
An n-unit standby redundant system with r repair facilities and preventive maintenance
11
Microelectron. Rellab., Vol. 22. No. 3, pp. 367-377, 1982. 0026-2714/82/030367-11503.00/0 Printed in Great Britain. Pergamon Press Ltd. AN n-UNIT STANDBY REDUNDANT SYSTEM WITH r REPAIR FACILITIES AND PREVENTIVE MAINTENANCE R. SUBRAMANIAN and R. NATARAJAN* Department of Mathematics, I.I.T., Madras, India (Receivedfor publication 4 March 1981) Abstract--Identifying suitable regeneration points the availability and reliability of an n-unit warm standby system with r repair facilities, in which the operating online unit is subjected to preventive maintenance are obtained. A numerical example is provided to illustrate the results obtained. Based on the numerical result, an optimal PM policy is also derived. !. INTRODUCTION In the last two decades there has been an increasing need for the development of complex systems containing a large number of units and hence it has become necessary to study multiple unit systems. Very often these systems are redundant systems--parallel, standby, or k out of n : G systems. Table 1 describes the present state of art of n-unit standby redundant systems. Following Kendars notation in queueing theory each model is described by a series of symbols and slashes such as A/B/C where A indicates the pdf of the lifetime of the unit operating online, B that of the units in standby and C the pdf of the repair time. The symbols G, M, Ek as usual stand for a general distribution, an exponential distribution, and an Erlangian distribution with k stages respectively. A cold standby is represented by the symbol O. This paper deals with an n-unit warm standby system with r repair facilities, where the unit operating online is subjected to PM. Earlier Govil (1973), Gopalan and Venkatachalam (1977), Dirickx and Kistner (1979) (see Table 1) have considered n-unit standby systems with PM. The system under consideration has the following characteristics. 2. SYSTEM DESCRIPTION AND NOTATION 1. The system consists ofn similar units one operating online and others in warm standby. 2. The pdf of the failure time of a unit while online is arbitrary. It is denoted by f(. ). 3. A standby has a constant failure rate b. 4. There are r repair facilities. A unit can be taken up for repair or PM in any one of the repair facilities. 5. The repair rate and the rate of PM action in each ofthe repair facilities are constants and equal/~ and d respectively. 6. A unit that has to undergo PM has a priority over the units waiting for repair. When a unit is sent for PM, the repair of a unit (if any) in one of the facilities will be discontinued and the unit waiting for PM taken up, if in all the repair facilities units are undergoing PM the unit will queue up for PM. When there are no units to be taken up for PM, the failed units are taken up for repair. 7. To make PM meaningful we assume that the online unit has an increasing failure rate, i.e. f(t)/lr(t) is an increasing function and (1 -e -dl) > (1 _e-st), i.e. Pr [PM completion in (0, t)] > Pr [repair completion in (0, t)] 8. When the online unit is operating up to age t without failure, the unit undergoes PM, the corresponding pdf being ra(" ). We assume that the online unit cannot be sent for PM, if the number of operable units in standby at time t is < K (K > 1), i.e. the online unit can be sent for PM only if the number of non-operable units at time t <~ n - K (= k, say). Two possible policies are as follows. (i) Skip PM policy: no PM is made for the online unit and once the PM is missed the unit is never sent for PM and it will eventually fail online; (ii) Delayed PM policy: the online unit goes for P M as soon as the number of operable units in standby becomes K + 1. We also use the following notation: (i,j) ordered pair denoting the state of the system: i = number of units for which PM has to be done (including those undergoing PM);j--number of failed units (including those undergoing repair); i = 0, 1,2 ..... k, j = 0,1,2 ..... n; i + j <~ n X(t) state of the system at any time t Y(t) state of the subsystem consisting of all the units excepting the one operating online © convolution symbol. * Present address: Head, Department of Mathematics, Madras Medical College, Madras-600003, India. 367
-
Upload
independent -
Category
Documents
-
view
5 -
download
0
Transcript of An n-unit standby redundant system with r repair facilities and preventive maintenance

Microelectron. Rellab., Vol. 22. No. 3, pp. 367-377, 1982. 0026-2714/82/030367-11503.00/0 Printed in Great Britain. Pergamon Press Ltd.
AN n-UNIT STANDBY R E D U N D A N T SYSTEM WITH r REPAIR FACILITIES AND PREVENTIVE MAINTENANCE
R. SUBRAMANIAN and R. NATARAJAN* Department of Mathematics, I.I.T., Madras, India
(Received for publication 4 March 1981)
Abstract--Identifying suitable regeneration points the availability and reliability of an n-unit warm standby system with r repair facilities, in which the operating online unit is subjected to preventive maintenance are obtained. A numerical example is provided to illustrate the results obtained. Based on the numerical result, an optimal PM policy is also derived.
!. INTRODUCTION
In the last two decades there has been an increasing need for the deve lopment of complex systems conta in ing a large n u m b e r of units and hence it has become necessary to s tudy multiple uni t systems. Very often these systems are r edundan t sys tems--para l le l , s tandby, or k out of n : G systems.
Table 1 describes the present state of ar t of n-unit s t andby r e d u n d a n t systems. Fol lowing K e n d a r s no ta t ion in queueing theory each model is described by a series of symbols and slashes such as A/B/C where A indicates the pdf of the lifetime of the unit opera t ing online, B tha t of the uni ts in s t andby and C the pdf of the repair time. The symbols G, M, Ek as usual s tand for a general dis t r ibut ion, an exponent ia l dis t r ibut ion, and an Er langian d is t r ibut ion with k stages respectively. A cold s tandby is represented by the symbol O.
This paper deals with an n-unit warm s tandby system with r repair facilities, where the unit operat ing online is subjected to PM. Earlier Govi l (1973), G o p a l a n and Venka tacha lam (1977), Dirickx and Kis tner (1979) (see Table 1) have considered n-unit s t andby systems with PM. The system under cons idera t ion has the following characteristics.
2. SYSTEM DESCRIPTION AND NOTATION
1. The system consists ofn similar units one operating online and others in warm standby. 2. The pdf of the failure time of a unit while online is arbitrary. It is denoted by f ( . ). 3. A standby has a constant failure rate b. 4. There are r repair facilities. A unit can be taken up for repair or PM in any one of the repair facilities. 5. The repair rate and the rate of PM action in each ofthe repair facilities are constants and equal/~ and d respectively. 6. A unit that has to undergo PM has a priority over the units waiting for repair. When a unit is sent for PM, the repair of a unit (if any) in one of the facilities will be discontinued and the unit waiting for PM taken up, if in all the repair facilities units are undergoing PM the unit will queue up for PM. When there are no units to be taken up for PM, the failed units are taken up for repair. 7. To make PM meaningful we assume that the online unit has an increasing failure rate, i.e. f(t)/lr(t) is an increasing function and (1 - e -dl) > (1 _e-st) , i.e.
Pr [PM completion in (0, t)] > Pr [repair completion in (0, t)]
8. When the online unit is operating up to age t without failure, the unit undergoes PM, the corresponding pdf being ra(" ). We assume that the online unit cannot be sent for PM, if the number of operable units in standby at time t is < K (K > 1), i.e. the online unit can be sent for PM only if the number of non-operable units at time t <~ n - K (= k, say). Two possible policies are as follows.
(i) Skip PM policy: no PM is made for the online unit and once the PM is missed the unit is never sent for PM and it will eventually fail online;
(ii) Delayed PM policy: the online unit goes for P M as soon as the number of operable units in standby becomes K + 1. We also use the following notation:
(i,j) ordered pair denoting the state of the system: i = number of units for which PM has to be done (including those undergoing P M ) ; j - - n u m b e r of failed units (including those undergoing repair); i = 0, 1,2 . . . . . k, j = 0,1,2 . . . . . n; i+j <~ n
X(t) state of the system at any time t Y(t) state of the subsystem consisting of all the units excepting the one operating online © convolution symbol.
* Present address: Head, Department of Mathematics, Madras Medical College, Madras-600003, India.
367
368 R. SUBRAMANIAN and R. NATARAJAN
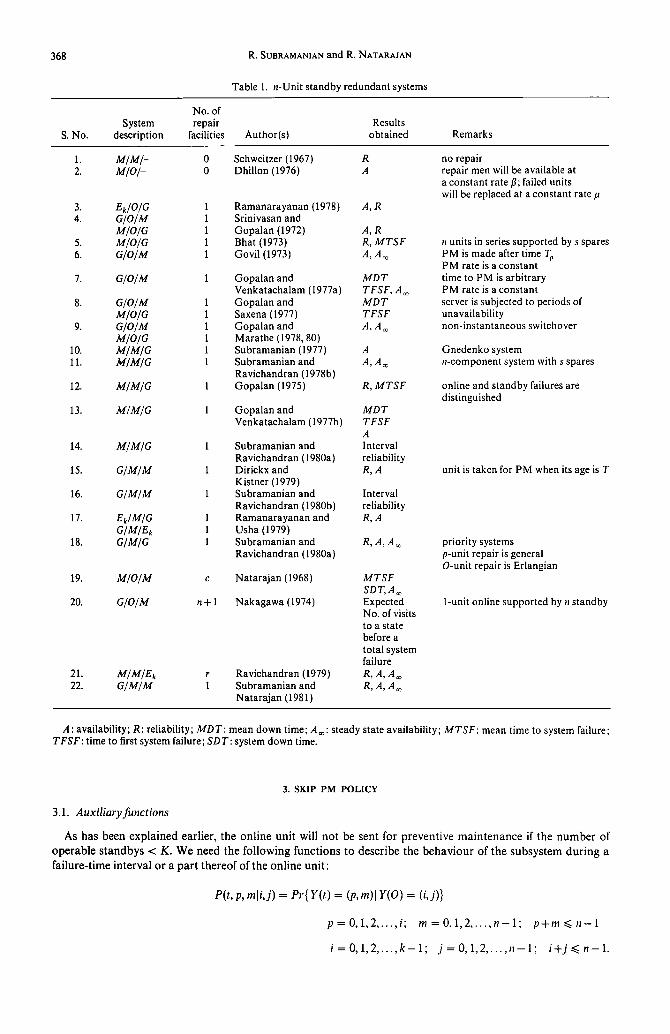
Table 1. n-Unit standby redundant systems
No. of System repair Results
S. No. description facilities Author(s) obtained Remarks
1. M/M~- 0 Schweitzer (1967) R 2. M/O/- 0 Dhillon (1976) A
3. Ek/O/G i Ramanarayanan (1978) 4. G/O/M 1 Srinivasan and
M/O/G 1 Gopalan (1972) 5. M/O/G 1 Bhat (1973) 6. G/O/M 1 Govil (1973)
7. G/O/M 1 Gopalan and Venkatachalam (1977a)
8. G/O/M 1 Gopalan and M/O/G 1 Saxena (1977)
9. G/O/M 1 Gopalan and M/O/G 1 Marathe (1978, 80)
10. M/M/G 1 Subramanian (1977) 11. M/M/G 1 Subramanian and
Ravichandran (1978b) 12. M/M/G 1 Gopalan (1975)
13. M/M/G 1 Gopalan and Venkatachalam (1977b)
14. M/M/G 1 Subramanian and Ravichandran (1980a)
15. G/M/M 1 Dirickx and Kistner (1979)
16. G/M/M 1 Subramanian and Ravichandran (1980b)
17. Ek/M/G 1 Ramanarayanan and G/M/Ek 1 Usha (1979)
18. G/M/G 1 Subramanian and Ravichandran (1980a)
19. M/O/M c
20. G/O/M n + 1
Natarajan (1968)
Nakagawa (1974)
21. M/M/E k r Ravichandran (1979) 22. G/M/M I Subramanian and
Natarajan (1981)
A,R
A,R R, MTSF A,A~
MDT TFSF, A o~ MDT TFSF A,A~
A A,A~
R, MTSF
MDT TFSF A Interval reliability R,A
Interval reliability R,A
R ,A ,A~
MTSF SDT, A~ Expected No. of visits to a state before a total system failure R,A ,A~ R ,A ,A~
no repair repair men will be available at a constant rate fl; failed units will be replaced at a constant rate
n units in series supported by s spares PM is made after time Tp PM rate is a constant time to PM is arbitrary PM rate is a constant server is subjected to periods of unavailability non-instantaneous switchover
Gnedenko system n-component system with s spares
online and standby failures are distinguished
unit is taken for PM when its age is T
priority systems p-unit repair is general O-unit repair is Erlangian
1-unit online supported by n standby
A: availability; R: reliability; MDT: mean down time; A~: steady state availability; MTSF: mean time to system failure; TFSF: time to first system failure; SDT: system down time.
3. SKIP PM POLICY
3.1. Auxiliary functions
As has been explained earlier, the online unit will not be sent for preventive main tenance if the n u m b e r of operable s tandbys < K. We need the following functions to describe the behav iour of the subsystem dur ing a failure-time interval or a par t thereof of the online uni t :
P(t, p, mli, j ) = er{ Y(t) = (p, m)l Y(O) = (i, j)}
p = 0 , 1 , 2 . . . . ,i; m = 0 , 1 , 2 . . . . , n - l ; p + m ~ < n - !
i = O , 1 , 2 , . . . , k - l ; j = 0 , I ,2 . . . . , n - l ; i + j < ~ n - 1 .
n-Unit redundant systems 369
These functions are defined over an online failure interval and during this interval one of the following possibilities can occur first:
(i) complet ion o f a P M action occurs in some repair facility (ii) complet ion of a repair occurs in some repair facility
(iii) some s tandby unit fails.
It is also possible that none of the above occurs. Accordingly we have the following equations for P(t,p, mli, j )
(i) fo rp > i , e ( t , p , mli , j ) = 0 (1)
(iia) p = l , i > I r
P(t, p, m)li , j) = 5(m - j ) e - ~' + fl(m - j ) ( n - 1 - i - j ) b e - y,' © P(t, p, m[i,j + 1) (2)
(iib)(i) p = i , i < r a n d i + j > ~ r
P(t ,p , mli , j) = 6 ( m - j ) e - h ' + ( n - 1 - i - j ) b e - ~' © P(t, p, m l i , j + 1) + ( r - i ) l z e - Y 2 ' © P ( t , p , m l i , j - 1 ) (3)
(iib) (ii) p = i, i < r and i + j < r
P(t, p, roll,j) = 5(m - j ) e - rd + (n - i - i - j ) b e - ~' © P(t, p, m li,j + 1 ) + j # e - ~3' © P(t, p, ro l l , j - 1)
(iiia) (i) for p < i, i >/r, p > / r
P(t, p, m li, j ) = rd e - ~,' © P(t, p, m li - 1,j) + f l ( m - j ) ( n - 1 - i - j ) b e - r,, © P(t, p, m li,j + 1) (4)
(iiia) (ii) p < i, i /> r, p < r
P(t, p, mli , j ) = rd e - ~,' © P(t, p, m l i - 1,j) + (n - 1 - i - j ) b e - Y,' © P(t, p, mli , j + 1) (5)
(iiib) (i) p < i , i < r , i + j >1 r
e( t , p, ml i,j) = id e - r2, © P(t, p, mli - 1,j) + (n - 1 - i - j ) b e - ,2' © P(t, p, ml i , j + 1 )
+ ( r - i ) l a e - r ~ ' © P ( t , p , m l i , j - 1 ) (6)
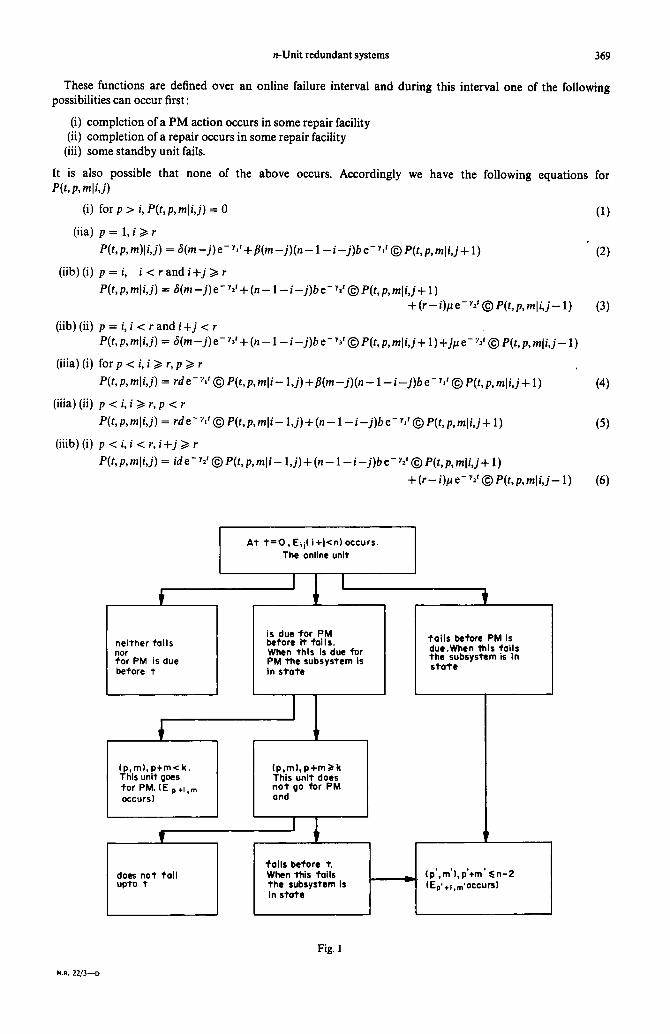
At t = O , Eij(i+J<n) occurs. The online unit
I I
neither fails nor for PM is due before t
(p,m), p+m< k. This unil goes for PM. (E p÷l,m occurs)
does not fail upto t
is due ~or PM before i~ ~ails. When this is due for PM the subsystem is In state
1 (p,m), p+m~> k This unit does not go for PM and
~alls before t. When this ~ails the subsystem is in state
• foi ls before PM is due .When this fails the subsystem is In s ta te
(p',m'), p'÷m' ~<n-2 v I (EP' +l,m'°Ccurs)
M.R. 22/3--D
Fig. 1
370 R. SUBRAMANIAN and R. NATARAJAN
(iiib) (ii) p < i, i < r, i+j < r P(t,p, mli,j) = ide-h ' © P(t,p, m l i - l , j)+ ( n - l - i - j ) b e - r / © e(t,p, rnli, j + l )
+fit e- ~' © P(t, p, m I i, j - 1 )
where
?t = r d + ( n - l - i - j ) b ?2 = id + ( r - i)lt + (n - 1 - i - j ) b
)'a = id + j l z + (n - 1 - i - j ) b .
(71
3.2. Reliability analysis
For the reliability analysis of the system we make use of the following events which are regenerative
Eij (at t) event that one unit just goes online and X(t) = (i,j),
i = 0 , 1 , 2 . . . . . n - l ; j = 0 , 1 , 2 . . . . . n - l ; i + j < n ,
(when i + j = n, this will correspond to the event that the system enters the down state).
Let Ro(t) = Pr{the system is up in (0, t][E o at t = 0}. Because of the given initial conditions the reliability of the system is given by Roo(t). We derive the following equation for Roo(t ) by considering the various possibilities described in the flow chart (see Fig. 1).
R o ( t ) = F ( t ) ~ l ( t )
+
+
+
~,~, {F(t)m(t)P(t,p, mli, j)} ©Rp+l.s(t) p=O,I,...,i
m ffi 0,1,...,n-- I p+m<k
~..~ F(t) f l m(u)P(u,p, mli,j)du p=O,l,...,i
m = 0,1, . . . ,n- 1 k<p+m<n-I
r l f }l ~.~, f( t) ~ .~ m(u)P(u,p',m'li,j)P(t-u,p, mlp',m') ©Rp.s+t(t) p f o A , . . . , f L L p '=o,I , . . . , i 0
m = 0,1,...,n - 2 m" ffi 0,1, . . . ,n- I O<~p+ra<~n-2 k < p ' + m ' < n - 1
+ ~ {f(t)l~l(t)P(t,p, mli,j)} © R~,m+l(t). p=O,l,...,i
m=0,1, . . . ,n-- 2 Ogp+m<~n-2
Equation (8) above can be solved for R~o(S) by Laplace transform technique.
(8)
3.3. Availability analysis
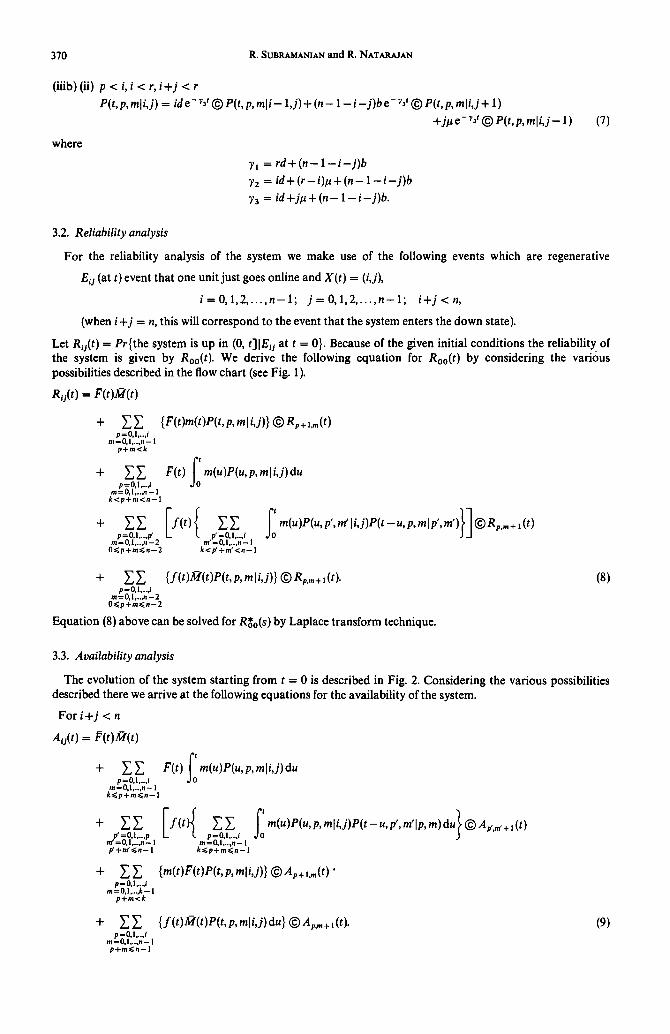
The evolution of the system starting from t = 0 is described in Fig. 2. Considering the various possibilities described there we arrive at the following equations for the availability of the system.
For i+j < n
&i(t) = F(t)~l(t)
+ y y p = 0,1,...,i
m = O,1,...,n- I k<<.p+m<~n-I
p ' = 0,1,... p p = 0,1,...,1 nfffi 0,1~..,n'- 1 m •0 ,1 , . . . ,n- 1 p'+nf <~n-I k<~p+m<<.n-I
+ EF. p = O,l,...j
mffiO, I,...,k- I p+m<k
+ E Y p ffi 0,1,...,i
m = 0,1,...,n-- I p+m6n--I
F(t) ~o m(u)P(u, p, mli,j) du
~i m(u)P(u'p'mli'J)P(t-u'p"m'lp'm)du} © A¢,.c + ,(t)
{m(t)P(t)P(t, p, mli,j)} © Ap+ i,m(t) "
{ f (t)2fl(t)P(t, p, mli,j ) du} © Ap,m+ i(t). (9)
n-Unit redundant systems 371
neither fails nor it is due for PM before t
At t f O , E i j ( i+ j<n)occurs . The online unit
is due for PM before i¢ fails When this is due for PM the subsystem is in store
fai ls before PM is due. When this foils the subsystem is in s'ra're
(p,m), p+m<k. This unit goes for PM (Ep+l,m occurs)
(p,m), p+m ~>k. This unit does not go for PM and
does not fail upto t
foi lsbef°re t" I I ( P ' , m ' l , p ' + m ' < n - l w h e n this foils the in s ta te subsystem is 1 v l (EP'+J'm'°Ccurs)
Fig. 2
Next we obtain the equations for the case i + j = n. (i) Let i + j = n and i >/r. This implies that the system is in the down state and in all the r repair facilities
units are under PM. Since the system is to be available at t, a P M completion should occur before t. Hence we have
Aij(t) = rd e-'d' © Ai - x,i(t), (10)
(ii) When i + j = n and i < r, i units are under P M in some i repair facilities and in the remaining ( r - i) repair facilities units are under repair. Hence for the system to be available at t either a PM completion or a repair completion should occur before t. Thus
Aij(t) = ide -(id+(r-Og), © A~_ ld(t) + (r--i)l~ e -(id+(r-i)#)t (~ Ai, J_ l (t). (11)
Equations (9)-(11) can be solved for A*o(S), the Laplace transform of the availability of the system by Laplace transform technique.
4. DELAYED PM POLICY
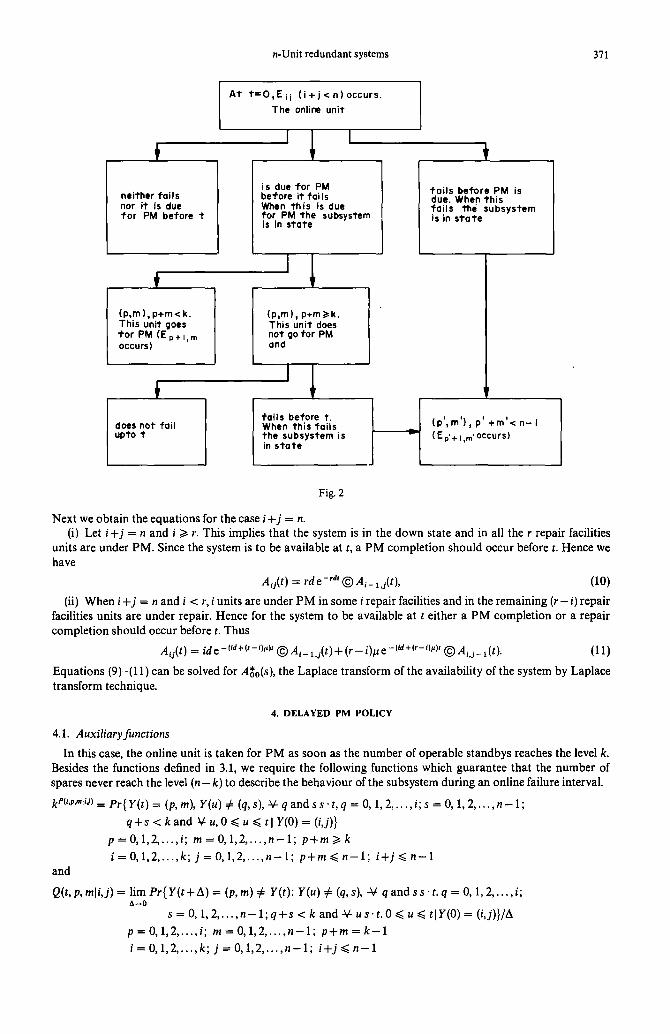
4.1. Auxiliary functions
In this case, the online uni t is t aken for P M as soon as the n u m b e r of operable s tandbys reaches the level k. Besides the functions defined in 3.1, we require the following funct ions which guaran tee tha t the n u m b e r of spares never reach the level (n - k) to describe the behav iour of the subsystem dur ing an online failure interval.
k ett'p'mliJ) = Pr{Y(t) = (p,m), Y(u) # (q, s), -~ q a n d s s . t , q = 0, 1,2 . . . . . i;s = 0, 1,2 . . . . . n - l ;
q+s < k a n d ~t u, 0 ~< u ~ tl Y(0) = (i,j)}
p = 0 , 1 , 2 , . . . , i ; m = 0 , 1 , 2 , . . . , n - 1 ; p+m>~k
i = 0 , 1 , 2 . . . . ,k ; j = 0 , 1 , 2 . . . . , n - l ; p + m < ~ n - 1 ; i + j < ~ n - 1 and
Q(t,p, mli, j) = lim Pr{Y( t+A) = (p,m) # Y(t): Y(u)--p (q,s), -V q a n d s s ' t . q = 0, 1,2 . . . . . i;
s = 0, 1, 2 . . . . . n - 1 ; q + s < k and -V- u s . t. 0 ~ u ~< t[ Y(0) = (i,j)}/A
p = 0 , 1 , 2 , . . . , i ; m = 0 , 1 , 2 , . . . , n - 1 ; p + m = k - 1 i = 0 , 1 , 2 , . . . , k ; j = O , 1,2 . . . . , n - l ; i + j ~ n - 1
372 R. SUBRAMANIAN and R. NATARAJAN
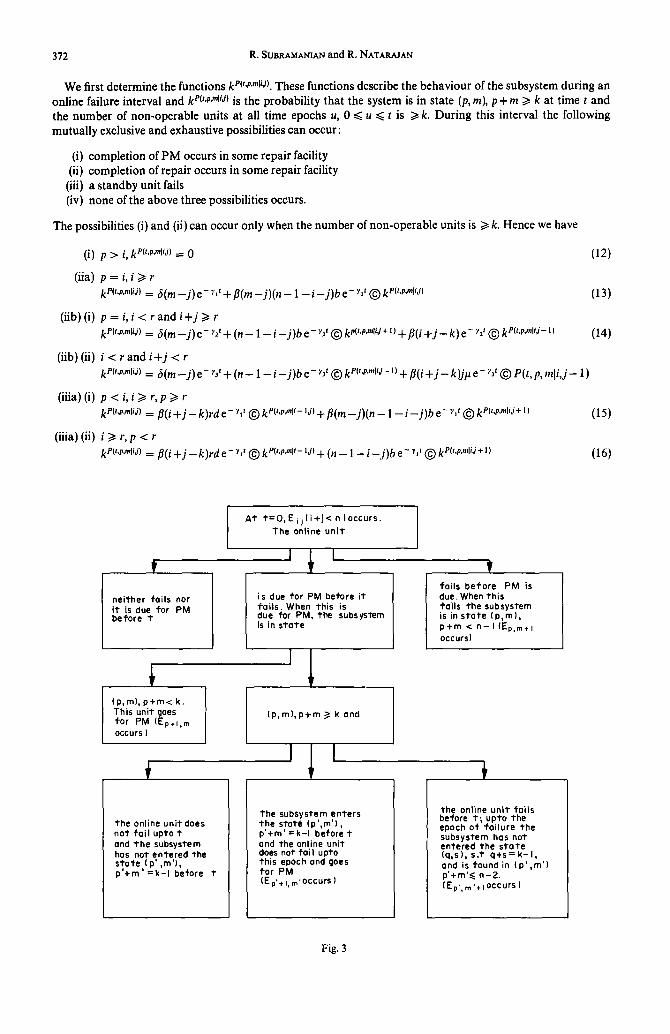
We first determine the functions k P(t'P'mliJ). These functions describe the behaviour of the subsystem during an online failure interval and k e(t,p,mlO) is the probabi l i ty that the system is in state (p, m), p + m >i k at time t and the number of non-operable units at all time epochs u, 0 ~< u ~< t is >/k. During this interval the following mutually exclusive and exhaustive possibilities can occur:
(i) complet ion of P M occurs in some repair facility (ii) complet ion of repa i r occurs in some repair facility
(iii) a s tandby unit fails (iv) none of the above three possibilities occurs.
The possibilities (i) and (ii) can occur only when the number of non-operable units is t> k. Hence we have
(i)
(iia)
(iib)(i)
(lib) (ii)
p > i, k e(t'p''li'i) = 0
p = i, i >>. r
k ett'p'mli'i) = 5 ( m - j ) e - r / + fl(m - j ) ( n - 1 - i - j ) b e - r,, © kt't'.l'.mlJd)
p = i , i < r a n d i + j i> r k Pt''p'mliJ) = 5(m - j ) e - ~' + (n - 1 - i - j ) b e - r~, © kptt.p.mlij+ 0 + fl(i + j - k) e - r=, © kP(t.p.,,,lij- n
(ilia) (i)
(iiia) (ii)
(12)
(13)
(14)
i < r and i-l-j < r k P(t'p'mliJ) = 5(m - j ) e - rjt + (n - 1 - i - j ) b e - ~t © kP(t,p.mlij- i) + fl(i + j - k) j# e - ~3 t © P(t , p, r o l l , j - 1)
p < i , i >~ r ,p >~ r
k e(t'p'n~lU) = fl(i + j - k)rd e - W © k eO,p.mli- ld) + f l (m-- j ) (n -- 1 -- i - j ) b e - rd © k Ptt,p,mliJ+ 1) (15)
i > ~ r , p < r
k P(t'p'mliJ) = fl(i + j - k)rd e - ~it © ket,,p,mli-l j) + (n - 1 - i - j ) b e - W © kPtt,p,.'lij + l) (16)
t
neither foi ls nor i t is due for PM before
(plm], p+m< k, This unit goes for PM (Ep+l,m Occurs )
$
A t t = O , E i i ( i ÷ J < n )occurs. The online un i t
is due for PM before i t fa i ls . When this is due for PM, the subsysl~m is in s'rote
' I (p ,m) ,p~m /> k and
I l l
t fai ls before PM is due. When this fai ls the subsystem is in s ta te (p0m), p+m < n - I ( E p , m . t occurs)
the online unit does not fa i l upto 1" ond t h e subsystem has not entered the s ta te (p' ,m'}, p '+m ' = k - I before t
the subsystem enters the state (p ' ,m' ) , p'+m' =k- I before t and the online unit does not fo i l upto this epoch and goes for PM (E p'. I, m' occurs )
the online uni t fai ls before t~ upto the epoch of fa i lure the subsystem has not entered the sta~e (qts), s.~ q + s = k - l t and is found in (p ' ,m ' ) p'+ m'~< n -2 . (Ep,,m'+loccurs)
Fig. 3
n-Unit redundant systems 373
(iiib) (i) i < r, i+j >i r k e(',p'ml~J) = fl(i +j - k)id e - ~2' © ket'.P~"l t- ij) + (n - 1 - i - j ) b e - Y2t © k ett'p,ml~J + 1)
+ f l ( i + j - k ) ( r - i ) # e - ~ ' © k t~t';'''l~J-ll (17)
(iiib) (ii) i < r, i+j < r k l:'(t'p'mli']} --- fl(i + j - k)id e - :,~t © k,"t,,p,mli- 1,i~ + (n - 1 - i - j ) b e - :'3 t © k I~{t'p'mli'i+ 1)
+fl(i+j-k)jlae-~3~©kett'p'mlid-l). (18)
Since Q(t, p, mli , j)dt is the probabi l i ty that the system enters the state (p, m) in (t, t + dt) and the number of non-operable units at each epoch u, 0 ~< u <~ t not less than k, the following are the mutually exclusive and exhaustive possibilities.
The system has not entered any state (q, s) s" t q >I 0, s >/0 q + s < k up to t and is
(i) in state ( p + 1,m) at time t and a P M complet ion occurs in (t, t + d t ) and thus the system enters state (p,m)
(ii) in state (p, m + 1) at time t and a repair complet ion occurs in (t, t + dr) and thus the system enters state (p,m) in ( t , t+dt )
(iii) in state ( p , m - 1 ) at time t and a s tandby fails in ( t , t+dt ) and thus the system enters state (p,m) in (t, t + dt). Combining all these possibilities, we obtain
Q(t, p, mli,j) = 7(r - p - 1 )(p + 1)d k e(r'p+ l,ml~j) + { 1 -- ~,(r-- p -- 1)} rd k e(t'p+ l.ralid)
+ ( n - p + m ) b k ett'pm-lliJ) + f l ( r - p ) ( r - p ) I t k P(t'p'm+llid). (19)
4.2. Reliability analysis
The evolution of the system start ing from t = 0, is described by Fig. 3. By considering the various possibilities described there, we have
Rij(t ) = F(t)/ffI(t)
+ ~ {F(t)m(t)P(t,p, mli, j)}©Rp+l.m(t)
p + m ~ k
fo + ~ 2 F(t) ~ 2 m(u)P(u,p, mli,j)k et'-',¢,m'lp,m} du p~O,l,...,i ~¢ = 0,1,... ,p
m=O,l,...,n- 2 m = 0 , 1 , . . . , n - 1 k<~p+m<~n-I k~p'+ra'<~n-I
p' =O,l,...,p p=O,l,...,t m' =O,l,...,n- 1 m=O,l,...,n - 1 p ' + m ' = k - 1 k ~ p + m ~ n - |
[ f' 1 + ~ ' f ( t ) ~ m(u)P(u,p, mli, j)kett-"#~lP.m~du ©Rp,,,c+,(t) p ' = 0 , 1 , . . , p p = 0,1,..,,i 0
m' = 0, l , . . . ,n ' - 2 m = 0 , 1 , . , . , n - 1 k<~p'+ra'<~n-2 k<<.p'+m~<n-I
+ ~ f(t)lVl(t)P(u,p, mli,j)©Rp.m+l(t). (20) p=O,l,...,i
m=O,l,...,n-2 p+m<~n-2
Equat ion (20) above can be solved for R*o(S) by the Laplace transform technique.
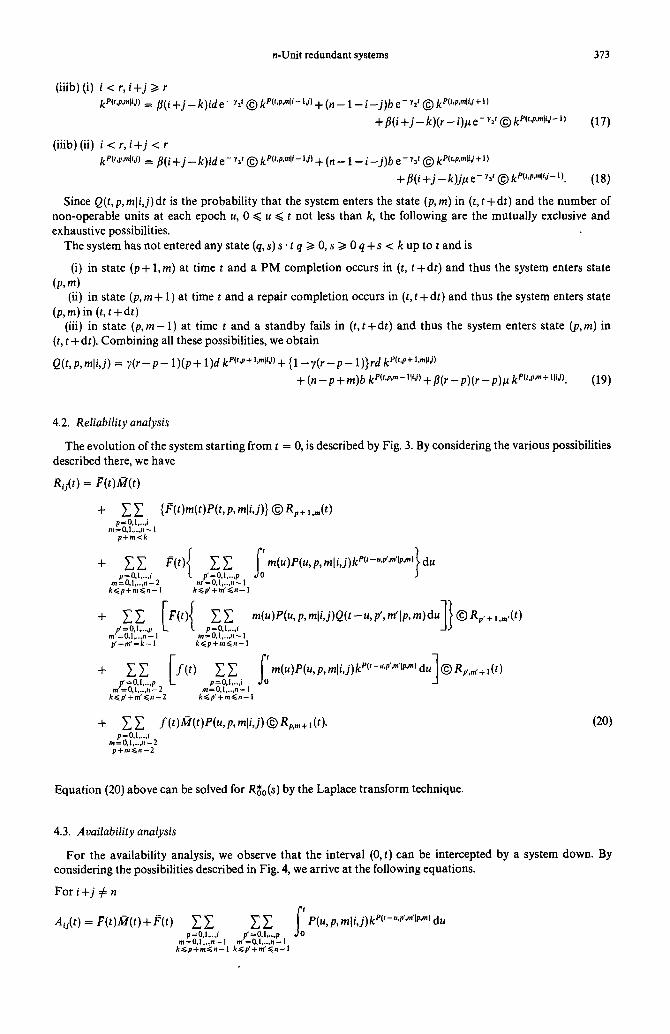
4.3. Availability analysis
For the availabili ty analysis, we observe that the interval (0, t) can be intercepted by a system down. By considering the possibilities described in Fig. 4, we arrive at the following equations.
For i + j :~ n
A,~(t) = F ( t ) /~ ( t )+ F(t) ~. ~ ~ ~. P(u, p, rn li,j)k elt-u'¢'m'lp',) du p = 0,1,...,i /¢ = O,l,...,p ,
m = O,l , . . . ,n-- 1 m' = O,l , . . . ,n-- 1 k~p+m<~n--I k<~p'-I-ng~n-I
374 R. SUBRAMANIAN and R. NATARAJAN
T
neither fa i ls nor i t is due fo r PM before t
(pDm), P+m <k. This uni t goes for PM (Ep~l, m occurs )
the online un i t does not fa i l upto t and the subsystem has not en1.ered the s,ta1.e ( p', m '), p +m = k- I before #
At t = O , E i j ( i + j < n)occurs. The online unit
' I '
is due fo r PM before i1. fai ls.When #his is due t a r PM, the subsystem is in s t a t e
J ( p , m ) , p + m > ~ k and I
I 1.he subsystem enters 1.he s ta te (p ' ,m ' ) , p ' + m ' = k - I before 1" and #he online uni1. does not fo i l upto #his epoch and goes for PM. (Ep'+l ,re'occurs)
foil before PM is due. When this fai ls the subsysl~m is in s1.ofe (p,m), p+m ~<n-I (Ep,m.I occurs)
the online uni~ fo i l s before t ; upto the epoch o f failure ~he subsystem has not en1.ered the sto#e (q~s)~s.t q+s=k- I , and is found in (p ' ,m ' ) , p '+m ' <~ n-I. (E p' ,m'+ I occurs )
Fig. 4
[{ f ) ] + ~,~ F(t) ~ P(u,p, mli,j)Q(t-u,p',m'lp, m)du ©Ap.+l , .~( t ) f =oJ,...,p p =o.t,....i o m" = 0,1.... n - 1 m =O.l...,n- 1 f+m'=~--I k<~p+m<~n-I
+ ~ [ f ( t ) t ~ f l P(u'p'mli'j)kP(t-'PV'lp'm)du} © A f , , ~ + , ( t , ] f ffi O,l,...,p l_ t. p = 0,1,...,i nf=O,1,...n- 1 m=O,I,...,n-I k<~p'+m'<~n-1 k~p+m<~n-I
+ 2 E p = 0,I,...,i
m = 0,1,...,n - l p+m<k
{m(t)F(t)P(t, p, roll, j)} © Ap+ l,m (t)
+ 2 2 p ffi O,l,...,i
m =O,I,...,n-- I p+m<<.n-1
[ { f (t)~l(t)P(t, p, mli, j)} © At,,,.+ l(t)] (21)
w h e n i+j = n the e q u a t i o n s for Au(t ) are the s ame as in the case of skip P M pol icy a n d are given by (10) and (11).
5. PARTICULAR CASES
W e n o w p r o c e e d to s tudy the var ious special cases d iscussed in the l i terature.
5.1. G/M/M 2-unit system with PM
Firs t we der ive the resul ts c o r r e s p o n d i n g to a 2-uni t system. In this case the Lap lace t r ans fo rm of the
avai labi l i ty of the sys t em c o n d i t i o n e d by an Eo, x event at t = 0 is given by
r*(s)+ fl*(s)T~(s) A*,(s) -- (22) 1 - T~'(s)-fl*(s)T~(s)

n-Unit redundant systems 375
fl(t) =
and
where for the skip PM policy
T 1 (t) = F(t)lffI(t) + F(t) f l m(u)P(u, O, 1[0, 1) du
T2(t ) = F(t)A'l(t)+ F(t) f l m(u)P(u, O, l[ 1, O)du + f l m(u)e(u, 1, 011. O) du
+f(t)2fl(t)P(t, 0, 010, 1 ) + {f(t)M(t)P(t, 0, 110, 1 )} ©/~ e-~t
T,(t) = f (t) f l m(u)V(u, O, 1[ 1, O)V(t - u, O, OlO, 1)du + f(t) f l m(u)V(u, 1, Oil, O)P(t - u, O, Oil, O)du
+{f(t) flm(u)e(u,O, 111,0)V(t-u,O, 1lO, 1 )du}©#e-"
+f(t)l~l(t)P(t, O, 0,[ 1, O) + {f(t)~l(t)P(t, O, I I 1, 0)} © # e-~' + {f(t)A'l(t)P(t, 1, O[ 1, 0)} © d e -dr
m(t)F(t)P(t, O, 010, 1) 1 - m(t)F(t)P(t. O, OI 1, O)
b b+ t + _ _ e - i .J P(t,O, OlO, O ) = b + #
b P(t,O, llO, O ) = ~ {1 - e -tb+~lt}
e(t, 1, OlO, O) = 0
e(t , O, OlO, 1) -- ~ { 1 - e -Cb+"lt}
b + # e_lb+u)t P(t,O, 1lO, 1 ) = - ~ g - ~ #
P(t,t,O[O, 1) = 0
P(t,O,O[1,O) = p (1--ed') q - -
b p(t,o, lll,o) = b---~ (1 - e - d ' )
P(t, 1, OI 1, O) = e-d'.
bd 1 _ _ [e-dt _e-lb+v~t] b + # b + l t - d
bd 1 _ _ [e -d t_e- tb+~c I
b + # b + # - d
The reliability of the system can also be determined in the same way. However in this analysis system down is not permissible. Thus the expression for reliability can be obtained from that of availability by suitably modifying certain terms which give rise to system down. Thus the Laplace transform of the reliability of the system is given by the righthand side of the expression (22) where the modified values of Ta(t ) and T4(t ) are given as follows:
;o T3(t) = f(t) m(u)P(u,O, 110, 1)P(t-u,O,O[O, 1)du +f(t)K'I(t)P(t,O, OlO, 1)
;o T4(t) = f(t) m(u)P(u,O, 111,O)P(t-u,O,010, l)du
+f(t) m(u)P(u, 1,OIl,O)P(t-u,O, OIl, O) du +f(t).,f-I(t)P(t,O, OI1,O).
Expressions for the Laplace transform of the availability and reliability for the delayed PM policy can be obtained in a similar manner.
376 R. SUBRAMANIAN and R. NATARAJAN
5.2. G/M/M 2-unit system without PM
We obtain the results corresponding to a 2-unit system without PM by setting M(t) = O, t >>. 0 in expressi, (22) and get the following results:
Tl(s) AT(s) = - -
1 - T3(s)
where
Tl(s) = F*(s)
T3(S)=b_~{f , (s )_ f , ( s+b+#)}+ la { b la } s+# 7 ~ f * ( s ) - ~ f*(s+b+p) .
This result is in agreement with Subramanian (1975).
6. NUMERICAL ILLUSTRATION
For the purpose of numerical illustration we take
f ( t ) = xy {e . . . . e -y'} y - - x
m ( t ) = pq { e - ~ ' - e - ' } q--p
with the following values for the parameters
x = 1/200, y = 1/300
p - - 1/10o, q -- 1/20o
b = 1/1000, ~ = 1/200
d = 1/100.
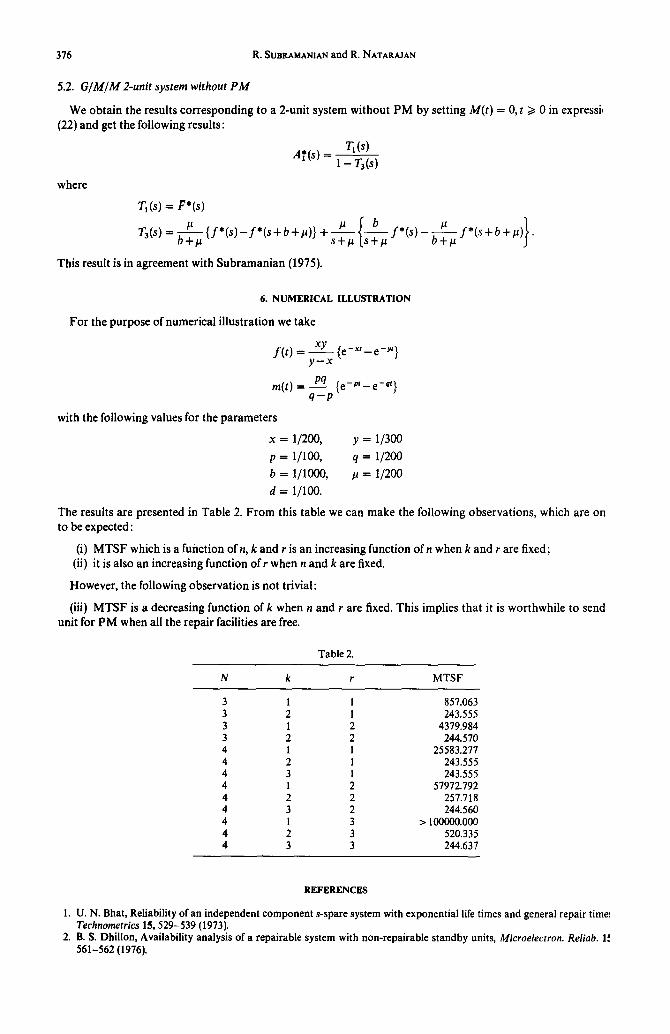
The results are presented in Table 2. F rom this table we can make the following observations, which are on to be expected:
(i) M T S F which is a function of n, k and r is an increasing function ofn when k and r are fixed; (ii) it is also an increasing function o f t when n and k are fixed.
However, the following observation is not trivial:
(iii) M T S F is a decreasing function of k when n and r are fixed. This implies that it is worthwhile to send unit for PM when all the repair facilities are free.
Table2.
N k r MTSF
3 1 1 857.063 3 2 1 243.555 3 1 2 4379.984 3 2 2 244.570 4 1 1 25583.277 4 2 1 243.555 4 3 1 243.555 4 1 2 57972.792 4 2 2 257.718 4 3 2 244.560 4 1 3 > 100000.000 4 2 3 520.335 4 3 3 244.637
REFERENCES
1. U. N. Bhat, Reliability of an independent component s-spare system with exponential life times and general repair time~ Technometrics 15, 529-539 (1973).
2. B. S. Dhillon, Availability analysis of a repairable system with non-repairable standby units, Microelectron. Reliab. 14. 561-562 (1976).
n-Unit redundant systems 377
3. Y. M. I. Dirickx and K. P. Kistner, Reliability of a repairable system with redundant units and preventive maintenance, IEEE Trans. Reliab. R-28 (2), 170-171 (June 1979).
4~ M. N. Gopalan, Probabilistie analysis of a single server n-unit system with (n-1) warm standbys, Oper. Res. 23, 591-595 (1975).
5. M. N. Gopalan and K. Y. Marathe, Availability analysis of 1-server n-unit system with slow switch, IEEE Trans. Reliab. R-27 (3), 231 (1978).
6. M. N. Gopalan and K. Y. Marathe, Availability analysis of 1-server n-unit system with slow switch subject to maintenance, IEEE Trans. Reliab. R-29 (2), 189 (1980).
7. M. N. Gopalan and A. R. Saxena, Analysis of an n-unit system with 1 repair facility which has down time, IEEE Trans. Reliab. R-26 (4), 297 (1977).
8. M. N. Gopalan and P. Venkatachalam, Two 1-server n-unit systems with preventive maintenance and repair, IEEE Trans. Reliab. R-26 (2), 127-128 (1977a).
9. M. N. Gopalan and P. Venkatachalam, Availability and reliability of a l-server system with n-warm standbys, IEEE Trans. Reliab. R-26, 298 (1977b).
10. A. K. Govil, Operational behaviour of a standby redundant system with scheduled maintenance, Microelectron. Reliab. 12, 243-247 (1973).
ll. T. Nakagawa, The expected number of visits to state k before a total system failure of complex system with repair maintenance, Oper. Res. 22, 108-116 (1974).
12. R. Natarajan, A reliability problem with spares and multiple repair facilities, Oper. Res. 16, 1041-57 (1968). 13. R. Ramanarayanan, Reliability and availability of two general multi-unit systems, IEEE Trans. Reliab. R-27, 70-72
(1978). 14. R. Ramanarayanan and K. Usha, n-Unit warm standby system with Erlangian failure and general repair and its dual,
IEEE Trans. Reliab. R-2g (2), 173 (1979). 15. N. Ravichandran, Reliability analysis of redundant repairable systems. Thesis for Ph.D. in Mathematics, I.I.T., Madras,
India (1979). 16. P.J. Schweitzer, Initial provision deterioration, Oper. Res. 15, 513-529 (1967). 17. S. K. Srinivasan and M. N. Gopalan, Probabilistic analysis of an n-unit cold standby with a single repair facility. Paper
presented at the 37th Conference of the Indian Mathematical Society held at Madurai, India (1972). 18. R. Subramanian, A note on a two-unit redundant system, Cashiers Centre D'Etudes de Recherche Operationnelle, 17 (1),
75-90 (1975). 19. R. Subramanian, Availability ofa Gnedenko system, IEEE Trans. Reliab. R-26, 302-303 (1977). 20. R. Subramanian and R. Natarajan, Multiple unit standby redundant repairable system, IEEE Trans. Reliab.
(1981). 21. R. Subramanian and N. Ravichandran, Availability of a redundant system, IEEE Trans. Reliab. R-27, 237-38 (1978). 22. R. Subramanian and N. Ravichandran, Interval reliability of an n-unit system with single repair facility, IEEE Trans.
Reliab. (1980a). 23. R. Subramanian and N. Ravichandran, Interval reliability of a redundant system, J. Math. Phys. Sci. (1980b). 24. R. Subramanian and N. Ravichandran, An n-unit priority redundant system, d. Math. Phys. Sci. 14 (1), 85-94
(1980c).




















