Species Status Assessment Report for the Giant Kangaroo Rat ...
A Kangaroo Inspired Heterogeneous Swarm of Mobile Robots withGlobal Network Integrity for Fast Deployment and Exploration in
Large Scale Structured EnvironmentsTrung Dung Ngo
University of Brunei DarussalamFaculty of Science
The More Than One Robotics [email protected]
Pham Duy Hung, Minh-Trien PhamFaculty of Electronics and Telecommunication
University of Engineering and TechnologyHanoi, Vietnam
Abstract— A heterogeneous robotic swarm for fast deploy-ment and exploration in large scale structured environments isaddressed in this paper. The swarm consists of a marsupialrobot that is capable of carrying the small robots for fastdeployment and loading the small robots for fast displacement.The heterogeneous robotic swarm is governed by a hierarchicaldistributed control including distributed node control for be-havioural control and connectivity maintenance, and distributedconnectivity control for network expansion and global networkintegrity. We illustrate systematic characteristics and potentialapplications of the heterogeneous robotic swarm compared tothe homogeneous robotic swarm through simulation results.
Keywords— Swarm Robotics, Heterogeneous Systems, Mar-supial Robot, Behavioral Control, Distributed Node Control,Distributed Connectivity Control, Connectivity Maintenance,Global Network Integrity
1. INTRODUCTION
Swarm robotics has been studied with several applicationdomains, e.g., surveillance and reconnaissance, patrollingand monitoring, area coverage, multiple target tracking. Itis impractical for human operators to remotely manageeach robot, instead the robots must be self-governed tomaintain connectivities with their immediate neighbours tomake consensus decisions for cooperative and coordinativeoperations.
A swarm of mobile robots with capacities of deploymentand exploration in large-scale structured environments isconsidered as a typical study case of coordinative andcooperative systems. A distributed control for connectivity(connectedness) maintenance (preservation) is the fundamen-tal issue to guarantee swarming behaviours and collectivedecision makings. To ensure that collected information suchas victim or poison sources, reported to human operatorsthrough peer-to-peer communication of an ad-hoc network,the mobile robots must maintain a global network integrityconnecting through all the robots. Hence, a distributedcontrol for connectivity maintenance and global networkintegrity is the key factor for homogeneous or heterogeneousrobotic swarms with applications of exploration and rescueservices.
In this paper, we introduce a heterogeneous swarm ofmobile robots that can preserve the global network integrity
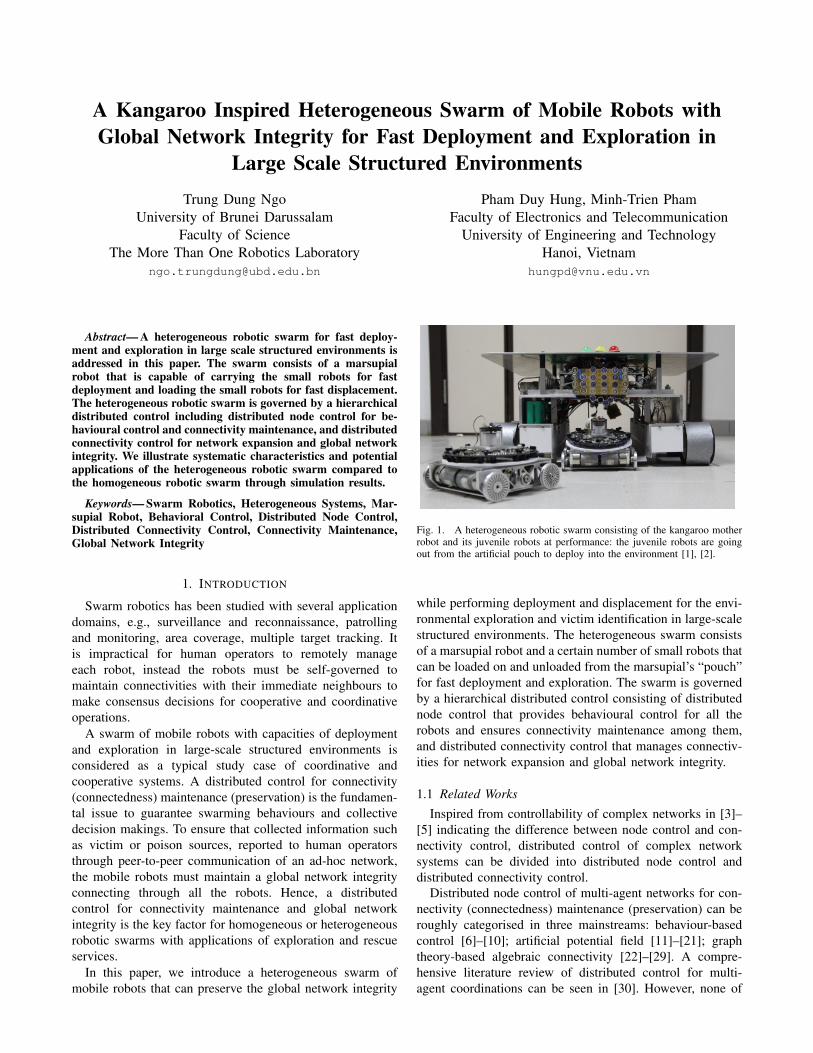
Fig. 1. A heterogeneous robotic swarm consisting of the kangaroo motherrobot and its juvenile robots at performance: the juvenile robots are goingout from the artificial pouch to deploy into the environment [1], [2].
while performing deployment and displacement for the envi-ronmental exploration and victim identification in large-scalestructured environments. The heterogeneous swarm consistsof a marsupial robot and a certain number of small robots thatcan be loaded on and unloaded from the marsupial’s “pouch”for fast deployment and exploration. The swarm is governedby a hierarchical distributed control consisting of distributednode control that provides behavioural control for all therobots and ensures connectivity maintenance among them,and distributed connectivity control that manages connectiv-ities for network expansion and global network integrity.
1.1 Related Works
Inspired from controllability of complex networks in [3]–[5] indicating the difference between node control and con-nectivity control, distributed control of complex networksystems can be divided into distributed node control anddistributed connectivity control.
Distributed node control of multi-agent networks for con-nectivity (connectedness) maintenance (preservation) can beroughly categorised in three mainstreams: behaviour-basedcontrol [6]–[10]; artificial potential field [11]–[21]; graphtheory-based algebraic connectivity [22]–[29]. A compre-hensive literature review of distributed control for multi-agent coordinations can be seen in [30]. However, none of

such previous works focused on preserving global networkintegrity for network utilisation, i.e., inter-agent communica-tion, cooperative sensing.
Distributed connectivity control emphasises on capabilityof link addition and deletion [22]–[29]. We even found afewer related works of distributed multi-agent coordinationwith global connectivity preservation [26], [31]. However,such works are not either integrated with distributed nodecontrol for the overall network management or associatedwith specific applications such as deployment, exploration,or rescue services.
Cooperative deployment, exploration and coverage [12],[13], [32]–[40] are closely relative research. However, suchworks were not dedicated for fast deployment and explo-ration and their performance efficiency is not statisticallymeasured for system validation.
To our best of knowledge, our work presented in thispaper is unique because we have not found any previousworks of heterogeneous robotic systems that has dealt withthe networking constraints while none of existing distributedcontrols of robotic systems are capable of performing fastdeployment and exploration, and intelligently dealing withglobal network integrity enhancing online information flowfor emergency and rescue services.
1.2 Statement of ContributionsTo overcome shortcomings of the existing methods, we
propose a new approach of a heterogeneous robotic swarmto exploration and rescue services in large-scale structuredenvironments. The heterogeneous robotic swarm is governedby a hierarchical distributed control that is originally builtup by behavioural control but upgraded the distributed nodecontrol for connectivity maintenance and distributed connec-tivity control for network expansion and global network in-tegrity. Thanks to the hierarchical distributed control and themarsupial robot, the heterogeneous swarm of mobile robotsis capable of performing fast deployment, displacement andexploration while preserving the global network integrity.Specifically,• Fast deployment, displacement, and exploration: the
marsupial robot can fast deliver the small robots tooffice like rooms without making efforts on dealing withcomplex constraints of network connectivities.
• Global network integrity: the hierarchical distributedcontrol intelligently minimises connectivities for net-work expansion required for exploration and coveragewhile preserving the global network integrity for onlineinformation flows to report victim identifications andtheir locations to the human operators.
1.3 Paper OutlineThe rest of this paper is organised as follows: Fundamental
knowledge of the graph theoretic network model and localconnectivity topologies used to develop the distributed con-trol are illustrated in section 2. The hierarchical distributedcontrol is described in detail in section 3. Experiment setups,simulation results, and discussions are elaborated in section4.
1.4 Graph-represented Network Model
A large-scale network of N mobile robots (a mother andN− 1 children) and E connectivities made among them isdescribed as an undirected graph G(N,E). A connectivitybetween two mobile robots, i and j, is represented by anedge of the connectivity graph, ei j ∈ E. A mobile robot ican perceive and communicate with its neighbouring robotsNi, if the relative distance between them is within the disk-based sensing and communication range rc. That is, theconnectivity ei j between the robots i and j exists if e ji ≤rc : j ∈ Ni. This rule is applied for both relationship betweenthe mother and children, and the children only as shown inFigure 2(b) and 2(c) .
Connectivity graph can be described by the mean ofthe adjacency matrix A ∈ RN∗N Each element ei j of theadjacency matrix A is defined as the weight of the edgebetween the robot i and the robot j, which is a positivevalue if j ∈ Ni, or zero otherwise. In the undirected graph,A is a symmetric matrix with each element ei j representedbelow:
ei j = e ji =
{1∥∥ri j
∥∥≤ rc
0∥∥ri j
∥∥> rc(1)
Connectivity property of the mobile robots is identifiedthrough the second smallest eigenvalue λ2 of the Laplacianmatrix A - so called algebraic connectivity. The mobilerobots are considered as being connected if λ2 ≥ 0. Con-nectivity strength is proportional to the value of λ2 - thehigher value, the stronger connectivity graph.
We release the following definitions used to develop thedistributed node control and distributed connectivity control.
Definition 1: (Sub Adjacency Matrix) The robot i has a setof neighbours Ni. We define Sub Adjacency Matrix, subA,of the robot i as the adjacency matrix of Ni.
The sensing and communication range of each mobilerobot is divided into three areas: obstacle avoidance area Sawith radii range r1; free area Sf inside annulus circle betweentwo radii r2 and r1, and critical area Sc inside annulus circlebetween two radii rc and r2 - so-called as critical error ε -as in Figure 2(a).
Definition 2: (Candidates as Critical Neighbours) Therobot j becomes a candidate of critical neighbours of therobot i if it is within the robot i’s critical area Sci and noobstacle exists within intersection of critical area and freearea of the robots i and j, Oi j = (Sfi ∪ Sc j)∩ (Sfi ∪ Sc j).Once obstacles k appear within Oi j, the robot j becomes acandidate of critical neighbours of the robot i if it is withinthe robot i’s critical area and free area Sci∪Sfi.
Ci =
{j ∈ Sci @k∈ Oi j
j ∈ Sci∪Sfi ∃k∈ Oi j(2)
Compared to our previous work in [41], Ci is expandedto Sci ∪ Sfi where obstacles exist in order to guaranteethat connectivity between i and j is consistently preservedwithout intervention of obstacles.

Critical area
rc
Free area
r2
r1
Avoid area
i
Sai
Sfi
Sci
(a) Connectivity range
j
k
m
iSci Sfi Sfj Scj
Sfi Sfj
Sci Scj
Si1 Sj1
i j
i
Sai Saj
j
(b) Critical robots
Sfj ScjSaj
SaM
SfM
ScM
rc
rb
(c) Mother and child robot
Fig. 2. Connectivity range and critical robots: (a) the robot j freely move within the S fi, move away from Sai, and is considered as a candidate ofcritical robots for the robot i if the robot j is within Sci; (b) the robot i has critical robots j, k, m; the robot j has critical robots i and k; the robot i is notthe critical robot of the robot j;(c) The Mother robot M with radius of body rb and sensing range rc. Sensing range area square of mother robot is morethan child robot 2πrbrc.
Definition 3: (Critical Neighbours and Critical Connec-tivities) The robot j is a candidate of critical robots of therobot i, j ∈Ci. The robot i becomes a critical robot of therobot j, and the connectivity between the robot i and therobot j is considered as the critical connectivity, and viceversa if there does not exist any other robots inside theintersection area between their free areas Sf j ∩Sfi.
Cni = { j ∈Ci, : Sf j ∩Sfi = /0} (3)
Note that the mother robot M will be not considered asa critical neighbour of other robots in any circumstance.However, child robots can be critical neighbours of themother robot M with all the above mentioned definitions.
1.5 Local Connectivity Topologies
In general, we have to take all the neighbours of therobot i into consideration to design its distributed control.However, the robot i’s critical neighbours act like ”anchors”preventing of the robot i moving out of the relative range tofurther explore unknown areas. We have to deal with threeconnectivity topologies established by the robot i and itscritical neighbours Cni to allow the robot i the possibilityof moving towards an assigned destination while preservingthe global network integrity:
Triangle topology: There exists two critical neighbours jand k connected together in Cni, i.e., checked by subAi = 1.Both the critical connectivities, ei j and eik, cause the robot iimpossible to reach a destination out of the coverage by theneighbours j and k. As illustrated in Figure 3(a), the triangletopology of three robots n1, n2, n3 prevents the robot n1 toreach the target T1.
K-connected topology: A robot i has two critical neigh-bours j and k that are not connected in Cni, i.e., subAi = 0.If the robots j, k have the neighbouring robots in N ∩Niconnected directly or indirectly through groups of interme-diate robots, denoted R j and Rk, and the intersection of thetwo groups is not a empty set, R j ∩Rk 6= /0, the robots i, j,k establish a k-connected topology (a type of k-connectedgraph, where k = 2, in the graph theory). Specifically, k-connected topology can be in the form of four edges,
T2
Sc8
Sc6
Sc7
Sf8
Sf7
Sf6
T1
n1n2
n3
n6
n7
n8
Sc1Sc2
Sc3
Sf2Sf1
Sf3
n5
n4
n9
n10n11
n12
n13
Fig. 3. Connectivity topologies: a) A triangle topology of the robot n1 -red triangle - consists of two critical robots n2 and n3 making two criticalconnectivities e12 and e13 within Sc1, and the connectivity e23 ≤ rc. b) Ak-connect topology (quadrangle topology) of the robot n8 - green polygon -consists of three critical robots {n5,n6,n7} in which the intersection of twogroups of the robots n6 and n7 is non-empty, i.e. R6 = {n5}, R7 = {n5},R6∩R7 = {n5} 6= /0. c) A k-connected topology vs. a one-connected topology:any robot in the group {n4,n5,n6,n9,n10,n11,n12} consists of either one-connected topology or k-connected topology with its neighbours, dependingthe neighbourhood level ` ( ` ≥ 3 for k-connected topology, e.g., R5 ={n6,n7,n8,n9,n10}, R4 = {n1,n2,n3,n10,n11,n12,n13}, R5∩R4 = {n10} 6= /0and ` < 3 for one-connected topology, e.g., e.g., R5 = {n6,n7,n8,n9,n9},R4 = {n1,n2,n3,n11,n12,n13}, R5∩R4 = /0). d) If neighbourhood level `≤ 2,an one-connected topology of the robot n5 - blue line - between the robotn5 and the robot n4 is the critical connectivity e45, i.e. R5 = {n6,n7,n8,n9},R4 = {n1,n2,n3,n11,n12,n13}, R5 ∩R4 = /0..
so-called as quadrangle topology; five edges, so-called aspentagon topology; six edges, so-called as hexagon topology,and so forth. Both the critical connectivities ei j and eikcause the robot i impossible to reach destinations out of thecoverage area of the robot j and the robot k. As illustratedin Figure 3(b), the k-connected topology with four robotsn5, n6, n7 and n8 become anchors preventing the node n8 toreach to the target T2.
One-connected topology: A robot i has only one criticalneighbour j, and vice versa the robot j has only one criticalneighbour i. If the robots i and j have the neighbouringrobots in N ∩ Ni connected directly or indirectly throughintermediate robots, denoted Ri, R j, and the intersection ofthe two groups is a empty set, Ri∩R j = /0, the robots i andj make a one-connected topology. The connectivity between

the robot i and the robot j must be preserved for the networkintegrity. If Ri ∩R j 6= /0, the critical connectivity ei j causesthe robot i impossible to reach its destination as illustratedin Figure 3(c).
2. HIERARCHICAL DISTRIBUTED CONTROL FORCONNECTIVITY MAINTENANCE, NETWORK EXPANSION,
AND GLOBAL NETWORK INTEGRITY
We assume that all the mobile robots are equipped withsensing and communication capacity. That is, a robot iscapable of identifying and measuring relative distance to itsnearest neighbours within the radii range rc. They can peer-to-peer communicate each other within the radii range rc.
This section is dedicated to designing the hierarchicaldistributed control for the heterogeneous robotic system.Note that the hierarchical distributed control is only appliedfor the children robots that need to maintain connectivitywith their mother or their peers. The mother is not consideredas critical neighbour of the children robots so it will betreated differently in terms of functionalities, which will beexplained next section.
2.1 Distributed Node Control
Level 1 - Behavioural Control: Inspired from behaviouralcontrol in [6] [7], velocity vector of the robot i, vt
i , issynthesised by cohesion vc
i , separation vsi , and alignment va
ivelocity vectors.
vi = αvci +βvs
i + γvai (4)
where α,β ,γ are factors to adjust cohesion, separation, andalignment for the overall behaviour.
Cohesion vci is the vector driving the robot i towards
its neighbouring robots satisfying j ∈ S fi ∪ Sci. Separationvs
i is the vectors that drives the the robot i away from itsneighbours satisfying j ∈ Sai. Alignment va
i is the vectorguiding the robot i towards the unexplored areas. Alignmentva
i becomes the vector for the robot i towards its assigneddestination when the mother robot recognised the door andmake a decision of sensing the small robots.
The factors α,β ,γ are normalised (all the robots areassigned with the same α and γ) in order to guarantee thesmooth movement of the whole network of mobile robotsfor exploration and search services.
Note that all the robots operate with this behaviouralcontrol if they have no critical neighbours. To guarantee thatthe robot i is not disconnected with the robot j when therobot i is within the free area of the robot j, i ∈ S f j, weadjust the velocity vi = ε if vi > ε .
Level 2 - Connectivity Maintenance: The distributednode control for connectivity maintenance aims at keepingall the robots connected in the network for data intercommu-nication - no robot is disconnected from the network at anytime. This distributed node control is only activated whena robot has critical robots and critical connectivities. Thedistributed node control is synthesised by the current velocityof the robot and its critical robots’ relative positioning as in(5):
tiv
tijv
to_ikv
t 1i+v
tp_ijv
Fig. 4. Distributed node control for connectivity maintenance
vt+1i = ∑
j∈Cni
(vti +vt
p i j)+ ∑k∈Oi j
vto ik (5)
where vti is the current velocity of the robot i, vt
p i j is theprojection of vt
i on the edge, ei j, of the robots i and the robotj, and vt
o ik is aligned with the opposite direction of existingobstacle k. At an instance, the modified velocity of the roboti for maintaining connectivity with the critical neighbour jmust satisfy the condition: ‖vt+1
i ‖ < minj∈Cni
rc−‖rti j‖
2∆t , where ri j
is the relative distance between the robot i and the neighbourj, and ∆t is time step. If ‖vt+1
i ‖ ≥ minj∈Cni
rc−‖rti j‖
2∆t , the velocity
vt+1i is normalised by a factor ξ <
minj∈Cni
(rc−
∥∥∥rtij
∥∥∥2∆t )
‖ ∑j∈Cni
(vti+vt
p i j)‖to ensure
that the robot i cannot disconnect with the robot j, ri j ≤ rc.Since then, the velocity of the robot i is recalculated by thenumerical factor ξ :
vt+1i = ∑
j∈Cni
ξ (vti +vt
p i j)+ ∑k∈Oi j
vto ik (6)
2.2 Distributed Connectivity Control
The distributed node control guarantees all the robots wellconnected in the network. However, connectivity mainte-nance plays the role of constraints that prevent the mobilerobots to move towards their assigned destination. Thefact is that only one interconnectivity - so called globalnetwork integrity - is needed to be maintained for inter-communication through all the robots while there mightexist more than one interconnectivity in the network. Ifthe “redundant” connectivities are identified by the robots,they can negotiate through information exchange in order toremove such connectivities, allowing the mobile robots toexpand explored areas spatially.
The distributed connectivity control is trigged only if arobot has at least two critical neighbours, which fall into oneof two cases triangle topologies and k-connected topologies.If so, the mobile robot is still working with the connectivitymaintenance but intelligently removing redundant connectiv-ities to accelerate the process of exploration and search.
Level 3 - Connectivity Minimisation of TriangleTopologies: A robot i has two critical neighbours j and k

connected together in Cni. Both the critical connectivities, ei jand eik, cause the robot i impossible to reach a destination outof the sensing and communicating area of the neighbours jand k. If so, the distributed connectivity control can decide toremove the longer connectivity between ei j and eik becausethe neighbour on this connectivity tends to escape from thenetwork preservation.
If all triangle topologies have been properly minimised, allexisting connectivity topologies on a robot i has only eitherk-connected topologies or one-connected topologies.
Level 4 - Connectivity Minimisation of K-connectedTopologies: A robot i has two critical neighbours j andk that are not connected in Cni. If the robots j, k havethe neighbouring robots in N ∩ Ni connected directly orindirectly through groups of intermediate robots, denotedR j and Rk, and the intersection of the two groups is nota empty set, R j ∩Rk 6= /0, the robots i, j, k establish a k-connected topology. The critical connectivities ei j and eikcause the robot i impossible to reach a destination out of thesensing and communicating area of the robot j and k. If so,the distributed connectivity control can decide to remove thelonger connectivity between ei j and eik. Note that the robotsin the two groups R j and Rk need to communicate each otherto check whether there are common neighbours. To remainthe distributivity of this SoS in this paper, every robot is set toonly peer-to-peer communicate with its nearest neighbours,thus R j and Rk might have common neighbours where theneighbourhood level ` > 1 will not be considered as k-connected topologies instead of one-connected topologiesonly.
Once triangle topologies and k-connected topologies isminimised, the inter-connectivity among the robots becomesone-connected topologies, which must be preserved for theglobal network integrity that is useful for information ex-change among the robots.
2.3 Hierarchical Distributed Control for Connectivity Main-tenance, Network Expansion, and Global Network Integrity
The hierarchical distributed control for all mobile robotssynthesised by distributed node control and distributed con-nectivity control is event-based trigged.
Level 1 - Behavioural Control: governing the fundamen-tal behaviours of the robots, e.g., navigation and exploration.
Level 2 - Connectivity Maintenance: added on the topof the Level 1 - Behavioural Control to keep all the robotsconnected robustly through the network. This control is onlytrigged when the robots tend to escape from the networkconnectivities.
Level 3 - Connectivity Minimisation of TriangleTopologies:: added on the top of the Level 2 - ConnectivityMaintenance allowing the robots to expand their possibleexploration area through intelligently removing redundantconnectivities of the network integrity. This control is onlytrigged if a robot has more than two critical neighbours.
Level 4 - Connectivity Minimisation of K-ConnectedTopologies:: added on the top of the Level 3 - ConnectivityMinimisation of Triangle Topologies to optimally minimise
redundant connectivities of the global network integrity forexploration expansion area through intelligently removing re-dundant connectivities of the network integrity. This controlis only trigged if a robot has more than two critical neigh-bours obtaining at least a common neighbour not includingitself.
3. SIMULATIONS AND DISCUSSIONS
A. Scenario GenerationTo examine performances of the heterogeneous robotic
swarm with the developed hierarchical distributed control,we generated structured building as shown in Figure 5(a).The scenario consists of office rooms along the main corridorwith only one main entrance. These rooms are designed withdifferent sizes and shapes for random exploration process.
We assume that a number of victims are trapped in thebuilding due to natural disasters, e.g, earthquake. The victimsare randomly allocated in different offices and they can notfind a way to escape due to environmental conditions, e.g.no entrance direction due to dark smoke, injuries.
With the generated scenario, we expect that the hetero-geneous robotic swarm is sent into the structured buildingto explore and identify trapped victims and their locations.Once victims are found and identified, a life path of mobilerobots is online built up to help victims to escape throughthe main entrance. This life path is also used by fire fightersto approach the victim for rescue services if the victim isnot capable of going out by themselves.B. Parameter Setting
We set rc = 1, ε = 0.1rc, time step ∆ = 1.0. The factorsα,β ,γ can be arbitrarily chosen because vt+1
i is automaticallynormalised to ensure the connectedness as seen in 6. Here,we set α = 2.5, β = 5.0, γ = 2.5 for experiments in thispaper. The size of the building 25 x 12 m2 is divided into 11office rooms. The total of 80 joey robots are used: 32 joeyrobots are used to explore all the office rooms and 48 joeyrobots to make the backbone to maintain the global networkintegrity. Note that, with the marsupial robot, 48 joey robotsused to build the backbone can be replaced by static wirelessbeacons.
3.1 Simulations
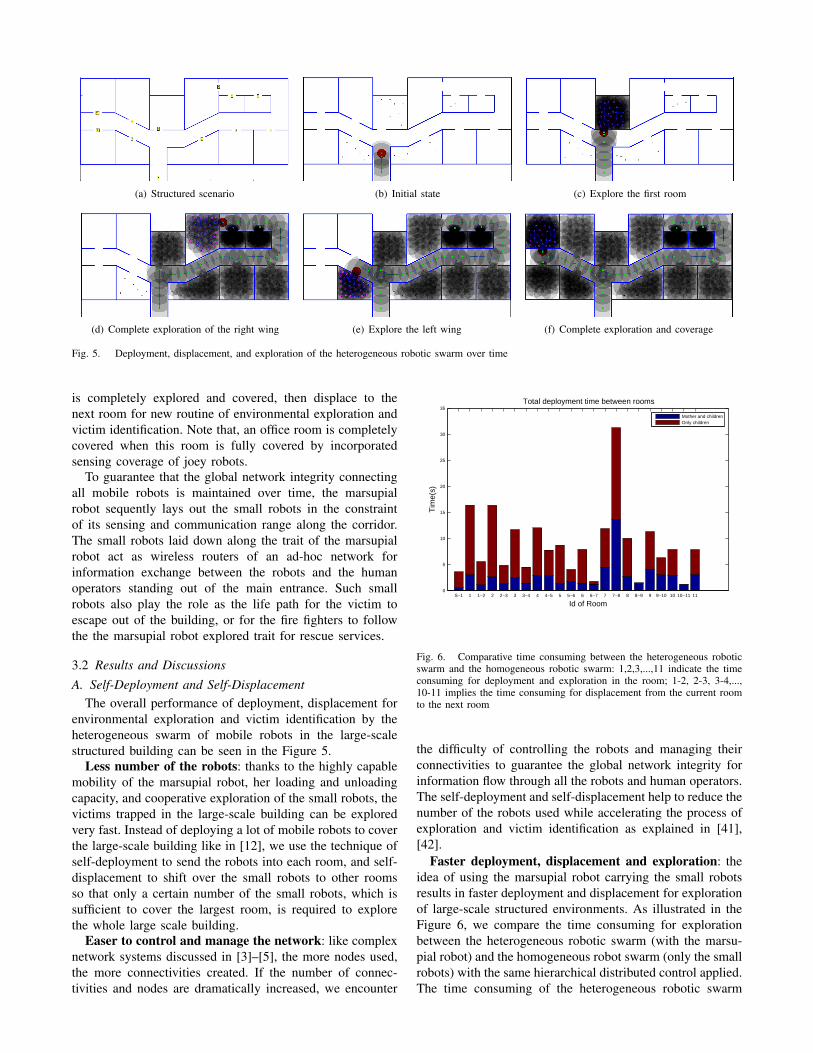
The kangaroo mother-like marsupial robot containing anumber of joey-like small robots on her “pouch” is sent intothe structured building for exploration and victim identifica-tion. Like other large scale robotic platforms, this marsupialplatform is equipped with high resolution sensors suchas laser range finders, 2D and 3D cameras with softwareframework for sensor fusion and data association, and highlycapable mobility allowing the robots to autonomously nav-igate and explore at the high speed in the main corridor.The marsupial robot can recognise office doors, but can notgo through the door due to its large body size so that themarsupial robot unloads the small robots on her “pouch”into the office rooms to cooperatively explore and identifyvictims, call them back on the “pouch” when the room
(a) Structured scenario (b) Initial state (c) Explore the first room
(d) Complete exploration of the right wing (e) Explore the left wing (f) Complete exploration and coverage
Fig. 5. Deployment, displacement, and exploration of the heterogeneous robotic swarm over time
is completely explored and covered, then displace to thenext room for new routine of environmental exploration andvictim identification. Note that, an office room is completelycovered when this room is fully covered by incorporatedsensing coverage of joey robots.
To guarantee that the global network integrity connectingall mobile robots is maintained over time, the marsupialrobot sequently lays out the small robots in the constraintof its sensing and communication range along the corridor.The small robots laid down along the trait of the marsupialrobot act as wireless routers of an ad-hoc network forinformation exchange between the robots and the humanoperators standing out of the main entrance. Such smallrobots also play the role as the life path for the victim toescape out of the building, or for the fire fighters to followthe the marsupial robot explored trait for rescue services.
3.2 Results and DiscussionsA. Self-Deployment and Self-Displacement
The overall performance of deployment, displacement forenvironmental exploration and victim identification by theheterogeneous swarm of mobile robots in the large-scalestructured building can be seen in the Figure 5.
Less number of the robots: thanks to the highly capablemobility of the marsupial robot, her loading and unloadingcapacity, and cooperative exploration of the small robots, thevictims trapped in the large-scale building can be exploredvery fast. Instead of deploying a lot of mobile robots to coverthe large-scale building like in [12], we use the technique ofself-deployment to send the robots into each room, and self-displacement to shift over the small robots to other roomsso that only a certain number of the small robots, which issufficient to cover the largest room, is required to explorethe whole large scale building.
Easer to control and manage the network: like complexnetwork systems discussed in [3]–[5], the more nodes used,the more connectivities created. If the number of connec-tivities and nodes are dramatically increased, we encounter
S−1 1 1−2 2 2−3 3 3−4 4 4−5 5 5−6 6 6−7 7 7−8 8 8−9 9 9−10 10 10−11 110
5
10
15
20
25
30
35Total deployment time between rooms
Id of Room
Tim
e(s)
Mother and childrenOnly children
Fig. 6. Comparative time consuming between the heterogeneous roboticswarm and the homogeneous robotic swarm: 1,2,3,...,11 indicate the timeconsuming for deployment and exploration in the room; 1-2, 2-3, 3-4,...,10-11 implies the time consuming for displacement from the current roomto the next room
the difficulty of controlling the robots and managing theirconnectivities to guarantee the global network integrity forinformation flow through all the robots and human operators.The self-deployment and self-displacement help to reduce thenumber of the robots used while accelerating the process ofexploration and victim identification as explained in [41],[42].
Faster deployment, displacement and exploration: theidea of using the marsupial robot carrying the small robotsresults in faster deployment and displacement for explorationof large-scale structured environments. As illustrated in theFigure 6, we compare the time consuming for explorationbetween the heterogeneous robotic swarm (with the marsu-pial robot) and the homogeneous robot swarm (only the smallrobots) with the same hierarchical distributed control applied.The time consuming of the heterogeneous robotic swarm

0 500 1000 1500 2000 2500
00.003
2
4
6
8
10
12
14
16
Step
Alg
ebra
ic C
onne
ctiv
ityConnectivity properties of the system with mother and children
Mobile Network IntegrityGlobal Network Integrity
0 12.65 29.61 54.12 77.23 100.23
Time(s)
(a) Marsupial and joeys
0 500 1000 1500 2000 2500 3000 3500 4000 4500
00.0026
5
10
15
20
25
Step
Alg
ebra
ic C
onne
ctiv
ity
Connectivity properties of the system with children only
Mobile Network IntegrityGlobal Network Integrity
0 20.79 40.97 59.73 77.71 94.46 110.56 125.19 138.65 146.04
Time(s)
(b) Joeys only
Fig. 7. Status of the global network integrity through the second smallest value of the adjacency matrix
is sufficiently less than the one of the homogeneous robotswarm in both deployment for exploration in the office roomsand displacement to the next room in the corridor. As a result,the total time consuming of the heterogeneous robotic swarmis less than the one of the homogeneous robotic swarm (100svs. 140s) as shown in the Figure 7.B. Global Network Integrity
The key issue of search and rescue services in the large-scale structured environment is that information about victimidentifications and their locations must be online reportedduring progress of exploration, search and rescue. Therefore,the global network integrity connecting all the robots asan wireless ad-hoc network for information exchange isnecessarily essential. As depicted in the Figure 7(a), thehierarchical distributed control including the distributed nodecontrol and distributed connectivity control guarantees thatthe global network integrity is consistently preserved (λ2 =0.003) while the heterogeneous robotic swarm is deployedto explore the whole structured building.
To compare complexity of the network integrity, we mea-sured λ2 of the mobile network integrity and the global net-work integrity in both the heterogeneous and homogeneousrobotic swarms, resulted in the Figure 7. It is expected that λ2is as small as possible so that the robotic swarm has higherflexibility in terms of deployment and exploration. Indeed, λ2of the mobile heterogeneous network (maximum λ2 ≈ 16.5)is smaller than the one of the mobile homogeneous network(maximum λ2 ≈ 26). With the marsupial robot, the mobilenetwork integrity (blue curve) sometimes reaches the globalnetwork integrity (red curve) because all the small robotsare on the “pouch” of the marsupial for faster displacement,which can not happen with the homogeneous robotic swarm.
4. CONCLUSION
We have presented technical aspects and technologicalsolutions of the heterogeneous swarm of mobile robots thatis capable of performing fast deployment, displacement,and exploration for search and rescue services in the largescale structured environments. We demonstrated that hetero-geneous robotic swarm with the marsupial robot carrying
and unloading the small robots can accelerate the progressof exploration and victim identification in the structuredenvironments. We proved that hierarchical distributed controlincluding the distributed node control and the distributedconnectivity control is the key factor for the network ex-pansion and the global network preservation.
In the near future, we will consider how to apply thehierarchical distributed control for the heterogeneous roboticswarm in noisy environments where connectivity is directlyimpacted by unpredictable environmental conditions.
Acknowledgement:This research was supported in part by the University of
Brunei Darrusalam (UBD/PNC2/2/RG/1(259)) and the AsiaResearch Centre and the Korea Foundation for AdvancedStudies.
References
[1] T. D. Ngo, “A bio-inspired hierarchical mobile sensor network forfast deployment and displacement in human impassible environments,”in The 9th IEEE International Conference in Ubiquitous Robots andAmbient Intelligence, November 2012, pp. 194–198.
[2] ——, “A kangaroo inspired robotic system: A system of systems toassist fire fighters,” in The 19th International Symposium on ArtificialLife and Robotics, Artificial Life and Robotics Society. Beppu, Oita,Japan: Springer, December 2014.
[3] Y.-Y. Liu, J.-J. Slotine, and A.-L. Barabasi, “Controllability of complexnetworks,” Nature, vol. 473, no. 7346, pp. 167–173, 2011.
[4] M. Egerstedt, “Complex networks: Degrees of control,” Nature, vol.473, no. 7346, pp. 158–159, 2011.
[5] T. Nepusz and T. Vicsek, “Controlling edge dynamics in complexnetworks,” CoRR, vol. abs/1112.5945, 2011. [Online]. Available:http://dblp.uni-trier.de/db/journals/corr/corr1112.html#abs-1112-5945
[6] C. W. Reynolds, “Flocks, herds and schools: A distributed behavioralmodel,” SIGGRAPH Comput. Graph., vol. 21, no. 4, pp. 25–34, Aug.1987. [Online]. Available: http://doi.acm.org/10.1145/37402.37406
[7] M. J. Mataric and M. J. Mataric, “Designing and understandingadaptive group behavior,” ADAPTIVE BEHAVIOR, vol. 4, pp. 51–80,1995.
[8] L. E. Parker, “Distributed algorithms for multi-robot observationof multiple moving targets,” Auton. Robots, vol. 12, no. 3, pp.231–255, May 2002. [Online]. Available: http://dx.doi.org/10.1023/A:1015256330750
[9] R. Olfati-Saber, R. Olfati-Saber, and R. M. Murray, “Graph rigidityand distributed formation stabilization of multi-vehicle systems,” PRO-CEEDINGS OF THE IEEE INT. CONFERENCE ON DECISION ANDCONTROL, vol. 3, pp. 2965–2971, 2002.

[10] A. Jadbabaie, J. Lin, and A. S. Morse, “Coordination of groupsof mobile autonomous agents using nearest neighbor rules.”IEEE Trans. Automat. Contr., vol. 48, no. 6, pp. 988–1001, 2003.[Online]. Available: http://dblp.uni-trier.de/db/journals/tac/tac48.html#JadbabaieLM03
[11] J. H. Reif, J. H. Reif, and H. Wang, “Social potential fields: A dis-tributed behavioral control for autonomous robots,” Rob. AutonomousSyst., 1999.
[12] M. J. M. Andrew Howard and G. S. Sukhatme, “Mobilesensor network deployment using potential fields: A distributed,scalable solution to the area coverage problem,” in Proceedings ofthe International Symposium on Distributed Autonomous RoboticSystems, 2002, pp. 299–308. [Online]. Available: http://robotics.usc.edu/publications/71/
[13] Y. Zou and K. Chakrabarty, “Sensor deployment and targetlocalization in distributed sensor networks,” ACM Trans. Embed.Comput. Syst., vol. 3, no. 1, pp. 61–91, Feb. 2004. [Online].Available: http://doi.acm.org/10.1145/972627.972631
[14] W. M. Spears, W. M. Spears, D. F. Spears, J. C. Hamann, andR. Heil, “Distributed, physics-based control of swarms of vehicles,”AUTONOMOUS ROBOTS, vol. 17, pp. 137–162, 2004.
[15] G. H. Elkaim, G. H. Elkaim, and R. J. Kelbley, “Extension of alightweight formation control methodology to groups of autonomousvehicles,” IN ISAIRAS, MUCHEN, 2005.
[16] S. S. Ge, S. S. Ge, and C.-H. Fua, “Queues and artificial poten-tial trenches for multi-robot formations,” IEEE TRANSACTIONS ONROBOTICS, vol. 21, no. 4, pp. 646–656, 2005.
[17] D. H. Kim, H. Wang, and S. Shin, “Decentralized control of au-tonomous swarm systems using artificial potential functions: Analyt-ical design guidelines,” Journal of Intelligent and Robotic Systems,vol. 45, no. 4, pp. 369–394, 2006.
[18] M. Ji and M. Egerstedt, “Distributed coordination control of multiagentsystems while preserving connectedness.” IEEE Transactions onRobotics, vol. 23, no. 4, pp. 693–703, 2007. [Online]. Available:http://dblp.uni-trier.de/db/journals/trob/trob23.html#JiE07
[19] S. B. Mikkelsen, R. Jespersen, and T. D. Ngo, “Probabilistic com-munication based potential force for robot formations: A practicalapproach,” in DARS, 2010, pp. 243–253.
[20] M. Schwager, D. Rus, and J. J. Slotine, “Unifying geometric, prob-abilistic, and potential field approaches to multi-robot deployment,”International Journal of Robotics Research, vol. 30, no. 3, pp. 371–383, March 2011.
[21] B. J. Julian, M. Angermann, M. Schwager, and D. Rus, “Distributedrobotic sensor networks: An information-theoretic approach,” Interna-tional Journal of Robotics Research, vol. 31, no. 10, pp. 1134–1154,September 2012.
[22] E. Stump, A. Jadbabaie, and V. Kumar, “Connectivity management inmobile robot teams,” in ICRA, 2008, pp. 1525–1530.
[23] M. M. Zavlanos and G. J. Pappas, “Distributed connectivity controlof mobile networks,” IEEE Transactions on Robotics, vol. 24, no. 6,pp. 1416–1428, 2008.
[24] K. M. Lynch, I. B. Schwartz, P. Yang, and R. A. Freeman,“Decentralized environmental modeling by mobile sensor networks.”IEEE Transactions on Robotics, vol. 24, no. 3, pp. 710–724,2008. [Online]. Available: http://dblp.uni-trier.de/db/journals/trob/trob24.html#LynchSYF08
[25] M. Schuresko and J. Cortes, “Distributed motion constraintsfor algebraic connectivity of robotic networks.” Journal ofIntelligent and Robotic Systems, vol. 56, no. 1-2, pp. 99–126, 2009. [Online]. Available: http://dblp.uni-trier.de/db/journals/jirs/jirs56.html#SchureskoC09
[26] M. M. Zavlanos, M. Egerstedt, and G. J. Pappas, “Graph-theoreticconnectivity control of mobile robot networks,” Proceedings of theIEEE, vol. 99, no. 9, pp. 1525–1540, 2011.
[27] Z. Mi, Y. Yang, and H. Ding, “Self-organized connectivity controland optimization subjected to dispersion of mobile ad hoc sensornetworks.” International Journal of Distributed Sensor Networks, vol.2012, 2012. [Online]. Available: http://dblp.uni-trier.de/db/journals/ijdsn/ijdsn2012.html#MiYD12
[28] S. S. Ponda, L. B. Johnson, A. N. Kopeikin, H.-L. Choi, and J. P.How, “Distributed planning strategies to ensure network connectivityfor dynamic heterogeneous teams,” IEEE Journal on Selected Areasin Communications, vol. 30, no. 5, pp. 861–869, 2012.
[29] A. Simonetto, T. Keviczky, and R. Babuska, “Constrained distributedalgebraic connectivity maximization in robotic networks,” Automatica,vol. 49, no. 5, pp. 1348–1357, 2013.
[30] Y. Cao, W. Yu, W. Ren, and G. Chen, “An overview of recent progressin the study of distributed multi-agent coordination,” IEEE Trans.Industrial Informatics, vol. 9, no. 1, pp. 427–438, 2013.
[31] L. Sabattini, C. Secchi, N. Chopra, and A. Gasparri, “Distributedcontrol of multirobot systems with global connectivity maintenance.”IEEE Transactions on Robotics, vol. 29, no. 5, pp. 1326–1332,2013. [Online]. Available: http://dblp.uni-trier.de/db/journals/trob/trob29.html#SabattiniSCG13
[32] M. A. Batalin and G. S. Sukhatme, “Coverage, exploration anddeployment by a mobile robot and communication network.”Telecommunication Systems, vol. 26, no. 2-4, pp. 181–196, 2004.[Online]. Available: http://dblp.uni-trier.de/db/journals/telsys/telsys26.html#BatalinS04
[33] J. Cortes, S. Martinez, T. Karatas, and F. Bullo, “Coverage controlfor mobile sensing networks,” IEEE Transactions on Robotics andAutomation, vol. 20, no. 2, pp. 243–255, 2004.
[34] S. Poduri, S. Poduri, and G. S. Sukhatme, “Constrained coverage formobile sensor networks,” IN IEEE INTERNATIONAL CONFERENCEON ROBOTICS AND AUTOMATION, vol. 1, pp. 165–172, 2004.
[35] B. Liu, P. Brass, O. Dousse, P. Nain, and D. Towsley, “Mobilityimproves coverage of sensor networks,” in Proceedings of the6th ACM International Symposium on Mobile Ad Hoc Networkingand Computing, ser. MobiHoc ’05. New York, NY, USA: ACM,2005, pp. 300–308. [Online]. Available: http://doi.acm.org/10.1145/1062689.1062728
[36] L. E. Parker, L. E. Parker, and A. Howard, “Experiments with alarge heterogeneous mobile robot team: Exploration, mapping, deploy-ment and detection,” INTERNATIONAL JOURNAL OF ROBOTICSRESEARCH, vol. 25, pp. 431–447, 2006.
[37] M. Schwager, D. Rus, and J. J. Slotine, “Decentralized, adaptivecoverage control for networked robots,” International Journal ofRobotics Research, vol. 28, no. 3, pp. 357–375, March 2009.
[38] C. C. Minyi Zhong, “Distributed coverage control and data collectionwith mobile sensor networks,” IEEE Trans. Automat. Contr., vol. 56,pp. 5604 – 5609, 2011.
[39] B. Liu, O. Dousse, P. Nain, and D. Towsley, “Dynamic coverageof mobile sensor networks,” IEEE Transactions on Parallel andDistributed Systems, vol. 24, no. 2, pp. 301–311, 2013.
[40] D. E. Soltero, M. Schwager, and D. Rus, “Decentralized path planningfor coverage tasks using gradient descent adaptive control,” Interna-tional Journal of Robotics Research, vol. 33, no. 3, pp. 401–425,March 2014.
[41] H. D. Pham, Q. V. Tran, and T. D. Ngo, “A scalable, decentralizedlarge-scale network of mobile robots for multi-target tracking,” inthe 13th International Conference in Intelligent Autonomous Systems(submitted), Padova, Italia. Springer-Verlag, July 2014 2014.
[42] H. D. Pham, M. T. Pham, Q. V. Tran, and T. D. Ngo, “Acceleratingmulti-target tracking by a swarm of mobile robots with networkpreservation,” in proceedings of the 4th International Conference ofSoft Computing and Pattern Recognition, Hanoi, Vietnam. IEEE,2013.
Copyright © 2022 FDOKUMEN