







Bahasa
Halaman
Hukum


KSCE Journal of Civil Engineering (2015) 19(3):611-620 Copyright ⓒ2014 Korean Society of Civil Engineers DOI 10.1007/s12205-013-0315-z
− 611−
pISSN 1226-7988, eISSN 1976-3808
www.springer.com/12205
Geotechnical Engineering
New Method for Predicting the Ultimate Bearing Capacity
of Driven Piles by using Flap Number
Fatehnia Milad*, Tawfiq Kamal**, Hataf Nader***, and Ozguven Eren Erman****
Received June 3, 2013/Revised January 14, 2014/Accepted April 9, 2014/Published Online October 3, 2014
··································································································································································································································
Abstract
A new method was proposed to predict the compressive bearing capacity of driven piles based on the number of hammer strikes inthe last one meter of pile penetration (known here as Flap number). To collect the data, a literature review was done on technicalpublications and pile driving record reports that were accessible to the authors at the time of publication. The data of a hundred drivenpiles including Flap number, basic properties of the surrounding soil, pile geometry, and pile-soil friction angle was collected. Thesedata were initially used in the artificial neural network to establish a relation for predicting pile capacity. Subsequently, by usinggenetic programing and linear regression, equations for determining pile bearing capacity with respect to the Flap number, soilparameters, and pile geometries were proposed. Finally, the performance of all applied methods in predicting the pile bearingcapacity were compared. The utmost importance was given to the comparison of the accuracy of the three models as well as the errorestimation.
Keywords: driven pile, Flap number, bearing capacity, neural network, genetic programming
··································································································································································································································
1. Introduction
Finding the unique bearing capacity of each driven pile is a
concern in foundation design. Although it is a common procedure
to use the same bearing capacity equation for different piles
installed in similar geotechnical settings, such a practice should
be dealt with caution. On the other side, since the pile-soil
interaction is ambiguous and not entirely understood, most of the
proposed procedures have achieved limited success in terms of
providing accurate prediction of pile capacity. This limitation can
be attributed to the assumptions and simplifications on which the
procedures have based their interpretation of pile behavior.
Using one of the available static methods to determine base
resistance may result in the same capacity for different piles of a
project. On the other hand, dynamic equations and dynamic
methods, which mostly use pile and hammer information and
pile set to predict the pile capacity, over-simplify the pile driving
problem. These methods do not take the characteristics of the
soil into account. Finally, the static tests, which are the most
reliable of all methods, have their own restrictions. In addition to
the high cost of these tests, if pile loading is stopped before the
pile fails, interpreting the test results is difficult and if loading is
continued until the pile’s failure, the test piles will be impaired
and the test can be only performed on a small percentage of all
piles. Therefore, an inexpensive method which can easily
suggest an accurate value for the compressive bearing capacity
of every driven pile is needed.
Based on the number of effective parameters in pile capacity, it
is needed to employ efficient computational algorithms that are
capable of incorporating the interdependence of several parameters.
In this respect, the methods that do not require prior assumptions
such as artificial intelligence techniques would provide better
solutions. Neural Network and Genetic Programming methods
had been widely used by professions for pile capacity predictions.
Researchers adopted different input parameters in their modeling
and tried to make the best estimation of the pile bearing capacity
from the proposed input parameters. Nawari et al. (1999) used
Back-Propagation, and Generalized Regression Neural Network
models to predict the pile capacity from N-SPT value and pile
geometrical properties (pile length, cross-sectional area,
circumference and the amount of steel reinforcement). They
used a database consisting of 83 full-scale loaded drilled shafts
TECHNICAL NOTE
*Ph.D. Candidate, Dept. of Civil and Environmental Engineering, FAMU-FSU College of Engineering, Tallahassee, FL 32310, United States (Corre-
sponding Author, E-mail: [email protected])
**Professor and Chair, Dept. of Civil and Environmental Engineering, FAMU-FSU College of Engineering, Tallahassee, FL 32310, United States (E-mail:
***Professor, Dept. of Civil and Environmental Engineering, Shiraz University, Shiraz 71345, Iran (E-mail: [email protected])
****Assistant Professor, Dept. of Civil and Environmental Engineering, FAMU-FSU College of Engineering, Tallahassee, FL 32310, United States (E-mail:

Fatehnia Milad, Tawfiq Kamal, Hataf Nader, and Ozguven Eren Erman
− 612− KSCE Journal of Civil Engineering
for their modeling and determined the real behavior of the piles
from comprehensive lateral and axial load tests in different
projects. Chan et al. (1995) trained a three-layer Back-Propagation
Neural Network to determine the bearing capacity of driven piles
using the same parameters listed in the simplified Hiley formula.
The parameters adopted were: Elastic compression of pile and soil,
pile set, and driving energy transferred to pile (evaluated from
the strain and acceleration measurements at the pile head in a
dynamic test). The pile capacity evaluated from CAPWAP or
CASE method was taken as the desired output value in training.
Lee and Lee (1996) adopted Neural Network to simulate the
results of modeled and some full scale pile load tests obtained
from a literature survey. They assumed that ultimate bearing
capacities were affected by penetration depth ratio, average
standard penetration number along the pile shaft, average
standard penetration number near the pile end, pile set (final
penetration depth/blow), and Hammer energy. Abu Kiefa (1998)
introduced a General Regression Neural Network for predicting
the capacity of a driven pile in non-cohesive soil. Four variables
were selected as input data: angle of friction of soil, effective
overburden pressure, pile length, and pile’s cross sectional area.
Ardalan et al. (2009) used Group Method of Data Handling type
Neural Networks optimized using Genetic Algorithms to model
the effects of effective cone point resistance and cone sleeve
friction as input parameters on pile unit shaft resistance. They
employed a database of 33 full-scale pile loading tests with
information of soil types and CPT soundings performed close to
the piles’ locations. Mahnesh (2011) employed a dataset consisting
94 pile driving records in cohesion-less soil. He used Generalized
Regression Neural Network based modeling approach to estimate
the pile bearing capacity from elastic modulus of pile, length,
cross-sectional area, weight, hammer drop, hammer weight, pile
set, and hammer type. Alkroosh and Nikraz (2012) utilized Gene
Expression Programming technique to predict axial capacity of
pile foundations driven into cohesive soils from the equivalent
pile diameter, pile embedment length, weighted average cone
point resistance over pile tip failure zone, weighted average
sleeve friction along shaft, weighted average cone point
resistance over shaft length, pile elastic modulus, E, and pile
Material. The data used for the development of the GEP model
was collected from the literature and comprised a series of in-situ
driven pile load tests as well as Cone Penetration Test (CPT)
results. Their model’s single target output was the interpreted
failure load. Wardani et al. (2013) used the Artificial Neural
Network to predict the ultimate bearing capacity of single pile
from pile diameter, length of the pile embedded, the N60 (shaft)
value, and the N60 (tip) value. They used the full-scale pile load
test as a reference for measuring the precision and accuracy of
modeling results. Maizer and Kassim (2013) applied the Artificial
Neural Network for prediction of axial capacity of a driven pile
from high strain dynamic testing, i.e.., Pile Driving Analyzer
(PDA) data by adopting 300 data from several projects in
Indonesia and Malaysia. The parameters they used as input for
their networks were pile equivalent diameter, embedment length,
compression stress, tension stress, vertical displacement, ram
weight, drop height, and energy. Axial bearing capacity of the
single pile was selected as the single target output variable for
their study.
In all of the stated researches, the main parameter adopted for
pile capacity modeling were either pile set, cone point resistance,
or N SPT value. In the current research, Flap number was
adopted as the main parameter in measurement of the ultimate
bearing capacity of driven pile. Flap number was defined as the
number of hammer blows needed to drive the last one meter of
pile length into the soil. This number is unique for each pile and
depicts the soil condition and pile- soil interaction. Since the Flap
number is highly dependent on the hammer type, we multiplied
the number of blows by the relative energy of the hammer to be
able to compare the number of blows that each pile has received.
On the other side, in previous studies, physical parameters of the
soil were not assumed to be effective in pile capacity, while here,
besides the Flap number, a soil’s basic parameters, a pile’s
geometric parameters, and the soil-pile friction angle were
assumed effective.
For conducting the research, data of a hundred concrete and
steel piles, including the soil condition, driving records, and
static load test results were collected. The collected data included
different steel and concrete piles ranging in length from 15 meter
concrete piles embedded in sand to 98 meter steel offshore piles.
The samples had cross sectional areas ranging from 0.1 m2 to
1.59 m2. Artificial Neural Network was used as the first method
of this research to estimate the pile ultimate bearing capacity.
Subsequently, the second method used Genetic Programming to
find the equation of pile bearing capacity prediction from pile’s
Flap number and other principal pile and soil characteristics.
Finally by using the Linear Regression techniques, the best linear
fit to predict the pile capacity was obtained. The precision of the
results in all applied methods were checked by root mean square
error and coefficient of multiple determinations that all certified
the satisfactory performance of the results.
2. Pile and Soil Information
The information of a hundred concrete and steel piles was
collected. The geometrical characteristics of the pile, physical
properties of the soil, Flap numbers and their respective
hammer strike energies, and static pile load test results were
compiled for all 100 piles. We assumed that drained cohesion
of the soil, drained friction angle of the soil, and effective
specific weight were the parameters that described soil
condition; pile cross section and embedded length were the
parameters that described pile geometric size; and pile-soil
friction angle was the parameter that described pile material.
Besides the selected parameters, Flap number was assumed to
represent all other unseen effective factors in measurement of
pile bearing capacity.
The seven parameters selected for the pile bearing capacity
estimations were
New Method for Predicting the Ultimate Bearing Capacity of Driven Piles by using Flap Number
Vol. 00, No. 0 / 000 0000 −613−
A = Pile cross section area (m2)
= Drained cohesion of the soil (kN/m2)
= Multiplication of number of hammer blows (N)
and relative energy of hammer (Er) in each blow
for the last 1 meter of pile penetration
L = Pile embedded length (m)
= Effective soil specific weight (kN/m3)
δ= Pile-soil interface friction angle (°)
= Drained Soil friction angle (°)
The following considerations were taken into account during
the measurement of the input parameters:
• The interpreted failure loads (piles capacities) were taken in
accordance with Eslami (1996) as plunging load in well-
defined failure cases. For the cases where failure load was
not clearly defined, the 80% Criterion of Hansen (1963) was
used.
• The average values were recorded for the parameters that
changed alongside the pile’s embedded length (drained
cohesion of the soil, drained soil friction angle, effective soil
specific weight, and pile-soil friction angle).
• Effective specific weight was considered for parts of the soil
placed beneath the water table (Bowles, 1997).
• Results of the static load tests, due to their acceptable preci-
sion, were used in the calculations. It was considered that the
long duration of the test provided enough time for the soil to
drain. Therefore, the Consolidated Drained (CD) condition
was assumed in the calculations.
• For different pile-soil interface friction angles, values pro-
posed by Bowles for various pile materials and soil or rock
were used (Bowles, 1997). These values are shown in Table 1.
• In order to have comparable values for Flap number (due to
the various types of hammers used for pile driving), the
number of hammer blows were normalized using the rela-
tive energy of the hammer. For this purpose, hammer type
Kobe 35 was selected as the standard hammer to measure
relative energies (Tomlinson and Woodward, 1994). In the
calculations, multiplication of the relative energy of the
hammer and the number of blows was used as the Flap num-
bers (Prakash and Sharma, 1990).
• For the steel H profiles and steel open ended tubes, due to
the formation of soil plug, total cross area of the pile section
was adopted (Fellenius, 1989).
The collected soil and pile information, normalized pile driving
Flap numbers, static load test results, and location of each testing
are displayed and referenced in Table 2.
3. Applied Methods
3.1 Method I: Artificial Neural Network
Artificial Neural Network (ANN) was the first method used to
predict the bearing capacity of driven pile from the pile’s Flap
number. ANN is a computational model based on the information
processing system of the human brain (Banimahd et al., 2005)
and is accepted as a reliable data-modeling tool to capture and
represent complex relationships between inputs and outputs
(Caglar and Arman, 2007). A typical structure of ANNs is
composed of a number of interconnected processing elements
(PEs), commonly referred to as neurons. The neurons are
logically arranged in layers: an input layer, an output layer and
one or more hidden layers. The neurons interact with each other
via weighted connections. Each neuron is connected to all the
neurons in the next layer. The input layer is the means by which
data are presented to the network. The output layer holds the
response of the network to the input. The hidden layers enable
these networks to represent and compute complicated associations
between inputs and outputs. In addition, there is also a bias,
which is only connected to neurons in the hidden and output
layers, with modifiable weighted connections. Artificial Neural
Networks can be autonomous and learn by input from outside
“teachers” or even self-teaching from written in rules (Fatehnia
and Hataf, 2011).
A feedforward Neural Network is an artificial Neural Network
where connections between the units do not form a directed
cycle. The feedforward Neural Network was the first and
C′
Er N×
γ ′
ϕ′
Table 1. Friction Angles between Various Materials and Different
Soils or Rocks (Bowles, 1997)
Interface materialsFriction angle δ, degrees
Mass concrete or masonry on the following:
Clean sound rock 35°
Clean gravel, gravel-sand mixtures, coarse sand ϕ
Clean fine to medium sand, silty medium to coarse sand,silty or clayey gravel
ϕ
Clean fine sand, silty or clayey fine to medium sand ϕ
Fine sandy silt, nonplastic silt ϕ
Very stiff and hard residual or preconsolidated clay ϕ
Medium stiff and stiff clay and silty clay ϕ
Steel sheet piles against the following:
Clean gravel, gravel-sand mixture, well-graded rock fill with spalls
22°
Clean sand, silty sand-gravel mixture, single-size hard rock fill 17°
Silty sand, gravel or sand mixed with silt or clay 14°
Fine sandy silt, nonplastic silt 11°
Formed concrete or concrete sheetpiling against the following:
Clean gravel, gravel-sand mixture, well-graded rock fillwith spalls
22°-26°
Clean sand, silty sand-gravel mixture, single-size hard rock fill 17°-22°
Silty sand, gravel, or sand mixed with silt or clay 17°
Fine sandy silt, nonplastic silt 14°
Various structural materials:
Dressed soft rock on dressed soft rock 35°
Dressed hard rock on dressed soft rock 33°
Dressed hard rock on dressed hard rock 29°
Masonry on wood (cross grain) 26°
Steel on steel at sheet-pile interlocks 17°
Wood on soil 14°-16°
Fatehnia Milad, Tawfiq Kamal, Hataf Nader, and Ozguven Eren Erman
−614− KSCE Journal of Civil Engineering
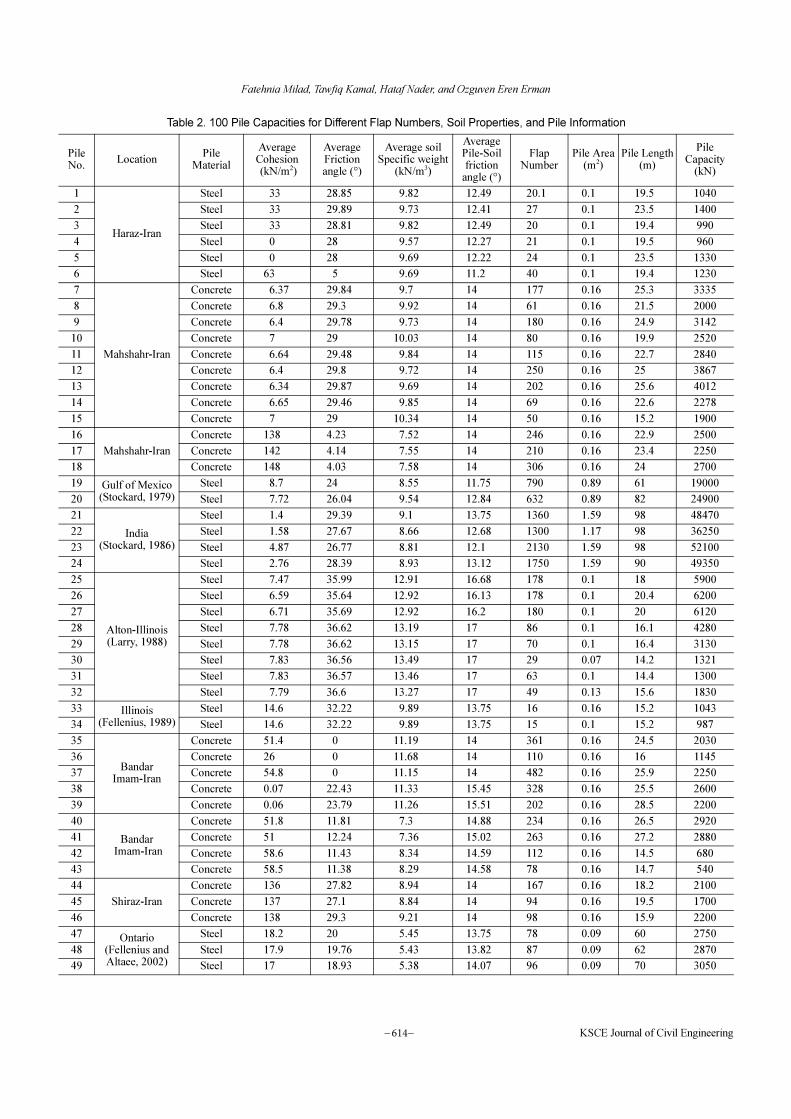
Table 2. 100 Pile Capacities for Different Flap Numbers, Soil Properties, and Pile Information
Pile No.
LocationPile
Material
Average Cohesion (kN/m2)
Average Friction angle (°)
Average soil Specific weight
(kN/m3)
Average Pile-Soil friction
angle (°)
Flap Number
Pile Area (m2)
Pile Length (m)
Pile Capacity
(kN)
1
Haraz-Iran
Steel 033 28.85 09.82 12.49 20.1 0.1 19.5 1040
2 Steel 033 29.89 09.73 12.41 27 0.1 23.5 1400
3 Steel 033 28.81 09.82 12.49 20 0.1 19.4 990
4 Steel 00 28 09.57 12.27 21 0.1 19.5 960
5 Steel 00 28 09.69 12.22 24 0.1 23.5 1330
6 Steel 63 05 09.69 11.2 40 0.1 19.4 1230
7
Mahshahr-Iran
Concrete 06.37 29.84 09.7 14 177 0.16 25.3 3335
8 Concrete 06.8 29.3 09.92 14 61 0.16 21.5 2000
9 Concrete 06.4 29.78 09.73 14 180 0.16 24.9 3142
10 Concrete 07 29 10.03 14 80 0.16 19.9 2520
11 Concrete 06.64 29.48 09.84 14 115 0.16 22.7 2840
12 Concrete 06.4 29.8 09.72 14 250 0.16 25 3867
13 Concrete 06.34 29.87 09.69 14 202 0.16 25.6 4012
14 Concrete 06.65 29.46 09.85 14 69 0.16 22.6 2278
15 Concrete 07 29 10.34 14 50 0.16 15.2 1900
16
Mahshahr-Iran
Concrete 138 4.23 07.52 14 246 0.16 22.9 2500
17 Concrete 142 4.14 07.55 14 210 0.16 23.4 2250
18 Concrete 148 4.03 07.58 14 306 0.16 24 2700
19 Gulf of Mexico(Stockard, 1979)
Steel 08.7 24 08.55 11.75 790 0.89 61 19000
20 Steel 07.72 26.04 09.54 12.84 632 0.89 82 24900
21
India(Stockard, 1986)
Steel 01.4 29.39 09.1 13.75 1360 1.59 98 48470
22 Steel 01.58 27.67 08.66 12.68 1300 1.17 98 36250
23 Steel 04.87 26.77 08.81 12.1 2130 1.59 98 52100
24 Steel 02.76 28.39 08.93 13.12 1750 1.59 90 49350
25
Alton-Illinois(Larry, 1988)
Steel 07.47 35.99 12.91 16.68 178 0.1 18 5900
26 Steel 06.59 35.64 12.92 16.13 178 0.1 20.4 6200
27 Steel 06.71 35.69 12.92 16.2 180 0.1 20 6120
28 Steel 07.78 36.62 13.19 17 86 0.1 16.1 4280
29 Steel 07.78 36.62 13.15 17 70 0.1 16.4 3130
30 Steel 07.83 36.56 13.49 17 29 0.07 14.2 1321
31 Steel 07.83 36.57 13.46 17 63 0.1 14.4 1300
32 Steel 07.79 36.6 13.27 17 49 0.13 15.6 1830
33 Illinois(Fellenius, 1989)
Steel 14.6 32.22 09.89 13.75 16 0.16 15.2 1043
34 Steel 14.6 32.22 09.89 13.75 15 0.1 15.2 987
35
Bandar Imam-Iran
Concrete 51.4 00 11.19 14 361 0.16 24.5 2030
36 Concrete 26 00 11.68 14 110 0.16 16 1145
37 Concrete 54.8 00 11.15 14 482 0.16 25.9 2250
38 Concrete 0.07 22.43 11.33 15.45 328 0.16 25.5 2600
39 Concrete 0.06 23.79 11.26 15.51 202 0.16 28.5 2200
40
Bandar Imam-Iran
Concrete 51.8 11.81 07.3 14.88 234 0.16 26.5 2920
41 Concrete 51 12.24 07.36 15.02 263 0.16 27.2 2880
42 Concrete 58.6 11.43 08.34 14.59 112 0.16 14.5 680
43 Concrete 58.5 11.38 08.29 14.58 78 0.16 14.7 540
44
Shiraz-Iran
Concrete 136 27.82 08.94 14 167 0.16 18.2 2100
45 Concrete 137 27.1 08.84 14 94 0.16 19.5 1700
46 Concrete 138 29.3 09.21 14 98 0.16 15.9 2200
47 Ontario(Fellenius and Altaee, 2002)
Steel 18.2 20 05.45 13.75 78 0.09 60 2750
48 Steel 17.9 19.76 05.43 13.82 87 0.09 62 2870
49 Steel 17 18.93 05.38 14.07 96 0.09 70 3050
New Method for Predicting the Ultimate Bearing Capacity of Driven Piles by using Flap Number
Vol. 00, No. 0 / 000 0000 −615−
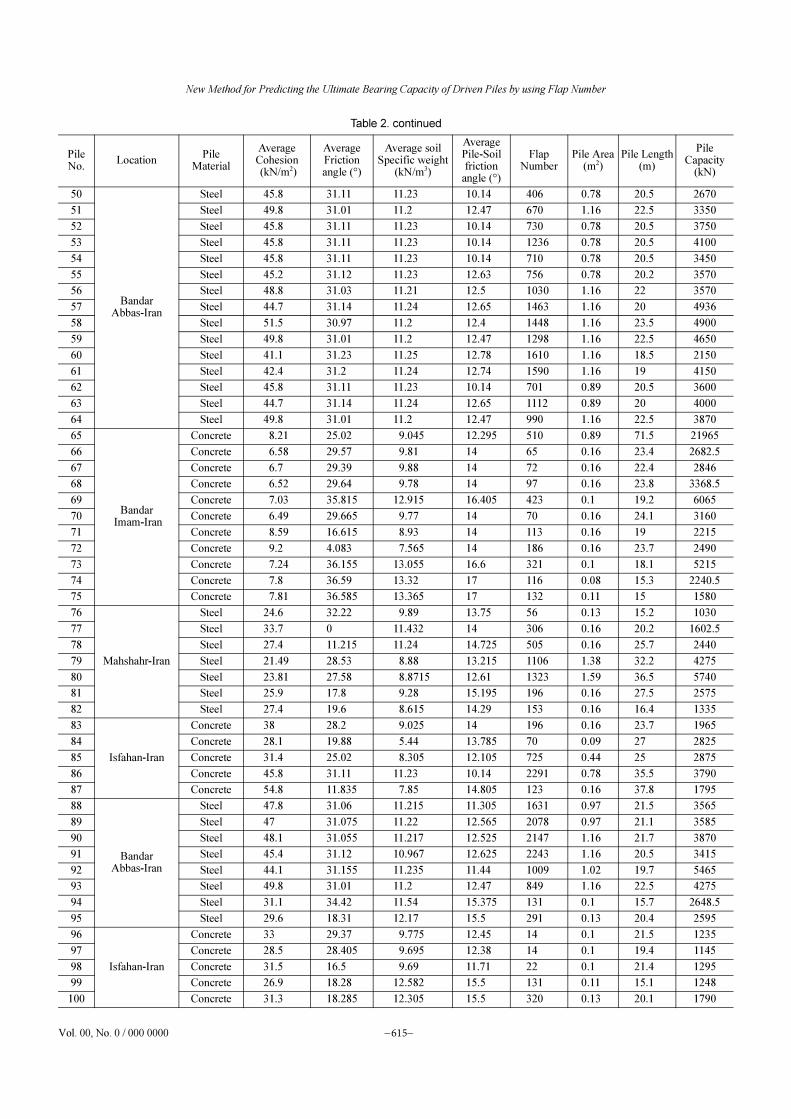
Table 2. continued
Pile No.
LocationPile
Material
Average Cohesion (kN/m2)
Average Friction angle (°)
Average soil Specific weight
(kN/m3)
Average Pile-Soil friction
angle (°)
Flap Number
Pile Area (m2)
Pile Length (m)
Pile Capacity
(kN)
50
Bandar Abbas-Iran
Steel 45.8 31.11 11.23 10.14 406 0.78 20.5 2670
51 Steel 49.8 31.01 11.2 12.47 670 1.16 22.5 3350
52 Steel 45.8 31.11 11.23 10.14 730 0.78 20.5 3750
53 Steel 45.8 31.11 11.23 10.14 1236 0.78 20.5 4100
54 Steel 45.8 31.11 11.23 10.14 710 0.78 20.5 3450
55 Steel 45.2 31.12 11.23 12.63 756 0.78 20.2 3570
56 Steel 48.8 31.03 11.21 12.5 1030 1.16 22 3570
57 Steel 44.7 31.14 11.24 12.65 1463 1.16 20 4936
58 Steel 51.5 30.97 11.2 12.4 1448 1.16 23.5 4900
59 Steel 49.8 31.01 11.2 12.47 1298 1.16 22.5 4650
60 Steel 41.1 31.23 11.25 12.78 1610 1.16 18.5 2150
61 Steel 42.4 31.2 11.24 12.74 1590 1.16 19 4150
62 Steel 45.8 31.11 11.23 10.14 701 0.89 20.5 3600
63 Steel 44.7 31.14 11.24 12.65 1112 0.89 20 4000
64 Steel 49.8 31.01 11.2 12.47 990 1.16 22.5 3870
65
Bandar Imam-Iran
Concrete 08.21 25.02 09.045 12.295 510 0.89 71.5 21965
66 Concrete 06.58 29.57 09.81 14 65 0.16 23.4 2682.5
67 Concrete 06.7 29.39 09.88 14 72 0.16 22.4 2846
68 Concrete 06.52 29.64 09.78 14 97 0.16 23.8 3368.5
69 Concrete 07.03 35.815 12.915 16.405 423 0.1 19.2 6065
70 Concrete 06.49 29.665 09.77 14 70 0.16 24.1 3160
71 Concrete 08.59 16.615 08.93 14 113 0.16 19 2215
72 Concrete 09.2 4.083 07.565 14 186 0.16 23.7 2490
73 Concrete 07.24 36.155 13.055 16.6 321 0.1 18.1 5215
74 Concrete 07.8 36.59 13.32 17 116 0.08 15.3 2240.5
75 Concrete 07.81 36.585 13.365 17 132 0.11 15 1580
76
Mahshahr-Iran
Steel 24.6 32.22 09.89 13.75 56 0.13 15.2 1030
77 Steel 33.7 0 11.432 14 306 0.16 20.2 1602.5
78 Steel 27.4 11.215 11.24 14.725 505 0.16 25.7 2440
79 Steel 21.49 28.53 08.88 13.215 1106 1.38 32.2 4275
80 Steel 23.81 27.58 08.8715 12.61 1323 1.59 36.5 5740
81 Steel 25.9 17.8 09.28 15.195 196 0.16 27.5 2575
82 Steel 27.4 19.6 08.615 14.29 153 0.16 16.4 1335
83
Isfahan-Iran
Concrete 38 28.2 09.025 14 196 0.16 23.7 1965
84 Concrete 28.1 19.88 05.44 13.785 70 0.09 27 2825
85 Concrete 31.4 25.02 08.305 12.105 725 0.44 25 2875
86 Concrete 45.8 31.11 11.23 10.14 2291 0.78 35.5 3790
87 Concrete 54.8 11.835 07.85 14.805 123 0.16 37.8 1795
88
Bandar Abbas-Iran
Steel 47.8 31.06 11.215 11.305 1631 0.97 21.5 3565
89 Steel 47 31.075 11.22 12.565 2078 0.97 21.1 3585
90 Steel 48.1 31.055 11.217 12.525 2147 1.16 21.7 3870
91 Steel 45.4 31.12 10.967 12.625 2243 1.16 20.5 3415
92 Steel 44.1 31.155 11.235 11.44 1009 1.02 19.7 5465
93 Steel 49.8 31.01 11.2 12.47 849 1.16 22.5 4275
94 Steel 31.1 34.42 11.54 15.375 131 0.1 15.7 2648.5
95 Steel 29.6 18.31 12.17 15.5 291 0.13 20.4 2595
96
Isfahan-Iran
Concrete 33 29.37 09.775 12.45 14 0.1 21.5 1235
97 Concrete 28.5 28.405 09.695 12.38 14 0.1 19.4 1145
98 Concrete 31.5 16.5 09.69 11.71 22 0.1 21.4 1295
99 Concrete 26.9 18.28 12.582 15.5 131 0.11 15.1 1248
100 Concrete 31.3 18.285 12.305 15.5 320 0.13 20.1 1790
Fatehnia Milad, Tawfiq Kamal, Hataf Nader, and Ozguven Eren Erman
−616− KSCE Journal of Civil Engineering
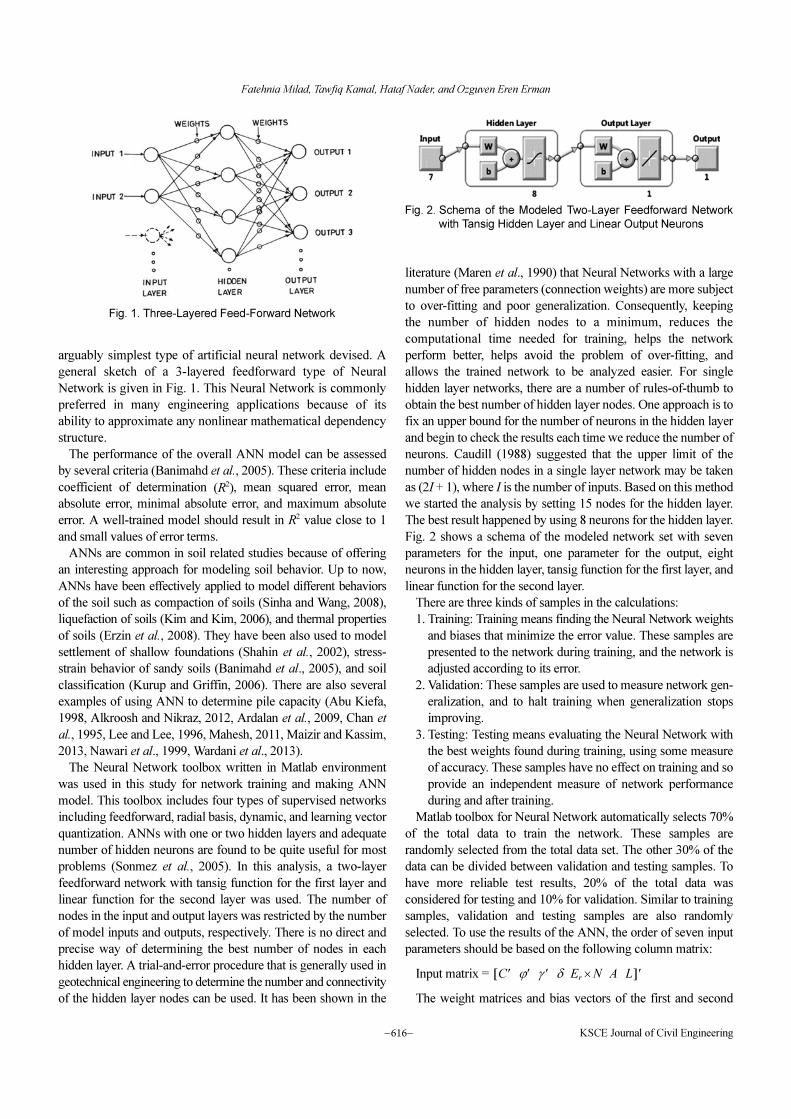
arguably simplest type of artificial neural network devised. A
general sketch of a 3-layered feedforward type of Neural
Network is given in Fig. 1. This Neural Network is commonly
preferred in many engineering applications because of its
ability to approximate any nonlinear mathematical dependency
structure.
The performance of the overall ANN model can be assessed
by several criteria (Banimahd et al., 2005). These criteria include
coefficient of determination (R2), mean squared error, mean
absolute error, minimal absolute error, and maximum absolute
error. A well-trained model should result in R2 value close to 1
and small values of error terms.
ANNs are common in soil related studies because of offering
an interesting approach for modeling soil behavior. Up to now,
ANNs have been effectively applied to model different behaviors
of the soil such as compaction of soils (Sinha and Wang, 2008),
liquefaction of soils (Kim and Kim, 2006), and thermal properties
of soils (Erzin et al., 2008). They have been also used to model
settlement of shallow foundations (Shahin et al., 2002), stress-
strain behavior of sandy soils (Banimahd et al., 2005), and soil
classification (Kurup and Griffin, 2006). There are also several
examples of using ANN to determine pile capacity (Abu Kiefa,
1998, Alkroosh and Nikraz, 2012, Ardalan et al., 2009, Chan et
al., 1995, Lee and Lee, 1996, Mahesh, 2011, Maizir and Kassim,
2013, Nawari et al., 1999, Wardani et al., 2013).
The Neural Network toolbox written in Matlab environment
was used in this study for network training and making ANN
model. This toolbox includes four types of supervised networks
including feedforward, radial basis, dynamic, and learning vector
quantization. ANNs with one or two hidden layers and adequate
number of hidden neurons are found to be quite useful for most
problems (Sonmez et al., 2005). In this analysis, a two-layer
feedforward network with tansig function for the first layer and
linear function for the second layer was used. The number of
nodes in the input and output layers was restricted by the number
of model inputs and outputs, respectively. There is no direct and
precise way of determining the best number of nodes in each
hidden layer. A trial-and-error procedure that is generally used in
geotechnical engineering to determine the number and connectivity
of the hidden layer nodes can be used. It has been shown in the
literature (Maren et al., 1990) that Neural Networks with a large
number of free parameters (connection weights) are more subject
to over-fitting and poor generalization. Consequently, keeping
the number of hidden nodes to a minimum, reduces the
computational time needed for training, helps the network
perform better, helps avoid the problem of over-fitting, and
allows the trained network to be analyzed easier. For single
hidden layer networks, there are a number of rules-of-thumb to
obtain the best number of hidden layer nodes. One approach is to
fix an upper bound for the number of neurons in the hidden layer
and begin to check the results each time we reduce the number of
neurons. Caudill (1988) suggested that the upper limit of the
number of hidden nodes in a single layer network may be taken
as (2I + 1), where I is the number of inputs. Based on this method
we started the analysis by setting 15 nodes for the hidden layer.
The best result happened by using 8 neurons for the hidden layer.
Fig. 2 shows a schema of the modeled network set with seven
parameters for the input, one parameter for the output, eight
neurons in the hidden layer, tansig function for the first layer, and
linear function for the second layer.
There are three kinds of samples in the calculations:
1. Training: Training means finding the Neural Network weights
and biases that minimize the error value. These samples are
presented to the network during training, and the network is
adjusted according to its error.
2. Validation: These samples are used to measure network gen-
eralization, and to halt training when generalization stops
improving.
3. Testing: Testing means evaluating the Neural Network with
the best weights found during training, using some measure
of accuracy. These samples have no effect on training and so
provide an independent measure of network performance
during and after training.
Matlab toolbox for Neural Network automatically selects 70%
of the total data to train the network. These samples are
randomly selected from the total data set. The other 30% of the
data can be divided between validation and testing samples. To
have more reliable test results, 20% of the total data was
considered for testing and 10% for validation. Similar to training
samples, validation and testing samples are also randomly
selected. To use the results of the ANN, the order of seven input
parameters should be based on the following column matrix:
Input matrix =
The weight matrices and bias vectors of the first and second
C′ ϕ′ γ ′ δ Er N × A L[ ]′
Fig. 1. Three-Layered Feed-Forward Network
Fig. 2. Schema of the Modeled Two-Layer Feedforward Network
with Tansig Hidden Layer and Linear Output Neurons
New Method for Predicting the Ultimate Bearing Capacity of Driven Piles by using Flap Number
Vol. 00, No. 0 / 000 0000 −617−
layers are as follows:
Weight to Layer 1 =
Bias to Layer 1 =
Weight to Layer 2 =
Bias to Layer 2 =
Bearing capacity of the driven pile can be found using the
calculated weight and bias matrices of the two-layer suggested
network. To do that, seven suggested independent parameters
should be considered as the inputs of the first layer. Output
matrix of the first layer will be the input matrix of the second
layer. By using “ ” with tansig function for the
first and linear function for the second layer, (P is the input
matrix, w and b are the weight and bias matrices respectively),
output of each layer can be calculated. The final result of the
network, that is the bearing capacity, is the output of the second
layer.
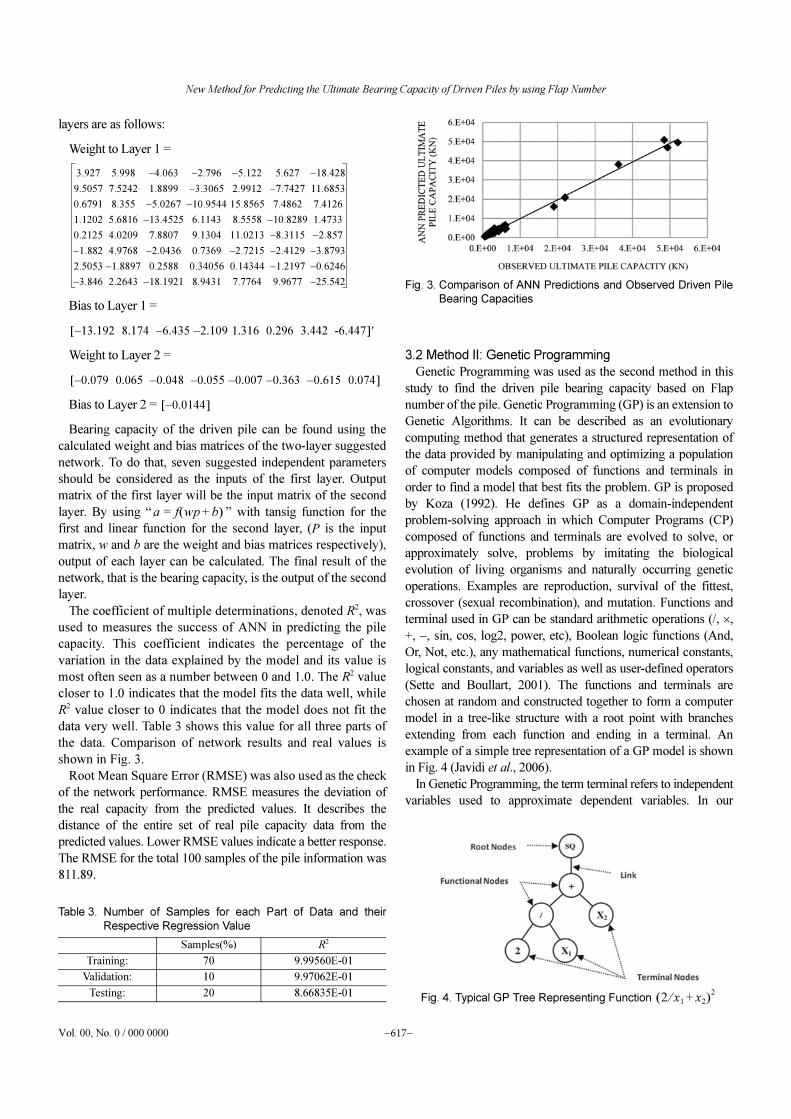
The coefficient of multiple determinations, denoted R2, was
used to measures the success of ANN in predicting the pile
capacity. This coefficient indicates the percentage of the
variation in the data explained by the model and its value is
most often seen as a number between 0 and 1.0. The R2 value
closer to 1.0 indicates that the model fits the data well, while
R2 value closer to 0 indicates that the model does not fit the
data very well. Table 3 shows this value for all three parts of
the data. Comparison of network results and real values is
shown in Fig. 3.
Root Mean Square Error (RMSE) was also used as the check
of the network performance. RMSE measures the deviation of
the real capacity from the predicted values. It describes the
distance of the entire set of real pile capacity data from the
predicted values. Lower RMSE values indicate a better response.
The RMSE for the total 100 samples of the pile information was
811.89.
3.2 Method II: Genetic Programming
Genetic Programming was used as the second method in this
study to find the driven pile bearing capacity based on Flap
number of the pile. Genetic Programming (GP) is an extension to
Genetic Algorithms. It can be described as an evolutionary
computing method that generates a structured representation of
the data provided by manipulating and optimizing a population
of computer models composed of functions and terminals in
order to find a model that best fits the problem. GP is proposed
by Koza (1992). He defines GP as a domain-independent
problem-solving approach in which Computer Programs (CP)
composed of functions and terminals are evolved to solve, or
approximately solve, problems by imitating the biological
evolution of living organisms and naturally occurring genetic
operations. Examples are reproduction, survival of the fittest,
crossover (sexual recombination), and mutation. Functions and
terminal used in GP can be standard arithmetic operations (/, ×,
+, −, sin, cos, log2, power, etc), Boolean logic functions (And,
Or, Not, etc.), any mathematical functions, numerical constants,
logical constants, and variables as well as user-defined operators
(Sette and Boullart, 2001). The functions and terminals are
chosen at random and constructed together to form a computer
model in a tree-like structure with a root point with branches
extending from each function and ending in a terminal. An
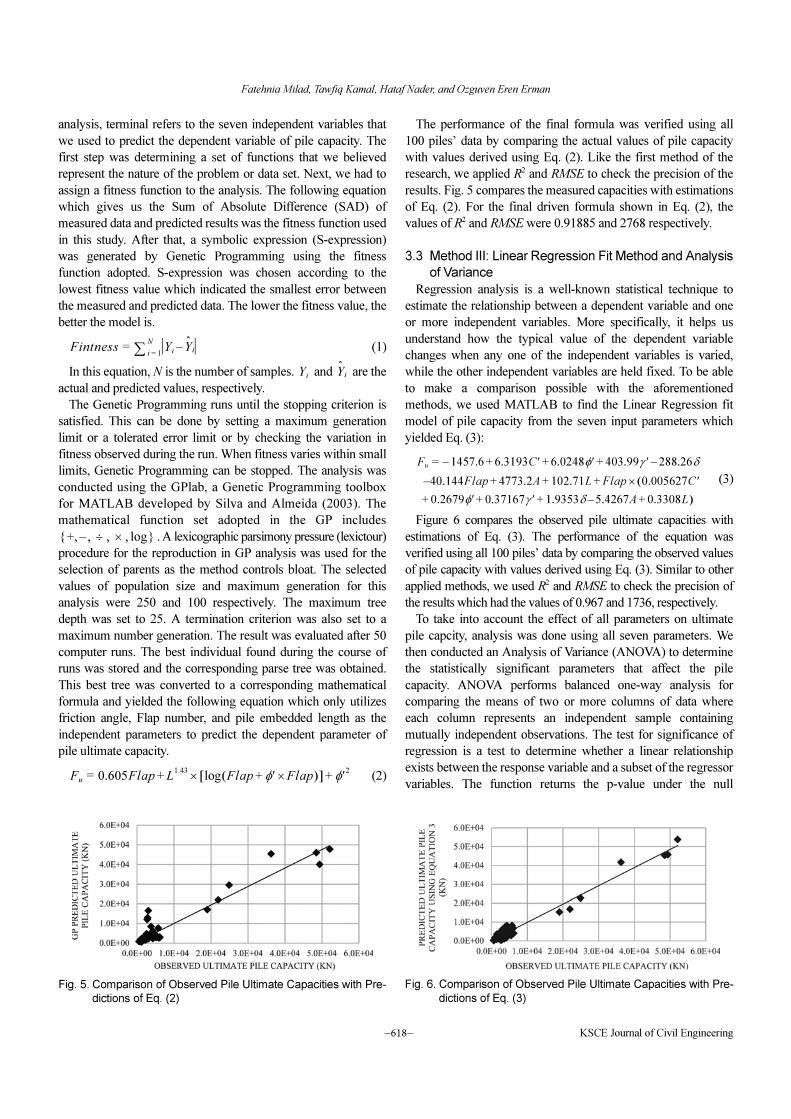
example of a simple tree representation of a GP model is shown
in Fig. 4 (Javidi et al., 2006).
In Genetic Programming, the term terminal refers to independent
variables used to approximate dependent variables. In our
3.927 5.998 4.063– 2.796– 5.122– 5.627 18.428–
9.5057 7.5242 1.8899 3.3065– 2.9912 7.7427– 11.6853
0.6791 8.355 5.0267– 10.9544– 15.8565 7.4862 7.4126
1.1202 5.6816 13.4525– 6.1143 8.5558 10.8289– 1.4733
0.2125 4.0209 7.8807 9.1304 11.0213 8.3115– 2.857–
1.882– 4.9768 2.0436– 0.7369 2.7215– 2.4129– 3.8793–
2.5053 1.8897– 0.2588 0.34056 0.14344 1.2197– 0.6246–
3.846– 2.2643 18.1921– 8.9431 7.7764 9.9677 25.542–
13.192 – 8.174 6.435 – 2.109 – 1.316 0.296 3.442 -6.447[ ]′
0.079– 0.065 0.048 – 0.055 – 0.007 – 0.363 – 0.615 – 0.074[ ]
0.0144–[ ]
a f wp b+( )=
Table 3. Number of Samples for each Part of Data and their
Respective Regression Value
Samples(%) R2
Training: 70 9.99560E-01
Validation: 10 9.97062E-01
Testing: 20 8.66835E-01
Fig. 3. Comparison of ANN Predictions and Observed Driven Pile
Bearing Capacities
Fig. 4. Typical GP Tree Representing Function 2 x1⁄ x2+( )2
Fatehnia Milad, Tawfiq Kamal, Hataf Nader, and Ozguven Eren Erman
−618− KSCE Journal of Civil Engineering
analysis, terminal refers to the seven independent variables that
we used to predict the dependent variable of pile capacity. The
first step was determining a set of functions that we believed
represent the nature of the problem or data set. Next, we had to
assign a fitness function to the analysis. The following equation
which gives us the Sum of Absolute Difference (SAD) of
measured data and predicted results was the fitness function used
in this study. After that, a symbolic expression (S-expression)
was generated by Genetic Programming using the fitness
function adopted. S-expression was chosen according to the
lowest fitness value which indicated the smallest error between
the measured and predicted data. The lower the fitness value, the
better the model is.
(1)
In this equation, N is the number of samples. and are the
actual and predicted values, respectively.
The Genetic Programming runs until the stopping criterion is
satisfied. This can be done by setting a maximum generation
limit or a tolerated error limit or by checking the variation in
fitness observed during the run. When fitness varies within small
limits, Genetic Programming can be stopped. The analysis was
conducted using the GPlab, a Genetic Programming toolbox
for MATLAB developed by Silva and Almeida (2003). The
mathematical function set adopted in the GP includes
. A lexicographic parsimony pressure (lexictour)
procedure for the reproduction in GP analysis was used for the
selection of parents as the method controls bloat. The selected
values of population size and maximum generation for this
analysis were 250 and 100 respectively. The maximum tree
depth was set to 25. A termination criterion was also set to a
maximum number generation. The result was evaluated after 50
computer runs. The best individual found during the course of
runs was stored and the corresponding parse tree was obtained.
This best tree was converted to a corresponding mathematical
formula and yielded the following equation which only utilizes
friction angle, Flap number, and pile embedded length as the
independent parameters to predict the dependent parameter of
pile ultimate capacity.
(2)
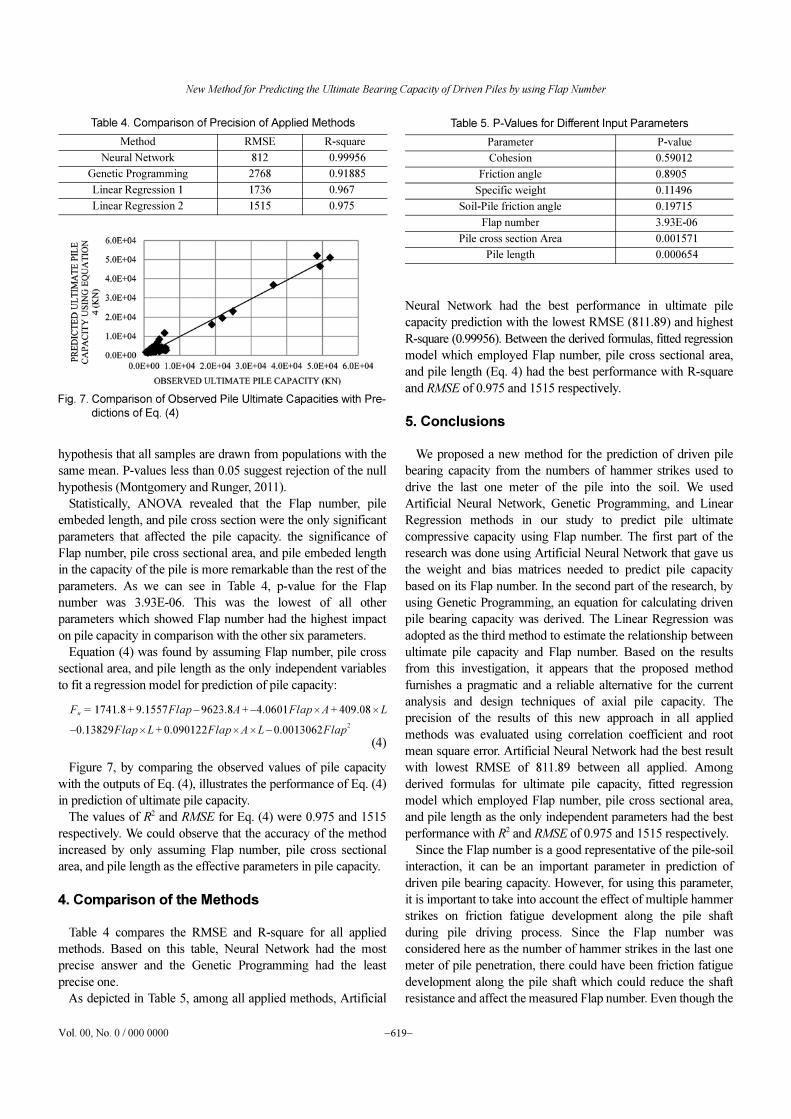
The performance of the final formula was verified using all
100 piles’ data by comparing the actual values of pile capacity
with values derived using Eq. (2). Like the first method of the
research, we applied R2 and RMSE to check the precision of the
results. Fig. 5 compares the measured capacities with estimations
of Eq. (2). For the final driven formula shown in Eq. (2), the
values of R2 and RMSE were 0.91885 and 2768 respectively.
3.3 Method III: Linear Regression Fit Method and Analysis
of Variance
Regression analysis is a well-known statistical technique to
estimate the relationship between a dependent variable and one
or more independent variables. More specifically, it helps us
understand how the typical value of the dependent variable
changes when any one of the independent variables is varied,
while the other independent variables are held fixed. To be able
to make a comparison possible with the aforementioned
methods, we used MATLAB to find the Linear Regression fit
model of pile capacity from the seven input parameters which
yielded Eq. (3):
(3)
Figure 6 compares the observed pile ultimate capacities with
estimations of Eq. (3). The performance of the equation was
verified using all 100 piles’ data by comparing the observed values
of pile capacity with values derived using Eq. (3). Similar to other
applied methods, we used R2 and RMSE to check the precision of
the results which had the values of 0.967 and 1736, respectively.
To take into account the effect of all parameters on ultimate
pile capcity, analysis was done using all seven parameters. We
then conducted an Analysis of Variance (ANOVA) to determine
the statistically significant parameters that affect the pile
capacity. ANOVA performs balanced one-way analysis for
comparing the means of two or more columns of data where
each column represents an independent sample containing
mutually independent observations. The test for significance of
regression is a test to determine whether a linear relationship
exists between the response variable and a subset of the regressor
variables. The function returns the p-value under the null
Fintnessi 1=
NYi Yi–∑=
Yi Yi
+ – ÷ × log, , , ,{ }
Fu 0.605Flap L1.43
log Flap φ′ Flap×+( )[ ] φ′2
+×+=
Fu
1457.6– 6.3193C′ 6.0248φ′ 403.99γ ′ 288.26δ–+ + +=
40.144Flap 4773.2A 102.71L Flap 0.005627C( ′×+ + +–
0.2679φ′ 0.37167γ ′ 1.9353δ 5.4267A– 0.3308L)+ + + +
Fig. 5. Comparison of Observed Pile Ultimate Capacities with Pre-
dictions of Eq. (2)
Fig. 6. Comparison of Observed Pile Ultimate Capacities with Pre-
dictions of Eq. (3)
New Method for Predicting the Ultimate Bearing Capacity of Driven Piles by using Flap Number
Vol. 00, No. 0 / 000 0000 −619−
hypothesis that all samples are drawn from populations with the
same mean. P-values less than 0.05 suggest rejection of the null
hypothesis (Montgomery and Runger, 2011).
Statistically, ANOVA revealed that the Flap number, pile
embeded length, and pile cross section were the only significant
parameters that affected the pile capacity. the significance of
Flap number, pile cross sectional area, and pile embeded length
in the capacity of the pile is more remarkable than the rest of the
parameters. As we can see in Table 4, p-value for the Flap
number was 3.93E-06. This was the lowest of all other
parameters which showed Flap number had the highest impact
on pile capacity in comparison with the other six parameters.
Equation (4) was found by assuming Flap number, pile cross
sectional area, and pile length as the only independent variables
to fit a regression model for prediction of pile capacity:
(4)
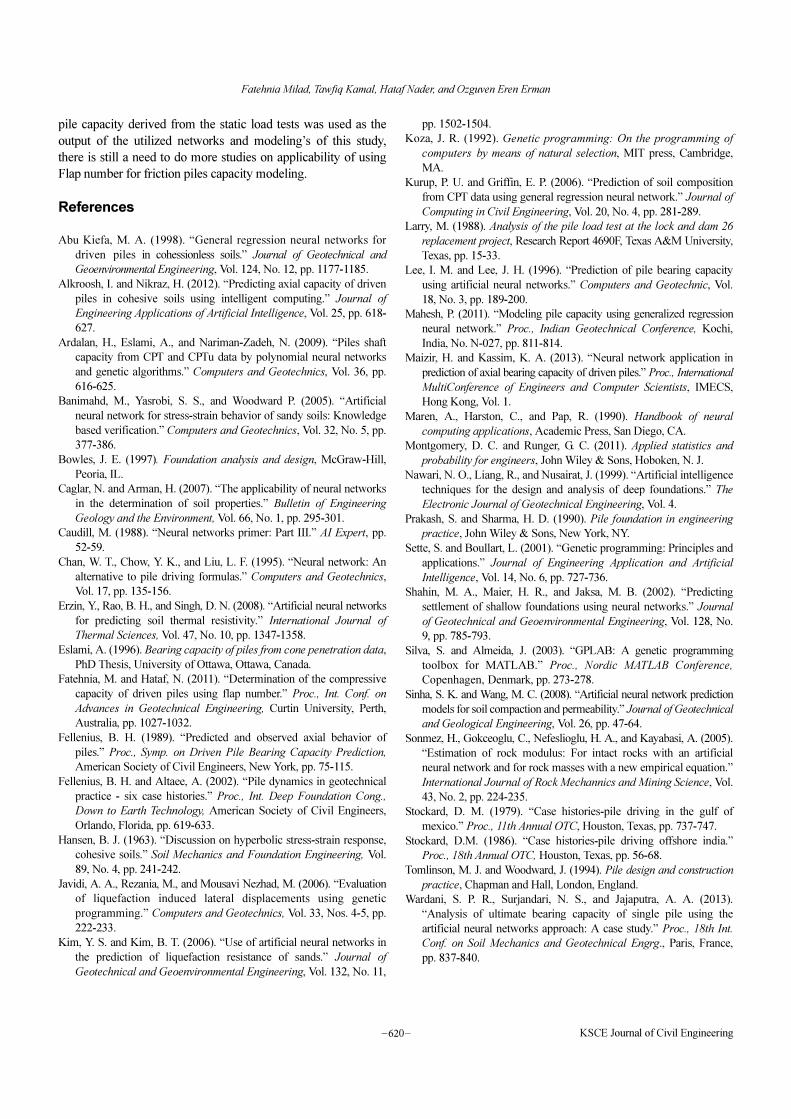
Figure 7, by comparing the observed values of pile capacity
with the outputs of Eq. (4), illustrates the performance of Eq. (4)
in prediction of ultimate pile capacity.
The values of R2 and RMSE for Eq. (4) were 0.975 and 1515
respectively. We could observe that the accuracy of the method
increased by only assuming Flap number, pile cross sectional
area, and pile length as the effective parameters in pile capacity.
4. Comparison of the Methods
Table 4 compares the RMSE and R-square for all applied
methods. Based on this table, Neural Network had the most
precise answer and the Genetic Programming had the least
precise one.
As depicted in Table 5, among all applied methods, Artificial
Neural Network had the best performance in ultimate pile
capacity prediction with the lowest RMSE (811.89) and highest
R-square (0.99956). Between the derived formulas, fitted regression
model which employed Flap number, pile cross sectional area,
and pile length (Eq. 4) had the best performance with R-square
and RMSE of 0.975 and 1515 respectively.
5. Conclusions
We proposed a new method for the prediction of driven pile
bearing capacity from the numbers of hammer strikes used to
drive the last one meter of the pile into the soil. We used
Artificial Neural Network, Genetic Programming, and Linear
Regression methods in our study to predict pile ultimate
compressive capacity using Flap number. The first part of the
research was done using Artificial Neural Network that gave us
the weight and bias matrices needed to predict pile capacity
based on its Flap number. In the second part of the research, by
using Genetic Programming, an equation for calculating driven
pile bearing capacity was derived. The Linear Regression was
adopted as the third method to estimate the relationship between
ultimate pile capacity and Flap number. Based on the results
from this investigation, it appears that the proposed method
furnishes a pragmatic and a reliable alternative for the current
analysis and design techniques of axial pile capacity. The
precision of the results of this new approach in all applied
methods was evaluated using correlation coefficient and root
mean square error. Artificial Neural Network had the best result
with lowest RMSE of 811.89 between all applied. Among
derived formulas for ultimate pile capacity, fitted regression
model which employed Flap number, pile cross sectional area,
and pile length as the only independent parameters had the best
performance with R2 and RMSE of 0.975 and 1515 respectively.
Since the Flap number is a good representative of the pile-soil
interaction, it can be an important parameter in prediction of
driven pile bearing capacity. However, for using this parameter,
it is important to take into account the effect of multiple hammer
strikes on friction fatigue development along the pile shaft
during pile driving process. Since the Flap number was
considered here as the number of hammer strikes in the last one
meter of pile penetration, there could have been friction fatigue
development along the pile shaft which could reduce the shaft
resistance and affect the measured Flap number. Even though the
Fu
1741.8 9.1557Flap 9623.8A– 4.0601Flap– A× 409.08 L×+ + +=
0.13829Flap L× 0.090122Flap A L 0.0013062Flap2
–××+–
Table 4. Comparison of Precision of Applied Methods
Method RMSE R-square
Neural Network 812 0.99956
Genetic Programming 2768 0.91885
Linear Regression 1 1736 0.967
Linear Regression 2 1515 0.975
Fig. 7. Comparison of Observed Pile Ultimate Capacities with Pre-
dictions of Eq. (4)
Table 5. P-Values for Different Input Parameters
Parameter P-value
Cohesion 0.59012
Friction angle 0.8905
Specific weight 0.11496
Soil-Pile friction angle 0.19715
Flap number 3.93E-06
Pile cross section Area 0.001571
Pile length 0.000654
Fatehnia Milad, Tawfiq Kamal, Hataf Nader, and Ozguven Eren Erman
−620 KSCE Journal of Civil Engineering
pile capacity derived from the static load tests was used as the
output of the utilized networks and modeling’s of this study,
there is still a need to do more studies on applicability of using
Flap number for friction piles capacity modeling.
References
Abu Kiefa, M. A. (1998). “General regression neural networks for
driven piles in cohessionless soils.” Journal of Geotechnical and
Geoenvironmental Engineering, Vol. 124, No. 12, pp. 1177-1185.
Alkroosh, I. and Nikraz, H. (2012). “Predicting axial capacity of driven
piles in cohesive soils using intelligent computing.” Journal of
Engineering Applications of Artificial Intelligence, Vol. 25, pp. 618-
627.
Ardalan, H., Eslami, A., and Nariman-Zadeh, N. (2009). “Piles shaft
capacity from CPT and CPTu data by polynomial neural networks
and genetic algorithms.” Computers and Geotechnics, Vol. 36, pp.
616-625.
Banimahd, M., Yasrobi, S. S., and Woodward P. (2005). “Artificial
neural network for stress-strain behavior of sandy soils: Knowledge
based verification.” Computers and Geotechnics, Vol. 32, No. 5, pp.
377-386.
Bowles, J. E. (1997). Foundation analysis and design, McGraw-Hill,
Peoria, IL.
Caglar, N. and Arman, H. (2007). “The applicability of neural networks
in the determination of soil properties.” Bulletin of Engineering
Geology and the Environment, Vol. 66, No. 1, pp. 295-301.
Caudill, M. (1988). “Neural networks primer: Part III.” AI Expert, pp.
52-59.
Chan, W. T., Chow, Y. K., and Liu, L. F. (1995). “Neural network: An
alternative to pile driving formulas.” Computers and Geotechnics,
Vol. 17, pp. 135-156.
Erzin, Y., Rao, B. H., and Singh, D. N. (2008). “Artificial neural networks
for predicting soil thermal resistivity.” International Journal of
Thermal Sciences, Vol. 47, No. 10, pp. 1347-1358.
Eslami, A. (1996). Bearing capacity of piles from cone penetration data,
PhD Thesis, University of Ottawa, Ottawa, Canada.
Fatehnia, M. and Hataf, N. (2011). “Determination of the compressive
capacity of driven piles using flap number.” Proc., Int. Conf. on
Advances in Geotechnical Engineering, Curtin University, Perth,
Australia, pp. 1027-1032.
Fellenius, B. H. (1989). “Predicted and observed axial behavior of
piles.” Proc., Symp. on Driven Pile Bearing Capacity Prediction,
American Society of Civil Engineers, New York, pp. 75-115.
Fellenius, B. H. and Altaee, A. (2002). “Pile dynamics in geotechnical
practice - six case histories.” Proc., Int. Deep Foundation Cong.,
Down to Earth Technology, American Society of Civil Engineers,
Orlando, Florida, pp. 619-633.
Hansen, B. J. (1963). “Discussion on hyperbolic stress-strain response,
cohesive soils.” Soil Mechanics and Foundation Engineering, Vol.
89, No. 4, pp. 241-242.
Javidi, A. A., Rezania, M., and Mousavi Nezhad, M. (2006). “Evaluation
of liquefaction induced lateral displacements using genetic
programming.” Computers and Geotechnics, Vol. 33, Nos. 4-5, pp.
222-233.
Kim, Y. S. and Kim, B. T. (2006). “Use of artificial neural networks in
the prediction of liquefaction resistance of sands.” Journal of
Geotechnical and Geoenvironmental Engineering, Vol. 132, No. 11,
pp. 1502-1504.
Koza, J. R. (1992). Genetic programming: On the programming of
computers by means of natural selection, MIT press, Cambridge,
MA.
Kurup, P. U. and Griffin, E. P. (2006). “Prediction of soil composition
from CPT data using general regression neural network.” Journal of
Computing in Civil Engineering, Vol. 20, No. 4, pp. 281-289.
Larry, M. (1988). Analysis of the pile load test at the lock and dam 26
replacement project, Research Report 4690F, Texas A&M University,
Texas, pp. 15-33.
Lee, I. M. and Lee, J. H. (1996). “Prediction of pile bearing capacity
using artificial neural networks.” Computers and Geotechnic, Vol.
18, No. 3, pp. 189-200.
Mahesh, P. (2011). “Modeling pile capacity using generalized regression
neural network.” Proc., Indian Geotechnical Conference, Kochi,
India, No. N-027, pp. 811-814.
Maizir, H. and Kassim, K. A. (2013). “Neural network application in
prediction of axial bearing capacity of driven piles.” Proc., International
MultiConference of Engineers and Computer Scientists, IMECS,
Hong Kong, Vol. 1.
Maren, A., Harston, C., and Pap, R. (1990). Handbook of neural
computing applications, Academic Press, San Diego, CA.
Montgomery, D. C. and Runger, G. C. (2011). Applied statistics and
probability for engineers, John Wiley & Sons, Hoboken, N. J.
Nawari, N. O., Liang, R., and Nusairat, J. (1999). “Artificial intelligence
techniques for the design and analysis of deep foundations.” The
Electronic Journal of Geotechnical Engineering, Vol. 4.
Prakash, S. and Sharma, H. D. (1990). Pile foundation in engineering
practice, John Wiley & Sons, New York, NY.
Sette, S. and Boullart, L. (2001). “Genetic programming: Principles and
applications.” Journal of Engineering Application and Artificial
Intelligence, Vol. 14, No. 6, pp. 727-736.
Shahin, M. A., Maier, H. R., and Jaksa, M. B. (2002). “Predicting
settlement of shallow foundations using neural networks.” Journal
of Geotechnical and Geoenvironmental Engineering, Vol. 128, No.
9, pp. 785-793.
Silva, S. and Almeida, J. (2003). “GPLAB: A genetic programming
toolbox for MATLAB.” Proc., Nordic MATLAB Conference,
Copenhagen, Denmark, pp. 273-278.
Sinha, S. K. and Wang, M. C. (2008). “Artificial neural network prediction
models for soil compaction and permeability.” Journal of Geotechnical
and Geological Engineering, Vol. 26, pp. 47-64.
Sonmez, H., Gokceoglu, C., Nefeslioglu, H. A., and Kayabasi, A. (2005).
“Estimation of rock modulus: For intact rocks with an artificial
neural network and for rock masses with a new empirical equation.”
International Journal of Rock Mechannics and Mining Science, Vol.
43, No. 2, pp. 224-235.
Stockard, D. M. (1979). “Case histories-pile driving in the gulf of
mexico.” Proc., 11th Annual OTC, Houston, Texas, pp. 737-747.
Stockard, D.M. (1986). “Case histories-pile driving offshore india.”
Proc., 18th Annual OTC, Houston, Texas, pp. 56-68.
Tomlinson, M. J. and Woodward, J. (1994). Pile design and construction
practice, Chapman and Hall, London, England.
Wardani, S. P. R., Surjandari, N. S., and Jajaputra, A. A. (2013).
“Analysis of ultimate bearing capacity of single pile using the
artificial neural networks approach: A case study.” Proc., 18th Int.
Conf. on Soil Mechanics and Geotechnical Engrg., Paris, France,
pp. 837-840.
−
Top Related
Copyright © 2022 FDOKUMEN

