Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, … · Sebuah pegas telah di desain...
16
Basyir Al Banjari 0896-5985-6821 mechtermlighlismfism DC3BCE5B [email protected] www.basyiralbanjari.wordpress.com Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821 Follow my Instagram @basyir.elphisic.elbanjari Hal | 1 OSK Fisika 2017 Number 1 LIFT JATUH BEBAS Sebuah pegas telah di desain sedemikian untuk diletakan di dasar lantai suatu kolom lift pada sebuah gedung bertingkat (lihat gambar di bawah). Pegas ini berfungsi untuk mengamankan orang yang di dalam lift ketika kabel lift putus dan kemudian lift terjatuh. Diketahui massa total lift dan penumpangnya adalah dan percepatan gravitasi . Jika pada saat lift berada pada ketinggian ℎ di atas puncak pegas, kabel lift putus dan kemudian lift terjatuh, tentukan: a. konstanta pegas agar penumpang lift merasakan percepatan yang tidak lebih besar dari pada 5 pada saat lift akan berhenti untuk pertama kali! b. amplitudo osilasi dinyatakan dalam ℎ, jika setelah berhenti pegas itu kemudian berosilasi. Pembahasan : a. perhatikan gambar di bawah! Saat pegas tertekan maksimum, panjangnya akan memendek sebesar dan lift akan mengalami percepatan ke arah atas. Tinjau gaya yang bekerja pada lift untuk arah vertikal − = = − Percepatan lift harus kurang dari atau sama dengan 5 − ≤ 5 ≤ 6 Nilai maksimum adalah = 6 Kita bisa mencari nilai menggunakan hukum kekekalan energi mekanik ℎ ℎ ℎ ℎ 0
Transcript of Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, … · Sebuah pegas telah di desain...
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 1
OSK Fisika 2017 Number 1
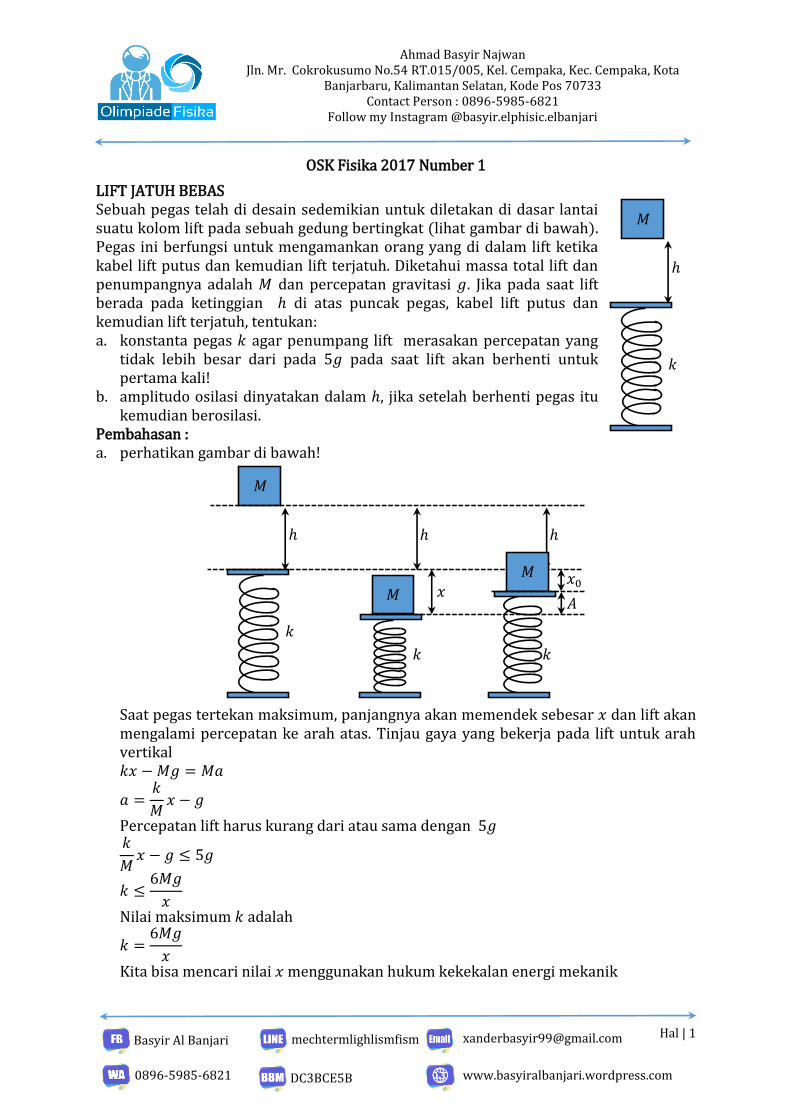
LIFT JATUH BEBAS Sebuah pegas telah di desain sedemikian untuk diletakan di dasar lantai suatu kolom lift pada sebuah gedung bertingkat (lihat gambar di bawah). Pegas ini berfungsi untuk mengamankan orang yang di dalam lift ketika kabel lift putus dan kemudian lift terjatuh. Diketahui massa total lift dan penumpangnya adalah 𝑀 dan percepatan gravitasi 𝑔. Jika pada saat lift berada pada ketinggian ℎ di atas puncak pegas, kabel lift putus dan kemudian lift terjatuh, tentukan: a. konstanta pegas 𝑘 agar penumpang lift merasakan percepatan yang
tidak lebih besar dari pada 5𝑔 pada saat lift akan berhenti untuk pertama kali!
b. amplitudo osilasi dinyatakan dalam ℎ, jika setelah berhenti pegas itu kemudian berosilasi.
Pembahasan : a. perhatikan gambar di bawah!
Saat pegas tertekan maksimum, panjangnya akan memendek sebesar 𝑥 dan lift akan mengalami percepatan ke arah atas. Tinjau gaya yang bekerja pada lift untuk arah vertikal 𝑘𝑥 −𝑀𝑔 = 𝑀𝑎
𝑎 =𝑘
𝑀𝑥 − 𝑔
Percepatan lift harus kurang dari atau sama dengan 5𝑔 𝑘
𝑀𝑥 − 𝑔 ≤ 5𝑔
𝑘 ≤6𝑀𝑔
𝑥
Nilai maksimum 𝑘 adalah
𝑘 =6𝑀𝑔
𝑥
Kita bisa mencari nilai 𝑥 menggunakan hukum kekekalan energi mekanik
𝑘
ℎ
𝑀
𝑘
𝑘
ℎ
𝑀
𝑘
𝑀
ℎ
𝑥
ℎ
𝑀 𝑥0
𝐴
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 2
𝑀𝑔(ℎ + 𝑥) =1
2𝑘𝑥2
𝑘𝑥2 = 2𝑀𝑔(ℎ + 𝑥) 6𝑀𝑔
𝑥𝑥2 = 2𝑀𝑔(ℎ + 𝑥)
6𝑀𝑔𝑥 = 2𝑀𝑔ℎ + 2𝑀𝑔𝑥
𝑥 =ℎ
2
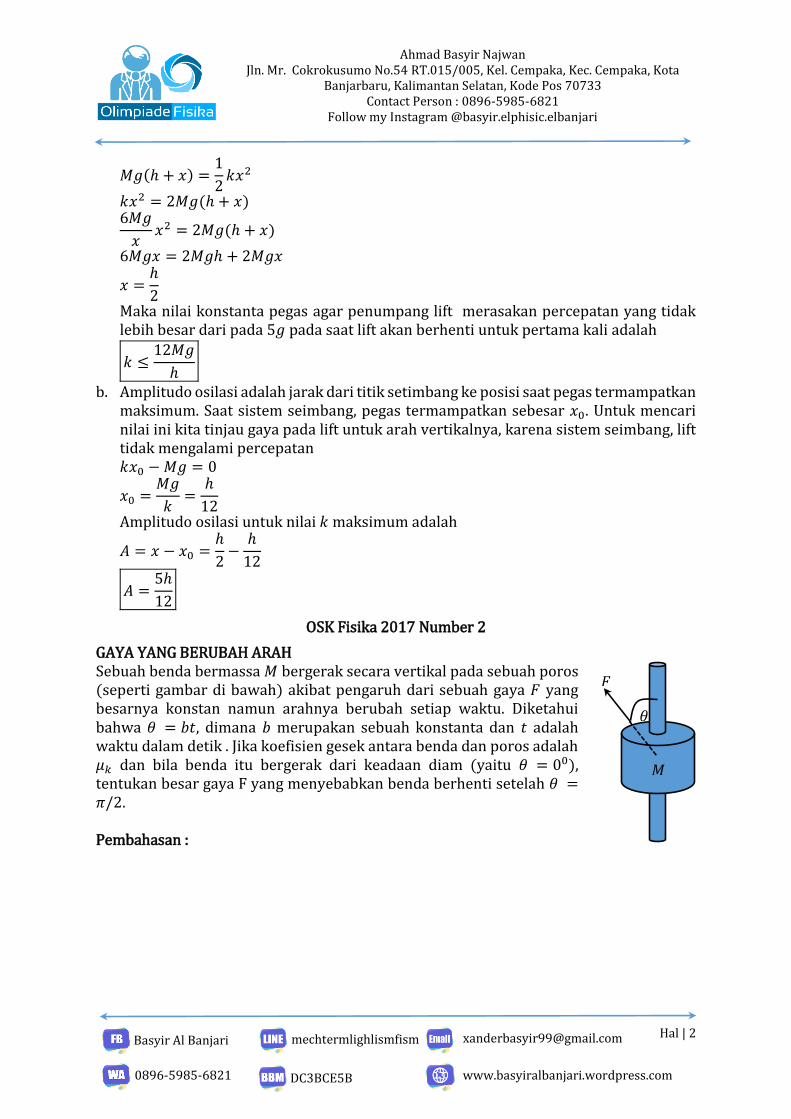
Maka nilai konstanta pegas agar penumpang lift merasakan percepatan yang tidak lebih besar dari pada 5𝑔 pada saat lift akan berhenti untuk pertama kali adalah
𝑘 ≤12𝑀𝑔
ℎ
b. Amplitudo osilasi adalah jarak dari titik setimbang ke posisi saat pegas termampatkan maksimum. Saat sistem seimbang, pegas termampatkan sebesar 𝑥0. Untuk mencari nilai ini kita tinjau gaya pada lift untuk arah vertikalnya, karena sistem seimbang, lift tidak mengalami percepatan 𝑘𝑥0 −𝑀𝑔 = 0
𝑥0 =𝑀𝑔
𝑘=ℎ
12
Amplitudo osilasi untuk nilai 𝑘 maksimum adalah
𝐴 = 𝑥 − 𝑥0 =ℎ
2−ℎ
12
𝐴 =5ℎ
12
OSK Fisika 2017 Number 2
GAYA YANG BERUBAH ARAH Sebuah benda bermassa 𝑀 bergerak secara vertikal pada sebuah poros (seperti gambar di bawah) akibat pengaruh dari sebuah gaya 𝐹 yang besarnya konstan namun arahnya berubah setiap waktu. Diketahui bahwa 𝜃 = 𝑏𝑡, dimana 𝑏 merupakan sebuah konstanta dan 𝑡 adalah waktu dalam detik . Jika koefisien gesek antara benda dan poros adalah 𝜇𝑘 dan bila benda itu bergerak dari keadaan diam (yaitu 𝜃 = 00), tentukan besar gaya F yang menyebabkan benda berhenti setelah 𝜃 =𝜋/2. Pembahasan :
𝜃
𝐹
𝑀

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 3
Benda tersebut bergerak naik karena adanya komponen gaya 𝐹 pada arah vertikal. Poros memberikan gaya normal ke kanan pada benda 𝑀 sebagai akibat adanya komponen gaya 𝐹 pada arah horizontal yang berarah ke kiri. Perhatikan diagram gaya yang bekerja pada benda 𝑀 berikut!
Tinjau gaya arah horizontal
𝑁 − 𝐹 sin 𝜃 = 0 → 𝑁 = 𝐹 sin 𝜃
Tinjau gaya arah vertikal
𝐹 cos 𝜃 − 𝑓 −𝑀𝑔 = 𝑀𝑎
Gaya gesek yang bekerja adalah gaya gesek kinetik
𝑓 = 𝜇𝑘𝑁 = 𝜇𝑘𝐹 sin 𝜃
Persamaan gerak benda 𝑀 akan menjadi
𝐹 cos 𝜃 − 𝜇𝑘𝐹 sin 𝜃 − 𝑀𝑔 = 𝑀𝑎
𝐹(cos 𝜃 − 𝜇𝑘 sin 𝜃) − 𝑀𝑔 = 𝑀𝑎
Subtitusi 𝜃 = 𝑏𝑡 dan 𝑎 =𝑑𝑣
𝑑𝑡
𝐹(cos 𝑏𝑡 − 𝜇𝑘 sin 𝑏𝑡) − 𝑀𝑔 = 𝑀𝑑𝑣
𝑑𝑡
𝑑𝑣 = (𝐹
𝑀(cos 𝑏𝑡 − 𝜇𝑘 sin 𝑏𝑡) − 𝑔)𝑑𝑡
Kemudian kita integralkan persamaan di atas. Kita gunakan batas bawah 𝑣 = 0 ketika 𝑡 =0 dan batas atas 𝑣 = 𝑣(𝑡) ketika 𝑡 = 𝑡.
∫ 𝑑𝑣𝑣(𝑡)
0
= ∫ (𝐹
𝑀(cos 𝑏𝑡 − 𝜇𝑘 sin 𝑏𝑡) − 𝑔)𝑑𝑡
𝑡
0
𝑣(𝑡) =𝐹
𝑏𝑀(sin 𝑏𝑡 + 𝜇𝑘 cos 𝑏𝑡) − 𝑔𝑡 −
𝐹
𝑀𝜇𝑘
𝑣(𝑡) =𝐹
𝑏𝑀(sin 𝑏𝑡 + 𝜇𝑘(cos 𝑏𝑡 − 1)) − 𝑔𝑡
Pada saat 𝜃 = 𝜋/2 atau 𝑡 = 𝜋/2𝑏 , kecepatan benda 𝑀 bernilai nol, 𝑣(𝑡) = 0.
0 =𝐹
𝑏𝑀(sin
𝜋
2+ 𝜇𝑘 (cos
𝜋
2− 1)) − 𝑔
𝜋
2𝑏
𝜃
𝐹
𝑀
𝐹 cos 𝜃
𝐹 sin 𝜃 𝑁
𝑓 𝑀𝑔
𝑎
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 4
𝐹
𝑏𝑀(1 − 𝜇𝑘) = 𝑔
𝜋
2𝑏
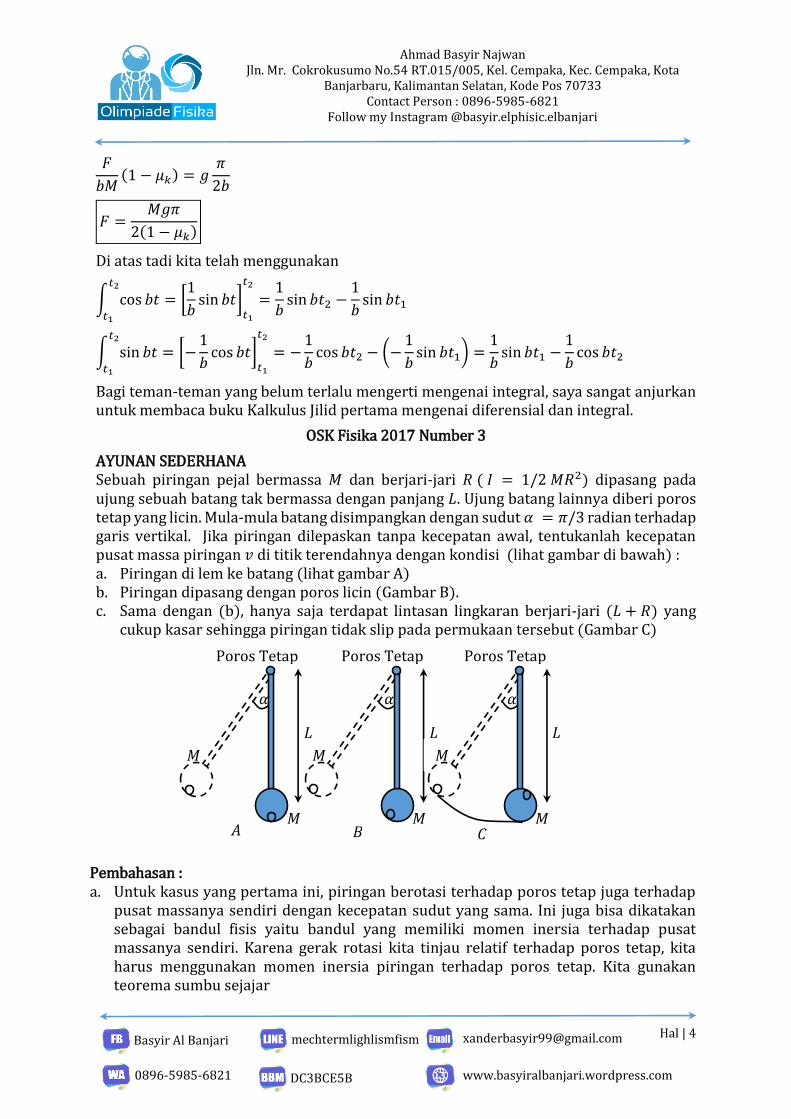
𝐹 =𝑀𝑔𝜋
2(1 − 𝜇𝑘)
Di atas tadi kita telah menggunakan
∫ cos 𝑏𝑡𝑡2
𝑡1
= [1
𝑏sin 𝑏𝑡]
𝑡1
𝑡2
=1
𝑏sin 𝑏𝑡2 −
1
𝑏sin 𝑏𝑡1
∫ sin 𝑏𝑡𝑡2
𝑡1
= [−1
𝑏cos 𝑏𝑡]
𝑡1
𝑡2
= −1
𝑏cos 𝑏𝑡2 − (−
1
𝑏sin 𝑏𝑡1) =
1
𝑏sin 𝑏𝑡1 −
1
𝑏cos 𝑏𝑡2
Bagi teman-teman yang belum terlalu mengerti mengenai integral, saya sangat anjurkan untuk membaca buku Kalkulus Jilid pertama mengenai diferensial dan integral.
OSK Fisika 2017 Number 3
AYUNAN SEDERHANA Sebuah piringan pejal bermassa 𝑀 dan berjari-jari 𝑅 ( 𝐼 = 1/2 𝑀𝑅2) dipasang pada ujung sebuah batang tak bermassa dengan panjang 𝐿. Ujung batang lainnya diberi poros tetap yang licin. Mula-mula batang disimpangkan dengan sudut 𝛼 = 𝜋/3 radian terhadap garis vertikal. Jika piringan dilepaskan tanpa kecepatan awal, tentukanlah kecepatan pusat massa piringan 𝑣 di titik terendahnya dengan kondisi (lihat gambar di bawah) : a. Piringan di lem ke batang (lihat gambar A) b. Piringan dipasang dengan poros licin (Gambar B). c. Sama dengan (b), hanya saja terdapat lintasan lingkaran berjari-jari (𝐿 + 𝑅) yang
cukup kasar sehingga piringan tidak slip pada permukaan tersebut (Gambar C) Pembahasan : a. Untuk kasus yang pertama ini, piringan berotasi terhadap poros tetap juga terhadap
pusat massanya sendiri dengan kecepatan sudut yang sama. Ini juga bisa dikatakan sebagai bandul fisis yaitu bandul yang memiliki momen inersia terhadap pusat massanya sendiri. Karena gerak rotasi kita tinjau relatif terhadap poros tetap, kita harus menggunakan momen inersia piringan terhadap poros tetap. Kita gunakan teorema sumbu sejajar
𝑀
𝑀
Poros Tetap
𝛼
𝐿
𝐴 𝑀
𝑀
Poros Tetap
𝛼
𝐿
𝐵 𝑀
𝑀
Poros Tetap
𝛼
𝐿
𝐶

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 5
𝐼 = 𝐼𝑝𝑚 +𝑀𝐿2
𝐼 =1
2𝑀𝑅2 +𝑀𝐿2 =
1
2𝑀(𝑅2 + 2𝐿2)
Dengan menggunakan hukum kekekalan energi akan kita dapatkan(poros tetap sebagai acuan) 𝐸𝑎𝑤𝑎𝑙 = 𝐸𝑎𝑘ℎ𝑖𝑟
−𝑀𝑔𝐿 cos 𝛼 = −𝑀𝑔𝐿 +1
2𝐼𝜔2
𝑀𝑔𝐿(1 − cos 𝛼) =1
2
1
2𝑀(𝑅2 + 2𝐿2) (
𝑣
𝐿)2
(𝑅2 + 2𝐿2)𝑣2 = 4 𝑔𝐿2(1 − cos 𝛼)
𝑣 = √4 𝑔𝐿2(1 − cos 𝛼)
𝑅2 + 2𝐿2
Subtitusi cos 𝛼 = cos𝜋
3=1
2
𝑣 = √4 𝑔𝐿2(1 − 1/2)
𝑅2 + 2𝐿2→ 𝑣 = √
2 𝑔𝐿2
𝑅2 + 2𝐿2
b. Karena piringan dipasang pada poros licin, dia tidak berotasi terhadap pusat massanya sendiri melainkan hanya berotasi terhadap poros tetap. Dengan Hukum kekekalan energi akan kita dapatkan 𝐸𝑎𝑤𝑎𝑙 = 𝐸𝑎𝑘ℎ𝑖𝑟
−𝑀𝑔𝐿 cos 𝛼 = −𝑀𝑔𝐿 +1
2𝑀𝑣2
𝑣2 = 2 𝑔𝐿(1 − cos 𝛼)
𝑣 = √2 𝑔𝐿(1 − cos 𝛼)
Subtitusi cos 𝛼 = cos𝜋
3=1
2
𝑣 = √2 𝑔𝐿(1 − 1/2) → 𝑣 = √𝑔𝐿
c. Untuk kasus yang ketiga ini, pusat massa piringan berotasi terhadap poros tetap dan juga terhadap pusat massanya namun dengan kecepatan yang berbeda. Karena piringan menggelinding tanpa slip, akan berlaku 𝜔1 = 𝑣/𝑅. 𝐸𝑎𝑤𝑎𝑙 = 𝐸𝑎𝑘ℎ𝑖𝑟
−𝑀𝑔𝐿 cos 𝛼 = −𝑀𝑔𝐿 +1
2𝑀𝑣2 +
1
2(1
2𝑀𝑅2) (
𝑣
𝑅)2
𝑀𝑔𝐿(1 − cos 𝛼) =3
4𝑀𝑣2
𝑣 = √4
3 𝑔𝐿(1 − cos 𝛼)
Subtitusi cos 𝛼 = cos𝜋
3=1
2

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 6
𝑣 = √4
3 𝑔𝐿(1 − 1/2) → 𝑣 = √
2
3𝑔𝐿
OSK Fisika 2017 Number 4
TUMBUKAN DAN LINTASAN SEPEREMPAT LINGKARAN Sebuah bola A bermassa 𝑚 menumbuk bola B dengan massa 2𝑚 yang mula-mula diam (seperti yang ditunjukkan gambar di bawah). Sesaat setelah tumbukan , bola B meluncur pada lintasan yang berbentuk seperempat lingkaran berjari-jari 𝑅 dan kemudian pada sudut 𝛽, gerakan bola B menjadi gerakan proyektil. Diketahui bahwa tumbukan antara kedua bola bersifat lenting sebahagian dengan koefisien restitusi 𝑒, dan kedua bola dapat dianggap sebagai benda titik. Tentukan besar kecepatan bola A sesaat menumbuk bola B. Pembahasan : Pertama kita harus mencari kecepatan bola B setelah ditumbuk oleh bola A. Misalkan kecepatan awal bola A adalah 𝑣0, maka dengan hukum kekekalan momentum akan kita dapatkan 𝑚𝐴𝑣0 = 𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵 𝑚𝑣0 = 𝑚𝑣𝐴 + 2𝑚𝑣𝐵 𝑣0 = 𝑣𝐴 + 2𝑣𝐵 …(1) Tumbukan bersifat lenting sebagian dengan koefisien restutis 𝑒, dari rumus koefisien restitusi akan kita dapatkan
𝑒 = −𝑣𝐵 − 𝑣𝐴0 − 𝑣0
𝑣𝐵 − 𝑣𝐴 = 𝑒𝑣0…(2)
Dari penjumlahan persamaan (1) dan (2) akan kita dapatkan
𝑣𝐴 + 2𝑣𝐵 = 𝑣0𝑣𝐵 − 𝑣𝐴 = 𝑒𝑣03𝑣𝐵 = (1 + 𝑒)𝑣0
+
𝑣𝐵 =1
3(1 + 𝑒)𝑣0…(3)
Kemudian gerakan bola menjadi proyektil pada sudut 𝛽, artinya di posisi ini bola lepas dari lintasan. Syarat bola lepas dari lintasan adalah gaya normal yang bekerja padanya bernilai nol. Dengan menggunakan persamaan gaya sentripetal akan kita dapatkan
𝐵
𝐵 𝐴 𝐴
𝑅
𝛽

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 7
𝑚𝐵𝑔 cos 𝛽 − 𝑁 =𝑚𝐵𝑣𝐵
′ 2
𝑅
𝑚𝐵𝑔 cos 𝛽 =𝑚𝐵𝑣𝐵
′ 2
𝑅→ 𝑣𝐵
′ 2 = 𝑔𝑅 cos𝛽 …(4)
Menggunakan Hukum kekekalan energi dengan saat awal sesaat setelah tumbukan bola B dan bola A dan saat akhir ketika bola B lepas dari lintasan seperempat lingkaran akan kita dapatkan
1
2𝑚𝐵𝑣𝐵
2 =1
2𝑚𝐵𝑣𝐵
′ 2 −𝑚𝐵𝑔𝑅(1 − cos 𝛽)
𝑣𝐵2 = 𝑣𝐵
′ 2 − 2𝑔𝑅(1 − cos 𝛽)
Subtitusi persamaan (3) dan (4) untuk mendapatkan kecepatan awal bola A
1
9(1 + 𝑒)2𝑣0
2 = 𝑔𝑅 cos 𝛽 − 2𝑔𝑅(1 − cos 𝛽)
1
9(1 + 𝑒)2𝑣0
2 = 𝑔𝑅(3 cos 𝛽 − 2)
𝑣02 =
9𝑔𝑅(3 cos𝛽 − 2)
(1 + 𝑒)2
𝑣0 =3
1 + 𝑒√𝑔𝑅(3 cos 𝛽 − 2)
OSK Fisika 2017 Number 5
VARIASI GAYA PADA TIMBANGAN Sebuah balok kecil (massa 𝑚1) berada di atas suatu bidang miring (massa 𝑚2, sudut kemiringan 𝜃) yang diletakkan di atas alat timbangan berat (lihat gambar). Diketahui bidang miring memiliki keringgian h dan titik pusatnya berada pada ketinggian ℎ/3 dari alas bidang miring. Sementara itu pada saat awal, titik pusat massa balok 𝑚1 berada di ketinggian ℎ dari alas bidang miring. Asumsikan bidang miring licin dan terikat pada timbangan. Tentukan : a. letak posisi vertikal pusat massa sistem balok-
bidang miring tersebut. b. komponen vertikal kecepatan pusat massa sistem tersebut dinyatakan sebagai fungsi
waktu 𝑡, saat balok kecil tergeser/bergerak ke bawah di atas permukaan bidang miring.
c. posisi vertikal pusat massa sistem tersebut sebagai fungsi waktu. d. nilai pembacaan pada alat timbangan berat saat balok kecil mulai bergeser. Pembahasan : a. Karena balok 𝑚1 kecil kita bisa abaikan dimensinya dan menganggapnya sebagai
massa titik. Pada saat awal, posisi pusat massa balok ini dari alas bidang miring adalah
ℎ 𝑚2
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 8
𝑦1 = ℎ sedangkan posisi pusat massa bidang miring dari dasarnya adalah 𝑦2 = ℎ/3 . posisi pusat massa sistem balok bidang miring ini sebagai fungsi 𝑦1 dan 𝑦2 adalah
𝑦𝑝𝑚 =𝑚1𝑦1 +𝑚2𝑦2𝑚1 +𝑚2
Untuk mendapatkan posisi pusat massa sistem saat awal kita subtitusi 𝑦1 = ℎ dan 𝑦2 = ℎ/3.
𝑦𝑝𝑚 =𝑚1ℎ +𝑚2(ℎ 3⁄ )
𝑚1 +𝑚2
𝑦𝑝𝑚 =3𝑚1 +𝑚2
3𝑚1 + 3𝑚2ℎ
Kita gunakan sistem koordinat kartesius dengan memilih titik sudut siku-siku bidang miring sebagai titik asal, maka posisi vertikal pusat balok-bidang miring adalah
�⃗�𝑝𝑚 =3𝑚1 +𝑚2
3𝑚1 + 3𝑚2ℎ𝑗̂
b. Untuk mendapatkan komponen vertikal kecepatan pusat massa sistem sebagai fungsi waktu kita cukup menurunkan posisi vertikal pusat massa satu kali terhadap waktu
𝑣𝑦,𝑝𝑚 =𝑑𝑦𝑝𝑚
𝑑𝑡=𝑑
𝑑𝑡(𝑚1𝑦1 +𝑚2𝑦2𝑚1 +𝑚2
) =𝑚1𝑑𝑦1𝑑𝑡
+ 𝑚2𝑑𝑦2𝑑𝑡
𝑚1 +𝑚2
Suku 𝑑𝑦2 𝑑𝑡⁄ adalah komponen kecepatan vertikal bidang miring tetapi karena bidang miring senantiasa diam maka nilainya sama dengan nol, 𝑑𝑦2 𝑑𝑡⁄ = 0. Sedangkan suku 𝑑𝑦1 𝑑𝑡⁄ adalah komponen kecepatan vertikal balok kecil. Untuk mendapatkannya kita tinjau gerakan balok di atas bidang miring, karena bidang miring licin, balok kecil hanya mendapat gaya 𝑚1𝑔 sin 𝜃 sejajar bidang miring sehingga dia mendapatkan percepatan 𝑎 = 𝑔 sin 𝜃 sejajar bidang miring. Komponen vertikal percepatan ini adalah 𝑎1𝑦 = 𝑎 sin 𝜃 = 𝑔 sin
2 𝜃 dan arahnya ke bawah.
Kecepatan awal balok pada arah vertikal nol sehingga komponen kecepatan balok kecil pada arah vertikal adalah
𝑣1𝑦 =𝑑𝑦1𝑑𝑡
= 𝑎1𝑦𝑡 = 𝑔𝑡 sin2 𝜃
Sehingga komponen vertikal kecepatan pusat massa sistem sebagai fungsi waktu adalah
𝑣𝑦,𝑝𝑚 =𝑚1(𝑔𝑡 sin
2 𝜃) + 𝑚2(0)
𝑚1 +𝑚2
𝑣𝑦,𝑝𝑚 =𝑚1𝑔𝑡 sin
2 𝜃
𝑚1 +𝑚2
Mengacu kepada sistem koordinat yang sudah kita tentukan sebelumnya, komponen kecepatan vertikal sistem ini adalah
�⃗�𝑦,𝑝𝑚 = −𝑚1𝑔𝑡 sin
2 𝜃
𝑚1 +𝑚2 𝑗̂
c. Posisi pusat massa bidang miring senantiasa tetap yaitu 𝑦2(𝑡) = ℎ 3⁄ . Sedangkan posisi pusat massa balok kecil akan turun dari posisi awalnya karena ada percepatan pada arah vertikal yang berarah ke bawah. Misalkan setelah waktu 𝑡 pusat massa

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 9
balok kecil turun sejauh 𝑦 yang besarnya kita bisa hitung menggunakan rumus GLBB dipercepat. kita jadikan arah ke bawah sebagai arah positif sesuai dengan arah bertambahnya 𝑦 maka
𝑦 = 𝑣0,1𝑦𝑡 +1
2𝑎1𝑦𝑡
2 = 0 +1
2𝑔 sin2 𝜃 𝑡2
𝑦 =1
2𝑔𝑡2 sin2 𝜃
Posisi pusat massa balok kecil adalah posisi awalnya ℎ dikurangi jarak penurunannya 𝑦
𝑦1(𝑡) = ℎ − 𝑦 = ℎ −1
2𝑔𝑡2 sin2 𝜃
Maka posisi pusat massa sistem sebagai fungsi waktu adalah
𝑦𝑝𝑚(𝑡) =𝑚1𝑦1(𝑡) + 𝑚2𝑦2(𝑡)
𝑚1 +𝑚2=𝑚1 (ℎ −
12𝑔𝑡
2 sin2 𝜃) + 𝑚2 (ℎ3)
𝑚1 +𝑚2
𝑦𝑝𝑚(𝑡) =3𝑚1 +𝑚2
3𝑚1 + 3𝑚2ℎ −
𝑚1𝑔𝑡2 sin2 𝜃
2𝑚1 + 2𝑚2
Mengacu kepada sistem koordinat kita, posisi pusat massa sistem sebagai fungsi waktu akan menjadi
�⃗�𝑝𝑚(𝑡) =3𝑚1 +𝑚2
3𝑚1 + 3𝑚2ℎ𝑗̂ −
𝑚1𝑔𝑡2 sin2 𝜃
2𝑚1 + 2𝑚2𝑗̂
d. Nilai pembacaan timbangan berat adalah sama dengan gaya normal yang diberikan alas bidang miring pada timbangan. Pada saat awal sebelum balok kecil dilepaskan, besar gaya normal tersebut sama dengan dengan berat total balok kecil dan bidang miring. Saat balok kecil dilepaskan, gaya normal ini akan berkurang nilainya dari besar awal karena balok kecil mengalami percepatan turun dan pusat massa sistem juga turun. Untuk mendapatkan percepatan turun pusat massa sistem kita turunkan satu kali kecepatan turun pusat massa sistem 𝑣𝑦,𝑝𝑚 terhadap waktu, sehingga
𝑎𝑦,𝑝𝑚 =𝑑𝑣𝑦,𝑝𝑚
𝑑𝑡=𝑑
𝑑𝑡(𝑚1𝑔𝑡 sin
2 𝜃
𝑚1 +𝑚2) =
𝑚1𝑔𝑑𝑡𝑑𝑡sin2 𝜃
𝑚1 +𝑚2=𝑚1𝑔 sin
2 𝜃
𝑚1 +𝑚2
Sistem balok-bidang miring kita mendapatkan gaya gravitasi sebesar (𝑚1 +𝑚2)𝑔 yang arahnya ke bawah dan gaya normal dari timbangan 𝑁 yang arahnya ke atas sehingga sistem ini memiliki percepatan turun 𝑎𝑦,𝑝𝑚 yang arahnya ke bawah. Maka
dengan menggunakan Hukum II Newton untuk sistem ini akan kita dapatkan
∑�⃗�𝑦 = (𝑚1 +𝑚2)�⃗�𝑦,𝑝𝑚
−(𝑚1 +𝑚2)𝑔𝑗̂ + 𝑁𝑗̂ = −(𝑚1 +𝑚2)𝑚1𝑔 sin
2 𝜃
𝑚1 +𝑚2𝑗̂
𝑁 = (𝑚1 +𝑚2)𝑔 − 𝑚1𝑔 sin2 𝜃
𝑁 = (𝑚2 +𝑚1 cos2 𝜃)𝑔
OSK Fisika 2017 Number 6

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 10
Diketahui dua batang seragam yang disusun seperti pada gambar berikut. Batang dengan panjang D dipasang tegak lurus terhadap batang dengan pamjang 𝐿1 + 𝐿2 (lihat gambar). Massa total batang adalah 𝑀. Ujung batang D diletakkan pada poros O yang licin, sedangkan pada ujung batang 𝐿1 dan batang 𝐿2 dipasang massa masing-masing berturut-turut 𝑀1 dan 𝐿2. Ternyata pada keadaan setimbang,batang D membentuk sudut 𝜃 terhadap vertikal. Percepatan gravitasi 𝑔 ke bawah. Tentukan tan 𝜃 dinyatakan dalam besaran-besaran di atas!
Pembahasan :
Karena batang seragam, massa persatuan panjang batang adalah
𝜆 =𝑀
𝐷 + 𝐿1 + 𝐿2
Massa batang yang panjangnya D adalah
𝑚1 = 𝜆𝐷 =𝑀𝐷
𝐷 + 𝐿1 + 𝐿2
Massa batang yang panjangnya 𝐿1 + 𝐿2 adalah
𝑚1 = 𝜆(𝐿1 + 𝐿2) =𝑀(𝐿1 + 𝐿2)
𝐷 + 𝐿1 + 𝐿2
Selanjutnya perhatikan gambar disamping ini! Lengan momen masing-masing gaya berat adalah
Gaya 𝑚1𝑔 ⟹𝑥
2
𝑥
2=𝐷 sin 𝜃
2
Gaya 𝑚2𝑔 ⟹ 𝑑
𝑑 = 𝑥 − (𝐿1 cos 𝜃 − 𝑠) = 𝐷 sin 𝜃 − (𝐿1 cos 𝜃 −𝐿1 + 𝐿22
cos 𝜃) = 𝐷 sin 𝜃 −𝐿1 − 𝐿22
cos 𝜃
Gaya 𝑀1𝑔 ⟹ 𝐿1 cos 𝜃 − 𝑥 Gaya 𝑀2𝑔 ⟹ 𝐿2 cos 𝜃 + 𝑥
𝐷
𝐿1 𝐿2
𝑂
𝜃 𝑀2
𝑀1
𝜃
𝑂
𝑀2𝑔
𝑀1𝑔
𝜃
𝐷
𝑥
𝐿1 cos 𝜃 𝐿2 cos 𝜃
𝑚2𝑔
𝑚1𝑔 𝑠
𝑑
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 11
Kemudian kita gunakan Hukum I Newton tentang gerak rotasi atau keseimbangan torsi terhadap titik O.
∑𝜏𝑜 = 0
𝑀1𝑔(𝐿1 cos 𝜃 − 𝑥) − 𝑀2𝑔(𝐿2 cos 𝜃 + 𝑥) − 𝑚1𝑔𝑥
2−𝑚2𝑔𝑑 = 0
𝑀1𝑔(𝐿1 cos 𝜃 − 𝐷 sin 𝜃) − 𝑀2𝑔(𝐿2 cos 𝜃 + 𝐷 sin 𝜃) −1
2𝑚1𝑔𝐷 sin 𝜃
− 𝑚2𝑔 (𝐷 sin 𝜃 −𝐿1 − 𝐿22
cos 𝜃) = 0| ×2
𝑔
2𝑀1𝐿1 cos 𝜃 − 2𝑀2𝐿2 cos 𝜃 − 2(𝑀1 +𝑀2)𝐷 sin 𝜃 − 𝑚1𝐷 sin 𝜃 − 2𝑚2𝐷 sin 𝜃+ 𝑚2(𝐿1 − 𝐿2) cos 𝜃 = 0
[2(𝑀1 +𝑀2) + 𝑚1 + 2𝑚2]𝐷 sin 𝜃 = (2(𝑀1𝐿1 −𝑀2𝐿2) + 𝑚2(𝐿1 − 𝐿2)) cos 𝜃 sin 𝜃
cos 𝜃= tan𝜃 =
2(𝑀1𝐿1 −𝑀2𝐿2) + 𝑚2(𝐿1 − 𝐿2)
[2(𝑀1 +𝑀2) + 𝑚1 + 2𝑚2]𝐷
Subtitusi 𝑚1 dan 𝑚2 yang sudah kita dapatkan di awal
tan 𝜃 =2(𝑀1𝐿1 −𝑀2𝐿2) +
𝑀(𝐿1 + 𝐿2)𝐷 + 𝐿1 + 𝐿2
(𝐿1 − 𝐿2)
[2(𝑀1 +𝑀2) +𝑀𝐷
𝐷 + 𝐿1 + 𝐿2+ 2
𝑀(𝐿1 + 𝐿2)𝐷 + 𝐿1 + 𝐿2
] 𝐷| ×
𝐷 + 𝐿1 + 𝐿2𝐷 + 𝐿1 + 𝐿2
tan 𝜃 =2(𝑀1𝐿1 −𝑀2𝐿2)(𝐷 + 𝐿1 + 𝐿2) + 𝑀(𝐿1 + 𝐿2)(𝐿1 − 𝐿2)
2(𝑀1 +𝑀2)𝐷(𝐷 + 𝐿1 + 𝐿2) + 𝑀𝐷[𝐷 + 2(𝐿1 + 𝐿2)]
tan 𝜃 =2(𝑀1𝐿1 −𝑀2𝐿2)(𝐷 + 𝐿1 + 𝐿2) + 𝑀(𝐿1
2 − 𝐿22)
2(𝑀1 +𝑀2)𝐷(𝐷 + 𝐿1 + 𝐿2) + 𝑀𝐷[𝐷 + 2(𝐿1 + 𝐿2)]
OSK FISIKA 2017 Number 7
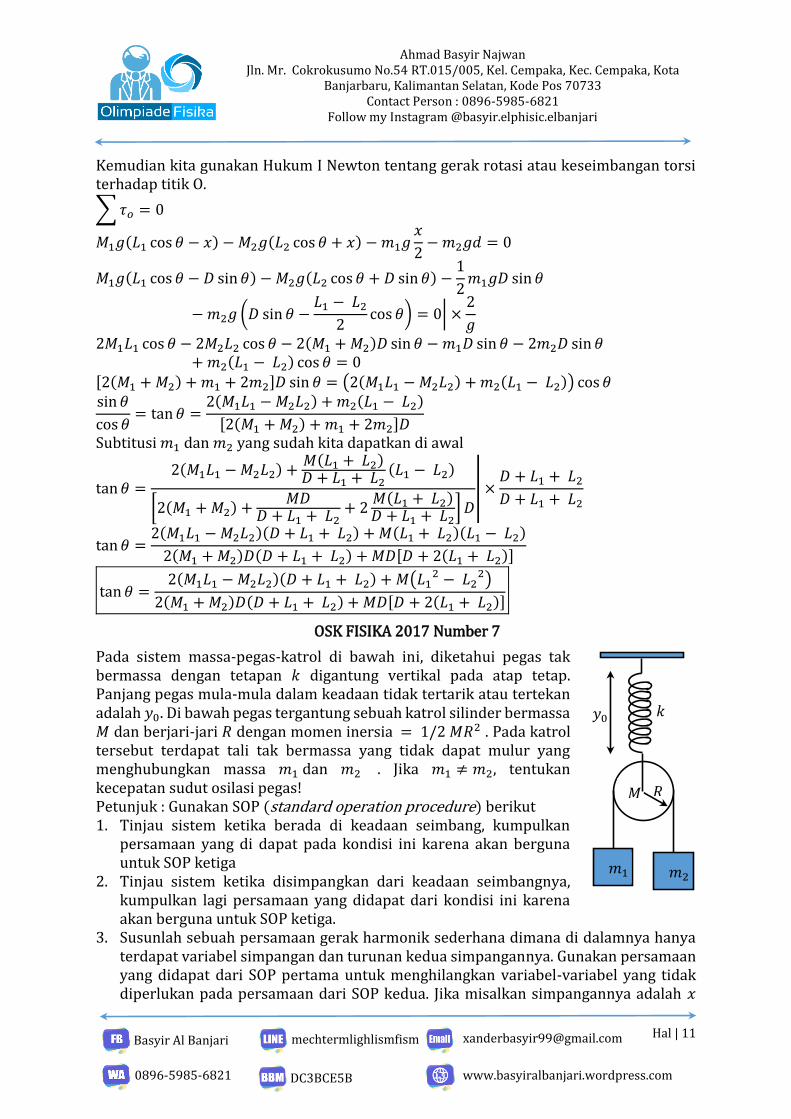
Pada sistem massa-pegas-katrol di bawah ini, diketahui pegas tak bermassa dengan tetapan 𝑘 digantung vertikal pada atap tetap. Panjang pegas mula-mula dalam keadaan tidak tertarik atau tertekan adalah 𝑦0. Di bawah pegas tergantung sebuah katrol silinder bermassa 𝑀 dan berjari-jari 𝑅 dengan momen inersia = 1/2 𝑀𝑅2 . Pada katrol tersebut terdapat tali tak bermassa yang tidak dapat mulur yang menghubungkan massa 𝑚1 dan 𝑚2 . Jika 𝑚1 ≠ 𝑚2, tentukan kecepatan sudut osilasi pegas! Petunjuk : Gunakan SOP (standard operation procedure) berikut 1. Tinjau sistem ketika berada di keadaan seimbang, kumpulkan
persamaan yang di dapat pada kondisi ini karena akan berguna untuk SOP ketiga
2. Tinjau sistem ketika disimpangkan dari keadaan seimbangnya, kumpulkan lagi persamaan yang didapat dari kondisi ini karena akan berguna untuk SOP ketiga.
3. Susunlah sebuah persamaan gerak harmonik sederhana dimana di dalamnya hanya terdapat variabel simpangan dan turunan kedua simpangannya. Gunakan persamaan yang didapat dari SOP pertama untuk menghilangkan variabel-variabel yang tidak diperlukan pada persamaan dari SOP kedua. Jika misalkan simpangannya adalah 𝑥
𝑦0 𝑘
𝑚1 𝑚2
𝑅 𝑀

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 12
dari posisi keseimbangannya, bentuk persamaannya haruslah seperti persamaan di bawah ini 𝑑2𝑥
𝑑𝑡2+ 𝜔2𝑥 = 0 atau �̈� + 𝜔2𝑥 = 0
jumlah dot(titik) di atas simpangan 𝑥 menandakan variabel tersebut adalah turunan variabel 𝑥 terhadap sebanyak jumlah titiknya. Misal contoh di atas, ada dua titik di atas variabel 𝑥, maka artinya itu adalah turunan kedua variabel 𝑥 terhadap waktu.
4. Terakhir untuk mencari periode atau frekuensi osilasi gunakan rumus berikut
untuk frekuensi ⟹ 𝑓 =𝜔
2𝜋
untuk periode ⟹ 𝑇 =2𝜋
𝜔
Pembahasan :
Baik, kita akan mengerjakan soal ini sesuai dengan SOP di atas. Pertama perhatikan dulu 3 gambar di bawah yaitu gambar saat awal dimana pegas dalam kondisi relaks dan kedua balok masih diam. Gambar kedua menyatakan kondisi ketika katrol mencapai posisi keseimbangannya dimana pegas teregang sejauh 𝑦 yang mengartikan juga katrol turun sejauh 𝑦 dari posisi awalnya. Walaupun katrol mencapai kesetimbangannya massa 𝑚1 dan 𝑚2 tetap bergerak seperti pesawat atwood, untuk lebih mudah nantinya, kita asumsikan 𝑚1 > 𝑚2, artinya nanti balok 𝑚1 akan bergerak turun dipercepat beraturan dan balok 𝑚2 akan bergerak naik dipercepat beraturan pula dengan percepatan yang sama. Kalaupun diasumsikan sebaliknya, hasilnya akan sama saja nantinya. Nah untuk gambar ketiga mengilustrasikan kondisi saat katrol di turunkan lagi sejauh Δ𝑦 dari posisi kesetimbangannya sehingga akhirnya saat dilepas katrol akan dipercepat ke arah atas dan berosilasi. Namun bagaimana dengan balok 𝑚1 dan 𝑚2? Jika pengamat ada ikut bergerak bersama katrol atau kita meninjaunya relatif terhadap katrol atau juga katrol dianggap diam, maka kedua balok tersebut juga akan bergerak dipercepat seperti pada saat seimbang namun dengan percepatan yang berbeda dengan kondisi saat katrol seimbang. Pada gambar ketiga, percepatan 𝑎 pada kedua balok adalah percepatan keduanya relatif terhadap katrol, jadi untuk percepatan totalnya harus mempertimbangkan percepatan katol juga. Tegangan tali pada kondisi ini juga berbeda nilainya dengan tegangan tali pada saat kondisi katrol setimbang. Berikut ini ketiga gambar tersebut.

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 13
1. Sistem ketika katrol seimbang
Katrol (keseimbangan arah sumbu 𝑦) 𝑘𝑦 −𝑀𝑔 − (𝑇1 + 𝑇2) = 0… (1) Katrol (gerak rotasi)
(𝑇1 − 𝑇2)𝑅 =1
2𝑀𝑅2𝛼0
Karena tali tidak slip terhadap katrol dan katrol diam akan berlaku 𝛼0 =𝑎0𝑅
(𝑇1 − 𝑇2)𝑅 =1
2𝑀𝑅2
𝑎0𝑅
𝑇1 − 𝑇2 =1
2𝑀𝑎0…(2)
Balok 𝑚1(gerak translasi arah sumbu 𝑦) 𝑚1𝑔 − 𝑇1 = 𝑚1𝑎0…(3) Balok 𝑚2(gerak translasi arah sumbu 𝑦) −𝑚2𝑔 + 𝑇2 = 𝑚2𝑎0…(4) Jumlahkan persamaan (2), (3), dan (4)
𝑇1 − 𝑇2 =12𝑀𝑎0
𝑚1𝑔 − 𝑇1 = 𝑚1𝑎0−𝑚2𝑔 + 𝑇2 = 𝑚2𝑎0
(𝑚1 −𝑚2)𝑔 = (𝑚1 +𝑚2 +12𝑀)𝑎0
+
𝑎0 =(𝑚1 −𝑚2)𝑔
𝑚1 +𝑚2 +12𝑀
Persamaan (3) dikurangi persamaan (4)
𝑦0 𝑘
𝑚1 𝑚2
𝑅 𝑀
𝑦
𝑘
𝑅 𝑀
𝑦0
𝑎0 𝑎0
𝑀𝑔
𝑚2𝑔 𝑚1𝑔
𝑇1
𝑇1 𝑇2
𝑇2
𝛼0
𝑅 𝑀
𝑦0
𝑦
∆𝑦
𝐴
𝑎 𝑎
𝑀𝑔
𝑚2𝑔 𝑚1𝑔
𝑇1′
𝑇1′
𝑇2′
𝑇2′
𝛼

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 14
𝑚1𝑔 − 𝑇1 = 𝑚1𝑎0−𝑚2𝑔 + 𝑇2 = 𝑚2𝑎0
−𝑇1 − 𝑇2 + (𝑚1 +𝑚2)𝑔 = (𝑚1 −𝑚2)𝑎0−(𝑇1 + 𝑇2) = (𝑚1 −𝑚2)𝑎0 − (𝑚1 +𝑚2)𝑔
−
Subtitusi 𝑎0
−(𝑇1 + 𝑇2) =(𝑚1 −𝑚2)(𝑚1 −𝑚2)𝑔
𝑚1 +𝑚2 +12𝑀
− (𝑚1 +𝑚2)𝑔… (5)
Subtitusi persamaan (5) ke (1)
𝑘𝑦 −𝑀𝑔 +(𝑚1 −𝑚2)(𝑚1 −𝑚2)𝑔
𝑚1 +𝑚2 +12𝑀
− (𝑚1 +𝑚2)𝑔 = 0
𝑘𝑦 +(𝑚1 −𝑚2)
2𝑔
𝑚1 +𝑚2 +12𝑀
− (𝑚1 +𝑚2 +𝑀)𝑔 = 0… (6)
2. Sistem ketika katrol tersimpang katrol (keseimbangan arah sumbu 𝑦) 𝑘(𝑦 + Δ𝑦) − 𝑀𝑔 − (𝑇1 + 𝑇2) = 𝑀𝐴…(7) Katrol (gerak rotasi)
(𝑇1′ − 𝑇2′)𝑅 =1
2𝑀𝑅2𝛼
Karena kedua balok dipercepat relatif terhadap katrol dengan percepatan 𝑎 maka dapat diartikan bahwa tali juga memiliki percepatan sebesar 𝑎. Kemudian karena tali tidak slip terhadap katrol berarti percepatan tangensial pinggiran katrol akan menjadi 𝑎 pula dan
percepatan sudut katrol dapat dinyatakan sebagai 𝛼 =𝑎
𝑅
(𝑇1′ − 𝑇2′)𝑅 =1
2𝑀𝑅2
𝑎
𝑅
𝑇1′ − 𝑇2′ =1
2𝑀𝑎…(8)
Balok 𝑚1(gerak translasi arah sumbu 𝑦) 𝑚1𝑔 − 𝑇1′ = 𝑚1(𝑎 − 𝐴)… (9) Balok 𝑚2(gerak translasi arah sumbu 𝑦) −𝑚2𝑔 + 𝑇2 = 𝑚2(𝑎 + 𝐴)… (10) Jumlahkan persamaan (8), (9), dan (10)
𝑇1′ − 𝑇2′ =12𝑀𝑎
𝑚1𝑔 − 𝑇1′ = 𝑚1(𝑎 − 𝐴)
−𝑚2𝑔 + 𝑇2 = 𝑚2(𝑎 + 𝐴)
(𝑚1 −𝑚2)𝑔 = (𝑚1 +𝑚2 +12𝑀)𝑎 −
(𝑚1 −𝑚2)𝐴+
(𝑚1 −𝑚2)𝑔 + (𝑚1 −𝑚2)𝐴 = (𝑚1 +𝑚2 +1
2𝑀)𝑎
𝑎 =(𝑚1 −𝑚2)𝑔 + (𝑚1 −𝑚2)𝐴
𝑚1 +𝑚2 +12𝑀

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 15
Persamaan (9) dikurangi persamaan (10) 𝑚1𝑔 − 𝑇1′ = 𝑚1(𝑎 − 𝐴)
−𝑚2𝑔 + 𝑇2 = 𝑚2(𝑎 + 𝐴)
−𝑇1 − 𝑇2 + (𝑚1 +𝑚2)𝑔 = (𝑚1 −𝑚2)𝑎 − (𝑚1 +𝑚2)𝐴
−(𝑇1 + 𝑇2) = (𝑚1 −𝑚2)𝑎 − (𝑚1 +𝑚2)𝑔 − (𝑚1 +𝑚2)𝐴
−
Subtitusi 𝑎0
−(𝑇1 + 𝑇2) = (𝑚1 −𝑚2)(𝑚1 −𝑚2)𝑔 + (𝑚1 −𝑚2)𝐴
𝑚1 +𝑚2 +12𝑀
− (𝑚1 +𝑚2)𝑔 − (𝑚1 +𝑚2)𝐴
−(𝑇1 + 𝑇2) =(𝑚1 −𝑚2)
2𝑔 + (𝑚1 −𝑚2)2𝐴
𝑚1 +𝑚2 +12𝑀
− (𝑚1 +𝑚2)𝑔 − (𝑚1 +𝑚2)𝐴… (11)
Subtitusi persamaan (11) ke (7)
𝑘(𝑦 + Δ𝑦) − 𝑀𝑔 +(𝑚1 −𝑚2)
2𝑔 + (𝑚1 −𝑚2)2𝐴
𝑚1 +𝑚2 +12𝑀
− (𝑚1 +𝑚2)𝑔 − (𝑚1 +𝑚2)𝐴
= 𝑀𝐴
𝑘𝑦 +(𝑚1 −𝑚2)
2𝑔
𝑚1 +𝑚2 +12𝑀
− (𝑚1 +𝑚2 +𝑀)𝑔 + 𝑘Δ𝑦
= [𝑚1 +𝑚2 +𝑀 −(𝑚1 −𝑚2)
2
𝑚1 +𝑚2 +12𝑀]𝐴
3. Membuat persamaan gerak sistem Lihat kembali persamaan terakhir yang kita dapatkan sebelumnya di langkah 2.
𝑘𝑦 +(𝑚1 −𝑚2)
2𝑔
𝑚1 +𝑚2 +12𝑀
− (𝑚1 +𝑚2 +𝑀)𝑔
⏟ ini sama dengan persamaan (6)=0
+ 𝑘Δ𝑦
= [𝑚1 +𝑚2 +𝑀 −(𝑚1 −𝑚2)
2
𝑚1 +𝑚2 +12𝑀
]𝐴
𝑘Δ𝑦 = [𝑚1 +𝑚2 +𝑀 −(𝑚1 −𝑚2)
2
𝑚1 +𝑚2 +12𝑀
]𝐴
Arah percepatan katrol 𝐴 adalah ke atas sedangkan arah simpangan katrol ke bawah, maka akan berlaku 𝐴 = −∆�̈�.
𝑘Δ𝑦 = −[𝑚1 +𝑚2 +𝑀 −(𝑚1 −𝑚2)
2
𝑚1 +𝑚2 +12𝑀
]∆�̈�
∆�̈� +𝑘 (𝑚1 +𝑚2 +
12𝑀)
𝑚12 +𝑚22 +𝑀2 + 2𝑚1𝑚2 +
32𝑀
(𝑚1 +𝑚2) − 𝑚12 + 2𝑚1𝑚2 −𝑚22Δ𝑦 = 0

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 16
∆�̈� +𝑘 (𝑚1 +𝑚2 +
12𝑀)
𝑀2 + 4𝑚1𝑚2 +32𝑀
(𝑚1 +𝑚2)×2
2Δ𝑦 = 0
∆�̈� +𝑘(2𝑚1 + 2𝑚2 +𝑀)
2𝑀2 + 8𝑚1𝑚2 + 3𝑀(𝑚1 +𝑚2)Δ𝑦 = 0
4. Menentukan kecapatan sudut osilasi pegas Persamaan terakhir analog dengan persamaan umum gerak harmonik sederhana yaitu ∆�̈� + 𝜔2Δ𝑦 = 0 Maka kecepatan sudut osilasi pegas adalah
𝜔2 =𝑘(2𝑚1 + 2𝑚2 +𝑀)
2𝑀2 + 8𝑚1𝑚2 + 3𝑀(𝑚1 +𝑚2)