







Bahasa
Halaman
Hukum

Spyros Chatzivasileiadis
31730: Electric Power Engineering, fundamentals
Symmetrical Faults
DTU Electrical Engineering, Technical University of Denmark
Exercises are important
By induction… exercise sessions are important
2

DTU Electrical Engineering, Technical University of Denmark
Empires of Light
• The war of currents
• AC vs DC
• Tesla and Westinghouse vs Edison
• The birth of power systems
3
DTU Electrical Engineering, Technical University of Denmark
Goals for Today• Fault current components during
transients of R-L circuits
• Transient and subtransientreactances: Xd’, Xd’’
4 1 November 2016
• How to calculate the fault currents during three-phase short-circuits
DTU Electrical Engineering, Technical University of Denmark
Have you ever experienced a blackout?
5
DTU Electrical Engineering, Technical University of Denmark
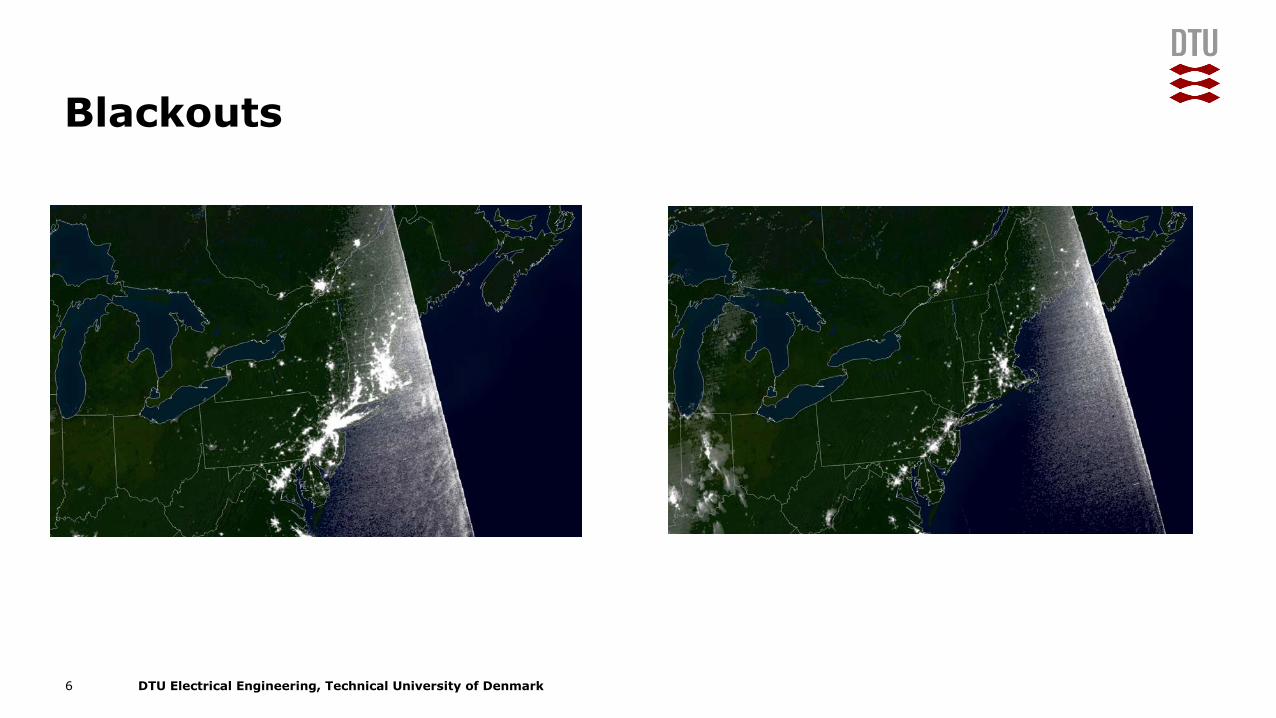
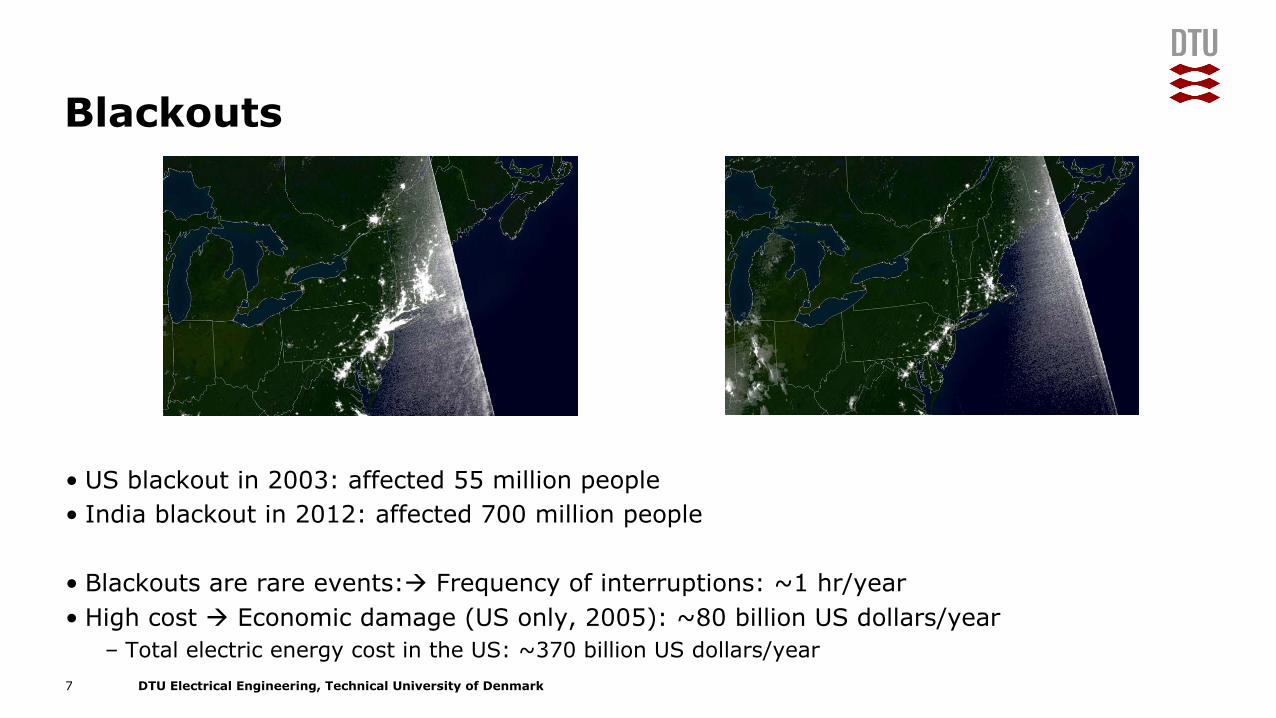
Blackouts
6
DTU Electrical Engineering, Technical University of Denmark
Blackouts
• US blackout in 2003: affected 55 million people• India blackout in 2012: affected 700 million people
• Blackouts are rare events:à Frequency of interruptions: ~1 hr/year• High cost à Economic damage (US only, 2005): ~80 billion US dollars/year
– Total electric energy cost in the US: ~370 billion US dollars/year7
DTU Electrical Engineering, Technical University of Denmark
Faults• Cause: insulation breakdown
– Lightning– Wires blowing together in the wind– Animals or plants coming in contact with the wires– Salt spray or pollution of insulators
• Two main types of faults– Symmetric faults: system remains balanced; relatively rare, but the easiest to analyze– Asymmetric faults: system is no longer balanced; much more common, but more difficult
to analyze
• Most common type of fault: single-phase-to-ground fault
8
DTU Electrical Engineering, Technical University of Denmark
Three-phase faults
• 3-phase faults are the most severe type of fault
• Engineers carry out a lot of studies and simulations, studying blackouts
• During both power system design and operation we study the impact of such faults, in order to:
– Calculate the fault currents– Calculate the voltages during the fault
so that:– We can dimension our equipment to survive the fault, e.g. conductors/cables,
transformers, etc.– Properly size and tune all our protection devices
https://www.youtube.com/watch?v=BFHtVqoyj8g
9
DTU Electrical Engineering, Technical University of Denmark
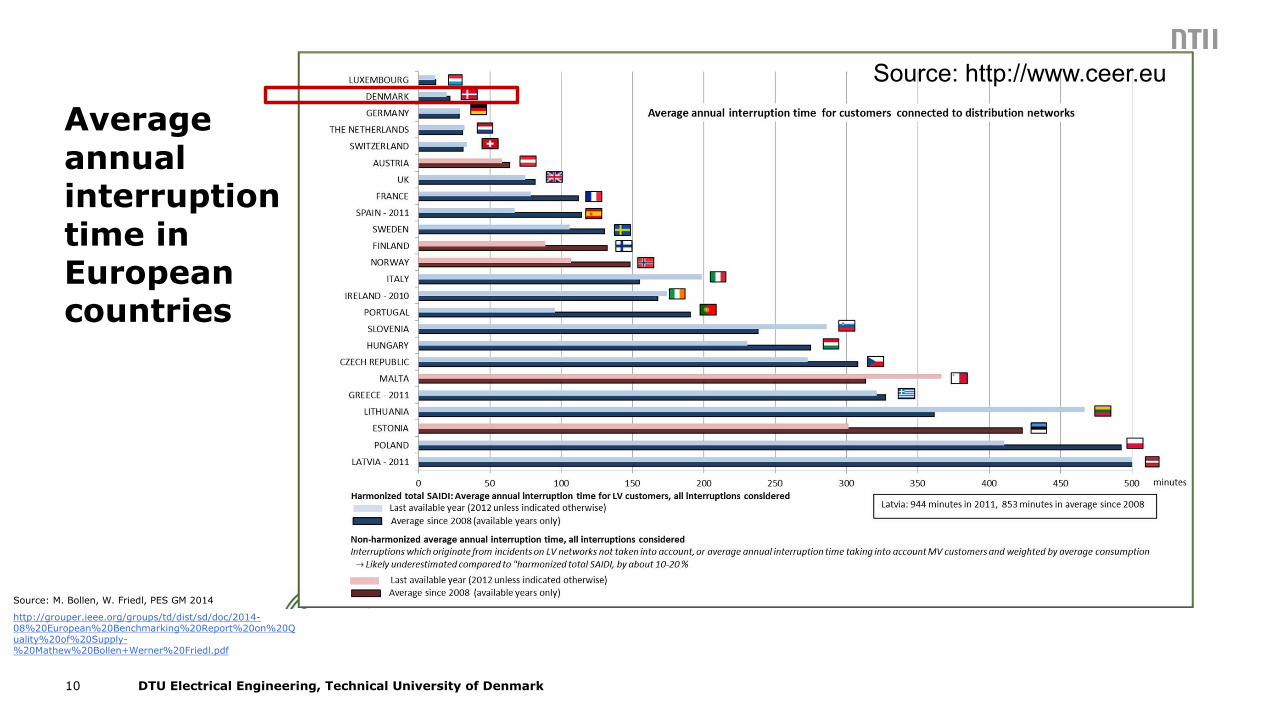
Benchmarking on Continuity of Supply I/II
16
Source: http://www.ceer.eu
Average annual interruption time in European countries
10
Source: M. Bollen, W. Friedl, PES GM 2014
http://grouper.ieee.org/groups/td/dist/sd/doc/2014-08%20European%20Benchmarking%20Report%20on%20Quality%20of%20Supply-%20Mathew%20Bollen+Werner%20Friedl.pdf
DTU Electrical Engineering, Technical University of Denmark
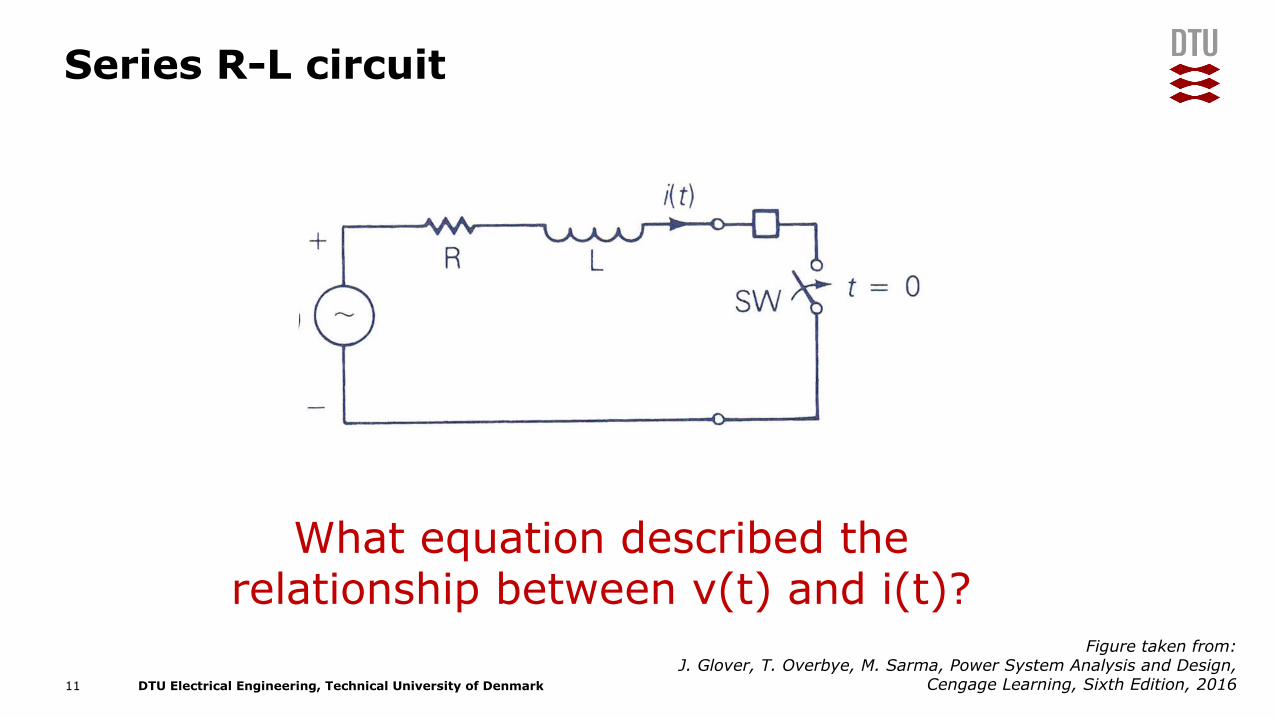
Series R-L circuit
11
What equation described the relationship between v(t) and i(t)?
Figure taken from:J. Glover, T. Overbye, M. Sarma, Power System Analysis and Design,
Cengage Learning, Sixth Edition, 2016
DTU Electrical Engineering, Technical University of Denmark
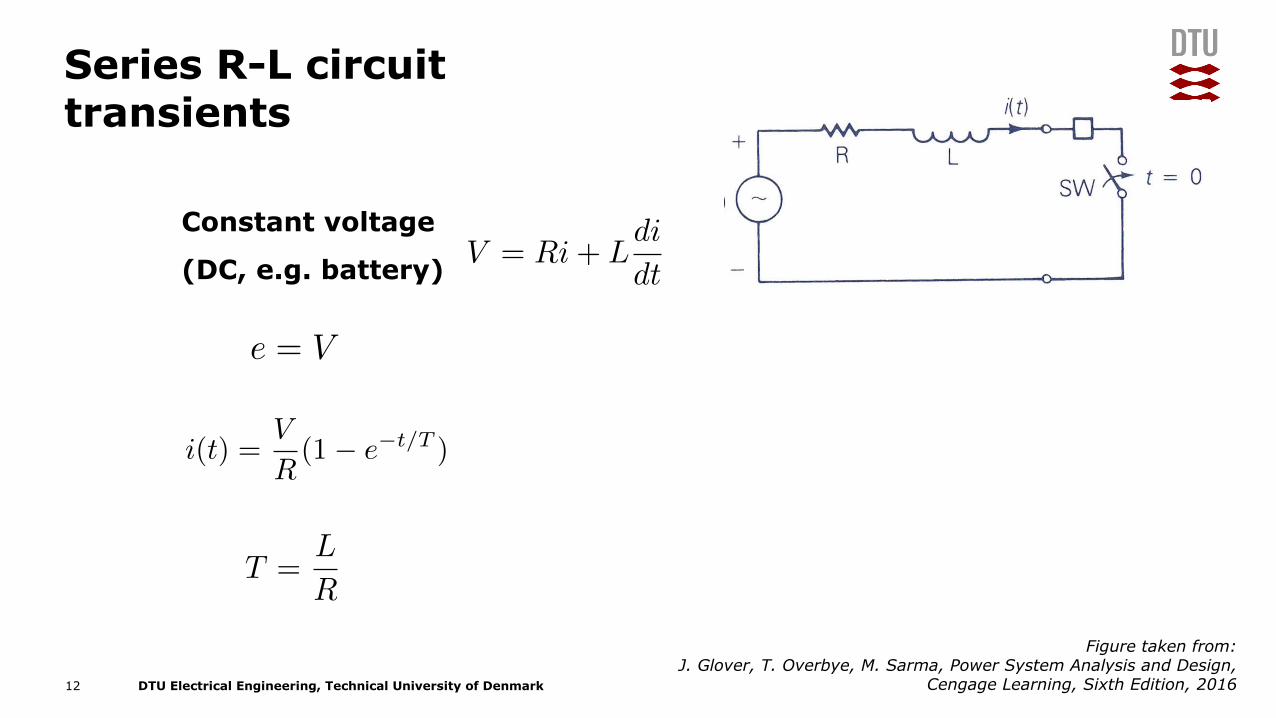
Series R-L circuit transients
12
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
T 0d (75)
T 00d (76)
X 00d < X 0
d < Xd (77)
(78)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(79)
V = Ri+ Ldi
dt(80)
i =V
R(1� e�t/T ) (81)
T =L
R(82)
4
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
T 0d (75)
T 00d (76)
X 00d < X 0
d < Xd (77)
(78)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(79)
V = Ri+ Ldi
dt(80)
i =V
R(1� e�t/T ) (81)
T =L
R(82)
4
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
T 0d (75)
T 00d (76)
X 00d < X 0
d < Xd (77)
(78)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(79)
V = Ri+ Ldi
dt(80)
i(t) =V
R(1� e�t/T ) (81)
T =L
R(82)
4
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
T 0d (75)
T 00d (76)
X 00d < X 0
d < Xd (77)
(78)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(79)
V = Ri+ Ldi
dt(80)
i(t) =V
R(1� e�t/T ) (81)
T =L
R(82)
e = V (83)
e(t) =p2V sin(!t+ ↵) (84)
4
Constant voltage
(DC, e.g. battery)
Figure taken from:J. Glover, T. Overbye, M. Sarma, Power System Analysis and Design,
Cengage Learning, Sixth Edition, 2016
DTU Electrical Engineering, Technical University of Denmark
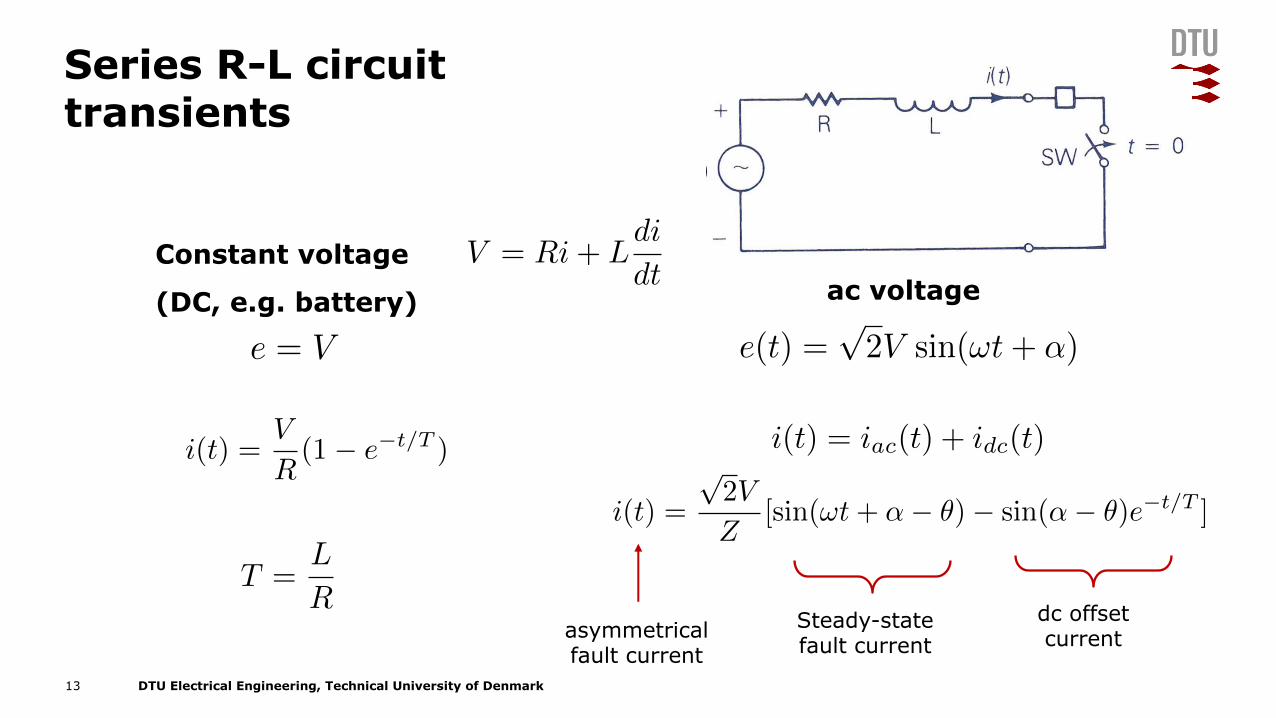
Series R-L circuit transients
13
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
T 0d (75)
T 00d (76)
X 00d < X 0
d < Xd (77)
(78)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(79)
V = Ri+ Ldi
dt(80)
i =V
R(1� e�t/T ) (81)
T =L
R(82)
4
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
T 0d (75)
T 00d (76)
X 00d < X 0
d < Xd (77)
(78)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(79)
V = Ri+ Ldi
dt(80)
i =V
R(1� e�t/T ) (81)
T =L
R(82)
4
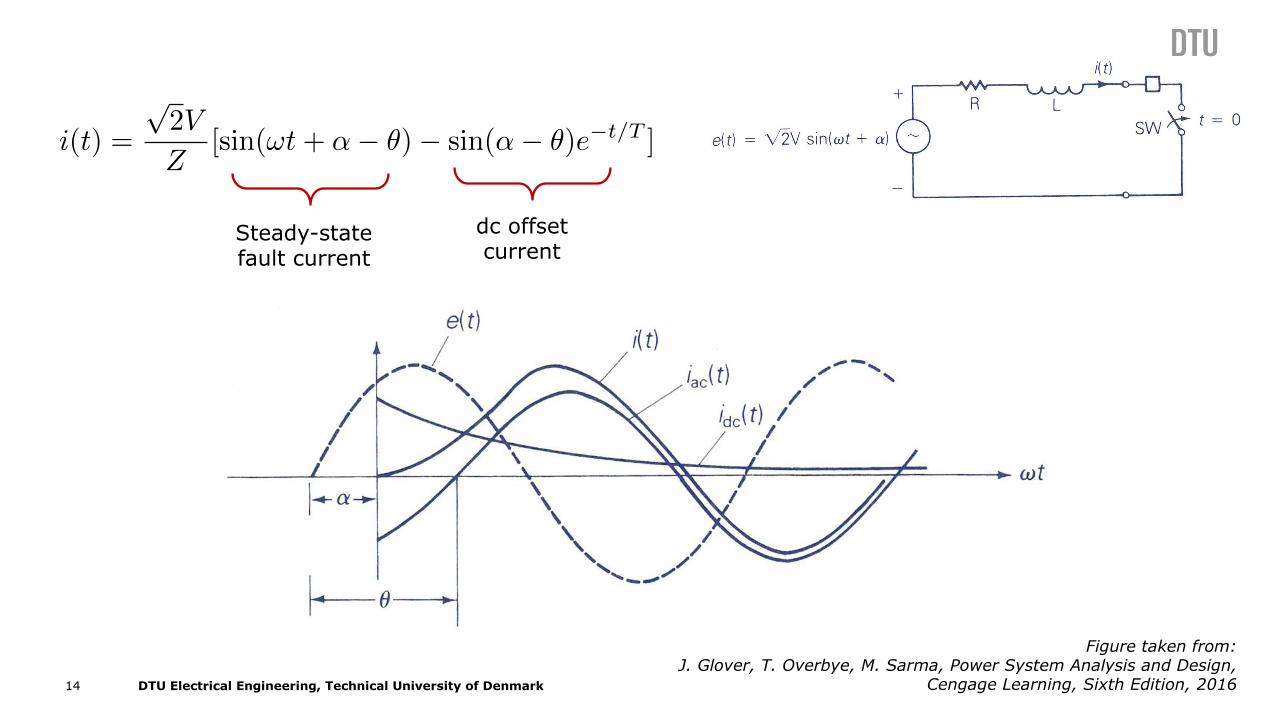
i(t) = iac(t) + idc(t) (83)
i(t) =
p2V
Z[sin(!t+ ↵� ✓)� sin(↵� ✓)e�t/T ] (84)
iac(t) =
p2V
Z[sin(!t+ ↵� ✓)] (85)
idc(t) = �p2V
Z[sin(↵� ✓)e�t/T ] (86)
5
i(t) = iac(t) + idc(t) (83)
i(t) =
p2V
Z[sin(!t+ ↵� ✓)� sin(↵� ✓)e�t/T ] (84)
iac(t) =
p2V
Z[sin(!t+ ↵� ✓)] (85)
idc(t) = �p2V
Z[sin(↵� ✓)e�t/T ] (86)
5
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
T 0d (75)
T 00d (76)
X 00d < X 0
d < Xd (77)
(78)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(79)
V = Ri+ Ldi
dt(80)
i(t) =V
R(1� e�t/T ) (81)
T =L
R(82)
4
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
T 0d (75)
T 00d (76)
X 00d < X 0
d < Xd (77)
(78)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(79)
V = Ri+ Ldi
dt(80)
i(t) =V
R(1� e�t/T ) (81)
T =L
R(82)
e = V (83)
e(t) =p2V sin(!t+ ↵) (84)
4
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
T 0d (75)
T 00d (76)
X 00d < X 0
d < Xd (77)
(78)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(79)
V = Ri+ Ldi
dt(80)
i(t) =V
R(1� e�t/T ) (81)
T =L
R(82)
e = V (83)
e(t) =p2V sin(!t+ ↵) (84)
4
Constant voltage
(DC, e.g. battery) ac voltage
Steady-state fault current
dc offset currentasymmetrical
fault current
DTU Electrical Engineering, Technical University of Denmark14
i(t) = iac(t) + idc(t) (83)
i(t) =
p2V
Z[sin(!t+ ↵� ✓)� sin(↵� ✓)e�t/T ] (84)
iac(t) =
p2V
Z[sin(!t+ ↵� ✓)] (85)
idc(t) = �p2V
Z[sin(↵� ✓)e�t/T ] (86)
5
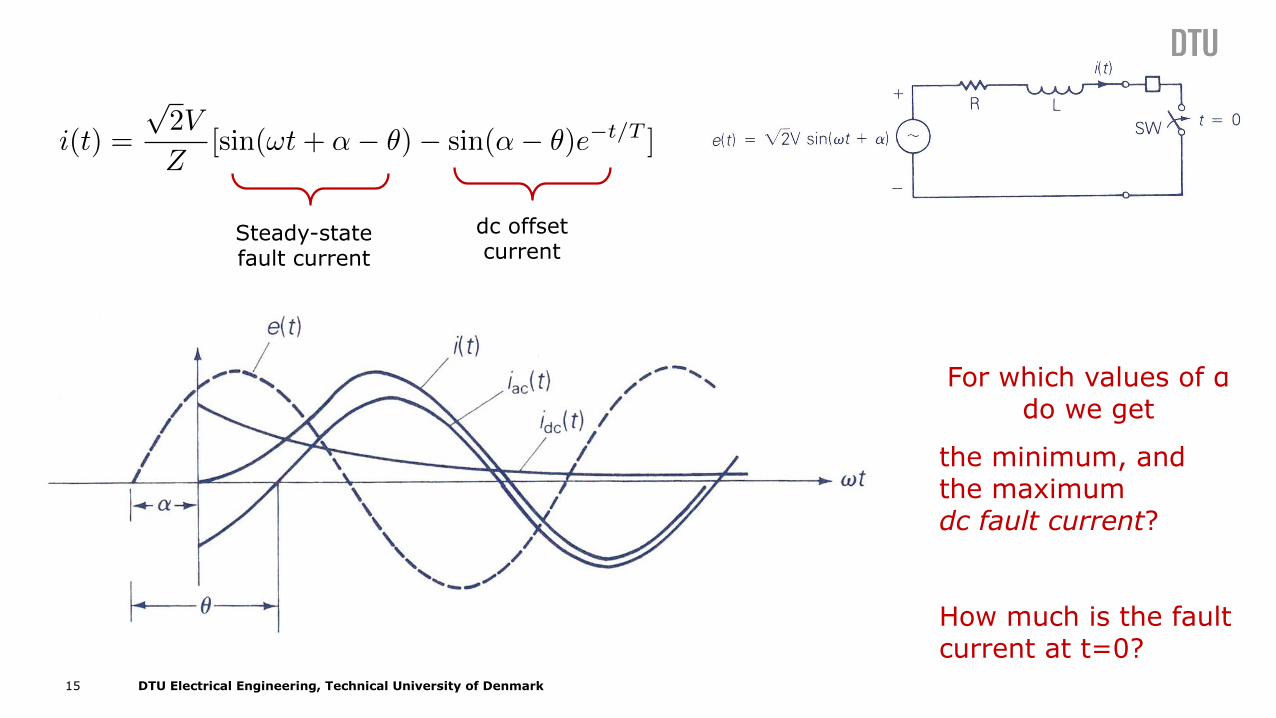
Steady-state fault current
dc offset current
Figure taken from:J. Glover, T. Overbye, M. Sarma, Power System Analysis and Design,
Cengage Learning, Sixth Edition, 2016
DTU Electrical Engineering, Technical University of Denmark15
i(t) = iac(t) + idc(t) (83)
i(t) =
p2V
Z[sin(!t+ ↵� ✓)� sin(↵� ✓)e�t/T ] (84)
iac(t) =
p2V
Z[sin(!t+ ↵� ✓)] (85)
idc(t) = �p2V
Z[sin(↵� ✓)e�t/T ] (86)
5
Steady-state fault current
dc offset current
For which values of αdo we get
the minimum, and the maximumdc fault current?
How much is the faultcurrent at t=0?
DTU Electrical Engineering, Technical University of Denmark
Unloaded synchronous machine
16
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
X 00d < X 0
d < Xd (75)
(76)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(77)
4
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
X 00d < X 0
d < Xd (75)
(76)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(77)
4
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
X 00d < X 0
d < Xd (75)
(76)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(77)
4
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
X 00d < X 0
d < Xd (75)
(76)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(77)
4
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
X 00d < X 0
d < Xd (75)
(76)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(77)
4
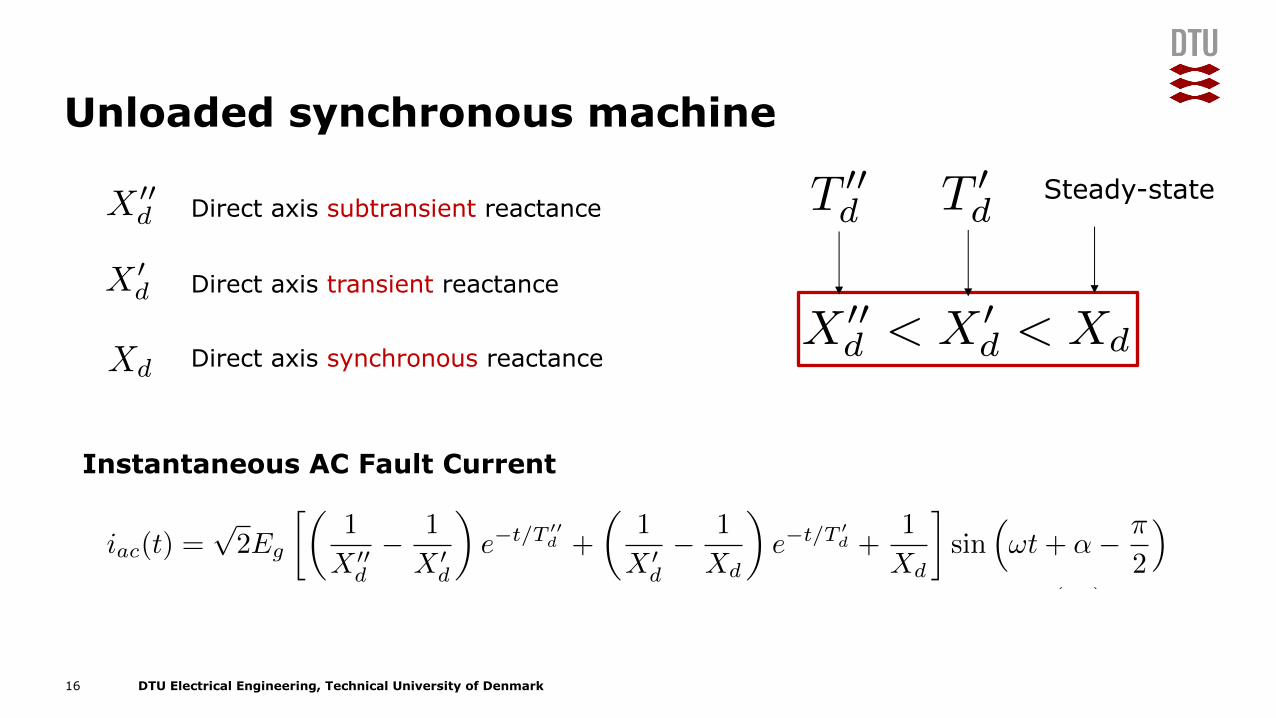
Direct axis synchronous reactance
Direct axis transient reactance
Direct axis subtransient reactance
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
T 0d (75)
T 00d (76)
X 00d < X 0
d < Xd (77)
(78)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(79)
4
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
T 0d (75)
T 00d (76)
X 00d < X 0
d < Xd (77)
(78)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(79)
4
Steady-state
Instantaneous AC Fault Current

DTU Electrical Engineering, Technical University of Denmark
Unloaded synchronous machine
17
�a1 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D12+ Ic ln
1
D13
�(63)
�a2 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D23+ Ic ln
1
D12
�(64)
�a3 =µ0
2⇡
Ia ln
1
r0+ Ib ln
1
D31+ Ic ln
1
D23
�(65)
�a =�a1
l3 + �a2
l3 + �a3
l3
l=
�a1 + �a2 + �a3
3(66)
�a =1
3
µ0
2⇡
3Ia ln
1
r0+ Ib ln
1
D12D23D31+ Ic ln
1
D13D12D23
�(67)
�a =1
3
µ0
2⇡
3Ia ln
1
r0� Ia ln
1
D12D23D31
�(68)
�a =1
3
µ0
2⇡
3Ia ln
3pD12D23D31
r0
�(69)
Deq = 3p
D12D23D31 (70)
La =µ0
2⇡ln
Deq
DSL(71)
Xd (72)
X 0d (73)
X 00d (74)
X 00d < X 0
d < Xd (75)
(76)
iac(t) =p2Eg
✓1
X 00d
� 1
X 0d
◆e�t/T 00
d +
✓1
X 0d
� 1
Xd
◆e�t/T 0
d +1
Xd
�sin
⇣!t+ ↵� ⇡
2
⌘
(77)
4
How much is iac for t=0 ?
How much is iac for t →∞ ?
*This is just the symmetrical (ac) component. The dc offset has been removed.
DTU Electrical Engineering, Technical University of Denmark
Assumptions for 3-phase short-circuit studies1. Transformers represented by their leakage reactances
2. Lines represented by their equivalent series reactance
3. Synchronous machines represented by constant voltage-sources behind subtransientreactances
4. Neglect non-rotating impedance loads
5. For small motors under 40 kW: either neglect induction motors or represent them as synchronous machines
18
These assumptions are made to simplify our calculations.
In everyday practice, there are cases where we have to avoid such simplifications.
Can you give an example where such simplifications should be avoided?
DTU Electrical Engineering, Technical University of Denmark
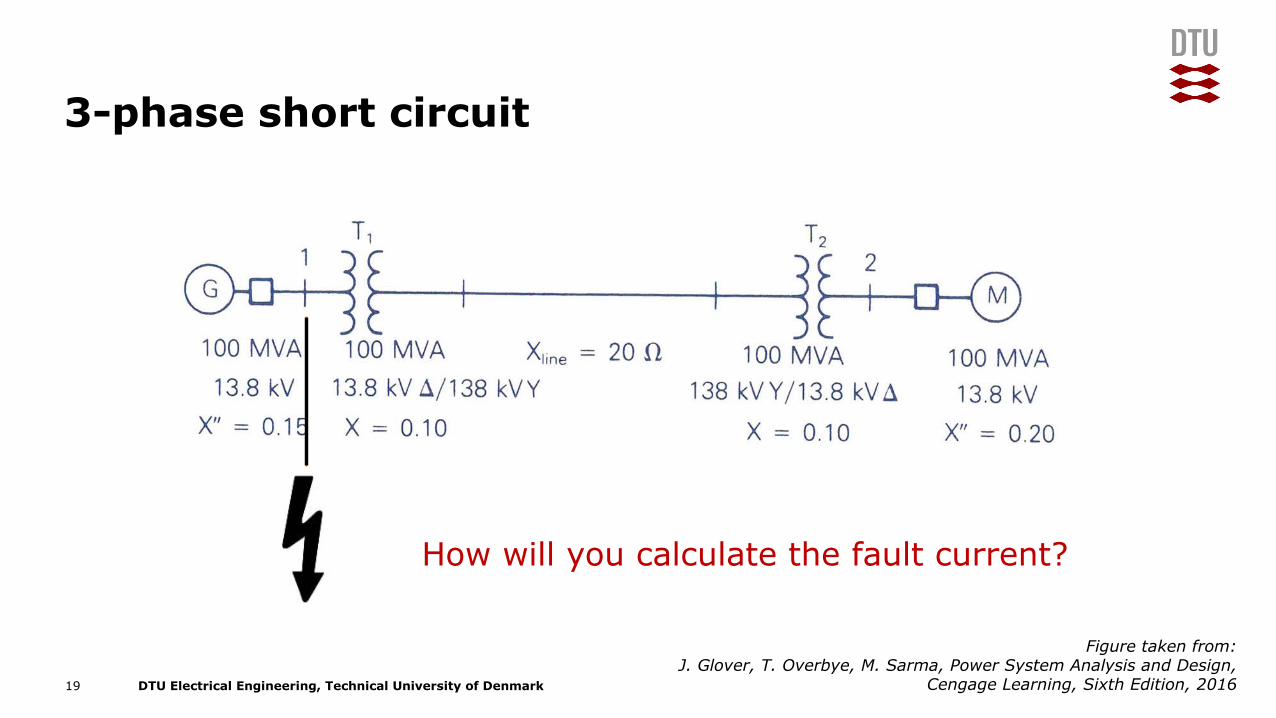
3-phase short circuit
19
How will you calculate the fault current?
Figure taken from:J. Glover, T. Overbye, M. Sarma, Power System Analysis and Design,
Cengage Learning, Sixth Edition, 2016
DTU Electrical Engineering, Technical University of Denmark
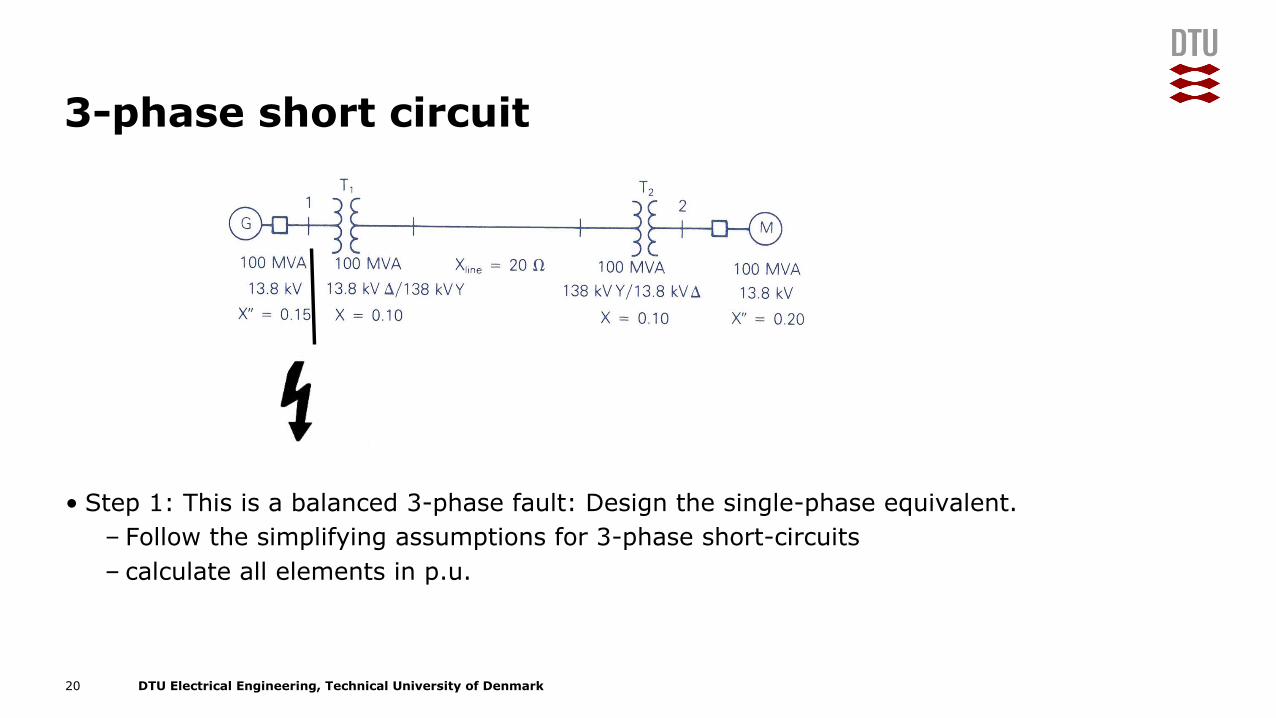
3-phase short circuit
20
• Step 1: This is a balanced 3-phase fault: Design the single-phase equivalent. – Follow the simplifying assumptions for 3-phase short-circuits– calculate all elements in p.u.

DTU Electrical Engineering, Technical University of Denmark
3-phase short circuit
21
1. Transformers represented by their leakage reactances
2. Lines represented by their equivalent series reactance
3. Synchronous machines represented by constant voltage-sources behind subtransient reactances
4. Neglect non-rotating impedance loads5. For small motors under 40 kW: either
neglect induction motors or represent them as synchronous machines

DTU Electrical Engineering, Technical University of Denmark
3-phase short circuit
22
Figure taken from:J. Glover, T. Overbye, M. Sarma, Power System Analysis
and Design, Cengage Learning, Sixth Edition, 2016

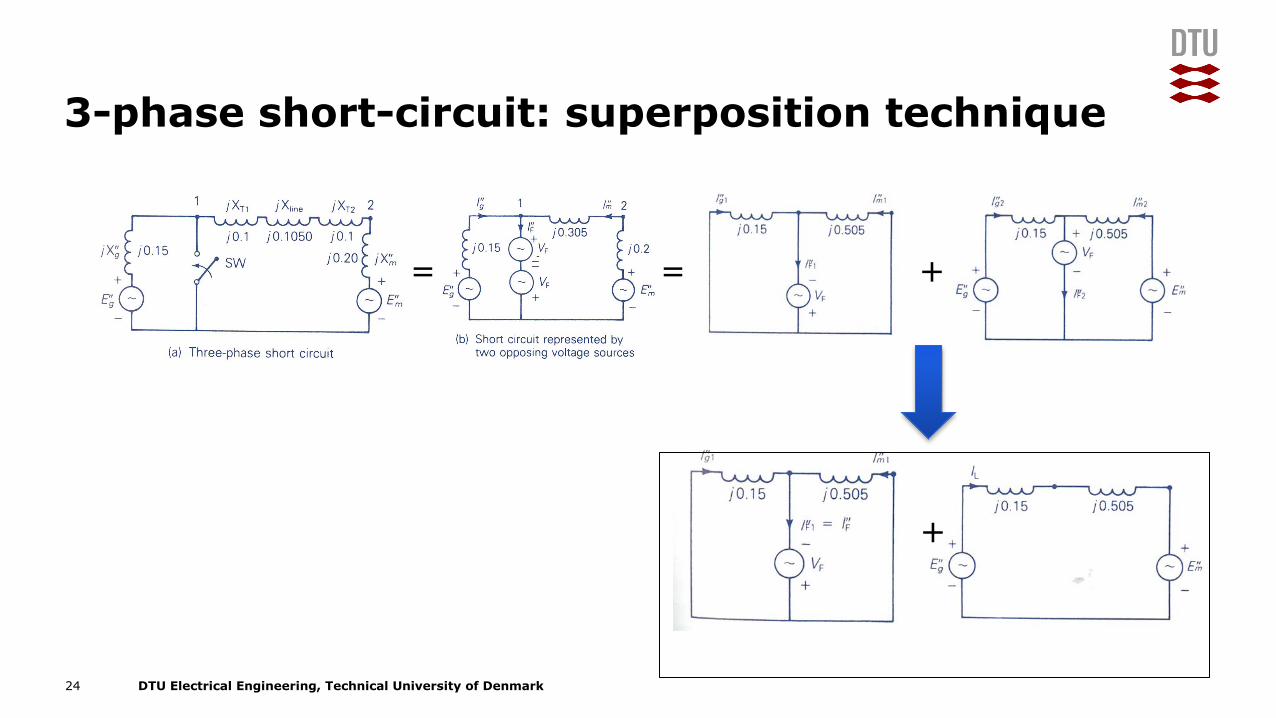
DTU Electrical Engineering, Technical University of Denmark23
Short-circuit = SW closes
=Then the two circuits are
equivalent
+VF
-VF
3-phase short-circuit: superposition technique
Figure taken from:J. Glover, T. Overbye, M. Sarma, Power System Analysis and Design,
Cengage Learning, Sixth Edition, 2016
DTU Electrical Engineering, Technical University of Denmark
3-phase short-circuit: superposition technique
24
= = +
+
DTU Electrical Engineering, Technical University of Denmark
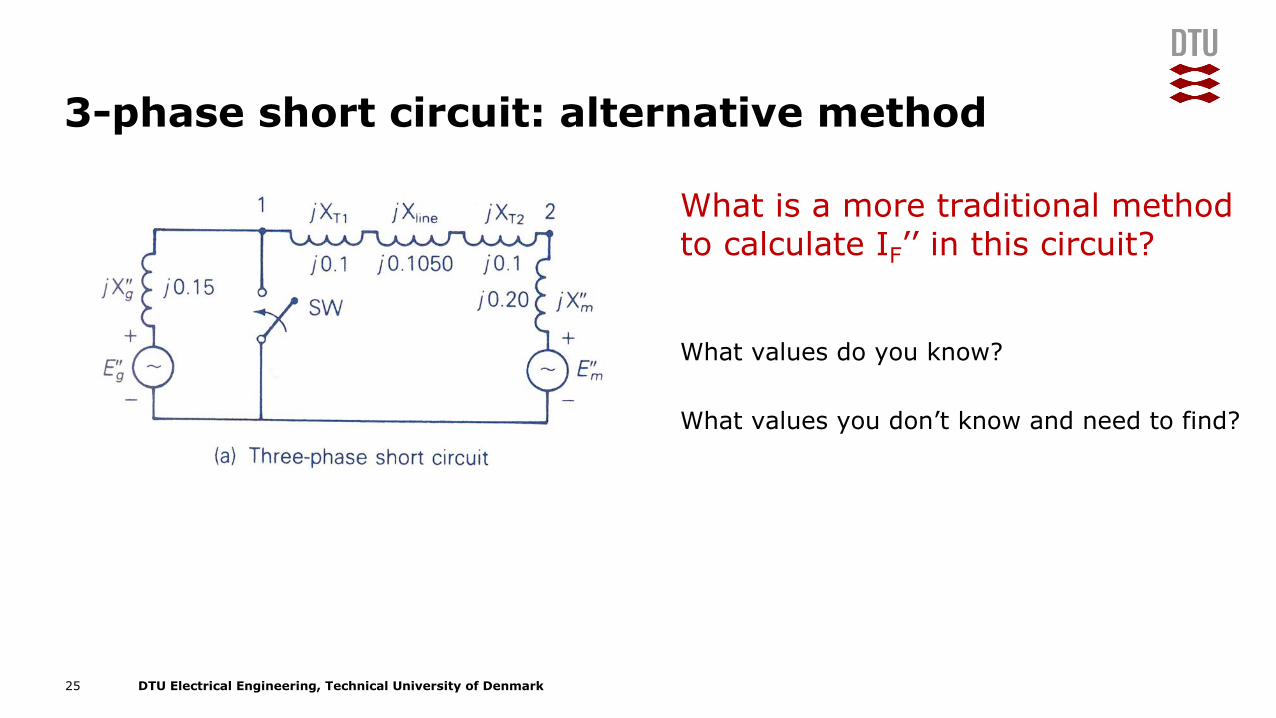
3-phase short circuit: alternative method
25
What is a more traditional method to calculate IF’’ in this circuit?
What values do you know?
What values you don’t know and need to find?
DTU Electrical Engineering, Technical University of Denmark
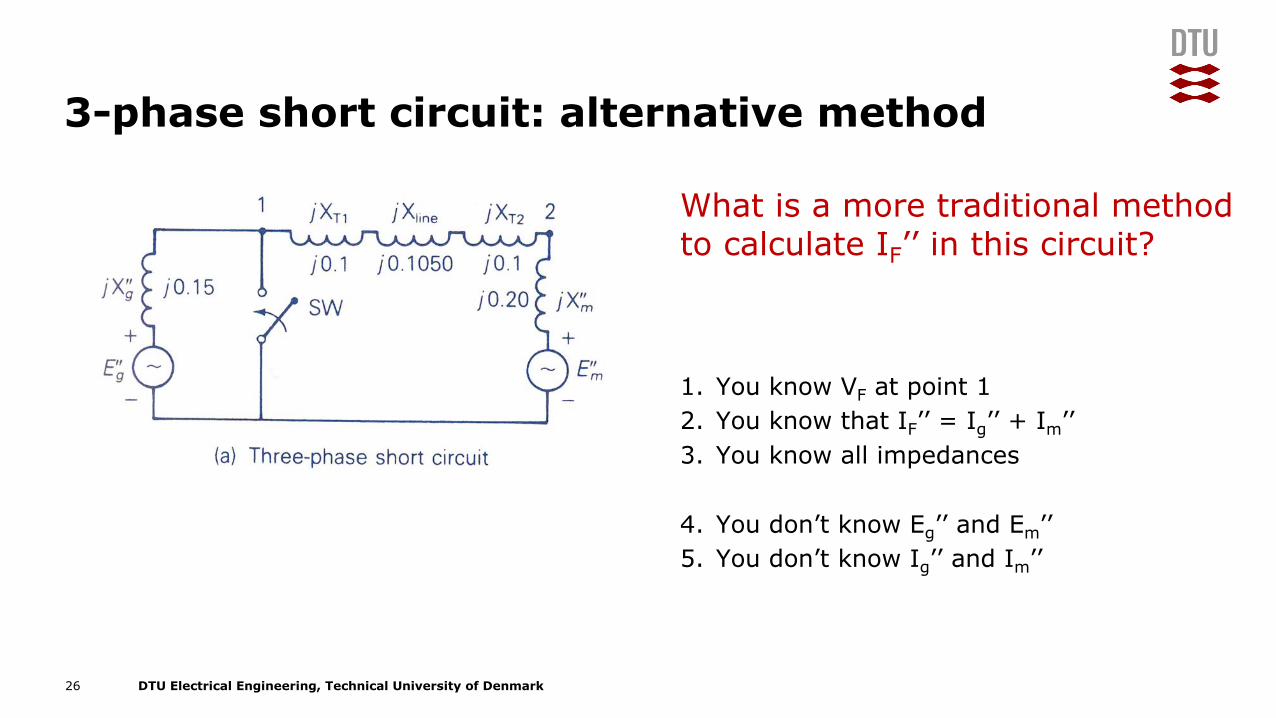
3-phase short circuit: alternative method
26
What is a more traditional method to calculate IF’’ in this circuit?
1. You know VF at point 12. You know that IF’’ = Ig’’ + Im’’3. You know all impedances
4. You don’t know Eg’’ and Em’’5. You don’t know Ig’’ and Im’’

DTU Electrical Engineering, Technical University of Denmark
3-phase short circuit: alternative method
27
1. Calculate the pre-fault current at point 1
2. Calculate Eg’’ and Em’’
3. Calculate the fault current Ig’’ at point 1, due to Eg’’
4. Calculate the fault current Im’’ at point 1, due to Em’’
5. IF’’ = Ig’’ + Im’’
DTU Electrical Engineering, Technical University of Denmark
Positive-sequence?• The term “positive-sequence” refers to the modeling approach we use for unbalanced
conditions: the symmetrical components
• Symmetrical components consist of the positive-sequence, negative-sequence, and zero-sequence
• In this course we deal only with balanced systems
• In balanced systems, the positive-sequence component corresponds to the single-phase equivalent of our three-phase system
28

DTU Electrical Engineering, Technical University of Denmark
Per unit calculations
29
Why do we calculate in p.u.?
DTU Electrical Engineering, Technical University of Denmark
Per unit calculations
30
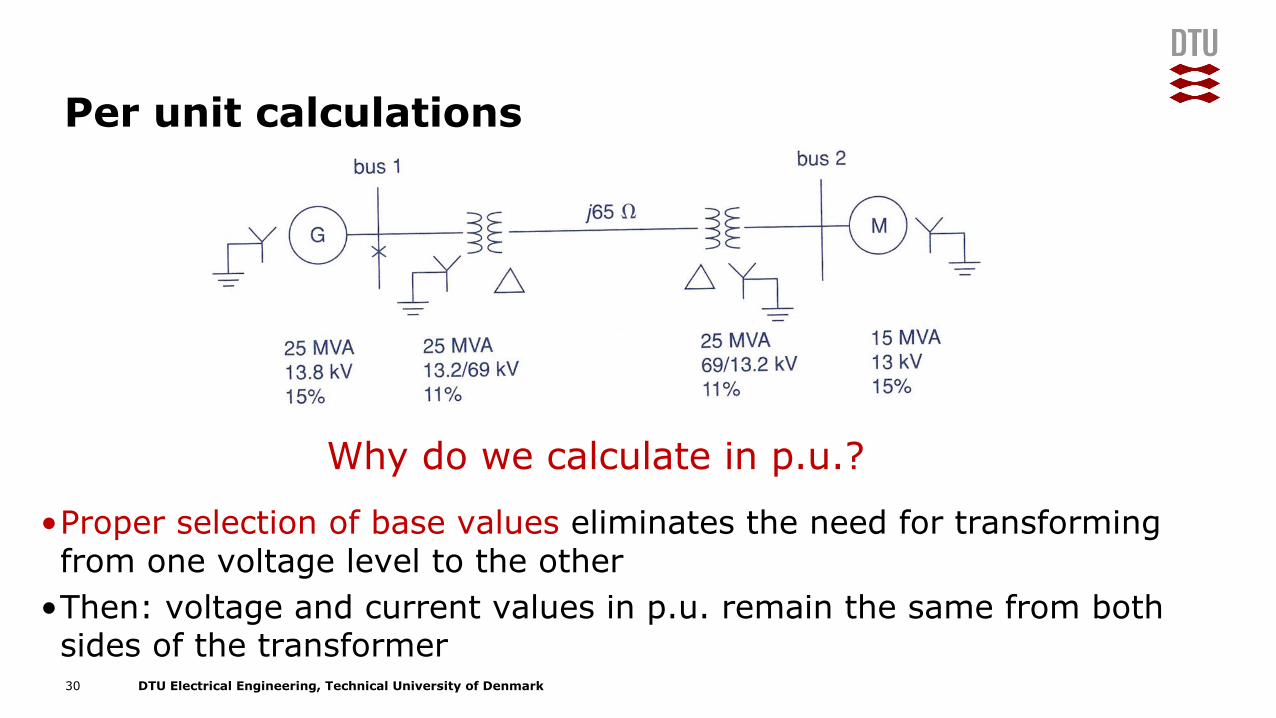
Why do we calculate in p.u.?
•Proper selection of base values eliminates the need for transforming from one voltage level to the other
•Then: voltage and current values in p.u. remain the same from both sides of the transformer

DTU Electrical Engineering, Technical University of Denmark
Per unit calculations1. Divide our system in as many areas as NTRAFO+1
2. Select a base voltage for each area– Make sure that the voltage ratio between two neighboring areas is the same as the
transformer ratio between the two areas it connects
3. Select a single base MVA that will be the same for the whole system
4. Calculate the base impedance in each area
5. Calculate the impedances in p.u.
6. Calculate the voltages in p.u.
7. Calculate the power in p.u. (i.e. usually of loads or generators)
31
DTU Electrical Engineering, Technical University of Denmark
31xxx : Optimization Methods for Power Systems
• Special 3-week course in January 2017 on power system optimization• 5 ECTS
Questions that we will try to answer:
• How do you plan the operation of our electricity system in order to:– Minimize costs?– Ensure a safe operation (no blackouts) ?
• What methods do power system operators currently use?
• What are the state-of-the-art methods?
32
Top Related
Copyright © 2022 FDOKUMEN

