uzi BAB 3
36
BAB III METODOLOGI PENELITIAN 3.1. Tempat dan Waktu penelitian Penelitian dilakukan di laboratorium Bengkel Mekanik Jurusan Teknik Elektro FT-UNJ, rentang waktu dilakukannya penelitian pada bulan agustus sampai bulan Februari 2015. 3.2. Metode Penelitian Metode penilitian yang digunakan dalam menyelesaikan penelitian ini adalah menggunakan metode penelitian dan pengembangan (Research and Development) yang meliputi perencanaan, analisa kebutuhan, perancangan, pengujian, implementasi perangkat keras (hardware), dan implementasi perangkat lunak (software). Metode yang digunakan dapat dilihat pada Gambar 3.1 dengan tahapan sebagai berikut : 38
-
Upload
rizqiana-putri-fiyendri -
Category
Documents
-
view
217 -
download
0
description
rev
Transcript of uzi BAB 3

BAB III
METODOLOGI PENELITIAN
3.1. Tempat dan Waktu penelitian
Penelitian dilakukan di laboratorium Bengkel Mekanik Jurusan Teknik Elektro
FT-UNJ, rentang waktu dilakukannya penelitian pada bulan agustus sampai bulan
Februari 2015.
3.2. Metode Penelitian
Metode penilitian yang digunakan dalam menyelesaikan penelitian ini adalah
menggunakan metode penelitian dan pengembangan (Research and Development)
yang meliputi perencanaan, analisa kebutuhan, perancangan, pengujian, implementasi
perangkat keras (hardware), dan implementasi perangkat lunak (software). Metode
yang digunakan dapat dilihat pada Gambar 3.1 dengan tahapan sebagai berikut :
38

39
Gambar 3.1. Metode Penelitian Prototipe Perancangan Sistem
Display Pengukur Sensor Jarak Parkir Mobil Truk
3.2.1. Analisa Kebutuhan Sistem
Analisa kebutuhan adalah hal pertama yang harus dilakukan dalam
pembuatan Prototipe Display Pengukur Sensor Jarak Berbasis Arduino Mega 2560.
Menganalisa perangkat input yang digunakan pada sistem, peneliti menggunakan
sensor jarak ultrasonik untuk mendeteksi jarak antara mobil ke benda lain.
40
Menganalisa perangkat proses yang digunakan pada sistem, peneliti
menggunakan Arduino Mega 2560 sebagai pengendali dan pemmroses data inputan
sensor. Perangkat output yang digunakan berupa indikator buzzer dan tampilan
LCD 20x4.
3.2.2. Perancangan Sistem
Perancangan sistem pada penelitian ini adalah membangun sebuah sistem blok
alat yang dapat mengidentifakasi jarak benda dengan mengunakan sensor jarak
ultrasonik yang telah diidentifikasi dan bagaimana memproses informasi yang didapat
oleh sensor ultrasonik menjadi informasi yang dipercaya hasilnya.
3.2.3. Pengujian
Pada tahap pengujian peneliti melakukan uji coba yaitu pengukuran setiap
sensor untuk mampu mengukur jarak dengan tepat agar dapat menditeksi
keberadaan benda penghalang di sekitar kendaraan dengan membuat program arduino
dari masing-masing sensor agar dapat terbaca dan tampil pada LCD 20x4. Lalu uji
coba selanjutnya adalah menggabungkan rangakain prototipe dengan komponen
buzzer agar bisa mengirim pesan peringatan berupa suara alarm apabila sensor-sensor
yang telah dipasang mendeteksi keberadaan benda disekitar kendaraan terlalu dekat.
Tahap pengujian adalah dengan menempatkan prototipe mobil truk pada suatu
keadaan dimana prototipe ini di kelilingi sebuah dinding yang mempunyai jarak
terukur oleh sensor agar mengambarkan posisi parkir yang sebenarnya. Dan

41
mengukur apakah jarak sebenarnya pada prototipe ke dinding sama dengan
pembacaan LCD 20x4. Jika akurat maka alat ini dinyatakan baik.
3.2.4 Implementasi Sistem Perangkat Keras
Setelah tahap uji coba selesai maka tahap selanjutnya adalah membuat sistem
perangkat keras, berupa prototipe dan maket sebuah truk besar dan sebuah maket
dinding. Desain prototipe mobil truk dibuat dari kayu dengan sensor terpisah dari
prototipe dan desain prototipe dinding dibuat dari bahan triplek tebal.
Maket mobil truk buatan dibuat untuk uji coba simulasi pada lahan parkir, pada
maket tersebut sudah terpasang sensor-sensor ultrasonik yang siap mendeteksi jarak
benda lain yang berada disekitar.
3.2.5 Implementasi Sistem Perangkat Lunak
Pada penelitian Display Pengukur Sensor Jarak Parkir Mobil Truk Berbasis
Arduinomega 2560 ini peneliti membuat sintaks program untuk dapat membuat
pembacaan dari sensor-sensor dapat tampil kedalam LCD 20x4 dengan menggunakan
aplikasi arduino IDE 1.0.
3.3. Rancangan Penelitian

42
Penelitian dalam menyelesaikan Prototipe Display Pengukur Sensor Jarak
Parkir Mobil Truk Berbasis Arduino Mega 2560 menggunakan beberapa tahap
rancang penelitian, yaitu :
3.3.1. Perancangan Sistem
Perancangan sistem adalah mendesain suatu sistem dalam langkah yang tepat
sehingga menghasilkan sistem yang baik. Perancangan alat digunakan untuk
menentukkan komponen penyusunan dari suatu alat yang dibuat, sehingga hasil akhir
sesuai dengan yang diinginkan. Perancangan mempermudah dalam proses pembuatan
alat, karena perancanagan terdiri dari pembuatan diagram blok dan sketsa rangkaian
untuk setiap block dengan fungsi tertentu dan spesifikasi alat yang di harapkan.
Gambar 3.2 adalah block diagram prototipe display pengukur sensor jarak parkir
mobil truk berbasis arduino mega 2560.
Gambar 3.2. Block Diagram Prototipe Diplay Pengukur Sensor Jarak

43
Berdasarkan blok diagram pada Gambar 3.2 Prototipe Perancangan alat
Display Pengukur Sensor Jarak Parkir Berbasis Arduino Mega 2560 dapat dibangun
oleh beberapa komponen utama antara lain :
1. Sensor jarak ultrasonik atau biasa disebut sensor ping yang digunakan
untuk mengukur jarak mobil terhadap benda lain.
2. Kontrol arduino mega 2560 adalah sebagai otak atau mikrokontroler yang
digunakan untuk mengendalikan dan memproses semua inputan dari
sensor menjadi informasi yang bisa dipahami oleh manusia.
3. LCD 20x4 digunakan sebagai tampilan prototipe dalam pembacaan nilai
sensor jarak ultrasonik.
4. Buzzer diguanakan sebagai indikator suara peringatan ketika terjadi
kebakaran.
5. Akumulator sebagai sumber daya utama bertegangan 12 volt.
3.3.2. Perancangan Perangkat Keras
Perancangan perangkat keras menentukan keberhasilan untuk kerja prototipe
display pengukur sensor jarak parkir mobil truk. Perancangan perangkat keras pada
alat ini terdiri dari dua bagian, bagian pertama pembuatan mobil truk untuk keperluan
simulasi prototipe pada saat parkir dan bagian kedua pembuatan maket dinding-
dinding untuk keperluan simulasi benda penghalang pada prototipe.

44
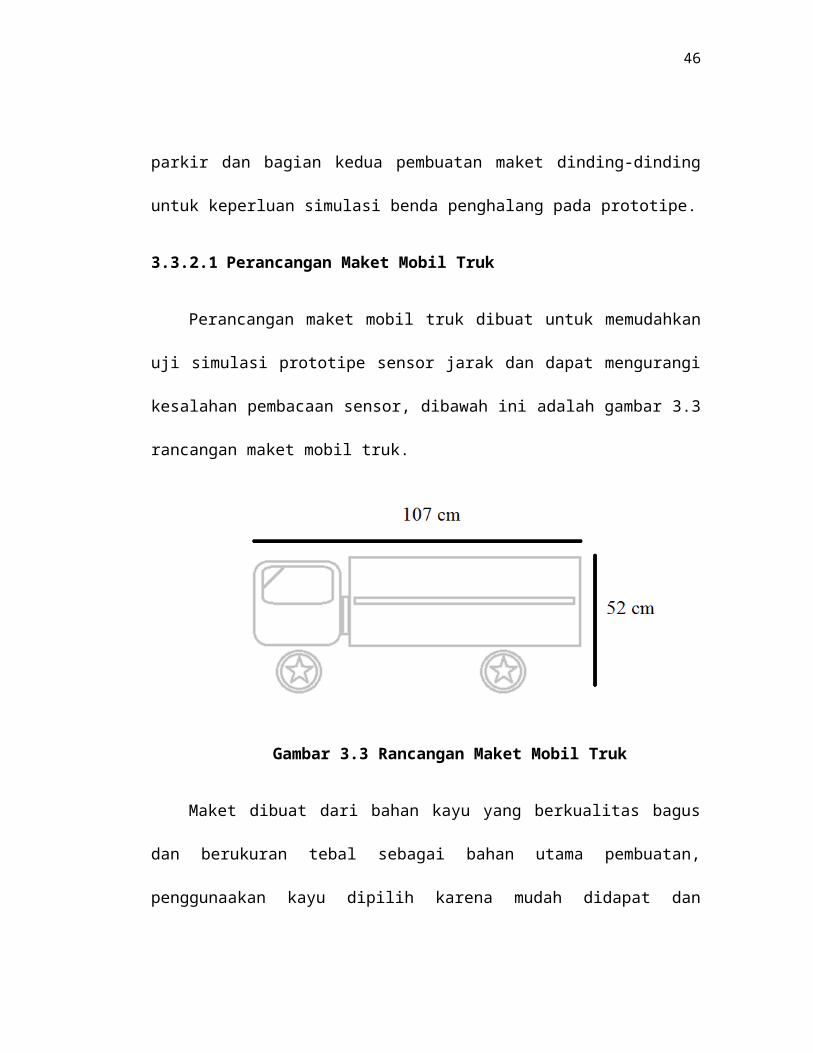
3.3.2.1 Perancangan Maket Mobil Truk
Perancangan maket mobil truk dibuat untuk memudahkan uji simulasi prototipe
sensor jarak dan dapat mengurangi kesalahan pembacaan sensor, dibawah ini adalah
gambar 3.3 rancangan maket mobil truk.
Gambar 3.3 Rancangan Maket Mobil Truk
Maket dibuat dari bahan kayu yang berkualitas bagus dan berukuran tebal
sebagai bahan utama pembuatan, penggunaakan kayu dipilih karena mudah didapat
dan dibentuk jika membutuhkan ukuran yang lebih kecil. Maket berbentuk serupa
seperti mobil truk pada umumnya tapi dibuat dengan ukuran panjang 107 cm lalu
lebar 39 cm dan tinggi 52 cm.
Pada maket truk ini terpasang sensor-sensor ultrasonik yang digunakan untuk
melakukan pengukuran jarak terhadap benda lain. Peletakan sensor dapat dilihat pada
Gambar 3.4. seperti berikut :

45
Gambar 3.4. Peletakan Sensor Pada Maket Mobil Truk
Sensor diletakan disudut-sudut bagian dari maket mobil bertujuan agar
peletakan pembacaan sensor lebih strategis dalam menditeksi keberadaan benda lain.
Dan arti dari penulisan sA pada gambar adalah sensor A, begitu pula yang
selanjutnya.
3.3.2.2 Perancangan Prototipe
1. Rangkaian Arduino Mega 2560
Arduino Mega 2560 merupakan salah satu jenis produk Arduino asal Italia,
kelebihan yang dimiliki oleh Arduino Mega 2560 dari produk Arduino lainnya adalah
46
banyak jumlah port Input dan Output sebanyak 54 pin, baik itu digital maupun
analog, sehingga memudahkan banyak sensor dalam penggunaannya dalam satu
papan arduino. Selain banyaknya Input dan Output, fasilitas yang menjadi kelebihan
dari Arduino Mega 2560 adalah terdapat 4 komunikasi serial sehingga memudahkan
perangkat lain dapat berinteraksi dengan Arduino Mega 2560. Gambar 3.5 dibawah
ini adalah gambar Arduino Mega 2560.
Gambar 3.5. Arduino Mega 25601
2. Catu Daya
Rangkaian catu daya merupakan rangkaian yang digunakan sebagai sumber
tegangan untuk Prototipe Display Pengukur Sensor Jarak Parkir Berbasis Arduino
Mega 2560. Rangkaian catu daya ini memiliki tegangan keluaran +12 Volt.
Tegangan +12 digunakan untuk memberi supply papan Arduino Mega 2560,
dikarenakan di dalam Arduino sudah terpasang IC Regulator 7805 sehingga tegangan
1 Yulin wang, electrical engineering and information technology, penerbit :WITpress (hal 253)

47
yang masuk tetap +5 Volt. Keluaran +5 volt digunakan untuk memberi supply sensor
dan buzzer.
Dalam rangkaian catu daya ini peneliti menggunakan baterai akumulator atau
biasa disebut aki karena merupakan catudaya utama pada kendaraan. Dengan
tegangan maksimum +12 Volt dan 3,5 Ampere. Peneliti menggunakan baterai
akumulator karena kemudahan dalam penggunaan untuk memberikan supply ke
dalam sistem.
3. Tampilan LCD 20x4
Penampil kristal cair (LCD) digunakan peneliti dalam penelitian Prototipe
Display Pengukur Sensor Jarak Parkir Berbasis Arduino Mega 2560 untuk
menampilkan nilai pembacaan dari sensor yang terpasang pada maket dan
memberikan informasi keadaan pada prototipe.
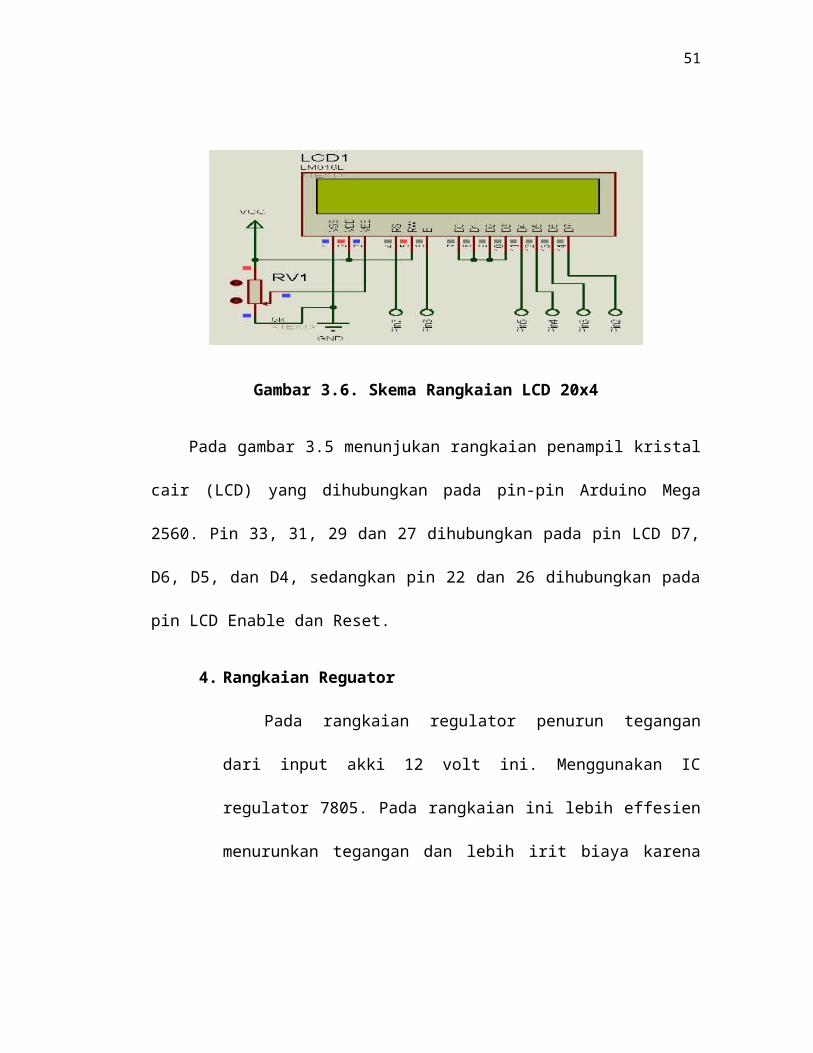
Gambar 3.6. Skema Rangkaian LCD 20x4

48
Pada gambar 3.5 menunjukan rangkaian penampil kristal cair (LCD) yang
dihubungkan pada pin-pin Arduino Mega 2560. Pin 33, 31, 29 dan 27 dihubungkan
pada pin LCD D7, D6, D5, dan D4, sedangkan pin 22 dan 26 dihubungkan pada pin
LCD Enable dan Reset.
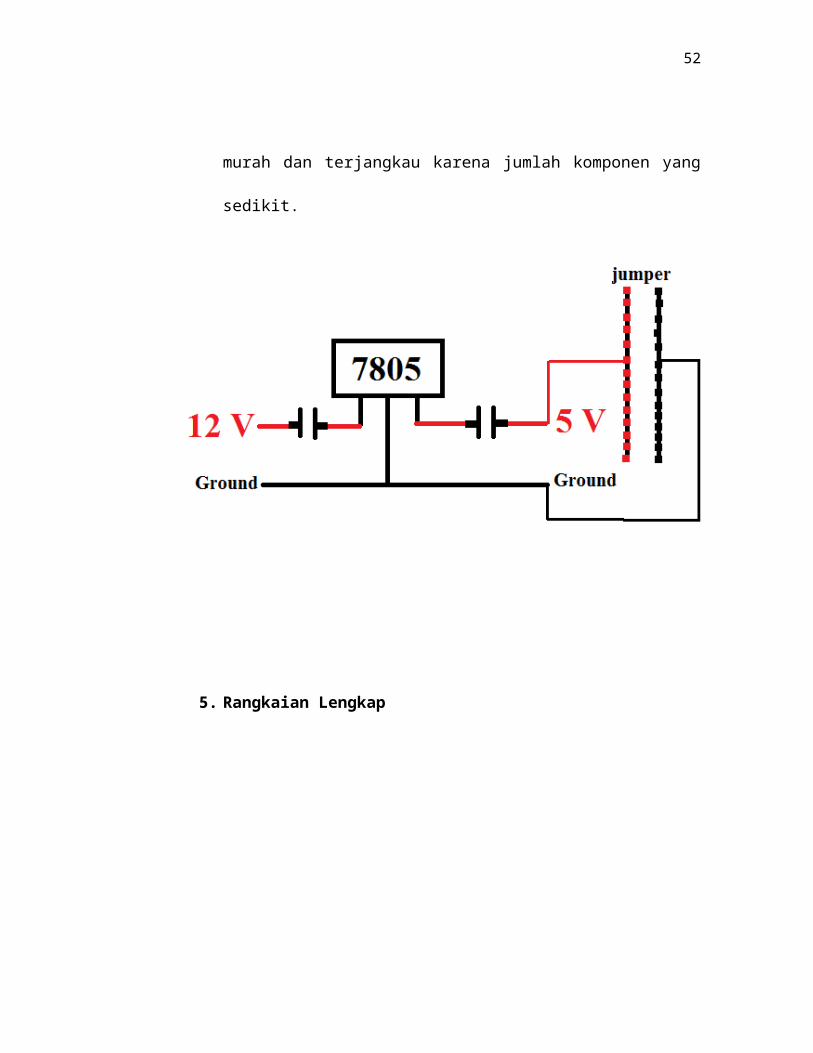
4. Rangkaian Reguator
Pada rangkaian regulator penurun tegangan dari input akki 12 volt
ini. Menggunakan IC regulator 7805. Pada rangkaian ini lebih effesien
menurunkan tegangan dan lebih irit biaya karena murah dan terjangkau
karena jumlah komponen yang sedikit.

49
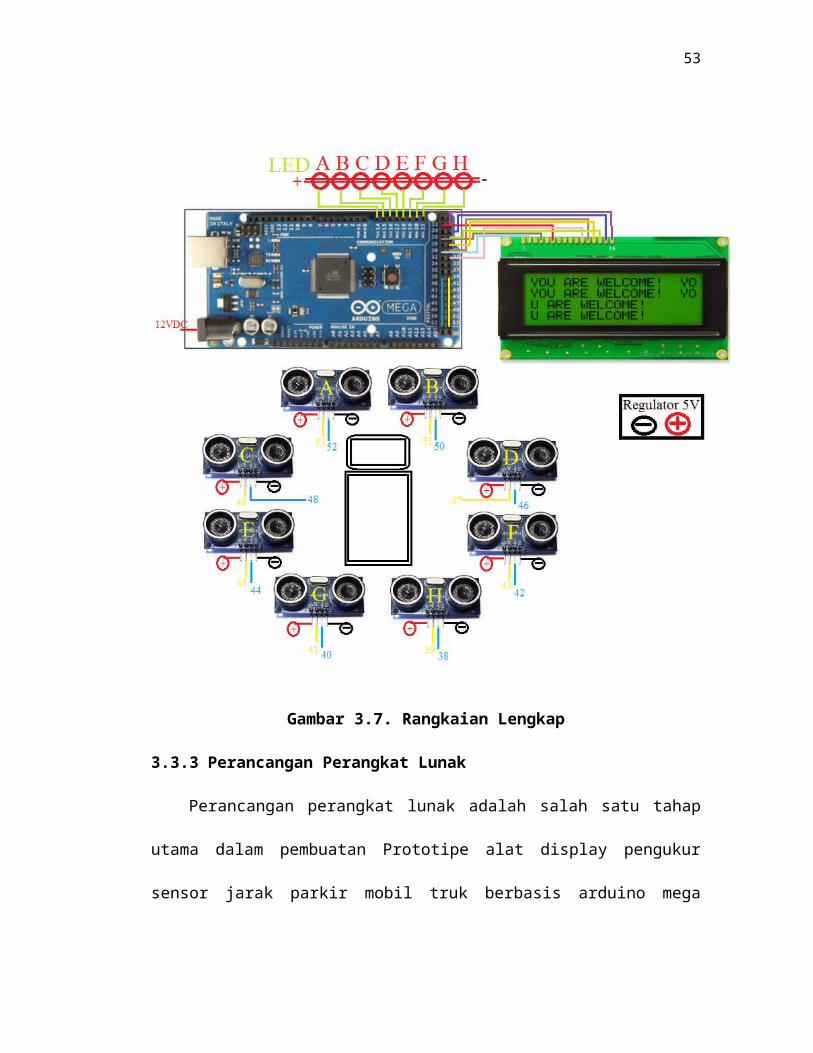
5. Rangkaian Lengkap
Gambar 3.7. Rangkaian Lengkap
3.3.3 Perancangan Perangkat Lunak
Perancangan perangkat lunak adalah salah satu tahap utama dalam pembuatan
Prototipe alat display pengukur sensor jarak parkir mobil truk berbasis arduino mega

50
2560, perancangan yang dimaksud di atas adalah pembuatan sintaks program untuk
Arduino Mega 2560 mengunakan software Arduino IDE 1.0.
a. Pemograman Arduino IDE 1.0
Dalam penelitian ini peneliti menggunakan software Arduino 1.0 untuk
membuat program prototipe, alasan peneliti menggunakan software ini karena
merupakan software khusus yang dibuat untuk memprogram berbagai
macam jenis arduino yang telah ada saat ini. Gambar 3.7 adalah tampilan awal
software Arduino 1.0.
51
Gambar 3.8 Tampilan Arduino IDE 1.0
Pada Prototipe Display Pengukur Sensor Jarak Parkir Berbasis Arduino
Mega 2560 digunakan beberapa input dan output. Perancangan perangkat
lunak membutuhkan parameter data untuk pemrograman, berikut ini adalah
parameter data yang digunakan pada Arduino Mega 2560 menggunakan
software Arduino 1.0 :
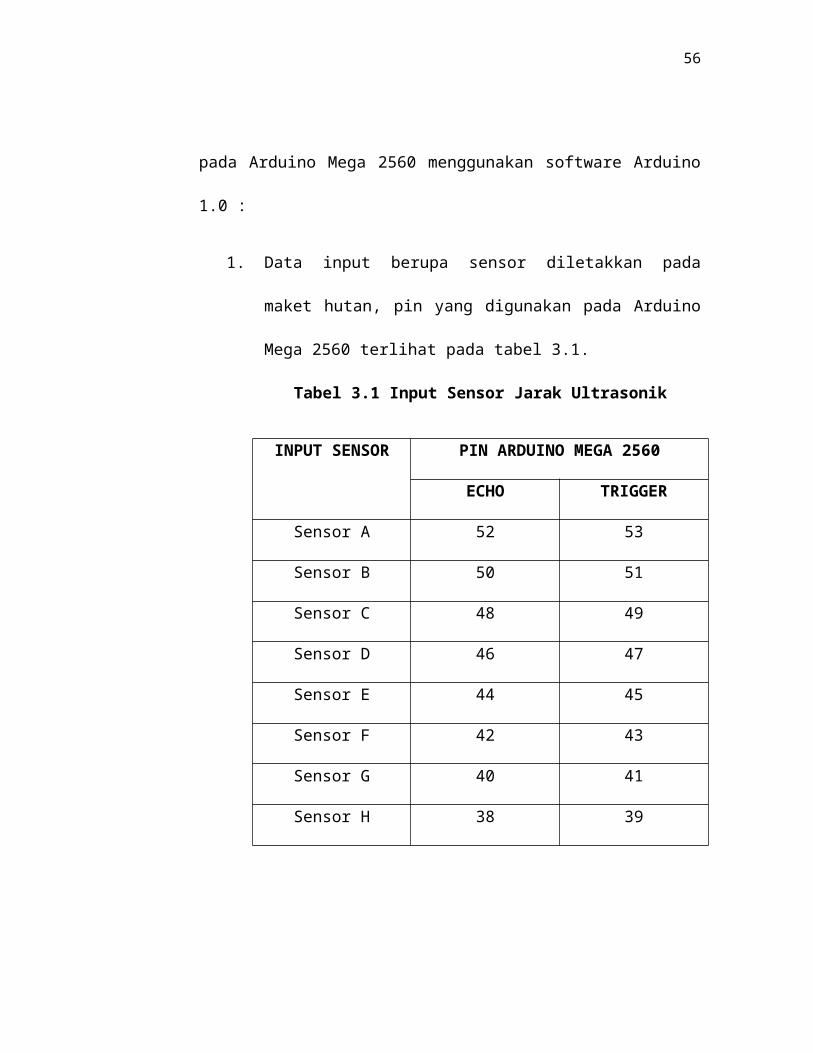
1. Data input berupa sensor diletakkan pada maket hutan, pin yang
digunakan pada Arduino Mega 2560 terlihat pada tabel 3.1.
Tabel 3.1 Input Sensor Jarak Ultrasonik
INPUT SENSOR PIN ARDUINO MEGA 2560
ECHO TRIGGER
Sensor A 52 53
Sensor B 50 51
Sensor C 48 49
Sensor D 46 47
Sensor E 44 45
Sensor F 42 43
Sensor G 40 41
Sensor H 38 39
52
2. Data output berupa suara buzzer, Pin yang gunakan pada Arduino
Mega 2560 terlihat pada tabel 3.2.
Tabel 3.2 Output Buzzer
OUTPUT PIN ARDUINO MEGA 2560
Buzzer 11
Buzzer 2 10
3. Pin Arduno Mega yang digunakan untuk tampilan LCD 20x4 terlihat
pada tabel 3.3.
Tabel 3.3 Pin LCD 20x4
LCD 20x4 PIN ARDUINO MEGA 2560
Reset 26
Enable 22
D4 33
D5 31
D6 29
D7 27
LED + 25
LED - 23
VCC 30
53
GROUND 23
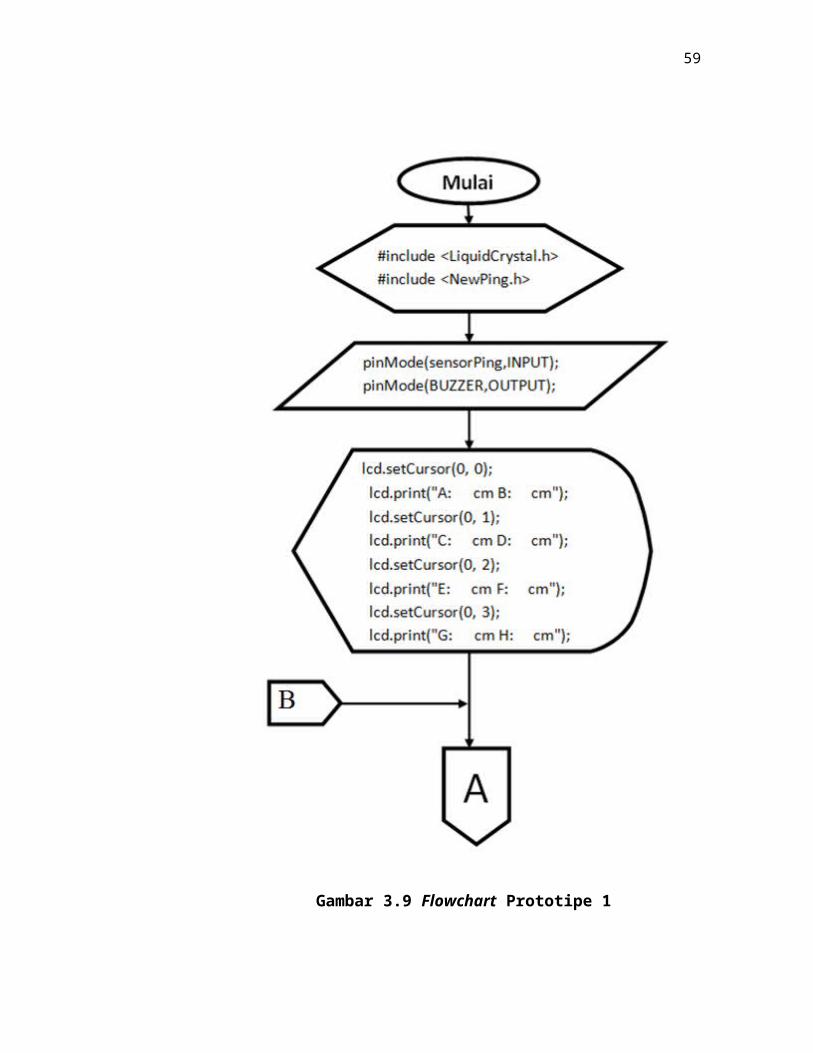
Berdasarkan parameter input dan output yang digunakan Prototipe
Display pengukur sensor jarak parkir mobil truk berbasis arduino Mega 2560,
pemograman arduino mega 2560 menggunakan software Arduino 1.0 peneliti
membuat program berdasarkan diagram alir yang tertera pada gambar dibawah
ini.

54
Gambar 3.9 Flowchart Prototipe 1
55
Gambar 3.10 Flowchart Prototipe 2
56
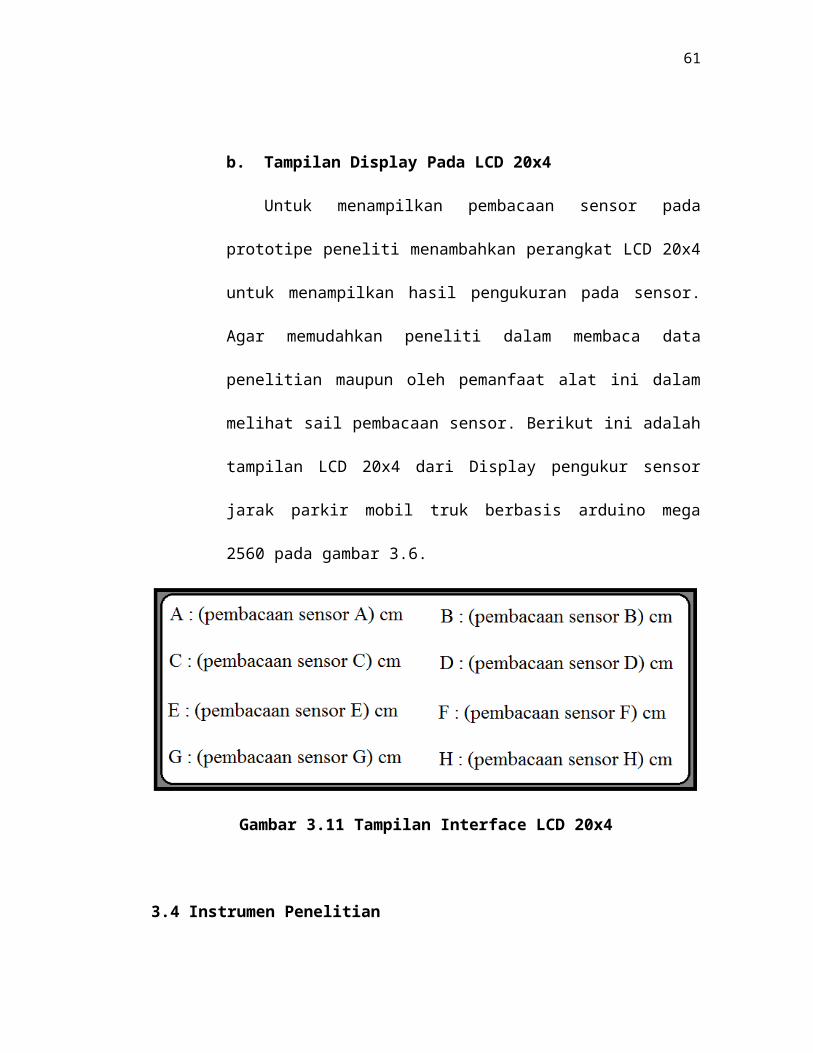
b. Tampilan Display Pada LCD 20x4
Untuk menampilkan pembacaan sensor pada prototipe peneliti
menambahkan perangkat LCD 20x4 untuk menampilkan hasil
pengukuran pada sensor. Agar memudahkan peneliti dalam membaca
data penelitian maupun oleh pemanfaat alat ini dalam melihat sail
pembacaan sensor. Berikut ini adalah tampilan LCD 20x4 dari Display
pengukur sensor jarak parkir mobil truk berbasis arduino mega 2560 pada
gambar 3.6.
Gambar 3.11 Tampilan Interface LCD 20x4
3.4 Instrumen Penelitian
a. Sistem komputer yang digunakan dalam penelitian ini adalah dengan
spesifikasi sebagai berikut :
1. Processor Intel®CoreTM i3-3110M ( 2,4 GHz)
2. RAM 2 GB DDR3

57
3. Harddisk 320 GB
4. Intel® HD Graphics 4000 (971 MB)
5. Kabel Printer
6. Hotspot LG Optimus L9 (P-765) OS Androids Jelly Bean 4.1.1.
b. Sistem Operasi Microsoft Windows 8.1 Pro 32- bit
c. Perangkat Lunak yang digunakan
1. Arduino IDE 1.0
2. Microsoft Word 2007
3. Google Sketch Up 8
d. Alat yang digunakan
1. Mini Elektrik drill (bor tangan kecil)
2. Drilling sets (mata bor)
3. Soldering Atraktor
4. Screwdrivers (macam-macam obeng)
5. Solder Listrik
e. Alat Ukur yang digunakan :
1. Multimeter Analor
2. Multimeter Digital
3. Serial Monitor Arduino IDE 1.0
f. Bahan Penelitian
Bahan-bahan yang digunakan dalam membuat Prototipe Display pengukur
sensor jarak parkir Berbasis Arduino mega 2560 antara lain :

58
1. Arduino Mega 2560
2. kayu
3. Sensor Jarak Ultrasonik
4. Buzzer
5. LCD 20x4
6. Box hitam
7. Header Female Male
8. Rangkaian Regulator
3.6. Prosedur Penelitian
Prosedur penelitian pada Prototipe Display pengukur Sensor jarak parkir mobil
truk berbasis arduino mega 2560. Diawali dengan mendesain Maket Prototipe, lalu
membuat pemograman pada Arduino IDE 1.0, lalu pengujian penggabungan antara
prototipe dan pemograman.
3.7. Teknik Analisis Data
Teknis analisis data merupakan kriteria data merupakan kriteria pengujian yang
dilakukan peneliti untuk mendapatkan data yang diperlukan pada keseluruhan sistem
prototipe, kriteria pengujian dilakukan peneliti untuk menyatakan bahwa sistem yang
telah dibuat dinyatakan berhasil atau gagal, berikut tabel-tabel pengujian pada
penelitian Prototipe Display pengukur sensor jarak parkir mobil truk berbasis arduino
mega 2560.
59
3.7.1. Kriteria Pengujian Hardware dan Software
3.7.1.1. Pengujian Sensor jarak ultrasonik dan buzzer.
Pengujian prorotipe Display pengukur sensor jarak parkir mobil truk dilakukan
untuk mengetahui seberapa besar nilai keberhasilan dalam penelitian ini berupa
pengujian keakuratan sensor jarak ultrasonik terhadap jarak sebenarnya dan pengujian
buzzer sebagai komponen yang bertugas memberi peringatan.
1. Pengujian mobil truk pada posisi center
Pengujian pertama adalah membuat prototipe mobil pada posisi center
ataupun sama tengah. Agar dapat kita lihat pada tabel pengujian 3.4, reaksi dari
sensor terhadap LCD 20x4 dan buzzer .
Tabel 3.4. Pengujian mobil truk pada posisi center
Sensor Jarak Pembacaan
Sensor
Respon Buzzer Hasil pembacaan
hidup mati akurat salah
Sensor A
Sensor B
Sensor C
Sensor D
Sensor E

60
Sensor F
Sensor G
Sensor H
2. Pengujian mobil truk pada posisi menyudut
Pengujian kedua adalah membuat prototipe mobil pada posisi menyudut
atau agak memojok pada dinding. Agar dapat kita lihat pada tabel pengujian
3.5, reaksi dari sensor terhadap LCD 20x4 dan buzzer.
Tabel 3.5 Pengujian Mobil Truk Pada Posisi Menyudut
Sensor Jarak Pembacaan
Sensor
Respon Buzzer Hasil pembacaan
hidup mati akurat salah
Sensor A
Sensor B
Sensor C
Sensor D
Sensor E
Sensor F
Sensor G
Sensor H
61
3. Pengujian mobil truk pada posisi menyerong.
Pengujian ketiga adalah membuat prototipe mobil pada posisi menyerong atau
menyamping terhadap dinding-dinding pembatas. Agar dapat kita lihat pada tabel
pengujian 3.6, reaksi dari sensor terhadap LCD 20x4 dan buzzer.
Tabel 3.6 Pengujian Mobil Truk Pada Posisi Menyerong
Sensor Jarak Pembacaan
Sensor
Respon Buzzer Hasil pembacaan
hidup mati akurat salah
Sensor A
Sensor B
Sensor C
Sensor D
Sensor E
Sensor F
Sensor G
Sensor H
4. Pengujian rangkaian regulator
62
Pengujian rangkaian regulator dilakukan untuk mengetahui tegangan
terukur regulator menggunakan Avo Meter Analog sebagai antisipasi dari
tegangan berlebih untuk supply tegangan ke prototipe.
Tabel 3.7 Pengujian Rangkaian Regulator
Jenis Ic
Regulator
Kriteria Pengujian Hasil
Pengukuran
7805 5 volt
3.8. Kriteria Uji Kelayakan Prototipe
Uji kelayakan prototipe dilakukan untuk mengetahui uji kerja prototipe
Display pengukur sensor jarak parkir mobil truk berbasis arduino mega 2560. Uji
kelayakan dilakukan dengan cara simulasi parkir meliputi pembacaan sensor untuk
mengetahui jarak benda lain lalu ditampilkan pada LCD 20x4 dengan menggunakan 8
buah sensor jarak ultrasonik yang terletak pada sudut-sudut mobil. Apabila sensor
yang terpasang menditeksi jarak sensor terhadap benda lain sudah terlalu dekat maka
suara peringatan dari buzzer akan aktif atau berbunyi sebagai suara peringatan
terhadap pengemudi atau pemanfaat alat display pengukur sensor jarak parkir mobil
truk berbasis arduino mega 2560.
1. Pengujian Prototipe Secara Manual

63
Pada pengujian prototipe secara manual alat display pengukur sensor
jarak parkir mobil truk berbasis arduino mega 2560 dengan cara menggunakan
papan yang digerakan oleh tangan peneliti dalam menguji pembacaan sensor
secara manual yang dapat berubah ditampilan LCD 20x4 saat kita memainkan
atau mengubah jarak sensor dengan tangan peneliti secara beraturan.
Tabel 3.8. Pengujian Prototipe Secara Manual
JarakPembacaan
Sensor
Respon Buzzer Hasil Pembacaan
Hidup Mati Akurat Salah
35 cm
30 cm
25 cm
20 cm
15 cm
10 cm
5 cm
3 cm
Uji kelayakan prototipe dengan menggunakan cara manual dengan
menggunakan tangan peneliti pada program alat ini seperti pada tabel 3.8 digunakan

64
tangan peneliti untuk menguji ketepatan pembacaan sensor secara manual berfungsi
sesuai dengan kriteria pengujian.