Efficient and highly available peer discovery: A case for independent trackers and gossiping
A peer-to-peer approach to web service discovery
10
A Peer-to-Peer Approach to Web Service Discovery Cristina Schmidt and Manish Parashar The Applied Software Systems Laboratory Department of Electrical and Computer Engineering, Rutgers University 94 BretRoad, Piscataway, NJ 08854, Tel: (732) 445-5388, Fax: (732) 445-0593 cristins,parashar @caip.rutgers.edu Abstract Web Services has emerged as a dominant paradigm for constructing and composing distributed business applica- tions and enabling entreprise-wide interoperability. A critical factor to the overall utility of Web Services is a scalable, flexible and robust discover mechanism. This paper presents a peer-to-peer (P2P) indexing system and associated P2P storage that supports large-scale, decentralized, real-time search capabilities. The presented system supports complex queries containing partial keywords and wildcards. Furthermore, it guarantees that all existing data elements match- ing a query will be found with bounded costs in terms of number of messages and number of nodes involved. The key inovation is a dimension reducing indexing scheme that effectively maps the multidimensional information space to physical peers. The design and an experimental evaluation of the system are presented. 1 Introduction Web Services are emerging as a dominant paradigm for distributed computing in industry as well as academia (e.g. the Open Grid Services Architecture standard for the “Web Services Grid” [15]). Web Services are enterprise applications that exchange data, share tasks, and automate processes over the Internet. They are designed to enable applications to communicate directly and exchange data, regardless of language, platform and location. A typical Web Service architecture consists of three entities: service providers that create and publish Web Services, service brokers that maintain a registry of published services and support their discovery, and service requesters that search the service broker’s registries. Web Service registries store information describing the Web Services produced by the service providers, and can be queried by the service requesters. These registries are critical to the utlimate utility of the Web Services and must support scalable, flexible and robust discovery mechanisms. Registries have traditionally had a centralized architecture (e.g. UDDI [16]) consisting of mutiple repositories that synchronize periodically. However as the number of Web Services grows and become more dynamic, such a centralized approach quickly becomes impractical. As a result, there are a number of decentralized approaches that have been proposed. These systems (e.g. [9, 10]) build on P2P technologies and ontologies to publish and search for Web Services descriptions. In this paper we present a methodology for building dynamic, scalable, decentralized registries with real-time and flexible serach capabilites, to support Web Service discovery. Web Services can be described in differentways, according to existing standards (e.g. WSDL, ontologies), and can be caracterized by a set of keywords. We use these keywords to index the Web Service description files, and store the index at peers in the P2P system using a distributed hash table (DHT) approach. The proposed P2P system supports complex queries containing partial keywords and wildcards. Furthermore, it guarantees that all existing data elements matching a query will be found with bounded costs in terms of number of messages and number of nodes involved. The key innovation of our approach is a dimension reducing indexing scheme that effectively maps the multidimensional information space describing the Web Service to a one dimensional index space that is mapped on to the physical peers. The overall architecture of the presented system is a DHT, similar to typical data lookup systems [6, 11]. The key difference is in the way we map data elements 1 to the index space. In existing systems, this is done using consistent The work presented in this paper was supported in part by the National Science Foundation via grant numbers ACI 9984357 (CAREERS), EIA 0103674 (NGS) and EIA-0120934 (ITR), and by DOE ASCI/ASAP (Caltech) via grant number PC295251. 1 We will use the term ’data element’ to represent a piece of information that is indexed and can be discovered. A data element can be an XML file describing a Web Service. 1
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of A peer-to-peer approach to web service discovery

A Peer-to-Peer Approach to Web Service Discovery�
Cristina Schmidt and Manish ParasharThe Applied Software Systems Laboratory
Department of Electrical and Computer Engineering, Rutgers University
94 Bret Road, Piscataway, NJ 08854, Tel: (732) 445-5388, Fax: (732) 445-0593�cristins,parashar � @caip.rutgers.edu
Abstract
Web Services has emerged as a dominant paradigm for constructing and composing distributed business applica-tions and enabling entreprise-wide interoperability. A critical factor to the overall utility of Web Services is a scalable,flexible and robust discover mechanism. This paper presents a peer-to-peer (P2P) indexing system and associated P2Pstorage that supports large-scale, decentralized, real-time search capabilities. The presented system supports complexqueries containing partial keywords and wildcards. Furthermore, it guarantees that all existing data elements match-ing a query will be found with bounded costs in terms of number of messages and number of nodes involved. Thekey inovation is a dimension reducing indexing scheme that effectively maps the multidimensional information spaceto physical peers. The design and an experimental evaluation of the system are presented.
1 Introduction
Web Services are emerging as a dominant paradigm for distributed computing in industry as well as academia (e.g. theOpen Grid Services Architecture standard for the “Web Services Grid” [15]). Web Services are enterprise applicationsthat exchange data, share tasks, and automate processes over the Internet. They are designed to enable applicationsto communicate directly and exchange data, regardless of language, platform and location. A typical Web Servicearchitecture consists of three entities: service providers that create and publish Web Services, service brokers thatmaintain a registry of published services and support their discovery, and service requesters that search the servicebroker’s registries.
Web Service registries store information describing the Web Services produced by the service providers, and canbe queried by the service requesters. These registries are critical to the utlimate utility of the Web Services and mustsupport scalable, flexible and robust discovery mechanisms. Registries have traditionally had a centralized architecture(e.g. UDDI [16]) consisting of mutiple repositories that synchronize periodically. However as the number of WebServices grows and become more dynamic, such a centralized approach quickly becomes impractical. As a result,there are a number of decentralized approaches that have been proposed. These systems (e.g. [9, 10]) build on P2Ptechnologies and ontologies to publish and search for Web Services descriptions.
In this paper we present a methodology for building dynamic, scalable, decentralized registries with real-timeand flexible serach capabilites, to support Web Service discovery. Web Services can be described in different ways,according to existing standards (e.g. WSDL, ontologies), and can be caracterized by a set of keywords. We use thesekeywords to index the Web Service description files, and store the index at peers in the P2P system using a distributedhash table (DHT) approach. The proposed P2P system supports complex queries containing partial keywords andwildcards. Furthermore, it guarantees that all existing data elements matching a query will be found with bounded costsin terms of number of messages and number of nodes involved. The key innovation of our approach is a dimensionreducing indexing scheme that effectively maps the multidimensional information space describing the Web Serviceto a one dimensional index space that is mapped on to the physical peers.
The overall architecture of the presented system is a DHT, similar to typical data lookup systems [6, 11]. The keydifference is in the way we map data elements1 to the index space. In existing systems, this is done using consistent�
The work presented in this paper was supported in part by the National Science Foundation via grant numbers ACI 9984357 (CAREERS), EIA0103674 (NGS) and EIA-0120934 (ITR), and by DOE ASCI/ASAP (Caltech) via grant number PC295251.
1We will use the term ’data element’ to represent a piece of information that is indexed and can be discovered. A data element can be an XMLfile describing a Web Service.
1

hashing to uniformly map data element identifiers to indices. As a result, data elements are randomly distributed acrosspeers without any notion of locality. Our approach attempts to preserve locality while mapping the data elements tothe index space. In our system, all data elements are described using a sequence of keywords. These keywords form amultidimensional keyword space where the keywords are the coordinates and the data elements are points in the space.Two data elements are “local” if their keywords are lexicographically close or they have common keywords. Thus,we map documents that are local in this multi-dimensional index space to indices that are local in the 1-dimensionalindex space, which are then mapped to the same node or to nodes that are close together in the overlay network.This mapping is derived from a locality-preserving mapping called Space Filling Curves (SFC) [1, 8]. In the currentimplementation, we use the Hilbert SFC [1, 8] for the mapping, and Chord [11] for the overlay network topology.
Note that locality is not preserved in an absolute sense in this keyword space; documents that match the samequery (i.e. share a keyword) can be mapped to disjoint fragments of the index space, called clusters. These clustersmay in turn be mapped to multiple nodes so a query will have to be efficiently routed to these nodes. We present anoptimization based on successive refinement and pruning of queries that significantly reduces the number of nodesqueried.
Unlike the consistent hashing mechanisms, SFC does not necessarily result in uniform distribution of data elementsin the index space - certain keywords may be more popular and hence the associated index subspace will be moredensely populated. As a result, when the index space is mapped to nodes load may not be balanced. We present a suiteof relatively inexpensive load-balancing optimizations and experimentally demonstrate that they successfully reducethe amount of load imbalance.
The rest of this paper is structured as follows. Section 2 compares the presented system to related work. Section3 describes the architecture and operation of the presented P2P indexing system. Section 4 presents an experimentalevaluation of the system and Section 5 presents our conclusions.
2 Related Work
Currents approaches to Web service discovery can be broadly classified as centralized or decentralized. The centralizedapproach include UDDI [16], where central registries are used to store Web Service descriptions. The distributedapproaches are based on P2P systems. Existing P2P systems developed for Web Service discovery include (1) theHypercube ontology-based P2P system [9] that focusses on the discovery of Web Services in the Semantic Web, and(2) the Speed-R [10] system that makes use of ontologies to organize web service discovery registries and addresesscalabilty of the discovery process.
The system presented in this paper enhances the Web Service discovery with a flexible, P2P-based keyword search.In this system, Web Services (description files) are indexed based on the keywords describing them. The P2P indexingsystem used is based on the Chord [11] data lookup protocol. Chord [11] and other lookup protocols (CAN [6], Pastry[7] and Tapestry [13]) offer guarantees, but lack flexible search capabilities - i.e. they only support lookup using aunique identifier. Our system enhances the lookup protocol with the flexibility of keyword searches (allowing partialkeywords and wildcards) while offering the same guarantees. The underlying overlay network in our system has to bestructured, unlike Gnutella-like systems [14] which have unstructured overlays. These systems however do not offerguarantees and do not scale well.
3 System Architecture and Design
The architecture of the presented P2P indexing system is similar to data-lookup systems [11, 6], and essentiallyimplements an Internet-scale distributed hash table. The architecture consists of the following components: (1) alocality preserving mapping that maps data elements to indices, (2) an overlay network topology, (3) a mappingfrom indices to nodes in the overlay network, (4) load balancing mechanisms, and (5) a query engine for routingand efficiently resolving keyword queries using successive refinements and pruning. These components are describedbelow.
3.1 Constructing an Index Space: Locality Preserving Mapping
A key component of a data-lookup system is defining the index space and deterministically mapping data elements tothis index space. To support complex keyword searches in a data lookup system, we associate each data element witha sequence of keywords and define a mapping that preserves keyword locality.
2
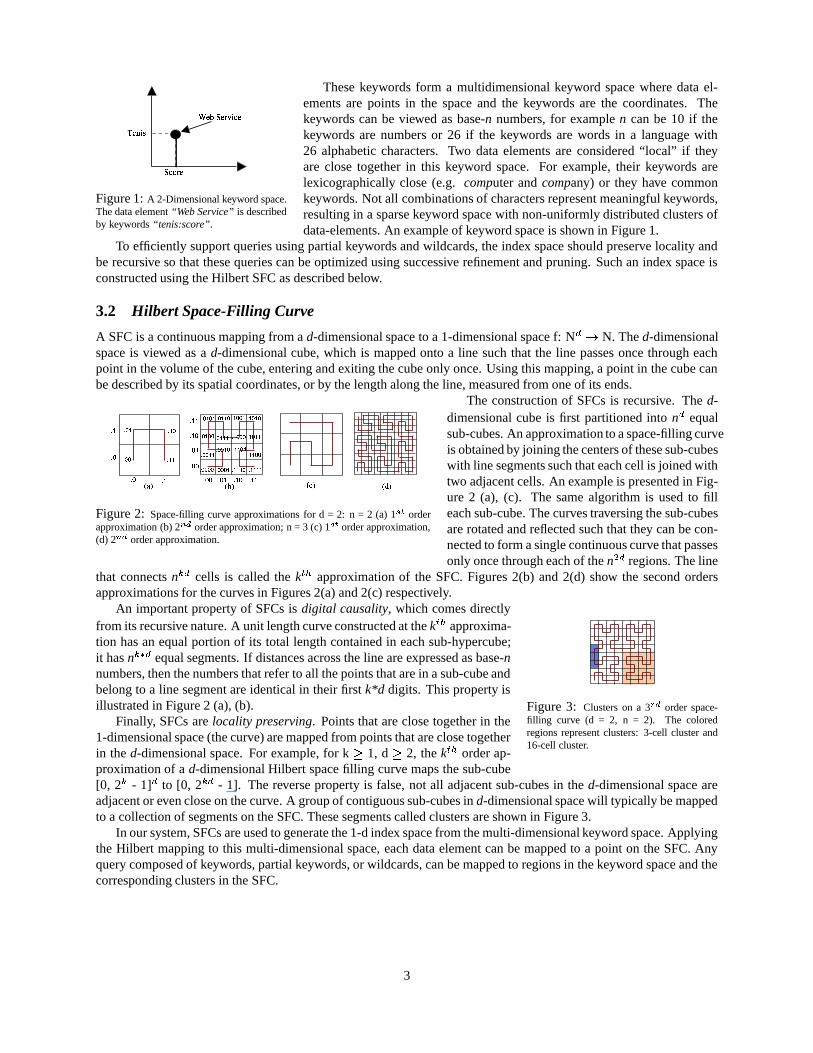
These keywords form a multidimensional keyword space where data el-
����� �� �� �� � � �������� ��� ���
Figure 1: A 2-Dimensional keyword space.The data element “Web Service” is describedby keywords “tenis:score”.
ements are points in the space and the keywords are the coordinates. Thekeywords can be viewed as base-n numbers, for example n can be 10 if thekeywords are numbers or 26 if the keywords are words in a language with26 alphabetic characters. Two data elements are considered “local” if theyare close together in this keyword space. For example, their keywords arelexicographically close (e.g. computer and company) or they have commonkeywords. Not all combinations of characters represent meaningful keywords,resulting in a sparse keyword space with non-uniformly distributed clusters ofdata-elements. An example of keyword space is shown in Figure 1.
To efficiently support queries using partial keywords and wildcards, the index space should preserve locality andbe recursive so that these queries can be optimized using successive refinement and pruning. Such an index space isconstructed using the Hilbert SFC as described below.
3.2 Hilbert Space-Filling Curve
A SFC is a continuous mapping from a d-dimensional space to a 1-dimensional space f: N ��� N. The d-dimensionalspace is viewed as a d-dimensional cube, which is mapped onto a line such that the line passes once through eachpoint in the volume of the cube, entering and exiting the cube only once. Using this mapping, a point in the cube canbe described by its spatial coordinates, or by the length along the line, measured from one of its ends.
The construction of SFCs is recursive. The d-
� ���� ��� � � �
� � �� ��
� �� � ! � "�� � � ���
� � �!� �� � ��� �� ��� � �� ��� � �� ! � #� � � � �!�� � �����
� ��� �!� � ��� � �� � � ���� � �����
� ��� � �� � ��� �$ % %�& &
� ��� ���
' (�) ' *�) ' +�) ' ,�)
� ����� � � � � �!�� ��� � �
Figure 2: Space-filling curve approximations for d = 2: n = 2 (a) 1 -/. orderapproximation (b) 2 021 order approximation; n = 3 (c) 1 -�. order approximation,(d) 2 031 order approximation.
dimensional cube is first partitioned into n � equalsub-cubes. An approximation to a space-filling curveis obtained by joining the centers of these sub-cubeswith line segments such that each cell is joined withtwo adjacent cells. An example is presented in Fig-ure 2 (a), (c). The same algorithm is used to filleach sub-cube. The curves traversing the sub-cubesare rotated and reflected such that they can be con-nected to form a single continuous curve that passesonly once through each of the n 45� regions. The line
that connects n 6 � cells is called the k 7�8 approximation of the SFC. Figures 2(b) and 2(d) show the second ordersapproximations for the curves in Figures 2(a) and 2(c) respectively.
An important property of SFCs is digital causality, which comes directly
Figure 3: Clusters on a 3 9:1 order space-filling curve (d = 2, n = 2). The coloredregions represent clusters: 3-cell cluster and16-cell cluster.
from its recursive nature. A unit length curve constructed at the k 7�8 approxima-tion has an equal portion of its total length contained in each sub-hypercube;it has n 62; � equal segments. If distances across the line are expressed as base-nnumbers, then the numbers that refer to all the points that are in a sub-cube andbelong to a line segment are identical in their first k*d digits. This property isillustrated in Figure 2 (a), (b).
Finally, SFCs are locality preserving. Points that are close together in the1-dimensional space (the curve) are mapped from points that are close togetherin the d-dimensional space. For example, for k < 1, d < 2, the k 7�8 order ap-proximation of a d-dimensional Hilbert space filling curve maps the sub-cube[0, 2 6 - 1] � to [0, 2 6 � - 1]. The reverse property is false, not all adjacent sub-cubes in the d-dimensional space areadjacent or even close on the curve. A group of contiguous sub-cubes in d-dimensional space will typically be mappedto a collection of segments on the SFC. These segments called clusters are shown in Figure 3.
In our system, SFCs are used to generate the 1-d index space from the multi-dimensional keyword space. Applyingthe Hilbert mapping to this multi-dimensional space, each data element can be mapped to a point on the SFC. Anyquery composed of keywords, partial keywords, or wildcards, can be mapped to regions in the keyword space and thecorresponding clusters in the SFC.
3

3.3 Mapping Indices to Peers and the Overlay Network
The next step consists of mapping the 1-dimensional index space onto an overlay network of peers. This step is similarto existing data-lookup systems. In our current implementation we use the Chord [11] overlay network topology. InChord each node has a unique identifier ranging from 0 to 2 = -1. These identifiers are arranged as a circle modulo 2 = .Each node maintains information about (at most) m neighbors, called fingers, in a finger table. The i 7�8 finger nodeis the first node that succeeds the current node by at least 2 >�?A@ , where 1 B i B m. The finger table is used for efficientrouting.
In our implementation, node identifiers are generated randomly. Each data0
5
8
10
11
Figure 4: Example of the overlay net-work. Each node stores the keys that mapto the segment of the curve between itselfand the predecessor node.
element is mapped, based on its SFC-based index or key, to the first node whoseidentifier is equal to or follows the key in the identifier space. The node is calledthe successor of the key. Consider the sample overlay network with 5 nodes andan identifier space from 0 to 16, as shown in Figure 4. In this example, dataelements with keys 6, 7, and 8, will map to node 8, the successor of these keys.The management of node joins, departures, and failures is described below.
Node Joins: The joining node has to know about at least one node already inthe network. It randomly chooses an identifier from the identifier space and sends ajoin message with this identifier to the known node. This message is routed acrossthe overlay network to the successor of the new node (based on the new identifier).
The joining node is inserted into the overlay network at this point and takes a part of the successor node’s load. Thecost for joining is O(log 4 4 N) messages2.
Node Departures: The finger tables of the nodes that have entries pointing to the departing node have to beupdated. The cost is O(log 4 4 N) messages.
Node Failures: When a node fails, the finger tables that have entries pointing to it will be incorrect. Each nodeperiodically runs a stabilization algorithm where it chooses a random entry in its finger table, checks for its state, andupdates it if required.
Data Lookup: Nodes are efficiently located based on their content. Data lookup takes O(log 4 N) hops. In oursystem partial queries will typically require interrogating more than one node, as the desired information may bestored at multiple nodes in the system.
3.4 The Query Engine
The primary function of the query engine is to efficiently process user queries. As described above, data elements inthe system are associated with a sequence of one or more keywords (up to d keywords, where d is the dimensionalityof the keyword space). The queries can consist of a combination of keywords, partial keywords, or wildcards. Theexpected result of a query is the complete set of data elements that match the user’s query. For example, (flight,schedule), (flight, info*), (flight, *) are all valid queries.
Query Processing: Processing a query consists of two steps: translating the keyword query to relevant clusters ofthe SFC-based index space, and querying the appropriate nodes in the overlay network for data-elements.
If the query consists of whole keywords (no wildcard) it will be mapped to at
C C CDC C�EFC�E C5C�E E"E C C�E C�E"E E C�E E E
E E EE E CE C�EE C CC E EC E CC C�EC C CG�H�I�JK�I!LG KK#K"J"I�L
Figure 5: Regions in a 2-dimensionalspace defined by the queries (000, *) and(1*, 0*).
most one point in the index space, and the node containing the result is locatedusing the network’s lookup protocol. If the query contains partial keywords and/orwildcards, the query identifies a set of points (data elements) in the keyword spacethat correspond to a set of points (indices) in the index space. In Figure 5, thequery (000, *) identifies 8 data elements, the squares in the vertical region. Theindex (curve) enters and exits the region three times, defining three segments ofthe curve or clusters (marked by different patterns). Similarly the query (1*, 0*)identifies 16 data elements, defining the square region in Figure 5. The SFC entersand exits this region once, defining one cluster.
Each cluster may contain zero, one or more data elements that match the query. Depending on its size, an indexspace cluster may be mapped to one or more adjacent nodes in the overlay network. A node may also store morethan one cluster. Once the clusters associated with a query are identified, straightforward query processing consistsof sending a query message for each cluster. A query message for a cluster is routed to the appropriate node in theoverlay network as follows. The overlay network provides us with a data lookup protocol: given an identifier for
2N is the number of nodes in the system
4
a data element, the node responsible for storing it is located. The same mechanism can be used to locate the noderesponsible for storing a cluster using a cluster identifier. The cluster identifier is constructed using SFC’s digitalcausality property. The digital causality property guarantees that all the cells that form a cluster have the same first idigits. These i digits are called the cluster’s prefix and form the first i digits of the m digit identifier. The rest of theidentifier is padded with zero.
The node that initiated the query can not know if a cluster is stored in the network or not, or if multiple clustersare stored at the same node, to make optimizations. The number of clusters can be very high, and sending a messagefor each cluster is not a scalable solution. For example, consider the query (000, *) in Figure 5, but using base-26digits and higher order approximation of the space-filling curve. The cost of sending a message for each cluster canbe prohibitive.
Query Optimization: Query processing can be made scalable using the observation that not all the clusters thatcorrespond to a query represent valid keywords as the keyword space and the clusters are typically sparsely populatedwith data elements. This is because we are using base-n numbers as coordinates along each dimension of the space andnot all the base-n numbers are valid keywords. The number of messages sent and nodes queried can be significantlyreduced by filtering out the useful clusters early. However, useful clusters cannot be identified at the node where thequery is initiated. The solution is to consider the recursive nature of the SFC and its digital causality property, andto distribute the process of cluster generation at multiple nodes in the system, the ones that might be responsible forstoring them.
Since the SFC generation is recursive, and clusters are
M M MNM M�O�M�O MQP R RQO M MQO M�O�O O M:O O O
S S SS S TS T!SS T TT!S ST!S TT T!ST T T U VWX Y�Z[ \]\
^�^[�[[!^ ^ [
X _�Z]�] ]�] [!^ \ ] \�\] \\ ]\�\
[�[�[�[ [�[�[!^[�[!^�^[!^ [�[[!^ [!^ [!^�^ [
[!^�^�^ ^ [�[�[^ [�[!^ ^ [!^ [
^ [!^�^^�^ [�[^�^ [!^
^�^�^ [ ^�^�^�^[�[!^ [
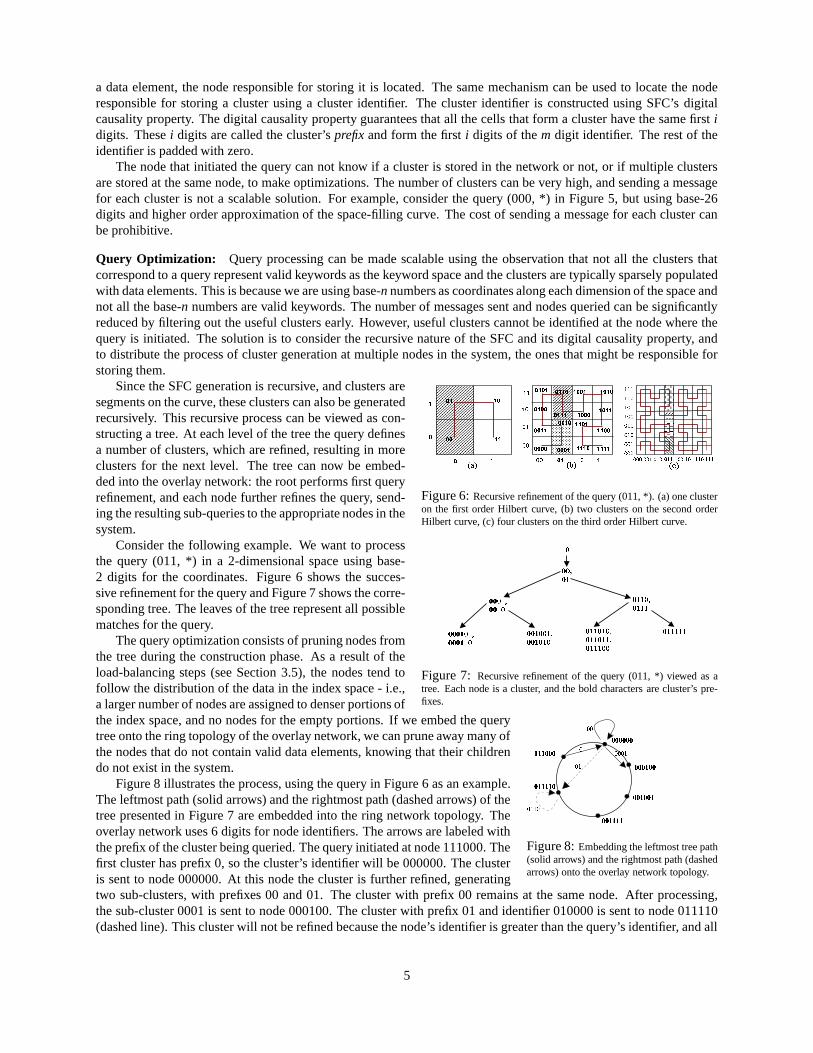
Figure 6: Recursive refinement of the query (011, *). (a) one clusteron the first order Hilbert curve, (b) two clusters on the second orderHilbert curve, (c) four clusters on the third order Hilbert curve.
segments on the curve, these clusters can also be generatedrecursively. This recursive process can be viewed as con-structing a tree. At each level of the tree the query definesa number of clusters, which are refined, resulting in moreclusters for the next level. The tree can now be embed-ded into the overlay network: the root performs first queryrefinement, and each node further refines the query, send-ing the resulting sub-queries to the appropriate nodes in thesystem.
Consider the following example. We want to process `
a#aa"bc/d�ea#aa"b�d�c a#a"b�a#c/d�ea#a"b�a/d�ca#a#c/d�ea#a/d�c
a#cfa/d
a"b#b#b�d#da#b�d�cfa#b�d#d
a"b#ba/d�c#ea"b#ba/d#d�ea"b#b#bc#cFigure 7: Recursive refinement of the query (011, *) viewed as atree. Each node is a cluster, and the bold characters are cluster’s pre-fixes.
the query (011, *) in a 2-dimensional space using base-2 digits for the coordinates. Figure 6 shows the succes-sive refinement for the query and Figure 7 shows the corre-sponding tree. The leaves of the tree represent all possiblematches for the query.
The query optimization consists of pruning nodes fromthe tree during the construction phase. As a result of theload-balancing steps (see Section 3.5), the nodes tend tofollow the distribution of the data in the index space - i.e.,a larger number of nodes are assigned to denser portions ofthe index space, and no nodes for the empty portions. If we embed the query g!g!g!g�g!g
g!g�gh�g!gg�gh�g!g�h
g!g�h!h!h!hgh!h!h�h�gh!h!h�g�g!g i
i ii�i�i�j
i�j�j ii�j
Figure 8: Embedding the leftmost tree path(solid arrows) and the rightmost path (dashedarrows) onto the overlay network topology.
tree onto the ring topology of the overlay network, we can prune away many ofthe nodes that do not contain valid data elements, knowing that their childrendo not exist in the system.
Figure 8 illustrates the process, using the query in Figure 6 as an example.The leftmost path (solid arrows) and the rightmost path (dashed arrows) of thetree presented in Figure 7 are embedded into the ring network topology. Theoverlay network uses 6 digits for node identifiers. The arrows are labeled withthe prefix of the cluster being queried. The query initiated at node 111000. Thefirst cluster has prefix 0, so the cluster’s identifier will be 000000. The clusteris sent to node 000000. At this node the cluster is further refined, generatingtwo sub-clusters, with prefixes 00 and 01. The cluster with prefix 00 remains at the same node. After processing,the sub-cluster 0001 is sent to node 000100. The cluster with prefix 01 and identifier 010000 is sent to node 011110(dashed line). This cluster will not be refined because the node’s identifier is greater than the query’s identifier, and all
5
matching data elements are stored at this node.A second query optimization is used to reduce the number of messages involved. It is based on the observation
that multiple sub-clusters of the same cluster can be mapped to the same node. To reduce the number of messages, wesort the sub-clusters in increasing order and send the first one in the network. The destination node of the sub-clusterreplies with its identifier. The sending node then aggregates all the sub-clusters associated with this identifier andsends them as a single message routed to the destination.
3.5 Balancing Load
As we mentioned earlier, the original d-dimensional keyword space is sparse and data elements form clusters in thisspace instead of being uniformly distributed in the space. As the Hilbert SFC-based mapping preserves keyword lo-cality, the index space will have the same properties. Since the nodes are uniformly distributed in the node identifierspace when the data elements are mapped to the nodes, the load will not be balanced. Additional load balancing hasto be performed. We have defined two load-balancing steps as described below.
Load Balancing at Node Join: At join, the incoming node generates several identifiers (e.g., 5 to 10) and sendsmultiple join messages using these identifiers. Nodes that are logical successors of these identifiers respond reportingtheir load. The new node uses the identifier that will place it in the most loaded part of the network. This way, nodeswill tend to follow the distribution of the data from the very beginning. With n identifiers being generated, the cost tofind the best successor is O(n*log 4 N), and the cost to update the tables remains the same, O(log 4 4 N). However, thisstep is not sufficient by itself. The runtime load-balancing algorithms presented below improve load distribution.
Load Balancing at Runtime: The runtime load-balancing step consists of periodically running a local load-balancing algorithm between few neighboring nodes. We propose two load-balancing algorithms. In the first algo-rithm, neighboring nodes exchange information about their loads, and the most loaded nodes give a part of their loadto their neighbors. The cost of load-balancing at each node using this algorithm is O(log 4 4 N). As this is expensive,this load-balancing algorithm cannot be run very often.
The second load-balancing algorithm uses virtual nodes. In this algorithm, each physical node houses multiplevirtual nodes. The load at a physical node is the sum of the load of its virtual nodes. When the load on a virtual nodegoes above a threshold, the virtual node is split into two or more virtual nodes. If the physical node is overloaded, oneor more of its virtual nodes can migrate to less loaded physical nodes (neighbors or fingers). An evaluation of the loadbalancing algorithms is presented in Section 4.
4 Experimental Evaluation
The performance of our P2P indexing system is evaluated using a simulator. The simulator implements the SFC-based mapping, the Chord-based overlay network, the load-balancing steps, and the query engine with the queryoptimizations described above. As the overlay network configuration and operations are based on Chord [11], itsmaintenance costs are of the same order as in Chord. An evaluation of the query engine and the load-balancingalgorithms is presented below.
4.1 Evaluating the Query Engine
The overlay network used to evaluate the query engine consists of 1000 to 5400 nodes. 2-dimensional (2D), anda 3-dimensional (3D) keyword spaces are used in this evaluation. Finally, we use up to 10 k keys (unique keywordcombinations) in the system, each of which could be associated with one or more data elements. We measure thefollowing:
Number of routing nodes: the nodes that route the query. Some of them also process the query.Number of processing nodes: the nodes that actually process the query, refine it, and search for matches. The
goal is to restrict processing only to those nodes that store matching data elements.Number of data nodes: the nodes that have data elements matching the query.Number of messages required to resolve a query. When using the query optimization each message is a sub-query
that searches for a fraction of the clusters associated with the original query.The types of queries used in the experiments are:Q1: Queries with one keyword or partial keyword, e.g. (library, *) for 2D, (sport, *, *) for 3D.
6

Q2: Queries with two to three keywords or partial keywords (at least one partial keyword), e.g. (math*, add*) for2D, (sport, tenis, *) for 3D.
4.1.1 Evaluating a 2-dimensional keyword space
This experiment represents a P2P indexing system where the number of keys and data elements in the system increasesas the number of nodes increases. The system size increases from 1000 nodes to 5400 nodes, and the number of storedkeys increases from 2*10 l to 10 k .
The results for experiments using six different type Q1 queries (query1 - query6) are plotted in Figure 9. Eachquery resulted in a different number of matches.
m npoqr qs q�qs r qt�q�qt r qu�q�q
s q r qvt#s r qwu�t�q�qyx!u�q�q r x!q�qz!{�|�} ~ s z!{�|!} ~ t z!{�|!} ~ uz!{�|�} ~ x z!{�|!} ~ r z!{�|!} ~Q��2�/�����Q�/�������������� ��� ���
� �������� ����� ��
m��No�� �� ���� � ������� � � ����
� � � �¡�#� � �¢ ������¡£! ���� � £!����¤�/���N�:�:���F�����/�N�¥ ¦§¨ ©ª«¬ ®¯ ®°«©±
z!{�|�} ~ s z!{�|!} ~ t z!{�|!} ~ uz!{�|�} ~ x z!{�|!} ~ r z!{�|!} ~Q�² ³´µ ¶·¸¹ ´º» ¼½ ¶¾
¿DÀNÁÃÂ�Ä/Å�Æ�ÇQÈ"Æ�É�Ä�ÊË ÌNÍ
Î Ï�Ð�ÏÒÑ#Î Ð�ÏÔÓ�Ñ�Ï�ÏÖÕ�Ó�Ï�ÏÒÐ�Õ�Ï�Ï×Ø ×�×Ù ×�×�×Ù Ø ×�×Ú�×�×�×Ú Ø ×�×Û�×�×�×Û Ø ×�×Ü ×�×�×
z!{�|�} ~ s z!{�|!} ~ t z!{�|!} ~ uz!{�|�} ~ x z!{�|!} ~ r z!{�|!} ~Q�
Figure 9: Results for query type Q1, 2D: (a) the number of matches for the queries, (b) the number of nodes that process the query, (c) the numberof nodes that found matches for the query.
As seen in Figures 9 (b) and (c), the number of processing and data nodes is a fraction of the total nodes andincrease at a slower rate than the system size. The number of processing nodes does not necessarily depend on thenumber of matches. For example, to solve a query with 160 matches (query6) can be more costly than solving a querywith 2600 matches (query1). This is due to the recursive processing of queries and the distribution of keys in theindex space. In order to optimize the query, we prune parts of the query tree based on the data stored in the system.The earlier the tree is pruned, the fewer processing nodes will be required and the better the performance will be.For example, if the query being processed is (computer, *) and the system contains a large number of data elementswith keys that start with “com” (e.g., company, commerce, etc.) but do not match the query, the pruning will be lessefficient and will result in a larger number of processing nodes.
Note that even under these conditions, the results are good. A keyword search system like Gnutella [14] wouldhave to query the entire network using some form of flooding to guarantee that all the matches to a query are returned,while in the case of a data lookup system such as Chord [11], one would have to know all the matches a priori andlook them up individually.
Figure 9 (c) plots the number of data nodes which are a subset of the processing nodes. The number of data nodesis close to the number of processing nodes, indicating that the query optimizations effectively reduce the number of
nodes involved. Furthermore, comparing
ÝÞ!Ý!Ýß�Ý!Ýà á!Ý�Ýà â!Ý�Ýá!Ý�Ý!Ýá�Þ!Ý!Ýá!ß�Ý!Ýã�á�Ý!Ý
ä!ä ã�Þ!åæÞ!á!ßèç�Þ!åéà å!ß�ßêá!á�å"à
ë�ìí î ï ð�ñDð�ì�ò�ó!ôõQó!ô�ô ö!ñ�ó!ô÷"ø ì!ù�ó�ô�ô�ï ð�ñ5ð�ì�ò!ó�ôú�ö�î öDð�ì�ò!ó�ô
ûü�û�ûý þ�û�ûý ÿ�û�ûþ���û�û��û�û�û��ü�û�û��þ�û�û��ÿ�û�û� ��û�û
ý ü�û � ÿ����!ý � ý þ�þ��êþ�ü�ÿ�û���ü���ü
��� � ����������������� � ���������� �� ��� �� ���������������� ����������
� � ���!"�#%$'&)(+*-,-.+/0&21"3 4"5"*"67/ .-,-8-$"*-, 9 *"6 #:$�&)(+*�,'."/;&21"3 4+5"*"67/ .-,-8�$+*-, 9 *�6
Figure 10: Results for all the metrics, 2D: (a) for a 3200 node system and 6*10 < keys,(b) for a 5400 node system and 10 = keys.
the number of matches to the number ofdata nodes demonstrates the clustering prop-erty of the Hilbert SFC index space, whichcan be defined as a ratio of the number ofmatches for a query to the number of datanodes that store these matches.
Figure 10 plots all the measurementsfor two system sizes and demonstrates thescalability of the presented system. Eachgroup of bars represents the results for aparticular query. The maximum value, plot-
ted on the vertical axis, is the size of the network. As seen in the graph, the processing nodes are a small fraction ofthe routing nodes, and a very small fraction of the entire system. The processing node population does not increaseas fast as the system. The number of data nodes is close to the number of processing nodes. The number of messagesused is almost twice the number of processing nodes, which is as expected.
7
> ?�@ A�BC
DEF DF EG�DG EH�D
F D E DIGJF E DKH�G�D�DML�H�D�D E L�D�DN�O P�Q R F N�O P�Q R G N�O P�Q R HN�O P�Q R L N�O P�Q R E
S0TVU7WYX+Z+[Y\�][V^+XY_`ab `bac�`cad�`da
b `a`ecJb
a`fd�c�`�`hg�d�`�`
ag�`�`
i�j k�l m b i�j k�l m c i�j k�l m di�j k�l m g i�j k�l ma
S TVU7WYX+Z+[Y\�][V^+XY_n opq rstu vstwrxxy z{zt| rx
} ~�� ���� � �� ���� ��
���������������������� ������ ������ ������ ������ ������������
� �������J� �����������I��������� ������ �V�7�Y�V�"�Y����V�+��
� ¡¢ £¤¥¦¡§¨ ©ª £«
¬�Y®i�j k�l m b i�j k�l m c i�j k�l m di�j k�l m g i�j k�l m
a
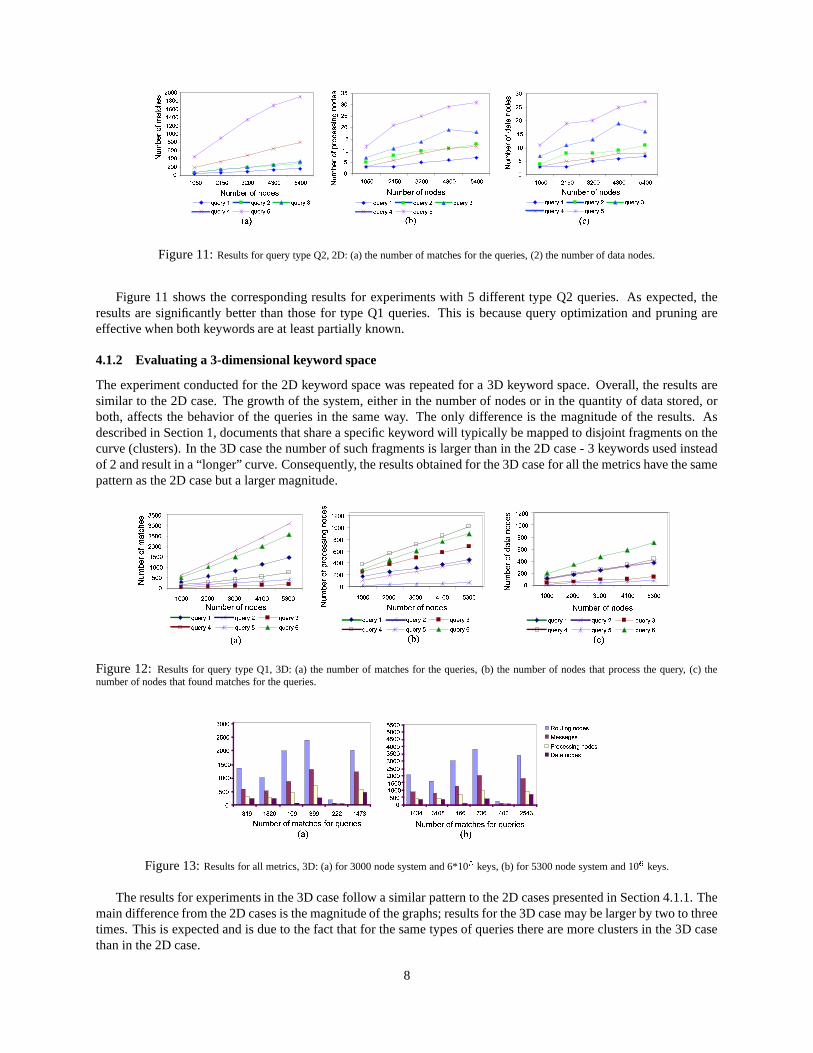
Figure 11: Results for query type Q2, 2D: (a) the number of matches for the queries, (2) the number of data nodes.
Figure 11 shows the corresponding results for experiments with 5 different type Q2 queries. As expected, theresults are significantly better than those for type Q1 queries. This is because query optimization and pruning areeffective when both keywords are at least partially known.
4.1.2 Evaluating a 3-dimensional keyword space
The experiment conducted for the 2D keyword space was repeated for a 3D keyword space. Overall, the results aresimilar to the 2D case. The growth of the system, either in the number of nodes or in the quantity of data stored, orboth, affects the behavior of the queries in the same way. The only difference is the magnitude of the results. Asdescribed in Section 1, documents that share a specific keyword will typically be mapped to disjoint fragments on thecurve (clusters). In the 3D case the number of such fragments is larger than in the 2D case - 3 keywords used insteadof 2 and result in a “longer” curve. Consequently, the results obtained for the 3D case for all the metrics have the samepattern as the 2D case but a larger magnitude.
¯°�¯�¯±�¯�¯²�¯�¯³�¯�¯´ ¯�¯�¯´ °�¯�¯
´ ¯�¯�¯M°�¯�¯�¯Iµ�¯�¯�¯I±¶´ ¯�¯�·�µ�¯�¯¸º¹+»½¼V¾"¿"ÀVÁ'ÂYÀ"Ã+¾VÄÅ�Æ�Ç�È É ´ Å�Æ�Ç�È É ° Å�Æ�Ç�È É µÅ�Æ�Ç�È É ± Å�Æ�Ç�È É · Å�Æ�Ç�È É ²
ÊË�Ê�ÊÌ�Ê�ÊÍ�Ê�ÊÎ�Ê�ÊÏ Ê�Ê�ÊÏ Ë�Ê�Ê
Ï Ê�Ê�ÊMË�Ê�Ê�ÊIÐ�Ê�Ê�ÊeÌ�Ï Ê�ÊMÑ�Ð�Ê�ÊÒºÓ+Ô½ÕVÖ"×"ØVÙ'ÚYØ"Û+ÖVÜ
Ý�Þ ß�à á Ï Ý�Þ�ß�à á Ë Ý�Þ�ß�à á ÐÝ�Þ ß�à á Ì Ý�Þ�ß�à á Ñ Ý�Þ�ß�à á Í
â ãäå æçèé êçèëæììí îïîèð æì
ñ òóô õö÷ø ù úû úü÷ù õý
þ ÿ�� þ����
�� ���� ������ � ��������� � ��������� � ���
� �������������������� �� ��� � ����������������������������
! "#$ %&'( #)* +, %-
.�/�0Å�Æ Ç�È É ´ Å�Æ�Ç�È É ° Å�Æ Ç�È É µÅ�Æ Ç�È É ± Å�Æ�Ç�È É · Å�Æ Ç�È É ²
Figure 12: Results for query type Q1, 3D: (a) the number of matches for the queries, (b) the number of nodes that process the query, (c) thenumber of nodes that found matches for the queries.
12�1�13 1�1�13 2�1�14�1�1�14�2�1�15�1�1�1
673 893 6�4�1:3 1�8;5�8�8�4�4�493 <>=�5 ?@ ?�?A ?�?�?A @ ?�?B ?�?�?B�@ ?�?C ?�?�?C�@ ?�?D ?�?�?DE@ ?�?@ ?�?�?@�@ ?�?
A D�C�DFC>A ?�G A H�HJI�C�HKD ?�? B�@�DECL�M�NPO�Q�R�S�T�N�U�V W�X�Q�YZT S[R�\�M�Q�R ] Q�Y L�M�N�O�Q�R�S�T�N�U�V W�X�Q�Y^T S[R[\[M�Q�R ] Q�Y
_a`Eb c d e�fge `�h�i�jk[i�j j l�f�i�jm7n `�o i�j j�d e�fge `�h�i�jpal�c lge�`�h�i�j
q�r�s q tus
Figure 13: Results for all metrics, 3D: (a) for 3000 node system and 6*10 < keys, (b) for 5300 node system and 10 = keys.
The results for experiments in the 3D case follow a similar pattern to the 2D cases presented in Section 4.1.1. Themain difference from the 2D cases is the magnitude of the graphs; results for the 3D case may be larger by two to threetimes. This is expected and is due to the fact that for the same types of queries there are more clusters in the 3D casethan in the 2D case.
8
vw�v�vxEv�vy�v�vz�v�v{ v�v�v{ w�v�v
{ v�v�v|w�v�v�v~}�v�v�v�x�{ v�v���}�v�v���������������[���������
� ��� ������� �� ��
�����
���� ��¡��¢��£ ���£ ���
£ �����~�������¥¤������¦ 7£ ���¨§�¤����©�ª�«¬�®�¯�°�±[²�°�³�®�´
µE¶ ·�¸ ¹ £ µ�¶�·�¸ ¹ � µ�¶ ·E¸ ¹ ¤µE¶ ·�¸ ¹ µ�¶�·�¸ ¹ §
º»�º¼Eº½�º¾�º¿ º�º¿ »�º
¿ º�º�º¨»�º�º�ºÁÀ�º�º�º¦¼7¿ º�º¨Â�À�º�ºÃ�Ä�ÅÆ�Ç�È�É�Ê�ËaÉ�Ì�Ç�Í
Î�Ï Ð�Ñ Ò ¿ Î�Ï�Ð�Ñ Ò » Î�Ï ÐEÑ Ò ÀÎ�Ï Ð�Ñ Ò ¼ Î�Ï�Ð�Ñ Ò Â
Ó ÔÕÖ ×ØÙÚ ÛØÙÜ×ÝÝÞ ßàßÙá ×Ý
â ãäå æçèéê ëì ëíèê æî
ï ð�ñ ï�ò�ñµ�¶ ·E¸ ¹ £ µ�¶ ·�¸ ¹ � µE¶ ·�¸ ¹ ¤µ�¶ ·E¸ ¹ µ�¶ ·�¸ ¹ §
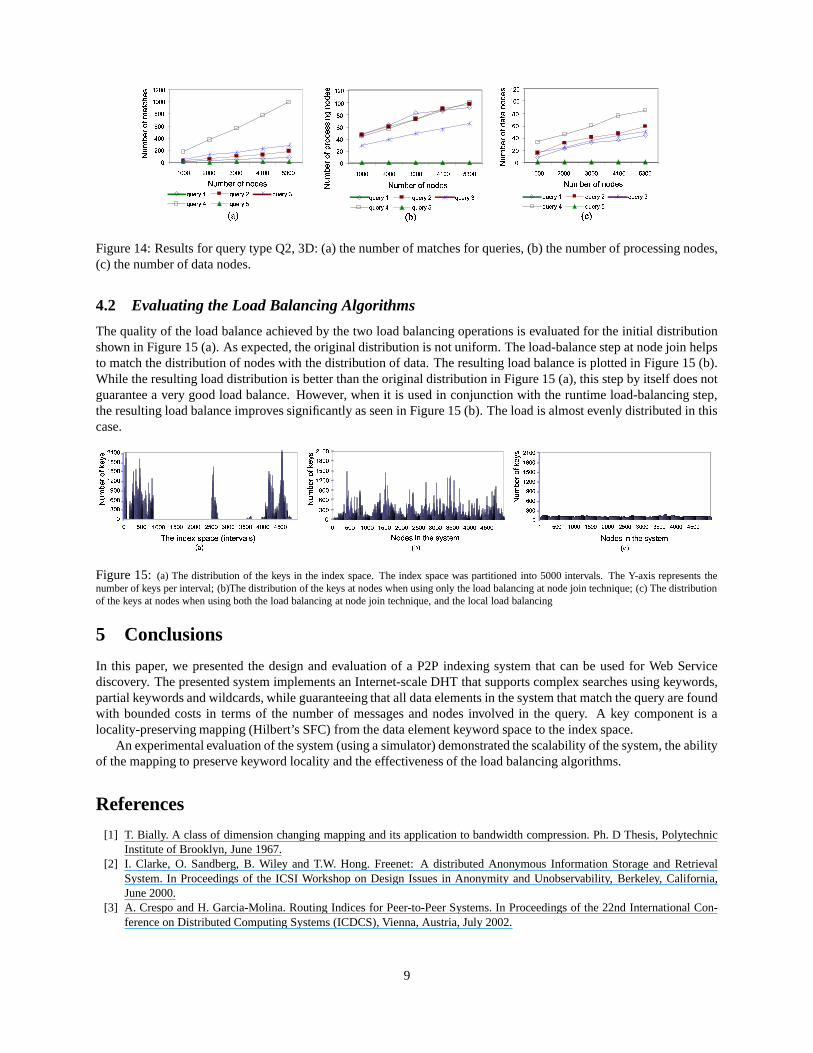
Figure 14: Results for query type Q2, 3D: (a) the number of matches for queries, (b) the number of processing nodes,(c) the number of data nodes.
4.2 Evaluating the Load Balancing Algorithms
The quality of the load balance achieved by the two load balancing operations is evaluated for the initial distributionshown in Figure 15 (a). As expected, the original distribution is not uniform. The load-balance step at node join helpsto match the distribution of nodes with the distribution of data. The resulting load balance is plotted in Figure 15 (b).While the resulting load distribution is better than the original distribution in Figure 15 (a), this step by itself does notguarantee a very good load balance. However, when it is used in conjunction with the runtime load-balancing step,the resulting load balance improves significantly as seen in Figure 15 (b). The load is almost evenly distributed in thiscase.
óô ó óõ ó óö ó ó÷ ø�ó ó÷ ù�ó ó÷ ú�ó óøE÷ ó ó
÷ûù ó óü÷ ó�ó óý÷ ù ó óþø ó ó�óýø ù�ó óýô�ó ó óþô ù ó ó ÿ�ó�ó ó ÿ�ù ó ó��������� �� ��������� ���
� ��� ���� � ���
� !�!�"!�!�#!�!�$ %!�!�$ &!�!�$ '!�!�%�$ �!�
�(&!�)�*$ �!�!�+$ &!�!�,%!�)�!�,%!&)�!�- !�!�)�. )&!�!�0/1�)�!�0/1&)�!�243�5768:9 ;=< >�6=8@?�8�< 6�A
B CDE FGHI J FKL
M NO M P)O
QR!Q)QS!Q)QT!Q)QU V)Q!QU W)Q!QU X)Q!QV@U Q!Q
QYW!Q!Q U Q!Q!Q U W!Q)QZV!Q!Q)QZV!W!Q)Q[R!Q)Q!QZR!W)Q!Q.\1Q)Q!Q.\1W)Q!Q
] ^_` abcd ea fg
h4i�jlk m�n7j�o:p�q�r7s�j-t k m�u jwv x�rwy p�zM {)O
Figure 15: (a) The distribution of the keys in the index space. The index space was partitioned into 5000 intervals. The Y-axis represents thenumber of keys per interval; (b)The distribution of the keys at nodes when using only the load balancing at node join technique; (c) The distributionof the keys at nodes when using both the load balancing at node join technique, and the local load balancing
5 Conclusions
In this paper, we presented the design and evaluation of a P2P indexing system that can be used for Web Servicediscovery. The presented system implements an Internet-scale DHT that supports complex searches using keywords,partial keywords and wildcards, while guaranteeing that all data elements in the system that match the query are foundwith bounded costs in terms of the number of messages and nodes involved in the query. A key component is alocality-preserving mapping (Hilbert’s SFC) from the data element keyword space to the index space.
An experimental evaluation of the system (using a simulator) demonstrated the scalability of the system, the abilityof the mapping to preserve keyword locality and the effectiveness of the load balancing algorithms.
References
[1] T. Bially. A class of dimension changing mapping and its application to bandwidth compression. Ph. D Thesis, PolytechnicInstitute of Brooklyn, June 1967.
[2] I. Clarke, O. Sandberg, B. Wiley and T.W. Hong. Freenet: A distributed Anonymous Information Storage and RetrievalSystem. In Proceedings of the ICSI Workshop on Design Issues in Anonymity and Unobservability, Berkeley, California,June 2000.
[3] A. Crespo and H. Garcia-Molina. Routing Indices for Peer-to-Peer Systems. In Proceedings of the 22nd International Con-ference on Distributed Computing Systems (ICDCS), Vienna, Austria, July 2002.
9

[4] Q. Lv, P. Cao, E. Cohen., K. Li, and S. Shenker. Search and replication in unstructured peer-to-peer networks. In Proceedingsof the 16th international conference on Supercomputing, June 2002.
[5] B. Moon, H.V. Jagadish, C. Faloutsos and J.H. Saltz. Analysis of the Clustering Properties of Hilbert Space-filling curve.Submitted to IEEE Transactions on Knowledge and Data Engineering, March1996.
[6] S. Ratnasamy, P. Francis, M. Handley, R. Karp and S. Shenker. A Scalable Content-Addressable Network. In Proceedings ofACM SIGCOMM, 2001.
[7] A. Rowstron and P. Druschel. Pastry: Scalable, distributed object location and routing for largescale peer-to-peer systems.IFIP/ACM International Conference on Distributed Systems Platforms (Middleware), Heidelberg, Germany, pages 329-350,November, 2001.
[8] H. Sagan. Space-Filling Curves. Springer-Verlag, 1994.[9] M. Schlosser, M. Sintek, S. Decker and W. Nejdl. A Scalable and Ontology-Based P2P Infrastructure for Semantic Web
Services. Second International Conference on Peer-to-Peer Computing (P2P’02) September 05-07, Linkoping, Sweden 2002.[10] K. Sivashanmugam, K. Verma, R. Mulye, Z. Zhong, A. Sheth. Speed-R: Semantic P2P Environment for diverse Web Service
Registries.[11] I. Stoica, R. Morris, D. Karger, F. Kaashoek and H. Balakrishnan. Chord: A Scalable Peer-To-Peer Lookup Service for
Internet Applications. In Proceedings of ACM SIGCOMM, 2001[12] B. Yang and H. Garcia-Molina. Improving Search in Peer-to-Peer Systems. In Proceedings of the 22nd International Confer-
ence on Distributed Computing Systems (ICDCS), Vienna, Austria, July 2002.[13] B. Y. Zhao, J. Kubiatowicz and A. D. Joseph. Tapestry: An Infrastructure for Fault-tolerant Widearea Location and Routing.
Technical Report No. UCB/CSD-01-1141, Computer Science Division, University of California at Berkeley, April 2001.[14] Gnutella webpage: http://gnutella.wego.com/.[15] Open Grid Services Architecture (OGSA): http://www.globus.org/ogsa/.[16] Universal Description, Discovery and Integration: UDDI Technical White paper, September 2000.
10




















