PENDEKATAN PEMECAHAN MASALAH Hama Burungeprints.uny.ac.id/7923/3/bab 2 -08507131031.pdf · 8 BAB II...
30
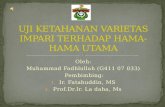
8 BAB II PENDEKATAN PEMECAHAN MASALAH A. Hama Burung Burung disebut hama padi karena mencuri dan memakan padi di sawah. Beberapa jenis burung yang biasanya menyerang areal tanaman padi adalah burung pipit, burung peking dan burung bondol. Burung-burung tersebut biasanya bersarang di dekat rumah, pohon-pohon yang rendah maupun pada semak-semak di sekitar sawah. Hama burung biasanya mulai menyerang areal pertanaman pada saat bulir padi mulai menguning sehingga menyebabkan kehilangan hasil secara langsung. Saat ini burung yang paling sering menyerang tanaman padi adalah adalah burung pipit. Hama burung ini sulit diusir. Berbeda dengan ulat atau hama lainnya bisa dibasmi dengan racun. Salah satu cara yang dilakukan petani untuk menghindari hama burung ini adalah dengan cara menunggui sawah mereka secara langsung untuk mengusir burung yang hendak memakan padi, atau dengan cara menutup padi mereka yang sudah menguning dan siap panen dengan jaring ikan. Akan tetapi karena luasnya sawah dan banyaknya jaring yang harus digunakan, petani harus mengeluarakan uang dalam jumlah besar untuk memasang jaring di sawah agar burung tidak dapat masuk. Jika terus dibiarkan, hama burung yang jumlahnya ribuan ini akan membuat petani rugi. Burung yang menyerang memang kecil, tapi mereka sekali menyerang jumlahnya ribuan, jadi bisa memakan padi yang sudah menguning.
Transcript of PENDEKATAN PEMECAHAN MASALAH Hama Burungeprints.uny.ac.id/7923/3/bab 2 -08507131031.pdf · 8 BAB II...

8
BAB II
PENDEKATAN PEMECAHAN MASALAH
A. Hama Burung
Burung disebut hama padi karena mencuri dan memakan padi di sawah.
Beberapa jenis burung yang biasanya menyerang areal tanaman padi adalah
burung pipit, burung peking dan burung bondol. Burung-burung tersebut
biasanya bersarang di dekat rumah, pohon-pohon yang rendah maupun pada
semak-semak di sekitar sawah. Hama burung biasanya mulai menyerang areal
pertanaman pada saat bulir padi mulai menguning sehingga menyebabkan
kehilangan hasil secara langsung. Saat ini burung yang paling sering
menyerang tanaman padi adalah adalah burung pipit.
Hama burung ini sulit diusir. Berbeda dengan ulat atau hama lainnya bisa
dibasmi dengan racun. Salah satu cara yang dilakukan petani untuk
menghindari hama burung ini adalah dengan cara menunggui sawah mereka
secara langsung untuk mengusir burung yang hendak memakan padi, atau
dengan cara menutup padi mereka yang sudah menguning dan siap panen
dengan jaring ikan. Akan tetapi karena luasnya sawah dan banyaknya jaring
yang harus digunakan, petani harus mengeluarakan uang dalam jumlah besar
untuk memasang jaring di sawah agar burung tidak dapat masuk.
Jika terus dibiarkan, hama burung yang jumlahnya ribuan ini akan
membuat petani rugi. Burung yang menyerang memang kecil, tapi mereka
sekali menyerang jumlahnya ribuan, jadi bisa memakan padi yang sudah
menguning.

9
B. Mikrokontroler AVR ( Alf and Vegaard’s Risc Processor)
Mikrokontroler jenis AVR adalah prosesor yang sekarang ini paling
banyak digunakan dalam membuat aplikasi sistem kendali bidang
instrumentasi, dibandingkan dengan mikrokontroler keluarga MCS51 seperti
AT 89C51/52.
Mikrokontroler seri AVR pertama kali diperkenalkan ke pasaran sekitar
tahun 1997 oleh perusahaan Atmel, yaitu sebuah perusahaan yang sangat
terkenal dengan produk mikrokontroler seri AT89S51/52-nya yang sampai
sekarang masih banyak digunakan di lapangan. Keterbatasan pada
mikrokontroler tersebut (resolusi, memori, dan kecepatan) menyebabkan
banyak orang beralih ke mikrokontroler AVR. Hal ini karena ada beberapa
kelebihan dari tipe AVR ini yaitu diantaranya ADC, DAC, Counter, Timer,
I2C, USART, dan sebagainya.
Mikrokontroler AVR standar memiliki arsitektur 8 bit, dimana semua
instruksi dikemas dalam kode 16 bit dan sebagian besar instruksi dieksekusi
dalam satu situs clock, berbeda dengan instruksi MCS51 yang membutuhkan
12 situs clock. Hal ini karena kedua jenis mikrokontroler tersebut memiliki
arsitektur yang berbeda. AVR berteknologi RISC(Reduce Insruction Set
Computing), sedangkan seri MCS51 berteknologi CISC(Complex Instruction
Set Computing). AVR dapat dikelompokkan menjadi empat kelas yaitu
ATtiny, AT90Sxx, ATmega, dan AT86RFFxx. Perbedaan dari masing-
masing keluarga AVR tersebut adalah memori, peripheral, dan fungsinya.
(http://[email protected])

10
1. Arsitektur Mikrokontroler ATmega8
Gambar 2. Blok diagram fungsional ATmega8
2. Fitur ATmega8
Fitur – fitur yang terdapat pada mikrokontroler ATmega8antara lain
adalah sebagai berikut :
a. High-Performance, Low-Power AVR 8-bit RISC Microcontroller
b. Advanced RISC Architecture
1) 130 Powerful Instructions – Most Single-clock Execution

11
2) 32 x 8 General Purpose Working Registers
3) Fully Static Operation
4) Up to 16 MIPS Throughput at 16MHz
5) On-chip 2-cycle Multiplier
c. High-Endurance Non-Volatile Memory segments
1) 8K Bytes In-System Self-programmable Flash Program Memory
2) 512 Bytes EEPROM
3) 1K Bytes of Internal SRAM
4) Write/Erase Cycles: 10,000 Flash / 100,000 EEPROM
5) Data Retention: 20 years at 85`C / 100 years at 25`C
6) Opitonal Boot Code Section with Independent Lock Bits
7) In-System Programming by On-chip Boot Program
8) True Read-While-Write Operation
9) Programming Lock for Software Security
d. Peripheral features
1) Two 8-bit Timers/Counters with Separate Prescaler, one
Compare Mode
2) One 16-bit Timer/Counter with Separate Prescaler, Compare
Mode, and Capture Mode
3) Real Time Counter with Separate Oscillator
4) Three PWM Channels
5) 6-channel ADC with 10-bit Accuracy
6) Byte-oriented Two-wire Serial Interface

12
7) Programmable Serial USART
8) Master/Slave SPI Serial Interface
9) Programmable Watchdog Timer with Separate On-Chip
Oscillator
10) On-Chip Analog Comparator
e. Special Microcontroller features
1) Power-On Reset and Programmable Brown-out Detection
2) Internal Calibrated RC Oscillator
3) External and Internal Interrupt Sources
4) Five Sleep Modes: Idle, ADC Noise Reduction, Power-save,
Power-down, and Standby
f. I/O and Packages
1) 23 Programmable I/O Lines
2) 28-lead PDIP, 32-lead TQFP, and 32-pad QFN/MLF
g. Operating Voltages
1) 2.7 – 5.5V (ATmega8L)
2) 4.5 – 5.5V (ATmega8)
h. Speed Grades
1) 0 – 8MHz (ATmega8L), 0 – 16MHz (ATmega8)
i. Power Consumption at 4MHz, 3V, 25`C
1) Active: 3.6 mA
2) Idle Mode: 1.0 mA
3) Power-Down Mode: 0.5 uA

13
3. Konfigurasi Pin ATmega8
Gambar 3. Susunan pin ATmega8
Berikut ini adalah susunan pin/kaki dari ATmega8.
a. VCC adalah merupakan pin masukan positip catu daya.
b. GND sebagai pin Ground.
c. PORT B (B.0-B.5) merupakan pin I/O dua arah dan pin fungsi
khusus yaitu Timer/Counter, dan SPI.
d. PORT C (C.0-C.6) merupakan pin I/O dua arah dan dapat diprogram
sebagai pin ADC.
e. PORT D (D.0-D.4) merupakan pin I/O dua arah dan pin fungsi
khusus yaitu interupsi eksternal dan komunikasi serial.
f. Reset merupakan pin yang digunakan untuk me-reset
mikrokontroler.
g. XTAL1 dan XTAL2 sebagai pin masukan clock eksternal. Suatu
mikrokontroler membutuhkan sumber detak (clock) agar dapat

14
mengeksekusi instruksi yang ada di memori. Semakin tinggi
kristalnya, semakin cepat kerja mikrokontroler tersebut.
h. AVCC sebagai pin suplai tegangan untuk ADC.
i. AREF sebagi pin masukan tegangan referensi untuk ADC.
4. Peta Memori
ATmega8 memiliki dua ruang memori utama, yaitu memori data
dan memori program. Selain dua memori utama, ATmega8 juga
memiliki fitur EEPROM yang dapat digunakan sebagai penyimpan data.
a. Flash Memory
ATmega8 memiliki flash memory sebesar 8 Kbytes untuk
memori program. Karena semua instruksi AVR menggunakan 16
atau 32 bit, maka AVR memiliki organisasi memori 4 Kbyte x 16
bit dengan alamat dari $000 hingga $FFF. Untuk keamanan
software, memori flash dibagi mejadi dua bagian, yaitu Boot
Program dan bagian Application program. AVR tersebut memiliki
12 bit Program Counter (PC) sehingga mampu mengalamati isi
flash memori.
b. SRAM
ATmega8 memiliki 608 alamat memori data yang terbagi
menjadi 3 bagian, yaitu 32 buah register file, 64 buah IO register
dan 512 byte internal SRAM.

15
c. EEPROM
ATmega8 juga memiliki memori data berupa EEPROM 8 bit
sebesar 512 byte ($000-$1FF).
d. Status Register (SREG)
Register SREG digunakan untuk menyimpan informasi dari
hasil operasi aritmatika yang terakhir. Informasi-informasi dari
register SREG dapat digunakan untuk mengubah alur program
yang sedang dijalankan dengan menggunakan instruksi
percabangan. Data SREG akan selalu akan berubah setiap instruksi
atau operasi pada ALU dan datanya tidak otomatis tersimpan
apabila terjadi instruksi percabangan baik karena interupsi maupun
lompatan.
5. Status Register
Status register adalah register berisi status yang dihasilkan pada
setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG
merupakan bagian dari inti CPU mikrokontroler. Berikut ini adalah status
register dari ATmega8 beserta penjelasannya.
Gambar 4. Status register ATmega8

16
a. Bit 7 (I)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set
supaya semua perintah interupsi dapat dijalankan. Untuk fungsi
interupsi individual akan dijelaskan pada bagian lain. Jika bit ini di-
set, maka semua perintah interupsi baik yang individual maupun
secara umum akan diabaikan. Bit ini akan dibersihkan atau cleared
oleh hardware setelah sebuah interupsi dijalankan dan akan di-set
kembali oleh perintah RETI. Bit ini juga dapat di-set dan di-reset
melalui aplikasi dengan instruksi SEI dan CLI.
b. BIT 6 (T)
Merupakan bit Copy Storage. Instruksi bit Copy Instructions
BLD (Bit LoaD) dan BST (Bit Store) menggunakan bit ini sebagai
asal atau tujuan untuk bit yang telah dioperasikan. Sebuah bit dari
sebuah register dalam Register File dapat disalin ke dalam bit ini
dengan menggunakan instruksi BST, dan sebuah bit di dalam bit ini
dapat disalin ke dalam sebuah bit di dalam register pada Register
File dengan menggunakan perintah BLD.
c. BIT 5 (H)
Merupakan bit Half Cary Flag. Bit ini menandakan sebuah
Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi
dalam aritmatik BCD.

17
d. BIT 4 (S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah eksklusif
diantara Negative Flag (N) dan Two’s Complement Overflow Flag
(V).
e. BIT 3 (V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini
menyediakan fungsi-fungsi aritmatika dua komplemen.
f. BIT 2 (N)
Merupakan bit Negative Flag. Bit ini mengindikasikan sebuah
hasil negatif di dalam sebuah fungsi logika atau aritmatika.
g. BIT 1 (Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah
hasil nol “0” dalam sebuah fungsi arimatika atau logika.
h. BIT 0 (C)
Merupakan bit Carry Flag. Bit ini mengindikasikan sebuah
carry atau sisa dalam sebuah fungsi aritmatika atau logika.
C. Bahasa Pemrograman C
Bahasa C merupakan salah satu bahasa pemrograman yang paling
populer untuk pengembangan program-program aplikasi yang berjalan pada
sistem mikroprosesor (komputer). Relatif dibandingkan dengan bahasa aras
tinggi lain, bahasa C merupakan bahasa pemrograman yang sangat fleksibel

18
dan tidak terlalu terikat dengan berbagai aturan yang sifatnya kaku.
Penggunaan bahasa C akan sangat efisien terutama untuk program
mikrokontroler yang berukuran relatif besar. Dibandingkan dengan bahasa
assembler, penggunaan bahasa C dalam pemrograman memiliki beberapa
kelebihan berikut: Mempercepat waktu pengembangan, bersifat modular dan
terstruktur, sedangkan kelemahannya adalah kode program hasil kompilasi
akan relatif lebih besar (dan sebagai konsekuensinya hal ini terkadang akan
mengurangi kecepatan eksekusi).
1. Struktur Penulisan Program Bahasa C
Struktur dalam bahasa C cukup sederhana, karena hanya mencakup 3
poin penting, yaitu :
a. Pre-Processor
Merupakan bagian dari program dalam bahasa C yang selalu
dijalankan pertama kali. Bagian ini juga melakukan proses tertentu.
Banyak sekali syntax dalam pre-processor. Namun setidaknya ada
dua syntax yang akan sering digunakan dalam latihan programming
dasar, yaitu syntax #include dan #define. Berikut penjelasannya :
1) #include adalah proses yang pertama kali dijalankan untuk
memanggil library fungsi yang ada di dalam header file.
Contoh:
#include <mega.h>
Berarti meng-include file mega.h. Dengan demikian berarti kita
mempersiapkan fungsi-fungsi dan instruksi-instruksi yang dapat

19
digunakan pada pemrogramman I/O mikrokontroler seperti
perintah DDRA, PORTA, PORTB, PINA, register-registernya
dan lain-lain.
2) #define adalah proses yang pertama kali dijalankan untuk
mendefinisikan konstanta. Nilai dari konstanta tidak akan
berubah selama program berlangsung. Contoh :
#define sensor PINA
#define kipas PORTB
#define nilai 100
b. Main function
Ini adalah fungsi utama dalam suatu program. Tentu saja fungsi
ini yang akan dijalankan pertama kali. Tidak menutup kemungkinan
di dalam fungsi ini terdapat statement yang memanggil fungsi lain.
c. Function
Fungsi dapat dibuat sendiri dan dapat dipanggil baik fungsi
utama ataupun fungsi lain dan bahkan fungsi itu sendiri. Fungsi
dapat diletaktan diatas fungsi utama, ataupun dapat juga dibawah
fungsi utama (dengan menambahkan deklarasi fungsi diatas fungsi
utama). Contoh :
#include <mega.h> // pre-processor
#include <stdio.h>
void fungsiku(); // deklarasi fungsi fungsiku()
void main(){ // fungsi utama
printf(“hello”);
coba();
}
void fungsiku(){ // fungsi
printf(“world!”);}

20
2. Tipe data
Tipe data merupakan bagian program yang paling penting karena
tipe data mempengaruhi setiap instruksi yang akan dilaksanakan oleh
komputer. Misalnya saja 5 dibagi 2 bisa saja menghasilkan hasil yang
berbeda tergantung tipe datanya.
Jika 5 dan 2 bertipe integer maka akan menghasilkan nilai 2, namun
jika keduanya bertipe float maka akan menghasilkan nilai 2.5000000.
Pemilihan tipe data yang tepat akan membuat proses operasi data
menjadi lebih efisien dan efektif. Dalam bahasa C terdapat lima tipe data
dasar, yaitu :
Tabel 1. Tipe Data Dasar Dalam Bahasa Pemrograman C
No. Tipe Data Range Format Keterangan
1. char 128 s/d 127 %c Karakter/string
2. int 32768 s/d 32767 %i , %d Integer/bilangan bulat
3. float 3.4E-38 s/d
3.4E+38
%f Float/pecahan
4. double 1.7E-308 s/d
1.7+308
%lf Pecahan presisi ganda
5. void - - -
3. Konstanta
Konstanta merupakan suatu nilai yang tidak dapat diubah selama
proses program berlangsung. Konstanta nilainya selalu tetap. Konstanta
harus didefinisikan terlebih dahulu di awal program. Konstanta dapat
bernilai integer, pecahan, karakter dan string. Selain itu, bahasa C juga

21
menyediakan beberapa karakter khusus yang disebut karakter escape,
antara lain :
\a: Untuk bunyi bel (alert)
\b: Mundur satu spasi (backspace)
\f: Ganti halaman (form feed)
\n: Ganti baris bar (new line)
\v: Tabulasi vertikal
\0: Nilai kosong (null)
\’: Karakter petik tunggal
\”: Karakter petik ganda
\\: Karakter garis miring
4. Variable
Variable adalah suatu pengenal (identifier) yang digunakan untuk
mewakili suatu nilai tertentu di dalam proses program. Berbeda dengan
konstanta yang nilainya selalu tetap, nilai dari suatu variable bisa diubah-
ubah sesuai kebutuhan. Nama dari suatu variable dapat ditentukan
sendiri oleh pemrogram dengan aturan sebagai berikut :
1) Terdiri dari gabungan huruf dan angka dengan karakter pertama
harus berupa huruf.
2) Bahasa C bersifat case-sensitive artinya huruf besar dan kecil
dianggap berbeda. Jadi antara Metal dengan metal itu berbeda.
3) Tidak boleh mengandung spasi.
4) Tidak boleh mengandung simbol-simbol khusus, kecuali garis bawah
(underscore), seperti : $, ?, %, #, !, &, *, (, ), -, +, dsb.
5) Panjangnya bebas, tetapi hanya 32 karakter pertama yang terpakai.

22
D. Perangkat Lunak CodeVision AVR (CVAVR)
CodeVision AVR pada dasarnya merupakan perangkat lunak
pemrograman Mikrokontroler keluarga AVR berbasis bahasa C. Ada tiga
komponen penting yang telah diintegrasikan dalam perangkat lunak ini:
Compiler C, IDE dan Program Generator.
Berdasarkan spesifikasi yang dikeluarkan oleh perusahaan
pengembangnya, Compiler C yang digunakan hampir mengimplementasikan
semua komponen standar yang ada pada bahasa C standar ANSI (seperti
struktur program, jenis tipe data, jenis operator, dan library fungsi standar-
berikut penamaannya). Tetapi walaupun demikian, dibandingkan bahasa C
untuk aplikasi komputer, compiler C untuk mikrokontroler ini memiliki
sedikit perbedaan yang disesuaikan dengan arsitektur AVR tempat program C
tersebut ditanamkan (embedded).
Khusus untuk library fungsi, disamping library standar (seperti fungsi-
fungsi matematik, manipulasi String, pengaksesan memori dan sebagainya),
CodeVisionAVR juga menyediakan fungsi-fungsi tambahan yang sangat
bermanfaat dalam pemrograman antarmuka AVR dengan perangkat luar yang
umum digunakan dalam aplikasi kontrol. Beberapa fungsi library yang
penting diantaranya adalah fungsi-fungsi untuk pengaksesan LCD,
komunikasi I2C, IC RTC (Real time Clock), sensor suhu LM75, SPI (Serial
Peripheral Interface) dan lain sebagainya. Untuk memudahkan
pengembangan program aplikasi, CodeVisionAVR juga dilengkapi IDE yang
sangat user friendly. Selain menu-menu pilihan yang umum dijumpai pada

23
setiap perangkat lunak berbasis Windows, CodeVisionAVR ini telah
mengintegrasikan perangkat lunak downloader yang dapat digunakan untuk
mentransfer kode mesin hasil kompilasi kedalam sistem memori
mikrokontroler AVR yang sedang diprogram.
Gambar 5. IDE perangkat lunak CodeVisionAVR
Selain itu, CodeVisionAVR juga menyediakan sebuah tool yang
dinamakan dengan Code Generator atau CodeWizardAVR. Secara praktis,
tool ini sangat bermanfaat membentuk sebuah kerangka program (template),
dan juga memberi kemudahan bagi programmer dalam penginisialisasian
register-register yang terdapat pada mikrokontroler AVR yang sedang
diprogram. Dinamakan Code Generator, karena perangkat lunak CodeVision
ini akan membangkitkan kode-kode program secara otomatis setelah fase

24
inisialisasi pada jendela CodeWizardAVR selesai dilakukan. Gambar berikut
memperlihatkan beberapa penggal baris kode program yang dibangkitkan
secara otomatis oleh CodeWizardAVR. Secara teknis, penggunaan tool ini
pada dasarnya hampir sama dengan application wizard pada bahasa-bahasa
pemrograman Visual untuk komputer (seperti Visual C, Borland Delphi, dan
sebagainya).
Gambar 6. Code Generator yang dapat digunakan untuk menginisialisasi
register-register pada Mikrokontroler AVR.

25
E. IC Regulator
Untuk menstabilkan tegangan DC (+) dan tegangan DC (-) dari catu
daya utama sebelum mensuplay rangkaian maka perlu digunakan regulator
dengan memasang IC regulator tipe 78xx dan 79xx agar tegangan outputnya
sesuai dengan kebutuhan rangkaian.
Gambar 7. IC regulator 7805
Berikut ini adalah tabel contoh jenis – jenis IC Regulator beserta output
keluarannya :
Tabel 2. Tipe IC Regulator
No Tipe Output Tipe Output
1 L7805C 5V L7905C -5V
2 L7852C 5.2V L7952C -5.2V
3 L7806C 6V L7906C -6V
4 L7808C 8V L7908C -8V
5 L7809C 9V L7909C -9V
6 L7812C 12V L7912C -12V
7 L7815C 15V L7915C -15V
8 L7818C 18V L7918C -18V
9 L7820C 20V L7920C -20V
10 L7822C 22V L7922C -22V
11 L7824C 24V L7924C -24V

26
F. Transistor TIP31
Transistor TIP31 merupakan standar transistor jenis NPN untuk aplikasi
medium power. Jenis lain dari transistor TIP31 ini bisa ditemukan dari
transistor TIP32 dengan jenis transistor PNP. Transistor TIP31 mempunyai
seri-seri lain sejenisnya, yaitu TIP31A dan TIP31B. Jenis TIP31 tersebut
mengindikasikan karateristik dari tegangan collector-base dan collector-
emitter-nya.
Seri dari penamaan TIP sendiri berasal dari nama Texas Instruments
Power. Sedang penomeran 31 adalah identitas serinya. Seri ini sudah
terdaftar pada Desember 1968 oleh Texas Instruments. Karakteristik tipe
transistor TIP31 (seri A, B, dan C) dapat dilihat pada Tabel 8 berikut :
Tabel 3. Karakteristik Transistor TIP31
Parameter
Manufacturer
A B C
Vce saturation 1.2V 1.2V 1.2V
Vbe saturation 1.8V 1.8V 1.8V
Small signal DC current gain (Hfe) 25 25 20
Hfe bandwidth product 3.0 MHz 3.0 MHz 3.0 MHz
Sedang tipe model komponen transitor adalah tipe TO-220, dengan
konfigurasi pin 1, 2, 3 adalah Base, Collector, dan Emitter.

27
Susunan pin Transistor TIP31 Lambang Transistor
Gambar 8. Susunan kaki Transistor TIP31 dan lambang Transistor
G. Relay
Dalam dunia elektronika, relay dikenal sebagai komponen yang dapat
mengimplementasikan logika switching. Sebelum tahun 70an, relay
merupakan “otak” dari rangkaian pengendali. Baru setelah itu muncul PLC
yang mulai menggantikan posisi relay. Relay yang paling sederhana ialah
relay elektromekanis yang memberikan pergerakan mekanis saat
mendapatkan energi listrik. Secara sederhana relay elektromekanis ini
didefinisikan sebagai berikut:
1. Alat yang menggunakan gaya elektromagnetik untuk menutup atau
membuka kontak saklar.
2. Saklar yang digerakkan secara mekanis oleh daya atau energi listrik.
Di bawah ini contoh relay yang beredar di pasaran.

28
Gambar 9. Relay yang Tersedia di Pasaran
1. Fungsi Relay
Secara umum, relay digunakan untuk memenuhi fungsi-fungsi
berikut:
a. Remote control : Dapat menyalakan atau mematikan alat dari jarak
jauh.
b. Penguatan daya : Menguatkan arus atau tegangan (Contoh : starting
relay pada mesin mobil).
c. Pengatur logika kontrol suatu sistem.
2. Prinsip Kerja dan Simbol
Relay terdiri dari coil dan contact. Perhatikan Gambar 10, coil
adalah gulungan kawat yang mendapat arus listrik, sedang contact
adalah sejenis saklar yang pergerakannya tergantung dari ada tidaknya
arus listrik di coil. Contact ada 2 jenis: Normally Open (kondisi awal
sebelum diaktifkan open), dan Normally Closed (kondisi awal sebelum
diaktifkan close).

29
Secara sederhana berikut ini prinsip kerja dari relay: ketika Coil
mendapat energi listrik (energized), akan timbul gaya elektromagnet
yang akan menarik armature yang berpegas, dan contact akan menutup.
(Sumber : http://lionjogja.20m.com/relay.html)
Gambar 10. Skema Relay Elektromekanik
Selain berfungsi sebagai komponen elektronik, relay juga
mempunyai fungsi sebagai pengendali sistem. Sehingga relay
mempunyai 2 macam simbol yang digunakan pada:
a. Rangkaian listrik (hardware)
b. Program (software)
Berikut ini simbol yang digunakan:
Gambar 11. Rangkaian dan Simbol Logika Relay
Simbol selalu mewakili kondisi relay tidak mendapat energy listrik.
Biasanya dalam datasheet, penjelasan untuk coil dan contact terpisah.

30
Hal ini menyebabkan masing-masing mempunyai spesifikasi yang
berbeda-beda juga.
3. Jenis – Jenis Relay
Seperti saklar, relay juga dibedakan berdasar pole dan throw yang
dimilikinya. Berikut definisi pole dan throw:
a. Pole: Banyaknya contact yang dimiliki oleh relay
b. Throw: Banyaknya kondisi (state) yang mungkin dimiliki contact
Berikut ini penggolongan relay berdasar jumlah pole dan throw:
a. SPST (Single Pole Single Throw)
b. DPST (Double Pole Single Throw)
c. SPDT (Single Pole Double Throw)
d. DPDT (Double Pole Double Throw)
e. 3PDT (Three Pole Double Throw)
f. 4PDT (Four Pole Double Throw)
Berikut ini rangkaian dan simbol macam-macam relay tersebut.
Gambar 12. Relay Jenis Single Pole Double Throw (SPDT)

31
Gambar 13. Relay Dengan Contact Lebih Dari Satu
4. Relay Sebagai Pengendali
Salah satu kegunaan utama relay dalam dunia industri ialah untuk
implementasi logika kontrol dalam suatu sistem. Sebagai “bahasa
pemrograman” digunakan konfigurasi yang disebut ladder diagram atau
relay ladder logic. Berikut ini beberapa petunjuk tentang relay ladder
logic (ladder diagram):
a. Diagram wiring yang khusus digunakan sebagai bahasa
pemrograman untuk rangkaian kontrol relay dan switching.
b. LD Tidak menunjukkan rangkaian hardware, tapi alur berpikir.
c. LD Bekerja berdasar aliran logika, bukan aliran tegangan/arus.
Relay Ladder Logic terbagi menjadi 3 komponen:
a. Input pemberi informasi
b. Logic pengambil keputusan
c. Output usaha yang dilakukan
Diagram sederhana dari sistem kontrol berbasis relay yang
menggambarkan penjelasan di atas dapat dilihat pada Gambar 14.

32
Gambar 14. Sistem Kontrol Berbasis Relay
Dari gambar di atas nampak bahwa sistem kendali dengan relay ini
mempunyai input device (misalnya: berbagai macam sensor, switch) dan
output device (misalnya: motor, pompa, lampu). Dalam rangkaian
logikanya, masing-masing input, output, dan semua komponen yang
dipakai mengikuti standard khusus yang unik dan telah ditetapkan
secara internasional.
Sebagai awal, pada gambar di bawah dapat dilihat aplikasi relay
untuk membentuk gerbang-gerbang logika sederhana (AND, OR, NOT,
dan latching).

33
Gambar 15. Aplikasi Relay dalam Gerbang Digital
H. Motor DC
Motor DC adalah peralatan elektromekanik dasar yang berfungsi untuk
mengubah tenaga listrik menjadi tenaga mekanik yang desain awalnya
diperkenalkan oleh Michael Faraday.
Motor DC berputar dikarenakan terdapat interaksi antara medan magnet
permanen dengan gaya yang bekerja pada lilitan (kumparan) karena arus yang
mengalir pada lilitan tersebut. Motor berputar karena antara magnet permanen
dengan gaya yang timbul pada kumparan akan saling tarik-menarik dan saling
tolak-menolak pada masing-masing kutub.
(Sumber: Endra Pitowarno. Robotika Desain, Kontrol, dan Kecerdasan
Buatan, 2006:76) .
Sesuai dengan namanya, Motor DC diberi daya dengan tegangan DC
(Direct Current = arus searah). Putaran motor DC akan berbalik arah jika
polaritas tegangan yang diberikan juga diubah. Motor DC mempunyai
tegangan kerja yang bervariasi. Ada yang memiliki tegangan kerja 3 V, 6 V
dan 12 V. Motor DC 6 Volt biasanya masih bisa beroperasi bila diberikan

34
tegangan kerja 3 Volt, walaupun putarannya menjadi lambat dan torsi yang
dihasilkan juga lebih kecil.
1. Bagian-bagian Motor DC
a. Armature
Merupakan bagian inti dalam motor DC berupa lilitan kawat
pada besi lunak sebagai inti kumparannya. Armature merupakan
bagian yang bergerak pada motor DC (rotor).
b. Komutator
Komutator disebut juga cincin belah karena bentuknya yang
seperti cincin yang terbelah. Merupakan tempat menempelnya
ujung-ujung kumparan pada armature. Belahan tersebut terpisah satu
sama lain sehingga tidak terjadi short circuit (hubung singkat).
c. Sikat Karbon (Brushes)
Merupakan bagian yang terhubung dengan kutub positif dan
kutub negatif dari sumber arus DC. Sikat ini dipasang bersentuhan
dengan komutator sehingga arus dari sumber diteruskan ke
kumparan melalui sikat dan komutator.
d. Sangkar Magnet
Merupakan magnet tetap yang disatukan dengan sangkar/ bodi
motor DC yang menghasilkan medan magnet dalam motor DC.

35
Gambar 16. Bagian-bagian Motor DC
2. Cara Kerja Motor DC
Pada gambar di bawah, saat sumber dinyalakan, arus akam mengalir
melewati sikat, komutator, kemudian ke kumparan, saat kumparan dialiri
arus akan menimbulkan medan magnet dan akan membuat kumparan
bergerak. Saat kumparan bergerak 90 derajat arus akan terputus karena
sikat berada pada belahan komutator, akan tetapi karena momentumnya
sendiri kumparan akan tetap berputar, saat bergerak 180 derajat,
komutator akan kembali kontak dengan sikat sehingga arus akan
mengalir dengan arah yang sama. Siklus ini akan terus berulang sampai
arus dari sumber diputus.

36
Gambar 17. Cara Kerja Motor DC
I. Akumulator (Aki)
Akumulator (accu, aki) adalah sebuah alat yang dapat menyimpan energi
(umumnya energi listrik) dalam bentuk energi kimia. Contoh-contoh
akumulator adalah baterai dan kapasitor. Dalam standar internasional setiap
satu cell akumulator memiliki tegangan sebesar 2 volt. sehingga aki 12 volt,
memiliki 6 cell sedangkan aki 24 volt memiliki 12 cell.
Aki (Akumulator) merupakan sel yang banyak kita jumpai karena banyak
digunakan pada sepeda motor maupun mobil. Aki temasuk sel sekunder,
karena selain menghasilkan arus listrik, aki juga dapat diisi arus listrik
kembali. secara sederhana aki merupakan sel yang terdiri dari elektroda Pb
sebagai anoda dan PbO2 sebagai katoda dengan elektrolit H2SO4

37
Gambar 18. Akumulator (Accu)
J. LCD Display 16x2 M1632
M1632 adalah merupakan modul LCD dengan tampilan 16 x 2 baris
dengan konsumsi daya yang rendah. Modul ini dilengkapi dengan
mikrokontroler yang didisain khusus untuk mengendalikan LCD.
Mikrokontroler HD44780 buatan Hitachi yang berfungsi sebagai pengendali
LCD ini mempunyai CGROM (Character Generator Read Only Memory),
CGRAM (Character Generator Random Access Memory) dan DDRAM
(Display Data Random Access Memory).
Gambar 19. LCD Display 16x2 M1632