A coupled numerical model for simulation of wave breaking and hydraulic performances of a composite...
15
A coupled numerical model for simulation of wave breaking and hydraulic performances of a composite seawall Mohammed Fazlul Karim * , Tawatchai Tingsanchali 1 Water Engineering and Management, School of Civil Engineering, Asian Institute of Technology, P.O. Box 4, Klong Luang, Pathumthani 12120, Thailand Received 5 June 2004; accepted 6 October 2004 Available online 15 August 2005 Abstract A numerical model is developed by combining a porous flow model and a two-phase flow model to simulate wave transformation in porous structure and hydraulic performances of a composite type low-crest seawall. The structure consists of a wide submerged reef, a porous terrace at the top and an impermeable rear wall. The porous flow model is based on the extended Navier-Stokes equations for wave motion in porous media and kK3 turbulence equations. The two-phase flow model combines the water domain with the air zone of finite thickness above water surface. A unique solution domain is established by satisfying kinematic boundary condition at the interface of air and water. The free surface advection of water wave is modeled by the volume of fluid method with newly developed fluid advection algorithm. Comparison of computed and measured wave properties shows reasonably good agreement. The influence of terrace width and structure porosity is investigated based on numerical results. It is concluded that there exist optimum value of terrace width and porosity that can maximize hydraulic performances. The velocity distributions inside and in front of the structure are also investigated. q 2005 Elsevier Ltd. All rights reserved. Keywords: Seawall; Two-phase model; VOF method; Wave breaking; Reflection Ocean Engineering 33 (2006) 773–787 www.elsevier.com/locate/oceaneng 0029-8018/$ - see front matter q 2005 Elsevier Ltd. All rights reserved. doi:10.1016/j.oceaneng.2004.10.026 * Corresponding author. Address: Ibaraki University, Center for Water Env. Studies, 4-12-1 Nakanarusawa, Hitachi, 316-8511, Ibaraki, Japan. Tel.: C66 2 524 5572; fax: C66 2 524 6425. E-mail addresses: [email protected] (M.F. Karim), [email protected] (T. Tingsanchali). 1 Tel.: C66 2 524 5557; fax: C66 2 516 2126.
Transcript of A coupled numerical model for simulation of wave breaking and hydraulic performances of a composite...
A coupled numerical model for simulation
of wave breaking and hydraulic performances
of a composite seawall
Mohammed Fazlul Karim*, Tawatchai Tingsanchali1
Water Engineering and Management, School of Civil Engineering, Asian Institute of Technology, P.O. Box 4,
Klong Luang, Pathumthani 12120, Thailand
Received 5 June 2004; accepted 6 October 2004
Available online 15 August 2005
Abstract
A numerical model is developed by combining a porous flow model and a two-phase flow model
to simulate wave transformation in porous structure and hydraulic performances of a composite type
low-crest seawall. The structure consists of a wide submerged reef, a porous terrace at the top and an
impermeable rear wall. The porous flow model is based on the extended Navier-Stokes equations for
wave motion in porous media and kK3 turbulence equations. The two-phase flow model combines
the water domain with the air zone of finite thickness above water surface. A unique solution domain
is established by satisfying kinematic boundary condition at the interface of air and water. The free
surface advection of water wave is modeled by the volume of fluid method with newly developed
fluid advection algorithm. Comparison of computed and measured wave properties shows
reasonably good agreement. The influence of terrace width and structure porosity is investigated
based on numerical results. It is concluded that there exist optimum value of terrace width and
porosity that can maximize hydraulic performances. The velocity distributions inside and in front of
the structure are also investigated.
q 2005 Elsevier Ltd. All rights reserved.
Keywords: Seawall; Two-phase model; VOF method; Wave breaking; Reflection
Ocean Engineering 33 (2006) 773–787
www.elsevier.com/locate/oceaneng
0029-8018/$ - see front matter q 2005 Elsevier Ltd. All rights reserved.
doi:10.1016/j.oceaneng.2004.10.026
* Corresponding author. Address: Ibaraki University, Center for Water Env. Studies, 4-12-1 Nakanarusawa,
Hitachi, 316-8511, Ibaraki, Japan. Tel.: C66 2 524 5572; fax: C66 2 524 6425.
E-mail addresses: [email protected] (M.F. Karim), [email protected] (T. Tingsanchali).1 Tel.: C66 2 524 5557; fax: C66 2 516 2126.
M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787774
1. Introduction
Conventionally, ‘vertical wall’ and ‘sloping mound’ seawalls are used for the
protection of coastal water front against storm waves. One of the major disadvantages of
those structures is the large crest height which prevents people to see natural beauty of the
sea. As an alternative of traditional seawalls, porous structures of composite type are being
increasingly used for the purpose of harbor securing and shore protection all over the
world. Karim et al. (2002) investigated the overtopping characteristics of a seawall having
a submerged artificial reef and a porous terrace with impermeable rear wall. In that study,
overtopping rate of proposed seawall was evaluated with respect to the Goda, et al. (1975)
model for the conventional seawalls. It was concluded that the crest height of traditional
seawalls could be reduced significantly using porous terrace. Later on, Tanimoto et al.
(2002) investigated the hydraulic performances of similar type of structure based on
experimental studies. They also applied the numerical software package CADMAS-SURF
of Coastal Development Institute of Technology (CDIT, 2001) to simulate the wave
transformation in the structure of seawall with porous terrace. The comparison of
measured wave heights in the experiments, however, shows some discrepancy with the
results of CADMAS-SURF.
Due to the complexities of both porous flow and nonlinear wave behavior, the problems
related to it are extremely difficult to solve and are being investigated for many years.
However, the mechanism of wave energy dissipation and reflection due to porous structure
is not understood clearly yet. The first systematic study on wave transmission through
porous structure was performed by Sollit and Cross (1972) based on linear wave theory
and linearised friction equation for flows in porous media. Following Sollit and Cross
(1972), several analytical and experimental studies were carried out on wave and porous
structure interactions (Karim, 2003). However, all these studies are based on a set of
assumptions, which limits the applicability of the model.
The drawbacks in the above-mentioned models for simulating interactions between
water waves and porous structures can be overcome by Navier-Stokes type model.
Sakakiyama and Kajima (1992) and Van Gent (1995) are the pioneer of Navier-Stokes
type numerical modeling of wave and porous structure interactions. Later on, the
governing equations and the solution techniques are modified and improved by several
other researchers (Mizutani et al., 1996; Liu et al., 1999; Hsu et al., 2002; Hur and
Mizutani, 2003). The studies above are the one-phase models in which the effect of air
movement above the free surface is ignored. The water splash in the air or entrapped air in
the water during wave breaking is not fully treated in those models. In addition to this
problem, one-phase model requires extrapolation or interpolation for physical variables
such as pressure and velocity at the interface boundary between air and water.
Occasionally, this approximation leads to the source of error in the solution domain.
One of the methods of improvement is to introduce the two-phase model considering finite
air zone above the free surface.
Karim (2003) developed a volume of fluid (VOF) based two-phase model to simulate
wave transformation in vertical porous structure. The vertical porous structure with an
impermeable rear wall is considered as an extremely simplified model of a porous seawall.
The wave breaking phenomenon which is more crucial for wave energy dissipation was
M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787 775
not included in that model. In the present study the model is further improved by
incorporating kK3 turbulence model so as to applicable for composite porous seawall. The
VOF method originally proposed by Hirt and Nichols (1981) was used in Navier-Stokes
type models for the fluid advection in past studies. However, outgoing fluid regions with in
a cell may overlap in their scheme and hence conservation of fluid volume is not assured.
Harvie and Fletcher (2001) proposed a new algorithm called ‘Defined Donating Region’ to
identify the true donating regions before calculating volume of outgoing fluid within a
time step. This new advection algorithm is implemented in the present study.
2. Numerical wave model
2.1. Governing equations
With consideration to the porosity of the structure, the extended Navier-Stokes
equations for two-dimensional wave field in porous media are used (Sakakiyama and
Kajima, 1992). The same set of equations is used for the flow outside the structure with the
null value of porous parameters. Assuming incompressible viscous fluid, the wave motion
is governed by the following set of equations.
vðgxuÞ
vxC
vðgzwÞ
vzZ 0 (1)
lv
vu
vtC
vðlxu2Þ
vxC
vðlzuwÞ
vz
ZKgv
vj
vxC
v
vxgxne 2
vu
vx
� �� �C
v
vzgzne
vu
vzC
vw
vx
� �� �KRx (2)
lv
vw
vtC
vðlxuwÞ
vxC
vðlzw2Þ
vz
ZKgv
vj
vzC
v
vxgxne
vw
vxC
vu
vz
� �� �C
v
vzgzne 2
vw
vz
� �� �KRz (3)
where t: time; x, z: horizontal and vertical coordinates; u, w: horizontal and vertical velocity
components; jZp=rCgz, r: density of fluid, p: pressure, g: gravitational acceleration; gv:
volume porosity; gx, gz: surface porosity components in the x and z projections. The
parameters lv, lx and lz are defined from the relationship lZgC ð1KgÞCM where CM is the
added mass coefficient. (Rx, Rz) is the resistance force due to porous media and is defined in
terms of drag coefficient CD, velocity components and porosity, ne: kinematic viscosity
(summation of molecular kinematic viscosity n and eddy kinematic viscosity nt. Based on
the kK3 model, ntZCmk2/3 where k and 3 are the turbulence energy and energy dissipation

M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787776
function determined by the following equations.
lv
vk
vtC
vlxuk
vxC
vlzwk
vzZ
v
vxgxnk
vk
vx
� �� �C
v
vzgznk
vk
vz
� �� �KgvGsKgv3 (4)
lv
v3
vtC
vlxu3
vxC
vlzw3
vz
Zv
vxgxn3
v3
vx
� �� �C
v
vzgzn3
v3
vz
� �� �KgvC1GsKgvC2
32
k(5)
where
nk Z ne=sk (6)
n3 Z ne=s3 (7)
Gs Z ne 2vu
vx
� �2
C2vw
vz
� �2
Cvw
vxC
vu
vz
� �2� �(8)
and CmZ0.09, skZ1.00, s3Z1.30, C1Z1.44, C2Z1.92 (CDIT, 2001).
The VOF method is used to represent the interface boundary between water and air
which is commonly known as free surface (Hirt and Nichols, 1981). It introduces a volume
of fluid function F(x,z,t) to define the fluid region. The physical meaning of F is the
fractional volume of a cell occupied by water. A unit value of F corresponds to a cell full
of water, while a zero value indicates that the cell contains no water. Cells with F value
between zero and one must then contain a free surface. The advection of free surface is
represented by the convective equation of F extended for porous media as follows:
vðgvFÞ
vtC
vðgxuFÞ
vxC
vðgzwFÞ
vzZ 0 (9)
A two-phase flow model is incorporated considering air zone of finite thickness above
free surface. The continuity of flow in the entire solution domain is represented by the
advection equations of fluid density and viscosity.
vðgvrÞ
vtC
vðgxurÞ
vxC
vðgzwrÞ
vzZ 0 (10)
vðgvneÞ
vtC
vðgxuneÞ
vxC
vðgzwneÞ
vzZ 0 (11)
The governing equations of porous flow are solved by standard finite difference
technique. However, it is difficult to solve Eqs. (10) and (11) using existing finite
difference scheme as the density and viscosity change sharply at the air water interface.
Consequently, numerical oscillation appears near the interface. To avoid this problem, a
level set method by using a level set function which defines the interface of water and air is
used (Sussman et al., 1994). The essential idea is that the density of fully air cell is equal to
air density while for fully water cell is equal to water density. At the interface it is

M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787 777
determined by averaging the water and air density. This idea can be represented by the
VOF function F. According to the definition, F represents the fractional volume of water
in a cell and consequently volume of air can be calculated. Therefore, advection equations
of density and viscosity are replaced as follows:
r Z ð1KFÞrair CFrwater (12)
ne Z ð1KFÞ½ne�air CF½ne�water (13)
2.2. Boundary conditions
The numerical wave channel is considered impermeable at the left and right wall
and at the bottom while it is considered open at the top. At the top boundary where the
computational domain is connected to the open air above, tangential boundary
condition is imposed by assuming the same velocities outside the solution domain (zero
gradient boundary condition). The gradient of pressure is set equal to the hydrostatic
pressure gradient. At the impermeable boundary the following velocity conditions are
adopted.
un Z 0 (14)
vus
vnZ 0 (15)
where n is the coordinate in the normal direction to the impermeable surface, un the
normal velocity component and us the velocity component along the surface. The
pressure gradient for the left and right boundaries is set zero while for the top and
bottom boundaries it is the product of density and gravitational acceleration.
On the interface of air and water, kinematic boundary condition is satisfied by the
advective equation of VOF function. As the same governing equations are used for
both air and water zones, it is not essential to apply the dynamic boundary condition at
the free surface, rather it is automatically satisfied from the concept of zero divergence
of the continuity equation. At the still water condition, zero pressure is considered at
the top of the solution domain instead of free surface. It is worthy to mention that no
boundary condition is needed at the surface boundary of porous structure as the flow is
continuous.
At the inflow section, a piston type non-reflective wave source is adopted. The
wave paddle is driven by the second order Stokes wave theory (Zhao and Tanimoto, 1998).
A gradual increase of wave amplitude is set for one wave period to avoid suddenly
accelerated flow.
2.3. Stability condition
In the computation of time domain, the stability of the calculation which is related with
the convergence of the numerical solution is assured by applying the Courant-Friedrichs-
M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787778
Levy (CFL) condition and a diffusive limit condition. They are respectively as follows:
Dt%minDx
juj;
Dz
jwj
� �Z Dtc (16)
Dt%1
2
1
ne1
Dx
� �2C 1
Dz
2� � Z Dtv (17)
Based on the above conditions, time increment Dt is defined by DtZkmin(Dtc,Dtv), where
k is a weighting parameter needed to ensure numerical stability. The proper choice for k is:
1RkOmaxuDt
Dx
��������; wDt
Dz
��������
� �(18)
As a rule of thumb, k is chosen approximately 1.2–1.5 times larger than the right side term
of the above inequality (CDIT, 2001). In the present study kZ0.3 is used throughout.
2.4. Solution algorithm
The staggered grid system is used for the discretization of governing equations using
finite difference technique. The pressure, density and viscosity are located at cell center,
while velocity components are defined at the cell faces. The locations of variables are
shown in Fig. 1(a). Setting position of control volume is different for different physical
variables in staggered grid system as shown in Fig. 1(b) and (c). The simplified marker and
cell (SMAC) method (Fletcher, 1991) is followed to solve the continuity and momentum
equations. In the solution algorithm of SMAC method, there are three steps: (a) explicit
approximation of transient velocity components using initial conditions or previous time
level values, (b) solution of Poisson equation for pressure difference by iterative
technique, and (c) modification of transient velocity by adopting pressure differences.
For a given/known time step m, the transient velocity u�i;k for the next time step mC1 is
obtained from the momentum equation by explicit Euler method where (i,k) represents
grid coordinates. The finite difference approximation of the momentum equation in the x
direction for a typical cell is given here in details while the momentum equation in z
direction and also the governing equations for kK3 model are discretized using same
method.
u�i;k Zum
i;kKDt
ðlvÞDxi;k
ðgvÞDxi;k
ri;k
pi;kKpiK1;k
Dxi
CFUXi;k CFUZi;kKVISXi;k CðRxÞi;k
� �(19)
FUXi;k Zv
vxðlxu2ÞZ
ðlxuÞdxi;kjui;k;uiC1;k
� K ðlxuÞdx
iK1;kjuiK1;k;ui;k
� dxi
(20)
FUZi;k Zv
vzðlzuwÞZ
ðlzÞDxi;kC1ðwÞ
Dxi;kC1jui;k;ui;kC1
� K ðlzÞ
Dxi;k ðwÞ
Dxi;k jui;kK1;ui;k
� Dzk
(21)
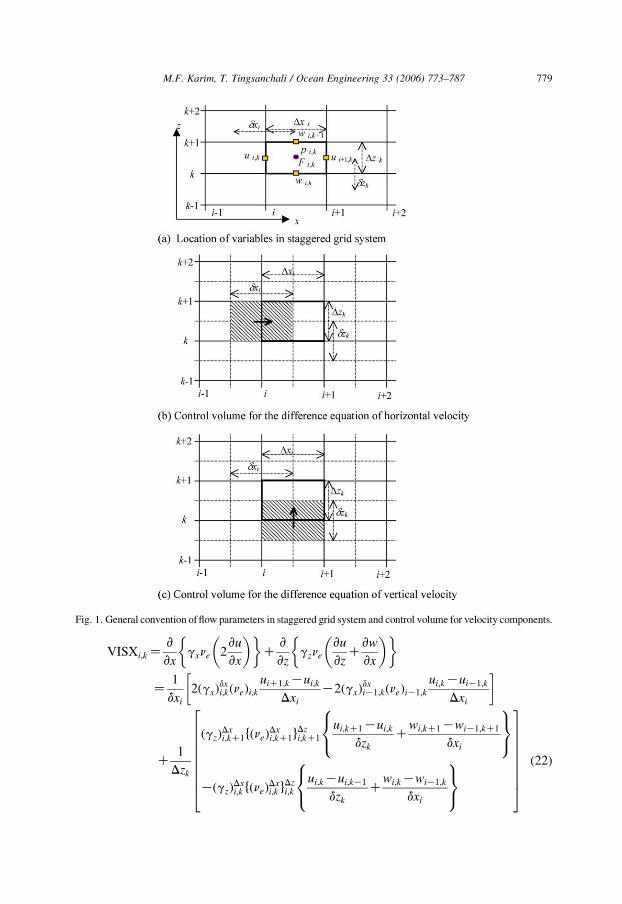
Fig. 1. General convention of flow parameters in staggered grid system and control volume for velocity components.
M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787 779
VISXi;k Zv
vxgxne 2
vu
vx
� �� �C
v
vzgzne
vu
vzC
vw
vx
� �� �
Z1
dxi
2ðgxÞdxi;kðneÞi;k
uiC1;kKui;k
Dxi
K2ðgxÞdxiK1;kðneÞiK1;k
ui;kKuiK1;k
Dxi
� �
C1
Dzk
ðgzÞDxi;kC1fðneÞ
Dxi;kC1g
Dzi;kC1
ui;kC1Kui;k
dzk
Cwi;kC1KwiK1;kC1
dxi
8<:
9=;
KðgzÞDxi;k fðneÞ
Dxi;k g
Dzi;k
ui;kKui;kK1
dzk
Cwi;kKwiK1;k
dxi
8<:
9=;
266666664
377777775
ð22Þ

M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787780
ðRxÞi;k Z1
2
CD
Dxð1KgxÞu
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiu2 Cw2
pZ
1
2
½CD�Dxi;k
Dxi
f1KðgxÞi;kgui;k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiu2
i;k C fðwÞdzi;kg
Dxi;k
h i2r
(23)
The transient velocity field does not satisfy the continuity equation. The deviation from
the equation of mass conservation is found as the source term Di,k of the predicted velocity
field. The difference between the new time level velocity and the predicted velocity field is
due to the effect of the change of the pressure Dp at the new time step. The corrected
velocity is computed as:
umC1i;k Zu�
i;kKðgvÞi;k
ðlvÞi;k
1
ri;k
vDpi;k
vxi
� �Dt (24)
where DpZpmC1Kpm. The corrected velocity field must satisfy the equation of mass
conservation and thus substituting Eq. (24) in continuity equation one can obtain the
Poisson equation for the pressure correction with the source term Di,k as follows:
v
vxgx
gv
lv
1
r
vðDpÞ
vx
� �C
v
vzgz
gv
lv
1
r
vðDpÞ
vz
� �Z
Di;k
Dt(25)
which is called the Poisson pressure equation. The second order five points scheme is used
for the discretization of Eq. (25) and simultaneous equations are solved by Bi-conjugate
gradient stabilize method for Dp (Van der Vorst, 1992). The Dp is substitute into Eq. (24)
to obtain the actual velocity at new time step. Then the advection equation of VOF
function F is solved explicitly using the new velocity field. Once the F value at the new
time step is obtained for all cells, the free surface position is reconstructed and the
distribution of density and viscosity are calculated.
2.5. Conditions of numerical simulation
A numerical wave channel similar to the experimental configuration is developed. The
length and height of the numerical channel are 14.90 m and 0.80 m respectively. Still
water level (SWL) is 0.375 m and the top boundary is set 0.425 m above the still water
level to avoid boundary effect. For a typical structure width, numerical wave channel is
shown in Fig. 2. The height of permeable terrace above submerge reef is 0.095 m and the
1:2
0.325
Fig. 2. Schematic view of the numerical model setup (unit: meter).
M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787 781
thickness Bt varies from 0 to 0.625 m. The computations are carried out for several terrace
width and porosity but same structure height. The origin of x-axis is considered at the front
face of the sloping reef and the positive distance is in the propagating direction of incident
wave.
Simulations of wave propagation have been carried out with appropriate inflow and
mesh boundaries. Three wave periods TZ1.2, 1.6 and 2.0 s, and several incident wave
height HI ranging from 0.03 to 0.12 m are considered for the model calibration. The
influence of different structural parameters are investigated for a typical wave condition
TZ1.6 s and HIZ0.076 m for which HI/hZ0.20, HI/LZ0.028 and h/LZ0.136.
Computational grid size is 0.02 m in the horizontal direction (x-axis) and 0.01 m in the
vertical direction (z-axis). Time increment is set by satisfying CFL and viscous stability
conditions. The computation starts from still water condition and the surface displacement
h at tZ0 is null for whole computational region as well as uZwZ0. The pressure at tZ0
is given by the hydrostatic pressure. Total computational time is set for approximately 16
incident wave cycles. However, in the analysis of numerical results, the last 8 wave cycles
are considered to avoid initial disturbances.
3. Results and discussions
3.1. Verification of numerical results
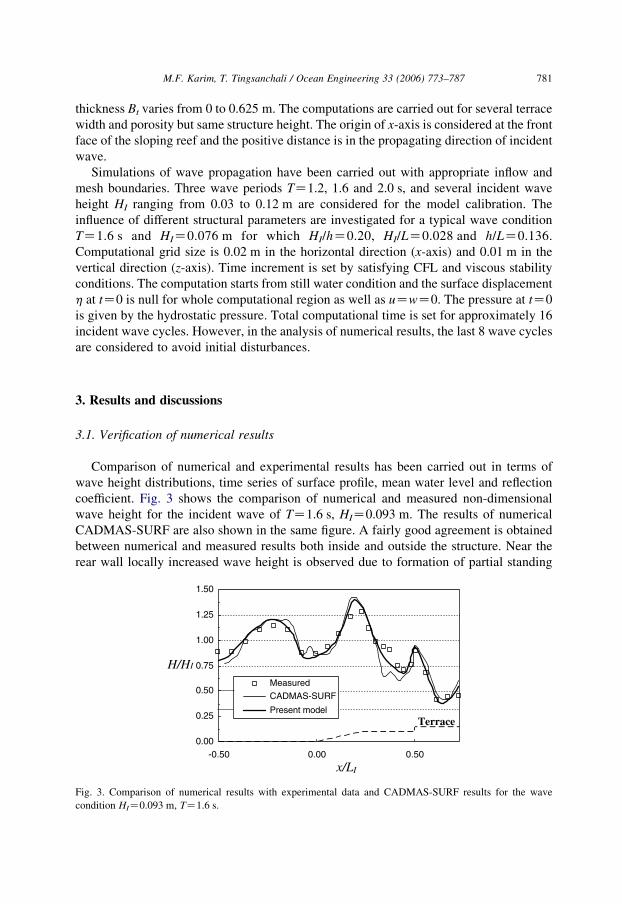
Comparison of numerical and experimental results has been carried out in terms of
wave height distributions, time series of surface profile, mean water level and reflection
coefficient. Fig. 3 shows the comparison of numerical and measured non-dimensional
wave height for the incident wave of TZ1.6 s, HIZ0.093 m. The results of numerical
CADMAS-SURF are also shown in the same figure. A fairly good agreement is obtained
between numerical and measured results both inside and outside the structure. Near the
rear wall locally increased wave height is observed due to formation of partial standing
Fig. 3. Comparison of numerical results with experimental data and CADMAS-SURF results for the wave
condition HIZ0.093 m, TZ1.6 s.
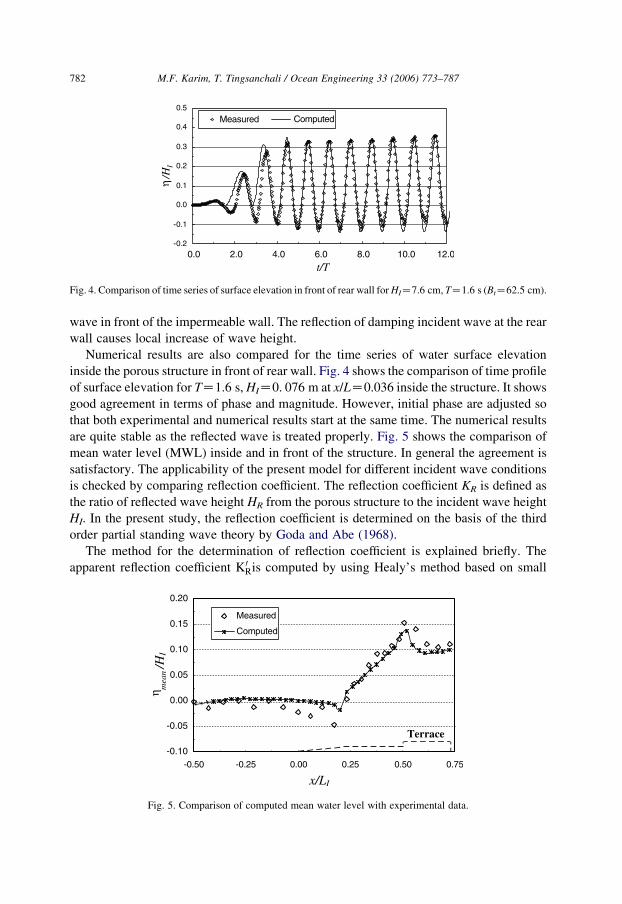
Fig. 4. Comparison of time series of surface elevation in front of rear wall for HIZ7.6 cm, TZ1.6 s (BtZ62.5 cm).
M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787782
wave in front of the impermeable wall. The reflection of damping incident wave at the rear
wall causes local increase of wave height.
Numerical results are also compared for the time series of water surface elevation
inside the porous structure in front of rear wall. Fig. 4 shows the comparison of time profile
of surface elevation for TZ1.6 s, HIZ0. 076 m at x/LZ0.036 inside the structure. It shows
good agreement in terms of phase and magnitude. However, initial phase are adjusted so
that both experimental and numerical results start at the same time. The numerical results
are quite stable as the reflected wave is treated properly. Fig. 5 shows the comparison of
mean water level (MWL) inside and in front of the structure. In general the agreement is
satisfactory. The applicability of the present model for different incident wave conditions
is checked by comparing reflection coefficient. The reflection coefficient KR is defined as
the ratio of reflected wave height HR from the porous structure to the incident wave height
HI. In the present study, the reflection coefficient is determined on the basis of the third
order partial standing wave theory by Goda and Abe (1968).
The method for the determination of reflection coefficient is explained briefly. The
apparent reflection coefficient K0Ris computed by using Healy’s method based on small
Fig. 5. Comparison of computed mean water level with experimental data.
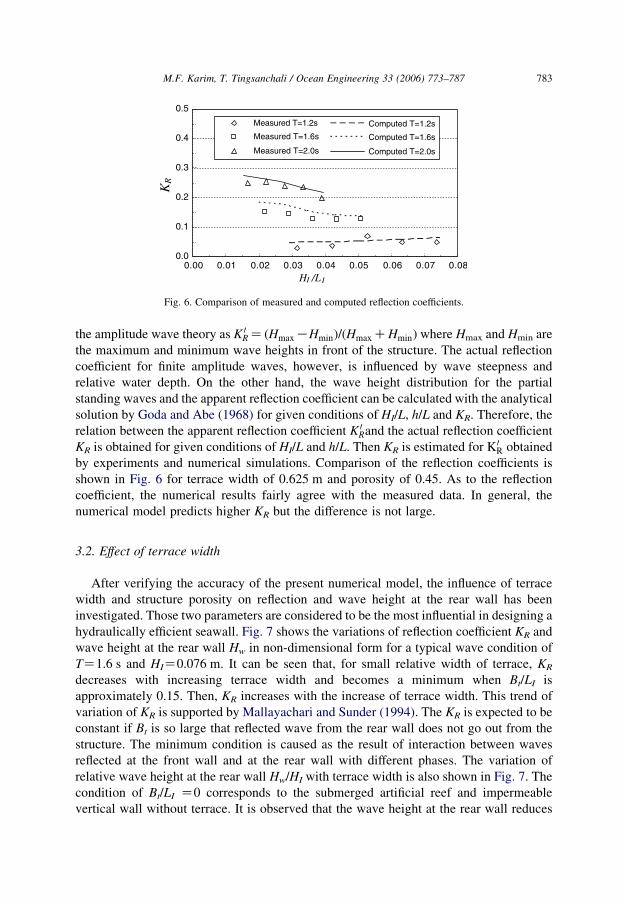
Fig. 6. Comparison of measured and computed reflection coefficients.
M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787 783
the amplitude wave theory as K 0R Z ðHmax KHminÞ=ðHmax CHminÞ where Hmax and Hmin are
the maximum and minimum wave heights in front of the structure. The actual reflection
coefficient for finite amplitude waves, however, is influenced by wave steepness and
relative water depth. On the other hand, the wave height distribution for the partial
standing waves and the apparent reflection coefficient can be calculated with the analytical
solution by Goda and Abe (1968) for given conditions of HI/L, h/L and KR. Therefore, the
relation between the apparent reflection coefficient K 0Rand the actual reflection coefficient
KR is obtained for given conditions of HI/L and h/L. Then KR is estimated for K0R obtained
by experiments and numerical simulations. Comparison of the reflection coefficients is
shown in Fig. 6 for terrace width of 0.625 m and porosity of 0.45. As to the reflection
coefficient, the numerical results fairly agree with the measured data. In general, the
numerical model predicts higher KR but the difference is not large.
3.2. Effect of terrace width
After verifying the accuracy of the present numerical model, the influence of terrace
width and structure porosity on reflection and wave height at the rear wall has been
investigated. Those two parameters are considered to be the most influential in designing a
hydraulically efficient seawall. Fig. 7 shows the variations of reflection coefficient KR and
wave height at the rear wall Hw in non-dimensional form for a typical wave condition of
TZ1.6 s and HIZ0.076 m. It can be seen that, for small relative width of terrace, KR
decreases with increasing terrace width and becomes a minimum when Bt/LI is
approximately 0.15. Then, KR increases with the increase of terrace width. This trend of
variation of KR is supported by Mallayachari and Sunder (1994). The KR is expected to be
constant if Bt is so large that reflected wave from the rear wall does not go out from the
structure. The minimum condition is caused as the result of interaction between waves
reflected at the front wall and at the rear wall with different phases. The variation of
relative wave height at the rear wall Hw/HI with terrace width is also shown in Fig. 7. The
condition of Bt/LI Z0 corresponds to the submerged artificial reef and impermeable
vertical wall without terrace. It is observed that the wave height at the rear wall reduces
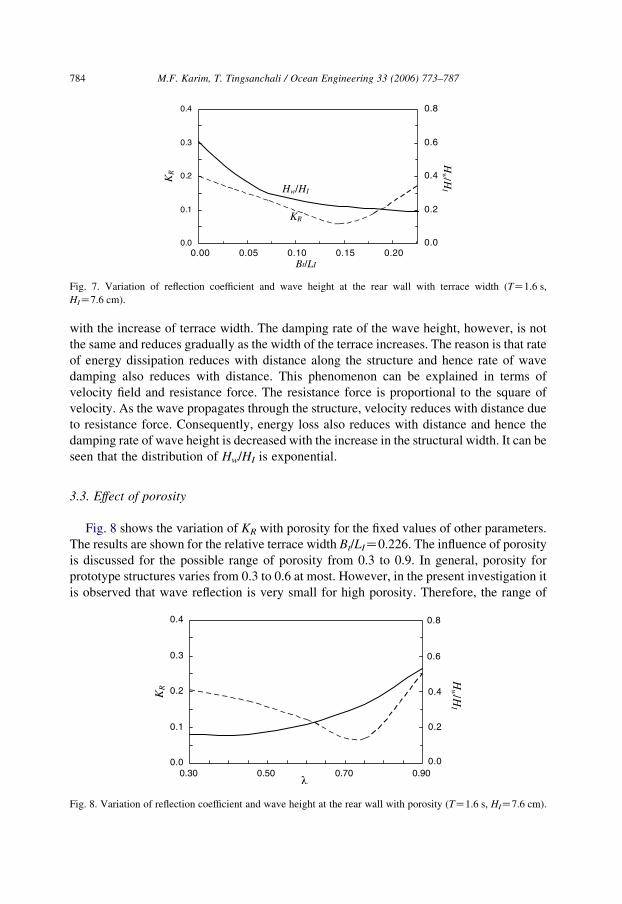
Fig. 7. Variation of reflection coefficient and wave height at the rear wall with terrace width (TZ1.6 s,
HIZ7.6 cm).
M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787784
with the increase of terrace width. The damping rate of the wave height, however, is not
the same and reduces gradually as the width of the terrace increases. The reason is that rate
of energy dissipation reduces with distance along the structure and hence rate of wave
damping also reduces with distance. This phenomenon can be explained in terms of
velocity field and resistance force. The resistance force is proportional to the square of
velocity. As the wave propagates through the structure, velocity reduces with distance due
to resistance force. Consequently, energy loss also reduces with distance and hence the
damping rate of wave height is decreased with the increase in the structural width. It can be
seen that the distribution of Hw/HI is exponential.
3.3. Effect of porosity
Fig. 8 shows the variation of KR with porosity for the fixed values of other parameters.
The results are shown for the relative terrace width Bt/LIZ0.226. The influence of porosity
is discussed for the possible range of porosity from 0.3 to 0.9. In general, porosity for
prototype structures varies from 0.3 to 0.6 at most. However, in the present investigation it
is observed that wave reflection is very small for high porosity. Therefore, the range of
Fig. 8. Variation of reflection coefficient and wave height at the rear wall with porosity (TZ1.6 s, HIZ7.6 cm).
M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787 785
porosity in investigation is extended to 0.9. It shows that the KR is significantly influenced
by the porosity. In general, KR decreases with increasing porosity to some extent and then
increases. For very high porosity toward 1.0, the structure behaves as if it has an
impermeable wall only and the energy dissipation tends to be 0. In between, there is a point
of optimal porosity for which KR is the minimum. In the present example, KR is minimum
when the porosity is approximately 0.75. The porosity is apparently higher than those of
ordinary porous structures. The variation of Hw/HI with structure porosity is also shown in
Fig. 8. The results show that the value of Hw/HI increases as the porosity increases and the
rate of increase in Hw/HI is also increases with increasing porosity. It is observed that for
small porosity the wave height at the rear wall is very small. One of the reasons is that
major part of wave energy is reflected by front wall and structure itself. Therefore, energy
transmission through the structure is very small.
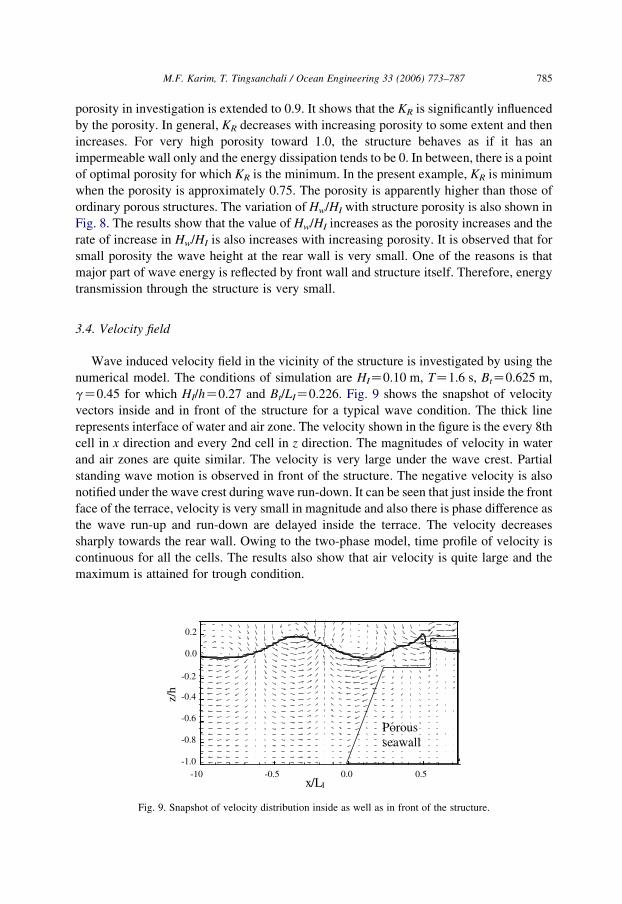
3.4. Velocity field
Wave induced velocity field in the vicinity of the structure is investigated by using the
numerical model. The conditions of simulation are HIZ0.10 m, TZ1.6 s, BtZ0.625 m,
gZ0.45 for which HI/hZ0.27 and Bt/LIZ0.226. Fig. 9 shows the snapshot of velocity
vectors inside and in front of the structure for a typical wave condition. The thick line
represents interface of water and air zone. The velocity shown in the figure is the every 8th
cell in x direction and every 2nd cell in z direction. The magnitudes of velocity in water
and air zones are quite similar. The velocity is very large under the wave crest. Partial
standing wave motion is observed in front of the structure. The negative velocity is also
notified under the wave crest during wave run-down. It can be seen that just inside the front
face of the terrace, velocity is very small in magnitude and also there is phase difference as
the wave run-up and run-down are delayed inside the terrace. The velocity decreases
sharply towards the rear wall. Owing to the two-phase model, time profile of velocity is
continuous for all the cells. The results also show that air velocity is quite large and the
maximum is attained for trough condition.
Fig. 9. Snapshot of velocity distribution inside as well as in front of the structure.

M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787786
4. Conclusions
By using the adapted Navier-Stokes equations for porous flow and the corresponding
kK3 turbulence model, a numerical model describing the flow both inside and outside of the
porous media is developed. Based on the comparison with Karim et al. (2002), we conclude
that the present model is capable of predicting the free surface, wave height distributions,
mean water level both inside and in front of the structure. In general, the agreement between
numerical and experimental results is fairly acceptable. Comparing with the one-phase
model, the present model is more general because of fewer assumptions especially at the air-
water interface. The calibrated numerical model is applied to investigate the influences of
terrace width and porosity of the structure on reflection and wave height at the rear wall. It is
concluded that the porous terrace is very effective in dissipating wave energy. Based on the
numerical investigations, it is concluded that the porosity effectively reduces wave
reflection. The influences of terrace width and porosity on wave height at the rear wall,
however, are different from the reflection. It is observed that wave height at the rear wall
decreases exponentially with increasing terrace width while it increases with the porosity
exponentially. The model is also applied to simulate the velocity distribution around the
structure. The velocity decreases along the structure significantly and near the rear wall it
approaches zero. In front of the structure, however, very large negative velocities are
observed. The two-phase model is found to be very useful tool for the investigation of
velocity field at the free surface.
Acknowledgements
The first author wishes to acknowledge Prof. Katsutoshi Tanimoto, Saitama University,
for invaluable suggestions and Mr. Tomohiro Suzuki, ECOH Corporation, Japan for his
assistance during experimental studies.
References
CDIT, 2001. Research and development of numerical wave channel. Coastal Dev. Inst. Technol., CDIT Libr. 12,
296 (in Japanese).
Goda, Y., Abe, Y., 1968. Apparent coefficient of partial reflection of finite amplitude waves. Rep. Port Harbour
Res. Inst., Jpn. 17 (3), 1–58.
Goda, Y., Kishira, Y., Kamiyama, Y., 1975. Laboratory investigation on the overtopping rate of seawalls by
irregular waves. Rep. Port Harbour Res. Inst., Jpn. 14 (4), 3–44.
Fletcher, C.A.J., 1991. Computational Techniques for Fluid Dynamics, Second Edition Springer, New York,
USA pp. 337–368.
Harvie, D.J.E., Fletcher, D.F., 2001. A new volume of fluid advection algorithm: the defined donating region
scheme. J. Numer. Methods Fluids 35, 151–172.
Hirt, C.W., Nichols, B.D., 1981. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput.
Phys. 39, 201–225.
Hsu, T.J., Sakakiyama, T., Liu, P.L.F., 2002. A numerical model for wave motions and turbulence flows in front
of a composite breakwater. Coastal Eng. 46 (1), 25–50.

M.F. Karim, T. Tingsanchali / Ocean Engineering 33 (2006) 773–787 787
Hur, D.S., Mizutani, M., 2003. Numerical estimation of the wave forces acting on a three-dimensional body on
submerged breakwater. Coastal Eng. 47 (3), 329–345.
Karim, M.F., 2003. Study on interaction between waves and porous structure by numerical simulation. Ph. D
dissertation, Saitama University, Japan.
Karim, M.F., Tanimoto, K., Suzuki, T., Hieu, P.D., 2002. Wave overtopping on seawall with permeable terrace
Proceedings of 4th international summer symposium. JSCE, Kyoto, Japan pp. 175–178.
Liu, P.L.F., Lin, P., Chang, K., Sakakiyama, T., 1999. Numerical modeling of wave interaction with porous
structures. J. Waterway, Port, Coastal Ocean Eng 125 (6), 322–330.
Mallayachari, V., Sundar, V., 1994. Reflection characteristics of permeable seawalls. Coastal Eng. 23, 135–150.
Mizutani, N., McDougal, D.G., Mostafa, A.M., 1996. BEM-FEM combined analysis of non-linear interaction
between wave and submerged breakwater. Proc. 25th Int. Conf. Coastal Eng, ASCE, 2377–2390.
Sakakiyama, T., Kajima, R., 1992. Numerical simulation of nonlinear wave interacting with permeable
breakwaters. Proc. 23rd Int. Conf. Coastal Eng., ASCE, 1517–1530.
Sollit, C.K., Cross, R.H., 1972. Wave transmission through permeable breakwaters. Proc. 13th Int. Conf. Coastal
Eng.,ASCE, 1827–1846.
Sussman, M., Smereka, P., Osher, S., 1994. A level set approach for computing solutions to incompressible two-
phase flow. J. Comput Phys. 114, 146–159.
Tanimoto, K., Suzuki, T., Karim, M.F., Hieu, P.D., 2002. Hydraulic Characteristics of Seawall with
Permeable Terrace Proc. 28th International Conference on Coastal Engineering, vol. 3. ASCE, Cardiff, UK
pp. 2019–2030.
Van Gent, M.R.A., 1995. Wave Interaction with Permeable Coastal Structures, Ph.D thesis, Delft University of
Technology, The Netherlands.
Van der Vorst, H.A., 1992. BI-CGSTAB: a fast and smoothly converging variant of BI-CG for the solution of
nonsymmetric linear systems. J. Sci. Stat. Comput., SIAM 13, 631–644.
Zhao, Q., Tanimoto, K., 1998. Numerical simulation of breaking waves by large eddy simulation and VOF
method. Proc. Int. Conf. Coastal Eng., ASCE, 892–905.