BAB 2 LANDASAN TEORIrepository.usu.ac.id/bitstream/123456789/26700/3/Chapter... · 2012-12-20 ·...
15
BAB 2 LANDASAN TEORI Pada bab ini akan dijelaskan mengenai teori – teori yang berhubungan dengan pembahasan ini sehingga dapat dijadikan sebagai landasan berpikir dan akan mempermudah dalam hal pembahasan hasil utama pada bab berikutnya. Adapun teori – teori tersebut mencakup pengertian dari pemrograman nonlinear, fungsi konveks, metode Lagrange, metode Newton, metode Wolfe, kondisi Kuhn-Tucker, pemrograman kuadratis, dan metode Sequential Quadratic Programming. 2.1 Pemrograman Nonlinear Menurut Bradley dkk (1976), persoalan umum optimisasi adalah memilih n variabel keputusan dari daerah fisibel yang diberikan untuk mengoptimasi (maksimum atau minimum) fungsi tujuan yang diberikan dari variabel keputusan. Persoalan ini disebut persoalan pemrograman nonlinear jika fungsi tujuannya nonlinear dan atau daerah fisibelnya ditentukan oleh kendala nonlinear. Jadi bentuk minimisasi persoalan pemrograman nonlinear ditulis sebagai: subject to: dimana masing-masing fungsi kendala sampai diberikan. Batasan nonnegatif pada variabel dapat dengan menambahkan kendala tambahan: Universitas Sumatera Utara
Transcript of BAB 2 LANDASAN TEORIrepository.usu.ac.id/bitstream/123456789/26700/3/Chapter... · 2012-12-20 ·...

BAB 2
LANDASAN TEORI
Pada bab ini akan dijelaskan mengenai teori – teori yang berhubungan dengan
pembahasan ini sehingga dapat dijadikan sebagai landasan berpikir dan akan
mempermudah dalam hal pembahasan hasil utama pada bab berikutnya. Adapun teori
– teori tersebut mencakup pengertian dari pemrograman nonlinear, fungsi konveks,
metode Lagrange, metode Newton, metode Wolfe, kondisi Kuhn-Tucker,
pemrograman kuadratis, dan metode Sequential Quadratic Programming.
2.1 Pemrograman Nonlinear
Menurut Bradley dkk (1976), persoalan umum optimisasi adalah memilih n variabel
keputusan dari daerah fisibel yang diberikan untuk mengoptimasi
(maksimum atau minimum) fungsi tujuan yang diberikan
dari variabel keputusan. Persoalan ini disebut persoalan pemrograman nonlinear jika
fungsi tujuannya nonlinear dan atau daerah fisibelnya ditentukan oleh kendala
nonlinear. Jadi bentuk minimisasi persoalan pemrograman nonlinear ditulis sebagai:
subject to:
dimana masing-masing fungsi kendala sampai diberikan. Batasan nonnegatif
pada variabel dapat dengan menambahkan kendala tambahan:
Universitas Sumatera Utara

Masalah optimisasi di atas dapat ditulis dalam bentuk yang lebih sederhana sebagai
berikut:
subject to:
Untuk kendala persamaan dapat ditulis sebagai dua kendala pertidaksamaan
dan . Sebagai tambahan, jika menambahkan variabel slack,
masing-masing kendala pertidaksamaan ditransformasi ke kendala persamaan.
Fokus utama dari pemrograman nonlinear adalah terkait dengan eksistensi dari
solusi optimal, karakterisasi dari solusi optimal dan algoritma untuk menghitung
solusi optimal. Masalah pemrograman nonlinear mempunyai 2 jenis persoalan yaitu
masalah nonlinear berkendala dan nonlinear tidak berkendala. Untuk persoalan
nonlinear tidak berkendala dapat dipecahkan dengan metode Newton sedangkan untuk
persoalan nonlinear berkendala dapat dipecahkan dengan metode Penalty dan Barrier,
Sequential Quadratic Programming (SQP), ataupun Primal-Dual Interior Point
(PDIP). Metode Penalty dan Barrier merupakan cara tidak langsung karena prosedur
metodenya yaitu mendekati persoalan optimisasi berkendala dengan persoalan yang
tidak berkendala. Contoh metode yang menerapkan cara langsung yaitu SQP dan
PDIP. (Bertsekas, 2007).
2.2 Optimum Global dan Lokal
Sebuah fungsi tujuan f(x) memiliki sebuah minimum lokal di jika terdapat sebuah
selang (yang kecil) yang berpusat di sedemikian rupa sehingga
untuk semua x dalam selang ini pada mana fungsi ini dedefinisikan. Jika
untuk semua x pada mana fungsi ini didefinisikan, maka minimum di (di
samping adalah lokal) adalah suatu minimum global. Maksimum lokal dan global
didefinisikan dengan cara yang sama tetapi dengan tanda ketidaksamaan yang terbalik
(Bronson, 1996).
Universitas Sumatera Utara

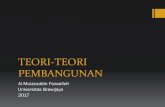
Gambar 1.1 Maksimum-minimum lokal dan global
Fungsi yang digambarkan di atas secara grafik hanya didefiniskan pada [a,b]. Fungsi
ini memiliki minimum lokal di ; maksimum lokal di ; minimum global
di dan maksimum global di dan b.
Definisi 2.1:
Jika adalah solusi fisibel untuk persoalan maksimisasi dengan
fungsi tujuan f(x). Kita menyebut x:
1. Sebuah global maksimum jika untuk setiap titik fisibel
2. Sebuah lokal maksimum jika untuk setiap titik fisibel
cukup dekat dengan x yaitu jika ada sebuah bilangan
(sangat kecil) sehingga kapanpun masing-masing variabel dalam dari
yaitu, dan y fisibel maka .
Minimum lokal dan global analog dengan definisi di atas. Untuk beberapa
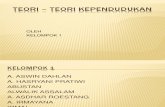
keadaan, maksimum dan minimum lokal disebut global. Gambar 1.2(a) di bawah
minimum lokal merupakan global. Fungsi ini disebut konveks. Gambar 1.2(b) di
bawah maksimum lokal merupakan maksimum global. Fungsi ini disebut konkaf.
Karena alasan ini fungsi konveks selalu diminimumkan sedangkan fungsi konkaf
selalu dimaksimumkan (Bradley dkk, 1976).
Universitas Sumatera Utara

Gambar 1.2 Fungsi konveks dan konkaf
2.3 Fungsi Konveks dan Konkaf
Menurut Luenberger (1984), fungsi konveks adalah dimana untuk setiap dua titik y
dan z, dapat ditarik garis yang menghubungkan f(y) dan f(z) pada fungsi tersebut.
Secara aljabar definisinya sebagai berikut:
Definisi 2.2:
Misalkan . Titik-titik dengan bentuk untuk disebut
konveks kombinasi dari y dan z.
Definisi 2.3:
Sebuah himpunan disebut himpunan konveks jika untuk setiap dan
maka berlaku .
Definisi 2.4:
Sebuah fungsi f(x) disebut konveks jika untuk setiap y dan z dan setiap
Disebut strictly konveks jika untuk setiap dua titik berbeda y dan z dan setiap
Definisi 2.5:
Sebuah fungsi f(x) disebut konkaf jika untuk setiap y dan z dan setiap
Universitas Sumatera Utara

Disebut strictly konkaf jika untuk setiap dua titik berbeda y dan z dan setiap
Mengalikan fungsi konveks dengan -1 akan menghasilkan fungsi konkaf.
Menjumlahkan beberapa fungsi konveks akan menghasilkan fungsi konveks juga.
Begitu juga dengan mengalikan dengan pengali nonnegatif akan menghasilkan fungsi
konveks.
Teorema 2.1:
Perhatikan masalah optimisasi (CP) berikut
Jika S adalah himpunan konveks, adalah fungsi konveks dan adalah titik
minimum lokal untuk masalah (CP) maka adalah titik minimum global dari
pada himpunan S.
Bukti:
Misalkan bukan titik minimum global, maka terdapat yang memenuhi
. Sebut yang merupakan kombinasi konveks dari
dan y, untuk . Hal ini mengakibatkan , untuk .
Karena adalah fungsi konveks maka berlaku
Untuk setiap . Hal ini kontradiksi dengan asumsi bahwa adalah minimum
lokal. Dengan demikian haruslah merupakan titik minimum global.
Teorema 2.2:
Misalkan S adalah himpunan buka yang konveks dan adalah fungsi yang
diferensiabel. Maka adalah fungsi konveks jika dan hanya jika memenuhi
kondisi gradient berikut:
Bukti :
Misalkan merupakan fungsi konveks. Maka untuk sebarang . Berlaku
Universitas Sumatera Utara

Yang mengakibatkan
Selanjutnya ambil maka diperoleh
Ambil sembarang dan . Set maka diperoleh
dan
Ambil kombinasi konveks dari dua persamaan ini maka diperoleh
,
Ini menunjukkan bahwa f adalah fungsi konveks.
Teorema 2.3:
Misalkan S adalah himpunan buka yang konveks dan dapat diturunkan dua
kali. Misal H(x) adalah Hessian dari f. Jika f(x) konveks maka H(x) adalah positif
semidefit untuk semua
Bukti:
() Perhatikan jika H(z) positif semidefinit untuk semua , maka untuk setiap
, deret Taylor orde dua memberikan
Untuk suatu z yang merupakan kombinasi linear dari (dengan demikian jelas
bahwa ). Karena H(z) positif semidefinit maka
Dengan demikian pertidaksamaan gradien terpenuhi dan mengakibatkan f(x)
merupakan fungsi konveks.
() Jika f(x) konveks dengan dan d sebarang arah. Maka untuk yang
cukup kecil, . Dalam hal ini berlaku
dimana
Universitas Sumatera Utara

dengan menggunakan pertidaksamaan gradien maka diperoleh
Bagi pertidaksamaan ini dengan dan ambil , maka diperoleh
Maka H(x) adalah positif semidefinit untuk setiap .
Teorema 2.4:
Misalkan konveks dan dapat diturunkan di X. Jika minimum global
maka
Bukti:
Karena adalah minimum global maka x adalah minimum lokal, dengan demikian
jelas bahwa . Sebaliknya jika , maka berlaku
Maka jelas bahwa adalah titik minimum global.
2.4 Metode Newton
Persoalan nonlinear tidak berkendala mempunyai bentuk umum:
dimana dan X adalah himpunan terbuka. Jika maka x
dikatakan solusi fisibel. Jika dan meminimumkan maka x dikatakan solusi
optimal.
Perhatikan bahwa semua titik minimum lokal dari suatu fungsi yang
diferensiabel dan kontinu f memenuhi syarat perlu
Persamaan ini merepresentasikan sebuah himpunan dari n buah persamaan nonlinear
yang harus diselesaikan sehingga diperoleh .
Universitas Sumatera Utara

Salah satu pendekatan untuk masalah minimisasi f(x) adalah mencari solusi
untuk himpunan untuk persamaan dengan memasukkan suatu cara untuk
menjamin bahwa solusi yang diperoleh tentunya merupakan sebuah minimum lokal.
Metode tertua untuk menyelesaikan suatu himpunan persamaan nonlinear adalah
metode Newton.
Perhatikan masalah optimisasi tanpa kendala berikut
Pada titik , f(x) dapat dihampiri dengan
dimana hampiran ini dikenal sebagai ekspansi Taylor Kuadratik pada , dimana
dan H(x) adalah vektor gradien dan Hessian dari fungsi f.
Perhatikan bahwa h(x) adalah sebuah fungsi yang kuadratik yang dapat
diminimisasi dengan menyelesaikan . Karena gradient dari h(x) adalah
Maka untuk memperoleh solusi cukup diselesaikan
Sehingga diperoleh
Perhatikan bahwa arah disebut sebagai arah Newton di
Algoritma metode Newton:
Step 1 : Diberikan x0, set k=0
Step 2 : Set . Jika maka STOP
Step 3 : Set step size
Step 4 : Set . Kembali ke step 1
Jika f(x) merupakan fungsi nonkuadratik, metode Newton dapat memberikan
solusi yang divergen dan mungkin saja konvergen menuju titik saddle dan titik
maksimum yang relatif. Bila hal tersebut terjadi maka metode Newton dapat
diimprovisasi dengan mengubah formulasi untuk titik baru
Universitas Sumatera Utara

dimana adalah panjangnya langkah tahapan yang minimum pada arah
.
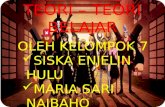
Jika kemiringan berubah-ubah pada setiap iterasi sehingga
Gambar 1.3 Metode Newton
maka prosedur turunan kedua bisa didapatkan. Dari persamaan di atas kita
mendapatkan
Sehingga
Jadi, hasil prosedur iterasi sekarang adalah
dengan dan ada, karena
2.5 Kekonvergenan
Kekonvergenan untuk barisan bilangan riil (Dennis dan Schnabel, 1983):
Diberikan sebuah metode iterasi sehingga menghasilkan barisan titik dari
sebuah titik awal , ingin diketahui apakah iterasi konvergen ke solusi . Jika
diasumsikan bahwa menyatakan barisan bilangan riil , maka
definisi berikut menyatakan sifat yang dibutuhkan.
Universitas Sumatera Utara

Definisi 2.6
Jika maka barisan dikatakan
konvergen ke jika
Jika dalam tambahan, ada sebuah konstanta dan sebuah bilangan bulat
sehingga untuk setiap
Teorema Weierstrass untuk barisan
Misalkan adalah barisan tak terbatas (infinit) dari titik-titik dari suatu
himpunan compact F (yaitu himpunan yang tertutup dan terbatas). Maka sebagian
subbarisan infinit dati titik-titik konvergen ke suatu titik di F.
Teorema Weierstrass untuk fungsi
Misalkan f(x) adalah fungsi bernilai riil dan kontinu pada suatu himpunan compact
yang tidak kosong . Maka F memuat suatu titik yang dapat meminimumkan
(atau memaksimumkan) f(x) pada himpunan F.
2.6 Metode Pengali Lagrange
Persamaan Lagrange dari persoalan nonlinear seperti yang telah dipaparkan pada
bagian 2.1 yaitu sebagai berikut:
dimana adalah tetapan-tetapan (yang tidak diketahui) yang disebut
pengali Lagrange. Kemudian kita pecahkan sistem n+m persamaan
(Bronson, 1996)
Universitas Sumatera Utara

2.7 Kondisi Karush-Kuhn Tucker
Tabel 1.1 Kondisi Perlu dan Cukup untuk Optimalitas
Persoalan Kondisi perlu untuk
optimalitas
Juga cukup jika
Satu variabel tidak
berkendala
f(x) konkaf
Banyak variabel tidak
berkendala
f(x) konkaf
Berkendala, hanya kendala
nonnegatif
(atau jika )
f(x) konkaf
Persoalan umum
berkendala
Kondisi Karush-Kuhn
Tucker
f(x) konkaf dan
konveks
(i=1,2,…,m)
Dari tabel di atas terlihat bahwa untuk kondisi persoalan umum disebut kondisi
Karush-Kuhn Tucker (Hillier dan Lieberman,2005). Kondisi perlu dan cukup untuk
sebagai solusi optimal untuk persoalan nonlinear berikut
(Wallace,2004) :
subject to:
Untuk menggunakan hasil, semua kendala persoalan nonlinear harus kendala
. Kendala dalam bentuk harus ditulis sebagai
. Kendala dalam bentuk harus diganti
dengan dan (Winston dan
Venkataramanan, 2003). Teorema di bawah ini memberikan kondisi Kuhn-Tucker
yang cukup bagi titik untuk memecahkan persoalan nonlinear di
atas.
Universitas Sumatera Utara

Teorema 2.6:
Andaikan persoalan nonlinear di atas adalah persoalan maksimisasi. Jika
adalah solusi optimal dari persoalan tersebut, maka
harus memenuhi m kendala dan harus ada pengali
yang memenuhi
Teorema 2.7:
Andaikan persoalan nonlinear di atas adalah persoalan minimisasi. Jika
adalah solusi optimal dari persoalan tersebut, maka
harus memenuhi m kendala dan harus ada pengali
yang memenuhi
Skalar disebut pengali Lagrange. Kondisi
disebut kondisi complementary slackness yang menyatakan dua kemungkinan yaitu:
1. Jika maka
Jika maka kendala
2.8 Pemrograman Kuadratis
Menurut Rao (1977), pemrograman kuadratis merupakan persoalan optimasi nonlinear
dimana fungsi tujuannya adalah fungsi minimisasi yang konveks dan semua
Universitas Sumatera Utara

kendalanya berbentuk persamaan atau pertidaksamaan linear. Bentuk umum persoalan
pemrograman kuadaratis adalah sebagai berikut:
Min.
s.t
dimana
11 12 1
21 22 2
1 2
n
n
n n nn
d d d
d d d
d d d
A =
11 12 1
21 22 2
1 2
n
n
m m mn
a a a
a a a
a a a
Pada fungsi tujuan di atas yaitu suku
menyatakan bagian kuadratis dari fungsi
tujuan dengan D adalah matriks definit positif simetri. Jika D=0 maka menjadi
persoalan linear. Karena D adalah matriks definit positif maka f(x) adalah fungsi
strictly convex.
Metode untuk menyelesaikan persoalan pemrograman kuadratis yaitu metode
Wolfe. Pertama, semua fungsi tujuan dan kendala harus ditambahkan variabel buatan
pada masing-masing kendala dengan kondisi Kuhn-Tucker dan variabel basis belum
jelas kemudian minimumkan jumlah variabel buatan. Metode wolfe merupakan versi
modifikasi dari fase I pada metode simplex dua fase. Untuk menjamin bahwa solusi
akhir (dengan variabel buatan sama dengan nol) memenuhi kondisi complementary
slackness, metode Wolfe memodifikasi pilihan variabel simplex yang masuk:
1. Tidak diperbolehkan dari kendala ke-i dan kedua-duanya sebagai
variabel basis.
2. Tidak diperbolehkan variabel slack atau excess dari kendala ke-i dan
kedua-duanya sebagai variabel basis.
(Winston dan Venkataramanan, 2003)
Universitas Sumatera Utara

2.9 Metode Sequential Quadratic Programming
Menurut Bertsekas (2007), metode Sequential Quadratic Programming digunakan
untuk menyelesaikan persoalan nonlinear yang memiliki kendala dalam bentuk
persamaan dengan bentuk umum :
Min. f(x)
s.t. h(x)=0
Kondisi Karush-Kuhn Tucker (KKT) untuk persoalan ini yaitu sebagai berikut:
dimana adalah pengali Lagrange dengan kendala yang berbentuk persamaan.
Jika menggunakan persamaan Lagrange
Kondisi Kuhn-Tucker dapat dituliskan sebagai berikut:
Metode Sequential Quadratic Programming menyerupai metode Newton yang
digunakan untuk mencari penyelesaian pada optimisasi tidak berkendala.Metode ini
menyelesaikan persoalan nonlinear secara langsung daripada mengubah ke barisan
persoalan minimisasi yang tidak berkendala. Ide utama dari SQP adalah memodelkan
persoalan kendala yang berbentuk persamaan pada titik awal kemudian mencari
pendekatan dengan subpersoalan pemrograman kuadratis berbentuk:
dimana
Metode Sequential Quadratic Programming atau yang juga dikenal sebagai
metode Lagrange-Newton karena metode SQP merupakan penggabungan dari kedua
metode tersebut. Algoritmanya secara umum adalah sebagai berikut:
Universitas Sumatera Utara

8. Tentukan
9. Atur k=0
10. Ulang
11. Pecahkan sistem Langrange-Newton untuk menemukan
12.
13.
14. Sampai konvergen
Metode SQP merupakan aplikasi dari metode Newton dengan memenuhi kondisi
optimal KKT. Menurut Gockenbach (2003), metode SQP memecahkan persoalan
nonlinear secara langsung tanpa mengubah ke barisan persoalan minimisasi yang tidak
berkendala. Ide dasar analog dengan metode Newton untuk persoalan minimisasi yang
tidak berkendala. Metode SQP dapat digunakan untuk menyelesaikan persoalan
aplikasi yang kompleksitasnya tinggi (Schittkowski dan Yuan, 2010)
Universitas Sumatera Utara