1562392709.pdf - SNS Courseware
12
1 of 12 A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations SNS COLLEGE OF TECHNOLOGY UNIT – I PROBLEMS 1. Derive the equation of motion of a simple pendulum. State the assumptions made in the analysis. Assumptions made in the analysis of simple pendulum. (a). Heavy spherical mass or bob is assumed to be a point mass. (b). The string is inextensible and has negligible mass. (c). Length of the pendulum is the distance between center of bob and point of suspension of the bob. (d). Oscillation angle θ is very small. (e). Air resistance and buoyancy are neglected. Forces acting on the bob: (i) tension force acting on the string and (ii) weight of the bob. Tension in the string cos T mg θ = Newton’s II law: Force = mass × acceleration sin sin (since is very small, sin ) From diagram , mg ma a g a g x x a g L L θ θ θ θ θ θ θ = ⇒ = ⇒ = ≈ = = Inertia force = sin where x mg mg mg mg mg x kx k L L L θ θ = = = = = . k = stiffness of pendulum string. For a single degree of freedom system, circular frequency or angular frequency k m ω = . 1 k mg g m Lm L ω = = = . since 2 f ω π = , 1 2 2 g f L ω π π = = . f is the natural frequency. θ A B θ Simple pendulum Free body diagram of the bob cos mg θ sin mg θ θ W mg = T L L x L or x L θ θ = = Bob T = Tension in the string
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of 1562392709.pdf - SNS Courseware

1 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
UNIT – I PROBLEMS
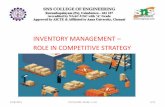
1. Derive the equation of motion of a simple pendulum. State the assumptions made in the analysis.
Assumptions made in the analysis of simple pendulum. (a). Heavy spherical mass or bob is assumed to be a point mass. (b). The string is inextensible and has negligible mass. (c). Length of the pendulum is the distance between center of bob and point of suspension
of the bob. (d). Oscillation angle θ is very small. (e). Air resistance and buoyancy are neglected. Forces acting on the bob: (i) tension force acting on the string and (ii) weight of the bob. Tension in the string cosT mg θ= Newton’s II law: Force = mass × acceleration
sin sin (since is very small, sin )
From diagram ,
mg ma a g a gx xa gL L
θ θ θ θ θ θ
θ
= ⇒ = ⇒ = ≈
= =
Inertia force = sin where x mg mgmg mg mg x kx kL L L
θ θ= = = = = .
k = stiffness of pendulum string.
For a single degree of freedom system, circular frequency or angular frequency km
ω = .
1k mg gm L m L
ω = = = . since 2 fω π= , 12 2
gfL
ωπ π
= = . f is the natural frequency.
θ
A B
θ
Simple pendulum
Free body diagram of the bob
cosmg θ
sinmg θ θ W mg=
T
L L
x Lor
xL
θ
θ
=
=
Bob
T = Tension in the string

2 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
Time period = 1 2 Lf g
τ π= = . This expression shows that the time period is independent
of the mass of the pendulum bob.
2. A harmonic motion is given by ( ) 10sin 303
x t t π = −
mm where t is in seconds and
phase angle is in radians. Find (i) frequency of motion (ii) period of motion (iii) maximum displacement (iv) maximum velocity and (v) maximum acceleration.
Assume the solution of the form: Displacement x at any time t : ( ) ( )sinx t A tω φ= − mm
A is the maximum amplitude, ω is the circular frequency (or angular velocity) of motion, φ
is the phase angle. Unit of ω is radsec
.
Also circular frequency 2 fω π= where f is the linear frequency. Time period 1f
τ = sec.
Velocity = ( ) ( ) ( )cosdx t
x t A tdt
ω ω φ= = − . Maximum velocity occurs when ( )cos 1tω φ− =
. Hence maximum velocity maxmm sec
v Aω=
Acceleration = ( ) ( ) ( ) ( )
22
2 sindv t d x t
x t A tdt dt
ω ω φ= = = − − . Maximum acceleration occurs
when ( )sin 1tω φ− = . Hence maximum velocity 2max 2
mm sec
a Aω= − .
In the present problem, ω = 30 radsec
. Phase angle φ = 3π radians. 4.77465
2f ω
π= = Hz.
Maximum amplitude A = 10 mm.
Maximum velocity maxmm 30 10 300sec
v Aω= = × =
Maximum acceleration 2 2max 2
mm30 10 9000 sec
a Aω= − = − × =
Time period 1 1 0.209444.77465f
τ = = = seconds.
3. Find the sum of the following two harmonic motions: ( ) ( )1 3sin 30x t tω= + mm and
( ) ( )2 2cos 15x t tω= − mm. Note that ω is in radians.
( ) ( ) [ ]( ) ( ) [ ]
1
2
3sin 30 3 sin cos30 cos sin 30 2.598sin 1.5cos
2cos 15 2 cos cos15 sin sin15 1.9318cos 0.5176sin
x t t t t t t
x t t t t t t
ω ω ω ω ω
ω ω ω ω ω
= + = + = +
= − = + = + Adding the two motions, we get

3 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
( )( )
1 2
1 2
1 2
3.1156sin 3.4318cos ..........(1)Also
sin
sin cos cos sin .............(2)
x x t t
x x A t
x x A t t
ω ω
ω φ
ω φ ω φ
+ = +
+ = +
+ = + Comparing the results, we get cos 3.1156; sin 3.4318A Aφ φ= =
( )1sin 3.4318tan 1.101489 tan 1.101489 47.76489cos 3.1156
oAA
φφ φφ
−= = = ⇒ = =
( ) ( )2 2 2 2sin cos 3.4318 3.1156 4.6351A A Aφ φ= + = + = mm
( )4.6351sin 47.76ox tω= +
4. A body describes simultaneously two motions, 1 3sin 40x t= mm and 2 4sin 41x t=
mm. What is the maximum and minimum amplitude of combined motion and what is the beat frequency?
Maximum amplitude is (a+b) and minimum amplitude is (a-b). Hence, for the present case, maximum amplitude is 3 + 4 = 7 mm and minimum amplitude is 4 – 3 = 1 mm.
Beat frequency = 1 2 41 40 12 2 2
ω ωπ π π− −
= = Hz.
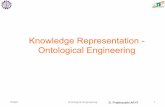
5. Derive the equation of motion of a spring mass system using (i) Newton’s laws of motion (ii) energy principle (iii) Rayleigh’s principle.
Free vibration of an undamped translational system
(i) Equation of motion using Newton’s second law of motion.
Newton’s second law of motion: The rate of change of momentum of mass is equal to the force acting on it.
If mass m is displaced a distance ( )x t when acted upon by a resultant force ( )F t
in the
same direction, Newton’s second law of motion gives ( ) ( )dx tdF t mdt dt
=
. If mass m is
constant, it can be taken outside the integral. Hence, ( ) ( )2
2
d x tF t m mx
dt= =
.........(1)
Resultant force on the mass = mass × acceleration.
Spring mass system in horizontal position

4 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
For a rigid body undergoing rotational motion, Newton’s second law gives ( )M t Jθ=
..(2)
where M
is the resultant moment acting on the body and θ
is the resulting angular
displacement and ( )2
2
d tdtθ
θ =
is the angular acceleration.
The procedure is now applied to the undamped single degree of freedom system shown in the figure. Here, the mass is supported on frictionless rollers and can have translator motion in the horizontal direction. When the mass is displaced a distance x+ from its static equilibrium position, the force in the spring is kx , and the free-body diagram of the mass can be represented as shown in figure. The application of equation (1) to mass m yields the equation of motion ( )F t kx mx= − = or 0mx kx+ = ......(3)
(ii) Equation of motion using D’Alembert’s Principle
The equation of motions, equations (1) and (2) can be rewritten as
( ) 0F t mx− =
and ( ) 0M t Jθ− =
........(4)
These equations can be considered equilibrium equations provided that mx−
and Jθ−
are treated as a force and a moment. This fictitious force (or moment) is known as the inertia force (or inertia moment) and the artificial state of equilibrium implied by equation (4) is known as dynamic equilibrium. This principle, implied in equation (4) is called D’Alembert’s principle. The application of D’Alembert’s principle to the system shown in figure yields the equation of motion: 0kx mx− − = or 0mx kx+ = .
(iii) Equation of motion using the principle of conservation of energy
A system is said to be conservative if no energy is lost due to friction or energy-dissipating non-elastic members. The kinetic energy T is stored in the mass by virtue of its velocity and the potential energy U is stored in the spring by virtue of its elastic deformation. Thus the principle of conservation of energy can be expressed as: constantT U+ = or
( ) 0d T Udt
+ = .......(5)
The kinetic energy of the mass is given by 2 21 12 2
T mv mx= =
The potential energy stored in the spring is given by 212
U kx=
Substituting these two expressions in equation (5) leads to 2 21 1 02 2
d mx kxdt + =
( ) ( )1 12 2 02 2
m xx k xx+ = or 0mx kx+ =

5 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
6. An unknown mass m is attached to one end of a spring of stiffness k having natural
frequency of 6 Hz. When 1 kg mass is attached with m , the natural frequency of the system is lowered by 20%. Determine the value of unknown mass m and stiffness k.
( )1 2
21
2
1 16 ; 6 0.2 6 4.82 2 1
6 1 11.25 1 1.25 1.7778 kg4.8
k kf Hz f Hz Hzm m
f k m m m m mf m k m
π π= = = − = = +
+ += = = = ⇒ + = ⇒ =
11 1 N6 2526.65
2 2 1.7778 mk kf Hz kmπ π
= = = ⇒ =
7. A body of mass 5 kg is hung on two helical springs in parallel. One spring is
elongated by 1 cm by a force of 3 N. The other spring requires a force of 2 N for an elongation of 1 cm. Calculate the natural frequency of vibration.
1 2
1 2
3 N 3 N N 2 N 2 N N300 ; 200 ;1 cm 0.01 m m 1 cm 0.01 m m
N200 300 500meq
k k
k k k
= = = = = =
= + = + =
Natural frequency, 1 1 500 1.59152 2 5n
kf Hzmπ π
= = =
8. The amplitude of vibration of an undamped system is measured to be 1 mm. The
phase shift from 0t = is measured to be 2 radians and the frequency is found to be 5 radians/second. Calculate the initial conditions that cause this vibration to occur. Assume the response is of the form ( ) ( )sinx t A tω φ= + .
Given A = 1 mm, φ = 2 radians, ω = 5 rad/s. for an undamped system: Amplitude of vibrations at any instant t: ( ) ( )sinx t A tω φ= + = ( )1sin 5 2t +
Velocity at any instant t: ( ) ( ) ( ) ( ) ( ) ( )cos 1 5 cos 5 2 5cos 5 2v t x t A t t tω ω φ= = + = × + = +
Setting 0t = in these expressions yield ( )0 sin 2 0.909297x t = = = mm
( ) ( ) mm0 0 5cos 2 2.080734s
v t x t= = = = = −
9. The maximum velocity attained by the mass of a simple harmonic oscillator is 10 cm/s, and the period of oscillation is 2 seconds. If the mass is released with an initial displacement of 2 cm, find (i) the amplitude (ii) the initial velocity (iii) the maximum acceleration and (iv) the phase angle.

6 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
The mass is released with an initial displacement of 2 cm. It means, at time 0t = , 0 2x = cm 0.02 m= .
Let ( ) ( ) ( )20 0 0cos sin cosn n n n nx A t x A t x A tω φ ω ω φ ω ω φ= − = − − = − −
(a) The maximum velocity attained by the mass of a simple harmonic oscillator is obtained when ( )0sin 1ntω φ− = in the velocity expression x .
2cm m m10 10 10 0.1s s snx Aω −= = = × =
Also given that time period of oscillation is 2 seconds.
1 2 rad rad2 2 3.141592 sec secn n
n
f πω π πτ
= = = =
Since m0.1 ,sn Aω = maximum amplitude
m0.10.1 s 0.03183 mrad3.14159 secn
Aω
= = =
(d) To find the phase angle 0φ .
At time 0t = , initial displacement is ( ) 00 2 cm 0.02 mx t x= = = =
Using displacement expression ( ) ( ) ( )0 0 00 cos 0 0.03183cos 0.02 mx t x A φ φ= = = − = − =
10
0.02cos 51.07240.03183
φ − = − = −
degrees
(b) To find initial velocity. Initial velocity is calculated by putting 0t = in velocity
expression. ( ) ( )0msin 3.14159 0.03183sin 51.0724 0.07779sn nx A tω ω φ= − − = − × − = −
(iii) To find maximum acceleration maxx .
Maximum acceleration occurs when ( )0cos 1ntω φ− = in the acceleration expression.
2 22
m3.14159 0.03183 0.314148snx Aω= − = − × =
10. The exhaust from a single-cylinder four-stroke diesel engine is to be connected to a silencer, and the pressure therein is to be measured with a simple U-tube manometer. Calculate the minimum length of the manometer tube so that the natural frequency of oscillation of the mercury column will be 3.5 times slower than the frequency of the pressure fluctuations in the silencer at an engine speed of 600 rpm. The frequency of pressure fluctuation in the silencer is equal to # of cylinders speed of the engine
2× .

7 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
Natural frequency of oscillation of the liquid column: Let the datum be taken as the equilibrium position of the liquid. If the displacement of the liquid column from the equilibrium position is denoted by x , the change in potential energy is given by
U = potential energy of raised liquid column + potential energy of depressed liquid column
U = (weight of mercury raised × displacement of the c.g. of the segment) + (weight of mercury depressed × displacement of the c.g. of the segment)
222xU Ag Agxρ ρ= × =
where A is the cross-sectional area of the mercury column, ρ is the density of the liquid and g is the acceleration due to gravity. The change in kinetic energy is given by
2 2 21 1 1mass of mercury velocity2 2 2
T mv ALxρ= = × × =
where L is the length of the mercury column. By assuming harmonic motion, we can write
( ) cos ; sinn n ndxx t X t x X tdt
ω ω ω= = = −
where X is the maximum displacement and nω is the natural frequency of oscillation. 2 2cos nU AgX tρ ω=
Maximum potential energy is obtained when 2cos 1.ntω = Hence, 2maxU AgXρ=
( )2 2 2 21 1sin sin2 2n n n nT AL X t AL X tρ ω ω ρ ω ω= − =
Similarly maximum kinetic energy is obtained when 2sin 1.ntω = Hence, 2 2max
12 nT AL Xρ ω=
Equating maxU and maxT , i.e. max maxU T= ⇒ 2 2 212 nAgX AL Xρ ρ ω=
2 2n
gL
ω = ⇒ 2n
gL
ω =

8 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
Length of the mercury column: the frequency of pressure fluctuations in the silencer 1 600 600 2 rad300 rpm 10
2 60 secπ π× ×
= = = =
Since the frequency of oscillations of the mercury column in the manometer is 3.5 times slower than the frequency of the pressure fluctuations in the silencer,
the frequency of oscillations of the mercury column 10 rad8.9759793.5 secnπω = = .
Since 2n
gL
ω = , ⇒ ( )
2
2 222
m2 9.812 sec 0.24352 metersrad8.975979 sec
n
gLω
×= = =
(Radians does not count during unit calculations).
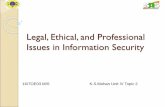
11. A cylinder of mass m and mass moment of inertia J is connected to a spring of stiffness k and rolls on a rough surface as shown in Fig. If the translational and angular displacements of the cylinder are x and θ from its equilibrium position, determine equation of motion.
Assume that the cylinder does not slide over the surface. Kinetic energy T of the cylinder = Translational KE + Rotational KE
2 21 12 2
T mx Jθ= +
......................(1)
Since the cylinder rolls without sliding, x Rθ= or xR
θ = ...........(2)
Substituting equation (2) in (1) 2
2 22 2
1 1 12 2 2
x JT mx J m xR R
= + = +
...........(3)
( )2 2 2 2 21 1 12 2 2
T m R J mR Jθ θ θ= + = + ...................(4)
The potential or strain energy U due to the deflection of the spring = 212
U kx= ......(5)
Or 2 212
U kR θ= ..................(6)
Total energy = KE + PE = a constant, since there is no damping, i.e., no loss of energy. Equation of motion in terms of x coordinate:
2 22
1 12 2
Jm x kxR
+ + =
constant ..................(6)

9 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
Differentiating equation (6) with respect to time,
( ) ( )2 2
2
1 12 2 0 or 0 or 02 2
J J km x x k x x m x kx x xJR R mR
+ + = + + = + = +
2
2
0 n nkx x Jm
R
ω ω+ = ⇒ =+
Since Polar mass moment of inertia of a cylinder about its center 212
J mR= , 23n
km
ω =
Equation of motion in terms of θ coordinate:
( )2 2 2 21 12 2
mR J kRθ θ+ + = constant
Differentiating with respect to time,
( )( ) ( ) ( ) ( )2
2 2 2 22
1 12 2 0 0 02 2
kRmR J kR mR J kRmR J
θ θ θ θ θ θ θ θ+ + = ⇒ + + = ⇒ + =+
2 2
22
2 2
20 where 1 32
n nkR kR k
mR J mmR mRθ ω θ ω+ = = = =
+ +
12. A cylinder of mass m and radius r rolls without slipping on a concave circular
surface of radius R. Determine the frequency of oscillation when the cylinder is slightly displaced from its equilibrium position. Use energy method.
φ - rolling angle of the mass; θ - angle of rotation of the ball about the center point O.
.RR rr
θ φ φ θ= ⇒ = If φ is clockwise, then automatically θ is anti-clockwise.
Kinetic energy of the cylinder is due to translation and rotation. Translational velocity of the center of the cylinder ( )v r R rω θ= = = −
Relative rotational velocity of the cylinder = φ θ−
Potential energy of the mass = ( ) ( ) ( )( )cos 1 cosmgh mg R r R r mg R rθ θ= − − − = − − ..(2)

10 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
Kinetic energy due to translation = ( ) ( )2 22 21 1 12 2 2
mv m r m R rω θ= = −
Kinetic energy due to rotation = ( )22 21 1 12 2 2
I mrω φ θ = −
( )2 2
22 2 2 21 1 14 4 4
R R rmr mr m R rr rθ θ θ θ− = − = = −
KE + PE ( ) ( ) ( )( )2 22 21 1 1 cos2 4
m R r m R r mg R rθ θ θ= − + − + − −
KE + PE ( ) ( )( )2 23 1 cos4
m R r mg R rθ θ= − + − −
Since ( ) 0d KE PEdt
+ = , ( ) ( )( )23 2 sin 04
m R r mg R rθθ θ θ− + − =
Since θ is very small, sinθ θ≈ ; Hence, ( )3 02
R r θ θ− + =
( )03
2
g
R rθ θ+ =
−
⇒ 2 0nθ ω θ+ = ⇒ ( )
2 23n
gR r
ω =−
⇒ ( )
2 rad3 secn
gR r
ω =−
13. A spring is cut into two halves and these two halves are connected in series. Find the new stiffness.
Springs connected in series 1total 1 2 1 1 1
1 1 1 1 1 1 1 2 2k kk k k k k k k k
= = + ⇒ = + = ⇒ =
14. A spring is cut into two unequal portions of length 1 4LL = and 2
34LL = and these
two new springs are connected in series. Find the new spring stiffnesses. If the spring is cut into 4 equal length springs, then
1 2 3 4total 1 2 3 4
1 1 1 1 1 1 1 4+ + If 4new newnew
k k k k k k kk k k k k k k k
= = + ⇒ = = = = ⇒ = =
Hence, the stiffness of the spring of length 1 4LL = is 4 .k
2total 1 2 2 2
1 1 1 1 1 1 1 1 1 3 4= + = 4 4 4 3
k kk k k k k k k k k k
= = + ⇒ = − ⇒ =
k
L 2
L
2
L
1k
1k
k
L 4
L
34
L
1 4k k= 2k

11 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
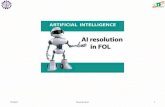
15. SSRAO-EXAMPLE 1.7: Equivalent spring stiffness of a hoisting drum: A hoisting drum, carrying a steel wire rope, is mounted at the end of a cantilever beam as shown in Figure. Determine the equivalent spring constant of the system when the suspended length of the wire rope is L. Assume that the net cross-sectional diameter of the wire rope is d and the Young’s modulus of the beam and the wire rope is E.
Deflection at the free end of a cantilever beam due to a concentrated load P is given by
3 3
3 3PL PbEI EI
δ = = . This equation can be rewritten in the form 3
3EIPb
δ= which is
analogous to the spring equation F kδ= . Hence the stiffness of the cantilever beam =
beam 3
3EIkb
= . Area moment of inertia I for the beam = 3 3
12 12bd at
= . Substituting I in
beamk , 3 3
beam 3 3
312 4
E at Eatkb b
= = .
The stiffness of the wire rope subjected to axial loading is 2
rope 4AE d EkL L
π= = .
Since both the wire rope and the cantilever beam experience the same load W, as shown in Figure (b), they can be modeled as springs in series, as shown in Figure(c). The equivalent spring constant eqk is given by
eq beam eq
1 1 1k k k
= +

12 of 12
A. Nagamani Dept. of Aero. Engg. 16AE323- Theory of vibrations
SNS COLLEGE OF TECHNOLOGY
16. A wooden rectangular prism of density wρ , height h , and cross section a b× is initially depressed in an oil tub and made to vibrate freely in the vertical direction. Use Rayleigh’s method to find the natural frequency of vibration of the prism. Assume the density of oil is oρ . If the rectangular prism is replaced by a uniform
circular cylinder of radius r , height h , and density wρ , will there be any change in the natural frequency?
When the wooden prism oscillates in the liquid, it is by inertia force with which the oscillation continues. Inertia force = mass of prism × acceleration of prism Mass of the prism = density of prism × volume of prism wabhρ= Displacement of the prism = x Velocity of the prism = x Acceleration of the prism = x When the prism is displaced by x from equilibrium position, the weight of oil displaced =
o gabxρ = restoring force.
(Weight = ( )mass × g = density of oil × volume of oil displaced × g = o abx gρ )
Equation of motion: Inertia force = Restoring force (Rayleigh’s method)
0 0 0
o
ow o n
w
mx gabxgabhx gabx x x x xh
ρρρ ρ ωρ
= −
+ = ⇒ + = ⇒ + =
on
w
gh
ρωρ
= .
Since, nω is independent of the cross section of the prism, nω remains same even for a circular wooden prism of same height h .
17. S 18. S