SISTEM PENGELOLAAN IRIGASI TERPUTUS DENGAN …web.irigasi.net/sites/default/files/otomatisasi 2011 -...
26
i SISTEM PENGELOLAAN IRIGASI TERPUTUS DENGAN OTOMATISASI Buku output hasil penelitian PENGKAJIAN EFISIENSI PENGGUNAAN AIR IRIGASI PERMUKAAN (OTOMATISASI IRIGASI) TA 2011
Transcript of SISTEM PENGELOLAAN IRIGASI TERPUTUS DENGAN …web.irigasi.net/sites/default/files/otomatisasi 2011 -...
i
SISTEM PENGELOLAAN IRIGASI TERPUTUS DENGAN OTOMATISASI
Buku output hasil penelitian
PENGKAJIAN EFISIENSI PENGGUNAAN AIR IRIGASI PERMUKAAN
(OTOMATISASI IRIGASI)
TA 2011

Buku output hasil penelitian
PENGKAJIAN EFISIENSI PENGGUNAAN AIR IRIGASI PERMUKAAN
(OTOMATISASI IRIGASI)
TA 2011
SISTEM PENGELOLAAN IRIGASI TERPUTUS DENGAN OTOMATISASI
Oleh: Tim Balai Irigasi
November 2011
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
i
KATA PENGANTAR
Pelaksanaan irigasi terputus sering terkendala karena lebih rumit dibandingkan
irigasi menerus karena petani perlu sering ke lahan untuk mengontrol dan
memberikan air ke lahan bila diperlukan. Sistem otomatis irigasi terputus dapat
membantu mempermudah pengaplikasian irigasi terputus agar sesuai dengan
kebutuhan tanaman (kelengasan tanah/tinggi muka air berada batas tertentu).
Untuk mengkaji hal tersebut, penelitian akan dilakukan selama 4 tahun (2010-
2013). Penelitian pada tahun 2010 dilakukan untuk menghasilkan model fisik
(prototip) sistem otomatis. Hasil pengkajian model fisik tersebut digunakan pada
tahun 2011 untuk menghasilkan model sistem. Pada tahun 2012 akan dihasilkan
naskah ilmiah (draft kriteria desain/spesifikasi teknik yang kemudian difinalisasi
menjadi R-0 Kriteria Desain/Spesifikasi Teknik Penerapan Irigasi Terputus
(Intermittent) dengan otomatisasi (tahun 2013).
Buku ini merupakan output yang dihasilkan dari penelitian Pengkajian
Efisiensi Penggunaan Air Irigasi Permukaan (Otomatisasi Irigasi). Penjelasan
dalam buku ini membahas mengenai model sistem yang disusun dalam
penelitian mulai dari konsep otomatisasi, algoritma sistm kendali dan contoh
penerapan di lapangan. Kami harap buku ini dapat bermanfaat bagi para
pengguna.
Bekasi, November 2011
Kepala Balai Irigasi
Ir. Dwi Kristianto, M.Eng
NIP: 19651016 199303 1 002
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
ii
DAFTAR ISI
KATA PENGANTAR ................................................................................................. i
DAFTAR ISI ..............................................................................................................ii
DAFTAR GAMBAR ................................................................................................. iii
DAFTAR TABEL ...................................................................................................... iii
I. PENDAHULUAN ................................................................................................ 1
1.1. Latar Belakang.............................................................................................. 1
1.2. Pemberian Air Irigasi Terputus ..................................................................... 2
II. SISTEM OTOMATIS UNTUK PEMBERIAN AIR IRIGASI TERPUTUS ............. 5
2.1. Skematisasi Sistem Otomatis ....................................................................... 5
2.2. Pola Pengendalian........................................................................................ 7
2.3. Pola Pendistribusian Air Irigasi ................................................................... 11
III. CONTOH PENERAPAN SISTEM OTOMATIS ................................................ 14
3.1. Lokasi Penerapan ....................................................................................... 14
3.2. Peralatan yang Digunakan ......................................................................... 14
3.2.1. Sensor Tinggi Muka Air ...................................................................... 15
3.2.2. Sensor Debit Aliran ............................................................................. 16
3.2.3. Valve Otomatis ................................................................................... 16
3.2.4. Wireless Transceiver .......................................................................... 17
3.3. Software Pengendali ................................................................................... 18
3.4. Pemasangan Peralatan di Lahan................................................................ 20
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
iii
DAFTAR GAMBAR
Gambar 1. Skema pemberian air irigasi terputus pada budidaya padi SRI. .............3
Gambar 2. Skema sistem otomatis. ..............................................................................5
Gambar 3. Alur kerja sistem kendali. ............................................................................8
Gambar 4. Contoh hasil pengendalian fuzzy dan on-off. ...........................................9
Gambar 5. Skema sistem kendali fuzzy (Saptomo, 2000) ....................................... 10
Gambar 6. Bidang polar sistem kendali fuzzy sederhana ........................................ 10
Gambar 7. Fungsi Keanggotaan Sudut Fasa dan Magnitudo .................................. 11
Gambar 8. Denah lahan ujicoba di demplot PT. Sang Hyang Seri .......................... 14
Gambar 9. Sensor tinggi muka air ............................................................................... 15
Gambar 10. Sensor kecepatan aliran ......................................................................... 16
Gambar 11. Valve otomatis .......................................................................................... 17
Gambar 12. Sistem transmisi wireless ........................................................................ 17
Gambar 13. Node wireless ........................................................................................... 18
Gambar 14. Tampilan perangkat lunak pengendali (tab status) .............................. 19
Gambar 15. Tampilan perangkat lunak pengendali (tab sinyal & baterai) .............. 19
Gambar 16. Tampilan perangkat lunak pengendali (tab setting) ............................. 20
Gambar 17. Pemasangan sensor tinggi air di lahan.................................................. 20
Gambar 18. Lahan ujicoba di demplot PT. Sang Hyang Seri ................................... 21
DAFTAR TABEL Tabel 1. Daftar peralatan sistem otomatis ....................................................................6
Tabel 2. Daftar peralatan pada prototipe .................................................................... 15
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
1
I. PENDAHULUAN
1.1. Latar Belakang
Saat ini, kondisi jaringan irigasi di lapangan sudah banyak yang mengalami
kerusakan, baik akibat umur jaringan, kesesuaian lahan yang kurang tepat, kurang
optimalnya operasi dan pemeliharaan maupun karena masih kurangnya peran
serta petani dan stakeholder lainnya dalam pengelolaan irigasi. Hal tersebut
menyebabkan perlunya revitalisasi dan optimasi jaringan irigasi. Selain itu,
ketersediaan air baik secara kualitas maupun kuantitas semakin menurun,
sementara kebutuhan semakin meningkat, akibatnya penggunaan air diberbagai
aspek kehidupan harus seefisien mungkin.
Tantangan tersebut direspon oleh Balai Irigasi Pusat Litbang SDA dengan
menyiapkan kegiatan litbang Pengkajian Efisiensi Penggunaan Air Irigasi
Permukaan dan Air Tanah yang terkait dengan pengembangan teknologi
otomatisasi irigasi pada metode irigasi hemat air.
Terkait dengan pelaksanaan operasi pemberian irigasi hemat air, diperlukan
suatu sistem pemberian air irigasi yang benar-benar berdasarkan gerak
permintaan (demand driven) melalui metode irigasi terputus. Berdasarkan hasil
penelitian Balai Irigasi (2008), irigasi terputus yang dipadukan dengan metode SRI
berpotensi menghemat air hingga 45% di tingkat lahan sampai 33% di tingkat
tersier tanpa menurunkan produksi, bahkan di beberapa lokasi dilaporkan
peningkatan produktivitas dan keuntungan usaha tani yang yang signifikan. Selain
itu, penerapan irigasi terputus juga berpotensi menjadi tindakan mitigasi
perubahan iklim global karena mengemisikan gas rumah kaca lebih rendah
dibandingkan irigasi menerus (penggenangan).
Pelaksanaan irigasi terputus sering terkendala karena lebih rumit dibandingkan
irigasi menerus. Petani perlu sering ke lahan untuk mengontrol dan memberikan
air ke lahan bila diperlukan. Sistem otomatis irigasi terputus dapat membantu
mempermudah pengaplikasian irigasi terputus agar sesuai dengan kebutuhan
tanaman (kelembaban tanah telah berada pada kondisi tertentu).
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
2
Penelitian Otomatisasi Penerapan Irigasi Terputus (Intermittent) ini
direncanakan akan dilakukan selama 4 tahun (2010-2013). Pada tahun 2010
penelitian telah dimulai untuk menghasilkan model fisik (prototip) sistem otomatis.
Berdasarkan hasil pengujian, model fisik sistem otomatis telah berfungsi dengan
baik. Monitoring kondisi lahan dapat dilakukan secara realtime dan irigasi
diberikan atau dihentikan sesuai batasan yang direncanakan. Namun demikian,
pengujian lanjutan dalam waktu yang lebih lama (hingga satu musim tanam) perlu
dilakukan untuk menguji durabilitas sistem, konsumsi daya dan pola pemeliharaan
yang perlu dilakukan serta untuk mengetahui nilai tambah dari pengaplikasian
sistem ini terhadap efisiensi penggunaan air, pengurangan tenaga kerja untuk
pengaturan air, dsb. Selain itu, biaya investasi untuk otomatisasi irigasi cukup
tinggi sehingga perlu dilakukan kajian untuk mencari alternatif alat yang lebih
ekonomis. Penelitian pada tahun 2011 ini menghasilkan model sistem
pengelolaan irigasi terputus dengan otomatisasi.
Pembahasan dalam buku ini mencakup hasil penelitian berupa model sistem
yang telah dihasilkan. Pembahasan akan ditekankan pada konsep model sistem,
pola kendali dan contoh penerapan sistem otomatis di lapangan (demplot pada
lahan milik PT. Sang Hyang Seri, Sukamandi).
1.2. Pemberian Air Irigasi Terputus
Irigasi perlu diberikan dalam jumlah yang tepat sehingga memenuhi kebutuhan
air tanaman dan memungkinkan daerah perakaran teraerasi. Aerasi daerah
perakaran dapat meningkatkan jumlah anakan dan mendukung aktivitas
mikroorganisme di daerah perakaran yang dampak akhirnya dapat meningkatkan
produksi. Pemberian air irigasi terputus umumnya diterapkan untuk budidaya SRI.
Pola pemberian air SRI di Jawa Barat dan Wilayah Indonesia Timur (DSIMP)
secara skematis tergambar dalam Gambar 1.
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
3
Pemberian Air SRI Jawa Barat
0,0
1,0
Awal Vegetatif-Anakan Pembungaan Pengisian Bulir -Masak Susu
Pema-
tangan
Genangan
(mm
)
Fase Pertumbuhan
3,0
5,0
4,0
2,0
Genangan ditinggikan untuk penyiangan
Retak
rambut
0,0
1,0
Awal Vegetatif-Anakan Pembungaan Pengisian Bulir -Masak Susu
Pema-
tangan
Genangan
(mm
)
Fase Pertumbuhan
3,0
5,0
4,0
2,0
Pemberian Air SRI DISIMP
Retak
rambut
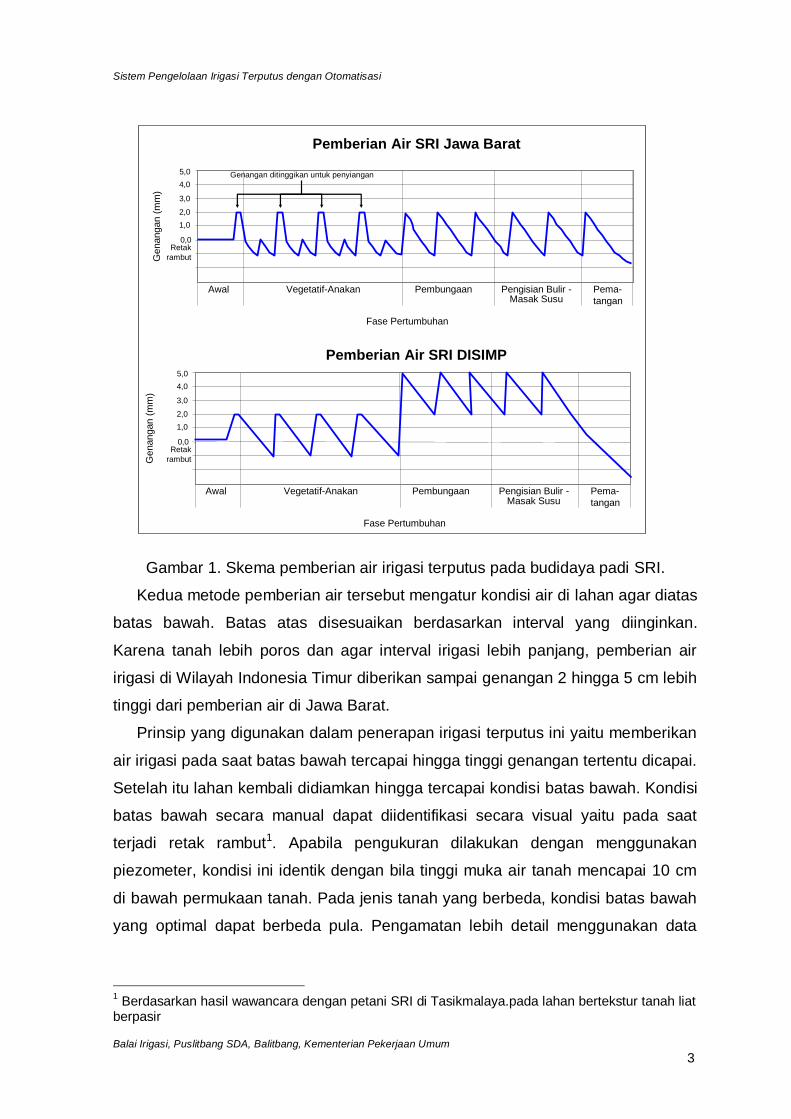
Gambar 1. Skema pemberian air irigasi terputus pada budidaya padi SRI.
Kedua metode pemberian air tersebut mengatur kondisi air di lahan agar diatas
batas bawah. Batas atas disesuaikan berdasarkan interval yang diinginkan.
Karena tanah lebih poros dan agar interval irigasi lebih panjang, pemberian air
irigasi di Wilayah Indonesia Timur diberikan sampai genangan 2 hingga 5 cm lebih
tinggi dari pemberian air di Jawa Barat.
Prinsip yang digunakan dalam penerapan irigasi terputus ini yaitu memberikan
air irigasi pada saat batas bawah tercapai hingga tinggi genangan tertentu dicapai.
Setelah itu lahan kembali didiamkan hingga tercapai kondisi batas bawah. Kondisi
batas bawah secara manual dapat diidentifikasi secara visual yaitu pada saat
terjadi retak rambut1. Apabila pengukuran dilakukan dengan menggunakan
piezometer, kondisi ini identik dengan bila tinggi muka air tanah mencapai 10 cm
di bawah permukaan tanah. Pada jenis tanah yang berbeda, kondisi batas bawah
yang optimal dapat berbeda pula. Pengamatan lebih detail menggunakan data
1 Berdasarkan hasil wawancara dengan petani SRI di Tasikmalaya.pada lahan bertekstur tanah liat
berpasir

Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
4
sifat fisik tanah (kurva pF, tekstur dan bulk density) diperlukan untuk
mengidentifikasi batas bawah yang optimal pada jenis tanah lainnya.
Pola pemberian air untuk irigasi terputus bervariasi tergantung varietas yang
ditanam, kondisi agroklimatologi, jenis tanah dan kebiasaan yang dianut petani. Di
PT. Sang Hyang Seri, pemberian air irigasi dibagi menjadi dua jenis sesuai
dengan varietas yang ditanam.
Pemberian air untuk varietas padi lokal dilakukan dengan penggenangan
dangkal (sekitar 3 cm) dan pola irigasi terputus dengan interval bervariasi mulai
dari setengah harian hingga 5 harian (3 hari diairi, 2 hari tidak diairi) tergantung
letak lahan dan ketersediaan air.
Berbeda dengan pengaturan pemberian air varietas lokal, varietas padi hibrida
memerlukan pengaturan pemberian air yang lebih rumit. Pola pemberian air untuk
padi hibrida dilakukan berdasarkan fase pertumbuhan sebagai berikut:
a. Selesai tanam lahan digenang setinggi 3 cm selama 3 hari
b. Lahan lalu dikeringkan dan dibiarkan macak-macak selama kurang lebih 10
hari.
c. Lahan kemudian digenangi setinggi 3 cm selama masa pembentukan
anakan hingga menjelang masa primordia.
d. Pada masa primordia hingga bunting, lahan digenangi lebih dari 5 cm.
e. Pada masa bunting hingga berbunga, lahan diirigasi secara terputus.
f. Pada masa pembungaan hingga pengisian bulir, lahan digenangi sekitar 3
cm.
g. Pada masa pengisian bulir hingga 7 hari sebelum panen, lahan diirigasi
secara terputus.
h. Pada 7 hari sebelum panen, lahan dikeringkan.
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
5
II. SISTEM OTOMATIS UNTUK PEMBERIAN AIR IRIGASI
TERPUTUS
2.1. Skematisasi Sistem Otomatis
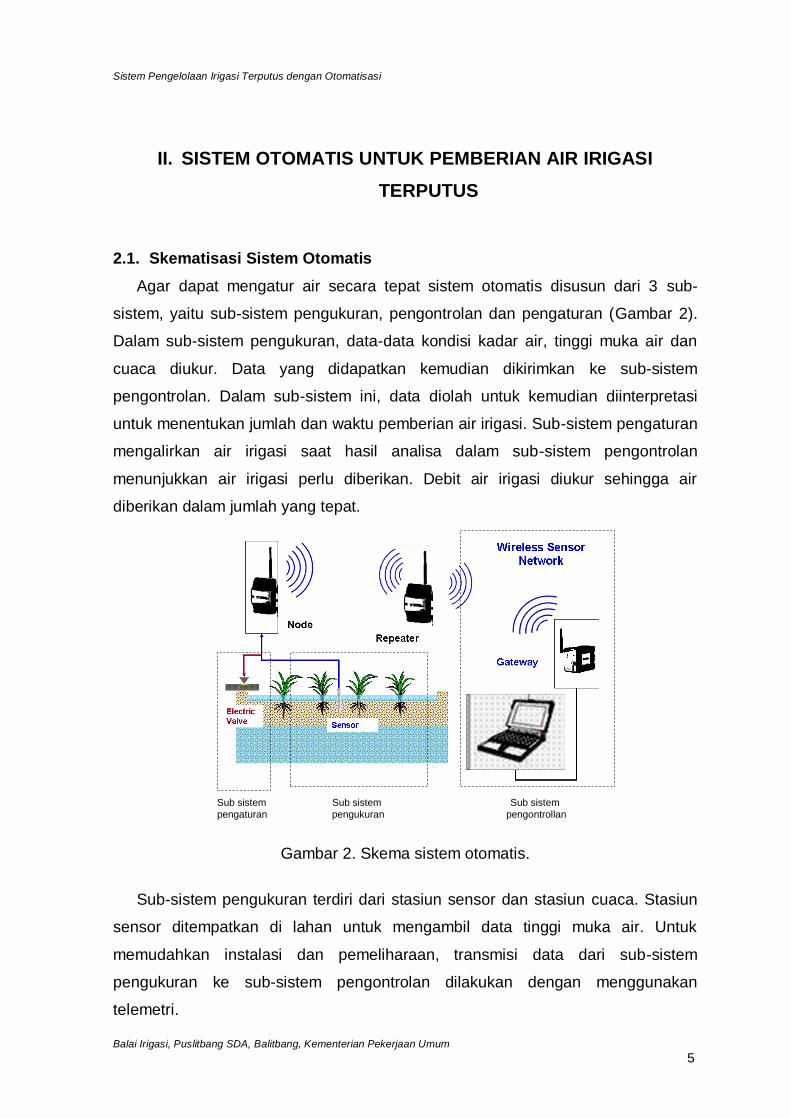
Agar dapat mengatur air secara tepat sistem otomatis disusun dari 3 sub-
sistem, yaitu sub-sistem pengukuran, pengontrolan dan pengaturan (Gambar 2).
Dalam sub-sistem pengukuran, data-data kondisi kadar air, tinggi muka air dan
cuaca diukur. Data yang didapatkan kemudian dikirimkan ke sub-sistem
pengontrolan. Dalam sub-sistem ini, data diolah untuk kemudian diinterpretasi
untuk menentukan jumlah dan waktu pemberian air irigasi. Sub-sistem pengaturan
mengalirkan air irigasi saat hasil analisa dalam sub-sistem pengontrolan
menunjukkan air irigasi perlu diberikan. Debit air irigasi diukur sehingga air
diberikan dalam jumlah yang tepat.
Sub sistem
pengaturan
Sub sistem
pengukuran
Sub sistem
pengontrollan
Gambar 2. Skema sistem otomatis.
Sub-sistem pengukuran terdiri dari stasiun sensor dan stasiun cuaca. Stasiun
sensor ditempatkan di lahan untuk mengambil data tinggi muka air. Untuk
memudahkan instalasi dan pemeliharaan, transmisi data dari sub-sistem
pengukuran ke sub-sistem pengontrolan dilakukan dengan menggunakan
telemetri.

Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
6
Sub-sistem pengontrolan terdiri dari perangkat keras dan perangkat lunak.
Perangkat keras yang diperlukan meliputi receiver, komputer dan peralatan
interfacing. Perangkat lunak disusun untuk mengolah dan menginterpretasi data
sehingga pengaturan pemberian air irigasi dapat dilakukan secara real time.
Pengontrollan dirancang agar dapat mengkomodir pola pemberian air yang
dilakukan di lahan.
Sub-sistem pengaturan terdiri dari actuator dan pengukur debit irigasi. Actuator
membuka pintu air saat irigasi diperlukan. Debit air irigasi kemudian diukur
menggunakan alat ukur yang dilengkapi dengan sensor debit.
Peralatan yang dibutuhkan dalam sistem ini yaitu sensor, unit transmisi data,
unit kontrol dan pengatur debit Daftar peralatan yang dibutuhkan terdapat pada
Tabel 1. Jenis peralatan yang dipakai sebaiknya menyesuaikan dengan sistem
penyaluran air irigasi yang akan digunakan. Apabila digunakan sistem irigasi
permukaan menggunakan saluran terbuka, pengatur aliran dapat berupa pintu
sorong yang dilengkapi sistem mekanis. Apabila pengukuran debit menggunakan
ambang, maka sensor debit yang digunakan dapat berupa sensor tinggi air yang
mengukur elevasi air. Debit aliran kemudian dapat diketahui menggunakan rumus
debit sesuai dengan ambang yang digunakan. Apabila digunakan sistem irigasi
perpipaan atau inlet lahan berupa pipa sadap, pengatur aliran dapat berupa valve
otomatis dan pengukur debit tipe propeller.
Tabel 1. Daftar peralatan sistem otomatis
No Subsistem Peralatan
1 Pengukuran - Sensor tinggi muka air - Unit transmisi data (wireless
transceiver)
2 Pengontrolan - Komputer dan software - Unit transmisi data (wireless
transceiver)
3 Pengaturan - Sensor debit - Pengatur aliran - Unit transmisi data (wireless
transceiver)
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
7
2.2. Pola Pengendalian
Sistem kendali dirancang untuk mengakomodir pengaturan air berdasarkan
pola pemberian air yang dikehendaki. Secara umum, pengelolaan air di lahan
dapat dikelompokkan menjadi dua pola yaitu:
(i) Tinggi genangan tetap
Pada beberapa fase pertumbuhan tanaman, genangan air diupayakan agar
berada pada ketinggian tertentu. Umumnya pengaturan ini dilakukan pada
awal musim tanam agar tanaman dapat teraklimatisasi dengan baik di lahan.
Pada budidaya padi SRI, setelah tanam hingga sekitar 7-10 HST. Pada
budidaya padi hibrida di PT. Sang Hyang Seri, ketinggian air diatur tetap pada
awal musim tanam, fase pembentukan anakan, fase primordia dan fase
pembungaan. Untuk menjaga tinggi muka air tetap bila irigasi dilakukan
secara manual, tinggi outlet drainase diatur pada ketinggian tertentu lalu irigasi
diberikan secara kontinu. Kelebihan air irigasi dibiarkan melimpas dari outlet
drainase. Dengan menerapkan pengendalian otomatis, jumlah air irigasi
terbuang dapat diminimalkan. Tinggi genangan dikendalikan agar berada pada
nilai tertentu dengan mengatur debit masuk.
(ii) Tinggi genangan berfluktuasi pada batas tertentu (irigasi terputus)
Kondisi tinggi genangan yang berfluktuasi memungkin tanah berada pada
kondisi kering pada beberapa saat. Kondisi ini umumnya diperlukan terutama
pada fase vegetatif untuk menghasilkan jumlah anakan yang lebih banyak
seperti yang dilakukan pada budidaya padi SRI. Pada budidaya padi hibrida di
PT. Sang Hyang Seri, pola ini diterapkan pada 4-13 HST, fase bunting dan
fase pengisian bulir. Untuk menghasilkan pola yang diharapkan, pengendalian
dilakukan secara on-off pada batas atas dan batas bawah tertentu. Irigasi
mulai diberikan saat batas bawah tercapai.
Dengan demikian, alur kerja sistem kendali dirancang seperti pada Gambar 3.
Alur kerja tersebut diulangi pada setiap interval waktu tertentu.

Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
8
Jadwal Irigasi
Irigasi
Intermittent?
H < batas bawah
Tinggi genangan (H)
H >= batas atas
Tinggi
genangan
tetap?
Alirkan debit
Tinggi genangan (H)
Alirkan irigasi
Atur debit
Ya
Tidak
Tidak
Irigasi dihentikan
Ya
Ya
Ya
Simpan data H
Tidak
Gambar 3. Alur kerja sistem kendali.
Pengendalian debit pada saat irigasi dapat dilakukan dengan menggunakan
pengendalian on-off atau metode pengendalian lainnya. Pengendali yang baik
dapat menggerakkan sistem secara efektif untuk mencapai output yang
diharapkan. Saat ini telah banyak berkembang model pengendalian yang
digunakan seperti model pengendalian on-off, PID (Proportional Integral
Differential), fuzzy , algoritma genetik dan lain sebagainya. Pada bidang irigasi,
aplikasi teknik pengendalian fuzzy pada bidang irigasi telah dikembangkan oleh
Iskandar et.al. (1999), Setiawan et.al. (2001a), Setiawan et.al. (2001b), Setiawan
et.al (2002) dan Saptomo et.al. (2004) untuk mengatur muka air di lahan basah.
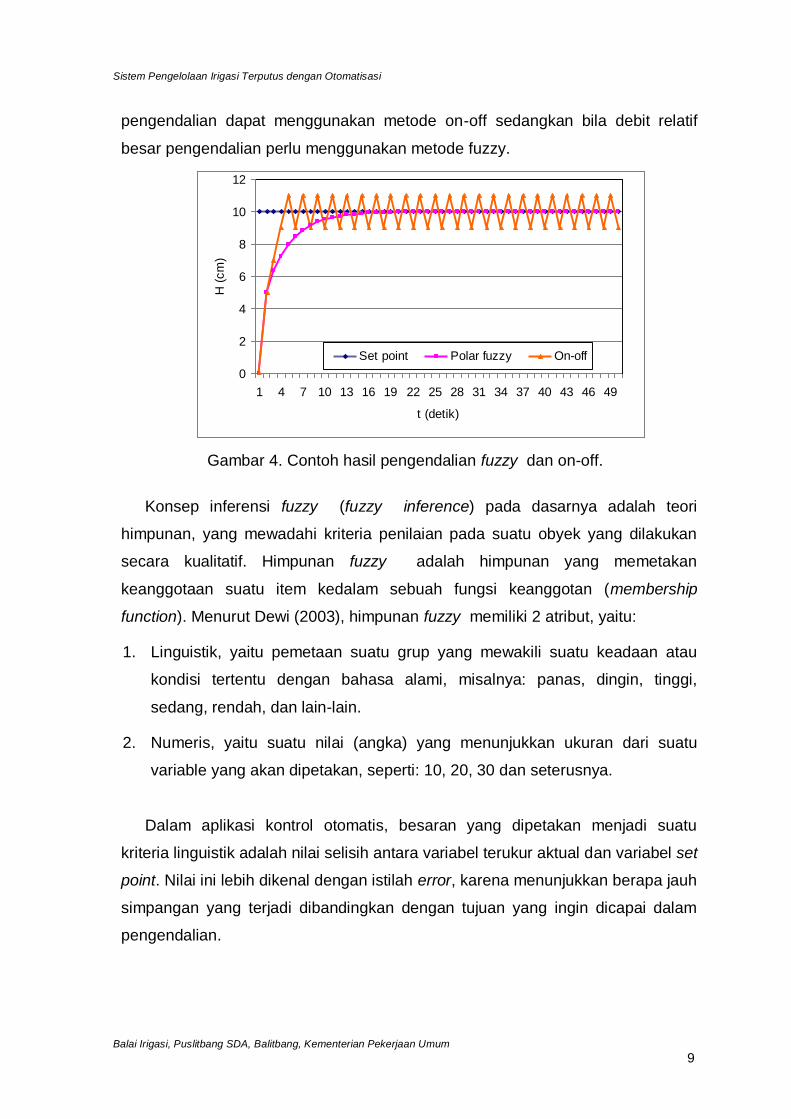
Teknik pengendalian fuzzy dapat mengurangi overshot dan fluktuasi pada set
point yang telah ditetapkan. Contoh perbandingan hasil pengendalian fuzzy dan
on-off adalah seperti pada Gambar 4. Pengendalian fuzzy menghasilkan output
yang lebih stabil walaupun sedikit lebih lambat mencapai set point dibandingkan
sistem pengendalian on-off. Bila debit relatif kecil dibandingkan luas lahan,
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
9
pengendalian dapat menggunakan metode on-off sedangkan bila debit relatif
besar pengendalian perlu menggunakan metode fuzzy.
0
2
4
6
8
10
12
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49
t (detik)
H (
cm
)
Set point Polar fuzzy On-off
Gambar 4. Contoh hasil pengendalian fuzzy dan on-off.
Konsep inferensi fuzzy (fuzzy inference) pada dasarnya adalah teori
himpunan, yang mewadahi kriteria penilaian pada suatu obyek yang dilakukan
secara kualitatif. Himpunan fuzzy adalah himpunan yang memetakan
keanggotaan suatu item kedalam sebuah fungsi keanggotan (membership
function). Menurut Dewi (2003), himpunan fuzzy memiliki 2 atribut, yaitu:
1. Linguistik, yaitu pemetaan suatu grup yang mewakili suatu keadaan atau
kondisi tertentu dengan bahasa alami, misalnya: panas, dingin, tinggi,
sedang, rendah, dan lain-lain.
2. Numeris, yaitu suatu nilai (angka) yang menunjukkan ukuran dari suatu
variable yang akan dipetakan, seperti: 10, 20, 30 dan seterusnya.
Dalam aplikasi kontrol otomatis, besaran yang dipetakan menjadi suatu
kriteria linguistik adalah nilai selisih antara variabel terukur aktual dan variabel set
point. Nilai ini lebih dikenal dengan istilah error, karena menunjukkan berapa jauh
simpangan yang terjadi dibandingkan dengan tujuan yang ingin dicapai dalam
pengendalian.

Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
10
Gambar 5. Skema sistem kendali fuzzy (Saptomo, 2000)
Pengendalian fuzzy yang digunakan dalam penelitian ini mengacu pada
bidang polar sistem kendali fuzzy sederhana untuk keperluan irigasi dan drainase
(Gambar 6) yang dikembangkan oleh Iskandar et al. (1999). Besaran yang
berpengaruh pada sistem kontrol fuzzy adalah error (Er) yang merupakan selisih
antara set point dengan kondisi aktual, dan beda error (dEr) yang merupakan
selisih antara error dengan error sebelumnya. Pada sistem kontrol logika fuzzy
diharapkan bahwa keluaran tidak memiliki lewatan (overshot) dan waktu yang
seminimal mungkin untuk mencapai set point.
Irigasi
III
IV
Drainase
I
II
f1EK
θK
ΔEK
f2E
ΔE
Gambar 6. Bidang polar sistem kendali fuzzy sederhana
2
1
2
KKK EfED ................................................................................. (1)
K
KK
D
E1cos ............................................................................................ (2)
Dk adalah magnitudo dan θk adalah sudut fasa yang membentuk suatu koordinat
polar, f1 adalah parameter yang dapat diatur untuk meningkatkan performansi
sistem. Penentuan irigasi atau drainase akan dilakukan secara otomatis dengan
inferensi fuzzy . Dari bidang polar aturan kendali fuzzy di atas dapat diturunkan
sebuah fungsi keanggotaan untuk θk dan untuk Dk seperti pada gambar berikut :
Error
Point
-
Fuzzifikasi Inferensi Defuzzifikasi Proses
+ Set

Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
11
(a) (b)
Gambar 7. Fungsi Keanggotaan Sudut Fasa dan Magnitudo
Berdasarkan kedua fungsi keanggotaan diatas dapat diturunkan sinyal
kendali Uk sebagai berikut.
mD
PN
PNK UU
.................................................................................. (3)
dengan Um adalah nilai maksimum sinyal kendali, yang besarnya dioptimalkan dari
hasil penyetelan dan kelayakan teknis. Dari hubungan μP = 1 –μN diperoleh:
mDNK UU )21( ................................................................................. (4)
Um dan Uk setara dengan irigasi atau drainase yang diberikan, dimana output
pengontrolan dapat dilakukan menggunakan solenoid valve, pompa, dan pintu air.
2.3. Pola Pendistribusian Air Irigasi
Sistem otomatis memerlukan algoritma tertentu untuk mendistribusikan irigasi
bila akan diaplikasikan dalam suatu jaringan yang terdiri dari beberapa blok lahan.
Dengan diaplikasikannya sistem otomatis, jaringan irigasi dapat dikategorikan
sebagai tipe jaringan gerak permintaan (demand driven). Dengan demikian,
fluktuasi debit di saluran akan sangat mungkin terjadi. Tanpa algoritma tersebut,
pendistribusian irigasi sangat mungkin terkendala ketersediaan debit dan
kapasitas saluran yang tidak memadai.
Algoritma yang dapat digunakan adalah dengan metode analisis multi kriteria.
Santhi dan Pundarikanthan (2000) menyusun model matematis multikriteria untuk
penjadwalan irigasi pada jaringan irigasi dengan irigasi rotasi. Kriteria yang
dipertimbangkan yaitu kriteria lokasi (untuk kemudahan operasional), pemerataan
(equity), pemenuhan kebutuhan (adequacy) dan ketepatan waktu pemberian
0
0.2
0.4
0.6
0.8
1
0 90 180 270 360
Sudut Fasa ( )
μPositif (I)
Negatif (D)
μP
μN
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2
Magnitudo (Dk)
μD
G
μD
f 2

Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
12
(timeliness). Keempat kriteria tersebut direpresentasikan dalam model sebagai
faktor pemberat yang berubah atau tetap selama waktu pengoperasian. Faktor
pembobot total yang digunakan dalam penentuan urutan irigasi didapatkan
dengan mengalikan keempat faktor pembobot setiap kriteria tersebut. Urutan
pemberian irigasi ditentukan berdasarkan urutan faktor pembobot total seperti
persamaan berikut:
Wkti=W1ktW2kW3kW4kri ............................................................................ (5)
dimana Wkri adalah faktor pembobot total untuk saluran „k’ pada hari ke-‘i' dan
urutan rotasi ke-„r‟. Perumusan kriteria lainnya adalah sebagai berikut.
Tabel 2. Kriteria pembobot dalam pendistribusian air irigasi Santhi dan
Pundarikanthan (2000
No Kriteria Persamaan
1 Lokasi (W1kt)
W1kt = 0,9 untuk k termasuk kelompok saluran yang
sedang mendapatkan giliran irigasi pada giliran ke-t
W1kt = 0,1 untuk k termasuk saluran yang tidak sedang
mendapatkan giliran irigasi pada giliran ke-t
2 Pemerataan /equity (W2k) D
dW k
k 2
W2k pembobot untuk saluran k, dk waktu pemberian air
yang diperlukan (hari) untuk memenuhi kebutuhan air pada
jaringan k pada debit rencana dan D total waktu tanam
(hari)
3 Pemenuhan kebutuhan/ adequacy (W3k)
n
k
k
k
k
A
AW
1
*
*
3
kk
k
kle
AA
)1(
*
W3k pembobot untuk saluran k, Ak* luas layanan virtual
dari saluran k, Ak luas layanan dari saluran k, ek
persentase kehilangan air perkilometer panjang dari
saluran k dan lk panjang saluran k
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
13
No Kriteria Persamaan
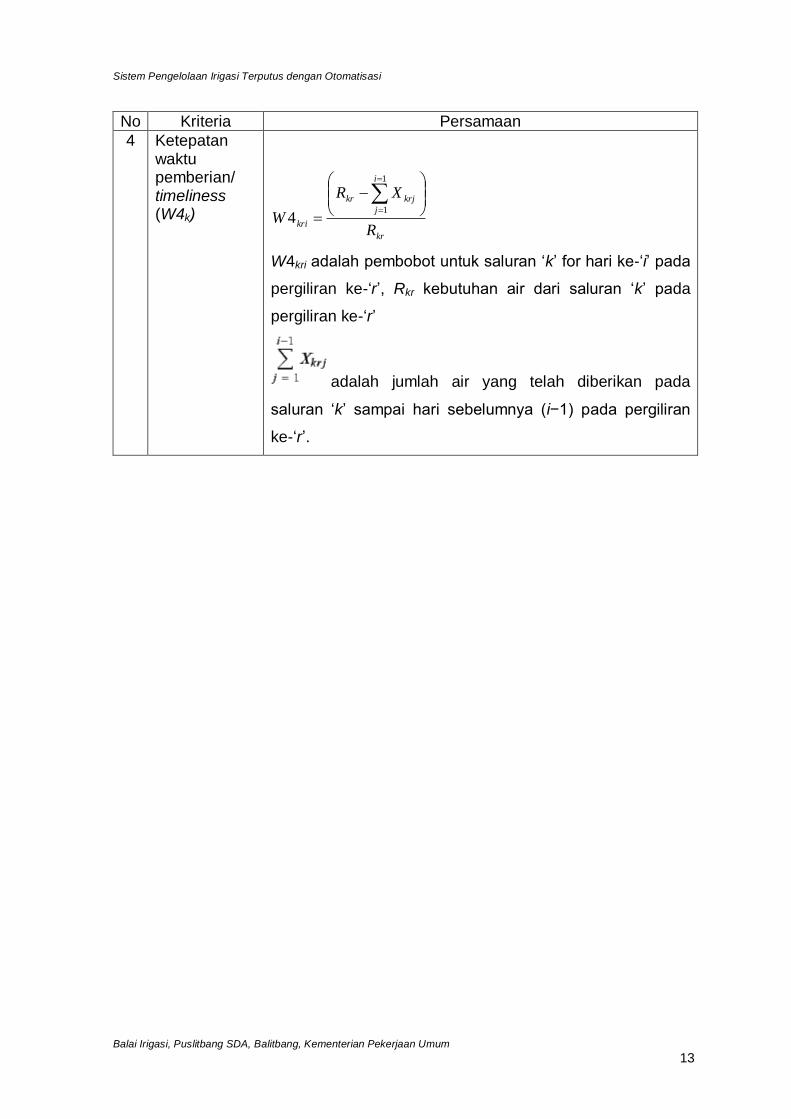
4 Ketepatan waktu pemberian/ timeliness (W4k)
kr
i
j
krjkr
kriR
XR
W
1
14
W4kri adalah pembobot untuk saluran „k‟ for hari ke-„i‟ pada
pergiliran ke-„r‟, Rkr kebutuhan air dari saluran „k‟ pada
pergiliran ke-„r‟
adalah jumlah air yang telah diberikan pada
saluran „k‟ sampai hari sebelumnya (i−1) pada pergiliran
ke-„r‟.

Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
14
III. CONTOH PENERAPAN SISTEM OTOMATIS
3.1. Lokasi Penerapan
Persiapan uji coba lanjutan di Demplot PT. Sang Hyang Seri telah
dilakukan mulai tahun 2010. Sesuai dengan naskah kerjasama yang telah
disepakati, PT. Sang Hyang Seri menyediakan fasilitas penelitian. Perbaikan
fasilitas telah dilakukan mulai bulan Oktober 2010. Hingga bulan Juli 2011,
fasilitas utama untuk penelitian (bangunan ruang kontrol dan instalasi listrik) telah
siap dan ujicoba dapat dilakukan. Denah lahan dan lokasi penempatan alat
terdapat pada Gambar 8. Untuk uji coba yang akan dilakukan nantinya, pengelola
irigasi di PT. Sang Hyang Seri telah diberikan pelatihan singkat sehingga dapat
mengoperasikan sistem.
Jalan akses
• Pengukuran dan pengaturan debit irigasi. Automatic valve
Flow meter
• Pengukuran kondisi cuacaWeather station
• Pengendalian sistem Komputer, software
• Pengukuran kondisi air dilahanWater level sensor
Gambar 8. Denah lahan ujicoba di demplot PT. Sang Hyang Seri
3.2. Peralatan yang Digunakan
Peralatan yang digunakan dalam prototipe ini adalah seperti pada Tabel 3
meliputi sensor-sensor, valve otomatis, komputer dan sistem wireless.
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
15
Tabel 3. Daftar peralatan pada prototipe
No Subsistem Peralatan
1 Pengukuran Sensor tinggi muka air (WL 400, Global Water)
2 Pengontrolan Komputer dan software (pemrograman menggunakan software Lab View)
3 Pengaturan - Sensor debit (TX80 dari Global Water)
- Automatic Valve (Valworx)
4 Transmisi data Wireless Sensor Network (WSN) dari National Instruments
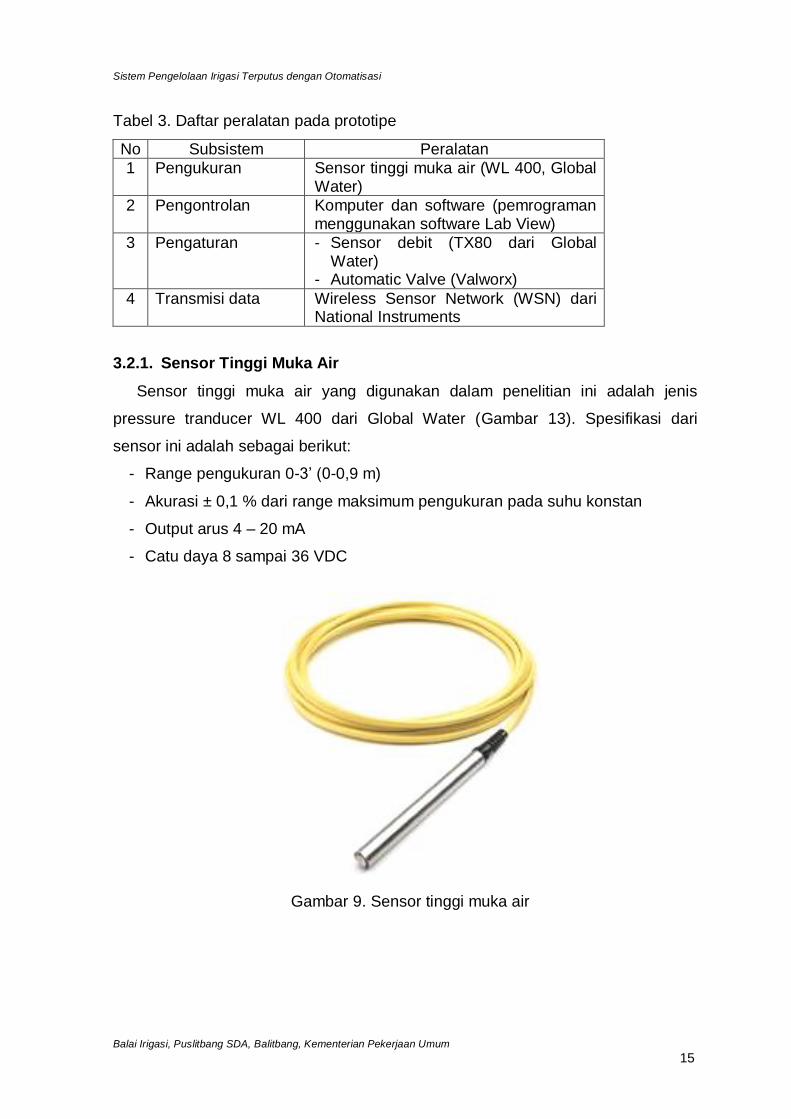
3.2.1. Sensor Tinggi Muka Air
Sensor tinggi muka air yang digunakan dalam penelitian ini adalah jenis
pressure tranducer WL 400 dari Global Water (Gambar 13). Spesifikasi dari
sensor ini adalah sebagai berikut:
- Range pengukuran 0-3‟ (0-0,9 m)
- Akurasi ± 0,1 % dari range maksimum pengukuran pada suhu konstan
- Output arus 4 – 20 mA
- Catu daya 8 sampai 36 VDC
Gambar 9. Sensor tinggi muka air
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
16
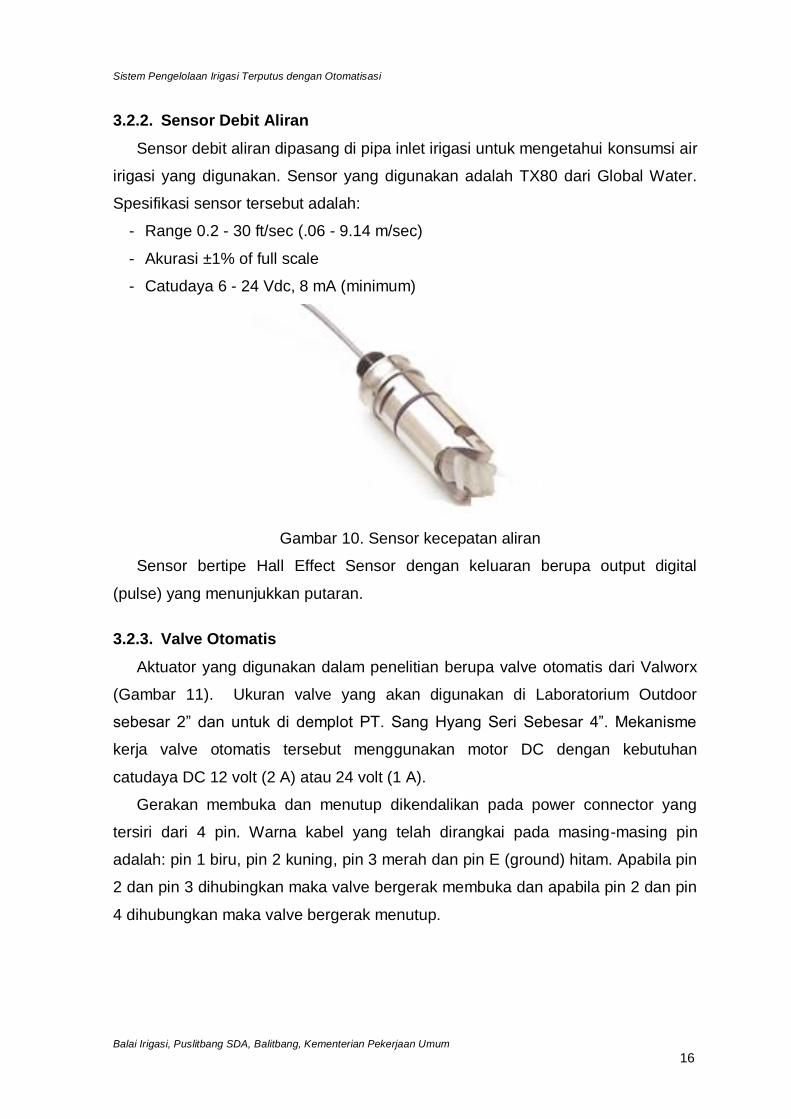
3.2.2. Sensor Debit Aliran
Sensor debit aliran dipasang di pipa inlet irigasi untuk mengetahui konsumsi air
irigasi yang digunakan. Sensor yang digunakan adalah TX80 dari Global Water.
Spesifikasi sensor tersebut adalah:
- Range 0.2 - 30 ft/sec (.06 - 9.14 m/sec)
- Akurasi ±1% of full scale
- Catudaya 6 - 24 Vdc, 8 mA (minimum)
Gambar 10. Sensor kecepatan aliran
Sensor bertipe Hall Effect Sensor dengan keluaran berupa output digital
(pulse) yang menunjukkan putaran.
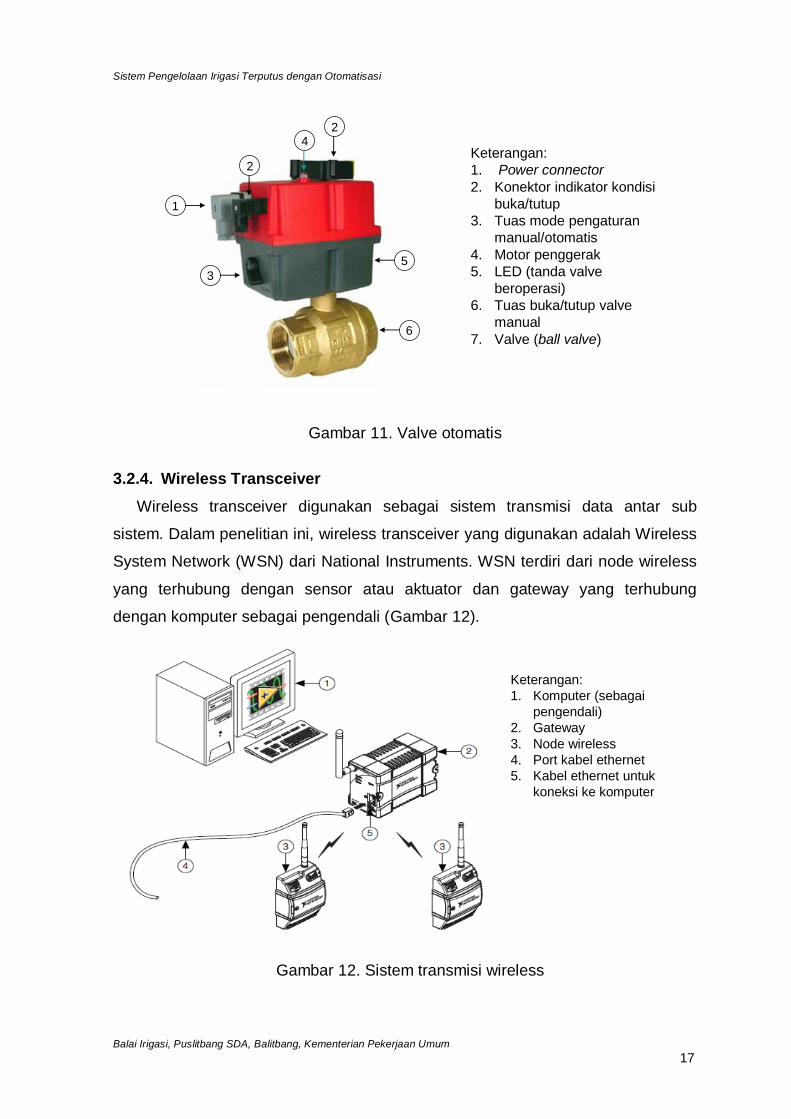
3.2.3. Valve Otomatis
Aktuator yang digunakan dalam penelitian berupa valve otomatis dari Valworx
(Gambar 11). Ukuran valve yang akan digunakan di Laboratorium Outdoor
sebesar 2” dan untuk di demplot PT. Sang Hyang Seri Sebesar 4”. Mekanisme
kerja valve otomatis tersebut menggunakan motor DC dengan kebutuhan
catudaya DC 12 volt (2 A) atau 24 volt (1 A).
Gerakan membuka dan menutup dikendalikan pada power connector yang
tersiri dari 4 pin. Warna kabel yang telah dirangkai pada masing-masing pin
adalah: pin 1 biru, pin 2 kuning, pin 3 merah dan pin E (ground) hitam. Apabila pin
2 dan pin 3 dihubingkan maka valve bergerak membuka dan apabila pin 2 dan pin
4 dihubungkan maka valve bergerak menutup.
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
17
Keterangan:
1. Power connector
2. Konektor indikator kondisi
buka/tutup
3. Tuas mode pengaturan
manual/otomatis
4. Motor penggerak
5. LED (tanda valve
beroperasi)
6. Tuas buka/tutup valve
manual
7. Valve (ball valve)
1
5
6
3
2
42
Gambar 11. Valve otomatis
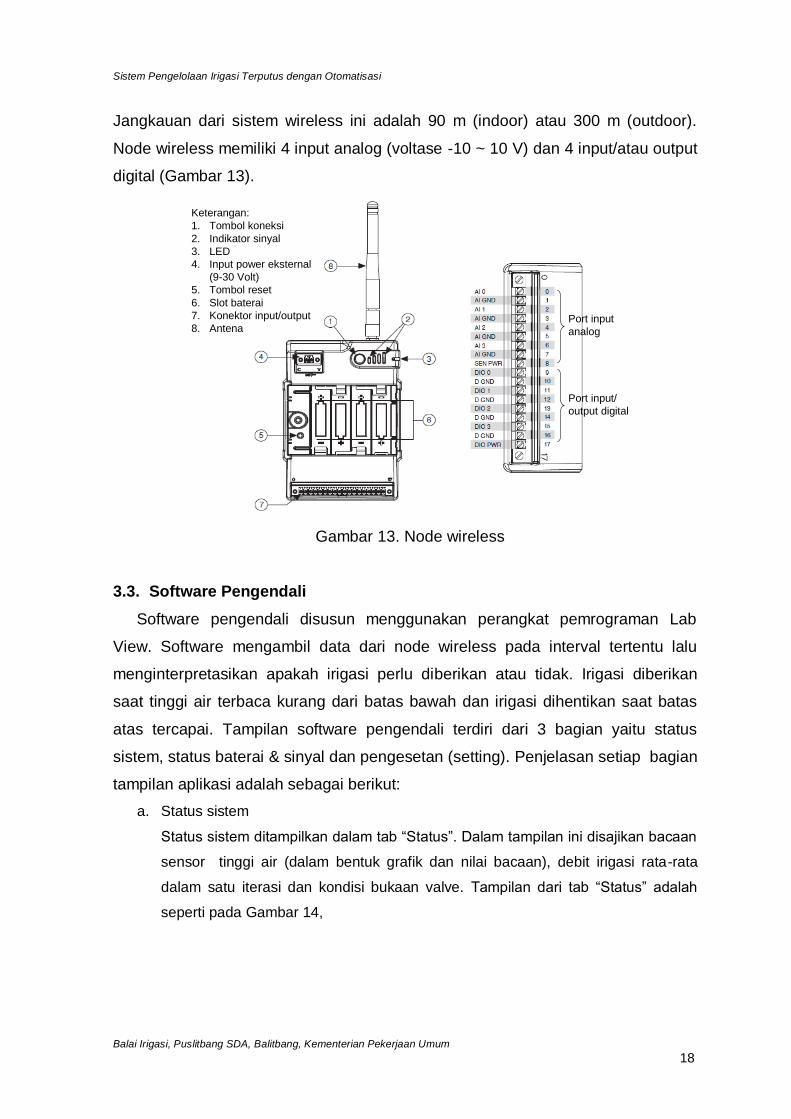
3.2.4. Wireless Transceiver
Wireless transceiver digunakan sebagai sistem transmisi data antar sub
sistem. Dalam penelitian ini, wireless transceiver yang digunakan adalah Wireless
System Network (WSN) dari National Instruments. WSN terdiri dari node wireless
yang terhubung dengan sensor atau aktuator dan gateway yang terhubung
dengan komputer sebagai pengendali (Gambar 12).
Keterangan:
1. Komputer (sebagai
pengendali)
2. Gateway
3. Node wireless
4. Port kabel ethernet
5. Kabel ethernet untuk
koneksi ke komputer
Gambar 12. Sistem transmisi wireless
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
18
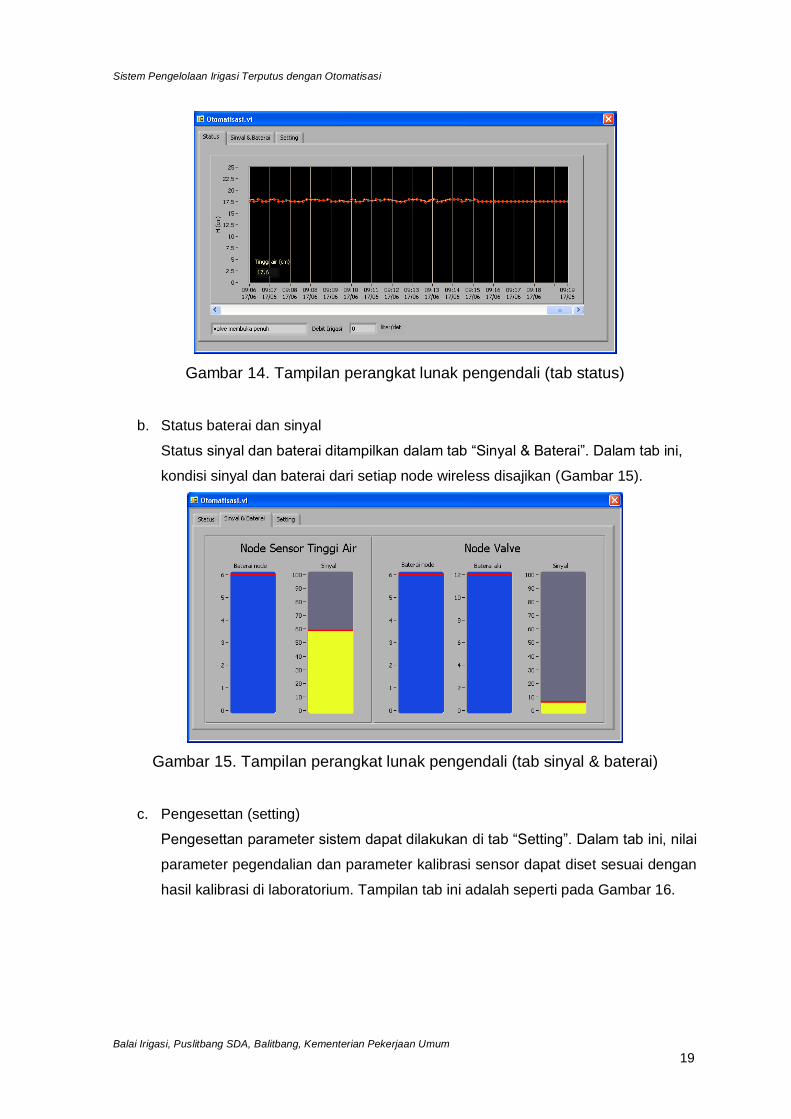
Jangkauan dari sistem wireless ini adalah 90 m (indoor) atau 300 m (outdoor).
Node wireless memiliki 4 input analog (voltase -10 ~ 10 V) dan 4 input/atau output
digital (Gambar 13).
Keterangan:
1. Tombol koneksi
2. Indikator sinyal
3. LED
4. Input power eksternal
(9-30 Volt)
5. Tombol reset
6. Slot baterai
7. Konektor input/output
8. AntenaPort input
analog
Port input/
output digital
Gambar 13. Node wireless
3.3. Software Pengendali
Software pengendali disusun menggunakan perangkat pemrograman Lab
View. Software mengambil data dari node wireless pada interval tertentu lalu
menginterpretasikan apakah irigasi perlu diberikan atau tidak. Irigasi diberikan
saat tinggi air terbaca kurang dari batas bawah dan irigasi dihentikan saat batas
atas tercapai. Tampilan software pengendali terdiri dari 3 bagian yaitu status
sistem, status baterai & sinyal dan pengesetan (setting). Penjelasan setiap bagian
tampilan aplikasi adalah sebagai berikut:
a. Status sistem
Status sistem ditampilkan dalam tab “Status”. Dalam tampilan ini disajikan bacaan
sensor tinggi air (dalam bentuk grafik dan nilai bacaan), debit irigasi rata-rata
dalam satu iterasi dan kondisi bukaan valve. Tampilan dari tab “Status” adalah
seperti pada Gambar 14,
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
19
Gambar 14. Tampilan perangkat lunak pengendali (tab status)
b. Status baterai dan sinyal
Status sinyal dan baterai ditampilkan dalam tab “Sinyal & Baterai”. Dalam tab ini,
kondisi sinyal dan baterai dari setiap node wireless disajikan (Gambar 15).
Gambar 15. Tampilan perangkat lunak pengendali (tab sinyal & baterai)
c. Pengesettan (setting)
Pengesettan parameter sistem dapat dilakukan di tab “Setting”. Dalam tab ini, nilai
parameter pegendalian dan parameter kalibrasi sensor dapat diset sesuai dengan
hasil kalibrasi di laboratorium. Tampilan tab ini adalah seperti pada Gambar 16.
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
20
Gambar 16. Tampilan perangkat lunak pengendali (tab setting)
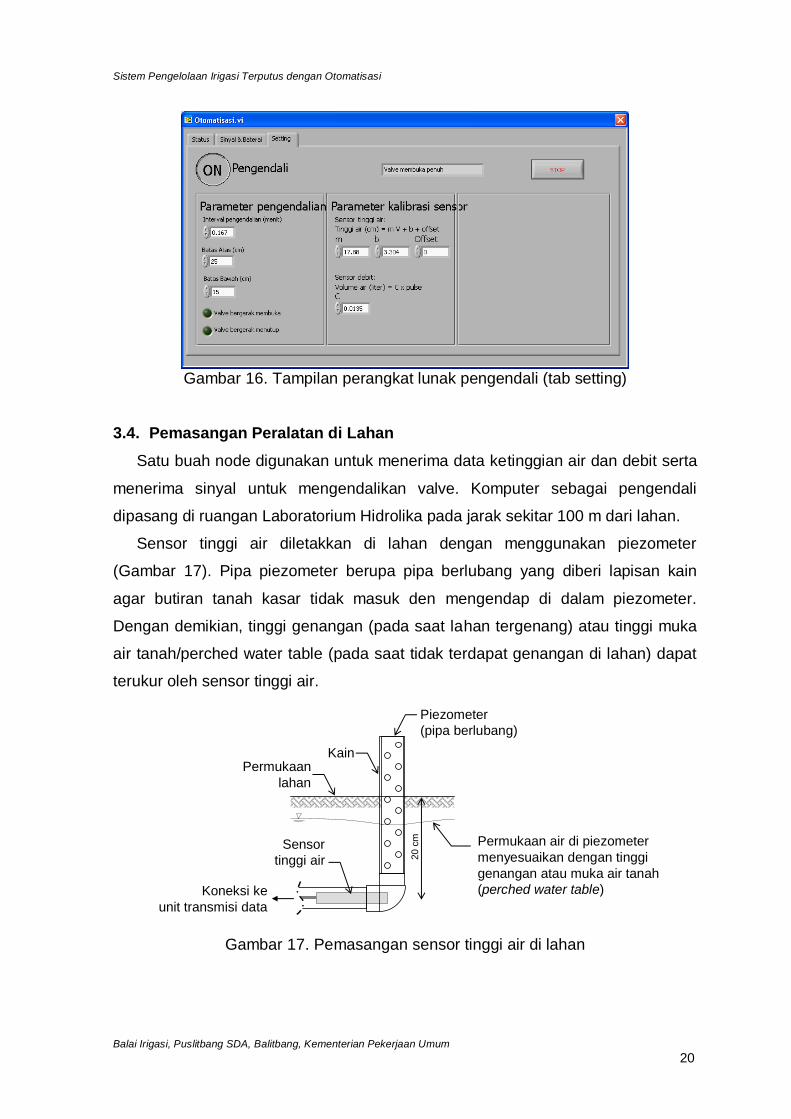
3.4. Pemasangan Peralatan di Lahan
Satu buah node digunakan untuk menerima data ketinggian air dan debit serta
menerima sinyal untuk mengendalikan valve. Komputer sebagai pengendali
dipasang di ruangan Laboratorium Hidrolika pada jarak sekitar 100 m dari lahan.
Sensor tinggi air diletakkan di lahan dengan menggunakan piezometer
(Gambar 17). Pipa piezometer berupa pipa berlubang yang diberi lapisan kain
agar butiran tanah kasar tidak masuk den mengendap di dalam piezometer.
Dengan demikian, tinggi genangan (pada saat lahan tergenang) atau tinggi muka
air tanah/perched water table (pada saat tidak terdapat genangan di lahan) dapat
terukur oleh sensor tinggi air.
Piezometer
(pipa berlubang)
KainPermukaan
lahan
Permukaan air di piezometer
menyesuaikan dengan tinggi
genangan atau muka air tanah
(perched water table)Koneksi ke
unit transmisi data
Sensor
tinggi air 20 c
m
Gambar 17. Pemasangan sensor tinggi air di lahan
Sistem Pengelolaan Irigasi Terputus dengan Otomatisasi
Balai Irigasi, Puslitbang SDA, Balitbang, Kementerian Pekerjaan Umum
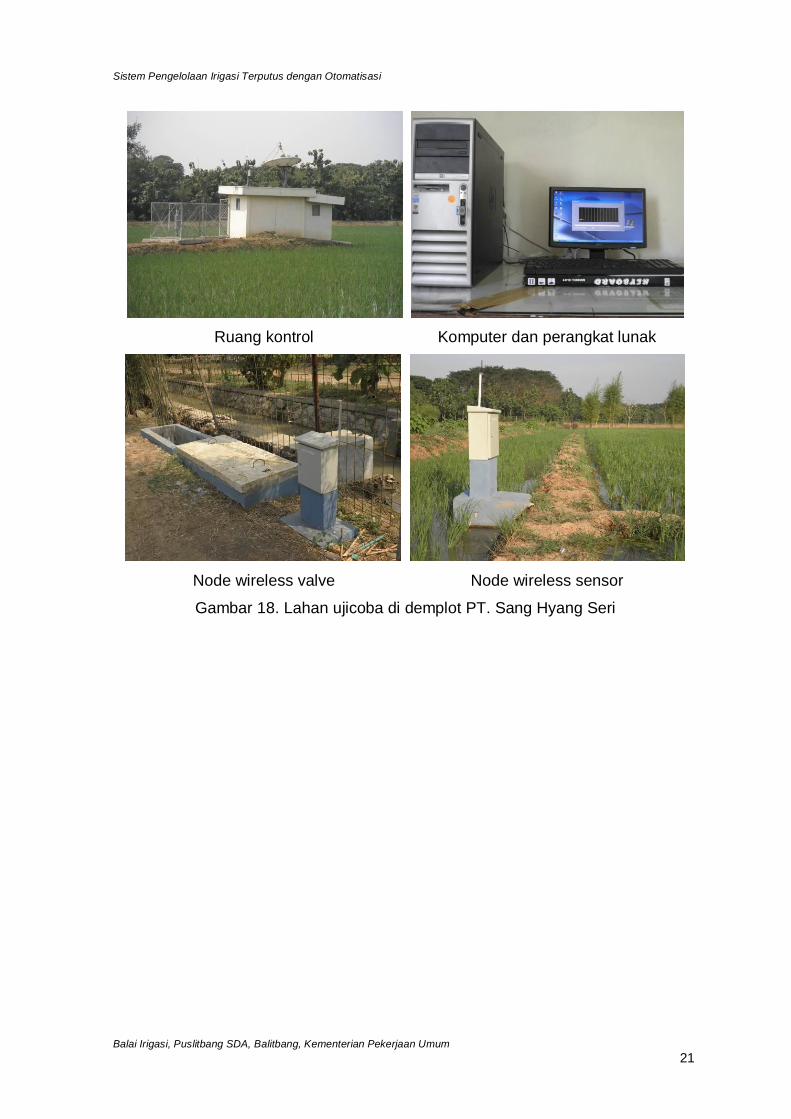
21
Ruang kontrol Komputer dan perangkat lunak
Node wireless valve Node wireless sensor
Gambar 18. Lahan ujicoba di demplot PT. Sang Hyang Seri