#Laporan JKG - Tugas 2 - Program Adjusment Jaring GPS.doc
63
TUGAS MATA KULIAH JARING KONTROL GEODESI “Pembuatan Program Post Adjustment Jaring GPS Menggunakan Software Matlab” Disusun Oleh : Theodorus Yan Neovanny (07/252715/TK/33083) Dyah Kartika Sari (07/252758/TK/33126) Dany Puguh Laksono (07/256988/TK/33449) JURUSAN TEKNIK GEODESI
description
Tugas Perataan Jaring Teknik Geodesi UGM
Transcript of #Laporan JKG - Tugas 2 - Program Adjusment Jaring GPS.doc
TUGAS MATA KULIAH
JARING KONTROL GEODESI
“Pembuatan Program Post Adjustment Jaring GPS Menggunakan Software Matlab”
Disusun Oleh :
Theodorus Yan Neovanny (07/252715/TK/33083)Dyah Kartika Sari (07/252758/TK/33126)
Dany Puguh Laksono (07/256988/TK/33449)
JURUSAN TEKNIK GEODESI
FAKULTAS TEKNIK UNIVERSITAS GADJAH MADA
YOGYAKARTA
2010

Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Uji Global Dan Data Snooping Jaring GPS Menggunakan Software Matlab”
Page ii
DAFTAR ISI
DAFTAR ISI...............................................................................................................................................ii
KATA PENGANTAR................................................................................................................................iii
BAB I : PENDAHULUAN.........................................................................................................................1
I.1. Latar Belakang..................................................................................................................................1
I.2. Ruang Lingkup Masalah...................................................................................................................2
I.3. Maksud dan Tujuan...........................................................................................................................3
BAB II: LANDASAN TEORI.....................................................................................................................4
II.1. Hitung Perataan Kuadrat Terkecil Metode Parameter.....................................................................4
II.2. Perataan Jaring Minimum Constraint dan Full Constraint...............................................................9
II.3. Post Adjustment Data Screening......................................................................................................9
II.3. Pemrograman Menggunakan Matlab.............................................................................................11
BAB III : PELAKSANAAN.....................................................................................................................14
III.1. Alat dan Bahan.............................................................................................................................14
III.2. Langkah Pelaksanaan....................................................................................................................14
BAB IV : PEMBAHASAN.......................................................................................................................23
IV.1. Hasil Uji Statistik Global Test......................................................................................................23
IV.2. Hasil Uji Statistik Data Snooping.................................................................................................23
BAB V : PENUTUP..................................................................................................................................26
V.1. Kesimpulan....................................................................................................................................26
V.2. Saran..............................................................................................................................................26
REFERENSI..............................................................................................................................................27
LAMPIRAN..............................................................................................................................................28
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page iii
KATA PENGANTAR
Segala puji hanyalah kami sanjungkan kepada Allah dzat yang Maha Esa. Kami memujiNya,
meminta perlindungan kepadaNya, dan memohon ampun. Dan kami berlindung padaNya dari kejahatan
diri-diri kami dan keburukan amal-amal kami. Barangsiapa diberiNya pertunjuk, maka tiada yang dapat
menyesatkannya. Dan barangsiapa yang disesatkannya, niscaya tak seorangpun mampu memberikan
pertunjuk kepadanya.
Makalah “Pembuatan Program Uji Global Dan Data Snooping Jaring GPS Menggunakan
Software Matlab” ini kami susun untuk memenuhi tugas mata kuliah Jaring Kontrol Geodesi pada
semester VI Jurusan Teknik Geodesi Fakultas Teknik Universitas Gadjah Mada (UGM), Yogyakarta.
Ungkapan terima kasih kami sampaikan kepada dosen pengampu mata kuliah Jaring Kontrol Geodesi,
kelas A, ibu DR. Leni Sophia Heliani, S.T, M.Sc, yang telah memberikan materi kuliah kepada kami
sebagaimana yang kami harapkan. Demikian pula kepada pihak-pihak lain yang telah membantu
terselesaikannya makalah ini, baik secara langsung maupun tidak langsung, kami mengucapkan terima
kasih.
Besar harapan kami agar penyusunan makalah ini dapat memberikan manfaat, baik bagi diri
kami sendiri maupun bagi pihak-pihak lain yang ingin mengambil manfaat darinya. Kritik dan saran
kami harapkan atas berbagai kekurangan dalam makalah ini.
Yogyakarta, 1 Mei 2010
Penyusun
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page iv
Steter Tropfen Höhlt
den Stein
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 1
BAB I : PENDAHULUAN
I.1. Latar Belakang
Salah satu fungsi yang paling penting dari ilmu geodesi adalah penentuan posisi titik-tiitk secara
teliti pada suatu sistem referensi atau datum yang terdefinisi dengan baik (well-defined). Dengan
demikian, ilmu Geodesi merupakan ilmu sains yang mempelajari penentuan bentuk bumi, sekaligus
merupakan sarana yang praktis untuk memperoleh data spasial. Bagaimanapun juga, sering dijumpai
adanya pemisahan antara teknik penentuan posisi “geodetik” secara sangat teliti dengan penentuan
posisi yang tidak memenuhi syarat ketelitian tertentu. Ada suatu spektrum ketelitian pengukuran mulai
dari yang tinggi sampai akurasi yang rendah. Hal ini telah lama disadari dan diwujudkan dalam bentuk
sistem hierarki yang digunakan dalam survey titik-titik kontrol (Control Survey). Jaring titik kontrol
Geodesi dibangun dari suatu teknik pengukuran dengan ketelitian yang tinggi, untuk kemudian
dibagi/dirapatkan (broke-down/densified) dengan pengukuran yang memiliki tingkat ketelitian yang
lebih rendah [Rizos, 1999].
Perwujudan dari konsep ini adalah pembangunan hierarki titik-titik Jaring Kontrol Geodesi
dalam beberapa tingkatan. Dalam skala nasional, tingkatan yang memiliki ketelitian paling tinggi yang
dijadikan sebagai acuan seringkali disebut sebagai orde nol (zero order) atau orde satu (first order),
sedangkan titik-titik yang merupakan perapatan dari titik-titik ini disebut dengan titik orde dua, orde
tiga, dan seterusnya dengan tingkat ketelitian yang lebih rendah. Di Indonesia, hal ini diwujudkan
dengan adanya pembagian orde titik-titik Jaring Kontrol Geodesi menjadi tingkatan orde 00 - orde 4
yang masing-masing memiliki metode pengukuran dan syarat ketelitian yang berbeda. Pembangunan
Jaring Titik Kontrol keenam orde ini dilakukan dengan menggunakan GPS (Global Positioning System),
ditambah alternatif pengukuran dengan menggunakan survei terestris untuk pengukuran orde 4 [SNI
JKHN, 2002].
Terdapat perbedaan dalam metode pengukuran dan syarat ketelitian untuk masing-masing orde
jaring kontrol ini. Suatu hasil ukuran jaring harus memenuhi syarat tertentu untuk dapat digolongkan
pada orde yang sesuai. Sebelum dilakukan penentuan kelas dan/atau orde jaring tersebut, harus
dilakukan uji statistik untuk mengetahui ada atau tidaknya kesalahan yang besar pada hasil pengukuran
tersebut. Uji statistik ini meliputi uji Pre Adjustment Data Screening yang dilakukan sebelum perataan
baseline Jaring Titik Kontrol Geodesi, dan Post Adjustment Data Screening yang dilakukan setelah
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 2
perataan baseline Jaring Titik Kontrol Geodesi. Post Adjustment Data Screening terdiri atas Uji Global
hasil pengolahan baseline dan Data Snooping.
Terdapat banyak perangkat lunak (software) yang mampu melakukan keseluruhan proses
pengolahan data pengukuran Jaring GPS tersebut, mulai dari perangkat lunak komersial, seperti
GPSurvey, GeoGenius, Trimble Total Control, Pinnacle, dll, hingga perangkat lunak ilmiah yang boleh
digunakan secara cuma-cuma, seperti Gamit/GlobK, Bernesse, dan lain sebagainya. Disamping dengan
menggunakan perangkat lunak yang tersedia tersebut, pengolahan jaring GPS juga dapat menggunakan
perangkat lunak lain yang tidak dibuat secara khusus untuk keperluan ini, misalnya software spreadsheet
seperti Microsoft Excel, atau berbagai jenis compiler yang sangat banyak tersedia, seperti Pascal
(biasanya digunakan untuk keperluan pendidikan), FORTRAN (Formula Translator), BASIC/Visual
Basic, C/C++, Java (biasanya digunakan untuk pemrograman web), Matlab (Matrix Laboratory,
digunakan untuk berbagai keperluan bidang matematika dan engineering), dan masih banyak lagi yang
lainnya. Dalam penggunaan software semacam ini untuk pengolahan baseline, maka harus terlebih
dahulu disusun algoritma hitungan untuk kemudian ditulis dalam bahasa program sesuai dengan aturan
penulisan program tersebut.
I.2. Ruang Lingkup Masalah
Penyusunan tugas ini dibatasi pada materi Perataan Baseline Jaring Titik Kontrol GPS dan Uji
Statistik Post Adjustment hasil pengolahan baseline GPS yang meliputi Global Test dan Data Snooping.
Pembuatan program utamanya dilakukan dengan menggunakan bahasa pemrograman Matlab, dengan
menggunakan beberapa perangkat lunak lain untuk keperluan input dan output data hitungan yang
dilakukan oleh program ini. Data jaring GPS yang diolah berjumlah 10 buah titik yang diperoleh dari
stasiun aktif GPS untuk Survey Ordonansi Irlandia (OSI) dalam bentuk file Rinex selama 1 jam
pengamatan pada tanggal 17 April 2010.
Hasil akhir dari penyusunan tugas ini adalah program dalam bahasa pemrograman Matlab yang
mampu melakukan hitungan uji statistik atas data masukan komponen baseline perataan jaring GPS dan
memberikan penilaian uji hipotesa yang menggambarkan kualitas jaring GPS tersebut.

Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 3
I.3. Maksud dan Tujuan
Penyusunan tugas ini bertujuan untuk menghasilkan suatu program yang mampu melakukan uji
statistik Post Adjustment Data Screening pada hasil perataan baseline dan membandingkannya dengan
hasil uji statistik yang serupa yang dilakukan dengan menggunakan perangkat lunak yang tersedia di
pasaran (komersial), yaitu Geogenius. Maksud penyusunan tugas ini adalah agar mahasiswa memahami
konsep dan langkah-langkah pengolahan baseline jaring GPS dan uji statistik atas hasil pengolahan
baseline tersebut, serta agar mahasiswa dapat mengaplikasikan konsep tersebut menjadi syntax dalam
bahasa pemrograman yang tersedia, yang dalam hal ini adalah Matlab.
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 4
BAB II: LANDASAN TEORI
II.1. Hitung Perataan Kuadrat Terkecil Metode Parameter
Suatu pengukuran akan memberikan nilai yang berbeda dari nilai true value-nya akibat adanya
kesalahan. Kesalahan pada pengukuran dapat digolongkan menjadi 3 macam berdasarkan sumbernya,
yaitu [Abidin, et al, 1995] :
- Kesalahan besar/kekeliruan (blunder).
- Kesalahan sistematik (systematic error)
- Kesalahan kebetulan atau acak (Accidental error, random error)
Kesalahan besar dapat dihilangkan dengan melakukan pengecekan pada daftar pengukuran.
Sedangkan kesalahan sistematik dihilangkan dengan memperbaiki kesalahan pada alat, dengan
menerapkan teknik pengukuran tertentu, atau menerapkan suatu model atau rumus yang dapat
menghilangkan pengaruh kesalahan tersebut. Apabila pada suatu pengukuran kedua jenis kesalahan ii
telah dieliminir, maka sisa kesalahan yang mungkin terdapat pada hasil ukuran adalah kesalahan acak
atau kesalahan kebetulan.
Hitung perataan pada hasil ukuran dilakukan dengan tujuan untuk menentukan nilai parameter
yang paling sesuai dengan sederetan hasil pengukuran yang bersifat acak, yaitu yang telah terbebas dari
kesalahan besar dan kesalahan sistematis [Abidin, et. Al, 1995]. Kesalahan acak (random error) dapat
dikatakan sebagai kesalahan yang terjadinya tidak mengikuti suatu pola tertentu, atau dalam matematika
statistik digolongkan sebagai suatu variabel stokastik. Disamping sifat ketidakteraturannya, sejumlah
penelitian mengenai perilaku kesalahan random memberikan hasil bahwa kesalahan random mengikuti
aturan empiris sebagai berikut [Kuang, 1996] :
Kesalahan random tidak akan melebihi suatu nilai tertentu
Nilai kesalahan positif dan negatif dapat terjadi pada frekuensi yang sama
Kesalahan yang memiliki magnitude kecil cenderung terjadi lebih sering dibandingkan
kesalahan dengan magnitude yang besar
Rata-rata dari suatu kesalahan acak cenderung mendekati nol apabila jumlah pengukuran
mendekati tak hingga.
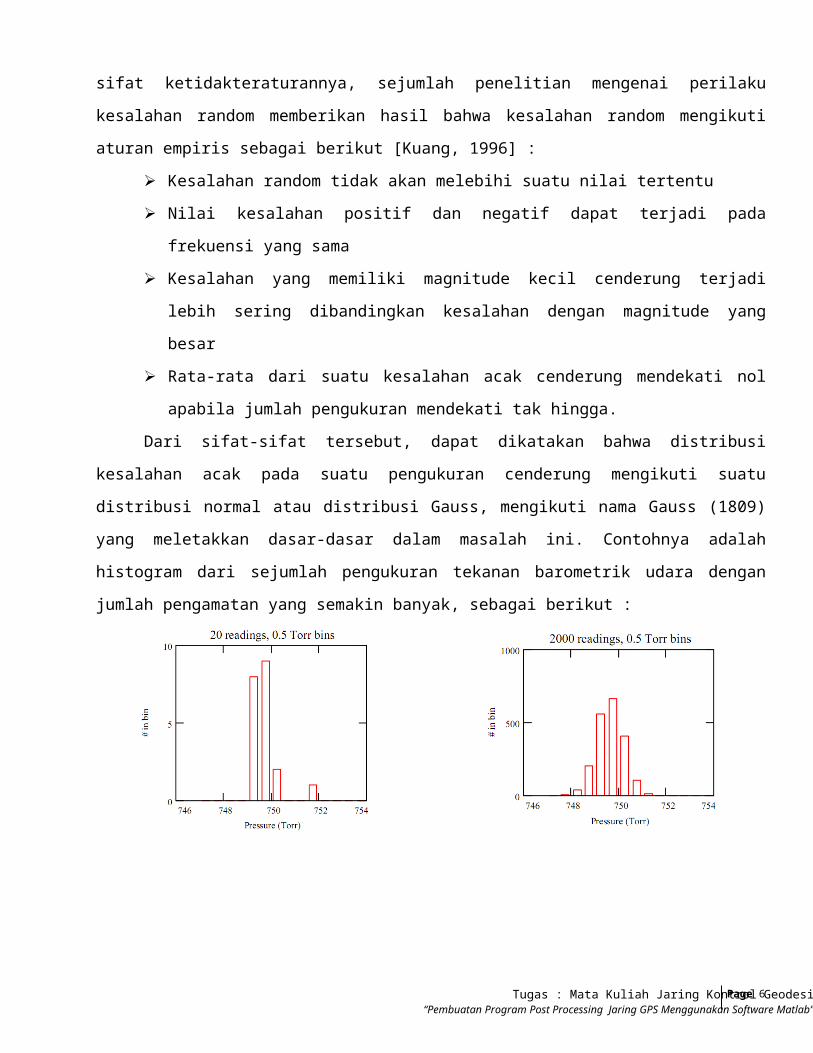
Dari sifat-sifat tersebut, dapat dikatakan bahwa distribusi kesalahan acak pada suatu pengukuran
cenderung mengikuti suatu distribusi normal atau distribusi Gauss, mengikuti nama Gauss (1809) yang
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 5
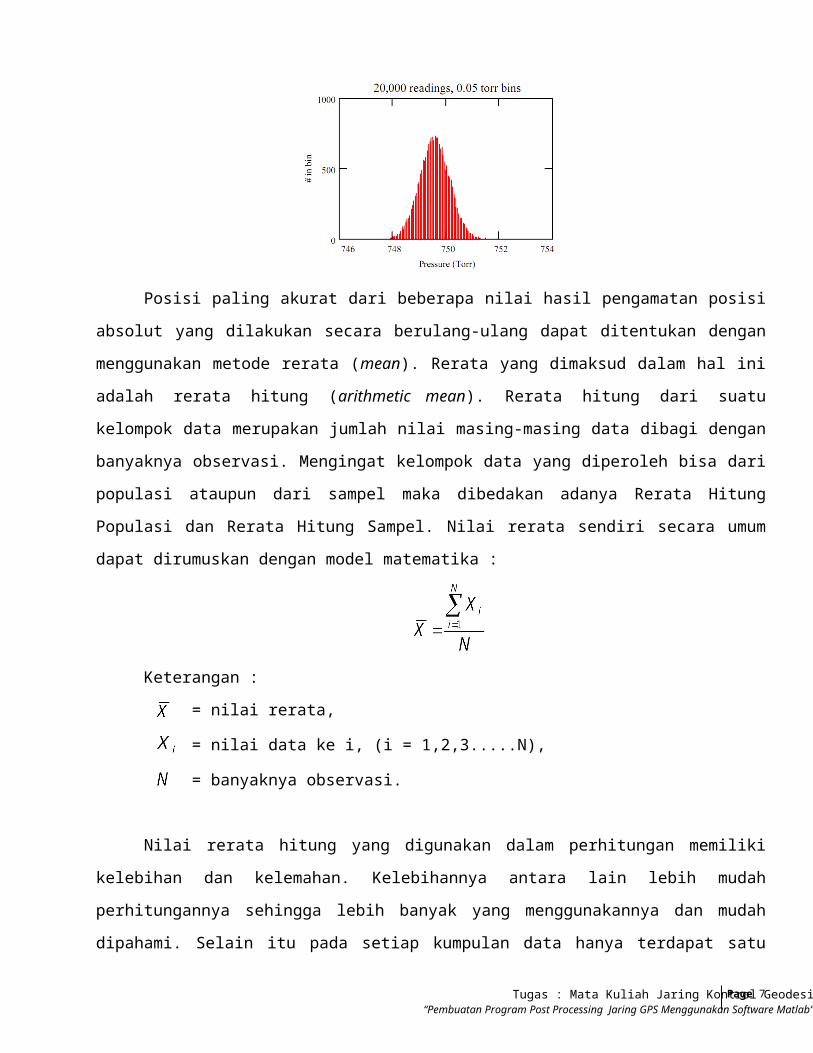
meletakkan dasar-dasar dalam masalah ini. Contohnya adalah histogram dari sejumlah pengukuran
tekanan barometrik udara dengan jumlah pengamatan yang semakin banyak, sebagai berikut :
Posisi paling akurat dari beberapa nilai hasil pengamatan posisi absolut yang dilakukan secara
berulang-ulang dapat ditentukan dengan menggunakan metode rerata (mean). Rerata yang dimaksud
dalam hal ini adalah rerata hitung (arithmetic mean). Rerata hitung dari suatu kelompok data merupakan
jumlah nilai masing-masing data dibagi dengan banyaknya observasi. Mengingat kelompok data yang
diperoleh bisa dari populasi ataupun dari sampel maka dibedakan adanya Rerata Hitung Populasi dan
Rerata Hitung Sampel. Nilai rerata sendiri secara umum dapat dirumuskan dengan model matematika :
Keterangan :
= nilai rerata,
= nilai data ke i, (i = 1,2,3.....N),
= banyaknya observasi.
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 6
Nilai rerata hitung yang digunakan dalam perhitungan memiliki kelebihan dan kelemahan.
Kelebihannya antara lain lebih mudah perhitungannya sehingga lebih banyak yang menggunakannya
dan mudah dipahami. Selain itu pada setiap kumpulan data hanya terdapat satu nilai rerata hitung saja.
Kelemahannya, nilai rerata hitung sangat dipengaruhi oleh nilai ekstrim. Apabila dalam data dijumpai
adanya data ekstrim maka nilai rerata hitung tidak mencerminkan karakteristik keadaan data yang
dominan.
Simpangan baku (standard deviation) merupakan akar nilai tengah kuadrat simpangan dari nilai
tengah atau kadang-kadang disebut akar kuadrat simpangan. Simpangan baku suatu himpunan N
bilangan X1, X2...,XN didefinisikan oleh :
Keterangan :
= simpangan baku
= nilai rerata,
= nilai data ke i, (i = 1,2,3.....N),
= banyaknya observasi.
Metode hitungan yang sering digunakan dalam perataan jaring GPS adalah hitungan metode
parameter. Dalam metode ini, harus dicari sejumlah parameter (besaran yang belum diketahui nilainya)
dimana masing-masing parameter yang dicari independent. Secara umum besaran yang akan dicari
nilainya dapat digunakan sebagai parameter. Banyaknya parameter yang harus ditentukan harus
sejumlah u, yaitu banyaknya nilai-nilai yang dapat ditentukan dari data yang ada atau dapat juga
dikatakan sebagai banyaknya data minimum yang harus dibuat pada permasalahan tersebut.
Setelah parameter ditentukan, maka dapat dicari hubungan masing-masing ukuran dengan
parameter sehingga akan didapat n persamaan (n = banyaknya pengukuran yang dilakukan).
Jika terdapat nilai La1, La2....Ln merupakan besaran ukuran terkoreksi, X1, X2....Xn merupakan
parameter yang akan ditentukan, nilai a1,1, a1,2, a2,1.....an,u adalah koefisien parameter dan a1,0,
a2,0....an,0 konstanta persamaan linier maka akan dapat disusun persamaan pengukuran sebagai berikut
[Uotilla, 1985] :
La1 = a1,1.x1 + a1,2.x2 + . . . + a1,u.xu + a1,0
La2 = a2,1.x1 + a2,2.x2 + . . . + a2,u.xu + a2,0
La3 = a3,1.x1 + a3,2.x2 + . . . + a3,u.xu + a3,0
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 7
. . . = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Lan = a4,1.x1 + an,2.x2 + . . . +an,u.xu+an,0
Jika nilai L merupakan besaran hasil ukuran yang masih mengandung kesalahan
sedangkan nilai La merupakan nilai yang akan dicari, maka akan ada perbedaan antara nilai La dengan
nilai L. Perbedaaan antara nilai L dengan nilai La ini biasa dikenal dengan istilah residual (V).
Hubungan antara L, La dan V dapat dimodelkan dengan persamaan sebagai berikut.
L + V = La
Sehingga dapat disusun persamaan dalam fungsi V, yang sering disebut sebagai
persamaan koreksi.
V1 = a1,1.X1 + a1,2.X2 + . . . + a1,u.Xu + a1,0 - L1
V2 = a2,1.X1 + a2,2.X2 + . . . + a2,u.Xu + a2,0 - L2
V3 = a3,1.X1 + a3,2.X2 + . . . + a3,u.Xu + a3,0 - L3
. . . = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Vn = a4,1.X1 + an,2.X2 + . . . +an,u.Xu+an,0- Ln
Ada n + u parameter (V dan X) yang belum diketahui nilainya dari sejumlah n persamaan
tersebut. Sehingga, jika diinginkan jumlah kuadrat residual (V) minimum, masing-masing parameter
bisa didapat secara unik. Persamaan ini dapat dibuat dalam bentuk matriks seperti di bawah ini.
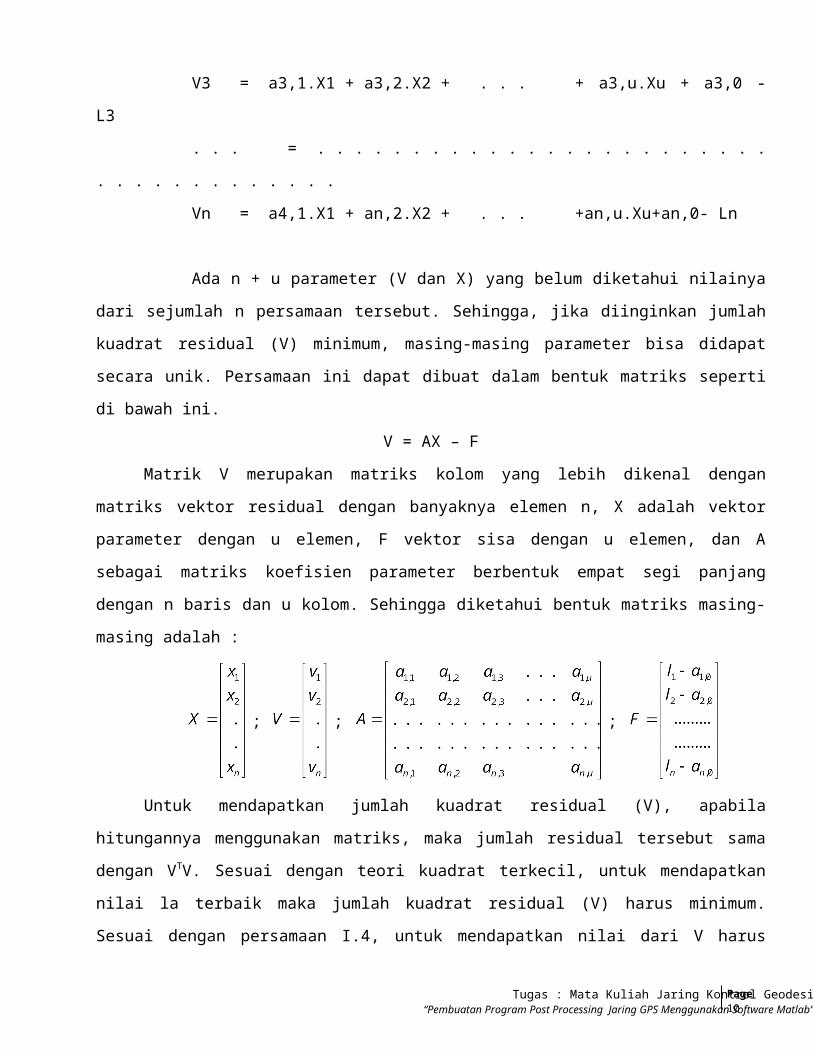
V = AX – F
Matrik V merupakan matriks kolom yang lebih dikenal dengan matriks vektor residual dengan
banyaknya elemen n, X adalah vektor parameter dengan u elemen, F vektor sisa dengan u elemen, dan A
sebagai matriks koefisien parameter berbentuk empat segi panjang dengan n baris dan u kolom.
Sehingga diketahui bentuk matriks masing-masing adalah :
; ; ;
Untuk mendapatkan jumlah kuadrat residual (V), apabila hitungannya menggunakan matriks,
maka jumlah residual tersebut sama dengan VTV. Sesuai dengan teori kuadrat terkecil, untuk
mendapatkan nilai la terbaik maka jumlah kuadrat residual (V) harus minimum. Sesuai dengan
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 8
persamaan I.4, untuk mendapatkan nilai dari V harus diketahui dulu besarnya nilai dari parameter X.
Nilai X sendiri dapat dicari dengan menggunakan rumus perkalian matriks.
X = (ATA)-1 AT F
Apabila besarnya nilai bobot pengukuran diketahui, maka persamaan ini harus dikalikan dengan
bobot, sehingga persamaan baru yang dapat dibentuk adalah :
X = (AT PA)-1 AT P F
Sehingga apabila diketahui nilai bobot pengukuran maka kuadrat masing-masing residual harus
dikalikan dengan bobot ukuran. Oleh karena itu yang harus minimum adalah nilai VTPV dimana nilai P
merupakan besarnya nilai bobot pengukuran.
Nilai akhir suatu hitungan kurang begitu berarti apabila tanpa disertai dengan keterangan
kemungkinan dari posisi nilai yang sebenarnya. Untuk mengetahui posisi sebenarnya, kita harus tahu
ketelitian nilai tersebut. Ketelitian suatu nilai dapat diketahui dengan cara mencari besarnya simpangan
baku dan korelasi nilai tersebut. Untuk menghitung besarnya simpangan baku dan korelasi dapat
dilakukan dengan mencari besarnya nilai varian dan kovarian hasil hitungan. Rumus di bawah ini
merupakan rumus yang digunakan untuk mencari besarnya varian kovarian parameter dengan
menggunakan bobot ukuran.
Pada persamaan diatas, x merupakan matriks kovarian dari parameter. Nilai disebut dengan
varian bobot tunggal hasil perataan atau sering disingkat dengan varian perataan (aposteori varian). Nilai
varian tersebut diperoleh dari jumlah residual kuadrat dibagi derajat kebebasan (n – u). Rumus
matematikanya adalah :
Jika matriks kovarian parameter sudah diketahui besarnya, maka dapat diketahui besarnya
simpangan baku parameter hasil hitungan. Karena besarnya simpangan baku menunjukkan tingkat
ketelitian data, maka otomatis besar ketelitian parameter hitungan juga dapat diketahui.
II.2. Perataan Jaring Minimum Constraint dan Full Constraint
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 9
Pada setiap jaring GPS yang tidak memiliki titik ikat, maka koordinat, skala,dan orientasi tidak
dapat ditentukan meskipun bentuk jaringan secara geometri dapat diketahui [Sunantyo, 2003]. Hal ini
berakibat suatu matriks kekurangan rank sehingga matriks tersebut menjadi singular. Rank yaitu sebagai
suatu dimensi tertinggi suatu matriks sehingga determinannya tidak nol. Dari persamaan ATPAX + ATPL
= 0 dan persamaan X = - (ATPA)-1ATPL, maka harga X dapat diselesaikan apabila matrik ATPA tidak
singular, maksudnya harga determinan matriks ATPA ≠ 0. Jika matriks koefisien parameter ATPA
singular maka tidak dapat diinvers sehingga persamaan X = - (ATPA)-1A-PL tidak dapat diselesaikan.
Kekurangan rank disebabkan oleh belum terdefinisinya sistem koordinat. Pada jaring horisontal, jika
datum atau referensi koordinat belum ada matriks (ATPA) akan singular sehingga kekurangan rank
sebanyak tiga atau empat dan sistem koordinat 2D terdefinisi dengan menentukan 1 titik sebagai
referensi atau acuan (koordinatnya) dan 1 asimut atau menentukan 2 titik sebagai referensi atau acuan
(koordinatnya). Sehingga yang dimaksud hitung kuadrat terkecil dengan persyaratan minimum
(minimum constraints) yaitu perataan sejumlah unsur yang diketahui atau data acuan (referensi) yang
melibatkan koefisien matriks A sebanyak kekurangan ranknya. Pada jaring GPS ada kekurangan rank
sebanyak 7 unsur sehingga sistem jaring GPS terdefinisi apabila ada 7 unsur yang dipakai sebagai
referensi. Tujuh unsur tersebut diperoleh dari 1 titik ikat yang koordinatnya diketahui dalam suatu
sistem koordinat. Penggunaan hitung kuadrat terkecil minimum constraints berguna untuk
mendefenisikan jaring dalam sistem koordinat.
Perataan jaring full constraints yaitu perataan dengan unsur yang diketahui sebagai titik ikat
melebihi dari kekurangan ranknya.
II.3. Post Adjustment Data Screening
Pengujian terhadap data dilakukan melalui uji statistik. Hal ini dilakukan akibat pengamatan
yang dilakukan secara berulang-ulang sehingga data yang dihasilkan mempunyai nilai yang bervariasi.
Adanya nilai yang bervarisai menunjukkan hasil pengamatan tersebut mengandung banyak kesalahan
yang secara alamiah terkandung di dalamnya. Untuk mengetahui bahwa hasil pengamatan tersebut tidak
mengandung kesalahan tak acak maka nilai varian dan koreksi ukuran hasil pengamatan maka dilakukan
pengujian statistik untuk daerah kepercayaan tertentu. Uji statistik ini meliputi uji global dan data
snooping [Widjajanti dan Heliani, 2005].
II.2.a. Uji Global.
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 10
Dalam uji global ini dilakukan terhadap seluruh data pengukuran secara global setelah dilakukan
penyelesaian dengan hitung perataanuntuk mengetahui ada atau tidaknya kesalahan tak acak yang
mempengaruhi data pengamatan setiap epok. Dalam uji global ini dilakukan dengan membandingkan
nilai varian aposteori (σ02) dengan nilai varian apriori (σ0
2), menggunakan sebaran fungsi Fisher
[Mikhail, 1976, dalam Widjajanti dan Heliani, 2005].
Adapun tahapan pengujiannya sebagai berikut :
1. Menyusun hipotesis. H0 (hiporesa nol) merupakan perumusan sementara yang akan diuji
kebenarannya yang artnya pengamatan tidak mengandung kesalahan tak acak. Persamaan
hipotesa nol :
H0 : 02 = σ0
2.
Ha (hipotesa tandingan) merupakan lawan dari hipotesa nol yang artinya pengamatan dipengaruhi
kesalahan acak. Persamaan hipotesa tandingan :
Ha : 02 > σ0
2.
2. Menetapkan taraf uji (σ0)
3. Menentukan nilai batas F1- σ,r,∞ dari tabel fungsi fisher dengan argumen σ0 dan r (derajat
kebebasan).
4. Menguji hipotesis nol (H0)
H0 ditolak apabila
Dalam hal ini :
σ02 : varian apriori
02 : varian aposteori
F1- σ,r,∞ : nilai statistik dari tanel fisher dengan taraf uji (σ) dan r (derajat kebebasan)
Penolakan H0 merupakan indikasi adanya kemungkinan pengaruhi kesalahan tak acak sehingga data
ukuran tidak mengikuti sebaran normal Gauss.
Penolakan H0 mungkin disebabkan oleh :
- Model matematis salah
- Kesalahan dalam menghitung
- Penghapusa derajat tinggi
- Ketidaktepatan mengestimasi varian apriori (bobot pengamatan)
- Adanya blunder pada pengukuran
II.2.b. Data Snooping.
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 11
Merupakan sebuah teknik atau cara menemukan kesalahan tak acak dari suatu sistem jaring
geodesi yang diukur dengan memakai kaidah-kaidah pengamatan lebih. Uji ini dilakukan apabila adanya
penolakan dari hasil uji global artinya data pengamatan mengandung kesalahan acak. Uji ini dilakukan
pada semua data pengamatan. Adapun tahapan pengujiannya sebagai berikut :
1. Menyusun hipotesis
H0 : Hasil pengamatan tidak dipengaruhi kesalahan tak acak
Ha : Hasil pengamatan dipengaruhi kesalahan tak acak
2. Menetapkan taraf uji (σ0)
3. Menentukan nilai batas F1- σ,r,∞ dari tabel fungsi fisher dengan argumen σ0 dan r (derajat
kebebasan).
4. Menguji hiotesis nol (H0)
Hipotesis nol diterima jika :
Dalam hal ini :
Wi :
Vi : koreksi pengamatan ke-i
Σvv : (P-1 - A(ATPA)-1AT)
: simpangan baku koreksi pengamatan ke-i (akar unsur diagonal Σvv)
Penerimaan H0 berari bahwa pengukuran Li tidak dipengaruhi kesalahan tak acak (kesalahan
blunder dan/atau sistematik), sehingga data tersebut tidak perlu dibuang atau diulang dan sebaliknya
penolakan H0 berarti pengukuran Li dipengaruhi kesalahan tak acak sehingga data tersebut harus
dibuang.
II.3. Pemrograman Menggunakan Matlab
Matlab merupakan suatu software pemrograman perhitungan dan analisis yang banyak
digunakan dalam semua area penerapan matematika baik bidang pendidikan maupun penelitian pada
universitas dan industri. Dengan menggunakan Matlab, perhitungan matematis yang rumit dapat
diimplementasikan dalam program dengan lebih mudah.
Matlab merupakan singkatan dari MATriks LABoratory dan berarti software ini dibuat
berdasarkan vektor-vektor dan matrik-matrik. Hal ini mengakibatkan software ini pada awalnya banyak
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 12
digunakan pada studi aljabar linier, serta juga merupakan perangkat yang tepat untuk menyelesaikan
persamaan aljabar dan diferensial dan juga untuk integrasi numerik.
Matlab memiliki perangkat grafik yang powerful dan dapat membuat gambar-gambar dalam 2D
dan 3D. Dalam hal pemrograman, Matlab serupa dengan bahasa C dan bahkan salah satu dari bahasa
pemrograman termudah dalam hal penulisan program matematik. Matlab juga memiliki beberapa
toolbox yang berguna untuk pengolahan sinyal (signal processing), pengolahan gambar (image
processing), dan lain-lain.
Terdapat perbedaan yang signifikan antara Matlab dengan software pemrograman lainnya (C/C+
+, Visual Basic, Java, dan lain-lain). Perbedaan yang utama antara keduanya dapat dilihat dari tiga
faktor yaitu tujuan penggunaannya, fitur yang disediakan dan orientasi hasil masing-masing.
* Ditinjau dari segi penggunaannya, software pemrograman biasanya berfungsi umum untuk
berbagai kebutuhan (misalnya sistem informasi dan database), sedangkan Matlab digunakan spesifik
sebagai alat bantu komputasi untuk bidang-bidang ilmiah (pendidikan, riset penelitian akademis, riset
penelitian industri, dan lain-lain) yang membutuhkan library program perhitungan dan tools disain dan
analisis sistem matematis.
* Ditinjau dari segi fiturnya, bahasa pemrograman umumnya hanya merupakan alat bantu membuat
program, sedangkan Matlab dalam softwarenya selain membuat program juga terdapat fitur lain yang
memungkinkan Matlab sebagai tools untuk disain dan analisis matematis dengan mudah.
* Ditinjau dari segi orientasi hasilya, software pemrograman lain lebih berorientasi sebagai program
untuk menghasilkan solusi program baru yang eksekusinya cepat, reliable dan efektif terhadap berbagai
kebutuhan. Sedangkan Matlab lebih berorientasi spesifik untuk memudahkan penuangan rumus
perhitungan matematis. Dalam hal ini dengan Matlab maka pembuatan program matematis yang
kompleks bisa menjadi lebih singkat waktunya namun bisa jadi eksekusi program Matlab ini jauh lebih
lambat dibandingkan bila dibuat dengan software pemrograman lainnya.
Matlab memiliki ruang lingkup kegiatan penggunaan yaitu:
1. Disain matematis
2. Pemodelan sistem matematis
3. Pengolahan data matematis (sinyal, citra dan lain-lain)
4. Simulasi, baik yang real time maupun tidak
5. Visualisasi 2D dan 3D
6. Tools analisis & testing
Karena kemampuan komputasi matematisnya yang tinggi, library program perhitungan yang
lengkap, serta tools disain dan analisis matematis yang sudah tersedia maka Matlab begitu banyak
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 13
digunakan di bidang-bidang pendidikan dan riset penelitian (akademis maupun industri) di dunia.
Matlab digunakan mulai dari mengajarkan siswa tentang matriks, grafik fungsi matematik, sistem
kontrol, pengolahan citra, pengolahan sinyal, sampai dengan memprediksi (forecasting) harga saham
serta disain persenjataan militer berteknologi tinggi.
Karena kebutuhan yang tinggi terhadap program komputer yang menyediakan tools komputasi,
pemodelan dan simulasi dengan berbagai fasilitasnya, maka berbagai fitur ditambahkan kepada Matlab
dari tahun ke tahun. Matlab kini sudah dilengkapi dengan berbagai fasilitas yaitu Simulink, Toolbox,
Blockset, Stateflow, Real Time Workshop, GUIDE dan lain-lain. Selain itu hasil dari program Matlab
sudah dapat diekspor ke C/C++, Visual Basic, Fortran, COM, Java, Excel, dan web/internet. Dengan
demikian hasil dari Matlab dapat dikompilasi dan menjadi program yang waktu eksekusinya lebih cepat,
serta bisa diakses dengan berbagai cara.
Selain Matlab sebenarnya sudah ada beberapa software komputasi lain yang sejenis, namun tidak
selengkap dan berkembang sebagus Matlab. Selain itu Matlab tersedia untuk bergai platform komputer
dan sistem operasi. Hingga kini Matlab tetap menjadi software terbaik untuk komputasi matematik, baik
di dunia komputer Macintosh maupun PC, yang sistem operasinya Windows ataupun Linux/Unix.
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 14
BAB III : PELAKSANAAN
III.1. Alat dan Bahan
Alat yang digunakan dalam pekerjaan ini adalah untuk keperluan pengolahan data dan
penyusunan laporan. Peralatan untuk pekerjaan ini meliputi perangkat keras dan perangkat lunak sebagai
berikut :
1. Perangkat lunak, meliputi :
a. GeoGenius untuk keperluan perataan baseline dari data Rinex sebagai input pada program
yang dibuat pada Matlab, serta sebagai pembanding data keluaran program Matlab
b. Matlab 6.1 sebagai program utama yang digunakan sebagai penjabaran algoritma program
dalam melakukan perataan jaring GPS dan uji statistik
c. Microsoft Excel 2003 untuk menyediakan platform bagi data input baseline
d. Microsoft Word 2003 untuk melakukan penyusunan laporan hasil proyek.
e. Notepad sebagai penampil data keluaran dari program pada Matlab.
2. Perangkat keras pengolahan yang meliputi :
Satu unit laptop Toshiba DynaBook Satellite sebagai alat untuk pengolahan data dan
penyusunan laporan dengan spesifikasi :
Processor Intel Pentium 3 646 Mhz, Memory 64 MB RAM, VGA card Trident Video Adaptor
9525DVD 2.5 MB. Sistem Operasi : Windows XP SP3 Professional Edition, ver. 2002.
Bahan pelaksanaan tugas ini adalah data pengukuran stasiun GPS tetap (Active GPS Station)
dalam bentuk Rinex, File Observasi dan Navigasi yang diperoleh dari : Website Ordnance Survey
Irlandia, http://www.osi.ie/en/geodeticservices/ dengan data pengamatan tanggal 15 April 2010.
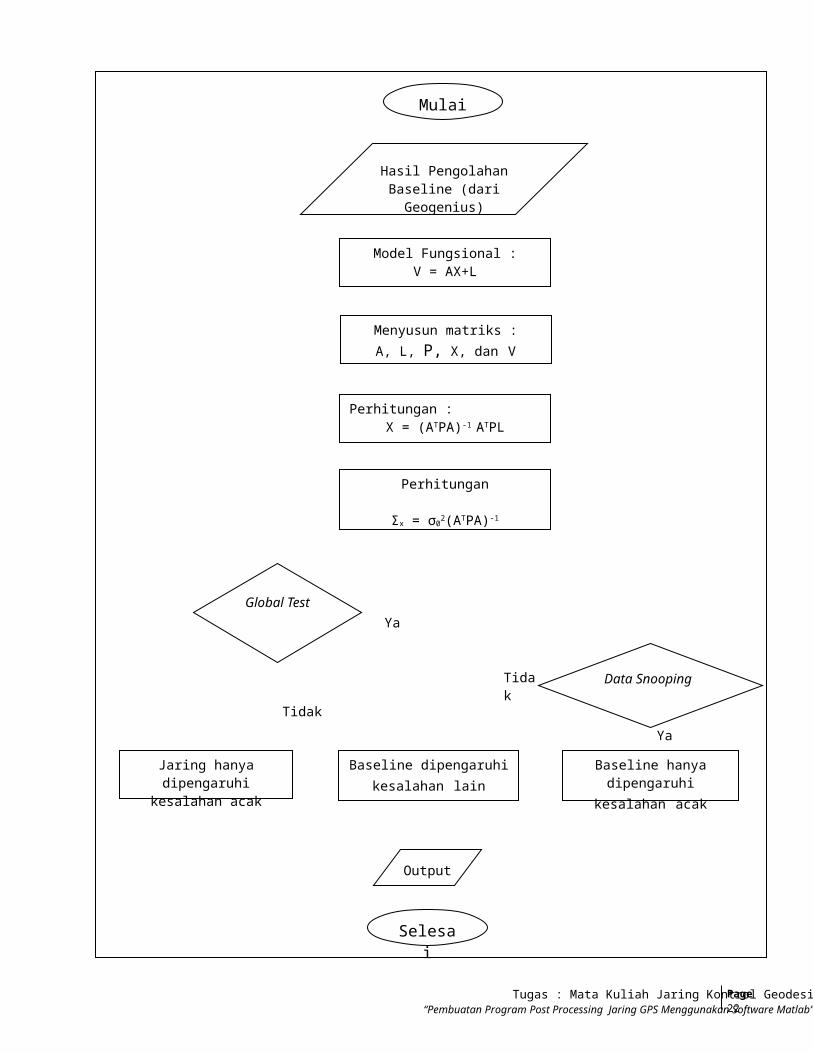
III.2. Langkah Pelaksanaan
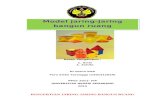
Algoritma pelaksanaan pembuatan program hitungan perataan jaring dan uji statistik ini dapat
dinyatakan dalam diagram alir sebagai berikut :
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 15
Hasil Pengolahan Baseline (dari Geogenius)
Model Fungsional :V = AX+L
Menyusun matriks :A, L, P, X, dan V
Perhitungan :X = (ATPA)-1 ATPL
Perhitungan
Σx = σ02(ATPA)-1
Global Test
Data Snooping
Jaring hanya dipengaruhi kesalahan acak
Baseline hanya dipengaruhi kesalahan acak
Ya
Ya
Mulai
Baseline dipengaruhi kesalahan lain
Tidak
Tidak
Selesai
Output
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 16
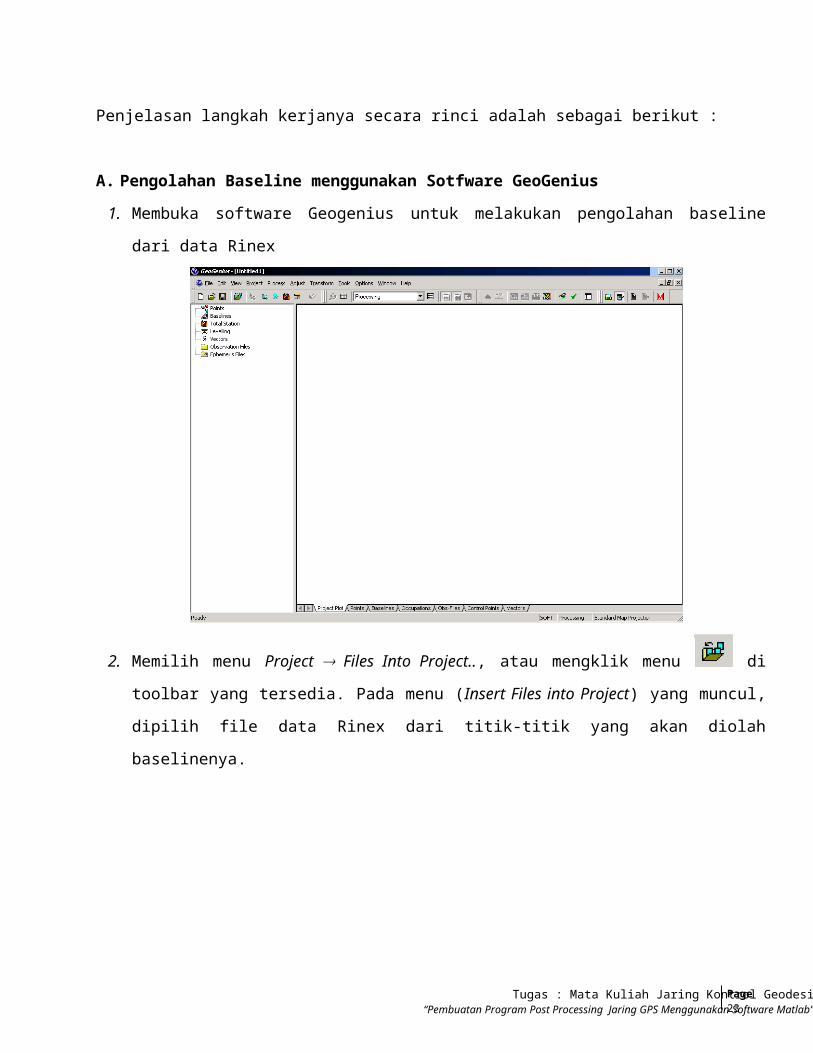
Penjelasan langkah kerjanya secara rinci adalah sebagai berikut :
A. Pengolahan Baseline menggunakan Sotfware GeoGenius
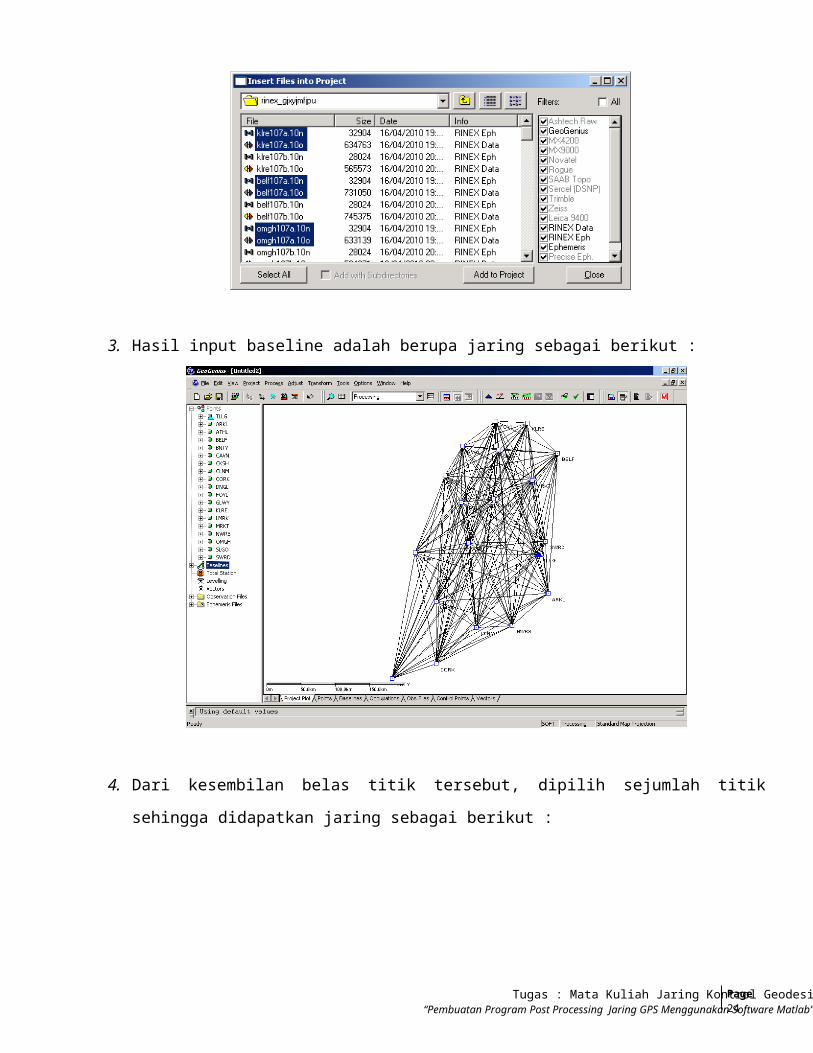
1. Membuka software Geogenius untuk melakukan pengolahan baseline dari data Rinex
2. Memilih menu Project Files Into Project.., atau mengklik menu di toolbar yang tersedia.
Pada menu (Insert Files into Project) yang muncul, dipilih file data Rinex dari titik-titik yang akan
diolah baselinenya.
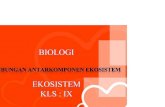
3. Hasil input baseline adalah berupa jaring sebagai berikut :
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 17
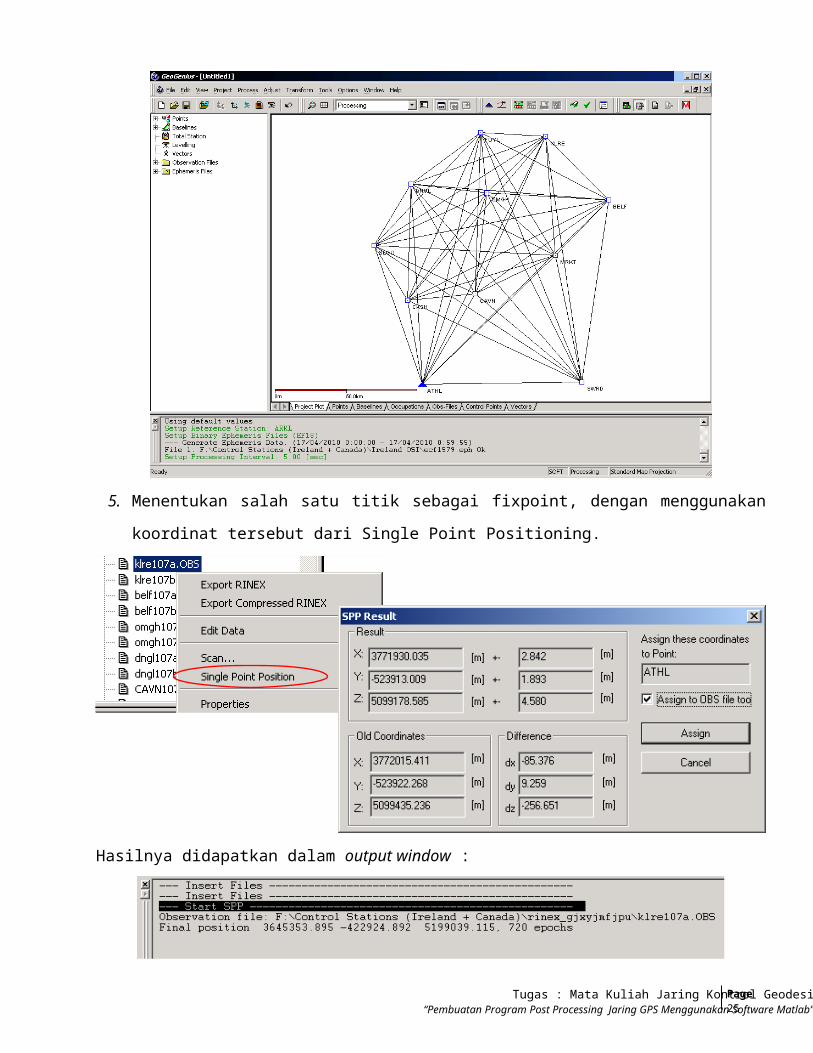
4. Dari kesembilan belas titik tersebut, dipilih sejumlah titik sehingga didapatkan jaring sebagai
berikut :
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 18
5. Menentukan salah satu titik sebagai fixpoint, dengan menggunakan koordinat tersebut dari Single
Point Positioning.
Hasilnya didapatkan dalam output window :
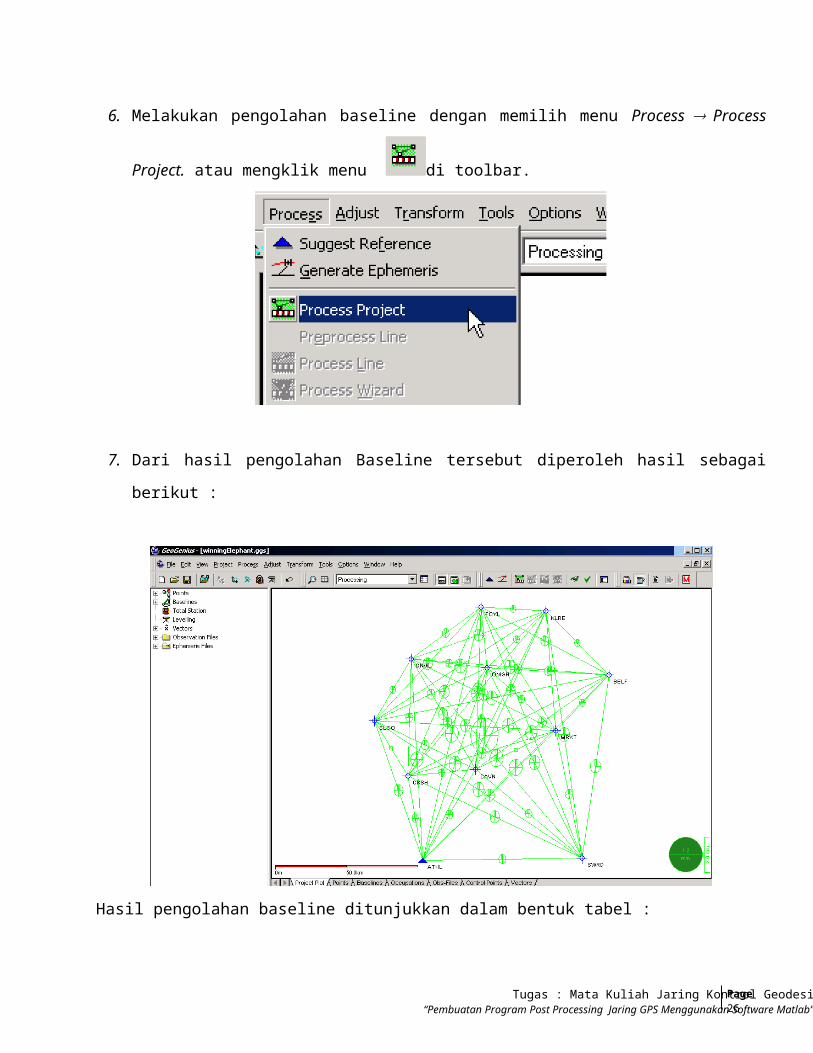
6. Melakukan pengolahan baseline dengan memilih menu Process Process Project. atau mengklik
menu di toolbar.
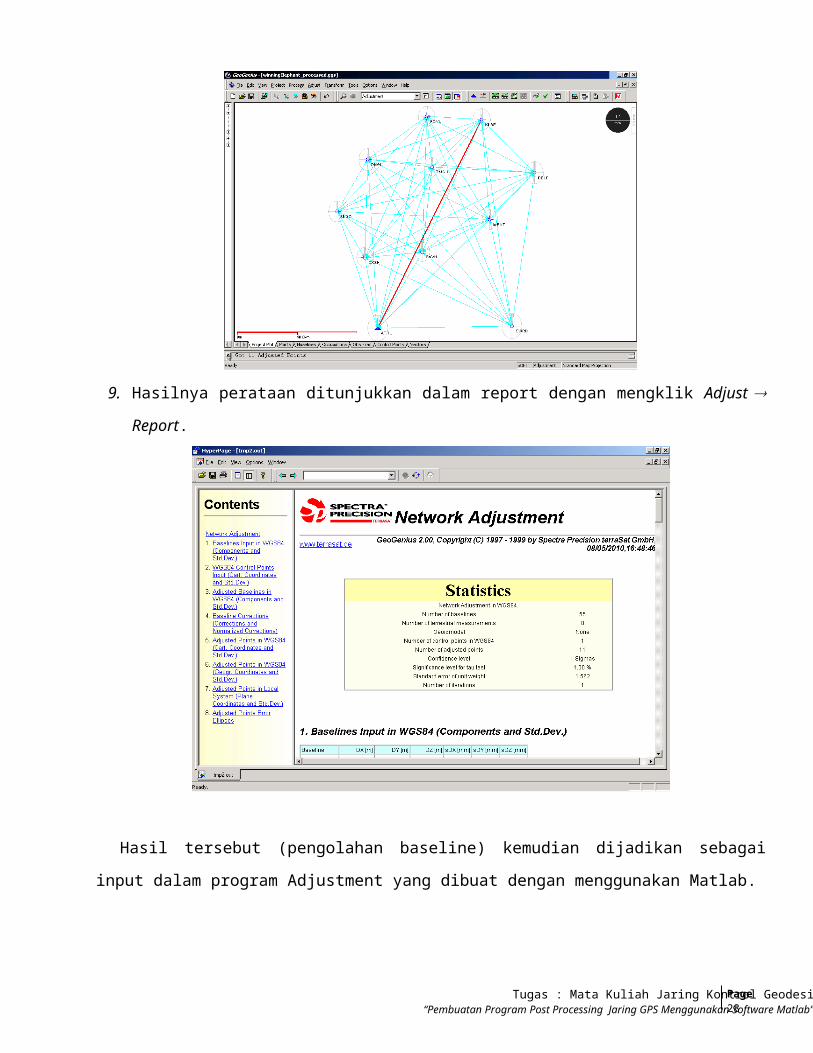
7. Dari hasil pengolahan Baseline tersebut diperoleh hasil sebagai berikut :
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 19
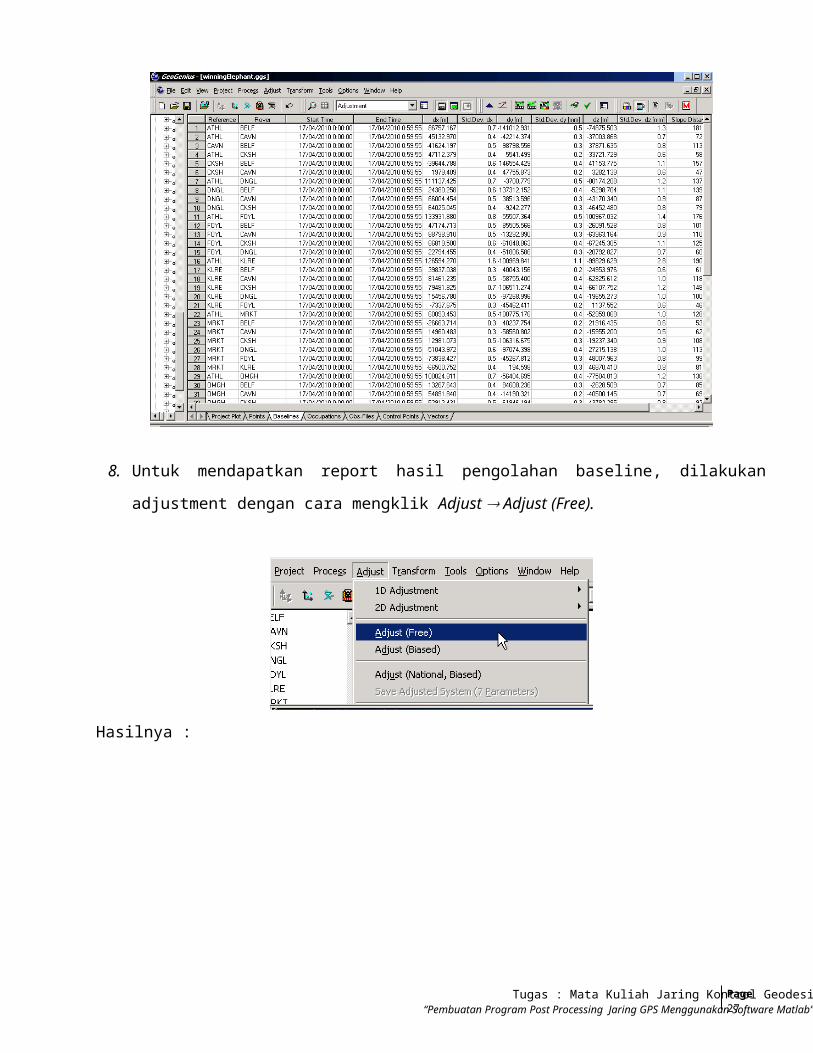
Hasil pengolahan baseline ditunjukkan dalam bentuk tabel :
8. Untuk mendapatkan report hasil pengolahan baseline, dilakukan adjustment dengan cara mengklik
Adjust Adjust (Free).
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 20
Hasilnya :
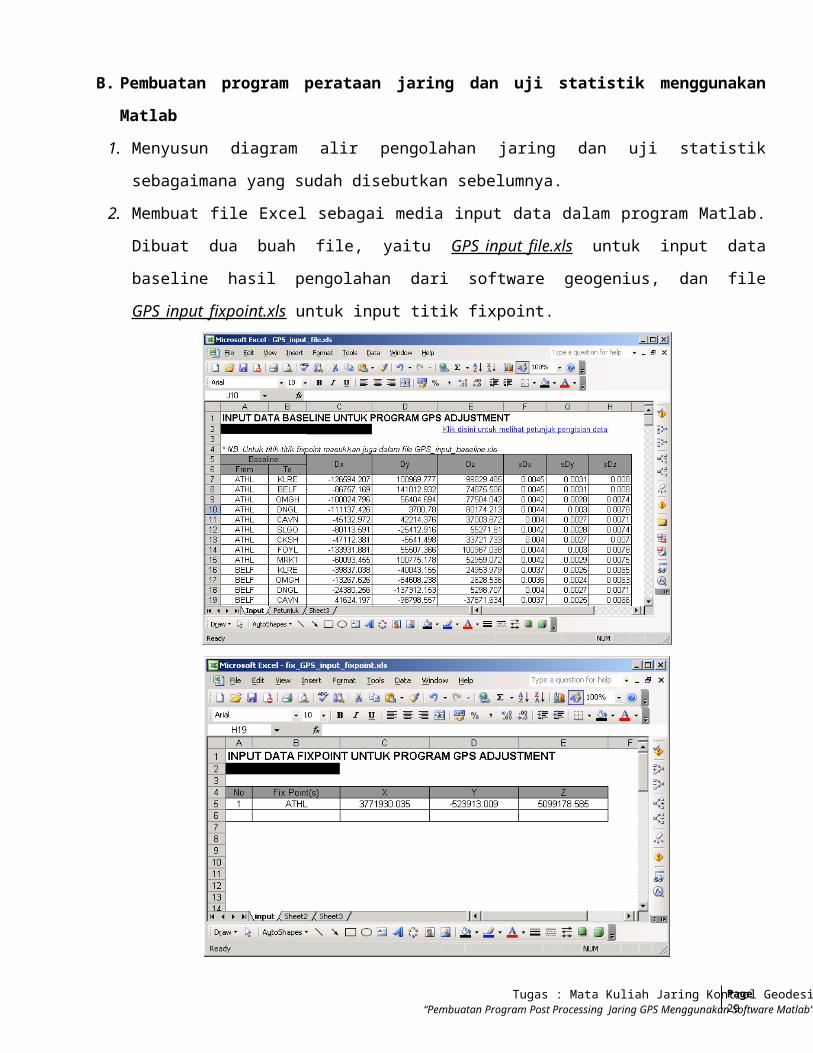
9. Hasilnya perataan ditunjukkan dalam report dengan mengklik Adjust Report.
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 21
Hasil tersebut (pengolahan baseline) kemudian dijadikan sebagai input dalam program Adjustment
yang dibuat dengan menggunakan Matlab.
B. Pembuatan program perataan jaring dan uji statistik menggunakan Matlab
1. Menyusun diagram alir pengolahan jaring dan uji statistik sebagaimana yang sudah disebutkan
sebelumnya.
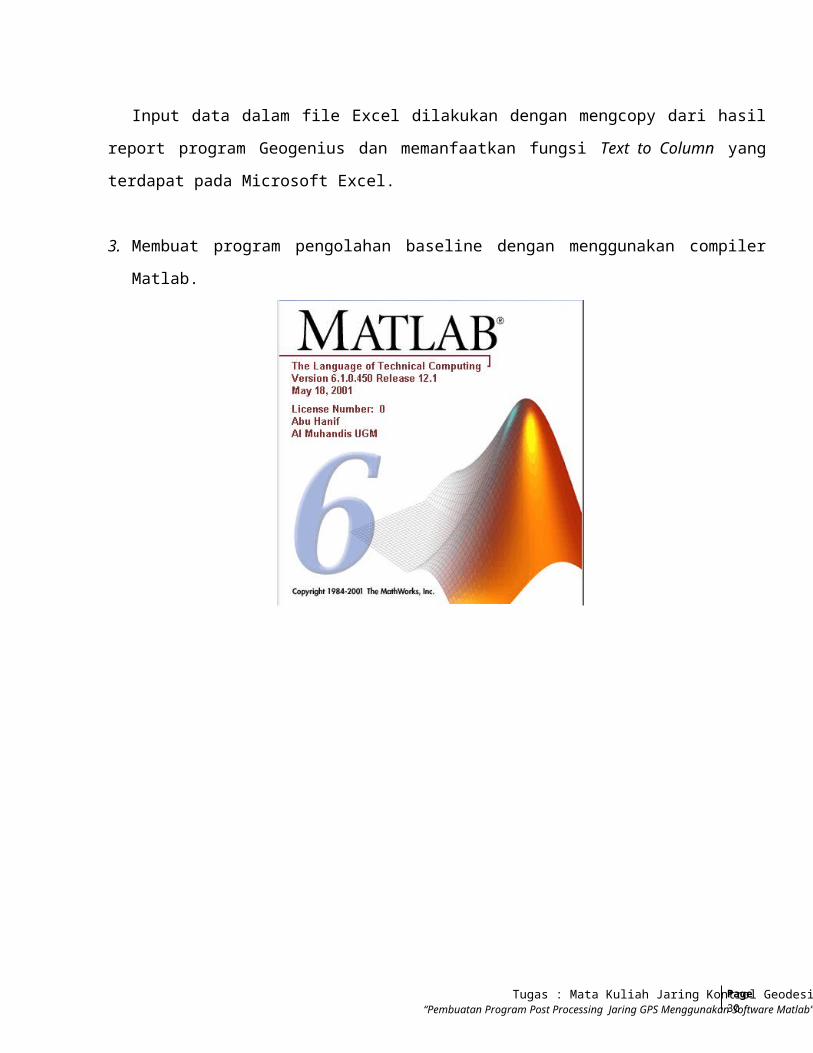
2. Membuat file Excel sebagai media input data dalam program Matlab. Dibuat dua buah file, yaitu
GPS_input_file.xls untuk input data baseline hasil pengolahan dari software geogenius, dan file
GPS_input_fixpoint.xls untuk input titik fixpoint.
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 22
Input data dalam file Excel dilakukan dengan mengcopy dari hasil report program Geogenius dan
memanfaatkan fungsi Text to Column yang terdapat pada Microsoft Excel.
3. Membuat program pengolahan baseline dengan menggunakan compiler Matlab.
Listing Program yang dibuat dalam bahasa pemrograman Matlab terlampir.
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 23
BAB IV : PEMBAHASAN
IV.1. Hasil Uji Statistik Global Test.
Uji Statistik Global Test dilakukan dengan argumen r (derajat kebebasan) = n – u, yaitu, (165 –
30) = 135 dan pembilang ∞. Dalam tabel uji Fisher-Snedecor (terlampir) dengan derajat kepercayaan
95% diperoleh dengan interpolasi nilai sebagai berikut :
D.o.f 1 (r) D.o.f 2 (∞) Keterangan
125 1.25 Taraf uji 1
135 ? Dicari
150 1.22 Taraf uji 2
Nilai yang dicari diperoleh dengan :
= 1.238
Dengan nilai Apriori ≈ 1 dan Aposteori hasil hitungan = 1.0869, maka hasil Global Test =
Aposteori/Apriori = 1.0869, masih berada dalam ambang batas penerimaan hipotesis tandingan ini,
sehingga global test diterima.
IV.2. Hasil Uji Statistik Data Snooping.
Uji statistik dengan data snooping dilakukan dengan melakukan pengetesan terhadap setiap data
pengamatan untuk menemukan data pengamatan yang mengandung kesalahan besar (kasar). Taraf uji
yang digunakan adalah akar kuadrat dari taraf uji pada Global test.
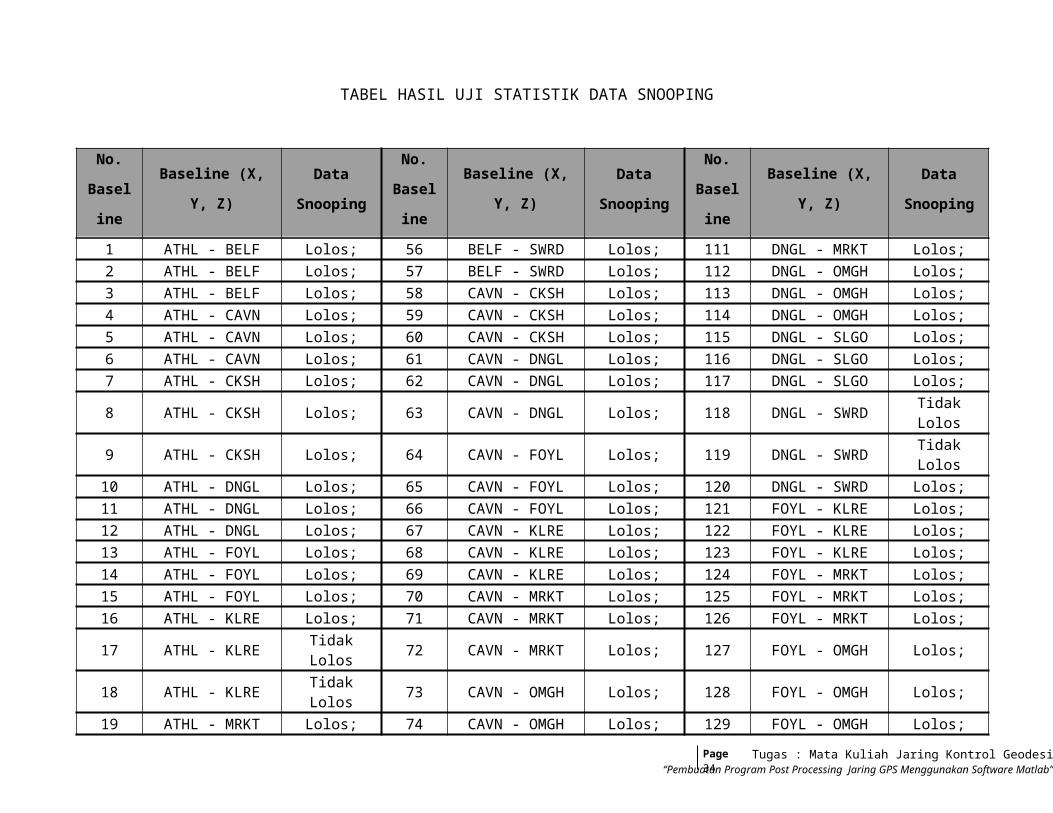
Pengujian dilakukan dengan membandingkan nilai matriks varian-kovarian koreksi dan
simpangan baku koreksi tiap pengamatan terhadap taraf uji tersebut. Dengan taraf uji F = √(1.238) =
1.126, maka diperoleh hasil uji tiap baseline sebagaimana pada tabel berikut :
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”Page 24
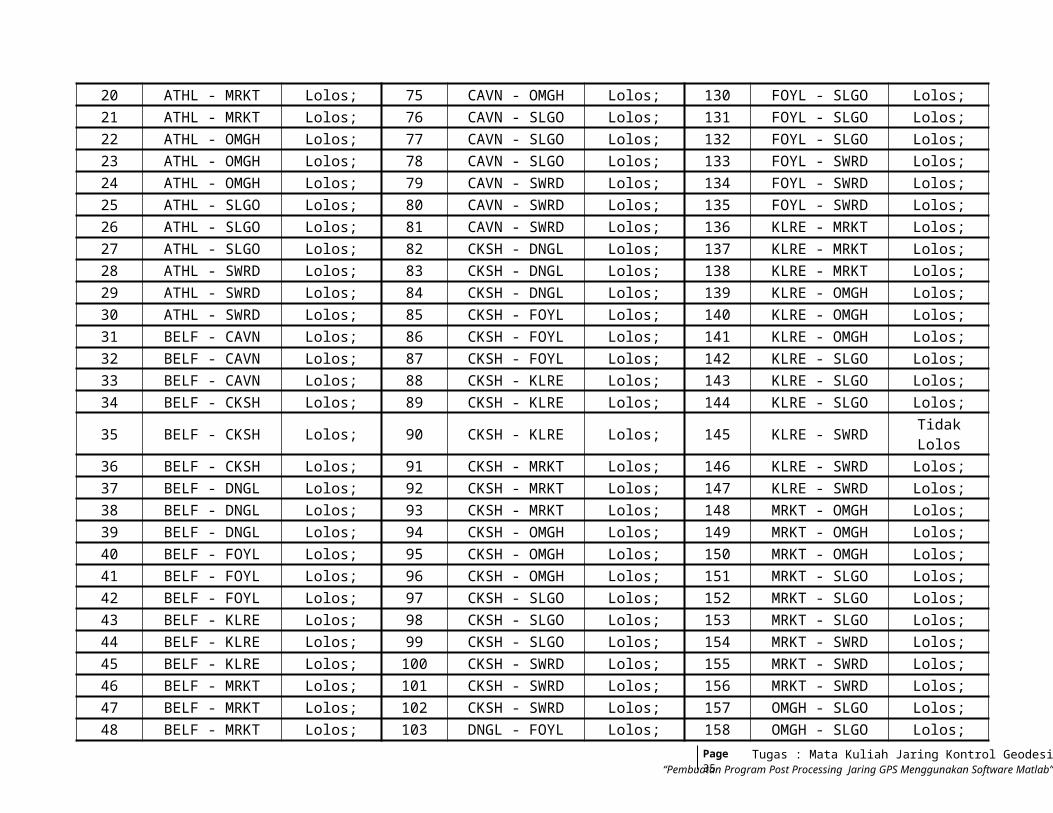
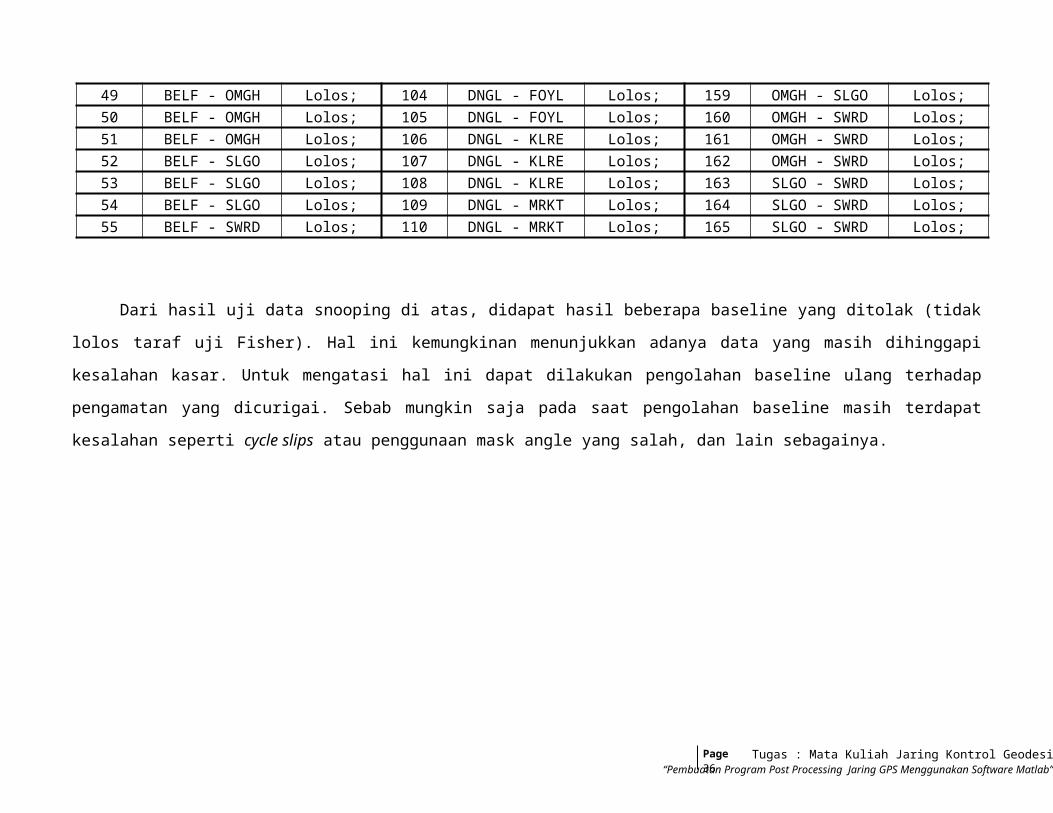
TABEL HASIL UJI STATISTIK DATA SNOOPING
No.
BaselineBaseline (X, Y, Z)
Data
Snooping
No.
BaselineBaseline (X, Y, Z)
Data
Snooping
No.
BaselineBaseline (X, Y, Z)
Data
Snooping
1 ATHL - BELF Lolos; 56 BELF - SWRD Lolos; 111 DNGL - MRKT Lolos;2 ATHL - BELF Lolos; 57 BELF - SWRD Lolos; 112 DNGL - OMGH Lolos;3 ATHL - BELF Lolos; 58 CAVN - CKSH Lolos; 113 DNGL - OMGH Lolos;4 ATHL - CAVN Lolos; 59 CAVN - CKSH Lolos; 114 DNGL - OMGH Lolos;5 ATHL - CAVN Lolos; 60 CAVN - CKSH Lolos; 115 DNGL - SLGO Lolos;6 ATHL - CAVN Lolos; 61 CAVN - DNGL Lolos; 116 DNGL - SLGO Lolos;7 ATHL - CKSH Lolos; 62 CAVN - DNGL Lolos; 117 DNGL - SLGO Lolos;8 ATHL - CKSH Lolos; 63 CAVN - DNGL Lolos; 118 DNGL - SWRD Tidak Lolos9 ATHL - CKSH Lolos; 64 CAVN - FOYL Lolos; 119 DNGL - SWRD Tidak Lolos
10 ATHL - DNGL Lolos; 65 CAVN - FOYL Lolos; 120 DNGL - SWRD Lolos;11 ATHL - DNGL Lolos; 66 CAVN - FOYL Lolos; 121 FOYL - KLRE Lolos;12 ATHL - DNGL Lolos; 67 CAVN - KLRE Lolos; 122 FOYL - KLRE Lolos;13 ATHL - FOYL Lolos; 68 CAVN - KLRE Lolos; 123 FOYL - KLRE Lolos;14 ATHL - FOYL Lolos; 69 CAVN - KLRE Lolos; 124 FOYL - MRKT Lolos;15 ATHL - FOYL Lolos; 70 CAVN - MRKT Lolos; 125 FOYL - MRKT Lolos;16 ATHL - KLRE Lolos; 71 CAVN - MRKT Lolos; 126 FOYL - MRKT Lolos;17 ATHL - KLRE Tidak Lolos 72 CAVN - MRKT Lolos; 127 FOYL - OMGH Lolos;18 ATHL - KLRE Tidak Lolos 73 CAVN - OMGH Lolos; 128 FOYL - OMGH Lolos;19 ATHL - MRKT Lolos; 74 CAVN - OMGH Lolos; 129 FOYL - OMGH Lolos;20 ATHL - MRKT Lolos; 75 CAVN - OMGH Lolos; 130 FOYL - SLGO Lolos;21 ATHL - MRKT Lolos; 76 CAVN - SLGO Lolos; 131 FOYL - SLGO Lolos;22 ATHL - OMGH Lolos; 77 CAVN - SLGO Lolos; 132 FOYL - SLGO Lolos;23 ATHL - OMGH Lolos; 78 CAVN - SLGO Lolos; 133 FOYL - SWRD Lolos;24 ATHL - OMGH Lolos; 79 CAVN - SWRD Lolos; 134 FOYL - SWRD Lolos;25 ATHL - SLGO Lolos; 80 CAVN - SWRD Lolos; 135 FOYL - SWRD Lolos;26 ATHL - SLGO Lolos; 81 CAVN - SWRD Lolos; 136 KLRE - MRKT Lolos;27 ATHL - SLGO Lolos; 82 CKSH - DNGL Lolos; 137 KLRE - MRKT Lolos;28 ATHL - SWRD Lolos; 83 CKSH - DNGL Lolos; 138 KLRE - MRKT Lolos;29 ATHL - SWRD Lolos; 84 CKSH - DNGL Lolos; 139 KLRE - OMGH Lolos;
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”Page 25
30 ATHL - SWRD Lolos; 85 CKSH - FOYL Lolos; 140 KLRE - OMGH Lolos;31 BELF - CAVN Lolos; 86 CKSH - FOYL Lolos; 141 KLRE - OMGH Lolos;32 BELF - CAVN Lolos; 87 CKSH - FOYL Lolos; 142 KLRE - SLGO Lolos;33 BELF - CAVN Lolos; 88 CKSH - KLRE Lolos; 143 KLRE - SLGO Lolos;34 BELF - CKSH Lolos; 89 CKSH - KLRE Lolos; 144 KLRE - SLGO Lolos;35 BELF - CKSH Lolos; 90 CKSH - KLRE Lolos; 145 KLRE - SWRD Tidak Lolos36 BELF - CKSH Lolos; 91 CKSH - MRKT Lolos; 146 KLRE - SWRD Lolos;37 BELF - DNGL Lolos; 92 CKSH - MRKT Lolos; 147 KLRE - SWRD Lolos;38 BELF - DNGL Lolos; 93 CKSH - MRKT Lolos; 148 MRKT - OMGH Lolos;39 BELF - DNGL Lolos; 94 CKSH - OMGH Lolos; 149 MRKT - OMGH Lolos;40 BELF - FOYL Lolos; 95 CKSH - OMGH Lolos; 150 MRKT - OMGH Lolos;41 BELF - FOYL Lolos; 96 CKSH - OMGH Lolos; 151 MRKT - SLGO Lolos;42 BELF - FOYL Lolos; 97 CKSH - SLGO Lolos; 152 MRKT - SLGO Lolos;43 BELF - KLRE Lolos; 98 CKSH - SLGO Lolos; 153 MRKT - SLGO Lolos;44 BELF - KLRE Lolos; 99 CKSH - SLGO Lolos; 154 MRKT - SWRD Lolos;45 BELF - KLRE Lolos; 100 CKSH - SWRD Lolos; 155 MRKT - SWRD Lolos;46 BELF - MRKT Lolos; 101 CKSH - SWRD Lolos; 156 MRKT - SWRD Lolos;47 BELF - MRKT Lolos; 102 CKSH - SWRD Lolos; 157 OMGH - SLGO Lolos;48 BELF - MRKT Lolos; 103 DNGL - FOYL Lolos; 158 OMGH - SLGO Lolos;49 BELF - OMGH Lolos; 104 DNGL - FOYL Lolos; 159 OMGH - SLGO Lolos;50 BELF - OMGH Lolos; 105 DNGL - FOYL Lolos; 160 OMGH - SWRD Lolos;51 BELF - OMGH Lolos; 106 DNGL - KLRE Lolos; 161 OMGH - SWRD Lolos;52 BELF - SLGO Lolos; 107 DNGL - KLRE Lolos; 162 OMGH - SWRD Lolos;53 BELF - SLGO Lolos; 108 DNGL - KLRE Lolos; 163 SLGO - SWRD Lolos;54 BELF - SLGO Lolos; 109 DNGL - MRKT Lolos; 164 SLGO - SWRD Lolos;55 BELF - SWRD Lolos; 110 DNGL - MRKT Lolos; 165 SLGO - SWRD Lolos;
Dari hasil uji data snooping di atas, didapat hasil beberapa baseline yang ditolak (tidak lolos taraf uji Fisher). Hal ini kemungkinan
menunjukkan adanya data yang masih dihinggapi kesalahan kasar. Untuk mengatasi hal ini dapat dilakukan pengolahan baseline ulang
terhadap pengamatan yang dicurigai. Sebab mungkin saja pada saat pengolahan baseline masih terdapat kesalahan seperti cycle slips atau
penggunaan mask angle yang salah, dan lain sebagainya.
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 26
BAB V : PENUTUP
V.1. Kesimpulan
Untuk mengetahui kualitas suatu jaring pengukuran GPS dan ada atau tidaknya data pengukuran
yang masih dihinggapi kesalahan besar, maka dapat dipergunakan berbagai metode uji statistik.
Diantaranya adalah Global Test dan Data Snooping dengan menggunakan taraf uji dari tabel distribusi
Fisher-Snedecor. Dengan menggunakan uji statistik tersebut, maka dapat diketahui kualitas jaringan
secara umum pada derajat kepercayaan 95% dan juga dapat diketahui data-data pengukuran mana yang
masih dihinggapi oleh kesalahan kasar yang mungkin disebabkan oleh adanya kesalahan pada saat
pengolahan baseline sebagai input pada program pengolahan jaring yang dibuat.
Compiler seperti Matlab atau yang lainnya dapat digunakan untuk membuat program pengolahan
jaring GPS dengan cukup sederhana. Kompleksitas program yang dibuat tergantung pada dukungan dari
compiler tersebut terhadap fungsi-fungsi yang dibutuhkan, semisal pengolahan matriks. Dalam hal ini,
Matlab menyediakan berbagai fungsi siap pakai yang cukup membantu dalam pembuatan program
pengolahan jaring ini, misalnya dalam hal pengolahan matriks.
V.2. Saran
Program yang telah dibuat tentunya masih banyak mengandung kekurangan di sana-sini meskipun
telah berusaha untuk dieliminir. Karenanya, berbagai penyempurnaan akan senantiasa diperlukan.pada
berbagai sisi dari program yang telah dibuat ini. Pengembangan lebih lanjut juga dapat dilakukan sehingga
dengan menggunakan compiler Matlab dapat dibuat program pengolahan data GPS secara lengkap mulai
dari screening, pengolahan baseline, pengolahan jaring hingga transformasi datum.(atau dapat juga
difokuskan pada fungsi tertentu seperti pada program Geolab). Demikian pula dapat dibuat aplikasi yang
juga menyediakan fungsi GUI (Graphical User Interface) sehingga lebih menarik bagi penggunanya.
Listing program semacam ini sebenarnya telah tersedia di internet, seperti GPS Easy Suite I dan
II yang dibuat oleh Prof. Kai Borre dari Aalborg University, Denmark. Namun sepertinya belum ada
produk lokal yang cukup memuaskan yang menyediakan program pengolahan data GPS baik yang gratis
maupun komersial. Padahal kebutuhan untuk hal tersebut cukup tinggi seiring dengan penggunaan GPS
dalam densifikasi jaring kontrol di Indonesia. Sehingga berbagai inovasi terhadap aplikasi pengolahan
data GPS masih perlu dikembangkan di Indonesia di masa yang akan datang.
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 27
REFERENSI
Abidin H.Z., Jones A., dan Kahar, J., 1995. Survei Dengan GPS. Pradnya Paramita, Jakarta
Anonim. 2002. Standar Nasional Indonesia Jaring Kontrol Horizontal. Badan Standarisasi
Nasional Indonesia.
Heliani, Leni S., Widjayanti, N. 2005. Bahan Ajar Perataan Jaring Geodesi. Jurusan Teknik
Geodesi FT-UGM, Yogyakarta
http://www.mikron123.com/
Kuang, Shanlong. 1996. Geodetic Network Analysis and Optimal Design. Ann Arbor Press
Inc., Chelsea, Michigan
Rizos, Chris. 1999. Introduction to GPS. PDF Files., University of New South Wales, Sydney,
Australia.
Uotilla, Urho A. 1985. Adjustment Computation Notes, Part I. Department of Geodetic Science
and Surveying, The Ohio State University., Columbus, Ohio, Amerika Serikat
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 28
LAMPIRAN
Listing Program dalam bahasa pemrograman Matlab
% GPS Network Adjustment
% Global Test and Data Snooping Post Adjustment
% ______________________________________________________________________________________________________
%
% Written By : __
% Geodetic Engineering Faculty, Gadjah Mada University
% Yogyakarta - Indonesia
% copyleft@2010
% ______________________________________________________________________________________________________
clc; clear all;
format compact; warning off;
% Input file & data extraction
[a,b] = xlsread('GPS_input_file.xls');
[c,d] = xlsread('GPS_input_fixpoint.xls');
% ekstraksi data baseline (titik awal dan akhir) dari input file
for i = 1:(length(b)-6)
for j = 1:2
fromto(i,j) = b(i+6,j);
end
end
% ekstraksi nilai komponen baseline dx, dy, dz
for i = 1:(length(a))
for j = 1:3
dxdydz(i,j) = a(i,j);
end
end
% ekstraksi nilai komponen baseline sx, sy, sz
for i = 1:(length(a))
for j = 1:3
sxsysz(i,j) = a(i,j+3);
end
end
% ekstraksi point
tempp = reshape(fromto,1,2*length(fromto));
points = unique(tempp');
% ekstraksi koordinat fix point(s)
for i = 1:(length(d)-4)
fixs(i,1) = d(i+4,2);
end
[I,J] = size(c);
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 29
for i = 1:I
for j = 1:3
cordfixs(i,j) = c(i,j+2);
end
end
cordfixs = cordfixs';
% titik-titik parameter
param = setdiff(points,fixs);
% temporary print out
fromto
dxdydz
sxsysz
points
fixs
cordfixs
% Desain Matrix perataan
% -Matrix A-
d = eye(3);
partr = param';
An1 = zeros(length(fromto)*3,length(partr)*3);
An2 = zeros(length(fromto)*3,length(partr)*3);
for i = 1:length(fromto)
for j = 1:length(partr)
kons1 = strmatch(fromto(i,2),partr(:));
kons2 = strmatch(fromto(i,1),partr(:));
if (kons1 ~= 0) & (kons1 ~= []),
brs1 = (3*i)-2;
klm1 = (3*kons1)-2;
An1(brs1:brs1+2,klm1:klm1+2) = d;
end
if (kons2 ~= 0) & (kons2 ~= []),
brs2 = (3*i)-2;
klm2 = (3*kons2)-2;
An2(brs2:brs2+2,klm2:klm2+2) = -d;
end
A = An1+An2;
end
end
% -Matrix L-
L = [];
for i = 1:length(fromto),
temp = (dxdydz(i,:)');
if strmatch(fixs,fromto(i,:)) == 1,
for j = 1:3,
Lsm(j,1) = temp(j)-(cordfixs(j));
end
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 30
elseif strmatch(fixs,fromto(i,:)) == 2,
for j = 1:3,
Lsm(j,1) = (cordfixs(j))-temp(j);
end
else
Lsm = temp;
end
L = [L; Lsm];
end
% -Matrix P-
hstdev = [];
for i = 1:length(fromto),
stv = sxsysz(i,:)';
hstdev = [hstdev; stv];
end
% >> Asumsi : tidak ada korelasi antar komponen
P = diag(1./(hstdev.^2));
% Matrix Penyelesaian Parameter (X)
X = -inv(A'*P*A)*A'*P*L;
matX = reshape(X,3,length(param))';
% Matrix Residu
V = A*X+L;
%- Global Test-
% Varian Apriori (dianggap = 1)
Apri = 1;
% Varian Aposteriori
[n,u] = size(A);
Apo = (V'*P*V)/(n-u);
% Hipotesis a
Hipo_a = Apo/Apri;
% Ambang Uji dari tabel Fisher, argumen r (derajat kebebasan)
Globtest = 1.238; % Taraf Uji hasil interpolasi
% Uji Hipotesis
if Hipo_a <= Globtest,
Uji_Global = 'Lolos';
else Uji_Global = 'Tidak Lolos';
end
% -Data Snooping-
%varian kovarian koordinat
xx = Apo*(inv((A'*P*A))) ;
%varian kovarian koreksi
%Svv
vv = Apri*(inv(P))-A*(inv(A'*P*A))*A';
% Ambang Uji Data Snooping
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 31
Snoop = sqrt(Globtest);
Dxx = diag(xx);
% Ex = Dxx(1:3:u);
% Ey = Dxx(2:3:u);
S = sqrt(Dxx);
% Menulis ke Output file : Output_GPS.txt
fprintf('\n\nMenulis File Output : "Output_GPS.txt" ... \n');
fid = fopen('Output_GPS.txt','wt');
fprintf(fid,'>> - KELUARAN PROGRAM HITUNGAN GPS ADJUSTMENT - <<\n');
fprintf(fid,' Written By : Dany Puguh Laksono \n');
fprintf(fid,' Geodetic Engineering Faculty, GMU \n');
fprintf(fid,'----------------------------------------------\n\n');
fprintf(fid,'\n\nMATRIKS DESAIN : \n');
fprintf(fid,'# Matriks A : \n');
for i=1:n
for j = 1:u
fprintf(fid,'%2.2s ',num2str(A(i,j)));
if j == u,
fprintf(fid,'\n');
end
end
end
fprintf(fid,'\n\n# Matriks L : \n');
for i=1:length(L)
fprintf(fid,'%3.10s \n',num2str(L(i)));
end
fprintf(fid,'\n\n# Matriks P : \n');
fprintf(fid,'1000 * \n');
for i=1:n
for j = 1:n
fprintf(fid,'%5.5s ',num2str(P(i,j)/1000));
if j == u,
fprintf(fid,'\n');
end
end
end
fprintf(fid,'\n\nHASIL HITUNGAN : \n');
fprintf(fid,'\n\n# Matriks X = -inv(A''*P*A)*(A''*P*L) : \n');
for i=1:length(X)
fprintf(fid,'%5.10s \n',num2str(X(i)));
end
fprintf(fid,'\n Koordinat tiap titik (X; Y; Z): \n');
for i = 1:length(param)
fprintf(fid,'%5.10s : %5.10s; %5.10s; %5.10s \n',char(param(i)),num2str(matX(i,1)),...
num2str(matX(i,2)),num2str(matX(i,3)));
end
fprintf(fid,'\n\n# Matriks V = A*X+L : \n');
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 32
for i=1:length(V)
fprintf(fid,'%5.10s \n',num2str(V(i)));
end
fprintf(fid,'\n\n# Varian Aposteriori : \n');
fprintf(fid,'%5.10s \n',num2str(Apo));
fprintf(fid,'\n\n# Hasil Uji Global : \n');
fprintf(fid,'%5.10s \n',Uji_Global);
fprintf(fid,'\n\n# Hasil Uji Data Snooping : \n');
for i= 1:n,
S(i,1) = V(i,1)/sqrt(vv(i,i));
if S(i,1) <= Snoop;
snooping = 'Lolos';
else S(i,1) > Snoop;
snooping = 'Tidak Lolos';
end
fprintf(fid, 'Baseline %s : %s;\n',num2str(i),num2str(snooping));
end
fclose(fid);
fprintf('\n\n .:Program Selesai:. \n');
%-----------------------------Akhir Program-------------------------------
Keluaran pada command Window Matlab>> fromto =
'ATHL' 'BELF'
'ATHL' 'CAVN'
'ATHL' 'CKSH'
'ATHL' 'DNGL'
'ATHL' 'FOYL'
'ATHL' 'KLRE'
'ATHL' 'MRKT'
'ATHL' 'OMGH'
'ATHL' 'SLGO'
'ATHL' 'SWRD'
'BELF' 'CAVN'
'BELF' 'CKSH'
'BELF' 'DNGL'
'BELF' 'FOYL'
'BELF' 'KLRE'
'BELF' 'MRKT'
'BELF' 'OMGH'
'BELF' 'SLGO'
'BELF' 'SWRD'
'CAVN' 'CKSH'
'CAVN' 'DNGL'
'CAVN' 'FOYL'
'CAVN' 'KLRE'
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 33
'CAVN' 'MRKT'
'CAVN' 'OMGH'
'CAVN' 'SLGO'
'CAVN' 'SWRD'
'CKSH' 'DNGL'
'CKSH' 'FOYL'
'CKSH' 'KLRE'
'CKSH' 'MRKT'
'CKSH' 'OMGH'
'CKSH' 'SLGO'
'CKSH' 'SWRD'
'DNGL' 'FOYL'
'DNGL' 'KLRE'
'DNGL' 'MRKT'
'DNGL' 'OMGH'
'DNGL' 'SLGO'
'DNGL' 'SWRD'
'FOYL' 'KLRE'
'FOYL' 'MRKT'
'FOYL' 'OMGH'
'FOYL' 'SLGO'
'FOYL' 'SWRD'
'KLRE' 'MRKT'
'KLRE' 'OMGH'
'KLRE' 'SLGO'
'KLRE' 'SWRD'
'MRKT' 'OMGH'
'MRKT' 'SLGO'
'MRKT' 'SWRD'
'OMGH' 'SLGO'
'OMGH' 'SWRD'
'SLGO' 'SWRD'
dxdydz =
-86757.167 141012.93 74875.503
-45132.97 42214.374 37003.868
-47112.379 -5541.499 33721.728
-111137.424 3700.779 80174.207
-133931.88 55507.364 100967.031
-126594.269 100969.841 99829.628
-60093.453 100775.176 52959.068
-100024.793 56404.692 77504.037
-80113.589 -25412.917 55271.804
11399.74 111640.16 1766.295
41624.197 -98798.556 -37871.635
39644.787 -146554.429 -41153.775
-24380.257 -137312.151 5298.704
-47174.713 -85505.566 26091.528
-39837.038 -40043.156 24953.976
26663.714 -40237.754 -21916.435
-13267.626 -84608.237 2628.534

Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 34
6643.577 -166425.847 -19603.699
98156.907 -29372.769 -73109.206
-1979.409 -47755.873 -3282.139
-66004.454 -38513.596 43170.34
-88798.909 13292.99 63963.164
-81461.234 58755.4 62825.611
-14960.483 58560.802 15955.2
-54891.823 14190.318 40500.169
-34980.619 -67627.291 18267.937
56532.71 69425.787 -35237.572
-64025.045 9242.277 46452.479
-86819.5 61048.863 67245.304
-79481.825 106511.273 66107.752
-12981.073 106316.675 19237.34
-52912.414 61946.191 43782.309
-33001.21 -19871.418 21550.076
58512.119 117181.66 -31955.431
-22794.455 51806.586 20792.827
-15456.78 97268.996 19655.273
51043.972 97074.398 -27215.138
11112.631 52703.914 -2670.17
31023.835 -29113.696 -24902.404
122537.179 107939.401 -78407.958
7337.675 45462.41 -1137.552
73838.427 45267.812 -48007.963
33907.084 897.33 -23462.993
53818.29 -80920.282 -45695.229
145331.62 56132.797 -99200.733
66500.752 -194.598 -46870.41
26569.411 -44565.082 -22325.443
46480.615 -126382.692 -44557.676
137993.968 10670.383 -98063.244
-39931.341 -44370.484 24544.968
-20020.137 -126188.093 2312.734
71493.192 10864.985 -51192.772
19911.203 -81817.61 -22232.233
111424.533 55235.469 -75737.74
91513.33 137053.079 -53505.507
sxsysz =
0.0074 0.005 0.0129
0.004 0.0027 0.0071
0.0037 0.0025 0.0064
0.007 0.0047 0.0122
0.0077 0.0052 0.0136
0.0157 0.0105 0.0277
0.0055 0.0037 0.0096
0.0067 0.0045 0.0117
0.0051 0.0035 0.009
0.0042 0.0028 0.0074
0.0048 0.0032 0.0085
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 35
0.0063 0.0043 0.0111
0.0061 0.0041 0.0107
0.0046 0.0031 0.0081
0.0033 0.0022 0.0059
0.0034 0.0023 0.0059
0.0041 0.0028 0.0072
0.0064 0.0044 0.0114
0.006 0.004 0.0106
0.0036 0.0024 0.0063
0.005 0.0034 0.0089
0.0049 0.0033 0.0087
0.0054 0.0036 0.0095
0.003 0.002 0.0053
0.0037 0.0025 0.0065
0.0043 0.0029 0.0076
0.0038 0.0025 0.0067
0.0043 0.0029 0.0075
0.0059 0.004 0.0106
0.0067 0.0045 0.0118
0.0049 0.0033 0.0086
0.0048 0.0032 0.0084
0.0024 0.0017 0.0043
0.0055 0.0037 0.0097
0.0041 0.0027 0.0072
0.0054 0.0036 0.0096
0.0056 0.0038 0.0099
0.0037 0.0025 0.0065
0.0034 0.0023 0.0059
0.0077 0.0052 0.0135
0.0031 0.0021 0.0056
0.0046 0.0031 0.0082
0.0026 0.0017 0.0046
0.0054 0.0037 0.0097
0.0066 0.0044 0.0115
0.0043 0.0029 0.0076
0.0033 0.0022 0.0059
0.0065 0.0044 0.0116
0.0064 0.0043 0.0113
0.0036 0.0024 0.0064
0.0056 0.0038 0.0099
0.0043 0.0029 0.0076
0.0046 0.0031 0.0081
0.0063 0.0042 0.011
0.0065 0.0043 0.0114
points =
'ATHL'
'BELF'
'CAVN'
'CKSH'
'DNGL'
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 36
'FOYL'
'KLRE'
'MRKT'
'OMGH'
'SLGO'
'SWRD'
fixs =
'ATHL'
cordfixs =
3771930.035
-523913.009
5099178.585
Menulis File Output : "Output_GPS.txt" ...
.:Program Selesai:.
Print Screen Output File (Output_GPS.txt)
Hasil hitungan pada Output File (Output_GPS.txt) {keluaran disini dalam 3 kolom}
HASIL HITUNGAN :
# Matriks X = -
inv(A'*P*A)*(A'*P*L) :
3858687.20
-664925.93
5024303.07
3817063.00
-566127.38
5062174.71
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 37
3819042.41
-518371.51
5065456.85
3883067.46
-527613.78
5019004.37
3905861.91
-579420.37
4998211.55
3898524.24
-624882.78
4999349.09
3832023.48
-624688.18
5046219.51
3871954.82
-580317.70
5021674.54
3852043.62
-498500.09
5043906.77
3760530.29
-635553.17
5097412.29
Koordinat tiap titik (X;
Y; Z):
BELF : 3858687.20; -
664925.93; 5024303.07
CAVN : 3817063.00; -
566127.38; 5062174.71
CKSH : 3819042.41; -
518371.51; 5065456.85
DNGL : 3883067.46; -
527613.78; 5019004.37
FOYL : 3905861.91; -
579420.37; 4998211.55
KLRE : 3898524.24; -
624882.78; 4999349.09
MRKT : 3832023.48; -
624688.18; 5046219.51
OMGH : 3871954.82; -
580317.70; 5021674.54
SLGO : 3852043.62; -
498500.09; 5043906.77
SWRD : 3760530.29; -
635553.17; 5097412.29
# Matriks V = A*X+L :
0.00098903
-0.0006807
-0.0031771
0.00092719
-0.0006935
-0.0017548
0.0011997
-0.0005262
-0.0021012
0.0019294
0.00068627
-0.004177
0.00031383
-0.0004324
-0.0036216
-0.061804
0.065474
0.14163
0.000555
-0.0007672
-0.0028115
0.0018343
-0.0012856
-0.003165
0.0014349
-0.0002132
-0.0021154
-0.0012691
-0.002081
0.0026286
-6.1839e-0
-1.2794e-0
0.0014223
-0.0007893
0.00015456
0.0010759
0.00094032
0.001367
-0.0009999
-0.0006752
0.00024834
-0.0004445
0.0012065
-0.0008455
-0.0041903
-0.0004340
-8.6475e-0
0.0003656
0.00084524
0.00039519
1.2111e-00
-0.0005541
0.00046754
0.0010617
-0.0022582
-0.0004002
0.0078056
0.00027248
0.00016735
0.00065363
0.0010022
0.00037984
-0.0014222
0.00038663
0.00026114
-0.0008668
0.0022684
-0.0008327
-0.0056125
-0.0003721
-7.3681e-0
-0.0010567
0.00090708
-0.0005920
-0.0014101
0.00050769
0.00048033
0.0006394
-0.0021963
-0.0003874
0.0053834
0.00072968
0.00021249
-0.0020758
0.00011415
9.3784e-00
-0.0005204
0.0019959
-0.0010001
-0.0042661
0.00035533
-0.0002410
-0.0007102
0.00063459
-0.0007593
-0.0010638
0.00023521
0.00031298
-1.4227e-0
-0.0024688
-0.0005548
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 38
0.0067298
-0.0006155
-0.0001187
0.0035554
0.0012662
-0.0012126
-0.0021903
-0.0003743
-0.0004535
0.0023655
-9.5087e-0
-0.0009718
0.001012
-0.0004944
-0.0008995
0.0010616
0.011802
0.017233
-0.039194
0.0018817
-0.0010939
-0.0037457
0.00024117
-0.0003348
0.00081015
-0.0014796
0.0011468
0.0014567
0.00012105
-0.0007808
-0.0004937
-0.0015829
-0.0006486
0.0092502
-0.0016405
0.00075907
0.0055558
-0.0013613
0.00024073
0.0032024
-0.0017607
0.00031308
0.0042519
0.019535
-0.0035547
-0.050004
0.00027927
-0.0005183
-0.0013535
-0.0001201
0.00055401
-0.0013039
-0.0028241
-0.0003138
0.0064401
-0.0013994
7.2352e-00
0.0010495
-0.0031034
0.00020454
0.0077935
-0.001704
0.00013219
0.006744
# Varian Aposteriori :
1.0869
# Hasil Uji Global :
Lolos
# Hasil Uji Data Snooping :
Baseline 1 : Lolos;
Baseline 2 : Lolos;
Baseline 3 : Lolos;
Baseline 4 : Lolos;
Baseline 5 : Lolos;
Baseline 6 : Lolos;
Baseline 7 : Lolos;
Baseline 8 : Lolos;
Baseline 9 : Lolos;
Baseline 10 : Lolos;
Baseline 11 : Lolos;
Baseline 12 : Lolos;
Baseline 13 : Lolos;
Baseline 14 : Lolos;
Baseline 15 : Lolos;
Baseline 16 : Lolos;
Baseline 17 : Tidak Lolos;
Baseline 18 : Tidak Lolos;
Baseline 19 : Lolos;
Baseline 20 : Lolos;
Baseline 21 : Lolos;
Baseline 22 : Lolos;
Baseline 23 : Lolos;
Baseline 24 : Lolos;
Baseline 25 : Lolos;
Baseline 26 : Lolos;
Baseline 27 : Lolos;
Baseline 28 : Lolos;
Baseline 29 : Lolos;
Baseline 30 : Lolos;
Baseline 31 : Lolos;
Baseline 32 : Lolos;
Baseline 33 : Lolos;
Baseline 34 : Lolos;
Baseline 35 : Lolos;
Baseline 36 : Lolos;
Baseline 37 : Lolos;
Baseline 38 : Lolos;
Baseline 39 : Lolos;
Baseline 40 : Lolos;
Baseline 41 : Lolos;
Baseline 42 : Lolos;
Baseline 43 : Lolos;
Baseline 44 : Lolos;
Baseline 45 : Lolos;
Baseline 46 : Lolos;
Baseline 47 : Lolos;
Baseline 48 : Lolos;
Baseline 49 : Lolos;
Baseline 50 : Lolos;
Baseline 51 : Lolos;
Baseline 52 : Lolos;
Baseline 53 : Lolos;
Baseline 54 : Lolos;
Baseline 55 : Lolos;
Baseline 56 : Lolos;
Baseline 57 : Lolos;
Baseline 58 : Lolos;
Baseline 59 : Lolos;
Baseline 60 : Lolos;
Baseline 61 : Lolos;
Baseline 62 : Lolos;
Baseline 63 : Lolos;
Baseline 64 : Lolos;
Baseline 65 : Lolos;
Baseline 66 : Lolos;
Baseline 67 : Lolos;
Baseline 68 : Lolos;
Baseline 69 : Lolos;
Baseline 70 : Lolos;
Baseline 71 : Lolos;
Baseline 72 : Lolos;
Baseline 73 : Lolos;
Baseline 74 : Lolos;
Baseline 75 : Lolos;
Baseline 76 : Lolos;
Baseline 77 : Lolos;
Baseline 78 : Lolos;
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 39
Baseline 79 : Lolos;
Baseline 80 : Lolos;
Baseline 81 : Lolos;
Baseline 82 : Lolos;
Baseline 83 : Lolos;
Baseline 84 : Lolos;
Baseline 85 : Lolos;
Baseline 86 : Lolos;
Baseline 87 : Lolos;
Baseline 88 : Lolos;
Baseline 89 : Lolos;
Baseline 90 : Lolos;
Baseline 91 : Lolos;
Baseline 92 : Lolos;
Baseline 93 : Lolos;
Baseline 94 : Lolos;
Baseline 95 : Lolos;
Baseline 96 : Lolos;
Baseline 97 : Lolos;
Baseline 98 : Lolos;
Baseline 99 : Lolos;
Baseline 100 : Lolos;
Baseline 101 : Lolos;
Baseline 102 : Lolos;
Baseline 103 : Lolos;
Baseline 104 : Lolos;
Baseline 105 : Lolos;
Baseline 106 : Lolos;
Baseline 107 : Lolos;
Baseline 108 : Lolos;
Baseline 109 : Lolos;
Baseline 110 : Lolos;
Baseline 111 : Lolos;
Baseline 112 : Lolos;
Baseline 113 : Lolos;
Baseline 114 : Lolos;
Baseline 115 : Lolos;
Baseline 116 : Lolos;
Baseline 117 : Lolos;
Baseline 118 : Tidak Lolos;
Baseline 119 : Tidak Lolos;
Baseline 120 : Lolos;
Baseline 121 : Lolos;
Baseline 122 : Lolos;
Baseline 123 : Lolos;
Baseline 124 : Lolos;
Baseline 125 : Lolos;
Baseline 126 : Lolos;
Baseline 127 : Lolos;
Baseline 128 : Lolos;
Baseline 129 : Lolos;
Baseline 130 : Lolos;
Baseline 131 : Lolos;
Baseline 132 : Lolos;
Baseline 133 : Lolos;
Baseline 134 : Lolos;
Baseline 135 : Lolos;
Baseline 136 : Lolos;
Baseline 137 : Lolos;
Baseline 138 : Lolos;
Baseline 139 : Lolos;
Baseline 140 : Lolos;
Baseline 141 : Lolos;
Baseline 142 : Lolos;
Baseline 143 : Lolos;
Baseline 144 : Lolos;
Baseline 145 : Tidak Lolos;
Baseline 146 : Lolos;
Baseline 147 : Lolos;
Baseline 148 : Lolos;
Baseline 149 : Lolos;
Baseline 150 : Lolos;
Baseline 151 : Lolos;
Baseline 152 : Lolos;
Baseline 153 : Lolos;
Baseline 154 : Lolos;
Baseline 155 : Lolos;
Baseline 156 : Lolos;
Baseline 157 : Lolos;
Baseline 158 : Lolos;
Baseline 159 : Lolos;
Baseline 160 : Lolos;
Baseline 161 : Lolos;
Baseline 162 : Lolos;
Baseline 163 : Lolos;
Baseline 164 : Lolos;
Baseline 165 : Lolos;
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 40
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 41
Tugas : Mata Kuliah Jaring Kontrol Geodesi“Pembuatan Program Post Processing Jaring GPS Menggunakan Software Matlab”
Page 42