






Bahasa
Halaman
Hukum

7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 1/20
BAB 1
K ONSEP UMPAN-BALIK DAN TANPA UMPAN-BALIK.
Pendahuluan
Pada bahasan ini menjelaskan konsep sistem kontrol umpan balik (feedback ) dan
tanpa umpan balik (control feedfoward). salah satu permasalah yang dihadapi industri
yang bergerak dalam bidang proses (seperti industri kimia, makanan, pulp, pupuk,
minyak dan gas) adalah regulasi atau pengontrolan berbagai variabel proses pada titik-
titik kerja yang diharapkan. Beberapa variabel proses yang umum dilakukan
pengontrolan diantaranya adalah temperature fluida (atau gas) pada sistem heat exchanger , tekanan pada reaktor, laju fluida pada pipa, level pada tanki penampung,
konsentrasi bahan kimia dan sebagainya. alam bab ini akan dibahas dua skema kontrol
P! lanjut yang dapat dijumpai di !ndustri Proses yaitu" skema Feedfoward dan
feedback control. #etelah menyelesaikan bab ini, diharapkan mahasiswa dapat
memahami sesuai tujuan yang diharapkan.
Tujuan khusus:
$. %ampu menjelaskan prinsip kerja kontrol umpan-balik dan tanpa umpan-balik
&. %ampu menjelaskan kontrol umpan-balik dengan #istem gangguan
'. %ampu menjelaskan kontrol umpan-balik #istem inamik
. %ampu menjelaskan kontrol umpan-balik #istem regeneratif
. %ampu menjelaskan prinsip-prinsip disain system kontrol
*. %ampu menjelaskan perbandingan kontrol lup tertutup dengan terbuka
sehingga mampu menetukan system kontrol mana yang akan dipakai untuk
aplikasi yang sesuai.
+. %ampu memodifikasi atau mendisain system kontrol.
1.1 Konsep kendal u!pan "alk dan #anpa u!pan-"alk
i dalam teknik kendali automatik faktor umpan-balik memegang peran yang
sangat penting, karena dengan cukup meyakinkan telah mampu menggantikan tugas
operator secara automatik . #istem kendali loop terbuka (tanpa umpan- balik)
sebagaimana ditunjukan melalui diagram blok pada ambar $.l, dioperasikan secara
langsung oleh sinyal .tunggal dari masukannya. i dalam sistem ini tidak terdapat
$
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 2/20
2
piranti koreksi keluaran dan tidak dilengkapi komponen mek anik untuk memperbaiki
atau mengkompensasi karakteristik sistem, manakala terjadi penyimpangan penampilan
operasi dari komponen pendukung system tersebut. i fihak lain, sistem kendali loop
tertutup (berumpan- balik) sebagaimana ditunjukan melalui diagram blok dan grafik
aliran sinyal pada ambar $.&, diaktifkan oleh dua buah sinyal yaitu sinyal masukan
dan sinyal umpan-balik yang berasal dari keluaran sistem. #inyal umpan- balik
memberikan aksi, mek anisme korelasi secara mandiri di dalam pengendalian sistem
sebagaimana akan dijelaskan berikut ini.
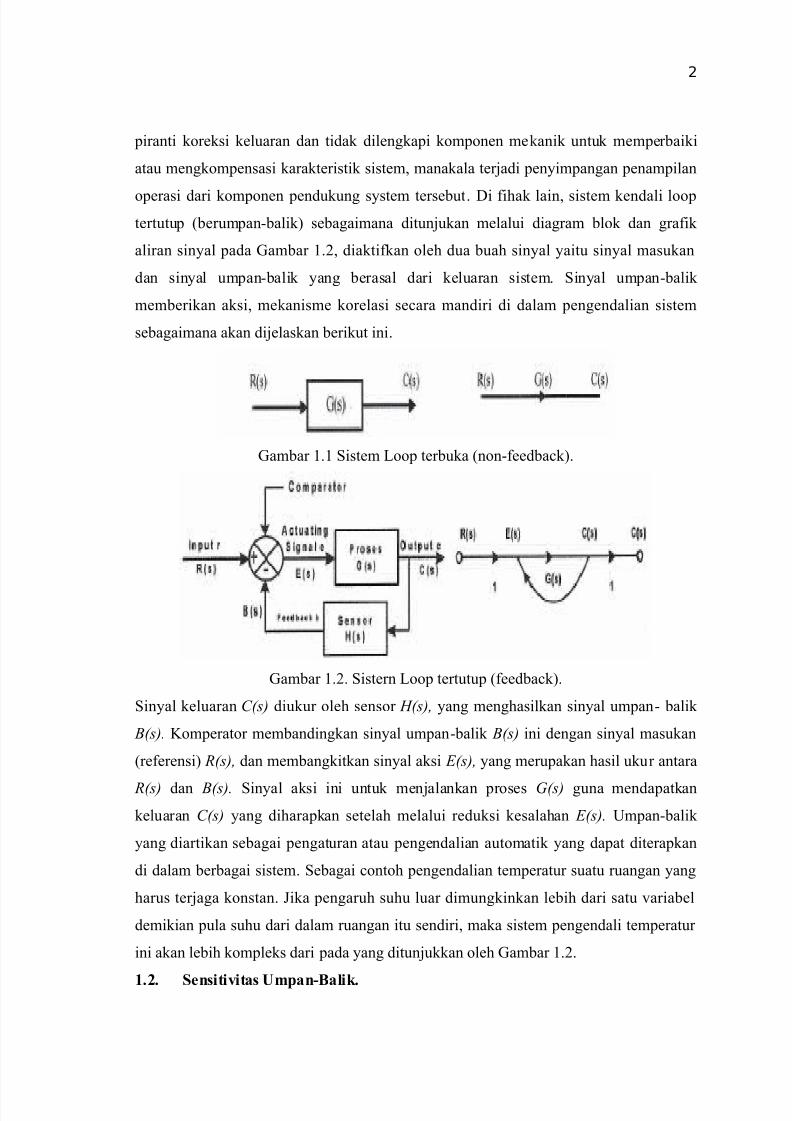
ambar $.$ #istem oop terbuka (non-feedback).
ambar $.&. #istern oop tertutup (feedback).
#inyal keluaran C(s) diukur oleh sensor H(s), yang menghasilkan sinyal umpan- balik
B(s). omperator membandingkan sinyal umpan- balik B(s) ini dengan sinyal masukan
(referensi) R(s), dan membangkitkan sinyal aksi E(s), yang merupakan hasil ukur antara
R(s) dan B(s). #inyal aksi ini untuk menjalankan proses G(s) guna mendapatkan
keluaran C(s) yang diharapkan setelah melalui reduksi kesalahan E(s). /mpan-balik
yang diartikan sebagai pengaturan atau pengendalian automatik yang dapat diterapkan
di dalam berbagai sistem. #ebagai contoh pengendalian temperatur suatu ruangan yang
harus terjaga konstan. 0ika pengaruh suhu luar dimungkinkan lebih dari satu variabel
demikian pula suhu dari dalam ruangan itu sendiri, maka sistem pengendali temperatur
ini akan lebih kompleks dari pada yang ditunjukkan oleh ambar $.&.
1.$. Sens#%#as U!pan-Balk.
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 3/20
3
#alah satu tujuan utama dari pemakaian umpan- balik di dalam system kendali
adalah untuk memperkecil atau mengur angi variasi parameter yang mengganggu
sensitivitas sistem tersebut. Parameter-parameter suatu sistem selalu berselang-seling
dengan waktu sehingga dapat mengganggu atau merubah karakteristik sistem tersebut,
sebagai misal temper atur ambang yang tidak tetap dan sebagainya. #ecara konseptual,
sensitivitas adalah ukuran ketepatan umpan balik di dalam mengurangi pengaruh semua
variasi dalam penampilan sistem.
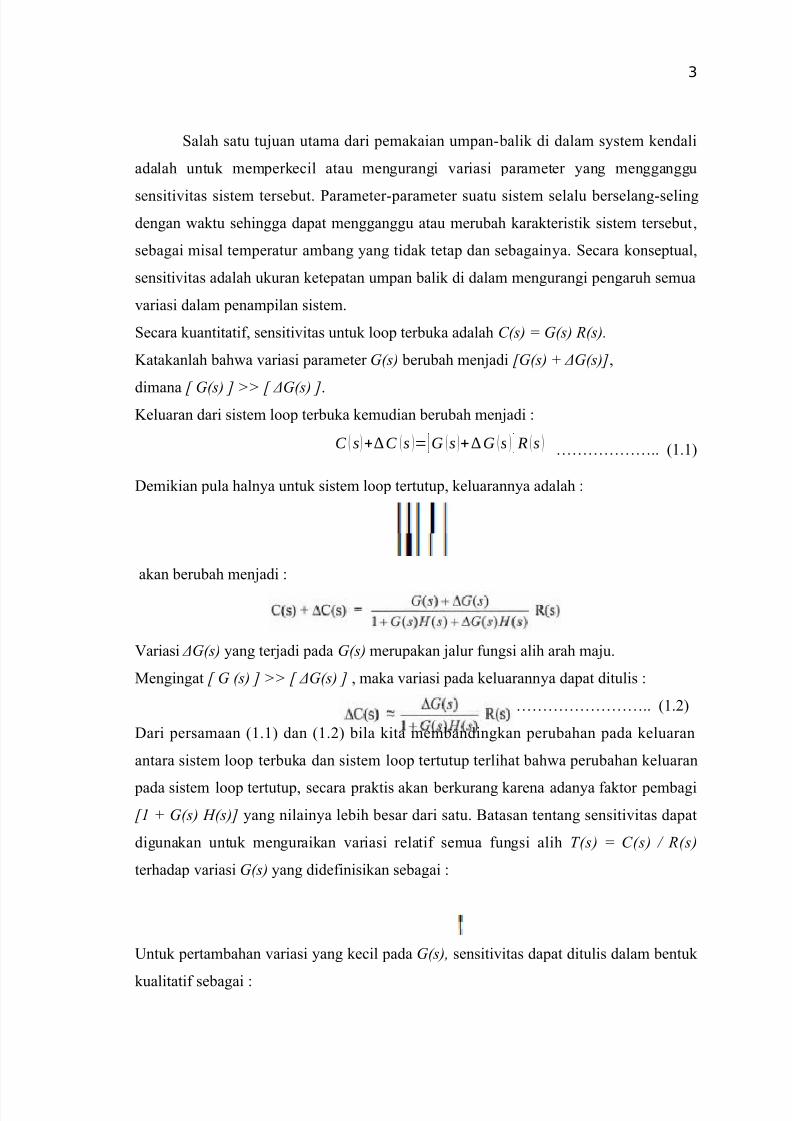
#ecara kuantitatif, sensitivitas untuk loop terbuka adalah C(s) = G(s) R(s).
atakanlah bahwa variasi parameter G(s) berubah menjadi [G(s) !G(s)",
dimana [ G(s) " ## [ !G(s) ".eluaran dari sistem loop terbuka kemudian berubah menjadi "
C ( s)+∆C (s )=[G (s )+∆G (s ) ] R (s ) 111111.. ($.$)
emikian pula halnya untuk sistem loop tertutup, keluarannya adalah "
akan berubah menjadi "
2ariasi !G(s) yang terjadi pada G(s) merupakan jalur fungsi alih arah maju.
%engingat [ G (s) " ## [ !G(s) " , maka variasi pada keluarannya dapat ditulis "
11111111.. ($.&)
ari persamaan ($.$) dan ($.&) bila kita membandingkan perubahan pada keluaran
antara sistem loop terbuka dan sistem loop tertutup terlihat bahwa perubahan keluaran
pada sistem loop tertutup, secara praktis akan berkurang karena adanya faktor pembagi
[$ G(s) H(s)" yang nilainya lebih besar dari satu. Batasan tentang sensitivitas dapat
digunakan untuk menguraikan variasi relatif semua fungsi alih %(s) = C(s) & R(s)
terhadap variasi G(s) yang didefinisikan sebagai "
/ntuk pertambahan variasi yang kecil pada G(s), sensitivitas dapat ditulis dalam bentuk
kualitatif sebagai "
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 4/20
4
dimana '
%
G menyatakan sensitivitas dari fungsi alih (%) dengan memperhatikan proses(G). Berkenaan dengan definisi di atas, maka sensitivitas dari sistem loop tertutup dapat
ditulis "
111($.')
emikian halnya sensitivitas untuk sistem loop terbuka adalah "
alam hal ini % = G
engan demikian, sensitivitas dari suatu sistem loop tertutup dengan memperhatikan
variasi dalam G, adalah dikurangi oleh faktor ($ GH), sedang bila dibandingkan
dengan memperhatikan H , sensor umpan-baliknya didapat "
1111..($.)
Persamaan di atas menunjukan bahwa untuk harga GH yang besar terutama harga H ,
maka sensitivitas umpan-balik dari sistem akan mendekati satu. engan demikian
dengan berubahnya harga H dapat mempengaruhi keluaran system secara langsung.
3leh sebab itu penerapan elemen umpan-balik ini sangat besar manfaatnya di dalam
mempertahankan kesetabilan sistem tanpa mengubah atau mengatur komponen yang
ada di dalamnya. Pemakaian umpan-balik dalam suatu sistem kendali sungguh
mengagumkan, kar ena variasi parameter yang dapat mengganggu sensitivitas sistem
dapat dikurangi. /ntuk mencapai tingkat akurasi yang tinggi dari system loop tertutup,
komponen G(s) dipilih yang memiliki spesif ikasi setepat mungkin agar tujuan sistem
dicapai optimum. 4amun demikian komponen sensor umpan balik H(s) pun perlu
diseleksi dengan cermat. G(s) dibuat menyerupai elemen daya dan H(s) dibuat
menyerupai elemen pengukur yang beroperasi pada tingkat daya rendah, maka
pemilihan akurasi untuk H(s) jauh lebih mahal daripada G(s). %isalnya biaya tersebut
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 5/20
5
dikarenakan adanya tuntutan sensitivitas sistem yang tinggi dengan menyertakan sistem
umpan-balik dan sistem penguatan khusus.
Pada sistem loop terbuka memiliki faktor penguatan G(s), sedang pada system loop
tertutup adalah G(s) [$ G(s) H(s)". 3leh sebab itu dengan menggunakan umpan-balik
penguatan sistem akan terkurangi dengan faktor yang sama dan sensitivitas sistem
terbebas dari variasi parameter yang mengganggunya.
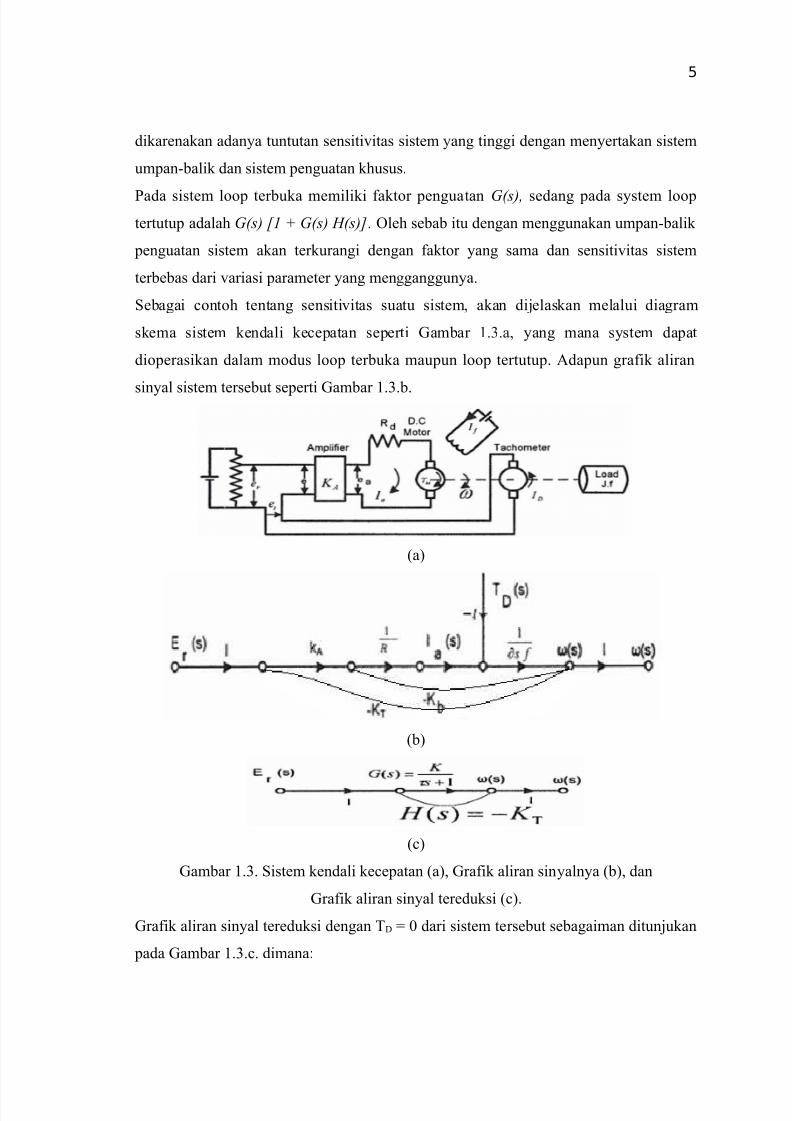
#ebagai contoh tentang sensitivitas suatu sistem, akan dijelaskan melalui diagram
skema sistem kendali kecepatan seperti ambar $.'.a, yang mana system dapat
dioperasikan dalam modus loop terbuka maupun loop tertutup. 5dapun grafik aliran
sinyal sistem tersebut seperti ambar $.'.b.
(a)
(b)
(c)
ambar $.'. #istem kendali kecepatan (a), rafik aliran sinyalnya (b), dan
rafik aliran sinyal tereduksi (c).
rafik aliran sinyal tereduksi dengan 6 7 8 dari sistem ter sebut sebagaiman ditunjukan
pada ambar $.'.c. dimana"

7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 6/20
6
onstanta variasi untuk sensitivitas operasi modus loop terbuka besarnya adalah satu,
sedang sensitivitas untuk modus loop tertutup da pat dievaluasi melalui grafik aliran
sinyal ambar$.'.c yaitu"
111111 ($.)
9ormulasi persamaan ($.) dapat juga diperoleh dengan mensubstitusikan (s) 7 :
(6#;$) dan <(s) 7 6 pada persamaan ($.').
/ntuk pemakaian sistem ini, kita dapat menetapkan harga l:6 7 8,$8 dan ($ 7 6):6 7
$8. 0adi dari persamaan ($.) kita peroleh"
ari uraian di atas dapat dipahami bahwa sensitivitas adalah mer upakan fungsi dari s
yang harus dievaluasi pada setiap perubahan frekuensi. Pada frekuensi tertentu,
misalnya s 7 j 7 j $, besar sensitivitas sistemnya adalah"
0adi sensitivitas dari sistem kendali kecepatan loop ter tutup pada frekuensi tertentu tadi
terkurangi oleh sebuah faktor 8,$8 atau $8= bila dibandingkan dengan yang dimilik i
oleh sistem loop terbuka.
1.&. Pe!akaan U!pan-Balk Pen'endalan Ss#e! Dna!k.
Perhatikanlah diagram blok dasar suatu sistem seperti ditunjukan pada
ambar$.. 9ungsi alih loop terbuka dari sistem tersebut adalah "
>ang mana mempunyai pole nyata pada bidang datar s sebesar s 7 - ?.
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 7/20
7
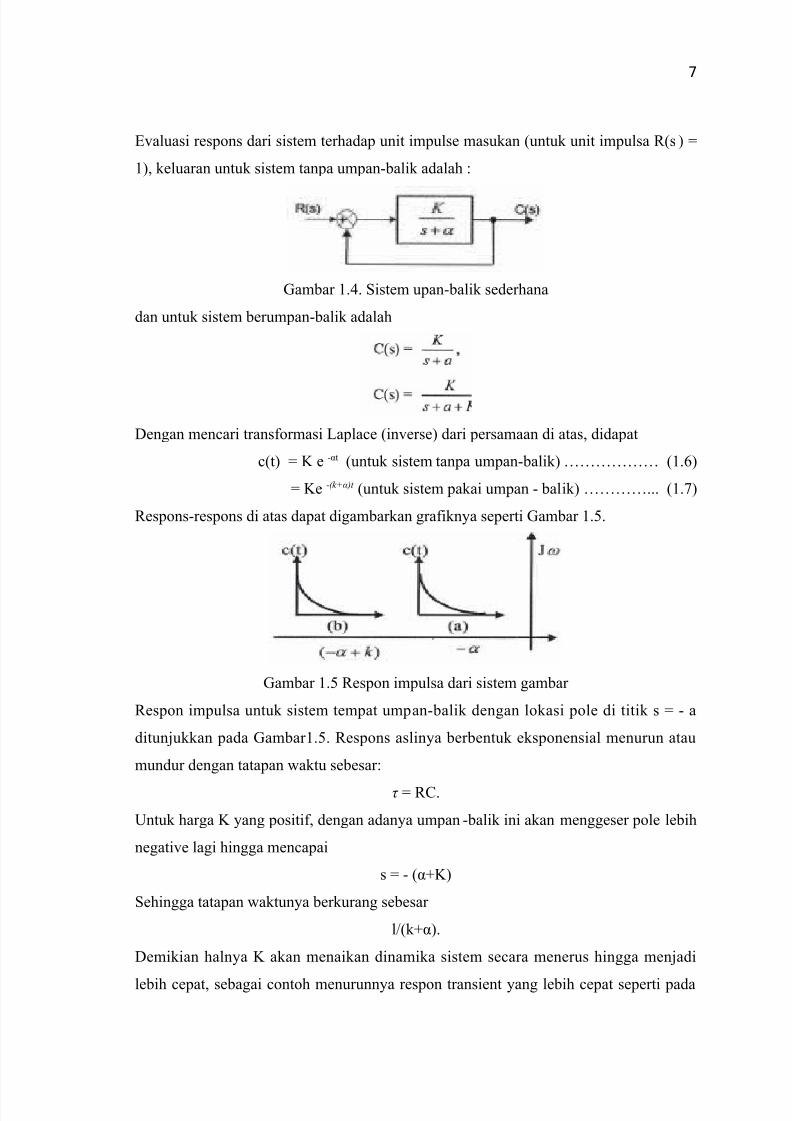
@valuasi respons dari sistem terhadap unit impulse masukan (untuk unit impulsa A(s ) 7
$), keluaran untuk sistem tanpa umpan-balik adalah "
ambar $.. #istem upan-balik sederhana
dan untuk sistem berumpan-balik adalah
engan mencari transformasi aplace (inverse) dari persamaan di atas, didapat
c(t) 7 e -?t (untuk sistem tanpa umpan-balik) 111111 ($.*)
7 e (k* )t (untuk sistem pakai umpan - balik) 1111... ($.+)
Aespons-respons di atas dapat digambarkan grafiknya seperti ambar $..
ambar $. Aespon impulsa dari sistem gambar
Aespon impulsa untuk sistem tempat umpan-balik dengan lokasi pole di titik s 7 - a
ditunjukkan pada ambar$.. Aespons aslinya berbentuk eksponensial menurun atau
mundur dengan tatapan waktu sebesar"
+ 7 A.
/ntuk harga yang positif, dengan adanya umpan- balik ini akan menggeser pole lebih
negative lagi hingga mencapai
s 7 - (?;)
#ehingga tatapan waktunya berkurang sebesar
l:(k;?).
emikian halnya akan menaikan dinamika sistem secara menerus hingga menjadi
lebih cepat, sebagai contoh menurunnya respon transient yang lebih cepat seperti pada
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 8/20
8
ambar $.. ari contoh di atas dapat disimpulkan bahwa umpan- balik mengendalikan
dinamika sistem dengan mengatur lokasi dari polenya. Perlu pula dicatat bahwa umpan-
balik disini dapat menjelaskan beberapa kemungkinan tentang ketidak stabilan sistem.
alam hal ini yaitu sistem loop tertutup biasa saja tidak stabil walaupun pada loop
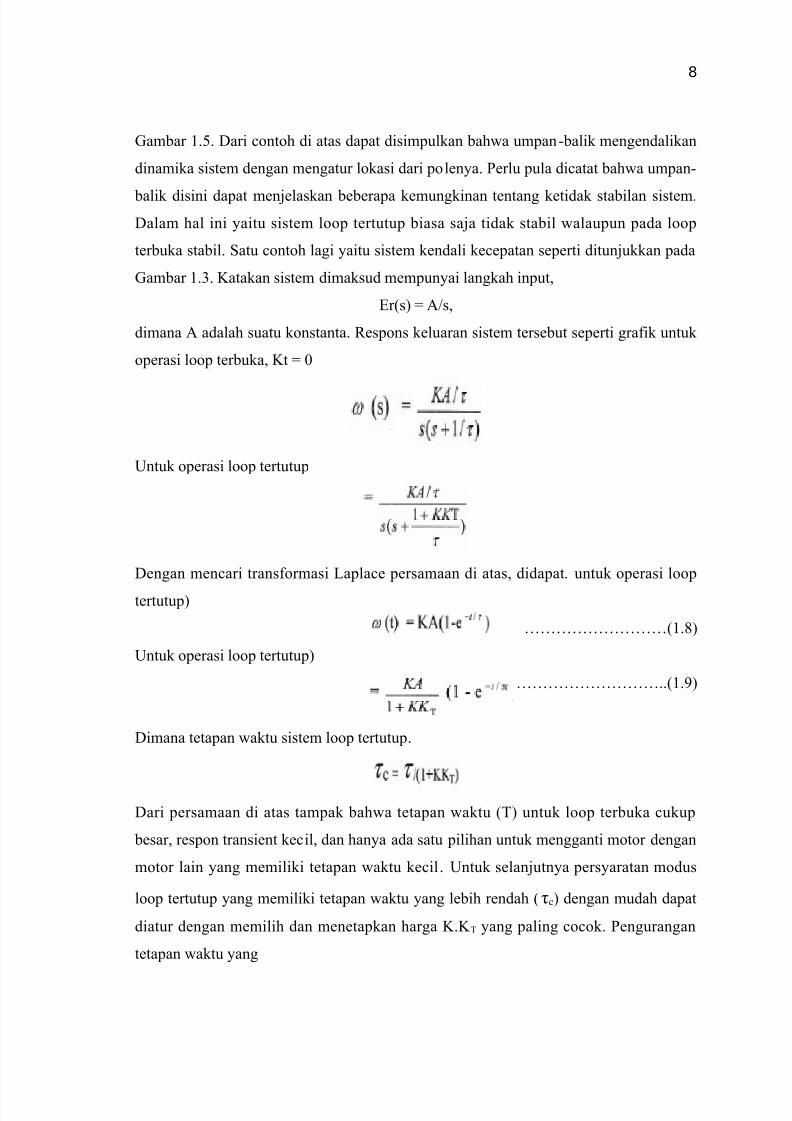
terbuka stabil. #atu contoh lagi yaitu sistem kendali kecepatan seperti ditunjukkan pada
ambar $.'. atakan sistem dimaksud mempunyai langkah input,
@r(s) 7 5:s,
dimana 5 adalah suatu konstanta. Aespons keluaran sistem tersebut seperti grafik untuk
operasi loop terbuka, t 7 8
/ntuk operasi loop tertutup
engan mencari transformasi aplace persamaan di atas, didapat. untuk operasi loop
tertutup)
111111111($.C)
/ntuk operasi loop tertutup)
111111111..($.D)
imana tetapan waktu sistem loop tertutup.
ari persamaan di atas tampak bahwa tetapan waktu (6) untuk loop terbuka cukup
besar, respon transient kecil, dan hanya ada satu pilihan untuk mengganti motor dengan
motor lain yang memiliki tetapan waktu kecil. /ntuk selanjutnya persyaratan modus
loop tertutup yang memiliki tetapan waktu yang lebih rendah (Ec) dengan mudah dapat
diatur dengan memilih dan menetapkan harga . 6 yang paling cocok. Pengurangan
tetapan waktu yang
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 9/20
9
berlebihan atau tak terbatas pasti tidak dapat dilakukan. ari ilustrasi di atas dapat
disimpulkan bahwa pemakaian umpan-balik pada pengendalian sistem dinamik adalah
cara yang terbaik.
1.(. Pen'endalan Sn)al *an''uan Me!aka U!pan-"alk
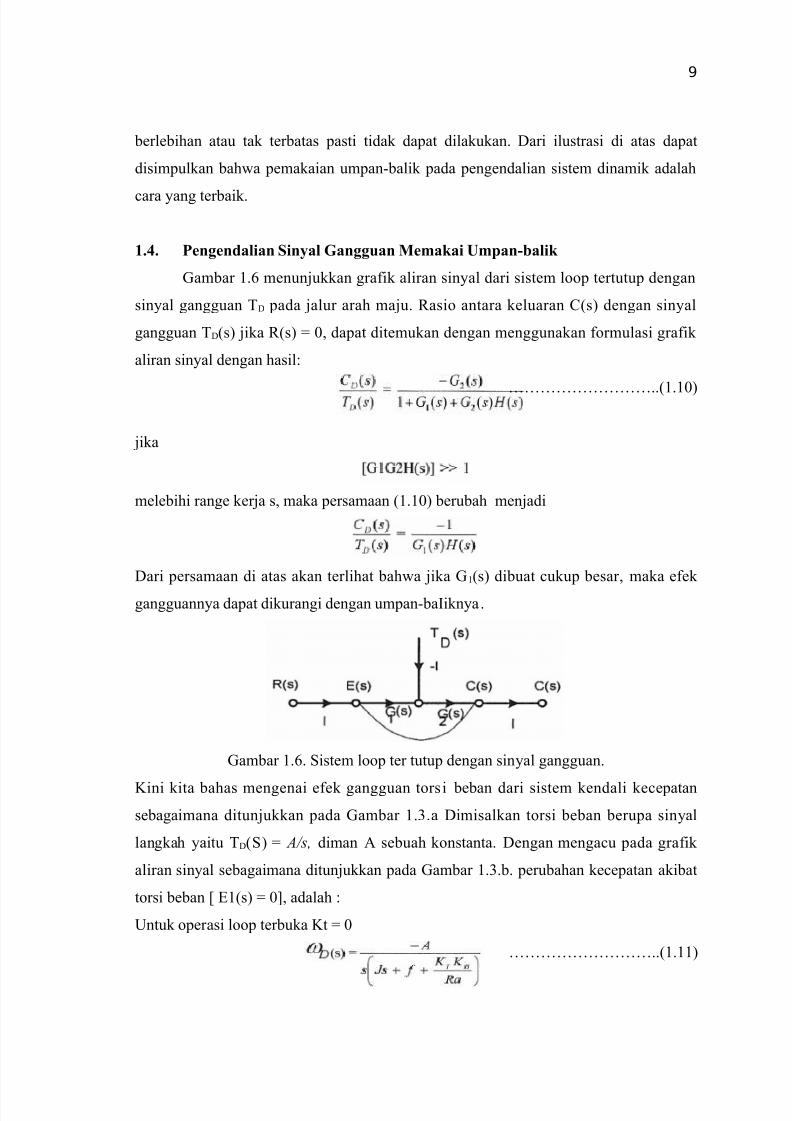
ambar $.* menunjukkan grafik aliran sinyal dari sistem loop tertutup dengan
sinyal gangguan 6 pada jalur arah maju. Aasio antara keluaran (s) dengan sinyal
gangguan 6(s) jika A(s) 7 8, dapat ditemukan dengan menggunakan formulasi grafik
aliran sinyal dengan hasil"
111111111..($.$8)
jika
melebihi range k erja s, maka persamaan ($.$8) berubah menjadi
ari persamaan di atas akan terlihat bahwa jika $(s) dibuat cukup besar , maka efek
gangguannya dapat dikurangi dengan umpan-ba!iknya.
ambar $.*. #istem loop ter tutup dengan sinyal gangguan.
ini kita bahas mengenai efek gangguan torsi beban dari sistem kendali kece patan
sebagaimana ditunjukkan pada ambar $.'.a imisalkan torsi beban berupa sinyal
langkah yaitu 6(#) 7 & s, diman 5 sebuah konstanta. engan mengacu pada graf ik
aliran sinyal sebagaimana ditunjukkan pada ambar $.'.b. perubahan kecepatan akibat
torsi beban F @$(s) 7 8G, adalah "
/ntuk oper asi loop terbuka t 7 8
111111111..($.$$)

7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 10/20
10
/ntuk operasi loop tertutup
11111111..($.$&)
esalahan kecepatan tunak (steady state) akibat beban terpasang dirumuskan sebagai"
111111111.($.$')
engan memakai persamaan ($.$$), kesalahan kecepatan tunak untuk loop tertutup akan
didapat"
11111111.($.$)
dan11111111.($.$)
Aasio antara kesalahan kecepatan keluaran tunak dengan torsi beban pada loop terbuka
dan loop tertutup didapat dari persamaan ($.$) dan ($.$), yaitu "
9aktor - - - b pada penyebut merupakan efek gangguan pada respons loop tertutup
yang keberadaannya masih dapat dipertimbangkan dari pada yang terjadi pada loop
terbuka. ari analisis di atas tampak bahwa pemakaian umpan-balik dapat mengurangi
adanya efek gangguan dan sinyal desau pada jalur arah maju dari loop umpan-balik.
/mpan-balik dapat pula diartikan seperangkat elemen tambahan yang disebut pengukur
sensor < yang dapat membangkitkan desau. #elanjutnya efek desau pada penampilan
sistem akan dibicarakan berikut ini. ambar $.+ menunjukkan grafik aliran sinyal suatu
sistem dengan sinyal desau 4(s) pada jalur umpan-balik. engan menggunakan
formulasi penguatan untuk grafik aliran sinyal diperoleh hasil sebagai berikut"
/ntuk harga penguatan loop yang besar
persamaan di atas dapat disederhanakan menjadi "

7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 11/20
11
ambar $.+. #istem loop tertutup dengan pengukuran desau
3leh sebab itu efek desau pada keluarannya dapat ditulis
111111111.($.$*)
0adi untuk penampilan sistem-sistem yang optimum, pengukur sensor < $(s) harus di
disain maksimum, yang ekivalen dengan rasio maksimum antara sinyal:desau dari
sensornya. #ensor umpan-balik harus memiliki variasi parameter yang rendah agar
sensitivitas maksimum (' % H 7$) dicapai. emikian pula rasio sinyal desau untuk
sensornya harus tinggi. Biasanya hal tersebut mudah didisain dan dirakit dengan
menyiapkan komponen yang spesifik dan murah, k arena elemen umpanbalik ini akan
di pakai untuk operasi daya kecil. esimpulan umum dari pemakaian umpan-balik
sebagaimana dijelaskan di atas antara lain ialah sensitivitas sistem terjaga dar i
gangguan, respons transient meningkat, dan sinyal gangguan pada sistem dapat
diminimisir. Berikut ini akan dikemukakan mengenai pemakaian umpan-balik pada
sistem kendali temperatur sebagaimana diilustrasikan pada ambar $.+. Pada system
tersebut diharapkan dihasilkan aliran cairan panas yang ajeg dengan temperature
terkendali. 6emperatur cairan yang mengalir diatur secara automatis oleh sensor umpan-
balik (sebut ia thermocouple) yang mana tegangan keluaran yang dihasilkan (et) ini
harus dikurangkan dari tegangan kesalahan e, atau e 7 er - et.
Besar tegangan kesalahan e ini akan mengatur arus elemen pemanas i c (masukan panas
untuk cairan) melalui penyearah gelombang penuh berupa #A . /ntuk mengurangi
kompleksitas dari sistem tersebut, beberapa asumsi penyederhanaan penting dapat
ditulis sebagai berikut " 0umlah cairan pada saluran masukan dan keluaran yang melalui
tanki adalah sarna, oleh karenanya tinggi permukaan cairan dalam tanki selama operasi
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 12/20
12
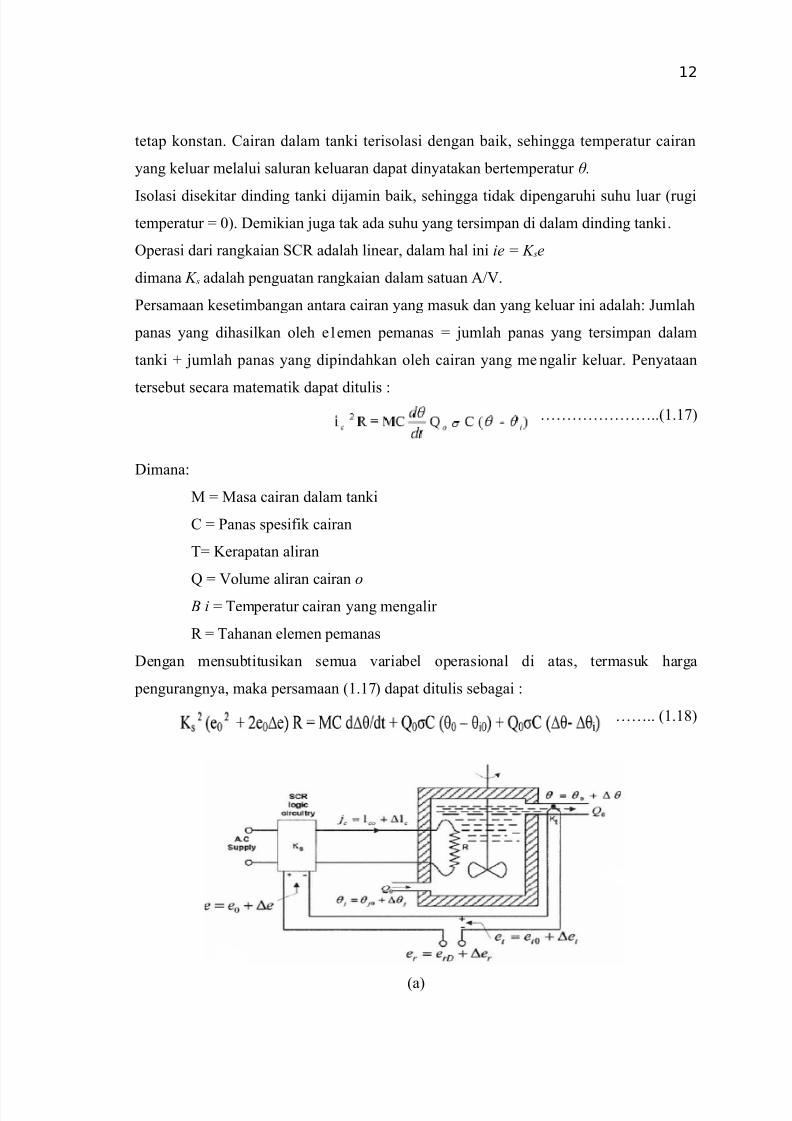
tetap konstan. airan dalam tanki terisolasi dengan baik, sehingga temperatur cairan
yang keluar melalui saluran keluaran dapat dinyatakan bertemperatur /.
!solasi disekitar dinding tanki dijamin baik, sehingga tidak dipengaruhi suhu luar (rugi
temperatur 7 8). emikian juga tak ada suhu yang tersimpan di dalam dinding tanki.
3perasi dari rangkaian #A adalah linear, dalam hal ini 0e = - se
dimana - s adalah penguatan rangkaian dalam satuan 5:2.
Persamaan kesetimbangan antara cairan yang masuk dan yang keluar ini adalah" 0umlah
panas yang dihasilkan oleh e$emen pemanas 7 jumlah panas yang tersimpan dalam
tanki ; jumlah panas yang dipindahkan oleh cairan yang mengalir keluar. Penyataan
tersebut secara matematik dapat ditulis "1111111..($.$+)
imana"
% 7 %asa cairan dalam tanki
7 Panas spesifik cairan
H7 erapatan aliran
I 7 2olume aliran cairan o
B 0 7 6emperatur cairan yang mengalir
A 7 6ahanan elemen pemanas
engan mensubtitusikan semua variabel operasional di atas, termasuk harga
pengurangnya, maka persamaan ($.$+) dapat ditulis sebagai "
11.. ($.$C)
(a)
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 13/20
13
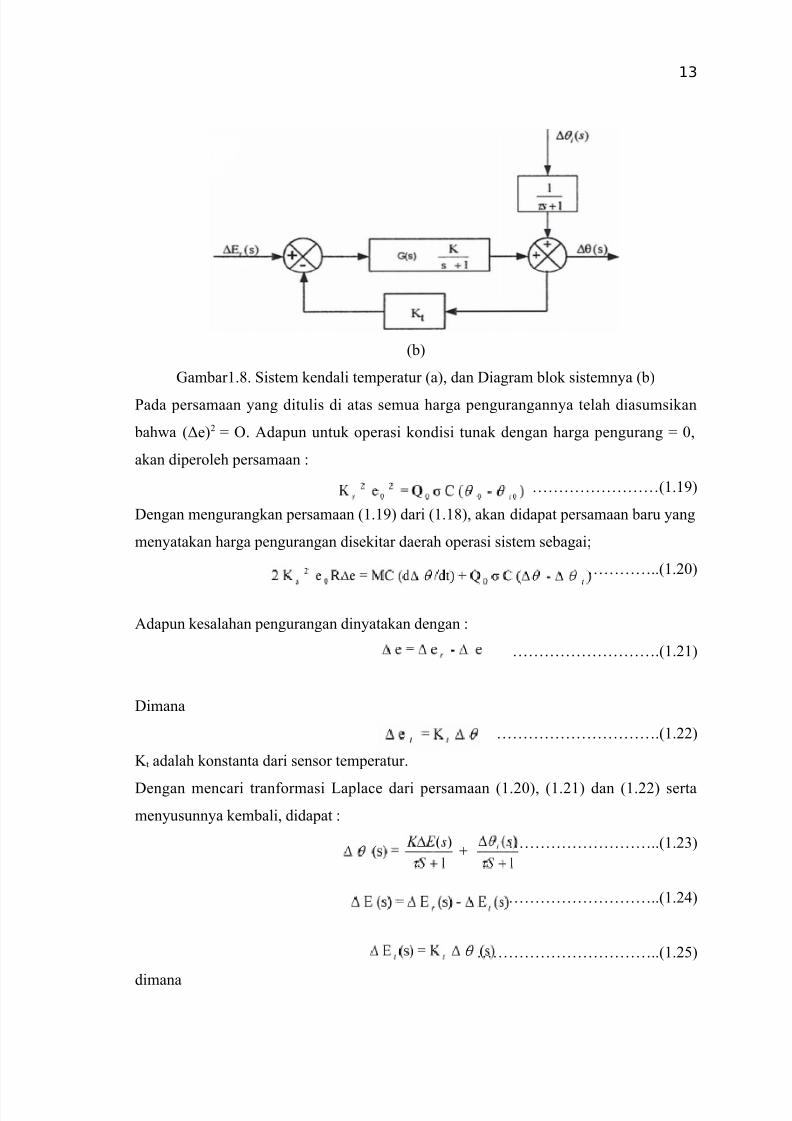
(b)
ambar$.C. #istem kendali temperatur (a), dan iagram blok sistemnya (b)
Pada persamaan yang ditulis di atas semua harga pengurangannya telah diasumsikan
bahwa (Je)& 7 3. 5dapun untuk operasi kondisi tunak dengan harga pengurang 7 8,
akan diperoleh persamaan "
11111111($.$D)
engan mengurangkan persamaan ($.$D) dari ($.$C), akan didapat persamaan baru yang
menyatakan harga pengurangan disekitar daerah operasi sistem sebagaiK
1111..($.&8)
5dapun kesalahan pengurangan dinyatakan dengan "
111111111.($.&$)
imana
1111111111.($.&&)
t adalah konstanta dari sensor temperatur.
engan mencari tranformasi aplace dari persamaan ($.&8), ($.&$) dan ($.&&) serta
menyusunnya kembali, didapat "
111111111..($.&')
111111111..($.&)
11111111111..($.&)
dimana

7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 14/20
14
ari persamaan ($.&'), ($.&) dan ($.&), kita dapat menggambarkan diagram blok
sistemnya seperti ambar$.C.b, dimana fungsi alih untuk loop tertutup tersebut adalah "
dan !/(s) adalah perubahan temperatur yang terjadi pad a cairan yang mengalir yang
dikategorikan sebagai gangguan masukan sistem, yakni $:( %s ; $).
atakanlah sinyal pengganggu !/ menjadi nol, perubahan temperature cairan yang
mengalir disebabkan oleh suatu pergantian langkah yang tidak diinginkan (J@) pada
tegangan referensi, yaitu "
ari persamaan di atas dengan mudah dapat diamati bahwa perubahan temperatur
cairan yang disebabkan oleh pergantian dengan faktor untuk loop tertutup
emikian halnya, bila referensi masukan dapat dipertahankan tetap, misal Jer 7 8,
pergantian langkah JL pada temperatur cairan akan menyebabkan perubahan temperatur
keluaran yaitu "
0adi perubahan temperatur cairan yang mengalir keluar yang disebabkan oleh perubahan
temperatur cairan yang masuk ke dalam tank i dapat dikurangi pada harga yang
diinginkan dengan memilih penguatan loop -.-t yang cocok. 0ika ingin mengetahui
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 15/20
15
panas yang hilang pada dinding tanki, kita dapat menghitungnya melalui formula
tambahan, yaitu " 5 M (JL - JLe) pada ruas kanan dari persamaan ($.&8), dimana M
adalah konstanta pemindahan panas dan 5 adalah luas permukaan tanki. <asilnya
adalah merupakan sinyal pengganggu tambahan JLe, yang disebabkan oleh perubahan
temperatur bagian dalam dari sistem Leo.
1.+. U!pan-Balk ,e'enea#
%ater i yang didahulukan dalam bab ini ditekankan pada penerapan umpan- balik
tipe degeneratif atau negative. Pada umpan-balik regeneratif , keluaran diumpankan
kembali dengan fungsi alih untuk umpan - balik tipe ini adalah"11111111($.&*)
6anda negatif pada penyebut dari persamaan ($.&*) menyatakan ada kemungkinan
penyebut berubah harga menjadi nol, manakala keluarannya tak berhingga akibat
masukan yang terlalu besar (kondisi sistem tak stabil).
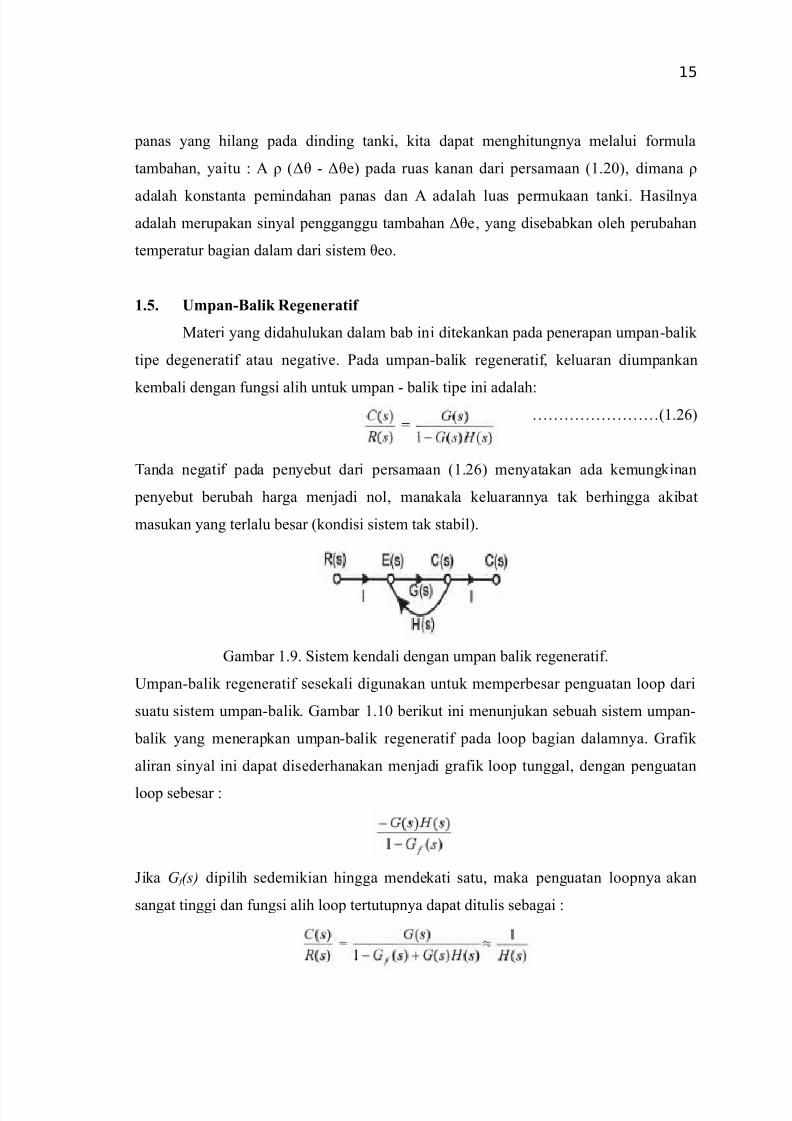
ambar $.D. #istem kendali dengan umpan balik regeneratif.
/mpan-balik regeneratif sesekali digunakan untuk memperbesar penguatan loop dari
suatu sistem umpan-balik. ambar $.$8 berikut ini menunjukan sebuah sistem umpan-
balik yang menerapkan umpan-balik r egeneratif pada loop bagian dalamnya. rafik
alir an sinyal ini dapat disederhanakan menjadi grafik loop tunggal, dengan penguatan
loop sebesar "
0ika G f (s) dipilih sedemikian hingga mendekati satu, maka penguatan loopnya akan
sangat tinggi dan fungsi alih loop tertutupnya dapat ditulis sebagai "
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 16/20
16
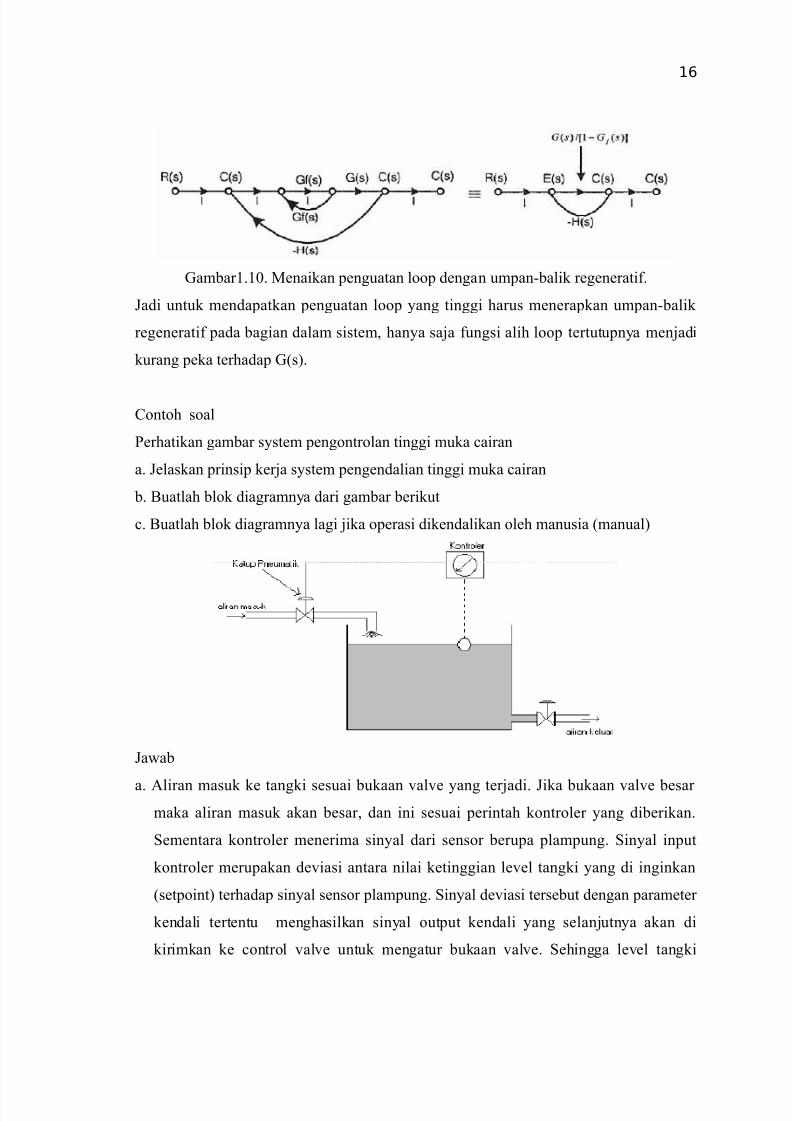
ambar$.$8. %enaikan penguatan loop dengan umpan-balik regeneratif.
0adi untuk mendapatkan penguatan loop yang tinggi harus menerapkan umpan-balik
regeneratif pada bagian dalam sistem, hanya saja fungsi alih loop tertutupnya menjadi
kurang peka terhadap (s).
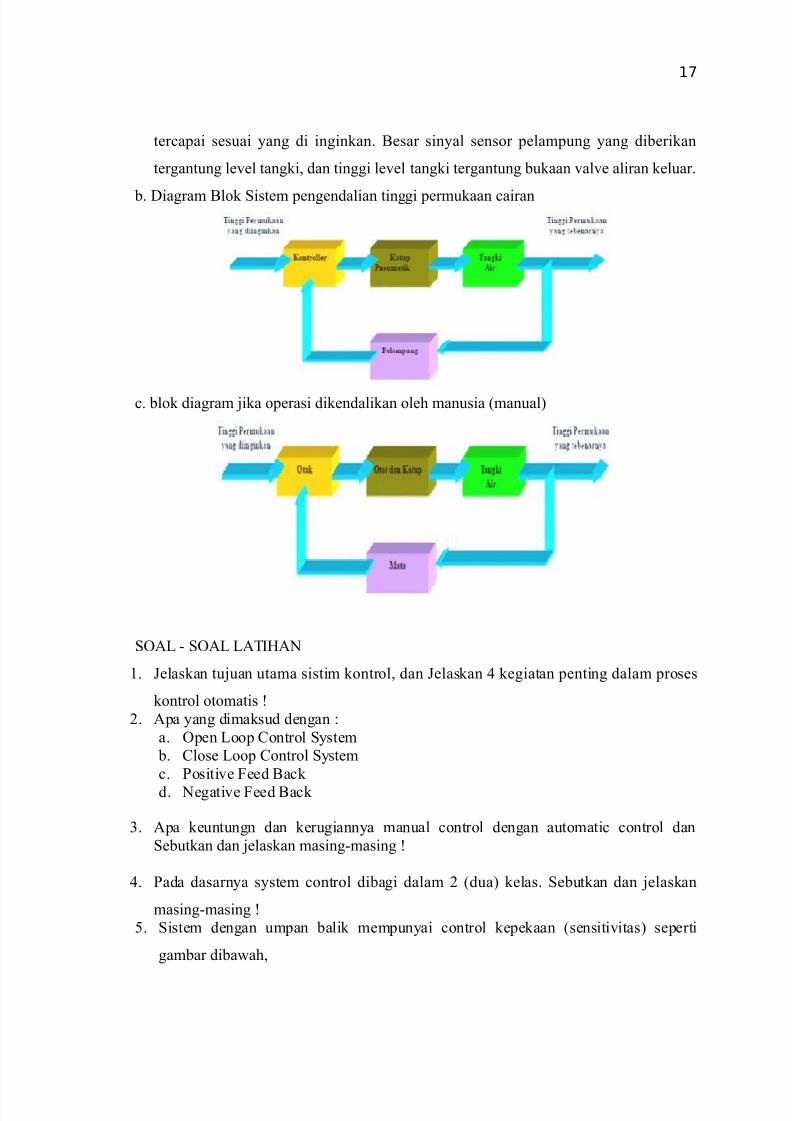
ontoh soal
Perhatikan gambar system pengontrolan tinggi muka cairan
a. 0elaskan prinsip kerja system pengendalian tinggi muka cairan
b. Buatlah blok diagramnya dari gambar berikut
c. Buatlah blok diagramnya lagi jika operasi dikendalikan oleh manusia (manual)
0awab
a. 5liran masuk ke tangki sesuai bukaan valve yang terjadi. 0ika bukaan valve besar
maka aliran masuk akan besar, dan ini sesuai perintah kontroler yang diberikan.
#ementara kontroler menerima sinyal dari sensor berupa plampung. #inyal input
kontroler merupakan deviasi antara nilai ketinggian level tangki yang di inginkan
(setpoint) terhadap sinyal sensor plampung. #inyal deviasi tersebut dengan parameter
kendali tertentu menghasilkan sinyal output kendali yang selanjutnya akan di
kirimkan ke control valve untuk mengatur bukaan valve. #ehingga level tangki
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 17/20
17
tercapai sesuai yang di inginkan. Besar sinyal sensor pelampung yang diberikan
tergantung level tangki, dan tinggi level tangki tergantung bukaan valve aliran keluar.
b. iagram Blok #istem pengendalian tinggi permukaan cairan
c. blok diagram jika operasi dikendalikan oleh manusia (manual)
#35 - #35 56!<54
$. 0elaskan tujuan utama sistim kontrol, dan 0elaskan kegiatan penting dalam proses
kontrol otomatis N
&. 5pa yang dimaksud dengan "
a. 3pen oop ontrol #ystem
b. lose oop ontrol #ystem
c. Positive 9eed Back
d. 4egative 9eed Back
'. 5pa keuntungn dan kerugiannya manual control dengan automatic control dan
#ebutkan dan jelaskan masing-masing N
. Pada dasarnya system control dibagi dalam & (dua) kelas. #ebutkan dan jelaskan
masing-masing N
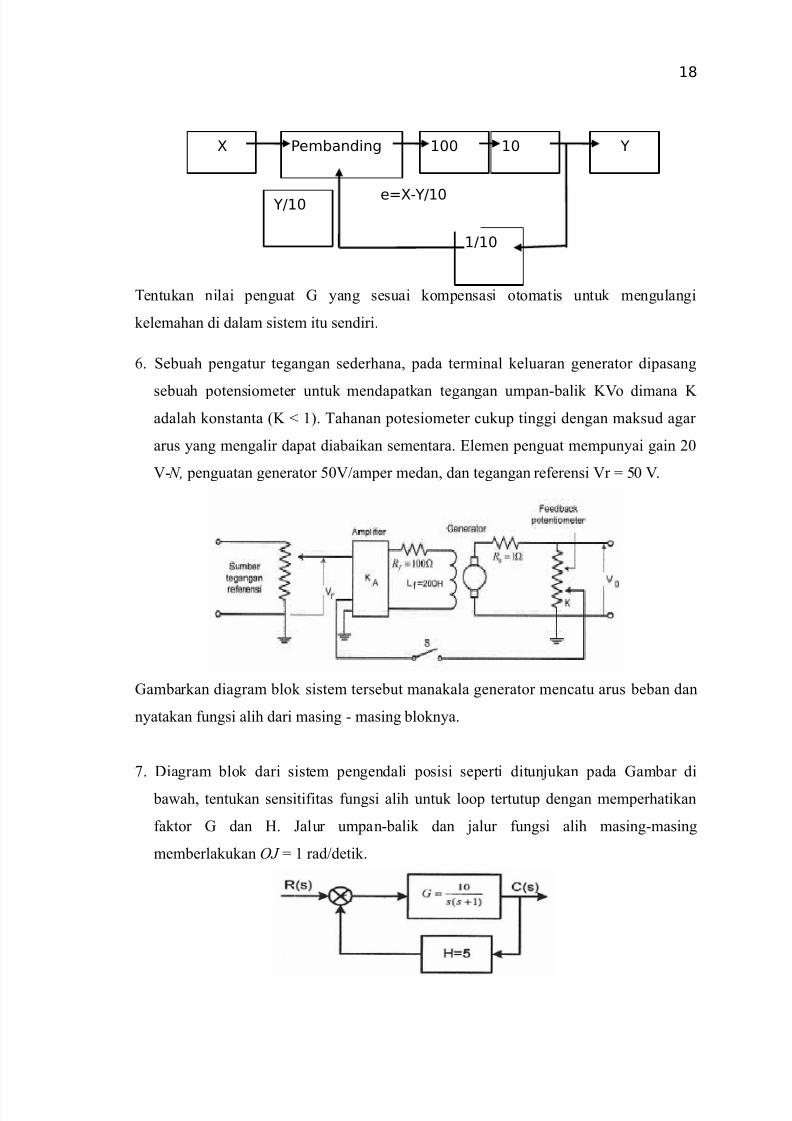
. #istem dengan umpan balik mempunyai control kepekaan (sensitivitas) seperti
gambar dibawah,
7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 18/20
Pembanding 100 10X Y
1/10
Y/10 e=X-Y/10
18
6entukan nilai penguat yang sesuai kompensasi otomatis untuk mengulangi
kelemahan di dalam sistem itu sendiri.
*. #ebuah pengatur tegangan sederhana, pada terminal keluaran generator dipasang
sebuah potensiometer untuk mendapatkan tegangan umpan- balik 2o dimana
adalah konstanta ( O $). 6ahanan potesiometer cukup tinggi dengan maksud agar
arus yang mengalir dapat diabaikan sementara. @lemen penguat mempunyai gain &8
2- 1, penguatan generator 82:amper medan, dan tegangan referensi 2r 7 8 2.
ambarkan diagram blok sistem tersebut manakala generator mencatu arus beban dan
nyatakan fungsi alih dari masing - masing bloknya.
+. iagram blok dari sistem pengendali posisi seperti ditunjukan pada ambar di
bawah, tentukan sensitifitas fungsi alih untuk loop tertutup dengan memperhatikan
faktor dan <. 0alur umpan- balik dan jalur fungsi alih masing-masing
memberlakukan 23 7 $ rad:detik .

7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 19/20
19
,an'ku!an
#etelah kita membahas mengenai sistem umpan balik, dimana di dalam teknik
kendali automatik faktor umpan-balik memegang peran yang sangat penting, karena
dengan cukup meyakinkan telah mampu menggantikan tugas operator secara automatik .
/mpan-balik yang diartikan sebagai pengaturan atau pengendalian automatik yang
dapat diterapkan di dalam berbagai sistem. #ebagai contoh pengendalian temperatur
suatu ruangan yang harus terjaga konstan. #ecara konseptual , sensitivitas adalah ukuran
ketepatan umpan balik di dalam mengurangi pengaruh semua variasi dalam penampilan
sistem. /mpan- balik mengendalikan dinamika sistem dengan mengatur lokasi dari
polenya. Perlu pula dicatat bahwa umpan-balik disini dapat menjelaskan beberapakemungkinan tentang ketidak stabilan sistem. alam hal ini yaitu sistem loop tertutup
biasa saja tidak stabil walaupun pada loop terbuka stabil. Pemakaian umpan-balik
sebagaimana dijelaskan di atas antara lain ialah sensitivitas sistem terjaga dar i
gangguan, respons transient meningkat, dan sinyal gangguan pada sistem dapat
diminimisir.

7/21/2019 konsep umpan balik dan tanpa umpan balik
http://slidepdf.com/reader/full/konsep-umpan-balik-dan-tanpa-umpan-balik 20/20
20
Top Related
Copyright © 2022 FDOKUMEN

