
Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec ... · Persamaan kinematika gerak bola...
23
Basyir Al Banjari 0896-5985-6821 mechtermlighlismfism DC3BCE5B [email protected] www.basyiralbanjari.wordpress.com Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821 Follow my Instagram @basyir.elphisic.elbanjari Hal | 1 OSP Fisika 2017 Number 1 BOLA MEMANTUL DI BIDANG MIRING Sebuah bola dilemparkan dengan kecepatan pada arah horisontal dari suatu puncak bukit yang memiliki sudut kemiringan terhadap horisontal. Setiap kali menumbuk permukaan bukit yang miring, tumbukan selalu bersifat elastik. Pada saat tumbukan ke , bola tepat sampai di dasar bukit. Percepatan mengarah vertikal ke bawah. a. Tentukan tinggi bukit (dinyatakan dalam 0 , , , dan ). b. Hitung ketinggian puncak bukit tersebut jika = 30 0 , 0 = 10 m/s, = 10 kali dan = 10 m/s 2 . Pembahasan : a. Misalkan tinggi bukit . Perhatikan gambar di bawah ini! Jadikan arah sejajar permukaan bukit sebagai arah sumbu dan arah tegak lurusnya sebagai sumbu . Komponen kecepatan awal bola adalah 0 = 0 cos 0 = 0 sin Komponen percepatan gravitasi yang bekerja pada bola adalah = sin = cos Persamaan kinematika gerak bola pada sumbu dan akan menjadi = 0 + ⟹ = 0 cos + sin = 0 + ⟹ = 0 sin − cos = 0 + 0 + 1 2 2 ⟹= 0 + 0 cos + 1 2 sin 2 = 0 + 0 − 1 2 2 ⟹= 0 + 0 sin − 1 2 cos 2 0 0 0 0
Transcript of Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec ... · Persamaan kinematika gerak bola...
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 1
OSP Fisika 2017 Number 1
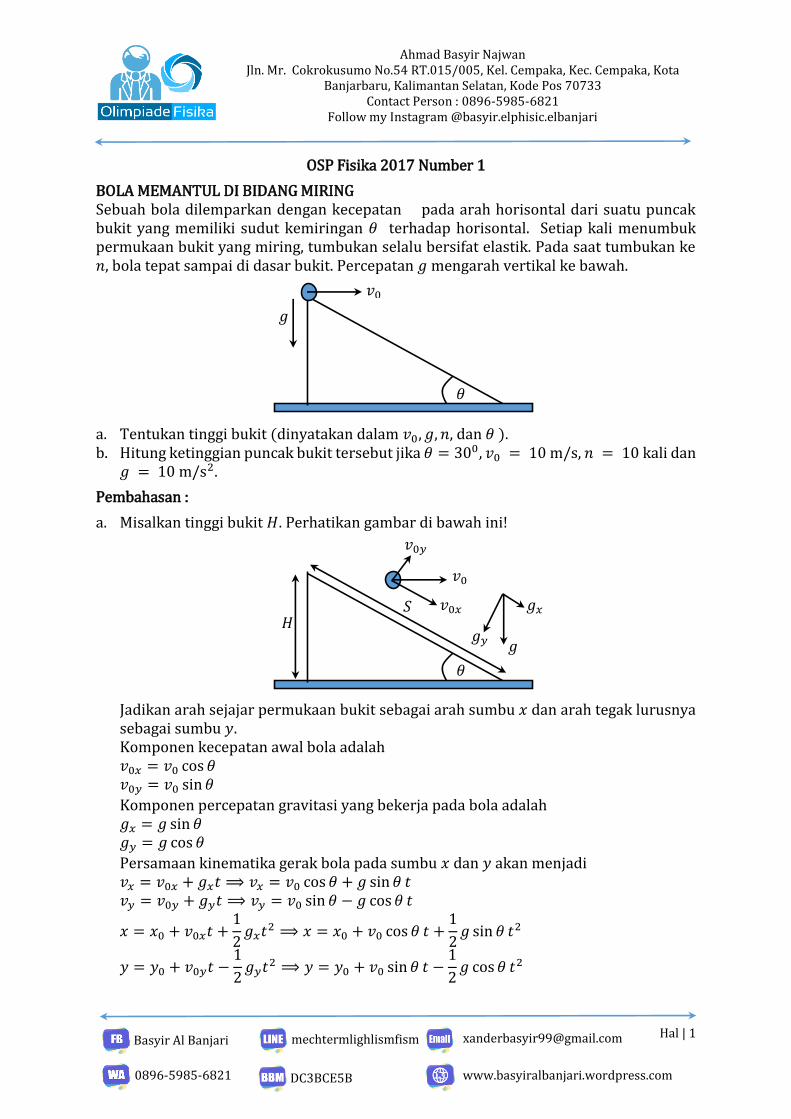
BOLA MEMANTUL DI BIDANG MIRING Sebuah bola dilemparkan dengan kecepatan pada arah horisontal dari suatu puncak bukit yang memiliki sudut kemiringan 𝜃 terhadap horisontal. Setiap kali menumbuk permukaan bukit yang miring, tumbukan selalu bersifat elastik. Pada saat tumbukan ke 𝑛, bola tepat sampai di dasar bukit. Percepatan 𝑔 mengarah vertikal ke bawah. a. Tentukan tinggi bukit (dinyatakan dalam 𝑣0, 𝑔, 𝑛, dan 𝜃 ). b. Hitung ketinggian puncak bukit tersebut jika 𝜃 = 300, 𝑣0 = 10 m/s, 𝑛 = 10 kali dan
𝑔 = 10 m/s2.
Pembahasan :
a. Misalkan tinggi bukit 𝐻. Perhatikan gambar di bawah ini! Jadikan arah sejajar permukaan bukit sebagai arah sumbu 𝑥 dan arah tegak lurusnya sebagai sumbu 𝑦. Komponen kecepatan awal bola adalah 𝑣0𝑥 = 𝑣0 cos 𝜃 𝑣0𝑦 = 𝑣0 sin 𝜃
Komponen percepatan gravitasi yang bekerja pada bola adalah 𝑔𝑥 = 𝑔 sin 𝜃 𝑔𝑦 = 𝑔 cos 𝜃
Persamaan kinematika gerak bola pada sumbu 𝑥 dan 𝑦 akan menjadi 𝑣𝑥 = 𝑣0𝑥 + 𝑔𝑥𝑡 ⟹ 𝑣𝑥 = 𝑣0 cos 𝜃 + 𝑔 sin 𝜃 𝑡 𝑣𝑦 = 𝑣0𝑦 + 𝑔𝑦𝑡 ⟹ 𝑣𝑦 = 𝑣0 sin 𝜃 − 𝑔 cos 𝜃 𝑡
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 +1
2𝑔𝑥𝑡
2 ⟹ 𝑥 = 𝑥0 + 𝑣0 cos 𝜃 𝑡 +1
2𝑔 sin 𝜃 𝑡2
𝑦 = 𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑦𝑡
2 ⟹ 𝑦 = 𝑦0 + 𝑣0 sin 𝜃 𝑡 −1
2𝑔 cos 𝜃 𝑡2
𝜃
𝐻
𝑣0
𝑣0𝑥
𝑣0𝑦
𝑔𝑥
𝑔 𝑔𝑦
𝑆
𝜃
𝑔
𝑣0

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 2
Kita tinjau dulu gerak bola dari saat awal (𝑦0 = 0) sampai akan menumbuk bukit (𝑦 =0) untuk yang pertama kalinya (𝑛 = 1), selang waktu untuk kedua kondisi ini adalah
0 = 0 + 𝑣0 sin 𝜃 𝑡 −1
2𝑔 cos 𝜃 𝑡2 ⟹ 𝑡 =
2𝑣0 tan 𝜃
𝑔
Kecepatan bola tepat ketika akan menumbuk bukit untuk yang pertama kalinya adalah
𝑣1𝑦 = 𝑣0 sin 𝜃 − 𝑔 cos 𝜃2𝑣0 tan 𝜃
𝑔⟹ 𝑣1𝑦 = −𝑣0 sin 𝜃
Karena tumbukan hanya terjadi pada arah tegak lurus permukaan bukit dan tumbukan yang terjadi bersifat elastis sempurna, maka bola hanya berbalik arah pada sumbu 𝑦. 𝑣1𝑦′ = −𝑣1𝑦 = −(−𝑣0 sin 𝜃) = 𝑣0 sin 𝜃 = 𝑣0𝑦
Sesaat setelah tumbukan yang pertama, kecepatan bola pada sumbu 𝑦 sama dengan kecepatan awal boal pada sumbu 𝑦. Artinya selang waktu antara tumbukan kedua dan ketiga juga akan sama dengan
𝑡 =2𝑣0 tan 𝜃
𝑔
Begitupan antara tumbukan ketiga dan keempat, keempat dan kelima, dan seterusnya. Jadi selang waktu total dari saat bola dilemparkan sampai tumbukan ke 𝑛 adalah
𝑡𝑛 =2𝑛𝑣0 tan 𝜃
𝑔
Pada sumbu 𝑥, bola hanya mengalami gerak lurus berubah beraturan dipercepat, hal ini dikarenakan tumbukan antar bola dan bukit tidak memberikan efek pada gerak bola arah sumbu 𝑥. Tumbukan hanya terjadi pada sumbu 𝑦, sehingga gerakan pada sumbu 𝑥 tidak terpengaruh. Maka panjang bukit dari puncak sampai dasarnya adalah (gunakan 𝑥0 = 0, karena puncak bukit adalah titik acuan atau titik asal sistem koordinat kita)
𝑆 = 𝑥0 + 𝑣0 cos 𝜃 𝑡𝑛 +1
2𝑔 sin 𝜃 𝑡𝑛
2
𝑆 = 0 + 𝑣0 cos 𝜃2𝑛𝑣0 tan 𝜃
𝑔+1
2𝑔 sin 𝜃 (
2𝑛𝑣0 tan 𝜃
𝑔)2
𝑆 =2𝑛𝑣0
2 tan 𝜃
𝑔(cos 𝜃 + 𝑛 sin 𝜃 tan 𝜃)
𝑆 =2𝑛𝑣0
2 sin 𝜃
𝑔(1 + 𝑛 tan2 𝜃)
Maka tinggi bukit adalah 𝐻 = 𝑆 sin 𝜃
𝐻 =2𝑛𝑣0
2 sin2 𝜃
𝑔(1 + 𝑛 tan2 𝜃)

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 3
b. Dengan mensubtitusi 𝜃 = 300, 𝑣0 = 10 m/s, 𝑛 = 10 kali dan 𝑔 = 10 m/s2 akan kita dapatkan
𝐻 =2(10)(10)2(1/2)2
10(1 + 10(1/√3)
2)
𝐻 = 50 (13
3)
𝐻 =650
3m
OSP Fisika 2016 Number 2
MELEPAS MUATAN DI ANGKASA Sebuah pesawat ruang angkasa dikirim untuk mengamati sebuah planet berbentuk bola yang bermassa 𝑀 dan berjari-jari 𝑅. Ketika pesawat tersebut menyalakan mesinnya sedemikian sehingga berada pada posisi diam terhadap planet tersebut dengan jarak 𝑑 dari pusat planet tersebut (𝑑 > 𝑅), pesawat tersebut menembakkan sebuah paket bermassa 𝑚 dengan kecepatan awal 𝑣0. Massa 𝑚 jauh lebih kecil daripada massa pesawat. Paket tersebut ditembakkan membentuk sudut 𝜃 terhadap garis radial yang menghubungkan pusat planet dan pesawat tersebut sehingga benda paket tersebut menyinggung permukaan planet. Tentukan: a. laju benda saat menyinggung permukaan planet. b. sudut 𝜃 agar paket tersebut tepat menyinggung permukaannyal c. kemudian untuk jarak d yang tetap, tentukan syarat untuk 𝑣0 (dinyatakan dalam
𝐺,𝑀, 𝑅 dan 𝑑) agar selalu ada sudut 𝜃 sedemikian sehingga paket tersebut dapat menyinggung planet.
Pembahasan : a. Untuk sistem ini, apakah momentum sudut paket kekal? Mari kita cek torsi eksternal
yang bekerja pada paket. Kita tinjau menggunakan sistem koordinat polar dengan acuannya adalah pusat planet. Gaya eksternal yang bekerja pada paket hanyalah gaya gravitasi antara planet dan paket (antara paket dan pesawat dapat diabaikan karena massa pesawat jauh lebih kecil dari massa planet)
�⃗�𝑔 = −𝐺𝑀𝑚
𝑟2�̂�
Vektor posisi paket dari planet adalah 𝑟 = 𝑟�̂�
𝑑
𝜃
𝑅
𝑣0
𝑀

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 4
Torsi eksternal yang bekerja pada paket adalah
𝜏 = 𝑟 × �⃗�𝑔 = 𝑟�̂� × (−𝐺𝑀𝑚
𝑟2�̂�) = −
𝐺𝑀𝑚
𝑟(�̂� × �̂�)⏟
0
𝜏 = 0 Karena torsi eksternal paket adalah perubahan momentum sudutnya, dan torsi eksternal ini berniali nol, maka momentum sudut sistem konstan.
�⃗⃗� = konstan ⟹ 𝜏 =𝑑�⃗⃗�
𝑑𝑡= 0
Maka kita bisa menggunakan hukum kekekalan momentum sudut untuk menentukan besar kecepatan paket ketika sampai di permukaan planet. Maka momentum linier paket akan men 𝐿𝑖 = 𝐿𝑓
𝑚𝑣0 sin 𝜃 𝑑 = 𝑚𝑣𝑅 ⟹ 𝑣 =𝑣0 sin 𝜃 𝑑
𝑅
b. Gaya gravitasi adalah gaya yang konservatif, maka energi mekanik sistem akan kekal. 𝐸𝑀𝑖 = 𝐸𝑀𝑓 1
2𝑚𝑣0
2 −𝐺𝑀𝑚
𝑑=1
2𝑚𝑣2 −
𝐺𝑀𝑚
𝑅
𝑣2 = 𝑣02 + 2𝐺𝑀 (
1
𝑅−1
𝑑)
Subtitusi 𝑣 dari hasil (a) 𝑣02 sin2 𝜃 𝑑2
𝑅2= 𝑣0
2 + 2𝐺𝑀 (𝑑 − 𝑅
𝑅𝑑)
sin2 𝜃 =𝑅2
𝑑2[1 +
2𝐺𝑀
𝑣02(𝑑 − 𝑅
𝑅𝑑)]
sin 𝜃 = ±𝑅
𝑑√1 +
2𝐺𝑀
𝑣02(𝑑 − 𝑅
𝑅𝑑)
𝜃 = arcsin (±𝑅
𝑑√1 +
2𝐺𝑀
𝑣02(𝑑 − 𝑅
𝑅𝑑))
c. Agar selalu ada sudut 𝜃 yang memenuhi syarat paket selalu menyinggung planet, maka sudut nilai sin 𝜃 harus berada di daerah hasil realnya yaitu berada di selang −1 ≤ sin 𝜃 ≤ 1 Maka sin2 𝜃 ≤ 1 𝑅2
𝑑2[1 +
2𝐺𝑀
𝑣02(𝑑 − 𝑅
𝑅𝑑)] ≤ 1
1 +2𝐺𝑀
𝑣02(𝑑 − 𝑅
𝑅𝑑) ≤
𝑑2
𝑅2
2𝐺𝑀
𝑣02(𝑑 − 𝑅
𝑅𝑑) ≤
𝑑2
𝑅2− 1 =
𝑑2 − 𝑅2
𝑅2=(𝑑 − 𝑅)(𝑑 + 𝑅)
𝑅2
𝑣02 ≥
2𝐺𝑀𝑅
𝑑(𝑑 + 𝑅)

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 5
𝑣0 ≥ √2𝐺𝑀𝑅
𝑑(𝑑 + 𝑅) atau 𝑣0 ≤ −√
2𝐺𝑀𝑅
𝑑(𝑑 + 𝑅)
Maka syarat 𝑣0 yang harus dipenuhi secara fisis adalah (𝑣0 tidak mungkin negatif)
𝑣0 ≥ √2𝐺𝑀𝑅
𝑑(𝑑 + 𝑅)
OSP Fisika 2016 Number 3
OSILASI SISTEM BATANG DAN MASSA KECIL DI ATAS PERMUKAAN SILINDER Gambar di bawah memperlihatkan sebuah papan pejal tipis homogen dengan panjang 2𝑏 dan massa 𝑀. Di kedua ujung papan dilekatkan massa 𝑚. Sistim papan ini dapat “menggelinding” (rolling) tanpa tergelincir (slip) di atas permukaan kasar suatu silinder yang berjari-jari 𝑎. Papan tersebut mula-mula setimbang, yaitu saat titik berat papan (titik G) tepat berada di titik puncak silinder tersebut (titik A), dan selanjutnya diberikan sedikit simpangan. Jika papan kemudian berosilasi dan 𝜃 adalah sudut AOC, tentukan besarnya periode osilasi kecil dari papan tersebut.
Pembahasan :
Soal ini juga bisa kita kerjakan dengan metode energi maupun metode gaya, akan tetapi akan menjadi lebih mudah jika menggunakan metode gaya. Pertama kita harus mencari energi total sistem terlebih dahulu. Kemudian kita turunkan satu kali energi total ini terhadap waktu dan hasil daripada turunan energi total ini bernilai nol karena energi totalnya kekal atau konstan sehingga tidak ada pengurangan atau penambahan energi terhadap waktu.
Energi total sistem ini adalah energi mekanik yang terdiri dari energi potensial dan energi kinetik daripada batang dan massa 𝑚. Hal yang perlu diamati adalah bahwa batang bergerak translasi juga rotasi terhadap pusat massanya sendiri, sehingga dia mempunyai energi kinetik rotasi dan transalasi. Sedangkan untuk kedua massa 𝑚, dia hanya mempunyai energi kinetik translasi dan tidak berotasi. Kenapa? Karena ukurannya kecil,
𝑚
𝑚
2𝑏
𝐴
𝑂
𝐺
𝐶
𝜃 𝑎
𝑀

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 6
kita bisa anggap dia sebagai massa titik. Terus, gimana cara menentukan energinya? Kan ribet tuh! Nah untuk menentukan energinya ada cara yang mudah. Berikut caranya...!!!
Kita jadikan terlebih dahulu titik O sebagai titik asal sistem koordinat kartesius kita. Karena batang menggelinding tanpa slip di atas permuakaan silinder, jarak GC akan sama dengan panjang busur AC. Maka posisi masing-masing benda pada koordinat ini adalah
Batang(cukup tinjau pusat massanya yaitu titik G dan tinjaulah keadaan saat batang tersimpang dari titik seimbangnya)
𝑥𝐵 = 𝑎 sin 𝜃 − 𝑎𝜃 cos 𝜃
𝑦𝐵 = 𝑎 cos 𝜃 + 𝑎𝜃 sin 𝜃
Massa 𝑚 sebelah kiri
𝑥𝐿 = 𝑎 sin 𝜃 − (𝑏 + 𝑎𝜃) cos 𝜃
𝑦𝐿 = 𝑎 cos 𝜃 + (𝑏 + 𝑎𝜃) sin 𝜃
Massa 𝑚 sebelah kanan
𝑥𝑅 = 𝑎 sin 𝜃 + (𝑏 − 𝑎𝜃) cos 𝜃
𝑦𝑅 = 𝑎 cos 𝜃 − (𝑏 − 𝑎𝜃) sin 𝜃
Untuk mendapatkan kecepatan masing-masing benda kita cukup menurunkan posisinya satu kali terhadap waktu dan perhatikan penulisan berikut
𝑣𝑥 =𝑑𝑥
𝑑𝑡= �̇� dan 𝑣𝑦 =
𝑑𝑦
𝑑𝑡= �̇�
Kecepatan masing-masing benda adalah
Batang 𝑀
�̇�𝐵 = 𝑎𝜃 sin 𝜃 �̇�
�̇�𝐵 = 𝑎𝜃 cos 𝜃 �̇�
Massa 𝑚 sebelah kiri
�̇�𝐿 = 𝑎𝜃 sin 𝜃 �̇� + 𝑏 sin 𝜃 �̇�
�̇�𝐿 = 𝑎𝜃 cos 𝜃 �̇� + 𝑏 cos 𝜃 �̇�
Massa 𝑚 sebelah kanan
�̇�𝑅 = 𝑎𝜃 sin 𝜃 �̇� − 𝑏 sin 𝜃 �̇�
�̇�𝑅 = 𝑎𝜃 cos 𝜃 �̇� − 𝑏 cos 𝜃 �̇�
Energi kinetik sistem adalah
𝐸𝐾 = 𝐸𝐾𝐵,𝑇𝑟𝑎𝑛𝑠 + 𝐸𝐾𝐵,𝑅𝑜𝑡 + 𝐸𝐾𝑚,𝐿 + 𝐸𝐾𝑚,𝑅
𝐸𝐾 =1
2𝑀(�̇�𝐵
2 + �̇�𝐵2) +
1
2(1
12𝑀(2𝑏)2) �̇�2 +
1
2𝑚(�̇�𝐿
2 + �̇�𝐿2) +
1
2𝑚(�̇�𝑅
2 + �̇�𝑅2)
𝐸𝐾 =1
2𝑀𝑎2𝜃2�̇�2 +
1
6𝑀𝑏2�̇�2 +𝑚(𝑎2𝜃2�̇�2 + 𝑏2�̇�2)

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 7
Untuk mendapatkan persamaan diatas silahkan diuraikan sendiri ya...!!! yang perlu diingat adalah sin2 𝜃 + cos2 𝜃 = 1.
Energi potensial sistem adalah
𝐸𝑃 = 𝐸𝑃𝐵 + 𝐸𝑃𝑚,𝐿 + 𝐸𝑃𝑚,𝑅
𝐸𝑃 = 𝑀𝑔𝑦𝐵 +𝑚𝑔𝑦𝐿 +𝑚𝑔𝑦𝑅
𝐸𝑃 = 𝑀𝑔𝑎(cos 𝜃 + 𝜃 sin 𝜃) + 𝑚𝑔(𝑎 cos 𝜃 + (𝑏 + 𝑎𝜃) sin 𝜃)+ 𝑚𝑔(𝑎 cos 𝜃 − (𝑏 − 𝑎𝜃) sin 𝜃)
𝐸𝑃 = 𝑀𝑔𝑎(cos 𝜃 + 𝜃 sin 𝜃) + 2𝑚𝑔𝑎(cos 𝜃 + 𝜃 sin 𝜃)
𝐸𝑃 = (𝑀 + 2𝑚)𝑔𝑎(cos 𝜃 + 𝜃 sin 𝜃)
Energi mekanik sistem akan menjadi
𝐸𝑀 = 𝐸𝐾 + 𝐸𝑃
𝐸𝑀 =1
2𝑀𝑎2𝜃2�̇�2 +
1
6𝑀𝑏2�̇�2 +𝑚(𝑎2𝜃2�̇�2 + 𝑏2�̇�2) + (𝑀 + 2𝑚)𝑔𝑎(cos 𝜃 + 𝜃 sin 𝜃)
Kita turunkan energi total ini terhadap waktu untuk mendapatkan persamaan geraknya
𝑑(𝐸𝑀)
𝑑𝑡=𝑑
𝑑𝑡(1
2𝑀𝑎2𝜃2�̇�2 +
1
6𝑀𝑏2�̇�2 +𝑚(𝑎2𝜃2�̇�2 + 𝑏2�̇�2)
+ (𝑀 + 2𝑚)𝑔𝑎(cos 𝜃 + 𝜃 sin 𝜃)) = 0
0 = 𝑀𝑎2(𝜃�̇�3 + 𝜃2�̇��̈�) +1
3𝑀𝑏2�̇��̈� + 2𝑚(𝑎2(𝜃2𝜃�̇�3 + �̇��̈�) + 𝑏2�̇��̈�)
+ (𝑀 + 2𝑚)𝑔𝑎𝜃 cos 𝜃 �̇�
0 = 𝑀𝑎2(𝜃�̇�2 + �̈�) +1
3𝑀𝑏2�̈� + 2𝑚(𝑎2(𝜃�̇�2 + �̈�) + 𝑏2�̈�) + (𝑀 + 2𝑚)𝑔𝑎𝜃 cos 𝜃
Karena simpangan sudut 𝜃 kecil kita bisa dekati suku cos 𝜃 ≈1, 𝜃2 ≈ 0, dan �̇�2 ≈ 0.
0 =1
3𝑀𝑏2�̈� + 2𝑚𝑏2�̈� + (𝑀 + 2𝑚)𝑔𝑎𝜃
0 =𝑀 + 6𝑚
3𝑏2�̈� + (𝑀 + 2𝑚)𝑔𝑎𝜃
�̈� +3(𝑀 + 2𝑚)𝑔𝑎
(𝑀 + 6𝑚)𝑏2𝜃 = 0
Persamaan terakhir analog dengan bentuk umum persamaan gerak harmonik sederhana yaitu �̈� + 𝜔2𝜃 = 0, sehingga kecepatan sudut atau disebut juga frekuensi sudut osilasi sistem adalah
𝜔 = √3(𝑀 + 2𝑚)𝑔𝑎
(𝑀 + 6𝑚)𝑏2
Dan periode osilasinya akan menjadi

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 8
𝑇 =2𝜋
𝜔
𝑇 = 2𝜋√(𝑀 + 6𝑚)𝑏2
3(𝑀 + 2𝑚)𝑔𝑎
Kita juga bisa menggunakan metode gaya untuk menentukan periode osilasi sistem ini. Mau tau caranya? Karena saya lagi baik hati, akan saya bahas sekalian untuk metode gaya.
Untuk sistem ini, lebih mudah kita tinjau gerak rotasinya. Torsi pemulih atau torsi yang cenderung mengembalikan batang serta kedua massa 𝑚 ke posisi awalnya adalah torsi akibat gaya gravitasi dan gaya normal permukaan silinder terhadap batang. Agar kita tidak perlu mempedulikan gaya normal, kita tinjau torsi pemulih relatif terhadap titik sentuh antara batang dengan permukaan silinder atau titik C. Besar torsi pemulih ini adalah
𝜏𝑃 = 𝑀𝑔 cos 𝜃 𝑎𝜃 +𝑚𝑔 cos 𝜃 (𝑏 + 𝑎𝜃) − 𝑚𝑔 cos 𝜃 (𝑏 − 𝑎𝜃)
𝜏𝑃 = (𝑀 + 2𝑚)𝑔 cos 𝜃 𝑎𝜃
Torsi ini cenderung memutar memutar sistem berlawanan arah jarum jam.
Karena torsi ini kita tinjau terhadap titik C, maka momen inersia sistem juga harus terhadap titik C. Kita bisa menggunakan teorema sumbu sejajr untuk menentukan momen inersia ini.
𝐼 =1
12𝑀(2𝑏)2
⏟ 1
+𝑀(𝑎𝜃)2⏟ 2
+𝑚(𝑏 + 𝑎𝜃)2⏟ 3
+𝑚(𝑏 − 𝑎𝜃)2⏟ 4
Suku 1 adalah adalah momen inersia batang terhadap pusat massanya sendiri.
Suku 2 adalah adalah tambahan momen inersia batang karena porosnya dipindahkan ke titik C menggunakan teorema sumbu sejajar (𝐼 = 𝐼0 +𝑚𝑑
2, dimana 𝐼0 adalah momen inersia benda terhadap suatu poros, 𝐼 adalah momen inersia benda terhadap poros yang baru, 𝑚 adalah massa benda, dan 𝑑 adalah jarak poros awal terhadap poros yang baru)
Suku 3 adalah momen inersia massa 𝑚 sebelah kiri terhadap titik C.
Suku 4 adalah momen inersia massa 𝑚 sebelah kanan terhadap titik C.
𝐼 =𝑀𝑏2 + 3𝑀𝑎2𝜃2 + 6𝑚(𝑏2 + 𝑎2𝜃2)
3
Selanjutnya kita gunakan Hukum II Newton tentang gerak rotasi (𝜏 = 𝐼𝛼) akan kita dapatkan
(𝑀 + 2𝑚)𝑔 cos 𝜃 𝑎𝜃 =𝑀𝑏2 + 3𝑀𝑎2𝜃2 + 6𝑚(𝑏2 + 𝑎2𝜃2)
3𝛼
3(𝑀 + 2𝑚)𝑔 cos 𝜃 𝑎𝜃
𝑀𝑏2 + 3𝑀𝑎2𝜃2 + 6𝑚(𝑏2 + 𝑎2𝜃2)= 𝛼
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 9
Percepatan sudut sistem yaitu 𝛼 adalah berlawanan arah jarum jam sedangkan simpangan sudut 𝜃 searah jarum jam(arah bertambahnya 𝜃). Maka percepatan sudut sistem adalah negatif dari turunan kedua simpangan sudut 𝜃 terhadap waktu atau
𝛼 = −𝑑2𝜃
𝑑𝑡2
Karena simpangan sudut 𝜃 kecil kita bisa gunakan pendekatan 𝜃2 ≈ 0 dan cos 𝜃 ≈ 1
3(𝑀 + 2𝑚)𝑔𝑎
(𝑀 + 6𝑚)𝑏2𝜃 = −
𝑑2𝜃
𝑑𝑡2→𝑑2𝜃
𝑑𝑡2+3(𝑀 + 2𝑚)𝑔𝑎
(𝑀 + 6𝑚)𝑏2𝜃 = 0 → 𝜔 = √
3(𝑀 + 2𝑚)𝑔𝑎
(𝑀 + 6𝑚)𝑏2
𝑇 = 2𝜋√(𝑀 + 6𝑚)𝑏2
3(𝑀 + 2𝑚)𝑔𝑎
OSP Fisika 2016 Number 4
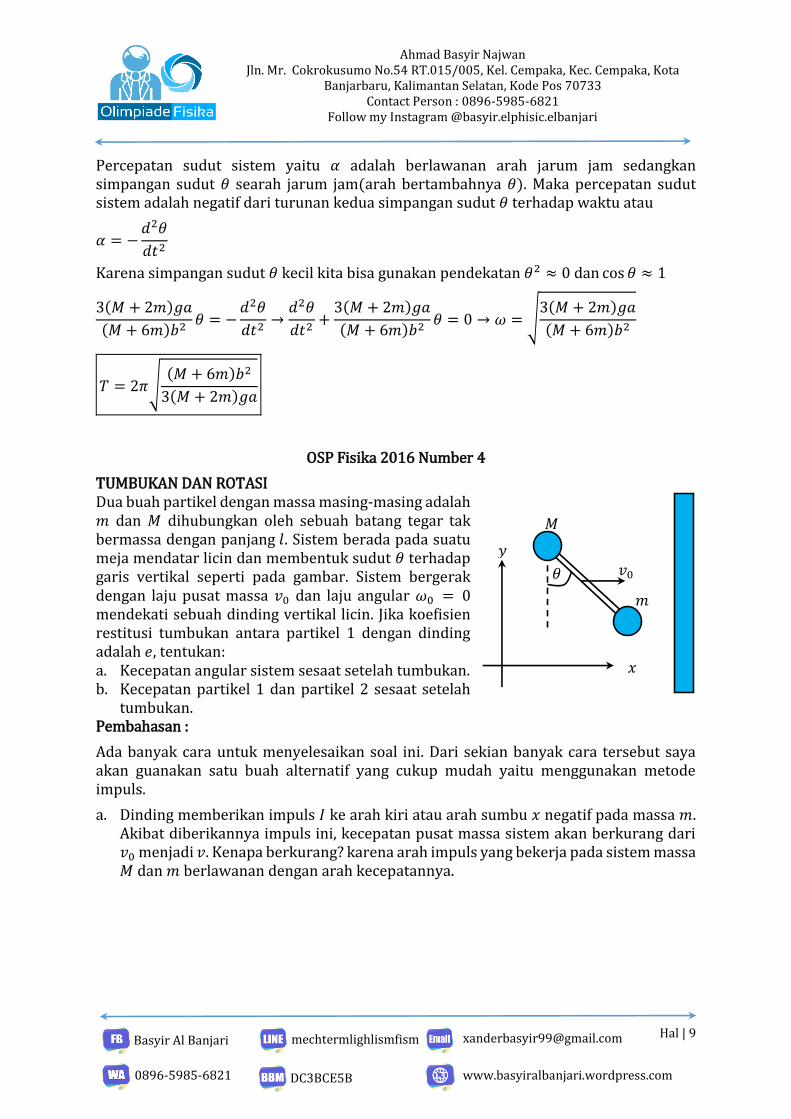
TUMBUKAN DAN ROTASI Dua buah partikel dengan massa masing-masing adalah 𝑚 dan 𝑀 dihubungkan oleh sebuah batang tegar tak bermassa dengan panjang 𝑙. Sistem berada pada suatu meja mendatar licin dan membentuk sudut 𝜃 terhadap garis vertikal seperti pada gambar. Sistem bergerak dengan laju pusat massa 𝑣0 dan laju angular 𝜔0 = 0 mendekati sebuah dinding vertikal licin. Jika koefisien restitusi tumbukan antara partikel 1 dengan dinding adalah 𝑒, tentukan: a. Kecepatan angular sistem sesaat setelah tumbukan. b. Kecepatan partikel 1 dan partikel 2 sesaat setelah
tumbukan. Pembahasan :
Ada banyak cara untuk menyelesaikan soal ini. Dari sekian banyak cara tersebut saya akan guanakan satu buah alternatif yang cukup mudah yaitu menggunakan metode impuls.
a. Dinding memberikan impuls 𝐼 ke arah kiri atau arah sumbu 𝑥 negatif pada massa 𝑚. Akibat diberikannya impuls ini, kecepatan pusat massa sistem akan berkurang dari 𝑣0 menjadi 𝑣. Kenapa berkurang? karena arah impuls yang bekerja pada sistem massa 𝑀 dan 𝑚 berlawanan dengan arah kecepatannya.
𝑚
𝑀
𝜃
𝑦
𝑥
𝑣0
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 10
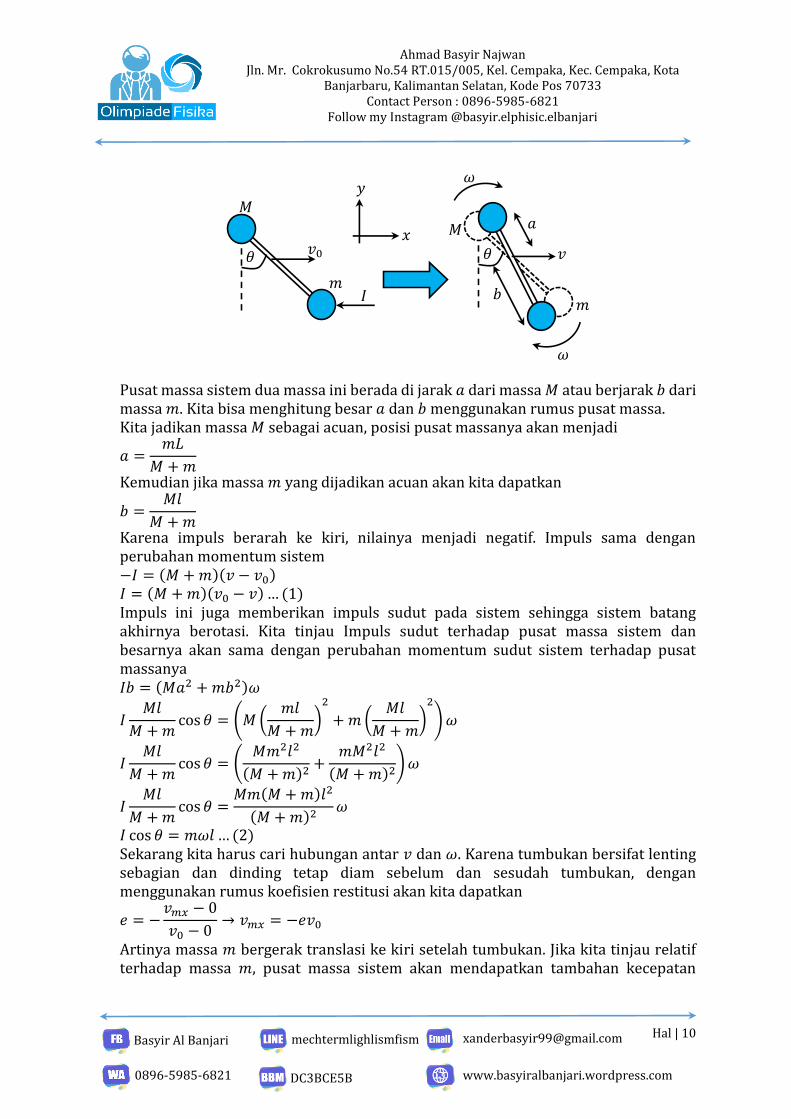
Pusat massa sistem dua massa ini berada di jarak 𝑎 dari massa 𝑀 atau berjarak 𝑏 dari massa 𝑚. Kita bisa menghitung besar 𝑎 dan 𝑏 menggunakan rumus pusat massa. Kita jadikan massa 𝑀 sebagai acuan, posisi pusat massanya akan menjadi
𝑎 =𝑚𝐿
𝑀 +𝑚
Kemudian jika massa 𝑚 yang dijadikan acuan akan kita dapatkan
𝑏 =𝑀𝑙
𝑀 +𝑚
Karena impuls berarah ke kiri, nilainya menjadi negatif. Impuls sama dengan perubahan momentum sistem −𝐼 = (𝑀 +𝑚)(𝑣 − 𝑣0) 𝐼 = (𝑀 +𝑚)(𝑣0 − 𝑣)… (1) Impuls ini juga memberikan impuls sudut pada sistem sehingga sistem batang akhirnya berotasi. Kita tinjau Impuls sudut terhadap pusat massa sistem dan besarnya akan sama dengan perubahan momentum sudut sistem terhadap pusat massanya 𝐼𝑏 = (𝑀𝑎2 +𝑚𝑏2)𝜔
𝐼𝑀𝑙
𝑀 +𝑚cos 𝜃 = (𝑀 (
𝑚𝑙
𝑀 +𝑚)2
+𝑚(𝑀𝑙
𝑀 +𝑚)2
)𝜔
𝐼𝑀𝑙
𝑀 +𝑚cos 𝜃 = (
𝑀𝑚2𝑙2
(𝑀 +𝑚)2+
𝑚𝑀2𝑙2
(𝑀 +𝑚)2)𝜔
𝐼𝑀𝑙
𝑀 +𝑚cos 𝜃 =
𝑀𝑚(𝑀 +𝑚)𝑙2
(𝑀 +𝑚)2𝜔
𝐼 cos 𝜃 = 𝑚𝜔𝑙 … (2) Sekarang kita harus cari hubungan antar 𝑣 dan 𝜔. Karena tumbukan bersifat lenting sebagian dan dinding tetap diam sebelum dan sesudah tumbukan, dengan menggunakan rumus koefisien restitusi akan kita dapatkan
𝑒 = −𝑣𝑚𝑥 − 0
𝑣0 − 0→ 𝑣𝑚𝑥 = −𝑒𝑣0
Artinya massa 𝑚 bergerak translasi ke kiri setelah tumbukan. Jika kita tinjau relatif terhadap massa 𝑚, pusat massa sistem akan mendapatkan tambahan kecepatan
𝑦
𝑥
𝑀
𝜃 𝑣0
𝑚 𝐼
𝑀
𝜃
𝑚
𝑣
𝜔
𝜔
𝑎
𝑏

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 11
sebesar 𝑒𝑣0. Kemudian kita menghubungkannya dengan kecepatan sudut sistem menjadi 𝜔𝑏 cos 𝜃 = 𝑣 + 𝑒𝑣0
𝑣 = 𝑀
𝑀 +𝑚𝜔𝑙 cos 𝜃 − 𝑒𝑣0
Subtitusi 𝑣 ke persamaan (1)
𝐼 = (𝑀 +𝑚)(𝑣0 −𝑀
𝑀 +𝑚𝜔𝑙 cos 𝜃 + 𝑒𝑣0)
𝐼 = (𝑀 +𝑚)(1 + 𝑒)𝑣0 −𝑀𝜔𝑙 cos 𝜃 Subtitusi 𝐼 ke persamaan (2) akan kita dapatkan kecepatan sudut sistem sesaat setelah tumbukan [(𝑀 +𝑚)(1 + 𝑒)𝑣0 −𝑀𝜔𝑙 cos 𝜃] cos 𝜃 = 𝑚𝜔𝑙 (𝑚 +𝑀 cos2 𝜃)𝜔𝑙 = (𝑀 +𝑚)(1 + 𝑒)𝑣0 cos 𝜃
𝜔 =(𝑀 +𝑚)(1 + 𝑒)𝑣0 cos 𝜃
(𝑚 +𝑀 cos2 𝜃)𝑙
b. Karena tidak ada gaya luar pada arah vertikal, momentum sistem arah vertikal kekal 𝑀𝑣𝑀𝑦 = 𝑚𝑣𝑚𝑦
𝑣𝑀𝑦 =𝑚
𝑀𝑣𝑚𝑦 …(3)
Jika kita tinjau relatif terhadap massa 𝑚, massa 𝑀 akan mendapatkan tambahan kecepatan ke arah atas sebesar 𝑣𝑚𝑦 . Kemudian kita bisa menghubungkannya dengan
kecepatan sudut sistem menjadi 𝜔𝑙 sin 𝜃 = 𝑣𝑀𝑦 + 𝑣𝑚𝑦
Subtitusi persamaan (3)
𝜔𝑙 sin 𝜃 =𝑚
𝑀𝑣𝑚𝑦 + 𝑣𝑚𝑦
𝑀 +𝑚
𝑀𝑣𝑚𝑦 = 𝜔𝑙 sin 𝜃
𝑣𝑚𝑦 =𝑀
𝑀 +𝑚𝜔𝑙 sin 𝜃
Subtitusi nilai 𝜔
𝑣𝑚𝑦 =𝑀
𝑀 +𝑚
(𝑀 +𝑚)(1 + 𝑒)𝑣0 cos 𝜃
(𝑚 +𝑀 cos2 𝜃)𝑙𝑙 sin 𝜃
𝑣𝑚𝑦 =𝑀(1 + 𝑒)𝑣0 sin 𝜃 cos 𝜃
𝑚 +𝑀 cos2 𝜃
Kecepatan massa 𝑚 sessat setelah tumbukan adalah
�⃗�𝑚 = −𝑒𝑣0𝑖̂ −𝑀(1 + 𝑒)𝑣0 sin 𝜃 cos 𝜃
𝑚 +𝑀 cos2 𝜃𝑗̂
Kecepatan massa 𝑀 arah vertikal setelah tmbukan adalah
𝑣𝑀𝑦 =𝑚(1 + 𝑒)𝑣0 sin 𝜃 cos 𝜃
𝑚 +𝑀 cos2 𝜃

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 12
Untuk mendapatkan 𝑣𝑀𝑥 kita tinjau massa 𝑀 relatif terhadap massa 𝑚, maka dia akan mendapatkan tambahan kecepatan arah ke kanan sebesar 𝑒𝑣0. Kemudian kita bisa menghubungkannya dengan kecepatan sudut sistem menjadi 𝜔𝑙 cos 𝜃 = 𝑣𝑀𝑥 + 𝑒𝑣0 𝑣𝑀𝑥 = 𝜔𝑙 cos 𝜃 − 𝑒𝑣0 Subtitusi nilai 𝜔
𝑣𝑀𝑥 =(𝑀 +𝑚)(1 + 𝑒)𝑣0 cos 𝜃
(𝑚 +𝑀 cos2 𝜃)𝑙𝑙 cos 𝜃 − 𝑒𝑣0
𝑣𝑀𝑥 =𝑀(1 + 𝑒)𝑣0 cos
2 𝜃 − (𝑚 +𝑀 cos2 𝜃)𝑒𝑣0𝑚 +𝑀cos2 𝜃
𝑣𝑀𝑥 =(𝑀 cos2 𝜃 − 𝑚𝑒)𝑣0𝑚 +𝑀 cos2 𝜃
Kecepatan massa 𝑀 sesaat setelah tumbukan adalah
�⃗�𝑀 =(𝑀 cos2 𝜃 −𝑚𝑒)𝑣0𝑚+𝑀 cos2 𝜃
𝑖̂ +𝑚(1 + 𝑒)𝑣0 sin 𝜃 cos 𝜃
𝑚 +𝑀 cos2 𝜃𝑗 ̂
�⃗�𝑀 =𝑣0
𝑚 +𝑀cos2 𝜃[(𝑀 cos2 𝜃 −𝑚𝑒)𝑖̂ + 𝑚(1 + 𝑒) sin 𝜃 cos 𝜃 𝑗̂]
OSP Fisika 2017 Number 5
PELUNCUR BARANG Gambar di bawah memperlihatkan sebuah peluncur barang (slipway) yang sangat panjang, dan berbentuk bidang miring yang membentuk sudut 𝛽 terhadap arah mendatar. Bidang miring tersebut dilengkapi dengan sangat banyak roda (roller) identik, dengan dua roda terdekat berada pada jarak 𝑑 satu sama lain (lihat gambar). Semua roda tersebut memiliki sumbu-sumbu rotasi mendatar dan merupakan silinder-slinder baja pejal yang permukaannya diselubungi dengan lapisan karet yang tipis dan diabaikan massanya. Masing-masing silinder tersebut bermassa 𝑚 dan berjari-jari 𝑟. Sebilah papan dengan massa 𝑀 dan panjang jauh lebih besar daripada 𝑑, mulai dilepas dari puncak peluncur barang tersebut. Abaikan gesekan udara dan gesekan pada poros-poros roda tersebut. Tentukan kelajuan akhir (terminal speed) 𝑣max papan tersebut. Pembahasan : Misalkan papan sudah bergerak sejauh 𝑆 sepanjang bidang miring sampai akhirnya antara roda dan papan tidak terjadi slip lagi. Penurunan energi potensial papan sebesar
𝑚
𝛽 𝑟
𝑑

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 13
𝑀𝑔𝑆 sin 𝛽. Maka sebanyak 𝑆/𝑑 buah roda akan memiliki kecepatan linier permukaan yang sama dengan kecepatan papan, yaitu 𝑣max. Maka kecepatan sudut tiap roda yang bergerak pada saat ini menjadi 𝜔max = 𝑣max/𝑟. Momen inersia tiap roda adalah
𝐼 =1
2𝑚𝑟2
Penurunan energi potensial papan ini diubah menjadi energi kinetik roda.
𝑀𝑔𝑆 sin 𝛽 =𝑆
𝑑
1
2𝐼𝜔max
2
𝑀𝑔𝑆 sin 𝛽 =𝑆
𝑑
1
2(1
2𝑚𝑟2) (
𝑣max𝑟)2
𝑀𝑔𝑆 sin 𝛽 =𝑆
𝑑
1
4𝑚𝑣max
2…(1)
𝑣max = √4𝑀𝑔𝑑 sin 𝛽
𝑚
Sebenarnya hasil di atas salah, karena kita melupakan kalor yang ditimbulkan akibat gesekan antara permukaan roda dan papan sebelum akhirnya papan mencapai kecepatan terminal. Jadi sebenarnya soal ini agak sedikit rumit, namun tidak tidak terlalu rumit juga sih. Okey kita cari dulu energi yang hilang sebagai kalor. Misalkan 𝑓𝑘 adalah gaya gesek kinetik antara permukaan papan dan roda. Dalam interval waktu yang singkat Δ𝑡, akan terjadi perubahan momentum sudut pada tiap roda sebesar 𝐼Δ𝜔 = 𝑓𝑘𝑟Δ𝑡 Dengan menjumlahkan semua perubahan momentum sudut roda, akan kita dapatkan momentum sudut akhir roda (kecepatannya maksimum pada saat akhir ini)
𝑟∑𝑓𝑘Δ𝑡 = 𝐼𝜔max = 𝐼𝑣max𝑟
Usaha yang dilakukan gaya gesek kinetik ini pada selang Δ𝑡, akan memunculkan kalor sebesar Δ𝑄 dan besar usaha ini sama dengan gaya gesek kinetik di kalikan dengan besar pergeseran relatif antara kedua permukaan tersebut Δ𝑄 = 𝑓𝑘(𝑣 − 𝑟𝜔)Δ𝑡 Dengan menjumlahkan semua kalor Δ𝑄 akan kita dapatkan kalor yang ditimbulakn oleh gesekan antara papan dengan sebuah roda
𝑄 =∑Δ𝑄
𝑄 =∑𝑓𝑘(𝑣 − 𝑟𝜔)Δ𝑡
𝑄 =∑𝑓𝑘𝑣Δ𝑡 −∑𝜔𝑓𝑘𝑟Δ𝑡
𝑄 =∑𝑓𝑘Δ𝑡∑𝑣 − 𝐼∑𝜔Δ𝜔
𝑄 =∑𝑓𝑘Δ𝑡∑𝑟𝜔 − 𝐼∑𝜔Δ𝜔
Ingat hubungan diferensial berikut 𝑑(𝜔2) = 2𝜔𝑑𝜔 Karena selang waktu Δ𝑡 sangat singkat, kita bisa lakukan pendekatan 𝑑𝜔 ≈ Δ𝜔 dan 𝑑(𝜔2) ≈ Δ(𝜔2)
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 14
Δ(𝜔2) = 2𝜔Δ𝜔 ⟹ 𝜔Δ𝜔 =1
2Δ(𝜔2)
𝑄 = 𝑟∑𝑓𝑘Δ𝑡⏟ 𝐼𝜔max
∑𝜔⏟ 𝜔max
−𝐼
2∑Δ(𝜔2)⏟ 𝜔max2
𝑄 = 𝐼𝜔max2 −
1
2𝐼𝜔max
2
𝑄 =1
2𝐼𝜔max
2 =1
2(1
2𝑚𝑟2) (
𝑣max𝑟)2
𝑄 =1
4𝑚𝑣max
2
Tambahkan faktor 𝑄 ini pada persamaan (1) (ingat bahwa 𝑄 adalah energi kinetik tiap roda)
𝑀𝑔𝑆 sin 𝛽 =𝑆
𝑑
1
4𝑚𝑣max
2 +𝑆
𝑑𝑄
𝑀𝑔𝑆 sin 𝛽 =𝑆
𝑑
1
4𝑚𝑣max
2 +𝑆
𝑑
1
4𝑚𝑣max
2 ⟹ 𝑣max = √2𝑀𝑔𝑑 sin 𝛽
𝑚
OSP Fisika 2017 Number 6
MANIK-MANIK DI ATAS SEGITIGA Sebuah batang dengan massa 𝑀 di-bengkok-an sehingga berbentuk siku-siku di B dengan sisi panjang AB adalah 𝐿 seperti terlihat pada gambar di bawah. Dua buah manik– manik kemudian ditaruh pada kedua sisi batang tersebut dengan massa masing–masing 𝑚1 dan 𝑚2 , serta dihubungkan oleh sebuah benang tak bermassa dengan panjang 𝑙. Sudut antara lantai horizontal dengan sisi AB adalah 𝜃. Abaikan semua gesekan pada semua kontak. Bila sistem di atas dalam keadaan setimbang, tentukan: a. Sudut 𝛼, yaitu sudut antara benang dan sisi panjang batang. b. Besar tegangan 𝑇 pada benang. Dalam kasus umum, sistem tersebut tidak setimbang dimana nilai 𝑚2 > 𝑚1. Jika batang ABC selama gerakannya diasumsikan tetap tegak, tentukan: c. Percepatan relatif setiap manik–manik terhadap batang sebagai fungsi 𝛼. d. Percepatan horizontal pusat massa batang, 𝐴𝑥 , sebagai fungsi 𝛼.
𝑚2 𝑚1
𝑙
𝐴
𝐿
𝐵
𝐶 𝜃
𝛼
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 15
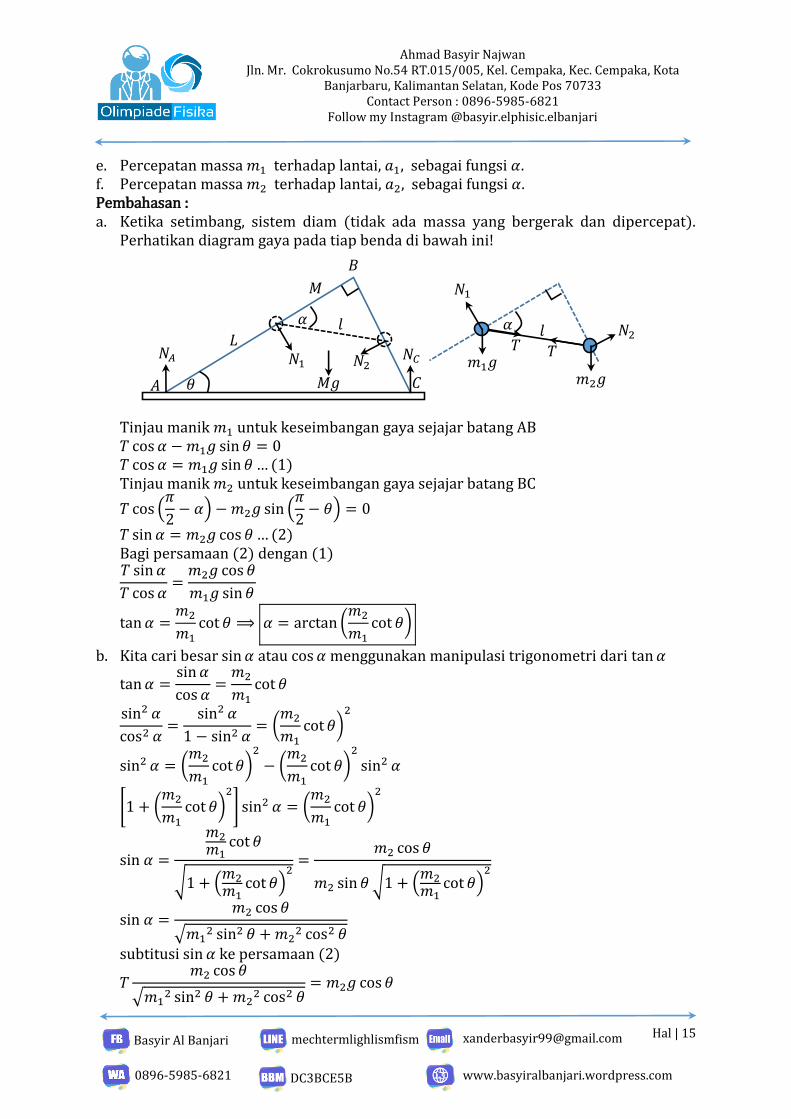
e. Percepatan massa 𝑚1 terhadap lantai, 𝑎1, sebagai fungsi 𝛼. f. Percepatan massa 𝑚2 terhadap lantai, 𝑎2, sebagai fungsi 𝛼. Pembahasan : a. Ketika setimbang, sistem diam (tidak ada massa yang bergerak dan dipercepat).
Perhatikan diagram gaya pada tiap benda di bawah ini!
Tinjau manik 𝑚1 untuk keseimbangan gaya sejajar batang AB 𝑇 cos 𝛼 − 𝑚1𝑔 sin 𝜃 = 0 𝑇 cos 𝛼 = 𝑚1𝑔 sin 𝜃 … (1) Tinjau manik 𝑚2 untuk keseimbangan gaya sejajar batang BC
𝑇 cos (𝜋
2− 𝛼) −𝑚2𝑔 sin (
𝜋
2− 𝜃) = 0
𝑇 sin 𝛼 = 𝑚2𝑔 cos 𝜃 … (2) Bagi persamaan (2) dengan (1) 𝑇 sin 𝛼
𝑇 cos 𝛼=𝑚2𝑔 cos 𝜃
𝑚1𝑔 sin 𝜃
tan𝛼 =𝑚2
𝑚1cot 𝜃 ⟹ 𝛼 = arctan (
𝑚2
𝑚1cot 𝜃)
b. Kita cari besar sin 𝛼 atau cos 𝛼 menggunakan manipulasi trigonometri dari tan𝛼
tan𝛼 =sin 𝛼
cos 𝛼=𝑚2
𝑚1cot 𝜃
sin2 𝛼
cos2 𝛼=
sin2 𝛼
1 − sin2 𝛼= (
𝑚2
𝑚1cot 𝜃)
2
sin2 𝛼 = (𝑚2
𝑚1cot 𝜃)
2
− (𝑚2
𝑚1cot 𝜃)
2
sin2 𝛼
[1 + (𝑚2
𝑚1cot 𝜃)
2
] sin2 𝛼 = (𝑚2
𝑚1cot 𝜃)
2
sin 𝛼 =
𝑚2
𝑚1cot 𝜃
√1 + (𝑚2
𝑚1cot 𝜃)
2=
𝑚2 cos 𝜃
𝑚2 sin 𝜃 √1 + (𝑚2
𝑚1cot 𝜃)
2
sin 𝛼 =𝑚2 cos 𝜃
√𝑚12 sin2 𝜃 +𝑚22 cos2 𝜃
subtitusi sin 𝛼 ke persamaan (2)
𝑇𝑚2 cos 𝜃
√𝑚12 sin2 𝜃 +𝑚22 cos2 𝜃
= 𝑚2𝑔 cos 𝜃
𝑙 𝛼
𝑚2𝑔 𝑚1𝑔
𝑁2 𝑇 𝑇
𝑁1 𝑀
𝑙
𝐴
𝐿
𝐵
𝐶 𝜃
𝛼
𝑁1 𝑁2
𝑀𝑔
𝑁𝐶 𝑁𝐴
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 16
𝑇 = 𝑔√𝑚12 sin2 𝜃 +𝑚22 cos2 𝜃
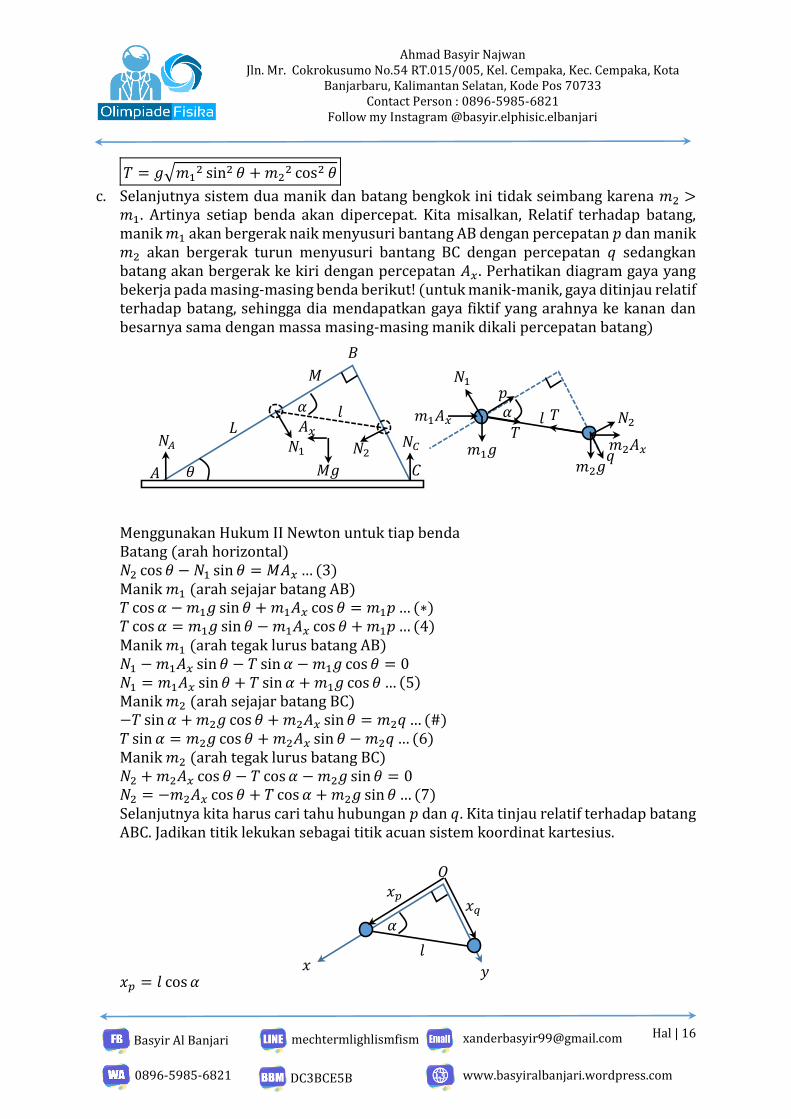
c. Selanjutnya sistem dua manik dan batang bengkok ini tidak seimbang karena 𝑚2 >𝑚1. Artinya setiap benda akan dipercepat. Kita misalkan, Relatif terhadap batang, manik 𝑚1 akan bergerak naik menyusuri bantang AB dengan percepatan 𝑝 dan manik 𝑚2 akan bergerak turun menyusuri bantang BC dengan percepatan 𝑞 sedangkan batang akan bergerak ke kiri dengan percepatan 𝐴𝑥. Perhatikan diagram gaya yang bekerja pada masing-masing benda berikut! (untuk manik-manik, gaya ditinjau relatif terhadap batang, sehingga dia mendapatkan gaya fiktif yang arahnya ke kanan dan besarnya sama dengan massa masing-masing manik dikali percepatan batang)
Menggunakan Hukum II Newton untuk tiap benda Batang (arah horizontal) 𝑁2 cos 𝜃 − 𝑁1 sin 𝜃 = 𝑀𝐴𝑥…(3) Manik 𝑚1 (arah sejajar batang AB) 𝑇 cos 𝛼 − 𝑚1𝑔 sin 𝜃 + 𝑚1𝐴𝑥 cos 𝜃 = 𝑚1𝑝… (∗) 𝑇 cos 𝛼 = 𝑚1𝑔 sin 𝜃 − 𝑚1𝐴𝑥 cos 𝜃 + 𝑚1𝑝… (4) Manik 𝑚1 (arah tegak lurus batang AB) 𝑁1 −𝑚1𝐴𝑥 sin 𝜃 − 𝑇 sin 𝛼 − 𝑚1𝑔 cos 𝜃 = 0 𝑁1 = 𝑚1𝐴𝑥 sin 𝜃 + 𝑇 sin 𝛼 + 𝑚1𝑔 cos 𝜃 … (5) Manik 𝑚2 (arah sejajar batang BC) −𝑇 sin 𝛼 +𝑚2𝑔 cos 𝜃 + 𝑚2𝐴𝑥 sin 𝜃 = 𝑚2𝑞… (#) 𝑇 sin 𝛼 = 𝑚2𝑔 cos 𝜃 + 𝑚2𝐴𝑥 sin 𝜃 − 𝑚2𝑞… (6) Manik 𝑚2 (arah tegak lurus batang BC) 𝑁2 +𝑚2𝐴𝑥 cos 𝜃 − 𝑇 cos𝛼 − 𝑚2𝑔 sin 𝜃 = 0 𝑁2 = −𝑚2𝐴𝑥 cos 𝜃 + 𝑇 cos 𝛼 + 𝑚2𝑔 sin 𝜃 … (7) Selanjutnya kita harus cari tahu hubungan 𝑝 dan 𝑞. Kita tinjau relatif terhadap batang ABC. Jadikan titik lekukan sebagai titik acuan sistem koordinat kartesius.
𝑥𝑝 = 𝑙 cos𝛼
𝑙 𝛼
𝑚2𝑔 𝑚1𝑔
𝑁2 𝑇
𝑇
𝑁1 𝑀
𝑙
𝐴
𝐿
𝐵
𝐶 𝜃
𝛼
𝑁1 𝑁2
𝑀𝑔
𝑁𝐶 𝑁𝐴 𝐴𝑥
𝑚1𝐴𝑥
𝑚2𝐴𝑥
𝑝
𝑞
𝑥𝑝
𝑥 𝑙
𝑦
𝑂
𝛼 𝑥𝑞

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 17
𝑥𝑞 = 𝑙 sin 𝛼
Dari rumus phytagoras akan kita dapatkan 𝑥𝑝2 + 𝑥𝑞
2 = 𝑙2
Kita diferensialkan kedua ruas terhadap waktu 2𝑥𝑝𝑥�̇� + 2𝑥𝑞𝑥�̇� = 0
𝑥𝑝𝑥�̇� + 𝑥𝑞𝑥�̇� = 0
Kita diferensialkan lagi terhadap waktu untuk kedua kalinya 𝑥�̇�𝑥�̇� + 𝑥𝑝𝑥�̈� + 𝑥�̇�𝑥�̇� + 𝑥𝑞𝑥�̈� = 0
𝑥�̇�2 + 𝑥𝑝𝑥�̈� + 𝑥�̇�
2 + 𝑥𝑞𝑥�̈� = 0
Ingat bahwa 𝑥�̇� = −𝑙 sin 𝛼 �̇�
𝑥�̇� = 𝑙 cos𝛼 �̇�
maka (−𝑙 sin 𝛼 �̇�)2 + 𝑥𝑝𝑥�̈� + (𝑙 cos 𝛼 �̇�)
2 + 𝑥𝑞𝑥�̈� = 0
𝑥𝑝𝑥�̈� + 𝑙2�̇�2 + 𝑥𝑞𝑥�̈� = 0
Menyesuaikan dengan arah positif sistem koordinat kita, maka 𝑥�̈� = −𝑝 dan 𝑥�̈� = 𝑞
Maka hubungan 𝑝 dan 𝑞 adalah −𝑝𝑙 cos 𝛼 + 𝑙2�̇�2 + 𝑞𝑙 sin 𝛼 = 0 𝑝 cos𝛼 = 𝑞 sin 𝛼 + 𝑙�̇�2…(8) �̇� adalah perubahan sudut 𝛼 terhadap waktu, dan ini memang sebagai fungsi 𝛼, dan jawaban bisa kita nyatakan sebagai fungsi �̇�. Kita tidak bisa menyatakan �̇� sebagai fungsi variabel lainnya karena diperlukan kondisi awal sistem, sedangkan kita tidak diberikan bagaimana kondisi awal sistem. Kita juga tidak bisa menggunakan hubungan percepatan pusat massa sistem sama dengan nol untuk menentukan hubungan 𝑝 dann 𝑞 karena sebenarnya ini juga berasal dari persamaan gaya. Mari kita coba buktikan. Karena seluruh permukaan licin, pusat massa sistem dua manik dan batang bengkok ini akan tetap di posisinya, artinya percepatan pusat massa sistem (dalam arah horizontal) akan bernilai nol.
𝑎pm = 0 =𝑚1𝑎1𝑥 +𝑚2𝑎2𝑥 −𝑀𝐴𝑥
𝑚1 +𝑚2 +𝑀
𝑚1𝑎1𝑥 +𝑚2𝑎2𝑥 = 𝑀𝐴𝑥 𝑚1(𝑝 cos 𝜃 − 𝐴𝑥) + 𝑚2(𝑞 sin 𝜃 − 𝐴𝑥) = 𝑀𝐴𝑥 𝑚1𝑝 cos 𝜃 + 𝑚2𝑞 sin 𝜃 = (𝑚1 +𝑚2 +𝑀)𝐴𝑥 Persamaan di atas juga bisa kita dapatkan dari persamaan (3)−(7) Subtitusi persamaan (4) ke (7) dan (6) ke (5) akan kita dapatkan 𝑁2 = −(𝑚1 +𝑚2)𝐴𝑥 cos 𝜃 + (𝑚1 +𝑚2)𝑔 sin 𝜃 + 𝑚1𝑝… (9) 𝑁1 = (𝑚1 +𝑚2)𝐴𝑥 sin 𝜃 + (𝑚1 +𝑚2)𝑔 cos 𝜃 − 𝑚2𝑞… (10) Subtitusi persamaan (9) dan (10) ke (3) −(𝑚1 +𝑚2)𝐴𝑥 cos
2 𝜃 + (𝑚1 +𝑚2)𝑔 sin 𝜃 cos 𝜃 + 𝑚1𝑝 cos 𝜃 − (𝑚1 +𝑚2)𝐴𝑥 sin2 𝜃
− (𝑚1 +𝑚2)𝑔 sin 𝜃 cos 𝜃 + 𝑚2𝑞 sin 𝜃 = 𝑀𝐴𝑥 −(𝑚1 +𝑚2)𝐴𝑥(sin
2 𝜃 + cos2 𝜃) + 𝑚1𝑝 cos 𝜃 +𝑚2𝑞 sin 𝜃 = 𝑀𝐴𝑥 𝑚1𝑝 cos 𝜃 + 𝑚2𝑞 sin 𝜃 = (𝑚1 +𝑚2 +𝑀)𝐴𝑥 …(11)

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 18
Nah begitulah. Mari kita selesaikan permasalahan hidup ini..eh maaf.. maksudnya soal ini wkwkwk...!!! Jumlahkan persamaan (∗) dan (#)
𝑇 cos 𝛼 − 𝑚1𝑔 sin 𝜃 + 𝑚1𝐴𝑥 cos 𝜃 = 𝑚1𝑝−𝑇 sin 𝛼 + 𝑚2𝑔 cos 𝜃 + 𝑚2𝐴𝑥 sin 𝜃 = 𝑚2𝑞
|× sin 𝛼× cos 𝛼
(𝑚2 cos 𝜃 cos 𝛼 − 𝑚1 sin 𝜃 sin 𝛼)𝑔 + (𝑚1 cos 𝜃 sin 𝛼 + 𝑚2 sin 𝜃 cos 𝛼)𝐴𝑥 =𝑚1𝑝 sin 𝛼 + 𝑚2𝑞 cos 𝛼 … (12)
+
Kita tuliskan ulang dulu persamaan (8), (11) dan (12) 𝑝 cos𝛼 − 𝑞 sin 𝛼 = 𝑙�̇�2 𝑚1𝑝 cos 𝜃 + 𝑚2𝑞 sin 𝜃 − (𝑚1 +𝑚2 +𝑀)𝐴𝑥 = 0 𝑚1𝑝 sin 𝛼 + 𝑚2𝑞 cos 𝛼 − 𝐵𝐴𝑥 = 𝐶𝑔 Dengan 𝐵 = 𝑚1 cos 𝜃 sin 𝛼 + 𝑚2 sin 𝜃 cos 𝛼 𝐶 = 𝑚2 cos 𝜃 cos𝛼 − 𝑚1 sin 𝜃 sin 𝛼 Dan dapat kita nyatakan dalam bentuk matriks menjadi
(cos 𝛼 − sin 𝛼 0𝑚1 cos 𝜃 𝑚2 sin 𝜃 −(𝑚1 +𝑚2 +𝑀)𝑚1 sin 𝛼 𝑚2 cos 𝛼 −𝐵
)(
𝑝𝑞𝐴𝑥) = (
𝑙�̇�2
0𝐶𝑔)
Supaya kita tidak perlu terlalu banyak subtitusi, kita gunakan Metode Cramers untuk menentukan besar 𝑝, 𝑞, dan 𝐴𝑥.
𝐷 = |cos𝛼 − sin 𝛼 0𝑚1 cos 𝜃 𝑚2 sin 𝜃 −(𝑚1 +𝑚2 +𝑀)𝑚1 sin 𝛼 𝑚2 cos 𝛼 −𝐵
|
𝐷 = −𝐵𝑚2 sin 𝜃 cos 𝛼 + 𝑚1(𝑚1 +𝑚2 +𝑀) sin2 𝛼 − 𝑚2(𝑚1 +𝑚2 +𝑀) cos
2 𝛼 + 𝐵𝑚1 cos 𝜃 sin 𝛼
𝐷 = 𝐵(𝑚1 cos 𝜃 sin 𝛼 − 𝑚2 sin 𝜃 cos 𝛼) + (𝑚1 +𝑚2 +𝑀)(𝑚1 sin2 𝛼 − 𝑚2 cos
2 𝛼 )
𝐷𝑝 = |𝑙�̇�2 −sin 𝛼 00 𝑚2 sin 𝜃 −(𝑚1 +𝑚2 +𝑀)𝐶𝑔 𝑚2 cos 𝛼 −𝐵
|
𝐷𝑝 = −𝐵𝑚2𝑙�̇�2 sin 𝜃 + 𝐶(𝑚1 +𝑚2 +𝑀)𝑔 sin 𝛼 + 𝑚2(𝑚1 +𝑚2 +𝑀)𝑙�̇�
2 cos 𝛼
𝐷𝑝 = (𝑚1 +𝑚2 +𝑀)(𝐶𝑔 sin 𝛼 + 𝑚2𝑙�̇�2 cos 𝛼 ) − 𝐵𝑚2𝑙�̇�
2 sin 𝜃
𝐷𝑞 = |cos 𝛼 𝑙�̇�2 0𝑚1 cos 𝜃 0 −(𝑚1 +𝑚2 +𝑀)𝑚1 sin 𝛼 𝐶𝑔 −𝐵
|
𝐷𝑞 = −𝑚1(𝑚1 +𝑚2 +𝑀)𝑙�̇�2 sin 𝛼 + 𝐶(𝑚1 +𝑚2 +𝑀)𝑔 cos 𝛼 + 𝐵𝑚1𝑙�̇�
2 cos 𝜃
𝐷𝑞 = (𝑚1 +𝑚2 +𝑀)(𝐶𝑔 cos𝛼 − 𝑚1𝑙�̇�2 sin 𝛼 ) + 𝐵𝑚1𝑙�̇�
2 cos 𝜃
𝐷𝐴𝑥 = |cos 𝛼 − sin 𝛼 𝑙�̇�2
𝑚1 cos 𝜃 𝑚2 sin 𝜃 0𝑚1 sin 𝛼 𝑚2 cos 𝛼 𝐶𝑔
|
𝐷𝐴𝑥 = 𝐶𝑚2𝑔 sin 𝜃 cos 𝛼 + 𝑚1𝑚2𝑙�̇�2 cos 𝜃 cos 𝛼 + 𝐶𝑚1𝑔 cos 𝜃 sin 𝛼
− 𝑚1𝑚2𝑙�̇�2 sin 𝜃 sin 𝛼
𝐷𝐴𝑥 = 𝐶(𝑚1 cos 𝜃 sin 𝛼 + 𝑚2 sin 𝜃 cos 𝛼)𝑔 + 𝑚1𝑚2𝑙�̇�2(cos 𝜃 cos 𝛼 − sin 𝜃 sin 𝛼)
𝐷𝐴𝑥 = 𝐶2𝑔 +𝑚1𝑚2𝑙�̇�
2 cos(𝜃 + 𝛼)

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 19
Sesuai Metode Cramers, nilai variabel 𝑝, 𝑞, dan 𝐴𝑥 adalah
𝑝 =𝐷𝑝
𝐷, 𝑞 =
𝐷𝑞
𝐷, dan 𝐴𝑥 =
𝐷𝐴𝑥𝐷
Maka percepatan relatif setiap manik-manik terhadap batang sebagai fungsi 𝛼 adalah
𝑝 =(𝑚1 +𝑚2 +𝑀)(𝐶𝑔 sin 𝛼 + 𝑚2𝑙�̇�
2 cos 𝛼 ) − 𝐵𝑚2𝑙�̇�2 sin 𝜃
𝐵(𝑚1 cos 𝜃 sin 𝛼 − 𝑚2 sin 𝜃 cos 𝛼) + (𝑚1 +𝑚2 +𝑀)(𝑚1 sin2 𝛼 − 𝑚2 cos2 𝛼 )
𝑞 =(𝑚1 +𝑚2 +𝑀)(𝐶𝑔 cos𝛼 − 𝑚1𝑙�̇�
2 sin 𝛼 ) + 𝐵𝑚1𝑙�̇�2 cos 𝜃
𝐵(𝑚1 cos 𝜃 sin 𝛼 − 𝑚2 sin 𝜃 cos 𝛼) + (𝑚1 +𝑚2 +𝑀)(𝑚1 sin2 𝛼 − 𝑚2 cos2 𝛼 )
d. Percepatan horizontal pusat massa batang adalah
𝐴𝑥 =𝐶2𝑔 +𝑚1𝑚2𝑙�̇�
2 cos(𝜃 + 𝛼)
𝐵(𝑚1 cos 𝜃 sin 𝛼 − 𝑚2 sin 𝜃 cos 𝛼) + (𝑚1 +𝑚2 +𝑀)(𝑚1 sin2 𝛼 − 𝑚2 cos2 𝛼 )
e. Percepatan manik 𝑚1 terhadap lantai adalah
𝑎1 = |(𝑝 cos 𝜃 − 𝐴𝑥)𝑖̂ + 𝑝 sin 𝜃 𝑗̂|
f. Percepatan manik 𝑚2 terhadap lantai adalah
𝑎2 = |(𝑝 sin 𝜃 − 𝐴𝑥)𝑖̂ − 𝑝 cos 𝜃 𝑗̂|
OSP Fisika 2016 Number 7
TIGA BUAH SILINDER Tiga buah silinder identik masing-masing bermassa 𝑚 dan jari-jari 𝑅 disusun seperti pada gambar disamping (Anggap antara dua silinder bawah permukaannya hanya menyinggung). a. Apabila sistem dalam kondisi setimbang, tentukan nilai koefisien gesek statis
minimum silinder dengan lantai! Asumsikan bahwa gesekan hanya terjadi pada permukaan silinder dengan lantai, sedangkan antar silinder bisa dianggap licin.
Apabila kondisinya adalah ketiga silinder di atas memiliki permukaan yang licin, permukaan lantai juga licin, dan sistem ditahan agar tetap pada posisi seperti pada gambar di atas. Kemudian seketika sistem penahan dilepas dan ketiga silinder bebas bergerak. Tentukan: b. Besar percepatan silinder atas sesaat setelah sistem penahan dilepas. c. Besar gaya normal yang terjadi antar silinder sesaat setelah sistem penahan dilepas. Apabila kondisinya adalah tidak ada gaya gesek antar permukaan silinder, namun permukaan lantai sangat kasar sehingga ada gaya gesek yang cukup besar antara permukaan silinder dengan permukaan lantai. Sistem tiga silinder awalnya ditahan seperti pada gambar di atas kemudian seketika dilepaskan sehingga ketiga silinder
𝑚
𝑅
𝑚
𝑅
𝑚
𝑅

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 20
bergerak. Akibat adanya gaya gesek yang besar antara silinder dengan lantai, maka kedua silinder yang bawah akan mengalami gerakan tidak slip terhadap lantai. Tentukan: d. Besar percepatan silinder atas sesaat setelah sistem penahan dilepas. e. Besar gaya gesek yang terjadi antara permukaan silinder bawah dengan permukaan
lantai. Pembahasan : a. Karena kondisi setimbang, ketiga silinder berada dalam kondisi diam (tidak
dipercepat) b. Ketiga silinder berhimpit, sehingga ketiga pusat massa silinder tersebut membentuk segitiga sama sisi. Dari sini dapat kita simpulkan bahwa sudut 𝜃 = 300. Maka
sin 𝜃 = sin 300 =1
2
cos 𝜃 = cos 300 =1
2√3
tan 𝜃 = tan 300 =1
3√3
Tinjau keseimbangan gaya pada masing-masing silinder Silinder atas (arah vertikal)
2𝐾 cos 𝜃 − 𝑚𝑔 = 0 ⟹ 𝐾 =𝑚𝑔
√3
Silinder bawah (arah vertikal, cukup meninjau salah satu saja, misalkan silinder bawah sebelah kanan) 𝑁 −𝑚𝑔 − 𝐾 cos 𝜃 = 0
𝑁 −𝑚𝑔 −𝑚𝑔
√3
1
2√3 = 0 ⟹ 𝑁 =
3
2𝑚𝑔
Silinder bawah (arah horizontal, silinder bawah sebelah kanan) 𝐾 sin 𝜃 − 𝑓𝑠 = 0 𝑚𝑔
√3
1
2− 𝑓𝑠 = 0 ⟹ 𝑓𝑠 =
1
2√3𝑚𝑔
Hubungan gaya gesek statik dan gaya normal adalah 𝑓𝑠 ≤ 𝜇𝑠𝑁
𝜇𝑠 ≥𝑓𝑠𝑁
𝜃
𝑚𝑔
𝐾
𝑁
𝜃
𝑚𝑔
𝐾
𝑁
𝐾 𝐾 𝑚𝑔
𝑓𝑠 𝑓𝑠
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 21
𝜇𝑠 ≥
1
2√3𝑚𝑔
32𝑚𝑔
=1
3√3×√3
√3=√3
9
Maka nilai minimum koefisien gesek antara lantai dan silinder bawah adalah
𝜇𝑠,min =√3
9
Nah, begitulah jawaban yang diberikan dari kemdikbud. Namun, saya kurang setuju dengan jawaban ini. Menurut saya, ketiga silinder tidak akan seimbang jika gaya gesekan hanya ada antara silinder bawah dan lantai. Kenapa? Karena silinder bawah akan berotasi akibat adanya torsi dari gaya gesek statik. Seharusnya, agar sistem seimbang, haruslah terdapat gesekan antara silinder atas dengan kedua silinder bawah.
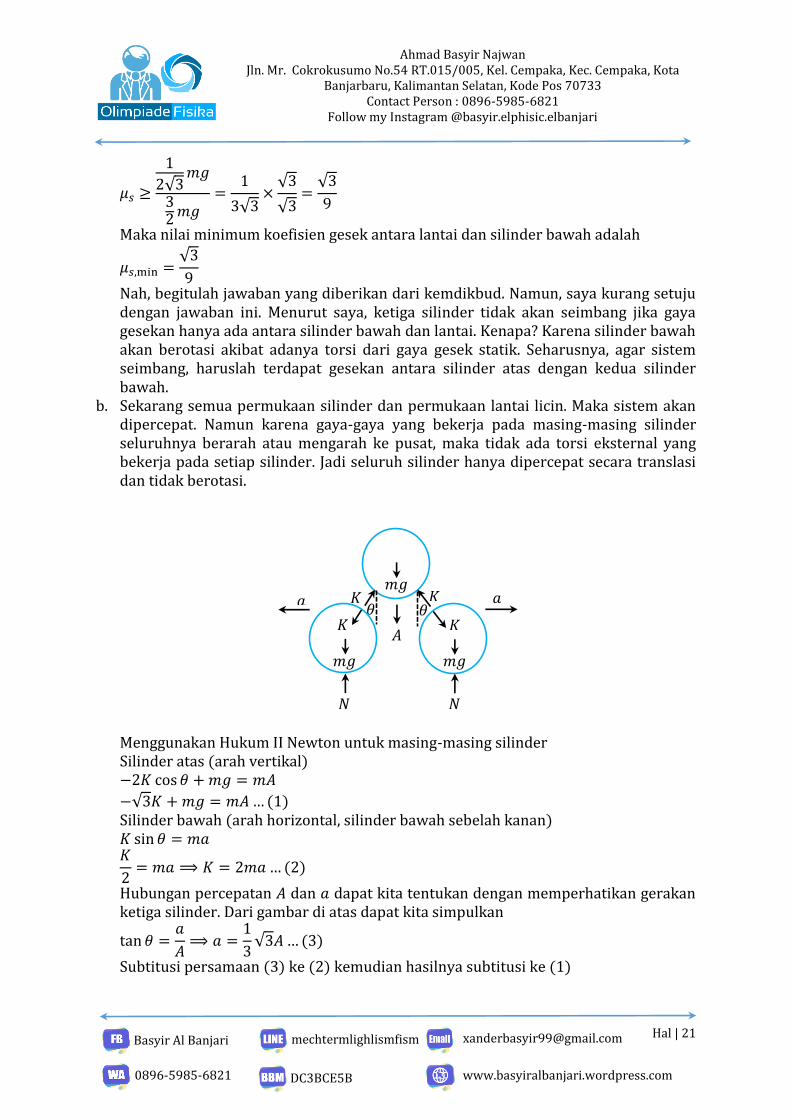
b. Sekarang semua permukaan silinder dan permukaan lantai licin. Maka sistem akan dipercepat. Namun karena gaya-gaya yang bekerja pada masing-masing silinder seluruhnya berarah atau mengarah ke pusat, maka tidak ada torsi eksternal yang bekerja pada setiap silinder. Jadi seluruh silinder hanya dipercepat secara translasi dan tidak berotasi.
Menggunakan Hukum II Newton untuk masing-masing silinder Silinder atas (arah vertikal) −2𝐾 cos 𝜃 + 𝑚𝑔 = 𝑚𝐴
−√3𝐾 +𝑚𝑔 = 𝑚𝐴…(1) Silinder bawah (arah horizontal, silinder bawah sebelah kanan) 𝐾 sin 𝜃 = 𝑚𝑎 𝐾
2= 𝑚𝑎 ⟹ 𝐾 = 2𝑚𝑎… (2)
Hubungan percepatan 𝐴 dan 𝑎 dapat kita tentukan dengan memperhatikan gerakan ketiga silinder. Dari gambar di atas dapat kita simpulkan
tan 𝜃 =𝑎
𝐴⟹ 𝑎 =
1
3√3𝐴… (3)
Subtitusi persamaan (3) ke (2) kemudian hasilnya subtitusi ke (1)
𝜃
𝑚𝑔
𝐾
𝑁
𝜃
𝑚𝑔
𝐾
𝑁
𝐾 𝐾 𝑚𝑔
𝑎 𝑎
𝐴

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 22
−2√3𝑚1
3√3𝐴 +𝑚𝑔 = 𝑚𝐴
−2𝑚𝐴 +𝑚𝑔 = 𝑚𝐴
𝑔 = 𝐴(1 + 2) ⟹ 𝐴 =1
3𝑔
c. Gaya normal antar silinder adalah 𝐾.
𝑎 =1
3√31
3𝑔 =
√3
9𝑔
𝐾 = 2𝑚√3
9𝑔 ⟹ 𝐾 =
2√3
9𝑚𝑔
d. Sekarang terdapat gaya gesekan yang cukup besar antara lantai dan kedua silinder bawah sehingga silinder bawah akan menggelinding tanpa slip. Kedua silinder bawah akan memiliki kecepatan pusat massa 𝑎 dan percepatan sudut 𝛼. Keduanya memiliki hubungan 𝑎 = 𝛼𝑅 karena silinder bergerak tanpa slip. Persamaan gerak untuk silinder atas akan sama seperti persamaan (1)
−√3𝐾 +𝑚𝑔 = 𝑚𝐴…(1) Hubungan percepatan silinder atas dan bawah pun masih sama
𝑎 =1
3√3𝐴
Namun untuk silinder bawah akan sedikit berbeda karena ada gaya gesek 𝑓. Hukum II Newton untuk silinder bawah kanan Arah horizontal 𝐾 sin 𝜃 − 𝑓 = 𝑚𝑎 1
2𝐾 − 𝑓 =
1
3√3𝑚𝐴…(4)
Gerak rotasi 𝑓𝑅 = 𝐼𝛼
𝑓𝑅 =1
2𝑚𝑅2
13√3𝐴
𝑅⟹ 𝑓 =
1
6√3𝑚𝐴…(5)
Subtitusi (5) ke (4) 1
2𝐾 −
1
6√3𝑚𝐴 =
1
3√3𝑚𝐴
𝜃
𝑚𝑔
𝐾
𝑁
𝜃
𝑚𝑔
𝐾
𝑁
𝐾 𝐾 𝑚𝑔
𝑓 𝑓
𝑎 𝑎
𝐴 𝛼 𝛼

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Follow my Instagram @basyir.elphisic.elbanjari
Hal | 23
1
2𝐾 =
√3
2𝑚𝐴 ⟹ 𝐾 = √3𝑚𝐴…(6)
Subtitusi persamaan (6) ke (1)
−√3√3𝑚𝐴 +𝑚𝑔 = 𝑚𝐴
𝐴 =1
4𝑔
e. Subtitusi 𝐴 ke (5)
𝑓 =1
6√3𝑚
1
4𝑔 ⟹ 𝑓 =
1
24√3𝑚𝑔














![Mekanisme Gerak Bola Mata [Read-Only]](https://static.fdokumen.com/doc/165x107/55cf980c550346d033954329/mekanisme-gerak-bola-mata-read-only.jpg)


