1
12
1.KLASYFIKACJA LOGÓW I STATYSTYCZNA DOKŁADNOŚĆ POSZCZEGÓLNYCH RODZAJÓW: 1.Logi mierzące prędkość względną: a)względem wody otaczającej statek, b)względem dna: -logi mechaniczne + -4% -logi ciśnieniowe + -2%; -logi korelacyjne + -1% -logi elektromagnetyczne + -1% 2.Logi mierzące prędkość bezwzględna -logi hydroakustyczne + -0,5% -logi laserowe 2. ZASADA PRACY LOGÓW: - elektromagnetycznych Elementem pomiarowym jest czujnik umieszczony w dnie lub pod dnem kadłuba na wypuście. W czujniku cewka zasilana napięciem przemiennym, wytwarza pulsujące pole magnetyczne prostopadłe do kierunku ruchu statku. Znajdujące się w wodzie jony otrzymują energię Lorentza, proporcjonalną do prędkości przesuwającego się pola magnetycznego. Energia ta nadaje jonom kierunek ruchu prostopadły do kierunku ruchu statku. Zjawisko to powoduje indukowanie się potencjału na elektrodach na płaszczyźnie pomiarowej logu. Potencjał ten zasila wzmacniacz, w którym jest on porównywany z sygnałem kompensacyjnym. Jeżeli powstanie różnica to zostanie ona wzmocniona oraz zasili uzwojenie siłownika natomiast siłownik spowoduje usunięcie tej różnicy pociągając za sobą palec potencjometru proporcjonalnego stąd napięcie podawane jest na gen. napięci odniesienia zachodzi tam formowanie sygnału wzbudzenia na czujnik logu. -ciśnieniowych Są znacznie doskonalsze od mechanicznych. Do pomiaru prędkości wykorzystuje się w nich różnicę ciśnienia całkowitego i statycznego, czyli wielkość ciśnienia dynamicznego mierzonego za pomocą manometru różnicowego. Ciśnienie wody doprowadzone jest do logu przez 2 rurki do części komory różnicowej przedzielonej membraną. Ciśnienie dynamiczne powstaje na skutek ruchu statku do przodu, odkształca membranę i połączony z nią popychacz wskaźnika prędkości pokazuje pewną wartość ciśnienia dyn, co pozwala określić prędkość statku. Potwierdza to równanie Bernoulliego: V 1 2 /2g+p 1 /γ=V 2 2 /2g+p 2 /γ -hydroakustycznych Mierzą one prędkość statku względem dna, jeśli głębokość morza jest znaczna log mierzy prędkość statku względem warstwy wody zalegającej na głębokości konstrukcyjnej logu, a więc nie ulegającej pływom, prądom. Wykorzystano w nich zjawisko Dopplera. Polega ono na zmianie częstotliwości syg odbieranego w stosunku do częstotliwości syg nadanego w funkcji przemieszczania się źródła emisji syg względem obiektu odbijającego lub odwrotnie. Wykorzystuje się zakres częstotliwości od 100-1000 kHz. 3. ZALETY I WADY LOGÓW HYDROAKUSTYCZNYCH Wady:
Transcript of 1
1.KLASYFIKACJA LOGÓW I STATYSTYCZNA DOKŁADNOŚĆ POSZCZEGÓLNYCHRODZAJÓW: 1.Logi mierzące prędkość względną: a)względem wody otaczającejstatek, b)względem dna: -logi mechaniczne + -4% -logi ciśnieniowe + -2%; -logi korelacyjne + -1% -logi elektromagnetyczne + -1%2.Logi mierzące prędkość bezwzględna -logi hydroakustyczne + -0,5% -logi laserowe2. ZASADA PRACY LOGÓW:- elektromagnetycznychElementem pomiarowym jest czujnik umieszczony w dnie lub pod dnemkadłuba na wypuście. W czujniku cewka zasilana napięciemprzemiennym, wytwarza pulsujące pole magnetyczne prostopadłe dokierunku ruchu statku. Znajdujące się w wodzie jony otrzymująenergię Lorentza, proporcjonalną do prędkości przesuwającego siępola magnetycznego. Energia ta nadaje jonom kierunek ruchuprostopadły do kierunku ruchu statku. Zjawisko to powodujeindukowanie się potencjału na elektrodach na płaszczyźnie pomiarowejlogu. Potencjał ten zasila wzmacniacz, w którym jest on porównywanyz sygnałem kompensacyjnym. Jeżeli powstanie różnica to zostanie onawzmocniona oraz zasili uzwojenie siłownika natomiast siłownikspowoduje usunięcie tej różnicy pociągając za sobą palecpotencjometru proporcjonalnego stąd napięcie podawane jest na gen.napięci odniesienia zachodzi tam formowanie sygnału wzbudzenia naczujnik logu. -ciśnieniowychSą znacznie doskonalsze od mechanicznych. Do pomiaru prędkościwykorzystuje się w nich różnicę ciśnienia całkowitego i statycznego,czyli wielkość ciśnienia dynamicznego mierzonego za pomocą manometruróżnicowego. Ciśnienie wody doprowadzone jest do logu przez 2 rurkido części komory różnicowej przedzielonej membraną. Ciśnieniedynamiczne powstaje na skutek ruchu statku do przodu, odkształcamembranę i połączony z nią popychacz wskaźnika prędkości pokazujepewną wartość ciśnienia dyn, co pozwala określić prędkość statku.Potwierdza to równanie Bernoulliego: V1
2/2g+p1/γ=V22/2g+p2/γ
-hydroakustycznychMierzą one prędkość statku względem dna, jeśli głębokość morza jestznaczna log mierzy prędkość statku względem warstwy wody zalegającejna głębokości konstrukcyjnej logu, a więc nie ulegającej pływom,prądom. Wykorzystano w nich zjawisko Dopplera. Polega ono na zmianieczęstotliwości syg odbieranego w stosunku do częstotliwości sygnadanego w funkcji przemieszczania się źródła emisji syg względemobiektu odbijającego lub odwrotnie. Wykorzystuje się zakresczęstotliwości od 100-1000 kHz.3. ZALETY I WADY LOGÓW HYDROAKUSTYCZNYCH Wady:
-wpływ zmian temperatury wody i jej zasolenia, co pogarszadokładność-dużą rolę odgrywają błędy bezwzględne logu, które powstają naskutek małej prędkości statku (manewry), zachodzi potrzeba obniżeniaprogu czułości aparatury-ograniczona odległość propagacji fali akustycznej w wodzie morskiej-silne zakłócenia środowiska-trudny wybór miejsca instalowania przetwornika w kadłubie statku-wysoka cena instalacji i napraw. Zalety:-dokonywanie pomiaru prędkości bezwzględnej-brak elementów wystających i ruchomych pod dnem statku-możliwość uzyskania dodatkowych informacji podczas manewrówkotwiczenia statku, czy podchodzenia do nabrzeża-możliwość łatwego łączenia z innymi urządzeniami-łatwa budowa systemów pomiarowych prędkości-możliwość wykorzystania układu elektronicznego logu do współpracy zsystemami hydronawigacji i hydrolokacji.4.SYSTEMY POMIAROWE PRĘDKOŚCI -logi mechaniczne- zasada pracy tych logów polega na działaniunaporu wody wywieranego na skrzydła śruby logu podczas ruchu statkudo przodu. Oś śruby musi być równoległa do osi wzdłużnej statku.Pomiar prędkości względnej.-logi ciśnieniowe do pomiaru prędkości względnej wykorzystuje sięróżnicę ciśnienia całkowitego i statycznego, czyli wielkośćciśnienia dynamicznego mierzonego za pomocą manometru różnicowego;-logi elektromagnetyczne patrz opis wyżej;-logi hydroakustyczne patrz opis wyżej;-logi korelacyjne wyposażone są w dwie echosondy o impulsowymcharakterze pracy. Pierwsza echosonda wysyła sygnał który odbija sięod odległości konstrukcyjnej (120cm) a odbiera go druga echosonda imierzą prędkość względną za pomocą techniki hydroakustycznejpomiaru. Prędkość więc wynosi V=S/T; T- czas korelacji, S-stałaodległość pomiędzy oscylatorami.5.FUNKCJE REGULATORÓW LOGU CIŚNIENIOWEGO. Regulatory służą do wprowadzenia poprawek do wskazań logu. I tak:-reg. A wprowadza poprawkę niezależną od prędkości statku,-reg. B -zależną tylko dla danej prędkości,-reg. C służy do ustawienia wskazówki w położeniu zerowym, gdystatek nie płynie6.PARAMETRY I WŁAŚCIWOŚCI ŻYROSKOPU SWOBODNEGO.Żyroskopem swobodnym nazywamy takie urządzenie mechaniczne, w którymżyroskop posiada bezwładność newtonowską oraz trzy stopnie swobody ruchu. Wirujący żyroskop określają następujące parametry: - prędkość kątowa i liniowa, - moment bezwładności,
- kręt i moment kinetyczny.Prędkość kątowa żyroskopu Ω wyznaczana jest stosunkiem jej do głównej osi żyroskopu X i przedstawiana jako wektor Ω leżący na tej osi. Prędkość obrotową określa się najczęściej liczbą obrotów na minutę. 2πn/60 Liniową prędkość punktu wirującego wokół osi określa zależność: v=Ω*r v-wektor prędkości linii punktu materialnego, r- wektor (promień) odległości punktu materialnego dla którego określana jest prędkość liniowa v od osi wokół której wiruje żyroskop.W tym przypadku chodzi o określenie momentu względem głównej osi żyroskopu X.
I= Ri2*dm,Gdzie: I-moment bezwładności, Ri -średnia odległość punktu materialnego mi od osi X. Dla wirującego ciała można wyznaczyć moment pędu zwany krętem względem obranego bieguna 0. Kręt punktu materialnego o masie dm równy jest iloczynowi wektorowemu promienia r poprowadzonego z bieguna 0 i pędu vdm czyli: |r*v|dm zaś składowe wektora krętu odpowiednio Kx, Ky i Kz.Jeżeli wirowanie ciała zachodzi tylko wokół jednej z głównych osi bezwładności, wtedy kręt nazywa się momentem kinetycznym i oznacza się literą H Elementarny moment kinetyczny h wirującego punktu materialnego żyroskopu wynosi: h=r*miv. Do podstawowych właściwości wirującego żyroskopu należą: - zachowanie stałego kierunku, -precesja, - reakcja żyroskopowa.Zachowanie stałego kierunku względem nieruchomego układu odniesieniajest podstawową właściwością. Ruch żyroskopu wywołany momentem sił zewnętrznych nazywany jest ruchem precesyjnym lub precesją żyroskopu. Moment reakcji żyroskopowej występuje tam gdzie występują wirujące masy umieszczone na ruchomej podstawie. 7. METODY PRZEKSZTAŁCANIA ŻYROSKOPU SWOBODNEGO W KOMPAS ŻYROSKOPOWY.Żyroskopem swobodnym nazywamy urządzenie mechaniczne, w którymżyroskop posiada bezwładność newtonowską oraz trzy stopnie swobodyruchu. Bezwładność uzyskuje się dzięki odpowiedniej masie żyroskopui jej rozmieszczeniu w stosunku głównej osi oraz odpowiedniejprędkości wirowania. Kompasem żyroskopowym jest urządzenie, którewykorzystuje cechy żyroskopu swobodnego oraz posiada zdolnościsamoczynnego ustawiania swojej głównej osi, będącej wskaźnikiemkierunku tj. w płaszczyźnie południka rzeczywistego oraz wpłaszczyźnie horyzontu. Źródłem informacji o położeniu wskaźnikajest wahadło fizyczne. Efekt wahadła uzyskuje się na dwa sposoby:
1. przez zawieszenie w osi głównej żyroskopu naczyń połączonychczęściowo wypełnionych cieczą które stanowią układ balistyczny( kompasy jednożyroskopowe)
2. przez obniżenie środka ciężkości (kompasy dwużyroskopowe).Kompasy zbudowane według tej zasady noszą nazwę kompasów z korekcjąwewnętrzną.8.METODY TŁUMIENIA GŁÓWNEJ OSI X W KOMPASACH 1 I 2 ŻYROSKOPOWYCH.Nietłumione i tłumione wahania głównej osi kompasu jednożyroskopowego są inaczej opisane niż dwużyroskopowego ; łączą jetylko przyczyny. Równanie opisujące ruch fizycznego wahadła dlamałych katów wychyleń jest następujące: I+mg=0 gdzie I-momentbezwładności. m-masa wahadła ,-odległość osi symetrii naczyniabalistycznego od osi wychyleń. Pierwszy człon równania określadynamiczny moment inercji wahadła , zaś drugi – momentnaprowadzający wahadła. W technice kompasów jednożyroskopowychtłumienie realizowane jest dwoma metodami:-przez przesunięcie o kąt punktu zamocowania układu balistycznegodo obudowy zżyroskopu (metoda mimośrodu)-przez zastosowanie dodatkowej masy umieszczanej po zachodniejstronie elementu pomiarowego.W celu uzyskania wahań tłumionych „osi głównej”, wewnątrz kuli stosuje się dwa zbiorniki N i S tłumika olejowego, które są umieszczone w górnej części kul żyroskopowych. Zbiorniki te są połączone rurkami- górną, powietrzną wyrównującą ciśnienie nad powierzchniami oleju w naczyniach oraz dolną- olejową łączącą oba zbiorniki. Czasami na rurce tej zainstalowany jest elektromagnetyczny zawór kulkowy, odcinający przepływ oleju podczas przechyłów kuli.9.DEWIACJE KOMPASÓW ŻYROSKOPOWYCH.a) dewiacja statyczna (nie zależą od ruchu kadłuba statku, nieulegają zmianie) , która jest sumą:- dewiacji czułości elementu pomiarowego δcz – wyrażona jestnajmniejszą wartością zmiany kąta kursu, na który zareaguje ukł śledzący kompasużyroskopowego (0,05-0,1o),- dewiacja odczytu (paralaksy)δo – zależy od sposobu rejestracji
kursu, minimalizację tej wielkości uzyskuje się poprzez stosowanietzw. dokładnych skal odczytowych, a eliminuje przez stosowaniecyfrowych technik rejestracyjnych,
- dewiacja konstrukcyjna δk – wynika z pracy kompasu w innejszerokości geograficznej niż konstrukcyjna, czyli z niespełnieniawarunku Schulera, wartość jej jest niewielka i na półkulipołudniowej zmienia znak na przeciwny,

- dewiacja montażu δm – wynika z niedokładności zamontowania kompasuna statku (dokładnie w płaszczyźnie wzdłużnej symetrii kadłubastatku lub równolegle do niej)
δst=δcz+δo+δk+δm (0,5-1o)b) dewiacja dynamiczna (wywołane na skutek ruchu statku i jegoprzemieszczania się) :
dewiacja prędkościowa δv – jest to uchyb wynikający z tego, że prstatku ma znaczący wpływ na ustalenie się osi głównej elementupomiarowego pomiarowego płaszczyźnie południka Do jej obliczaniastosuje się wzór wyprowadzony metodą trygonometryczną oraz zopisu ruchu elementu pomiarowego z uwzględnieniem ruchu statkupłynącego ze stałą prędkością i stałym kursem, określając azymutpołożenia dynamicznego równowagi.Wraz ze wzrostem prędkości statku dewiacja ta rośnie. Zależy onaod :a) prędkości statku- składowej prędkości statku leżącej na równoleżniku - składowej prędkości leżącej na południkub) promienia kuli ziemskiej
a) c) pędkości kątowej obrotu płaszczyzny południka w dobowym ruchukuli ziemskiej,
- dewiacja inercyjna δi – Powstaje na skutek oddziaływania naelement pomiarowy przyśpieszeń ( zmian prędkości , kursu ,wykonywania cyrkulacji ) które powstają przy manewrach statku.Wyróżnia się 1 i 2 rodzaju δi=δi
I+δiII
δiI – zależy od różnicy dewiacji prędkościowej przed i po
manewrze oraz od odległości manewrującego statku od szerokości konstrukcyjnej. δi
II – (dewiacja tłumienia) występuje na skutek oddziaływaniasił inercyjnych na płyn ukł tłumienia, występują na każdej szerokości geograficznej, - dewiacja środowiskowa δs – dzieli się na dewiację falowania i
stałego przechyłu δs= δf+δp
δf – (ćwiartkowa) nie jest uwzględniana w szerokościachgeograficznych do 50o N i S(+-0,5-1,5o),δp – nie uwzględnia się jej dla statków handlowych z uwagi naograniczony stały kąt przechyłu statku uprawiającego żeglugę nawodach otwartych,
δd=δv+δk+δs
10. UKŁADY KOMPASU ŻYROSKOPOWEGO.W urządzeniach kompasów żyroskopowych można wyróżnić czteryfunkcjonalne podstawowe układy:a) Układ śledzący – zwany układem zależnym służy do śledzenieelementu pomiarowego i przekazywania jego wskazań w orientacji
głównych kierunków świata do wskaźników głównych i nadajnika układupowtarzania.b) Układ powtarzania (synchronicznego przekazywania wskazań) - służydo przekazywania sygnału kursu statku a więc wartości konta pomiędzywzdłużną linią symetrii statku a linią północnego kierunkuwskazywanego przez element pomiarowy do wszystkich odbiorników ipowtarzaczy znajdujących się w różnych miejscach statku.c) Układ korekcyjny - służy do kompensacji błędu wskazywanego przezelement pomiarowy kierunku. Korektory mogą być wewnętrzne izewnętrzne. W zależności od rozwiązania mogą one znajdować się wobudowie kompasu lub stanowić oddzielne urządzenie.d) Układ zasilania - funkcją zasilaczy jest przetwarzanie energiielektrycznej z sieci statkowej na prąd o parametrach potrzebnych dozasilania poszczególnych układów i elementów kompasu żyroskopowego.W tym wypadku może być zastosowany jeden lub kilka przekształtników,albo maszyna rotacyjna wielouzwojeniowa z urządzeniem ruchowym orazprzekształtnik statyczny z falownikiem. Istnieją również układy pomocnicze: regulacji temperatury, kontrolistanu pracy, alarmowy.11. UKŁAD STEROWANIA KURSEM STATKU.
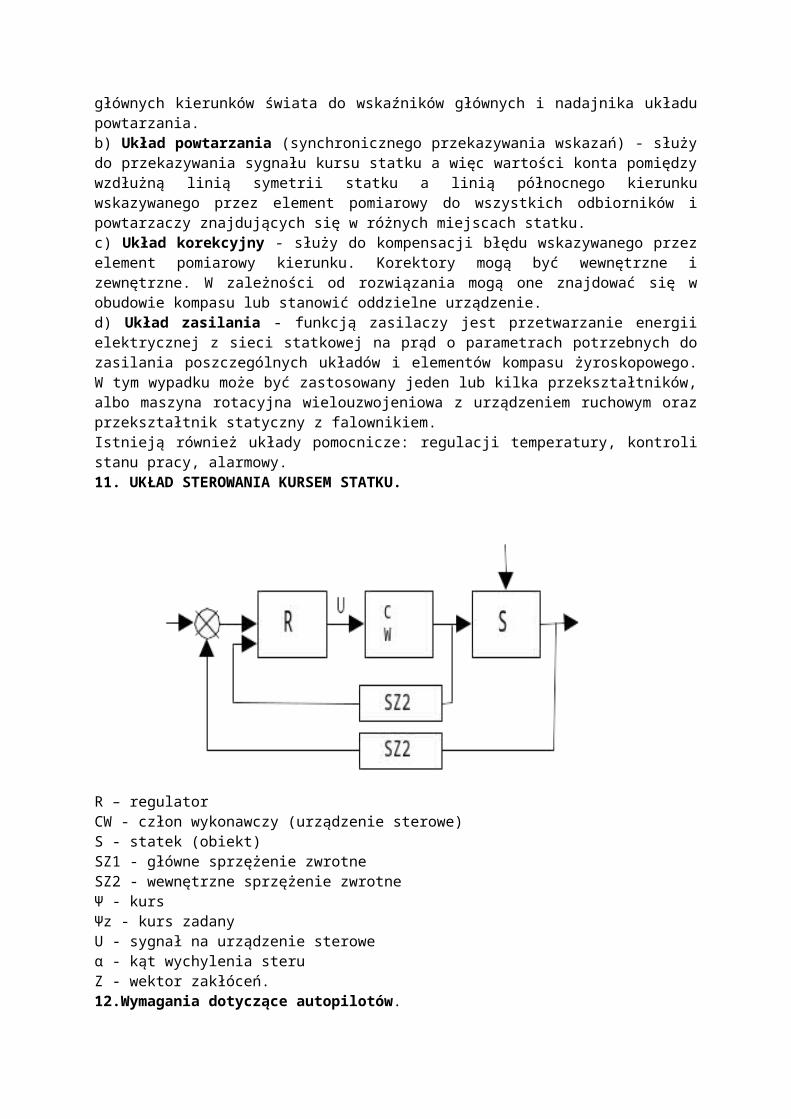
R – regulatorCW - człon wykonawczy (urządzenie sterowe)S - statek (obiekt)SZ1 - główne sprzężenie zwrotneSZ2 - wewnętrzne sprzężenie zwrotneΨ - kursΨz - kurs zadany U - sygnał na urządzenie steroweα - kąt wychylenia steruZ - wektor zakłóceń.12.Wymagania dotyczące autopilotów.
Autopilotom stawia się różne wymagania. Jednym z podstawowych jest ciągłe porównywanie, bez udziału człowieka, rzeczywistego kąta kursowego z kątem zadanym i utrzymanie tego stanu mimo występowania zakłóceń.
13. PARAMETRY NASTAWIALNE WEDŁUG TS (autopilot).Dobierane są one eksperymentalnie i poprzez modelowaniematematyczne:a) wychylenia - powodują zmianę wartości kąta wychylenia steru,czyli współczynnika wzmocnienia Kp, w więc członu Pb) tłumienie - zmiana wartości współczynnika wagowego członu Dc) czułość - zmiana zakresu strefy martwej regulatora, czyli funkcjiczłonu całkującegod) ograniczenia wychylenia - pozwala ograniczyć wielkośćmaksymalnego kąta wychylenia steru podczas pełnej prędkości statku wczasie pracy automatycznej.14.FUNKCJA BLOKU ADAPTACJI.Blok adaptacji w autopilotach stanowi integralną część składową członu regulacji. Funkcją bloku adaptacji jest dobór optymalnych wartości parametrów nastawialnych autopilota. Jest to dokonywane na podstawie wartości mierzalnych i programowalnych . Najczęściej blok adaptacji zawiera regulator typu PID, który zapewnia ciągłą kompensację wpływu kołysań statku i innych zakłóceń pochodzących od złych warunków środowiskowych. Funkcją bloku jest również wyprzedzenie ruchu steru w stosunku do ruchu statku, co jest szczególnie istotne z uwagi na duże stałe czasowe członu wykonawczego i obiektu sterowania . W nowych rozwiązaniach autopilotów zadaniem bloku jest dalsze zmniejszenie częstotliwości iwartości kąta wychyleń steru .Realizowane jest to przez uniezależnienie działania autopilota od wartości odchyłek kursu i ich częstotliwości w procesie myszkowania. Uzależnia to pracę autopilota od zakłóceń, gdy tymczasem dąży się wykorzystania wpływu zakłóceń na obiekt.15. Wyjaśnić dynamiczną stateczność statku.Statek posiadający dynamiczną sterowność statku (krzywa Dieudonne’a przechodzi przez poczatek układu odniesienia ), przy zerowym położeniu steru (=0) , będzie poruszał się w przybliżeniu kuresem prostym. Statek posiadający niestateczną sterowność dynamiczną (przy=0), wejdzie w cyrkulacje z prędkością kątową proporcjonalną do stopnia niestateczności. Krzywe Dieudonne’a określają zdolność manewrową przy próbie spiralnej.RYSUNEK:
Przykład wyznaczenia krzywych Dieudonne dla 3 predkości.16. Sposoby napędu sterów strumieniowych (3 metody)
Pierwszy sposób ma miejsce gdy stery strumieniowe napedzane są silnikiem do mocy 375kW i mogą posiadać wyłącznie stałe śruby napędowe. Stery te są napędzane za pomącą silników asynchronicznych klatkowych, rewersywnych, jedno lub dwubiegowych z rozruchem bezrośrednim ( za pomocą przełącznika gwiazda w trójkat) na napięcie380V/50Hz bądź 440V/60Hz lub autotransformatora oraz silniki asynchroniczne pierścieniowe, względnie pradu stałego.Drugi sposób to stery strumieniowe ze śrubą nastawną stosowane są nienawrotne, stałoprędkościowe układy napędowe. Zastosowanie prostych układów napędowych wynika ze sposobusterowania wartością i kierunkiem wytwarzania siły naporu steru, polegające tylko na zmianie skoku skrzydeł śruby.Trzeci sposób to stosowanie silników na wyższe napięcia w związku zewzrostem mocy instalowanych sterów, tzn. 3,3kV i 6kV. Silniki dobierane są do pracy dorywczej na czas 30 lub 60 minut. 17. Funkcje steru strumieniowego.1.Możliwość zapewnienia sterowności statku przy niewielkich prędkościach do przodu i wstecz.2.Możliwość samodzielnego wykonywania dużych zwrotów na obszarach ograniczonych.3.Możliwośc zatrudnienia mniejszej liczby holowników przy statkach duzych oraz całkowita rezygnacja z usług holowniczych na małych i średnich jednostkach.4.Niezawodność poprawnego kierunku działania urzadzenia sterowego zestanowiska dowodzenia statkiem.18. EFEKTYWNOŚĆ POPRZECZNEGO STERU STRUMIENIOWEGO.( NARYSOWAĆ I
OPISAĆ)
RYSUNEK:
Efektywność poprzecznego steru strumieniowego zależy w dużym stopniuod prędkości. Ewentualne zmiany skuteczności działania sterów strumieniowych w ruchu naprzód i wstecz przy różnych prędkościach powodowane są:
- tworzeniem w obszarze kadłuba ewentualnych nad i pod ciśnień hydrodynamicznych na skutek odchylenia strumienia wody pochodzącej od steru strumieniowego
- zakłóceń równomierności dopływu strumienia wody do śruby steruW celu poprawy efektywności stosuje dodatkowe tunele wyrównawczy ciśnień przyburtowych, który poprawia efektywność do 20%.19. METODY STABILIZACJI PRZECHYŁÓW BOCZNYCH.Wyróżniamy 3 podstawowe metody klasyfikacji stabilizatorów przechyłów bocznych:-wodne-żyroskopowe-płetwoweWodne mają zastosowanie na statkach średnich, gdzie można zainstalować burtowe zbiorniki przechyłowe o znacznych pojemnościach. Największą zaletą tych stabilizatorów jest prostota ich budowy i skuteczność ich działania, ale czas kołysań powinien być wystarczający do przeprowadzenia takiej ilości wody aby moment stabilizacyjny Mst był skuteczny.Żyroskopowe są stosowane na statkach o mniejszej pojemności. Pomijając kłopotliwe układy rozruchowe oraz odpowiednie zabezpieczenie pomieszczenia, mają tę zaletę, że działanie układu odbywa się samoczynnie. Wartość Mst jest proporcjonalna do wartości kąta przechyłu oraz prędkości jego powstawania. Pasywne żyroskopowe układy stabilizacyjne mają uproszczone układy regulacji, pomiaru i sterowania, dlatego często stosowane są na jednostkach specjalnych np. holowniki, promy, kontenerowce.Płetwowe znajdują zastosowanie na statkach o dużych pojemnościach. Wukładach tych szczególną rolę pełni regulator R. Płetwy są wysuwane hydraulicznie na zewnątrz kadłuba statku pod linią wody.
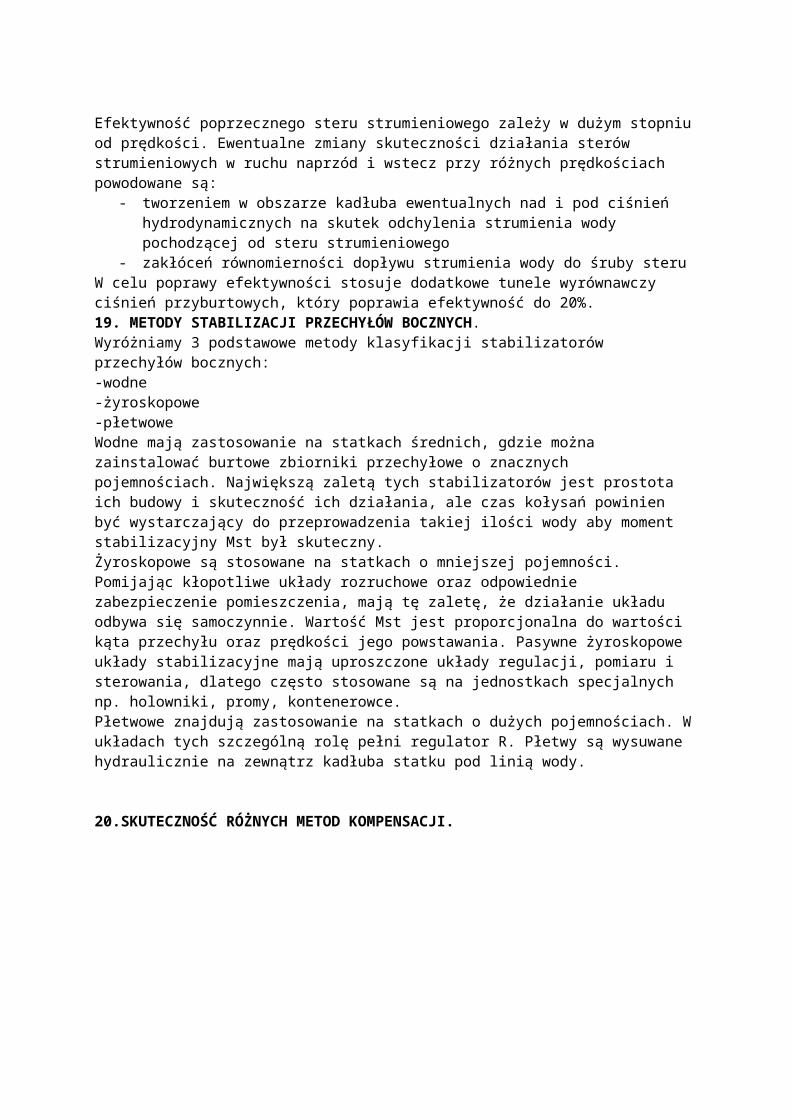
20.SKUTECZNOŚĆ RÓŻNYCH METOD KOMPENSACJI.
Krzywe:
1-bez kompensacji (swobodne kołysanie),2-bierna, niesterowalna płynowa,3-czynna, sterowana płynowa,4-bierna mechaniczna (żyroskopowa),5-czynna, mechaniczna płetwowa.
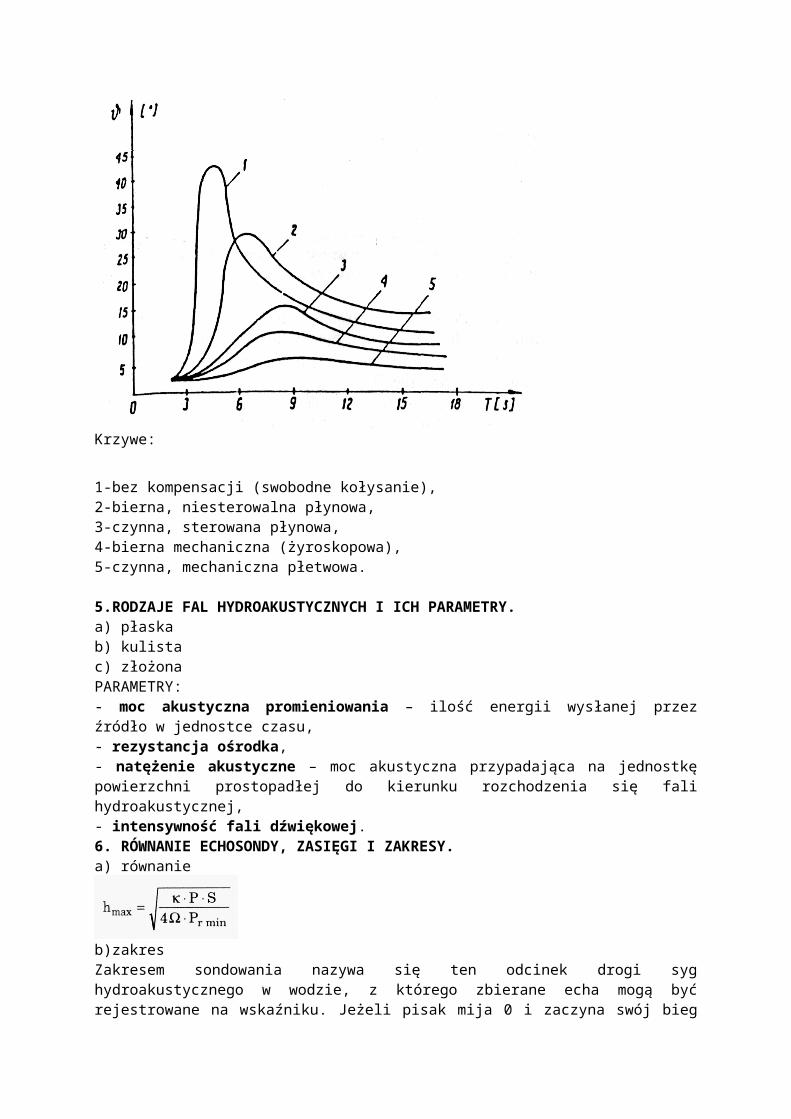
5.RODZAJE FAL HYDROAKUSTYCZNYCH I ICH PARAMETRY.a) płaskab) kulistac) złożonaPARAMETRY:- moc akustyczna promieniowania – ilość energii wysłanej przezźródło w jednostce czasu,- rezystancja ośrodka,- natężenie akustyczne – moc akustyczna przypadająca na jednostkępowierzchni prostopadłej do kierunku rozchodzenia się falihydroakustycznej,- intensywność fali dźwiękowej.6. RÓWNANIE ECHOSONDY, ZASIĘGI I ZAKRESY.a) równanie
b)zakresZakresem sondowania nazywa się ten odcinek drogi syghydroakustycznego w wodzie, z którego zbierane echa mogą byćrejestrowane na wskaźniku. Jeżeli pisak mija 0 i zaczyna swój bieg
po papierze, to początek odcinka zakresu znajduje się w wodzie, azakres nazywa się podstawowym zakresem sondowania.c) zasięgEchosonda nawigacyjna ma 1 zasięg, kilka zakresów oraz nieskończonąilość podzakresów.
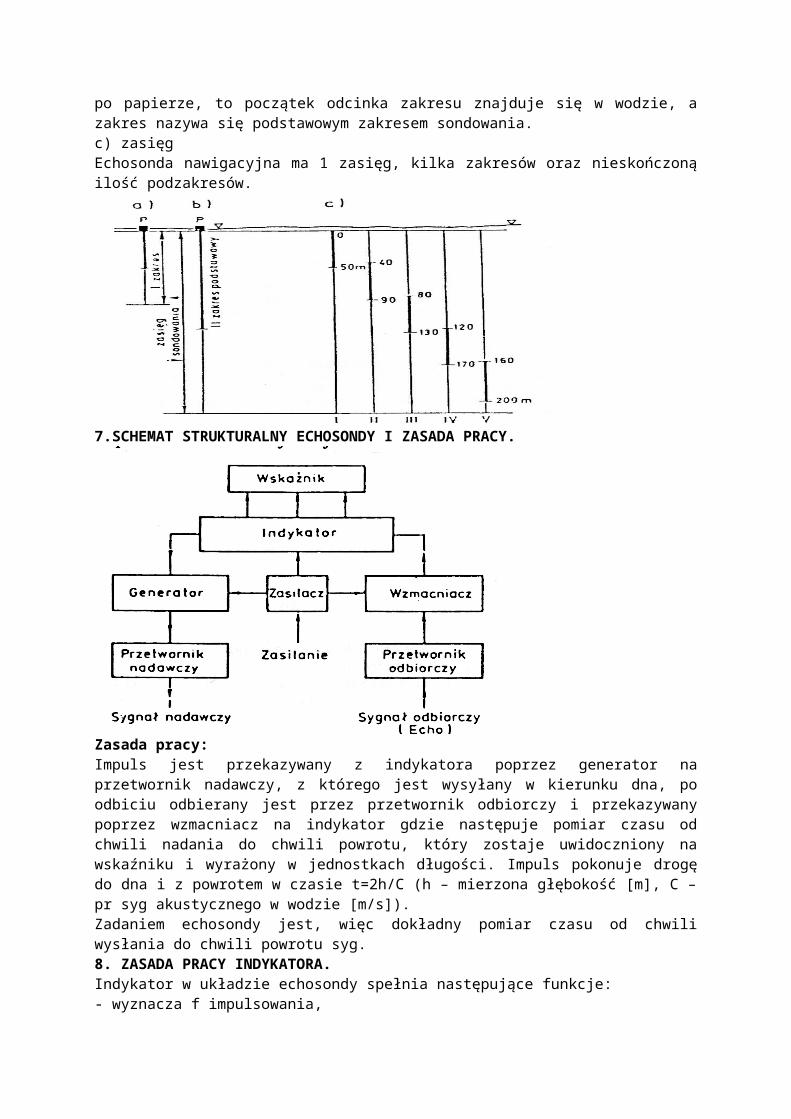
7.SCHEMAT STRUKTURALNY ECHOSONDY I ZASADA PRACY.
Zasada pracy:Impuls jest przekazywany z indykatora poprzez generator naprzetwornik nadawczy, z którego jest wysyłany w kierunku dna, poodbiciu odbierany jest przez przetwornik odbiorczy i przekazywanypoprzez wzmacniacz na indykator gdzie następuje pomiar czasu odchwili nadania do chwili powrotu, który zostaje uwidoczniony nawskaźniku i wyrażony w jednostkach długości. Impuls pokonuje drogędo dna i z powrotem w czasie t=2h/C (h – mierzona głębokość [m], C –pr syg akustycznego w wodzie [m/s]).Zadaniem echosondy jest, więc dokładny pomiar czasu od chwiliwysłania do chwili powrotu syg.8. ZASADA PRACY INDYKATORA.Indykator w układzie echosondy spełnia następujące funkcje:- wyznacza f impulsowania,

- dokonuje wyboru zakresu sondowania,- wyznacza wybór kanału pracy (nadawczy lub odbiorczy),- dokonuje pomiaru czasu od chwili pobudzenia przetwornika do chwiliodebrania echa (pomiar odległości),- podaje syg rejestracji do wskaźnika.Podstawową częścią, na której oparto działanie indykatora jest silnik el utrzymujący stałą prędkość obrotową. W echosondach nawigacyjnych ten sam silnik, poprzez przekładnię mech, napędza pisak rejestratora graficznego.