Kuliah PengSin-5
16
2.11 MATLAB DAN SIGNALS AND SYSTEMS Selama ini kita mempelajari cara manual untuk menentukan respon sistem pengolahan dari input diskrit yang berbeda- beda. Meskipun sangat penting bagi kita untuk mengetahui prosesnya, namun pada prakteknya, sangat tidak lazim mengerjakannya secara manual. Ada banyak software yang dapat kita gunakan untuk menyelesaikan proses pengolahan suatu sinyal. Salah satunya adalah MATLAB. Software ini merupakan alat CAD yang bagus, yang bisa digunakan untuk berbagai aplikasi, mulai dari penyelesaian persamaan dan plotting grafik untuk desain lengkap sebuah digital filter. Gambar 2.11 menunjukkan display MATLAB yang merupakan output pada contoh 2.5, yaitu untuk fungsi transfer, T(z) = 1 + 2z -1 - z -2 dengan input yang berupa discrete unit step. 1
-
Upload
sahbandi-rachmatsyah -
Category
Documents
-
view
232 -
download
0
description
Upload this file is only for downloading another document
Transcript of Kuliah PengSin-5
2.11 MATLAB DAN SIGNALS AND SYSTEMS
Selama ini kita mempelajari cara manual untuk menentukan respon sistem pengolahan dari input diskrit yang berbeda-beda. Meskipun sangat penting bagi kita untuk mengetahui prosesnya, namun pada prakteknya, sangat tidak lazim mengerjakannya secara manual. Ada banyak software yang dapat kita gunakan untuk menyelesaikan proses pengolahan suatu sinyal. Salah satunya adalah MATLAB. Software ini merupakan alat CAD yang bagus, yang bisa digunakan untuk berbagai aplikasi, mulai dari penyelesaian persamaan dan plotting grafik untuk desain lengkap sebuah digital filter. Gambar 2.11 menunjukkan display MATLAB yang merupakan output pada contoh 2.5, yaitu untuk fungsi transfer, T(z) = 1 + 2z-1 - z-2 dengan input yang berupa discrete unit step.
Gambar 2.11
1
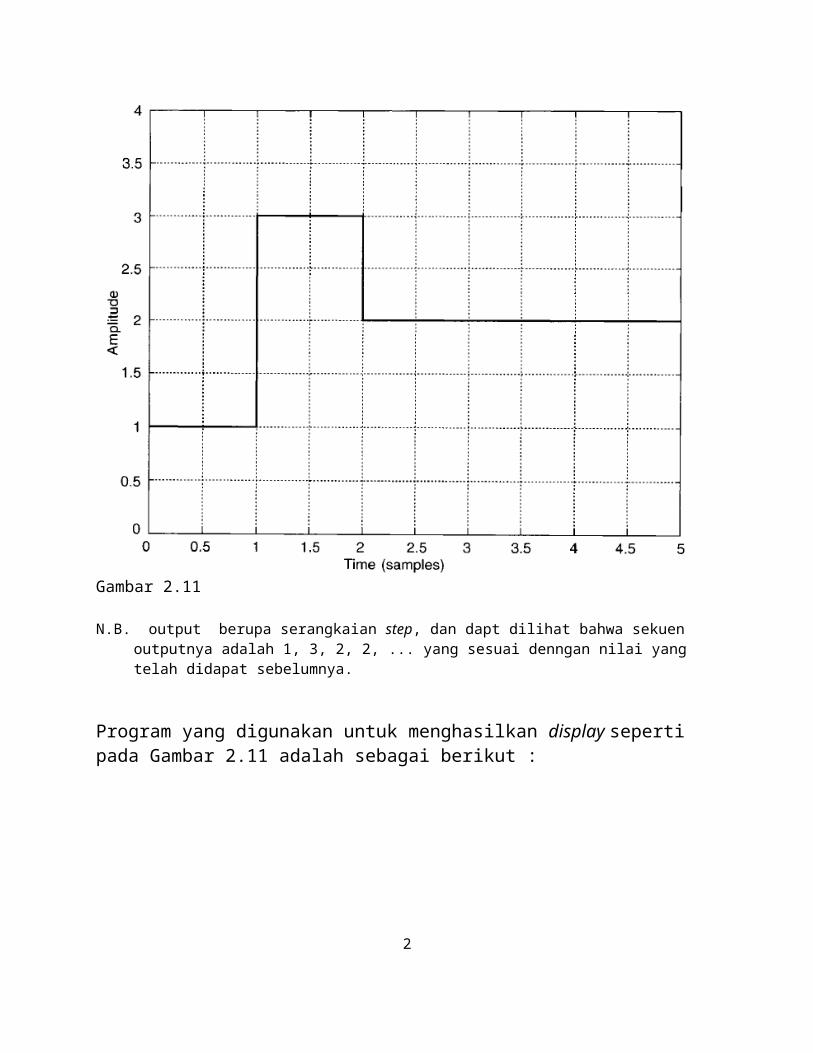
N.B. output berupa serangkaian step, dan dapt dilihat bahwa sekuen outputnya adalah 1, 3, 2, 2, ... yang sesuai denngan nilai yang telah didapat sebelumnya.
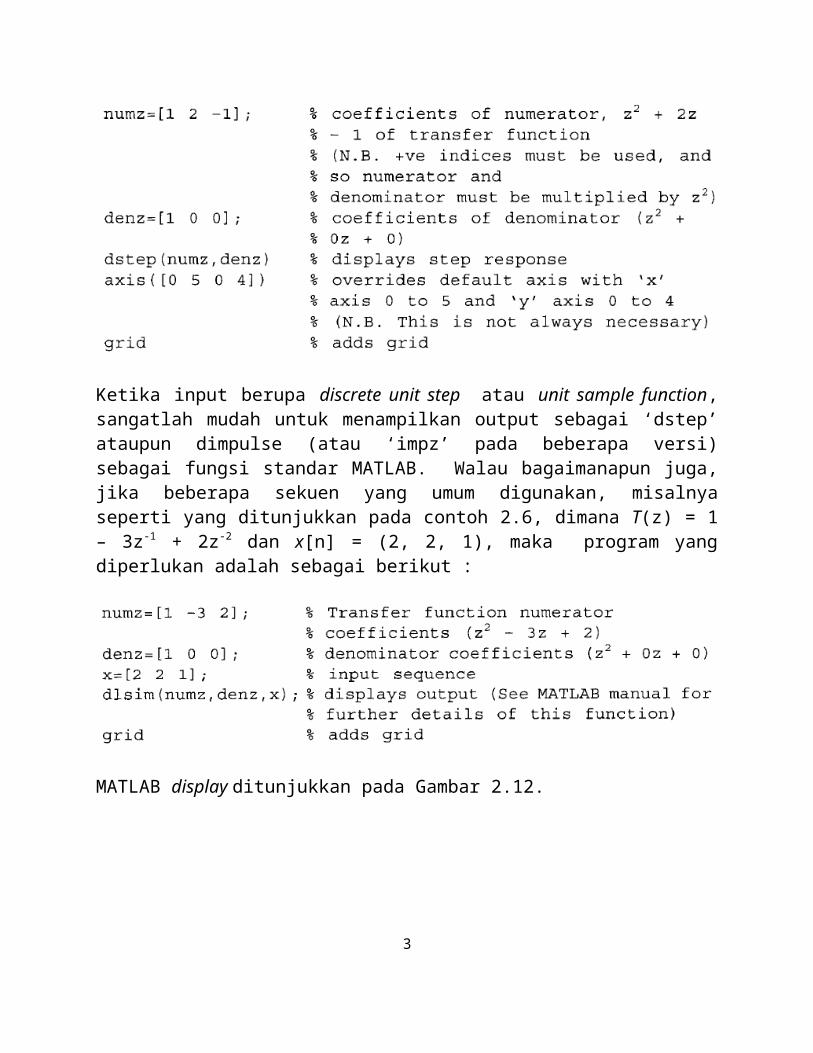
Program yang digunakan untuk menghasilkan display seperti pada Gambar 2.11 adalah sebagai berikut :
Ketika input berupa discrete unit step atau unit sample function, sangatlah mudah untuk menampilkan output sebagai ‘dstep’ ataupun dimpulse (atau ‘impz’ pada beberapa versi) sebagai fungsi standar MATLAB. Walau bagaimanapun juga, jika beberapa sekuen yang umum digunakan, misalnya seperti yang ditunjukkan pada contoh 2.6, dimana T(z) = 1 – 3z-1 + 2z-2 dan x[n] = (2, 2, 1), maka program yang diperlukan adalah sebagai berikut :
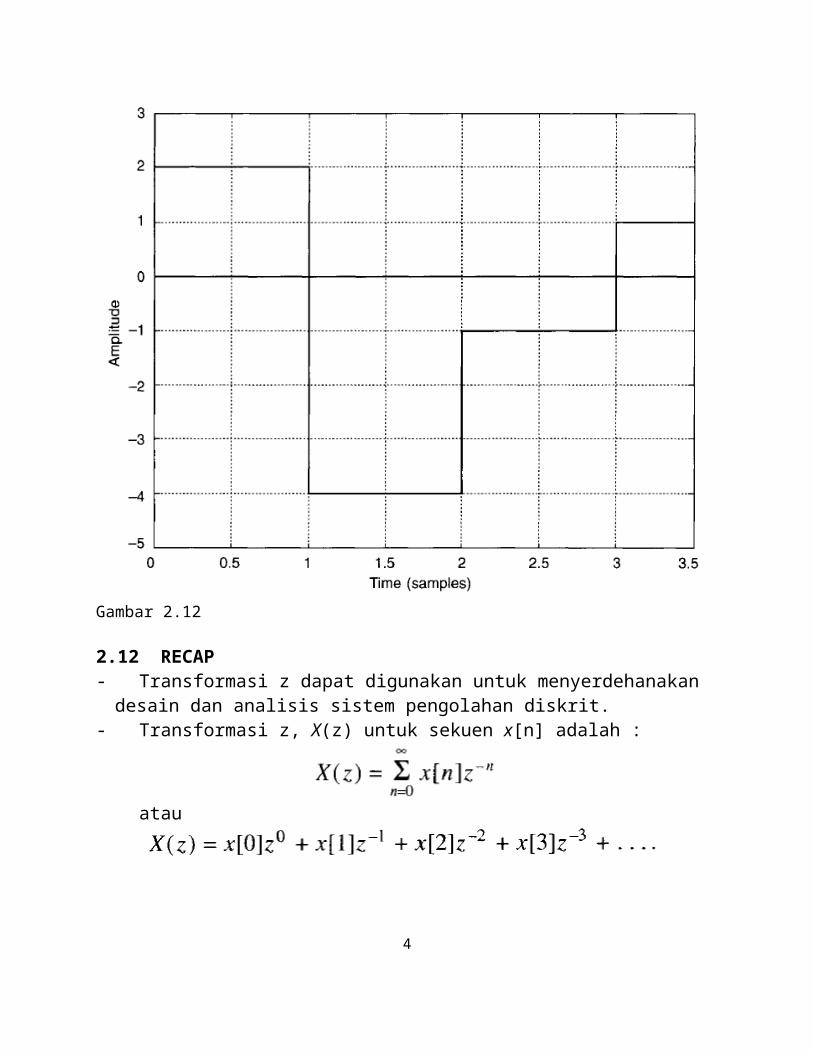
MATLAB display ditunjukkan pada Gambar 2.12.
2
Gambar 2.12
2.12 RECAP- Transformasi z dapat digunakan untuk menyerdehanakan desain dan
analisis sistem pengolahan diskrit.- Transformasi z, X(z) untuk sekuen x[n] adalah :
atau
- Z-n dapat dianggap sebagai ‘tag’ sample, ‘-n’ melambang adanya delay sebanyak n perioda sampling.
- Beberapa transformasi z yang penting adalah discrete unit step
3
dan unit sample function
- Fungsi Transfer untuk sistem diskrit diberikan oleh persamaan
2.13 DIGITAL SIGNAL PROCESSORS DAN z-DOMAINPada chapter sebelumnya telah diperkenalkan beberapa jenis digital
Signal Processor (prosesor sinyal digital). Kalian mungkin masih ingat bahwa digital filter dapat diklasifikasikan menjadi recursive dan non-recursive, yaitu filter yang mengumpanbalikkan lagi sample output sebelumnya untuk menghasilkan sample output yang sekarang (recursive) dan filter yang tidak mengumpanbalikkan output sebelumnya (non-recursive). Nama lain recursive filter adalah infinite impulse response (IIR). Hal ini dikarenakan respon filter nterhadap sekuen unit sample biasanya dalam bentuk sekuen yang infinite, secara normalnya tidak tergantung dengan waktu. Sebaliknya, respon non-recursive filter terhadap sekuen unit sample dalam bentuk sekuen finite. Sehingga, nama lainnya finite impulse response (FIR).
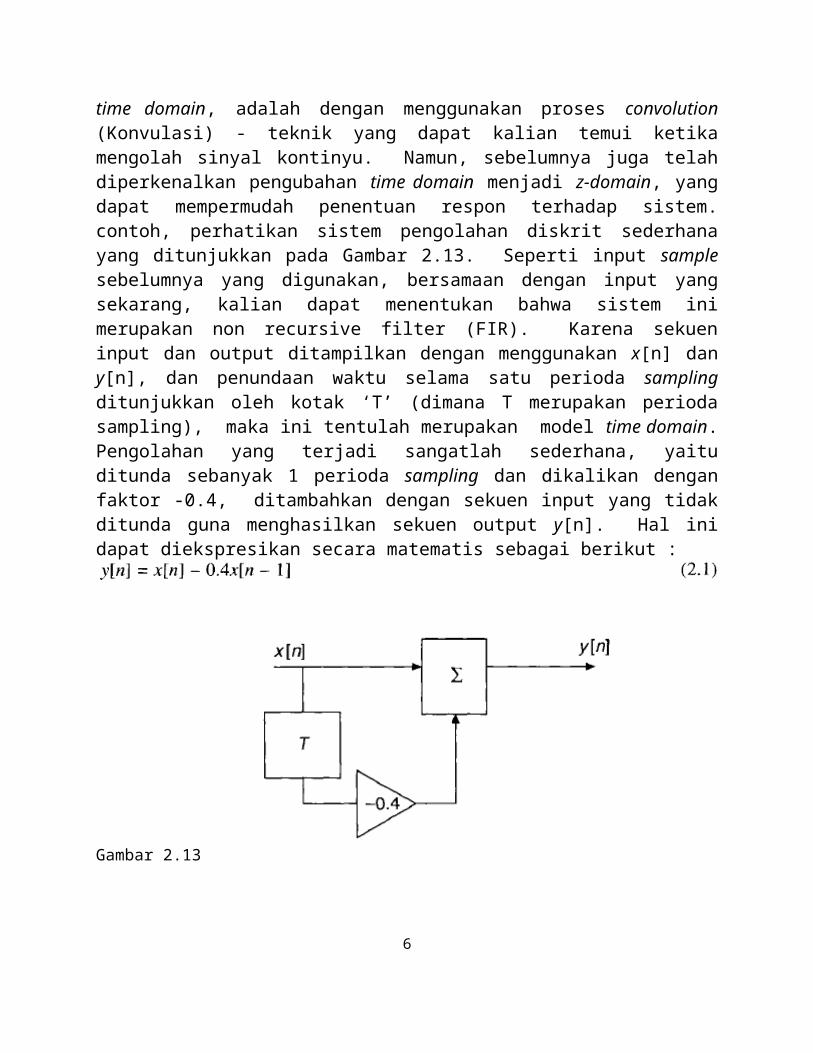
Pada pelajaran sebelumnya juga dibahas bahwa respon filter terhadap sinyal input, bekerja menggunakan time domain. Pendekatan yang lebih realistik, masih dengan menggunakan time domain, adalah dengan menggunakan proses convolution (Konvulasi) - teknik yang dapat kalian temui ketika mengolah sinyal kontinyu. Namun, sebelumnya juga telah diperkenalkan pengubahan time domain menjadi z-domain, yang dapat mempermudah penentuan respon terhadap sistem. contoh, perhatikan sistem pengolahan diskrit sederhana yang ditunjukkan pada Gambar 2.13. Seperti input sample sebelumnya yang digunakan, bersamaan dengan input yang sekarang, kalian dapat menentukan bahwa sistem ini merupakan non recursive filter (FIR). Karena sekuen input dan output ditampilkan dengan menggunakan x[n] dan y[n], dan penundaan waktu selama satu perioda sampling ditunjukkan oleh kotak ‘T’ (dimana T merupakan perioda sampling), maka ini tentulah merupakan model time domain. Pengolahan yang terjadi sangatlah sederhana, yaitu ditunda sebanyak 1 perioda sampling dan dikalikan dengan faktor -0.4, ditambahkan dengan sekuen input yang tidak ditunda guna menghasilkan sekuen output y[n]. Hal ini dapat diekspresikan secara matematis sebagai berikut :
4
Gambar 2.13
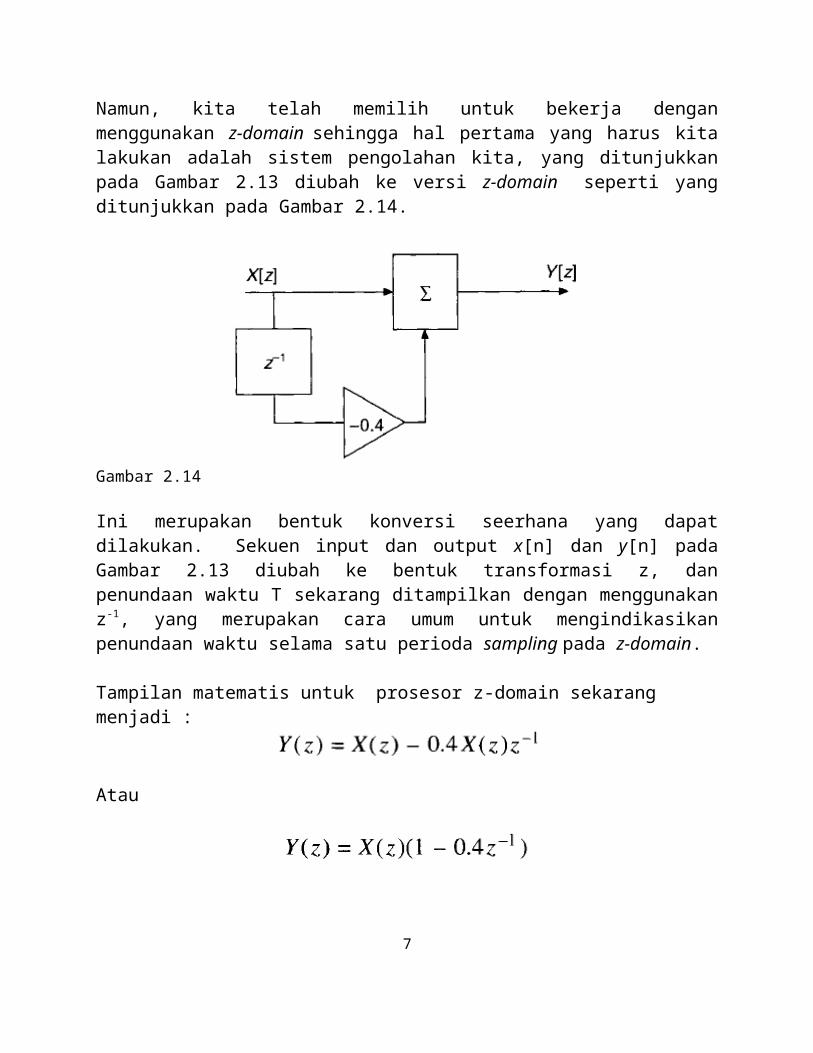
Namun, kita telah memilih untuk bekerja dengan menggunakan z-domain sehingga hal pertama yang harus kita lakukan adalah sistem pengolahan kita, yang ditunjukkan pada Gambar 2.13 diubah ke versi z-domain seperti yang ditunjukkan pada Gambar 2.14.
Gambar 2.14
Ini merupakan bentuk konversi seerhana yang dapat dilakukan. Sekuen input dan output x[n] dan y[n] pada Gambar 2.13 diubah ke bentuk transformasi z, dan penundaan waktu T sekarang ditampilkan dengan menggunakan z-1, yang merupakan cara umum untuk mengindikasikan penundaan waktu selama satu perioda sampling pada z-domain.
Tampilan matematis untuk prosesor z-domain sekarang menjadi :
5
Atau
Kita dapat mencari fungsi transfer dari prosesor dengan mudah. Disenjatai dengan transformasi ini, kita dapat memprediksikan respon sistem untuk setiap input, baik secara manual ataupun dengan pertolongan MATLAB.
N.B. Fungsi Transfer z-domain dapat juga dicari dengan cara mengkonversikan persamaan 2.1 ke bentuk ekivalen z-domain, yaitu Y(z) = X(z) - 0.4X(z)z-1 dan seterusnya, X(z)z-1 merupakan sekuen input, yang ditunda selama satu perioda waktu sampling.
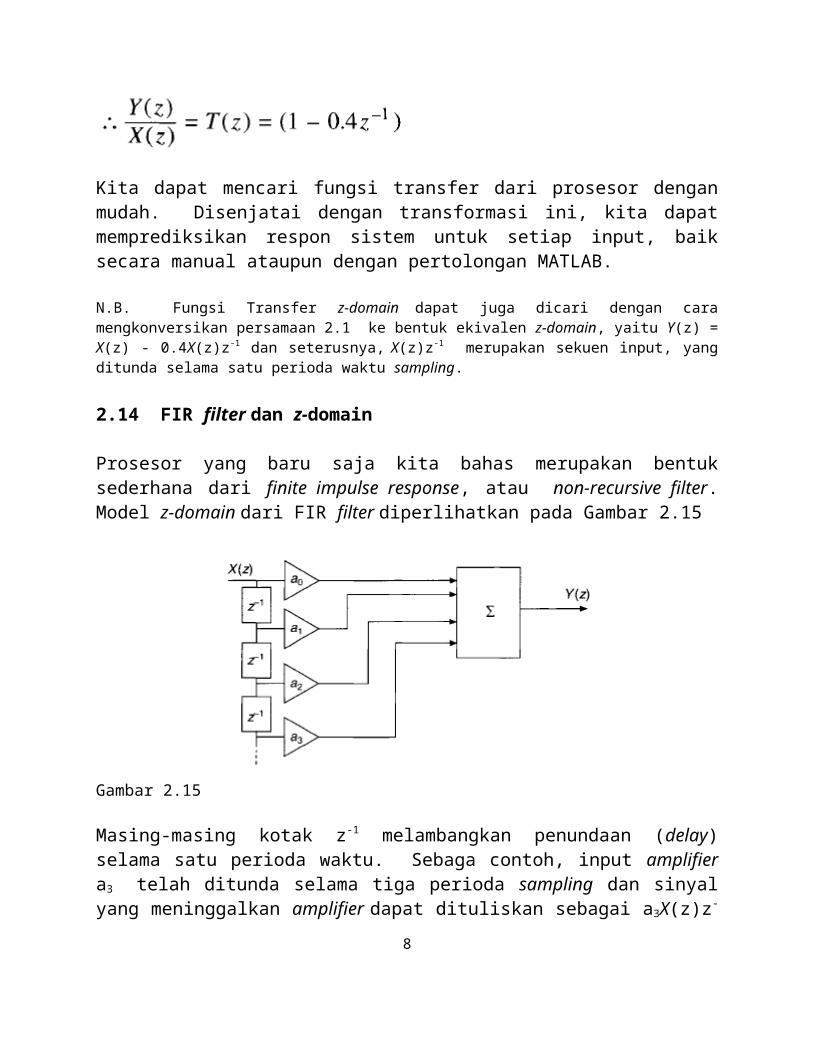
2.14 FIR filter dan z-domain
Prosesor yang baru saja kita bahas merupakan bentuk sederhana dari finite impulse response, atau non-recursive filter. Model z-domain dari FIR filter diperlihatkan pada Gambar 2.15
Gambar 2.15
Masing-masing kotak z-1 melambangkan penundaan (delay) selama satu perioda waktu. Sebaga contoh, input amplifier a3 telah ditunda selama tiga perioda sampling dan sinyal yang meninggalkan amplifier dapat dituliskan
6
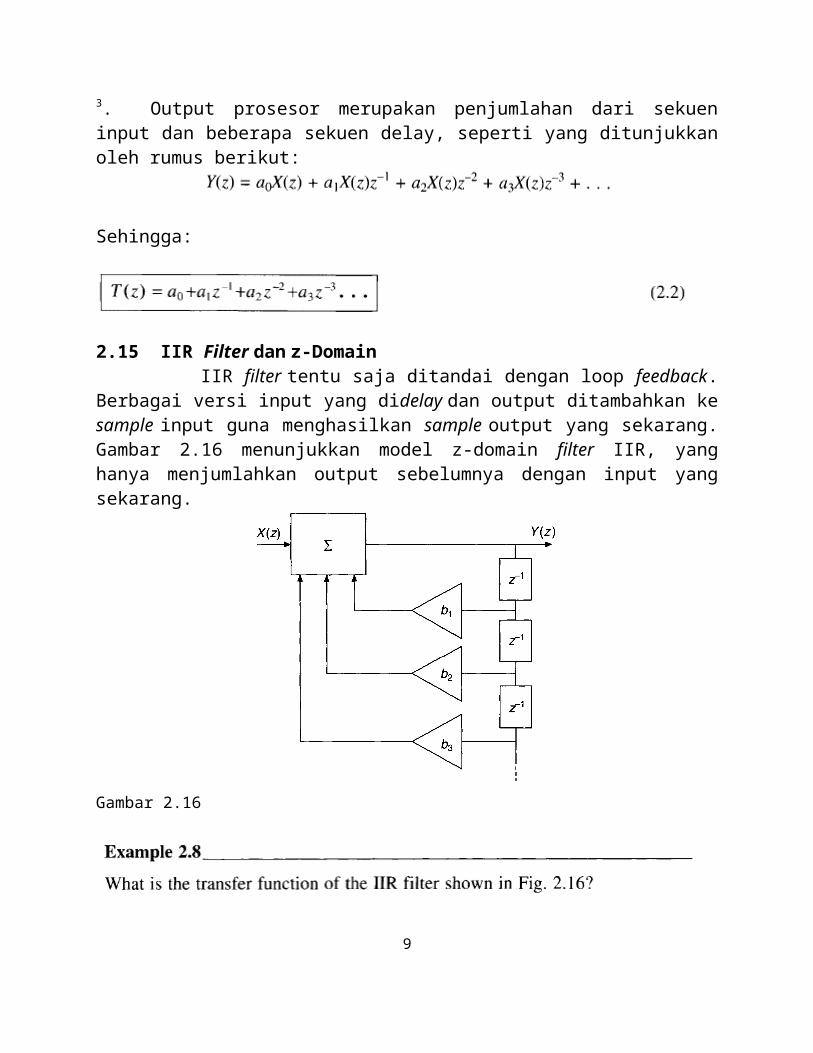
sebagai a3X(z)z-3. Output prosesor merupakan penjumlahan dari sekuen input dan beberapa sekuen delay, seperti yang ditunjukkan oleh rumus berikut:
Sehingga:
2.15 IIR Filter dan z-Domain IIR filter tentu saja ditandai dengan loop feedback. Berbagai versi input yang didelay dan output ditambahkan ke sample input guna menghasilkan sample output yang sekarang. Gambar 2.16 menunjukkan model z-domain filter IIR, yang hanya menjumlahkan output sebelumnya dengan input yang sekarang.
Gambar 2.16
7
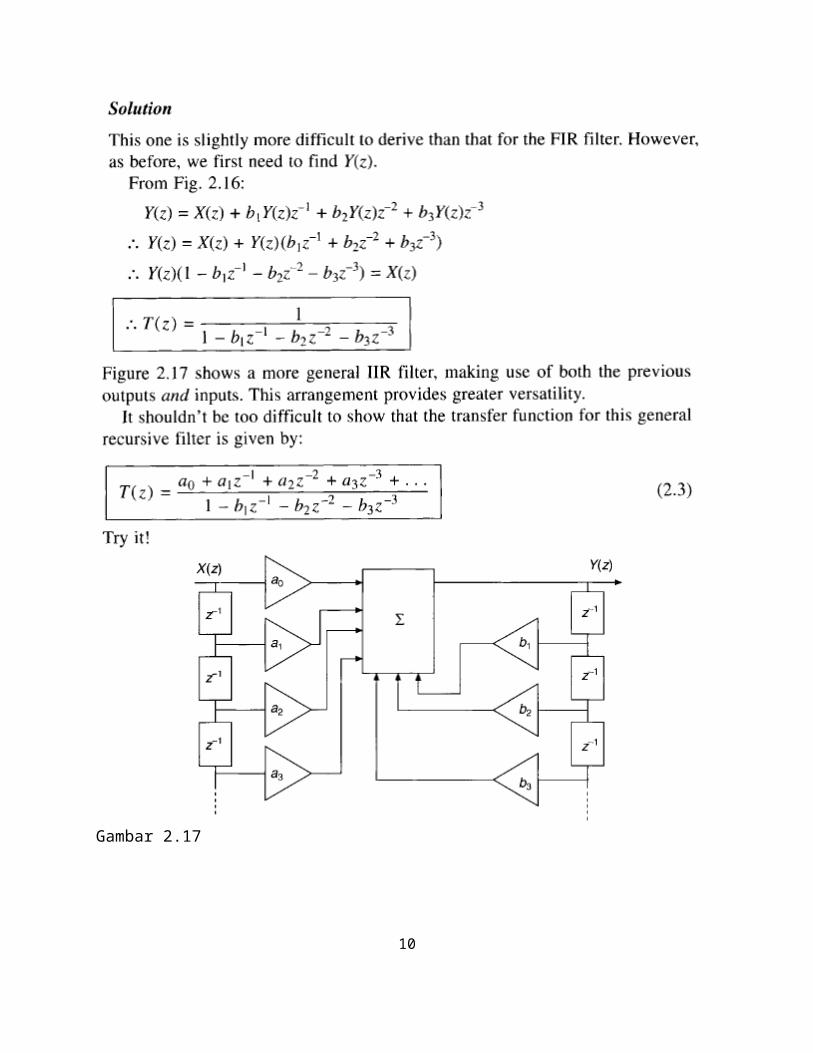
Gambar 2.17
8
9
Gambar 2.18
10

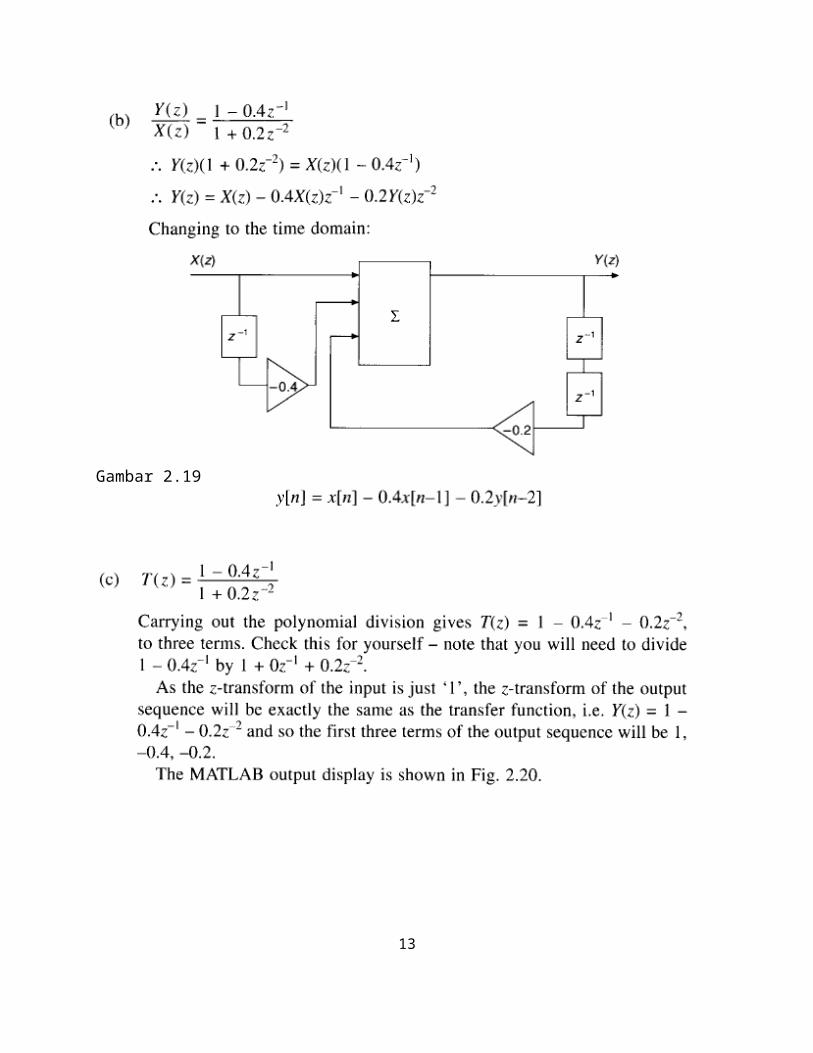
Gambar 2.19
11

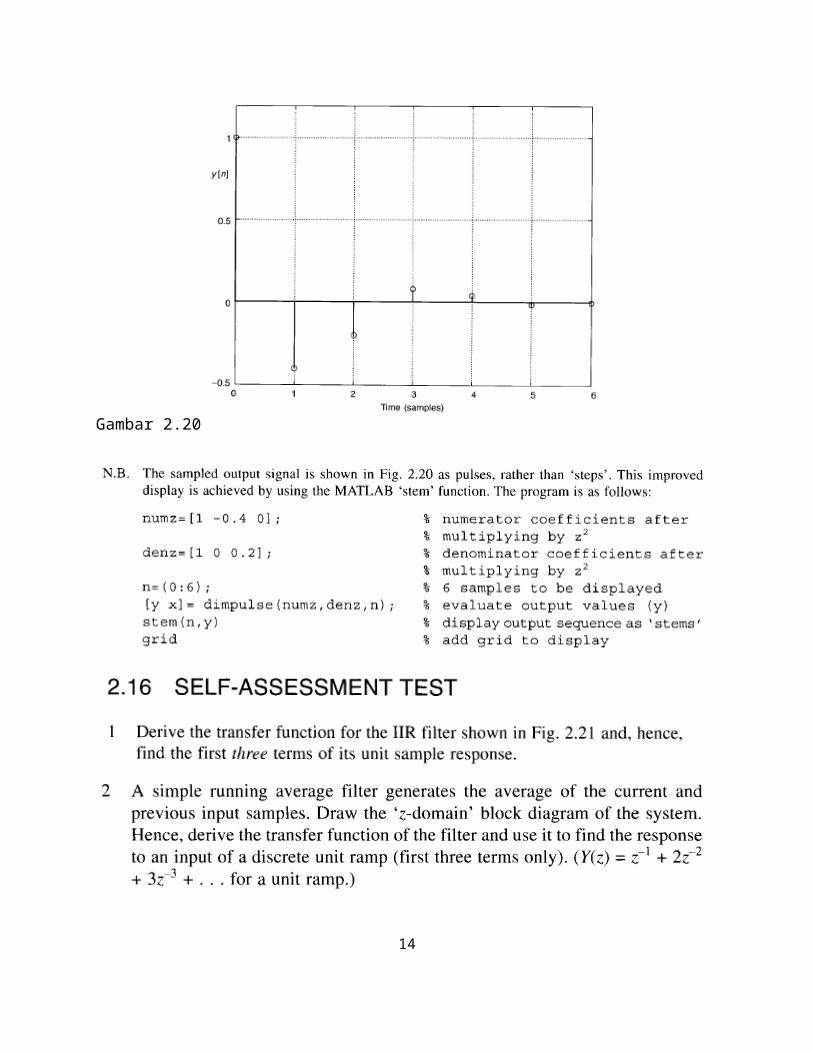
Gambar 2.20
12
13
14