Rangkuman Pcd Alston
10
Alston Evan Wijaya 0810117261401 3 TI A Image Restoration Tujuan utama dari teknik restorasi adalah untuk meningkatkan sebuah gambar dalam beberapa pengertian yang telah ditetapkan. Restorasi merupakan usaha untuk memulihkan gambar yang telah terdegradasi dengan menggunakan pengetahuan yang cukup mengenai fe nomena degradasi. Restorasi biasanya melibatkan perumusan kriteria perbaikan yang akan menghasilkan perkiraan optimal yang diinginkan. 1. A Model of the Image Degradation/Restoration Process Gambar yang terdegradasi dalam domain spatial dinyatakan dengan dimana h(x,y) representasi spatial dari fungsi degradasi dan mengindikasikan konvulsi. Oleh karena itu, kita mendapatkan representasi domain frekuensi 2. Noise Models Sumber utama dari noise terjadi pada saat pengakuisisian dan transmisi gambar. Spatial and Frequency Properties of Noise Properti frekuensi merujuk pada isi frekuensi dari noise dalam Fourier sense Secara umum, kita asumsikan bahwa noise independen terhadap koordinat spasial dan tidak berkorelasi dengan gambar itu sendiri
-
Upload
ananda-amno -
Category
Documents
-
view
172 -
download
0
Transcript of Rangkuman Pcd Alston
5/6/2018 Rangkuman Pcd Alston - slidepdf.com
http://slidepdf.com/reader/full/rangkuman-pcd-alston 1/10
Alston Evan Wijaya
0810117261401
3 TI A
Image Restoration
Tujuan utama dari teknik restorasi adalah untuk meningkatkan sebuah gambar dalam beberapa
pengertian yang telah ditetapkan. Restorasi merupakan usaha untuk memulihkan gambar yang
telah terdegradasi dengan menggunakan pengetahuan yang cukup mengenai fenomena
degradasi. Restorasi biasanya melibatkan perumusan kriteria perbaikan yang akan
menghasilkan perkiraan optimal yang diinginkan.
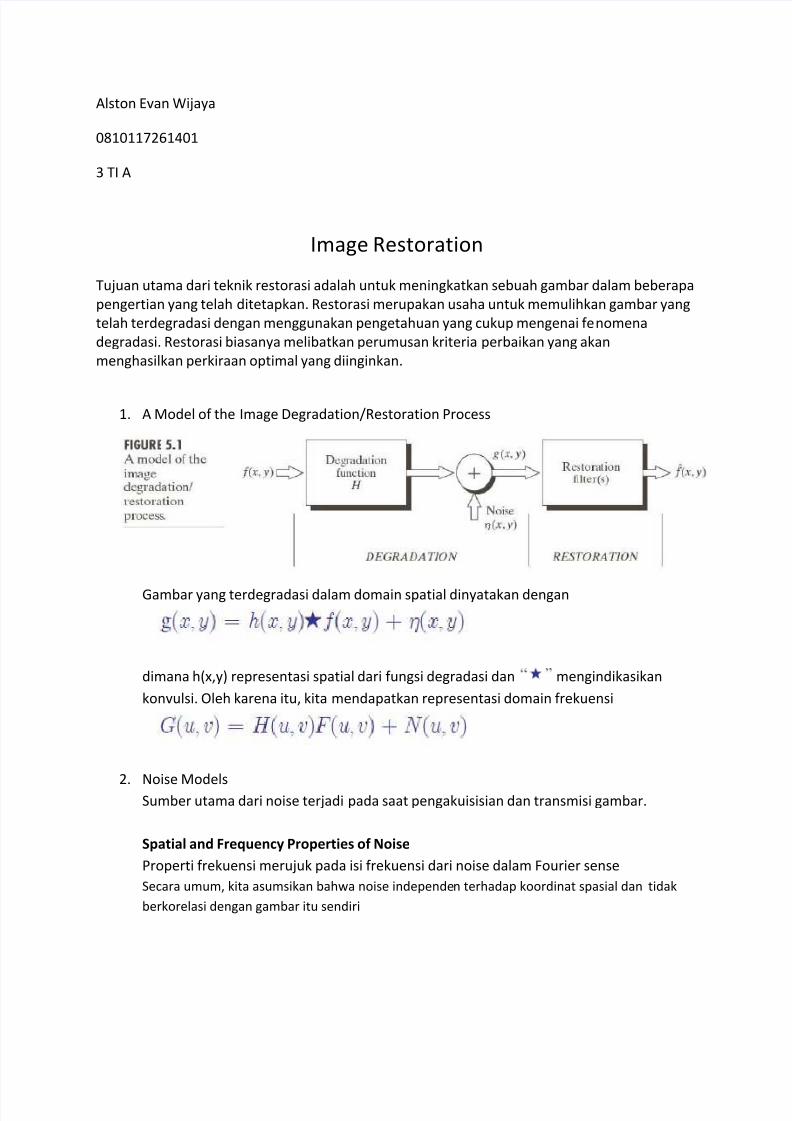
1. A Model of the Image Degradation/Restoration Process
Gambar yang terdegradasi dalam domain spatial dinyatakan dengan
dimana h(x,y) representasi spatial dari fungsi degradasi dan mengindikasikan
konvulsi. Oleh karena itu, kita mendapatkan representasi domain frekuensi
2.
Noise ModelsSumber utama dari noise terjadi pada saat pengakuisisian dan transmisi gambar.
Spatial and Frequency Properties of Noise
Properti frekuensi merujuk pada isi frekuensi dari noise dalam Fourier sense
Secara umum, kita asumsikan bahwa noise independen terhadap koordinat spasial dan tidak
berkorelasi dengan gambar itu sendiri
5/6/2018 Rangkuman Pcd Alston - slidepdf.com
http://slidepdf.com/reader/full/rangkuman-pcd-alston 2/10
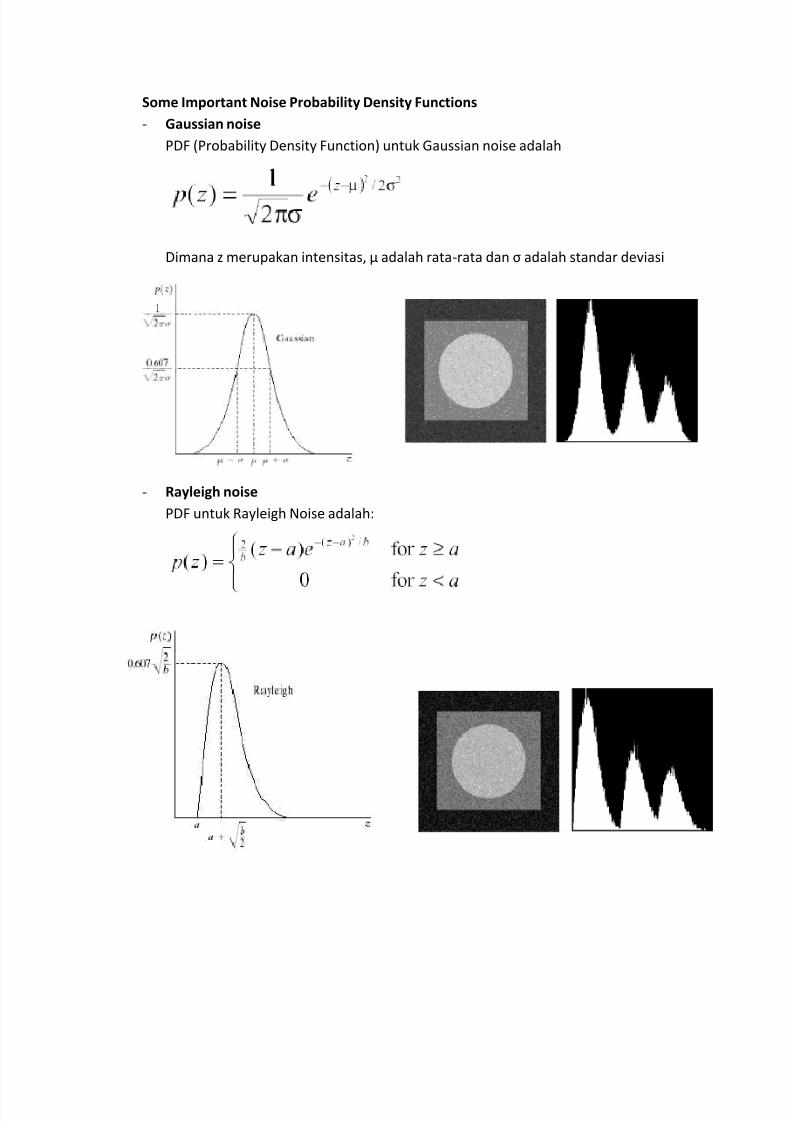
Some Important Noise Probability Density Functions
- Gaussian noise
PDF (Probability Density Function) untuk Gaussian noise adalah
Dimana z merupakan intensitas, µ adalah rata-rata dan adalah standar deviasi
- Rayleigh noise
PDF untuk Rayleigh Noise adalah:
5/6/2018 Rangkuman Pcd Alston - slidepdf.com
http://slidepdf.com/reader/full/rangkuman-pcd-alston 3/10
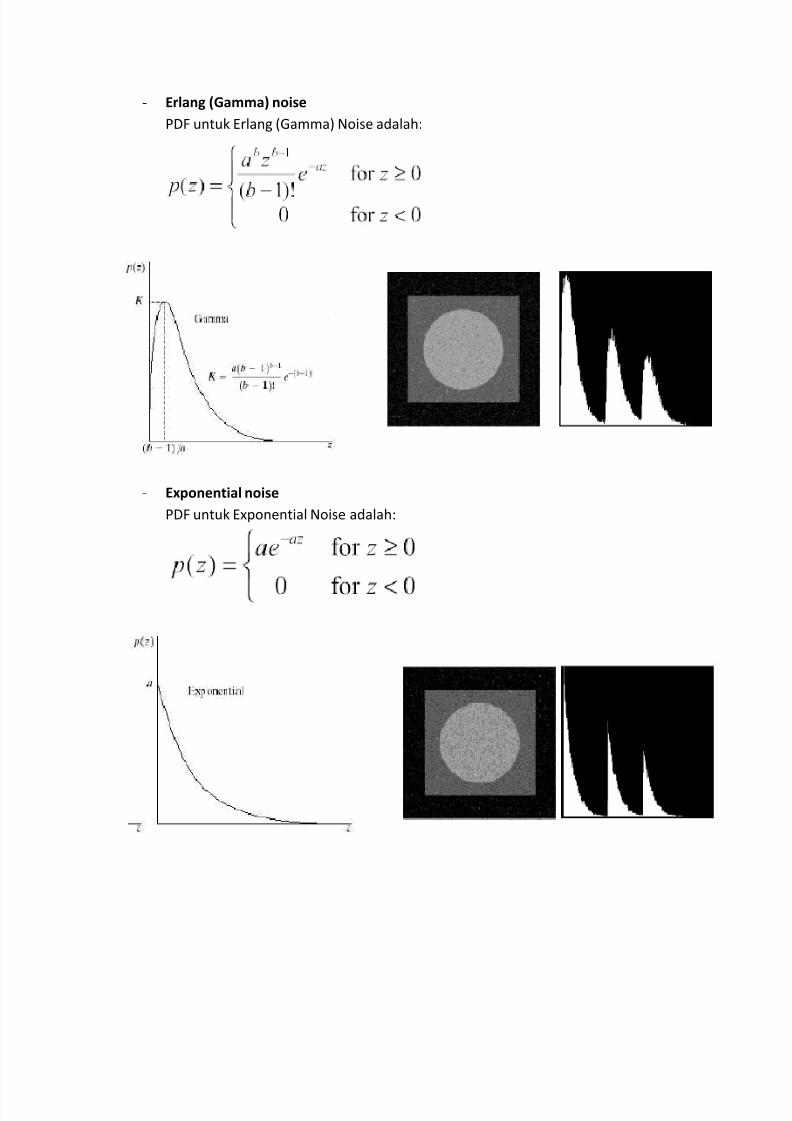
- Erlang (Gamma) noise
PDF untuk Erlang (Gamma) Noise adalah:
- Exponential noise
PDF untuk Exponential Noise adalah:
5/6/2018 Rangkuman Pcd Alston - slidepdf.com
http://slidepdf.com/reader/full/rangkuman-pcd-alston 4/10
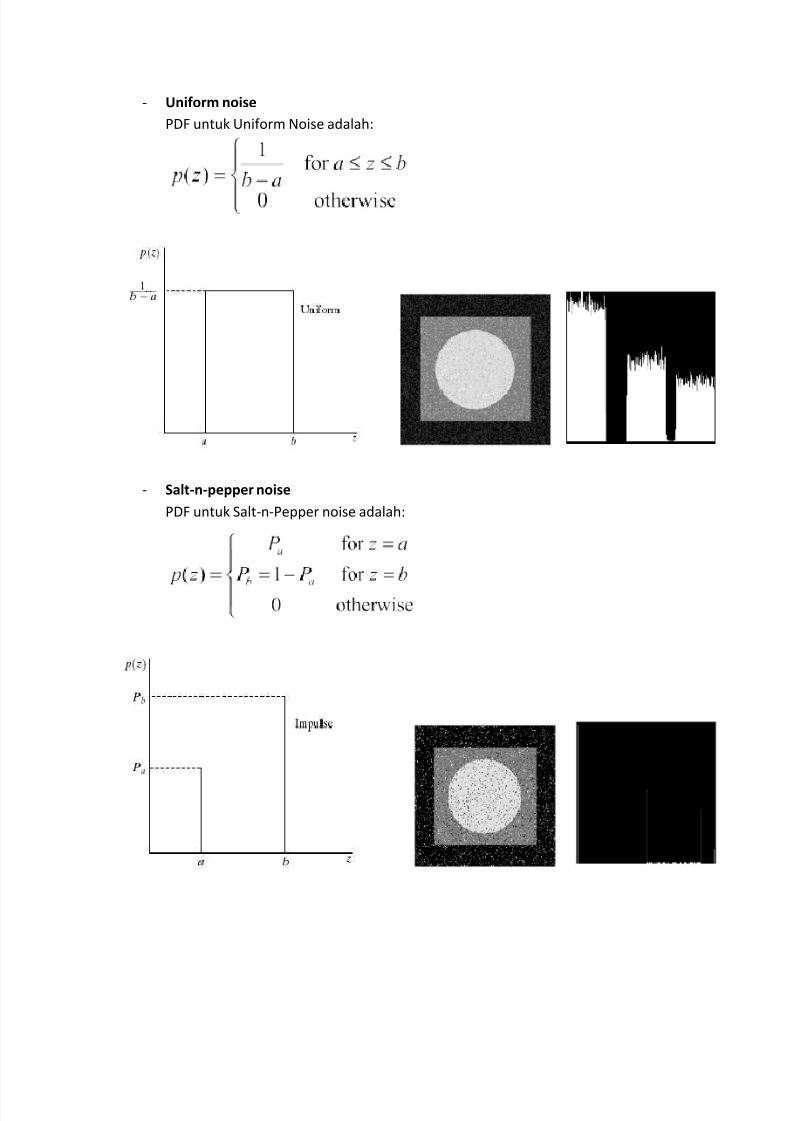
- Uniform noise
PDF untuk Uniform Noise adalah:
- Salt-n-pepper noise
PDF untuk Salt-n-Pepper noise adalah:
5/6/2018 Rangkuman Pcd Alston - slidepdf.com
http://slidepdf.com/reader/full/rangkuman-pcd-alston 5/10
- Periodic noise
Degradasi jenis ini muncul akibat interferensi magnetik/mekanik saat akuisisi citra.
Sifat noise spatial dependent dan sangat mudah dihilangkan dalam domain frekuensi
Estimation of Noise Parameters
- Periodic noise
o Periksa spektrum Fourier: spike
o Analisa otomatis ketika spike terjadi
o Imaging sistem tersedia: capture uniform environment
o Imaging sistem tidak tersedia: mempertimbangkan patch kecil dari skala
keabuan
3. Restoration in the Presence of Noise OnlySpatial Filtering
Mean filter
Arithmetic Mean Filter
Ini adalah metode paling mudah dari mean filters. Misalkan Sxy mewakili
himpunan koordinat dalam sebuah window kotak subimage berukuran m x n,
berpusat di titik (x, y). Proses Arithmetic Mean Filtering menghitung rata rata
nilai dari gambar yang rusak g(x, y) pada area yang didefinisika oleh Sxy. Nilai
dari gambar yang diperbaiki pada tiap titik (x, y) adalah arithmetic mean mudah
yang dihitung dengan menggunakan pixel dalam daerah yang didefinisikan oleh
Sxy.
Geometric Mean Filter
Di sini, setiap pixel yang diperbaiki diberikan oleh hasil pixel dalam subimage
window, dinaikkan dengan factor 1/mn. Geometric Mean Filter menghasilkan
smoothing yang dapat dibandingkan dengan arithmetic mean filter, tetapi
cenderung menghilangkan detail image lebih sedikit dalam prosesnya.
HarmonicMean Filter
Filter ini bekerja dengan baik untuk salt noise, tetapi gagal untuk pepper noise.
Dapat bekerja baik dengan tipe noise yang lain seperti Gaussian noise.
5/6/2018 Rangkuman Pcd Alston - slidepdf.com
http://slidepdf.com/reader/full/rangkuman-pcd-alston 6/10
ContraharmonicMean Filter
Filter ini sangat cocok untuk mengurangi atau secara virtual mengeliminasi efek
salt-and-pepper noise. Untuk nilai Q positif, filter mengeliminasi pepper noise.
Untuk nilai Q negatif ini mengeliminasi salt noise. Ini tidak dapat melakukankeduanya secara bersamaan. Perhatikan bahwa contraharmonic filter
mengurangi pada arithmetic mean filter jika Q = 0, dan ke harmonic mean filter
jika Q = -1.
Order-Statistics Filters
Order-statistic filter adalah spasial filter yang responsenya berdasarkan dalam ordering
(ranking) pixel yang dikandung image area yang dilingkupi oleh filter. Response dari
filter pada tiap titik ditentukan oleh hasil ranking.
Median Filter
Merupakan order-statistics filter yang paling banyak diketahui, yang mana sesuai
namanya, mengganti nilai pixel dengan median dari gray level dalam
neighbourhood dari pixel itu. Nilai asli dari pixel diikutkan dalam komputasi
median. Median filters sangat popular karena, untuk tipe tipe tertentu random
noise, dia memberikan kemampuan noise-reduction yang sangat baik, dengan
blurring yang amat lebih sedikit daripada linear smoothing filter dari ukuran yang
sama. Median filters secara khusus efektif dalam keadaan bipolar dan unipolar
impulse noise. Median filter memberikan hasil yang sangat bagus untuk image
yang dirusak oleh tipe noise ini.
Max and min filters
Filter ini sangat berguna untuk menemukan titik paling terang dari sebuah image.
Juga, karena pepper noise mempunyai nilai yang sangat rendah, ini dikurangi
dengan filter ini sebagai hasil dari proses max selection dalam subimage area Sxy.
Filter ini sangat berguna untuk menemukan titik tergelap dalam image. Juga, ini
mengurangi salt noise sebagai hasil dari min operation.
Midpoint filter
Midpoint filter dengan mudah menghitung midpoint antara nilai maksimum dan
minimum dalam area yang dicakup oleh filter. Perhatikan bahwa filter ini
mengkombinasikan order statistics dan averaging. Filter ini bekerja paling baik
untuk noise yang tersebar acak, seperti Gaussian atau uniform noise.
5/6/2018 Rangkuman Pcd Alston - slidepdf.com
http://slidepdf.com/reader/full/rangkuman-pcd-alston 7/10
Alpha-trimmed mean filter
Misalkan kita menghapus nilai gray-level d/2 paling rendah dan d/2 paling tinggi
dari g(s,t) dalam neighbourhood Sxy. Anggap gr(s,t) mewakili mn-d pixel yang
tersisa. Sebuah filter yang dibentuk dengan averaging pixel yang tersisa ini
disebut alpha-
trimmed mean filter.
Adaptive Filters
Filter yang didiskusikan diatas diaplikasikan pada image tanpa memperhatikan
bagaimana karakterististik yang bermacam macam dari satu titik dan yang lain.
Adaptive filter mampu memberikan performa yang tinggi dibandingkan dengan filter
yang telah dibahas. Harga yang harus dibayar untuk meningkatkan kekuatan filtering
adalah peningkatan kompleksitas filter. Ingat, bahwa kita menghadapi kasus image
terdegradasi adalah sama dengan gambar asli ditambah noise. Tidak ada tipe degradasi
lain yang dipertimbangkan.
Adaptive, local noise reduction filter
Perhitungan statistic dari variable acak yang paling sederhana adalah mean dan
variance. Mereka adalah parameter yang layak untuk mendasari sebuah
adaptive filter karena mereka memberikan jumlah secara dekat yang
berhubungan dengan penampilan image. Mean memberikan ukuran rata rata
gray-level dalam region dimana mean dihitung, dan variance memberikan
ukuran rata rata kontras dalam region itu.
Adaptive median filter
Algoritma adaptive median filtering bekerja dalam dua level, disebut level A dan
level B, seperti berikut :
Level A : A1 = zmed - zmin A2 = zmed - zmaxIf A1 > 0 AND A2 < b1 =" zxy" b2 ="
zxy"> 0 AND B2 < 0 output zxy Else output zmed
4. Periodic Noise Reduction by Frequency Domain Filtering
Band Reject filter
Filter ini menghilangkan atau melemahkan band (pita) frequency di sekitar asal dari
transformasi Fourier terjadi.

5/6/2018 Rangkuman Pcd Alston - slidepdf.com
http://slidepdf.com/reader/full/rangkuman-pcd-alston 8/10
Ideal band reject:
Butterworth band reject:
Gaussian band reject:
Bandpass filter
Filter ini merupakan kebalikan dari metode Bandreject. Filter ini jarang digunakan
karena dapat menghilangkan banyak detail gambar. Tetapi Filter ini dapat digunakan
untuk mengisolasi jenis frequency tertentu.
Notch Filter
Jika kedua filter diatas melakukan operasi di sekitar asal dari transformasi Fourier, maka
filter Notch melakukan operasi (reject/pass) di area sekitar pusat/asal dari frequency
Ideal notch filter:
5/6/2018 Rangkuman Pcd Alston - slidepdf.com
http://slidepdf.com/reader/full/rangkuman-pcd-alston 9/10
Butterworth notch filter:
Gaussian notch filter:
5. Linear, Position-Invariant Degradations
Berbagai macam tipe degradasi dapat diperkirakan secara linear, proses position-
invariant. Keuntungan dari pendekatan ini adalah peralatan mahal seperti teori system
linear menjadi berharga untuk solusi dari permasalahan pemulihan gambar
6. Estimating the Degradation Function
Ada 3 prinsip utama untuk memperkirakan pemulihan gambar yang menggunakan
fungsi degradasi , yakni: 1. Observasi 2. Eksperimen 3. Model matematis Proses untuk
memulihkan gambar menggunakan fungsi degradasi yang telah diperkirakan
sebelumnya, terkadang disebut blind deconvolution. Estimation by Image Observation
(Perkiraan dengan pengamatan gambar) Estimation by Experimentation (Perkiraan
dengan percobaan) Estimation by Modelling (Perkiraan dengan permodelan)
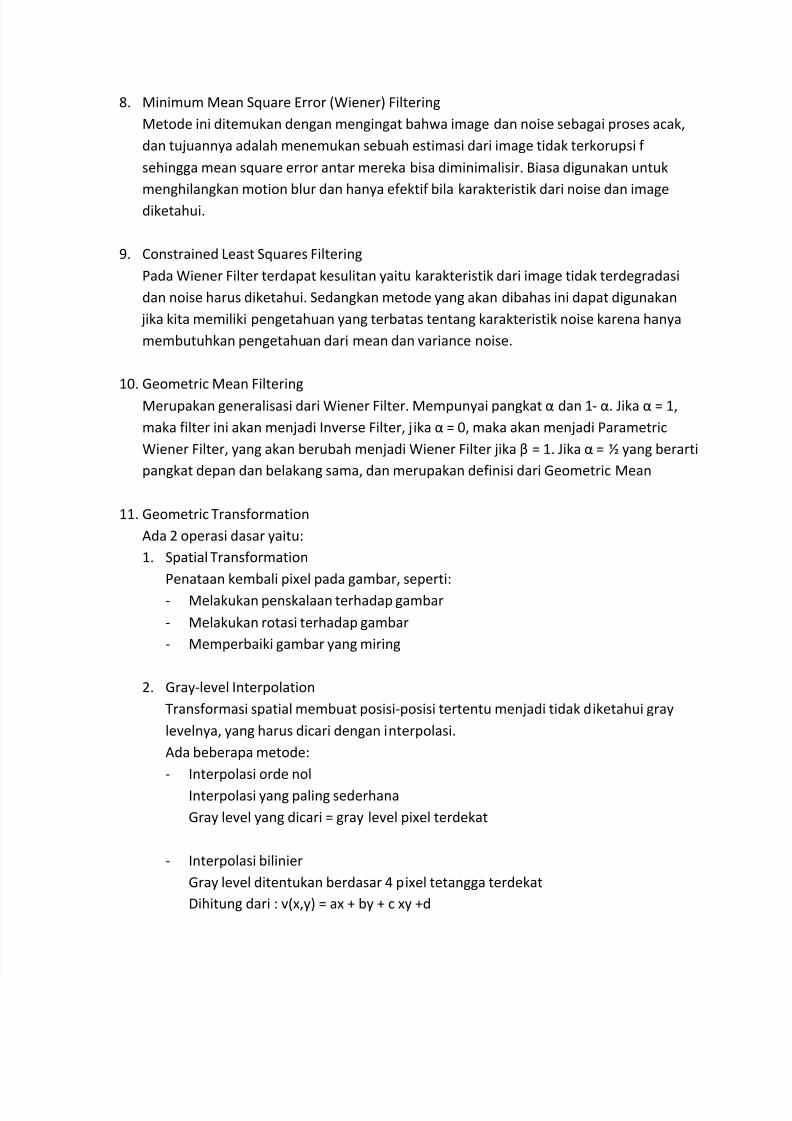
7. Inverse filtering
Pendekatan paling sederhana untuk pemulihan adalah secara langsung membalik
penyaringan, yang kita hitung sebagai perkiraan, sebuah transformasi gambar
sederhana asli, didapatkan dengan membagi transformasi gambar degradasi , dengan
fungsi degradasi
5/6/2018 Rangkuman Pcd Alston - slidepdf.com
http://slidepdf.com/reader/full/rangkuman-pcd-alston 10/10
8. Minimum Mean Square Error (Wiener) Filtering
Metode ini ditemukan dengan mengingat bahwa image dan noise sebagai proses acak,
dan tujuannya adalah menemukan sebuah estimasi dari image tidak terkorupsi f
sehingga mean square error antar mereka bisa diminimalisir. Biasa digunakan untuk
menghilangkan motion blur dan hanya efektif bila karakteristik dari noise dan imagediketahui.
9. Constrained Least Squares Filtering
Pada Wiener Filter terdapat kesulitan yaitu karakteristik dari image tidak terdegradasi
dan noise harus diketahui. Sedangkan metode yang akan dibahas ini dapat digunakan
jika kita memiliki pengetahuan yang terbatas tentang karakteristik noise karena hanya
membutuhkan pengetahuan dari mean dan variance noise.
10. Geometric Mean Filtering
Merupakan generalisasi dari Wiener Filter. Mempunyai pangkat dan 1- . Jika = 1,
maka filter ini akan menjadi Inverse Filter, jika = 0, maka akan menjadi Parametric
Wiener Filter, yang akan berubah menjadi Wiener Filter jika = 1. Jika = ½ yang berarti
pangkat depan dan belakang sama, dan merupakan definisi dari Geometric Mean
11. Geometric Transformation
Ada 2 operasi dasar yaitu:
1. Spatial Transformation
Penataan kembali pixel pada gambar, seperti:
- Melakukan penskalaan terhadap gambar
- Melakukan rotasi terhadap gambar
- Memperbaiki gambar yang miring
2. Gray-level Interpolation
Transformasi spatial membuat posisi-posisi tertentu menjadi tidak diketahui gray
levelnya, yang harus dicari dengan interpolasi.
Ada beberapa metode:
- Interpolasi orde nol
Interpolasi yang paling sederhana
Gray level yang dicari = gray level pixel terdekat
- Interpolasi bilinier
Gray level ditentukan berdasar 4 pixel tetangga terdekat
Dihitung dari : v(x,y) = ax + by + c xy +d