscilador armónico amortiguado.
Sin embargo, cuando el sistema es no lineal, ya no existe una única frecuencia y la recta
vertical se curva. En el siguiente epígrafe, se va a ejemplicar el cálculo de las frecuencias
y amplitudes instantáneas mediante un oscilador no lineal de Dung.
2.8.5. Ejemplo de un sistema no lineal: Oscilador de Dung
Sea un oscilador de Dung con un término independiente no lineal tal y como se
muestra en la siguiente ecuación:
md2y
dt2+ c
dy
dt+ k
(1 + εy2
)y = 0 (2.160)
Donde m es la masa, c es el amortiguamiento y k la constante de rigidez. En la gura
2.25, se puede ver el aspecto de la respuesta al impulso para el caso de ε = 5:
78

2.8. La transformada de Hilbert
Figura 2.25: Respuesta al impulso de un oscilador de Dung no lineal con ε = 5 .
La no linealidad se comprueba a través de las diferentes frecuencias que muestra la
oscilación. En torno a 2-4 segundos, el periodo de la oscilación es mucho más pequeño
que en el entorno de los 10 segundos. Por otro lado, si se compara con la respuesta lineal,
es decir, para un caso en que ε = 0, las oscilaciones mantienen la misma frecuencia a lo
largo de todo el intervalo temporal tal y como se observa en la gura 2.26.
79

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Figura 2.26: Respuesta al impulso de un oscilador armónico lineal.
80

2.8. La transformada de Hilbert
Realizando la transformada de Hilbert de la señal, se puede obtener, como ya se explicó
anteriormente, la frecuencia y la amplitud instantáneas. En las guras 2.27 y 2.28 se han
representado la amplitud y frecuencia instantáneas frente al tiempo de un oscilador lineal
y uno no lineal con ε = 5.
Figura 2.27: Amplitud instantánea frente al tiempo de un oscilador de Dung con ε = 5
y de un oscilador lineal.
81

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
Figura 2.28: Frecuencia instantánea frente al tiempo de un oscilador de Dung con ε = 5
y de un oscilador lineal.
En la gura 2.27 no se observa un gran diferencia entre el caso lineal y el no lineal. No
obstante, en la 2.28 correspondiente a las frecuencias instantáneas, se puede apreciar que
en el caso no lineal, al comienzo de la oscilación, hay frecuencias que doblan la frecuencia
natural del oscilador, en este caso, 0,5 Hz. A medida que nos acercamos a los 10 segundos,
ambas frecuencias se igualan. Estas representaciones no son sucientes para diagnosticar
de forma eciente la no linealidad de un sistema, por ello se utiliza muy a menudo la
representación backbone como se muestra en la gura 2.29.
Como ya se adelantó al hablar de las señales analíticas, la columna vertebral de un
82

2.8. La transformada de Hilbert
Figura 2.29: Amplitud instantánea vs frecuencia instantánea para los casos lineal y no
lineal de un oscilador Dung con ε = 5.
83

2. FUNDAMENTOS DEL ANÁLISIS DE VIBRACIONES ALEATORIAS
oscilador armónico lineal es una línea vertical, lo que implica que la frecuencia de la
oscilación se mantiene constante aunque la amplitud cambie. Sin embargo, en el caso no
lineal la columna se curva hacia la derecha debido a la aparición de frecuencias más altas
al comienzo de la oscilación. En la gura 2.30 se puede ver una representación detallada
de la gura 2.29.
Figura 2.30: Detalle de la amplitud instantánea vs frecuencia instantánea para los casos
lineal y no lineal de un oscilador de Dung con ε = 5.
84

Parte II
SISTEMAS LINEALES
85


Capítulo 3
ANÁLISIS DE RUIDO NEUTRÓNICO
PARA MANTENIMIENTO DE
CENTRALES NUCLEARES
3.1. Introducción
En este capítulo se va a tratar la aplicación del análisis de ruido, concretamente del
ruido neutrónico en reactores de agua a presión (PWR), para el mantenimiento de los
internos del reactor. Un reactor nuclear es una planta industrial que aprovecha la energía
de la sión del uranio para producir energía eléctrica. En la gura 3.1 se muestra un
esquema sencillo de un reactor PWR:
87

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
Figura 3.1: Esquema de una planta nuclear tipo PWR.
Un reactor PWR está compuesto por tres sistemas de refrigeración:
1. Sistema de refrigeración del reactor. Según el diseño, puede estar formado por
dos, tres o cuatro lazos (loops) unidos a la vasija. En la gura 3.2 se muestra un
diseño con cuatro. Cada uno de los lazos se compone de una bomba y de un generador
de vapor. El agua ligera se calienta a su paso por las barras de combustible y debido
a que la presión se mantiene con el presurizador, se evita el cambio de fase. Por
último va a al generador de vapor.
2. Sistema de refrigeración secundario. Incluye el circuito principal de vapor así
como el del agua de alimentación procedente del condenador.
3. Sistema de refrigeración del condensador. Se compone de un circuito por el
que uye agua procedente de una fuente externa (mar, río, lago, etc).
Nuestro objetivo de estudio se centra en la vasija del reactor y los modos de vibración
88

3.1. Introducción
Figura 3.2: Reactor Westinghouse PWR de cuatro lazos.
de sus componentes internos: núcleo, barras de combustible, barras de control, circuito de
agua, entre otros. En la gura 3.3 se muestra una vista 3D de la vasija y un corte lateral
con sus elementos más importantes.
3.1.1. Ruido neutrónico
Se entiende por ruido neutrónico las uctuaciones del ujo de neutrones presentes
en la vasija. Debido a que estas uctuaciones son inherentes al proceso de sión, su
medida no supone la interrupción en la operación. La medida de estas uctuaciones da
una información muy valiosa de la dinámica de los elementos estructurales del reactor.
Existen varias fuentes de ruido neutrónico que se explican a continuación brevemente:
1. Ruido a potencia zero: Se trata de las uctuaciones que tienen un origen mi-
89

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
Figura 3.3: Vista 3D y sección lateral de la vasija de un reactor PWR.
croscópico y que se producen a cualquier nivel de potencia. Son las únicas que se
registran para potencias muy bajas y son debidas a las reacciones en cadena y al
proceso de sión sin tener en cuenta ningún elemento estructural del reactor
2. Ruido inducido por la reactividad: Son uctuaciones macroscópicas del ujo
de neutrones debido a la uctuación de reactividad y pueden proceder de fuentes
mecánicas, hidráulicas o térmicas entre otras.
3. Ruido geométrico: Cambios en la geometría de los componentes del reactor que
a su vez se traduce en cambios en las uctuaciones del ujo neutrónico.
El ruido neutrónico se mide con detectores de neutrones. La instrumentación nuclear
es diferente en los reactores tipo PWR y en los BWR. De hecho, en estos últimos sólo
90

3.1. Introducción
existe instrumentación intra-nuclear, es decir, ubicada en el interior del reactor. En esta
tesis se han analizado señales procedentes de detectores de reactores PWR, por tanto,
la instrumentación nuclear de los reactores BWR no será objeto de estudio. Así, en los
reactores PWR existen dos tipos de detectores neutrónicos según su ubicación:
Ex-core: Se trata de detectores que se colocan en el exterior del núcleo. Suele haber
8 detectores, cuatro superiores y cuatro inferiores para el rango da potencia más alto.
In-core: Se trata de detectores ubicados en el interior del núcleo para la medida
del ujo neutrónico. Con esta medida se calcula la potencia del reactor ya que
ambas magnitudes son proporcionales. Son detectores móviles que se utilizan para
elaborar un perl axial del ujo neutrónico una vez al mes. Normalmente, existen
unas zonas en la placa de sujeción de los elementos combustibles que se reservan
para la instrumentación in-core. Dicha instrumentación, además de los detectores
de neutrones, incluye los termopares para la medida de temperatura del agua de
salida del núcleo.
Los detectores de neutrones ex-core miden los neutrones a través de pulsos de voltaje
que se producen por partículas cargadas que están en el interior del detector. Como los
neutrones no están cargados, para producirse ionización es necesario que los neutrones
den lugar a una reacción que produzca partículas cargadas y que éstas ionicen un gas que
se encuentre en el interior del detector[29]. Los pares iónicos producidos se recogen en los
electrodos del detector produciéndose una corriente eléctrica. A continuación se presenta
91

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
la reacción nuclear que tiene lugar en los detectores para producir los pares iónicos:
10n+ 10
5 B → 115 B → 7
3Li+ α + Energía (3.1)
En la gura 3.4 se muestra un esquema de un detector ex-core. Los detectores in-core
Figura 3.4: Esquema de un detector de neutrones ex-core.
tienen un principio de funcionamiento diferente. Se denominan cámaras de sión ya que
están compuestos por un material físil de manera que al incidir los neutrones sobre él,
se producen siones y, en consecuencia, los productos de éstas de alta energía ionizan un
gas, normalmente argón, que se ubica en el interior del detector[29]. Cuando el material
físil se agota el detector ya no puede medir más. En la gura 3.5 se muestra un esquema
del detector.
92

3.1. Introducción
Figura 3.5: Esquema de un detector de neutrones in-core o cámara de sión.
3.1.2. Medida de los modos de vibración de los internos de un
reactor
El ruido registrado por los detectores ex-core e in-core es procesado para identicar
los modos de vibración de cada uno de los elementos internos del reactor. Los espectros
obtenidos a partir de los registros de unos y otros son ligeramente distintos, ya que su
posición en el reactor es diferente. En primer lugar, los detectores in-core suelen registrar
el ruido durante menos tiempo, ya que al contener un material físil, éste se consume y
dejan de ser operativos. En consecuencia, la PSD in-core tien un perl menos denido
que la registrada por los detectores ex-core. En la gura 3.6 se muestran 6 PSDs, las de
la izquierda proceden de tres señales ex-core, y las de la derecha son tres señales in-core,
correspondientes a tres meses consecutivos de vigilancia.
93

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
Figura 3.6: PSDs en tres momentos del ciclo (febrero, marzo y abril) procedentes de
señales in-core (a) y ex-core (b).
Como se puede observar, los espectros son ligeramente diferentes dependiendo si se
trata de señales in-core o ex-core. Respecto al momento en el que fueron tomados, se
puede apreciar cómo en los tres meses considerados apenas existe diferencia, y las PSDs
prácticamente se solapan unas con otras.
El espectro de frecuencias se puede dividir en las zonas especicadas por la tabla
3.1.Es necesario mencionar que de todos los elementos, el que ha dado lugar a mayor
número de estudios y publicaciones es el movimiento del barrilete (Core Barrel Motion,
CBM). El barrilete está anclado a la parte superior de la vasija y vibra de dos maneras
diferentes: por un lado se tiene una vibración pendular en torno a los 8 Hz (Beam mode)
y un segundo modo en torno a los 20 Hz (Shell mode) que corresponde a un movimiento
extensional del barrilete que se traduce en una modicación de su diámetro.
94

3.2. Evolución de la investigación precedente
Frecuencia Elemento estructural
<1 Hz Vibraciones termohidráulicas
2-3 Hz Primer modo de vibración de elementos combustibles
6-7 Hz Segundo modo de vibración de elementos combustibles
8 Hz Primer modo de vibración del barrilete (Beam Mode)
12 Hz Escudo térmico
15 Hz Vasija
20 Hz Segundo modo de vibración del barrilete (Shell Mode)
Tabla 3.1: Identicación de las vibraciones registradas en las PSDs procedentes de las
señales de los detectores de neutrones
3.2. Evolución de la investigación precedente
El mantenimiento predictivo de los internos del reactor se ha venido realizando desde de
los años 70. En el año 1975, Thie [116] estableció que se podía relacionar el movimiento del
barrilete del núcleo con la señal obtenida a través de los detectores de neutrones aplicando
la ecuación de un oscilador armónico simple. Así, la PSD de cada resonancia se puede
modelar por:
PSD(ω) =pico en f0
(ω20−ω2)2
4ζ2ω20
+ ω2
ω20
(3.2)
donde ζ es el ratio de amortiguamiento, ω0 es la frecuencia natural del sistema dada
por√k/m, m es la masa del barrilete y k la constante de rigidez del resorte asociado. Por
95

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
tanto, existen tres parámetros asociados a cada resonancia. Además, es posible obtener la
amplitud media del barrilete como:
RMS =π
2∆f × pico (3.3)
donde ∆f = 2ζf0 y se obtiene como la anchura del pico a media altura y picoPSD es la
amplitud de la resonancia.
Durante estos años surgieron otros trabajos encaminados a identicar las resonancias
de las diferentes PSDs de diversas Centrales. Así en la central de Stade, en Alemania, se
realizó un estudio mecánico del movimiento del reactor [16]. Se establecieron dos direc-
ciones preferentes, una pendular y otra vertical. En Holanda, en la central de Borselle, las
medidas de los detectores in-core y ex-core se utilizaron para identicar las resonancias
y establecer una relación entre éstas, la concentración de boro y el momento del ciclo
[39]. También surgieron otros trabajos relacionados con la identicación y monitorización
de las vibraciones de los internos en las centrales francesas [18]. Cada central tenía un
espectro con unas características propias, aunque en general, las bandas de frecuencia
vinculadas a cada elemento estructural eran muy similares. Por ello, Thie, en el capítulo
9 de su libro sobre ruido en el reactor [114] ya estableció ciertas bases para conocer las
propiedades mecánicas de los internos. Por un lado, describió la existencia de dos tipos
de movimientos del barrilete: uno pendular (Beam mode) y otro que produce cambios en
la forma del mismo (Shell mode). Dado que el barrilete está anclado a la vasija desde su
parte superior, el paso del refrigerante produce el movimiento pendular que a su vez será
el causante de la vibración de los elementos combustibles, de los detectores de neutrones
96

3.2. Evolución de la investigación precedente
in-core o de las barras de control. Respecto al segundo modo de vibración, la causa de
vibración se establece en la frecuencia fundamental de revolución de las bombas.
A continuación se publicaron trabajos para comprender los modos de vibración de
los elementos combustibles. En [113], Sweeney y Renier del Laboratorio Nacional de Oak
Ridge comprobaron que existía un aumento de la amplitud de la PSD procedente de los
detectores ex-core en torno a los 2-4 Hz(modo 1 de los elementos combustibles) a lo largo
de un ciclo, al aumentar el quemado y disminuir la concentración de boro. No obstante
se estableció que, tras corregir la señal del detector, las amplitudes de vibración de los
elementos combustibles no se veían afectadas por tales cambios a lo largo del ciclo.
Otro trabajo de interés es el realizado en el reactor Sequoya-1 [111], ya que comparó
medidas ex-core de dos ciclos distintos e in-core a lo largo de un ciclo. Entre las observa-
ciones a recalcar se encuentran: el aumento de la amplitud de la PSD a lo largo del ciclo
y su disminución tras la recarga de combustible; la detección de un pico ancho en torno
a los 8 Hz que probablemente englobe el movimiento del barrilete y el segundo modo del
combustible, y por último, se manifestó la dicultad de calcular el factor de escala que
traduce el ruido a vibraciones estructurales de cada elemento interno.
Un trabajo de gran relevancia dado su potencial de cara a la vigilancia de los internos
es la utilización de la fórmula de Breit-Wigner para el ajuste de la PSD [128]. A este
trabajo le siguieron otros donde se ponía en práctica el nuevo método de ajuste [100, 126].
De esta manera, cada resonancia viene caracterizada por cuatro parámetros que no sólo
tienen en cuenta las propiedades mecánicas de los elementos estructurales, sino también el
momento del ciclo de combustible y en consecuencia, el porcentaje de solapamiento entre
97

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
unas resonancias y otras. Dichos parámetros son:
Amplitud, Aλ
Frecuencia, νλ
Amortiguamiento, µλ
Asimetría, Bλ
La fórmula de Breit-Wigner es:
φ(ω) =∑λ
µλAλ + (ω − νλ)Bλ
µ2λ + (ω − νλ)2
+µλAλ − (ω + νλ)Bλ
µ2λ + (ω + νλ)2
(3.4)
Esta fórmula permite hacer un ajuste no lineal directo de la PSD y caracterizar cada
resonancia con cuatro parámetros con signicado físico.
Durante los años siguientes siguieron muchas publicaciones donde se explicaban méto-
dos para la mejora de la traducción del ruido a una vibración estructural y se aumentaba
de esta manera la base de datos de espectros de resonancias procedentes de cada planta
nuclear [111, 36, 112, 131, 17, 79]. La tarea de identicación de las resonancias era y es
difícil y cada planta tiene sus propias idiosincrasias.
En 1991, durante el SMORN VI celebrado en Gatlinburg (EE.UU.) se reservó una
sesión bajo el título Monitorización y vigilancia del movimiento de las estructuras de los
PWR y BWR donde se exponían los resultados concernientes al movimiento del barrilete
y de los internos de plantas de Argentina[98], Checoslovaquia [122], EEUU [126, 24] [99],
Hungría [70] y Francia [117].
98

3.2. Evolución de la investigación precedente
Desde estos años a la actualidad se han seguido realizando mejoras en este campo.
Por ejemplo, también existen trabajos donde, además del movimiento de los internos, era
importante conocer la velocidad del refrigerante a su paso por el reactor[62].
Sin duda, de los estudios más notables en seguimiento, monitorización y mejora conti-
nua de ésta, es el caso del trabajo conjunto realizado entre la universidad de Chalmers y el
reactor Ringhals de Suecia. En 1999 Pázsit [104]explicaba parte de los avances obtenidos
en años anteriores, de donde se destaca el modelo k−α que tiene en cuenta la disposición
de los detectores ex-core alrededor del núcleo y la física de reactores para identicar más
ecientemente cada componente del ruido neutrónico. Otros trabajos que han examinado
las posibilidades que ofrecen los detectores in-core y su ubicación preferente es [3] donde
se recomienda que se coloquen en la periferia del núcleo y en un único cuadrante si sólo se
dispone de unos pocos. También se destaca entre otros [54, 78, 96, 108] donde se examinan
nuevos datos de plantas nucleares en Canadá, Ucrania, Korea y Alemania.
Más recientemente cabe destacar nuevos informes técnicos de las medidas tomadas
en Ringhals [102]. En la fase 12 de este proyecto de diagnóstico de reactores se pone
en práctica un nuevo algoritmo de ajuste de las PSDs procedentes de los detectores
ex-core basado en la fórmula de Breit-Wigner. El ajuste permite la identicación de las
resonancias y se realiza hasta una frecuencia de 10 Hz. Además se realizan perles axiales
de amplitudes de vibración obtenidos de medidas in-core. No obstante, el ajuste de las
medidas in-core con la fórmula de Breit-Wigner no pudo llevarse a cabo y los resultados se
basan en una inspección visual. Así, la fase 13 de este proyecto [103] en la que la autora de
esta tesis estuvo participando, puso en práctica el algoritmo de ajuste a todo el espectro
99

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
de resonancias ex-core e in-core. Se realizaron nuevos perles axiales de amplitudes de
vibración y se conrmó que existían dos frecuencias de vibración en torno a los 8 Hz:
una de amplitud constante en el tiempo, posiblemente relacionada con el Beam mode; y
una de amplitud creciente relacionada con el segundo modo de vibración de los elementos
combustibles. Por último, hay que destacar, que pese a las ventajas que brinda la fórmula
de Breit-Wigner para el mantenimiento predictivo de los internos, la dicultad del ajuste
es considerable, ya que requiere mucha experiencia y en la mayoría de los casos, el número
de resonancias a ajustar es muy elevado y desconocido. Además, un seguimiento de las
resonancias a lo largo de un ciclo supone muchas medidas y muchos parámetros que
monitorizar.
100

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
3.3. Ajustes de Breit-Wigner de señales in-core y ex-
core
El trabajo que se presenta en esta sección fue realizado por la autora de la presente
tesis en la Universidad de Chalmers en Göteborg dentro del Departamento de Ingeniería
Nuclear bajo la dirección del Dr. Imre Pászit. Se encuadra dentro de un proyecto de
investigación entre dicho departamento y la Central nuclear de Ringhals gestionada por
la empresa Vatenfall. Dicho proyecto, que actualmente se encuentra en su fase 13, es fruto
de la colaboración entre el equipo de investigación del Dr. Pázsit y la central nuclear para
la mejora continua del mantenimiento y el diagnóstico de la misma.
En la fase anterior (fase 12)[102], en lo que se reere a la monitorización de los internos
del reactor, y más concretamente, al diagnóstico del movimiento del barrilete, se puso en
funcionamiento un algoritmo basado en la fórmula de Breit-Wigner y programado en
Matlab para el ajuste de las PSDs procedentes de señales ex-core. El ajuste se realizó
hasta los 10 Hz, ya que la zona de interés se encuentra en torno a los 8 Hz. Los resultados
indicaron que en torno a esta zona del espectro(beam mode) existen dos resonancias: Modo
1, en torno a los 7 Hz y el Modo 2, en torno a los 8 Hz. Además, dado que se tomaron tres
medidas correspondientes a tres momentos de un mismo ciclo de combustible (octubre
2006, febrero 2007, abril 2007), fue posible llevar a cabo un análisis de la tendencia (trend
analysis) de ciertos parámetros a lo largo del tiempo. Entre los parámetros analizados se
encuentran: las amplitudes de los modos 1 y 2 y las frecuencias de éstos. Se pudo observar
101

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
que existe un comportamiento distinto de ambos modos, lo que indujo a pensar que son
debidos a dos fenómenos físicos diferentes. En el caso del Modo 1, la frecuencia se mantuvo
constante a lo largo del ciclo al igual que la amplitud de la resonancia. No obstante, el
Modo 2 sufrió un aumento de su amplitud. Las explicaciónes ante estos resultados fueron:
Modo 1: Es la frecuencia del movimiento del barrilete (CBM, core barrel motion).
Modo 2: Se trata de la vibración de los elementos combustibles debido al ujo
turbulento del refrigerante. Dado que las características mecánicas de los elementos
combustibles cambian con el quemado, esto explicaría el cambio en la amplitud.
Respecto a las medidas in-core, sólo se disponía de registros de un momento del ciclo,
Abril 2008. Se tomaron con 5 detectores móviles que registraron en 6 posiciones axiales
diferentes. Así, se representaron perles axiales de las amplitudes de las resonancias de
interés y se compararon dichos resultados con datos de ciclos anteriores. Se pudo ver
cómo cada resonancia tenía un comportamiento axial diferente y que los resultados eran
consistentes con lo observado en las medidas ex-core. Sin embargo, hay que mencionar
que a las PSDs obtenidas de las señales in-core no se les realizó el ajuste no lineal basado
en la fórmula de Breit-Wigner y, en consecuencia, los perles de amplitudes se basan en
una mera inspección visual de las PSDs.
En conclusión, los objetivos que se planteaban para la fase 13 del proyecto [102] y que
serán explicados en esta sección son:
Aplicar el algoritmo de ajuste no lineal basado en la fórmula de Breit-Wigner de las
PSDs procedentes de las medidas ex-core de tres momentos diferentes del ciclo. El
102

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
ajuste se amplió hasta los 20 Hz
Comprobar que existen dos resonancias (Modo 1 y Modo 2) en torno a los 8 Hz y
validar las hipótesis establecidas en la fase 12 respecto al origen físico de las mismas
Realizar los ajustes no lineales de las PSDs de señales in-core y realizar perles
axiales con los parámetros obtenidos de los ajustes
Calcular las coherencias entre las señales in-core y ex-core
103

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
3.3.1. Toma de datos en Ringhals
Figura 3.7: Ubicación de los detectores
ex-core alrededor del núcleo en la cen-
tral de Ringhals .
Los datos analizados en esta parte de la tesis
proceden del reactor 4 de Ringhals, Suecia. Se
trata de un PWR de diseño Westinghouse. Las
medidas corresponden a tres momentos del ci-
clo: febrero, marzo y abril de 2009 procedentes
de detectores in-core y ex-core. La frecuencia de
muestreo utilizada fue de 62.5 Hz y el tiempo to-
tal del registro, 3 horas. Los detectores ex-core
son ocho, cuatro colocados en la parte superior
del núcleo y otros cuatro en la parte inferior. Su
disposición alrededor del núcleo es tal y como se muestra en la gura 3.7.
Por otro lado, los detectores in-core cuyas medidas han sido analizadas son cinco y son
móviles de manera que registran datos en seis posiciones axiales diferentes a lo largo de las
tres horas de medida. Hay que tener en cuenta que en el reactor el número de detectores
in-core es mucho mayor, dado que se utilizan para realizar mapas de ujo neutrónico
durante la operación y con una periodicidad especicada. En el caso que nos ocupa, sólo
se analizaron señales procedentes de 5 de estos detectores. En la gura 3.8 se muestra un
esquema de su posición en el núcleo y de las seis posiciones axiales.
104

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
Figura 3.8: Ubicación en el interior del núcleo del reactor 4 de Ringhals de los detectores
in-core cuyas medidas han sido analizadas.
Por tanto, al nal de cada periodo de medida se obtiene un archivo ASCII con un
conjunto de señales correspondientes a cada detector. En la tabla 3.2 se especican los
sensores que registraron datos en cada periodo (Febrero, Marzo o Abril). Existen 16
canales de medida, de los cuales dos están destinados a medir la componente de continua
de los detectores ex-core (N41 y N42 superior DC ), un canal a la medida de la presión,
5 a los detectores in-core (Incore A, B, C, D y E) y ocho a las señales de alterna de los
detectores ex-core (N41-N44 superior AC y N41-N44 inferior AC). En Abril las medidas
realizadas cambiaron ligeramente respecto a Febrero y Marzo, y en los canales 1, 5 y 7
(D3 termopar, N4 termopar y L8 termopar) se conectaron termopares para la medida de
la temperatura del refrigerante. Los termopares se identican por una letra y un número
que corresponden a las coordenadas de ubicación en el núcleo.
105

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
Canal de medida Febrero Marzo Abril
1 N41 Superior DC N41 Superior DC D3 Termopar
2 N42 Superior DC N42 Superior DC N42 Superior DC
3 Presión Presión Presión
4 Incore A Incore A Incore A
5 Incore B Incore B N4 Termopar
6 Incore C Incore C Incore C
7 Incore D Incore D L8 Termopar
8 Incore E Incore E Incore E
9 N41 Superior AC N41 Superior AC N41 Superior AC
10 N42 Superior AC N42 Superior AC N42 Superior AC
11 N43 Superior AC N43 Superior AC N43 Superior AC
12 N44 Superior AC N44 Superior AC N44 Superior AC
13 N41 Inferior AC N41 Inferior AC N41 Inferior AC
14 N42 Inferior AC N42 Inferior AC N42 Inferior AC
15 N43 Inferior AC N43 Inferior AC N43 Inferior AC
16 N44 Inferior AC N44 Inferior AC N44 Inferior AC
Tabla 3.2: Lista de medidas in-core y ex-core realizadas en Febrebero, Marzo y Abril de
2009
106

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
Figura 3.9: Ejemplo de señal obtenida a través de un detector in-core móvil. Cada uno de
los picos corresponde al momento en el que el detector es desplazado de una posición a
la siguiente.
Hay que mencionar que dado que dado que los detectores in-core son móviles, en el
momento de su desplazamiento, el ruido aumentaba su amplitud considerablemente (véase
la gura 3.9). Por ello, fue necesario eliminar esa parte de la señal de cada registro in-core.
3.3.2. Procesamiento de datos y ajuste no lineal
Una vez obtenidos los datos, fue necesario utilizar las herramientas de análisis de señal
para su procesamiento. En el caso de las medias ex-core se ha procedido de la siguiente
manera:
1. Lectura de datos: Es necesario leer el archivo donde se encuentren los datos
procedentes de los detectores.
107

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
2. Cálculo de las PSDs de cada detector: Cada señal procedente de cada detector
es dividida en una serie de bloques. A cada uno de los bloques se le divide por la
componente de continua [114] y se le aplica la transformada de Fourier, y a partir
de ésta, se calcula la PSD. Por último se suman todas las PSDs de cada bloque
y se promedia entre el número de bloques. Este procedimiento sigue los estándares
que se aplican en el análisis de ruido [114].
X = xii=1,...N ⇒ n =N
tbloq⇒ bloquek = xjj=(k−1)tbloq+1,...,k·tbloq
⇒ PSDk =fft(bloquek) · [fft(bloquek)]∗
DC2⇒ PSDt =
n∑k=1
PSDk
n
(3.5)
donde X es la señal, n es el número de bloques en que se divide la señal, tbloq es el
tamaño de cada bloque, PSDk es la densidad espectral de cada bloque, PSDt es la
densidad espectral de toda la señal promediada y DC es la componente de continua
de la señal.
3. Cálculo de las PSDs de los detectores superiores e inferiores: En algunas
ocasiones no nos interesa obtener la PSD de cada detector sino realizar un promedio
de las PSDs de los detectores superiores o inferiores.
4. Ajuste no lineal: Se ha realizado en Matlab con el comando lscurvet y está
basado en la fórmula de Breit-Wigner:
PSD(ω) =∑λ
µ2λAλ + (ω − νλ)Bλ
µ2λ + (ω − νλ)2
(3.6)
108

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
donde λ es el subíndice de la resonancia, µ es el amortiguamiento de la resonancia,
A es la amplitud, B es el factor de asimetría y ν es la frecuencia de la resonancia.
Para realizar el ajuste se ha ido barriendo la PSD desde las zonas de baja frecuencia
hasta la de alta de una manera acumulativa. Así, en primer lugar se intenta ajustar
el primer pico especicando los cuatro valores iniciales de frecuencia, amortigua-
miento, amplitud y asimetría. Una vez que se consigue el ajuste, se procede con la
siguiente resonancia pero ajustando conjuntamente la primera, de manera que el
primer barrido ajusta una resonancia, el segundo ajusta la primera y la segunda, y
así sucesivamente. Los valores del ajuste del primer barrido servirán como valores
iniciales del segundo, teniendo en cuenta que ahora el número de valores iniciales es
ocho en vez de cuatro. En la gura 3.10 se muestra una secuencia de ajuste en el
que progresivamente se obtienen los parámetros de las resonancias hasta 12 Hz.
109

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
(a) Ajuste hasta 4 Hz
(b) Ajuste hasta 9 Hz
110

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
(c) Ajuste hasta 12 Hz
Figura 3.10: Secuencia del procedimiento de ajuste. En (a) el ajuste se realiza hasta 4 Hz,
en (b) hasta 9 Hz, y en (c) hasta 12 Hz.
Este procedimiento puede resultar muy largo y tedioso. Hay determinados parámetros
como el amortiguamiento, la amplitud o la frecuencia que pueden obtenerse a través de
la gráca de la PSD, no obstante, la asimetría es mucho más difícil de predecir y ésta a
su vez determina los parámetros anteriores. Por tanto, el proceso requiere experiencia y
en muchas ocasiones es imprescindible añadir resonancias al ajuste que en principio no se
aprecian a simple vista.
Para el caso de los detectores in-core, se ha procedido de manera similar aunque existen
algunas diferencias ya que la toma de datos es diferente y además no existe componente
de continua en los datos suministrados para el análisis. Por tanto, el procesamiento de los
111

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
datos se puede resumir como sigue:
1. Filtrado de la señal: Previo al cálculo de la PSD, es necesario eliminar de la señal
aquellos picos correspondientes al momento en el que se desplazan los detectores de
una posición a otra.
2. Obtención de cada posición axial: La señal es dividida en seis, dado que cada
una de éstas representa una posición axial y debe ser analizada separadamente.
3. Cálculo de las PSDs: Obtención de la PSD de cada posición axial. Como hay
seis posiciones y cinco detectores, hacen un total de 30 PSDs in-core que se pueden
ajustar. El procedimiento de cálculo de la PSD es igual que en el caso ex-core, con
la consideración que las señales ahora son de menor longitud y por tanto, el tamaño
de cada bloque debe ser reducido.
4. Ajuste no lineal: Los ajustes se han llevado a cabo como en el caso de las señales
ex-core. Debido a que el perl de las PSDs in-core está menos denido, su ajuste
es más problemático y lleva más tiempo.
Como se ha mencionado, el ajuste es una tarea que consume mucho tiempo, por un
lado, porque es difícil dar con los adecuados valores iniciales y por otro, porque no se sabe
de antemano cuántas resonancias están presentes en el espectro. Además, cada detector
está en una posición distinta respecto al núcleo, esto implica que los valores iniciales para
el ajuste también dieren de un detector a otro.
112

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
En total, en esta fase se han ajustado un total de 30 PSDs ex-core y 30 in-core por
cada periodo de medida.
3.3.3. Resultados de las medidas ex-core
En este epígrafe se van a mostrar las PSDs obtenidas de las señales procedentes de
los detectores ex-core en tres momentos distintos del ciclo y los ajustes no lineales de las
mismas. Además, la atención se concentrará en el estudio del beam-mode y su evolución
en estos tres meses de estudio.
En la gura 3.11 se muestran las PSDs de varios detectores ex-core en los tres meses
en los que se realizaron medidas.
113

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
(a)
(b)
114

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
(c)
Figura 3.11: PSDs de señales de detectores ex-core durante los tres periodos de medida.
Detector N41 superior (a), detector N43 superior (b) y detector N41 inferior (c)
Como se puede observar, en todas las PSDs la amplitud en la zona nal del espectro
es ligeramente mayor en abril que en el resto de meses. Se cumple por tanto que la
amplitud aumenta a lo largo del ciclo. Además, se aprecia que la resonancia en torno a
los 8 Hz, el beam mode, es un pico muy ancho y que probablemente se trate de al menos
dos resonancias.
Aplicando el algoritmo de ajuste no lineal a los promedios de las PSDs delos detectores
inferiores y superiores se obtienen los grácos dela gura 3.12, mientras que el ajuste de
un detector concreto se muestra en la gura 3.13
115

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
(a) Detectores superiores
(b) Detectores inferiores
Figura 3.12: Ajustes no lineales de los promedios de las PSDs de las señales de los
detectores superiores (a) e inferiores (b) correspondiente al mes de febrero.
116

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
Figura 3.13: Ajuste de la PSD de la señal procedente del detector N-44 superior. (Tomada
en febrero).
La inspección visual muestra que los ajustes de las PSDs son muy adecuados. Co-
mo resultado de los ajustes, se obtiene una serie de parámetros correspondientes a cada
resonancia. En la tabla 3.3 se muestran los resultados de Febrero de tres detectores.
Como se puede observar, el número de resonancias no es el mismo en los tres detectores.
Por ello, el ajuste se complica aún más si cabe. Con respecto al beam mode, se puede
apreciar cómo existen dos resonancias en torno a las frecuencias de 7-8 Hz. Si se analizan
las frecuencias y amplitudes obtenidas para el Modo 1 y el Modo 2 en los detectores
inferiores a lo largo de los tres meses, se puede ver la evolución de dichas resonancias en
ese periodo de tiempo. En la gura 3.14 se muestra dicha evolución junto con la que se
observó en otro ciclo anterior de combustible, concretamente, la correspondiente a la fase
117

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
Tabla 3.3: Parámetros obtenidos del ajuste de las PSDs de las señales de tres detectores
ex-core correspondientes a febrero de 2009
118

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
12 del proyecto entre Ringhals y Chalmers[102].
(a) evolución frecuencia fase 12 (b) evolución frecuencia fase 13
(c) evolución amplitud fase 12 (d) evolución amplitud fase 13
Figura 3.14: (a) y (b) evolución de la frecuencia. (c) y (d) amplitud de los modos 1 y 2
para dos ciclos de combustible diferentes.
Del análisis de las guras se deducen varias cosas. En primer lugar, las medidas ana-
lizadas y ajustadas en esta tesis pertenecen a un periodo de tiempo que apenas abarca 3
meses, mientras que las medidas analizadas en la fase 12, se extendían mucho más en el
tiempo. Por tanto, es mucho más fácil ver cambios apreciables en la fase 12. No obstante,
119

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
Periodo Frec.1(Hz) Amp.1 (u.a.) Frec.2(Hz) Amp.2(u.a.)
Octubre 2006 6.92 1.60 7.80 0.429
Febrero 2007 6.90 1.80 7.75 15.70
Abril 2007 6.77 2.80 7.75 19.20
(a) Fase 12 (octubre 2006-abril 2007)
Periodo Frec.1(Hz) Amp.1(u.a.) Frec.2(Hz) Amp.2(u.a.)
Febrero 2009 6.80 4.60 8.03 13.2
Marzo 2009 6.85 5.20 8.06 16.1
Abril 2009 6.87 7.40 8.03 17
(b) Fase 13 (febrero 2009-abril 2009)
Tabla 3.4: Datos de amplitud y frecuencia de los modos 1 y 2 correspondientes a las fases
12 y 13
si se tienen en cuentan los cambios relativos en ambos periodos de tiempo se podrían
comparar las medidas de Febrero y Abril de 2007 con las de Febrero y Abril de 2009. En
la tabla 3.4 se resumen dichos datos.
Como se puede apreciar, la frecuencia de las resonancias se ha mantenido constante a
lo largo del periodo Febrero-Abril 2009. Para el caso de la amplitud, el comportamiento
es bastante diferente. El primer modo registra un aumento de su amplitud del 28,8% y
de un 60,9% para el segundo modo. Si se calcula este incremento relativo en el periodo
Febrero-Abril de la fase 12, los resultados son muy similares. Se obtiene un 22,3% en
120

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
el primer modo y 55,6% en el segundo. Por tanto, los resultados obtenidos ahora son
consistentes con los ajustes de la fase anterior aunque éstos se hayan realizado únicamente
hasta los 10 Hz, y lo que es más, se observa un comportamiento muy diferente entre ambas
resonancias, reforzándose la hipótesis de que sus orígenes físicos son distintos. No obstante,
debido a la cercanía en el tiempo de las medidas realizadas en la fase 13, ha sido imposible
apreciar el cambio tan brusco en amplitud que se registró en la fase 12 en el Modo 2 desde
Octubre hasta Abril. Sería necesario, para conrmar hipótesis, que las tres medidas fueran
realizadas a lo largo de un ciclo en tres momentos distintos: principio del ciclo, mitad del
ciclo y fase nal antes de la recarga. Así, se podría conrmar que el Modo 2 corresponde
a la vibración incoherente de los elementos combustibles debido al ujo turbulento y que
el brusco cambio en su amplitud se debe al propio agotamiento del material físil.
La identicación correcta de ambas resonancias es muy importante para el diagnóstico,
ya que no es lo mismo suponer que es el propio barrilete el que registra una oscilación
mayor, o que por el contrario, es debido al cambio en las propiedades mecánicas de las
barras de combustible. Una adecuada identicación de las zonas del espectro supone una
mejora en el mantenimiento y en denitiva, en la seguridad de la planta.
121

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
3.3.4. Resultados de las medidas in-core
Las PSDs obtenidas de las medidas in-core también son ajustadas con el algoritmo no
lineal de ajuste basado en la fórmula de Breit-Wigner. En la fase 12 [102] no se llevó a cabo
el ajuste, y el estudio de los perles axiales de amplitud correspondientes a las resonancias
del beam-mode se realizó por medio de inspección visual. En este caso, para evitar dicha
subjetividad se ha preferido ajustar las resonancias y obtener los cuatro parámetros que
las caracterizan.
La dicultad del ajuste es mucho mayor debido a que las PSDs están menos denidas.
Hay que recordar que en cada posición axial el detector permaneció unos 30 minutos, lo
que comparado con las tres horas de recogida de datos por parte de los detectores ex-core,
es mucho menos tiempo. A esto hay que añadir que el desplazamiento de los detectores
implica la eliminación de parte de las medidas.
En las grácas de la gura 3.15 se muestra la PSD correspondiente al detector B en
la posición 1, y las PSDs que se obtienen de las seis posiciones axiales correspondientes
a la medida de Febrero 2009.
Por otro lado, también se pueden visualizar los datos a lo largo del tiempo en una
determinada posición axial tal y como aparece en la gura 3.16
122

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
(a) Detector in-core B posición1
(b) Detector in-core B todas las posiciones
Figura 3.15: PSDs obtenidas de las señales del detector in-core B en la posición 1(a) y
en todas las posiciones (b)
123

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
(a) Detector in-core A posición1
(b) Detector in-core E posición3
Figura 3.16: PSDs obtenidas de las señales del detector in-core A en la posición 1 en tres
periodos diferentes(a) y del detector in-core E en la posición 3 en los mismos periodos (b)
124

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
Como se puede apreciar, las PSDs de los detectores in-core evolucionan de manera
diferente según la ubicación del detector en el núcleo y de la posición axial de éste. En la
gura 3.16, en la PSD del detector E, se puede apreciar que la amplitud ha aumentado con
el tiempo, mientras que no se observa lo mismo para el detector A, también en la misma
gura. Además, la zona del espectro en torno al beam-mode cambia según la posición axial
y en algunos casos, parece observarse una tercera resonancia. En denitiva, el ajuste de
estas PSDs es mucho más difícil.
En las guras 3.17, 3.18 y 3.19 se presentan los ajustes no lineales basados en la fórmula
de Breit-Wigner.
125

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
Figura 3.17: PSD de la señal del detector B en la posición 6 y su ajuste no lineal de
Breit-Wigner
126

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
Figura 3.18: PSD de la señal del detector C en la posición 3 y su ajuste no lineal de
Breit-Wigner
127

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
Figura 3.19: PSD de la señal del detector A en la posición 4 y su ajuste no lineal de
Breit-Wigner
En la tabla 3.5 se recopilan los resultados de los ajustes. El número de resonancias
utilizadas para el ajuste de las PSDs in-core es mucho mayor. Es necesario utilizar más
de las que en principio se predicen por inspección visual. Otros autores han denominado
a estas resonancias como espúreas, ya que probablemente no tengan signicado físico
pero son necesarias para el ajuste y en denitiva, para que el método funcione[127]. En el
caso de los detectores in-core el número de resonancias asciende en algunos casos a 15, y
en torno al beam-mode se obtiene una tercera resonancia con frecuencia de unos 7,5 Hz.
128

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
Tabla 3.5: Parámetros obtenidos del ajuste de las PSDs de las señales de tres detectores
in-core en tres posiciones axiales diferentes
129

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
En cuanto a los perles axiales de las amplitudes de las resonancias del beam-mode,
es decir, los denominados Modo 1 y Modo 2, dado que sólo se tienen medidas de los tres
meses considerados (Febrero, Marzo y Abril) para los detectores A, C y E, el análisis de
la evolución temporal sólo ha tenido en cuenta dichos detectores. En la gura 3.20 se
muestran los perles de amplitudes de cada detector del Modo 1 y en la gura 3.21 los
correspondientes al Modo 2.
(a) Perl axial de amplitud del Modo 1 Detector in-core A
130

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
(b) Perl axial de amplitud del Modo 1 Detector in-core C
(c) Perl axial de amplitud del Modo 1 Detector in-core E
Figura 3.20: Perles de amplitudes obtenidos a través del ajuste no lineal de Breit-Wigner
de las PSDs de los detectores in-core A(a) C(b) y E(c) correspondientes al Modo 1
131

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
(a) Perl axial de amplitud del Modo 2 Detector in-core A
(b) Perl axial de amplitud del Modo 2 Detector in-core C
132

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
(c) Perl axial de amplitud del Modo 2 Detector in-core E
Figura 3.21: Perles de amplitudes obtenidos a través del ajuste no lineal de Breit-Wigner
de las PSDs de los detectores in-core A(a) C(b) y E(c) correspondientes al Modo 2
En el caso de los perles del Modo 1, es decir, el pico de frecuencia 6.8 Hz, son muy
parecidos a lo observado en la fase 12. Además, aunque es difícil sacar conclusiones a partir
de estos resultados, sí se puede mencionar que la amplitud no aumenta con el tiempo.
De hecho, en muchas de las posiciones axiales, la amplitud del mes de Febrero es la más
alta. Este hecho refuerza la hipótesis de que esta resonancia está ligada al movimiento del
barrilete (Core Barrel Motion) y no a los elementos combustibles.
Respecto a la dependencia axial del pico en torno a 8 Hz, se observa un comportamiento
mucho más complicado. En este caso, las amplitudes de Abril suelen ser las más altas en
133

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
la mayor parte de las posiciones axiales. En la fase 12, la amplitud de este pico tomado de
los datos ex-core se incrementó drásticamente durante el ciclo de combustible, y entonces
se asumió que estaba relacionada con el segundo modo de vibración de los elementos
combustibles. Aunque estas hipótesis no pueden conrmarse con los datos aportados en
la fase 13, ambos resultados, fase 12 y 13, son consistentes entre sí. Se necesitaría una
tercera evidencia correspondiente a medidas más separadas en el tiempo para que se pueda
seguir la evolución de las resonancias a lo largo de todo un ciclo, desde el principio hasta
el nal.
3.3.5. Coherencia entre medidas in-core y ex-core
Entre los cálculos que se realizaron con los datos, también se comprobaron las cohe-
rencias existentes entre las PSDs ex-core y las pertenecientes a las medidas in-core. La
coherencia entre dos señales se evalúa como el módulo del espectro cruzado de ambas.
En la gura 3.22 se muestran las coherencias respecto a la frecuencia de los detectores
ex-core N41 superior y N44 inferior con todos los detectores in-core.
134

3.3. Ajustes de Breit-Wigner de señales in-core y ex-core
(d) Coherencias entre el detector ex-core N41 superior y los detectores in-core
(e) Coherencias entre el detector ex-core N44 inferior y los detectores in-core
Figura 3.22: Coherencias entre el detector ex-core N41 superior y los detectores in-core
(d) y entre el detector ex-core N44 inferior y los detectores in-core (e)
135

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
La coherencia más alta se encuentra en torno a los 6-8 Hz, es decir, en el beam mode.
Esto nos conrma el hecho de que las medidas in-core y ex-core están altamente correla-
cionadas en ese rango de frecuencia. Por tanto, el hecho de obtener información de ambos
detectores es muy útil para entender el origen físico de los diferentes picos.
136

3.4. Breit-Wigner y álgebra de cuaterniones: una herramienta para elmantenimiento predictivo
3.4. Breit-Wigner y álgebra de cuaterniones: una he-
rramienta para el mantenimiento predictivo
El número tan alto de datos que se obtienen de los detectores ex-core e in-core supone
una gran cantidad de trabajo si se quieren analizar todos ellos. A esto se le añade que
para los propósitos de diagnóstico de los internos es necesario realizar ajustes no lineales
que como ya se mencionó en los epígrafes anteriores, requiere experiencia y puede resultar
muy tedioso. No obstante, el diagnóstico es necesario, y en las plantas es fundamental
para garantizar la seguridad.
En el ajuste de una PSD, ya sea in-core o ex-core, se obtienen por cada resonancia
cuatro parámetros. El apartado anterior estuvo enteramente dedicado al análisis de la
evolución de la amplitud y de la frecuencia de dos de las resonancias obtenidas. Ni siquiera
se observaron otros parámetros como el amortiguamiento o la asimetría. Si a esto se añade
que el espectro tiene más de 10 resonancias y cada una contiene cuatro parámetros que
las caracterizan, el volumen de datos a analizar es enorme y se plantea como una tarea
que consume mucho tiempo. Por ejemplo, en la sección 3.3 se ajustó un gran número de
PSDs; tres periodos de medida, ocho detectores ex-core, cinco detectores in-core y seis
posiciones axiales por cada detector. Todas estas medidas suponen un total de 10 PSDs
que ajustar correspondientes a los datos ex-core y otras 30 PSDs para los in-core. Como
son tres periodos de medida se tienen un total de 120 PSDs.
La falta de tiempo en investigación no suele ser el problema fundamental, pero cuando
137

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
se pone a punto un método para la operación en planta, se requiere que éste sea sencillo
y además no consuma mucho tiempo. Por tanto, lo que se va a plantear en esta fase de
la tesis tiene que ver con la operatividad al ejecutar los análisis en la planta. La idea
fundamental es que el ajuste de las resonancias se lleve a cabo exclusivamente en aquellas
zonas del espectro que sean de interés y en segundo lugar, se construya un índice que
englobe los cuatro parámetros de la resonancia. De esta manera, en lugar de realizar un
análisis histórico de cada parámetro, se podría tener en en el análisis de un sólo parámetro
global toda la información condensada.
3.4.1. Índice global de vigilancia
Las principales resonancias bajo vigilancia son los elementos combustibles y el mo-
vimiento del barrilete. No permanecen constantes a lo largo del ciclo sino que tanto sus
amplitudes como sus frecuencias registran cambios pero ¾cuál es el porcentaje de variación
en un determinado periodo?
Después de obtener las PSDs de las señales de los detectores ex-core y realizarles
un ajuste no lineal de Breit-Wigner hasta la zona de frecuencia de interés, los cuatro
parámetros de las resonancias pueden obtenerse y construirse con ellos cuatro grácas
para observar su evolución temporal (trend analysis). Esto se ha realizado anteriormente
[127] y lo que se propone en esta tesis es que se aúnen los cuatro parámetros en un
único número, un cuaternión. En el apéndice A se recogen los fundamentos del álgebra
de cuaterniones.
Así, si cada resonancia está formada por la amplitud A, la asimetría B, la frecuencia ν
138

3.4. Breit-Wigner y álgebra de cuaterniones: una herramienta para elmantenimiento predictivo
y el amortiguamiento µ, se puede construir un cuaternión q tal que q = (B; ν, µ, A), donde
B es la parte real y el resto ν, µ, A) la parte vectorial o imaginaria. Como los cuaterniones
se pueden dividir, se puede calcular el cambio relativo en un periodo evaluando:
q − q0
q0
× 100 (3.7)
El módulo de dicho cuaternión, un número real, sería la respuesta ante la pregunta de la
variación porcentual durante un periodo determinado. El índice que se propone para la
vigilancia se dene por:
INDEX =
∣∣∣∣q − q0
q0
∣∣∣∣ 100
4(3.8)
La división entre cuatro se debe a que existen cuatro parámetros. El módulo del
cuaternión se dene por:
|q|2 = B2 + ν2 + µ2 + A2 (3.9)
Los cuatro parámetros deben tener la misma dimensión física, y el módulo calculado
no la tiene, por tanto, es necesario convertir el cuaternión en una magnitud adimensio-
nal. Así q = (B; ν, µ, A) se transforma en (B/B0; ν/ν0, µ/µ0, A/A0) donde el subíndide
0 representa dichos parámetros al principio del ciclo de combustible. En consecuencia, el
cuaternión de referencia es (1; 1, 1, 1). El álgebra de cuaterniones es paralela al álgebra
de números complejos; el conjugado se dene cambiando el signo de la parte vectorial:
q = (B;−ν,−µ,−A). Además, el álgebra de cuaterniones [55] es isomorfa al álgebra de
matrices complejas:
139

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
Q =
B − iν −µ+ iA
µ+ iA B + iν
; |q|2 = Det(Q)
Con las relaciones especicadas, INDEX se puede calcular de forma inmediata permi-
tiendo una monitorización global de las resonancias. En las tablas 3.6 y 3.7 se especican
los cuaterniones para el primer modo de vibración de los elementos combustibles y para
la vibración del barrilete a lo largo de 15 meses, en este caso, un ciclo.
Mes B/B0 ν/ν0 µ/µ0 A/A0
0 1.000 1.000 1.000 1.000
8 1.241 0.947 1.140 1.266
11 1.720 0.958 1.168 1.618
13 1.529 0.943 1.252 1.400
15 4.176 0.887 1.374 1.725
Tabla 3.6: Cuaterniones adimensionales para la primera resonancia de los elementos com-
bustibles
Se puede observar que la parte real del cuaternión es la que experimenta mayor cambio,
llegando incluso a cambiar el signo.
En la gura 3.23 la cantidad INDEX se representa para dos resonancias: el caso (a)
para el combustible y el (b) para el barrilete. INDEX alcanza valores muy altos en el
caso (b); esto es debido al aumento del solape con el segundo modo de vibración de los
elementos combustibles, como también se observa en la tabla 3.7. Aunque el parámetro
140

3.4. Breit-Wigner y álgebra de cuaterniones: una herramienta para elmantenimiento predictivo
Mes B/B0 ν/ν0 µ/µ0 A/A0
0 1.000 1.000 1.000 1.000
8 -9.351 0.928 1.096 1.250
11 -4.390 0.934 0.999 1.448
13 -12.87 0.919 1.071 1.456
15 -23.11 0.881 0.950 1.546
Tabla 3.7: Cuaterniones adimensionales para la resonancia del soporte del barrilete
B juega un papel muy importante en el ajuste no lineal, para los propósitos de vigilancia
temporal, no tiene ningún signicado físico y por tanto se puede prescindir de él. Así que
dicho parámetro se puede considerar cero y en consecuencia evitar que el solape sea uno de
los aspectos que se monitoricen. En la gura 3.23, (c) y (d) los casos anteriores con B = 0.
El máximo valor de INDEX es alrededor del 20% para la resonancia del combustible y
se alcanza al nal del ciclo( gura 3.23 c)).Para el caso del soporte del barrilete, INDEX
aumenta hasta un 10% alcanzándolo al nal del ciclo también ( gura 3.23 d).
3.4.2. Discusión de los resultados
La gura 3.23 reeja la complejidad de la operación en los reactores de agua a presión
en el caso del combustible. En la tabla 3.6 la frecuencia de resonancia decrece un 10%,
reejando el quemado de combustible; esto produce el cambio en la densidad de manera
monótona. Por la misma razón, el parámetro de amortiguamiento aumenta un 37% al
141

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
Figura 3.23: Vigilancia global de resonancias para el combustible (a) y el barrilete (b). Los
casos (c) y (d) recogen los resultados anteriores, haciendo que el factor de asimetría B se
considere nulo.
nal del ciclo. El aumento del amortiguamiento signica que la amplitud de la vibración
mecánica del elemento combustible debería decrecer, y éste es el caso, pero el detector
ex-core ve al combustible como una fuente de neutrones, y éstos son absorbidos por el
boro, un veneno neutrónico.
Se puede observar que la amplitud decrece en el mes 11, esto indica la inserción de un
nuevo veneno neutrónico: las barras de control.
Para la resonancia del soporte del barrilete, la tabla 3.7 muestra un INDEX que
crece monotonamente, lo que es mucho más conveniente para la monitorización. Todos
los cambios son moderados; la frecuencia resonante se mueve a la izquierda un 12%,
142

3.4. Breit-Wigner y álgebra de cuaterniones: una herramienta para elmantenimiento predictivo
indicando una ligera relajación de la fuerza de anclaje; el parámetro de amortiguamiento
permanece practicamente constante; pero la amplitud aumenta un 54%. El factor de
asimetría aumenta considerablemente al igual que el segundo modo de vibración de los
elementos combustibles. Cerca del nal del ciclo ambas resonancias apenas se distinguen
y por ello, la fórmula de Breit-Wigner es fundamental para el ajuste.
INDEX es la magnitud construida para el propósito de mantenimiento predictivo a
través del álgebra de cuaterniones. Sólo se ha reejado su módulo, no obstante la fase
también se podría monitorizar para el mismo objetivo. Además, INDEX ha tenido en
cuenta sólo aquellos parámetros de la resonancia importantes para el seguimiento y con
signicado físico.
143

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
3.5. Conclusiones relativas al Capítulo 3
Las conclusiones a las que se ha llegado en este capítulo de la tesis son:
Aplicación satisfactoria del algoritmo de ajuste no lineal. Uno de los obje-
tivos principales de esta sección era aplicar un algoritmo de ajuste no lineal basado
en la fórmula de Breit-Wigner a las PSDs obtenidas con detectores ex-core e in-
core. El algoritmo ha funcionado correctamente para ambos tipos de medidas y los
parámetros obtenidos pueden utilizarse a partir de ahora para el diagnóstico de los
internos del reactor.
Estudio del Beam Mode a través de las medidas ex-core. Se ha comprobado
que existen dos resonancias en torno al Beam Mode con dos comportamientos dis-
tintos. Los resultados son consistentes con los trabajos anteriores de otros autores
de los que la presente tesis es continuación. El primer modo de resonancia está vin-
culado al movimiento del barrilete debido al ligero aumento de la amplitud durante
el periodo de medida, y que el segundo modo registra un aumento de la ampli-
tud considerable que probablemente está vinculado a la vibración de los elementos
combustibles debido al ujo turbulento.
Estudio de los perles axiales de amplitud por medio de las medidas in-
core. Los perles axiales in-core son consistentes con las medidas ex-core. En ellos
se puede apreciar que la amplitud del primer modo no registra un aumento con el
tiempo, mientras que el segundo modo sí.
144

3.5. Conclusiones relativas al Capítulo 3
Consistencia con las medidas realizadas hasta ahora. Todos los resultados
obtenidos son consistentes (Véase página anterior) y sería conveniente que una vez
adquirida la experiencia en el ajuste de resonancias en esta fase, se pudiera aplicar
el algoritmo de ajuste a nuevas medidas más separadas en el tiempo. Lo ideal sería
tener al menos una medida a principio del ciclo y realizar otras al nal para com-
probar que los cambios observados en los registros de ruido son diferentes según el
momento del ciclo.
Índice de vigilancia global. Se ha construido un índice de vigilancia de los inter-
nos del reactor a través del álgebra de cuaterniones. El cuaternión está formado por
cuatro números que son los parámetros de una resonancia resuelta por una fórmula
de Breit-Wigner.
Ajuste en la cercanía de la resonancia. La fórmula de Breit-Wigner permite
que el ajuste de las resonancias sea local y por tanto, si sólo se pretende hacer un
seguimiento de una determinada resonancia no es necesario ajustar todo el espectro.
Creación de una gura modelo. La gura 3.23 se puede utilizar para el segui-
miento de las vibraciones de los internos como un modelo de comportamiento. En
caso de que el ciclo muestre otro comportamiento, los operadores deberían pregun-
tarse que podría estar pasando.
Calibración de las rectas. El álgebra de cuaterniones debe ajustarse a cada
reactor concreto, así para un determinado reactor, sus rectas de INDEX frente al
tiempo pueden cambiar ligeramente.
145

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
3.6. Publicaciones
Artículos en revistas
A.García-Berrocal, C.Montalvo, J.Blázquez y M.Balbás. Resolución de reso-
nancias de vibración. Aplicación a un problema de mantenimiento predicti-
vo.Anales de Ingeniería Mecánica. Año16, 2, 2008.
A. Garcia-Berrocal, J. Blazquez, C. Montalvo, and M. Balbás.Resolving mecha-
nical resonances with breit-wigner formula. Journal of Vibration and Control,
15(8), 126712802009.
Informes técnicos
I. Pázsit, C. Montalvo-Martin, T. Tambouratzis, and V. Dykin. Final report
on the research project Ringhals diagnostics and monitoring stage 13. Techni-
cal report, Chalmers internal report CTH-NT-230/RR-15, 2010.Department of
Nuclear Engineering
Se trata de un informe interno sobre el proyecto de investigación entre la Uni-
versidad de Chalmers y la central nuclear de Ringhals. Por otro lado, la colabo-
ración con Pázsit dará lugar a un artículo que pueda incluir todos los resultados
obtenidos en esta parte de la tesis.
146

3.6. Publicaciones
Ponencias a congresos
A.García-Berrocal, C.Montalvo, J.Blázquez y M.Balbás. Resolución de reso-
nancias de vibración. Aplicación a un problema de mantenimiento predicti-
vo.XVII Congreso Nacional de Ingeniería Mecánica, Gijón, 14-15 febrero de
2008.
Imre Pázsit C. Montalvo et al. Diagnostics of core barrel and fuel assembly
vibrations in the Ringhals PWRs, Sweden. American Nuclear Society: Winter
Meeting, Las Vegas November 2010. Resumen aceptado
147

3. ANÁLISIS DE RUIDO NEUTRÓNICO PARA MANTENIMIENTO DECENTRALES NUCLEARES
148

Capítulo 4
ANÁLISIS DE RUIDO APLICADO A
SENSORES DE CENTRALES
NUCLEARES
4.1. Introducción
El análisis de ruido en planta se reere a la monitorización y al diagnóstico de las
propiedades dinámicas de uctuaciones aleatorias o periódicas que se detectan en los
dispositivos de medida, ya sean éstos de ujo neutrónico, presión, caudal, temperatura,
etc. El análisis de ruido es una herramienta muy eciente para el tratamiento de la señal
debido a su sensibilidad y porque no requiere necesariamente introducir instrumentación
especial en el reactor y, por tanto, el sistema no se ve afectado al medir un parámetro
dinámico[92].
Existen varias magnitudes que deben medirse periódicamente en la planta: presión,
149

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
temperatura, caudal, ujo neutrónico, etc. Una de las principales es la presión (los sensores
de presión también miden el caudal y el nivel) que se suele medir a través de sensores capa-
citivos, y entre éstos, los más utilizados son los de tipo Rosemount. Por tanto, el correcto
mantenimiento de éstos, así como el de las líneas sensoras a las que están conectados, es
fundamental para la seguridad de las plantas.
En las centrales hay una media de entre 200-800 sensores de presión[59]. En la gura 4.1
se muestra la ubicación de los sensores de presión en un lazo de un PWR. Los fabricantes
de sensores los someten a una serie de condiciones simuladas de accidente para conseguir su
licenciamiento. Ello consiste en certicar si un sensor puede soportar ciertas condiciones
de radiación o no. No todos los sensores tienen que medir en las mismas condiciones,
dependerá de su ubicación en la planta. Así, existe una clasicación de la instrumentación
de planta en función de si ésta es de vital importancia para la seguridad o no lo es. En
la tabla 4.1 tomada de [1] se detalla la nomenclatura utilizada por la IAEA y por otros
países. Los sensores catalogados como 1E son aquellos que se encuentran en los sistemas
primario y secundario.
Para el mantenimiento de sensores, las autoridades reguladoras establecen que el fun-
cionamiento dinámico de éstos debe vericarse a través de la medida de su tiempo de
respuesta [44, 33, 89]. Las medidas del tiempo de respuesta en las centrales nucleares
vienen realizándose desde 1980, y por medio de ellas se ha detectado la degradación de
los sensores o las averías propias de las líneas sensoras como: burbujas, fugas , bloqueos,
etc [59].
Uno de los métodos para la medida del tiempo de respuesta es el ensayo de la rampa
150

4.1. Introducción
Figura 4.1: Ubicación de los principales sensores de presión, caudal y nivel en un lazo de
un PWR.
Tabla 4.1: Clasicación de seguridad de los equipos de las plantas nucleares
151

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
en laboratorio. Tras someter al sensor a una rampa de presión, el tiempo de respuesta
se calcula tal y como muestra la gura 4.2. Esta medida también se puede realizar in
situ a través de las técnicas de análisis de ruido en el dominio del tiempo, por medio
de un modelo autorregresivo y calculando la respuesta a la rampa. En el dominio de la
frecuencia, la gura 4.3 muestra un esquema para obtener la señal del sensor, su PSD, y
el tiempo de respuesta a partir de la frecuencia de corte.
Figura 4.2: Medida del tiempo de respuesta de un sensor de presión a partir de una rampa
de presión.
Así, si se conocen los coecientes autorregresivos que caracterizan la respuesta diná-
152

4.1. Introducción
Figura 4.3: Obtención de la respuesta del sensor.
mica del sensor, se puede calcular la respuesta de éste a una rampa por medio de:
yi =n∑k=1
ak · yi−k + κxi i = 1...N (4.1)
siendo yi la respuesta a la rampa en el instante i, ak los coecientes autorregresivos del
modelo, n el orden del modelo, κ la ganancia del sistema, xi la rampa de entrada al
sistema y N la longitud del registro.
Además de la medida del tiempo de respuesta, ya sea in situ o no, es muy conveniente
tener un modelo del sensor para entender adecuadamente su comportamiento dinámico.
La elaboración de un modelo permite correlacionar el sensor con un sistema teórico y así
poder llevar a cabo una vigilancia más detallada del mismo que permita un diagnóstico
temprano de posibles averías.
4.1.1. El sensor capacitivo de presión y la línea sensora
Un sensor de presión es una combinación de dos sistemas: un sistema mecánico y uno
eléctrico. El sistema mecánico contiene un elemento sensor elástico (diafragma, tubo de
Bourdon, fuelles, etc.) que sufren una exión en respuesta a la presión. El movimiento de
153

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
este elemento sensor se detecta usando un medidor de desplazamiento y se convierte a una
señal eléctrica que es proporcional a la presión[59]. Los sensores de presión pueden medir
Figura 4.4: Tipos de medida de presión.
presión absoluta, presión manométrica o presión diferencial. Para la medida absoluta, un
lado del elemento sensor está abierto a la presión de proceso y el otro al vacío. En el
caso de la manométrica, un lado está abierto a la de proceso y el otro al ambiente y en
el último caso, los dos lados están abiertos al proceso. En la gura 4.4 se muestra un
154

4.1. Introducción
esquema aclaratorio. El rango superior de presiones estáticas es aproximadamente 200
bares en PWRs y 100 bares en BWRs.
Figura 4.5: Módulo sensor de un trans-
misor de presión capacitivo tipo Rose-
mount.
Sólo unos pocos fabricantes de sensores de
presión (menos de 10) suministran la mayor par-
te de los sensores que se usan en los sistemas de
seguridad de las plantas nucleares. Así, Foxboro,
Barton y Rosemount han fabricado la mayoría
de los sensores para las plantas de EEUU desde
1960 [59]. En esta tesis, nos centraremos en los
sensores Rosemount, que son sensores capaciti-
vos rellenos de aceite de silicona. Están formados
por un módulo sensor denominado celda δ ( δ-
cell) que está aislado del uido de proceso por
medio de una membrana aislante. En el interior se encuentra el aceite de silicona que
se usa para transmitir la presión desde la membrana de aislamiento hasta la sensora a
través de unos microtúbulos. Cuando el aceite circula desde la membrana aislante hasta la
sensora, su constante dieléctrica cambia y por tanto cambia la capacidad del condensador
cuyas placas están a ambos lados del diafragma sensor. En la gura 4.5 se representa el
módulo sensor del Rosemount.
En las centrales nucleares los sensores se ubican fuera del proceso que se quiere medir
para evitar su envejecimiento prematuro. Para conectar las líneas hidráulicas de procesos
y en denitiva, las señales hidráulicas con el sensor se utilizan las denominadas líneas
155

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
sensoras. Contienen un uido ya sea agua, aceite o incluso un gas como aire, nitrógeno,
etc. Suele tratarse de tubos y no de tuberías para evitar las uniones en soldadura y en
consecuencia las posibles fugas. Su diámetro varía entre 10 y 15 mm y su longitud desde
10 metros hasta 200 [59]. No obstante, como la longitud afecta el tiempo de respuesta
del sistema sensor-línea sensora, se preere que sean lo más cortas posible. La media de
longitud de las líneas está en torno a 20 metros [59].
Las líneas sensoras pueden presentar varias averías:
Bloqueos: Debido al boro, residuos o lodos.
Burbujas: En las líneas de baja presión puede atraparse aire o gas.
Escapes: Debido a problemas en las válvulas.
Estos problemas suelen causar un aumento del tiempo de respuesta, valores erróneos
de presión e incluso resonancias en el espectro que no corresponden al sistema sensor-línea.
Como se puede apreciar, la medida del tiempo de respuesta es un parámetro de vigilancia
del sensor y también de la línea.
4.1.2. Modelo dinámico del sensor
En primer lugar, consideremos la línea sensora y una membrana elástica al nal de la
línea cuya sección y longitud son A y l respectivamente. Al principio de la línea la presión
inicial es Pi, al nal es P0, la velocidad del uido es u y la densidad del mismo ρ tal y
como muestra la gura 4.6.
156

4.1. Introducción
Figura 4.6: Esquema de presiones al inicio (Pi) y al nal de la línea sensora (P0).
Como las longitudes de las líneas sensoras están en torno a 20 m y, teniendo en
cuenta que en las plantas el uido es agua a presión cuya comprensibilidad isotérmica es
aproximadamente cT = 70 × 10−12 dinas−2 y su densidad es del orden de 0,76 g/cm3, la
velocidad del sonido es en estas condiciones:
c =
√1
(0,76) (70 · 10−12)= 137102 cm/s = 1371 m/s (4.2)
Dado que las frecuencias de interés están en torno a los 10 Hz, la longitud de onda
acústica está en torno a 137 m. Como las líneas sensoras tienen una longitud de 20 m
aproximadamente, se puede suponer que los puntos del uido están en fase.
Así, suponiendo un término de rozamiento en la línea fR , que la masa del uido es
M y que la elongación de la onda sonora es ξ, se tiene para la ecuación del movimiento:
Md2ξ
dt2= − (Po − Pi)A− fRM
dξ
dt(4.3)
Sabiendo además que M = ρlA y que la membrana elástica tiene una rigidez tal que
157

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Cd = A ξP0:
Pi = ρld2ξ
dt2+ fRρl
dξ
dt+Aξ
Cd(4.4)
Como se puede observar, existe una analogía eléctrica, ya que si suponemos que la veloci-
dad v = dξdtes análoga a la intensidad de corriente y la presión a la diferencia de potencial,
la densidad, longitud y término de rozamiento pueden ser agrupados como parámetros
eléctricos:
R = fRρl
A; L = ρ
l
A; C =
A
Cd(4.5)
siendo R la resitencia óhmica, L el coeciente de autoinducción y C la capacidad Así,
sustituyendo en (4.4):
Pi = LAd2ξ
dt2+RA
dξ
dt+Aξ
Cd(4.6)
Lo que supone el circuito eléctrico de la gura 4.7: Tomando la transformada de Laplace
Figura 4.7: Analogía eléctrica de la línea sensora y la membrana de aislamiento.
en (4.6), resulta:
Pi =
[LAs2 +RAs+
A
Cd
]ξ (4.7)
158

4.1. Introducción
donde Pi y ξ son las transformadas de Laplace de Pi y ξ respectivamente. Teniendo en
cuenta la relación existente entre la presión nal P0 y la elongación dada por Cd = A ξP0
,
la función de transferencia entre la presión inicial y la presión de salida será:
HP0/Pi =1
LCds2 +RCds+ 1(4.8)
Esta función de transferencia es similar a la de un oscilador armónico cuya ecuación
genérica es:
H (s) =ω2
0
s2 + 2ζω0s+ ω20
(4.9)
donde ω0eslafrecuencianaturaldelsistemayζ es el coeciente de amortiguamiento. De
manera que la frecuencia resonante es:
f0 =1
2π
√1
LCd(4.10)
La función de transferencia presentará un pico a esta frecuencia, de manera que con la
vigilancia del pico se puede ver si la membrana ha perdido o no rigidez. Así, una deriva
del pico a zonas de alta frecuencia, supone que la rigidez de la membrana ha disminuido,
y si la deriva es hacia zonas de baja frecuencia, habrá ocurrido lo contrario.
Por otro lado, dado que L está relacionado con la longitud de la línea sensora, el
pico resonante también puede tener una posición distinta en función de la longitud de
la línea sensora. Así, para líneas largas, la frecuencia del pico se trasladará a zonas de
baja frecuencia, y en caso de líneas cortas, la resonancia derivará hacia la zona de alta
frecuencia.
159

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
El polo real en los sensores Rosemount: la parte interna
En el apartado anterior se ha modelado la línea sensora, no obstante se necesita un
modelo para la parte interna del sensor. La membrana elástica que aísla el sensor de la
línea continúa en una serie de tubos cerámicos que reducen la velocidad del uido interno
que es aceite de silicona. Cuando el aceite oscila, la capacidad del condensador cambia.
Un esquema sencillo se muestra en la gura 4.8.
Figura 4.8: Diagrama de la línea sensora y la parte interna del sensor Rosemount.
Como se ha demostrado antes, la analogía eléctrica de la línea sensora y la membrana
elástica es la mostrada en la gura 4.9: Puesto que en la parte interna del sensor la
velocidad del uido disminuye y ésta es análoga a la intensidad de corriente, se debe
añadir una rama en paralelo que tendrá una elevada resistencia hidráulica (numerosos
tubos cerámicos) y un condensador. El circuito análogo se representa en la gura 4.10 con
160

4.1. Introducción
Figura 4.9: Analogía eléctrica de la línea sensora y la membrana de aislamiento.
las posibles intensidades que lo recorren. En la gura 4.10, r es una resistencia hidráulica
Figura 4.10: Analogía eléctrica del sistema compuesto por la línea y el sensor nombrando
las intensidades de corriente.
tal que r >> R y C el efecto de capacidad asociado al condensador. Dado que la masa
de aceite es mucho menor que la de agua, se desprecia el efecto de la inercia en la rama
en paralelo. Para plantear la función de transferencia HV0/VI , el circuito se resolverá, de
modo que:
Vi (s) = [R + Ls] I (s) +
[1
Ms
]I1 (s) (4.11)
161

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
V0 (s) =
[1
Cs
]I2 (s) (4.12)
Como se puede ver, de acuerdo a la gura 4.10, las ecuaciones (4.11)y (4.12) expresan
las relaciones existentes entre las transformadas de Laplace de las diferencias de potencial
y las intensidades. Operando adecuadamente, la función de transferencia queda de la
siguiente manera:
HV0/Vi =1
(R + Ls) [rMCs2 + Cs+Ms] + rCs+ 1(4.13)
El denominador es un polinomio de orden 3 y tiene por tanto una raíz real que será
solución de:
[LCrM ] s3 +
[LC
(1 +
M
C
)+ rMRC
]s2 +
[RC
(1 +
M
C
)+ rC
]s+ 1 = 0 (4.14)
Obtención de los polos mediante la fórmula de Vieta
Puesto que ya se ha obtenido un polinomio de grado tres como denominador de la
función de transferencia del sistema de medida formado por la línea sensora y el sensor
de presión, a continuación se va a proceder a analizar los polos de dicha función mediante
la fórmula de Vieta de los polinomios cúbicos. Dicha fórmula establece que si x1, x2 y x3
son las raíces de un polinomio de grado tres tal que x3 + ax2 + bx+ c = 0 , entonces:
a = − (x1 + x2 + x3) , b = x1x2 + x2x3 + x3x1, c = −x1x2x3 (4.15)
162

4.1. Introducción
Así, de esta manera, a, b y c se pueden expresar en función de los parámetros de la analogía
eléctrica:
a =LC
(1 + M
C
)+ rMRC
LCrM, b =
RC(1 + M
C
)+ rC
LCrM, c =
1
LCrM(4.16)
Como en nuestro caso, hay dos polos complejos conjugados (p y p∗) y un polo real (p1), y
se trata de un sistema subamortiguado donde la parte real de los polos complejos es muy
pequeña, entonces:
R(1 + M
C
)+ r
LrM= pp∗ + pp1 + p∗p1 = |P |2 + p1 (p+ p∗) = |P |2 + p12 Re (p) ∼= |P |2 (4.17)
Además, es necesario aclarar que el polo real p1 es mucho menor que |P | y que la resistencia
de la línea sensora es es mucho menor que la interna del sensor, es decir, r >> R, entonces:
R(1 + M
C
)+ r
LrM∼=
1
LM∼= |P |2 ; |P | =
√1
LM(4.18)
Teniendo en cuenta ahora el coeciente de grado 0 y lo obtenido en (4.17):
1
LCrM= −pp∗p1 = − |P |2 p1 =
−p1
LM(4.19)
Lo que quiere decir que el polo real es negativo y que depende de los siguientes parámetros:
−p1∼=
1
rC(4.20)
Como se puede ver, el polo real depende de los parámetros internos del sensor. En conclu-
sión, el polo real nos sirve para la vigilancia de la estructura interna del sensor, mientras
que los polos complejos hacen referencia a la línea sensora acoplada a él.
163

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
4.2. Evolución de la investigación precedente
El análisis del ruido neutrónico procedente de los detectores ex-core e in-core se ha
venido realizando desde los años 70 por la necesidad de monitorizar el movimiento del
reactor. A nales de los 70 Upadhyaya y otros autores [120] aplicaron modelos autorre-
gresivos a varios sistemas de la planta, entre ellos, a las termorresistencias, con el objetivo
de medir in situ su tiempo de respuesta. Más adelante, la necesidad de realizar un se-
guimiento de otros sensores de la planta adquirió importancia y comenzaron a llevarse a
cabo los primeros estudios exhaustivos sobre la dinámica de los sensores de presión y de
su línea sensora, y la inuencia de los efectos de las burbujas y bloqueos en el tiempo de
respuesta, en el Laboratorio Nacional de Oak Ridge[26][27]. Dicho estudio se redujo a los
sensores Foxboro que no son capacitivos y en él se compararon las medidas de laborato-
rio con los resultados de los métodos del análisis de ruido. Ese mismo año, otro informe
técnico realizado en Oak Ridge[86, 87] estudió el ruido de presión para su utilización en
el diagnóstico de defectos en las líneas sensoras.
En el año 1988, Hashemian, uno de los mayores expertos actuales en instrumentación
nuclear, publicó dos artículos [68, 69] donde se establecía el potencial del análisis de
ruido para la vigilancia. En el primero, desde una perspectiva global de los sistemas de la
planta, explicó las posibilidades de monitorización mediante análisis de ruido en función
del tipo de sensor y su ubicación. En el segundo, comparaba las medidas en laboratorio
con los resultados obtenidos mediante el análisis de ruido para la obtención del tiempo de
respuesta. El análisis resultó ser muy útil para la vigilancia de sensores de presión por su
164

4.2. Evolución de la investigación precedente
sensibilidad a la hora de detectar fallos en las líneas sensoras con la medida del tiempo
de respuesta.
En aquellos años, en España, el Ciemat publicó varios informes técnicos que establecían
las bases para la utilización de modelos autorregresivos para el mantenimiento de sistemas
en la planta [15, 13, 12]. En dichos informes se incluía el código de programación utilizado,
de manera que el enfoque de los estudios era eminentemente práctico.
Los informes técnicos que recopilaban información sobre la dinámica y el comporta-
miento de los sensores en diversas situaciones fueron muy numerosos en los años siguientes.
Destaca especialmente uno que se publicó como resultado de un programa de investigación
de la Comisión Nuclear Reguladora de EEUU (Nuclear Regulatory Comission, NRC)[67]
donde se estudió ampliamente el efecto de la radiación y de los procesos que afectan a la
operatividad de los sensores de presión, entre los que se encuentran los capacitivos de tipo
Rosemount. Este estudio incluía modelos teóricos de los sensores, de sus líneas hidráulicas
y toda la experiencia acumulada en tests de laboratorio y en la planta.
Una de las averías más problemáticas de los sensores tipo Rosemount era la pérdida
de aceite de su cámara interna. Por ello, instituciones como la NRC y la EPRI(Electrical
Power Research Institute) publicaron informes para la detección temprana de dicha avería
[44, 33].
Así, con toda la experiencia acumulada, en el congreso SMORN VI en la sesión de
Monitorización de sensores (Sensor monitoring and signal validation) se presentaron va-
rias ponencias sobre la dinámica de los sensores capacitivos y los modelos autorregresivos,
entre las que destacaban la publicada por el Ciemat para detectar burbujas en las líneas
165

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
sensoras a través del análisis espectral[10] y la presentada por Hashemian para medir el
tiempo de respuesta in situ de los sensores de presión[66].
En los años siguientes, continuó la publicación de informes técnicos resultado de in-
vestigaciones sobre la dinámica de sensores y sus particularides, tanto a cargo del Ciemat
[8, 7, 21] como a cargo de la NRC [60].
La producción cientíca del Ciemat en los años 90 en el entorno del diagnóstico de
sensores de plantas es muy relevante. Así, Blázquez y Ballestrín [23] establecieron que el
conjunto sensor-línea sensora es un sistema cuya función de transferencia tiene un polo
complejo asociado al acoplamiento entre el sensor y la línea, y otro real, que hace referencia
al propio sensor. El tiempo de respuesta de los sensores está inuenciado por la línea y
otros factores de la planta; no obstante, en ciertos casos en los que la línea es corta, el polo
real del sensor es dominante, y la línea apenas afecta al tiempo de respuesta del sensor.
Por tanto, las tareas de vigilancia se facilitan y pueden llevarse a cabo por técnicos de
la planta. Así, continuando con esta investigación, se obtuvo una expresión analítica del
tiempo de respuesta en [123] y se llevó a cabo el proyecto VISSP (Vigilancia in Situ de
Sensores de Presión)[6], en el que se recopilaron los modelos teóricos de los sensores y
las bases del análisis de ruido, los programas realizados para la vigilancia de éstos y los
resultados obtenidos en determinadas plantas.
Puesto que las averías de los sensores son importantes para el mantenimiento, para el
caso de las burbujas en la línea sensora se propuso la vigilancia de la frecuencia del pico
resonante como parámetro para la detección[11]. Otros trabajos, aunque fuera del ámbito
nuclear, también propusieron para el diagnóstico del bloqueo de la línea el uso de wavelets
166

4.2. Evolución de la investigación precedente
sobre la señal de salida del sensor[133].
En el campo de los sensores de plantas nucleares no podemos olvidar el trabajo rea-
lizado por Glöckler en los reactores CANDU [53, 54]. En ellos se detalla la manera de
calcular la función de transferencia de los sensores de presión e incluso llega a probar en
laboratorio la existencia de, al menos, que existen dos polos reales asociados al modelo
teórico del sensor.
En referencia a la construcción de nuevos modelos teóricos del sensor que representen
posibles averías se encuentra el estudio de la pérdida de linealidad [49, 22]. En ellos se
aborda el problema de la pérdida de aceite de silicona de los sensores tipo Rosemount. En
un caso se construye un modelo bilineal para representar el diferente comportamiento del
sensor ante una rampa de presión en función de si éste está averiado o no, y en el otro, se
deriva un modelo no lineal que caracteriza completamente la respuesta del sensor si éste
sufre el síndrome de la pérdida de aceite.
Por otro lado , Hashemian publica dos libros de instrumentación orientados al mante-
nimiento en plantas[58, 59]. Dichos libros suponen una referencia para los técnicos e in-
vestigadores de la instrumentación nuclear. Además decide realizar su tesis doctoral [57]
donde propone una manera de poner en funcionamiento un sistema de monitorización
on-line de los sistemas de la planta. Dicho sistema se basa en su experiencia profesional
en el campo de la instrumentación de sensores de presión, temperatura y detectores de
neutrones.
Muy recientemente, los trabajos realizados se han enfocado a mejorar los modelos
teóricos del sensor[80] y utilizar éstos como una nueva herramienta de detección de averías;
167

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
ya se trate de bloqueos en la línea [81] o de burbujas en la misma[82]. En 2009-2010
Hashemian ha publicado varios artículos [63, 65, 64] en los que revisa las posibles averías
de los sensores y las líneas, enfatiza las ventajas de detectarlas a través del análisis de
ruido on line en planta, los diferentes métodos para medir el tiempo de repuesta utilizados
hasta el momento y las causas que pueden provocar una falta de exactitud en los sensores.
168

4.3. Propuesta de un modelo de cuatro polos para los sensores de presióncapacitivos
4.3. Propuesta de un modelo de cuatro polos para los
sensores de presión capacitivos
Los sensores de presión tipo Rosemount se llevan al laboratorio en muchas ocasiones
para la medida de su tiempo de respuesta. En uno de estos experimentos[53] se puso de
maniesto la existencia de un segundo polo real antes no contemplado en los modelos
propuestos para el sistema transmisor-línea sensora[30, 49, 50].
Hay que tener en cuenta que un experimento de laboratorio consiste en separar el sensor
de su línea sensora y, por tanto, la PSD resultante de dicho experimento corresponde a
un modelo de dos polos reales tal y como se muestra en la gura 4.11.
Figura 4.11: PSD de una señal tomada en un experimento de laboratorio procedente de
un Rosemount .
El tiempo de respuesta se puede calcular a través de la frecuencia de corte correspon-
diente a la caída a 3 dB o aplicando una rampa de presión simulada al modelo autorre-
169

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
gresivo. En cualquiera de los dos casos, el tiempo de respuesta es único y no depende
de la línea sensora. Como ya se vio anteriormente en el epígrafe 4.1.2, el tiempo de res-
puesta depende fundamentalmente de la estructura interna del sensor y no de su línea.
Por tanto, si se utiliza un modelo de 4 polos para la vigilancia in situ del sensor, habría
que plantearse si la presencia del pico del espectro de frecuencias podría afectar al polo
real de alta frecuencia. Como ya se explicó anteriormente, el pico depende de la longitud
de la línea sensora y, por tanto, habría que comprobar si el valor medido del tiempo de
respuesta se ve afectado sensiblemente por la longitud de la línea sensora.
4.3.1. Modelo de cuatro polos
La analogía eléctrica detallada en el epígrafe 4.1.1 era un circuito RLC acoplado a una
rama en paralelo con una resistencia y una condensador. El primer condensador muestra
el acoplamiento entre el sensor y la línea mediante la membrana aislante y el segundo, se
reere a la membrana sensora en el interior del sensor. No obstante, ante la evidencia de
un segundo polo, se plantea modelar el sistema mediante la analogía eléctrica de la gura
4.12.
Como la velocidad del uido es análoga a la intensidad de corriente, la segunda rama
en paralelo implica que el aceite de silicona ha cambiado su velocidad. En el interior del
sensor existe una segunda reducción de la velocidad debido a la alta resistencia hidráulica
de los tubos cerámicos.
A continuación, se va a proceder a obtener la función de transferencia a partir de la
analogía. Para ello se necesita nombrar las diferentes intensidades de corriente según se
170

4.3. Propuesta de un modelo de cuatro polos para los sensores de presióncapacitivos
Figura 4.12: Analogía eléctrica propuesta para modelar el sensor acoplado a la línea sen-
sora.
muestra en la gura 4.13. lo que también se puede plantear como se recoge en la gura
Figura 4.13: Analogía eléctrica propuesta para modelar el sensor acoplado a la línea sensora
con las intensidades que recorren cada rama.
4.14: donde L es la inercia de la línea sensora, R la resistencia de la línea sensora, M , la
capacidad del diafragma de acoplamiento, r1 la resistencia interna de parte de los tubos
cerámicos, C1 la capacidad que hace referencia al cambio de velocidad del aceite que se
produce en el interior de sensor, r2 la resistencia de la otra parte de los tubos cerámicos
y C2 la capacidad asociada a la membrana sensora.
171

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Figura 4.14: Detalle de la analogía eléctrica propuesta para modelar el sensor acoplado a
la línea sensora con las intensidades que recorren cada rama.
Las ecuaciones para llegar a la función de transferencia son las siguientes:
Vi = (R + Ls) I +1
MsI1
V0 =1
C2sI4
(4.21)
Para seguir planteando todas las ecuaciones se necesita la impedancia equivalente del
acoplamiento paralelo entre C1 y el conjunto serie r2 y C2:
z =C2r2s+ 1
C1C2r2s2 + C1s+ C2s(4.22)
I1 = Ir1 + z
r1 + z + 1Ms
(4.23)
I2 = I1Ms
r1 + z + 1Ms
(4.24)
172

4.3. Propuesta de un modelo de cuatro polos para los sensores de presióncapacitivos
I4 = I2
1C1s
r1 + z + 1Ms
(4.25)
Empleando un poco de álgebra, nalmente se obtiene la siguiente función de transferencia,
donde los coecientes del denominador vienen especicados en la tabla 4.2.
H (s) =1
D (s); D (s) = a4s
4 + a3s3 + a2s
2 + a1s+ 1 (4.26)
a1 RM +RC1 +RC2 + r1C1 + r2C2 + r1C2
a2 Rr1MC1 +Rr1MC2 +Rr2MC2 +Rr2C1C2 + r1r2C1C2 + LM + LC1 + LC2
a3 Rr1r2MC1C2 + Lr1MC1 + Lr1MC2 + Lr2MC2 + Lr2C1C2
a4 Lr1MC1C2r2
Tabla 4.2: Coecientes del denominador de la función de transferencia del sensor y la
línea sensora en función de los parámetros de la analogía eléctrica
4.3.2. Valores de las constantes del modelo de 4 polos
A la hora de dar valores a las constantes de la analogía eléctrica se han tenido en
cuenta los valores empleados en la literatura en el modelo de 3 polos[49] y los tiempos
obtenidos por Göckler[53] en el laboratorio. Estos tiempos son:
τ = 80 · 10−3 s ; τ ′ = 15 · 10−3 s (4.27)
Y están relacionados con las constantes del sistema de la siguiente manera:
τ = 2τ2 ; τ ′ = τ1/2 (4.28)
173

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Siendo τ1 y τ2 :
τ1 = r1C1 ; τ2 = r2C2 (4.29)
Asumiendo, sin pérdida de generalidad, que r1 = r2 , los valores de las constantes de la
analogía eléctrica son los siguientes:
Sistema Mecánico Analogía eléctrica Valores típicos
Inercia de la línea sensora Inductancia (L) 5,55× 107Pa s2m - 3
Fricción de la línea sensora Resistencia (R) 2,21× 108Pa sm - 3
Diafragma de aislamiento Capacidad (M) 1,03× 10−12 m3Pa - 1
Fricción de la parte interna Resistencia (r1) 1,25× 1012Pa sm - 3
Fricción de la parte interna Resistencia (r2) 1,25× 1012Pa sm - 3
Cambio de velocidad Capacidad (C1) 2,4× 10−14 m3Pa - 1
Diafragma sensor Capacidad (C2) 3,2× 10−14 m3Pa - 1
Tabla 4.3: Valores de las constantes de la analogía eléctrica de 4 polos
Esto supone que la función de transferencia, en unidades SI, sea la siguiente:
H (s) =1
6,18× 10−8s4 + 5,986× 10−6s3 + 0,00128s2 + 0,1102 s+ 1(4.30)
Como se puede apreciar, el coeciente de s4 es muy pequeño, y al comparar estos resultados
con el modelo de tres polos, las diferencias no deberían, en principio ser muy grandes.
174

4.3. Propuesta de un modelo de cuatro polos para los sensores de presióncapacitivos
Los polos de la función de transferencia 4.30 son los siguientes:
p1 = −10,23
p2 = −81,50
p = −2,57 + 139,26j
p∗ = −2,57− 139,26j
(4.31)
Si se calcula la frecuencia de corte de los polos reales, se obtiene lo siguiente:
fp1 =−p1
2π= 1,63Hz
fp2 =−p2
2π= 12,97Hz
(4.32)
Como se puede ver existen dos polos, uno de baja frecuencia y otro de alta frecuencia.
Los tiempos asociados a cada polo son los siguientes:
τp1 =1
2πfP1
=1
2π · 1,63= 97,64 · 10−3 s
τp2 =1
2πfP2
=1
2π · 81,5= 1,95 · 10−3 s
(4.33)
El par de polos complejos conjugados se sitúa en la frecuencia siguiente:
|P | = |P ∗| = 138,829Hz fpico =138,829
2π= 22,17Hz (4.34)
En el modelo de tres polos, el pico resonante está muy lejos del polo real, no obstante,
en el modelo de cuatro polos, puede situarse cerca del polo real de alta frecuencia.
4.3.3. PSD y longitud de la línea sensora
Para un modelo de sensor-línea como el explicado en la sección anterior, de cuatro po-
los, dos de ellos complejos conjugados y dos reales, se tiene una PSD como la representada
en la gura 4.15.
175

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Figura 4.15: PSD de la respuesta simulada del sistema sensor-línea y su ajuste por medio
de un modelo autorregresivo.
No obstante, tal y como se explicó en el epígrafe 4.1.2, la frecuencia del pico está dada
por los parámetros de la analogía eléctrica, que en el caso que nos ocupa son:
fpico =1
2π
√1
ML(4.35)
Además, la inercia de la línea L se traduce a longitud de la línea sensor l de la siguiente
manera:
l =LA
ρ(4.36)
siendo A la sección de la línea y ρ la densidad del agua. Para los cálculos realizados
en esta tesis, se han tomado valores de la literatura [11] siendo A = 1, 37 · 10−4 m2 y
ρ = 760 kg/m3. Por tanto, para cada frecuencia del pico resonante se tendrá una longitud
176

4.3. Propuesta de un modelo de cuatro polos para los sensores de presióncapacitivos
de línea diferente y un máximo de longitud de línea lmaxima para el que el modelo es válido
dada por:
λ =v
fpicolmaxima =
λ
2(4.37)
siendo λ la longitud de la onda de presión y v la velocidad del agua (obtenida en el epígrafe
4.1.2). Por tanto, a la hora de simular sensores y sus longitudes de línea se debe tener en
cuenta el máximo de longitud de línea que permite el modelo. Para longitudes de línea
muy largas se utilizan modelos algo más complicados.
En la gura 4.16 se representan dos PSDs correspondientes a dos modelos de ajuste
AR de sensores acoplados a líneas de longitudes diferentes.
Figura 4.16: PSDs de dos sensores acoplados a líneas sensoras cuyas longitudes son 6 y
17 m.
177

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
4.3.4. Método de Monte-Carlo para la medida del tiempo de res-
puesta
El análisis de ruido del sensor ha consistido en considerar que la señal de salida del
sensor, que es un sistema de cuatro polos, es la respuesta ante un ruido blanco y que
por tanto, los coecientes autorregresivos del sistema se pueden obtener con la ecuación
de Yule-Walker [101]. El orden óptimo del modelo está dado por el criterio de Akaike[2]
o cualquier otro criterio basado en la predicción del error de la varianza del modelo[28].
Para medir el tiempo de respuesta, se obtiene la respuesta a la rampa simulada a tra-
vés del modelo autorregresivo. No obstante, no basta con que se simule la medida una
vez del tiempo de respuesta, sino que para ver la incertidumbre del método debido a la
repetibilidad de las medidas se han usado 1000 muestras de ruido blanco que han dado
lugar a 1000 conjuntos de coecientes autorregresivos con sus correspondientes tiempos
de respuesta. En la gura 4.17 se indica el procedimiento seguido para obtener el tiempo
de respuesta a través de la respuesta del modelo del sensor ante un ruido blanco.
La desviación típica στ de la distribución que englobe todos los tiempos de respuesta
obtenidos es una estimación de la incertidumbre de la medida. Así, si la media aritmética
τ fuera diferente del valor analítico τ0 obtenido de la función de transferencia del sistema,
la medida estaría afectada por un error de medida [19, 20].
Cuando los sensores se simulan suponiéndose acoplados a líneas sensoras cortas, τ es
cercano al valor analítico τ0 y además, la curtosis, el momento de cuarto orden normalizado
(µ4/σ4τ ), de la distribución de τ es mucho más alta que la de una distribución rectangular.
178

4.3. Propuesta de un modelo de cuatro polos para los sensores de presióncapacitivos
Figura 4.17: Procedimiento seguido para obtener el tiempo de respuesta simulando la ex-
citación con ruido blanco.
En la gura 4.18 se muestra un histograma correspondiente a una línea sensora de 10 m,
donde τ = 0,10 s, στ = 0,03 s, la curtosis es 3,25 y τ0 = 0, 11 s. Se observa que el rango
τ ± στ incluye a τ0.
Sin embargo, cuando las líneas sensoras son largas, los resultados son diferentes, tal y
como se muestra en la gura 4.19.
Longitud (m) 65 31 28 26 13.7 10
τ (s) 0.15 0.15 0.14 0.14 0.10 0.10
στ (s) 0.05 0.05 0.05 0.05 0.03 0.03
Curtosis 2.04 1.66 1.74 1.84 3.37 3.25
Máximo (s) 0.25 0.26 0.25 0.25 0.21 0.18
Mínimo (s) 0.02 0.06 0.06 0.06 0.06 0.06
Tabla 4.4: Descriptores estadísticos del tiempo de respuesta de sensores acoplados a líneas
de diferentes longitudes
179

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Figura 4.18: Distribución estadística del tiempo de respuesta de un sensor acoplado a una
línea corta (10 m).
Los resultados de la tabla 4.4 corresponden al mismo tiempo de referencia τ0 = 0, 11 s.
Se puede observar que a medida que la longitud de línea es mayor, la desviación típica
se hace mayor. Además, la curtosis toma valores cercanos a 1,8 (valor característico de
una distribución rectangular) cuando las líneas sensoras son largas y de valor mayor que
2 cuando son cortas.
Discusión de resultados
La simulación de la medida in situ del tiempo de respuesta aplicando un modelo
autorregresivo, y eligiendo el orden del modelo por medio del criterio de Akaike y el
principio de parsimonia, da resultados aceptables cuando la línea sensora es corta. Sin
embargo, cuando la línea sensora es larga, aparece un error sistemático quedando afectado
180

4.3. Propuesta de un modelo de cuatro polos para los sensores de presióncapacitivos
(a) Distribución estadística de τ para una línea sensora de 31 m
(b) Distribución estadística de τ para una línea sensora de 65 m
Figura 4.19: Distribuciones estadísticas de sensores acoplados a líneas de diferente longi-
tud. (a) l = 31 m , τ = 0, 15 s y στ = 0, 05 s.(b) l = 65 m , τ = 0, 15 s y στ = 0, 05 s.
181

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
el resultado de la medida. En la práctica, dicho error es desconocido y puede dar lugar a
una errónea sustitución del sensor.
En esta tesis se propone corregir el error sistemático utilizando un orden de modelo
distinto al obtenido con el criterio de Akaike [28] hasta que la simulación por el método
de Monte-Carlo dé lugar a valores de la curtosis de la distribución estadística de los
tiempos de respuesta mayores que los de una rectangular y además, que el valor medio
de ésta (τ) sea compatible con el valor analítico (τ0). En la gura 4.20 se muestran los
histogramas obtenidos aplicando el criterio de Akaike y un orden mucho mayor que da
lugar a distribuciones de curtosis mucho más altas.
Como se puede apreciar, las simulaciones que han utilizado un orden mayor al dado
por el criterio de Akaike tienen curtosis más altas y se acercan a distribuciones parecidas
a una gaussiana, de manera que el error sistemático de la medida del tiempo de respuesta
se elimina.
En la práctica, para determinar el orden del modelo autorregresivo, la medida debe
simularse con cada una de las longitudes de línea de interés. El orden aplicado para
analizar el ruido procedente de la planta se obtiene con el método de Monte-Carlo.
Cuando el criterio de Akaike se aplica, el hecho de que aparezcan valores de curtosis
bajas en las distribuciones por Monte-Carlo permite establecer si la línea sensora es larga
o no. En el modelo dinámico del sensor, los dos polos reales se relacionan con el tiempo
de respuesta, aunque la contribución del polo de alta frecuencia sea despreciable en la
práctica. Sin embargo, es muy probable que la frecuencia del pico resonante tome valores
cercanos a la frecuencia del polo real de alta frecuencia e incluso alacance el rango de
182

4.3. Propuesta de un modelo de cuatro polos para los sensores de presióncapacitivos
Figura 4.20: (a) Simulación de Monte-Carlo obtenida con n = 5 (Orden de Akaike) para
un sensor acoplado a una línea sensora corta (12 m). (b) Simulación de Monte-Carlo con
n = 5 (Orden de Akaike) para una línea sensora larga (26 m). (c) Simulación de Monte-
Carlo con n = 10 (Orden óptimo) para una línea sensora corta (12 m). (b) Simulación
de Monte-Carlo con n = 10 (Orden óptimo) para una línea sensora larga (26 m).
183

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
frecuencias limitado por ambos polos. La frecuencia del pico estará siempre alejada del
polo de más baja frecuencia ya que el modelo físico lo requiere. Se puede considerar
entonces que las líneas largas son aquellas en las que el pico resonante esté cerca del polo
real de alta frecuencia y es en esos casos cuando surge el error a la hora de simular la
medida utilizando el criterio de Akaike.
184

4.4. Incertidumbre en la estimación del tiempo de respuesta
4.4. Incertidumbre en la estimación del tiempo de res-
puesta
La incertidumbre en la estima del tiempo de respuesta tiene dos componentes: una
se deriva del cálculo de los coecientes autorregresivos y la otra, de la variabilidad de
la muestra de ruido utilizada. Para obtener la primera, hay que tener en cuenta que los
coecientes autorregresivos se obtienen a través de las ecuaciones de Yule-Walker:
C1
C2
...
Cm
=
C0 C1 . . . Cm−1
C1 C0 . . . Cm−2
......
......
Cm−1 Cm−2 . . . C0
·
a1
a2
...
am
donde a1, a2...am son los coecientes autorregresivos y C0, C1, Cm son los valores de la
autocorrelación del ruido para diferentes desfases. Abreviadamente se expresa en notación
vectorial como función de la matriz de autocorrelación P y del vector ~a de coecientes:
~C = P~a
Por tanto, si a es una estima del vector ~a, la matriz de covarianza será:
E∣∣(~a− a) (~a− a)t
∣∣ =σ2ν
N −mP−1 (4.38)
donde σ2ν es una estima de la varianza del ruido blanco, n el orden del modelo AR y N
el tamaño de la muestra de ruido. Como se puede observar, este cálculo no es trivial y
185

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
además supone que en la matriz de covarianzas (eq:4.38) haya que considerar no sólo los
elementos de la diagonal, sino también los no-diagonales.
En esta parte de la tesis se propone otra manera de calcular la incertidumbre que
implique un cálculo más sencillo y práctico.
4.4.1. Fuentes de incertidumbre
Para calcular la incertidumbre en la estima del tiempo de respuesta se deben conocer
las incertidumbres tipo A, uA, y tipo B,uB. La de tipo A depende de la variabilidad de
la muestra de ruido y por tanto, la distribución de probabilidad de esta componente es
de tipo gaussiana. Por otro lado , la de tipo B es debida al error sistemático al escoger
un número de coecientes distinto del óptimo, es decir, si se deben elegir 8 coecientes,
se escogen 7 o 9. En principio, la probabilidad de escoger un modelo autorregresivo con
un coeciente menos o más que el óptimo es idéntica a la de elegir un modelo con dos
coecientes de discrepancia con respecto al óptimo. Por tanto, la incertidumbre tipo B
sigue una distribución de probabilidad rectangular cuya semi-anchura a, depende de la
diferencia entre el tiempo de respuesta óptimo y el estimado tal y como se muestra en la
gura 4.21.
186

4.4. Incertidumbre en la estimación del tiempo de respuesta
Figura 4.21: Función de probabilidad rectangular que sigue la incertidumbre tipo B asocia-
da a la causa sistemática de elegir un número no óptimo de coecientes autorregresivos.
4.4.2. Función modelo para el tiempo de respuesta
El tiempo de respuesta se puede expresar en función del valor estimado y de la incer-
tidumbre asociada a esa estimación como:
τ = τe ± U(τ) (4.39)
siendo τe el valor estimado por el modelo AR y U(τ) la incertidumbre expandida del
tiempo de respuesta que se expresa como:
U(τ) = ku(τ) (4.40)
siendo u(τ) la incertidumbre típica y k el factor de cobertura. La incertidumbre típica se
calcula a partir de los valores de las incertidumbre tipo A y tipo B:
u(τ) =√u2B + u2
A (4.41)
187

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Por tanto, se puede expresar el tiempo de respuesta como una función modelo del valor
estimado τe y de las correcciones que se deberían aplicar por la variabilidad de la muestar
de ruido, δτA y por el error sistemático al escoger un número inadecuado de coecientes,
δτB:
τ = τe + δτA + δτB (4.42)
y, en consecuencia, la incertidumbre típica se calcula como:
u2(τ) = u2(δτA) + u2(δτB) (4.43)
4.4.3. Factor de cobertura para el tiempo de respuesta
Para hallar el factor de cobertura será necesario calcular analíticamente la función de
probabilidad para estimar la incertidumbre del valor esperado del tiempo de respuesta
siendo la función modelo del tipo Y = X1 + X2. A esta función de probabilidad la de-
nominaremos gaussiana-aplanada (Flatten-gaussian) y se puede hallar por medio de los
polinomios caos[83] o bien utilizando los momentos centrales[37]. Para una solución ana-
lítica, se necesitan estos métodos dado que la función rectangular no es analítica en los
bordes. En esta tesis, se seguirá el método de los momentos centrales, teniendo en cuenta
que los momentos impares son cero debido a la simetría de la función de densidad de
probabilidad gaussiana-aplanada; por tanto, sólo se considerarán los momentos segundo
y cuarto.
La función generadora de momentos para la gaussiana-aplanada debe ser:
MY (t) = exp
(σ2gt
2
sinh(art)
art
), ar =
√3σr, (4.44)
188

4.4. Incertidumbre en la estimación del tiempo de respuesta
donde el primer factor corresponde a una distribución gaussiana y el segundo a una
rectangular con semi-anchura ar. Desarrollando My(t) en serie de Taylor hasta el cuarto
orden, se obtienen el segundo y cuarto momentos:
µ2 = σ2g + σ2
r ; µ4 = 3σ4g + 6σ2
gσ2r +
9
5σ4r (4.45)
Se puede observar que µ2 es la suma de las varianzas, como se esperaba; pero µ4 contiene
un término cruzado que es dominante en el caso en que ambas varianzas sean de orden
de magnitud similar.
La forma analítica de la función de densidad de probabilidad gaussiana-aplanada
pFG(Y ) se obtiene aplicando el principio de máxima entropía limitado con los cuatro
momentos [41]. El resultado es:
pFG(Y ) = Ae−aY2−bY 4
(4.46)
donde A es el factor de normalización para que el área sea la unidad y los coecientes a
y b se obtienen como los multiplicadores de Lagrange haciendo la entropía máxima.
Se requieren algunas restricciones para los coecientes: por razones de convergencia,
b > 0. No obstante, el coeciente a, considerado como un multiplicador de Lagrange,
podría ser negativo. En este caso, la distribución gaussiana-aplanada no sería unimodal.
Para evitar este caso, se requiere que la condición a > 0 se cumpla siempre.
El factor de normalización A se calcula de:
∫ ∞∞
pFG(Y )dY = 1 (4.47)
189

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
denotando α = ab1/2, se obtiene∫ ∞∞
pFG(Y )dY
= 2b−1/4
∫0∞e−αu
2−u4
du
= 2b−1/4
[1
4Γ
(1
4
)F1
(1
4;1
2;α2
4
)− α1
4Γ
(3
4
)F1
(3
4;3
2;α2
4
)](4.48)
donde F1(n;m;x) es la función de primer orden hipergeométrica conuente. Si se
realiza el cambio de variables: λ = b−1/4, s = (2a)−1/2, la forma completa de la función
de densidad de probabilidad es:
PFG(Y ) =( 2λ) exp
(−Y 2
2s2− Y 4
λ4
)Γ(1
4)1F1(1
4; 1
2; λ4
16s4)− λ2
2s2Γ(3
4)1F1(3
4; 3
2; λ4
16s4)
(4.49)
Para obtener el factor de cobertura se necesitan las constantes a y b, que pueden ser
calculadas como multiplicadores de Lagrange en el proceso de minimización de la entropía,
o bien igualando el segundo y cuarto momentos obtenidos de las medidas con los momentos
de la función de densidad de probabilidad. En cualquier de los dos casos se necesita resolver
un sistema de ecuaciones no lineales.
Debido a esta dicultad, es mucho más sencillo construir distribuciones gaussianas
aplanadas generando números aleatorios uniformemente distribuidos. Así se puede obtener
el factor de cobertura kv, que para un nivel de conanza del 95% tiene la siguiente
expresión empírica:
kv =1, 64σr + 1, 96σg
σr + σg(4.50)
Para nuestro caso concreto, se necesita la incertidumbre tipo A o σg y una incertidum-
bre tipo B o σr que se obtienen de los datos de las estimaciones del tiempo de respuesta.
190

4.4. Incertidumbre en la estimación del tiempo de respuesta
En la tabla 4.5 se presentan los diferentes tiempos de respuesta medios obtenidos con
cada modelo AR de n coecientes, así como las desviaciones típicas de las distribuciones
de los tiempos de respuesta obtenidos con el método de Monte-Carlo par auna longitud
de línea de 21 m.
n τ σ curtosis
5 0,1186 0,0417 2,72
6 0,0967 0,0182 4,7177
7 0,0969 0,0136 2,78
8 00986 0,0115 2,92
9(óptimo) 0,1010 0,0108 2,95
10 0,1016 0,0101 3,25
Tabla 4.5: Valores de tiempos de respuesta medios, desviaciones típicas y curtosis para
modelos autorregresivos de diferentes número de coecientes y longitud de línea de 21 m
Así, para el cálculo de la incertidumbre tipo B, se toman los valores de la tabla 4.5:
uB =τn=9 − τn=7√
3=
0, 0041√3
= 0, 0024 (4.51)
siendo la incertidumbre típica:
u(τ) =√u2A + u2
B =√
0, 00242 + 0, 012 = 0, 01s (4.52)
El factor de cobertura es según (4.50):
kv =1, 64σr + 1, 96σg
σr + σg=
1, 64 · 0, 0024 + 1, 96 · 0, 01
0, 0024 + 0, 01= 1, 898 ≈ 1, 9 (4.53)
191

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Por tanto, la incertidumbre expandida de la estimación del tiempo de respuesta es:
U(τ) = kvu(τ) = 1, 9 · 0, 01 = 0, 019s (4.54)
192

4.5. Obtención in situ del cuarto polo de un sensor de presión capacitivo tipoRosemount
4.5. Obtención in situ del cuarto polo de un sensor de
presión capacitivo tipo Rosemount
Puesto que según se ha explicado en el epígrafe 4.3 las medidas en laboratorio muestran
que al menos existen dos polos reales asociados a la parte interna del sensor, aplicando la
metodología conocida como Dynamic Data System [110, 71], sería posible, aplicando los
métodos del análisis de ruido y utilizando un adecuado tiempo de muestreo, obtener un
modelo autorregresivo con únicamente cuatro coecientes autorregresivos que permitiera
la identicación de los dos polos reales del sensor.
En esta parte de la tesis se han analizado señales procedentes de tres sensores capaci-
tivos de caudal procedentes de un PWR registrados con un tiempo de muestreo de 0,02
segundos. El registro de las señales se ha realizado in situ, estando operativo el sensor en
todo momento. En la gura 4.22 se han representado las señales procedentes de cada uno
de los sensores.
193

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
(a) Señal del sensor 1
(b) Señal del sensor 2
(c) Señal del sensor 3
Figura 4.22: Señales registradas in situ de tres sensores de caudal tipo Rosemount ubicados
en un reactor PWR 194

4.5. Obtención in situ del cuarto polo de un sensor de presión capacitivo tipoRosemount
Como se puede observar, las tres señales tienen componentes de baja frecuencia que
añaden una cierta tendencia que debe ser eliminada ltrando adecuadamente. En el caso
que nos ocupa, se ha utilizado la herramienta de Matlab sptool para ltrar las señales. En
los tres casos se han utilizado ltros pasaaltos de Butterworth cuya frecuencia de corte
ha sido 0,04 Hz.
En las guras 4.23 y 4.24 se muestran dos impresiones de pantalla de la interface
gráca de sptool para diseñar el ltro.
Figura 4.23: Interface gráca de la herramienta sptool de Matlab para diseño de ltros.
195

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Figura 4.24: Interface gráca de la herramienta sptool de Matlab para diseño de ltros
donde se muestra la frecuencia de corte (Fc) y la frecuencia de muestreo (Fs).
En las guras 4.25 4.26 y 4.27 se representan las señales y su correspondiente resultado
tras la aplicación del ltro.
196

4.5. Obtención in situ del cuarto polo de un sensor de presión capacitivo tipoRosemount
Figura 4.25: Señal correspondiente al sensor 1(superior) y su correspondiente tras el l-
trado(inferior).
197

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Figura 4.26: Señal correspondiente al sensor 2(superior) y su correspondiente tras el l-
trado(superior).
198

4.5. Obtención in situ del cuarto polo de un sensor de presión capacitivo tipoRosemount
Figura 4.27: Señal correspondiente al sensor 3(superior) y su correspondiente tras el l-
trado(superior).
Como se puede apreciar, el ltro ha eliminado la tendencia que se observaba previa-
mente. Las señales de planta no sólo registran los datos del sensor sino todo aquello que
rodea al mismo y que forma parte de la operación de la planta. La eliminación de ciertas
frecuencias es fundamental para una correcta interpretación de los datos y para poder
obtener el cuarto polo, tal y como se verá más adelante.
199

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
El siguiente paso es calcular la PSD de la señal y estimar el modelo autorregresivo a
través del cuál se obtendrán los polos del sistema. En las guras que se van a presentar
a continuación (4.28, 4.29 y 4.30) se han obtenido las PSDs y se han ajustado con un
modelo AR de cuatro coecientes autorregresivos.
Figura 4.28: PSD de la señal procedente del sensor capacitivo de caudal número 1 y su
ajuste autorregresivo utilizando cuatro coecientes .
200

4.5. Obtención in situ del cuarto polo de un sensor de presión capacitivo tipoRosemount
Figura 4.29: PSD de la señal procedente del sensor capacitivo de caudal número 2 y su
ajuste autorregresivo utilizando cuatro coecientes.
201

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Figura 4.30: PSD de la señal procedente del sensor capacitivo de caudal número 3 y su
ajuste autorregresivo utilizando cuatro coecientes.
202

4.5. Obtención in situ del cuarto polo de un sensor de presión capacitivo tipoRosemount
Como se puede apreciar, el modelo autorregresivo con únicamente cuatro coecientes
no es suciente para ajustar la PSD de la señal. La operación de ltrado no ha conseguido
eliminar una zona de baja frecuencia que da lugar a un par de polos complejos conjugados.
Son precisamente éstos los que aparecen en los modelos autorregresivos. Así, los polos del
modelo para el caso del sensor 3 (gura 4.30) son:
p1 = −3, 3842 + 87, 6560i
p∗1 = −3, 3842− 87, 6560i
p2 = −6, 4601 + 10, 4149i
p∗2 = −6, 4601− 10, 4149i
(4.55)
Los polos p1 y p∗1 corresponden al acoplamiento entre la línea sensora y el sensor
capacitivo y dan lugar al pico que se observa en la parte derecha de la PSD. Los otros
polos p2 y p∗2 corresponden a una componente de baja frecuencia que no forma parte del
sistema línea-sensor y que no se ha conseguido eliminar con el ltrado. No obstante, dado
que ltrar es una operación complicada y podría eliminardel espectro alguno de los polos
reales del sensor, se ha preferido ajustar la PSD con seis coecientes autorregresivos. Así,
el par de coecientes a añadir debe corresponder a los dos polos reales que contribuyen al
tiempo de respuesta del sensor.
En las guras 4.31, 4.32 y 4.33 se muestran los ajustes con los seis coecientes.
203

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Figura 4.31: PSD de la señal procedente del sensor capacitivo de caudal número 1 y su
ajuste autorregresivo utilizando seis coecientes.
204

4.5. Obtención in situ del cuarto polo de un sensor de presión capacitivo tipoRosemount
Figura 4.32: PSD de la señal procedente del sensor capacitivo de caudal número 2 y su
ajuste autorregresivo utilizando seis coecientes.
205

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Figura 4.33: PSD de la señal procedente del sensor capacitivo de caudal número 3 y su
ajuste autorregresivo utilizando seis coecientes.
206

4.5. Obtención in situ del cuarto polo de un sensor de presión capacitivo tipoRosemount
Como se puede ver,es suciente tomar seis autorregresivos para ajustar las PSD de
las señales. Los polos en el plano s obtenidos a través del modelo autorregresivo para el
sensor no 1 son:
p1 = −2, 9516 + 89, 8452i
p∗1 = −2, 9516− 89, 8452i
p2 = −25,9637 + 22, 0523i
p∗2 − 25, 9637− 22, 0523i
p3 = −6, 5987
p4 = −96, 3488
(4.56)
donde p1 y p∗1 son los polos complejos asociados al acoplamiento entre la línea y el sensor,
p2 y p∗2 son los polos complejos de la componente de baja frecuencia que no se ha podido
eliminar mediante el ltrado, y p3 y p4 son los dos polos reales del sensor. Las frecuencias
de corte de estos últimos polos y los tiempos asociados a los mismos son:
p3 = −6, 6 f3 = 1, 05 Hz τ3 = 0, 15 s
p4 = −96, 35 f4 = 15, 33 Hz τ4 = 0, 01 s
(4.57)
lo que supone que el tiempo de respuesta τ del sensor es 0,16 s, valor que está de acuerdo
con lo medido en laboratorio para estos sensores[53].
207

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Los polos obtenidos para el sensor no 2 son:
p1 = −2, 79 + 89, 79i
p∗1 = 2, 79− 89, 79i
p2 = −0,22, 97 + 23, 77i
p∗2 = −22, 97− 23, 77i
p3 = −5, 26
p4 = −155, 73
(4.58)
que corresponden con las siguientes frecuencias de corte y tiempos de respuesta:
f3 = 0, 8371 Hz τ3 = 0, 19 s
f4 = 24, 7846 Hz τ4 = 0, 006 s
(4.59)
Por último, los polos en el plano s del sensor no 3 son:
p1 = −2, 61 + 89, 87i
p∗1 = 2, 61− 89, 87i
p2 = −23, 85 + 23, 29i
p∗2 = −23, 85− 23, 29i
p3 = −6, 99
p4 = −136, 98
(4.60)
y sus frecuencias de corte y tiempos asociados:
f3 = 1, 1126 Hz τ3 = 0, 1431 s
f4 = 21, 8005 Hz τ4 = 0, 0073 s
(4.61)
208

4.5. Obtención in situ del cuarto polo de un sensor de presión capacitivo tipoRosemount
Como se puede ver, el polo real de alta frecuencia, es decir, el cuarto polo, es difícil de
encontrar debido a que su contribución al tiempo de respuesta es pequeño y porque se
ubica muy cerca del pico resonante. No obstante, forma parte de la dinámica del sensor y
en consecuencia, dado que contribuye al tiempo de respuesta, debe ser vigilado. Además,
la metodología que aquí se ha expuesto ha demostrado ser ecaz para realizar dicha
vigilancia in-situ.
209

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
4.6. Modelo bilineal de un sensor de presión capacitivo
para la detección del síndrome de la pérdida de
aceite
La pérdida de aceite de silicona en un sensor de presión es una anomalía difícil de
detectar [53]. El aceite de silicona rellena un pequeño canal que reduce la presión entre
la membrana de aislamiento y la membrana sensora. Como el sensor es capacitivo, el
aceite actúa también como dieléctrico inuyendo en la capacidad eléctrica del sensor.
Dicha pérdida de aceite provoca que el comportamiento de la membrana sensora pierda
su simetria, actuando con una rigidez distinta según el signo de la sobrepresión a que esté
sometida. El tiempo de respuesta del sensor no es sensible al síndrome de pérdida de aceite
de silicona en su fase incipiente cuando aún no se puede asegurar la existencia de la avería;
la respuesta ya no es lineal, con lo que, en rigor, si se somete al sensor a una rampa de
presión, el tiempo de respuesta depende del signo de la rampa. El cambio de las condiciones
dinámicas del sensor produce un comportamiento bilineal. La aparición de no linealidades
en los sistemas de planta, aparte de ser un indicador de avería incipiente, hace necesario
implementar estrategias de compensación en los lazos de control[124]. Se han estudiado
procedimientos empíricos para lograr una detección temprana de esta anomalía, pero en
esta tesis se desarrolla una justicación teórica mediante la modelización del sensor, con
la posibilidad de obtener un indice de alarma que evidencie la existencia del síndrome.
210

4.6. Modelo bilineal de un sensor de presión capacitivo para la detección delsíndrome de la pérdida de aceite
4.6.1. Antecedentes
Cuando se produce una pérdida de aceite se puede observar que el comportamiento del
sensor da lugar a un desvio signicativo de la medida en relacion con los valores dados por
otros canales redundantes, al tiempo que una disminucion del nivel de ruido a la salida del
sensor, dicultad para su calibracion y respuesta lenta despues de una parada del reactor.
Todo ello fue observado por primera vez en 1987, en transmisores de presion dife-
rencial Rosemount 1153HD5PC. Estos transmisores fueron declarados fuera de servicio
y el fabricante, tras diversas pruebas, identicó la anomalía como una fuga del aceite.
Como consecuencia de este suceso algunos investigadores y el propio fabricante [107] em-
prendieron estudios para entender este síndrome y generar procedimientos de detección
incipiente.
Las investigaciones experimentales demostraron que la membrana retardaba su vuelta
a la posicion de equilibrio después de una sobrepresión [67], con lo que se ocasionaba una
asimetría en la vibración de la membrana.
Esta asimetría de las oscilaciones se reeja en los valores del ruido, hay una relación
entre el sesgo de la distribución de amplitudes [67] y el valor de la pérdida.
En la gura 4.34 se muestra un ejemplo característico de ruido bilineal. Sin embargo
el detectar sesgo en el ruido no es suciente para asegurar la existencia del síndrome,
porque también otras anomalías pueden dar lugar al sesgo. Debe existir al mismo tiempo
una disminución de la varianza.
211

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Figura 4.34: Ruido típico en el síndrome de pérdida de aceite.
En las pruebas en el laboratorio se encontraron tiempos de respuesta diferentes según
que la rampa fuera positiva o negativa; especialmente, en el modelo indicado, en el caso
en que el punto de tarado correspondía a baja presión, las membranas vuelven a su
posición de equilibrio muy lentamente en la rampa negativa, con tiempos de respuesta
muy superiores a los obtenidos para la rampa positiva.
4.6.2. Modelización del síndrome
La gura 4.35 muestra la analogía eléctrica propuesta para modelar la pérdida de
aceite del sensor. Como se observa, el modelo de partida para el conjunto sensor-línea
sensora es el de un sistema de tres polos. Los valores típicos de los parámetros de dicho
circuito se han tomado de la literatura [11] y se recogen en la tabla 4.6.
212

4.6. Modelo bilineal de un sensor de presión capacitivo para la detección delsíndrome de la pérdida de aceite
Figura 4.35:Modelo físico simplicado del sensor de presión y su correspondiente eléctrico.
Las características del síndrome podrían explicarse según la gura 4.35 repartiendo la
capacidad de la membrana sensora en dos condensadores. Cuando la presión es positiva,
hay una rigidez dieléctrica normal (C1), y cuando es negativa, la pérdida de aceite ocasiona
otra rigidez (C2). Para separarlas se incluyen los diodos en el modelo, que deja asi de ser
lineal.
La respuesta no lineal se puede modelizar empleando dos funciones de transferencia
cuya forma es [123]:
H (s) =1/Cs
(LS +R)(1− r+1/Ls1/Ms
) + r + 1/Cs(4.62)
Una de las funciones de transferencia se obtiene seleccionando C = C1 si V0 > 0, y la
otra tomando C = C2 si V0 < 0. Esto es necesario para explicar por qué los tiempos de
213

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Tabla 4.6: Valores típicos de los parámetros del sensor y la línea sensora
214

4.6. Modelo bilineal de un sensor de presión capacitivo para la detección delsíndrome de la pérdida de aceite
respuesta a rampas positivas y negativas son distintos. Las respuestas a la rampa vienen
dadas por la transformada inversa de Laplace de H(s)/s2. De aquí pueden calcularse los
tiempos de respuesta para ambas rampas.
4.6.3. Resultados de la simulación del análisis de ruido
La primera manifestación del síndrome es la pérdida de amplitud del ruido. En la
gura 4.36 se observa cómo disminuye la varianza al aumentar la capacidad C2 respecto a
la de referencia C1. Los sensores redundantes que no sufren el síndrome son la clave para
identicar el primer síntoma. Es necesario también detectar la falta de simetría.
Figura 4.36: Reducción de la varianza del ruido en función del cambio de capacidad
∆C/C1 = (C2 − C1)/C1 asociado a la presencia del síndrome.
En la gura 4.37 se ha representado el sesgo en función del cambio de capacidad.
Es una función creciente debido a que la asimetría es maniesta y a que la varianza es
215

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
decreciente. Los sensores redundantes que no sufren el síndrome tienen un sesgo nulo.
Figura 4.37: Aumento del sesgo del ruido en función del cambio de capacidad ∆C/C1 =
(C2 − C1)/C1 asociado a la presencia del síndrome.
El análisis de frecuencia es menos adecuado para la detección del síndrome. Se debe
a que la línea sensora y la rigidez de la membrana aisladora, que explican la resonancia
del espectro, permanecen inalterados por el síndrome, habiéndose observado sólamente
un pequeño corrimiento del polo real hacia la izquierda.
El tiempo de respuesta es la base para la vigilancia de los sensores, pero en un sistema
no lineal no es unívoco, por lo que, en rigor, este concepto no debería usarse. Ademas,
aunque τ se calculase, no es el parámetro de vigilancia adecuado para detectar el síndrome
de la pérdida de aceite. En efecto, se ha calculado τ simulando el síndrome con diferentes
niveles de incidencia; tal y como se observa en la gura 4.38 no se trata de un buen
indicador de la avería como la varianza o el sesgo.
216

4.6. Modelo bilineal de un sensor de presión capacitivo para la detección delsíndrome de la pérdida de aceite
Figura 4.38: Tiempo de respuesta, calculado suponiendo linealidad, en funcion del cambio
de capacidad ∆C/C1 = (C2 − C1)/C1 asociado a la presencia del síndrome.
Para realizar un análisis, basado en el tiempo de respuesta, en el caso del síndrome,
puede procederse de una manera más simple: se descompone la señal de ruido en sus
partes positiva y negativa:
x+j =
xj, si xj ≥ 0
0, si xj < 0
; x−j =
0, si xj ≥ 0
xj, si xj < 0
(4.63)
Ambas señales se han analizado como ruidos lineales, puesto que no son señales deter-
ministas. Se han obtenido los tiempos de respuesta τ+ y τ− correspondientes a cada una de
ellas. Se ha llamado a+ al conjunto de coecientes cuando el ruido es positivo y a− cuando
es negativo. Los coecientes a+ toman el mismo valor que los a que se obtendrían si no
existiera la pérdida de aceite. El sentido de este análisis se justica porque un ruido lineal
217

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Tabla 4.7: Coecientes AR: a+ corresponde al caso normal (C2 = 0) y a− corresponde al
caso de pérdida de aceite en el que C2/C1 = 2. Tiempo de muestreo 0,01 s.
descompuesto según (4.63) da lugar a dos señales con coecientes AR a+ y a− iguales a
los correspondientes al ruido lineal original.
Si se consideran los valores de la tabla 4.6 para simular el comportamiento del sensor,
y se supone una incidencia del síndrome tal que C2/C1 = 2, un posible conjunto de
coecientes AR se recoge en la tabla 4.7.
Si a partir de los coecientes AR a+ y a− se calcula la respuesta a la rampa positiva y
negativa, se obtienen distintos valores, en conformidad con los valores determinados en las
experiencias de laboratorio. Se han obtenido las respuestas a las rampas para C2/C1 = 2.
Los tiempos de respuesta obtenidos son τ+ = 0, 24 s, caso normal; y τ− = 0,47 s, caso del
síndrome.
Puede obtenerse un indice dado por el cociente |τ− − τ+| /τ donde τ+ y τ− son los
tiempos de respuesta obtenidos descomponiendo la señal de ruido en sus partes positiva y
negativa, respectivamente; y τ es el tiempo de respuesta considerando el ruido procedente
de un sistema lineal. El índice así calculado es un indicador de la gravedad del síndrome.
218

4.6. Modelo bilineal de un sensor de presión capacitivo para la detección delsíndrome de la pérdida de aceite
En la gura 4.39 se muestra la representación del índice de anomalía en función del cambio
de capacidad producido por el síndrome. Como puede observarse en la gura 4.39, cuando
este índice es mayor que 100% indica la presencia de la anomalía, ya que a partir del 100%
cambia cualitativamente la distribucion de los valores: primero se ajustan a una recta y
después forman una nube en torno a una recta diferente.
Figura 4.39: Índice ∆τ/τ en función del cambio de capacidad ∆C/C1 = (C2 − C1)/C1
asociado a la presencia del síndrome.
219

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
4.7. Conclusiones relativas al Capítulo 4
Las conclusiones a las que se ha llegado en este capítulo de la tesis son las siguientes:
Obtención de un nuevo modelo de un sensor capacitivo a partir de una
analogía eléctrica: Se ha obtenido un nuevo modelo de cuatro polos (dos reales
y dos complejos conjugados) para el sensor capacitivo de presión tipo Rosemount a
partir de una analogía eléctrica y como consecuencia de la evidencia en laboratorio
de que existe al menos un polo real extra a añadir al modelo anterior de tres polos.
El orden del modelo dado por el criterio de Akaike no es correcto, si las
líneas sensoras son largas: Se ha utilizado el análisis de ruido para simular la
medida in situ del tiempo de respuesta del modelo de cuatro polos y se ha observado
que el tiempo obtenido tiene un error sistemático cuando se utiliza el criterio de
Akaike para obtener el orden del modelo autorregresivo en un sensor acoplado a
líneas sensoras largas.
Aplicación de un método de Monte Carlo para establecer un nuevo orden
del modelo AR que evite el error sistemático y aplicación a las medidas
reales: Por medio de un método de Monte Carlo se obtienen distribuciones estadís-
ticas del tiempo de respuesta. El orden óptimo del modelo es aquel cuya distribución
estadística tiene curtosis mucho más altas que la de una rectangular. El método de
Monte-Carlo establece el orden óptimo para cada longitud de línea y éste luego
podrá ser utilizado para la obtención del modelo AR en la práctica.
220

4.7. Conclusiones relativas al Capítulo 4
Propuesta de un modelo bilineal para reproducir el comportamiento del
sensor cuando sufre el síndrome de la pérdida de aceite: Se propone un
modelo para explicar cuantitativamente el comportamiento bilineal observado en los
sensores de presión del tipo Rosemount que presentan el síndrome de la pérdida de
aceite. El modelo consiste en una analogía eléctrica con dos diodos para reproducir
respuestas no lineales.
Simulación de la avería utilizando dos modelos AR diferentes: Se ha si-
mulado la respuesta bilineal con dos modelos AR, de manera que cada uno de ellos
proporcione la respuesta cuando actúe cada uno de los diodos. Se han simulado
cuarenta respuestas lineales variando poco a poco la capacidad del sensor, así se
ha podido detallar la evolución de la avería. Este procedimiento evita resolver nu-
méricamente ecuaciones diferenciales estocásticas no lineales, y permite extender la
aplicación de los modelos AR, que en el ámbito del mantenimiento son más conocidos
que los métodos no lineales.
Diagnóstico de la avería por medio de parámetros estadísticos del ruido
no lineal: El análisis de ruido de las señales generadas reproduce los resultados ex-
perimentales observados tanto en el laboratorio como en las plantas. Se ha diagnos-
ticado el síndrome a partir del decrecimiento de la varianza, y a partir del aumento
del sesgo del ruido no lineal generado. También se ha comprobado que el tiempo
de respuesta no es la magnitud de vigilancia adecuada para detectar la presencia
incipiente del síndrome.
221

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
Obtención de un índice de vigilancia para cuanticar la intensidad de la
anomalía: Considerando la asimetría del ruido bilineal, se ha propuesto un índice
de vigilancia basado en el tiempo de respuesta, para cuanticar la intensidad de la
anomalía. Este índice tiene la ventaja de calcularse con los algoritmos lineales que
se emplean para medir el tiempo de respuesta, extendiéndose así la aplicación de
una metodología lineal bien conocida al ámbito no lineal.
Obtención del cuarto polo de un sensor de presión capcitivo: Se ha obtenido
el cuarto polo del sensor a través del análisis de las PSDs procedentes de tres
sensores capacitivos tipo Rosemount de planta. Dicho hallazgo implica variar el
tiempo de muestreo de las señales, ltrar la señal con un ltro pasaaltos y realizar
un ajuste autorregresivo con un número de coecientes que evite los polos espúreos.
4.8. Publicaciones
Artículos en revistas
J.Blázquez, A.García-Berrocal, C.Montalvo y M.Balbás. The coverage factor
in a Flatten-Gaussian distribution. Metrologia, 2008, 45, 503-506.
C.Montalvo, M.Balbás, J.Blázquez y J.M.Chicharro. Vigilancia paramétrica de
la bilinealidad de transmisores de presión por análisis de ruido. Información
tecnológica, 2010, 21(2), 77-84.
C.Montalvo, M.Balbás, J.Blázquez and A.García-Berrocal. Application of the
222
4.8. Publicaciones
Monte Carlo method for capacitive pressure transmitters surveillance in Nu-
clear Power Plants. Enviado aMathematics and Computers in Simulation Mayo
2010.
Ponencias a congresos
A.García-Berrocal, J.M.Chicharro, C.Montalvo, J.Blázquez y M.Balbás. Ca-
racterización de un comportamiento bilineal mediante análisis de ruido: una
aplicación al mantenimiento predictivo. 8o Congreso Iberoamericano de Inge-
niería Mecánica, Cuzco, 23 al 25 de Octubre de 2007.
J.Blázquez, A.García-Berrocal, M.Balbás y C.Montalvo. Factor de cobertura
con incertidumbres combinadas de Tipo A y B.4o Congreso Español de Metro-
logía, Santander,1 al 3 de junio de 2009.
C.Montalvo, M.Balbás, J.Blázquez y A.García-Berrocal.Obtención por medio
de análisis de ruido del cuarto polo de un sensor capacitivo de presión. Acta
de congreso. XVII Congreso Nacional de Ingeniería Mecánica, Ciudad Real,
Noviembre 2010.
223

4. ANÁLISIS DE RUIDO APLICADO A SENSORES DE CENTRALESNUCLEARES
224

Parte III
SISTEMAS NO LINEALES
225


Capítulo 5
LA TRANSFORMADA DE HILBERT
Y EL MANTENIMIENTO
PREDICTIVO
5.1. Introducción
El análisis de Fourier ha demostrado ser una herramienta fundamental en el análisis
de señales en el dominio de la frecuencia. No obstante tiene sus limitaciones y cuando los
sistemas no son lineales o existen frecuencias que desaparecen o aparecen con el tiempo,
Fourier no es capaz de discriminar el momento en que eso ocurre. Para esos casos se
necesitan otro tipo de herramientas en las que el análisis no sólo sea global sino también
local y se puedan ver los cambios que sufren las frecuencias de vibración de los sistemas
a lo largo del tiempo.
La transformada de Hilbert y más recientemente, la transformada de Hilbert-Huang
227

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
se han utilizado para la caracterización de sistemas no lineales, o que no son estacionarios
ni ergódicos. Existe una gran cantidad de datos en la realidad que no pueden ser anali-
zados como sistemas lineales, estacionarios y ergódicos de disciplinas muy dispares como:
sísmica, geofísica, medicina, economía, biología, etc.
En este último capítulo de la tesis se va a utilizar la transformada de Hilbert en el
análisis de señales no lineales de un sensor de presión capacitivo tipo Rosemount y además
se aplicará la transformada de Hilbert-Huang para el análisis de señales procedentes de
una pala de aerogenerador. Este último caso, que no se encuadra dentro de la ingeniería
nuclear, se muestra como ejemplo de las posibilidades que ofrece la transformada de
Hilbert-Huang en el mantenimiento avanzado en problemas mecánicos, objeto de nuestra
tesis.
228

5.2. La transformada de Hilbert-Huang
5.2. La transformada de Hilbert-Huang
La transformada de Hilbert-Huang es una herramienta para analizar señales no linea-
les y no estacionarias. Se ha validado empíricamente y ha demostrado ser muy efectiva
para una gran variedad de señales de disciplinas muy distintas[77, 73, 74]. El método
para obtener esta transformada se compone de dos partes: la descomposición en modos
empíricos de la señal (Empirical Mode Descomposition EMD) y el análisis de cada uno
de los modos a través de la transformada de Hilbert (Hilbert Spectral Analysis HSA).
En esta sección se va a describir el método sin entrar en profundidad en las peculiari-
dades matemáticas de éste.
5.2.1. La descomposición en modos empíricos
La descomposición en modos empíricos se basa en la suposición de que los diferentes
modos de vibración de una señal, ya sean lineales o no lineales, tienen el mismo número de
máximos locales o relativos y de intersecciones con el eje de las abscisas. Además, existe
otra condición, y es que las señales a analizar deben ser simétricas con respecto a su media.
Por tanto, se asume que una señal está formada por la suma de estos modos de vibración
que se denominan Modos Intrínsecos(Intrinsic Mode Function, IMF ). En denitiva, cada
una de estas funciones intrínsecas debe satisfacer las siguientes condiciones:
El número de extremos debe ser igual o diferir en una unidad con el número de
intersecciones con el eje de las abscisas.
229

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
En cualquier punto del modo, la media entre la envolvente de los máximos locales
y la de los mínimos locales debe ser cero.
Para obtener los modos, primeramente se deben obtener los máximos locales, y por
medio de una interpolación cúbica de tipo spline, se obtiene su envolvente. Con los mí-
nimos, se procedería de la misma manera y se calcula la media entre ambas envolventes.
Así, partiendo de una señal determinada, se obtienen sus envolventes y la media de éstas
tal y como muestra la gura 5.1.
Por tanto, si x(t) es la señal inicial, al restarle la media obtenida de las envolventes
m1(t), se obtiene h1(t), que podría ser el primer modo de la señal:
h1(t) = x(t)−m1(t) (5.1)
Para saber si h1(t) es el primer modo empírico de la señal x(t) es necesario que cumpla
las propiedades enunciadas anteriormente. Si no las cumple, es necesario seguir llevando a
cabo el proceso con h1(t) de obtención de envolventes y medias, lo que se denomina sifting
process, hasta obtener el modo empírico deseado. Así, el siguiente paso sería considerar
que h1(t) es la señal de partida y repetir el proceso de sifting :
h11(t) = h1(t)−m11(t) (5.2)
siendo m11 la media de las envolventes de h1(t), y siendo h11(t) el posible nuevo modo de
vibración. Después de repetir este proceso k veces, se alcanza el primer modo de vibración
h1k(t) como:
h1k(t) = h1(k−1)(t)−m1k(t) (5.3)
230

5.2. La transformada de Hilbert-Huang
(a) Señal
(b) Señal, envolventes y media
Figura 5.1: Señal inicial (a) y señal con las envolventes de los máximos y mínimos locales
y la media de éstas (b)
231

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
y se denota por:
c1(t) = h1k(t) (5.4)
Como la señal todavía tiene información, es necesario seguir descomponiéndola en sus
otros modos empíricos, para ello se obtiene el denominado residuo r1(t) como:
r1(t) = x(t)− c1(t) (5.5)
Este residuo será sometido al proceso de sifting antes mencionado. En la gura 5.2 se
representa la señal de partida y el residuo obtenido tras calcular el primer modo empírico.
Figura 5.2: Señal de partida x(t) y el residuo r1(t) obtenido tras calcular el primer modo
empírico.
232

5.2. La transformada de Hilbert-Huang
La suma de todos los modos empíricos y el residuo obtenido en el último proceso de
sifting componen la señal de partida tal y como se indica a continuación:
x(t) =n∑j=1
cj(t) + rn(t) (5.6)
donde n es el número total de modos obtenidos.
En la gura 5.3 se muestran los modos empíricos obtenidos tras el análisis de la
respuesta dinámica de una viga[105]. También se añade el residuo de la señal.
233

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
Figura 5.3: Respuesta dinámica de una viga , sus modos empíricos y el residuo nal.
234

5.3. Evolución de la investigación precedente
5.3. Evolución de la investigación precedente
Los sistemas lineales han sido ampliamente estudiados; sin embargo, la no linealidad
de los sistemas requiere un análisis local que no puede proporcionar la transformada de
Fourier. Uno de los primeros trabajos en ingeniería mecánica para obtener analíticamente
parámetros locales del sistema, tales como las frecuencias naturales y los amortiguamien-
tos, a través de la transformada de Hilbert y del concepto de señal analítica fueron [45, 46].
El primero se reere únicamente a sistemas de segundo orden no lineales y sin excitación,
y en el segundo se analizan sistemas forzados. En 1996 se publicó un review [56] donde
se explicaban los métodos utilizados para realizar análisis de sistemas no lineales en el
tiempo y en la frecuencia. Las transformadas wavelets o la propia transformada de Hil-
bert eran explicadas junto con otras herramientas que se habían venido utilizando hasta
entonces. Parte de las conclusiones señalaban que aún no existía un método que destacara
sobre el resto en este tipo de sistemas.
En 1997 Feldman publicó dos trabajos [25, 47] en los que identicaba por medio de
la transformada de Hilbert las características no lineales de varios sistemas como un
oscilador de Dung o un sistema sin memoria. En ellos se explicaban las ventajas de
abordar una sistemática de tiempo-frecuencia frente al análisis de Fourier para el estudio
de los sistemas no lineales.
En 1996 Huang, en un capítulo del libro Advances in applied mathematics [76] expli-
caba de qué manera se podían estudiar los efectos no lineales observados en las ondas del
agua a través de la transformada de Hilbert. La idea se basaba en que, debido al cambio de
235

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
frecuencia que experimentan las ondas en ciertos momentos, debía ser posible realizar un
análisis local donde pudiera observarse dicho cambio, y para ello propuso la transformada
de Hilbert.
Sin embargo, la transformada de Hilbert tenía sus problemas. La aparición de fre-
cuencias negativas a la hora de obtener las frecuencias instantáneas o las dicultades que
surgen en el análisis de los extremos de las señales, a veces provocaban que no fuese
adecuado un análisis directo con la transformada de Hilbert para tratar datos reales no
estacionarios y no lineales. Por ello, en 1998 Huang y otros investigadores de la NASA y
de varios centros de investigación de EE.UU propusieron en [77] un método que combi-
naba la transformada de Hilbert con la descomposición de la señal en una serie de modos
empíricos. De esta manera se reducían los problemas asociados al uso de la transformada
de Hilbert, debido a que la señal inicial era dividida en una serie de componentes con
signicado físico.
Desde ese momento hasta ahora, la utilización de la transformada de Hilbert se ha
extendido considerablemente y se ha convertido en una herramienta muy útil en el estudio
de sistemas no lineales y no estacionarios. Aunque en un principio surgió en los estudios
oceanográcos [40], o dentro de las ciencias naturales, como es el caso de su aplicación en
las señales geofísicas[72], luego se ha ido ampliando a la detección de daños en estructuras
dentro de la ingeniería civil [132], al estudio de series de matemática nanciera [75], al
análisis de señales procedentes de detectores de neutrones para la obtención de parámetros
de vigilancia de las plantas nucleares[84] y a un sinfín de disciplinas y aplicaciones que
sería imposible incluir en su totalidad en esta tesis.
236

5.3. Evolución de la investigación precedente
Por último cabe citar que han surgido estudios que comparan las técnicas de la trans-
formada de Hilbert-Huang con el simple análisis de Hilbert [48] o con la transformada
wavelet[31], también utilizada en el ámbito de la no linealidad y el análisis local, y libros
que recopilan toda la experiencia acumulada en el uso de la transformada de Hilbert-
Huang y sus aplicaciones [74, 73].
237

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
5.4. La transformada de Hilbert como herramienta pa-
ra el control de calidad
Los sensores de presión capacitivos están muy extendidos en las plantas nucleares hoy
en día[49]. Como se ha comentado en capítulos anteriores, están compuestos por una
membrana de aislamiento que separa la línea sensora de la parte interna del sensor que
contiene una serie de microtúbulos rellenos de aceite de silicona[60]. Éstos terminan en
una membrana sensora unida a las placas de un condensador. La exactitud del sensor está
determinada por el proceso de llenado de la cámara interna con el aceite de silicona[58],
de manera que un llenado parcial de la misma puede afectar a la respuesta dinámica del
sensor. De hecho, el síndrome de la pérdida de aceite es una de las averías más notables,
ya que la respuesta del sensor deja de ser lineal[49, 22]. En este capítulo se va a analizar
la respuesta de un sensor con grados diferentes de incidencia del síndrome a través de la
transformada de Hilbert y del diagrama backbone. Los resultados se compararán con los
de un sensor no averiado cuyo comportamiento es lineal, para nalmente proponer dicha
herramienta como método de control de calidad en el proceso de llenado con aceite de
silicona de la cámara interna del sensor.
238

5.4. La transformada de Hilbert como herramienta para el control de calidad
5.4.1. Estudio de un caso
En este epígrafe la transformada de Hilbert se aplicará al estudio de un sensor Rose-
mount modelo 1153 ubicado en un reactor PWR cuya respuesta ante una onda de presión
ha sido registrada. El sensor bajo estudio ha sufrido el síndrome de la pérdida de aceite,
lo que implica que su cámara interna no está completamente llena de aceite de silicona.
Primeramente la onda de presión utilizada como entrada al sensor tiene una amplitud
alta, mientras que la segunda aplicada es de amplitud menor. En la gura 5.4 se muestra
la respuesta del sensor en el primer caso.
Figura 5.4: Respuesta de un sensor de presión capacitivo tipo Rosemount 1153 deun PWR
que sufre el síndrome de la pérdida de aceite ante una entrada armónica.
En la gura 5.4 se observa que la onda de respuesta del sensor está rota y la no
linealidad se aprecia a simple vista. Después de aplicar la transformada de Hilbert a esta
239

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
señal se obtiene el diagrama backbone mostrado en la gura 5.5. En él las amplitudes y
frecuencias instantáneas están normalizadas con respecto a la frecuencia aparente de la
respuesta (0,2 Hz) y la amplitud máxima registrada.
Figura 5.5: Backbones correspondientes a la respuesta de un sensor lineal ante una entrada
armónica y a la respuesta de un sensor no lineal averiado ante una entrada armónica.
En la gura 5.5 se aprecia el backbone de la respuesta de un sensor lineal en gris y otro,
no lineal, que sufre el síndrome de la pérdida de aceite en negro. El comportamiento lineal
se caracteriza por tener una cierta amplitud instantánea única y una cierta frecuencia
instantánea, única también mientras que el caso no lineal comprende un rango mayor de
amplitudes y frecuencias.
La respuesta ante una entrada de menor amplitud se presenta en la gura 5.6. Apa-
240
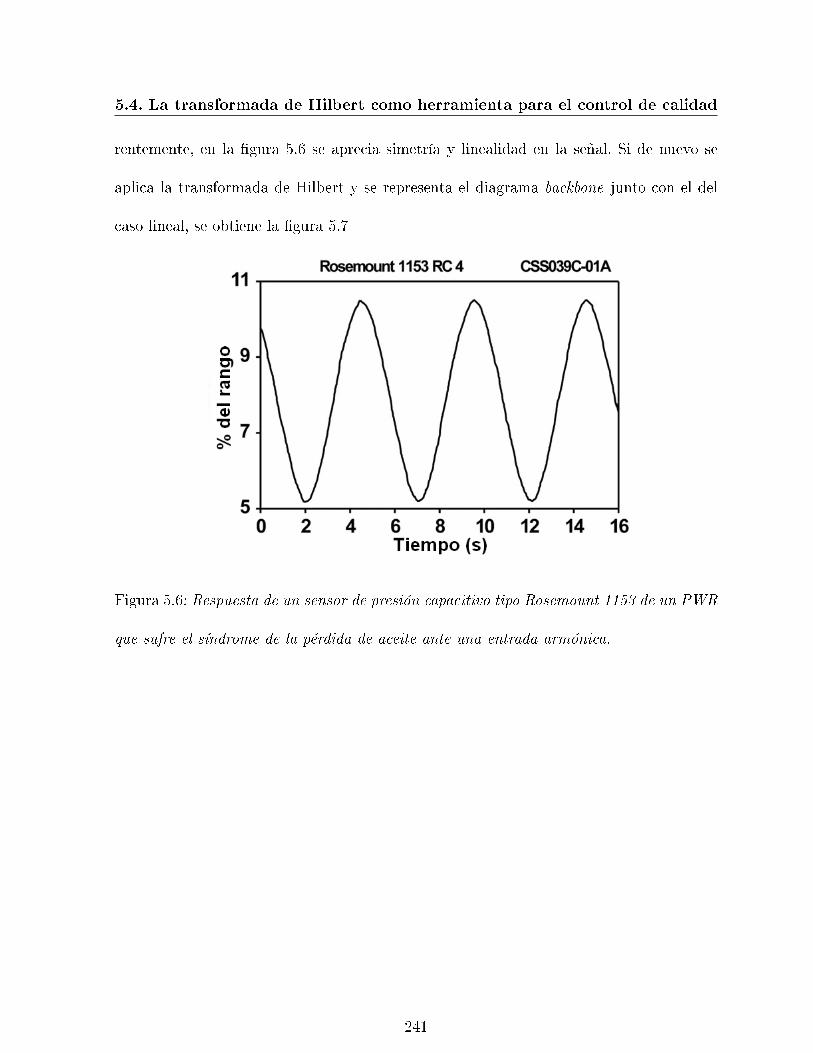
5.4. La transformada de Hilbert como herramienta para el control de calidad
rentemente, en la gura 5.6 se aprecia simetría y linealidad en la señal. Si de nuevo se
aplica la transformada de Hilbert y se representa el diagrama backbone junto con el del
caso lineal, se obtiene la gura 5.7
Figura 5.6: Respuesta de un sensor de presión capacitivo tipo Rosemount 1153 de un PWR
que sufre el síndrome de la pérdida de aceite ante una entrada armónica.
241

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
Figura 5.7: Backbones correspondientes a la respuesta de un sensor lineal ante una entrada
armónica y a la respuesta de un sensor no lineal averiado ante una entrada armónica.
El sensor averiado muestra una mayor dispersión de los valores tal y como se pudo ver
en el caso de la entrada armónica de mayor amplitud. También hay una cierta tendencia
a que los valores de la backbone sigan una pendiente determinada. La transformada de
Hilbert, a través de las frecuencias y amplitudes instantáneas, es decir, a través del análisis
local, es capaz de diferenciar casos lineales de los no lineales, aunque éstos tengan una no
linealidad incipiente.
242

5.4. La transformada de Hilbert como herramienta para el control de calidad
5.4.2. Modelo no lineal
Los sensores de presión capacitivos están formados por una membrana de aislamiento
conectada a la membrana sensora a través de unos tubos capilares rellenos de aceite de
silicona. Un esquema sencillo para explicar la relación entre las presiones iniciales y nales
en el sensor se muestra en la gura 5.8
Figura 5.8: Esquema sencillo de presiones inicial y nal en un sensor capacitivo tipo
Rosemount.
Por tanto, la relación existente entre la presión de entrada y la de salida está dada por
la siguiente ecuación diferencial de primer orden:
pi = p+ τodp
dt(5.7)
donde pi es la presión de entrada, p la presión de salida y τ0 es el tiempo de respuesta,
que en el caso lineal es único.
No obstante, si el modelo es no lineal, la respuesta del sensor dependerá del valor de
la presión registrada[22]. Para deducir una ecuación para la respuesta del sensor en estas
condiciones, se considerará la relación existente entre la presión y el volumen desplazado
de aceite de silicona V (p) aproximando al segundo término de una serie de Taylor para
243

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
presión positiva:
V (p) =
C0p p ≤ 0
C0
(p+ ap2
)p > 0
(5.8)
donde C0 es la compresibilidad del aceite de silicona, p es la presión y a es una constante
positiva. Evaluando la compresibilidad y teniendo en cuenta (5.8), se obtiene la expresión
siguiente: (dV
dp
)pm
=
C0 p ≤ 0
C0 (1 + 2apm) p > 0
(5.9)
donde pm es la máxima presión que el sensor puede tolerar. En la gura 5.9 se representa
la relación entre V y p.
Figura 5.9: Relación entre la presión y el volumen de la cámara interna de un sensor no
lineal, debido al síndrome de la pérdida de aceite.
Como se puede ver en la gura 5.9, la pendiente alcanza su máximo en pm, lo que es
244

5.4. La transformada de Hilbert como herramienta para el control de calidad
equivalente a decir que la compresibilidad es mayor en ese punto. Si la compresibilidad
para presiones positivas se expresa como una función dependiente de una constante y la
compresibilidad del aceite, entonces (5.9) se transforma en:
(dV
dp
)pm
=
C0 p ≤ 0
nC0 n ≥ 1 p > 0
(5.10)
En consecuencia, la no linealidad ha sido expresada en función del aumento de com-
presibilidad, debido al hecho de que la cantidad de aceite en el interior del sensor ha
disminuido y el parámetro a ahora se puede expresar como una función de n y pm como
se muestra a continuación:
a =n− 1
2pmn ≥ 1 pm > 0 (5.11)
sustituyendo esta última ecuación en (5.10):
(dV
dp
)pm
=
C0 p ≤ 0
C0 +
(n− 1
pm
)C0p = C0
(1 +
n− 1
pmp
)= C0 (1 + kp) k > 0 p > 0
(5.12)
donde k es un parámetro que caracteriza la no linealidad. Considerando que la ecuación
del modelo de la gura 5.8 se obtiene aplicando la segunda ley de Newton:
(pi − p)A = RAdV
dt= RA
dV
dp
dp
dt(5.13)
siendo A la sección del canal y R un término de fricción. Así sustituyendo 5.12 en 5.13,
entonces:
(pi − p) = RC0(1 + kp)dp
dt(5.14)
245

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
Como RC0 es el tiempo de respuesta, sustiyéndolo en (5.14) se obtiene:
(pi − p) = τ0(1 + kp)dp
dt(5.15)
Como se aprecia, cuando k es igual a cero, el modelo es lineal. Si el valor absoluto del
parámetro k se incrementa, la no linealidad asociada al sensor cambia. El parámetro k se
usa, por tanto, como un índice que determina el grado de no linealidad.
5.4.3. Validación del modelo no lineal
Para validar el modelo no lineal, la respuesta simulada ante una entrada senoidal de un
sensor Rosemount se ha analizado vía transformada de Hilbert. El diagrama backbone de
amplitudes y frecuencias instantáneas se puede simular numericamente para cada valor de
k, que es el parámetro que caracteriza el grado de no linealidad y por tanto, la severidad
del síndrome. En la gura 5.10 se representa un ejemplo en el que se ha simulado el
backbone para un caso lineal k = 0 y un caso en el que k = 0, 3.
246

5.4. La transformada de Hilbert como herramienta para el control de calidad
Figura 5.10: Backbones simuladas correspondientes a un modelo lineal del sensor (k = 0)
y a un modelo no lineal con k = 0, 3.
La simulación se ha realizado con una entrada senoidal cuya frecuencia era 0,2 Hz y su
amplitud 1,7. Para la representación backbone, las frecuencias y amplitudes se normalizan
tal y como se hizo en los casos anteriores. Por otro lado, se aprecia que el caso no lineal
tiene mayor número de frecuencias y amplitudes instantáneas y que además presentan
una tendencia con una pendiente tal y como se mostró en epígrafes anteriores.
247

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
Para aquellos casos en los que la no linearidad es incipiente (síndrome de difícil de-
tección), el valor absoluto del parámetro k debe ser muy pequeño. El diagrama backbone
para k = 0, 05 y el caso lineal se presentan en la gura 5.11. Como se puede apreciar de
Figura 5.11: Backbones simuladas correspondientes a un modelo lineal del sensor (k = 0)
y a un modelo no lineal con k = 0, 05.
la gura 5.11, cuando el parámetro k decrece, las frecuencias y amplitudes instantáneas
cubren un área más pequeña en la gráca, pero en cualquier caso, la diferencia entre el
caso lineal y el no lineal es apreciable.
248

5.4. La transformada de Hilbert como herramienta para el control de calidad
Es preciso mencionar que el espectro en frecuencias de la señal del sensor realizado con
la transformada de Fourier presenta un armónico adicional(véase gura 5.12. La principal
diferencia con el análisis de Fourier es que la transformada de Hilbert permite distinguir
aquellos casos de incipiente avería.
Figura 5.12: PSD de las señales simuladas del sensor para un caso lineal (k = 0) y para
un caso no lineal con k = 0, 05.
249

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
5.5. La transformada de Hilbert-Huang para caracteri-
zar las palas de un aerogenerador
5.5.1. Introducción
La posibilidad de que alguno de los elementos de los aerogeneradores entre en resonan-
cia, dando lugar a vibraciones muy elevadas pudiendo provocar roturas o accidentes, hace
necesario caracterizar los diferentes elementos que lo constituyen. Uno de ellos son las
palas, que son sometidas a un control de calidad por medio de una serie de ensayos[106].
Existen diferentes tipos de ensayos y diferentes frecuencias a medir. Así, los ensayos se
realizan midiendo las señales de las palas cuando éstas están empotradas en un soporte y
tienen libre un extremo(véase gura 5.13). El acelerómetro, que suele estar colocado en el
extremo libre de la pala, mide las frecuencias en ap (abatimiento) o en lag(arrastre)[106];
es decir, las que se producen paralelamente al soporte de empotramiento o perpendicu-
larmente a él. Este tipo de ensayos se lleva a cabo soltando rápidamente la pala desde
un posición inicial y midiendo dichas frecuencias o bien, sometiendo a la pala a un cierto
impulso inicial[9].
Debido a la heterogeneidad de los materiales con los que se construyen las palas, obte-
ner un modelo de éstas para llegar a una ecuación de movimiento es una tarea compleja.
Normalmente están compuestas de bra de vidrio y sus perles son de alta aerodinamici-
dad y en consecuencia, de geometría complicada.
250

5.5. La transformada de Hilbert-Huang para caracterizar las palas de unaerogenerador
Figura 5.13: Esquema del ensayo realizado para medir frecuencias en ap y en lag en una
pala de aerogenerador de 20 metros.
Uno de los parámetros a medir, y que no se conocen previamente, es su rozamiento.
Se puede medir realizando un análisis de Fourier, por medio de la anchura de cada pico
resonante o incluso a través de un ajuste no lineal de Breit-Wigner. No obstante, los
parámetros obtenidos por medio de la inspección visual del espectro son aproximados y
además el análisis de Fourier es global, no permite un estudio localizado de las vibraciones
de las palas.
Por tanto, con el objetivo de caracterizar mejor el comportamiento dinámico de las
palas y el rozamiento asociado a las mismas, se realiza un análisis de señal por medio de
la transformada de Hilbert-Huang. Este análisis permite la descomposición de la señal en
una serie de modos empíricos; y por medio de la transformada de Hilbert de los mismos,
se obtienen las amplitudes y frecuencias instantáneas así como el rozamiento asociado a
ellos[46]. Además, dado que el análisis con esta metodología es local, se pueden determinar
251

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
con mayor precisión los diferentes modos de vibración y la escala de tiempos asociada a
los mismos.
En esta parte de la tesis se analiza, por medio de esta metodología, una señal proce-
dente de un ensayo de suelta repentina en ap de pala de aerogenerdor y se obtienen sus
modos empíricos. De cada modo, y con un análisis armónico basado en la transformada de
Hilbert, se obtienen la amplitud instantánea y la frecuencia instantánea frente al tiempo.
A continuación se obtiene el rozamiento de cada modo a través del decremento logarítmico
y de las frecuencias instantáneas.
5.5.2. Modos propios de vibración
Una pala empotrada se puede asimilar a una viga elástica uniforme con un extremo
libre y otro empotrado. La elongación y de la viga depende de la posición y del tiempo
según la ecuación diferencial en derivadas parciales:
EI∂4y
∂x4= −Aγ
g
∂2y
∂t2(5.16)
donde E es el módulo de Young, I es el momento de inercia de la sección recta, A es
la sección, γ es el peso especíco de la viga y g la constante de la gravedad. Se puede
resolver aplicando el método de separación de variables, tal que la solución se escriba como
el producto de dos funciones que dependen del espacio y del tiempo respectivamente:
y(x, t) = X(x) · T (t) (5.17)
252

5.5. La transformada de Hilbert-Huang para caracterizar las palas de unaerogenerador
Introduciendo esta forma de solución en la ecuación diferencial (5.16) se obtienen dos
ecuaciones diferenciales ordinarias independientes[32]:
d2T
dt2+ λ2T = 0 (5.18)
d4X
dx4= K4X (5.19)
siendo la relación entre las constantes de estas ecuaciones:
K4 =λ2
b2(5.20)
donde b es igual a: √EIg
Aγ(5.21)
La solución general de (5.18) es:
T = A cosλt+ b senλt (5.22)
y la de (5.19):
X = C1 senKx+ C2 cosKx+ C3senhKx+ C4 coshKx (5.23)
Cuando el extremo izquierdo de la viga está empotrado y el otro libre, las condiciones de
contorno vienen dadas por:
(X)x=0 = 0;
(dX
dx
)x=0
= 0;(d2X
dx2
)x=l
= 0;
(d3X
dx3
)x=l
= 0;
(5.24)
253

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
que conducen a la siguiente solución:
cosKl coshKl = −1 (5.25)
donde l es la longitud de la viga. Las diferentes raíces de esta ecuación se muestran en la
tabla 5.1[32].
K1l K2l K3l K4l K5l K6l
1,875 4,694 7,855 10,996 14,137 17,279
Tabla 5.1: Diferentes modos de vibración de una viga dependiendo de la longitud de la
misma
5.5.3. Análisis de Fourier
En la gura 5.14 se presenta la señal obtenida de una pala sometida a un ensayo en de
suelta repentina en ap . En la gura 5.15 se representa el espectro de dicha señal donde
se indican las frecuencias de los dos picos resonantes que se observan.
254

5.5. La transformada de Hilbert-Huang para caracterizar las palas de unaerogenerador
Figura 5.14: Respuesta al impulso de la pala de un aerogenerador de 20 metros.
Figura 5.15: Espectro de Fourier de la respuesta al impulso representada en la gura 5.14.
La simple inspección visual de la señal nos indica que existen al menos dos frecuencias
255

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
involucradas en la vibración de la pala, y que se muestran claramente en el espectro de
Fourier. Además, a través de un ajuste de Breit-Wigner se podrían obtener los parámetros
característicos de cada resonancia, entre ellos el rozamiento. No obstante, esto requiere
un ajuste no lineal que como ya se explicó en el capítulo 3 requiere mucha experiencia y
es muy poco práctico. Hallar el rozamiento a través de la anchura del pico proporciona
un valor aproximado y además el análisis de Fourier, al tener carácter global no aporta
información sobre la duración de cada vibración.
5.5.4. Estimación del rozamiento de los modos empíricos
Según consta en la literatura [46], es posible obtener el rozamiento frente al tiempo de
una señal por medio de las amplitudes y frecuencias instantáneas. Sea y(t) la solución de
una ecuación diferencial del tipo:
d2y
dt2+ 2h0(A)
dy
dt+ ω2
0(A)y = 0 (5.26)
siendo A la amplitud instantánea de la señal analítica de y, h0 el rozamiento del sistema
y ω0 la frecuencia natural del sistema. También se puede expresar (5.27) en función de la
señal analítica de y(t):
d2Y
dt2+ 2h0(A)
dY
dt+ ω2
0(A)Y = 0 (5.27)
siendo Y la señal analítica de y(t). Sabiendo que la primera y segunda derivada de Y se
pueden expresar en función de la amplitud instantánea A y de la frecuencia instantánea
256

5.5. La transformada de Hilbert-Huang para caracterizar las palas de unaerogenerador
ω [46] tal y como sigue:
Y = Y (t) [A (t)
A (t)+ jω (t)]
Y = Y (t) [A (t)
A (t)− ω2 (t) +
2jA (t)ω (t)
A (t)+ jω (t)]
(5.28)
Resolviendo la ecuación para las partes reales e imaginarias, se obtiene el término del
rozamiento:
h0(t) = −AA− ω
2ω(5.29)
Así, para llegar a obtener el rozamiento de los modos empíricos de la señal que se está
estudiando, habrá que proceder a la descomposición de la misma según los modos empí-
ricos enunciados por Huang. En la gura 5.16 se muestran los dos modos obtenidos (c1(t)
y c2(t)) y el residuo.
257

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
Figura 5.16: Modos empíricos y residuo de la señal de respuesta al impulso de una pala
de aerogenerador.
Como se puede observar, la descomposición en modos empíricos ha dado lugar a dos
modos y a un residuo. El primer modo c1 tiene una frecuencia mayor que el segundo
modo c2. Se observa también que el residuo es prácticamente nulo, lo que indica que de
la señal era imposible extraer un tercer modo. En torno al tercer segundo de la vibración
de la pala, se aprecia un cambio considerable en la frecuencia del primer modo. Teniendo
en cuenta que la descomposición de Huang da lugar a modos de vibración con una de-
terminada frecuencia característica, el hecho de que exista un cambio implica que dicho
modo desaparece en torno a ese instante. Esta observación es mucho más evidente con
258

5.5. La transformada de Hilbert-Huang para caracterizar las palas de unaerogenerador
una representación de las frecuencias instantáneas de cada modo empírico, tal y como se
muestra en la gura 5.17:
Figura 5.17: Frecuencias instantáneas de los modos empíricos de la señal de respuesta al
impulso de una pala de aerogenerador.
Como se aprecia, la frecuencia instantánea del primer modo se sitúa en torno a los
5 Hz, tal y como indicaba el espectro de frecuencias de Fourier. El segundo modo tiene
una frecuencia de unos 2 Hz. Aproximadamente a partir de los 3 segundos se produce un
cambio brusco en la frecuencia del primer modo, pasando a situarse en los 2 Hz; es decir,
en la frecuencia del segundo modo. Al desaparecer el primer modo, la descomposición en
modos empíricos sólo puede encontrar un único modo de vibración, por eso el primero
259

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
pasa a tener la frecuencia del segundo y el segundo tiende a una frecuencia nula.
Para obtener el rozamiento de los modos, sólo se ha analizado la señal hasta los 2,5 s, ya
que es cuando uno de los modos desaparece. En la gura 5.18 se representa el rozamiento
del primer modo.
Figura 5.18: Rozamiento frente al tiempo de cada modo empírico de la respuesta al impulso
de una pala de aerogenerador .
Calculando el valor esperado de h1(t) se obtiene un valor de 0, 048 para el rozamiento.
260

5.6. Conclusiones relativas al Capítulo 5
5.6. Conclusiones relativas al Capítulo 5
Se ha detectado y caracterizado un comportamiento no lineal incipiente al aplicar
la transformada de Hilbert a la respuesta de un sensor de presión capacitivo que
comienza a sufrir el síndrome de la pérdida de aceite, cuando dicho sensor es excitado
con una entrada senoidal.
La detección y caracterización de dicha anomalía no puede llevarse a cabo con los
métodos tradicionales de análisis de Fourier debido al carácter global de éstos.
Dada la gran sensibilidad de la metodología se propone utilizar la transformada de
Hilbert para vericar que el proceso de llenado de la cámara interna de los sensores
de presión capacitivos con aceite de silicona se ha realizado correctamente tras su
fabricación.
Se ha tomado un modelo teórico de la literatura y se ha usado para validar con éxito
la metodología.
Se ha aplicado la descomposición en modos empíricos de vibración de la señal de
respuesta al impulso de una pala de aerogenerador, por medio de la transformada
de Hilbert- Huang. Se han identicado dichos modos y se ha analizado su carácter
estacionario. Además se ha estimado el rozamiento asociado a cada uno de ellos.
261

5. LA TRANSFORMADA DE HILBERT Y EL MANTENIMIENTOPREDICTIVO
5.7. Publicaciones
Revistas
C. Montalvo, A. García-Berrocal, J. Blázquez and M. Balbás. The Hilbert
transform as a quality control tool in capacitive pressure transmitters. Mecha-
nical Systems and Signal procesing,24, 1025 - 1031, 2010.
Ponencias a congresos
C. Montalvo, J. Blázquez, M. Balbás y A. García-Berrocal. La transformada
de Hilbert como herramienta para el control de calidad en sensores de presión
capacitivos. 9o Congreso Iberoamericano de Ingeniería Mecánica, Las Palmas
de Gran Canaria 2009.
C. Montalvo, J. Blázquez, M. Balbás y A. García-Berrocal. Aplicación de las
transformadas de Hilbert a la dinámica de una pala de aerogenerador.XVIII
Congreso Nacional de Ingeniería Mecánica, Ciudad Real, Noviembre 2009.
262

263


Capítulo 6
CONCLUSIONES Y
PUBLICACIONES
CONCLUSIONES
Las conclusiones referentes al análisis de ruido aplicado a sensores son:
Se ha obtenido un nuevo modelo de un sensor de presión capacitivo tipo Rose-
mount a partir de una analogía eléctrica. El nuevo modelo tiene cuatro polos:
dos reales y dos complejos conjugados. La nueva propuesta se basa en la evi-
dencia empírica de que existía un cuarto polo no contemplado hasta ahora en
los modelos realizados del sensor.
El criterio de Akaike no es correcto cuando se quiere medir el tiempo de res-
puesta de un sensor de presión capacitivo a partir de su modelo de cuatro polos
si la línea sensora asociada a éste es larga. Para establecer el criterio adecuado
265

6. CONCLUSIONES Y PUBLICACIONES
se ha utilizado un método de Monte-Carlo que obtiene las distribuciones esta-
dísticas de los tiempos de respuesta según la longitud de línea. El nuevo criterio
se basa en la curtosis de dichas distribuciones, que deben ser mucho más altas
que las correspondientes a las de una distribución rectangular. El método de
Monte-Carlo establece el orden óptimo para cada longitud de línea y éste luego
podrá ser utilizado para la obtención del modelo AR en la práctica.
Las contribuciones a la incertidumbre en la estimación del tiempo de respuesta
hacen que la metodología internacionalmente empleada para expandir la incer-
tidumbre no sea aplicable, por lo que se ha desarrollado un cálculo analítico
original para expandir la incertidumbre adecuadamente.
Se ha obtenido el cuarto polo del sensor a través del análisis de las PSDs pro-
cedentes de tres sensores capacitivos tipo Rosemount de planta. Dicho hallazgo
implica variar el tiempo de muestreo de las señales, ltrar la señal con un ltro
pasaaltos y realizar un ajuste autorregresivo con un número de coecientes que
evite los polos espúreos.
Se propone un modelo para explicar cuantitativamente el comportamiento bili-
neal observado en los sensores de presión del tipo Rosemount que presentan el
síndrome de la pérdida de aceite. El modelo consiste en una analogía eléctrica
con dos diodos para reproducir respuestas no lineales.
Se ha simulado la respuesta bilineal con dos modelos autorregresivos y se han
hallado los tiempos de respuesta de cada modelo que coinciden con los obtenido
266

en laboratorio. Con los dos tiempos de respuesta, se ha obtenido un índice de
vigilancia que varía en función de la incidencia de la anomalía.
Las conclusiones referentes a la detección de comportamientos no lineales en los
sensores de presión son:
Se ha detectado y caracterizado un comportamiento no lineal incipiente al apli-
car la transformada de Hilbert a la respuesta de un sensor de presión capacitivo
que comienza a sufrir el síndrome de la pérdida de aceite, cuando dicho sensor
es excitado con una entrada senoidal.
Dada la gran sensibilidad de la metodología basada en la transformada de
Hilbert, se propone su utilización para vericar que el proceso de llenado de la
cámara interna de los sensores de presión capacitivos con aceite de siliconpa se
ha realizado correctamente tras su fabricación.
Las conclusiones referentes al mantenimiento y diagnóstico de los internos de un
reactor PWR son:
El ajuste basado en una fórmula de Breit-Wigner se ha implementado en código
Matlab y se ha aplicado satisfactoriamente a las PSDs de las señales de los
detectores de neutrones tanto in-core como ex-core. Los parámetros obtenidos
por medio del ajuste pueden utilizarse a partir de ahora para el diagnóstico de
los internos del reactor.
En el análisis de los internos, los parámetros del ajuste correspondientes al ran-
267

6. CONCLUSIONES Y PUBLICACIONES
go de frecuencia entre 7-8 Hz determinan que existen dos modos de vibración,
uno vinculado al movimiento del barrilete y otro a los elementos combustibles.
El origen físico de ambos modos se justica por la diferente evolución experi-
mentada por las amplitudes de las resonancias a lo largo de los tres periodos
de tiempo analizados.
Se ha construido un índice de vigilancia de los internos del reactor a través
del álgebra de cuaterniones. El cuaternión está formado por cuatro números
que son los parámetros de una resonancia resuelta por una fórmula de Breit-
Wigner. Así, para cada reactor y cada resonancia se puede elaborar una serie de
rectas modelo de comportamiento que pueden ser utilizadas por los operadores
en tareas de vigilancia y mantenimiento.
Los resultados obtenidos referentes a la aplicación de la transformda de Hilbert-
Huang se resumen en la siguiente conclusión:
Se ha aplicado la descomposición en modos empíricos de vibración de la señal
de respuesta al impulso de una pala de aerogenerador, por medio de la trans-
formada de Hilbert- Huang. Se han identicado dichos modos y se ha analizado
su carácter estacionario. Además se ha estimado el rozamiento asociado a cada
uno de ellos.
268

PUBLICACIONES
Revistas Internacionales
J.Blázquez, A.García-Berrocal, C.Montalvo y M.Balbás. The coverage fac-
tor in a Flatten-Gaussian distribution. Metrologia, 2008, 45, 503-506.
A. García-Berrocal, J. Blázquez, C. Montalvo, and M. Balbás.Resolving
mechanical resonances with Breit-Wigner formula. Journal of Vibration
and Control, 15(8), 12671280,2009.
C.Montalvo, M.Balbás, J.Blázquez and A.García-Berrocal. Application of
the Monte Carlo method for capacitive pressure transmitters surveillance
in Nuclear Power Plants. Pendiente de la aceptación de la revisión de julio
2010 en Mathematics and Computers in Simulation.
C.Montalvo, M.Balbás, J.Blázquez y J.M.Chicharro. Vigilancia paramé-
trica de la bilinealidad de transmisores de presión por análisis de ruido.
Información tecnológica, 2010, 21(2), 77-84.
C. Montalvo, A. García-Berrocal, J. Blázquez and M. Balbás. The Hilbert
transform as a quality control tool in capacitive pressure transmitters.
Mechanical Systems and Signal procesing, 24, 1025 - 1031, 2010.
Revistas Nacionales
A.García-Berrocal, C.Montalvo, J.Blázquez y M.Balbás. Resolución de re-
sonancias de vibración. Aplicación a un problema de mantenimiento pre-
269

6. CONCLUSIONES Y PUBLICACIONES
dictivo. Anales de Ingeniería Mecánica. Año 16, 2, 2008.
Informes técnicos
I. Pázsit, C. Montalvo-Martin, T. Tambouratzis, and V. Dykin. Final re-
port on the research project Ringhals diagnostics and monitoring stage 13.
Technical report, Chalmers internal report CTH-NT-230/RR-15, 2010.
Ponencias a congresos
A.García-Berrocal, J.M.Chicharro, C.Montalvo, J.Blázquez y M.Balbás.
Caracterización de un comportamiento bilineal mediante análisis de ruido:
una aplicación al mantenimiento predictivo.8o Congreso Iberoamericano de
Ingeniería Mecánica, Cuzco, 23 al 25 de Octubre de 2007.
A.García-Berrocal, C.Montalvo, J.Blázquez y M.Balbás. Resolución de re-
sonancias de vibración. Aplicación a un problema de mantenimiento pre-
dictivo. XVII Congreso Nacional de Ingeniería Mecánica, Gijón, 14-15 de
febrero de 2008.
J.Blázquez, A.García-Berrocal, M.Balbás y C.Montalvo. Factor de cober-
tura con incertidumbres combinadas de Tipo A y B.4o Congreso Español
de Metrología, Santander,1 al 3 de junio de 2009.
C. Montalvo, J. Blázquez, M. Balbás y A. García-Berrocal. La transforma-
da de Hilbert como herramienta para el control de calidad en sensores de
presión capacitivos. 9o Congreso Iberoamericano de Ingeniería Mecánica,
Las Palmas de Gran Canaria 2009.
270

C.Montalvo, M.Balbás, J.Blázquez y A.García-Berrocal. Obtención por
medio de análisis de ruido del cuarto polo de un sensor capacitivo de
presión. XVII Congreso Nacional de Ingeniería Mecánica, Ciudad Real,
Noviembre 2010. (Pendiente de celebración, aceptado)
C. Montalvo, J. Blázquez, M. Balbás y A. García-Berrocal. Aplicación
de las transformadas de Hilbert a la dinámica de una pala de aeroge-
nerador.XVIII Congreso Nacional de Ingeniería Mecánica, Ciudad Real,
Noviembre 2010. (Pendiente de celebración, aceptado)
Imre Pázsit, C. Montalvo et al. Diagnostics of core barrel and fuel assem-
bly vibrations in the Ringhals PWRs, Sweden. American Nuclear Society:
Winter Meeting, Las Vegas November 2010. (Pendiente de celebración,
aceptado)
FUTURAS LÍNEAS DE INVESTIGACIÓN
Implantación y análisis del índice de vigilancia basado en el álgebra de cuater-
niones en datos de la central de Ringhals, Suecia.
Análisis de nuevas medidas procedentes de los detectores de neutrones en tres
momentos del ciclo de combustible nuclear: principio, en el medio y al nal.
El objetivo es conrmar hipótesis sobre el origen físico de cada resonancia, en
especial el movimiento del barrilete.
Aplicar la transformada de Hilbert-Huang a señales de tipo senoidal de los
271

6. CONCLUSIONES Y PUBLICACIONES
sensores capacitivos de presión para mejora en el diagnóstico de averías.
Extender la metodología del análisis de ruido y de la transformada de Hilbert-
Huang a señales de otros sensores, especialmente los de temperatura, para
cubrir necesidades de las plantas nucleares.
272

APÉNDICES
273


Apéndice A
Álgebra de cuaterniones
En esta tesis sólo se han necesitado las propiedades elementales del álgebra de cuater-
niones. Los cuaterniones son vectores de cuatro elementos que componen un álgebra
desde un punto de vista matemático; por tanto, un cociente entre cuaterniones da
lugar a un cuaternión. Fueron inventados por el matemática irlandes William Rowan
Hamilton en 1883 como una extensión de los números complejos.
Un complejo se compone de un vector de dos elementos (x0, x1), las partes real e
imaginaria. El cuaternión es un vector de cuatro elementos (σ, x1, x2, x2) donde la
parte real σ, denominada aquí 'escalar' y la parte imagainaria se extiende a tres
dimensiones y se denomina 'vector': v = (v1, v2, v3). Abreviadamente el cuaternión
se represneta por (σ, v).
Como cualquier vector el cuaternión se escribe como: q = σeo + v1e1 + v2e2 + v3e3,
siguiendo la analogía con los números complejos:
e0 = 1
275

A. Álgebra de cuaterniones
e21 = e2
2 = e23 = −1
eiej + ejei = 0; i, j = 1, 2, 3,
e1e2 = e3; e2e3 = e1; e3e1 = e2.
Con estas reglas el producto de dos cuaterniones q = (σ, v) y p = (ρ, u) se dene
como
pq = (σρ− v) + (σu+ v + v ∧ u)
donde v · u es un producto escalar y v ∧ u el producto vectorial. Se puede observar
la analogía con el producto de dos números complejos (x0, x1) y (yo, y1):
xy = (x0yo − x1y1) + (x0iy1 + y0ix1 + ix1 ∧ iy1)
donde ix1 ∧ iy1 = 0 porque ix1 y iy1 son vectores paralelos.
El cuaternión conjugado de q = (σ, v) es q∗ = (σ,−v); por tanto su módulo es: |q|2 =
qq∗ = σ2 + v21 + v2
2v23. Entonces existe un representación polar de los cuaterniones:
q = |q| (cosφ+ w senφ)
donde la fase φ = tan− 1(|v| /σ), y w = v/ |v|, un vector unitario en la dirección de
v.
Se puede observar que el producto cuaterniónico es asociativo pero no conmutativo
debido al producto vectorial.
Finalmente, el álgebra de cuaterniones es isomorfa al álgebra de matrice complejas:
Q =
σ − iv1 −v2 + iv3
v2 + iv3 σ + iv1
; |q|2 = Det(Q)
276

que puede usarse para la implementación práctica del álgebra de cuaterniones es el
ordenador.
277

A. Álgebra de cuaterniones
278

Apéndice B
Ajustes no lineales de las PSDs
utilizando una fórmula de
Breit-Wigner
B.1. AJUSTES DEL PRIMER PERIODO: FEBRE-
RO 2009
279

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
B.1.1. Señales de los detectores ex-core
Figura B.1: Ajuste no lineal de Breit-Wigner, detector ex-core N41 superior.
280

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.2: Ajuste no lineal de Breit-Wigner, detector ex-core N42 superior.
281

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.3: Ajuste no lineal de Breit-Wigner, detector ex-core N43 superior.
282

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.4: Ajuste no lineal de Breit-Wigner, detector ex-core N44 superior.
283

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.5: Ajuste no lineal de Breit-Wigner, detector ex-core N41 inferior.
284

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.6: Ajuste no lineal de Breit-Wigner, detector ex-core N42 inferior.
285

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.7: Ajuste no lineal de Breit-Wigner, detector ex-core N43 inferior.
286

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.8: Ajuste no lineal de Breit-Wigner, detector ex-core N44 inferior.
287

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.9: Ajuste no lineal de Breit-Wigner, detectores superiores ex-core.
288

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.10: Ajuste no lineal de Breit-Wigner, detectores inferiores ex-core.
289

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.11: Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores superiores.
290

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.12: Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores inferiores.
291

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
B.1.2. Señales de los detectores in-core
Figura B.13: Ajuste no lineal de Breit-Wigner, detector A, posición 1.
292

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.14: Ajuste no lineal de Breit-Wigner, detector A, posición 2.
293

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.15: Ajuste no lineal de Breit-Wigner, detector A, posición 3.
294

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.16: Ajuste no lineal de Breit-Wigner, detector A, posición 4.
295

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.17: Ajuste no lineal de Breit-Wigner, detector A, posición 5.
296

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.18: Ajuste no lineal de Breit-Wigner, detector A, posición 6.
297

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.19: Ajuste no lineal de Breit-Wigner, detector B, posición 1.
298

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.20: Ajuste no lineal de Breit-Wigner, detector B, posición 2.
299

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.21: Ajuste no lineal de Breit-Wigner, detector B, posición 3.
300

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.22: Ajuste no lineal de Breit-Wigner, detector B, posición 4.
301

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.23: Ajuste no lineal de Breit-Wigner, detector B, posición 5.
302

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.24: Ajuste no lineal de Breit-Wigner, detector B, posición 6.
303

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.25: Ajuste no lineal de Breit-Wigner, detector C, posición 1.
304

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.26: Ajuste no lineal de Breit-Wigner, detector C, posición 2.
305

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.27: Ajuste no lineal de Breit-Wigner, detector C, posición 3.
306

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.28: Ajuste no lineal de Breit-Wigner, detector C, posición 4.
307

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.29: Ajuste no lineal de Breit-Wigner, detector C, posición 5.
308

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.30: Ajuste no lineal de Breit-Wigner, detector C, posición 6.
309

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.31: Ajuste no lineal de Breit-Wigner, detector D, posición 1.
310

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.32: Ajuste no lineal de Breit-Wigner, detector D, posición 2.
311

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.33: Ajuste no lineal de Breit-Wigner, detector D, posición 3.
312

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.34: Ajuste no lineal de Breit-Wigner, detector D, posición 4.
313

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.35: Ajuste no lineal de Breit-Wigner, detector D, posición 5.
314

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.36: Ajuste no lineal de Breit-Wigner, detector D, posición 6.
315

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.37: Ajuste no lineal de Breit-Wigner, detector E, posición 1.
316

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.38: Ajuste no lineal de Breit-Wigner, detector E, posición 2.
317

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.39: Ajuste no lineal de Breit-Wigner, detector E, posición 3.
318

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.40: Ajuste no lineal de Breit-Wigner, detector E, posición 4.
319

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.41: Ajuste no lineal de Breit-Wigner, detector E, posición 5.
320

B.1. AJUSTES DEL PRIMER PERIODO: FEBRERO 2009
Figura B.42: Ajuste no lineal de Breit-Wigner, detector E, posición 6.
321

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
B.2. AJUSTES DEL SEGUNDO PERIODO: MAR-
ZO 2009
B.2.1. Señales de los detectores ex-core
Figura B.43: Ajuste no lineal de Breit-Wigner, detector ex-core N41 superior.
322

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.44: Ajuste no lineal de Breit-Wigner, detector ex-core N42 superior.
323

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.45: Ajuste no lineal de Breit-Wigner, detector ex-core N43 superior.
324

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.46: Ajuste no lineal de Breit-Wigner, detector ex-core N44 superior.
325

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.47: Ajuste no lineal de Breit-Wigner, detector ex-core N41 inferior.
326

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.48: Ajuste no lineal de Breit-Wigner, detector ex-core N42 inferior.
327

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.49: Ajuste no lineal de Breit-Wigner, detector ex-core N43 inferior.
328

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.50: Ajuste no lineal de Breit-Wigner, detector ex-core N44 inferior.
329

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.51: Ajuste no lineal de Breit-Wigner, detectores superiores ex-core.
330

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.52: Ajuste no lineal de Breit-Wigner, detectores inferiores ex-core.
331

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.53: Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores superiores.
332

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.54: Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores inferiores.
333

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
B.2.2. Señales de los detectores in-core
Figura B.55: Ajuste no lineal de Breit-Wigner, detector A, posición 1.
334

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.56: Ajuste no lineal de Breit-Wigner, detector A, posición 2.
335

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.57: Ajuste no lineal de Breit-Wigner, detector A, posición 3.
336

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.58: Ajuste no lineal de Breit-Wigner, detector A, posición 4.
337

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.59: Ajuste no lineal de Breit-Wigner, detector A, posición 5.
338

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.60: Ajuste no lineal de Breit-Wigner, detector A, posición 6.
339

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.61: Ajuste no lineal de Breit-Wigner, detector B, posición 1.
340

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.62: Ajuste no lineal de Breit-Wigner, detector B, posición 2.
341

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.63: Ajuste no lineal de Breit-Wigner, detector B, posición 3.
342

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.64: Ajuste no lineal de Breit-Wigner, detector B, posición 4.
343

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.65: Ajuste no lineal de Breit-Wigner, detector B, posición 5.
344

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.66: Ajuste no lineal de Breit-Wigner, detector B, posición 6.
345

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.67: Ajuste no lineal de Breit-Wigner, detector C, posición 1.
346

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.68: Ajuste no lineal de Breit-Wigner, detector C, posición 2.
347

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.69: Ajuste no lineal de Breit-Wigner, detector C, posición 3.
348

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.70: Ajuste no lineal de Breit-Wigner, detector C, posición 4.
349

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.71: Ajuste no lineal de Breit-Wigner, detector C, posición 5.
350

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.72: Ajuste no lineal de Breit-Wigner, detector C, posición 6.
351

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.73: Ajuste no lineal de Breit-Wigner, detector D, posición 1.
352

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.74: Ajuste no lineal de Breit-Wigner, detector D, posición 2.
353

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.75: Ajuste no lineal de Breit-Wigner, detector D, posición 3.
354

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.76: Ajuste no lineal de Breit-Wigner, detector D, posición 4.
355

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.77: Ajuste no lineal de Breit-Wigner, detector D, posición 5.
356

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.78: Ajuste no lineal de Breit-Wigner, detector D, posición 6.
357

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.79: Ajuste no lineal de Breit-Wigner, detector E, posición 1.
358

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.80: Ajuste no lineal de Breit-Wigner, detector E, posición 2.
359

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.81: Ajuste no lineal de Breit-Wigner, detector E, posición 3.
360

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.82: Ajuste no lineal de Breit-Wigner, detector E, posición 4.
361

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.83: Ajuste no lineal de Breit-Wigner, detector E, posición 5.
362

B.2. AJUSTES DEL SEGUNDO PERIODO: MARZO 2009
Figura B.84: Ajuste no lineal de Breit-Wigner, detector E, posición 6.
363

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
B.3. AJUSTES DEL TERCER PERIODO: ABRIL
2009
B.3.1. Señales de los detectores ex-core
Figura B.85: Ajuste no lineal de Breit-Wigner, detector ex-core N41 superior.
364

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.86: Ajuste no lineal de Breit-Wigner, detector ex-core N42 superior.
365

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.87: Ajuste no lineal de Breit-Wigner, detector ex-core N43 superior.
366

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.88: Ajuste no lineal de Breit-Wigner, detector ex-core N44 superior.
367

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.89: Ajuste no lineal de Breit-Wigner, detector ex-core N41 inferior.
368

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.90: Ajuste no lineal de Breit-Wigner, detector ex-core N42 inferior.
369

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.91: Ajuste no lineal de Breit-Wigner, detector ex-core N43 inferior.
370

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.92: Ajuste no lineal de Breit-Wigner, detector ex-core N44 inferior.
371

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.93: Ajuste no lineal de Breit-Wigner, detectores superiores ex-core.
372

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.94: Ajuste no lineal de Breit-Wigner, detectores inferiores ex-core.
373

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.95: Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores superiores.
374

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.96: Ajuste no lineal de Breit-Wigner de los dos modos en torno a 7-8 Hz de los
detectores inferiores.
375

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
B.3.2. Señales de los detectores in-core
Figura B.97: Ajuste no lineal de Breit-Wigner, detector A, posición 1.
376

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.98: Ajuste no lineal de Breit-Wigner, detector A, posición 2.
377

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.99: Ajuste no lineal de Breit-Wigner, detector A, posición 3.
378

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.100: Ajuste no lineal de Breit-Wigner, detector A, posición 4.
379

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.101: Ajuste no lineal de Breit-Wigner, detector A, posición 5.
380

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.102: Ajuste no lineal de Breit-Wigner, detector A, posición 6.
381

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.103: Ajuste no lineal de Breit-Wigner, detector C, posición 1.
382

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.104: Ajuste no lineal de Breit-Wigner, detector C, posición 2.
383

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.105: Ajuste no lineal de Breit-Wigner, detector C, posición 3.
384

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.106: Ajuste no lineal de Breit-Wigner, detector C, posición 4.
385

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.107: Ajuste no lineal de Breit-Wigner, detector C, posición 5.
386

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.108: Ajuste no lineal de Breit-Wigner, detector C, posición 6.
387

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.109: Ajuste no lineal de Breit-Wigner, detector E, posición 1.
388

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.110: Ajuste no lineal de Breit-Wigner, detector E, posición 2.
389

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.111: Ajuste no lineal de Breit-Wigner, detector E, posición 3.
390

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.112: Ajuste no lineal de Breit-Wigner, detector E, posición 4.
391

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
Figura B.113: Ajuste no lineal de Breit-Wigner, detector E, posición 5.
392

B.3. AJUSTES DEL TERCER PERIODO: ABRIL 2009
Figura B.114: Ajuste no lineal de Breit-Wigner, detector E, posición 6.
393

B. Ajustes no lineales de las PSDs utilizando una fórmula de Breit-Wigner
394

Apéndice C
INSTRUMENTACIÓN NUCLEAR
DE UN PWR DISEÑO
WESTINGHOUSE
El sistema de Instrumentación Nuclear se utiliza en los PWR de diseño Westing-
house para vigilar la distribución de potencia y para la protección de la planta
(generando las alarmas apropiadas y el disparo del reactor). El control y vigilancia
de la distribución de potencia relativa en el núcleo es de suma importancia, dado
que el nivel de potencia del reactor está limitado por el pico de densidad de potencia
y el límite de la ebullición nucleada.
La instrumentación in-core o intranueclear y ex-core o extranuclear satisfacen las
siguientes necesidades: por una lado la intranuclear da una medida de distribución
relativa de potencia dentro del núcleo, no teniendo ninguna función de protección al
respecto. Por otro lado la extranuclear está calibrada con respecto a la intranuclear
395

C. INSTRUMENTACIÓN NUCLEAR DE UN PWR DISEÑOWESTINGHOUSE
y se utiliza para protección automática del reactor en casos de picos de potencia
indeseables.
C.1. Instrumentación intra-nuclear o in-core
La instrumentación intra-nuclear (guraC.1) facilita información de la distribución
del ujo neutrónico y de la temperatura del agua de refrigeración en diferentes zonas
del núcleo próximas a las varillas de combustible. Con esta información, se puede
determinar la distribución de potencia en el núcleo en cualquier momento de la vida
del combustible.
Consta de dos tipos de sensores: los termopares y los detectores de ujo neutrónico
móviles.
Los termopares están situados en zonas seleccionadas para medir la temperatura del
refrigerante en diferentes puntos del núcleo; esta información se utiliza para calcular
la distribución de potencia radial y la distribución entálpica del refrigerante.
Los detectores móviles de neutrones exploran la totalidad de la longitud de los
elementos de combustible seleccionados de arriba a abajo, de esta manera obtenemos
un mapa de distribución de ujo del núcleo en tres dimensiones.
La temperatura y distribución del ujo se utilizan para determinar la distribución
de potencia del núcleo. La información de la distribución de potencia se utiliza para:
calibrar y comprobar la respuesta de los detectores de ujo externos al reactor.
396

C.1. Instrumentación intra-nuclear o in-core
determinar una distribución de potencia lineal, quemado de combustible e in-
ventario de éste.
Esta información permite determinar cualquier anomalía en el núcleo, de manera
que se pueden tomar medidas correctivas antes de alcanzar una situación peligrosa.
Termopares
Se utilizan termopares de cromel-alumel con vaina de acero inoxidable para medir
la temperatura en la parte superior de los elementos combustibles.
Para alojar los termopares en la vasija se utilizan unos conductos instalados per-
manentemente encima del conjunto superior del soporte del núcleo. Se insertan los
termopares en estos conductos con un útil especial que proporciona la fuerza axial
para colocar el termopar en un asiento cónico al nal del conducto dentro de la
vasija. Las conexiones eléctricas se hacen mediante un conector en la parte superior
de los conductos y fuera de la vasija. Una vez insertado el termopar, se hace un
sellado entre el termopar y el nal de conducto.
Detectores móviles de neutrones
Para acomodar los detectores de neutrones, se colocan tubos de instrumentación
huecos en diversas posiciones del interior del núcleo. El fondo de la vasija se conecta a
la mesa de sellado mediante tubos guía que envuelven a los tubos de instrumentación
anteriormente mencionados. Existe un tubo guía para cada uno de los tubos de
instrumentación; los tubos guía se sueldan al fondo de la vasija del reactor y tienen
aproximadamente 2.5 cm de diámetro externo.
397

C. INSTRUMENTACIÓN NUCLEAR DE UN PWR DISEÑOWESTINGHOUSE
Los tubos de instrumentación son de acero inoxidable y pueden ser introducidos
y extraídos del núcleo del reactor a través de los tubos guía. Cuando los tubos
de instrumentación están totalmente insertados llegan desde detrás de la mesa de
sellado, por la parte inferior de la vasija, hasta la parte superior del núcleo. Los tubos
están cerrados en su extremo, son estancos y sirven de barrera de presión entre el
refrigerante del reactor y la atmósfera, y sólo pueden ser introducidos o extraídos
durante los periodos de despresurización de la Central. Antes de la inserción de
los tubos de instrumentación, los tubos guía están sellados mediante tapones para
permitir la realización de los ensayos hidráulicos. Los tubos de instrumentación no
están introducidos durante estos ensayos puesto que el combustible no está cargado
y los tubos no tienen por consiguiente puntos de apoyo.
Durante el funcionamiento del reactor los tubos de instrumentación están jos, y
sólo se mueven durante la carga de combustible u operaciones de mantenimiento del
reactor. En estas ocasiones, detrás de la mesa de sellado debe haber un espacio libre
para permitir la extracción de los tubos de instrumentación.
El ujo neutrónico interior se mide mediante cámaras de sión en miniatura o de-
tectores que puedan ser posicionados remotamente en el interior de los tubos de
instrumentación. Estos detectores proporcionan un mapa de ujo de la totalidad
del núcleo del reactor mediante la medición del ujo de determinados elementos de
combustible.
Los detectores de ujo van acoplados en los extremos de cables de accionamientos
398

C.1. Instrumentación intra-nuclear o in-core
helicoidales (conteniendo en su interior cables coaxiales forrados) que sirven para
su inserción y extracción. Cada detector se conecta a una unidad de accionamiento
y se emplea para medir la distribución de ujo en diez elementos de combustible
diferentes. Mediante la ayuda de un sistema de transferencia mecánico, los detectores
pueden emplearse para otras zonas.
El sistema de accionamiento trabaja de tres modos: Automático, Especial y Manual.
El modo Automático no requiere prácticamente la intervención del operador. En este
modo los detectores se introducen y extraen de los tubos de instrumentación en una
forma semisecuencial predeterminada, se recogen los datos, se realizan los cálculos
y el ordenador da resultados.
En el modo Especial se requiere que el operador acciones el teclado del sistema para
elegir los caminos que quiere explorar y los detectores que quiere usar. Los detectores
se mueven automáticamente, se recogen los datos, se realizan los cálculos y se dan
los resultados. Este modo se emplea para realizar los mapas de ujo de una cuarta
parte del núcleo.
El modo Manual requiere una interrelación mayor entre máquina y operador. En
este modo el operador elige mediante el teclado el camino a explorar, detector a
emplear, velocidad y dirección del detector, rango de la medida y registro gráco de
datos.
399

C. INSTRUMENTACIÓN NUCLEAR DE UN PWR DISEÑOWESTINGHOUSE
Figura C.1: Disposición típica de la instrumentación nuclear en un PWR.
400

C.2. Instrumentación extra-nuclear o ex-core
C.2. Instrumentación extra-nuclear o ex-core
El Sistema de Instrumentación Extra Nuclear mide el nivel de potencia del reactor y
el ujo de neutrones desde el rango fuente pasando por el rango intermedio y hasta
el 120 % de la potencia nominal del reactor. El sistema emplea ocho detectores de
ujo neutrónico situados en pozos de instrumentos en torno al reactor.
El sistema está en operación de un modo continuo proporcionando alarmas y señales
de control y de protección del reactor. La gura C.2 muestra una vista en planta de
la disposición típica del emplazamiento de los detectores.
Figura C.2: Localización típica de los detectores de rango de potencia.
401

C. INSTRUMENTACIÓN NUCLEAR DE UN PWR DISEÑOWESTINGHOUSE
Detectores
El sistema utiliza ocho conjuntos detectores situados en pozos de instrumentación,
en torno al reactor dentro del blindaje primario. Dos de estos detectores son conta-
dores proporcionales utilizados en los canales del intervalo de fuente: están situados
en pozos verticales para instrumentos, situados diametralmente opuestos y a una
elevación correspondiente a la mitad de la altura total del núcleo.
En los dos pozos donde van instalados los dos detectores fuente, van instaladas
igualmente dos cámaras de ionización compensadas de una longitud similar a la
altura del núcleo.
En estas cámaras los electrodos internos se encuentran divididos en dos secciones
iguales para proporcionar, básicamente, un total de ocho cámaras no compensadas
de ionización , cubriendo aproximadamente cada una de ellas la mitad de la longitud
total del núcleo.
Estos cuatro conjuntos detectores están situados en pozos verticales para instru-
mentos, contiguos a las cuatro esquinas del reactor.
Los rangos de operación de los diferentes detectores están indicados en la gura C.3.
402

C.2. Instrumentación extra-nuclear o ex-core
Figura C.3: Sistema de instrumentación ex-core o extra-nuclear, detectores de neutrones
y rango de operación.
403

C. INSTRUMENTACIÓN NUCLEAR DE UN PWR DISEÑOWESTINGHOUSE
Canales de rango fuente
Los dos canales de rango fuente utilizan contadores proporcionales. El ujo de neu-
trones (medido en la zona de blindaje primario) produce impulsos en los detectores.
Estos impulsos se transmiten a través de un cable triaxial hasta un preamplicador
y de aquí al equipo situado en la sala de control.
Estos dos canales proporcionan información de rango de fuente, nivel de disparo de
reactor, alarmas y señales para los sistemas de control y protección del reactor. Tam-
bién se utilizan durante la operación de parada, con objeto de proporcionar señales
de alarma en el caso de producirse un aumento imprevisto de reactividad. Durante
la fase inicial de arranque existe una señal sonora de los incrementos producidos.
Canales de rango intermedio
Los dos canales de Rango Intermedio utilizan, cada uno, una cámara de ionización
compensada. La señal de salida de la cámara de ionización va a través e un cable
coaxial, al equipo situado en la sala de control.
Estos canales dan el nivel de ujo neutrónico intermedio al mismo tiempo que pro-
porcionan alarmas por elevado ujo neutrónico y por señales de disparo del reactor.
Proporcionan también una señal que interrumpe el suministro de lata tensión a los
detectores de los rango fuente.
Los canales de fuente e intermedio producen una indicación de la velocidad de
arranque en la sala de control.
404

C.2. Instrumentación extra-nuclear o ex-core
Canales de rango de potencia
Existen tres tipos de medidas de potencia, utilizando cada uno cuatro señales eléc-
tricas independientes.
Cuatro señales de corriente provenientes de las secciones inferiores de las cá-
maras de ionización.
Cuatro señales de corriente provenientes de las secciones superiores de las cá-
maras de ionización.
Cuatro señales de corriente equivalentes a la suma o promedio de las señales
anteriores.
Las señales de los detectores superiores e inferiores proporcionan información de
desequilibrio axial de la distribución de ujo. También funcionan como parte del
sistema de protección por exceso de potencia.
En la sala de control se reejan las corrientes medias de salida de la parte superior e
inferior de los detectores. Estas entradas medias proporcionan las señales de parada
del reactor debido a exceso de potencia, señales de protección por cada de barras
de control y señales de para de dichas barras.
405

C. INSTRUMENTACIÓN NUCLEAR DE UN PWR DISEÑOWESTINGHOUSE
406

Apéndice D
INSTRUMENTACIÓN NUCLEAR
DE LOS REACTORES TIPO BWR
Existen tres tipos de instrumentación nuclear para la medida del ujo neutrónico.
Según la potencia del reactor sea más o menos alta, los detectores utilizados son
diferentes:
Rango fuente: Medida y registro del ujo neutrónico para potencias muy bajas.
Para este rango se utilizan los detectores SRM (Source Range Monitor).
Rango intermedio: Medida y registro del ujo neutrónico para potencias bajas.
Para este rango se utilizan los detectores IRM (Intermediate Range Monitor).
Rango de potencia: Medida y registro del ujo neutrónico para potencias altas.
Para este rango se utilizan los detectores LPRM (Local Power Range Monitor).
Las señales de estos detectores se envían a los APRM (Average Power Range
Monitor) donde son promediadas. Los APRM no poseen detector y constan
407

D. INSTRUMENTACIÓN NUCLEAR DE LOS REACTORES TIPO BWR
exclusivamente de circuitos electrónicos que promedian las señales.
Obviamente, deberá existir un solape entre los diferentes tipos para que el ujo sea
siempre vigilado. Es más, los detectores de rango fuente e intermedio deben tener
la posibilidad de extraerse del núcleo una vez cumplidos sus cometidos respectivos,
ya que se quemarían cuando la planta estuviera en rangos altos de potencia.
Los detectores de cada rango son esencialmente cámaras de sión que constan de
un electrodo central y un electrodo exterior recubierto de U3O8 enriquecido en 235U .
Los neutrones, al penetrar en el recubrimiento del detector producen la sión de
los átomos de 235U , introduciéndose los productos de sión en la cámara . Éstos,
al tratar de partículas de una gran masa, energía y carga eléctrica, provocarán la
ionización del argón que llena la cámara.
Detectores SRM
Vigilan el ujo neutrónico durante las paradas, recargas y en los arranques. El
sistema consta de:
1. Cuatro cámaras de són que pueden introducirse en el núcleo del reactor desde
sala de control y que miden el nivel de ujo neutrónico.
2. Cinco fuentes emisoras de neutrones, localizadas en el interior del núcleo, que
proporcionan el ujo neutrónico adicional requerido para alcanzar la sensibili-
dad mínima de los detectores
408

Detectores IRM
Se dispone de ocho canales de IRM agrupados en 2 grupos de cuatro.
El sistema suministra al operador la información necesaria durante el calentamiento
del reactor, sobre la evolución de la potencia neutrónica.
Detectores LPRM
A potencias altas, el sistema de detectores de potencia local, LPRM, suministra
información del ujo neutrónico existente en diferentes puntos del núcleo.
Son detectores muy similares a los anteriores, pero permanentemente instalados en
el núcleo.
Están alojados en tubos secos ( 1 tubo para cada detector) y todo el conjunto se
instala dentro de una envoltura llamada tubo de instrumentación.
Los conjuntos de detectores son instalados entre los elementos combustibles donde
no hay dispuestas barras de control.
Las 132 señales generadas por las cámaras LPRM se distribuyen entre los 8 APRM
que promedian las señales adecuadamente. Si alguna cámara LPRM estuviera de-
fectuosa, enviando al APRM correspondiente una señal muy baja o muy alta, la
potencia térmica indicada por este APRM estaría falseada siendo por tanto conve-
niente, realizar un bypass.
409

D. INSTRUMENTACIÓN NUCLEAR DE LOS REACTORES TIPO BWR
Figura D.1: Rangos y solapes de la instrumentación nuclear de un BWR.
410

Figura D.2: Situación relativa de la instrumentación nuclear en un BWR.
411

D. INSTRUMENTACIÓN NUCLEAR DE LOS REACTORES TIPO BWR
412

Bibliografía
[1] Management of life cycle and ageing at nuclear power plants: Improved I&C
maintenance. Technical Report IAEA-TECDOC-1402, IAEA, International
Atomic Energy Agency. Nuclear Power Engineering Section, August 2004.
[2] H. Akaike. A new look at the statistical model identication. Automatic
Control, IEEE Transactions on, 19(6):716723, 1974.
[3] V. Arzhanov and I. Pázsit. Diagnostics of core barrel vibrations by in-core
and ex-core neutron noise. Progress in Nuclear Energy, 43(1-4):151 158,
2003. Proceedings of the 8th Symposium on Nuclear Reactor Surveillance and
Diagnostics.
[4] M. Balbás, J.M. Chicharro, and A. García-Berrocal. Ruido blanco en la exci-
tación de sistemas mecánicos. Fundación Gómez-Pardo, 2002.
[5] M. Balbás, A. García-Berrocal, and C. Montalvo. Vibraciones aleatorias. Cur-
so de doctorado: "Herramientas para el análisis de señales y ruido en procesos
físicos". Departamento de Física Aplicada a los Recursos Naturales., Mayo
2009.
413

BIBLIOGRAFÍA
[6] J. Ballestrín, J. Blázquez, D. Cillero, R. Sansa, and O. Vela. Proyecto VISSP:
Vigilancia in situ de sensores de presión. Technical Report ITN/TS-22/IF-95,
Ciemat, 1996.
[7] J. Ballestrín and J.Blázquez. Simulación de ruido no lineal. Technical report,
Ciemat, Centro de Investigaciones Energéticas, Medioambientales y Tecnoló-
gicas, 1992.
[8] J.M. Ballestrín and J.Bláquez. Obtención del tiempo de respuesta de un
sensor de presión a partir de su densidad espectral de potencia. Technical
report, Ciemat, Centro de Investigaciones Energéticas, Medioambientales y
Tecnológicas, 1992.
[9] F.J. Barbero, F.Barrio de Miguel, and M.Esteban. Análisis de vibraciones y
ruido en la pala ecotecnia de e.eólica. Technical report, Centro de Investiga-
ciones Energéticas, Medioambientales y Tecnológicas. Ciemat, 1992.
[10] J. Barbero and J. Bláquez. The use of noise analysis to detect bubles' appea-
rance in the transmitter sensing lines. In Gatlinbrug, Tenessee, USA, SMORN
VI, Symposium on Nuclear Reactor Surveillance and Diagnostics, 1991.
[11] J. Barbero, J. Blázquez, and O. Vela. Bubbles in the sensing line of nuclear
power plant pressure transmitters: the shift of spectrum resonances. Nuclear
Engineering and Design, 199(3):327334, 2000.
[12] F.J. Barrio. Análisis en frecuencia de los modelos autorregresivos multiva-
riantes. Technical report, Ciemat, Centro de Investigaciones Energéticas, Me-
414

BIBLIOGRAFÍA
dioambientales y Tecnológicas, 1991.
[13] F.J. Barrio, J.M. Ballestrín, and J. Blázquez. Generación de una señal de ruido
a partir de su densidad espectral de potencia. Technical report, Ciemat, Centro
de Investigaciones Energéticas, Medioambientales y Tecnológicas, 1991.
[14] F.J. Barrio and J. Blázquez. Análisis de ruido en termómetros gamma. Techni-
cal report, Ciemat, Centro de Investigaciones Energéticas, Medioambientales
y Tecnológicas, 1993.
[15] J. Barrio and J. Blázquez. Análisis de sistemas lineales estacionarios mediante
métodos autorregresivos. Technical Report TN/TS/19/N-88, Ciemat, Centro
de Investigaciones Energéticas, Medioambientales y Tecnológicas, julio 1988.
[16] V. Bauernfeind. Vibration and pressure signals as sources of information
for an on-line vibration monitoring system in PWR power plants. Nuclear
Engineering and Design, 40(2):403 420, 1977.
[17] V. Bauernfeind. Vibration monitoring of a four-loop PWR: Model-
investigations of the sensitivity of the monitored signals on mechanical failures.
Progress in Nuclear Energy, 21:247 254, 1988.
[18] P Bernard, C Messainguiral, J.C Carre, A Epstein, R Assedo, and G Castello.
Quantitative monitoring and diagnosis of french PWRs' internal structures
vibrations by excore neutron noise and accelerometers analysis. Progress in
Nuclear Energy, 9:465 492, 1982. Reacto Noise - Smorn III.
415

BIBLIOGRAFÍA
[19] IFCC-ISO IUPAC BIPM, IEC and OIML. Guide to Espression of Uncertainty
in Measurement. 2008.
[20] IFCC-ISO IUPAC BIPM, IEC and OIML. International Vocabulary of Me-
trology. Basic and general concepts and associated terms (VIM). 2008.
[21] J. Blázquez. From the researcher to the NPP operator. Technical report, Cie-
mat, Centro de Investigaciones Energéticas, Medioambientales y Tecnológicas,
1992.
[22] J. Blázquez. When a pressure transmitter leaves the linearity: the Rose-
mount case. International Journal of Nuclear Energy Science and Technology,
2(3):299307, 2006.
[23] J. Blázquez and J. Ballestrín. Pressure transmitter surveillance: the dominant
real pole case. Progress in Nuclear Energy, 29(3):139145, 1995.
[24] T. Bogard, T. Kozlosky, S. Lowenfeld, and N. Singleton. Reactor internals
and core support monitoring system. In Gatlinbrug, Tenessee, USA, SMORN
VI, Symposium on Nuclear Reactor Surveillance and Diagnostics, 1991.
[25] S. Braun and M. Feldman. Time-frequency characteristics of non-linear sys-
tems. Mechanical systems and signal processing, 11(4):611620, 1997.
[26] M. E. Buchanan, L. F. Miller, J. A. Thie, T. W. Kerlin, G. E. Ragan, and
J. March-Leuba. Measurement of response time and detection of degradation
in pressure sensor/sensing line systems. Technical report, NUREG/CR-4256,
Oak Ridge National Lab., TN (USA), 1985.
416

BIBLIOGRAFÍA
[27] M.E. Buchanan, L.F. Miller, J.A. Thie, T.W. Kerlin, G. Ragan, and J. March-
Leuba. Measurement of response time and detection of degradation in pressure
sensor/sensing-line systems. Nuclear Engineering and Design, 89(1):91 99,
1985.
[28] J. L. H. Carvalho, A. F. Rocha, I. dos Santos, C. Itiki, L. F. Junqueira Jr,
and F. A. O. Nascimento. Study on the optimal order for the auto-regressive
time-frequency analysis of heart rate variability. In Engineering in Medici-
ne and Biology Society, 2003. Proceedings of the 25th Annual International
Conference of the IEEE, volume 3, 2003.
[29] U.S. Nuclear Regulatory Comission Technical Training Centre. Westinghouse
Technology Systems Manual.
[30] J. M. Chicharro, A. García-Berrocal, M. Balbás, and J. Blázzquez. Pressure
transmitter surveillance using quaternion numbers. Mechanical Systems and
Signal Processing, 16(6):10831091, 2002.
[31] SHi Chun-xiang and LUO Qi-feng. Hilbert-Huang transform and wavelet
analysis of time history signal. ACTA SEISMOLOGICA SINICA, 16(4):422
429, 2003.
[32] Samuel K. Clark. Dinámica de elementos continuos. Reverté, 1975.
[33] Nuclear Regulatory Comission. Loss of ll oil in transmitter manufactured by
rosemount. Technical Report NRC Bulettin No 90-01, US Nuclear Regulatory
Commission, 1990.
417

BIBLIOGRAFÍA
[34] S. Crandall, Galt B. Booth, and Thoma K. Caughey. Random Vibration. The
M.I.T press, 1963.
[35] S. Crandall and W. Mark. Random Vibration. Academic Press, 1963.
[36] K. Dach, V. Krett, J. Vavrín, L. Pecínka, and J. Kott. The experiences of using
neutron noise analysis for vibration behaviour of internal structures. Progress
in Nuclear Energy, 15:243 250, 1985. Fourth Specialists Meeting on Reactor
Noise.
[37] G. D'Antona. Expanded uncertainty and coverage factor computation by
higher order moments analysis. In Proc. IEEE IMTC, page pp. 234238.,
Como, Italy, May 1820, 2004.
[38] Christophe Demazière and Imre Pázsit. Power reactor noise, lecture notes.
Department of Nuclear Engineering, Chalmers University of Technology, Got-
henburg, Sweden, 2008.
[39] J.B. Dragt and E. Türkcan. Borssele PWR noise: Measurements, analysis and
interpretation. Progress in Nuclear Energy, 1(2-4):293 307, 1977. Reactor
Noise - Smorn II.
[40] Marcus Dätig and Torsten Schlurmann. Performance and limitations of the
hilbert-huang transformation (hht) with an application to irregular water wa-
ves. Ocean Engineering, 31(14-15):1783 1834, 2004.
[41] J. M. Einbu. On the existence of a class of maximum-entropy probability
density functions. IEEE Trans. Inform. Theory, 23(6):772775, 1977.
418

BIBLIOGRAFÍA
[42] A. Einstein. On the movement of small particles suspendedin a stationary
liquid demanded by the molecular kinetic theory of heat. Ann.d.Phys., 17:549
560, 1905.
[43] A. Einstein. On the theory of the brownian movement. Ann.d.Phys., 19:371
381, 1906.
[44] Electrical Power Research Institute (EPRI). Technical guidance for detection
of oil loss failure of Rosemount's pressure transmitters. Technical Report EPRI
NP-7121, December 1990.
[45] M. Feldman. Non-linear system vibration analysis using Hilbert transform
I. free vibration analysis method'Freevib'. Mechanical Systems and Signal
Processing, 8(2):119127, 1994.
[46] M. Feldman. Non-linear system vibration analysis using Hilbert transform
ii. Free vibration analysis method 'Freevib'. Mechanical Systems and Signal
Processing, 8(3):309318, 1994.
[47] M. Feldman. Non-linear free vibration identication via the Hilbert transform.
Journal of Sound and Vibration, 208(3):475489, 1997.
[48] Michael Feldman. Theoretical analysis and comparison of the hilbert trans-
form decomposition methods. Mechanical Systems and Signal Processing,
22(3):509 519, 2008.
[49] A. García-Berrocal, J.M. Chicharro, M. Balbás, and J. Blázquez. Non-linear
noise analysis from a capacitive pressure transmitter. Mechanical Systems and
419

BIBLIOGRAFÍA
Signal Processing, 18(1):187197, 2004.
[50] A. García-Berrocal, J.M. Chicharro, M. Balbás, and J. Blázquez. A fuzzy
logic approach for noise signal reconstruction: Application to pressure sensors.
Mechanical Systems and Signal Processing, 19(3):501508, 2005.
[51] A. Garcia-Berrocal, J. Blazquez, C. Montalvo, and M. Balbás. Resolving
mechanical resonances with Breit-Wigner formula. Journal of Vibration and
Control, 15(8):12671280, 2009.
[52] William Gardner. Introduction to random processes. With applications to Sig-
nals and Systems. McGraw-Hill, second edition edition, 1989.
[53] O. Glöckler. Estimating the response times of SDS pressure/ow transmitters
and their sensing lines via in-situ at-power noise measurements in Bruce-B
Unit 6. Technical report, 2000.
[54] O. Glöckler. Reactor noise measurements in the safety and regulating systems
of CANDU stations. Progress in Nuclear Energy, 43(1-4):7582, 2003.
[55] K. Gurlebeck and W. Sprossig. Quaternionic and Cliord calculus for physi-
cists and engineers. John Wiley &. Sons, Chichester, 1997.
[56] J. K. Hammond and P. R. White. The analysis of non-stationary signals using
time-frequency methods. Journal of Sound and Vibration, 190(3):419 447,
1996.
[57] H. Hashemian. On-Line Monitoring Applications in Nuclear Power Plants.
PhD thesis, Nuclear Engineering Department of Applied Physics Chalmers
420

BIBLIOGRAFÍA
University of Technology Göteborg, Sweden, 2009.
[58] H. M. Hashemian. Sensor performance and reliability. Connecting People and
Ideas in Automation and Control, USA, 2005.
[59] H. M. Hashemian. Maintenance of Process Instrumentation in Nuclear Power
Plants. Springer, Berlin, 2006.
[60] H. M. Hashemian, D. W. Mitchell, R. E. Fain, and K. M. Petersen. Long term
performance and aging characteristics of nuclear plant pressure transmitters.
Technical report, NUREG/CR5851, Nuclear Regulatory Commission, Wa-
shington, DC (United States). Div. of Engineering; Analysis and Measurement
Services Corp., Knoxville, TN (United States), 1993.
[61] H.M. Hashemian, D.D. Beverly, D.W. Mitchell, and K.M. Petersen. Aging
of nuclear plant resistance temperature detectors. Technical Report (s)
NUREG/CR-5560, Nuclear Regulatory Commission, Washington, DC (USA).
Div. of Engineering; Analysis and Measurement Services Corp., Knoxville, TN
(USA), 1990.
[62] H.M. Hashemian, I. Jakubenko, and V. Forej. Measurements of core barrel-
vibration and testing for core ow anomalies in pressurized water reactors.
In Proceedings of the Specialist's Meeting on Instrumentation and Control of
WWER Type Nuclear Power Plants, Prague/Rez, Czech Republic, 1994.
[63] H.M. Hashemian and Jin Jiang. Pressure transmitter accuracy. ISA Transac-
tions, 48(4):383 388, 2009.
421

BIBLIOGRAFÍA
[64] H.M. Hashemian and Jin Jiang. A practical review of methods for measuring
the dynamic characteristics of industrial pressure transmitters. ISA Transac-
tions, 49(1):2 9, 2010.
[65] H.M. Hashemian and Jin Jiang. Using the noise analysis technique to detect
response time problems in the sensing lines of nuclear plant pressure trans-
mitters. Progress in Nuclear Energy, 52(4):367 373, 2010.
[66] H.M. Hashemian and K.M. Petersen. On line measurement of response time
of pressure transmitters using noise analysis. In Gatlinbrug, Tenessee, USA,
SMORN VI, Symposium on Nuclear Reactor Surveillance and Diagnostics,
1991.
[67] H.M. Hashemian, K.M. Petersen, R.E. Fain, and J.J. Gingrich. Eect of
aging on response time of nuclear plant pressure sensors. Technical Report
NUREG/CR-5383, Nuclear Regulatory Commission, Washington, DC (USA).
Div. of Engineering; Analysis and Measurement Services Corp., Knoxville, TN
(USA), 1989.
[68] H.M. Hashemian, J.A. Thie, and B.R. Upadhyaya. Reactor sensor surveillance
using noise analysis. Nucl. Sci. Eng.olume, 98:96102, 1988.
[69] H.M. Hashemian, J.A. Thie, B.R. Upadhyaya, and K.E. Holbert. Sensor res-
ponse time monitoring using noise analysis. Progress in Nuclear Energy, 21:583
592, 1988.
[70] E. Holló, P. Siklossy, L.Turi, and S. Ratkai. On-line diagnostic method for
422

BIBLIOGRAFÍA
vibrational surveillanceof PAKS NPP primary circuit equipments. In Gatlin-
brug, Tenessee, USA, SMORN VI, Symposium on Nuclear Reactor Survei-
llance and Diagnostics, 1991.
[71] M.C. Hsu. On line identication of reactor dynamic charcateristics from ope-
rating data analysis vida Dynamic Data System methodology. PhD thesis,
University of Wisconsin-Madison, 1979.
[72] N. E. Huang and Z. Wu. A review on Hilbert-Huang transform: Method and
its applications to geophysical studies. Reviews of Geophysics, 46(2), 2008.
[73] N.E. Huang and N.O. Attoh-Okine. The Hilbert-Huang transform in enginee-
ring. CRC Press, 2005.
[74] N.E. Huang and S.S. Shen. Hilbert-Huang transform and its applications.
World Scientic Pub Co Inc, 2005.
[75] N.E. Huang, M.L. Wu, W. Qu, S.R. Long, S.S.P. Shen, and J.E. Zhang. Ap-
plications of Hilbert-Huang transform to non-stationary nancial time series
analysis. Applied Stochastic Models in Business and Industry, 19(3):245268,
2003.
[76] Norden E. Huang. Advances in applied Mathematics, volume 32. Academic
Press, 1996.
[77] Norden E. Huang, Zheng Shen, Steven R. Long, Manli C. Wu, Hsing H. Shih,
Quanan Zheng, Nai-Chyuan Yen, Chi Chao Tung, and Henry H. Liu. The
Empirical Mode Decomposition and the Hilbert spectrum for nonlinear and
423

BIBLIOGRAFÍA
non-stationary time series analysis. Proceedings: Mathematical, Physical and
Engineering Sciences, 454(1971):903995, 1998.
[78] A. Kolbasse and R. Sunder. Lessons learned with vibration monitoring sys-
tems in german nuclear power plants. Progress in Nuclear Energy, 43(1-4):159
165, 2003. Proceedings of the 8th Symposium on Nuclear Reactor Survei-
llance and Diagnostics.
[79] Peter Liewers, Wilfried Schmitt, Peter Schumann, and Frank-Peter Weiss.
Detection of core barrel motion at WWER-440-type reactors. Progress in
Nuclear Energy, 21:89 96, 1988.
[80] Kang Lin and Keith E. Holbert. Applying the equivalent pi circuit to the
modeling of hydraulic pressurized lines. Mathematics and Computers in Si-
mulation, 79(7):20642075, 3 2009.
[81] Kang Lin and Keith E. Holbert. Blockage diagnostics for nuclear power
plant pressure transmitter sensing lines. Nuclear Engineering and Design,
239(2):365372, 2 2009.
[82] Kang Lin and Keith E. Holbert. Void diagnostics in liquid-lled pressure
sensing lines. Progress in Nuclear Energy, 52(5):503 511, 2010.
[83] T. Lovett and A. Monti. A polynomial chaos approach to measurement un-
certainty. In IEEE Proc. AMUEM, page pp 338, Niagara Falls, Ontario,
Canada, 2005.
424

BIBLIOGRAFÍA
[84] M. E. Montesinos, J. L. Muñoz-Cobo, and C. Pérez. Hilbert-Huang analysis of
BWR neutron detector signals: application to DR calculation and to corrupted
signal analysis. Annals of Nuclear Energy, 30(6):715727, 2003.
[85] M.N. Moore. The determination of reactor transfer functions from measure-
ments at steady operation. Nucl. Sci. Eng, 3:387394, 1958.
[86] J. A. Mullens and J. A. Thie. Pressure noise in pressurized water reactors.
Technical Report NUREG/CR-4389; ORNL/TM-9773, Oak Ridge National
Lab., TN (USA), 1985.
[87] J.A. Mullens and J.A. Thie. Modeling and diagnostic techniques applicable
to the analysis of pressure noise in pressurized water reactors and pressure-
sensing systems. Progress in Nuclear Energy, 15:217 224, 1985. Fourth
Specialists Meeting on Reactor Noise.
[88] D.E. Newland. An Introduction to Random Vibrations, Spectral & Wavelet
Analysis: Third Edition. Editorial AC, primera edición edition, 1975.
[89] U.S. Nuclear Regulatory Commission. Oce of Nuclear Regulatory Research.
Division of Engineering. Nuclear plant aging research (NPAR) program plan :
status and accomplishments. Division of Engineering, Oce of Nuclear Regu-
latory Research, U.S. Nuclear Regulatory Commission : Supt. of Docs., U.S.
G.P.O. [distributor], Washington, DC, 1991. ID: 24426619.
[90] K. Ogata. Ingeniería de control moderna. Prentice Hall, 1998.
425

BIBLIOGRAFÍA
[91] A. V. Oppenheim and A. S. Willsky. Señales y Sistemas. Prentice-Hall His-
panoamericana, Mexico, 1983.
[92] J. Ortiz-Villafuerte, R. Castillo-Durán, G. Alonso, and G. Calleros-Micheland.
BWR online monitoring system based on noise analysis. Nuclear Engineering
and Design, 236(22):23942404, 2006.
[93] Thomas L. Paez. The history of random vibrations through 1958. Mechanical
Systems and Signal Processing,, 20(8):17831818, 11 2006.
[94] A. Papoulis. The Fourier integral and its applications. McGraw-Hill Book
Company, USA, 1962.
[95] Athanasios Papoulis. Probability, Random Variables, and Stochastic Processes.
McGraw-Hill, 1980.
[96] Jinho Park, Jeong Han Lee, Tae-Ryong Kim, Jong-Beom Park, Sang Kwon
Lee, and In-Soo Koo. Identication of reactor internals' vibration modes of a
Korean standard PWR using structural modeling and neutron noise analysis.
Progress in Nuclear Energy, 43(1-4):177 186, 2003. Proceedings of the 8th
Symposium on Nuclear Reactor Surveillance and Diagnostics.
[97] D. Peña. Estadística. Modelos y Métodos. 1. Fundamentos, volume 1. Fun-
damentos. Alianza Universidad Textos, Madrid, 2a edición revisada edition,
1999.
[98] J. Piñeyro, H. Lescano, E. Laggiard, L. Wentzeis, A. Pereyra, J. Sidelnik, and
R. Pérez. Monitoring of the internals in the PWR Atucha I by means of neu-
426

BIBLIOGRAFÍA
tron noise analysis. In Gatlinbrug, Tenessee, USA, SMORN VI, Symposium
on Nuclear Reactor Surveillance and Diagnostics, 1991.
[99] G.M. Presnell. Duke power's investigation of ghanging neutron noise signatu-
res at Mcguire Nuclear Unit I during recent cycles of operation. In Gatlinbrug,
Tenessee, USA, SMORN VI, Symposium on Nuclear Reactor Surveillance and
Diagnostics, 1991.
[100] R.B. Pérez and R.T. Wood. A stochastic method for nuclear power plant
diagnosis. In NATO advanced research workshop on noise and nonlinear phe-
nomena in nuclear systems, 1988.
[101] M. B. Priestly. Spectral Analysis and Time Series. Academic Press Ltd,
London, 1981.
[102] I. Pázsit, C. Demazière, C. Sunde, P. Bernitt, and A. Hernández-Solís. Final
report on the research project Ringhals diagnostics and monitoring stage 12.
Technical Report CTH-NT-220/RR-14, Department of Nuclear Engineering,
Chalmers University of Technology SE-412 96 Göteborg, Sweden, 2008.
[103] I. Pázsit, C. Montalvo-Martin, T. Tambouratzis, and V. Dykin. Final report on
the research project Ringhals diagnostics and monitoring stage 13. Technical
report, Chalmers internal report CTH-NT-230/RR-15, 2010.
[104] Imre Pázsit. Development of core diagnostic methods and their application
at Swedish BWRs and PWRs. Journal of Nuclear Science and Technology,
36(6):473485, 1999.
427

BIBLIOGRAFÍA
[105] S T Quek, P S Tua, and Q Wang. Detecting anomalies in beams and plate
based on the Hilbert-Huang transform of real signals. Smart Materials and
Structures, 12(3):447, 2003.
[106] R.Medina and J.M Chicharro. Determinación de frecuencias estáticas y diná-
micas. Información tecnológica, 9 (2):265270, 1998.
[107] Nuclear Operating Group. Rosemount Eng. Company. Status report on oil-
loss rosemount model 1153 series b/d and 1154 transmitters. rep. Technical
Report report No. D9200129, Rosemount Eng. Company, Minneapolis, USA,
1992.
[108] V.A. Rudakov. Correlation analysis for nosie diagnostics of in-core reactor
equipment. Problems of Atomic Science and Technology, 3(2):326330, 2007.
[109] K. Saito. Sources papers in reactor noise. Progress in Nuclear Energy, 3:157
218, 1979.
[110] S.M.Wu, C.Hsu, and M.C. Chow. The determination of time constants of
reactor pressure and temperature sensors: the dynamic data system method.
Nucl. Sci. Eng, 72:8496, 1979.
[111] F. J. Sweeney, J. March-Leuba, and C. M. Smith. Contribution of fuel vibra-
tions to ex-core neutron noise during the rst and second fuel cycles of the
Sequoyah-1 PWR. In Specialists Meeting on Reactor Noise-IV (SMORN-IV)
October 15-19, Dijon, FRANCE, 1984.
428

BIBLIOGRAFÍA
[112] FJ Sweeney, J. March-Leuba, RT Wood, and CO McNew. Excitation sources
for fuel assembly vibrations in a PWR. In American Nuclear Society Summer
Meeting, June , 1985, Boston, Massachusetts. CONF-850610-48, Oak Ridge
National Lab., TN (USA); Tennessee Univ., Knoxville (USA), 1985.
[113] FJ Sweeney and JP Renier. Fuel-assembly vibration-induced neutron noise in
PWRs. CONF-830609-31, Oak Ridge National Lab., TN (USA), 1983.
[114] J. A. Thie. Power Reactor Noise. American Nuclear Society, La Grange Park,
IL, USA, 1981.
[115] J.A. Thie. Elementary methods of reactor noise analysis. Nuclear Science and
Engineering, 15:10914, 1963.
[116] J.A. Thie. Theoretical considerations and their applications to experimental
data in the determination of reactor internals motion from stochastic signals.
Annals of Nuclear Energy., 2:253259, 1975.
[117] A. Trenty, C. Puyal, and H. Klajnmic. SINBAD, a data base for PWR internals
vibratory monitoring. In Gatlinbrug, Tenessee, USA, SMORN VI, Symposium
on Nuclear Reactor Surveillance and Diagnostics, 1991.
[118] E. Türkcan. On-line monitoring of a PWR for plant surveillance by noise
analysis. Progress in Nuclear Energy, 15:365 378, 1985. Fourth Specialists
Meeting on Reactor Noise.
[119] B. R. Upadhyaya, T. W. Kerlin, and J. E. Strange. Application of empirical
modeling in nuclear reactor system analysis. In Decision and Control including
429

BIBLIOGRAFÍA
the 16th Symposium on Adaptive Processes and A Special Symposium on Fuzzy
Set Theory and Applications, 1977 IEEE Conference on, volume 16, pages
875880, Dec. 1977.
[120] B.R. Upadhyaya and T.W. Kerlin. Response time testing of temperature
sensors using a noise analysis method. Trans. Am. Nucl. Soc., 26:445446,
1977.
[121] I. Vallejo, J. Blázquez, and J. López. Participación del proyecto de tecno-
logía de diagnóstico en el IMORN-26. Technical report, Ciemat, Centro de
Investigaciones Energéticas, Medioambientales y Tecnológicas, 1996.
[122] J. Vavrin. Noise analysis of reactor core barrel impact oscillations. In Gatlin-
brug, Tenessee, USA, SMORN VI, Symposium on Nuclear Reactor Survei-
llance and Diagnostics, 1991.
[123] O. Vela and J. Blázquez. Expresión analítica del tiempo de respuesta de
transmisores de presión capacitivos. Anales de Física, 93(1):4046, 1997.
[124] R. E. Vásquez and F. Castrillón. Strategies to compensate non-linearities
generated by valves in ow control loops. Información tecnológica, 18:161
168, 2007.
[125] N. Wiener. Genaralized harmonic analysis. Acta Mathematica, 55(1):117258,
december 1930.
[126] R. T. Wood and R. B. Pérez. Modeling and analysis of neutron noise from an
ex-core detector at a pressurized water reactor. In Gatlinbrug, Tenessee, USA,
430

BIBLIOGRAFÍA
SMORN VI, Symposium on Nuclear Reactor Surveillance and Diagnostics,
volume 19, 1991.
[127] Richard Thomas Wood. A neutron noise diagnostic methodology for Pressu-
rized Water Reactors. PhD thesis, The University of Tennessee, Knoxville,
Diciembre 1990.
[128] R.T. Wood, J. March-Leuba, R.B. Pérez, and F.J. Sweeney. A stochastic
model to monitor mechanical vibrations in pressurized water reactors. Trans.
Am. Nucl. Soc, 46:735736, 1984.
[129] R.T. Wood, L.F. Miller, and R.B. Pérez. Applications of a surveillance and
diagnostics methodology using neutron noise from a pressurized-water reactor.
Nuclear Safety, 33:2335, 1992.
[130] S. Yamada. Reactor noise analysis of swimming pool type reactor. Journal of
Nuclear Science and Technology, 1(4):130136, 1964.
[131] S. Yamada, T. Sato, and H. Kanamaru. Five-detector method for core-barrel
motion analysis. Annals of Nuclear Energy, 12(9):455 460, 1985.
[132] J. N. Yang, Y. Lei, S. Lin, and N. Huang. Hilbert-huang based approach for
structural damage detection. Journal of Engineering Mechanics, 130(1):8595,
2004.
[133] Jianqiu Zhang, Jun Ma, and Yong Yan. Assessing blockage of the sensing
line in a dierential-pressure ow sensor by using the wavelet transform of its
output. Measurement Science and Technology, 11(3):178184, 2000.
431