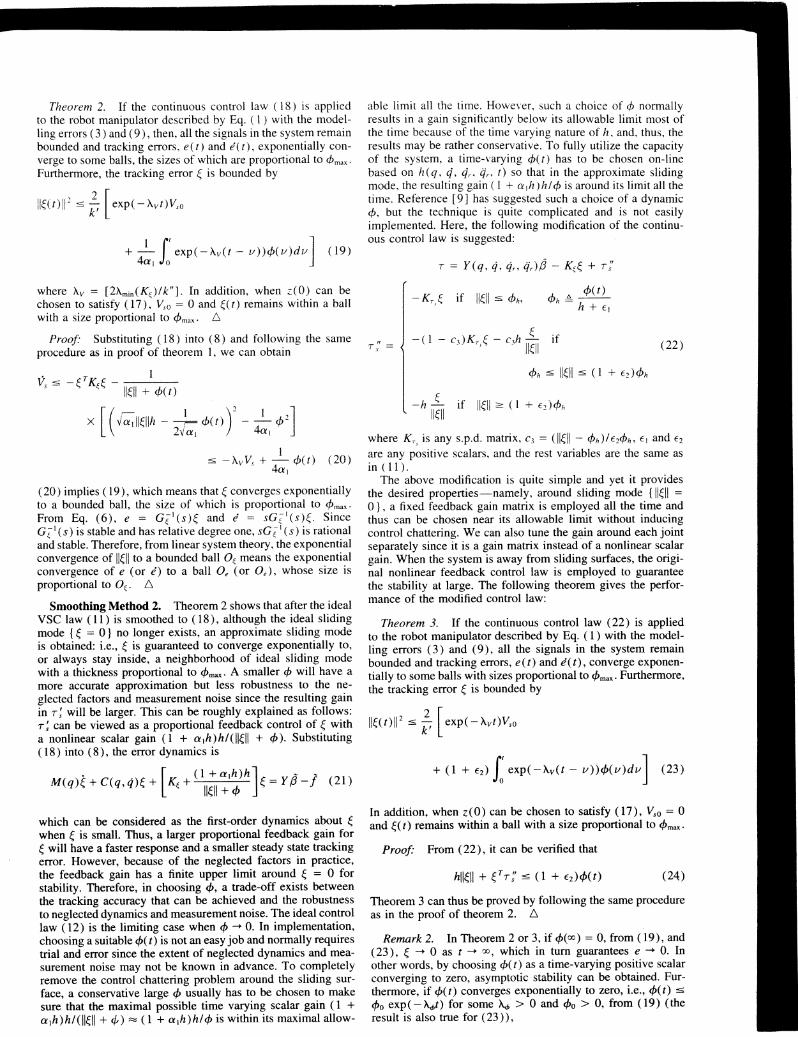
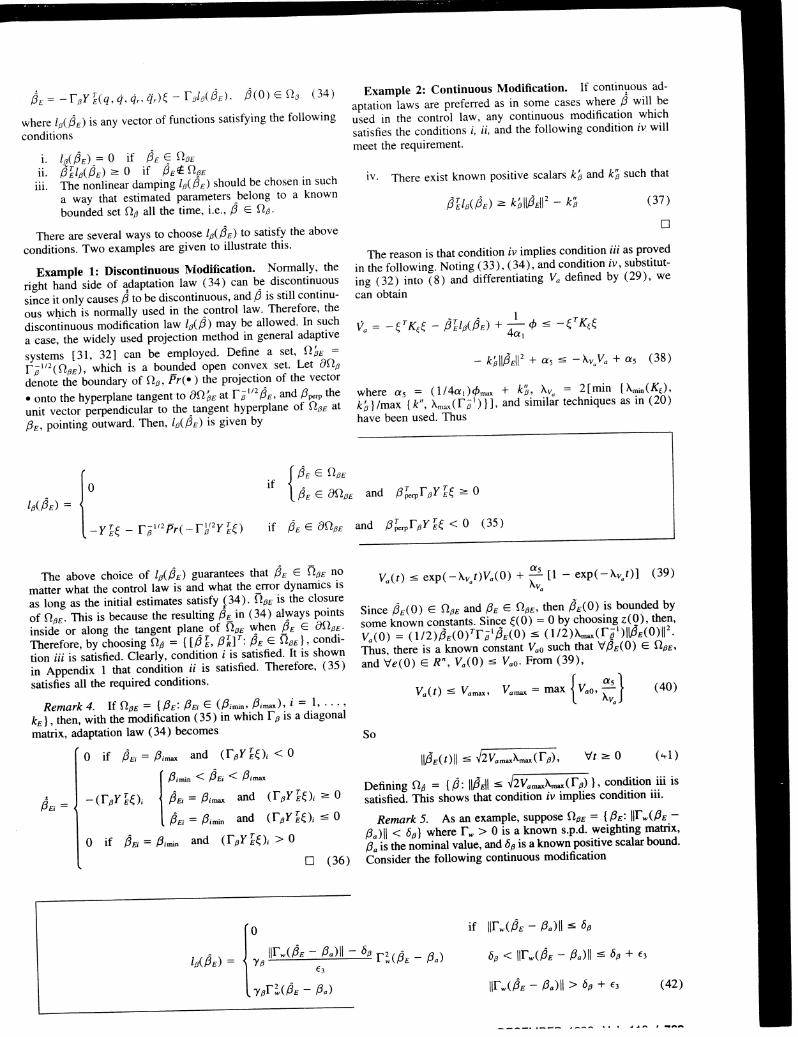
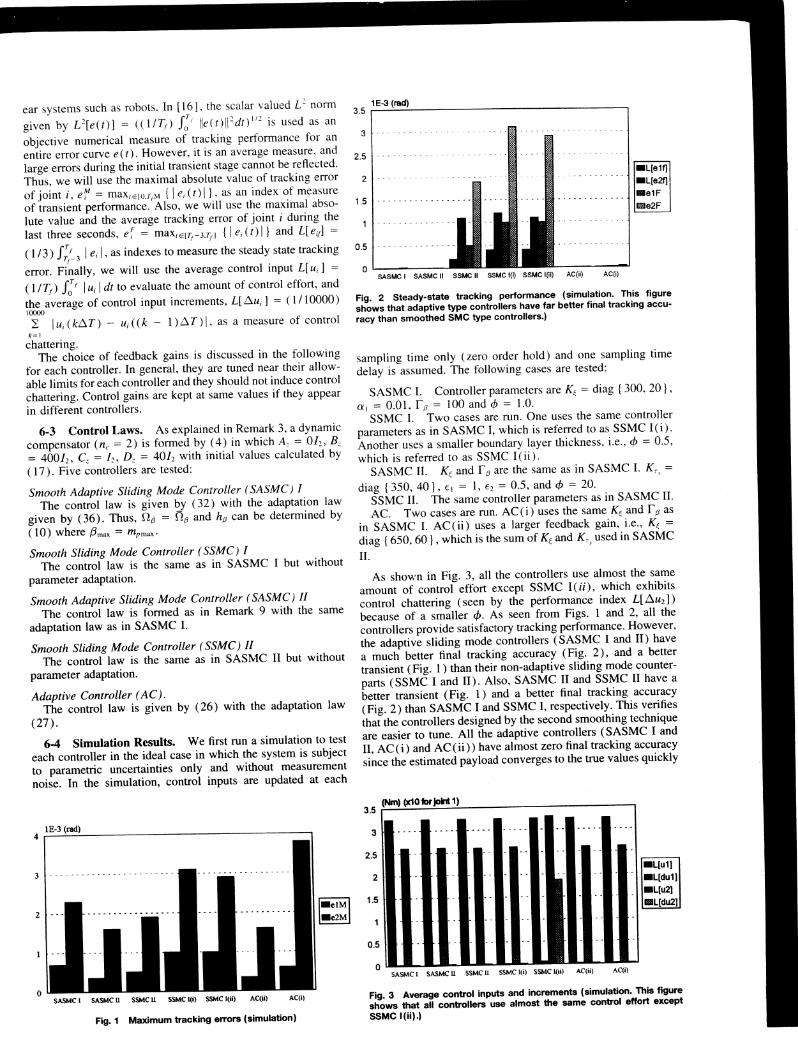
Top Related
Intelligent Behaviour Modelling and Control for Mobile Manipulators
Topology of serial and parallel manipulators and topological diagrams
All round protection guaranteed SLR
Sliding lubricated anisotropic rough surfaces
Robotics education: Proposals for laboratory practices about manipulators
Guaranteed Pre-tagging for the Brill Tagger
Nonlinear Effects in Stiffness Modeling of Robotic Manipulators
A Unified Framework for the Scheduling of Guaranteed ...