







Bahasa
Halaman
Hukum

CENTER FOR AIR TRANSPORTATION SYSTEMS RESEARCH CCCCCCCCCCCCCCEEEEEEEEEEEEENNNNNNNNNNNNNNNNTTTTTTTTTTTTTTEEEEEEEEEEEEEERRRRRRRRRRRRRR FFFFFFFFFFFFOOOOOOOOOOOOOOORRRRRRRRRRRRRRR AAAAAAAAAAAAAAAAIIIIIRRRRRRRRRRRRRR TTTTTTTTTTTRRRRRRRRRRRRRRRAAAAAAAAAAAAAAANNNNNNNNNNNNNNNNSSSSSSSSSSSSSSPPPPPPPPPPPPPOOOOOOOOOOOOOOOORRRRRRRRRRRRRRRRTTTTTTTTTTTTAAAAAAAAAAAAAAATTTTTTTTTTTTTTTIIIIIIIOOOOOOOOOOOOOOONNNNNNNNNNNNNNNNN SSSSSSSSSSSSSSYYYYYYYYYYYYYYYSSSSSSSSSSSSSSTTTTTTTTTTTEEEEEEEEEEEEEMMMMMMMMMMMMMMMMSSSSSSSSSSSSSS RRRRRRRRRRRRRRREEEEEEEEEEEESSSSSSSSSSSSSSSSSSSSSSSEEEEEEEEEEEEEEAAAAAAAAAAAAAAAARRRRRRRRRRRRRRRRCCCCCCCCCCCCCCCCCCCCCCCCCCHHHHHHHHHHHHHCENTER FOR AIR TRANSPORTATION SYSTEMS RESEARCH
CATSR CCCCCCCCCCCCAAAAAAAAAAAAAAAATTTTTTTTTTTTSSSSSSSSSSSSSSSRRRRRRRRRRRRRRRCATSR
1
Methodology for Collision Risk Assessment of Flow Corridor Concept
Yimin Zhang (PhD Student)John Shortle (PhD)Lance Sherry (PhD)
24th April, 2013
CATSR 2
Agenda
1. Introduction
2. Problem Statement
3. Proposed Methodology
4. Results
5. Future Work
CATSR
Demand Forecast
• FAA forecasts that the air transportation industry will grow from 731 million passengers in 2011 to 1.2 billion in the year 2030.[1]
• It is projected that en route activity will increase 2.5 percent annually, reaching 64.1 million aircraft handled in 2030. [1]
En-route delays increase by 500% with 20% increase.[2]
Controller workload is one of the factors that limits en route capacity.
3 [1] FAA aerospace forecasts fiscal years 2010 – 2030[2] FAA report, National Airspace System (NAS) En Route Airspace Assessment, 2007
CATSR
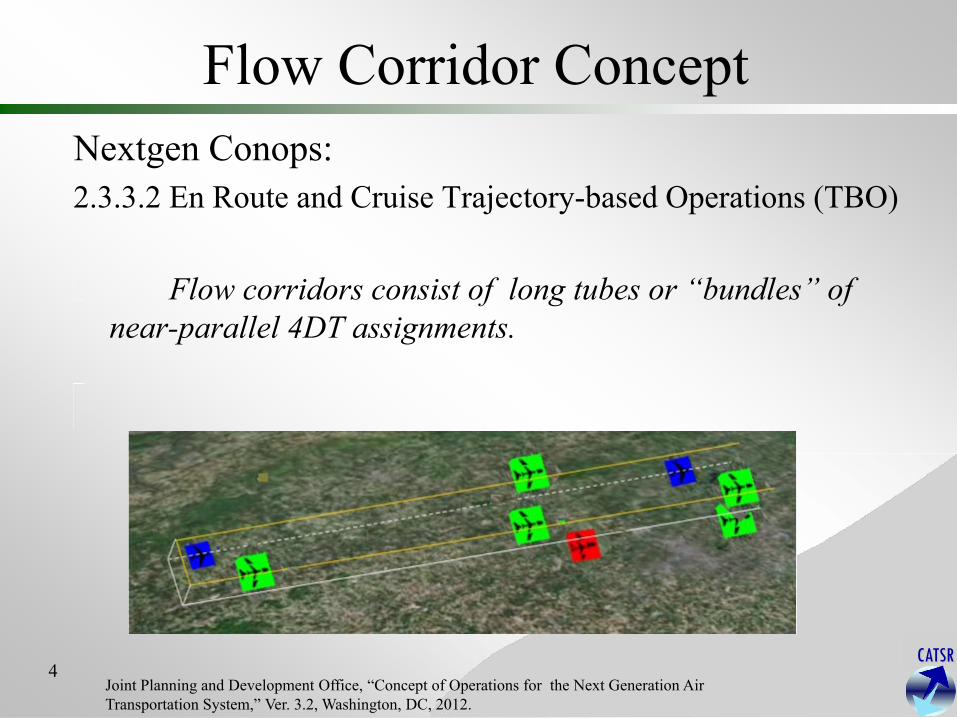
Flow Corridor ConceptNextgen Conops: 2.3.3.2 En Route and Cruise Trajectory-based Operations (TBO)
Flow corridors consist of long tubes or “bundles” of near-parallel 4DT assignments.
4 Joint Planning and Development Office, “Concept of Operations for the Next Generation Air Transportation System,” Ver. 3.2, Washington, DC, 2012.
CATSR
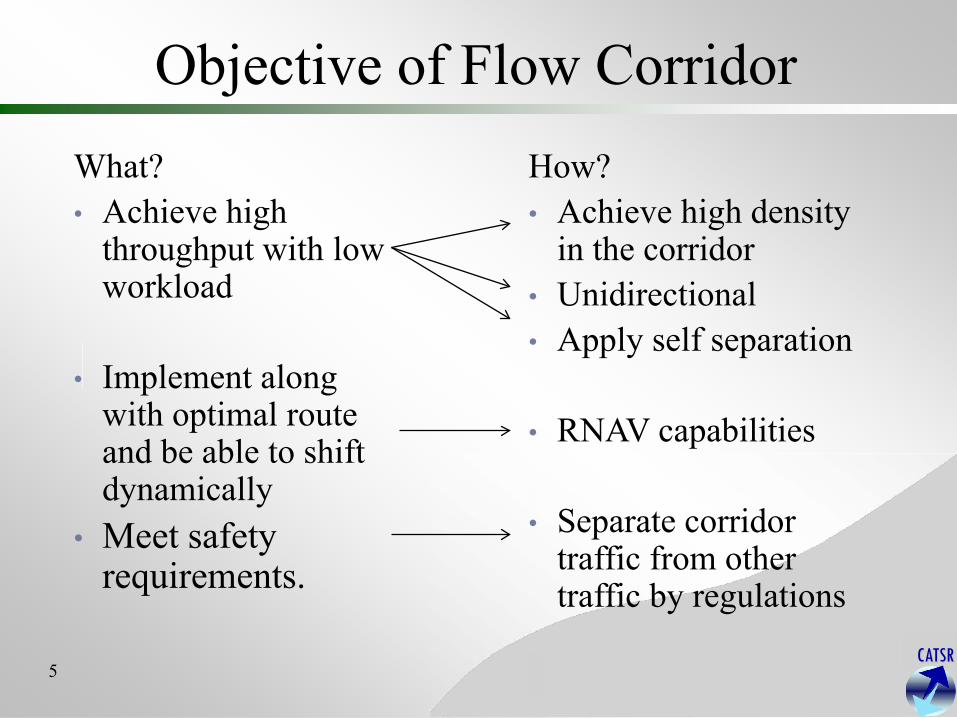
Objective of Flow CorridorWhat?• Achieve high
throughput with low workload
• Implement along with optimal route and be able to shift dynamically
• Meet safety requirements.
5
How?• Achieve high density
in the corridor• Unidirectional• Apply self separation
• RNAV capabilities
• Separate corridor traffic from other traffic by regulations
CATSR
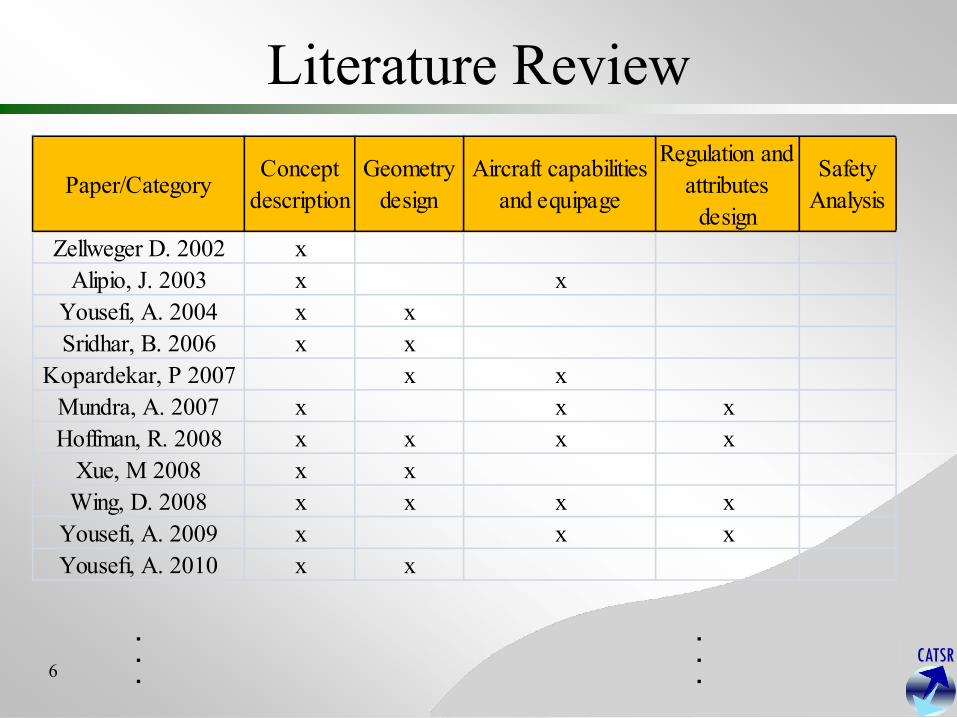
Literature Review
6
.
.
.
.
.
.
Paper/CategoryConcept
descriptionGeometry
design Aircraft capabilities
and equipage
Regulation and attributes
design
Safety Analysis
Zellweger D. 2002 xAlipio, J. 2003 x x
Yousefi, A. 2004 x xSridhar, B. 2006 x x
Kopardekar, P 2007 x xMundra, A. 2007 x x xHoffman, R. 2008 x x x x
Xue, M 2008 x xWing, D. 2008 x x x x
Yousefi, A. 2009 x x xYouse x x
CATSR
Problem Statement
• What is the collision probability of flow corridor concept?
• What factors will affect the collision probability most?
7

CATSR 8
Agenda1. Introduction/Scope
2. Problem Statement
3. Proposed Method
4. Preliminary Results
5. Future Work
CATSR
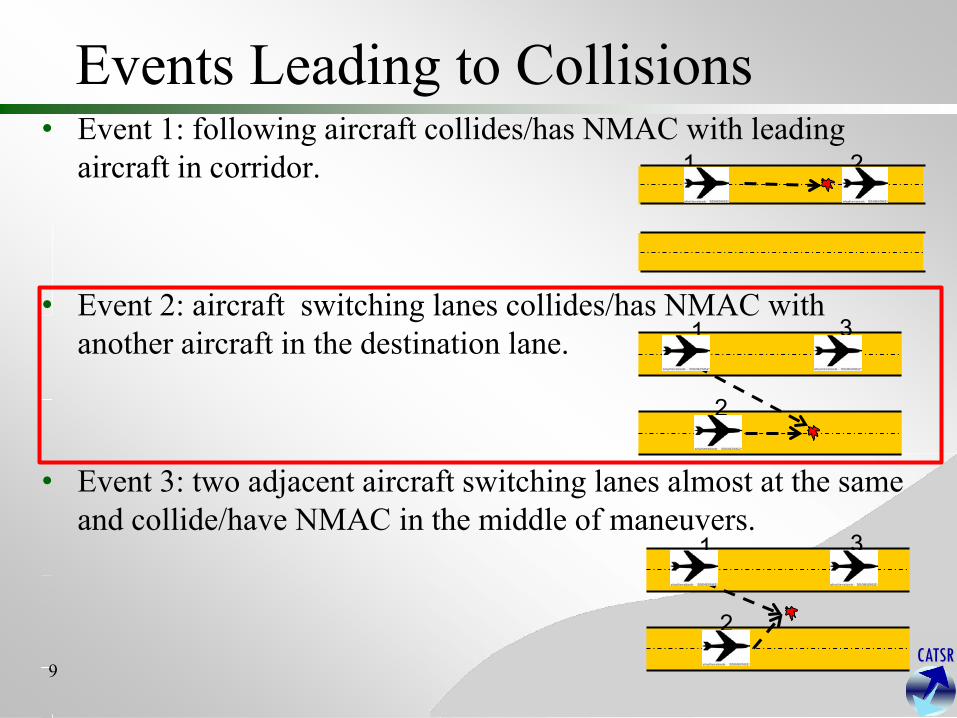
Events Leading to Collisions • Event 1: following aircraft collides/has NMAC with leading
aircraft in corridor.
• Event 2: aircraft switching lanes collides/has NMAC with another aircraft in the destination lane.
• Event 3: two adjacent aircraft switching lanes almost at the same and collide/have NMAC in the middle of maneuvers.
9
1 2
2
1 3
2
1 3
CATSR
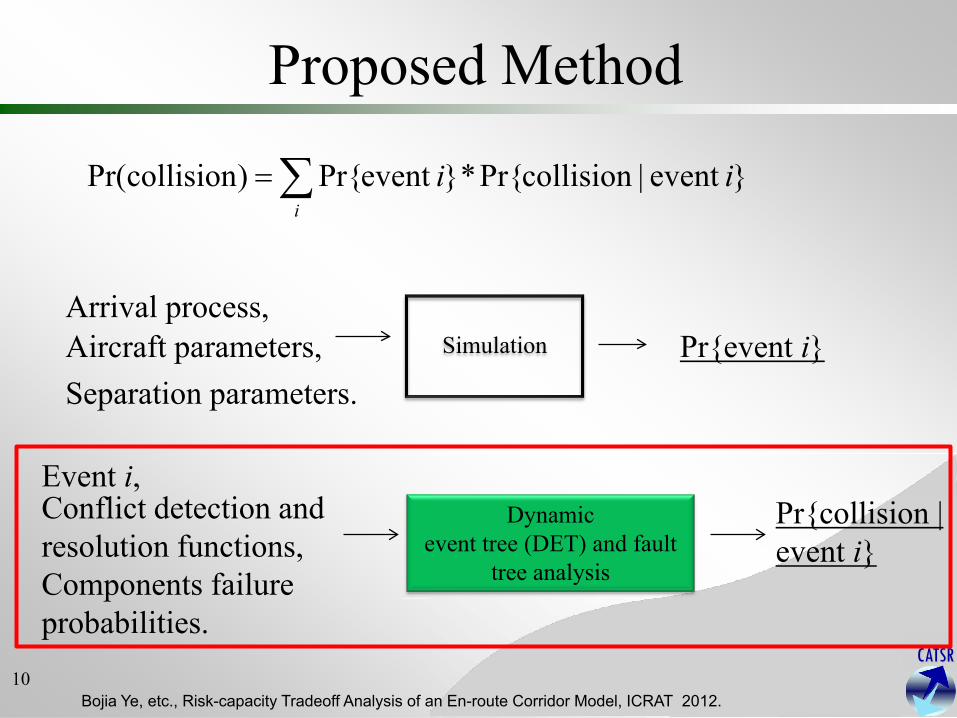
Proposed Method
10
Dynamic event tree (DET) and fault
tree analysis
Arrival process,Aircraft parameters, Simulation
Separation parameters.Pr{event i}
Event i,Conflict detection and resolution functions,Components failure probabilities.
Pr{collision | event i}
Bojia Ye, etc., Risk-capacity Tradeoff Analysis of an En-route Corridor Model, ICRAT 2012.
i
ii }event |collisionPr{*}event Pr{)collisionPr(
CATSR
Resolution maneuvers
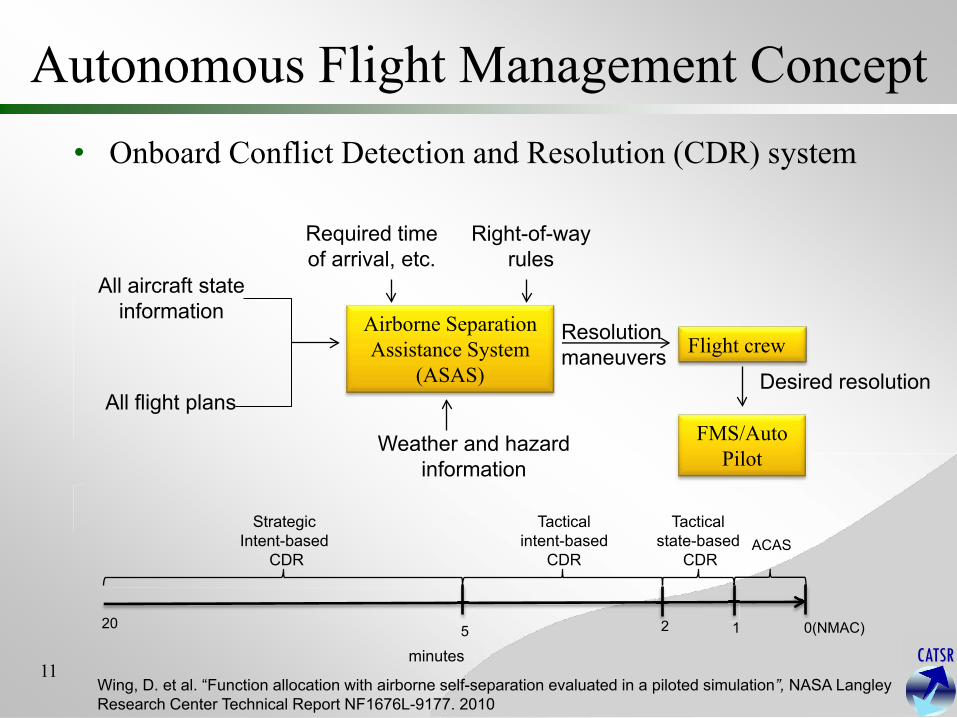
• Onboard Conflict Detection and Resolution (CDR) system
Autonomous Flight Management Concept
11
Flight crew
FMS/Auto Pilot
Airborne Separation Assistance System
(ASAS)
All aircraft stateinformation
All flight plans
Required timeof arrival, etc.
Right-of-wayrules
Desired resolution
Weather and hazardinformation
Wing, D. et al. “Function allocation with airborne self-separation evaluated in a piloted simulation”, NASA Langley Research Center Technical Report NF1676L-9177. 2010
0(NMAC)
minutes
1
ACAS
2 5 20
Strategic Intent-based
CDR
Tacticalintent-based
CDR
Tactical state-based
CDR
CATSR
No
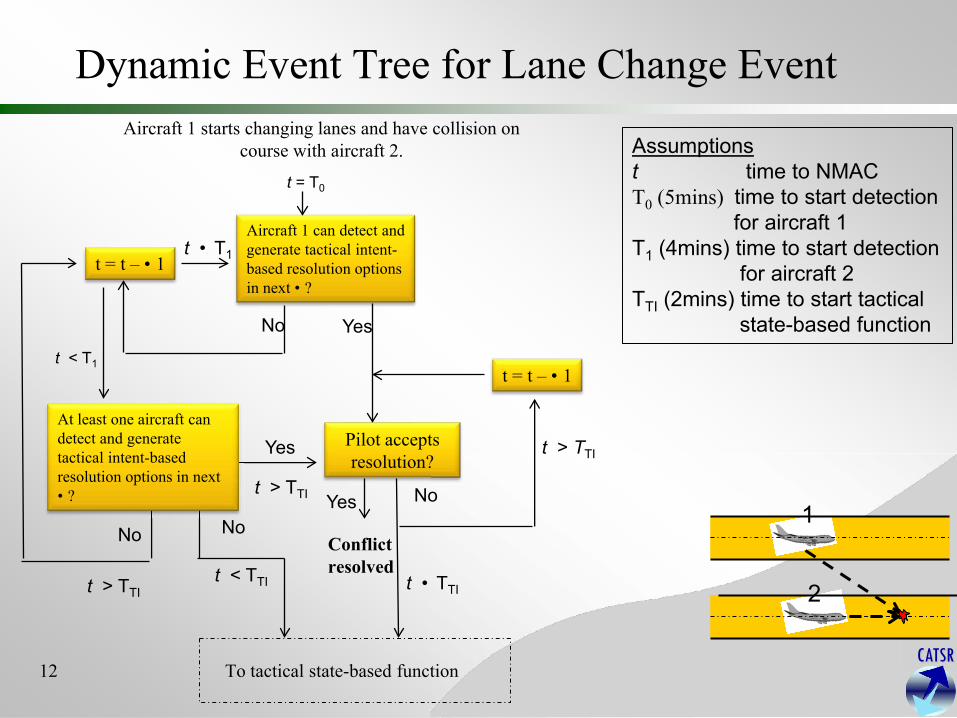
Dynamic Event Tree for Lane Change Event
12
No
t > TTI
NoYes
t • TTI
Conflict resolved
Aircraft 1 can detect and generate tactical intent-based resolution options in next • ?
t = t – • 1
t = T0
Pilot accepts resolution?
t = t – • 1
No
t > TTI
Yes
t < TTI
t > TTI
t < T1
Yes
t • T1
Assumptionst time to NMACT0 (5mins) time to start detection for aircraft 1T1 (4mins) time to start detection for aircraft 2TTI (2mins) time to start tactical
state-based function
2
1
To tactical state-based function
Aircraft 1 starts changing lanes and have collision oncourse with aircraft 2.
At least one aircraft can detect and generate tactical intent-based resolution options in next • ?
CATSR
No
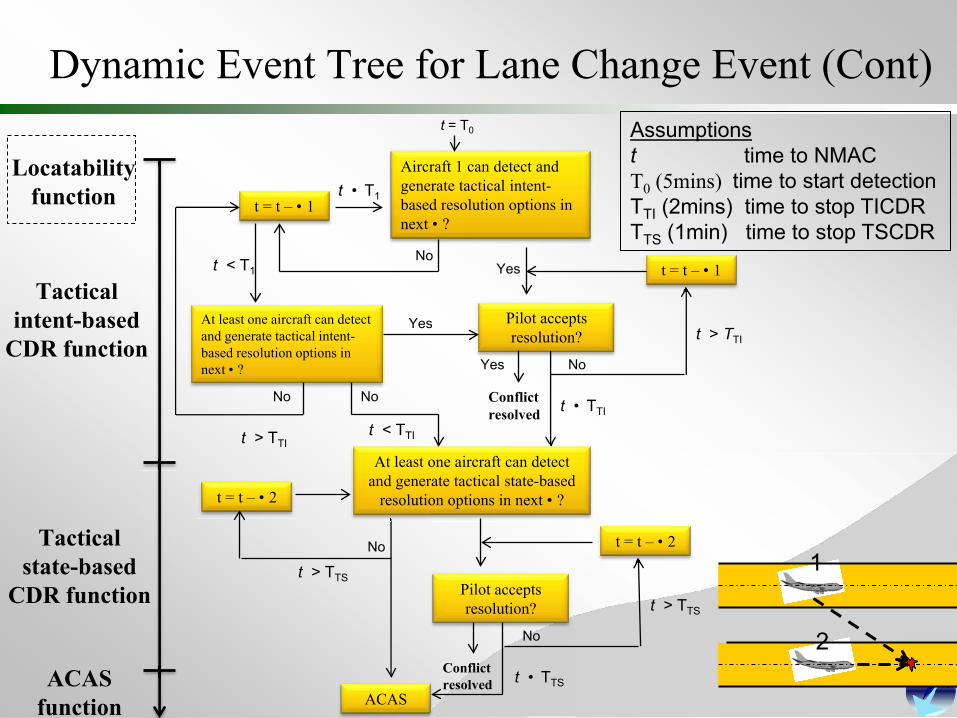
Dynamic Event Tree for Lane Change Event (Cont)
No
t > TTI
NoYes
t • TTIConflict resolved
Aircraft 1 can detect and generate tactical intent-based resolution options in next • ?
t = t – • 1
t = T0
Pilot accepts resolution?
At least one aircraft can detect and generate tactical state-based
resolution options in next • ?
t = t – • 1
No
t > TTS
t = t – • 2
ACAS
Assumptionst time to NMACT0 (5mins) time to start detectionTTI (2mins) time to stop TICDRTTS (1min) time to stop TSCDR
t > TTS
No
t • TTSConflict resolved
Pilot accepts resolution?
t = t – • 2
At least one aircraft can detect and generate tactical intent-based resolution options in next • ?
No
t > TTI
Yes
t < TTI
t < T1
Yes
t • T1
Tactical intent-based
CDR function
Tactical state-based
CDR function
ACASfunction
Locatability function
2
1
CATSR
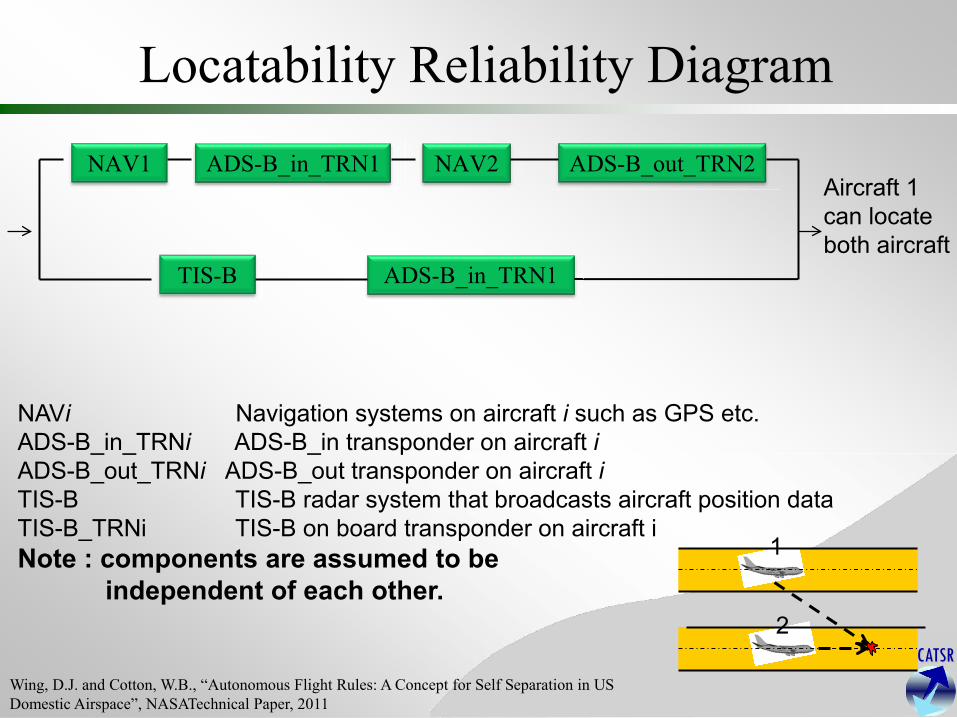
Locatability Reliability Diagram
NAVi Navigation systems on aircraft i such as GPS etc.ADS-B_in_TRNi ADS-B_in transponder on aircraft iADS-B_out_TRNi ADS-B_out transponder on aircraft i TIS-B TIS-B radar system that broadcasts aircraft position dataTIS-B_TRNi TIS-B on board transponder on aircraft i Note : components are assumed to be independent of each other.
2
1
Wing, D.J. and Cotton, W.B., “Autonomous Flight Rules: A Concept for Self Separation in US Domestic Airspace”, NASATechnical Paper, 2011
Aircraft 1 can locate both aircraft
ADS-B_in_TRN1 ADS-B_out_TRN2 NAV1 NAV2
TIS-B ADS-B_in_TRN1
CATSR
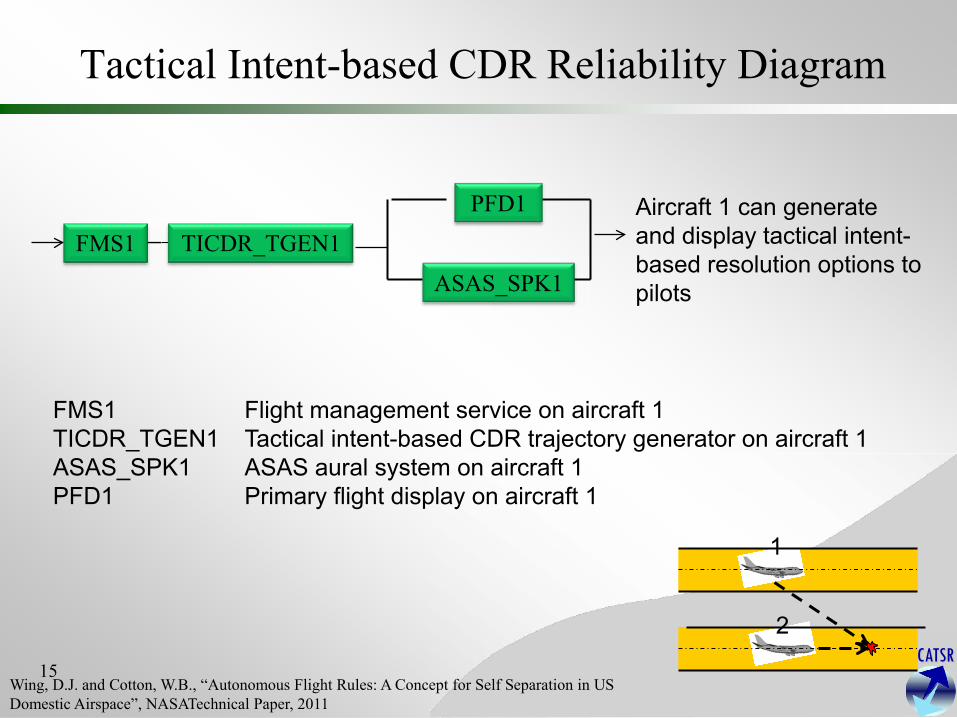
Tactical Intent-based CDR Reliability Diagram
15
FMS1 TICDR_TGEN1
ASAS_SPK1
PFD1 Aircraft 1 can generate and display tactical intent-based resolution options to pilots
FMS1 Flight management service on aircraft 1TICDR_TGEN1 Tactical intent-based CDR trajectory generator on aircraft 1ASAS_SPK1 ASAS aural system on aircraft 1PFD1 Primary flight display on aircraft 1
2
1
Wing, D.J. and Cotton, W.B., “Autonomous Flight Rules: A Concept for Self Separation in US Domestic Airspace”, NASATechnical Paper, 2011
CATSR
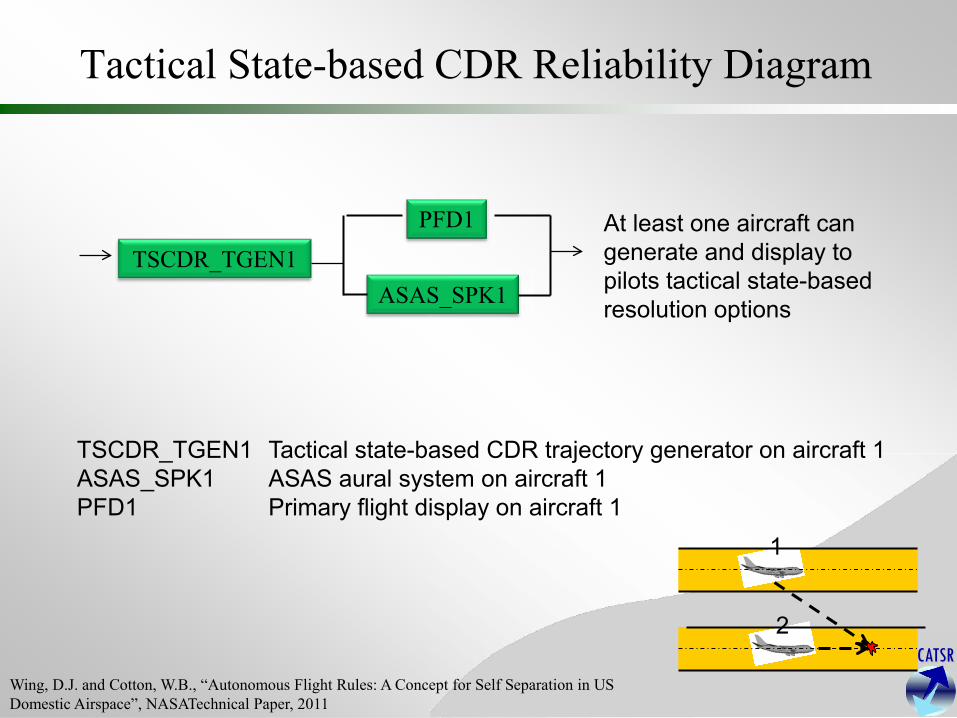
Tactical State-based CDR Reliability Diagram
TSCDR_TGEN1 Tactical state-based CDR trajectory generator on aircraft 1ASAS_SPK1 ASAS aural system on aircraft 1PFD1 Primary flight display on aircraft 1
TSCDR_TGEN1ASAS_SPK1
PFD1 At least one aircraft can generate and display to pilots tactical state-based resolution options
2
1
Wing, D.J. and Cotton, W.B., “Autonomous Flight Rules: A Concept for Self Separation in US Domestic Airspace”, NASATechnical Paper, 2011
CATSR
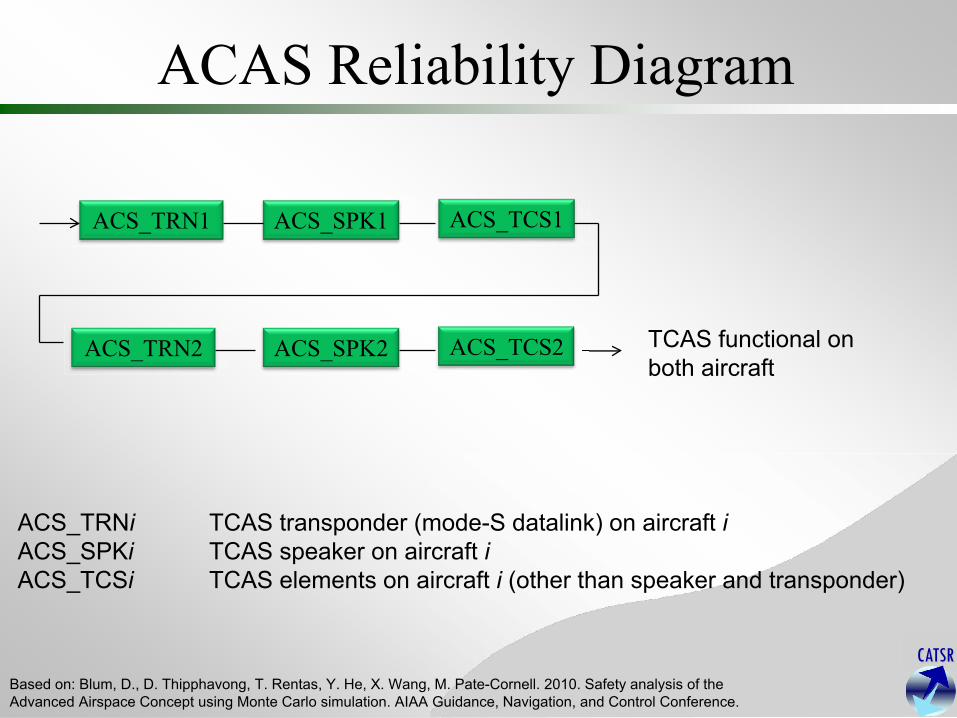
ACAS Reliability Diagram
ACS_TRN1 ACS_SPK1 ACS_TCS1
TCAS functional on both aircraft
ACS_TRNi TCAS transponder (mode-S datalink) on aircraft iACS_SPKi TCAS speaker on aircraft iACS_TCSi TCAS elements on aircraft i (other than speaker and transponder)
Based on: Blum, D., D. Thipphavong, T. Rentas, Y. He, X. Wang, M. Pate-Cornell. 2010. Safety analysis of the Advanced Airspace Concept using Monte Carlo simulation. AIAA Guidance, Navigation, and Control Conference.
ACS_TRN2 ACS_SPK2 ACS_TCS2
CATSR
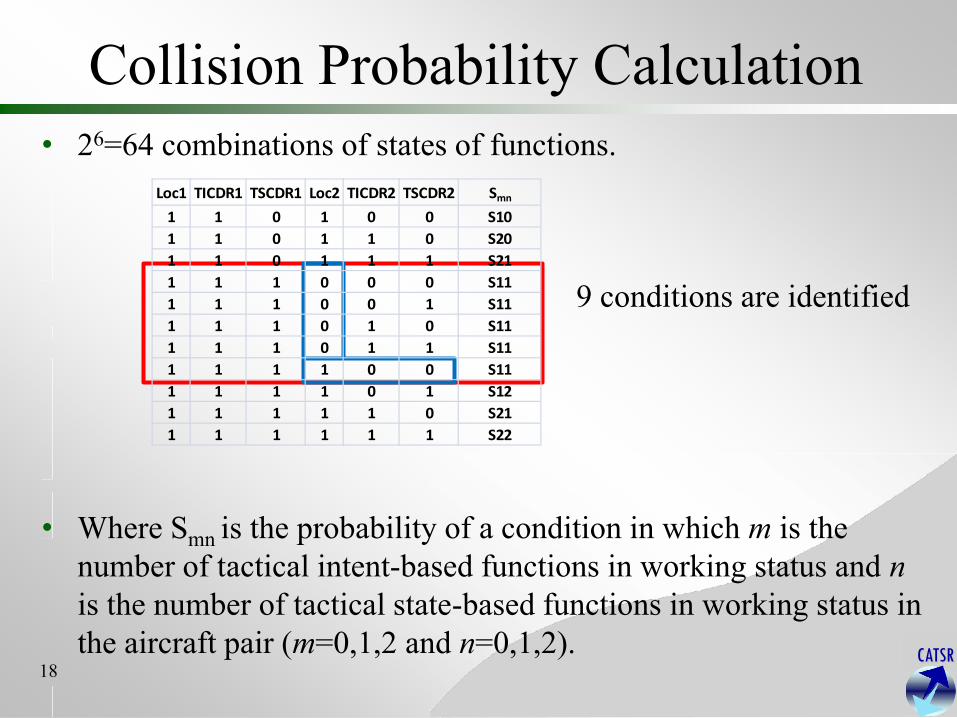
• 26=64 combinations of states of functions.
• Where Smn is the probability of a condition in which m is the number of tactical intent-based functions in working status and nis the number of tactical state-based functions in working status in the aircraft pair (m=0,1,2 and n=0,1,2).
Collision Probability Calculation
18
Loc1 TICDR1 TSCDR1 Loc2 TICDR2 TSCDR2 Smn
1 1 0 1 0 0 S101 1 0 1 1 0 S201 1 0 1 1 1 S211 1 1 0 0 0 S111 1 1 0 0 1 S111 1 1 0 1 0 S111 1 1 0 1 1 S111 1 1 1 0 0 S111 1 1 1 0 1 S121 1 1 1 1 0 S211 1 1 1 1 1 S22
9 conditions are identified
CATSR
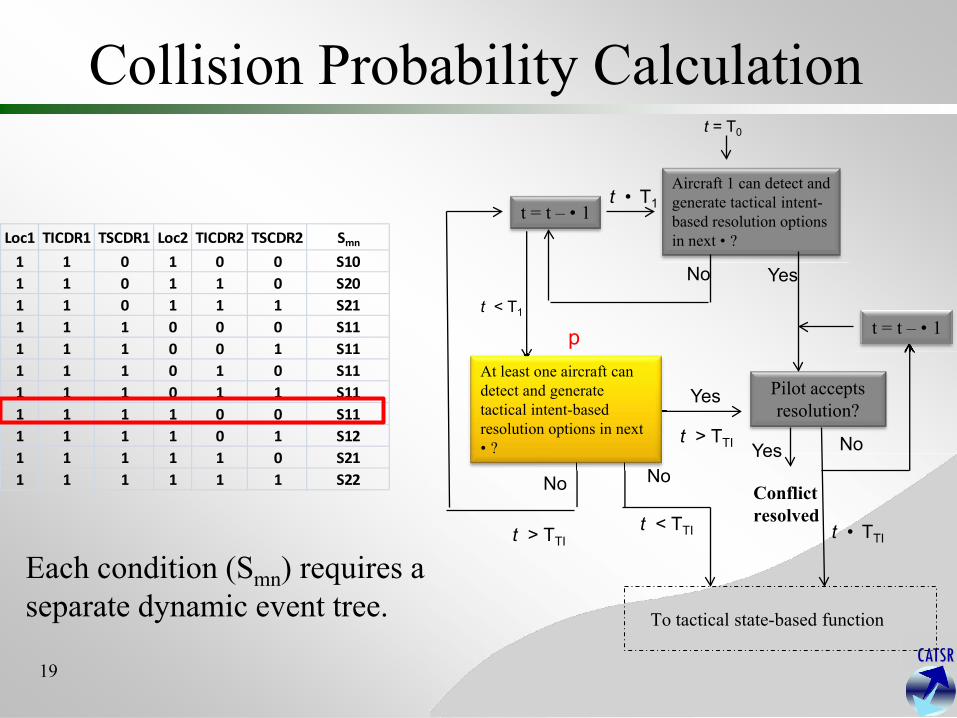
Loc1 TICDR1 TSCDR1 Loc2 TICDR2 TSCDR2 Smn
1 1 0 1 0 0 S101 1 0 1 1 0 S201 1 0 1 1 1 S211 1 1 0 0 0 S111 1 1 0 0 1 S111 1 1 0 1 0 S111 1 1 0 1 1 S111 1 1 1 0 0 S111 1 1 1 0 1 S121 1 1 1 1 0 S211 1 1 1 1 1 S22
Collision Probability Calculation
19
p
No
No
NoYes
t • TTI
Conflict resolved
Aircraft 1 can detect and generate tactical intent-based resolution options in next • ?
t = t – • 1
Pilot accepts resolution?
t = t – • 1
No
t > TTI
Yes
t < TTI
t > TTI
t < T1
Yes
t • T1
To tactical state-based function
t = T0
Each condition (Smn) requires a separate dynamic event tree.
N
At least one aircraft can detect and generate tactical intent-based resolution options in next • ?
CATSR
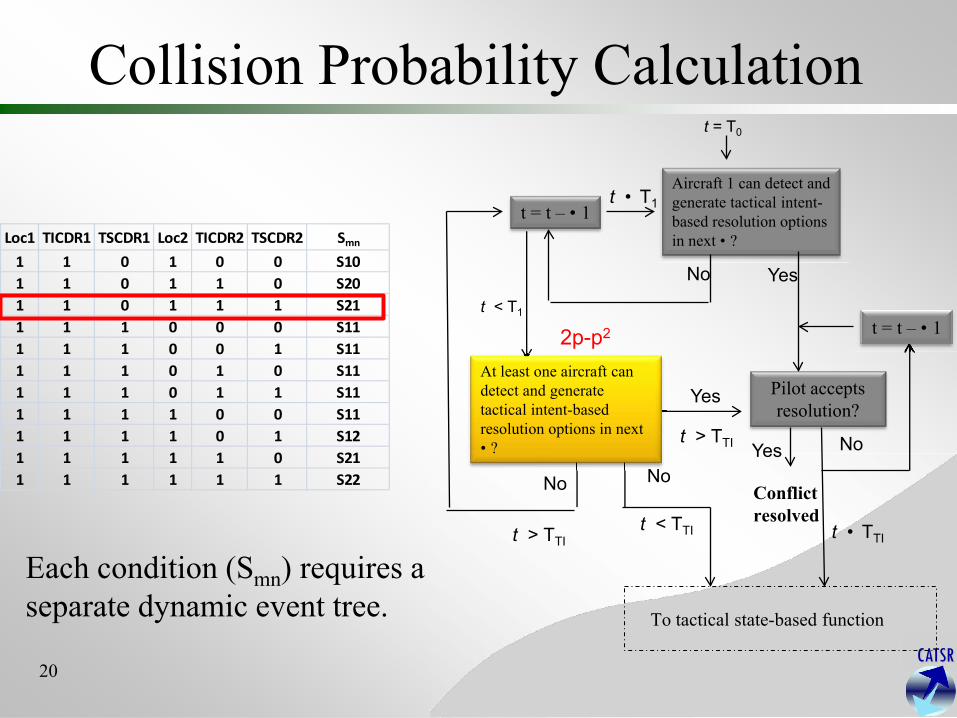
Loc1 TICDR1 TSCDR1 Loc2 TICDR2 TSCDR2 Smn
1 1 0 1 0 0 S101 1 0 1 1 0 S201 1 0 1 1 1 S211 1 1 0 0 0 S111 1 1 0 0 1 S111 1 1 0 1 0 S111 1 1 0 1 1 S111 1 1 1 0 0 S111 1 1 1 0 1 S121 1 1 1 1 0 S211 1 1 1 1 1 S22
Collision Probability Calculation
20
2p-p2
No
No
NoYes
t • TTI
Conflict resolved
Aircraft 1 can detect and generate tactical intent-based resolution options in next • ?
t = t – • 1
Pilot accepts resolution?
t = t – • 1
No
t > TTI
Yes
t < TTI
t > TTI
t < T1
Yes
t • T1
To tactical state-based function
t = T0
Each condition (Smn) requires a separate dynamic event tree.
N
At least one aircraft can detect and generate tactical intent-based resolution options in next • ?
CATSR
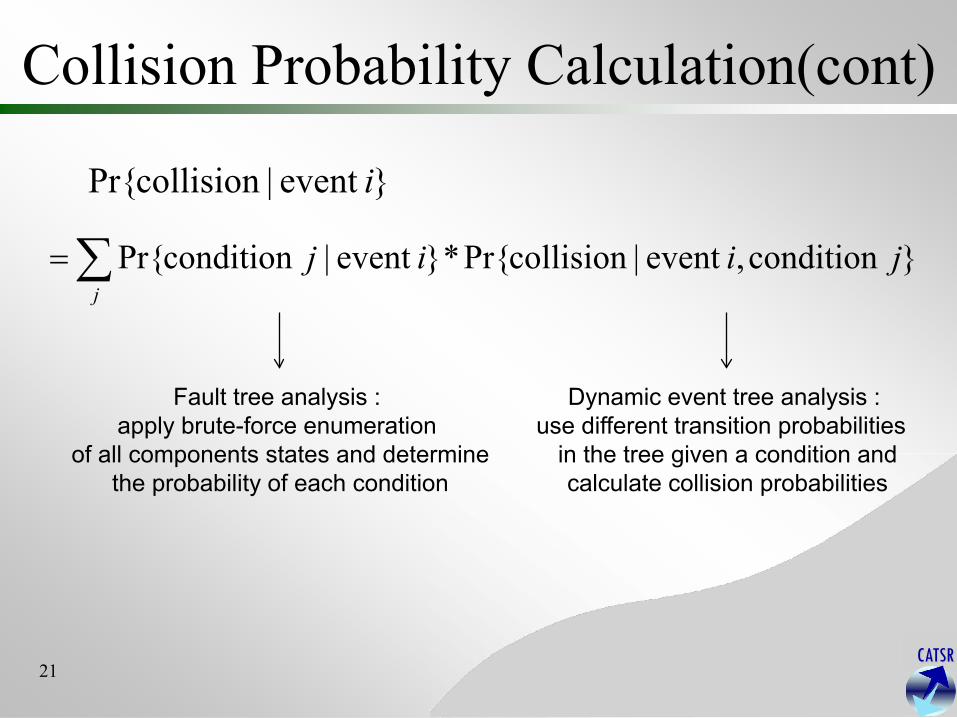
Collision Probability Calculation(cont)
21
Fault tree analysis : apply brute-force enumeration
of all components states and determinethe probability of each condition
Dynamic event tree analysis : use different transition probabilities
in the tree given a condition andcalculate collision probabilities
}event |collisionPr{ i
}condition ,event |collisionPr{*}event |condition Pr{ jiijj
CATSR }condition ,event |collisionPr{*}event |condition Pr{ jiijj
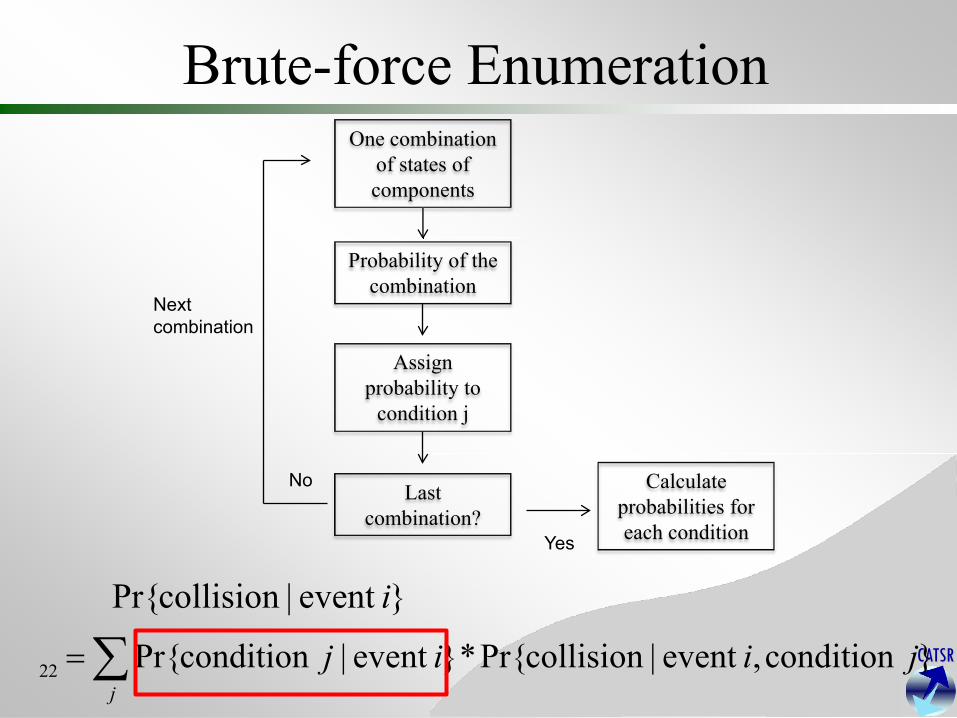
Brute-force Enumeration
22
One combination of states of components
Probability of the combination
Assign probability to
condition j
Last combination?
Next combination
Yes
No Calculate probabilities for each condition
}event |collisionPr{ i
CATSR }condition ,event |collisionPr{*}event |condition Pr{ jiijj
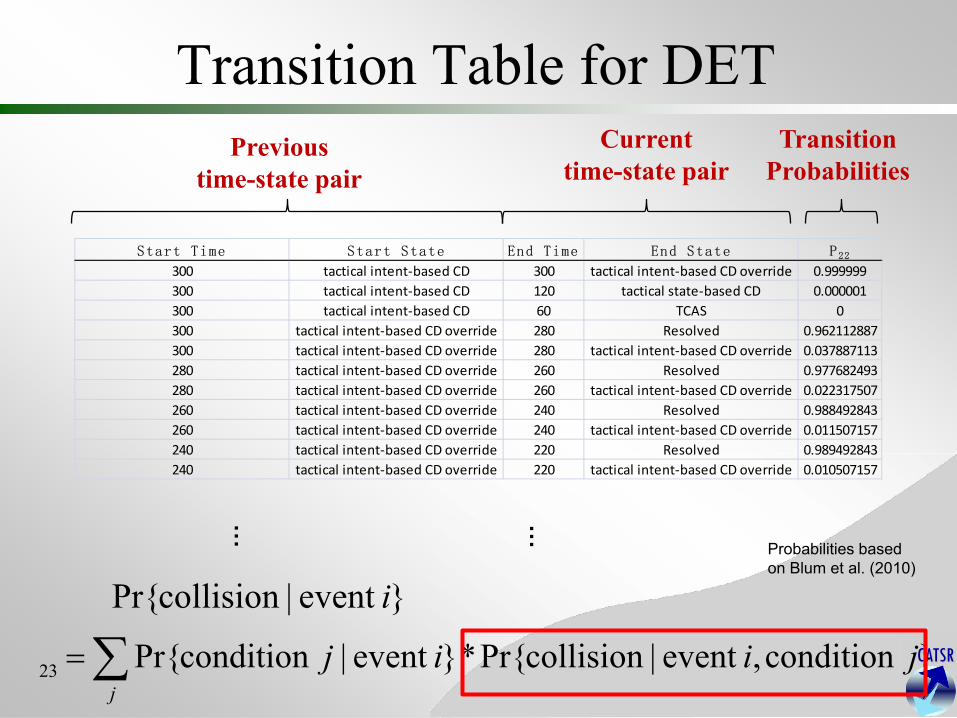
Transition Table for DET
23
Previoustime-state pair
Current time-state pair
TransitionProbabilities
. . . . . . Probabilities based on Blum et al. (2010)
300 tactical intent-based CD 300 tactical intent-based CD override 0.999999300 tactical intent-based CD 120 tactical state-based CD 0.000001300 tactical intent-based CD 60 TCAS 0300 tactical intent-based CD override 280 Resolved 0.962112887300 tactical intent-based CD override 280 tactical intent-based CD override 0.037887113280 tactical intent-based CD override 260 Resolved 0.977682493280 tactical intent-based CD override 260 tactical intent-based CD override 0.022317507260 tactical intent-based CD override 240 Resolved 0.988492843260 tactical intent-based CD override 240 tactical intent-based CD override 0.011507157240 tactical intent-based CD override 220 Resolved 0.989492843240 tactical intent-based CD override 220 tactical intent-based CD override 0.010507157
}event |collisionPr{ i
CATSR
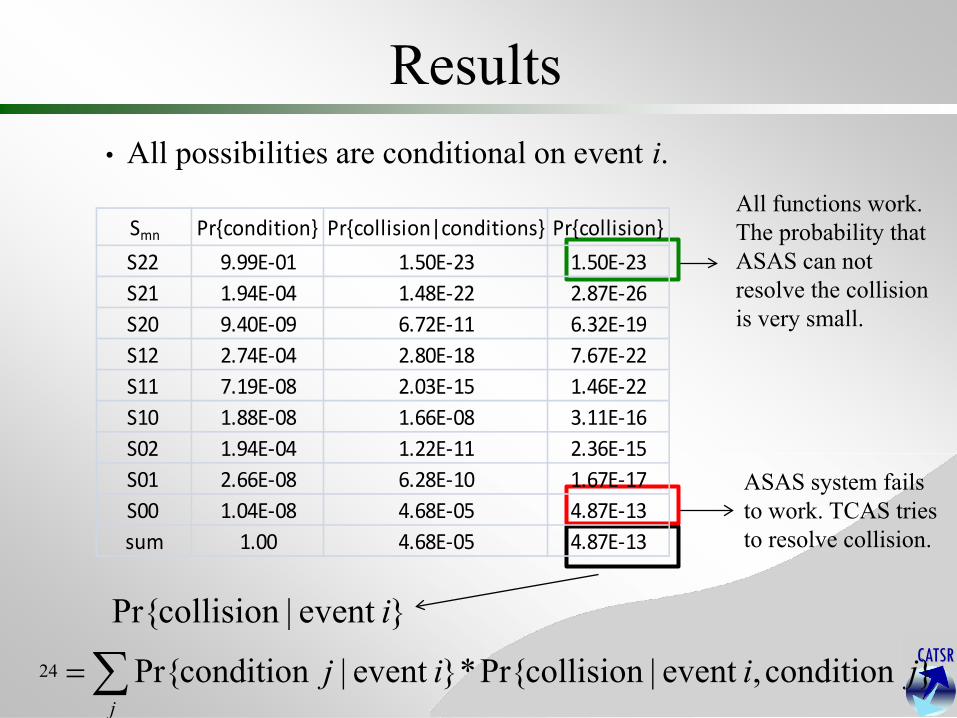
Results
24
• All possibilities are conditional on event i.
}condition ,event |collisionPr{*}event |condition Pr{ jiijj
}event |collisionPr{ i
All functions work. The probability that ASAS can not resolve the collision is very small.
ASAS system fails to work. TCAS tries to resolve collision.
Smn Pr{condition} Pr{collision|conditions} Pr{collision}
S22 9.99E-01 1.50E-23 1.50E-23S21 1.94E-04 1.48E-22 2.87E-26S20 9.40E-09 6.72E-11 6.32E-19S12 2.74E-04 2.80E-18 7.67E-22S11 7.19E-08 2.03E-15 1.46E-22S10 1.88E-08 1.66E-08 3.11E-16S02 1.94E-04 1.22E-11 2.36E-15S01 2.66E-08 6.28E-10 1.67E-17S00 1.04E-08 4.68E-05 4.87E-13sum 1.00 4.68E-05 4.87E-13
CATSR
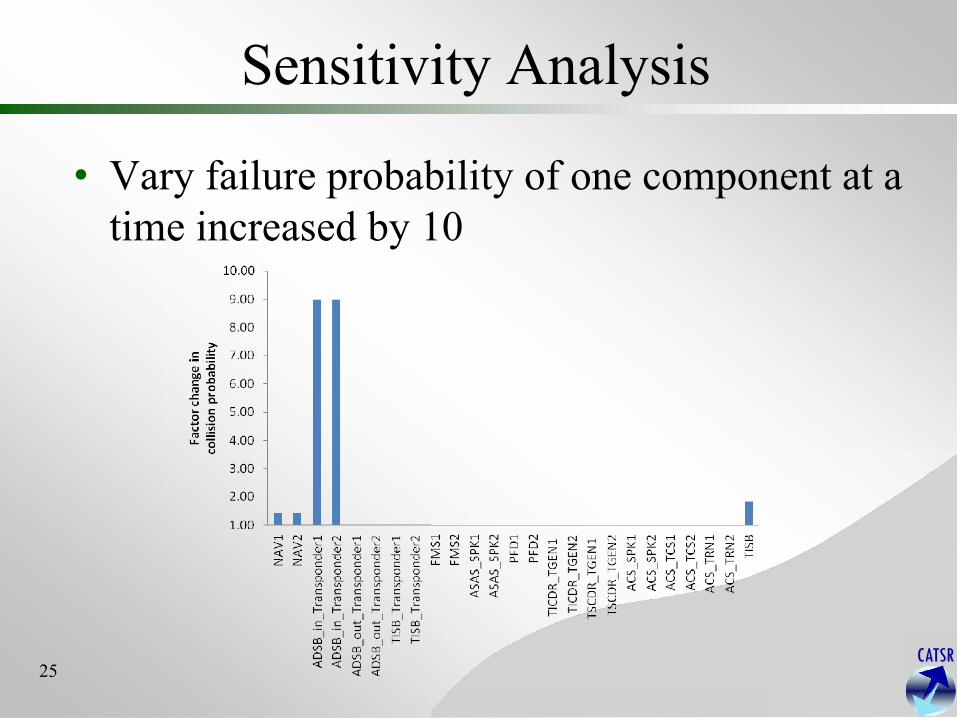
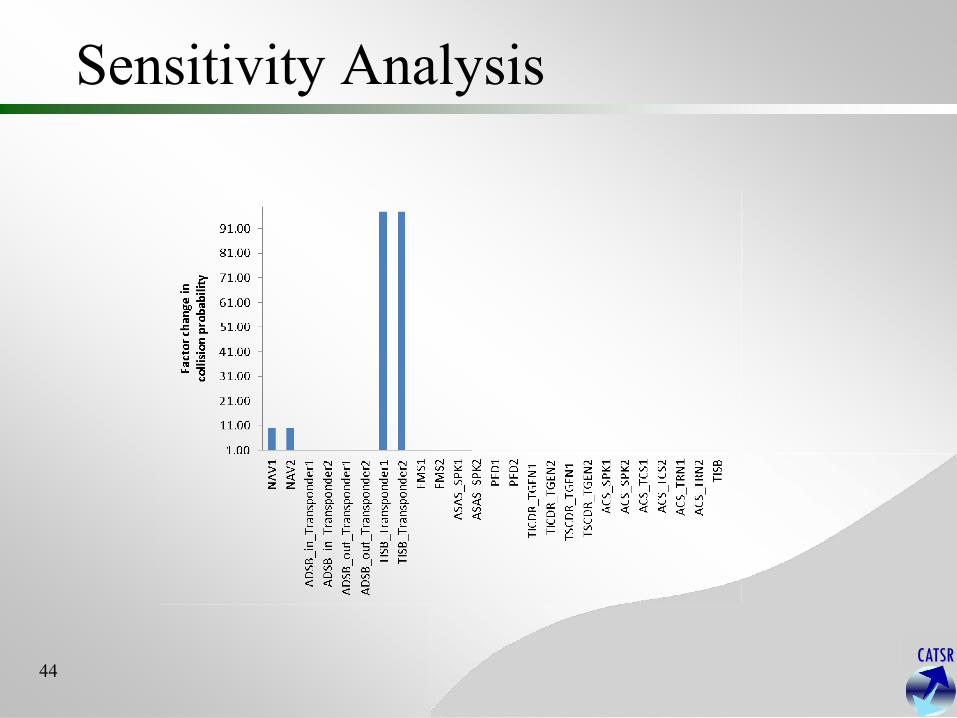
Sensitivity Analysis
• Vary failure probability of one component at a time increased by 10
25
CATSR
Summary • Process
Identify events that may lead to potential collisions Apply AFM concept for onboard conflict detection and resolution Conduct fault trees to model CDR functionsConduct dynamic event trees to model CDR flow and compute collision probabilities in terms of transition probabilities
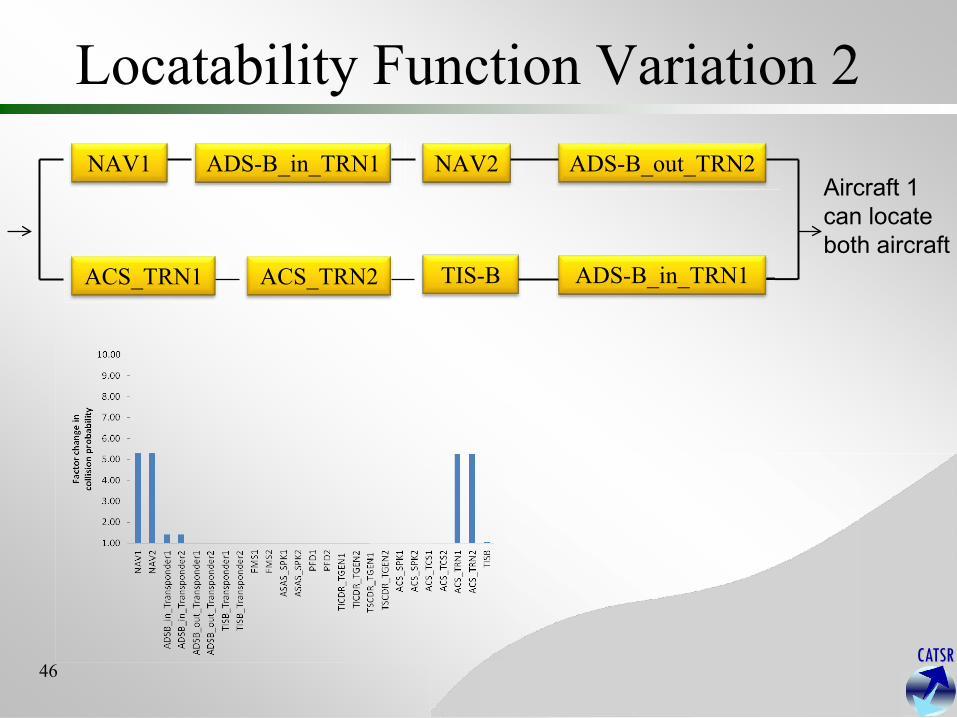
• ResultsCollision probability given lane change event satisfies current target level of safety (10-9)Sensitivity analysis shows that ADS-B in transponder has higher impact to the entire system26
CATSR
Future Work
• Difference between events in terms of dynamic event trees• The starting points of the trees
Overtaking event starts from strategic intent-based CDR function but lane change event starts from tactical intent-based CDR function.
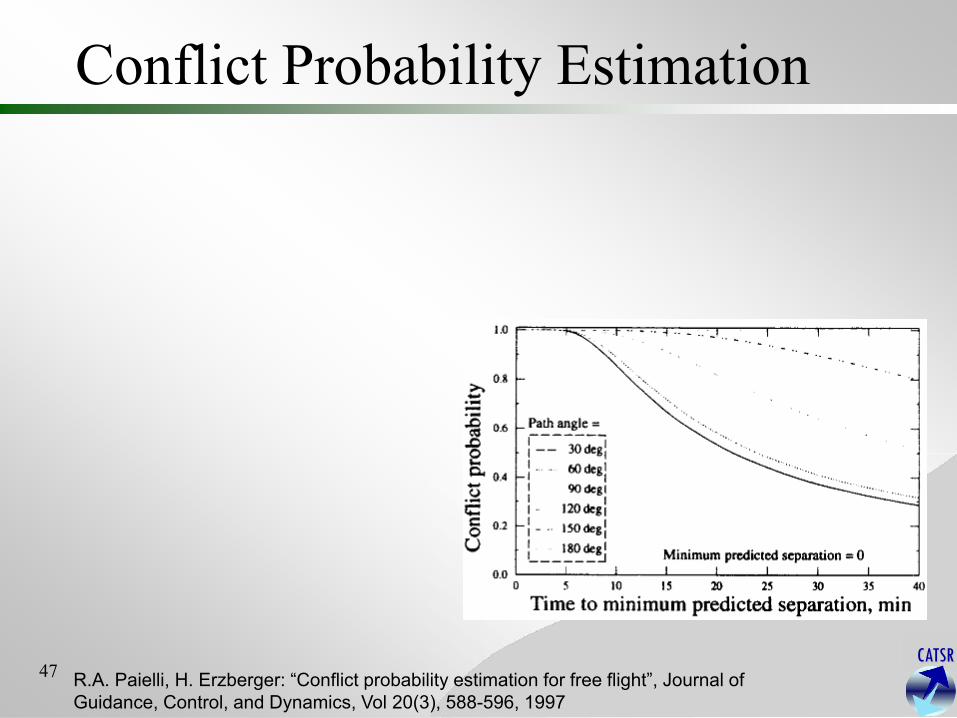
• The conflict detection probability It varies in terms of conflict angles.
27
CATSR
Question?
28
Thank You !
CATSR
Backup Slides
29
CATSR
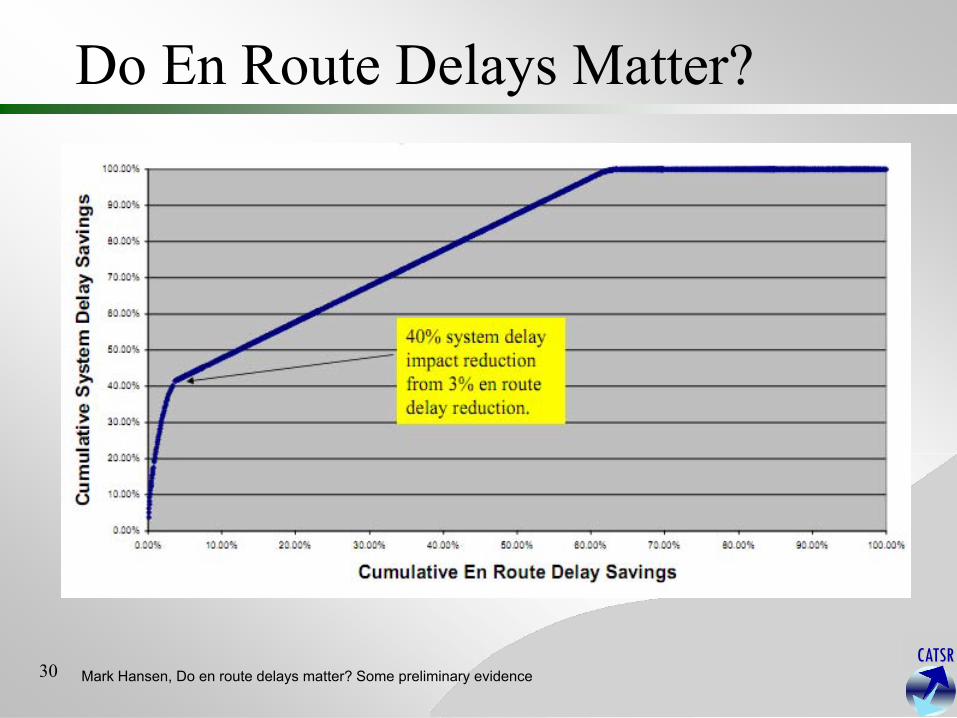
Do En Route Delays Matter?
30 Mark Hansen, Do en route delays matter? Some preliminary evidence
CATSR
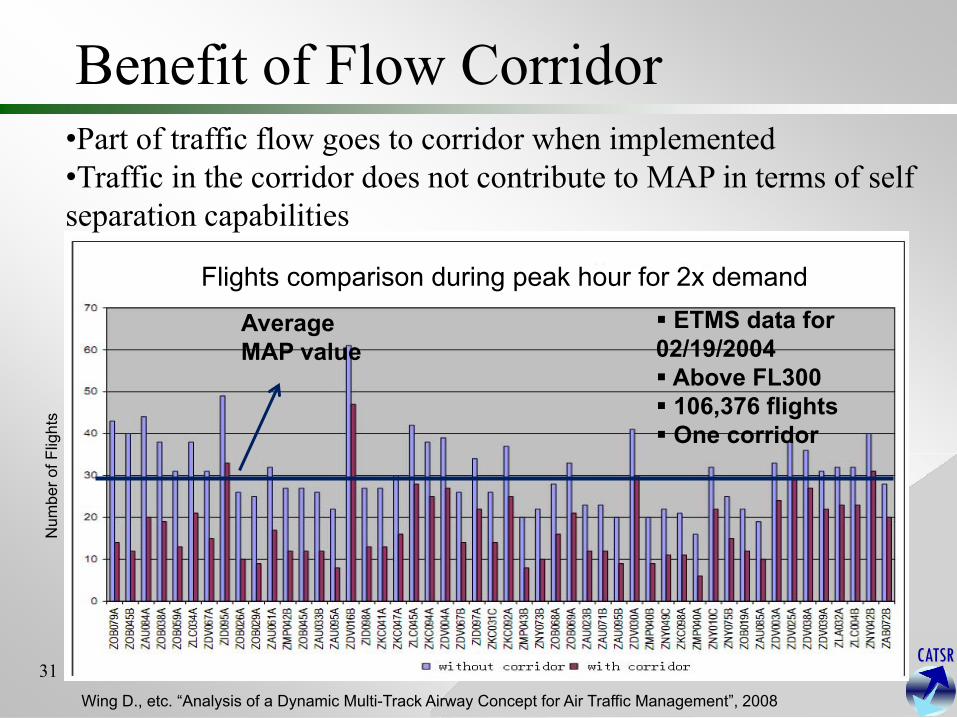
Benefit of Flow Corridor
31Wing D., etc. “Analysis of a Dynamic Multi-Track Airway Concept for Air Traffic Management”, 2008
ETMS data for 02/19/2004
Above FL300106,376 flightsOne corridor
AverageMAP value
Num
ber o
f Flig
hts
Flights comparison during peak hour for 2x demand
•Part of traffic flow goes to corridor when implemented •Traffic in the corridor does not contribute to MAP in terms of self separation capabilities
CATSR
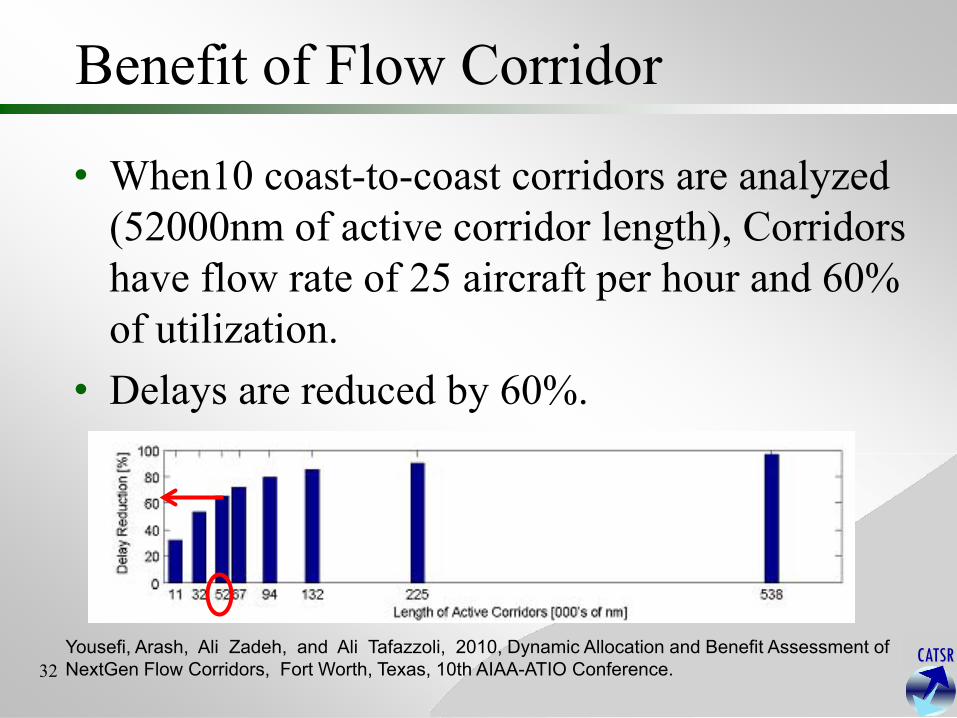
Benefit of Flow Corridor
• When10 coast-to-coast corridors are analyzed (52000nm of active corridor length), Corridors have flow rate of 25 aircraft per hour and 60% of utilization.
• Delays are reduced by 60%.
32Yousefi, Arash, Ali Zadeh, and Ali Tafazzoli, 2010, Dynamic Allocation and Benefit Assessment of NextGen Flow Corridors, Fort Worth, Texas, 10th AIAA-ATIO Conference.
CATSR
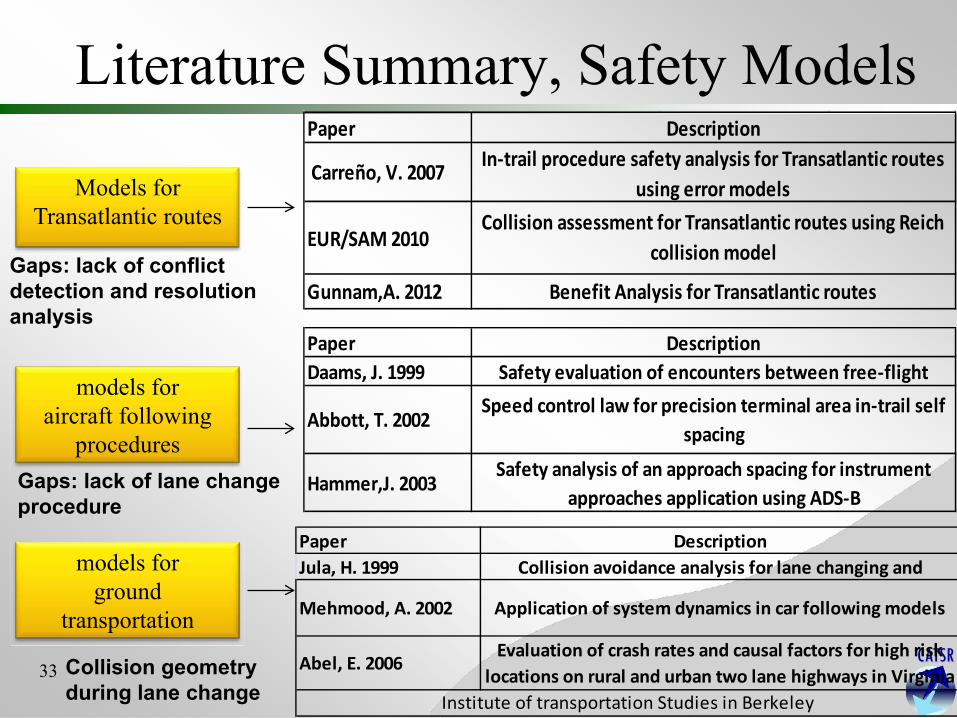
Literature Summary, Safety Models
33
models for aircraft following
procedures
Models for Transatlantic routes
Gaps: lack of conflict detection and resolution analysis
Gaps: lack of lane change procedure
Paper
Carreño, V. 2007
EUR/SAM 2010
Gunnam,A. 2012
In-trail procedure safety analysis for Transatlantic routes using error models
Collision assessment for Transatlantic routes using Reich collision model
Benefit Analysis for Transatlantic routes
Description
models for ground
transportation
PaperDaams, J. 1999
Abbott, T. 2002
Hammer,J. 2003
Safety evaluation of encounters between free-flight
Speed control law for precision terminal area in-trail self spacing
Description
Safety analysis of an approach spacing for instrument approaches application using ADS-B
PaperJula, H. 1999
Mehmood, A. 2002
Abel, E. 2006
Institute of transportation Studies in Berkeley
Evaluation of crash rates and causal factors for high risk locations on rural and urban two lane highways in Virginia
Description
Application of system dynamics in car following models
Collision avoidance analysis for lane changing and
Collision geometry during lane change
CATSR
Related Literature
• Autonomous Flight Management (AFM) is an airborne-based automated separation assurance system.
• Advanced Airspace Concept (AAC) is a ground-based automated separation assurance system.
• Conflict detection and resolution techniques and collision risk assessment methods.
34
Erzberger, H.”The Automated Airspace Concept”. the Fourth USA/Europe Air Traffic Management R&D Seminar, Santa Fe, New Mexico, USA, Dec. 3-7, 2001.Wing, D. “Autonomous Flight Rules, A concept for self-separation in U.S. domestic airspace”, NASA technical report, NASA/TP-2011-217174.
CATSR
Roles and Responsibilities Flight Crew:• Adhere to the assignment of corridor controller (e.g. re-routing).• Respond to conflict resolution given by automation and following corridor flying
procedure (e.g. lane change procedure).• Coordinate with corridor controller for exception situations
Automation: • Detect conflicts and provide resolutions a certain period of time prior to actual
conflicts.• Notify corridor controllers when conflicts can not be handled or aircraft needs to
break out the corridor to avoid a collision.
Corridor Controller:• Manage corridor configuration, traffic flow on ramp/off ramp and in the corridor• Resolve conflicts that cannot be handle by automation
35
CATSR
Aircraft Equipage
• Eligible aircraft must have the RNP-x and RNAV capability.
• Eligible aircraft are equipped with ADS-B, CDTI system and data link communication system.
• Eligible aircraft are equipped with automated separation assurance system.
36
CATSR
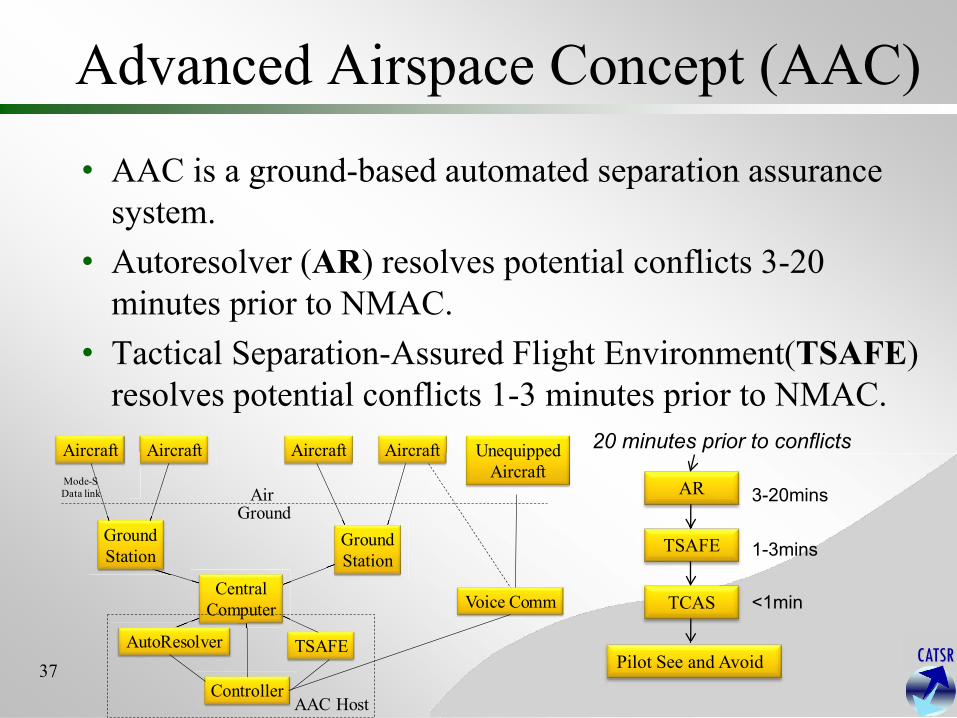
Advanced Airspace Concept (AAC)
• AAC is a ground-based automated separation assurance system.
• Autoresolver (AR) resolves potential conflicts 3-20minutes prior to NMAC.
• Tactical Separation-Assured Flight Environment(TSAFE)resolves potential conflicts 1-3 minutes prior to NMAC.
37
AR
TCAS
TSAFE
Pilot See and Avoid
20 minutes prior to conflicts
3-20mins
1-3mins
Aircraft Aircraft Aircraft Aircraft
AutoResolver TSAFE
Controller
CentralComputer
AirGround
GroundStation
GroundStation
AAC Host
Voice Comm
UnequippedAircraft
Mode-SData link
<1min
CATSR
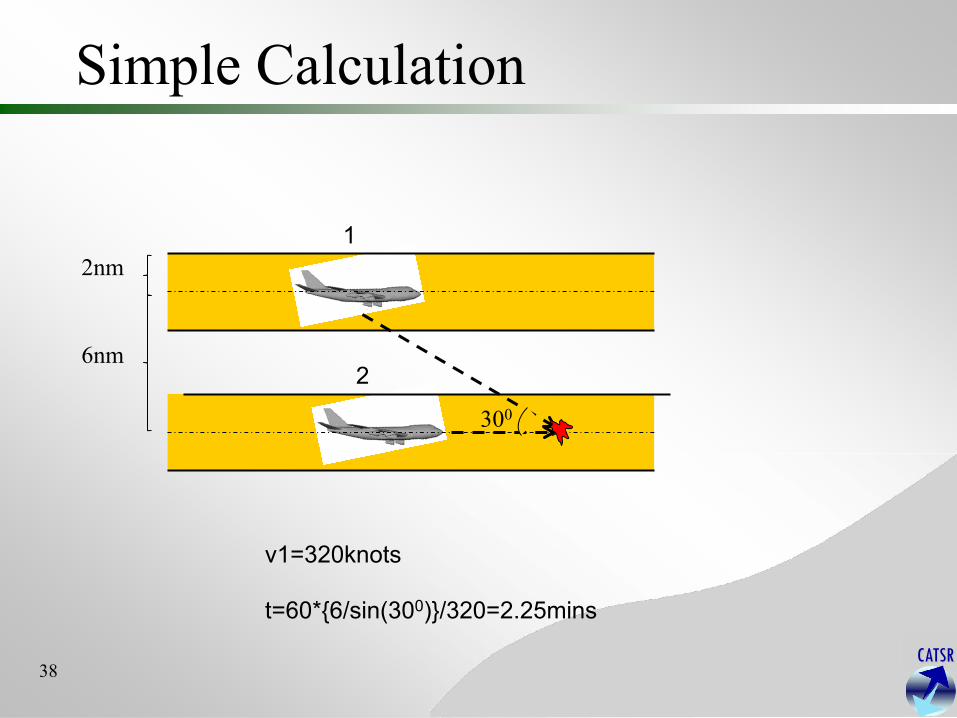
Simple Calculation
38
2
1
6nm
2nm
300
v1=320knots
t=60*{6/sin(300)}/320=2.25mins
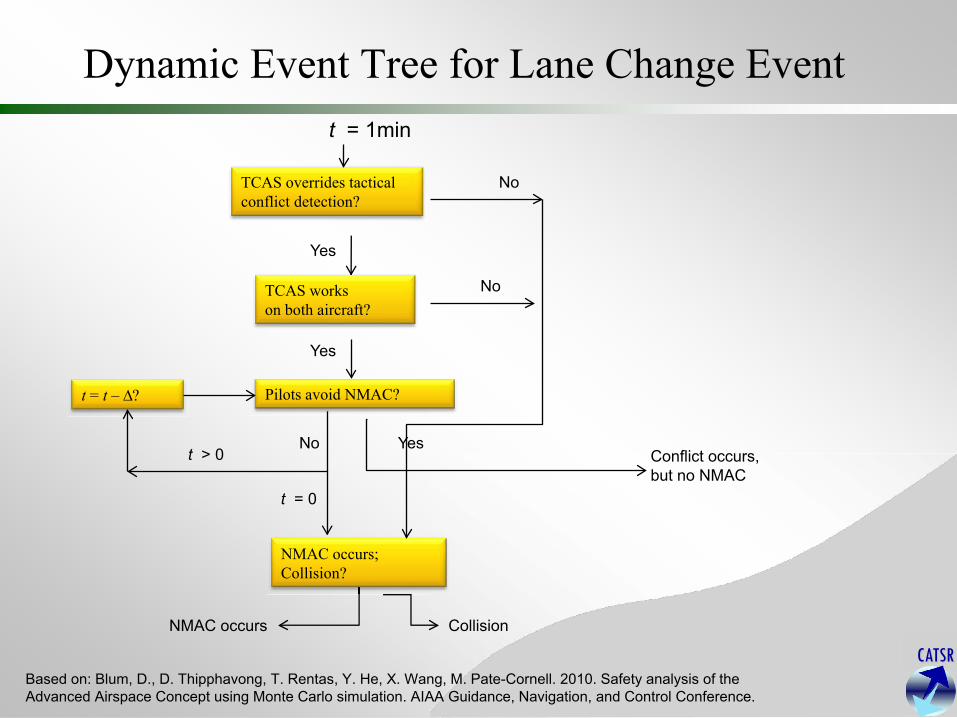
CATSR Based on: Blum, D., D. Thipphavong, T. Rentas, Y. He, X. Wang, M. Pate-Cornell. 2010. Safety analysis of the Advanced Airspace Concept using Monte Carlo simulation. AIAA Guidance, Navigation, and Control Conference.
TCAS overrides tactical conflict detection?
Pilots avoid NMAC?
Not > 0
t = t –
t = 0
Conflict occurs,but no NMAC
Yes
Yes
No
NMAC occurs Collision
TCAS workson both aircraft?
Yes
NMAC occurs;Collision?
No
t = 1min
Dynamic Event Tree for Lane Change Event
CATSR
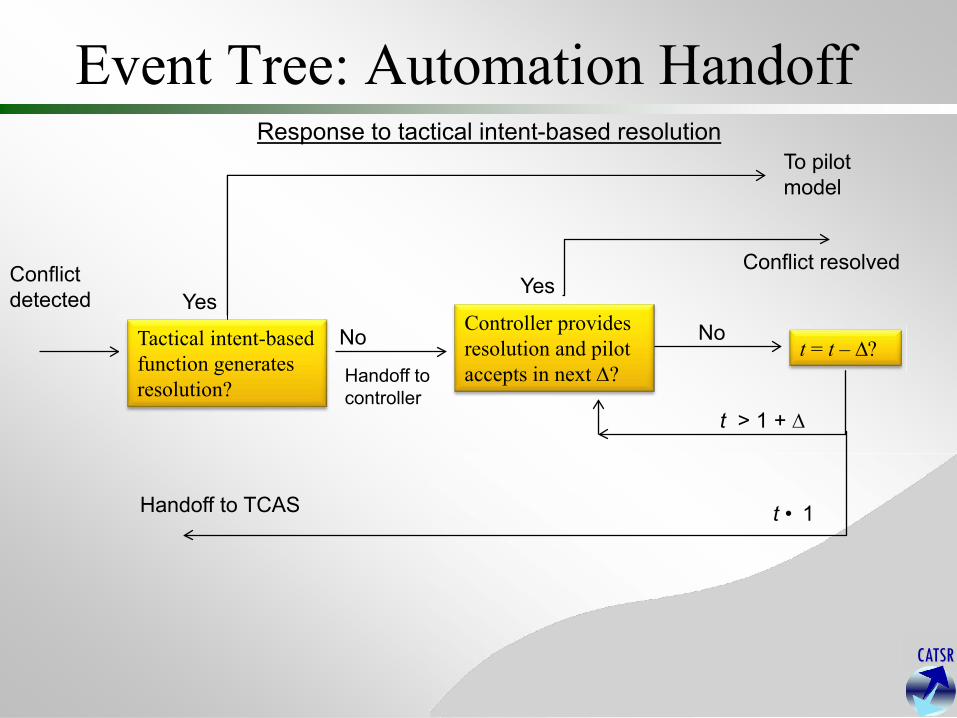
Event Tree: Automation Handoff
Controller providesresolution and pilot accepts in next ?
No
t > 1 +
t = t –
To pilotmodel
Yes
t • 1
Conflict detected
Response to tactical intent-based resolution
Tactical intent-based function generates resolution?
Handoff to controller
Handoff to TCAS
YesConflict resolved
No
CATSR
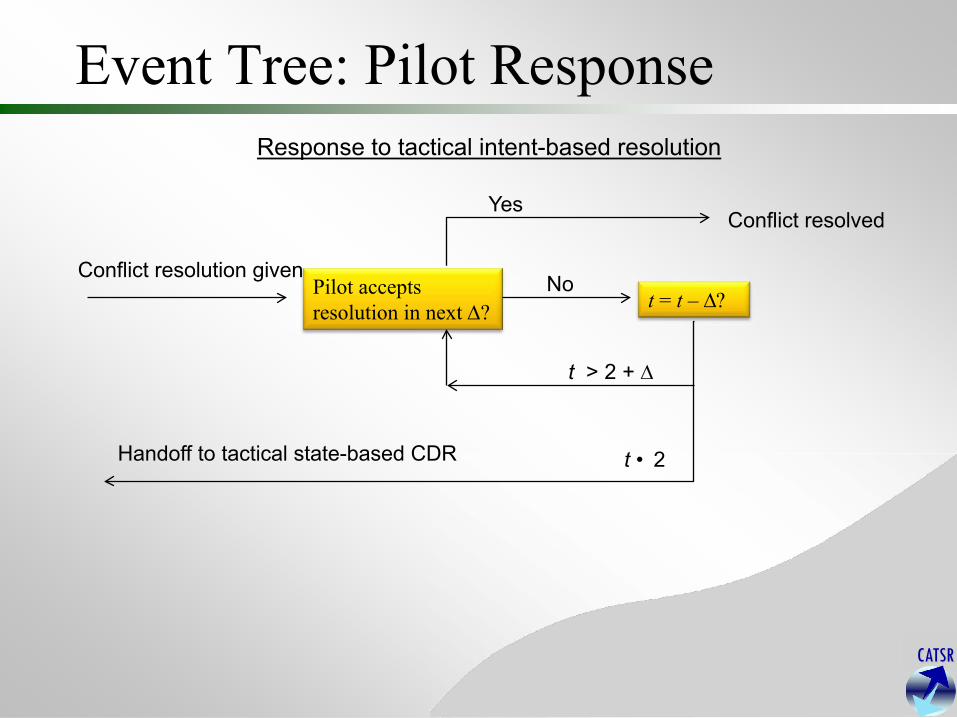
Event Tree: Pilot Response
Pilot acceptsresolution in next ?
No
t > 2 +
t = t –
Conflict resolvedYes
t • 2
Conflict resolution given
Handoff to tactical state-based CDR
Response to tactical intent-based resolution
CATSR
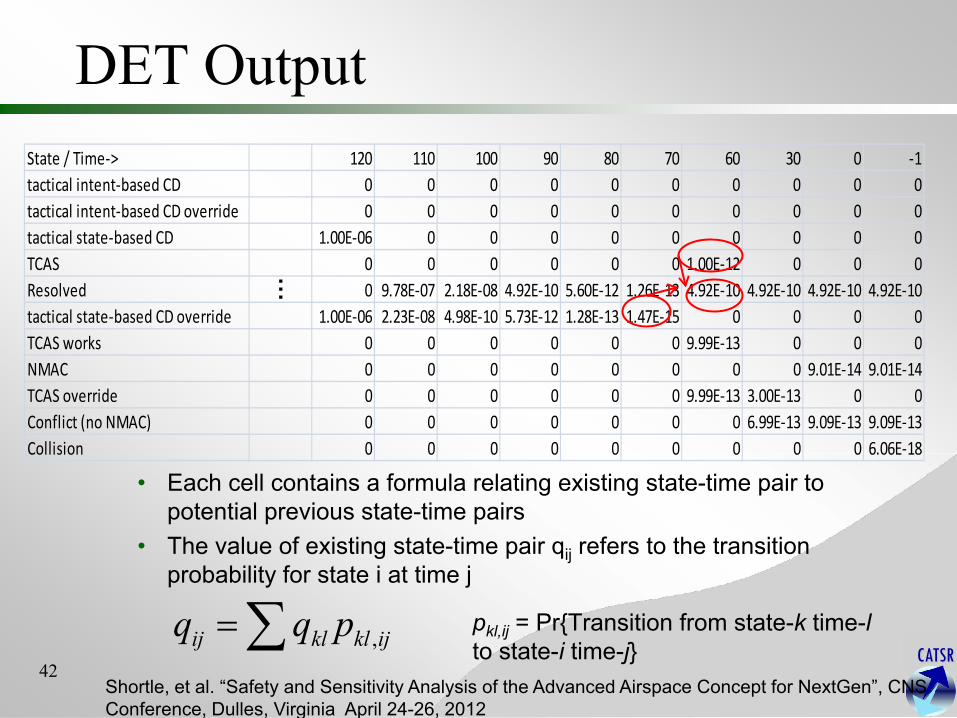
State / Time-> 120 110 100 90 80 70 60 30 0 -1tactical intent-based CD 0 0 0 0 0 0 0 0 0 0tactical intent-based CD override 0 0 0 0 0 0 0 0 0 0tactical state-based CD 1.00E-06 0 0 0 0 0 0 0 0 0TCAS 0 0 0 0 0 0 1.00E-12 0 0 0Resolved 0 9.78E-07 2.18E-08 4.92E-10 5.60E-12 1.26E-13 4.92E-10 4.92E-10 4.92E-10 4.92E-10tactical state-based CD override 1.00E-06 2.23E-08 4.98E-10 5.73E-12 1.28E-13 1.47E-15 0 0 0 0TCAS works 0 0 0 0 0 0 9.99E-13 0 0 0NMAC 0 0 0 0 0 0 0 0 9.01E-14 9.01E-14TCAS override 0 0 0 0 0 0 9.99E-13 3.00E-13 0 0Conflict (no NMAC) 0 0 0 0 0 0 0 6.99E-13 9.09E-13 9.09E-13Collision 0 0 0 0 0 0 0 0 0 6.06E-18
DET Output
42
,ij kl kl ijq q p pkl,ij = Pr{Transition from state-k time-l to state-i time-j}
• Each cell contains a formula relating existing state-time pair to potential previous state-time pairs
• The value of existing state-time pair qij refers to the transition probability for state i at time j
Shortle, et al. “Safety and Sensitivity Analysis of the Advanced Airspace Concept for NextGen”, CNS Conference, Dulles, Virginia April 24-26, 2012
. . .
CATSR
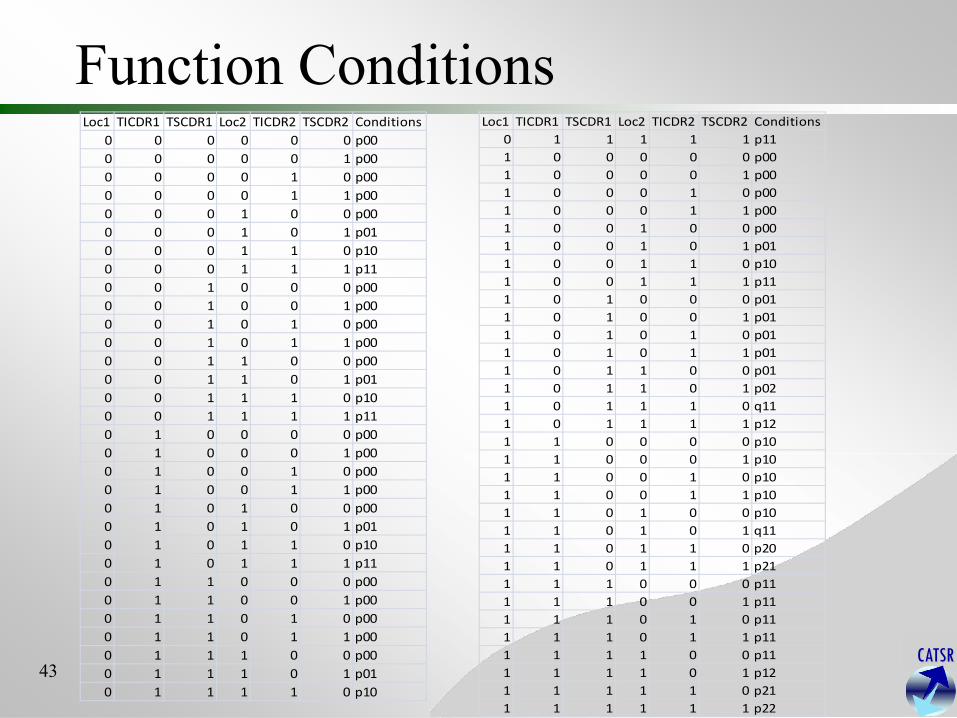
Function Conditions
43
Loc1 TICDR1 TSCDR1 Loc2 TICDR2 TSCDR2 Conditions0 0 0 0 0 0 p000 0 0 0 0 1 p000 0 0 0 1 0 p000 0 0 0 1 1 p000 0 0 1 0 0 p000 0 0 1 0 1 p010 0 0 1 1 0 p100 0 0 1 1 1 p110 0 1 0 0 0 p000 0 1 0 0 1 p000 0 1 0 1 0 p000 0 1 0 1 1 p000 0 1 1 0 0 p000 0 1 1 0 1 p010 0 1 1 1 0 p100 0 1 1 1 1 p110 1 0 0 0 0 p000 1 0 0 0 1 p000 1 0 0 1 0 p000 1 0 0 1 1 p000 1 0 1 0 0 p000 1 0 1 0 1 p010 1 0 1 1 0 p100 1 0 1 1 1 p110 1 1 0 0 0 p000 1 1 0 0 1 p000 1 1 0 1 0 p000 1 1 0 1 1 p000 1 1 1 0 0 p000 1 1 1 0 1 p010 1 1 1 1 0 p10
Loc1 TICDR1 TSCDR1 Loc2 TICDR2 TSCDR2 Conditions0 1 1 1 1 1 p111 0 0 0 0 0 p001 0 0 0 0 1 p001 0 0 0 1 0 p001 0 0 0 1 1 p001 0 0 1 0 0 p001 0 0 1 0 1 p011 0 0 1 1 0 p101 0 0 1 1 1 p111 0 1 0 0 0 p011 0 1 0 0 1 p011 0 1 0 1 0 p011 0 1 0 1 1 p011 0 1 1 0 0 p011 0 1 1 0 1 p021 0 1 1 1 0 q111 0 1 1 1 1 p121 1 0 0 0 0 p101 1 0 0 0 1 p101 1 0 0 1 0 p101 1 0 0 1 1 p101 1 0 1 0 0 p101 1 0 1 0 1 q111 1 0 1 1 0 p201 1 0 1 1 1 p211 1 1 0 0 0 p111 1 1 0 0 1 p111 1 1 0 1 0 p111 1 1 0 1 1 p111 1 1 1 0 0 p111 1 1 1 0 1 p121 1 1 1 1 0 p211 1 1 1 1 1 p22
CATSR
Sensitivity Analysis
44
CATSR
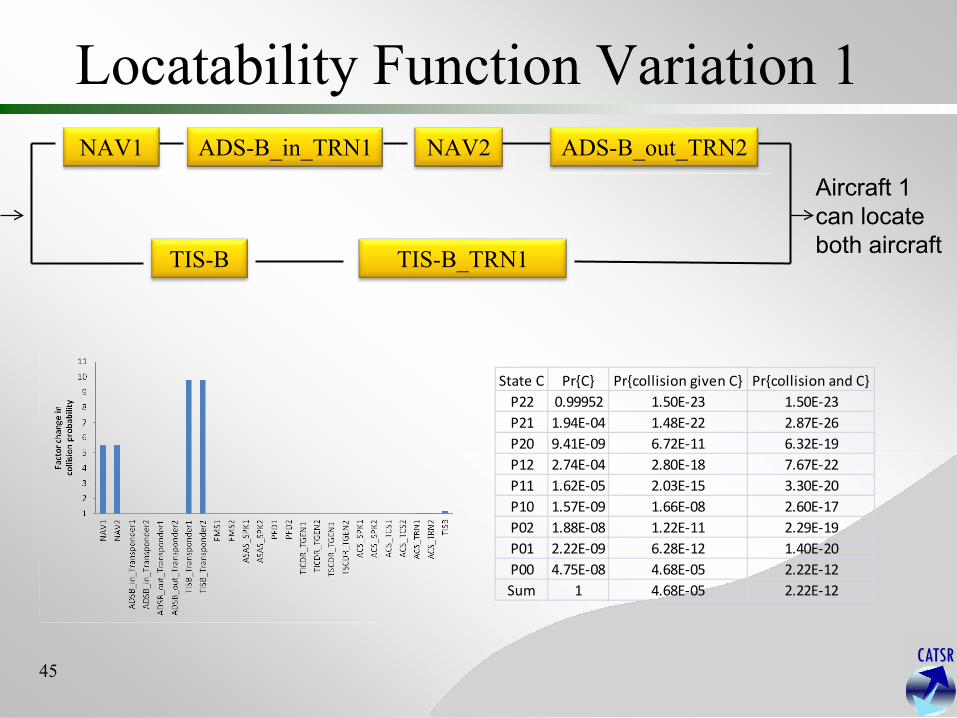
Locatability Function Variation 1
45
Aircraft 1 can locate both aircraft
ADS-B_in_TRN1 ADS-B_out_TRN2 NAV1 NAV2
TIS-B TIS-B_TRN1
State C Pr{C} Pr{collision given C} Pr{collision and C}P22 0.99952 1.50E-23 1.50E-23P21 1.94E-04 1.48E-22 2.87E-26P20 9.41E-09 6.72E-11 6.32E-19P12 2.74E-04 2.80E-18 7.67E-22P11 1.62E-05 2.03E-15 3.30E-20P10 1.57E-09 1.66E-08 2.60E-17P02 1.88E-08 1.22E-11 2.29E-19P01 2.22E-09 6.28E-12 1.40E-20P00 4.75E-08 4.68E-05 2.22E-12Sum 1 4.68E-05 2.22E-12
CATSR
Locatability Function Variation 2
46
Aircraft 1 can locate both aircraft
ADS-B_in_TRN1 ADS-B_out_TRN2 NAV1 NAV2
TIS-B ADS-B_in_TRN1 ACS_TRN1 ACS_TRN2
CATSR
Conflict Probability Estimation
47 R.A. Paielli, H. Erzberger: “Conflict probability estimation for free flight”, Journal ofGuidance, Control, and Dynamics, Vol 20(3), 588-596, 1997
Top Related
Copyright © 2022 FDOKUMEN

