
An implicit gradient type of static failure criterion for mixed-mode loading
15
Int J Fract (2006) 141:497–511 DOI 10.1007/s10704-006-9011-z ORIGINAL PAPER An implicit gradient type of static failure criterion for mixed-mode loading R. Tovo · P. Livieri · E. Benvenuti Received: 29 September 2005 / Accepted: 18 July 2006 / Published online: 25 October 2006 © Springer Science+Business Media B.V. 2006 Abstract This paper proposes a new criterion for the prediction of static failure load of structural components made of linear brittle-elastic material affected by high stress concentrations. The static failure criterion is based on the definition of a non- local equivalent stress scalar. The approach starts with the definition of a spatial weighted average of a local stress scalar, called non-local equiva- lent stress. The non-local equivalent stress is then approximated through a spatial gradient expan- sion containing the Laplacian of the local equiva- lent stress multiplied by a non-local length. Thus, the non-local equivalent stress is expressed as an implicit differential equation. We develop an ana- lytical solution in the case of a one-dimensional stress state at a crack tip, assuming Neumann’s boundary conditions. Two-dimensional V-notched components are then considered and a numeri- cal solution is found via a standard finite element procedure. We also relate the non-local length of the model to the ultimate tensile stress and frac- ture toughness of the material. Finally, we consider experimentally measured failure loads reported in the literature for brittle-elastic PMMA speci- mens. The failure loads numerically calculated for mode I and mixed-mode loading are compared R. Tovo · P. Livieri (B ) · E. Benvenuti Department of Engineering, University of Ferrara, Via Saragat 1, 44100 Ferrara, Italy e-mail: [email protected] with experimental data. For this purpose, different definitions of the local equivalent stress are taken into account. The accuracies of the numerically estimated failure loads are satisfactory for the con- sidered loading modes. Keywords Implicit gradient · Non-local failure criterion · V-notches · Brittle fracture · NSIF 1 Introduction Accurate prediction of the static failure initiation of brittle components subjected to high stress con- centrations is of great interest in mechanics. In this case, however, classical continuum models, based on the investigation of local maximal values of stress, cannot be used. This has motivated the adop- tion of enhanced criteria in fracture and fatigue mechanics, such as those based on volume aver- ages of the local stress scalar representative of the adopted failure. Many papers have been devoted to this topic following Neuber’s pioneering work in 1968: representative references are Novozhilov (1969), Seweryn and Mroz (1995), Taylor (1999), and Lazzarin and Zambardi (2001). Other contri- butions about brittle fracture criteria of V-notched components based on two material parameters (tensile strength and fracture toughness) have been proposed by Leguillon (2002), Gómez and Elices (2003), and Carpinteri and Pugno (2005).
Transcript of An implicit gradient type of static failure criterion for mixed-mode loading

Int J Fract (2006) 141:497–511DOI 10.1007/s10704-006-9011-z
ORIGINAL PAPER
An implicit gradient type of static failure criterionfor mixed-mode loading
R. Tovo · P. Livieri · E. Benvenuti
Received: 29 September 2005 / Accepted: 18 July 2006 / Published online: 25 October 2006© Springer Science+Business Media B.V. 2006
Abstract This paper proposes a new criterion forthe prediction of static failure load of structuralcomponents made of linear brittle-elastic materialaffected by high stress concentrations. The staticfailure criterion is based on the definition of a non-local equivalent stress scalar. The approach startswith the definition of a spatial weighted averageof a local stress scalar, called non-local equiva-lent stress. The non-local equivalent stress is thenapproximated through a spatial gradient expan-sion containing the Laplacian of the local equiva-lent stress multiplied by a non-local length. Thus,the non-local equivalent stress is expressed as animplicit differential equation. We develop an ana-lytical solution in the case of a one-dimensionalstress state at a crack tip, assuming Neumann’sboundary conditions. Two-dimensional V-notchedcomponents are then considered and a numeri-cal solution is found via a standard finite elementprocedure. We also relate the non-local length ofthe model to the ultimate tensile stress and frac-ture toughness of the material. Finally, we considerexperimentally measured failure loads reportedin the literature for brittle-elastic PMMA speci-mens. The failure loads numerically calculated formode I and mixed-mode loading are compared
R. Tovo · P. Livieri (B) · E. BenvenutiDepartment of Engineering, University of Ferrara,Via Saragat 1, 44100 Ferrara, Italye-mail: [email protected]
with experimental data. For this purpose, differentdefinitions of the local equivalent stress are takeninto account. The accuracies of the numericallyestimated failure loads are satisfactory for the con-sidered loading modes.
Keywords Implicit gradient · Non-local failurecriterion · V-notches · Brittle fracture · NSIF
1 Introduction
Accurate prediction of the static failure initiationof brittle components subjected to high stress con-centrations is of great interest in mechanics. In thiscase, however, classical continuum models, basedon the investigation of local maximal values ofstress, cannot be used. This has motivated the adop-tion of enhanced criteria in fracture and fatiguemechanics, such as those based on volume aver-ages of the local stress scalar representative of theadopted failure. Many papers have been devotedto this topic following Neuber’s pioneering workin 1968: representative references are Novozhilov(1969), Seweryn and Mroz (1995), Taylor (1999),and Lazzarin and Zambardi (2001). Other contri-butions about brittle fracture criteria of V-notchedcomponents based on two material parameters(tensile strength and fracture toughness) have beenproposed by Leguillon (2002), Gómez and Elices(2003), and Carpinteri and Pugno (2005).

498 R. Tovo et al.
Recently, Livieri and Tovo (2004) reported aunified approach for the treatment of geometricdiscontinuities. A possible drawback is that theseapproaches are based on empirical averaging tech-niques which lack a sufficiently general theoreti-cal basis. In particular, the interaction between thematerials is distance-independent in these mod-els: within the critical volume, the stress is notweighted, independently of the distance from thecritical point; this does not seem to be physicallyconsistent. Moreover, the shape, width and posi-tion of the integration-volume are stated a priorias a function of the loading-mode.
On the other hand, these averaging approachescan be seen as simplified versions of non-local mod-els developed in elasticity starting from the 1960s(Kröner 1967; Eringen and Edelen 1972; Edelen1976). These non-local models are based on theassumption that the principle of local action doesnot hold in the presence of stress or strain sin-gularities. In these non-local models, a non-localfield is defined as the volume-average of the corre-sponding local field weighted by a suitable weightfunction. This distance-dependent weight functionreaches its maximum value at the actual point anddecays to zero at increasing distances from it. Asthese models are based on integral non-local defi-nitions, they are usually referred to as integralmodels. The concept of non-local elastic materialswas subsequently applied to the analysis of strainlocalization phenomena for concrete-like materi-als (Lasry and Belytschko 1988; Mühlhaus andAifantis 1991; Pijaudier-Cabot and Bažant 1987;Bažant 1987; De Borst and Mühlhaus 1992). Inthe latter context, Peerlings et al. (1996) proposednon-local gradient models in which the non-localintegral variable is approximated through a spa-tial gradient expansion: a Laplacian term multi-plied by a non-local length appears in addition tothe usual local term. Because the Laplacian termapplies to the non-local variable itself, the latterapproach is usually referred to as an implicit gra-dient type. From the computational standpoint,implicit gradient formulations have proved to bemore convenient and robust than integral formu-lations. For this reason, they have been widelyapplied in the finite element literature dealing withconcrete-like materials. To our knowledge, how-ever, implicit gradient criteria for the prediction of
static failure loads of brittle components have yetto be presented.
A different approach to gradient elasticity wasadopted by Aifantis and coworkers in the early1980s. In this case, a Laplacian-dependent term isadded to the classical Hooke’s stress–strain law. Inthis way, it is possible to eliminate the stress singu-larity at a crack tip. The Aifantis gradient elasticityapproach was also applied to the analysis of anti-plane shear cracks and size effect. For a review onthe Aifantis strain-gradient elasticity, see Aifantis(2003).
In the present paper, we propose an implicitgradient type of stress-failure criterion for the anal-ysis of static failure of V-shaped notches undermode I and mixed-mode loadings. A linear elas-tic constitutive behavior is assumed. The first stepis the definition of a scalar equivalent stress. Then,the non-local equivalent stress definition is intro-duced and its implicit gradient approximation isconsidered. A detailed description of the analyt-ical procedure to derive the resolving equationsof the method is provided in Sect. 2. For the sakeof completeness, different equivalent stress scalarsare taken into account, namely the maximum prin-cipal stress, the Von Mises stress scalar and theTresca stress scalar. Both plane-stress and plane-strain states are investigated. We propose an ana-lytical solution of the differential equation definingthe non-local equivalent stress for the analysis of aone-dimensional stress-field singular at the notchtip. Neumann’s boundary conditions are imposedto solve the differential equation. This is the usualchoice in the literature, and it can be motivatedby adopting the unified variational approach pro-posed in Benvenuti et al. (2004). For more generaltwo-dimensional geometries, a numerical solutionis obtained by means of a standard finite elementprocedure.
In the following, bold characters denote tensorand vector variables, while thin characters indi-cate scalar quantities. Non-local quantities are con-noted through an upper bar.
2 Non-local models
Non-local models, first developed for elastic bodiesby Eringen, Edelen and Kröner during the 1960s,

An implicit gradient type of static failure criterion 499
are based on the assumption that the principle oflocal action can be violated. In particular, it issupposed that the stress σ depends not only onthe strain ε at the actual point x, but also on theweighted strain averaged over a reference volumewith weigh proportional to the distance from x.
Hence, in a body with volume V and surface S,the non-local stress σ̄ (x) at a point x = (x1, x2, x3)in V can be obtained from the weighted average ofthe local stress tensor σ (x) through the expression
σ̄ (x) = 1Vr(x)
∫
V
α(x, y) σ (y)dy (1)
In Eq. (1), the symbol α(x, y) denotes a scalar val-ued weight function that is dependent on theEuclidean distance
∥∥x − y∥∥between the point x and
any point y = (y1, y2, y3) in V. Moreover, the refer-ence volume Vr(x) can be calculated through a nor-malization condition of the weight function on thedomain V
Vr(x) =∫
V
α(x, y)dy (2)
Normalization condition (2) preserves homoge-neous fields over the finite volume V, namely ahomogeneous local equivalent scalar coincideswith its non-local version. Alternatively, the nor-malization condition Vr(x) = ∫
R3α(x, y) dy makes
it possible to obtain a spatially homogeneous refer-ence volume. For a more exhaustive discussion onthe aspects related to the choice of the normaliza-tion condition, reference can be made to Polizzotto(2001).
The choice of the weight function should beinfluenced by the physics of the phenomena to bemodeled. The functional form of the non-localitykernel should be derived from the discrete struc-ture of the material at the atomic scale and consid-ering the actual interatomic potential (Picu 2002).However, when dealing with phenomena at macroor meso-scale, satisfying results were obtained byadopting a weight function that
– it attains its maximum at the actual point x,– it decays to zero for increasing distances from
x, thus vanishing at a distance, that dependson the type of the weight function and that isrelated to an intrinsic length �.
Among the set of weight functions that satisfy theabove requirements, the most simple are the stepfunction
α(x, y) ={
1 if∥∥x − y
∥∥ ≤ �
0 otherwise
and the bell function
α(x, y) =⎧⎨⎩
(1 − ‖x−y‖2
�2
)if
∥∥x − y∥∥ ≤ �
0 otherwise
Usually, due to its simplicity, also the Gauss func-tion
α(x, y) = e−‖x−y‖2/�2
(3)
is employed (e.g. Pijaudier-Cabot and Bažant 1987;Picu 2002). In this case, the reference volume Vrcalculated over the infinite Rn domain turns outbeing equal to (�
√π)n where n = 1,2,3.
In the early works, non-local averages of all thevariables of the problem were introduced, such asmass, body forces, body moments, entropy sourcesand the stress field itself (e.g. Eringen 1976;Bažant 1987). However, such models show seriousweak points, such as the fact that the equilibriumequation is an integro-differential equation, andthe difficulty in envisaging the physical meaning ofthe non-local stress at the boundaries.
In the 1980s, a great effort was made to developnon-local models for modeling concrete-like mate-rials. For these materials, the structural response ischaracterized by an elastic branch up to a peak,eventually followed by a softening branch. Hencea softening stress–strain law is usually assumed.Standard finite elements for strain-softening mate-rials cannot properly predict the failure of struc-tural components because they are affected bymesh-dependency of the load-displacement results.As the mesh is refined, the structural load-displacement response of classical finite elementmodels tends to elastic unloading and the processzone where strain localization takes place progres-sively vanishes. Simultaneously, the equilibriumequations lose ellipticity and the system of gov-erning equations becomes ill-posed. Therefore, torestore the mesh-objectivity of the finite elementresults for softening materials, it was proposed toassume only one scalar variable as non-local, e.g.the damage scalar, the maximum principal strain

500 R. Tovo et al.
or the energy release rate (e.g. Bažant 1987; Pijau-dier-Cabot and Bažant 1987). Typically, a non-localintegral variable
ζ̄ (x) = 1Vr(x)
∫
V
α(x, y)ζ(y)dy (4)
is defined starting from a local scalar ζ . Thesenon-local models were shown to effectively over-come the pathological mesh-dependency. They alsomake it possible to retain the standard local formatof the equilibrium equations because the non-localdefinition affects a scalar internal variable and doesnot apply to the stress tensor. Models based onEq. (1) are usually referred to as integral non-localmodels since the non-local variable is the weightedintegral of the local counterpart.
A well-known and diffuse variant of integralnon-local models is the so-called implicit-gradientmodel, first proposed by Peerlings et al. (1996).Indeed, it was observed that, starting from non-local integral definitions, gradient expansions ofthe non-local scalar can be derived.
Here, the basic steps for the derivation of theimplicit gradient expansion are recalled. For a moreexhaustive analysis, reference can be made to Peer-lings et al. (1996) and Peerlings (1999). Assum-ing the (generalized) derivatives of a certain scalarfield ζ to exist, the stress scalar at a point y=x + scan be developed in a Taylor series in a neighbor-hood of point x of radius ||s||, with s = (s1, s2, s3)
(e.g. Ciarlet 1988)
ζ(y) =∞∑
|m|=0
1m!ζ
(m)(x) s(m) (5)
In Eq. (5), according to the conventional multi-index notation for the Rn case, m=(m1, m2, . . ., mn)is a sequence of n natural numbers whose facto-rial is m! = m1! m2! . . .mn! and such that |m| =m1 + m2 + · · · mn; the symbol ζ (m) represents thesets formed by all partial derivatives of a given
order m, namely ζ (m) = ∂ |m|ς∂x|m| = ∂m1
∂xm11
∂m2
∂xm22. . .
∂mn ζ
∂xmnn
,
and, finally, s(m) = sm1sm2 . . . smn (Ciarlet 1988).Subsequently, the product of ζ (y), expressed byTaylor’s expansion (4), times the weight function
is integrated over a symmetric domain V
ζ̄ (x) = 1Vr(x)
∫
V
α(‖s‖)∞∑
|m|=0
1m!ζ
(m)(x) s(m) ds
(6)
where ds = ds1ds2ds3. Let us exploit the fact thatthe product of any even function α(||s||) by any oddfunction vanishes over a symmetric domain, and,furthermore, neglect higher than third-order deriv-ative in the Taylor’s expansion (5). Finally, Eq. (6)can be written as
ζ (x) ∼= ζ(x) + 12Vr(x)
(∂2ζ
∂x21
c21 + ∂2ζ
∂x22
c22 + ∂2ζ
∂x23
c23
)
(7)
where normalization condition (2) was used. InEq. (7), coefficients c2
i = ∫V α(‖s‖) s2
i ds, i = 1, . . ., nturn out to be all equal so that the index i can bedropped. Finally, we can express the non-local fieldζ̄ through the differential approximation
ζ̄ (x) ∼= ζ(x)+ c2∇2ζ(x) (8)
where ∇2 indicates the Laplacian operator, such
that ∇2ζ = div grad ζ = ∂2 ζ
∂ x21
+ · · · + ∂2 ζ
∂ x2n
, and
the coefficient c plays the role of a diffusive length.The gradient expansion (8) is referred to as an
explicit gradient approximation because theLaplacian is applied to the local field ζ . This re-quires a high-order regularity of the local field ζ .Accordingly, the non-local equivalent variable ζ̄ isobtained by solving an explicit differential equa-tion. The positive real constant c represents a non-local length of the gradient model.
In the technical literature, the non-local lengthc is usually linked to the intrinsic length � of theweight function assumed in the starting integralformulation (4). Consequently, the value of thenon-local length turns out being model-dependent.For instance, in the two-dimensional case, the con-stant c can be linked to the characteristic length� of the Gauss function (3) through c2 = �2
2 (e.g.Peerlings et al. 1996). In Sect. 6, a different proce-dure of identification of the non-local length c willbe adopted.
According to Peerlings et al. (1996), the implicitgradient approximation of Eq. (8) can be derived

An implicit gradient type of static failure criterion 501
by applying the Laplacian operator to both sidesof Eq. (8):
∇2ζ̄ (x) ∼= ∇2ζ(x)+ c2 ∇4ζ(x) (9)
Consistently with the approximation performed toobtain Eq. (8), the fourth-order term of the non-local variable ∇4ζ̄ can be neglected in Eq. (9). Sub-sequently, the Laplacian of the local term can bereplaced with the Laplacian of the non-local vari-able within the explicit gradient expansion Eq. (8).Finally, we obtain the differential approximation
ζ̄ (x) ∼= ζ(x)+ c2 ∇2ζ̄ (x) (10)
Note that, by construction, the implicit gradientformulation Eq. (10) and the explicit gradient for-mulation (8) imply the same degree of approxima-tion, as they both have been obtained by neglectingfourth-order derivatives in the Taylor expansion(5) (Peerlings et al. 1996).
In Eq. (10), the Laplacian term is applied to thenon-local variable; thus the latter can be obtainedby solving an implicit differential equation. Be-cause Eq. (10) does not contain the Laplacian ofthe local variable, lower-order regularity of thelocal variable is required. Neumann’s boundaryconditions of type ∇ ζ̄ · n = 0 are usually imposed,where n denotes the normal to the surface of V(De Borst and Mühlhaus 1992; Peerlings et al.1996). This boundary condition can be alterna-tively derived from variational statements (Ben-venuti et al. 2004). One advantage of the implicitgradient model with respect to integral models isthat the former can be more easily implemented ina finite element code, because it involves quantitiesthat have to be evaluated at the actual point.
Here, the implicit gradient formulation (10) wasderived for a generic weight function α through anapproximated procedure that is based on neglect-ing the fourth-order derivatives terms in theTaylor’s expansion (5). However, the use of theGreen’s function of the implicit gradient differen-tial equation (10) as a particular type of weightfunction α makes it possible to achieve a perfectequivalence between the integral formulation (4)and the implicit gradient approximation (10) of thenon-local scalar (Peerlings 1999).
However, the procedure that was used in thispaper to derive the implicit gradient expansion isindependent on the specific choice of the weight
function. This makes it possible to univocallyexpress the length c as a function of the static fail-ure strength of the material.
It will be shown in Sect. 6, that the c parameteris related to material properties and its value turnsout to be independent on the specific choice of theweight function.
In the following section, implicit gradient expan-sions of a variable called the non-local equivalentstress are considered and a static failure conditionfor quasi-brittle materials is consistently derived.
3 One-dimensional analytical solution
In this section, we derive an analytical solution ofthe problem of obtaining the non-local equivalentstress from the solution of the differential equa-tion. For the sake of simplicity, a one-dimensionalsingular stress field is considered. More generaltwo-dimensional cases are analyzed in the subse-quent sections. Let us consider a one-dimensionalscalar field that is singular at the origin x = 0:
ζ(x) = K0√x
(11)
and defined over the domain x ∈ (0, RD] (seeFig. 1). In this particular case, differential equation(10) becomes:
c2 d2ζ̄ (x)dx2 − ζ̄ (x) = −ζ(x) (12)
x [mm]5
[MPa]
0
100
200
300
400
0 1 2 3 4
ζζ maxanalytical solution
K0
xζ
[mm]
[MPa]
200
300
400
500
0 0.2 0.4 0.6
ζ
Fig. 1 Singular local one-dimensional stress ζ and ana-lytical non-local equivalent stress solution ζ̄ (K0 =100 MPa mm0.5, c = 0.2 mm, RD = 5 mm)

502 R. Tovo et al.
The general solution of Eq. (12) is sought as theseries expansion:
ζ̄ (x) =∞∑
n=0
bn cosnπ xRD
+ cn sinnπ xRD
(13)
By assuming Neumann’s boundary condition, asusual for implicit gradient models (see e.g.Peerlings et al. 1996; Benvenuti et al. 2004)
d ζ̄ (x)dx
∣∣∣∣ x = 0x = RD
= 0 (14)
Then, solution (13) becomes:
ζ̄ (x) =∞∑
n=0
bn cosnπxRD
(15)
where the coefficients bn are the unknowns of theproblem. If Eq. (14) is used in Eq. (12), and theGalerkin method is then employed, the coefficientsbn turn out to be
bn =4K0R
32D
[1 + ∑∞
k=0 (−1)k+1 π2k+2 n2k+2
(4k+5)(2k+2)!]
c2π2n2 + R2D
(16)
for the case n = 0, and
b0 = 2K0√RD
(17)
for the case n = 0. Figure 1 shows the trend of theanalytical solution (15). The singularity of the localscalar field at the origin disappears and it can beshown that the limit of solution (15) for x tendingto zero is its maximum value:
ζ̄max(x = 0) =∞∑
n=0
bn (18)
By means of Eq. (10), we have transformed thesingular field of Eq. (11) into an equivalent non-singular stress field of Fig. 1.
Note that, for a given value of the parameter c,when RD tends to infinity, both b0 and the genericbn coefficients tend to zero. However, the sumgiven in Eq. (18) is convergent to a value differ-ent from zero. This value is proportional to K0/
√c
(see Appendix).
4 Two-dimensional numerical solution
To obtain the solution of Eq. (10) in a two-dimensional domain with a geometric discontinu-ity (a sharp open corner), we used a mesh-adaptivefinite element Matlab toolbox. Linear interpola-tion functions were used for both domain discreti-zation and approximation of the non-local field.
The non-local approach of gradient type exhibitssome remarkable computational advantages withrespect to the integral approach. In the integralcase, the weight matrix that collects the mutualcontributions of the quadrature points is required(e.g. Pijaudier-Cabot and Bažant 1987; Benvenutiand Tralli 2006). Commercial finite element codedo not generally provide built-in tools account-ing for the weight matrix. Hence, the user haseither to implement the weight matrix and mod-ify the linear equation solver in an existing code,or to implement his own finite element code. Inthe (implicit) gradient model, instead, no weightmatrices need to be implemented: the non-localeffects are introduced uniquely through the diffu-sive coefficient c, and the differential equation thatexpresses the non-local equivalent stress scalar is,in fact, local. Furthermore, any commercial codesendowed with standard tools for the analysis ofdiffusive phenomena makes it possible to deal withthe solution of both explicit and implicit differ-ential equations such as those considered in thepresent analysis. Finally, it was already observed inthe literature that spurious oscillations and numer-ical instabilities of the numerical results can bemore frequently encountered when using the inte-gral formulation (e.g. Pijaudier-Cabot and Bažant1987).
As a non-local scalar field, a non-local equiva-lent stress ζ̄ is here defined as the weighted inte-gral average of the corresponding local equivalentstress (Eq. (4)). Then the implicit gradient approx-imation (10) of the weighted integral average (4)is adopted.
As usual in the analysis of the stress field arounda crack tip, it is possible to restrict the analysis toa circular two-dimensional domain of radius RD(Fig. 2).
The elastic analytical Williams’ (1952) stressfield is considered in the analytical form proposedby Lazzarin and Tovo (1996):

An implicit gradient type of static failure criterion 503
•n = 0Δζ n
R
P
K iN
TM
P
TM
D
2α
2α
Fig. 2 Typical integration domain of radius RD
⎧⎨⎩σϑσrτrϑ
⎫⎬⎭= 1√
2π
rλ1−1KN1
(1+λ1)+χ1(1−λ1)·⎧⎨⎩
fϑ ,1(ϑ)
fr,1(ϑ)
frϑ ,1(ϑ)
⎫⎬⎭
(19)
for mode I, and⎧⎨⎩σθσrτrθ
⎫⎬⎭= 1√
2π
rλ2−1KN2
(1−λ2)+χ2(1+λ2)·⎧⎨⎩
fϑ ,2(ϑ)
fr,2(ϑ)
frϑ ,2(ϑ)
⎫⎬⎭(20)
for mode II, where χi and λi are geometric param-eters and KN
i are the Notch Stress Intensity Fac-tors (N-SIF) of sharp V-notches, in agreement withthe definition proposed by Gross and Mendelson
(1972). Thus the global stress field is imposed bymeans of N-SIF due to the applied loading.
Neumann’s boundary conditions of type ∇ ζ̄ ·n =0 are again prescribed, where n denotes the normalto the surface of V.
The maximum principal stress is adopted as adefinition of the local equivalent stress. For thecase of two-dimensional geometry, the differen-tial boundary value problem is numerically solved.Figure 3 shows a typical solution of the non-localequivalent stress obtained for the circular domainfor an opening angle of 120◦. It can be seen that thesingularity of the Williams elastic stress field dis-appears; the critical point of the domain at which ζ̄attains the maximum value can also be identified.
Note that, owing to the nature of the asymptoticstress field, the numerical solution of Eq. (10) isaccurate only close to the V-notch tip. In the fol-lowing the width of the material parameter c will besufficiently small with respect to asymptotic stressfield size given by Eqs. (19) and (20). Elsewhere,when this condition is not satisfied, the asymptoticstress field should be modified by introducing thenominal stress as suggested by Livieri and Tovo(2003) in the case of Creager-Paris’ equations.
As far as the accuracy is concerned, in numeri-cal analysis, the precision of significant terms wasobtained by managing the value of the parameter“par” into the adaptative meshing routine, pro-vided by the PDE Matlab toolbox. This parametercontrols the number of triangular elements and
[mm]
[MPa]
ζ
[mm]
-0.2 -0.1 0 0.1 0.2 0.3-0.4
0.450
100
150
-0.4-0.3
-0.2
-0.2-0.2
-0.1
-0.1
0
0 0
0.1
0.1
0.2
0.2 0.2
0.3
0.3
[mm]
[mm]
120°
Fig. 3 Typical solution in an integration domain of radius RD assuming the maximum principal stress as non-local stress(KN
1 = 100 MPa mm0.384, KN2 = 50 MPa mm−0.149, 2α = 120◦, c = 0.05 mm, RD=0.3 mm)
504 R. Tovo et al.
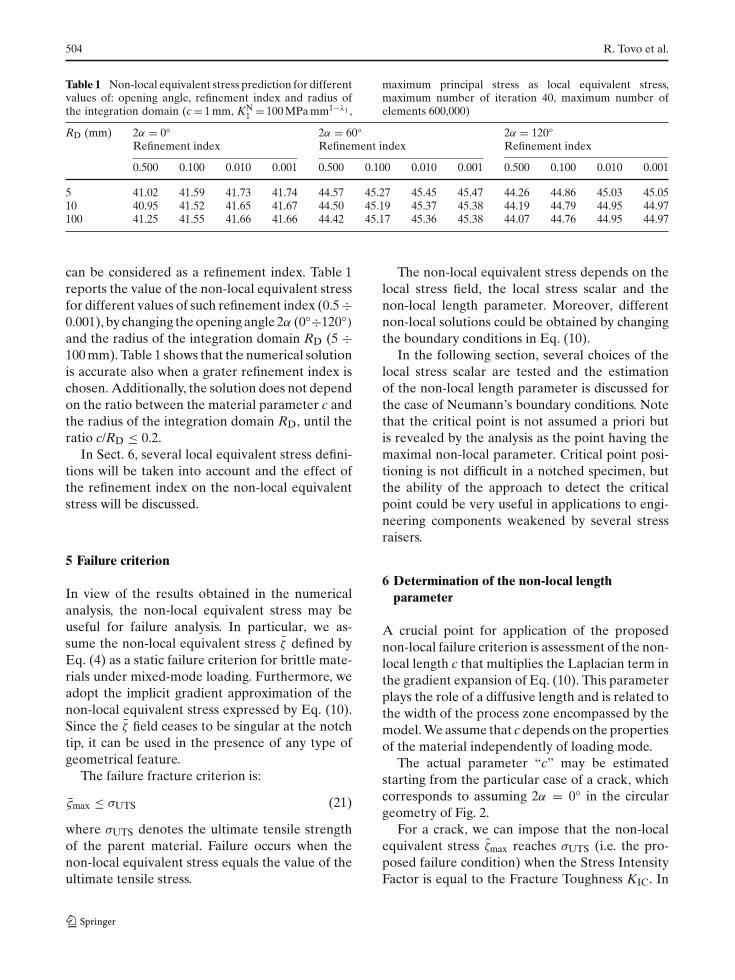
Table 1 Non-local equivalent stress prediction for differentvalues of: opening angle, refinement index and radius ofthe integration domain (c = 1 mm, KN
1 = 100 MPa mm1−λ1 ,
maximum principal stress as local equivalent stress,maximum number of iteration 40, maximum number ofelements 600,000)
RD (mm) 2α = 0◦ 2α = 60◦ 2α = 120◦Refinement index Refinement index Refinement index
0.500 0.100 0.010 0.001 0.500 0.100 0.010 0.001 0.500 0.100 0.010 0.001
5 41.02 41.59 41.73 41.74 44.57 45.27 45.45 45.47 44.26 44.86 45.03 45.0510 40.95 41.52 41.65 41.67 44.50 45.19 45.37 45.38 44.19 44.79 44.95 44.97100 41.25 41.55 41.66 41.66 44.42 45.17 45.36 45.38 44.07 44.76 44.95 44.97
can be considered as a refinement index. Table 1reports the value of the non-local equivalent stressfor different values of such refinement index (0.5 ÷0.001), by changing the opening angle 2α (0◦÷120◦)and the radius of the integration domain RD (5 ÷100 mm). Table 1 shows that the numerical solutionis accurate also when a grater refinement index ischosen. Additionally, the solution does not dependon the ratio between the material parameter c andthe radius of the integration domain RD, until theratio c/RD ≤ 0.2.
In Sect. 6, several local equivalent stress defini-tions will be taken into account and the effect ofthe refinement index on the non-local equivalentstress will be discussed.
5 Failure criterion
In view of the results obtained in the numericalanalysis, the non-local equivalent stress may beuseful for failure analysis. In particular, we as-sume the non-local equivalent stress ζ̄ defined byEq. (4) as a static failure criterion for brittle mate-rials under mixed-mode loading. Furthermore, weadopt the implicit gradient approximation of thenon-local equivalent stress expressed by Eq. (10).Since the ζ̄ field ceases to be singular at the notchtip, it can be used in the presence of any type ofgeometrical feature.
The failure fracture criterion is:
ς̄max ≤ σUTS (21)
where σUTS denotes the ultimate tensile strengthof the parent material. Failure occurs when thenon-local equivalent stress equals the value of theultimate tensile stress.
The non-local equivalent stress depends on thelocal stress field, the local stress scalar and thenon-local length parameter. Moreover, differentnon-local solutions could be obtained by changingthe boundary conditions in Eq. (10).
In the following section, several choices of thelocal stress scalar are tested and the estimationof the non-local length parameter is discussed forthe case of Neumann’s boundary conditions. Notethat the critical point is not assumed a priori butis revealed by the analysis as the point having themaximal non-local parameter. Critical point posi-tioning is not difficult in a notched specimen, butthe ability of the approach to detect the criticalpoint could be very useful in applications to engi-neering components weakened by several stressraisers.
6 Determination of the non-local lengthparameter
A crucial point for application of the proposednon-local failure criterion is assessment of the non-local length c that multiplies the Laplacian term inthe gradient expansion of Eq. (10). This parameterplays the role of a diffusive length and is related tothe width of the process zone encompassed by themodel. We assume that c depends on the propertiesof the material independently of loading mode.
The actual parameter “c” may be estimatedstarting from the particular case of a crack, whichcorresponds to assuming 2α = 0◦ in the circulargeometry of Fig. 2.
For a crack, we can impose that the non-localequivalent stress ζ̄max reaches σUTS (i.e. the pro-posed failure condition) when the Stress IntensityFactor is equal to the Fracture Toughness KIC. In
An implicit gradient type of static failure criterion 505
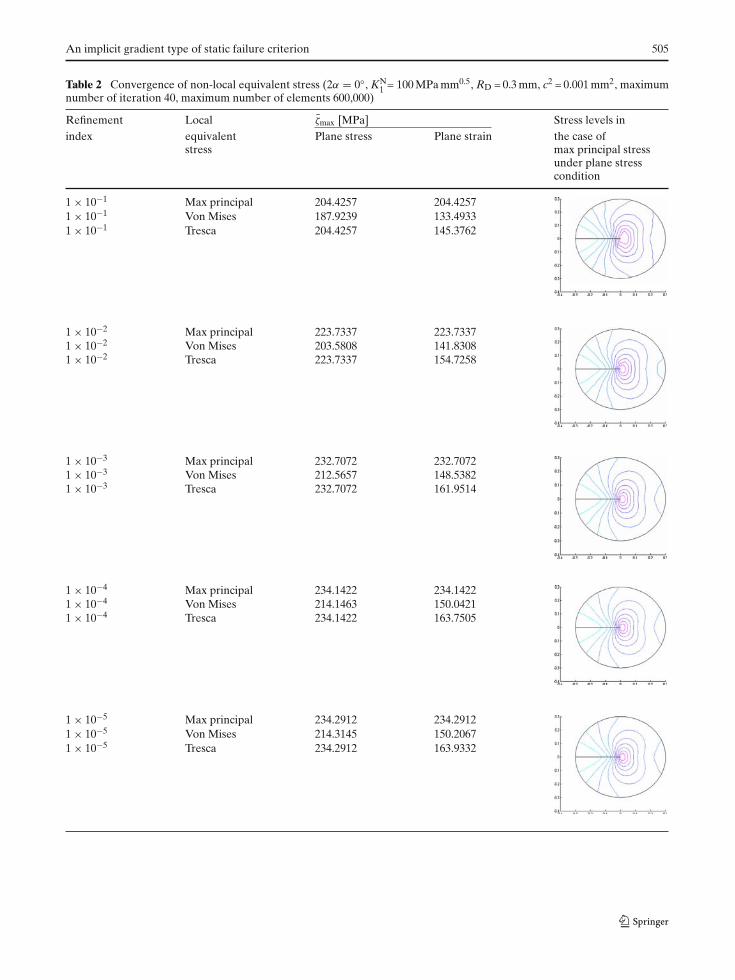
Table 2 Convergence of non-local equivalent stress (2α = 0◦, KN1 = 100 MPa mm0.5, RD = 0.3 mm, c2 = 0.001 mm2, maximum
number of iteration 40, maximum number of elements 600,000)
Refinement Local ζ̄max [MPa] Stress levels inindex equivalent Plane stress Plane strain the case of
stress max principal stressunder plane stresscondition
1 × 10−1 Max principal 204.4257 204.42571 × 10−1 Von Mises 187.9239 133.49331 × 10−1 Tresca 204.4257 145.3762
1 × 10−2 Max principal 223.7337 223.73371 × 10−2 Von Mises 203.5808 141.83081 × 10−2 Tresca 223.7337 154.7258
1 × 10−3 Max principal 232.7072 232.70721 × 10−3 Von Mises 212.5657 148.53821 × 10−3 Tresca 232.7072 161.9514
1 × 10−4 Max principal 234.1422 234.14221 × 10−4 Von Mises 214.1463 150.04211 × 10−4 Tresca 234.1422 163.7505
1 × 10−5 Max principal 234.2912 234.29121 × 10−5 Von Mises 214.3145 150.20671 × 10−5 Tresca 234.2912 163.9332

506 R. Tovo et al.
this case, parameter c depends on KIC and σUTS,namely c = f (KIC, σUTS). According to standardresults of the dimensional analysis, c can be assumedto be the type (see Barenblatt 2004)
c = zac (22)
where the intrinsic ac parameter usually takes theform (Seweryn 1994; Novozhilov 1969)
ac = 1π
(KIC
σUTS
)2
(23)
The values of the parameter z are determined bysolving the differential equation defining theimplicit gradient equivalent stress via the finite ele-ment method. Thus, “z” depends on the choice ofthe stress scalar and, generally speaking, also onthe choice of the boundary condition.
Consequently, after having determined the valueof z, and in view of the knowledge of the two staticparameters KIC and σUTS, we can evaluate c for agiven material.
A constant value of parameter c is assumedfor all loading modes. Note that for the non-localLaplacian term to be effective, the mesh size mustbe smaller than the non-local length c.
We performed a convergence analysis of themesh-adaptive finite element model by evaluatingthe maximum value of the non-local equivalentstress ζ̄max for a crack under mode I loading. Themaximum non-local equivalent stress ζ̄max obtainedfrom the analysis for different values of a generalconvergence of the refinement index are indicatedin Table 2. The results show that the mesh-adaptivealgorithm is stable and convergent.
The analysis was performed under both plane-stress and plane-strain conditions. Obviously, un-
Table 3 Values of z parameters for c assessments froma0 intrinsic parameters (2α = 0◦, RD = 0.3 mm, maximumnumber of iteration 40, refinement index 1 × 10−5, maxi-mum number of elements 600,000)
Local equivalent stress Stress type zc = zac
Max. principal Plane stress 0.545Von Mises Plane stress 0.456Tresca Plane stress 0.545Max. principal Plane strain 0.545Von Mises Plane strain 0.224Tresca Plane strain 0.267
der mode I loading, the maximum principal stressdefinition of the equivalent stress for both plane-stress and plane-strain conditions, and the Trescaequivalent stress definition under plane-stressconditions, give the same values as the maximumnon-local equivalent stress ζ̄max.
Therefore, for development of a failure crite-rion, only four combinations of equivalent stressscalar and stress condition give different results:
(a) maximum principal stress and a plane-stressstate;
(b) Von Mises equivalent stress and a plane-stressstate;
(c) Von Mises equivalent stress and a plane-strainstate;
(d) Tresca equivalent stress and plane-strain state.
Table 3 reports the z values for different equiva-lent stress choices, assuming a value of refinementindex sufficiently low for the purpose of this inves-tigation.
Note that in non-local and implicit gradientmodels that appeared so far in the technical lit-erature the characteristic length c is usually chosenon the basis of its relationship with the character-istic length that is related to the weight function.Since it has been shown that implicit gradient for-mulation given by Eq. (10) does not depend onthe weight function (assumed that it is even), thanin the present analysis, the non-local length c isrelated, through an identification procedure, to themacroscopic static properties of the material, suchas the fracture toughness and the ultimate tensilestrength.
7 Comparison between numericaland experimental results
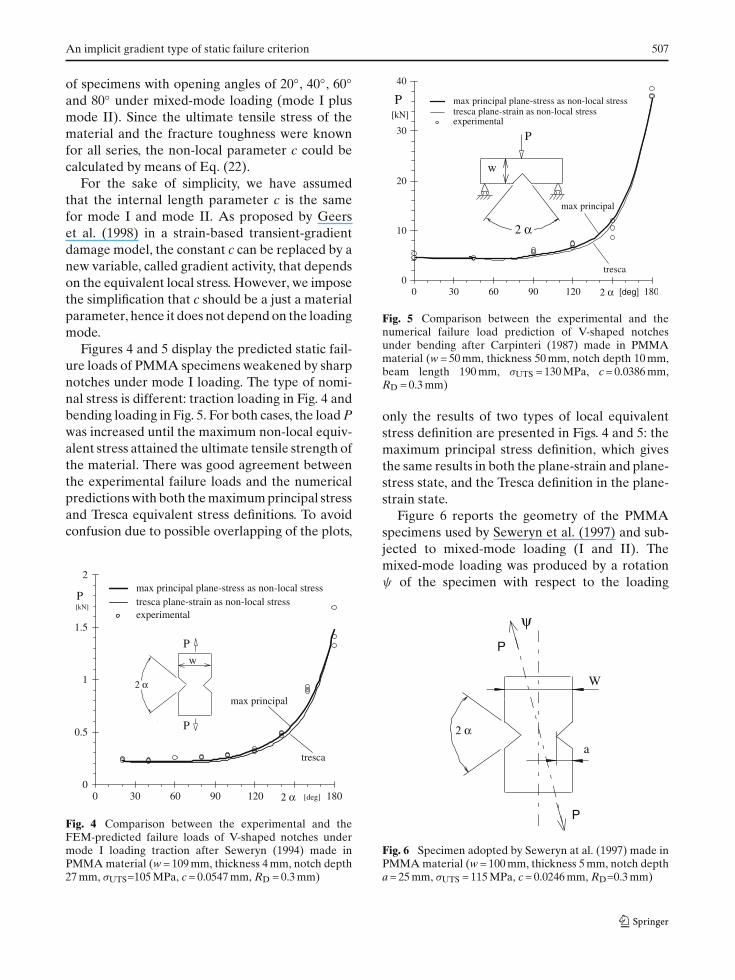
To check the static failure load predictions ofEq. (21), we analyzed experimental results forPMMA specimens with brittle behavior. Six setsof experimental data reported by different authorswere considered. Carpinteri (1987) and Seweryn(1994) analyzed the behavior of PMMA specimensunder mode I loading with lateral V-notchs char-acterized by an opening angle 2α ranging from0◦ to 180◦ and subjected to bending and traction.Instead, Seweryn et al. (1997) considered four types
An implicit gradient type of static failure criterion 507
of specimens with opening angles of 20◦, 40◦, 60◦and 80◦ under mixed-mode loading (mode I plusmode II). Since the ultimate tensile stress of thematerial and the fracture toughness were knownfor all series, the non-local parameter c could becalculated by means of Eq. (22).
For the sake of simplicity, we have assumedthat the internal length parameter c is the samefor mode I and mode II. As proposed by Geerset al. (1998) in a strain-based transient-gradientdamage model, the constant c can be replaced by anew variable, called gradient activity, that dependson the equivalent local stress. However, we imposethe simplification that c should be a just a materialparameter, hence it does not depend on the loadingmode.
Figures 4 and 5 display the predicted static fail-ure loads of PMMA specimens weakened by sharpnotches under mode I loading. The type of nomi-nal stress is different: traction loading in Fig. 4 andbending loading in Fig. 5. For both cases, the load Pwas increased until the maximum non-local equiv-alent stress attained the ultimate tensile strength ofthe material. There was good agreement betweenthe experimental failure loads and the numericalpredictions with both the maximum principal stressand Tresca equivalent stress definitions. To avoidconfusion due to possible overlapping of the plots,
P
2 α [deg]
max principal plane-stress as non-local stress
experimental
2 α
0
0.5
1
1.5
2
0 30 60 90 120 180
tresca plane-strain as non-local stress[kN]
P
P
w
max principal
tresca
Fig. 4 Comparison between the experimental and theFEM-predicted failure loads of V-shaped notches undermode I loading traction after Seweryn (1994) made inPMMA material (w = 109 mm, thickness 4 mm, notch depth27 mm, σUTS=105 MPa, c = 0.0547 mm, RD = 0.3 mm)
2 α [deg]0
10
20
30
40
0 30 60 90 120 180
P max principal plane-stress as non-local stress
experimentaltresca plane-strain as non-local stress[kN]
2 α
P
w
max principal
tresca
Fig. 5 Comparison between the experimental and thenumerical failure load prediction of V-shaped notchesunder bending after Carpinteri (1987) made in PMMAmaterial (w = 50 mm, thickness 50 mm, notch depth 10 mm,beam length 190 mm, σUTS = 130 MPa, c = 0.0386 mm,RD = 0.3 mm)
only the results of two types of local equivalentstress definition are presented in Figs. 4 and 5: themaximum principal stress definition, which givesthe same results in both the plane-strain and plane-stress state, and the Tresca definition in the plane-strain state.
Figure 6 reports the geometry of the PMMAspecimens used by Seweryn et al. (1997) and sub-jected to mixed-mode loading (I and II). Themixed-mode loading was produced by a rotationψ of the specimen with respect to the loading
W
a
P
2 α
ψ
P
Fig. 6 Specimen adopted by Seweryn at al. (1997) made inPMMA material (w = 100 mm, thickness 5 mm, notch deptha = 25 mm, σUTS = 115 MPa, c = 0.0246 mm, RD=0.3 mm)
508 R. Tovo et al.
direction (the same N-SIF values given by Sewe-ryn et al. 1997 were also adopted here, accordingto Gross and Mendelson’s definition 1972).
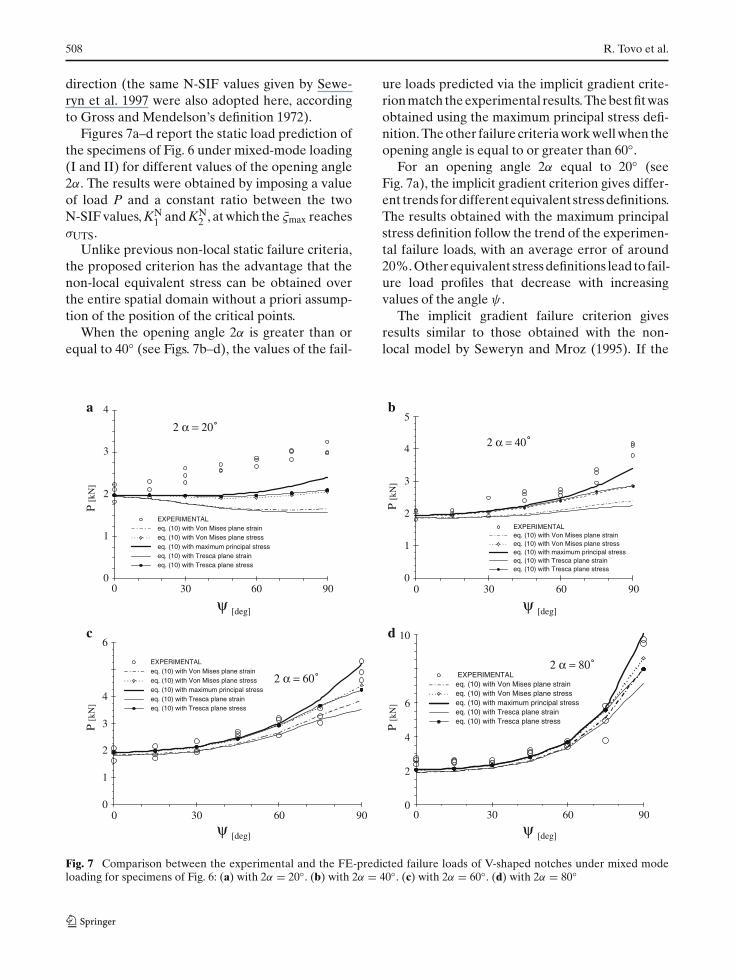
Figures 7a–d report the static load prediction ofthe specimens of Fig. 6 under mixed-mode loading(I and II) for different values of the opening angle2α. The results were obtained by imposing a valueof load P and a constant ratio between the twoN-SIF values, KN
1 and KN2 , at which the ς̄max reaches
σUTS.Unlike previous non-local static failure criteria,
the proposed criterion has the advantage that thenon-local equivalent stress can be obtained overthe entire spatial domain without a priori assump-tion of the position of the critical points.
When the opening angle 2α is greater than orequal to 40◦ (see Figs. 7b–d), the values of the fail-
ure loads predicted via the implicit gradient crite-rion match the experimental results. The best fit wasobtained using the maximum principal stress defi-nition. The other failure criteria work well when theopening angle is equal to or greater than 60◦.
For an opening angle 2α equal to 20◦ (seeFig. 7a), the implicit gradient criterion gives differ-ent trends for different equivalent stress definitions.The results obtained with the maximum principalstress definition follow the trend of the experimen-tal failure loads, with an average error of around20%. Other equivalent stress definitions lead to fail-ure load profiles that decrease with increasingvalues of the angle ψ .
The implicit gradient failure criterion givesresults similar to those obtained with the non-local model by Seweryn and Mroz (1995). If the
P [k
N]
P [k
N]
P [k
N]
P [k
N]
a2 α = 20˚
0
1
2
3
4
0 30 60 90
EXPERIMENTALeq. (10) with Von Mises plane straineq. (10) with Von Mises plane stresseq. (10) with maximum principal stresseq. (10) with Tresca plane straineq. (10) with Tresca plane stress
b
2 α = 40˚
EXPERIMENTALeq. (10) with Von Mises plane straineq. (10) with Von Mises plane stresseq. (10) with maximum principal stresseq. (10) with Tresca plane straineq. (10) with Tresca plane stress
0
1
2
3
4
5
0 30 60 90
c
ψ [deg] ψ [deg]
ψ [deg]ψ [deg]
2 α = 60˚EXPERIMENTALeq. (10) with Von Mises plane straineq. (10) with Von Mises plane stresseq. (10) with maximum principal stresseq. (10) with Tresca plane straineq. (10) with Tresca plane stress
0
1
2
3
4
6
0 30 60 90
d
EXPERIMENTALeq. (10) with Von Mises plane straineq. (10) with Von Mises plane stresseq. (10) with maximum principal stresseq. (10) with Tresca plane straineq. (10) with Tresca plane stress
2 α = 80˚
0
2
4
6
10
0 30 60 90
Fig. 7 Comparison between the experimental and the FE-predicted failure loads of V-shaped notches under mixed modeloading for specimens of Fig. 6: (a) with 2α = 20◦. (b) with 2α = 40◦. (c) with 2α = 60◦. (d) with 2α = 80◦

An implicit gradient type of static failure criterion 509
line method is used (see Seweryn 1994), the accu-racy in predicting the failure load is comparableto that obtained by adopting the implicit gradientapproach proposed in this paper. Furthermore, thegeneralization of the line method proposed bySeweryn and Mroz for mixed mode loading (modeI plus mode II) provides errors of the same orderas the ones obtained when the data correspondingto Figs. 7a–d are used (see Seweryn and Mroz 1995;Seweryn et al. 1997). However, the main advantageof the implicit gradient approach over the existingmethods is that, unlike other non-local criteria, itdoes not depend on the knowledge of the criticalpoint and on the of crack propagation direction.
In conclusion, the average errors for theentire set of loading conditions is generally lessthan 10% for the maximum principal stress defini-tion and around 15% for the other equivalent stresscriteria.
8 Conclusions
In this paper, a non-local equivalent stress criterionwas obtained with an implicit gradient approach inthe case of linear elastic material behavior.Owing to the non-local character of the criterion,the drawback of stress singularity at a crack tippredicted by the analytical solution is overcome.Moreover, while current non-local engineeringapproaches evaluate an average stress along a lineor over a prefixed area, we obtained a non-localequivalent stress over the entire spatial domainwithout a priori assumption of the position anddirection of propagation of the critical points. Inaddition, the gradient criterion makes it possibleto check the static failure load condition over thewhole geometric domain.
One original aspect of the present approachis that, here, the non-local length c is identifiedthrough a univocally determined and physicallymotivated procedure as a function of the staticfailure parameters of the material (fracture tough-ness and ultimate tensile strength). Therefore, thecharacteristic length c is independent on the spe-cific choice of weight function within the startingintegral formulation assumptions. Using a finiteelement mesh-adaptive toolbox, we obtained thestatic failure loads of V-shaped specimens for
different loading conditions. There was very goodagreement between the experimental values andnumerical predictions under mode I loading. Inthe case of mixed-mode loading (mode I plus modeII), the scatter between experimental and numer-ical failure load increased as the opening angledecreased. In particular, we found that when theopening angle was greater than or equal to 40◦,the prediction obtained with the implicit gradientcriterion was acceptable and comparable with thatresulting from other criteria reported in the litera-ture.
Appendix
Let us consider a one-dimensional domain withdimension RD greater than the material parame-ter c (i.e. RD/c >> 0). In order to verify that thevalue of the maximum non-local equivalent stressζ̄max is independent on RD, the generic bn coeffi-cient can be rewritten in the implicit form:
bn = 2√
2K0R32D
∫ √2n
0 cos(πx2
2
)dx
c2π2n52 + R2
D√
n(24)
If in Eq. (24) the cosine Fresnel integral is solvedby means of a power series, Eq. (24) results inEq. (15).
By remembering that the Fresnel integral tendsto 0.5 when x tends to infinity, then for large valueof n, Eq. (24) can be approximated as:
bn ≈ A1K0R
32D
c2π2n52 + R2
D√
n(25)
where A1 is a constant.Now, the sum (18) can be approximated by an
integral function:
ζ̄max(x = 0, RD) =∞∑
n=0
bn(RD)
≈ b0 + A1
∞∫
1
K0R32D
c2π2x52 + R2
D√
xdx
(26)
510 R. Tovo et al.
DR
[MPa]
ζ maxc = 0.2 mm
C
100
150
200
250
300
350
450
1 10 100 1000
c = 1 mm
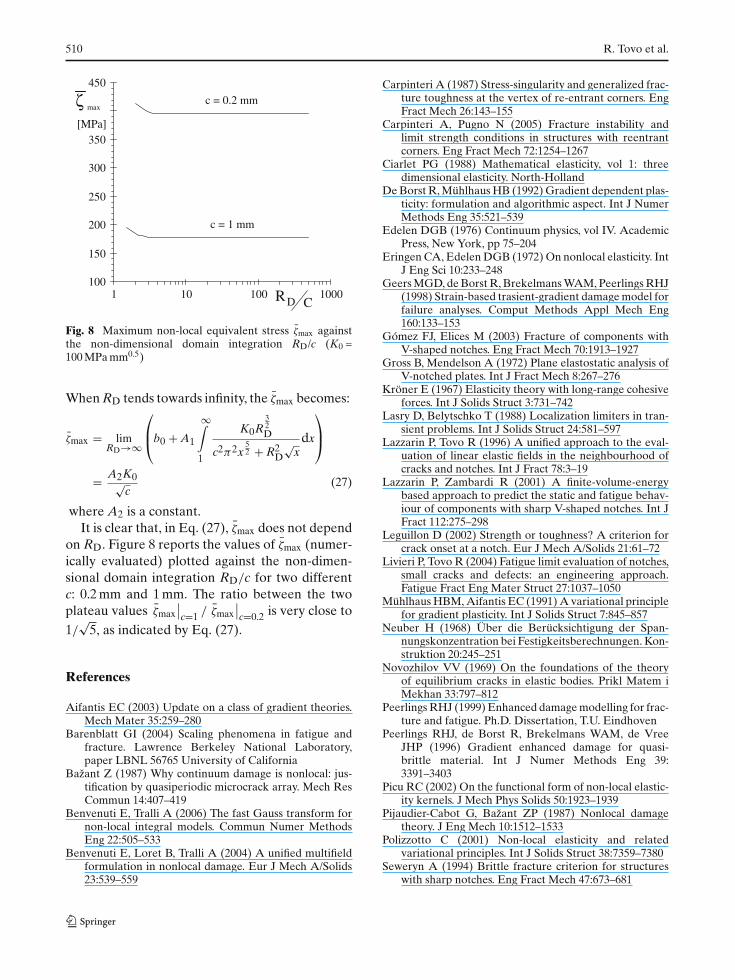
Fig. 8 Maximum non-local equivalent stress ζ̄max againstthe non-dimensional domain integration RD/c (K0 =100 MPa mm0.5)
When RD tends towards infinity, the ζ̄max becomes:
ζ̄max = limRD→∞
⎛⎜⎝b0 + A1
∞∫
1
K0R32D
c2π2x52 + R2
D√
xdx
⎞⎟⎠
= A2K0√c
(27)
where A2 is a constant.It is clear that, in Eq. (27), ζ̄max does not depend
on RD. Figure 8 reports the values of ζ̄max (numer-ically evaluated) plotted against the non-dimen-sional domain integration RD/c for two differentc: 0.2 mm and 1 mm. The ratio between the twoplateau values ζ̄max
∣∣c=1 / ζ̄max
∣∣c=0.2 is very close to
1/√
5, as indicated by Eq. (27).
References
Aifantis EC (2003) Update on a class of gradient theories.Mech Mater 35:259–280
Barenblatt GI (2004) Scaling phenomena in fatigue andfracture. Lawrence Berkeley National Laboratory,paper LBNL 56765 University of California
Bažant Z (1987) Why continuum damage is nonlocal: jus-tification by quasiperiodic microcrack array. Mech ResCommun 14:407–419
Benvenuti E, Tralli A (2006) The fast Gauss transform fornon-local integral models. Commun Numer MethodsEng 22:505–533
Benvenuti E, Loret B, Tralli A (2004) A unified multifieldformulation in nonlocal damage. Eur J Mech A/Solids23:539–559
Carpinteri A (1987) Stress-singularity and generalized frac-ture toughness at the vertex of re-entrant corners. EngFract Mech 26:143–155
Carpinteri A, Pugno N (2005) Fracture instability andlimit strength conditions in structures with reentrantcorners. Eng Fract Mech 72:1254–1267
Ciarlet PG (1988) Mathematical elasticity, vol 1: threedimensional elasticity. North-Holland
De Borst R, Mühlhaus HB (1992) Gradient dependent plas-ticity: formulation and algorithmic aspect. Int J NumerMethods Eng 35:521–539
Edelen DGB (1976) Continuum physics, vol IV. AcademicPress, New York, pp 75–204
Eringen CA, Edelen DGB (1972) On nonlocal elasticity. IntJ Eng Sci 10:233–248
Geers MGD, de Borst R, Brekelmans WAM, Peerlings RHJ(1998) Strain-based trasient-gradient damage model forfailure analyses. Comput Methods Appl Mech Eng160:133–153
Gómez FJ, Elices M (2003) Fracture of components withV-shaped notches. Eng Fract Mech 70:1913–1927
Gross B, Mendelson A (1972) Plane elastostatic analysis ofV-notched plates. Int J Fract Mech 8:267–276
Kröner E (1967) Elasticity theory with long-range cohesiveforces. Int J Solids Struct 3:731–742
Lasry D, Belytschko T (1988) Localization limiters in tran-sient problems. Int J Solids Struct 24:581–597
Lazzarin P, Tovo R (1996) A unified approach to the eval-uation of linear elastic fields in the neighbourhood ofcracks and notches. Int J Fract 78:3–19
Lazzarin P, Zambardi R (2001) A finite-volume-energybased approach to predict the static and fatigue behav-iour of components with sharp V-shaped notches. Int JFract 112:275–298
Leguillon D (2002) Strength or toughness? A criterion forcrack onset at a notch. Eur J Mech A/Solids 21:61–72
Livieri P, Tovo R (2004) Fatigue limit evaluation of notches,small cracks and defects: an engineering approach.Fatigue Fract Eng Mater Struct 27:1037–1050
Mühlhaus HBM, Aifantis EC (1991) A variational principlefor gradient plasticity. Int J Solids Struct 7:845–857
Neuber H (1968) Über die Berücksichtigung der Span-nungskonzentration bei Festigkeitsberechnungen. Kon-struktion 20:245–251
Novozhilov VV (1969) On the foundations of the theoryof equilibrium cracks in elastic bodies. Prikl Matem iMekhan 33:797–812
Peerlings RHJ (1999) Enhanced damage modelling for frac-ture and fatigue. Ph.D. Dissertation, T.U. Eindhoven
Peerlings RHJ, de Borst R, Brekelmans WAM, de VreeJHP (1996) Gradient enhanced damage for quasi-brittle material. Int J Numer Methods Eng 39:3391–3403
Picu RC (2002) On the functional form of non-local elastic-ity kernels. J Mech Phys Solids 50:1923–1939
Pijaudier-Cabot G, Bažant ZP (1987) Nonlocal damagetheory. J Eng Mech 10:1512–1533
Polizzotto C (2001) Non-local elasticity and relatedvariational principles. Int J Solids Struct 38:7359–7380
Seweryn A (1994) Brittle fracture criterion for structureswith sharp notches. Eng Fract Mech 47:673–681

An implicit gradient type of static failure criterion 511
Seweryn A, Mroz Z (1995) A non-local stress failure con-dition for structural elements under multiaxial loading.Eng Fract Mech 51:955–973
Seweryn A, Poskrobko S, Mroz Z (1997) Brittle fracture inplane elements with sharp notches under mixed-modeloading. ASCE J Eng Mech 123:535–543
Taylor D (1999) Geometric effects in fatigue: a unifyingtheoretical model. Int J Fatigue 21:413–420
Williams ML (1952) Stress singularities resulting fromvarious boundary conditions in angular corners ofplates in extension. ASME J Appl Mech 19:526–528




















