IP

If you can't read please download the document
-
Upload
nita-apriliyani -
Category
Documents
-
view
58 -
download
5
Transcript of IP
BAB I
1.1 Tujuan Percobaan 1. Menghitung persamaan kurva kalibrasi dengan regresi linier dari seluruh data pembacaan naik dan turun. 2. Menghitung ketelitian (presisi) an ketepatan (akurasi) instrumen ukur dalam persen skala penuh. 3. Menghitung nilai sesungguhnya jika pengukuran dilakukan dengan mendapatkan pembacaan selain dari pembacaan saat kalibrasi, lengkap dengan nilai akurasinya. 4. Menghitung nilai hysteresis.
1.2 Landasan Teori Mengkalibrasi suatu unit instumen, pada hakekatnya adalah memberikan simulasi input (yang akurat) dan melakukan penyetelan agar output sesuai dengan yang dikehendaki. Jadi, syarat utama melakukan aktivasi kalibrasi adalah membuat simulasi input secara akurat. Itulah sebabnya ketelitian meter meter kalibrasi dituntut jauh lebih tinggi dari meter meter operasi. Sebagai contoh, terdapat sebuah pressure transmitter pneumatik dengan range 50 100 psig. Output transmitter ini akan dikalibrasi 3 15 psig. Kalibrasi itu aka dilakukan melalui tahapan langkah lagkah berikut : 1. Kalibrasi selalu dimulai dari titik zero. Zero transmitter ini adalah 50 psig. Pada input 50 psig, output harus 3 psig. Bila output ternyata tidak 3 psig, bagian zero adjusiment harus disetel agar didapatkan output 3 psig. 2. Titik maksimum kemudian disimulasi dengan memberikan tekanan sebesar 100 psig. Bila output tidak 15 psig, bagian span adjustment harus disetel agar didapatkan output 15 psig. 3. Pada beberapa transmitter, penyetelan span akan berpengaruh pada penyetelan zero, atau sebaliknya penyetelan zero akan berpengaruh pada penyetelan span. Bilamana hal itu terjadi, dikatakan bahwa hal iitu terjadi interaksi (interaction) antara zero dan span. Kalau demikian halnya, ulanglah langkah 1 dan 2 sampai didapatkan output zero dan span yang tepat.
4. Setelah kalibrasi zero dan span didapat, perlu dilakukan pengujian linearitas. Hal itu dilakukan dengan memberikan input 25%, 50%, dan 75%. Bila penyimpangan linearitas masih dalam batas batas toleransi, kalibrasi transmitter sudah dianggap selesai. Namun, bila penyimpangan terlalu besar, perlu diadakan penyetelan linearitas. 5. Repotnya, tidak semua instrumen mempunyai fasilitas penyetelan linearitas. Kalau fasilitas penyetelan lonearitas tersedia, penyetelan dapat dilakuka dengan menyetel bagian linearitas seperti yang selalu diterangka di dalam instruction manual instrument. Akan tetapi, kalau penyetelan linearitas tidak tersedia, kalibrasi perlu dicuri dengan sedikit menggeser tiitk zero dan span agar titik yang lain, 25%, 50%, dan 75% juga masuk ke batas batas toleransi linearitas.
Istilah kalibrasi di dalam bahsa Indonesia seringkali juga diterjemahkan menjadi tera. Dalam bentuk kata kerja, akar kata itu kemudian menjadi menera. Dalam bentuk kata benda kemudian menjadi peneraan. Kalau dikaji lebih jauh, kata tera itu di dalam bahasa Indonesia mempunyai arti yang lebih spesifik dari sekedar kata kalibrasi. Penggunaan kata tera selalu dikaitkan dengan kalibrasi meter meter penjualan (sales meter).
Sebelum peralatan ukur digunakan, kalibrasi perlu dilakukan sesuai dengan kebutuhan. Kalibrasi biasanya dilakukan untuk sensor tekanan / pengkondisi sinyal (signal conditicining) adalah : Tekanan minimum Tekanan maksimum = 0 psig = 8 psig = 0,000 volt = 4 mA = 1,000 volt = 20 mA
Pada sistem perpipaan apabila aliran udara ditutup atau tidak ada udara yang mengalir dalam pipa, maka tekanana udara di dalam sistem tersebut sama dengan tekanan atmosfer. Sehingga tekanan minimum di dalam sistem sebesar 0 psig adalah tekanan atmosfer yang tidak terdapat aliran udara dalam pipa. Namun sensor tekanan dapat dikalibrasi pada rentang yang berbeda apabila dikehendaki, yang disesuaikan dengan rentang operasi dan diperlukan dasar/ satuan untuk pemakaian khusus. Pada umumnya sensor tekanan mempunyai keluaran yang dapat mengubah linearitas bila ada perubahan tekanan dan suatu histeeris. Kalibrasi yang akan dilakukan untuk I/P converter sesuai dengan katup pengendali pneumatik dengan karakteristik sebagai berikut :
4 mA ke convertor
= 3 psig dai converter di P2. Katup pengendali pneumatik terbuka penuh.
20 mA ke coverter
= 15 psig dari converter di P2. Katup pengendali pneumatik tertutup penuh.
Katup penegendali pneumatik dirancang dapat terbuka dengan sedikit udara walau pembaacaan di P2 = 15 psig. Pada percobaan ini dilakukan penempatanpengaturan kondisi katup penegendali pneumatik denga cara mengoperasikan secara manual terhadap keluaran daya di pengendali proses. Proporsional band diatur ke titik selain nol. Misalnya atur [prop] pad 20% (bisa pula pada angka yang lain).
Pada kalibrasi sensor tekanan diferensial/pengkondisi sinyal (signal conditioining), sensor dibawa ke kondisi minimum dan maksimum shingga diperoleh : Aliran minimum Aliran maksimum = 0,000 volt dari keluaran pengatur = 1,000 volt dari keluaran pengatur
Karena PCT 14 tidak dilengkapi dengan flowmeter, maka sulit untuk meneliti hubungan antara laju alir yang nyata dan keluaran dari sensor/pengatur. Namun, sensor dan pengatur dapat dikalibrasi ke kondisi aliran maksimun dan minimum. Disni sensor tekanan diferensial dihubungkan ke suatu lobang dibagian hulu dan hilir ari piringan orifice yang sebanding dengan kuadrat dari aliran. Panda percobaan ini, pengendali proses akan dioperasikan secara manual untuk dapat menggerakkan katuk pengendali pneumatik melalui I/P converter, juga untuk memantau tekanan dalam pipa proses. Pengendali proses perlu dikalibrasi dengan [prop] diluar harga nol, misalnya atur [prop] pada pengendali prose 20%. Kalibrasi penegendali : Span span 100% dimasukkan 20 mA Zero zero 0% dimasukkan 4 mA
Ketelitian (presisi) adalah tingkat keterulangan pengukuran pada kondisi dan rentang waktu tertentu. Dengan kata lain, ketelitian menunjukkan seberapa konsisten hasil pengukuran mempunyai pembacaan yang sama. Ketelitian dinyatakan dengan nilai ketidaktelitian pengukuran. Ketelitian instrmen ukur = 0,1 0C. Artinya nilai ketidaktelitian instrumen ukur adalah 0,10
C diatas atau dibawah nilai pengukuran.
Penentuan ketelitian dilakukan dengan mengulan beberapa kali pengukuran! Dari beberapa kali pengukuran variabel terikat atau nilai pengukuran (y) dari satu nilai variabel bebas atau nilai sebenarnya (x) diperoleh ketelitian sebagai berikut. Ketelitian = Sy / y Dimana Sy = standar deviasi dari suatu rangkaian pengukuran skala naik atau skala turun, y = rata rata pembacaan Ketepatan (akurasi) adalah tingkat kedekatan nilai terukur dengan nilai standar. Dengan kata lain, akurasi menunjukkan seberapa dekat hasil pengukuran dengan nilai sebenarnya. Ketepatan dinyatakan dengan nilai ketidaktepatan atau ketidakpastian pengukuran. Penentuan ketepatan memerlukan instrumen standar ! Ketetapan instrumen ukur = 0,1 0C. Artinya nilai ketidaktepatan instrumen ukur adalah 0,1 0C diatas atau dibawah nilai sebenanrnya. Hysteresis adalah penyimpangan terbesar yang terjadi antara pengukuran naik dan turun.
BAB II 2.1 Alat dan Bahan Yang Digunakan a. PCT 10 electrical consol b. trim tool c. PCT- 14 aksesori pengendali tekanan d. Kabel penghubung e. Modul pengendali tekaana f. Udara tekan minimal 2 bar gauge
2.2 Prosedur kerja Kalibrasi I/P converter
1. buat rangkaian alat seperti gambar 2
2. hubungkan I/P converter ke keluaran pengendalian proses
3. hubungkan modul pengatur tekanan ke salah satu pengkondisian sinyal pada PCT-10
4. hubungkan keluaran pengkondisian sinyal ke masukan pengendalian proses
5. hubungkan catu tekananudara ke lubang pipa masukan
6. tutup katup V2,V3,V4,V5,V6 dan buka katup V1
7. atur katup V1 sehingga pembacaan d P1 18 psig
8. atur pengendali proses pda operasi secara manual dan [prop] = 20%
9. lepaskan tutup plastik yang membungkis pengatur 'zero' dan span pada I/P converter disini 'span' pada I/P converter disebut range
10. atur keluaran daya [Pr] dari pengendalian proses pada 0% (=4mV0
11. atur 'zero' pada I/P converter sehingga pebacaan di P2 = 15 Psig
12. ulagi pengaturan 'zero' dan ' span' berulang kali sehingga diperoleh hasil yang stabil. pasang kembali tutup plastik pada pengatur 'zero' dan 'span'
13. untuk pemerikasaan terhadap posisi katup pengendali maka:
a. buka katup V2 dan V4
b. dengan mengatur [Pr] = 0% atur katup V2 sehingga pembacaan di P4 = 0,8 Psig. atur 'spa' pada modul pengkondisian sinyal sehingga pembacaaan pada voltmeter menunjukan 1,000 volt
c. dengan mengatur [Pr] = 100% atur katup V2 sehingga di P4 = 0 psig. atur 'zero' pada modl pengkondisian sinyal sehingga pembacaan pada vltmeter menunjukan angka 0,000 volt
d. atur [Pr] = 40% dan 60% amati perubahan posisi katup pengendali pneumatik dan tekanan di alat pengukur P4
14. buka katup V2 dengan mengatur [Pr] = 0%. leuaran dari I/P converter di P2=3psig
15. atr [Pr] secara bertahap dari 0% sampai 100% dengan kenaikan 10% setiap tahap. catat tekanan yang berasal dari I/P converter pada P4, serta tegangan yang dihasilkan untuk masing-masing tahap.
16. atur [Pr] secara bertahap dari 100% sampa 0% sengan penurunan 10% setiap tahap. catat tekanan yang berasal dari I/P converter pada P2, tekanan pada P4, serta tegangan yang dihasilkan untuk masing-masing tahap.
17. ulangi langkah 15 sebanyak 3 kali pembacaan
BAB III 3.1 Data Pengamatan Tabel kalibrasi I/P Converter (pengukuran naik) Tegangan (volt) Pr (%) 1 0 10 20 30 40 50 60 70 80 90 100 0,988 0,993 0,991 0,977 0,923 0,240 0,024 0,021 0,019 0,019 0,019 2 0,987 0,986 0,986 0,972 0,935 0,272 0,040 0,024 0,021 0,020 0,019 3 0,983 0,984 0,984 0,971 0,924 0,405 0,035 0,025 0,023 0,020 0,020 1 8 8 7,9 7,9 7,9 5,1 1 0 0 0 0 2 8 8 8 8 7,8 2,5 1 0 0 0 0 3 8 8 8 8 7,5 3,5 0 0 0 0 0 Tekanan (psi)
Tabel kalibrasi I/P Converter (pengukuran turun) Tegangan (volt) Pr (%) 1 100 90 80 70 60 50 0,019 0,019 0,019 0,019 0,019 0,019 2 0,019 0,019 0,019 0,019 0,019 0,019 3 0,020 0,020 0,020 0,019 0,019 0,019 1 0 0 0 0 0 0 2 0 0 0 0 0 0 3 0 0 0 0 0 0 Tekanan (psi)
40 30 20 10 0
0,910 0,973 0,986 0,986 0,987
0,905 0,969 0,983 0,983 0,983
0,910 0,966 0,980 0,981 0,981
7 7,9 8 8 8
7,3 8 8 8 8
7 8 8 8 8
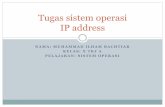
Pengukuran 1
pengukuran 18 7 6 tekanan 5 4 3 2 1 0 0 0.2 0.4 tegangan 0.6 0.8 1 Series1 Linear (Series1) y = 8.0149x + 0.1449 R = 0.9659
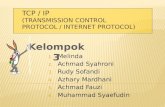
Pengukuran 2
pengukuran 28 7 6 Tekanan (psi) 5 4 3 2 1 0 0 0.2 0.4 0.6 0.8 1 tegangan (V) Series1 Linear (Series1) y = 8.2429x - 0.0668 R = 0.9975
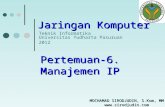
Pengukuran 3
pengukuran 39 8 7 6 tekana (psi) 5 4 3 2 1 0 -1 0 0.2 0.4 0.6 0.8 tegangan (volt) 1 1.2 Series1 Linear (Series1) y = 8.3109x - 0.1671 R = 0.9991
Persamaan Linear Pengukuran Pertama y = 8,014x + 0,144 R = 0,9659 Pengukuran Kedua y = 8,242x - 0,066 R = 0,997 Pengukuran Ketiga y = 8,310x - 0,167 R = 0,999
3.2 Perhitungan Rata rata, Standar Deviasi, presisi, Rata rata : Pada Pr% = 0 tegangan pada pengukuran naik
Standar Deviasi Pada Pr% = 0 tegangan pada pengukuran naik dengan perhitungan kalkulator Sy = 2,645.103 Presisi Pada Pr% = 0 tegangan pada pengukuran naik Ketelitian = = = 2,683 x 10-3 1) Y = mx+n
= 0,98
2)
Y = mx+n
= 0,98 3) Y = mx+n
= 0,98
3.3 KESIMPULAN PENGUKURAN NAIK Tegangan (volt) Pr (%) 1 0 10 20 30 40 50 60 0,988 0,993 0,991 0,977 0,923 0,24 0,024 2 0,987 0,986 0,986 0,972 0,935 0,272 0,04 3 0,983 0,984 0,984 0,971 0,924 0,405 0,035 0,986 0,987 0,987 0,973 0,927 0,305 0,033 Rata-rata Standar Deviasi 2,645 x 10-3 4,726 x 10-3 3,606 x 10-3 3,215 x 10-3 6,658 x 10-3 8,750 x 10-2 8,185 x 10-3 Presisi 2,683 x 10-3 4,788 x 10-3 3,653 x 10-3 3,304 x 10-3 7,182 x 10-3 2,689 x 10-1 2,480 x 10-1
70 80 90 100
0,021 0,019 0,019 0,019
0,024 0,021 0,02 0,019
0,025 0,023 0,02 0,02
0,023 0,021 0,019 0,019
2,082 x 10-3 2 x 10-3 5,774 x 10-4 5,774 x 10-4
9,052 x 10-2 9,524 x 10-2 3,039 x 10-2 3,039 x 10-2
PENGUKURAN TURUN Tegangan (volt) Pr (%) 1 0 10 20 30 40 50 60 70 80 90 100 0,019 0,019 0,019 0,019 0,019 0,019 0,91 0,973 0,986 0,986 0,987 2 0,019 0,019 0,019 0,019 0,019 0,019 0,905 0,969 0,983 0,983 0,983 3 0,02 0,02 0,02 0,019 0,019 0,019 0,91 0,966 0,98 0,981 0,981 0,019 0,019 0,019 0,019 0,019 0,019 0,908 0,969 0,983 0,983 0,984 5,774 x 10-4 5,774 x 10-4 5,774 x 10-4 0 0 0 2,887 x 10-3 3,512 x 10-3 3 x 10-3 2,517 x 10-3 3,055 x 10-3 3,039 x 10-2 3,039 x 10-2 3,039 x 10-2 0 0 0 3,179 x 10-3 3,624 x 10-3 3,052 x 10-3 2,561 x 10-3 3,105 x 10-3 Rata-rata Standar Deviasi Presisi
PENGUKURAN NAIK Tekanan (Psi) Pr (%) 1 0 10 20 30 8 8 7,9 7,9 2 8 8 8 8 3 8 8 8 8 8 8 7,967 7,967 Rata-rata Standar Deviasi 0 0 0,058 0,058 Presisi 0 0 7,280 x 10-3 7,280 x 10-3
40 50 60 70 80 90 100
7,9 5,1 1 0 0 0 0
7,8 2,5 1 0 0 0 0
7,5 3,5 0 0 0 0 0
7,733 3,7 0,667 0 0 0 0
0,208 1,312 0,577 0 0 0 0
2,689 x 10-2 3,546 x 10-1 8,651 x 10-1 0 0 0 0
PENGUKURAN TURUN Tekanan (Psi) Pr (%) 1 0 10 20 30 40 50 60 70 80 90 100 0 0 0 0 0 0 7 7,9 8 8 8 2 0 0 0 0 0 0 7,3 8 8 8 8 3 0 0 0 0 0 0 7 8 8 8 8 0 0 0 0 0 0 7,1 7,967 8 8 8 Rata-rata Standar Deviasi 0 0 0 0 0 0 0,173 0,058 0 0 0 Presisi 0 0 0 0 0 0 2,437 x 10-2 7,280 x 10-3 0 0 0
Pr (%) 0 10
Pengukuran naik Tegangan (Volt) 1 2 3
Pengukuran turun Tegangan (volt) 1 2 3
Histeresis 0,969 0,974
0,988 0,993
0,987 0,986
0,983 0,984
0,019 0,019
0,019 0,019
0,02 0,02
20 30 40 80 90 100 50 60 70
0,991 0,977 0,923 0,24 0,024 0,021 0,019 0,019 0,019
0,986 0,972 0,935 0,272 0,04 0,024 0,021 0,02 0,019
0,984 0,971 0,924 0,405 0,035 0,025 0,023 0,02 0,02
0,019 0,019 0,019 0,019 0,91 0,973 0,986 0,986 0,987
0,019 0,019 0,019 0,019 0,905 0,969 0,983 0,983 0,983
0,02 0,019 0,019 0,019 0,91 0,966 0,98 0,981 0,981
0,972 0,958 0,916 0,386 0,886 0,952 0,967 0,967 0,968
Pengukuran naik
Pengukuran turun
Pr (%)1
Tekanan (Psi)2 3 1
Tekanan (Psi)2 3
Histeresis
0 10 20 30 40 50 60 70 80 90
8 8 7,9 7,9 7,9 5,1 1 0 0 0
8 8 8 8 7,8 2,5 1 0 0 0
8 8 8 8 7,5 3,5 0 0 0 0
0 0 0 0 0 0 7 7,9 8 8
0 0 0 0 0 0 7,3 8 8 8
0 0 0 0 0 0 7 8 8 8
8 8 8 8 7,9 5,1 7 8 8 8
100
0
0
0
8
8
8
8
Grafik menunjukan nilai kelinieran mendekati satu artinya percobaan telah benar dilakukan Kesalahan dalam ketelitian salah satunya disebabkan karena alat yang sudah tua dan penunjuk tekanan hampir rusak tetapimasih dapat digunakan Hubungan antara tekanan dan tegangan adalah berbanding lurus dengan persamaan y Hubungan antara Pr dan tegangan adalah berbanding terbalik Hubungan antara Pr dan Tekanan adalah berbanding terbalik