130524_OG_Neural Dynamics Utk Pengendalian Proyek Konstruksi
28
APLIKASI METODE NEURAL DYNAMICS UNTUK PENGENDALIAN PROYEK KONSTRUKSI UNTUK PENGENDALIAN PROYEK KONSTRUKSI Onnyxiforus Gondokusumo Onnyxiforus Gondokusumo Pelatihan Pengendalian Proyek Konstruksi dan Aplikasi System Dynamics Hotel Werdapura, Sanur, Bali 24−25 Mei 2013 Program Doktor Ilmu Teknik Sipil – Universitas Tarumanagara – Jakarta
-
Upload
nasher-andi-ariastha -
Category
Documents
-
view
48 -
download
2
description
neural dynamic
Transcript of 130524_OG_Neural Dynamics Utk Pengendalian Proyek Konstruksi
-
APLIKASI METODE NEURAL DYNAMICSUNTUK PENGENDALIAN PROYEK KONSTRUKSIUNTUK PENGENDALIAN PROYEK KONSTRUKSI
Onnyxiforus GondokusumoOnnyxiforus Gondokusumo
Pelatihan Pengendalian Proyek Konstruksidan Aplikasi System Dynamics
Hotel Werdapura, Sanur, Bali2425 Mei 2013
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
-
Proyek Konstruksi
penyempurnaan,
Perencanaan Pelaksanaan,pengendalian
ypenyesuaian
Proyekselesaipengendalian
M l h
Berhasil?
Masalah(problem)
Sumber daya proyekterbatas
- Manpower Optimasi
Penyelesaian(solution)
kriteriap
- Money- Material- Machine
M th d
Tujuan(objective)
Op as(optimization)
o Biayao Mutuo Waktu
alt.
ltalt.
alt.alt. Pilihterbaik kriteria
- Method
o K3o Lingkungan
alt.
alt.alt.
(optimum)
Alternatif
Kendala(constraints)
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
Alternatif(pilihan)
-
Contoh masalah optimasi :o Komposisi campuran material
agar keuntungan maksimumo Strategi penggalian dan penimbunan tanaho Strategi penggalian dan penimbunan tanah
agar biaya minimumo Pemilihan proyek untuk dikerjakan
agar keuntungan maksimumo Strategi penentuan harga satuan pada proses tender
agar keuntungan maksimumagar keuntungan maksimumo Metode pemotongan besi tulangan
agar sisa potongan minimumo Penjadwalan proyek
agar biaya minimum
Penyelesaian:Mudah! ada program aplikasi komputer..B k h d iki ?
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
Benarkah demikian?
-
Contoh masalahPenjadwalan proyek
Method
o Teori klasikAnalisis Precedence Diagram Network
Penyelesaian:
Analisis Precedence Diagram Network+ Critical Path Method
o Ms-Project, Primavera, Artemis
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
-
o Teori klasikPenyelesaian:o Teori klasik
- Resource allocation- Resource leveling
o Ms-Project, Primavera, Artemis
Orang Kebutuhan
Histogram sumber dayaOrangper hari
j , ,
KetersediaanHubungan durasidgn sumber daya
kegiatan- Manpower- Machine
M t i l
WaktuDurasikegiatan
dmin dmax
- Material
AB
CD
E
Barchart
Method
Waktu
FG
H
E
Precedence Diagram
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
Precedence DiagramNetwork
-
Method
Kurva hubungan:Penyelesaian: Kurva hubungan:- Linier- Non-linier
o Teori klasikNetwork Compression
o LP model
y
Money
o LP model- Lindo- Lingo- Solver Trial and error?
Penyelesaian:
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
-
Orang Kebutuhan
Histogram sumber dayaOrang
h i
- Manpower- Machine
Material gKetersediaan
per hari
Hubungan durasidgn sumber daya
kegiatan BiayaP k
Hubungan durasidgn biaya proyek
- Material
WaktuDurasikegiatan
dmin dmax
Proyek(Rp)
dgn biaya proyek
Biayatotal
Biayatotal?
AB
CD
E
Barchart
minimumBiayatidaklangsung
Biaya
Waktu
FG
H
Precedence DiagramDurasi
optimumDurasiproyek
Biayalangsung
Biayakegiatan
(Rp)dcmax
Hubungan durasidgn biaya langsung
Network
Kurva hubungan:
Method
dmin dmax
dcmin
g y g gkegiatan
Kurva hubungan:- Linier- Non-linierTrial and error?
Money
Penyelesaian:
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
Durasikegiatan
min maxy
-
AB
CD
E
Barchart
Waktu
FG
H
E
RpA k
Grafik arus kasPrecedence Diagram
Network
Arus kaskeluar
Arus kask
+
+Ketentuan2kontrak
masuk
Waktu+ +
++
t=0NPV=?NPV ?
Ms-Project + Ms-ExcelPenyelesaian:
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
-
Orang Kebutuhan
Histogram sumber dayaOrangper hari
- Manpower- Machine- Material
Ketersediaanper hari
Hubungan durasidgn sumber daya
kegiatan BiayaProyek
Hubungan durasidgn biaya proyek
Material
WaktuDurasikegiatan
dmin dmax
Proyek(Rp)
g y p y
Biayatotal
i i
Biayatotal?
AB
CD
FE
Barchart
minimumBiayatidaklangsung
Biaya
Waktu
FG
H
Precedence DiagramN t k
Durasioptimum
Durasiproyek
Biayalangsung
RpArus kas
keluar
Grafik arus kas
+
Biayakegiatan
(Rp)dcmax
Hubungan durasidgn biaya langsung
Network
Ketentuan2
Method
Arus kasmasuk
Waktu+ +
++
+
+
t=0 dmin dmax
dcmin
kegiatanete tuakontrak
T i l d ?Penyelesaian:
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
Waktut 0NPV=? Durasi
kegiatanMoneyTrial and error?
-
Neural Dynamics
Metode penyelesaian model optimasi
Jaring kerja saraf buatan(Artificial Neural Network)(Artificial Neural Network)
Teorema kestabilan Lyapunovpada sistem dinamik
NeuralDynamics
(dynamic system)
Adeli dan Park (1998)- Estimation- Pattern recognition- Optimization etc
Konvergen dan stabil
Linier atau non-linier
- Optimization, etc.
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
Human brain Neurons (1x1011) Artificial Neural Network
-
Sistem dinamik(dynamic system)
didefinisikan sebagaitrayektori penyelesaian terhadap waktu
(dynamic system)
trayektori penyelesaian terhadap waktudari suatu sistem persamaan diferensial.
Dalam sistem persamaan diferensial,sistem dinamik dituliskan:
Xi (t): vektor dari time dependent variables
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
-
Fungsi Lyapunovdidefinisikan sebagai fungsi yang bersifat kontinyudari suatu vektor bilangan nyata dalam suatu sistem dinamikyang nilainya mengecil sepanjang trayektori sistem.
Jika , maka disebut titik ekuilibrium,
Teorema kestabilan Lyapunov:
JikaJika
maka adalah stabil
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
maka adalah stabil
-
Jika trayektori-trayektori yang dimulai maka titik ekuilibrium iniJika trayektori trayektori yang dimulaidekat dengan titik ekuilibrium
maka titik ekuilibrium inidisebut
bergerak mendekati titik ekuilibrium stabil secara asimtotis
tetap berada dekat dengan titik ekuilibriumtanpa bergerak mendekati titik ekuilibrium
stabil
bergerak menjauhi titik ekuilibrium tidak stabil
Stabil secara asimtotis Stabil Tidak stabil
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
Stabil secara asimtotis Stabil Tidak stabil
-
Model optimasi(optimization model)
Model optimasidengan fungsi kendala(optimization model) dengan fungsi kendala(constrained optimization model)
Variabel2 keputusan (decision variables) Fungsi tujuan (objective function)
Minimumkan: Fungsi tujuan (objective function)
- Minimumkan, atau- Maksimumkan
Penyelesaian optimum(optimum solution)
Kendala-kendala (constraints)- Pertidaksamaan2 (inequations)- Persamaan2 (equations) (optimum solution)
>3 variabel:l i ipenyelesaian optimum
tidak dapat digambarkansecara grafis
2 i b l 3 i b l
operasi vektor
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
2 variabel 3 variabel
-
Metode transformasiMetode transformasi
Model optimasidengan fungsi kendala
Model optimasitanpa fungsi kendaladitransformasidengan fungsi kendala
(constrainedoptimization model)
tanpa fungsi kendala(unconstrainedoptimization model)
ditransformasimenjadi
Jika semua kendala terpenuhi(semua dan(semua )maka tidak ada penaltiyang perlu diberlakukan.
: exterior penalty function
yang perlu diberlakukan.
Tujuan penalti:b t i i
: fungsi tujuan
: besaran skalar sebagai penalti membatasi penyimpanganterhadap fungsi-fungsi kendaladalam batas toleransi.: fungsi tujuan berpenalti
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
-
Metode Neural Dynamics (Adeli & Park, 1997)Bil.positif & kontinyuBil.positif & kontinyu
: fungsi tujuan berpenalti: parameter penalti ke n: parameter penalti ke n: parameter penalti awal: iterasi ke: bilangan nyata positif
(Teorema kestabilan Lyapunov)
dapat diperlakukansbg fungsi Lyapunov
learning rulepada metode
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
neural dynamics
-
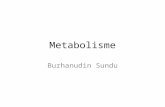
Diagram model neural dynamics
Model neural dynamicsdigambarkan sebagaineural networkneural networkdengan 2 lapisan
Lapisan variabel(variable layer) lapisan masukan
(input layer)
Jumlah titik simpul= jumlah variabel
Lapisan kendala Lapisan kendala(constraint layer) lapisan keluaran
(output layer)(output layer)
Jumlah titik simpul= jumlah kendala
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
(Ref.: Adeli dan Park, 1997)
-
Fungsi-fungsi aktivasipada diagram model neural dynamicspada diagram model neural dynamics(lintasan maju)
(Ref : Adeli dan Park 1997)
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
(Ref.: Adeli dan Park, 1997)
-
Fungsi-fungsi aktivasipada diagram model neural dynamics(lintasan mundur)
Kriteria konvergensi:perubahan pada fungsi tujuan dan penyimpangan terhadap kendala-kendala
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
perubahan pada fungsi tujuan dan penyimpangan terhadap kendala kendalaberada dalam batas toleransi yang dikehendaki.
-
Metode Euler danmetode 4th order Runge-Kutta
adalah metode numerik untukmencari nilai integral dari suatufungsi turunan pertama
Kemiringan kurva pada titik (xi, yi)
fungsi turunan pertama
M t d E l
adalah nilai turunan pertama fungsidi titik tersebut, yaitu tan = f(xi, yi)
Metode EulerMetode 4th order Runge-Kutta
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
-
Contoh masalah sederhanaMenghitung durasi optimum & biaya total minimum (6 kegiatan)
Rp Biayatotal
Proyek
?
toptimum
min
B.langsung
B.tidaklangsung
?
Biaya Langsung setiap kegiatanNormal Dipercepat maks. Cost Dipercepat
Kegiatan Durasi Biaya Durasi Biaya Slope Durasi Biaya8 8 8 8
toptimum
(bulan) (x108 Rp) (bulan) (x108 Rp) (x108 Rp/bln) (bulan) (x108 Rp)TN CN TC CC s TC < d < TN CN + (TN - d) * s
A 4 120 2 150 15 dA 180 - 15 dAB 5 200 4 220 20 dB 300 - 20 dBC 10 500 5 625 25 dC 750 - 25 dCD 3 135 2 165 30 dD 225 - 30 dDE 4 240 3 255 15 dE 300 - 15 dEF 6 330 3 390 20 dF 450 - 20 dF
1525 1805 2205
Biaya Tidak Langsung proyekBiaya Tidak Langsung proyek per bulan: 30 (x108 Rp/bln)D i k t l h di t D (b l )
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
Durasi proyek setelah dipercepat: D (bulan)Biaya Tidak Langsung proyek keseluruhan: 30*D (x108 Rp)
-
Biaya Langsung setiap kegiatanNormal Dipercepat maks. Cost Dipercepat
Kegiatan Durasi Biaya Durasi Biaya Slope Durasi Biaya(bulan) (x108 Rp) (bulan) (x108 Rp) (x108 Rp/bln) (bulan) (x108 Rp)
TN CN TC CC s TC < d < TN CN + (TN - d) * s
d dA 4 120 2 150 15 dA 180 - 15 dAB 5 200 4 220 20 dB 300 - 20 dBC 10 500 5 625 25 dC 750 - 25 dCD 3 135 2 165 30 dD 225 - 30 dDE 4 240 3 255 15 dE 300 - 15 dEF 6 330 3 390 20 dF 450 - 20 dF
1525 1805 2205
Biaya Tidak Langsung proyekBiaya Tidak Langsung proyek per bulan: 30 (x108 Rp/bln)Durasi proyek setelah dipercepat: D (bulan)
8Biaya Tidak Langsung proyek keseluruhan: 30*D (x108 Rp)
Penyelesaiandengan membuat model optimasi
Fungsi tujuan:Minimumkan: 2205 -15 dA - 20 dB -25 dC -30 dD -15 dE -20 dF + 30 D
D = TF + dFatau: 2205 -15 dA - 20 dB -25 dC -30 dD -15 dE + 10 dF + 30 TFA B C D E F F
Kendala Kendala durasi kegiatan: Kondisi non-negatif:hubungan antar kegiatan: A dA 2 dA 4 A TA 0A TA + 3 TB B dB 4 dB 5 B TB 0
TA + dA TC C dC 5 dC 10 C TC 0TA + dA TC C dC 5 dC 10 C TC 0TA + dA +2 TD D dD 2 dD 3 D TD 0
B TB + dB TE E dE 3 dE 4 E TE 0C TC + dC - 1 TF F dF 3 dF 6 F TF 0D TD + dD TF + dF
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
E TE + dE TF + dF
-
Penyelesaiandengan add-in Solverpada Microsoft Excel p
6 kegiatan12 variabel25 kendala
Rp Biayatotal
Proyek
toptimum
min
B.langsung
B.tidaklangsung
Penyelesaian optimum:Zmin = 2025TA = 0 dA = 2 T = 3 d = 5TB = 3 dB = 5 TC = 2 dC = 8 TD = 4 dD = 3 TE = 8 dE = 4 T = 9 d = 3TF = 9 dF = 3
JadiDurasi optimum= 12 bulan
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
Biaya total minimum= Rp 202,5 Milyar
-
Rp Biayatotal
Proyek
toptimum
min
total
B.langsung
B.tidaklangsung
Penyelesaian optimum:
Durasi optimum = 12 bulan
toptimum
Biaya total minimum = Rp 202,5 Milyar
KondisiKondisinormal
Kondisioptimumoptimum
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
-
Penyelesaiandengan program Fortran untuk Neural Dynamics
Neural Add-inNilai Dynamics Spreadsheet
Z 2023.8088 2025Proj.Dur. 11.9933 12
TA -0.0100 0TB 2.9883 3TC 1.9783 2TD 3.9867 4TE 7.9917 8TF 8.9950 9dA 1 9967 2
Rp Biaya
Proyek
dA 1.9967 2dB 5.0050 5dC 8.0250 8dD 3.0100 3dE 4.0033 4dF 2.9983 3
min
total
B.langsung
B.tidaklangsung
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
toptimum
-
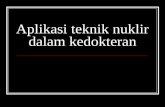
8000Nilai awal X1...X12=0, r0=10, a=10, t.step=0.0001 Trayektori Penyelesaian
dengan metodeN l D i
6000
7000a
n
b
e
r
p
e
n
a
l
t
i
Neural Dynamics
3000
4000
5000
N
i
l
a
i
f
u
n
g
s
i
t
u
j
u
a
Rp
min
Biayatotal
B.tidaklangsung
Proyek
0 0.5 1 1.5 2 2.5 3x 10
4
2000
3000
Iterasi
N
toptimum
B.langsung
g g
2200
2250
n
+
0
8
R
p
)
Neural Add-inNilai Dynamics Spreadsheet
Z 2023.8088 2025Proj.Dur. 11.9933 12
TA -0.0100 0T 2 9883 3
2050
2100
2150
i
l
a
i
f
u
n
g
s
i
t
u
j
u
a
n
t
a
l
m
i
n
i
m
u
m
,
1
E
+ TB 2.9883 3TC 1.9783 2TD 3.9867 4TE 7.9917 8TF 8.9950 9dA 1.9967 2
0 0 5 1 1 5 2 2 5 31950
2000
2050
N
i
(
b
i
a
y
a
t
o
t
A
dB 5.0050 5dC 8.0250 8dD 3.0100 3dE 4.0033 4dF 2.9983 3
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
0 0.5 1 1.5 2 2.5 3x 10
4Iterasi
-
810Nilai awal (X1...X12)=0, r0=10, a=10, t.step=0.0001
.
X
6
a
h
a
r
i
k
e
)
TA
Trayektori Penyelesaiandengan metodeN l D i
0
2
4
6
N
i
l
a
i
v
a
r
i
a
b
e
l
X
1
.
.
a
t
a
n
d
i
m
u
l
a
i
p
a
d
a
TATBTCTDTETF
Neural Dynamics
0 0.5 1 1.5 2 2.5 3
x 104
-2
0
Iterasi
(
k
e
g
i
a
10
)
4
6
8
v
a
r
i
a
b
e
l
7
.
.
1
2
g
i
a
t
a
n
d
a
l
a
m
h
a
r
i
)
dAdBdCdDdE
0 0.5 1 1.5 2 2.5 3
104
0
2
4
Iterasi
N
i
l
a
i
v
(
d
u
r
a
s
i
k
e
g
dEdF
Neural Add-inNilai Dynamics Spreadsheet
Z 2023.8088 2025Proj.Dur. 11.9933 12
x 10Iterasi
15
20
25
y
e
k
jTA -0.0100 0TB 2.9883 3TC 1.9783 2TD 3.9867 4TE 7.9917 8TF 8 9950 9
5
10
15
D
u
r
a
s
i
p
r
o
(
h
a
r
i
)
TF 8.9950 9dA 1.9967 2dB 5.0050 5dC 8.0250 8dD 3.0100 3dE 4.0033 4d 2 9983 3
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta
0 0.5 1 1.5 2 2.5 3
x 104
0
Iterasi
dF 2.9983 3
-
Terima kasih Semoga bermanfaat.
Program Doktor Ilmu Teknik Sipil Universitas Tarumanagara Jakarta