







Bahasa
Halaman
Hukum


Page 1 of 8
2015-01-XXXX
Uncertainty Analysis of Static Plane Problems by Intervals
N. Xiao1, R.L. Muhanna
1, F. Fedele
1, and R.L. Mullen
2
1 School of Civil and Environmental Engineering, Georgia Institute of Technology,
2 Department of Civil and Environmental Engineering, University of South Carolina
Abstract
We present a new interval-based formulation for the static analysis of
plane stress/strain problems with uncertain parameters in load,
material and geometry. We exploit the Interval Finite Element
Method (IFEM) to model uncertainties in the system. Overestimation
due to dependency among interval variables is reduced using a new
decomposition strategy for the structural stiffness matrix and the
nodal equivalent load vector. Primary and derived quantities follow
from minimization of the total energy and they are solved
simultaneously and with the same accuracy by means of Lagrangian
multipliers. Two different element assembly strategies are introduced
in the formulation: one is Element-by-Element, and the other
resembles conventional assembly. In addition, we implement a new
variant of the interval iterative enclosure method to obtain outer and
inner solutions. Numerical examples show that the proposed interval
approach guarantees to enclose the exact system response.
Keywords: Interval, Finite element method, Plane problems.
Introduction
In recent years, there has been an increasing interest in the modeling
and analysis of structural systems with uncertain parameters, which
originate from incomplete information available about the system.
Conventional probability theory models uncertainties as random
variables [4, 10], and it is suitable when there is enough data to
reliably estimate the ranges and distributions of the uncertain
variables. However, in reality, we usually know some partial
information about uncertainties. In such cases, one can apply non-
probabilistic approaches such as evidence theory [7, 23, 24], fuzzy
sets [13, 25, 26] and interval methods [3, 6, 11, 15].
In this work, we study plane stress/strain problems by using Interval
Finite Element Method (IFEM, see [14, 19, 27, 28]). In particular, we
use intervals to model uncertainties in load, material and geometry.
Intervals are extension of real numbers. They describe an uncertain
variable by its endpoints, with no assumption regarding the
probability value distribution between the endpoints [12]. The
associated interval arithmetic operations provide a guaranteed
interval enclosure of the exact response of the system.
The main obstacle encountered in IFEM, and in interval analysis in
general, is that naïve implementation of interval arithmetic suffers
from the curse of overestimation caused by dependency among
interval variables [12]. In order to reduce overestimation, we adopt
the M-δ method [16] to eliminate load dependencies completely.
Further, we propose new decomposition strategies for the stiffness
matrix to reduce and limit dependency. In addition, we use
Lagrangian multipliers to solve for both derived and primary
variables simultaneously and with the same accuracy via energy
minimization, avoiding interval intermediate calculations [20]. The
governing interval linear equations are then solved by means of a
new variant of the iterative enclosure method [18].
The paper is organized as follows. First, we present the new matrix
decomposition strategies to reduce overestimation. Then, we
introduce direct and indirect approaches to compute derived
quantities. This is followed by the description of the new variant of
the iterative enclosure method to solve for the outer and inner
solutions of the system response. Several numerical examples are
finally discussed.
Interval Finite Element Method
Interval Finite Element Method (IFEM) uses intervals to model
uncertain variables. An interval ,| xxxxxx represents
the set of real numbers within the specified range, where x and x
denote the lower and upper bounds of the interval, respectively.
Hereafter, non-italic bold letters denote interval variables. Detailed
discussion on interval arithmetic and extensions to interval matrices
and functions can be found in [1, 9, 12, 17].
Naïve implementation of IFEM yields overestimation of the interval
solution, which is caused by the dependencies among the interval
variables. For instance, to compute f(x) = x – x2 with x = [0, 1], a
naïve implementation yields
, , , , ,xf ,
which is much wider than the exact solution f(x) = [0, 1/4].
We propose to reduce overestimation due to dependency as follows.
From the equilibrium equation Ku = f, the stiffness matrix K and the
nodal equivalent load f are decomposed as
, , diag δfαK MAA T (1.)
where A, Λ, M are scalar matrices, α, δ are interval vectors, and
diag(v) maps a vector v into a diagonal matrix, whose diagonal is v.
By doing so, we separate scalar and interval parts and avoid multiple
occurrences of the same variables. The dependency in the load
variables is eliminated completely by decomposing f in accord with
the M-δ method [16]. Note that the introduction of the scalar matrix
Λ makes the proposed method different from that by Impollonia [5]
and Neumaier and Pownuk [18]. The decomposition in Eq. (1) is

Page 2 of 8
carried out in two steps. First, the element stiffness matrix Ke and the
element nodal equivalent load fe are decomposed into Ae, Λe, Me, αe
and δe. Then, Ae, Λe, Me, αe and δe are assembled into A, Λ, M, α and
δ in the global system. Two different assembly strategies are
hereafter adopted: i) an Element-By-Element assembly and ii) a
modified conventional FEM assembly. This formulation is the bases
for a bounded uncertain field of variation of material and geometric
properties, viz. E and t, where a specific transition function can be
used between elements.
Decomposition of Ke and fe
Hereafter, we use the standard 8-node rectangular isoparametric
element. Assume the element thickness t and Young’s modulus E are
modeled by intervals, and all other quantities in the stiffness matrix
Ke are scalars. Then,
,
dBB eeTee tEK (2.)
where Ω is the integration domain, i.e. the entire element, Be is the
strain-displacement matrix. For plane stress, the constitutive matrix
Ee is given by
,
EEe
(3.)
and for plane strain
,
EEe
(4.)
where ν is Poisson’s ratio. The double integral in Eq. (2.) is computed
numerically using a 3×3 Gaussian integration rule, that is
,
i
iiiieieiTee JwBB tEK (5.)
where the coordinates ξi and weights wi for all the integration points
in the standard domain [-1, 1]×[-1, 1] are given and J is the
determinant of the Jacobian of the coordinate transformation between
the local and global reference system.
In Eq. (5.), the only interval term Et can be factored out, viz. Ke =
KeEt, where Ke is a scalar matrix. This can be decomposed as T
eeee AAK diag , where Λe is the eigenvalue matrix and the
columns of Ae are the corresponding eigenvectors. Note that Λe
includes three zero eigenvalues, which correspond to rigid body
motion of translation and rotation. They are dropped and Eq. (5) can
be rewritten as
,)(diag )(diag
Teeeee
Teeee AAAA ααK (6.)
where αe = {Et} is the only interval quantity. One can also use an
LDL decomposition of Ke. As a result, Ae is a lower unitriangular
matrix, and Λe is also different. In both cases, Ke is explicitly
computed in order to obtain Ae and Λe.
Alternatively, we can use a different strategy, hereafter referred to as
the B-matrix approach. Here, we can decompose Ke without
explicitly computing Ke. To do so, we write TeE Ediag ,
where Φ is a 3×3 scalar matrix and φ is a 3×1 scalar vector, both
depending on the Poisson’s ratio ν. Then, from Eq. (5)
,
diag
diag
diag
Et
EtK
eT
eT
Te
Te
i
iiieT
iTee
B
B
Jw
Jw
BB
JwBB
(7.)
where E and t are factored out and collected into αe = {Et}, and Ae
and Λe are given by
. ,
Jw
Jw
BBA eTe
Tee
(8.)
And Eq. (7) simplifies to
.)(diag )(diag
Teeeee
Teeee AAAA ααK (9.)
The B-matrix approach yields Ae and Λe directly from Be and Ee, but
matrices are larger than the those from the eigen or LDL
decomposition method. Indeed, in the eigen or LDL decomposition
we need to decompose a 16×16 matrix Ke and Ae is 16×13 and Λe is
13×1. In the B-matrix approach, a 3×3 matrix Ee is decomposed and
Ae is 16×27 and Λe is 27×1. Clearly, the B-matrix approach saves
time in the decomposition process, but it is more time-consuming in
the final computation. Comparisons between the two decomposition
strategies are presented below in several numerical examples.
The nodal equivalent load vector f is decomposed by using the M-δ
method [16]. For a standard 8-node rectangular isoparametric
element,
,,,
i
L
ilT
bT
n
i
iciT
e dlNdNN ffff (10.)
where N is the displacement interpolation matrix, fc,i are concentrated
loads, n is the number of concentrated loads in the element, fb is the
distributed body load, and fl,i are the distributed line loads on the
edges.
We can further simplify Eq. (10) as follows. First, rewrite ,,, eicic L δf ebb L δf and eilil L δf ,, as function of the interval
vector δe, where Lc,i, Lb, Ll,i are scalar matrices. Then,

Page 3 of 8
,
,,
,,
me
me
me
i
L
m
ilT
mb
Tn
i m
iciT
i
L
me
m
ilT
me
mb
Tn
im
e
m
iciT
e
MdlLNdLNLN
dlLNdLNLN
δδ
δδδf
(11.)
where m is the size of δe, and Me is defined as the matrix in braces.
Each component of δe is assumed to vary independently.
(ξ, η)
r
dA
qdA
P
y
x
O
η
ξ
Figure 1. Loads acting on an 8-node rectangular isoparametric element.
As an example, consider the element shown in Figure 1. This is
subject to a concentrated load P in the x-direction at (ξ, η), a
uniformly distributed body load q in the y-direction, and a uniformly
distributed line load r acting on the right edge. Then, δe = {P, q, r}T
and Me is given by
,
,
,
L
x
L
x
L
x
L
x
e
dlJNdN
dlJNN
dlJNdN
dlJNN
M
(12.)
where Ni are displacement interpolation matrix with respect to the i-
th node, L is the length of the right edge, and TJJ , is the first
column of the Jacobian matrix, accounting for the distributed load r
acting normal to the right edge.
Note that our proposed method is general and it can be applied to
other plane stress/strain elements. The only difference is the size of
the matrices Ae, Λe, and Me. For instance, if one uses a 6-node
triangular isoparametric element, Ke is 12×12. From the eigen-
decomposition, the resulting Ae is 12×9 and Λe is 9×1; instead, if the
B-matrix approach and a 7-point numerical integration rule are
adopted, Ae is 12×21 and Λe is 21×1.
Element assembly strategies
We consider the Element-by-Element approach [20] and the
conventional FEM assembly strategy [2, 29].
In the Element-by-Element approach, the structure is modeled by free
elements and connecting common nodes [20]. Structural nodal
displacement vector u is composed of the element nodal
displacement vector ue and displacement vector un of the common
nodes. Then
, , ,
n
e
e
e
e
n
e
e
f
f
f
f
0
K
K
K
u
u
u
u (13.)
where fn denotes concentrated loads applied on the common nodes.
Note K is a singular matrix.
Using the decomposition rules for K and f in Eq. (1.), the
corresponding assembly rules for the scalar matrices A, Λ, M and
interval vectors α, δ are given by
, ,
; , ,
n
e
e
n
e
e
e
e
e
e
e
e
M
M
M
M
A
A
A
δ
δ
δ
δ
α
α
α
(14.)
where the decomposition fn = Mnδn is applied to fn. Here, components
in α and δ are assumed to vary independently. If two components in
α or δ represent the same variable, the corresponding two columns in
Λ or M should be added together. If some of the components in δ are
equal to zero, the corresponding columns in M should be deleted.
The stiffness matrix K from the Element-by-Element assembly is
singular since there is no connection between element and common
nodes. To eliminate this singularity, we enforce compatibility and
apply essential boundary conditions, which are collected into the
matrix constraint equations C1u = 0. For instance, to enforce
compatibility between one element node (with two DOF) and the
connecting common node, the corresponding two rows of C1 take the
following simple form,
,
nodeCommon nodeElement
C
(15.)
where the rest of these two rows are zeroes. Essential boundary
conditions are applied by setting the corresponding entries in C1 to 1
and leaving zeros in the rest of the row.
To impose equilibrium, we introduce the Lagrangian multiplier λ1 to
enforce the constraint C1u = 0. The energy functional Π of the system
is
.uλfuKuuΠ
CTTT (16.)
Minimizing Π with respect to u and λ1 yields the interval governing
equations

Page 4 of 8
.
0
f
λ
uK
C
C T
(17.)
To reduce dependency, K and f are decomposed as in Eq. (1.), and
Eq. (17.) is rewritten as
. diag δλ
uα
MA
A
C
C T
T
(18.)
The Lagrangian multiplier λ1 denotes negative internal forces
between element nodes and common nodes when the constraint is a
compatibility conditions, and it denotes reactions at the supports
when the constraint is an essential boundary condition. In simple
words, the Element-by-Element approach obtains internal forces and
support reactions as a by-product from the Lagrangian multiplier λ1,
at the cost of a very sparse but large stiffness matrix K.
Alternatively, the conventional assembly strategy provides smaller
stiffness matrix and is more efficient for large scale problems. In this
case, the global nodal displacement vector u contains only
displacement vector un of the common nodes. The global matrices are
given by
, , n
e
eT
e
e
eeT
e TTT fffKK (19.)
where Te is the matrix in the transformation ue = Teu between global
and local nodal displacement vector u and ue. Since
Teeeee AA αK diag , K in Eq. (19.) can be written as
.
diag
diag
diag
eTe
eTe
ee
ee
eT
eeT
e
e
eTeeee
Te
TA
TA
ATAT
TAAT
α
α
αK
(20.)
The assembly rules for A, Λ and α are
. ,
,
e
e
e
e
eT
eeT
e ATATA
α
α
α
(21.)
Using eee M δf and nnn M δf , the nodal equivalent load f in Eq.
(19.) can be written as
.
n
e
e
neT
eeT
e
nn
e
eeT
e
MMTMT
MMT
δ
δ
δ
δδf
(22.)
The assemble rules for M and δ are
. ,
n
e
e
neT
eeT
e MMTMTM
δ
δ
δ
δ
(23.)
The global stiffness matrix K in Eq. (19.) is still singular, as essential
boundary conditions have not been applied yet. If we apply the
essential boundary conditions in the form of C1u = 0, the resulting
governing equations are the same as Eqs. (17.) and (18.).
Iterative Enclosure Method
The equilibrium equation to be solved is given in Eq. (18.). It can be
brought into the following generalized form
, diag δuα gggggg MBAC (24.)
where Cg, Ag, Bg, Λg, Mg are given scalar matrices, α, δ are given
interval vectors, and ug is the unknown interval vector. Any interval
solver can be used to solve for Eq. (24.). Here, we propose a new
variant of the iterative enclosure method [20], which incorporates the
new decomposition of K given in Eq. (1). We aim at finding an outer outgu for the exact solution ug such that
outgg uu is guaranteed.
To compute outgu , we add gggg BA uα diag to both sides of
Eq. (24.), and leave ug as the only interval on the left-hand side, viz.
, diag
diag
ggggg
ggggg
BAM
BAC
uαδ
u
(25.)
where α0 is an arbitrary scalar vector and preferably α0 = mid (α).
Now, assume that the scalar square matrix gggg BAC diag
is invertible and denote G as its inverse. Then, from (25) ug satisfies
the following fixed-point equation
, diag αuδu gggggg BGAGM (26.)
where we have used the identities
. diag diag αuuα gggggg BB (27.)
To solve for ug, one can directly iterate Eq. (26) to find its fixed point
until convergence is attained. However, Bgug is computed after each
iteration, causing unnecessary overestimation. To avoid that, we
follows from the work by Neumaier and Pownuk [18], and introduce
the auxiliary variable v = Bgug, which satisfies
. diag αuδv ggggggg BGABGMB (28.)
To find v, the fixed-point of Eq. (28), we use the iterative scheme
, diag igiggggi GABGMB vαvδv (29.)
where denote the interval hull of two intervals and we start with
an initial trivial guess is δv ggGMB .

Page 5 of 8
Iterating Eq. (29) does not yield any additional overestimation since
there is no pre-multiplication of v by any interval quantity as in Eq.
(26). The iterations are stopped when the relative difference between
two successive approximations vi+1 and vi is smaller than a given
tolerance (τ = 10-6), and the converged solution is called v*. Due to
the isotonic inclusion of interval operations [12], v* guarantees to
enclose the exact fixed-point v. The outer solution outgu is obtained by
substituting Bgug in Eq. (26.) with v*. To reduce overestimation,
matrices GMg, (GAg)diag(v*)Λ in Eq. (26.) and matrices BgGMg,
(BgGAg)diag(vi)Λg in Eq. (29.) are calculated before they are
multiplied by the interval vectors δ and (α0 – α).
Numerical Examples
The proposed formulation [see Eqs. (1), (18), (26), (29)] for plane
stress/strain problems is coded in INTLAB [21], which is an
extension package for interval arithmetic developed for the
MATLAB environment. Two numerical examples are considered
below: i) a beam modeled by plane stress elements, and ii) a
rectangular plate with a circular cutoff. The interval solutions (IS) of
our proposed method is compared against those from the endpoint
combination (EC) method [17], sensitivity analysis (SA, [8]), and the
Monte Carlo (MC) method from an ensemble of 10,000 simulations.
The results show that the proposed method yields guaranteed tight
bounds of the exact solution, and it is computationally inexpensive.
q
A
B
E, ν, t
2L/3 L/3
Figure 2. A beam with one end clamped and the other end hinged subject to uniformly distributed vertical load.
Remodeled beam
The first example is a beam with the end A clamped and the other
end B hinged, as shown in Figure 2. The beam is subject to uniformly
distributed vertical load q acting on the top. The length, height and
thickness of the beam are L = 1.2 m, h = 0.3 m and t = 0.1 m,
respectively. The Poisson’s ratio ν = 0.3 for each element. Distributed
load q and element Young’s moduli Ei are modeled as intervals,
using midpoint values q = 100 kN/m and Ei = 200 GPa respectively.
Figure 3. A 2×6 finite element mesh with 8-node rectangular isoparametric
elements to model the beam in Figure 2.
We solve the beam as a plane stress problem, and use a 2×6 finite
element mesh composed of standard 8-node rectangular
isoparametric elements, as shown in Figure 3. Element Young’s
moduli Ei are assumed to vary independently, and q is modeled as a
single interval number. We further assume that all the 13 interval
variables have the same uncertainty level, viz. Ei = E(1+β), for i =
1,…,12, and q = q(1+β), where β has zero midpoint, and width
measured in percentage as the uncertainty level β. Essential boundary
conditions include constraints on the x-displacements along the left
edge and y-displacements of nodes A and B.
Figure 4. Vertical deflection vC at node C of the beam of Figure 3 as function
of the uncertainty level β: endpoint combination (EC) solutions used as a
reference, interval solution (IS) obtained from the proposed method, Monte Carlo (MC) solution from an ensemble of 10,000 simulations).
Figure 5. Comparison between the interval solution from our proposed method and Monte Carlo predictions of the vertical deflection vC of the beam
of Figure 2 from an ensemble of 10,000 simulations: (left) observed
probability density function (PDF) of the Young’s modulus E = [190,210] GPa (10% uncertainties) sampled from (a) uniform, (b) triangular, (c)
truncated exponential and (d) bimodal probability distributions (interval endpoints denoted by circular markers); (right) observed PDF of the vertical
deflection vC, interval solution (endpoints denoted by circular markers) and
Monte Carlo predicted interval [min(vC) max(vC)] (square markers).
We study the performance of the proposed method under increasing
uncertainty level up to 40% and we compare our interval solution
(IS) against EC and MC solutions. The EC predictions are obtained
by multiple runs of the deterministic solver. In each run, the
equivalent load δi and parameter vector αi take either the lower or
upper bounds of the corresponding interval vectors δ and α, and the
associated scalar solution is called as ug,i. The interval solution for
EC follows from the lower and upper bounds of all possible 213 =
8096 combinations, as there are 13 independent variables, that is ug =
[miniug,i, maxiug,i]. Similarly, the MC solution follows by sampling
Page 6 of 8
random values δi and αi within the interval δ and α according to
various probability distributions, viz. uniform, triangular, exponential
and bimodal.
Figures 4 displays vertical deflection vC at node C computed from
different methods as function of the uncertainty level β. Note that IS
always contains EC, and MC is always contained by EC.
Finally, Figure 5 illustrates that the proposed interval method yields
solutions that guarantee to enclose the MC predictions regardless of
the type of probability distribution used to model uncertainties.
q E, ν, t
A C
G
F D
r
L
h
B
E
L/2
H
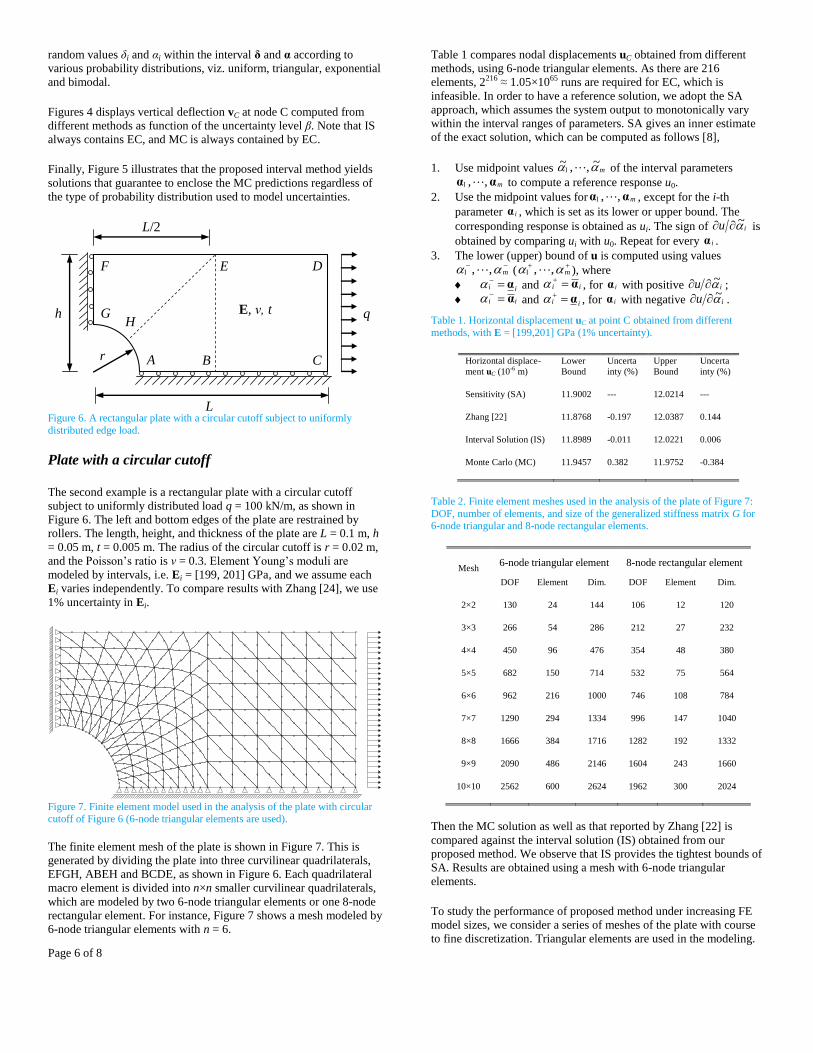
Figure 6. A rectangular plate with a circular cutoff subject to uniformly
distributed edge load.
Plate with a circular cutoff
The second example is a rectangular plate with a circular cutoff
subject to uniformly distributed load q = 100 kN/m, as shown in
Figure 6. The left and bottom edges of the plate are restrained by
rollers. The length, height, and thickness of the plate are L = 0.1 m, h
= 0.05 m, t = 0.005 m. The radius of the circular cutoff is r = 0.02 m,
and the Poisson’s ratio is ν = 0.3. Element Young’s moduli are
modeled by intervals, i.e. Ei = [199, 201] GPa, and we assume each
Ei varies independently. To compare results with Zhang [24], we use
1% uncertainty in Ei.
Figure 7. Finite element model used in the analysis of the plate with circular cutoff of Figure 6 (6-node triangular elements are used).
The finite element mesh of the plate is shown in Figure 7. This is
generated by dividing the plate into three curvilinear quadrilaterals,
EFGH, ABEH and BCDE, as shown in Figure 6. Each quadrilateral
macro element is divided into n×n smaller curvilinear quadrilaterals,
which are modeled by two 6-node triangular elements or one 8-node
rectangular element. For instance, Figure 7 shows a mesh modeled by
6-node triangular elements with n = 6.
Table 1 compares nodal displacements uC obtained from different
methods, using 6-node triangular elements. As there are 216
elements, 2216 ≈ 1.05×1065 runs are required for EC, which is
infeasible. In order to have a reference solution, we adopt the SA
approach, which assumes the system output to monotonically vary
within the interval ranges of parameters. SA gives an inner estimate
of the exact solution, which can be computed as follows [8],
1. Use midpoint values m ~ , ,~ of the interval parameters
mαα , , to compute a reference response u0.
2. Use the midpoint values for mαα , , , except for the i-th
parameter iα , which is set as its lower or upper bound. The
corresponding response is obtained as ui. The sign of iu ~ is
obtained by comparing ui with u0. Repeat for every iα .
3. The lower (upper) bound of u is computed using values
m , , (
m , , ), where
ii α and ii α , for iα with positive iu ~ ;
ii α and ii α , for iα with negative iu ~ .
Table 1. Horizontal displacement uC at point C obtained from different
methods, with E = [199,201] GPa (1% uncertainty).
Horizontal displace-
ment uC (10-6 m)
Lower
Bound
Uncerta
inty (%)
Upper
Bound
Uncerta
inty (%)
Sensitivity (SA) 11.9002 --- 12.0214 ---
Zhang [22] 11.8768 -0.197 12.0387 0.144
Interval Solution (IS) 11.8989 -0.011 12.0221 0.006
Monte Carlo (MC) 11.9457 0.382 11.9752 -0.384
Table 2. Finite element meshes used in the analysis of the plate of Figure 7:
DOF, number of elements, and size of the generalized stiffness matrix G for 6-node triangular and 8-node rectangular elements.
Mesh 6-node triangular element 8-node rectangular element
DOF Element Dim. DOF Element Dim.
2×2 130 24 144 106 12 120
3×3 266 54 286 212 27 232
4×4 450 96 476 354 48 380
5×5 682 150 714 532 75 564
6×6 962 216 1000 746 108 784
7×7 1290 294 1334 996 147 1040
8×8 1666 384 1716 1282 192 1332
9×9 2090 486 2146 1604 243 1660
10×10 2562 600 2624 1962 300 2024
Then the MC solution as well as that reported by Zhang [22] is
compared against the interval solution (IS) obtained from our
proposed method. We observe that IS provides the tightest bounds of
SA. Results are obtained using a mesh with 6-node triangular
elements.
To study the performance of proposed method under increasing FE
model sizes, we consider a series of meshes of the plate with course
to fine discretization. Triangular elements are used in the modeling.

Page 7 of 8
Table 2 lists the total DOF, element numbers and dimension of the
matrix G for each mesh. Here, 5% material uncertainty is considered
and Ei = [195, 205] GPa. Nodal displacements uC computed from
different methods are displayed in Figure 8. The SA solution is set as
a reference. This is compared against MC solution and the IS. SA and
MC can only be computed for coarse meshes.
Figure 8. Horizontal displacement uC at point C, obtained from different finite
element meshes, with E = [195,205] GPa (5% uncertainty).
From Figure 8, we observe the following: when the mesh is refined,
the overall widths of the interval solutions do not change, and the
difference between IS and SA remains unchanged. This means that
overestimation in our proposed method, if any, does not depend on
specific finite element mesh or problem scale.
Conclusions
We have proposed a new interval-based method for the analysis of
the extreme response of plane stress/strain problems, with
uncertainties in load, geometry and material. To reduce
overestimation in the solution, we have proposed a new
decomposition strategy for stiffness matrix (K), separating scalar
components from interval ones, thus limiting multiple occurrence of
the same interval variable. We solve primary and derived quantities
simultaneously using Lagrangian multipliers [20]. The interval
equilibrium equations are solved by means of a new variant of the
iterative enclosure method [18], which exploits the new
decomposition for K. Several numerical examples confirm that using
the proposed method supersedes all available interval methods in
literature [8, 17] by attaining the tightest guaranteed enclosures of the
structural extreme response. Furthermore, the proposed method
yields reliable solutions even under excessively large level of
uncertainties (30-40%). In addition, the computational time is
negligible if compared to the endpoint combination method,
sensitivity analysis, and Monte Carlo method.
References
1. Alefeld, G. and Herzberger, J., “Introduction to Interval
Computation”, Academic Press, San Diego, 1983.
2. Cook, R.D., Malkus, D.S., Plesha, M.E., Witt, R.J., “Concepts
and applications of finite element analysis”, John Wiley & Sons,
2007.
3. Corliss, G., Foley, C., Kearfott, R.B., “Formulation for Reliable
Analysis of Structural Frames”, Reliable Computing, 13(2): 125-
147, 2007.
4. Ellingwood, B.R. and Kinali, K., “Quantifying and
communicating uncertainty in seismic risk assessment”,
Structural Safety, 31:179–87, 2009.
5. Impollonia, N., “A method to derive approximate explicit
solutions for structural mechanics problems”, International
Journal of Solids and Structures, 43: 7082–7098, 2006.
6. Impollonia, N. and Muscolino, G., “Interval analysis of
structures with uncertain-but-bounded axial stiffness”, Comput.
Methods Appl. Mech. Engrg., 220(21-22): 1945-1962, 2011.
7. Jiang, C., Zhang, Z., Han, X., Liu, J., “A novel evidence-theory-
based reliability analysis method for structures with epistemic
uncertainty”, Computers and Structures, 129: 1–12, 2013.
8. Kreinovich, V., Beck, J., Ferregut, C., Sanchez, A., et al.,
“Monte-carlo-type techniques for processing interval
uncertainty, and their engineering applications”, Proc. NSF
workshop on reliable engineering computing, R. L. Muhanna
and R. L. Mullen, eds., Savannah, GA, 2004.
http://www.gtsav.gatech.edu/rec/recworkshop/index.html.
9. Kulisch, U.W. and Miranker, W.L., “Computer Arithmetic in
Theory and Practice”, Academic Press, New York, 1981.
10. Lutes, L.D. and Sarkani, S., “Random Vibrations”, edited by
Loren D. Lutes and Shahram Sarkani, Butterworth-Heinemann,
Burlington, 2004.
11. Moens, D. and Vandepitte, D., “A survey of non-probabilistic
uncertainty treatment in finite element analysis”, Comput.
Methods Appl. Mech. Engrg., 194: 1527–1555, 2005.
12. Moore, R.E., Kearfott, R.B., Cloud M.J., “Introduction to
interval analysis”, Society for Industrial and Applied
Mathematics, Philadelphia, 2009.
13. Muhanna, R.L. and Mullen, R.L., “Formulation of Fuzzy Finite-
Element Methods for Solid Mechanics Problems”, Computer-
Aided Civil and Infrastructure Engineering, 14: 107–117, 1999.
14. Muhanna, R.L. and Mullen, R.L., “Uncertainty in Mechanics
Problems - Interval-Based Approach”, Journal of Engineering
Mechanics ASCE, 127(6): 557-566, 2001.
15. Muhanna, R.L., Zhang, H., Mullen, R.L., “Combined Axial and
Bending Stiffness in Interval Finite-Element Methods”, Journal
of Structural Engineering, 133(12): 1700–1709, 2007.
16. Mullen, R. L. and Muhanna, R. L., “Bounds of Structural
Response for All Possible Loadings”, Journal of Structural
Engineering, 125(1): 98-106, 1999.
17. Neumaier, A., “Interval methods for systems of equations”,
Cambridge University Press, New York, 1990.
18. Neumaier, A. and Pownuk, A., “Linear systems with large
uncertainties, with applications to truss structures”, Reliable
Computing, 13(2): 149–172, 2007.
19. Pownuk, A., “Calculation of the extreme values of
displacements in truss structures with interval parameters”,
2004. Available online at:
http://andrzej.pownuk.com/php/ansys2interval/
20. Rama Rao, M.V., Mullen, R.L., Muhanna, R.L., “A New
Interval Finite Element Formulation with the same accuracy in
primary and derived variables”, Int. J. Reliability and Safety, 5
(3/4): 336-367, 2011.
21. Rump, S.M., “INTLAB - INTerval LABoratory”, In T. Csendes
(eds), editor, Developments in Reliable Computing: 77-104.
Dordrecht: Kluwer Academic Publishers, 1999.
http://www.ti3.tu-harburg.de/rump/intlab/
22. Zhang, H., “Nondeterministic Linear Static Finite Element
Analysis: An Interval Approach”, PhD Dissertation. School of
Civil and Environmental Engineering, Georgia Institute of
Technology, Atlanta, GA. 2005.
23. Dempster, A.P., “Upper and lower probabilities induced by a
muilti-valued mapping”, Ann. Math. Stat., 38: 325–339, 1967.
24. Shafer, G., “A mathematical theory of evidence”. Princeton
University Press, Princeton, 1968.

Page 8 of 8
25. Adhikari, S. and Khodaparast, H. H., “A spectral approach for
fuzzy uncertainty propagation in finite element analysis”, Fuzzy
Sets and Systems, 243: 1–24, 2014.
26. Klir, G.J. and Wierman, M.J., “Uncertainty-based information -
Elements of generalized information theory”, Physica-Verlag,
Heidelberg, 1999.
27. Sim, J., Qiu, Z., and Wang, X., “Modal analysis of structures
with uncertain-but-bounded parameters via interval analysis”,
Journal of Sound and Vibration, 303: 29–45, 2007.
28. Yang, Y., Cai, Z., and Liu, Y., “Interval analysis of frequency
response functions of structures with uncertain parameters”,
Mechanics Research Communications, 47: 24–31, 2013.
29. Bathe, K. and Wilson, E.L., “Numerical methods in finite
element analysis”, Prentice-Hall, Inc., Englewood Cliffs, New
Jersey, 1976.
Top Related
Copyright © 2022 FDOKUMEN

