A High-Order Accurate Method for Frequency Domain Maxwell Equations with Discontinuous Coefficients
21
DOI: 10.1007/s10915-005-9049-5 Journal of Scientific Computing, Vol. 27, Nos. 1–3, June 2006 (© 2006) A High-Order Accurate Method for Frequency Domain Maxwell Equations with Discontinuous Coefficients Eugene Kashdan 1 and Eli Turkel 1 Received September 26, 2004; accepted (in revised form) April 20, 2005; Published online March 13, 2006 Maxwell equations contain a dielectric coefficient ε that describes the particular media. For homogeneous materials the dielectric coefficient is constant. There is a jump in this coefficient across the interface between differing media. This discontinuity can significantly reduce the order of accuracy of the numerical scheme. We present an analysis and implementation of a fourth order accu- rate algorithm for the solution of Maxwell equations with an interface between two media and so the dielectric coefficient is discontinuous. We approximate the discontinuous function by a continuous one either locally or in the entire domain. We study the one-dimensional system in frequency space. We only consider schemes that can be implemented for multidimensional problems both in the frequency and time domains. KEY WORDS: Maxwell equations; Helmholtz equation; discontinuous coeffi- cients; high-order method. 1. INTRODUCTION The Maxwell equations for E, D, H and B are: ∂ B ∂t +∇× E = 0, (Faraday’s Law) (1) ∂ D ∂t −∇× H =− J, (Ampere’s law) coupled with Gauss’s law ∇· B = 0, ∇· D = ρ, (2) 1 School of Mathematical Sciences, Tel Aviv University, Ramat Aviv, Tel Aviv 69978, Israel. E-mail: Eugene [email protected]; [email protected] 75 0885-7474/06/0600-0075/0 © 2006 Springer Science+Business Media, Inc.
Transcript of A High-Order Accurate Method for Frequency Domain Maxwell Equations with Discontinuous Coefficients

DOI: 10.1007/s10915-005-9049-5Journal of Scientific Computing, Vol. 27, Nos. 1–3, June 2006 (© 2006)
A High-Order Accurate Method for Frequency DomainMaxwell Equations with Discontinuous Coefficients
Eugene Kashdan1 and Eli Turkel1
Received September 26, 2004; accepted (in revised form) April 20, 2005; Published online March 13, 2006
Maxwell equations contain a dielectric coefficient ε that describes the particularmedia. For homogeneous materials the dielectric coefficient is constant. Thereis a jump in this coefficient across the interface between differing media. Thisdiscontinuity can significantly reduce the order of accuracy of the numericalscheme. We present an analysis and implementation of a fourth order accu-rate algorithm for the solution of Maxwell equations with an interface betweentwo media and so the dielectric coefficient is discontinuous. We approximatethe discontinuous function by a continuous one either locally or in the entiredomain. We study the one-dimensional system in frequency space. We onlyconsider schemes that can be implemented for multidimensional problems bothin the frequency and time domains.
KEY WORDS: Maxwell equations; Helmholtz equation; discontinuous coeffi-cients; high-order method.
1. INTRODUCTION
The Maxwell equations for �E, �D, �H and �B are:
∂ �B∂t
+∇ × �E =0, (Faraday’s Law)
(1)∂ �D∂t
−∇ × �H =− �J , (Ampere’s law)
coupled with Gauss’s law
∇ · �B =0, ∇ · �D =ρ, (2)
1School of Mathematical Sciences, Tel Aviv University, Ramat Aviv, Tel Aviv 69978, Israel.E-mail: Eugene [email protected]; [email protected]
75
0885-7474/06/0600-0075/0 © 2006 Springer Science+Business Media, Inc.

76 Kashdan and Turkel
where �J is the electric current density vector and ρ is the electric chargedensity.
For linear, homogeneous, isotropic materials we relate the magneticflux density vector �B to the magnetic field vector �H and the electric fluxdensity vector �D to the electric field vector �E using:
�B =µ �H, �D = ε �E.
We assume µ and ε are given scalar functions of space only. ε is thedielectric permittivity and µ is the magnetic permeability. Both of thesequantities are positive and describe the dielectric and magnetic character-istics of the material. In many cases ε and µ are constant within eachbody. We set ε = ε0 · εr and µ = µ0 · µr , where µ0 = 4π × 10−7 H/m andε0 = 1
c2µ0F/m are the free space permeability and permittivity respectively
(c≈3.0×108 m/sec is the speed of light). In general, the relative permittiv-ity εr and relative permeability µr are frequency dependent. However, inthis paper we concentrate on wave propagation through materials withoutsuch dependence, the so-called simple materials. The magnetic permeabilityµr is equal to one for almost all simple materials except metals which canbe considered as perfect electric conductors (PEC). The dielectric permit-tivity satisfies εr �1. It is discontinuous at the interface between materialsand these jumps frequently cause significant difficulties for numerical sim-ulations.
The ultimate goal [8] is a three dimensional time dependent codeto study electromagnetic phenomena. This necessitates the analysis of theorder of convergence, stability and robustness of the numerical schemes.To facilitate this analysis we shall consider the one-dimensional Maxwellsystem in frequency space. The results can then be applied to the timedependent code using Fourier analysis.
2. MODEL PROBLEM
The following infinite material structure (Fig. 1) can be considered amodel for the electromagnetic wave scattering by a physical body.
Where
ε(x)=
⎧⎪⎨
⎪⎩
ε1, x <L1,
ε2, L1 <x <L2,
ε1, x >L2.
We consider the physical domain [0,L]. We place material interfacescontaining regions with different relative dielectric permittivity εr at x=L1

A High-Order Accurate Method 77
Fig. 1. Model problem.
and x=L2. We assume µ=µ1=µ2 =µ0. A unit amplitude wave entersfrom −∞ travelling in the positive direction. We Fourier transform in time.This yields
iωεE − ∂H
∂x=0, (3)
−∞<x <∞,
iωµH − ∂E
∂x=0. (4)
We also consider the one-dimensional Helmholtz equation for theelectric field. It is derived by the differentiation of (4) by x and its sub-stitution into (3).
Exx + [ω2Q(x)]E =0. (5)
The multidimensional version of this is a second order linear elliptic equa-tion with variable coefficients, where
Q(x)= ε(x)µ= 1c2(x)
.
For the magnetic field, H , Maxwell’s equations can be converted intothe Helmholtz equation by the differentiation of (3) by x, yielding
1µ
∂
∂x
(1
ε(x)
∂H
∂x
)
+ω2H =0. (6)
Left of the first interface and between the two interfaces the solutionof (5) consists of two waves, travelling to the right and left. To the right

78 Kashdan and Turkel
of the second interface there only exists a wave travelling in the positivedirection. We denote α(x)=√
Q(x). So,
E =
⎧⎪⎨
⎪⎩
e−iα(1)ωx +Reiα(1)ωx, x <L1,
Ae−iωα(2)x +Beiωα(2)x , L1 <x <L2,
T e−iα(1)ωx, x >L2.
(7)
At the interfaces the solution and its first derivative remain continuous.At x =L1:
{e−iωα(1)L1 +Reiωα(1)L1 =Ae−iωα(2)L1 +Beiωα(2)L1 ,
α(1)(−e−iωα(1)L1 +Reiωα(1)L1)=α(2)(−Ae−iωα(2)L1 +Beiωα(2)L1).(8)
At x =L2:
{Ae−iωα(2)L2 +Beiωα(2)L2 =T e−iωα(1)L2 ,
α(2)(−Ae−iωα(2)L2 +Beiωα(2)L2)=−α(1)T e−iωα(1)L2 .(9)
This gives a system of four equations with four unknowns. Solving it weget:
T =4α(1)
α(2) e−iωα(1)(L1−L2)
D,
A =2α(1)
α(2)
(1+ α(1)
α(2)
)e−iω(α(1)L1−α(2)L2)
D,
B =2α(1)
α(2)
(1− α(1)
α(2)
)e−iω(α(1)L1+α(2)L2)
D,
R =
(
1−(
α(1)
α(2)
)2)
e−2iωα(1)L1
{eiωα(2)(L1−L2) − e−iωα(2)(L1−L2)
}
D,
where
D =(
1+ α(1)
α(2)
)2
e−iωα(2)(L1−L2) −(
1− α(1)
α(2)
)2
eiωα(2)(L1−L2)
One can similarly derive the exact solution for the magnetic field Eq. (6).

A High-Order Accurate Method 79
3. REGULARIZATION OF DISCONTINUOUS PERMITTIVITY ε
3.1. Background
There are several ways to treat a discontinuity. The important ques-tion is how to preserve the global order of accuracy for locally high-orderaccurate schemes. One of the approaches to the solution of Maxwell equa-tions with discontinuous coefficients is based on one-sided finite differenceformulae, approximating the differential equation from both sides of theinterface (see e.g. [3]). However, for a multidimensional problem it is diffi-cult to achieve higher order accuracy for an interface not aligned with thegrid. Another drawback of this approach is the violation of the Gauss’ lawat the interface that can lead to the spurious solutions (see e.g. [7]).
An alternative approach is “regularization” (see e.g. [10]). We replacethe discontinuous functions, ε, µ by a continuous approximation. Wethen use the standard scheme everywhere. It is straightforward to verifythat this automatically preserves a zero divergence (in multidimensionalcase) when the system is solved by a central difference scheme even forspace dependent coefficients. We shall develop our algorithm based on thisapproach.
One can regularize either ε and µ or else 1/ε and 1/µ. Regularizationcan be viewed as a generalized averaging of the piecewise-continuous func-tion. Algebraic, geometric and harmonic averages have different effects onthe numerical solution. Wesseling [12] has shown that arithmetic averagingof the piecewise-continuous coefficient a(x) in equation
d
dx
[
a(x)d
dx
]
u(x)=f
reduces the second order of a numerical scheme to the first order. In con-trast, the geometric average preserves the second order accuracy of thescheme independent of the location of the discontinuity relative to the grid.
For multidimensional problems we need to consider the angle of inci-dence of the electromagnetic wave to the interface. In [1] it is shown for thetwo-dimensional Maxwell equations that the Yee scheme preserves the secondorder of accuracy if the angle of incidence is less than 90◦ and the harmonicaverage is used for the approximation of the discontinuity in the dielectric per-mittivity ε. If the angle of incidence is more than 90◦, the arithmetic averageshould be used. It is known that electric and magnetic field vectors are perpen-dicular each other. So one should use different types of averaging when both ε
and µ are discontinuous at the interface. We shall only consider a discontinuityin ε and assume the electric field is one dimensional.
Once regularization occurs within a mesh width, it is equivalent tothe solving the discontinuous problem. We compare different techniques

80 Kashdan and Turkel
for the approximation of the piecewise-continuous dielectric permittivity.We divide these techniques into local and global methods. We pay atten-tion to monotonicity.
3.2. Local Regularization
We regularize ε1 and ε2 near the discontinuities. We choose two pointsL1 − δ and L1 + δ on each side of the first interface and L2 − δ and L2 + δ
on each side of the second interface. We choose δ small enough so thatL1 + δ <L2 − δ so that the two interfaces do not overlap. We connect ε onthe two sides of the discontinuity with smooth functions. We locate the inter-face at a node and connect the ends with a Hermite cubic spline. A cubicspline can be written as
S3(x, δ)= c1 + c2(x −xk)+ c3(x −xk)2 + c4(x −xk)
3. (10)
We calculate in the interval xk−1/2 �x �xk+1/2 the following parameters:
c1 = fk+1/2,
c2 = f ′k+1/2,
c3 =3Sk −f ′
k+1/2 −2f ′k−1/2
∆x,
c4 = −2Sk −f ′
k+1/2 −f ′k−1/2
(∆x)2
and
Sk = fk+1/2 −fk−1/2
∆x,
where f is equal to ε or 1/ε at the half-nodes. Hyman [6], shows that thisis the most accurate approximation that can be achieved when the deriva-tive, f ′, is approximated using a high-order accurate implicit finite differencescheme.
One can try to improve the quality and accuracy of the approxima-tion by demanding monotonicity. The following criteria, [6], allows theaddition a monotonicity restraint (MR) to the approximation
f ′k =
⎧⎪⎨
⎪⎩
min[max(0, f ′k),3 min(Sk−1, Sk)], min(Sk−1, Sk)>0,
max[min(0, f ′k),3 max(Sk−1, Sk)], max(Sk−1, Sk)<0.
0, Sk−1 ·Sk �0(11)
As an alternative to a cubic spline one can consider a high-orderpolynomial smoothly connecting the known εl and εr at a distance δ from

A High-Order Accurate Method 81
the interfaces. Let z=x −x0/δ be the normalized distance from the inter-face x0. We define the polynomial
f (x)= fl +fr
2+ fl −fr
2315128
z
(
1− 4z2
3+ 6z4
5− 4z6
7+ z8
9
)
(12)
f (x) and its first four derivatives are continuous at x0 − δ and x0 + δ. More-over, this function is monotone since f ′ = 315
128 (1− z2)4 �0 for −1� z�1.
3.3. Global Regularization
For global regularization (2δ =L) we choose an implicit fourth-orderaccurate (Pade) interpolation. Based on the Taylor expansion we can write:
fi+1/2 +fi−1/2
2=fi + h2
8 f′′i +O(h4),
fi+1 +fi−1
2=fi + h2
2 f′′i +O(h4).
Eliminating the error term multiplied by h2 we obtain
fi+1 +fi−1
8+ 3
4fi =
fi+1/2 +fi−1/2
2+O(h4). (13)
Equation (13) is shown in matrix form in Fig. 2. f is equal to eitherε or 1/ε. This regularization does not necessarily preserve monotonicity. Ituses all the grid points to construct a smooth approximation of the piece-wise-continuous function. Similarly the values of ε are changed everywhereeven far from the discontinuity.
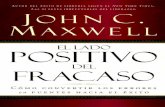
One can construct a monotonic global regularization using sums ofhyperbolic tangent functions. We approximate ε(x) by
ε(x, η)= c+dtanh[η(x −L1)]− tanh[η(x −L1)]
tanh(ηL1)+ tanh(ηL2), −∞<x <∞, (14)
Fig. 2. Implicit interpolation.

82 Kashdan and Turkel
0 0.5 1 1.5 2 2.5 31
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
x
ε (x
, η)
η = 1η = 10η = 100
Fig. 3. Approximation of ε by continuous function in model problem.
where η is large and c and d are scaling parameters. Matching at ±∞ weget c = ε1 and d = ε2 − ε1. In Fig. 3 we present ε as a function of x forvarious η.
4. MATCHING CONDITION
We write (5) in operator form as
Lu=0, (15)
where there is a discontinuity in the coefficients of L. We replace L by itsregularized approximation Lδ, where 2δ is the length of the zone wherethe discontinuous function is replaced by its regularization. The regular-ized equation is given by
Lδuδ =0. (16)

A High-Order Accurate Method 83
The regularization is called global if 2δ is equal to the length of thephysical domain and local otherwise. To solve (15) numerically we approx-imate (16) by a discretization yielding
Lδ(h)uδ(h) =0. (17)
The regularization parameter δ may depend on the mesh size h.The numerical implementation introduces two types of errors: E1 =
‖u − uδ‖ – the error caused by replacement of the discontinuous prob-lem by the regularized problem (“analytic error”) and E2 =‖uδ −uδ(h)‖ –the error from the numerical discretization of the regularized problem(“numerical error”). The total error is bounded by
‖u−uδ(h)‖�‖u−uδ‖+‖uδ −uδ(h)‖=E1 +E2. (18)
Clearly, E1 becomes smaller when the length of the regularizationregion decreases (δ → 0). However, δ → 0 increases the error E2. We con-sider a part of the model problem that includes the first interface onlylocated, for simplicity, at x =0 (Fig. 4).
For δ 1 ε near the interface can be approximated by a linear func-tion.
ε(x)=
⎧⎪⎨
⎪⎩
ε1, x <−δ,ε2−ε1
2δx + ε2+ε1
2 , −δ <x <δ,
ε2, x >δ.
Fig. 4. Model problem with one interface.

84 Kashdan and Turkel
Then Eq. (5) becomes⎧⎪⎨
⎪⎩
Exx +ω2Q1E =0, x <−δ,
Exx +ω2Q(x)E =0, −δ <x <δ,
Exx +ω2Q2E =0, x >δ.
(19)
The second equation of (19) can be transformed into the Airy equation.Define new variables: k1=ω2ε1µ and k2=ω2ε2µ. Then, the solution of (19)is given by
E(x)=
⎧⎪⎨
⎪⎩
e−i√
k1x +Rδei√
k1x, x <−δ,
A ·Ai(ξ(x))+B ·Bi(ξ(x)), −δ <x <δ,
Tδe−i
√k2x, x >δ,
where Rδ and Tδ are the reflection and transmission coefficients. Ai andBi are the Airy functions of the first and second kind respectively and
ξ(x) = −(
2δ
k2 −k1
) 23(
k2 −k1
2δx + k1 +k2
2
)
So ξ(x)→0 as δ →0 for −δ <x <δ.We match the solution and its derivative at x =−δ and x = δ.
ei√
k1δ +Rδe−i
√k1δ = AAi(ξ(−δ))+B Bi(ξ(−δ)),
−i√
k1
[ei
√k1δ −Rδe
−i√
k1δ]
= −(
k2 −k1
2δ
)13 [
AAi′(ξ(−δ))+B Bi′(ξ(−δ))],
(20)
Tδe−i
√k2δ = AAi(ξ(δ))+B Bi(ξ(δ)),
−i√
k2Tδe−i
√k2δ = −
(k2 −k1
2δ
) 13 [
AAi′(ξ(δ))+B Bi′(ξ(δ))],
where
ξ(−δ)=−(
2δ
k2 −k1
) 23
k1, ξ(δ)=−(
2δ
k2 −k1
) 23
k2. (21)
This yields four equations for Rδ, Tδ, A and B. The solution is given inthe Appendix A.
From the continuity of the solution across the interface follows thatreflection and transmission coefficients are connected by the matching con-dition T −R = 1. Based on the solution of (20), we calculate Tδ −Rδ andexpand it into the Taylor series in δ. The first terms of the expansion are

A High-Order Accurate Method 85
Tδ −Rδ =1− (√
k2 −√k1)
√k1
3δ2 +O(δ4). (22)
We see that the matching condition is satisfied, when δ → 0. The errordecays as O(δ2). Since, on the discrete level δ = δ(h), this limits the accu-racy as a function of h. Hence, we do not expect an asymptotic accuracybetter than O(h2). Specifically, for coarse meshes the regularization erroris small compared with the truncation error. Thus, for engineering accu-racy the fourth order implicit method is much more efficient than the Yeescheme. However, for finer grids the regularization error dominates sincethe optimal δ is less than one mesh width wide. Hence, asymptotically weexpect at most a second order scheme.
5. NUMERICAL ALGORITHM
5.1. Artificial Boundary Conditions
We consider the model problem with a boundary condition, which isan incoming wave at −∞. We introduce the scattered field Escat (x) suchthat
E(x)=Escat (x)+ e−iωα(1)x .
After substitution into (5) Escat satisfies:
Escatxx +ω2Q(x)Escat =g(x), (23)
where g(x) = ω2[(
α(1))2 −Q(x)
]e−iωα(1)x . Outside the physical domain
Escat satisfies the Sommerfeld boundary conditions: there are no wavesreturning from ±∞ into the physical domain.
The system of Maxwell equations ((3), (4)) has the same analyticsolution as the Helmholtz equation derived for E and for H . However,it differs on the numerical level. The scattered fields satisfy an inhomoge-neous linear system of ODEs
iωε(x)Escat − ∂Hscat
∂x=f (x),
−∞<x <∞, (24)
iωµHscat − ∂Escat
∂x=0,
where f (x)= iω[ε1 − ε(x)]e−iωα(1)x .

86 Kashdan and Turkel
Fig. 5. Algorithm for solution of frequency dependent Maxwell equations.
To solve the system (24) numerically we need to bound the domainand construct boundary conditions at the artificial surface. We use the uni-axial PML as described in [4]. Inside the physical domain we solve theoriginal system (24) and in the PML we solve a transformed system:
iωεSEscat − ∂Hscat
∂x=0,
−∞<x <∞, (25)
iωµSHscat − ∂Escat
∂x=0,
where S =1 + σiω
. σ = σε
ε= σµ
µis a polynomial inside the PML and zero
inside the physical domain. At the interface between the PML and theinterior σ must be sufficiently smooth.
For the one-dimensional problem one may use a characteristic orlocal [2] boundary condition. However, since we wish to model a multi-dimensional problem with a high-order scheme then the use of the PMLis preferable [9] (Fig. 5).
5.2. Finite Difference Discretization
The scheme we use to approximate derivatives is a staggered compactimplicit scheme. Gottlieb and Yang [5] and Turkel [11] have shown that astaggered scheme is more accurate and efficient than a co-located schemefor the same order of accuracy. The electric field component E is locatedat the nodes and the magnetic field component H is located at half-nodes.We place all interfaces at a node. To establish notation, we write the

A High-Order Accurate Method 87
second-order accurate spatial derivative operator as (Du)i . (Du)i ≈ ∂u(xi )∂x
with a local truncation error of order O(∆x2).The scheme is derived from Ty operator [11]:
(Du)i+1 + (Du)i−1
24+ 11
12(Du)i =
ui+ 1
2−u
i− 12
∆x. (26)
We denote a Ty operator applied to the approximation of the spatialderivatives at nodes as AE , and at half-nodes as AH . It yields
∂Hscat
∂x= (AH )−1D(Hscat ),
∂Escat
∂x= (AE)−1D(Escat ).
Based on the notation introduced in [8], we define S = iωε(x)S and S =iωµS. After discretization, the system (24)+(25) becomes
AH · (SEscat )−D(Hscat ) = AH ·f,
AE · (SH scat )−D(Escat ) = 0.
This scheme is locally fourth order accurate both inside the physicaldomain and inside the PML. Using the fact that E is located at the nodes andH is at the half-nodes we construct a pentadiagonal system of linear equations:
6. NUMERICAL EXPERIMENTS
6.1. Setup
For the model problem there is an explicit solution of (3,4) which fol-lows from the solution of the Helmholtz equation. Let L=3 m, L1 =0.75 mand L2 =2.25 m. We choose εr =2 between the interfaces. εr =1 to the leftof the first interface and to the right of the second interface. The wave-length λ in free space is 0.3 m and ω=2π GHz. Between the interfaces thewavelength is reduced by a factor
√2. The electric component of the solu-
tion is shown in Fig. 6.
6.2. Global Regularization
For global regularization (13) the errors, in the L2 norm, are pre-sented in Table I.
Computing on even finer meshes confirms that asymptotically therate of accuracy approaches 2. However, this occurs for error levels much

88 Kashdan and Turkel
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
0 0.5 1 1.5 2 2.5 3−4
−2
0
2
4
Fig. 6. Amplitude (top) and argument (bottom) of solution to model problem.
Table I. Error of Global (Implicit) Regularization
No. of nodes ∆x ‖Escat −Escatδ(h)‖L2 Rate Order of accuracy
129 0.0234 1/ε: 2.0058×10−2
ε: 2.0484×10−2
257 0.0117 1/ε: 5.2048×10−3 3.8538 1.9463ε: 1.9044×10−3 10.7561 3.4271
513 0.0059 1/ε: 3.6608×10−3 1.4218 0.5077ε: 3.3058×10−4 5.7608 2.5263
smaller than usual accuracy levels. For practical error levels we get moreaccurate results with regularization than with arithmetic averaging acrossthe interface (see [1, 8]). Numerical computations [8] show that using (14)yields a larger error than the (Pade) approximation (5). Regularizationbased on 1/ε yields a much larger error than regularization based on ε.
In Fig. 7 we show the relative (pointwise) error for a grid with 257nodes for the regularization of both ε and 1/ε. The largest relative erroroccurs near the first interface. The regularization of 1/ε yields a much

A High-Order Accurate Method 89
0 0.5 1 1.5 2 2.5 30
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04R
elat
ive
erro
r
x
1/εε
Fig. 7. Relative pointwise error of solution using global regularization.
larger error at all grid points. One observes that the major errors are inthe vacuum region.
6.3. Local Regularization
We choose a Hermite cubic spline as the connecting function for thelocal regularization of ε and 1/ε. In Table II we present the total error forvarious grids. We fix the length of the δ-interval and check the influenceon the accuracy of the MR to the spline approximation. Though the reg-ularized variable is close to constant on either side of the discontinuity itis now smooth. The results are now insensitive to the value of δ.
We see from Tables I and II that a global regularization yields betterresults than a local regularization. We also observe that regularization ofε yields more accurate results than the regularization of 1/ε. The additionof a MR to the regularization does not make any significant changes tothe accuracy.
It is shown in [8] that in using of regularization (14) the best choicefor η is sufficiently large. So the gradient of the hyperbolic tangent func-tion lies within the closest grid point to the discontinuity. Hence, this

90 Kashdan and Turkel
Table II. Error of the Local Regularization
δ (cm) No. of nodes ∆x ‖Escat −Escatδ(h)‖L2 Rate Order of accuracy
129 0.0234 1/ε: 5.3177×10−2
ε: 2.0667×10−2
9.375 257 0.0117 1/ε: 3.2576×10−2 1.6323 0.7070ε: 2.6548×10−3 7.7848 2.9607
513 0.0059 1/ε: 1.6468×10−2 1.9781 0.9841ε: 6.4382×10−4 4.1235 2.0439
129 0.0234 1/ε: 5.4096×10−2
ε: 2.0821×10−2
9.375 257 0.0117 1/ε: 3.2833×10−2 1.6476 0.7204
+MR ε: 2.7040×10−3 7.7001 2.9449513 0.0059 1/ε: 1.6530×10−2 1.9863 0.9841
ε: 6.4904×10−4 4.1335 2.0473
simply duplicates arithmetic averaging of ε at the discontinuity. Similarlyfor the high-order polynomial (12) the best choice is δ =1, i.e. we changeonly the discontinuity point itself. However, as shown in [8] the simplearithmetic averaging yields less accurate results than both global (implicit)and local (Hermite spline based) regularizations.
7. ERROR ANALYSIS
7.1. Analytic Error
There are two main sources of error. First is the replacement of the con-tinuous problem by a discretization. The second is the replacement of thepiecewise smooth function ε by a regularized smooth function. Let Escat bethe exact solution to the continuous problem. Define E∗ be the exact solu-tion to the regularized differential equation and Escat
δ the solution of theregularized difference equation. We note that in general the optimal δ is afunction of the mesh width h. The first error is given by E1 =‖Escat −E∗‖.The second error is given by E2 =‖E∗ −Escat
δ ‖. We investigate the role ofthe analytic error E1 as a part of the total error E. We need an “exact”solution to the regularized differential equation which has variable coeffi-cients. We get this by computing on a fine mesh. We construct a “referencesolution” E∗ for the electric field component in (24) using a grid of 2049nodes. We need to choose the PML thick enough so that it does not affectthe accuracy. For grids coarser than 2049 nodes we use a PML with 8 meshpoints. For the finest grid of 2049 we used a PML with 16 mesh points.

A High-Order Accurate Method 91
Table III. Numerical Error of Global Regularization vs. Total Error
Order OrderNo. of nodes ∆x ‖Escat −Escat
δ ‖L2 of accuracy ‖E∗ −Escatδ ‖L2 of accuracy
129 0.0234 2.0484×10−2 2.0544×10−2
257 0.0117 1.9044×10−3 3.4270 1.8800×10−3 3.4499513 0.0059 3.3058×10−4 2.5263 3.1236×10−4 2.5895
Table IV. Numerical Error of Local Regularization vs. Total Error
Order OrderNo. of nodes ∆x ‖Escat −Escat
δ ‖L2 of accuracy ‖E∗ −Escatδ ‖L2 of accuracy
129 0.0234 2.0667×10−2 2.0667×10−2
257 0.0117 2.6548×10−3 2.9606 2.6101×10−3 2.9852513 0.0059 6.4382×10−3 2.0439 6.0488×10−4 2.1094
Therefore, the inequality (18) can be rewritten as
E =‖Escat −Escatδ ‖�‖Escat −E∗‖+‖E∗ −Escat
δ ‖=E1 +E2.
We only regularize ε. In the Tables III and IV we compare the total errorfrom Table I for the global and local regularization with the estimatednumerical error.
For coarse grids the error of the numerical solution of the regular-ized problem is the main component of the total error. The error causedby the regularization plays only a minor role in the total error. For finegrids both E1 and E2 are the same order of magnitude and so the totalerror decays slower than the formal order of accuracy of the scheme.
7.2. Error in Different Regions
We now study the accumulation of errors at the interface. We com-pare the error outside the interfaces vs. the error between the interfacesboth local and global regularizations of ε. We consider the global regu-larization and the local regularization inside the interval δ =9.375 cm.
In Tables V and VI we compare the error outside the interfaces withthe error between the interfaces. Between the interfaces the order of accu-racy is about third order for the global interpolation and about 2 1
2 for the

92 Kashdan and Turkel
Table V. Error in Different Regions for Global Regularization
Order OrderNo. of nodes ∆x ‖Outside‖ of accuracy ‖Between‖ of accuracy
129 0.0234 2.3128×10−2 1.7391×10−2
257 0.0117 1.9261×10−3 3.5859 1.8822×10−3 3.2078513 0.0059 3.9289×10−4 2.2935 2.5305×10−4 2.8995
Table VI. Error in Different Regions for Local Regularization
Order OrderNo. of nodes ∆x ‖Outside‖ of accuracy ‖Between‖ of accuracy
129 0.0234 2.0970×10−2 2.0354×10−2
257 0.0117 2.7011×10−3 2.9567 2.5810×10−3 2.9647513 0.0059 7.9532×10−4 1.7639 4.4228×10−4 2.5595
local regularization. Outside the interfaces the order of accuracy decreasesbecause of the PML.
8. CONCLUSIONS
We have performed detailed computations for the Maxwell system inone dimension in frequency space. The equations are solved with a fourthorder accurate compact implicit method on a staggered grid. ε is discon-tinuous across interfaces but is replaced by a continuous function. A globalregularization of ε based on a Pade approximation yields a lower total errorcompared with local regularization based Hermite splines. Nevertheless, forvery fine grids the order of accuracy reduces to second order. At engineer-ing accuracy both methods combined with the fourth order scheme are sig-nificantly more accurate than simple averaging of ε with the standard Yeescheme. This is analyzed by considering a simple local regularization. Anexplicit solution shows that δ = O(h2) and so for fine enough meshes theoptimal width for a local regularization is less than one mesh width. Thiscan not be represented with a standard finite difference scheme.
For coarse and intermediate grids the numerical error dominates theregularization error. Furthermore, the error in the interior behaves betterthan the error outside the interfaces. This indicates that the PML contrib-utes to the error and reduces the total accuracy.

A High-Order Accurate Method 93
APPENDIX A. COMPUTATION OF THE MATCHING CONDITION
Solving system (20) with Mathematica we get
Rδ =2e2iδ(P1 +P2), (A.1)
where
P1 ={
(k2 −k1)Ai′(ξ(−δ))(Ai
′(ξ(−δ))Bi
′(ξ(δ))−Bi
′(ξ(−δ))Ai
′(ξ(δ)))+2iδ
×(Ai(ξ(−δ))k1√
k2(Bi(ξ(−δ))Ai(ξ(δ))−Ai(ξ(δ))Bi(ξ(−δ)))
}/
Denominator
P2 = 2δ
(k2 −k1
2δ
) 13{
Ai(ξ(−δ))k1(Ai(ξ(−δ))Bi′(ξ(δ))−Bi(ξ(−δ))Ai
′(ξ(δ)))
+Ai(ξ(δ))√
k1k2(Bi(ξ(−δ))Ai′(ξ(−δ))−Ai(ξ(−δ))Bi
′(ξ(−δ)))i
(k2−k1
2δ
) 13
+[√
k1Ai′(ξ(δ))(Bi(ξ(−δ))Ai
′(ξ(−δ))−Ai(ξ(−δ))Bi
′(ξ(−δ)))
√k2Ai
′
+(ξ(−δ))(Bi′(ξ(−δ))Ai(ξ(δ))−Ai
′(ξ(−δ))Bi(ξ(δ)))
]}/
Denominator
and
Tδ ={
−8δeiδ(√
k1+√
k2)
(k2 −k1
2δ
) 13
(Bi(ξ(δ))Ai′(ξ(δ))−Ai(ξ(δ))Bi
′(ξ(δ)))
×Ai(ξ(−δ))k1 + i
(k2 −k1
2δ
) 13
Ai′(ξ(−δ))
√k1
}/
Denominator. (A.2)
The Denominator is given by
Denominator = 2(k2 −k1)Ai′(ξ(−δ))(Ai
′(ξ(−δ))Bi
′(ξ(δ))−Bi
′(ξ(−δ))Ai
′(ξ(δ)))
+4iδ(Ai(ξ(−δ))k1
√k2(Bi(ξ(−δ))Ai(ξ(δ))−Ai(ξ(δ))Bi(ξ(−δ)))
+4δ
(k2−k1
2δ
)13{
Ai(ξ(−δ))k1(Ai(ξ(−δ))Bi′(ξ(δ))−Bi(ξ(−δ))Ai
′(ξ(δ)))
+√
k1k2(Bi(ξ(−δ))Ai′(ξ(−δ))Ai(ξ(δ))+Ai(ξ(−δ))Bi
′(ξ(−δ))Ai(ξ(δ))
−2Ai(ξ(−δ))Ai′(ξ(−δ))Bi(ξ(δ)))+ i
(k2 −k1
2δ
) 13
×[√
k1(Bi(ξ(−δ))Ai′(ξ(−δ))Ai
′(ξ(δ))

94 Kashdan and Turkel
+Ai(ξ(−δ))Bi′(ξ(−δ))Ai
′(ξ(δ))−2Ai(ξ(−δ))Ai
′(ξ(−δ))Bi
′(ξ(δ)))
+√
k2Ai′(ξ(−δ))(Ai
′(ξ(−δ))Bi(ξ(δ))−Bi
′(ξ(−δ))Ai(ξ(δ)))
]}
.
Expanding the Airy functions and their derivatives in a Taylor series in δ
we get
Ai(ξ(−δ)) = 1
323 Γ( 2
3
) + 223 k1
313 Γ( 1
3
)
(1
k2 −k1
) 23
δ23 − 2k3
1
353 Γ( 2
3
)
(1
k2 −k1
)2
δ2
− 223 k4
1
343 Γ( 1
3
)
(1
k2 −k1
) 83
δ83 +O(δ4),
Bi(ξ(−δ)) = 1
316 Γ( 2
3
) − 223 3
16 k1
Γ( 1
3
)
(1
k2 −k1
) 23
δ23 − 2k3
1
376 Γ( 2
3
)
(1
k2 −k1
)2
δ2
+ 223 k4
1
356 Γ( 1
3
)
(1
k2 −k1
) 83
δ83 +O(δ4),
Ai′(ξ(−δ)) = − 1
313 Γ( 1
3
) + 213 k2
1
323 Γ( 2
3
)
(1
k2 −k1
) 43
δ43 + 4k3
1
343 Γ( 1
3
)
(1
k2 −k1
)2
δ2
− 273 k5
1
5 ·353 Γ( 2
3
)
(1
k2 −k1
) 103
δ103 +O(δ4),
Bi′(ξ(−δ)) = 3
16
Γ( 1
3
) + 213 k2
1
316 Γ( 2
3
)
(1
k2 −k1
) 43
δ43 − 4k3
1
356 Γ( 1
3
)
(1
k2 −k1
)2
δ2
− 273 k5
1
5 ·376 Γ( 2
3
)
(1
k2 −k1
) 103
δ103 +O(δ4).
Expansions for Ai(ξ(δ)), Bi(ξ(δ)), Ai′(ξ(δ)) and Bi
′(ξ(δ)) can be con-
structed similarly, with the replacement of k1 by k2 according to (21).Using the expansions (A.1, A.2) we get approximations for Rδ and Tδ. Let
P3 = 2i
15(√
k1 +√k2)
4
(
−k321 k2
2 +k121 k3
2 +2k31k
122 +k
721 +2k1k
522 −4k2
1k322 −k1
52 k2
)
Then
Rδ =√
k1 −√k2√
k1 +√k2
− 2
3(√
k1 +√k2)
3
(
k21k
122 −k
121 k2
2 +k21k
122 −k
121 k2
2
)
δ2
−P3δ3 +O(δ4)=R +O(δ2)

A High-Order Accurate Method 95
and
Tδ = 2√
k1√k1 +√
k2− 1
3(√
k1 +√k2)
3(2k
321 k2 −k
521 −k
121 k2
2)δ2
−P3δ3 +O(δ4)=T +O(δ2).
REFERENCES
1. Andersson, U. (2001). Time-Domain Methods for the Maxwell’s Equations. Ph.D. thesis,Royal Institute of Technology – Sweden.
2. Bayliss, A., Gunzburger, M., and Turkel, E. (1982). Boundary conditions for the numer-ical solution of elliptic equations in exterior regions. SIAM J. Appl. Math. 42, 430–45l.
3. Dridi, K. H., Hesthaven, J. S., and Ditkowski, A. (2001). Staircase-free finite-differencetime-domain formulation for general materials in complex geometries. IEEE Trans.Antennas Propagat. 49, 749–756.
4. Gedney, S. D. (1998). The perfectly matched layer absorbing medium. In Taflove, A.(ed.), Advances in Computational Electrodynamics: The Finite-Difference Time-DomainMethod, Artech House, Boston, MA, Chapter 5, pp. 263–344.
5. Gottlieb, D., and Yang, B. (1996). Comparisons of staggered and non-staggered schemesfor Maxwell’s equations. In 12th Annual Review of Progress in Applied ComputationalElectromagnetics, Monterey, CA, pp. 1122–1131.
6. Hyman, J. M. (1983). Accurate monotonicity preserving cubic interpolation. SIAMJ. Sci. Stat. Comput. 4, 645–654.
7. Jiang, B., Wu, J., and Povinelli, L. A. (1996). The origin of spurious solutions in compu-tational electromagnetics. J. Comput. Phys. 125, 104–123.
8. Kashdan, E. (2004). High-Order Accurate Methods for Maxwell Equations, Ph.D. thesis,Tel Aviv University.
9. Taflove, A., and Hagness, C. (2005). Computational Electrodynamics: The Finite-Difference Time-Domain Method, Artech House, Boston, MA, 3rd edition.
10. Tornberg, A.-K., and Engquist, B. (2003). Regularization techniques for numericalapproximation of PDEs with singularities. J. Sci. Comput. 19, 527–552.
11. Turkel, E. (1998). High-Order Methods. In Taflove, A. (ed.), Advances in ComputationalElectrodynamics: The Finite-Difference Time-Domain Method, Artech House, Boston,MA, Chapter 2, pp. 63–110.
12. Wesseling, P. (2004). An Introduction to Multigrid Methods, R.T. Edwards.