







Bahasa
Halaman
Hukum

Impact of UK Low Carbon Energy Scenarios on Transmission Network Protection Policies
2019
Melake Kuflom
A thesis submitted to The University of Manchester for the degree of
Doctor of Philosophy
in the Faculty of Science and Engineering
School of Electrical and Electronic Engineering
2
Table of Contents
Table of Contents ......................................................................................................................................... 2
List of Figures ................................................................................................................................................. 6
List of Tables ................................................................................................................................................... 9
List of Abbreviations .................................................................................................................................. 10
Abstract ........................................................................................................................................................... 12
Declaration ..................................................................................................................................................... 13
Copyright Statement.................................................................................................................................. 14
Acknowledgment ......................................................................................................................................... 15
Chapter 1: Introduction............................................................................................................................. 16
1.1 Power System Protection and Control ................................................................... 16
1.1.1 Electrical power system fault types and causes ........................................................... 18
1.1.2 Development of protective relay technology ................................................................. 20
1.1.3 Role of protection and zone of protection ..................................................................... 23
1.1.4 Overview of GB transmission line protection system .................................................... 23
1.1.5 Impact of fault level reduction on protection schemes .................................................. 25
1.2 Project Aims & Objectives ..................................................................................... 25
1.3 Structure of the Thesis .......................................................................................... 27
Chapter 2: Review into fault level and protection system studies ....................................... 28
2.1. Motivation of fault level analysis ........................................................................... 28
2.2. Short circuit current analysis ................................................................................. 28
2.3. Review on relay scheme selection issues caused by inverter based sources ....... 35
2.4. Short circuit analysis from synchronous generator & inverter based sources ........ 36
2.5. Review on protection challenges in converter dominated power system ............... 44
2.6. Protection challenges with respect to the declining fault levels in the UK .............. 45
2.6.1 Fault level analysis for protection setting requirements ................................................ 51
2.6.2 Protection policy on performing short circuit levels ....................................................... 54
2.7. Physical relay injection and simulation test methods ............................................. 55
2.8. Summary .............................................................................................................. 59
3
Chapter 3: Sensitivity Analysis of Distance Protection Schemes ........................................ 60
3.1. Concept of distance protection scheme ................................................................ 60
1.1.1 Distance relay and zone setting calculations ................................................................ 60
1.1.2 Distance protection with signalling channels ................................................................ 62
3.2 Distance relay protection....................................................................................... 66
3.3 Fault types and calculations .................................................................................. 67
3.4 Relationship between relay voltage and source impedance ratio (SIR) ................. 72
3.5 Effect of remote fault in-feed current on distance zone setting .............................. 74
3.6 Effect of parallel line outage on distance protection and setting implications ......... 76
3.7 Three ended feeder protection (Teed feeder) and setting considerations .............. 77
3.8 Performance assessment on distance protection of transmission line ................... 80
3.9 The influence of resistive faults on reach setting of distance protection ................ 83
3.10 The effect of mutual coupling on the ground distance reach setting ...................... 85
3.11 Summary .............................................................................................................. 88
Chapter 4: Sensitivity Analysis of Differential Protection Schemes .................................... 89
4.1 Concept of line current differential protection ........................................................ 89
4.1.1 Mode of operation, selectivity, and application of current differential protection .......... 89
4.1.2 Basic principles of feeder line differential protection ..................................................... 90
4.1.3 Operating characteristics of differential feeder protection............................................. 91
4.1.4 Performance assessment on line current differential protection ................................... 94
4.2 Current Transformer (CT) ..................................................................................... 98
4.2.1 Dimensioning of CTs ................................................................................................... 101
4.3 Protection signalling and intertripping.................................................................. 104
4.4 Busbar protection ................................................................................................ 106
4.5 Feeder transformer protection ............................................................................. 108
4.5.1 Setting of transformer biased differential protection ................................................... 110
4.6 Generator protection ........................................................................................... 110
4.7 Summary ............................................................................................................ 112
Chapter 5: Sensitivity Analysis of Overcurrent Protection ................................................... 113
5.1 Review on sensitivity analysis of overcurrent protection ...................................... 113
5.2 Grading of overcurrent relays .............................................................................. 117
4
5.3 The role of backup overcurrent protection applied in National Grid ..................... 119
5.3.1 Backup overcurrent protection for outgoing feeders ................................................... 121
5.3.2 Backup earth fault (IDMT) protection for outgoing feeders ......................................... 125
5.4 Summary ............................................................................................................ 130
Chapter 6: Role of Backup Protection under Low Fault Level ........................................... 131
6.1 Role of back-up protection .................................................................................. 131
6.2 Limitation of current differential protection under low fault level .......................... 132
6.2.1 Feeder protection ........................................................................................................ 132
6.3 Limitation of distance protection under low fault level .......................................... 140
6.3.1 The Great Britain electricity transmission system protection ...................................... 140
6.4 Limitation of backup overcurrent protection under low fault level ......................... 158
6.4.1 Feeder backup overcurrent protection ........................................................................ 158
6.4.2 Feeder backup earth IDMT fault protection ................................................................ 163
6.5 Summary ............................................................................................................ 168
Chapter 7: Impact of low fault level & alternative protection strategy ............................. 169
7.1 Review into the impact of low fault levels on feeder protection ............................ 169
7.1.1 Unit differential protection ........................................................................................... 169
7.1.2 Non-unit distance protection ....................................................................................... 170
7.1.3 Backup overcurrent protection .................................................................................... 172
7.1.4 Backup earth fault (IDMT) protection .......................................................................... 174
7.2 Application of protection schemes under low fault levels ..................................... 175
7.2.1 Unit protection ............................................................................................................. 175
7.2.2 Non-unit distance protection ....................................................................................... 176
7.2.3 Backup overcurrent protection .................................................................................... 177
7.2.4 Backup earth fault protection ...................................................................................... 177
7.3 Implications for future protection strategy under low fault level............................ 177
7.3.1 Identifying alternative protection methodologies and their suitability for transmission
systems under the various future scenarios ............................................................................... 177
7.4 The impact of new technology on fault clearing times ......................................... 179
7.5 Summary ............................................................................................................ 180
Chapter 8: The Role & Impact of IEC 61850 protocols for Future Protection
Development .............................................................................................................................................. 181
8.1 Motivation of IEC 61850 Protection Development ............................................... 181
5
8.2 Implementation of IEC61850 IEDs ...................................................................... 181
8.2.1 Sampling values configuration (SV) ............................................................................ 182
8.2.2 Goose Message Configuration .................................................................................... 184
8.3 Implementation of IEC 61850 Process Bus Architecture for secondary system ... 185
8.3.1 The role of Merging Unit in digital substations ............................................................ 186
8.4 Summary ............................................................................................................ 187
Chapter 9: Conclusion and Future work ....................................................................................... 189
References .................................................................................................................................................. 191
List of Publication ..................................................................................................................................... 196
Appendix: 1 ................................................................................................................................................. 197
Appendix: 2 ................................................................................................................................................. 198
Word count: 53,317
6
List of Figures
Figure 1.1: Modern power station, Connah’s Quay, North Wales [4] ................................................... 16 Figure 1.2: Electrical fault types on feeder network .............................................................................. 18 Figure 1.3: Causes of electrical short-circuit [7] .................................................................................... 19 Figure 1.4: Relay development technology [23].................................................................................... 20 Figure 1.5: Types of overcurrent relays available in the protection and control room, UOM [24] ........ 21 Figure 1.6: Numerical distance relay operation for three phase fault ................................................... 22 Figure 1.7: Single line diagram and overlapping zone of protection ..................................................... 23 Figure 1.8: Modern protection & control system, Carrington, GB National Grid (2016) ....................... 24 Figure 1.9: Protection & automatic switching schedule [29] ................................................................. 24 Figure 2.1: Short circuit calculation method (DIgSILENT PowerFactory) [35] ...................................... 29 Figure 2.2: 400kV/132kV transformer feeder (SLD) with calculated nominal current [39] ................. 33 Figure 2.3: Short circuit current for 3 phase fault located on all busbar ............................................... 34 Figure 2.4: Modelling structure for protection devices [35] ................................................................... 35 Figure 2.5: Synchronous generator response to 3-phase fault current [7] [16] .................................... 37 Figure 2.6: EMT dynamic simulation where faults are presented at bus-3 ........................................... 39 Figure 2.7: Single line diagram with the relay on BB1 is set to protect the line .................................... 40 Figure 2.8: Variation of relay voltage and fault level with system source to line impedance ratio [24] 41 Figure 2.9: Wind farm generator fully rated converter control with EMT simulation ............................. 43 Figure 2.10: VSC HVDC system model ................................................................................................ 44 Figure 2.11: Dungeness–Ninfield, south east transmission network .................................................... 46 Figure 2.12: Average short circuit current based on UK regions (SOF 2015) [33] ............................... 46 Figure 2.13: Declining of short circuit levels 2025/26 vs 2015/16 (SOF 2015) [33].............................. 47 Figure 2.14: Speed of decentralisation vs level of decentralisation [19] ............................................... 48 Figure 2.15: Generation capacity mix scenarios for the south of England [19] .................................... 49 Figure 2.16: Transmission network model fed from generation mix ..................................................... 51 Figure 2.17: Fault level in south UK network under two degree scenarios .......................................... 51 Figure 2.18: Fault level in North Scotland network under Two Degree scenarios................................ 53 Figure 2.19: CMC-256-6-hardware -protection relay ............................................................................ 55 Figure 2.20: Conventional hard wired relay configuration with Omicron Test universe ....................... 56 Figure 2.21: Limitation of transmission line differential protection [63] ................................................. 57 Figure 2.22: Limitation of transmission line distance protection ........................................................... 57 Figure 2.23: Limitation of distance protection during weak in-feed sources ......................................... 58 Figure 3.1: Operating principle of distance relay protection [20] .......................................................... 60 Figure 3.2: Distance protection zone coordination [20] ........................................................................ 61 Figure 3.3: Quadrilateral characteristics of distance protection coordination [20] ................................ 62 Figure 3.4: Direct under-reach transfer tripping scheme with logic signal [4] ....................................... 63 Figure 3.5: Permissive under reach transfer tripping scheme .............................................................. 64 Figure 3.6: Permissive over reach transfer tripping scheme ................................................................ 64 Figure 3.7: Blocking distance scheme .................................................................................................. 65 Figure 3.8: Relay measure the faulted voltage and current and calculates the ratio............................ 66 Figure 3.9: Symmetrical component circuit for single, double and three phase faults [68] .................. 67 Figure 3.10: Fault location technique methods on transmission network ............................................. 70 Figure 3.11: Effect of source impedance ratio on relay voltage [4] ...................................................... 72 Figure 3.12: Power system arrangment ................................................................................................ 72 Figure 3.13: Under reaching problem caused by infeed current........................................................... 74 Figure 3.14: Over reachng problem caused by autage of local “line B”. .............................................. 75 Figure 3.15: Effect of parallel line service on relay setting ................................................................... 76 Figure 3.16: Measuring apparent impedance during teed feeder protection ........................................ 77 Figure 3.17: Effect of varying teed point for faults on 50% of line A-B ................................................. 78
7
Figure 3.18: Internal fault with current flowing out at one line end [4] .................................................. 79 Figure 3.19: Performance assessment of distance protection of transmission line .............................. 80 Figure 3.20: Shot test of relay characteristic responses during fault conditions ................................... 81 Figure 3.21: Z/t diagram for R-Y-B fault ................................................................................................ 82 Figure 3.22: Current and voltage test signal ......................................................................................... 82 Figure 3.23: Impact of resistive fault on impedance relay measurement [73] ...................................... 83 Figure 3.24: Characteristics of Mho type distance relay with polarised shape [4] ................................ 85 Figure 3.25: General example of parallel lines bused at both end terminals [20] ................................. 86 Figure 4.1: Unit protection scheme ....................................................................................................... 89 Figure 4.2: Operating principle of differential protection during internal faults ..................................... 90 Figure 4.3: Operating principle of differential protection during internal faults ..................................... 90 Figure 4.4: Operating characteristics of differential protection using alpha plane & % biased ............. 91 Figure 4.5: Feeder protection and setting consideration ...................................................................... 93 Figure 4.6: Performance assessment of differential protection of transmission line ............................ 95 Figure 4.7: Differential relay configuration test on phase-phase fault .................................................. 95 Figure 4.8: Non-operating region of differential protection characteristics ........................................... 96 Figure 4.9: Operating region of differential protection characteristics .................................................. 97 Figure 4.10: Multiple differential operating characteristic tes results .................................................... 98 Figure 4.11: Actual arrangement of CT into 400 kV transmission system ............................................ 98 Figure 4.12: Carrington 400 kV substation operated by National Grid ................................................. 99 Figure 4.13: Protection CT magnetization curve with CT knee-point ................................................. 100 Figure 4.14: CT dimensioning on a single line diagram ...................................................................... 102 Figure 4.15: Differntial protection scheme using optical pilots ............................................................ 105 Figure 4.16: Busbar sizing calculation (parameters are taken from National Grid data) [87] ............. 106 Figure 4.17: Mesh-corner protection [4] .............................................................................................. 108 Figure 4.18: Three phase transformer rated 240MVA, 275/132kV (Daines substation)..................... 109 Figure 4.19: Typical transformer feeder line protection ...................................................................... 109 Figure 4.20: High impedance differential protection relay and requirements ..................................... 111 Figure 5.1: Operating characteristics of inverse definite minimum time overcurrent relay [95] .......... 113 Figure 5.2: Types of inverse time overcurrent protection ................................................................... 114 Figure 5.3: Operating characteristic of long time inverse time vs standard inverse ........................... 115 Figure 5.4: Effects of varying TMS value on the operating times of standard inverse ....................... 116 Figure 5.5: Effects of varying PSM value on the operating times of standard inverse ....................... 117 Figure 5.6: Grading coordination arrangement between relay-relay .................................................. 118 Figure 5.7: The role of earth fault and overcurrent protection [96] ..................................................... 119 Figure 5.8: Protection and control system in Carrington substaion (site visit June 2017) .................. 120 Figure 5.9: Positive sequence network (source impedance value) .................................................... 121 Figure 5.10: Three phase short circuit current at BB2 ........................................................................ 122 Figure 5.11: Overcurrent relay response for 3-phase remote end fault .............................................. 124 Figure 5.12: Sequence network for a earth fault at the remote end of the feeder .............................. 126 Figure 5.13: Operation of earth fault protection for earth fault at the remote end .............................. 128 Figure 6.1: The role of backup protection, local vs remote backup .................................................... 131 Figure 6.2: Evaluation of bias and fault current at midpoint of 400kV system [29] ............................. 133 Figure 6.3: Unit protection under low fault level for three phase fault ................................................ 134 Figure 6.4: Relay operates for 3-phase fault (case 1) ........................................................................ 135 Figure 6.5: Relay operates for 3-phase fault with Rf=100Ω (case 1) ................................................. 136 Figure 6.6: Relay operates for 3-phase fault (case 2) ........................................................................ 136 Figure 6.7: Relay operates for 3-phase fault with Rf=100Ω (case 2) ................................................. 137 Figure 6.8: Operating characteristic of current differential relay using biased setting ....................... 138 Figure 6.9: Relay response for 3-phase fault when the load current is 4kA. ...................................... 138 Figure 6.10: Relay response for 3-phase fault on 30% and 50% of the protected line ...................... 139 Figure 6.11: Performance analysis of distance relay under strong infeed source .............................. 141
8
Figure 6.12: Protection zone coordination (primary impedance) ........................................................ 142 Figure 6.13: Relay response to 3Ø fault on 5% and 50% of the protected line .................................. 143 Figure 6.14: Performance analysis of distance relay under low fault level (south east England) ...... 146 Figure 6.15: Performance analysis of distance relay under reduced fault level (England to Wales) . 148 Figure 6.16: Performance assessment of distance relay under reduced fault level (England) .......... 150 Figure 6.17: 100% penetration level from zero carbon operation ....................................................... 152 Figure 6.18: Infeed source added between the relay and fault location ............................................. 153 Figure 6.19: Throttling effect on the reach setting of distance protection ........................................... 153 Figure 6.20: Situation where a fault occurs on different line length with relay on feeder A. ............... 155 Figure 6.21: Impact of weak infeed source on operating performance of distance scheme .............. 157 Figure 6.22: Limitation of non-unit protection on three ended sources .............................................. 157 Figure 6.23: Network model for 400kV backup overcurrent protection study ..................................... 158 Figure 6.24: Network model for 275kV backup overcurrent protection study ..................................... 160 Figure 6.25: Network model for 132kV backup overcurrent protection study ..................................... 161 Figure 6.26: Network model for 400kV outgoing feeder earth fault protection ................................... 163 Figure 6.27: Network model for 275kV outgoing feeder earth fault protection ................................... 164 Figure 6.28: Network model for 132kV outgoing feeder earth fault protection ................................... 166 Figure 8.1: Complete implementation of IEC61850 IED relays .......................................................... 182 Figure 8.2: Sampled values configuration with the test results being passed .................................... 183 Figure 8.3: Wireshark screenshot of sampled value configuration ..................................................... 184 Figure 8.4: Distance setting and GOOSE subscribing ........................................................................ 184 Figure 8.5: Architecture of IEC 61850 substation automation system ................................................ 185 Figure 8.6: Merging unit interoperability test setup from different manufacturers .............................. 186 Figure 8.7: Decoupling primary and secondary plant with merging units ........................................... 187
9
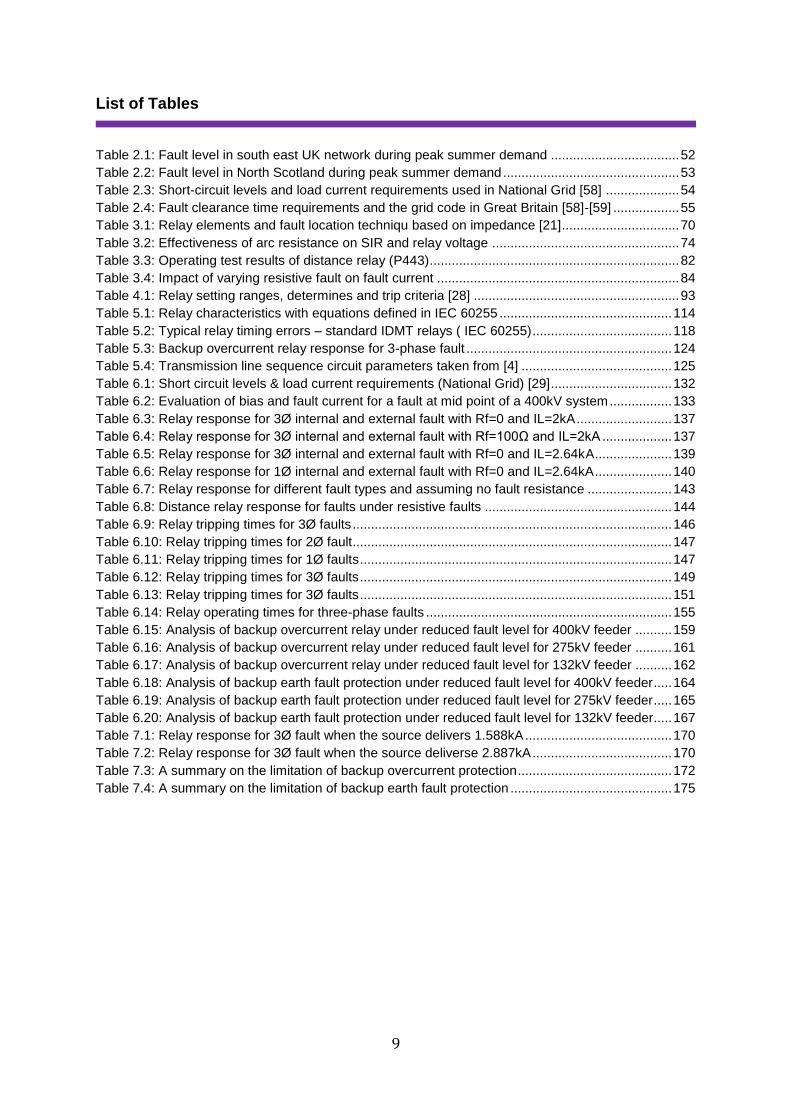
List of Tables
Table 2.1: Fault level in south east UK network during peak summer demand ................................... 52 Table 2.2: Fault level in North Scotland during peak summer demand ................................................ 53 Table 2.3: Short-circuit levels and load current requirements used in National Grid [58] .................... 54 Table 2.4: Fault clearance time requirements and the grid code in Great Britain [58]-[59] .................. 55
Table 3.1: Relay elements and fault location techniqu based on impedance [21]................................ 70 Table 3.2: Effectiveness of arc resistance on SIR and relay voltage ................................................... 74 Table 3.3: Operating test results of distance relay (P443) .................................................................... 82 Table 3.4: Impact of varying resistive fault on fault current .................................................................. 84 Table 4.1: Relay setting ranges, determines and trip criteria [28] ........................................................ 93
Table 5.1: Relay characteristics with equations defined in IEC 60255 ............................................... 114 Table 5.2: Typical relay timing errors – standard IDMT relays ( IEC 60255) ...................................... 118 Table 5.3: Backup overcurrent relay response for 3-phase fault ........................................................ 124 Table 5.4: Transmission line sequence circuit parameters taken from [4] ......................................... 125
Table 6.1: Short circuit levels & load current requirements (National Grid) [29] ................................. 132 Table 6.2: Evaluation of bias and fault current for a fault at mid point of a 400kV system ................. 133 Table 6.3: Relay response for 3Ø internal and external fault with Rf=0 and IL=2kA .......................... 137 Table 6.4: Relay response for 3Ø internal and external fault with Rf=100Ω and IL=2kA ................... 137 Table 6.5: Relay response for 3Ø internal and external fault with Rf=0 and IL=2.64kA ..................... 139 Table 6.6: Relay response for 1Ø internal and external fault with Rf=0 and IL=2.64kA ..................... 140 Table 6.7: Relay response for different fault types and assuming no fault resistance ....................... 143 Table 6.8: Distance relay response for faults under resistive faults ................................................... 144 Table 6.9: Relay tripping times for 3Ø faults ....................................................................................... 146 Table 6.10: Relay tripping times for 2Ø fault....................................................................................... 147 Table 6.11: Relay tripping times for 1Ø faults ..................................................................................... 147 Table 6.12: Relay tripping times for 3Ø faults ..................................................................................... 149 Table 6.13: Relay tripping times for 3Ø faults ..................................................................................... 151 Table 6.14: Relay operating times for three-phase faults ................................................................... 155 Table 6.15: Analysis of backup overcurrent relay under reduced fault level for 400kV feeder .......... 159 Table 6.16: Analysis of backup overcurrent relay under reduced fault level for 275kV feeder .......... 161 Table 6.17: Analysis of backup overcurrent relay under reduced fault level for 132kV feeder .......... 162 Table 6.18: Analysis of backup earth fault protection under reduced fault level for 400kV feeder..... 164 Table 6.19: Analysis of backup earth fault protection under reduced fault level for 275kV feeder..... 165 Table 6.20: Analysis of backup earth fault protection under reduced fault level for 132kV feeder..... 167
Table 7.1: Relay response for 3Ø fault when the source delivers 1.588kA ........................................ 170 Table 7.2: Relay response for 3Ø fault when the source deliverse 2.887kA ...................................... 170 Table 7.3: A summary on the limitation of backup overcurrent protection .......................................... 172 Table 7.4: A summary on the limitation of backup earth fault protection ............................................ 175
10
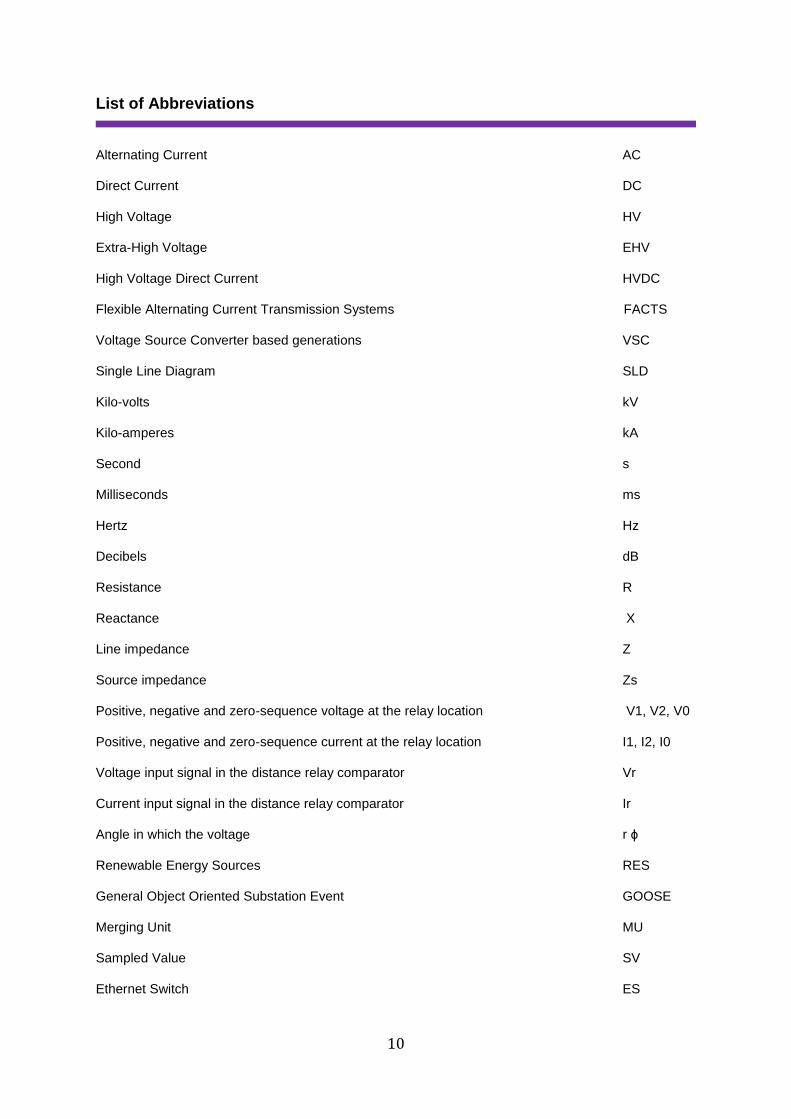
List of Abbreviations
Alternating Current AC
Direct Current DC
High Voltage HV
Extra-High Voltage EHV
High Voltage Direct Current HVDC
Flexible Alternating Current Transmission Systems FACTS
Voltage Source Converter based generations VSC
Single Line Diagram SLD
Kilo-volts kV
Kilo-amperes kA
Second s
Milliseconds ms
Hertz Hz
Decibels dB
Resistance R
Reactance X
Line impedance Z
Source impedance Zs
Positive, negative and zero-sequence voltage at the relay location V1, V2, V0
Positive, negative and zero-sequence current at the relay location I1, I2, I0
Voltage input signal in the distance relay comparator Vr
Current input signal in the distance relay comparator Ir
Angle in which the voltage r ϕ
Renewable Energy Sources RES
General Object Oriented Substation Event GOOSE
Merging Unit MU
Sampled Value SV
Ethernet Switch ES
11
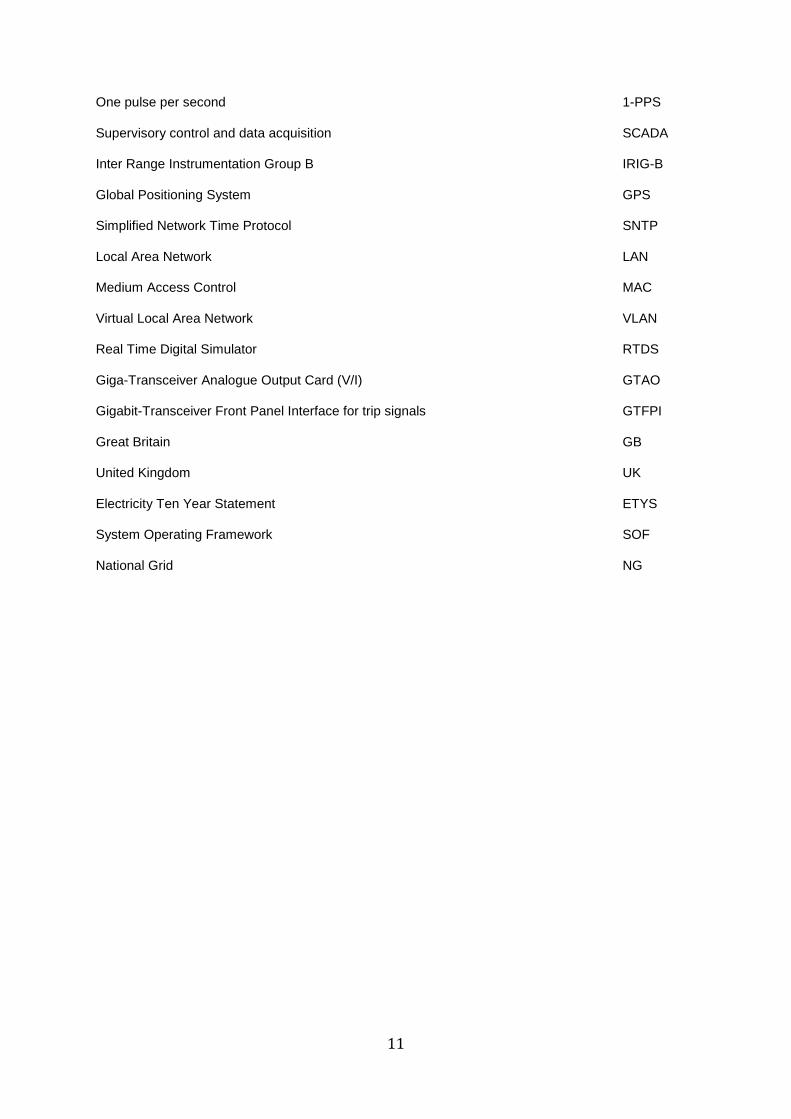
One pulse per second 1-PPS
Supervisory control and data acquisition SCADA
Inter Range Instrumentation Group B IRIG-B
Global Positioning System GPS
Simplified Network Time Protocol SNTP
Local Area Network LAN
Medium Access Control MAC
Virtual Local Area Network VLAN
Real Time Digital Simulator RTDS
Giga-Transceiver Analogue Output Card (V/I) GTAO
Gigabit-Transceiver Front Panel Interface for trip signals GTFPI
Great Britain GB
United Kingdom UK
Electricity Ten Year Statement ETYS
System Operating Framework SOF
National Grid NG

12
Abstract
Name of University: The University of Manchester
Candidate Name: Melake Kuflom
Degree Title: The Degree of Doctor of Philosophy
Title: Impact of UK Low Carbon Energy Scenarios on Transmission Network Protection Policies Date: June 2019
Traditional UK power stations operate using synchronous generators which ensures they deliver a
high fault level, are the main source of system inertia and provides the control of the power frequency.
Recently, the percentage of demand satisfied by large synchronous generators has significantly
reduced, as more wind farms, photo voltaic sources, power electronic converters, storage and HVDC
links are integrated within the power system. Increasing deployment of converter based generation
within the distribution networks and the decline in large scale traditional synchronous power
generation at transmission level results in a fault level reduction across Great Britain network and
severe implications for the effectiveness of existing protection relaying performance. The reduction in
inertia also poses a challenge for power system stabilises, especially following a disturbance such as
the tripping of a large synchronous generation or a major interconnector to a region with synchronous
generation.
This project studies the behaviour of existing protection relaying scheme as related to the future
power system protection strategies of Great Britain and to establish how adaptive the relay can be to
the future generation mix and changes in summer minimum demand. This project also presents the
protection setting strategy used on the existing GB transmission network and to assess the limitation
of exiting protection schemes as related to the future protection setting strategy when the source
delivers a fault level that changes from a high level (strong source) to a low level (weak source).
From the research outcome, the performance of overcurrent protection is the most affected scheme
whereas unit protection is the least affected scheme during low fault level conditions. The proposed
alternative transmission protection strategies are configuring distance protection with weak infeed
logic, overcurrent protection with voltage restraint, and deploy two unit protections as main 1 & 2 with
distance protection as backup in condition when distance protection is not suitable. Other
recommended scheme includes unblocking distance schemes with weak infeed, wide area protection
and travelling wave based protection.
This thesis introduces briefly the aim & scope of the project, and then reviews the key papers in the
field as well as existing protection schemes as used in the GB transmission system. Following this, a
review into fault level, sensitivity of protection schemes, and challenges as related to the future
scenarios are discussed. The impact of low fault level on existing protection schemes, alternative
protection strategies, overview on the role & impact of IEC61850 protocol for future protection
development, and conclusions are provided at the end.
13
Declaration
No portion of the work referred to in the thesis has been submitted in support of an application for
another degree or qualification of this or any other university or other institute of learning.
14
Copyright Statement
i. The author of this thesis (including any appendices and/or schedules to this thesis) owns certain
copyright or related rights in it (the “Copyright”) and s/he has given The University of Manchester
certain rights to use such Copyright, including for administrative purposes.
ii. Copies of this thesis, either in full or in extracts and whether in hard or electronic copy, may be
made only in accordance with the Copyright, Designs and Patents Act 1988 (as amended) and
regulations issued under it or, where appropriate, in accordance with licensing agreements which the
University has from time to time. This page must form part of any such copies made.
iii. The ownership of certain Copyright, patents, designs, trademarks and other intellectual property
(the “Intellectual Property”) and any reproductions of copyright works in the thesis, for example graphs
and tables (“Reproductions”), which may be described in this thesis, may not be owned by the author
and may be owned by third parties. Such Intellectual Property and Reproductions cannot and must
not be made available for use without the prior written permission of the owner(s) of the relevant
Intellectual Property and/or Reproductions.
iv. Further information on the conditions under which disclosure, publication and commercialisation of
this thesis, the Copyright and any Intellectual Property and/or Reproductions described in it may take
place is available in the University IP Policy (see
http://documents.manchester.ac.uk/DocuInfo.aspx?DocID=24420), in any relevant Thesis restriction
declarations deposited in the University Library, The University Library’s regulations (see
https://www.library.manchester.ac.uk/aboutus/regulations) and in The University’s policy on
Presentation of Theses.
15
Acknowledgment
This project research is made in collaboration with the School of Electrical and Electronic
Engineering, the EPSRC Centre for Doctoral Training in Power Networks, University of Manchester,
and National Grid.
Firstly, I would like to express my sincere gratitude to my supervisor, Professor Peter Crossley. His
invaluable guidance, encouragement, constructive feedback, positive attitude and recommendations
to available technology throughout my research were countless. His wide knowledge, great
experience, logical way of thinking and networks he linked has been of great value for me. It would be
impossible to finish this report without his supervision and I wish him a joyful life.
I would also like to thank my co-supervisor, Dr Victor Levi and Dr Mark Osborne from National Grid,
for their guidance, constructive advices and suggestions.
Many thanks to the CDT administrative managers, staff members of University of Manchester and
those who have encouraged me during my studies.
Last but not least, sincere thanks to my beloved parents, my lovely wife and little daughter, and my
siblings for their moral support and encouragements throughout this work.
16
Chapter 1: Introduction
1.1 Power System Protection and Control
ower system engineering deals with the generation, transmission and distribution of electrical
energy [1]. At the end of 19th century, UK’s first AC coal-fired power station (i.e. 10kV 800kW)
was built in Deptford, south-east London [2]. Rapid developments of technology and an improvement
in quality of life have resulted in a massive increase in power demand over the 20th century. Building
power stations, operating at higher voltage is one possible solution to satisfy the maximum power
demand and to enhance the power transfer capabilities of transmission feeders [3]. As a part of this
process, and as an example of development, a 400kV grid system was implemented in the UK in the
1960’s.
Power system protection is a sub-division of power system engineering involved with electrical faults
[4]-[5]. The main concern of electrical network is to maintain continuity of supply, especially when
electrical faults or random failure of devices have occurred. This is because the consequence of
power outage and/or blackout is significant. In history, the largest blackout occurred in India in July
2012, and this affected about 630 million people [6]. Therefore, in transmission system protection,
technical aspects of design are crucial in related to health and safety. If protection fails, a person
could be killed or injured and financial cost for the Grid Company is very high. In addition, mal-
operation of protection causes reputational damage to a company. Figure 1.1 shows a typical
1.42GW gas fired modern power station which was commissioned in North Wales in 1996 [4].
Figure 1.1: Modern power station, Connah’s Quay, North Wales [4]
P
17
The role of power system protection is to minimize the damage caused by electrical faults, maintain
security of supply and ensure the safety of personnel [7]. Transmission lines in the UK are often lightly
loaded for most of the year, this means they are not thermally stressed and have been continued to
operate in a reliable and stable manner for 50 to 60 years. In addition to this, traditional power system
generations have been providing a strong fault level and are capable of contributing sufficient short
circuit current during fault conditions [8] [9] and [10]. This enables the protective devices to provide
correct operation during fault conditions.
However, due to the move towards low carbon technology [11] [12] [13], many existing UK
generations are recently being shut down, including Cottam, Aberthaw and Fiddlers Ferry coal fired
power stations, whereas Dungeness power station is also expected to close down by 2027/28 or
earlier. Hence, future UK generation to demand is expected to be satisfied by green energy sources
such as nuclear power, hydro, biomass and renewables [14] [15]. From protection prospective, if the
closure of coal fired power station is replaced with nuclear power, the fault level remains high. In
comparison, the challenge is use of renewables interfaced to power grid by power electronics which
resulted a substantial fault level reduction, difference in short circuit characteristics and their capacity
ratings [16] [17].
As part of this, the research is focused on the impact of UK low carbon energy scenarios on
transmission network protection policies. A recent report from National Grid’s System Operating
Framework and Future Energy Scenario documents [18]-[19] identified the low fault levels and
reduction in system synchronous inertia as problem for the future. These issues are associated with
increasing changes of equipment connected to the transmission network and the issues faced by the
existing protection control systems due to these changes. The dynamic characteristic response of
static power electronic of synchronous generators is starting to show a profound impact on the
continuity and reliability of power systems with high penetration of renewable generation levels.
The scope and key study area of concern in particular is for the reliable & secure operation of
protection relays including:
The impact of low fault currents on the operation of existing protection systems,
The impact of green or low carbon energy on the protection & control systems & practice
Alternative protection strategy as related to the future energy scenarios
Note, reliability is associated with dependability and security [20]. Dependability depends on which
relay can operate as expected, whereas security is a measure of a relay that will not operate if not
required. Selectivity or discrimination is dealt with by tripping the correct circuit breaker [20]-[21]. This
includes whether the operation is required to isolate the fault or not. Relay operating speed is critical
in a protection scheme, since it is necessary to detect a fault and isolate the faulted system as fast as
possible and avoided the possibilities of a wide area disturbance or a power system collapse.
The main contribution of this research is highlighted in chapter 7 and 8, where the limitations of exiting
protections are identified and alternative protection strategies are also proposed. For example, the
18
performance of overcurrent protection (i.e. accuracy relay reach and operating time) under reduced
fault level is the most affected scheme whereas unit protection is the least. The solutions being
considered as an alternative transmission network protection strategy includes configuring distance
protection with weak infeed logic to cope with extremely weak infeed conditions and configuring
overcurrent protection with voltage restraint control system to speed up the operating time. Utilising
two unit differential protection as first main with distance protection as backup in condition when
distance protection is not suitable is also highly considered in this thesis. Other recommended
alternative protection schemes includes unblocking distance schemes with weak infeed, wide area
protection and travelling wave based protection.
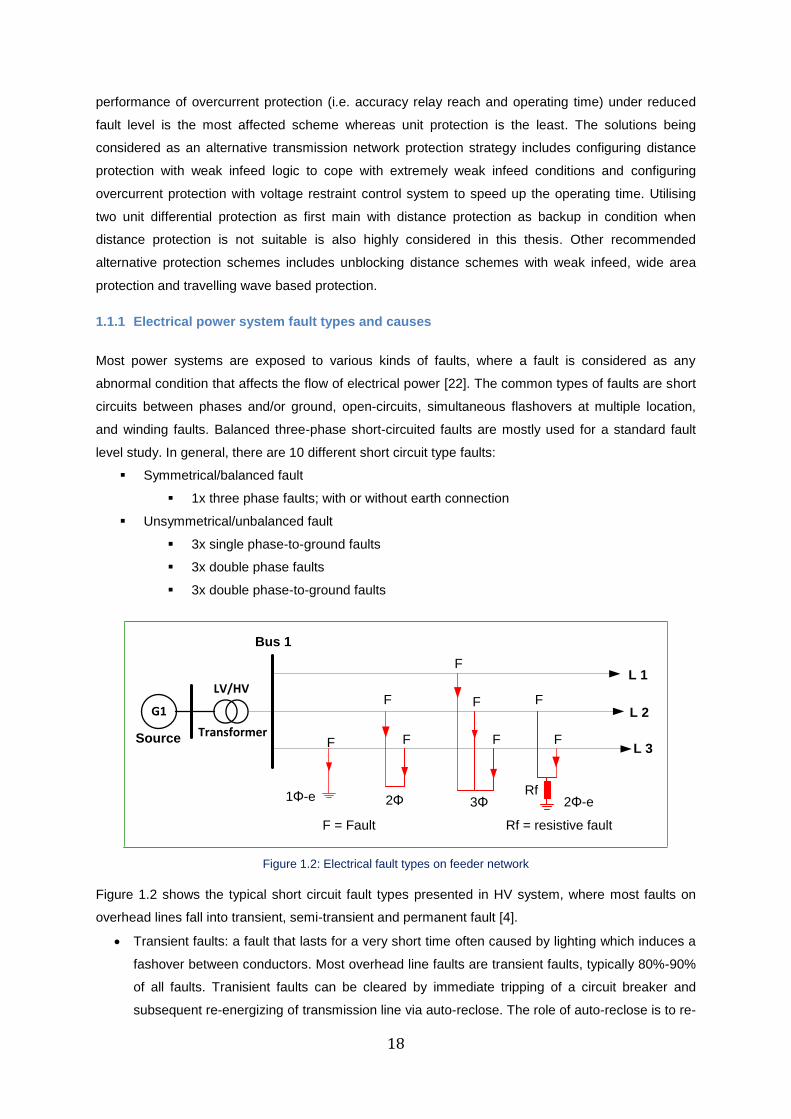
1.1.1 Electrical power system fault types and causes
Most power systems are exposed to various kinds of faults, where a fault is considered as any
abnormal condition that affects the flow of electrical power [22]. The common types of faults are short
circuits between phases and/or ground, open-circuits, simultaneous flashovers at multiple location,
and winding faults. Balanced three-phase short-circuited faults are mostly used for a standard fault
level study. In general, there are 10 different short circuit type faults:
Symmetrical/balanced fault
1x three phase faults; with or without earth connection
Unsymmetrical/unbalanced fault
3x single phase-to-ground faults
3x double phase faults
3x double phase-to-ground faults
Source
G1
Transformer
LV/HV
1Φ-e
F
2Φ
F
F
F
F
F
3Φ 2Φ-e
F
F
F = Fault Rf = resistive fault
Rf
L 1
L 2
L 3
Bus 1
Figure 1.2: Electrical fault types on feeder network
Figure 1.2 shows the typical short circuit fault types presented in HV system, where most faults on
overhead lines fall into transient, semi-transient and permanent fault [4].
Transient faults: a fault that lasts for a very short time often caused by lighting which induces a
fashover between conductors. Most overhead line faults are transient faults, typically 80%-90%
of all faults. Tranisient faults can be cleared by immediate tripping of a circuit breaker and
subsequent re-energizing of transmission line via auto-reclose. The role of auto-reclose is to re-
19
energise and restoration of supply the line after the fault trip and this allows a successful re-
energisation of the line [4].
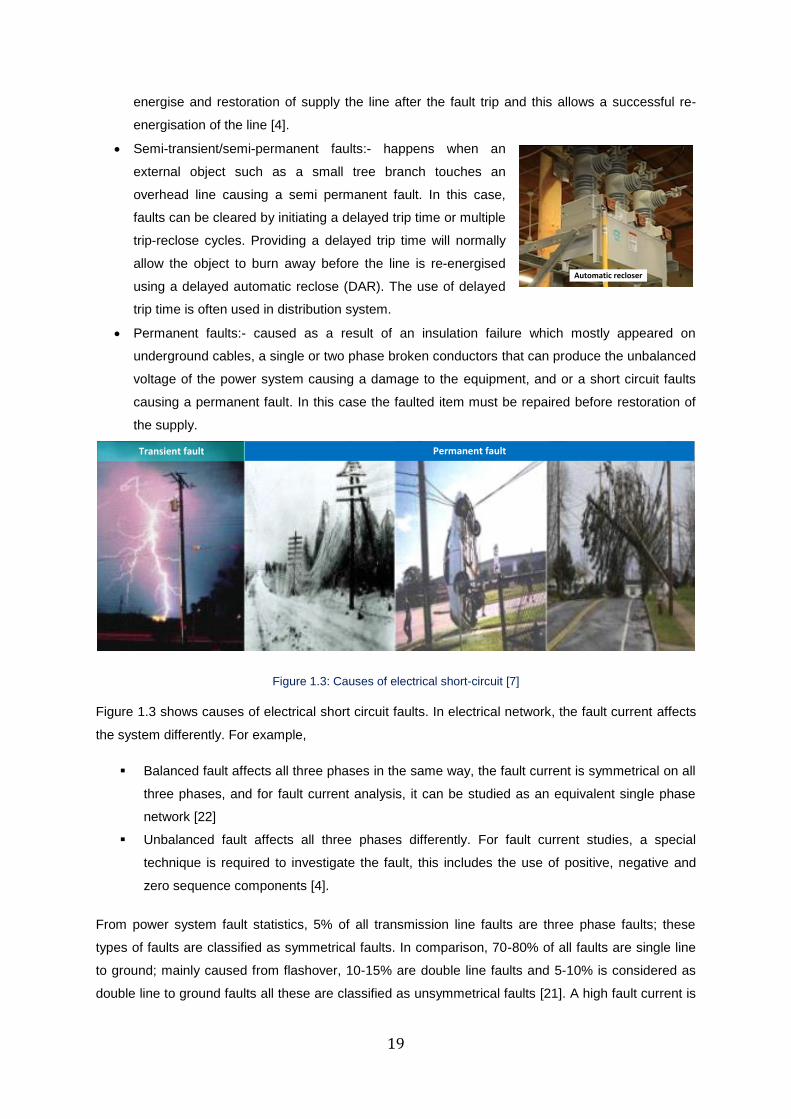
Semi-transient/semi-permanent faults:- happens when an
external object such as a small tree branch touches an
overhead line causing a semi permanent fault. In this case,
faults can be cleared by initiating a delayed trip time or multiple
trip-reclose cycles. Providing a delayed trip time will normally
allow the object to burn away before the line is re-energised
using a delayed automatic reclose (DAR). The use of delayed
trip time is often used in distribution system.
Permanent faults:- caused as a result of an insulation failure which mostly appeared on
underground cables, a single or two phase broken conductors that can produce the unbalanced
voltage of the power system causing a damage to the equipment, and or a short circuit faults
causing a permanent fault. In this case the faulted item must be repaired before restoration of
the supply.
Transient fault Permanent fault
Figure 1.3: Causes of electrical short-circuit [7]
Figure 1.3 shows causes of electrical short circuit faults. In electrical network, the fault current affects
the system differently. For example,
Balanced fault affects all three phases in the same way, the fault current is symmetrical on all
three phases, and for fault current analysis, it can be studied as an equivalent single phase
network [22]
Unbalanced fault affects all three phases differently. For fault current studies, a special
technique is required to investigate the fault, this includes the use of positive, negative and
zero sequence components [4].
From power system fault statistics, 5% of all transmission line faults are three phase faults; these
types of faults are classified as symmetrical faults. In comparison, 70-80% of all faults are single line
to ground; mainly caused from flashover, 10-15% are double line faults and 5-10% is considered as
double line to ground faults all these are classified as unsymmetrical faults [21]. A high fault current is
Automatic recloser
20
the most severe type of fault and therefore a balanced three phase solid fault is the most severe,
whereas, a single line to ground fault is less severe, but if the fault is resistive or the network has
impedance in the grounding.
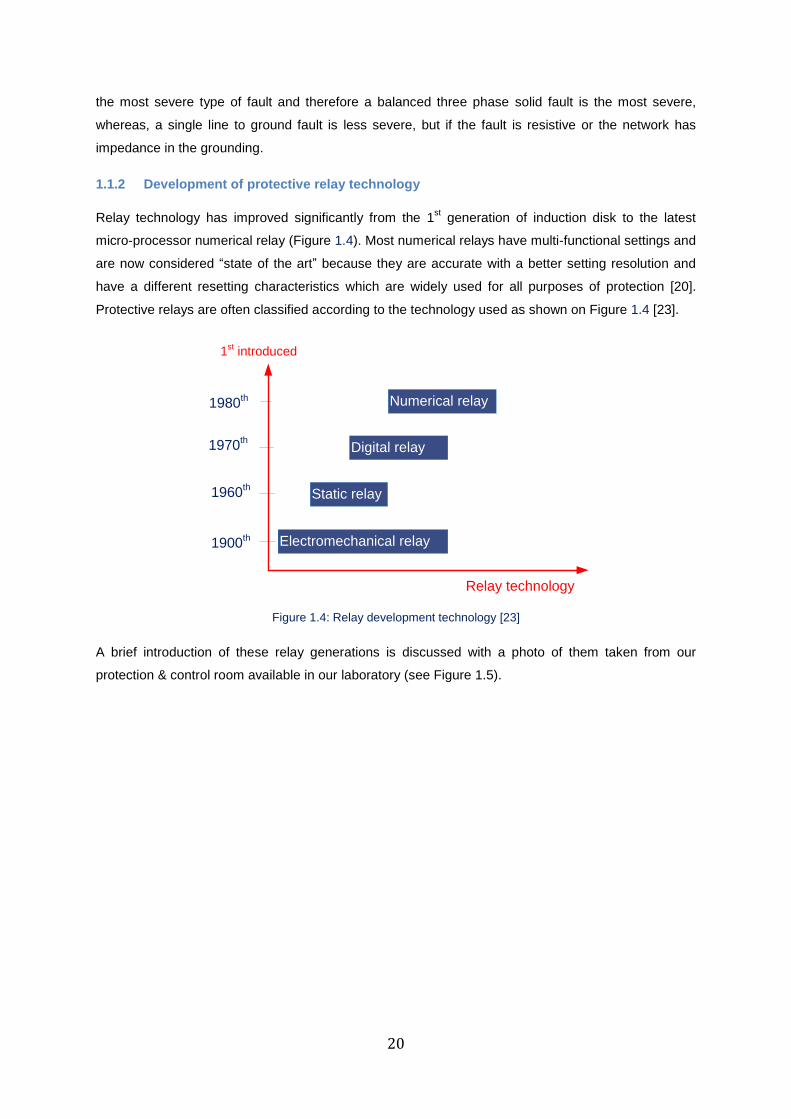
1.1.2 Development of protective relay technology
Relay technology has improved significantly from the 1st generation of induction disk to the latest
micro-processor numerical relay (Figure 1.4). Most numerical relays have multi-functional settings and
are now considered “state of the art” because they are accurate with a better setting resolution and
have a different resetting characteristics which are widely used for all purposes of protection [20].
Protective relays are often classified according to the technology used as shown on Figure 1.4 [23].
1st introduced
1900th
1960th
1970th
1980th
Electromechanical relay
Static relay
Digital relay
Numerical relay
Relay technology
Figure 1.4: Relay development technology [23]
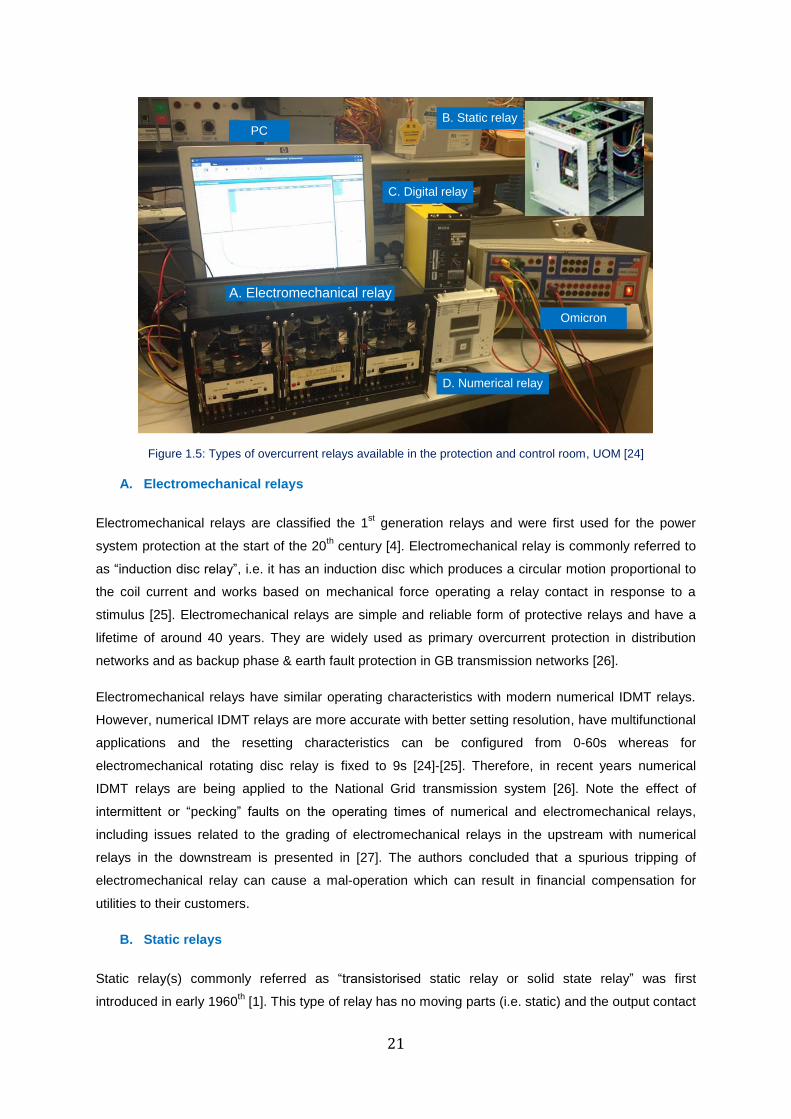
A brief introduction of these relay generations is discussed with a photo of them taken from our
protection & control room available in our laboratory (see Figure 1.5).
21
B. Static relay
D. Numerical relay
A. Electromechanical relay
C. Digital relay
PC
Omicron
Figure 1.5: Types of overcurrent relays available in the protection and control room, UOM [24]
A. Electromechanical relays
Electromechanical relays are classified the 1st generation relays and were first used for the power
system protection at the start of the 20th century [4]. Electromechanical relay is commonly referred to
as “induction disc relay”, i.e. it has an induction disc which produces a circular motion proportional to
the coil current and works based on mechanical force operating a relay contact in response to a
stimulus [25]. Electromechanical relays are simple and reliable form of protective relays and have a
lifetime of around 40 years. They are widely used as primary overcurrent protection in distribution
networks and as backup phase & earth fault protection in GB transmission networks [26].
Electromechanical relays have similar operating characteristics with modern numerical IDMT relays.
However, numerical IDMT relays are more accurate with better setting resolution, have multifunctional
applications and the resetting characteristics can be configured from 0-60s whereas for
electromechanical rotating disc relay is fixed to 9s [24]-[25]. Therefore, in recent years numerical
IDMT relays are being applied to the National Grid transmission system [26]. Note the effect of
intermittent or “pecking” faults on the operating times of numerical and electromechanical relays,
including issues related to the grading of electromechanical relays in the upstream with numerical
relays in the downstream is presented in [27]. The authors concluded that a spurious tripping of
electromechanical relay can cause a mal-operation which can result in financial compensation for
utilities to their customers.
B. Static relays
Static relay(s) commonly referred as “transistorised static relay or solid state relay” was first
introduced in early 1960th [1]. This type of relay has no moving parts (i.e. static) and the output contact
22
to trip the CB is achieved with the attracted armature principle. The design of this relays uses
analogue electronic devices and the average useful life time is about 30 years.
C. Digital relays
Digital relays were first introduced in 1980’s and are a step change in technology as compared to
static or electro-mechanical relays. Microprocessors and microcontrollers replaced the analogue
circuits used in static relays to implement relay functions [4]. They often copy the behaviour of
electromechanical relays and have similar or the same performance as electromechanical relays
which are still the current technology for many relay applications. Compared to an electromechanical
or static relays, digital relays have a wider range of settings, great accuarcy, and a communication
link to a remote computer. Similar to static relays, the usefull life time is about 30 years.
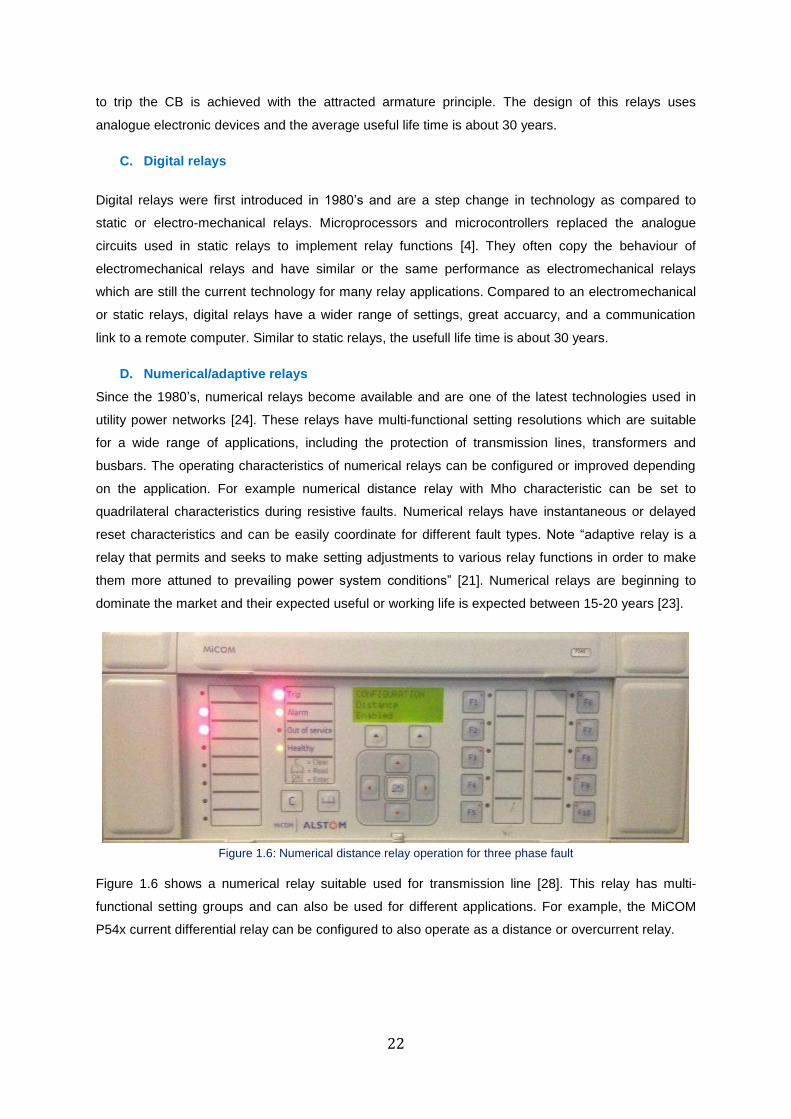
D. Numerical/adaptive relays
Since the 1980’s, numerical relays become available and are one of the latest technologies used in
utility power networks [24]. These relays have multi-functional setting resolutions which are suitable
for a wide range of applications, including the protection of transmission lines, transformers and
busbars. The operating characteristics of numerical relays can be configured or improved depending
on the application. For example numerical distance relay with Mho characteristic can be set to
quadrilateral characteristics during resistive faults. Numerical relays have instantaneous or delayed
reset characteristics and can be easily coordinate for different fault types. Note “adaptive relay is a
relay that permits and seeks to make setting adjustments to various relay functions in order to make
them more attuned to prevailing power system conditions” [21]. Numerical relays are beginning to
dominate the market and their expected useful or working life is expected between 15-20 years [23].
Figure 1.6: Numerical distance relay operation for three phase fault
Figure 1.6 shows a numerical relay suitable used for transmission line [28]. This relay has multi-
functional setting groups and can also be used for different applications. For example, the MiCOM
P54x current differential relay can be configured to also operate as a distance or overcurrent relay.
23
1.1.3 Role of protection and zone of protection
The primary aim of protection is to clear faults as fast as possible and limit further damage to the
equipment and the system. The application of protection is based on the fault level of the system and
may also differ according to the system topology. A Unit or differential protection scheme is suitable to
protect a specific item of plant including transmission lines, bus-bars, motors, transformers and
generators, whereas non-unit distance protection schemes are mainly used for transmission and sub-
transmission line protection, and over-current relays are commonly used as main protection for a
radial distribution network or as backup protection in a transmission network.
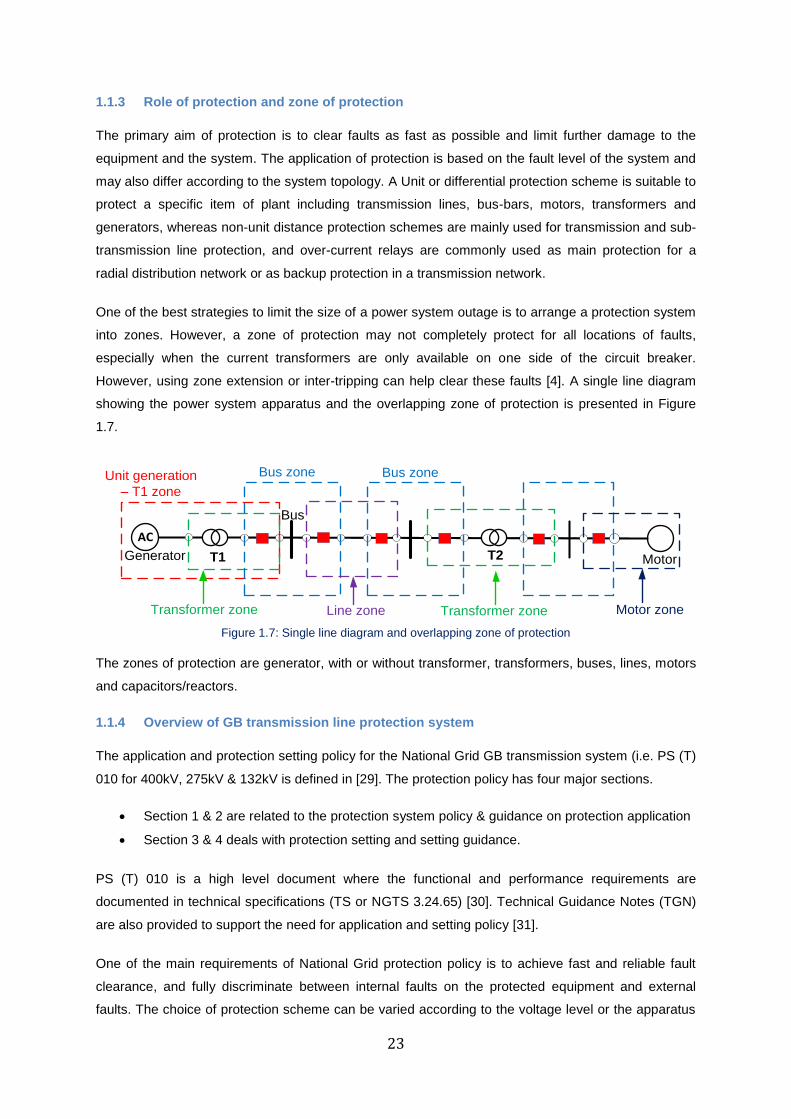
One of the best strategies to limit the size of a power system outage is to arrange a protection system
into zones. However, a zone of protection may not completely protect for all locations of faults,
especially when the current transformers are only available on one side of the circuit breaker.
However, using zone extension or inter-tripping can help clear these faults [4]. A single line diagram
showing the power system apparatus and the overlapping zone of protection is presented in Figure
1.7.
AC
T1 T2
Bus zone Bus zoneUnit generation
– T1 zone
Transformer zone Line zone Transformer zone
Motor
Motor zone
Generator
Bus
Figure 1.7: Single line diagram and overlapping zone of protection
The zones of protection are generator, with or without transformer, transformers, buses, lines, motors
and capacitors/reactors.
1.1.4 Overview of GB transmission line protection system
The application and protection setting policy for the National Grid GB transmission system (i.e. PS (T)
010 for 400kV, 275kV & 132kV is defined in [29]. The protection policy has four major sections.
Section 1 & 2 are related to the protection system policy & guidance on protection application
Section 3 & 4 deals with protection setting and setting guidance.
PS (T) 010 is a high level document where the functional and performance requirements are
documented in technical specifications (TS or NGTS 3.24.65) [30]. Technical Guidance Notes (TGN)
are also provided to support the need for application and setting policy [31].
One of the main requirements of National Grid protection policy is to achieve fast and reliable fault
clearance, and fully discriminate between internal faults on the protected equipment and external
faults. The choice of protection scheme can be varied according to the voltage level or the apparatus
24
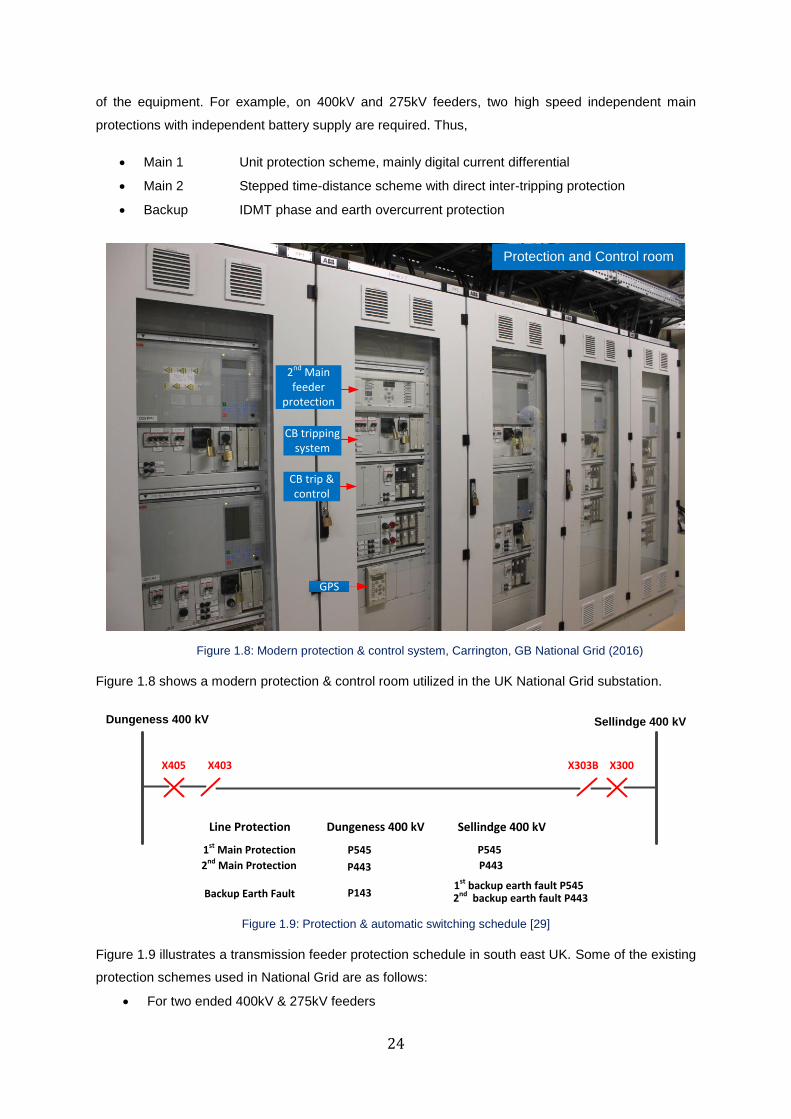
of the equipment. For example, on 400kV and 275kV feeders, two high speed independent main
protections with independent battery supply are required. Thus,
Main 1 Unit protection scheme, mainly digital current differential
Main 2 Stepped time-distance scheme with direct inter-tripping protection
Backup IDMT phase and earth overcurrent protection
GPS
Protection and Control room
CB tripping system
CB trip & control
2nd Main feeder
protection
Figure 1.8: Modern protection & control system, Carrington, GB National Grid (2016)
Figure 1.8 shows a modern protection & control room utilized in the UK National Grid substation.
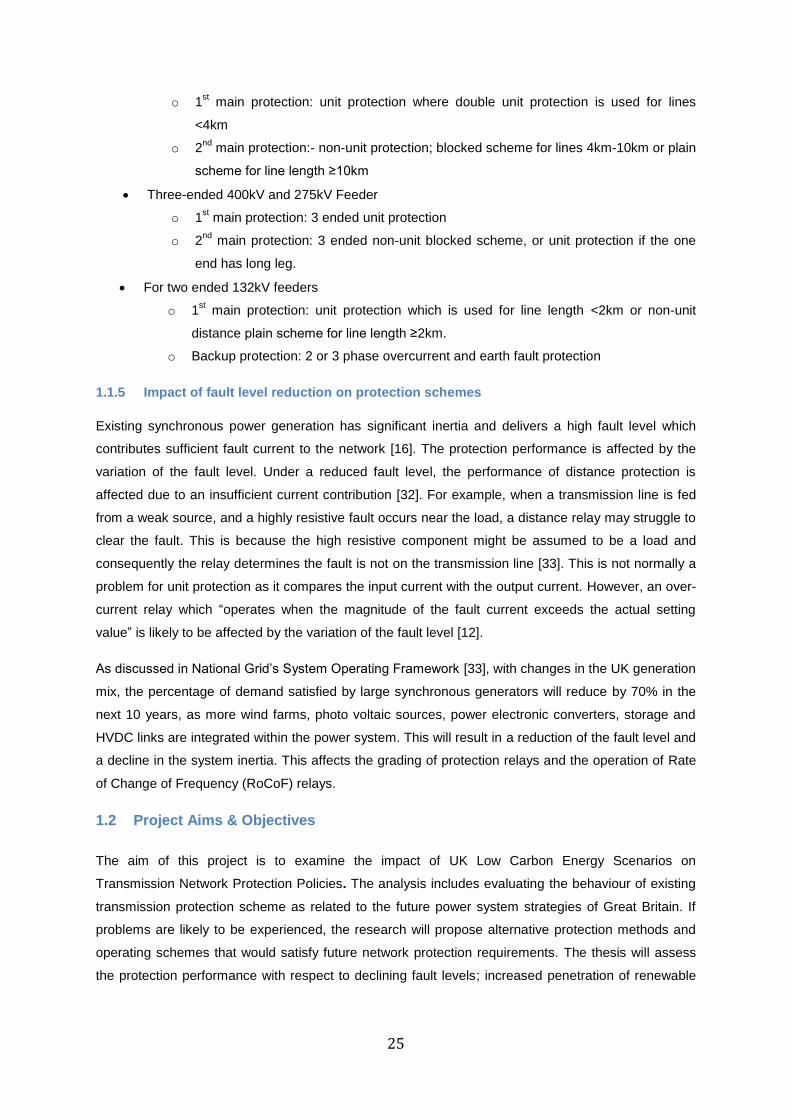
Dungeness 400 kV Sellindge 400 kV
Line Protection Dungeness 400 kV Sellindge 400 kV
1st Main Protection
2nd Main Protection
Backup Earth Fault
P545
P443
P143
P545
P443
1st backup earth fault P5452nd backup earth fault P443
X405 X403 X303B X300
Figure 1.9: Protection & automatic switching schedule [29]
Figure 1.9 illustrates a transmission feeder protection schedule in south east UK. Some of the existing
protection schemes used in National Grid are as follows:
For two ended 400kV & 275kV feeders
25
o 1st main protection: unit protection where double unit protection is used for lines
<4km
o 2nd
main protection:- non-unit protection; blocked scheme for lines 4km-10km or plain
scheme for line length ≥10km
Three-ended 400kV and 275kV Feeder
o 1st main protection: 3 ended unit protection
o 2nd
main protection: 3 ended non-unit blocked scheme, or unit protection if the one
end has long leg.
For two ended 132kV feeders
o 1st main protection: unit protection which is used for line length <2km or non-unit
distance plain scheme for line length ≥2km.
o Backup protection: 2 or 3 phase overcurrent and earth fault protection
1.1.5 Impact of fault level reduction on protection schemes
Existing synchronous power generation has significant inertia and delivers a high fault level which
contributes sufficient fault current to the network [16]. The protection performance is affected by the
variation of the fault level. Under a reduced fault level, the performance of distance protection is
affected due to an insufficient current contribution [32]. For example, when a transmission line is fed
from a weak source, and a highly resistive fault occurs near the load, a distance relay may struggle to
clear the fault. This is because the high resistive component might be assumed to be a load and
consequently the relay determines the fault is not on the transmission line [33]. This is not normally a
problem for unit protection as it compares the input current with the output current. However, an over-
current relay which “operates when the magnitude of the fault current exceeds the actual setting
value” is likely to be affected by the variation of the fault level [12].
As discussed in National Grid’s System Operating Framework [33], with changes in the UK generation
mix, the percentage of demand satisfied by large synchronous generators will reduce by 70% in the
next 10 years, as more wind farms, photo voltaic sources, power electronic converters, storage and
HVDC links are integrated within the power system. This will result in a reduction of the fault level and
a decline in the system inertia. This affects the grading of protection relays and the operation of Rate
of Change of Frequency (RoCoF) relays.
1.2 Project Aims & Objectives
The aim of this project is to examine the impact of UK Low Carbon Energy Scenarios on
Transmission Network Protection Policies. The analysis includes evaluating the behaviour of existing
transmission protection scheme as related to the future power system strategies of Great Britain. If
problems are likely to be experienced, the research will propose alternative protection methods and
operating schemes that would satisfy future network protection requirements. The thesis will assess
the protection performance with respect to declining fault levels; increased penetration of renewable
26
generation, decreased generation from synchronous sources and changes in the source impedance
ratio.
The main objectives of this thesis are to:
1. Assess the impact of low fault level on the operation of existing protection systems such as
a. Line protection schemes
Unit differential protection
Non-unit distance protection
Backup overcurrent protection
Back up earth fault (IDMT) protection
2. Establish the limitation of existing protection policy to cater for future scenarios
Assess the limitation of existing protection under varying fault level
3. Consider how faults can be differentiated from heavy loading conditions during low short circuit
Fault current vs load current
4. Provide an alternative protection methodologies for transmission network with low inertia and
low fault current analysis that includes
Protection philosophy
Time scale
5. Consider the impact of new technology on fault clearing times and recommended protection &
control coordination strategies
27
1.3 Structure of the Thesis
The outline of the remaining chapters is organised as follows:
Chapter 2 details the fault level analysis, protection studies and provides a review on the selection of
a relay scheme. Then an evaluation of existing & future fault level analysis on the Great Britain
transmission network and the protection challenges with respect to the declining fault levels is
explored. The impact on protection policy of declining short circuit levels is also investigated.
Chapter 3 shows the concept and sensitivity analysis of distance protection and the associated zone
setting methodology. Various parameters that influence the performance of time stepped distance
protection are discussed.
Chapter 4 shows the concept and sensitivity analysis of differential protection. Issues related to the
dimensioning of current transformers, protection signalling and the application of unit scheme are also
highlighted.
Chapter 5 identifies the concept, sensitivity analysis of backup overcurrent phase and earth fault
protection. The focus is put on the impact of fault level reduction on the backup overcurrent protection
and an implication on the limitation of backup overcurrent protection.
Chapter 6 explores the role of backup protection and identifies the key strategy for evaluating the
impact of low fault level on the limitation of existing protection schemes as related to the future
protection strategy and this is one of the most significant parts of this thesis.
As fault level reduces, the effectiveness of existing protection schemes used in the UK transmission
network is assessed. The assessment process is based on National Grid reports, i.e. System
Operating Framework (SOF) and Electricity Ten Year Statement (ETYS). Chapter 7 identifies the
impact of low fault levels on the capability of conventional protection schemes. This has the
implications for the future protection application and setting strategy.
The drive towards decarbonisation, decentralisation and digitalisation; means future digital substation
will use smart IEDs operating in line with IEC61850 protocols, GOOSE, Sampling Values and real
time synchronisation. Chapter 8 evaluates the role, benefit & impact of IEC 61850 protocols for future
protection development.
A conclusion of the thesis and implications for future work is discussed in chapter 9. A summary of
operating characteristics of distance relay types and their applications can be found in appendix 1
whereas a postscript on the UK blackout incident is also provided in appendix 2.
28
Chapter 2: Review into fault level and protection system studies
2.1. Motivation of fault level analysis
This chapter will focus on fault level studies and the key protection challenges associated with a
converter dominated power system. Firstly, the standard methods of fault level calculation will be
discussed. Then, fault current contribution from traditional synchronous generations and converter
based generations will be evaluated. Next, the impact of declining fault levels and increased
penetration of renewable generations on existing protection schemes, including in the GB
transmission system will be highlighted. Finally, the short circuit analysis simulation test results will be
presented. The summary will describe how adequate handling of short circuit and protection policy
can be applied to the calculated short circuit levels.
2.2. Short circuit current analysis
Short circuit current is an excessive form of current flowing into an item of power system plant that
has been affected by a short circuit. In a power system, adequate handling of a short circuit current is
vital to the design of an optimal network [22]. The main reasons for fault current study are
Calculate the rating of circuit breaker: must be able to make or break a very large current.
Design protection system: to distinguish if the fault current is large enough to be detected
because undetected faults are a safety hazards
Check system stability: faults can cause large system disturbances
Power quality: faults create voltage sags in other parts of the network
Generally, if the short circuit current is not properly detected & cleared; it may result in equipment
damage, the interruption of power in large parts of the network including the healthy system and a
health risk to utility personnel or the general public.
The causes of short circuit current are generally the following:
Lightning discharge on transmission lines/live conductors
Insulation failure causing a contact between live conductors
Failure of equipment; acting as a fault point which draws large amount of fault current
Incorrect system operation caused by human error that may result in a short circuit current
In power system protection, the maximum, minimum current flowing into a fault within the protected
object or zone and the through fault current is required to determine the relay setting necessary to
provide correct operation [5]. Thus, the common methods of fault analysis are thevenin equivalent
and superposition (complete) method [22]. According [17] [34], the most common methods used to
calculate short circuit currents are IEC 60909 and complete methods, where DIgSILENT Power-
Factory simulator has modules that implement both IEC 60909 and complete methods as shown in
Figure 2.1.
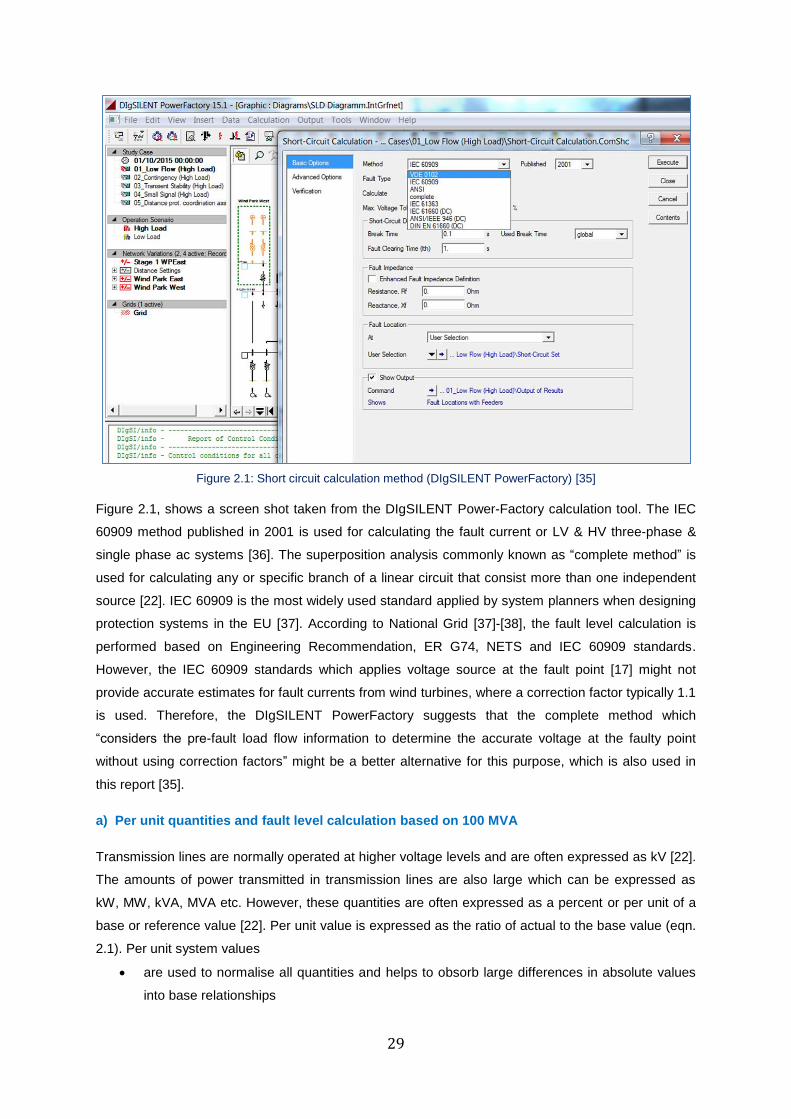
29
Figure 2.1: Short circuit calculation method (DIgSILENT PowerFactory) [35]
Figure 2.1, shows a screen shot taken from the DIgSILENT Power-Factory calculation tool. The IEC
60909 method published in 2001 is used for calculating the fault current or LV & HV three-phase &
single phase ac systems [36]. The superposition analysis commonly known as “complete method” is
used for calculating any or specific branch of a linear circuit that consist more than one independent
source [22]. IEC 60909 is the most widely used standard applied by system planners when designing
protection systems in the EU [37]. According to National Grid [37]-[38], the fault level calculation is
performed based on Engineering Recommendation, ER G74, NETS and IEC 60909 standards.
However, the IEC 60909 standards which applies voltage source at the fault point [17] might not
provide accurate estimates for fault currents from wind turbines, where a correction factor typically 1.1
is used. Therefore, the DIgSILENT PowerFactory suggests that the complete method which
“considers the pre-fault load flow information to determine the accurate voltage at the faulty point
without using correction factors” might be a better alternative for this purpose, which is also used in
this report [35].
a) Per unit quantities and fault level calculation based on 100 MVA
Transmission lines are normally operated at higher voltage levels and are often expressed as kV [22].
The amounts of power transmitted in transmission lines are also large which can be expressed as
kW, MW, kVA, MVA etc. However, these quantities are often expressed as a percent or per unit of a
base or reference value [22]. Per unit value is expressed as the ratio of actual to the base value (eqn.
2.1). Per unit system values
are used to normalise all quantities and helps to obsorb large differences in absolute values
into base relationships
30
provides the system to become more uniform in more meaningfull data
The ratio in percent is 100 times the per unit values. For example, when a system voltage is 420kV
and if the chosen base voltage is 400kV; this can be transferred to 420/400=1.05 per unit or
1.05×100=105%.
per unit of an element =actual value
base value eqn. 2.1
The conversion of actual value of current (A), voltage (kV), apparent power (kVA or MVA) and
impedance (Ω) on chosen base value to per unit or vice versa can be performed using eqn. 2.1. The
basic conversations are provided as follows:
For single phase power (1∅),
Base current, A = Sbase
Vbase
= base MVA1∅
base voltage, kVLN
eqn. 2.2
Base impedance, Ω = Vbase
Ibase
=base voltage VLN
base current, A eqn. 2.3
Base impedance, Ω =𝑉𝑏𝑎𝑠𝑒
2
Sbase
=(base voltage, kVLN)2
base MVA1∅ eqn. 2.4
Base power, MW1∅ = base MVA1∅ eqn. 2.5
For three phase power, the power is 3 times the single phase power. The line voltage is also √3 times
the phase voltage. For instance, if the 3-phase power and line-line voltage is given as:
Base power, MVA3∅ = 100 MVA and base kVLL = 400 kV
The single phase power and phase voltage will be:
Base power, MVA1∅ =100
3= 33.33MVA
Base voltage, kVLL =400
√3= 230.94kV
If the actual line to line voltage in a balanced 3-phase is 390kV, the phase voltage will be 390/√3 =
225.167kV.
Per unit voltage =390
400= 0.975p. u.
If the actual power is 75 MVA (i.e. the single phase power is 25MVA), the power in per unit will be:
Per unit power =75
100= 0.75 p. u.
31
Similarly, the base element in three phase system can be obtained as follows:
Base current, A = Sbase
Vbase
= base MVA3∅
base voltage, kVLL
eqn. 2.6
Where kVLL = √3 × kVLN
Base impedance, Ω = Vbase
Ibase
=base voltage VLL
base current, A eqn. 2.7
Base impedance =(base voltage, kVLL)2
base MVA3∅
eqn. 2.8
For example, using 100MVA base (eqn. 2.8), the base impedance on 400kV feeder line will be:
Base impedance =kV2
MVA =
4002
100 = 1600 Ω
In a power system, the system fault level at each voltage level is constrained within the design limits.
Thus, the fault current at any point of a system is determined by the source impedance value.
According to National Grid, the technical data of the system parameter are given as R and X (% on
100 MVA). Hence, it’s important to note the basic conversation methods in transferring from % to
MVA or ohmic values and vice versa.
If the reactance of generator or transformer is given in % based on the name plate ratings, it
can be converted into a 100MVA base using:
X% on 100 MVAbase =X % at name plate rated MVA × 100
normal rating (MVA) eqn. 2.9
For instance, if a 400/275kV feeder transformer supplied at 400kV with a fault level at the 275kV
busbar is 750MVA, the % reactance on 100MVA base will be:
%X on 100MVA = Base MVA
Fault level, MVA× 100 =
100 MVA
750MVA× 100 = 13.33%
Assume a transformer with a reactance of 10% on 10MVA. On 100MVA base, this translates to:
% X = X% × Base MVA
Fault level, MVA× 100 = 10% ×
100
10 × 100 = 100% at 100MVA rating
Similarly, if the fault infeed of 40kA at the 275kV busbar is considered in the UK, the % sources
impedance will be:
Fault MVA = √3 × 275kV × 40kA = 19050MVA
% Zs =Base MVA × 100
Fault MVA=
100 × 100
19050 = j0.525%
32
i. e. Zs (p. u) =j0.525%
100 = j0.00525 p. u.
The normal rating fault level (MVA) can be rearranged from eqn. 2.9:
Fault Level (MVA) =Base MVA × 100
X (% on 100 MVA) eqn 2.10
Example, if the percentage source impedance of a generator is 0.525%, the fault level on 100MVA
base will be
e. g Fault level on 100 MVAbase =100MVA × 100
0.525%= 19047MVA = 19.05GVA
i. e the lower % source impedance implies the stronger fault level of the system
If the resistance and reactance values are given in %, the ohmic values can be obtained as:
𝑅(Ω) =%R × kV2
100 × 100MVA 𝑎𝑛𝑑 𝑋(Ω) =
%X × kV2
100 × 100MVA eqn. 2.11
Example, the percentage values for 400kV transmission line i.e. from Dungeness to Ninfield
substation are given as Z = 0.0391 + j0.7567Ω i. e Z = 0.7577∠96Ω) (% on 100MVA); the ohmic
values based on eqn. 2.11 will be:
𝑅(Ω) =0.0391 × 4002
100 × 100= 0.6256Ω 𝑎𝑛𝑑 𝑋(Ω) =
0.7567 × 4002
100 × 100 = 12.107Ω
i. e Z (% on 100 MVA) = 0.7577∠96 (i. e 0.00757 p. u. ) translates to Z = 12.116∠87Ω
From, eqn. 2.8, on 100MVA base, the base impedance for 400kV line is 1600Ω whereas the ohmic
impedance from eqn. 2.11 is 12.116Ω. The per unit impedance on 100MVA base will be
Z (per unit) =Zactual/ohmic
Zbase
=12.116 Ω
1600 Ω= 0.00757 p. u.
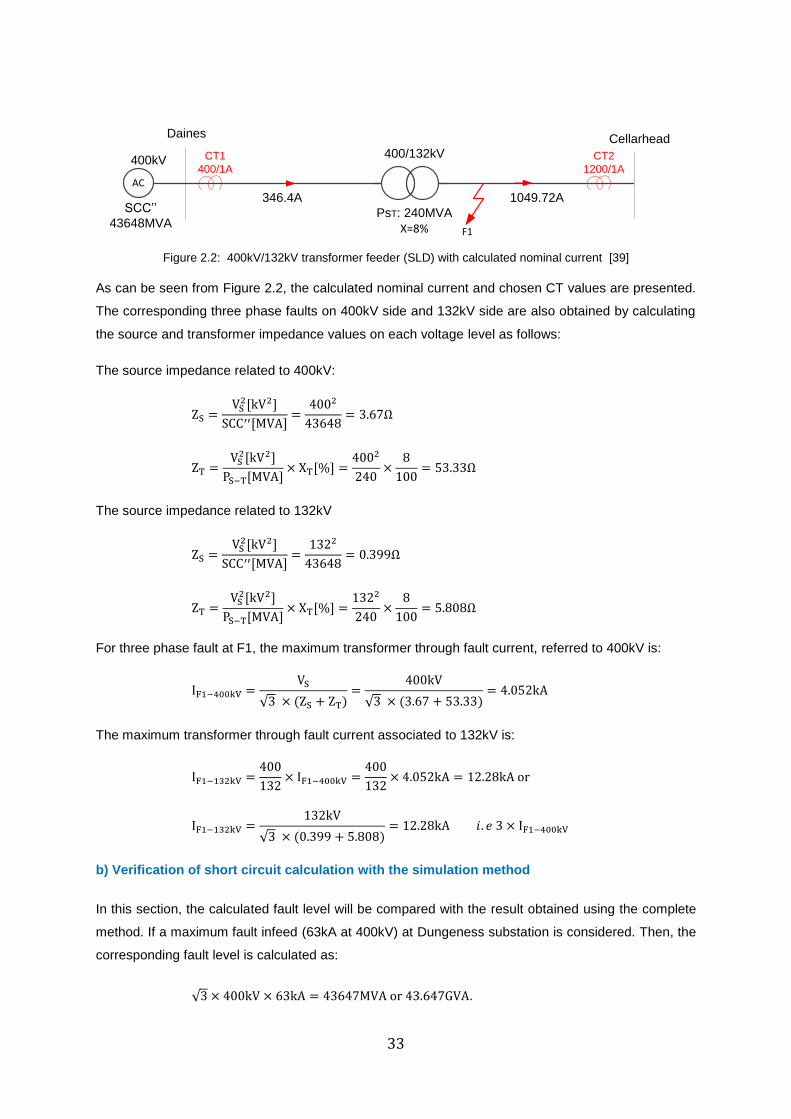
In addition to the above conversion of per unit to fault level or percentage calculations, normal rating
current and CT selection can be obtained. For example, let’s consider a 400kV source that delivers
63kA or 43,648MVA (Figure 2.2) that stepped down to transfer electricity to the 132kV transmission
feeder line, with a given transformer leakage reactance of 8% on 240MVA rating, then the CT ratio
can be determined by obtaining the corresponding nominal currents as follows:
Nominal current, In(400kV side) =240MVA
√3 × 400kV= 346.4A use CT ratio > In i. e. 600/1A
Nominal current, In(132kV side) =240MVA
√3 × 132kV= 1049.72A use CT ratio > In i. e. 1200/1A
33
Daines Cellarhead 400/132kV
PsT: 240MVA
X=8%
346.4A 1049.72A
AC
400kV
SCC’’
43648MVA
CT1
400/1A
F1
CT2
1200/1A
Figure 2.2: 400kV/132kV transformer feeder (SLD) with calculated nominal current [39]
As can be seen from Figure 2.2, the calculated nominal current and chosen CT values are presented.
The corresponding three phase faults on 400kV side and 132kV side are also obtained by calculating
the source and transformer impedance values on each voltage level as follows:
The source impedance related to 400kV:
ZS =VS
2[kV2]
SCC′′[MVA]=
4002
43648= 3.67Ω
ZT =VS
2[kV2]
PS−T[MVA]× XT[%] =
4002
240×
8
100= 53.33Ω
The source impedance related to 132kV
ZS =VS
2[kV2]
SCC′′[MVA]=
1322
43648= 0.399Ω
ZT =VS
2[kV2]
PS−T[MVA]× XT[%] =
1322
240×
8
100= 5.808Ω
For three phase fault at F1, the maximum transformer through fault current, referred to 400kV is:
IF1−400kV =VS
√3 × (ZS + ZT)=
400kV
√3 × (3.67 + 53.33)= 4.052kA
The maximum transformer through fault current associated to 132kV is:
IF1−132kV =400
132× IF1−400kV =
400
132× 4.052kA = 12.28kA or
IF1−132kV =132kV
√3 × (0.399 + 5.808)= 12.28kA 𝑖. 𝑒 3 × IF1−400kV
b) Verification of short circuit calculation with the simulation method
In this section, the calculated fault level will be compared with the result obtained using the complete
method. If a maximum fault infeed (63kA at 400kV) at Dungeness substation is considered. Then, the
corresponding fault level is calculated as:
√3 × 400kV × 63kA = 43647MVA or 43.647GVA.

34
This translates to a source impedance of
400kV2/43647MVA = 3.67Ω.
In Figure 2.3, the short circuit simulation is compared with the calculated values.
Figure 2.3: Short circuit current for 3 phase fault located on all busbar
As shown in Figure 2.3, the short circuit current at the sending feeder (i.e. Dungeness substation) is
63kA, with the equivalent grid impedance of 3.67Ω, i.e. the results from the short circuit calculation
equations are matched with the simulation test results.
c) DIgSILENT Relay Modelling and Simulation Methods
Protective relays play an important role in transmission protection, i.e. they are designed to detect
faults and isolate the faulted section after an appropriate time. Hence, it is important to evaluate the
operating characteristics of the IED or protective relay model and its setting configurations. In
DIgSILENT Power-Factory [40], the modelling structure for a protective device consists of three
different level as shown in Figure 2.4.
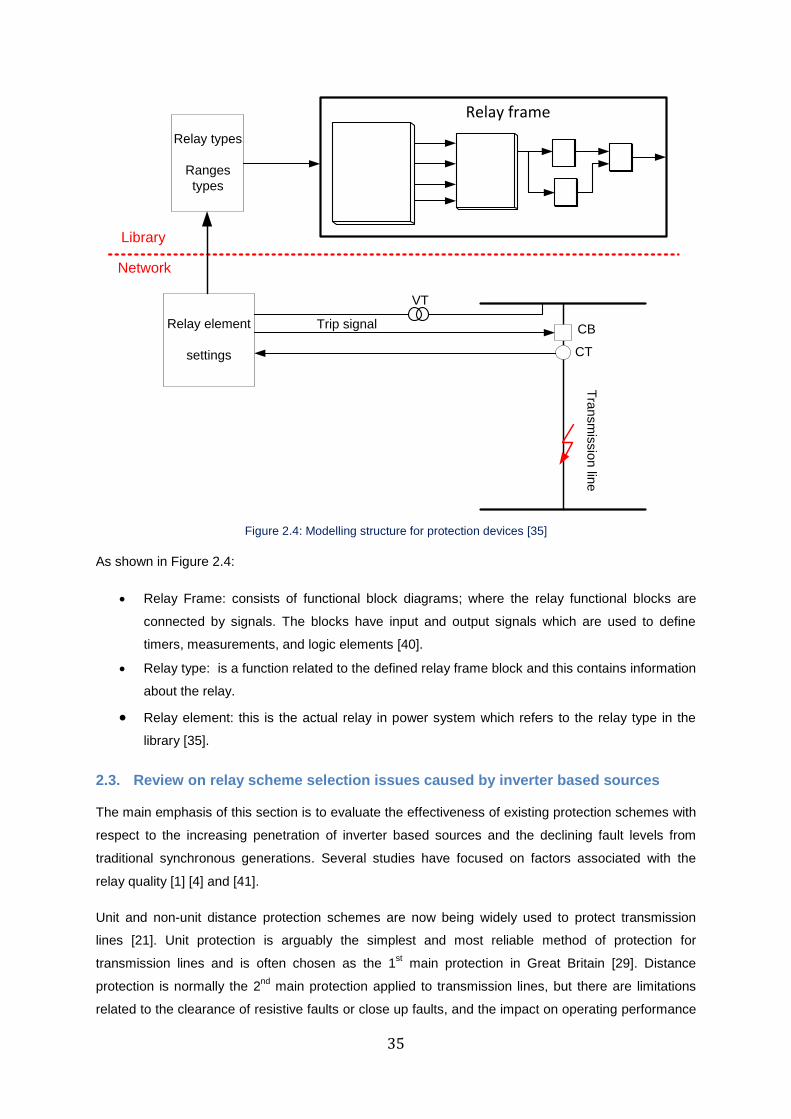
35
Library
Network
Relay element
settings
Trip signal CB
CT
VT
Relay types
Ranges
types
Relay frame
Tra
nsm
issio
n lin
e
Figure 2.4: Modelling structure for protection devices [35]
As shown in Figure 2.4:
Relay Frame: consists of functional block diagrams; where the relay functional blocks are
connected by signals. The blocks have input and output signals which are used to define
timers, measurements, and logic elements [40].
Relay type: is a function related to the defined relay frame block and this contains information
about the relay.
Relay element: this is the actual relay in power system which refers to the relay type in the
library [35].
2.3. Review on relay scheme selection issues caused by inverter based sources
The main emphasis of this section is to evaluate the effectiveness of existing protection schemes with
respect to the increasing penetration of inverter based sources and the declining fault levels from
traditional synchronous generations. Several studies have focused on factors associated with the
relay quality [1] [4] and [41].
Unit and non-unit distance protection schemes are now being widely used to protect transmission
lines [21]. Unit protection is arguably the simplest and most reliable method of protection for
transmission lines and is often chosen as the 1st main protection in Great Britain [29]. Distance
protection is normally the 2nd
main protection applied to transmission lines, but there are limitations
related to the clearance of resistive faults or close up faults, and the impact on operating performance
36
of heavy load encroachment, where the setting configurations are used to improve operating
performance [42].
As discussed in chapter 1, traditional fault level has been strong i.e. the short circuit current is
sufficient for the relay to provide correct operation. Under fault level reduction; the effectiveness of
some existing protection might be affected and might reduce the dependability of the protection and
increase the operating speed. The security and selectivity of the protection might be less affected,
perhaps enhance the security. The next section will focus on the pros and cons of transmission
protection due to the integration of converter based generations into existing AC power systems and
with a particular emphasis on declining fault levels.
2.4. Short circuit analysis from synchronous generator & inverter based sources
This section will investigate the impact on transmission line protection of changes in the source fault
level. Fault level is the magnitude of fault current during fault conditions and is used to measure the
robustness of the system [37]. A system with high fault level indicates strong inertia, i.e. it is capable
of contributing sufficient fault current and is used to establish the highest stress during short circuit
fault conditions. In comparison, a system with a high source impedance contributes minimum fault
level and this is used to “determine the lowest signal the protection device must provide correct
operation” [14]. Therefore, an increase in the system fault level does not generally impact on the
protection setting [43]. However, a decrease in the system fault level can increase the risk of non-
operation on an in-zone fault and consequently requires a review of the protection settings.
Moreover, declining fault level may be detrimental to protection, but it reduces the stress on primary
equipment and the substation operates lower than their thermal limit and this enhances the useful life
of the existing apparatus. Generally, load current can be high with converter connected generators,
but fault current may be low or comparable to rated current.
a) Short circuit analysis of synchronous generation
As discussed in section 1.1.1, most faults occurred on transmission lines are transient or permanent
faults. Transient faults are caused by lightning strike resulting insulator flashover and can be cleared
by immediate opening of the circuit breaker. In contrast, permanent faults are faults that can cause a
permanent damage to the equipment. Faults are also classified as symmetrical (i.e. three phase
faults) and unsymmetrical faults (i.e. single phase, double phase or double phase to ground faults).
Symmetrical faults commonly referred to as balanced faults involve all three phases with equal phase
angle and the symmetry of the system is not affected. It can be studied as an equivalent single phase
network. In comparison, unsymmetrical faults commonly known as unbalanced faults involves one or
two phase and affects all three phases differently i.e. the symmetry of fault current characteristics is
no longer the same. For such faults, a special technique is required to investigate the fault; this
includes the use of positive, negative and zero sequence components.
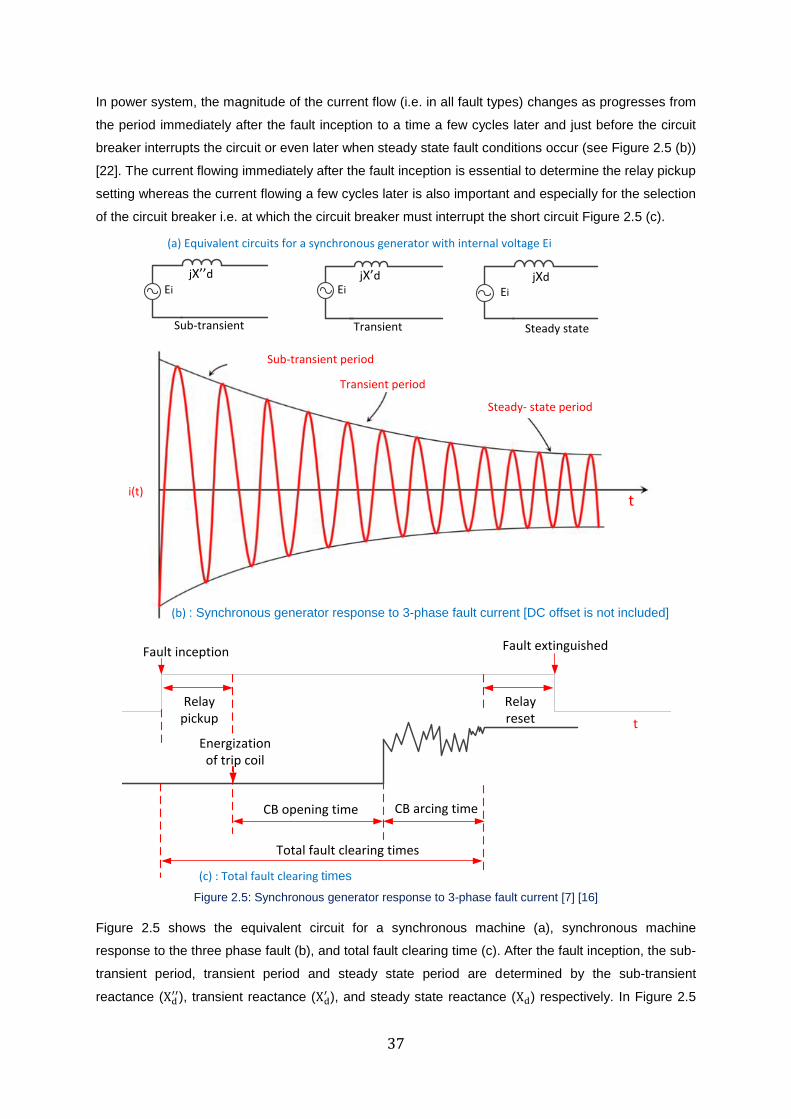
37
In power system, the magnitude of the current flow (i.e. in all fault types) changes as progresses from
the period immediately after the fault inception to a time a few cycles later and just before the circuit
breaker interrupts the circuit or even later when steady state fault conditions occur (see Figure 2.5 (b))
[22]. The current flowing immediately after the fault inception is essential to determine the relay pickup
setting whereas the current flowing a few cycles later is also important and especially for the selection
of the circuit breaker i.e. at which the circuit breaker must interrupt the short circuit Figure 2.5 (c).
(a) Equivalent circuits for a synchronous generator with internal voltage Ei
Relay pickup
Relay reset
Fault inception Fault extinguished
Total fault clearing times
CB opening time CB arcing time
Transient period
Sub-transient period
Steady- state period
i(t)t
jX’’d jX’d jXdEi Ei Ei
Sub-transient Transient Steady state
(b) : Synchronous generator response to 3-phase fault current [DC offset is not included]
(c) : Total fault clearing times
t
Energization of trip coil
Figure 2.5: Synchronous generator response to 3-phase fault current [7] [16]
Figure 2.5 shows the equivalent circuit for a synchronous machine (a), synchronous machine
response to the three phase fault (b), and total fault clearing time (c). After the fault inception, the sub-
transient period, transient period and steady state period are determined by the sub-transient
reactance (Xd′′), transient reactance (Xd
′ ), and steady state reactance (Xd) respectively. In Figure 2.5
38
(b), the fault current magnitude decreases as a function of time. The sub-transient current commonly
referred to as the initial symmetrical rms current is much larger than the steady state because the
sub-transient reactance (Xd′′) is much smaller than the steady state reactance (Xd). The transient
current is also smaller than the sub-transient, but larger than the steady state current (i.e. |Id′′| > |Id
′ | >
|Id| or Xd′′ < Xd
′ < Xd ).
According to [16], synchronous generation is capable of providing fault current up to 6 times its rated
current immediately after the fault, but a few cycles later it will have it reduced to 400%-200% of rated
current. From [16], the sub-transient period is the first few cycles or after the fault when the fault
current is very large & falls rapidly whereas the transient period is when the fault current falls at a
slower rate. Steady state period on the other hand is when a fault current reaches the steady value. In
Figure 2.5 (c), the circuit breaker must withstand the maximum instantaneous current and interrupt
the total short circuit current. The basic definitions and assumptions during the fault conditions are
provided as follows:
Initial peak short circuit current (ip) or asymmetrical peak which is the 1st peak and the largest
current after fault inception. 𝑖𝑝 = 𝑘 × √2 × 𝐼𝑘 𝑤ℎ𝑒𝑟𝑒 𝑘 = 1.02 + 0.98𝑒−3𝑅
𝑋. This is the short
circuit current where the circuit breaker must be able to close onto the event.
Ik = steady state current which is a symmetrical fault current
Peak make current: is the maximum possible instantaneous value of the prospective short
circuit current. Normally, peak make occurs at the first ac peak after fault inception. Due to the
the short time has elapsed; since the fault occurred there is minimum decay of the dc
component [22] [36].
Ib = peak break current,: is the largest instantaneous short circuit current the circuit breaker
may be required to extinguish during the arcing period, taking account the protection
operating time.
RMS break current, Ib: is the RMS value of the ac component of the short circuit current at the
instant when the circuit breaker is required to open and this takes no account of the dc
component. This is effectively the nominal rating of the equipment and can be calculated
using the break time (i.e. the break time for 275kV and 400kV is 50ms, and for 132kV is 70ms
on the GB network) [44]. Transient faults are used for protection study. In addition, the making
capacity of switchboard is 2.5 times the breaking capacity of the switchboard (i.e specified in
BS EN 62271-100 standard for High-voltage switchgear and control gear) [9].
Total fault clearing time: is the time from the fault occurrence to CB opening. The protection
trip contacts normally close 40-60ms before CB opens.
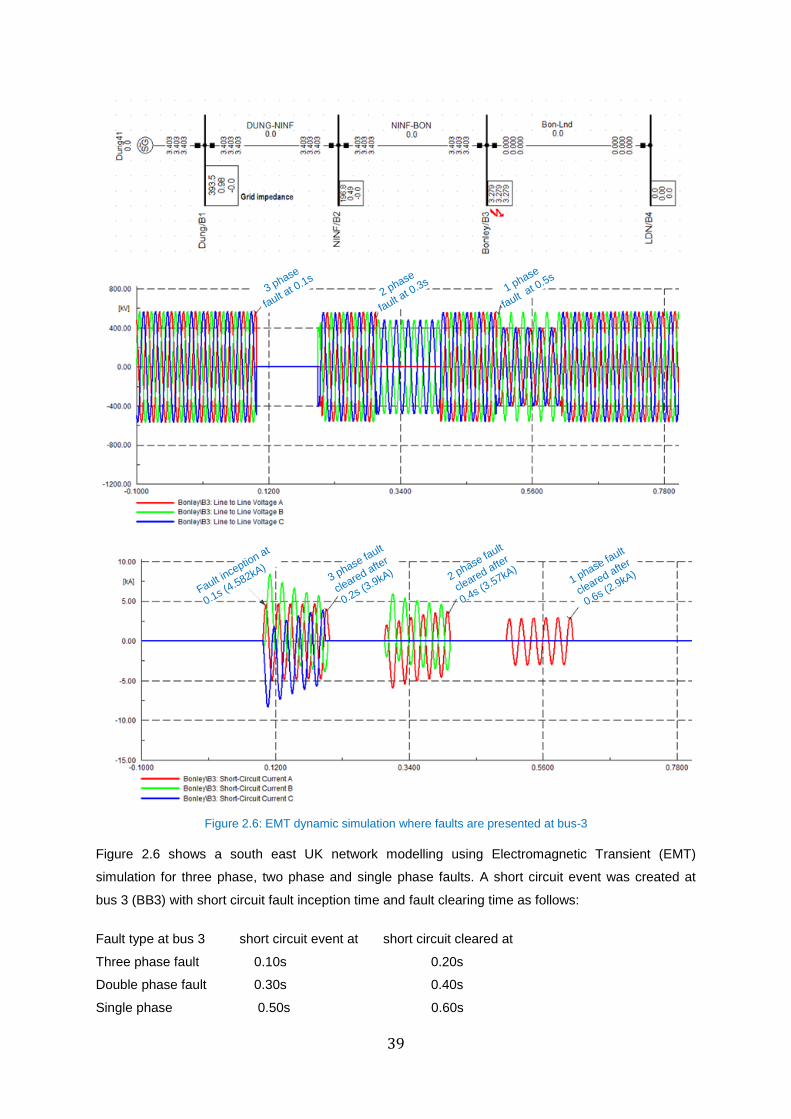
39
3 phase fault
cleared after
0.2s (3.9kA) 2 phase fa
ult
cleared after
0.4s (3.57kA)
1 phase fault
cleared after
0.6s (2.9kA)
Fault inceptio
n at
0.1s (4.582kA)
3 phase
fault at 0
.1s
2 phase
fault at 0
.3s1 phase
fault at 0
.5s
Figure 2.6: EMT dynamic simulation where faults are presented at bus-3
Figure 2.6 shows a south east UK network modelling using Electromagnetic Transient (EMT)
simulation for three phase, two phase and single phase faults. A short circuit event was created at
bus 3 (BB3) with short circuit fault inception time and fault clearing time as follows:
Fault type at bus 3 short circuit event at short circuit cleared at
Three phase fault 0.10s 0.20s
Double phase fault 0.30s 0.40s
Single phase 0.50s 0.60s
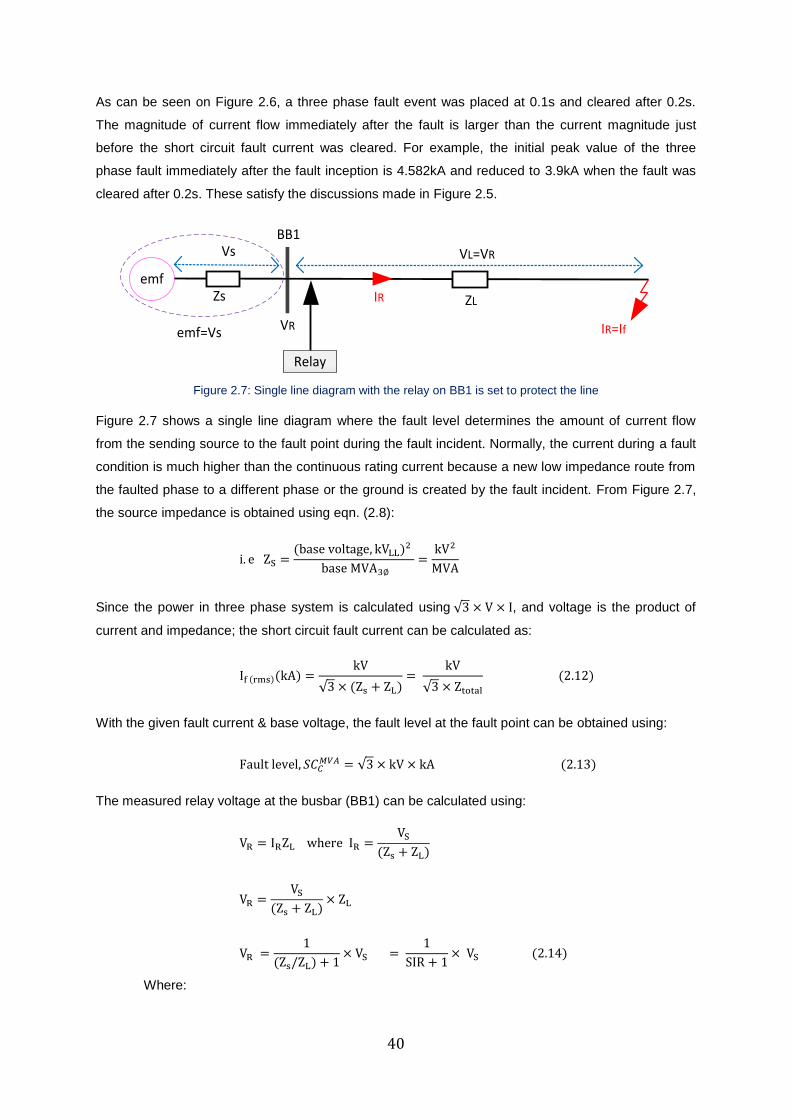
40
As can be seen on Figure 2.6, a three phase fault event was placed at 0.1s and cleared after 0.2s.
The magnitude of current flow immediately after the fault is larger than the current magnitude just
before the short circuit fault current was cleared. For example, the initial peak value of the three
phase fault immediately after the fault inception is 4.582kA and reduced to 3.9kA when the fault was
cleared after 0.2s. These satisfy the discussions made in Figure 2.5.
emf
Relay
ZLZs
BB1
IR
VL=VRVs
emf=Vs VR IR=If
Figure 2.7: Single line diagram with the relay on BB1 is set to protect the line
Figure 2.7 shows a single line diagram where the fault level determines the amount of current flow
from the sending source to the fault point during the fault incident. Normally, the current during a fault
condition is much higher than the continuous rating current because a new low impedance route from
the faulted phase to a different phase or the ground is created by the fault incident. From Figure 2.7,
the source impedance is obtained using eqn. (2.8):
i. e ZS =(base voltage, kVLL)2
base MVA3∅
=kV2
MVA
Since the power in three phase system is calculated using √3 × V × I, and voltage is the product of
current and impedance; the short circuit fault current can be calculated as:
If (rms)(kA) =kV
√3 × (Zs + ZL)=
kV
√3 × Ztotal
(2.12)
With the given fault current & base voltage, the fault level at the fault point can be obtained using:
Fault level, 𝑆𝐶𝐶𝑀𝑉𝐴 = √3 × kV × kA (2.13)
The measured relay voltage at the busbar (BB1) can be calculated using:
VR = IRZL where IR =VS
(Zs + ZL)
VR =VS
(Zs + ZL)× ZL
VR =1
(Zs/ZL) + 1× VS =
1
SIR + 1× VS (2.14)
Where:
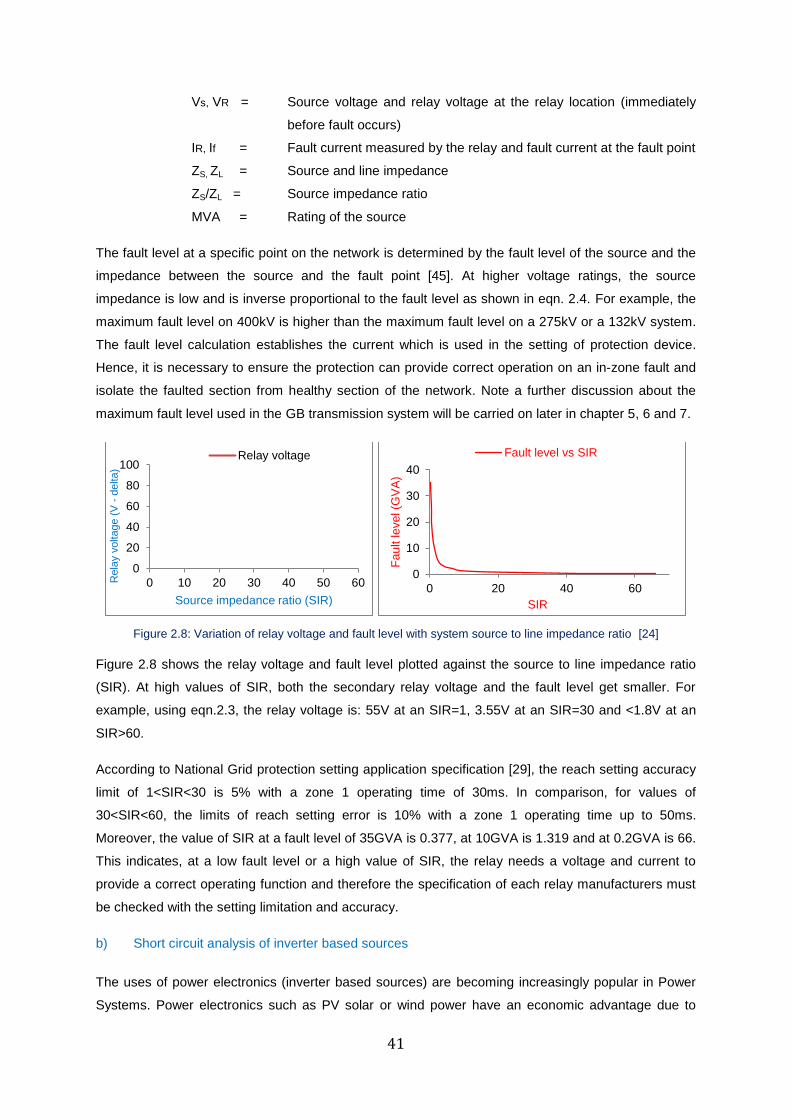
41
Vs, VR = Source voltage and relay voltage at the relay location (immediately
before fault occurs)
IR, If = Fault current measured by the relay and fault current at the fault point
ZS, ZL = Source and line impedance
ZS/ZL = Source impedance ratio
MVA = Rating of the source
The fault level at a specific point on the network is determined by the fault level of the source and the
impedance between the source and the fault point [45]. At higher voltage ratings, the source
impedance is low and is inverse proportional to the fault level as shown in eqn. 2.4. For example, the
maximum fault level on 400kV is higher than the maximum fault level on a 275kV or a 132kV system.
The fault level calculation establishes the current which is used in the setting of protection device.
Hence, it is necessary to ensure the protection can provide correct operation on an in-zone fault and
isolate the faulted section from healthy section of the network. Note a further discussion about the
maximum fault level used in the GB transmission system will be carried on later in chapter 5, 6 and 7.
Figure 2.8: Variation of relay voltage and fault level with system source to line impedance ratio [24]
Figure 2.8 shows the relay voltage and fault level plotted against the source to line impedance ratio
(SIR). At high values of SIR, both the secondary relay voltage and the fault level get smaller. For
example, using eqn.2.3, the relay voltage is: 55V at an SIR=1, 3.55V at an SIR=30 and <1.8V at an
SIR>60.
According to National Grid protection setting application specification [29], the reach setting accuracy
limit of 1<SIR<30 is 5% with a zone 1 operating time of 30ms. In comparison, for values of
30<SIR<60, the limits of reach setting error is 10% with a zone 1 operating time up to 50ms.
Moreover, the value of SIR at a fault level of 35GVA is 0.377, at 10GVA is 1.319 and at 0.2GVA is 66.
This indicates, at a low fault level or a high value of SIR, the relay needs a voltage and current to
provide a correct operating function and therefore the specification of each relay manufacturers must
be checked with the setting limitation and accuracy.
b) Short circuit analysis of inverter based sources
The uses of power electronics (inverter based sources) are becoming increasingly popular in Power
Systems. Power electronics such as PV solar or wind power have an economic advantage due to
0
20
40
60
80
100
0 10 20 30 40 50 60Rela
y v
oltage (
V -
delta)
Source impedance ratio (SIR)
Relay voltage
0
10
20
30
40
0 20 40 60
Fa
ult le
ve
l (G
VA
)
SIR
Fault level vs SIR
42
zero running cost, but the installation cost might be expensive [16]. However, inverter sources do not
have a rotating mass component and hence cannot produce inertia to drive the fault current i.e. the
main protection challenge towards renewable energy sources (RES) [46]. According to [16], the fault
level contributions from non-synchronous or converter based generations is limited to 1.1-2.0 times its
rated current, the actual value depends on the performance of the power electronics used in the
converter. The recent work reported by IEEE Power & Energy Society [47] identified that the output
for inverter based resources are limited to 1.1-2.0 per unit of nominal current. Unlike traditional
synchronous generators, converter based sources do not have a defined short circuit current
response characteristic and the actual response is based on the specific system design [47].
Figure 2.9 shows an example of a transmission feeder mainly fed from wind farm (i.e. fully rated
converter), where the grid is out of service in this case. The following data and assumptions have
been made in the fault current calculation methods when moving from synchronous generators to fully
rated converter sources:
The model used in this case is fully rated converter using “current source” (with infinite
parallel impedance) that contributes to an inductive fault current according to a predefined
limited value [17]
A maximum fixed contribution from fully rated converter in the fault current regardless of the
fault location, where maximum fault contribution is limited by its overrating capability at the
grid- side [17]
This approach only considers the positive sequence current even in the case of unbalanced
faults such as single or double line faults
A type-4 wind farm (10MW or LV=0.4kV) is integrated to a grid (20kV) through a step-up
transformer (trt)
From new BB1 (i.e. Point of Common Coupling PCC), the voltage is again stepped up to
match with the National Grid transmission system voltage level (400kV)
The wind farm is operated at unity power factor to maximize the active power production. It is
worth mentioning that the dynamic model of the grid-side converter has a reactive power
control with fully rated converter capability [35]
The proportional gain (K-factor) of the injected reactive current is set equal to 2. It is also
assumed that the converter has an overrating capability equal to 1.1 of its rating.
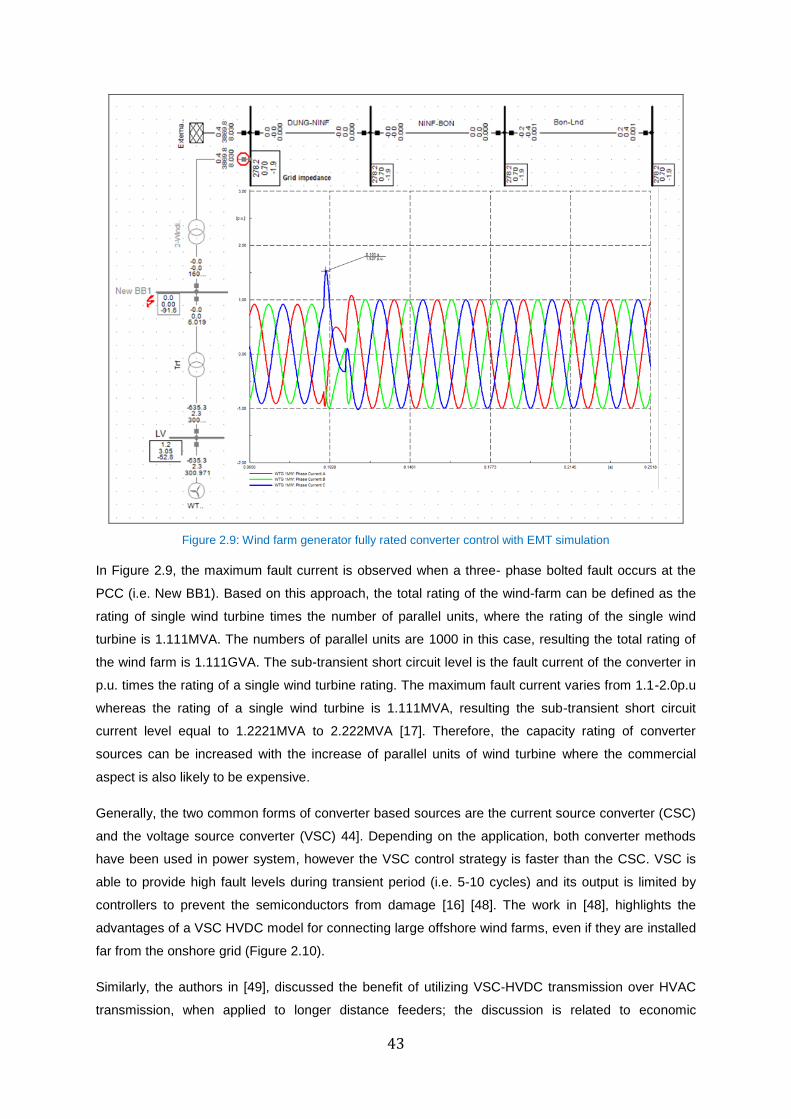
43
Figure 2.9: Wind farm generator fully rated converter control with EMT simulation
In Figure 2.9, the maximum fault current is observed when a three- phase bolted fault occurs at the
PCC (i.e. New BB1). Based on this approach, the total rating of the wind-farm can be defined as the
rating of single wind turbine times the number of parallel units, where the rating of the single wind
turbine is 1.111MVA. The numbers of parallel units are 1000 in this case, resulting the total rating of
the wind farm is 1.111GVA. The sub-transient short circuit level is the fault current of the converter in
p.u. times the rating of a single wind turbine rating. The maximum fault current varies from 1.1-2.0p.u
whereas the rating of a single wind turbine is 1.111MVA, resulting the sub-transient short circuit
current level equal to 1.2221MVA to 2.222MVA [17]. Therefore, the capacity rating of converter
sources can be increased with the increase of parallel units of wind turbine where the commercial
aspect is also likely to be expensive.
Generally, the two common forms of converter based sources are the current source converter (CSC)
and the voltage source converter (VSC) 44]. Depending on the application, both converter methods
have been used in power system, however the VSC control strategy is faster than the CSC. VSC is
able to provide high fault levels during transient period (i.e. 5-10 cycles) and its output is limited by
controllers to prevent the semiconductors from damage [16] [48]. The work in [48], highlights the
advantages of a VSC HVDC model for connecting large offshore wind farms, even if they are installed
far from the onshore grid (Figure 2.10).
Similarly, the authors in [49], discussed the benefit of utilizing VSC-HVDC transmission over HVAC
transmission, when applied to longer distance feeders; the discussion is related to economic
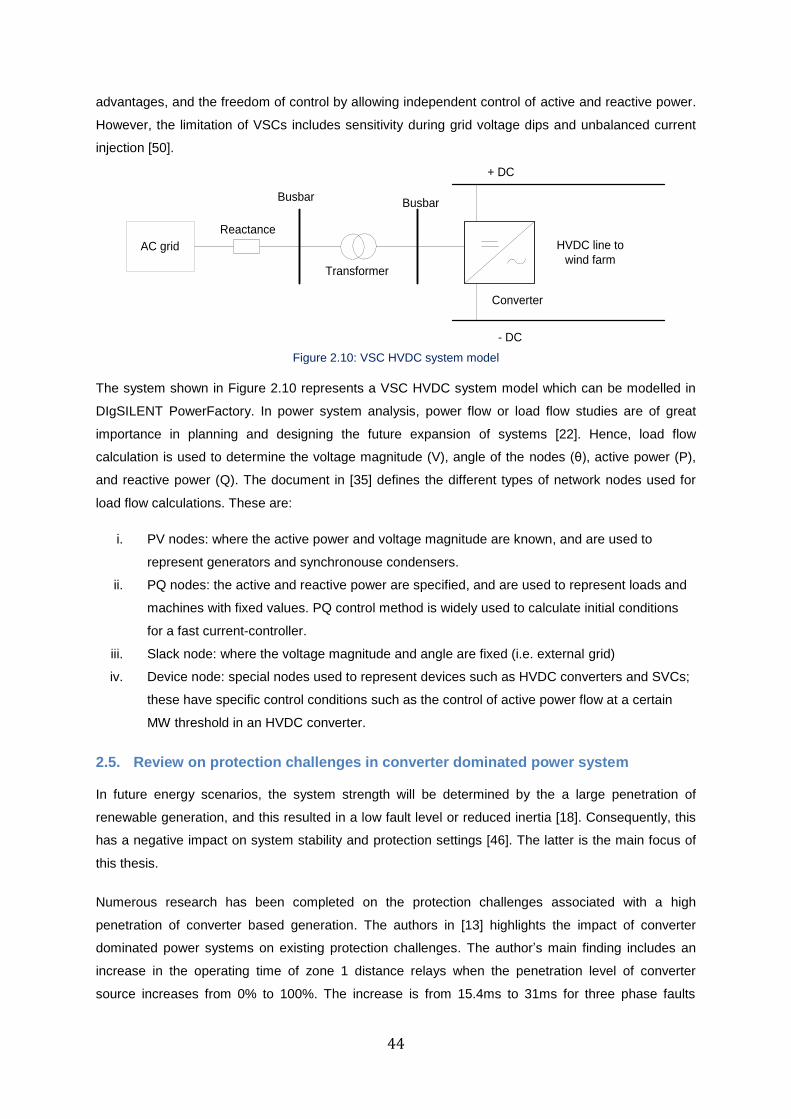
44
advantages, and the freedom of control by allowing independent control of active and reactive power.
However, the limitation of VSCs includes sensitivity during grid voltage dips and unbalanced current
injection [50].
Transformer
Converter
- DC
HVDC line to
wind farm
+ DC
BusbarBusbar
AC grid
Reactance
Figure 2.10: VSC HVDC system model
The system shown in Figure 2.10 represents a VSC HVDC system model which can be modelled in
DIgSILENT PowerFactory. In power system analysis, power flow or load flow studies are of great
importance in planning and designing the future expansion of systems [22]. Hence, load flow
calculation is used to determine the voltage magnitude (V), angle of the nodes (θ), active power (P),
and reactive power (Q). The document in [35] defines the different types of network nodes used for
load flow calculations. These are:
i. PV nodes: where the active power and voltage magnitude are known, and are used to
represent generators and synchronouse condensers.
ii. PQ nodes: the active and reactive power are specified, and are used to represent loads and
machines with fixed values. PQ control method is widely used to calculate initial conditions
for a fast current-controller.
iii. Slack node: where the voltage magnitude and angle are fixed (i.e. external grid)
iv. Device node: special nodes used to represent devices such as HVDC converters and SVCs;
these have specific control conditions such as the control of active power flow at a certain
MW threshold in an HVDC converter.
2.5. Review on protection challenges in converter dominated power system
In future energy scenarios, the system strength will be determined by the a large penetration of
renewable generation, and this resulted in a low fault level or reduced inertia [18]. Consequently, this
has a negative impact on system stability and protection settings [46]. The latter is the main focus of
this thesis.
Numerous research has been completed on the protection challenges associated with a high
penetration of converter based generation. The authors in [13] highlights the impact of converter
dominated power systems on existing protection challenges. The author’s main finding includes an
increase in the operating time of zone 1 distance relays when the penetration level of converter
source increases from 0% to 100%. The increase is from 15.4ms to 31ms for three phase faults
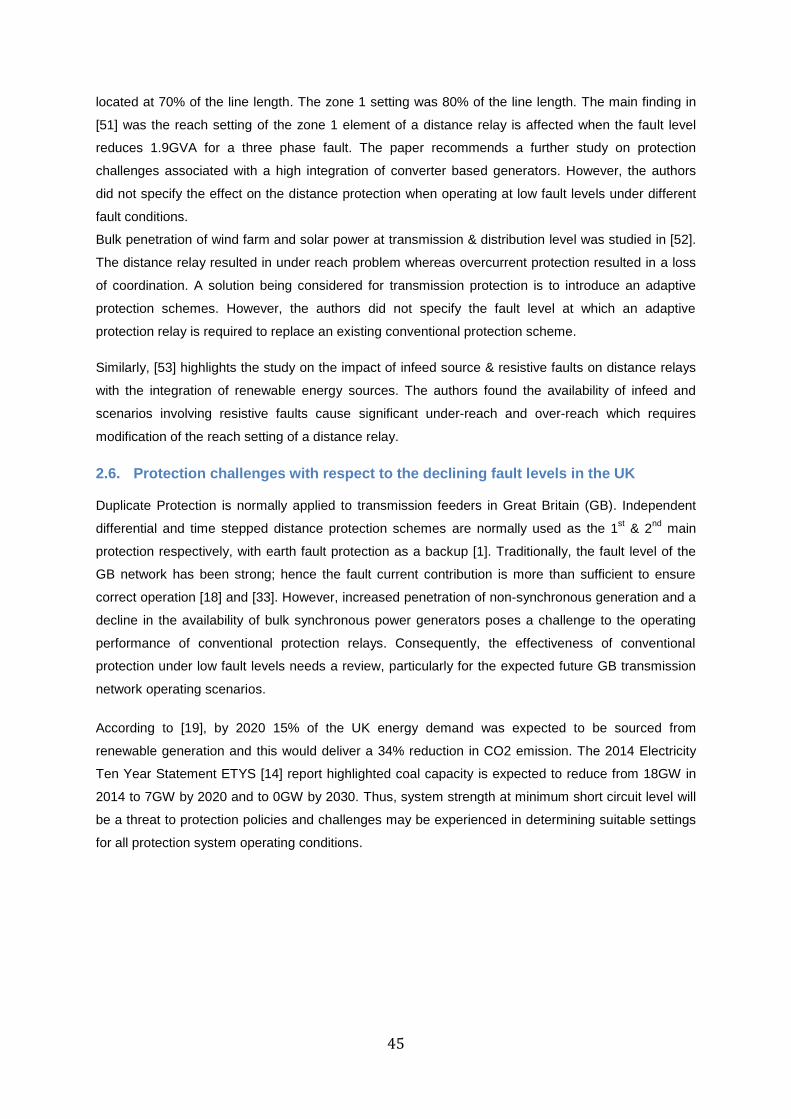
45
located at 70% of the line length. The zone 1 setting was 80% of the line length. The main finding in
[51] was the reach setting of the zone 1 element of a distance relay is affected when the fault level
reduces 1.9GVA for a three phase fault. The paper recommends a further study on protection
challenges associated with a high integration of converter based generators. However, the authors
did not specify the effect on the distance protection when operating at low fault levels under different
fault conditions.
Bulk penetration of wind farm and solar power at transmission & distribution level was studied in [52].
The distance relay resulted in under reach problem whereas overcurrent protection resulted in a loss
of coordination. A solution being considered for transmission protection is to introduce an adaptive
protection schemes. However, the authors did not specify the fault level at which an adaptive
protection relay is required to replace an existing conventional protection scheme.
Similarly, [53] highlights the study on the impact of infeed source & resistive faults on distance relays
with the integration of renewable energy sources. The authors found the availability of infeed and
scenarios involving resistive faults cause significant under-reach and over-reach which requires
modification of the reach setting of a distance relay.
2.6. Protection challenges with respect to the declining fault levels in the UK
Duplicate Protection is normally applied to transmission feeders in Great Britain (GB). Independent
differential and time stepped distance protection schemes are normally used as the 1st & 2
nd main
protection respectively, with earth fault protection as a backup [1]. Traditionally, the fault level of the
GB network has been strong; hence the fault current contribution is more than sufficient to ensure
correct operation [18] and [33]. However, increased penetration of non-synchronous generation and a
decline in the availability of bulk synchronous power generators poses a challenge to the operating
performance of conventional protection relays. Consequently, the effectiveness of conventional
protection under low fault levels needs a review, particularly for the expected future GB transmission
network operating scenarios.
According to [19], by 2020 15% of the UK energy demand was expected to be sourced from
renewable generation and this would deliver a 34% reduction in CO2 emission. The 2014 Electricity
Ten Year Statement ETYS [14] report highlighted coal capacity is expected to reduce from 18GW in
2014 to 7GW by 2020 and to 0GW by 2030. Thus, system strength at minimum short circuit level will
be a threat to protection policies and challenges may be experienced in determining suitable settings
for all protection system operating conditions.
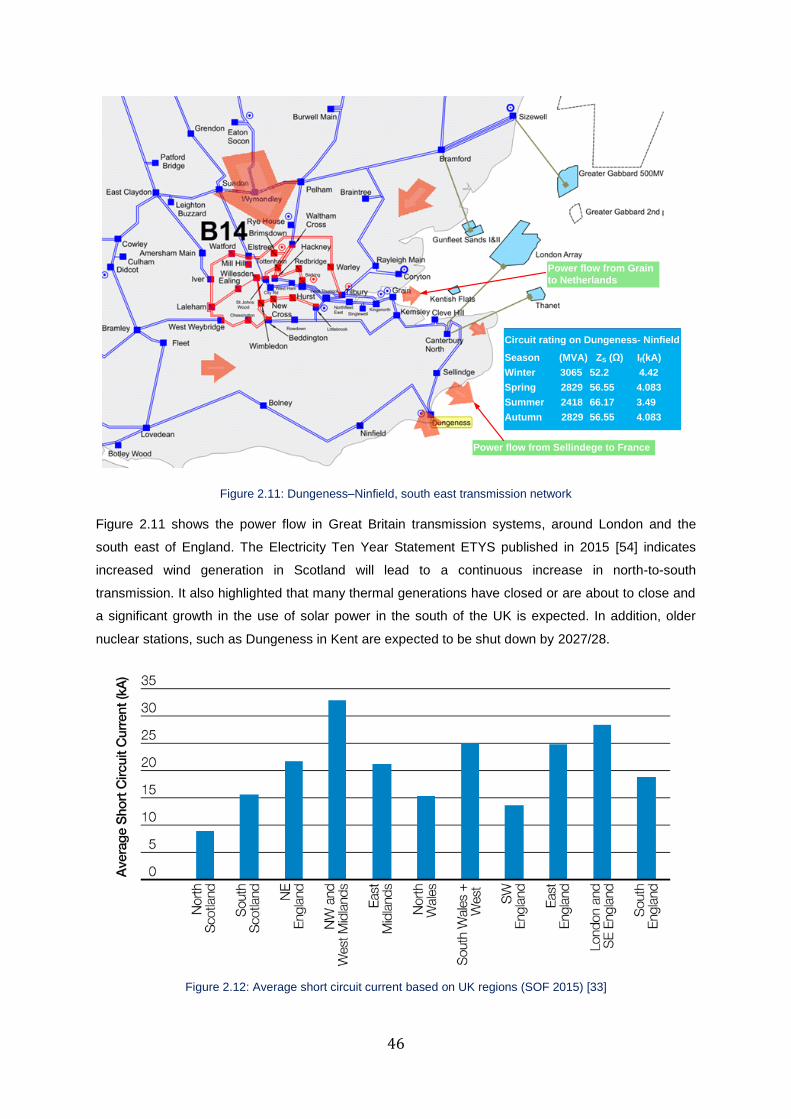
46
Season (MVA) ZS (Ω) If(kA)
Winter 3065 52.2 4.42
Spring 2829 56.55 4.083
Summer 2418 66.17 3.49
Autumn 2829 56.55 4.083
Circuit rating on Dungeness- Ninfield
Power flow from Sellindege to France
Power flow from Grain
to Netherlands
Figure 2.11: Dungeness–Ninfield, south east transmission network
Figure 2.11 shows the power flow in Great Britain transmission systems, around London and the
south east of England. The Electricity Ten Year Statement ETYS published in 2015 [54] indicates
increased wind generation in Scotland will lead to a continuous increase in north-to-south
transmission. It also highlighted that many thermal generations have closed or are about to close and
a significant growth in the use of solar power in the south of the UK is expected. In addition, older
nuclear stations, such as Dungeness in Kent are expected to be shut down by 2027/28.
Figure 2.12: Average short circuit current based on UK regions (SOF 2015) [33]
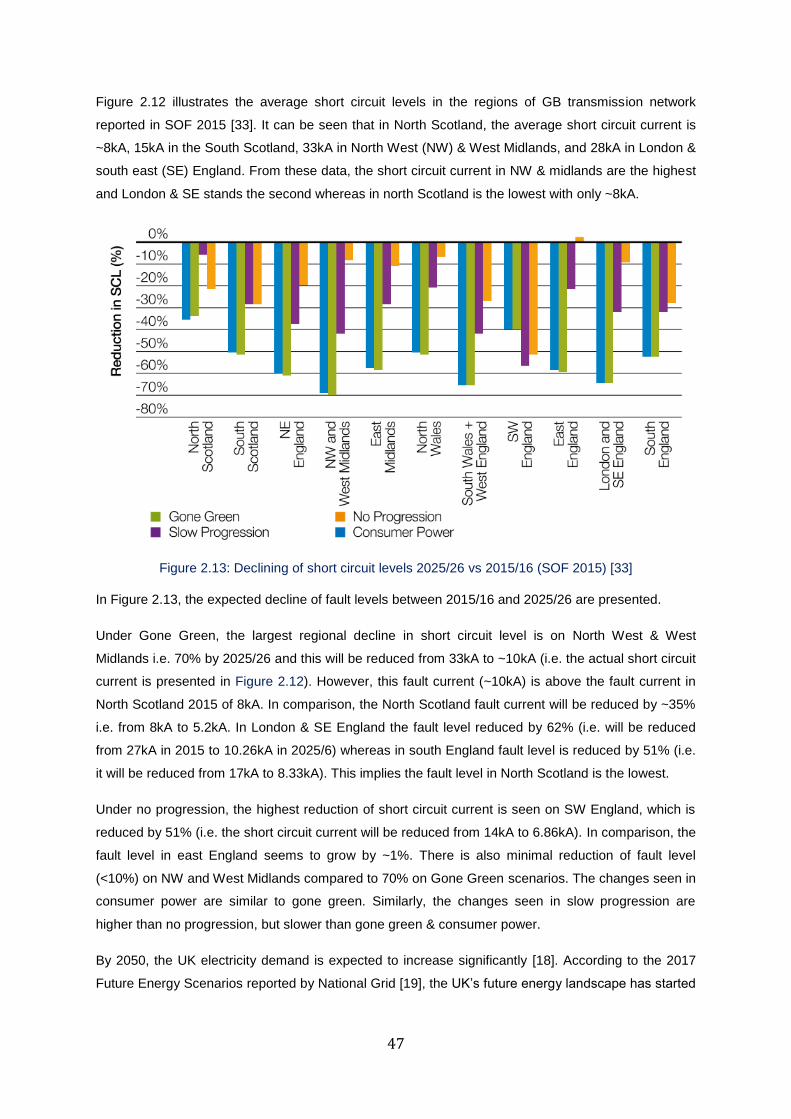
47
Figure 2.12 illustrates the average short circuit levels in the regions of GB transmission network
reported in SOF 2015 [33]. It can be seen that in North Scotland, the average short circuit current is
~8kA, 15kA in the South Scotland, 33kA in North West (NW) & West Midlands, and 28kA in London &
south east (SE) England. From these data, the short circuit current in NW & midlands are the highest
and London & SE stands the second whereas in north Scotland is the lowest with only ~8kA.
Figure 2.13: Declining of short circuit levels 2025/26 vs 2015/16 (SOF 2015) [33]
In Figure 2.13, the expected decline of fault levels between 2015/16 and 2025/26 are presented.
Under Gone Green, the largest regional decline in short circuit level is on North West & West
Midlands i.e. 70% by 2025/26 and this will be reduced from 33kA to ~10kA (i.e. the actual short circuit
current is presented in Figure 2.12). However, this fault current (~10kA) is above the fault current in
North Scotland 2015 of 8kA. In comparison, the North Scotland fault current will be reduced by ~35%
i.e. from 8kA to 5.2kA. In London & SE England the fault level reduced by 62% (i.e. will be reduced
from 27kA in 2015 to 10.26kA in 2025/6) whereas in south England fault level is reduced by 51% (i.e.
it will be reduced from 17kA to 8.33kA). This implies the fault level in North Scotland is the lowest.
Under no progression, the highest reduction of short circuit current is seen on SW England, which is
reduced by 51% (i.e. the short circuit current will be reduced from 14kA to 6.86kA). In comparison, the
fault level in east England seems to grow by ~1%. There is also minimal reduction of fault level
(<10%) on NW and West Midlands compared to 70% on Gone Green scenarios. The changes seen in
consumer power are similar to gone green. Similarly, the changes seen in slow progression are
higher than no progression, but slower than gone green & consumer power.
By 2050, the UK electricity demand is expected to increase significantly [18]. According to the 2017
Future Energy Scenarios reported by National Grid [19], the UK’s future energy landscape has started
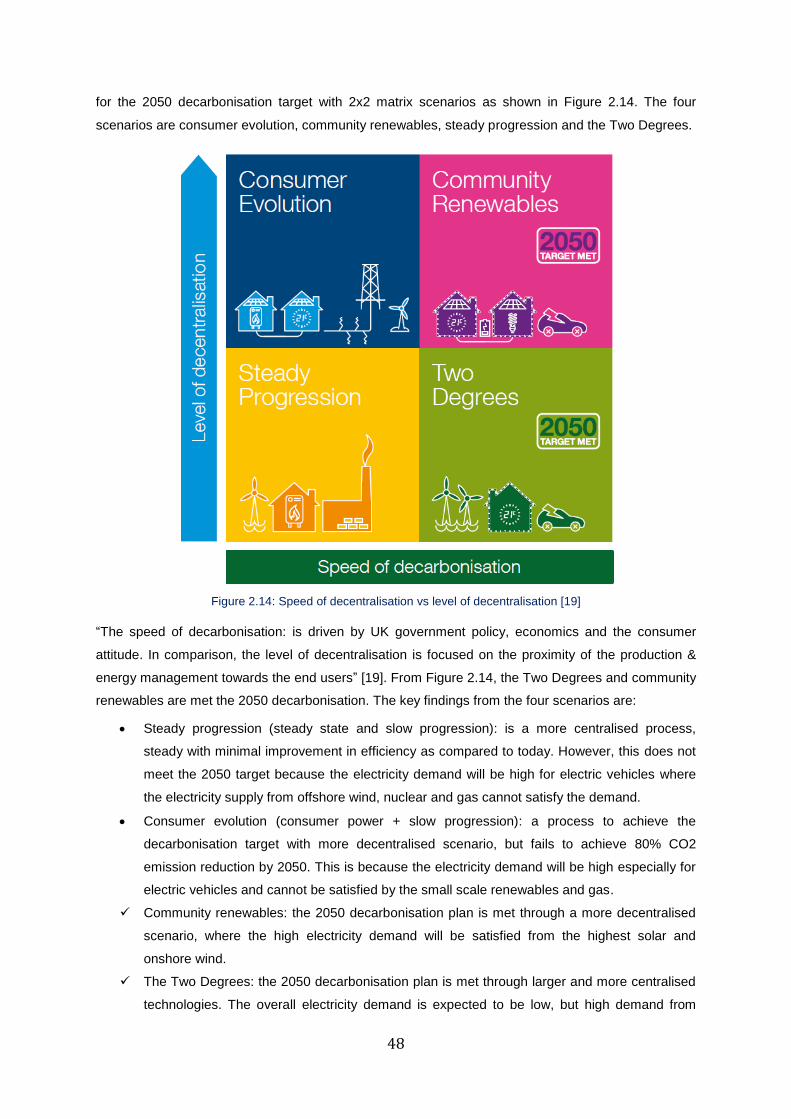
48
for the 2050 decarbonisation target with 2x2 matrix scenarios as shown in Figure 2.14. The four
scenarios are consumer evolution, community renewables, steady progression and the Two Degrees.
Figure 2.14: Speed of decentralisation vs level of decentralisation [19]
“The speed of decarbonisation: is driven by UK government policy, economics and the consumer
attitude. In comparison, the level of decentralisation is focused on the proximity of the production &
energy management towards the end users” [19]. From Figure 2.14, the Two Degrees and community
renewables are met the 2050 decarbonisation. The key findings from the four scenarios are:
Steady progression (steady state and slow progression): is a more centralised process,
steady with minimal improvement in efficiency as compared to today. However, this does not
meet the 2050 target because the electricity demand will be high for electric vehicles where
the electricity supply from offshore wind, nuclear and gas cannot satisfy the demand.
Consumer evolution (consumer power + slow progression): a process to achieve the
decarbonisation target with more decentralised scenario, but fails to achieve 80% CO2
emission reduction by 2050. This is because the electricity demand will be high especially for
electric vehicles and cannot be satisfied by the small scale renewables and gas.
Community renewables: the 2050 decarbonisation plan is met through a more decentralised
scenario, where the high electricity demand will be satisfied from the highest solar and
onshore wind.
The Two Degrees: the 2050 decarbonisation plan is met through larger and more centralised
technologies. The overall electricity demand is expected to be low, but high demand from
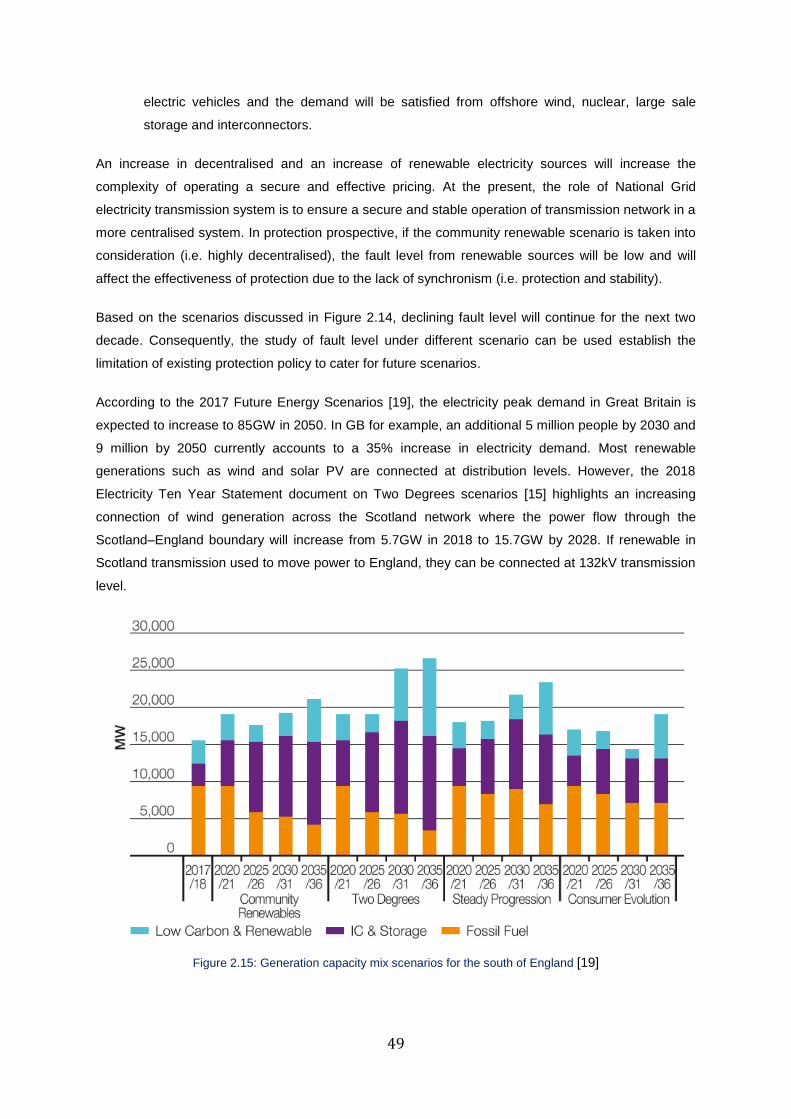
49
electric vehicles and the demand will be satisfied from offshore wind, nuclear, large sale
storage and interconnectors.
An increase in decentralised and an increase of renewable electricity sources will increase the
complexity of operating a secure and effective pricing. At the present, the role of National Grid
electricity transmission system is to ensure a secure and stable operation of transmission network in a
more centralised system. In protection prospective, if the community renewable scenario is taken into
consideration (i.e. highly decentralised), the fault level from renewable sources will be low and will
affect the effectiveness of protection due to the lack of synchronism (i.e. protection and stability).
Based on the scenarios discussed in Figure 2.14, declining fault level will continue for the next two
decade. Consequently, the study of fault level under different scenario can be used establish the
limitation of existing protection policy to cater for future scenarios.
According to the 2017 Future Energy Scenarios [19], the electricity peak demand in Great Britain is
expected to increase to 85GW in 2050. In GB for example, an additional 5 million people by 2030 and
9 million by 2050 currently accounts to a 35% increase in electricity demand. Most renewable
generations such as wind and solar PV are connected at distribution levels. However, the 2018
Electricity Ten Year Statement document on Two Degrees scenarios [15] highlights an increasing
connection of wind generation across the Scotland network where the power flow through the
Scotland–England boundary will increase from 5.7GW in 2018 to 15.7GW by 2028. If renewable in
Scotland transmission used to move power to England, they can be connected at 132kV transmission
level.
Figure 2.15: Generation capacity mix scenarios for the south of England [19]
50
Figure 2.15 presents the generation capacity mix for the south of England where 2017/18 is used as a
benchmark for the forecasted changes. IC refers to “inter connection” between England and
France/Belgium/Netherlands.
Under community renewable (2017/18 to 2035/36), the low carbon & renewable is expected to
increase from ~3GW in 2017/18 to ~7GW in 2035/36 whereas the IC & storage is expected to
increase from 4GW in 2017/18 to 9GW in 2025/26 and ~12GW in 2035/36. In addition, the fossil fuel
is expected to be reduced from 9GW in 2017/18 to 6GW in 2025/26 as well as to 4GW in 2035/36
[19].
Under the Two Degrees scenario, the low carbon & renewable remains similar from 2017/18 upto
2025/26 (i.e. <5MW), but will be expected to increase by 2030 & 2035 from 7GW to 10GW. The IC &
storage is also expected to increase from 4GW in 2017/18 to 13GW in 2035/36, whereas the fossil
fuel is expected to be reduced from 9GW in 2017/18 to 4GW in 2035/36.
Under steady progression, the low carbon & renewable will expect to increase from 3GW in 2017/18
to ~8GW in 2035/36 whereas the IC & storage will also expect to increase from 3GW (2017/18), 7GW
(2025/26) to 8GW in 2035/36 [19]. In comparison, the fossil fuel is expected to reduce from 9GW
(2017/18) to 7GW by 2035/36.
Under consumer evolution, the low carbon & renewable is expected to increase from 3GW in 2017/18
to 6GW in 2035/36. The IC & storage is also expected to increase from 3GW (2017/18) to 6GW
(2035/36). The fossil fuel is however expected to reduce from 9GW (2017/18) to 7GW in 2035/36.
In summary, both low carbon & renewable and IC & storage are expected to increase for the next 15
years whereas fossil fuel is expected to decline. These change implies, the focus should put on fault
level or characteristic behaviour of short circuit current contributions from low carbon & renewable as
well as the IC & storage The maximum fault level model that complies with the G74 standard occurs
during winter peak-demand when the maximum numbers of sources are in service. In comparison,
the minimum fault level occurs on summer minimum demand when minimum numbers of sources (i.e.
most electricity comes from renewable energy sources, such as wind and PV solar) are in service.
The method for investigating the effectiveness and limitation of conventional protection as related to
the future GB transmission network will be discussed in the next section.
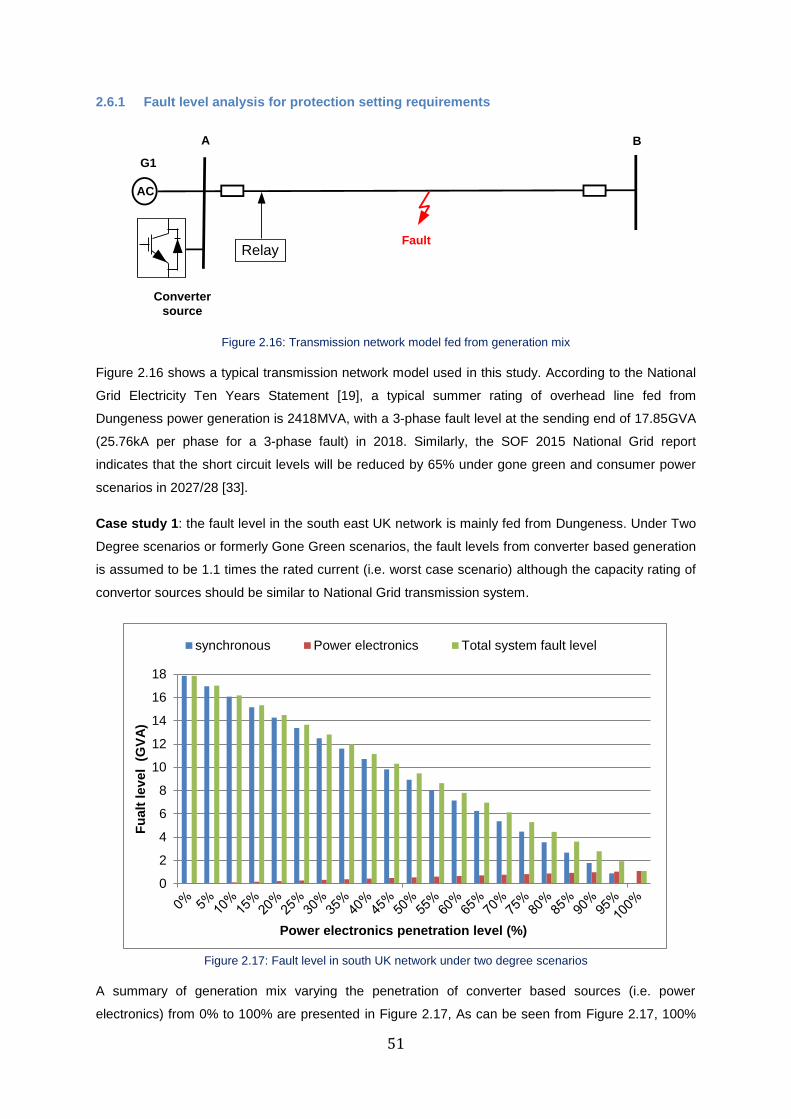
51
2.6.1 Fault level analysis for protection setting requirements
G1
AC
A B
Fault
Converter
source
Relay
Figure 2.16: Transmission network model fed from generation mix
Figure 2.16 shows a typical transmission network model used in this study. According to the National
Grid Electricity Ten Years Statement [19], a typical summer rating of overhead line fed from
Dungeness power generation is 2418MVA, with a 3-phase fault level at the sending end of 17.85GVA
(25.76kA per phase for a 3-phase fault) in 2018. Similarly, the SOF 2015 National Grid report
indicates that the short circuit levels will be reduced by 65% under gone green and consumer power
scenarios in 2027/28 [33].
Case study 1: the fault level in the south east UK network is mainly fed from Dungeness. Under Two
Degree scenarios or formerly Gone Green scenarios, the fault levels from converter based generation
is assumed to be 1.1 times the rated current (i.e. worst case scenario) although the capacity rating of
convertor sources should be similar to National Grid transmission system.
Figure 2.17: Fault level in south UK network under two degree scenarios
A summary of generation mix varying the penetration of converter based sources (i.e. power
electronics) from 0% to 100% are presented in Figure 2.17, As can be seen from Figure 2.17, 100%
0
2
4
6
8
10
12
14
16
18
Fu
alt
lev
el
(G
VA
)
Power electronics penetration level (%)
synchronous Power electronics Total system fault level
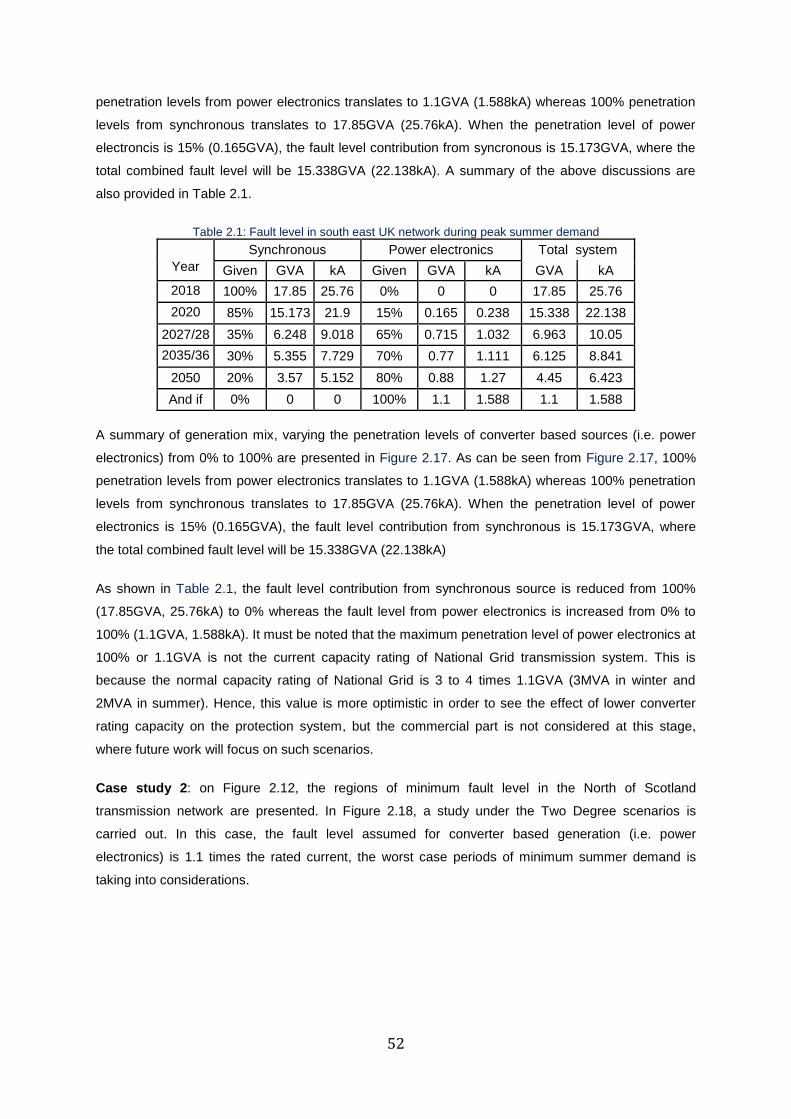
52
penetration levels from power electronics translates to 1.1GVA (1.588kA) whereas 100% penetration
levels from synchronous translates to 17.85GVA (25.76kA). When the penetration level of power
electroncis is 15% (0.165GVA), the fault level contribution from syncronous is 15.173GVA, where the
total combined fault level will be 15.338GVA (22.138kA). A summary of the above discussions are
also provided in Table 2.1.
Table 2.1: Fault level in south east UK network during peak summer demand
Year
Synchronous Power electronics Total system
Given GVA kA Given GVA kA GVA kA
2018 100% 17.85 25.76 0% 0 0 17.85 25.76
2020 85% 15.173 21.9 15% 0.165 0.238 15.338 22.138
2027/28 35% 6.248 9.018 65% 0.715 1.032 6.963 10.05
2035/36 30% 5.355 7.729 70% 0.77 1.111 6.125 8.841
2050 20% 3.57 5.152 80% 0.88 1.27 4.45 6.423
And if 0% 0 0 100% 1.1 1.588 1.1 1.588
A summary of generation mix, varying the penetration levels of converter based sources (i.e. power
electronics) from 0% to 100% are presented in Figure 2.17. As can be seen from Figure 2.17, 100%
penetration levels from power electronics translates to 1.1GVA (1.588kA) whereas 100% penetration
levels from synchronous translates to 17.85GVA (25.76kA). When the penetration level of power
electronics is 15% (0.165GVA), the fault level contribution from synchronous is 15.173GVA, where
the total combined fault level will be 15.338GVA (22.138kA)
As shown in Table 2.1, the fault level contribution from synchronous source is reduced from 100%
(17.85GVA, 25.76kA) to 0% whereas the fault level from power electronics is increased from 0% to
100% (1.1GVA, 1.588kA). It must be noted that the maximum penetration level of power electronics at
100% or 1.1GVA is not the current capacity rating of National Grid transmission system. This is
because the normal capacity rating of National Grid is 3 to 4 times 1.1GVA (3MVA in winter and
2MVA in summer). Hence, this value is more optimistic in order to see the effect of lower converter
rating capacity on the protection system, but the commercial part is not considered at this stage,
where future work will focus on such scenarios.
Case study 2: on Figure 2.12, the regions of minimum fault level in the North of Scotland
transmission network are presented. In Figure 2.18, a study under the Two Degree scenarios is
carried out. In this case, the fault level assumed for converter based generation (i.e. power
electronics) is 1.1 times the rated current, the worst case periods of minimum summer demand is
taking into considerations.
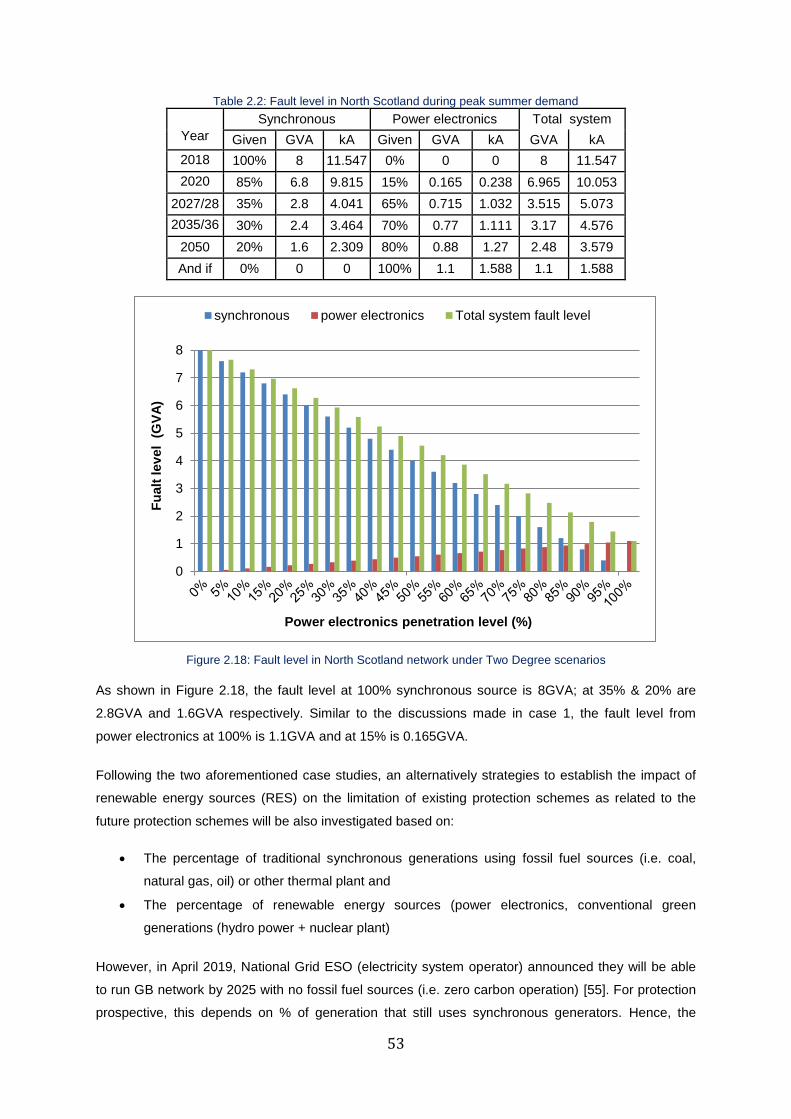
53
Table 2.2: Fault level in North Scotland during peak summer demand
Year
Synchronous Power electronics Total system
Given GVA kA Given GVA kA GVA kA
2018 100% 8 11.547 0% 0 0 8 11.547
2020 85% 6.8 9.815 15% 0.165 0.238 6.965 10.053
2027/28 35% 2.8 4.041 65% 0.715 1.032 3.515 5.073
2035/36 30% 2.4 3.464 70% 0.77 1.111 3.17 4.576
2050 20% 1.6 2.309 80% 0.88 1.27 2.48 3.579
And if 0% 0 0 100% 1.1 1.588 1.1 1.588
Figure 2.18: Fault level in North Scotland network under Two Degree scenarios
As shown in Figure 2.18, the fault level at 100% synchronous source is 8GVA; at 35% & 20% are
2.8GVA and 1.6GVA respectively. Similar to the discussions made in case 1, the fault level from
power electronics at 100% is 1.1GVA and at 15% is 0.165GVA.
Following the two aforementioned case studies, an alternatively strategies to establish the impact of
renewable energy sources (RES) on the limitation of existing protection schemes as related to the
future protection schemes will be also investigated based on:
The percentage of traditional synchronous generations using fossil fuel sources (i.e. coal,
natural gas, oil) or other thermal plant and
The percentage of renewable energy sources (power electronics, conventional green
generations (hydro power + nuclear plant)
However, in April 2019, National Grid ESO (electricity system operator) announced they will be able
to run GB network by 2025 with no fossil fuel sources (i.e. zero carbon operation) [55]. For protection
prospective, this depends on % of generation that still uses synchronous generators. Hence, the
0
1
2
3
4
5
6
7
8
Fu
alt
lev
el
(G
VA
)
Power electronics penetration level (%)
synchronous power electronics Total system fault level
54
strategies to establish the impact of renewable energy sources (RES) on the limitation of existing
protection schemes as related to the future protection schemes will be investigated based on:
The percentage of power electronics (PV solar, wind power)
The percentage of conventional green generations (hydro power + nuclear plant)
2.6.2 Protection policy on performing short circuit levels
If a system has excessive synchronous generation infeeds in one region, the system should be
constrained to the accepted thermal limits of individual items of plant. This can be reduced by
splitting’s the system, increase reactance of the line or earthing system through low impedance to the
ground. This reduces the system security, but ensures the fault level is acceptable and the
transmission system is not overstressed or damaged when a fault occurs [56]. This issue is of
concern during a cold winter in the UK when there is peak maximum demand and most synchronous
generations are connected into the system. For instance, the worst case (i.e. the infeed source on
400kV system is 63kA) may happen at 7pm on a cold January working day when no wind and no
solar energy is available.
To design the protection scheme, the rating of the network equipment must be checked for maximum
and minimum expected current. According to the National Grid technical specification, the current
transformer (CT) ratio used for 400kV at rated current of switchgear or rated continuous thermal limit
of 4kA per phase is 2000:1A, and 1200:1A for 275kV at rated continuous thermal current of 3.15kA
[57]. The basic short circuit level requirements for plant and equipment are provided in Table 2.3.
Table 2.3: Short-circuit levels and load current requirements used in National Grid [58]
System Voltage (kV)
Rated continuous thermal current (A)
Infeed short circuit current 3-phase (kA)
Max duration of fault time at remote end (s)
400 4000 63 1
275 3150 40 1
132 2000 40 3
Table 2.3 shows the requirements of infeed short-circuit levels and load current for plants &
equipment used in National Grid. From the given data [59], on 400kV systems with rated current of
4kA, if the infeed fault is 63kA, the protection must detect the short circuit current at the remote end
within 1s. For 275kV with 40kA infeed fault current, the remote end fault must be cleared with in 1s.
Similarly, for 132kV with 40kA infeed fault current, the remote end fault must be cleared with in 3s. At
high voltage rating, the fault level is designed to be strong. For example, the fault level at 400kV is
higher than the fault level at 132kV (i.e. a detailed calculation is provided in chapter 5 and 6). This is
because the impedance or reactance of the system (X/R) gets higher at lower voltage rating where an
increase of ohmic loss is possible.
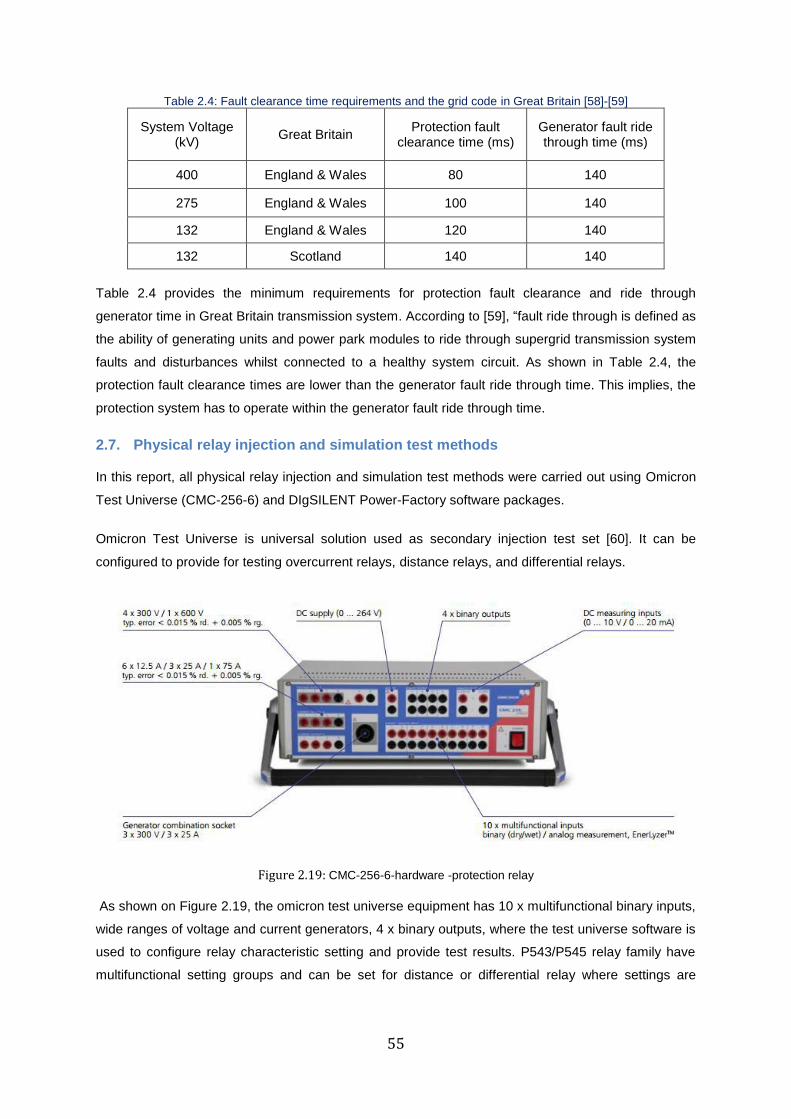
55
Table 2.4: Fault clearance time requirements and the grid code in Great Britain [58]-[59]
System Voltage (kV)
Great Britain Protection fault
clearance time (ms) Generator fault ride through time (ms)
400 England & Wales 80 140
275 England & Wales 100 140
132 England & Wales 120 140
132 Scotland 140 140
Table 2.4 provides the minimum requirements for protection fault clearance and ride through
generator time in Great Britain transmission system. According to [59], “fault ride through is defined as
the ability of generating units and power park modules to ride through supergrid transmission system
faults and disturbances whilst connected to a healthy system circuit. As shown in Table 2.4, the
protection fault clearance times are lower than the generator fault ride through time. This implies, the
protection system has to operate within the generator fault ride through time.
2.7. Physical relay injection and simulation test methods
In this report, all physical relay injection and simulation test methods were carried out using Omicron
Test Universe (CMC-256-6) and DIgSILENT Power-Factory software packages.
Omicron Test Universe is universal solution used as secondary injection test set [60]. It can be
configured to provide for testing overcurrent relays, distance relays, and differential relays.
Figure 2.19: CMC-256-6-hardware -protection relay
As shown on Figure 2.19, the omicron test universe equipment has 10 x multifunctional binary inputs,
wide ranges of voltage and current generators, 4 x binary outputs, where the test universe software is
used to configure relay characteristic setting and provide test results. P543/P545 relay family have
multifunctional setting groups and can be set for distance or differential relay where settings are

56
normally specified through “MiCOM S1 Agile, online software or by pressing the button on the panel
[60].
/
Input V and IUser
Computer
Parallel line
Pickup
current
P545 relay
Omicron Test
Universe
Input V and I
Feeder remote panel CMC 256 plus
Figure 2.20: Conventional hard wired relay configuration with Omicron Test universe
Figure 2.20 (left) shows a hard wired testing method between CMC 256 and P545 relay. The input “I
& V" are referred as input current and voltage measured by the relay. The “pick up current” defines
the relay trip decision and the software is controlled on the PC where parallel cable is used to connect
with the Omicron hardware. As can be seen from Figure 2.20 (right), Micom P545 current differential
relay with distance programmable scheme is set to protect feeder transmission line. The wires
connected to CMC-256-6 are on the back of the panel. The operating setting characteristics and test
results of each relays are provided in chapter 3 , 4 and 5. In addition, the omicron test universe
software package offers a functional facility that works with the CMC test tools. These includes IEC
61850 testing modules, net simulation (NetSim), goose message & sampled values configuration and
scheme testing tools [61].
In section 2 (b and c), the short circuit current analysis and relay model based on DIgSILENT Power-
Factory software package were covered. Using these approaches, the simulation methods of
protective relays have been carried out throughout this research project including assumptions and
recommendations, when appropriate.
A. Overview on the limitation of protection relays
In this section, the limitations of existing protection system including unit and non-unit distance
protection are highlighted. Improvements have been done through setting resolutions and adequate
communication schemes [62]. As related to this and future protection scenarios, the limitations of unit
and non-unit distance protection as applied to transmission lines are briefly discussed as follows:
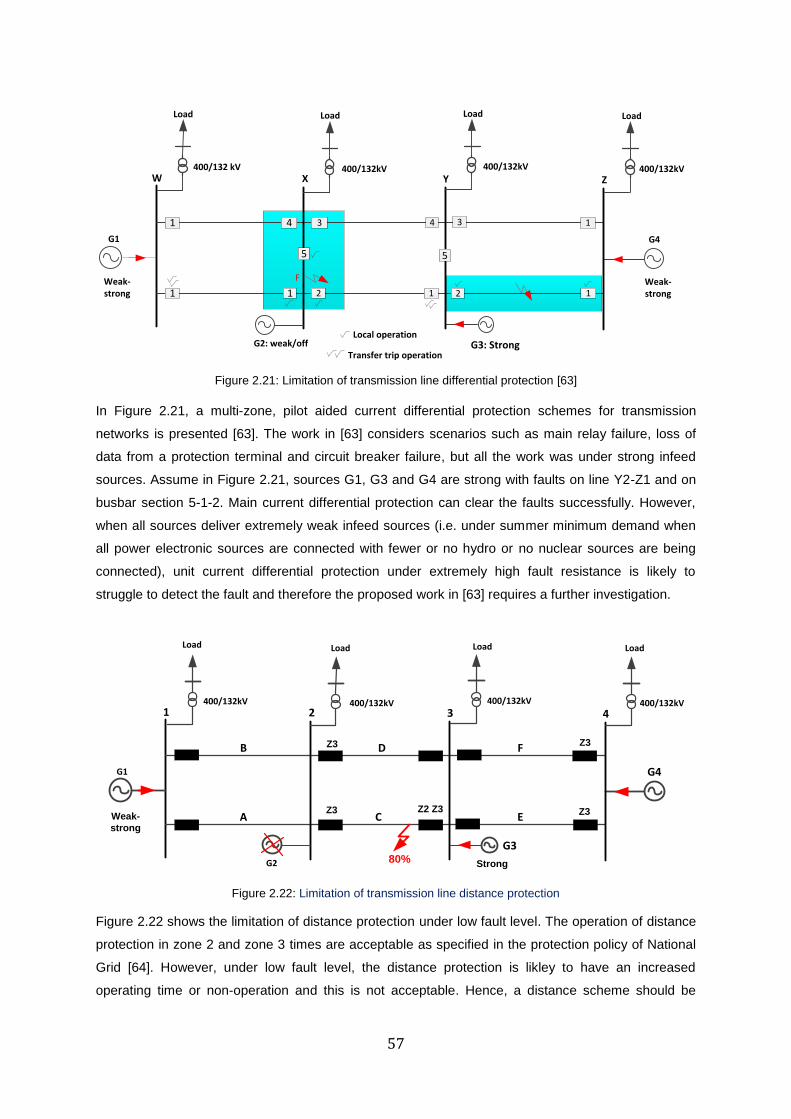
57
Weak-strong
G1 G4
G3: StrongG2: weak/off
W
Load
F
X Y Z
21
31 14
11
400/132 kV 400/132kV 400/132kV 400/132kV
Load Load Load
3
21
4
55
Local operation
Transfer trip operation
Weak-strong
Figure 2.21: Limitation of transmission line differential protection [63]
In Figure 2.21, a multi-zone, pilot aided current differential protection schemes for transmission
networks is presented [63]. The work in [63] considers scenarios such as main relay failure, loss of
data from a protection terminal and circuit breaker failure, but all the work was under strong infeed
sources. Assume in Figure 2.21, sources G1, G3 and G4 are strong with faults on line Y2-Z1 and on
busbar section 5-1-2. Main current differential protection can clear the faults successfully. However,
when all sources deliver extremely weak infeed sources (i.e. under summer minimum demand when
all power electronic sources are connected with fewer or no hydro or no nuclear sources are being
connected), unit current differential protection under extremely high fault resistance is likely to
struggle to detect the fault and therefore the proposed work in [63] requires a further investigation.
G1 G4
CA
B D
E
F
G3
G2
1
Load
80%
2 3 4400/132kV 400/132kV 400/132kV 400/132kV
Load Load Load
Z3
Z3 Z3
Z3Weak-
strong
Strong
Z2 Z3
Figure 2.22: Limitation of transmission line distance protection
Figure 2.22 shows the limitation of distance protection under low fault level. The operation of distance
protection in zone 2 and zone 3 times are acceptable as specified in the protection policy of National
Grid [64]. However, under low fault level, the distance protection is likley to have an increased
operating time or non-operation and this is not acceptable. Hence, a distance scheme should be
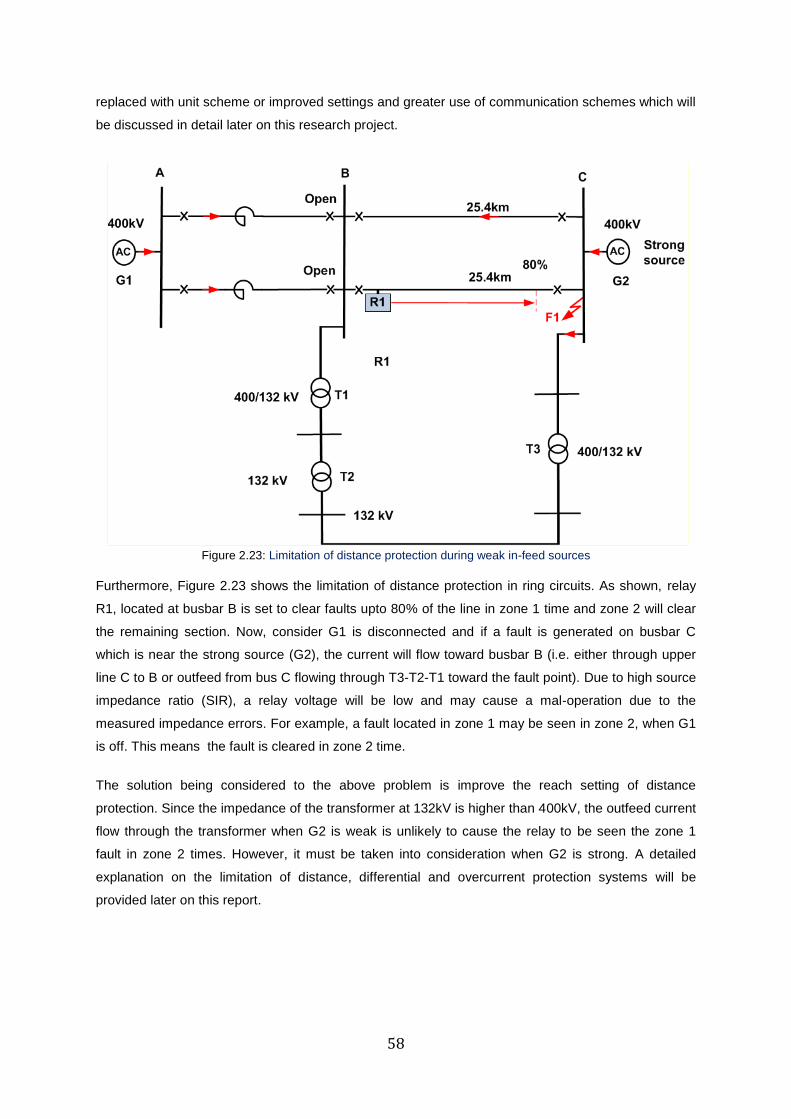
58
replaced with unit scheme or improved settings and greater use of communication schemes which will
be discussed in detail later on this research project.
Figure 2.23: Limitation of distance protection during weak in-feed sources
Furthermore, Figure 2.23 shows the limitation of distance protection in ring circuits. As shown, relay
R1, located at busbar B is set to clear faults upto 80% of the line in zone 1 time and zone 2 will clear
the remaining section. Now, consider G1 is disconnected and if a fault is generated on busbar C
which is near the strong source (G2), the current will flow toward busbar B (i.e. either through upper
line C to B or outfeed from bus C flowing through T3-T2-T1 toward the fault point). Due to high source
impedance ratio (SIR), a relay voltage will be low and may cause a mal-operation due to the
measured impedance errors. For example, a fault located in zone 1 may be seen in zone 2, when G1
is off. This means the fault is cleared in zone 2 time.
The solution being considered to the above problem is improve the reach setting of distance
protection. Since the impedance of the transformer at 132kV is higher than 400kV, the outfeed current
flow through the transformer when G2 is weak is unlikely to cause the relay to be seen the zone 1
fault in zone 2 times. However, it must be taken into consideration when G2 is strong. A detailed
explanation on the limitation of distance, differential and overcurrent protection systems will be
provided later on this report.

59
2.8. Summary
The fault level calculation was discussed in this chapter. The issues associated with declining fault
level and their impacts on existing protection schemes are highlighted. From a fault level analysis
perspective, the minimum fault level is normally seen during minimum summer demand. Utility
concern about protection performance as the penetration of non- synchronous generation increases
was reviewed in this chapter.
A review of the literature indicates, overcurrent protection is most likely to be affected during low short
circuit fault levels whereas differential protection is the least affected. Distance protection also shows
an increase in operating times. However, there is limited information on the protection setting strategy
at different fault level conditions.
According to the system operating framework published by National Grid, the largest decline in the
fault level provides a benchmark for establishing the limitation of existing protection and their settings.
In the GB transmission network, the average lowest short current level is seen during the summer
minimum demand period whereas the maximum fault level is seen during winter maximum demand.
Based on the Two Degree scenario, the expected fault level calculations used for the assessment of
protection performance in 2020, 2028, 2036 and 2050 are presented on Table 2.1.
The protection policy on performing short circuit levels, overview on the limitation of existing
protection systems and test methods used in this research are also discussed. The short circuit
calculation is performed based on complete method, incapable of providing exact values without
approximation.
The key strengths of this study are to increase understanding on the concept of fault level and issues
associated with the setting of protection when significant renewable generation is operational and
minimal synchronous generation is being used. The objective is to understand the impact of
protection performance of declining fault levels on the Great Britain networks.
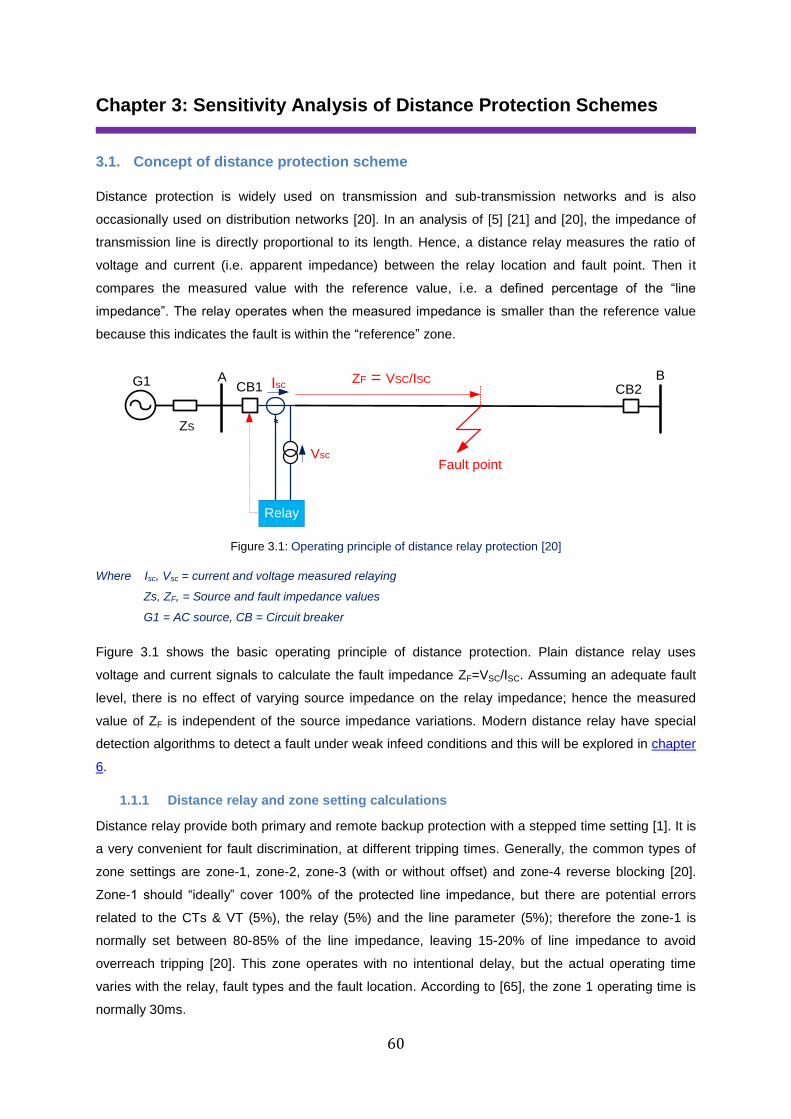
60
Chapter 3: Sensitivity Analysis of Distance Protection Schemes
3.1. Concept of distance protection scheme
Distance protection is widely used on transmission and sub-transmission networks and is also
occasionally used on distribution networks [20]. In an analysis of [5] [21] and [20], the impedance of
transmission line is directly proportional to its length. Hence, a distance relay measures the ratio of
voltage and current (i.e. apparent impedance) between the relay location and fault point. Then it
compares the measured value with the reference value, i.e. a defined percentage of the “line
impedance”. The relay operates when the measured impedance is smaller than the reference value
because this indicates the fault is within the “reference” zone.
B
Relay
ACB1 Isc
ZF = VSC/ISC
ZS
Fault point
CB2G1
Vsc
Figure 3.1: Operating principle of distance relay protection [20]
Where Isc, Vsc = current and voltage measured relaying
Zs, ZF, = Source and fault impedance values
G1 = AC source, CB = Circuit breaker
Figure 3.1 shows the basic operating principle of distance protection. Plain distance relay uses
voltage and current signals to calculate the fault impedance ZF=VSC/ISC. Assuming an adequate fault
level, there is no effect of varying source impedance on the relay impedance; hence the measured
value of ZF is independent of the source impedance variations. Modern distance relay have special
detection algorithms to detect a fault under weak infeed conditions and this will be explored in chapter
6.
1.1.1 Distance relay and zone setting calculations
Distance relay provide both primary and remote backup protection with a stepped time setting [1]. It is
a very convenient for fault discrimination, at different tripping times. Generally, the common types of
zone settings are zone-1, zone-2, zone-3 (with or without offset) and zone-4 reverse blocking [20].
Zone-1 should “ideally” cover 100% of the protected line impedance, but there are potential errors
related to the CTs & VT (5%), the relay (5%) and the line parameter (5%); therefore the zone-1 is
normally set between 80-85% of the line impedance, leaving 15-20% of line impedance to avoid
overreach tripping [20]. This zone operates with no intentional delay, but the actual operating time
varies with the relay, fault types and the fault location. According to [65], the zone 1 operating time is
normally 30ms.
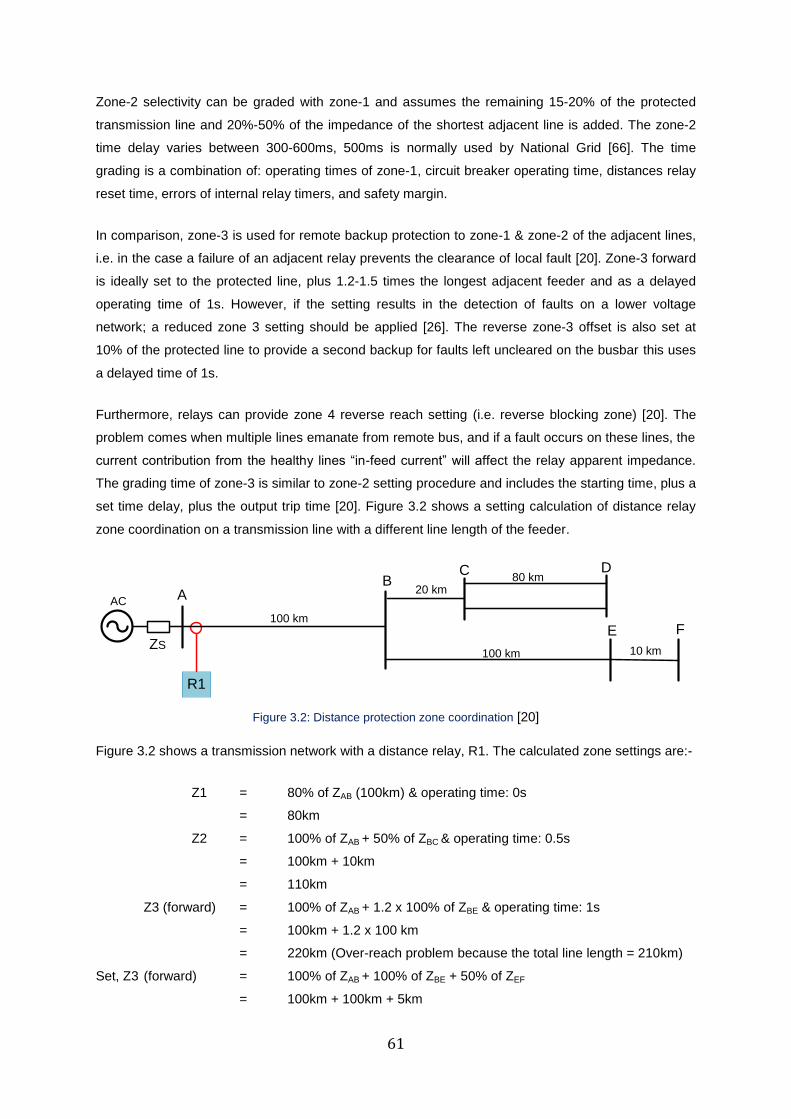
61
Zone-2 selectivity can be graded with zone-1 and assumes the remaining 15-20% of the protected
transmission line and 20%-50% of the impedance of the shortest adjacent line is added. The zone-2
time delay varies between 300-600ms, 500ms is normally used by National Grid [66]. The time
grading is a combination of: operating times of zone-1, circuit breaker operating time, distances relay
reset time, errors of internal relay timers, and safety margin.
In comparison, zone-3 is used for remote backup protection to zone-1 & zone-2 of the adjacent lines,
i.e. in the case a failure of an adjacent relay prevents the clearance of local fault [20]. Zone-3 forward
is ideally set to the protected line, plus 1.2-1.5 times the longest adjacent feeder and as a delayed
operating time of 1s. However, if the setting results in the detection of faults on a lower voltage
network; a reduced zone 3 setting should be applied [26]. The reverse zone-3 offset is also set at
10% of the protected line to provide a second backup for faults left uncleared on the busbar this uses
a delayed time of 1s.
Furthermore, relays can provide zone 4 reverse reach setting (i.e. reverse blocking zone) [20]. The
problem comes when multiple lines emanate from remote bus, and if a fault occurs on these lines, the
current contribution from the healthy lines “in-feed current” will affect the relay apparent impedance.
The grading time of zone-3 is similar to zone-2 setting procedure and includes the starting time, plus a
set time delay, plus the output trip time [20]. Figure 3.2 shows a setting calculation of distance relay
zone coordination on a transmission line with a different line length of the feeder.
A
ZS
BC D
100 km
AC
R1
100 km
20 km
10 km
E F
80 km
Figure 3.2: Distance protection zone coordination [20]
Figure 3.2 shows a transmission network with a distance relay, R1. The calculated zone settings are:-
Z1 = 80% of ZAB (100km) & operating time: 0s
= 80km
Z2 = 100% of ZAB + 50% of ZBC & operating time: 0.5s
= 100km + 10km
= 110km
Z3 (forward) = 100% of ZAB + 1.2 x 100% of ZBE & operating time: 1s
= 100km + 1.2 x 100 km
= 220km (Over-reach problem because the total line length = 210km)
Set, Z3 (forward) = 100% of ZAB + 100% of ZBE + 50% of ZEF
= 100km + 100km + 5km
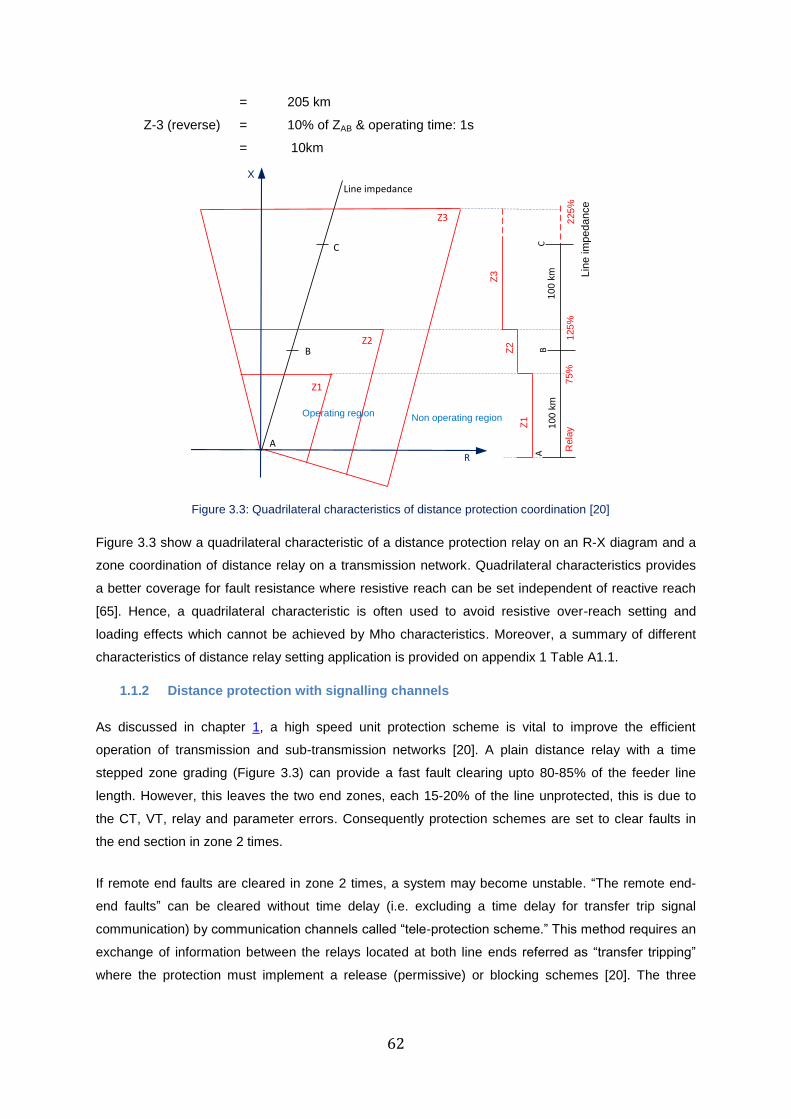
62
= 205 km
Z-3 (reverse) = 10% of ZAB & operating time: 1s
= 10km
Non operating regionOperating region
R
X
Line impedance
Z3
Z2
Z1
A
B
C
Z2
Z1
Z3
75
%1
25
%
AB
C
Re
lay
Lin
e im
pe
da
nce
10
0 k
m1
00
km
22
5%
Figure 3.3: Quadrilateral characteristics of distance protection coordination [20]
Figure 3.3 show a quadrilateral characteristic of a distance protection relay on an R-X diagram and a
zone coordination of distance relay on a transmission network. Quadrilateral characteristics provides
a better coverage for fault resistance where resistive reach can be set independent of reactive reach
[65]. Hence, a quadrilateral characteristic is often used to avoid resistive over-reach setting and
loading effects which cannot be achieved by Mho characteristics. Moreover, a summary of different
characteristics of distance relay setting application is provided on appendix 1 Table A1.1.
1.1.2 Distance protection with signalling channels
As discussed in chapter 1, a high speed unit protection scheme is vital to improve the efficient
operation of transmission and sub-transmission networks [20]. A plain distance relay with a time
stepped zone grading (Figure 3.3) can provide a fast fault clearing upto 80-85% of the feeder line
length. However, this leaves the two end zones, each 15-20% of the line unprotected, this is due to
the CT, VT, relay and parameter errors. Consequently protection schemes are set to clear faults in
the end section in zone 2 times.
If remote end faults are cleared in zone 2 times, a system may become unstable. “The remote end-
end faults” can be cleared without time delay (i.e. excluding a time delay for transfer trip signal
communication) by communication channels called “tele-protection scheme.” This method requires an
exchange of information between the relays located at both line ends referred as “transfer tripping”
where the protection must implement a release (permissive) or blocking schemes [20]. The three
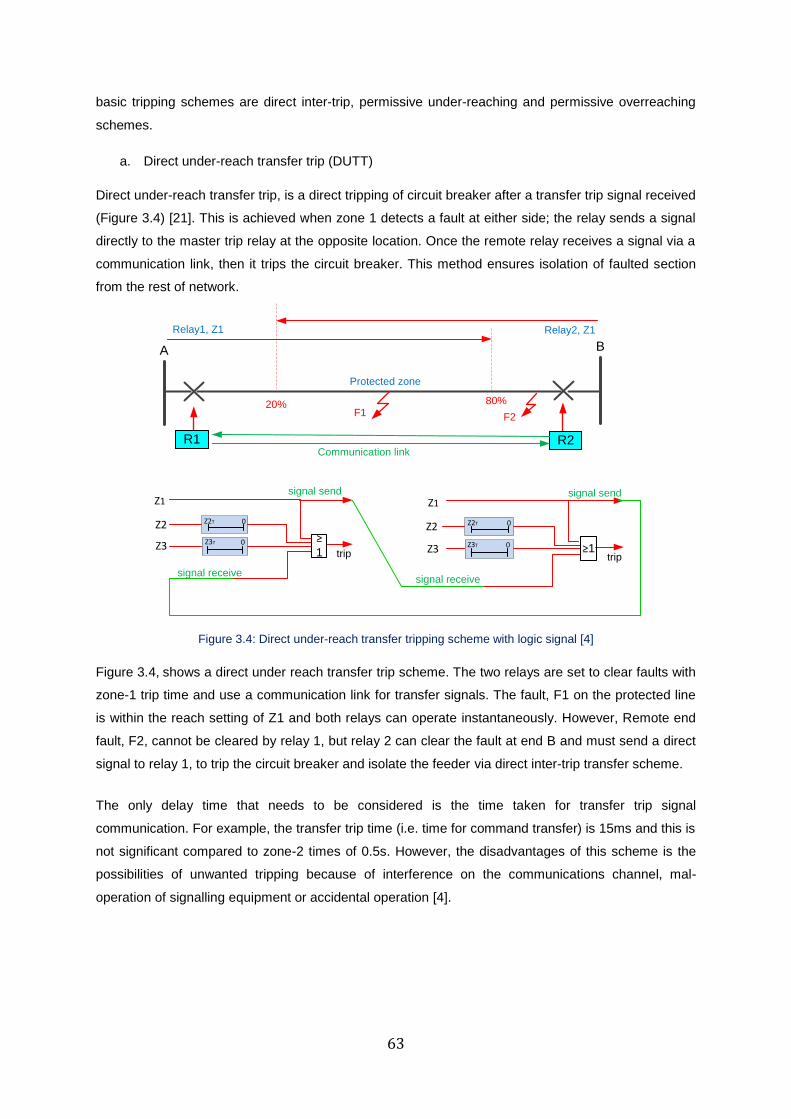
63
basic tripping schemes are direct inter-trip, permissive under-reaching and permissive overreaching
schemes.
a. Direct under-reach transfer trip (DUTT)
Direct under-reach transfer trip, is a direct tripping of circuit breaker after a transfer trip signal received
(Figure 3.4) [21]. This is achieved when zone 1 detects a fault at either side; the relay sends a signal
directly to the master trip relay at the opposite location. Once the remote relay receives a signal via a
communication link, then it trips the circuit breaker. This method ensures isolation of faulted section
from the rest of network.
Z1signal send
trip
signal receive
Z2
Z3
Z2T 0
Z3T 0 ≥1
Z1signal send
trip
signal receive
Z2
Z3
Z2T 0
Z3T 0 ≥1
A B
20% 80%
R1 R2Communication link
Protected zone
Relay2, Z1Relay1, Z1
F1 F2
Figure 3.4: Direct under-reach transfer tripping scheme with logic signal [4]
Figure 3.4, shows a direct under reach transfer trip scheme. The two relays are set to clear faults with
zone-1 trip time and use a communication link for transfer signals. The fault, F1 on the protected line
is within the reach setting of Z1 and both relays can operate instantaneously. However, Remote end
fault, F2, cannot be cleared by relay 1, but relay 2 can clear the fault at end B and must send a direct
signal to relay 1, to trip the circuit breaker and isolate the feeder via direct inter-trip transfer scheme.
The only delay time that needs to be considered is the time taken for transfer trip signal
communication. For example, the transfer trip time (i.e. time for command transfer) is 15ms and this is
not significant compared to zone-2 times of 0.5s. However, the disadvantages of this scheme is the
possibilities of unwanted tripping because of interference on the communications channel, mal-
operation of signalling equipment or accidental operation [4].
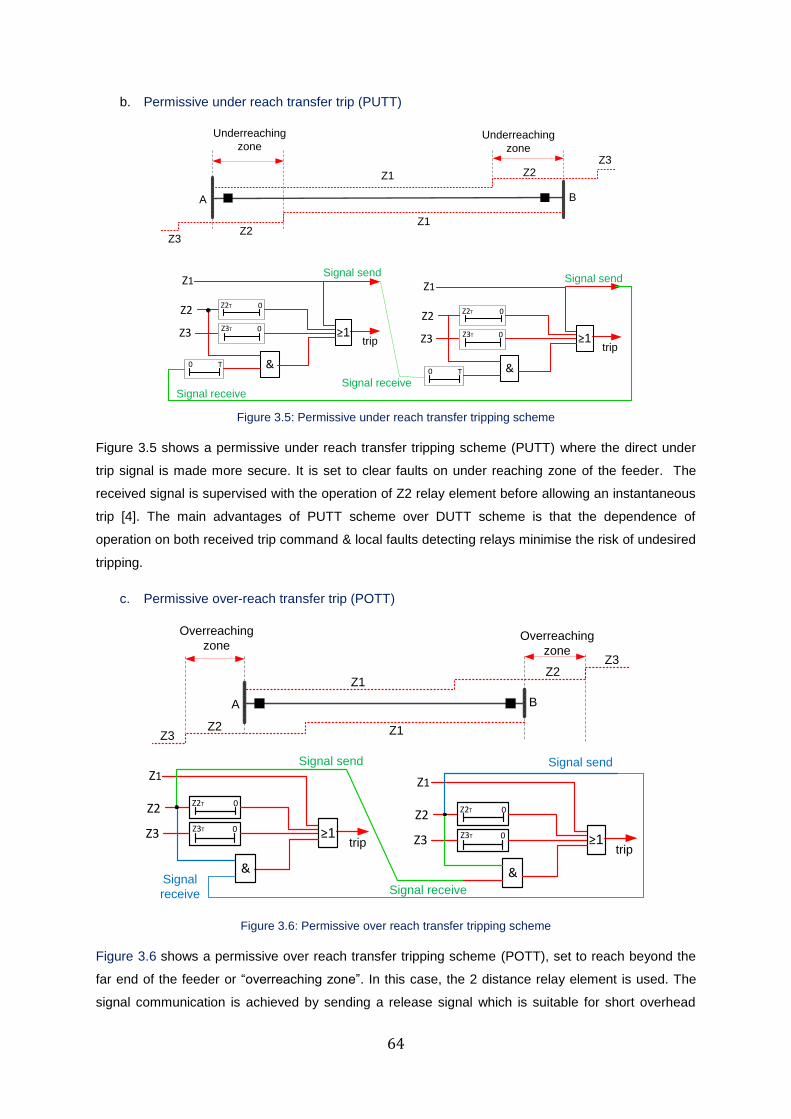
64
b. Permissive under reach transfer trip (PUTT)
&
Z1Signal send
trip
Signal receive
Z2
Z3
Z2T 0
Z3T 0
0 T
≥1
&
Z1Signal send
trip
Signal receive
Z2
Z3
Z2T 0
Z3T 0
0 T
≥1
Z1
Z1
Z2Z3
Z2Z3
Underreaching
zoneUnderreaching
zone
A B
Figure 3.5: Permissive under reach transfer tripping scheme
Figure 3.5 shows a permissive under reach transfer tripping scheme (PUTT) where the direct under
trip signal is made more secure. It is set to clear faults on under reaching zone of the feeder. The
received signal is supervised with the operation of Z2 relay element before allowing an instantaneous
trip [4]. The main advantages of PUTT scheme over DUTT scheme is that the dependence of
operation on both received trip command & local faults detecting relays minimise the risk of undesired
tripping.
c. Permissive over-reach transfer trip (POTT)
Z1
Z1
Z2Z3
Z2Z3
Overreaching
zoneOverreaching
zone
A B
Z1Signal send
trip
Signal
receive
Z2
Z3
Z2T 0
Z3T 0 ≥1
&
Z1
Signal send
trip
Signal receive
Z2
Z3
Z2T 0
Z3T 0 ≥1
&
Figure 3.6: Permissive over reach transfer tripping scheme
Figure 3.6 shows a permissive over reach transfer tripping scheme (POTT), set to reach beyond the
far end of the feeder or “overreaching zone”. In this case, the 2 distance relay element is used. The
signal communication is achieved by sending a release signal which is suitable for short overhead
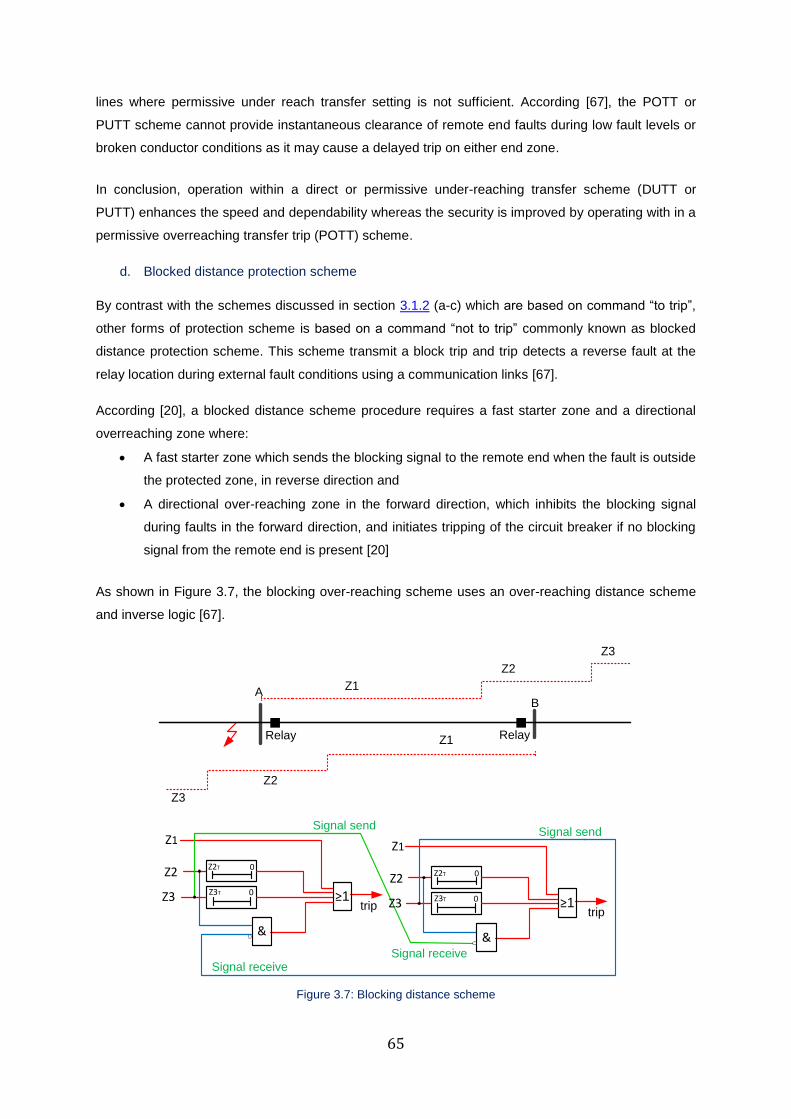
65
lines where permissive under reach transfer setting is not sufficient. According [67], the POTT or
PUTT scheme cannot provide instantaneous clearance of remote end faults during low fault levels or
broken conductor conditions as it may cause a delayed trip on either end zone.
In conclusion, operation within a direct or permissive under-reaching transfer scheme (DUTT or
PUTT) enhances the speed and dependability whereas the security is improved by operating with in a
permissive overreaching transfer trip (POTT) scheme.
d. Blocked distance protection scheme
By contrast with the schemes discussed in section 3.1.2 (a-c) which are based on command “to trip”,
other forms of protection scheme is based on a command “not to trip” commonly known as blocked
distance protection scheme. This scheme transmit a block trip and trip detects a reverse fault at the
relay location during external fault conditions using a communication links [67].
According [20], a blocked distance scheme procedure requires a fast starter zone and a directional
overreaching zone where:
A fast starter zone which sends the blocking signal to the remote end when the fault is outside
the protected zone, in reverse direction and
A directional over-reaching zone in the forward direction, which inhibits the blocking signal
during faults in the forward direction, and initiates tripping of the circuit breaker if no blocking
signal from the remote end is present [20]
As shown in Figure 3.7, the blocking over-reaching scheme uses an over-reaching distance scheme
and inverse logic [67].
Z1
Z2
AB
Z1Signal send
trip
Z2
Z3
Z2T 0
Z3T 0 ≥1
Signal receive
&
Z1Signal send
trip
Signal receive
Z2
Z3
Z2T 0
Z3T 0 ≥1
&
Z3
Z1
Z2
Z3
Relay Relay
Figure 3.7: Blocking distance scheme
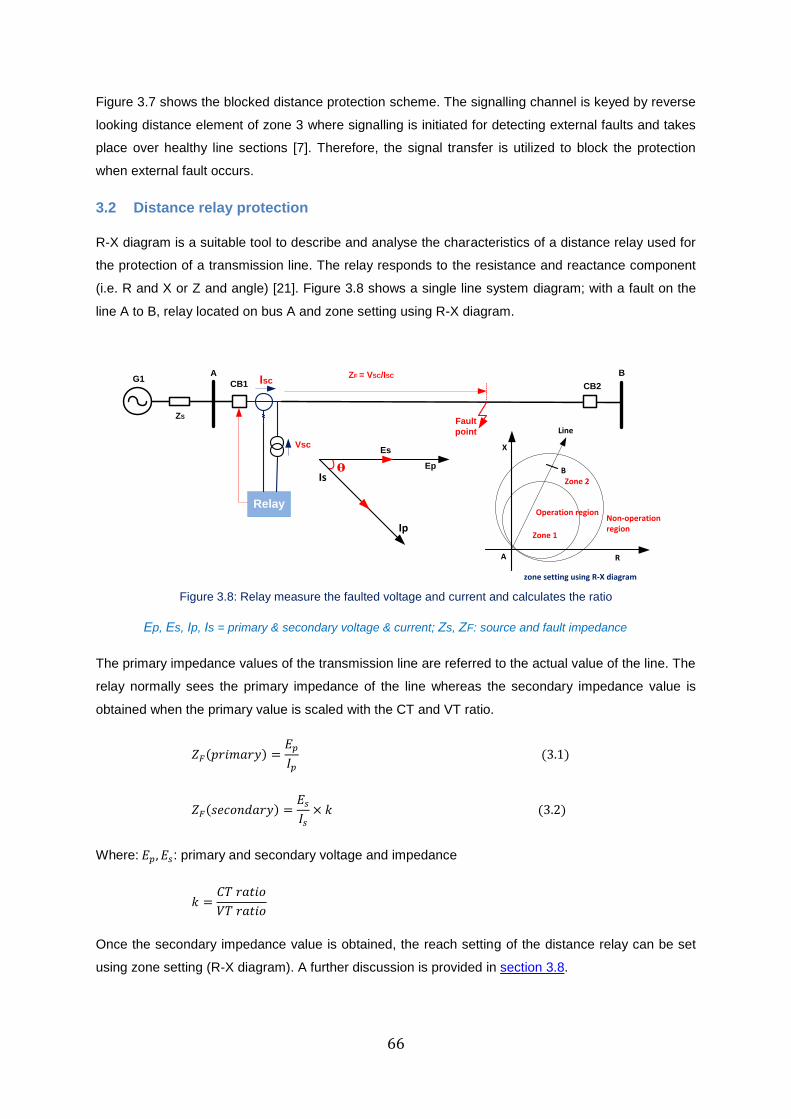
66
Figure 3.7 shows the blocked distance protection scheme. The signalling channel is keyed by reverse
looking distance element of zone 3 where signalling is initiated for detecting external faults and takes
place over healthy line sections [7]. Therefore, the signal transfer is utilized to block the protection
when external fault occurs.
3.2 Distance relay protection
R-X diagram is a suitable tool to describe and analyse the characteristics of a distance relay used for
the protection of a transmission line. The relay responds to the resistance and reactance component
(i.e. R and X or Z and angle) [21]. Figure 3.8 shows a single line system diagram; with a fault on the
line A to B, relay located on bus A and zone setting using R-X diagram.
Es
Ip
Ep
Isө
B
Relay
A
CB1 IscZF = VSC/ISC
ZSFault
point
CB2G1
Vsc
A
B
Zone 1
Non-operation region
Operation region
Zone 2
Line
X
R
zone setting using R-X diagram Figure 3.8: Relay measure the faulted voltage and current and calculates the ratio
Ep, Es, Ip, Is = primary & secondary voltage & current; Zs, ZF: source and fault impedance
The primary impedance values of the transmission line are referred to the actual value of the line. The
relay normally sees the primary impedance of the line whereas the secondary impedance value is
obtained when the primary value is scaled with the CT and VT ratio.
𝑍𝐹(𝑝𝑟𝑖𝑚𝑎𝑟𝑦) =𝐸𝑝
𝐼𝑝
(3.1)
𝑍𝐹(𝑠𝑒𝑐𝑜𝑛𝑑𝑎𝑟𝑦) =𝐸𝑠
𝐼𝑠
× 𝑘 (3.2)
Where: 𝐸𝑝, 𝐸𝑠: primary and secondary voltage and impedance
𝑘 =𝐶𝑇 𝑟𝑎𝑡𝑖𝑜
𝑉𝑇 𝑟𝑎𝑡𝑖𝑜
Once the secondary impedance value is obtained, the reach setting of the distance relay can be set
using zone setting (R-X diagram). A further discussion is provided in section 3.8.
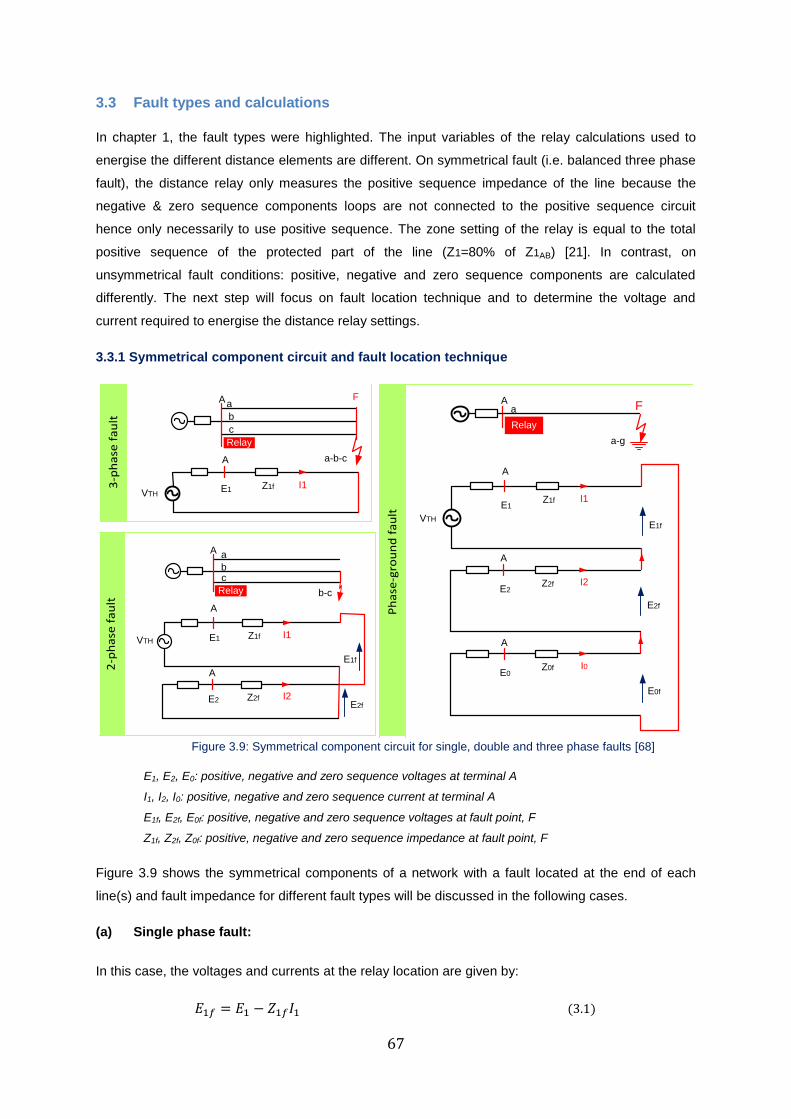
67
3.3 Fault types and calculations
In chapter 1, the fault types were highlighted. The input variables of the relay calculations used to
energise the different distance elements are different. On symmetrical fault (i.e. balanced three phase
fault), the distance relay only measures the positive sequence impedance of the line because the
negative & zero sequence components loops are not connected to the positive sequence circuit
hence only necessarily to use positive sequence. The zone setting of the relay is equal to the total
positive sequence of the protected part of the line (Z1=80% of Z1AB) [21]. In contrast, on
unsymmetrical fault conditions: positive, negative and zero sequence components are calculated
differently. The next step will focus on fault location technique and to determine the voltage and
current required to energise the distance relay settings.
3.3.1 Symmetrical component circuit and fault location technique
Ph
ase
-gro
un
d f
au
lt
2-p
ha
se f
au
lt3
-ph
ase
fa
ult
a
A
VTH E1 Z1f
A
E2 Z2f
I1
I2E2f
E1f
A
Relay
a
bc
b-c
A
F
VTH
E1Z1f
A
E2Z2f
A
E0Z0f
I1
I2
I0
E0f
E2f
E1f
A
Relay
a-g
A
VTHE1 Z1f I1
F
a-b-c
A
Relay
a
b
c
Figure 3.9: Symmetrical component circuit for single, double and three phase faults [68]
E1, E2, E0: positive, negative and zero sequence voltages at terminal A
I1, I2, I0: positive, negative and zero sequence current at terminal A
E1f, E2f, E0f: positive, negative and zero sequence voltages at fault point, F
Z1f, Z2f, Z0f: positive, negative and zero sequence impedance at fault point, F
Figure 3.9 shows the symmetrical components of a network with a fault located at the end of each
line(s) and fault impedance for different fault types will be discussed in the following cases.
(a) Single phase fault:
In this case, the voltages and currents at the relay location are given by:
𝐸1𝑓 = 𝐸1 − 𝑍1𝑓𝐼1 (3.1)

68
𝐸2𝑓 = 𝐸2 − 𝑍2𝑓𝐼2
𝐸0𝑓 = 𝐸0 − 𝑍0𝑓𝐼0
The phase “a” voltage and current can be expressed in symmetrical components.
𝐸𝑎𝑓 = 𝐸1𝑓 + 𝐸2𝑓 + 𝐸0𝑓 (3.2)
Where the phase voltage “a” at the fault point is set equal to zero:
𝐸𝑎𝑓 = (𝐸1 + 𝐸2 + 𝐸0) − 𝑍1𝑓(𝐼1 + 𝐼2) − 𝑍0𝑓𝐼0 = 0
= 𝐸𝑎𝑓 − 𝑍1𝑓𝐼𝑎 − (𝑍0𝑓 − 𝑍0𝑓)𝐼0 = 0
The total current and voltage measured by the relay are:
𝐼𝑎 = 𝐼1 + 𝐼2 + 𝐼0
𝐸𝑎 = 𝐸1 + 𝐸2 + 𝐸0
The relay current 𝐼𝑎′ is:
𝐼𝑎′ = 𝐼𝑎 +
𝑍0𝑓−𝑍1𝑓
𝑍1𝑓 𝐼0 = 𝐼𝑎 +
𝑍0−𝑍1
𝑍1𝐼0 = 𝐼𝑎 + 𝑚𝐼0
Z0 and Z1 are zero and positive sequence impedance values of the line. “m” is referred as the
compensated/ground factor and compensates the phase current for a mutual coupling between the
faulted phase & the other healthy phases.
𝑚 =𝑍0−𝑍1
𝑍1
Therefore the apparent impedance measured at the fault location is calculated as
𝑍1𝑓 =𝐸𝑎
𝐼𝑎′ =
𝐸𝑎
𝐼𝑎+𝑚𝐼0 (3.3)
If resistive fault, Rf is considered, the voltage measured by the relay is obtained as
𝐸𝑎 = (𝐼𝑎 + 𝑚𝐼0)𝑍1 + 3𝐼0𝑅𝑓
And the apparent impedance is
𝑍1𝑓 = 𝑍1 +3𝐼0𝑅𝑓
𝐼𝑎+𝑚𝐼0
The fault current, 𝐼𝑓 is equal to 3x the total sequence current and the apparent impedance will be
𝑍1𝑓 = 𝑍1 +𝐼𝑓𝑅𝑓
𝐼𝑎+𝑚𝐼0
(b) Phase-Phase fault:
The positive and negative sequence voltages at the fault point are given as follows:

69
E1f = E2f = E1 − Z1fI1 = E2 − Z2fI2
Thus, the positive fault impedance
Z1f =E1 − E2
I1 − I2
The phase voltage at the relay point is given as:
Eb = 𝑎2E1 + aE2 + E0
Ec = 𝑎E1 + 𝑎2E2 + E0
Then,
(Eb − Eb) = (𝑎2 − a)(E1 + E2)
(Ib − Ib) = (𝑎2 − a)(I1 + I2)
By rearranging, the fault impedance is given as:
Z1f =Eb − Ec
Ib − Ic
=E1 − E2
I1 − I2
The double phase to ground fault impedance calculation is similar to the phase to phase fault
calculations, but have zero sequence components.
(c) Three-Phase fault:
In three phase fault, only positive sequence network is available which can be obtained as follows:
E1 = Ea = Z1fI1 = Z1fIa
However, the negative and zero sequence voltage and current are zero.
E2 = E0 = 0 and I2 = I0 = 0
The positive fault impedance can be obtained as follows:
Z1f =Ea − Eb
Ia − Ib
=Eb − Ec
Ib − Ic
=Ec − Ea
Ic − Ia
=𝐸𝑎
𝐼𝑎
On single phase to ground faults, for most transmission line, the range of compensated factor, m,
varies between 1.5 and 2.5 [21]. According to [21], if the value of “m” is set to 2, the 𝑍0 of
transmission line is being equal to 3Z1. Thus, it takes 3Ø to ground distance relay (i.e. phase a-e, b-e,
c-e) to cover the 3x1-phase-ground faults. Hence, for 3-phase fault, the compensated value of phase
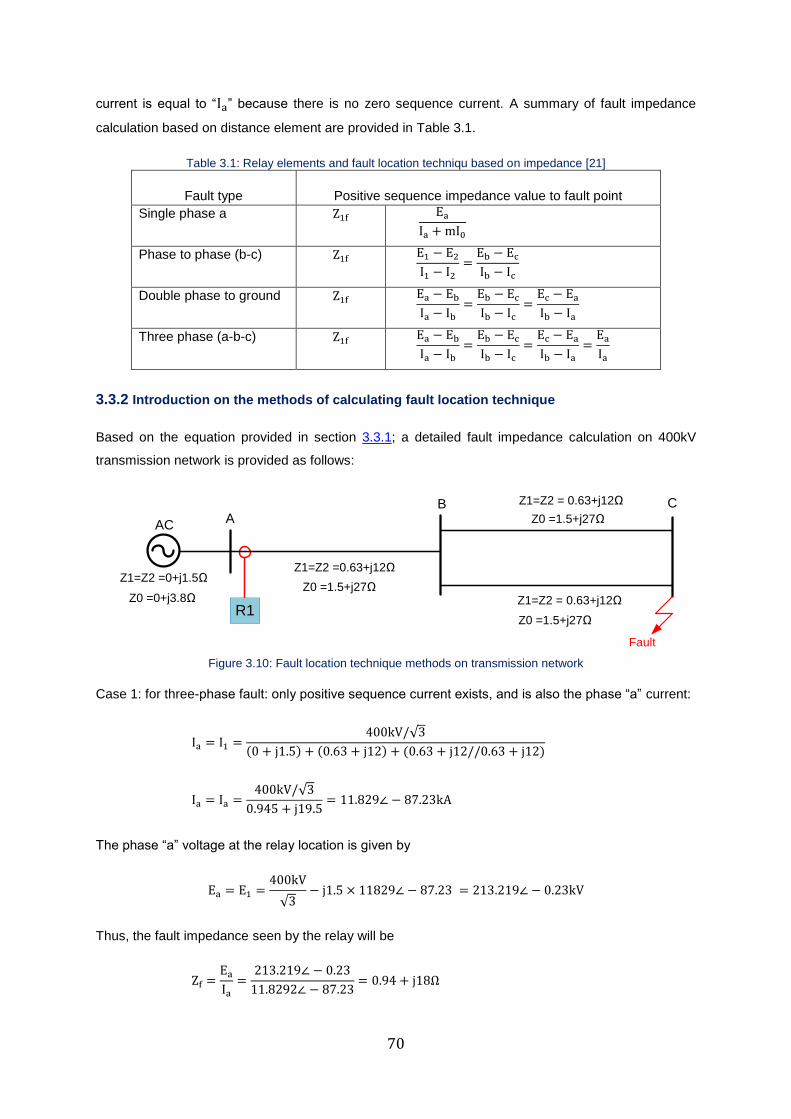
70
current is equal to “Ia” because there is no zero sequence current. A summary of fault impedance
calculation based on distance element are provided in Table 3.1.
Table 3.1: Relay elements and fault location techniqu based on impedance [21]
Fault type Positive sequence impedance value to fault point
Single phase a Z1f Ea
Ia + mI0
Phase to phase (b-c) Z1f E1 − E2
I1 − I2
=Eb − Ec
Ib − Ic
Double phase to ground Z1f Ea − Eb
Ia − Ib
=Eb − Ec
Ib − Ic
=Ec − Ea
Ib − Ia
Three phase (a-b-c) Z1f Ea − Eb
Ia − Ib
=Eb − Ec
Ib − Ic
=Ec − Ea
Ib − Ia
=Ea
Ia
3.3.2 Introduction on the methods of calculating fault location technique
Based on the equation provided in section 3.3.1; a detailed fault impedance calculation on 400kV
transmission network is provided as follows:
Z1=Z2 = 0.63+j12Ω
Z0 =0+j3.8Ω
AB
AC
R1
Fault
Z1=Z2 =0.63+j12Ω
Z0 =1.5+j27Ω Z1=Z2 = 0.63+j12Ω
Z0 =1.5+j27Ω
Z0 =1.5+j27Ω
C
Z1=Z2 =0+j1.5Ω
Figure 3.10: Fault location technique methods on transmission network
Case 1: for three-phase fault: only positive sequence current exists, and is also the phase “a” current:
Ia = I1 =400kV/√3
(0 + j1.5) + (0.63 + j12) + (0.63 + j12//0.63 + j12)
Ia = Ia =400kV/√3
0.945 + j19.5= 11.829∠ − 87.23kA
The phase “a” voltage at the relay location is given by
Ea = E1 =400kV
√3− j1.5 × 11829∠ − 87.23 = 213.219∠ − 0.23kV
Thus, the fault impedance seen by the relay will be
Zf =Ea
Ia
=213.219∠ − 0.23
11.8292∠ − 87.23= 0.94 + j18Ω
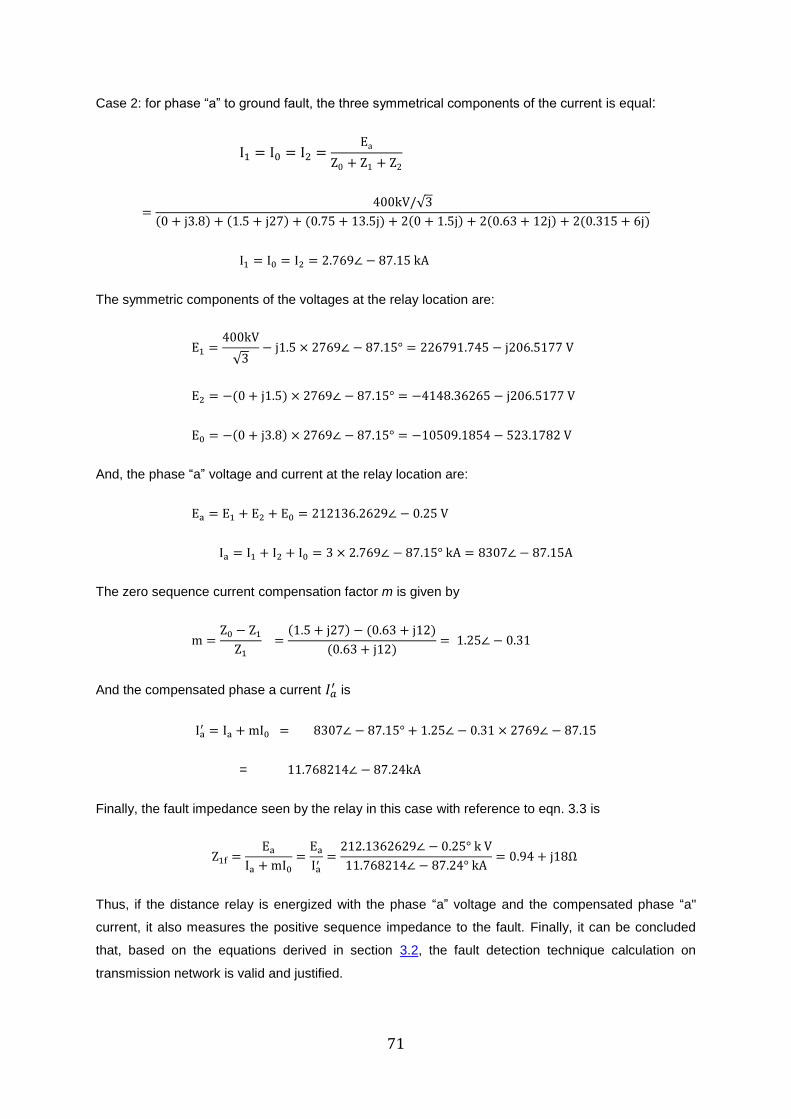
71
Case 2: for phase “a” to ground fault, the three symmetrical components of the current is equal:
I1 = I0 = I2 =Ea
Z0 + Z1 + Z2
=400kV/√3
(0 + j3.8) + (1.5 + j27) + (0.75 + 13.5j) + 2(0 + 1.5j) + 2(0.63 + 12j) + 2(0.315 + 6j)
I1 = I0 = I2 = 2.769∠ − 87.15 kA
The symmetric components of the voltages at the relay location are:
E1 =400kV
√3− j1.5 × 2769∠ − 87.15° = 226791.745 − j206.5177 V
E2 = −(0 + j1.5) × 2769∠ − 87.15° = −4148.36265 − j206.5177 V
E0 = −(0 + j3.8) × 2769∠ − 87.15° = −10509.1854 − 523.1782 V
And, the phase “a” voltage and current at the relay location are:
Ea = E1 + E2 + E0 = 212136.2629∠ − 0.25 V
Ia = I1 + I2 + I0 = 3 × 2.769∠ − 87.15° kA = 8307∠ − 87.15A
The zero sequence current compensation factor m is given by
m =Z0 − Z1
Z1
=(1.5 + j27) − (0.63 + j12)
(0.63 + j12)= 1.25∠ − 0.31
And the compensated phase a current 𝐼𝑎′ is
Ia′ = Ia + mI0 = 8307∠ − 87.15° + 1.25∠ − 0.31 × 2769∠ − 87.15
= 11.768214∠ − 87.24kA
Finally, the fault impedance seen by the relay in this case with reference to eqn. 3.3 is
Z1f =Ea
Ia + mI0
=Ea
Ia′
=212.1362629∠ − 0.25° k V
11.768214∠ − 87.24° kA= 0.94 + j18Ω
Thus, if the distance relay is energized with the phase “a” voltage and the compensated phase “a"
current, it also measures the positive sequence impedance to the fault. Finally, it can be concluded
that, based on the equations derived in section 3.2, the fault detection technique calculation on
transmission network is valid and justified.
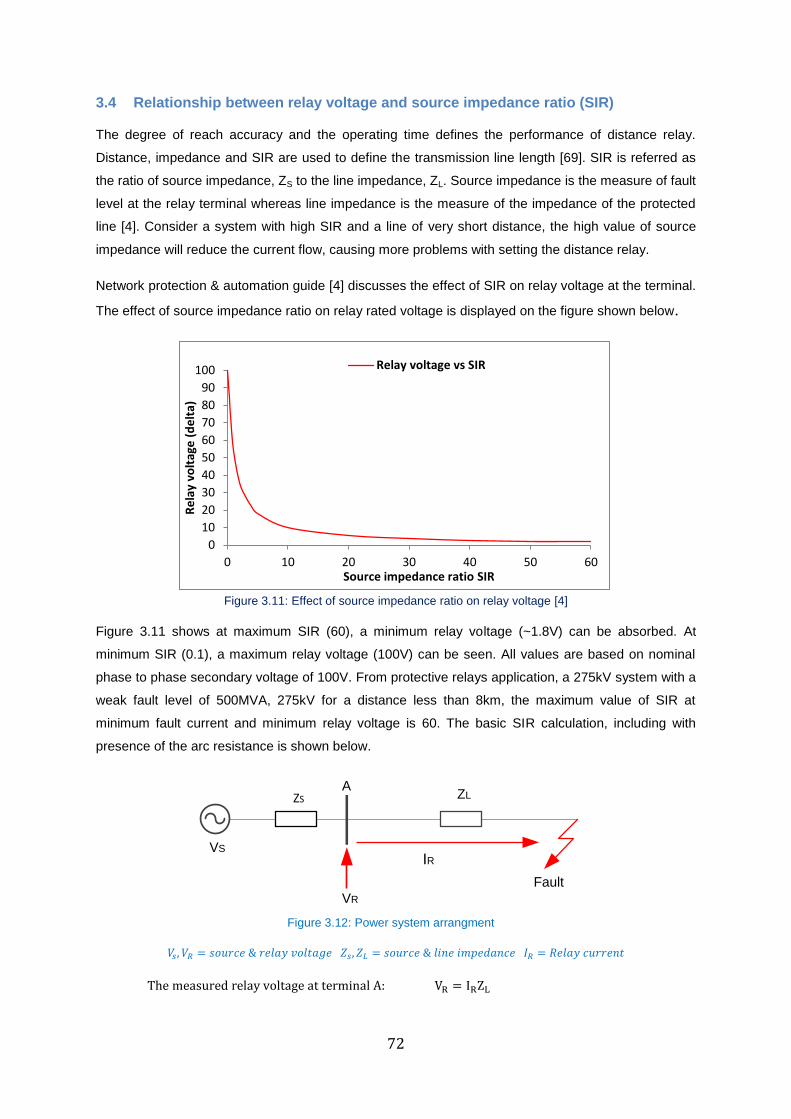
72
3.4 Relationship between relay voltage and source impedance ratio (SIR)
The degree of reach accuracy and the operating time defines the performance of distance relay.
Distance, impedance and SIR are used to define the transmission line length [69]. SIR is referred as
the ratio of source impedance, ZS to the line impedance, ZL. Source impedance is the measure of fault
level at the relay terminal whereas line impedance is the measure of the impedance of the protected
line [4]. Consider a system with high SIR and a line of very short distance, the high value of source
impedance will reduce the current flow, causing more problems with setting the distance relay.
Network protection & automation guide [4] discusses the effect of SIR on relay voltage at the terminal.
The effect of source impedance ratio on relay rated voltage is displayed on the figure shown below.
Figure 3.11: Effect of source impedance ratio on relay voltage [4]
Figure 3.11 shows at maximum SIR (60), a minimum relay voltage (~1.8V) can be absorbed. At
minimum SIR (0.1), a maximum relay voltage (100V) can be seen. All values are based on nominal
phase to phase secondary voltage of 100V. From protective relays application, a 275kV system with a
weak fault level of 500MVA, 275kV for a distance less than 8km, the maximum value of SIR at
minimum fault current and minimum relay voltage is 60. The basic SIR calculation, including with
presence of the arc resistance is shown below.
AZL
IRVS
ZS
VR
Fault
Figure 3.12: Power system arrangment
𝑉𝑠, 𝑉𝑅 = 𝑠𝑜𝑢𝑟𝑐𝑒 & 𝑟𝑒𝑙𝑎𝑦 𝑣𝑜𝑙𝑡𝑎𝑔𝑒 𝑍𝑠, 𝑍𝐿 = 𝑠𝑜𝑢𝑟𝑐𝑒 & 𝑙𝑖𝑛𝑒 𝑖𝑚𝑝𝑒𝑑𝑎𝑛𝑐𝑒 𝐼𝑅 = 𝑅𝑒𝑙𝑎𝑦 𝑐𝑢𝑟𝑟𝑒𝑛𝑡
The measured relay voltage at terminal A: VR = IRZL
0
10
20
30
40
50
60
70
80
90
100
0 10 20 30 40 50 60
Re
lay
volt
age
(d
elt
a)
Source impedance ratio SIR
Relay voltage vs SIR

73
The measured relay current at terminal A: IR =Vs
Zs + ZL
By substituting IR into measured relay voltage: VR =ZL
Zs+ZLVs
The measured relay voltage at terminal A: VR =1
ZsZL
⁄ + 1Vs (3.2)
Now, assume a 275kV double circuit line with phase to phase fault has a positive sequence
impedance value of 0.5∠84°Ω/km and the line length is 8km. Then, the total line impedance will be
ZL = ZL × L = 0.5∠84Ω × 8km = 0.418 + j3.978Ω = 4∠84Ω primary
If the 275kV feeder has an infeed fault level of 500MVA (infeed fault current is 1050A), with the CT
ratio of 1200/1A, and VT ratio of 275kV/110V=2500. Then, ratio of CT/VT= 1200/2500=0.48.
Then, the source impedance is obtained as follows:
Zs =kV2
MVA=
2752
500= 151Ω
Since the source and line impedance values are 151Ω and 4Ω, the ratio of source to line impedance
(SIR) is calculated as follows:
SIR =151
4= 37.8
It should be noted that the fault is located at remote end of the feeder (i.e. at 100% of the protected
line). Then, the fault current at the remote end will be:
If(3Φ) =V/√3
Zs + ZL
=275000
√3 × (151 + 4)= 1024A
The secondary relay voltage, without the presence of arc resistance (SIR = 37.8) is
VR =1
37.8 + 1× 110 = 2.8V
The maximum fault current at the remote end of the line is equal to 1024A and for phase to phase
current, it will be 1024 × 0.866 = 887A. According to [5], when the fault current falls below 2kA, the
effect of arc resistance is taken into consideration and can be obtained using:-
Ra =8750 × L
I1.4
Ra= arc resistance (Ω) I= fault current (A) L= arc length (ft)
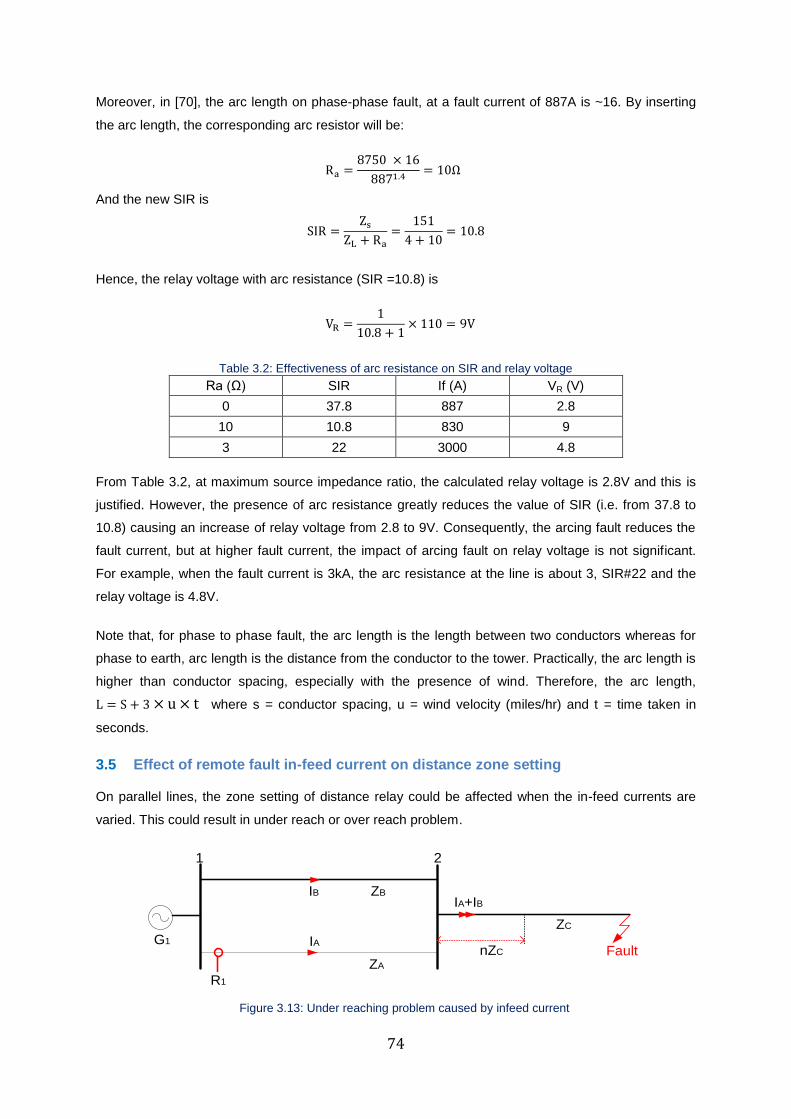
74
Moreover, in [70], the arc length on phase-phase fault, at a fault current of 887A is ~16. By inserting
the arc length, the corresponding arc resistor will be:
Ra =8750 × 16
8871.4= 10Ω
And the new SIR is
SIR =Zs
ZL + Ra
=151
4 + 10= 10.8
Hence, the relay voltage with arc resistance (SIR =10.8) is
VR =1
10.8 + 1× 110 = 9V
Table 3.2: Effectiveness of arc resistance on SIR and relay voltage
Ra (Ω) SIR If (A) VR (V)
0 37.8 887 2.8
10 10.8 830 9
3 22 3000 4.8
From Table 3.2, at maximum source impedance ratio, the calculated relay voltage is 2.8V and this is
justified. However, the presence of arc resistance greatly reduces the value of SIR (i.e. from 37.8 to
10.8) causing an increase of relay voltage from 2.8 to 9V. Consequently, the arcing fault reduces the
fault current, but at higher fault current, the impact of arcing fault on relay voltage is not significant.
For example, when the fault current is 3kA, the arc resistance at the line is about 3, SIR#22 and the
relay voltage is 4.8V.
Note that, for phase to phase fault, the arc length is the length between two conductors whereas for
phase to earth, arc length is the distance from the conductor to the tower. Practically, the arc length is
higher than conductor spacing, especially with the presence of wind. Therefore, the arc length,
L = S + 3 × u × t where s = conductor spacing, u = wind velocity (miles/hr) and t = time taken in
seconds.
3.5 Effect of remote fault in-feed current on distance zone setting
On parallel lines, the zone setting of distance relay could be affected when the in-feed currents are
varied. This could result in under reach or over reach problem.
IB
G1
ZB
IA
R1
ZA
ZC
nZC
IA+IB
Fault
1 2
Figure 3.13: Under reaching problem caused by infeed current
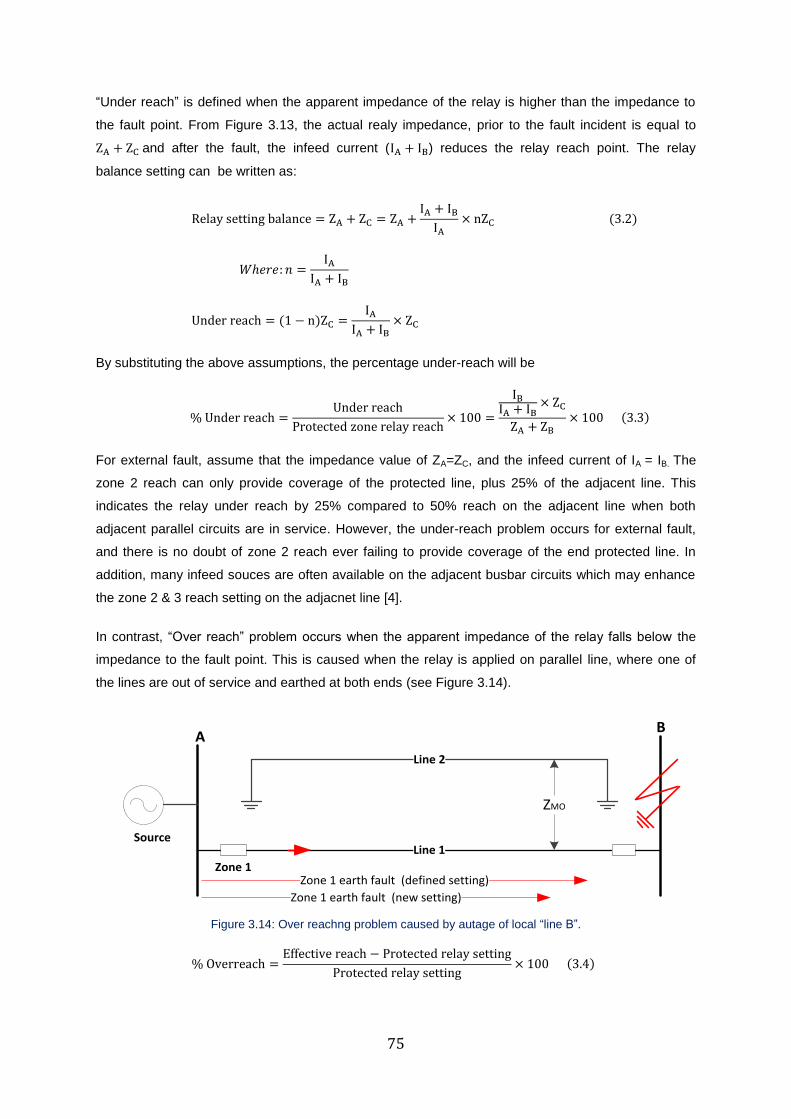
75
“Under reach” is defined when the apparent impedance of the relay is higher than the impedance to
the fault point. From Figure 3.13, the actual realy impedance, prior to the fault incident is equal to
ZA + ZC and after the fault, the infeed current (IA + IB) reduces the relay reach point. The relay
balance setting can be written as:
Relay setting balance = ZA + ZC = ZA +IA + IB
IA
× nZC (3.2)
𝑊ℎ𝑒𝑟𝑒: 𝑛 =IA
IA + IB
Under reach = (1 − n)ZC =IA
IA + IB
× ZC
By substituting the above assumptions, the percentage under-reach will be
% Under reach =Under reach
Protected zone relay reach× 100 =
IB
IA + IB× ZC
ZA + ZB
× 100 (3.3)
For external fault, assume that the impedance value of ZA=ZC, and the infeed current of IA = IB. The
zone 2 reach can only provide coverage of the protected line, plus 25% of the adjacent line. This
indicates the relay under reach by 25% compared to 50% reach on the adjacent line when both
adjacent parallel circuits are in service. However, the under-reach problem occurs for external fault,
and there is no doubt of zone 2 reach ever failing to provide coverage of the end protected line. In
addition, many infeed souces are often available on the adjacent busbar circuits which may enhance
the zone 2 & 3 reach setting on the adjacnet line [4].
In contrast, “Over reach” problem occurs when the apparent impedance of the relay falls below the
impedance to the fault point. This is caused when the relay is applied on parallel line, where one of
the lines are out of service and earthed at both ends (see Figure 3.14).
SourceLine 1
Line 2
ZMO
AB
Zone 1 earth fault (defined setting)
Zone 1 earth fault (new setting)
Zone 1
Figure 3.14: Over reachng problem caused by autage of local “line B”.
% Overreach =Effective reach − Protected relay setting
Protected relay setting× 100 (3.4)
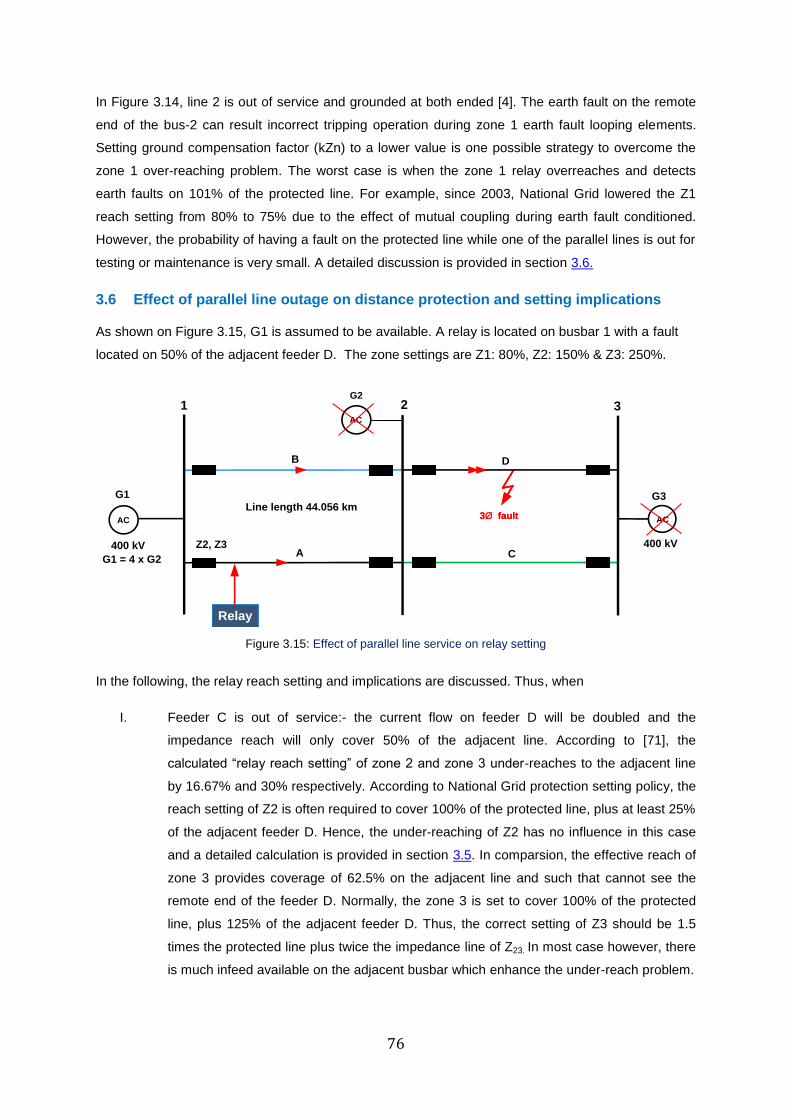
76
In Figure 3.14, line 2 is out of service and grounded at both ended [4]. The earth fault on the remote
end of the bus-2 can result incorrect tripping operation during zone 1 earth fault looping elements.
Setting ground compensation factor (kZn) to a lower value is one possible strategy to overcome the
zone 1 over-reaching problem. The worst case is when the zone 1 relay overreaches and detects
earth faults on 101% of the protected line. For example, since 2003, National Grid lowered the Z1
reach setting from 80% to 75% due to the effect of mutual coupling during earth fault conditioned.
However, the probability of having a fault on the protected line while one of the parallel lines is out for
testing or maintenance is very small. A detailed discussion is provided in section 3.6.
3.6 Effect of parallel line outage on distance protection and setting implications
As shown on Figure 3.15, G1 is assumed to be available. A relay is located on busbar 1 with a fault
located on 50% of the adjacent feeder D. The zone settings are Z1: 80%, Z2: 150% & Z3: 250%.
G1
G1 = 4 x G2
400 kV 400 kV
3
AC
B D
Relay
A C
1 2
AC
G3
AC
G2
Z2, Z3
Line length 44.056 km3Ø fault3Ø fault
Figure 3.15: Effect of parallel line service on relay setting
In the following, the relay reach setting and implications are discussed. Thus, when
I. Feeder C is out of service:- the current flow on feeder D will be doubled and the
impedance reach will only cover 50% of the adjacent line. According to [71], the
calculated “relay reach setting” of zone 2 and zone 3 under-reaches to the adjacent line
by 16.67% and 30% respectively. According to National Grid protection setting policy, the
reach setting of Z2 is often required to cover 100% of the protected line, plus at least 25%
of the adjacent feeder D. Hence, the under-reaching of Z2 has no influence in this case
and a detailed calculation is provided in section 3.5. In comparsion, the effective reach of
zone 3 provides coverage of 62.5% on the adjacent line and such that cannot see the
remote end of the feeder D. Normally, the zone 3 is set to cover 100% of the protected
line, plus 125% of the adjacent feeder D. Thus, the correct setting of Z3 should be 1.5
times the protected line plus twice the impedance line of Z23. In most case however, there
is much infeed available on the adjacent busbar which enhance the under-reach problem.
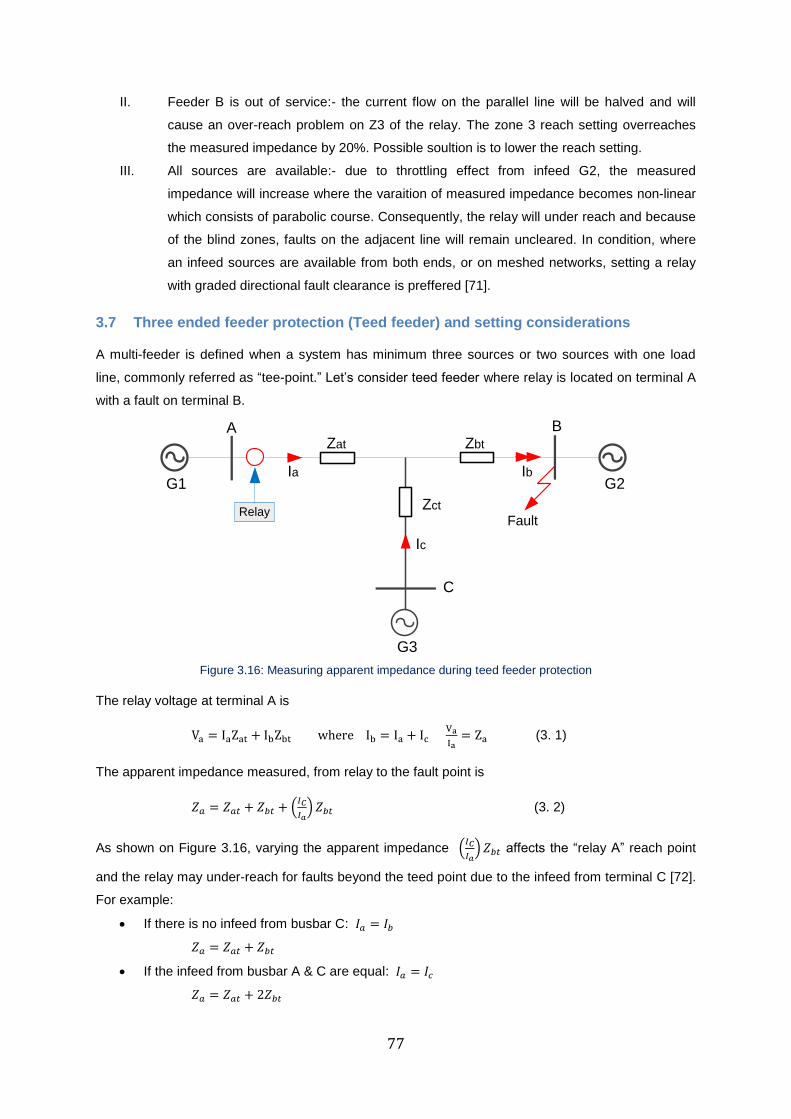
77
II. Feeder B is out of service:- the current flow on the parallel line will be halved and will
cause an over-reach problem on Z3 of the relay. The zone 3 reach setting overreaches
the measured impedance by 20%. Possible soultion is to lower the reach setting.
III. All sources are available:- due to throttling effect from infeed G2, the measured
impedance will increase where the varaition of measured impedance becomes non-linear
which consists of parabolic course. Consequently, the relay will under reach and because
of the blind zones, faults on the adjacent line will remain uncleared. In condition, where
an infeed sources are available from both ends, or on meshed networks, setting a relay
with graded directional fault clearance is preffered [71].
3.7 Three ended feeder protection (Teed feeder) and setting considerations
A multi-feeder is defined when a system has minimum three sources or two sources with one load
line, commonly referred as “tee-point.” Let’s consider teed feeder where relay is located on terminal A
with a fault on terminal B.
A
Ia
Zat
G1
RelayFault
B
C
Zct
Zbt
Ic
IbG2
G3
Figure 3.16: Measuring apparent impedance during teed feeder protection
The relay voltage at terminal A is
Va = IaZat + IbZbt where Ib = Ia + Ic Va
Ia= Za (3. 1)
The apparent impedance measured, from relay to the fault point is
𝑍𝑎 = 𝑍𝑎𝑡 + 𝑍𝑏𝑡 + (𝐼𝐶
𝐼𝑎) 𝑍𝑏𝑡 (3. 2)
As shown on Figure 3.16, varying the apparent impedance (𝐼𝐶
𝐼𝑎) 𝑍𝑏𝑡 affects the “relay A” reach point
and the relay may under-reach for faults beyond the teed point due to the infeed from terminal C [72].
For example:
If there is no infeed from busbar C: 𝐼𝑎 = 𝐼𝑏
𝑍𝑎 = 𝑍𝑎𝑡 + 𝑍𝑏𝑡
If the infeed from busbar A & C are equal: 𝐼𝑎 = 𝐼𝑐
𝑍𝑎 = 𝑍𝑎𝑡 + 2𝑍𝑏𝑡
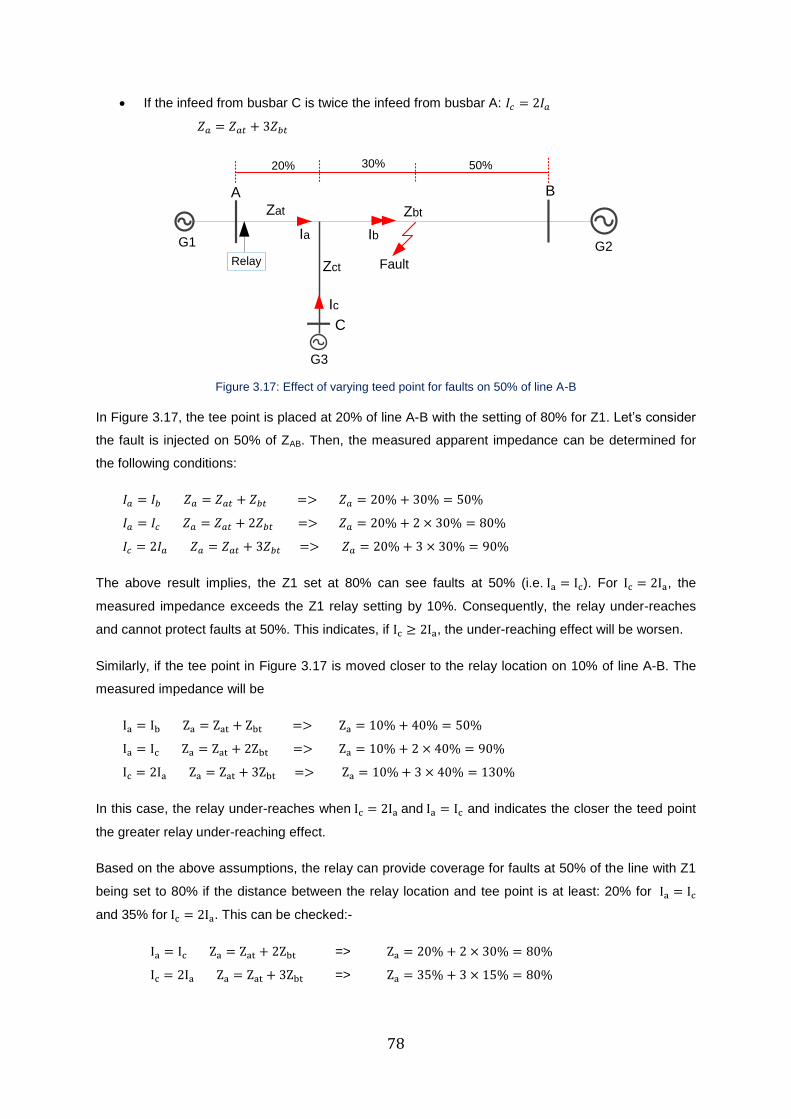
78
If the infeed from busbar C is twice the infeed from busbar A: 𝐼𝑐 = 2𝐼𝑎
𝑍𝑎 = 𝑍𝑎𝑡 + 3𝑍𝑏𝑡
A
Ia
Zat
G1
Relay Fault
B
C
Zct
Zbt
Ic
Ib
G3
G2
20% 50%30%
Figure 3.17: Effect of varying teed point for faults on 50% of line A-B
In Figure 3.17, the tee point is placed at 20% of line A-B with the setting of 80% for Z1. Let’s consider
the fault is injected on 50% of ZAB. Then, the measured apparent impedance can be determined for
the following conditions:
𝐼𝑎 = 𝐼𝑏 𝑍𝑎 = 𝑍𝑎𝑡 + 𝑍𝑏𝑡 => 𝑍𝑎 = 20% + 30% = 50%
𝐼𝑎 = 𝐼𝑐 𝑍𝑎 = 𝑍𝑎𝑡 + 2𝑍𝑏𝑡 => 𝑍𝑎 = 20% + 2 × 30% = 80%
𝐼𝑐 = 2𝐼𝑎 𝑍𝑎 = 𝑍𝑎𝑡 + 3𝑍𝑏𝑡 => 𝑍𝑎 = 20% + 3 × 30% = 90%
The above result implies, the Z1 set at 80% can see faults at 50% (i.e. Ia = Ic). For Ic = 2Ia, the
measured impedance exceeds the Z1 relay setting by 10%. Consequently, the relay under-reaches
and cannot protect faults at 50%. This indicates, if Ic ≥ 2Ia, the under-reaching effect will be worsen.
Similarly, if the tee point in Figure 3.17 is moved closer to the relay location on 10% of line A-B. The
measured impedance will be
Ia = Ib Za = Zat + Zbt => Za = 10% + 40% = 50%
Ia = Ic Za = Zat + 2Zbt => Za = 10% + 2 × 40% = 90%
Ic = 2Ia Za = Zat + 3Zbt => Za = 10% + 3 × 40% = 130%
In this case, the relay under-reaches when Ic = 2Ia and Ia = Ic and indicates the closer the teed point
the greater relay under-reaching effect.
Based on the above assumptions, the relay can provide coverage for faults at 50% of the line with Z1
being set to 80% if the distance between the relay location and tee point is at least: 20% for Ia = Ic
and 35% for Ic = 2Ia. This can be checked:-
Ia = Ic Za = Zat + 2Zbt => Za = 20% + 2 × 30% = 80%
Ic = 2Ia Za = Zat + 3Zbt => Za = 35% + 3 × 15% = 80%
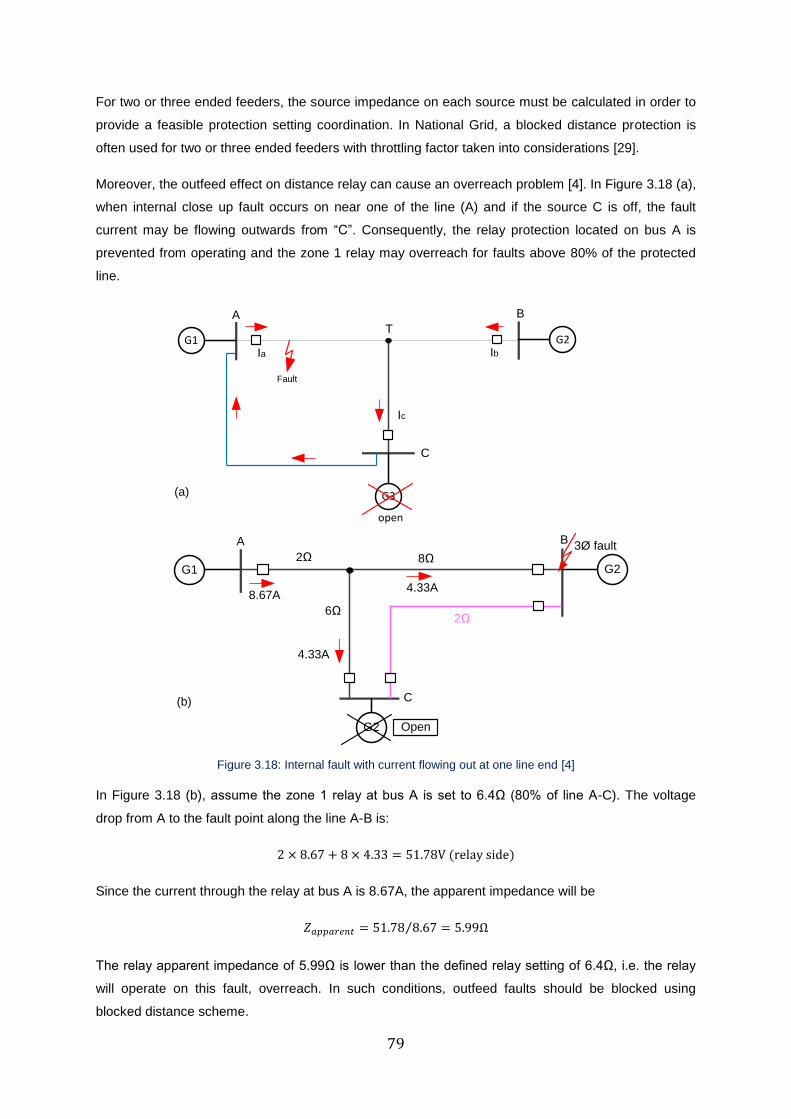
79
For two or three ended feeders, the source impedance on each source must be calculated in order to
provide a feasible protection setting coordination. In National Grid, a blocked distance protection is
often used for two or three ended feeders with throttling factor taken into considerations [29].
Moreover, the outfeed effect on distance relay can cause an overreach problem [4]. In Figure 3.18 (a),
when internal close up fault occurs on near one of the line (A) and if the source C is off, the fault
current may be flowing outwards from “C”. Consequently, the relay protection located on bus A is
prevented from operating and the zone 1 relay may overreach for faults above 80% of the protected
line.
A
Ia
B
C
Ic
Ib
Fault
TG1
G3
G2
open
A B
C
G1 G2
G2 Open
2Ω 8Ω
2Ω 6Ω
4.33A
8.67A4.33A
3Ø fault
(a)
(b)
Figure 3.18: Internal fault with current flowing out at one line end [4]
In Figure 3.18 (b), assume the zone 1 relay at bus A is set to 6.4Ω (80% of line A-C). The voltage
drop from A to the fault point along the line A-B is:
2 × 8.67 + 8 × 4.33 = 51.78V (relay side)
Since the current through the relay at bus A is 8.67A, the apparent impedance will be
𝑍𝑎𝑝𝑝𝑎𝑟𝑒𝑛𝑡 = 51.78 8.67⁄ = 5.99Ω
The relay apparent impedance of 5.99Ω is lower than the defined relay setting of 6.4Ω, i.e. the relay
will operate on this fault, overreach. In such conditions, outfeed faults should be blocked using
blocked distance scheme.
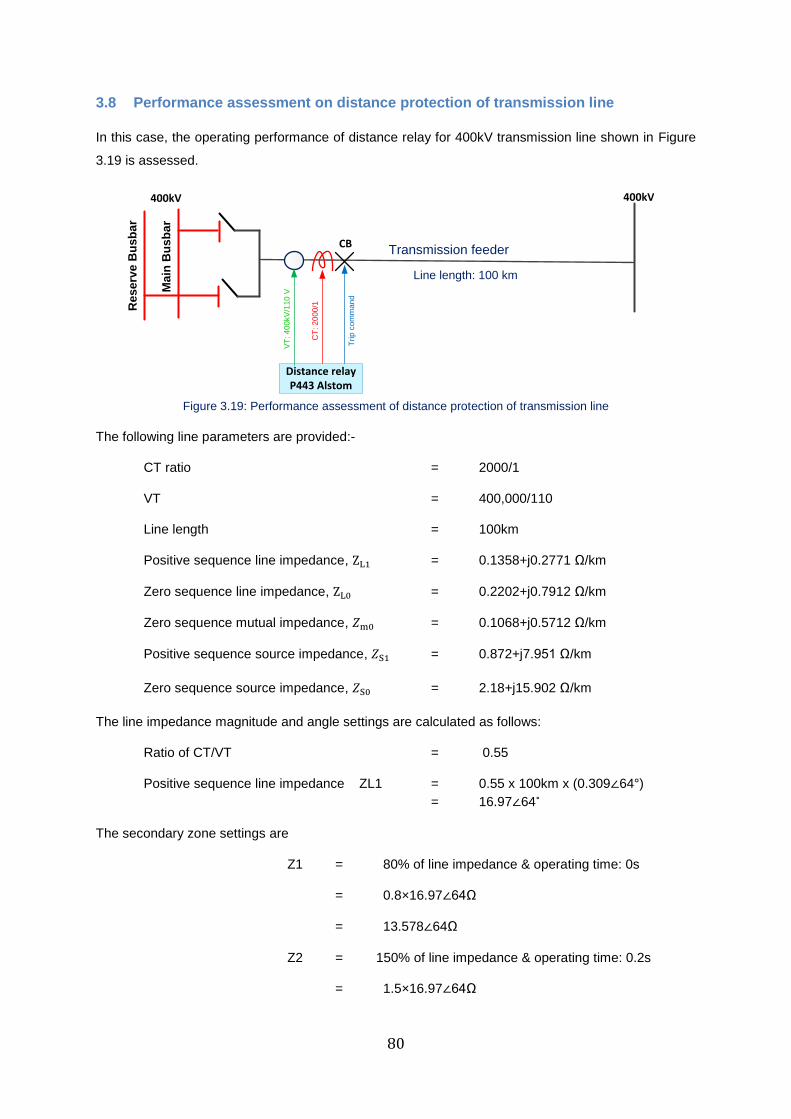
80
3.8 Performance assessment on distance protection of transmission line
In this case, the operating performance of distance relay for 400kV transmission line shown in Figure
3.19 is assessed.
Re
se
rve
Bu
sb
ar
Ma
in B
us
ba
r
Distance relay P443 Alstom
CB
400kV400kV
Transmission feeder
Line length: 100 km
CT
: 2
00
0/1
VT
: 4
00
kV
/11
0 V
Trip
co
mm
an
d
Figure 3.19: Performance assessment of distance protection of transmission line
The following line parameters are provided:-
CT ratio = 2000/1
VT = 400,000/110
Line length = 100km
Positive sequence line impedance, ZL1 = 0.1358+j0.2771 Ω/km
Zero sequence line impedance, ZL0 = 0.2202+j0.7912 Ω/km
Zero sequence mutual impedance, 𝑍m0 = 0.1068+j0.5712 Ω/km
Positive sequence source impedance, 𝑍S1 = 0.872+j7.951 Ω/km
Zero sequence source impedance, 𝑍S0 = 2.18+j15.902 Ω/km
The line impedance magnitude and angle settings are calculated as follows:
Ratio of CT/VT = 0.55
Positive sequence line impedance ZL1 = 0.55 x 100km x (0.309∠64°)
= 16.97∠64˚
The secondary zone settings are
Z1 = 80% of line impedance & operating time: 0s
= 0.8×16.97∠64Ω
= 13.578∠64Ω
Z2 = 150% of line impedance & operating time: 0.2s
= 1.5×16.97∠64Ω
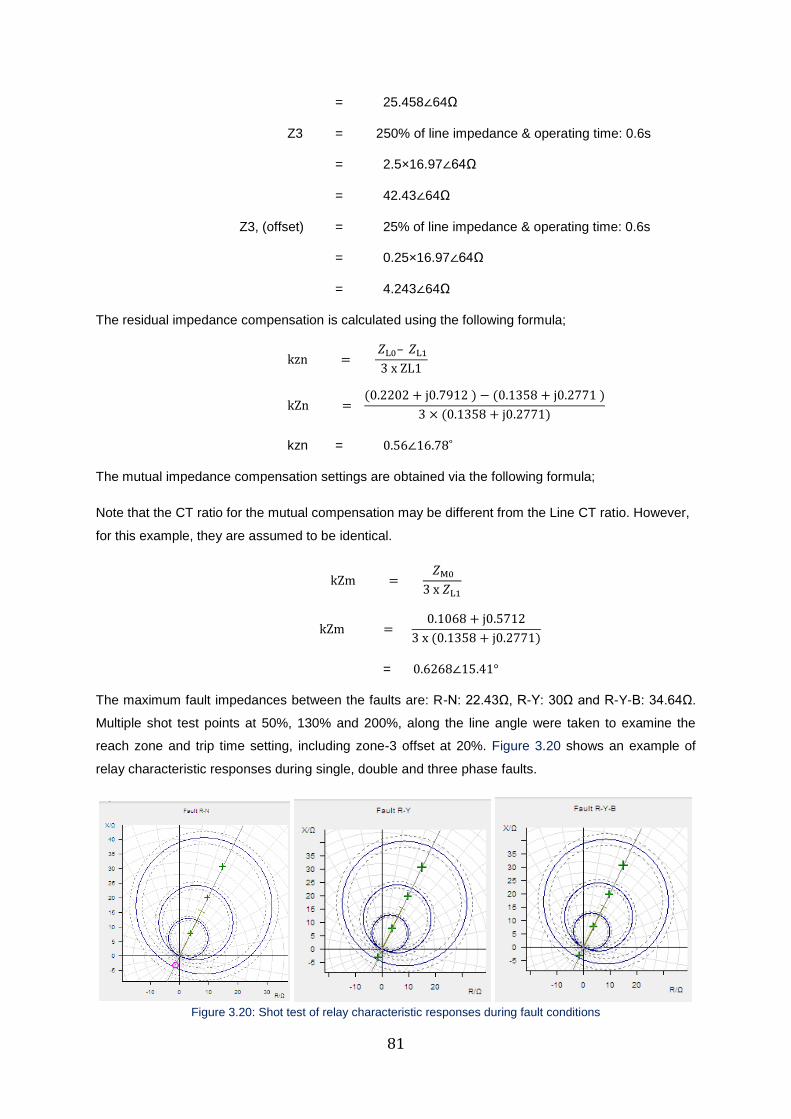
81
= 25.458∠64Ω
Z3 = 250% of line impedance & operating time: 0.6s
= 2.5×16.97∠64Ω
= 42.43∠64Ω
Z3, (offset) = 25% of line impedance & operating time: 0.6s
= 0.25×16.97∠64Ω
= 4.243∠64Ω
The residual impedance compensation is calculated using the following formula;
kzn = 𝑍L0– 𝑍L1
3 x ZL1
kZn = (0.2202 + j0.7912 ) − (0.1358 + j0.2771 )
3 × (0.1358 + j0.2771)
kzn = 0.56∠16.78˚
The mutual impedance compensation settings are obtained via the following formula;
Note that the CT ratio for the mutual compensation may be different from the Line CT ratio. However,
for this example, they are assumed to be identical.
kZm = 𝑍M0
3 x 𝑍L1
kZm = 0.1068 + j0.5712
3 x (0.1358 + j0.2771)
= 0.6268∠15.41°
The maximum fault impedances between the faults are: R-N: 22.43Ω, R-Y: 30Ω and R-Y-B: 34.64Ω.
Multiple shot test points at 50%, 130% and 200%, along the line angle were taken to examine the
reach zone and trip time setting, including zone-3 offset at 20%. Figure 3.20 shows an example of
relay characteristic responses during single, double and three phase faults.
Figure 3.20: Shot test of relay characteristic responses during fault conditions
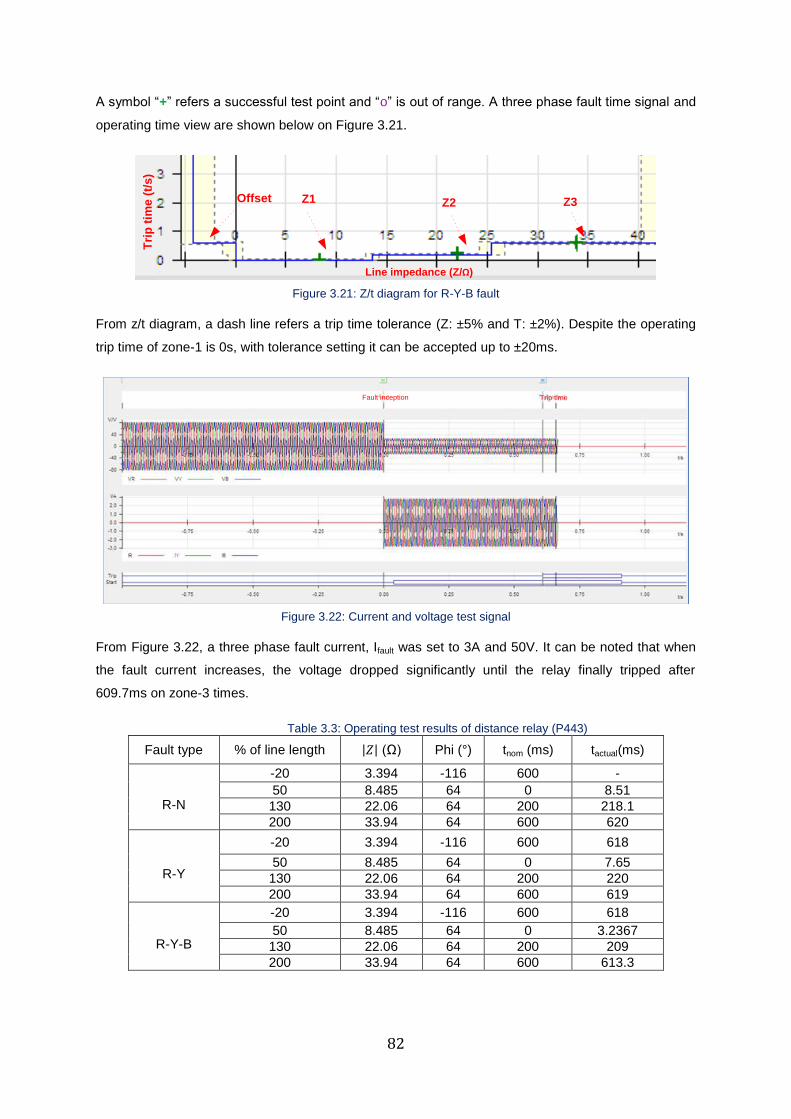
82
A symbol “+” refers a successful test point and “o” is out of range. A three phase fault time signal and
operating time view are shown below on Figure 3.21.
Tri
p t
ime
(t/
s)
Line impedance (Z/Ω)
Offset Z1 Z2 Z3
Figure 3.21: Z/t diagram for R-Y-B fault
From z/t diagram, a dash line refers a trip time tolerance (Z: ±5% and T: ±2%). Despite the operating
trip time of zone-1 is 0s, with tolerance setting it can be accepted up to ±20ms.
Fault inception Trip time
Figure 3.22: Current and voltage test signal
From Figure 3.22, a three phase fault current, Ifault was set to 3A and 50V. It can be noted that when
the fault current increases, the voltage dropped significantly until the relay finally tripped after
609.7ms on zone-3 times.
Table 3.3: Operating test results of distance relay (P443)
Fault type % of line length |𝑍| (Ω) Phi (°) tnom (ms) tactual(ms)
R-N
-20 3.394 -116 600 -
50 8.485 64 0 8.51
130 22.06 64 200 218.1
200 33.94 64 600 620
R-Y
-20 3.394 -116 600 618
50 8.485 64 0 7.65
130 22.06 64 200 220
200 33.94 64 600 619
R-Y-B
-20 3.394 -116 600 618
50 8.485 64 0 3.2367
130 22.06 64 200 209
200 33.94 64 600 613.3
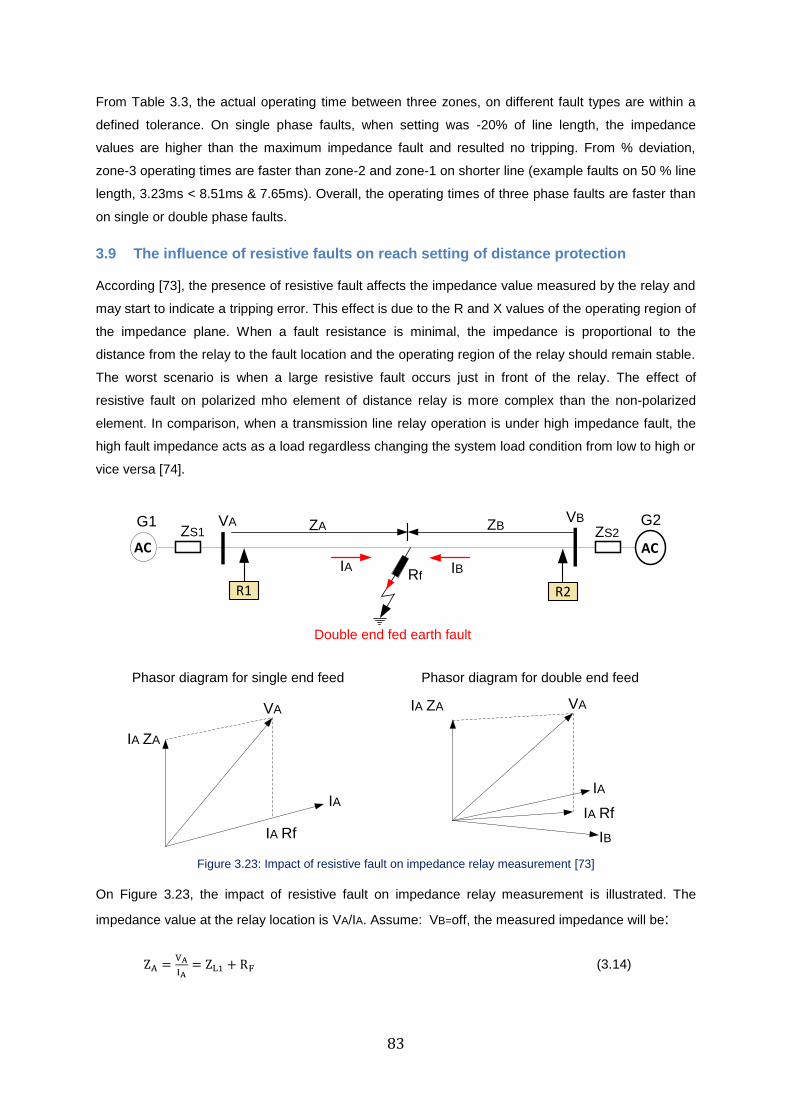
83
From Table 3.3, the actual operating time between three zones, on different fault types are within a
defined tolerance. On single phase faults, when setting was -20% of line length, the impedance
values are higher than the maximum impedance fault and resulted no tripping. From % deviation,
zone-3 operating times are faster than zone-2 and zone-1 on shorter line (example faults on 50 % line
length, 3.23ms < 8.51ms & 7.65ms). Overall, the operating times of three phase faults are faster than
on single or double phase faults.
3.9 The influence of resistive faults on reach setting of distance protection
According [73], the presence of resistive fault affects the impedance value measured by the relay and
may start to indicate a tripping error. This effect is due to the R and X values of the operating region of
the impedance plane. When a fault resistance is minimal, the impedance is proportional to the
distance from the relay to the fault location and the operating region of the relay should remain stable.
The worst scenario is when a large resistive fault occurs just in front of the relay. The effect of
resistive fault on polarized mho element of distance relay is more complex than the non-polarized
element. In comparison, when a transmission line relay operation is under high impedance fault, the
high fault impedance acts as a load regardless changing the system load condition from low to high or
vice versa [74].
G1
AC
R1
IA
ZS1
AC
R2
IB
ZA ZB G2 ZS2
VA VB
Double end fed earth fault
VAVA
IB
IAIA
IA ZA
IA ZA
IA Rf
IA Rf
Phasor diagram for single end feed Phasor diagram for double end feed
Rf
Figure 3.23: Impact of resistive fault on impedance relay measurement [73]
On Figure 3.23, the impact of resistive fault on impedance relay measurement is illustrated. The
impedance value at the relay location is VA/IA. Assume: VB=off, the measured impedance will be:
ZA =VA
IA= ZL1 + RF (3.14)
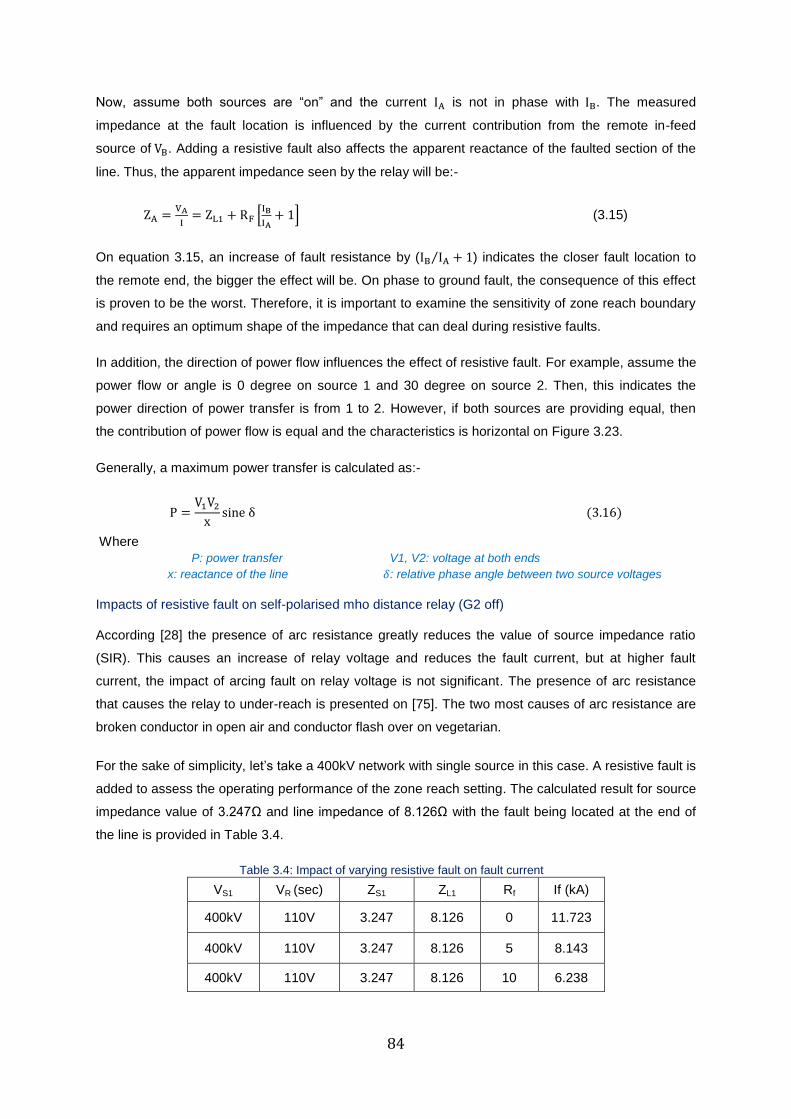
84
Now, assume both sources are “on” and the current IA is not in phase with IB. The measured
impedance at the fault location is influenced by the current contribution from the remote in-feed
source of VB. Adding a resistive fault also affects the apparent reactance of the faulted section of the
line. Thus, the apparent impedance seen by the relay will be:-
ZA =VA
I= ZL1 + RF [
IB
IA+ 1] (3.15)
On equation 3.15, an increase of fault resistance by (IB IA⁄ + 1) indicates the closer fault location to
the remote end, the bigger the effect will be. On phase to ground fault, the consequence of this effect
is proven to be the worst. Therefore, it is important to examine the sensitivity of zone reach boundary
and requires an optimum shape of the impedance that can deal during resistive faults.
In addition, the direction of power flow influences the effect of resistive fault. For example, assume the
power flow or angle is 0 degree on source 1 and 30 degree on source 2. Then, this indicates the
power direction of power transfer is from 1 to 2. However, if both sources are providing equal, then
the contribution of power flow is equal and the characteristics is horizontal on Figure 3.23.
Generally, a maximum power transfer is calculated as:-
P =V1V2
xsine δ (3.16)
Where
P: power transfer V1, V2: voltage at both ends
x: reactance of the line 𝛿: relative phase angle between two source voltages
Impacts of resistive fault on self-polarised mho distance relay (G2 off)
According [28] the presence of arc resistance greatly reduces the value of source impedance ratio
(SIR). This causes an increase of relay voltage and reduces the fault current, but at higher fault
current, the impact of arcing fault on relay voltage is not significant. The presence of arc resistance
that causes the relay to under-reach is presented on [75]. The two most causes of arc resistance are
broken conductor in open air and conductor flash over on vegetarian.
For the sake of simplicity, let’s take a 400kV network with single source in this case. A resistive fault is
added to assess the operating performance of the zone reach setting. The calculated result for source
impedance value of 3.247Ω and line impedance of 8.126Ω with the fault being located at the end of
the line is provided in Table 3.4.
Table 3.4: Impact of varying resistive fault on fault current
VS1 VR (sec) ZS1 ZL1 Rf If (kA)
400kV 110V 3.247 8.126 0 11.723
400kV 110V 3.247 8.126 5 8.143
400kV 110V 3.247 8.126 10 6.238
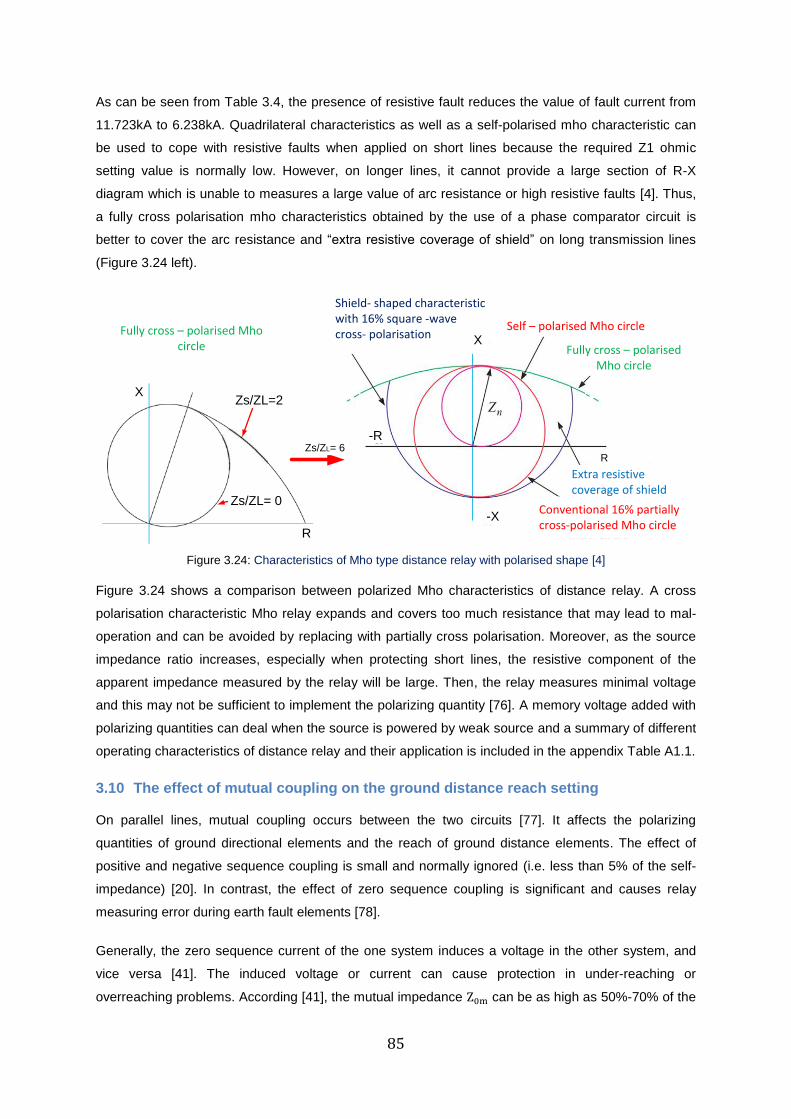
85
As can be seen from Table 3.4, the presence of resistive fault reduces the value of fault current from
11.723kA to 6.238kA. Quadrilateral characteristics as well as a self-polarised mho characteristic can
be used to cope with resistive faults when applied on short lines because the required Z1 ohmic
setting value is normally low. However, on longer lines, it cannot provide a large section of R-X
diagram which is unable to measures a large value of arc resistance or high resistive faults [4]. Thus,
a fully cross polarisation mho characteristics obtained by the use of a phase comparator circuit is
better to cover the arc resistance and “extra resistive coverage of shield” on long transmission lines
(Figure 3.24 left).
Fully cross – polarised Mho circle
Zs/ZL= 25Zs/ZL=2
Zs/ZL= 0
R
Zs/
ZL=
25
X
Shield- shaped characteristic with 16% square -wave cross- polarisation
Self – polarised Mho circle
Fully cross – polarisedMho circle
Extra resistive coverage of shield
Conventional 16% partially cross-polarised Mho circle
Zs/ZL= 6R
-R
-X
X
Figure 3.24: Characteristics of Mho type distance relay with polarised shape [4]
Figure 3.24 shows a comparison between polarized Mho characteristics of distance relay. A cross
polarisation characteristic Mho relay expands and covers too much resistance that may lead to mal-
operation and can be avoided by replacing with partially cross polarisation. Moreover, as the source
impedance ratio increases, especially when protecting short lines, the resistive component of the
apparent impedance measured by the relay will be large. Then, the relay measures minimal voltage
and this may not be sufficient to implement the polarizing quantity [76]. A memory voltage added with
polarizing quantities can deal when the source is powered by weak source and a summary of different
operating characteristics of distance relay and their application is included in the appendix Table A1.1.
3.10 The effect of mutual coupling on the ground distance reach setting
On parallel lines, mutual coupling occurs between the two circuits [77]. It affects the polarizing
quantities of ground directional elements and the reach of ground distance elements. The effect of
positive and negative sequence coupling is small and normally ignored (i.e. less than 5% of the self-
impedance) [20]. In contrast, the effect of zero sequence coupling is significant and causes relay
measuring error during earth fault elements [78].
Generally, the zero sequence current of the one system induces a voltage in the other system, and
vice versa [41]. The induced voltage or current can cause protection in under-reaching or
overreaching problems. According [41], the mutual impedance Z0m can be as high as 50%-70% of the
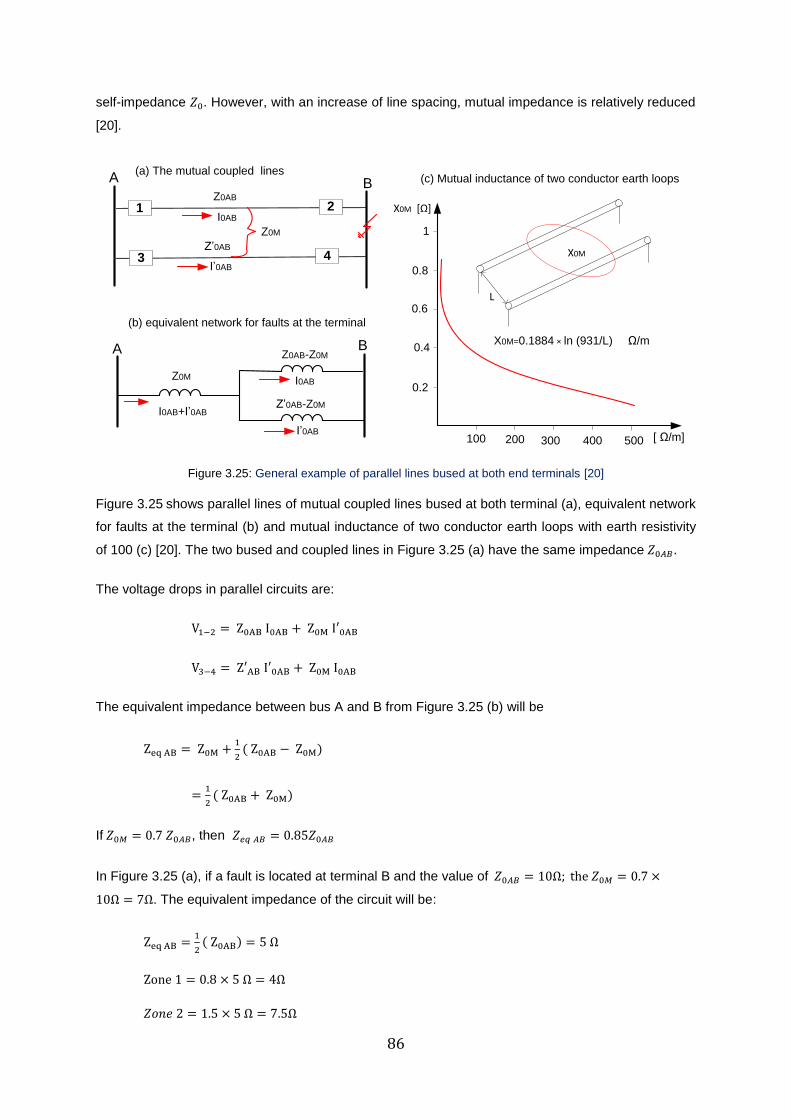
86
self-impedance 𝑍0. However, with an increase of line spacing, mutual impedance is relatively reduced
[20].
L
X0M
100 200 300 400 500
0.2
0.4
0.6
0.8
1
X0M=0.1884 × ln (931/L) Ω/m
[ Ω/m]
X0M [Ω]
(c) Mutual inductance of two conductor earth loops
A B
Z0M
I0AB+I’0ABZ’0AB-Z0M
Z0AB-Z0M
I0AB
I’0AB
A B
1
Z0M
I0AB
I’0AB
Z0AB
Z’0AB
3
2
4
(a) The mutual coupled lines
(b) equivalent network for faults at the terminal
Figure 3.25: General example of parallel lines bused at both end terminals [20]
Figure 3.25 shows parallel lines of mutual coupled lines bused at both terminal (a), equivalent network
for faults at the terminal (b) and mutual inductance of two conductor earth loops with earth resistivity
of 100 (c) [20]. The two bused and coupled lines in Figure 3.25 (a) have the same impedance 𝑍0𝐴𝐵.
The voltage drops in parallel circuits are:
V1−2 = Z0AB I0AB + Z0M I′0AB
V3−4 = Z′AB I′0AB + Z0M I0AB
The equivalent impedance between bus A and B from Figure 3.25 (b) will be
Zeq AB = Z0M +1
2( Z0AB − Z0M)
=1
2( Z0AB + Z0M)
If 𝑍0𝑀 = 0.7 𝑍0𝐴𝐵, then 𝑍𝑒𝑞 𝐴𝐵 = 0.85𝑍0𝐴𝐵
In Figure 3.25 (a), if a fault is located at terminal B and the value of 𝑍0𝐴𝐵 = 10Ω; the 𝑍0𝑀 = 0.7 ×
10Ω = 7Ω. The equivalent impedance of the circuit will be:
Zeq AB =1
2( Z0AB) = 5 Ω
Zone 1 = 0.8 × 5 Ω = 4Ω
𝑍𝑜𝑛𝑒 2 = 1.5 × 5 Ω = 7.5Ω
87
Now, if the zero sequence mutual coupling is considered, the apparent impedance and zone setting
would be
𝑍𝑒𝑞 𝐴𝐵 =1
2(10 + 7) = 8.5Ω
𝑍𝑜𝑛𝑒 1 = 0.8 × 8.5 Ω = 6.8Ω
𝑍𝑜𝑛𝑒 2 = 1.5 × 8.5 Ω = 12.5Ω
Thus, when the currents are flowing in the same direction, the mutual increases the line impedance
between the two buses from 5Ω to 8.5Ω (i.e. 0.5 times 𝑍0𝐴𝐵 without the mutual coupling). Hence, the
rising of mutual coupling affects the inductive reactance of the protected circuit especially during
uncertainties associated with the data model (i.e. an accurate value of the zero sequence impedance
to which the relay must be set), changes in earth resistivity, or by the change of mutual coupling due
to availability of infeed sources [20].
The impact of mutual coupling on the ground distance element includes
Zone 1 over-reach: happened when the zero sequence currents in the protected line and the
coupled line flow in opposite directions (i.e when one of the parallel lines is out of service and
grounded at both end with fault on the remote bus). This can be resolved by altering the zone
1 earth loop reach where the residual compensation factor is set to a lower value than normal
[78].
Zone 2 and 3: under-reach: happened when the current flow in the same direction (i.e. both
parallel line in service with fault on remote bus) [78]. This can be resolved by increasing the
setting of the earth fault elements such that it will have a comparable reach to the phase fault
elements [72]. However, the reach setting of residual compensation factor has to consider the
effects of mutual coupling and provide a relay with correct data model of the zero sequence
current of the coupled line [20].
In UK National Grid, the zero sequence impedance of a double circuit (Z0DC ) is 180 -200% of 𝑍0 [29].
In order to avoid the overreaching operation, the positive sequence impedance of a double circuit is
set lower by 5% than a single circuit positive sequence when the same current is flowing in the same
direction. Thus, the current policy of National Grid reduced the zone 1 setting in 2004 from 80% to
75% Z1DC for 400 kV and 275 kV. If the residual compensation factor is given, the phase and earth
fault Zone 1 reaches is set using the following equation [29]:
Zone 1earth fault = Zone 1phase fault (1 + kZn); kZn =1
3(
Z0
Z1
− 1)
Z1, Z0= positive and zero sequence impedance for the protected line
The recent paper presented by National Grid [43] identified the risk for protection mal-operation for
out-of-zone faults during transmission system reinforcements. The authors have recommended
protection setting re-calculation for earth fault reach up to the acceptable level.
88
3.11 Summary
In this chapter, the operating behaviour and setting application of distance protection is discussed.
Distance relay measures the impedance of the line and operates when the measured value is less
than the reference value. The role of distance protection scheme is designed to provide a high speed
protection for faults within the protected line. If a measuring element of a distance relay is set to cover
100% of the protected line, without considering the errors generated from CT and VT, relay
measurements (i.e.15%-20%), and data obtained from the primary values; it would be difficult to
ensure relay operation does not trip for an external fault beyond the remote end of the protected line.
Hence, the accepted Zone 1 setting of a distance protection is 75%-85% of protected line impedance,
and this is configured for an instantaneous trip with no intentional delay time. The minimum Zone 2
setting covers 120% of the protected line and the maximum setting covers the protected line, plus
50% of the shortest adjacent line, operating at a delayed time of 0.5s. The Zone 3 forward setting
covers 100% of the protected line, plus 125%-150% of the adjacent line and provides a backup
protection for zone 1 and 2 at a delayed time of 1s. The Zone 3 reverse looking setting covers part of
the adjacent line, and looks in a reverse direction, it is normally set to impedance equal to 10% of the
protected line. The reach setting of distance protection can be affected by the presence of resistive
fault, mutual coupling effect, fault location on parallel lines, especially if one of the lines is
disconnected, the ratio of source to line impedance, and the availability of fault level.
However, with aid of a communication channel, a distance protection scheme can provide 100% fault
coverage of the protected line. The common types of communication schemes are direct inter-trip,
permissive and blocking schemes. However, the performance of these schemes may be affected
during weak infeed conditions, on varying source impedance ratio or during a failure of signal
communication channels. In the GB transmission system operated by National Grid, distance
protection is the 2nd
main protection used for 400 kV or 275 kV feeder protections. On feeders with
purely cable section where double unit protection is used, the integral distance protection is set to
provide backup protection. The sensitivity analysis of reach setting of distance relay and setting
consideration of distance protection of a double circuit transmission line is highlighted in this chapter.
The key strengths of this study are to widen understanding on the concept and application of distance
protection. To validate this, a simulation testing of distance protection relay on a 400kV double circuit
transmission feeder was performed. Thus, the physical relay was tested using the Omicron test
universe (secondary injection static test). During these experimental tests, three phase, double phase
and single phase fault tests were conducted.
The 1st technical paper entitled < Impact of Weak In-feed Tripping Performance on Distance Protection
Schemes> was published and presented based on this work at the HubNet Smart Grids Symposium annual show
case. The Symposium was held on Sep 13-14, 2016 at the University of Strathclyde, Glasgow, UK.
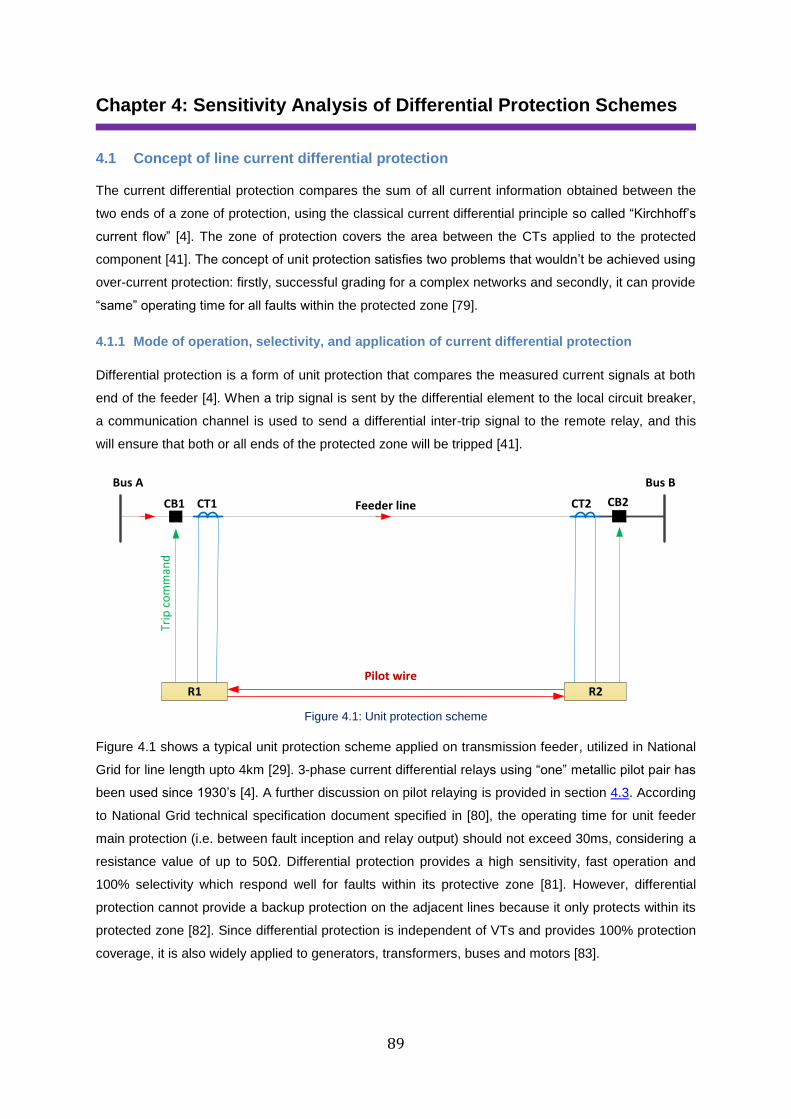
89
Chapter 4: Sensitivity Analysis of Differential Protection Schemes
4.1 Concept of line current differential protection
The current differential protection compares the sum of all current information obtained between the
two ends of a zone of protection, using the classical current differential principle so called “Kirchhoff’s
current flow” [4]. The zone of protection covers the area between the CTs applied to the protected
component [41]. The concept of unit protection satisfies two problems that wouldn’t be achieved using
over-current protection: firstly, successful grading for a complex networks and secondly, it can provide
“same” operating time for all faults within the protected zone [79].
4.1.1 Mode of operation, selectivity, and application of current differential protection
Differential protection is a form of unit protection that compares the measured current signals at both
end of the feeder [4]. When a trip signal is sent by the differential element to the local circuit breaker,
a communication channel is used to send a differential inter-trip signal to the remote relay, and this
will ensure that both or all ends of the protected zone will be tripped [41].
R1
CB1 CB2CT1 CT2
Pilot wire
Feeder line
Bus A Bus B
Trip
co
mm
and
R2
Figure 4.1: Unit protection scheme
Figure 4.1 shows a typical unit protection scheme applied on transmission feeder, utilized in National
Grid for line length upto 4km [29]. 3-phase current differential relays using “one” metallic pilot pair has
been used since 1930’s [4]. A further discussion on pilot relaying is provided in section 4.3. According
to National Grid technical specification document specified in [80], the operating time for unit feeder
main protection (i.e. between fault inception and relay output) should not exceed 30ms, considering a
resistance value of up to 50Ω. Differential protection provides a high sensitivity, fast operation and
100% selectivity which respond well for faults within its protective zone [81]. However, differential
protection cannot provide a backup protection on the adjacent lines because it only protects within its
protected zone [82]. Since differential protection is independent of VTs and provides 100% protection
coverage, it is also widely applied to generators, transformers, buses and motors [83].
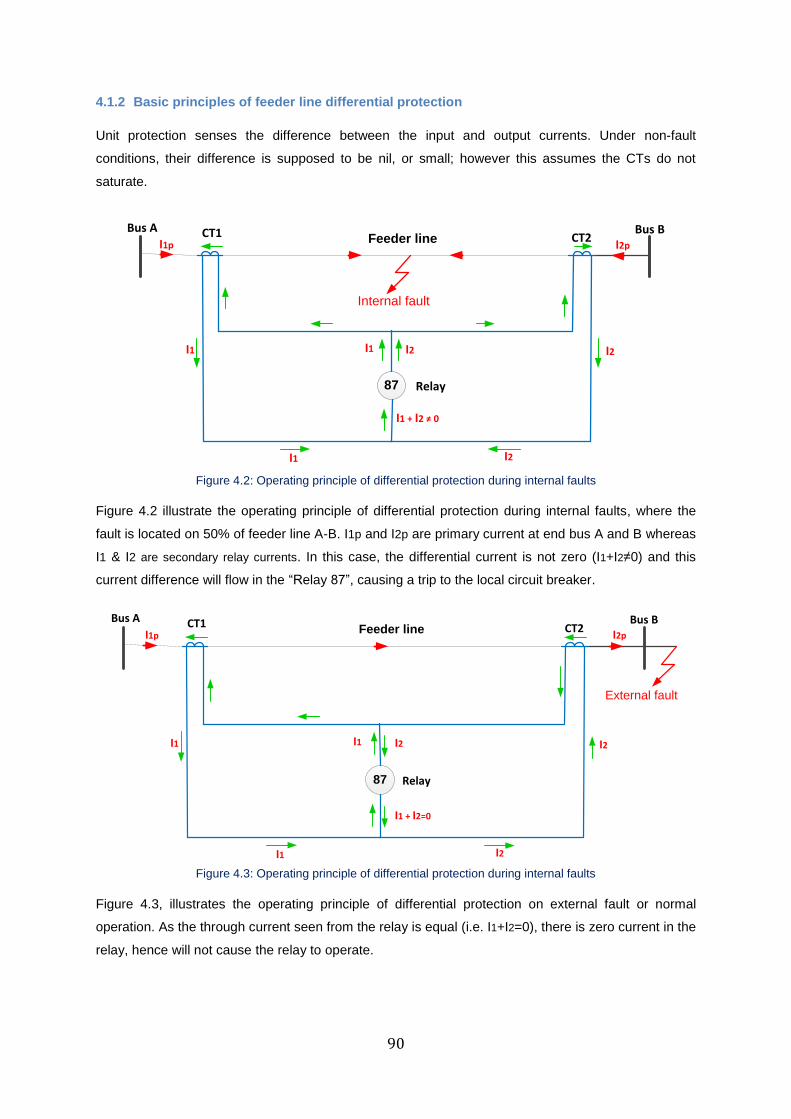
90
4.1.2 Basic principles of feeder line differential protection
Unit protection senses the difference between the input and output currents. Under non-fault
conditions, their difference is supposed to be nil, or small; however this assumes the CTs do not
saturate.
Bus A Bus BCT1 CT2Feeder line
87 Relay
Internal fault
I1p
I1 I2
I2I1
I1 + I2 ≠ 0
I1 I2
I2p
Figure 4.2: Operating principle of differential protection during internal faults
Figure 4.2 illustrate the operating principle of differential protection during internal faults, where the
fault is located on 50% of feeder line A-B. I1p and I2p are primary current at end bus A and B whereas
I1 & I2 are secondary relay currents. In this case, the differential current is not zero (I1+I2≠0) and this
current difference will flow in the “Relay 87”, causing a trip to the local circuit breaker.
External fault
Bus A Bus BCT1 CT2Feeder line
87 Relay
I1p I2p
I1 I2
I2I1
I1 + I2=0
I1 I2
Figure 4.3: Operating principle of differential protection during internal faults
Figure 4.3, illustrates the operating principle of differential protection on external fault or normal
operation. As the through current seen from the relay is equal (i.e. I1+I2=0), there is zero current in the
relay, hence will not cause the relay to operate.
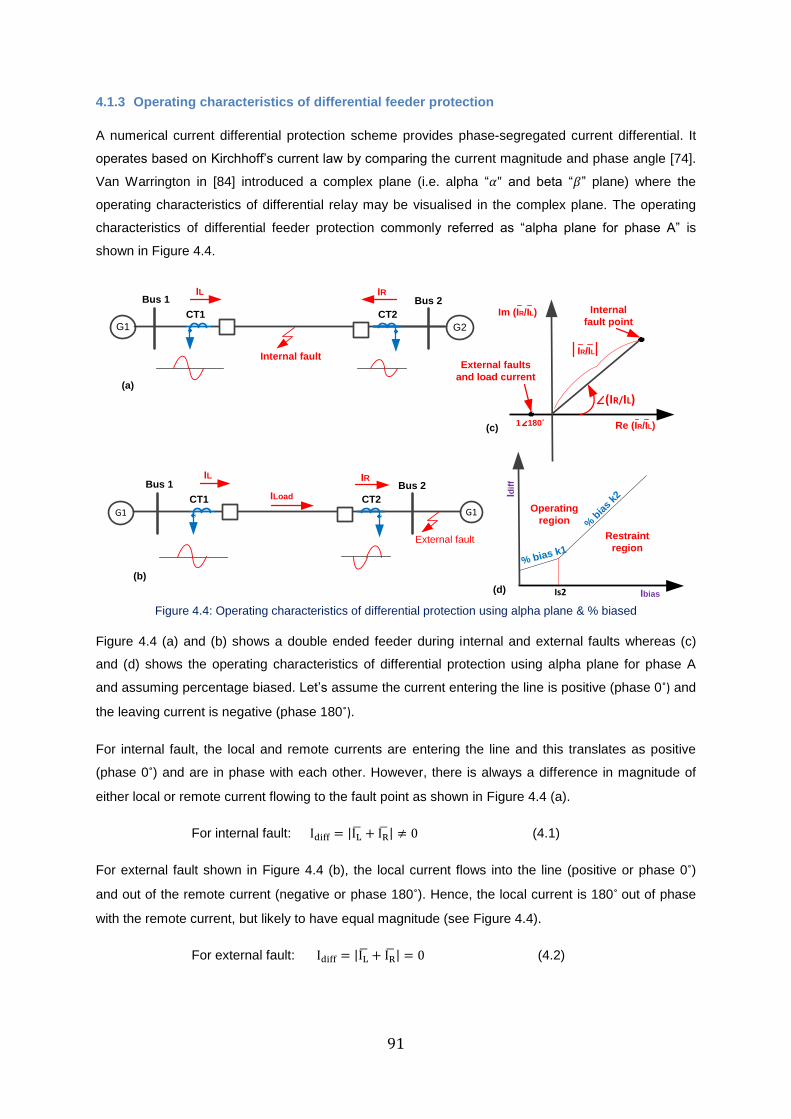
91
4.1.3 Operating characteristics of differential feeder protection
A numerical current differential protection scheme provides phase-segregated current differential. It
operates based on Kirchhoff’s current law by comparing the current magnitude and phase angle [74].
Van Warrington in [84] introduced a complex plane (i.e. alpha “𝛼" and beta “𝛽” plane) where the
operating characteristics of differential relay may be visualised in the complex plane. The operating
characteristics of differential feeder protection commonly referred as “alpha plane for phase A” is
shown in Figure 4.4.
Idif
f
Ibias
Restraint
region
Operating
region
Is2
% bias k1
% b
ias
k2
(d)
Bus 1 Bus 2
CT1 CT2
IL IR
G1 G2
Bus 1 Bus 2
CT1 CT2
IL IR
G1 G1
ILoad
Internal fault
External fault
(a)
(b)
Internal
fault point
External faults
and load current
Re (IR/IL)1 180˚
(IR/IL)
IR/IL
Im (IR/IL)
(c)
Figure 4.4: Operating characteristics of differential protection using alpha plane & % biased
Figure 4.4 (a) and (b) shows a double ended feeder during internal and external faults whereas (c)
and (d) shows the operating characteristics of differential protection using alpha plane for phase A
and assuming percentage biased. Let’s assume the current entering the line is positive (phase 0˚) and
the leaving current is negative (phase 180˚).
For internal fault, the local and remote currents are entering the line and this translates as positive
(phase 0˚) and are in phase with each other. However, there is always a difference in magnitude of
either local or remote current flowing to the fault point as shown in Figure 4.4 (a).
For internal fault: Idiff = |IL + IR| ≠ 0 (4.1)
For external fault shown in Figure 4.4 (b), the local current flows into the line (positive or phase 0˚)
and out of the remote current (negative or phase 180˚). Hence, the local current is 180˚ out of phase
with the remote current, but likely to have equal magnitude (see Figure 4.4).
For external fault: Idiff = |IL + IR| = 0 (4.2)

92
Figure 4.4 (c) shows the complex plane called “alpha plane”, where the relay operates by checking
the vector ratio of the local and remote current [85]. From [84], plane 𝛼 = IR/IL = 𝑎 + 𝑗𝑏 = r = 𝑟𝑒𝑗𝜃
and 𝛽 = IL/IR. For external fault or normal operation, let’s assume the magnitude of line current is “I”
and the ratio of remote to local current will be as follows:
Phase A =IRA
ILA
=1∠180°
1∠0°= 1∠180° or − 1 + j0 i. e the same rule for phase B and C.
This indicates, the ratio of remote to local current is out of phase and the relay will not trip as shown
on the left of the origin on the alpha plane or X axis (Figure 4.4 (c)). The alpha plane can be modified
to accumulate the errors caused by line charging current, CT saturation, channel time-delay
compensation errors and other related errors. Therefore, internal fault will be appeared in the 1st and
4th quadrant whereas external fault will be appeared in the 2
nd and 3
rd quadrant.
A good sensitivity of the relay is ensured by making the differential current almost proportional to the
fault current. Hence, the operating current is the magnitude phasor sum of local and remote current
and is given by:
Idiff = |IL + IR| (4.3)
The restraint or bias current is the ratio of differential or spill current to the mean through fault current.
Since the restraint or bias current is a function of the total current where the function is often constant
“k”, it is given by:
Irestriant = k(|IL| + |IR|) (4.4)
The minimum operating criterion is:
Iop > Imin + Irestriant (4.5)
Where:
𝐼𝑜𝑝 = |𝐼 𝑚𝑖𝑛 + 𝐼 𝑚𝑖𝑛| (4.6)
𝐼𝑚𝑖𝑛 = 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 𝑟𝑒𝑙𝑎𝑦 𝑝𝑖𝑐𝑘𝑢𝑝 𝑙𝑒𝑣𝑒𝑙 𝑜𝑓 𝑡ℎ𝑒 𝑟𝑒𝑙𝑎𝑦 𝑎𝑛𝑑
𝐼𝑟𝑒𝑠𝑡𝑟𝑖𝑎𝑛𝑡 = 𝑓(𝐼 𝑚𝑖𝑛 , 𝐼 𝑚𝑖𝑛)
Alternatively, as shown on Figure 4.4 (d), for percentage biased characteristic, the tripping criterion is
given by:
For |Ibias| < Is2 |Idiff| > k1 × |Ibias| + Is1 (4.7)
For |Ibias| > Is2 |Idiff| > k2 × |Ibias| − (k2 − k1) × Is2 + Is1 (4.8)
The basic relay setting ranges[28], the operating criteria of differential protection is summarised in
Table 4.1.
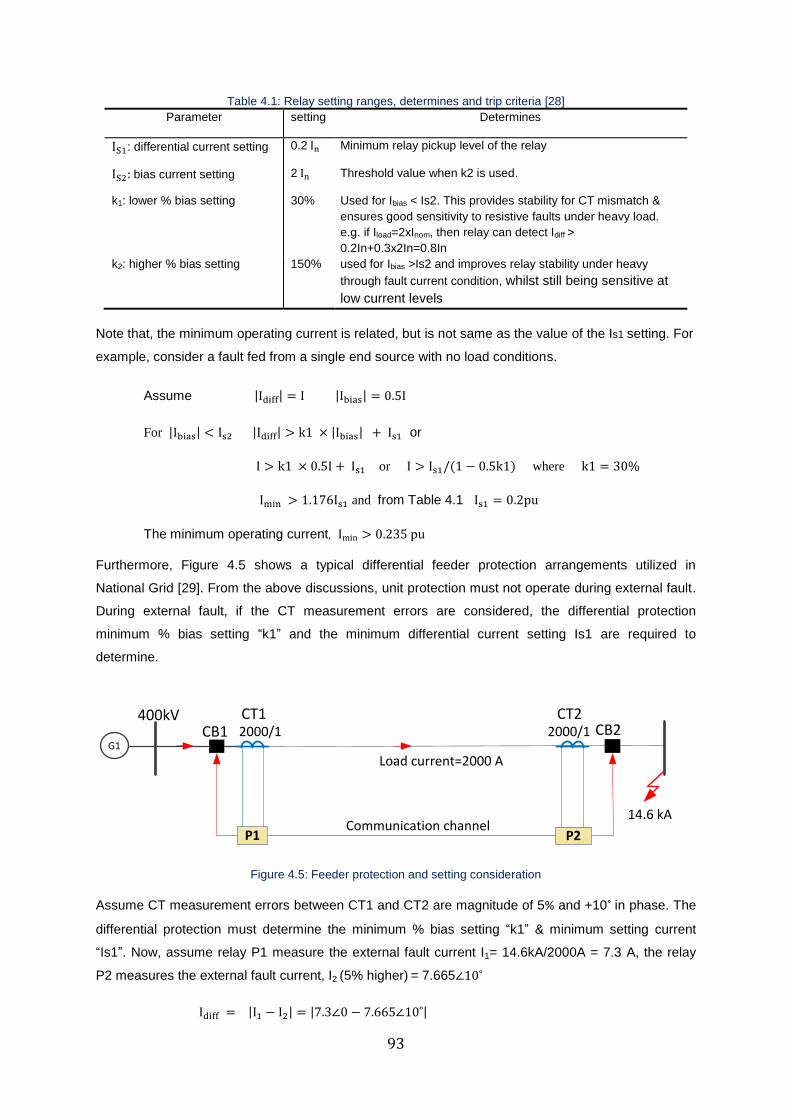
93
Table 4.1: Relay setting ranges, determines and trip criteria [28]
Parameter setting Determines
IS1: differential current setting 0.2 In Minimum relay pickup level of the relay
IS2: bias current setting 2 In Threshold value when k2 is used.
k1: lower % bias setting 30% Used for Ibias < Is2. This provides stability for CT mismatch &
ensures good sensitivity to resistive faults under heavy load.
e.g. if Iload=2xInom, then relay can detect Idiff >
0.2In+0.3x2In=0.8In
k2: higher % bias setting 150% used for Ibias >Is2 and improves relay stability under heavy
through fault current condition, whilst still being sensitive at
low current levels
Note that, the minimum operating current is related, but is not same as the value of the Is1 setting. For
example, consider a fault fed from a single end source with no load conditions.
Assume |Idiff| = I |Ibias| = 0.5I
For |Ibias| < Is2 |Idiff| > k1 × |Ibias| + Is1 or
I > k1 × 0.5I + Is1 or I > Is1/(1 − 0.5k1) where k1 = 30%
Imin > 1.176Is1 and from Table 4.1 Is1 = 0.2pu
The minimum operating current, Imin > 0.235 pu
Furthermore, Figure 4.5 shows a typical differential feeder protection arrangements utilized in
National Grid [29]. From the above discussions, unit protection must not operate during external fault.
During external fault, if the CT measurement errors are considered, the differential protection
minimum % bias setting “k1” and the minimum differential current setting Is1 are required to
determine.
P1
CB1 CB2CT12000/1 2000/1
CT2400kV
P2
Load current=2000 A
14.6 kA
G1
Communication channel
Figure 4.5: Feeder protection and setting consideration
Assume CT measurement errors between CT1 and CT2 are magnitude of 5% and +10˚ in phase. The
differential protection must determine the minimum % bias setting “k1” & minimum setting current
“Is1”. Now, assume relay P1 measure the external fault current I1= 14.6kA/2000A = 7.3 A, the relay
P2 measures the external fault current, I2 (5% higher) = 7.665∠10˚
Idiff = |I1 − I2| = |7.3∠0 − 7.665∠10˚|
94
= |0.248 − j1.331| = 1.354A
|Ibias| = Irest = |I1 − I2| 2⁄ =7.3 + 7.665
2= 7.482A
The minimum % bias setting “k1” is:
k1 = Idiff Irest = 1.354/7.482 = 0.1809 = 18.09%⁄
Since the feeder normal load current is 2000A,
CT1 secondary, I1= 1A
CT2 has errors of +5% in magnitude & +10˚ in phase, I2 = 105% × 1∠10˚ = 1.05∠10˚
The minimum setting current “Is1” is:
IS1 = |I1 − I2| = |1∠0˚ − 1.05∠10| = 0.185 A
Thus, the % biased characteristic of relay operating tripping criteria is:
|Idiff | = 18.09% × |Ibias| + 0.185A
The basic advantages of low impedance % biased differential protection provided by numerical
differential protection scheme are:
Low impedance or % biased element is often used to rid of the errors caused by CTs
tolerance. Therefore, there is no need of a CTs design at high tolerance which is also too
expensive [86].
As the through fault current increases, the error will be increased. Thus, as the error
increases, the differential current setting must be increased and this is called biased
differential current protection [86].
4.1.4 Performance assessment on line current differential protection
In this section, a 400kV transmission feeder is examined based on physical relay injection test (Figure
4.6).
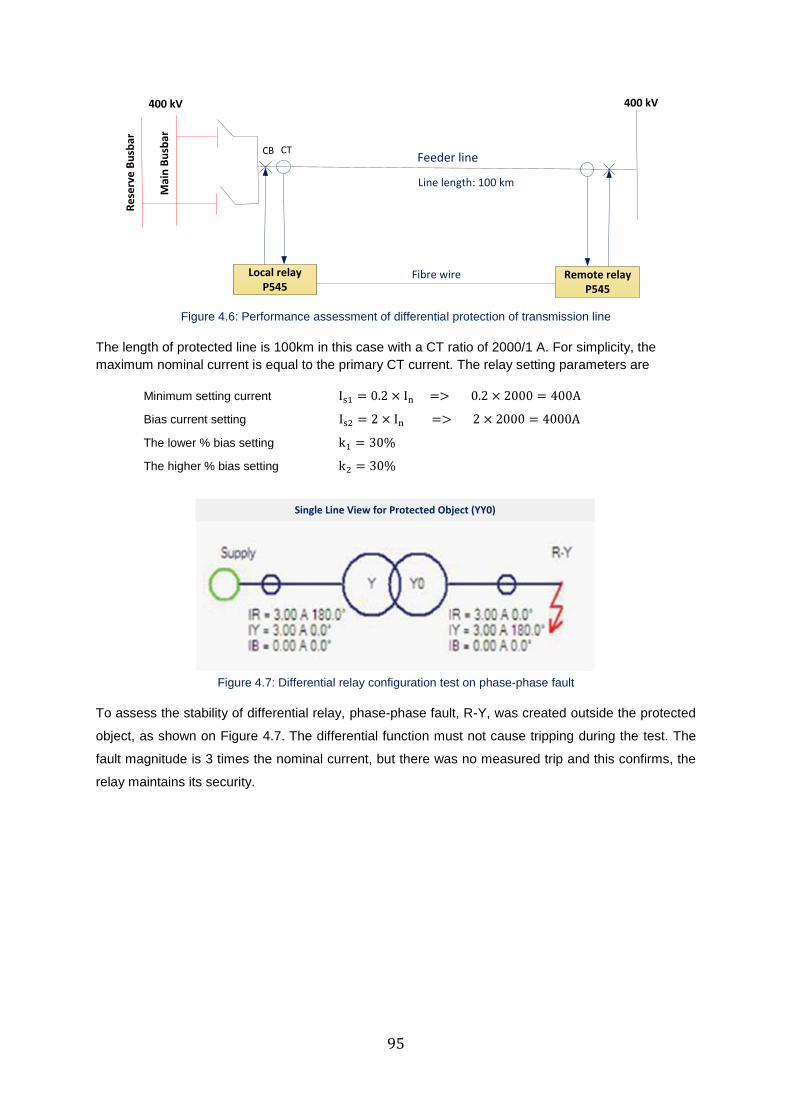
95
Re
serv
e B
usb
ar
Mai
n B
usb
ar
Local relayP545
CTCB
400 kV400 kV
Feeder line
Line length: 100 km
Remote relayP545
Fibre wire
Figure 4.6: Performance assessment of differential protection of transmission line
The length of protected line is 100km in this case with a CT ratio of 2000/1 A. For simplicity, the
maximum nominal current is equal to the primary CT current. The relay setting parameters are
Minimum setting current Is1 = 0.2 × In => 0.2 × 2000 = 400A
Bias current setting Is2 = 2 × In => 2 × 2000 = 4000A
The lower % bias setting k1 = 30%
The higher % bias setting k2 = 30%
Single Line View for Protected Object (YY0)
Figure 4.7: Differential relay configuration test on phase-phase fault
To assess the stability of differential relay, phase-phase fault, R-Y, was created outside the protected
object, as shown on Figure 4.7. The differential function must not cause tripping during the test. The
fault magnitude is 3 times the nominal current, but there was no measured trip and this confirms, the
relay maintains its security.
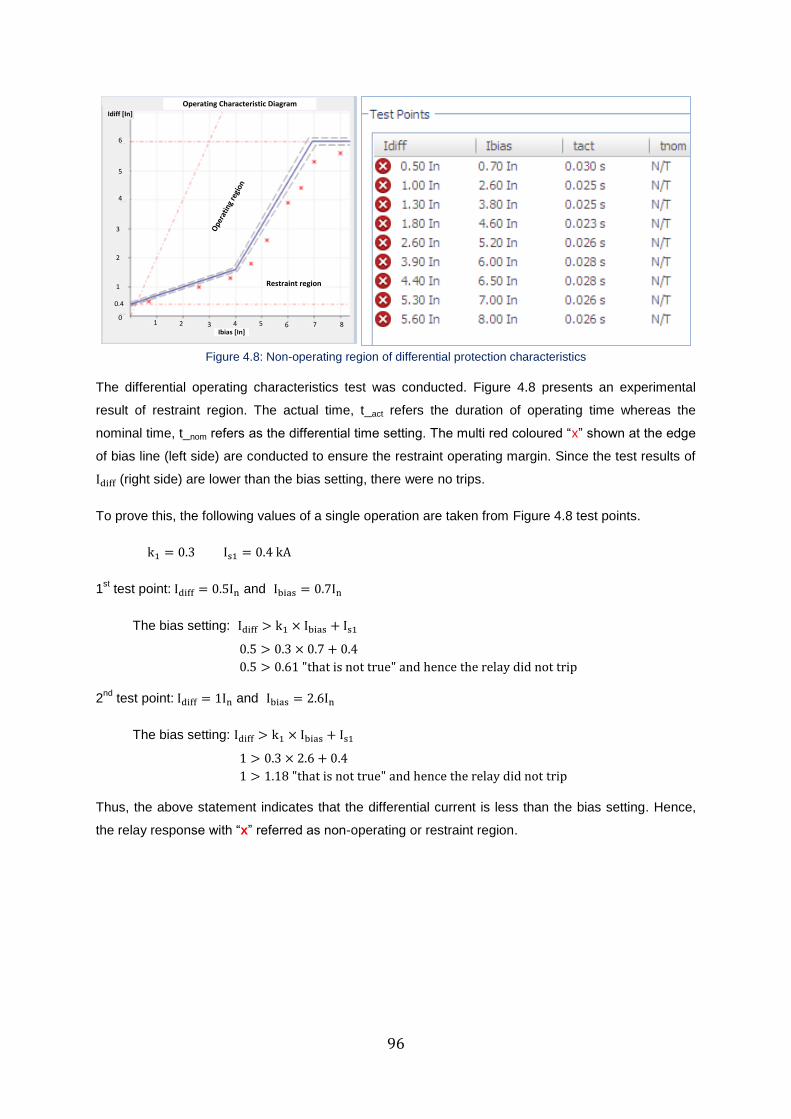
96
Ibias
Operating Characteristic DiagramIdiff [In]
6
5
4
3
2
1
0
Restraint region
Ope
rati
ng re
gion
1 2 3 4Ibias [In]
5 6 7 8
0.4
Figure 4.8: Non-operating region of differential protection characteristics
The differential operating characteristics test was conducted. Figure 4.8 presents an experimental
result of restraint region. The actual time, t_act refers the duration of operating time whereas the
nominal time, t_nom refers as the differential time setting. The multi red coloured “x” shown at the edge
of bias line (left side) are conducted to ensure the restraint operating margin. Since the test results of
Idiff (right side) are lower than the bias setting, there were no trips.
To prove this, the following values of a single operation are taken from Figure 4.8 test points.
k1 = 0.3 Is1 = 0.4 kA
1st test point: Idiff = 0.5In and Ibias = 0.7In
The bias setting: Idiff > k1 × Ibias + Is1
0.5 > 0.3 × 0.7 + 0.4
0.5 > 0.61 "that is not true" and hence the relay did not trip
2nd
test point: Idiff = 1In and Ibias = 2.6In
The bias setting: Idiff > k1 × Ibias + Is1
1 > 0.3 × 2.6 + 0.4
1 > 1.18 "that is not true" and hence the relay did not trip
Thus, the above statement indicates that the differential current is less than the bias setting. Hence,
the relay response with “x” referred as non-operating or restraint region.
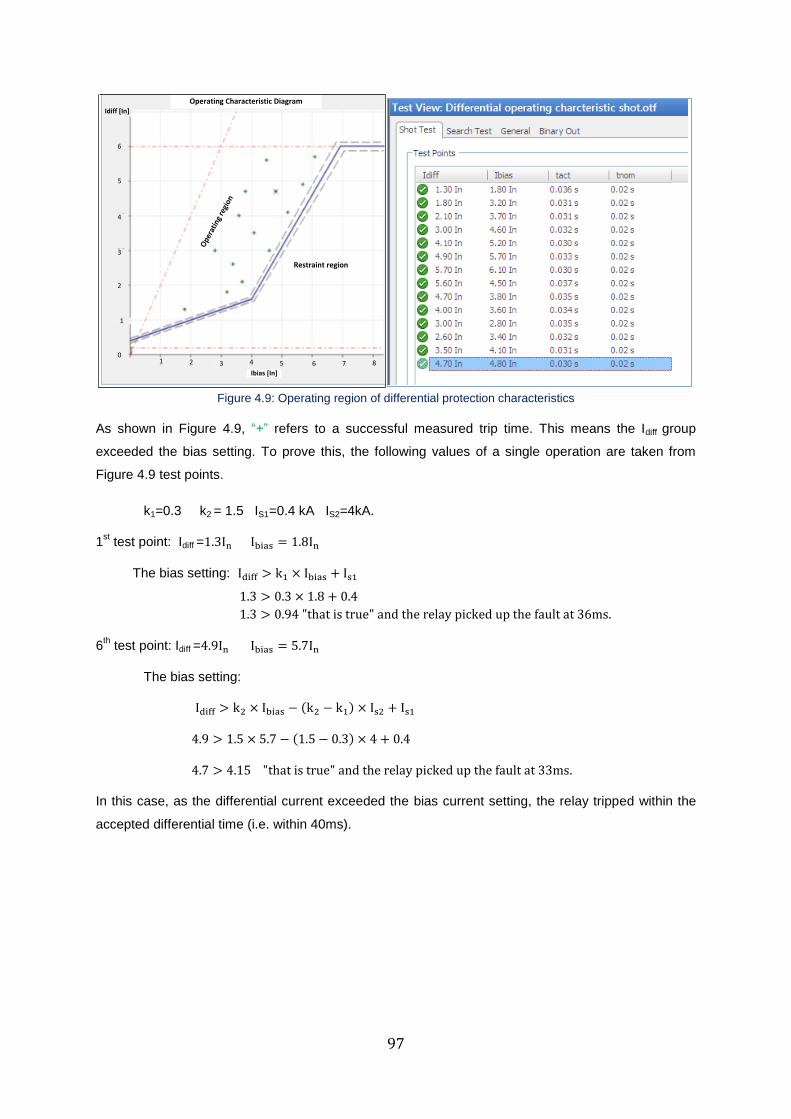
97
Operating Characteristic DiagramIdiff [In]
6
5
4
3
2
1
0
Restraint region
Ope
rati
ng r
egio
n
1 2 3 4
Ibias [In]
5 6 7 8
Figure 4.9: Operating region of differential protection characteristics
As shown in Figure 4.9, “+” refers to a successful measured trip time. This means the Idiff group
exceeded the bias setting. To prove this, the following values of a single operation are taken from
Figure 4.9 test points.
k1=0.3 k2 = 1.5 IS1=0.4 kA IS2=4kA.
1st test point: Idiff =1.3In Ibias = 1.8In
The bias setting: Idiff > k1 × Ibias + Is1
1.3 > 0.3 × 1.8 + 0.4
1.3 > 0.94 "that is true" and the relay picked up the fault at 36ms.
6th test point: Idiff =4.9In Ibias = 5.7In
The bias setting:
Idiff > k2 × Ibias − (k2 − k1) × Is2 + Is1
4.9 > 1.5 × 5.7 − (1.5 − 0.3) × 4 + 0.4
4.7 > 4.15 "that is true" and the relay picked up the fault at 33ms.
In this case, as the differential current exceeded the bias current setting, the relay tripped within the
accepted differential time (i.e. within 40ms).
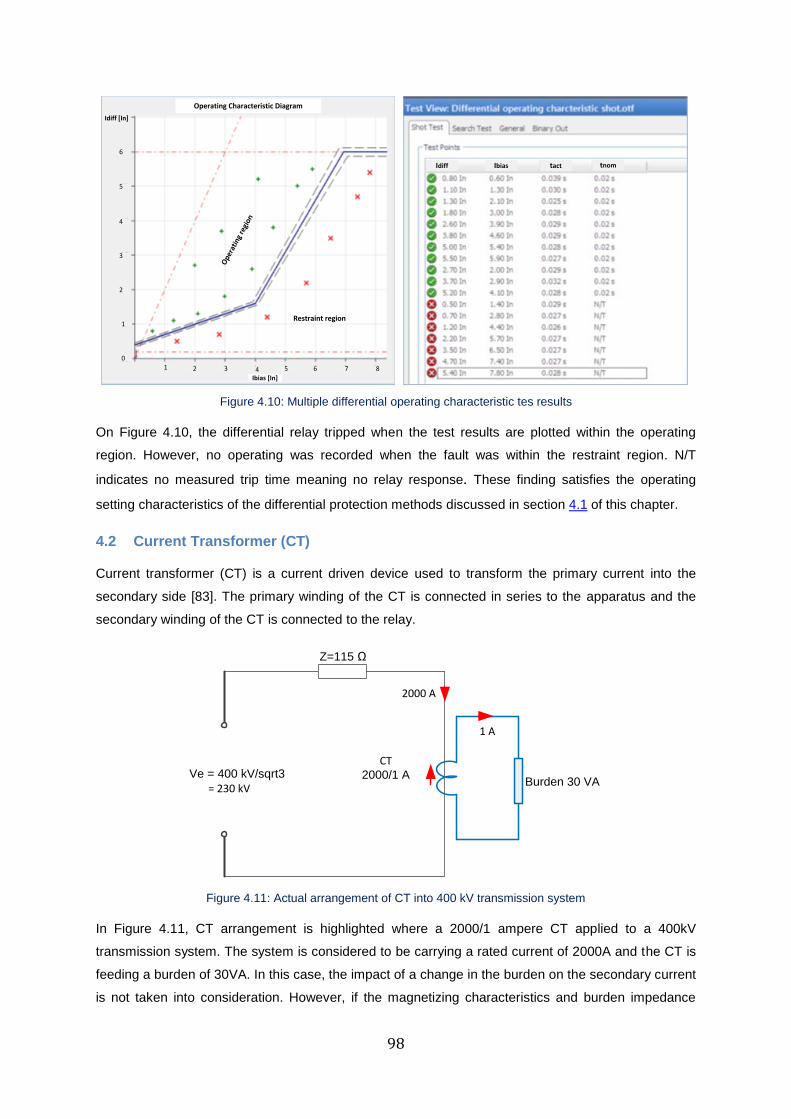
98
Restraint region
Ope
rati
ng r
egio
n
Operating Characteristic Diagram
Idiff [In]
6
5
4
3
2
1
0
1 2 3 4Ibias [In]
5 6 7 8
IbiasIdiff tact tnom
Figure 4.10: Multiple differential operating characteristic tes results
On Figure 4.10, the differential relay tripped when the test results are plotted within the operating
region. However, no operating was recorded when the fault was within the restraint region. N/T
indicates no measured trip time meaning no relay response. These finding satisfies the operating
setting characteristics of the differential protection methods discussed in section 4.1 of this chapter.
4.2 Current Transformer (CT)
Current transformer (CT) is a current driven device used to transform the primary current into the
secondary side [83]. The primary winding of the CT is connected in series to the apparatus and the
secondary winding of the CT is connected to the relay.
Ve = 400 kV/sqrt3
= 230 kV
CT2000/1 A
Burden 30 VA
Z=115 Ω
2000 A
1 A
Figure 4.11: Actual arrangement of CT into 400 kV transmission system
In Figure 4.11, CT arrangement is highlighted where a 2000/1 ampere CT applied to a 400kV
transmission system. The system is considered to be carrying a rated current of 2000A and the CT is
feeding a burden of 30VA. In this case, the impact of a change in the burden on the secondary current
is not taken into consideration. However, if the magnetizing characteristics and burden impedance
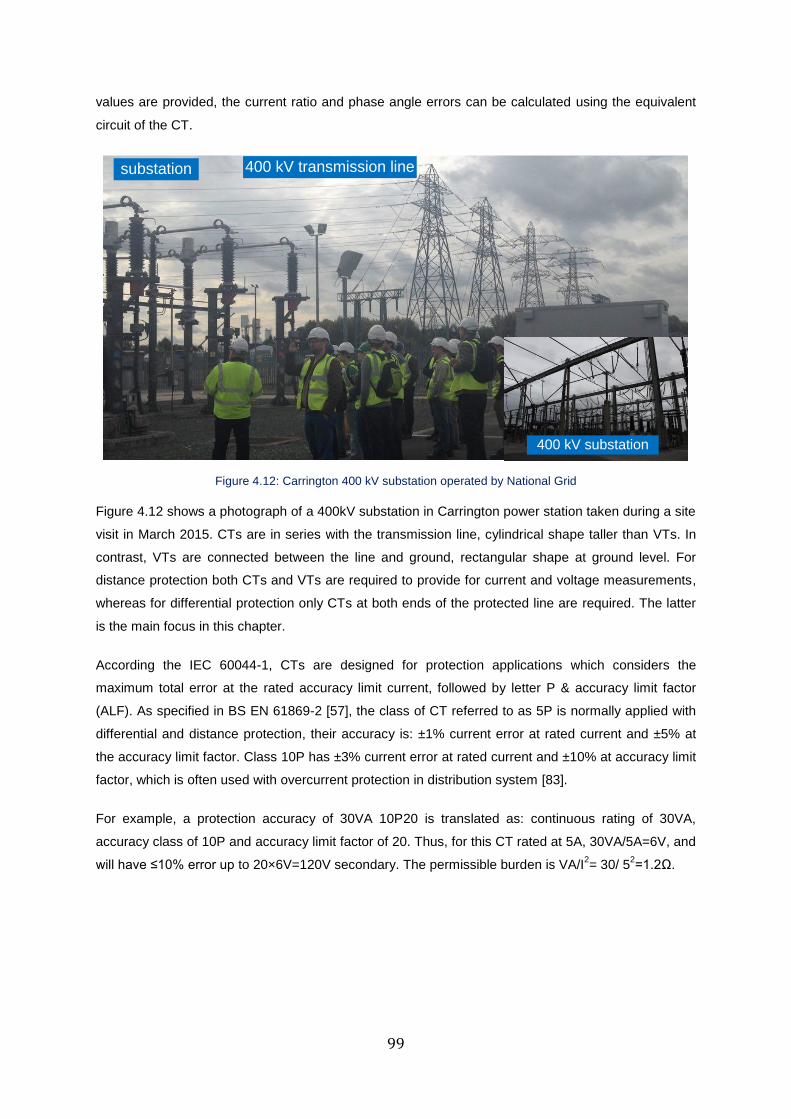
99
values are provided, the current ratio and phase angle errors can be calculated using the equivalent
circuit of the CT.
400 kV transmission linesubstation
400 kV substation
Figure 4.12: Carrington 400 kV substation operated by National Grid
Figure 4.12 shows a photograph of a 400kV substation in Carrington power station taken during a site
visit in March 2015. CTs are in series with the transmission line, cylindrical shape taller than VTs. In
contrast, VTs are connected between the line and ground, rectangular shape at ground level. For
distance protection both CTs and VTs are required to provide for current and voltage measurements,
whereas for differential protection only CTs at both ends of the protected line are required. The latter
is the main focus in this chapter.
According the IEC 60044-1, CTs are designed for protection applications which considers the
maximum total error at the rated accuracy limit current, followed by letter P & accuracy limit factor
(ALF). As specified in BS EN 61869-2 [57], the class of CT referred to as 5P is normally applied with
differential and distance protection, their accuracy is: ±1% current error at rated current and ±5% at
the accuracy limit factor. Class 10P has ±3% current error at rated current and ±10% at accuracy limit
factor, which is often used with overcurrent protection in distribution system [83].
For example, a protection accuracy of 30VA 10P20 is translated as: continuous rating of 30VA,
accuracy class of 10P and accuracy limit factor of 20. Thus, for this CT rated at 5A, 30VA/5A=6V, and
will have ≤10% error up to 20×6V=120V secondary. The permissible burden is VA/I2= 30/ 5
2=1.2Ω.
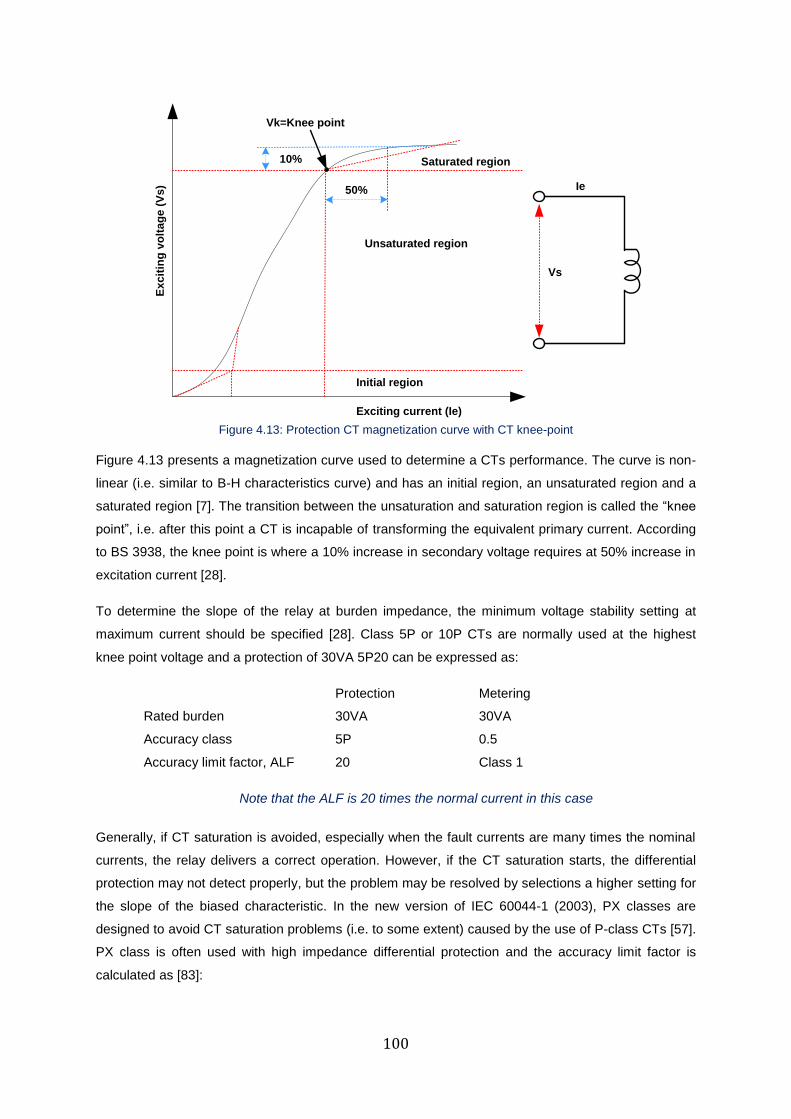
100
Vk=Knee point
Exciting current (Ie)
Ex
cit
ing
vo
lta
ge
(V
s) 50%
10% Saturated region
Unsaturated region
Ie
Initial region
Vs
Figure 4.13: Protection CT magnetization curve with CT knee-point
Figure 4.13 presents a magnetization curve used to determine a CTs performance. The curve is non-
linear (i.e. similar to B-H characteristics curve) and has an initial region, an unsaturated region and a
saturated region [7]. The transition between the unsaturation and saturation region is called the “knee
point”, i.e. after this point a CT is incapable of transforming the equivalent primary current. According
to BS 3938, the knee point is where a 10% increase in secondary voltage requires at 50% increase in
excitation current [28].
To determine the slope of the relay at burden impedance, the minimum voltage stability setting at
maximum current should be specified [28]. Class 5P or 10P CTs are normally used at the highest
knee point voltage and a protection of 30VA 5P20 can be expressed as:
Protection Metering
Rated burden 30VA 30VA
Accuracy class 5P 0.5
Accuracy limit factor, ALF 20 Class 1
Note that the ALF is 20 times the normal current in this case
Generally, if CT saturation is avoided, especially when the fault currents are many times the nominal
currents, the relay delivers a correct operation. However, if the CT saturation starts, the differential
protection may not detect properly, but the problem may be resolved by selections a higher setting for
the slope of the biased characteristic. In the new version of IEC 60044-1 (2003), PX classes are
designed to avoid CT saturation problems (i.e. to some extent) caused by the use of P-class CTs [57].
PX class is often used with high impedance differential protection and the accuracy limit factor is
calculated as [83]:

101
𝐴𝐿𝐹′ = 𝐴𝐿𝐹 ×𝑃𝑖+𝑃𝑛
𝑃𝑖+𝑃𝐵= 𝐴𝐿𝐹 ×
𝑅𝐶𝑇+𝑅𝐵𝑛
𝑅𝐶𝑇+𝑅𝐵 (4.9)
Where
𝑃𝑛: Rated burden
𝑃𝑖: Internal burden of the CT (𝑅𝐶𝑇𝐼2𝑛2 )
𝑃𝐵: Actual connected burden (𝑅𝐵𝐼2𝑛2 )
𝑅𝐶𝑇: Secondary winding resistance
𝑅𝐵𝑛: Rated burden resistance
𝑅𝐵 : Burden resistance (resistance of connection wire & burden of relay; 𝑅𝑅 + 𝑅𝐿)
For example, if a CT of 2000/1 A; 5P20; 30 VA; RCT = 4.4Ω with a burden resistance of RB = RL + RR =
7+0.5= 7.5Ω is considered. For accuracy limit Factor ALF of 20, the real accuracy limit factor, ALF’ will
be:
ALF′ = ALF ×RCT+RBn
RCT+RB= 20 ×
4.4+30
4.4+7.5= ALF × 2.89 = 57.81
In this example, the CT can operate at 57.81 times the rated current with an accuracy of 5% (i.e.
improved from the given operational condition 20 times to 57.81 times rated current).
4.2.1 Dimensioning of CTs
From [83], the required operating accuracy limit factor ALF’ is given by:
𝐴𝐿𝐹′ =𝐼𝐹
𝐼𝑛
× 𝐾𝑇𝐹 × 𝐾𝑅𝑒𝑚 (4.10)
Where:
𝐼𝐹/𝐼𝑛= considers the maximum ratio of fault to nominal current
KFT = transient factor that considers the single end magnetising of the CT due to the DC component in
the fault current
KRem = over-dimensioning factor that accounts the remanence and the typical range is 1.25-5.0.
From eqn. 4.9, the corresponding rated accuracy limit factor ALF is obtained as follows:
𝐴𝐿𝐹 = 𝐴𝐿𝐹′ ×𝑅𝐶𝑇+𝑅𝐵
𝑅𝐶𝑇+𝑅𝐵𝑛= 𝐴𝐿𝐹′ ×
𝑃𝑖+𝑃𝐵
𝑃𝑖+𝑃𝑛 (4.11)
For external fault, the criterion for stability of dimensioning CTs during the through fault current is
required to determine the minimum operating accuracy limit factor as follows:
ALF’ = 𝐾𝑇𝐷 ×𝐼𝐹−max −through fault
𝐼𝑛−𝐶𝑇 (4.12)
Where:
KTD =Minimum transient dimensioning factor for the maximum through fault current flowing (KTD>1)
IF: Maximum through fault current
In-CT= Primary CT current
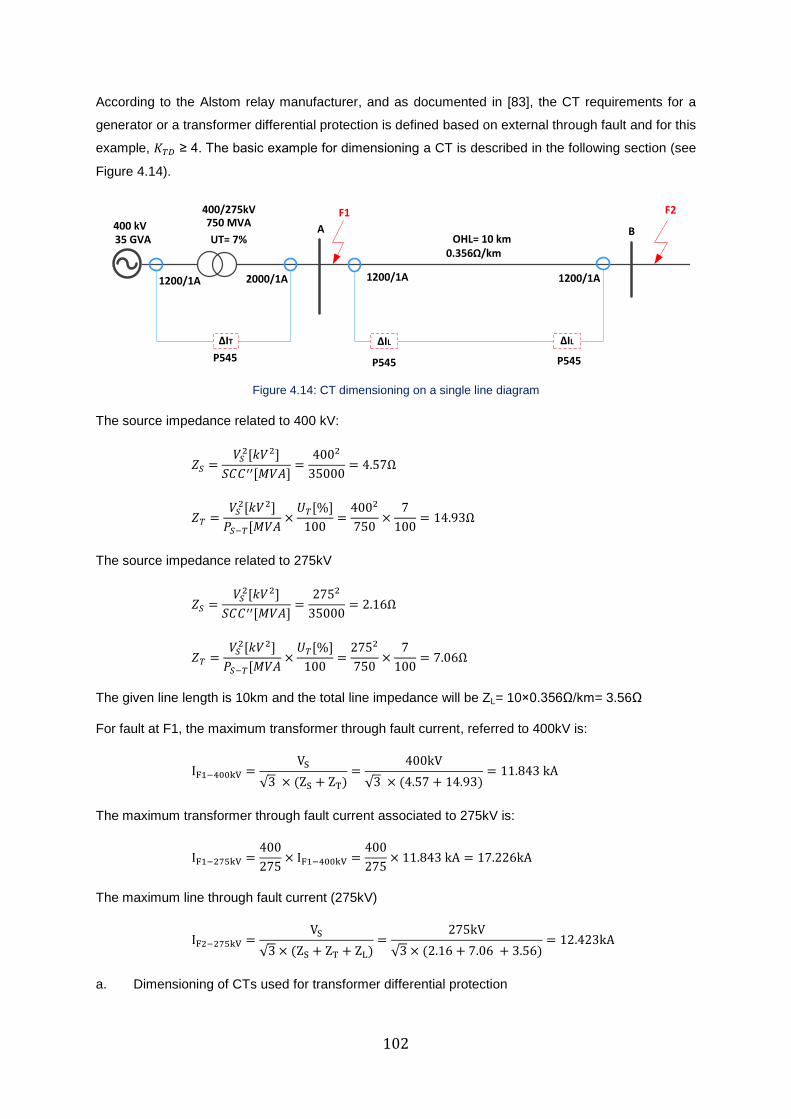
102
According to the Alstom relay manufacturer, and as documented in [83], the CT requirements for a
generator or a transformer differential protection is defined based on external through fault and for this
example, 𝐾𝑇𝐷 ≥ 4. The basic example for dimensioning a CT is described in the following section (see
Figure 4.14).
BA
F2F1750 MVA
400/275kV
35 GVA400 kV
1200/1A 2000/1A 1200/1A 1200/1A
OHL= 10 km0.356Ω/km
ΔIT ΔIL
UT= 7%
P545 P545 P545
ΔIL
Figure 4.14: CT dimensioning on a single line diagram
The source impedance related to 400 kV:
𝑍𝑆 =𝑉𝑆
2[𝑘𝑉2]
𝑆𝐶𝐶′′[𝑀𝑉𝐴]=
4002
35000= 4.57Ω
𝑍𝑇 =𝑉𝑆
2[𝑘𝑉2]
𝑃𝑆−𝑇[𝑀𝑉𝐴×
𝑈𝑇[%]
100=
4002
750×
7
100= 14.93Ω
The source impedance related to 275kV
𝑍𝑆 =𝑉𝑆
2[𝑘𝑉2]
𝑆𝐶𝐶′′[𝑀𝑉𝐴]=
2752
35000= 2.16Ω
𝑍𝑇 =𝑉𝑆
2[𝑘𝑉2]
𝑃𝑆−𝑇[𝑀𝑉𝐴×
𝑈𝑇[%]
100=
2752
750×
7
100= 7.06Ω
The given line length is 10km and the total line impedance will be ZL= 10×0.356Ω/km= 3.56Ω
For fault at F1, the maximum transformer through fault current, referred to 400kV is:
IF1−400kV =VS
√3 × (ZS + ZT)=
400kV
√3 × (4.57 + 14.93)= 11.843 kA
The maximum transformer through fault current associated to 275kV is:
IF1−275kV =400
275× IF1−400kV =
400
275× 11.843 kA = 17.226kA
The maximum line through fault current (275kV)
IF2−275kV =VS
√3 × (ZS + ZT + ZL)=
275kV
√3 × (2.16 + 7.06 + 3.56)= 12.423kA
a. Dimensioning of CTs used for transformer differential protection

103
CTs on 400kV-side:
The accuracy limit factor in operation:
ALF’ = KTD ×IF1−400kV
In−CT= 4 ×
11843
1200= 39.477
Note that according to [83], the Siemens manufacturer recommended value of 𝐾𝑇𝐷 for generator and transformer
differential protection during external fault is ≥4.
If the CT design data are 1200/1A, 30VA, 5P, internal burden of 4.5VA and the connection burden
resistance of 5 VA (i.e. the CT secondary cable and relay).
Then, the required rated accuracy limit factor will be
𝐴𝐿𝐹 ≥𝑃𝑖 + 𝑃𝐵
𝑃𝑖 + 𝑃𝑛
× 𝐴𝐿𝐹′ =4.5 + 5
4.5 + 30× 39.477 = 10.87
The following CT type is selected (choose higher than the calculate value):
1200/1 A, 30 VA class1 5P20, RCT ≤ 4.5 Ω (Pi ≤ 4.5VA)
CTs on 275 kV side:
The accuracy limit factor
ALF’ = 𝐾𝑇𝐷 ×𝐼𝐹1−275𝑘𝑉
𝐼𝑛−𝐶𝑇
= 4 ×17226
2000= 34.45
For CT design data with 2000/1A, 30VA, 5P, an internal burden of 8VA and a connection burden
resistance of 8.5 VA (i.e. the CT secondary cable and relay). The required rated accuracy limit factor
will be
𝐴𝐿𝐹 ≥𝑃𝑖 + 𝑃𝐵
𝑃𝑖 + 𝑃𝑛
× 𝐴𝐿𝐹′ =8 + 8.5
8 + 30× 34.45 = 14.96
The following CT type is selected (choose higher than the calculate value):
2000/1 A, 30VA, 5P20, RCT ≤ 8 Ω (Pi ≤ 8VA)
b. Dimensioning of the CTs for feeder differential protection
The accuracy limit factor,
ALF’ = 𝐾𝑇𝐷 ×𝐼𝐹2−275𝑘𝑉
𝐼𝑛−𝐶𝑇
= 2 ×12423
1200= 20.71
Note that according to [83], the Siemens manufacturer recommended value of 𝐾𝑇𝐷 for feeder differential
protection during external fault is ≥ 1.2 and in this case the value of 𝐾𝑇𝐷 = 2 is assumed.
Assume the data for each CT are 1200/1 A, 30VA, 5P, internal burden ≤ 12VA and connection burden
resistance of 12.5 VA. Hence,
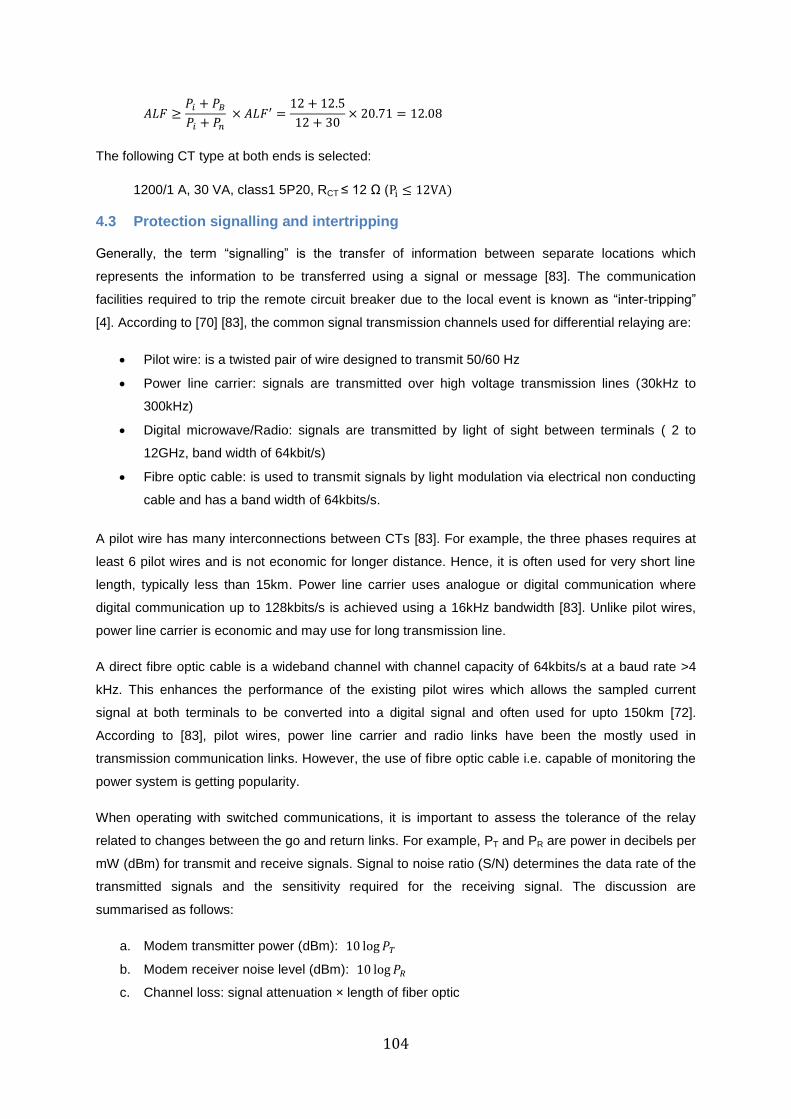
104
𝐴𝐿𝐹 ≥𝑃𝑖 + 𝑃𝐵
𝑃𝑖 + 𝑃𝑛
× 𝐴𝐿𝐹′ =12 + 12.5
12 + 30× 20.71 = 12.08
The following CT type at both ends is selected:
1200/1 A, 30 VA, class1 5P20, RCT ≤ 12 Ω (Pi ≤ 12VA)
4.3 Protection signalling and intertripping
Generally, the term “signalling” is the transfer of information between separate locations which
represents the information to be transferred using a signal or message [83]. The communication
facilities required to trip the remote circuit breaker due to the local event is known as “inter-tripping”
[4]. According to [70] [83], the common signal transmission channels used for differential relaying are:
Pilot wire: is a twisted pair of wire designed to transmit 50/60 Hz
Power line carrier: signals are transmitted over high voltage transmission lines (30kHz to
300kHz)
Digital microwave/Radio: signals are transmitted by light of sight between terminals ( 2 to
12GHz, band width of 64kbit/s)
Fibre optic cable: is used to transmit signals by light modulation via electrical non conducting
cable and has a band width of 64kbits/s.
A pilot wire has many interconnections between CTs [83]. For example, the three phases requires at
least 6 pilot wires and is not economic for longer distance. Hence, it is often used for very short line
length, typically less than 15km. Power line carrier uses analogue or digital communication where
digital communication up to 128kbits/s is achieved using a 16kHz bandwidth [83]. Unlike pilot wires,
power line carrier is economic and may use for long transmission line.
A direct fibre optic cable is a wideband channel with channel capacity of 64kbits/s at a baud rate >4
kHz. This enhances the performance of the existing pilot wires which allows the sampled current
signal at both terminals to be converted into a digital signal and often used for upto 150km [72].
According to [83], pilot wires, power line carrier and radio links have been the mostly used in
transmission communication links. However, the use of fibre optic cable i.e. capable of monitoring the
power system is getting popularity.
When operating with switched communications, it is important to assess the tolerance of the relay
related to changes between the go and return links. For example, PT and PR are power in decibels per
mW (dBm) for transmit and receive signals. Signal to noise ratio (S/N) determines the data rate of the
transmitted signals and the sensitivity required for the receiving signal. The discussion are
summarised as follows:
a. Modem transmitter power (dBm): 10 log 𝑃𝑇
b. Modem receiver noise level (dBm): 10 log 𝑃𝑅
c. Channel loss: signal attenuation × length of fiber optic
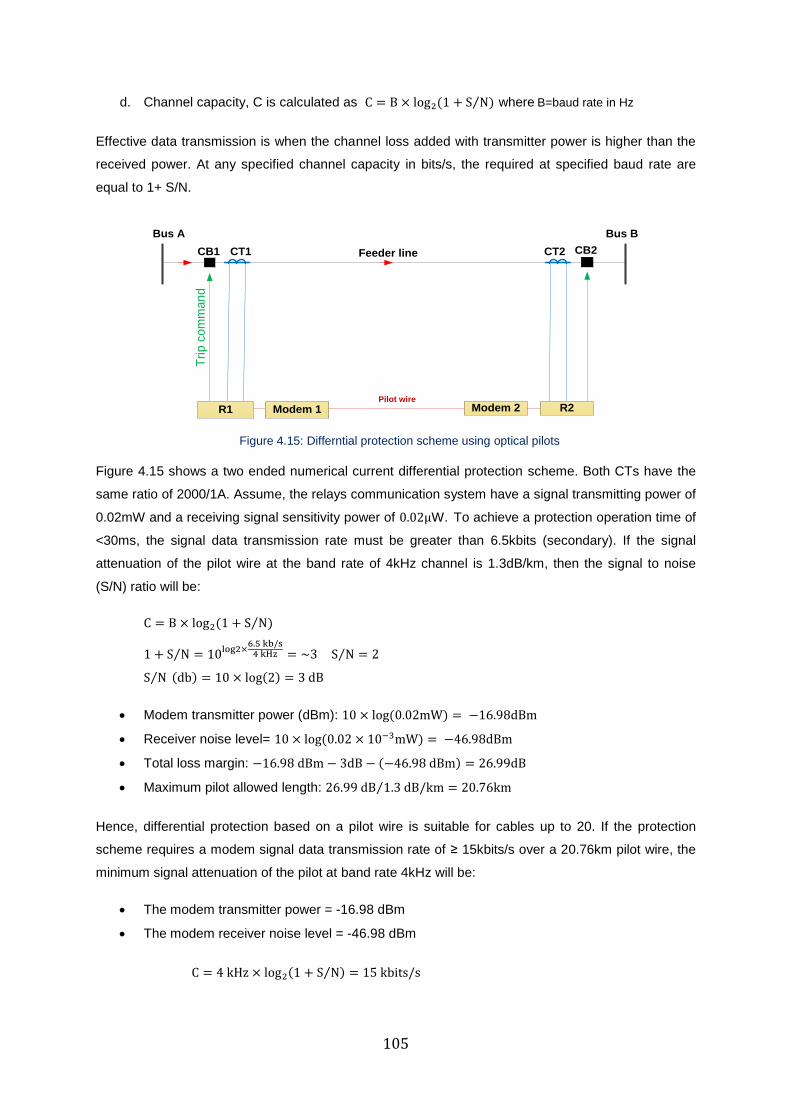
105
d. Channel capacity, C is calculated as C = B × log2(1 + S N⁄ ) where B=baud rate in Hz
Effective data transmission is when the channel loss added with transmitter power is higher than the
received power. At any specified channel capacity in bits/s, the required at specified baud rate are
equal to 1+ S/N.
CB1 CB2CT1 CT2
Pilot wire
Feeder line
Bus A Bus B
Trip
co
mm
an
d
Modem 1 Modem 2 R2R1
Figure 4.15: Differntial protection scheme using optical pilots
Figure 4.15 shows a two ended numerical current differential protection scheme. Both CTs have the
same ratio of 2000/1A. Assume, the relays communication system have a signal transmitting power of
0.02mW and a receiving signal sensitivity power of 0.02μW. To achieve a protection operation time of
<30ms, the signal data transmission rate must be greater than 6.5kbits (secondary). If the signal
attenuation of the pilot wire at the band rate of 4kHz channel is 1.3dB/km, then the signal to noise
(S/N) ratio will be:
C = B × log2(1 + S N⁄ )
1 + S N⁄ = 10log2×6.5 kb/s
4 kHz = ~3 S N⁄ = 2
S N⁄ (db) = 10 × log(2) = 3 dB
Modem transmitter power (dBm): 10 × log (0.02mW) = −16.98dBm
Receiver noise level= 10 × log (0.02 × 10−3mW) = −46.98dBm
Total loss margin: −16.98 dBm − 3dB − (−46.98 dBm) = 26.99dB
Maximum pilot allowed length: 26.99 dB 1.3 dB/km⁄ = 20.76km
Hence, differential protection based on a pilot wire is suitable for cables up to 20. If the protection
scheme requires a modem signal data transmission rate of ≥ 15kbits/s over a 20.76km pilot wire, the
minimum signal attenuation of the pilot at band rate 4kHz will be:
The modem transmitter power = -16.98 dBm
The modem receiver noise level = -46.98 dBm
C = 4 kHz × log2(1 + S N⁄ ) = 15 kbits/s
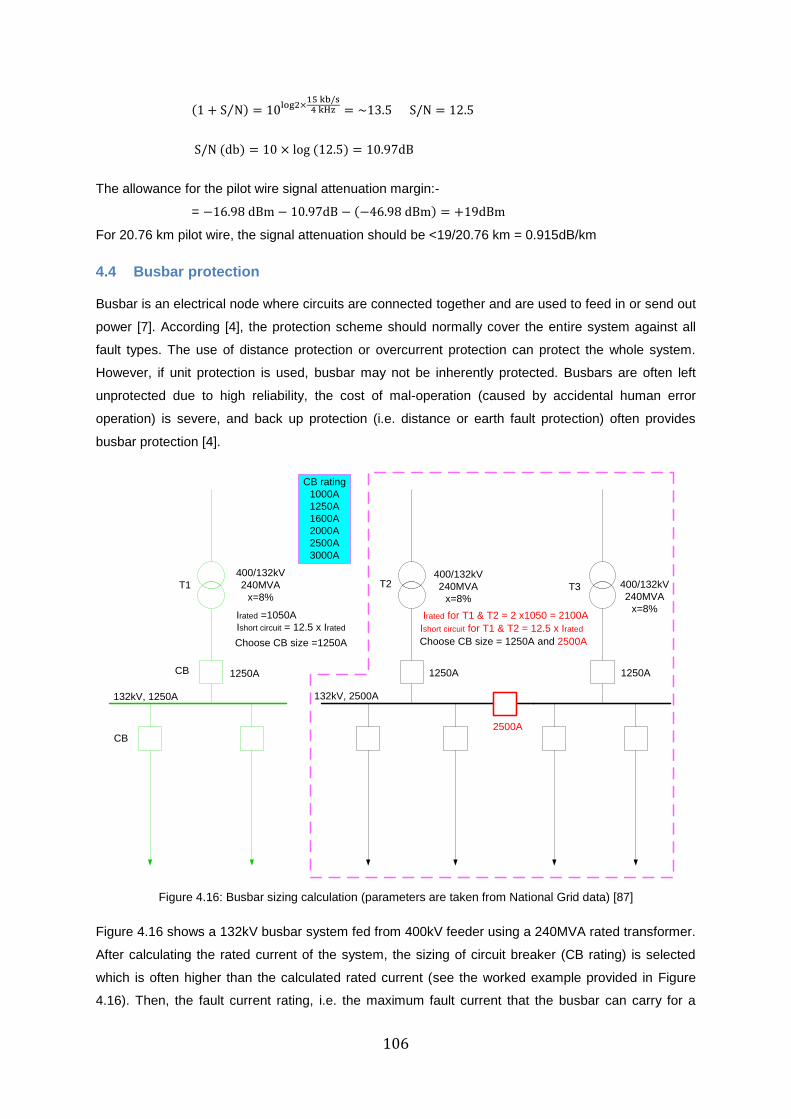
106
(1 + S N⁄ ) = 10log2×15 kb/s
4 kHz = ~13.5 S/N = 12.5
S/N (db) = 10 × log (12.5) = 10.97dB
The allowance for the pilot wire signal attenuation margin:-
= −16.98 dBm − 10.97dB − (−46.98 dBm) = +19dBm
For 20.76 km pilot wire, the signal attenuation should be <19/20.76 km = 0.915dB/km
4.4 Busbar protection
Busbar is an electrical node where circuits are connected together and are used to feed in or send out
power [7]. According [4], the protection scheme should normally cover the entire system against all
fault types. The use of distance protection or overcurrent protection can protect the whole system.
However, if unit protection is used, busbar may not be inherently protected. Busbars are often left
unprotected due to high reliability, the cost of mal-operation (caused by accidental human error
operation) is severe, and back up protection (i.e. distance or earth fault protection) often provides
busbar protection [4].
400/132kV
240MVA
x=8%
400/132kV
240MVA
x=8%
400/132kV
240MVA
x=8%
Irated =1050A
1250A
132kV, 1250A
1250A
132kV, 2500A
2500A
1250A
Irated for T1 & T2 = 2 x1050 = 2100A
Choose CB size =1250A Choose CB size = 1250A and 2500A
CB
CB
T1 T2 T3
Ishort circuit = 12.5 x Irated Ishort circuit for T1 & T2 = 12.5 x Irated
CB rating
1000A
1250A
1600A
2000A
2500A
3000A
Figure 4.16: Busbar sizing calculation (parameters are taken from National Grid data) [87]
Figure 4.16 shows a 132kV busbar system fed from 400kV feeder using a 240MVA rated transformer.
After calculating the rated current of the system, the sizing of circuit breaker (CB rating) is selected
which is often higher than the calculated rated current (see the worked example provided in Figure
4.16). Then, the fault current rating, i.e. the maximum fault current that the busbar can carry for a
107
defined period is also calculated by knowing the transformer reactance. In this case, the transformer
reactance is given 8% and the short circuit current is 12.5 (i.e. 100/impedance =100/8=12.5) times the
rated current.
Generally, busbar protection is required when busbar is not fully protected. The common types of
busbar protection are:
High impedance differential protection: is a simple, well proven, easy setting calculation and
fast operation. The disadvantages are high dependant on CT performance, CT saturation,
expensive X CTs.
Low impedance biased differential protection: is based on Merz-price circulating current
biased differential.
Directional blocking protection: is simple, inexpensive, fast fault clearance, no additional CTs,
and covers phase and earth faults.
In a National Grid substation (400kV or 275kV), the main types of busbar protection are low
impedance and high impedance [29]. Other form of protection such as circuit breaker fail protection,
mesh corner protection and bus sections & bus coupler protection is also used in National Grid.
a. CB Fail Protection
Circuit breakers (CB) are automatic devices which are used for stopping the flow of current in an
electric circuit as a safety measure. Disconnectors or isolators are devices used to provide isolation of
main plant items for maintenance, or to isolate faulted equipment from other live equipment during an
off-load conditions.
As discussed in chapter 2 and Figure 4.16, the study of fault current is required to calculate the rating
of CB. This will ensure to make and break very large current. However, if breaker failure occurs, the
problem becomes much worse where a CB Fail (CBF) protection is required. CBF protection was
introduced in the 1960’s and 70’s when circuit breakers were unreliable. However, modern SF6
breakers are relatively simple, have a long operating life and failures are rare [88]. The main causes
of CBF are overloading, repeated use of circuit breaker as a switch and manufacturing defects. Since
1970’s National Grid has used CBF on all their secondary circuit breakers to prevent subsequent
damage to primary equipment resulting from a single equipment failure that result in un-cleared power
system faults [29]. The operation time for circuit breaker fail protection is 300ms.
b. Mesh corner protection
Normally, a single numerical protection is used for each mesh corner, where duplicated operating
times can be used in such applications [83]. A correct discrimination of overcurrent protections is not
possible in mesh corner protection and as a result, no overcurrent or earth fault protection is applied.
Hence, unit protection is normally used, but a time-stepped distance scheme is also used to clear the
remaining faults [89]. Similar to busbar protection, mesh corner protection is set to ensure stability for
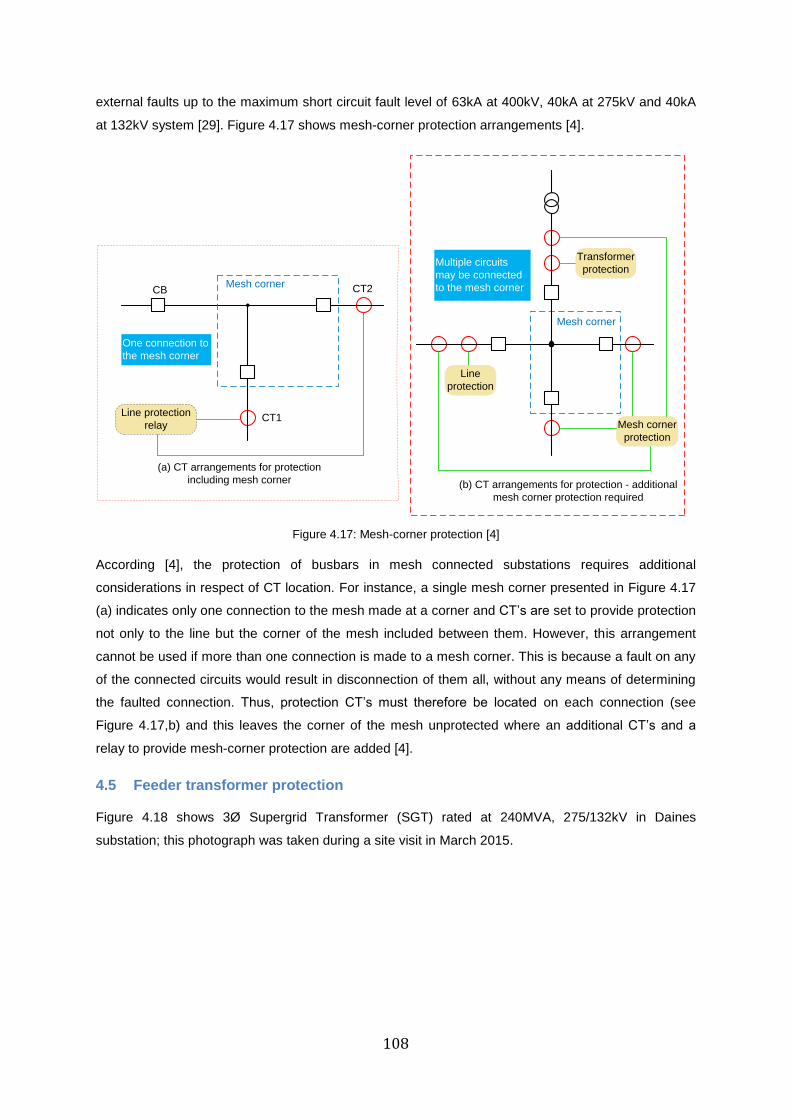
108
external faults up to the maximum short circuit fault level of 63kA at 400kV, 40kA at 275kV and 40kA
at 132kV system [29]. Figure 4.17 shows mesh-corner protection arrangements [4].
Mesh corner
Line
protection
Transformer
protection
Mesh corner
protection
Multiple circuits
may be connected
to the mesh corner
(b) CT arrangements for protection - additional
mesh corner protection required
CB
Line protection
relayCT1
CT2Mesh corner
One connection to
the mesh corner
(a) CT arrangements for protection
including mesh corner
Figure 4.17: Mesh-corner protection [4]
According [4], the protection of busbars in mesh connected substations requires additional
considerations in respect of CT location. For instance, a single mesh corner presented in Figure 4.17
(a) indicates only one connection to the mesh made at a corner and CT’s are set to provide protection
not only to the line but the corner of the mesh included between them. However, this arrangement
cannot be used if more than one connection is made to a mesh corner. This is because a fault on any
of the connected circuits would result in disconnection of them all, without any means of determining
the faulted connection. Thus, protection CT’s must therefore be located on each connection (see
Figure 4.17,b) and this leaves the corner of the mesh unprotected where an additional CT’s and a
relay to provide mesh-corner protection are added [4].
4.5 Feeder transformer protection
Figure 4.18 shows 3Ø Supergrid Transformer (SGT) rated at 240MVA, 275/132kV in Daines
substation; this photograph was taken during a site visit in March 2015.

109
Bushings
Supergrid
Transformer
(SGT)
Circuit
Breaker
Current
Transformer, CTs
Figure 4.18: Three phase transformer rated 240MVA, 275/132kV (Daines substation)
The CTs are connected in series to current differential protection, and this has been used to protect
each transformer for many decades [90]. A reliable and correct transformer protection requires
several factors to be considered such as:
transformer magnitude and phase angle shift compensation: the primary current
magnitude and phase angle difference at both ends of the protected transformer should
be compensated [91].
zero sequence current compensation: in this case these CTs are used to correct for the
zero-sequence current on the star-side which is not seen on the delta side.
CT mismatch on both side of windings: it is necessary to obtain the ratio correction factor
applied to the relays at each transformer end.
operating system of the relay.
In an electro-mechanical or early static differential protection scheme, the magnitude, phase angle
shift, and zero sequence current compensation is achieved by interposing CTs. In comparison, the
compensation in numerical differential relay is performed using the relay software and this does not
require interposing CTs [91].
Local relay
600/1
Dyn1
240MVA 400/132kV
Remote relay
1200/1346A 1050A
0˚ -30˚
400kV 132kV
Digital communication channel
Figure 4.19: Typical transformer feeder line protection

110
Figure 4.19, shows a typical transformer feeder with different CTs at both ends. The ratio correction
factor applied to the relays at each line end is calculated as follows:
On 400 kV side: the full load current is:
Iload = 240MVA/(√3 × 400kV) = 346A and Isec = 346 × 1 600⁄ = 0.577A
On 132 kV side: the full load current is also obtained as:
Iload = 240MVA/(√3 × 132kV) = 1050A and Isec = 1050 × 1 1200⁄ = 0.875A
Then, each CT should be corrected to relay rated current; in this case 1A
HV ratio correction factor 1 0.577⁄ = 1.733 (this setting value should applied to relay)
LV ratio correction factor 1 0.875⁄ = 1.143 (this setting value should applied to relay)
4.5.1 Setting of transformer biased differential protection
In National Grid, a transformer with a nominal primary voltage of 400kV (or 275kV) connected to the
lower voltage is commonly referred as a “Supergrid Transformer” and is normally an autotransformer
type [29]. The transformer protection is based on a numerical design suitable for an auto-transformer
and including an overall differential protection scheme [92]. It has a set of CT installed on HV side, LV
side, and at the neutral end [29]. For delta-star transformer, restricted earth fault protection is normally
used on the secondary “star” side of the transformer (i.e. at the neutral point) which will ensure earth
faults are cleared and this principle also applies to generator winding protection [29]. Transformer
differential protection needs to ensure that the currents are compared accurately and the risk of mal-
operation is minimized.
4.6 Generator protection
A synchronous generator commonly known as “AC generator or alternator” is a device driven by a
turbine, that converts mechanical power into electrical power [93]. Large generators are very
expensive and appropriate means of protection scheme is required to maintain the continuity of
generating supply. A failure to clear a fault promptly may cause expensive damage to a large
generator and rushing the integrity of the power system. A generator often requires a protection
against stator earth fault, short circuits unbalanced load or rotor earth faults [83].
A high impedance differential protection scheme is normally used for generator protection [93]. A
stabilising resistor in series with a relay is added to avoid relay mal-operation for faults on the external
side of the line, especially if one set of the CT’s saturate. This is because if one of the CT is fully
saturated during external fault as shown in Figure 4.20 (i.e. in the worst case scenario), the current
from the secondary of healthy CT flows through secondary of saturated CT and the voltage across the
relay will exceed the operating voltage of the relay. Hence, stabilizing resistor must drop the
increased voltage to ensure the relay provides a correct operation.
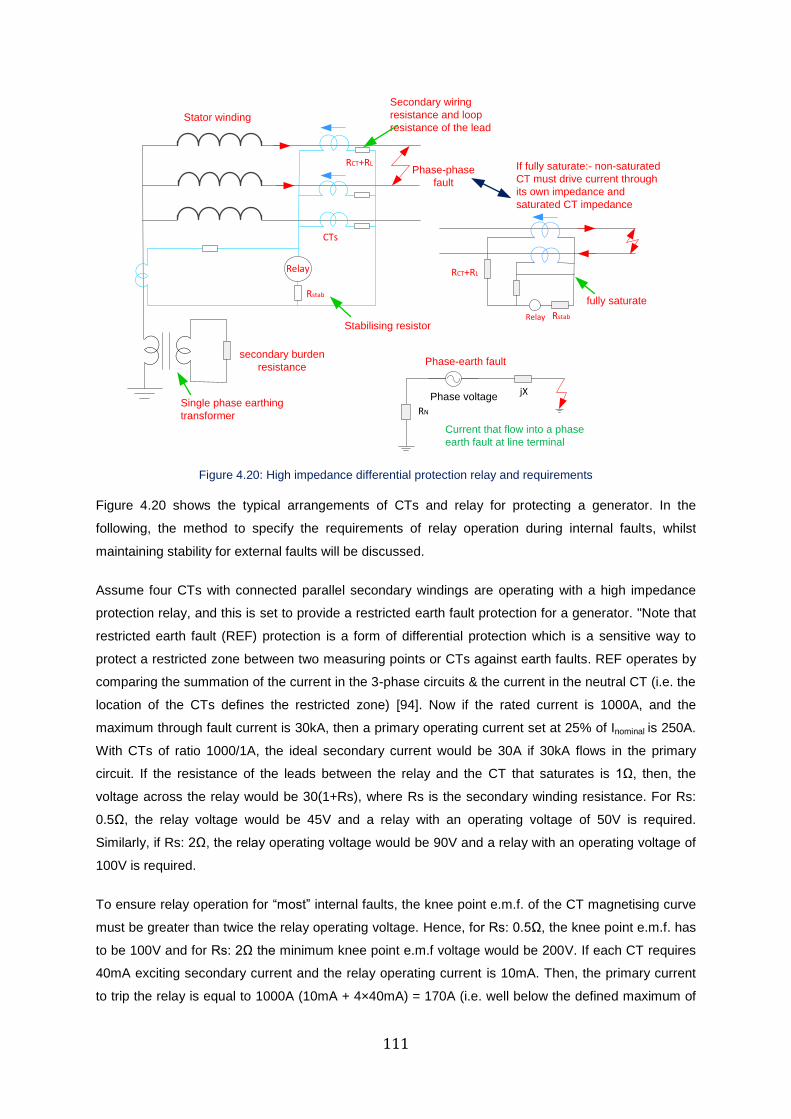
111
CTs
Relay
Stabilising resistor
secondary burden
resistance
RCT+RL
Secondary wiring
resistance and loop
resistance of the lead
Rstab
Stator winding
Single phase earthing
transformer
Phase-phase
fault
RstabRelay
RCT+RL
If fully saturate:- non-saturated
CT must drive current through
its own impedance and
saturated CT impedance
Phase-earth fault
Phase voltage
RN
jX
Current that flow into a phase
earth fault at line terminal
fully saturate
Figure 4.20: High impedance differential protection relay and requirements
Figure 4.20 shows the typical arrangements of CTs and relay for protecting a generator. In the
following, the method to specify the requirements of relay operation during internal faults, whilst
maintaining stability for external faults will be discussed.
Assume four CTs with connected parallel secondary windings are operating with a high impedance
protection relay, and this is set to provide a restricted earth fault protection for a generator. "Note that
restricted earth fault (REF) protection is a form of differential protection which is a sensitive way to
protect a restricted zone between two measuring points or CTs against earth faults. REF operates by
comparing the summation of the current in the 3-phase circuits & the current in the neutral CT (i.e. the
location of the CTs defines the restricted zone) [94]. Now if the rated current is 1000A, and the
maximum through fault current is 30kA, then a primary operating current set at 25% of Inominal is 250A.
With CTs of ratio 1000/1A, the ideal secondary current would be 30A if 30kA flows in the primary
circuit. If the resistance of the leads between the relay and the CT that saturates is 1Ω, then, the
voltage across the relay would be 30(1+Rs), where Rs is the secondary winding resistance. For Rs:
0.5Ω, the relay voltage would be 45V and a relay with an operating voltage of 50V is required.
Similarly, if Rs: 2Ω, the relay operating voltage would be 90V and a relay with an operating voltage of
100V is required.
To ensure relay operation for “most” internal faults, the knee point e.m.f. of the CT magnetising curve
must be greater than twice the relay operating voltage. Hence, for Rs: 0.5Ω, the knee point e.m.f. has
to be 100V and for Rs: 2Ω the minimum knee point e.m.f voltage would be 200V. If each CT requires
40mA exciting secondary current and the relay operating current is 10mA. Then, the primary current
to trip the relay is equal to 1000A (10mA + 4×40mA) = 170A (i.e. well below the defined maximum of
112
250A). Appropriate choice of stabilising resistor will ensure the relay does not operate on the worse-
case external fault (highest possible fault current). However, it requires to be ensured the relay can
detect an earth fault located at any point on the stator winding. In practise this is impossible, since the
fault current seen when a fault occurs near the neutral point is very small. Hence it is required to
determine the percentage of the winding protected by the relay, i.e. often between 80% and 95% [93].
4.7 Summary
The basic principles, operating characteristics and application of current differential protection were
studied in this chapter. Unit protection is set to provide fault clearance for a protected line or
transformer under all minimum and maximum fault level operating conditions and the setting must
ensure stability is maintained for external faults up to the switchgear rated fault current capacity. CTs
are normally used to provide current information between the protected object and the relay, whereas
communication channel is used to transfer information between two locations via a signal or
message.
In comparison to distance & overcurrent protection; unit protection has better selectivity, is more
secure, has higher sensitivity, does not over reach and is not influenced by the load or power swings.
However, it has limitations as it fully dependant on the communication channel and cannot provide
backup protection. In addition, concerns related to CT saturation must be noted. The influence of CT
mismatch and saturation reduces the sensitivity of differential protection. However, this can be
overcome by configuring “lower & higher” bias setting. A CT fully saturates when the secondary
excitation voltage exceeds the CT knee point voltage and this affects the relay performance.
In many transmission networks including the UK, unit protection is often used as 1st main protection
for feeder protection. In National Grid, unit protection is also used as the 2nd
main protection when
utilizing distance protection scheme is not possible. However, blocked or plain distance protections
are normally used as the 2nd
main protection. Generally, unit protection is widely used to protect
transmission feeders, transformers, generators, busbars and motors. A double unit protection is used
on cables or on situations when utilizing a voltage transformer becomes difficult. In addition, REF is
used to protect a zone of generator or transformer against internal earth faults.
The key strengths of this study are to increase understanding on the concept and application of
current differential protection. The objective is to understand the operating characteristics and setting
calculation of unit protection. The impact of low fault level on the operating performance of unit
protection and setting implication will be discussed in chapter 6.
The 2nd
technical paper entitled < Impact on Transmission Line Protection of future changes in the UK Energy
landscape > was published and presented based on this work on 7th
International conference on Advanced
Power System Automation and Protection (APAP 2017). The conference was held on October 16-18, 2017, Jeju,
Korea.
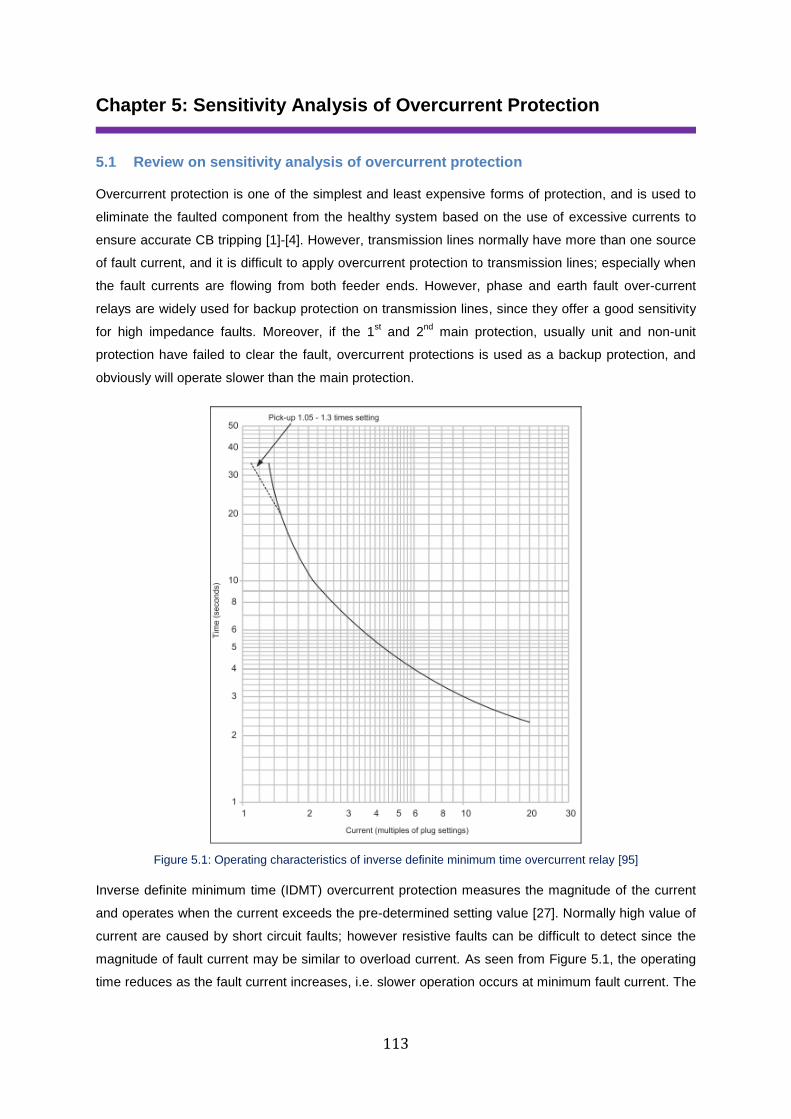
113
Chapter 5: Sensitivity Analysis of Overcurrent Protection
5.1 Review on sensitivity analysis of overcurrent protection
Overcurrent protection is one of the simplest and least expensive forms of protection, and is used to
eliminate the faulted component from the healthy system based on the use of excessive currents to
ensure accurate CB tripping [1]-[4]. However, transmission lines normally have more than one source
of fault current, and it is difficult to apply overcurrent protection to transmission lines; especially when
the fault currents are flowing from both feeder ends. However, phase and earth fault over-current
relays are widely used for backup protection on transmission lines, since they offer a good sensitivity
for high impedance faults. Moreover, if the 1st and 2
nd main protection, usually unit and non-unit
protection have failed to clear the fault, overcurrent protections is used as a backup protection, and
obviously will operate slower than the main protection.
Figure 5.1: Operating characteristics of inverse definite minimum time overcurrent relay [95]
Inverse definite minimum time (IDMT) overcurrent protection measures the magnitude of the current
and operates when the current exceeds the pre-determined setting value [27]. Normally high value of
current are caused by short circuit faults; however resistive faults can be difficult to detect since the
magnitude of fault current may be similar to overload current. As seen from Figure 5.1, the operating
time reduces as the fault current increases, i.e. slower operation occurs at minimum fault current. The
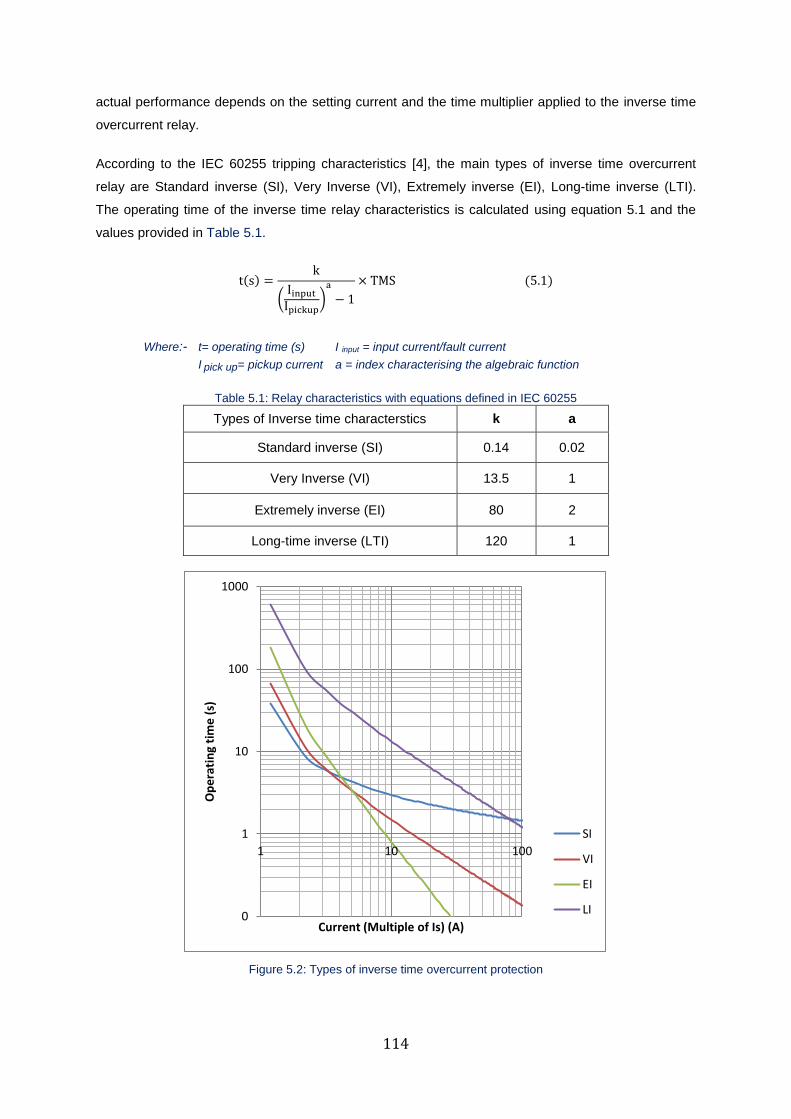
114
actual performance depends on the setting current and the time multiplier applied to the inverse time
overcurrent relay.
According to the IEC 60255 tripping characteristics [4], the main types of inverse time overcurrent
relay are Standard inverse (SI), Very Inverse (VI), Extremely inverse (EI), Long-time inverse (LTI).
The operating time of the inverse time relay characteristics is calculated using equation 5.1 and the
values provided in Table 5.1.
t(s) =k
(Iinput
Ipickup)
a
− 1
× TMS (5.1)
Where:- t= operating time (s) I input = input current/fault current
I pick up= pickup current a = index characterising the algebraic function
Table 5.1: Relay characteristics with equations defined in IEC 60255
Types of Inverse time characterstics k a
Standard inverse (SI) 0.14 0.02
Very Inverse (VI) 13.5 1
Extremely inverse (EI) 80 2
Long-time inverse (LTI) 120 1
Figure 5.2: Types of inverse time overcurrent protection
0
1
10
100
1000
1 10 100
Op
era
tin
g ti
me
(s)
Current (Multiple of Is) (A)
SI
VI
EI
LI
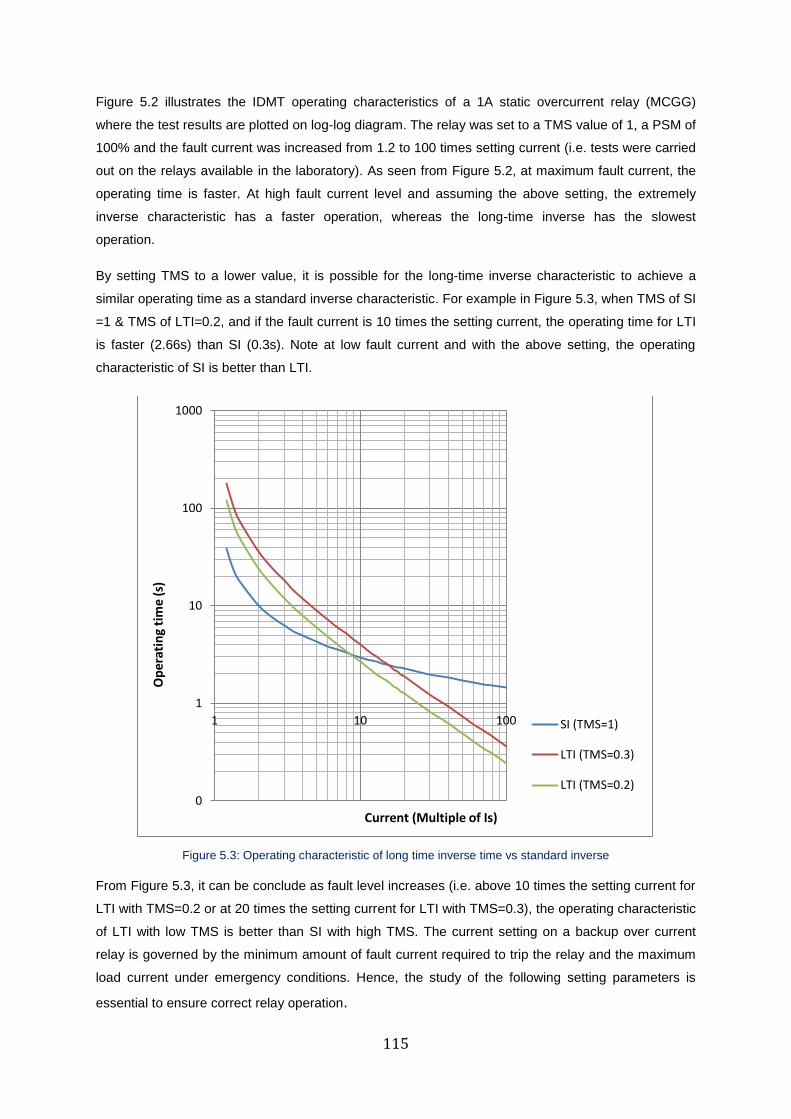
115
Figure 5.2 illustrates the IDMT operating characteristics of a 1A static overcurrent relay (MCGG)
where the test results are plotted on log-log diagram. The relay was set to a TMS value of 1, a PSM of
100% and the fault current was increased from 1.2 to 100 times setting current (i.e. tests were carried
out on the relays available in the laboratory). As seen from Figure 5.2, at maximum fault current, the
operating time is faster. At high fault current level and assuming the above setting, the extremely
inverse characteristic has a faster operation, whereas the long-time inverse has the slowest
operation.
By setting TMS to a lower value, it is possible for the long-time inverse characteristic to achieve a
similar operating time as a standard inverse characteristic. For example in Figure 5.3, when TMS of SI
=1 & TMS of LTI=0.2, and if the fault current is 10 times the setting current, the operating time for LTI
is faster (2.66s) than SI (0.3s). Note at low fault current and with the above setting, the operating
characteristic of SI is better than LTI.
Figure 5.3: Operating characteristic of long time inverse time vs standard inverse
From Figure 5.3, it can be conclude as fault level increases (i.e. above 10 times the setting current for
LTI with TMS=0.2 or at 20 times the setting current for LTI with TMS=0.3), the operating characteristic
of LTI with low TMS is better than SI with high TMS. The current setting on a backup over current
relay is governed by the minimum amount of fault current required to trip the relay and the maximum
load current under emergency conditions. Hence, the study of the following setting parameters is
essential to ensure correct relay operation.
0
1
10
100
1000
1 10 100
Op
erat
ing
tim
e (s
)
Current (Multiple of Is)
SI (TMS=1)
LTI (TMS=0.3)
LTI (TMS=0.2)
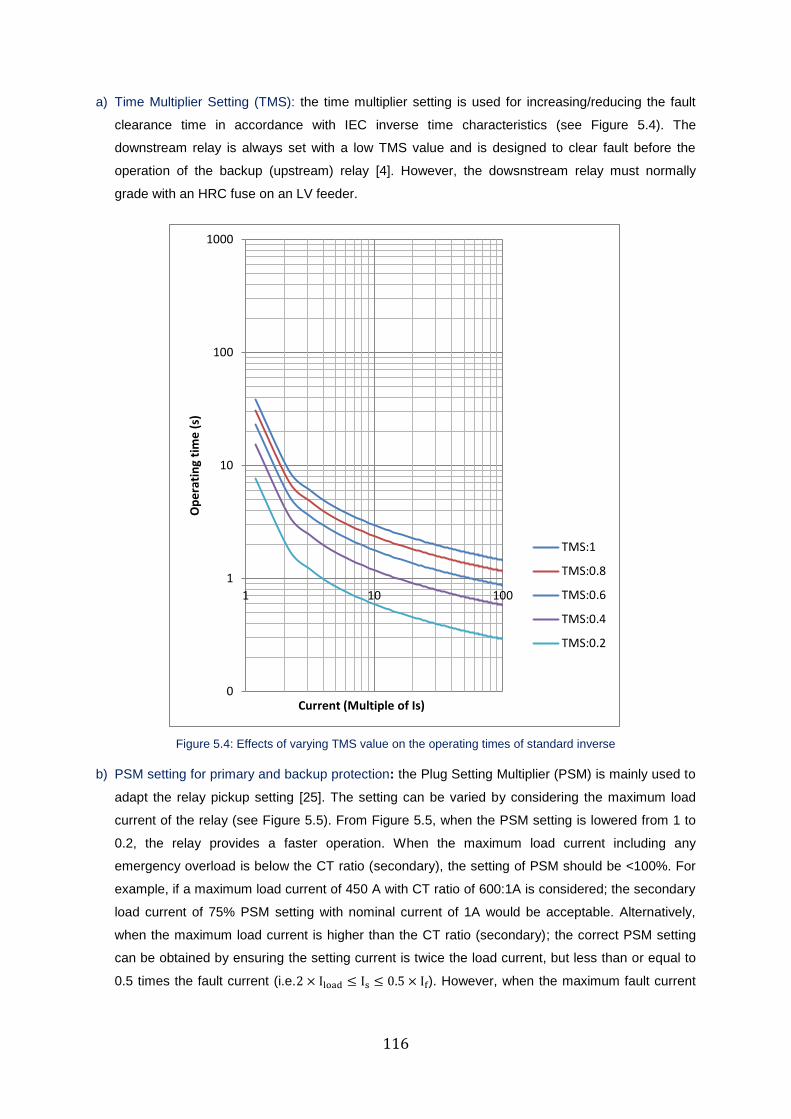
116
a) Time Multiplier Setting (TMS): the time multiplier setting is used for increasing/reducing the fault
clearance time in accordance with IEC inverse time characteristics (see Figure 5.4). The
downstream relay is always set with a low TMS value and is designed to clear fault before the
operation of the backup (upstream) relay [4]. However, the dowsnstream relay must normally
grade with an HRC fuse on an LV feeder.
Figure 5.4: Effects of varying TMS value on the operating times of standard inverse
b) PSM setting for primary and backup protection: the Plug Setting Multiplier (PSM) is mainly used to
adapt the relay pickup setting [25]. The setting can be varied by considering the maximum load
current of the relay (see Figure 5.5). From Figure 5.5, when the PSM setting is lowered from 1 to
0.2, the relay provides a faster operation. When the maximum load current including any
emergency overload is below the CT ratio (secondary), the setting of PSM should be <100%. For
example, if a maximum load current of 450 A with CT ratio of 600:1A is considered; the secondary
load current of 75% PSM setting with nominal current of 1A would be acceptable. Alternatively,
when the maximum load current is higher than the CT ratio (secondary); the correct PSM setting
can be obtained by ensuring the setting current is twice the load current, but less than or equal to
0.5 times the fault current (i.e.2 × Iload ≤ Is ≤ 0.5 × If). However, when the maximum fault current
0
1
10
100
1000
1 10 100
Op
era
tin
g ti
me
(s)
Current (Multiple of Is)
TMS:1
TMS:0.8
TMS:0.6
TMS:0.4
TMS:0.2
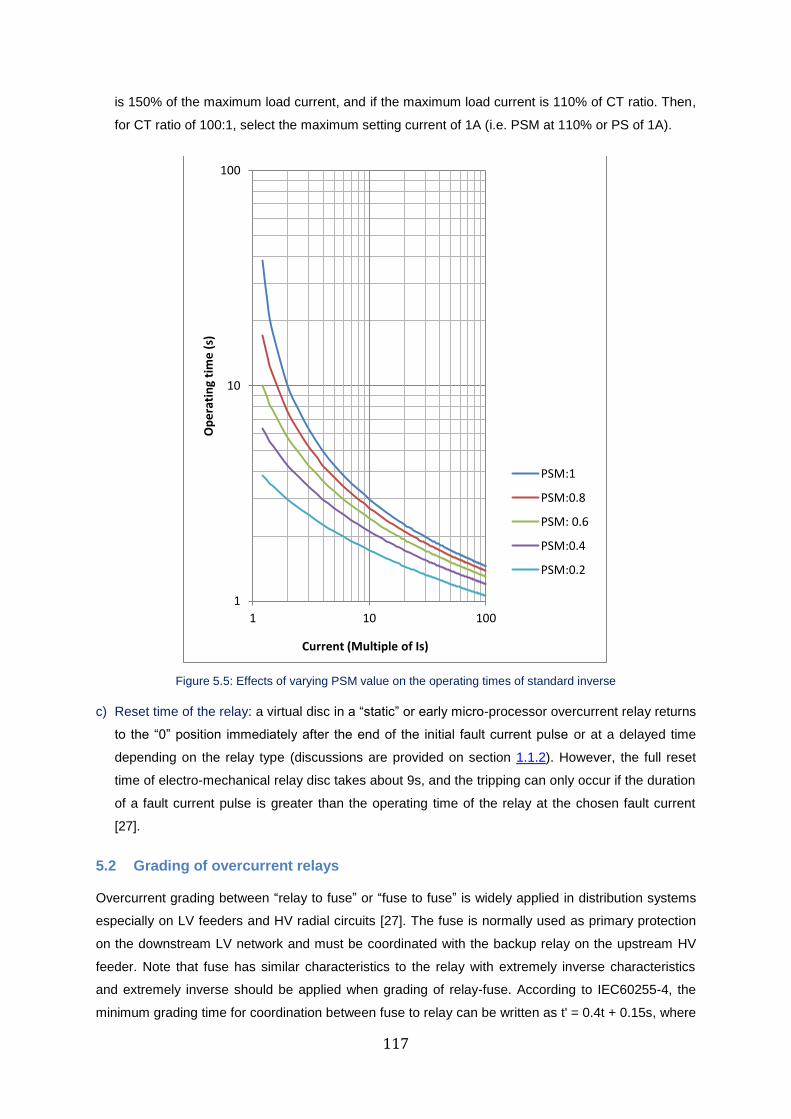
117
is 150% of the maximum load current, and if the maximum load current is 110% of CT ratio. Then,
for CT ratio of 100:1, select the maximum setting current of 1A (i.e. PSM at 110% or PS of 1A).
Figure 5.5: Effects of varying PSM value on the operating times of standard inverse
c) Reset time of the relay: a virtual disc in a “static” or early micro-processor overcurrent relay returns
to the “0” position immediately after the end of the initial fault current pulse or at a delayed time
depending on the relay type (discussions are provided on section 1.1.2). However, the full reset
time of electro-mechanical relay disc takes about 9s, and the tripping can only occur if the duration
of a fault current pulse is greater than the operating time of the relay at the chosen fault current
[27].
5.2 Grading of overcurrent relays
Overcurrent grading between “relay to fuse” or “fuse to fuse” is widely applied in distribution systems
especially on LV feeders and HV radial circuits [27]. The fuse is normally used as primary protection
on the downstream LV network and must be coordinated with the backup relay on the upstream HV
feeder. Note that fuse has similar characteristics to the relay with extremely inverse characteristics
and extremely inverse should be applied when grading of relay-fuse. According to IEC60255-4, the
minimum grading time for coordination between fuse to relay can be written as t' = 0.4t + 0.15s, where
1
10
100
1 10 100
Op
era
tin
g ti
me
(s)
Current (Multiple of Is)
PSM:1
PSM:0.8
PSM: 0.6
PSM:0.4
PSM:0.2
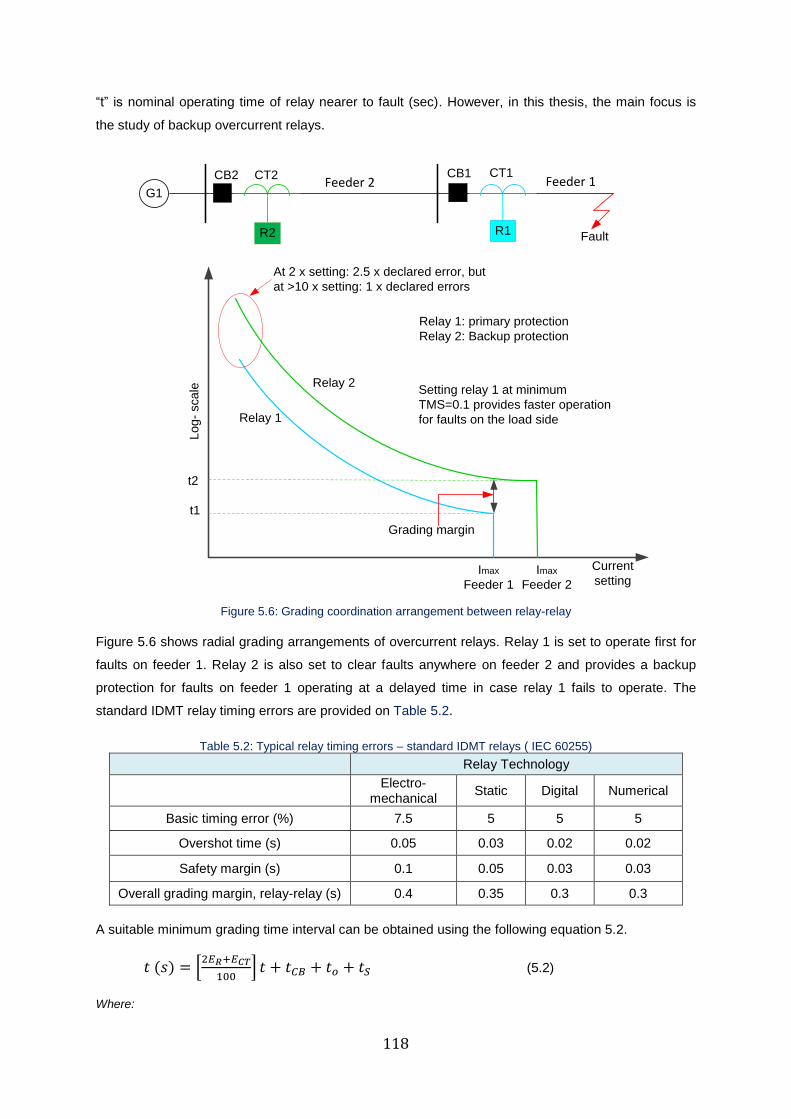
118
“t” is nominal operating time of relay nearer to fault (sec). However, in this thesis, the main focus is
the study of backup overcurrent relays.
G1
R2 R1 Fault
Relay 2
Relay 1
Grading margin
Relay 1: primary protection
Relay 2: Backup protection
CT2 CT1CB1CB2
Lo
g-
sca
le
Imax
Feeder 1
t1
t2
Setting relay 1 at minimum
TMS=0.1 provides faster operation
for faults on the load side
Feeder 2 Feeder 1
At 2 x setting: 2.5 x declared error, but
at >10 x setting: 1 x declared errors
Imax
Feeder 2
Current
setting
Figure 5.6: Grading coordination arrangement between relay-relay
Figure 5.6 shows radial grading arrangements of overcurrent relays. Relay 1 is set to operate first for
faults on feeder 1. Relay 2 is also set to clear faults anywhere on feeder 2 and provides a backup
protection for faults on feeder 1 operating at a delayed time in case relay 1 fails to operate. The
standard IDMT relay timing errors are provided on Table 5.2.
Table 5.2: Typical relay timing errors – standard IDMT relays ( IEC 60255)
Relay Technology
Electro-
mechanical Static Digital Numerical
Basic timing error (%) 7.5 5 5 5
Overshot time (s) 0.05 0.03 0.02 0.02
Safety margin (s) 0.1 0.05 0.03 0.03
Overall grading margin, relay-relay (s) 0.4 0.35 0.3 0.3
A suitable minimum grading time interval can be obtained using the following equation 5.2.
𝑡 (𝑠) = [2𝐸𝑅+𝐸𝐶𝑇
100] 𝑡 + 𝑡𝐶𝐵 + 𝑡𝑜 + 𝑡𝑆 (5.2)
Where:
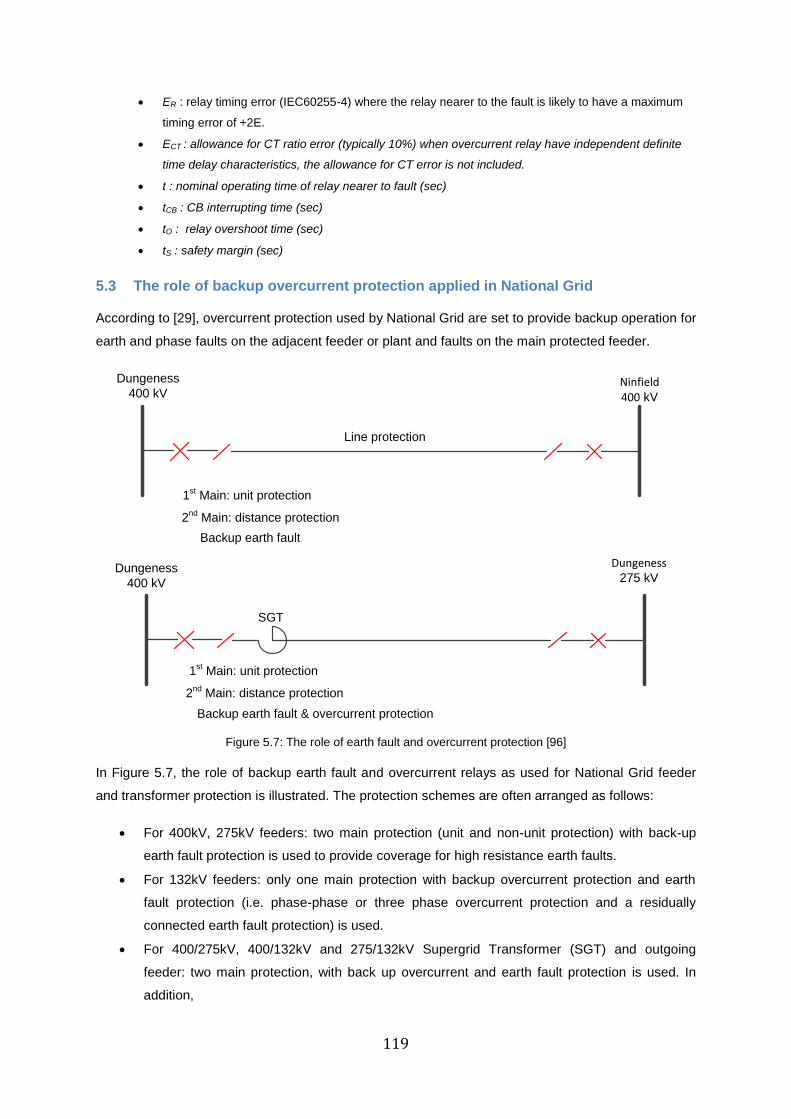
119
ER : relay timing error (IEC60255-4) where the relay nearer to the fault is likely to have a maximum
timing error of +2E.
ECT : allowance for CT ratio error (typically 10%) when overcurrent relay have independent definite
time delay characteristics, the allowance for CT error is not included.
t : nominal operating time of relay nearer to fault (sec)
tCB : CB interrupting time (sec)
tO : relay overshoot time (sec)
tS : safety margin (sec)
5.3 The role of backup overcurrent protection applied in National Grid
According to [29], overcurrent protection used by National Grid are set to provide backup operation for
earth and phase faults on the adjacent feeder or plant and faults on the main protected feeder.
Dungeness
400 kV
Ninfield 400 kV
1st Main: unit protection
2nd
Main: distance protection
Backup earth fault & overcurrent protection
SGT
Dungeness
400 kV
Dungeness 275 kV
1st Main: unit protection
2nd
Main: distance protection
Backup earth fault
Line protection
Figure 5.7: The role of earth fault and overcurrent protection [96]
In Figure 5.7, the role of backup earth fault and overcurrent relays as used for National Grid feeder
and transformer protection is illustrated. The protection schemes are often arranged as follows:
For 400kV, 275kV feeders: two main protection (unit and non-unit protection) with back-up
earth fault protection is used to provide coverage for high resistance earth faults.
For 132kV feeders: only one main protection with backup overcurrent protection and earth
fault protection (i.e. phase-phase or three phase overcurrent protection and a residually
connected earth fault protection) is used.
For 400/275kV, 400/132kV and 275/132kV Supergrid Transformer (SGT) and outgoing
feeder: two main protection, with back up overcurrent and earth fault protection is used. In
addition,
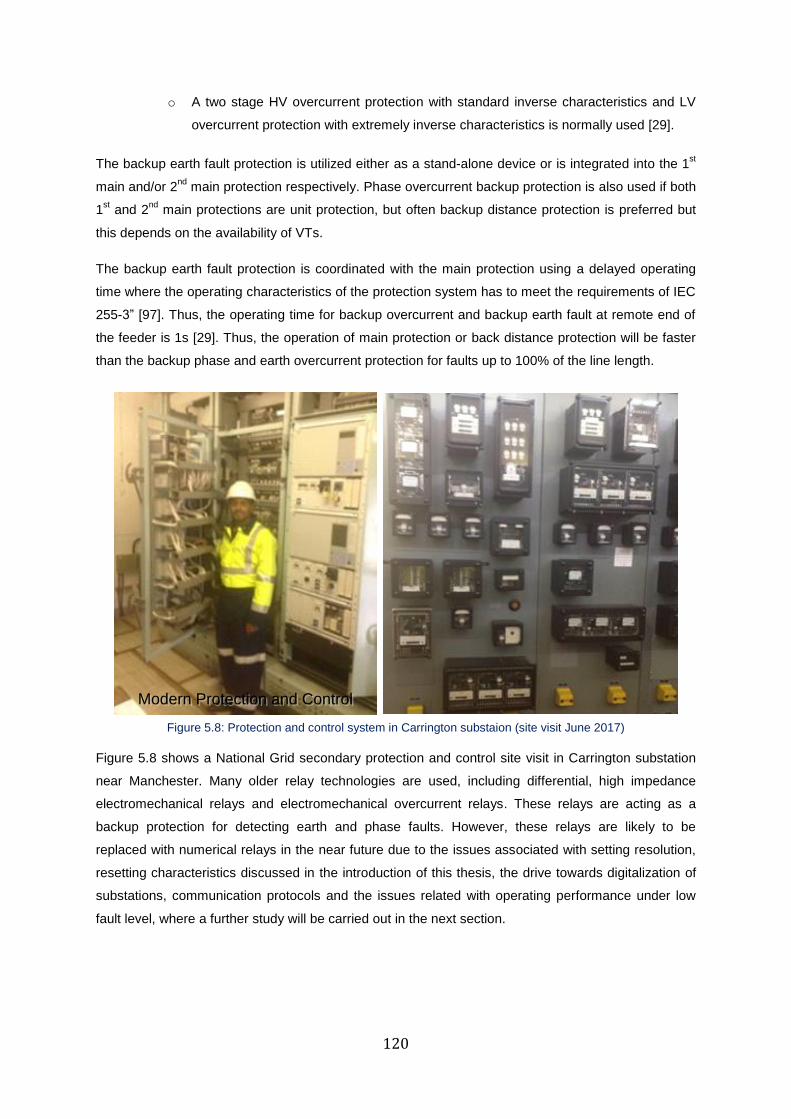
120
o A two stage HV overcurrent protection with standard inverse characteristics and LV
overcurrent protection with extremely inverse characteristics is normally used [29].
The backup earth fault protection is utilized either as a stand-alone device or is integrated into the 1st
main and/or 2nd
main protection respectively. Phase overcurrent backup protection is also used if both
1st and 2
nd main protections are unit protection, but often backup distance protection is preferred but
this depends on the availability of VTs.
The backup earth fault protection is coordinated with the main protection using a delayed operating
time where the operating characteristics of the protection system has to meet the requirements of IEC
255-3” [97]. Thus, the operating time for backup overcurrent and backup earth fault at remote end of
the feeder is 1s [29]. Thus, the operation of main protection or back distance protection will be faster
than the backup phase and earth overcurrent protection for faults up to 100% of the line length.
Modern Protection and ControlModern Protection and Control
High Impedance
Electromechanical Relays
Figure 5.8: Protection and control system in Carrington substaion (site visit June 2017)
Figure 5.8 shows a National Grid secondary protection and control site visit in Carrington substation
near Manchester. Many older relay technologies are used, including differential, high impedance
electromechanical relays and electromechanical overcurrent relays. These relays are acting as a
backup protection for detecting earth and phase faults. However, these relays are likely to be
replaced with numerical relays in the near future due to the issues associated with setting resolution,
resetting characteristics discussed in the introduction of this thesis, the drive towards digitalization of
substations, communication protocols and the issues related with operating performance under low
fault level, where a further study will be carried out in the next section.
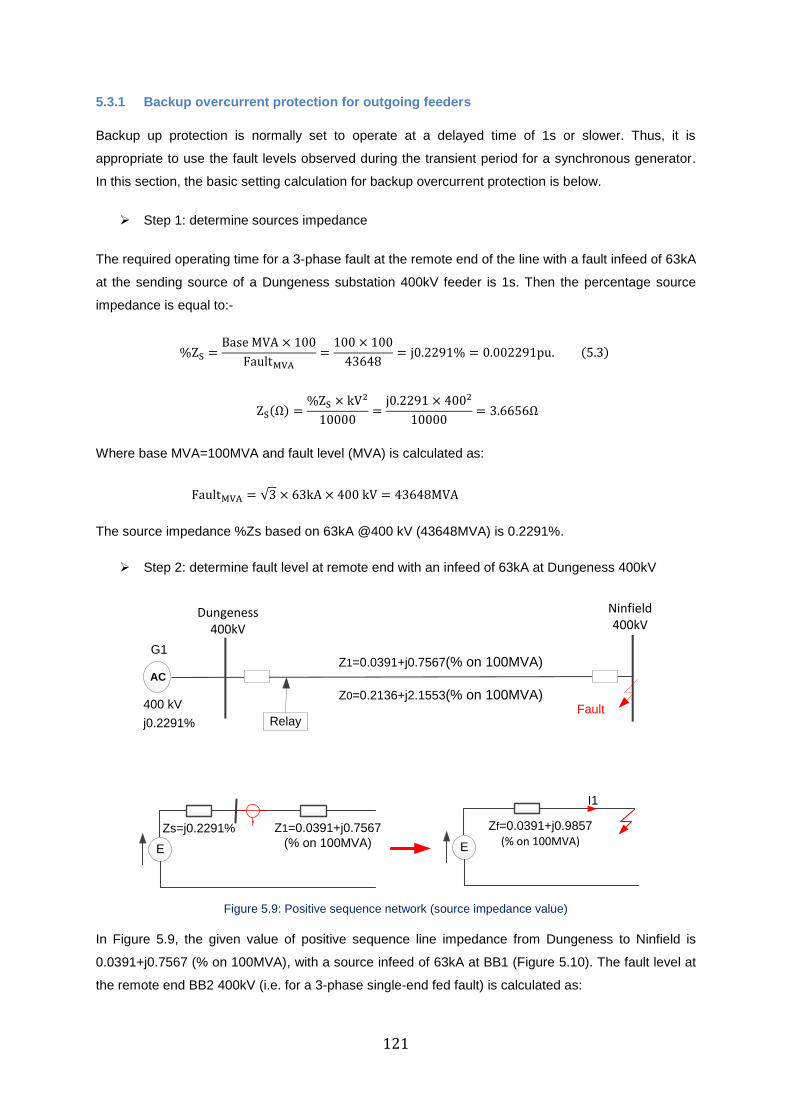
121
5.3.1 Backup overcurrent protection for outgoing feeders
Backup up protection is normally set to operate at a delayed time of 1s or slower. Thus, it is
appropriate to use the fault levels observed during the transient period for a synchronous generator.
In this section, the basic setting calculation for backup overcurrent protection is below.
Step 1: determine sources impedance
The required operating time for a 3-phase fault at the remote end of the line with a fault infeed of 63kA
at the sending source of a Dungeness substation 400kV feeder is 1s. Then the percentage source
impedance is equal to:-
%ZS =Base MVA × 100
FaultMVA
=100 × 100
43648= j0.2291% = 0.002291pu. (5.3)
ZS(Ω) =%ZS × kV2
10000=
j0.2291 × 4002
10000= 3.6656Ω
Where base MVA=100MVA and fault level (MVA) is calculated as:
FaultMVA = √3 × 63kA × 400 kV = 43648MVA
The source impedance %Zs based on 63kA @400 kV (43648MVA) is 0.2291%.
Step 2: determine fault level at remote end with an infeed of 63kA at Dungeness 400kV
Z1=0.0391+j0.7567
(% on 100MVA)
Dungeness 400kV
E
Zs=j0.2291% Zf=0.0391+j0.9857
(% on 100MVA) E
I1
G1
AC
Ninfield 400kV
Fault
Z1=0.0391+j0.7567(% on 100MVA)
Relay
400 kV
j0.2291%
Z0=0.2136+j2.1553(% on 100MVA)
Figure 5.9: Positive sequence network (source impedance value)
In Figure 5.9, the given value of positive sequence line impedance from Dungeness to Ninfield is
0.0391+j0.7567 (% on 100MVA), with a source infeed of 63kA at BB1 (Figure 5.10). The fault level at
the remote end BB2 400kV (i.e. for a 3-phase single-end fed fault) is calculated as:
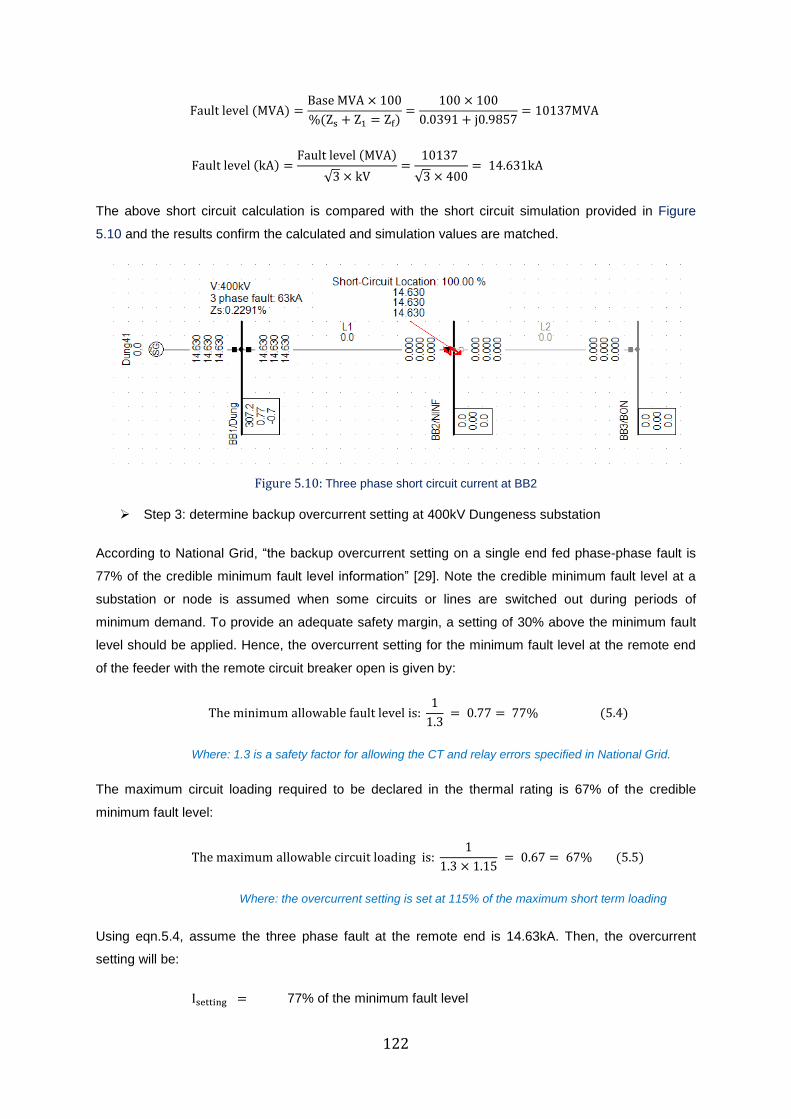
122
Fault level (MVA) =Base MVA × 100
%(Zs + Z1 = Zf)=
100 × 100
0.0391 + j0.9857= 10137MVA
Fault level (kA) =Fault level (MVA)
√3 × kV=
10137
√3 × 400= 14.631kA
The above short circuit calculation is compared with the short circuit simulation provided in Figure
5.10 and the results confirm the calculated and simulation values are matched.
Figure 5.10: Three phase short circuit current at BB2
Step 3: determine backup overcurrent setting at 400kV Dungeness substation
According to National Grid, “the backup overcurrent setting on a single end fed phase-phase fault is
77% of the credible minimum fault level information” [29]. Note the credible minimum fault level at a
substation or node is assumed when some circuits or lines are switched out during periods of
minimum demand. To provide an adequate safety margin, a setting of 30% above the minimum fault
level should be applied. Hence, the overcurrent setting for the minimum fault level at the remote end
of the feeder with the remote circuit breaker open is given by:
The minimum allowable fault level is: 1
1.3 = 0.77 = 77% (5.4)
Where: 1.3 is a safety factor for allowing the CT and relay errors specified in National Grid.
The maximum circuit loading required to be declared in the thermal rating is 67% of the credible
minimum fault level:
The maximum allowable circuit loading is: 1
1.3 × 1.15 = 0.67 = 67% (5.5)
Where: the overcurrent setting is set at 115% of the maximum short term loading
Using eqn.5.4, assume the three phase fault at the remote end is 14.63kA. Then, the overcurrent
setting will be:
Isetting = 77% of the minimum fault level
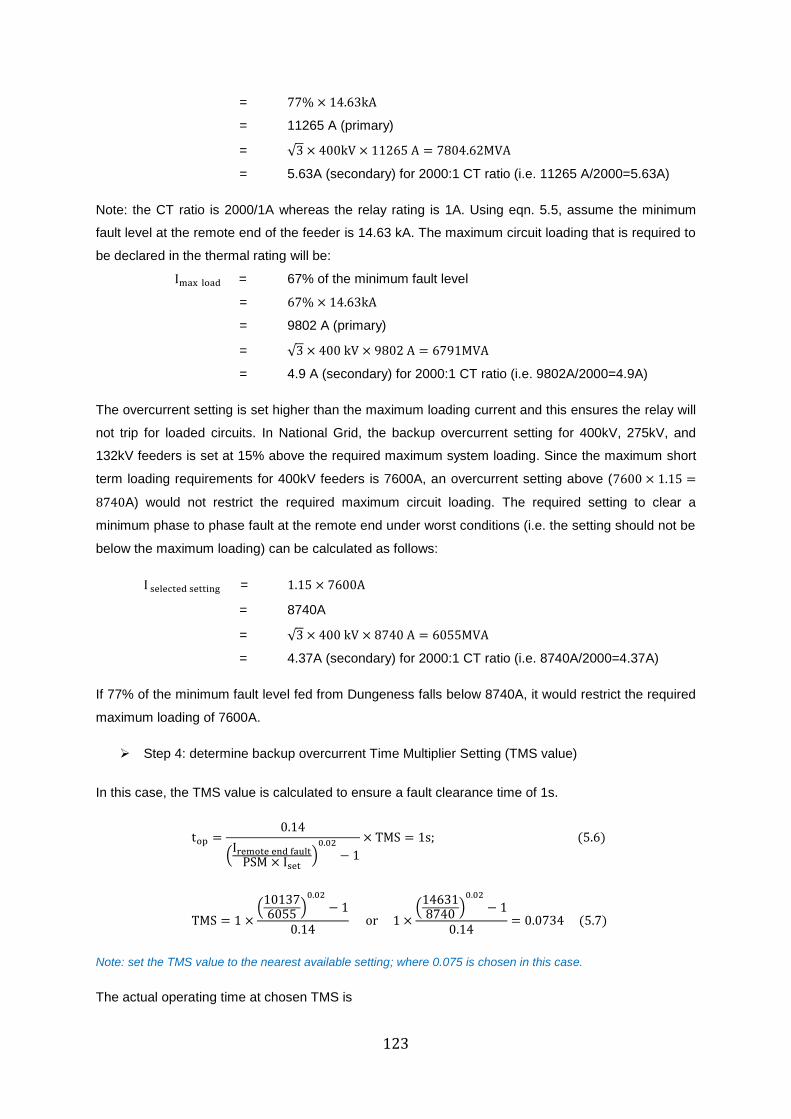
123
= 77% × 14.63kA
= 11265 A (primary)
= √3 × 400kV × 11265 A = 7804.62MVA
= 5.63A (secondary) for 2000:1 CT ratio (i.e. 11265 A/2000=5.63A)
Note: the CT ratio is 2000/1A whereas the relay rating is 1A. Using eqn. 5.5, assume the minimum
fault level at the remote end of the feeder is 14.63 kA. The maximum circuit loading that is required to
be declared in the thermal rating will be:
Imax load = 67% of the minimum fault level
= 67% × 14.63kA
= 9802 A (primary)
= √3 × 400 kV × 9802 A = 6791MVA
= 4.9 A (secondary) for 2000:1 CT ratio (i.e. 9802A/2000=4.9A)
The overcurrent setting is set higher than the maximum loading current and this ensures the relay will
not trip for loaded circuits. In National Grid, the backup overcurrent setting for 400kV, 275kV, and
132kV feeders is set at 15% above the required maximum system loading. Since the maximum short
term loading requirements for 400kV feeders is 7600A, an overcurrent setting above (7600 × 1.15 =
8740A) would not restrict the required maximum circuit loading. The required setting to clear a
minimum phase to phase fault at the remote end under worst conditions (i.e. the setting should not be
below the maximum loading) can be calculated as follows:
I selected setting = 1.15 × 7600A
= 8740A
= √3 × 400 kV × 8740 A = 6055MVA
= 4.37A (secondary) for 2000:1 CT ratio (i.e. 8740A/2000=4.37A)
If 77% of the minimum fault level fed from Dungeness falls below 8740A, it would restrict the required
maximum loading of 7600A.
Step 4: determine backup overcurrent Time Multiplier Setting (TMS value)
In this case, the TMS value is calculated to ensure a fault clearance time of 1s.
top =0.14
(Iremote end fault
PSM × Iset)
0.02
− 1
× TMS = 1s; (5.6)
TMS = 1 ×(
101376055
)0.02
− 1
0.14 or 1 ×
(146318740
)0.02
− 1
0.14= 0.0734 (5.7)
Note: set the TMS value to the nearest available setting; where 0.075 is chosen in this case.
The actual operating time at chosen TMS is
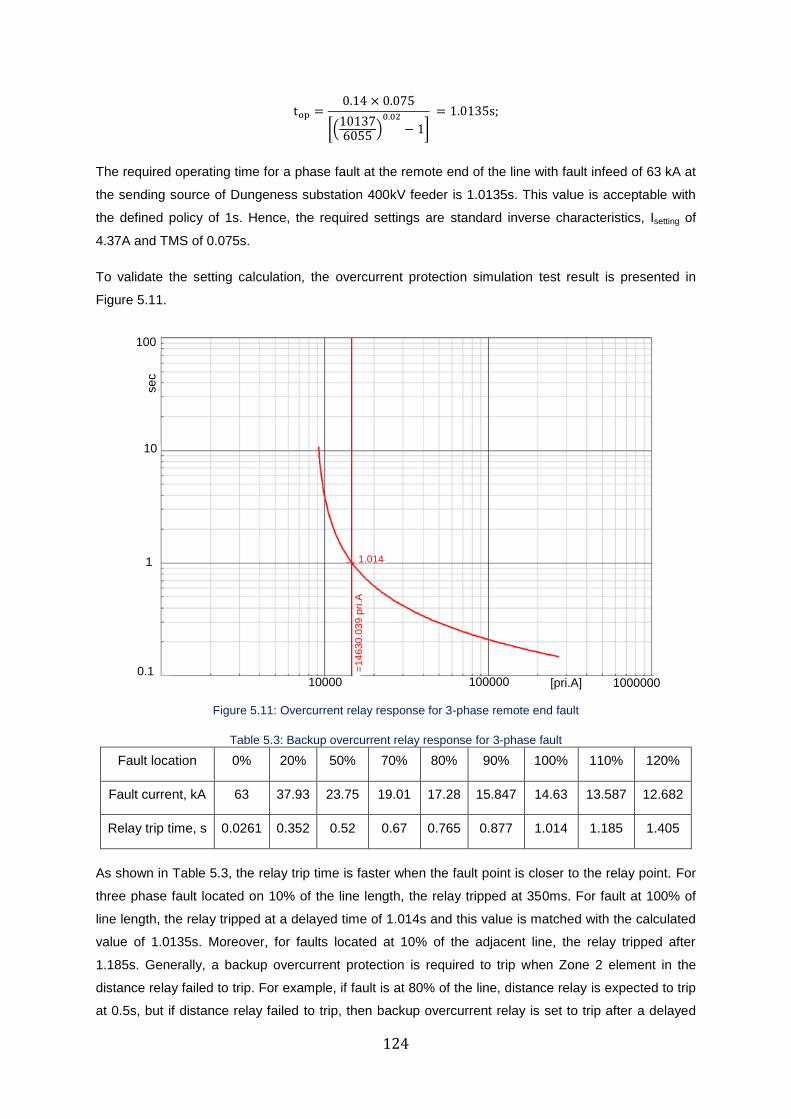
124
top =0.14 × 0.075
[(101376055
)0.02
− 1]
= 1.0135s;
The required operating time for a phase fault at the remote end of the line with fault infeed of 63 kA at
the sending source of Dungeness substation 400kV feeder is 1.0135s. This value is acceptable with
the defined policy of 1s. Hence, the required settings are standard inverse characteristics, Isetting of
4.37A and TMS of 0.075s.
To validate the setting calculation, the overcurrent protection simulation test result is presented in
Figure 5.11.
0.1
1
10
se
c
100
10000 100000 1000000[pri.A]
1.014
=1
46
30
.03
9 p
ri.A
Figure 5.11: Overcurrent relay response for 3-phase remote end fault
Table 5.3: Backup overcurrent relay response for 3-phase fault
Fault location 0% 20% 50% 70% 80% 90% 100% 110% 120%
Fault current, kA 63 37.93 23.75 19.01 17.28 15.847 14.63 13.587 12.682
Relay trip time, s 0.0261 0.352 0.52 0.67 0.765 0.877 1.014 1.185 1.405
As shown in Table 5.3, the relay trip time is faster when the fault point is closer to the relay point. For
three phase fault located on 10% of the line length, the relay tripped at 350ms. For fault at 100% of
line length, the relay tripped at a delayed time of 1.014s and this value is matched with the calculated
value of 1.0135s. Moreover, for faults located at 10% of the adjacent line, the relay tripped after
1.185s. Generally, a backup overcurrent protection is required to trip when Zone 2 element in the
distance relay failed to trip. For example, if fault is at 80% of the line, distance relay is expected to trip
at 0.5s, but if distance relay failed to trip, then backup overcurrent relay is set to trip after a delayed
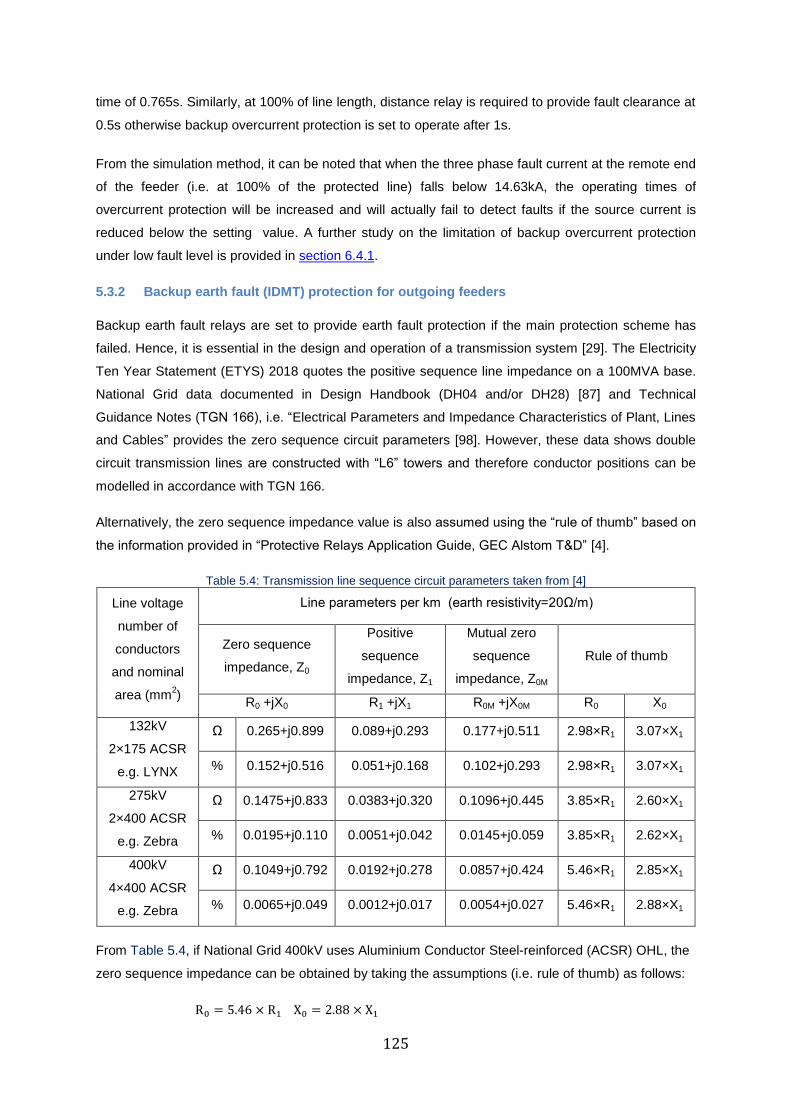
125
time of 0.765s. Similarly, at 100% of line length, distance relay is required to provide fault clearance at
0.5s otherwise backup overcurrent protection is set to operate after 1s.
From the simulation method, it can be noted that when the three phase fault current at the remote end
of the feeder (i.e. at 100% of the protected line) falls below 14.63kA, the operating times of
overcurrent protection will be increased and will actually fail to detect faults if the source current is
reduced below the setting value. A further study on the limitation of backup overcurrent protection
under low fault level is provided in section 6.4.1.
5.3.2 Backup earth fault (IDMT) protection for outgoing feeders
Backup earth fault relays are set to provide earth fault protection if the main protection scheme has
failed. Hence, it is essential in the design and operation of a transmission system [29]. The Electricity
Ten Year Statement (ETYS) 2018 quotes the positive sequence line impedance on a 100MVA base.
National Grid data documented in Design Handbook (DH04 and/or DH28) [87] and Technical
Guidance Notes (TGN 166), i.e. “Electrical Parameters and Impedance Characteristics of Plant, Lines
and Cables” provides the zero sequence circuit parameters [98]. However, these data shows double
circuit transmission lines are constructed with “L6” towers and therefore conductor positions can be
modelled in accordance with TGN 166.
Alternatively, the zero sequence impedance value is also assumed using the “rule of thumb” based on
the information provided in “Protective Relays Application Guide, GEC Alstom T&D” [4].
Table 5.4: Transmission line sequence circuit parameters taken from [4]
Line voltage
number of
conductors
and nominal
area (mm2)
Line parameters per km (earth resistivity=20Ω/m)
Zero sequence
impedance, Z0
Positive
sequence
impedance, Z1
Mutual zero
sequence
impedance, Z0M
Rule of thumb
R0 +jX0 R1 +jX1 R0M +jX0M R0 X0
132kV
2×175 ACSR
e.g. LYNX
Ω 0.265+j0.899 0.089+j0.293 0.177+j0.511 2.98×R1 3.07×X1
% 0.152+j0.516 0.051+j0.168 0.102+j0.293 2.98×R1 3.07×X1
275kV
2×400 ACSR
e.g. Zebra
Ω 0.1475+j0.833 0.0383+j0.320 0.1096+j0.445 3.85×R1 2.60×X1
% 0.0195+j0.110 0.0051+j0.042 0.0145+j0.059 3.85×R1 2.62×X1
400kV
4×400 ACSR
e.g. Zebra
Ω 0.1049+j0.792 0.0192+j0.278 0.0857+j0.424 5.46×R1 2.85×X1
% 0.0065+j0.049 0.0012+j0.017 0.0054+j0.027 5.46×R1 2.88×X1
From Table 5.4, if National Grid 400kV uses Aluminium Conductor Steel-reinforced (ACSR) OHL, the
zero sequence impedance can be obtained by taking the assumptions (i.e. rule of thumb) as follows:
R0 = 5.46 × R1 X0 = 2.88 × X1
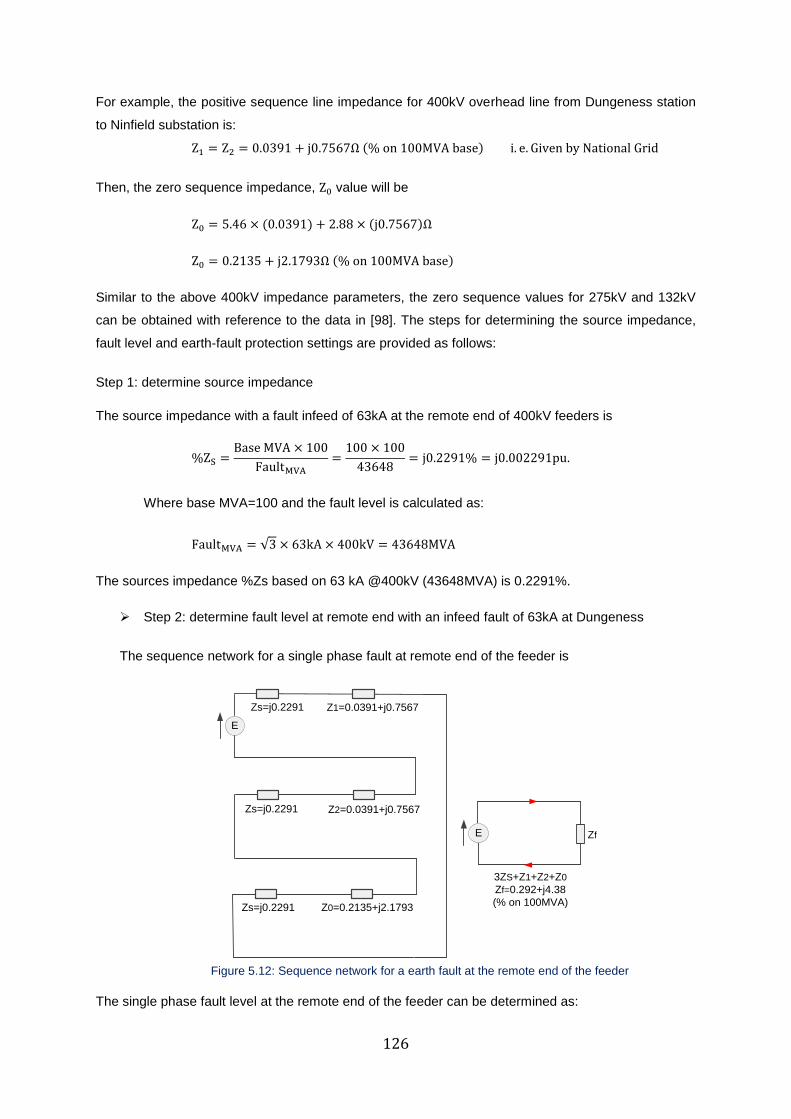
126
For example, the positive sequence line impedance for 400kV overhead line from Dungeness station
to Ninfield substation is:
Z1 = Z2 = 0.0391 + j0.7567Ω (% on 100MVA base) i. e. Given by National Grid
Then, the zero sequence impedance, Z0 value will be
Z0 = 5.46 × (0.0391) + 2.88 × (j0.7567)Ω
Z0 = 0.2135 + j2.1793Ω (% on 100MVA base)
Similar to the above 400kV impedance parameters, the zero sequence values for 275kV and 132kV
can be obtained with reference to the data in [98]. The steps for determining the source impedance,
fault level and earth-fault protection settings are provided as follows:
Step 1: determine source impedance
The source impedance with a fault infeed of 63kA at the remote end of 400kV feeders is
%ZS =Base MVA × 100
FaultMVA
=100 × 100
43648= j0.2291% = j0.002291pu.
Where base MVA=100 and the fault level is calculated as:
FaultMVA = √3 × 63kA × 400kV = 43648MVA
The sources impedance %Zs based on 63 kA @400kV (43648MVA) is 0.2291%.
Step 2: determine fault level at remote end with an infeed fault of 63kA at Dungeness
The sequence network for a single phase fault at remote end of the feeder is
Z1=0.0391+j0.7567
E
Zs=j0.2291
ZfE
Z2=0.0391+j0.7567Zs=j0.2291
Z0=0.2135+j2.1793Zs=j0.2291
3ZS+Z1+Z2+Z0
Zf=0.292+j4.38
(% on 100MVA)
Figure 5.12: Sequence network for a earth fault at the remote end of the feeder
The single phase fault level at the remote end of the feeder can be determined as:

127
I0(MVA) =Base MVA × 100
%(Zf)=
100 × 100
0.292 + j4.38= 2278MVA
I0(kA) =Fault level (MVA)
√3 × kV=
2278
√3 × 400= 3.288kA
Note the zero sequence data is normally given from the data of the plant, where the earth fault current
may vary significant. As shown in Figure 5.12, the earth fault current is lowered due to the high zero
sequence impedance value. With comments in chapter 1, the zero sequence components are not
available in phase fault currents or normal load currents. Overall, the sensitivity of earth fault
protection is greatly improved using the zero sequence current instead of phase current. According to
National Grid system design specified in [29], the maximum level of zero phase sequence current is
3.3%, where the current seen by earth fault protection is 10% (i. e. 3I0 = 9.9%).
The maximum fault level at the remote end of the feeder will be:
Fault MVA = 3I0(MVA) = 3 × 2278 = 6834MVA (5.8)
Fault kA =3I0(MVA)
√3 × kV=
6834
√3 × 400= 9.86kA or 3I0(kA) = 9.86kA
Step 3: determine backup earth fault setting at 400kV Dungeness substation
If the earth fault protection is required to detect up to 100Ω resistive faults, the fault current will be
If(400kV) = kV
√3 × Rf
=400kV
√3 × 100Ω= 2309.4A = 2.309kA (5.9)
The fault current at the midpoint for equally fed from two sources will be 2309.4/2=1154.7A. If the
relay pickup safety factor of 1.3 is assumed. The required earth fault setting is:
I setting = 1154.7 1.3⁄
= 888A (primary)
= √3 × 400 kV × 888A = 615MVA
= 0.444 A (secondary) for 2000:1 CT ratio (i.e. 888A/2000=0.444A)
To prevent unwanted operation, the earth fault relay pickup is set to 115% of the maximum
overloading circuit, and the earth fault relay should not trip for the imbalance current, i.e. 10% of the
full load current. Hence, the earth fault pickup setting can be given by:
I selected setting = Irated load (max) × 10% × 1.15 (5.10)
= 7600 × 10% × 1.15 = 874A, ~880A
= 880A primary
= √3 × 400 kV × 880A = 610MVA
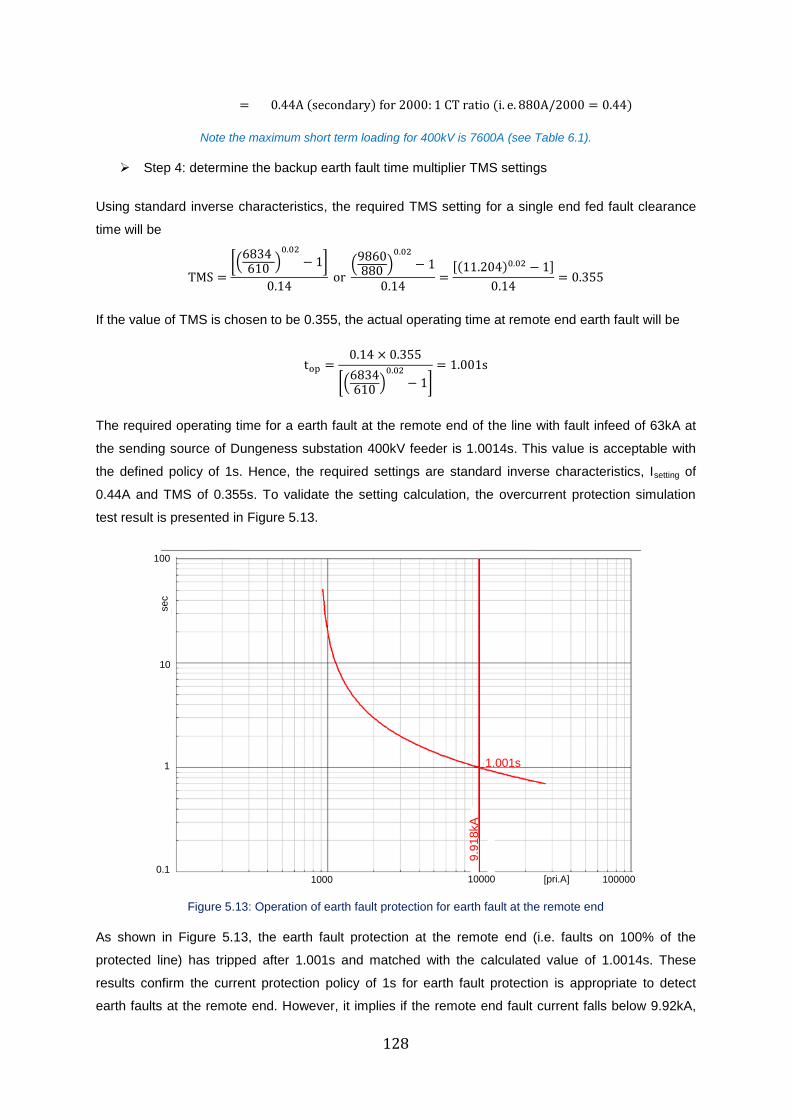
128
= 0.44A (secondary) for 2000: 1 CT ratio (i. e. 880A/2000 = 0.44)
Note the maximum short term loading for 400kV is 7600A (see Table 6.1).
Step 4: determine the backup earth fault time multiplier TMS settings
Using standard inverse characteristics, the required TMS setting for a single end fed fault clearance
time will be
TMS =[(
6834 610
)0.02
− 1]
0.14 or
(9860880
)0.02
− 1
0.14=
[(11.204)0.02 − 1]
0.14= 0.355
If the value of TMS is chosen to be 0.355, the actual operating time at remote end earth fault will be
top =0.14 × 0.355
[(6834610
)0.02
− 1]
= 1.001s
The required operating time for a earth fault at the remote end of the line with fault infeed of 63kA at
the sending source of Dungeness substation 400kV feeder is 1.0014s. This value is acceptable with
the defined policy of 1s. Hence, the required settings are standard inverse characteristics, Isetting of
0.44A and TMS of 0.355s. To validate the setting calculation, the overcurrent protection simulation
test result is presented in Figure 5.13.
Earth fault protection
0.1
1
10
se
c
100
1000 10000 100000[pri.A]
1.001s
9.9
18
kA
Figure 5.13: Operation of earth fault protection for earth fault at the remote end
As shown in Figure 5.13, the earth fault protection at the remote end (i.e. faults on 100% of the
protected line) has tripped after 1.001s and matched with the calculated value of 1.0014s. These
results confirm the current protection policy of 1s for earth fault protection is appropriate to detect
earth faults at the remote end. However, it implies if the remote end fault current falls below 9.92kA,
129
the operating times of earth fault protection will be increased and may fail to provide adequate earth
fault protection. This will occur if the infeed fault current is reduced substantially. The impact of low
fault level on the limitation of backup earth fault protections will be carried out in section 6.4.2.
5.3.3 Setting implications for 400/275 kV Auto Transformer
In this case, a phase overcurrent and earth fault protection scheme will be discussed. It is essential to
ensure the TMS value for feeder backup protection (overcurrent and earth fault) provides adequate
grading with the SGT HV overcurrent and LV earth fault protection.
a. 400/275 kV high set overcurrent (HSOC)/ HV three phase overcurrent protection
High set overcurrent protection is normally used on the HV side of the transformer to provide fast
instantaneous operation for faults on the terminal ends of the transformer HV winding or on the
bushing, whilst time-delayed overcurrent protection detects faults on the LV side of the transformer
[7]. Since the operation of HSOC is fast, the sub-transient fault current values must be used.
To ensure the HSOC must not operate for a fault on the LV side of the transformer, the current
settings, used by National Grid, are as follows [29]:
Isetting: ≥150% of the fault current supplied to a 3-phase fault on the LV windings when the
fault level is a maximum
Isetting: ≤50% of the fault current supplied to a 2-phase fault on the HV bushing under
minimum fault level conditions.
5.3.4 Review on setting requirements for supergrid/132 kV auto-transformers
Earth fault protection is set to provide both current and time grading with residual connected earth
fault protection applied to the 132kV side of the super grid 400/132kV auto-transformers [90]. Similarly
to the protection setting applied for 400/275kV transformer, in this case will be:
a. High set overcurrent protection: settings are similar to 400/275kV
b. 2 Stage HV three phase Overcurrent protection
Stage 1: is set to provide backup protection for faults left detected in the LV of the
transformer.
Stage 2: is set to provide backup protection for faults left undetected on the transformer.
c. LV three phase overcurrent
This form of protection is set to provide a backup protection for faults left undetected on
the LV conncetions of the transformer when faults are fed from the LV side [21].
d. LV earth fault
Earth fault protection is set to provide backup protection for earth faults left undetected on
the DNO feeders operating at 132 kV.
130
5.4 Summary
The basic principles, operating characteristics and application of overcurrent protection were studied
in this chapter. An over-current protection operates when the magnitude of the fault current caused by
short circuit exceeds a pre-determined setting current. Overcurrent relays are used for backup
protection of transmission system and the sub-transmission network (132kV in UK), and are the main
types of protection used in distribution networks (11kV in UK).
Unlike differential and distance protection; overcurrent protection is the simplest and least expensive
form of protection. However, overcurrent coordination is difficult to achieve when transmission system
have more than one source, especially when the fault currents are flowing from both sides of the
terminal.
At present, backup overcurrent and backup earth fault protection are widely used by National Grid.
The role of backup protection is to clear a fault, only if the first and second main protection schemes
failed to detect faults. The operation is set to achieve 1s for faults on the remote end of the feeder.
The operation time is normally calculated based on the fault level of the system where TMS is used to
adjust the trip time of the relay. In UK National Grid, backup overcurrent or backup earth fault
protection operation is normally slower than the zone 2 distance protection (0.5s) and this ensures the
coordination between the main and backup protection is adequate.
The key strengths of this chapter are to widen understanding on the concept and application of
overcurrent protection. The objective is to understand the operating characteristics and setting
calculation of overcurrent protection. The impact of low fault level on the operating performance of
overcurrent and setting implication will be discussed in chapter 6.
The 3rd
technical paper entitled < Impact of Pecking Faults on the Operating Times of Numerical and
Electromechanical Over-current Relays> was published and presented based on grading of overcurrent
protection on 13th
International conference on Development in Power System Protection (DPSP2016). The
conference was held on March 7-10, 2016, Edinburgh, UK.
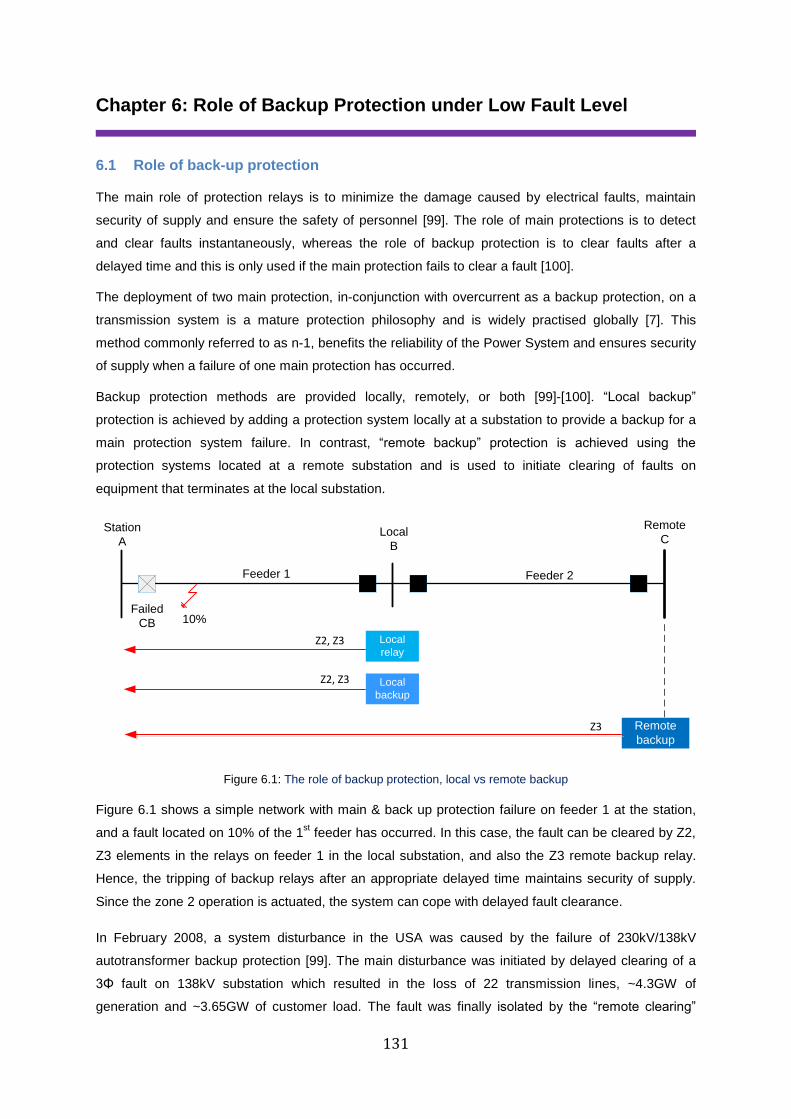
131
Chapter 6: Role of Backup Protection under Low Fault Level
6.1 Role of back-up protection
The main role of protection relays is to minimize the damage caused by electrical faults, maintain
security of supply and ensure the safety of personnel [99]. The role of main protections is to detect
and clear faults instantaneously, whereas the role of backup protection is to clear faults after a
delayed time and this is only used if the main protection fails to clear a fault [100].
The deployment of two main protection, in-conjunction with overcurrent as a backup protection, on a
transmission system is a mature protection philosophy and is widely practised globally [7]. This
method commonly referred to as n-1, benefits the reliability of the Power System and ensures security
of supply when a failure of one main protection has occurred.
Backup protection methods are provided locally, remotely, or both [99]-[100]. “Local backup”
protection is achieved by adding a protection system locally at a substation to provide a backup for a
main protection system failure. In contrast, “remote backup” protection is achieved using the
protection systems located at a remote substation and is used to initiate clearing of faults on
equipment that terminates at the local substation.
Feeder 2Feeder 1
Local
B
Remote
CStation
A
10%
Remote
backup
Local
relay
Local
backup
Failed
CB
Z3
Z2, Z3
Z2, Z3
Figure 6.1: The role of backup protection, local vs remote backup
Figure 6.1 shows a simple network with main & back up protection failure on feeder 1 at the station,
and a fault located on 10% of the 1st feeder has occurred. In this case, the fault can be cleared by Z2,
Z3 elements in the relays on feeder 1 in the local substation, and also the Z3 remote backup relay.
Hence, the tripping of backup relays after an appropriate delayed time maintains security of supply.
Since the zone 2 operation is actuated, the system can cope with delayed fault clearance.
In February 2008, a system disturbance in the USA was caused by the failure of 230kV/138kV
autotransformer backup protection [99]. The main disturbance was initiated by delayed clearing of a
3Φ fault on 138kV substation which resulted in the loss of 22 transmission lines, ~4.3GW of
generation and ~3.65GW of customer load. The fault was finally isolated by the “remote clearing”
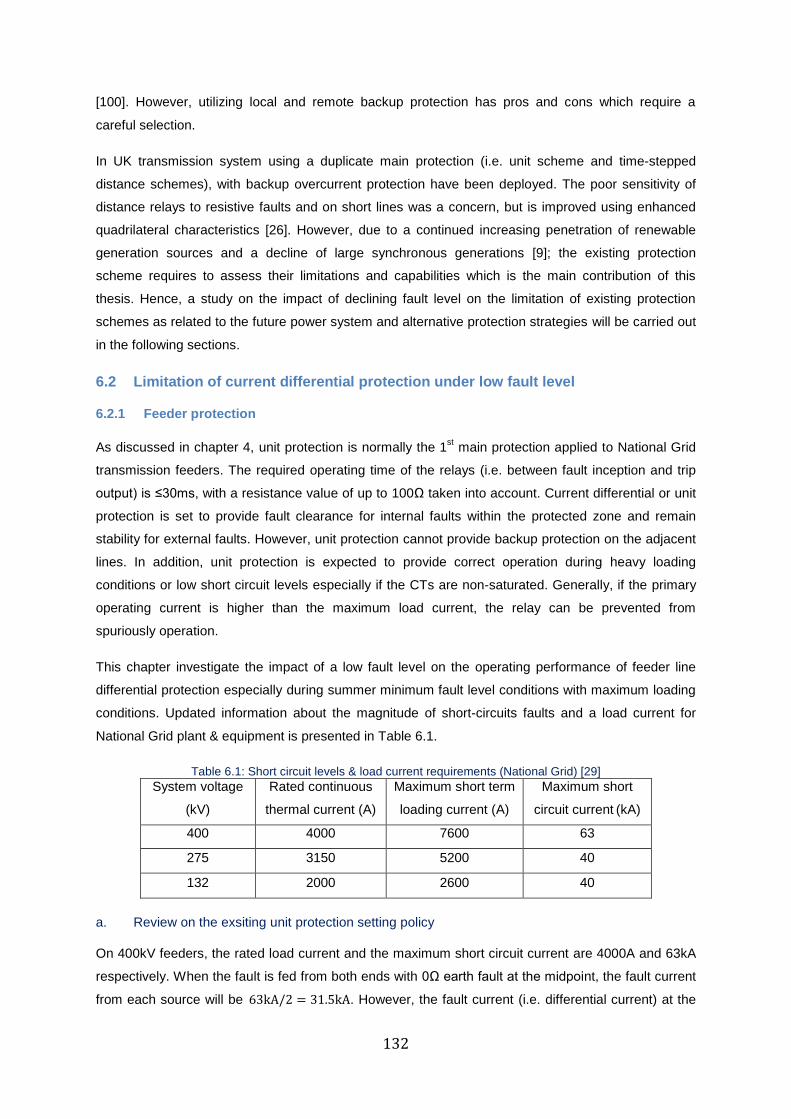
132
[100]. However, utilizing local and remote backup protection has pros and cons which require a
careful selection.
In UK transmission system using a duplicate main protection (i.e. unit scheme and time-stepped
distance schemes), with backup overcurrent protection have been deployed. The poor sensitivity of
distance relays to resistive faults and on short lines was a concern, but is improved using enhanced
quadrilateral characteristics [26]. However, due to a continued increasing penetration of renewable
generation sources and a decline of large synchronous generations [9]; the existing protection
scheme requires to assess their limitations and capabilities which is the main contribution of this
thesis. Hence, a study on the impact of declining fault level on the limitation of existing protection
schemes as related to the future power system and alternative protection strategies will be carried out
in the following sections.
6.2 Limitation of current differential protection under low fault level
6.2.1 Feeder protection
As discussed in chapter 4, unit protection is normally the 1st main protection applied to National Grid
transmission feeders. The required operating time of the relays (i.e. between fault inception and trip
output) is ≤30ms, with a resistance value of up to 100Ω taken into account. Current differential or unit
protection is set to provide fault clearance for internal faults within the protected zone and remain
stability for external faults. However, unit protection cannot provide backup protection on the adjacent
lines. In addition, unit protection is expected to provide correct operation during heavy loading
conditions or low short circuit levels especially if the CTs are non-saturated. Generally, if the primary
operating current is higher than the maximum load current, the relay can be prevented from
spuriously operation.
This chapter investigate the impact of a low fault level on the operating performance of feeder line
differential protection especially during summer minimum fault level conditions with maximum loading
conditions. Updated information about the magnitude of short-circuits faults and a load current for
National Grid plant & equipment is presented in Table 6.1.
Table 6.1: Short circuit levels & load current requirements (National Grid) [29]
System voltage
(kV)
Rated continuous
thermal current (A)
Maximum short term
loading current (A)
Maximum short
circuit current (kA)
400 4000 7600 63
275 3150 5200 40
132 2000 2600 40
a. Review on the exsiting unit protection setting policy
On 400kV feeders, the rated load current and the maximum short circuit current are 4000A and 63kA
respectively. When the fault is fed from both ends with 0Ω earth fault at the midpoint, the fault current
from each source will be 63kA/2 = 31.5kA. However, the fault current (i.e. differential current) at the
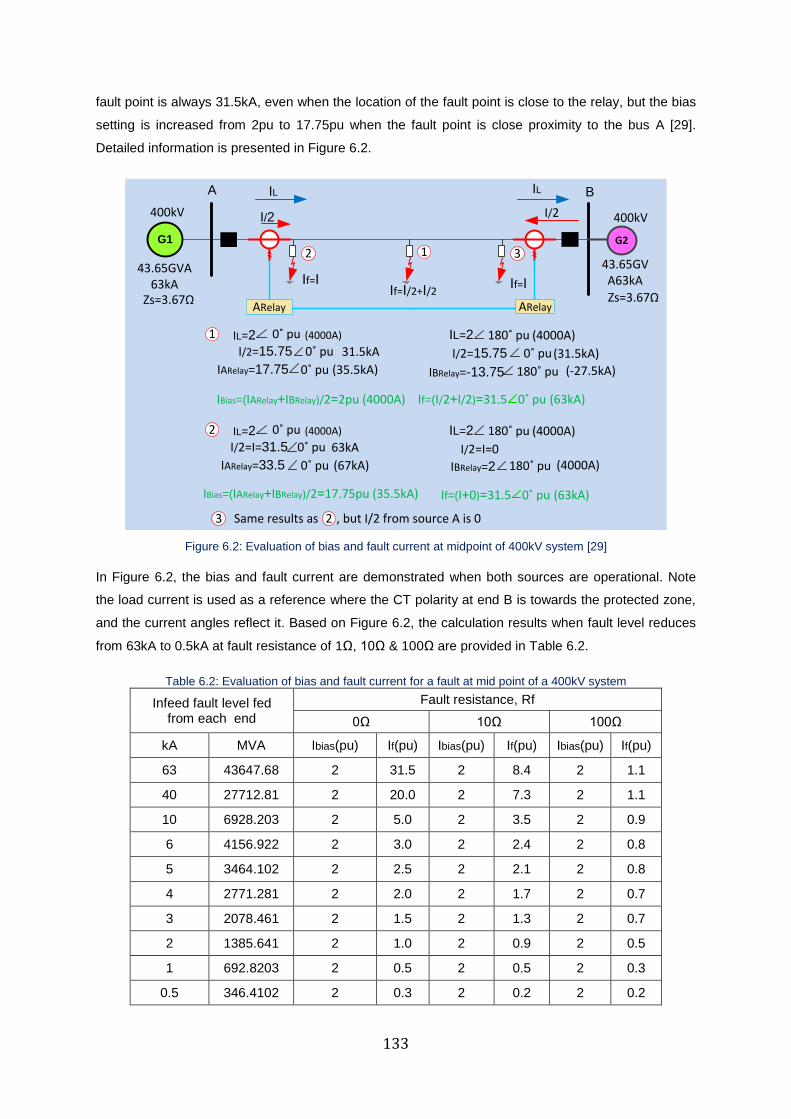
133
fault point is always 31.5kA, even when the location of the fault point is close to the relay, but the bias
setting is increased from 2pu to 17.75pu when the fault point is close proximity to the bus A [29].
Detailed information is presented in Figure 6.2.
G1
I/2
ILA IL
G2
ARelay
I/2
2 1
If=I/2+I/2If=I
43.65GVA 63kA
400kV
43.65GVA63kA
400kV
B
1 IL=2 (4000A)0˚ pu IL=2 (4000A)180˚ puI/2=15.75 31.5kA0˚ pu I/2=15.75 (31.5kA)0˚ pu
IARelay=17.75 (35.5kA)0˚ pu (-27.5kA)180˚ pu
ARelay
IBRelay=-13.75
IBias=(IARelay+IBRelay)/2=2pu (4000A)
Zs=3.67Ω
If=(I/2+I/2)=31.5 0˚ pu (63kA)
Zs=3.67Ω
3
If=I
23 Same results as , but I/2 from source A is 0
2 IL=2 (4000A)0˚ pu IL=2 (4000A)180˚ puI/2=I=31.5 63kA0˚ pu I/2=I=0
IARelay=33.5 (67kA)0˚ pu (4000A)180˚ puIBRelay=2
IBias=(IARelay+IBRelay)/2=17.75pu (35.5kA) If=(I+0)=31.5 0˚ pu (63kA)
Figure 6.2: Evaluation of bias and fault current at midpoint of 400kV system [29]
In Figure 6.2, the bias and fault current are demonstrated when both sources are operational. Note
the load current is used as a reference where the CT polarity at end B is towards the protected zone,
and the current angles reflect it. Based on Figure 6.2, the calculation results when fault level reduces
from 63kA to 0.5kA at fault resistance of 1Ω, 10Ω & 100Ω are provided in Table 6.2.
Table 6.2: Evaluation of bias and fault current for a fault at mid point of a 400kV system
Infeed fault level fed from each end
Fault resistance, Rf
0Ω 10Ω 100Ω
kA MVA Ibias(pu) If(pu) Ibias(pu) If(pu) Ibias(pu) If(pu)
63 43647.68 2 31.5 2 8.4 2 1.1
40 27712.81 2 20.0 2 7.3 2 1.1
10 6928.203 2 5.0 2 3.5 2 0.9
6 4156.922 2 3.0 2 2.4 2 0.8
5 3464.102 2 2.5 2 2.1 2 0.8
4 2771.281 2 2.0 2 1.7 2 0.7
3 2078.461 2 1.5 2 1.3 2 0.7
2 1385.641 2 1.0 2 0.9 2 0.5
1 692.8203 2 0.5 2 0.5 2 0.3
0.5 346.4102 2 0.3 2 0.2 2 0.2
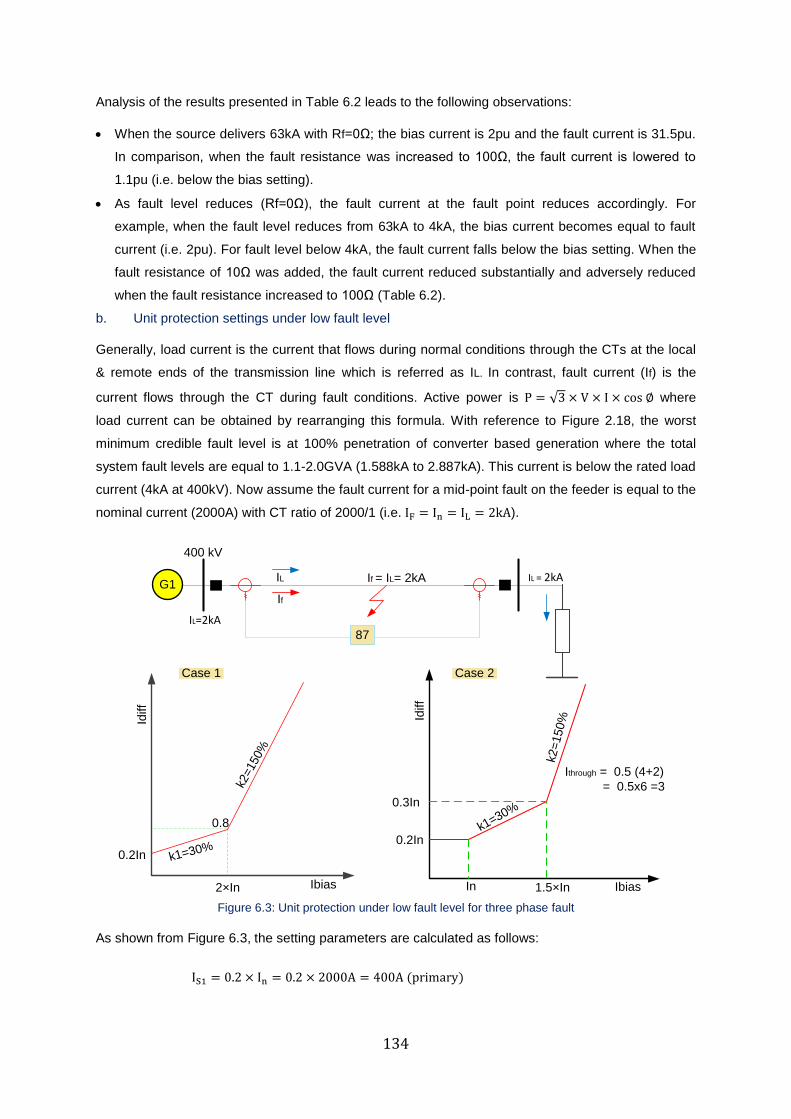
134
Analysis of the results presented in Table 6.2 leads to the following observations:
When the source delivers 63kA with Rf=0Ω; the bias current is 2pu and the fault current is 31.5pu.
In comparison, when the fault resistance was increased to 100Ω, the fault current is lowered to
1.1pu (i.e. below the bias setting).
As fault level reduces (Rf=0Ω), the fault current at the fault point reduces accordingly. For
example, when the fault level reduces from 63kA to 4kA, the bias current becomes equal to fault
current (i.e. 2pu). For fault level below 4kA, the fault current falls below the bias setting. When the
fault resistance of 10Ω was added, the fault current reduced substantially and adversely reduced
when the fault resistance increased to 100Ω (Table 6.2).
b. Unit protection settings under low fault level
Generally, load current is the current that flows during normal conditions through the CTs at the local
& remote ends of the transmission line which is referred as IL. In contrast, fault current (If) is the
current flows through the CT during fault conditions. Active power is P = √3 × V × I × cos ∅ where
load current can be obtained by rearranging this formula. With reference to Figure 2.18, the worst
minimum credible fault level is at 100% penetration of converter based generation where the total
system fault levels are equal to 1.1-2.0GVA (1.588kA to 2.887kA). This current is below the rated load
current (4kA at 400kV). Now assume the fault current for a mid-point fault on the feeder is equal to the
nominal current (2000A) with CT ratio of 2000/1 (i.e. IF = In = IL = 2kA).
Ithrough = 0.5 (4+2)
= 0.5x6 =3
G1
87
If = IL= 2kA
If
0.2In
0.3In
In 1.5×In
Idiff
Ibias
IL
400 kV
0.2In
2×In
Idiff
Ibias
k1=30%
k2=150%
0.8
k2=
150%
k1=30%
Case 1 Case 2
IL = 2kA
IL=2kA
Figure 6.3: Unit protection under low fault level for three phase fault
As shown from Figure 6.3, the setting parameters are calculated as follows:
IS1 = 0.2 × In = 0.2 × 2000A = 400A (primary)
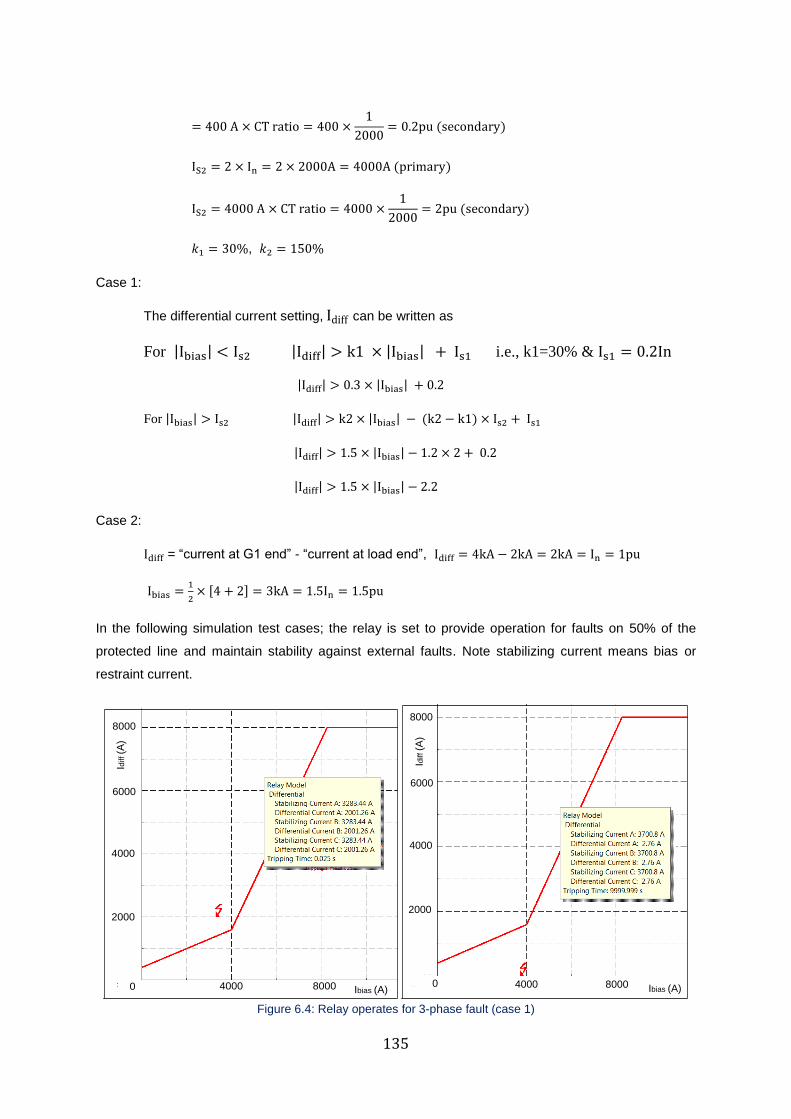
135
= 400 A × CT ratio = 400 ×1
2000= 0.2pu (secondary)
IS2 = 2 × In = 2 × 2000A = 4000A (primary)
IS2 = 4000 A × CT ratio = 4000 ×1
2000= 2pu (secondary)
𝑘1 = 30%, 𝑘2 = 150%
Case 1:
The differential current setting, Idiff can be written as
For |Ibias| < Is2 |Idiff| > k1 × |Ibias| + Is1 i.e., k1=30% & Is1 = 0.2In
|Idiff| > 0.3 × |Ibias| + 0.2
For |Ibias| > Is2 |Idiff| > k2 × |Ibias| − (k2 − k1) × Is2 + Is1
|Idiff| > 1.5 × |Ibias| − 1.2 × 2 + 0.2
|Idiff| > 1.5 × |Ibias| − 2.2
Case 2:
Idiff = “current at G1 end” - “current at load end”, Idiff = 4kA − 2kA = 2kA = In = 1pu
Ibias =1
2× [4 + 2] = 3kA = 1.5In = 1.5pu
In the following simulation test cases; the relay is set to provide operation for faults on 50% of the
protected line and maintain stability against external faults. Note stabilizing current means bias or
restraint current.
Idiff (A
)
8000
6000
4000
2000
4000 8000 12000 160000 Ibias (A)
Idiff (A
)
8000
6000
4000
2000
4000 8000 12000 16000Ibias (A)0
Figure 6.4: Relay operates for 3-phase fault (case 1)
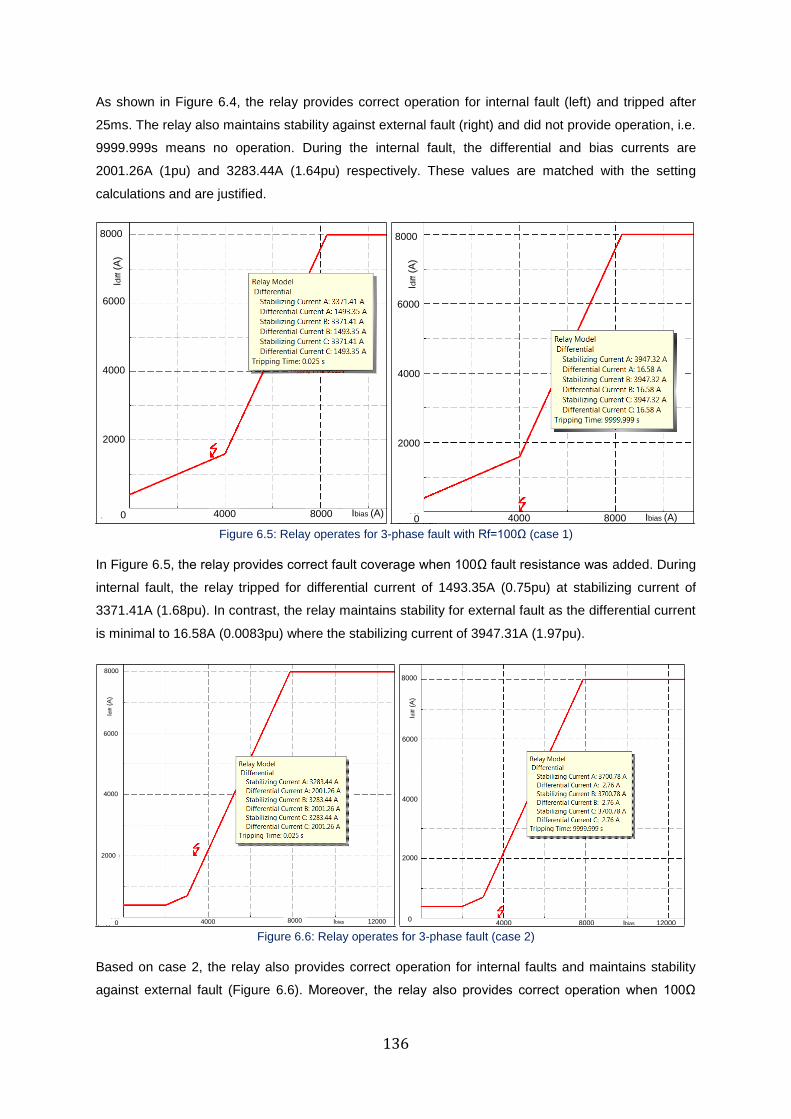
136
As shown in Figure 6.4, the relay provides correct operation for internal fault (left) and tripped after
25ms. The relay also maintains stability against external fault (right) and did not provide operation, i.e.
9999.999s means no operation. During the internal fault, the differential and bias currents are
2001.26A (1pu) and 3283.44A (1.64pu) respectively. These values are matched with the setting
calculations and are justified.
0Ibias (A)4000 8000 12000
8000
6000
4000
2000
0
Idiff (A
)
0
Ibias (A)4000 8000 12000
8000
6000
4000
2000
0
Idiff (A
)
Figure 6.5: Relay operates for 3-phase fault with Rf=100Ω (case 1)
In Figure 6.5, the relay provides correct fault coverage when 100Ω fault resistance was added. During
internal fault, the relay tripped for differential current of 1493.35A (0.75pu) at stabilizing current of
3371.41A (1.68pu). In contrast, the relay maintains stability for external fault as the differential current
is minimal to 16.58A (0.0083pu) where the stabilizing current of 3947.31A (1.97pu).
8000
6000
4000
2000
0 Ibias4000 8000
Idiff (A
)
12000 12000Ibias800040000
2000
4000
6000
Idiff (A
)
8000
Figure 6.6: Relay operates for 3-phase fault (case 2)
Based on case 2, the relay also provides correct operation for internal faults and maintains stability
against external fault (Figure 6.6). Moreover, the relay also provides correct operation when 100Ω
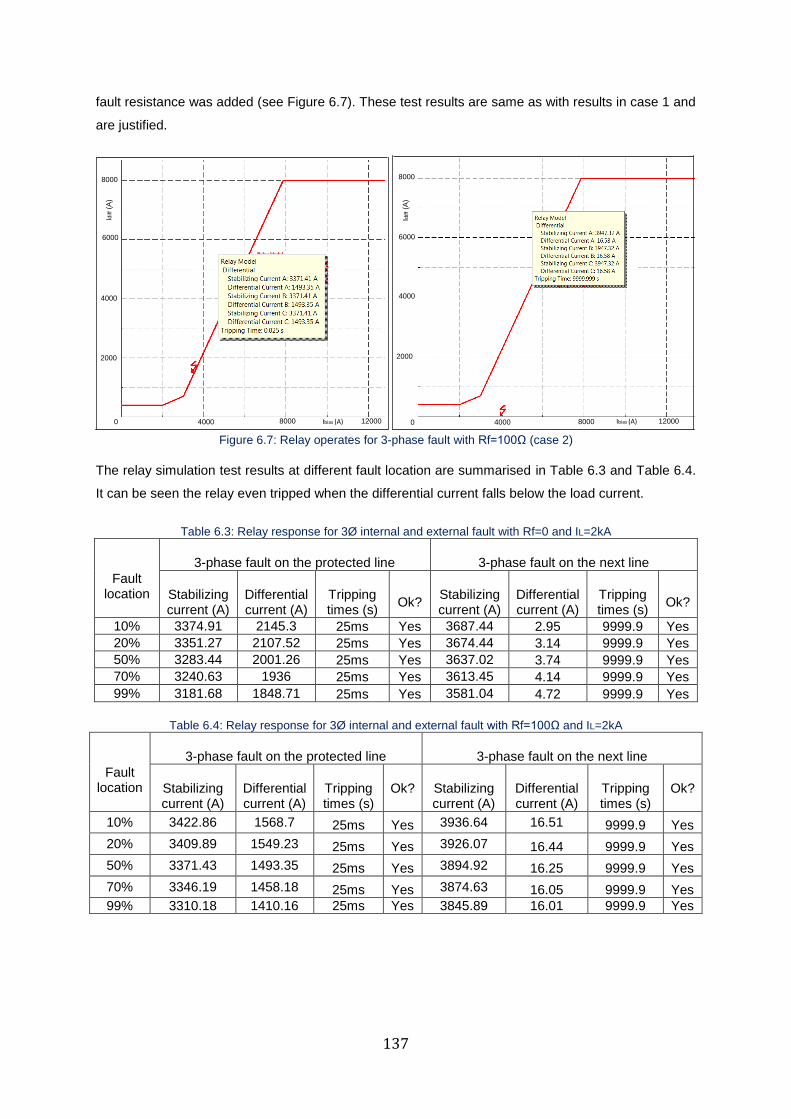
137
fault resistance was added (see Figure 6.7). These test results are same as with results in case 1 and
are justified.
6000
4000
2000
0 Ibias (A)4000 8000
Idiff (A
)
12000
8000
8000
6000
4000
2000
0 Ibias (A)4000 8000
Idiff (A
)
12000 Figure 6.7: Relay operates for 3-phase fault with Rf=100Ω (case 2)
The relay simulation test results at different fault location are summarised in Table 6.3 and Table 6.4.
It can be seen the relay even tripped when the differential current falls below the load current.
Table 6.3: Relay response for 3Ø internal and external fault with Rf=0 and IL=2kA
Fault location
3-phase fault on the protected line 3-phase fault on the next line
Stabilizing current (A)
Differential current (A)
Tripping times (s)
Ok? Stabilizing current (A)
Differential current (A)
Tripping times (s)
Ok?
10% 3374.91 2145.3 25ms Yes 3687.44 2.95 9999.9 Yes
20% 3351.27 2107.52 25ms Yes 3674.44 3.14 9999.9 Yes 50% 3283.44 2001.26 25ms Yes 3637.02 3.74 9999.9 Yes 70% 3240.63 1936 25ms Yes 3613.45 4.14 9999.9 Yes 99% 3181.68 1848.71 25ms Yes 3581.04 4.72 9999.9 Yes
Table 6.4: Relay response for 3Ø internal and external fault with Rf=100Ω and IL=2kA
Fault location
3-phase fault on the protected line 3-phase fault on the next line
Stabilizing current (A)
Differential current (A)
Tripping times (s)
Ok? Stabilizing current (A)
Differential current (A)
Tripping times (s)
Ok?
10% 3422.86 1568.7 25ms Yes 3936.64 16.51 9999.9 Yes
20% 3409.89 1549.23 25ms Yes 3926.07 16.44 9999.9 Yes
50% 3371.43 1493.35 25ms Yes 3894.92 16.25 9999.9 Yes
70% 3346.19 1458.18 25ms Yes 3874.63 16.05 9999.9 Yes 99% 3310.18 1410.16 25ms Yes 3845.89 16.01 9999.9 Yes
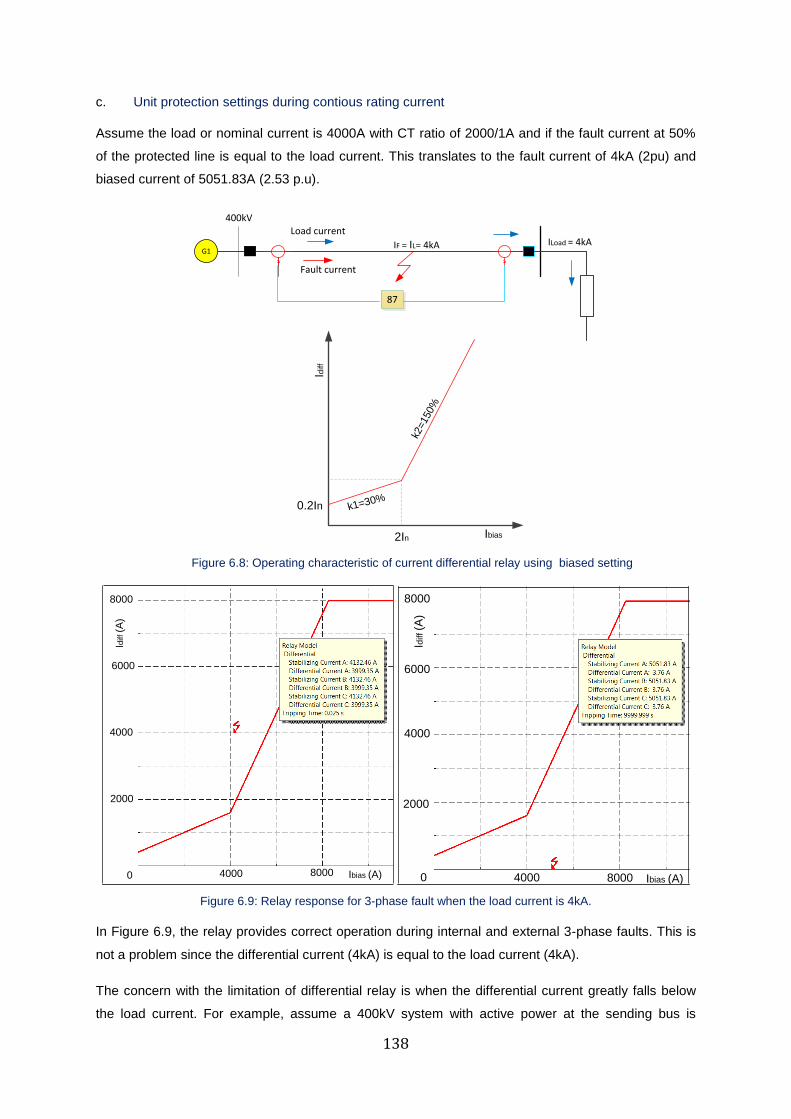
138
c. Unit protection settings during contious rating current
Assume the load or nominal current is 4000A with CT ratio of 2000/1A and if the fault current at 50%
of the protected line is equal to the load current. This translates to the fault current of 4kA (2pu) and
biased current of 5051.83A (2.53 p.u).
G1IF = IL= 4kA ILoad = 4kA
Load current
Fault current
87
400kV
0.2In
2In
Idiff
Ibias
k1=30%
k2=150%
Figure 6.8: Operating characteristic of current differential relay using biased setting
2000
0 4000 8000 Ibias (A)
4000
6000
8000
Idiff (A
)
Ibias (A)80004000 0
2000
4000
6000
Idiff (A
)
8000
Figure 6.9: Relay response for 3-phase fault when the load current is 4kA.
In Figure 6.9, the relay provides correct operation during internal and external 3-phase faults. This is
not a problem since the differential current (4kA) is equal to the load current (4kA).
The concern with the limitation of differential relay is when the differential current greatly falls below
the load current. For example, assume a 400kV system with active power at the sending bus is
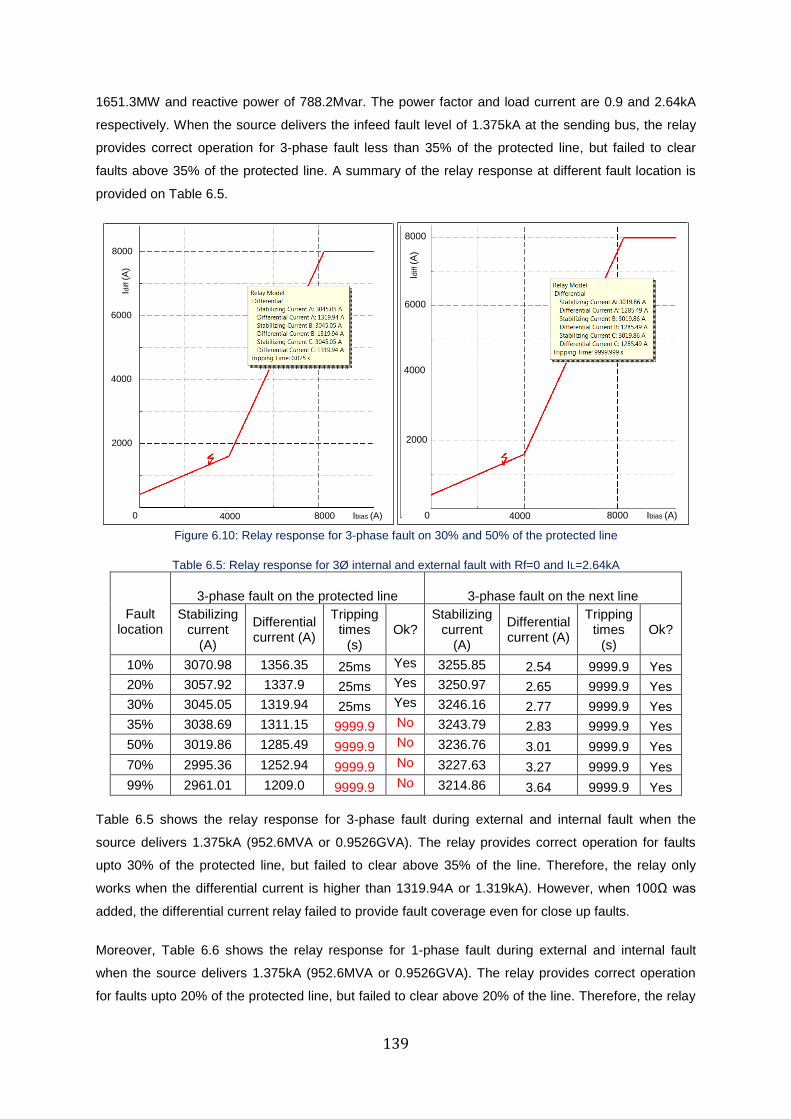
139
1651.3MW and reactive power of 788.2Mvar. The power factor and load current are 0.9 and 2.64kA
respectively. When the source delivers the infeed fault level of 1.375kA at the sending bus, the relay
provides correct operation for 3-phase fault less than 35% of the protected line, but failed to clear
faults above 35% of the protected line. A summary of the relay response at different fault location is
provided on Table 6.5.
Ibias (A)80004000 0
2000
4000
6000
Idiff (A
)
8000
Ibias (A)80004000 0
2000
4000
6000
Idiff (A
)
8000
Figure 6.10: Relay response for 3-phase fault on 30% and 50% of the protected line
Table 6.5: Relay response for 3Ø internal and external fault with Rf=0 and IL=2.64kA
Fault location
3-phase fault on the protected line 3-phase fault on the next line
Stabilizing current
(A)
Differential current (A)
Tripping times
(s) Ok?
Stabilizing current
(A)
Differential current (A)
Tripping times
(s) Ok?
10% 3070.98 1356.35 25ms Yes 3255.85 2.54 9999.9 Yes
20% 3057.92 1337.9 25ms Yes 3250.97 2.65 9999.9 Yes
30% 3045.05 1319.94 25ms Yes 3246.16 2.77 9999.9 Yes
35% 3038.69 1311.15 9999.9 No 3243.79 2.83 9999.9 Yes
50% 3019.86 1285.49 9999.9 No 3236.76 3.01 9999.9 Yes
70% 2995.36 1252.94 9999.9 No 3227.63 3.27 9999.9 Yes
99% 2961.01 1209.0 9999.9 No 3214.86 3.64 9999.9 Yes
Table 6.5 shows the relay response for 3-phase fault during external and internal fault when the
source delivers 1.375kA (952.6MVA or 0.9526GVA). The relay provides correct operation for faults
upto 30% of the protected line, but failed to clear above 35% of the line. Therefore, the relay only
works when the differential current is higher than 1319.94A or 1.319kA). However, when 100Ω was
added, the differential current relay failed to provide fault coverage even for close up faults.
Moreover, Table 6.6 shows the relay response for 1-phase fault during external and internal fault
when the source delivers 1.375kA (952.6MVA or 0.9526GVA). The relay provides correct operation
for faults upto 20% of the protected line, but failed to clear above 20% of the line. Therefore, the relay
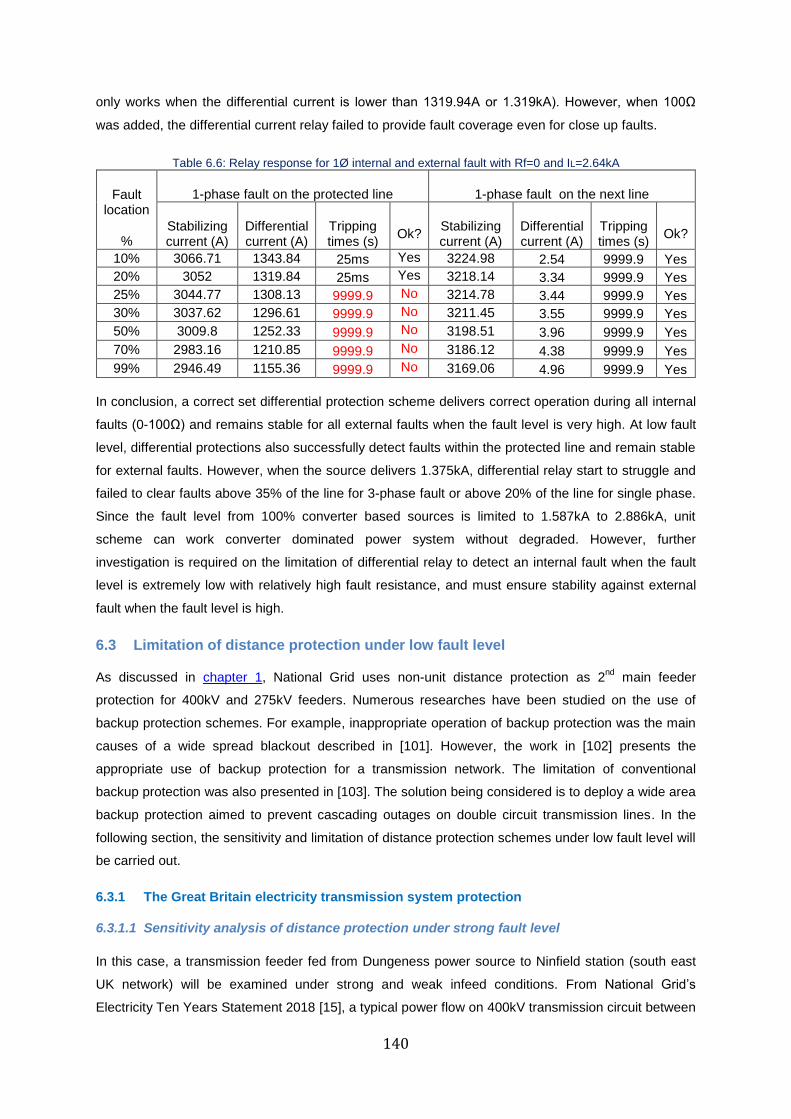
140
only works when the differential current is lower than 1319.94A or 1.319kA). However, when 100Ω
was added, the differential current relay failed to provide fault coverage even for close up faults.
Table 6.6: Relay response for 1Ø internal and external fault with Rf=0 and IL=2.64kA
Fault location
%
1-phase fault on the protected line 1-phase fault on the next line
Stabilizing current (A)
Differential current (A)
Tripping times (s)
Ok? Stabilizing current (A)
Differential current (A)
Tripping times (s)
Ok?
10% 3066.71 1343.84 25ms Yes 3224.98 2.54 9999.9 Yes 20% 3052 1319.84 25ms Yes 3218.14 3.34 9999.9 Yes 25% 3044.77 1308.13 9999.9 No 3214.78 3.44 9999.9 Yes 30% 3037.62 1296.61 9999.9 No 3211.45 3.55 9999.9 Yes 50% 3009.8 1252.33 9999.9 No 3198.51 3.96 9999.9 Yes 70% 2983.16 1210.85 9999.9 No 3186.12 4.38 9999.9 Yes 99% 2946.49 1155.36 9999.9 No 3169.06 4.96 9999.9 Yes
In conclusion, a correct set differential protection scheme delivers correct operation during all internal
faults (0-100Ω) and remains stable for all external faults when the fault level is very high. At low fault
level, differential protections also successfully detect faults within the protected line and remain stable
for external faults. However, when the source delivers 1.375kA, differential relay start to struggle and
failed to clear faults above 35% of the line for 3-phase fault or above 20% of the line for single phase.
Since the fault level from 100% converter based sources is limited to 1.587kA to 2.886kA, unit
scheme can work converter dominated power system without degraded. However, further
investigation is required on the limitation of differential relay to detect an internal fault when the fault
level is extremely low with relatively high fault resistance, and must ensure stability against external
fault when the fault level is high.
6.3 Limitation of distance protection under low fault level
As discussed in chapter 1, National Grid uses non-unit distance protection as 2nd
main feeder
protection for 400kV and 275kV feeders. Numerous researches have been studied on the use of
backup protection schemes. For example, inappropriate operation of backup protection was the main
causes of a wide spread blackout described in [101]. However, the work in [102] presents the
appropriate use of backup protection for a transmission network. The limitation of conventional
backup protection was also presented in [103]. The solution being considered is to deploy a wide area
backup protection aimed to prevent cascading outages on double circuit transmission lines. In the
following section, the sensitivity and limitation of distance protection schemes under low fault level will
be carried out.
6.3.1 The Great Britain electricity transmission system protection
6.3.1.1 Sensitivity analysis of distance protection under strong fault level
In this case, a transmission feeder fed from Dungeness power source to Ninfield station (south east
UK network) will be examined under strong and weak infeed conditions. From National Grid’s
Electricity Ten Years Statement 2018 [15], a typical power flow on 400kV transmission circuit between
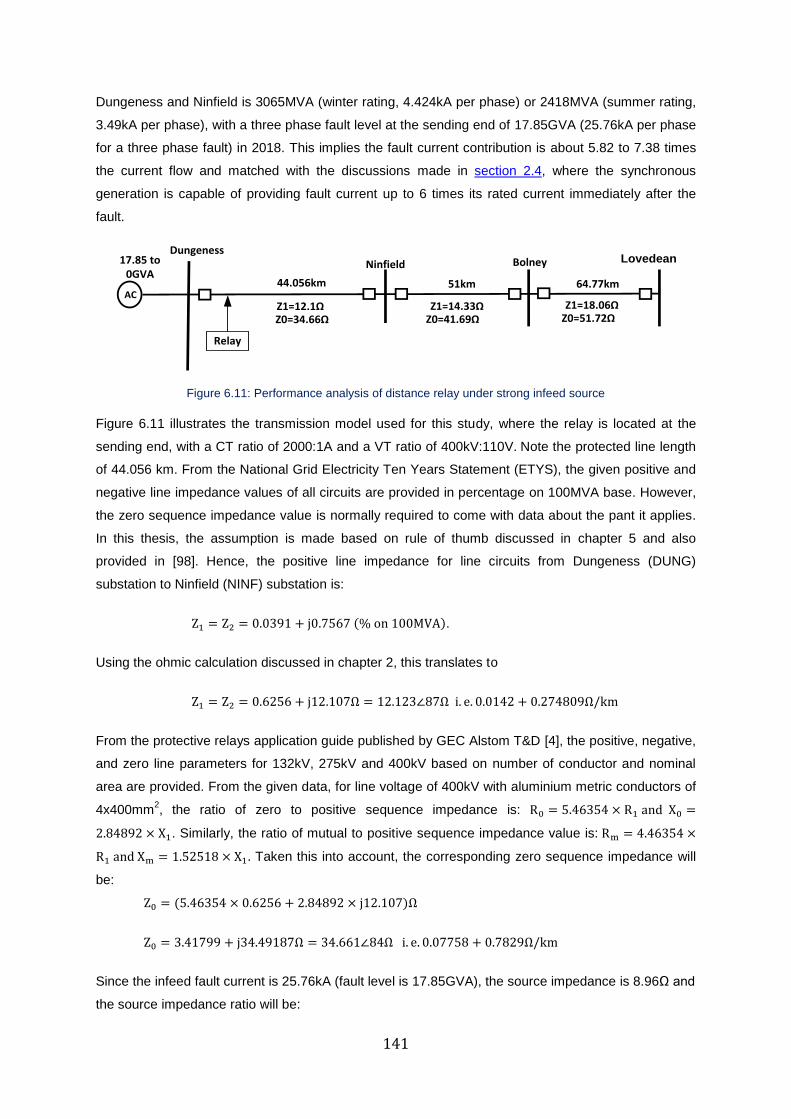
141
Dungeness and Ninfield is 3065MVA (winter rating, 4.424kA per phase) or 2418MVA (summer rating,
3.49kA per phase), with a three phase fault level at the sending end of 17.85GVA (25.76kA per phase
for a three phase fault) in 2018. This implies the fault current contribution is about 5.82 to 7.38 times
the current flow and matched with the discussions made in section 2.4, where the synchronous
generation is capable of providing fault current up to 6 times its rated current immediately after the
fault.
Lovedean17.85 to 0GVA
AC
DungenessNinfield
44.056km
Relay
Bolney
51km 64.77km
Z1=14.33Ω Z0=41.69Ω
Z1=18.06Ω Z0=51.72Ω
Z1=12.1Ω Z0=34.66Ω
Figure 6.11: Performance analysis of distance relay under strong infeed source
Figure 6.11 illustrates the transmission model used for this study, where the relay is located at the
sending end, with a CT ratio of 2000:1A and a VT ratio of 400kV:110V. Note the protected line length
of 44.056 km. From the National Grid Electricity Ten Years Statement (ETYS), the given positive and
negative line impedance values of all circuits are provided in percentage on 100MVA base. However,
the zero sequence impedance value is normally required to come with data about the pant it applies.
In this thesis, the assumption is made based on rule of thumb discussed in chapter 5 and also
provided in [98]. Hence, the positive line impedance for line circuits from Dungeness (DUNG)
substation to Ninfield (NINF) substation is:
Z1 = Z2 = 0.0391 + j0.7567 (% on 100MVA).
Using the ohmic calculation discussed in chapter 2, this translates to
Z1 = Z2 = 0.6256 + j12.107Ω = 12.123∠87Ω i. e. 0.0142 + 0.274809Ω/km
From the protective relays application guide published by GEC Alstom T&D [4], the positive, negative,
and zero line parameters for 132kV, 275kV and 400kV based on number of conductor and nominal
area are provided. From the given data, for line voltage of 400kV with aluminium metric conductors of
4x400mm2, the ratio of zero to positive sequence impedance is: R0 = 5.46354 × R1 and X0 =
2.84892 × X1. Similarly, the ratio of mutual to positive sequence impedance value is: Rm = 4.46354 ×
R1 and Xm = 1.52518 × X1 . Taken this into account, the corresponding zero sequence impedance will
be:
Z0 = (5.46354 × 0.6256 + 2.84892 × j12.107)Ω
Z0 = 3.41799 + j34.49187Ω = 34.661∠84Ω i. e. 0.07758 + 0.7829Ω/km
Since the infeed fault current is 25.76kA (fault level is 17.85GVA), the source impedance is 8.96Ω and
the source impedance ratio will be:
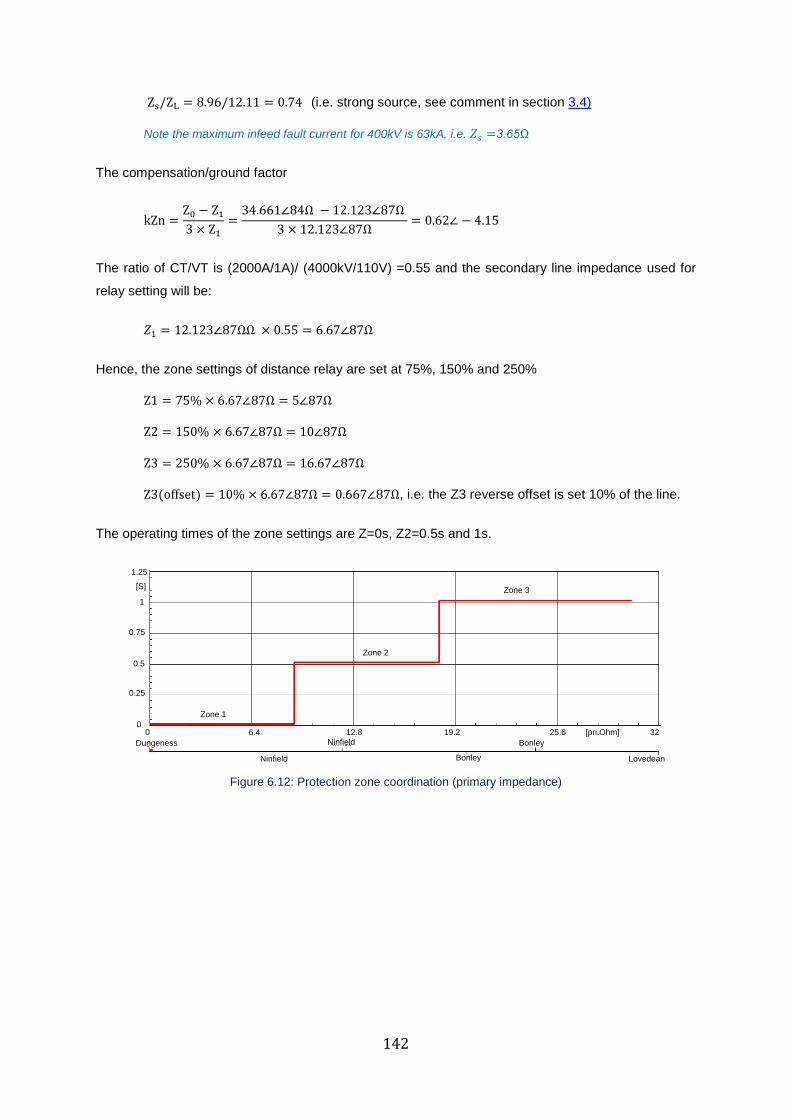
142
Zs/ZL = 8.96/12.11 = 0.74 (i.e. strong source, see comment in section 3.4)
Note the maximum infeed fault current for 400kV is 63kA, i.e. 𝑍𝑠 =3.65Ω
The compensation/ground factor
kZn =Z0 − Z1
3 × Z1
=34.661∠84Ω − 12.123∠87Ω
3 × 12.123∠87Ω= 0.62∠ − 4.15
The ratio of CT/VT is (2000A/1A)/ (4000kV/110V) =0.55 and the secondary line impedance used for
relay setting will be:
𝑍1 = 12.123∠87ΩΩ × 0.55 = 6.67∠87Ω
Hence, the zone settings of distance relay are set at 75%, 150% and 250%
Z1 = 75% × 6.67∠87Ω = 5∠87Ω
Z2 = 150% × 6.67∠87Ω = 10∠87Ω
Z3 = 250% × 6.67∠87Ω = 16.67∠87Ω
Z3(offset) = 10% × 6.67∠87Ω = 0.667∠87Ω, i.e. the Z3 reverse offset is set 10% of the line.
The operating times of the zone settings are Z=0s, Z2=0.5s and 1s.
Zone 1
Zone 2
Zone 3
6.4 12.8 19.2 25.6 [pri.Ohm] 320
1
0.75
0.5
0.25
0
Dungeness
Ninfield
Ninfield
Bonley
Bonley
Lovedean
[S]
1.25
Figure 6.12: Protection zone coordination (primary impedance)
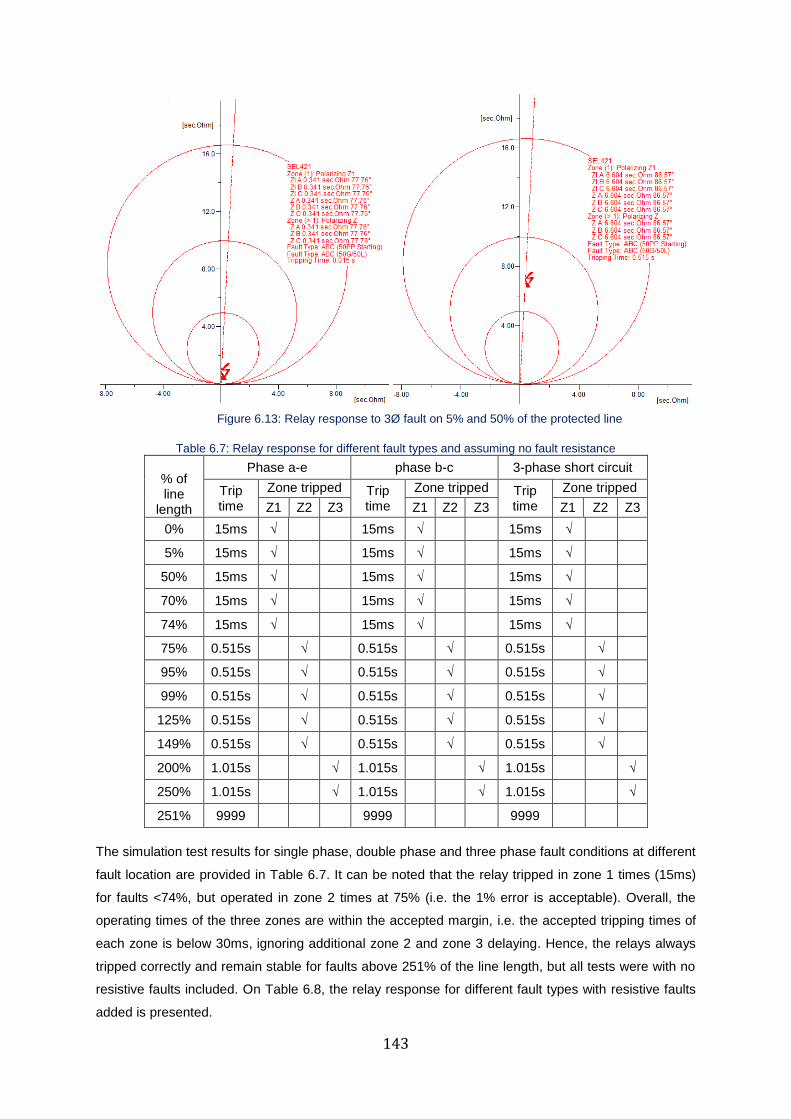
143
Figure 6.13: Relay response to 3Ø fault on 5% and 50% of the protected line
Table 6.7: Relay response for different fault types and assuming no fault resistance
% of line
length
Phase a-e phase b-c 3-phase short circuit
Trip time
Zone tripped Trip time
Zone tripped Trip time
Zone tripped
Z1 Z2 Z3 Z1 Z2 Z3 Z1 Z2 Z3
0% 15ms √ 15ms √ 15ms √
5% 15ms √ 15ms √ 15ms √
50% 15ms √ 15ms √ 15ms √
70% 15ms √ 15ms √ 15ms √
74% 15ms √ 15ms √ 15ms √
75% 0.515s √ 0.515s √ 0.515s √
95% 0.515s √ 0.515s √ 0.515s √
99% 0.515s √ 0.515s √ 0.515s √
125% 0.515s √ 0.515s √ 0.515s √
149% 0.515s √ 0.515s √ 0.515s √
200% 1.015s √ 1.015s √ 1.015s √
250% 1.015s √ 1.015s √ 1.015s √
251% 9999 9999 9999
The simulation test results for single phase, double phase and three phase fault conditions at different
fault location are provided in Table 6.7. It can be noted that the relay tripped in zone 1 times (15ms)
for faults <74%, but operated in zone 2 times at 75% (i.e. the 1% error is acceptable). Overall, the
operating times of the three zones are within the accepted margin, i.e. the accepted tripping times of
each zone is below 30ms, ignoring additional zone 2 and zone 3 delaying. Hence, the relays always
tripped correctly and remain stable for faults above 251% of the line length, but all tests were with no
resistive faults included. On Table 6.8, the relay response for different fault types with resistive faults
added is presented.
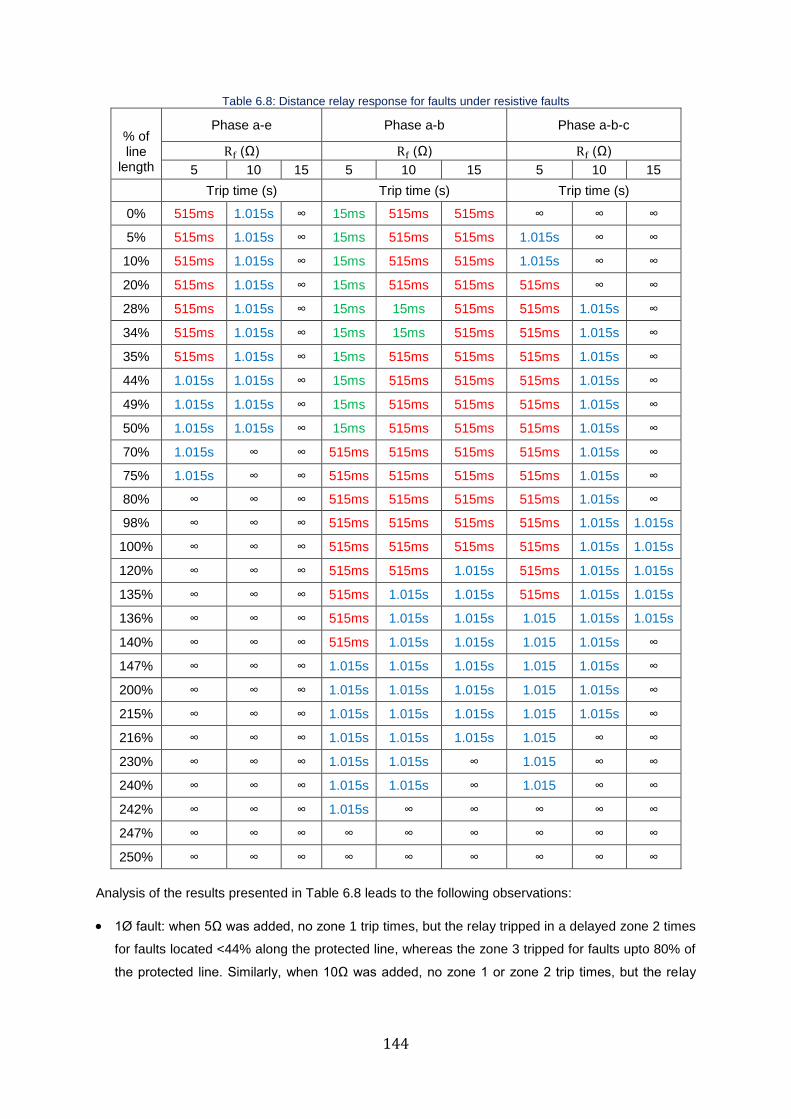
144
Table 6.8: Distance relay response for faults under resistive faults
% of line
length
Phase a-e Phase a-b Phase a-b-c
Rf (Ω) Rf (Ω) Rf (Ω)
5 10 15 5 10 15 5 10 15
Trip time (s) Trip time (s) Trip time (s)
0% 515ms 1.015s ∞ 15ms 515ms 515ms ∞ ∞ ∞
5% 515ms 1.015s ∞ 15ms 515ms 515ms 1.015s ∞ ∞
10% 515ms 1.015s ∞ 15ms 515ms 515ms 1.015s ∞ ∞
20% 515ms 1.015s ∞ 15ms 515ms 515ms 515ms ∞ ∞
28% 515ms 1.015s ∞ 15ms 15ms 515ms 515ms 1.015s ∞
34% 515ms 1.015s ∞ 15ms 15ms 515ms 515ms 1.015s ∞
35% 515ms 1.015s ∞ 15ms 515ms 515ms 515ms 1.015s ∞
44% 1.015s 1.015s ∞ 15ms 515ms 515ms 515ms 1.015s ∞
49% 1.015s 1.015s ∞ 15ms 515ms 515ms 515ms 1.015s ∞
50% 1.015s 1.015s ∞ 15ms 515ms 515ms 515ms 1.015s ∞
70% 1.015s ∞ ∞ 515ms 515ms 515ms 515ms 1.015s ∞
75% 1.015s ∞ ∞ 515ms 515ms 515ms 515ms 1.015s ∞
80% ∞ ∞ ∞ 515ms 515ms 515ms 515ms 1.015s ∞
98% ∞ ∞ ∞ 515ms 515ms 515ms 515ms 1.015s 1.015s
100% ∞ ∞ ∞ 515ms 515ms 515ms 515ms 1.015s 1.015s
120% ∞ ∞ ∞ 515ms 515ms 1.015s 515ms 1.015s 1.015s
135% ∞ ∞ ∞ 515ms 1.015s 1.015s 515ms 1.015s 1.015s
136% ∞ ∞ ∞ 515ms 1.015s 1.015s 1.015 1.015s 1.015s
140% ∞ ∞ ∞ 515ms 1.015s 1.015s 1.015 1.015s ∞
147% ∞ ∞ ∞ 1.015s 1.015s 1.015s 1.015 1.015s ∞
200% ∞ ∞ ∞ 1.015s 1.015s 1.015s 1.015 1.015s ∞
215% ∞ ∞ ∞ 1.015s 1.015s 1.015s 1.015 1.015s ∞
216% ∞ ∞ ∞ 1.015s 1.015s 1.015s 1.015 ∞ ∞
230% ∞ ∞ ∞ 1.015s 1.015s ∞ 1.015 ∞ ∞
240% ∞ ∞ ∞ 1.015s 1.015s ∞ 1.015 ∞ ∞
242% ∞ ∞ ∞ 1.015s ∞ ∞ ∞ ∞ ∞
247% ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
250% ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
Analysis of the results presented in Table 6.8 leads to the following observations:
1Ø fault: when 5Ω was added, no zone 1 trip times, but the relay tripped in a delayed zone 2 times
for faults located <44% along the protected line, whereas the zone 3 tripped for faults upto 80% of
the protected line. Similarly, when 10Ω was added, no zone 1 or zone 2 trip times, but the relay
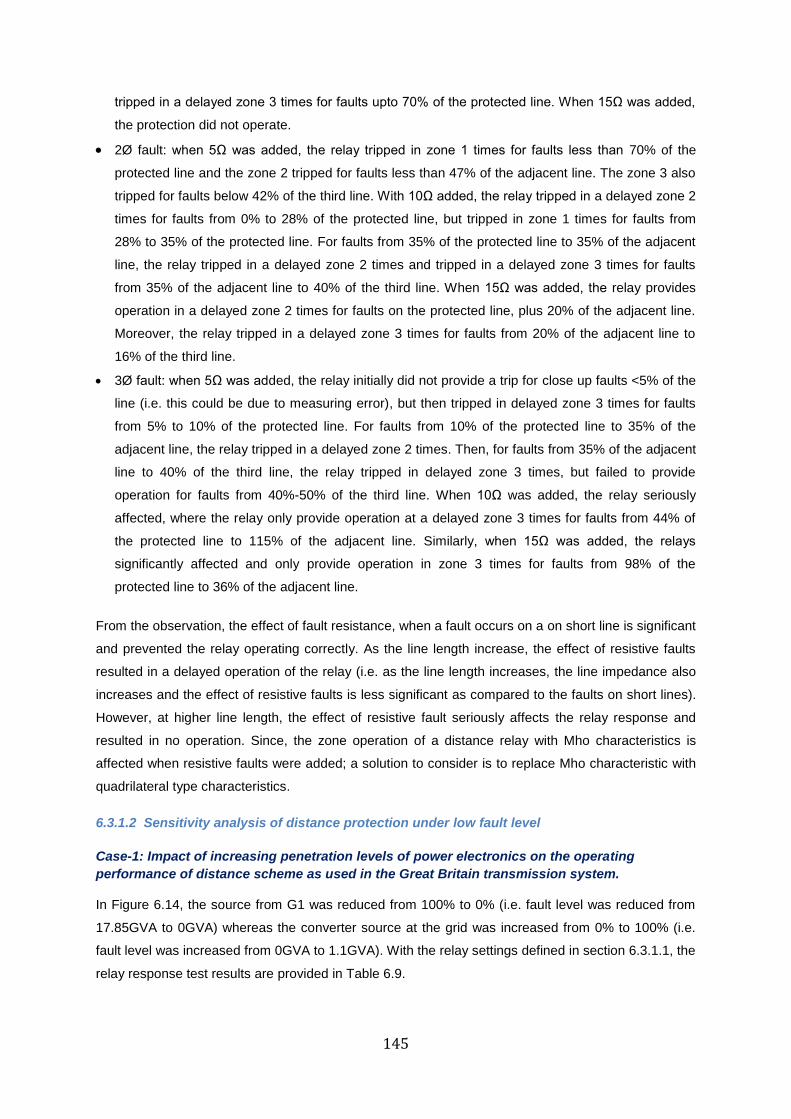
145
tripped in a delayed zone 3 times for faults upto 70% of the protected line. When 15Ω was added,
the protection did not operate.
2Ø fault: when 5Ω was added, the relay tripped in zone 1 times for faults less than 70% of the
protected line and the zone 2 tripped for faults less than 47% of the adjacent line. The zone 3 also
tripped for faults below 42% of the third line. With 10Ω added, the relay tripped in a delayed zone 2
times for faults from 0% to 28% of the protected line, but tripped in zone 1 times for faults from
28% to 35% of the protected line. For faults from 35% of the protected line to 35% of the adjacent
line, the relay tripped in a delayed zone 2 times and tripped in a delayed zone 3 times for faults
from 35% of the adjacent line to 40% of the third line. When 15Ω was added, the relay provides
operation in a delayed zone 2 times for faults on the protected line, plus 20% of the adjacent line.
Moreover, the relay tripped in a delayed zone 3 times for faults from 20% of the adjacent line to
16% of the third line.
3Ø fault: when 5Ω was added, the relay initially did not provide a trip for close up faults <5% of the
line (i.e. this could be due to measuring error), but then tripped in delayed zone 3 times for faults
from 5% to 10% of the protected line. For faults from 10% of the protected line to 35% of the
adjacent line, the relay tripped in a delayed zone 2 times. Then, for faults from 35% of the adjacent
line to 40% of the third line, the relay tripped in delayed zone 3 times, but failed to provide
operation for faults from 40%-50% of the third line. When 10Ω was added, the relay seriously
affected, where the relay only provide operation at a delayed zone 3 times for faults from 44% of
the protected line to 115% of the adjacent line. Similarly, when 15Ω was added, the relays
significantly affected and only provide operation in zone 3 times for faults from 98% of the
protected line to 36% of the adjacent line.
From the observation, the effect of fault resistance, when a fault occurs on a on short line is significant
and prevented the relay operating correctly. As the line length increase, the effect of resistive faults
resulted in a delayed operation of the relay (i.e. as the line length increases, the line impedance also
increases and the effect of resistive faults is less significant as compared to the faults on short lines).
However, at higher line length, the effect of resistive fault seriously affects the relay response and
resulted in no operation. Since, the zone operation of a distance relay with Mho characteristics is
affected when resistive faults were added; a solution to consider is to replace Mho characteristic with
quadrilateral type characteristics.
6.3.1.2 Sensitivity analysis of distance protection under low fault level
Case-1: Impact of increasing penetration levels of power electronics on the operating
performance of distance scheme as used in the Great Britain transmission system.
In Figure 6.14, the source from G1 was reduced from 100% to 0% (i.e. fault level was reduced from
17.85GVA to 0GVA) whereas the converter source at the grid was increased from 0% to 100% (i.e.
fault level was increased from 0GVA to 1.1GVA). With the relay settings defined in section 6.3.1.1, the
relay response test results are provided in Table 6.9.
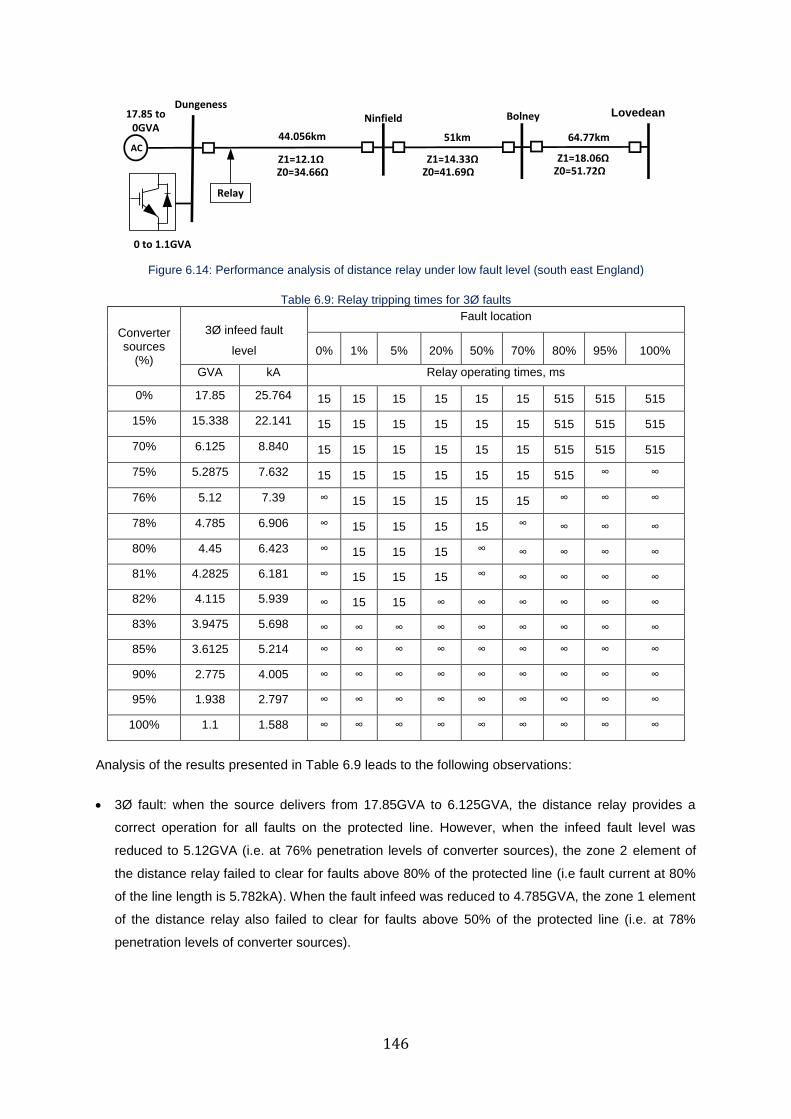
146
Lovedean17.85 to 0GVA
AC
DungenessNinfield
44.056km
0 to 1.1GVA
Relay
Bolney
51km 64.77km
Z1=14.33Ω Z0=41.69Ω
Z1=18.06Ω Z0=51.72Ω
Z1=12.1Ω Z0=34.66Ω
Figure 6.14: Performance analysis of distance relay under low fault level (south east England)
Table 6.9: Relay tripping times for 3Ø faults
Converter sources
(%)
3Ø infeed fault
level
Fault location
0% 1% 5% 20% 50% 70% 80% 95% 100%
GVA kA Relay operating times, ms
0% 17.85 25.764 15 15 15 15 15 15 515 515 515
15% 15.338 22.141 15 15 15 15 15 15 515 515 515
70% 6.125 8.840 15 15 15 15 15 15 515 515 515
75% 5.2875 7.632 15 15 15 15 15 15 515 ∞ ∞
76% 5.12 7.39 ∞ 15 15 15 15 15 ∞ ∞ ∞
78% 4.785 6.906 ∞ 15 15 15 15 ∞ ∞ ∞ ∞
80% 4.45 6.423 ∞ 15 15 15 ∞ ∞ ∞ ∞ ∞
81% 4.2825 6.181 ∞ 15 15 15 ∞ ∞ ∞ ∞ ∞
82% 4.115 5.939 ∞ 15 15 ∞ ∞ ∞ ∞ ∞ ∞
83% 3.9475 5.698 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
85% 3.6125 5.214 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
90% 2.775 4.005 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
95% 1.938 2.797 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
100% 1.1 1.588 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
Analysis of the results presented in Table 6.9 leads to the following observations:
3Ø fault: when the source delivers from 17.85GVA to 6.125GVA, the distance relay provides a
correct operation for all faults on the protected line. However, when the infeed fault level was
reduced to 5.12GVA (i.e. at 76% penetration levels of converter sources), the zone 2 element of
the distance relay failed to clear for faults above 80% of the protected line (i.e fault current at 80%
of the line length is 5.782kA). When the fault infeed was reduced to 4.785GVA, the zone 1 element
of the distance relay also failed to clear for faults above 50% of the protected line (i.e. at 78%
penetration levels of converter sources).
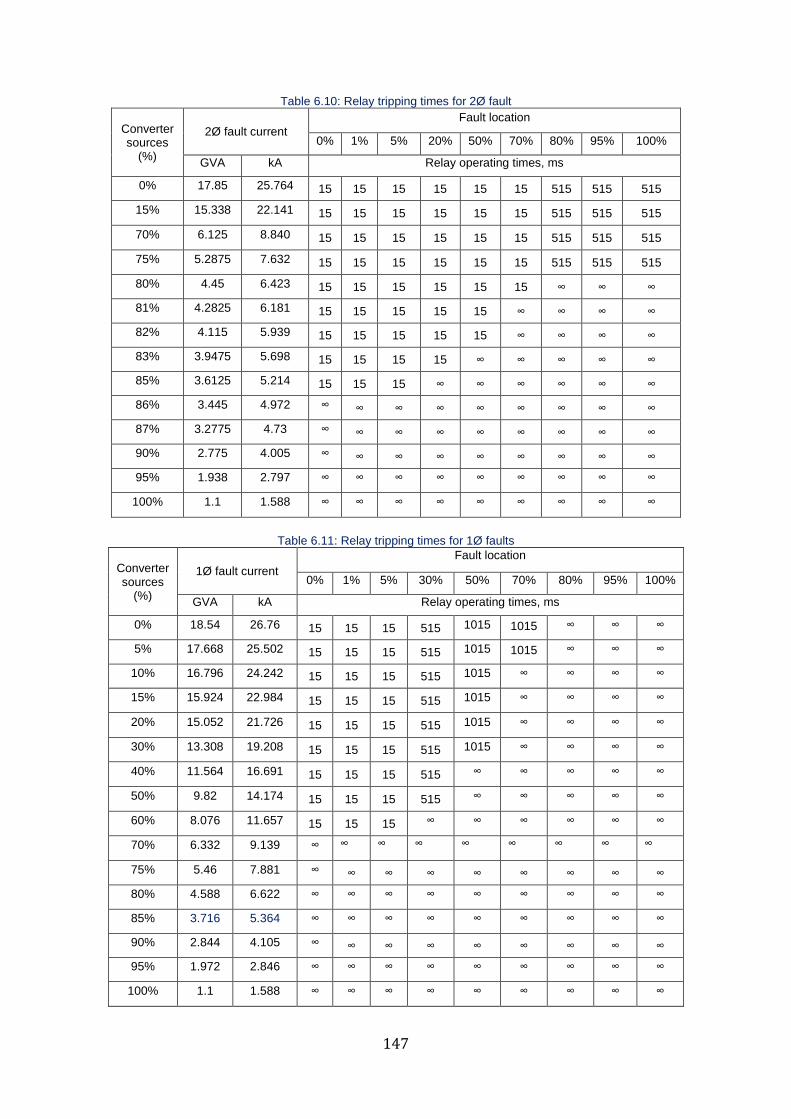
147
Table 6.10: Relay tripping times for 2Ø fault
Converter sources
(%)
2Ø fault current
Fault location
0% 1% 5% 20% 50% 70% 80% 95% 100%
GVA kA Relay operating times, ms
0% 17.85 25.764 15 15 15 15 15 15 515 515 515
15% 15.338 22.141 15 15 15 15 15 15 515 515 515
70% 6.125 8.840 15 15 15 15 15 15 515 515 515
75% 5.2875 7.632 15 15 15 15 15 15 515 515 515
80% 4.45 6.423 15 15 15 15 15 15 ∞ ∞ ∞
81% 4.2825 6.181 15 15 15 15 15 ∞ ∞ ∞ ∞
82% 4.115 5.939 15 15 15 15 15 ∞ ∞ ∞ ∞
83% 3.9475 5.698 15 15 15 15 ∞ ∞ ∞ ∞ ∞
85% 3.6125 5.214 15 15 15 ∞ ∞ ∞ ∞ ∞ ∞
86% 3.445 4.972 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
87% 3.2775 4.73 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
90% 2.775 4.005 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
95% 1.938 2.797 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
100% 1.1 1.588 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
Table 6.11: Relay tripping times for 1Ø faults
Converter sources
(%)
1Ø fault current
Fault location
0% 1% 5% 30% 50% 70% 80% 95% 100%
GVA kA Relay operating times, ms
0% 18.54 26.76 15 15 15 515 1015 1015 ∞ ∞ ∞
5% 17.668 25.502 15 15 15 515 1015 1015 ∞ ∞ ∞
10% 16.796 24.242 15 15 15 515 1015 ∞ ∞ ∞ ∞
15% 15.924 22.984 15 15 15 515 1015 ∞ ∞ ∞ ∞
20% 15.052 21.726 15 15 15 515 1015 ∞ ∞ ∞ ∞
30% 13.308 19.208 15 15 15 515 1015 ∞ ∞ ∞ ∞
40% 11.564 16.691 15 15 15 515 ∞ ∞ ∞ ∞ ∞
50% 9.82 14.174 15 15 15 515 ∞ ∞ ∞ ∞ ∞
60% 8.076 11.657 15 15 15 ∞ ∞ ∞ ∞ ∞ ∞
70% 6.332 9.139 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
75% 5.46 7.881 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
80% 4.588 6.622 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
85% 3.716 5.364 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
90% 2.844 4.105 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
95% 1.972 2.846 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
100% 1.1 1.588 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
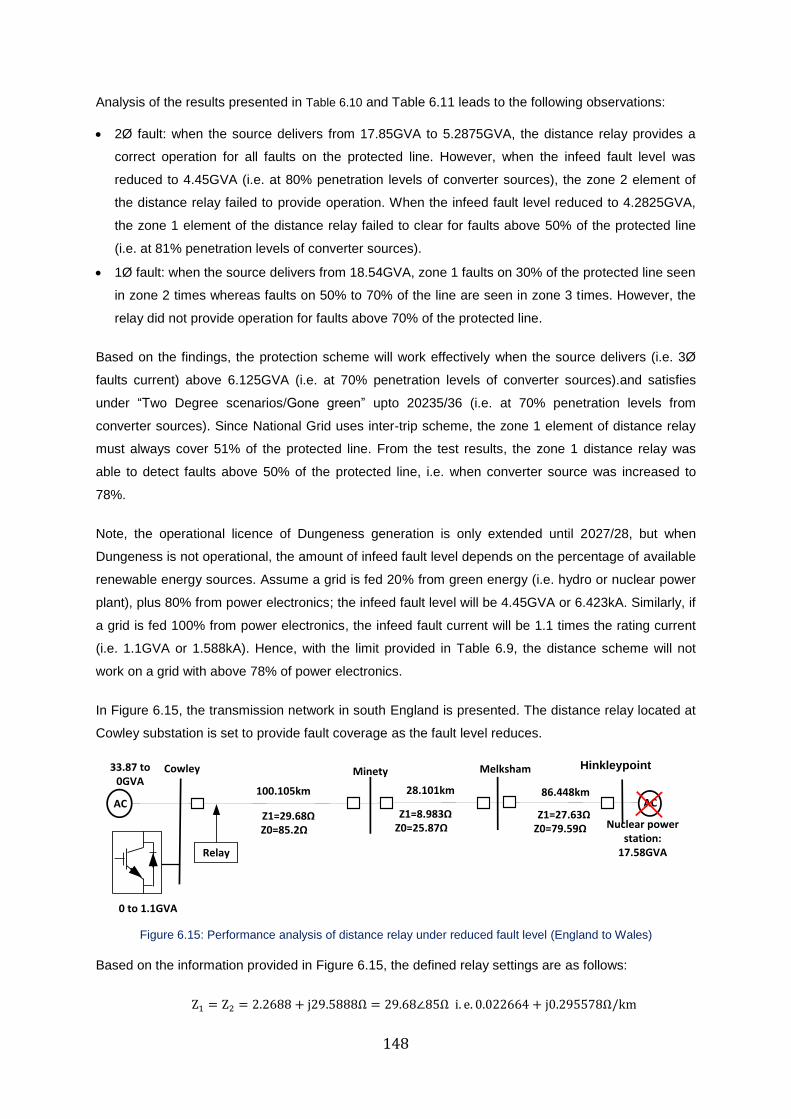
148
Analysis of the results presented in Table 6.10 and Table 6.11 leads to the following observations:
2Ø fault: when the source delivers from 17.85GVA to 5.2875GVA, the distance relay provides a
correct operation for all faults on the protected line. However, when the infeed fault level was
reduced to 4.45GVA (i.e. at 80% penetration levels of converter sources), the zone 2 element of
the distance relay failed to provide operation. When the infeed fault level reduced to 4.2825GVA,
the zone 1 element of the distance relay failed to clear for faults above 50% of the protected line
(i.e. at 81% penetration levels of converter sources).
1Ø fault: when the source delivers from 18.54GVA, zone 1 faults on 30% of the protected line seen
in zone 2 times whereas faults on 50% to 70% of the line are seen in zone 3 times. However, the
relay did not provide operation for faults above 70% of the protected line.
Based on the findings, the protection scheme will work effectively when the source delivers (i.e. 3Ø
faults current) above 6.125GVA (i.e. at 70% penetration levels of converter sources).and satisfies
under “Two Degree scenarios/Gone green” upto 20235/36 (i.e. at 70% penetration levels from
converter sources). Since National Grid uses inter-trip scheme, the zone 1 element of distance relay
must always cover 51% of the protected line. From the test results, the zone 1 distance relay was
able to detect faults above 50% of the protected line, i.e. when converter source was increased to
78%.
Note, the operational licence of Dungeness generation is only extended until 2027/28, but when
Dungeness is not operational, the amount of infeed fault level depends on the percentage of available
renewable energy sources. Assume a grid is fed 20% from green energy (i.e. hydro or nuclear power
plant), plus 80% from power electronics; the infeed fault level will be 4.45GVA or 6.423kA. Similarly, if
a grid is fed 100% from power electronics, the infeed fault current will be 1.1 times the rating current
(i.e. 1.1GVA or 1.588kA). Hence, with the limit provided in Table 6.9, the distance scheme will not
work on a grid with above 78% of power electronics.
In Figure 6.15, the transmission network in south England is presented. The distance relay located at
Cowley substation is set to provide fault coverage as the fault level reduces.
Hinkleypoint33.87 to 0GVA
Cowley Minety
100.105km
0 to 1.1GVA
Relay
Melksham
28.101km 86.448km
Z1=8.983Ω Z0=25.87Ω
Z1=27.63Ω Z0=79.59Ω
Z1=29.68Ω Z0=85.2Ω
AC AC
Nuclear power station:
17.58GVA
Figure 6.15: Performance analysis of distance relay under reduced fault level (England to Wales)
Based on the information provided in Figure 6.15, the defined relay settings are as follows:
Z1 = Z2 = 2.2688 + j29.5888Ω = 29.68∠85Ω i. e. 0.022664 + j0.295578Ω/km
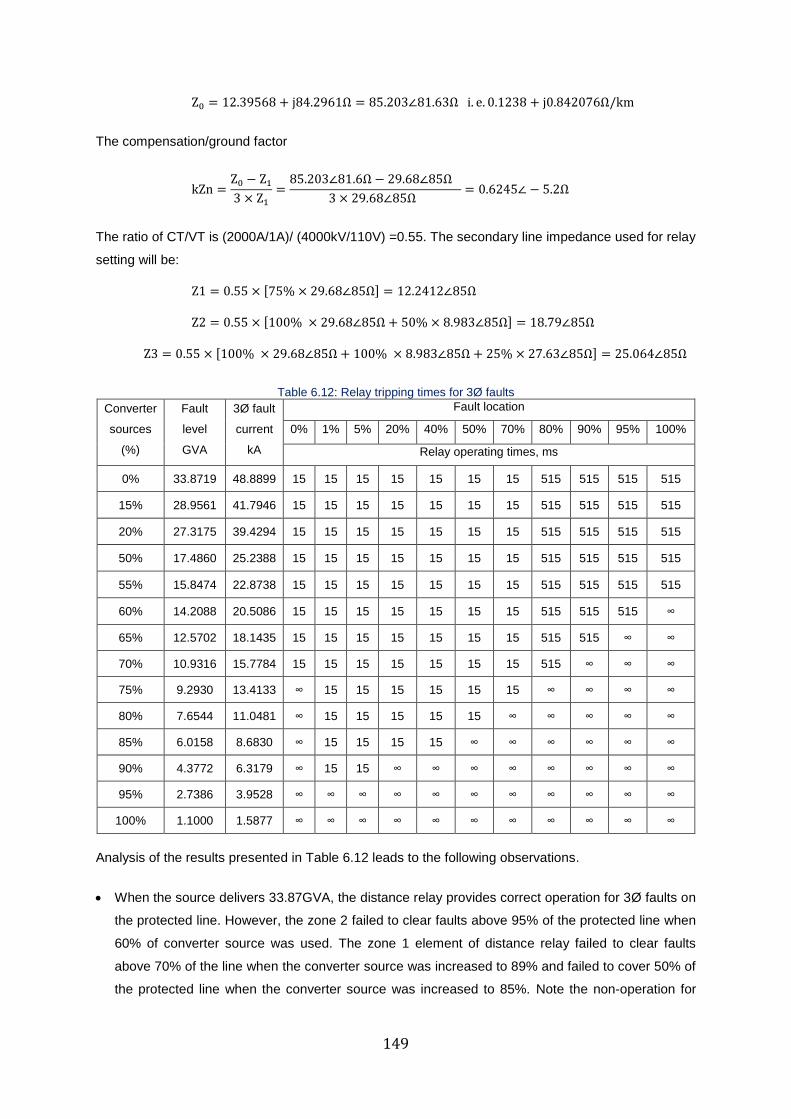
149
Z0 = 12.39568 + j84.2961Ω = 85.203∠81.63Ω i. e. 0.1238 + j0.842076Ω/km
The compensation/ground factor
kZn =Z0 − Z1
3 × Z1
=85.203∠81.6Ω − 29.68∠85Ω
3 × 29.68∠85Ω = 0.6245∠ − 5.2Ω
The ratio of CT/VT is (2000A/1A)/ (4000kV/110V) =0.55. The secondary line impedance used for relay
setting will be:
Z1 = 0.55 × [75% × 29.68∠85Ω] = 12.2412∠85Ω
Z2 = 0.55 × [100% × 29.68∠85Ω + 50% × 8.983∠85Ω] = 18.79∠85Ω
Z3 = 0.55 × [100% × 29.68∠85Ω + 100% × 8.983∠85Ω + 25% × 27.63∠85Ω] = 25.064∠85Ω
Table 6.12: Relay tripping times for 3Ø faults
Converter
sources
(%)
Fault
level
GVA
3Ø fault
current
kA
Fault location
0% 1% 5% 20% 40% 50% 70% 80% 90% 95% 100%
Relay operating times, ms
0% 33.8719 48.8899 15 15 15 15 15 15 15 515 515 515 515
15% 28.9561 41.7946 15 15 15 15 15 15 15 515 515 515 515
20% 27.3175 39.4294 15 15 15 15 15 15 15 515 515 515 515
50% 17.4860 25.2388 15 15 15 15 15 15 15 515 515 515 515
55% 15.8474 22.8738 15 15 15 15 15 15 15 515 515 515 515
60% 14.2088 20.5086 15 15 15 15 15 15 15 515 515 515 ∞
65% 12.5702 18.1435 15 15 15 15 15 15 15 515 515 ∞ ∞
70% 10.9316 15.7784 15 15 15 15 15 15 15 515 ∞ ∞ ∞
75% 9.2930 13.4133 ∞ 15 15 15 15 15 15 ∞ ∞ ∞ ∞
80% 7.6544 11.0481 ∞ 15 15 15 15 15 ∞ ∞ ∞ ∞ ∞
85% 6.0158 8.6830 ∞ 15 15 15 15 ∞ ∞ ∞ ∞ ∞ ∞
90% 4.3772 6.3179 ∞ 15 15 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
95% 2.7386 3.9528 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
100% 1.1000 1.5877 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
Analysis of the results presented in Table 6.12 leads to the following observations.
When the source delivers 33.87GVA, the distance relay provides correct operation for 3Ø faults on
the protected line. However, the zone 2 failed to clear faults above 95% of the protected line when
60% of converter source was used. The zone 1 element of distance relay failed to clear faults
above 70% of the line when the converter source was increased to 89% and failed to cover 50% of
the protected line when the converter source was increased to 85%. Note the non-operation for
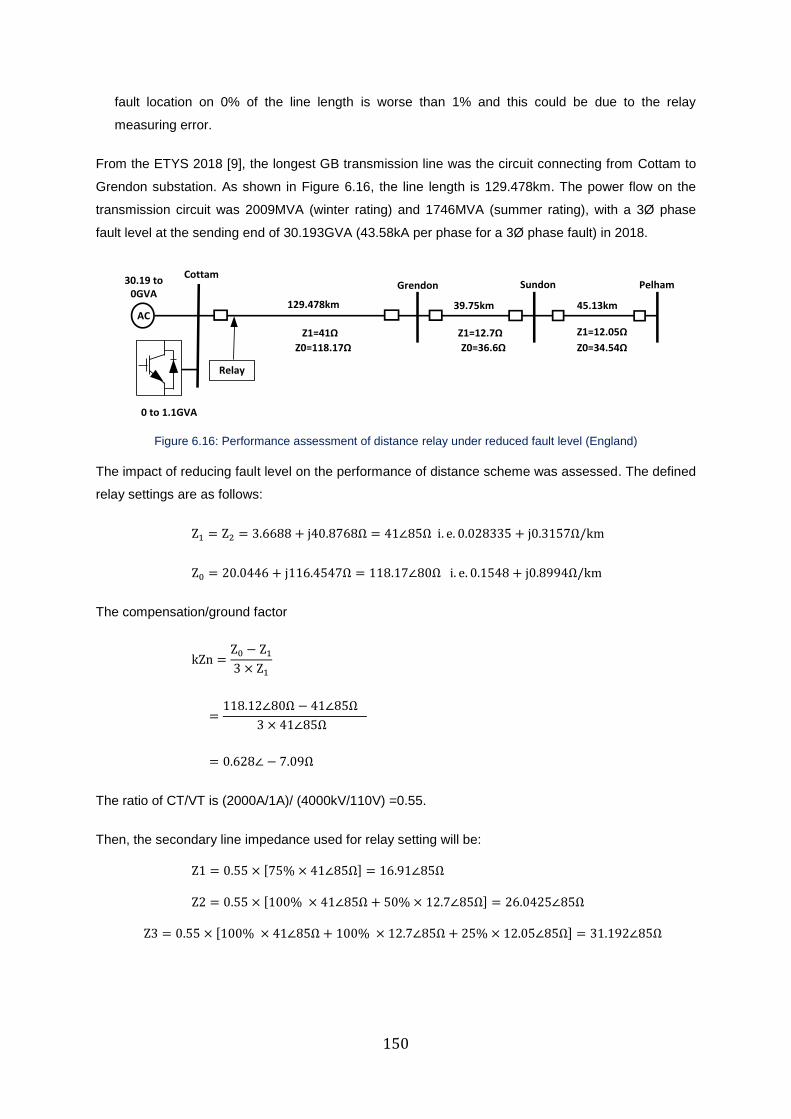
150
fault location on 0% of the line length is worse than 1% and this could be due to the relay
measuring error.
From the ETYS 2018 [9], the longest GB transmission line was the circuit connecting from Cottam to
Grendon substation. As shown in Figure 6.16, the line length is 129.478km. The power flow on the
transmission circuit was 2009MVA (winter rating) and 1746MVA (summer rating), with a 3Ø phase
fault level at the sending end of 30.193GVA (43.58kA per phase for a 3Ø phase fault) in 2018.
0 to 1.1GVA
30.19 to 0GVA
AC
CottamGrendon
129.478km
Relay
Sundon Pelham
39.75km 45.13km
Z1=12.05Ω Z1=12.7Ω Z1=41Ω
Z0=118.17Ω Z0=36.6Ω Z0=34.54Ω
Figure 6.16: Performance assessment of distance relay under reduced fault level (England)
The impact of reducing fault level on the performance of distance scheme was assessed. The defined
relay settings are as follows:
Z1 = Z2 = 3.6688 + j40.8768Ω = 41∠85Ω i. e. 0.028335 + j0.3157Ω/km
Z0 = 20.0446 + j116.4547Ω = 118.17∠80Ω i. e. 0.1548 + j0.8994Ω/km
The compensation/ground factor
kZn =Z0 − Z1
3 × Z1
=118.12∠80Ω − 41∠85Ω
3 × 41∠85Ω
= 0.628∠ − 7.09Ω
The ratio of CT/VT is (2000A/1A)/ (4000kV/110V) =0.55.
Then, the secondary line impedance used for relay setting will be:
Z1 = 0.55 × [75% × 41∠85Ω] = 16.91∠85Ω
Z2 = 0.55 × [100% × 41∠85Ω + 50% × 12.7∠85Ω] = 26.0425∠85Ω
Z3 = 0.55 × [100% × 41∠85Ω + 100% × 12.7∠85Ω + 25% × 12.05∠85Ω] = 31.192∠85Ω
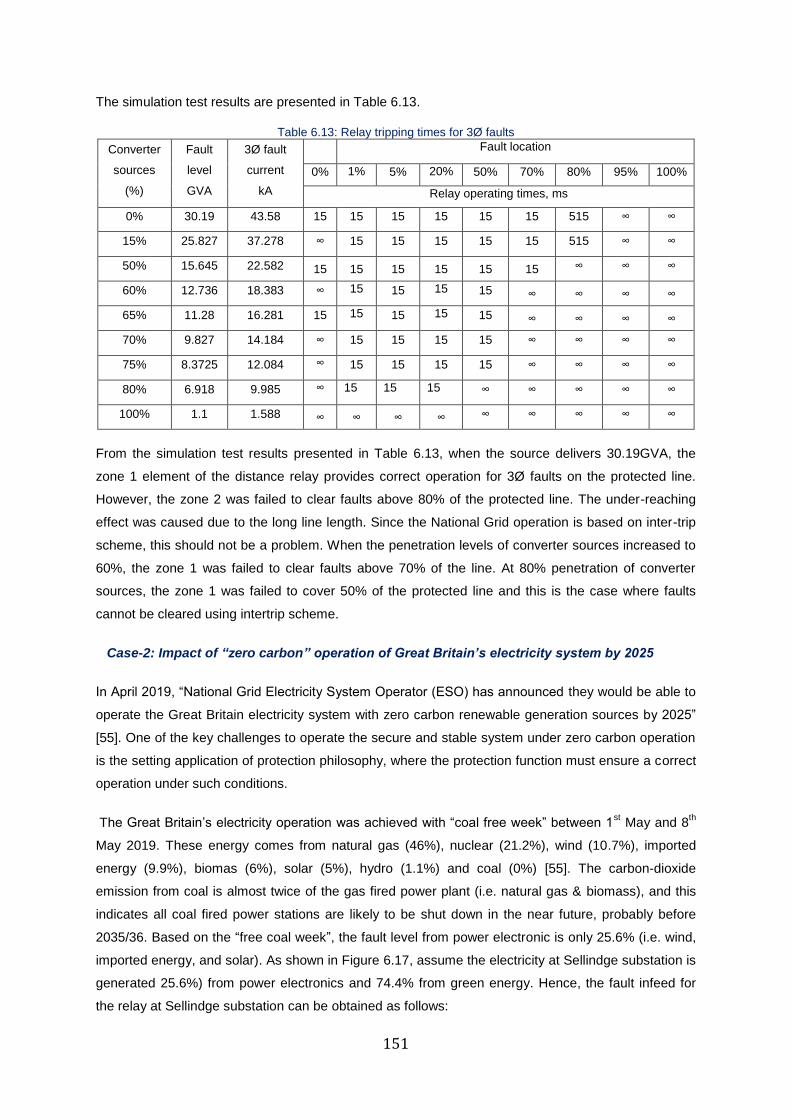
151
The simulation test results are presented in Table 6.13.
Table 6.13: Relay tripping times for 3Ø faults
Converter
sources
(%)
Fault
level
GVA
3Ø fault
current
kA
Fault location
0% 1% 5% 20% 50% 70% 80% 95% 100%
Relay operating times, ms
0% 30.19 43.58 15 15 15 15 15 15 515 ∞ ∞
15% 25.827 37.278 ∞ 15 15 15 15 15 515 ∞ ∞
50% 15.645 22.582 15 15 15 15 15 15 ∞ ∞ ∞
60% 12.736 18.383 ∞ 15 15 15 15 ∞ ∞ ∞ ∞
65% 11.28 16.281 15 15 15 15 15 ∞ ∞ ∞ ∞
70% 9.827 14.184 ∞ 15 15 15 15 ∞ ∞ ∞ ∞
75% 8.3725 12.084 ∞ 15 15 15 15 ∞ ∞ ∞ ∞
80% 6.918 9.985 ∞ 15 15 15 ∞ ∞ ∞ ∞ ∞
100% 1.1 1.588 ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
From the simulation test results presented in Table 6.13, when the source delivers 30.19GVA, the
zone 1 element of the distance relay provides correct operation for 3Ø faults on the protected line.
However, the zone 2 was failed to clear faults above 80% of the protected line. The under-reaching
effect was caused due to the long line length. Since the National Grid operation is based on inter-trip
scheme, this should not be a problem. When the penetration levels of converter sources increased to
60%, the zone 1 was failed to clear faults above 70% of the line. At 80% penetration of converter
sources, the zone 1 was failed to cover 50% of the protected line and this is the case where faults
cannot be cleared using intertrip scheme.
Case-2: Impact of “zero carbon” operation of Great Britain’s electricity system by 2025
In April 2019, “National Grid Electricity System Operator (ESO) has announced they would be able to
operate the Great Britain electricity system with zero carbon renewable generation sources by 2025”
[55]. One of the key challenges to operate the secure and stable system under zero carbon operation
is the setting application of protection philosophy, where the protection function must ensure a correct
operation under such conditions.
The Great Britain’s electricity operation was achieved with “coal free week” between 1st May and 8
th
May 2019. These energy comes from natural gas (46%), nuclear (21.2%), wind (10.7%), imported
energy (9.9%), biomas (6%), solar (5%), hydro (1.1%) and coal (0%) [55]. The carbon-dioxide
emission from coal is almost twice of the gas fired power plant (i.e. natural gas & biomass), and this
indicates all coal fired power stations are likely to be shut down in the near future, probably before
2035/36. Based on the “free coal week”, the fault level from power electronic is only 25.6% (i.e. wind,
imported energy, and solar). As shown in Figure 6.17, assume the electricity at Sellindge substation is
generated 25.6%) from power electronics and 74.4% from green energy. Hence, the fault infeed for
the relay at Sellindge substation can be obtained as follows:
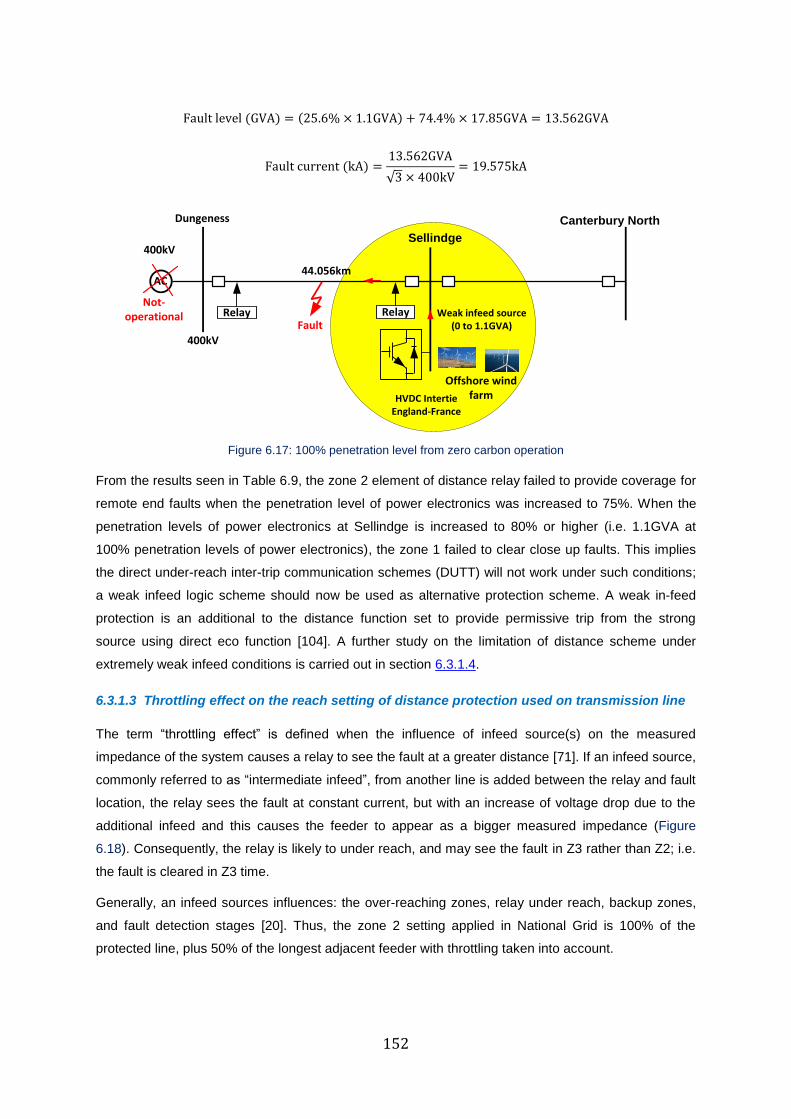
152
Fault level (GVA) = (25.6% × 1.1GVA) + 74.4% × 17.85GVA = 13.562GVA
Fault current (kA) =13.562GVA
√3 × 400kV= 19.575kA
400kV
AC
Dungeness
Sellindge
Fault
44.056km
Relay
Canterbury North
HVDC IntertieEngland-France
RelayNot-
operational Weak infeed source (0 to 1.1GVA)
Offshore wind farm
400kV
Figure 6.17: 100% penetration level from zero carbon operation
From the results seen in Table 6.9, the zone 2 element of distance relay failed to provide coverage for
remote end faults when the penetration level of power electronics was increased to 75%. When the
penetration levels of power electronics at Sellindge is increased to 80% or higher (i.e. 1.1GVA at
100% penetration levels of power electronics), the zone 1 failed to clear close up faults. This implies
the direct under-reach inter-trip communication schemes (DUTT) will not work under such conditions;
a weak infeed logic scheme should now be used as alternative protection scheme. A weak in-feed
protection is an additional to the distance function set to provide permissive trip from the strong
source using direct eco function [104]. A further study on the limitation of distance scheme under
extremely weak infeed conditions is carried out in section 6.3.1.4.
6.3.1.3 Throttling effect on the reach setting of distance protection used on transmission line
The term “throttling effect” is defined when the influence of infeed source(s) on the measured
impedance of the system causes a relay to see the fault at a greater distance [71]. If an infeed source,
commonly referred to as “intermediate infeed”, from another line is added between the relay and fault
location, the relay sees the fault at constant current, but with an increase of voltage drop due to the
additional infeed and this causes the feeder to appear as a bigger measured impedance (Figure
6.18). Consequently, the relay is likely to under reach, and may see the fault in Z3 rather than Z2; i.e.
the fault is cleared in Z3 time.
Generally, an infeed sources influences: the over-reaching zones, relay under reach, backup zones,
and fault detection stages [20]. Thus, the zone 2 setting applied in National Grid is 100% of the
protected line, plus 50% of the longest adjacent feeder with throttling taken into account.
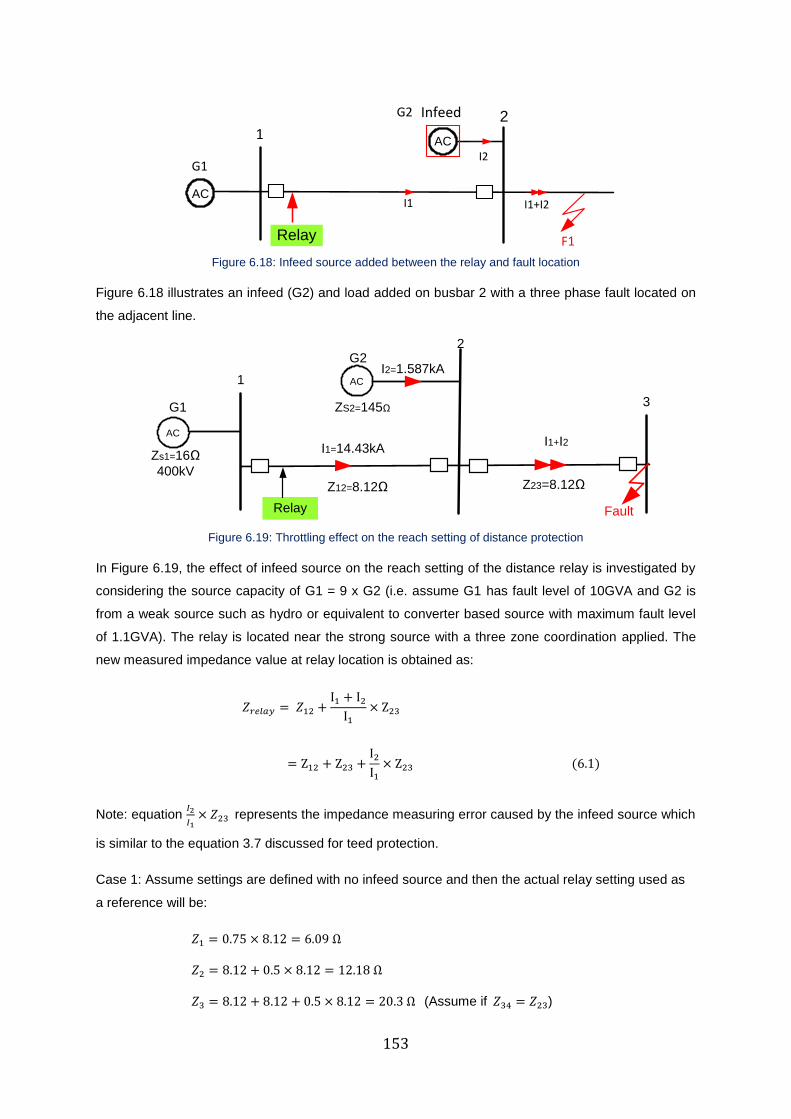
153
G1
AC
2
1AC
F1
G2 Infeed
I1
I2
I1+I2
Relay
Figure 6.18: Infeed source added between the relay and fault location
Figure 6.18 illustrates an infeed (G2) and load added on busbar 2 with a three phase fault located on
the adjacent line.
2
Zs1=16Ω
400kV
Fault
I2=1.587kA
ZS2=145Ω
1
3
Z12=8.12Ω
Relay
AC
I1+I2
G2
I1=14.43kA
Z23=8.12Ω
AC
G1
Figure 6.19: Throttling effect on the reach setting of distance protection
In Figure 6.19, the effect of infeed source on the reach setting of the distance relay is investigated by
considering the source capacity of G1 = 9 x G2 (i.e. assume G1 has fault level of 10GVA and G2 is
from a weak source such as hydro or equivalent to converter based source with maximum fault level
of 1.1GVA). The relay is located near the strong source with a three zone coordination applied. The
new measured impedance value at relay location is obtained as:
𝑍𝑟𝑒𝑙𝑎𝑦 = 𝑍12 +I1 + I2
I1
× Z23
= Z12 + Z23 +I2
I1
× Z23 (6.1)
Note: equation 𝐼2
𝐼1× 𝑍23 represents the impedance measuring error caused by the infeed source which
is similar to the equation 3.7 discussed for teed protection.
Case 1: Assume settings are defined with no infeed source and then the actual relay setting used as
a reference will be:
𝑍1 = 0.75 × 8.12 = 6.09 Ω
𝑍2 = 8.12 + 0.5 × 8.12 = 12.18 Ω
𝑍3 = 8.12 + 8.12 + 0.5 × 8.12 = 20.3 Ω (Assume if 𝑍34 = 𝑍23)

154
𝑍3 = 8.12 + 8.12 + 0.5 × 0.812 = 16.646Ω (Assume if Z34 = 20% of Z23)
Case 2: After weak infeed source added, the measured impedance seen by the relay would be
𝑍1 = 0.75 × 8.12 = 6.09 Ω
𝑍2 = 8.12 + 0.5 × (8.12 +1.587
14.43× 8.12) = 12.63 Ω
𝑍3 = 8.12 + 1.5 × (8.12 +1.587
14.43× 8.12) = 21.64 Ω (i. e. if 𝑍34 = 𝑍23)
𝑍3 = 8.12 + 8.12 + 0.5 × (14.43 + 1.587
14.43× 0.812) = 16.69Ω (i. e. if 𝑍34 = 0.1Z23)
The % increase of measured impedance seen by the relay is
𝑍1 =6.09 − 6.09
6.09× 100 = 0%
𝑍2 =12.63 − 12.18
12.18× 100 = 3.69%
𝑍3 =21.64 − 20.3
20.3× 100 = 6.6% (i. e. if 𝑍34 = 𝑍23)
𝑍3 =16.69 − 16.646
16.646× 100 = 0.26% (i. e. if Z34 = 0.1Z23)
It can be seen that during external fault adding a weak infeed has no effect on zone 1 reach setting.
However, the Z2 and Z3 measured impedance seen by the relay has increased. For example, Z2 has
increased by 3.69% whereas the Z3 has increased by 6.6% (i. e. if 𝑍34 = 0.1Z23) or by 0.26%
(i. e. if 𝑍34 = 0.1Z23). Normally, the reach setting of relay with no infeed is 100% of the protected line,
plus 50% of the adjacent line. However, when the infeed source was added, the new measured
impedance of zone 2 setting sees 100% of the protected line, plus 53.69% of the adjacent line. Since
the relay settings are defined with no infeed source; for faults on 50% to 53.69% of the adjacent line,
the relay would see in zone 3 times rather than zone 2 times. These errors can be resolved by
altering the reach of zone setting.
The above finding implies, if the fault level from the infeed source is stronger than the main source;
the measured impedance seen by the relay will increase significantly which may resulted in under-
reach problem or loss of discrimination. The errors in this case cannot be resolved by altering the
zone reach setting and the operating reach of distance protection will be indeterminate. Further
studies related to the effects of “intermediate infeed “ or “throttling” on the relay reach setting when
the main sources are varying from weak to strong or vice versa is presented in [71].
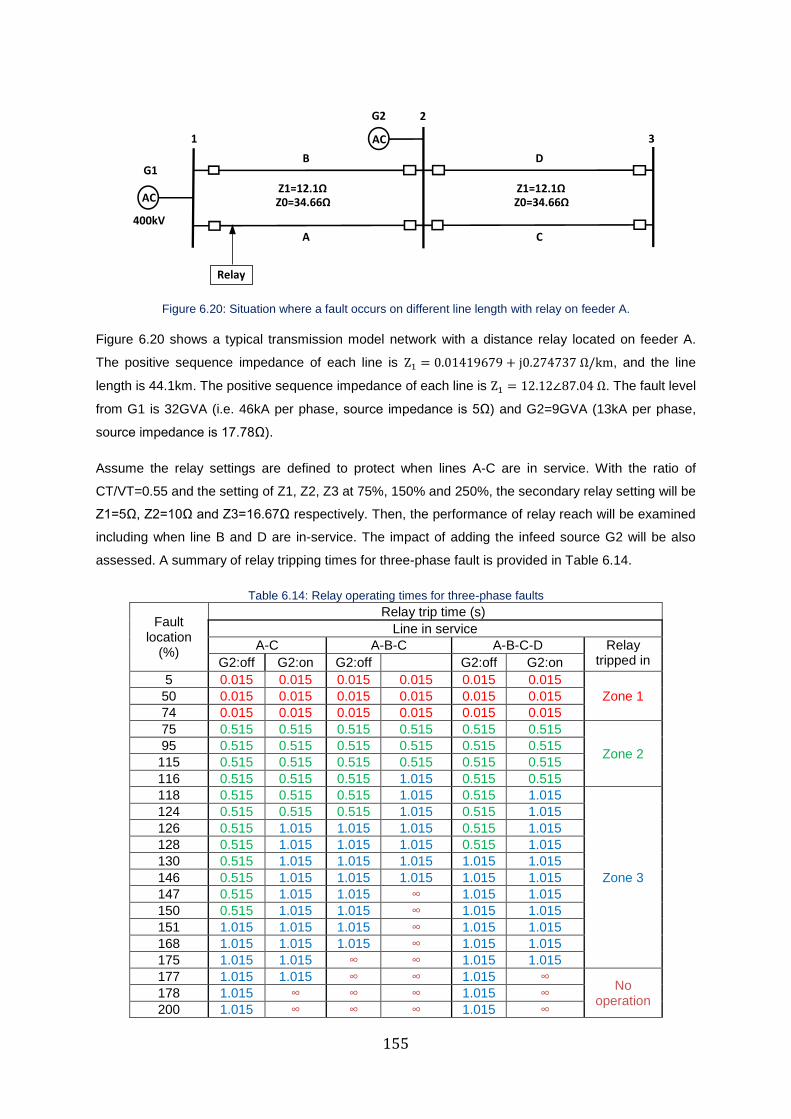
155
G1
AC
Relay
400kV
A
D
Z1=12.1Ω Z0=34.66Ω
AC
G2
1
Z1=12.1Ω Z0=34.66Ω
C
B
2
3
Figure 6.20: Situation where a fault occurs on different line length with relay on feeder A.
Figure 6.20 shows a typical transmission model network with a distance relay located on feeder A.
The positive sequence impedance of each line is Z1 = 0.01419679 + j0.274737 Ω/km, and the line
length is 44.1km. The positive sequence impedance of each line is Z1 = 12.12∠87.04 Ω. The fault level
from G1 is 32GVA (i.e. 46kA per phase, source impedance is 5Ω) and G2=9GVA (13kA per phase,
source impedance is 17.78Ω).
Assume the relay settings are defined to protect when lines A-C are in service. With the ratio of
CT/VT=0.55 and the setting of Z1, Z2, Z3 at 75%, 150% and 250%, the secondary relay setting will be
Z1=5Ω, Z2=10Ω and Z3=16.67Ω respectively. Then, the performance of relay reach will be examined
including when line B and D are in-service. The impact of adding the infeed source G2 will be also
assessed. A summary of relay tripping times for three-phase fault is provided in Table 6.14.
Table 6.14: Relay operating times for three-phase faults
Fault location
(%)
Relay trip time (s)
Line in service
A-C A-B-C A-B-C-D Relay tripped in G2:off G2:on G2:off G2:off G2:on
5 0.015 0.015 0.015 0.015 0.015 0.015
Zone 1 50 0.015 0.015 0.015 0.015 0.015 0.015
74 0.015 0.015 0.015 0.015 0.015 0.015
75 0.515 0.515 0.515 0.515 0.515 0.515
Zone 2 95 0.515 0.515 0.515 0.515 0.515 0.515
115 0.515 0.515 0.515 0.515 0.515 0.515
116 0.515 0.515 0.515 1.015 0.515 0.515
118 0.515 0.515 0.515 1.015 0.515 1.015
Zone 3
124 0.515 0.515 0.515 1.015 0.515 1.015
126 0.515 1.015 1.015 1.015 0.515 1.015
128 0.515 1.015 1.015 1.015 0.515 1.015
130 0.515 1.015 1.015 1.015 1.015 1.015
146 0.515 1.015 1.015 1.015 1.015 1.015
147 0.515 1.015 1.015 ∞ 1.015 1.015
150 0.515 1.015 1.015 ∞ 1.015 1.015
151 1.015 1.015 1.015 ∞ 1.015 1.015
168 1.015 1.015 1.015 ∞ 1.015 1.015
175 1.015 1.015 ∞ ∞ 1.015 1.015
177 1.015 1.015 ∞ ∞ 1.015 ∞ No
operation 178 1.015 ∞ ∞ ∞ 1.015 ∞
200 1.015 ∞ ∞ ∞ 1.015 ∞
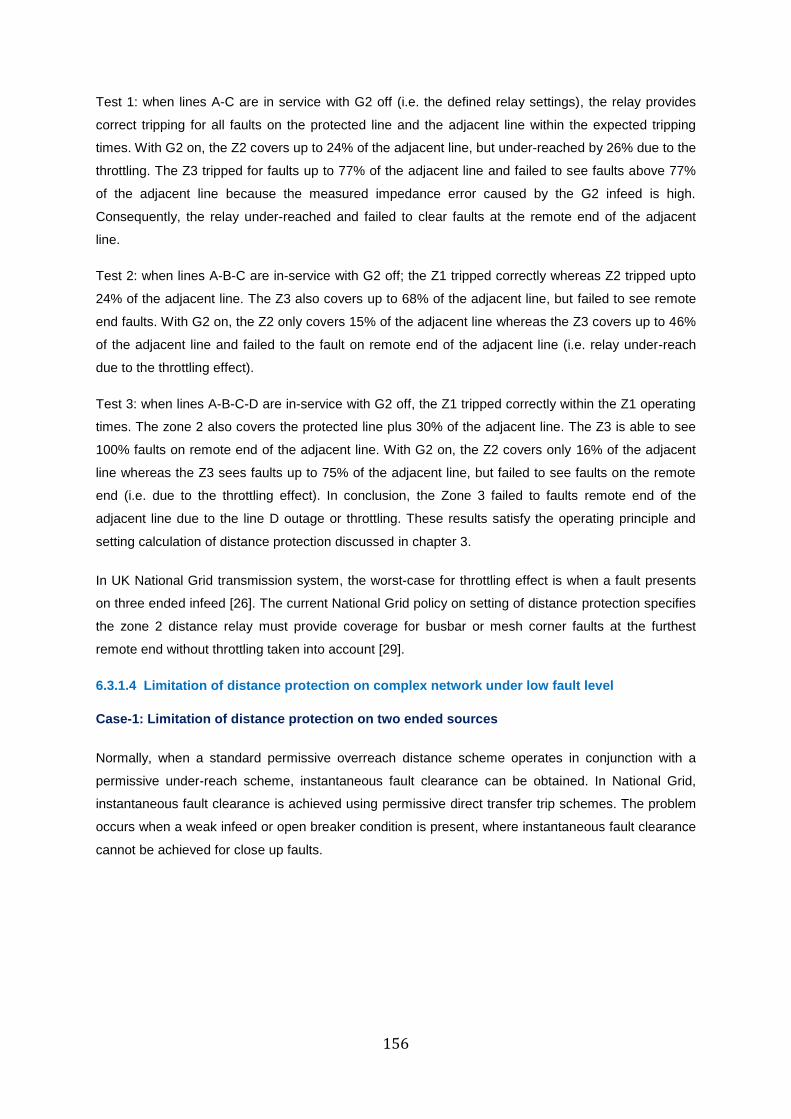
156
Test 1: when lines A-C are in service with G2 off (i.e. the defined relay settings), the relay provides
correct tripping for all faults on the protected line and the adjacent line within the expected tripping
times. With G2 on, the Z2 covers up to 24% of the adjacent line, but under-reached by 26% due to the
throttling. The Z3 tripped for faults up to 77% of the adjacent line and failed to see faults above 77%
of the adjacent line because the measured impedance error caused by the G2 infeed is high.
Consequently, the relay under-reached and failed to clear faults at the remote end of the adjacent
line.
Test 2: when lines A-B-C are in-service with G2 off; the Z1 tripped correctly whereas Z2 tripped upto
24% of the adjacent line. The Z3 also covers up to 68% of the adjacent line, but failed to see remote
end faults. With G2 on, the Z2 only covers 15% of the adjacent line whereas the Z3 covers up to 46%
of the adjacent line and failed to the fault on remote end of the adjacent line (i.e. relay under-reach
due to the throttling effect).
Test 3: when lines A-B-C-D are in-service with G2 off, the Z1 tripped correctly within the Z1 operating
times. The zone 2 also covers the protected line plus 30% of the adjacent line. The Z3 is able to see
100% faults on remote end of the adjacent line. With G2 on, the Z2 covers only 16% of the adjacent
line whereas the Z3 sees faults up to 75% of the adjacent line, but failed to see faults on the remote
end (i.e. due to the throttling effect). In conclusion, the Zone 3 failed to faults remote end of the
adjacent line due to the line D outage or throttling. These results satisfy the operating principle and
setting calculation of distance protection discussed in chapter 3.
In UK National Grid transmission system, the worst-case for throttling effect is when a fault presents
on three ended infeed [26]. The current National Grid policy on setting of distance protection specifies
the zone 2 distance relay must provide coverage for busbar or mesh corner faults at the furthest
remote end without throttling taken into account [29].
6.3.1.4 Limitation of distance protection on complex network under low fault level
Case-1: Limitation of distance protection on two ended sources
Normally, when a standard permissive overreach distance scheme operates in conjunction with a
permissive under-reach scheme, instantaneous fault clearance can be obtained. In National Grid,
instantaneous fault clearance is achieved using permissive direct transfer trip schemes. The problem
occurs when a weak infeed or open breaker condition is present, where instantaneous fault clearance
cannot be achieved for close up faults.
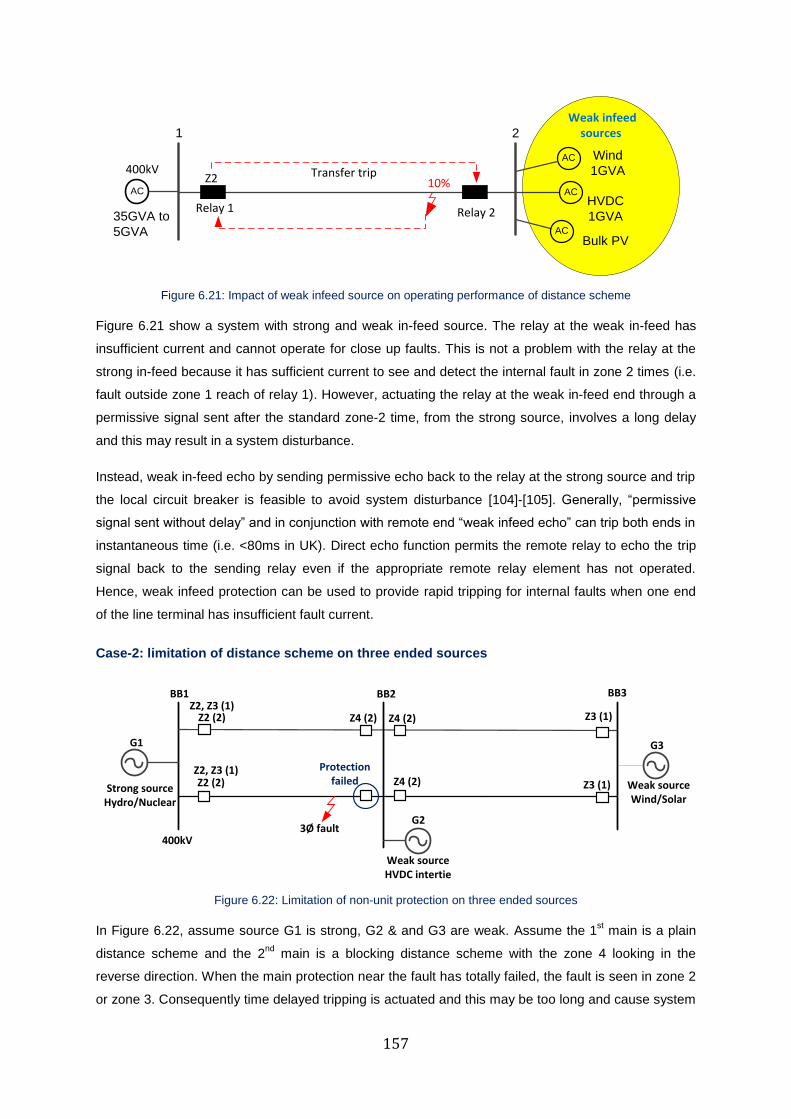
157
AC
10%
1 2
400kV
AC
35GVA to
5GVA
Relay 1
AC
ACBulk PV
HVDC
1GVA
Wind
1GVA
Relay 2
Transfer tripZ2
Weak infeed sources
Figure 6.21: Impact of weak infeed source on operating performance of distance scheme
Figure 6.21 show a system with strong and weak in-feed source. The relay at the weak in-feed has
insufficient current and cannot operate for close up faults. This is not a problem with the relay at the
strong in-feed because it has sufficient current to see and detect the internal fault in zone 2 times (i.e.
fault outside zone 1 reach of relay 1). However, actuating the relay at the weak in-feed end through a
permissive signal sent after the standard zone-2 time, from the strong source, involves a long delay
and this may result in a system disturbance.
Instead, weak in-feed echo by sending permissive echo back to the relay at the strong source and trip
the local circuit breaker is feasible to avoid system disturbance [104]-[105]. Generally, “permissive
signal sent without delay” and in conjunction with remote end “weak infeed echo” can trip both ends in
instantaneous time (i.e. <80ms in UK). Direct echo function permits the remote relay to echo the trip
signal back to the sending relay even if the appropriate remote relay element has not operated.
Hence, weak infeed protection can be used to provide rapid tripping for internal faults when one end
of the line terminal has insufficient fault current.
Case-2: limitation of distance scheme on three ended sources
Strong source Hydro/Nuclear
G1
Weak source HVDC intertie
BB2
Weak source Wind/Solar
G3
BB1 BB3
G2
400kV3Ø fault
Protection failed
Z2, Z3 (1)
Z2, Z3 (1)Z4 (2)Z2 (2)
Z2 (2) Z4 (2)
Z4 (2) Z3 (1)
Z3 (1)
Figure 6.22: Limitation of non-unit protection on three ended sources
In Figure 6.22, assume source G1 is strong, G2 & and G3 are weak. Assume the 1st main is a plain
distance scheme and the 2nd
main is a blocking distance scheme with the zone 4 looking in the
reverse direction. When the main protection near the fault has totally failed, the fault is seen in zone 2
or zone 3. Consequently time delayed tripping is actuated and this may be too long and cause system
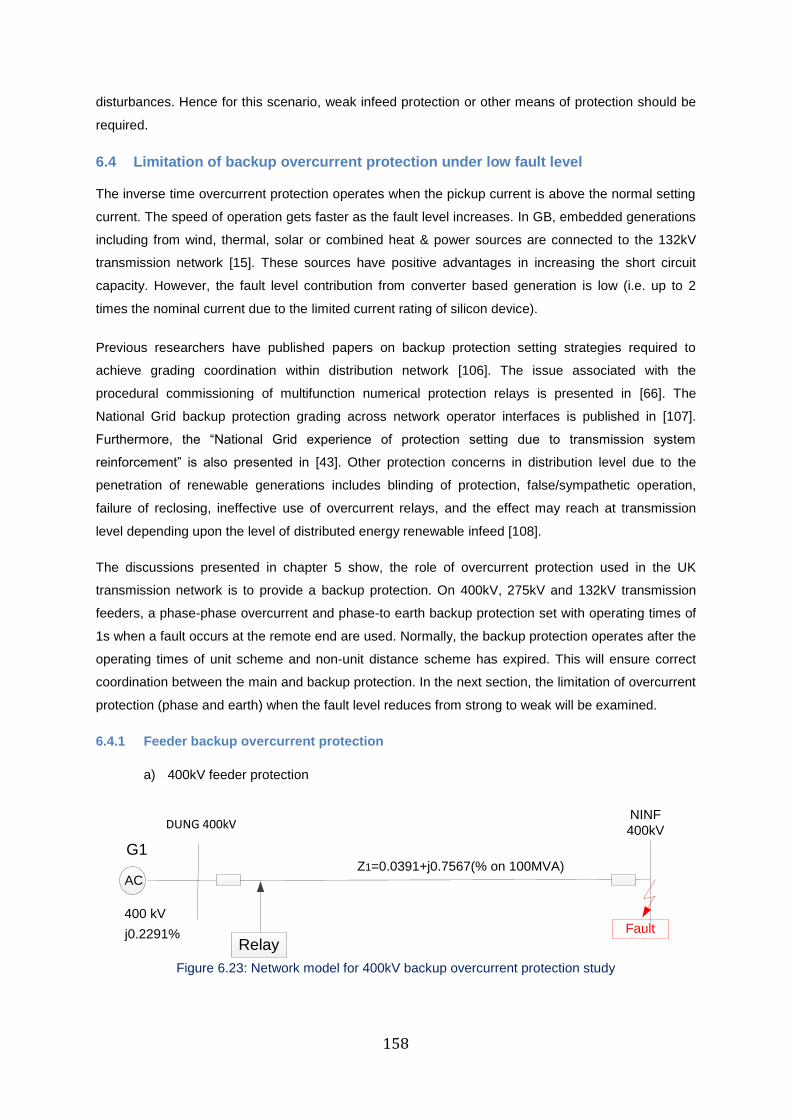
158
disturbances. Hence for this scenario, weak infeed protection or other means of protection should be
required.
6.4 Limitation of backup overcurrent protection under low fault level
The inverse time overcurrent protection operates when the pickup current is above the normal setting
current. The speed of operation gets faster as the fault level increases. In GB, embedded generations
including from wind, thermal, solar or combined heat & power sources are connected to the 132kV
transmission network [15]. These sources have positive advantages in increasing the short circuit
capacity. However, the fault level contribution from converter based generation is low (i.e. up to 2
times the nominal current due to the limited current rating of silicon device).
Previous researchers have published papers on backup protection setting strategies required to
achieve grading coordination within distribution network [106]. The issue associated with the
procedural commissioning of multifunction numerical protection relays is presented in [66]. The
National Grid backup protection grading across network operator interfaces is published in [107].
Furthermore, the “National Grid experience of protection setting due to transmission system
reinforcement” is also presented in [43]. Other protection concerns in distribution level due to the
penetration of renewable generations includes blinding of protection, false/sympathetic operation,
failure of reclosing, ineffective use of overcurrent relays, and the effect may reach at transmission
level depending upon the level of distributed energy renewable infeed [108].
The discussions presented in chapter 5 show, the role of overcurrent protection used in the UK
transmission network is to provide a backup protection. On 400kV, 275kV and 132kV transmission
feeders, a phase-phase overcurrent and phase-to earth backup protection set with operating times of
1s when a fault occurs at the remote end are used. Normally, the backup protection operates after the
operating times of unit scheme and non-unit distance scheme has expired. This will ensure correct
coordination between the main and backup protection. In the next section, the limitation of overcurrent
protection (phase and earth) when the fault level reduces from strong to weak will be examined.
6.4.1 Feeder backup overcurrent protection
a) 400kV feeder protection
G1
AC
DUNG 400kVNINF
400kV
Fault
Z1=0.0391+j0.7567(% on 100MVA)
Relay
400 kV
j0.2291%
Figure 6.23: Network model for 400kV backup overcurrent protection study
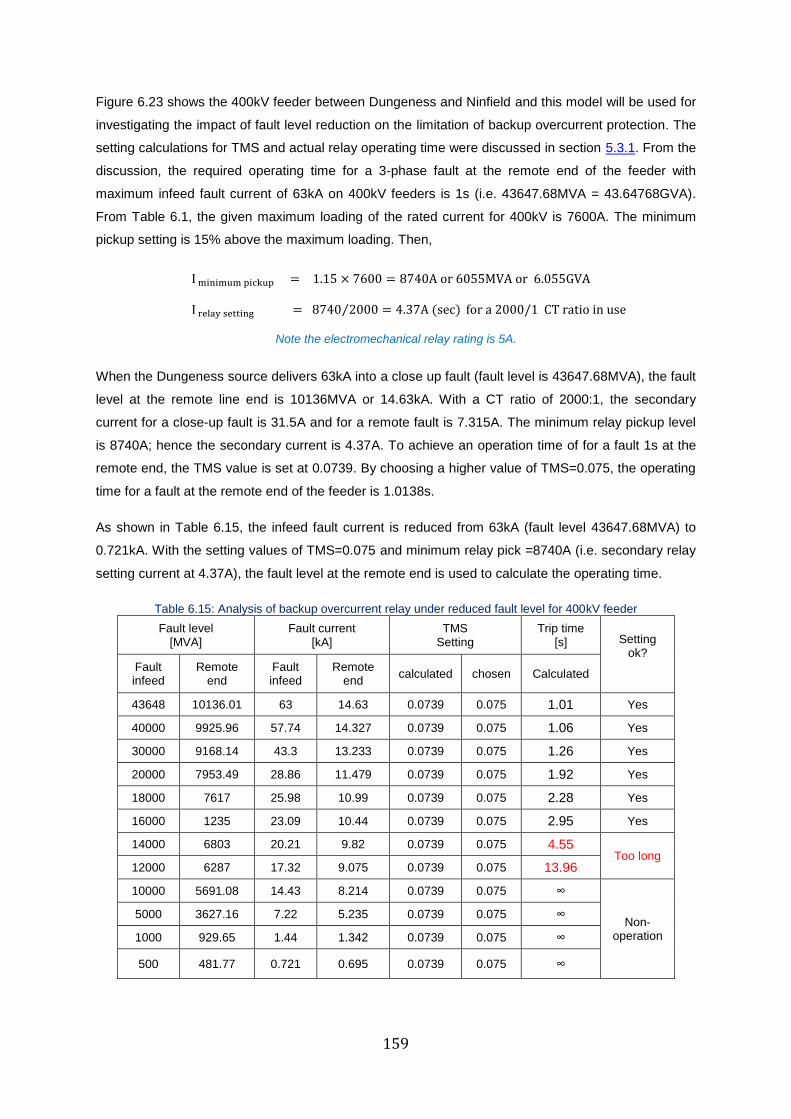
159
Figure 6.23 shows the 400kV feeder between Dungeness and Ninfield and this model will be used for
investigating the impact of fault level reduction on the limitation of backup overcurrent protection. The
setting calculations for TMS and actual relay operating time were discussed in section 5.3.1. From the
discussion, the required operating time for a 3-phase fault at the remote end of the feeder with
maximum infeed fault current of 63kA on 400kV feeders is 1s (i.e. 43647.68MVA = 43.64768GVA).
From Table 6.1, the given maximum loading of the rated current for 400kV is 7600A. The minimum
pickup setting is 15% above the maximum loading. Then,
I minimum pickup = 1.15 × 7600 = 8740A or 6055MVA or 6.055GVA
I relay setting = 8740 2000 = 4.37A (sec)⁄ for a 2000/1 CT ratio in use
Note the electromechanical relay rating is 5A.
When the Dungeness source delivers 63kA into a close up fault (fault level is 43647.68MVA), the fault
level at the remote line end is 10136MVA or 14.63kA. With a CT ratio of 2000:1, the secondary
current for a close-up fault is 31.5A and for a remote fault is 7.315A. The minimum relay pickup level
is 8740A; hence the secondary current is 4.37A. To achieve an operation time of for a fault 1s at the
remote end, the TMS value is set at 0.0739. By choosing a higher value of TMS=0.075, the operating
time for a fault at the remote end of the feeder is 1.0138s.
As shown in Table 6.15, the infeed fault current is reduced from 63kA (fault level 43647.68MVA) to
0.721kA. With the setting values of TMS=0.075 and minimum relay pick =8740A (i.e. secondary relay
setting current at 4.37A), the fault level at the remote end is used to calculate the operating time.
Table 6.15: Analysis of backup overcurrent relay under reduced fault level for 400kV feeder
Fault level [MVA]
Fault current [kA]
TMS Setting
Trip time [s] Setting
ok? Fault
infeed Remote
end Fault infeed
Remote end
calculated chosen Calculated
43648 10136.01 63 14.63 0.0739 0.075 1.01 Yes
40000 9925.96 57.74 14.327 0.0739 0.075 1.06 Yes
30000 9168.14 43.3 13.233 0.0739 0.075 1.26 Yes
20000 7953.49 28.86 11.479 0.0739 0.075 1.92 Yes
18000 7617 25.98 10.99 0.0739 0.075 2.28 Yes
16000 1235 23.09 10.44 0.0739 0.075 2.95 Yes
14000 6803 20.21 9.82 0.0739 0.075 4.55 Too long
12000 6287 17.32 9.075 0.0739 0.075 13.96
10000 5691.08 14.43 8.214 0.0739 0.075 ∞
Non- operation
5000 3627.16 7.22 5.235 0.0739 0.075 ∞
1000 929.65 1.44 1.342 0.0739 0.075 ∞
500 481.77 0.721 0.695 0.0739 0.075 ∞
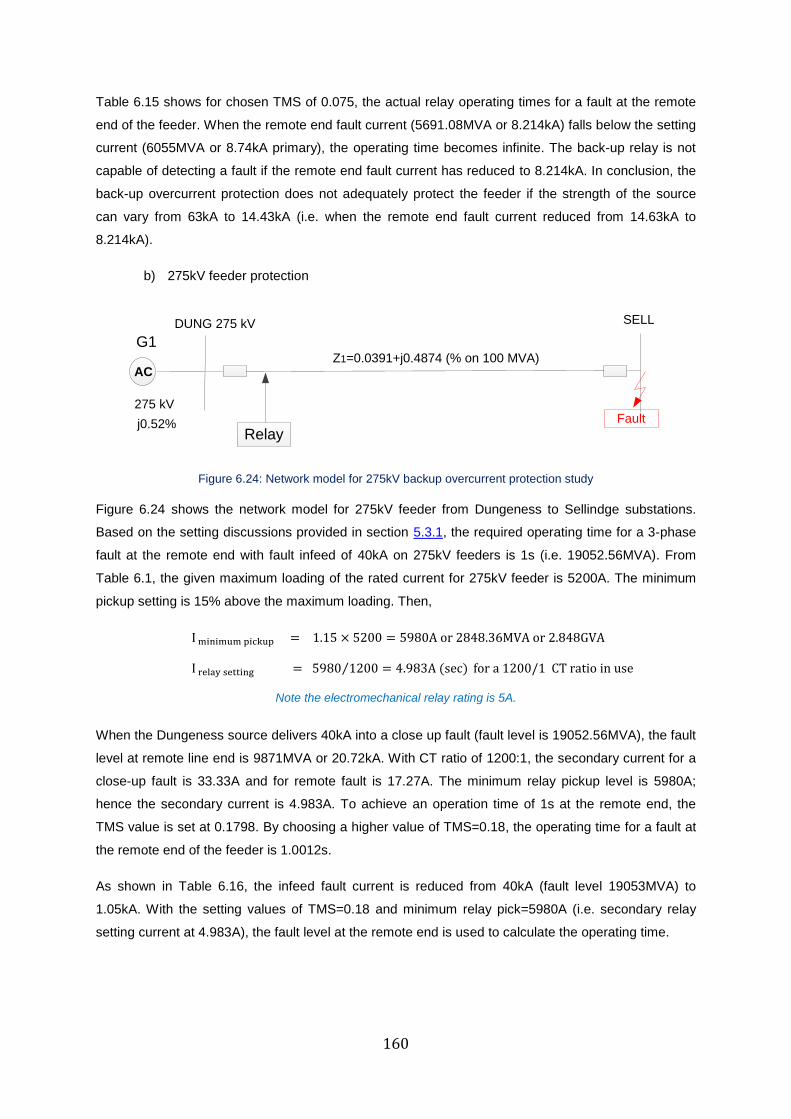
160
Table 6.15 shows for chosen TMS of 0.075, the actual relay operating times for a fault at the remote
end of the feeder. When the remote end fault current (5691.08MVA or 8.214kA) falls below the setting
current (6055MVA or 8.74kA primary), the operating time becomes infinite. The back-up relay is not
capable of detecting a fault if the remote end fault current has reduced to 8.214kA. In conclusion, the
back-up overcurrent protection does not adequately protect the feeder if the strength of the source
can vary from 63kA to 14.43kA (i.e. when the remote end fault current reduced from 14.63kA to
8.214kA).
b) 275kV feeder protection
G1
AC
DUNG 275 kV SELL
Fault
Z1=0.0391+j0.4874 (% on 100 MVA)
Relay
275 kV
j0.52%
Figure 6.24: Network model for 275kV backup overcurrent protection study
Figure 6.24 shows the network model for 275kV feeder from Dungeness to Sellindge substations.
Based on the setting discussions provided in section 5.3.1, the required operating time for a 3-phase
fault at the remote end with fault infeed of 40kA on 275kV feeders is 1s (i.e. 19052.56MVA). From
Table 6.1, the given maximum loading of the rated current for 275kV feeder is 5200A. The minimum
pickup setting is 15% above the maximum loading. Then,
I minimum pickup = 1.15 × 5200 = 5980A or 2848.36MVA or 2.848GVA
I relay setting = 5980 1200 = 4.983A (sec)⁄ for a 1200/1 CT ratio in use
Note the electromechanical relay rating is 5A.
When the Dungeness source delivers 40kA into a close up fault (fault level is 19052.56MVA), the fault
level at remote line end is 9871MVA or 20.72kA. With CT ratio of 1200:1, the secondary current for a
close-up fault is 33.33A and for remote fault is 17.27A. The minimum relay pickup level is 5980A;
hence the secondary current is 4.983A. To achieve an operation time of 1s at the remote end, the
TMS value is set at 0.1798. By choosing a higher value of TMS=0.18, the operating time for a fault at
the remote end of the feeder is 1.0012s.
As shown in Table 6.16, the infeed fault current is reduced from 40kA (fault level 19053MVA) to
1.05kA. With the setting values of TMS=0.18 and minimum relay pick=5980A (i.e. secondary relay
setting current at 4.983A), the fault level at the remote end is used to calculate the operating time.
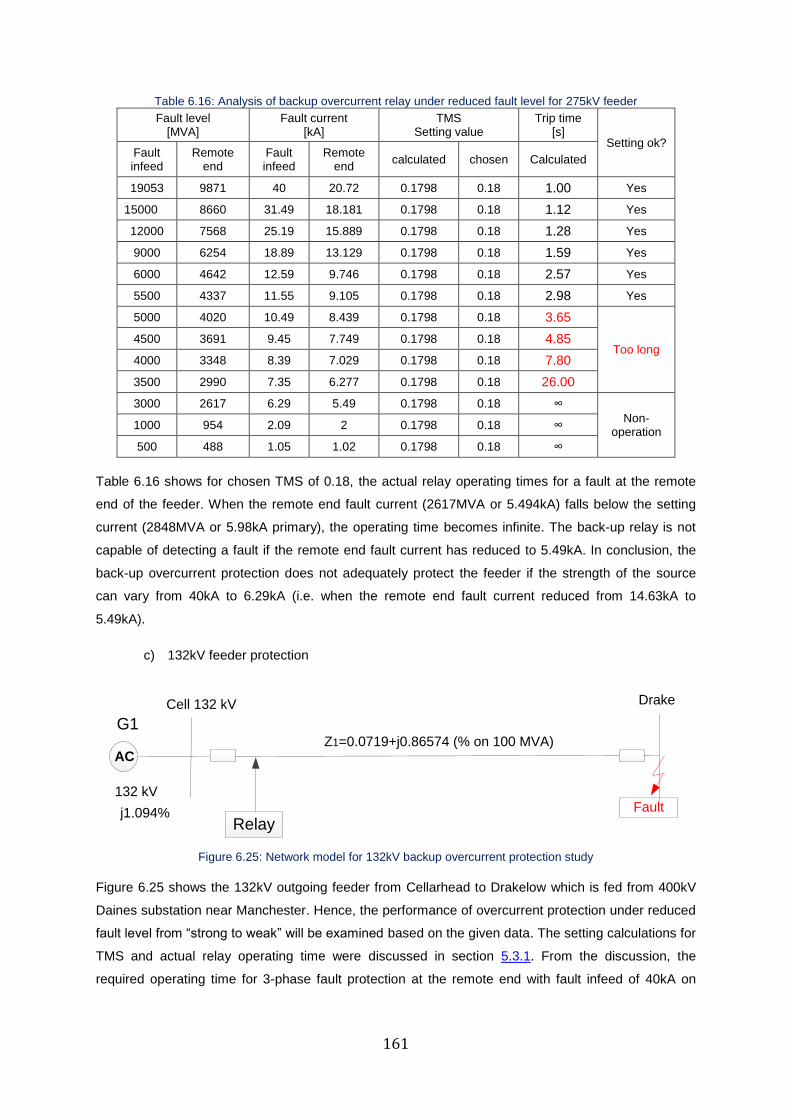
161
Table 6.16: Analysis of backup overcurrent relay under reduced fault level for 275kV feeder
Fault level [MVA]
Fault current [kA]
TMS Setting value
Trip time [s]
Setting ok? Fault infeed
Remote end
Fault infeed
Remote end
calculated chosen Calculated
19053 9871 40 20.72 0.1798 0.18 1.00 Yes
15000 8660 31.49 18.181 0.1798 0.18 1.12 Yes
12000 7568 25.19 15.889 0.1798 0.18 1.28 Yes
9000 6254 18.89 13.129 0.1798 0.18 1.59 Yes
6000 4642 12.59 9.746 0.1798 0.18 2.57 Yes
5500 4337 11.55 9.105 0.1798 0.18 2.98 Yes
5000 4020 10.49 8.439 0.1798 0.18 3.65
Too long 4500 3691 9.45 7.749 0.1798 0.18 4.85
4000 3348 8.39 7.029 0.1798 0.18 7.80
3500 2990 7.35 6.277 0.1798 0.18 26.00
3000 2617 6.29 5.49 0.1798 0.18 ∞ Non-
operation 1000 954 2.09 2 0.1798 0.18 ∞
500 488 1.05 1.02 0.1798 0.18 ∞
Table 6.16 shows for chosen TMS of 0.18, the actual relay operating times for a fault at the remote
end of the feeder. When the remote end fault current (2617MVA or 5.494kA) falls below the setting
current (2848MVA or 5.98kA primary), the operating time becomes infinite. The back-up relay is not
capable of detecting a fault if the remote end fault current has reduced to 5.49kA. In conclusion, the
back-up overcurrent protection does not adequately protect the feeder if the strength of the source
can vary from 40kA to 6.29kA (i.e. when the remote end fault current reduced from 14.63kA to
5.49kA).
c) 132kV feeder protection
G1
AC
Cell 132 kV Drake
Fault
Z1=0.0719+j0.86574 (% on 100 MVA)
Relay
132 kV
j1.094%
Figure 6.25: Network model for 132kV backup overcurrent protection study
Figure 6.25 shows the 132kV outgoing feeder from Cellarhead to Drakelow which is fed from 400kV
Daines substation near Manchester. Hence, the performance of overcurrent protection under reduced
fault level from “strong to weak” will be examined based on the given data. The setting calculations for
TMS and actual relay operating time were discussed in section 5.3.1. From the discussion, the
required operating time for 3-phase fault protection at the remote end with fault infeed of 40kA on
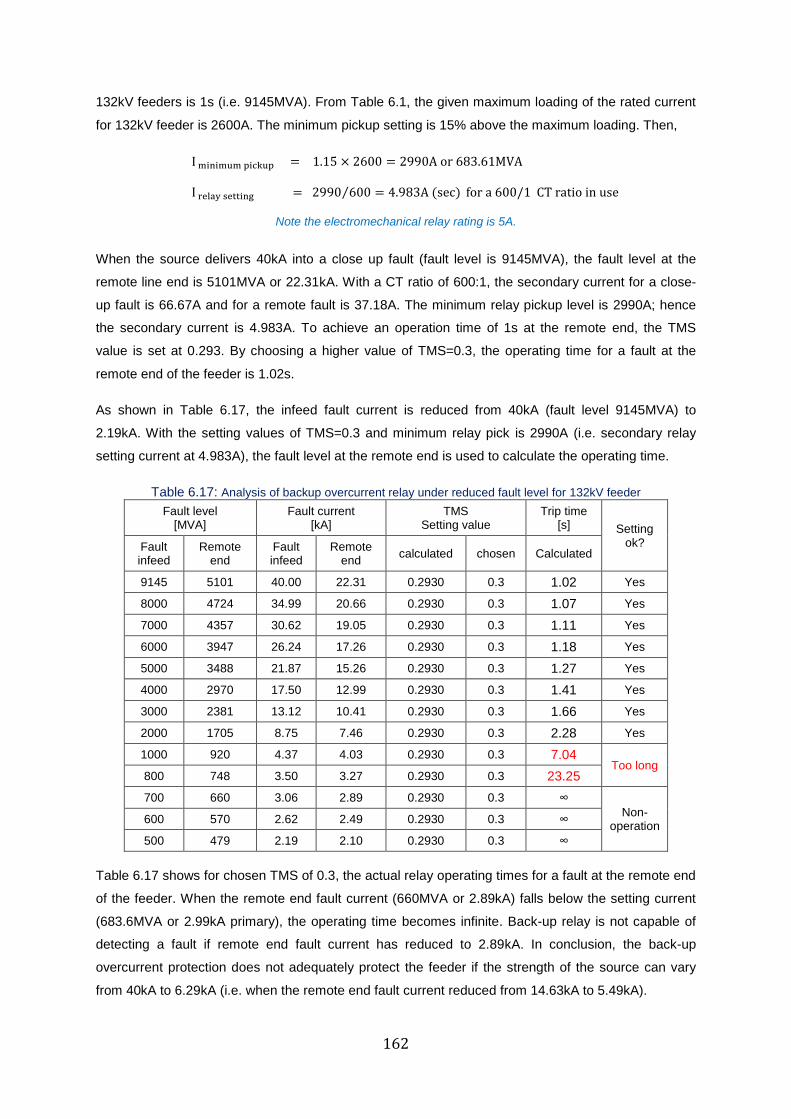
162
132kV feeders is 1s (i.e. 9145MVA). From Table 6.1, the given maximum loading of the rated current
for 132kV feeder is 2600A. The minimum pickup setting is 15% above the maximum loading. Then,
I minimum pickup = 1.15 × 2600 = 2990A or 683.61MVA
I relay setting = 2990 600 = 4.983A (sec)⁄ for a 600/1 CT ratio in use
Note the electromechanical relay rating is 5A.
When the source delivers 40kA into a close up fault (fault level is 9145MVA), the fault level at the
remote line end is 5101MVA or 22.31kA. With a CT ratio of 600:1, the secondary current for a close-
up fault is 66.67A and for a remote fault is 37.18A. The minimum relay pickup level is 2990A; hence
the secondary current is 4.983A. To achieve an operation time of 1s at the remote end, the TMS
value is set at 0.293. By choosing a higher value of TMS=0.3, the operating time for a fault at the
remote end of the feeder is 1.02s.
As shown in Table 6.17, the infeed fault current is reduced from 40kA (fault level 9145MVA) to
2.19kA. With the setting values of TMS=0.3 and minimum relay pick is 2990A (i.e. secondary relay
setting current at 4.983A), the fault level at the remote end is used to calculate the operating time.
Table 6.17: Analysis of backup overcurrent relay under reduced fault level for 132kV feeder
Fault level [MVA]
Fault current [kA]
TMS Setting value
Trip time [s] Setting
ok? Fault infeed
Remote end
Fault infeed
Remote end
calculated chosen Calculated
9145 5101 40.00 22.31 0.2930 0.3 1.02 Yes
8000 4724 34.99 20.66 0.2930 0.3 1.07 Yes
7000 4357 30.62 19.05 0.2930 0.3 1.11 Yes
6000 3947 26.24 17.26 0.2930 0.3 1.18 Yes
5000 3488 21.87 15.26 0.2930 0.3 1.27 Yes
4000 2970 17.50 12.99 0.2930 0.3 1.41 Yes
3000 2381 13.12 10.41 0.2930 0.3 1.66 Yes
2000 1705 8.75 7.46 0.2930 0.3 2.28 Yes
1000 920 4.37 4.03 0.2930 0.3 7.04 Too long
800 748 3.50 3.27 0.2930 0.3 23.25
700 660 3.06 2.89 0.2930 0.3 ∞ Non-
operation 600 570 2.62 2.49 0.2930 0.3 ∞
500 479 2.19 2.10 0.2930 0.3 ∞
Table 6.17 shows for chosen TMS of 0.3, the actual relay operating times for a fault at the remote end
of the feeder. When the remote end fault current (660MVA or 2.89kA) falls below the setting current
(683.6MVA or 2.99kA primary), the operating time becomes infinite. Back-up relay is not capable of
detecting a fault if remote end fault current has reduced to 2.89kA. In conclusion, the back-up
overcurrent protection does not adequately protect the feeder if the strength of the source can vary
from 40kA to 6.29kA (i.e. when the remote end fault current reduced from 14.63kA to 5.49kA).
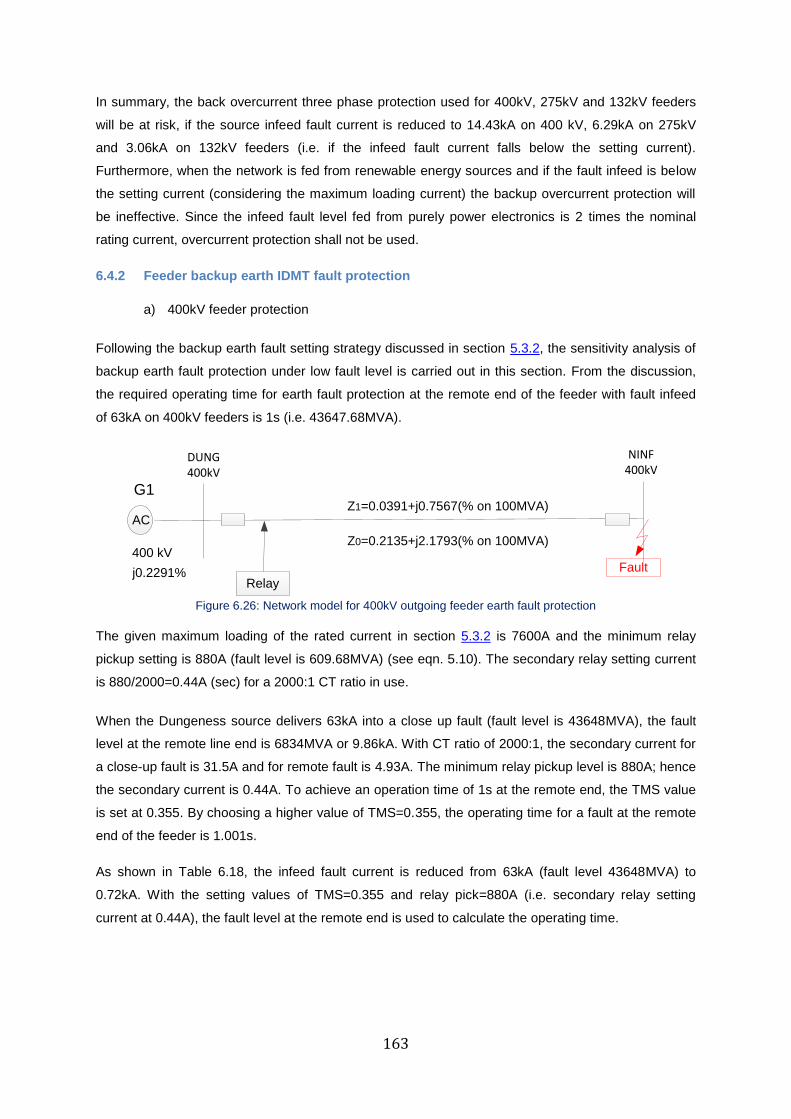
163
In summary, the back overcurrent three phase protection used for 400kV, 275kV and 132kV feeders
will be at risk, if the source infeed fault current is reduced to 14.43kA on 400 kV, 6.29kA on 275kV
and 3.06kA on 132kV feeders (i.e. if the infeed fault current falls below the setting current).
Furthermore, when the network is fed from renewable energy sources and if the fault infeed is below
the setting current (considering the maximum loading current) the backup overcurrent protection will
be ineffective. Since the infeed fault level fed from purely power electronics is 2 times the nominal
rating current, overcurrent protection shall not be used.
6.4.2 Feeder backup earth IDMT fault protection
a) 400kV feeder protection
Following the backup earth fault setting strategy discussed in section 5.3.2, the sensitivity analysis of
backup earth fault protection under low fault level is carried out in this section. From the discussion,
the required operating time for earth fault protection at the remote end of the feeder with fault infeed
of 63kA on 400kV feeders is 1s (i.e. 43647.68MVA).
G1
AC
DUNG 400kV
NINF 400kV
Fault
Z1=0.0391+j0.7567(% on 100MVA)
Relay
400 kV
j0.2291%
Z0=0.2135+j2.1793(% on 100MVA)
Figure 6.26: Network model for 400kV outgoing feeder earth fault protection
The given maximum loading of the rated current in section 5.3.2 is 7600A and the minimum relay
pickup setting is 880A (fault level is 609.68MVA) (see eqn. 5.10). The secondary relay setting current
is 880/2000=0.44A (sec) for a 2000:1 CT ratio in use.
When the Dungeness source delivers 63kA into a close up fault (fault level is 43648MVA), the fault
level at the remote line end is 6834MVA or 9.86kA. With CT ratio of 2000:1, the secondary current for
a close-up fault is 31.5A and for remote fault is 4.93A. The minimum relay pickup level is 880A; hence
the secondary current is 0.44A. To achieve an operation time of 1s at the remote end, the TMS value
is set at 0.355. By choosing a higher value of TMS=0.355, the operating time for a fault at the remote
end of the feeder is 1.001s.
As shown in Table 6.18, the infeed fault current is reduced from 63kA (fault level 43648MVA) to
0.72kA. With the setting values of TMS=0.355 and relay pick=880A (i.e. secondary relay setting
current at 0.44A), the fault level at the remote end is used to calculate the operating time.
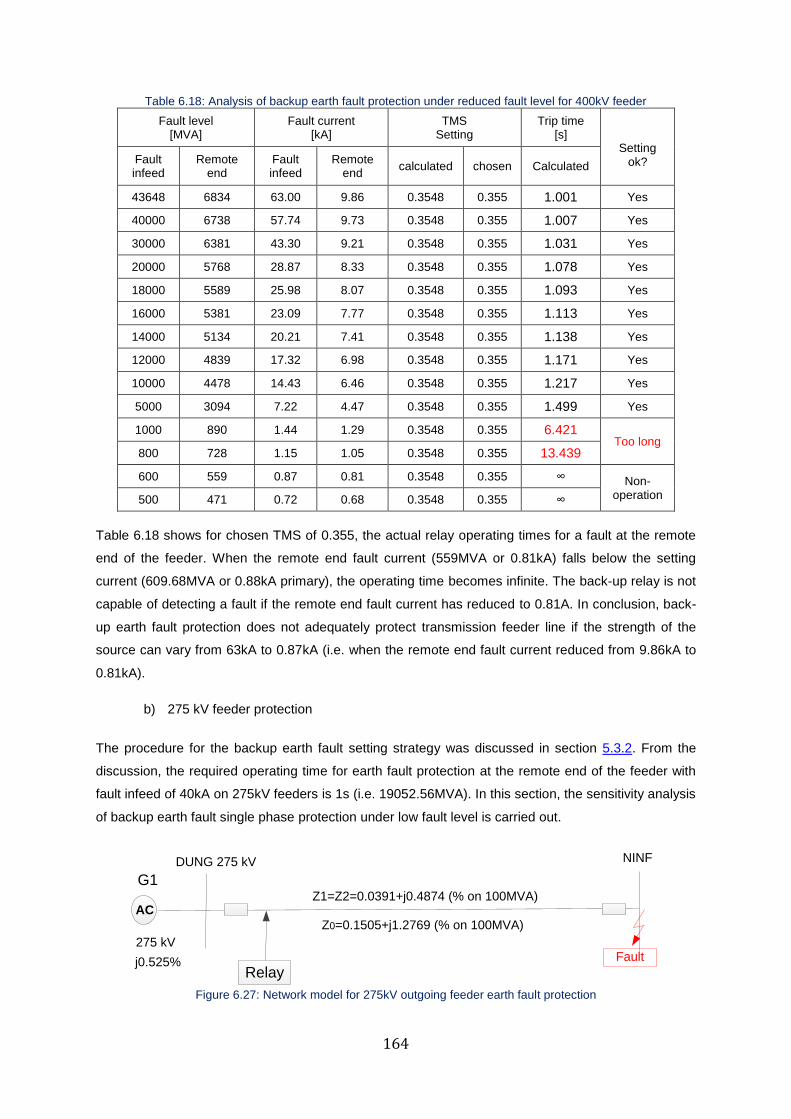
164
Table 6.18: Analysis of backup earth fault protection under reduced fault level for 400kV feeder
Fault level [MVA]
Fault current [kA]
TMS Setting
Trip time [s]
Setting ok? Fault
infeed Remote
end Fault infeed
Remote end
calculated chosen Calculated
43648 6834 63.00 9.86 0.3548 0.355 1.001 Yes
40000 6738 57.74 9.73 0.3548 0.355 1.007 Yes
30000 6381 43.30 9.21 0.3548 0.355 1.031 Yes
20000 5768 28.87 8.33 0.3548 0.355 1.078 Yes
18000 5589 25.98 8.07 0.3548 0.355 1.093 Yes
16000 5381 23.09 7.77 0.3548 0.355 1.113 Yes
14000 5134 20.21 7.41 0.3548 0.355 1.138 Yes
12000 4839 17.32 6.98 0.3548 0.355 1.171 Yes
10000 4478 14.43 6.46 0.3548 0.355 1.217 Yes
5000 3094 7.22 4.47 0.3548 0.355 1.499 Yes
1000 890 1.44 1.29 0.3548 0.355 6.421 Too long
800 728 1.15 1.05 0.3548 0.355 13.439
600 559 0.87 0.81 0.3548 0.355 ∞ Non-operation 500 471 0.72 0.68 0.3548 0.355 ∞
Table 6.18 shows for chosen TMS of 0.355, the actual relay operating times for a fault at the remote
end of the feeder. When the remote end fault current (559MVA or 0.81kA) falls below the setting
current (609.68MVA or 0.88kA primary), the operating time becomes infinite. The back-up relay is not
capable of detecting a fault if the remote end fault current has reduced to 0.81A. In conclusion, back-
up earth fault protection does not adequately protect transmission feeder line if the strength of the
source can vary from 63kA to 0.87kA (i.e. when the remote end fault current reduced from 9.86kA to
0.81kA).
b) 275 kV feeder protection
The procedure for the backup earth fault setting strategy was discussed in section 5.3.2. From the
discussion, the required operating time for earth fault protection at the remote end of the feeder with
fault infeed of 40kA on 275kV feeders is 1s (i.e. 19052.56MVA). In this section, the sensitivity analysis
of backup earth fault single phase protection under low fault level is carried out.
G1
AC
DUNG 275 kV NINF
Fault
Z1=Z2=0.0391+j0.4874 (% on 100MVA)
Relay
275 kV
j0.525%
Z0=0.1505+j1.2769 (% on 100MVA)
Figure 6.27: Network model for 275kV outgoing feeder earth fault protection
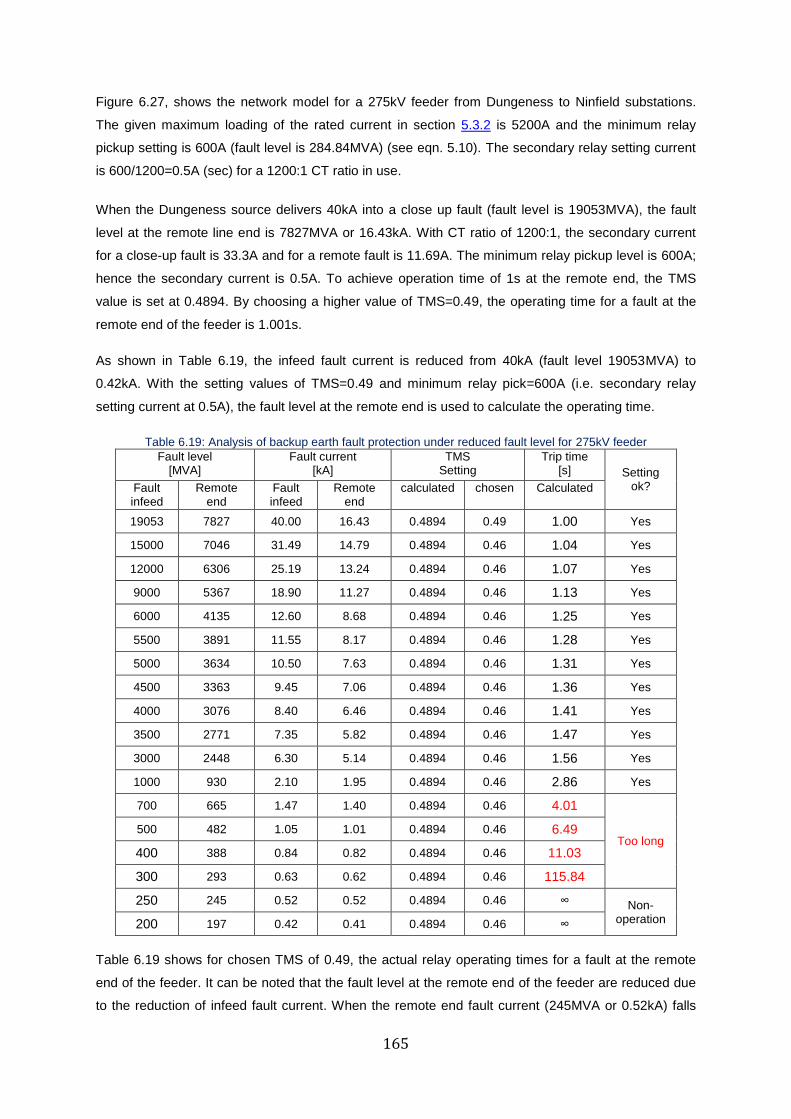
165
Figure 6.27, shows the network model for a 275kV feeder from Dungeness to Ninfield substations.
The given maximum loading of the rated current in section 5.3.2 is 5200A and the minimum relay
pickup setting is 600A (fault level is 284.84MVA) (see eqn. 5.10). The secondary relay setting current
is 600/1200=0.5A (sec) for a 1200:1 CT ratio in use.
When the Dungeness source delivers 40kA into a close up fault (fault level is 19053MVA), the fault
level at the remote line end is 7827MVA or 16.43kA. With CT ratio of 1200:1, the secondary current
for a close-up fault is 33.3A and for a remote fault is 11.69A. The minimum relay pickup level is 600A;
hence the secondary current is 0.5A. To achieve operation time of 1s at the remote end, the TMS
value is set at 0.4894. By choosing a higher value of TMS=0.49, the operating time for a fault at the
remote end of the feeder is 1.001s.
As shown in Table 6.19, the infeed fault current is reduced from 40kA (fault level 19053MVA) to
0.42kA. With the setting values of TMS=0.49 and minimum relay pick=600A (i.e. secondary relay
setting current at 0.5A), the fault level at the remote end is used to calculate the operating time.
Table 6.19: Analysis of backup earth fault protection under reduced fault level for 275kV feeder
Fault level [MVA]
Fault current [kA]
TMS Setting
Trip time [s] Setting
ok?
Fault infeed
Remote end
Fault infeed
Remote end
calculated chosen Calculated
19053 7827 40.00 16.43 0.4894 0.49 1.00 Yes
15000 7046 31.49 14.79 0.4894 0.46 1.04 Yes
12000 6306 25.19 13.24 0.4894 0.46 1.07 Yes
9000 5367 18.90 11.27 0.4894 0.46 1.13 Yes
6000 4135 12.60 8.68 0.4894 0.46 1.25 Yes
5500 3891 11.55 8.17 0.4894 0.46 1.28 Yes
5000 3634 10.50 7.63 0.4894 0.46 1.31 Yes
4500 3363 9.45 7.06 0.4894 0.46 1.36 Yes
4000 3076 8.40 6.46 0.4894 0.46 1.41 Yes
3500 2771 7.35 5.82 0.4894 0.46 1.47 Yes
3000 2448 6.30 5.14 0.4894 0.46 1.56 Yes
1000 930 2.10 1.95 0.4894 0.46 2.86 Yes
700 665 1.47 1.40 0.4894 0.46 4.01
Too long 500 482 1.05 1.01 0.4894 0.46 6.49
400 388 0.84 0.82 0.4894 0.46 11.03
300 293 0.63 0.62 0.4894 0.46 115.84
250 245 0.52 0.52 0.4894 0.46 ∞ Non-operation 200 197 0.42 0.41 0.4894 0.46 ∞
Table 6.19 shows for chosen TMS of 0.49, the actual relay operating times for a fault at the remote
end of the feeder. It can be noted that the fault level at the remote end of the feeder are reduced due
to the reduction of infeed fault current. When the remote end fault current (245MVA or 0.52kA) falls
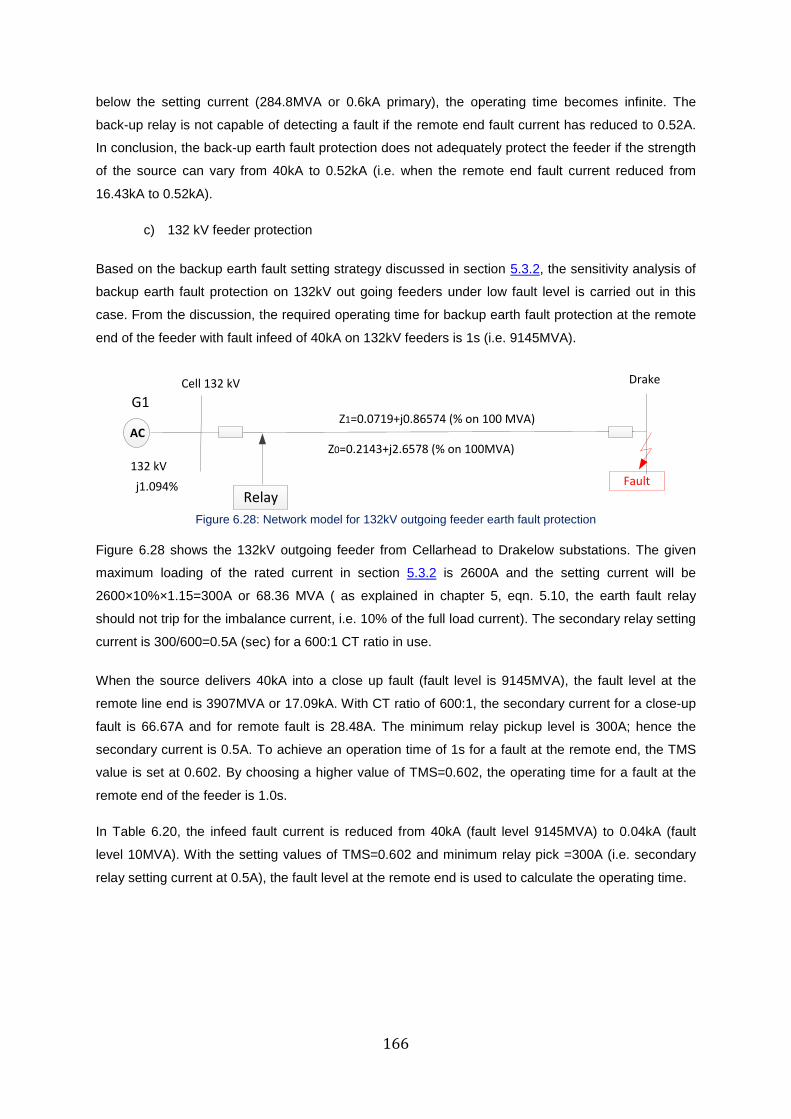
166
below the setting current (284.8MVA or 0.6kA primary), the operating time becomes infinite. The
back-up relay is not capable of detecting a fault if the remote end fault current has reduced to 0.52A.
In conclusion, the back-up earth fault protection does not adequately protect the feeder if the strength
of the source can vary from 40kA to 0.52kA (i.e. when the remote end fault current reduced from
16.43kA to 0.52kA).
c) 132 kV feeder protection
Based on the backup earth fault setting strategy discussed in section 5.3.2, the sensitivity analysis of
backup earth fault protection on 132kV out going feeders under low fault level is carried out in this
case. From the discussion, the required operating time for backup earth fault protection at the remote
end of the feeder with fault infeed of 40kA on 132kV feeders is 1s (i.e. 9145MVA).
G1
AC
Cell 132 kV Drake
Fault
Z1=0.0719+j0.86574 (% on 100 MVA)
Relay
132 kV
j1.094%
Z0=0.2143+j2.6578 (% on 100MVA)
Figure 6.28: Network model for 132kV outgoing feeder earth fault protection
Figure 6.28 shows the 132kV outgoing feeder from Cellarhead to Drakelow substations. The given
maximum loading of the rated current in section 5.3.2 is 2600A and the setting current will be
2600×10%×1.15=300A or 68.36 MVA ( as explained in chapter 5, eqn. 5.10, the earth fault relay
should not trip for the imbalance current, i.e. 10% of the full load current). The secondary relay setting
current is 300/600=0.5A (sec) for a 600:1 CT ratio in use.
When the source delivers 40kA into a close up fault (fault level is 9145MVA), the fault level at the
remote line end is 3907MVA or 17.09kA. With CT ratio of 600:1, the secondary current for a close-up
fault is 66.67A and for remote fault is 28.48A. The minimum relay pickup level is 300A; hence the
secondary current is 0.5A. To achieve an operation time of 1s for a fault at the remote end, the TMS
value is set at 0.602. By choosing a higher value of TMS=0.602, the operating time for a fault at the
remote end of the feeder is 1.0s.
In Table 6.20, the infeed fault current is reduced from 40kA (fault level 9145MVA) to 0.04kA (fault
level 10MVA). With the setting values of TMS=0.602 and minimum relay pick =300A (i.e. secondary
relay setting current at 0.5A), the fault level at the remote end is used to calculate the operating time.
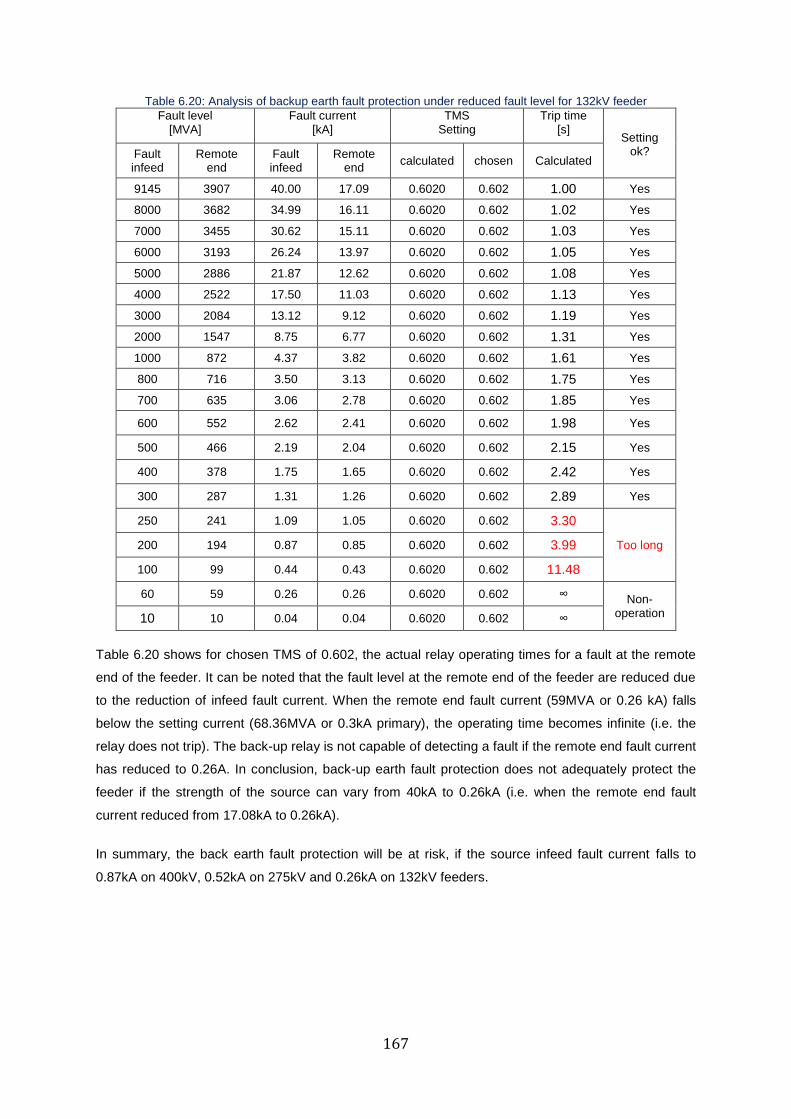
167
Table 6.20: Analysis of backup earth fault protection under reduced fault level for 132kV feeder
Fault level [MVA]
Fault current [kA]
TMS Setting
Trip time [s]
Setting ok?
Fault infeed
Remote end
Fault infeed
Remote end
calculated chosen Calculated
9145 3907 40.00 17.09 0.6020 0.602 1.00 Yes
8000 3682 34.99 16.11 0.6020 0.602 1.02 Yes
7000 3455 30.62 15.11 0.6020 0.602 1.03 Yes
6000 3193 26.24 13.97 0.6020 0.602 1.05 Yes
5000 2886 21.87 12.62 0.6020 0.602 1.08 Yes
4000 2522 17.50 11.03 0.6020 0.602 1.13 Yes
3000 2084 13.12 9.12 0.6020 0.602 1.19 Yes
2000 1547 8.75 6.77 0.6020 0.602 1.31 Yes
1000 872 4.37 3.82 0.6020 0.602 1.61 Yes
800 716 3.50 3.13 0.6020 0.602 1.75 Yes
700 635 3.06 2.78 0.6020 0.602 1.85 Yes
600 552 2.62 2.41 0.6020 0.602 1.98 Yes
500 466 2.19 2.04 0.6020 0.602 2.15 Yes
400 378 1.75 1.65 0.6020 0.602 2.42 Yes
300 287 1.31 1.26 0.6020 0.602 2.89 Yes
250 241 1.09 1.05 0.6020 0.602 3.30
Too long 200 194 0.87 0.85 0.6020 0.602 3.99
100 99 0.44 0.43 0.6020 0.602 11.48
60 59 0.26 0.26 0.6020 0.602 ∞ Non-operation 10 10 0.04 0.04 0.6020 0.602 ∞
Table 6.20 shows for chosen TMS of 0.602, the actual relay operating times for a fault at the remote
end of the feeder. It can be noted that the fault level at the remote end of the feeder are reduced due
to the reduction of infeed fault current. When the remote end fault current (59MVA or 0.26 kA) falls
below the setting current (68.36MVA or 0.3kA primary), the operating time becomes infinite (i.e. the
relay does not trip). The back-up relay is not capable of detecting a fault if the remote end fault current
has reduced to 0.26A. In conclusion, back-up earth fault protection does not adequately protect the
feeder if the strength of the source can vary from 40kA to 0.26kA (i.e. when the remote end fault
current reduced from 17.08kA to 0.26kA).
In summary, the back earth fault protection will be at risk, if the source infeed fault current falls to
0.87kA on 400kV, 0.52kA on 275kV and 0.26kA on 132kV feeders.
168
6.5 Summary
The operating performances of transmission feeder protection were studied in this chapter. The
protection schemes used in this chapter are unit scheme, non-unit distance scheme and backup
phase and earth protection scheme. Under strong infeed conditions, unit scheme works correctly and
cope with resistive fault or high level of loading conditions. However, the operating performance of
unit scheme under low fault level with relatively high fault resistance is a concern and may require
establishing correct setting limitations during minimum credible fault levels.
In contrast, the non-unit distance scheme operating using Mho characteristics works correctly under
strong infeed conditions, but there are limitations when resistive faults are included or during short
lines. However, the operating performance of distance scheme can be improved by setting to a
quadrilateral and polarization characteristics. As fault level reduces, the operating performance of
non-unit scheme was influenced with changes in line length, fault location and percentage levels of
power electronic and resulted in an increase of operating times or non-operation. Hence, the distance
scheme operating using a permissive direct transfer scheme should be replaced with a weak infeed
protection. Moreover, the operating performance of backup overcurrent (phase and earth) protection
was examined under reduced fault level. Under low fault level, overcurrent back-up protection is
severely affected by low fault currents whereas the backup earth fault protection is less affected.
The key strengths of this study are to increase understanding on the impact of low fault level on the
operating performance of unit protection, distance protection, overcurrent and their setting
implications. The objective is to investigate the performances of protection schemes under low fault
level and establish their limitation. Further discussions related to the impact of low fault level on future
protection performances and alternative protection strategy is provided in chapter 7.
The 4th
technical paper entitled < Impact of Intermediate Sources on Distance Protection of Transmission Lines >
was published and presented based on this work on 14th
International Conference on Development in Power
System Protection (DPSP 2018). The conference was held at the Europa Hotel on March 12-15, 2018, Belfast,
UK.
169
Chapter 7: Impact of low fault level & alternative protection strategy
7.1 Review into the impact of low fault levels on feeder protection
In chapter 6, the strategies to evaluate the impact of fault level reduction on performance assessment
of unit scheme protection, non-unit distance scheme protection and backup overcurrent or earth fault
protection were studied in depth based on the following three conditions:
a) strong fault level
b) reduced fault level.
c) converter dominated power system
7.1.1 Unit differential protection
Case (a): strong fault level
As discussed in section 6.2.1(a), when a system is fed from a strong source, a unit protection is
capable of providing a correct operation and resistive faults were cleared successfully within the
expected operating region (i.e. <30ms).
Case (b): reduced fault level
When a weak infeed source was added to the network, the sensitivity of unit protection adapted to the
change in fault level, but sensitivity check of the unit scheme is required under extremely low fault
level. For instance, during internal fault with relatively high fault resistance (i.e. when fault current falls
below 1.375kA), a part of the load current may still be flowing through the protected item during the
fault period, and the through flowing load current is superimposed onto the fault currents flowing into
the protected item.
Case (c): converter dominated power systems
Renewable energy or green energy sources are a form of electrical generation produced from power
electronics (i.e. wind power or solar panel) and synchronous generation (i.e. hydropower, nuclear
power). When a system is fed from generation mix, the amount of % generation determines the
system fault level. For example, the electricity minimum demand is normally seen in summer when all
power electronic sources are in service with fewer synchronous generations such as nuclear or hydro
power being in service.
If a system is fed 80%-90% from power electronics and 10%-20% of synchronous generation (i.e.
fault level is 4.45GVA to 2.77GVA), unit protection can provide correct operation (see section 6.2.1).
Moreover, when the penetration level from power electronics is 100% (i.e. fault level is 1.1GVA-
2.0GVA or 1.588kA to 2.886kA), the sensitivity of unit scheme also works perfect. However, the relay
struggle to detect when a large fault resistance values were added. For example, if the worst case
scenario is considered, i.e. the converter source delivers 1.1pu per unit of nominal current (1.587kA)
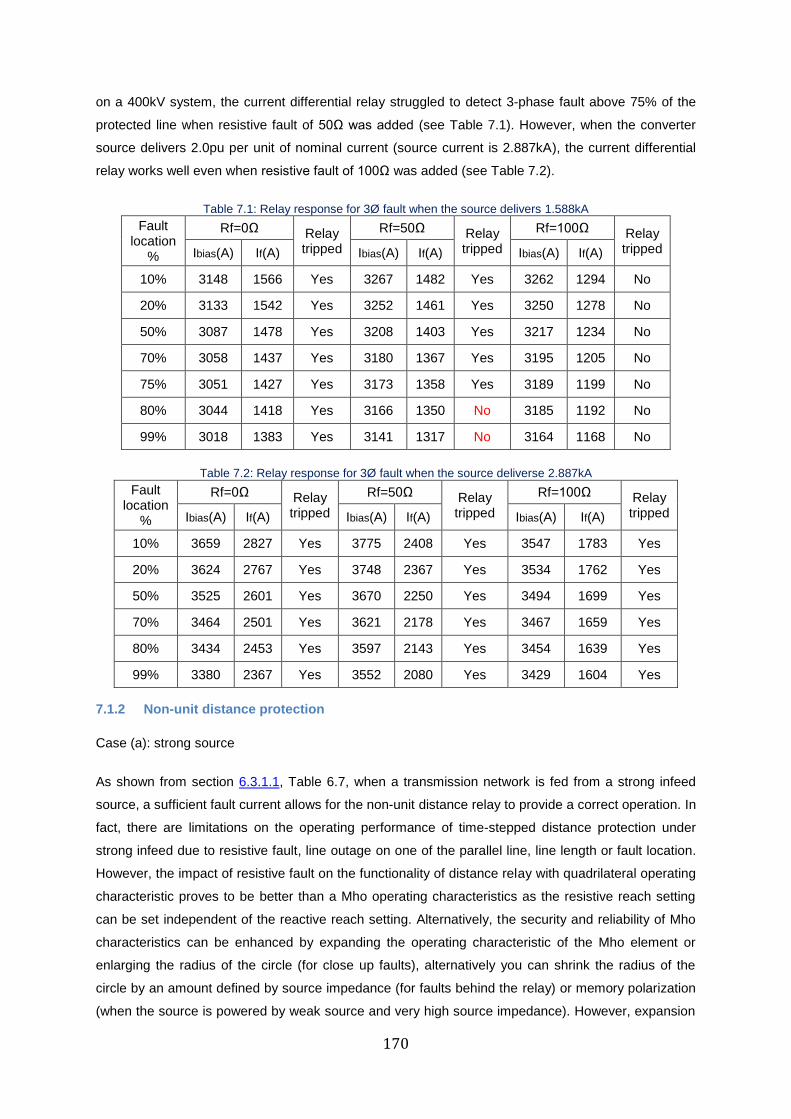
170
on a 400kV system, the current differential relay struggled to detect 3-phase fault above 75% of the
protected line when resistive fault of 50Ω was added (see Table 7.1). However, when the converter
source delivers 2.0pu per unit of nominal current (source current is 2.887kA), the current differential
relay works well even when resistive fault of 100Ω was added (see Table 7.2).
Table 7.1: Relay response for 3Ø fault when the source delivers 1.588kA
Fault location
%
Rf=0Ω Relay tripped
Rf=50Ω Relay tripped
Rf=100Ω Relay tripped Ibias(A) If(A) Ibias(A) If(A) Ibias(A) If(A)
10% 3148 1566 Yes 3267 1482 Yes 3262 1294 No
20% 3133 1542 Yes 3252 1461 Yes 3250 1278 No
50% 3087 1478 Yes 3208 1403 Yes 3217 1234 No
70% 3058 1437 Yes 3180 1367 Yes 3195 1205 No
75% 3051 1427 Yes 3173 1358 Yes 3189 1199 No
80% 3044 1418 Yes 3166 1350 No 3185 1192 No
99% 3018 1383 Yes 3141 1317 No 3164 1168 No
Table 7.2: Relay response for 3Ø fault when the source deliverse 2.887kA
Fault location
%
Rf=0Ω Relay tripped
Rf=50Ω Relay tripped
Rf=100Ω Relay tripped Ibias(A) If(A) Ibias(A) If(A) Ibias(A) If(A)
10% 3659 2827 Yes 3775 2408 Yes 3547 1783 Yes
20% 3624 2767 Yes 3748 2367 Yes 3534 1762 Yes
50% 3525 2601 Yes 3670 2250 Yes 3494 1699 Yes
70% 3464 2501 Yes 3621 2178 Yes 3467 1659 Yes
80% 3434 2453 Yes 3597 2143 Yes 3454 1639 Yes
99% 3380 2367 Yes 3552 2080 Yes 3429 1604 Yes
7.1.2 Non-unit distance protection
Case (a): strong source
As shown from section 6.3.1.1, Table 6.7, when a transmission network is fed from a strong infeed
source, a sufficient fault current allows for the non-unit distance relay to provide a correct operation. In
fact, there are limitations on the operating performance of time-stepped distance protection under
strong infeed due to resistive fault, line outage on one of the parallel line, line length or fault location.
However, the impact of resistive fault on the functionality of distance relay with quadrilateral operating
characteristic proves to be better than a Mho operating characteristics as the resistive reach setting
can be set independent of the reactive reach setting. Alternatively, the security and reliability of Mho
characteristics can be enhanced by expanding the operating characteristic of the Mho element or
enlarging the radius of the circle (for close up faults), alternatively you can shrink the radius of the
circle by an amount defined by source impedance (for faults behind the relay) or memory polarization
(when the source is powered by weak source and very high source impedance). However, expansion
171
of the Mho element during weak source conditions will result in operation over a much larger area in
the resistive direction and this may cause mal-operation.
Case (b): reduced fault level
As fault level reduces, the source impedance ratio increases, and the reach setting error increases. At
higher value of SIR or extremely low fault level, the specification of each relay manufacturers must be
checked with the setting limitation and accuracy. With the comments made in section 3.4, most
conventional relays stop working if the source impedance ratio exceeds 60-65.
Under low fault level, the distance relay has issues with the measured impedance error which
increases the operating times of zone 2 and zone 3. This error leads to an under-reach problem and
may be partially resolved by changing the reach of zone settings. However, as the fault level reduces,
the operating reach of a distance relay may change and in extreme cases become inadequate. For
example, based on the data from the Electricity Ten Year Statement 2018 Appendix B, the impact of
fault level reduction with the increase in penetration of renewable energy sources on the operating
performance of protection schemes was examined. Note the fault level from power electronics varies
between 1.1-2.0pu. However, in this study, 1.1 times the rated current is considered (i.e. in the worst
case scenario).
As fault level reduces, the distance scheme starts to under reach and resulting in an increase of
operating times or non-operation. For example in section 6.3.1.2 Table 6.9, when the infeed fault level
was reduced from 17.85GVA to 5.12GVA (i.e. at 76% penetration levels of converter sources), the
zone 2 element of the distance relay failed to clear for faults above 80% of the protected line. When
the fault infeed was reduced to 4.785GVA, the zone 1 element of the distance relay also failed to
clear for faults above 50% of the protected line (i.e. at 78% penetration levels of converter sources).
Based on the findings, the protection scheme will work effectively when the source delivers (i.e. 3Ø
faults current) above 6.125GVA (i.e. at 70% penetration levels of converter sources) and satisfies
under “Two Degree scenarios/gone green” upto 2035/36 (i.e. at 70% penetration levels from
converter sources). Since National Grid uses inter-trip scheme, the zone 1 element of distance relay
must ensure to cover 51% of the protected line. From the test results, the zone 1 distance relay was
able to detect faults above 50% of the protected line, i.e. when converter source was increased to
78%.
Case (c): converter dominated power systems
As fault level reduces, the limitation of distance scheme reduces and resulted in an increase of
operating times. Assume Dungeness power station is not operational and if a grid is fed 20% from
green energy, plus 80% from power electronics; the infeed fault level will be 4.45GVA or 6.423kA.
Similarly, if a grid is fed 100% from power electronics, the infeed fault current will be 1.1GVA to
2.0GVA times the rating current (i.e. 1.588kA to 2.886kA). However, the distance scheme will not
work if the power electronics exceeds 78%.
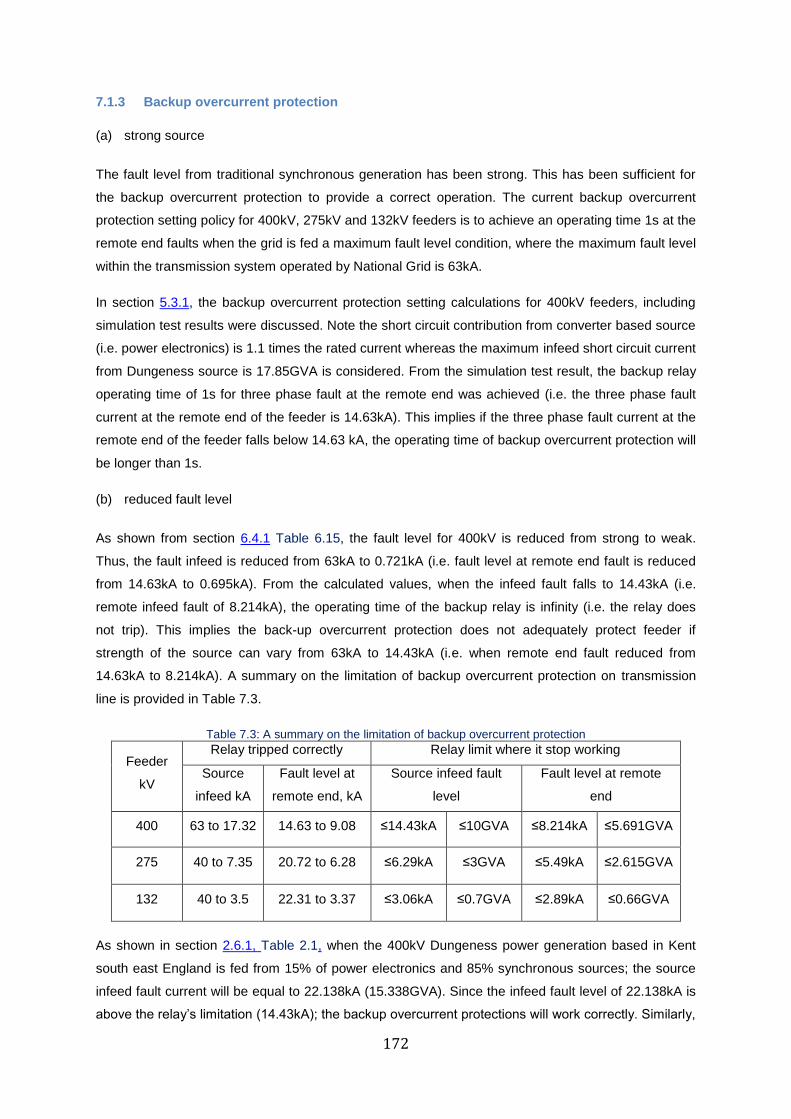
172
7.1.3 Backup overcurrent protection
(a) strong source
The fault level from traditional synchronous generation has been strong. This has been sufficient for
the backup overcurrent protection to provide a correct operation. The current backup overcurrent
protection setting policy for 400kV, 275kV and 132kV feeders is to achieve an operating time 1s at the
remote end faults when the grid is fed a maximum fault level condition, where the maximum fault level
within the transmission system operated by National Grid is 63kA.
In section 5.3.1, the backup overcurrent protection setting calculations for 400kV feeders, including
simulation test results were discussed. Note the short circuit contribution from converter based source
(i.e. power electronics) is 1.1 times the rated current whereas the maximum infeed short circuit current
from Dungeness source is 17.85GVA is considered. From the simulation test result, the backup relay
operating time of 1s for three phase fault at the remote end was achieved (i.e. the three phase fault
current at the remote end of the feeder is 14.63kA). This implies if the three phase fault current at the
remote end of the feeder falls below 14.63 kA, the operating time of backup overcurrent protection will
be longer than 1s.
(b) reduced fault level
As shown from section 6.4.1 Table 6.15, the fault level for 400kV is reduced from strong to weak.
Thus, the fault infeed is reduced from 63kA to 0.721kA (i.e. fault level at remote end fault is reduced
from 14.63kA to 0.695kA). From the calculated values, when the infeed fault falls to 14.43kA (i.e.
remote infeed fault of 8.214kA), the operating time of the backup relay is infinity (i.e. the relay does
not trip). This implies the back-up overcurrent protection does not adequately protect feeder if
strength of the source can vary from 63kA to 14.43kA (i.e. when remote end fault reduced from
14.63kA to 8.214kA). A summary on the limitation of backup overcurrent protection on transmission
line is provided in Table 7.3.
Table 7.3: A summary on the limitation of backup overcurrent protection
Feeder
kV
Relay tripped correctly Relay limit where it stop working
Source
infeed kA
Fault level at
remote end, kA
Source infeed fault
level
Fault level at remote
end
400 63 to 17.32 14.63 to 9.08 ≤14.43kA ≤10GVA ≤8.214kA ≤5.691GVA
275 40 to 7.35 20.72 to 6.28 ≤6.29kA ≤3GVA ≤5.49kA ≤2.615GVA
132 40 to 3.5 22.31 to 3.37 ≤3.06kA ≤0.7GVA ≤2.89kA ≤0.66GVA
As shown in section 2.6.1, Table 2.1, when the 400kV Dungeness power generation based in Kent
south east England is fed from 15% of power electronics and 85% synchronous sources; the source
infeed fault current will be equal to 22.138kA (15.338GVA). Since the infeed fault level of 22.138kA is
above the relay’s limitation (14.43kA); the backup overcurrent protections will work correctly. Similarly,
173
when the penetration of power electronics was increased to 45% with 55% from synchronous source
(see Figure 2.17), the fault infeed will be 14.88kA (10.313GVA), i.e. just above the limitation of relay
setting of 14.43kA and the backup relay will work correctly. However, if the penetration of power
electronics was increased to 46% with 54% from synchronous sources, the fault infeed will be
14.627kA (10.134GVA), i.e. just below the limitation of relay setting (14.63kA) and this indicates the
backup relay will no longer work.
In longer term: with the discussions made in section 2.6.1, Figure 2.17, the UK and EU have a long
term agreement on the reduction of CO2 emission where 80% penetration of renewable generation
was set to achieve by 2050. If a grid is fed 20% from thermal nuclear & hydro sources (3.57GVA),
20% from thermal coal fired generation (3.57GVA), and 60% from power electronics (0.66GVA) are
assumed. The total infeed fault level will be 7.8GVA (11.258kA), i.e. below the backup relay limit
(infeed fault level of 10GVA or 14.43kA). Thus, the relay will not work under such conditions and shall
not be used by 2050. In conclusion, under the condition considered, the backup overcurrent relay will
not work if the penetration of power electronics (i.e. converted based sources) is ≥45%.
In short term; with the discussions made in section 2.6.1, Figure 2.17, the UK has a short and long
term agreement. For example, National Grid proposed a penetration of 15% (case1), 65% (case2)
and 70% (case3) renewable energy sources by 2020 and 2027/8 and 2035/36 respectively.
Case 1: assume a grid is fed 15% (0.165GVA) from power electronics and 85% (15.173GVA)
from traditional synchronous sources. The total infeed fault level will be 15.338GVA
(22.138kA) and this value is higher than the relay limit (14.43kA or 10GVA). Hence, the
operating performance of backup overcurrent protection will not be affected by 2020.
Case 2: assume a grid is fed 45% (0.495GVA) from power electronics, 20% (3.57GVA) from
hydro & nuclear power plant, and 35% (6.248GVA) from traditional synchronous sources, the
total infeed fault level will be 10.313GVA (14.885kA), i.e. slightly higher than the relay
minimum pickup current (14.43kA or 10GVA). The effectiveness of backup overcurrent
protection may not be affected by 2027/8. However, if the penetration of power electronics is
above 45%, the operating performance of the protection will be at risk.
Case 3: assume a grid is fed 50% (0.55GVA) from power electronics (i.e. in the worst case for
the protection), 20% (3.57GVA) from hydro & nuclear power plant and 30% (5.355GVA) from
traditional synchronous sources. The total infeed fault level is 9.475GVA (13.678 kA) and this
is below the relay limit (10GVA or 14.43kA). Hence, the effectiveness of backup overcurrent
protection will be at risk by 2035/36. Thus, the maximum penetration of power electronics
should not exceed 45% (i.e.the rating of power electronics was assumed 1.1pu). However, if
assuming the rating of power electrocnics is 2pu, the limitation of the relay may increase.
(c) converter dominated power systems
As discussed in the above case (2) and section 2.6.1, Table 2.1, for a system fed 45% from power
electronics and 55% from traditional synchronous sources, the total infeed fault level is 10.313GVA
(14.885kA), i.e. slightly above the relay limit (10GVA). This implies the 400kV backup overcurrent
174
protection is at risk if more than 45% of power electronics is added into the grid. Thus, if a system is
fed from 100% of renewable generation (let say 80%-90% of power electronics, and 10%-20% from
hydro & nuclear power), the total fault infeed will be 2.775GVA to 4.45GVA. This implies backup
overcurrent protection will not work and should not be used.
Moreover, the Great Britain’s electricity operation was achieved recently with “coal free week”
between 1st May and 8th May 2019. These energy were a generation mix from natural gas (46%),
nuclear (21.2%), wind (10.7%), imported energy (9.9%), biomas (6%), solar (5%), hydro (1.1%) and
coal (0%). This means, the penetration of power electronics is 25.6% (i.e. 10.7% wind, 9.9% imported
energy & 5% solar), with 74.4% from gas fired power plant and green energy (i.e. nuclear, biomass &
hydro). Hence, the total infeed fault current is 13.562GVA (i.e. 19.575kA). As the infeed fault current
level is above the relay minimum pickup level (14.63kA), it can be said the backup relay is not at risk
by the operation of the Great Britain’s electricity with coal free week.
Furthermore, National Grid ESO (electricity system operator) has announced in April 2019 they would
be able to run the GB network by 2025 with no fossil fuel sources (i.e. zero carbon operation) [55]. As
discussed earlier, if the penetration level from power electronics increased above 45%, the backup
relay will be at risk.
7.1.4 Backup earth fault (IDMT) protection
(a) strong source
The fault level from traditional synchronous generation has been strong. This has been sufficient for
the backup earth fault protection to provide a correct operation. The current backup overcurrent
protection setting policy for 400kV, 275kV and 132kV feeders is to achieve an operating time of 1s for
a fault at the remote feeder end when the grid operates under maximum fault level condition; the
maximum fault level on a 400kV National Grid feeder is 63kA whereas 40kA on 275kV and 132kV
feeder.
In section 5.3.2, the backup earth fault protection setting calculations for 400kV feeders, including
simulation test results were discussed. Note the short circuit contribution from converter based source
(i.e. power electronics) is 1.1 times the rated current whereas the maximum infeed short circuit current
from Dungeness source is 17.85GVA is considered. From the simulation test result, the backup relay
operating time of 1s for three phase fault at the remote end was achieved (i.e. the three phase fault
current at the remote end of the feeder is 9.86kA). This implies if the three phase fault current at the
remote end of the feeder falls below 9.86kA, the operating time of backup overcurrent protection will
be longer than 1s. A further discussion is provided below in case (b).
(b) reduced fault level
As shown in section 6.4.1 Table 6.18, the infeed fault level for 400kV is reduced from 63kA to 0.72kA
(i.e. the fault level at remote end is reduced from 9.86kA to 0.68kA). However, when the infeed fault
falls from 63kA to 0.87kA (i.e. remote infeed fault of 0.81kA), the operating time of the relay is infinity.
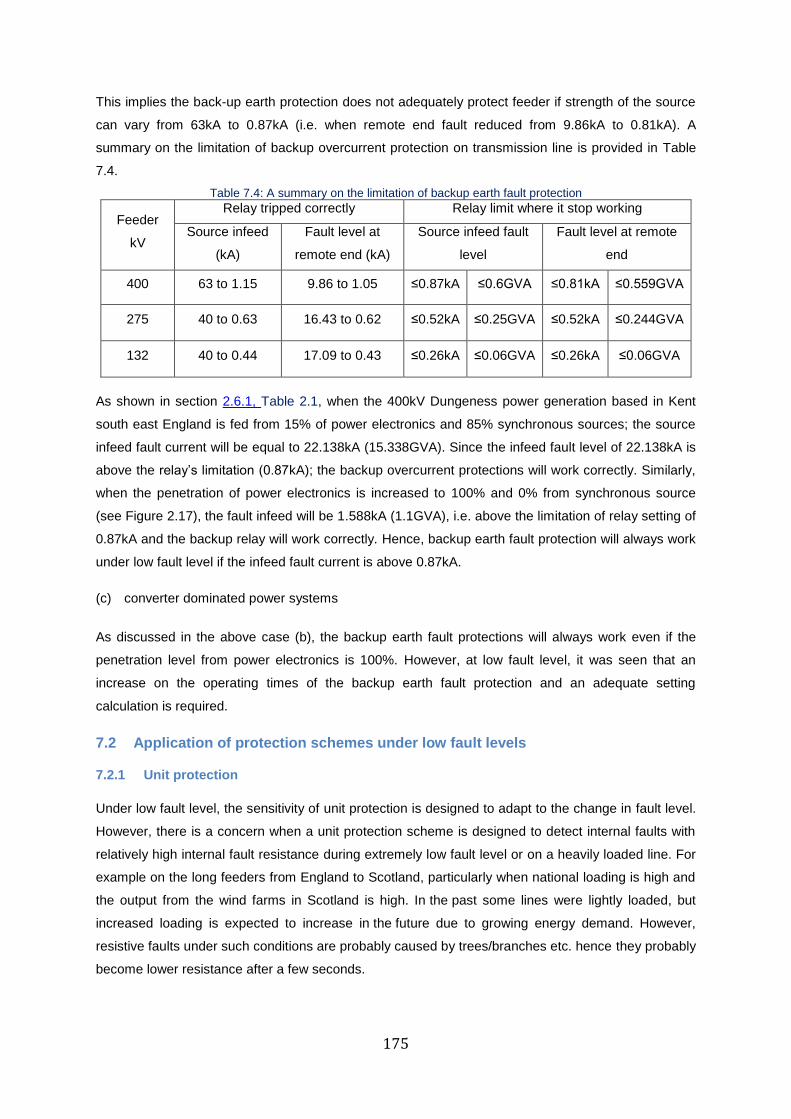
175
This implies the back-up earth protection does not adequately protect feeder if strength of the source
can vary from 63kA to 0.87kA (i.e. when remote end fault reduced from 9.86kA to 0.81kA). A
summary on the limitation of backup overcurrent protection on transmission line is provided in Table
7.4.
Table 7.4: A summary on the limitation of backup earth fault protection
Feeder
kV
Relay tripped correctly Relay limit where it stop working
Source infeed
(kA)
Fault level at
remote end (kA)
Source infeed fault
level
Fault level at remote
end
400 63 to 1.15 9.86 to 1.05 ≤0.87kA ≤0.6GVA ≤0.81kA ≤0.559GVA
275 40 to 0.63 16.43 to 0.62 ≤0.52kA ≤0.25GVA ≤0.52kA ≤0.244GVA
132 40 to 0.44 17.09 to 0.43 ≤0.26kA ≤0.06GVA ≤0.26kA ≤0.06GVA
As shown in section 2.6.1, Table 2.1, when the 400kV Dungeness power generation based in Kent
south east England is fed from 15% of power electronics and 85% synchronous sources; the source
infeed fault current will be equal to 22.138kA (15.338GVA). Since the infeed fault level of 22.138kA is
above the relay’s limitation (0.87kA); the backup overcurrent protections will work correctly. Similarly,
when the penetration of power electronics is increased to 100% and 0% from synchronous source
(see Figure 2.17), the fault infeed will be 1.588kA (1.1GVA), i.e. above the limitation of relay setting of
0.87kA and the backup relay will work correctly. Hence, backup earth fault protection will always work
under low fault level if the infeed fault current is above 0.87kA.
(c) converter dominated power systems
As discussed in the above case (b), the backup earth fault protections will always work even if the
penetration level from power electronics is 100%. However, at low fault level, it was seen that an
increase on the operating times of the backup earth fault protection and an adequate setting
calculation is required.
7.2 Application of protection schemes under low fault levels
7.2.1 Unit protection
Under low fault level, the sensitivity of unit protection is designed to adapt to the change in fault level.
However, there is a concern when a unit protection scheme is designed to detect internal faults with
relatively high internal fault resistance during extremely low fault level or on a heavily loaded line. For
example on the long feeders from England to Scotland, particularly when national loading is high and
the output from the wind farms in Scotland is high. In the past some lines were lightly loaded, but
increased loading is expected to increase in the future due to growing energy demand. However,
resistive faults under such conditions are probably caused by trees/branches etc. hence they probably
become lower resistance after a few seconds.
176
It must be noted that during internal fault with a high fault resistance, a part of the load current may
still be flowing through the protected item during the fault period, and the through flowing load current
is superimposed onto the fault currents flowing into the protected item [83] . Hence, the limitation of
unit scheme under heavy loading conditions with relatively high faults resistance, plus when the fault
current falls below the load current needs further investigation. Further, there is no clear information
about the nominal current currently used in National Grid. For example, if the maximum fault current
from power electronics is limited to 1.1pu-2.0pu, a further emphasis on the use of nominal current of
2000A (i.e. used on 400kV or 275kV system) may need a review.
7.2.2 Non-unit distance protection
(a) strong source
As discussed in section 7.1.2, distance protection works effectively under strong source. The
limitations of distance protection have been already known for decades and can be resolved using
different setting configuration such as Quadrilateral for resistive faults. Hence, if a system has strong
infeed, distance protection can be used as 1st or 2
nd main protection depends on the application and
protection policy of the utilities.
(b) reduced fault level
As fault level reduces, the distance scheme starts to under-reach, resulting in an increase in operating
times or non-operation. When the source delivers extremely low fault level, the ratio of source to line
impedance on short feeders is very large. The relay with mho characteristics may struggle to detect
close up faults and a relay with quadrilateral characteristics should be used. Similarly, as the fault
level reduces, the reach setting of distance scheme on long feeders is adversely affected (i.e. the
delayed time distance scheme likely to fail to clear remote end faults on the next line).
(c) under converter dominated power systems
National Grid Electric System Operator has recently announced to be able to run the GB network by
2025 with no fossil fuel sources. From the results seen in Table 6.9, the zone 2 element of distance
relay failed to provide coverage remote end faults when the penetration level of power electronics was
increased to 75%. When the power electronic source was increased to 80% or higher, the zone 1
failed to clear close up faults. This implies, the direct under-reach inter-trip communication schemes
(DUTT) will not work under such conditions where weak infeed logic scheme should be used as an
alternative means of protection scheme. A weak in-feed protection is an additional to the distance
function set to provide permissive trip from the strong source using direct eco function [100]. Direct
echo function permits the remote relay to echo the trip signal back to the sending relay even if the
appropriate remote relay element has not operated. Hence, weak infeed protection can be used to
provide rapid tripping for internal faults when one end of the line terminal has insufficient fault current.
177
7.2.3 Backup overcurrent protection
A backup overcurrent protection shall not be used if the infeed fault current falls to 14.43kA or lower.
According to National Grid, when 45% of the energy supplied to a system is fed from power
electronics, backup overcurrent protection will be at risk and should be replaced with voltage
controlled overcurrent protection of over-reaching distance protection.
7.2.4 Backup earth fault protection
A backup earth fault protection shall not be used if the infeed fault current falls to 0.87kA or lower.
However, earth fault protection shall be used even under 100% penetration from converted based
sources (i.e. 100% power electronics).
7.3 Implications for future protection strategy under low fault level
7.3.1 Identifying alternative protection methodologies and their suitability for transmission
systems under the various future scenarios
Based on the length of the feeders, availability of VTs, and infeed source; the application of
protection scheme may vary. For example, on some feeders when unit protection is not possible
to use, a double distance scheme is used, with one configured in a blocking scheme. However,
when one of the schemes is out for maintenance or needs to be tested, and if high internal
resistive fault occurs, the second main distance scheme might struggle to provide a correct
operation, especially during weak infeed conditions (i.e. resistive faults in zone 1 may be cleared
in zone 2 or zone 3 times or the relay may not provide operation depending on percentage levels
of power electronics, the line length or fault location).
In future National Grid should consider “unblocking” schemes and “unblocking with weak infeed”
to cope with extremely weak infeed conditions. More advanced distance schemes are now being
used in countries with complex transmission networks. For example, SEL distance relays, but
most existing National Grid protection schemes do not apply weak infeed logic schemes and may
need to configure differently to cope with extremely weak infeed conditions, especially when the
zone 1 distance relay cannot provide 50% fault coverage of the protected line. Based on the
information from National Grid protection schedule and site network documents, protection relays
used by National Grid that have the option of weak infeed logic are P54x distance relays,
REC561 relays, REL531 high speed distance relays or 7SA522 distance relays [65].
The main benefit of weak infeed logic scheme is to enhance the operation of direct under-reach
inter-trip communication schemes (DUTT). Weak infeed logic is used when the relay near the
weak infeed source cannot clear close up faults, where the relay near the strong source is
permitted to provide operation.
178
a) What is the need for 2 main protection schemes, if one protection system is more
relaible than the other
Under low fault level; the dependability of distance and backup overcurrent protection were
degraded and this reduces the dependability of the protection schemes and increased the
operating time. Since the National Grid transmission network are mainly double circuits, a solo
main protection may not be able to provide local backup operation in the events of communication
failure (i.e. assume unit scheme was used). Alternatively, when a smart and high reliable distance
relay is used to protect the system, the system may be left unprotected if the relay is out for
maintenance or if a relay needs to be tested and only one scheme is applied. The need for 2 main
protections, even if one protection system becomes more reliable than the other is for redundancy
purpose. Hence, if one main protection will be used in the future, the redundancy of the system
will be reduced, but solutions depend on governmental and regulatory requirements and needs
further investigation.
b) What is the role for backup protection if the main protections do not work properly?
At present, the role of backup protection used in National Grid is to provide fault coverage in case
the main protection does not work properly. For example, in the event of unit scheme
communication failure, the task of main protection can be achieved using a backup distance
scheme (i.e. under-reaching zone 1 element using inter-trip scheme). Then, the delayed zone 2
and 3 elements of distance relay can provide fault coverage on the remote end of the line, plus
the next lines. Backup overcurrent protection is also set to provide phase and earth fault
protection at a delayed time (1s at the remote end fault) in case the main scheme fails.
Under low fault level, the role of backup should be also considered, especially on local protection.
Assume on extremely weak infeed conditions, only unit protection scheme is used, and if the unit
scheme failed to see internal faults with relatively high fault resistance. Since the fault level is low,
the risk of damage to the primary equipment might not be severe, but a health and safety risk still
exists. Hence, it’s essential to clear the fault with a delayed backup scheme. Moreover, when the
main protection failed to clear the fault and if faults are not cleared within the defined National
Grid’s “Grid code” (i.e. where the generator is required to ride through grid faults during voltage
dips without being disconnected), a blackout may occur if the generator that feed the fault current
is disconnected.
c) Will voltage be a better parameter to monitor than current as fault level reduces?
Monitoring voltage signal is essential during weak in-feed conditions. In weak in-feed conditions;
the zero sequence current which dominates in the phase currents overshadows the fault
signature which makes difficult to identify [20]. If the actual voltage can be read by distance relay
for example, the relay will use this for the directional comparison. If there is no voltage present,
the relay will use the recorded voltage before the fault known as memory voltage. Moreover, if the
source impedance is high, fault current is low, but voltage on a large part of network drops to a

179
low value. Concern that during a fault, if measured voltage at multiple relays on the faulted line
and adjacent lines is very low, monitoring voltage to decide where the fault is located may not be
the best option. Hence, a wide area protection scheme, or perhaps travelling wave based
protection should be used.
d) How faults can be differentiated from heavy loading conditions during low short circuit
When the maximum possible fault current in a system is close to the rated load current; the problem
of distinguishing between a fault and a load arises. Load current usually does not exceed 30˚ from the
reference voltage at the worst power factor, i.e. cos (30) = 0.866. Since transmission lines are highly
inductive circuits where most faults occur on inductive lines; the angle between voltage and current is
much greater than 30 degree and usually start above 70 degree. This method can help to differentiate
the fault current from load current. Other method is to consider the analysis of zero sequence
impedance (Z0) value of the source. As discussed in chapter 5, the earth/ground fault setting is
normally much lower than the rated current (For example 5%, 10%, 15% or 20% etc.) and there is no
problem, but when the source is grounded through impedance the maximum possible earth fault
current also becomes lower.
Inverter-based generation or micro-grids only provides about 1.1 – 2.0 times rated current during a
fault conditions. Differential line protection can easily solve the issues related to distinguishing fault
from load current. An alternative protection strategy to resolve the impact of low fault level on backup
overcurrent protection is to use a voltage controlled/voltage constrained over current protection in
places where the fault current is equal or lower than the load current which uses the measured
voltage to differentiate load from fault currents. According to [5], voltage-controlled type prevents the
overcurrent scheme from operation until the fault reduces the system voltage to the minimum
acceptable value (let say 80% to 85%) of the nominal voltage depending on the utilities voltage limit.
e) Is Circuit Breaker Failure (CBF) protection required as switchgear performance reliability improves
Circuit breaker failure (CBF) protection was introduced in the 1960’s and 70’s when circuit
breakers were unreliable, air blast breakers had many operating parts [29]. However, modern
SF6 breakers are relatively simple, have a long operating life and failures are rare. However,
need to check how often CBF is needed in UK at transmission levels, suspect very few (or even
no) failures in last 10 years. Hence, it is unclear and needs further investigation.
7.4 The impact of new technology on fault clearing times
Due to the drive towards digitalisation and decarbonisation or possibly decentralization, the traditional
equipment used in secondary substation including protection and control system devices are likely to
be replaced with IEDs based on IEC 61850 protocols [55] [109]. For example, National Grid has an
intention to replace all transmission substations to digital technology in the future [89]. To achieve
this, National Grid and The University of Manchester have been working on a joint project involved on
the digital substation more focus on testing performance of IEC61850 process bus, interoperability of

180
multi-vendor bay solutions in a fully digital substation. From protection prospective, the impact of new
technology may have less impact on the fault clearing times, especially if the reliability of new
technology is improved. A review on the operating performance of IEC 61850 IEDs, GOOSE
message and sampling value is provided in chapter 8.
7.5 Summary
The impact of low fault level on the operating performance of unit protection, distance protection,
overcurrent and their setting implications were discussed in this chapter. Under strong infeed
conditions, unit scheme works correctly and cope with resistive faults or high level of loading
conditions. However, the operating performance of unit scheme under extremely low fault level with
relatively high fault resistance is a concern in the future and may require establishing correct setting
limitations during minimum credible fault levels.
In contrast, the non-unit distance scheme operating using Mho characteristics works correctly under
strong infeed conditions, but there are limitations in detecting resistive faults or when protecting short
lines. However, the operating performance of distance scheme can be improved by using a relay with
a quadrilateral or a polarized Mho characteristic. As fault level reduces, the operating performance of
non-unit distance scheme was affected and resulted in an increase of operating times or non-
operation. The performance of distance scheme also greatly influenced with changes in the line
length, fault location, fault resistance and percentage level of power electronics. For example, as fault
level reduces a distance scheme applied to a short feeder works better than one applied to a long
feeder. The limitation of distance scheme as related to the future energy scenarios is discussed in
section 7.1 and 7.2. The implications of future protection strategy are also covered in section 7.3.
Moreover, the operating performance of backup overcurrent (phase and earth) protection was
examined under reduced fault level. Under low fault level, overcurrent back-up protection is severely
affected by low fault currents.
Generally, distance scheme under extremely low fault level or when the transmission is fully powered
by converter based generation is unlikely to provide correct operation. The solution being
recommended to National Grid is to use weak infeed protection instead of DUTT scheme.
Alternatively, a duplicated unit scheme should be used when distance protection is not suitable. In a
long term, National Grid may even need to consider superimposed directional comparison protection
and perhaps wide area protection with local functionality.
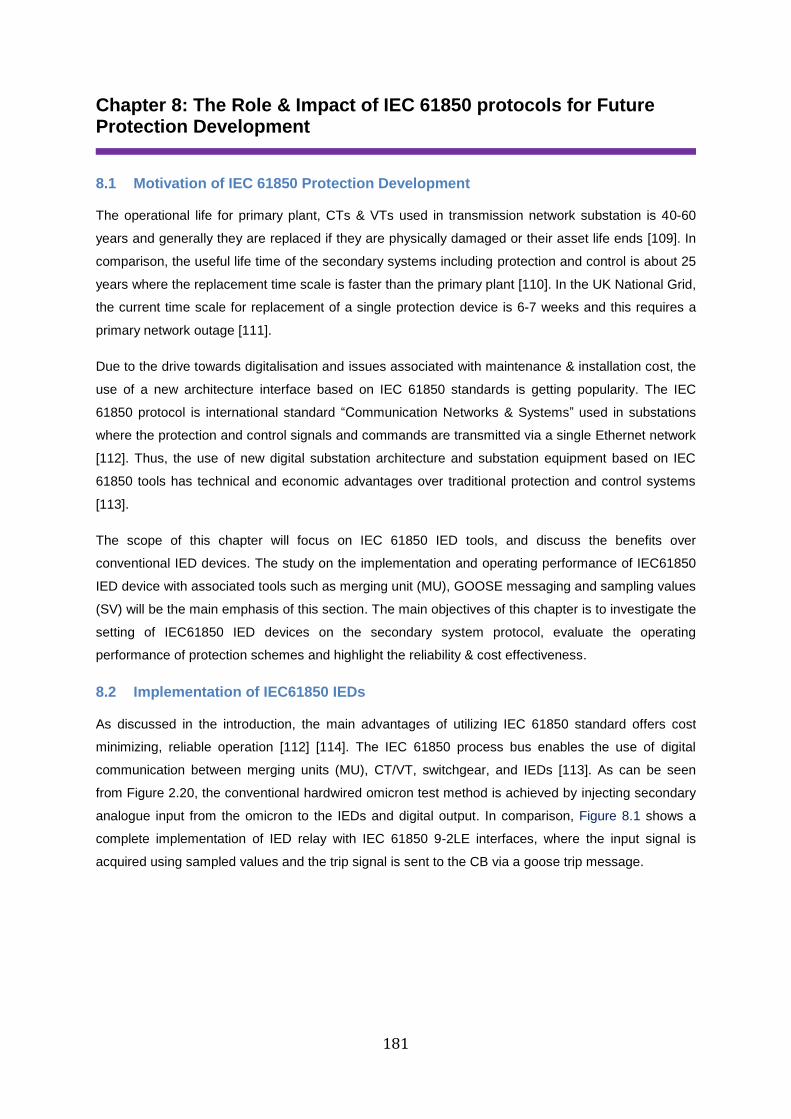
181
Chapter 8: The Role & Impact of IEC 61850 protocols for Future Protection Development
8.1 Motivation of IEC 61850 Protection Development
The operational life for primary plant, CTs & VTs used in transmission network substation is 40-60
years and generally they are replaced if they are physically damaged or their asset life ends [109]. In
comparison, the useful life time of the secondary systems including protection and control is about 25
years where the replacement time scale is faster than the primary plant [110]. In the UK National Grid,
the current time scale for replacement of a single protection device is 6-7 weeks and this requires a
primary network outage [111].
Due to the drive towards digitalisation and issues associated with maintenance & installation cost, the
use of a new architecture interface based on IEC 61850 standards is getting popularity. The IEC
61850 protocol is international standard “Communication Networks & Systems” used in substations
where the protection and control signals and commands are transmitted via a single Ethernet network
[112]. Thus, the use of new digital substation architecture and substation equipment based on IEC
61850 tools has technical and economic advantages over traditional protection and control systems
[113].
The scope of this chapter will focus on IEC 61850 IED tools, and discuss the benefits over
conventional IED devices. The study on the implementation and operating performance of IEC61850
IED device with associated tools such as merging unit (MU), GOOSE messaging and sampling values
(SV) will be the main emphasis of this section. The main objectives of this chapter is to investigate the
setting of IEC61850 IED devices on the secondary system protocol, evaluate the operating
performance of protection schemes and highlight the reliability & cost effectiveness.
8.2 Implementation of IEC61850 IEDs
As discussed in the introduction, the main advantages of utilizing IEC 61850 standard offers cost
minimizing, reliable operation [112] [114]. The IEC 61850 process bus enables the use of digital
communication between merging units (MU), CT/VT, switchgear, and IEDs [113]. As can be seen
from Figure 2.20, the conventional hardwired omicron test method is achieved by injecting secondary
analogue input from the omicron to the IEDs and digital output. In comparison, Figure 8.1 shows a
complete implementation of IED relay with IEC 61850 9-2LE interfaces, where the input signal is
acquired using sampled values and the trip signal is sent to the CB via a goose trip message.
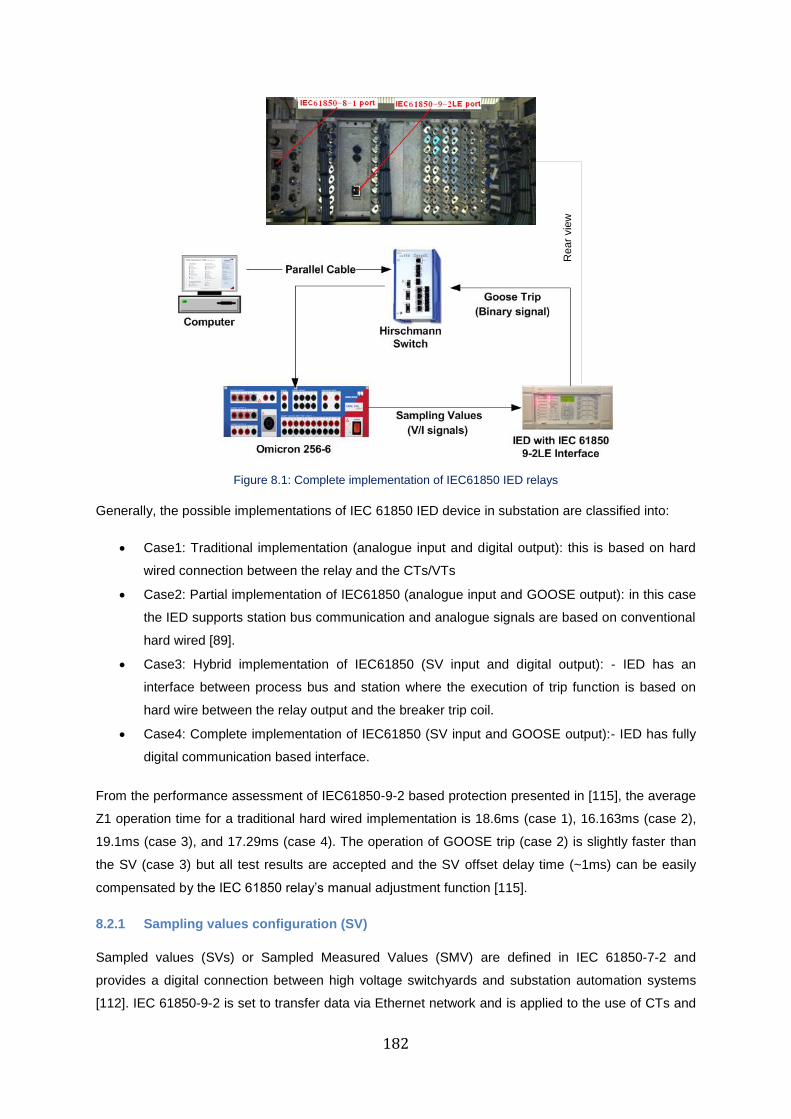
182
Re
ar
vie
w
Figure 8.1: Complete implementation of IEC61850 IED relays
Generally, the possible implementations of IEC 61850 IED device in substation are classified into:
Case1: Traditional implementation (analogue input and digital output): this is based on hard
wired connection between the relay and the CTs/VTs
Case2: Partial implementation of IEC61850 (analogue input and GOOSE output): in this case
the IED supports station bus communication and analogue signals are based on conventional
hard wired [89].
Case3: Hybrid implementation of IEC61850 (SV input and digital output): - IED has an
interface between process bus and station where the execution of trip function is based on
hard wire between the relay output and the breaker trip coil.
Case4: Complete implementation of IEC61850 (SV input and GOOSE output):- IED has fully
digital communication based interface.
From the performance assessment of IEC61850-9-2 based protection presented in [115], the average
Z1 operation time for a traditional hard wired implementation is 18.6ms (case 1), 16.163ms (case 2),
19.1ms (case 3), and 17.29ms (case 4). The operation of GOOSE trip (case 2) is slightly faster than
the SV (case 3) but all test results are accepted and the SV offset delay time (~1ms) can be easily
compensated by the IEC 61850 relay’s manual adjustment function [115].
8.2.1 Sampling values configuration (SV)
Sampled values (SVs) or Sampled Measured Values (SMV) are defined in IEC 61850-7-2 and
provides a digital connection between high voltage switchyards and substation automation systems
[112]. IEC 61850-9-2 is set to transfer data via Ethernet network and is applied to the use of CTs and
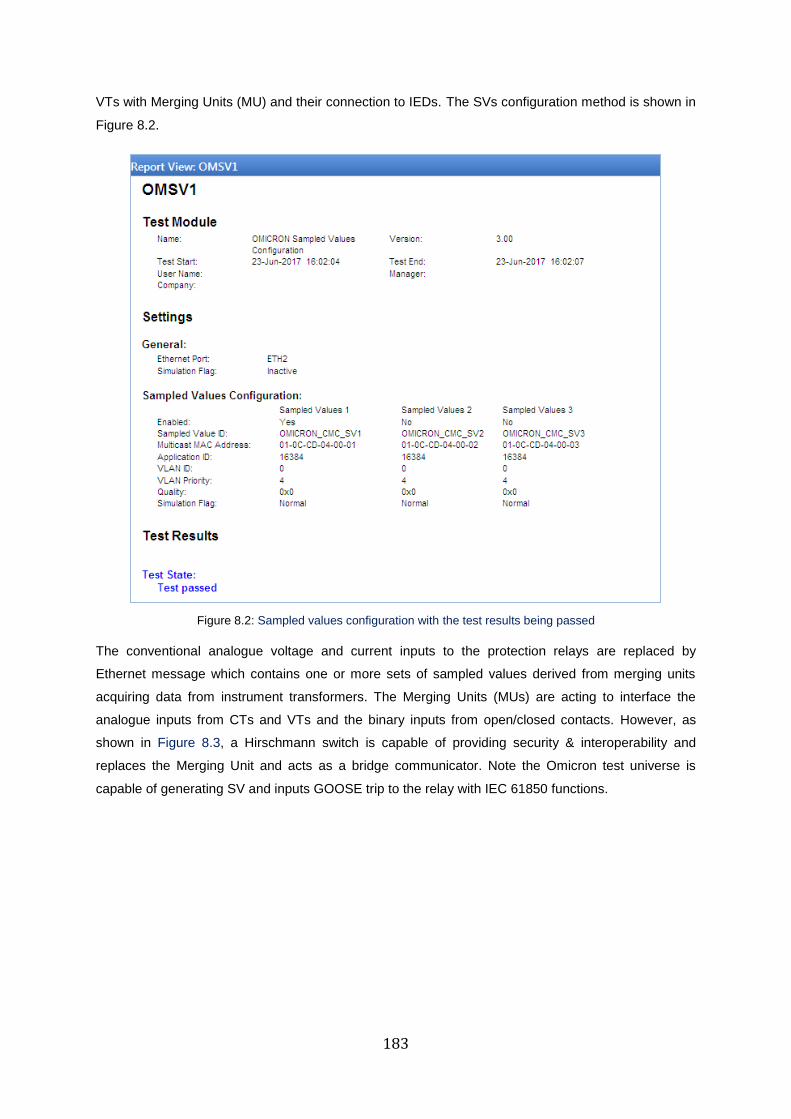
183
VTs with Merging Units (MU) and their connection to IEDs. The SVs configuration method is shown in
Figure 8.2.
Figure 8.2: Sampled values configuration with the test results being passed
The conventional analogue voltage and current inputs to the protection relays are replaced by
Ethernet message which contains one or more sets of sampled values derived from merging units
acquiring data from instrument transformers. The Merging Units (MUs) are acting to interface the
analogue inputs from CTs and VTs and the binary inputs from open/closed contacts. However, as
shown in Figure 8.3, a Hirschmann switch is capable of providing security & interoperability and
replaces the Merging Unit and acts as a bridge communicator. Note the Omicron test universe is
capable of generating SV and inputs GOOSE trip to the relay with IEC 61850 functions.
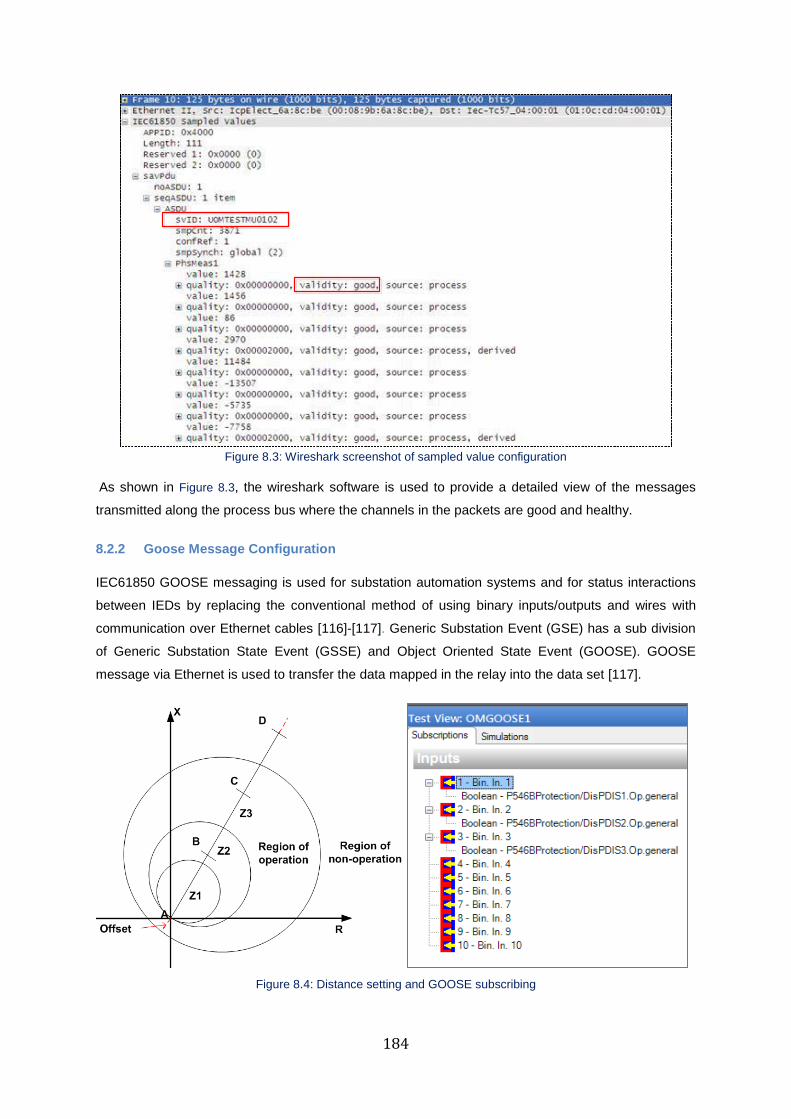
184
Figure 8.3: Wireshark screenshot of sampled value configuration
As shown in Figure 8.3, the wireshark software is used to provide a detailed view of the messages
transmitted along the process bus where the channels in the packets are good and healthy.
8.2.2 Goose Message Configuration
IEC61850 GOOSE messaging is used for substation automation systems and for status interactions
between IEDs by replacing the conventional method of using binary inputs/outputs and wires with
communication over Ethernet cables [116]-[117]. Generic Substation Event (GSE) has a sub division
of Generic Substation State Event (GSSE) and Object Oriented State Event (GOOSE). GOOSE
message via Ethernet is used to transfer the data mapped in the relay into the data set [117].
Figure 8.4: Distance setting and GOOSE subscribing
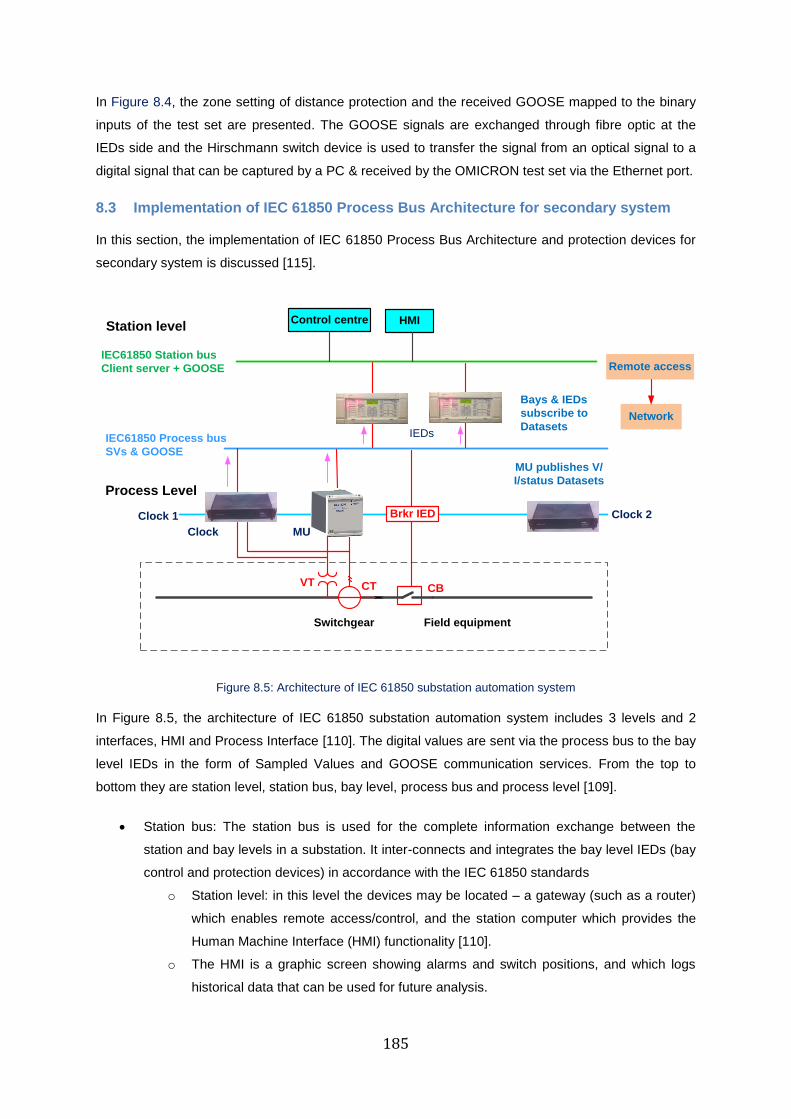
185
In Figure 8.4, the zone setting of distance protection and the received GOOSE mapped to the binary
inputs of the test set are presented. The GOOSE signals are exchanged through fibre optic at the
IEDs side and the Hirschmann switch device is used to transfer the signal from an optical signal to a
digital signal that can be captured by a PC & received by the OMICRON test set via the Ethernet port.
8.3 Implementation of IEC 61850 Process Bus Architecture for secondary system
In this section, the implementation of IEC 61850 Process Bus Architecture and protection devices for
secondary system is discussed [115].
CBCTVT
MU publishes V/
I/status Datasets
Bays & IEDs
subscribe to
Datasets
Station level HMIControl centre
Switchgear Field equipment
IEC61850 Station bus
Client server + GOOSE
IEC61850 Process bus
SVs & GOOSE
Clock 1 Clock 2
Process Level
Brkr IED
MUClock
Remote access
IEDs
Network
Figure 8.5: Architecture of IEC 61850 substation automation system
In Figure 8.5, the architecture of IEC 61850 substation automation system includes 3 levels and 2
interfaces, HMI and Process Interface [110]. The digital values are sent via the process bus to the bay
level IEDs in the form of Sampled Values and GOOSE communication services. From the top to
bottom they are station level, station bus, bay level, process bus and process level [109].
Station bus: The station bus is used for the complete information exchange between the
station and bay levels in a substation. It inter-connects and integrates the bay level IEDs (bay
control and protection devices) in accordance with the IEC 61850 standards
o Station level: in this level the devices may be located – a gateway (such as a router)
which enables remote access/control, and the station computer which provides the
Human Machine Interface (HMI) functionality [110].
o The HMI is a graphic screen showing alarms and switch positions, and which logs
historical data that can be used for future analysis.
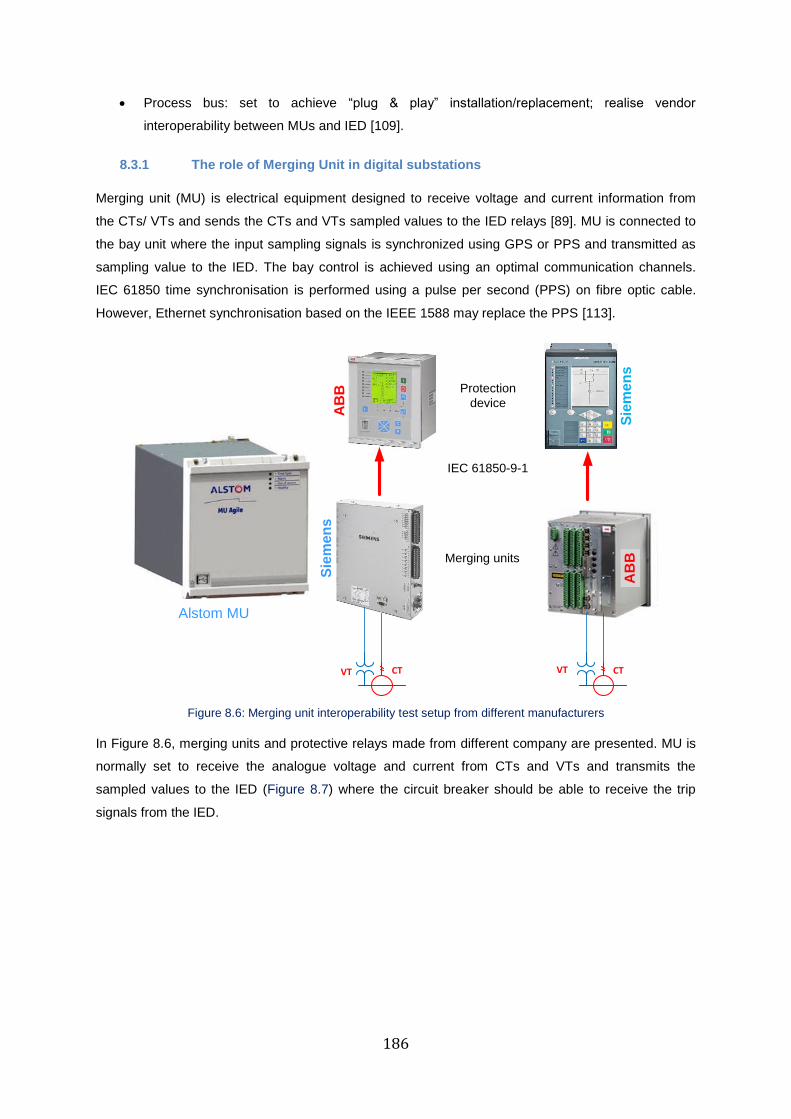
186
Process bus: set to achieve “plug & play” installation/replacement; realise vendor
interoperability between MUs and IED [109].
8.3.1 The role of Merging Unit in digital substations
Merging unit (MU) is electrical equipment designed to receive voltage and current information from
the CTs/ VTs and sends the CTs and VTs sampled values to the IED relays [89]. MU is connected to
the bay unit where the input sampling signals is synchronized using GPS or PPS and transmitted as
sampling value to the IED. The bay control is achieved using an optimal communication channels.
IEC 61850 time synchronisation is performed using a pulse per second (PPS) on fibre optic cable.
However, Ethernet synchronisation based on the IEEE 1588 may replace the PPS [113].
Protection
device
IEC 61850-9-1
Merging units
Sie
me
ns
Sie
me
ns
A
BB
AB
B
CTVT CT
Alstom MU
VT
Figure 8.6: Merging unit interoperability test setup from different manufacturers
In Figure 8.6, merging units and protective relays made from different company are presented. MU is
normally set to receive the analogue voltage and current from CTs and VTs and transmits the
sampled values to the IED (Figure 8.7) where the circuit breaker should be able to receive the trip
signals from the IED.
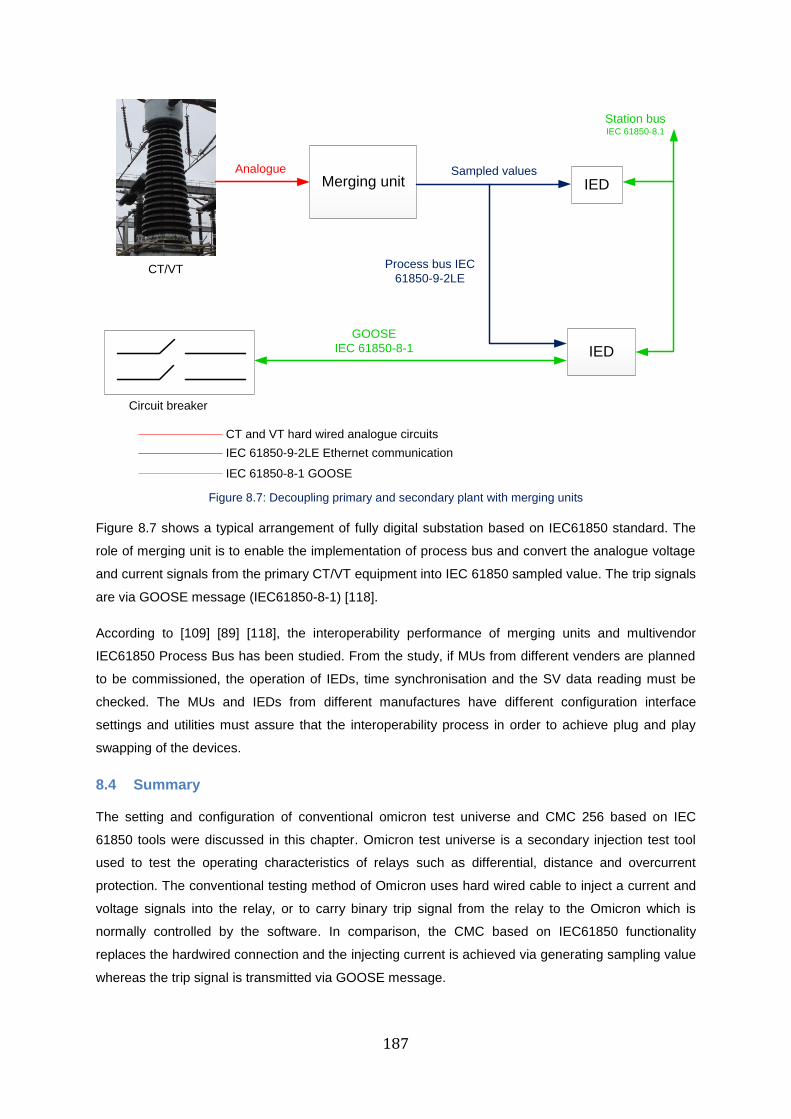
187
CT/VT
Merging unit IED
IED
Circuit breaker
GOOSE
IEC 61850-8-1
Process bus IEC
61850-9-2LE
Analogue Sampled values
Station busIEC 61850-8.1
CT and VT hard wired analogue circuits
IEC 61850-9-2LE Ethernet communication
IEC 61850-8-1 GOOSE
Figure 8.7: Decoupling primary and secondary plant with merging units
Figure 8.7 shows a typical arrangement of fully digital substation based on IEC61850 standard. The
role of merging unit is to enable the implementation of process bus and convert the analogue voltage
and current signals from the primary CT/VT equipment into IEC 61850 sampled value. The trip signals
are via GOOSE message (IEC61850-8-1) [118].
According to [109] [89] [118], the interoperability performance of merging units and multivendor
IEC61850 Process Bus has been studied. From the study, if MUs from different venders are planned
to be commissioned, the operation of IEDs, time synchronisation and the SV data reading must be
checked. The MUs and IEDs from different manufactures have different configuration interface
settings and utilities must assure that the interoperability process in order to achieve plug and play
swapping of the devices.
8.4 Summary
The setting and configuration of conventional omicron test universe and CMC 256 based on IEC
61850 tools were discussed in this chapter. Omicron test universe is a secondary injection test tool
used to test the operating characteristics of relays such as differential, distance and overcurrent
protection. The conventional testing method of Omicron uses hard wired cable to inject a current and
voltage signals into the relay, or to carry binary trip signal from the relay to the Omicron which is
normally controlled by the software. In comparison, the CMC based on IEC61850 functionality
replaces the hardwired connection and the injecting current is achieved via generating sampling value
whereas the trip signal is transmitted via GOOSE message.
188
The different implementation methods between the IEC 61850 relay and omicron test universe are
partial, hybrid and complete method. The main advantages of complete method (i.e. fully digitalisation
communication) between the CT and IEC61850 IED relays over conventional hardwired connection
are eliminating copper wires, cost minimizing, easy flexible of coper wiring, easy of configuration plug
and play swapping devices. The goal of IEC 61850 standard is to contribute a viable solution to future
smart network based on optical fibre and digital communications. However, a compressive
interoperability testing of Merging Units and IEDs from different manufactures is required to improve
reliable operation of secondary systems.
The 5th
technical paper entitled < Performance Testing of Distance Protection under Weak in-feed Sources based
on IEC61850 standard tools > was published and presented based on this work at the 9th
Protection, Automation
& Control World (PACWorld 2018). The Conference was held on June 25-28, 2018 at Grand hotel, Sofia,
Bulgaria.
189
Chapter 9: Conclusion and Future work
The thesis first introduces a background study into the role of existing transmission protection and
control system. Traditional power system with synchronous generators are capable of contributing
sufficient short circuit current during fault conditions and this enables the protective relays to provide
correct operation. However, due to the move towards low carbon technology, many existing UK
generation sources are shut down; including Cottam, Aberthaw and Fiddlers Ferry coal fired power
stations. Thus, increasing levels of demand will be satisfied by green energy sources such as by
hydro, biomass and renewable sources and low carbon energy such as nuclear power. The closure of
coal fired power station as replaced with nuclear and renewables have many challenges including
fault level reduction, difference in short circuit characteristics or behaviour due to declining inertia and
stability issues. As part of this, the research has been focused on the impact of UK low carbon energy
scenarios on transmission network protection policies.
The literature review into fault level, protection system studies as well as the methodology used in this
thesis is highlighted in chapter 2. This includes the operating principles of protection systems, short
circuit current types & calculation methods, sizing CTs & VTs, and physical relay testing procedures &
configurations.
Then, the impact of a low fault level on the operating performance of unit protection, distance
protection, and backup overcurrent relays were discussed thoroughly in this research project, which
are the main contribution of this research outcome. Under strong infeed conditions, unit scheme
works correctly and copes with resistive faults or a high level of loading. However, the operating
performance of unit scheme under extremely low fault level when a relatively high resistive fault
occurs is a concern. In the future, it may be necessary to re-establish correct setting limitations during
minimum credible fault levels.
In contrast, the distance protection operating using Mho characteristics works correctly under strong
infeed conditions, but there are limitations when resistive faults are included or during closed up faults
on short lines. However, the operating performance of distance scheme can be improved by the
utilisation of quadrilateral or cross polarised Mho characteristic. As fault level reduces, the operating
performance of non-unit distance protection was affected and resulted in an increase of operating
times or non-operation. However, factors such as line length, fault location, fault resistance and
percentage level of power electronics are also greatly influences the performance of distance
protection scheme. For example, as fault level reduces the distance scheme on short feeders works
better than on long feeders. The limitation of distance scheme as related to the future energy
scenarios is discussed in section 7.1 and 7.2.
One of the main challenges of this research project was the strategy to examine the impact of short
circuit contribution from renewable energy sources and synchronous sources, especially on the
operating performance of existing protection system in order to adapt the future power system
protection. As part of this, the implications of future protection strategy are also covered in section 7.3.
190
Moreover, the operating performance of backup overcurrent (phase and earth) protection was
examined under reduced fault level. Under low fault level, overcurrent back-up protection is severely
affected by low fault currents and should be replaced with voltage controlled overcurrent protection.
Based on the finding, distance scheme under extremely low fault level or when the transmission is
fully powered by converter based generation is unlikely to provide correct operation. The solution
being recommended to National Grid is to replace DUTT scheme with weak infeed protection.
Alternatively, a double unit scheme should be used when distance protection is not suitable, but unit
scheme cannot provide backup protection.
From the finding of the project National Grid should consider “unblocking” schemes and “unblocking
with weak infeed” to cope with extremely weak infeed conditions especially when differential
protection is not used. More advanced distance schemes are now being used in countries with
complex transmission networks. For example, SEL distance relays, but most existing National Grid
protection schemes do not apply weak infeed logic schemes and may need to configure differently to
cope with extremely weak infeed conditions, especially when the zone 1 distance relay cannot provide
50% fault coverage of the protected line. In a long term, National Grid may even need to consider
superimposed directional comparison protection and perhaps wide area protection with local
functionality.
The setting and testing of IED relays with IEC 61850 protocols is also covered. The goal of IEC 61850
standard is to contribute a viable solution to future smart network based on optical fibre and digital
communications. From physical relay testing results and previous research studies, the operating
times of IED relays using IEC 61850 protocols is similar to the traditional protection trip times and
have no impact on the existing National Grid protection operating times.
The future work will focus on establishing the limitations of unit scheme and non-unit distance scheme
when a source delivers an extremely weak infeed condition. These includes the setting configurations
of distance scheme using weak infeed conditions, impact of new technology on fault clearing times
and or design a relay algorithm that adapts the change of low fault levels. Moreover, studies on the
setting and testing of voltage controlled protection for transmission and distribution system will be
covered.
Furthermore, future work will focus on innovation research ideas to emphasise on suitability of future
transmission and distribution protection systems. The idea of having zero carbon smart cities are not
far from reality which will enable future smart cities to power with clean energy and be able to use
efficient and less energy. Thus, the overall future work will focus on the study of protection system
studies that can adapt for the future flexible smart grids.
191
References
[1] P. M. Anderson, Power System Protection. New York: A John Wiley & Sons, Inc, 1999. [2] Jonathan Clarke, “20th-century coal and oil-fired electric power generation,” Introductions to
Heritage Assets, Historic England, England, UK, 2015. Available at https://historicengland.org.uk/images-books/publications/iha-20thcentury-coal-oil-fired-electric-power-generation/heag056-electric-power-generation-iha.
[3] R. Bhattarai, A. Haddad, H. Griffiths, and N. Harid, “Voltage uprating of overhead transmission lines,” in Proceedings of the Universities Power Engineering Conference, 2010, pp. 1–6.
[4] Network Protection & Automation Guide, Protective Relays, Measurement & Control. Stafford, UK: Alstom Grid, 2011.
[5] J. Lewis Blackburn. and Thomas J. Domin, Protective Relaying Principles and Applications, 3rd ed. ISBN: 9781574447163, New York, USA, 2007.
[6] Joshua J. Romero, “Blackouts illuminate India’s power problems,” IEEE Spectrum, vol. 49, no. 10, 2012.
[7] L. G. Hewitson, M. Brown, and R. Balakrishnan, Practical power system protection, vol. 22, no. 4. IDC Technologies, ISBN:9780080455983, Elsevier, London, England, 2006.
[8] S. M. Blair, N. K. Singh, C. D. Booth, and G. M. Burt, “Operational control and protection implications of fault current limitation in distribution networks,” Univ. Power Eng. Conf., pp. 1–5, 2009.
[9] “Fault level, Electricity Ten Year Statement (ETYS), National Grid, UK,” 2018. [10] P. System, R. Committee, I. Power, and E. Society, IEEE Guide for Determining Fault Location
on AC Transmission and Distribution Lines, vol. 2014. 2014. [11] Julian Leslie, “Zero Carbon Operation 2025,” National Grid ESO, UK. [12] “System Operability Framework,” Electricity Tranmission, National Grid, UK. [Online].
Available: https://www.nationalgrideso.com/sites/eso/files/documents/35435-SOF%202014%20Final.pdf. [Accessed: 5-Jan-2015], 2014.
[13] Ruiqi Li, Campbell Booth, Adam Dyko, Andrew Roscoe, Jiebei Zhu, and Helge Urda, “Protection challenges in future converter dominated power systems,” in 6th Protection, Automation and Control World Conference (PAC), 2015.
[14] “Electricity Ten Year Statement,” Electricity Transmission, National Grid, UK. [Online]. Available: https://www.nationalgrideso.com/sites/eso/files/documents/37790-ETYS%202014.pdf. [Accessed: 10-Feb-2016], 2014.
[15] “Electricity Ten Year Statement,” National Grid, UK. Available at https://www.nationalgrideso.com/insights/electricity-ten-year-statement-etys, 2018.
[16] J. Keller and B. Kroposki, “Understanding Fault Characteristics of Inverter-Based Distributed Energy Resources,” 2010.
[17] R. Aljarrah, H. Marzooqhi, V. Terzija, and J. Yu, “Issues and challenges of steady-state fault calculation methods in power systems with a high penetration of non-synchronous generation,” in 2019 IEEE Milan PowerTech, PowerTech 2019, 2019, vol. 691800, no. 691800, pp. 1–6.
[18] “System Operability Framework,” Electricity Transmission, National Grid, UK. Available at https://www.nationalgrideso.com/insights/system-operability-framework-sof, 2016.
[19] “Future Energy Scenarios,” National Grid, UK. Available at http://fes.nationalgrid.com/fes-document/fes-archives/, 2017.
[20] G. Ziegler, Numerical Distance Protection, Principle and Application, ISBN:9788578110796, SIEMENS, 4th ed., vol. 53, no. 9. Berlin, 2011.
[21] Stanley H. Horowitz and Arun G. Phadke, Power System Relaying, 3rd ed. ISBN 978-0-470-05712-4, USA, 2008.
[22] P. S. R. Murty, Power System Analysis. 2007. [23] A. Abdelmoumene and H. Bentarzi, “A review on protective relays’ developments and trends,”
in Journal of Energy in Southern Africa, 2014, vol. 25, no. 2, pp. 91–95. [24] “Feeder Management IED Platform, P40 Agile P14N, Technical Manual,” Alstom Grid, UK,
2012. [25] G. Benmouyal, M. Meisinger, J. Burnworth, and W.A. Elmore, “IEEE Standard Inverse-Time
Characteristic Equations for Overcurrent Relays,” IEEE Trans. Power Deliv., vol. 14, no. 3, pp. 868–872, 1999.
[26] “A Review of Transmission System Back-up Protection,” Technical Report TR(E)339, National Grid, UK, 2000.
[27] M. Kuflom, P. A. Crossley, and N. Liu, “Impact of Pecking Faults on the Operating Times of
192
Numerical and Electromechanical Over-current Relays,” pp. 1–6, 2016. [28] “Current Differential Protection Relay,” Technical Manual, MiCOM P54x/EN M/Mc5, Schneider
Electric. Available at https://www.schneider-electric.co.uk/en/download/document/P54x_EN_M_Mc5__VC0%252BVD0_M/, 2013.
[29] I. Sokhey, “Application and Protection Setting for the National Grid UK Transmission System,” Transmission System, National Grid, UK, Policy Statement PS(T) 010, Warwick Technology Park, Gallows Hill, Warwick CV34 6DA, UK, 2015.
[30] “Overall Protection,” National Grid Technical Specification, NGTS 3.24.65, National grid, UK, National Grid Technical Specification NGTS 3.24.65, Warwick Technology Park, Gallows Hill, Warwick CV34 6DA, UK, 2000.
[31] “Protection and Control Equipment Meeting the Requirements of TPS 5/33.” National Grid Technical Guidance Note NGT (E) 15, Warwick Technology Park, Gallows Hill, Warwick CV34 6DA, UK, 2000.
[32] M. Singh, T. Vishnuvardhan, and S. G. Srivani, “Adaptive protection coordination scheme for power networks under penetration of distributed energy resources,” IET Gener. Transm. Distrib., vol. 10, no. 15, pp. 3919–3929, 2016.
[33] National Grid, “System Operability Framework,” UK Electricity Transmission, 2015. [34] Francisco M. Gonzalez and Longatt José Luis Rueda, PowerFactory Applications for Power
System Analysis. ISBN 978-3-319-12958-7: Springer Berlin Heidelberg, 2014. [35] “DIgSILENT PowerFactory 15, Integrated Power System Analysis Software user Manual,”
Gomaringen, Germany, 2015. [36] J.C. Das, Power system analysis, vol. 22, no. 12. ISBN: 0-8247-0737-0, New York, 2002. [37] National Grid UK, “Electricity Ten Year Statement (ETYS) - Appendix D - Fault Levels,”
National Grid UK. Available at https://www.nationalgrideso.com/insights/electricity-ten-year-statement-etys, 2015.
[38] A. Kazerooni, S. Jupe, N. Murdoch, and J. Berry, “Sensitivity Analysis of Fault level Assesments in HV Networks,” 2014, no. 0200, pp. 11–12.
[39] “Guidance on Requirements for Protection Setting Re-calculation due to changes in Feeder Impedance or Fault level,” no. 1. National Grid Capital Delivery Design Handbook DH29, pp. 1–19, 2014.
[40] “DigSILENT PowerFactory, Advanced Tutorial Distance Protection.” DIgSILENT GmbH, Gomaringen, Germany, 2017.
[41] J. Lewis Blackburn Thomas J. Domin, Protective Relaying, Principles and Applications, Electrical Engineering and Electronics, New York, USA, 3rd ed., vol. 18, no. 37. 1987.
[42] Filipe Faria da Silva and Claus L. Bak, “Distance protection of multiple-circuit shared tower transmission lines with different voltages - Part I: Fault current magnitude,” IET Gener. Transm. Distrib., vol. 11, no. 10, 2017.
[43] S. Dhakshinamurthi, I. Sokhey, J. Singh, N. Tart, and A. Sharman, “National Grid Experience of Protection Setting Re-Calculation Due to Transmission System Reinforcements,” in 13th IET International Conference on Development in Power System Protection (DPSP), Edinburgh UK, 2016, pp. 1–5.
[44] “Short Circuit, Electricity Ten Year Statement (ETYS),” National Grid UK. Available at https://www.nationalgrideso.com/insights/electricity-ten-year-statement-etys, 2018.
[45] I. Hernando-Gil, H. Shi, F. Li, S. Djokic, and M. Lehtonen, “Evaluation of Fault Levels and Power Supply Network Impedances in 230/400 v 50 Hz Generic Distribution Systems,” IEEE Trans. Power Deliv., vol. 32, no. 2, pp. 768–777, 2017.
[46] Helge Urdal, Richard lerna, Jiebei Zhu, Chavdar Ivanov, Amir Dahresobh, and Djaved Rostom, “System strength considerations in a converter dominated power system,” in IET Renewable Power Generation, 2015, vol. 9, no. 1, pp. 10–17.
[47] IEEE PES, “Impact of Inverter Based Generation on Bulk Power System Dynamics and Short-Circuit Performance,” 2018.
[48] B. Rios and R. Garcia-Valle, “Dynamic modelling of VSC-HVDC for connection of offshore wind farms,” in 9th IET International Conference on AC and DC Power Transmission (ACDC 2010), 2010, pp. P22–P22.
[49] J. Zhu, C. D. Booth, G. P. Adam, A. J. Roscoe, and C. G. Bright, “Inertia Emulation Control Strategy for VSC-HVDC Transmission Systems,” IEEE Trans. POWER Syst., vol. 28, no. 2, pp. 1277–1287, 2013.
[50] J. Jia, G. Yang, S. Merner, A. H. Nielsen, and S. Merner, “Investigation of Grid-connected Voltage Source Converter Performance under Unbalanced Faults,” 2016, no. 12196, pp. 609–613.
193
[51] Ruiqi Li, Campbell Booth, Adam Dyśko, Andrew Roscoe, Helge Urdal, and Jiebei Zhu, “A systematic evaluation of network protection responses in future converter-dominated power systems,” 2016.
[52] Vishnuvardhan Telukunta, Janmejaya Pradhan, Anubha Agrawal, Manohar Singh, and Sankighatta Garudachar Srivani, “Protection Challenges Under Bulk Penetration of Renewable Energy Resources in Power Systems,” CSEE J. Power Energy Syst., vol. 3, no. 4, pp. 365–379, 2017.
[53] Vassilis C. Nikolaidis, Aristotelis M. Tsimtsi, and Anastasia S. Safigianni, “Investigating Particularities of Infeed and Fault Resistance Effect on Distance Relays Protecting Radial Distribution Feeders with DG,” IEEE Access, vol. 6, pp. 11301–11312, 2018.
[54] “Electricity Ten Year Statement,” Electricity Transmission, National Grid, UK. Available at https://www.nationalgrideso.com/insights/electricity-ten-year-statement-etys, 2015.
[55] Julian Leslie, “Zero Carbon Operation 2025,” Electricity System Operator, National Grid, UK. [Online]. Available: https://www.nationalgrideso.com/document/141031/download. [Accessed: 5-April-2019], 2019.
[56] X. Wu, J. Mutale, N. Jenkins, and G. Strbac, “An investigation of Network Splitting for Fault Level Reduction,” no. January, pp. 1–30, 2003.
[57] “Current transformers for protection and general use,” no. 6. National Grid Technical Specification NGTS 3.02.04, Warwick Technology Park, Gallows Hill, Warwick CV34 6DA, UK, pp. 1–36, 2015.
[58] “Rating and General Requirements for plant, equipment and apparatus for the National Grid System,” no. 3. National Grid plc, Thorpe Park 1100 Century Way, Leeds, LS15 8TU, National Grid Technical Specification NGTS1, pp. 1–6, 2007.
[59] Andrew Hemus, “The Grid Code,” National Grid, Warwick Technology Park, Gallows Hill, Warwick CV34 6DA, UK. Available at https://www.nationalgrideso.com/codes/grid-code, 2018.
[60] OMICRON CMC 256plus -, “Protection relay test set and universal calibrator,” 2006. [61] O. Gmbh, “Application-oriented testing of a distance teleprotection function end to end in the
field using the corresponding RelaySimTest template Author,” pp. 1–25, 2015. [62] A. A. Omicron, D. T. A. T, and D. Automation, “Protection of Double Circuit Transmission
Lines.” [63] K. Kangvansaichol and P. A. Crossley, “Multi-zone Current Differential Protection For
Transmission Networks,” in PES Transmission and Distribution Conference and Exposition, 2003, pp. 359–364.
[64] I. Sokhey, “Application and Protection Setting for the National Grid UK Transmission System,” no. 3, 2015.
[65] “Non-Unit Feeder Protection,” Technical Specification NGTS 3.24.35, National Grid, Warwick Technology Park, Gallows Hill, Warwick CV34 6DA, UK, 2000.
[66] A. Sharman, I. Sokhey, B. Chong, J. Watson, and S. Dhakshinamurthi, “National Grid procedural test requirements for commissioning of multifunction numerical protection relays,” in 13th International Conference on Development in Power System Protection (DPSP), IET, Edinburgh, UK, 2016, pp. 1–6.
[67] “Distance Protection Scheme,” in Network Protection & Automation Guide, 2011, pp. 170–191. [68] S. H. Horowitz and A. G. Phadke, Power System Relaying: Third Edition. 2008. [69] M. J. Thompson and A. Somani, “A Tutorial on Calculating Source Impedance Ratios for
Determining Line Length.” p. 9, 2015. [70] J. L. Blackburn and T. . Domin, Protective Relaying, Principle and Application, vol. 18, no. 37.
1987. [71] M. Kuflom, P. A. Crossley, and M. Osborne, “Impact of ‘ Intermediate ’ Sources on Distance
Protection of Transmission Lines,” in 14th International Conference on Developments in Power System Protection DPSP, 2018, pp. 1–6.
[72] “Current differential Protection relays, Technical Guide, MiCOM P54x/EN T/I53,” Alstom Grid, UK, 2012.
[73] M. E. Erezzaghi and P. A. Crossley, “The Effect Of High Resistance Faults On A Distance Relay,” in IEEE Power Engineering Society General Meeting (IEEE Cat. No.03CH37491), 2003, pp. 2128–2133.
[74] J. B. Lee, I. D. Kim, and Y. K. Baek, “Protective Relay Testing and Characteristic Analysis for High Impedance Faults in Transmission Lines,” pp. 1076–1081, 1999.
[75] A. a Abdlrahem and H. H. Sherwali, “Modelling of Numerical Distabce Relays Using MATLAB,” in IEEE Symposium on Industrial Electronics and Applications (ISIEA), 2009, no. Isiea, pp. 389–392.
194
[76] Bogdan Kasztenny and Dale Finney, “Fundamentals of Distance Protection,” in 61st IEEE Annual Conference for Protective Relay Engineers, 2008.
[77] A. Apostolov, D. Tholomier, S. Sambasivan, and S. Richards, “Protection of Double Circuit Transmission Lines,” in 60th IEEE Annual Conference for Protective Relay Engineers, 2007, pp. 1–17.
[78] Demetrios A. Tziouvaras, Héctor J. Altuve, and Fernando Calero, “Protecting mutually coupled transmission lines: Challenges and solutions,” in 67th Annual Conference for Protective Relay Engineers, 2014, pp. 30–49.
[79] H. Y. Li, E. P. Southern, and P. A. Crossley, “A new type of differential feeder protection relay using the global positioning system for data synchronization,” IEEE Trans. Power Deliv., vol. 12, no. 3, pp. 1090–1097, 1997.
[80] “Unit Feeder Main Protection,” National Grid Technical Specification NGTS 3.24.18, Warwick Technology Park, Gallows Hill, Warwick CV34 6DA, UK, 2011.
[81] S. Dambhare, S. A. Soman, and M. C. Chandorkar, “Novel sensitive current differential protection of transmission line,” pp. 1–6, 2008.
[82] Jingham He, Tony Yip, Yupeng Huang, Ziqi Wang, and Lin Liu, “Digital Substation Backup Protection using a Multi-Agent System Approach,” in 13th International Conference on Development in Power System Protection (DPSP), Edinburgh UK, 2016, pp. 1–6.
[83] Gerhard Ziegler, Numerical Differential Protection, Principles and Application, 2nd ed. SIEMENS, Germany, 2012.
[84] H. Altuve, G. Benmouyal, J. Roberts, and D.A. Tziouvaras, “Transmission line differential protection with an enhanced characteristic,” in 8th IET International Conference on Developments in Power System Protection, 2004, pp. 1–8.
[85] Tarangini Karoor Subrahmanyam, “Design of a differential protection scheme fo a 345 kV transmission line using SEL 311L relays,” Manhattan, Kansas, 2014.
[86] “Current Differential Protection Relay, Technical Manual, MiCOM P54x/EN M/Ka4+Kb4, Schneider Electric,” 2010.
[87] “Guidance on Policy Application and Setting of Feeder Backup Protection,” National Grid Capital Delivery Design Handbook DH04, Warwick Technology Park, Gallows Hill, Warwick CV34 6DA, UK.
[88] “Circuit Breaker Fail Protection,” National Grid, Technical Specification NGTS 3.24.39, Warwick Technology Park, Gallows Hill, Warwick CV34 6DA, UK., 2000.
[89] P. A. Crossley, L. Yang, H. Y. Li, U. Anombem, and A. Wen, “Performance assessment of an IEC 61850-9-2 based protection scheme for the mesh corner of a 400kV transmission substation,” in CIGRE, B5, 2012, vol. B5-118, pp. 1–11.
[90] J. Rushton and K. G. M. Mewes, “Protection of generators , transformers , generator-transformer units and transformer feeders,” .
[91] Lubomir Sevov, Zhiying Zhang, and Ilia Voloh, “Differential Protection for Power Transformers With Non-Standard Phase Shifts,” in 64th Annual Conference for Protective Relay Engineers, 2011, pp. 1–10.
[92] “Strategic Spares Policy for Supergrid Transformers,” Supporting Statement for Transmission System PS(T) 029, National Grid, Warwick Technology Park, Gallows Hill, Warwick CV34 6DA, UK., 2011.
[93] “IEEE Guide for AC Generator Protection, The Institute of Electrical and Electronics Engineers, IEEE C37.102-1987,” New York, USA, 1995.
[94] E. Khan, A. Biswas, and R. Islam, “Restricted Earth Fault Protection with Superconducting Fault Current Limiter for 100 % Stator Winding,” 2013.
[95] Network Protection & Automation Guide, Protection Relays, Measurments & Control. Alstom Grid: Alstom Grid, 2011.
[96] “Guidance on Policy Application & Setting of Feeder Backup Protection,” no. 2. National Grid Capital Delivery Design Handbook DH04, pp. 1–20, 2011.
[97] S. Sip and E. No, “Overcurrent protection,” pp. 1–5. [98] “Electrical Parameters and Impedance Characteristics of Plant, Lines and Cables,” National
Grid Technical Guidance Note TGN (E) 166, Warwick Technology Park, Gallows Hill, Warwick CV34 6DA, UK, 2002.
[99] R. Guideline, “Transmission System Phase Backup Protection,” no. June, 2011. [100] “Local Back-up Protection for an Electric Power System, GE Power Management, GER-3178.” [101] Arun G. Phadke, Peter Wall, Lei Ding, and Vladmir Terzija, “Improving the performance of
power system protection using wide area monitoring systems,” Mod. Power Syst. Clean Energy, vol. 4, no. 3, pp. 319–331, 2016.
195
[102] J. C. Tan, P. A. Crossley, D. Kirschen, J. Goody, and J. A. Downes, “An expert system for the back-up protection of a transmission network,” IEEE Trans. Power Deliv., vol. 15, no. 2, pp. 508–514, 2000.
[103] J. C. Tan, P. A. Crossley, P. G. Mclaren, P. F. Gale, I. Hall, and J. Farrell, “Application of a Wide Area Backup Protection Expert System to Prevent Cascading Outages,” vol. 17, no. 2, pp. 375–380, 2002.
[104] A. Bartylak, “Evaluation of weak infeed tripping technique on the ESKOM transmission network,” CIGRE, Study Committee B5 Colloquium 2005 September 14-16 Calgary, CANADA, 2005.
[105] Mark Wang and Yong Chen, “Weak Infeed Study and Protection Solution,” in 38 th Annual Western Protection Relay Conferenceth Annual Western Protection Relay Conference, 2011.
[106] B. Chong, A. Sharman, I. Sokhey, and S. Dhakshinamurithi, “National Grid Back-up Protection Setting Tool for Grading Coordination across Distribution Network Operators / Third Party Interfaces,” in 13th International Conference on Development in Power System Protection (DPSP), IET, Edinburgh, UK, 2016, pp. 1–6.
[107] “Back-up Protection Grading Across Network Operator Interfaces,” National Grid Policy Statement, UK, 2014.
[108] Edward Coster, Johanna Myrzik, and Wil Kling, “Effect of DG on distribution grid protection,” in Distributed Generation, 2010, pp. 93–118.
[109] X. Chen, H. Guo, and P. Crossley, “Interoperability Performance Assessment of Multivendor IEC61850 Process Bus,” IEEE Trans. Power Deliv., vol. 31, no. 4, pp. 1934–1944, 2016.
[110] D. Otto, R. Zhang, and H. Li, “IEC 61850 configuration strategy for substation control and protection,” Dev. Power Syst. Prot. (DPSP 2010). Manag. Chang. 10th IET Int. Conf., pp. 1–4, 2010.
[111] H.Y. Li, P.A. Crossley, and J. Fitch, “Development of IEC61850 Hardware Laboratory Platform for Substation Protection and Control integration,” in 9th International Conference on Developments in Power System Protection, 2008, pp. 501–505.
[112] X. Chen, P. A. Crossley, and H. Guo, “Design, construction and validation of a next generation protection and control system based on IEC61850 standards,” in Developments in Power System Protection (DPSP 2014), 12th IET International Conference on, 2014, pp. 1–6.
[113] Xi Chen, Hao Guo, and Peter Crossley, “Performance Testing of IEC 61850 Based Architecture for UK National Grid Standardised Substation Automation Solutions,” in IEEE Power & Energy Society General Meeting, 2015, pp. 1–5.
[114] A. C. Adewole and R. Tzoneva, Impact of IEC 61850-9-2 standard-based process bus on the operating performance of protection IEDS: Comparative study, vol. 19, no. 3. IFAC, 2014.
[115] L. Yang, P. A. Crossley, A. Wen, R. Chatfield, and J. Wright, “Performance assessment of a IEC 61850-9-2 based protection scheme for a transmission substation,” IEEE PES Innov. Smart Grid Technol. Conf. Eur., pp. 1–5, 2011.
[116] C. Mctaggart and D. Adam, “A Multilevel System Integrity Protection Scheme Based on GOOSE Messaging,” pp. 1–5, 2017.
[117] P. Franco, G. Rocha, and D. Dolezilek, “Improving reliability and security of protection algorithms via signal message supervision,” pp. 1–6.
[118] Anombem Uzoamaka, LI Haiyu, Peter A. Crossley, AN Wen, Zhan Ray, and Mctaggart Craig, “Performance testing and assessment of Merging Units using IEC61850,” in APAP 2011 - Proceedings: 2011 International Conference on Advanced Power System Automation and Protection, 2011, vol. 2, pp. 1252–1257.
[119] “Appendices to the Technical Report on the events of 9 August 2019,” 2019. [120] “Technical Report on the events of 9 August 2019,” National Grid Capital Delivery Design
Handbook DH05, 2019.
196
List of Publication
1. M. Kuflom; P. A Crossley, “Performance Assessment of Protection Schemes under Low Fault Level for GB Transmission Networks”, to be submitted to IEEE Transactions on Power Delivery
2. M. Kuflom; P. A Crossley, “Reliable Grading Strategy for Overcurrent Relays during “Pecking” Faults” in IEEE Transactions on Power Delivery, to be submitted to IEEE Transactions on Power Delivery
3. M. Kuflom; P. A Crossley and Mark Osborne, “Performance Testing of Distance Protection under Weak in-feed Sources based on IEC61850 standard tools”, 9th Protection, Automation & Control World (PACWorld) conference, Sofia, Bulgaria, June 25-28, 2018
4. M. Kuflom; P. A Crossley; M. Osborne, “Impact of Intermediate Sources on Distance Protection of Transmission Lines” 14th International Conference on Development in Power System Protection (DPSP) pp 1-6, dio: 10.1049/joe.2018.0239; Belfast, UK, March 12-15, 2018
5. M. Kuflom; P. A Crossley; M. Osborne, “Impact on Transmission Line Protection of future changes in the UK Energy landscape” 7th International conference on Advanced Power System Automation and Protection (APAP), Jeju, Korea, October 16 -18, 2017
6. M. Kuflom; P. A Crossley, “Impact of weak In-feed Tripping Performance on Distance Protection Schemes” HubNet Smart Grids Symposium, University of Strathclyde, Glasgow, UK, Sep 13-14, 2016
7. M. Kuflom; P. A Crossley and Nan. Liu, “Impact of pecking faults on the operating times of numerical and electromechanical over-current relays” 13th International Conference on Development in Power System Protection (DPSP) pp 1-6; doi:10.1049/cp.2016.0046, Edinburgh,UK, March 7-10, 2016
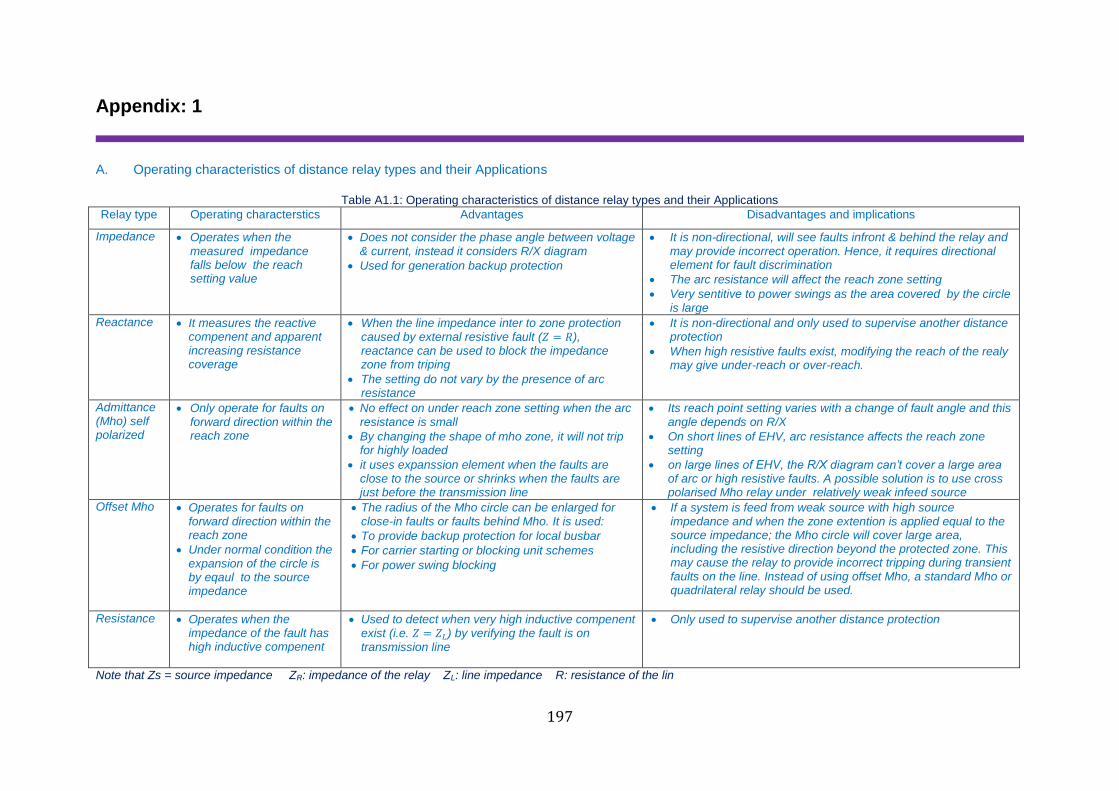
197
Appendix: 1
A. Operating characteristics of distance relay types and their Applications
Table A1.1: Operating characteristics of distance relay types and their Applications
Relay type Operating characterstics Advantages Disadvantages and implications
Impedance Operates when the measured impedance falls below the reach setting value
Does not consider the phase angle between voltage & current, instead it considers R/X diagram
Used for generation backup protection
It is non-directional, will see faults infront & behind the relay and may provide incorrect operation. Hence, it requires directional element for fault discrimination
The arc resistance will affect the reach zone setting
Very sentitive to power swings as the area covered by the circle is large
Reactance It measures the reactive compenent and apparent increasing resistance coverage
When the line impedance inter to zone protection caused by external resistive fault (𝑍 = 𝑅), reactance can be used to block the impedance zone from triping
The setting do not vary by the presence of arc resistance
It is non-directional and only used to supervise another distance protection
When high resistive faults exist, modifying the reach of the realy may give under-reach or over-reach.
Admittance (Mho) self polarized
Only operate for faults on forward direction within the reach zone
No effect on under reach zone setting when the arc resistance is small
By changing the shape of mho zone, it will not trip for highly loaded
it uses expanssion element when the faults are close to the source or shrinks when the faults are just before the transmission line
Its reach point setting varies with a change of fault angle and this angle depends on R/X
On short lines of EHV, arc resistance affects the reach zone setting
on large lines of EHV, the R/X diagram can’t cover a large area of arc or high resistive faults. A possible solution is to use cross polarised Mho relay under relatively weak infeed source
Offset Mho Operates for faults on forward direction within the reach zone
Under normal condition the expansion of the circle is by eqaul to the source impedance
The radius of the Mho circle can be enlarged for close-in faults or faults behind Mho. It is used:
To provide backup protection for local busbar
For carrier starting or blocking unit schemes
For power swing blocking
If a system is feed from weak source with high source impedance and when the zone extention is applied equal to the source impedance; the Mho circle will cover large area, including the resistive direction beyond the protected zone. This may cause the relay to provide incorrect tripping during transient faults on the line. Instead of using offset Mho, a standard Mho or quadrilateral relay should be used.
Resistance Operates when the impedance of the fault has high inductive compenent
Used to detect when very high inductive compenent exist (i.e. 𝑍 = 𝑍𝐿) by verifying the fault is on transmission line
Only used to supervise another distance protection
Note that Zs = source impedance ZR: impedance of the relay ZL: line impedance R: resistance of the lin
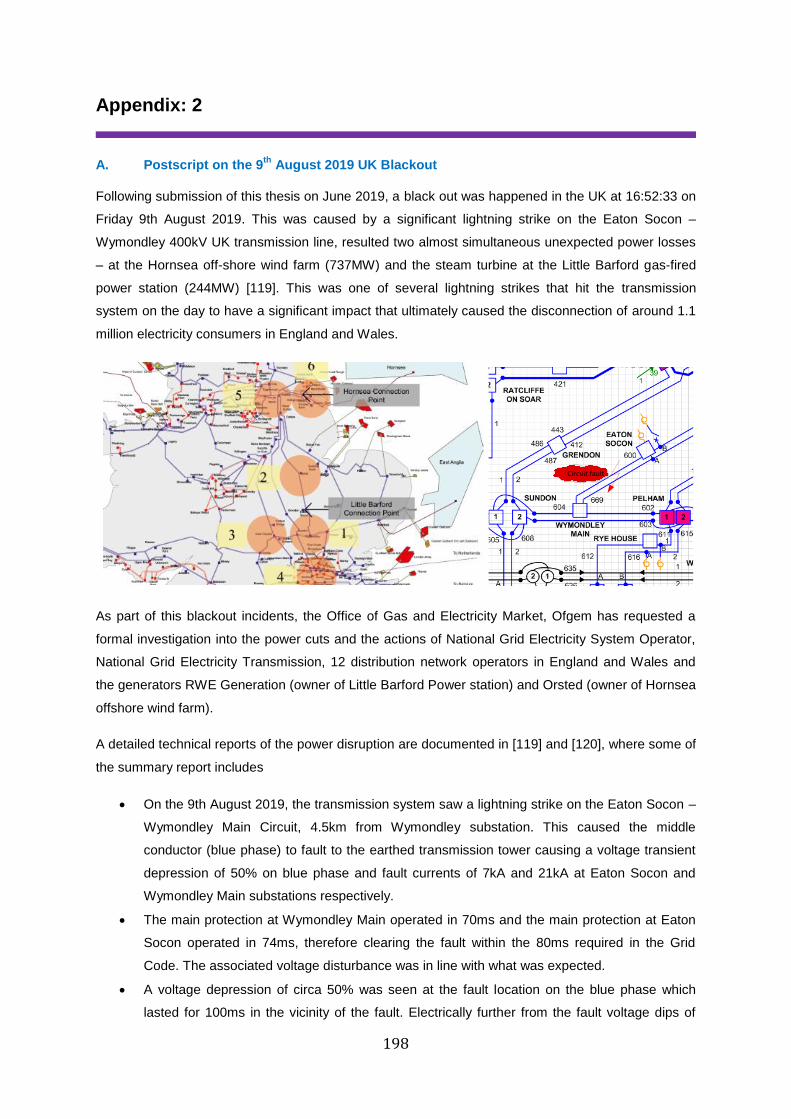
198
Appendix: 2
A. Postscript on the 9th
August 2019 UK Blackout
Following submission of this thesis on June 2019, a black out was happened in the UK at 16:52:33 on
Friday 9th August 2019. This was caused by a significant lightning strike on the Eaton Socon –
Wymondley 400kV UK transmission line, resulted two almost simultaneous unexpected power losses
– at the Hornsea off-shore wind farm (737MW) and the steam turbine at the Little Barford gas-fired
power station (244MW) [119]. This was one of several lightning strikes that hit the transmission
system on the day to have a significant impact that ultimately caused the disconnection of around 1.1
million electricity consumers in England and Wales.
Circuit fault
As part of this blackout incidents, the Office of Gas and Electricity Market, Ofgem has requested a
formal investigation into the power cuts and the actions of National Grid Electricity System Operator,
National Grid Electricity Transmission, 12 distribution network operators in England and Wales and
the generators RWE Generation (owner of Little Barford Power station) and Orsted (owner of Hornsea
offshore wind farm).
A detailed technical reports of the power disruption are documented in [119] and [120], where some of
the summary report includes
On the 9th August 2019, the transmission system saw a lightning strike on the Eaton Socon –
Wymondley Main Circuit, 4.5km from Wymondley substation. This caused the middle
conductor (blue phase) to fault to the earthed transmission tower causing a voltage transient
depression of 50% on blue phase and fault currents of 7kA and 21kA at Eaton Socon and
Wymondley Main substations respectively.
The main protection at Wymondley Main operated in 70ms and the main protection at Eaton
Socon operated in 74ms, therefore clearing the fault within the 80ms required in the Grid
Code. The associated voltage disturbance was in line with what was expected.
A voltage depression of circa 50% was seen at the fault location on the blue phase which
lasted for 100ms in the vicinity of the fault. Electrically further from the fault voltage dips of
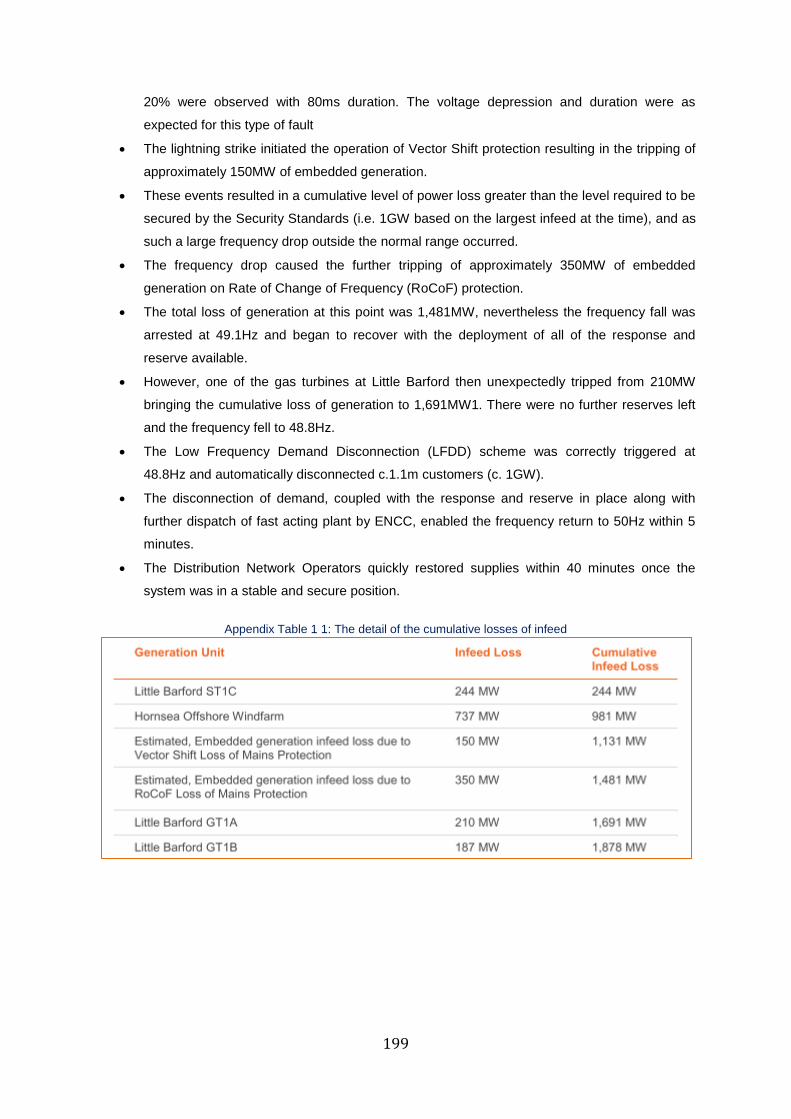
199
20% were observed with 80ms duration. The voltage depression and duration were as
expected for this type of fault
The lightning strike initiated the operation of Vector Shift protection resulting in the tripping of
approximately 150MW of embedded generation.
These events resulted in a cumulative level of power loss greater than the level required to be
secured by the Security Standards (i.e. 1GW based on the largest infeed at the time), and as
such a large frequency drop outside the normal range occurred.
The frequency drop caused the further tripping of approximately 350MW of embedded
generation on Rate of Change of Frequency (RoCoF) protection.
The total loss of generation at this point was 1,481MW, nevertheless the frequency fall was
arrested at 49.1Hz and began to recover with the deployment of all of the response and
reserve available.
However, one of the gas turbines at Little Barford then unexpectedly tripped from 210MW
bringing the cumulative loss of generation to 1,691MW1. There were no further reserves left
and the frequency fell to 48.8Hz.
The Low Frequency Demand Disconnection (LFDD) scheme was correctly triggered at
48.8Hz and automatically disconnected c.1.1m customers (c. 1GW).
The disconnection of demand, coupled with the response and reserve in place along with
further dispatch of fast acting plant by ENCC, enabled the frequency return to 50Hz within 5
minutes.
The Distribution Network Operators quickly restored supplies within 40 minutes once the
system was in a stable and secure position.
Appendix Table 1 1: The detail of the cumulative losses of infeed
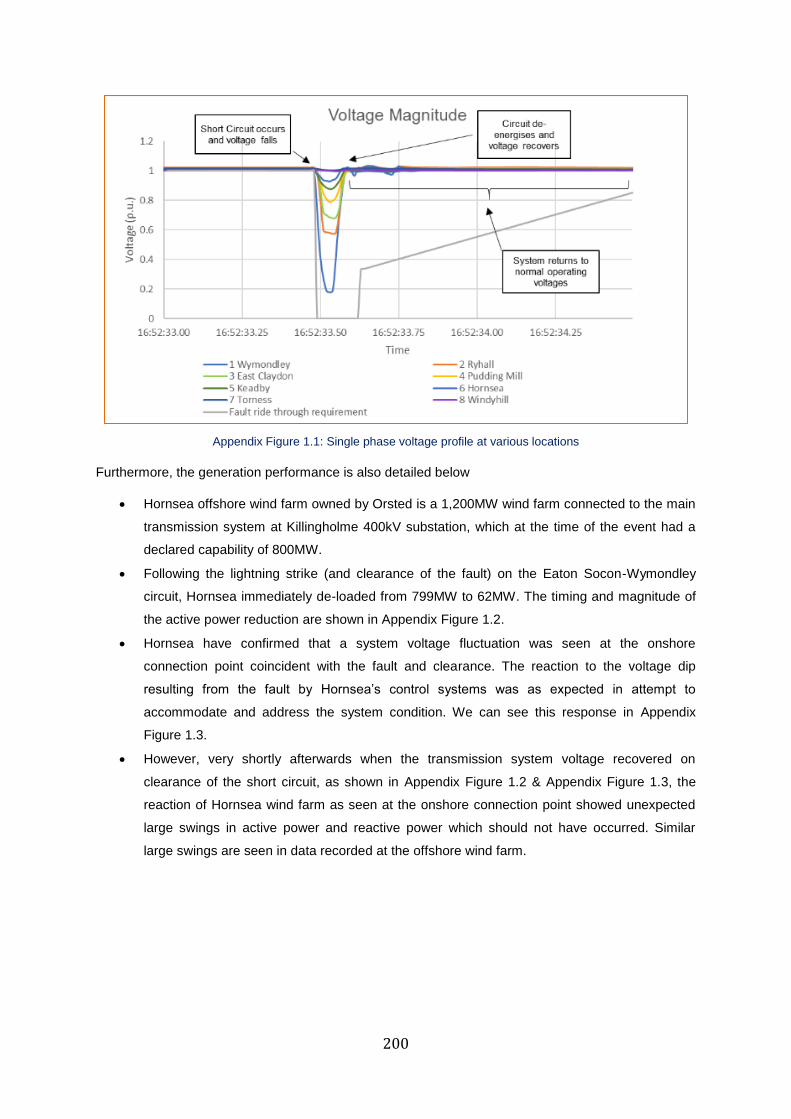
200
Appendix Figure 1.1: Single phase voltage profile at various locations
Furthermore, the generation performance is also detailed below
Hornsea offshore wind farm owned by Orsted is a 1,200MW wind farm connected to the main
transmission system at Killingholme 400kV substation, which at the time of the event had a
declared capability of 800MW.
Following the lightning strike (and clearance of the fault) on the Eaton Socon-Wymondley
circuit, Hornsea immediately de-loaded from 799MW to 62MW. The timing and magnitude of
the active power reduction are shown in Appendix Figure 1.2.
Hornsea have confirmed that a system voltage fluctuation was seen at the onshore
connection point coincident with the fault and clearance. The reaction to the voltage dip
resulting from the fault by Hornsea’s control systems was as expected in attempt to
accommodate and address the system condition. We can see this response in Appendix
Figure 1.3.
However, very shortly afterwards when the transmission system voltage recovered on
clearance of the short circuit, as shown in Appendix Figure 1.2 & Appendix Figure 1.3, the
reaction of Hornsea wind farm as seen at the onshore connection point showed unexpected
large swings in active power and reactive power which should not have occurred. Similar
large swings are seen in data recorded at the offshore wind farm.
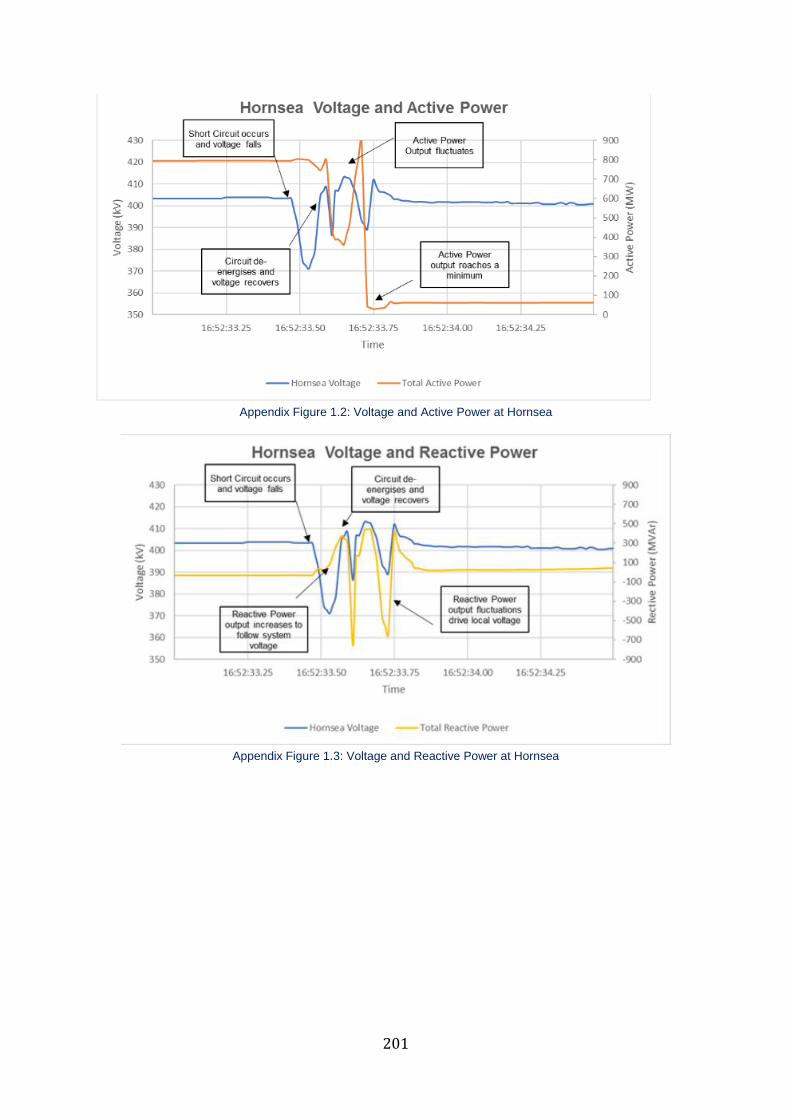
201
Appendix Figure 1.2: Voltage and Active Power at Hornsea
Appendix Figure 1.3: Voltage and Reactive Power at Hornsea
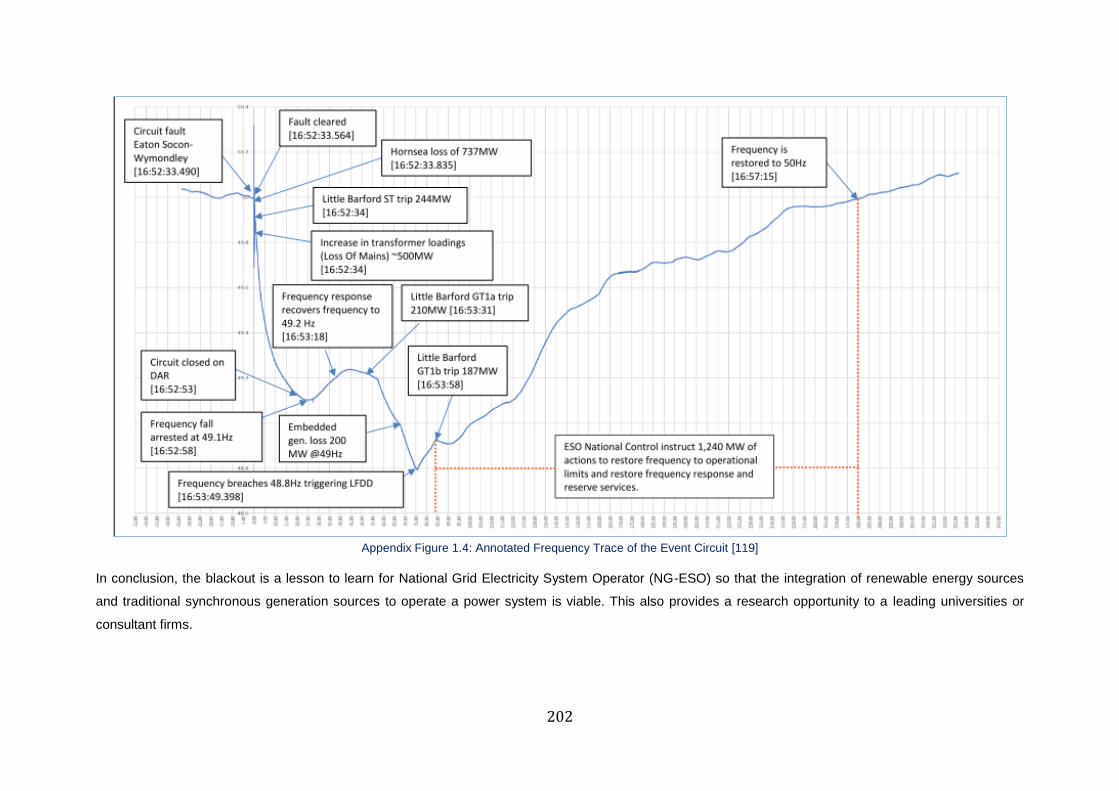
202
Appendix Figure 1.4: Annotated Frequency Trace of the Event Circuit [119]
In conclusion, the blackout is a lesson to learn for National Grid Electricity System Operator (NG-ESO) so that the integration of renewable energy sources
and traditional synchronous generation sources to operate a power system is viable. This also provides a research opportunity to a leading universities or
consultant firms.
Copyright © 2022 FDOKUMEN

